
UNIVERSIDADE ESTADUAL DO MARANHÃO CENTRO DE CIÊNCIAS TECNOLÓGICAS
16
UNIVERSIDADE ESTADUAL DO MARANHÃO CENTRO DE CIÊNCIAS TECNOLÓGICAS ÁLGEBRA LINEAR Trabalho referente à 3ª nota Emanuelle de Araújo Silva - 1011206
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of UNIVERSIDADE ESTADUAL DO MARANHÃO CENTRO DE CIÊNCIAS TECNOLÓGICAS

UNIVERSIDADE ESTADUAL DO MARANHÃO
CENTRO DE CIÊNCIAS TECNOLÓGICAS
ÁLGEBRA LINEAR
Trabalho referente à 3ª nota
Emanuelle de Araújo Silva - 1011206

São Luís – MA
Julho 2011
SUMÁRIO
1. Funções Vetoriais2. Transformações Lineares3. Núcleo de uma transformação linear4. Imagem de uma transformação linear5. Propriedades e Núcleo da Imagem6. Matriz de uma transformação linear7. Operações com transformações lineares8. Transformações lineares planas

TRANSFORMAÇÕES LINEARES
1.0 FUNÇÕES VETORIAIS
Considerando que o domínio e o contra domínio de uma função sejam espaços vetoriais reais, e que a variável dependente e independente são vetores, então, essas funções são denominadas de funções vetoriais ou transformações lineares.
Então, para simbolizar matematicamente que f é uma transformação do espaço vetorial V no espaço vetorial W, escreve-se
. Sendo f uma função, cada vetor tem um só vetor imagem , que será indicado por: .
2.0 TRANSFORMAÇÕES LINEARES
2.1 Definição
Seja V e W espaços vetoriais, é chamada transformação linear de V em W, se:
I)
II)
No caso em que V = W, uma transformação linear , é chamada também de operador linear.
2.2 Interpretação geométrica
Na interpretação geométrica das transformações lineares de dois vetores u e v, por exemplo, as operações de adição e multiplicação,

na forma escalar, possuem resultados idênticos na forma geométrica, sendo assim, dizemos que f preserva a operação de vetor que foi realizada.
2.3 Propriedades das transformações lineares
I) Se é uma transformação linear, a imagem do vetor é o vetor , ou seja, F(0v)= 0w
II) Se é uma transformação linear, tem-se:
Isto é, a imagem de uma combinação linear dos vetores v1 e v2 é umacombinação linear das imagens f (v1) e f (v2) com os mesmoscoeficientes k1 e k2.
NÚCLEO E IMAGEM DE UMA TRANSFORMAÇÃO LINEAR
3.0 Núcleo de uma transformação linear T: V W é o conjunto de vetores do espaço vetorial V cuja imagem é o vetor 0w.
Notação: N(T) = Ker(T)= {v V | T(v)=0w}.
4.0 Imagem de uma transformação linear T:V W é o conjunto de vetoresde W que são imagem dos vetores do conjunto V.
Notação: Im(T) = T(V) = {w W | T(v)=w, para algum v V}.

5.0 PROPRIEDADES
1. N(T) é um subespaço vetorial de V. 2. Im(T) é um subespaço vetorial de W. 3. Teorema do Núcleo e da Imagem: dimV=dimN(T) + dimIm(T)
Exemplo: Seja T:R²R³ tal que T(x,y)=(0,x + y,0).
N(T) ={(x,y) R²|T(x,y)=(0,0,0)}.
Então, T(x,y)=(0,x + y,0) = (0,0,0).
Assim, x + y = 0 .:. x= -y.
Portanto, N(T)={(x,y) R²| x = -y} = {(-y,y),y R}.
Uma base é {(-1,1)} e dimN(T) = 1.
Representação gráfica,

Im(T) = {T(x,y) = (0,x + y,0), para todo (x,y) R²}.
Uma base para o conjunto imagem é {(0,1,0)} e dim Im(T) = 1.
Observe que, dim R² = dim N(T) + dim Im(T), (2 = 1 + 1).

7.0 TRANSFORMAÇÕES LINEARES PLANAS
São transformações pertencentes ao plao R², seus domínios e contradomínios constituem o plano. Serão consideradas as Reflexões, Dilatações e Contrações e Rotação de planos.
1. Reflexões – ocorrem em relação a um eixo, ordenadas, abscissas ou uma reta.
a) Reflexão ao eixo x:
Relaciona o ponto ou vetor (x,y) para sua imagem simétrica em relação ao eixo x, (x, -y), como na figura
A matriz canônica da transformação é
A = ,
logo:
b) Reflexão ao eixo y:
f: R² -> R², f(x,y) = (-x,y)

