Topometría y Microgeodesia - Biblioteca Digital CPA
373
Armando Del Bianco Ingeniero Agrimensor Profesor Titular Cátedra de Topometría y Microgeodesia UNIVERSIDAD NACIONAL DE CORDOBA FACULTAD DE CIENCIAS EXACTAS FISICAS Y NATURALES DEPARTAMENTO DE AGRIMENSURA
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of Topometría y Microgeodesia - Biblioteca Digital CPA
Armando Del BiancoIngeniero Agrimensor
Profesor Titular
Cátedra de
Topometría y Microgeodesia
UNIVERSIDAD NACIONAL DE CORDOBA
FACULTAD DE CIENCIAS EXACTAS FISICAS Y NATURALES
DEPARTAMENTO DE AGRIMENSURA
TOPOMETRÍA y MICROGEODESIA - Año 2000
1
La ilustración de la portada, reproduce el frontispicio del libro de Topografía publicado por
Aaron Rathborne, denominado “ El Agrimensor ” editado en el año 1616.
En él nos muestra un pórtico a cuyos flancos se encuentran las dos musas de los Agri-
mensores que trabajan en los campos: “ la Geometría y la Aritmética “.
En la imagen inferior, vemos un Agrimensor con su tabla y alidada, quien se encuentra
realizando un relevamiento sobre un paisaje con árboles y un arroyo que pasa por detrás
del castillo.
En la imagen superior, un estudiante de Agrimensura, está usando un teodolito(*) mientras
toma nota de los ángulos y distancias en su libro de campo.
Nótese que el aprendiz se encuentra parado sobre dos personas, a quien el autor los iden-
tificó como “ el tonto y el ignorante”.
(*) esta es una de las representaciones más antigua del uso del teodo-
lito, para las mediciones verticales y horizontales desde una misma
estación.
Rathborne introdujo en su libro el nombre de teodolito para describir
este instrumento topográfico que fue inventado por Th.Digges.
Th.Digges además diseñó una cadena dividida en 100 partes para medir
distancias en lugar de utilizar cuerdas o palos. También diseñó y utilizó
por primera vez una libreta de campaña normalizada.
Programa (versión 3.3) TOPOMETRÍA y MICROGEODESIA - Año 2000
2
Programa de clases teóricas de la asignatura
Topometría y Microgeodesiaversión 3.3 - 2000
Capitulo 1: Introducción
1.1 Objetivos de la AsignaturaI. Objetivos generalesII. Objetivos Específicos
1.2 Inserción de la materia dentro de la carrera de AgrimensuraUN POCO DE HISTORIA ANTIGUA
UN POCO DE HISTORIA MODERNA
... ACERCA DEL NOMBRE DE LA MATERIA
1.3 DefinicionesTOPOMETRÍA - MICROGEODESIA
ESTUDIOS - TRAZADOS ESPECIALES
1.4 Espaciado y exactitudes de las Mediciones Especiales
1.5 Dominio de las Mediciones EspecialesMEDICIONES PARA LA EXPLOTACIÓN Y PRODUCCIÓN AGROPECUARIA
MEDICIONES PARA ESTUDIOS Y PROYECTOS DE GRAN EXTENSION
MEDICIONES PARA OBRAS DE ARQUITECTURA E INGENIERÍA
MEDICIONES PARA LA EXPLORACION Y EXPLOTACIÓN MINERA
MEDICIONES DE LA CORTEZA TERRESTRE
MEDICIONES PARA LA INDUSTRIA METAL MECÁNICA
MEDICIONES PARA EL ESTUDIO DEL MEDIO AMBIENTE
1.6 Etapas secuenciales y modos de participación1. IDEA GESTADORA
2. PLANTEO PREVIO (CAPTURA DE LA INFORMACIÓN GRAL.)3. ANTEPROYECTO
4. PLANTEO ( CAPTURA Y PROCESO DE DATOS.)5. PROYECTO EJECUTIVO
6. REPLANTEO
7. MEDICIONES POSTERIORES
8. MEDICIONES SIMULTÁNEAS
1.7 División del Dominio (En las Obras de Arquitectura e Ingeniería)I. OBRAS DE DESARROLLO LINEAL
II. OBRAS DE DESARROLLO SUPERFICIAL
III. OBRAS DE PROFUNDIDAD O ALTURA
Capitulo 2: Sistemas de Apoyo - Sistemas y Marco de Referencia
2.1 Forma de la tierra
2.2 Sistemas de Referencia
2.3 Sistema de Coordenadas planas.2.3.1) Coordenadas rectangulares: EJE DE REFERENCIA LÍNEA RECTA
2.3.2) Coordenadas rectangulares: EJE DE REFERENCIA LÍNEA MIXTA
2.3.3) Coordenadas rectangulares: SUP.AUXILIAR EL PLANO VERTICAL
Programa (versión 3.3) TOPOMETRÍA y MICROGEODESIA - Año 2000
3
2.3.4) Coordenadas rectangulares: SUP.AUXILIAR EL PLANO HORIZONTAL- EJES CARTESIANOS
2.3.5) Coordenadas rectangulares Espaciales2.3.6) Coordenadas polares: SUP.AUXILIAR EL PLANO HORIZONTAL
2.3.7) Coordenadas polares: SUP.AUXILIAR EL PLANO VERTICAL
2.4 Sistema de referencia Topocéntrico Físico
2.5 Sistema de Referencia Geodésico
2.6 El Datum Horizontal
2.7 El Datum Vertical2.7.1) La estructura interior de la tierra2.7.2) Algunas consideraciones sobre la fuerza de la gravedad2.7.3) Potencial de la fuerza de atracción terrestre.
2.8 Sistemas Geocéntricos
2.9 Sistema GPS2.9.1) El segmento espacial2.9.2) El segmento control2.9.3) El segmento usuario2.9.4) Sistema de Referencia Espacial2.9.5) Sistema de Referencia Terrestre WGS842.9.6) El Sistema POSGAR2.9.7) Transformación de coordenadas
2.10 Proyecciones Cartográficas más usuales
2.11 Altura elipsoidal – Cota Ortométrica
Capítulo 3: Captura de datos
3.0 Revisión y actualización del Instrumental topográfico de medición.(Clase teórica práctica)3.0.1) Teodolitos:
APARATOS ÓPTICOS - APARATOS ELECTRÓNICOS: MEDICIÓN ANGULAR ( DIFERENCIA DE FASE)MEJORAS INTRODUCIDAS A LOS EQUIPOS MODERNOS.
3.0.2) Niveles:APARATOS ÓPTICOS - NIVELES LÁSER - NIVELES DIGITALES
NIVELACIÓN CON ULTRASONIDO.3.0.3) Distanciómetros - Taquímetros - Estaciones Totales.
HISTORIA - EQUIPO DE CORTA DISTANCIA-MEDIANA Y GRAN ALCANCE - EQUIPOS DE PRECISIÓN Y DE ALTA PRECISIÓN
COMPENSACIÓN DE LOS EJES. - PROGRAMAS - ERRORES - ERROR DE SETEO. - ESTACIONES TOTALES ROBÓTICAS - UTILIDAD -3.0.4) Posicionadores Satelitales - GPS y DGPS3.0.5) Otros
COLECTORAS DE DATOS - COLIMADORES LASER - VERTICALIZADORES
3.1 Objetivos
3.2 Topografía y forma del relieve3.2.1) Puntos acotados3.2.2) Perfilometría3.2.3) Curvas de Nivel
3.3 La información3.3.1) La información general3.3.2) La información específica3.3.3) Modos de obtener los datos
3.3.3.a) Directos3.3.3.b) Indirectos
3.3.4) Tipo y estructura de la información3.3.5) Soporte
3.4 Captura de la información del terreno3.4.1) Métodos directos3.4.2) Métodos indirectos3.4.3) Clasificación de los objetos desde un punto de vista geométrico3.4.4) Clasificación de los objetos conforme a la visibilidad
Programa (versión 3.3) TOPOMETRÍA y MICROGEODESIA - Año 2000
4
3.4.4.a) Objetos Ocultos3.4.4.b) Objetos no visibles
3.5 Clasificación de los levantamientos3.5.1) Levantamientos superficiales3.5.2) Levantamientos lineales
3.6 Exactitudes: DEFINICIONES - ACOTACIÓN DE ERRORES
3.7 Sistema de Apoyo del Relevamiento3.7.1) Marco de Referencia3.7.2) Precisión de las redes de apoyo
3.7.2.a) MGEO3.7.2.b) Estándares Geodésicos
3.7.3) Acotación de errores de un levantamiento
Capítulo 4: Levantamientos Terrestres
4.1 Elección de los puntos a relevar: MUESTREO4.1.1) Muestreo aleatorio simple4.1.2) Muestreo sistemático3.1.3) Muestreo estratificado
4.2 Métodos de levantamiento Superficial4.2.1) Cuadrícula
4.2.1.a) Acotación de Errores
4.2.2) Método Polar (taquimetría)4.2.2.a) Acotación de Errores4.2.2.b) Determinación de la dirección del vector4.2.2.c) Determinación de la magnitud del vector
4.2.3) Bisección4.2.3.a) Acotación de Errores
4.3 Sistemas de Medición para levantamientos industriales4.3.1) Sistemas de bisección4.3.2) Sistemas de medición polar4.3.3) Sistemas de videogrametría4.3.4) Sistemas de rastreo láser
4.4 Métodos de levantamiento lineal: Perfilometría 4.4.1) Perfil Longitudinal
4.4.1.a) Características 4.4.1.b) Dibujo 4.4.1.c) Obtención
4.4.2) Perfiles Transversales
4.5 Métodos de levantamientos con GPS 4.5.1) Determinación de la posición horizontal 4.5.2) Modos de medición
4.5.2.a) Medición de la Pseudodistancia 4.5.2.b) Medición con DGPS 4.5.2.c) Medición de la fase
4.5.3) Determinación de la Altimetría 4.5.4) Proyecciones
4.6 Fotografía digital y GPS
Capitulo 5: Levantamientos hidrográficos
5.1 Objetivos 5.2 Determinación de la cota de los puntos sumergidos
5.2.1) Determinación de la cota de la Superficie Auxiliar 5.2.1.a) En lagos o lagunas 5.2.1.b) En ríos 5.2.1.c) En los mares y océanos
5.2.2) Determinación del sondeo 5.2.2.a) Miras o prismas
Programa (versión 3.3) TOPOMETRÍA y MICROGEODESIA - Año 2000
5
5.2.2.b) Varillas graduadas 5.2.2.c) Sogas / alambres 5.2.2.d) Ecosondas
5.2.3) Precisión de los sondeos 5.2.3.a) Movimientos de la lancha 5.2.3.b) Calidad del equipo
5.3 Determinación de la posición planimétrica5.3.1) Areales o superficiales
5.3.1.a) Método Polar 5.3.1.b) Bisección 5.3.1.c) Libre Estacionamiento
5.3.2) Posicionamiento con GPS 5.3.3) Navegación precisa con GPS 5.3.4) Perfilometría 5.3.5) Métodos híbridos 5.3.6) Sistemas de Apoyo
5.4 Cruce Altimétrico de grandes ríos
Capitulo 6: Aplicaciones de los Levantamientos Hidrográficos
6.1 Vías Navegables
6.2 Obras de Ingeniería
6.3 Determinación de la pendiente media de un curso líquido.
6.4 Cálculo del caudal de un canal.
6.5 Cálculo del caudal de un río.6.5.1) Estudio de Cuenca
6.5.1.a) Definición de la cuenca y tiempo de concentración6.5.1.b) Definición de la lluvia de diseño6.5.1.c) Cálculo de caudales
6.5.2) Perfiles Transversales6.5.2.a) Procedimiento
6.6 Cálculo de la distancia “L”.
6.7 Cálculo de la poligonal “Línea de Ribera”
6.8 Determinación del “Perilago”.
6.9 Determinación de la “Línea de Costa Marítima”.EL CAMPO DE GRAVEDAD TERRESTRE Y LAS FUERZAS DE MAREA.MAREAS OCEÁNICAS Y ATMOSFÉRICAS - MAREAS DE LA TIERRA SÓLIDA
Capitulo 7: Proceso de la Información
7.1 Introducción7.2 Procesos Cad
7.2.1) Análisis de distintos Software de Cad7.2.2) CartoMap como Sofware específico
7.3 Proceso de Imágenes
7.4 Relación con los SIG
7.5 Impresión de los trabajos
PLOTEOS DESDE AUTOCAD - COMENTARIOS
Programa (versión 3.3) TOPOMETRÍA y MICROGEODESIA - Año 2000
6
Capitulo 8: Replanteo
8.1 Introducción
8.2 Modelos de Solución8.2.1) Formulación precisa8.2.2) Desarrollo de un modelo8.2.3) Análisis del modelo
8.3 Tareas Previas
8.4 Ejes
8.5 El Plano de Replanteo8.5.1) Geometrialización8.5.2) Posicionamiento8.5.3) Confección del plano de replanteo
8.6 Clasificación de los ejes8.6.1) Ejes de replanteo en obras de desarrollo superficial8.6.2) Ejes de replanteo en obras de desarrollo lineal8.6.3) Análisis del modelo
8.7 El Sistema de Apoyo Principal8.7.1) Configuración del Sistema8.7.2) Permanencia en el tiempo8.7.3) Monumentación8.7.4) Protección de los mojones8.7.5) Cierre de la obra8.7.6) Exactitudes
8.8 Los Sistemas de Apoyos Secundarios8.8.1) Configuración del Sistema8.8.2) Permanencia en el tiempo8.8.3) Monumentación8.8.4) Protección de los mojones8.8.5 ) Exactitudes
8.9 Diferencias entre el S. Principal y el S. Secundario
8.10 Replanteo de puntos del Sistema Secundario
8.11 Modos de replanteo de vértices del S.S.
8.12 Sistema de Apoyo Altimétrico8.12.1) Exactitudes
8.13 Métodos de Replanteo de Puntos Secundarios y Auxiliares8.13.1) Alineaciones
8.13.1.a) Procedimiento
8.13.2) Poligonales8.13.3) Polar
8.13.3.a) Procedimiento8.13.3.b) Replanteo de un punto en obra Empleando Estación Total8.13.3.c) Replanteo de un punto secundario Empleando Estación Total8.13.3.d) Acotación de errores8.13.3.e) Acotación de errores en una dirección determinada
8.13.4) Bisección8.13.4.a) Procedimiento8.13.4.b) Acotación de errores en la dirección de los ejes de referencia
8.13.5) Libre Estacionamiento8.13.5.a) Procedimiento
8.14 Replanteo de Obras8.14.1) Replanteo de Obras de Desarrollo Superficial8.14.2) Replanteo de Obras de Desarrollo Lineal
8.14.2.a) Replanteo de Obras Viales8.14.2.b) Replanteo de Obras Hidráulicas a cielo abierto8.14.2.c) Replanteo de tuberías
Programa (versión 3.3) TOPOMETRÍA y MICROGEODESIA - Año 2000
7
8.15 Replanteo de puntos y rectas
8.16 Replanteo de Curvas Horizontales Circulares8.16.1) Métodos de replanteo
8.16.1.a) Abscisas y Ordenadas8.16.1.b) Deflexión8.16.1.c) Polar8.16.1.d) Bisección
8.17 Replanteo de Curvas Horizontales Espirales: CLOTOIDE
8.17.1) Métodos de replanteo
8.18 Replanteo de Curvas Verticales: PARÁBOLA
8.19 Control del Replanteo8.19.1) Obras de Altura
8.19.1.a) Control planimétrico de encofrados, instalaciones e insertosCONTROL DEL REPLANTEO DE EJES, DE INSTALACIONES Y ENCOFRADOS DE COLUMNAS, VIGAS Y CASETONES.
CONTROL DEL REPLANTEO DE INSERTOS
8.19.1.b) Control de niveles de encofrados, instalaciones e insertos8.19.1.c) Control de la verticalidad de encofrados de columnas
8.19.2) Determinaciones conjuntas8.19.3) Obras de Profundidad8.19.4) Túneles
8.19.4.a) Sistema de Apoyo Superficial8.19.4.b) Orientación Interior8.19.4.c) Control de la vertical de los pozos8.19.4.d) Excavación manual. Replanteo8.19.4.e) Excavación con tunelera. Replanteo8.19.4.f ) Monitoreo de tuneleras automatizadas
Capitulo 9: Mediciones posteriores
9.1 Movimiento de suelos9.1.1) Métodos de medición y cálculo de volúmenes
9.2 Ductos subterráneos9.2.1) Planos conforme a obras9.2.2) Catastro de ductos
9.3 Medición de deformaciones9.3.1) Nivelación de alta precisión9.3.2) Red de Control y Malla Testigo9.3.3) Prueba de Cargas: Puentes, losas, vigas, pilas.9.3.4) Auscultación de presas
9.3.4.a) Métodos directos o clásicos9.3.4.b) Métodos geodésicos c/acceso a los puntos testigos.9.3.4.c) Métodos geodésicos s/acceso a los puntos testigos.9.3.4.d) Sensores remotos. Instrumental especial
Capitulo 10: Aplicaciones
10.1 Mediciones aplicadas a la Industria Metal Mecánica10.1.1) Montaje de estructuras metálicas10.1.2) Control de deformación de estructuras fijas10.1.3) Control de deformación de estructuras móviles10.1.4) Control de deformación de máquinas
10.2 Mediciones aplicadas a la Industria Agropecuaria10.2.1) Relevamiento de mejoras y desmejoras10.2.2) Intervención en proyectos de cultivos intensivos10.2.3) Agricultura de precisión
Bibliografía TOPOMETRÍA y MICROGEODESIA - Año 2000
8
Bibliografía
1. Compendio de Topografía: Roberto Muller – Cuarta Edición – Editorial El Ateneo: Baires
2. Curso de Topografía : Lelis Espartes – Edición 2055 – Editorial Globo: Brasil
3. Tratados de Topografía : W. Jordan – Tirada 4°- Editorial G.Gili - Barcelona
4. Teoría de Errores e instrumentación : M. Chueca Pazos y otros -. Editorial Paraninfo – Madrid
5. Métodos Topográficos : M. Chueca Pazos y otros -. Editorial Paraninfo - Madrid
6. Redes Topográfica y MicroGeodesia : M. Chueca Pazos y otros -. Editorial Paraninfo - Madrid
7. Tratado de Topografía : Davis, Foote & Kelly – Edic. original– Editorial Aguilar: Madrid
8. Topografía para obras de Ingeniería : Piliph Kisan
9. Apuntes de las Cátedras de Topografía I y II de la Escuela de Agrimensura
10. Topografía Subterránea :
11. Topografía para Obras de Ingeniería: A. Santos Mora – Colegio Topogr.- 1988 - Madrid
12. Topografía Mecánica y de Estructuras : Expósito Bata –1°Edición- CEAC - Barcelona
13. Mediciones para Obras de Arquit. e Ingeniería : Del Bianco-Bosch 1988 Artesol: Córdoba.
14. Surveying Procyect
15. Sistemas geométricos : Tito.L.Racagni – UNC – 1992 - Córdoba
16. Tratado de Geodesia Superior : P.S. Zacatov - 3°Edición – Editorial Mir - Moscú
17. Geodesia y Cartografía Matemática : Fernando Martín Asin - 2°Edición- Paraninfo - Madrid
18. Geodesia para Obras de Ingeniería e Industrias : Sundacov – 2°Edición – Editorial Mir – Moscú
19. Apuntes de la Cátedra de Geodesia de la Escuela de Agrimensura
20. Sistemas Geodésicos: Agrim.Rubén Rodriguez - Comite Nacional de la Unión Geodésica
21. Estándares Geodésicos: Agrim.Rubén Rodriguez - Comite Nacional de la Unión Geodésica
22. Manual para Control geodésico de áreas pequeñas: Excequiel Pallejá y otros – IPGH - Mexico
23. Proyecciones Cartográficas mas usuales: S.G.Bartaburu – UNC – 1991 - Córdoba
24. Apuntes de GPS (2 módulos) U.N.R: Mangiaterra, Parachú, Huerta– UNR – 1999 Rosario
25. GPS Una guía para el utilitario del futuro: Jeff Hurn
26. Los Observables GPS: C. Bruninni– UNLP – 1998 – La Plata
La bibliografía se completa con apuntes del titular de la Cátedra, notas y publicaciones de colegas docentes y
profesionales Agrimensores, folletos técnicos de Instrumental de medición, revistas, y material bajado de Internet.-
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
9
“ … cada generación renueva sus ideales. Si este libro pudiera estimular a los jóvenes a descubrir los
propios quedarían satisfechos los anhelos del autor, que siempre estuvo en la vanguardia de la suya y es-
pera tener la dicha de morir antes de envejecer. ”
JOSE INGENIEROS Bs.As 1910.-
Se cita este autor al abrir nuestras páginas, y volveremos a citarlo en numerosas
oportunidades, ya que sus palabras y pensamientos son faro, cuya intensa luz han
guiado a buen puerto las naves de la juventud latinoamericana durante casi un siglo,
rescatándolas de las tinieblas de la vulgaridad y de la mediocridad…
... y por ser también, quien suscribe estas notas, un ferviente admirador de su obra
y un seguidor de sus ideales.
Capitulo 1. Introducción
1.1: Objetivos de la Asignatura
I. Objetivos generales:
• Destacar el rol que le corresponde al Agrimensor, como parte integrante de equipos
multi disciplinarios, ya sea que se desempeñe en estudios y proyectos, en la conduc-
ción y coordinación de equipos, o en la faz ejecutiva. Tomando en cuenta que el mismo
actúe como profesional independiente, o lo haga en relación de dependencia (en la faz
pública o privada).
• Alentar a los futuros profesionales, a la búsqueda del valor más probable de la verdad.
Incentivarlos para que, en su desempeño en la vida profesional se destaquen por la la-
bor técnica/científica, cumpliendo prioritariamente con los valores éticos.
• Desarrollar procesos de comprensión, de análisis, comparación y síntesis; tendientes a
movilizar los procesos de razonamientos necesarios para resolver los problemas nuevos
que se les presenten, motivándolos al desarrollo de la imaginación y la capacidad crea-
dora, a fin de obtener criterios personales de solución.
II. Objetivos Específicos:
• Integrar los conocimientos adquiridos en las materias correspondientes al área de la
Geometría Territorial, ya cursadas con anterioridad.
• Actualizar los conocimientos de los alumnos sobre la tecnología de punta, en lo que se
refiere a instrumental de medición, metodologías de trabajo y herramientas de cálculo.
• Ejercitar el manejo e interpretación de planos de proyectos y documentación específica
de obras civiles y mecánicas, analizadas desde el punto de vista que le interesa al
Agrimensor.
• Hacer conocer e incentivar el dominio de la vasta terminología, propia de la temática
analizada.
• Ejercitar destrezas en el manejo del instrumental de medición, herramientas de cálculo y
diseño gráfico.
• Desarrollar un programa de temas que tome en cuenta las necesidades actuales de la
sociedad y los requerimientos del mercado laboral; sin olvidar el lugar o la región donde
probablemente desarrollará su actividad el futuro profesional.
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
10
• En esta especialidad, el Agrimensor se verá forzado en forma permanente a resolver
problemas que le exigirán un adiestramiento especial para arribar a la solución óptima.
Es por ello que el objetivo a alcanzar en el desarrollo del temario será prioritariamente la
de formar criterios:
Criterios para la selección y análisis de la información, para la correcta opción de
la metodología de medición, para la elección del instrumental adecuado y de la
herramienta matemática.
Criterios el la investigación y análisis de la exactitud necesaria en cada empren-
dimiento, en el empeño y esfuerzo por lograrlo y en la implementación de los
mecanismos de control para asegurar que el resultado cumpla con la tolerancia
preestablecida.
Criterios para la optimización de los recursos, es decir:
Lograr la efectivización de los dos puntos anteriores, en el menor tiempo y con el
menor costo posible de movilización y de recursos.-
1.2: Inserción de la materia dentro de la carrera de
Agrimensura
Un poco de historia antigua:
Si nos imaginamos a los primeros hombres caminando sobre la tierra, algo asi…como
2.000.000 de años atrás, asociaremos inmediatamente este ser débil, indefenso, luchando
por su propia supervivencia contra un clima y un medio totalmente hostil, luchando contra el
resto de los animales e incluso contra sus primos antropoides.
Esta victoria lograda por los primeros hombres, es lo que algunos historiadores han dado en
llamar “el autentico milagro de la creación”, y ello fue posible a partir del empleo de la única
ventaja que poseía el hombre sobre el resto de los seres vivos - el INGENIO - la habilidad para
fabricar útiles y la posibilidad de usar las manos.
Debieron de pasar muchos milenios para que el hombre abandonara su etapa de animal pre-
dador y dar el gran salto hacia la historia, desde la primitiva economía destructiva hacia la
economía de producción y conservación.
La historia antigua de la humanidad se divide en Paleolítico y
Neolítico. A su vez el Neolítico en : Edad de Piedra – Edad de
Bronce y Edad de hierro.
En los milenios finales del Paleolítico y primeros milenios de la
Edad de Piedra, el refugio del Hombre eran Cavernas naturales
o excavadas en la roca (Areniscas).-
Al producirse los cambios climáticos del final del cuaternario,
los grandes rebaños y por lógica consecuencia también el
hombre, son
empujados hacia las cuencas de los grandes ríos, allí comienza a practicar los primeros culti-
vos y la domesticación de los animales (Esta nueva forma de vida se conoce con el nombre
de economía neolítica). Esta actividad vincula estrechamente al hombre con la tierra, el hábi-
tat se transforma, el refugio temporal cede el paso al poblado estable, la economía de pro-
ducción exige el nacimiento de la industria, - la fabricación de herramientas para el cultivo de
la tierra y de armas - ya no sirven las armas de caza, ahora se necesitan armas de guerra,
para defender las cosechas.
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
11
Con la revolución urbana cambia la religión, cambia el arte, cambia la cultura - cambia elHombre - esta etapa se ubica entre -9.000 y - 6.000 años aC.
En sus orígenes el poblado estaba formado por una inmensa aglomeración de viviendas, pe-
gadas unas a otras formando un bloque inexpugnable, plantas rectangulares, techos planos
con entradas por la azotea.
Posteriormente en la cultura megalíti-
ca, la incorporación de la industria
metalúrgica cambia fundamentalmen-
te el diseño urbano: las casas son
rectangulares y se encuentran distri-
buidas alrededor de los palacios y los
templos, generalmente protegidas por
robustas murallas, con torres de de-
fensa tronco-cónicas. Aparecen en
este período las construcciones en
círculo y los techos en bóveda. Inclu-
so existen poblados como el de Alca-
ydús (en Menorca) construidos por
múltiples recintos circulares tangen-
tes entre sí.
La Mesopotamia fue cuna de un conjunto de civilizaciones (Súmera - Acadia - Babilonia - Asi-
ria y Caldea). La más antigua cultura urbana conocida, es la de los Súmeros y llama podero-
samente la atención de los historiadores los conocimientos que ya poseían sobre las matemá-
ticas y la astronomía de posición. Y los conocimientos de geometría y topografía que los lle-
varon a construir importantes obras de Arquitectura como así también complejos canales de
riego.
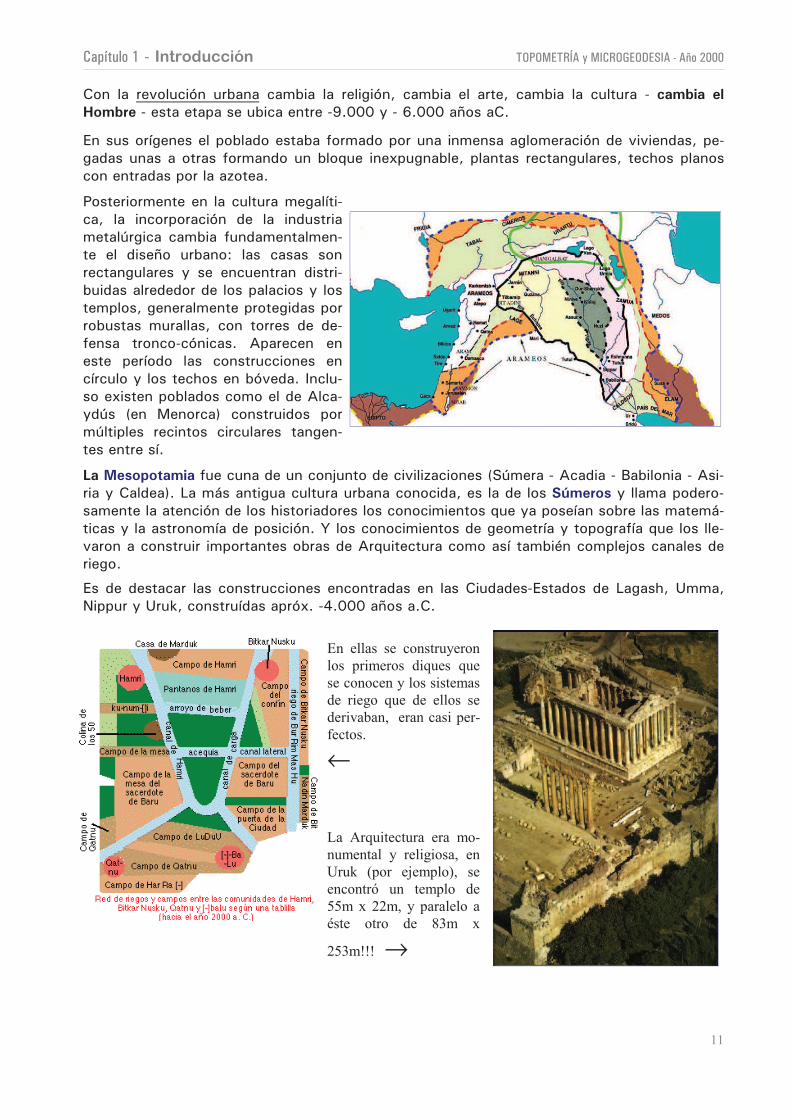
Es de destacar las construcciones encontradas en las Ciudades-Estados de Lagash, Umma,
Nippur y Uruk, construídas apróx. -4.000 años a.C.
En ellas se construyeron
los primeros diques que
se conocen y los sistemas
de riego que de ellos se
derivaban, eran casi per-
fectos.
←
La Arquitectura era mo-
numental y religiosa, en
Uruk (por ejemplo), se
encontró un templo de
55m x 22m, y paralelo a
éste otro de 83m x
253m!!! →
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
12
La perfecta simetría de sus naves, pasillos y columnas y el manejo de planos horizontales en
distintos desniveles, hace suponer el empleo de rudimentarios instrumentos de medición to-
pográfico.
En Babilonia el rey Nabucodonosor, fue famoso más que por
sus conquistas por la construcción de la Ciudad, en la cual
levantó numerosos palacios, templos, puentes y una gran mu-
ralla de 25m de espesor que rodeaba toda la ciudad. De ella
llama la atención muchísimas cosas, como por ejemplo la dis-
tribución de las viviendas por manzanas, o la perpendiculari-
dad de sus calles, pero nada llama tanto la atención como la
majestuosidad de sus jardines colgantes.
En esta cultura se advierte ya el uso de un instrumental más sofisticado de medición, como
así también del manejo de la geometría práctica, como por ejemplo el empleo del círculo gra-
duado en 360°…
Los Asirios asombraron con sus construcciones en terrazas, con desniveles, escaleras, ram-
pas y planos inclinados.
Otro pueblo vecino y con una cultura también milenaria
fueron los Persas, de quienes podemos poner como ejemplo
la construcción de la Ciudad de Persépolis, en la cual se
observan varios ejes de simetría rigurosamente perpendicu-
lares entre sí y distribuídos uniformente en la ciudad.
También es importante rescatar el templo que mandó a
construir el rey Salomón, rey del pueblo hebreo -950 años
a.C. que tenía las siguientes medidas: 300m x 450m !!, fue
proyectado por Arquitectos y replanteado por Geómetras
Fenicios mandados a buscar expresamente
… pero en esta recorrida a vuelo de “ NAVSTAR “ por la historia antigua, merece una espe-
cial atención la cultura egipcia…
dice el historiador J.Vercoutter: “…al neolítico se remontan los pri-
meros esfuerzos del acondicionamiento del valle del Nilo por el hom-
bre … el cultivo de las tierras del valle sólo podían hacerse bajo una
doble condición: había que proceder a secar los terrenos cenagosos
de los bordes del lecho del río, una vez terminada la crecida. Y a
continuación había que irrigar las parcelas desde la siembra y hasta
las cosechas…”,para lograr este propósito se diseñó y se
construyó un extraordinario sistema de drenaje, con ata-
guías de retención, un complejo de diques, azudes nivelado-
res y canales de riego.
dicen otros historiadores, en este caso Trevisand y Sinland en su
Historia Antigua “… si reflexionamos acerca de las monumentales
tumbas y de los grandiosos templos y palacios que los egipcios le-
vantaron, llegaremos a la conclusión que sus conocimientos de las
matemáticas y de la geometría práctica debían ser considerables…”
Había tres tipos de tumbas, la mastaba, la pirámide y el hi-
pogeo.

Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
13
Para dar una idea de las dimensiones, podemos decir que la
gran pirámide esta construída con 2.300.000 bloques de
piedra de 2.5 T c/u, mide 227m de lado y tiene una altura de
147m.
Si aplicamos el algoritmo de cálculo de volumen de la pirámi-
de, dice que: V = 2.524.921 m3 de movimiento de rocas!!!,
más que todo el movimiento de suelos de la presa del Cho-
cón.y a -2.500 años a.C.
¿Sabe Ud. replantear una pirámide?
…una vez elegido el lugar, había que preparar el terreno limpiándolo de toda la arena superfi-
cial hasta llegar a la roca viva, donde debían afirmarse los cimientos. Entonces los arquitec-
tos dirigían a los esclavos para que tallaran terrazas en formas de escalones en las laderas
irregulares de la colina. Estas terrazas que servían de cimientos para el asentamiento de los
bloques de piedras, debían de estar rigurosamente horizontales.
Para asegurar la horizontalidad, los constructores abrieron trincheras llenas de agua por todo
el contorno de la base. Usando como referencia el nivel plano materializado por la superficie
del líquido, nivelaron una superficie de 6 Ha.. El terreno resultó tan horizontal que ente el
vértice Sudeste y el vértice Noreste solo hay una diferencia de dos centímetros.
Estos canales que rodeaban toda la construcción, eran llenados con agua en forma perma-
nente mediante el empleo de mecanismos formados por baldes y contrapesos. El primer his-
toriador “Herodoto” señala que el agua convirtió el lugar en una isla.-
Posteriormente, ya sobre la superficie perfectamente nivelada, se replanteaban los lados de la
pirámide, es decir el cuadrado de la base, pero debía hacerlo asegurándose que los cuatros
lados del monumento estuviesen correctamente orientados hacia los cuatro puntos cardina-
les. La orientación de la pirámide se hacia con la ayuda de varios cuerpos celestes, puesto
que los egipcios desconocían la brújula…seguramente utilizaron la estrella “Alfa” de la cons-
telación del Dragón, ubicada muy próxima al polo Norte celeste.
Trazar los ángulos rectos para los geómetras egipcios no debió presentar ningún tipo de difi-
cultad, ya que sabían que en un triángulo rectángulo cuando un cateto mide 3 unidades y el
otro cateto 4 unidades, la hipotenusa debe medir rigurosamente 5 unidades.
¿Sabe Ud. quien realizaba el replanteo de la pirámide?
La tarea topométrica de nivelación y replanteo de las terrazas, lo realizaban los topógrafos.
El replanteo “fino” de los vértices y la orientación de los lados, lo realizaba un Geómetra,
que a la vez tenía el cargo de Sacerdote, y lo hacía en representación del dios Thoth… tam-
bién llamado “Ermes Trimegisto” (tres veces grande), Dios de la Sabiduría.-
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
14
Conclusiones
Podemos entonces afirmar sin temor a equivocarnos, que la Geo-
metría práctica, es decir la Topometría, aparece en el reloj de la his-
toria en el mismo instante que la Arquitectura, es decir entre 5000 y
6000 años aC. –
Desde entonces la Arquitectura y la Geometría han recorrido juntas ,
el mismo camino, por todo el mundo y en todas las culturas. Se nece-
sitó de la Geometría práctica para construir:
“desde la obra más pequeña hasta las monumentales maravillas que
aun hoy en día sorprenden al mundo”.
Al principio las mediciones estuvieron en manos de geómetras capa-
citados para el difícil arte del replanteo de obras. Los algoritmos
matemáticos y los métodos de medición se trasmitieron oralmente, y
más tarde a través de papiros o en tablillas cuneiformes que, en todas
las épocas y en todas las culturas, fueron celosamente custodia-
dos por los sacerdotes.
Fueron los griegos quienes se llevaron los laureles al encargarse de
compilar, normalizar, darle una base científica y trasmitir este con-
junto de conocimientos.
A partir de la Geometría práctica, (que ya estaban en uso desde hacía ya
al menos 3000 años atrás), los griegos elaboraron las bases de la geo-
metría teórica, y de todos fueron Euclides, Thales y Pitágoras quie-
nes más se destacaron.
… Y fue así como el conocimiento nos fue dado, y llegó hasta noso-
tros [los Agrimensores] la responsabilidad de aplicarlos a través de
todos los tiempos.-
Un poco de historia moderna:
En nuestras Escuelas de Agrimensura, fiel reflejo de la Escuela Alemana, se construyó cimen-
tada sobre tres pilares básicos: La Mensura, el Catastro y la Cartografía. Por ende todo el
sistema educativo estaba orientado a la formación de un profesional que cumpliese con este
paradigma.-
Por otra parte, las mediciones destinadas a los relevamientos y replanteos de las obras civi-
les, y en general todas las mediciones conducentes a la ejecución de un proyecto, o la cons-
trucción de una obra de ingeniería, estuvieron en manos de los “Topógrafos” 1 de obras.
Sin embargo, en el devenir de las últimas décadas, con la agresiva inclusión de la modernatecnología, se fueron produciendo profundos cambios en la industria de la construcción, re-sumiendo en dos los más importantes:
a) La necesidad de reducir los costos constructivos.b) La necesidad de reducir los tiempos de obras
1 Se llama topógrafo: a operadores de instrumentos topográficos, que aprendieron el arte y oficio de las mediciones de
obras, directamente en las obras mismas, y cuyos conocimientos prácticos elementales sumada a su propia experiencia,
lo fueron trasmitiendo a otros topógrafos de forma exclusivamente oral
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
15
Ambos cambios debían operarse de manera simultánea a fin de poder sobrevivir y sobresalir
en un mundo que ya se movía hacia la globalización, y en un mercado cada día más competi-
tivo.
• Reducir los costos implica, entre otros cambios, hacer la mayor cantidad de trabajo
en el menor tiempo posible, lo cual incluye por supuesto, no realizar trabajos mal eje-
cutados que deban rehacerse.
• La necesidad de reducir los tiempos obligó a las empresas constructoras a cambiar la
metodología de trabajo. Por ejemplo: a fraccionar la obra en muchas partes y atacarla
desde todos los frentes posibles. ...y este hecho trajo aparejado una dificultad nove-
dosa. La obra se convirtió en un gigante rompecabezas, con márgenes de contacto
cada vez más estrechos.
Este problema sólo puede resolverse con éxito si se plantea la construcción previa de una
sólida e indeformable estructura geométrica que sirva de apoyo, que vincule las mediciones
del relevamiento que sirvió de base al proyecto, con las mediciones del replanteo, que ate
idealmente todas las piezas del puzle dejando al error de vínculo encerrado dentro de una
elipse, cuyos parámetros también sean previstos con anticipación.
