UNIVERSIDAD DE CUENCA PRACTICAS DE COMPENSADORES APLICADOS A UNA PLANTA DE FLUJO LUMUNOSO
12
UNIVERSIDAD DE CUENCA FACULTAD DE INGENIERIA LABORATORIO DE CONTROL PRACTICAS DE COMPENSADORES APLICADOS A UNA PLANTA DE FLUJO LUMUNOSO ANDREA BERMEO OCHOA XAVIER JARAMILLO EDUARDO SIAVICHAY SEXTO CICLO
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of UNIVERSIDAD DE CUENCA PRACTICAS DE COMPENSADORES APLICADOS A UNA PLANTA DE FLUJO LUMUNOSO

UNIVERSIDAD DE CUENCAFACULTAD DE INGENIERIA
LABORATORIO DE CONTROL
PRACTICAS DE COMPENSADORES APLICADOSA UNA PLANTA DE FLUJO LUMUNOSO
ANDREA BERMEO OCHOA
XAVIER JARAMILLO
EDUARDO SIAVICHAY
SEXTO CICLO

SEPTIEMPRE 2014 – ENERO 2015
INTRODUCCION:
En la actualidad, los sistemas de control se encuentran en todosistema. Existen tres tipos de controles de lazo cerrado: tipo P,tipo PI y tipo PID. Siento el primero de este más complejo que uncontrol tipo encendido/apagado y así sucesivamente hasta llegar alcontrol tipo PID. Los distintos tipos de control tienen sus pros ysus contras, los mismos que serán verificados a continuación, enel control de una planta de flujo luminoso.
OBJETIVOS:
Conocer el funcionamiento de cada uno de los tipos decontrol.
Verificar las respuestas de la planta para cada uno de lostipos de control.
Comprender la inestabilidad de un control tipo P.
DESARROLLO:
Control tipo P:
El control tipo proporcional, es más complejo que un sistemade control encendido/apagado, la salida del bloque controlador,es proporcional a su entrada, es decir, la posición exacta quetoma es proporcional al error. Si la banda proporcional es muypequeña, pueden existir oscilaciones.
Para realizar la práctica de control P, se ingresó a la aplicación“Control Pa”, configurando el canal ADC en 3 y el Com 1…10 en 5.Se fue cambiando el valor de referencia, y el valor de kp y seobtuvieron los siguientes resultados.
REFERENCIA KP RETROALIMENTACIO
N ERROR

200 0.7 625 -425200 1 520 -320200 0.5 731 -531400 0.7 755 -355400 1 684 -284400 0.5 817 -41750 0.7 508 -45850 1 403 -35350 0.5 641 -59120 0.7 484 -46420 1 368 -34820 0.5 619 -593
Para poder observar la inestabilidad de la planta, se aumentó elKp, en la siguiente figura se puede observar la respuesta delsistema, en el sistema, se podía observar como la luminariacomenzaba a prenderse y apagarse.
Ilustración 1 planta inestable, control p
Se realizó, la simulación en Simulink, se pudo observar que elsistema, no se estabiliza en el valor de entrada.

Ilustración 2 simulacion
Ilustración 3 respuesta del control tipo p, con entrada de 200 unidades
Control tipo PI:
El valor de salida del controlador proporcional varía en razónproporcional al tiempo en que ha permanecido el error y lamagnitud del mismo. Donde KP es la ganancia proporcional, estevalor es ajustable. Una modificación en KP afecta tanto a la parteintegral como a la parte proporcional de la acción de control.
Para realizar la práctica de control PI, se ingresó a laaplicación “Control PIa”, configurando el canal ADC en 3 y el Com1…10 en 5. Se fue cambiando el valor de referencia, y el valor dekp en 0.7 y ki en 0.4 y se obtuvieron los siguientes resultados.
REFERENCIA KP KI RETROALIMENTACIO
NERROR

200 0.7 0.4 198 2400 0.7 0.4 395 550 0.7 0.4 53 -3
Para medir el tiempo de estabilización del sistema, se aplicaronescalones y se midió el tiempo de estabilización. Se llenó lasiguiente tabla.
ESCALON DEENTRADA
TIEMPO DEESTABILIZACION
300 4.1 seg500 5.8 seg.600 7.3 seg.700 24.3 seg.800 18 seg
Al aplicar un escalón de 300 unidades, con un ki=0.1, se observóla siguiente respuesta del sistema, se pudo observar, que elsistema se demoró más en estabilizarse.
Ilustración 4 respuesta del sistema con ki=0.1
También, se pudo observar como la planta reaccionaba a un control p, claramente se puede observar que existe un error.

