Збірник рефератів
147
Всеукраїнський конкурс студентських наукових робіт з галузі „ ЕЛЕКТРОТЕХНІКА ТА ЕЛЕКТРОМЕХАНІКА” Загальні питання та елементи електротехнічних комплексів та систем Енергозбереження засобами електротехніки та електромеханіки Математичне моделювання електротехнічних комплексів та систем Електромеханічні системи з електроприводом постійного струму та змінного струму Лабораторне обладнання для дослідження електротехнічних та електромеханічних систем Електричні мережі і обладнання електричних станцій та підстанцій Джерела та споживачі електричної енергії Регулювання якості електричної енергії Електротехнічні системи і комплекси транспортних засобів Електромеханічні системи автоматизації МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ Дніпродзержинський державний технічний університет (ДДТУ) КАФЕДРА ЕЛЕКТРОТЕХНІКИ ТА ЕЛЕКТРОМЕХАНІКИ Збірник рефератів робіт Дніпродзержинськ 2014
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Збірник рефератів

Всеукраїнський конкурс студентських наукових робіт з галузі
„ЕЛЕКТРОТЕХНІКА ТА
ЕЛЕКТРОМЕХАНІКА”
Загальні питання
та елементи
електротехнічних
комплексів та систем
Енергозбереження
засобами
електротехніки та
електромеханіки
Математичне
моделювання
електротехнічних
комплексів та систем
Електромеханічні
системи з
електроприводом
постійного струму та
змінного струму
Лабораторне
обладнання для
дослідження
електротехнічних та
електромеханічних
систем
Електричні
мережі і обладнання
електричних станцій
та підстанцій
Джерела та споживачі
електричної енергії
Регулювання якості
електричної енергії
Електротехнічні
системи і комплекси
транспортних засобів
Електромеханічні
системи автоматизації
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
Дніпродзержинський державний технічний університет
(ДДТУ)
КАФЕДРА ЕЛЕКТРОТЕХНІКИ ТА ЕЛЕКТРОМЕХАНІКИ
Збірник рефератів робіт
Дніпродзержинськ
2014

Міністерство освіти і науки України
Дніпродзержинський державний технічний університет (ДДТУ)
Всеукраїнський конкурс студентських наукових
робіт з галузі
„ЕЛЕКТРОТЕХНІКА ТА ЕЛЕКТРОМЕХАНІКА”
Збірник рефератів робіт
Дніпродзержинськ
2014

УДК 621.3.001.57(08)+621.311.004.14/18(08)
Всеукраїнського конкурсу студентських наукових робіт з галузі „Електротехніка та
електромеханіка”. Збірник рефератів робіт. / Дніпродзержинськ: ДДТУ. - 2014. – 146с.
В збірнику представлена реферативна інформація про студентські наукові роботи, подані
до участі у ІІ турі Всеукраїнського конкурсу з галузі знань „Електротехніка та
електромеханіка”. Висвітлюється розв’язання актуальних питань автоматизованого
електроприводу, теорії автоматичного керування, діагностики електромеханічних систем,
використання альтернативних джерел електричної енергії. Багато уваги приділяється
проблемам електропостачання та електроустаткування промислових та цивільних споруд.
В сборнике представлена реферативная информация о студенческих научных работах,
представленных к участию во ІІ туре Всеукраинского конкурса в отрасли знаний
„Электротехника и электромеханика”. Освещены решения актуальных вопросов
автоматизированного электропривода, теории автоматического управления, диагностики
электромеханических систем, использования альтернативных источников электрической
энергии. Большое внимание уделяется проблемам электроснабжения и электрооборудования
промышленных и гражданских сооружений.
Авторський стиль і орфографія збережені, редакційна колегія не несе відпові-
дальності за стилістичні і орфографічні помилки авторів.
Головний редактор: О.В.Садовой, д-р техн. наук, професор
Редакційна колегія: В.Б.Нізімов, д-р техн. наук, професор,
Р.С.Волянський, к-т техн. наук, доцент,
Ю.В.Сохіна, к-т техн. наук, доцент,
О.Л.Дерець, к-т техн. наук, доцент,
С.В.Количев, к-т техн. наук, доцент,
Ю.М.Клименко, к-т техн. наук, доцент,
Є.Д.Хмельницький, к-т техн. наук, доцент.
Друкується за рішенням Вченої ради Дніпрозержинського державного технічного
університету від 27 березня 2014 р., протокол № 9
© Дніпродзержинський державний
технічний університет

Зміст 3
ЗМІСТ
СЕКЦІЯ «ЗАГАЛЬНІ ПИТАННЯ ТА ЕЛЕМЕНТИ ЕЛЕКТРОТЕХНІЧНИХ КОМПЛЕКСІВ ТА СИСТЕМ».........................................................................................................................................................................7
Бажинова Т.О. Математична модель тягової акумуляторної батареї синергетичного автомобіля ...........................8
Бречко О.Ю. Вибір вітродвигунів вітроенергетичних установок по аеродинамічним параметрам .......................10
Гринишин Р.О. Особливості будови та керування трифазним вентильним електродвигуном ...............................12
Наход Є.Ю., Медяник Б.С. Повышение эффективности электромеханических систем путем оптимизации технического обслуживания ..........................................................................................................................................14
Молодковець Б. І. Енергозберігаюча технологія виробництва біогазу на основі теплового насоса.......................16
Полишко Н. М. Определение энергоэффективности магистральных ленточных конвейеров угольных шахт на стадии их выбора ............................................................................................................................................................18
СЕКЦІЯ «ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ АВТОМАТИЗАЦІЇ» ................................................................20
Бровка О.В., Ткаченко Ю.В. Розробка автоматизованого комплексу стабілізації температури опалення житлового приміщення...................................................................................................................................................21
Зиняк А.Ю., Панченко В.В Автоматизація діагностування несправності електромеханічного обладнання культиватора....................................................................................................................................................................23
Наумчук Л.М. Енергоефективні режими роботи електромеханічної системи автоматизації конвеєрної установки..........................................................................................................................................................................................25
Пісемський О. В. Зниження поточних витрат на водопостачання будинку ..............................................................27
Рудик М.А., Кокуб І.І. проектування систем керування мехатронних систем при ремонті та відновленні деталей..........................................................................................................................................................................................28
СЕКЦІЯ «МАТЕМАТИЧНЕ МОДЕЛЮВАННЯ ЕЛЕКТРОТЕХНІЧНИХ КОМПЛЕКСІВ ТА СИСТЕМ»..........................................................................................................................................................................................30
Аландар В.О. Лабораторне дослідження параметрів ударної взаємодії вагона трамвая з рейкою в місцях стиків..........................................................................................................................................................................................31
Довбиш А.О. Дослідження роботи системи вентиляції навчального приміщення при рекуперативному перерозподілі потоків .....................................................................................................................................................32
Дмитрів О.В., Серьоженко С.Ю. Розрахунок втрат і математична модель теплового стану частотно-керованого асинхроного двигуна ......................................................................................................................................................34
Колодяжна Н.М. Модель електротехнічного комплексу електрошлакової печі.......................................................35
Кравцов Д.І. Дослідження динаміки стенда з асинхронним двигуном на базі математичних моделей .................37
Леонтьєва Т.В., Москаленко Я.Г. Моделювання системи електропостачання трифазного споживача , та розрахунок коефіцієнтів несиметрії ..............................................................................................................................39
Манько Р.М., Христовий Б.А Процес рушання з визначенням оптимального моменту асинхронного двигуна..41
СЕКЦІЯ «ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ З ЕЛЕКТРОПРИВОДАМИ ПОСТІЙНОГО ТА ЗМІННОГО СТРУМУ»................................................................................................................................................43
Абакумов И. Разработка и исследование методов гашения колебаний груза в мостовых кранах ..........................44

Зміст 4
Авраменко Д.С., Федотьєв А.В. Методика формування керуючих імпульсів для вентильно-індукторного двигуна з урахуванням конструктивних параметрів................................................................................................... 46
Баранцов Д., Домбровский Е. Математическая модель асинхронного двигателя, работающего в условиях некачественной электроэнергией.................................................................................................................................. 48
Брус М.І., Нагорний Д.О. Система керування головним електроприводом реверсивного стану холодної прокатки .......................................................................................................................................................................... 50
Введенский В.Р. Динамика параметрического пуска синхронного двигателя с многоступеньчатым накопителем энергии ............................................................................................................................................................................ 51
Гитман Е.Э. Асинхронный управляемый по ротору электропривод......................................................................... 53
Захарчук А.И. Разработка законов управления преобразователем частоты, минимизирующие потери в асинхронном двигателе.................................................................................................................................................. 54
Коваленко О.І. Дослідження процесів вирівнювання навантаження дводвигунного електроприводу шарового млина в умовах збагачувальної фабрики єрістовського гзк ....................................................................................... 56
Москалець М.І. Порівняльна оцінка енергетичних та експлуатаційних показників статичних збуджувачів синхронних машин......................................................................................................................................................... 58
Смірнов Ю.І. Дослідження можливостей застосування крокових електроприводів в системах озброєння та військової техніки .......................................................................................................................................................... 60
Чечоткіна К.В., Шупилюк А.В. Удосконалення способу регулювання частоти обертання двигунів змішаного збудження з використанням DC-DC перетворювача .................................................................................................. 62
СЕКЦІЯ «ЛАБОРАТОРНЕ ОБЛАДНАННЯ ДЛЯ ДОСЛІДЖЕННЯ ЕЛЕКТРОТЕХНІЧНИХ СИСТЕМ».......................................................................................................................................................................................... 63
Біліченко В.М. Способи підвищення тягових властивостей трамвайних вагонів.................................................... 64
Вялий М.К., Федоров Р.В. Дослідження системи “керований перетворювач – двигун постійного струму” ........ 66
Гуков В.В. Лабораторний стенд дослідження характеристик автомобільних електричних машин постійного струму.............................................................................................................................................................................. 67
Коваль І.С., Чаленко А.О. Автоматизована система узгодженого обертання електричних двигунів на прикладі моделі стенду з виготовлення скловолоконних труб.................................................................................................. 69
Красільнікова Д.Ю., Мокрий А.Ю. Автоматизований комплекс для дослідження енергетичних режимів електромеханічних систем ............................................................................................................................................ 71
Нестеров І.О. Діагостика і визначення енергетичних показників асинхронних двигунів у робочому режимі..... 73
Новомлинский В.А., Ткачев А.А. Регулирование углового положения дебаланса, вращающегося вокруг подвижной оси................................................................................................................................................................ 75
Сватенко А.О. Впровадження засобів діагностування низьковольтного обладнання тролейбусів....................... 77
Тоболкин С.Ю. Лабораторный стенд для исследования микропроцессорных систем управления шаговыми двигателями .................................................................................................................................................................... 78
СЕКЦІЯ «ЕЛЕКТРИЧНІ МЕРЕЖІ І ОБЛАДНАННЯ ЕЛЕКТРИЧНИХ СТАНЦІЙ ТА ПІДСТАНЦІЙ». 80
Герасименко А.І., Рекуненко М.Ю. Комп’ютерне моделювання зон захисту стрижневих та тросових блискавковідводів складної конфігурації .................................................................................................................... 81
Дяговченко І.М., Скотаренко М.А. Високочастотний датчик реєстрації ожеледно-паморозевих утворень на лініях електропередавання ............................................................................................................................................ 82

Зміст 5
Іванов С.О., Ігнатова О.І. Моделювання диференційного струмового захисту в програмному комплексі pscad/emtdc.......................................................................................................................................................................84
Любовець А.І. Про можливість виконання високовольтних гідрогенераторів .........................................................86
СЕКЦІЯ «ДЖЕРЕЛА ТА СПОЖИВАЧІ ЕЛЕКТРИЧНОЇ ЕНЕРГІЇ» ...............................................................88 Балала М.І., Жижеріна І.О. Інтелектуальна систма керування генераторами сонячної енергії ..............................89
Гадай В.О. Автоматичне регулювання освітлення з використанням rgb-світлодіодів.............................................90
Горюшкин Н.И. Анализ возможностей использования разных типов генераторов для ветроэнергетических установок с учетом диапазона мощности .....................................................................................................................92
Кошевой О.П. Усовершенствование генерирующих элементов электроэнергетических систем ...........................94
Куліш Я.Р. Створення вітроенергетичних комплексів для оптимізації роботи вітроенергетичних установ .........96
Панченко М.О. Техніко-економічні аспекти розвитку електромашинобудування з урахуванням напрямків розвитку електроенергетики ..........................................................................................................................................98
Ханкишиєва М.С., Федорова Я.В. Аналіз режимів функціонування та видів несправностей тягових електричних двигунів рудничного рухомого складу .......................................................................................................................100
СЕКЦІЯ «РЕГУЛЮВАННЯ ЯКОСТІ ЕЛЕКТРИЧНОЇ ЕНЕРГІЇ» ..................................................................102
Безнікова О.В Особливості використання компенсуючих пристроїв в системах електропостачання промислових підприємств україни...........................................................................................................................103
Березка О.І. Комп’ютерне моделювання впливу та вимірювання якості електричної енергії в мережі з використанням електроприладів .................................................................................................................................104
Герасименко Р.В., Синяговський Д.В. Дослідження впливу на якість електричної енергії методів і параметрів керування трифазного силового активного фільтра ..................................................................................................105
Глазєв Д.О. Розробка засобів забезпечення електромагнітної сумісності тиристорного перетворювача напруги зі судновою мережею електроприводу підрулюючого пристрою................................................................................107
Жидченко Д.В., Однолеток М.Д. Вибір фільтркомпенсуючих пристроїв для дугових печей...............................109
Матвєєнко П.І. Засоби регулювання реактивної потужності в енергосистемах ....................................................110
Опришко М.О., Хребтова Т.О. Аналіз показників якості електричної енергії........................................................112
СЕКЦІЯ «ЕЛЕКТРОТЕХНІЧНІ СИСТЕМИ І КОМПЛЕКСИ ТРАНСПОРТНИХ ЗАСОБІВ» .................114
Бур’янова М.І., Літвіненко М.В. Підвищення ефективності роботи реостатного гальма тролейбусів з тяговим двигуном постійного струму........................................................................................................................................115
Ващенко А.К. Впровадження електричного підсилювача рульового керування на вітчизняному тролейбусі ...116
Дмитрук А.І., Косьянова А.Н. Проект струнного транспортного засобу з імпеллером.........................................117
Жеваженко С.М., Кучинська С.І. Підвищення енергоефективності тягового електропривода тролейбуса в режимі ослаблення поля ...............................................................................................................................................118
Іваніна Т.О., Миколаєнко Ю.О. Дослідження позаштатних режимів роботи тягового електротехнічного комплексу двохсистемного електровозу з асинхронним приводом.........................................................................119
Кулик Д.В., Леонтьєв П.О. Тяговий електропривод автобуса з гібридною силовою установкою........................121

Зміст 6
Лабадзе Г.Г., Раздобаров А.В. Гібридний електромобіль з асинхронним електроприводом .............................. 122
Миколаєнко Ю.О. Електроенергетичні процеси в схемі тягового електротехнічного комплексу в режимі рекуперативного гальмування .................................................................................................................................... 123
Мульгін В.С. Розробка системи керування незасліплюючою фарою ..................................................................... 125
Рувінський П.В. Розпізнавання голосових команд за допомогою нечіткої логіки. перспективи використання даної технології у автомобілях.................................................................................................................................... 127
Турпак О.М. Иммитационная модель системы управления курсовой устойчивостью транспортного средства с гусеничными движителями ......................................................................................................................................... 129
СЕКЦІЯ «ЕНЕРГОЗБЕРЕЖЕННЯ ЗАСОБАМИ ЕЛЕКТРОТЕХНІКИ ТА ЕЛЕКТРОМЕХАНІКИ»...... 131
Блінова А.С. Особливості підвищення енергетичних показників асинхронного двигуна у складі електротехнічного комплексу з регульованим джерелом напруги живлення ........................................................ 132
Варламов А.Г. Розробка ресурсозберігаючих технологій при експлуатації та ремонті редуктора ліфта........... 134
Величко О.В., Дубовець К.Ю. Характеристики електроприводу насосних комплексів при наявності кавітаційних процесів у гідромережі.......................................................................................................................... 136
Зубань Е.С. Вопросы энергосбережения в электромашиностроении...................................................................... 138
Омельницький А.Є. Система керування переміщенням електродів дугової сталеплавильної печі ..................... 140
Ошовський С.В., Мирко В.М. Метод оцінки енергоефективності насосних комплексів з регульованим електроприводом.......................................................................................................................................................... 142
АЛФАВІТНИЙ ПОКАЖЧИК АВТОРІВ ............................................................................................................... 144

Загальні питання та елементи електротехнічних комплексів та систем 7
СЕКЦІЯ
«ЗАГАЛЬНІ ПИТАННЯ ТА ЕЛЕМЕНТИ ЕЛЕКТРОТЕХНІЧНИХ
КОМПЛЕКСІВ ТА СИСТЕМ»

Загальні питання та елементи електротехнічних комплексів та систем 8
Бажинова Т.О. . Харків
Харківський національний автомобільно-дорожній університет
Математична модель тягової акумуляторної батареї синергетичного автомобіля
Вступ. В ролі накопичувача енергії транспортного засобу з тяговим електроприводом найчастіше виступа-ють електрохімічні джерела струму – тягові акумуляторні батареї (ТАБ). Акумуляторна батарея синергетичного автомобіля повинна володіти високими питомими значеннями енергії і потужності, високим ККД, великим чи-слом циклів «заряд-розряд», низькою вартістю, безпекою в експлуатації, надійністю, низькою вартістю техніч-ного обслуговування, малим часом заряду.
Мета роботи. Дослідження впливу конструктивних особливостей на енергетичний баланс силової установ-ки з урахуванням рекуперації кінетичної енергії гальмування.
Матеріали і результати дослідження. Перспективними для використання в тяговому електроприводі вва-жаються акумулятори на основі літію (літій-іонні, літій-полімерні і так далі). Номінальна ЕРС акумулятора лі-тій-іонних батарей складає ЕАК=3,5 В при дуже низькому внутрішньому опорі. Саморозряд таких ТАБ складає приблизно 10% у місяць. Час повного заряду – 2 - 3 год. Широке впровадження літій-іонних ТАБ в даний час стримує ряд невирішених технологічних проблем і висока вартість.
Побудуємо математичну модель тягової акумуляторної батареї синергетичного автомобіля, придатної для дослідження взаємодії тягового електроприводу і ТАБ під час руху автомобіля з використанням електротяги і в процесі рекуперації енергії гальмування. Для досягнення поставленої мети необхідно вирішити завдання струк-турної і параметричної ідентифікації моделі ТАБ.
0
0
1
3600
t
TAB TAB TAB
TAB nom
I dtC
θ = θ − ⋅⋅
∫ , (1)
де 0TAB
θ – ступінь зарядженої ТАБ у момент часу t = 0.
Якщо представити еквівалентну схему заміщення ТАБ [1, 3, 4] у вигляді послідовного з'єднання еквівалент-ної ЕРС (ETAB) і еквівалентного внутрішнього опору (RTAB), напругу ТАБ можна визначити з виразу:
U E I RTAB TAB TAB TAB
= − ⋅ . (2)
Даний вираз не враховує динамічні властивості ТАБ, якими при дослідженні властивостей ГСУ можна нех-
тувати. У загальному випадку ETAB і є функціями ступеня зарядженості ТАВ, температури електроліту ( 0
TABt ),
величини і напрямку струму (ITAB):
( )0, ,= θTAB TAB TAB TAB TABE E I t ; ( )0
, ,= θTAB TAB TAB TAB TABR R I t . (3)
Потужність, що віддається або споживана акумуляторною батареєю, визначається виразом ( )= ⋅ = − ⋅ ⋅TAB TAB TAB TAB TAB TAB TABP U I E I R I . (4)
Отже 21
42
= ⋅ − − ⋅ ⋅ ⋅
TAB TAB TAB TAB TAB
TAB
I E E R PR
. (5)
Негативне значення підкорінного виразу в останній формулі відповідає випадку PTAB > PTAB max, де PTAB max – максимальна потужність ТАБ, що віддається. Отже
2
max4
=
⋅
TABTAB
TAB
EP
R
. (6)
Якщо живлення тягового електроприводу синергетичного автомобіля здійснюється тільки від ТАБ, а поту-жність, вироблювана їм при роботі в генераторному режимі, витрачається на заряджання ТАБ і живлення дода-ткових споживачів, то можна записати:
, при 0
, при 0
= + ≥ η
= ⋅η + <
VDTAB dop VD
inv
TAB VD inv dop VD
PP P P
P P P P
, (7)
де VDP – потужність, споживана тяговим електроприводом.
Якщо у якості тягового електроприводу виступає вентильний двигун
( )3
2= ⋅ ⋅ + ⋅VD d d q qP u i u i , (8)
де ud, uq, id, iq – проекції векторів напруги і струму статора на осі пов'язаної з ротором системи координат, що обертається. У тяговому режимі PVD = Pptr > 0 у генераторному режимі PVD = Pgnr < 0, dopP Pdop – потужність,
споживана від бортової мережі додатковим електроустаткуванням, ηinv – ККД трифазного інвертора з ШІМ. Часто разом з ТАБ і паралельно їй як накопичувач енергії в силових установках синергетичних транспорт-
них засобів використовуються суперконденсатори. Таке технічне рішення дозволяє подолати деякі обмеження, властиві використанню акумуляторних батарей (нездатність віддавати і приймати великі потужності в коротко-часному імпульсі при розгоні і рекуперативному гальмуванні, малий діапазон робочих температур) [2].

Загальні питання та елементи електротехнічних комплексів та систем 9
Використання суперконденсаторів еквівалентне включенню в математичну модель накопичувача енергії аперіодичної ланки першого порядку з постійною часу TSC = 0.1…10 c.
При проведенні параметричної ідентифікації математичної моделі ТАБ конкретного типу може бути вико-ристана методика для нікельвмісних батарей. Дана методика заснована на дослідженні зарядно-розрядних ха-рактеристик АБ при струмах заряду і розряду у вигляді прямокутних імпульсів заданої амплітуди при різних значеннях температури електроліту. За наслідками даного дослідження можна зробити вивід про характер за-лежностей еквівалентних ЕРС і внутрішнього опору ТАБ від її ступеня зарядженості, величини і напряму стру-му, а також температури електроліту.
Результати дослідження для ЕРС акумулятора тягової акумуляторної батареї приведені на рис. 1.
а) 0 0
20 C=t , 1 – 30ATABI = − , 2 – 60A
TABI = − , 3 – 120A
TABI = − ,
4 – 30ATABI = , 5 – 60A
TABI = , 6 – 120A
TABI = ,
7 – результат поліноміальної апроксимації, 8 – результат лінійної апроксимації;
б) 60 ATABI = − , 1 – 0 0
15 Ct = − , 2 – 0 020 Ct = , 3 – 0 0
45 Ct = ,
60 ATABI = , 4 – 0 0
15 Ct = − , 5 – 0 020 Ct = , 6 – 0 0
45 Ct =
Рисунок 1 – Залежність ЕРС акумулятора ТАБ від ступеня зарядженості.
Висновоки. Приведене математичне моделювання та дослідження дозволяють зробити висновок про те, що
вплив температури і величини струму на ЕРС акумулятора виявляється неістотним і їм можна нехтувати. В той же час напрям струму і ступінь зарядженості ТАБ істотно впливають на ЕРС.
ЛІТЕРАТУРА 1. Бажинова Т.О. Оцінка режимів роботи гібридних силових установок / Нечитайло Ю.А., Бажино-
ва Т.О.// Вісник Національного технічного університету «ХПІ», Збірник наукових праць. Серія: Автомобіле- та тракторобудування. – Х.: НТУ «ХПІ». – 2013 –№29(1002). – С. 32-36.
2. Бажинова Т.О. Оценка качества технических решений в конструкции легкових автомобилей / Т.О. Бажинова // Вестник ХНАДУ. – 2012– №55. – С.49-51.
3. Бажинова Т.А. Концепция оценки технических решений создания синергетического автомобиля / Т.А. Бажинова // Сборник докладов международной научно – практической конференции студентов, аспирантов и молодых ученых «Молодежь и научно – технический прогресс». – Губкин: ООО «Айкью», 2013.– №61. – С. 15-17.
4. Бажинова Т.А. Выбор электрохимической системы для тягового привода электромобиля (Т.А. Бажино-ва, М.А. Кучерявая // Вестник ХНАДУ. – 2013. - № 63. – С. 32-36.
TABθ
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1.22
1.24
1.26
1.28
1.3
1.32
1.34
1.36
1.38
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1.2
1.25
1.3
1.35
1.4,AK
E
B
,AK
E
B
TABθ
а) б)
1
2
3
4
5
6
1
2 3
4 5
6
7
8
0
;
var
TABI const
t
=
=
0;
varTAB
t const
I
=
=

Загальні питання та елементи електротехнічних комплексів та систем 10
Бречко О.Ю. Харків
Національний технічний університет «ХПІ»
ВИБІР ВІТРОДВИГУНІВ ВІТРОЕНЕРГЕТИЧНИХ УСТАНОВОК ПО АЕРОДИНАМІЧНИМ
ПАРАМЕТРАМ
Вступ. Частка вітрової енергетики в системі енергопостачання може бути значно збільшена за рахунок реа-лізації масштабних заходів у області енергозбереження. На ринку вітроенергетики працюють понад 50 учасни-ків, половину з яких можна віднести до виробників. Практично всі виробники виготовляють свою продукцію на підставі власних розробок. Менше 1% виготовляють вітроенергетичні установки (ВЕУ) на основі трансферту зарубіжних технологій. Згідно державним планам, надалі вітроенергетика повинна розвиватися швидкими тем-пами. Це достатньо складне завдання, враховуючи нинішню динаміку розвитку.
Відомо багато різновидів вітродвигунів (ВД): з горизонтальною (наприклад, карусельні, барабанні) або з ве-ртикальною (крильчаті, роторні) віссю обертання, з плоскою формою вітроприймальних частин, що обертають-ся, у вигляді різних криволінійних поверхонь. В ВЕУ вітроприймальним пристроєм є лопаті, що мають різну форму. При виборі кількості лопатей вітряка слід враховувати, що кожна нова лопать додає потужності не про-порційно їх числу. Треба звертати увагу на зростання впливу тертя при збільшенні швидкохідності. Найбільша потужність досягається збільшенням аеродинамічної якості профілю, а не збільшенням числа лопатей. Вибір найкращої геометрії ВД підвищує ефективність всього комплексу і тому є актуальним і перспективним.
Ціль роботи - встановити кращий тип вітродвигуна для конкретного регіону і діапазону потужності, кілько-сті і форми лопотів, виду їх секцій, робочого кута атаки, встановити найбільший коефіцієнт використання енер-гії вітру.
Материалы и результаты исследования. В даний час в світі функціонує більше 30000 ВЕУ, сумарна по-тужність яких перевищує 30 млн. кВт. Діапазон потужностей сучасних ВЕУ змінюється від сотень ватів до де-кількох мегават. Світова практика показує, що темпи зростання кількості ВЕУ збільшуються щорічно на 30 %. В даний час частка вітроенергетики в енергобалансі Європи складає приблизно 5,5%, а до 2020 року повинна досягти 12 %. У США, Канаді, Австрії, Данії і Німеччині розвитку вітроенергетики приділяється особлива ува-га, причому на державному рівні з інвестиціями, позитивною банківською і податковою політикою, що заохо-чує цей важливий напрям енерговиробництва.
Використання вітру в енергетиці перспективно, проте є деякі проблеми. Наприклад: неможливість управля-ти напрямом потоку повітряних мас і швидкістю вітру; недосконалість технології виготовлення ВЕС, що при-водить до великих втрат і низького ККД.
Вітроенергетика є складовою частиною Національної енергетичної програми України. По Указу Президента від 1996 р. в Україні діє Комплексна програма будівництва ВЕУ. Метою програми є виробництво вітроагрега-тов і будівництво промислових ВЕУ у складі електроенергетичних систем. Відповідно до цієї програми до 2020 р. передбачено будівництво ВЕУ сумарною встановленою потужністю 1990 МВт і досягнення при цьому виро-бництва електроенергії близько 5,3 млрд. кВт·год. щорічно, що дозволить економити майже 2 млн. т у.п. в рік.
Вітроколесо перетворить енергію вітру в механічну роботу; воно може мати одну або багато лопатей, що встановлюються під деяким кутом до площини обертання вітроколеса. Крило складається з лопаті і маху, що закріплюється на валу вітроколеса, як правило, перпендикулярно осі валу. Головка є опорою, на якій вмонто-вують вал вітроколеса і верхній передавальний механізм. Крильчатий вітродвигун складається з наступних ос-новних частин: вітроколеса, головки, хвоста і башти. В даний час відрізняють два основних типа промислових ВЕУ: горизонтальні - з горизонтально віссю турбіни (вітроколесом), виконання, коли вісь обертання вітроколе-са паралельна повітряному потоку; вертикальні - з вертикально віссю турбіни (ротором), виконання, коли вісь обертання перпендикулярна повітряному потоку, рис. 1-3.
Рисунок 1 - Крильчаті ВЕС з горизонталь-ною віссю обертання - найпоширеніший тип.
Найбільша ефективність досягається, коли віт-ровий потік діє перпендикулярно площині обе-ртання лопатей. Вони досягають великих роз-
мирів: висота 80÷100 м; діаметр - 90÷120 м
Рисунок 2 - Карусельні (ро-торні) ВЕС обертаються навко-ло вертикальної осі і працюють при будь-якому напрямі вітру. Вони тихохідні і малошумні
Рисунок 3 - Роторні ВЕС можуть мати ло-
паті різної форми і конфігурації
У сучасних вітродвигунах застосовуються лопаті, що мають спеціальний аеродинамічний профіль, що за-безпечує високий коефіцієнт використання енергії вітру. Принцип роботи крильчатого вітродвигуна пояснює план швидкостей повітряного потоку, що набігає на елемент лопаті, і діючих сил, рис. 4. Вітер перед вітроколе-

Загальні питання та елементи електротехнічних комплексів та систем 11
сом підходить до лопаті з швидкістю V. Унаслідок обертання вітроколеса в площині у-у елемент лопаті зустрі-чає повітряний потік із швидкістю ωR . Швидкості V і ωR, складаючись геометрично, дають результуючу швид-кість W, з якою повітряний потік набігає на елемент лопаті під кутом атаки δ щодо хорди лопаті. Швидкість W, названа відносною, викликає силу Q, яку можна розкласти на підйомну силу Y і силу опору X, яка збільшує ло-бовий тиск Рл і створює складову опору обертанню Х'.
Рисунок 4 - План швидкостей і сил,
що діють на елемент лопаті Рисунок 5 - План швидкостей повітряного потоку,
що набігає на пряму лопать Складова сили Y', що діє по осі у-у, забезпечує обертання вітроколеса. Кут між хордою лопаті і віссю у-у в
площині обертання називають кутом заклинювання і позначають буквою φ. З результатів продувань моделей вітроколіс в аеродинамічних трубах відомо, що підйомна сила лопаті має найбільшу величину при малих кутах атаки δ, рівних 2-80. Пряма лопать, що має постійний кут заклинювання φ унаслідок різних значень окружної швидкості, має кут атаки α, що змінюється по довжині лопаті в широких межах (рис. 5).
Для того, щоб мати кут атаки на заданому рівні по всій довжині лопаті, необхідно збільшувати кут заклиню-вання φ кожного перетину по мірі наближення його до осі обертання вітроколеса. В цьому випадку можна до-битися того, що потік набігатиме на лопать по всієї неї довжині з постійним, найбільш вигідним кутом атаки α. Таким чином лопать матиме змінний по довжині лопаті кут заклинення φ і гвинтоподібну форму, яка є аероди-намічний найбільш здійсненою. Аеродинамічною характеристикою вітродвигуна називають залежність момен-ту вітроколеса Мв і коефіцієнта використання енергії вітру від числа модулів Z. Число модулів характеризує швидкохідність вітродвигуна. Визначається воно відношенням окружної швидкості обертання вітроколеса ра-діусом R до швидкості вітру V , тобто Z = ω · R / V . Приймаючи одну і ту ж швидкість для вітроколіс різних діаметрів, одержуємо різні оберти вітроколіс при одній і тій же швидкості вітру. Найбільші обороти розвивати-ме вітроколесо з найменшим діаметром. Оберти вітроколіс з рівними швидкостями відноситимуться один до одного обернено пропорційно до їх діаметрів, тобто (n1/n2) = (D1/D2). Це означає, що вітроколесо з діаметром D2 робитиме об/хв. в стільки разів більше, в скільки діаметр цього вітроколеса менше діаметру іншого вітроколеса D1. Наприклад, якщо вітроколесо з діаметром 1,5 м робить 714 об/хв, то вітроколесо з діаметром 3 м робитиме 357 об/хв, тобто в 2 рази менше, хоча швидкохідності їх однакові. Коефіцієнт використання енергії вітру може бути знайдений з аеродинамічної характеристики моментів: ξ = МВ·Ζ. Найбільший коефіцієнт використання енергії вітру колесо має лише при певній швидкості, тобто для кожної швидкості вітру є одні оберті, при яких коефіцієнт найбільший. Коефіцієнт використання потужності іноді називають критерієм Жуковського - Бетца по імені двох вчених, які теоретично обґрунтували його граничне (ідеальне) значення, яке дорівнює ξ = 0,593.
Виводи: 1. Виходячи з аналізу кліматичних умов, в Україні можна і потрібно застосовувати ВЕУ і це еко-номічно і вигідно. 2. Для різних діапазонів потужності, швидкості вітру, місця розміщення треба вибирати різні типи вітродвигунів з різною кількістю лопотів, що дозволить максимально використовувати потенціал вітрово-го потоку, підвищити надійність і ККД ВЕУ, отримати економічний ефект. 3. Величину підйомної сили визна-чає форма вигину крила, яка залежить від кута атаки і площі контактної поверхні лопаті. 4. Для підвищення потужності встановлених ВЕУ треба змінити систему кріплення лопатив, що дозволить змінити співвідношення виробляємої потужності для турбін з жорстко закріпленою віссю, яке визначається межею Betz-а, рівною 16/27 (59,3 %). При зміні системи механічного кріплення, типу лопатей вітротурбіни, установці регульованих по час-тоті обертання ВЕУ для встановлених генераторів можна на геометрії існуючої ВЕУ, із застосуванням змін, одержувати потужність більшу, ніж що існує в даний час, на 10÷60 %, залежно від переліку застосованих змін.
ЛІТЕРАТУРА 1. Шевченко В.В., Заныхайло Е.А. Порівняльний аналіз енергетичних параметрів генераторів, які викорис-
товуються в вітроенергетичних установках // Вестник НТУ «ХПИ», № 46, 2010. - С. 234-241. 2. Шевченко В.В., Омельченко Л.Н., Лизан И.Я. Исходные положения для построения модели ветроэнерге-
тической установки при решении проблем промышленной энергетики // Наукові праці ДонНТУ, серія «Обчис-лювальна техніка та автоматизація», вип. 19 (171), Донецьк, 2010. - С. 65 – 69.

Загальні питання та елементи електротехнічних комплексів та систем 12
Гринишин Р.О. Харків
Харківський національний автомобільно-дорожній університет
ОСОБЛИВОСТІ БУДОВИ ТА КЕРУВАННЯ ТРИФАЗНИМ ВЕНТИЛЬНИМ ЕЛЕКТРОДВИГУНОМ
Основним недоліком двигунів постійного струму при таких важливих перевагах, як висока здатність керу-
вання, високий пусковий момент, прямолінійність механічних характеристик, є наявність колектора, який виконує функцію механічного комутатора струму якоря. З розвитком силової напівпровідникової техніки з’явилася можливість замінити колектор на електронний комутатор на основі транзисторів чи тиристорів. Так як у звичайних двигунів колектор обертається, то для реалізації електронного комутатора двигун виготовляється у інверсному варіанті, тобто з обмоткою якоря на нерухомому статорі та системою збудження на роторі. Збудження двигунів потужністю приблизно до 30 кВт виконується за допомогою постійних магнітів. Найменша кількість секцій обмотки якоря для надійної роботи двигуна повинна дорівнювати трьом, тому схема вентильного двигуна може реалізуватися на основі серійних синхронних двигунів. Для визначення моменту часу перемикання секцій обмотки якоря обов’язково потрібно мати датчик положення ротора. У звичайних двигунів постійного струму перемикання проходить автоматично шляхом переходу електричних щіток на наступні пластики колектора при повороті ротора. Таким чином, вентильний двигун – це система, яка складається з електронного комутатора, датчика положення ротора ДПР та безпосередньо інверсного двигуна постійного струму чи еквівалентного синхронного двигуна. Для вмикання трьох секцій обмотки якоря з нульо-вою точкою необхідно мати три електронні ключі комутатора, проте найчастіше застосовується схема із шістьма ключами для обмотки без нульової точки
Рис.1 Схема керування трифазним вентильним двигуном
Особливості тополоігї силових шин. Коло постійного струму є одним з головних елементів конструкції пе-
ретворювача, що визначає його надійність, габарити і вагу. Сполучні шини розподіляють енергетичні потоки між силовими модулями і накопичувальними конденсаторами. Основними вимогами, що пред'являються до шин, є мінімальні значення індуктивностей і опорів провідників і велика допустима щільність струму в поєднанні з високою напругою ізоляції.
Будь-яка шина, як реальний провідник кінцевої довжини, має розподілену паразитну індуктивність Lb. При комутації великих струмів з високою швидкістю їх зміни наявність цієї індуктивності призводить до виникнен-ня перенапруг на силових ключах [2]. Наприклад, при відключенні IGBT напруга на колекторі зростає на вели-чину ∆V = LB·diC/dt щодо потенціалу шини живлення VDC, де diC/dt – швидкість спаду струму колектора. Якщо сумарне значення VCE = VDC + ∆V перевищить гранично допустимий рівень, це може привести до пробою тран-зистора. Значення енергії, накопичуваної індуктивністю, пропорційне квадрату робочого струму і величині індуктивності, тому для потужних застосувань зменшення значення розподілених індуктивностей набуває особливо важливого значення.
Для отримання мінімальних паразитних індуктивностей повинні використовуватися спеціальні багатошарові силові шини [2]. Багатошарова силова шина являє собою пакет ізольованих мідних пластин. Для досягнення максимального ефекту з'єднання силових модулів з батареєю розв'язувальних конденсаторів також повинно проводитися за допомогою широких мідних пластин.

Загальні питання та елементи електротехнічних комплексів та систем 13
На рис. 2 показаний поперечний перетин каскаду інвертора. Верхня пластина з'єднує транзистори напівмоста, середня пластина є шиною живлення, нижня – шиною загального дроту. Дві нижні шини підключені також до батареї конденсаторів. Плата драйвера встановлена безпосередньо на модулі, а плата снабберів – над багатошаровою шиною.
Рис. 2. Конструкція багатошарової силової шини
Сплески самоіндукції і захист від них. Практично всі сучасні транзистори і модулі IGBT мають прямокутну
область безпечної роботи, тобто допускають роботу в режимі «жорсткого перемикання», коли комутуються максимальний струм і напруга. У цьому випадку головне завдання снабберів - обмеження перехідних перена-пруг.
Снаббери застосовуються як для обмеження перехідних перенапруг, так і для зниження динамічних втрат в силових ключах. В останньому випадку вони використовуються для формування траєкторії перемикання клю-ча: ємності, встановлені паралельно колу «колектор-емітер», знижують швидкість наростання напруги, індуктивності в колі колектора, обмежують швидкість наростання струму.
Конфігурація снабберної схеми залежить від багатьох параметрів – типу силових модулів, робочої частоти і параметрів навантаження.
Висновки. Проектування частотних перетворювачів управління електроприводом високої потужності вимагає знань особливостей конструювання і методів розрахунку елементів схем з урахуванням розподілених паразитних параметрів. Урахування особливостей топології конструкції силової частини управління дозволяє істотно знизити вимоги до схем захисту, масогабаритні параметри і покращити надійність роботи частотних перетворювачів.
ЛІТЕРАТУРА 1. Семенов Б.Ю. Силовая электроника: профессиональный решения. – М.: СОЛОН-ПРЕСС, 2011. – 416 с. 2. Колпаков А. SEMITEACH – силовая электроника для студентов // Компоненты и технологии. – М.: К и Т,
2010. – №10. – С. 83-90. 3. Кроз А. Мощные полевые транзисторы в современном электроприводе // Компоненты и технологии. – М.:
К и Т, 2001. – №7. 4. Колпаков А. Топология частотных преобразователей средней и большой мощности // Компоненты и тех-
нологии. – М.: К и Т, 2002. – №2.
Фільтруючі конденсатори
Модуль IGBT
верхнього плеча
Модуль IGBT
нижнього плеча
Ізолююча прокладка
Плата снабберів
Плата драйвера
Вихідна шина
Ізолятор
(+) Шини
(–) живлення

Загальні питання та елементи електротехнічних комплексів та систем 14
Медяник Б.С. , Наход Є.Ю. Днепропетровск
Национальная металлургическая академия Украины
ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ ПУТЕМ
ОПТИМИЗАЦИИ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
Введение. Необходимость оценки надежности непосредственно связана с повышением эффективности и ка-чества, уменьшением материальных и временных затрат на эксплуатацию металлургических электромеханиче-ских систем (ЭМС), в том числе электроприводов этих систем, а также совершенствованием их системы техни-ческого обслуживания (СТО). Поэтому оценка технической надежности является важной и актуальной задачей, решаемой на всех этапах “жизненного” цикла ЭМС. Для современных ЭМС, представляющих собой многообъ-ектовые и функционально связанные технологические комплексы и установки важно знать, за какое время и до какого уровня СТО сможет восстановить утраченную в результате отказа или технического обслуживания (ТО) готовность комплексов. Кроме того, нельзя не учитывать эксплуатационные затраты и технико-экономическую важность ЭМС, что непосредственно влияет на уровень энергосбережения. В работе рассматривается методика и алгоритм определения оптимальных периодичностей и стратегий ТО ЭМС металлургических технологиче-ских комплексов. Для решения задачи предлагается полумарковская модель эксплуатации ЭМС, позволяющая получить аналитическое выражение и рассчитать оптимальные периодичности ТО, исходя из условия обеспе-чения максимального коэффициента готовности системы при изменяющемся во времени параметре потока от-казов.
Цель работы. Построение и исследование математической модели процесса эксплуатации ЭМС для опре-деления оптимальных периодичностей и стратегий технического обслуживания и текущего ремонта.
Материалы и результаты исследования. При большой периодичности проведения ТО в ЭМС накаплива-ются скрытые отказы, приводящие к увеличению времени простоя системы. При уменьшении периодичности ТО увеличивается частота нахождение ЭМС в режиме ТО, что, в свою очередь, ведет к снижению её уровня готовности и увеличению затрат. Анализ СТО ЭМС указывает на то, что ТО проводятся с неизменными во вре-мени объемами и периодичностями, принимая за величину параметра потока отказов его среднее значение на интервале эксплуатации. Однако, на практике показатели надежности ЭМС, в частности параметр потока отка-зов, являются изменяющимися во времени величинами. В силу этого имеет смысл определять такие значения периодичностей ТО, которые обеспечивали бы на протяжении всего "жизненного" цикла ЭМС максимальный коэффициент готовности.
Тогда задача определения оптимальных периодичностей ТО ЭМС может быть сформулирована следующим образом. Известны закон изменения параметра потока ( )tΛ
и вероятность обнаружения обнР отказов, вероят-
ность отказовот
Р , продолжительности рτ различных видов ТО, текущего ремонта трτ , а также другие характе-
ристики СТО. Определить для любого шага эксплуатации ( 1, )y y Y= длительностью э
Т такие значения пе-
риодичностей *
рТ ТО, которые обеспечивают максимальную величину коэффициента готовности ЭМС. Реше-
ние такой задачи состоит из следующих основных этапов: построение модели процесса эксплуатации ЭМС; вывод расчетного соотношения для коэффициента готовности как функции параметров технического состояния ЭМС и СТО; получение аналитического выражения для определения оптимальных периодичностей q-го вида ТО.
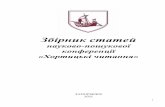
Решение первого этапа задачи основывается на использовании полумарковской модели процесса эксплуата-ции ЭМС, заданного на множестве дискретных состояний и возможных переходов на интервале эксплуатации [1,2]. В любой произвольный момент времени ЭМС может находиться в одном из состояний Sk є S графа со-стояний и переходов (ГСП), приведенного на рисунку :
1S - ЭМС работоспособна и готова к применению,
2S -
на ЭМС проводится ТО при условии, что в аппаратуре нет отказов; 3S - в аппаратуре ЭМС существуют скрытые
отказы; 4S - на ЭМС проводится ТО, во время которого могут выявляться скрытые отказы;
5S - производится
текущий ремонт аппаратуры.
Рисунок – Граф состояний и переходов ЭМС в процессе ее эксплуатации
Загальні питання та елементи електротехнічних комплексів та систем 15
Исчерпывающими характеристиками полумарковского процесса являются матрица условных функций рас-пределения ( ) ( )
klF t F t= времени пребывания ЭМС в состоянии
kS до перехода в состояние
∈lkl SSS ,( S) и матрица условных вероятностей переходов ),1,( NlkРР kl == , где N – число состояний
процесса. Анализ математических методов показывает, что наиболее адекватной математической моделью является
полумарковская модель процесса эксплуатации ЭМС, и представленного в виде ориентированного графа со-стояний и переходов. На основании этой модели получена система уравнений, решением которой является ма-
тематическое выражение для определения значения оптимальной периодичности *рТ ТО ЭМС
* 3 2 3 23 3р
у
1Т ln 1 ( ) ( ) ( ) ( ) ,
2 2 2 2 2 2
β β β β β β = − − + + − − + Λ
связывающее продолжительность ТО с параметрами технического состояния ЭМС и СТО. Согласно этому соотношению производится расчёт, построение и анализ графиков кривых периодичностей
ТО в функции продолжительности ТО и времени. Для поддерживания высокого уровня готовности ЭМС в процессе эксплуатации должны проводиться раз-
личные виды ТО, регламентированные по объемам, периодичностями и времени их проведения. Опыт эксплуа-тации указывает на необходимость уточнения объемов и порядка проведения некоторых видов ТО, а в ряде случаев необходимо отказаться от обслуживания вообще или проводить ТО по сокращенным (усеченным) объ-емам. Всё это приводит к необходимости рассмотрения различных вариантов ТО ЭМС, что позволит опреде-лить действительно целесообразные объемы, периодичности и порядок проведения обслуживаний в каждом из состояний системы. Выбор того или иного мероприятия ТО, как и отдельных его составляющих операций, за-
висит от технико-экономической и производственной целесообразности. Для любого состояния Sk є S ( 1, )k n=
ЭМС каждому варианту обслуживания будет соответствовать определенная совокупность технологических операций, обусловливающих интенсивность потока событий, приводящих систему из состояния
kS в состояние
eS , и стоимость обслуживания по данному варианту.
Использование конечного множества вариантов ТО и текущего ремонта позволяет ввести понятие страте-гии ТО и ремонта, представляющей собой совокупность указаний о порядке обслуживания и ремонта ЭМС в любом из её состояний. Содержание такой стратегии определяется конкретным набором вариантов по всем со-стояниям ЭМС, задаваемым в виде ГСП. Одна от другой стратегии отличаются хотя бы одним вариантом в лю-бом из состояний этого графа.
Тогда задачу выбора оптимальных стратегий ТО и ТР ЭМС можно сформулировать в следующем виде. Найти набор параметров mij назначения j-й стратегии для обслуживания i-й ЭМС на рассматриваемом шаге
эксплуатации ( 1, )y y Y= , при котором обеспечивается перевод системы из неработоспособного состояния с
наименьшим суммарным временем перевода tnij с допустимыми эксплуатационными затратами и коэффициен-том готовности, не ниже заданного. Таким образом mij = 1, если j-я стратегия выбрана для обслуживания i-й ЭМС на интервале эксплуатации у, mij = 0 – в противном случае; Кгт(у) и Сдоп(у), – соответственно требуемое значение уровня готовности и допустимое значение затрат на эксплуатацию ЭМС; ωi(y) – коэффициент техни-ко-экономической важности i-й ЭМС. По содержанию задача выбора оптимальных стратегий ТО [2] относится к классу задач линейного целочисленного программирования. Составлена схема алгоритма выбора оптималь-ных стратегий ТО и текущего ремонта, основанная на использовании метода наименьшего элемента строки.
Выводы. Получено на основе полумарковской модели процесса эксплуатации аналитическое соотношение позволяющее рассчитать оптимальные из условия обеспечения максимума коэффициента готовности перио-дичности ТО, что дает возможность управлять нестационарным процессом эксплуатации ЭМС. Предложенная в работе схема алгоритма выбора оптимальных стратегий ТО позволит: оценить качество системы обслужива-ния по данным оптимальной стратегии; выбрать рациональный режим работы СТО; проводить сравнительную оценку различных вариантов СТО при условии использования в каждой из них оптимальной стратегии ТО и ремонта; обеспечивать заданный уровень готовности ЭМС к применению; создать адаптивную АСУ техниче-ским состоянием ЭМС.
ЛИТЕРАТУРА 1. Барлоу Р., Прошан Ф. Статистическая теория надежности и испытаний на безотказность. Пер. с англ. Н.А.
Ушакова. –М.: Наука, 1984. -327с. 2. Королюк В.С., Турбин А.Ф. Полумарковские процессы и их приложения. К.: Наук. думка, 1976. -184с. 3. Корн Г.А., Корн Т.М. Справочник по математике для научных работников и инженеров. Определения,
теоремы, формулы. 5-е изд. –М.: Наука,1984. -831с. 4. Ястребенецкий М.А., Иванова Г.М. Надежность автоматизированных систем управления технологиче-
скими процессами. -М.: Энергоатомиздат, 1989. -264с.

Загальні питання та елементи електротехнічних комплексів та систем 16
Молодковець Б. І. Одеса
Одеський національний політехнічний університет
ЕНЕРГОЗБЕРІГАЮЧА ТЕХНОЛОГІЯ ВИРОБНИЦТВА БІОГАЗУ НА ОСНОВІ ТЕПЛОВОГО НАСОСА
Вступ. Існуючі системи підтримки функціонування біогазових установок не завжди достовірно використо-вують вимірювання температури зброджування сировини, що обумовлено її значною тепловою акумулюючою ємністю. Більш того, регулюючим впливом при зміні температури зброджування є зміна витрати сусла, що може порушити необхідний баланс свіжої та збродженої сировини [1, 2].
Мета роботи. Для підтримки технологічного процесу здобуття біогазу необхідно здобути прогнозуючу аналітичну оцінку зміни температури зброджування на основі вимірювання температури теплоносія, що гріє на виході із теплообмінника для підігріву субстрату, що змінюється за часом раніше, ніж зміна температури збро-джування. Такий підхід надасть можливість прийняття упереджених рішень на встановлення енергозберігаючих режимів функціонування біогазової установки [3-4, 5-6].
Матеріали та результати дослідження. З цією ціллю необхідно розширити технологічну систему вироб-ництва біогазу [6] за рахунок нової динамічної підсистеми – теплового насоса та блок підтримки динамічної рівноваги доповнити додатковими блоками, що прогнозують відвантаження та завантаження сировини при не можливості збереження її балансу в умовах підтримки динамічної рівноваги процесу зброджування (рис.1) [7-9].
Рис. 1. Архітектура інтегрованої технологічної системи
виробництва біогазу 1 - динамічна підсистема (біогазова установка та тепловий насос); 2 – інтегрована система підтримки дина-
мічної рівноваги процесу зброджування; 3- блок зміни режимних умов функціонування; 4 – блок оцінки функ-ціональної ефективності
Використання результатів чисельного моделювання біогазової установки та теплового насоса надає можли-
вість здобути еталонну та функціональну інформацію з використанням графа причинно-наслідкових зв’язків [3-5,6] у складі запропонованої технологічної системи виробництва біогазу ( рис.1). Здобута підсумкова інформація від блоку контролю CTc при розряді біогазової установки:
с ст. розр. верх. розр. рів. ст. розр. верх. (СT ( )( t( ) / t. ( ) t ( ) / t ( ) 0)),τ τ τ τ τ∆ ∆ < ∆ ∆ > (1)
дозволяє приймати рішення на підтримку температури збродження шляхом відключення секцій теплообмінника для підігріву субстрату, вбудованого в метантенк [7-8, 9-10] (рис. 2).
. Рис. 2. Система підтримки динамічної рівноваги процесу здобуття біогазу при розряді
1, 2, 4 - гранично припустима працездатність для верхнього, середнього та низького рівнів функціонування,
відповідно; 3, 5 – розряд та ідентифікація розряду верхнього та середнього рівнів, відповідно
де СT – контроль події; t – температура зброджування, К; ι - час, с. Індекси: с – контроль працездатності; ст. розр. верх. – стале розрахункове значення параметра верхнього рівня функціонування; розр. рів. – розрахункове значення параметра рівня функціонування.
Якщо після прийняття рішення на відключення секції теплообмінника здобуваємо таку підсумкову інформацію від блоку контролю CTc :
с ст . розр верх. . розр. рів . ст. розр. верх. (СT ( )( t( ) / t ( ) t ( ) / t ( ) 1)),τ τ τ τ τ∆ ∆ > ∆ ∆ < (2)

Загальні питання та елементи електротехнічних комплексів та систем 17
то для запобігання зміни напряму теплообміну виконуємо відвантаження збродженої сировини та завантаження свіжого матеріалу з включенням секції теплообмінника щодо підтримки процесу зброджування за рахунок ба-лансу потоків свіжої та збродженої сировини (рис. 3).
Рис. 3. Система підтримки динамічної рівноваги процесу здобуття біогазу при заряді
1, 3, 5 - гранично припустима працездатність біогазової установки для верхнього, середнього, низького рівнів функціонування, відповідно; 4, 2 – заряд та ідентифікація заряду нижнього та середнього рівнів
відповідно Зниження температури відвантаженого сусла при розряді метантенка дозволяє приймати упереджені
рішення на збільшення перепуску пари у конденсатор теплового насоса для збільшення температури теплоносія, що гріє, для підтримки заряду метантенка [7-8,9 -10]. Здобуття ж підсумкової інформації (1) після відключення секції теплообмінника свідчить про продовження процесу зброджування щодо входження енергетичної системи в допуск нового рівня підтримки процесу розряду (рис. 2).
Висновки. На основі чисельного моделювання біогазової установки визначена перевага яйцевидної форми метантенка у зв’язку зі зменшенням втрат теплоти в оточуюче середовище, що дозволяє збільшити товарність біогазової установки майже на 5%. Запропонована технологічна система виробництва біогазу з використанням теплового насоса дозволяє збільшити товарність біогазової установки до 15% в умовах постійного виходу біогазу.
ЛІТЕРАТУРА
1. Баадер В. Биогаз: теория и практика / Е.Доне, М. Бренндерфер . – М.: Колос, 1982 – 148с. 2. Эдер Б., Шульц Х. Биогазовые установки. Практическое пособие. / Перевод с немецкого выпонен ком-панией Zorg Biogas в 2008 г. / 1996, - 268 с. 3. Чайковская Е.Е. Энергосберегающие технологии на основе интеллектуального управления тепломассоб-менными процессами / Е.Е. Чайковская //Abstracts of the reports and communication XIY Minsk International Heat and Mass Transfer Forum.- Минск.- 2012, Т.2, Ч.1.- С.378-382. 4. Чайковська, Є.Є.Функціонування енергетичних систем на рівні прийняття рішень / Є.Є. Чайковська // Восточно-Европейский журнал передовых технологий. - 2012. - №5/8(59).- С.4-6. 5. Чайковська, Є.Є. Енергозберігаючі технології на рівні прийняття рішень / Є.Є.Чайковська // Вісник На-ціонального технічного університету “ХПІ”. Серія ” Нові рішення в сучасних технологіях ”. – Харків, 2012. –№33. – С.103 - 108. 6. Чайковська Є.Є. Підтримка функціонування біопаливних установок / Є.Є.Чайковська, К.О. Кустов // Вос-точно-Европейский журнал передовых технологий. - 2012. - №2/10(56).- С.41-44. 7. Чайковська Є.Є. Інтелектуальна система управління теплонасосним енергопостачанням / В.В. Стефанюк // Вісник Вінницького політехнічного інституту. - 2011.- №5.- С. 76-83. 8. Чайковська Є.Є.Інтегрована експертна система підтримки процесу здобуття біогазу/ Є.Є. Чайковська, В.В. Стефанюк, А.В. Столярова, Б.І. Молодковець // Сборник трудов Международной научно-практической конференции “Новые технологии в автоматизированном управлении; Теория и практика”, Одесса, 12 - 15 сен-тября.- Наука и техника. — 2013. — С.97— 104. 9. Чайковська Є.Є. Інтегрована технологічна система виробництва біогазу / Є.Є. Чайковська // Восточно-Европейский журнал передовых технологий. — 2013. — №4/8 (64) . — С. 31—34. 10. Чайковська Є.Є. Підтримка розряду та заряду біогазової установки на рівні прийняття рішень / Є.Є.Чайковська, Б.І. Молодковець // Сборник докладов YI Всеукраинской научно-практической конференции ”Информационные технологии и автоматизация - 2013”, Одесса, 17 октября. — 2013. — С.47— 48. 11. "Екомузей", м. Караганда, Агентство з відновлюваної енергетики, м. Київ, 2005. 12. Документация для планирования и проектирования рассольно-водяных тепловых насосов Logatherm WPS 6–11 K и WPS 6–17, Buderus, издание: 06/2008.

Загальні питання та елементи електротехнічних комплексів та систем 18
Полишко Н. М. Днепропетровск
ГВУЗ Национальный горный университет
ОПРЕДЕЛЕНИЕ ЭНЕРГОЭФФЕКТИВНОСТИ МАГИСТРАЛЬНЫХ ЛЕНТОЧНЫХ КОНВЕЙЕРОВ УГОЛЬНЫХ ШАХТ НА СТАДИИ ИХ ВЫБОРА
Вступление. Известно, что при сплошной конвейеризации доставки угля из очистных забоев, конкретные конвейеры на шахтах, в том числе и Западного Донбасса, работают при неравномерных грузопотоках и пото-му с завышенным в 2-5 раз удельным расходом электроэнергии, то есть, не эффективно. [1]
Цель работы. Обоснование степени влияния параметров грузопотоков на энергоэффективность конвейер-ного транспорта на стадии выбора.
Материалы и результаты исследования. Основные статистические параметры грузопотоков следующие: математическое ожидание груза во время поступления, среднеквадратичное отклонение, время поступления груза из очистного забоя, количество грузопотоков. Исследуем влияние перечисленных параметров, кроме ма-тематического ожидания грузопотока, на энергоэффективность одиночного конвейера, и оценим его возможное удельное энергопотребление на стадии выбора. Выбор конвейера осуществляется по максимальному минутно-му грузопотоку и проверяется по среднечасовому.
Согласно СОУ максимальный суммарный грузопоток а1(max)∑ за время поступления груза на сборную транс-портную систему от нескольких очистных забоев определяется следующим выражением:
21(max) 1( )
1 1Σ
= =
= +∑ ∑n n
n i
i i
a a nσ
σ (1)
где а1(n) – средний грузопоток за время поступление из одного очистного забоя, σ – среднеквадратичное откло-нение значения минутных грузопотоков за время поступления по каждому из суммарных очистных забоев, что вычисляется по формуле:
1(max) 1( )
2,33
na a
σ
−
= (2)
nσ - вероятностный параметр, что учитывает одновременность поступления максимальных грузопотоков из очистных забоев в зависимости от средневзвешенного времени поступления грузопотоков и количества очист-ных забоев, что подают груз на сборный конвейер: в СОУ 10.1.00185790.004-2006 приводится таблицей, значе-ния элементов которой зависит от коэффициента машинного времени лав и их количества. Численными мето-дами (в частности методом Ньютона) аппроксимируем зависимость вероятностного параметра от упомянутых величин:
( ) 2 2 2 2 2 2, 0,517 0,815 0,081 1,004 0,035 1,398 0,485 0,818 2,284t t t t t t t
n K n K n K n K n K n K n K nσ
= − − + + + + − + (3)
Средняя относительная погрешность при аппроксимации полиномом второй степени составляет 2,45 %, притом, что для значений n<8 и Kt>0,3 относительная погрешность не превышает 4 %. Подставляя (3) в (1) по-лучаем максимальный поток, по которому выбирается конвейер, зависимый от интересующих нас параметров.
Для расчета энергопотребления конвейера необходим тяговый расчет – установить зависимость энергопо-требления от механических параметров установки и грузопотока. [2] Далее определяются удельные затраты: относим затраченную энергию к тонно-километру перемещаемого груза.
Для построения зависимостей исследования энергоэффективности примем конвейер 2ЛУ120 с резиноткане-вой лентой. Предположим, что конвейер горизонтальный (β=0), его параметры:
Тип qл, кг/м q`р, кг/м q``р, кг/м L, м c' w' β, ° Погонная приемная способность, кг/м
2ЛУ120 18 26,7 12,5 1000 1,1 0,06 0 133,3
Примем параметры каждой лавы, из которых уголь поступает на конвейер: а1(mах) = 5000 кг/мин, а1(n) = 3600 кг/мин, Кt = 0,4 – коэффициент машинного времени работы очистного забоя.
Для расчетов примем, что скорость подбирается с помощью редуктора под максимальный расчетный грузо-поток – таким образом, обеспечиваем наименьшие удельные затраты.
Используя соотношения (1)-(3) проанализируем зависимость удельной энергоэффективности конвейера от интересующих нас параметров грузопотоков: их количества, времени поступления (оно же коэффициент ма-шинного времени лавы в отн. ед.) и дисперсии.
Определим пределы измерения перечисленных параметров. Количество лав работающих на один конвейер в угольной шахте от одной и, как правило, до пяти-шести; коэффициент машинного времени: от 0,2 до 0,6; дис-персия: от 10 % до 50 % от величины математического ожидания. На рисунках 1 и 2 представлены зависимости удельного расхода электроэнергии магистральным конвейером в зависимости от количества лав при коэффици-енте машинного времени Кt=0,2;0,4;0,6 и дисперсии 0,1·а1(n) (рис 1) и 0,5·а1(n) (рис 2).