En otras palabras, surge la vital necesidad de anticipar a las mediciones de obras, una riguro-
sa acotación de errores, y por consiguiente un correcto análisis para elegir la metodología y el
instrumental de medición adecuado en cada circunstancia.
Esta evolución en el área de las mediciones supera en todo la capacidad operativa y el nivel
de respuesta de los topógrafos de obra, y obliga a las empresas constructoras a buscar la
solución en un profesional competente en el área de la Geometría teórica y práctica, y lo en-
cuentra únicamente en el Agrimensor.-
Respondiendo a este requerimiento, el Congreso Internacional de la F.I.G. (Federación Inter-
nacional de Geómetras), realizado en Munich (Alemania) en el año 1978, crea una Comisión
denominada “Mediciones Especiales” que comienza a tratar por primera vez, los problemas ydesafíos que esta nueva disciplina plantea, recomendando a los claustros universitarios suincorporación como asignatura de grado en los planes de estudio de la Agrimensura. En otraspalabras, Mediciones Especiales, surge como sinónimo de “ mediciones topométricas aplica-das a las obras de ingeniería”, y se la designa con este nombre a los efectos de distinguirla, odiferenciarla de las mediciones tradicionales, fundamentalmente a las mediciones dirigidas arealizar una operación de mensura. Haciéndose eco de esta sugerencia, el Departamento de Agrimensura y la AEDAC (Asociación deEstudiantes de Agrimensura de Córdoba) logran que se modifiquen los planes de estudio y se incorpore
“Mediciones Especiales” dentro de la materia “Elementos de Ingeniería” en el año 1983.-
Casi en correspondencia en el tiempo, se comienza a dictar en la Universidad de Rosario la
asignatura “Estudios y trazados especiales” con un programa destinado en su mayor parte al
estudio y replanteo de trazados viales. Años más tarde se incluye una asignatura con igual
nombre en la carrera de Agrimensura de Catamarca.
- Desde el año 1998, se dicta por primera vez en la Escuela de Agrimensura de la Universidad
de Morón, con el nombre: “Aplicaciones de la Topografía en Obras de Ingeniería”.
A partir que se comienzan a desarrollar los cursos de aplicación en las universidades, se co-
menzó a trabajar fijando estándares, normas, cambios en las metodologías de medición,
siempre dentro del marco de referencia de la topometría.
Sin embargo en muy poco tiempo se produjo en la construcción un nuevo cambio que impac-
tó directamente a las exactitudes constructivas, surge como consecuencia de la globalización
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
16
la necesidad de estandarizar, de fijar normas y tolerancias, obligando a los claustros universi-
tarios a producir cambios que brindaran una solución a este nuevo requerimiento. La solución
más rápida para resolver problemas que involucran exactitudes muy ajustadas, fue la de
adoptar la metodología de medición y la herramienta de cálculo (me estoy refiriendo al cálculo
de compensación), que nos aporta la Geodesia, pero adaptados a espacios más reducidos, de
allí que el nombre que se le asignó fue el de Micro-Geodesia.
Es por este motivo que en algunas universidades, como en Buenos Aires y La Plata se dicta
la materia, “Microgeodesia”.
Felizmente, los violentos cambios tecnológicos que se produjeron en la vereda de enfrente,fueron acompañados con profundos cambios tecnológicos en el instrumental de medición,mientras que la computación nos aportó un extraordinario salto cualitativo, al facilitarnos unaoptimización en las herramientas de cálculo y en los programas de procesamiento, poniendosobre la mesa de trabajo la posibilidad de resolver en minutos complejos programas matricia-les, como es por ejemplo la simulación y la compensación de redes. Todo esto conduce a que hoy en día resulte muy difícil marcar un límite (en lo que a exacti-tudes se refiere) entre: Topometría - Microgeodesia y Geodesia.
Al llegar a este punto de nuestra historia, se juntan tres elementos y se produce el caldo decultivo justo para que se produzca un nuevo cambio evolutivo:
Los tres elementos: Teníamos una infraestructura básica en continuo desarrollo en mediciones especiales Incorporamos toda la potencia y el bagaje ancestral de la Geodesia Y en tercer lugar incorporamos tecnología en la medición y en los procesos.
Y el caldo de cultivo: Las exigencias de controles de calidad (ISO 9000), cada vez más obligatorios y cada
vez más exigentes.-
Esta amalgama perfecta, nos posibilitó a los agrimensores a avanzar varios pasos hacia ade-lante, a incursionar en las mediciones de control de deformación en las obras civiles, y a em-pezar a caminar por un territorio hasta ese momento virgen para nosotros … “Las medicionesIndustriales” .
A medida que se fueron produciendo los saltos tecnológicos, se fueron abriendo nuevos hori-zontes. Así por ejemplo:
al teodolito óptico lo sucedió el teodolito electrónico-digital. Al Telurómetro el distanciómetro, luego la estación total y finalmente la Estación Total
inteligente. A la libreta de campo, la libreta electrónica, luego la colectora de datos, luego la tarje-
ta PC MCIA y finalmente los teclados dettachables. A los niveles ópticos se sumaron los niveles láser, niveles de ultrasonido, autofocus y
los niveles digitales. Se fabricaron instrumentos especiales, accesorios especiales, anteojos de centración
nadiral-cenital y trípodes especiales, mesas de trabajos, colimadores, verticalizadores,etc.
A las computadoras personales 286 a 486 a pentium, pentium II, pentium pro y ade-más se sumaron las notebook.
A los rudimentarios programas en basic los programas enlatados. Aparecen las planillas de cálculo y al Lotus lo sucede el Simphony, el Qpro, el Work y
luego el Excel Se incorporan los programas Cad, siendo el AutoCad el que fija el estándar.
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
17
Aparecen programas comerciales que generan MDT “Modelo Digital de Terreno”, elSurfer 1º; luego el Map de Sokkia, el Cartomap y otro de Leika. Al “Civil Survey” deAutodesk compatible con AutoCad, lo sucede el “landdevelopment” y el “Civildesing”
A la tableta digitalizadora la sucede la mesa digitalizadora y estos a su vez quedan ob-soletos con el empleo de software que transforman imágenes raster en imágenes vec-torizadas, como por ej. el CadOverlay de Autodesk.
El tamaño de pixel de las imágenes Landsat fue mejorado por las imágenes del satéliteSpot, que ya fue también superado por las imágenes de otros satélites.
Los satélites radar- interferométricos. Último ejemplo: “Space Shuttle Endeavour” La creación de las mesas de trabajo -digitales- fotogramétrica. La potencia gráfica de los programas Cad combinada con los GIS.
Y por supuestos los GPS: La facilidad, rapidez y precisión alcanzada por estos equi-pos, nos permiten en modo estático, por ejemplo: plantear y resolver extensas redesde control geométrica, colocación de PAF, medición de PCI., realizar auscultación deobras, etc. Y en modo dinámico, por ejemplo: para verificar y actualizar la cartografía,realizar apoyos rápidos y económicos para la restitución aerofotogramétrica, enderezary corregir imágenes satelitales, etc.-
…y todo este violento cambio conduce a que el campo de acción de las mediciones especiales sea
como la explosión del Big Bang, en continua expansión sin límites.
… acerca del nombre de la materia
Cuando se comenzó a dictar la asignatura en nuestra escuela, se lo hizo como una segundaparte del contenido de otra asignatura, con la cual no tenía ningún punto en común y por lotanto no pudo desarrollarse plenamente debido a las limitaciones que le imponían la estructu-ra de la otra materia en la que estaba inserta, hasta que finalmente se organizó como disci-plina independiente ( materia selectiva), en la modificación de la curricula realizada en el año1989, en el plan actualmente vigente.
Al realizarse el cambio de plan de estudios, y tomando en cuenta su contenido, se denominóa la materia: “Topometría y Microgeodesia”, como título abreviado de lo que debió ser…
“ Topometría, Microgeodesia y Geodesia, aplicadas en las mediciones para obras de la Ingeniería y laIndustria ”.
Sin embargo, tal como descubrirá el alumno al avanzar en el desarrollo de la materia, el dila-tado campo de aplicación vigente y el vasto campo por crearse, cuyos horizontes aun no seavizoran, le dan motivo suficiente al autor de estas notas a opinar que el nombre correcto dela asignatura debiera ser “Mediciones para Estudios y Trazados Especiales”, por brindarnosun marco conceptual mucho mas amplio donde movernos y sin dejar afuera del contexto tan-to a la topometría, como a la microgeodesia y la Geodesia. Y otras disciplinas de la ciencia,tales como la Fotogrametría, la Cartografía y la Teledetección. Finalmente (en mi opinión), laasignatura podría ser llamada simplemente “Mediciones Especiales“
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
18
A fin de cubrir estas expectativas, se elaboró un programa de temas que es el que
está actualmente vigente en la curricula de la carrera, sin embargo el devenir de los
acontecimientos, los permanentes cambios y el continuo avance tecnológico nos impi-
den atarnos a un programa fijo, estático e inmóvil, por el contrario nos sentimos obli-
gados a crear todos los años un programa activo y dinámico, que dé una repuesta
dialéctica a los cambios que continuamente se van produciendo. Por tal motivo, el
temario que se desarrollará en el transcurso de este semestre no se corresponde en
nada con el programa oficial, y por ende se adjunta para el conocimiento, análisis y
debate por parte de los estudiantes que la cursan.-
Finalmente es necesario aclarar, que al ser esta asignatura una aplicación de los conocimien-
tos ya adquiridos en las disciplinas correspondientes al área de la Geometría Territorial; el
desarrollo ideal y los óptimos resultados, se obtienen cuando el estudiante que la cursa posee
un acabado conocimiento de las correlativas, ( es decir de las Topografías, Geodesia, Astro-
nomía, Fotogrametría y Cartografía ), en caso contrario resultará muy difícil, cuando no im-
posible, realizar la necesaria integración de los conocimientos.
1.3: Definiciones
Topometría:
Conjunto de operaciones:
Mediciones lineales, mediciones angulares y mediciones específicas.
Cálculos y procesos matemáticos
destinados a determinar, o replantear la posición de puntos en el terreno, con-
forme a un sistema de referencia previamente establecido.
Microgeodesia:
Control geodésico de alta precisión en áreas de extensión limitada.
Definición del IPGH (Instituto Panamericano de Geografía e Historia) - año 1970.
Al refererirnos al nombre de la asignatura, propusimos el siguiente:
“ Mediciones para el Estudio y Trazados Especiales:
Estudios: Se refiere al análisis de las variables que intervienen en un proyecto, donde ellevantamiento topométrico, la topografía y la cartografía juegan un papel pri-mordial. Vemos que está estrechamente ligado a la determinación de la posi-ción de puntos en el terreno.
Trazados: Con este nombre los autores españoles y mexicanos, denominan a las medicio-nes destinadas al replanteo de puntos de un proyecto en el terreno. Debido aque las traducciones de obras producidas en otros idiomas también son elabo-rados por ellos, ocurre que este nombre se ha generalizado.
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
19
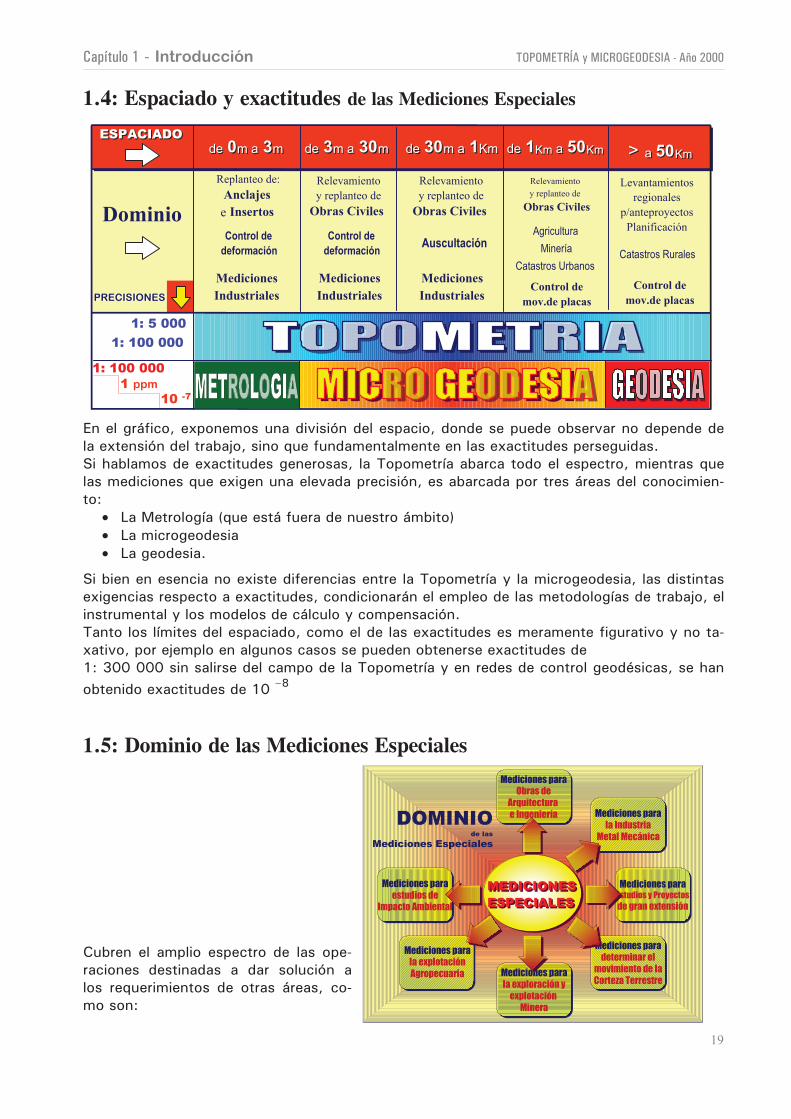
1.4: Espaciado y exactitudes de las Mediciones Especiales
ESPACIADOESPACIADO
de 0m a 3mde 0m a 3m de 3m a 30mde 3m a 30m de 30m a 1Kmde 30m a 1Km de 1Km a 50Kmde 1Km a 50Km > a 50Km> a 50Km
Dominio
Replanteo de:
Anclajes
e Insertos
Mediciones
Industriales
Relevamiento
y replanteo de
Obras Civiles
Mediciones
Industriales
Mediciones
Industriales
Relevamiento
y replanteo de
Obras Civiles
AuscultaciónControl de
deformación
Control de
deformación
Relevamiento
y replanteo de
Obras Civiles
Minería
Catastros Urbanos
Agricultura
Control de
mov.de placas
Levantamientos
regionales
p/anteproyectos
Planificación
Catastros Rurales
Control de
mov.de placas
1: 5 000
1 ppm
1: 100 000
10 -7
PRECISIONESPRECISIONES
1: 100 000
En el gráfico, exponemos una división del espacio, donde se puede observar no depende de
la extensión del trabajo, sino que fundamentalmente en las exactitudes perseguidas.
Si hablamos de exactitudes generosas, la Topometría abarca todo el espectro, mientras que
las mediciones que exigen una elevada precisión, es abarcada por tres áreas del conocimien-
to:
• La Metrología (que está fuera de nuestro ámbito)
• La microgeodesia
• La geodesia.
Si bien en esencia no existe diferencias entre la Topometría y la microgeodesia, las distintas
exigencias respecto a exactitudes, condicionarán el empleo de las metodologías de trabajo, el
instrumental y los modelos de cálculo y compensación.
Tanto los límites del espaciado, como el de las exactitudes es meramente figurativo y no ta-
xativo, por ejemplo en algunos casos se pueden obtenerse exactitudes de
1: 300 000 sin salirse del campo de la Topometría y en redes de control geodésicas, se han
obtenido exactitudes de 10 –8
1.5: Dominio de las Mediciones Especiales
Cubren el amplio espectro de las ope-
raciones destinadas a dar solución a
los requerimientos de otras áreas, co-
mo son:
Mediciones paraestudios de
Impacto Ambiental
Mediciones paraestudios de
Impacto Ambiental
Mediciones parala Industria
Metal Mecánica
Mediciones parala Industria
Metal Mecánica
Mediciones paraEstudios y Proyectos
de gran extensión
Mediciones paraEstudios y Proyectos
de gran extensión
Mediciones paraObras de
Arquitectura e Ingeniería
Mediciones paraObras de
Arquitectura e Ingeniería
Mediciones parala exploración y
explotación Minera
Mediciones parala exploración y
explotación Minera
Mediciones paradeterminar el
movimiento de laCorteza Terrestre
Mediciones paradeterminar el
movimiento de laCorteza Terrestre
MEDICIONES
ESPECIALES
MEDICIONES
ESPECIALES
DOMINIOde las
Mediciones Especiales
Mediciones parala explotaciónAgropecuaria
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
20
MEDICIONES PARA LA EXPLOTACIÓN Y PRODUCCIÓN AGROPECUARIA
En esta área, el Agrimensor interviene en:
Relevamientos de campos: Conforme sea la finalidad será la información a levantar y
el plano topográfico resultante. Así por ejemplo puede tratarse de un plano para el
proyecto de un uso industrial intensivo, o un relevamiento de desmejoras para un pro-
yecto de recuperación, o un plano para el estudio de riego o saneamiento.
Replanteo: de industrias agrícolas (tambos), y de galpones, de alambrados internos, de
conductos de agua, de represas, de canales de riego y/o de drenajes. Construcción en
el terreno de curvas de nivel, de terrazas de cultivos, albardones, etc.
Las exactitudes perseguidas en este ámbito se encuentran generalmente en un entor-
no inferior a 1: 5 000 para las mediciones planimétricas y en las mediciones altimétri-
cas más exigentes difícilmente superen 1: 10 000 por cuanto quedan cubiertas con
las precisiones de la Topometría.
Otra tarea muy frecuente es la medición rápida de superficies de potreros, definiendo
y delimitando las superficies con cultivos intensivos, las superficies cubiertas con
monte o malezas, las superficies destinadas al pastoreo, etc. Todo ello para una mejor
planificación de las tareas del laboreo, calcular mejor la cantidad de semilla, la superfi-
cie a regar, la cantidad de plaguicida, herbicida, etc.
Las exactitudes perseguidas alcanzan y sobran con el 2% ó el 3% para la determina-
ción del valor de la superficie, no es necesario la determinación altimétrica, por cuanto
estos requerimientos quedan totalmente cubiertos con la Topometría.
Estos trabajos siempre conducen, o son el resultado de la realización de un proyecto
de explotación agropecuaria, por tal motivo, en la generalidad de los casos el Agri-
mensor deberá trabajar en común acuerdo con Ing. Agrónomos, Técnicos Agrarios,
Ing. Hidráulicos, Constructores, Veterinarios, Lic.en Administración de Empresas, y di-
rectamente con los productores agropecuarios.
Importante es destacar los avances que en este campo se vienen produciendo, respec-
to al empleo de posicionadores GPS, y la aplicación de GIS, en el seguimiento y con-
trol de cosechas, en donde la georreferenciación es la tarea básica. A este tema se lo
conoce con el nombre de “Agricultura de Precisión”
MEDICIONES PARA ESTUDIOS Y PROYECTOS DE GRAN EXTENSION
Generalmente el Estado (Nacional – Provincia - Municipal), Entes autárquicos y regionales, o em-presas Consultoras privadas, encaran estudios y proyectos de gran envergadura, esdecir que abarcan muchas hectáreas de extensión, como son por ejemplo los estudioshidrológicos, los estudios de cuencas, los relevamientos forestales, los relevamientosgeológicos, los catastros mineros, los estudios de saneamiento, la planificación regio-nal. Cartas temáticas de censos, densidad o distribución de población. Catastros mul-tifinalitarios. Censo, catastros y planificación vial, relevamientos de líneas de conduc-ción (eléctrica, gas, agua ). Cartografía base para GIS.
Las exactitudes perseguidas son generalmente muy generosas, (en la mayoría de loscasos la precisión gráfica es suficiente).Por ej., en cartas a escala 1: 50 000, la precisión gráfica es de ± 10m. Lo cual condu-ce a trabajar dentro de precisiones que van desde 1:1000 a 1:5000Si la cartografía final, es el resultado de una restitución aerofotrogramétrica, en esecaso las precisiones para el posicionamiento de los PAF, puede estar entre:
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
21
1: 10.000 a 1:100.000. Y si es el resultado de un proceso de imágenes satelitales, la
medición de los PCI (puntos de corrección de imágenes), pueden estar entre:
1: 1000 a 1: 10.000 dependiendo del tamaño del pixel y de la fuente origen y de la
finalidad.
El Agrimensor no podrá alcanzar los resultados con el sólo empleo de la Topometría y
deberá recurrir permanentemente al auxilio y complemento de las otras disciplinas: la
Cartografía, la Geodesia, la Fotogrametría, el Catastro, la Teledetección el manejo de
imágenes ópticas y de radar, y las Valuaciones masivas.
Como en el caso anterior, como las tareas implican un trabajo interdisciplinario, el pro-
fesional de la Agrimensura deberá coordinar sus tareas con profesionales de muy dis-
tintas especialidades : Ing. Hidráulicos, Ing. Agrónomos, Biólogos, Merceólogos, Geó-
logos, Ecologistas, Lic., Ing.o Dres. Especialistasa en impacto ambiental, Arquitectos,
Ing. Civiles, Ing.Viales, Ing.Mecánicos-Electricistas, Ing.en Sistemas, Lic.en Informáti-
ca, etc.
MEDICIONES PARA OBRAS DE ARQUITECTURA E INGENIERÍA
El Agrimensor interviene en todas las etapas evolutivas de las obras de Arquitectura e
Ingeniería, desde el relevamiento inicial para la confección del anteproyecto hasta las
mediciones necesarias para la elaboración del proyecto ejecutivo. Interviene en el re-
planteo de las obras civiles y el control de los montajes durante toda la construcción
de la obra. Posteriormente realizará mediciones de control de deformaciones y medi-
ciones destinadas al cómputo métrico.-
Las exactitudes dependerán de las características de las mediciones, si son para un
sistema de apoyo, para el relevamiento o replanteo de puntos, para el cómputo, re-
planteo de anclajes e insertos, control de deformación, etc. Pero en reglas generales
podemos definir:
a) Sistemas de Apoyo y mediciones para el relevamiento. Construcción de la obra ci-
vil. Replanteo de estructuras hormigonadas insitu.
En Gral. para las obras de Desarrollo Lineal (excepto algunos túneles) → Precisiones
topométricas.
b) Para la construcción de Redes de Control, la auscultación, el relevamiento de de-
formaciones, replanteo de anclajes e insertos, montajes de estructuras premoldea-
das, montajes mecánicos y el control geométrico de las estructuras.
En Gral. para algunas obras de desarrollo superficial y algunos túneles → Precisio-
nes microgeodésicas.
En cuanto a su desempeño, el Agrimensor deberá coordinar sus tareas con profesio-
nales del área de la construcción: Ing. Civiles, Arquitectos, Ing. Viales, Ing. Hidráuli-
cos, Ing. Mecánico-Electricistas, Ing. Especialistas, Constructores, etc.
MEDICIONES PARA LA EXPLORACION Y EXPLOTACIÓN MINERA
El Agrimensor interviene en el replanteo de las excavaciones subterráneas o en las
canteras a cielo abierto. En las exploraciones y explotaciones petroleras. Lo hace reali-
zando los relevamientos necesarios, replanteos de pozos, túneles, socavones y gale-
rías.
Mensuras de pertenencias mineras, mensuras petroleras, etc.
Las precisiones requeridas generalmente son cubiertas por la Topometría.
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
22
Recurrimos a la Geodesia en casos de trabajos de gran extensión como por ejemplo la
ejecución de la red de apoyo del proyecto Pasma.-
Como en los casos precedentes, el Agrimensor coordinará sus tareas con Geólogos,
Ing.en Minas, Técnicos en perforación y en voladuras, Ing. Geofísicos, etc.
MEDICIONES DE LA CORTEZA TERRESTRE
Cuando se trate de brindar apoyo a los estudios geológicos, georreferenciación de
muestreos y de perfiles gravimétricos, las precisiones son topométricas.
Se Incluyen en los trabajos de MGEO ( Microgeodesia ), las mediciones necesarias pa-
ra detectar los movimientos volcánicos, sísmicos, y en general todos los movimientos
producidos en la corteza terrestre, cuando la extensión de los trabajos sean de un área
determinada y reducida.-
Cuando las dimensiones abarcan regiones extensas, se trata de un trabajo cuyo domi-
nio es de la Geodesia.
En estos casos, el equipo se integrará con Ing.Geodestas, Ing. Geofísicos y Geólogos.
MEDICIONES PARA LA INDUSTRIA METAL MECÁNICA
El Agrimensor participa realizando mediciones destinadas al montaje de estructuras
metálicas, y en el control de las deformaciones producidas en estructuras fijas, móvi-
les y máquinas.
Las precisiones perseguidas se encuentran siempre dentro del ámbito de la Metrología
y de la Microgeodesia.
El equipo de trabajo interdisciplinario se compartirá con Metrólogos, Ing. Industriales,
Ing. Metalúrgicos, Ing. Mecánico-Electricistas e Ing. Civiles.
MEDICIONES PARA ESTUDIOS DE MEDIO AMBIENTE
El Agrimensor interviene en la realización de Levantamientos topográficos, georrefe-
renciación de muestreos, y procesos de imágenes, cuyo fin sea la generación de car-
tografía temática a distintas escalas y para los siguientes fines:
Planificación y diagnósticos ambientales. Proyección a futuro del impacto.-
Estudios de evaluación y diagnóstico de Impacto ambiental.-
Aplicación de Sistemas de Información Geográfico para la zonificación de áreas
contaminadas, determinación de contaminantes y parámetros de impacto.
Manejo de cuencas hídricas, reservas naturales, areas protegidas, conservación
y desarrollo de Flora y Fauna. Impacto paisajístico, turismo y recreación. Etc.-
Como en casos anteriores, la precisión de la topometría alcanza, pero el Agrimensor
deberá auxiliarse de la cartografía, la fotogrametría, y la teledetección de imágenes.
El Agrimensor integrará equipo con Licenciados, Ing. Químicos y Dres. Especialistas en
estudios ambientales.-
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
23
1.6: Etapas secuenciales y modos de participación
En las Obras de Arquitectura e Ingeniería
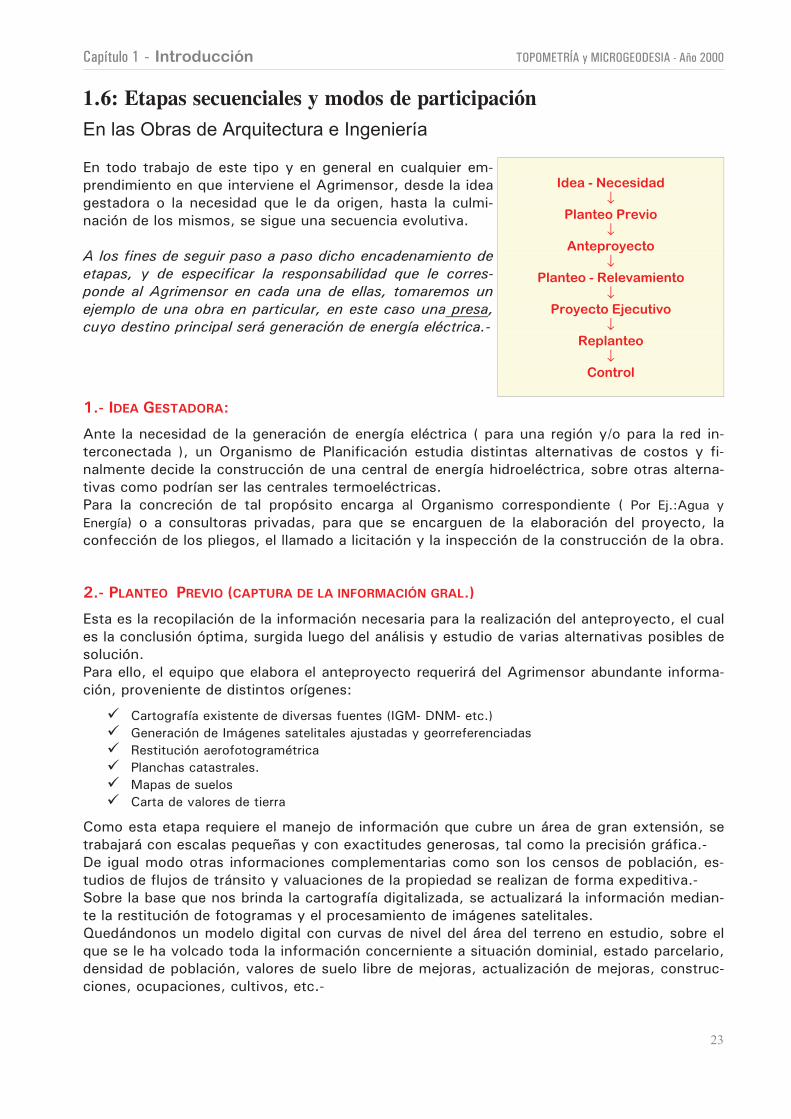
En todo trabajo de este tipo y en general en cualquier em-
prendimiento en que interviene el Agrimensor, desde la idea
gestadora o la necesidad que le da origen, hasta la culmi-
nación de los mismos, se sigue una secuencia evolutiva.
A los fines de seguir paso a paso dicho encadenamiento de
etapas, y de especificar la responsabilidad que le corres-
ponde al Agrimensor en cada una de ellas, tomaremos un
ejemplo de una obra en particular, en este caso una presa,
cuyo destino principal será generación de energía eléctrica.-
Idea - Necesidad
↓
Planteo Previo
↓
Anteproyecto
↓
Planteo - Relevamiento
↓
Proyecto Ejecutivo
↓
Replanteo
↓
Control
1.- IDEA GESTADORA:
Ante la necesidad de la generación de energía eléctrica ( para una región y/o para la red in-
terconectada ), un Organismo de Planificación estudia distintas alternativas de costos y fi-
nalmente decide la construcción de una central de energía hidroeléctrica, sobre otras alterna-
tivas como podrían ser las centrales termoeléctricas.
Para la concreción de tal propósito encarga al Organismo correspondiente ( Por Ej.:Agua y
Energía) o a consultoras privadas, para que se encarguen de la elaboración del proyecto, la
confección de los pliegos, el llamado a licitación y la inspección de la construcción de la obra.
2.- PLANTEO PREVIO (CAPTURA DE LA INFORMACIÓN GRAL.)
Esta es la recopilación de la información necesaria para la realización del anteproyecto, el cual
es la conclusión óptima, surgida luego del análisis y estudio de varias alternativas posibles de
solución.
Para ello, el equipo que elabora el anteproyecto requerirá del Agrimensor abundante informa-
ción, proveniente de distintos orígenes:
Cartografía existente de diversas fuentes (IGM- DNM- etc.)
Generación de Imágenes satelitales ajustadas y georreferenciadas
Restitución aerofotogramétrica
Planchas catastrales.
Mapas de suelos
Carta de valores de tierra
Como esta etapa requiere el manejo de información que cubre un área de gran extensión, se
trabajará con escalas pequeñas y con exactitudes generosas, tal como la precisión gráfica.-
De igual modo otras informaciones complementarias como son los censos de población, es-
tudios de flujos de tránsito y valuaciones de la propiedad se realizan de forma expeditiva.-
Sobre la base que nos brinda la cartografía digitalizada, se actualizará la información median-
te la restitución de fotogramas y el procesamiento de imágenes satelitales.
Quedándonos un modelo digital con curvas de nivel del área del terreno en estudio, sobre el
que se le ha volcado toda la información concerniente a situación dominial, estado parcelario,
densidad de población, valores de suelo libre de mejoras, actualización de mejoras, construc-
ciones, ocupaciones, cultivos, etc.-
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
24
3.- ANTEPROYECTO:
Sobre esta base, los Ingenieros y Técnicos especialistas elaborarán distintas hipótesis de tra-
bajo, ubicando la presa en distintos lugares, ponderando en cada caso costos de construc-
ción de la presa y de la central, costos de la conducción, costos de expropiación, volúmenes
de agua almacenado, costo del destronque, impacto ambiental, costo de los movimientos de
suelos, cantidad de superficie regada, etc.
De la comparación de costos y beneficios, se elegirá aquella variante cuyo resultado sea el
de menor costo y de mayores beneficios.
Elegida la alternativa final, se elaborarán documentos gráficos (planos ), literales (memorias técnicas,pliegos), y numéricos (cómputos, precios) que integrarán el Anteproyecto de la Obra.
El Organismo que estudió el anteproyecto, o la consultora, o un equipo especializado en el
tema a definir, encarará la elaboración del Proyecto Ejecutivo de la Obra en base a las pautas
y documentos que integran el anteproyecto.-
La empresa Consultora que haya sido nominada para la elaboración del Proyecto Ejecutivo,
deberá comenzar por requerir mayor información geo-topo-cartográfica.-
En nuestro ejemplo, una comisión integrada por Ingenieros Civiles e Ingenieros Especialistas,
se abocarán al estudio y análisis de los antecedentes, encargando al Agrimensor de inmediato
el relevamiento ajustado y en distintas escalas y equidistancias: del área de inundación del
lago, de la zona de emplazamiento del cerramiento, detalles de la zona de ubicación de la
central, la faja de los canales de riego, y de toda la zona de influencia.
4.- PLANTEO (CAPTURA DE DATOS Y PROCESO)
El Agrimensor nuevamente será convocado, esta vez será el encargado de realizar la captura
de los datos necesarios para generar la información requerida por los proyectistas, la cual
ahora se realizará con mayor detalle y mayores precisiones.
Se determinará un modelo digital del terreno, que tiene por finalidad la elaboración de la pla-
nimetría general, sobre la cual se asentará la información específica para el estudio de la obra
particular. El modelo digital de elevaciones que tiene por finalidad la representación de la
forma del relieve.
Realizará la planificación, materialización, medición y cálculo de un sistema geométrico de
apoyo que abarque el área de construcción de la presa, la obra de toma, el perímetro de ex-
propiación, la zona de riego, el sector de emplazamiento de la central, los túneles de conduc-
ción, etc.
Encarará levantamientos de detalles en distintas escalas y con distintas exactitudes, y la me-
todología de captura será combinando levantamientos terrestres con restituciones aerofoto-
gramétricas. Para tal fin planificará, contratará y controlará el vuelo aerofotogramétrico, la
colocación de los PAF, la aerotriangulación y la restitución final.-
Realizará un Catastro parcelario de la zona de afectación, el estudio dominial de la tenencia
de la tierra y los valores de la tierra libre de mejoras.
Una vez definido la planimetría general del proyecto, fijará el límite del perilago, determinará
la línea poligonal de expropiación y realizará el relevamiento y tasación de las mejoras.
Calculará los volúmenes de movimientos de suelos, valuará el costo de la expropiación y de-
finirá las servidumbres (si correspondiere) generadas por la obra.
5.- PROYECTO EJECUTIVO:
Un equipo de proyectistas integrado por un grupo numeroso de Ing. especializados en distin-
tas ramas de la Ingeniería, se abocará a la confección del proyecto definitivo.
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
25
Una vez finalizados los estudios, los resultados se plasmarán en un conjunto de documentos
gráficos y alfa numéricos, planos, pliegos de condiciones generales, particulares, de especifi-
caciones técnicas, memorias y cálculos, que conformarán el proyecto ejecutivo.
El mismo Ente que inició la gestión, llamará a concurso público (licitación) para la cotización
de la ejecución del proyecto.
Existen varias modalidades de cotización:
a) Precio por Unidad de Medida. → Cada empresa cotiza por ítem, conforme a las
cantidades establecida en los planos y pliegos. Una vez terminadas las obras, se reali-
zará una medición final para determinar las cantidades exactas, pagándose la obra
conforme estas mediciones.
b) Precio por Ajuste Alzado → Cada empresa cotiza con un valor global por todos los
trabajos, y cobrará este valor, aunque resulten distintas mediciones al final del trabajo.
c) Precio tope → El contratante fija un valor tope para los trabajos, cada empresa co-
tiza un precio inferior o igual al fijado por pliego.
Cuando la modalidad de contratación es según (b) ó (c), las empresas interesadas en partici-
par en el concurso de precios, se ven obligadas a realizar un análisis exhaustivo de las medi-
ciones que figuran en planos y pliegos, con el objeto de tener valores lo más ajustado posible
a los costos reales, buscando el auxilio del Agrimensor para corroborar los valores que co-
rresponden a su ámbito.
Verificación del plano de relevamiento, cómputo del movimiento de suelos, etc.-
6.- REPLANTEO
Una vez que haya sido adjudicada la obra, la empresa contratista llevará adelante la cons-
trucción de la obra, para tal fin contratará al Agrimensor para que planifique y ejecute las
tareas de replanteo correspondiente.
Volviendo a nuestro ejemplo, el Agrimensor confeccionará el Plano general de replanteo, vin-
culando geométricamente todas las obras que integran el proyecto, y confeccionará un plano
de replanteo específico de cada obra en particular: El cerramiento de la presa y vertederos,
obra de toma, túnel de conducción, canales de riego, central y playa de maniobras, etc.
Efectuará la acotación de errores a fin de cumplir con las tolerancias constructivas. Planifica-
rá el Sistema de Apoyo principal y secundario, elegirá la metodología de medición, adquirirá
el instrumental necesario, materializará el límite de expropiación, realizará las mensuras de
afectación, replanteará y controlará las voladuras, replanteará y controlará los movimientos
de suelos, ídem con las sucesivas tongadas de hormigón o construcción del terraplén de ce-
rramiento, replanteará las ataguías, vigilará el avance de los túneles, realizará mediciones y
cálculo de volúmenes de suelo para los certificados parciales, etc.
7.- MEDICIONES POSTERIORES
Una vez concluidas las obras, queda aún una tarea, en especial en aquellas obras contratadas
según la modalidad (a) (precio por unidad de medida), la medición y cómputo definitivo con el fin de
ajustar la certificación final.
Y en todos los casos, con el propósito de ejecutar los planos conformes a obras.
Ya habilitada la obra al uso para el que fue destinada, se realizan mediciones periódicas para
determinar movimientos o deformaciones. A estas mediciones se las denomina Auscultación.
La auscultación de una presa radica en medir en forma periódica las deformaciones produci-
das en la estructura de la pantalla de cierre, coronamiento y vertedero. Ello se hace sobre
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
26
puntos testigos que se dejaron empotrados en el hormigón de la estructura, durante la cons-
trucción de la misma.
Como las exactitudes perseguidas es milimétrica la metodología y el instrumental responde a
la microgeodesia.
