Use and comparison of different types of boundary elements for 2D soil–structure interaction...
9
Use and comparison of different types of boundary elements for 2D soil–structure interaction problems I.O. Deneme a, * , H.R. Yerli b , M.H. Severcan c , A.H. Tanrikulu b , A.K. Tanrikulu b a Department of Civil Engineering, Aksaray University, 68100 Merkez, Aksaray, Turkey b Department of Civil Engineering, Cukurova University, 01330 Balcali, Adana, Turkey c Department of Civil Engineering, Nigde University, 51100 Merkez, Nigde, Turkey article info Article history: Received 25 November 2008 Received in revised form 6 January 2009 Accepted 24 January 2009 Available online 24 February 2009 Keywords: Boundary element method Elastodynamics Fourier transform space Dynamic soil–structure interaction Discontinuous boundary element abstract In this study, the usage and the comparison of some discontinuous boundary elements (constant, linear and quadratic) are investigated for 2D soil–structure interaction (SSI) problems. Based on the formula- tions presented in this study, some general purpose computer programs coded in FORTRAN77 are devel- oped for each type of discontinuous boundary elements for elastic or visco-elastic 2D SSI problems. The programs perform the analysis in Fourier transform space. The results of 2D dynamic SSI problems are compared with those in the literature. Examples studied here indicate that present formulations have sufficient computational accuracy for analyzing 2D SSI problems. As a result of this study, the use of con- stant element is more sufficient than the other type of elements. Ó 2009 Elsevier Ltd. All rights reserved. 1. Introduction Problems, which have infinite geometry, are encountered in a wide variety of engineering applications. The simulation of the un- bounded domains in numerical methods is a very important topic in dynamic soil–structure interaction problems. In this type of problems discrete formulations such as Finite Element Method (FEM) and Boundary Element Method (BEM) are mostly used. The soil–structure interaction problems are normally of very large size. This is partly because the soil region is of a semi-infinite ex- tent; as a result, its discretization contributes a large number of de- grees of freedom if the FEM is used to model the soil region. A proper modeling of the soil region to minimize the number of de- grees of freedom in association with a suitable transformation is required to reduce the size of the problem. When the FEM is used, the soil model must be truncated along appropriately defined boundaries to limit the size of the finite element mesh. Suitable boundary conditions are applied at the truncated boundaries to prevent the reflection of the waves from such boundaries. The BEM automatically accounts for propagation towards infinity and artificial boundaries are not necessary. Then, the use of dynamic infinite elements has been introduced as an alternative tool to transmitting boundaries for unbounded domain problems [1,2]. More recently, BEM is used for the analysis of soil–structure inter- action problems. In contrast to the FEM, BEM requires in general only a discretization of the boundary. Hence a smaller amount of data is needed. BEM reduces the solution of a boundary value problem to that of some integral equations which involve integrals over the bound- ary of the solution region [3–6]. In BEM, the governing equations of a problem are transformed from differential to integral equations. These integral equations involve surface integrals over the bound- ary of solution region, as well as, volume integral if internal excita- tion exists. However, the volume integrals can be carried to the boundary by using Dual Reciprocity Method [7]. The kernels appearing in integral equations are called fundamental solutions, which may be determined analytically by applying unit excitation to a fixed source point in infinite medium [8]. The second step of BEM involves the discretization of the boundary and the numerical solution of the unknown boundary quantities which are boundary tractions or displacements in elastodynamics. Having determined unknown boundary quantities, if desired, the response quantities at interior points are computed numerically. When a node is located at a point where the boundary is not smooth, i.e. has a corner point, a discontinuity in traction will occur at that node. This type of problems can be solved either duplicating the corner node or introducing the concept of discontinuous ele- ments [3]. To eliminate the discontinuity in this study, discontinu- ous boundary elements are used. On the other hand, by using the discontinuous element, there is no need to satisfy continuity con- dition between the adjacent elements. Although the uses of discon- tinuous boundary elements (linear and quadratic) are present in the literature, majority of them are concerned with fracture 0965-9978/$ - see front matter Ó 2009 Elsevier Ltd. All rights reserved. doi:10.1016/j.advengsoft.2009.01.006 * Corresponding author. Tel.: +90 382 2150953; fax: +90 382 2150592. E-mail address: [email protected] (I.O. Deneme). Advances in Engineering Software 40 (2009) 847–855 Contents lists available at ScienceDirect Advances in Engineering Software journal homepage: www.elsevier.com/locate/advengsoft
Transcript of Use and comparison of different types of boundary elements for 2D soil–structure interaction...