Загальні питання та елементи електротехнічних комплексів та систем 19
Рисунок 1, 2. Зависимость удельного энергопотребления ленточного конвейера 2ЛУ120 от количества лав
при различных коэффициентах машинного времени работы лав и дисперсии потока 0,1·а1(n) (рис.1) и 0,5·а1(n)
(рис.2). По представленным зависимостям на рисунках 1 и 2 можно сказать, что при увеличении количества лав
энергоэффективность увеличивается, причем чем больше дисперсия грузопотока и меньше коэффициент ма-шинного времени работы лавы, тем более эта закономерность проявляется.
На рисунках 3 и 4 представлены зависимости удельного расхода электроэнергии магистральным конвейе-ром в зависимости от коэффициента машинного времени работы лав при количестве лав п=1;3;5 и дисперсии 0,1·а1(n) (рис 3) и 0,5·а1(n) (рис 4).
Рисунок 3, 4. Зависимость удельного энергопотребления ленточного конвейера 2ЛУ120 от коэффициента ма-
шинного времени работы лав при различном количестве лав и дисперсии потока 0,1·а1(n) и 0,5·а1(n) (рис 2). Анализируя рисунки 3 и 4 можно сказать, что при большей дисперсии и меньшем коэффициенте машинного
времени работы лав сильнее проявляется влияния количества лав на энергоэффективность. Пересечение кривых на рисунке 4 можно объяснить большой ошибкой при граничных значениях интерполяции многочленом веро-ятностного параметра nσ.
Из всех представленных зависимостей можно сделать следующие выводы: при малой дисперсии более эф-фективным средством снижения энергопотребления является увеличение машинного времени работы лав, а при больших значениях дисперсии соответственно увеличение количества лав. Влияния коэффициента машинного времени на энергоэффективность сохраняется при любых значениях n и σ. Влияния количества лав на энерго-эффективность выразительно при любых низких Kt (<0,5) и высоких σ (>0,3). Влияние дисперсии на энергоэф-фективность увеличивается с коэффициентом машинного времени и проявляется при Kt >0,2.
Выводы. Из параметров потоков угля наибольшую степень влияния на энергоэффективность на стадии вы-бора ленточного магистрального шахтного конвейера имеет коэффициент машинного времени работы очистно-го забоя. Следующим по влиятельности является дисперсия потока, и ее влияние увеличивается при росте Kt. Наименьшее влияние имеет количество грузопотоков из очистных забоев, что сходится на исследуемый кон-вейер.
ЛИТЕРАТУРА
1. Заика В.Т. Модели для контроля энергетической эффективности шахтных магистральных конвейерных установок // Науковий вісник НГА України. - Дніпропетровськ: РВК НГА України. – 2000. - № 2. С. 72 – 77.
2. Шахмейстер. Л.Г. Вероятностные методы расчета транспортирующих машин, М.,1983. – 312 с.

Електромеханічні системи автоматизації 20
СЕКЦІЯ
«ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ АВТОМАТИЗАЦІЇ»

Електромеханічні системи автоматизації 21
Бровка О.В. , Ткаченко Ю.В. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
РОЗРОБКА АВТОМАТИЗОВАНОГО КОМПЛЕКСУ СТАБІЛІЗАЦІЇ ТЕМПЕРАТУРИ ОПАЛЕННЯ ЖИТЛОВОГО ПРИМІЩЕННЯ
Вступ. Велика кількість житлових приміщень, які не можуть обслуговуватися централізованою системою опалення, вимагають підтримки сталості температури протягом тривалого часу в межах зазначеного діапазону. Наприклад, для забезпечення комфортних умов праці на підприємстві працюють складні установки обігріву та системи стабілізації температури, які оснащені системами автоматизації та потребують мінімального втручання оператора. Широке застосування цих установок спонукало до розробки лабораторного комплексу, який дає можливість ознайомлення й вивчення систем автоматизації теплових процесів, що реалізовані на базі сучасних пристроїв контролю та регулювання температури.
Мета роботи. Розробка фізичної моделі стенду стабілізації температури опалення житлового приміщення, а також математичного та програмного забезпечення системи керування роботою установки термостабілізації для досягнення точності відпрацювання необхідного завдання.
Матеріал і результати дослідження. Створення систем термостабілізації житлового приміщення є необхідною умовою для комфортної роботи персоналу, адже від температури приміщення залежить продуктивність роботи персоналу. У випадку, якщо температура буде занадто низькою, то втрачається відчуття комфорту та виникає можливість захворювання персоналу, і навпаки – при високих температурах можливе ви-никнення сонливості, що може призвести до аварійних ситуацій на виробництві та зниження продуктивності працівників. Для забезпечення необхідних параметрів роботи технологічного об’єкту важливим є урахування всіх факторів роботи та розробка системи керування. У якості досліджуваної системи автоматизації процесів термостабілізації є фізична модель комплексу (рис. 1), яка надає можливість виконувати обмін даних з персо-нальним комп’ютером (ПК), обробляти та проводити відображення інформації в реальному часі, створення баз даних про технологічні параметри та аварійні відмови, аварійної сигналізації, редагування візуального відображення технологічних процесів.
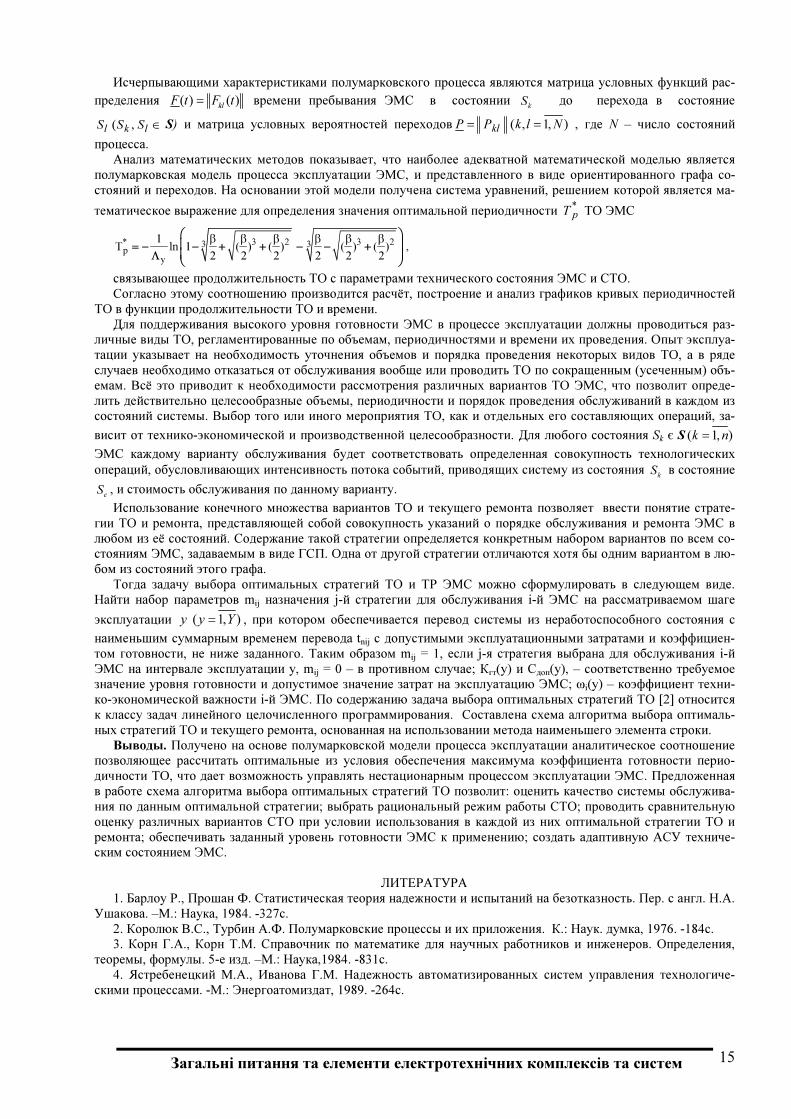
Рисунок 1 – Фізична модель комплексу. Джерелом тепла є термоелектричний нагрівач, що отримує живлення від тиристорного регулятора напруги
(ТРН) і передає теплову енергію металевому корпусу. Значення температури корпусу вимірюється за допомо-гою датчика температури ДТ2. Теплоносій, який циркулює системою за допомогою циркуляційного насосу НЦ по металевим трубам, нагріває теплообмінник ТО, на якому встановлено датчик температури ДТ1. Поточне значення температури з датчика ДТ1 у вимірювачі-регуляторі ТРМ порівнюється зі значенням датчика темпе-ратури ДТ2. Пристрій формує сигнал управління відповідно до обчисленого розузгодження. Цей сигнал є сиг-налом завдання, що надходить на вхід ТРН. Відповідно завданню, ТРН змінює вихідну напругу, що призводить до зміни нагріву електронагрівача та температури теплоносія. Це в свою чергу збільшує чи зменшує інтенсивність нагріву теплообмінника.
Таким чином, температура змінюється відповідно до зменшення похибки регулювання відносно уставки. Перетворювач частоти (ПЧ) та вентилятор (В) з двигуном М1 формують систему розсіювання температури теплообмінника, що призводить до його охолодження. За допомогою зміни інтенсивності охолодження

Електромеханічні системи автоматизації 22
моделюється певна кількість послідовно з’єднаних теплообмінників в однотрубній системі опалення житлового приміщення. Запис даних на комп’ютер здійснюється через перетворювач інтерфейсів (ПІ).
Для візуалізації процесу регулювання температури використано інтерфейс, який розроблено в пакеті NI Labview 11 (рис.2). Результати роботи системи стабілізації температури на математичній моделі при різних зна-ченнях напруги наведено на рис 3. Результати аналізі сигналів, які зображені на рис. 3, показали, що при збільшенні напруги мережі живлення збільшується перерегулювання. При зменшенні напруги живлення в два рази перерегулювання різко знижується, але значно збільшується час регулювання.
Рисунок 2 – Робоче поле програми-реєстратора.
Рисунок 3 – Перехідні процеси за температу-рою при різних значеннях напруги.
Висновки. Розроблено математичну модель системи стабілізації температури, яка дозволяє аналізувати
процеси нагріву та охолодження. Розроблено інтерфейс візуалізації роботи технологічного процесу на основі NI Labview, який дозволяє віддалено керувати та слідкувати за процесами у реальному часі. Розроблений ком-плекс разом із програмним забезпеченням дозволяє досліджувати процес стабілізації температури опалення житлового приміщення з метою покращення умов роботи працівників, а також вивчати принципи розробки су-часного програмного забезпечення систем автоматизації типових промислових механізмів.
ЛІТЕРАТУРА 1. Федь П. И. О вопросах нагрева и охлаждения электрических двигателей // Збірник матеріалів конференції
«Електромеханічні та енергетичні системи, методи моделювання та оптимізації». – Кременчук: КНУ, 2010. – С. 531–532.
2. Носач Е. В. Состояние исследований по построению систем управляемого охлаждения крупных электри-ческих машин // Збірник матеріалів конференції «Електромеханічні та енергетичні системи, методи моделю-вання та оптимізації». – Кременчук: КНУ, 2010. – С. 245–247.
3. Захаренко В. А. Особенности построения системы управления тепловыми режимами обмоток крупных электрических машин // Вісник КДПУ: Наукові праці КДПУ. – Кременчук: КДПУ, 2003. – Вип. 2(19), Т. 2. – С. 107–111.
4. Ефстифеев В. А., Артеменко А. В., Сененко Р. Г. Определение структуры системы принудительного ох-лаждения электрических машин // Вісник КДПУ: Наукові праці КДПУ. – Кременчук: КДПУ, 2002. – Вип. 1 (12). – С. 122–125.
5. Ефстифеев В. А., Родькин Д. И. Обоснование создания управляемого охлаждения электрических машин систем електропривода // Проблемы создания новых машин и технологий. Научные труды КГПИ. – Кременчуг: КГПИ, 2000. – Вып. 1(8). – С. 92–94.
6. Сененко Р. Г., Кирьянов О. Ф. Принципы построения систем управления охлаждениям электрических машин // Вісник КДПУ: Наукові праці КДПУ. – Кременчук: КДПУ, 2003. – Вип. 2 (19), Т. 2. – С. 112–115.
7. Стенцель Й. І. Автоматика та автоматизація хіміко-технологічних процесів. Навч. посібник. – Луганськ: Видавництво Східноукраїнського університету ім. В. Даля, 2004. – 376 с.

Електромеханічні системи автоматизації 23
Зиняк А.Ю., Панченко В.В. , Харків
Харківський національни університет міського господарства імені О.М. Бекетова
АВТОМАТИЗАЦІЯ ДІАГНОСТУВАННЯ НЕСПРАВНОСТІ ЕЛЕКТРОМЕХАНІЧНОГО ОБЛАДНАННЯ КУЛЬТИВАТОРА
Вступ. Створювана нині для муніципальних потреб техніка на базі транспортних засобів відрізняється вико-ристанням в ній нових матеріалів і технологій, що дозволяють постійно розширювати спектр функціональних властивостей, підвищувати надійність при експлуатації електроустаткування. Проте висока якість роботи серві-сних підрозділів і центрів для обслуговування муніципальної техніки можна досягти при постійному вдоскона-ленні технічних засобів для виявлення можливих і виникаючих несправностей в електричних і електромеханіч-них блоках самого різного призначення.
Враховуючи невисоку кваліфікацію обслуговуючого персоналу, що експлуатує електромеханічне устатку-вання сезонного призначення (культиватори, снегоприбиральники, сміттєзбирачі та ін.), доцільно створювати спеціальні технічні засоби для діагностики несправностей в них найбільш важних блоків для попередження серйозних поломок, а також для спостереження режимів експлуатації.
В зв'язку з цим найбільший інтерес викликають засобі діагностування електромеханічного обладнання для комунального господарства, що не вимагають значних капіталовкладень, а їх реалізація можлива силами спів-робітників самих підприємств.
Мета роботи: запропонувати варіант пристрою для діагностування електромеханічного культиватора, що використовуються в міських парках, скверах для обробки різних ґрунтів.
Матеріали та результати дослідів. Розглядається електромеханічний культиватор «Тарпан» на базі авто-мобіля для обробки ґрунту глибиною до 30 см в комунальному господарстві. Для цього об'єкту здійснено роз-рахунок вимірювальної схеми датчика контролю глибини обробки грунту (табл. 1).
Таблиця 1 – Розрахунок резистивних ланцюгів постійного струму Вар Uвх R1-R3 R4(R4.4/R4.2) R5 R6-R10 R11(%) Uвих1 Uвих2 26 36 75 9,1(2/4) 8,2 68 680(16) 0,406 13,22 За допомогою запропонованої схеми можлива реалізація пристрою контролю й діагностики справності об-
ладнання обробки грунту. Діагностування електричної принципової схеми можна реалізовувати за допомогою оптичного вольтметра. Розширений технічний діагноз для схеми можна забезпечити за допомогою роз'єму діа-
гностики ХТ2, (при необхідності вибирають роз'єм з необхідним числом клем), до якого окрім Uвих1 , Uвих2 не-
обхідно підключити точки контролю величин U5 і U6 схеми. Розраховано вимірювальний міст для датчика контролю температури вала фрези й двигуна, на базі цих роз-
рахунків здійснено вибір раз'єма «діагностика» з клемами роз'єму для контролю параметрів і елементів для за-пропонованої схеми (рис. 1)
Рис. 1 − Принципова електрична схема розміщення датчиків для контролю різних параметрів культиватора
Для пошуку несправностей за допомогою переносних приладів вимірів різних параметрів розроблена
блок-схема (рис.2) автоматизованого діагностування і пошуку несправностей в культиваторі.

Електромеханічні системи автоматизації 24
Рис. 2 – Алгоритм діагностування електрокультиватора Функціональна схема на логічних елементах забезпечує діагностику культиватора за результатами парале-
льного моделювання двох вхідних наборів (рис.3). Розглянутий принцип розробки функціональної схеми був використаний і для проектування трирівневого сигналізатора режиму експлуатації культиватора. Запропонова-но схему застосування засобів сигналізації з елементами пам’яті в раніше розробленому діагностичному при-строї (рис.4).
Рис. 3 − Функціональна схема пристрою діагнозу справності культиватора: DD1 - логічні елементи;
VD1, VD2 - світолдіоди; R1, R2 - резистори.
Рис. 4 – Діагностичний пристрій з сигналізаторами
Запропоновано ескізний проект пульта пристрою автоматичного діагностування електрообладнання
культиватора (рис.5).
Рис. 5 − Ескізний проект пульта автоматичного діагностичного пристрою для культиватора
Висновки. Виконано розрахунки окремих компонентів системи діагностики електромеханічного культива-
тора. На основі запропонованої схеми для пошуку несправностей за допомогою переносних приладів вимірів різних параметрів розроблена блок-схема автоматизованого діагностування і пошуку несправностей в культи-ваторі. Запропоновано варіант трирівневого сигналізатора (норма, max, min) для візуального контролю умов експлуатації культиватора на різних ґрунтах. Виконано комп'ютерне моделювання системи діагностики неспра-вностей. Запропоновано пульт діагностичного пристрою для персоналу, який експлуатує електромеханічний культиватор. Обґрунтовано доцільність використання такого технічного засобу діагностики, для електромеха-нічного культиватора із терміном окупності в конці третього сезону експлуатації.
ЛІТЕРАТУРА
1. Єсаулов С. М. Методичні вказівки до самостійного вивчення курсу «Елементи систем автоматики і мікропроцесорної техніки». - Х.: ХНАМГ, 2005. - 55 с.
2. Єсаулов С. М. Мікропроцесорні пристрої. Методичні вказівки до виконання лабораторних робіт. - Х.:
ХНАМГ, 2006. - 66 с. 3. Єсаулов С. М. Периферійні компоненти мікропроцесорних пристроїв. Методичні вказівки до виконан-
ня контрольної та самостійної робіт. - Х.: ХНАМГ, 2007. - 63 с. 4. ГОСТ 19002-80. Схемы алгоритмов и программ. Правила выполнения. 5. ГОСТ 19002-80. Схемы алгоритмов и программ. Обозначения условные графические и правила выпол-
нения. 6. Єсаулов С.М. Пакет программ SinSys. − Х.: ХНУМГ, 2013 7. Электромеханический культиватор "Тарпан". Руководство. /
http://www.tulamash.ru/tarpan/ekultivator.html

Електромеханічні системи автоматизації 25
Наумчук Л.М. Київ
Національний технічний університет України “Київський політехнічний інститут”
ЕНЕРГОЕФЕКТИВНІ РЕЖИМИ РОБОТИ ЕЛЕКТРОМЕХАНІЧНОЇ СИСТЕМИ АВТОМАТИЗАЦІЇ КОНВЕЄРНОЇ УСТАНОВКИ
Вступ. На сьогоднішній день важливим завданням є підвищення енергоефективності безперервного транс-порту, зокрема конвеєрів. Це значно знизить економічні і енергетичні витрати підприємства, дозволивши раціонально використовувати обладнання та зменшить ризик його швидкого зношення. Якщо ж конвеєрний транспорт використовувати непродуктивно, без дослідження характеру надходження вантажопотоку і його властивостей то це призведе до того, що більша частина енергії буде витрачатися на холостий хід, що призведе до передчасного зносу деталей. Підвищити енергоефективність стрічкових конвеєрів можна не лише за допомо-гою реєстрації вантажу на стрічці, а й за допомогою оптимального регулятора напруги (ОРН).
Мета роботи. Метою роботи є розробка оптимальних законів керування, які дадуть можливість зменшити втрати енергії в електромеханічних системах, а також дослідження енергоефективних режимів роботи конвеєра при зміні навантаження на тяговому органі.
Матеріал і результати дослідження. В ході роботи була застосована розрахункова схема динамічної моделі конвеєра з врахуванням пружних властивостей тягового органу (рис.1)[1].
Рисунок 1 – Розрахункова схема динамічної моделі конвеєра
На рисунку 1 прийняті наступні позначення: Jп , Jр , Jн , Jх– еквівалентний момент інерції приводного бара-
бану, робочої вітки конвеєра, натяжного барабану, холостої вітки конвеєра; Ср , Сн , Сх , – коефіцієнти жорстко-сті робочої, натяжної і холостої віток конвеєра; ρр , ρн , ρх , – коефіцієнти в’язкого тертя пружного робочого ор-гану для робочої, натяжної і холостої віток.
В якості узагальнених змінних математичної моделі руху конвеєра прийняті координати положення чоти-рьох мас m1, m2, m3, m4, їх швидкості
1 2 3 4, , , ,X X X X& & & & переміщення
1 2 3 4, , , ,X X X X а також положення і швидкість
переміщення натяжного вантажу ,δ δ& . Було розроблено функціональну схему електромеханічної системи автоматичного керування магістральним
конвеєром, що дозволяє оцінити характер зміни втрат при варіаціях параметрів руху тягового органу (рис.2).
Рисунок 2 – Функціональна схема електромеханічної системи
На функціональній схемі електромеханічної системи прийнято такі позначення: ЗІ – задатчик інтенсивності;
РШ – регулятор швидкості; ОРН – оптимальний регулятор напруги. У даній роботі було синтезовано оптимальний регулятор в основі якого лежить закон керування напру-
гою(рис.3).

Електромеханічні системи автоматизації 26
Рисунок 3 – Структурна схема оптимального регулятора
Структурну схему оптимального, з точки зору енергетичної ефективності, регулятора напруги отримано у
відповідності з наступного виразу [2].
.
.
.
( )
∗
⋅
= ⋅ ⋅ ⋅ + +
⋅ + ⋅
м н
н
н c н н
н
ст н
н
fP
ffu u M S S
ffP a b
f
Впровадження в електромеханічну систему ОРН дозволило збільшити енергетичну ефективність конвеєрного транспорту, тобто значно зменшити економічні та енергетичні показники системи і збільшити коефіцієнт корисної дії (ККД)двигуна.
Для дослідження еноргоефективних режимів використано програму MatLab в середовищі Simulink. Застосу-вавши типові блоки SIMULINK було складено структурну схему системи, яка об’єднувала модель стрічки конвеєра і електромеханічну систему.
Для моделювання системи була використана конвеєрна установка довжиною в 1000 м, продуктивністю 420 т/год. і асинхронний двигун потужністю 160 кВт.
У ході дослідження були отримані статичні характеристики ККД двигуна та загальних втрат замкненої сис-теми по швидкості з ОРН та без нього. Отже, з використанням ОРН при 0.5Мн ККД збільшувався до 0,21% від номінального значення, а втрати зменшувалися на 5%; при 1.2Мн ККД збільшувався до 0,31% від номінального значення, а втрати зменшувалися на 7.5%.
Також були проведені дослідження при довільній зміні моменту навантаження і швидкості. У першому ви-падку, коли момент змінювався за законом [0.5Мн – Мн – 0.8Мн – 0.5Мн] – ОРН забезпечував при Мн підвищення ККД до 0,2 % від номінального значення і зменшення втрат до 3,3%, якщо величина навантаження сягала позначки 0,5Мн , то ККД збільшувався до 0,52 % від номінального значення, а втрати зменшувалися до 42%. У другому випадку момент змінювався за більш довільним законом: [0.5Мн – Мн – 0.8Мн– 1.5Мн –Мн– 1.2Мн –0.7Мн]. При позначці 0,5Мн з використанням оптимального регулятора ККД підвищувався на 0,52% від номінального, при 1,5Мн – на 0,26%, при 1,2Мн – ККД збільшувався до0,28%. Втрати в свою чергу при 0,5Мн з використанням ОРН складали 5950 Вт, а без нього 6000Вт; при 1,5Мн – 8600Вт, а без оптимального регулятора 9700Вт; при 1,2Мн – 6950 Вт, а без ОРН – 7350 Вт.
Висновки. Як показали отримані результати досліджень, застосування ОРН спільно з перетворювачем час-тоти допоможе знизити швидкість зношення стрічки конвеєра, витрати електроенергії і суттєво підвищити ККД електромеханічної системи.
ЛІТЕРАТУРА
1. Черный А.П.Моделированиеэлектромеханических систем / А.П.Черный, Д.И.Родькин, А.В.Луговой, Г.Ю.Сисюк, А.В.Садовой//Учебноепособие. – Кременчуг: 1999. – 202с.
2. Печеник М.В. Питання підвищення енергетичної ефективності асинхронних елелектроприводів / М.В. Печеник, О.М. Суходоля // Наукові вісті НТУУ“КПІ”. – 1998. –Вип. 2. –С. 29–32.

Електромеханічні системи автоматизації 27
Пісемський О. В. Житомир
Житомирський військовий інститут імені С. П. Корольова Державного університету телекомунікацій
ЗНИЖЕННЯ ПОТОЧНИХ ВИТРАТ НА ВОДОПОСТАЧАННЯ БУДИНКУ
Вступ. У порівнянні з витратами на будівництво поточні експлуатаційні витрати в довгостроковій перспек-тиві значно вищі. Тому продумана автоматизація процесів експлуатації й обслуговування будівель може дати економію коштів у середньому до 10-30%. Насамперед це стосується водопостачання, теплопостачання, техніч-ного обслуговування і персоналу. Сучасні насоси з можливістю регулювання створюють гарні технологічні умови для зниження експлуатаційних витрат за рахунок автоматизації та оптимізації управління системою во-допостачання будівельної споруди. Крім того, сучасна автоматика істотно спрощує обслуговування систем, що у свою чергу значно знижує експлуатаційні витрати.
Мета роботи. Зниження поточних витрат при експлуатації системи водопостачання будинку за рахунок оптимального управління частотним електроприводом насосної установки.
Матеріали й результати досліджень. У більшості випадків водопостачання об’єктів здійснюється одини-чними відцентровими насосними агрегатами із регулюванням витрат води шляхом зміни положення дросельно-го затвору. В умовах значних добових перепадів у споживанні води дроселювання збільшує споживану потуж-ність насосної установки через створення надлишкового напору на затворі. На даний час найефективнішим способом управління насосною установкою системи водопостачання вважається регулювання витрат води змі-ною частоти обертання робочого колеса. Найбільш поширеним алгоритмом при цьому є підтримання сталої величини напору в напірному трубопроводі [1]. При зміні водоспоживання продуктивність насоса змінюється, а напір залишається сталим. Це усуває проблему створення зайвого напору на запірно-регулюючих пристроях для забезпечення необхідної продуктивності. Для регулювання обертів насосних агрегатів великого поширення на даний час набули керовані електроприводи по системі перетворювач частоти – асинхронний двигун. Вони дозволяють керувати насосами з найбільшою ефективністю, тим самим досягається скорочення витрат енергії.
Для водопостачання житлового будинку пропонується технологічна схема, яка включатиме не менше трьох паралельно з’єднаних насосів. Постійно в роботі можуть знаходитися один або два насоси, третій насос є резер-вним. Це вирішить питання резервування обладнання та забезпечить вимоги по надійності водопостачання. З точки зору зменшення капітальних витрат достатньо мати тільки один частотний перетворювач з можливістю підключення його до електродвигуна приводу кожного насосу і здійснювати більш глибоке регулювання вими-канням окремих насосів [2]. Переключеннями управляє пристрій управління, який складається з програмовано-го контролера MaxyCon Flexy та перемикача, який підключає двигуни насосної установки до електромережі за заданим алгоритмом. Датчик тиску води у трубопроводі постачає дані про зміни тиску в системі на аналогово-дискретний вхід контролера, який обробляє ці дані за розробленим алгоритмом і видає сигнал управління на аналогові та дискретні виходи. Необхідно також передбачити схему ручного управління, яка призначена для запуску та зупинки насосних агрегатів в ручному режимі.
Розроблений алгоритм передбачає етап аналізу величини тиску води і етап вироблення управління, яке може бути у формі збільшення або зменшення частоти обертання робочого колеса насосу, підключення частотного перетворювача до того або іншого насосу, включення або відключення насосу, видачі сигналу про аварію.
У якості основної насосної установки, яка регулюється, для системи водопостачання житлового комплексу була обрана насосна установка з вбудованим частотним перетворювачем CRЕ-32-3 фірми Grundfos. Цей вибір обумовлений рядом таких її переваг, як висока енергоефективність, малі габарити, простота монтажу, простота інтегрування в комп’ютерні системи контролю й управління. Суттєвим фактором є також доступність програм-ного забезпечення для підбору насосного обладнання цього типу у відповідності до вихідних параметрів.
Висновки. Зниження поточних витрат при експлуатації системи водопостачання будинку можливе за умови оптимального управління частотним електроприводом насосної установки. Для управління насосною установ-кою в ручному або автоматичному режимі розроблена схема пристрою управління на основі програмованого контролера MaxyCon Flexy. Розроблений алгоритм оптимального управління приводом багатоагрегатної насос-ної установки реалізує принцип підтримання сталого напору, який у порівнянні з регулюванням положення дросельного затвору забезпечує зниження споживаної потужності на 20%, зменшує непродуктивні витрати во-ди та передбачає рівномірне напрацювання моторесурсу, що зменшує ймовірність аварій та призводить до збі-льшення терміну безвідмовної експлуатації обладнання. Алгоритм управління приводом насосів реалізований за допомогою зовнішнього прикладного середовища «Конфігуратор FBD».
ЛІТЕРАТУРА
1. О.І. Рибачук. Управління електроприводом насосної установки системи водопостачання житлового ком-плексу / О.І. Рибачук, О.Ф.Соколовський,О.В. Пісемський / Проблеми водопостачання, водовідведення та гід-равліки. Науково-технічний збірник Київського національного університету будівництва та архітектури. – Київ, 2012. – Випуск 20. – с. 140-149.
2. Рибачук О. І. Оцінка ефективності інтерактивного керування в насосних установках / О.І. Рибачук, О.Ф.Соколовський, О.В. Пісемський/ Вісник ЖДТУ/ Технічні науки. – 2012.–№2(61).– С. 39-47.

Електромеханічні системи автоматизації 28
Рудик М.А. , Кокуб І.І. Харків
Харківський національни університет міського господарства імені О.М. Бекетова
ПРОЕКТУВАННЯ СИСТЕМ КЕРУВАННЯ МЕХАТРОННИХ СИСТЕМ ПРИ РЕМОНТІ ТА ВІДНОВЛЕННІ ДЕТАЛЕЙ
Вступ. За останні десятиліття автоматизація основних технологічних операцій (формоутворення і зміна фі-зичних властивостей деталей) досягла такого рівня, що допоміжні операції, пов'язані з транспортуванням і складуванням деталей, розвантаженням і завантаженням технологічного устаткування, виконувані вручну або за допомогою існуючих засобів механізації й автоматизації, є гальмом як в підвищенні продуктивності праці, так і в подальшому вдосконаленні технології. Звичайними методами за допомогою існуючих технічних засобів неможливо автоматизувати складальні, зварювальні, фарбувальні і багато інших операцій. Усе це привело до гострих протиріч між досконалістю промислової техніки і характером праці при її використанні, потребою в трудових ресурсах та їх фактичною наявністю, вимогами інтенсифікації виробничих процесів і обмеженими психофізіологічними можливостями людини. Ці причини соціального, економічного і технічного характеру, що стали основними стримуючими чинниками в розвитку виробництва і подальшому підвищенні продуктивності праці, а також сучасні досягнення в створенні знарядь виробництва, обчислювальної техніки і електроніки при-вели до бурхливого розвитку робототехники в галузі, що створила і виробляє новий різновид автоматичних машин, − промислові роботи. За задумом розробників ці машини призначені для заміни людини на небезпечних для здоров'я, фізично важких і стомливо одноманітних ручних роботах. Свою назву вони дістали завдяки реалі-зованої в них ідеї моделювання рухомих, керуючих і, в деякій мірі, пристосовних функцій робочих, зайнятих на трудових повторювальних операціях, по розвантаженню-завантаженню технологічного устаткування, керуван-ням роботою цього устаткування, міжопераційним переміщенню і складуванням деталей, а також на різних складальних, зварювальних, фарбувальних та ін. операціях, що виконуються із застосуванням переносних зна-рядь праці.
Промислові роботи дозволяють вирішувати завдання комплексної автоматизації на більш високому рівні, об'єднуючи засоби виробництва підприємства в єдиний автоматизований комплекс.
Мета роботи: запропонувати варіант мехатронного пристрою для ремонту та відновлення деталей з викори-станням зварювання деталей на дільниці ремонту транспортних засобів.
Матеріали та результати дослідів. Розраховано реалізаціяю компонентів мехатронного пристрою (маніпу-лятора) приначеного для ремонту стандартного механічного обладнання (рис. 1). Здійснена розробка елементів конструкцій маніпулятора з пов'язаними системами координат (рис.2).
Рис. 1 − Кінематична схема маніпулятора Рис. 2 − Спрощена конструкція маніпулятора з
пов’язаними системами координат
Здійснено моделювання маніпулятора на основі однорідної матриці перетворень чотирьох точок позицію-вання. Результуючі однорідні матриці перетворення визначаються за допомогою рівняння кінематики маніпу-лятора:
PO
i
iPOTTT ⋅=
00
. (1) На основі ориманих однорідних матриць і кінематичних схем руху маніпулятора для чотирьох точок запро-
поновано реальній варіант мехатронного пристрою на базі реальних засобів механізації зварювальних робіт на дільниці ремонту транспорту (рис.3).
Запропоновано варіант блоку цифрового пристрою автоматичного керування виконавчими елементами ме-хатронного пристрою дільниці ремонту механічного обладнання в депо електротранспорту (рис.4).

Електромеханічні системи автоматизації 29
Рис. 3 − Збірна схема маніпулятора в прямокутної правобічної системі координат
Рис. 4 − Принципова електрична схема пристрою керування
Висновки. Спроектовано мехатронний пристрій на базі реального механічного маніпулятора, який виробляє
технологічні операції при відбракуванні елементів механічного устаткування або виконанні точкового зварю-вання на стандартному устаткуванні. Даний мехатронний пристрій може виконувати зварювання в чотирьох точках позиціювання, але при необхідності їх кількість можна збільшити.
В мехатронному пристрої використовується позиційна система керування та представлена схема електрична принципова пристрою керування. Як показує проект, робот може справлятися з деякими завданнями виконува-ними людьми, а особливо незамінною допомогу подібного робота стає в складних умовах, в яких людині немо-жливо працювати чи вимагається особлива увага виконавця зварювальних робіт, що приводить його до бистро-го стомлення.
ЛІТЕРАТУРА 1. Попов Е.П. Основы робототехники: Введение в специальность: Учеб. для вузов по спец. “Роботехничес-
кие системы и комплексы”/ Е.П. Попов, Г.В. Письменный – М.: Высш. шк., 1990. – 224 с. 2. Юревич Е. И. Основы робототехники / Е.И. Юревич. − СПб.: БХВ-Петербург, 2005. − 408с. 3. Афонин В.Л. Интеллектуальные робототехнические системы. Курс лекций / В.Л. Афонин, В.А.
Макушкин. − М.: 2005.− 208 с. 4. Патент RU 2381891 C1 B25J11/00 Манипулятор // Ю.А. Валюкевич, А.А. Зеленский, О.Г. Толстунов, И.И.
Наумов − Опубл. 20.02.2010 5. Мардаре И.А. Конспект «Робототехніка». − Кишенев: ТУМ, 2001. − 92с. 6. Управление роботами и робототехническими системами, Юревич Е.И.: Учеб. пособие. − СПб.: Изд-во
СПбГТУ, 2001. − 168с. 7. Тихонов А.Ф. Автоматизация и роботизация технологических процессов и машин в строительстве / А.Ф.
Тихонов. − М.: Издательство Ассоциации строительных вузов, 2005. − 245с.

Математичне моделювання електротехнічних комплексів та систем 30
СЕКЦІЯ
«МАТЕМАТИЧНЕ МОДЕЛЮВАННЯ ЕЛЕКТРОТЕХНІЧНИХ
КОМПЛЕКСІВ ТА СИСТЕМ»

Математичне моделювання електротехнічних комплексів та систем 31
Аландар В.О. Харків
Харківський національний університет міського господарства імені О.М. Бекетова
ЛАБОРАТОРНЕ ДОСЛІДЖЕННЯ ПАРАМЕТРІВ УДАРНОЇ ВЗАЄМОДІЇ ВАГОНА ТРАМВАЯ З РЕЙКОЮ В МІСЦЯХ СТИКІВ
Вступ. Під дією динамічного навантаження рухомого вагона елементи рейкової колії зазнають ряд найскладніших деформацій і при несприятливому збігу обставин деякі з елементів колії можуть отримати небезпечні напруження , а вагон придбати нестійкі , тобто небезпечні форми руху.
Мета роботи. Дослідити процеси ударної взаємодії системи "двовимірна дисипативна система - балка на пружних опорах". Побудувати динамічну модель двовимірної дисипативної системи на фазі балістичного руху та отримати залежності доударної швидкості, а також горизонтальної координати ударного імпульсу від гео-метричних параметрів стику; механічних характеристик двовимірної дисипативної системи.
Матеріали та результати дослідження. При проходженні рухомим складом несиметричного стику колесо впливає на кінець віддаючої рейки, викликаючи його пружну деформацію.
Рисунок 1.1 - Модель механічної системи на фазі балістичного руху
Значить конструкція несиметричного стику знижує ударне навантаження від рухомого складу, зменшує
ймовірність появи залишкових деформацій і розладів. При дуже значних витратах можливо істотно підвищити стабільність шляху, знизити угон на двоколійних ділянках.
Висновки: В даній роботі були досліджені процеси ударної взаємодії системи "двовимірна дисипативна система - балка на пружних опорах". Була побудована динамічна модель двомасової дисипативної системи на фазі балістичного руху і проведено дослідження залежностей доударної швидкості V0, а також горизонтальної координати ударного імпульсу від геометричних параметрів стику (h, ?); механічних характеристик двовимірної дисипативної системи (m1, m2, c, b).
СПИСОК ВИКОРИСТАНИХ ДЖЕРЕЛ 1. Иванов П.С., Писаненко Є.П. Стык можно усилить.//Путь и путевое хозяйство, №1, 1992. 2. Данович В.Д.,. Взаимодействие колес вагона с рельсами Р65 и UIC60. / В.Д. Данович, В.Я. - Железнодо-
рожный транспорт Украины, №3,2000. 3. Восковец Ю.А. Почему повреждаются концы рельсов. / Ю.А. Восковец, Л.Я. Шнаперман., В.Е. Огарь, -
Путь и путевое хозяйство, №5, 1991

Математичне моделювання електротехнічних комплексів та систем 32
Довбиш А.О. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
ДОСЛІДЖЕННЯ РОБОТИ СИСТЕМИ ВЕНТИЛЯЦІЇ НАВЧАЛЬНОГО ПРИМІЩЕННЯ ПРИ РЕКУПЕРАТИВНОМУ ПЕРЕРОЗПОДІЛІ ПОТОКІВ
Вступ. Для створення сприятливих умов перебування і дотримання параметрів повітряного середовища ви-користовують вентиляційні системи. Вентиляційні системи з одного боку повинні бути високоефективними і зручними в експлуатації, забезпечувати високий ККД, а з іншого – відповідати вимогам мінімального енергоспоживання. Для цього використовують вентиляційні системи з рециркуляційними або рекуператив-ними пристроями [1].
Актуальність дослідження повітряного середовища приміщення, зокрема пристроїв подібного типу у вентиляційній системі пов’язане з використанням енергії витяжного повітря зі зменшенням матеріаломісткості; забезпечення заданого температурного режиму в приміщенні; економія енергії в системах вентиляції за рахунок регенерації тепла.
Мета роботи. Визначення впливу пристрою рециркуляції на параметри повітряного середовища приміщення. Визначення конструктивних особливостей та роботи пристрою рециркуляції повітря і його мате-матичний опис.
Матеріал і результати досліджень. Можливість регулювати кількість поступаючого та витяжного повітря в системі вентиляції підтверджують дослідження пристрою перерозподілу повітряних потоків у складі системи вентиляції приміщень, об’ємом 19 м3 та 39 м3. Використовуються приточний та витяжний вентилятори ВКМ 500/250 з витратою повітря Q=2110 м3/год, які подають повітря в розподілені повітропроводи діаметром d=200 мм.
Пристрій має вигляд блоку прямокутної форми з отворами для підключення в гілку системи приточно-витяжної вентиляції. Пристрій має три заслінки: дві знаходяться на каналах приточної і витяжної вентиляції, а третя заслінка дає можливість відкривати і закривати отвір між приточною і витяжною вентиляцією.
Рисунок 1 – Пристрій перерозподілу повітряних потоків
На рис. 1 прийняті позначення: Qв – вагова витрата повітря на вході витяжного каналу; Qп – вагова витрата
повітря на вході приточного каналу; Q1 – вагова витрата повітря, що надходить до приміщення; Тв – температура повітря на вході витяжного каналу; Тп – температура повітря на вході приточного каналу; Т – температура навколишнього середовища;Т1 – температура повітря , що надходить до приміщення.
Теплота в пристрій надходить з потоками Qв і Qп, які мають відповідно температури Тв і Тп. Пристрій має камеру змішування. З пристрою надходить до приміщення підігріте повітря з витратою Q1, яка має температу-руТ1, вона змінюється в залежності зміни температури на вході приточного каналу і становить:
1 пТ 1..3 С T= ° + (1) Отже рівняння теплового балансу має вигляд:
dq,dqdqdqdq1vпв++=+ (2)
де в
dq ,п
dq – кількість теплоти, яка надходить з потоками Qв і Qп;
vdq – кількість теплоти, яка накопичилася в об’ємі V;
1
dq – кількість теплоти, яка надходить з потоком Q1 до приміщення;
dq – кількість теплоти, яка витрачається в навколишнє середовище.
Кількість теплоти, яка надходить або витрачається з матеріальними потоками, становить:
в в в вdq Q с Т dt= ,
п п п пdq Q с Т dt= , 1 1 1dq Q сТ dt= , (3)
дев
с ,п
с , с – теплоємності потоків Qв, Qп і Q1 відповідно.

Математичне моделювання електротехнічних комплексів та систем 33
При дослідженні даного пристрою кал/г·град 1сспв==
А теплоємність потоку Q1, відповідно становить: с=св+0.2402 Кількість теплоти, яка накопичується в масі m повітря пристрою:
vdq mcdT= (4)
Витрати тепла н
dq становлять:
1dq γS(T -T)dt= , (5)
де γ – коефіцієнт тепловіддачі з зовнішньої поверхні пристрою;
Т – температура навколишнього середовища. Маємо:
в в в п п п 1 1 1 1Q с Т dt Q с Т dt mcdT Q cT dt γS(T T)dt+ = + + − (6)
Розділивши останнє рівняння на dt , отримаємо математичну модель пристрою перерозподілу повітряних потоків в наступній диференціальній формі:
11 1 в в в п п п
dTmc (Q c γS)T Q с Т Q с Т γST
dt+ − = + − (7)
При дослідженні моделі вентиляційної системи з пристроєм перерозподілу повітряних потоків, було уста-новлено залежність температури від регулювання подачі повітря, від зміни кута відкриття заслінок пристрою. Вхідними даними була зміна температури навколишнього середовищаТп=9,11,13…23, враховуючи теплову енергію витяжного повітря отримали температуру, що надходить до приміщення Т1= 12…26. На рис.2 пред-ставлений графік залежності температури від відкриття заслінки.
Рисунок 2 – Графік зміни температури в залежності від кута відкриття заслінки
На рис.2 прийняті наступні позначення: 1 – Тп=23 °С, Т
1=26 °С; 2 – Тп=21 °С, Т
1=24 °С; 3 – Тп=19 °С,
Т1=22 °С; 4 – Тп=17 °С, Т
1=20 °С; 5 – Тп=15 °С, Т
1=18 °С; 6 – Тп=13 °С, Т
1=16 °С; 7 – Тп=11 °С, Т
1=14 °С;
8 – Тп=9 °С, Т1=12 °С.
З графіка залежності слідує що, для підтримання оптимальної температури +20 °C [2], необхідно закрити заслінки на 78% при Т=26°С, 83% при 24°С, 91% при 22°С, 100% при 20°С.
Висновки. Застосування пристроїв рециркуляції в системах вентиляції вирішують ряд задач енергозбере-ження у системах вентиляції. При цьому питомі затрати зовнішньої енергії на нагрів припливного повітря зменшуються прямо пропорційно до зменшення витрат теплоти відпрацьованого повітря, що підлягають регенерації тепла після рециркуляції частини потоку та рекуперації теплоти в пристрої перерозподілу повітряних потоків.
Аналіз роботи системи керування вентиляцією дозволив математично описати роботу вентиляційної систе-ми з використанням пристрою перерозподілу повітряних потоків.
Результати аналізу показують, що включення в математичну модель системи вентиляції пристрою перерозподілу повітряних потоків дозволить регулювати встановлення оптимальних мікрокліматичних параметрів в навчальному приміщенні.
ЛІТЕРАТУРА
1. Стефанов Е.В. Вентиляция и кондиционирование воздуха / Стефанов Е.В. – Спб.: АВОК Северо-Запад, 2005. – 399 с.
2. Отопление, вентиляция и кондиционирование воздуха. СНиП 2.04.05-91 – [чинний від 1992-01-01] – М.: ГУП ЦПП, 2001. – 74 с.

Математичне моделювання електротехнічних комплексів та систем 34
Дмитрів О.В. , Серьоженко С.Ю. Харків
Харківський національни університет міського господарства імені О.М. Бекетова
РОЗРАХУНОК ВТРАТ І МАТЕМАТИЧНА МОДЕЛЬ ТЕПЛОВОГО СТАНУ ЧАСТОТНО-КЕРОВАНОГО АСИНХРОНОГО ДВИГУНА
Вступ. У зв’язку з постійним зростанням цін на енергетичні ресурси зростає їх питома вага в собівартості продукції. На сьогоднішній день питома вага становить 30-50%, що в кілька разів перевищує аналогічні показ-ники закордонних фірм і призводить до не конкуренто-спроможності продукції на внутрішньому і зовнішньому ринках. Високий рівень залежності вітчизняної економіки від зовнішніх джерел енергетичних ресурсів і постій-не зростання їх цін зумовлюють актуальність проблеми енергозбереження.
Основним споживачем (близько 60%) вироблюваної електроенергії є електричні двигуни. Серед них найбільше застосування знаходять асинхронні двигуни. Тільки в промисловості України в експлуатації знахо-диться близько 6 млн. шт. асинхронних двигунів, а в цілому в Україні експлуатуються десятки мільйонів асин-хронних двигунів. У зв'язку з цим навіть незначне поліпшення техніко-економічних показників електроприводів на базі асинхронних двигунів в масштабах країни дає значну економію електроенергії.
Одним з найбільш ефективних способів поліпшення техніко-економічних показників електроприводів є за-міна нерегульованих електроприводів регульованими. У розвинених країнах частка регульованих електропри-водів досягається 40-50% від загальної кількості. В Україні ця частка становить кілька відсотків. Характерною особливістю роботи асинхронних двигунів в складі багатьох приводів є нерівномірність навантаження, що ви-кликається технологічними умовами виробництва. Таким чином, більшість асинхронних двигунів системи суттєво недовантажені, що призводить до значного зниження їх енергетичних показників. Радикальним захо-дом, що забезпечує поліпшення енергетичних показників двигунів працюючих при широкому діапазоні наван-тажень, є заміна нерегульованих асинхронних двигунів на регульовані.
Мета роботи: Метою роботи є дослідження теплового стану частотно-керованих асинхронних двигунів при різних законах регулювання.
Матеріали та результати дослідів. Розглянуті джерела живлення і закони регулювання частоти обертання асинхронного двигуна. За допомогою Г-образної схеми заміщення визначені електромеханічні характеристики, розраховані електричні і магнітні втрати в обмотках та осердях статора і ротора.
Для визначення теплового стану двигуна використовується метод еквівалентних теплових схем (ЕТС), яка розвинута до 16 вузлів. На базі ЕТС складені диференційні рівняння теплового балансу для всіх вузлів. Ддифе-ренційні рівняння всіх вузлів утворюють систему рівнянь, яки складають математичну модель. Математична модель вирішувалась за допомогою універсального гібридного методу Адамса-BDF, що дало можливість ви-значити значення теплоємностей і температур вузлів асинхронного частотно-керованого двигуна
Висновки. 1. При роботі частотно-керованого асинхронного двигуна від перетворювача частоти типу НПЧ і АІН із сту-
пінчастою формою вихідної напруги виникають всі складові основних втрат, додаткові електричні втрати в об-мотках статора і ротора та додаткові втрати в осердях статора і ротора.
2. Дослідження температурного поля двигуна за допомогою математичної моделі теплового стану дозволило установити:
- виникнення додаткових втрат від вищих гармонік струму і магнітного потоку, зміну величини і співвідношення між потужностями тепловиділення вузлів ЕТС;
- додаткові магнітні втрати Рмагд складають 6% від основних магнітних втрат.
ЛІТЕРАТУРА 1. Гуревич Э.И. Переходные тепловые процессы в электрических машинах /Э.И.Гуревич, Ю.Л.Рыбин -
Л.:Энергоатомиздат. Ленинградское отделение, 1983, - 216 с.. 2. Осташевский Н.А. Потери частотно-управляемого асинхронного двигателя при различных законах регу-
лирования и типах преобразователя частоты /Н.А. Осташевский, В.И. Иваненко, А.Н. Петренко //Электротехника и электромеханика. – 2009. - №3 – С. 37 – 41.
3. Андрющенко О.А. Метод учета потерь в асинхронном двигателе при векторном управлении / О.А. Анд-рющенко, С.Б. Шевченко // Електромашинобудування та електрообладнання. Міжвід. наук-техн. cбipн. – 2006. – № 66. – С. 327–328.
4. Булгаков А.А. Частотное управление асинхронными электроприводами / А.А. Булгаков. – М.: Энергоиз-дат, 1982 – 216 с.
5. Беспалов В.Я. Упрощенная математическая модель нестационарного нагрева и охлаждения обмотки ста-тора асинхронного двигателя / В.Я. Беспалов, Ю.А. Мощинский, В.И. Цуканов // Электричество. – 2003. – № 4. – С. 20–26.
6. Беспалов В.Я. Перспективы создания отечественных электродвигателей нового поколения для частотно-регулируемого привода / В.Я. Беспалов // ЗАО «СЗЭМО» Газета промышленного оборудования. – 2004. – №11.
7. Вербовой П.Ф. Асинхронные двигатели для тиристорного электропривода / П.Ф. Вербовой, А.П. Забо-лотный, А.М Сьянов. – Киев: Наукова думка, 1994. – 244 с.

Математичне моделювання електротехнічних комплексів та систем 35
Колодяжна Н.М. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
МОДЕЛЬ ЕЛЕКТРОТЕХНІЧНОГО КОМПЛЕКСУ ЕЛЕКТРОШЛАКОВОЇ ПЕЧІ
Вступ. На даний час велику увагу приділяють розробці тих видів техніки і технології, які забезпечують зна-чну економію сировинних енергетичних і трудових ресурсів. У зв’язку з цим велике значення набуває розвиток електротермічних технологій і ЕШП.
ЕШП характеризується цілою низкою переваг: отримання максимально очищеного металу від домішок, фо-рмування гладкої поверхні злитку, яка не потребує додаткової механічної обробки, достатньо високий питомий опір, що забезпечує ефективність виконання шлакової ванни у ролі приймача і перетворювача електроенер-гії[1].
Для забезпечення необхідних технологічних параметрів роботи ЕШП та фізичних властивостей злитків, по-стає необхідність розробити математичну модель електричної частини печі.
Мета роботи. Розробка математичної моделі електричної частини і аналіз роботи електрошлакової печі. Матеріали і результати дослідження. Для дослідження пічної електричної дуги обраний часовий метод
аналізу, тому що при використанні спектральних методів необхідно вимірювання напруги та струму дуги в ді-ючій установці, а для тимчасових методів можуть бути використані відносні імовірнісні параметри динамічної ВАХ дуги, справедливі для цілого ряду однотипних дугових електропечей [2].
Розроблена Simulink-модель дозволяє моделювати всі три періоди горіння і пік запалювання дуги. Вид роз-робленої моделі в Matlab (Simulink) і результати її використання представлені на рис. 1 і 2.
Рисунок 1 – Вид розробленої моделі пічної дуги в Matlab (Simulink)
Рисунок 2 – Графіки напруги на дузі, напруги на шинах низької напруги трансформатора і струму дуги для
розробленої моделі

Математичне моделювання електротехнічних комплексів та систем 36
Результати гармонічного аналізу струмів і напруг показали, що рівень вищих гармонік в розробленій моделі відповідає середньостатистичним даним[3], отриманими експериментальним шляхом.
Була створена спрощена модель однієї фази системи електропостачання з дуговим навантаженням. Розрахунковим шляхом показано, що імовірнісні параметри динамічної ВАХ дуги необхідно задавати окре-
мо для позитивного і негативного напівперіоду для отримання достовірного рівня парних гармонік у розрахун-ковому спектрі.
В реальній ВАХ дуги опір 1SR пов'язаний з областю малих струмів, в той час як процес розплавлення мета-
лу в області великих струмів характеризує опір 2SR , який чинить значний вплив на рівень вищих гармонік і
коливання напруги в моделі системи електроспоживання з дугового електропіччю. При роботі дугових електропечей спостерігаються коливання напруги в діапазоні частот від 0,5 до 15 Гц.
Характерною частотою регулярних коливань напруги, при якій спостерігаються максимальні розмахи вимірю-вання напруги і негативний вплив на джерела штучного світла , є частота 10 Гц.
Залежність динамічного опору дуги ДR від струму дуги ДI представлена на рис. 3.
На рисунку 4 представлений спектр гармонік напруг на дузі для динамічної моделі дуги[4].
,
ДR
Ом
,ДI A
Рисунок 3 – Залежність динамічного опору ду-
ги ДR від струму дуги ДI .
,%U
,f Гц
Рисунок 4 – Лінійчатий спектр гармонічних складо-вих напруги на дузі для динамічної моделі дуги.
Висновки. Була розроблена математична модель електрошлакової печі, у якій здійснюється моделювання
роботи безпосередньо усієї печі та можливо окремо моделювання електричної дуги. Дана модель описує елект-ричні параметри печі та ВАХ і гармонійний спектр дуги.
При виконані моделювання та розрахунків було виявлено, що в реальній ВАХ дуги опір 1SR пов'язаний з
областю малих струмів , в той час як процес розплавлення металу в області великих струмів характеризує опір
2SR , який чинить значний вплив на рівень вищих гармонік і коливання напруги в моделі системи електропос-
тачання з дугового електропіччю.
ЛІТЕРАТУРА
1. Школа для электрика // Электрооборудование дуговых сталеплавильных печей. – Режим доступу: http://www.electricalschool.info/main/elsnabg/307-jelektrooborudovanie-dugovykh.html – 21.02.2009.
2. Черненко А. Н. Разработка методики расчета высших гармоник тока и напряжения дуговых электропечей в точке общего присоединения: автореф. дис. … канд. тех. наук: 18.11.11 / А. Н. Черненко; МЭИ.: – М., 2011. – с.20.
3. Черненко А. Н. Расчет высших гармоник тока и напряжения при работе дуговой сталеплавильной печи / А. Н. Черненко, В. В. Вахнина // Известия вузов. Проблемы энергетики. – 2006. – №11–12. – С.16–19.
4. Черненко А. Н. Обобщенная модель печной и сварочной дуги / А. Н. Черненко // «Вектор науки ТГУ». – 2011. – №3. – С. 68–69.

Математичне моделювання електротехнічних комплексів та систем 37
Кравцов Д.І. Краматорськ
Донбаська державна машинобудівна академія
ДОСЛІДЖЕННЯ ДИНАМІКИ СТЕНДА З АСИНХРОННИМ ДВИГУНОМ НА БАЗІ МАТЕМАТИЧНИХ МОДЕЛЕЙ
Актуальність роботи. Асинхронна електрична машина і процеси, які в ній відбуваються є складними з по-зиції математичного опису. Для його виконання необхідно експериментально дослідити роботу електромехані-чної системи та промоделювати її роботу, проаналізувавши перехідні функції, що можна одержати на моделях асинхронного двигуна в трифазній та двохфазних системах координат. Співпадіння результатів експерименту з даними, отриманими на моделях свідчить про їх адекватність.
Мета роботи і задачі дослідження. У більшості випадків досліджуваний об’єкт складний і формування йо-го математичного опису є трудомісткою і тривалою роботою.
У цьому випадку поступають таким чином: на оригіналі проводять експерименти, обробляють отримані ре-зультати і, не вдаючись в особливості фізичної природи модельованого об’єкта, за допомогою методів матема-тичної статистики і теорії ймовірності, встановлюють зв’язки між змінними, що описують об’єкт. Потім отри-мують стохастичну модель. В стохастичній моделі зв’язок між змінними носить випадковий характер, іноді це буває принципово.
Метою роботи є побудування трифазних та двофазних моделей стенда з асинхронним двигуном та порів-няння результатів моделювання з експериментальними даними для встановлення адекватності моделей.
Для досягнення мети в роботі розв’язуються наступні задачі: – виконати математичний опис асинхронного двигуна як узагальненої електричної машини; – виконати розрахунок параметрів математичної моделі асинхронного двигуна; – дослідити асинхронний двигун на моделі в двофазної системі координат (α - β) та в трифазній системі ко-
ординат; – дослідити асинхронний двигун на моделі в програмному середовищі SimPowerSystems; – дослідити двомасовий стенд з асинхронним двигуном на моделі в двофазній системі координат (α - β) та в
трифазній системі координат; – обробити результати експериментальних досліджень, порівняти їх зі значеннями, одержаними на моделях,
та розрахувати середньоквадратичні відхилення. Об'єкт дослідження – динамічний стенд з асинхронним двигуном, призначений для лабораторного дослі-
дження двохмасових електромеханічних систем. Предмет дослідження – процеси перетворення енергії в електромеханічній системі стенду з асинхронним
двигуном АИР56А4У3 на моделях в двохфазних та трифазних системах координат. Методи досліджень. У роботі використані загальні методи теорії автоматичного керування, методи мате-
матичного аналізу, математичне моделювання в середовищі MATLAB та лабораторно-стендові випробування з обробкою результатів експериментів у середовищі Mathcad.
Основні наукові та практичні результати, їх значення. Встановлено залежність середньоквадратичного відхилення даних, отриманих на математичних моделях, від експериментальних даних, яка дозволяє стверджу-вати про адекватність застосованих моделей. При проведенні експерименту датчик швидкості встановлювався на другий масі двохмасового стенду з асинхронним двигуном. Результати експериментальних досліджень зве-дено до таблиць. Для обробки даних була застосована лінійна інтерполяція, тобто інтерполяція відрізками пря-мих, що з'єднують між собою експериментальні точки. Результати обробки даних наведені на рисунках 1, 2.
Рисунок 1 – Експериментальні дані та дані, отримані на моделі

Математичне моделювання електротехнічних комплексів та систем 38
після виконання лінійної інтерполяції
Рисунок 2 – Модуль відхилення між експериментальними даними і даними, отриманими на моделі
Аналізуючи результати, можна зробити висновок, що модель адекватно описує поведінку реального об'єкта
– двохмасового стенду з асинхронним двигуном. Стандартне відхилення (іноді середньоквадратичне відхилен-ня) – в теорії ймовірності і статистиці найбільш поширений показник розсіювання значень випадкової величини відносно її математичного сподівання. Вимірюється в одиницях виміру самої випадкової величини. Дорівнює кореню квадратному з дисперсії випадкової величини:
( )2
n
i i
i 1
1ˆx x
nσ
=
= −
∑ ,
де n – кількість експериментальних точок;
ix – i–е значення, отримане на моделі;
ix̂ – i–е значення, отримане в результаті експерименту.
В результаті проведеної обробки експерименту встановлено, що середньоквадратичне відхилення даних, отриманих на моделі, від експериментальних даних становить 553,2=σ , а значить модель двохмасового стенду з асинхронним двигуном є адекватною.
Зменшити середньоквадратичне відхилення можна, виконавши повторні експерименти, зокрема, повторно вимірявши результати. Проблемним в даному сенсі є також і той факт, що процес пуску дуже швидкоплинний і для точного вимірювання швидкості потрібні датчики з досить високою швидкодією.
Висновки. За результатами моделювання можна зробити висновки, що дані, одержані на моделі в двохфаз-ної системі координат, нерухомій відносно статора, повністю збігаються з результатами моделювання в трифа-зних координатах. Моделювання в SimPowerSystems істотно відрізняється. Цей факт можна пояснити викорис-танням у SimPowerSystems готових функціональних блоків, в котрих можуть змінюватися тільки деякі з дослі-джуваних параметрів.
Модель адекватно описує поведінку реального об'єкта – двохмасового стенду з асинхронним двигуном. По-хибкою експерименту є шоста точка, в якій відхилення значно перевищує середню помилку.
Після виконання обробки експерименту встановлено, що середньоквадратичне відхилення даних, отриманих на моделі, від експериментальних даних становить 553,2=σ , тобто модель лабораторного стенду з асинхрон-ним двигуном є адекватною та може використовуватись для дослідження його динаміки.
Література.
1. Козярук А.Е., Рудаков В.В. Современное и перспективное алгоритмическое обеспечение частотно-регулируемых электроприводов. – СПб: Санкт-Петербургская электротехническая компания, 2002. – 88 с.
2. Фираго Б.И. Регулируемые электроприводы переменного тока / Б.И. Фираго, Л.Б. Павлячик. – Минск: Техноперспектива, 2006. – 363 с.
3. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб: КОРОНА принт, 2001. – 320 с.