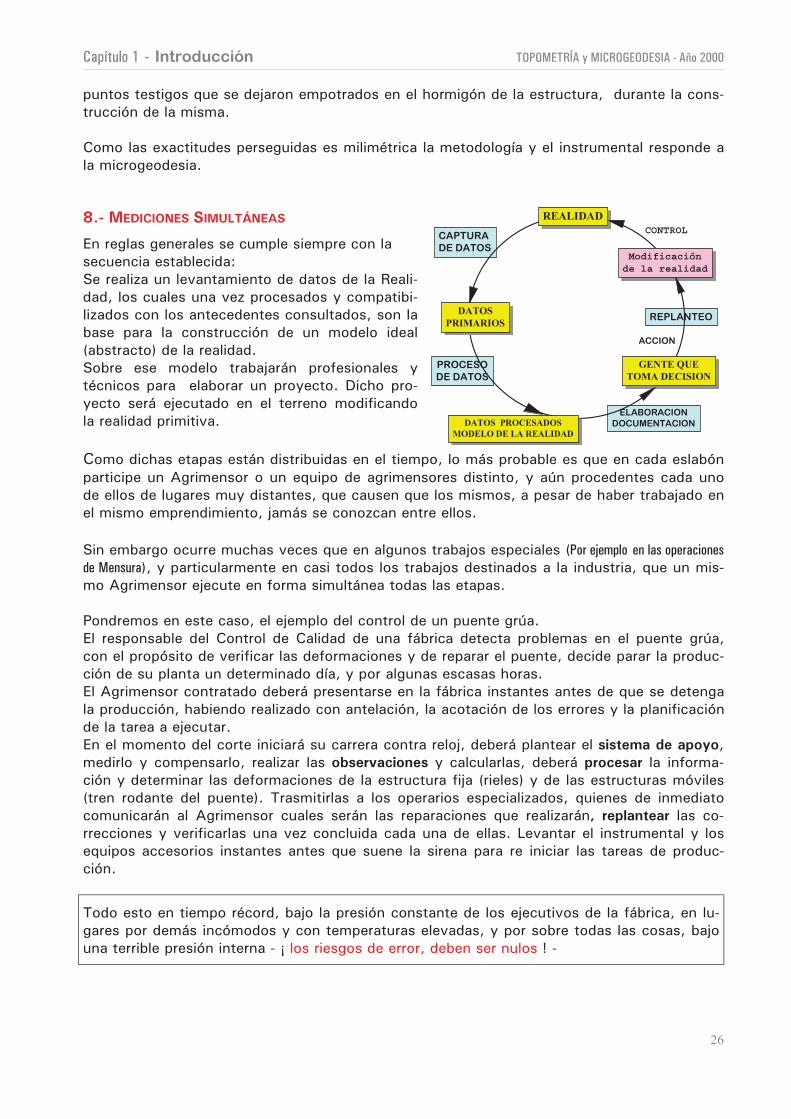
8.- MEDICIONES SIMULTÁNEAS
En reglas generales se cumple siempre con la
secuencia establecida:
Se realiza un levantamiento de datos de la Reali-
dad, los cuales una vez procesados y compatibi-
lizados con los antecedentes consultados, son la
base para la construcción de un modelo ideal
(abstracto) de la realidad.
Sobre ese modelo trabajarán profesionales y
técnicos para elaborar un proyecto. Dicho pro-
yecto será ejecutado en el terreno modificando
la realidad primitiva.
REPLANTEO
ELABORACION
DOCUMENTACION
PROCESO
DE DATOS
CAPTURA
DE DATOS
REALIDAD
DATOS PROCESADOS
MODELO DE LA REALIDAD
DATOS
PRIMARIOS
GENTE QUE
TOMA DECISION
ACCION
Modificación
de la realidad
CONTROL
Como dichas etapas están distribuidas en el tiempo, lo más probable es que en cada eslabón
participe un Agrimensor o un equipo de agrimensores distinto, y aún procedentes cada uno
de ellos de lugares muy distantes, que causen que los mismos, a pesar de haber trabajado en
el mismo emprendimiento, jamás se conozcan entre ellos.
Sin embargo ocurre muchas veces que en algunos trabajos especiales (Por ejemplo en las operacionesde Mensura), y particularmente en casi todos los trabajos destinados a la industria, que un mis-
mo Agrimensor ejecute en forma simultánea todas las etapas.
Pondremos en este caso, el ejemplo del control de un puente grúa.
El responsable del Control de Calidad de una fábrica detecta problemas en el puente grúa,
con el propósito de verificar las deformaciones y de reparar el puente, decide parar la produc-
ción de su planta un determinado día, y por algunas escasas horas.
El Agrimensor contratado deberá presentarse en la fábrica instantes antes de que se detenga
la producción, habiendo realizado con antelación, la acotación de los errores y la planificación
de la tarea a ejecutar.
En el momento del corte iniciará su carrera contra reloj, deberá plantear el sistema de apoyo,
medirlo y compensarlo, realizar las observaciones y calcularlas, deberá procesar la informa-
ción y determinar las deformaciones de la estructura fija (rieles) y de las estructuras móviles
(tren rodante del puente). Trasmitirlas a los operarios especializados, quienes de inmediato
comunicarán al Agrimensor cuales serán las reparaciones que realizarán, replantear las co-
rrecciones y verificarlas una vez concluida cada una de ellas. Levantar el instrumental y los
equipos accesorios instantes antes que suene la sirena para re iniciar las tareas de produc-
ción.
Todo esto en tiempo récord, bajo la presión constante de los ejecutivos de la fábrica, en lu-
gares por demás incómodos y con temperaturas elevadas, y por sobre todas las cosas, bajo
una terrible presión interna - ¡ los riesgos de error, deben ser nulos ! -
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
27
1.7: División del DominioEn las Obras de Arquitectura e Ingeniería
Podemos dividir al dominio conforme muchos criterios, pero lo haremos siguiendo un punto
de vista que interese al Agrimensor, la forma geométrica.
Desde este enfoque, clasificaremos a la obras en:
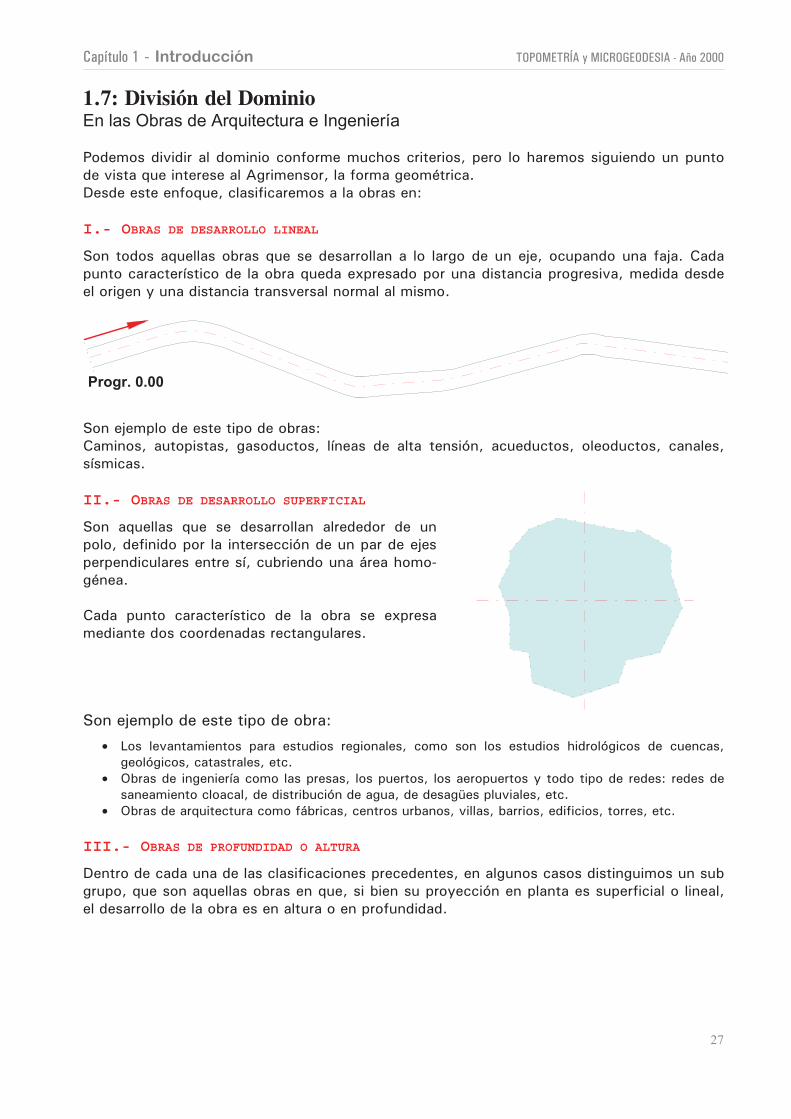
I.- OBRAS DE DESARROLLO LINEAL
Son todos aquellas obras que se desarrollan a lo largo de un eje, ocupando una faja. Cada
punto característico de la obra queda expresado por una distancia progresiva, medida desde
el origen y una distancia transversal normal al mismo.
Progr. 0.00
Son ejemplo de este tipo de obras:
Caminos, autopistas, gasoductos, líneas de alta tensión, acueductos, oleoductos, canales,
sísmicas.
II.- OBRAS DE DESARROLLO SUPERFICIAL
Son aquellas que se desarrollan alrededor de un
polo, definido por la intersección de un par de ejes
perpendiculares entre sí, cubriendo una área homo-
génea.
Cada punto característico de la obra se expresa
mediante dos coordenadas rectangulares.
Son ejemplo de este tipo de obra:
• Los levantamientos para estudios regionales, como son los estudios hidrológicos de cuencas,
geológicos, catastrales, etc.
• Obras de ingeniería como las presas, los puertos, los aeropuertos y todo tipo de redes: redes de
saneamiento cloacal, de distribución de agua, de desagües pluviales, etc.
• Obras de arquitectura como fábricas, centros urbanos, villas, barrios, edificios, torres, etc.
III.- OBRAS DE PROFUNDIDAD O ALTURA
Dentro de cada una de las clasificaciones precedentes, en algunos casos distinguimos un sub
grupo, que son aquellas obras en que, si bien su proyección en planta es superficial o lineal,
el desarrollo de la obra es en altura o en profundidad.
Capítulo 1 - Introducción TOPOMETRÍA y MICROGEODESIA - Año 2000
28
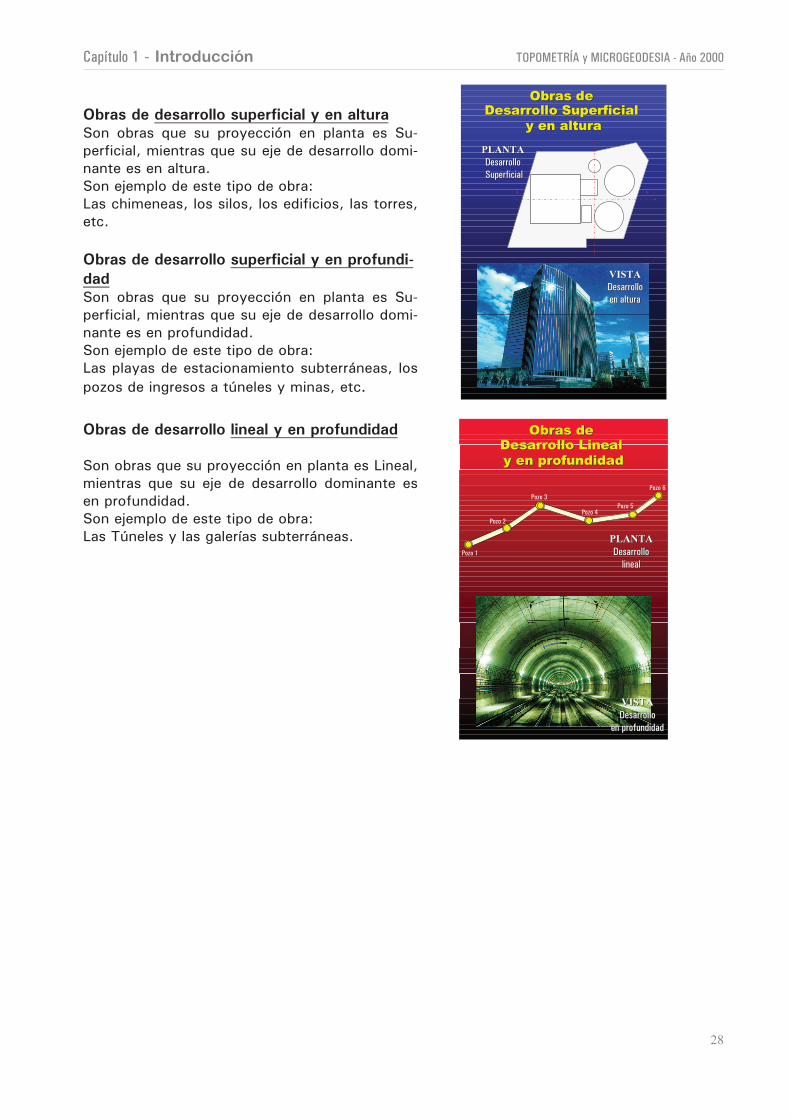
Obras de desarrollo superficial y en alturaSon obras que su proyección en planta es Su-
perficial, mientras que su eje de desarrollo domi-
nante es en altura.
Son ejemplo de este tipo de obra:
Las chimeneas, los silos, los edificios, las torres,
etc.
Obras de desarrollo superficial y en profundi-dadSon obras que su proyección en planta es Su-
perficial, mientras que su eje de desarrollo domi-
nante es en profundidad.
Son ejemplo de este tipo de obra:
Las playas de estacionamiento subterráneas, los
pozos de ingresos a túneles y minas, etc.
A A
VISTA
Desarrolloen altura
VISTA
Desarrolloen altura
PLANTA
Desarrollo Superficial
PLANTA
Desarrollo Superficial
Obras de Desarrollo Superficial
y en altura
Obras de Desarrollo Superficial
y en altura
Obras de desarrollo lineal y en profundidad
Son obras que su proyección en planta es Lineal,
mientras que su eje de desarrollo dominante es
en profundidad.
Son ejemplo de este tipo de obra:
Las Túneles y las galerías subterráneas.
Obras de Desarrollo Lineal y en profundidad
Obras de Desarrollo Lineal y en profundidad
VISTA
Desarrolloen profundidad
VISTA
Desarrolloen profundidad
PLANTA
Desarrollolineal
PLANTA
Desarrollolineal
Pozo 1
Pozo 2
Pozo 3
Pozo 4Pozo 5
Pozo 6
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
29
Hablemos de algunos PORTICOS ...
En nuestro primer encuentro conversamos ya sobre algunos pórticos, ha-
blamos sobre la puerta de entrada a esta cátedra, también de la puerta de
entrada a la vida profesional del Agrimensor. Conversamos algo sobre el
pórtico que flanqueado por dos musas, alguien en 1600 imaginó como la
entrada al conocimiento de la Agrimensura.
En el pórtico de este capítulo 2, los invito a que atravesemos otros pórticos...
En el pórtico de entrada de la Academia de Filosofía de Platón, había un
cartel que sentenciaba: “ Nadie que no sepa Geometría entre aquí ”. El
maestro ateniense ponía a la Geometría en el más alto sitial, y no era por la
utilidad práctica de sus enseñanzas, sino porque la consideraba vital para
educar a los cerebros en la inteligencia de las ideas. Extraído del Tratado de Geometría Analítica Donato Di Pietro
En el mundo antiguo existieron muchísimos “oráculos”, lugares donde por intermedio de sacerdotes o de
bellas pitonisas, se trasmitía a los “suplicantes” el mensaje de los dioses.
El oráculo Griego más famoso, fue el “Delphos”. Allí, los suplicantes se comunicaron durante 1100 años
con el Dios Apolo. Pero en ese mismo lugar y 1000 años antes del reinado de este dios, quién trasmitía las
profecías era la diosa “Gea”, que había elegido ese lugar por considerarlo el centro del universo. La dife-
rencia entre ambos dioses no era mucha, salvo que el primero profesaba en un monumental templo, mien-
tras que la diosa daba sus cátedras en una cueva. Pero había algo que ambos oráculos tenían en común y
que resultaba la clave de todas las profecías, tanto en la entrada de la cueva, como en el pórtico del fastuo-
so templo, había un cartel que modestamente aleccionaba sobre la principal máxima universal : “Conócete
a ti mismo”.-
Pórtico sobre la palabra Eduardo Galeano escritor y poeta uruguayo
I.- Los cuentacuentos, los cantacuentos, sólo pueden contar mientras la nieve cae. Así manda la tradición.
Los indios del norte de América tienen mucho cuidado con este asunto de los cuentos. Dicen que cuando los
cuentos suenan, las plantas no se ocupan de crecer y los pájaros olvidan la comida de sus hijos
II.- En Haití, no se pueden contar cuentos durante el día. Quien cuenta de día, merece la desgracia: la
montaña le arrojará una pedrada a la cabeza y su madre sólo podrá caminar en cuatro patas. Los cuentos
se cuentan en la noche, porque en la noche vive lo sagrado, y quien sabe contar cuenta sabiendo que el
nombre es la cosa que el nombre nombra
III.- En lengua guaraní, ñe'~e significa "palabra" y también significa "alma". Creen los indios guaraníes
que quienes mienten la palabra, - o la dilapidan - son traidores del alma....
Pórtico sobre la Memoria Eduardo Galeano
A orillas de otro mar, otro alfarero se retira en sus años tardíos.
Se le nublan los ojos, las manos le tiemblan, ha llegado la hora del adiós. Entonces
ocurre la ceremonia de la iniciación: el alfarero viejo ofrece al alfarero joven su
pieza mejor. Así manda la tradición, entre los indios del noroeste de América: el
artista que se va entrega su obra maestra al artista que se inicia.
Y el alfarero joven no guarda esa vasija perfecta para contemplarla y admirarla,
sino que la estrella contra el suelo, la rompe en mil pedacitos, recoje los pedacitos
y los incorpora a su arcilla....
Pórtico sobre la Utopía Eduardo Galeano
Ella está en el horizonte - dice Fernando Birri -. Me acerco dos pasos, ella se aleja dos pasos. Camino diez
pasos y el horizonte se corre diez pasos más allá. Por mucho que yo camine, nunca la alcanzaré. ¿Para que
sirve la utopía? - Para eso sirve: para caminar.
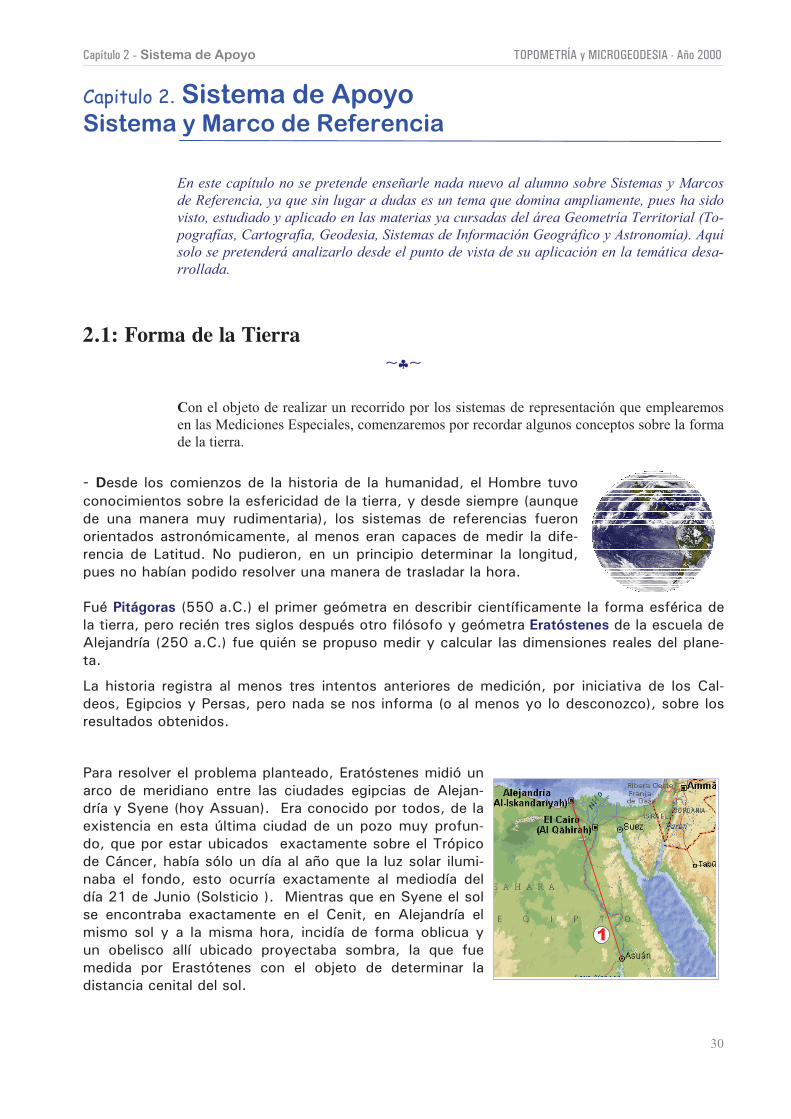
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
30
Capitulo 2. Sistema de ApoyoSistema y Marco de Referencia
En este capítulo no se pretende enseñarle nada nuevo al alumno sobre Sistemas y Marcos
de Referencia, ya que sin lugar a dudas es un tema que domina ampliamente, pues ha sido
visto, estudiado y aplicado en las materias ya cursadas del área Geometría Territorial (To-
pografías, Cartografía, Geodesia, Sistemas de Información Geográfico y Astronomía). Aquí
solo se pretenderá analizarlo desde el punto de vista de su aplicación en la temática desa-
rrollada.
2.1: Forma de la Tierra
∼♣∼
Con el objeto de realizar un recorrido por los sistemas de representación que emplearemos
en las Mediciones Especiales, comenzaremos por recordar algunos conceptos sobre la forma
de la tierra.
- Desde los comienzos de la historia de la humanidad, el Hombre tuvo
conocimientos sobre la esfericidad de la tierra, y desde siempre (aunque
de una manera muy rudimentaria), los sistemas de referencias fueron
orientados astronómicamente, al menos eran capaces de medir la dife-
rencia de Latitud. No pudieron, en un principio determinar la longitud,
pues no habían podido resolver una manera de trasladar la hora.
Fué Pitágoras (550 a.C.) el primer geómetra en describir científicamente la forma esférica de
la tierra, pero recién tres siglos después otro filósofo y geómetra Eratóstenes de la escuela de
Alejandría (250 a.C.) fue quién se propuso medir y calcular las dimensiones reales del plane-
ta.
La historia registra al menos tres intentos anteriores de medición, por iniciativa de los Cal-
deos, Egipcios y Persas, pero nada se nos informa (o al menos yo lo desconozco), sobre los
resultados obtenidos.
Para resolver el problema planteado, Eratóstenes midió un
arco de meridiano entre las ciudades egipcias de Alejan-
dría y Syene (hoy Assuan). Era conocido por todos, de la
existencia en esta última ciudad de un pozo muy profun-
do, que por estar ubicados exactamente sobre el Trópico
de Cáncer, había sólo un día al año que la luz solar ilumi-
naba el fondo, esto ocurría exactamente al mediodía del
día 21 de Junio (Solsticio ). Mientras que en Syene el sol
se encontraba exactamente en el Cenit, en Alejandría el
mismo sol y a la misma hora, incidía de forma oblicua y
un obelisco allí ubicado proyectaba sombra, la que fue
medida por Erastótenes con el objeto de determinar la
distancia cenital del sol.
1
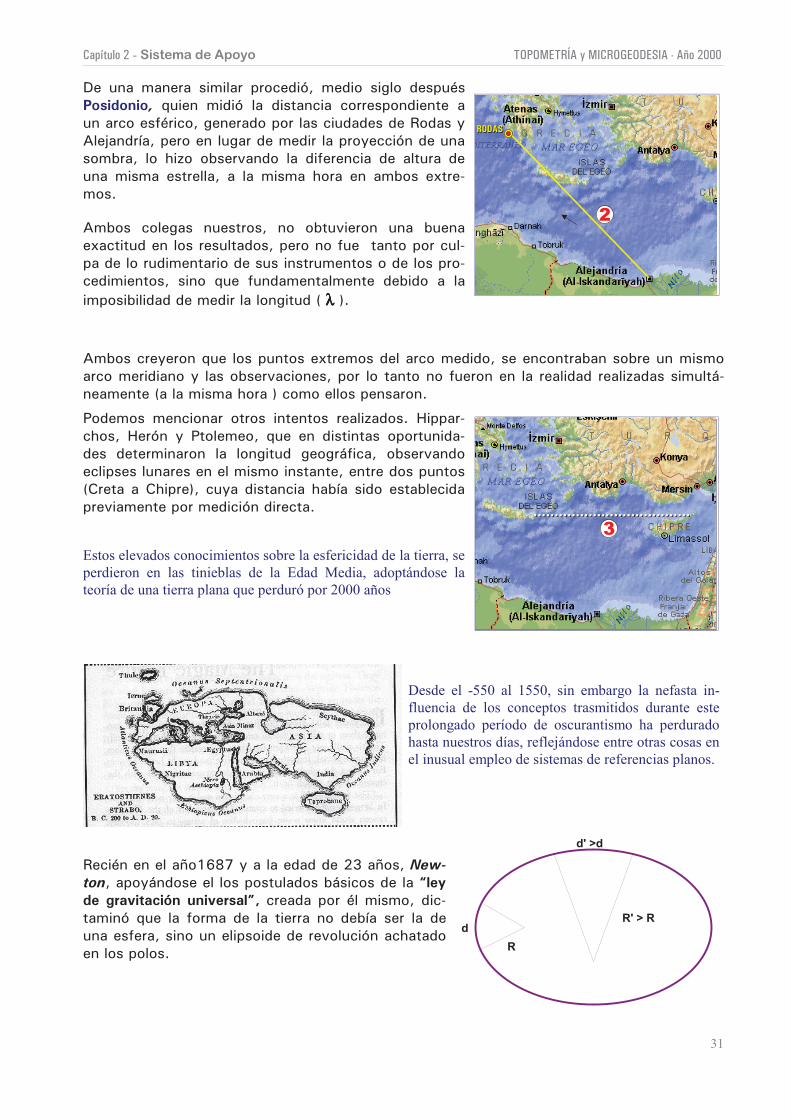
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
31
De una manera similar procedió, medio siglo después
Posidonio, quien midió la distancia correspondiente a
un arco esférico, generado por las ciudades de Rodas y
Alejandría, pero en lugar de medir la proyección de una
sombra, lo hizo observando la diferencia de altura de
una misma estrella, a la misma hora en ambos extre-
mos.
Ambos colegas nuestros, no obtuvieron una buena
exactitud en los resultados, pero no fue tanto por cul-
pa de lo rudimentario de sus instrumentos o de los pro-
cedimientos, sino que fundamentalmente debido a la
imposibilidad de medir la longitud ( λλλλ ).
2
RODASRODAS
Ambos creyeron que los puntos extremos del arco medido, se encontraban sobre un mismo
arco meridiano y las observaciones, por lo tanto no fueron en la realidad realizadas simultá-
neamente (a la misma hora ) como ellos pensaron.
Podemos mencionar otros intentos realizados. Hippar-
chos, Herón y Ptolemeo, que en distintas oportunida-
des determinaron la longitud geográfica, observando
eclipses lunares en el mismo instante, entre dos puntos
(Creta a Chipre), cuya distancia había sido establecida
previamente por medición directa.
Estos elevados conocimientos sobre la esfericidad de la tierra, se
perdieron en las tinieblas de la Edad Media, adoptándose la
teoría de una tierra plana que perduró por 2000 años
3
Desde el -550 al 1550, sin embargo la nefasta in-
fluencia de los conceptos trasmitidos durante este
prolongado período de oscurantismo ha perdurado
hasta nuestros días, reflejándose entre otras cosas en
el inusual empleo de sistemas de referencias planos.
Recién en el año1687 y a la edad de 23 años, New-
ton, apoyándose el los postulados básicos de la “ley
de gravitación universal”, creada por él mismo, dic-
taminó que la forma de la tierra no debía ser la de
una esfera, sino un elipsoide de revolución achatado
en los polos.
R' > R
R
d
d' >d
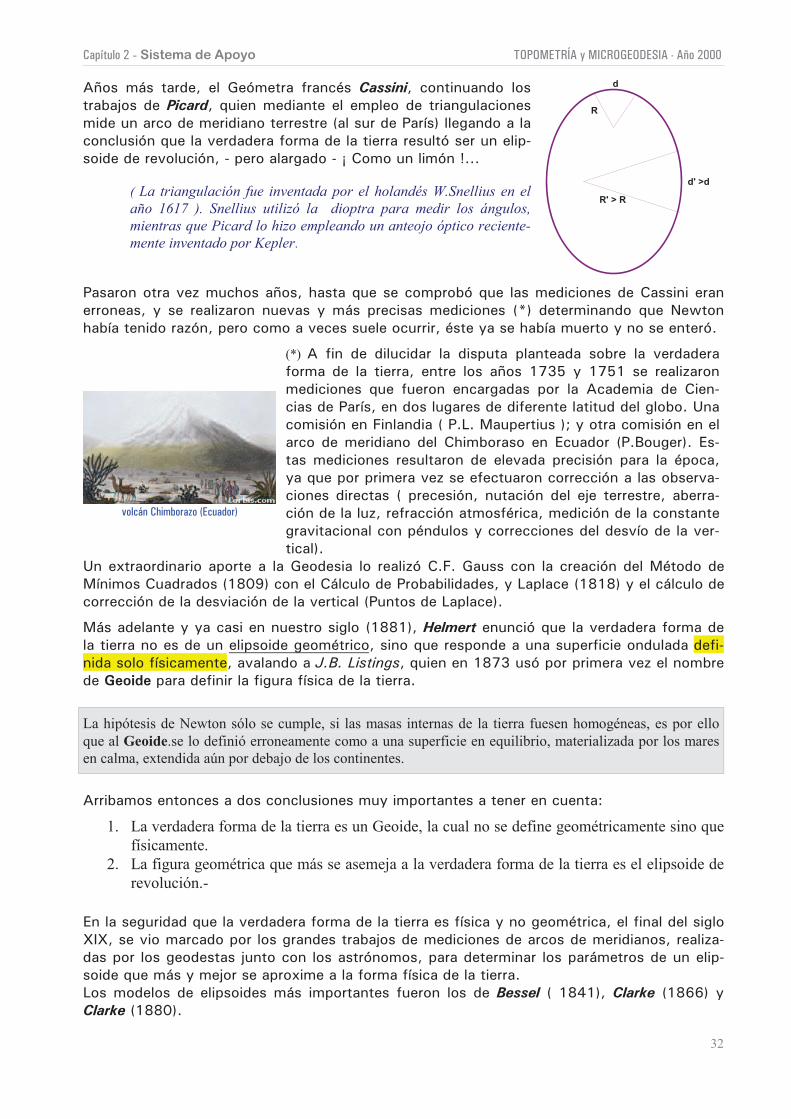
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
32
Años más tarde, el Geómetra francés Cassini, continuando los
trabajos de Picard, quien mediante el empleo de triangulaciones
mide un arco de meridiano terrestre (al sur de París) llegando a la
conclusión que la verdadera forma de la tierra resultó ser un elip-
soide de revolución, - pero alargado - ¡ Como un limón !...
( La triangulación fue inventada por el holandés W.Snellius en el
año 1617 ). Snellius utilizó la dioptra para medir los ángulos,
mientras que Picard lo hizo empleando un anteojo óptico reciente-
mente inventado por Kepler.
R' > R
R
d
d' >d
Pasaron otra vez muchos años, hasta que se comprobó que las mediciones de Cassini eran
erroneas, y se realizaron nuevas y más precisas mediciones (*) determinando que Newton
había tenido razón, pero como a veces suele ocurrir, éste ya se había muerto y no se enteró.
volcán Chimborazo (Ecuador)
(*) A fin de dilucidar la disputa planteada sobre la verdadera
forma de la tierra, entre los años 1735 y 1751 se realizaron
mediciones que fueron encargadas por la Academia de Cien-
cias de París, en dos lugares de diferente latitud del globo. Una
comisión en Finlandia ( P.L. Maupertius ); y otra comisión en el
arco de meridiano del Chimboraso en Ecuador (P.Bouger). Es-
tas mediciones resultaron de elevada precisión para la época,
ya que por primera vez se efectuaron corrección a las observa-
ciones directas ( precesión, nutación del eje terrestre, aberra-
ción de la luz, refracción atmosférica, medición de la constante
gravitacional con péndulos y correcciones del desvío de la ver-
tical).
Un extraordinario aporte a la Geodesia lo realizó C.F. Gauss con la creación del Método de
Mínimos Cuadrados (1809) con el Cálculo de Probabilidades, y Laplace (1818) y el cálculo de
corrección de la desviación de la vertical (Puntos de Laplace).
Más adelante y ya casi en nuestro siglo (1881), Helmert enunció que la verdadera forma de
la tierra no es de un elipsoide geométrico, sino que responde a una superficie ondulada defi-
nida solo físicamente, avalando a J.B. Listings, quien en 1873 usó por primera vez el nombre
de Geoide para definir la figura física de la tierra.
La hipótesis de Newton sólo se cumple, si las masas internas de la tierra fuesen homogéneas, es por ello
que al Geoide.se lo definió erroneamente como a una superficie en equilibrio, materializada por los mares
en calma, extendida aún por debajo de los continentes.
Arribamos entonces a dos conclusiones muy importantes a tener en cuenta:
1. La verdadera forma de la tierra es un Geoide, la cual no se define geométricamente sino que
físicamente.
2. La figura geométrica que más se asemeja a la verdadera forma de la tierra es el elipsoide de
revolución.-
En la seguridad que la verdadera forma de la tierra es física y no geométrica, el final del siglo
XIX, se vio marcado por los grandes trabajos de mediciones de arcos de meridianos, realiza-
das por los geodestas junto con los astrónomos, para determinar los parámetros de un elip-
soide que más y mejor se aproxime a la forma física de la tierra.
Los modelos de elipsoides más importantes fueron los de Bessel ( 1841), Clarke (1866) y
Clarke (1880).
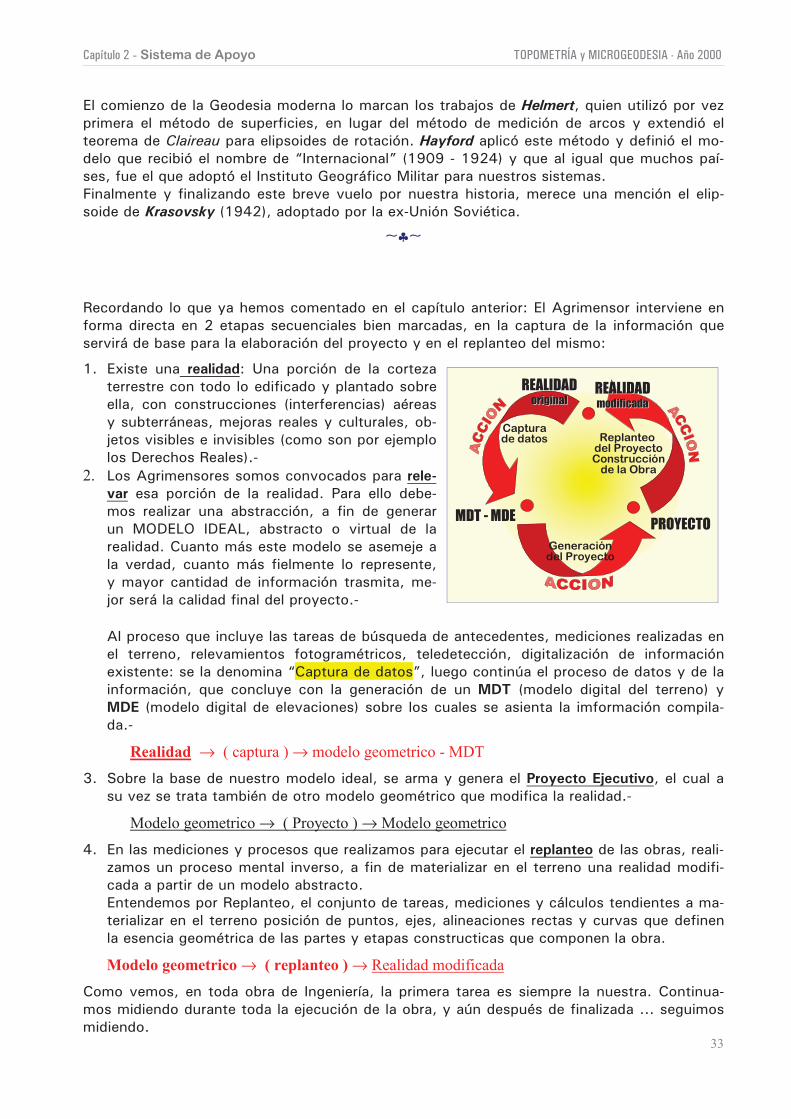
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
33
El comienzo de la Geodesia moderna lo marcan los trabajos de Helmert, quien utilizó por vez
primera el método de superficies, en lugar del método de medición de arcos y extendió el
teorema de Claireau para elipsoides de rotación. Hayford aplicó este método y definió el mo-
delo que recibió el nombre de “Internacional” (1909 - 1924) y que al igual que muchos paí-
ses, fue el que adoptó el Instituto Geográfico Militar para nuestros sistemas.
Finalmente y finalizando este breve vuelo por nuestra historia, merece una mención el elip-
soide de Krasovsky (1942), adoptado por la ex-Unión Soviética.
∼♣∼
Recordando lo que ya hemos comentado en el capítulo anterior: El Agrimensor interviene en
forma directa en 2 etapas secuenciales bien marcadas, en la captura de la información que
servirá de base para la elaboración del proyecto y en el replanteo del mismo:
1. Existe una realidad: Una porción de la corteza
terrestre con todo lo edificado y plantado sobre
ella, con construcciones (interferencias) aéreas
y subterráneas, mejoras reales y culturales, ob-
jetos visibles e invisibles (como son por ejemplo
los Derechos Reales).-
2. Los Agrimensores somos convocados para rele-
var esa porción de la realidad. Para ello debe-
mos realizar una abstracción, a fin de generar
un MODELO IDEAL, abstracto o virtual de la
realidad. Cuanto más este modelo se asemeje a
la verdad, cuanto más fielmente lo represente,
y mayor cantidad de información trasmita, me-
jor será la calidad final del proyecto.-
REALIDADoriginal
REALIDADoriginal
MDT - MDEPROYECTO
Capturade datos
Generacióndel Proyecto
Replanteo del ProyectoConstrucción
de la Obra
REALIDADmodificada
REALIDADmodificada
Al proceso que incluye las tareas de búsqueda de antecedentes, mediciones realizadas en
el terreno, relevamientos fotogramétricos, teledetección, digitalización de información
existente: se la denomina “Captura de datos”, luego continúa el proceso de datos y de la
información, que concluye con la generación de un MDT (modelo digital del terreno) y
MDE (modelo digital de elevaciones) sobre los cuales se asienta la imformación compila-
da.-
Realidad → ( captura ) → modelo geometrico - MDT
3. Sobre la base de nuestro modelo ideal, se arma y genera el Proyecto Ejecutivo, el cual a
su vez se trata también de otro modelo geométrico que modifica la realidad.-
Modelo geometrico → ( Proyecto ) → Modelo geometrico
4. En las mediciones y procesos que realizamos para ejecutar el replanteo de las obras, reali-
zamos un proceso mental inverso, a fin de materializar en el terreno una realidad modifi-
cada a partir de un modelo abstracto.
Entendemos por Replanteo, el conjunto de tareas, mediciones y cálculos tendientes a ma-
terializar en el terreno posición de puntos, ejes, alineaciones rectas y curvas que definen
la esencia geométrica de las partes y etapas constructicas que componen la obra.
Modelo geometrico → ( replanteo ) → Realidad modificada
Como vemos, en toda obra de Ingeniería, la primera tarea es siempre la nuestra. Continua-
mos midiendo durante toda la ejecución de la obra, y aún después de finalizada ... seguimos
midiendo.