Advances in Engineering Software 40 (2009) 847–855
Contents lists available at ScienceDirect
Advances in Engineering Software
journal homepage: www.elsevier .com/locate /advengsoft
Use and comparison of different types of boundary elements for 2Dsoil–structure interaction problems
I.O. Deneme a,*, H.R. Yerli b, M.H. Severcan c, A.H. Tanrikulu b, A.K. Tanrikulu b
a Department of Civil Engineering, Aksaray University, 68100 Merkez, Aksaray, Turkeyb Department of Civil Engineering, Cukurova University, 01330 Balcali, Adana, Turkeyc Department of Civil Engineering, Nigde University, 51100 Merkez, Nigde, Turkey
a r t i c l e i n f o a b s t r a c t
Article history:Received 25 November 2008Received in revised form 6 January 2009Accepted 24 January 2009Available online 24 February 2009
Keywords:Boundary element methodElastodynamicsFourier transform spaceDynamic soil–structure interactionDiscontinuous boundary element
0965-9978/$ - see front matter � 2009 Elsevier Ltd. Adoi:10.1016/j.advengsoft.2009.01.006
* Corresponding author. Tel.: +90 382 2150953; faxE-mail address: [email protected] (I.O. Deneme
In this study, the usage and the comparison of some discontinuous boundary elements (constant, linearand quadratic) are investigated for 2D soil–structure interaction (SSI) problems. Based on the formula-tions presented in this study, some general purpose computer programs coded in FORTRAN77 are devel-oped for each type of discontinuous boundary elements for elastic or visco-elastic 2D SSI problems. Theprograms perform the analysis in Fourier transform space. The results of 2D dynamic SSI problems arecompared with those in the literature. Examples studied here indicate that present formulations havesufficient computational accuracy for analyzing 2D SSI problems. As a result of this study, the use of con-stant element is more sufficient than the other type of elements.
� 2009 Elsevier Ltd. All rights reserved.
1. Introduction
Problems, which have infinite geometry, are encountered in awide variety of engineering applications. The simulation of the un-bounded domains in numerical methods is a very important topicin dynamic soil–structure interaction problems. In this type ofproblems discrete formulations such as Finite Element Method(FEM) and Boundary Element Method (BEM) are mostly used.The soil–structure interaction problems are normally of very largesize. This is partly because the soil region is of a semi-infinite ex-tent; as a result, its discretization contributes a large number of de-grees of freedom if the FEM is used to model the soil region. Aproper modeling of the soil region to minimize the number of de-grees of freedom in association with a suitable transformation isrequired to reduce the size of the problem. When the FEM is used,the soil model must be truncated along appropriately definedboundaries to limit the size of the finite element mesh. Suitableboundary conditions are applied at the truncated boundaries toprevent the reflection of the waves from such boundaries. TheBEM automatically accounts for propagation towards infinity andartificial boundaries are not necessary. Then, the use of dynamicinfinite elements has been introduced as an alternative tool totransmitting boundaries for unbounded domain problems [1,2].More recently, BEM is used for the analysis of soil–structure inter-action problems. In contrast to the FEM, BEM requires in general
ll rights reserved.
: +90 382 2150592.).
only a discretization of the boundary. Hence a smaller amount ofdata is needed.
BEM reduces the solution of a boundary value problem to thatof some integral equations which involve integrals over the bound-ary of the solution region [3–6]. In BEM, the governing equations ofa problem are transformed from differential to integral equations.These integral equations involve surface integrals over the bound-ary of solution region, as well as, volume integral if internal excita-tion exists. However, the volume integrals can be carried to theboundary by using Dual Reciprocity Method [7]. The kernelsappearing in integral equations are called fundamental solutions,which may be determined analytically by applying unit excitationto a fixed source point in infinite medium [8]. The second step ofBEM involves the discretization of the boundary and the numericalsolution of the unknown boundary quantities which are boundarytractions or displacements in elastodynamics. Having determinedunknown boundary quantities, if desired, the response quantitiesat interior points are computed numerically.
When a node is located at a point where the boundary is notsmooth, i.e. has a corner point, a discontinuity in traction will occurat that node. This type of problems can be solved either duplicatingthe corner node or introducing the concept of discontinuous ele-ments [3]. To eliminate the discontinuity in this study, discontinu-ous boundary elements are used. On the other hand, by using thediscontinuous element, there is no need to satisfy continuity con-dition between the adjacent elements. Although the uses of discon-tinuous boundary elements (linear and quadratic) are present inthe literature, majority of them are concerned with fracture

+1 0 -1
ξ
1
φ
+1 0 -1
ξ
1
φ1
+1 0 -1
ξ
1
φ1
848 I.O. Deneme et al. / Advances in Engineering Software 40 (2009) 847–855
mechanics and/or crack problems. Therefore, in this study,discontinuous boundary elements (constant, linear and quadratic)are investigated especially for 2D soil–structure interactionproblems.