A matriz canônica dessa transformação é
A = ,
logo:
c) Reflexão com relação à origem
f R² -> R², f(x,y) = (-x,-y)
A matriz canônica da transformação é
A = ,
logo:
d) Reflexão com relação à reta y = xf: R² -> R², f(x,y) = (y,x)
A matriz canônica dessa transformação é
A = ,
logo:

e) Reflexão com relação à reta x = y
f R² -> R², f(x,y) = f(-y,-x)
A matriz canônica da transformação é
A = ,
logo:
2. CONTRAÇÕES E DILATAÇÕES
Trata-se da multiplicação por uma escalar real, k, que altera as dimensões do vetor.

a) Na direção do vetor
f R² -> R², f(x,y) = k (x,y) = (kx, ky)
A matriz canônica datransformação é
Que gera:
O efeito no vetor dependerá do valor de k:
- se |k| > 1, f dilata o vetor
- se |k| < 1, f contrai o vetor
- se k = 1, f é a identidade de I.
- se k < 0, f muda o sentido do vetor
b) Na direção do eixo xf: R²->R², f(x,y) = f(kx,y), k 0≥
O efeito de k no vetor édefinido pelas expressões

- se k >1, f dilata o vetor
- se 0 k ≤ 1 ≤, f contrai o vetor
c) Na direção do eixo y
f R² -> R², f(x,y) = (x, ky), k ≥ 0
A transformação tem comomatriz canônica:
Que gera:
Se:
k >1, f dilata o vetor
0 k 1, f ≤ ≤ contrai o vetor
3 CISALHAMENTOS
a) Direção eixo x
O cisalhamento na direção do eixo x tem o efeito de transformar o retângulo OAPB, na figura, no paralelogramo OAP’B’.
Para k um escalar real,

f: R² -> R², f(x,y) = (x+ky,y)
A matriz canônica da transformação é
Então
Nessas tranformações, todos os pontos nãopertencentes ao eixo x se movem paralelamentea tal eixo. O que torna o retângulo inicial eo paralelogramo de mesma base.
b) Direção do eixo y
O cisalhamento na direção do eixo y tem oobjetivo de transformação o retângulo OAPB noparalelogramo OAP’B’, de mesma base e altura.
A matriz canônica da transformação f: R² -> R², f(x,y)= (x,y + kx)
Então
4 ROTAÇÕES
Um vetor v = (x,y) pode ser rotacionado em torno da origemde coordenadas, cuja base é A = { e1 = (1,0) e e2 = (0,1)}. Essa rotação é uma transformação linear fo : R² -> R², que a cada vetor (x,y) faz-se corresponder um vetor fθ(v) = (x’,y’), com θ graus de diferença, no sentido horário ou antihorário.

Sendo A um base do plano e v um vetor pertencente ao plano, podemos escrever
v = x .e1 + y. e2
Ou ainda, de acordo com as propriedades de transformações lineares
fθ(v) = x fθ(e1) + y fθ(e2)
Pelo gráfico acima, os vetores fθ(e1) e fθ(e2) podem ser escritos
fθ(e1) = (cosθ, senθ)
fθ(e2) = (-senθ, cosθ)
Reescrevendo fθ(v) através da substituição das expressões acima, obtém-se
fθ(v) = (x’,y’) = [(cos θ)x + (-sen θ)y, (sen θ)x + (cos θ)y]
θ
A partir daí, determina-se a matriz canônica da transformação