Математичне моделювання електротехнічних комплексів та систем 39
Леонтьєва Т.В., Москаленко Я.Г. Суми
Сумський державний університет
МОДЕЛЮВАННЯ СИСТЕМИ ЕЛЕКТРОПОСТАЧАННЯ ТРИФАЗНОГО СПОЖИВАЧА , ТА РОЗРАХУНОК КОЕФІЦІЄНТІВ НЕСИМЕТРІЇ
Вступ. Якість електричної енергії – це фактор, який суттєво впливає на ефективність роботи і надійність електричної мережі та на режим роботи устаткування споживачів. Тому, актуальною задачею є вирішення пи-тань за рахунок зменшення негативного впливу споживачів на мережу або за рахунок застосування спеціальних заходів.
Мета роботи. Моделювання системи електропостачання трифазних споживачів із нерівномірним заванта-женням фаз, та розрахунок коефіцієнтів несиметрії фазних напруг при заданих навантаженнях фаз.
Матеріали та результати дослідження. За об’єкт дослідження обрали математичну модель системи поста-чання закритого акціонерного товариства. Основними складовими даної математичної моделі є: трифазне дже-рело напруги; 2 трифазних лінії; трифазний двообмотковий трансформатор; трифазне несиметричне наванта-ження та вимірювальні блоки.
Розрахунок коефіцієнтів несиметрії фазних напруг при заданих навантаженнях фаз проводимо за наступни-ми формулами:
Коефіцієнт несиметрії напруг по зворотній послідовності дорівнює,% 2(1)
21(1)
100%= ⋅U
UK
U
(1)
Коефіцієнт несиметрії напруг по нульовій послідовності дорівнює,% 0(1)
01(1)
100%= ⋅U
UK
U
(2)
У даній роботі досліджувалось трифазне джерело напруги, до якого приєднана трифазна лінія електропере-дач, до виходів якої підключено трифазний блок вимірювання. Наруга 10 кВ понижується до 0,4 кВ за допомо-гою трансформатора. Трифазне навантаження (із зміною потужності у часі) під’єднано до трансформатора лінією 0,4 кВ.
Ми провели три досліди, в яких показали, як змінюються показання осцилограм напруг та струмів в залежності від зміни навантаження споживачів. Вимірювання показників несиметрії здійснювалося в трьох точках системи: після першої лінії (поєднує джерело та трансформатор), після трансформатора та перед неси-метричним трифазним споживачем. В першому досліді потужність кожної фази була однаковою, в другому досліді ми змінили потужність лише одної фази, а в третьому досліді ми задали таку потужність споживача, що усі три фази мали різну потужність.
Дослід №1
Рисунок 1 – Осцилограми напруг та струмів при симетричному навантаженні, виміряні безпосередньо біля
приймача. Дослід №2

Математичне моделювання електротехнічних комплексів та систем 40
Рисунок 2 – Осцилограми напруг та струмів при однофазній несиметрії навантаження, виміряні безпосеред-
ньо біля приймача. Дослід №3
Рисунок 3 – Осцилограми напруг та струмів при двофазній несиметрії навантаження, виміряні безпосеред-
ньо біля приймача. Висновки. Аналіз математичної моделі показав, що при симетричному навантаженні фаз – коефіцієнти не-
симетрії по зворотній та нульовій послідовності дорівнювали нулю. Коли ж навантаження має несиметрію, то з’являються коефіцієнти несиметрії. Зворотна та нульова складова фазних напруг суттєво більше біля несимет-ричного навантаження ніж при вимірюваннях біля трансформатора на напрузі 0,4 кВ. Коефіцієнт звороної та нульової складової фазних напруг при вимірюваннях біля трансформатора на напрузі 10 кВ складає тисячні долі відсотків, тому ними можна знехтувати.
ЛІТЕРАТУРА 1. Бурбело М. Й. Квазізрівноважені вимірювальні канали для симетрувальних установок: Монографія /
М. Й. Бурбело, О. В. Бабенко – Вінниця: УНІВЕРСУМ – Вінниця, 2009. – 96 с. 2. Вимірювальні канали для установок динамічної компенсації реактивної потужності / М. Й. Бурбело, О. М.
Кравець, М. В. Никитенко, А. В. Гадай // Енергетика та електрифікація. – 2008. – № 11. – C. 42–45. 3. Владимиров Ю.В., Крамская Т.В. Учет фактора влияния несимметрии нагрузки на потери в электрических
сетях от перетоков реактивных мощностей. //Энергетика и электрификация. 2007, № 1. 4. Герлига В.А., Гуржий П.Г., Показатели качества электроэнергии // Збірник наукових праць СНУЯЕтаП. –
2011. С. 177-183. 5. ДСТУ – ГОСТ 13109-97. Нормы качества электрической энергии в системах электроснабжения общего
назначения. [Действует с 2000-01-01]. – К.: Госпотребстандарт Украины. – 38 с. (Национальный стандарт Ук-раины).

Математичне моделювання електротехнічних комплексів та систем 41
Манько Р.М., Христовий Б.А Кременчуг
Кременчуцький національний університет імені Михайла Остроградського
ПРОЦЕС РУШАННЯ З ВИЗНАЧЕННЯМ ОПТИМАЛЬНОГО МОМЕНТУ АСИНХРОННОГО ДВИГУНА
Вступ. В даний час , незважаючи на безліч поліпшених систем управління електроприводами , гостро стоїть питання роботі технологічних механізмів з важкими умовами рушання та пуску. У роботах [1,2] обґрунтовано застосування систем керованого рушання на базі перетворювача частоти (ПЧ). Однак для деяких технологічних механізмів ( конвеєрних ліній , підйомно-транспортних механізмів ) не всі можливості системи керованого ру-шання на базі ПЧ – АД застосовні.
Організація передстартової підготовки за рахунок найпростіших законів частотного управління дозволяє не тільки підвищувати пусковий значення моменту Ад, а й забезпечувати необхідну інтенсивність його збільшен-ня, за рахунок зміни співвідношення амплітуди і частоти живлячої напруги. Реалізація основних законів часто-тних управління передбачає прийняті допущення [3] . В результаті вибрані параметри управління при роботі на зниженій частоті неефективні.
У роботах [4,5] обґрунтовано необхідність врахування впливу насичення стали магнітопроводу і витіснення струму в обмотці ротора для забезпечення точності визначення параметрів регульованих електроприводів з ва-жкими умовами рушання та пуску, що працюють в широких діапазонах зміни частоти обертання. Для цього необхідно на підставі експериментальних або довідкових даних визначати криву намагнічування АД.
Мета роботи. Визначення залежності частоти й напруги асинхронного двигуна для формування максималь-ного значення пускового моменту maxM
п→ з мінімальним пусковим струмом у ланцюзі статора nmіI
п→ .
Матеріал та результати досліджень. У роботі розглянуто спосіб визначення параметрів мережі живлення для частотно-регульованого асинхронного електроприводу в умовах важкого рушання та пуску. Встановлено, що застосування регресійної моделі, що відображає поліноміальну залежність пускового моменту і струму від амплітуди та частоти напруги мережі живлення дозволяє отримати максимально допустимий пусковий момент при мінімальному пусковому струмі з урахування кривої намагнічування, для технологічних механізмів в умо-вах важкого рушання та пуску. Регресійна модель отримана методом планування експерименту, вхідні параме-три якого, визначалися на базі математичної моделі асинхронного двигуна в трифазній системі координат. Для апроксимації кривої намагнічування за експериментальними даними, авторами запропоновано використовувати функцію Локон (верзьера) Аньезі, яка відображає реальні процеси в області низьких частот напруги живлення.
Крива намагнічування може бути апроксимована наступним чином: * * *(I ) a acrtg(b I )µ µΨ = ⋅ ⋅ , (1)
де a 0,9932814= , b 1, 4963076= – коефіцієнти апроксимації.
Після перетворень залежність
* *L (I )µ µ
у відносних одиницях, буде мати вигляд:
* * * *
* * 2
d a bL (I ) (I )
dI 1 (b I )µ µ µ
µ µ
⋅= ⋅Ψ =
+ ⋅
. (2)
Розрахунок виконаний для електродвигуна серії 4А з наступними параметрами : потужність Рnom = 1.5 кВт ,номінальна швидкість - 1276 об /хв; номінальний струм - 3,1 А; ККД - 75 %; коефіцієнт потужності - 0,71 ; ак-тивний опір ротора - 5,6 Ом; реактивний опір ротора - 6,9 Ом; наведене активний опір статора - 2,4 Ом; наведе-ний реактивний опір статора - 6,9 Ом; опір контуру намагнічування - 5,6 Ом; перевантажувальний коефіцієнт по струму - 5; перевантажувальна здатність по номінальному моменту -
н2,2λ = ; перевантажувальна здатність
по пусковому моменту - п
2λ = .
В експерименті повнофакторна матриця складається з 6 стовпців значень факторів і 10 рядків (дослідів) пе-реборів цих значень. Умови кожного досліду (рядки) повторювали три рази. Гіпотезу про адекватність моделі перевіряли за F-критерієм. Значимість коефіцієнтів регресії оцінювали двома рівноцінними способами: побудо-вою довірчого інтервалу і по t-критерієм Стьюдента.
Адекватність отриманої моделі, згідно з коефіцієнтом детермінації 2R , становить 99,3282 %. Для того , щоб
була можливість порівнювати моделі з різним числом факторів так, щоб число факторів не впливало на статис-
тику зазвичай використовується скоригований коефіцієнт детермінації, 2R який складає 98,4885 %. Критерій
Фішера визначаться як эмпF 1,815= при 22,3F
кр= . t - критерієм Стьюдента визначається як
эмпt 1, 25= при
крt 2,23= . Таким чином математична регресійна модель повністю відображає залежність пускового моменту і
струму від зміни частоти і напруги живильної мережі з допустимою точністю. В результаті виконання матема-тичного планування отримуємо поліноміальні залежності пускового струму і пускового моменту :
( ) 2 2
п 1 2 3 4 5 6M U,f a a U a f a U a U f a f ,= + ⋅ + ⋅ + ⋅ + ⋅ ⋅ + ⋅ (4)

Математичне моделювання електротехнічних комплексів та систем 42
де 1a 0,0406082= − , 14881,0a
2= , 277744,0a
3−= , 0011652,0a
4= , 0111,0a
5−= , 0182,0a
6= - коефіцієнти
поліноміальної залежності (4). 2 2
п 1 2 3 4 5 6I (U, f ) b b U b f b U b U f b f .= + ⋅ + ⋅ + ⋅ + ⋅ ⋅ + ⋅ , (5)
де 97918,0b1= , 162416,0b
2= , 222417,0b
3−= , 0006009,0b
4−= , 000169881,0b
5−= , 00358028,0b
6= -
коефіцієнти поліноміальної залежності (5). При накладенні на отримані графіки номінальних значень моменту критичного 5.10M
k= (Н·м), пускового
струму п cI I 5 15.5= ⋅ = (А) можна визначити діапазон варіювання
cf і
cU для визначення заданого значення
( )f,UMп
, яке буде здаватися як kп
MkM ⋅= де k - коефіцієнт перевантажувальної здатності АД (0,2-2).
З робіт Сандлера А. С і Сарбатова Р. С. відомо, що при забезпеченні сталості перевантажувальної здатності асинхронного двигуна при частотному управлінні , магнітний потік машини значно збільшується в області ни-зьких частот. При максимально низькому значенні струму статора магнітний потік приймає максимальне зна-чення і машина перебувати в насиченому стані. При пуску двигуна бажано уникати такий діапазон струмів і напруг , які при забезпеченні сталості моменту , призводять двигун в цю область роботи. Тому параметри
cf і
cU визначаємо з урахуванням кривої намагнічування і на підставі виразу ( 5 ) отримуємо мінімальне значення
струму з заданим значенням пускового моменту kn
M2M ⋅= . Таким способом можна розрахувати мінімальне
значення струму, при різних заданих значень пускового моменту. Висновок. Таким чином , в роботі отримані умови та розроблено алгоритм для формування максимально
допустимого пускового моменту при мінімумі пускового струму частотно - регульованого електроприводу тех-нологічних механізмів з важкими умовами рушання й пуску. Асинхронна машина при отриманих значеннях параметрів напруги мережі живлення може працювати тривалий час. Однак існують, такі режими рушання , які вимагаю створення пускового моменту в 3 ÷ 5 перевищує критичний момент. Для цього можна використовува-ти наведений вище алгоритм визначення пускового моменту, але при цьому пусковий струм буде перевищувати номінальний майже в 10 разів. Даний режим роботи асинхронної машини не бажаний , але допустимо на корот-кий період часу. Чим більше значення пускового струму , тим менше час роботи при такому режимі роботи. Тому подальше дослідження з визначення моменту асинхронного двигуна для реалізації процесу рушання , на думку авторів , слід проводити з веденням додаткового параметра , який є тимчасовим показником роботи дви-гуна з пусковими струмами вище допустимого номіналу для забезпечення
knM5...3M = .
ЛІТЕРАТУРА
1. Сандлер А. С. , сарбат Р. С. Частотне управління асинхронними двигунами. - Москва : Енергія , 1966 . - 146 с.
2. Огарь В.А. Характеристики асинхронних двигунів з урахуванням нелінійності кривої намагнічування / А.П. Калинів , В.А. Огарь / / Електромашінобуд . та електрообладн . : Mіжвід . наук. -техн. зб . Пробл. автомат . електропривода . Теорія і практика . - 2006 . - Вип. 66 . - С. 226-229
3. Штурмана Г.І. До питань частотного керування асинхронними двигунами / / Вісник електропромисловості . 1946 .
4. Адлер Ю. П. , Маркова Є. В. , Грановський Ю. В. Планування експерименту при пошуку оптимальних умов. - М.: Наука , 1976 . - 289 с.
5. Чиликин М. Г. , Сандлер А. С. Загальний курс електроприводу. - Москва : Енергоіздат , 1981 . - 577 с.9 . 6. В.В. Якимов Проблеми обліку втрат у сталі при розрахунку перехідних процесів в електричних машинах
змінного струму / / Тез.докл . II Міжнародній конференції з електромеханіки та електротехнології , Частина 1 . - Крим , 1-5 жовтня . 1996 . - С. 172-174 .10 .
7. Беспалов В.Я. Математична модель асинхронного двигуна в узагальненій ортогональній системі коорди-нат / В.Я. Беспалов , Ю.А. Мощинський , А.П. Пертів / / Електрика. - 2002 . - № 8 . - С. 33-39 .
8. Огарь В.А. Уточнення характеристик асинхронних двигунів з урахуванням зміни їх параметрів в пускових режимах / В.А. Огарь , А.П. Калинів / / Вісник Кременчуцького державного політехнічного УНІВЕРСИТЕТУ : Зб. наук . пр. КДПУ. - Вип.3 ( 39 ) Частина 1 . - Кременчук : КРНУ , 2006 , - с.45 - 49 .

Електромеханічні системи з електроприводом постійного та змінного струму 43
СЕКЦІЯ
«ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ З ЕЛЕКТРОПРИВОДАМИ
ПОСТІЙНОГО ТА ЗМІННОГО СТРУМУ»

Електромеханічні системи з електроприводом постійного та змінного струму 44
Абакумов И. Донецк
Донецкий национальный технический университет
РАЗРАБОТКА И ИССЛЕДОВАНИЕ МЕТОДОВ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА В МОСТОВЫХ КРАНАХ
Мостовые краны широко используются в разных отраслях промышленности. Они осуществляют горизон-тальные перемещения грузов, использую механизмы поступательного движения. При этом в процессе движе-ния возникают колебания груза, которые существенно влияют на энергетические показатели работы электро-приводов, увеличивают механические нагрузки в передаточных механизмах, увеличивают продолжительность производственного цикла и создают угрозу возникновения аварийных ситуаций. Это обуславливает необходи-мость внедрения мер по гашению колебаний груза.
В литературе часто описывают методы, основанные на применении задатчиков траектории движения или темпа разгона для электроприводов тележки и моста [1, 2, 3]. Каждый из приведенных законов обладает как преимуществами, так и недостатками.
Объектом исследований является компьютерная модель мостового крана. Цель работы – исследование методов управления электроприводом передвижения тележки мостового крана,
обеспечивающих гашение колебаний перемещаемого груза. Получены формулы для расчета трехэтапных диаграмм разгона, обеспечивающих гашение колебаний груза
при подержании постоянного ускорения или силы на каждом из этапов (см. рис.1).
yзyvv
yзyaa
yзyFF
сt,
а)
yзy vv
yзy aa
yзyFF
сt,
б)
Рис. 1 – Гашение колебаний груза с помощью трехэтапных диаграмм разгона: а) с постоянным ускорением; б) с постоянным усилием
Установлено, что эффективность гашения колебаний груза при применении таких законов управления элек-
троприводами существенно снижается, если длина каната определена неточно или она меняется во время дви-жения.
Предложено применить систему модального управления с обратной связью по полному вектору состояния системы. Получены аналитические выражения для расчета коэффициентов модального регулятора при управ-лении скоростью тележки. Учитывая, что показателем эффективности законов управления является время отра-ботки заданного перемещения, дополнительно были рассчитаны коэффициенты модального регулятора при управлении перемещением тележки. Регулятор выполнен в виде функции, рассчитывающей коэффициенты в

Електромеханічні системи з електроприводом постійного та змінного струму 45
функции текущего значения длины каната. Графики переходных процессов, свидетельствующие об эффектив-ности такого подхода, приведены на ри.2.
yзyFF
yзyvv
сt,
yзyss
Рис.2 – Переходные процессы в системе модального управления
Исследования показали, что качество переходных процессов существенно зависит от величины среднегео-
метрического корня характеристического полинома системы. Выбор его оптимального значения является це-лью дальнейших исследований. Также в дальнейшем планируется синтезировать наблюдатель состояния и идентификатора длины каната, необходимые для практической реализации предложенного алгоритма управле-ния.
Выводы. В данной работе для модели мостового крана, учитывающей изменение длины каната в процессе работы создана система модального управления, позволяющая эффективно гасить колебания груза при любом значении длины каната.
Наиболее существенные научные и прикладные результаты, выводы и рекомендации заключаются в сле-дующем:
1. Применение трехэтапных диаграмм разгона позволяет эффективно гасить колебания груза при условии, что длина каната определена точно, а начальное значение угла отклонения груза от вертикали равно нулю.
2. Система модального управления обеспечивает желаемое качество переходных процессов при изменении длины каната в процессе перемещения.
ЛИТЕРАТУРА
1. A. Buch. Optimale Bewegungssteuerung von schwingungsfähigen mechatronischen Systemen mit zwei Freiheits-graden am Beispiel eines Krans mit Pendelnder Last und elastischer Mechanik – Magdeburg, 1999. – 250 S.
2. Герасимяк Р.П. Анализ и синтез крановых электромеханических систем /Р.П. Герасимяк, В.А. Лещев. – Одесса, СМИЛ, 2008. – 191 с.
3. Толочко О.И., Бажутин Д.В. Сравнительный анализ методов гашения колебаний груза, подвешенного к механизму поступательного движения мостового крана / Міжвідомчий науково-технічний журнал «Електро-машинобудування та електрообладнання» №75 – Київ: «Техніка», 2010. – С.22-28.
4. Толочко О.І. Аналіз та синтез електромеханічних систем зі спостерігачами стану: [Навчальний посібник] для студентів вищих навчальних закладів / О.І. Толочко. – Донецьк: Норд-Прес, 2004. – 298 с.
5. Толочко О.І., Бажутін Д.В. Розробка моделей мостового крану із урахуванням зміни довжини канату / Наукові праці Донецького національного технічного університету. Серія: “Електротехніка і енергетика”, випуск 11 (186), Донецьк: ДВНЗ «ДонНТУ», 2011. С. 388-391.

Електромеханічні системи з електроприводом постійного та змінного струму 46
Авраменко Д.С., Федотьєв А.В. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
МЕТОДИКА ФОРМУВАННЯ КЕРУЮЧИХ ІМПУЛЬСІВ ДЛЯ ВЕНТИЛЬНО-ІНДУКТОРНОГО ДВИГУНА З УРАХУВАННЯМ КОНСТРУКТИВНИХ ПАРАМЕТРІВ
Вступ. Аналіз відомих застосувань ВІЕП і його електромеханічних властивостей дозволяє припустити, що подальший розвиток у першу чергу знайдуть області, де звичайним двигунам важко або неможливо забезпечи-ти необхідні режими. Насамперед, це низькооборотні, але високомоментні приводи, які дозволяють у ряді випадків виключити механічний редуктор, і спростити конструкцію механізму, а також високооборотні приво-ди в металообробці, лабораторному устаткуванні, побутовій техніці [1].
Робочі характеристики ВІЕП залежать від типу комутації напруги живлення. В свою чергу характер імпульсів керування напругою живлення залежить від конструктивних параметрів від та характеру наванта-ження, діапазону регулювання, вимог, що застосовуються до електроприводу.
Тому актуальною задачею являється розробка методики формування керуючих імпульсів з урахуванням конструктивних параметрів та умов роботи електроприводу.
Мета роботи. Підвищення надійності вентильно-індукторного електроприводу, шляхом визначення засто-совуваних типів комутації та їх параметрів.
Матеріали і результати дослідження. Ос-новний принцип комутації фаз вентильно-індукторного двигуна пов'язаний з характером зміни взаємної індуктивності між зубцями активної фази статора та зубцями ротора під час обертання (рис. 1). Період дії напруги жив-лення для поточної фази позначено Uϕ .
Підключення фази відбувається із неузгодже-ного положення [2] – точка 1. На ділянці 2–3 фаза відключається від напруги живлення у момент, який залежить від типу комутації та конструктивних параметрів двигуна. При цьо-му у точці 3 фазна індуктивність сягає макси-мального значення L
max.
Uϕ
Uzϕ
Рисунок 1 – Зв'язок між імпульсом комутації та фазною
індуктивністю
Часто до поточної фази прикладається імпульс зворотної напруги з метою прискорення згасання струму. Згідно викладеного вище параметрами імпульсу напруги живлення є: kϕ – стала складова, обчислюється за
умови живлення симетричними типами комутації (кут послідовної комутації); Uϕ∆ – змінна складова,
обчислюється за умови живлення несиметричними типами комутації, залежить від значення полюсної дуги ро-тора Rβ ; Uzϕ – складова зворотної напруги.
Відповідно при живлені двигунів можуть застосовуватись: одиночна симетрична комутація (ОСК); парна симетрична комутація (ПСК); одиночна несиметрична комутація (ОНК); парна несиметрична комутація (ПНК); одиночна симетрична з прикладенням зворотної напруги – (ОСКЗН). Після аналізу всіх параметрів, що впли-вають на тип комутації ВІД був складений алгоритм, наведений на рис. 3.
Первинними конструктивними параметрами двигуна для визначення форми імпульсів комутації є: кількість зубців статора;кількість зубців ротора; кількість полюсів на фазу. Від останнього параметра залежить кількість фаз двигуна, а також вибір базового типу комутації: парної або одиночної. Які є факторами визначення кількості фаз, що задіяні у циклі комутації. Це перше розгалуження алгоритму. На наступному етапі виконується обчислення основних параметрів комутації: тактового кута та кількості імпульсів за повний оберт ротора, за умови симетричного типу комутації (відповідно до вибраних базових типів комутації). На цьому етапі ми визначаємо сталу складову імпульсу напруги живлення. Переходимо до другого розгалуження алго-ритму, який ґрунтується на можливості застосування несиметричної комутації. Обмеження застосування неси-метричних підтипів комутації може бути викликано умовами технологічного процесу, або відсутністю їх реалізації на рівні мікроконтролера ВІД. Якщо обмеження для застосування несиметричної комутації не існує, то ми переходимо до обчислення її параметрів. Первинними даними для визначення меж регулювання ширини імпульсу напруги живлення при несиметричній комутації є: полюсна дуга статора; полюсна дуга ротора. У двигунів, для яких виконується умова RS ZZ > , полюсна дуга статора є величиною сталою, а полюсна дуга
ротора зазвичай більша від неї на 2–40. У двигунів, для яких виконується умова RS ZZ < , полюсна дуга ротора
є величиною сталою, а полюсна дуга статора зазвичай менша від неї на 2–40. Відповідно відбувається рокіровка наступних етапів алгоритму: обчислення полюсної дуги статора; завдання полюсної дуги ротора. Алгоритм приведений для випадку RS ZZ > , оскільки ця умова виконується для переважної кількості типів ВІД. А умова
RS ZZ < більш притаманна вентильно-індукторним генераторам. Якщо проводяться дослідження на етапі про-
ектування ІМ, можна для різних значень полюсної дуги ротора отримати різні форми імпульсів комутації.

Електромеханічні системи з електроприводом постійного та змінного струму 47
Комутацію ВІД найпростіше опису-вати у прив’язці до характеру зміни фазної індуктивності від кута повороту ротора. Для побудови залежності ( )ϕL
необхідно обчислити наступні пара-метри: різниця полюсних дуг; кут між зубцями статора; кут між зубцями ро-тора. Після цього можна обчислити максимальне збільшення ширини імпульсу напруги живлення maxUϕ∆ .
Відповідно межі регулювання ширини імпульсу для несиметричної комутації будуть від 0 до maxUϕ∆ . Слід зазначи-
ти, що ширина імпульсу величина дис-кретна, і для спрощення налаштувань системи керування її крок зміни має бути 10. На цьому етапі ми визначаємо змінну складову імпульсу напруги живлення.
Переходимо до останнього розгалу-ження алгоритму, на якому вирішується питання про прикладення зворотної напруги по завершенню ро-бочого періоду фази. Якщо за умовами роботи ВІЕП немає суворих заборон щодо прикладення зворотної напруги, відповідь на це питання – так. Прикла-дення зворотної напруги має декілька переваг: покращення умов роботи тиристорів перетворювача; запобігання насиченню магнітної системи; підвищення кінетичної енергії обертан-ня ротора.
Останнім етапом алгоритму є ви-значення умовних функцій, що опису-ють залежності імпульсів комутації від кута повороту ротора.
Загальна довжина імпульсу комутації буде
Рисунок 3 – Алгоритм формування імпульсів напруги живлення
UzUkU ϕϕϕϕ +∆+=Σ . (1) Відповідно умовна функція імпульсу напруги живлення
( )
<+∆+
+∆+≤≤∆+−
∆+<≤
=
ϕϕϕϕ
ϕϕϕϕϕϕ
ϕϕϕ
ϕ
UzUk
UzUkUk
Uk
*
qqякщо
qqqякщо
qякщо
q,q,U
21
211
1
21
0
1
01
,
(2)
де 1q , 2q – ключі застосування несиметричної комутації та прикладення зворотної напруги відповідно, можуть
приймати значення 0 або 1. Висновки. Огляд літературних джерел показав, що робочі характеристики ВІЕП залежать від типу
комутації напруги живлення. В свою чергу характер імпульсів керування напругою живлення залежить від кон-структивних параметрів від та характеру навантаження, діапазону регулювання, вимог, що застосовуються до електроприводу. За результатами аналізу існуючих типів комутації та їх параметрів, конструктивних параметрів двигуна, та їх зв’язку був створений алгоритм формування імпульсів напруги живлення, та отрима-на універсальна умовна функція, що описує імпульс напруги живлення.
ЛІТЕРАТУРА
1. Фролов Ю. М. Состояние и тенденции развития електропривода [Электронный ресурс] / Ю. М. Фролов. – Режим доступа : www.v-itc.ru/electrotech
2. Проектирование вентильных индукторных двигателей: Методическое пособие / В. Г. Фисенко, А. Н. Попов. – М. : Издательство МЭИ, 2005. – 56 с.

Електромеханічні системи з електроприводом постійного та змінного струму 48
Баранцов Д., Домбровский Е. Днепропетровск
Национальная металлургическая академия Украины
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ АСИНХРОННОГО ДВИГАТЕЛЯ, РАБОТАЮЩЕГО В УСЛОВИЯХ НЕКАЧЕСТВЕННОЙ ЭЛЕКТРОЭНЕРГИЕЙ
Самым распространенным электромеханическим преобразователем сейчас является асинхронный двигатель (АД) с короткозамкнутым ротором, благодаря его высокой надежности и низкой стоимости. Вместе с тем, акту-альной остается проблема работы таких двигателей в сетях с некачественной электроэнергией[1].
Решение данной проблемы невозможно без наличия математической модели, которая позволяла бы анали-зировать его энергетическую эффективность при различных значениях всех показателей качества электриче-ской энергии в сети. Такая модель, получена на основе дифференциальных уравнений Парка-Горева, записан-ных относительно пространственно-временных комплексов токов и напряжений. Необходимо также учитывать и насыщение магнитопровода, которое обусловлено предельной ориентацией магнитных диполей в материале последнего:
11 01 01
dU I R I R
dt
Ψ= + + (1)
22 0 m2 0 2
d0 I R I R j
dtω
Ψ= + + − Ψ , (2)
где 1U - пространственно – временные комплексы (ПВК) напряжения статора,
1I ,
2I ,
0I - ПВК токов статора,
ротора, и тока намагничивания,1Ψ ,
2Ψ - ПВК потокосцеплений статора и ротора, mω - угловая скорость вра-
щения АД, 1R , 2R - активные сопротивления статора и ротора.
Необходимо учитывать, что на динамические и энергетические показатели асинхронных двигателей суще-ственное влияние оказывает насыщение магнитопровода, которое обусловлено предельной ориентацией маг-нитных диполей в материале последнего, и, таким образом, прекращения роста магнитного потока с ростом тока намагничивания, как это показано на рис. 1.
Рис. 1 Зависимость главного магнитного потока от тока намагничивания.
Существуют различные методы учета этого влияния [2]. Наилучшее сочетание точности и простоты расче-
тов дает использование зависимости главной взаимной индуктивности от величины тока намагничивания L12=f(I0).
Такая зависимость может быть описана полиномиальными функциями четных степеней [3]. Величина ин-дуктивности ветви намагничивания без учета эффекта насыщения приведена в справочной литературе, либо может быть примерно определена по результатам опыта холостого хода. Определение же коэффициентов поли-номиальной зависимости индуктивности от величины тока намагничивания является самостоятельной задачей. Для моделирования нами взято уравнение из [4].
Таким образом, в уравнениях для определения потокосцепления необходимо записывать:
( )1 12 01 1 2I L L I IΨ = ⋅ + ⋅ , (3)
( )2 12 02 2 1I L L I IΨ = ⋅ + ⋅ (4)
Переменными состояния моделируемого объекта в рассматриваемом случае являются скорость асинхронно-го двигателя, а также пространственно-временные комплексы потокосцепления статора и ротора. Для нахожде-ния последних исходная система уравнений дополнена известными зависимостями
*
12 1 2
3M p L Im(I I )
2τ
= , (5)
m
c
dM M J
dt
ω
− = , (6)
где c
M – момент статический; J – момент инерции механической части привода; τ
p – число пар полюсов.
Структурная схема объекта моделирования, отражающая уравнения (1) и (2) с учетом (3) и (4),(5),(6) пред-ставлена на рис. 2.

Електромеханічні системи з електроприводом постійного та змінного струму 49
Рис. 2. Структурная схема асинхронного двигателя как объекта моделирования.
Поскольку в ПВК используются мгновенные значения токов и напряжений, отпадает необходимость спек-
трального анализа и записи уравнений для каждой гармоники. Кроме того, в них учитывается и несимметрия питающего напряжения. Рассматриваемая система является, фактически, универсальной моделью, позволяю-щей анализировать процессы как в установившихся, так и в переходных режимах.
Программная реализация разработанной модели АД, апробирована путем описания процесса пуска, наброса нагрузки и установившегося режима двигателя типа MTKH 112-6 мощностью 5,3 кВт. В качестве питания зада-но соответствующее реальному несимметричное несинусоидальное напряжение с отклонениями по фазам по-рядка 10% и коэффициентами гармонических составляющих 0,8-3%
Анализ полученных энергетических показателей работы АД, представленных в таблице 1, подтверждает, что некачественное питающее напряжение обуславливает рост всех видов потерь, и, соответственно, снижение КПД и коэффициента мощности двигателя.
Таблица 1. Энергетические показатели АД Показатели Ед. Идеальное питание Некачественное питание
Потери в статоре Вт 491,3 498,3 Потери в роторе Вт 652,2 661,5 Потери в стали Вт 89,2 90
Суммарные потери Вт 1235 1250 КПД % 81,4 81,2
Коэффициент мощности о.е. 0,98 0,9 Рассмотренная нами универсальная модель асинхронного двигателя позволяет анализировать статические и
динамические процессы в электромеханической системе при несинусоидальном и несимметричном питании статора. Она дает возможность исследовать как установившиеся, так и переходные режимы асинхронного дви-гателя.
Несимметричное и несинусоидальное питание АД приводит к появлению пульсаций токов статора и ротора, а также момента, развиваемого двигателем. В результате ухудшаются энергетические показатели его работы.
ЛИТЕРАТУРА
1. Качан Ю.Г. О влиянии гармонического состава питающего напряжения на энергетические показатели асинхронного двигателя / Ю.Г. Качан, А.В. Николенко, В.В. Кузнецов // Гірнича електромеханіка та автомати-ка: Наук.-техн. зб. – Вип.83.–Дніпропетровськ, 2009.– С.113 - 117.
2. Иванов-Смоленский А.В. Электрические машины. - М.: Энергия, 1980. 3. Огарь В.А. Оценка нелинейности индуктивности катушки со сталью энергетическим методом / В.А.
Огарь //Вестник КрГПУ. – 2004. – Вып. 2/2004 (25). – С.78-84. 4. Kerkman O, Russel J. Steady-State and Transient Analyses of an Induction Machine with Saturation of the Mag-
netizing Branch //IEEE Transactions on Industry Applications. – 1985. – Vol. 21. – РР.226-234.

Електромеханічні системи з електроприводом постійного та змінного струму 50
Брус М.І. , Нагорний Д.О. Дніпродзержинськ
Дніпродзержинський державний технічний університет
СИСТЕМА КЕРУВАННЯ ГОЛОВНИМ ЕЛЕКТРОПРИВОДОМ РЕВЕРСИВНОГО СТАНУ ХОЛОДНОЇ ПРОКАТКИ
Вступ. Режим обтиснень на стані є найважливішим елементом технології виробництва холоднокатаних штаб. Він визначає продуктивність стану, якість поверхні, точність і властивості готової продукції, завантаження ме-ханічного і електричного устаткування, стійкість інструмента, стабільність процесу і стійкість штаби при холо-дній прокатці.
Оптимальний режим обтиснень повинен забезпечувати [1,2]: одержання продукції, що задовольняє вимогам стандартів або технічних умов; найбільш повне використання можливостей механічного і електричного устат-кування стану; мінімальний видатковий коефіцієнт металу; високу ефективність роботи систем регулювання і керування; високу продуктивність стану і найбільш низьку собівартість продукції.
Метою роботи. Синтез системи курування головним електроприводом одноклітьового реверсивного стану 550 комбінату “Запоріжсталь” та удосконалення режимів обтиснень жерсті №22, №25 та №28 на стані з метою зменшення енерговитрат на ведення процесу прокатки.
Матеріали роботи. При розробці режимів обтиснень на станах холодної прокатки повинні бути враховані технологічні обмеження [2]: по максимальній силі прокатки: по максимальному моменту прокатки, по макси-мальній потужності прокатки, по максимальній швидкості прокатки, по питомих натягах з умови відсутності пробуксовки в кліті, по питомих натягах з умов максимальної стійкості форми штаби при наявності дефектів концентраторів напруг, по максимальній температурі в зоні контакту з умови стабільності змащення, по пло-щинності штаби на виході стану, по мінімальному обтисненню в кліті з умов ефективної роботи системи авто-матичного регулювання товщини (САРТ), по мікрогеометрії прокатуємої штаби, по питомих натягах при змо-туванні штаби з умов запобігання дефектів “злипання” та “злам”. Врахування технологічних обмежень при роз-робці режимів обтиснень дозволяє сформулювати умови, які забезпечують ефективну роботу технологічного устаткування і одержання продукції з необхідними показниками якості.
В [3] приведені рекомендації, з яких випливає, що на безперервних жерстикатальних станах комбінату ‘Запо-ріжсталь” енергетично вигідно вести процес прокатки з натягами 0,3βσтср (βσтср середня примусова межа теку-чості металу).
Виходячи з цього, пропонується застосовувати режими натягів для реверсивного жерстикатального стану 550 при прокатці жерсті товщина ми 0,22 мм, 0,25 мм та 0,28 мм, які дорівнюють 0,3 Тсрβσ . В останніх проходах
використовуємо задній натяг 0,15 Тсрβσ оскільки значний задній натяг збільшує момент та потужність дефор-
мації. Натяги в першому (задній) та останньому (передній) проходах приймаємо відповідно 10 МПа та 15 МПа [1].
Це не суперечить обмеженням, приведеним вище, та призводить до зниження сумарного моменту та потуж-ності на деформацію у порівнянні з існуючими режимами.
Висновки. За принципом симетрії розроблена система курування двигуном постійного струму головних вал-ків, яка дозволяє підтримувати постійною швидкость обертання, для забезпечення необхідного обтиснення.
Зниження їх сумарних величин буде відповідно: 7,2% та 8,4% при прокатці жерсті №22; 8,1% та 7,8% жерсті №25; 14,5% та 14,1% жерсті №28. Приблизний річний економічний ефект від впровадження цих режимів скла-дає 182,8 тис. грн.
Таким чином розроблені режими натягів для стану 550 комбінату “Запоріжсталь”, за якими забезпечується зниження енерговитрат на ведення процесу прокатки жерсті.
ЛІТЕРАТУРА
1. Василев Я. Д. Производство полосовой и листовой стали / Я. Д. Василев, М. М. Сафьян. “Вища школа”, 1975. – 192 с.
2. Василев Я. Д. Инженерные модели и алгоритмы расчета параметров холодной прокатки / Я. Д. Василев. – М.: Металлургия, 1995. – 368 с.
3. Романюк Р. Я. Підвищення поздовжньої сталості процесу тонколистової прокатки на основі розвитку тео-ретичних положень щодо контактної взаємодії полоси з валками: автореф. дис. на здобуття наук. ступеня канд. техн. наук: спец. 05.03.05 “ Процеси та машини обробки тиском” / Р. Я. Романюк. – Дніпропетровськ, 2012. – 19 с.
4. Садовой А.В., Сухинин В.Б., Сохина Ю.В. Синтез отипмального управления презиционніми єлектропри-водами. Под ред. А.В. Садового. К.: ИСИМО, 1996. – 298с., ил.

Електромеханічні системи з електроприводом постійного та змінного струму 51
Введенский В.Р. Днепродзержинск
Днепродзержинский государственный технический университет
ДИНАМИКА ПАРАМЕТРИЧЕСКОГО ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ С МНОГОСТУПЕНЬЧАТЫМ НАКОПИТЕЛЕМ ЭНЕРГИИ
Введение. Задача пуска мощных синхронных двигателей (СД) с токоограничением не теряет своей актуаль-ности, в первую очередь для разворота механизмов со значительным моментом статического сопротивления, что характерно для приводов механизмов буровых установок нефте- и газодобывающей промышленности и турбокомпрессоров газоперекачивающих станций.
Цель работы. Целью работы является повышение пускового момента СД для разворота механизмов с большим моментом статического сопротивления при одновременном ограничении токов статора и пусковой обмотки.
Материалы и результаты исследования. Параметрические способы пуска с использованием реакторов, автотрансформаторов и полупроводниковых регуляторов напряжения (ТРН) обеспечивают ограничение пуско-вых токов, однако не позволяют создать необходимых пусковых моментов для разворота СД выше перечислен-ных механизмовю. Повышение пускового момента СД может быть достигнуто:
применением специальных законов управления контуром возбуждения (дискретное управление напряжени-ем возбуждения, непрерывное или ступенчатое изменение величины сопротивления пускового резистора, а также их совместное управление)[1];
усложнением системы возбуждения СД (пусковые индукционные сопротивления в роторе, системы возбуж-дения с преобразователями двусторонней проводимости, емкостные накопители энергии в контуре возбужде-ния)[2];
изменением конструкции собственно СД (применение расщепленных обмоток возбуждения с последова-тельными конденсаторами, размещение поперечной обмотки возбуждения)[3];
Существенным недостатком конденсаторного пуска СД является зависимость увеличения электромагнитно-го момента от скольжения. Это связано с тем, что максимум момента двигателя достигается при полной ком-пенсации емкостным сопротивлением накопителя сопротивления рассеяния контуров ротора по продольной оси полюсов. Для этого емкостное сопротивление накопителя должно изменяться в функции скольжения по закону:
2
c
A AX B,
2 4= − −
где 2 2
2 2 4 2 4 2 2 2kd kdkd f f kd f f f
kd kd
r rA x s 2x s ; B x x s x s x s R s ,
x xσ σ σ σ σ σ
σ σ
= + + = + + + тоесть носит нелинейный характер.
Поскольку создание емкостного накопителя энергии с нелинейными параметрами представляет собой дос-таточно сложную техническую задачу, то альтернативой ему может послужить многоступенчатый емкостной накопитель энергии (МЕНЭ), состоящий из батареи конденсаторов, коммутируемых с помощью электронных ключей.
Розработана функциональная схема пускового устройства, содержащего ТРН и МЕНЭ, представлена на рис. 1.
Управление выходным напряжением ТРН осуществляется в зависимости от величины тока статора, данные о котором, с помощью датчиков TA, TU, поступают на микропроцессорный модуль (MCU). Он, в свою очередь, формирует управляющие сигналы для блока управления тиристорами (AUZ) и осуществляет контроль выход-ного напряжения ТРН. Коммутация ключей МЕНЭ и, соответственно, изменение его емкости, производится в функции скольжения, вычисляемого посредством измерения частоты вращения ротора двигателя.
При подаче напряжения от ТРН на статор СД, ток в ОВ замыкается через резистор R1 и последовательно со-единенный с ним МЕНЭ (С1, С2 и С3). По мере увеличения частоты вращения ротора суммарная емкость МЕНЭ должна увеличиваться , что достигается последовательным включением ключей К1, К2 и К3.
При замыкании ключа К3 МЕНЭ выводится из контура возбуждения, и ток в ОВ протекает через часть ре-зистора R1, что приводит к увеличению входного момента СД. Для ограничения перенапряжений на конденса-торах, в схеме предусмотрены разрядные цепи, состоящие из тиристорных ключей VS7 и VS8 и резисторов R2 и R3.
Електромеханічні системи з електроприводом постійного та змінного струму 52
Рисунок 1 – Функциональная схема пускового устройства с МЕНЭ в контуре возбуждения и ТРН в статоре
СД
При достижении на конденсаторах уровня напряжения, допустимого по электрической прочности изоляции обмотки возбуждения, пробиваются стабилитроны VD3 или VD2, в зависимости от полярности напряжения, и через диоды VD1 и VD4 поступает управляющий сигнал на открытие тиристора VS7 или VS8 и накопители разряжаются на соответствующие резисторы.
Блок AU служит для задания на ограничение максимального тока статора. В результате моделирования пуска СД типа СДСЗ-2000-100 привода шаровой барабанной мельницы с рас-
смотренным устройством, выполненного в ортогональной системе координат d-q [11], были получены расчет-ные зависимости переходных процессов. Номинальные параметры двигателя: Pн=2000 кВт, U1н=6000 В, Iн=229 А, nн=100 об/мин. Параметры обмотки возбуждения: Ufн=51 В, Ifн=276 А. На рис. 2 представлены харак-теристики пуска двигателя с применением предложенной системы, а на рис. 3 – прямой асинхронный пуск с десятикратным добавочным резистором без накопителя энергии.
Расчетными зависимостями показано, что, при ограничение тока статора на шестикратном уровне относи-тельно номинального, ток в ОВ вырос с 2,5, при прямом асинхронном пуске, до 5 значений от номинального, при включении МЕНЭ. Развиваемый двигателем электромагнитный момент возрос на 25% по отношению к моменту при резисторном пуске. Вследствие перераспределения токовой нагрузки между роторными контура-ми, ток в демпферной обмотке при пуске с использованием МЕНЭ снизился в среднем на один номинал в про-дольной и поперечной обмотках.
Выводы. Применение МЕНЭ, включенного в контур возбуждения СД, позволяет создать и поддерживать значительный электромагнитный момент двигателя во время пуска, достаточный для разворота и надежного запуска двигателя в условиях ограничения напряжения питания на обмотках статора. В результате перераспре-деления токовой нагрузки между обмотками ротора, повысилась эффективность использования ОВ во время пуска, снизилась загрузка демпферных контуров, а, также уменьшилось воздействие на контура термомехани-ческих сил, что способствует продлению срока службы и снижению аварийности двигателя, вызванную часты-ми пусками.
ЛИТЕРАТУРА
1. Носов К.Б. Средства и способы самозапуска электродвигателей / Носов К.Б., Дворак Н.М. - Кемерово: Кемеровское книжное изд-во, 1985. – 128 с.
2. Бабурин В.Б. И.А. О повышении продольного электромагнитного момента машин переменного тока в асинхронном режиме: Труды ВНИИЭ / Бабурин В.Б., Сумцов И.А. // М.: ВНИИЭ. - 1979. - Вып. 57. - С. 65-71.
3. Низимов В.Б. Применение накопителей энергии для асинхронного пуска синхронных двигателей / Ни-зимов В.Б. // Науковий вісник НГА України. - 2000. - №1. - С. 49-51.

Електромеханічні системи з електроприводом постійного та змінного струму 53
Гитман Е.Э. Алчевск
Донбасский государственный технический университет
АСИНХРОННЫЙ УПРАВЛЯЕМЫЙ ПО РОТОРУ ЭЛЕКТРОПРИВОД
Введение. Наиболее экономичным среди асинхронных электроприводов является привод по системе двой-ного питания, который способен обеспечивать желаемый характер энергопотребления от питающей сети (вплоть до опережающего cosφ). Системы векторного управления являются наиболее точными ввиду постоян-ного контроля составляющих электромагнитного момента, тем более развитие современных микропроцессор-ных систем позволяет их реализовывать.
Рассмотрим систему векторного управления электроприводом с асинхронным двигателем статор которого подключен к сети, а ротор – к непосредственному преобразователю частоты [1, 2].
Цель работы. Разработка эффективных алгоритма и структуры системы автоматического регулирования асинхронным электроприводом по ротору.
Материалы и результаты исследования. Для исследования управляемого по ротору асинхронного элек-тропривода разработана модель неприведенного асинхронного двигателя в реальных фазовых координатах ΨS – IR (конкретнее - (ΨA, ΨB, ΨC) – (IX, IY, IZ)). В основу ее положено стандартное математическое описание на базе уравнений равновесия напряжений статора и ротора (при исключении потокосцеплений ротора и токов статора) и выражения для электромагнитного момента. Такая модель позволяет получить реальные процессы в статоре и роторе в трехосных пространственных системах координат.
Регулирование по ротору осуществляется системой векторного управления. Выбор системы отсчета для синтеза САР МДП в значительной степени определяется характером нагрузки и, следовательно, требованиями к динамическим характеристикам электропривода. Динамические свойства АД как объекта регулирования в системе МДП могут быть максимально учтены в САР, синтезированной в пространственной системе, связанной с ΨS. Такая САР обеспечивает инвариантность скорости к колебаниям напряжения питающей сети. В качестве второй из управляемой координаты при управлении по ротору выбирается ток ротора.
Система имеет два канала регулирования: канал регулирования потокосцепления статора, в котором контур регулирования реактивной составляющей тока ротора iRU подчинен контуру регулирования потокосцепления ΨS; канал регулирования момента, в котором контур регулирования активной составляющей тока ротора iRV подчинен контуру регулирования скорости ω. Контуры регулирования токов имеют по два последовательных регулятора. Для развязки каналов регулирования и компенсации возмущающих воздействий питающей сети в схему вводятся компенсирующие связи.
Полученная система имеет 7 контуров регулирования (4 контура по составляющим тока ротора, контур ско-рости, контур потокосцепления статора, контур регулирования реактивного тока статора) и 6 компенсирующих связей (ЭДС вращения, 2 связи ЭДС скольжения, 2 – компенсация составляющих напряжения статора, компен-сация влияния ΨS в контуре регулирования iRU).
В системе используются сигналы напряжения статора, токов статора, токов ротора, потокосцепления стато-ра (которое может вычисляться и косвенно), скорости, положения ротора (датчики синуса и косинуса угла по-ворота вала).
На модели электропривода, составленной на базе функциональной схемы, с использованием разработанной модели асинхронного двигателя проверена правильность оптимизации контуров регулирования и подтверждена работоспособность системы.
Выводы. Получено математическое описание асинхронного двигателя в реальных пространственных коор-динатах, построена структурная реализация этого описания в MATLAB/Simnlink. Полученная структура может быть использована для исследования асинхронных управляемых по ротору электроприводов. Синтезирована система векторного управления преобразователем частоты в роторной цепи двигателя. Создана цифровая мате-матическая модель асинхронного управляемого по ротору электропривода с векторным управлением.
ЛИТЕРАТУРА
1. Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразовате-лями / О.В. Слежановский, Л.Х. Дацковский, И.С. Кузнецов и др. – М.: Энергоатомиздат, 1983. – 256 с.
2. Асинхронные электроприводы с векторным управлением / В.В. Рудаков, И.М. Столяров, В.А. Дартау. – Л.: Энергоатомиздат, Ленингр. отд-ние, 1987. – 136 с.

Електромеханічні системи з електроприводом постійного та змінного струму 54
Захарчук А.И. Днепропетровск
Национальный горный университет
РАЗРАБОТКА ЗАКОНОВ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ, МИНИМИЗИРУЮЩИЕ ПОТЕРИ В АСИНХРОННОМ ДВИГАТЕЛЕ.
Введение. На данный момент до 65% электроэнергии используется электроприводами. Привод осуществля-ет практически все технологические процессы в которых требуется движение. Учитывая то, что единицу энер-гетических ресурсов сэкономить вдвое дешевле чем ее добыть, можно с уверенностью сказать, что актуально рассматривать проблему энергосбережения приводов. Главным образом необходимо исследовать и улучшать энергоэффективность асинхронного двигателя, т.к. двигатели постоянного тока, в регулируемом приводе, вы-тесняются асинхронными, это связано с появлением надежных и приемлемых по цене преобразователей часто-ты.
Цель работы. Разработка системы управления преобразователем частоты с функцией энергосбережения. Материалы и результаты исследования. Используя математическую модель двигателя необходимо полу-
чить характеристики потерь, вольт-частотные характеристики для преобразователя с учетом минимума потерь в двигателе.
Данный проект посвящен определению метода управления преобразователем частоты с оптимизацией по критерию минимума потерь.
При работе асинхронный двигатель потребляет из сети активную мощность. Данная мощность Р1 расходуется в статоре на покрытие электрических потерь в обмотке статора и на по-
крытие потерь в стали. Остальная мощность поступает через воздушный зазор в ротор. Эта мощность опреде-ляет электромагнитный момент двигателя, поэтому ее называют электромагнитной мощностью.
Часть электромагнитной мощности теряется в виде электрических потерь в обмотке ротора, а остальная часть мощности преобразуется в механическую мощность.
Часть механической мощности теряется внутри самой машины в виде механических потерь , магнит-
ных потерь и добавочных потерь . Механические потери включают потери на трение и на вентиляцию.
Магнитные потери обычно малы и отдельно не определяются , а учитываются вместе с потерями в стали
статора. Добавочные потери вызваны в основном высшими гармониками магнитных полей. Они трудно подда-ются расчету. Поэтому добавочные потери оценивают приближенно величиной 0,5% от номинальной мощно-сти двигателя.
Частотное управления асинхронным двигателем является наиболее простым и распространенным. При час-тотном способе регулирования скорости асинхронных электродвигателей необходимо изменять не только час-тоту, но и амплитуду питающего напряжения. От соотношения частоты и амплитуды зависят механические характеристики и энергетические показатели электропривода, поэтому с практической точки зрения важно знать механические и энергетические характеристики асинхронного электропривода при различных законах частотного управления в условиях изменения скорости и момента нагрузки.
Таким образом целью работы является следующее: С помощью математической модели АД определить минимумы потерь для заданного АД при разных часто-
тах. Проанализировать и построить вольт-частотные характеристики для АД при которых наблюдается минимум
потерь. Принять метод оптимизации вольт-частотных характеристик ПЧ. Так как в вышеописанном преобразователе не реализуется передача энергии от двигателя в сеть в режимах
рекуперации, то было принято решение улучшить энергоэффективность асинхронного двигателя за счет управ-ляемых преобразователем частоты величин – амплитуды и частоты переменного напряжения.
Для анализа потерь применялась модель АД в неподвижной системе координат α-β созданная в пакете MATLAB в библиотеке SIMULINK. Это позволило в интерактивном режиме получать данные о токе ротора и статора. Модель дает возможность измерять токи статора и ротора, момент на валу двигателя, задаваться необ-ходимой нагрузкой, а также следить за скоростью двигателя.
С помощью данной модели и возможностей MATLAB получили зависимости I1(U) и I2(U) в статическом режиме при f=const. Это позволило рассчитать потери при разных значениях напряжения. Кроме того изменяя частоту получили характеристики токов статора и ротора в зависимости от напряжения при различных значе-ниях частоты. При этом получится семейство кривых с точками минимума потерь.
Построив графики зависимостей тока статора и ротора от напряжения питания необходимо произвести их анализ и определить минимальные потери при разных значениях частоты.(Рис.1)
Данные графики иллюстрируют характер функции потерь асинхронного двигателя. Это дает возможность оптимизировать энергопотребление привода. Таким образом проведенный анализ и количественные оценки дают возможность осуществлять и внедрять необходимый закон управления в зависимости от параметров и режимов работы АД.

Електромеханічні системи з електроприводом постійного та змінного струму 55
Суть оптимизации заключается в поиске точки минимума потерь при заданной частоте используя возмож-ности микропроцессорной системы. Минимум достигается за счет подбора такого напряжения при котором наблюдается минимум потерь. Определение данного напряжения и является главной задачей при оптимизации.
Рис.1 Зависимость потерь от напряжения питания при различных частотах
Следующие графики отображают вольт-частотные характеристики преобразователя при оптимизации по
критерию минимума потерь, при различной нагрузке на валу двигателя (Рис.2). На данных графиках линией тренда указаны вольт-частотные характеристики закона управления U/f=const, а сплошной желаемые характе-ристики при оптимизации по критерию минимума потерь.
Рис.2 Вольт-частотная характеристика преобразователя при нагрузке
При нагрузке статическим моментом точки на вольт-частотной характеристике ПЧ имеющие минимум по-
терь, расположены на прямой линии, которая в соответствии с величиной момента будет изменять свой наклон по отношению к оси абсцисс, что соответствует представлениям о АД. Но при вентиляторной нагрузке (нагруз-ке с переменным моментом сопротивления на валу двигателя) заметна следующая ситуация: вольт-частотная характеристика изменяет свою форму и становится нелинейной, наблюдается квадратичная зависимость на-пряжения питания двигателя от частоты.
Выводы. Данный метод управления двигателем весьма эффективен, но не дает возможности аналитически определять значения напряжения в зависимости от частоты. Основная сложность аналитического выражения потерь заключается в том, что потери зависят от скольжения и вида нагрузки на валу.
ЛИТЕРАТУРА 1. Колб Ант. А, Колб А.А., Теорія електроприводу: Навчальний посібник. – Д., Національний гірничий
університет, 2006. – 511 с. 2. Ключев В.И. Теория электропривода: Учеб. Для вузов. – 2-е изд. Перераб и доп. – М.: Энергоатомиздат,
2001. – 704 с.: ил. 3. Энергосберегающий асинхронный электропривод / И.Я. Браславский, З.Ш. Ишматов, В.Н. Поляков; под
ред. И.Я. Браславского – М. ACADEMA, 2004. – 202 c. 4. Усольцев А.А. Частотное управление асинхронными двигателями – ми/Учебное пособие. СПб: СПбГУ
ИТМО, 2006 – 94 с. 5. Казачковський М.М. Автономні перетворювачі та перетворювачі частоти. - Дніпропетровськ: НГА
України, 2000 – 196 с.

Електромеханічні системи з електроприводом постійного та змінного струму 56
Коваленко О.І. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
ДОСЛІДЖЕННЯ ПРОЦЕСІВ ВИРІВНЮВАННЯ НАВАНТАЖЕННЯ ДВОДВИГУННОГО ЕЛЕКТРОПРИВОДУ ШАРОВОГО МЛИНА В УМОВАХ ЗБАГАЧУВАЛЬНОЇ ФАБРИКИ
ЄРІСТОВСЬКОГО ГЗК
Вступ. Використання на потужних технологічних об’єктах систем дводвигунного електроприводу з CД має низку переваг перед системами з індивідуальним приводом: менші махові маси, кращі масогабаритні показники тощо, але попри всі їх переваги, має і суттєві недоліки. До найбільш важливих слід віднести: нерівномірність статичного навантаження між двигунами в усталеному режимі роботи електроприводу та при його пуску.
Уникнути нерівномірності навантаження практично неможливо враховуючи, що навіть у нових двигунів можливі деякі розбіжності в параметрах опорів та індуктивностей обмоток, а для двигунів, які довгий час екс-плуатуються і були ремонтованими такі розбіжності можуть бути досить значними.
Наразі виникає нерівномірність розподілу навантаження. Перевантажений двигун поступово перегрівається і виходить з ладу. Тому актуальною є вирішення науково-практичної задачі синтезу систем зниження нерівно-мірності навантаження в усталених режимах роботи електроприводу шляхом впливу на магнітний потік обмот-ки збудження.
Мета роботи. Підвищення ефективності експлуатації електропривода шарового млина збагачувальної фаб-рики шляхом зниження нерівномірності навантаження між синхронними двигунами дводвигунного електро-приводу шарового млина.
Матеріали і результати досліджень. Подрібнення матеріалу в шарових млинах проводиться шляхом стирання і розчавлювання матеріалу при перекочуванні шарів. Млин являє собою циліндричний барабан, закритий з торців торцевими стінками. Зазвичай електропривод млина нерегульований з привід-ним синхронним двигуном (СД). При великих потужностях елект-ропривод виконують дводвигунним (рис.1), якому притаманні за-значені вище недоліки.
Математичний аналіз процесів у СД в загальному випадку дуже складний і обумовлений зміною електромагнітного моменту і стру-мів двигуна в широкому діапазоні. В даний час існує ряд методів розрахунку зміних стану СД. Найбільш часто СД моделюються на основі рівнянь, записаних в осях, нерухомих щодо ротора даної ма-шини (система d, q) [1]. Однак для випадку дводвигунного електро-приводу рівняння кожного з СД мають спільне рівняння механічної
частини. Рисунок 1 - Зовнішній вигляд дводвигунного електроприводу шарового млина Рівняння першого СД Рівняння другого СД
d1d1 d1 a1 1 q1
dU i r
dt
ψω ψ= − + ;
q1q1 q1 a1 1 d1
dU i r
dt
ψ
ω ψ= − + ;
f1f1 f1 f1
dU i r
dt
ψ= − ;
ed1ed1 ed1
di r
dt
ψ= − ;
eq1eq1 eq1
di r
dt
ψ
= − ;
1 d1 q1 q1 d1M ( i i )ψ ψ= − .
d2d2 d2 a2 2 q2
dU i r
dt
ψω ψ= − + ;
q2q2 q2 a2 2 d2
dU i r
dt
ψ
ω ψ= − + ;
f2f 2 f 2 f 2
dU i r
dt
ψ= − ;
ed2ed2 ed2
di r
dt
ψ= − ;
eq2eq2 eq2
di r
dt
ψ
= − ;
2 d2 q2 q2 d2M ( i i )ψ ψ= − .
Рівняння руху без урахування зазорів у шестернях:
cMMM
dt
d−+=
ω
21jH
Існує декілька видів схем вирівнювання нерівномірності навантаження між СД [2]: вирівнювання моментів за різницевим сигналом споживаних потужностей двигунів; вирівнювання струмів за різницевим сигналом споживаного струму статора двигунів; вирівнювання втрат за різницевим сигналом втрат потужностей двигунів в обмотках статора і збудження. На прикладі СД СТМ-3500-2, з параметрами приведеними табл.1 було виконане дослідження вирівнювання
нерівномірності навантаження при навантажені приводу на 75%. Вказані вище способи вирівнювання навантаження були досліджені шляхом математичного моделювання у
Matlab Simulink.