Elastodynamic soil–structure interaction problems based onsubstructure method is usually carried out in the frequency do-main. This is because frequency domain analysis is most effectivein treating the problem of wave propagation in a semi-infinite reg-ular soil region. Also, with the use of fast Fourier transform (FFT)[9], frequency domain analysis becomes computationally very effi-cient. Finally, when the BEM is used in the analysis, the fundamen-tal solution for the soil region is much simpler in the frequencydomain than in the time domain. Because of this, all the formula-tions are performed in Fourier transform space. Based on the for-mulation, some general purpose computer programs aredeveloped for elastic or visco-elastic medium. The programs havebeen validated through the analysis of sample problems.
2. Boundary element equation in elastodynamics
The dynamic response of a linear elastic body V bounded by thesurface S and referred to an xi coordinate system (Fig. 1) is gov-erned in Fourier transform space by the equation
@jsij þ fi þ qx2ui ¼ 0: ð1Þ
In Eq. (1), sij, ui and fi are stress, displacement and body force com-ponents, respectively. In addition, @j represents the derivative withrespect to xj (@j = @/@xj).
Boundary integral equation of elastodynamics is well estab-lished in literature [3,6,10]. It is in indicial notation and in Fouriertransform space,
c‘kukðPÞ ¼Z
SG‘kðP;QÞtkðQÞdS�
ZS
H‘kðP;QÞukðQÞdS
þZ
VG‘kðP;QÞfkðQÞdV : ð2Þ
Here, G‘k and H‘k represent first and second fundamental solutions;uk, tk and fk are displacement, traction and body force components,respectively, in Fourier transform space. P and Q are fixed (source)and varied (integration) points, respectively. c‘k is a constantdepending on the location of P. The indicial notation is used forwriting Eqs. (1) and (2) and it is assumed that the indices appearingin these equations have the range from 1 to 2 for two-dimensionalanalysis. Repeated index implies summation over the range of thatindex.
Boundary integral equation, Eq. (2), can be rewritten in matrixform as
x1
x2
P
r
rr
r
n
n
Q (xi)
Q (xi)
S
V
Fig. 1. Typical body.
cuðPÞ ¼Z
SGðP;QÞtðQÞdS�
ZS
HðP;QÞuðQÞdS
þZ
VGðP;QÞf ðQÞdV : ð3Þ
In Eq. (3), c is a matrix which is
c ¼I if P is an interior point;0 if P is outside of V ;12 I if P is on the boundary S;
8><>: ð4Þ
where I is identity matrix. It may be noted that the last expressionabove does not hold when P is a corner point [3]. The fundamentalsolutions G and H of elastodynamics have been presented in the lit-erature by taking the auxiliary system as infinite [8].
3. Numerical solution of boundary element equation
Solving boundary element equation using boundary conditions,the unknown displacement and traction components (i.e., bound-ary quantities) on the boundary S can be determined.
The boundary element equation can be solved numerically bydiscretizing the boundary S into small elements (boundary ele-ments). In this analysis, the distribution of boundary quantitiesover the elements is approximated using some shape functions.In the present study, discontinuous boundary element (constant,linear and quadratic) formulations are used. Constant elementcontains one node, linear element contains two nodes andquadratic element contains three nodes located on the element(Fig. 2).
For the numerical solution, the boundary S is discretized into Nboundary elements (Fig. 3). When boundary integral equation, Eq.(3), is written at the node Pm (m = 1, . . . ,N) of the mth boundary ele-ment the following equation can be obtained (in the absence ofbody force),
12
um ¼XN
n¼1
Gmntn �XN
n¼1
Hmnun ðm ¼ 1; . . . ;NÞ; ð5Þ
where
ξ=0.00
a) Constant
1 φ2
ξ= ± 0.67
b) Linear
1
φ2
ξ= ± 0.75
ξ= 0.00
c) Quadratic
1 φ3
Fig. 2. Interpolation functions and position of nodes.

x2
x1
Sm
Q(xi)
SnS knQ
r r
kmP
Fig. 3. Boundary element discretization of the body.