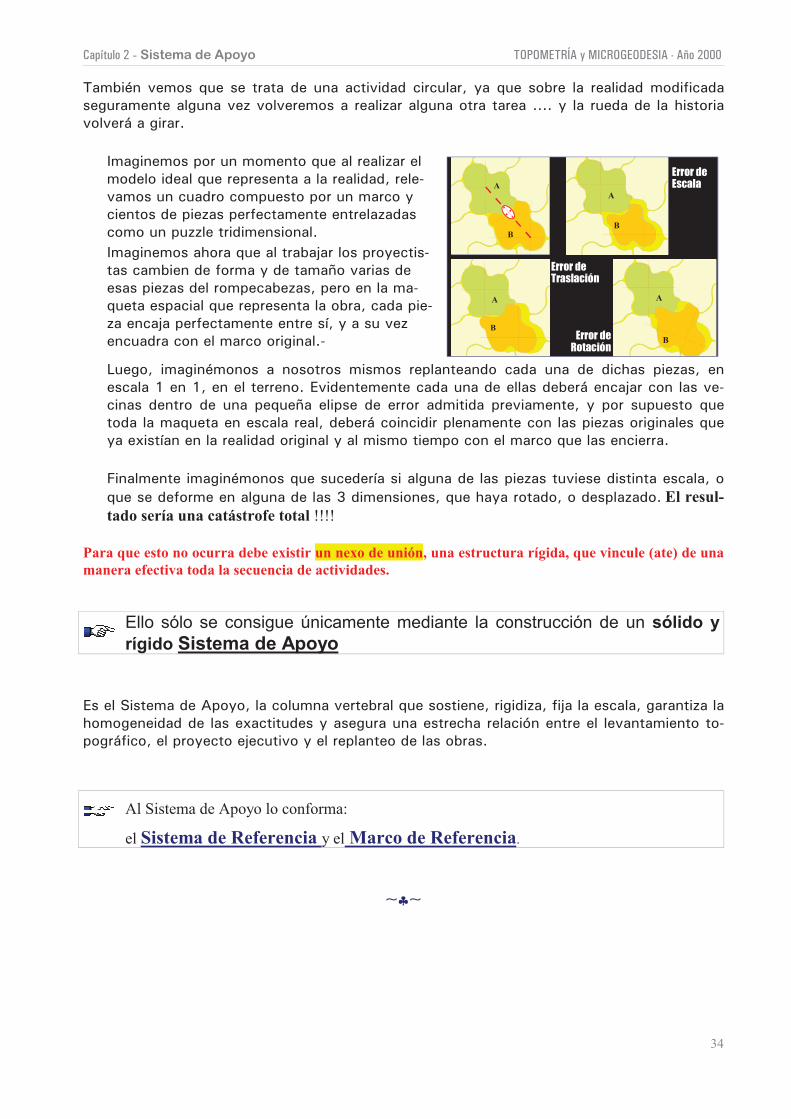
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
34
También vemos que se trata de una actividad circular, ya que sobre la realidad modificada
seguramente alguna vez volveremos a realizar alguna otra tarea .... y la rueda de la historia
volverá a girar.
Imaginemos por un momento que al realizar el
modelo ideal que representa a la realidad, rele-
vamos un cuadro compuesto por un marco y
cientos de piezas perfectamente entrelazadas
como un puzzle tridimensional.
Imaginemos ahora que al trabajar los proyectis-
tas cambien de forma y de tamaño varias de
esas piezas del rompecabezas, pero en la ma-
queta espacial que representa la obra, cada pie-
za encaja perfectamente entre sí, y a su vez
encuadra con el marco original.-
A
BB
A
B
A
B
B
A
B
Error deEscala
Error deTraslación
Error deRotación
Luego, imaginémonos a nosotros mismos replanteando cada una de dichas piezas, en
escala 1 en 1, en el terreno. Evidentemente cada una de ellas deberá encajar con las ve-
cinas dentro de una pequeña elipse de error admitida previamente, y por supuesto que
toda la maqueta en escala real, deberá coincidir plenamente con las piezas originales que
ya existían en la realidad original y al mismo tiempo con el marco que las encierra.
Finalmente imaginémonos que sucedería si alguna de las piezas tuviese distinta escala, o
que se deforme en alguna de las 3 dimensiones, que haya rotado, o desplazado. El resul-
tado sería una catástrofe total !!!!
Para que esto no ocurra debe existir un nexo de unión, una estructura rígida, que vincule (ate) de una
manera efectiva toda la secuencia de actividades.
Ello sólo se consigue únicamente mediante la construcción de un sólido y
rígido Sistema de Apoyo
Es el Sistema de Apoyo, la columna vertebral que sostiene, rigidiza, fija la escala, garantiza la
homogeneidad de las exactitudes y asegura una estrecha relación entre el levantamiento to-
pográfico, el proyecto ejecutivo y el replanteo de las obras.
Al Sistema de Apoyo lo conforma:
el Sistema de Referencia y el Marco de Referencia.
∼♣∼
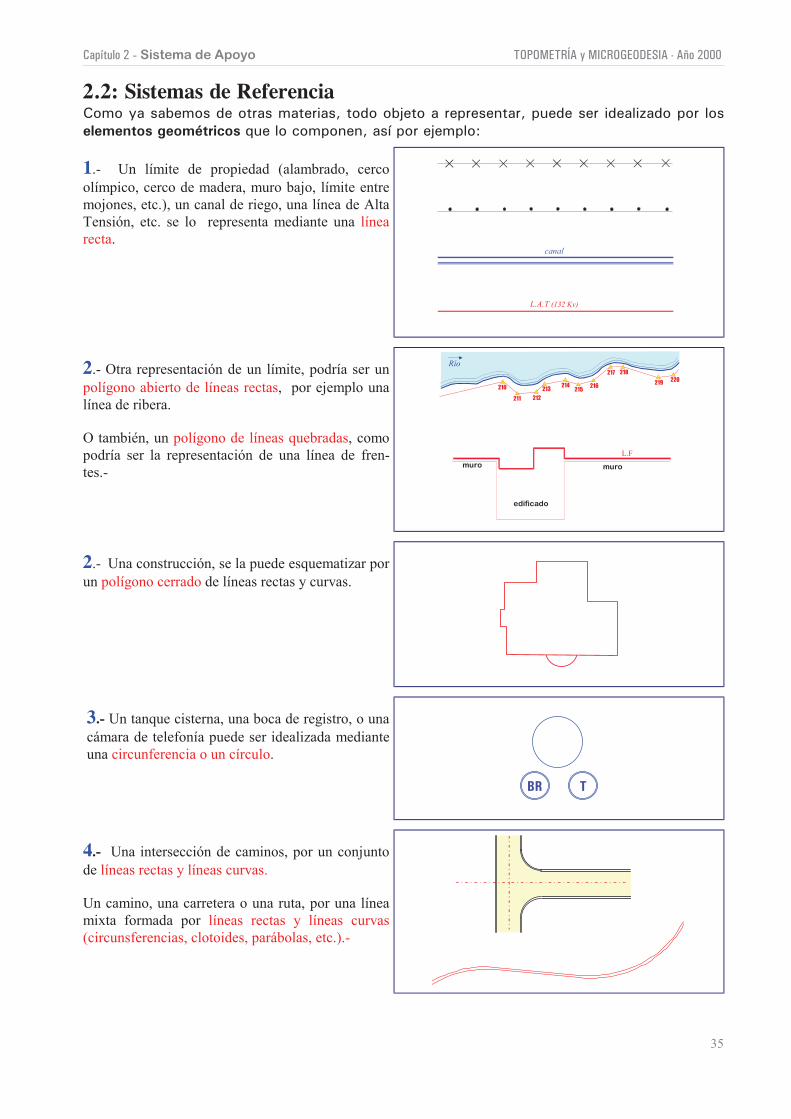
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
35
2.2: Sistemas de Referencia
Como ya sabemos de otras materias, todo objeto a representar, puede ser idealizado por los
elementos geométricos que lo componen, así por ejemplo:
1.- Un límite de propiedad (alambrado, cerco
olímpico, cerco de madera, muro bajo, límite entre
mojones, etc.), un canal de riego, una línea de Alta
Tensión, etc. se lo representa mediante una línea
recta.canal
L.A.T (132 Kv)
2.- Otra representación de un límite, podría ser un
polígono abierto de líneas rectas, por ejemplo una
línea de ribera.
O también, un polígono de líneas quebradas, como
podría ser la representación de una línea de fren-
tes.-
edificado
muromuro
L.F
Río
210
211 212
213214
215216
217 218
219 220
2.- Una construcción, se la puede esquematizar por
un polígono cerrado de líneas rectas y curvas.
3.- Un tanque cisterna, una boca de registro, o una
cámara de telefonía puede ser idealizada mediante
una circunferencia o un círculo.
BR T
4.- Una intersección de caminos, por un conjunto
de líneas rectas y líneas curvas.
Un camino, una carretera o una ruta, por una línea
mixta formada por líneas rectas y líneas curvas
(circunsferencias, clotoides, parábolas, etc.).-

Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
36
5.- una cámara de inspección, una boca de tormen-
ta, una cámara de rejas, por un rectángulo
Una obra de arte (alcantarilla) también por un rec-
tángulo, y cada muro de ala por dos segmentos de
rectas
6.- Un árbol, un poste de línea, una farola de ilu-
minación, un poste esquinero, una válvula de gas,
un mojón, etc.; queda idealizado por un punto.
farola
Al relevar un objeto cualquiera sea, polígono cerrado, polígono abierto, cuadrado, rectángulo,
etc. lo que hacemos es levantar el conjunto de líneas rectas que lo componen.
A su vez, cada línea recta queda definida por los dos puntos extremos.
En otras palabras, para representar un objeto, lo hacemos relevando en el terreno solamente
los elementos que lo definen →→→→ PUNTOS
El elemento básico de nuestros trabajos serán siempre → “puntos”.
Esta afirmación seguramente el alumno lo verá muy claro en los objetos definidos por líneas
rectas, pero quizás no lo interprete tan claramente cuando lo que se trate de relevar sea una
circusferencia o una línea curva. La primera idea que surge sería la de relevar una sucesión
muy grande de puntos ubicados sobre la misma, sin embargo esto no es necesario. Una cir-
cunferencia queda definida por:
α
FC
PC
V
El valor de las Tangentes y el án-
gulo comprendido, lo cual generan
3 puntos carácterísticos, PC, FC y
V.
R
Por las direcciones de sus tangen-
tes, (lo cual al ser dos líneas rec-
tas sólo se precisan relevar 4 pun-
tos); y el valor del Radio
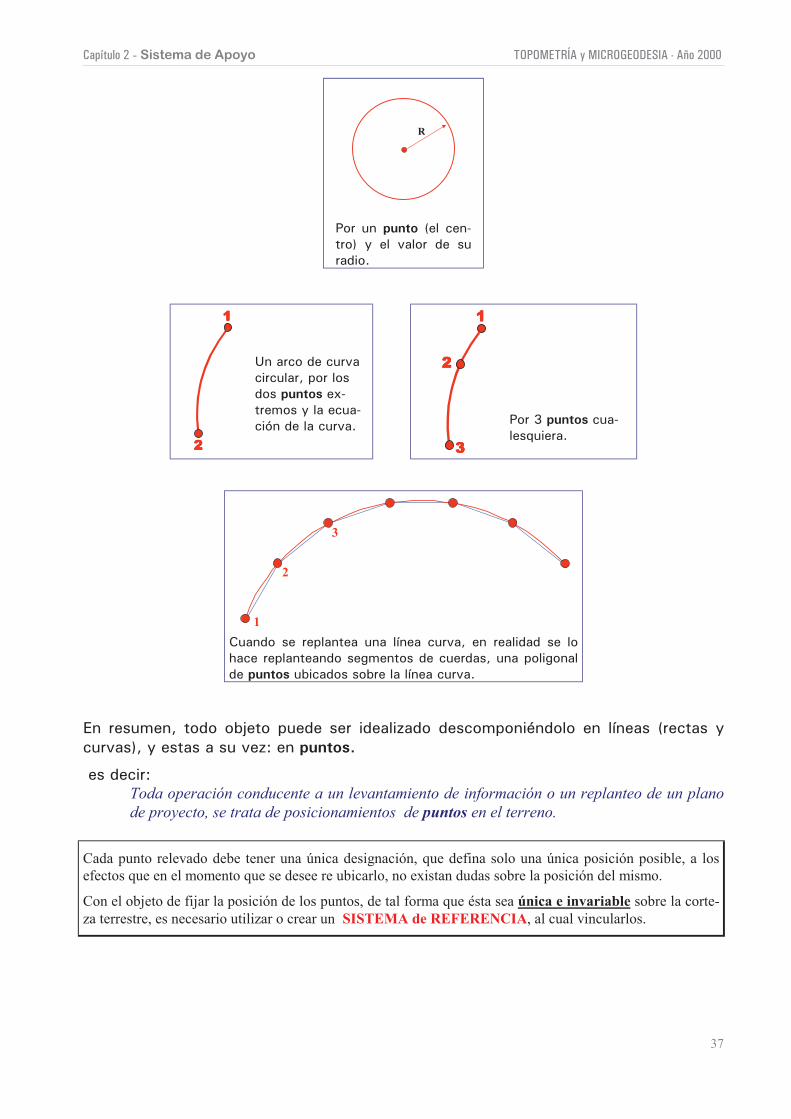
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
37
R
Por un punto (el cen-
tro) y el valor de su
radio.
1111
2222
Un arco de curva
circular, por los
dos puntos ex-
tremos y la ecua-
ción de la curva.
1111
2222
3333
Por 3 puntos cua-
lesquiera.
1
2
3
Cuando se replantea una línea curva, en realidad se lo
hace replanteando segmentos de cuerdas, una poligonal
de puntos ubicados sobre la línea curva.
En resumen, todo objeto puede ser idealizado descomponiéndolo en líneas (rectas y
curvas), y estas a su vez: en puntos.
es decir:
Toda operación conducente a un levantamiento de información o un replanteo de un plano
de proyecto, se trata de posicionamientos de puntos en el terreno.
Cada punto relevado debe tener una única designación, que defina solo una única posición posible, a los
efectos que en el momento que se desee re ubicarlo, no existan dudas sobre la posición del mismo.
Con el objeto de fijar la posición de los puntos, de tal forma que ésta sea única e invariable sobre la corte-
za terrestre, es necesario utilizar o crear un SISTEMA de REFERENCIA, al cual vincularlos.
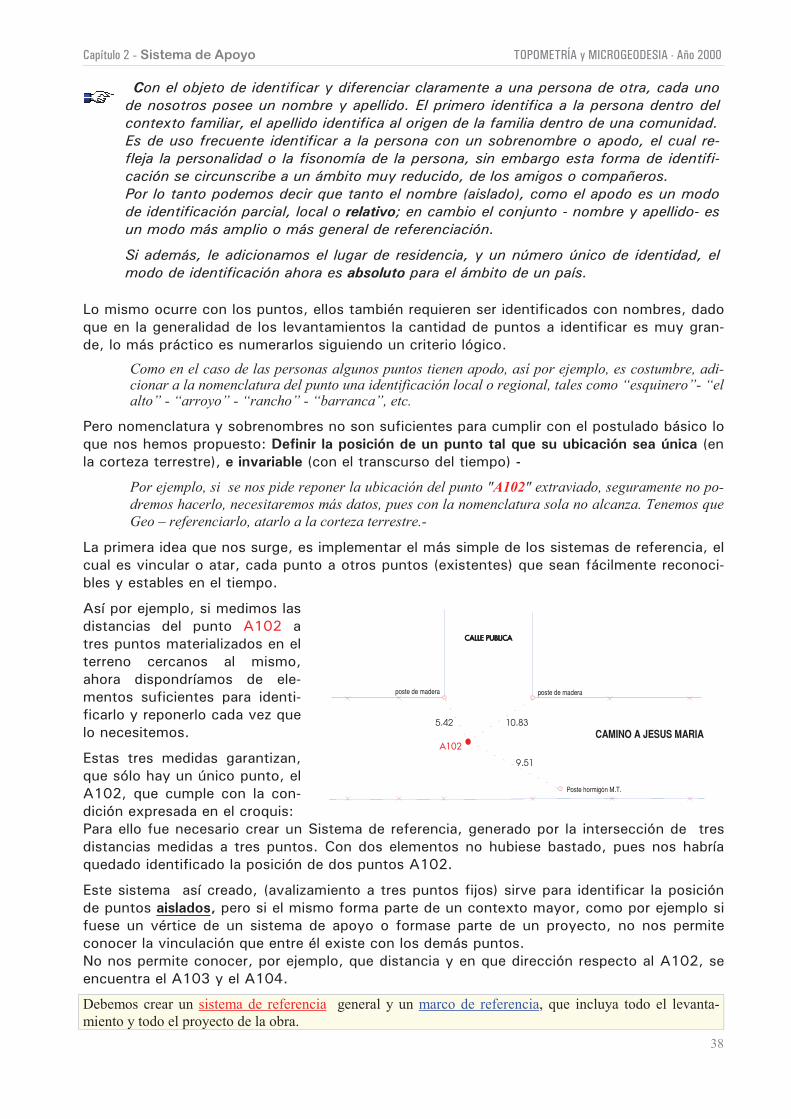
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
38
Con el objeto de identificar y diferenciar claramente a una persona de otra, cada uno
de nosotros posee un nombre y apellido. El primero identifica a la persona dentro del
contexto familiar, el apellido identifica al origen de la familia dentro de una comunidad.
Es de uso frecuente identificar a la persona con un sobrenombre o apodo, el cual re-
fleja la personalidad o la fisonomía de la persona, sin embargo esta forma de identifi-
cación se circunscribe a un ámbito muy reducido, de los amigos o compañeros.
Por lo tanto podemos decir que tanto el nombre (aislado), como el apodo es un modo
de identificación parcial, local o relativo; en cambio el conjunto - nombre y apellido- es
un modo más amplio o más general de referenciación.
Si además, le adicionamos el lugar de residencia, y un número único de identidad, el
modo de identificación ahora es absoluto para el ámbito de un país.
Lo mismo ocurre con los puntos, ellos también requieren ser identificados con nombres, dado
que en la generalidad de los levantamientos la cantidad de puntos a identificar es muy gran-
de, lo más práctico es numerarlos siguiendo un criterio lógico.
Como en el caso de las personas algunos puntos tienen apodo, así por ejemplo, es costumbre, adi-cionar a la nomenclatura del punto una identificación local o regional, tales como “esquinero”- “elalto” - “arroyo” - “rancho” - “barranca”, etc.
Pero nomenclatura y sobrenombres no son suficientes para cumplir con el postulado básico lo
que nos hemos propuesto: Definir la posición de un punto tal que su ubicación sea única (en
la corteza terrestre), e invariable (con el transcurso del tiempo) -
Por ejemplo, si se nos pide reponer la ubicación del punto "A102" extraviado, seguramente no po-
dremos hacerlo, necesitaremos más datos, pues con la nomenclatura sola no alcanza. Tenemos que
Geo – referenciarlo, atarlo a la corteza terrestre.-
La primera idea que nos surge, es implementar el más simple de los sistemas de referencia, el
cual es vincular o atar, cada punto a otros puntos (existentes) que sean fácilmente reconoci-
bles y estables en el tiempo.
Así por ejemplo, si medimos las
distancias del punto A102 a
tres puntos materializados en el
terreno cercanos al mismo,
ahora dispondríamos de ele-
mentos suficientes para identi-
ficarlo y reponerlo cada vez que
lo necesitemos.
Estas tres medidas garantizan,
que sólo hay un único punto, el
A102, que cumple con la con-
dición expresada en el croquis:
Poste hormigón M.T.
poste de maderaposte de madera
A102CAMINO A JESUS MARIA
CALLE PUBLICACALLE PUBLICACALLE PUBLICACALLE PUBLICA
5.42 10.83
9.51
Para ello fue necesario crear un Sistema de referencia, generado por la intersección de tres
distancias medidas a tres puntos. Con dos elementos no hubiese bastado, pues nos habría
quedado identificado la posición de dos puntos A102.
Este sistema así creado, (avalizamiento a tres puntos fijos) sirve para identificar la posición
de puntos aislados, pero si el mismo forma parte de un contexto mayor, como por ejemplo si
fuese un vértice de un sistema de apoyo o formase parte de un proyecto, no nos permite
conocer la vinculación que entre él existe con los demás puntos.
No nos permite conocer, por ejemplo, que distancia y en que dirección respecto al A102, se
encuentra el A103 y el A104.
Debemos crear un sistema de referencia general y un marco de referencia, que incluya todo el levanta-
miento y todo el proyecto de la obra.
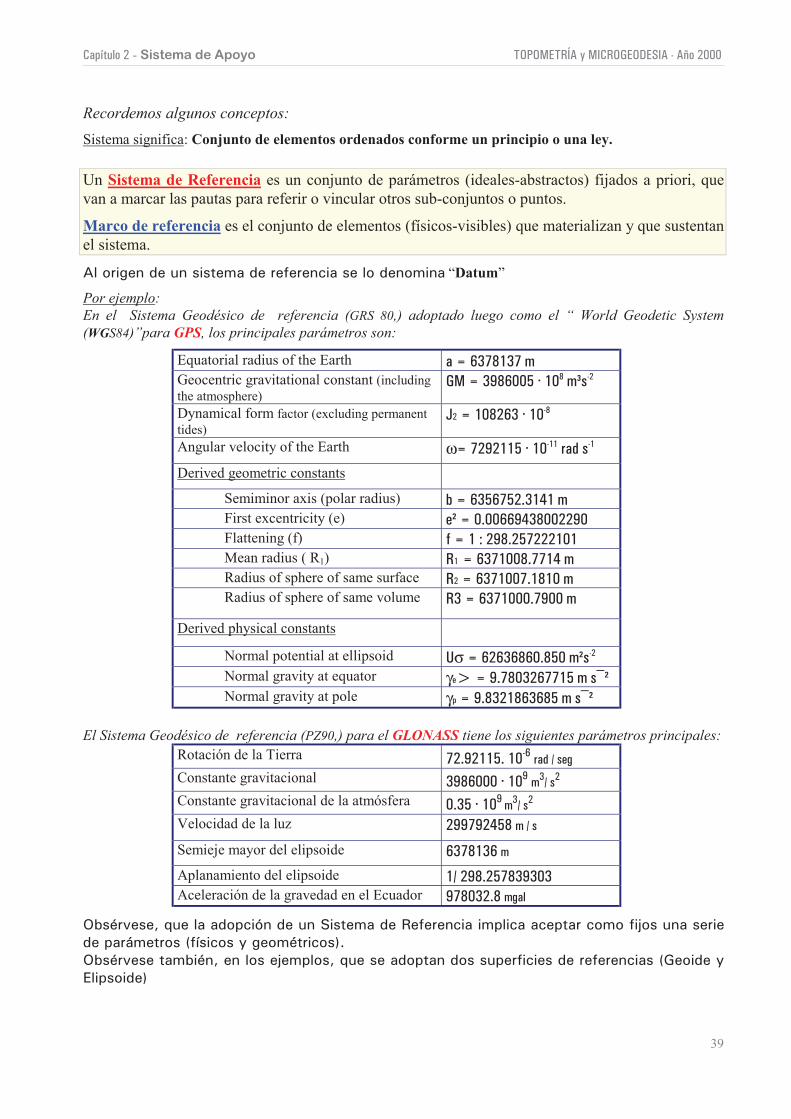
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
39
Recordemos algunos conceptos:
Sistema significa: Conjunto de elementos ordenados conforme un principio o una ley.
Un Sistema de Referencia es un conjunto de parámetros (ideales-abstractos) fijados a priori, que
van a marcar las pautas para referir o vincular otros sub-conjuntos o puntos.
Marco de referencia es el conjunto de elementos (físicos-visibles) que materializan y que sustentan
el sistema.
Al origen de un sistema de referencia se lo denomina “Datum”
Por ejemplo:
En el Sistema Geodésico de referencia (GRS 80,) adoptado luego como el “ World Geodetic System
(WGS84)”para GPS, los principales parámetros son:
Equatorial radius of the Earth a = 6378137 mGeocentric gravitational constant (including
the atmosphere)GM = 3986005 108 m³s-2
Dynamical form factor (excluding permanent
tides)J2 = 108263 10-8
Angular velocity of the Earth ω= 7292115 10-11 rad s-1
Derived geometric constants
Semiminor axis (polar radius) b = 6356752.3141 mFirst excentricity (e) e² = 0.00669438002290Flattening (f) f = 1 : 298.257222101Mean radius ( R1) R1 = 6371008.7714 mRadius of sphere of same surface R2 = 6371007.1810 mRadius of sphere of same volume R3 = 6371000.7900 m
Derived physical constants
Normal potential at ellipsoid Uσ = 62636860.850 m²s-2
Normal gravity at equator γe> = 9.7803267715 m s¯²Normal gravity at pole γp = 9.8321863685 m s¯²
El Sistema Geodésico de referencia (PZ90,) para el GLONASS tiene los siguientes parámetros principales:
Rotación de la Tierra 72.92115. 10-6 rad / seg
Constante gravitacional 3986000 109 m3/ s2
Constante gravitacional de la atmósfera 0.35 109 m3/ s2
Velocidad de la luz 299792458 m / s
Semieje mayor del elipsoide 6378136 m
Aplanamiento del elipsoide 1/ 298.257839303Aceleración de la gravedad en el Ecuador 978032.8 mgal
Obsérvese, que la adopción de un Sistema de Referencia implica aceptar como fijos una serie
de parámetros (físicos y geométricos).
Obsérvese también, en los ejemplos, que se adoptan dos superficies de referencias (Geoide y
Elipsoide)
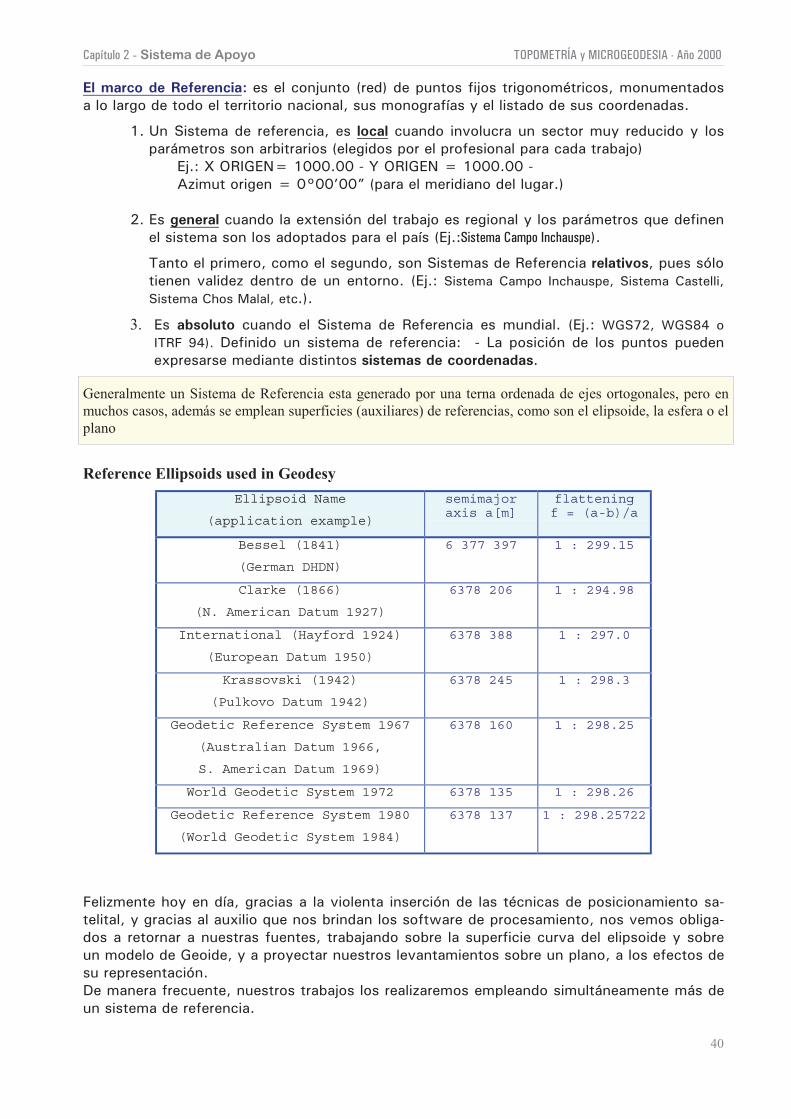
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
40
El marco de Referencia: es el conjunto (red) de puntos fijos trigonométricos, monumentados
a lo largo de todo el territorio nacional, sus monografías y el listado de sus coordenadas.
1. Un Sistema de referencia, es local cuando involucra un sector muy reducido y los
parámetros son arbitrarios (elegidos por el profesional para cada trabajo)
Ej.: X ORIGEN= 1000.00 - Y ORIGEN = 1000.00 -
Azimut origen = 0°00’00” (para el meridiano del lugar.)
2. Es general cuando la extensión del trabajo es regional y los parámetros que definen
el sistema son los adoptados para el país (Ej.:Sistema Campo Inchauspe).
Tanto el primero, como el segundo, son Sistemas de Referencia relativos, pues sólo
tienen validez dentro de un entorno. (Ej.: Sistema Campo Inchauspe, Sistema Castelli,
Sistema Chos Malal, etc.).
3. Es absoluto cuando el Sistema de Referencia es mundial. (Ej.: WGS72, WGS84 o
ITRF 94). Definido un sistema de referencia: - La posición de los puntos pueden
expresarse mediante distintos sistemas de coordenadas.
Generalmente un Sistema de Referencia esta generado por una terna ordenada de ejes ortogonales, pero en
muchos casos, además se emplean superficies (auxiliares) de referencias, como son el elipsoide, la esfera o el
plano
Reference Ellipsoids used in Geodesy
Ellipsoid Name
(application example)
semimajoraxis a[m]
flatteningf = (a-b)/a
Bessel (1841)
(German DHDN)
6 377 397 1 : 299.15
Clarke (1866)
(N. American Datum 1927)
6378 206 1 : 294.98
International (Hayford 1924)
(European Datum 1950)
6378 388 1 : 297.0
Krassovski (1942)
(Pulkovo Datum 1942)
6378 245 1 : 298.3
Geodetic Reference System 1967
(Australian Datum 1966,
S. American Datum 1969)
6378 160 1 : 298.25
World Geodetic System 1972 6378 135 1 : 298.26
Geodetic Reference System 1980
(World Geodetic System 1984)
6378 137 1 : 298.25722
Felizmente hoy en día, gracias a la violenta inserción de las técnicas de posicionamiento sa-
telital, y gracias al auxilio que nos brindan los software de procesamiento, nos vemos obliga-
dos a retornar a nuestras fuentes, trabajando sobre la superficie curva del elipsoide y sobre
un modelo de Geoide, y a proyectar nuestros levantamientos sobre un plano, a los efectos de
su representación.
De manera frecuente, nuestros trabajos los realizaremos empleando simultáneamente más de
un sistema de referencia.
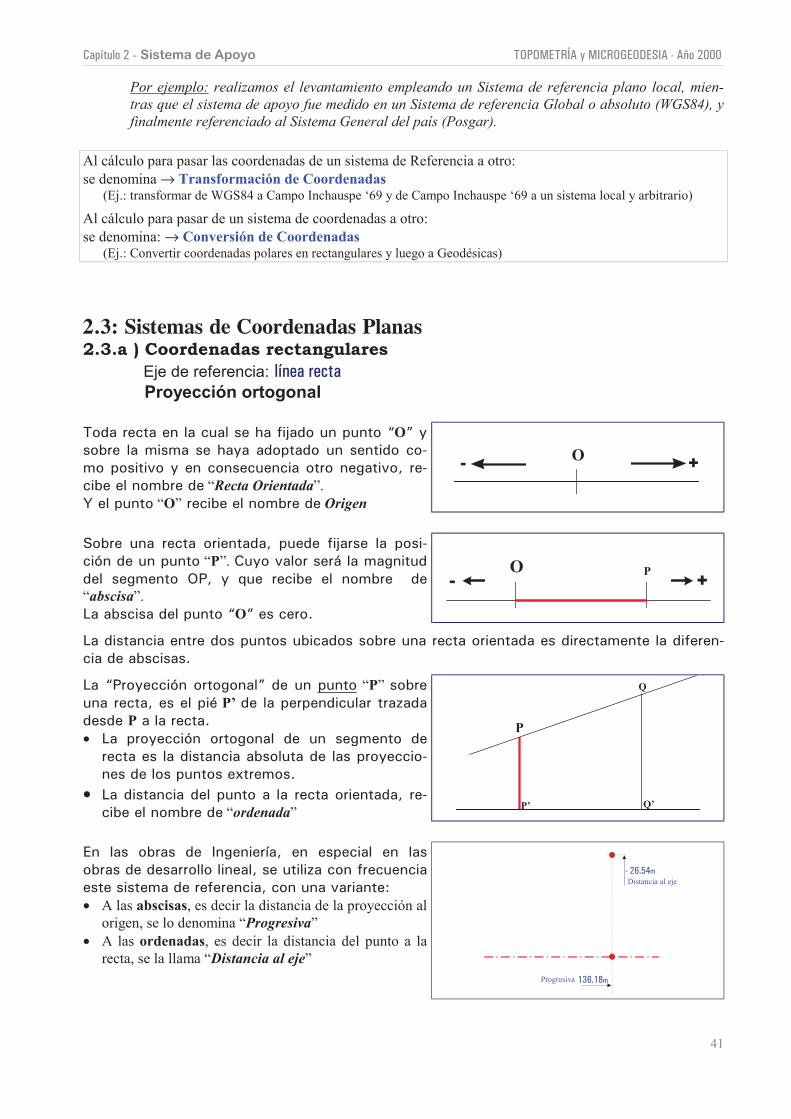
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
41
Por ejemplo: realizamos el levantamiento empleando un Sistema de referencia plano local, mien-
tras que el sistema de apoyo fue medido en un Sistema de referencia Global o absoluto (WGS84), y
finalmente referenciado al Sistema General del país (Posgar).
Al cálculo para pasar las coordenadas de un sistema de Referencia a otro:
se denomina → Transformación de Coordenadas (Ej.: transformar de WGS84 a Campo Inchauspe ‘69 y de Campo Inchauspe ‘69 a un sistema local y arbitrario)
Al cálculo para pasar de un sistema de coordenadas a otro:
se denomina: → Conversión de Coordenadas (Ej.: Convertir coordenadas polares en rectangulares y luego a Geodésicas)
2.3: Sistemas de Coordenadas Planas
2.3.a ) Coordenadas rectangulares
Eje de referencia: línea recta Proyección ortogonal
Toda recta en la cual se ha fijado un punto “O” y
sobre la misma se haya adoptado un sentido co-
mo positivo y en consecuencia otro negativo, re-
cibe el nombre de “Recta Orientada”.
Y el punto “O” recibe el nombre de Origen
O+-
Sobre una recta orientada, puede fijarse la posi-
ción de un punto “P”. Cuyo valor será la magnitud
del segmento OP, y que recibe el nombre de
“abscisa”.
La abscisa del punto “O” es cero.
O+-
P
La distancia entre dos puntos ubicados sobre una recta orientada es directamente la diferen-
cia de abscisas.
La “Proyección ortogonal” de un punto “P” sobre
una recta, es el pié P’ de la perpendicular trazada
desde P a la recta.
• La proyección ortogonal de un segmento de
recta es la distancia absoluta de las proyeccio-
nes de los puntos extremos.
• La distancia del punto a la recta orientada, re-
cibe el nombre de “ordenada”
P
P’ Q’
Q
En las obras de Ingeniería, en especial en las
obras de desarrollo lineal, se utiliza con frecuencia
este sistema de referencia, con una variante:
• A las abscisas, es decir la distancia de la proyección al
origen, se lo denomina “Progresiva”
• A las ordenadas, es decir la distancia del punto a la
recta, se la llama “Distancia al eje”
- 26.54mDistancia al eje
136.18mProgresiva
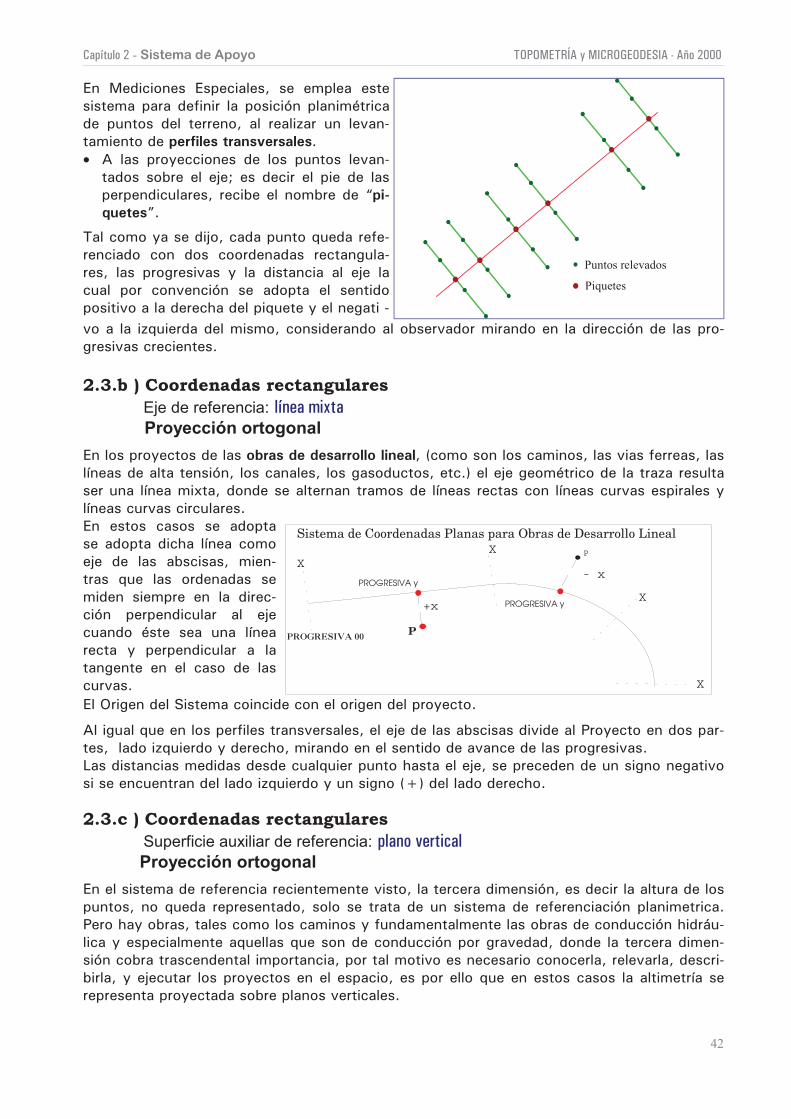
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
42
En Mediciones Especiales, se emplea este
sistema para definir la posición planimétrica
de puntos del terreno, al realizar un levan-
tamiento de perfiles transversales.
• A las proyecciones de los puntos levan-
tados sobre el eje; es decir el pie de las
perpendiculares, recibe el nombre de “pi-
quetes”.
Tal como ya se dijo, cada punto queda refe-
renciado con dos coordenadas rectangula-
res, las progresivas y la distancia al eje la
cual por convención se adopta el sentido
positivo a la derecha del piquete y el negati -
Puntos relevados
Piquetes
vo a la izquierda del mismo, considerando al observador mirando en la dirección de las pro-
gresivas crecientes.