Електромеханічні системи з електроприводом постійного та змінного струму 57
Таблиця 1 – Параметри досліджуваного СД шарового млина Параметр Познач. Велич. Номінальна потужність, кВт
нP 3500
Номінальна напруга, В нU 6000
Номінальний струм, А нI 390
Напруга збудження, В fU 69
Номінальний струм збудження, А fI 252
На рис. 2, як приклад показані результати дослідження вирів-нювання навантаження різницевим сигналом споживаного струму статора двигунів. Модулі векторів струмів статорів відповідно
першого 2
1
2
11 qd III += і другого 2
2
2
22 qd III += СД, а їх
різницевий сигнал 21 III −=∆ . Результати дослідження показані
на рис.3. Рисунок 2 – Функціональна схема системи вирівнювання на-
вантаження за різницевим сигналом споживаного струму статора СД
б)
в) а)
Рисунок 3 – Графік залежності моментів та кутової швидкості приводу від часу –а), та фрагменти роботи си-стеми: зміна у часі струмів СД – б) та струмів збудження – в) до і після вирівнювання навантаження
Висновки. В роботі розглянуті питання синтезу системи вирівнювання навантаження між синхронними
двигунами у складі дводвигунного електроприводу за моментом на валу, струмами статора та загальними втра-тами в двигуні. Розроблені системи дозволяють: вирівняти нерівномірність механічного навантаження та по-кращити тепловий режим обмоток двигунів, підвищити надійність роботи електроприводу та збільшити ресурс його роботи, що в цілому вирішує одну з складових загальної проблеми енергоресурсозбереження. Вказане до-зволяє визначити наукову новизну і практичне значення роботи яка полягає у синтезі системи вирівнювання навантаження за різницевим сигналом змінних стану двигунів шляхом дії на магнітний потік обмотки збуджен-ня, що на відміну від відомих забезпечує не лише вирівнювання механічного навантаження, а й зниження зага-льних втрат в обмотках статора і збудження, що дозволяє покращити тепловий режим обмоток двигунів. Прак-тичне значення роботи у можливості підвищити надійність роботи електроприводу та збільшити ресурс його роботи.
ЛІТЕРАТУРА
1. Ахматов М. Г. Синхронные машины. Специальный курс: Учебное пособие / М. Г. Ахматов. – М.: Высшая школа, 1984. – 135 с.
2. Вершинин П.П Применение синхронных электроприводов в металлургии. / П.П. Вершинин, Л.Я Хашпер / Учебное пособие. М.: Металлургия. 1987.

Електромеханічні системи з електроприводом постійного та змінного струму 58
Москалець М.І. Дніпродзержинськ
Дніпродзержинський державний технічний університет
ПОРІВНЯЛЬНА ОЦІНКА ЕНЕРГЕТИЧНИХ ТА ЕКСПЛУАТАЦІЙНИХ ПОКАЗНИКІВ СТАТИЧНИХ ЗБУДЖУВАЧІВ СИНХРОННИХ МАШИН
Вступ. Відповідно до сучасних вимог до кратності форсування струму або напруги збудження синхронних двигунів (СД) статичні напівпровідникові збуджувачі (СНЗ) в номінальному режимі роботи мають великі кути керування, споживають значну реактивну потужність і створюють потужність викривлення, тобто володіють невисокими енергетичними показниками. Надійність і ефективність процесу гасіння магнітного поля СД цілком залежить від можливості інвертування в умовах посадок напруги в електромережі. Крім того, швидкодія режиму форсування струму збудження цілком визначається сталою часу контуру збудження. Тому підвищення енергетичних показників і експлуатаційних характеристик сучасних СНЗ зберігає свою актуальність.
Мета роботи. Аналіз та обрання раціональної силової схеми статичних збуджувачів для синхронних двигунів.
Матеріали та результати досліджень. Необхідність забезпечення режиму форсування напруги збудження призводить до того, що потужність випрямного трансформатора вибирається за максимальною випрямленою напругою Ufo і номінальним струмом збудження ifн. Максимальна випрямлена напруга в режимі форсування [1]:
fн’ ffo
kн
U kU
u %k (1 А )
100
=
−
(1)
Приймаючи до уваги, що згідно з [2] Kф=1,75; Кн=0,8; uk% = 4,5...10 %, отримаємо за виразом (1) макси-мального значення випрямленої напруги:
для нульової схеми Ufo=(2,276 ... 2,396)⋅Ufн; для мостових схем (симетричних і несиметричних) Ufo=(2,23 ... 2,3)⋅Ufн. Потужність випрямного трансформатора: - для трифазної нульової схеми ST=1,345⋅Ufo⋅Ifн=(3,06...3,22)⋅Pfн - для трифазної мостової симетричної і несиметричної схем ST = 1,045⋅Ufo ⋅Ifн = (2,23...2,40)⋅Pfн. Оскільки потужність трансформатора перевищує в три рази номінальну потужність збуджувача, тому вико-
ристовувати трифазну нульову схему не доцільно. Визначимо енергетичні показники мостових симетричних та напівкерованих збуджувачів відповідно до ме-
тодики [2]. Приймаючи D = 0,5, отримуємо:
1. Споживана реактивна потужність: - для симетричної схеми:
м.с. m m mfн fн fн
3 3 3 3Q U I sin α U I 0,866 1,433U I
π 3,14= = =
; (2)
- для несиметричної схеми:
м.н. m mfн fн
3 3Q U I sin α 0,827U I
2π= = . (3)
2. Коефіцієнт потужності: - для симетричної схеми:
м.с.
3χ D 0,477
π= = ; (4)
- для несиметричної схеми:
D 6 0,5 6χ 0,552
α 1,57π 1 3,14 1
π 3,14
м.н.= = =
− −
. (5)
Як видно з наведених співвідношень, істотним недоліком сучасних симетричних збуджувачів СД є значне зниження коефіцієнта потужності на 15,7 % і зростання реактивної потужності на 42,3 %.
Розглянемо експлуатаційні характеристики несиметричного збуджувача з примусовим вимиканням тиристорів зустрічною напругою ємнісного накопичувача енергії, яка дозволяє компенсувати електромагнітну інерційність контура збудження.
Для порівняльної оцінки ефективності форсування струму збудження проведено експериментальні дослідження синхронного двигуна з запропонованим пристроєм і з серійними тиристорними збуджувачами. На рис.1,а наведена осцилограма режиму форсування збудження при ємнісному накопичувачі енергії, а на рис.1,б - осцилограми форсування напруги, характерна для серійних збуджувачів. Аналіз осцилограм (рис.1, а і б) показує, що час досягнення струмом збудження форсованого значення становить відповідно 0,008 і 0,16 с.

Електромеханічні системи з електроприводом постійного та змінного струму 59
2 15A⋅
а) б)
Рис.1 – Осцилограми режимів форсування струму збудження в запропонованому (а) і в існуючому збуджувачах (б)
На рис.2,а наведена осцилограма процесу гасіння поля СМ при переводі збуджувача в інверторний режим з
форсуванням напруги, рівної Ku=2,2 при початковій напрузі 10 В і струмі 5 А. Час досягнення струмом збуд-ження нульового значення склав 0,154 с. На рис.2,б наведена осцилограма процесу гасіння поля СД з ємнісним накопичувачем енергії і зворотним розрядом перезарядженої у процесі гасіння поля ємності. Кратність макси-мального значення перехідної напруги на обмотці збудження склала Ku = 8,0, що у два рази вище ніж у попе-редньому випадку при рівній ємності конденсатора С = 250 мкФ. Час досягнення струмом збудження нульового значення склав 0,05с.
а) б)
Рис.2 – Осцилограми процесу гасіння поля СД а) при інвертуванні збуджувача; б) при замиканні об-мотки збудження на ємнісний накопичувач енергії
Висновки. 1. Несиметричні мостові збуджувачі дозволяють підвищити коефіцієнт потужності на 15% та
зменшити споживання реактивної потужності до 40 % в режимі номінального збудження в порівнянні з симет-ричними.
2. Ефективність процесу гасіння поля збудження не залежить від величини та наявності напруги живлення збуджувача, а час гасіння поля в 3 рази менший в порівнянні з режимом інвертування симетричного збуджува-ча.
ЛІТЕРАТУРА
1. Казарьянц Л.С. Комплектные тиристорные возбудительные устройства. Инструктивные указания по про-ектированию электротехнических промышленных установок / Казарьянц Л.С., Ю.В. Богомолов, Э.Н. Райхман // Тр. ГПИ Тяжпромэлектропроект. 1972. № 8. С. 22 – 28.
2. Стиоп Я.И. Повышение коэффициента мощности трёхфазных мостових схем выпрямления / Я.И. Стиоп, В.М. Яров // Электротехника. 1973. № 9. С. 20 – 22.

Електромеханічні системи з електроприводом постійного та змінного струму 60
Смірнов Ю.І. Львів
Академія сухопутних військ імені гетьмана Петра Сагайдачного
ДОСЛІДЖЕННЯ МОЖЛИВОСТЕЙ ЗАСТОСУВАННЯ КРОКОВИХ ЕЛЕКТРОПРИВОДІВ В СИСТЕМАХ ОЗБРОЄННЯ ТА ВІЙСЬКОВОЇ ТЕХНІКИ
Вступ. Зростаючий рівень техніки і технологій приводять до суттєвих, а іноді і радикальних змін в усіх сферах діяльності людей. Зокрема це проявляється і в збройних конфліктах. Військові аналітики відмічають, що для сучасних збройних конфліктів є характерними висока динамічність і швидкий темп застосування засобів забезпечення та ведення бойових дій. Такі особливості вимагають більшої швидкодії від усіх технічних систем озброєнь та військової техніки. Аналіз показує, що в загальній витраті часу на підготовку та ведення стрільби значну частину становлять витрати пов’язані з здійсненням процесу наведення і прицілювання. В зразках озброєнь, які є в Збройних Силах України ці процеси забезпечують електроприводи на основі двигунів постій-ного струму. Підвищити їх швидкодію без втрати точнісних характеристик практично неможливо, тому над-звичайно актуальним і важливим питанням є розробка нових електроприводів, які будуть здатні виконувати наведення і прицілювання з більшою точністю і за менший час.
Мета роботи. Аналіз можливостей і теоретичне обґрунтування доцільності застосування крокового елект-роприводу в системах озброєння та військової техніки, який потенційно здатний забезпечувати більшу швидко-дію і точність позиціонування.
Матеріали та результати досліджень. Широке впровадження цифрових технологій на основі застосування мікропроцесорних систем дозволяє модернізувати практично усі технічні системи зразків озброєння і військо-вої техніки. В даній роботі виконані дослідження, які стосуються систем наведення. Зокрема для уникнення чисельних аналого-цифрових та цифро-аналогових перетворень пов’язаних з використанням двигунів постійно-го струму в цифровій системі керування наведенням пропонується використовувати електроприводи на основі гібридних крокових двигунів, які безпосередньо здатні перетворювати цифрові сигнали у відповідне кутове, або лінійне переміщення.
Основна перевага крокових двигунів полягає у можливості здійснювати точне позиціювання і регулювання швидкості без датчика положення, тобто без зворотнього зв’язку. Однак це підходить тільки для систем, які працюють при невеликих прискореннях і з відносно постійним навантаженням. Система наведення озброєння навпаки повинна бути і високо динамічною і точною, крім того під час стрільби і в русі вона зазнає потужних імпульсних впливів. Якщо навантаження крокового двигуна перевищить його момент то інформація про дійсне положення ротора може бути втраченою і систему потрібно буде заново позиціонувати з допомогою кінцевого вимикача або іншого датчика. При використанні зворотнього зв’язку цей недолік автоматично усувається. Для підвищення точності позиціонування системи наведення і покращення її динамічних властивостей пропонуєть-ся за допомогою системи управління забезпечити міжкроковий режим роботи крокових двигунів. Цей режим забезпечує практичну відсутність вібрацій і безшумну роботу двигуна.
Результатом використання мікрокрокового режиму є набагато більш плавне обертання ротора на низьких частотах.
Сучасні мікроконтролери, які мають вбудовані ЦАП, можна використовувати для реалізації мікрокроковий режиму замість спеціальних контролерів. Це дозволяє зробити практично однаковою вартість обладнання для забезпечення роботи крокового електроприводу в повнокроковому та мікрокроковому режимах.
Практично здійснити мікрокроковий режим можна за допомогою широтно-імпульсної модуляції. Комута-тор з широтно-імпульсною модуляцією (ШІМ) забезпечує стабілізацію струму з незначними втратами.
Враховуючи те, що для роботи в прецизійних системах наведення озброєння особливо важливим фактором є точність позиціонування тому доцільно використовувати гібридні крокові двигуни. Найбільш поширеним гіб-ридним кроковим двигуном є чотирьохфазний 200 - кроковий двигун з кутом кроку 1.8°.
Високі вимоги до точності позиціонування систем наведення ОІВТ вимагають використання зворотного зв′язку в системі управління кроковими двигунами.
Якщо в якості виконавчого двигуна використовувати синхронний кроковий двигун, то можна обійтися без датчика зворотного зв'язку ( Дз ) і спростити систему керування двигуном (СКД) , так як відпадає необхідність використання в ній цифро-аналогових (ЦАП) і аналого-цифрових (АЦП) перетворювачів.
Фрагмент силової частини системи керування КД, яка задовольняє вимогам до системи наведення ОІВТ по-казаний на рисунку.
Виконання кроків контролюється за допомогою зворотного зв'язку, який реалізований на датчиках струму і компараторах. Датчики струмів включаються в ланцюг витоків польових транзисторів. Сигнали, зняті з датчи-ків струму, надходять на входи компараторів, на другий входи компараторів подається опорна напруга, сфор-мована мікроконтролером яка і визначає піковий струм в обмотках крокової двигуна. Виходи компараторів під-ключаються до входів переривань мікроконтролера.

Електромеханічні системи з електроприводом постійного та змінного струму 61
Рисунок – Фрагмент принципової схеми мікропроцесорної системи
управління крокових двигунів системи наведення.
Основою пристрою є мікроконтролер DD1. Сигнали управління обмотками двигуна формуються на портах РВ4 - РВ7. Для комутації обмоток використовуються польові транзистори, щоб транзистори залишалися закри-тими під час дії сигналу «скидання» мікроконтролера (порти в цей час знаходяться в високоімпедансному ста-ні), між затворами і витоками включені резистори R11, R14, R17, R18. Для обмеження струму перезарядки єм-ності затворів встановлені резистори R3, R6, R7, R8. У даному контролері реалізований повільний спад струму фаз, який забезпечується шунтуванням обмоток двигуна діодами VD1 - VD4. Для підключення крокового дви-гуна є роз'єм ХР1, який дозволяє підключити двигун, що має два окремих виводи від кожної обмотки.
Стабілізація струму здійснюється за допомогою ШІМ , яка реалізована програмно. Для цього використову-ються два датчика струму R15 і R16. Сигнали, зняті з датчиків струму, через ФНЧ R12 C5 і R13 C6 надходять на входи компараторів DA1.1 і DA1.2. ФНЧ запобігають помилковому спрацьовуванні компараторів внаслідок дії завад. На другий вхід кожного компаратора подається опорна напруга, яка і визначає піковий струм в обмо-тках двигуна. Ця напруга формується мікроконтролером. Для фільтрації сигналу ШІМ використовуються дво-ланкові ФНЧ R1C1R4C3 і R2C2R5C4. Одночасно резистори R1, R4, R9 і R2, R5, R10 утворюють подільники, які задають масштаб регулювання струмів фаз. Виходи компараторів підключені до виходів переривань мікрокон-тролера INT 0 і INT 1. Грунтуючись на схемі стабілізації струму, програмно реалізована система контролю ви-конання кроків.
Висновки. У даній роботі виконаний аналіз сучасних крокових електродвигунів. Детально розглянуті осно-вні конструкції і параметри таких двигунів, чітко виділені їх можливості і переваги перед іншими перетворюва-чами електричної енергії в механічний рух.
На підставі проведеного аналізу зроблений обґрунтований висновок про доцільність використання кроково-го електроприводу в системах наведення сучасних озброєнь і військової техніки.
Використання в системі управління кроковими двигунами швидкодіючого мікроконтролера дозволило шля-хом застосування цифрової обробки сигналів з датчиків струму фазових обмоток крокового двигуна отримува-ти достовірну інформацію про відпрацювання двигуном не тільки повноцінних кроків і напівкроків, але навіть і мікрокрокових переміщень. Такий підхід надав можливість побудувати надійне і високоточне управління кро-ковими двигунами без застосування прецизійних і мало захищених сенсорів кутового положення в системі на-ведення озброєння та військової техніки. Таке застосування крокового двигуна дозволить покращити швидко-дію і точність систем наведення озброєння і військової техніки, а отже збільшити їх ефективність і перевагу над системами озброєнь можливих противників у збройних конфліктах.
.ЛІТЕРАТУРА
1. Рентюк В. Шаговые двигатели и особенности их применения // Электрик. 2012. № 11. 2. Рентюк В. Управление шаговым двигателем // Радиоаматор (Radioamator). 2010. № 10. 3. Емельянов А.В., Шилин А.Н. Шаговые двигатели: учеб. пособие. ВолГТУ. Волгоград, 2005. 4. Такаши К. Шаговые двигатели и их микропроцессорные системы управления. Пер. с англ. М.: Энерго-
атомиздат, 1987. 5. А.В. Фрунзе. Микроконтроллеры? Это же просто! Т.1. – М.: ООО “ИД СКИМЕН”, 2002. – 336 с.

Електромеханічні системи з електроприводом постійного та змінного струму 62
Чечоткіна К.В., Шупилюк А.В. Харків
Харківський національний університет міського господарстваімені О.М.Бекетова
УДОСКОНАЛЕННЯ СПОСОБУ РЕГУЛЮВАННЯ ЧАСТОТИ ОБЕРТАННЯ ДВИГУНІВ ЗМІШАНОГО ЗБУДЖЕННЯ З ВИКОРИСТАННЯМ DC-DC ПЕРЕТВОРЮВАЧА
Вступ. Застосування ослаблення поля тягових електродвигунів послідовного та змішаного збудження на мі-ському електричному транспорті є важливим заходом, спрямованим на підвищення ефективності його роботи і має в зв’язку з цим безпосереднє практичне значення.
Ослаблення поля тягових двигунів при використанні DC-DC перетворювача дасть можливість одержати економію електроенергії при збереженні тих же швидкостей, одержати плавне регулювання швидкості руху і тим самим підвищити маневреність рухомого складу.
Матеріали та результати дослідження. - Аналіз існуючих способів регулювання частоти обертання електричних двигунів змішаного збудження; - На основі отриманої інформації удосконалення схем регулювання швидкості двигуна змішаного збуджен-
ня; - Створення стенду з використанням DC-DC перетворювача для дослідження способу регулювання частоти
обертання. -Отримання осцилограм параметрів при пуску та ослабленні поля з використанням DC-DC
перетворювача . Висновки Отримано ряд осцилограм, які підтверджують переваги якими володіє даний спосіб у порівнянні із тими які
використовуються у теперішній час на рухомому складі. Визначено що запропонований спосіб ослаблення поля може бути використано на будь-якому електричному транспорті з тяговими електричними двигунами змішано-го збудження.
Література 1. Єфремов И.С., Косарев Г.Е. Теория и расчет троллейбуса: Электрическое оборудование. В 2-х ч. / И.С.
Єфремов -М.: Высш. шк., 1981.-Ч1-293с.,Ч.2-248 с. 2. Тихменев Б.Н. Подвижной состав электрифицированных железных дорог. Теория работы электрообору-
дования. Электрические схемы и аппараты. / Б.Н. Тихменев, Л.М.Трахтман – М.: Транспорт, 1980,- 471 с. 3. Проектирование систем управления электроподвижным составом / Н.А. Ротанов, Д.Д. Захарченко, А.В.
Плакс, В.И. Некрасов, Ю.М. Иньков; Под ред. Н.А. Ротанова. – М.: Транспорт, 1986,- 327 с. 4. Патент № 2471652 Российская Федерація, МПК (2006.01) B60L15/08 Способ ослабления возбуждения тя-
говых электродвигателей локомотива. / Руденко В.Ф., Егоров М.А.,Спиридонов Д.С.; заявитель и правооблада-тель Открытое акционерное общество "Российские железные дороги". – № 2471652, заявл. 20.07.2011; опубл. 10.01.2013.
5.Гаврилов Я.И. Вагоны метрополитена с импульсными преобразователями / Я.И.Гаврилов, В.А. Мнацака-нов - М.: Транспорт, 1986,- 229с.
6.Мелешин В.И. Транзисторная преобразовательная техника / В.И.Мелешин -Москва:Техносфера, 2005. – 632с.
.

Лабораторне обладнання для дослідження електротехнічних систем 63
СЕКЦІЯ
«ЛАБОРАТОРНЕ ОБЛАДНАННЯ ДЛЯ ДОСЛІДЖЕННЯ
ЕЛЕКТРОТЕХНІЧНИХ СИСТЕМ»

Лабораторне обладнання для дослідження електротехнічних систем 64
Біліченко В.М. Харків
Харківський національний університет міського господарства імені О.М.Бекетова
СПОСОБИ ПІДВИЩЕННЯ ТЯГОВИХ ВЛАСТИВОСТЕЙ ТРАМВАЙНИХ ВАГОНІВ
Вступ. Найважливішим напрямком підвищення ефективності експлуатації трамвайних вагонів є вдоскона-лення їх систем управління для більш повного використання встановленої потужності тягових електродвигунів. Для цього необхідно вирішити завдання підвищення їх тягових властивостей за рахунок поліпшення сил зчеп-лення колеса з рейкою в зонах продуктивного ковзання (крип) і буксовання.
Мета работи. Підвищення тягових властивостей трамвайних вагонів шляхом удосконалення системи регу-лювання струмів тягових двигунів.
Матеріали та результати дослідження. Пристрій забезпечує регулювання магнітних потоків при роботі в зоні крипу і його стабілізацію в зоні буксування. Він прийнятний за умовами технічної реалізації, тому що конструктивно простий і вимагає вузького діапазону регулювання струмів як у зоні крипу, так і буксування [1].
Функціональна схема даного пристрою представлена на рис.2.1.
Рисунок 2.1 - Структурна схема пристрою стабілізації магнітного потоку
Вона працює таким чином. При відсутності буксування контакти 4, 10 реле буксування 16, 17 розімкнуті.
Дійсно, контакти 4 і 10 належать до силових контакторів, котушки яких керуються контактами реле буксуван-ня. Для спрощення схеми силовий контактор не враховується і уявляємо, що контакти 4 і 10 належать реле бук-сування.
На виході суматора 14 чи 15, залежно від того, у якого з двигунів менший струм, в порівнянні із струмом ву-зла виділення максимального сигналу 13, з'являється сигнал, що надходить на керуючі входи напівпровіднико-вих ключів 6 чи 12, які зменшують магнітний потік відповідного двигуна.
При буксуванні якої-небудь колісної пари струм якоря 1 або 7 тягового електродвигуна цієї колісної пари зменшується. Відповідно зменшується рівень вихідного сигналу трансформатора постійного струму 3 чи 9 цьо-го кола. На виході одного із суматорів 14 чи 15, що належить колу буксуючої колісної пари, з'являється сигнал, під дією якого вмикається реле буксування 16 чи 17 і подається сигнал керування на відповідний напівпровід-никовий ключ 6 або 12. Реле буксування 16 чи 17 замикає свої контакти 4 або 10, що підключають через допо-міжні контактори до силового кола резистор 5 чи 11. Обмотка збудження 2 або 8 тягового електродвигуна бук-суючої колісної пари одержує живлення по колу "контакти 4 чи 10 реле буксування 16 чи 17 – резистор 5 або 11". Одночасно, суматор 14 чи 15 видає сигнал на напівпровідниковий ключ 6 чи 12 такої величини, при якій струм в обмотці збудження 2 чи 8 тягового електродвигуна буксуючої колісної пари залишається приблизно

Лабораторне обладнання для дослідження електротехнічних систем 65
рівним струму тягового електродвигуна небуксуючої колісної пари. За рахунок цього тяговий електродвигун буксуючої колісної пари починає працювати за абсолютно жорсткою характеристикою.
По закінченні буксування вихідні сигнали трансформаторів постійного струму 3, 9 вирівнюються і сигнали суматорів 14, 15 стають рівними нулю. Відмикається реле буксування 16 чи 17. Контакти 4 або 10 розмикають коло резистора 5 або 11 і підживлення обмотки збудження 2 чи 8 тягового електродвигуна припиняється. Дви-гун починає працювати за природною швидкісною характеристикою.
Розроблено принципову схему ключа, яка здатна працювати з керованими тиристорами або силовими тран-зисторами. На рис.2. наведена функціональна схема розробленого напівпровідникового ключа. Датчики струму ДС1 і ДС2, виконано у вигляді магнітних підсилювачів з пригніченими парними гармоніками (трансформатори постійного струму), видають сигнали про струмах в паралельних гілках тягових електродвигунів. Вихідні сиг-нали датчиків струмів надходять на входи блоку управління БУ, де зіставляються між собою. Блок управління виділяє біполярний сигнал, величина і полярність якого обумовлені співвідношенням вихідних сигналів датчиків струмів, і перетворює його в імпульсну форму. Вихідні сигнали формувачів керуючих імпульсів Ф1, Ф2 формують біполярні імпульси заданої амплітуди і тривалості, за допомогою яких здійснюється управління замикаючими тиристорами (транзисторами) Т1, Т2. Живлення пристрою здійснюється від блоку живлення БП, видає ряд стабілізованих напруг постійного і змінного струмів. Регулятор виконаний на сучасній елементній базі.
Рисунок 2 . - Функціональна схема
напівпровідникового ключа
ЛІТЕРАТУРА 1.Хворост Н.В., Минеева Ю.В. О неравномерности токораспределения между тяговыми электродвигателями
// Коммунальное хозяйство городов: Науч.-техн. сб. Вып.6. – К.: Техніка, 1996. – С.91-97. 2.Далека В.Ф., Хворост Н.В., Минеева Ю.В. Требования к устройствам уменьшения неравномерности рас-
пределения мощностей между тяговыми электродвигателями // Коммунальное хозяйство городов: Науч.-техн. сб. Вып.9. – К.: Техніка, 1997. – С.89-92.
3.Гайдуков В.Е., Далека В.Ф., Минеева Ю.В. Методы максимального использования сил сцепления // Ком-мунальное хозяйство городов: Науч.-техн. сб. Вып.10. – К.: Техніка, 1997. – С.114-117.
4.Далека В.Ф., Храповицкий И.С., Минеева Ю.В., Хворост Н.В. Сопоставление неравномерностей токорас-пределения, рассчитанных по предельному и вероятностному законам // Коммунальное хозяйство городов: На-уч.-техн. сб. Вып.11. – К.: Техніка, 1997. – С.126-130.
5.Минеева Ю.В. Реализация максимальной силы тяги трамвайного вагона // Коммунальное хозяйство горо-дов: Науч.-техн. сб. Вып.13. – К.: Техніка, 1998. – С.119-125.
6.Далека В.Ф., Минеева Ю.В. Повышение качества тяги трамвайных вагонов / Вестник ХГПУ. Новые реше-ния в современных технологиях. Вып.46. – Харьков: ХГПУ, 1999. – С.39-41.

Лабораторне обладнання для дослідження електротехнічних систем 66
Вялий М.К., Федоров Р.В. Харків
Харківський національни університет міського господарства імені О.М. Бекетова
ДОСЛІДЖЕННЯ СИСТЕМИ “КЕРОВАНИЙ ПЕРЕТВОРЮВАЧ – ДВИГУН ПОСТІЙНОГО СТРУМУ”
Основним завданням автоматизованого електроприводу є автоматичне регулювання заданих параметрів електроприводу або забезпечення необхідної функції зміни заданих кординат.
Автоматичне регулювання в динамічному режимі виконується за допомогою регулятора. Завданням регуля-тора є компенсація впливу інерційних елементів системи. В інерційних елементах системи запасається енергія, вони характеризуються відповідними постійними часу Т, що визначають в системі вплив тієї чи іншої інерцій-ності. Постійні часу визначають час перехідного процесу, а також час регулювання величини і швидкодію сис-теми.
Основними методами аналізу систем автоматизованого електроприводу є методи теорії автоматичного управління (ТАУ). Як об'єкт регулювання розглядають приводи, що зведені до одномасової системи (жорсткої механічної ланки) з лінійною або лінеаризованою характеристикою двигуна.
Зменшення ∆ωс досягається за допомогою застосування системи П-Д, збудованої за замкнутим принципом. Залежно від вимог до діапазону і точності регулювання застосовуються різні зворотні зв'язки. Якщо ці вимоги не дуже жорсткі, то можливе застосування негативного зворотного зв'язку за напругою перетворювача.. Її осно-ву складає розімкнена система П-Д. Потрібна швидкість обертання М визначається величиною сигналу завдан-ня Uзс. Випрямлена напруга перетворювача U контролюється датчиком напруги ДН. За наявності внутрішнього активного опору перетворювача Rп випрямлена напруга залежить від струму в якірному колі М. В сталому ре-жимі U=Еп-ІяRп. Вихідний сигнал ДН Uос=αU є сигналом зворотного зв'язку за напругою. Тут α – коефіцієнт передачі датчика напруги.
В пристрої, що підсумовує, сигнал зворотного зв'язку обчислюється із задаючого сигналу Uзс і їх різниця у вигляді сигналу помилки Uвх= Uзс- Uос подається на вхід регулятора напруги РН, який з коефіцієнтом крн підси-лює сигнал помилки і подає його у вигляді сигналу управління Uу= крнUвх на вхід перетворювача П.
При збільшенні моменту опору Мс на валу двигуна зменшується його швидкість ω і тому збільшується струм в якірному колі Ія. За рахунок збільшення падіння напруги на активному опорі перетворювача ІяRп зни-жується напруга на якорі М і зменшується сигнал зворотного зв'язку Uос. Це викликає збільшення сигналу по-милки Uвх і сигналу управління Uу, що у свою чергу приведе до зростання ЕРС перетворювача Еп і напруги на якорі двигуна. Тим самим компенсується складова статичного падіння швидкості ∆ω2, визначувана величиною ІяRп.
Пристрій управління складається з силової частини і системи управління і є конструкцією відкритого вико-нання з одностороннім обслуговуванням. Елементи силової частини змонтовані на вертикальній панелі, а еле-менти системи управління розміщені на поворотній передній платі з печатним монтажем. Для зручності налад-ки і перевірки роботи системи управління на платі передбачені контрольні виводи для індикації стану окремих вузлів. Плата управління з'єднується з елементами силової частини гнучким джгутом за допомогою роз'ємного з'єднання Ш2.
Живлення пристрою керування здійснюється через контакти 1, 2 клемної колодки Ш1 від мережі 380В час-тотою 50Гц. Допустимі відхилення параметрів мережі по напрузі - ±10%, по частоті - ±2%.
Розроблена лабораторна установка дозволяє проводити науково-дослідні роботи з таких дисциплін як: – «Теорія електропривода»; – «Елементи автоматизованого електропривода»; – «Автоматизований електропривод загально-промислових механізмів»; – «Системи керування електроприводами».
ЛІТЕРАТУРА
1. Ключев В.И., Терехов В.М. Электропривод и автоматизація общепромышленных механизмов. – М.: Энергия, 1980.
2. Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. – М.: Высшая школа, 1979. 3. Москаленко В.В. Автоматизированный электропривод. – М.: Энергоатомиздат, 1986. Яуре А.Г., Певзнер
Е.М. Крановое электрооборудование. Справочник. - М.: Энергоатомиздат, 1989

Лабораторне обладнання для дослідження електротехнічних систем 67
Гуков В.В. Харків
Харківський національний автомобільно-дорожній університет
ЛАБОРАТОРНИЙ СТЕНД ДОСЛІДЖЕННЯ ХАРАКТЕРИСТИК АВТОМОБІЛЬНИХ ЕЛЕКТРИЧНИХ МАШИН ПОСТІЙНОГО СТРУМУ
Вступ. В теперішній час в сучасній автомобільній техніці все більшу популярність знаходить застосування електричних машин постійного струму (МПС). Так наряду з потужними електричними двигунами, які застосо-вуються в гібридних та електромобілях, широке застосування знайшли малопотужні двигуни постійного стру-му (ДПС) в таких системах як склопідйомники, системи центральний замок, пристроях керування ДВЗ та інші. З огляду на це виникла актуальна потреба потреба в більш детальним вивченням характеристик сучасних елек-тричних МПС.
Ціль роботи. Розробка лабораторного стенду для дослідження характеристик двигунів та генераторів по-стійного струму з різними схемами підключеннями обмоток збудження, а також робота вентильного двигуна в режимі генератор –двигун.
Матеріали та результати дослідів. Основні комплектуючі складові стенду : двигун колекторний ДПТ 42, двигун вентильний DC-12v, тахометр електронний, оптопара, реостати три на 150 Ом і один на 100 Ом, в стенді також присутні електронні вимірювальні пристрої: чотири амперметри з межою вимірювання до 10 А і чотири вольтметри до 24 В.
Конструктивно двигун вентильного типу розміщений на одній осі з машиною постійного струму, завдяки чому з’являється можливість проводити дослідження даних машин у режимах генератор - двигун і навпаки. Таким чином за допомогою розробленого стенду передбачається дослідження генера-торів та двигунів постій-ного струму з незалежним, паралельним і послідовним збудженням, які представ-влені на рисунку 1.
Рисунок 1- Схеми дослідження МПС з послідовним, незалежним та паралельним збудженням
Також, данний стенд дозволяє проводити дослідження характеристик МПС вентильного типу, схема якого
представлена на рисунку 2.
Рисунок 2- Схема електрична принципова МПС вентильного двигуна
Розроблений стенд має наступні характеристики. Виріб живиться від мережі змінного струму напругою 220 В ± 10% і частотою 50 Гц. Споживана потужність
не перебільшує 200Вт. Габаритні розміри 590х600х300мм. Маса стенду 14кг. На даному стенді проводяться наступні дослідження. Дослідження характеристик генератора постійного струму: навантажувальна характеристика U=f(Iв); зовні-
шня характеристика U=f(Iн ); регулювальна характеристика Iв=f(Iн). Дослідження характеристик двигуна постійного струму з незалежним, паралельним та послідовним
збудженням: робочі характеристики (n, ±, M, P1)=f(P2); механічні характеристики M=f(n).

Лабораторне обладнання для дослідження електротехнічних систем 68
Дослідження характеристик вентильного двигуна: робочі характеристики (n, I, P1)=f(P2); механічні характе-ристики M=f(n).
Дослідження характеристик вентильного генератора: зовнішня характеристика U=f(Iн ). Зовнішній вигляд стенда та його передньої панелі представлено на фото 1 і 2.
Фото1 Фото2
Висновки. Лабораторний стенд призначений для використання у вищих і середніх спеціальних навча-льних закладах при проведенні лабораторно-практичних занять з дисциплін Електричні машини та Електричний при-вод.
До переваг такого стенду відноститься його простота виконання та дешевизна. Як показують розрахунки, вартість виготовлення стенду складає 3715грн в той час як вартість аналогічного стенду ТОВ «ЕТАЛОН-ПРИЛАД» складає порядку 78000 грн. Стенд має привабливе ергономічне оформлення та зручний в експлуата-ції.
ЛІТЕРАТУРА
1. Кацман М.Н. Электрические машины. – Изд. Академия, М., 2001. 2. Яцун М.А. Електричні машини. - Вид. Львівська політехніка, Львів, 2001.

Лабораторне обладнання для дослідження електротехнічних систем 69
Коваль І.С., Чаленко А.О. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
АВТОМАТИЗОВАНА СИСТЕМА УЗГОДЖЕНОГО ОБЕРТАННЯ ЕЛЕКТРИЧНИХ ДВИГУНІВ НА ПРИКЛАДІ МОДЕЛІ СТЕНДУ З ВИГОТОВЛЕННЯ СКЛОВОЛОКОННИХ ТРУБ
Вступ. Досить широка група технологічних механізмів потребує узгодженого обертання двох або більше осей, синфазного положення елементів в процесі їх поступального або обертального руху, підтримки заданого відношення швидкості та заданої точності позиціювання. Такі вимоги є характерними для механізмів багатьох галузей промисловості. У якості прикладу можна привести гідротехнічні споруди (затвори, ворота шлюзу, роз-відні мости), портальні крани з великою відстанню між опорами, ротаційні машини поліграфічної промислово-сті, чесальні машини ткацької промисловості, сліпи для спуску суден на воду, корабельні гребні гвинти і т.д. Ці механізми в більшості випадків мають обмежені можливості, управління та регулювання параметрів роботи здійснюється за допомогою великої кількості механічних передач, що в комплексі значно знижує характерис-тики роботи системи, її надійність, універсальність і т.д.
Одним із найбільш оптимальних способів удосконалення подібних систем є використання регульованих електроприводів, які однаково можуть працювати в усіх чотирьох квадрантах. Так, в більшості випадків, елект-роприводом для механізмів базується на основі асинхронного двигуна з короткозамкненим ротором. Оскільки технології перетворювальної техніки розвиваються дуже швидко, широкого поширення набуває використання перетворювачів частоти (ПЧ), що дає можливість енергоефективно керувати роботою АД. У ряду простих уста-новок вистачає внутрішніх функцій ПЧ, де необхідна підтримка усталеної роботи на певному рівні. В більш складних механізмах використовують сучасні засоби автоматизації, а саме датчики, контролери, програмовані реле і т.д. Зокрема, відбувається контроль роботи безпосередньо за об’єктом керування, чим забезпечується якість виконання поставленої задачі. Під час використання нових технологій зменшується кількість механічних передач, за допомогою яких здійснюється керування роботою установки, а також з’являється можливість авто-матизації процесу роботи[1,2].
Мета роботи. Удосконалення фізичної моделі стенду з виготовлення склопластикових труб, розробка алго-ритмічного, математичного, програмного забезпечення системи керування роботою електропривода установки задля досягнення точності відпрацювання необхідного завдання.
Матеріали і результати роботи. Створення систем узгодженого обертання двигунів є необхідною умовою коректної роботи багатьох технологічних механізмів, які потребують узгодженого обертання двох або більше осей, синфазного положення елементів в процесі їх поступального або обертального руху, підтримки заданого відношення швидкості та заданої точності позиціювання. Для забезпечення необхідних параметрів роботи тех-нологічного механізму важливим є урахування всіх факторів роботи системи електроприводу та розробка сис-теми керування ним.
У якості верхнього рівня системи автоматизації технологічних процесів виступає SCADA-система (рис. 1), яка надає можливість: обміну даних з ПЛК, обробки та відображення інформації в реальному часі, ведення баз даних про зміну технологічних параметрів та аварійні відмови, аварійної сигналізації, редагування візуального відображення технологічних процесів[3,4]. Для візуалізації процесу намотування скловолоконних труб було використано SCADA-систему Zenon 6.5.
Рисунок 1 – Рівні автоматизації технологічних процесів

Лабораторне обладнання для дослідження електротехнічних систем 70
Було розроблено і створено інтерфейс відображення технологічного процесу намотування. Даний інтерфейс
включає в себе два вікна: 1) завдання технологічних параметрів (рис. 2); 2) відображення процесу намотування (рис. 3). Розроблений інтерфейс дозволяє задавати початкові параметри роботи стенда, слідкувати за процесом намотування у реальному часі, відслідковувати та попереджувати аварійні режими роботи, планувати і відпра-цьовувати графік роботи технологічного процесу. Розроблений стенд, разом із програмним забезпеченням кон-тролера і SCADA-системи, дозволяють як досліджувати процес виготовлення склопластикових труб з метою покращення параметрів технологічного процесу і якості продукту, так і вивчати принципи розробки сучасного програмного забезпечення систем автоматизації типових промислових механізмів.
Висновки. При виконанні даної роботи вирішено актуальну науково-практичну задачу розробки автомати-зованої системи узгодженої роботи керованого електроприводу на основі моделі установки з виготовлення склопластикових труб. Розроблено математичне забезпечення, яке дозволяє аналізувати коректність процесу намотування, та є основою для алгоритмічного і програмного забезпечення системи. Експериментальна переві-рка роботи моделі установки з керованої ПЛК з розробленим згідно математичного забезпечення алгоритмом функціонування показала адекватність виконаних розрахунків. Розроблений інтерфейс візуалізації роботи тех-нологічного процесу намотки на основі SCADA-системи Zenon 6.5 дозволяє віддалено керувати і слідкувати за процесом у реальному часі.
Розроблений стенд, разом із програмним забезпеченням контролера і SCADA-системи, дозволяють як до-сліджувати процес виготовлення склопластикових труб з метою покращення параметрів технологічного проце-су і якості продукту, так і вивчати принципи розробки сучасного програмного забезпечення систем автоматиза-ції типових промислових механізмів.
ЛІТЕРАТУРА
1. Виноградов В. М. Технология производства препрегов для ПКМ / В. М. Виноградов, Г. С. Головкин, А. И. Горохович – Уфа: УГАТУ, 1995. – с.92.
2. Гончаренко В. А. Оптимизация технологического режима послойного формования изделий из ТКМ / В. А. Гончаренко, Р. Б. Палыга // «Конструкциииз КМ». – М.:ВИМИ, 1993. – №1. – С.18–22.
3. Головкин Г. С. Производство и переработка непрерывно армированных термопластов намоткой (обзор) // Г. С. Головкин, Д. В. Павловский // «Пластические массы». – М.:МГТУ, 1997. – №3. – С.42–48.
4. Сухарев В. А. Расчёт тел намотки. Москва / В. А. Сухарев, И. И. Матюшев – М.:Машиностроение, 1982. – с.98.
Рисунок 2 – Вікно завдання технологічних па-
раметрів
Рисунок 3 – Вікно відображення процесу намоту-
вання

Лабораторне обладнання для дослідження електротехнічних систем 71
Красільнікова Д.Ю., Мокрий А.Ю. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
АВТОМАТИЗОВАНИЙ КОМПЛЕКС ДЛЯ ДОСЛІДЖЕННЯ ЕНЕРГЕТИЧНИХ РЕЖИМІВ ЕЛЕКТРОМЕХАНІЧНИХ СИСТЕМ
Вступ. Необхідність економного використання енергії, зниження непродуктивних витрат потужності обу-мовлює актуальність розвитку підходів щодо аналізу процесів передачі, перетворення і споживання (генеру-вання) енергії в електромеханічних системах (ЕМС) різного призначення.
Поведінка ЕМС повністю визначається енергетичними процесами, що протікають в окремих елементах комплексу. Силовий канал ЕМС – це складна система перетворення енергії, яка відображає різноманітність роз-глянутих явищ і енергетичних режимів. Аналізовані процеси залежать як від впливів зі сторони джерел жив-лення, так і від зміни електричних, електромагнітних, механічних і інших характеристик окремих ланок систе-ми або комплексу. Кожен з елементів ЕМС характеризується параметрами енергетичного режиму, причому це можуть бути не тільки напруга )t(u i та струм )t(ii , а будь-які величини, що описують фізичний процес пере-
творення енергії, добуток яких дає потужність )t(i)t(u)t(p iii = . Визначивши )t(pi для окремих елементів, мо-
жна судити про картину перетворення енергії системи в цілому. Для аналізу енергетичних процесів зазвичай використовують активну, реактивну, повну (уявну), обмінну
складові потужності, що одержуються за допомогою інтегральних методів [1, 2]. Такий підхід є ефективним у тих випадках, коли допустимо усереднення на певному часовому інтервалі, в якості якого, найчастіше, прийма-ється період змінної напруги, однак цей процес веде до втрати частини інформації про реальні зміни сигналу.
В роботах [3–5] запропоновано використовувати для дослідження енергетичних режимів метод миттєвої по-тужності, теоретичною базою якого є баланс гармонійних складових миттєвої потужності джерела живлення і елементів ЕМС, який базується на дотриманні закону збереження енергії у всіх ланках ЕМС, та справедливий як для синусоїдальних так і несинусоїдальних сигналів.
Сказане обумовлює необхідність пошуку підходів, що дозволяють автоматизувати і спростити питання ви-вчення енергопроцесів з використанням сучасних інформаційних технологій.
Мета роботи. Розробка енергетичних моделей та дослідження процесів енергоперетворення в ЕМС засоба-ми автоматизованого комплексу енергетичного аналізу.
Матеріал і результати дослідження. Створення автоматизованого комплексу для дослідження енергоп-роцесів в ЕМС дозволяє виконати якісний та кількісний аналіз отриманих сигналів миттєвої потужності в кожній ланці силового каналу розглянутої системи, що представленні еквівалентними електричними схе-мами заміщення. Це завдання реалізується за допомогою віртуального конструктора (ВК) енергетичних моделей та програмного модуля (ПМ) «Енергоаналізатор».
Графічний інтерфейс ВК ЕМС розроблений в середовищі програмування LabVIEW. Головне вікно ВК наве-дено на рис. 1, центральним елементом якого є поле набору електричної схеми, що складається з "комірок" з можливістю вибору елементів схеми: лінійних (нелінійних) активних, індуктивних чи ємнісних опорів; постій-ного, синусоїдального чи полігармонійного джерел живлення. Такий підхід дозволяє розглядати електричні схеми будь-якого ступеня складності та отримати криві зміни напруги, струму та миттєвої потужності на виб-раних елементах системи, а також визначити необхідні показники енергопроцесів.
Рисунок 1 – Головне вікно ВК енергетичних моделей ЕМС
На рис. 2 приведена електрична схема заміщення ЕМС с джерелом полігармонійного живлення та її енерге-тична модель, розроблена засобами ВК.
Рисунок 2 – Електрична схема заміщення з полігармонійним джерелом живлення та RLC - навантаженням а)
та її енергетична модель б)

Лабораторне обладнання для дослідження електротехнічних систем 72
Для системи з параметрами: U1=141,421В; f=50 Гц; ;451
°=ϕ U3=212,132 В; ;1351
°=ϕ R=10 Ом; L=0,01 Гн;
C=0,0001 мкФ засобами ВК отримані криві зміни струму, напруги та миттєвої потужності на виході джерела полігармонійного живлення (рис. 3, а) та на елементах енергетичної моделі (рис. 3, б).
Рисунок 3 – Криві зміни потужності (1), напруги (2) та струму (3) на виході джерела полігармонійного жив-
лення а) та криві зміни потужності на активному, індуктивному та ємнісному опорах, відповідно б)
Для якісного та кількісного аналізу сигналів напруги, струму та потужності, отриманих засобами ВК, розро-блений ПМ «Енергоаналізатор», в основі якого лежить метод миттєвої потужності і математичний апарат гар-монійного аналізу на базі рядів Фур'є [4, 5]. Графічний інтерфейс ПМ створений в пакеті LabView, головне вік-но якого приведено на рис. 4.
Рисунок 4 – Головне вікно ПМ «Енергоаналізатор»
У вікні «Гармонійний склад сигналів напруги та струму» вводяться параметри відповідних сигналів, після
чого в графічному вікні «Форма сигналу» відображаються в режимі реального часу тимчасові залежності зміни сигналів напруги, струму та потужності. Для отримання частотних характеристик електричних та енергетичних сигналів запропоновано вікно «Спектри сигналів», яке демонструє розкладання тимчасової функції в спектр (фазовий або амплітудний) для обраного сигналу напруги, струму або потужності. В нижній частині лицьової панелі розташоване вікно формулювання аналітичних залежностей і чисельних значень ортогональних складо-вих напруги, струму та миттєвої потужності, а також показників енергетичних режимів на базі ефективних зна-чень миттєвої потужності та її складових.
Висновки. Створений автоматизований комплекс – це універсальне лабораторне обладнання для дослі-дження енергетичних процесів в електромеханічних системах, представлених у вигляді еквівалентних схем заміщення з синусоїдальним чи полігармонійним живленням різної частоти.
Для якісного аналізу енергопроцесів в автоматизованому комплексі використовується метод миттєвої поту-жності, в основі якого лежать рівняння балансу гармонійних складових миттєвої потужності джерела живлення та елементів системи. Даний підхід може бути застосований як до аналізу процесів енергоперетворення в елек-тричних схемах, так і до іншого роду систем: механічних, електромеханічних, гідравлічних і т. п.
ЛІТЕРАТУРА 1.Зиновьев Г. С. Прямые методы расчета энергетических показателей вентильных преобразователей. – Но-
восибирск: изд-во Новосиб. ун-та, 1990. – 220 с. 2.Тонкаль В. Е., Новосельцев А. Е., Денисюк С. П. Баланс энергий в силовых цепях. – К.: Наукова думка,
1992. – 312 с. 3.Родькин Д. И. Составляющие мгновенной мощности полигармонических сигналов. – М.: Электротехника,
2003. – №3. – С. 39–44. 4.Загирняк М. В. Анализ процессов преобразования энергии в электромеханическом комплексе // М. В. За-
гирняк, Д. И. Родькин, Т. В Коренькова // Журнал «Електромеханічні та енергозберігаючі системи». – Кремен-чук: КрНУ, 2012. – Вип. 3/2012(19). – С. 30–36.
5. Загирняк М. В. Особенности формирования составляющих мгновенной мощности полигармонических сигналов // М. В. Загирняк, Д. И. Родькин, Т. В. Коренькова // Журнал «Електромеханічні та енергозберігаючі системи.» – Кременчук: КрНУ, 2012. – Вип.4/2012(20). – C.83-91.

Лабораторне обладнання для дослідження електротехнічних систем 73
Нестеров І.О. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
ДІАГОСТИКА І ВИЗНАЧЕННЯ ЕНЕРГЕТИЧНИХ ПОКАЗНИКІВ АСИНХРОННИХ ДВИГУНІВ У РОБОЧОМУ РЕЖИМІ
Вступ. На даний час питанням надійності й довговічності електричних машин та діагностики наявних дефектів приділяють усе більшу увагу. У цьому напрямі ведуться численні дослідження, питання надійності електричних машин обговорюються на різних семінарах і конференціях. Однак на даний момент відсутні робо-ти, що узагальнюють результати досліджень питань надійності електричних машин, які необхідні численним фахівцям. Особливо гостро стоїть необхідність у розгляді питань діагностики поточного стану обладнання з метою визначення залишкового ресурсу.
Мета роботи. Розробка методу діагностики і визначення енергетичних показників АД у статичних і динамічних режимах роботи на основі аналізу спектру споживаної ним потужності.
Матеріал і результати дослідження. Незважаючи на вдосконалення технологій виготовлення конструкційних матеріалів і технологій ремонту, показники відмов електричних машин в усьому світі приблиз-но наступні [1]: із загального числа ушкоджених електродвигунів близько 80 % ремонтується, а 20 % замінюються резервними. Згідно з різними статистичними джерелами [2], найчастіше вихід з ладу АД трапляється через пошкодження обмоток статора та відмову підшипникового вузла. Серед інших типових відмов слід виділити пошкодження обмоток ротора, неспіввісність ротора і виконавчого механізму, дефекти кріплень АД до основи і виконавчого механізму до ротора АД (рис. 1).
Рисунок 1 – Статистика відмов вузлів АД
Проведений аналіз існуючих методів діагностики АД показав, що на даний момент існує необхідність роз-
робки надійного та простого методу для діагностики машин середньої та малої потужності, які працюють у ни-зьковольтних мережах з можливою неякісністю напруги живлення. Такий метод повинен не тільки показувати чіткий зв’язок діагностичної інформації з певними типами пошкоджень АД, але й бути стійким до можливих завад з метою уникнення хибного діагнозу. У результаті аналізу зроблено висновок, що такий метод може бути створений на основі аналізу сигналу споживаної трифазним АД потужності.
Для визначення діагностики асинхронних машин пропонується метод, який базується на основі аналізу ек-спериментальних сигналів фазних струмів і напруг статора АД. Інші параметри, що характеризують енергетич-ну ефективність роботи двигуна, можуть бути визначені опосередковано.
Діагностика виконується на основі відповідності певних гармонік спектру сигналу потужності визначеним дефектам АД. З робіт ряду авторів відомі залежності формування гармонік сигналу струму внаслідок виник-нення найбільш розповсюджених дефектів. Але при діагностиці на основі аналізу сигналу струму можуть вини-кати невизначеності або помилки внаслідок впливу завад або неякісних параметрів мережі живлення. Для уне-можливлення подібних помилок необхідно виконувати комплексний аналіз сигналів струму, напруги та потужності електромеханічної системи.
Оцінка адекватності та ефективності запропонованих методів діагностики була виконана на основі експери-менту. Для досліджень використовувались ідентичні асинхронні двигуни типу АИР80В4У2, в які було штучно внесено досліджувані дефекти з можливістю імітації їх розвитку. Було розроблено апаратне та програмне за-безпечення випробувального обладнання та проведені експериментальні дослідження, перевірка ефективності розроблених методів, алгоритмів оцінки режимів роботи та діагностики АД. Експериментальна перевірка пока-зала можливість виконання діагностики АД на основі аналізу спектра споживаної трифазним АД потужності (рис. 2) та перевагу даного методу у порівнянні з відомим методом діагностики на основі аналізу спектру струмів при діагностиці дефектів, що зароджуються та наявності одночасно кількох дефектів АД.

Лабораторне обладнання для дослідження електротехнічних систем 74
Рисунок 2 – Спектри електричних сигналів при замиканні 2,74% витків обмотки фази А статора та обриві
одного стрижня ротора Ефективність енерговикористання АД можливо оцінити за допомогою таких енергетичних показників ре-
жиму роботи АД, як ККД, коефіцієнт потужності, складові втрат потужності, складові споживаної потужності. Для аналізу показників ефективності енерговикористання АД пропонується метод, що базується на основі
експериментальних сигналів фазних струмів і напруг статора асинхронного двигуна. У більшості випадків, у промислових умовах єдиними параметрами, які можна досить просто виміряти, зафіксувати й оцінити, є фазні або лінійні струми й напруги статора електричної машини.
Експерименти проводилися на АД з параметрами Pн=1.5 кВт, Uн=380 В, Iн=6.3 А, nн=1395 об/хв при пря-мому пуску в режимі неробочого ходу. Врезультаті знятих з датчиків даних та розрахунків були знайдені енер-гетичні показники даного АД (рис 3).
Рисунок 3 – Активна споживана потужність, електромагнітна потужність і потужність втрат у міді статора
Зазначений алгоритм розрахунку енергетичних параметрів роботи АД дозволяє визначити та оцінити
енергоефективність режиму роботи двигуна лише на основі миттєвих сигналів струмів та напруг фаз статора АД. Недоліком даного алгоритму є те, що його застосування передбачає наявність інформації про параметри СЗ, що не завжди є можливим в реальних умовах технологічного процесу на виробництві [3]. Також при визначенні втрат у сталі необхідно знати коефіцієнт kст, який не завжди можливо розрахувати із достатньою точністю, оскільки для цього необхідно проводити дослід неробочого ходу при наявності джерела регульованої напруги.
Дуже часто при проведенні оцінювання енергоефективності роботи двигуна не має змоги провести необхід-ні досліди для ідентифікації параметрів АД через складність вилучення двигуна із технологічного процесу або через брак необхідного обладнання. Зважаючи на це також пропонується другий варіант алгоритму розрахунку основних показників ефективності енерговикористання АД для випадку, коли немає інформації про усі пара-метри схеми СЗ двигуна.
Висновки. Аналіз спектра сигналу потужності, як метод для діагностики та визначення енергетичних пара-метрів, дозволяє уникнути недоліків інших існуючих методів, оскільки враховує властивості як сигналу струму так і сигналу напруги. При діагностуванні забезпечується можливість розділення показників дефектів, що діють одночасно в одній системі АД.
ЛІТЕРАТУРА
1. Гемке Р. Г. Неисправности электрических машин / Р. Г. Гемке [под. ред. Р. Б. Уманцева]. – Л.: Энерго-атомиздат, 1989. – 336 с.
2. Вольдек А.И. Электрические машины / А.И. Вольдек – Л.: Энергия, 1974., - 840 с. 3. Калинов А.П. Энергетические характеристики асинхронных двигателей в динамических режимах работы
/ А. П. Калинов, Д. Г. Мамчур, А. В. Чумачёва // Збірник наук. праць Дніпродзержинського державного технічного університету: (техн. науки) – Дніпродзержинськ : ДДТУ. – 2009. Вип. №1 (11). – С. 104-109.

Лабораторне обладнання для дослідження електротехнічних систем 75
Новомлинский В.А., Ткачев А.А. Запорожье
Запорожский национальный технический университет
РЕГУЛИРОВАНИЕ УГЛОВОГО ПОЛОЖЕНИЯ ДЕБАЛАНСА, ВРАЩАЮЩЕГОСЯ ВОКРУГ ПОДВИЖНОЙ ОСИ
Введение. Задачей замкнутой системы управления регулируемым дебалансным вибровозбудителем [1] яв-ляется поддержание заданного фазового сдвига вращающихся дебалансов, оси которых жестко связаны с под-вижной платформой, с целью получения требуемой амплитуды вибрации. Достаточно сложная задача управле-ния четырьмя взаимосвязанными электроприводами дебалансов может быть разделена на четыре однотипные задачи поддержания заданного фазового сдвига вращающегося дебаланса относительно колебаний подвижной платформы. Поэтому разработка системы управления скоростью дебаланса, вращающегося вокруг подвижной оси является актуальной задачей.
Цель. Разработка релейной системы управления скоростью дебаланса, вращающегося вокруг подвижной оси.
Материалы и результаты исследований. Учитывая существенную нелинейность самого вибровозбудителя, а также нестационарность технологической нагрузки вибро-агрегатов и сложность её математического описания, для регулирования углового положения дебаланса предложено использовать релейную систему управления, преимущест-вом которой является сочетание предельной точности, мак-симального быстродействия и инвариантности к парамет-рическим и координатным возмущениям [2].
В результате исследований получена имитационная мо-дель релейного регулятора скорости вращения дебалансов с учетом особенностей микропроцессорной реализации и функцией изменения углового рассогласования вращаю-щихся дебалансов, которая может быть использована при синтезе системы управления, обеспечивающей регулирова-ние возмущающей силы группового вибропривода.
На основе имитационной модели был построен лабораторный стенд (рисунок 2), в состав которого входят: ЛБП – лабораторный_блок_питания Б5-47; М1,М2 – два двигателя постоянного тока; Д1,Д2 –два датчика на основе кодировочного диска с пропущенным зубцом; МК1 – микроконтроллер ADuC841, который осуществля-ет: связь с ПК через UART – универсальный асинхронный приемо-передатчик (далее УАПП) реализован на микросхеме FTRL232, обработку сигналов с датчиков по прерываниям INT0 и INT1, выдает сигналы управле-ния ведомым двигателем через дискретные выходы портов P0 и P1; С – стробоскоп; К – коммутатор системы управле-ния ведомым двигателем.
В соответствии с указанной целью исследования произ-ведены изменения в конструкции описанного в [1] лабора-торного стенда. А именно, демонтирован один из двух дви-гателей, приводящих в движение дебалансы и дополнитель-но установлен кривошипно-шатунный механизм, задающий подвижной платформе возвратно-поступательное движение. Кинематическая схема изменённого стенда приведена на рисунке 1, где r – радиус кривошипа, l – длина шатуна, φкр – угол поворота кривошипа, φдеб – угол поворота дебаланса, mдеб – масса дебаланса, ε – эксцентриситет, О1, О2 – оси вращения кривошипа и дебаланса. Особенностью стенда является возможность установки радиуса кривошипа r в диапазоне 0…2,5 мм. Использование для приведения в движение кривошипа двигателя, мощность которого почти на два порядка превышает мощность приводного двигателя дебаланса позволяет считать движение подвижной платформы практически независимым от движе-ния дебаланса.
На двигатели задавались близкие по значению, но с небольшой разницей (около 2%) периоды оборота коди-ровочных дисков, в результате чего происходило равномерное увеличение угла рассогласования, что привело к периодическому изменению тока двигателя М2.
Математическое описание экспериментов приведено далее. При rl >> координата подвижной оси дебаланса О2 c достаточной точностью определяется выражением
крcosrx ϕ⋅= . Момент дебаланса, обусловленный движением его оси [3], определяется выражением
Рисунок 2 – Структурная схема лабораторного стенда
Рисунок 1 – Имитационная модель лабораторного стенда

Лабораторне обладнання для дослідження електротехнічних систем 76
деб деб дебM m ε x sinφ= ⋅ ⋅ ⋅&& . (1)
В случае вращения кривошипа с постоянной угловой скоростью constкркр ==ϕω & с учётом того, что
tcosrx кр2кр ⋅⋅⋅−= ωω&& выражение (1) запишется как
кр2кр cosϕϕω ⋅⋅⋅⋅⋅−= дебдебдеб sinrεmM
. (2) При деб кр сω ω ω= = с учётом деб крφ φ φ= + ∆ из выражения (2) следует
)sin∆)∆tсr(sin(2ε2сдебm
2
1дебM ϕ+ϕ+ω⋅⋅ω⋅−= , (3)
где сω - синхронная скорость вращения, ϕ∆ - рассогласование углового положения дебаланса и кривошипа.
При этом, средний за период момент дебаланса
с
1 2M m ε r sinдеб.ср деб2
ω φ= − ⋅ ⋅ ⋅ ⋅ ∆
. (4) В ходе экспериментов (математического и физического) были получены следующие зависимости
а) б)
в) г)
Рисунок 3 – Зависимости тока двигателя М2 (а, в) и угла рассогласования (б, г) от времени, полученные в результате математического (а, б) и физического (в, г) экспериментов.
Из рисунка 3 следует, что физический эксперимент подтверждает адекватность математической модели. Ко-
личественное несовпадение указанных зависимостей наиболее вероятно связанно с неточностью задания угло-вой скорости во время проведения физического эксперимента.
Выводы: 1. Релейная система управления скоростью дебаланса, вращающегося вокруг подвижной оси, обеспечивает
медленное изменение углового рассогласования вращающихся дебалансов, и может быть использована в каче-стве подчиненного контура в системы управления угловым положением дебалансов группового вибропривода.
2. Полученный на лабораторном стенде диапазон скоростей (16-50 об/с) нормальной работы релейного регулятора скорости удовлетворяет требованиям для использования в известных вибрационных машинах.
3. Близость результатов проведенных математического и физического экспериментов свидетельствует об адекватности разработанной имитационной модели релейной системы управления скоростью, и дает основания для использования указанной модели в дальнейших исследованиях по созданию регулируемого дебалансного вибропривода.
ЛІТЕРАТУРА
1. Осадчий В.В. Регульований електропривод дебалансного віброзбуджувача / Осадчий В.В. Батраченко І.В., Микитюк Д.В. // Електромеханічні і енергозберігаючі системи. – Кременчук: КрНУ. – 2012. – Вип. 3/2012 (19). – С. 194-197.
2. Садовой А.В., Сухинин Б.В., Сохина Ю.В., Дерец А.Л. Релейные системы оптимального управления элек-троприводами. – Днепродзержинск: «ДГТУ», 2011. – 337 с.
3. Блехман И.И. Синхронизация динамических систем – М.: Наука, 1971. – 894 с.