I.O. Deneme et al. / Advances in Engineering Software 40 (2009) 847–855 849
Gmn ¼Z
Sn
GðPkm;QÞdS; Hmn ¼
ZSn
HðPkm;QÞdS; ð6Þ
in which Sn is the boundary of the nth element (Fig. 3). In Eq. (5), un
and tn are associated with the nth boundary element. It should benoted that the node Pk
m is not a corner point. Thus, c = ½ I is used.According to the boundary element formulation; coordinates,
displacement and traction components of a point can be defined as
xi ¼Xq
k¼1
/kðnÞxki ; ð7Þ
ui ¼Xq
k¼1
/kðnÞuki ; ð8Þ
ti ¼Xq
k¼1
/kðnÞtki ; ð9Þ
where xki is vector position of the end nodes; uk
i and tki are nodal dis-
placements and stresses; n is parametric variable coordinate and /k
is shape function (k = 1, . . . ,q).The shape function for constant element (q = 1) is given as
/1 ¼ 1: ð10Þ
The shape functions for linear element (q = 2) are given as
/1ðnÞ ¼n2 � nn2 � n1
� �; /2ðnÞ ¼
n� n1
n2 � n1
� �ð�1 � n1 < 0 and 0 < n2 � 1Þ; ð11Þ
where n1 and n2 denote local coordinate of first and second node ofelements, respectively.
The quadratic shape functions for discontinuous element (q = 3)are given as
/1ðnÞ ¼12
na
na� 1
� �; /2ðnÞ ¼ 1� n
a
� �2
;
/3ðnÞ ¼12
na
naþ 1
� �ð12Þ
where �1 6 n 6 1 and a is a parameter (0 < a < 1) which defines theratio of the distance between boundary nodes to the length of theelement. The nodes 1 and 3 are allowed to vary symmetrically bya. If a = 1, then the shape functions will reduce to the standard qua-dratic shape functions, thus the element becomes a continuouselement.
By using Eqs. (8) and (9), Eq. (5) can be rewritten as
ckmuðPk
mÞ ¼XN
n¼1
Xq
s¼1
Gmnks tðQs
nÞ �XN
n¼1
Xq
s¼1
Hmnks uðQ s
nÞ ð13Þ
where tðQsnÞ and uðQs
nÞ are the traction and displacement vectors atsth node of nth element, respectively. In addition
Gmnks ¼
Z 1
�1JðnÞGðPk
m;QÞ/sdn; Hmnks ¼
Z 1
�1JðnÞHðPk
m;QÞ/sdn; ð14Þ
where J is Jacobian and /s is shape function matrix and defined as
/s ¼/s 00 /s
� �ðs ¼ 1; . . . qÞ: ð15Þ
By writing Eq. (13) for the fixed points Pkm with k = 1, . . . ,q
(which are the nodes of Sm) and combining them, the followingequation can be obtained:
cmum ¼XN
n¼1
Gmntn �XN
n¼1
Hmnun: ð16Þ
When Eq. (16) is written for all boundary elements (m = 1, . . . ,N)and combined, the system equations of BEM can be obtained inmatrix form as,eH~u ¼ eG~t; ð17Þ
where
eG ¼ ðGmnÞ; eH ¼ ðHmn þ 12
IdmnÞ;
~u ¼ ðunÞ; ~t ¼ ðtnÞ ðm;n ¼ 1; . . . ;NÞð18Þ
with dmn is Kronecker’s delta. The elements Gmn and Hmn may becomputed numerically by using Gaussian quadrature formula.
The solution of Eq. (17), together with the prescribed boundaryconditions, determines numerically the unknown boundary quan-tities. Having determined unknown boundary quantities, if desired,the interior displacements and stresses can be computed numeri-cally using the boundary quantities.
4. Calculation of singular integrals
The singular integrals will occur when fixed point P and variedpoint Q are on the same element. Therefore, diagonal matrices inEq. (17) will be singular. These singular matrices Gmm
ks and Hmmks
can be written as,
Gmmks ¼
ZSm
GðPkm;QÞ/s dS; Hmm
ks ¼Z
Sm
HðPkm;QÞ/s dS; ð19Þ
where k is fixed point number and s is shape function number. Theintegrals in Eq. (19) are to be understood in the sense of Cauchyprincipal value, i.e., they do not contain the contributions when var-ied point Q coincides with the fixed point Pk
m [8]. But the fundamen-tal solutions involve the distance r between the fixed and variedpoints, and become singular when r = 0. In Eq. (14) (written form = n) the varied point Q is on the element Sm and the distance ris smaller compared to case in which m – n. So that, care shouldbe given for the evaluation of the integrals in Eq. (19) and theyshould be computed by using some special numerical integrationtechniques [3].