2.3.b ) Coordenadas rectangulares
Eje de referencia: línea mixta Proyección ortogonal
En los proyectos de las obras de desarrollo lineal, (como son los caminos, las vias ferreas, las
líneas de alta tensión, los canales, los gasoductos, etc.) el eje geométrico de la traza resulta
ser una línea mixta, donde se alternan tramos de líneas rectas con líneas curvas espirales y
líneas curvas circulares.
En estos casos se adopta
se adopta dicha línea como
eje de las abscisas, mien-
tras que las ordenadas se
miden siempre en la direc-
ción perpendicular al eje
cuando éste sea una línea
recta y perpendicular a la
tangente en el caso de las
curvas.
X
X
X
X
PROGRESIVA 00
PROGRESIVA y
PROGRESIVA y
P
- x
P
+x
Sistema de Coordenadas Planas para Obras de Desarrollo Lineal
El Origen del Sistema coincide con el origen del proyecto.
Al igual que en los perfiles transversales, el eje de las abscisas divide al Proyecto en dos par-
tes, lado izquierdo y derecho, mirando en el sentido de avance de las progresivas.
Las distancias medidas desde cualquier punto hasta el eje, se preceden de un signo negativo
si se encuentran del lado izquierdo y un signo (+) del lado derecho.
2.3.c ) Coordenadas rectangulares
Superficie auxiliar de referencia: plano vertical Proyección ortogonal
En el sistema de referencia recientemente visto, la tercera dimensión, es decir la altura de los
puntos, no queda representado, solo se trata de un sistema de referenciación planimetrica.
Pero hay obras, tales como los caminos y fundamentalmente las obras de conducción hidráu-
lica y especialmente aquellas que son de conducción por gravedad, donde la tercera dimen-
sión cobra trascendental importancia, por tal motivo es necesario conocerla, relevarla, descri-
birla, y ejecutar los proyectos en el espacio, es por ello que en estos casos la altimetría se
representa proyectada sobre planos verticales.
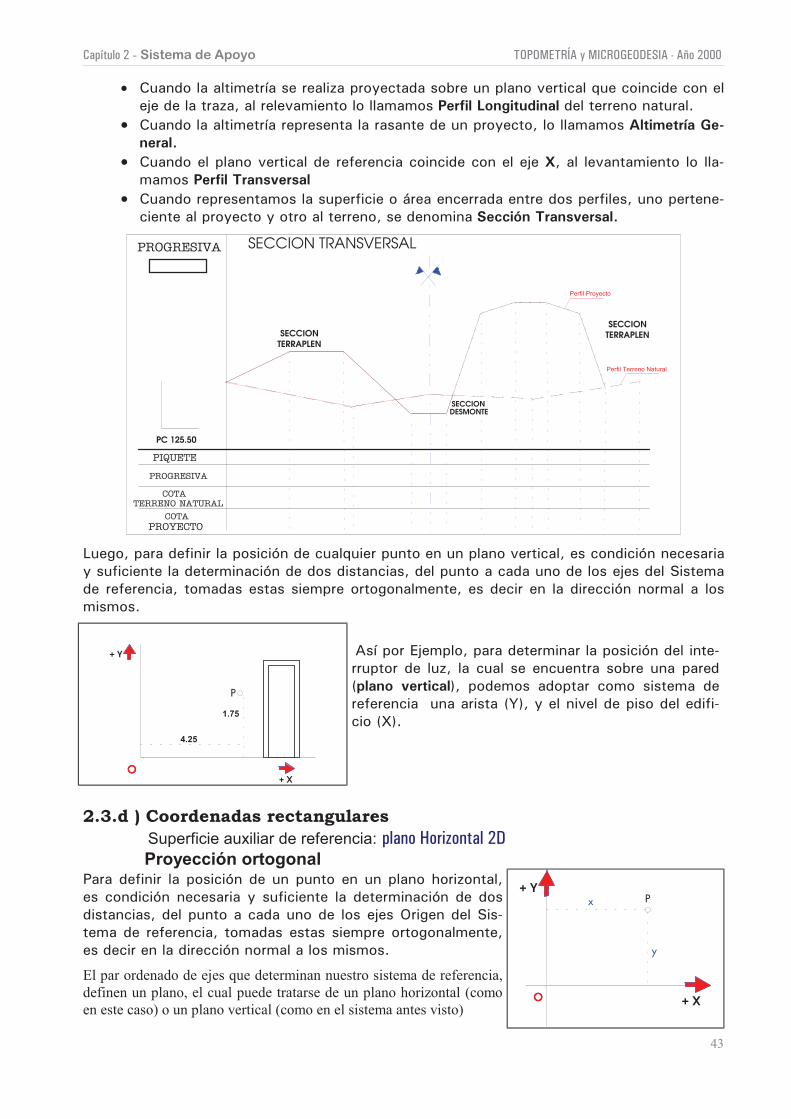
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
43
• Cuando la altimetría se realiza proyectada sobre un plano vertical que coincide con el
eje de la traza, al relevamiento lo llamamos Perfil Longitudinal del terreno natural.
• Cuando la altimetría representa la rasante de un proyecto, lo llamamos Altimetría Ge-
neral.
• Cuando el plano vertical de referencia coincide con el eje X, al levantamiento lo lla-
mamos Perfil Transversal
• Cuando representamos la superficie o área encerrada entre dos perfiles, uno pertene-
ciente al proyecto y otro al terreno, se denomina Sección Transversal.
PIQUETE
PROGRESIVA
COTATERRENO NATURAL
PROYECTOCOTA
PC 125.50
Perfil Proyecto
Perfil Terreno Natural
SECCION
TERRAPLENSECCION
TERRAPLEN
SECCION
DESMONTE
SECCION TRANSVERSALPROGRESIVA
Luego, para definir la posición de cualquier punto en un plano vertical, es condición necesaria
y suficiente la determinación de dos distancias, del punto a cada uno de los ejes del Sistema
de referencia, tomadas estas siempre ortogonalmente, es decir en la dirección normal a los
mismos.
P
+ X
+ Y
OOOO
4.25
1.75
Así por Ejemplo, para determinar la posición del inte-
rruptor de luz, la cual se encuentra sobre una pared
(plano vertical), podemos adoptar como sistema de
referencia una arista (Y), y el nivel de piso del edifi-
cio (X).
2.3.d ) Coordenadas rectangulares
Superficie auxiliar de referencia: plano Horizontal 2D Proyección ortogonal
Para definir la posición de un punto en un plano horizontal,
es condición necesaria y suficiente la determinación de dos
distancias, del punto a cada uno de los ejes Origen del Sis-
tema de referencia, tomadas estas siempre ortogonalmente,
es decir en la dirección normal a los mismos.
El par ordenado de ejes que determinan nuestro sistema de referencia,
definen un plano, el cual puede tratarse de un plano horizontal (como
en este caso) o un plano vertical (como en el sistema antes visto)
Px
y
+ X
+ Y
OOOO
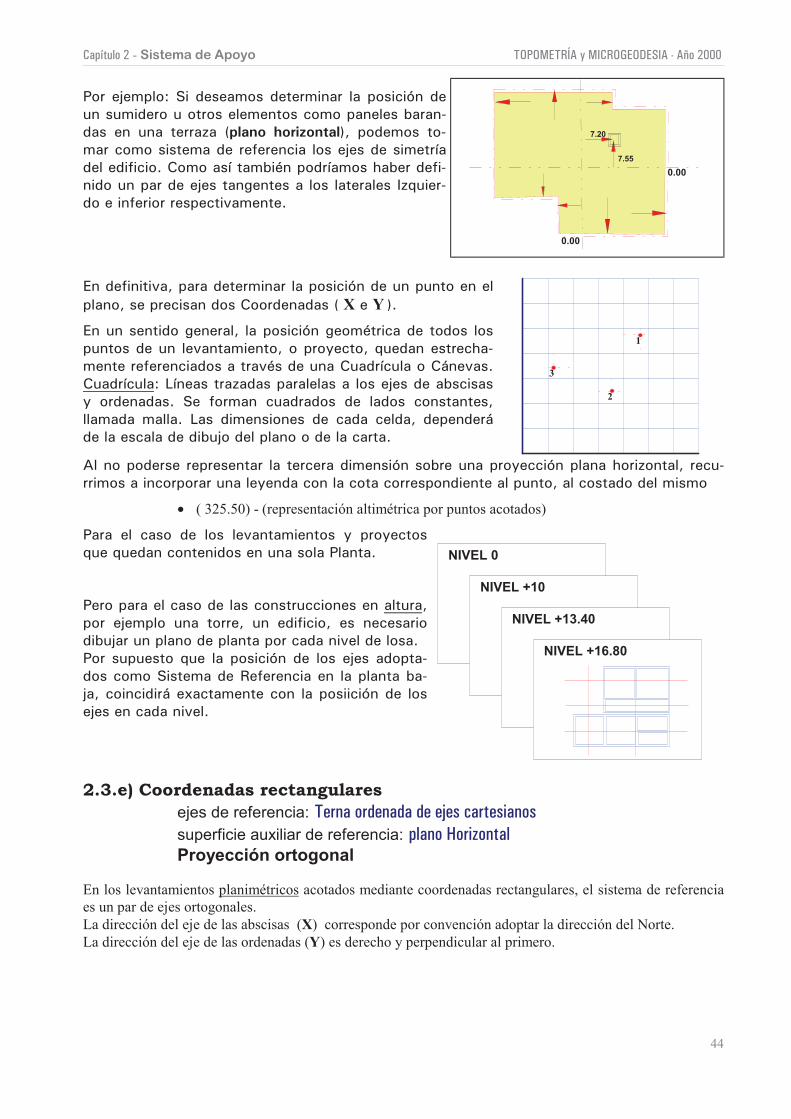
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
44
Por ejemplo: Si deseamos determinar la posición de
un sumidero u otros elementos como paneles baran-
das en una terraza (plano horizontal), podemos to-
mar como sistema de referencia los ejes de simetría
del edificio. Como así también podríamos haber defi-
nido un par de ejes tangentes a los laterales Izquier-
do e inferior respectivamente.
0.00
0.00
7.20
7.55
En definitiva, para determinar la posición de un punto en el
plano, se precisan dos Coordenadas ( X e Y ).
En un sentido general, la posición geométrica de todos los
puntos de un levantamiento, o proyecto, quedan estrecha-
mente referenciados a través de una Cuadrícula o Cánevas.
Cuadrícula: Líneas trazadas paralelas a los ejes de abscisas
y ordenadas. Se forman cuadrados de lados constantes,
llamada malla. Las dimensiones de cada celda, dependerá
de la escala de dibujo del plano o de la carta.
1
2
3
Al no poderse representar la tercera dimensión sobre una proyección plana horizontal, recu-
rrimos a incorporar una leyenda con la cota correspondiente al punto, al costado del mismo
• ( 325.50) - (representación altimétrica por puntos acotados)
Para el caso de los levantamientos y proyectos
que quedan contenidos en una sola Planta.
Pero para el caso de las construcciones en altura,
por ejemplo una torre, un edificio, es necesario
dibujar un plano de planta por cada nivel de losa.
Por supuesto que la posición de los ejes adopta-
dos como Sistema de Referencia en la planta ba-
ja, coincidirá exactamente con la posiición de los
ejes en cada nivel.
NIVEL +16.80
NIVEL 0
NIVEL +10
NIVEL +13.40
2.3.e) Coordenadas rectangulares
ejes de referencia: Terna ordenada de ejes cartesianossuperficie auxiliar de referencia: plano HorizontalProyección ortogonal
En los levantamientos planimétricos acotados mediante coordenadas rectangulares, el sistema de referencia
es un par de ejes ortogonales.
La dirección del eje de las abscisas (X) corresponde por convención adoptar la dirección del Norte.
La dirección del eje de las ordenadas (Y) es derecho y perpendicular al primero.
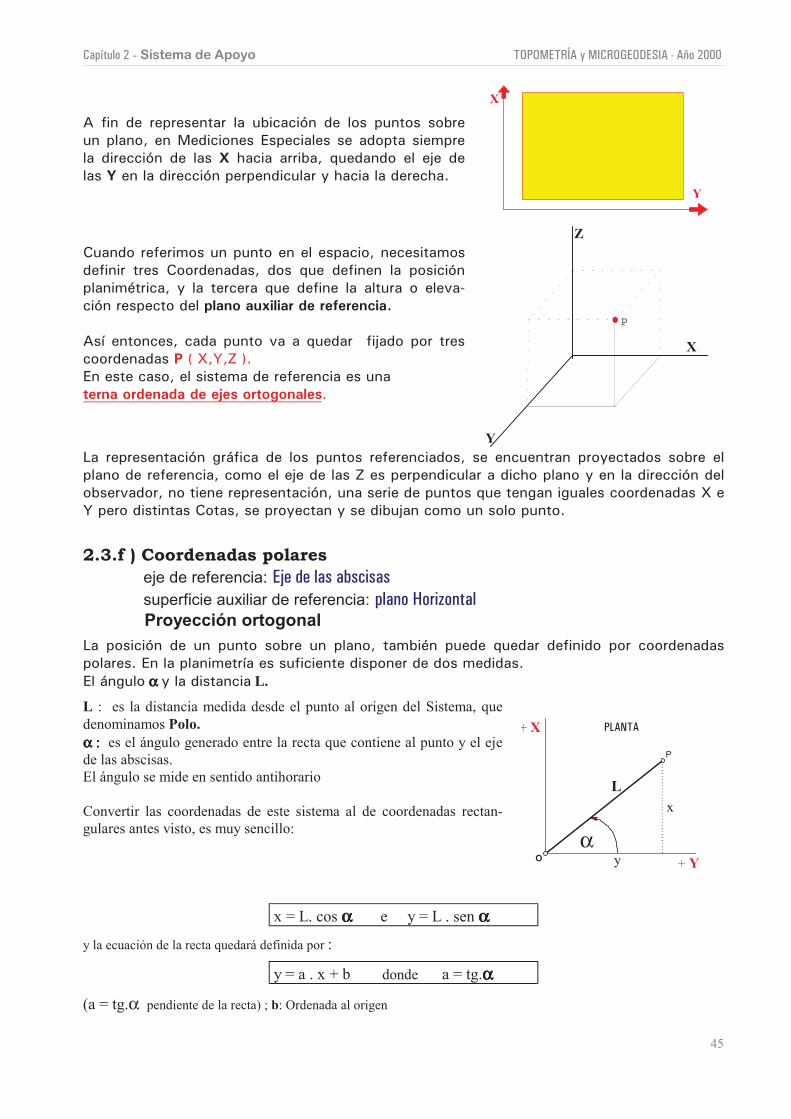
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
45
A fin de representar la ubicación de los puntos sobre
un plano, en Mediciones Especiales se adopta siempre
la dirección de las X hacia arriba, quedando el eje de
las Y en la dirección perpendicular y hacia la derecha.
X
Y
Cuando referimos un punto en el espacio, necesitamos
definir tres Coordenadas, dos que definen la posición
planimétrica, y la tercera que define la altura o eleva-
ción respecto del plano auxiliar de referencia.
Así entonces, cada punto va a quedar fijado por tres
coordenadas P ( X,Y,Z ).
En este caso, el sistema de referencia es una
terna ordenada de ejes ortogonales.
P
X
Y
Z
La representación gráfica de los puntos referenciados, se encuentran proyectados sobre el
plano de referencia, como el eje de las Z es perpendicular a dicho plano y en la dirección del
observador, no tiene representación, una serie de puntos que tengan iguales coordenadas X e
Y pero distintas Cotas, se proyectan y se dibujan como un solo punto.
2.3.f ) Coordenadas polares
eje de referencia: Eje de las abscisas superficie auxiliar de referencia: plano Horizontal Proyección ortogonal
La posición de un punto sobre un plano, también puede quedar definido por coordenadas
polares. En la planimetría es suficiente disponer de dos medidas.
El ángulo α α α α y la distancia L.
L : es la distancia medida desde el punto al origen del Sistema, que
denominamos Polo.
α :α :α :α : es el ángulo generado entre la recta que contiene al punto y el eje
de las abscisas.
El ángulo se mide en sentido antihorario
Convertir las coordenadas de este sistema al de coordenadas rectan-
gulares antes visto, es muy sencillo:
O
P
α
x
y + Y
+ X
L
PLANTA
x = L. cos α α α α e y = L . sen α α α α
y la ecuación de la recta quedará definida por :
y = a . x + b donde a = tg.α α α α
(a = tg.α pendiente de la recta) ; b: Ordenada al origen
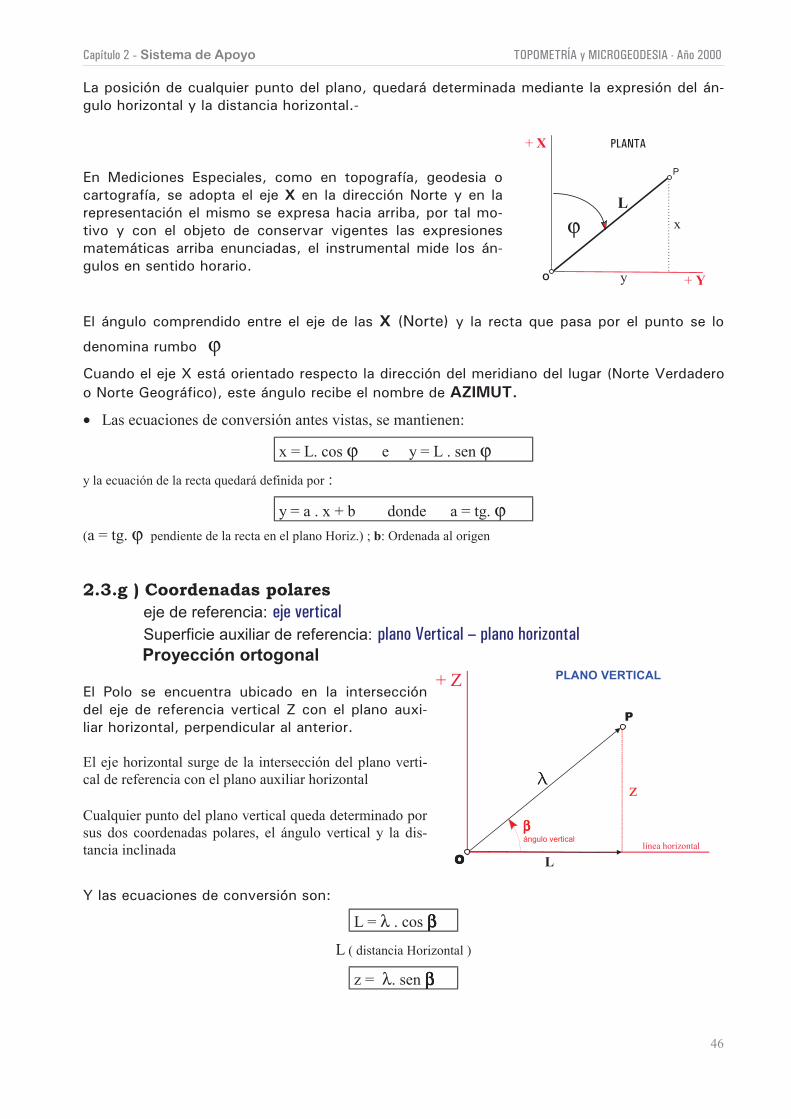
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
46
La posición de cualquier punto del plano, quedará determinada mediante la expresión del án-
gulo horizontal y la distancia horizontal.-
En Mediciones Especiales, como en topografía, geodesia o
cartografía, se adopta el eje X en la dirección Norte y en la
representación el mismo se expresa hacia arriba, por tal mo-
tivo y con el objeto de conservar vigentes las expresiones
matemáticas arriba enunciadas, el instrumental mide los án-
gulos en sentido horario.O
P
ϕ x
y + Y
+ X
L
PLANTA
El ángulo comprendido entre el eje de las X (Norte) y la recta que pasa por el punto se lo
denomina rumbo ϕ
Cuando el eje X está orientado respecto la dirección del meridiano del lugar (Norte Verdadero
o Norte Geográfico), este ángulo recibe el nombre de AZIMUT.
• Las ecuaciones de conversión antes vistas, se mantienen:
x = L. cos ϕ e y = L . sen ϕ
y la ecuación de la recta quedará definida por :
y = a . x + b donde a = tg. ϕ
(a = tg. ϕ pendiente de la recta en el plano Horiz.) ; b: Ordenada al origen
2.3.g ) Coordenadas polares
eje de referencia: eje vertical Superficie auxiliar de referencia: plano Vertical – plano horizontal Proyección ortogonal
El Polo se encuentra ubicado en la intersección
del eje de referencia vertical Z con el plano auxi-
liar horizontal, perpendicular al anterior.
El eje horizontal surge de la intersección del plano verti-
cal de referencia con el plano auxiliar horizontal
Cualquier punto del plano vertical queda determinado por
sus dos coordenadas polares, el ángulo vertical y la dis-
tancia inclinadaOOOO
P
ββββ
z
L
+ Z
llll
PLANO VERTICAL
ángulo verticallínea horizontal
Y las ecuaciones de conversión son:
L = λ . cos β β β β
L ( distancia Horizontal )
z = λ. sen ββββ
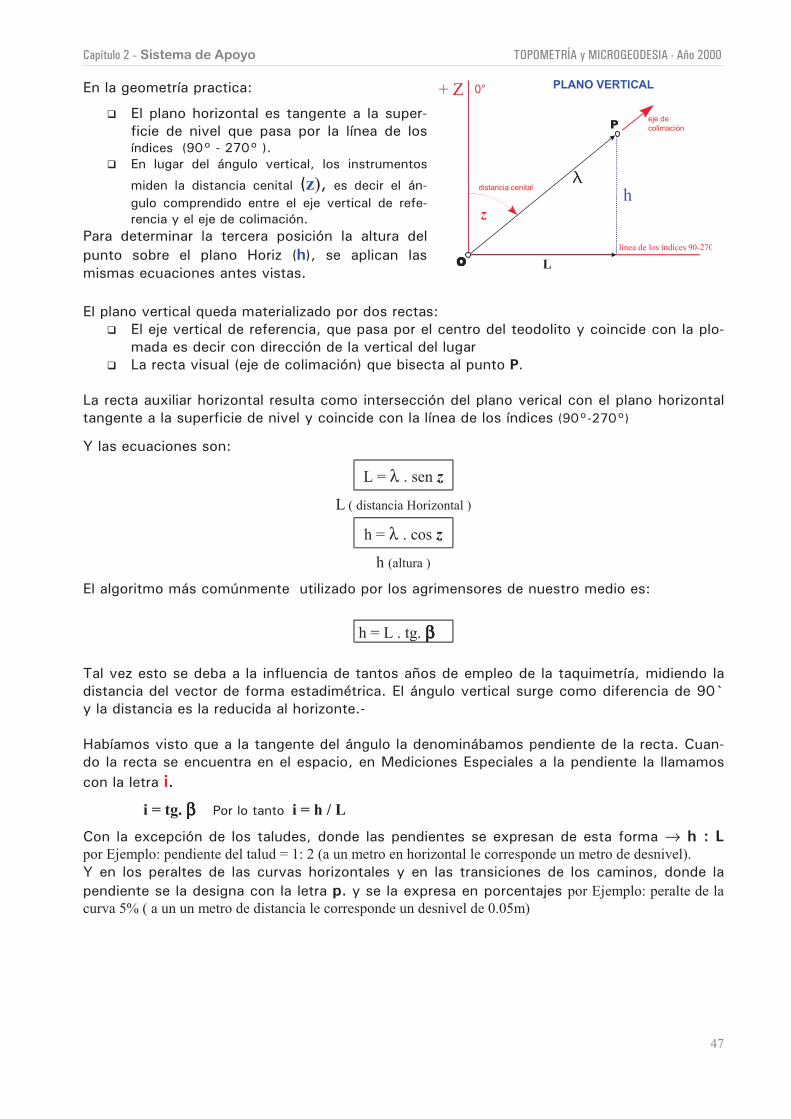
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
47
En la geometría practica:
El plano horizontal es tangente a la super-
ficie de nivel que pasa por la línea de los
índices (90° - 270° ).
En lugar del ángulo vertical, los instrumentos
miden la distancia cenital (z), es decir el án-
gulo comprendido entre el eje vertical de refe-
rencia y el eje de colimación.
Para determinar la tercera posición la altura del
punto sobre el plano Horiz (h), se aplican las
mismas ecuaciones antes vistas.OOOO
P
h
L
+ Z
llll
PLANO VERTICAL
distancia cenital
línea de los índices 90-270
eje de
colimación
z
0°
El plano vertical queda materializado por dos rectas:
El eje vertical de referencia, que pasa por el centro del teodolito y coincide con la plo-
mada es decir con dirección de la vertical del lugar
La recta visual (eje de colimación) que bisecta al punto P.
La recta auxiliar horizontal resulta como intersección del plano verical con el plano horizontal
tangente a la superficie de nivel y coincide con la línea de los índices (90°-270°)
Y las ecuaciones son:
L = λ . sen z
L ( distancia Horizontal )
h = λ . cos z
h (altura )
El algoritmo más comúnmente utilizado por los agrimensores de nuestro medio es:
h = L . tg. ββββ
Tal vez esto se deba a la influencia de tantos años de empleo de la taquimetría, midiendo la
distancia del vector de forma estadimétrica. El ángulo vertical surge como diferencia de 90`
y la distancia es la reducida al horizonte.-
Habíamos visto que a la tangente del ángulo la denominábamos pendiente de la recta. Cuan-
do la recta se encuentra en el espacio, en Mediciones Especiales a la pendiente la llamamos
con la letra i.
i = tg. β β β β Por lo tanto i = h / L
Con la excepción de los taludes, donde las pendientes se expresan de esta forma → h : Lpor Ejemplo: pendiente del talud = 1: 2 (a un metro en horizontal le corresponde un metro de desnivel).
Y en los peraltes de las curvas horizontales y en las transiciones de los caminos, donde la
pendiente se la designa con la letra p. y se la expresa en porcentajes por Ejemplo: peralte de la
curva 5% ( a un un metro de distancia le corresponde un desnivel de 0.05m)
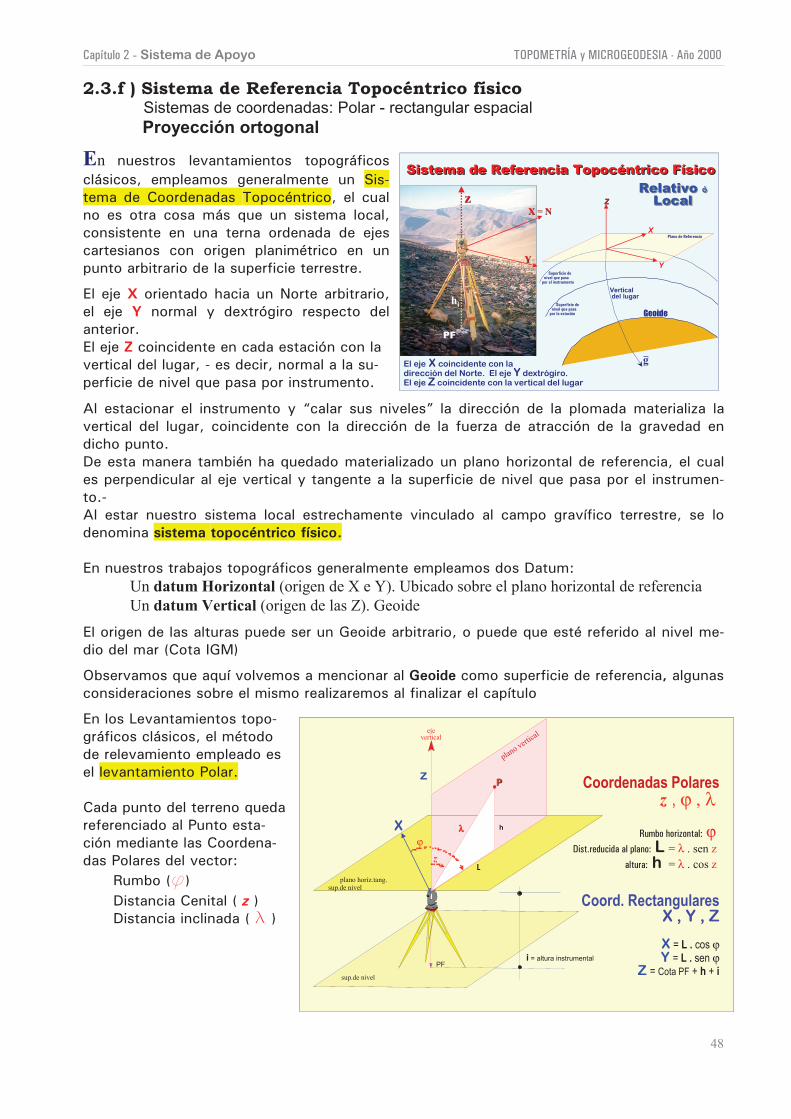
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
48
2.3.f ) Sistema de Referencia Topocéntrico físico Sistemas de coordenadas: Polar - rectangular espacial
Proyección ortogonal
En nuestros levantamientos topográficos
clásicos, empleamos generalmente un Sis-
tema de Coordenadas Topocéntrico, el cual
no es otra cosa más que un sistema local,
consistente en una terna ordenada de ejes
cartesianos con origen planimétrico en un
punto arbitrario de la superficie terrestre.
El eje X orientado hacia un Norte arbitrario,
el eje Y normal y dextrógiro respecto del
anterior.
El eje Z coincidente en cada estación con la
vertical del lugar, - es decir, normal a la su-
perficie de nivel que pasa por instrumento.
Sistema de Referencia Topocéntrico FísicoSistema de Referencia Topocéntrico Físico
El eje X coincidente con ladirección del Norte. El eje Y dextrógiro.El eje Z coincidente con la vertical del lugar
ZZ
YY
X = NX = N
ZZ
PF
hi
X
Y
Geoide
Vertical del lugar
g
Superficie de nivel que pasapor la estación
Relativo ó
LocalRelativo ó
Local
Superficie de nivel que pasapor el instrumento
Plano de Referencia
Al estacionar el instrumento y “calar sus niveles” la dirección de la plomada materializa la
vertical del lugar, coincidente con la dirección de la fuerza de atracción de la gravedad en
dicho punto.
De esta manera también ha quedado materializado un plano horizontal de referencia, el cual
es perpendicular al eje vertical y tangente a la superficie de nivel que pasa por el instrumen-
to.-
Al estar nuestro sistema local estrechamente vinculado al campo gravífico terrestre, se lo
denomina sistema topocéntrico físico.
En nuestros trabajos topográficos generalmente empleamos dos Datum:
Un datum Horizontal (origen de X e Y). Ubicado sobre el plano horizontal de referencia
Un datum Vertical (origen de las Z). Geoide
El origen de las alturas puede ser un Geoide arbitrario, o puede que esté referido al nivel me-
dio del mar (Cota IGM)
Observamos que aquí volvemos a mencionar al Geoide como superficie de referencia, algunas
consideraciones sobre el mismo realizaremos al finalizar el capítulo
En los Levantamientos topo-
gráficos clásicos, el método
de relevamiento empleado es
el levantamiento Polar.
Cada punto del terreno queda
referenciado al Punto esta-
ción mediante las Coordena-
das Polares del vector:
Rumbo (f)
Distancia Cenital ( z )
Distancia inclinada ( l )
Coordenadas Polares z , ϕ , λ
Rumbo horizontal: ϕ Dist.reducida al plano: L = λ . sen z
altura: h = λ . cos z
Coord. Rectangulares X , Y , Z
X = L . cos ϕ Y = L . sen ϕ
Z = Cota PF + h + i
i = altura instrumental
sup.de nivel
sup.de nivelplano horiz.tang.
PF
plano vert
icaleje
vertical
PP
hλλλλ
L
ϕ
z
X
z
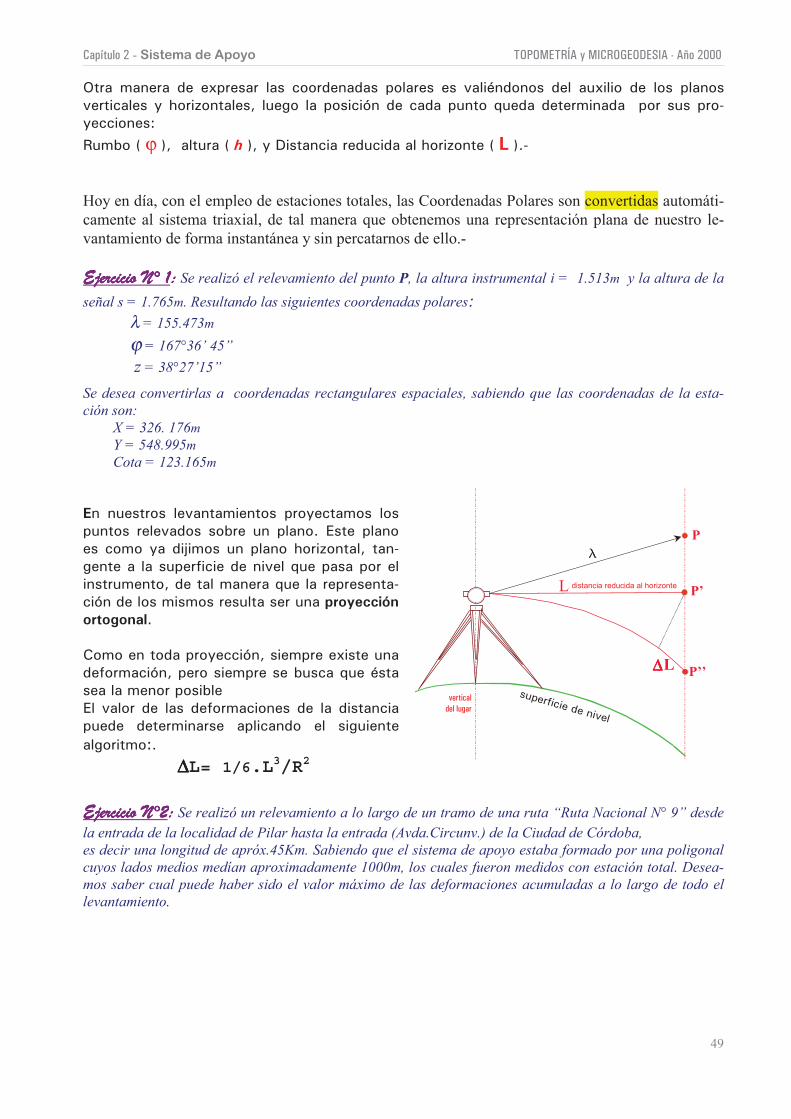
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
49
Otra manera de expresar las coordenadas polares es valiéndonos del auxilio de los planos
verticales y horizontales, luego la posición de cada punto queda determinada por sus pro-
yecciones:
Rumbo ( ϕ ), altura ( h ), y Distancia reducida al horizonte ( L ).-
Hoy en día, con el empleo de estaciones totales, las Coordenadas Polares son convertidas automáti-
camente al sistema triaxial, de tal manera que obtenemos una representación plana de nuestro le-
vantamiento de forma instantánea y sin percatarnos de ello.-
Ejercicio N° 1Ejercicio N° 1Ejercicio N° 1Ejercicio N° 1:::: Se realizó el relevamiento del punto P, la altura instrumental i = 1.513m y la altura de la
señal s = 1.765m. Resultando las siguientes coordenadas polares: λ = 155.473m
ϕ = 167°36’ 45”
z = 38°27’15”
Se desea convertirlas a coordenadas rectangulares espaciales, sabiendo que las coordenadas de la esta-
ción son:
X = 326. 176m
Y = 548.995m
Cota = 123.165m
En nuestros levantamientos proyectamos los
puntos relevados sobre un plano. Este plano
es como ya dijimos un plano horizontal, tan-
gente a la superficie de nivel que pasa por el
instrumento, de tal manera que la representa-
ción de los mismos resulta ser una proyección
ortogonal.
Como en toda proyección, siempre existe una
deformación, pero siempre se busca que ésta
sea la menor posible
El valor de las deformaciones de la distancia
puede determinarse aplicando el siguiente
algoritmo:.
∆∆∆∆L= 1/6.L3/R2
P’’
distancia reducida al horizonteL P’
P
superficie de nivel
∆∆∆∆L
llll
verticaldel lugar
Ejercicio N°2Ejercicio N°2Ejercicio N°2Ejercicio N°2:::: Se realizó un relevamiento a lo largo de un tramo de una ruta “Ruta Nacional N° 9” desde
la entrada de la localidad de Pilar hasta la entrada (Avda.Circunv.) de la Ciudad de Córdoba,
es decir una longitud de apróx.45Km. Sabiendo que el sistema de apoyo estaba formado por una poligonal
cuyos lados medios medían aproximadamente 1000m, los cuales fueron medidos con estación total. Desea-
mos saber cual puede haber sido el valor máximo de las deformaciones acumuladas a lo largo de todo el
levantamiento.
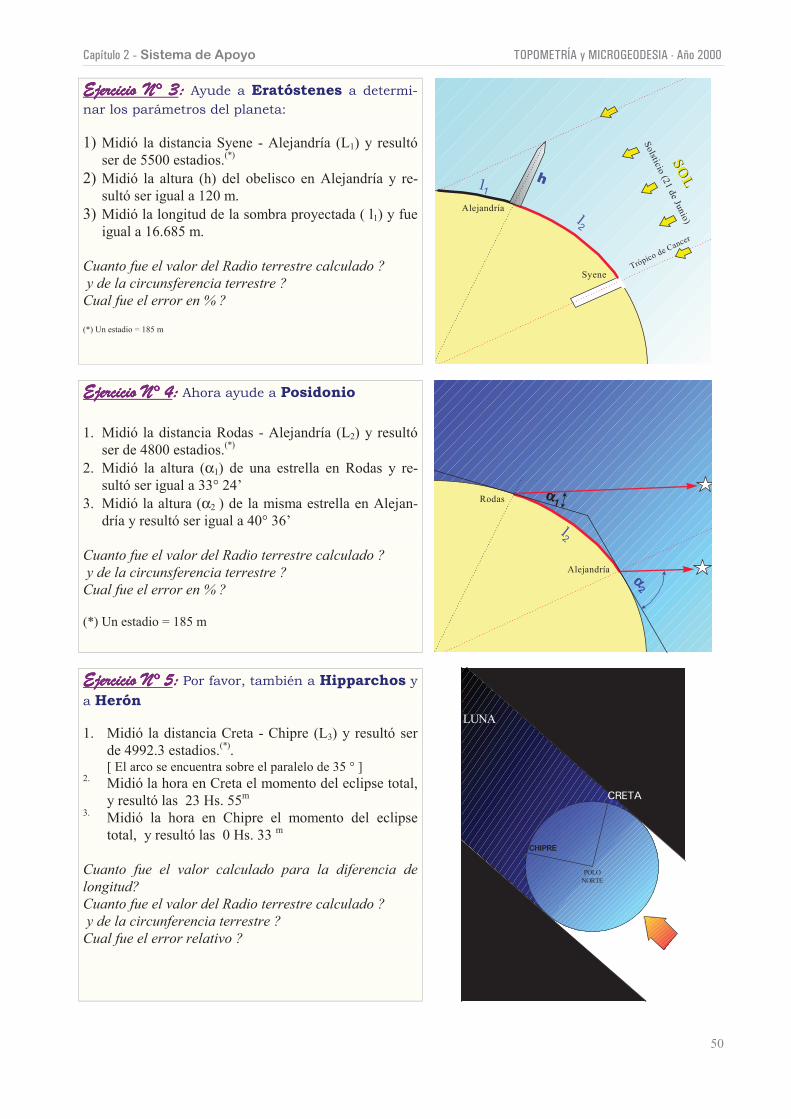
Capítulo 2 - Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
50
Ejercicio N° 3Ejercicio N° 3Ejercicio N° 3Ejercicio N° 3:::: Ayude a Eratóstenes a determi-
nar los parámetros del planeta:
1) Midió la distancia Syene - Alejandría (L1) y resultó
ser de 5500 estadios.(*)
2) Midió la altura (h) del obelisco en Alejandría y re-
sultó ser igual a 120 m.