Лабораторне обладнання для дослідження електротехнічних систем 77
Сватенко А.О. Харків
Харківський національний університет міського господарства імені О.М. Бекетова
ВПРОВАДЖЕННЯ ЗАСОБІВ ДІАГНОСТУВАННЯ НИЗЬКОВОЛЬТНОГО ОБЛАДНАННЯ ТРОЛЕЙБУСІВ
Вступ. Безперервне зростання складності конструкції рухомого складу викликає посилювання норм, допус-ків і технічних вимог. Наслідком цього є збільшення числа необхідних регулювань і контрольно-профілактичних операцій і в той же час числа чинників, що роблять вплив на працездатність того або іншого вузла. Зростання складності технічних пристроїв вимагає підвищення кваліфікації обслуговуючого персоналу і витрат часу на по-шук несправностей і їх усунення.
Інтуїтивні методи і, індивідуальні професійні способи оцінки технічного стану вузла або агрегату малоефектив-ні, часто не об'єктивні. Найбільш точну оцінку дає технічне діагностування за допомогою спеціальних пристроїв.
Матеріали та результати дослідження. аналіз літературних джерел з технічного обслуговування низьковольтного обладнання з метою формування
пропозицій щодо застосування сучасних засобів і методів технічного діагностування рухомого складу електрич-ного транспорту;
обробка статистичних даних; розрахунок показників надійності; пропозиції щодо застосування сучасних засобів технічного діагностування низьковольтного обладнання. Висновки Розглянуто і проаналізовано конструкцію, умови експлуатації та режими роботи акумуляторних батарей з
метою впровадження засобів технічного діагностування та підвищення експлуатаційної надійності тролейбусів у цілому.
Доведено, що умови експлуатації і специфіка конструктивного виконання вузлів і агрегатів тролейбусів позначаються при побудові системи діагностики і технічної реалізації комплексу автоматизованих засобів.
Встановлено, що засоби технічної діагностики, що відповідають вимогам, які пред'являються до них експлуа-таційними підприємствами, дозволяють контролювати всі основні параметри, що характеризують працездатність вузла або агрегату.
Література 1. Тролейбус Е183D1. Керівництво з експлуатації. ВАТ «Львівський автомобільний завод», 2006.- 152с. 2. Лудченко О.А. Технічне обслуговування і ремонт автомобілів: організація і управління: Підручник. - К.:
Знання-Прес, 2004. - 478с. 3. Веклич В.Ф. Диагностирование технического состояния троллейбусов.- М.: Транспорт, - 1990. - 295 с. 4. Далека В.Х., Коваленко В.І., Шавкун В.М. Методичні вказівки до курсового проекту з технічної експлуа-
тації. Рухомий склад трамвая і тролейбуса. Харків: ХНАМГ, 2007.-79с. 5. Максимов А. Н. Городской ±лектротранспорт. Троллейбус. – М.: «Академия», 2004.-256 с.

Лабораторне обладнання для дослідження електротехнічних систем 78
Тоболкин С.Ю. Запорожье
Запорожский национальный технический университет
ЛАБОРАТОРНЫЙ СТЕНД ДЛЯ ИССЛЕДОВАНИЯ МИКРОПРОЦЕССОРНЫХ СИСТЕМ УПРАВЛЕНИЯ ШАГОВЫМИ ДВИГАТЕЛЯМИ
Введение. Шаговые двигатели применяются в приводах машин и механизмах, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задается последовательностью импульсов. Достоинством таких двигателей является высокий момент при низких скоростях вращения, так же шаговые двигатели позволяют получить точное позиционирование без датчика обратной связи.
Одним из недостатков данного вида двигателей является проскальзывание ротора. Для устранения назван-ного недостатка в высокоточных приводах устанавливают датчики положения и используют различные алго-ритмы управления, например, дробление шага - управляя соотношением тока в обмотках статора можно до-биться фиксации ротора в промежуточном положении.
Цель работы. Создание имитационной модели электропривода на основе ШД для разработки и исследова-ния алгоритмов управления.
Материалы и результаты исследования. Для отработки различных алгоритмов микропроцессорного управления ШД был разработан лабораторный стенд, внешний вид которого представлена на рисунке 1.
Рисунок 1 - Внешний вид стенда.
Стенд состоит из таких частей: - униполярный шаговый двигатель с напряжени-
ем питания +5В; - блок управления на основе микропроцессора
ADuC841; - коммутатор, обеспечивающий согласование
выходного сигнала блока управления и питание ШД;
- диск с отверстиями под болты для варьирова-ния момента инерции, установленный на валу дви-гателя;
- барабан с леской, на конце которой крепятся грузики для изменения момента сопротивления;
- в качестве обратной связи используется 10 оборотный переменный резистор;
- для визуализации полученных данных и их об-работки написано программное обеспечение, по-зволяющее передать данные с МК в среду EXCEL
Для создания модели, адекватно отражающей процессы в ШД, сняты экспериментальные данные двигателя (зависимость момента от угла поворота ротора двигателя, частота собственных колебаний ротора при одном шаге) и на их основе составлены уравнения зависимости параметров двигателя.
На диске закреплено плечо, на конце которого находится регулировочный болт для изменения положения ротора, плечо непрерывно давит на тензодатчик. Нулевым положением вала считаем линию, проведенную из центра вала двигателя к основанию регулировочного болта в выкрученном положении параллельную горизон-ту. Вкручивая и выкручивая болт, изменяя положения вала в пределах ±10 мм, снимаем показания тензодчика в зависимости от положения вала. Изменение угла отслеживалось с помощью микрометра, который установлен на противоположной части диска. Изменение тока в фазе осуществлялось с помощью регулятора тока. Таким образом, были сняты характеристик для каждой фазы двигателя при различных значениях тока (рис. 2).
Рисунок 2 - Графики зависимости момента от угла
поворота при разном токе в фазе двигателя.
Анализируя полученные зависимости мо-мента от угла поворота ротора было установ-лено что момент двигателя состоит из двух составляющих: первая момент создаваемый магнитным потоком при прохождении тока через обмотку и вторая составляющая конст-руктивная, а общий момент определяется вы-ражением (1).
М=Кi*sin(±+K*sin(4±), (1)

Лабораторне обладнання для дослідження електротехнічних систем 79
где Ki– коэффициент пропорциональности момента току.±± – угол поворота ротора;К – конструктивный ко-эффициент.
Для определения формы переходного процесса собственных колебаний ротора при переключении с одной фазы на другую был проведен следующий опыт. На диске, прикрепленном к валу двигателя, закреплена лазер-ная указка, которая светит на лист бумаги на противоположном конце комнаты (вес указки был скомпенсиро-ван массой на противоположной стороне диска). На языке Аssembler[1] была написана программа для пере-ключения фаз двигателя в ручном режиме. При переключении фазы на листе бумаги отображались колеба-тельные процессы, которые фиксировались фотоаппаратом.
Рисунок 3 – Переходной процесс
без добавления болтов.
С началом переходного процесса фотоаппарат по-ворачивался и фиксировал колебания лазерного луча на листе бумаги, закрепленном на стене, поученный переходной процесс рисунок 3. Для привязки пере-ходного процесса ко времени была собрана электри-ческая схема с мигающим светодиодом, период мер-цания составляет 40 ms. Вид шкалы, зафиксированный фотоаппаратом, показан на рисунке 3. Каждая черточ-ка равна 20 ms.
После проведения экспериментов и определения необходимых коэффициентов была создана имитационная модель (рис. 4) в среде моделирования Matlab Simulink. Модель описывает механические процессы в шаговом двигателе, управляющим воздействием служит ток, подавая импульсы в фазы двигателя можно реализовать различные режимы работы двигателя.
Рисунок 2 – Имитационная модель стенда для проверки микропроцессорных алгоритмов управления ШД.
Выводы. Разработанный лабораторный стенд позволяет тестировать алгоритмы управления гибридными шаговыми двигателями при изменении момента инерции (1:2,18) и момента сопротивления (1: 20) как для сис-тем с обратной связь так и без таковой.
Лабораторный стенд в совокупности с адекватной ему имитационной моделью является комплексным инст-рументом по разработке, отладке и оценке эффективности систем управления гибридными шаговыми двигате-лями и призван сократить время и снизить затраты на пути от идеи САУ до её практической реализации в гото-вом изделии.
ЛІТЕРАТУРА
1. Микропроцессорная техника / [Ткачов В.В. и др.] – [5-ть изд.]. – Днепропетровск, НГУ, 2012. – 188.

Електромеханічні мережі і обладнання електричних станцій та підстанцій 80
СЕКЦІЯ
«ЕЛЕКТРИЧНІ МЕРЕЖІ І ОБЛАДНАННЯ ЕЛЕКТРИЧНИХ СТАНЦІЙ
ТА ПІДСТАНЦІЙ»

Електромеханічні мережі і обладнання електричних станцій та підстанцій 81
Герасименко А.І., Рекуненко М.Ю. Суми
Сумський державний університет
КОМП’ЮТЕРНЕ МОДЕЛЮВАННЯ ЗОН ЗАХИСТУ СТРИЖНЕВИХ ТА ТРОСОВИХ БЛИСКАВКОВІДВОДІВ СКЛАДНОЇ КОНФІГУРАЦІЇ
У зв'язку з необхідністю забезпечення захисту об'єктів від атмосферних перенапруг здійснюється грозоза-хист з використанням стрижньових та тросових блискавковідводів. Дані захисні пристрої можуть утворювати різноманітні за формою зони захисту, параметри яких залежать від типу блискавковідводів, співвідношення відстаней між ними, їх висот та заданої надійності грозозахисту. У зв’язку із цим спрощення розрахунків зон захисту блискавковідводів на даний час є актуальною задачею.
Вибір місць встановлення і параметрів блискавковідводів повинен проводитися за допомогою відповідних комп'ютерних програм, здатних обчислювати зони захисту або імовірність прориву блискавки в об'єкт (групу об'єктів) будь-якої конфігурації при довільному розташуванні будь-якої кількості блискавковідводів різних ти-пів.
Метою даної роботи є розробка комп’ютерної програми, що дозволяє провести розрахунок параметрів зони захисту стрижньових та тросових блискавковідводів, а також побудову її горизонтального перерізу на довільній висоті, у відповідності з вимогами та методиками нормативних документів.
Матеріал і результат дослідження. Для роботи програми необхідно задати вихідні дані: – координати об’єкта, що захищається, по точкам у таблиці «Защищаемая зона»; – координати точок встановлення та висота стрижневих блискавковідводів у таблиці «Молниеотводы»; – координати початкової та кінцевої точок встановлення (між якими натягнутий трос) і висота тросових
блискавковідводів у таблиці «Грозозащитные тросы»; – висота перегляду (перерізу), для якої проводиться розрахунок та побудова зони блискавкозахисту; – методика розрахунку (за РД чи ДСТУ) та надійність блискавкозахисту. Усі координати задаються відносно лівого нижнього кута у метрах. Висоти також вводяться у метрах. Вихі-
дні дані допускається вказувати із точністю до тисячних. За координатами таблиці «Защищаемая зона» на малюнку зображується контур об’єкта, що захищається.
Координати цієї зони є вершинами замкнутого багатокутника довільної форми. У циклі відбувається попарний вибір стрижневих блискавковідводів. Кожна пара стрижневих блискавковід-
водів перевіряється на зв’язаність, тобто чи утворюють вони подвійний стрижневий блискавковідвід. Перевірка виконується за відстанню між ними. У разі, якщо дана пара блискавковідводів задовольняє цим вимогам, то кожен блискавковідвід позначається спеціальною міткою. Відбувається розрахунок параметрів захисної зони подвійного стрижневого блискавковідводу. Розраховані параметри передаються до процедури малювання зони блискавкозахисту та виводяться до таблиці.
Аналогічна операція проводиться з тросовими блискавковідводами. Висновки. Розроблена програма Lightning Protection Zone з визначення захищеної зони об’єкта із викорис-
танням стрижньових та тросових блискавковідводів. Програма дозволяє спростити розрахунок з улаштування грозозахисту об’єктів згідно з вимогами діючих норм, звільняючи від необхідності багаторазового перерахунку та виключаючи людську помилку. Захищена зона представляється у зручному для сприйняття людини графіч-ному вигляді.
Програма має значну цінність вважаючи на зменшення кількості ручних розрахунків. Вона може бути вико-ристана як для проектування грозозахисту об’єкта, так і для перевірки існуючої системи грозозахисту.

Електромеханічні мережі і обладнання електричних станцій та підстанцій 82
Дяговченко І.М., Скотаренко М.А. Суми
Сумський державний університет
ВИСОКОЧАСТОТНИЙ ДАТЧИК РЕЄСТРАЦІЇ ОЖЕЛЕДНО-ПАМОРОЗЕВИХ УТВОРЕНЬ НА ЛІНІЯХ ЕЛЕКТРОПЕРЕДАВАННЯ
Вступ. Зміни клімату України, пов’язані з глобальним потеплінням, викликають необхідність досліджень впливу кліматичних факторів на енергетичні об’єкти, такі як повітряні лінії (ПЛ) та обладнання підстанцій (ПС).Фізико-географічне положення України, природні процеси та явища, котрі виникають в атмосфері під ді-єю різноманітних природних факторів або їхнього поєднання, зумовлюють високу частоту виникнення неспри-ятливих для об’єктів електричних мереж умов експлуатації [1].
Основними небезпечними кліматичними факторами, котрі діють на споруди електричних мереж, є тиск вітру та ожеледно-паморозеві утворення (ОПУ), окремо та в їхньому поєднанні.
Мета роботи. Створення високочастотного датчика для контролю процесу утворення ожеледі, який має ви-соку чутливість, безінерційний, споживає мало енергії та напрямлений на отримання інформації про початок утворення ожеледі і, тим самим, на підвищення ефективності роботи диспетчерських служб енергосистем.
Матеріали та результати дослідження. Для автоматизації процесу плавки ожеледі, запобігання перегоран-ню проводу й своєчасного виявлення аварійної ситуації повинна застосовуватися автоматизована система діаг-ностики, що включає сигналізатор ожеледі.
Відомі на сьогоднішній день датчики можливого утворення ожеледі в більшому числі випадків використо-вують конструктивно-механічну частину ПЛ як елемент власне датчика (введення в підвіску проводу механіч-них, магнітних або інших датчиків, спорудження контрольних прольотів уздовж ПЛ і т.п.). Подібний підхід вимагає перемонтажу ділянок ПЛ, індивідуального «настроювання» вимірювань при дуже низькій їхній точно-сті. Крім того, функціонування всіх відомих датчиків вимагає наявності в їхньому складі нагрівальних елемен-тів, що споживають певну кількість електроенергії [2]. Тому вирішення задачі створення датчиків контролю процесу утворення ожеледі, які мають високу чутливість, безінерційні, споживають мало енергії, є актуальним завданням.
Існує можливість практично миттєво визначати характеристики атмосферного повітря, які корелюють із по-чатком появи зледенінь. Мова йде про таку характеристику як діелектрична проникність і тангенс кута діелект-ричних втрат повітря. З огляду на те, що наближення моменту льодоутворення пов'язане із цілком певною кон-центрацією вологи в повітрі і його температурою, а це, у свою чергу, безпосередньо пов'язано з електрофізич-ними характеристиками повітря, можливе використання резонансних пристроїв, параметри яких прямо пов'яза-ні із цими характеристиками. Іншими словами, мова йде про резонансні вимірювачі діелектричної проникності й тангенса кута втрат повітряного середовища.
У сантиметровому й міліметровому діапазоні довжин хвиль найбільш широке застосування для виміру діе-лектричної проникності речовин знайшли об'ємні резонатори, а в субміліметровому діапазоні – резонатори ква-зіоптичного типу [3, 4]. Застосування резонаторних методів основане на результатах розв'язання рівнянь, що описують електромагнітне поле для конкретного типу робочої хвилі й конструкції резонатора з урахуванням впливу на це поле вимірюваного зразка, розташованого в резонаторі [3]. Розрахунок і вимір відносної діелект-ричної проникності й тангенса кута діелектричних втрат виконуються через вимірювану резонансну частоту й добротність резонатора без зразка й, резонатора зі зразком. Даний метод покладений в основу метрологічних вимірів і оснований на вимірі різниці довжин хвиль резонатора без зразка й з уведеним зразком. Похибка вимі-ру дорівнює 0,1 %. Найбільше значення добротності повинен забезпечити біконічний резонатор. (рис. 1, 2). Як видно із рисунка, запропонований резонатор має центральну регулярну частину, в якій існує одна або декілька мод хвиль, котрі відповідають даній конфігурації резонатора. Також є торцеві частини, які звужуються по зада-ному закону і поступово становляться позамежними для існуючих в центральній частині хвиль. Тобто, буде відбуватися реактивне відбиття полів від обох торців резонатора. Крім того, оскільки електромагнітне поле пе-рестає існувати в торцевих частинах, починаючи з деякого перерізу, то самі торці резонатора можуть бути від-критими, так як випромінювання із них буде відсутнє. Це дозволяє атмосферному повітрю легко проникати до резонатора і, крім того, зменшення металевої поверхні резонатора знижує величину втрат в ньому.
Моделювання та аналіз роботи відкритого біконічного резонатора здійснюємо в програмному середовищі CST Microwave Studio. Даний програмний продукт дозволив промоделювати роботу високочастотного датчика, а саме зміну розподілу електромагнітного поля резонатора в залежності від метеорологічних параметрів. Його роботу розглядаємо за нормальних атмосферних умов та за умов, котрі відповідають початковій точці утворен-ня ожеледі.
Таким чином нами було виявлено, що в результаті потрапляння всередину біконічного резонатора ожеледі, яка має іншу діелектричну проникність та інший тангенс кута діелектричних втрат, ніж повітря, маємо зміну резонансної частоти до 8,02489 ГГц. Це впливає на покази приймача потужності ЕМП, який налаштований ли-ше на одну резонансну частоту (19,6101 ГГц). Отже, коли змінюється частота потужність сигналу стає меншою. З цього можемо зробити висновок, що при такій ситуації є можливим утворення ожеледі на проводах.

Електромеханічні мережі і обладнання електричних станцій та підстанцій 83
Висновки. 1. Проаналізовано основні види ОПУ та метеофактори, котрі сприяють їхньому виникненню. З’ясовано, що атмосферний лід утворюється внаслідок двох фізичних процесів: сублімація пари та кристаліза-ція великих крапель води. Визначено граничні умови метеофакторів, при яких можливе виникнення ОПУ.
2. На основі виразів виконані розрахунки можливих розмірів біконічних резонаторів в залежності від резо-нансної довжини хвилі.
3. Розроблено експериментальну установку для дослідження параметрів біконічного резонатора під дією рі-зних метеофакторів, котрі супроводжуються утворенням ОПУ.
4. Експериментально встановлено, що процес льодоутворення впливає на параметри електромагнітного поля відкритого біконічного резонатора, а саме, відбувається зсув резонансної частоти.
5. Було розглянуто наступні моделі: а) коли ожеледні утворення в порожнині біконічного резонатора відсут-ні; б) коли в біконічнй резонатор потрапляє вологе повітря і всередині нього виникають льодоподібні утворен-ня.
Датчик реагує на основні метеопараметри, котрі сприяють утворенню ОПУ. Реакція полягає у різкому пере-паді потужності, накопиченої у резонаторі, що відповідає моменту утворення ожеледі (сублімації водяної пари). Під дією вітру та при мряці утворення ожеледі відбувається при температурах вищих, ніж при замерзанні без вітру. Також показано, що потужність коливань резонатора залежить від пружності водяної пари та відносної вологості повітря, що підтверджує можливість його використання у системам контролю процесу утворення ОПУ.
6. Визначено, що резонатор потрібно встановлювати таким чином, щоб його вісь була перпендикулярна осі проводу. При цьому датчик має використовуватися не окремо, а виключно в мережі метеорологічних постів.
ЛІТЕРАТУРА
1. Дьяков А.Ф. Предотвращение и ликвидация гололедных аварий в электрических сетях энергосистем. / А.Ф. Дьяков, А.С. Засыпкин, И.И. Левченко – Пятигорск.: Изд-во РП «Южэнергонадзор», 2000. – 284 с.
2. Потапов А.А. Современные диэлектрические методы и аппаратура для исследования микро- и макроско-пических свойств вещества. / А.А. Потапов – М.: ВНИИКИ, 1980. – 124 с.
3. Харвей А.Ф. Техника сверхвысоких частот. / Харвей А.Ф. – М.: Сов. радио, 1965. – 783 с. 4. Волохін В.В. Метод та пристрій контролю ожеледно-паморозевих утворень для підвищення експлуата-
ційних характеристик ліній електропередавання: автореф. дис. канд. техн. наук: спец. 05.11.13 / В. В. Волохін. – Харків, 2010. – 22 с.

Електромеханічні мережі і обладнання електричних станцій та підстанцій 84
Іванов С.О., Ігнатова О.І. Суми
Сумський державний університет
МОДЕЛЮВАННЯ ДИФЕРЕНЦІЙНОГО СТРУМОВОГО ЗАХИСТУ В ПРОГРАМНОМУ КОМПЛЕКСІ PSCAD/EMTDC
Стійка робота електричних станцій у великій мірі забезпечується за рахунок надійної роботи релейного за-хисту їх електрообладнання. У нинішніх умовах, що характеризуються збільшенням числа аварійних ситуацій, а також зростанням кількості випадків виникнення супутніх ушкоджень, роль релейного захисту постійно зрос-тає. У багатьох випадках через відносну недосконалість релейного захисту не можна запобігти розвитку аварій, які все частіше протікають по найбільш важкому шляху і супроводжуються значними економічними втратами.
Ціль роботи. Розробка в середовищі PSCAD/EMTDC віртуальної моделі релейного захисту, яка б дозволяла детально проаналізувати процеси, що протікають як в первинних силових колах енергосистем, так і в колах релейного захисту, що має величезне значення не тільки для наукового, а й для освітнього процесу.
Матеріал і результат дослідження. У даній роботі розроблена модель диференційного струмового захисту силового трансформатора, яка складається з декількох блоків, вибраних з бібліотеки програми PSCAD / EMTDC. На рис. 1 представлена функціональна схема моделі диференціального захисту.
Рисунок 1. – Схема для імітації пошкоджень силового трансформатора
Диференційний струмовий захист трансформатора складається з трьох аналогічних блок-схем, які викону-
ють роль однофазного диференційного реле, які об’єднуються логічним елементом «ИЛИ» в трифазний захист. Схема блок-схеми для захисту фази приведена на рис. 2.
Рисунок 2. – Частина розробленого диференційного струмового захисту: 1 – програмно диференційний ор-
ган; 2 – компаратор; 3 – утримувач сигналу; 4, 5 – логічні елементи «НЕ» та «И»; 6 – дійсна константа; 7 – вихідний канал; 8 – ім’я сигналу.
Програмно диференційний орган “Dual Slope Current Differential Relay” виконує основну функцію, а саме з
сигналів Ia11 та Ia11 які подаються на відповідні входи I1M та І2М визначається диференційний Idiff та гальмівний струм Ibias.
Проведено перевірку побудованого диференційного захисту. Для цього будемо змінювати положення еле-менту KZ (розташовувати в зоні захисту, та за її межами), за допомогою перемикача KZ_switch будемо зміню-вати тип та вид короткого замикання, та задавати в налаштуваннях елементу KZ опір короткого замикання. За допомогою елементу Control panel, будемо фіксувати значення диференційного diffI та гальмівного biasI стру-
мів, та струмів короткого замикання.

Електромеханічні мережі і обладнання електричних станцій та підстанцій 85
Рисунок 3. Результати перевірки змодельованого диференційного захисту
Червоним кольором на рис. 18 відображено точки при яких відбувалося спрацювання захисту, блакитним кольором – випадки не спрацювання захисту
Висновки. В ході виконання наукової роботи був розроблений алгоритм роботи диференційного стру-
мового захисту трансформатора, який було відтворено в програмному комплексі PSCAD/EMTDC, що дозволи-ло в режимі реального часу проводити різноманітні маніпуляції над розробленою схемою та одразу спостеріга-ти результат роботи, що значно полегшує процес прийняття рішень.
Розроблена модель диференційного захисту трансформатора дозволяє спостерігати всі процеси, які відбу-ваються при спрацюванні та до моменту спрацювання захисту.
Запобігання фальшивому спрацюванню при включенні силового трансформатора під напругу, або при від-ключенні зовнішніх коротких замикань відбувається за рахунок контролю рівня вищих гармонік, а саме другої та п’ятої.

Електромеханічні мережі і обладнання електричних станцій та підстанцій 86
Любовець А.І. Харків
Національний технічний університет «ХПІ»
ПРО МОЖЛИВІСТЬ ВИКОНАННЯ ВИСОКОВОЛЬТНИХ ГІДРОГЕНЕРАТОРІВ
Вступ. При передачі електроенергії при низькій напрузі маємо значні втрати вже на першому етапі транспо-ртування електроенергії до споживача. У всіх країнах ведуться роботи щодо створення високовольтних генера-торів з метою виключення підвищувального трансформатора з ланцюга «генератор - трансформатор – мережа». Це дозволить знизити втрати потужності при передачі енергії на низькій напрузі (13,65 або 16 кВ) по шинопро-водах уздовж дамби до берега. Трансформатори є невід'ємною складовою частиною будь-якої електричної ме-режі і є найважливішим елементом забезпечення ефективного і безпечного перетворення енергії в найрізнома-нітніших системах напруги. Без застосування трансформаторів практично була немислима в сучасних масшта-бах передача електроенергії на великі відстані. Але трансформатори виконують не тільки функцію перетворен-ня параметрів електроенергії. На гідроелектростанціях трансформатори встановлюють на березі, і вони вико-нують ще і захисну функцію: вони захищають гідрогенератори від атмосферних перенапружень, блискавок. Тому актуальним є проведення аналізу сучасних засобів організації захисту трансформаторів від атмосферних перенапружень і встановлення засобів передачі цієї функції захисту від трансформатора до гідрогенератора.
Ціль роботи - встановлення можливості розробки високовольтних генераторів (з напругою до 110 кВ), роз-робка пропозицій щодо зміни конструкції активної зони генератора.
Матеріали і результати дослідження. Для захисту трансформаторів від хвиль грозових і комутаційних пе-ренапружень використовують пристрої з розподіленими параметрами зі складними електромагнітними проце-сами, які необхідно вивчати і від яких треба уміти захищатися. Досвід експлуатації трансформаторів і пристро-їв, [3], показує; що найбільше число їх пошкоджень відбувається в літній грозовий період.
Грозові перенапруження створюються прямим ударом блискавки в лінію, або за рахунок індуктивного або електричного впливу у момент стікання струму блискавки в землю через предмети або будови, розташовані поряд з ВЛЕП. Для обмеження дії прямих ударів блискавки в трансформатори, при трикутному розташуванні дротів ВЛЕП, верхній дріт використовується як захисний. Крім того, на тій же опорі, де змонтований трансфо-рматор, встановлюються два високовольтні розрядники типу РВП (розрядник вентильної підстанції) для захис-ту трансформатора від подовжніх перенапружень у ВЛЕП (між дротом і землею). Але, не дивлячись на наявний захист, трансформатор, як і сам захист, продовжує залишатися об'єктом поразки від перенапружень.
Високий відсоток пошкодження трансформаторів в літній грозовий період (в середньому число пошкоджень збільшується в 3 рази), зниження якості електропостачання пристроїв, приводять до порушення нормального функціонування і відмов пристроїв, а на залізниці, наприклад, до затримок потягів. Дослідження процесів в трансформаторах при дії атмосферних і комутаційних перенапружень, розробка заходів щодо посилення захис-ту трансформатора від перенапружень є актуальним завданням. Для захисту трансформатора від перенапру-жень застосовуються різні заземлюючі пристрої зовнішнього захисту: троси, протягнуті над лінією, для захисту від прямих ударів блискавки, як лінії, так і сполучених з нею трансформаторів; розрядники для зменшення ам-плітуди фронту хвилі; дросельні котушки для зменшення крутизни фронту хвилі і т.д.
Збільшення напруги від нуля до максимуму (фронт хвилі) відбувається за дуже короткий відрізок часу, ви-мірюваний часто десятими долями мікросекунди. Хвиля з крутим фронтом може розглядатися як 1/4 періоду змінної напруги дуже високої частоти (10-50 кГц). Для аналізу передачі перенапруження через трансформатор у вторинний ланцюг, а так само перенапружень на нейтралі у випадку, якщо вона не заземлена, необхідне скла-дання розрахункових схем заміщення трансформатора (часткове разземлення нейтралів силових трансформато-рів 110-220 кВ застосовується як ефективна міра обмеження струмів однофазного короткого замикання, які складають основну частку в загальному числі коротких замикань). Хвильові процеси в обмотці вищої напруги можуть бути передані в обмотку нижчої напруги і на розземлену нейтраль як електростатичним, так і магніт-ним шляхом. При електростатичній передачі початковий розподіл напруги, сталий в обмотці вищої напруги, передається завдяки зв'язку, місткості, в обмотку нижчої напруги. Відповідна ємнісна схема заміщення наведе-на на рис. 1.
Рисунок 1 - Ємнісна схема заміщення двохобмоткового трансформатора.
Рисунок 2 – П - подібна схема заміщення однофазного двохобмоткового трансформатора

Електромеханічні мережі і обладнання електричних станцій та підстанцій 87
Трансформатор можна представити у вигляді узагальненої П - подібної схеми заміщення з обмотками вели-кої ємності (CП1' і CП2'), рис. 1, (розподілені ємності C1', C2', C12 ' замінені зосередженими, розміщеними на поча-тку і в кінці обмоток ). Після об'єднання трьох однофазних схем заміщення трансформатора в трифазну групу із з'єднанням обмоток “Υ/∆”, получимо схему рис. 2. Кінці обмоток фаз високої і низької сторони на схемі позна-чені, як A,B,C,N, і a,b,c. Зірка має виведену нейтраль (заземлену або ні).
Усунути ємність проводів відносно землі не можна, але їх можна компенсувати. Захист обмоток трансфор-маторів від атмосферних перенапружень виконується різними пристроями ємнісного захисту. До таких при-строїв відносять екрани, кільця, ємності і екрануючи витки. Ємнісний захист у формі екрануючих щитів ускла-днює конструкцію трансформатора. Збільшення міжкотушкової ємності досягається шляхом укладання між витками котушок ізольованої металевої стрічки. Недоліком ємнісного захисту є ускладнення конструкції тран-сформатора із-за введення лінійного потенціалу углиб обмотки. Екрани (незамкнуті циліндри з немагнітного металу) укладають під внутрішній шар обмотки ВН і підключають до лінійного введення. Екранами забезпечу-ють трансформатори напругою 35 кВ і нижче. У схему входить незамкнуте металеве ізольоване кільце, розта-шоване з торця обмотки, і декілька незамкнутих екрануючих витків. Екрануючи витки електрично сполучені з ємнісним кільцем і підключені до лінійного введення обмотки.
Трансформатори із ємнісним захистом, місткості, називають грозо - упорними або не резонуючими, оскіль-ки у них практично усунена небезпека виникнення значних резонансних коливань в обмотках при дії періодич-них затухаючих хвиль перенапруження. Обмотки, у яких початковий розподіл напруги при перенапруженнях практично співпадає з кінцевим, називаються нерезонуючими. Назва пов'язана з тим, що в цьому випадку елек-тромагнітні коливання в перехідних процесах сильно ослаблені і тому виключена можливість виникнення не-безпечних резонансних коливань. Достатньо надійним захистом нейтралів від короткочасних перенапружень є застосування вентильних розрядників. Нейтралі трансформаторів 110 кВ захищаються розрядниками 2РВС-20 з найбільшою допустимою діючою напругою гасіння 50 кВ. Проте практика показує, що на нейтралі трансфор-маторів можуть впливати не тільки короткочасні перенапруження. Нейтралі можуть опинитися під впливом фазної напруги промислової частоти (для мереж 110 кВ – до 65-67 кВ), яка небезпечно, як для ізоляції трансфо-рматора, так і для розрядника в його нейтралі, рис. 3.
Рисунок 3 - Однофазне коротке замикання в мережі з ефективним заземленням нейтралі
Виводи: 1) Аналіз пошкоджень трансформаторів показав, що найбільш небезпечними є перенапруження, що
викликаються атмосферними причинами, в результаті яких між окремими частинами високовольтного транс-форматора з'являються значні напруги, що у багато разів перевершують відповідні напруги при сталому режи-мі; 2) для рішення задачі захисту гідрогенератора від атмосферних перенапружень найкраще організувати ємні-сний захист обмоткам статору. Тобто при розробці геометрії зубцевої зони статора гідрогенератора з обмотка-ми з кабелю з екструдованою ізоляцією необхідно робити уставки ємнісного захисту в кожному пазу статора.
3) встановлено, що ставити питання про створення високовольтних гідрогенераторів стало можливим завдя-ки розвитку кабельної техніки – створенню кабелів з екструдованою полімерною ізоляцією для обмотки стато-ру з напругою 110 кВ. Можливо запропонувати нову конструкцію паза (поглиблення і виконання у вигляді «ве-лосипедного ланцюга») для укладання туди обмотки за типом високовольтного кабелю з ізоляцією з зшитого поліетилену.
ЛІТЕРАТУРА
1. Шевченко В.В., Соловьев М.В. Проблемы и перспективы создания высоковольтных генераторов. // Сис-теми обробки інформації. Збірник наукових праць. Вип. 5 (45), Харків, Харківський університет повітряних сил, 2005. - С. 194-203.
2. Брускин Д.Э. и др. Электрические машины: В 2-х ч. Ч. 1: Учеб. для электротехн. спец. вузов. 2-е изд. пе-рераб и доп. / Д.Э. Брускин, А.Е. Зорохович, В.С. Хвостов. - М.: Высшая школа, 1987. - 319 с.

Джерела та споживачі електричної енергії 88
СЕКЦІЯ
«ДЖЕРЕЛА ТА СПОЖИВАЧІ ЕЛЕКТРИЧНОЇ ЕНЕРГІЇ»

Джерела та споживачі електричної енергії 89
Балала М.І., Жижеріна І.О. Суми
Сумський державний університет
ІНТЕЛЕКТУАЛЬНА СИСТМА КЕРУВАННЯ ГЕНЕРАТОРАМИ СОНЯЧНОЇ ЕНЕРГІЇ
Вступ. Впровадження альтернативних джерел енергії, автономних і децентралізованих, в багатьох країнах вигідніше, як з економічної, так і з екологічної точки зору. Викопне паливо стає джерелом енергії вчорашнього дня, яке не може забезпечити стійкий розвиток людства в довгостроковій перспективі. Сьогодні в майбутнє сміливо заглядають інші форми енергії, одна з яких - енергія сонця.
Сонячна фотоелектрична система - це сонячна електростанція, в якій використовується спосіб прямого пе-ретворення енергії сонячного випромінювання в електричну.
Мета роботи. Вирішення проблеми нерухомості систем сонячної енергії методом використання штучного інтелекту як засобу управління системою генерування сонячної енергії. Розробка на основі інтелектуальних систем керування схеми MPPT (модель сонячного модуля фотоелектричного і зворотного поширення нейронної мережі на основі максимального відстеження силової точки) для сонячної фотоелектричної системи зі змінами у статичних і динамічних умовах.
Матеріали і результати дослідженя.
Рисунок 1 – Сонячна система виробництва електоренергії з підвищуючим перетворювачем DC / DC.
Характеристичне рівняння сонячної батареї може бути описано за допомогою світла, що генерується джере-
лом струму і діодом. Якщо внутрішнім шунтом і опором серії знехтувати, вихідний струм сонячної батареї по-дамо у такому вигляді:
(1) де, ККД = q / (ПКТ) з електронним збирачем q = 1,6 × 10-19 С,стала Больцмана постійна К = 1.3805 × 10-23 Дж / К, температура Т-клітин, а ідеал р-п переходу характерний множник р = 1 -5, Iph - світло-генерований струм, і ІРС позначає струм зворотного насичення.
Висновки. Основними компонентами сонячної енергетичної установки є запропонована інтелектуальна си-стема керування, сонячна батарея з приладами контролю і керування, акумуляторна батарея, інвертор для пере-творення постійного струму сонячної батареї в перемінний струм промислових параметрів, що споживається більшістю електричних пристроїв. Незважаючи на нерівномірність добового потоку сонячного випромінювання і його відсутність у нічний час, акумуляторні батареї за рахунок накопичення електрики, яка виробляється со-нячною батареєю, дозволяє забезпечити автономну, безупинну роботу сонячної енергетичної установки.
ЛІТЕРАТУРА
1. Розрахунок ресурсів сонячної енергетики / В.І. Віссаріонов , Г.В. Дерюгіна , С.В. Кривенкова , В.А. Куз-нєцова , Н.К. Малінін . - М.: Видавництво МЕІ , 1998 - 61 с.
2. Теорія ймовірностей і математична статистика . Савич Л.К. , Смольська Н.А. - М. : Видавництво « Адукація » , 2006 - 207 с.
3. Теоретичні основи нетрадиційної та відновлюваної енергетики. Ч. 1 . Визначення вітроенергетичних ресурсів регіону : Учеб. посібник. Єлістратов В.В , Кузнєцов М.В. СПб . : Изд-во СПбГПУ , 2004 . - 59с.
4. Толбатов В.А., Лебединський І.Л., Толбатов А.В. Організація систем енергозбереження на промислових підприємствах: Навчальний посібник. – Суми: Видавництво СумДУ, 2009. – 195 с.

Джерела та споживачі електричної енергії 90
Гадай В.О. Луцьк
Луцький національний технічний університет
АВТОМАТИЧНЕ РЕГУЛЮВАННЯ ОСВІТЛЕННЯ З ВИКОРИСТАННЯМ RGB-СВІТЛОДІОДІВ
Вступ. Освітлення являється одним з найбільших споживачів електроенергії, і в той же час найперспектив-нішим способом економії енергоресурсів, завдяки появі і розвитку більш економічних джерел світла. Недоста-тня освітленість спричиняє виникнення «загальмованого» стану та сповільнення реакції людини. Все це при-зводить до необхідності не тільки слідкувати, за дотриманням нормативного рівня освітленності, але і ретельно підбирати тип джерела світла і його колірну температуру, в залежності від виду робіт, та часу доби в який вони виконуються.
Мета роботи. Створення системи штучного освітлення, з параметрами, що наближено відтворюють харак-теристики природнього освітлення.
Матеріали і результати дослідження. Зміна колірної температури джерела світла стала технічно можли-вою тільки нещодавно, в зв’яку з розробкою і впровадженням RGB світлодіодів. Їх особливістю є розміщення трьох світловипромінюючих кристалів –з червоним, зеленим і синім кольором свічення в одному корпусі з оп-тичною системою. Це дало можливість змінюючи значення напруги незалежно для кожного з кристалів, отри-мати всю палітру кольорів яке розрізняє людське око.
Регулювання інтенсивності випромінювання кожного кольору світлодіода здійснюється за допомогою ши-ротно–імпульсної модуляції. Для задання відповідного кольору свічення необхідно підібрати інтенсивність випромінювання кожного кристала. В колориметричній системі RGB колір представляється впорядкованим набором трьох чисел (r, g, b), кожне з яких показує, у скільки разів змінена одинична потужність відповідного джерела кольору (R, G або B) при отриманні суміші, еквівалентній вимірюваному кольору. Система RGB була замінена рішенням Міжнародної Комісії з освітлення (МКО) на зручнішу для розрахунків систему ХYZ. Оскільки x + y + z = 1, а отже, тільки дві координати з трьох незалежні, графік колірності може бути представ-лений в системі прямокутних координат на площині. Така залежність була стандартизована МКО і отримала назву «діаграми XY». Ця діаграма являє собою розташовану уздовж двох осей і розбиту координатної сіткою площину, всередині якої вписана фігура, що нагадує формою підкову і названа локусом (рис. 1). У простір, об-межений цим контуром, вдало вписалися всі з існуючих в природі кольорів, які розрізняє людське око.
По всьому периметру «підкови» розташувалися максимально насичені спектральні кольори. Замикаючі спектр фіолетовий і червоний кольори знаходяться відповідно з лівого і правого боку локусу. За рахунок відсутності чітких кордонів між сімома кольорами спектра, усередині цієї складної фігури створюються сотні різних відтінків. При цьому горизонтальна вісь діаграми характеризує насиченість того чи іншого кольору, а вертикальна – його тон. Таким чином, будь–який колір може бути визначений за допомогою двох координат.
Рисунок 1 – Діаграма колірності в системі x, y
Центр локусу являє собою область найменш насичених кольорів. Саме тут розташувався білий колір, який
найбільш часто використовується в джерелах штучного освітлення. Зона максимальної ефективності білого кольору обмежена чіткими параметрами, які використовуються виробниками освітлювального обладнання. Насправді, будь–які, так звані, білі випромінювання мають у своїй основі різні колірні відтінки, що визначають, чи буде світло що генерується лампою «холодним» чи «теплим».

Джерела та споживачі електричної енергії 91
В існуючих на сьогодні стандартних електричних лампах нереально відтворити ідеальний колір, який би не містив домішок інших відтінків, тому всяке випромінювання – біле або кольорове –комплекс з декількох моно-хроматичних випромінювань. Якщо необхідно створити певний відтінок білого кольору достатньо використати три джерела монохраматичного випромінювання з чітко підібраним співвідношенням. Підбираючи інтенсивність цих випромінювань можна отримати такі цифрові координати точок, в обмеженій локусом площі, що утворюють зміну колірної температури джерел світла (крива Тс(°К) (рис. 1).
Зважаючи на це, в нашій роботі основну увагу ми приділяємо використанню RGB світлодіодів, тому що во-ни не тільки мають спектр найбільш відповідний до чутливості людського ока, але і дозволяють регулювати колірну температуру.
Функціональна схема системи наведена на рис. 2. Основою системи блок управління на мікроконтроллері (МК) ATmega16L–8PU фірми ATMEL [1]. Завдяки їх впровадженню стало можливим більшість функції елек-тронного пристрою реалізувати програмно.
Блок управління
(мікроконтроллер)
Давач освітленості і
колірної температури
Давач руху
Давач руху
Джерело світла
Блок виконання
Блок живлення
Мережа 220В
Рисунок 2 – Функціональна схема роботи системи
Використання в даній системі МК в якості управляючого пристрою дозволило програмно реалізувати об-
робку інформації отримувану з давачів, її співставлення з даними про необхідний рівень освітленості, та ство-рення керуючих імпульсів для управління джерелом світла. Регулювання рівня освітленості має деяку особливість, яка заключається в необхідності врахувати той факт, що сприйняття рівня яскравості людським оком має нелінійну залежність [2, 3].
Розробка блоку виконання на основі RGB дозволяє отримувати різні відтінки білого кольору, шляхом змішуванням різних кольорів. Такий метод ефективний в першу чергу для освітлення житлових приміщень, оскільки дає можливість наблизитись до відворення природньої атмофери освітленості – найбільш комфортної для людей. Це стало можливим за рахунок поєднання в єдину систему широких функціональних можливостей МК з ефективністю світлодіодів. Використовуючи МК ATmega16L–8PU в якості пристрою управління RGB світлодіодом можливо відтворити 256 відтінків кожного кольору, або близько 16,5 мільйонів кольорів.
В якості давача колірної температури і освітленості використовується мікросхема TCS3200 перетворювач освітленість–частота. Вона складається з матриці фотодіодів 8 на 8, та операційного підсилювача, що перетворює зміну освітленості в зміну частоти. Світлодіодна матриця складається з фотодіодів з фільтрами різних кольорів. Ці фільтри формують і оптимізують спектральну чутливість фотодіода. Належним чином розроблені світлофільтри дозволяють отримати спектральну чутливість фотодіодної матриці подібну до чутливості людського ока.
Висновки. Запропонована системи штучного освітлення відтворює колірну світлову атмосферу – зміну ко-лірної температури та яскравості освітлення в реальному часі, відтворючи найменші коливання їх значень. Дана система може бути доповнена додатковим функціоналом і введена в проект «розумного будинку», як один з елементів що забезпечують комфортне життя людей.
ЛІТЕРАТУРА
1. ATmega16 – User Guide / Atmel Corporation [Electronic resource]. – mode of access: http://www.atmel.com/Images/doc2466.pdf.
2. "Four Great Reasons to Dim" – Lutron Electronics [Electronic resource]. – mode of access: http://www.lutron.com/dim.htm.
3. Buck–based LED Drivers Application Note [Electronic resource]. – mode of access : http://www.supertex.com/pdf/app_notes/AN-H48.pdf.

Джерела та споживачі електричної енергії 92
Горюшкин Н.И. Харьков
Национальный технический университет «ХПИ»
АНАЛИЗ ВОЗМОЖНОСТЕЙ ИСПОЛЬЗОВАНИЯ РАЗНЫХ ТИПОВ ГЕНЕРАТОРОВ ДЛЯ ВЕТРОЭНЕРГЕТИЧЕСКИХ УСТАНОВОК С УЧЕТОМ ДИАПАЗОНА МОЩНОСТИ
Введение. В Украине признано, что будущее «большой» электроэнергетики связано с атомными станциями. Но существует проблема энергоснабжения отдаленных населенных пунктов, единичных хозяйств, где необхо-димы малые энергоустановок. Эта проблема должна решаться на базе возобновляемых, или, как их называют, нетрадиционных источников энергии. Солнечная энергетика для Украины возможна для очень небольшого гео-графического региона (Крым и ряд южных областей) и не весь календарный год. Поэтому основное внимание следует уделять ветроэнергетике. Для поддержания уровня жизни в небольших населенных пунктах и в еди-ничных хозяйствах необходимо создавать системы малых энергоустановок. Малая ветроэнергетика не требует больших территорий. Локальные ветроэнергетические установки (ВЭУ) могут быть установлены практически везде, где среднегодовая скорость ветра не менее 4-5 м/с, а для тихоходных многолопастных ВЭУ - не менее 3 м/с. Выбор расчетных параметров для каждой конкретной ветроустановки заключается в определении рас-четной скорости ветра, единичной мощности и размеров ветроколеса, установленной мощности и типа элек-трической машины, определение системы регулирования, условий монтажа и эксплуатации ВЭУ. Таким обра-зом, выбор типа генератора для ВЭУ следует отнести к важнейшим вопросам ветроэнергетики.
Цель работы. Установление типа генератора для автономных ВЭУ в различных диапазонах вырабатывае-мой мощности.
Материалы и результаты исследования. Различные организации всего мира проводят исследования по использованию новых и совершенствованию уже установленных генераторов. В Греции (университет в Афи-нах) исследуют возможность использования асинхронизированного генератора двойного питания; в Велико-британии (Ноттингем) - коммутируемый реактивный синхронный генератор; в Нидерландах и Шотландии раз-работан управляемый реактивный синхронный генератор для безредукторной установки; в Японии (г. Хати-нойе) исследовали работу асинхронного генератора с короткозамкнутым ротором, оснащенного системой управления тиристора реактивной мощности в цепи статора для снижения пусковых токов и так далее, Но все эти генераторы в Украине не имеют баз производства и при современном состоянии экономики не смогут быть предложены до промышленного выпуска. Поэтому для Украины, на наш взгляд, предпочтительнее использова-ние классических типов генераторов или генераторов специального, но более традиционного, исполнений.
1. Наибольшее распространение в настоящее время в диапазоне мощностей от нескольких кВт до 1÷2 МВт получили асинхронные генераторы (АГ) с короткозамкнутыми (к.з.) ротором. К недостаткам ВЭУ с АГ следует отнести: 1) необходимость установления редукторов; 2) АГ с к.з. ротором не позволяют управлять режимными параметрами, что бывает необходимо при порывистом ветре; 3) для работы любой асинхронной машины в ге-нераторном режиме необходима реактивная мощность. При работе в автономном режиме необходим автоном-ный источник реактивной мощности; 4) АГ ограничены в промышленном применении из-за искаженной формы выходного напряжения и неудовлетворительных динамических свойств. К достоинствам использования АГ для ВЭУ следует отнести простоту в обслуживании машины, ее надежность, относительно невысокую стоимость. При параллельной работе такие генераторы имеют сравнительно малые колебания мощности, генерируемой, электромагнитного момента и тока при переменной скорости ветра и даже его порывах.
2. Классические по конструкции синхронные генераторы (СГ) с электромагнитным возбуждением устанав-ливаются на установках или малой, или очень большой мощности. Технология изготовления и опыт расчета таких машин позволяет устанавливать мощные безредукторные установки (мощностью до 2 МВт) с хорошими массогабаритными показателями, высоким КПД и возможностью регулировать напряжение в широких преде-лах за счет изменения тока возбуждения. К недостаткам применения СГ в ВЭУ следует отнести: высокую стоимость, сложность конструкции, меньшую надежность, чем у АМ; наличие скользящего контакта и необхо-димость в источнике постоянного тока для обмотки возбуждения; существует жесткая зависимость генерируе-мой ЭДС частоты от скорости вала. Если ветер нестабильный, то в СГ появляются высокие значения перемен-ных составляющих в режимных параметрах, ухудшается работа СГ параллельно с сетью. Это ограничивает, а в регионах с резкими порывами ветра делает невозможным, использование СГ для прямого включения в сеть.
3. СГ с возбуждением от постоянных магнитов получают все большее распространение с развитием рынка постоянных магнитов. Такие конструкции позволяют исключить скользящий контакт, повысить надежность работы генератора и всей ВЭУ, повысить КПД.
4. Асинхронизированный СГ может быть целесообразен для ВЭУ мощностью от 1 МВт и выше. Этот тип машин имеет ряд недостатков: 1) наличие на роторе скользящего контакта для подвода напряжения к обмотке возбуждения; 2) необходимо использование преобразователя частоты для регулирования напряжения возбуж-дения; 3) при отклонении скорости вала от синхронной требуется значительное увеличение реактивной мощно-сти и напряжения, подводимых к обмотке возбуждения; 4) при приближении скольжения к нулю и наличии несинусоидальности в выпрямителе, питающем обмотку возбуждения, в напряжении генератора возникают значительные субгармонические составляющие; 5) при параллельной работе и регулировании напряжения по величине и фазе скольжения, в вырабатываемом напряжении возникают пульсации, практически повторяющие

Джерела та споживачі електричної енергії 93
пульсации момента ветротурбины. Однако у этих машин есть и преимущества, которые определяют диапазон их использования: 1) они имеют большую устойчивость; 2) их можно использовать в автономных системах в сочетании с другими машинами. Например, возможно каскадное соединение с АГ или соединение АГ и ДПТ с параллельным возбуждением.
Для автономных установок наиболее целесообразно использовать АГ с к.з. ротором, что требует рассмотре-ния вопроса самовозбуждения АГ.
В связи с тем, что скорость ветра на Украине не одинакова, то для оценки возможности использования кон-кретного типа генератора для ВЭУ необходимо учесть возможные районы установки ВЭУ. На рис. 1 приведен пример зависимости выработки электроэнергии от скорости ветра, в м/с. В течение суток скорость ветра меня-ется и меняется величина вырабатываемой электроэнергии.
Рисунок 1 - Типичная кривая зависимости мощности
ВЭУ от скорости ветра
Вырабатываемая генератором активная мощность Р зависит прямо пропорционально от КПД генератора ηel , КПД ветроустановки ηmech плотности воздуха ρ, которая может изменяться сезонно и зависит от дав-ления и температуры окружающей среды, коэффици-ента мощности Cp ветроустановки, а также находится в кубической зависимости от скорости ветра V и в квадратичной зависимости от диаметра ветроколеса D
3 2
р el mech
V DР С , Вт
2 4
ρ πη η= ⋅ ⋅ ⋅ ⋅
Скорость ветра на момент времени t носит слу-чайных характер и определяется на основании на-блюдений и с определенной точностью прогнозирует-ся. При рассмотрении энергетических соотношений обычно пренебрегают потерями в системах и считают коэффициент мощности постоянным.
Уравнения баланса мощностей для автономной системы электроснабжения с асинхронным самовозбуж-дающимся генератором при включении конденсаторов в цепь статорной обмотки представим в виде:
111111 coscos ϕϕ ⋅⋅⋅=⋅⋅⋅ IUmIUm АГ1
2
1
2
1 QLIC
Im k =
⋅⋅−
⋅⋅ ω
ω
АГ
k QC
Im =
⋅
⋅
1
2
1ω
АГ
k
k QLC
ImC
Im =
⋅−
⋅⋅⋅+
⋅⋅ 1
1
2
1
1
2
1
1ω
ωω
АГ
22
1
1m QC
I
C
I
k
kk =
+⋅
ω
где I1, I, Ik— токи фазы генератора, нагрузки и шунтирующих конденсаторов; ω1 - угловая частота напряжения ге-нератора; L - индуктивность фазы нагрузки; С, Ск - емкость фазы шунтирующих и компаундирующих конденсато-ров; φ1, φ - фазовые углы сдвига генератора и нагрузки; m1 – количество фаз генератора; QАГ = m1U1I1sinφ1 - реактивная мощность генератора.
Первое уравнение является уравнением баланса активных мощностей. Оно остается справедливым для любой ав-тономной системы с асинхронным самовозбуждающимся генератором. Остальными уравнениями выражается ба-ланс реактивных мощностей при активно-индуктивной или активной нагрузке и при использовании в генератор-ной установке только шунтирующих конденсаторов или шунтирующих и компаундирующих конденсаторов. Зна-чение емкости, необходимой для возбуждения генератора при данной частоте:
( )2
1 1 m
1С
2 f (L L )π
= ⋅ +
здесь L1 и Lm - соответственно индуктивность обмотки статора и намагничивающего контура генератора, Гн. Выводы. 1) Автономные АГ целесообразно использовать при значениях n2 /nN ≥ 0,9. При меньших n2 тре-
буемая емкость быстро возрастает и генератор почти полностью загружается реактивным током. 2) АГ допус-кают относительно простую параллельную работу в отличие от СГ, требующих при параллельном включении строгой синхронизации частоты вращения. У параллельно работающих АГ частоты вращения могут различать-ся, при этом в общей цепи статорных обмоток создается ток такой частоты, которая соответствует резонансу в полной эквивалентной схеме, включающей помимо цепи нагрузки и конденсаторной батареи цепи объединен-ных статорных и роторных обмоток АГ с соответствующими активными и реактивными сопротивлениями.
ЛИТЕРАТУРА
1. Шевченко В.В., Горюшкин Н.И. Выбор ветродвигателей ветроэнергетических установок по аэродинами-ческим параметрам // 5-а щорічна міжвузівська НТК викладачів, молодих вчених та студентів «Енерго- та ресурсозберігаючі технології при експлуатації машин та устаткування», грудень 2013 р., Донецький інститут залізничного транспорту. – С. 54-56.
Джерела та споживачі електричної енергії 94
Кошевой О.П. Харьков
Национальный технический университет «ХПИ»
УСОВЕРШЕНСТВОВАНИЕ ГЕНЕРИРУЮЩИХ ЭЛЕМЕНТОВ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
Введение. При увеличении единичной мощности агрегатов снижается стоимость электроэнергии и объем капитальных вложений в производство турбогенераторов (ТГ), количество исходных материалов, повышается производительность труда и т.д. Поэтому производство мощных и сверхмощных ТГ непрерывно растет. Про-гноз развития турбогенераторостроения до конца текущего столетия базируется на потребностях электроэнер-гетики, на разработке научных основ создания энергетических блоков, на достижения многих отраслей про-мышленности. Сверхмощные энергетические блоки будут нужны для ТЭС и, особенно, для АЭС. Указанные направления могут быть реализованы только в едином комплексном, системном подходе.
Цель работы. Определение путей совершенствования ТЭК Украины, используя системные подходы к на-правлениям его развития, к исследованию новых возможностей повышения эффективности функционирования энергопредприятий на основе имеющихся внутренних резервов, определение задач по обеспечению надежной и эффективной работы мощных ТГ, установление направлений совершенствования современных ТГ, что позво-лит заблаговременно предусмотреть более гибкую энергетическую политику.
Материалы и результаты исследования. В вопросах энергетики наиболее перспективны исследования: 1) увеличение единичных устанавливаемых мощностей генерирующих систем (ТГ до 1500 МВт); 2) повышение эффективности использования установленных мощностей, проведение работ по продлению
сроков эксплуатации действующего ЭО, снижение потерь в работающих энергетических установках; 3) поиск новых нетрадиционных источников энергии (энергия ветра, солнца, морских течений и приливов,
гейзеров, биогазовая и геотермальная энергетика…). Увеличение доли генерирующих мощностей малой энер-гетики в национальной СЭС, т.е. развитие полиэнергетики: мини-ТЭЦ, малых и микро-ГЭС, ветроэнергетики, т.е. развитие источников энергии, которые могут быть максимально приближены к потребителям;
4) для обеспечения покрытия пиковых нагрузок энергосистемы перспективно создание гидроаккумулирую-щих и парогазовых электростанций, что позволит в определенной степени разрешить вопрос источников ма-невренных мощностей. Для этой же цели, в диапазоне малых мощностей, возможно использование специаль-ных типов СГ с магнитоэлектрическим возбуждением;
5) Использование высокотемпературных сверхпроводников (ВТСП-ков) в электроэнергетическом оборудо-вании, что стало возможным с открытием и получением первых промышленных ВТСП-ов с температурой кри-тического перехода выше 77,3 К, т.е. выше температуры кипения азота.
Создание турбогенераторов все большей единичной мощности требует решения научных задач электроди-намики, механики, теплофизике, гидродинамике, аэродинамике, материаловедению, физике металлов, физике диэлектриков, органической и неорганической химии. Современные мощные агрегаты создаются с определен-ными запасами по электрической, механической и тепловой нагрузкам, а также по электродинамическим харак-теристикам энергосистемы. По мере увеличения единичной мощности ТГ эти запасы приходится сокращать из-за увеличения удельного использования активных материалов в машине.
К числу ограничений, которые необходимо соблюдать при проектировании ЭМ, наряду с максимально до-пустимыми механическими и электрическими нагрузками, величиной допустимых температур активных эле-ментов конструкций и возможностью осуществления технологических операций, относятся нормативы по ус-тановлению массогабаритных параметров конструкций. Последние характеризуют эффективность геометрии машины, степень рациональности выбора и использования конструкционных материалов и трудоемкость тех-нологических операций. Общему прогрессу электромашиностроения всегда сопутствует оценка его конкурен-тоспособности, одним из главных критерием которых являются массогабаритные характеристики ТГ.
В табл. 1 приведены данные сравнительного анализа конструкций ТГ украинского («Электротяжмаш») и российского производства («Электросила», г. С.- Петербург), для сравнения соотношения мощности машин и их весовых показателей. Условное соотношение веса активной и неактивной частей составляет соответственно 85 % и 15 %. Вес ТГ завода «Электротяжмаш» остается выше российской продукции. Возможно уменьшение массы ТГ при переходе от водородного к воздушному охлаждению путем внесения изменений в конструкцию неактивной зоны ТГ. В табл. 2 приведены данные этих машин. Изменения в конструкции неактивной зоны должны быть направлены на обеспечение технических и технологических требований эксплуатации ТГ, а имен-но: обеспечение достаточной механической прочности конструкции; соблюдение герметичности газового про-странства; учет особенностей компоновки газоохладителей.
При реабилитации и модернизации ТГ непосредственно на действующих блоках 200÷500 МВт следует вы-полнить ряд технических и организационных мероприятий, которые позволят повысить режимную маневрен-ность ТГ и упростить конструкцию при использовании воздушного охлаждения: создание менее газоплотного, т.е. дешевого и легкого, корпуса; возможность убрать масляные уплотнения вала; снятие водородной и/или во-дяной систем охлаждения и маслоснабжения уплотнений вала. Следует также отметить в этом случае отсутст-вие при изготовлении ТГ остродефицитных материалов, например, уплотнительной резины, фторопластовых шлангов, полых медных проводников и др.