The diagonal matrices Gmmks and Hmm
ks (for the fixed point P andthe varied point Q) can be rewritten as
GPQ ¼Z
G‘kðrPðnÞÞ/Q ðnÞJðnÞdn; ð20Þ
HPQ ¼Z
H‘kðrPðnÞÞ/Q ðnÞJðnÞdn: ð21Þ

850 I.O. Deneme et al. / Advances in Engineering Software 40 (2009) 847–855
Here ‘ = 1, 2 and k = 1, 2 for two-dimensional problems, G‘k and H‘k
are, the first and the second fundamental solution for two-dimen-sional elastostatics, given in Eqs. (22) and (23). The number of shapefunctions should be the same with varied point number
G‘k ¼1
8plð1� mÞ ð3� 4mÞ ln 1r
� �d‘k þ
r‘r
rk
r
� �; ð22Þ
H‘k ¼ �1
4pð1� mÞr@r@nð1� 2mÞd‘k þ 2
r‘r
rk
r
n o�þð1� 2mÞ rk
rn‘ �
r‘r
nk
� �i; ð23Þ
where d‘k, m, l, nk and n‘ denote Kronecker delta, Poisson’s ratio,shear modulus and outer unit normal vector components,respectively.
In this study, singularity subtraction technique has been usedfor all types of discontinuous elements (constant, linear and qua-dratic) therefore; singularity in static case will be mentionedfirstly.
4.1. Singular integrals for constant element in static case
As stated previously, it may be noted that the integrals in Eq.(19) are defined in the sense of Cauchy principal value and excludethe point n = 0 which corresponds to the fixed point P. After someanalytical calculations were done [8], the first fundamental solu-tion components (Gmm
‘k ) are obtained as,
Gmm‘k ¼
R4plð1� mÞ ½ð3� 4mÞð1� ln RÞd‘k þ s‘sk�; ð24Þ
where R denotes half of the length of the element. s‘ and sk are unittangential vector components.
The second fundamental solution can be integrated usingstandard Gaussian quadrature for determining Hmn matrices. Whenthe fixed point P and the varied point Q at the same element theterms Hmm can be determined using rigid-body motion as follows[3]:
Hmm ¼ �XN
n¼1
Hmn ðm–nÞ ð25Þ
4.2. Singular integrals for linear element in static case
The first fundamental solution G (when P and Q on the sameelement) includes ln(1/r) and (1/r) singularity cases. The integral,that contains first fundamental solution, will be considered intwo parts. The first part includes ln(1/r) and the second part con-tains (1/r) singularity case. The ln(1/r) term can be calculated ana-lytically and converting the integral limits (�1,+1) to (0,+1) [11]. Inaddition the second part, that includes (1/r) singularity, can beintegrated using standard Gaussian quadrature. Therefore the firstfundamental solution can be integrated [11].
The second fundamental solution, in Eq. (23), can be integratedusing standard Gaussian quadrature for determining Hmn matrices.When the fixed point P and the varied point Q at the same elementthe terms Hmm can be determined using rigid-body motion, asshown in Eq. (25).
4.3. Singular integrals for quadratic element in static case
For calculating the first fundamental solution G (when P and Qon the same element) there is need for special techniques. For thispurpose, the integral that contains first fundamental solution intwo parts will be considered. The first part includes ln(1/r) andthe second part contains (1/r) singularity case.
If the fundamental solution is written, which was given at Eq.(22), into Eq. (20), GPQ will contain a weak singularity in the formof natural logarithm. After all GPQ can be rewritten as
GPQ ¼Z
18plð1� mÞ ð3� 4mÞ ln 1
rP
� �d‘k þ
r‘rP
rk
rP
� �/Q ðnÞJðnÞdn:
ð26Þ
The ln(1/rp) term can be manipulated by conversion into a form,where the logarithmic quadrature can apply. This conversion canaccomplish by using change of variables [12]. The second part ofEq. (26) can be integrated using standard Gaussian quadrature.
The second fundamental solution, in Eq. (23), can be integratedusing standard Gaussian quadrature for determining Hmn matrices.When the fixed point P and the varied point Q at the same elementthe terms Hmm can be determined using rigid-body motion, asshown in Eq. (25).
4.4. Singular integrals in dynamic case
The orders of singularity in the dynamic fundamental solutionsare the same as in the static fundamental solutions and can bedealt with in the following manner:Zð ÞDynamicdS ¼
Zð ÞStaticdSþ
Z½ð ÞDynamic � ðÞStatic�dS; ð27Þ
where the second integral on the right-hand side of Eq. (27) is non-singular and can be evaluated using standard Gaussian quadrature.The first integral on the right-hand side of Eq. (27) can be evaluatedusing the method described in static case. Eq. (27) can be rewrittenfor both of the fundamental solutions in concise form as:
GD ¼ GS þ ðGD � GSÞ; ð28ÞHD ¼ HS þ ðHD � HSÞ; ð29Þ
where GD and HD are dynamic fundamental solutions, GS and HS arestatic fundamental solutions. The fundamental solutions GD and HD
for two-dimensional elastodynamics are given in Eqs. (30) and (31)
GD ¼1
2plWd‘k � vr‘rk½ �; ð30Þ
HD ¼1
2pdWdr� v
r
� �d‘k
@r@nþ rkn‘
� �� 2
rv nkr‘ � 2r‘rk
@r@n
� ���2
dvdr
r‘rk@r@nþ
c2p
c2s� 2
!dWdr� dv
dr� v
r
� �r‘nk
); ð31Þ
where
W ¼ K0ðasÞ þ1as
K1ðasÞ �cs
cpK1ðapÞ
� �; ð32Þ
v ¼ K2ðasÞ �c2
s
c2p
K2ðapÞ; ð33Þ
where
as ¼ixrcs
; ap ¼ixrcp
:
Here i is imaginary number, cp and cs are dilatational and shearwave velocities. Ki’s are modified Bessel functions of second kind.