3) Midió la longitud de la sombra proyectada ( l1) y fue
igual a 16.685 m.
Cuanto fue el valor del Radio terrestre calculado ?
y de la circunsferencia terrestre ?
Cual fue el error en % ?
(*) Un estadio = 185 m
hl1
l2
SO
LSO
L
Alejandría
Syene
Solsticio
(21 d
e Junio
)
Trópico de Cancer
Ejercicio N° 4Ejercicio N° 4Ejercicio N° 4Ejercicio N° 4:::: Ahora ayude a Posidonio
1. Midió la distancia Rodas - Alejandría (L2) y resultó
ser de 4800 estadios.(*)
2. Midió la altura (α1) de una estrella en Rodas y re-
sultó ser igual a 33° 24’
3. Midió la altura (α2 ) de la misma estrella en Alejan-
dría y resultó ser igual a 40° 36’
Cuanto fue el valor del Radio terrestre calculado ?
y de la circunsferencia terrestre ?
Cual fue el error en % ?
(*) Un estadio = 185 m
αααα1
l2
Rodas
Alejandríaαααα2
Ejercicio N° 5Ejercicio N° 5Ejercicio N° 5Ejercicio N° 5:::: Por favor, también a Hipparchos y
a Herón
1. Midió la distancia Creta - Chipre (L3) y resultó ser
de 4992.3 estadios.(*)
.[ El arco se encuentra sobre el paralelo de 35 ° ]
2. Midió la hora en Creta el momento del eclipse total,
y resultó las 23 Hs. 55m
3.
Midió la hora en Chipre el momento del eclipse
total, y resultó las 0 Hs. 33 m
Cuanto fue el valor calculado para la diferencia de
longitud?
Cuanto fue el valor del Radio terrestre calculado ?
y de la circunferencia terrestre ?
Cual fue el error relativo ?
CRETA
CHIPRE
POLO
NORTE
CRETA
LUNA
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
51
Nada cabe esperar de los hombres que entran a la vida sin afiebrarse por algún ideal; a los que
nunca fueron jóvenes paréceles descarriado todo ensueño.
Y no se nace joven:
- ¡Hay que adquirir la juventud ¡ - Y sin un ideal, jamás se adquiere.
[…] todo las fuerzas conservadoras que componen el sub suelo social pretenden amalgamar a los
individuos, decapitándolos, detestan las diferencias, aborrecen las excepciones, anatematizan al
que se aparta en busca de su propia personalidad. El original, el imaginativo, el creador no teme a
sus odios: Los desafía, aún sabiéndolos terribles porque son irresponsables…
[…] todo idealista es una viviente afirmación del individualismo, aunque persiga una quimera
social; puede vivir para los demás, nunca de los demás.
Su independencia es una reacción hostil a todos los dogmatismos.
Concibiéndose incesantemente perfectibles, los temperamentos idealistas quieren decir en todos
los momentos de su vida como Don Quijote “yo sé quién soy”. Viven animados de ese afán afir-
mativo. En sus ideales cifran su ventura suprema y su perpetua desdicha. En ellos caldean la pa-
sión que anima su fe; ésta, al estrellarse contra la realidad social, puede parecer desprecio, aisla-
miento, misantropía: la clásica “torre de marfil” reprochada a cuantos se erizan al contacto con
de los obtusos. Diríase que de ellos dejó escrita una eterna imagen Teresa de Avila - “gusanos de
seda somos, gusanitos que hilamos la seda de nuestras vidas y en el capullito de la seda nos ence-
rramos para que el gusano muera, y del capullo salga volando una mariposa”
Todo idealismo es exagerado, necesita serlo. Y debe ser cálido su idioma, como si desbordara la
personalidad sobre lo impersonal; el pensamiento sin calor es frío, está muerto, carece de estilo,
no tiene firma.
Jamás fueron tibios los genios, los santos y los héroes.
Para crear una partícula de Verdad, de Virtud o de Belleza, se requiere un esfuerzo original y
violento… la pasión, es un atributo necesario, aún cuando parezca desviar de la verdad; lleva al
hipérbole, al error mismo; a la mentira nunca. Ningún ideal es falso para quien lo profesa; lo cree
verdadero y coopera a su advenimiento con fé, con desinterés. El sabio busca la verdad… y goza
arrancándole secretos a la naturaleza, […] el artista busca también la suya, porque la belleza es
una verdad animada por la imaginación, más que por la experiencia; y el moralista la persigue en
el Bien, que es una recta lealtad de la conducta para consigo mismo y para con los demás.
Tener un ideal es servir a su propia verdad.- Siempre.-
[…] Algunos ideales se revelan como pasión combativa, otros como pertinaz obsesión.
Los idealistas románticos son exagerados porque son insaciables. Sueñan lo más para realizar lo
menos; comprenden que en todo ideal está contenida una partícula de utopía y pierden algo al
realizarse.
[…] en pocas cosas el Hombre puede llegar al ideal que su imaginación señala:
- su gloria está en marchar siempre hacia él, siempre inalcanzado e inalcanzable.
JOSE INGENIEROS 1915
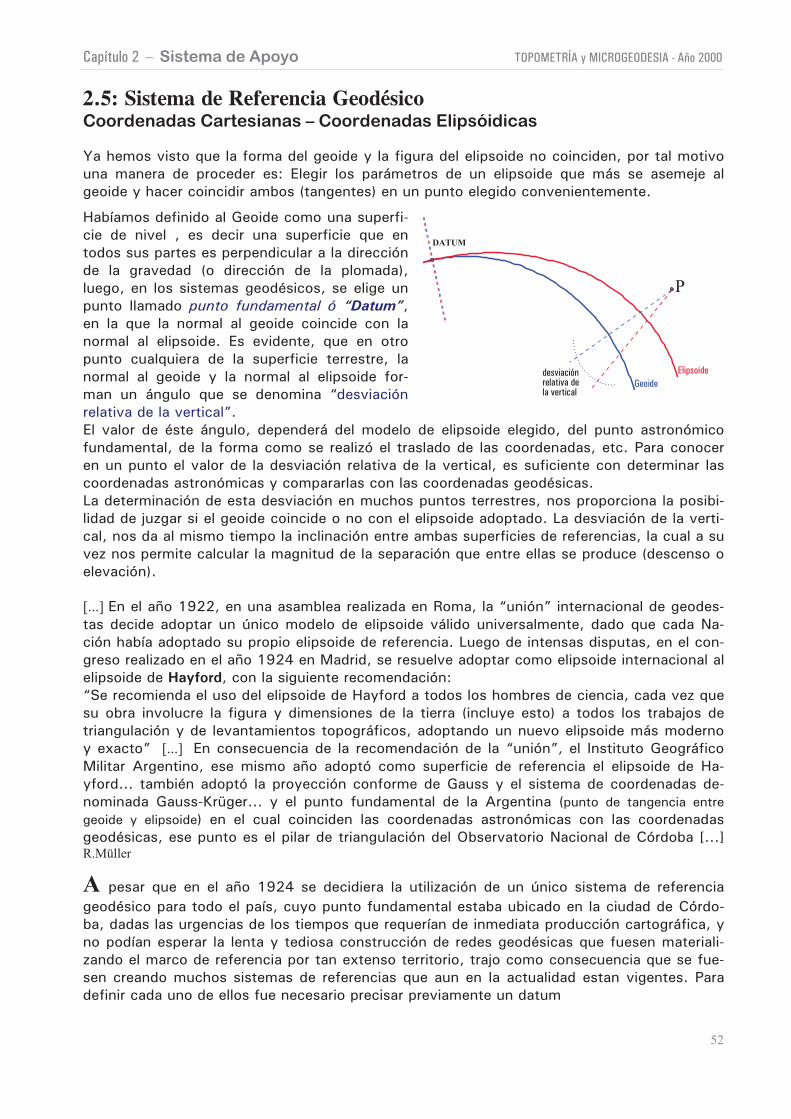
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
52
2.5: Sistema de Referencia GeodésicoCoordenadas Cartesianas – Coordenadas Elipsóidicas
Ya hemos visto que la forma del geoide y la figura del elipsoide no coinciden, por tal motivo
una manera de proceder es: Elegir los parámetros de un elipsoide que más se asemeje al
geoide y hacer coincidir ambos (tangentes) en un punto elegido convenientemente.
Habíamos definido al Geoide como una superfi-
cie de nivel , es decir una superficie que en
todos sus partes es perpendicular a la dirección
de la gravedad (o dirección de la plomada),
luego, en los sistemas geodésicos, se elige un
punto llamado punto fundamental ó “Datum”,
en la que la normal al geoide coincide con la
normal al elipsoide. Es evidente, que en otro
punto cualquiera de la superficie terrestre, la
normal al geoide y la normal al elipsoide for-
man un ángulo que se denomina “desviación
relativa de la vertical”.
P
desviaciónrelativa dela vertical
DATUM
GeoideElipsoide
El valor de éste ángulo, dependerá del modelo de elipsoide elegido, del punto astronómico
fundamental, de la forma como se realizó el traslado de las coordenadas, etc. Para conocer
en un punto el valor de la desviación relativa de la vertical, es suficiente con determinar las
coordenadas astronómicas y compararlas con las coordenadas geodésicas.
La determinación de esta desviación en muchos puntos terrestres, nos proporciona la posibi-
lidad de juzgar si el geoide coincide o no con el elipsoide adoptado. La desviación de la verti-
cal, nos da al mismo tiempo la inclinación entre ambas superficies de referencias, la cual a su
vez nos permite calcular la magnitud de la separación que entre ellas se produce (descenso o
elevación).
[...] En el año 1922, en una asamblea realizada en Roma, la “unión” internacional de geodes-
tas decide adoptar un único modelo de elipsoide válido universalmente, dado que cada Na-
ción había adoptado su propio elipsoide de referencia. Luego de intensas disputas, en el con-
greso realizado en el año 1924 en Madrid, se resuelve adoptar como elipsoide internacional al
elipsoide de Hayford, con la siguiente recomendación:
“Se recomienda el uso del elipsoide de Hayford a todos los hombres de ciencia, cada vez que
su obra involucre la figura y dimensiones de la tierra (incluye esto) a todos los trabajos de
triangulación y de levantamientos topográficos, adoptando un nuevo elipsoide más moderno
y exacto” [...] En consecuencia de la recomendación de la “unión”, el Instituto Geográfico
Militar Argentino, ese mismo año adoptó como superficie de referencia el elipsoide de Ha-
yford... también adoptó la proyección conforme de Gauss y el sistema de coordenadas de-
nominada Gauss-Krüger... y el punto fundamental de la Argentina (punto de tangencia entre
geoide y elipsoide) en el cual coinciden las coordenadas astronómicas con las coordenadas
geodésicas, ese punto es el pilar de triangulación del Observatorio Nacional de Córdoba [...]R.Müller
A pesar que en el año 1924 se decidiera la utilización de un único sistema de referencia
geodésico para todo el país, cuyo punto fundamental estaba ubicado en la ciudad de Córdo-
ba, dadas las urgencias de los tiempos que requerían de inmediata producción cartográfica, y
no podían esperar la lenta y tediosa construcción de redes geodésicas que fuesen materiali-
zando el marco de referencia por tan extenso territorio, trajo como consecuencia que se fue-
sen creando muchos sistemas de referencias que aun en la actualidad estan vigentes. Para
definir cada uno de ellos fue necesario precisar previamente un datum
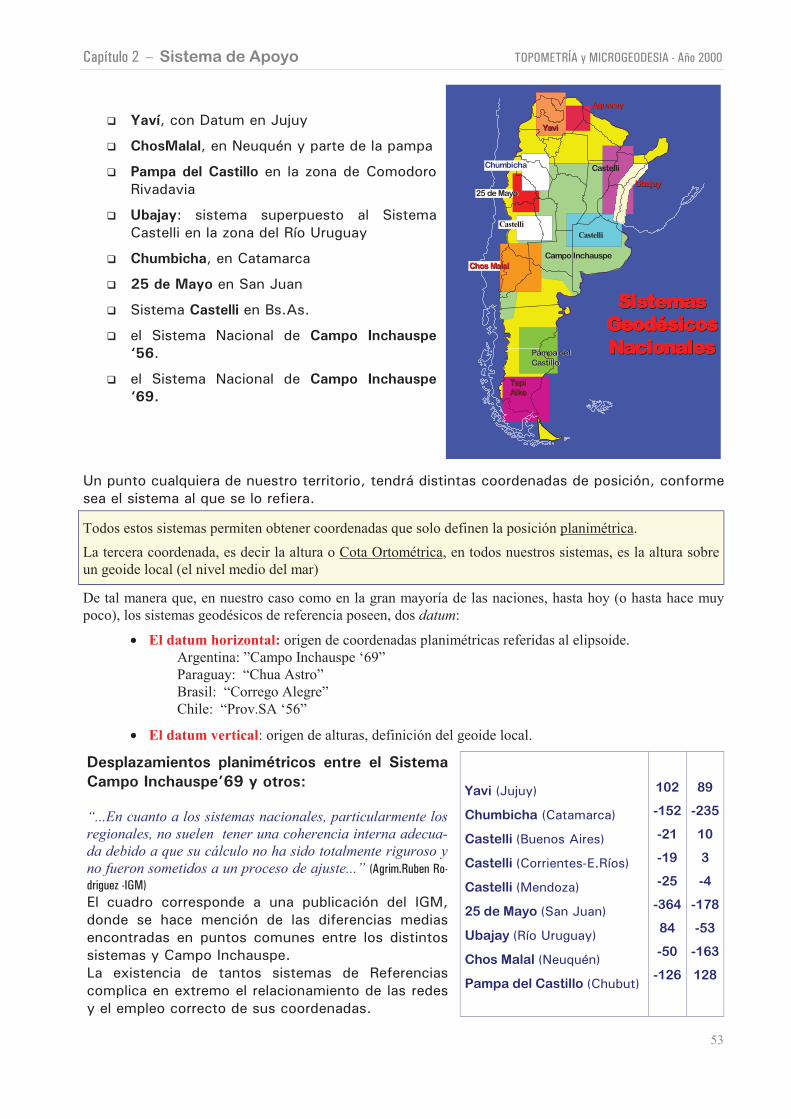
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
53
Yaví, con Datum en Jujuy
ChosMalal, en Neuquén y parte de la pampa
Pampa del Castillo en la zona de Comodoro
Rivadavia
Ubajay: sistema superpuesto al Sistema
Castelli en la zona del Río Uruguay
Chumbicha, en Catamarca
25 de Mayo en San Juan
Sistema Castelli en Bs.As.
el Sistema Nacional de Campo Inchauspe
‘56.
el Sistema Nacional de Campo Inchauspe
‘69.
Castelli
Pampa del
Castillo
Pampa del
Castillo
Tapi
Aike
Tapi
Aike
AguarayAguaray
Castelli
YaviYavi
UbajayUbajay
Campo Inchauspe
25 de Mayo25 de Mayo
Chumbicha
Castelli
Chos MalalChos Malal
SistemasSistemasSistemasSistemas
GeodésicosGeodésicosGeodésicosGeodésicos
NacionalesNacionalesNacionalesNacionales
SistemasSistemasSistemasSistemas
GeodésicosGeodésicosGeodésicosGeodésicos
NacionalesNacionalesNacionalesNacionales
Un punto cualquiera de nuestro territorio, tendrá distintas coordenadas de posición, conforme
sea el sistema al que se lo refiera.
Todos estos sistemas permiten obtener coordenadas que solo definen la posición planimétrica.
La tercera coordenada, es decir la altura o Cota Ortométrica, en todos nuestros sistemas, es la altura sobre
un geoide local (el nivel medio del mar)
De tal manera que, en nuestro caso como en la gran mayoría de las naciones, hasta hoy (o hasta hace muy
poco), los sistemas geodésicos de referencia poseen, dos datum:
• El datum horizontal: origen de coordenadas planimétricas referidas al elipsoide.
Argentina: ”Campo Inchauspe ‘69”
Paraguay: “Chua Astro”
Brasil: “Corrego Alegre”
Chile: “Prov.SA ‘56”
• El datum vertical: origen de alturas, definición del geoide local.
Desplazamientos planimétricos entre el Sistema
Campo Inchauspe’69 y otros:
“...En cuanto a los sistemas nacionales, particularmente los
regionales, no suelen tener una coherencia interna adecua-
da debido a que su cálculo no ha sido totalmente riguroso y
no fueron sometidos a un proceso de ajuste...” (Agrim.Ruben Ro-driguez -IGM)El cuadro corresponde a una publicación del IGM,
donde se hace mención de las diferencias medias
encontradas en puntos comunes entre los distintos
sistemas y Campo Inchauspe.
La existencia de tantos sistemas de Referencias
complica en extremo el relacionamiento de las redes
y el empleo correcto de sus coordenadas.
Yavi (Jujuy)
Chumbicha (Catamarca)
Castelli (Buenos Aires)
Castelli (Corrientes-E.Ríos)
Castelli (Mendoza)
25 de Mayo (San Juan)
Ubajay (Río Uruguay)
Chos Malal (Neuquén)
Pampa del Castillo (Chubut)
102
-152
-21
-19
-25
-364
84
-50
-126
89
-235
10
3
-4
-178
-53
-163
128
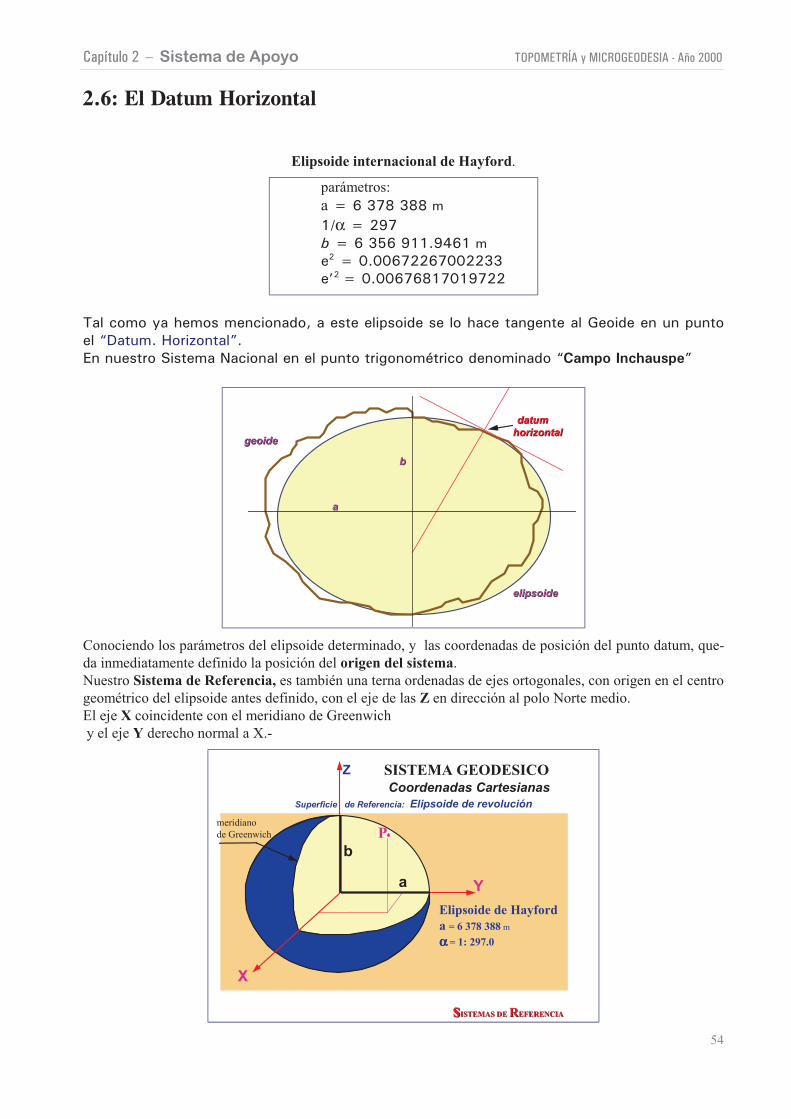
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
54
2.6: El Datum Horizontal
Elipsoide internacional de Hayford.
parámetros:
a = 6 378 388 m
1/α = 297
b = 6 356 911.9461 m
e2 = 0.00672267002233
e’2 = 0.00676817019722
Tal como ya hemos mencionado, a este elipsoide se lo hace tangente al Geoide en un punto
el “Datum. Horizontal”.
En nuestro Sistema Nacional en el punto trigonométrico denominado “Campo Inchauspe”
aa
bb
elipsoideelipsoide
geoidegeoidehorizontalhorizontaldatumdatum
Conociendo los parámetros del elipsoide determinado, y las coordenadas de posición del punto datum, que-
da inmediatamente definido la posición del origen del sistema.
Nuestro Sistema de Referencia, es también una terna ordenadas de ejes ortogonales, con origen en el centro
geométrico del elipsoide antes definido, con el eje de las Z en dirección al polo Norte medio.
El eje X coincidente con el meridiano de Greenwich
y el eje Y derecho normal a X.-
ssISTEMAS DE ISTEMAS DE RREFERENCIAEFERENCIA
P
X
Z
Coordenadas Cartesianas
Y
meridiano
de Greenwich
a
b
Elipsoide de Hayford
a = 6 378 388 m
αααα = 1: 297.0
Superficie de Referencia: Elipsoide de revolución
SISTEMA GEODESICO
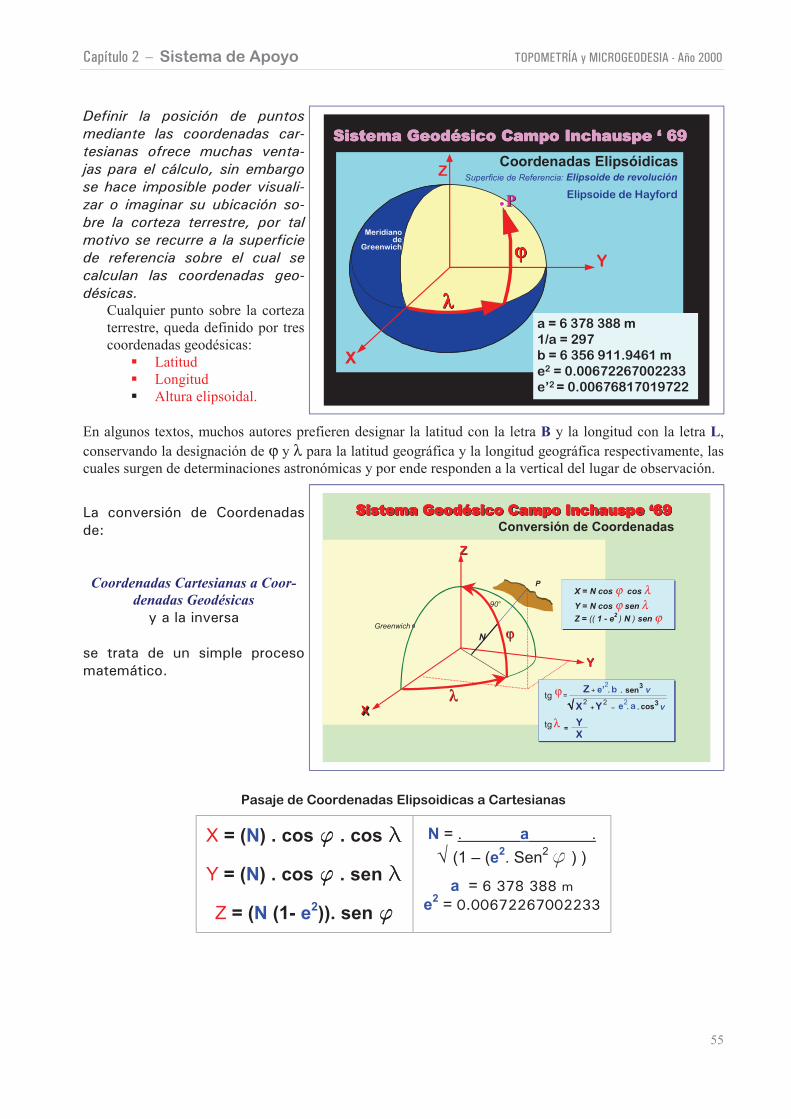
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
55
Definir la posición de puntos
mediante las coordenadas car-
tesianas ofrece muchas venta-
jas para el cálculo, sin embargo
se hace imposible poder visuali-
zar o imaginar su ubicación so-
bre la corteza terrestre, por tal
motivo se recurre a la superficie
de referencia sobre el cual se
calculan las coordenadas geo-
désicas.
Cualquier punto sobre la corteza
terrestre, queda definido por tres
coordenadas geodésicas:
Latitud
Longitud
Altura elipsoidal.
Coordenadas Elipsóidicas
Elipsoide de Hayford
Superficie de Referencia: Elipsoide de revolución
Sistema Geodésico Campo Sistema Geodésico Campo Sistema Geodésico Campo Sistema Geodésico Campo Inchauspe Inchauspe Inchauspe Inchauspe ‘ 69‘ 69‘ 69‘ 69Sistema Geodésico Campo Sistema Geodésico Campo Sistema Geodésico Campo Sistema Geodésico Campo Inchauspe Inchauspe Inchauspe Inchauspe ‘ 69‘ 69‘ 69‘ 69
X
Z
Y
Meridianode
Greenwich
PP
ϕϕϕϕϕϕϕϕ
λλλλλλλλa = 6 378 388 m
1/a = 297
b = 6 356 911.9461 m
e2 = 0.00672267002233
e’2 = 0.00676817019722
En algunos textos, muchos autores prefieren designar la latitud con la letra B y la longitud con la letra L,
conservando la designación de ϕ y λ para la latitud geográfica y la longitud geográfica respectivamente, las
cuales surgen de determinaciones astronómicas y por ende responden a la vertical del lugar de observación.
La conversión de Coordenadas
de:
Coordenadas Cartesianas a Coor-
denadas Geodésicas
y a la inversa
se trata de un simple proceso
matemático.
Y = N cos ϕ sen λZ = (( 1 - e ) N ) sen ϕ2
X = N cos ϕ cos λ
ZZ
XXXX
YY
NN
Greenwich
P
90°
ϕϕ
λλ tg ϕ = Z + e’
2. b sen
3v
√√√√ X2+Y
–
.
2e
2. a . cos
3v
tg λ =
Y X
Conversión de Coordenadas
Sistema Geodésico Campo Sistema Geodésico Campo Sistema Geodésico Campo Sistema Geodésico Campo Inchauspe Inchauspe Inchauspe Inchauspe ‘69‘69‘69‘69Sistema Geodésico Campo Sistema Geodésico Campo Sistema Geodésico Campo Sistema Geodésico Campo Inchauspe Inchauspe Inchauspe Inchauspe ‘69‘69‘69‘69
Pasaje de Coordenadas Elipsoidicas a Cartesianas
X = (N) . cos ffff . cos llll
Y = (N) . cos ffff . sen llll
Z = (N (1- e2)). sen ffff
N = . a .
√ (1 – (e2. Sen
2 f ) )
a = 6 378 388 m
e2 = 0.00672267002233
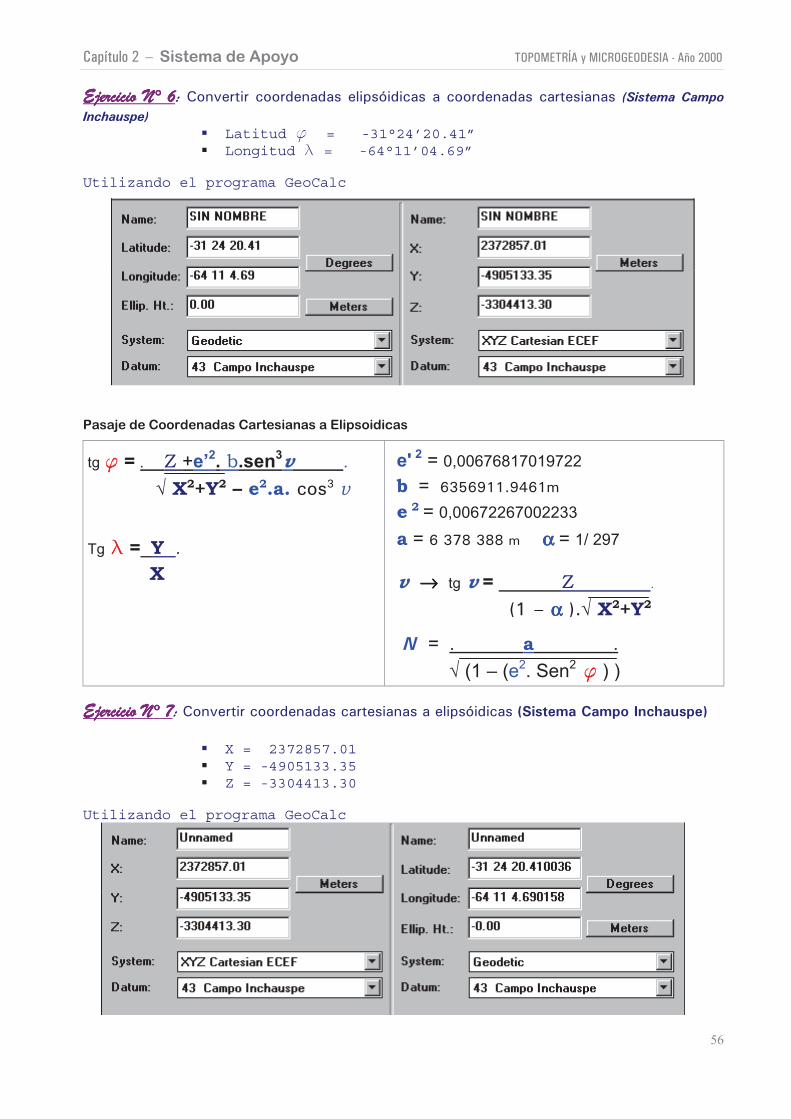
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
56
Ejercicio N° 6Ejercicio N° 6Ejercicio N° 6Ejercicio N° 6:::: Convertir coordenadas elipsóidicas a coordenadas cartesianas (Sistema Campo
Inchauspe)
Latitud f = -31°24’20.41” Longitud l = -64°11’04.69”
Utilizando el programa GeoCalc
Pasaje de Coordenadas Cartesianas a Elipsoidicas
tg ffff = . Z +e’2. b.sen3v .
√ X2+Y
2 – e
2.a. cos3
v
Tg llll = Y .
X
e' 2 = 0,00676817019722
b = 6356911.9461m
e 2 = 0,00672267002233
a = 6 378 388 m α α α α = 1/ 297
v →→→→ tg v = Z .
(1 – αααα ).√ X2+Y
2
N = . a .
√ (1 – (e2. Sen2 ffff ) )
Ejercicio N° 7Ejercicio N° 7Ejercicio N° 7Ejercicio N° 7:::: Convertir coordenadas cartesianas a elipsóidicas (Sistema Campo Inchauspe)
X = 2372857.01
Y = -4905133.35
Z = -3304413.30
Utilizando el programa GeoCalc
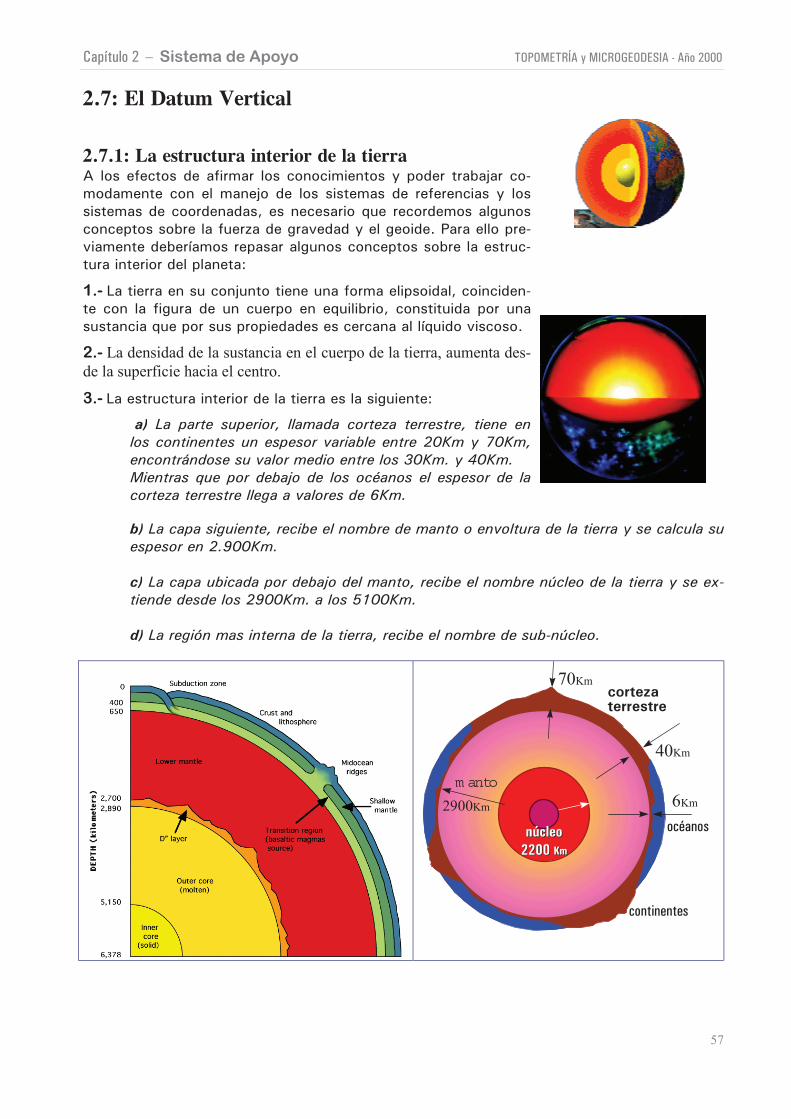
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
57
2.7: El Datum Vertical
2.7.1: La estructura interior de la tierraA los efectos de afirmar los conocimientos y poder trabajar co-
modamente con el manejo de los sistemas de referencias y los
sistemas de coordenadas, es necesario que recordemos algunos
conceptos sobre la fuerza de gravedad y el geoide. Para ello pre-
viamente deberíamos repasar algunos conceptos sobre la estruc-
tura interior del planeta:
1.- La tierra en su conjunto tiene una forma elipsoidal, coinciden-
te con la figura de un cuerpo en equilibrio, constituida por una
sustancia que por sus propiedades es cercana al líquido viscoso.
2.- La densidad de la sustancia en el cuerpo de la tierra, aumenta des-
de la superficie hacia el centro.
3.- La estructura interior de la tierra es la siguiente:
a) La parte superior, llamada corteza terrestre, tiene en
los continentes un espesor variable entre 20Km y 70Km,
encontrándose su valor medio entre los 30Km. y 40Km.
Mientras que por debajo de los océanos el espesor de la
corteza terrestre llega a valores de 6Km.
b) La capa siguiente, recibe el nombre de manto o envoltura de la tierra y se calcula su
espesor en 2.900Km.
c) La capa ubicada por debajo del manto, recibe el nombre núcleo de la tierra y se ex-
tiende desde los 2900Km. a los 5100Km.
d) La región mas interna de la tierra, recibe el nombre de sub-núcleo.
m anto
corteza terrestre
40Km
6Km
70Km
2900Km
núcleo
2200 Km
núcleo
2200 Km
continentes
océanos
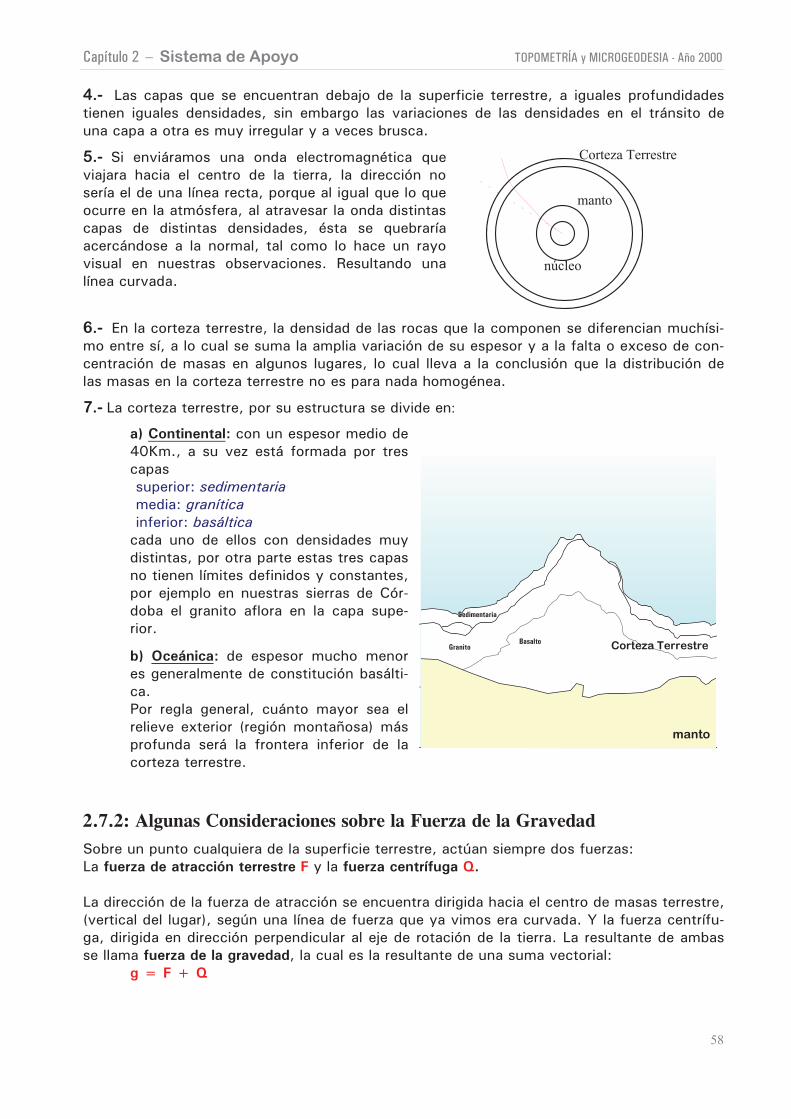
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
58
4.- Las capas que se encuentran debajo de la superficie terrestre, a iguales profundidades
tienen iguales densidades, sin embargo las variaciones de las densidades en el tránsito de
una capa a otra es muy irregular y a veces brusca.
5.- Si enviáramos una onda electromagnética que
viajara hacia el centro de la tierra, la dirección no
sería el de una línea recta, porque al igual que lo que
ocurre en la atmósfera, al atravesar la onda distintas
capas de distintas densidades, ésta se quebraría
acercándose a la normal, tal como lo hace un rayo
visual en nuestras observaciones. Resultando una
línea curvada.
Corteza Terrestre
manto
núcleo
6.- En la corteza terrestre, la densidad de las rocas que la componen se diferencian muchísi-
mo entre sí, a lo cual se suma la amplia variación de su espesor y a la falta o exceso de con-
centración de masas en algunos lugares, lo cual lleva a la conclusión que la distribución de
las masas en la corteza terrestre no es para nada homogénea.