Джерела та споживачі електричної енергії 95
Таблица 2 - Значения мощности и веса турбогенераторов серии ТА и Т3Ф с воздушной системой охлажде-ния
Тип Мощность, МВт Масса, т Производитель
ТЗФП-120-2 120 178 «Электросила», Россия
ТА-120-2 120 257 «Электротяжмаш», Украина
ТА-160-2 160 300,5 «Электротяжмаш», Украина
ТЗФП-160-2М 160 243 «Электросила», Россия
ТЗФ-220-2 220 268 «Электросила», Россия
ТЗФ-350-2 350 280 «Электросила», Россия
Таблица 3 - Сравнение мощности и массы турбогенераторов производства завода «Электротяжмаш» с водо-родным (серия ТГВ, ТВВ) и воздушным охлаждением
Водородное охлаждение Воздушное охлаждение
Тип Мощность,
МВт Масса, т
Тип Мощность,
МВт Масса, т
ТГВ-200-2М 200 321 ТА-160-2 160 300,5
ТГВ-300-2 300 364 ТА-200-2* 200 264
ТГВ-500-2 500 495 ТА-350-2* 350 303,5
ТВВ-1000-2 1000 561 - - -
* – проект находится на стадии разработки.
Новая серия ТГ с воздушным охлаждением проектируется с учетом возможности их установки на фунда-менты машин аналогичной мощности с водородным и водородно - водяным охлаждением, которые отработали свой ресурс. В первую очередь они могут быть установлены взамен генераторов 100, 150 и 200 МВт. Для такой замены в настоящее время рассматриваются генераторы 120 и 200 МВт Бурштынской и Змиевской ТЭС, а с также Ровенской АЭС.
Выводы: 1) Для решения проблем энергетики, внедрения приемов энергосбережения надо анализировать широкий
диапазон проблем, выбор следует вести индивидуально в каждом отдельном случае, учитывая особенность и специфику производства, экономическую целесообразность, техническое состояние и степень износа электро-оборудования; При оценке направлений развития современного турбогенераторостроения необходимо приме-нять комплексный подход: приоритеты совместного развития мировой экономики и промышленности, техноло-гические, ресурсные и экологические возможности, энергетические, политические, демографические проблемы, а также необходимость учета взаимного влияния всех указанных факторов друг на друга.
2) совершенствование конструкции, повышение качества и экономичности ТГ должно вестись с учетом уси-ления конкурентной борьбы за право поставки энергетического оборудования на мировой рынок, что требует проведения работ по таким факторам, как снижение массогабаритных параметров ТГ, переход от водородного к воздушному охлаждению, оценка возможности использования сверхпроводящих материалов;
3) планово-предупредительные ремонты не отвечают современным требованиям. Необходимо внедрять комплексные системы технической диагностики в режимах on-line для своевременного выявления предаварий-ного состояния машин, устранения неисправностей и исключения длительного простоя ТГ из-за аварий;
4) вопрос повышения единичной мощности ТГ актуален, поскольку это является одним из реальных направ-лений энергосбережения. Это возможно, т.к. общая мощность энергосетей стала выше, то есть устойчивее в случае внезапного отключения мощного генерирующего элемента системы.
ЛИТЕРАТУРА
1. Шевченко В.В. Определение критериев оценки состояния турбогенераторов для установления необходи-мости их замены или реабилитации // Вісник НТУ «ХПІ», серія «Проблеми удосконалення електричних машин і апаратів. Теорія і практика», № 61(967), 2012, Харків, НТУ «ХПІ». - С. 44-50
2. Шевченко В.В., Кошевой О.П. Конструктивные особенности турбогенераторов с воздушным охлаждени-ем // Международный симпозиум «Проблеми удосконалення електричних машин і апаратів. Теорія і практика», SIEMA /2013, Харьков, 2013, НТУ «ХПИ».
3. Шевченко В.В., Кошевой О.П. Усовершенствование генерирующих элементов электроэнергетических си-стем // 5-а щорічна міжвузівська НТК викладачів, молодих вчених та студентів «ЕЕннееррггоо-- ттаа ресурсозберігаючі ттееххннооллооггііїї ппррии ееккссппллууааттааццііїї ммаашшиинн ттаа ууссттааттккуувваанннняя»»,, 2013, Донецький інститут залізн. транспорту. – С. 8-9.

Джерела та споживачі електричної енергії 96
Куліш Я.Р. Харків
Національний технічний університет «ХПІ»
СТВОРЕННЯ ВІТРОЕНЕРГЕТИЧНИХ КОМПЛЕКСІВ ДЛЯ ОПТИМІЗАЦІЇ РОБОТИ ВІТРОЕНЕРГЕТИЧНИХ УСТАНОВ
Вступ. Вітроенергетика - галузь альтернативної енергетики, пов'язана з розробкою методів і засобів пере-творення енергії вітру в механічну, теплову або електричну. Вітроенергетиці притаманні всі переваги, характе-рні для альтернативної енергетики в цілому - екологічна чистота, відновлюваність, низькі експлуатаційні ви-трати. Але є і недоліки: шум працюючої установки; візуальна дія – зміна ландшафтів; заняття великих земельних ділянок. Зараз в середньому в світі 1,5÷2,0 % електроенергії виробляється з використанням вітроенергетичних установок (ВЕУ). У країнах, де уряд підтримує розвиток енергетики від поновлюємих джерел, частка вітроенергетики вище. Наприклад, в Данії за допомогою вітру одержують понад 20 % електроенергії, в Іспанії – 10 %, у Німеччині – 8 %. В Україні ця цифра набагато нижче із-за особливостей кліматичних умов, але вітроенергетика незамінна для видалених, окремо розташованих селищ, будинків фермерів і лісників. Ціль роботи. Порівняння окремих вітроенергетичних установок, які працюють в автономному режимі, з ро-ботою вітроенергетичних комплексів.
Матеріали і результати дослідження. Дослідження режимів роботи електричних мереж довели, що робота вітроенергетичних станцій (ВЕС) призводить до зниження втрати потужності у всій електричної мережі, оскі-льки ВЕС, в більшості випадків, знаходяться на периферійній частині мереж енергозабезпечуючей компанії. Проведені розрахунки режимів навантажень у варіантах розміщення ВЕС, наприклад, в різних регіонах Криму дали такі результати: середнє зниження втрат потужності в електричній мережі на 1 кВт встановленій потужно-сті ВЕС складає 0,04 кВт. З урахуванням прийнятого коефіцієнта використання потужності (25 %) зниження втрат енергії протягом року оцінюється в 92,5 кВт.год на 1 кВт ВЕУ, що забезпечує річну економію засобів енергетичної компанії 3 дол./кВт.
Крім того, держава в даний час бере на себе частину витрат на видобуток вугілля (за даними Донецького ін-ституту вугілля - 15%). ВЕС, як відомо, економе паливо, тому інвестор ВЕС має всі підстави зарахувати в свій актив таку «вугільну» дотацію, яка складає близько 5,5 дол./кВт. Потрібно взяти до уваги те, що у разі роботи ВЕС економиться не тільки 15% вартості палива, які держава оплачує шахтам у вигляді прямих субсидій, а все 100 % палива. Річний ефект в цьому випадку міг би перевищити 30 дол./кВт залежно від потужності ВЕС. Ця економія, хоч і є реальною, але вона так розсівається в економіці України, що залишається незрозумілим, хто саме одержує цю економію і хто за це хоч би частково повинен заплатити інвестору, який вклав гроші в будів-ництво ВЕС. Тому механізм використання 100% «паливного» ефекту є проблемним.
Вітроенергетичні комплекси, що складаються з комбінації ВЕУ з іншими джерелами енергії і накопичува-чами, забезпечують безперервне енергопостачання автономного споживача незалежно від інтенсивності вітру в дані момент часу. Встановлено, що для мережі енергосистеми немає проблем при коливанні потужності, що віддається комплексом, зокрема для слабкої мережі. У останньому випадку проблеми усуваються системою регулювання комплексу. У світовій практиці розглядалися різні поєднання електричних машин один з одним, з акумуляторами, з різними проміжними ланками і системами управління. Проведені дослідження показали, що для отримання перспективних рішень нових виконань і комплектацій ВЕУ не досить визначити тип електричної машини, використовуваної як генератор системи. Необхідно шукати рішення в комплексі: тип генератора, сис-тема стабілізації величини і частоти напруги, конструкція вітротурбіни. Тільки визначення їх оптимального поєднання дасть оптимальне рішення всієї ВЕУ. Тому можна стверджувати, що майбутнє вітроенергетики - використання вітроенергетичних комплексів.
Вітроенергетичні комплекси - це об'єднання в єдину систему сусідніх ВЕУ та поєднання вітроенергетичного генератора з іншими установками: резервуючими його роботу джерелами енергії або акумулюючими установ-ками. Вони забезпечують безперервне енергопостачання автономного споживача незалежно від інтенсивності вітру в дані момент часу. Встановлено, що для мережі енергосистеми немає проблем при коливанні потужності, що віддається комплексом, зокрема для слабкої мережі. У останньому випадку проблеми усуваються системою регулювання комплексу. У світовій практиці розглядалися різні поєднання електричних машин один з одним, з акумуляторами, з різними проміжними ланками і системами управління.
У лабораторії м. Тукуби (Японія) з початку 90-х років працюють 2 установки з регульованою частотою обе-ртання WPNDMEL-1 і WestDMEL- 2. Перевіряється робота системи регулювання при різних швидкостях вітру, частоті обертання при постійній частоті напруги, що віддається в мережу, системи управління кроком лопатей, напрямом осі турбіни щодо напряму вітру, системи пуску і зупинки, захисту від рознесення. ці установки ма-ють потужність по 15 кВт, робочі швидкості вітру 3,5 - 25,6 м/с. Турбіни мають дволопатевий ротор розмахом лопатей 15 м, редуктор має еластичну муфту. Генератор першої установки - асинхронний, потужністю 22 кВт, другої установки - синхронний, такої ж потужності. Для першої установки передбачений зв'язок з мережею че-рез перетворювач з проміжною ланкою постійного струму, для другої - зв'язок, як через перетворювач, так і безпосередня. Перспективним є використання для ВЕУ СГ із збудженням від постійних магнітів або з електро-магнітною системою збудження і діодним випрямлячем. Порівняння показали переваги за вартістю і втратами ВЕУ з СГ і діодним випрямлячем в порівнянні з схемою з АГ з транзисторним випрямлячем. В даний час вар-

Джерела та споживачі електричної енергії 97
тість транзисторних інверторів знижується. Оскільки такі інвертори краще захищають електричні схеми від дії з боку мережі, вони представляють особливий інтерес для розробки ВЕУ.
Напрямок вітру зазвичай грає меншу роль з точки зору ефективності роботи ВЕУ. Проте в різних ландшаф-тах вітри різних румбів мають неоднакову поривчастість і швидкість. Їх повторюваність визначають по «розі» вітрів - графіку, що показує, який відсоток в яку пору року вітер має той чи інший напрямок. Кутові градієнти швидкості істотно впливають на роботу механізмів автоматичної орієнтації і на величину гіроскопічних наван-тажень. Потужність ВЕУ:
3 2
р el mech
V DР С , Вт
2 4
ρ πη η= ⋅ ⋅ ⋅ ⋅
Згідно думці багатьох дослідників, (EWEA, 1991; Андерсон, 1992, Bearskins and Jensen, 2001), якщо відомо середнє значення швидкості вітру на площадці установки вітротурбін, то для орієнтовного розрахунку виробіт-ку електроенергії в рік можна розрахувати. (Е, кВт·год):
Е = К·Vm
3·At·N де К = 3,2 – чисельний коефіцієнт, отриманий для типових характеристик роботи вітрогенератора при приблиз-ному значенні середньої швидкості і частоти зміни швидкості вітру;
Vm – середньорічна швидкість вітру через перетин поверхні, утвореної лопатями вітротурбіни, м/с; At - перетин поверхні, утвореної лопатями вітротурбіни, м2; N – число вітроенергетичних установок, шт. Важливою характеристикою вітроколеса (ВК) є число лопатей. У більшості застосовуваних у світі ВЕУ чис-
ло лопатей не перевищує чотирьох, при цьому генерується потужність залежить в основному від ометаємої ВК площі і мало залежить від числа лопатей. Електромагнітна потужність генератора в загальному випадку також є функцією частоти обертання ротора. Реальна робота ВЕУ малої потужності при змінній частоті обертання і швидкості вітру представлена на рис. 1, де побудовані у відносних одиницях механічні характеристики ВД - залежність потужності Р від кутової частоти обертання ротора ω при реальних швидкостях вітру V в діапазоні від 7 до 22 м/с.
Рисунок 1 - Механічні характеристики вітродвигуна P = f (ω) при різних швидкостях вітру
Розвивається генератором електромагнітна потужність повинна збільшуватися із зростанням швидкості віт-
ру V тільки до точок d, с, в, а, де він починає виробляти номінальну потужність, а ВД розвиває механічну поту-жність, що відповідає номінальній швидкості VN вітрового потоку. Оскільки допустима електромагнітна потуж-ність генератора в загальному випадку скінченна, при подальшому збільшенні швидкості вітрового потоку по-тужність вітродвигуна повинна бути обмежена рівнем РN з кутовою швидкістю обертання ωN з регулюванням кута встановлення лопатей.
Виводи. Для ВЕУ невеликої потужності може бути досить перспективною система, що складається з елект-ричних машин змінного струму і транзисторних або тиристорних перетворювачів частоти, що приводяться віт-родвигунами зі змінною частотою обертання. Необхідно шукати рішення в комплексі: тип генератора, система стабілізації величини і частоти напруги, конструкція вітротурбіни. Визначення їх оптимального поєднання дасть оптимальне рішення всієї ВЕУ, тобто майбутнє вітроенергетики - використання вітроенергетичних ком-плексів.
ЛІТЕРАТУРА
1. Шевченко В.В. Проблемы и основные направления развития электроэнергетики в Украине. // Енергетика та електрифікація. № 7(287), 2007. - С. 11-16.
2. Шевченко В.В. Оценка технической и экологической перспективы развития энергетики Украины // Якість технологій та освіти. Збірник наукових праць - Вип. 2. – Харьков, УИПА, 2011. - С. 19-25.

Джерела та споживачі електричної енергії 98
Панченко М.О. Харків
Національний технічний університет «ХПІ»
ТЕХНІКО-ЕКОНОМІЧНІ АСПЕКТИ РОЗВИТКУ ЕЛЕКТРОМАШИНОБУДУВАННЯ З УРАХУВАННЯМ НАПРЯМКІВ РОЗВИТКУ ЕЛЕКТРОЕНЕРГЕТИКИ
Вступ. Шляхи виведення України з еколого - енергетичної кризи та запобігання загрози глобальних катаст-роф вимагають постановки і проведення серйозних наукових досліджень в соціологічній, економічній і науко-во-технічній областях. Два головних взаємозалежних аспекти активної дискусії в області енергетики, які скла-дають основу світової проблеми, - це попит на довгострокові стійки джерела енергії і необхідність екологічної безпеки при їх отриманні та використанні. Питання сталого і безпечного розвитку енергетики нерозривно пов'я-зані із загальносвітовими, глобальними проблемами, такими, як підтримання клімату, сталий розвиток економі-ки, скорочення рівня бідності та забезпечення нормальної життєдіяльності населення. Необхідно вирішувати подвійну проблему: як задовольнити енергетичні потреби мільярдів людей, які прагнуть підвищити свій рівень життя, і як зробити це безпечно і стійким чином. За останні 50 років при подвоєння населення планети вироб-ництво зерна потроїлася, майже в 4 рази зросло споживання енергії, в 5 разів - загальна економічна активність. Вже чверть століття тому було показано, що продовження такого типу розвитку затягне світ у екологічну катас-трофу. Енергозбереження - основний напрямок розвитку економіки будь-якої держави. Інвестиції в енергоефек-тивність повинні вести до скорочення витрат на енергію, зростанню конкурентоспроможності, покращенню надійності постачання та зниженню впливу на екологію.
Ціль роботи - встановити перспективність, умови доцільності вдосконалення конструкції, підвищення якос-ті і економічності турбогенераторів – основного електрообладнання всіх електростанцій, - встановлення напря-мків збереження їх конкурентоспроможності. Дослідити спектр характеристик електроприймачів енергосисте-ми і динамічність режимів експлуатації.
Матеріали і результати дослідження. В даний час у нашій країні в галузі електроенергетики є значні неви-рішені проблеми, які є спільними для всіх країн: 1) наростаюче забруднення навколишнього середовища, без-перервне зростання населення; 2) обмеженість паливних і мінеральних ресурсів; 3) значні втрати електроенергії в процесі отримання, розподілу та споживання. Збільшення рівня втрат електроенергії визначається також по-ганим технічним станом електромереж, недосконалими системи обліку. За оцінками фахівців втрати електро-енергії у всіх мережах України становлять 15-18 %. Багато в чому ці проблеми виникли із-за серйозних недоро-бок сучасних технологій отримання електроенергії. Статистика показує, що сьогодні в світі електростанції пра-цюють на нафті - 38 %, на природний газ - 20%, на вугіллі - 27%. Це становить 85% від загального виробітку електроенергії. Решта 15 % припадають на атомні електростанції (АЕС) і на електростанції, що працюють від поновлюваних джерел енергії. На відміну від загальносвітових показників, в Україні АЕС виробляють до 52 % обсягу електроенергії. Аналогічна ситуація склалася і в деяких інших країнах, наприклад, у Франції.
Загальна встановлена потужність енергоустановок України оцінюється в 52900 МВт. Загальна потужність 15 встановлених енергетичних блоків на 4 АЕС України становить 11800 МВт. Причому сьогодні в Україні, як і в багатьох інших країнах, основне питання - не про забезпечення достатньою мірою безпеки АЕС, а технічна мо-жливість їх експлуатації, оскільки встановлене обладнання практично відпрацювало свій ресурс. В даний час багато АЕС і практично всі ТЕС потребують негайної модернізації. З інженерно-економічним оцінками, модер-нізація одного енергоблоку АЕС оцінюється в 130 млн. дол. В Україні розпочато поодинокі роботи з ремонту і модернізації окремих блоків. Але це не вирішує проблем енергетики в цілому. У всьому світі як і раніше гостро стоїть питання утилізації атомних відходів. Через недоотримання грошей ядерних енергетичним комплексом України АЕС не мали коштів для проведення серйозних ремонтних робіт, достатню закупівлю атомного пали-ва» - ТВЕЛ-ів, створення баз для їх сухого (або іншого) способів зберігання після закінчення строку їх роботи.
Для забезпечення можливостей зберігання відпрацьованого палива АЕС в нашій країні існують два шляхи: активний (у басейнових сховищах) і пасивний (сухе зберігання). У басейнових сховищах паливо розміщується в заповнених водою басейнах, аналогічних басейнах витримки відпрацьованого палива, які знаходяться в межах реакторних відділень. Вода, як охолоджувач використовується в басейновому сховище, забезпечує найкращі умови відводу тепла від ядерного палива з глибоким вигорянням і коротким часом витримки, включаючи тіль-ки що вивантажене з реактора паливо. Для більш старого палива, тепловиділення якого істотно нижче, придат-не сухе зберігання. Басейнове зберігання використовується протягом багатьох років, сухе зберігання має більш коротку історію, проте десятки сховищ цього типу вже кілька років перебувають в експлуатації.
Для АЕС сухе зберігання, зберігання в СХОЯТ-ах, краще басейнового, оскільки пасивні системи мають пе-ревагу перед активними з точки зору безпеки. До складу активних систем басейнового зберігання входять сис-теми фільтрації води, що призводить до появи радіоактивних залишків, системи підготовки підпиточної води, системи виявлення і збору витоків з басейнів. Басейнове зберігання пред'являє вимоги до хімічного складу во-ди, щоб зменшити ймовірність корозії оболонок паливних збірок. Вартість також є важливим чинником - сухі сховища більш економічні. Початкові витрати на будівництво сухого сховища нижче, ніж для басейнового схо-вища, а модульність системи сухого зберігання дозволяє додавати контейнери по мірі необхідності. Експлуата-ційні витрати в такій системі мінімальні, оскільки після завантаження палива витрати зводяться до витрат на охорону і нечастий огляд.

Джерела та споживачі електричної енергії 99
Різні технології сухого зберігання відпрацьованого ядерного палива засновані на особистих підходах, які за-безпечують безпеку зберігання, але всі вони використовують для розміщення відпрацьованого палива гермети-чні ємності, які встановлюються всередині конструкцій, що забезпечують радіаційну захист і відведення тепла. Системи зберігання відпрацьованого ядерного палива можна розділити по просторовій орієнтації, по вживано-му матеріалу, що екранує, і по інших чинниках на такі загальні групи: металеві контейнери; бетонні контейне-ри; сухі колодязі; камерні сховища. Також розрізняють конструкції вертикального або горизонтального збері-гання, єдину або модульну структуру сховища, вентильований або не вентильовану конструкцію.
Контейнери - це наземні конструкції із сталі та армованого бетону, а сухі колодязі - це стаціонарні підземні споруди. Камерні сховища - це споруди з армованого бетону, що містять ряд порожнин для розміщення відпра-цьованого палива. Як правило, всі системи сухого зберігання використовують металеву кошик, в котру помі-щають кілька збірок ТВЕЛ-ів. Кошик потім поміщають всередину спеціального герметичного контейнера і тра-нспортують до спеціального місця зберігання, розташованому на території АЕС. В залежності від застосовуємої системи, це може бути проста бетонований майданчик, залізобетонне камерне сховище або інша споруда.
В Україні прийнятий варіант зберігання відпрацьованих ТВЕЛ-ів в СХОЯТ-ах. Але і цей варіант не вирішує остаточно проблеми утилізації, термін існування СХОЯТ-ів від 30 до 50 років. Питання розкриття СХОЯТ-ів по закінченню терміну зберігання залишається відкритим, рис. 1.
Рисунок 1 – Транспортування контейнера СХОЯТ по території станції на майданчик зберігання
Найбільшими проблемами енергетичної галузі є економічні проблеми. У тарифах на оплату енергії та енер-
горесурсів не передбачені кошти не тільки на розвиток, але й просте відтворення і навіть утримання енергетич-ного господарства. Сама структура тарифів не відповідає загальноприйнятій в розвинених країнах.
Великою мірою досягла моральна застарілість та фізична зношеність обладнання на кінець 1998 р. 95,2% енергоблоків ТЕС відпрацювали свій розрахунковий ресурс (100 тис. годин), у тому числі 72,1% перевищили граничний ресурс (170 тис.год.), а 78 % енергоблоків перебувають в експлуатації понад 200 тис. год., що пере-вищує визнану в світовій практиці межу фізичного зносу та морального старіння. За даними досліджень, прове-дених у США і країнах ЄЕС, збитки в економіці цих країн в результаті руйнування і аварій становлять 4% ВВП.
Виводи. 1) При оцінці напрямів розвитку сучасної енергетики необхідно враховувати пріоритети спільного розвитку світової економіки та промисловості, технологічні, ресурсні та екологічні можливості, політичні, де-мографічні проблеми, а також необхідність урахування взаємного впливу всіх зазначених факторів один на од-ного. Тобто доцільно застосовувати комплексний підхід; 2) роботи по вдосконаленню конструкції, підвищення якості і економічності електрообладнання повинні вестися з урахуванням посилення конкурентної боротьби за право постачання енергетичного устаткування на світовий ринок, що вимагає проведення робіт по такому фак-тору, як зниження масогабаритних показників ТГ, підвищення надійності їх роботи, врахування широкого спе-ктру характеристик електроприймачів енергосистеми і динамічності режимів експлуатації; 3) актуальні питання підвищення одиничної потужності ТГ, оскільки це є одним із реальних напрямів енергозбереження; 4) виконана порівняльна характеристика різних типів електростанцій, де указано недоліки і переваги кожного типу.
ЛІТЕРАТУРА
1. Шевченко В.В., Панченко М.А. Технико-экономические аспекты развития электромашиностроения с уче-том направлений развития электроэнергетики // 5-а щорічна міжвузівська НТК викладачів, молодих вчених та студентів «ЕЕннееррггоо-- ттаа рреессууррссооззббееррііггааююччіі ттееххннооллооггііїї ппррии ееккссппллууааттааццііїї ммаашшиинн ттаа ууссттааттккуувваанннняя»»,, 2013 р., Донець-кий інститут залізничного транспорт. – с. 6-7.
2. Оценка воздействия хранилища отработавшего ядерного топлива Запорожской АЭС на окружающую сре-ду. - Харьков: Госкоматом, 1994. – 74 с.

Джерела та споживачі електричної енергії 100
Ханкишиєва М.С., Федорова Я.В. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
АНАЛІЗ РЕЖИМІВ ФУНКЦІОНУВАННЯ ТА ВИДІВ НЕСПРАВНОСТЕЙ ТЯГОВИХ ЕЛЕКТРИЧНИХ ДВИГУНІВ РУДНИЧНОГО РУХОМОГО СКЛАДУ
Вступ. Одна з найважливіших складових електричного транспорту це тяговий електропривод, в якості якого використовують двигуни постійного або змінного струму. На вітчизняному електровозному рудничному транс-порті встановлені тягові двигуни постійного струму послідовного збудження. Такі двигуни краще переносять перевантаження в порівняння, наприклад, з двигунами постійного струму паралельного або незалежного збу-дження. Як показує досвід експлуатації тягового рухомого складу, більшу частину часу він знаходиться в пере-хідних режимах (близько 60–70 %), що негативно позначається на надійності складових елементів, а особливо на тягових електродвигунах.
Мета роботи. Аналіз видів та причин несправностей тягових електродвигунів рудничних електровозів. Матеріали і результати дослідження. Надійність та ефективність функціонування електрорухомого складу
гірничозбагачувальних підприємств залежить від надійності тягового електричного приводу, який під час робо-ти піддається впливу різноманітних зовнішніх та внутрішніх факторів.
Під час роботи тягові двигуни електровозів піддаються дії динамічних сил, що виникають при русі коліс по нерівностях шляху, вібраційних навантаженнях, які прискорюють процес зносу і збільшують вірогідність вини-кнення несправностей. Крім того, на тягові двигуни здійснюють негативний вплив ряд зовнішніх факторів, та-ких як коливання напруги живлення, висока запиленість, вологість навколишнього повітря, що в цілому позна-чається на працездатності як тягових механізмів, так і усього комплексу устаткування електровоза [1]. Сукуп-ність зовнішніх чинників знижують надійність і є причиною погіршення ефективності функціонування усього комплексу тягового устаткування.
Як свідчать результати багаточисельних досліджень, на тягові електродвигуни припадає більша частина не-справностей – більше 60 % [2]. В тягових електродвигунах рудничних електровозів найбільш схильні з виходу з ладу головні і додаткові полюси, якір, щіткотримачі, вивідні кабелі. Це свідчить про те, що підчас роботи тяго-вого електродвигуна спостерігається підвищений нагрів, що призводить до пробою ізоляції обмоток і пошкод-ження колектора, тобто температурний фактор є визначальним для ресурсу працездатності тягового електро-двигуна.
Причини та наслідки виходу з ладу елементів тягового електротехнічного комплексу, а в більшій мірі тяго-вих електродвигунів, можуть бути різноманітні. Наприклад, іскріння щіток тягового двигуна може бути викли-кано безліччю причин, які вимагають від обслуговуючого персоналу уважного спостереження за системою ков-заючого контакту і щіткового апарату. До основних з цих причин відносяться механічні (механічне іскріння) і електромагнітні (електромагнітне іскріння). При перевантаженні машин виникає загальний перегрів від тепла, виділеного обмоткою якоря, додатковими полюсами, компенсаційної обмоткою і обмоткою збудження. Нагріванню також сприяє бруд, який потрапляє в машину. Так, проведені дослідження електродвигунів показа-ли, що вугільний пил шаром 0,9 мм, який потрапляє на обмотки, сприяє підвищенню температури на 10 °С. Однією з основних причин несправностей двигуна може бути перегрів обмотки якоря, так як найбільша кількість тепла може виділитися в якорі. Колектор, як невід’ємна частина якоря, сприятиме нагріванню маши-ни. Температура колектора може значно підвищитися через постійну роботу машини на граничній потужності, через неправильно вибрані щітки, через низьку вологості повітря. Таким чином, вплив температури негативно позначається на надійності тягового електродвигуна [3]. У зв’язку з цим, дуже важливим є завдання підвищен-ня надійності роботи тягових двигунів рудничного електровозного транспорту.
Для підвищення надійності тягових електродвигунів шахтних електровозів можливе застосування одного з наступних варіантів: установка більш потужних двигунів; зниження температури нагріву існуючих двигунів, використовуючи примусове охолодження. Перший спосіб не може бути здійснений без зміни конструкції елек-тровоза через відсутність вільного простору для розміщення електродвигунів великих габаритів. Тому можливість промислової реалізації цього способу підвищення надійності тягових двигунів практично виключе-на. Найбільш перспективний напрямок підвищення надійності тягових двигунів за рахунок застосування примусової вентиляції. На електровозах за кордоном застосовуються дві системи: обдув корпусу і подача повітря у внутрішню порожнину двигуна. На вітчизняних шахтних електровозах, наприклад К14, можливо реалізувати тільки другий варіант системи примусового охолодження, тому що зовнішній обдув двигунів не може бути здійснений без збільшення поперечних габаритів – висоти і ширини електровозів. Це нераціонально як з економічних міркувань через необхідність збільшення перерізу гірничих виробок, так і технічних, оскільки необхідно розробляти електровоз нової конструкції, на освоєння виробництва якого потрібно не менше 7–10 років. Тому, актуальним завданням є проведення досліджень режимів роботи тягових електродвигунів з метою розробки рекомендацій щодо оптимізації режимів їх функціонування.
Висновки. Проведена оцінка пошкоджень вузлів тягових двигунів постійного струму підземного електрово-зного транспорту показала, що температурний фактор є визначальним для ресурсу працездатності тягового електродвигуна, тобто, вплив температури негативно позначається на надійності тягового електродвигуна. В

Джерела та споживачі електричної енергії 101
роботі розглянули способи зниження температури тягового електродвигуна та найбільш часто використовуване обладнання.
ЛІТЕРАТУРА 1. Волотковский С.А. Электровозная и рудничная тяга. 4-е изд., перераб. и доп. М.: Недра, 1981. – 389с. 2. Гемке Р.Г. Неисправности электрических машин. – Л.: Энергоатомиздат, Ленинградское отделение,
1989. – 334 с. 3. Вольдек А.И. Электрические машины. Учебник для студентов высш. техн. учебн. заведений. – 3-е изд.,
перераб. – Л.: Энергия, 1978. – 832 с.

Регулювання якості електричної енергії 102
СЕКЦІЯ
«РЕГУЛЮВАННЯ ЯКОСТІ ЕЛЕКТРИЧНОЇ ЕНЕРГІЇ»

Регулювання якості електричної енергії 103
Безнікова О.В Харків
Українська інженерно-педагогічна академія
ОСОБЛИВОСТІ ВИКОРИСТАННЯ КОМПЕНСУЮЧИХ ПРИСТРОЇВ В СИСТЕМАХ ЕЛЕКТРОПОСТАЧАННЯ ПРОМИСЛОВИХ ПІДПРИЄМСТВ УКРАЇНИ
Вступ. Компенсація реактивної потужності з кожним роком стає усе більше актуальної у зв'язку з ростом потужності споживання електричної енергії. При нормальних робочих умовах всі споживачі електричної енер-гії, чий режим супроводжується постійним виникненням електромагнітних полів (електродвигуни, устаткуван-ня зварювання, люмінесцентні лампи й багато чого ін.) навантажують мережа як активної, так і реактивної складової повної споживаної потужності. Ця реактивна складова потужності необхідна для роботи встаткуван-ня утримуючі значні індуктивності й у той же час може бути розглянута як небажане додаткове навантаження на мережу.
Мета роботи. Дослідження доцільності використання різних технічних засобів для компенсації реактивної потужності у системах електропостачання промислових підприємств.
Матеріали та результати досліджень. Повна потужність, що виробляється синхронними генераторами умовно ділиться на складові: активну й реактивну(1).
Активна складова потужності корисно використовується, вона перетворюється у механічну, хімічну, світло-ву та іншу. енергію. Реактивна складова потужності - реактивна потужність (РП), не виконує корисної роботи, а йде на створення магнітних полів у індуктивних приймачах (наприклад, в електродвигунах, трансформаторах і т. д.), циркулюючи весь час між джерелом струму і приймачами з подвійною частотою.
Компенсація реактивної потужності на великих промислових підприємствах приводить до розвантаження підключених мереж живлення від значних перетікань реактивної потужності, що суттєво знижує втрати напру-ги й поліпшує якість електроенергії в розподільних мережах. У якості пристроїв, що компенсують, доцільно використовувати конденсаторні батареї, які є найбільш економічним джерелом реактивної потужності. Однак їх застосування на цілому ряді підприємств є досить проблематичним внаслідок високого вмісту вищих гармонік.
Проблема компенсації реактивної потужності (КРП) завжди займала важливе місце в загальному комплексі питань підвищення ефективності передачі, розподілу і споживання електричної енергії. Раціональна компен-сація реактивної енергії передбачає економію грошових і матеріальних ресурсів, призводить до зниження втрат активної потужності із-за перетікань реактивної енергії, забезпечує належну якість електроенергії, що споживається, за рахунок регулювання і стабілізації рівня напруги в електромережах.
Основним показником ефективності компенсації реактивної потужності є величина витрат, пов'язаних з пе-редачею реактивної потужності по електричних мережах всіх класів напруг - від генераторів електричних ста-нцій до місць установки, компенсуючих пристроїв (КП). З погляду мінімізації цих витрат КП повинні встанов-люватися якнайближче до електроприймачів, тобто в системах електропостачання споживачів електроенергії. У такому випадку, втрати електроенергії знижуються як у мережах споживачів, так й у мережах енергопостачаль-них організацій.
Величина зниження втрат залежить від багатьох факторів. Такі з них, як рівень технічної досконалості КП, їхні техніко-економічні характеристики й технології застосування в системах електропостачання споживачів досить добре вивчені. Обсяг проведених науково-дослідних робіт, у нашій країні й за кордоном, дозволив роз-робити безліч різних модифікацій КП, а також сучасні технології їхнього використання в системах електропос-тачання, які можуть забезпечити досить високий рівень ефективності КРМ.
Основними джерелами РП є синхронні генератори та ЛЕП, але транспортування РП не вигідно тому, що її перетоки викликають втрати активної потужності, тому доцільніше використовувати допоміжні джерела РП (батареї конденсаторів (БК), синхронні компенсатори, синхронні двигуни, тиристорні компенсатори) біля споживачів електроенергії(2).
На базі аналізу характеристик батарей конденсаторів, були проведені техніко-економічних розрахунки які показали, що при використанні батарей конденсаторів треба розрахувати їх потужність таким чином, щоб вона забезпечила максимальну ефективність компенсації реактивної потужності. Це дає можливість проаналі-зувати режим напруги в розрахунковому вузлі навантаження й визначити ефективність компенсації реактивної потужності у сучасних ринкових умовах.
Висновки: Установка БК у мережах споживачів приводить до зниження втрат електроенергії в мережі. Однак це не означає автоматичного енергозберігаючого ефекту, тому що генерація батареями конденсаторів реактивної потужності викликає підвищення напруги на затискачах споживачів, що приводить до деякого збі-льшення споживаної активної потужності. Це збільшення в ряді випадків може перевершувати по величині зменшення втрат у мережі, що негативно позначається на енергозбереженні. Тому питання КРП варто вирішу-вати одночасно з регулюванням напруги при КРП.
ЛІТЕРАТУРА 1. Константинов Б.А., Зайцев Г.З. Компенсация реактивной мощности. – Л.: Энергия, 1976. 2. Глушков В.М., Грибин В.П. Компенсация реактивной мощности в электроустановках промышленого пре-
дприятия. – М.: Энергия, 1975.

Регулювання якості електричної енергії 104
Березка О.І. Суми
Сумський державний університет
КОМП’ЮТЕРНЕ МОДЕЛЮВАННЯ ВПЛИВУ ТА ВИМІРЮВАННЯ ЯКОСТІ ЕЛЕКТРИЧНОЇ ЕНЕРГІЇ В МЕРЕЖІ З ВИКОРИСТАННЯМ ЕЛЕКТРОПРИЛАДІВ
Зростання встановленої потужності нелінійних, а також несиметричних і різкозмінних навантажень промис-лових підприємств привів до істотного збільшення рівня електромагнітних впливів в системах електропоста-чання підприємств і енергетичній системі. Ці впливи, в залежності від їх характеру, інтенсивності та тривалості, несприятливо впливають на силові електроустановки, системи автоматики, релейного захисту та телекомунікації,а також електрообладнання, що є джерелом електромагнітних впливів.
На даний час існує декілька принципів виміру якості електричної енергії, але єдина методика перевірки яко-сті поки що не сформована, тому дане питання є актуальним як в методологічному, так і в практичному плані.
Метою даної роботи є аналіз існуючих пристроїв для вимірювання якості електричної енергії, основні техні-чні вимоги до приладів, вимоги до нормуючих метрологічних характеристик та методи їх контролю. Промоде-лювати електричну мережу з різними типами навантаження та влив перешкод на якість роботи мережі.
Матеріал і результат дослідження. Розглянуто типові структури сучасних засобів вимірювання, основні технічні вимоги до приладів. Приведені вимоги до нормуючих метрологічних характеристик та методи їх кон-тролю. Обрана модель трифазної системи електропостачання від постачальника до споживача. Під час переда-вання електроенергії на лінію електропередачі діють різного плану перешкоди, які погіршують якість енергії. Приведені графіки.
Висновки. Проведений аналіз типових структур сучасних засобів вимірювань, розглянуті основні технічні
вимоги до приладів, приведені нормовані метрологічні характеристики та методи їх контролю. Графіки, що були отримані в ході експерименту, дають можливість зробити висновок про негативний вплив перешкод на роботу лінії електропередач, та на якість електроенергії що передається споживачу, а також необхідність по-дальшого аналізу та створення єдиного приладу для аналізу та контролю електроенергії на основі отриманих результатів.

Регулювання якості електричної енергії 105
Герасименко Р.В., Синяговський Д.В. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
ДОСЛІДЖЕННЯ ВПЛИВУ НА ЯКІСТЬ ЕЛЕКТРИЧНОЇ ЕНЕРГІЇ МЕТОДІВ І ПАРАМЕТРІВ КЕРУВАННЯ ТРИФАЗНОГО СИЛОВОГО АКТИВНОГО ФІЛЬТРА
Вступ. У зв’язку з підвищенням ціни за використання електроенергії, що спостерігається останні роки, все більше уваги в Україні та за кордоном приділяється енергозбереженню в системах електропостачання. Гостро затребувані в створенні і застосуванні в експлуатації ефективні технічні засоби по збереженню електроенергії при передачі її до електроспоживачів [1].
Розвиток силової електроніки сприяв створенню і широкому практичному застосуванню потужних, швид-кодіючих і повністю керованих електронних ключів типу IGBT, GTO, IGCT та ін. Одночасно почали розвива-тися багаторівневі схеми, що дозволяють підвищити вихідну напругу перетворювачів і підвищити якість імпу-льсної модуляції струмів і напруги за рахунок поєднання амплітудної та частотної їх реалізації. Це призвело не тільки до створення нових типів перетворювачів із малим спотворенням, але і засобів забезпечення якості елек-троенергії, споживаної і генерованої існуючими джерелами [2].
Мета роботи. Дослідження силового активного фільтра з замкнутою системою керування та аналіз існую-чих методів керування і вплив їх на роботу САФ.
Матеріали та результати досліджень. Відповідно до [3,4] виділяють два базових методи керування АФ: релейне регулювання з певною шириною петлі гістерезісу (рис. 1,2); широтно–імпульсне регулювання моду-люючим пилкоподібним сигналом певної частоти (рис. 1,3) [3].
Блок гістерезіс
Блок гістерезіс
Блок гістерезіс
Рисунок 1 – Релейний метод керування Рисунок 2 – Принцип дії релейного методу керу-вання: ПЗС – поточне значення струму; ГС – генерація
заданого струму
Рисунок 3 – Широтно–імпульсне регулювання Рисунок 4 – Принцип дії системи керування ши-ротно–імпульсного регулювання: ГПН – генератор
пилкоподібного сигналу;СП – сигнал помилки Модель АФ складається з трифазного джерела електричної енергії (U=220В, f=50Гц), реактора, автономного
інвертора, до складу якого входять чотири повністю керовані транзистори (VT1-VT6), накопичувальний кон-денсатор. Параметри реактора та конденсатора розраховані для зазначеної мережі відповідно до рекомендацій викладених у [5].
Для отримання рівнянь регресії, які будуть адекватними досліджуваному процесу та для отримання графіків коефіцієнтів регресії використано пакет програми Statgraphics [6].
Рівняння регресії для коефіцієнту гармонійних спотворень струму ( _Ry THD I ), напруги конденсатора
( _Ry U kon ) та частоти вищих гармонік (
Ry f ) при релейному методі керування:
2
7 2 2
_ 0,114943 0,0111884 494,902 52,7013 0,0432606
1932,22 12,1389 4,95926 10 593333, 6736,29
= − ⋅∆ − ⋅ − ⋅ + ⋅∆ −
− ⋅∆ ⋅ + ⋅∆ ⋅ + ⋅ ⋅ + ⋅ ⋅ + ⋅
Ry THD I I C L I
I C I L C C L L (1)

Регулювання якості електричної енергії 106
7 2
7 12 2 8 7 2
_ 2122,72 1458,32 2,38469 10 584703, 656,493
3,95333 10 279000, 1,01074 10 4, 10 6,85425 10
= − ⋅∆ + ⋅ ⋅ − ⋅ + ⋅∆ −
− ⋅ ⋅∆ ⋅ + ⋅∆ ⋅ + ⋅ ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅
Ry U kon I C L I
I C I L C C L L (2)
6 2
10 2 9 2
139,868 89,0539 2,58348 10 16278,7 27,1846
333333, 1666,67 1,80869 10 1,2 10 452142,
= − ⋅∆ − ⋅ ⋅ − ⋅ + ⋅∆ −
− ⋅∆ ⋅ + ⋅∆ ⋅ − ⋅ ⋅ + ⋅ ⋅ ⋅ − ⋅
Ry f I C L I
I C I L C C L L (3)
Рівняння регресії для коефіцієнту гармонійних спотворень струму ( _PIy THD I ) та напруги конденсатора
( _PIy U kon ) при широтно-імпульсному методі керування: 2
7 2 2
_ 0,426382 0,00819322 Pr 974,781 154,405 0,0109988 Pr
3200,0 Pr 5,97113 10 133333, 18180,3
= − ⋅ − ⋅ − ⋅ − ⋅ −
− ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ + ⋅
PIy THD I C L
C C C L L
(4)
7 2
7 11 2 10 7 2
_ 2162,83 5008,22 Pr 3,83755 10 370943, 9273,42 Pr
1,2 10 Pr 20000,0 Pr 9,941 10 1,64 10 8,14206 10
= − ⋅ + ⋅ ⋅ − ⋅ + ⋅ −
− ⋅ ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅
PIy U kon C L
C L C C L L (5)
а) б) в)
г) д)
Рисунок 5 – Залежності коефіцієнту спотворення гармонік струму (а,б), напруги на конденсаторі (в,г) та час-тоти пульсацій гармонік (д) від індуктивності та ємності
Аналізуючи графіки наведені на рисунку 5 (а-д), слід відзначити, що THD_І, Uk, f залежать від значень інду-ктивності реактора та не залежать від ємності конденсатора для обох методів керування. Також впливають на досліджувані параметри і значення ∆І та Pr для пристрою з релейним методом керування та з методом керуван-ня ШІМ відповідно.
Виходячи з побудованих залежностей можна стверджувати, що на роботу фільтрокомпенсуючого пристрою з релейним методом керування не впливає значення ємності, впливає індуктивність реактора та ширина гістере-зісу. При чому коефіцієнт спотворення гармонік струму зменшується зі зменшенням ширини гістерезису. Це саме явище можна побачити і з методом керування ШІМ, тільки при зменшенні коефіцієнта підсилення пропо-рційної складової ПІ-регулятора.
Висновок. У роботі проведено дослідження режимів роботи трифазного активного фільтра за релейним ме-тодом керування та за методом керування ШІМ. Їх вплив на якість електричної енергії при значеннях елементів фільтрокомпенсуючого пристрою за допомогою методу планування багатофакторного експерименту другого порядку. В результаті виконаної роботи отримані функції регресії, побудовані графіки коефіцієнтів регресії та отримані залежності досліджуваних параметрів якості електроенергії від значень елементів силового активного фільтра.
ЛІТЕРАТУРА 1. Волков В.А. Снижение сетевых потерь мощности посредством симметрирования сетевых фазных токов
активным фільтром // Вісник КДУ і мені Михайла Остроградського . Випуск 3/2010 (62). Частина 2 2. Бурман А.П. Управление потоками электроэнергии и повышение эффективности электроэнергетических
систем: учебное пособие / А.П. Бурман, Ю.К. Розанов, Ю.Г. Шакарян. – М.: Издательский дом МЭИ, 2012. – 336 с.
3. Juan W. Dixon, Sebastian Tepper M. Analysis and evaluation of different modulation techniques for active power filters. IEEE 1994, Dept. of Electrical Engineering Universidad Catolica de Chile Casilla 306, Santiago, CHILE.
4. Mihaela Popescu. Optimum control strategy of three-phase shunt active filter system, World Academy of Science, Engineering and Technology 58 2009
5. Zakis J., Vinnikov D., Laugis J., Rankis I., Feasibility study of flexible systems for reactive power compensation // Науково-прикладний журнал «Технічна електродинаміка» - Київ: ІЕД НАН України, 2010 ч.2, с. 16-21.
6. Програма для статичних розрахунків та побудови графіків. Режим доступу: http://www.statgraphics.com/

Регулювання якості електричної енергії 107
Глазєв Д.О. Одеса
Одеська національна морська академія
РОЗРОБКА ЗАСОБІВ ЗАБЕЗПЕЧЕННЯ ЕЛЕКТРОМАГНІТНОЇ СУМІСНОСТІ ТИРИСТОРНОГО ПЕРЕТВОРЮВАЧА НАПРУГИ ЗІ СУДНОВОЮ МЕРЕЖЕЮ ЕЛЕКТРОПРИВОДУ ПІДРУЛЮЮЧОГО
ПРИСТРОЮ
Вступ. Прогресуюче впровадження електроприводу з нелінійними перетворювачами (НП) зумовило важливість і актуальність вирішення проблеми вищих гармонік в електричних мережах. Основне коло питань, що становлять зміст цієї проблеми, зводиться до наступного:
– оцінка електромагнітної сумісності (ЕМС) джерел вищих гармонік та інших навантажень, тобто впливи гармонік на електроустаткування, і розрахунок економічного збитку, що виникає при цьому;
– проведення кількісної оцінки вищих гармонік струму, що генеруються різними нелінійними навантажен-нями, і прогнозування значень вищих гармонік струму і напруги в електричних мережах;
– розробка та впровадження заходів для зниження рівнів вищих гармонік. Дія НП на електроустаткування і споживачів проявляється в наступних двох аспектах: – генеруванні в мережу вищих гармонік напруги і струму; – споживанню з мережі реактивної потужності. Оскільки найбільш вагомим аспектом в проблемі ЕМС є генерування НП вищих гармонік струмів і напруги,
то важливим завданням наукових досліджень є з'ясування причин виникнення вищих гармонік, вивчення методів їх теоретичного розрахунку та експериментальних вимірів, а також ознайомлення зі схемотехнічними рішеннями, направленими на поліпшення гармонійного складу сигналів в енергомережах.
Мета роботи. Метою роботи є розробка засобів забезпечення електромагнітної сумісності тиристорного пе-ретворювача напруги (ТПН) зі судновою мережею електроприводу підрулюючого пристрою.
Матеріали і результати дослідження. Аналіз літературних джерел [1,2,3,4,5] показав, що найбільш поширеним устаткуванням, що генерує вищі
гармоніки струму в суднову мережу, є потужні статичні НП (ТПН, конвертори, випрямлячі, перетворювачі час-тоти).
Вищі гармоніки струму, що накладаються на основну гармоніку, приводять до викривлення форми струму, який у свою чергу, викривлює форму напруги у системі електроживлення, що визиває неприпустимі наслідки на навантаження суднової електроенергетичної системи (СЕЕС). Найбільший вплив на СЕЕС з частотою 50 Гц мають 3, 5 і 7 гармоніки [2].
На практиці, в суднових системах з потужними НП, найбільш широке застосування знайшли заходи забез-печення ЕМС, які засновані на збільшенні фазності перетворювачів та запровадження мережевих фільтрів [1].
Складність проведення натурних експериментів для дослідження гармонійного складу струмів і напруги підрулюючого пристрою за системою ТПН–АД спричинила необхідність створення моделі як самого пристрою ТПН, так і всієї електромеханічної системи в цілому. Модель АД з ТПН приведено на рисунке 1.
Рисунок 1 – Модель АД з ТПН.
Побудова моделі системи «Суднова мережа – ТПН – АД – Навантаження» дозволила отримати та дослідити тимчасові діаграми струмів і напруги на ділянках «Суднова мережа – ТПН», зробити розрахунок гармонійних складових струмів та напруг, завдяки підключенню блоку перетворення Фур’є (FFT Analysis) та

Регулювання якості електричної енергії 108
використовуючи запропоновану у роботі методику провести розрахунок параметрів пасивних фільтрів за допо-могою наступних рівнянь:
( )
( )
2 20
2 20
4 1
4
−
=
a
a
UR
I
ω π η
ω π η
(1)
( )
( )
( )3 2
2 22 2
0
2 20
4 14 1
2 8
−−
= =
a
a a a
URL
I
π ηωπ η
ω ω π η ω
(2)
( ) ( )
( )
( )
2 2 2 20
2 2 2 2 2 1 22 2 0
1 4 1 1 1 1 8
4 1 4 14 1
−
= =
+ +−
a
a aa
IC
L U
ωπ η π η
ω ωπ η π ηω π η
, (3)
де aω - частота a - тої гармоніки, ( )0 a
U ω - амплітуда напруги цієї гармоніки, ( )0 aI ω амплітуда струму цієї
гармоніки, η =2n (n - номер гармоніки) - кількість періодів за які затухають власні коливання резонансного
контуру n-ої гармоніки. Наведена методика дозволяє по реальним, отриманим у разі експерименту чи розрахунку, значенням амп-
літуд напруги та струмів визначити параметри R, L, C послідовних коливальних контурів на кожну гармоніку несинусоїдальних сигналів.
Виводи. В роботі здійснено теоретичне узагальнення й розв’язання актуальної науково-технічної задачі еле-ктромагнітної сумісності ТПН зі судновою мережею електроприводу підрулюючого пристрою судна типу кон-тейнеровоз з використанням пасивних фільтрів.
Найбільш суттєві наукові та прикладні результати, висновки і рекомендації полягають у наступному: 1. Побудована математична модель системи з урахуванням отриманих параметрів схеми заміщення АД:
«Суднова мережа – ТПН – АД – Навантаження» в середовищі MATLAB-Simulink. 2. На основі математичної моделі проведено імітаційне моделювання та аналіз усталених несинусоїдальних
режимів, отримано гармонійний склад струмів і напруги на ділянці «Суднова мережа –ТПН» при різних часто-тах обертання ротора АД.
3. Запропонована методика розрахунку параметрів пасивних фільтрів. 4. Розраховані параметри пасивних фільтрів для компенсації вищих гармонік струмів і напруги на ділянці
«Суднова мережа – ТПН» при типових швидкостях підрулюючого пристрою. 5. Застосування розроблених мережевих пасивних фільтрів дозволило зменшити THD системи на 2,2 % при
типових швидкостях підрулюючого пристрою судна типу контейнеровоз на 8450 TEU (MAERSK SOFIA).
ЛІТЕРАТУРА 1. Инжиниринг электроприводов и систем автоматизации: учебное пособие для студ. высш. учеб. заведе-
ний/М.П.Белов, О.И.Зементов, А.Е.Козярук и др.; под ред. В.А.Новикова, Л.М.Чернигова.– М.: Издательский центр «Академия».– 2006.– 368 с.
2. Арриллага Дж.и др. Гармоники в электрических системах: Пер. с англ./Дж. Арриллага, Д. Брэдли, П.Боджер.– М.: Энергоатомиздат, 1990.– 320 с.: ил.
3. Климов В.П., Москалев А.Д. Проблемы высших гармоник в современных системах электропитания // Практическая силовая электроника. Науч.-техн.сб./Под ред. Малышкова Г.М., Лукина А.В.– М.: АОЗТ "ММП-Ирбис".– 2002. Вып 5.– 53 с.
4. Воршевский А.А., Гальперин В.Е. Электромагнитная совместимость судовых технических средств/А.А. Воршевский, В.Е.Гальперин; СПбГМТУ.– СПб.– 2006.– 317 с.
5. Электромагнитная и электромеханическая совместимость в электротехнических системах с полупровод-никовыми преобразователями: Конспект лекций /В.И. Вершинин, Э.А. Загривный, А.Е.Козярук, Санкт-Петербургский горный ин-т.СПб.– 2000.– 67 с.
6. В.П. Дьяконов MATLAB 6.5 SP1/7+Simulink 5/6. Основы применения. Серия «Библиотека профессиона-ла».– М.: СОЛОН-Пресс, 2005.– 800с.: ил.
7. Ткачук А., Кривовяз В., Копырин В., Силуков А. Плавный пуск группы высоковольтных асинхронных электроприводов центробежных механизмов.– Силовая электроника.– №2.– 2008.– С.54–57.
8. Бессонов Л. А. Теоретические основы электротехники. Электрические цепи.– М. : Гардарики, 2002. – 638 с.: ил.

Регулювання якості електричної енергії 109
Жидченко Д.В., Однолеток М.Д. Суми
Сумський державний університет
ВИБІР ФІЛЬТРКОМПЕНСУЮЧИХ ПРИСТРОЇВ ДЛЯ ДУГОВИХ ПЕЧЕЙ
Вступ. В останні роки з'явилася велика кількість нетрадиційних електроприймачів (прокатні стани, дугові сталеплавильні печі, випрямні установки) з різкозмінним навантаженням або нерівномірністю їх розподілу за фазами і наявністю несинусоїдальних струмів і напруг. Ці нові види ЕП привели до порушень якості електро-енергії.
Велике поширення на металургійних підприємствах великих дугових печей (ДП) створює такі проблеми: 1) значно зростає вартість систем електропостачання через необхідність застосування більш високих напруг; 2) значно погіршується якість електроенергії як власне на підприємстві, так і в точках його підключення до
мереж енергосистем; 3) виникають проблеми з компенсацією реактивної потужності, так як ДП мають порівняно низький cos φ
(0,7-0,78). Для підвищення якості електроенергії та cos φ в мережах з дуговими печами дуже перспективно застосову-
вати фільтрокомпенсуючі пристрої (ФКП) прямої або непрямої компенсації. Мета роботи. Метою даної роботи є вибір ФКП. Для цього необхідно вирішити три завдання: яке має бути
ФКП: групове або індивідуальні; яке ФКП найбільш надійно і економічно (прямої або непрямої компенсації); як вибрати параметри окремих елементів ФКП.
Матеріали та результати дослідження. Схема фільтрокомпенсуючого пристрою непрямої компенсації для великої ДП потужністю 140 МВА.
Рис.1 Схема фільтрокомпенсуючого пристрою
Розрахунок показав, що для зниження рівнів вищих гармонік достатня установка трьох фільтрів. Фільтри на
3 і 4-ту гармоніки є налаштованими на частоти 147,5 та 197,5 Гц відповідно. Фільтр на 2-у гармоніку є широко-смуговим фільтром типу С, він має малий опір широкому спектру гармонік, що дозволяє скоротити кількість фільтрів з ФКП і знизити в них втрати електроенергії.
Висновки. 1.Для підвищення якості електроенергії в електричних мережах з дуговими печами рекомендується застосо-
вувати індивідуальні фільтрокомпенсуючі установки непрямої компенсації. 2. Застосування ФКП дозволяє також збільшити потужність, що вводиться в піч (за рахунок стабілізації на-
пруги), знижує час плавки і підвищує продуктивність ДП.
ЛІТЕРАТУРА 1. И.В. Жежеленко, Ю.Л. Саенко Показатели качества электроэнергии и их контроль на промышленных
предприятиях. – Москва: Энергоатомиздат, 2000. 2. В.В. Суднова. Качество электрической энергии. – Москва: Энергосервис, 2000. 3. В.И. Идельчик. Электрические системы и сети. – М: Энергоатомиздат, 1989.