The singularity in HD can be manipulated using Eq. (29) insteadof the rigid-body motion mentioned in static case.
5. Computer programs
Based on the formulations, presented in this study, three gen-eral purpose computer programs are developed by using FOR-

Compute terms of Gmm and Hmm matrices
Compute the resultants of boundary tractions
Determine the displacements
and stresses at interior points
START
Read input data and perform data generations
Form the system matrices for defined boundary in problems
Singular element (m = n)?
Compute Gmn matrices
Interior points?
Compute the unknown boundary quantities by solving Eq.17
Write the results
STOP
No
No
Yes
Compute Hmn matrices
Yes
Fig. 4. Flow chart of computer programs.
I.O. Deneme et al. / Advances in Engineering Software 40 (2009) 847–855 851
TRAN77 codes for analyzing elastic or visco-elastic 2D elastody-namic soil–structure interaction problems. The structures of thethree programs are basically the same and the flow chart is shownin Fig. 4. The programs perform the analysis in Fourier transformspace. If desired, the obtained results can be transformed to timespace with the use of FFT algorithm [9].
6. Numerical examples
In this section, some numerical examples are solved for thecomparison of the various discontinuous boundary element formu-lations. To this end, based on the above mentioned formulations,some general purpose computer programs have been developedfor each type of discontinuous boundary elements. All the pro-grams perform the analysis in Fourier transform space. Although
the programs are developed for dynamic analysis, it can also beused for static analysis by assigning a very small value close to zerofor the frequency.
Two examples are handled to demonstrate the suitability andaccuracy of the present formulation comparing with the results ob-tained by independent numerical methods and/or exact solutionsavailable in the literature. In the example problems, mesh trunca-tion is used for the analysis of unbounded domains and the funda-mental solutions are integrated with 10 point quadrature rule forboth standard and logarithmic Gaussian quadrature formulas.Boundary element model have been represented with the parame-ters of n1 = �0.67 and n2 = 0.67 (for linear element) also n1 = �0.75,n2 = 0, n3 = 0.75 and a = 0.75 (for quadratic element).
In the formulation hysteretic damping ratio is used for damp-ing. The hysteretic damping in the material can be included into

1.6
lianc
e
852 I.O. Deneme et al. / Advances in Engineering Software 40 (2009) 847–855
a system by replacing, in Fourier transform space, the shear mod-ulus l of a material by l(1 + 2iz). Here, i is imaginary number and zis the hysteretic damping ratio of the material, and all the param-eters involving the elastic constant l are determined by this com-plex valued shear modulus [13].
6.1. Rigid strip foundation
In this example, a rigid strip foundation on half-space shown inFig. 5 is considered. Here, compliances of rigid strip foundation areinvestigated.
This problem has been solved, as a plane strain problem. Thetop surface of the problem is discretized into 80 equal elementsfor all types of discontinuous boundary elements.
The analysis is carried out in nondimensional space. The nondi-mensional variables are defined as:
omp
�b ¼ 1
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0.0 0.2 0.4
No
Non
dim
ensi
onal
hor
izon
tal c
ompl
ianc
e
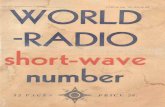
Fig. 6. Variation of real pa
Rigid s
b
A
Fig. 5. Rigid s
nondimensional half-width of footing
1.2tal c
�x ¼ xbcS
nondimensional frequencyon
ðC11;C22Þ ¼ plðC11;C22Þ0.8
riz
nondimensional vertical and horizontalcompliances, respectively
l ho
Exact
C33 ¼ plb2C33 nondimensional rocking complianceiona Constant
0.6 0.8 1.0 1.2 1.4 1.6
ndimensional frequency
Exact
Constant
Linear
Quadratic
rt of horizontal compliance with frequency.
trip foundation
B
b
Half-space μ, ν, ρ,
x2
x1
trip foundation over half-space.
where x is the Fourier transform parameter, cS and l are the shearwave velocity and shear modulus. In the analysis, Poisson’s ratio,nondimensional mass density and nondimensional shear modulusare taken as m ¼ 0:25; �q ¼ 1; �l ¼ 1.