7.- La corteza terrestre, por su estructura se divide en:
a) Continental: con un espesor medio de
40Km., a su vez está formada por tres
capas
superior: sedimentaria
media: granítica
inferior: basáltica
cada uno de ellos con densidades muy
distintas, por otra parte estas tres capas
no tienen límites definidos y constantes,
por ejemplo en nuestras sierras de Cór-
doba el granito aflora en la capa supe-
rior.
b) Oceánica: de espesor mucho menor
es generalmente de constitución basálti-
ca.
Por regla general, cuánto mayor sea el
relieve exterior (región montañosa) más
profunda será la frontera inferior de la
corteza terrestre.
Corteza Terrestre
manto
Sedimentaria
GranitoBasalto
2.7.2: Algunas Consideraciones sobre la Fuerza de la Gravedad
Sobre un punto cualquiera de la superficie terrestre, actúan siempre dos fuerzas:
La fuerza de atracción terrestre F y la fuerza centrífuga Q.
La dirección de la fuerza de atracción se encuentra dirigida hacia el centro de masas terrestre,
(vertical del lugar), según una línea de fuerza que ya vimos era curvada. Y la fuerza centrífu-
ga, dirigida en dirección perpendicular al eje de rotación de la tierra. La resultante de ambas
se llama fuerza de la gravedad, la cual es la resultante de una suma vectorial:
g = F + Q
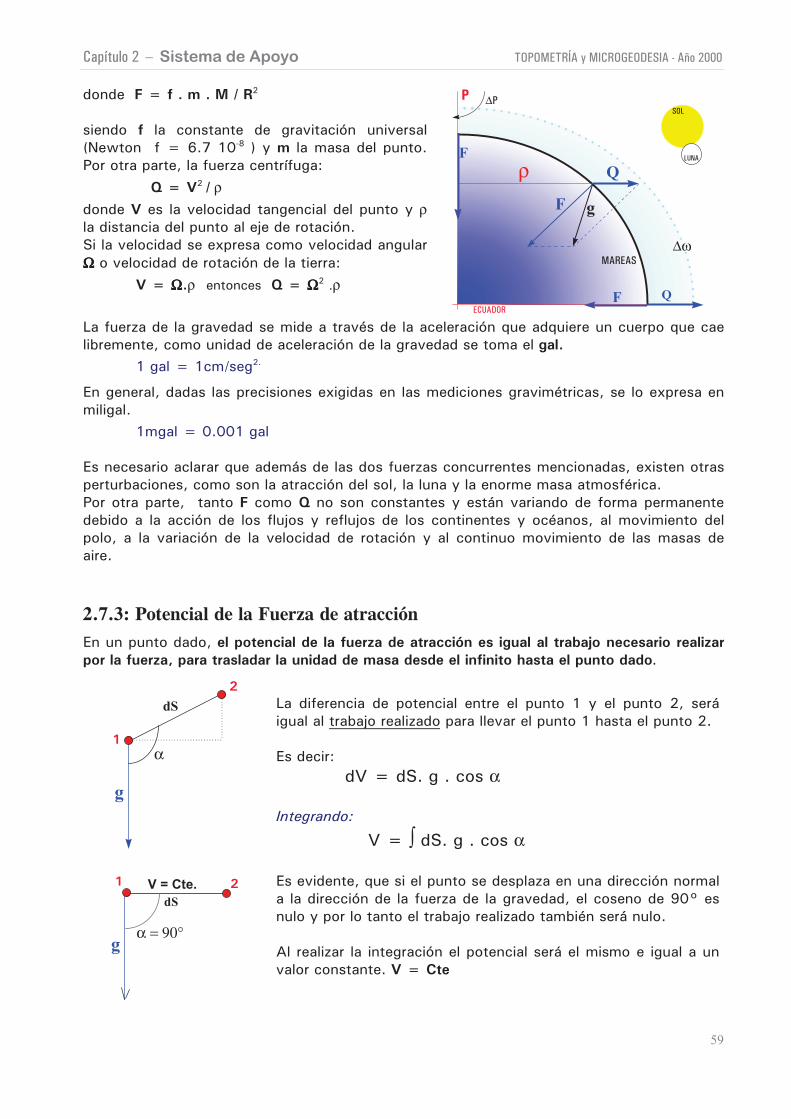
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
59
donde F = f . m . M / R2
siendo f la constante de gravitación universal
(Newton f = 6.7 10-8 ) y m la masa del punto.
Por otra parte, la fuerza centrífuga:
Q = V2 / ρ
donde V es la velocidad tangencial del punto y ρla distancia del punto al eje de rotación.
Si la velocidad se expresa como velocidad angular
ΩΩΩΩ o velocidad de rotación de la tierra:
V = ΩΩΩΩ.ρ entonces Q = ΩΩΩΩ2 .ρ
Q
F g
ρ
ECUADOR
P
QF
F
SOL
LUNA
MAREAS
∆P
∆ω
La fuerza de la gravedad se mide a través de la aceleración que adquiere un cuerpo que cae
libremente, como unidad de aceleración de la gravedad se toma el gal.
1 gal = 1cm/seg2.
En general, dadas las precisiones exigidas en las mediciones gravimétricas, se lo expresa en
miligal.
1mgal = 0.001 gal
Es necesario aclarar que además de las dos fuerzas concurrentes mencionadas, existen otras
perturbaciones, como son la atracción del sol, la luna y la enorme masa atmosférica.
Por otra parte, tanto F como Q no son constantes y están variando de forma permanente
debido a la acción de los flujos y reflujos de los continentes y océanos, al movimiento del
polo, a la variación de la velocidad de rotación y al continuo movimiento de las masas de
aire.
2.7.3: Potencial de la Fuerza de atracción
En un punto dado, el potencial de la fuerza de atracción es igual al trabajo necesario realizar
por la fuerza, para trasladar la unidad de masa desde el infinito hasta el punto dado.
dS
g
α1
2
La diferencia de potencial entre el punto 1 y el punto 2, será
igual al trabajo realizado para llevar el punto 1 hasta el punto 2.
Es decir:
dV = dS. g . cos α
Integrando:
V = ∫ dS. g . cos α
dS
gα = 90°
V = Cte.1 2 Es evidente, que si el punto se desplaza en una dirección normal
a la dirección de la fuerza de la gravedad, el coseno de 90° es
nulo y por lo tanto el trabajo realizado también será nulo.
Al realizar la integración el potencial será el mismo e igual a un
valor constante. V = Cte
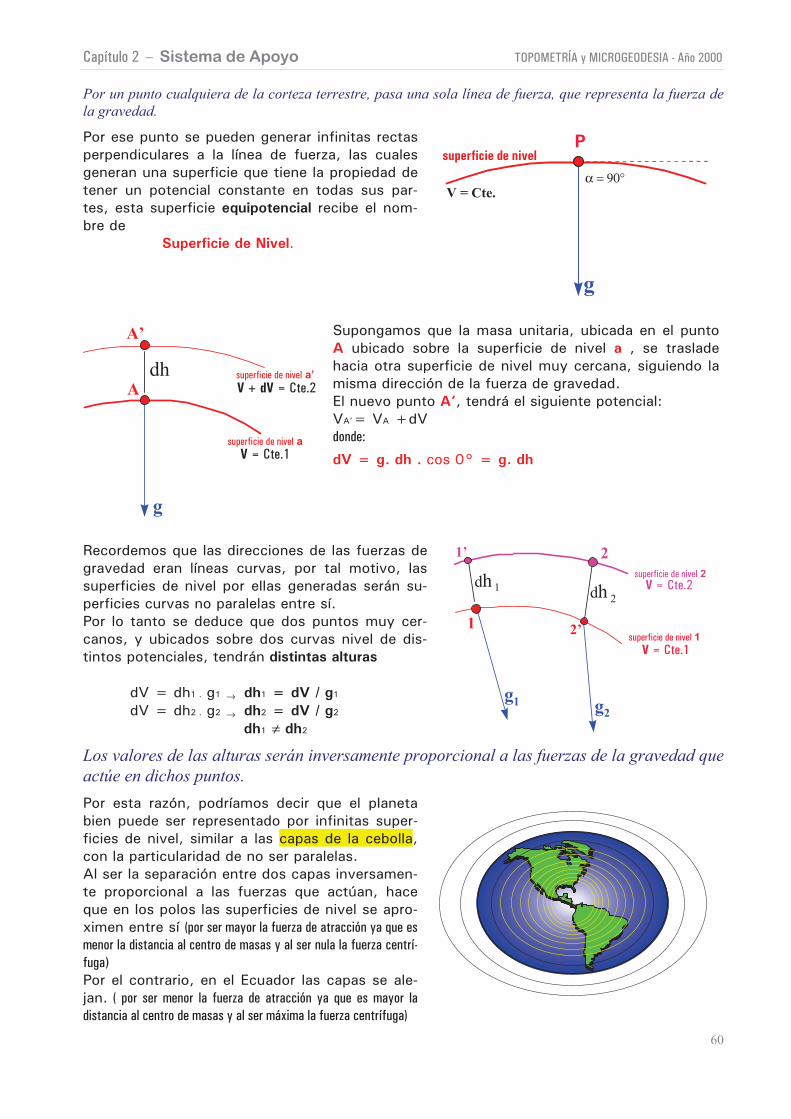
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
60
Por un punto cualquiera de la corteza terrestre, pasa una sola línea de fuerza, que representa la fuerza de
la gravedad.
Por ese punto se pueden generar infinitas rectas
perpendiculares a la línea de fuerza, las cuales
generan una superficie que tiene la propiedad de
tener un potencial constante en todas sus par-
tes, esta superficie equipotencial recibe el nom-
bre de
Superficie de Nivel.
g
α = 90°V = Cte.
superficie de nivelP
g
superficie de nivel a
dhA V + dV = Cte.2
A’
V = Cte.1
superficie de nivel a’
Supongamos que la masa unitaria, ubicada en el punto
A ubicado sobre la superficie de nivel a , se traslade
hacia otra superficie de nivel muy cercana, siguiendo la
misma dirección de la fuerza de gravedad.
El nuevo punto A’, tendrá el siguiente potencial:
VA’= VA +dV
donde:
dV = g. dh . cos 0° = g. dh
Recordemos que las direcciones de las fuerzas de
gravedad eran líneas curvas, por tal motivo, las
superficies de nivel por ellas generadas serán su-
perficies curvas no paralelas entre sí.
Por lo tanto se deduce que dos puntos muy cer-
canos, y ubicados sobre dos curvas nivel de dis-
tintos potenciales, tendrán distintas alturas
dV = dh1 . g1 → dh1 = dV / g1
dV = dh2 . g2 → dh2 = dV / g2
dh1 ≠ dh2
g1
superficie de nivel 1
dh
1
V = Cte.2
1’
V = Cte.1
superficie de nivel 21
g2
dh
2’
2
2
Los valores de las alturas serán inversamente proporcional a las fuerzas de la gravedad que
actúe en dichos puntos.
Por esta razón, podríamos decir que el planeta
bien puede ser representado por infinitas super-
ficies de nivel, similar a las capas de la cebolla,
con la particularidad de no ser paralelas.
Al ser la separación entre dos capas inversamen-
te proporcional a las fuerzas que actúan, hace
que en los polos las superficies de nivel se apro-
ximen entre sí (por ser mayor la fuerza de atracción ya que esmenor la distancia al centro de masas y al ser nula la fuerza centrí-fuga)Por el contrario, en el Ecuador las capas se ale-
jan. ( por ser menor la fuerza de atracción ya que es mayor ladistancia al centro de masas y al ser máxima la fuerza centrífuga)
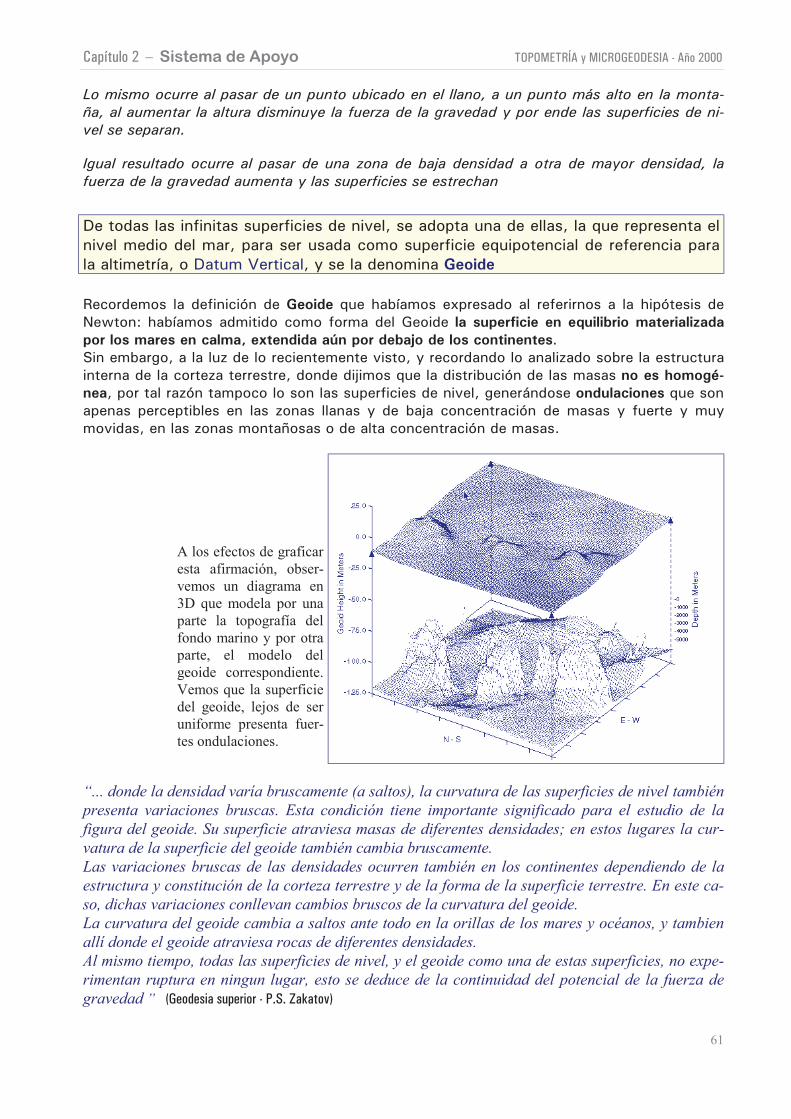
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
61
Lo mismo ocurre al pasar de un punto ubicado en el llano, a un punto más alto en la monta-
ña, al aumentar la altura disminuye la fuerza de la gravedad y por ende las superficies de ni-
vel se separan.
Igual resultado ocurre al pasar de una zona de baja densidad a otra de mayor densidad, la
fuerza de la gravedad aumenta y las superficies se estrechan
De todas las infinitas superficies de nivel, se adopta una de ellas, la que representa el
nivel medio del mar, para ser usada como superficie equipotencial de referencia para
la altimetría, o Datum Vertical, y se la denomina Geoide
Recordemos la definición de Geoide que habíamos expresado al referirnos a la hipótesis de
Newton: habíamos admitido como forma del Geoide la superficie en equilibrio materializada
por los mares en calma, extendida aún por debajo de los continentes.
Sin embargo, a la luz de lo recientemente visto, y recordando lo analizado sobre la estructura
interna de la corteza terrestre, donde dijimos que la distribución de las masas no es homogé-
nea, por tal razón tampoco lo son las superficies de nivel, generándose ondulaciones que son
apenas perceptibles en las zonas llanas y de baja concentración de masas y fuerte y muy
movidas, en las zonas montañosas o de alta concentración de masas.
A los efectos de graficar
esta afirmación, obser-
vemos un diagrama en
3D que modela por una
parte la topografía del
fondo marino y por otra
parte, el modelo del
geoide correspondiente.
Vemos que la superficie
del geoide, lejos de ser
uniforme presenta fuer-
tes ondulaciones.
“... donde la densidad varía bruscamente (a saltos), la curvatura de las superficies de nivel también
presenta variaciones bruscas. Esta condición tiene importante significado para el estudio de la
figura del geoide. Su superficie atraviesa masas de diferentes densidades; en estos lugares la cur-
vatura de la superficie del geoide también cambia bruscamente.
Las variaciones bruscas de las densidades ocurren también en los continentes dependiendo de la
estructura y constitución de la corteza terrestre y de la forma de la superficie terrestre. En este ca-
so, dichas variaciones conllevan cambios bruscos de la curvatura del geoide.
La curvatura del geoide cambia a saltos ante todo en la orillas de los mares y océanos, y tambien
allí donde el geoide atraviesa rocas de diferentes densidades.
Al mismo tiempo, todas las superficies de nivel, y el geoide como una de estas superficies, no expe-
rimentan ruptura en ningun lugar, esto se deduce de la continuidad del potencial de la fuerza de
gravedad ” (Geodesia superior - P.S. Zakatov)
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
62
En los trabajos geodésicos se hace necesario reducir las mediciones directas al elipsoide de
referencia, para ello es necesario conocer en todos los puntos la desviación relativa de la ver-
tical, lo cual obliga a determinar un modelo del geoide.
En nuestros trabajos topométricos, frecuentemente recurrimos al auxilio del posicionamiento
GPS para nuestras redes de control y para tal efecto necesitaremos conocer alturas, las cua-
les no son posibles sin el auxilio de un modelo de geoide.
Para disponer de un modelado del geoide, se precisa conocer el potencial de suficientes pun-
tos, que luego nos permitan generar un modelo de curvas isoanómalas.
“ ... Por lo tanto, como tarea subsiguiente se plantea el examen de la determinación del potencial
de la fuerza de gravedad en base a mediciones directas, cuyos resultados dependen de la figura de
la tierra y de su campo gravitatorio exterior. No obstante, el cálculo directo del valor del potencial
calculado a través de una fórmula, en la práctica choca hoy en día con obstáculos insuperables.
Para la explicación de esto tomamos la expresión del potencial.
W = f . ∫ [(δ . d τ ) / R ] + [1/2 ω2 . (x
2 +y
2)]
El segundo término de esta expresión representa el potencial de la fuerza centrífuga, es pequeño y
puede ser determinado sin dificultad.... pero el cálculo de la primera integral, que representa el
potencial de la atracción terrestre, no contamos con los datos necesarios. En realidad para su de-
terminación necesitaríamos conocer la densidad δ en cada punto de la tierra, al no contar con es-
tos datos es imposible emplear el algoritmo de cálculo...En la práctica es conveniente aplicar el
siguiente camino para la determinación del potencial W. ..Determinar en algún lugar el potencial
normal de la zona, designado con la letra U... luego la tarea de determinar el potencial real se re-
duce a determinar las perturbaciones T... W = U + T ...”
Las perturbaciones al potencial, son causadas por las anomalías de la gravedad y son las ge-
neradoras de las ondulaciones del geoide.
“... arribamos a la conclusión de que para determinar el potencial de perturbación se deben em-
plear las anomalías de la fuerza de gravedad, para cuya obtención es impresindible el levanta-
miento gravimétrico...
... las anomalías de la fuerza de la gravedad dependen de las masas topográficas exteriores, ubica-
das por encima del nivel de los océanos, y de la acción de las masas anómalas que se encuentran
dentro de la tierra” (Geodesia superior - P.S. Zakatov)
Mas adelante veremos una manera más práctica de determinar un modelo de geoide, valién-
donos del Sistema GPS.
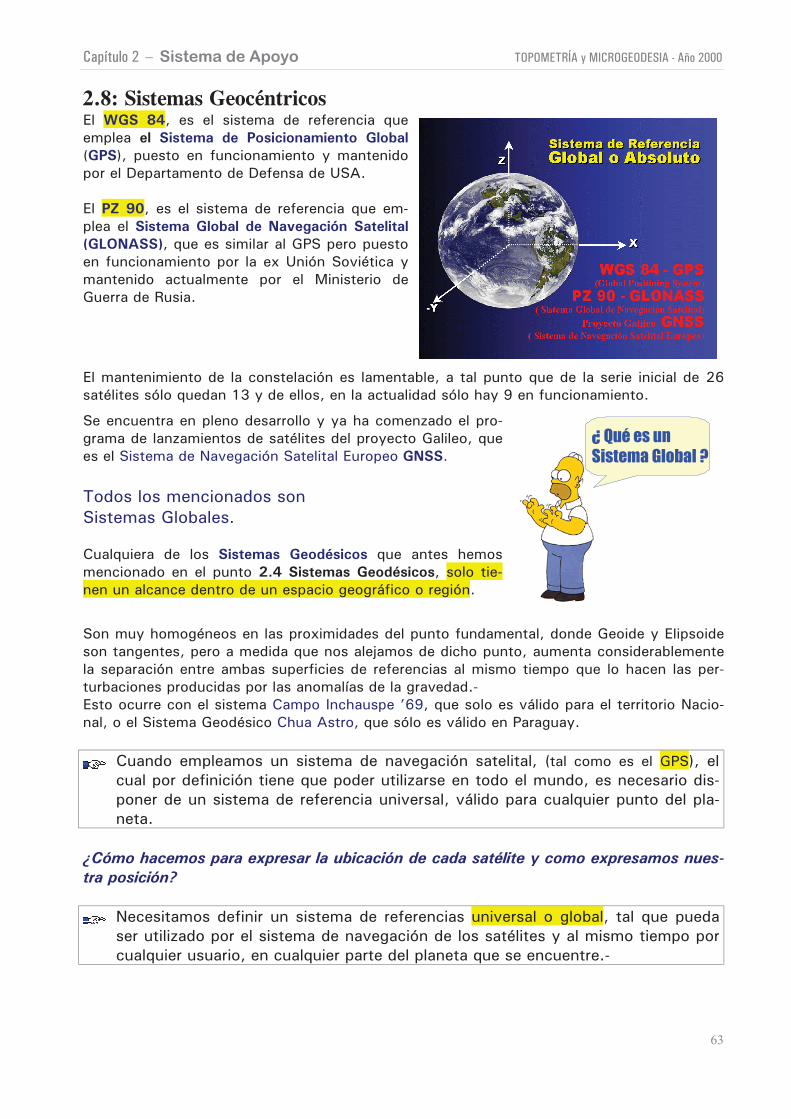
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
63
2.8: Sistemas GeocéntricosEl WGS 84, es el sistema de referencia que
emplea el Sistema de Posicionamiento Global
(GPS), puesto en funcionamiento y mantenido
por el Departamento de Defensa de USA.
El PZ 90, es el sistema de referencia que em-
plea el Sistema Global de Navegación Satelital
(GLONASS), que es similar al GPS pero puesto
en funcionamiento por la ex Unión Soviética y
mantenido actualmente por el Ministerio de
Guerra de Rusia.
El mantenimiento de la constelación es lamentable, a tal punto que de la serie inicial de 26
satélites sólo quedan 13 y de ellos, en la actualidad sólo hay 9 en funcionamiento.
Se encuentra en pleno desarrollo y ya ha comenzado el pro-
grama de lanzamientos de satélites del proyecto Galileo, que
es el Sistema de Navegación Satelital Europeo GNSS.
Todos los mencionados son
Sistemas Globales.
Cualquiera de los Sistemas Geodésicos que antes hemos
mencionado en el punto 2.4 Sistemas Geodésicos, solo tie-
nen un alcance dentro de un espacio geográfico o región.
¿ Qué es un Sistema Global ?
Son muy homogéneos en las proximidades del punto fundamental, donde Geoide y Elipsoide
son tangentes, pero a medida que nos alejamos de dicho punto, aumenta considerablemente
la separación entre ambas superficies de referencias al mismo tiempo que lo hacen las per-
turbaciones producidas por las anomalías de la gravedad.-
Esto ocurre con el sistema Campo Inchauspe ’69, que solo es válido para el territorio Nacio-
nal, o el Sistema Geodésico Chua Astro, que sólo es válido en Paraguay.
Cuando empleamos un sistema de navegación satelital, (tal como es el GPS), el
cual por definición tiene que poder utilizarse en todo el mundo, es necesario dis-
poner de un sistema de referencia universal, válido para cualquier punto del pla-
neta.
¿Cómo hacemos para expresar la ubicación de cada satélite y como expresamos nues-
tra posición?
Necesitamos definir un sistema de referencias universal o global, tal que pueda
ser utilizado por el sistema de navegación de los satélites y al mismo tiempo por
cualquier usuario, en cualquier parte del planeta que se encuentre.-
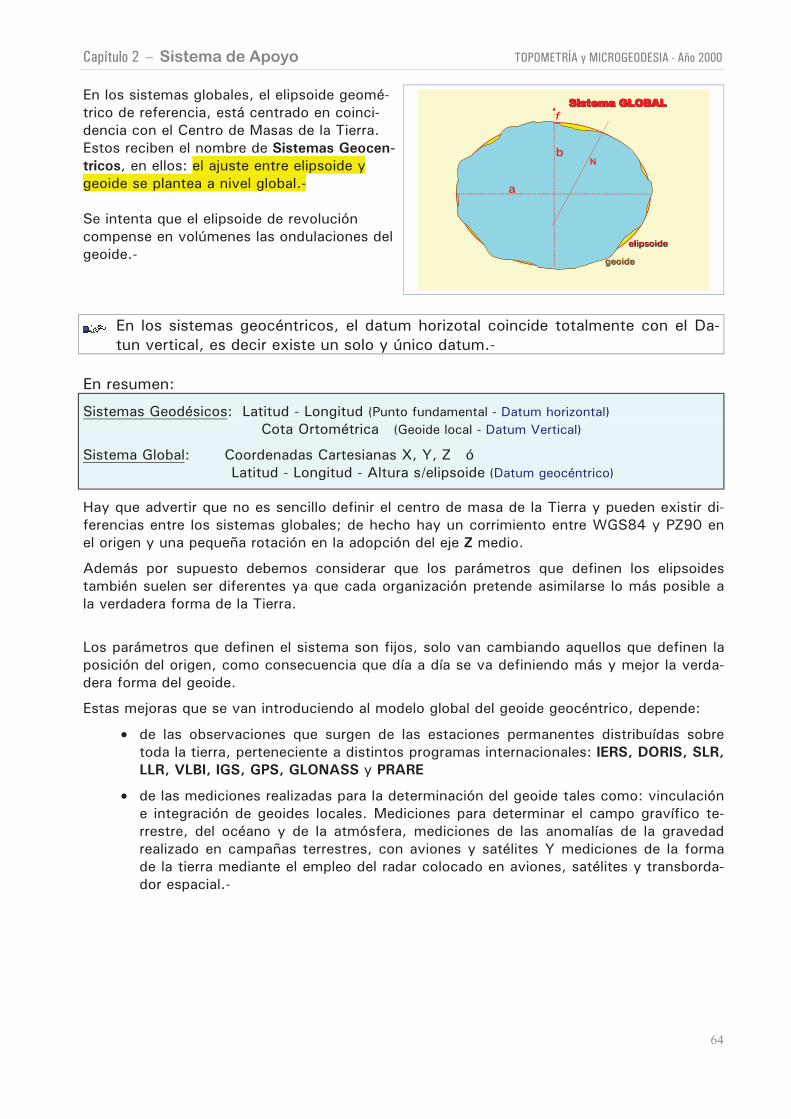
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
64
En los sistemas globales, el elipsoide geomé-
trico de referencia, está centrado en coinci-
dencia con el Centro de Masas de la Tierra.
Estos reciben el nombre de Sistemas Geocen-
tricos, en ellos: el ajuste entre elipsoide y
geoide se plantea a nivel global.-
Se intenta que el elipsoide de revolución
compense en volúmenes las ondulaciones del
geoide.-elipsoideelipsoide
geoidegeoide
a
Nb
f
Sistema GLOBALSistema GLOBALSistema GLOBALSistema GLOBALSistema GLOBALSistema GLOBALSistema GLOBALSistema GLOBAL
En los sistemas geocéntricos, el datum horizotal coincide totalmente con el Da-
tun vertical, es decir existe un solo y único datum.-
En resumen:
Sistemas Geodésicos: Latitud - Longitud (Punto fundamental - Datum horizontal)
Cota Ortométrica (Geoide local - Datum Vertical)
Sistema Global: Coordenadas Cartesianas X, Y, Z ó
Latitud - Longitud - Altura s/elipsoide (Datum geocéntrico)
Hay que advertir que no es sencillo definir el centro de masa de la Tierra y pueden existir di-
ferencias entre los sistemas globales; de hecho hay un corrimiento entre WGS84 y PZ90 en
el origen y una pequeña rotación en la adopción del eje Z medio.
Además por supuesto debemos considerar que los parámetros que definen los elipsoides
también suelen ser diferentes ya que cada organización pretende asimilarse lo más posible a
la verdadera forma de la Tierra.
Los parámetros que definen el sistema son fijos, solo van cambiando aquellos que definen la
posición del origen, como consecuencia que día a día se va definiendo más y mejor la verda-
dera forma del geoide.
Estas mejoras que se van introduciendo al modelo global del geoide geocéntrico, depende:
• de las observaciones que surgen de las estaciones permanentes distribuídas sobre
toda la tierra, perteneciente a distintos programas internacionales: IERS, DORIS, SLR,
LLR, VLBI, IGS, GPS, GLONASS y PRARE
• de las mediciones realizadas para la determinación del geoide tales como: vinculación
e integración de geoides locales. Mediciones para determinar el campo gravífico te-
rrestre, del océano y de la atmósfera, mediciones de las anomalías de la gravedad
realizado en campañas terrestres, con aviones y satélites Y mediciones de la forma
de la tierra mediante el empleo del radar colocado en aviones, satélites y transborda-
dor espacial.-
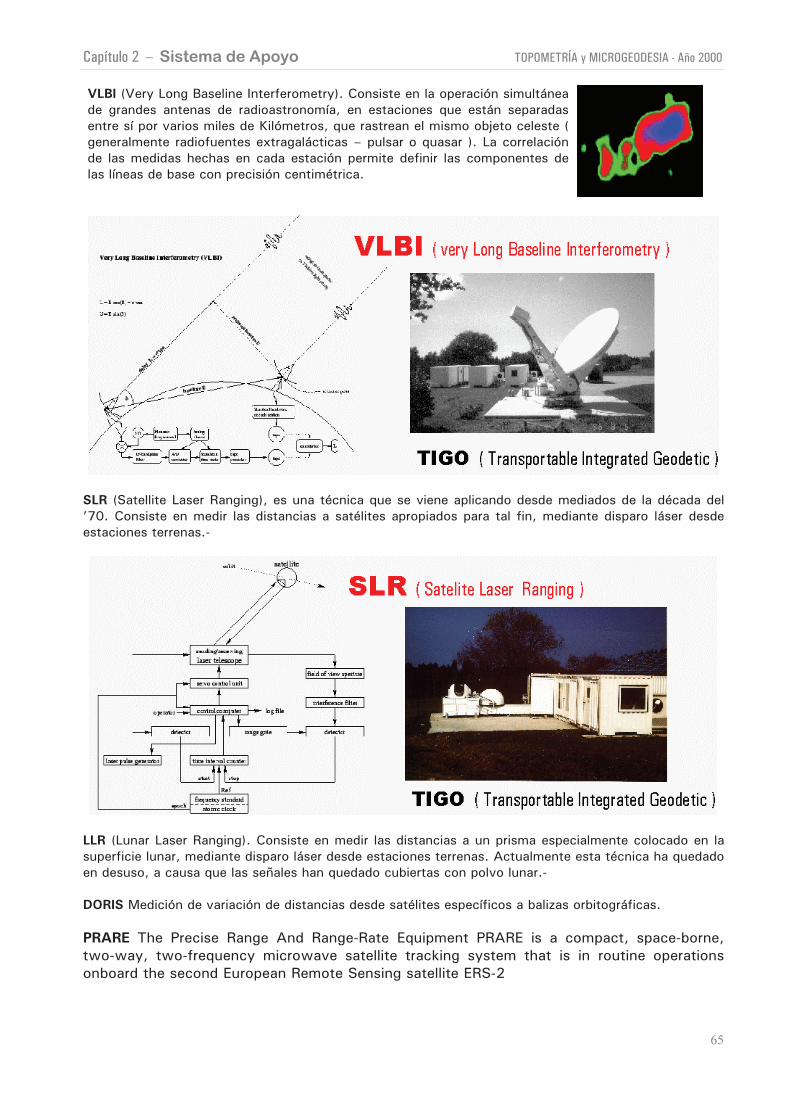
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
65
VLBI (Very Long Baseline Interferometry). Consiste en la operación simultánea
de grandes antenas de radioastronomía, en estaciones que están separadas
entre sí por varios miles de Kilómetros, que rastrean el mismo objeto celeste (
generalmente radiofuentes extragalácticas – pulsar o quasar ). La correlación
de las medidas hechas en cada estación permite definir las componentes de
las líneas de base con precisión centimétrica.
SLR (Satellite Laser Ranging), es una técnica que se viene aplicando desde mediados de la década del
’70. Consiste en medir las distancias a satélites apropiados para tal fin, mediante disparo láser desde
estaciones terrenas.-
LLR (Lunar Laser Ranging). Consiste en medir las distancias a un prisma especialmente colocado en la
superficie lunar, mediante disparo láser desde estaciones terrenas. Actualmente esta técnica ha quedado
en desuso, a causa que las señales han quedado cubiertas con polvo lunar.-
DORIS Medición de variación de distancias desde satélites específicos a balizas orbitográficas.
PRARE The Precise Range And Range-Rate Equipment PRARE is a compact, space-borne,
two-way, two-frequency microwave satellite tracking system that is in routine operations
onboard the second European Remote Sensing satellite ERS-2
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
66
Tal como se puede apreciar en los gráficos, una TIGO es un estación geodésica integral transportable que
realiza una serie completa de observaciones, mediciones de VLBI, mediciones SLR, mediciones GPS y
GLONAS de altísima precisión, PRARE, DORIS, determinaciones de las anomalías de la gravedad, lleva
registros sísmicos, mediciones y registros metereológicos, mediciones de la marea terrestre, etc.
En Diciembre de 1998, el Instituto BKG (Bundesamt für Kartographie und Geodäsie) de Alemania, quienes
realizan mediciones en todo el mudo para la perfección de los parámetros de ICRF (International Celestial
Reference Frame), los parámetros de ITRF (International Terrestrial Reference Frame) y de IERS (Interna-
tional Earth Rotation Service); llamó a concurso para instituciones que les interesase trabajar en un pro-
yecto conjunto en el manejo de una estación TIGO; el profesor M. Diaz Saravia, con el apoyo del profesor
V. Haar, solicitaron a dicha institución, la colocación de la misma en los terrenos de la estación terrena de
la CONAE en falda del Carmen, con la idea de ser operada en forma conjunta entre la Escuela de Agrimen-
sura de la UNC y la CONAE (Comisión Nacional de Asuntos Espaciales).
En este lugar, se cumplían con todas las condiciones requeridas para la instalación de la estación, el lugar
era de maravillas, el clima inmejorable, la ubicación geográfica de primera, la cercanía a un aeropuerto
internacional, las facilidades con que contaría el personal extranjero, etc., el mas grave problema era el
aspecto económico ya que había que hacer un importante aporte de dinero para el montaje, mantenimiento
y sueldos de personal de planta permanente de no menos 11 personas para atender la estación que debe
trabajar las 24 horas los 365 días del año.
Córdoba fue seleccionada en Noviembre de 1999, pero la negación a realizar un aporte económico por
parte de las autoridades académicas universitarias, fue la principal causa por la cual se resolvió instalar la
estación TIGO en Concepción, en la vecina República de Chile, quedando Córdoba en segundo lugar de
una lista de más de 20 postulantes Latinoamericanos, lo cual es un triste consuelo pero que no trae ningún
beneficio a nuestra carrera.
Continuando con los sistemas geocétricos:
Cuando el Origen del Sistema está en el centro de masa de la Tierra y la posición de los ejes
coincide con las definiciones del IERS (Servicio Internacional de la Rotacion de la Tierra), este
sistema adquiere el nombre de ITRS (Sistema Internacional de Referencia Terrestre). A su
vez, a éste le corresponde el ITRF ( International Terrestrial Reference Frame) ó Marco Inter-
nacional de Referencia Terrestre, a cuya sigla se le agrega el año para el cual fue determina-
do. - Ejemplo.: ITRF 92 - ITRF 93 - ITRF 94 - ITRF 98.
ITRF 94 fue definido en dicho año y es el que está en uso en la actualidad, ya que todavía no
se han concluido con los ajuste de coordenadas de la red de ITRF98.
Es importante conocer el dato del año. Por una parte porque los parámetros del origen del
sistema de referencia han sido establecido para dicha fecha, y en el caso del marco de refe-
rencia como el de nuestro ejemplo, porque el planeta se mueve y la corteza terrestre también
lo hace, en su movimiento arrastra los mojones que conforman el marco alterando las coor-
denadas del punto, es decir que cada vértice de la red posee en definitiva cuatro coordena-
das, las coordenadas X,Y,Z del punto referida al año 94 y la cuarta coordenada es el vector
velocidad. Por lo tanto al comparar dos mediciones realizadas en tiempos diferentes, se en-
contrarán diferencias y por ello es necesario reducir ambas a la época de medición.
El desplazamiento entre los dos sistemas (WGS 84 - ITRF 94) es mejor que un metro. Este
valor también resulta ser, la precisión de las coordenadas absolutas de los puntos expresados
en WGS 84.
La Asociación Internacional de Geodesia, recomienda el empleo del Sistema ITRF, para las
aplicaciones geodésicas de muy alta precisión y las determinaciones Geodinámicas, es por
ello que ITRF provee coordenadas y velocidades de los puntos de la red.
Y recomienda el uso de WGS84 para determinaciones geodésicas, microgeodésicas, topomé-
tricas, la cartografía y la navegación.