Регулювання якості електричної енергії 110
Матвєєнко П.І. Харків
Національний технічний університет «ХПІ»
ЗАСОБИ РЕГУЛЮВАННЯ РЕАКТИВНОЇ ПОТУЖНОСТІ В ЕНЕРГОСИСТЕМАХ
Вступ. У сучасних електричних мережах існує проблема підтримки номінальних рівнів напруги. Ця про-блема тісно пов'язана з властивістю високовольтних ліній електропередачі (повітряних і кабельних) генерувати в електричну мережу реактивну енергію (РЕ). Вона ускладнюється недостатнім об'ємом, або відсутністю, засобів компенсації РЕ, нерівномірним розподілом потоків РЕ між мережами різного класу напруг, що приво-дить до надмірного підвищення рівнів напруги.
У ряді випадків для підтримки необхідного рівня напруги в системі доцільно синхронні генераторі (СГ) ви-користовувати в режимі синхронного компенсатора (СК). Включений в мережу СГ переводиться в режим СК припиненням подачі в турбіну енергоносія (пари або води), тобто припиненням видачі СГ-м активної потужності в енергосистему. Потім, регулюючи збудження, можна примусити СК працювати з перезбуджуван-ням, тобто віддавати РЕ в мережу, або з недозбудженням, і споживати РЕ з мережі. Але тривала робота ТГ в режимі СК з перезбуджуванням з часом приводить до прискореного зносу ТГ, а, у ряді випадків, і до аварійних відключень із-за руйнування торцевих зон статорів, оскільки синхронні ТГ не розраховані на ці режими.
Ціль роботи - встановити перспективність переводу СГ в режим СК для постійної експлуатації в режимі компенсації. Це питання актуальне для електростанцій з ТГ потужністю до 200 МВт, особливо з урахуванням практично повного зносу електроустаткування теплових електростанцій
Матеріали і результати дослідження. Слідством збільшення напруги в енергомережах є прискорений знос і підвищена аварійність електроустаткування. Для вирішення цієї проблеми вживаються спеціальні заходи, які приводять до погіршення показників стійкості і економічності роботи енергосистем. Зокрема, для нормалізації рівнів напруги, персонал електростанцій, що працюють на шини 110-750 кВ, вимушений переводити турбоге-нератори (ТГ) в режими споживання РЕ, що дозволяє декілька понизити рівні напруги. Також не менш важли-вими і все більш актуальними є проблеми підвищення стійкості і надійності роботи електроенергетичних сис-тем в цілому з урахуванням тенденції до збільшення перетікань потужності по існуючих лініях електропередач і забезпечення транспорту електроенергії на значні відстані.
У сучасних електричних мережах є проблеми підтримання нормативних рівнів напруги. Ця проблема тісно пов'язана з властивістю високовольтних ліній електропередачі (повітряних і кабельних) генерувати в електрич-ну мережу реактивну потужність (РП). Вона ускладнюється недостатнім обсягом або відсутністю коштів компенсації РП, нерівномірним рас-розподілом потоків РП між мережами різного класу напруги тощо, що при-зводить до надмірного підвищення рівнів напруги. Наслідком роботи з високими напругами є прискорений знос і підвищена аварійність електрообладнання. Для вирішення цієї проблеми приймаються спеціальні заходи, які нерідко призводять до погіршення показників - стійкості та економічності роботи енергосистем. Зокрема, для нормалізації рівнів напруги, персонал електростанцій, що працюють на шини 110-500 кВ, змушений переклада-ти турбогенератори в режими споживання РП, що дозволяє трохи знизити рівні напруги. Це з часом призводить до прискореного зносу турбогенераторів, а в ряді випадків і до аварійних відключень через руйнування торце-вих зон статорів, оскільки синхронні турбогенератори (СГ) не розраховані на ці режими.
Також не менш важливими і все більш актуальними є проблеми підвищення стійкості та надійності роботи електроенергетичних систем в цілому з урахуванням тенденції до збільшення перетоків потужності по існуючих лініях електропередач та забезпечення транспорту електроенергії на значні відстані. У ряді випадків для підтримки необхідного рівня напруги в системі доцільно СГ використовувати як СК. Включений в мережу СГ переводиться в режим СК припиненням подачі в турбіну енергоносія (пари або води). На гідротурбіни потім зривається вакуум, а якщо робоче колесо розташоване нижче рівня води в нижньому б'єфі, то додатково прово-диться віджимання води тиском повітря з ресиверів. Видалення води з робочого колеса скорочує до мінімуму втрати на його обертання. Переклад працюючого СГ в режим роботи СК проводиться шляхом припинення подачі пари або води в турбіну, тобто припиненням видачі генератором активної потужності.
Регулюючи збудження, можна змусити СК працювати з перезбудженням, тобто віддавати реактивну потужність в мережу, або з недозбудженням, тобто споживати реактивну потужність з мережі. Регулювання реактивної навантаження на СГ, переведеному на режим СК, виробляється зміною струму в роторі. Тривала робота ТГ режимі СК з перезбудженням допускається тільки при струмі збудження не вище номінального. Це з часом призводить до прискореного зносу ТГ, а в ряді випадків і до аварійних відключень через руйнування торцевих зон статорів, оскільки синхронні ТГ не розраховані на ці режими. Зворотний переклад СК в генера-торний режим здійснюється шляхом відкриття направляючого апарата для подачі води на робоче колесо турбіни та припинення подачі стисненого повітря під робоче колесо.
Синхронний компенсатор (СК) є синхронним двигуном, що працює без навантаження на валу. При цьому по обмотці якоря проходить практично тільки реактивний струм. СК може працювати в режимі поліпшення cosφ або в режимі стабілізації напруги. Звичайно електрична мережа, що живить електроенергією промислові підприємства, навантажена струмом Ін, що відстає по фазі від напруги мережі Uc (рис. 1, а). Це пояснюється тим, що від мережі одержують живлення асинхронні двигуни, у яких велика реактивна складова струму. Для поліпшення cosφ мережі СК повинен працювати в режимі перезбуджування. При цьому струм збудження

Регулювання якості електричної енергії 111
регулюється так, щоб струм якоря Іа СК випереджав на 900 напруг мережі Uc (рис. 1, а) і був приблизно рівний реактивній складовій ІNreac струму навантаження ІN. В результаті мережа завантажується тільки активним струмом навантаження Іс = ІN.act
Рисунок 1 - Векторні діаграми синхронного компенсатора в режимі
а - поліпшення cosφ мережі, б, в, г - в режимі стабілізування напруги
При роботі в режимі стабілізації напруги струм збудження СК встановлюється постійним, такого значення, щоб електрорушійна сила (ЕРС) компенсатора Е0 дорівнювала номінальній напрузі мережі UcN (рис. 1, б). У мережі при цьому є деякий струм ІN, що визначає падіння напруги
∆U ≈ IN·Rс cosφ + INXc sinφ, В де Rc і Хс—активні і індуктивні опори мережі;
φ — кут здвигу фаз між векторами напруги і струму мережі. Якщо напруга мережі в точці підключення СК дещо знижується із-за зростання струму навантаження ІN і
стає меншим за його номінальне значення, то синхронний компенсатор починає забирати з мережі реактивний випереджаючий струм Іа (рис. 1, в). Це зменшує падіння напруги в ній на величину ∆Uк=IaXc. При підвищенні напруги в мережі, коли Uc>UcN, синхронний компенсатор завантажує мережу реактивним відстаючим струмом Іа (рис. 1, г), що приводить до збільшення падіння напруги на величину ∆Uк = IaXc.
При достатній потужності СК коливання напруги в мережі не перевищують 0,5... 1,0%. Недоліком вказаного методу стабілізації напруги є те, що CK завантажує лінію реактивним струмом, збільшуючи втрати в ній. Але при перекладі в режим недозбудження ця проблема зникає і, більш того, СК розвантажує енергомережа від надмірного реактивного струму. Тривала робота ТГ в режимі СК з перезбуджуванням допускається тільки при струмі збудження не вище номінального. У генераторів з безпосереднім охолоджуванням cosφ < 0,95÷0,96. При підвищенні cosφ = 1,0 тривало можуть працювати тільки генератори з непрямим охолоджуванням.
Виводи: 1) на відміну від активної потужності, реактивна енергія (РЕ) не виконує корисної роботи, вона служить лише для створення магнітних полій у індуктивних приймачах і циркулює весь час між джерелом струму і приймачами; 2) основними джерелами РЕ є синхронні генератори та ЛЕП, але передача її від джерела енергії до споживача має недоліки: додаткові втрати активної потужності; напруга біля споживача знижується, тим самим знижується якість електричної енергії; зменшується пропускна здібність мережі, що позбавляє спо-живача перспективи розвитку. Як рішення, використовують встановлення біля споживачів допоміжних джерел РЕ статичних батарей конденсаторів, синхронних і тиристорних компенсаторів, синхронних двигунів; 3) знач-ний знос електрообладнання ТЕС привів до того, що електромережі знаходяться на межі повного розвалу, про-те реабілітація зношеного електрообладнання не завжди рентабельна. Доказано, що для ТГ потужністю до 200 МВт, які потребують капітального ремонту, перспективно розглядати зміни режиму експлуатації. В роботі за-пропоновано розглянути можливість принципової зміни системи його експлуатації, що є новим і перспектив-ним; 4) запропоновано розглядати подальші напрямки використання старого електрообладнання з ухваленням рішень на урядовому рівні.
ЛІТЕРАТУРА
1. Шевченко В.В., Матвеенко П.И. Способы регулирования реактивной мощности в энергосистемах // 5-а щорічна міжвузівська НТК викладачів, молодих вчених та студентів «ЕЕннееррггоо-- ттаа рреессууррссооззббееррііггааююччіі ттееххннооллооггііїї ппррии ееккссппллууааттааццііїї ммаашшиинн ттаа ууссттааттккуувваанннняя»»,, 2013 р., Донецький інститут залізничного транспорту. – С. 53-54.
2. Шевченко В.В., Матвеенко П.И. О целесообразности перевода турбогенераторов в режим синхронных компенсаторов // Международный симпозиум «Проблеми удосконалення електричних машин і апаратів. Теорія і практика», SIEMA /2013, Харьков, 2013, НТУ «ХПИ». – Вестник НТУ «ХПИ», № 3, 2014.

Регулювання якості електричної енергії 112
Опришко М.О., Хребтова Т.О. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
АНАЛІЗ ПОКАЗНИКІВ ЯКОСТІ ЕЛЕКТРИЧНОЇ ЕНЕРГІЇ
Вступ. В Україні діє стандарт ГОСТ 13109-97 «Электрическая энергия. Совместимость технических средств электромагнитная. Нормы качества электрической энергии в системах электроснабжения общего на-значения», який встановлює показники і норми якості електричної енергії (ЯЕ) в електричних мережах загаль-ного призначення змінного трифазного і однофазного струму частотою 50 Гц в точках, до яких приєднуються електричні мережі або приймачі електричної енергії. Відхилення ЯЕ від нормованих значень погіршує умови експлуатації електрообладнання енергопостачальних організацій та споживачів електроенергії, може призвести до значних збитків як в промисловості, так і у побутовому секторі.
Мета роботи. Аналіз показників якості електричної енергії (ПЯЕ) на відповідність вимогам ГОСТ 13109-97 за результатами експериментальних вимірювань та розробка рекомендацій щодо їх поліпшення.
Матеріал та результати досліджень. У роботі проведено експериментальні дослідження та аналіз показників якості електричної енергії (ПЯЕ) підстанція ЗАТ JT International Ukraine. Крім регламентованих ГОСТом показників здійснено аналіз додаткових факторів, які впливають на режими роботи мережі живлення.
На підстанції встановлено два трансформатора по 1600кВА. Трансформатори працюють з коефіцієнтами за-вантаження близькими до 0,85-0,95. Два вводи 0,4 кВ забезпечені системами компенсації реактивної потужності по 1240 квар кожна. Для регулювання реактивної потужності використовуються контролери реактивної потужності ABB RVC 12. При вимірюваннях режимів роботи підстанції фіксувалися миттєві зна-чення струмів фаз А, В і С, а також фазні напруги А, В і С. Датчики струму включалися у вторинні кола існуючих трансформаторів струму (АВВ 3000/5 типу CT12/3000, 40 ВА, клас 0,5).
Аналіз несиметрії струмів показав нормальну рівномірність завантаження фаз мережі живлення. Аналіз струму нульової послідовності показав, що основна його складова утворена вищими складовими струмів. Фор-ма кривої струму нульової послідовності характеризується істотними піками з великими значеннями похідної, що, при неправильно організованому заземленні обладнання нелінійних споживачів, може призводити до ви-никнення суттєвих кондуктивних перешкод в інформаційних і сигнальних лініях.
Аналіз несинусоїдальності струмів показав значну кількість нелінійних споживачів близько 20-40% для 1-го вводу та близько 70-90% для 2-го вводу від загальної споживаної активної потужності.
Розрахунок додаткових втрат, як наслідок впливу збільшення значення 5,7,11 і 13 гармонік струму, у провідниках і обмотках трансформатора показує збільшення загальних втрат на величину до 3% для 1-го вводу, що може бути причиною незначних перевищень температури та до 7% для 2-го вводу, що може бути причиною помітних перевищень температури.
Наявність вищих гармонік напруги може призводити до перегріву конденсаторних батарей системи компенсації реактивної потужності. Так, розрахунки показали, що ефективні значення струмів конденсаторних батарей при зафіксованому під час проведених вимірювань гармонійному складі напруг перевищує номінальне на величину від 9 % до 15 % , що є істотним фактором зниження ресурсу напрацювання на відмову всієї систе-ми компенсації реактивної потужності.
Аналіз змінної складової трифазної активної потужності показав, що при виникненні необхідності нейтралізації вищих гармонік струму в лініях мережі живлення доцільно розглянути два варіанти:
– аналіз силових схем перетворювачів частоти на предмет достатності параметрів дроселів у колах змінного або постійного струму. Для зменшення впливу роботи перетворювача на мережу живлення можлива установка додаткових дроселів або заміна існуючих дроселів дроселями зі збільшеною індуктивністю.
– установка у вузлах підключення найбільшого числа нелінійних споживачів (перетворювачів частоти і т.д.) активних напівпровідникових компенсаторів. Зазначені пристрої працюють як в режимі компенсації вищих гармонік струму, так і в режимі симетрування струмів в мережі. Розрахункова потужність змінної складової трифазної активної потужності становить не більше 150 кВА для 1-го вводу і 100 кВА для 2-го вводу. Номінальний струм активних напівпровідникових компенсаторів розраховується на підставі середньоквадра-тичного значення вищих гармонік струму, для розглянутих режимів роботи розрахунковий струм на фазу ак-тивного компенсатора не перевищує 200А для 1-го воду та 150 А для 2-го воду. Для компенсації вищих гармонік рекомендується використання пристроїв типу PQFM компанії ABB для активної фільтрації вищих гармонік в промислових мережах обмеженою потужності.
Висновок. Результатами обробки експериментальних вимірів режимів роботи підстанції ЗАТ JT International Ukraine показали відповідність ПЯЕ ГОСТу 13109-97, але додаткові дослідження щодо можливості виникнення перешкод та перегріву обмоток трансформаторів та компенсаторних конденсаторів показали необхідність вживання заходів щодо поліпшення ЯЕ.
ЛІТЕРАТУРА
1. Жежеленко И.В. Вопросы качества электроэнергии в электроустановках / И.В. Жежеленко, Ю.Л. Саенко – Мариуполь: ПГТУ, 1996. – 173 с. 2. Жежеленко И.В. Качество электроэнергии на промышленных предприятиях / И.В. Жежеленко, М.Л. Раби-

Регулювання якості електричної енергії 113
нович, В.М. Божко – Киев: Техника. 1981. – 160 с. 3. ГОСТ 13109-97 «Электрическая энергия. Совместимость технических средств электромагнитная. Нормы качества электрической энергии в системах электроснабжения общего назначения»

Електротехнічні системи і комплекси транспортних засобів 114
СЕКЦІЯ
«ЕЛЕКТРОТЕХНІЧНІ СИСТЕМИ І КОМПЛЕКСИ ТРАНСПОРТНИХ
ЗАСОБІВ»

Електротехнічні системи і комплекси транспортних засобів 115
Бур’янова М.І., Літвіненко М.В. Харків
Харківський національний університет міського господарства імені О.М.Бекетова
ПІДВИЩЕННЯ ЕФЕКТИВНОСТІ РОБОТИ РЕОСТАТНОГО ГАЛЬМА ТРОЛЕЙБУСІВ З ТЯГОВИМ ДВИГУНОМ ПОСТІЙНОГО СТРУМУ
Вступ. Поліпшення транспортного обслуговування пасажирів вимагає підвищення ефективності роботи міського електротранспорту. Особлива роль при цьому відводиться надійності та економічності роботи рухомо-го складу, що визнано основним напрямком при створенні і модернізації міського електротранспорту. Сучас-ний стан економіки України негативно впливає на технічний стан транспорту, що знаходиться в експлуатації. Це викликало необхідність вирішення завдань підвищення ефективності його експлуатації, шляхом модернізації , яка враховує як передовий досвід технічного розвитку, так і специфіку перехідного періоду в Україні - зниження кількості експлуатованого парку, недостатня кількість коштів для підтримки нормального технічного стану.У роботі наведені результати досліджень та вирішення питань, пов'язаних з підвищенням ефективності експлуатації тролейбусу з електродвигуном постійного струму і зниженням витрати електроенергії, що досягається модернізацією електричної схеми гальмівного режиму. У роботі проаналізовано способи гальмування тягових електродвигунів послідовного і змішаного збудження, які використовуються на сучасному рухомому складі та запропоновано пристрій стосовно до тролейбусу. Причому при мінімальній зміні силової схеми тролейбуса, вдалося використати намагнічуючу силу послідовної обмотки в режимі гальмуван-ня.
Мета роботи. Поліпшення транспортного обслуговування пасажирів вимагає підвищення ефективності ро-боти міського електротранспорту. Особлива роль при цьому відводиться надійності та економічності робо-ти рухомого складу, що визнано основним напрямком при створенні і модернізації міського електротранспор-ту.
Матеріали та результати дослідження. -Аналіз способів гальмування тягових електродвигунів послідовного і змішаного збудження; -Зроблено розрахунок гальмівних характеристик тягового електродвигуна з урахуванням зміни силової еле-
ктричної схеми тролейбуса; -На основі отриманих даних була представлена модернізована схема тролейбуса. Висновки. Розроблена електрична схема силового ланцюга, при роботі якої в гальмівному режимі викорис-
товується як серієсна, так і шунтова обмотки при узгодженому їх включенні, а також виконується секціонуван-ня гальмівного опору.
ЛІТЕРАТУРА
1. Розенфельд В.Е., Исаев И.П., Сидоров Н.Н. Теория электрической тяги. - М.: Транспорт, 1983.-328 с. 2. Байрыева Л.С., Шевченко В.В. Электрическая тяга. Городской наземный транспорт-М.: Транспорт,
1986.-206 с. 3. Кутыловский М.П. Электрическая тяга. Городской электрический транспорт. М.: Изд-во лит-ры по
строительству, 1970.-263 с. 4. Осипов С.И., Миронов К.А., Ревич В.И. Основы локомотивной тяги. -М.: Транспорт, 1979.-440 с. 5. Ефремов И.С., Кесарев Г.В. Теория и расчет троллейбусов (электрическое оборудование). Ч. 1 и 2.-М.:
Высшая школа, 1981.- 294 с. и 248 с. 6. Гаврилов Я.И., Мнацаканов В.А. Вагоны метрополитена с импульсными преобразователями.-М.: Транс-
порт, 1986.-230 с. Корягина Е.Е., Коськин О.А. Электрооборудование трамваев и троллейбусов.-М.: Транспорт, 1982.-296

Електротехнічні системи і комплекси транспортних засобів 116
Ващенко А.К. Харків
Харківський національний університет міського господарства
ВПРОВАДЖЕННЯ ЕЛЕКТРИЧНОГО ПІДСИЛЮВАЧА РУЛЬОВОГО КЕРУВАННЯ НА ВІТЧИЗНЯНОМУ ТРОЛЕЙБУСІ
Вступ. Міський електричний транспорт повинен забезпечувати: високу надійність і безпеку руху; надати максимум зручностей для пасажирів при мінімальній вартості перевезень; високу швидкість повідомлення і достатню провізну здатність; необхідну частоту і регулярність руху по лінії; хорошу маневреність; мінімальний шум. У роботі розроблена конструкція рульового керування тролейбуса з електропідсилювачем керма, яка від-повідає перерахованим вище вимогам.
Мета роботи. Впровадження електропідсилювача керма на вітчизняному тролейбусі ЗіУ–9. Матеріали та результати дослідження. Як показав докладний аналіз тих, що існують в світі конструкцій,
проведений в процесі виконання роботи, вибране рульове керування виявляє такі переваги, як відносну просто-ту конструкції, при мінімальному числі шарнірів, рівномірний розподіл опор пружних елементів і несучих вер-тикальне навантаження шарнірів по довжині тролейбуса, що знижує непідпружинину масу, підвищення попе-речної жорсткості підвіски без збільшення її вертикальної жорсткості, зниження трудомісткості технічного об-слуговування, пониження висоти підлоги в салоні тролейбуса, підвищення маневреності за рахунок зменшення радіусу повороту і тощо.
Окрім розрахункових і конструкторських опрацьовувань конструкції механічних частин в роботі приділено увагу питанням економічної ефективності впроваджуваного вузла.
При впроваджені електропідсилювача стала проблема полегшення зусилля на кермо з боку водія без гідрав-лічного або пневматичного носія. Існує три типу підсилювача, гідравлічний, електрогідравлічний і електрич-ний. У гідропідсилювачі є поршень, по праву і ліву сторони якого знаходиться рідина під постійним тиском, який підтримується за допомогою насоса, що працює від двигуна. Також присутній золотник, який, реагуючи на поворот керма, перекриває певний канал, щоб допомогти повернути кермо. Мінусом такого пристрою є на-сос, який може працювати тільки при включеному двигуні. Цей недолік усунений в електрогідропідсилювачі. У ньому насос для створення тиску приводиться в дію за допомогою електромотора, який може працювати від акумулятора, а значить, при вимкненому двигуні. Такий підхід дозволяє зняти навантаження з двигуна, тим самим віддати додаткові кінські сили для руху. У електропідсилювачі немає ніякого поршня (рис.). Тут елект-ромотор безпосередньо сполучений з рейкою рульового управління. Гідністю такої системи є те, що тут немає ніякої рідини, а значить, немає і ніяких протікань. До того ж така конструкція достатньо компактна.
Рис. – Електропідсилювач
Висновки. Застосування електропідсилювача дасть можливість зменшити вагу тролейбуса і значно спрос-
тить компоновку підкузовного простору тролейбуса. Також це приведе до зменшення енерговитрат оскільки електропідсилювач позбавлений режиму холостого ходу.
Розробка і впровадження конструкції електропідсилювача керма дозволить значною мірою полегшити пра-цю водія безрейкового рухомого складу міського електротранспорту, збільшити чіткість і швидкодію системи, як в поворотах, так і на прямих ділянках дороги і, головне, сприятиме підвищенню безпеки руху в місті.
ЛІТЕРАТУРА
1. Максимов А.Н. «Городской электрический транспорт. Троллейбус» М., «ACADEMA» − 2008. 2. Ефремов И.С. Теория и расчет механического оборудования подвижного состава городского электриче-
ского транспорта/ И. С. Ефремов, Б. П. Гущо–Малков. – М.: Транспорт, 1970. – 480 с.

Електротехнічні системи і комплекси транспортних засобів 117
Дмитрук А.І., Косьянова А.Н. Харків
Харківська національний університет міського господарства ім.О.М.Бекетова
ПРОЕКТ СТРУННОГО ТРАНСПОРТНОГО ЗАСОБУ З ІМПЕЛЛЕРОМ
Вступ. Необхідність вирішення проблем розвитку та модернізації наземних транспортних засобів (ТЗ) на сучасному етапі розвитку потребує дослідження можливостей використання нових концептуальних рішень при розробці нових та модернізації існуючих наземних ТЗ.
Мета роботи. Аналіз ефективності струнного ТЗ та розробка концептуальної моделі підвісного трамваю з аеродинамічним рушієм.
Матеріали та результати дослідження. Розроблена математична модель та проведено аналіз левітаційних властивостей транспортних засобів з різними принципами створення тяги. Доведено, що використання аероди-намічного рушія є більш ефективним на швидкостях руху більше 60 км/год. Коефіцієнт корисної дії спроекто-ваного багато лопатевого повітряного гвинта (імпелера) складає 85%, що дозволяє стверджувати про ефектив-ність струнного транспорту з аеродинамічним рушієм.
Висновки. Запропонована концептуальна модель струнного транспортного засобу другого рівня з додатко-вим рушієм аеродинамічного типу – імпеллером, який дозволяє покращити характеристики струнного транспо-ртного засобу другого рівня (підвісного трамваю) на великих швидкостях руху, а також на ділянках дорозі з великими нахилами.
Література
1. Юницкий А.Э. Струнная транспортная система (варианты), способ изготовления и монтажа пролетного отрезка струнной рельсовой нити (3 изобретения). Евразийский патент №005017, Кл. Е 01 В 25/24, 2003.
2. Юницкий А.Э. Отчет по проекту Программы ООН по населенным пунктам (ООН-ХАБИТАТ) № FS-RUS-02-S03 «Обеспечение устойчивого развития населенных пунктов и защита городской окружающей среды с ис-пользованием струнной транспортной системы» – М.: Федеральное агентство по строительству и жилищно-коммунальному хозяйству (Госстрой России), 2004. — 155 с.
4. Борин А.А. К оценке энергетического совершенства различных видов транспорта // Ученые записки ЦАГИ.- 1971. –Т.2, №6, стр. 140-145.
5. Емцев Б.Т. Техническая гидромеханика, - М.: Машиностроение, 1987.

Електротехнічні системи і комплекси транспортних засобів 118
Жеваженко С.М., Кучинська С.І. Харків
Харківський національний університет міського господарства імені О.М.Бекетова
ПІДВИЩЕННЯ ЕНЕРГОЕФЕКТИВНОСТІ ТЯГОВОГО ЕЛЕКТРОПРИВОДА ТРОЛЕЙБУСА В РЕЖИМІ ОСЛАБЛЕННЯ ПОЛЯ
Вступ. Застосування ослаблення поля тягових електродвигунів послідовного та змішаного збудження на мі-ському електричному транспорті є важливим заходом, спрямованим на підвищення ефективності його роботи і має в зв’язку з цим безпосереднє практичне значення. На даний час для розширення діапазону регулювання швидкості електричного транспорту з тяговими двигунами послідовного збудження застосовують режим осла-блення поля за рахунок зменшення величини магнітного потоку.
Матеріали та результати дослідження. Аналіз способів регулювання збудження тягових двигунів постійного струму; На основі отриманої інформації удосконалення імпульсних схем; Розробка енергоефективного пристрою для регулювання частоти обертання двигуна послідовного збуджен-
ня; Побудова залежності необхідної ємності від струму якоря двигуна при різних коефіцієнтах ослаблення поля
та різних напругах заряду Висновки Розроблена електрична принципова схема енергоефективного пристрою для регулювання частоти обертання
двигуна послідовного збудження має ряд переваг. Визначено, що запропонований спосіб ослаблення поля може бути використано на будь-якому електричному транспорті з тяговими електричними двигунами послідовного збудження
Література
1.Єфремов И.С., Косарев Г.Е. Теория и расчет троллейбуса: Электрическое оборудование. В 2-х ч. / И.С. Єфремов -М.: Высш. шк., 1981.-Ч1-293с.,Ч.2-248 с.
2.Тихменев Б.Н. Подвижной состав электрифицированных железных дорог. Теория работы электрооборудо-вания. Электрические схемы и аппараты. / Б.Н. Тихменев, Л.М.Трахтман – М.: Транспорт, 1980,- 471 с.
3.Проектирование систем управления электроподвижным составом / Н.А. Ротанов, Д.Д. Захарченко, А.В. Плакс, В.И. Некрасов, Ю.М. Иньков; Под ред. Н.А. Ротанова. – М.: Транспорт, 1986,- 327 с.
4. Патент № 2471652 Российская Федерація, МПК (2006.01) B60L15/08 Способ ослабления возбуждения тя-говых электродвигателей локомотива. / Руденко В.Ф., Егоров М.А.,Спиридонов Д.С.; заявитель и правооблада-тель Открытое акционерное общество "Российские железные дороги". – № 2471652, заявл. 20.07.2011; опубл. 10.01.2013.
5. Москаленко В.В. Автоматизированный электропривод / В.В. Москаленко– М.: Энергоатомиздат, 1986,- 416 с.
6. Корягина Е.Е. Электрооборудование трамваев и троллейбусов / Е.Е. Корягина, О.А Коськин – М.: Транспорт, 1982,- 296 с.
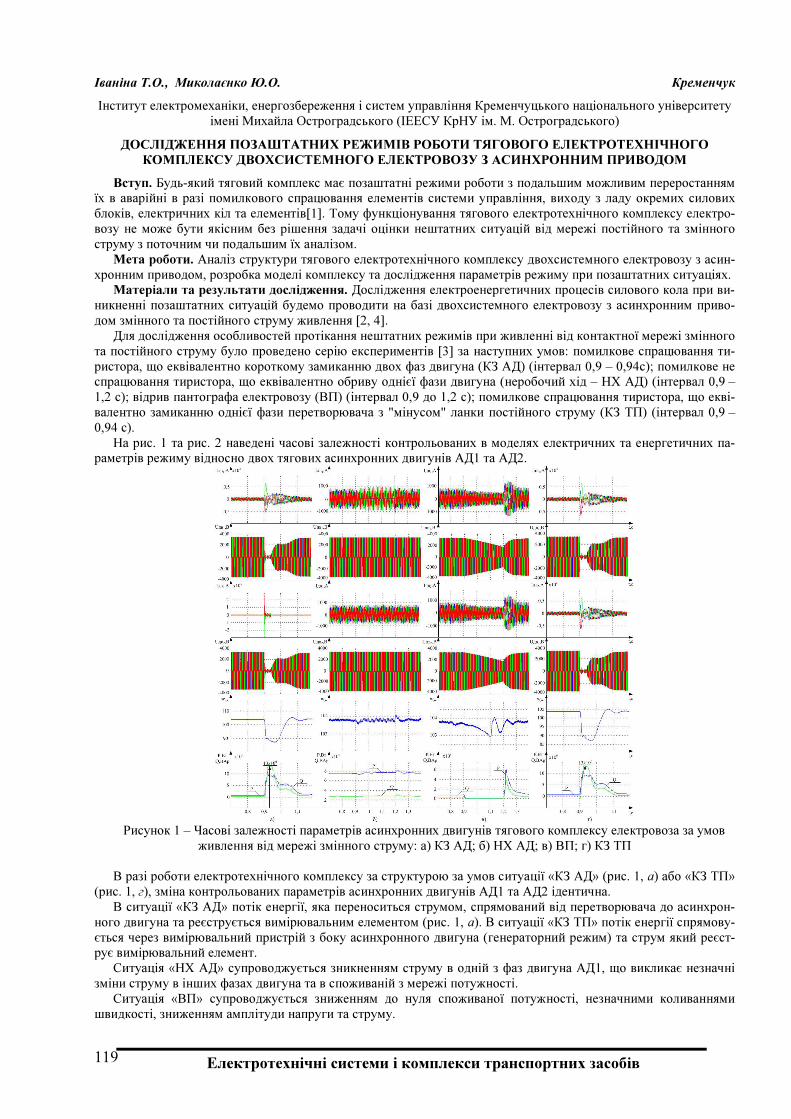
Електротехнічні системи і комплекси транспортних засобів 119
Іваніна Т.О., Миколаєнко Ю.О. Кременчук
Інститут електромеханіки, енергозбереження і систем управління Кременчуцького національного університету імені Михайла Остроградського (ІЕЕСУ КрНУ ім. М. Остроградського)
ДОСЛІДЖЕННЯ ПОЗАШТАТНИХ РЕЖИМІВ РОБОТИ ТЯГОВОГО ЕЛЕКТРОТЕХНІЧНОГО КОМПЛЕКСУ ДВОХСИСТЕМНОГО ЕЛЕКТРОВОЗУ З АСИНХРОННИМ ПРИВОДОМ
Вступ. Будь-який тяговий комплекс має позаштатні режими роботи з подальшим можливим переростанням їх в аварійні в разі помилкового спрацювання елементів системи управління, виходу з ладу окремих силових блоків, електричних кіл та елементів[1]. Тому функціонування тягового електротехнічного комплексу електро-возу не може бути якісним без рішення задачі оцінки нештатних ситуацій від мережі постійного та змінного струму з поточним чи подальшим їх аналізом.
Мета роботи. Аналіз структури тягового електротехнічного комплексу двохсистемного електровозу з асин-хронним приводом, розробка моделі комплексу та дослідження параметрів режиму при позаштатних ситуаціях.
Матеріали та результати дослідження. Дослідження електроенергетичних процесів силового кола при ви-никненні позаштатних ситуацій будемо проводити на базі двохсистемного електровозу з асинхронним приво-дом змінного та постійного струму живлення [2, 4].
Для дослідження особливостей протікання нештатних режимів при живленні від контактної мережі змінного та постійного струму було проведено серію експериментів [3] за наступних умов: помилкове спрацювання ти-ристора, що еквівалентно короткому замиканню двох фаз двигуна (КЗ АД) (інтервал 0,9 – 0,94с); помилкове не спрацювання тиристора, що еквівалентно обриву однієї фази двигуна (неробочий хід – НХ АД) (інтервал 0,9 – 1,2 с); відрив пантографа електровозу (ВП) (інтервал 0,9 до 1,2 с); помилкове спрацювання тиристора, що екві-валентно замиканню однієї фази перетворювача з "мінусом" ланки постійного струму (КЗ ТП) (інтервал 0,9 – 0,94 с).
На рис. 1 та рис. 2 наведені часові залежності контрольованих в моделях електричних та енергетичних па-раметрів режиму відносно двох тягових асинхронних двигунів АД1 та АД2.
Рисунок 1 – Часові залежності параметрів асинхронних двигунів тягового комплексу електровоза за умов
живлення від мережі змінного струму: а) КЗ АД; б) НХ АД; в) ВП; г) КЗ ТП В разі роботи електротехнічного комплексу за структурою за умов ситуації «КЗ АД» (рис. 1, а) або «КЗ ТП»
(рис. 1, г), зміна контрольованих параметрів асинхронних двигунів АД1 та АД2 ідентична. В ситуації «КЗ АД» потік енергії, яка переноситься струмом, спрямований від перетворювача до асинхрон-
ного двигуна та реєструється вимірювальним елементом (рис. 1, а). В ситуації «КЗ ТП» потік енергії спрямову-ється через вимірювальний пристрій з боку асинхронного двигуна (генераторний режим) та струм який реєст-рує вимірювальний елемент.
Ситуація «НХ АД» супроводжується зникненням струму в одній з фаз двигуна АД1, що викликає незначні зміни струму в інших фазах двигуна та в споживаній з мережі потужності.
Ситуація «ВП» супроводжується зниженням до нуля споживаної потужності, незначними коливаннями швидкості, зниженням амплітуди напруги та струму.

Електротехнічні системи і комплекси транспортних засобів 120
Ситуації «КЗ АД» та «КЗ ТП» у разі роботи комплексу від мережі постійного струму (рис. 2) мають ознаки загальні із визначеними для аналогічних ситуацій на рис. 1, а саме: неприпустимі збільшення струмів, зниження швидкості обертання. Але в той же час їм властиві деякі відмінності у постситуативному проміжку часу. Зни-ження швидкості не настільки значне, як на рис. 1, а, г; схема з’єднання елементів фільтру та живлення елект-родвигунів АД1 та АД2 від окремих перетворювачів призводить до перерозподілу напруги на конденсаторах та коливальній її зміні.
Ситуація «НХ АД» має спільні ознаки з відповідною ситуацією при живленні комплексу від мережі змінно-го струму, але окрім цього має відмінності.
Рисунок 2 – Часові залежності параметрів асинхронних двигунів тягового комплексу електровоза за умов
живлення від мережі постійного струму: а) КЗ АД; б) НХ АД; в) ВП; г) КЗ ТП Зважаючи на схему з’єднання елементів комплексу та наявність накопичувачів ситуація «ВП» споживана
потужність, амплітуди напруги та струму двох двигунів різко знижуються до нуля в момент відриву пантогра-фу та знову поновлюються до номінальних значень при підключенні пантографу до контактної мережі.
Висновки. Аналіз електричних параметрів в часі у разі виникнення нештатних ситуації та після їх усунення дозволив виявити ознаки, які вирізняють кожну з них не зважаючи на аналогію їх розвитку при живленні елек-тротехнічного комплексу від мережі змінного чи постійного струмів: ознака, яка відрізняє ситуацію «КЗ АД» від «КЗ ТП» є саме амплітуда струму відносного другого двигуна системи; ознаки ситуації «НХ АД» – високо-частотні коливання швидкості та відсутність струму у вимірювальному елементі; зникнення ситуації «ВП» ви-кликає заряд накопичувачів, що супроводжується різким збільшенням потоку споживаної потужності, зростан-ням амплітуди напруги та струму без значних перебільшень; ознаки, які відрізняють ситуації «КЗ АД» та «КЗ ТП» у разі роботи комплексу від мережі постійного струму є збільшення та зменшення напруги в колах двигу-нів АД1 та АД2 відповідно, та перетворювача; ознаки, які відрізняють ситуації «НХ АД» у разі роботи компле-ксу від мережі постійного струму (рис. 2, б) є більша частота коливань швидкості та збільшення напруг та струмів працюючих обмоток двигунів.
ЛІТЕРАТУРА
1. Основы электрического транспорта: учебник для студ. Высш. учеб. заведений/ (М.А. Слепцов, Г.П. До-лаберидзе, А.В. Прокопович и др); под общ. ред. М.А. Слепцова. – М.: Издательский центр «Академия», 2006. – 464с.
2. Система управления и диагностики электровоза ЭП10/ Под ред. С.В. Покровского. – М.: Интекст,2009. – 356с.
3. Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystem и Simulink. – М.: ДМК Пресс; СПб.: Питер, 2008. – 288с.
4. Электроподвижной состав с асинхронными тяговыми двигателями/ Н.А. Ротанов, А.С. Курбасов, Ю.Г. Быков, В.В. Литовченко; под ред. Н.А. Ротанова. – М.: Транспорт, 1991. – 336с.

Електротехнічні системи і комплекси транспортних засобів 121
Кулик Д.В., Леонтьєв П.О. Харків
Харківський національний університет міського господарства імені О.М Бекетова
ТЯГОВИЙ ЕЛЕКТРОПРИВОД АВТОБУСА З ГІБРИДНОЮ СИЛОВОЮ УСТАНОВКОЮ
Вступ. На сьогоднішній день значна увага приділяється проблемам економії енергоресурсів та екології на транспорті [1-3]. Велика кількість автомобілів на дорогах, особливо в мегаполісах, змусила більш уважно по-ставитись до екологічних проблем. Для перевезення пасажирів все більше використовуються автобуси з двигу-нами внутрішнього згорання. Тому є актуальним використання для міських перевезень автобусів з гібридними енергоустановками, що дозволить суттєво економити енергоресурси та покращити екологію міст[4,5].
Мета роботи. Обґрунтування необхідності створення автобусів з гібридними силовими установками. для міських пасажирських перевезень.
Матеріали та результати дослідження. Автобуси з гібридними силовими установками можуть вирішувати економічні та екологічні проблеми міст. Світовий досвід показує, що найбільш перспективним способом вирішення цих проблем є розробка та удосконалення гібридних силових установок. Такі установки дозволяють оптимізувати режими роботи двигуна внутрішнього згоряння (ДВЗ) і акумулювати надлишки кінетичної енергії транспортного засобу при гальмуванні, що надзвичайно ефективно в міському циклі руху. В якості накопичувачів енергії можуть використовуватись літій-іонні акумулятори та суперконденсатори. Використання їх поодинці недоцільне по ряду причин. Для забезпечення максимально довгого терміну служби акумулятору, необхідно його експлуатувати в режимах при номінальних струмах. При використанні його в пусковому режимі, або в режимі гальмування, коли струм значно перевищує номінальне значення, термін служби акуму-лятора суттєво зменшиться. Поєднання акумулятора та суперконденсатора в енергоустановці вирішує цю про-блему, так як суперконденсатор може за короткий час приймати і віддавати значну кількість енергії, а акумуля-тор працює при струмах, що не перевищують номінальні значення.
Завдяки вдосконаленій системі автоматичного керування (САК) забезпечується акумуляція енергії гальму-вання та необхідна розгінна динаміка автобусу. Крім того, забезпечується режим старт – стоп з мінімальним періодом холостого ходу ДВЗ у випадку короткочасних зупинок транспортного засобу. Основним завданням САК гібридної силової установки є забезпечення найбільш економічного й екологічно безпечного режиму ро-боти ДВЗ за рахунок перерозподілу навантаження між ДВЗ, тяговим електроприводом і контуром акумуляції енергії. Особливості об’єкта керування зумовлюють ієрархічну організацію САК. Необхідні режими роботи кожного агрегату силової установки забезпечуються відповідними регуляторами і блоками керування, які вра-ховують особливості побудови конкретних вузлів та агрегатів і становлять перший рівень ієрархії. Підтримка оптимального режиму роботи ДВЗ на різних режимах автобуса за рахунок перерозподілу навантаження між ДВЗ, тяговим електроприводом і контуром рекуперації енергії забезпечується елементами системи керування другого рівня ієрархії. Елементи САК третього рівня ієрархії забезпечують інтерфейс водія, який імітує керу-вання традиційним автобусом.
Висновки. Об’єднання позитивних якостей ДВЗ та тягового електроприводу на автобусі з гібридною сило-вою установкою дозволяє отримати переваги в порівнянні з традиційною конструкцією за рахунок підвищення екологічної чистоти, економії палива, поліпшення динамічних властивостей та підвищення ККД енергоуста-новки.
ЛІТЕРАТУРА 1. Богомолов В.А., Кудрявцев И.Н., Пятак А.И. и др. Развитие новейших криогенных технологий для перс-
пективных видов автомобильного транспорта // Автомобильный транспорт: Сб. науч.тр. Вып. 12. – Харьков: РИО ХНАДУ, 2004. – С.67-69.
2. Туренко А.Н., Пятак А.И., Кудрявцев И.Н. и др. Экологически чистый криогенный транспорт: современ-ное состояние и проблемы// Вестник ХГАДТУ: сб.науч. тр. Вып. 12-13. – Харьков: РИО ХГАДТУ, 2000. – С.42-47.
3. Дубинин А.В., Быков А.А., Колобов М.Г. Гибридный транспорт // Коммунальное хозяйство городов // на-уч.-техн.сб. Вып. 88. – Киев: «Техніка», 2009. – С.275-280
4. Бажинов О.В., Смирнов О.П. та ін. Гібридні автомобілі. – Харків, 2008. – 327 с. 5. Румянцев М.В., Глушенков А.В. Тяговый привод транспортных средств с конденсаторным накопителем //
Коммунальное хозяйство городов // науч.-техн.сб. Вып. 88. – Киев: «Техніка», 2009. – С.259-263.

Електротехнічні системи і комплекси транспортних засобів 122
Лабадзе Г.Г., Раздобаров А.В. Харків
Харківський національний університет міського господарства імені О.М. Бекетова
ГІБРИДНИЙ ЕЛЕКТРОМОБІЛЬ З АСИНХРОННИМ ЕЛЕКТРОПРИВОДОМ
Вступ. Одним з головних напрямків розвитку автомобільного транспорту на даний час є підвищення його економічності та екологічної безпечності. Світовий досвід показує, що найбільш перспективним способом вирішення цих проблем є розробка і удосконалення електромобілів та гібридних силових установок. Такі уста-новки дозволяють оптимізувати режими роботи ДВЗ і акумулювати надлишки кінетичної енергії транспортного засобу при гальмуванні, що надзвичайно ефективно міському циклі руху.
На сьогоднішній день існує три основні шляхи побудови електромобілів: 1) електромобілі з напівпровідниковими силовими перетворювачами; 2) гібридні електромобілі. 3) гібридні електромобілі з маховичним накопичувачем. Одно з найбільш важких науково-технічних завдань – це розробка тягового електроприводу, який
перетворює електроенергію та передає її ведучим колесам у відповідності з необхідною тяговою характеристи-кою та технологічними циклами транспортних операцій, від параметрів якого в багатьох випадках залежать експлуатаційні та техніко-економічні показники електромобіля.
Сьогодні вентильні перетворювачі – один з основних агрегатів тягового силового електрообладнання систе-ми тягового електроприводу і в значній ступені визначає її техніко-економічні показники.
Мета роботи. Обгрунтування можливості використання асинхронного електроприводу в електромобілях. Матеріали та результати дослідження. Високі тягові характеристики електроприводу, разом з відсутністю
шуму і неприємного вихлопу, дозволяли електромобілю успішно конкурувати з автомобілем. Автономні пересувні об'єкти (АПО) для пересування по суші представлені двома основними типами: авто- і електромобілями. Інші типи, такі, як електровози, тепловози, трамваї, тролейбуси, транспорт на магнітній підвісці мають тим або іншим способом обмежену автономність. Вони прив'язані або до спеціально побудова-ного шляху, або до спеціально побудованої системи енергопостачання, або до того і іншого одночасно.
Що ж є первинним джерелом енергії для згаданих вище систем? Для ДВЗ — це органічне паливо, що зберігається в спеціальному резервуарі і поповнюване на мережі заправних станцій. У електромобілі це збере-жена в ХІТ електроенергія. Високі питомі показники палива як енергоносія, в порівнянні з ХІТ, дозволило автомобілям витіснити електромобілі в область, де недоліки ДВЗ обмежували застосування останнє.
Перевага електроприводів постійного струму послідовного збудження полягає в здатності створювати висо-кий момент, що крутить, при пуску, що обуславлює їх широке розповсюдження в електроприводі малих АПО — електрокарів і машин для гольфу. До недоліків слід віднести нелінійність залежності між моментом і швидкістю, складність при реверсі, динамічному і генераторному гальмуванні. Електродвигун паралельного збудження має жорстку характеристику навантаження, але із-за низького пускового моменту не застосовується для електроприводу в автомобілі. Електродвигун незалежного збудження дозволяє варіювати характеристики в пусковому і робочому режимах, здійснювати динамічне і генераторне гальмування шляхом управління невели-ким, щодо струму якоря, струмом обмотки збудження. Схожими параметрами володіють і трифазні синхронні електродвигуни. АПО з трифазними асинхронними електродвигунами або знаходяться у стадії прототипів, або вже зняті з виробництва, як EV1 від General Motors. У гібридних автомобілів, що серійно випускаються, на-приклад, Тойота Prius, використовується саме синхронний електродвигун змінного струму. Підвищення екологічної чистоти автомобіля досягається за рахунок оптимізації процесу рекуперації енергії і зниження вит-рати палива. Система керування гібридною трансмісією вимикає двигун внутрішнього згоряння на холостому ходу, а також, коли двигун знаходиться в зоні високих питомих витрат палива, використовуючи для руху тяго-вий електричний двигун МG2. Коли умови для роботи двигуна внутрішнього згоряння сприятливі (низька пи-тома витрата палива), обертовий момент двигуна використовується для руху автомобіля і для приводу електричної машини МG1, яка працює в режимі генератора. Таким чином, система керування міняє поєднання і напрям обертових моментів усередині коробки передач, добиваючись високої паливної економічності, а, отже, і високої екологічної чистоти.
Висновки. В даній роботі доведено можливість використання асинхронного електроприводу електромобіля та вибір і розрахунок силових напівпровідникових приладів вентельного перетворювача силового агрегата сис-теми тягового привода електромобіля.
ЛІТЕРАТУРА 1. Електромеханічні системи автоматичного керування та електроприводи: навч. посібник / М.Г. Попович,
О.Ю. Лозинський, В.Б. Клепіков та ін.; за ред.. М.Г. Поповича, О.Ю. Лозинського. – К.: Либідь, 2005. – 680 с. 2. Я.И. Гаврилов, В.А. Мнацаканов «Вагоны метро с импульсными преобразователями». «Транспорт», М.: -
1986 г. 3. Моделювання електроприводів: Навч. посібник / Л.Д. Костинюк, В.І. Мороз, Я.С. Паранчук. - Львів: Ви-
давництво Національного Університету «Львівська політехніка», 2004.- 404с. 4. Преобразовательная тех. в электроприводе и электрическом транспорте: Тематический сб./ ред.: И.С. Еф-
ремов. и В.А. Лабунцов. – М. 1980 – 140с. Ил. - /труды / мош. Энергетич. ин.-т.

Електротехнічні системи і комплекси транспортних засобів 123
Миколаєнко Ю.О. Кременчук
Кременчуцький національний університет
ЕЛЕКТРОЕНЕРГЕТИЧНІ ПРОЦЕСИ В СХЕМІ ТЯГОВОГО ЕЛЕКТРОТЕХНІЧНОГО КОМПЛЕКСУ В РЕЖИМІ РЕКУПЕРАТИВНОГО ГАЛЬМУВАННЯ
Вступ. Витрати на електроенергію, споживану на тягу поїздів, становлять відчутну частку в загальних екс-плуатаційних витратах залізниць. Одним з напрямків їх зниження є повернення електроенергії (ЕЕ) при рекупе-ративному гальмуванні. Останнім часом актуальною є проблема впровадження накопичувачів енергії (НЕ) в тягові електротехнічні комплекси (ТЕТК). Пропоновані концепції орієнтовані на розв'язок різних завдань. На-приклад, рішення проблеми накопичення надлишкової енергії рекупераціїї для подальшого її використання, без передачі через контактну мережу.
Мета роботи. Аналіз та дослідження електроенергетичних процесів в системі ТЕТК в режимі рекуператив-ного гальмування та шляхів підвищення ефективності електроспоживання.
Матеріали та результати дослідження. Підвищення ефективності використання тягового електроустатку-вання на ТЕТК може бути реалізовано за рахунок повернення і накопичення енергії на накопичувачах енергії при гальмуванні. ТЕТК змінного струму мають рекуперативне гальмування порівнянне з потужністю режиму тяги. При гальмуванні поїзда використовуються електричні гальма й генерується ЕЕ. У цей час економія ЕЕ від рекуперації по мережі становить близько 3%. Рекуперативне гальмування – це вид електричного гальмування, при якому електрична енергія, що виробляється тяговими оберненими електричними машинами, які працюють в генераторному режимі, повертається на накопичувальні елементи для подальшого користування [1].
Найбільш ефективне використання НЕ в системі тягового електротранспорту досягається при його розмі-щенні безпосередньо на рухомому складі. Ємність накопичувального обладнання, установлюваного на ТЕТК, значною мірою визначається його призначенням: використання енергії електричних гальмувань або забезпе-чення автономності ходу ТЕТК. З погляду ефективності використання енергії гальмування, проектований нако-пичувач повинен працювати в буферному режимі: запасати енергію гальмування й віддавати її при наступному режимі тяги.
Для дослідження режиму рекуперації з накопиченням енергії була розгянута система ТЕТК [2] зображена на рисунку 1. Дана система містить у своєму складі такі елементи: тяговий асинхронний двигун АМ з нейтраль-ним виводом N; джерело живлення постійного струму ДЖ; 3-ф інвертор напруги ІН, який складається з 6 IGBT-транзисторів (VT1-VT6) та 6 зворотніх діодів (VD1-VD6); фільтр Ф (Сф1, Lф1), для згладження рівня напруги; пристрій накопичення Ск; силові лінії: L1 (від джерела живлення до фільта), L2 (фільтр – вхід інвертора), L3 (вихід інвертора – фазні обмотки двигуна).
Рисунок 1 – Система ТЕТК з асинхронним приводим на базі дворівневого АІН
Зображена система працює так: в режмі руху електроенергія змінного струму прикладається з джерела жив-лення ДЖ через силові лінії L1 до фільтру перетворювача Ф. По лінії L2 енергія від фільтра поступає в інвертор ІН, інвертори перетворюють енергію постійного струму в змінну для живлення асинхронних машин АМ; в ре-жимі рекуперативного гальмування асинхронна машина АМ переводиться в генераторний режим, і генерує електроенергію змінного струму. Згенерована енергія від АМ по силовим лініям L3 потрапляє до інверторів ІН(який в режимі рекуперативного гальмування працює як випрямляч), де вона перетворюється в електроенер-гію постійного струму і по силовим лініям L2 надходить до пристрою накопиченняСк.
Магістральний двохсистемний електровоз складається з трьох ідентичних за своїм складом візків з відпові-дними тяговими комплексами. Зважаючи на ідентичність кожного тягового кола розроблена модель (рис. 2), яка включає в себе лише один асинхронний двигун. Модель складена з типових напівпровідникових та елект-ричних елементів та включає: джерело живлення (Ed); вимірювач потужності та коефецієнт потужності (W); блок системи керування; інвертор; вимірювачі напруги (Vab, Va, Vc) та струму (Ia, Ib, Ic, Id); асинхронна машина (АМ), навантаження, яке предсталене блоком механічнно-електричного інтерфейсу, який перетворю параметри конденсатора в механічні (ємність відповідає моменту інерції, а напруга – кутовій швидкості).
Параметри елементів розраховані за методикою викладеною в [3] та мають наступні чисельні значення: джерело живлення постійного струму 3,3кВ
номU = ; двигун (АД) типу НТА-1200 з номінальними параметрами:
2183ВномU = , 385А
номI = , 1200кВт
номР = , 95,7%η = з параметрами схеми заміщення 0,037Ом
rr = ,

Електротехнічні системи і комплекси транспортних засобів 124
0,057Омsr = , 4
4,11 10 Гнr
L−
= ⋅ , 44,11 10 Гн
sL
−
= ⋅ . Момент інерції перерахований з розрахунку на одну вісь та
дорівнює 2120кг мJ = ⋅ . Блок формування імпульсів формує сигнали для автономного інвертора напруги з від-
повідним фазовим зрушенням для створення 3-ф системи. Асинхронна машина для режиму рекуперації прево-диться в генератоний режим за рахунок інверторного збудження (різниця між частотою живлячої мережі і маг-нітного поля статора ∆f повинна бути від'ємна).
Рисунок 2 – Модель досліджуваного ТЕТК Основними параметрами системи керування є часота живлячої напруги, та скважність. Для дослідження
особливостей протікання режиму рекуперативного гальмування було проведено серію експериментів при змі-ніфіксованої різниці частоти (∆f=10,15,20). Приведені результати моделювання (рис. 3) для частот ∆f=10,15,20 та скважності γ= 0,4. В результаті моделювання були отримані часові діаграми, зміни струму (Ia, Ib, Ic), фазна напруга (Ua), швидкість обертів АД (n), повна споживана потужність (S), та коефіцієнт потужності (cosφ), які відображають процеси в системі.
Рисунок 3 – Результати моделювання для частот ∆f=10,15,20 та скважності γ= 0,4.
Висновки. На отриманих графіках можна спостерігати, що під час гальмування двигуна (0,025-0,1с.) збіль-шується кут зрушення між фазними струмами та фазною напругою (відбувається стійка рекуперація) порівняно з режимом сталого руху. Коефіцієнт потужності на цьому ж інтервалі стає від'ємним, що означає віддачу енергії на пристрій накопичення. Режим стійкої рекуперації обмежений за часом зниження частоти двигуна на ∆f, тоб-то даний режим роботи є некерованим. Для подальшого збільшення ефективності рекуперативного гальмування потрібно створювати систему регулювання зі зворотнім зв'язком по частоті.
ЛІТЕРАТУРА
1. Валтонен П.В. Электровоз с асинхронными двигателями / П.В. Валтонен, О.Н. Жулев., В.П. Янов. // Же-лезнодорожный транспорт. 1986. –№11. – С. 37–40.
2. Магистральные электровозы. Тяговые электрические машины / В.И. Бочаров, Г.В. Василенко, А.Л. Куро-чка и др. – М.: Энергоатомиздат, 1992. – 464 с.
3. Электроподвижной состав с асинхронными тяговыми двигателями/ Н.А. Ротанов, А.С. Курбасов, Ю.Г. Быков, В.В. Литовченко; под ред. Н.А. Ротанова. – М.: Транспорт, 1991. – 336 с.

Електротехнічні системи і комплекси транспортних засобів 125
Мульгін В.С. Харків
Харківський національний автомобільно-дорожній університет
РОЗРОБКА СИСТЕМИ КЕРУВАННЯ НЕЗАСЛІПЛЮЮЧОЮ ФАРОЮ
Вступ. У даній роботі пропонується спосіб запобігання засліплення людини, що знаходиться на транспорт-ному засобі (автомобіль, поїзд, мотоцикл і т.і.), який полягає в обробці сигналу фотоелектронного приймача в блоці обробці сигналів і формування на виході блоку сигналу, призначеного для управління світлом фари.
Мета роботи. Розробка системи антизасліплення водія зустрічного транспорту для підвищення безпеки ру-ху у темний час доби та комфортності користування світловими приладами автомобіля.
Матеріали та результати дослідження. Система антизасліплення повинна задовольняти ряду вимог: бути досить простою у реалізації; забезпечувати високу чутливість і перешкодозахищеність; мати достатню надійність.
Чутливим елементом визначення інтенсивності освітлення найбільш підходящим є датчик, робота якого за-снована на світлоефекті. Він досить простий у виготовленні, його чутливість висока, а перешкодозахищеність найбільш висока. Крім того, цей тип датчика дозволяє використовувати малогабаритні чутливі елементи.
При аналізі інтерфейсу датчика освітлення розглянуті можливі варіанти сполучення датчика з автомобільною інформаційною мережею. Можна виділити основні найпоширеніші рішення: CAN-шина, пря-мий аналоговий зв'язок з основним процесором автомобіля, LIN-шина.
Найбільш надійним і зручним рішенням є CAN-шина, однак на автомобілях старих років випуску, які мож-ливо модифікувати деякі датчики з'єднані з основним процесором автомобіля напряму. По цьому необхідно розглядати наступу схему «Контролер цифрового датчика освітлення – ЦАП –Контролер управління світловим потоком».
Одна з переваг розробленої системи в тому, що за допомогою додаткового програмного модуля можна ско-регувати характеристику датчика освітлення й таким чином налаштувати роботу системи на оптимальну відстань, чутливість ока водія та інші чинники пов’язані з безпекою руху у темний час доби.
Розроблена схема була промодельована в пакеті схемотехнічного моделювання PROTEUS, рис. 1.
Рисунок 1 – Модель системи анти засліплення
Наступний етап проектування приладу полягає у оцінці роботи цифрового фільтру. Цифровий фільтр
володіє рядом істотних переваг, до яких відносяться, наприклад, висока стабільність параметрів, можливість одержувати найрізноманітніші форми АЧХ і ФЧХ. Цифрові фільтри не вимагають настроювання й легко реалізуються на ЕОМ програмними методами.
У даній роботі фільтр повинен бути виконаний на основі набору К1821 при використанні ЦАП К572ПА1. Набір К1821 складається з мікросхем: К1821ВМ85 - мікропроцесор, КР1821РФ55 - ПЗУ (ємність - 2 Кб; два 8-розрядних порти введення-виводу), КР1821РУ55 - ОЗУ (ємність - 256 байт; два 8-розрядних і один 6-розрядний порти введення-виводу, вбудований лічильник-таймер).
Вхідний сигнал цифровий, вихідний аналоговий, перетворення із цифрового сигналу в аналоговий сигнал здійснюється за допомогою ЦАП на мікросхемі К572ПА1.
Після приходу сигналу з периферійного пристрою (ПУ) на порт уведення в додатковому цифровому коді на ПУ видається сигнал квітірування. Частота дискретизації FД = 5,5 кГц, розрядність вхідного сигналу 8. Обробка повинна відбуватися в реальному масштабі часу.
Проектований пристрій і його базова конфігурація повинні містити мінімальні апаратні й програмні засоби, достатні для виконання поставленої вище завдання обробки.

Електротехнічні системи і комплекси транспортних засобів 126
Загальний алгоритм функціонування фільтра будується на основі виводів і визначень, зроблених при аналізі завдання, і містить у собі всі функції пристрою, реалізовані апаратно й реалізовані програмно. Він містить та-кож всі сигнали й повідомлення, необхідні для взаємозв'язку апаратно-реалізуємих і програмно-реалізуємих операцій.
Далі проведено розрахунок модуля підсилювача потужності світлодіодної фари. Було зроблено аналіз та вибір транзистора, який проводився по значеннях розсіюваної потужності на колекторі, граничної частоти підсилення максимального значення колекторного струму та напруги.
Друкована плата була розроблена в пакеті схемотехнічного проектування PROTEUS. Результати наведені на рис. 2.
Рисунок 2– Розташування компонентів та шари на друкованої платі
Друкована плата виконана з фольгованого склотекстоліту. Доріжки створені наступним способом. У системі
схемотехнічного проектування PROTEUS створюється шар друкованих провідників. За допомогою різних методів поліграфії створені маски наносяться на знежирену поверхню склотекстоліту. Нижній шар – у прямому відображенні. Далі відбувається процес травлення. Незахищені маскою області фольги витравлюються. Таким чином, на поверхні склотекстоліту залишаються тільки друковані провідники. Далі висвердлюються отвори під ніжки елементів електронної схеми.
Висновок. У даній роботі проведено вибір елементної бази приладу, зроблені розрахунки номіналів елементів схеми, підібрано контролер управління системою незасліплюючого елемента освітлення транспорт-ного засобу. Моделювання системи показало здатність її реагувати на підвищене освітлення. Було розглянуто можливі варіанти застосування різноманітних датчиків світла та ймовірні місця їх монтажу на поверхні кузова транспортного засобу. Аналіз, моделювання та розрахунки показали, що оптимальним варіантом використання датчика контролю можливого засліплення світлом зустрічного транспорту, є датчик робота котрого засновано-го на фотоефекті.
ЛІТЕРАТУРА 1. Б.Б. Абрантис, Н.Н. Аверьянов, А.И. Белоус и др. Микропроцессоры и микропроцессорные комплекты
интегральных микросхем. Справочник. М.: Радио и связь, 1988, Том 1. 368 с. 2. М.Алиев, Цифровая вычислительная техника и микропроцессоры, М.: 2009, 160 с. 3. В.А. Бесекерский, Н.Б. Ефимов, С.И. Зиатдинов, В.В. Изранцев, А.В. Небьшов, Н.Г. Соколов, Микропро-
цессорные системы автоматического управления. М.: Машиностроение. 1988, 365 с.