The results, which were obtained using boundary element for-mulations, are presented and compared with exact ones in Figs.6–11. The exact results are taken from Luco and Westman [14].As seen in the figures, the results are in good agreement.
6.2. Visco-elastic soil under harmonic strip load
In this problem, the compliances have been investigated for vis-co-elastic soil under harmonic strip load shown in Fig. 12. The
0.0
0.5
1.0
1.5
2.0
2.5
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
Nondimensional frequency
Non
dim
ensi
onal
ver
tical
com
plia
nce
Exact
Constant
Linear
Quadratic
Fig. 8. Variation of real part of vertical compliance with frequency.
0.0
0.4
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
Nondimensional frequency
Non
dim
ens
Linear
Quadratic
Fig. 7. Variation of imaginary part of horizontal compliance with frequency.
0.0
0.4
0.8
1.2
1.6
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6Nondimensional frequency
Non
dim
ensi
onal
ver
tical
com
plia
nce
ExactConstantLinearQuadratic
Fig. 9. Variation of imaginary part of vertical compliance with frequency.

0.0
0.3
0.6
0.9
1.2
1.5
1.8
2.1
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
Nondimensional frequency
Non
dim
ensi
onal
rock
ing
com
plia
nce
ExactConstantLinearQuadratic
Fig. 10. Variation of real part of rocking compliance with frequency.
−0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
Nondimensional frequency
Non
dim
ensi
onal
roc
king
com
plia
nce
Exact
Constant
Linear
Quadratic
Fig. 11. Variation of imaginary part of rocking compliance with frequency.
15b
Visco-elastic soilμ, ν, ρ, z
q=q0eiω t
x1
x2
1 2 3 4 5 6 7 8
b 7b
Fig. 12. Visco-elastic soil under harmonic strip load.
−0.2
0.0
0.2
0.4
0.6
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Nondimensional x1
Non
dim
ensi
onal
hor
izon
tal c
ompl
ianc
e
Exact
Finite-Infinite
Constant
Linear
Quadratic
Fig. 13. Real part of horizontal compliance.
−0.1
−0.2
−0.3
−0.4
−0.5
0.0
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Nondimensional x1
Non
dim
ensi
onal
hor
izon
tal c
ompl
ianc
eExact
Finite-Infinite
Constant
Linear
Quadratic
Fig. 14. Imaginary part of horizontal compliance.
−0.2
0.0
0.2
0.4
0.6
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Nondimensional x1
Non
dim
ensi
onal
ver
tical
com
plia
nce
Exact
Finite-Infinite
Constant
Linear
Quadratic
Fig. 15. Real part of vertical compliance.
I.O. Deneme et al. / Advances in Engineering Software 40 (2009) 847–855 853
material properties of half-space are given as; Poisson’s ratiom = 0.25, nondimensional mass density �q ¼ 1, nondimensionalshear modulus �l ¼ 1 and hysteretic damping ratio z = 0.125. Theeffect of strip load on half-space can be defined with a nondimen-sional width �b ¼ 1 and nondimensional amplitude �q0 ¼ 1. In the
problem, horizontal and vertical compliances, at eight points(Fig. 12) are calculated for nondimensional frequency a0 = 0.5.
The exact solutions for horizontal and vertical compliancesare taken from Gutierrez and Chopra [15] and they can be definedas:
Fxxm ¼
1G½f xx
m ða0Þ þ igxxm ða0Þ�; ð34Þ
Fyym ¼
1G½f yy
m ða0Þ þ igyym ða0Þ�: ð35Þ

−0.6
−0.4
−0.2
0.0
0.2
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Nondimensional x1
Non
dim
ensi
onal
ver
tical
com
plia
nce
Exact
Finite-InfiniteConstant
Linear
Quadratic
Fig. 16. Imaginary part of vertical compliance.
−0.2
0.0
0.2
0.4
0.6
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Nondimensional x1
Nond
imen
sion
al h
oriz
onta
l com
plia
nce
Finite-Infinite
Constant
Linear
Quadratic
Fig. 17. Real part of horizontal compliance (without damping).
−0.4
−0.3
−0.2
−0.1
0.0
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Nondimensional x1
Non
dim
ensi
onal
hor
izon
tal c
ompl
ianc
e
Finite-Infinite
Constant
Linear
Quadratic
Fig. 18. Imaginary part of horizontal compliance (without damping).