Tθ =
=
É possível fazer o caminho inverso, ou seja, determinar vetor a partir da sua imagem (x’,y’). Uma vez que a rotação aconteceria no sentido anti-horário, o valor θ < 0 e os senos e cossenos são alterados.
sen(-θ) = -sen(θ)
cos(-θ) = cos(θ)
A matriz T(-θ) = poderá ser escrita
T(-θ) = , que é a matriz inversade T(θ). Se isso é verdade, o cálculo abaixo é válido:
f(v) = Tθ. v
v = Tθ-1. f(v)
Nas matrizes:
8.0 OPERAÇÕES COM TRANSFORMAÇÕES LINEARES
1. ADIÇÃO
Sejam T1 : V W e T2: V W transformações lineares. Define-se a
adição de T1 com T2 como sendo a transformação linear:
(T1+ T2):VW
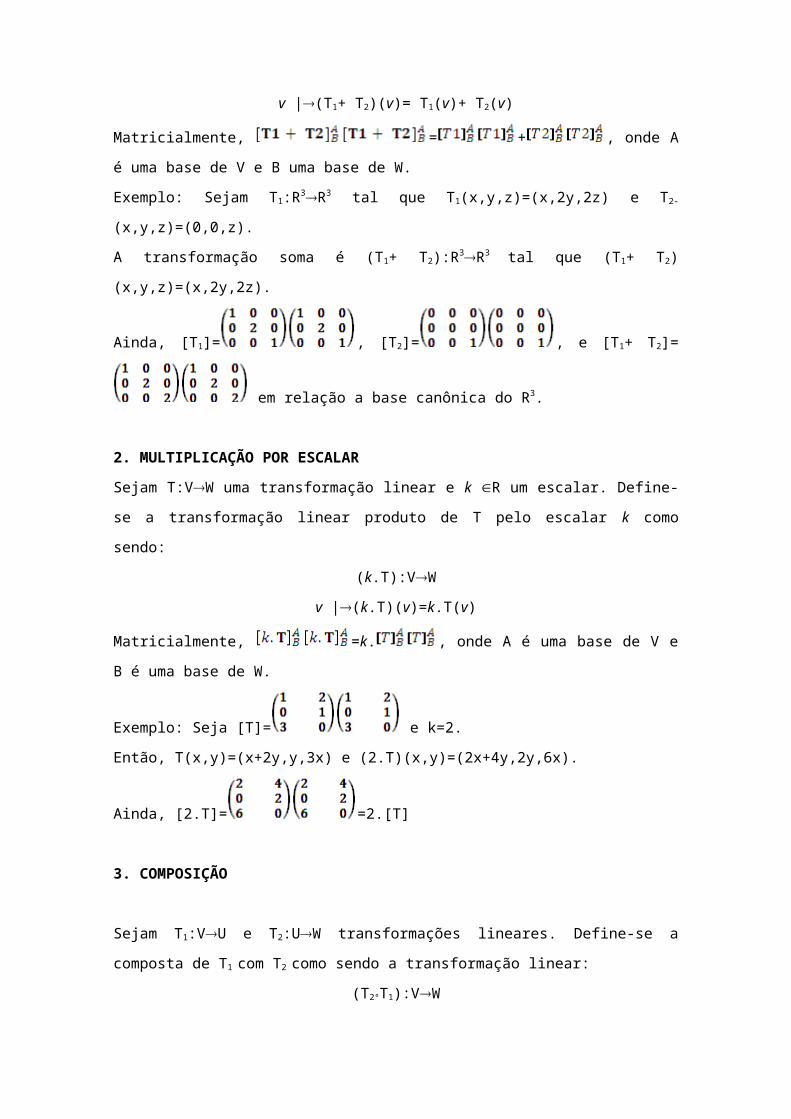
v |(T1+ T2)(v)= T1(v)+ T2(v)
Matricialmente, = + , onde A
é uma base de V e B uma base de W.
Exemplo: Sejam T1:R3R3 tal que T1(x,y,z)=(x,2y,2z) e T2-
(x,y,z)=(0,0,z).
A transformação soma é (T1+ T2):R3R3 tal que (T1+ T2)
(x,y,z)=(x,2y,2z).
Ainda, [T1]= , [T2]= , e [T1+ T2]=
em relação a base canônica do R3.
2. MULTIPLICAÇÃO POR ESCALAR
Sejam T:VW uma transformação linear e k R um escalar. Define-
se a transformação linear produto de T pelo escalar k como
sendo:
(k.T):VW
v |(k.T)(v)=k.T(v)
Matricialmente, =k. , onde A é uma base de V e
B é uma base de W.
Exemplo: Seja [T]= e k=2.
Então, T(x,y)=(x+2y,y,3x) e (2.T)(x,y)=(2x+4y,2y,6x).
Ainda, [2.T]= =2.[T]
3. COMPOSIÇÃO
Sejam T1:VU e T2:UW transformações lineares. Define-se a
composta de T1 com T2 como sendo a transformação linear:
(T2ºT1):VW

v| (T2ºT1)(v)=T2 (T1(v))
Matricialmente, [T2ºT1 =[T2 .[T1 , onde
A é uma base de V, B é uma base de U e C é uma base de W.
Exemplo:
Sejam os operadores lineares no R2, T1(x,y)=(2x+y, -y) e
T2(x,y)=(2x, -x+3y).
(T2ºT1)(x,y)=T1(T2(x,y))= T1(2y,-x+3y)=(2(2y)+(-x+3y)-(-x+3y))=(-
x+7y,x-3y)
(T2ºT1)(x,y)=T1(T2(x,y))= T2(2x+y, -y)=(2(-y), -(2x+y)+3(-y))=(-
2y,-2x-4y)
Com relação a base canônica: [T1]= e [T2]=
.
Assim, [T1ºT2] = . =
e [T2ºT1]= , = .
Propriedades de Transformações Invertíveis
Sejam T:VW, T1:VW e T2:WU transformações lienares invertíveis
e k R, k≠0.
1. (T-1)-1=T
2. (k.T)-1=k-1,T-1
3. (T2ºT1)-1=T1-1ºT2
-1




