Ilustración 5 respuesta de la planta con ki=0
Con los valores de kp=0.1 y ki=0.4, se observó que la respuesta del sistema es sobre amortiguada
Ilustración 6 respuesta sobre amortiguada
Además, se observo el sistema con ki=0.1 y kp=0.1
Ilustración 7 respuesta del sistema con ki=0.1 y kp=0.1
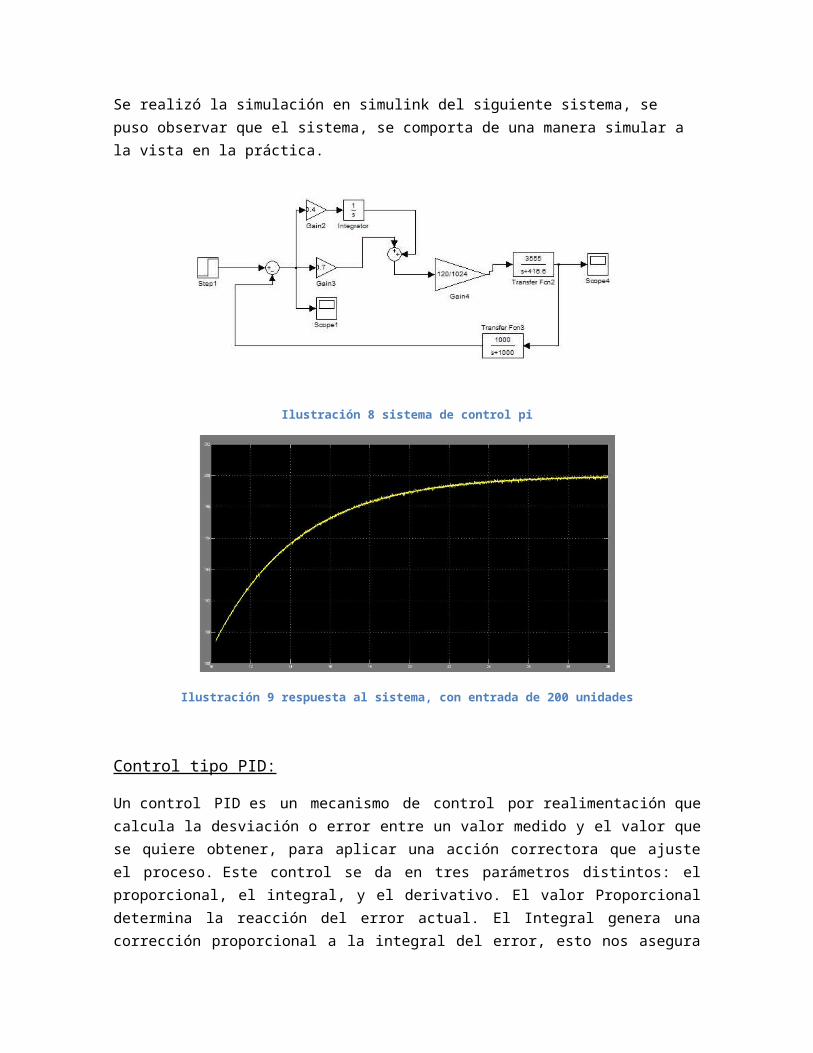
Se realizó la simulación en simulink del siguiente sistema, se puso observar que el sistema, se comporta de una manera simular a la vista en la práctica.
Ilustración 8 sistema de control pi
Ilustración 9 respuesta al sistema, con entrada de 200 unidades
Control tipo PID:
Un control PID es un mecanismo de control por realimentación quecalcula la desviación o error entre un valor medido y el valor quese quiere obtener, para aplicar una acción correctora que ajusteel proceso. Este control se da en tres parámetros distintos: elproporcional, el integral, y el derivativo. El valor Proporcionaldetermina la reacción del error actual. El Integral genera unacorrección proporcional a la integral del error, esto nos asegura

que aplicando un esfuerzo de control suficiente, el error deseguimiento se reduce a cero. El Derivativo determina la reaccióndel tiempo en el que el error se produce. La suma de estas tresacciones es usada para ajustar al proceso vía un elemento decontrol como la posición de una válvula de control o la energíasuministrada.
Para realizar la práctica de control PID, se ingresó a laaplicación “Control PIDa”, configurando el canal ADC en 3 y el Com1…10 en 5. Se fue cambiando el valor de referencia, y el valor dekp en 0.7, kd en 0.001 y ki en 0.4 y se obtuvieron los siguientesresultados.
REFERENCIA KP KI KD RETROALIMENTACIO
N ERROR
50 0.7
0.4
0.001 55 -5
200 0.7
0.4
0.001 207 -7
400 0.7
0.4
0.001 395 5
Para un valor de kp=0.7, ki=2 y kd=0.001, se puede observar que elsistema es muy rápido en estabilizarse, mas o menos en 1 segundo.
Ilustración 10 respuesta del sistema con kp=0.7, ki=2, kd=0.001

Para un valor de kp=0.2, ki=0.4 y kd=0.001, ante entradas de escalones de 400 unidades, se verifica que el sistema es sobre amortiguado, con tiempo de estabilización de 3.1s.
Ilustración 11 respuesta del sistema, a un escalon de 400 unidades de entrada
Convirtiendo el control en un control PD, se puede observar que existe un error de estado estacionario, como se ve a continuación.
Ilustración 12 respuesta del sistema a un control tipo pd
Para un valor de kp=0.5, ki=0 y kd=0.01, también se observa un error de estado estacionario.

Ilustración 13 respuest del sistema con kp=0.5 y kd=0.01
Se realizó la simulación en simulink del siguiente sistema, se puso observar que el sistema, se comporta de una manera simular a la vista en la práctica.
Ilustración 14 sistema con control PID

Ilustración 15 respuest a la simulacion, con una entrada de 200 unidades
CONCLUSIONES:
Con la realización de esta práctica, se pudo concluir que:
Un control tipo P, posee un valor de error estacionario alto,además, se pudo comprar que el sistema puede convertirse eninestable aumentando su Kp.
Un control tipo PI, es un control que llega a estabilizarseen el valor deseado, mientras el escalón de entrada es mayor,el sistema va a demorar más en estatizarse, también se pusocomprobar que el sistema tiene una respuesta sobreamortiguada.
Un control tipo PID, es muy rápido para estabilizarse, ademásposee una respuesta sobre amortiguada, también se pudoobservar que con un ki=0 el sistema posee un valor de errorestacionario.
BIBLIOGRAFIA:
Maloney, T. (2006). Electronica Industrial Moderna. Mexico: Pearson Educacion.





