−0.4
−0.2
0.0
0.2
0.4
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Nondimensional x1
Non
dim
ensi
onal
ver
tical
com
plia
nce
Finite-Infinite
Constant
Linear
Quadratic
Fig. 19. Real part of vertical compliance (without damping).
−0.2
0.0
0.2
0.4
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Nondimensional x1
Non
dim
ensi
onal
ver
tical
com
plia
nce
Finite-Infinite
Constant
Linear
Quadratic
Fig. 20. Imaginary part of vertical compliance (without damping).
854 I.O. Deneme et al. / Advances in Engineering Software 40 (2009) 847–855
Here, Fxxm ; F
yym are horizontal and vertical compliances, G is shear
modulus for soil. f xxm ; g
xxm ; f
yym and gyy
m denote real and imaginary partsof compliances in x1 and x2 direction, respectively.
The surface of the problem is discretized using 15 equal lengthelements for all types of discontinuous boundary elements.
The results are presented and compared with coupling of finiteand infinite element results obtained by Yerli et al. [1] and exactones in Figs. 13–16. As seen in the figures, the results are in goodagreement.
This problem is solved again without damping. The boundaryelement mesh is the same with the previous case. Since the exactsolution for this case is unavailable, the boundary element solu-tions are presented and compared with coupling of finite and infi-nite element formulation presented by Yerli [16] in Figs. 17–20. Asseen in the figures, the results are in good agreement.
7. Conclusions
In this study, various discontinuous boundary element formula-tions (constant, linear and quadratic) are compared. Based on theformulations, general purpose computer programs are developed,and they are applied to 2D dynamic soil–structure interactionproblems.
The formulations proposed in this study are assessed by apply-ing to several example problems. The results are compared withthose obtained by exact ones and/or the other methods availablein the literature. The comparisons indicate that the formulationspresented in this study can be used with a good confidence inthe dynamic analysis of soil–structure interaction problems. Inaddition, results obtained for constant, linear and quadratic bound-ary elements are in good agreement to each other. Thus, it can besaid that the use of constant element (the simplest discontinuousboundary element) formulation is sufficient for 2D elastodynamicsoil–structure interaction problems.

I.O. Deneme et al. / Advances in Engineering Software 40 (2009) 847–855 855
References
[1] Yerli HR, Temel B, Kiral E. Multi-wave transient and harmonic infinite elementsfor two-dimensional unbounded domain problems. Comput Geotech1999;24(3):185–206.
[2] Yerli HR, Temel B, Kiral E. Transient infinite elements for 2-dimensional soil–structure interaction analysis. J Geotech Geoenviron, ASCE 1998;124(10):976–88.
[3] Brebbia CA, Dominguez J. Boundary elements an introductorycourse. Southampton: Computational Mechanics Publications; 1989.
[4] Mackerle J, Brebbia CA. The boundary element referencebook. Southampton: Computational Mechanics Publications; 1988.
[5] Brebbia CA, Connor JJ. Advances in boundary elements, vol.1. Southampton: Computational Mechanics Publications; 1989.
[6] Banerjee PK. The boundary element methods inengineering. London: McGraw-Hill Book Company; 1994.
[7] Partridge PW, Brebbia CA, Wrobel LC. The dual reciprocity boundary elementmethod. Southampton: Computational Mechanics Publications; 1992.
[8] Mengi Y, Tanrikulu AH, Tanrikulu AK. Boundary element method for elasticmedia: an introduction. Ankara: METU Press; 1994.
[9] Cooley JW, Lewis PAW, Welch PD. The fast Fourier transform and itsapplications. IEEE Trans Ed 1969;12:27–34.
[10] Manolis GD, Beskos DE. Boundary element methods in elasto-dynamics. London: Unwin Hyman; 1988.
[11] Severcan MH. Boundary element method formulation for dynamic soil–structure interaction problems. PhD Dissertation, University of Cukurova,Adana, 2004 [in Turkish].
[12] Yerli HR, Deneme IO. Elastodynamic boundary element formulationemploying discontinuous curved elements. Soil Dyn Earthq Eng2008;28(6):480–91.
[13] Wolf JP. soil–structure interaction analysis in time domain. Englewood Cliffs,New Jersey: Prentice-Hall; 1988.
[14] Luco JE, Westman RA. Dynamic response of a rigid footing bounded to anelastic half space. J Appl Mech – Trans ASME 1972;39(2):527–34.
[15] Gutierrez JA, Chopra AK. A substructure method for earthquake analysis ofstructures including structure–soil interaction. Earthq Eng Struct Dyn1978;6:51–69.
[16] Yerli HR. Analysis of two and three dimensional dynamic soil–structureinteraction problems using finite and infinite elements. PhD Dissertation,University of Cukurova, Adana, 1998 [in Turkish].