Електротехнічні системи і комплекси транспортних засобів 127
Рувінський П.В. Харків
Харківський національний автомобільно-дорожній університет
РОЗПІЗНАВАННЯ ГОЛОСОВИХ КОМАНД ЗА ДОПОМОГОЮ НЕЧІТКОЇ ЛОГІКИ. ПЕРСПЕКТИВИ ВИКОРИСТАННЯ ДАНОЇ ТЕХНОЛОГІЇ У АВТОМОБІЛЯХ
Вступ. Існує гостра потреба в створенні та технічній реалізації пристрою, який мав би змогу розпізнавати голосові. Існують спеціальні методи, що дозволяють навчити машину розуміти людські команди та реагувати на них. Одним з таких методів є використання нечіткої логіки.
Мета роботи. Розробка алгоритму для створення та реалізації пристрою для розпізнавання голосових ко-манд.
Матеріали та результати дослідження. При необхідності керування пристроєм за допомогою голосових команд немає необхідності розпізнавати складні команди, фрази та речення та проводити їх обробку. Одним з математичних інструментів для розпізнавання окремих голосових команд може слугувати нечітка логіка. На думку автора розпізнавання команд за допомогою даної технології може знайти багато різноманітних додатків в техніці та у автомобільній галузі зокрема. Це зумовлено тим, що в даному випадку необхідно розпізнати клю-чове слово та виконати дію, яка є реакцією на дану команду.
Структурна схема приладу розпізнавання людської мови. Структурна схема приладу для розпізнавання мови наведено на рис. 1.
1- мікрофон; 2- комп’ютер; 3- об’єкт керування.
Рисунок 1 – Структурна схема приладу На рис. 2 представлено структурну схему програмного продукту, за допомогою якого реалізовано
управління об’єктом керування.
1 – отримання голосової команди у форматі матриці чисел та огинаючої сигналу; 2 – ідентифікація ознак даної команди;
3 – фаззифікація ознак; 4 – причислення команди за ознаками до однієї з числа наявних команд;
5 – дефаззифікація та створення керуючого сигналу. Рисунок 2 – Структурна схема програмного продукту
Нижче приведені пояснення по роботі алгоритму розпізнавання. Для реалізації даного приладу пропонується використовувати комп’ютерну програму MATLAB, це зумов-
лено наявністю в даному пакеті програмного забезпечення достатньо досконалого вбудованого пакету Fuzzy Logic Toolbox. Ще одним аргументом для використання даного програмного забезпечення є можливість заван-тажувати аудіо файли, які записані на вбудований в комп’ютер мікрофон. Керувати зовнішнім обладнанням пропонується за допомогою вбудованих USB-портів.
При натисканні на клавішу починається запис голосової команди для подальшої обробки. Отриманий сигнал зберігається у вигляді матриці-стовпця чисел у пам’яті комп’ютера. Після цього необхідно пропустити вхідний сигнал скрізь низькочастотний фільтр. Це необхідно для того, щоб мати змогу відділити низькочастотні скла-дові. За допомогою цього проводиться ідентифікація початку та кінця самої команди на фоні навколишнього шуму. Наступна обробка проводиться лише даної виділеної команди.
Після цього визначаються типові ознаки для кожної окремої голосової команди не залежно від статі, на-строю, тембру та сили з якою говорить людина. Це проводиться при проектуванні пропонованої системи.
Ідентифікація кожної команди проводитися за класифікацією та обробкою особливих ознак. Подальша робота з ідентифікування проводитися лише за даними ознаками. Для цього необхідним є вико-
ристання пакету Fuzzy Logic Toolbox. Алгорим роботи у даному пакеті приведено на рис. 3.
2 5 3 1 4
2 1 3

Електротехнічні системи і комплекси транспортних засобів 128
Рисунок 3 – Діаграма діяльності процеса нечіткого виводу у формі діаграми діяльності мови UML
Формування бази правил для системи нечіткого виводу проводиться при проектуванні приладу. Складність
бази правил для системи нечіткого виводу залежить від кількості голосових команд на які повинна реагувати система.
Перевагами даної технології є можливість не використовувати спеціалізовані контролери, які створено для програмування на мові Fuzzy Control Language. Можна використовувати стандартні контролери. Це дає змогу скоротити витрати на створення даного пристрою.
Наявний програмний продукт може бути використаний при модернізації різноманітних систем керування, це дасть можливість застосовувати та значно поширити голосове керування у промисловості. Наявний програ-мний продукт дасть змогу створити подібну систему з розпізнавання людської мови за допомогою штучних нейронних мереж.
Висновки. Використання даної технології важливе для промисловості та техніки, особливо це стосується автомобільної галузі. Використання даної технології дозволить вирішити ряд прикладних задач: підвищення комфорту та рівня безпеки. На основі розробленого алгоритму заплановано створення та технічна реалізація пристрою для розпізнавання людських команд. Технічну реалізацію даного пристрою покладено у основу магі-стерського дослідження автора.
ЛІТЕРАТУРА
1. Штовба С. Д. Проектирование нечётких систем в среде MATLAB. – М.: Горячая линия – Телеком, 2007.– 288с., ил.
2. Леоненков А. В. Нечёткое моделирование в среде MATLAB и fuzzyTECH. – СПб.: БХВ-Петербург, 2005.– 736 с.:ил.
3. Дьяконов В., Абраменкова И. Обработка сигналов и зображений. Специальный справочник. – СПб.: Пи-тер, 2002 – 608 с.: ил.
Формування бази правил
Фаззифікація вхідних змінних
Агрегування підумов
Агрегування підвиснов-
Акумулювання виснов-

Електротехнічні системи і комплекси транспортних засобів 129
Турпак О.М. Запорожье
Запорожский национальный технический университет
ИММИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ КУРСОВОЙ УСТОЙЧИВОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА С ГУСЕНИЧНЫМИ ДВИЖИТЕЛЯМИ
Введение. Выполнение работ в условиях связанных с опасностью для здоровья и жизни человека, например, радиация, повышенные или пониженные температуры, газы и пр. требует создания самоходных устройств, спо-собных перемещаться в пространстве по заданной траектории. Применение средств передвижения малой массы и с высокой удельной мощностью делает существенным влияние ряда факторов, таких как занос (при больших скоростях передвижения) и отклонение от курса (при различной силе трения гусениц). Поэтому создание физи-ческой модели транспортного средства с гусеничными движителями и имитационной модели системы управле-ния курсовой устойчивостью является актуальной задачей.
Цель работы. Разработка имитационной модели транспортного средства с гусеничными движителями. Материалы и результаты исследования. При создании модели гусеничной машины использовалась ходо-
вая часть от радиоуправляемой модели. Опираясь на [2], была применена функциональная схема, которая пред-ставлена на рисунке 1.
Рисунок 1 – Функциональная схема физической модели Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе. Реализован на
базе микроконтроллера ADUC 841. Электрический преобразователь (ЭП). Реализован на базе микросхемы L293b Электромеханический преобразователь (ЭМП) - в модели используются два ДПТ НВ. Механический преобразователь (МП) – редукторы с передаточным числом i=19. В роли измерительного устройства выступает магнитометр LSM303DLH [3]. В качестве упрощенной модели гусеничного движителя взято колесо. Так как известны параметры редукто-
ра – построение модели движителя сводится к построению модели ДПТ НВ, который используется. Исходя из [1, 244c], двигатель постоянного тока независимого возбуждения описывается следующей систе-
мой дифференциальных и алгебраических уравнений: di
u e R i Ldt
= + ⋅ + (1)
C
dM-M J
dt
ω
= (2)
iC ⋅Φ⋅=M (3) ω⋅Φ⋅=Ce (4)
где u - напряжение на якорной обмотке двигателя, e - электродвижущая сила (ЭДС) якоря, i - ток якоря, Ф - поток, создаваемый обмоткой возбуждения, M - электромагнитный момент двигателя, MC - момент сопро-тивления движению, ω - скорость вращения вала двигателя, R - активное сопротивление якорной цепи, L - ин-дуктивность якорной цепи, J - суммарный момент инерции якоря и нагрузки, C- конструктивная константа.
Входное воздействие - напряжение (u). Выходные переменные – ток якоря (I) и скорость вращения вала (ω). Применив преобразования Лапласа к уравнениям (1) и (2), получаем:
1i(p) (u(p) e(p))
R L p= −
+ ⋅
(5)
CM(p)-M
J pω =
⋅
(6)
С использованием уравнения (3)-(6), [1, 246c] составляем имитационную модель в MatLab Simulink. Для получения параметров модели, был проведен опыт короткого замыкания и опыт с изменяемой нагруз-
кой. Данные были обработаны, произведена их регрессия с помощью пакета MathCad. После чего из них были построены электромеханические характеристики (рисунок 2) двигателей и вычислены значения констант для моделей ДПТ.
измерительное устройство
ИО МП ЭМП ЭП Р
ИП
Упр.

Електротехнічні системи і комплекси транспортних засобів 130
Рисунок 2 - Сравнение электромеханических характеристик ДПТ при 4V и 5V
По известным параметрам была составлена имитационная модель. Также были произведены следующие до-пущения:
-в качестве упрощенной модели гусеничного движителя используется колесо, расположенное в центре кор-пуса модели;
-сила движителя прикладывается в точке соприкосновения колеса с поверхностью; -индуктивность якоря L принята равной нулю, так как время переходного процесса крайне мало и ею можно
пренебречь; -момент инерции двигателя принят равным единице - для упрощения экспериментов, его влиянием на дан-
ном этапе работы также можно пренебречь. Для подтверждения адекватности измерялся радиус окружности, описываемой моделью и период оборота,
при различных значениях напряжения, подаваемого на гусеницы. Данные занесены в таблицу 1. Таблица 1 - Период одного оборота при изменении напряжения
Радиус круга, м U, B 1,5 3 4,5 6 7,5 1,5 0,3(–) 0,2(0,186) 0,167(0,125) 0,15(0,067) 3 0,3 0,5(1,567) 0,3(0,371) 0,234(0,146) 4,5 0,2 0,5 0,7(2,485) 0,4(0,482) 6 0,167 0,3 0,7 0,9 (–) 7,5 0,15 0,234 0,4 0,9
Значительная разница радиусов и времени оборотов при близких номиналах напряжений связана, в первую очередь с упрощением имитационной модели от гусеницы к колесу, в результате чего не учитывалось трение, которое, при больших массах вносит существенное влияние на траекторию движения машины и скорость.
В свою очередь при большой разнице номиналов напряжений модель теряет хорошее сцепление с поверхно-стью, и входит в занос. Что приводит к уменьшению радиуса траектории.
Выводы: 1) Предложенный алгоритм расчета рассогласования между заданным направлением и текущим направ-
лением, определенным посредством электронного компаса, позволяет снизить требования к вычислительной мощности управляющего устройства и может быть реализован на сравнительно недорогих 8-ми разрядных микроконтроллерах.
2) Полученная имитационная модель, адекватность которой подтверждается близостью результатов фи-зического эксперимента и математического моделирования, может быть использована для исследования харак-теристик системы управления курсовой устойчивостью транспортного средства с гусеничными движителями.
3) Дальнейшие исследования с целью минимизации отличия результатов моделирования от реальности при значительной разнице напряжений питания двигателей, обусловленное проскальзыванием гусениц, позво-лят создать системы управления, обеспечивающие курсовую устойчивость в условиях высоких скоростей и недостаточного сцепления с поверхностью.
ЛИТЕРАТУРА
1.Черных И.В. Моделирование электротехнических устройств в MatLab, SimPowerSystems и Simulink. – Санкт-Петербург: Питер, 2008. – 288с.
2.Электрический привод [Электронный ресурс]. Режим доступа: http://ru.wikipedia.org/wiki/Электрический_привод 3. LSM303DLH Datasheet [Электронный ресурс]. Режим доступа: http://www.st.com/web/en/resource/technical/document/datasheet/CD00260288.pdf

Енергозбереження засобами електротехніки та електромеханіки 131
СЕКЦІЯ
«ЕНЕРГОЗБЕРЕЖЕННЯ ЗАСОБАМИ ЕЛЕКТРОТЕХНІКИ ТА
ЕЛЕКТРОМЕХАНІКИ»

Енергозбереження засобами електротехніки та електромеханіки 132
Блінова А.С. Кременчук
Кременчуцький національний університет імені Михайла Остоградського
ОСОБЛИВОСТІ ПІДВИЩЕННЯ ЕНЕРГЕТИЧНИХ ПОКАЗНИКІВ АСИНХРОННОГО ДВИГУНА У СКЛАДІ ЕЛЕКТРОТЕХНІЧНОГО КОМПЛЕКСУ З РЕГУЛЬОВАНИМ ДЖЕРЕЛОМ НАПРУГИ
ЖИВЛЕННЯ
Вступ. Одними з найбільших споживачів електроенергії в системах водопостачання є двигуни змінного струму, укомплектовані в більшості випадків асинхронними двигунами (АД), на які припадає більше 60 % ене-ргії, що споживається електромеханічною системою з транспортування рідини [1-3]. Однією з особливостей функціонування таких систем є змінний режим роботи, обумовлений кривою водоспоживання споживача, що в більшості випадків призводить до недовантаження асинхронного двигуна (електропривод працює у не номіна-льному режимі). Це призводить до зниження коефіцієнту корисної дії (ККД) та коефіцієнту потужності елект-ричної машини.
Для покращення енергетичних характеристик електротехнічних систем з АД, використовуються різноманіт-ні методи. Аналіз [1, 3] дозволив виділити такі основні методи оптимізації енергетичних характеристик недова-нтажених АД: перемикання статорної обмотки з «трикутника» на «зірку»; секціювання статорних обмоток; зниження напруги в силових колах підприємств перемиканням відгалужень знижуючих трансформаторів; за-стосування найпростішого регульованого електропривода за схемою ТРН-АД; заміна недовантажених АД на менш потужні.
Рішення зі застосування того чи іншого методу оптимізації виконується на базі енергетичних чи економіч-них показників отриманих в ході розрахунків, у якості вихідних даних до яких, в більшості випадків, викорис-товують параметри, що розраховані за Т-подібною схемою заміщення електричної машини.
Мета роботи. Дослідження та визначення похибки застосування методу оптимізації енергетичних характе-ристик асинхронного двигуна з регульованим джерелом напруги живлення при використанні параметрів асинх-ронного двигуна, отриманих теоретичним та експериментальним шляхом.
Матеріали і результати дослідження. Електропривод змінного струму споживає з мережі активну і реак-тивну потужності. Активна потужність (P) витрачається на здійснення електроприводом корисної роботи і по-криття втрат у ньому, а реактивна (Q) забезпечує створення обертального магнітного поля двигуна і безпосере-дньо корисної роботи не виконує й при недовантаженні обумовлює необхідність її зменшення [1, 3].
Аналіз [1, 3] показав, що найбільш розповсюдженим методом оптимізації енергетичних показників недован-таженого асинхронного двигуна при використанні регульованого джерела живлення є підтримка на максималь-ному значенні його ККД. Так максимальний ККД двигуна при зміні навантаження , відповідає коефіцієнту регулювання напруги , в.о.:
,/ 4
.
.*11
номм
номел
номu
P
PMUUK
∆
∆⋅==
де – діюча напруга на статорі, В; – номінальна напруга статора, В; ном
M
MM
1
1* = – відносна величина мо-
менту, в.о.; – поточне значення моменту на валу АД, Нм; 95,131,287
560===
н
н
н
PMω
– номінальне значення
моменту, що розвиває двигун; , – номінальні значення корисної потужності та кутової частоті обертання
вала АД, відповідно, Вт, с-1; )(3 21
2`
2. rrIPнномел
+=∆ – номінальні електричні втрати в двигуні, Вт;
)(21. прпсноммPPPPP ∆+∆+∆−∆=∆
Σ – номінальні магнітні втрати в двигуні, Вт.
З урахуванням змінного у часі режиму навантаження та з урахуванням забезпечення максимального
ККД , споживана АД потужність:
,
121
η
ω
η
MPP ==
де – корисна потужність; – кутова частота обертання вала АД, с-1; – поточне значення моменту на валу двигуна.
Тоді, втрати в АД: .21 PPP −=∆
Також слід зазначити, що регулювання напруги в колі статора супроводжується зміною коефіцієнта потуж-ності АД, в.о.:
,cos11
11
IU
P
S
P==ϕ

Енергозбереження засобами електротехніки та електромеханіки 133
де – повна потужність, що підводиться до АД, ВА; 1 11
1
P MI
3r
ω−
= – струм в колі статора, А.
Тоді, реактивна потужність, ВАр: 2 2
1Q S P .= −
Таким чином використовуючи дані отримані теоретичним та експериментальним шляхом, для різних режи-
мів навантаження АД визначено коефіцієнт регулювання напруги , діюче значення напруги на статорі , коефіцієнт потужності та реактивну потужність (табл. 1, 2).
Аналіз табл. 1, 2 дозволяє сказати, що при використанні значень параметрів схеми заміщення слід врахову-вати похибку методу, яка за результатами розрахунку склала 30%. Так отримано, що використання даних отри-маних теоретичним шляхом призведе до хибного значення зміни напруги живлення, а отже ККД двигуна буде мати не максимальне значення.
Слід зазначити, що використання результатів розра-хунку на базі параметрів схеми заміщення отриманих теоретичним шляхом при виборі технічного рішення та його техніко-економічного обґрунтування призведе до хибного результату.
Висновки. В результаті проведеної роботи з аналізу методу, щодо оптимізації показників асинхронних дви-гунів засобами регульованого джерела живлення, виконано розрахунок його енергетичних характеристик, на базі параметрів схеми заміщення отриманих теоретичним (розрахунок Т-подібної схеми) та експериментальним шляхом. Отримано, що похибка при використанні теоретичних параметрів схеми заміщення склала 30%.
Використання значення напруги живлення обмоток статора на базі теоретичних параметрів в дійсності при-веде до невідповідності режиму роботи двигуна його навантаженню й зменшенню на 10 % ККД від максималь-ного значення.
Врахування цих особливостей допоможе обрати правильне технічне рішення при оптимізації режиму роботи недовантаженого двигуна.
ЛІТЕРАТУРА
1. Ильинский Н. Ф. Электропривод: энерго- и ресурсосбережение: учеб. пособие для студ. высш. учеб. заве-дений / Н. Ф.Ильинский, В. В.Москаленко. – М.: Издательский цент «Академия», 2008. – 208 с.
2. Сандлер А. С., Сарбатов Р. С. Автоматическое частотное управление асинхронными двигателями: учеб-ное пособие. – Москва, издательство «Энергия», 1974. – 328 с.
3.Закладний О.М., Праховник А.В., Соловей О.І. Е 65 Енергозбереження засобами промислового електро-привода: Начальний посібник. – К: Кондор, 2005. – 408 с.
Таблиця 1 Показники АД з урахуванням параметрів схеми заміщення отриманих тео-ретичним шляхом
0,8 0,7 0,6 0,5
0,7 0,65 0,6 0,55
266 247 228 209 Q 825,7 732,3 619.3 520,9
cosφ 0,63 0,625 0,63 0,627
Таблиця 2 – Показники АД з урахуванням па-раметрів схеми заміщення отриманих експери-ментальним шляхом
0,8 0,7 0,6 0,5
0,95 0,93 0,86 0,79
361 353,4 326,8 300,2 Q 603 594.5 586,5 577,8
cosφ 0,95 0,94 0,92 0,9

Енергозбереження засобами електротехніки та електромеханіки 134
Варламов А.Г. Харьков
Харківський національний університет міського господарства імені О.М. Бекетова
РОЗРОБКА РЕСУРСОЗБЕРІГАЮЧИХ ТЕХНОЛОГІЙ ПРИ ЕКСПЛУАТАЦІЇ ТА РЕМОНТІ РЕДУКТОРА ЛІФТА
Вступ. Враховуючи режими роботи електропривода ліфта, який характеризується частими пусками, під-вищене нагрівання редуктора, знос зубів колеса і збільшений бічний зазор в передачі редуктора, відчутна віб-рація, що виникає в редукторі при роботі ліфта. Причинами всіх цих негативних явищ є застаріла технологія виготовлення глобоїдних передач (нарізка зубів різцями), що не дозволяє виготовляти передачу з високим сту-пенем точності.
Разом з тим, незважаючи на те, що відбувається процес заміни ліфтового обладнання, у нас в країні все ще експлуатуються десятки тисяч ліфтів, в приводах яких застосовуються редуктори з колишніми недосконалими глобоїдним передачами. А тому перед відповідними експлуатаційними службами і раніше стоїть безліч про-блем, пов'язаних з якісним ремонтом, заміною чи модернізацією ліфтових редукторів, лебідок і приводів.
Мета роботи. обґрунтування необхідності впровадження та застосування сучасних засобів і методів змащу-
вання редуктора ліфта на підприємствах. Матеріали та результати дослідження. Техніко-економічні наслідки неравноміцності, що виражаються у
відмовах, простоях, ремонтах, підвищеній витраті запасних частин, зниженні ефективності і збільшенні вартос-ті експлуатації ліфтів, дуже значні. Тому проблема неравноміцності машин заслуговує серйозної уваги. Її слід розглядати як один з розділів проблеми надійності, оскільки більшість завдань, пов'язаних з неравнопрочнос-тью вузлів тяги ліфта, найтіснішим чином переплітається з питаннями забезпечення їх надійності.
Рис.1-Квазісжіженний шар шо утворюється в результаті дії компонента Nanoprotec.
Як відомо, нерівність ресурсів компонентів виробу може не виявлятися протягом деякого періоду його ро-
боти. У міру збільшення напрацювання виробу (або тривалості його використання) рано чи пізно виникнуть відмови окремих деталей, поступово або швидко частіших. У конструкціях невдалих, погано виготовлених або відремонтованих ці відмови виникають рано і відбуваються часто. У відпрацьованих, якісно виготовлених або відремонтованих конструкціях відмови тривалий час не виникають, а потім протягом певного періоду трапля-ються порівняно рідко.
Існує можливість створення конструкції, яка взагалі не відмовляє протягом заданої напрацювання або від-мовляє не частіше, ніж це дозволено технічними умовами. Звідси випливає наведене вище визначення терміну "равнопрочность Проведені численні випробування на машині тертя показали, що в процесі обкатки зразків тертя формується шар, який відрізняється від вихідної поверхні і типовою приробиться поверхні. Причому ко-ефіцієнт тертя після підробітки зразків знижувався на порядок і більше (з 0,1 до 0,005), а швидкість зношування знижувалася до 3-5 разів. Посилена формула складу, що сприяє активізації процесів формування нових струк-тур поверхонь тертя, що дозволяє скоротити час прояву ефектів модифікації тертя на 1 і 2 етапах обробки реду-ктора. Це легко помітити незабаром після обробки, по зниженню витрати палива, масла на чад, зниження шуму і вібрації, а також оптимізації робочого процесу редуктора і в перспективі в збільшенні його ресурсу. Активізація процесів формування нових структур на поверхнях тертя досягається додаванням в традиційний склад Nanoprotec певного типу спеціально приготовлених мінералів. Таким чином, одна з важливих переваг мастильних композицій Nanoprotec - хімічна нейтральність до основного пакету присадок масла – зберігається. Механізм дії Nanoprotec показан на рисунку 1 (Рис 1.)
Висновки. Створена поверхня має дуже високу маслоутримуючу здатність, що дозволяє процесу тертя на-близитися до гідродинамічного режиму. Тобто безпосередній контакт пари тертя зменшується за рахунок робо-ти масляного клину. Результатами формування шару є: Здатність багаторазово знижувати швидкість зношуван-

Енергозбереження засобами електротехніки та електромеханіки 135
ня вузлів тертя за рахунок створення динамічних захисних плівок, що складаються з тонкодисперсних продуктів зносу і самого НАНОПРОТЕК у вигляді квазісжіженного шару. Зниження механічних втрат, пуско-вих зносів та ймовірності задирів за рахунок зміщення характеристик тертя в область змішаного і гідродинамічного режимів. Великий час життя модифікованого шару (за відсутності критичних змін умов робо-ти вузла тертя він зберігається аж до термоциклічної втомного руйнування ). Це все за допомогою, квазісжіженного шару товщиною від 5 до 100 мкм, і дозволяє ефективно відновлювати (тобто замінює собою знос) геометричні розміри деталей тертя, знижувати зазори до номінальних, бачемо на Рис 1. На цьому ми ба-чемо нарощування шарів відбувається з такими характеристиками, які найбільш вигідні трибосистемах при да-ному режимі тертя. Тобто вхідними характеристиками є швидкість ковзання, навантаження, матеріал, мастило, циклічність, температура, шорсткість, адгезія, наклеп і т.д. А вихідними характеристиками є: товщина сформо-ваного шару, пористість, шорсткість, хвилястість, мікротвердість, пружність і т.д. Причому, зі зміною вхідних характеристик плавно змінюються і характеристики шару. Для забезпечення динамічного реагування системи є наявність в мастилі невеликих концентрацій НАНОПРОТЕК.
Література 1. Архангельский Г.Г., Вайнсон А. А., Ионов А. А. Эксплуатация и расчет лифтовых установок. – М.:
МИСИ, 1980. 2. Ермишкин В. Г. Техническое обслуживание лифтов. М., «Недра»,1977, 3.Сайт http://nanoprotec.ua/ 4. Трояновская Г.И., Зеленская М.Н. «О расчете силы трения между полимером и металлом» статья в книге
Теоретические и прикладные задачи трения, износа и смазки машин. – М.:«Наука», 1982. 5. Чутчиков П.И.Ремонт лифтов. – М.:Стройиздат, 1983 6. Трояновская Г.И., Зеленская М.Н. «О расчете силы трения между полимером и металлом» статья в книге
Теоретические и прикладные задачи трения, износа и смазки машин.– М.: «Наука»,1982.

Енергозбереження засобами електротехніки та електромеханіки 136
Величко О.В., Дубовець К.Ю. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
ХАРАКТЕРИСТИКИ ЕЛЕКТРОПРИВОДУ НАСОСНИХ КОМПЛЕКСІВ ПРИ НАЯВНОСТІ КАВІТАЦІЙНИХ ПРОЦЕСІВ У ГІДРОМЕРЕЖІ
Вступ. Насосні комплекси (НК) комунального водопостачання призначені для транспортування рідини спо-живачам. До складу електромеханічної системи з транспортування рідини входять насоси (відцентрові, осьові, діагональні) та приводні двигуни (асинхронні або синхронні), розгалужена система трубопроводу з запірно-регулювальною арматурою, споживач зі змінним режимом роботи.
Останнім часом для енергоефективного регулювання водоподачі широкого розповсюдження набула система частотно-регульованого електроприводу. Відомо, що зміна режиму роботи НК (збільшення швидкості течії рідини, температури навколишнього середовища або рідини, зменшення абсолютного тиску в системі) у відповідності з кривою водопостачання споживача в більшості випадків призводить до розвитку кавітаційних процесів у гідромережі [1-4]. Наявність останніх супроводжується збільшенням нераціональних втрат потужності на транспортування рідини, підвищеному зносу та вібрації гідравлічного обладнання.
Мета. Аналіз характеристик насосного комплексу з регульованим електроприводом при наявності кавітаційних процесів в гідросистемі на базі фізичної моделі гідротранспортної установки.
Матеріали та результати дослідження. Експериментальне дослідження характеристик НК з регульованим електроприводом при наявності кавітаційних процесів в гідросистемі проводилася на фізичній моделі насосної установки, загальний вигляд якої наведено на рис. 1. Лабораторний стенд охоплює цілий комплекс науково-
дослідних і науково-прикладних задач, однією з яких є дослідження впливу кавітаційних процесів на енергетичні характеристики НК. В якості насосів в експериментальній установці використовуються відцентрові насоси Willo MHI , оснащені трифазними асинхронними двигунами (АД) з спо-живаної потужністю 830 Вт кожен. Для зміни частоти обер-тання ЕП турбомеханізму встановлені низьковольтні трифа-зні ПЧ Lenze 8200 SMD 302L4TXA і Mitsubishi Electric FR - D700 потужністю 3 кВт і 1,5 кВт , відповідно.
Відомо, що явище кавітації розвивається, коли поточне число кавітації χ стане рівним або менше його критично-
го значення [3]. Для аналізу меж безкавітаційної роботи фізичної моделі НК при роботі насоса з регульованим еле-ктроприводом, що працює на трубопровідну мережу з ве-ртикальною трубкою Вентурі виділено три ділянки гідро-мережі (рис. 2). Криві ( )
k1H Q− , ( )
k2H Q− , що відобра-
жають межу безкавітаційного режиму роботи кожної з розглянутих ділянок гідродинамічної мережі. З їх аналізу видно, що поточний режим роботи НС, який відповідає витраті 8,5QА = м3/год, приводить до виконання умови
2_kr2 HH ≤ і розвитку кавітаційних процесів на другій
ділянці гідродинамічної мережі. У загальному випадку вираз для визначення відносної
критичної частоти обертання ЕП насоса, що забезпечує безкавітаційну роботу гідросистеми, має вигляд [4]:
n nkr _ i st _ i
st s bs _ ii 1 i 1
kr _ i0
H H
H R RR
Hν
= =
− + + =
∑ ∑,
де 2
i kr _ i st _ i i s _ i para _ ikr _ i 2
_ i kr _ i i s _ i i
H 2S R pH
2S R g
ρ χ
ρ χ ρ
−
=
−
– значення критичного напору на i-ій ділянці трубопроводу, відповідне
початку розвитку кавітаційних процесів, м; i_stH , i_sR , – протитиск, гідравлічний опір на і-ій ділянці відповідно;
n
st _ i st1 st2 st3i 1
H H H H
=
= + +∑ – сумарний протитиск в НК; і_krχ , ρ_і – критичне число кавітації та щільність рідини
на і-ій ділянці гідромережі відповідно; – прискорення вільного падіння ( 9,81 м/с2).
Рисунок 1 – Фізична модель насосної установки
Ри-сунок 2 – Характеристика НК і межі виникнення
кавітації в трубопроводі

Енергозбереження засобами електротехніки та електромеханіки 137
З урахування виразу отримано, що значення відносної частоти обертання 671,0kr =ν робочого колеса насо-
су, яке відповідає границі безкавітаційної роботи НК. Тоді, точка В перетину напірно-витратної характеристики
насоса ( ) nQH′
− при роботі з відносною частотою обертання, характеристиці мережі відповідає значення про-
дуктивності 2,4QB = м3/ч. точці В'(рис. 1) виконується умова 2_kr2 HH = , що визначає межу безкавітаційного
режиму руху рідини по трубопроводу з вертикальною трубкою Вентурі. Дослідження динамічних процесів на фізичній моделі НК (рис. 1) виконано для однакових навантажуваль-
них режимів роботи ЕП насоса за відсутності і наявності кавітаційних процесів в трубопроводі (проходження потоку рідини через трубки Вентурі) .
У ході проведення досліджень отримано експериментальні та розрахункові криві , що відображають зміну в часі: гідравлічної потужності насосу при відсутності ( )tN
n та наявності Nn_k(t) кавітаційних процесів у трубо-
проводі (рис. 2); тиску на виході насоса за відсутності ( )tp1 (рис. 2, а) та наявності p1_k(t) (рис. 2, б) кавітацій-
них процесів у трубопроводі; кутової частоти обертання насоса за відсутності ( )tω та наявності ( )tkω кавіта-
ційних процесів у трубопроводі (рис. 2).
а)
б)
Рисунок 3 – Криві зміни потужності ( )tNd
, тиску ( )tp1
, та кутової частоти обертання ( )tω при відсутнос-
ті (а) та наявності кавітаційних процесів (б) у трубопроводі Аналіз кривих, що відображають зміну в часі гідравлічної потужності насосу ( )tN k_n (рис. 3, б), тиску
( )tp k_1 (рис. 3, б) при частоті живлячої напруги 50f 1_s = Гц дозволив виділити ділянки періодичного нарос-
тання і зниження зазначених параметрів. Це в свою чергу призводить до наявності коливань кутової швидкості обертання робочого колеса насосу з амплітудою 5=ω∆ с-1 та частотою 25,1fkav = Гц.
Отримано для експериментальної установки, що похибка при отриманні значення відносної критичної час-тоти обертання склала 2,23%
Висновки. Для фізичної моделі насосної установки визначено діапазон значень відносної частоти обертання електропривода насосу у межах 0…0,656, що відповідає безкавітаційній роботі насосного комплексу. Підтвер-джено на фізичній моделі насосної установки адекватність методу визначення границь безкавітаційної роботи насосного комплексу, що дозволяє визначити діапазон припустимих значень зміни частоти обертання електро-привода насосу при регулюванні продуктивності в необхідних межах. Отримано, що похибка методу складає 2,23%.
Отримано, що наявність кавітаційних процесів в трубопровідній мережі електромеханічної системи з транс-портування рідини впливає на механічні та енергетичні характеристики насосного агрегату. Так в розглянутому випадку амплітуда та частота коливань швидкості обертання робочого колеса насосу при наявності кавітацій-них процесів у трубопровідній мережі склали 5=ω∆ с-1 , 25,1fkav = Гц, відповідно.
ЛІТЕРАТУРА 1. Карелин В. Я. Изнашивание лопастных насосов / В. Я. Карелин. – М.: Машиностроение, 1983. – 168 с. 2. Карелин В.Я. Кавитационные явления в центробежных и осевых насосах. – М.: Машиностроение, 1975. – 336 с. 3. Пирсол И. Кавитация. – М.: МИР, 1975. – 94 с. 4. Сердюк А. А. Влияние параметров трубопроводной сети на границы возникновения кавитационных / А.
А. Сердюк // Електромеханічні і енергозберігаючі системи. Щоквартальний науково-виробничий журнал. – Кременчук: КДПУ, 2008. – Вип. 1/2009 (5). – С. 43–46

Енергозбереження засобами електротехніки та електромеханіки 138
Зубань Е.С. Харьков
Национальный технический университет «ХПИ»
ВОПРОСЫ ЭНЕРГОСБЕРЕЖЕНИЯ В ЭЛЕКТРОМАШИНОСТРОЕНИИ
Введение. Электроэнергетика - основа развития всех отраслей промышленности, жилищно-коммунального сектора и государства в целом. Повышение энергоэффективности снижает риски и затраты, связанные с высокой энергоёмкостью украинской электроэнергетики. Для полной реализации потенциала энергоэффек-тивности необходима целенаправленная политика государства. Энергосбережение в процессе производства электрической и тепловой энергии, в системах передачи электроэнергии от источников генерации к потреби-телям, энергосбережение в потребительских сетях - относительно самостоятельные области энергосбереже-ния. В настоящее время есть значительные нерешенные проблемы, которые являются общими для всех стран: загрязнение окружающей среды; ограниченность ископаемых топливных и минеральных ресурсов; непрерыв-ный рост населения; значительные потери электроэнергии. Совершенствование основных генерирующих мощ-ностей – турбогенераторов (ТГ), – является одним из наиболее перспективных направлений энергосбережения.
Цель работы - с учетом направлений развития электроэнергетики определить для современных типов ТГв - основного электрооборудования электростанций, - возможные направления энергосбереже-ния.
Материалы и результаты исследования. Плохое техническое состояние электросетей, несовершенные системы учета вызывают увеличение потерь электроэнергии. Кроме того, проблемы возникают из-за серьезных недоработок в современных технологиях ее получения. Основой силового энергетического комплекса Украины является Объединенная энергетическая система (ОЭС), которая обеспечивает централизованное энергоснабже-ние собственных потребителей и взаимодействует с энергосистемами соседних стран. В ОЭС входят электро-станции энергогенерирующих компаний (14 ТЭС, 4 АЭС, 7 ГЭС и 1 ГАЭС, 97 ТЭЦ, 8 ВЭС, мини- и микро-ГЭС и т.д.), магистральные электрические сети национальной энергетической компании (НЭК) «Укрэнерго» и рас-пределительные электросети региональных энергоснабжающих компаний. В Украине основная выработка электроэнергии (до 52 % от общего объема) приходится на АЭС, общая мощность 15 турбогенераторов (ТГ), установленных на 4 АЭС Украины составляет 11800 МВт. Стратегия развития атомной энергетики Украины, России, Китая и ряда других стран в первой половине XXI века предусматривает дальнейший рост доли АЭС в балансе электроэнергетики страны с увеличением производства электроэнергии на них к 2020 году более чем в 2 раза. Анализ литературных источников, [1-3], позволяет сделать вывод, что указанная задача будет решаться поэтапно, путем повышения единичной мощности установленного электрооборудования, продления срока службы АЭС первого поколения, достройки энергоблоков АЭС высокой степени готовности, путем создания и ввода в строй АЭС нового поколения с высокими показателями уровня безопасности и экономичности. Причем сегодня в Украине уже не стоит вопрос только о достаточной степени безопасности АЭС, а о самой техниче-ской возможности их эксплуатации: установленное оборудование практически отработало свой ресурс. В на-стоящее время АЭС требуют немедленной модернизации. По инженерно-экономическим оценкам, модерниза-ция одного энергоблока АЭС оценивается в 130 млн.дол. Начаты единичные работы по ремонту и модерниза-ции отдельных блоков. Но это не решает проблем энергетики в целом.
За время своего жизненного цикла, начиная со стадии проектирования и до момента вывода из эксплуата-ции, любая энергетическая установка не только производит, но и потребляет энергию. Поэтому, при созда-нии новых энергетических проектов очень важно правильно оценить их эффективность, особенно в тех слу-чаях, когда речь идет о новом направлении в энергетике, где еще нет достаточного практического опыта.
Электрические машины традиционного исполнения не имеют перспектив радикального улучшения массога-баритных показателей путем повышения электромагнитных нагрузок, по крайней мере, в диапазоне малых и средних единичных мощностей. Сейчас использование активной стали и изоляционных материалов в электри-ческих машинах находится на технически допустимом пределе. Речь идет о достигнутых значениях температур, индукций, линейных нагрузок. Можно улучшить параметры электрооборудования, существенно снизив их удельную массу путем перехода на повышенные частоты вращения или на увеличение частоты тока для транс-форматоров. В некоторой степени можно ожидать улучшение характеристик машин при использовании сверх-проводников (СП-ков) с высокой температурой. Использование СП-ков в энергетике теперь перспективно, т.к. созданы СП-ки с температурой выше 77,3 К, т.е. выше температуры кипения азота.
Перспективны работы по созданию высоковольтных турбо- и гидрогенераторов. Продолжается рост мощно-сти генераторов, что приводит к возникновению проблем снижения потерь, как в самих генераторах, так и в элементах, соединяющим выводы статорной обмотки с повышающим трансформатором – промежуточным свя-зующим звеном генератора с сетью. Также необходимо разрабатывать и внедрять коммутационную аппаратуру на все возрастающие токи (при сохранении прежнего, сравнительного малого напряжения генератора). Наибо-лее очевидным решением является увеличение напряжения генератора до уровня напряжения ЛЭП, т.е. хотя бы до 110 кВ, рис. 1, 2. Эта проблема более значима для гидрогенераторов, которые территориально достаточно удалены от своих повышающих трансформаторов: размещение трансформаторов с масляным охлаждением в «теле» плотины недопустимо согласно требованиям пожаробезопасности. Поэтому трансформаторы располо-жены на значительных расстояниях. Т.е. на большие расстояния приходится передавать большие мощности при

Енергозбереження засобами електротехніки та електромеханіки 139
малых напряжениях (13 –16 кВ) и, соответственно, при больших токах. Это приводит к значительным потерям уже на первом этапе транспортирования электроэнергии к потребителю, рис. 2.
Рисунок 1 - Схематическая диаграмма включения гене-ратора в энергосеть: а – схема с повышающим транс-
форматором для обычного генератора; b – схема вклю-чения высоковольтного генератора в сеть.
1 – генератор; 2 – высоковольтный выключатель гене-ратора; 3 – разрядник; 4 – повышающий трансформа-
тор; 5 – автомат включения генератора в сеть
Рисунок 2 - Схематический разрез ГЭС с использованием новой технологии (высоковольтного гидрогенератора), всё, правее сечения А-А, устранено.
1 - машинный зал. 2 - гидрогенератор. 3 – система токо-проводов. 4 - туннельная система связи генератора,
трансформатора и СЭС. 5 – повышающий трансформа-тор
Использование высоковольтных генераторов, т.е. вариант исключения повышающего трансформатора, име-
ет ряд достоинств: 1) исключение из сети повышающего трансформатора, а также низковольтных коммутаци-онных аппаратов и шинопроводов; 2) повышение КПД системы выработки электроэнергии (на 0,5... 1,5 %); 3) уменьшение стоимости, повышение технологичности энергетической установки и стоимости её эксплуатации (снижение строительных затрат); 4) экономия материалов - электротехнической стали, меди и трансформатор-ного масла; 5) улучшение экологических условий (в связи с отсутствием трансформаторного масла); 6) воз-можность сохранения при модернизации существующих генераторов части основных сборочных единиц.
Одно из направлений развития электроэнергетики – повышение мощности в единице энергетической уста-новки, - возможно, и подкреплено созданием уже в настоящее время высокоэффективного ТГ предельной мощности. В качестве основного варианта замещения выбывающих мощностей предполагается строительство атомных энергоблоков с водо-водяными реакторами типа ВВЭР-1500 и турбоагрегатами мощностью около 1500 МВт. Для реализации проекта следует использовать возможности отечественной промышленности, доби-ваться минимальных и экономичных вложений для модернизации имеющихся производственных технологий.
Зарубежные фирмы при создании ТГ мощностью свыше 1000 МВт ориентируются на четырехполюсное ис-полнение с частотой вращения 1500 об/мин (50 Гц) или 1800 об/мин (60 Гц). Это генераторы мощностью 1150÷1360 МВт, изготовленные в Японии (Мицубиси), США (Дженерал Электрик, Вестингауз), Германии (Крафтверкюнион), Швейцарии (Броун Бовери). Наибольшей мощности 1485 МВт достигла Франция (Аль-стом).
Выводы. 1) Одно из направлений развития электроэнергетики – повышение мощности в единице энергети-ческой установки, - возможно, создан высокоэффективного турбогенератора предельной мощности.
2) Применение СП-ников в электромашиностроении позволяет уменьшить массу и габаритные размеры электрических машин, увеличить предельную мощность и КПД ТГ, получить электродвигатели с минимальным моментом инерции, с малым временем реверса, со специальными характеристиками.
3) ведутся работы по созданию высоковольтных генераторов с целью исключения повышающего трансфор-матора из цепочки генератор - трансформатор – сеть.
4) ТЭС и АЭС реализуют несовершенные, экологически вредные методы получения энергии из относитель-но низкопотенциальных источников. Значительный износ электрооборудования требует немедленного приня-тия решений по развитию новых и совершенствованию старых способов получения электроэнергии. Особенно-стью развития электроэнергетики 21 века является то, что, не отказываясь от классических, эволюционных пу-тей развития, следует искать принципиально новые способы получения электроэнергии.
ЛИТЕРАТУРА 1. Шевченко В.В., Шевченко С.Е. Направления и перспективы использования специальных типов генерато-
ров для энергетических установок с возобновляемыми источниками энергии. //Системи обробки інформації. Збірник наук. праць. - Вип. 9, 2004, с. 213-218.
2. Шевченко В.В. Проблемы и основные направления развития электроэнергетики в Украине. // Енергетика та електрифікація. - № 7(287), 2007. - С. 11 – 16.
3. Жежеленко И.В. Показатели качества электроэнергии и их контроль на промышленных предприятиях. - М: Энергоатомиздат, 2000.- 252 с.

Енергозбереження засобами електротехніки та електромеханіки 140
Омельницький А.Є. Дніпродзержинськ
Дніпродзержинський державний технічний університет
СИСТЕМА КЕРУВАННЯ ПЕРЕМІЩЕННЯМ ЕЛЕКТРОДІВ ДУГОВОЇ СТАЛЕПЛАВИЛЬНОЇ ПЕЧІ
Вступ. Однією з особливостей сучасного світового ринку сталі є зростання обсягів продукції, що виплавля-ється в дугових електросталеплавильних печах (ДСП) змінного струму. Вітчизняні та зарубіжні металургійні підприємства використовують ДСП для виробництва низько- і средньовуглецевих, легованих і високолегованих сталей. При цьому дугова електросталеплавильна піч залишається одним з найбільш енергоємних агрегатів, які застосовуються у чорній металургії, що в свою чергу призводить до задач зниження енергоспоживання ДСП. Існує два основних способи вирішення енергетичної проблеми дугових електросталеплавильних печей: засто-сування ДСП нових конструкцій і модернізація існуючих дугових сталеплавильних печей. При цьому доціль-ною, з економічної точки зору, слід визнати модернізацію ДСП шляхом створення сучасної системи управлін-ня, що базується на ефективному законі управління.
Мета роботи. Синтез системи керування переміщенням електродів ДСП, для отримання оптимального за-кону керування з метою зменшення енерго затрат.
Матеріали та результати дослідження. Нехай переміщення електродів дугової сталеплавильної печі здійс-нюється за рахунок трьох електричних приводів постійного струму. Тоді рух силової частини електричного приводу однієї фази може бути описаний системою лінійних диференціальних рівнянь:
И
СЯ
М
П
Я Я Я
П УПП
П П
pP K ,
MRp I ,
T C C
E С IpI ,
R T T
K uEpE ,
T T
ω
ω
=
= ⋅ − Φ Φ
− Φ= −
= − +
(1)
де d
pdt
= ; ПE - е.р.с. підсилювача-перетворювача потужності; I - струм якірного ланцюга двигуна; ω - кутова
швидкість двигуна; Уu - напруга управління перетворювачем; С - конструкційна стала двигуна; Φ - магнетний
потік двигуна; СM -момент навантаження; ЯR - опір якірного ланцюга; ЯТ - електромагнітна стала часу якір-
ного ланцюга; МT - електромеханічна стала часу якірного ланцюга; ПT - стала часу підсилювача-
перетворювача потужності; ПK - коефіцієнт підсилення підсилювача-перетворювача потужності; ИK - коефі-
цієнт пропорційності.
Структурна схема об’єкта управління зображена на рис.1. Коефіцієнт пропорційності И
K знаходиться за
допомогою отриманої залежності активної потужності кожної фази від довжини дуги цієї фази. Якщо функція
)(iilP лінеаризована за методом січних так як це показано на рис. 2, тоді
1 0И РЕД РЕД
1 0
P PP 1K K K
l l l 2
−∆= =
∆ −, (2)
де РЕДK - коефіцієнт передачі редуктора.
Рис. 1. Структурна схема об’єкта управління

Енергозбереження засобами електротехніки та електромеханіки 141
Рис. 2. Лінеарація функції )(
iilP
Для синтезу системи управління рухом електродів дугових сталеплавильних печей слід розробити регуля-
тор, який забезпечує досягнення заданого значення активної потужності кожної фази. Крім того для зниження динамічного навантаження на електрод система управління має містити регулятор струму двигуна.
Отриманий керуючий вплив регулятору струму має вигляд:
30 ПРC 3 32 33 34
MAX MAX ПMAX
A EI IU sat k A A A
p I E
ω
ω
∗ − = + + −
, (3)
Отриманий керуючий вплив регулятору потужності має вигляд:
ПРП 1 11 12 13 14
MAX MAX MAX ПMAX
EP P IU sat k A A A A
P I E
ω
ω
∗ − = − − −
, (4)
де MAXω - максимальна кутова швидкість двигуна; MAXI - струм короткого замикання двигуна; ПMAXE . –
максимальна е.р.с. підсилювача-перетворювача потужності; MAXP - максимальне значення активної
потужності. Висновки. Синтезована система управління рухом електродів дугових електросталеплавильних печей, яка
заснована на отриманій вперше лінеаризованій залежності активної потужності, що подається в піч кожною фазою, від довжини дуги цієї фази, з високою точністю забезпечує досягнення заданої траєкторії зміни значен-ня потужності, яка надходить у робочий простір ДСП.
ЛІТЕРАТУРА
1. Садовой А.В., Яшина К.В. Исследование влияния электрических параметров дуговых сталеплавильных печей на режим их тепловой работы// Вісник НУ «ЛП» «Електроенергетичні та електромеханічні системи». – 2009. - № 654. – С. 192 – 199.
2. Садовой А.В., Яшина К.В. Исследование электрических процессов в дуговых электросталеплавильных печах// Научный вестник Донбасской государственной машиностроительной академии. – 2009. - № 1(4Е). – С. 156 – 164.
3. Яшина К.В., Садовой А.В. Математическая модель электрических процессов в дуговых электросталепла-вильных печах// Материалы Межгосударственной научно-методической конференции «Проблемы математиче-кого моделирования». – Днепродзержинск, 2009. – С. 117 – 119.

Енергозбереження засобами електротехніки та електромеханіки 142
Ошовський С.В., Мирко В.М. Кременчук
Кременчуцький національний університет імені Михайла Остроградського
МЕТОД ОЦІНКИ ЕНЕРГОЕФЕКТИВНОСТІ НАСОСНИХ КОМПЛЕКСІВ З РЕГУЛЬОВАНИМ
ЕЛЕКТРОПРИВОДОМ
Вступ. Насосні комплекси (НК) є складними енергоємними системами з високою аварійністю й неефектив-ними методами регулювання технологічних параметрів. Змінний у часі характер водоспоживання призводить до необхідності регулювання режимів насосних агрегатів (НА). Досі для управління роботою НК використову-ють релейно-контактні схеми, недоліками яких є: велика частота ввімкнень/вимкнень НА (для НА систем водо-відведення сягає 50…60 разів на добу); передчасний знос обладнання через прямий некерований пуск/зупинку електродвигунів; значні динамічні навантаження в НК у результаті запуску насоса на відкриту засувку; гідро-удари через неможливість якісно й надійно реалізувати захист некерованою трубопровідної арматурою. Унас-лідок зношеності обладнання, неузгодження параметрів і характеристик електромеханічного обладнання з ре-жимами роботи споживача технічні показники елементів НК погіршуються в процесі експлуатації. Це призво-дить до зниження ККД насоса на 8…12 %, напору – на 10…20 %, відхилення продуктивності від паспортних параметрів до 20…30 %, збільшення енергоспоживання НК до 50 %.
Існуючі підходи підвищення ефективності НК [1-4] зводяться до застосування регульованого електроприво-да (ЕП) як основи енергозбереження в НК, що дозволяє здійснити економію електроенергії до 30 %, чистої води – до 5…10 %, стоків – 2…7 %. Однак такі підходи не враховують вплив параметрів гідромережі й споживача на робочі режими НА, зміну гідравлічних характеристик насосного та трубопровідного обладнання в результаті зносу на енергопоказники всієї системи. У зв'язку з цим для підвищення ефективності функціонування НК не-обхідна оцінка енергетичних показників всього силового каналу НК з урахуванням вищезазначених чинників.
Мета роботи. Підвищення енергоефективності насосних комплексів з регульованим електроприводом. Матеріали і результати дослідження. В роботі запропонований метод оцінки енергоефективності НК, який
враховує розподіл енергії і втрат енергії на всіх елементах силового каналу НК при змінному характері наван-таження, різних схемах регулювання технологічного параметра та змінених в процесі експлуатації характерис-тик електрогідравлічного обладнання [5-8].
В основі методу лежить математичний апарат для визначення енергії і втрат енергії на всіх елементах сило-вого каналу НК, основні формули якого наведені нижче.
Сумарні втрати потужності в силовому каналі НК:
im cp p mrP P P P PΣ Σ
∆ = ∆ + ∆ + ∆ + ∆ , (1)
де ∆PΣim – втрати потужності в асинхронному двигуні, що визначаються за відомими в теорії ЕП виразами; ∆Pcp=Рsh–Рucp – втрати потужності у відцентровому насосі; ∆Pp=ρgQ∆hl/1000 – втрати потужності на ділянці трубопроводу; Рsh=A3ν
2Q+B3νQ2+D3ν3 – потужність на валу насоса; Рucp=ρgHQ – гідравлічна потужність на ви-
ході насоса; Q – продуктивність насоса; ρ – щільність рідини; g – прискорення вільного падіння; H=A2ν
2+B2νQ+C2Q2 – напірно-витратна характеристика насоса; A2, B2, C2, A3, B3, D3 – коефіцієнти апроксима-
ції, що залежать від конструктивних особливостей відцентрової машини й визначаються за паспортними напір-но-витратною і потужнісною характеристикам насоса; ν – відносна частота обертання насоса; ∆hl=λlυ2/(2gd) – втрати напору за довжиною (формула Вейсбаха–Дарсі); λ – коефіцієнт гідравлічного опору (коефіцієнт Дарсі), що залежить від режиму течії рідини; l – довжина трубопроводу; υ – середня швидкість руху рідини; d – діаметр трубопроводу; ∆Pmr – втрати потужності залежно від методу регулювання технологічного параметра, що вико-ристовується.
В роботі виконаний аналіз енергетичних показників для двох найбільш широко розповсюджених на практи-ці методів регулювання: зміною частоти обертання НА й дроселювання.
При дроселюванні втрати потужності на засувці складають: ∆Pv=ρgQ1∆Hv/1000, (2)
де ∆Hv=H1–Hs–RpQ2
1 – втрати напору на засувці; H1, Q1 – напір і продуктивність, що відповідають положенню дросельної засувки з гідравлічним опором рівним Rv відповідно; Hs, Rp – статичний напір і гідродинамічний опір гідромережі, відповідно.
При зміні частоти обертання НА втрати потужності в перетворювачі частоти: ∆PΣfc= ∆Рrect+∆Рinv+2∆Рtr, (3)
де ∆Рrect, ∆Рinv, ∆Рtr – втрати потужності, відповідно, в інверторі, випрямлячі перетворювача частоти й трансфо-рматорі.
Тоді споживана потужність НК: при зміні частоти обертання НА
Pg=∆PΣfc+P1=∆PΣfc+∆PΣim+Рsh; (4) при дроселюванні
Pg=P1=∆PΣim+Рsh, (5) де P1 – потужність, що підводиться до електродвигуна.
Урахування змінених в процесі експлуатації характеристик насоса здійснюється уточненням значень коефі-цієнтів апроксимації, які входять до опису напірно-витратної та енергетичної характеристик:

Енергозбереження засобами електротехніки та електромеханіки 143
H'=A'2ν2+B'2νQ+C'2Q
2; (6) Р'=A'3ν
2Q+B'3νQ2+D'3ν3, (7)
де A'2, B'2, C'2, А'3, В'3, D'3 – коефіцієнти апроксимації, що залежать від конструктивних особливостей відцент-рової машини й визначаються на базі вимірювань поточних параметрів напору і витрати на виході насоса. Ця процедура може бути виконана під час запуску НА при проведенні планово-попереджувальних ремонтів або введенні в роботу іншого (чи резервного) НА.
Аналіз отриманих діаграм розподілу енергії й втрат енергії у всіх елементах силового каналу НК, виконаний для насосної станції II-го підйому системи водопостачання м. Кременчука (з параметрами: продуктивність на-соса Q=2000 м3/с, напір Н=100 м, потужність Р=800 кВт, номінальна частота обертання nn=980 об/хв; довжина трубопровідної мережі l=5 км, діаметр d=0,8 м, протитиск Hs = 10 м, гідродинамічний опір Rp = 292 с2/м5), до-зволив визначити складові, де має місце найбільший резерв енергозбереження.
Так, при відпрацюванні добового графіка водоспоживання зміною частоти обертання в межах 40 % униз від номінальної енергоспоживання НК на 19 % нижче, ніж при використанні дроселювання потоку рідини на вихо-ді насоса. Причому найбільше зниження втрат енергії спостерігається в насосі (до 30 %) і на засувці (у 3,5 рази). При відхиленні (до 10 %) поточних експлуатаційних характеристик насоса від паспортних у результаті зносу енергоспоживання збільшилося на 23 %, сумарні втрати потужності зросли на 70 %. При цьому підвищилися втрати потужності в насосі (на 80%) і в трубопроводі (у 5 разів).
Отримано, що для розглянутого НК з необхідним діапазоном регулювання продуктивності в межах 40 % униз від номінальної енергоефективною схемою регулювання технологічних параметрів є зміна частоти обер-тання НА, оскільки розрахунковий період окупності системи автоматичного керування НК, в основі якої ле-жить пропонований метод, становить 1,4 року, що не перевищує нормативного терміну окупності. При відхи-ленні (10 %) поточних експлуатаційних характеристик насоса від паспортних у результаті зносу доцільна замі-на насоса на новий, зважаючи, що різниця грошових витрат на втрати енергії в насосі зі зміненими і паспорт-ними експлуатаційними характеристиками насоса перевищує вартість нового насоса [9].
Перевірка запропонованого у роботі методу оцінки енергоефективості НК виконана на експериментальній установці, яка включає НА, оснащений ЕП за схемою перетворювач частоті-асинхронний двигун, запірно-регулюючі пристрої й контрольно-вимірювальну апаратуру. Метод оцінки ефективності НК підтверджується отриманими на основі експериментальних досліджень діаграмами розподілу потужності і втрат потужності у всіх елементах силового каналу насосного комплексу [5].
Висновки. Запропонований метод оцінки енергоефективності насосних комплексів може бути використа-ний в основі енергоресурсозберігаючих алгоритмах керування насосними комплексами з регульованим елект-роприводом. Підтверджено на експериментальній насосній установці доцільність запропонованого методу з урахуванням змінених в процесі експлуатації характеристик обладнання, фактичного графіка роботи спожива-ча, способу управління технологічними параметрами.
ЛІТЕРАТУРА
1. Лезнов Б.С. Энергосбережение и регулируемый привод в насосных и воздуходувных установках / Б.С. Лезнов. – М.: Энергоатомиздат, 2006. – 360 с.
2. Закладной А.Н. Энергосбережение средствами промышленного электропривода / А.Н. Закладной, А.В. Праховник, А.И. Соловей. − К.: ДИЯ, 2001. – 343 с.
3. Петросов В.А. Устойчивость водоснабжения / В.А. Петросов. – Харьков: Фактор, 2007. – 357 с. 4. Грянко Л.П. Обратимые гидромашины / Л.П. Грянко, Н.И. Зубарев, В.А. Умов, С.А. Шумилин. – Л.: Ма-
шиностроение, 1981. – 263 с. 5. Алексеева Ю.А. Оценка потерь мощности в экспериментальном насосном комплексе // Електромеханічні і
енергозберігаючі системи. – Кременчук: КрНУ, 2013. − Вип. 1/2013 (21). – С. 81–89. 6. Загирняк М. В. Система повышения эффективности электромеханических комплексов / М. В. Загирняк,
Т. В. Коренькова, Ю. А. Алексеева // Электротехника. – М.: Знак, 2012. – № 7. – С. 2–8. 7. Zagirnyak M. Energy and resource saving control system for pumping station / M. Zagirnyak, T. Korenkova,
I. Alieksieieva // Przegląd Elektrotechniczny. – Iss. 2013. – № 2b. – РР. 76–79. 8. Пат. 67313 України на корисну модель, МПК (2011.01) F04D 13/00, F04D 15/00. Спосіб керування енерге-
тичними режимами гідротранспортного комплексу / Родькін Д.Й., Коренькова Т.В., Алєксєєва Ю.О. // Кремен-чуцький національний університет імені Михайла Остроградського. № u201109888; заявл. 09.08.2011, опубл. 10.02.2012, Бюл. № 3/2012.
9 Алексеева Ю.А. Технико-экономические показатели системы комплексного повышения эффективности насосных станций / Ю.А. Алексеева, Т.В. Коренькова // Енергозбереження. Енергетика. Енергоаудит. Загально-державний науково-виробничий і інформаційних журнал. – Харків, 2012. – № 12/2012 (106). – С. 25–31.

Алфавітний покажчик авторів 144
АЛФАВІТНИЙ ПОКАЖЧИК АВТОРІВ
—А—
Абакумов И. ............................................................. 44
Авраменко Д.С......................................................... 46
Аландар В.О............................................................. 31
—Б—
Бажинова Т.О. .......................................................... 8
Балала М.І. .............................................................. 89
Баранцов Д............................................................... 48
Безнікова О.В......................................................... 103
Березка О.І. ............................................................ 104
Біліченко В.М. ......................................................... 64
Блінова А.С. ........................................................... 132
Бречко О.Ю.............................................................. 10
Бровка О.В. .............................................................. 21
Брус М.І. ................................................................... 50
Бур’янова М.І. ....................................................... 115
—В—
Варламов А.Г. ........................................................ 134
Ващенко А.К.......................................................... 116
Введенський В.Р. ..................................................... 51
Величко О.В........................................................... 136
Вялий М.К................................................................ 66
—Г—
Гадай В.О. ................................................................ 90
Герасименко А.І.. .................................................... 81
Герасименко Р.В. .................................................. 105
Гитман Е.Э. ............................................................ 53
Глазев Д.О. ............................................................. 107
Горюшкин Н.И........................................................ 92
Гринишин Р.О. ........................................................ 12
Гуков В.В. ................................................................. 67
—Д—
Дмитрів О.В. ........................................................... 34
Дмитрук А.І. ......................................................... 117
Довбиш А.О.............................................................. 32
Домбровский Е. ....................................................... 48
Дубовець К.Ю. ....................................................... 136
Дяговченко І.М. ....................................................... 82
—Ж—
Жеваженко С.М. ................................................... 118
Жидченко Д.В. ....................................................... 109
Жижеріна І.О. ......................................................... 89
—З—
Захарчук А.И............................................................ 54
Зиняк А.Ю................................................................ 23
Зубань Е.С. ............................................................. 138
—І—
Іваніна Т.О.. ........................................................... 119
Іванов С.О................................................................. 84
Ігнатова О.І............................................................. 84
—К—
Коваленко О.І. ......................................................... 56
Коваль І.С................................................................. 69
Кокуб І.І.................................................................... 28
Колодяжна Н.М. ..................................................... 35
Косьянова А.Н. ...................................................... 117
Кошевой О.П............................................................ 94
Кравцов Д.І............................................................... 37
Красільнікова Д.Ю.................................................. 71
Кулик Д.В. .............................................................. 121
Куліш Я.Р. ................................................................ 96
Кучинська С.І......................................................... 118
—Л—
Лабадзе Г.Г............................................................. 122
Леонтьев П.О. ....................................................... 121
Леонтьєва Т.В. ........................................................ 39
Літвіненко М.В. .................................................... 115
Любовець А.І. ........................................................... 86
—М—
Манько Р.М.............................................................. 41
Матвєєнко П.І....................................................... 110
Медяник Б.С. ........................................................... 14
Миколаєнко Ю.О........................................... 119, 123
Мирко В.М. ............................................................ 142
Мокрий А.Ю............................................................. 71
Молодковець Б. І. .................................................... 16
Москаленко Я.Г. ...................................................... 39
Москалець М.І. ........................................................ 58
Мульгін В.С. ........................................................... 125
—Н—
Нагорний Д.О........................................................... 50
Наумчук Л.М............................................................ 25
Наход Є.Ю................................................................ 14
Нестеров І.О............................................................ 73
Новомлинсикий В.А................................................ 75
—О—
Однолеток М.Д. .................................................... 109
Омельницький А.Є.. .............................................. 140
Опришко М.О. ....................................................... 112
Ошовський С.В. ..................................................... 142
—П—
Панченко В.В........................................................... 23

Алфавітний покажчик авторів
145
Панченко М.О. ........................................................ 98
Пісемський О. В. ..................................................... 27
Полишко Н. М......................................................... 18
—Р—
Раздобаров А.В. ..................................................... 122
Рекуненко М.Ю. ...................................................... 81
Рувінський П.В.. .................................................... 127
Рудик М.А................................................................. 28
—С—
Сватенко А.О. ......................................................... 77
Серьоженко С.Ю. ................................................... 34
Синяговський Д.В. ................................................ 105
Скотаренко М.А. .................................................... 82
Смірнов Ю.І. ............................................................ 60
—Т—
Ткачев А.А................................................................ 75
Ткаченко Ю.В.......................................................... 21
Тоболкин С.Ю. ........................................................ 78
Турпак О.М............................................................. 129
—Ф—
Федоров Р.В. ............................................................ 66
Федорова Я.В. ........................................................ 100
Федотьєв А.В........................................................... 46
—Х—
Ханкишиєва М.С. .................................................. 100
Хребтова Т.О......................................................... 112
Христовий Б.А. ....................................................... 41
—Ч—
Чаленко А.О............................................................. 69
Чечоткіна К.В......................................................... 62
—Ш—
Шупилюк А.В. ......................................................... 62

146
Всеукраїнський конкурс студентських наукових робіт в галузі „Електротехніка та електромеханіка” Збірник рефератів робіт
Технічний редактор: Цабенко М.В. Комп’ютерна верстка: Цабенко М.В. Здано до набору 12.03.2014. Підписано до друку Формат 60×84 1/8 Гарнітура «Таймс». Умовн.друк.арк. 17,0 Тираж 120.
Адреса редакції: 51918, м. Дніпродзержинськ, вул. Дніпробудівська,2. ДДТУ тел. (0569) 55 12 87 E-mail: [email protected]