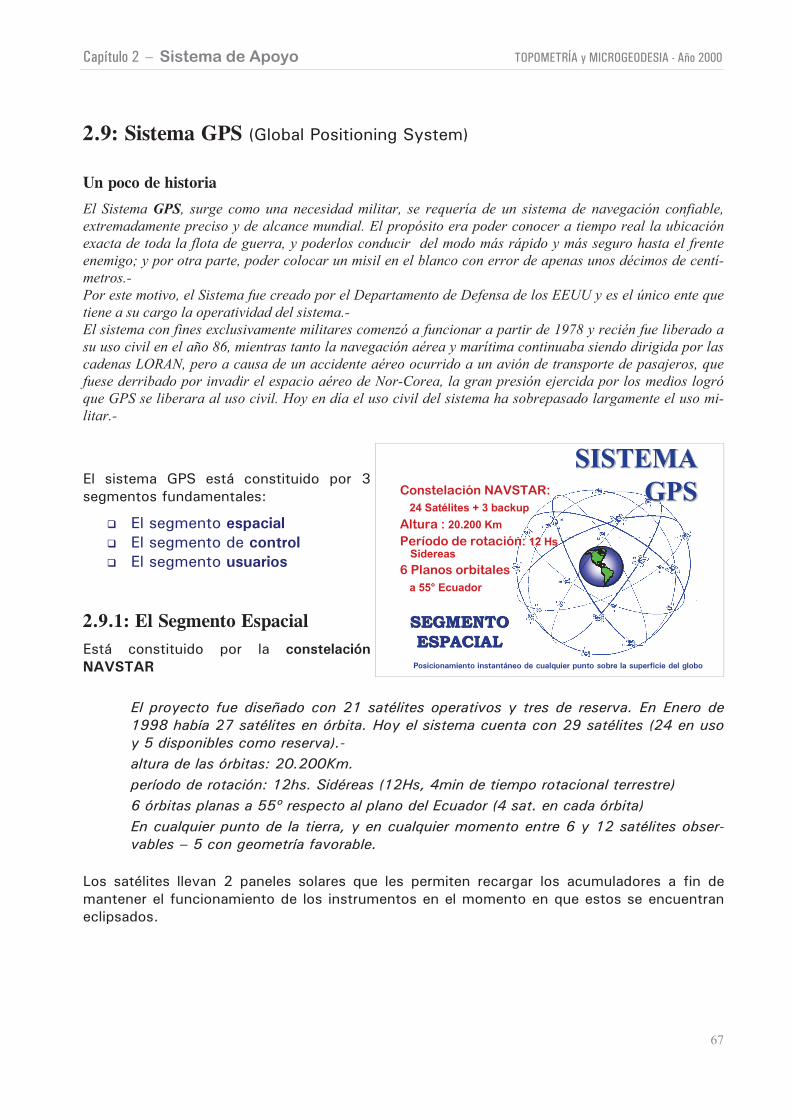
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
67
2.9: Sistema GPS (Global Positioning System)
Un poco de historia
El Sistema GPS, surge como una necesidad militar, se requería de un sistema de navegación confiable,
extremadamente preciso y de alcance mundial. El propósito era poder conocer a tiempo real la ubicación
exacta de toda la flota de guerra, y poderlos conducir del modo más rápido y más seguro hasta el frente
enemigo; y por otra parte, poder colocar un misil en el blanco con error de apenas unos décimos de centí-
metros.-
Por este motivo, el Sistema fue creado por el Departamento de Defensa de los EEUU y es el único ente que
tiene a su cargo la operatividad del sistema.-
El sistema con fines exclusivamente militares comenzó a funcionar a partir de 1978 y recién fue liberado a
su uso civil en el año 86, mientras tanto la navegación aérea y marítima continuaba siendo dirigida por las
cadenas LORAN, pero a causa de un accidente aéreo ocurrido a un avión de transporte de pasajeros, que
fuese derribado por invadir el espacio aéreo de Nor-Corea, la gran presión ejercida por los medios logró
que GPS se liberara al uso civil. Hoy en día el uso civil del sistema ha sobrepasado largamente el uso mi-
litar.-
El sistema GPS está constituido por 3
segmentos fundamentales:
El segmento espacial
El segmento de control
El segmento usuarios
2.9.1: El Segmento Espacial
Está constituido por la constelación
NAVSTAR Posicionamiento instantáneo de cualquier punto sobre la superficie del globo
Constelación NAVSTAR:
24 Satélites + 3 backup
Altura : 20.200 Km
Período de rotación: 12 HsSidereas
6 Planos orbitales
a 55° Ecuador
SISTEMA
GPS
SISTEMASISTEMA
GPSGPS
SEGMENTO
ESPACIAL
SEGMENTO
ESPACIAL
El proyecto fue diseñado con 21 satélites operativos y tres de reserva. En Enero de
1998 había 27 satélites en órbita. Hoy el sistema cuenta con 29 satélites (24 en uso
y 5 disponibles como reserva).-
altura de las órbitas: 20.200Km.
período de rotación: 12hs. Sidéreas (12Hs, 4min de tiempo rotacional terrestre)
6 órbitas planas a 55º respecto al plano del Ecuador (4 sat. en cada órbita)
En cualquier punto de la tierra, y en cualquier momento entre 6 y 12 satélites obser-
vables – 5 con geometría favorable.
Los satélites llevan 2 paneles solares que les permiten recargar los acumuladores a fin de
mantener el funcionamiento de los instrumentos en el momento en que estos se encuentran
eclipsados.
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
68
Tienen una serie de antenas emisoras que
funcionan en la banda “L” del espectro y
son las encargadas de enviar las señales a
tierra. Otra antena operando en banda “S”
para recibir las correcciones desde los cen-
tros de rastreo y control terrestre.
Las antenas son direccionales, de modo tal
que deben apuntar permanentemente hacia
la tierra, y al girar ésta, obliga a generar un
movimiento rotacional también al satélite.-
Cada satélite lleva 2 relojes atómicos, ellos
pueden ser de rubidio con una precisión de
10-12; o de Cesio 10-13 o de Hidrógeno 10-
14 de precisión en la estabilidad.-
SEGMENTO
ESPACIAL
SEGMENTO
ESPACIAL
SISTEMA
GPS
SISTEMASISTEMA
GPSGPS
Todos los satélites trabajan en las mismas frecuencias. Cada uno de ellos emite dos portado-
ras con distintas frecuencias, se les llama “ondas portadoras” L1 y L2.
Montados sobre las portadoras, viajan dos señales de códigos (C/A – P ), y un mensaje de
navegación, todo ello conforma una onda que se denomina “ruido seudo aleatorio” y que es
la firma espectral de cada satélite.-
2.9.2: El Segmento de Control
Hay 10 estaciones oficiales de control terrestre distribuidas por todo el mundo. La estación
central se encuentra en Colorado Spring.(USA)-
Las 10 estaciones se encuentran distribui-
das uniformemente en longitud, poseen
coordenadas extremadamente precisas
expresadas en el sistema de referencia
WGS 84, generalmente son también esta-
ciones de VLBI.
Reciben señales permanentemente sobre la
posición de todos los satélites y de ese
modo pueden procesar y calcular con gran
precisión las efemérides, llevar el ajuste de
los relojes atómicos y toda otra informa-
ción que luego se re trasmite y almacena
en la memoria de cada satélite para su ra-
diodifusión.-
SISTEMA
GPS
SISTEMASISTEMA
GPSGPS
SEGMENTO
CONTROL
SEGMENTO
CONTROL
efemeridesefemerides
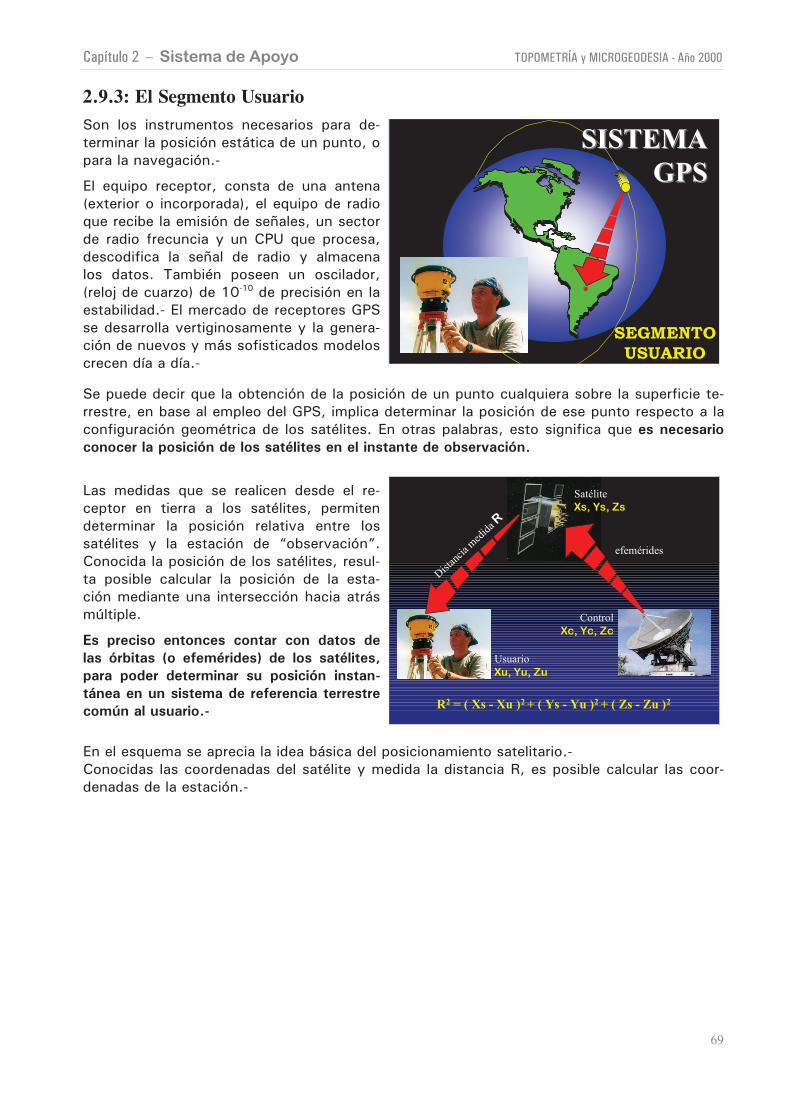
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
69
2.9.3: El Segmento Usuario
Son los instrumentos necesarios para de-
terminar la posición estática de un punto, o
para la navegación.-
El equipo receptor, consta de una antena
(exterior o incorporada), el equipo de radio
que recibe la emisión de señales, un sector
de radio frecuncia y un CPU que procesa,
descodifica la señal de radio y almacena
los datos. También poseen un oscilador,
(reloj de cuarzo) de 10-10 de precisión en la
estabilidad.- El mercado de receptores GPS
se desarrolla vertiginosamente y la genera-
ción de nuevos y más sofisticados modelos
crecen día a día.-
SISTEMASISTEMA
GPSGPS
SEGMENTO
USUARIO
SEGMENTO
USUARIO
Se puede decir que la obtención de la posición de un punto cualquiera sobre la superficie te-
rrestre, en base al empleo del GPS, implica determinar la posición de ese punto respecto a la
configuración geométrica de los satélites. En otras palabras, esto significa que es necesario
conocer la posición de los satélites en el instante de observación.
Las medidas que se realicen desde el re-
ceptor en tierra a los satélites, permiten
determinar la posición relativa entre los
satélites y la estación de “observación”.
Conocida la posición de los satélites, resul-
ta posible calcular la posición de la esta-
ción mediante una intersección hacia atrás
múltiple.
Es preciso entonces contar con datos de
las órbitas (o efemérides) de los satélites,
para poder determinar su posición instan-
tánea en un sistema de referencia terrestre
común al usuario.-
Usuario
Xu, Yu, Zu
Control
Xc, Yc, Zc
Satélite
Xs, Ys, Zs
efemérides
Dista
ncia
med
ida R
R2 = ( Xs - Xu )2 + ( Ys - Yu )2 + ( Zs - Zu )2
En el esquema se aprecia la idea básica del posicionamiento satelitario.-
Conocidas las coordenadas del satélite y medida la distancia R, es posible calcular las coor-
denadas de la estación.-
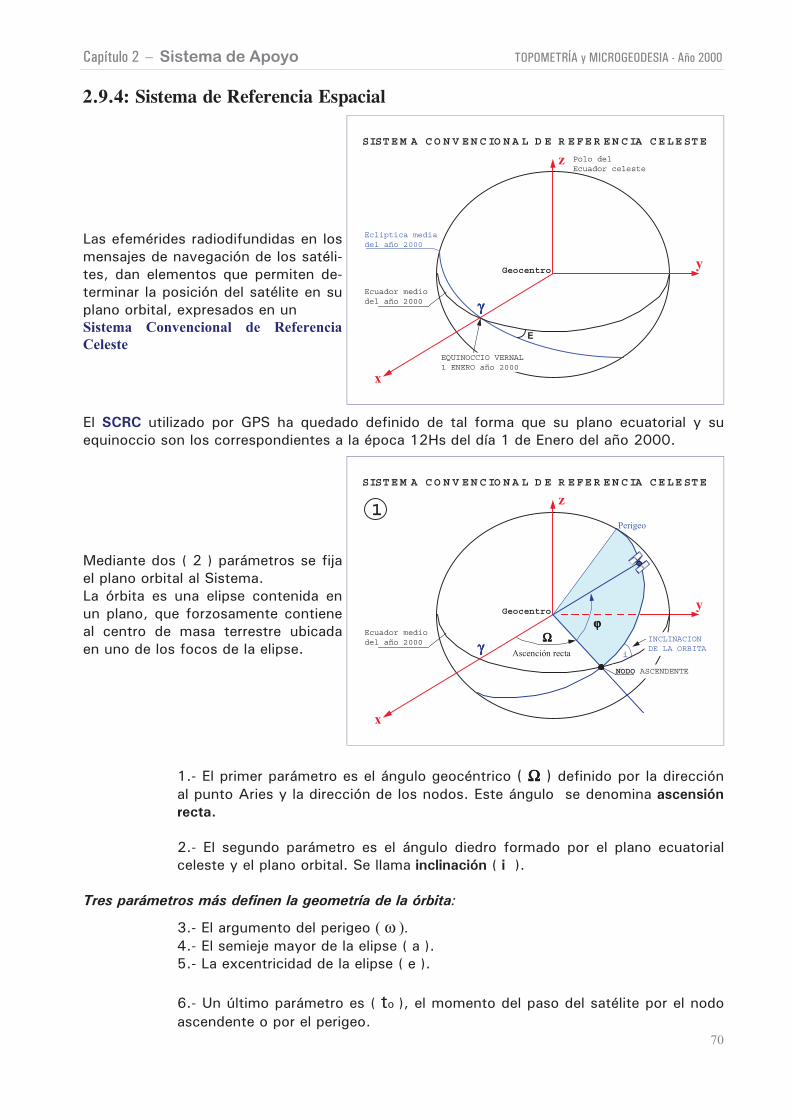
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
70
2.9.4: Sistema de Referencia Espacial
Las efemérides radiodifundidas en los
mensajes de navegación de los satéli-
tes, dan elementos que permiten de-
terminar la posición del satélite en su
plano orbital, expresados en un
Sistema Convencional de Referencia
Celeste
x
y
z
E
Ecuador medio
del año 2000
Ecliptica media
del año 2000
Geocentro
EQUINOCCIO VERNAL
1 ENERO año 2000
γγγγ
SISTEM A CO N V EN C IO N A L D E R EFER EN CIA CE LE STE
Polo del
Ecuador celeste
El SCRC utilizado por GPS ha quedado definido de tal forma que su plano ecuatorial y su
equinoccio son los correspondientes a la época 12Hs del día 1 de Enero del año 2000.
Mediante dos ( 2 ) parámetros se fija
el plano orbital al Sistema.
La órbita es una elipse contenida en
un plano, que forzosamente contiene
al centro de masa terrestre ubicada
en uno de los focos de la elipse.
x
y
z
γγγγ
SISTEM A CO N V EN C IO N A L D E R EFER EN CIA CE LE STE
Geocentro
NODO ASCENDENTE
ΩΩΩΩ INCLINACION
DE LA ORBITA
Ecuador medio
del año 2000
Perigeo
Ascención recta
ϕϕϕϕ
i
1
1.- El primer parámetro es el ángulo geocéntrico ( ΩΩΩΩ ) definido por la dirección
al punto Aries y la dirección de los nodos. Este ángulo se denomina ascensión
recta.
2.- El segundo parámetro es el ángulo diedro formado por el plano ecuatorial
celeste y el plano orbital. Se llama inclinación ( i ).
Tres parámetros más definen la geometría de la órbita:
3.- El argumento del perigeo ( ω ).
4.- El semieje mayor de la elipse ( a ).
5.- La excentricidad de la elipse ( e ).
6.- Un último parámetro es ( to ), el momento del paso del satélite por el nodo
ascendente o por el perigeo.
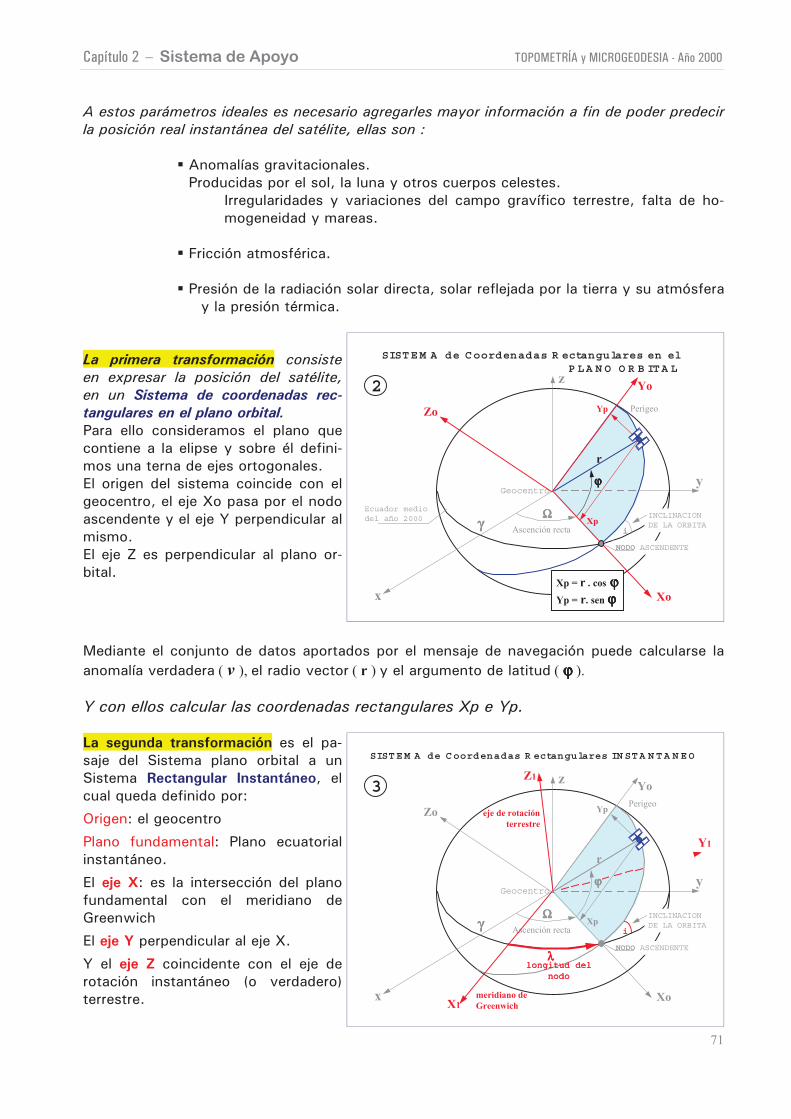
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
71
A estos parámetros ideales es necesario agregarles mayor información a fin de poder predecir
la posición real instantánea del satélite, ellas son :
Anomalías gravitacionales.
Producidas por el sol, la luna y otros cuerpos celestes.
Irregularidades y variaciones del campo gravífico terrestre, falta de ho-
mogeneidad y mareas.
Fricción atmosférica.
Presión de la radiación solar directa, solar reflejada por la tierra y su atmósfera
y la presión térmica.
La primera transformación consiste
en expresar la posición del satélite,
en un Sistema de coordenadas rec-
tangulares en el plano orbital.
Para ello consideramos el plano que
contiene a la elipse y sobre él defini-
mos una terna de ejes ortogonales.
El origen del sistema coincide con el
geocentro, el eje Xo pasa por el nodo
ascendente y el eje Y perpendicular al
mismo.
El eje Z es perpendicular al plano or-
bital.
x
y
z
γγγγ
SISTEM A de Coordenadas R ectangulares en elP LA N O O R B ITA L
Geocentro
NODO ASCENDENTE
ΩΩΩΩ INCLINACION
DE LA ORBITA
Ecuador medio
del año 2000
Perigeo
Ascención recta
ϕϕϕϕ
i
Zo
Xo
Yo
Yp
Xp
r
2
Xp = r . cos ϕ ϕ ϕ ϕYp = r. sen ϕϕϕϕ
Mediante el conjunto de datos aportados por el mensaje de navegación puede calcularse la
anomalía verdadera ( v ), el radio vector ( r ) y el argumento de latitud ( ϕϕϕϕ ).
Y con ellos calcular las coordenadas rectangulares Xp e Yp.
La segunda transformación es el pa-
saje del Sistema plano orbital a un
Sistema Rectangular Instantáneo, el
cual queda definido por:
Origen: el geocentro
Plano fundamental: Plano ecuatorial
instantáneo.
El eje X: es la intersección del plano
fundamental con el meridiano de
Greenwich
El eje Y perpendicular al eje X.
Y el eje Z coincidente con el eje de
rotación instantáneo (o verdadero)
terrestre. x
y
z
γγγγ
SISTEM A de Coordenadas R ectangulares IN STA N TA N EO
Geocentro
NODO ASCENDENTE
ΩΩΩΩ INCLINACION
DE LA ORBITA
Perigeo
Ascención recta
ϕϕϕϕ
i
Zo
Xo
Yo
Yp
Xp
r
Z1
X1
Y1
eje de rotación
terrestre
meridiano de
Greenwich
λλλλ
3
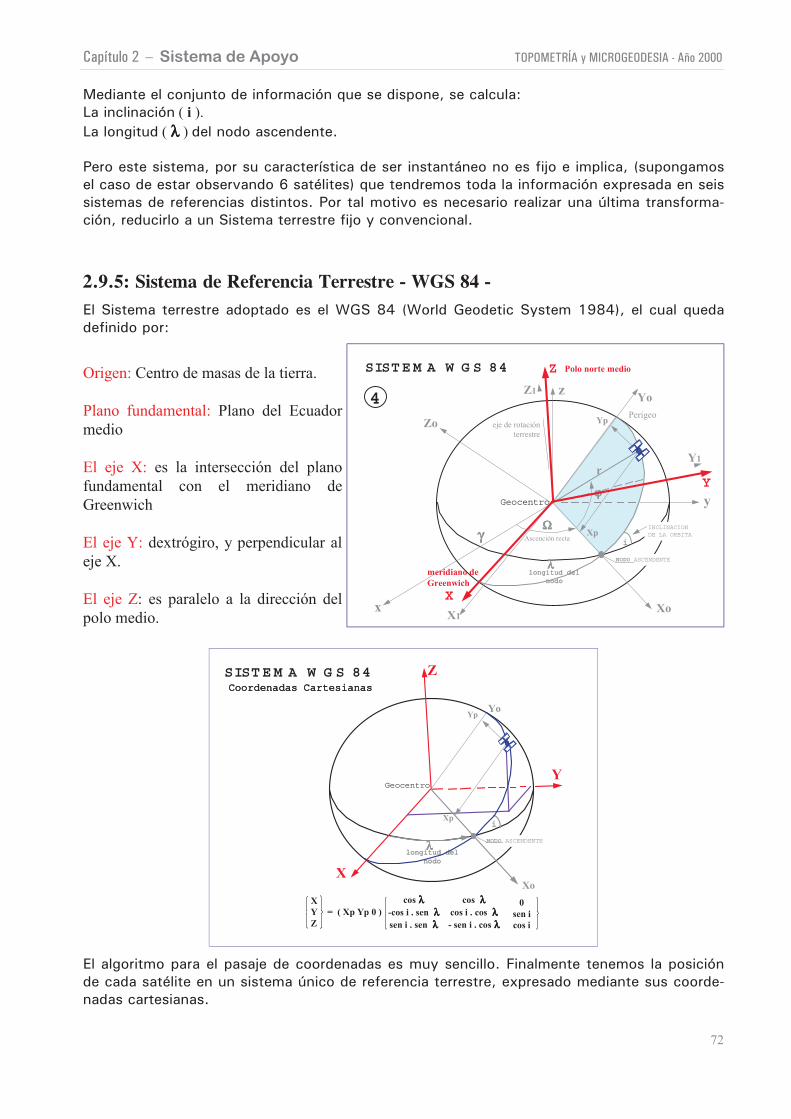
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
72
Mediante el conjunto de información que se dispone, se calcula:
La inclinación ( i ).
La longitud ( λλλλ ) del nodo ascendente.
Pero este sistema, por su característica de ser instantáneo no es fijo e implica, (supongamos
el caso de estar observando 6 satélites) que tendremos toda la información expresada en seis
sistemas de referencias distintos. Por tal motivo es necesario realizar una última transforma-
ción, reducirlo a un Sistema terrestre fijo y convencional.
2.9.5: Sistema de Referencia Terrestre - WGS 84 -
El Sistema terrestre adoptado es el WGS 84 (World Geodetic System 1984), el cual queda
definido por:
Origen: Centro de masas de la tierra.
Plano fundamental: Plano del Ecuador
medio
El eje X: es la intersección del plano
fundamental con el meridiano de
Greenwich
El eje Y: dextrógiro, y perpendicular al
eje X.
El eje Z: es paralelo a la dirección del
polo medio.x
y
z
γγγγ
SISTEM A W G S 84
Geocentro
NODO ASCENDENTE
ΩΩΩΩ INCLINACION
DE LA ORBITA
Perigeo
Ascención recta
ϕϕϕϕ
i
Zo
Xo
Yo
Yp
Xp
r
Z1
X1
Y1
eje de rotación
terrestre
meridiano de
Greenwich
λλλλ
4
Y
Z Polo norte medio
X
SISTE M A W G S 84
Geocentro
NODO ASCENDENTE
i
Xo
Yo
Xp
λλλλ
Y
Z
X
Yp
X
Y
Z
cos λ λ λ λ-cos i . sen λ λ λ λsen i . sen λ λ λ λ
cos λ λ λ λcos i . cos λ λ λ λ- sen i . cos λ λ λ λ
0
sen i
cos i
= ( Xp Yp 0 )
El algoritmo para el pasaje de coordenadas es muy sencillo. Finalmente tenemos la posición
de cada satélite en un sistema único de referencia terrestre, expresado mediante sus coorde-
nadas cartesianas.
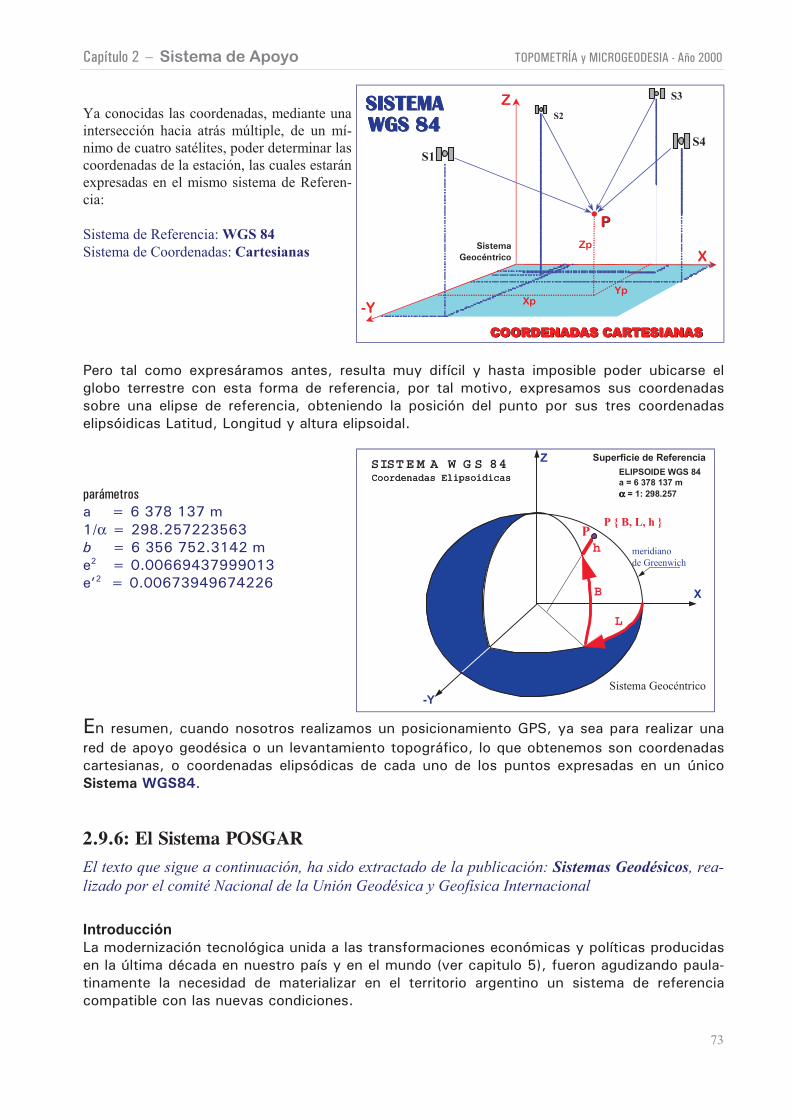
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
73
Ya conocidas las coordenadas, mediante una
intersección hacia atrás múltiple, de un mí-
nimo de cuatro satélites, poder determinar las
coordenadas de la estación, las cuales estarán
expresadas en el mismo sistema de Referen-
cia:
Sistema de Referencia: WGS 84
Sistema de Coordenadas: Cartesianas
PP
-Y
Z
COORDENADAS CARTESIANASCOORDENADAS CARTESIANASCOORDENADAS CARTESIANASCOORDENADAS CARTESIANASCOORDENADAS CARTESIANASCOORDENADAS CARTESIANASCOORDENADAS CARTESIANASCOORDENADAS CARTESIANAS
XSistema
Geocéntrico
SISTEMASISTEMASISTEMASISTEMA
WGS 84WGS 84WGS 84WGS 84
SISTEMASISTEMASISTEMASISTEMA
WGS 84WGS 84WGS 84WGS 84
S1
S2
S3
S4
Zp
YpXp
Pero tal como expresáramos antes, resulta muy difícil y hasta imposible poder ubicarse el
globo terrestre con esta forma de referencia, por tal motivo, expresamos sus coordenadas
sobre una elipse de referencia, obteniendo la posición del punto por sus tres coordenadas
elipsóidicas Latitud, Longitud y altura elipsoidal.
parámetrosa = 6 378 137 m
1/α = 298.257223563
b = 6 356 752.3142 m
e2 = 0.00669437999013
e’2 = 0.00673949674226
SISTEM A W G S 84
P
-Y
Z Superficie de Referencia
X
Sistema Geocéntrico
h
B
L
meridiano
de Greenwich
ELIPSOIDE WGS 84
a = 6 378 137 m
αααα = 1: 298.257
P B, L, h
En resumen, cuando nosotros realizamos un posicionamiento GPS, ya sea para realizar una
red de apoyo geodésica o un levantamiento topográfico, lo que obtenemos son coordenadas
cartesianas, o coordenadas elipsódicas de cada uno de los puntos expresadas en un único
Sistema WGS84.
2.9.6: El Sistema POSGAR
El texto que sigue a continuación, ha sido extractado de la publicación: Sistemas Geodésicos, rea-
lizado por el comité Nacional de la Unión Geodésica y Geofísica Internacional
Introducción
La modernización tecnológica unida a las transformaciones económicas y políticas producidas
en la última década en nuestro país y en el mundo (ver capitulo 5), fueron agudizando paula-
tinamente la necesidad de materializar en el territorio argentino un sistema de referencia
compatible con las nuevas condiciones.
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
74
A comienzos de la década del 90, especialistas de la Universidad Nacional de La Plata (UNLP)
y del Instituto Geográfico Militar (IGM) analizaban las posibilidades de materializar un nuevo
marco de referencia utilizando observaciones GPS. Diversos trabajos presentados en congre-
sos nacionales e internacionales fueron producto de esas investigaciones y dieron lugar a
recomendaciones de avanzar en la dirección de materializar un marco de referencia suficien-
temente preciso para las aplicaciones que se estaban desarrollando en el país y tan cercano
como fuera posible al sistema global WGS84, utilizado por el GPS (ver, por ejemplo, “Una red
GPS para el país: el proyecto POSGAR”, R. Rodríguez, Revista del IGM, Año 4, Nº 6, enero -
diciembre de 1989/90). En ese contexto nace el proyecto POSGAR (POSiciones Geodésicas
ARgentinas), cuyo principal objetivo fue materializar dicho marco de referencia.
Una circunstancia afortunada crea una oportunidad inmejorable para realizar las tareas de
campo: un proyecto científico denominado Central Andes Project (CAP), liderado por dos uni-
versidades estadounidenses cuyo objetivo era el estudio de la geodinámica de los Andes cen-
trales, se proponía medir con GPS una red de control de muy alta precisión, con numerosos
puntos distribuidos mayoritariamente en el oeste del país, llegando hasta la latitud de aproxi-
madamente -40º. A cambio del apoyo logístico para realizar las mediciones, ofrecían sus re-
ceptores para la medición de la red POSGAR. Esta oportunidad no fue desaprovechada por el
IGM y gracias a ello pudieron realizarse tres campañas de medición que dieron lugar a la red
POSGAR:
• POSGAR 93: desde el 10 de febrero hasta el 12 de abril de 1993;
• CAP 93: desde el 11 de febrero hasta el 11 de marzo de 1993;
• POSGAR 94: desde el 8 de marzo hasta el 5 de mayo de 1994.
Por la misma época la comunidad de usuarios del sistema GPS se expandía en forma sosteni-
da y ya había comenzado el desarrollo de importantes programas de modernización de los
catastros provinciales, los que involucraban grandes inversiones solventadas mayoritariamen-
te con créditos de organismos financieros internacionales. Estas circunstancias impusieron
una condición adicional al desarrollo del proyecto: el nuevo marco de referencia debía estar
disponible en el plazo más corto posible para proveer un sistema de referencia único para
todo el país, al cual pudieran vincularse los nuevos levantamientos GPS, en especial las redes
geodésicas provinciales que ya estaban en ejecución.
Era necesario entonces, realizar el cálculo de las observaciones que permitiera disponer de las
nuevas coordenadas. Esta responsabilidad fue asumida por la Facultad de Ciencias Astronó-
micas y Geofísicas de la UNLP, contando para ello con el apoyo económico del Programa de
Desarrollo Económico y Saneamiento Financiero de las Provincias Argentinas, interesado en
que los proyectos catastrales dispusieran del nuevo marco de referencia en el tiempo más
breve posible.
Una decisión importante al momento de iniciar el cálculo fue decidir qué programa de proce-
samiento se utilizaría. Por un lado, los programas denominados “científicos” ofrecían la posi-
bilidad de extraer de las observaciones la máxima precisión posible, pero su uso demandaba
de una experiencia no suficientemente bien desarrollada en el país. Por otro lado, el uso de
un programa “comercial” aseguraba la posibilidad de realizar un cálculo compatible con las
precisiones requeridas y el tiempo disponible. Finalmente, se optó por esta última alternativa,
lo que permitió disponer de las coordenadas que dieron lugar al actual marco de referencia
POSGAR 94, a comienzos de 1995.
Los estimadores “internos” de precisión, esto es, los que se obtenían luego de compensar los
vectores medidos, resultaron muy satisfactorios, mostrando una red homogénea con una
precisión del orden de 1 parte por millón. Sin embargo, tuvo que transcurrir algún tiempo
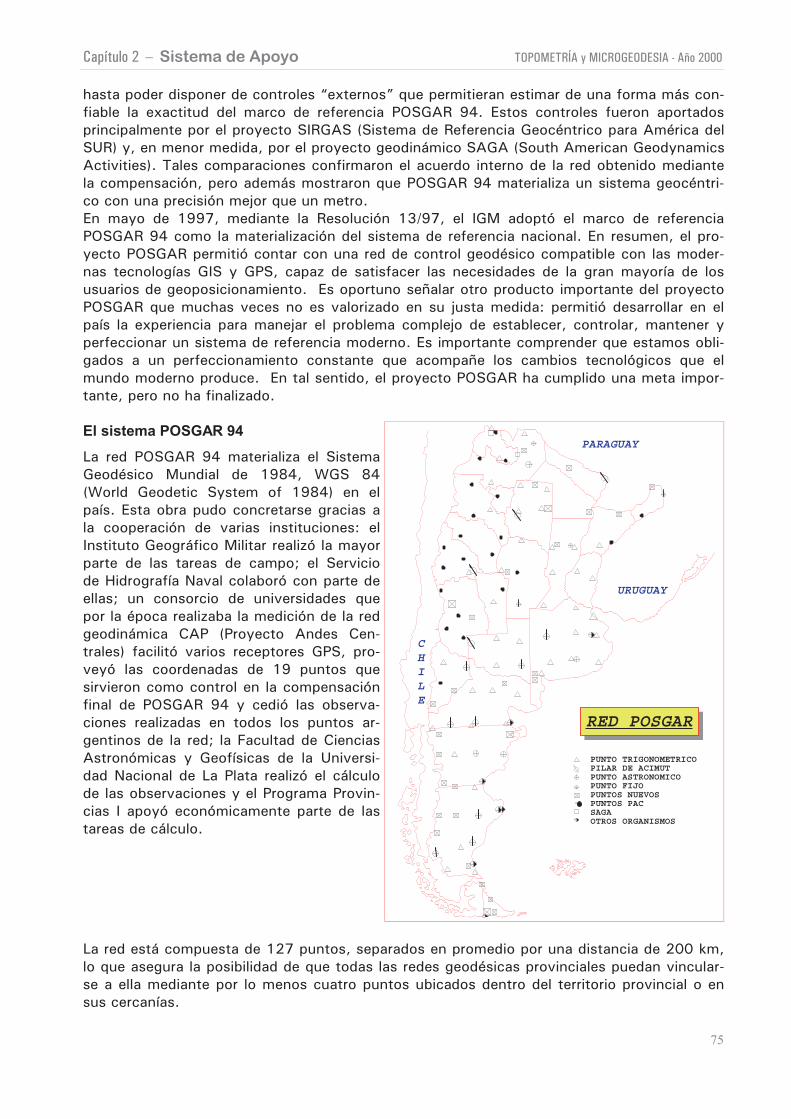
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
75
hasta poder disponer de controles “externos” que permitieran estimar de una forma más con-
fiable la exactitud del marco de referencia POSGAR 94. Estos controles fueron aportados
principalmente por el proyecto SIRGAS (Sistema de Referencia Geocéntrico para América del
SUR) y, en menor medida, por el proyecto geodinámico SAGA (South American Geodynamics
Activities). Tales comparaciones confirmaron el acuerdo interno de la red obtenido mediante
la compensación, pero además mostraron que POSGAR 94 materializa un sistema geocéntri-
co con una precisión mejor que un metro.
En mayo de 1997, mediante la Resolución 13/97, el IGM adoptó el marco de referencia
POSGAR 94 como la materialización del sistema de referencia nacional. En resumen, el pro-
yecto POSGAR permitió contar con una red de control geodésico compatible con las moder-
nas tecnologías GIS y GPS, capaz de satisfacer las necesidades de la gran mayoría de los
usuarios de geoposicionamiento. Es oportuno señalar otro producto importante del proyecto
POSGAR que muchas veces no es valorizado en su justa medida: permitió desarrollar en el
país la experiencia para manejar el problema complejo de establecer, controlar, mantener y
perfeccionar un sistema de referencia moderno. Es importante comprender que estamos obli-
gados a un perfeccionamiento constante que acompañe los cambios tecnológicos que el
mundo moderno produce. En tal sentido, el proyecto POSGAR ha cumplido una meta impor-
tante, pero no ha finalizado.
El sistema POSGAR 94
La red POSGAR 94 materializa el Sistema
Geodésico Mundial de 1984, WGS 84
(World Geodetic System of 1984) en el
país. Esta obra pudo concretarse gracias a
la cooperación de varias instituciones: el
Instituto Geográfico Militar realizó la mayor
parte de las tareas de campo; el Servicio
de Hidrografía Naval colaboró con parte de
ellas; un consorcio de universidades que
por la época realizaba la medición de la red
geodinámica CAP (Proyecto Andes Cen-
trales) facilitó varios receptores GPS, pro-
veyó las coordenadas de 19 puntos que
sirvieron como control en la compensación
final de POSGAR 94 y cedió las observa-
ciones realizadas en todos los puntos ar-
gentinos de la red; la Facultad de Ciencias
Astronómicas y Geofísicas de la Universi-
dad Nacional de La Plata realizó el cálculo
de las observaciones y el Programa Provin-
cias I apoyó económicamente parte de las
tareas de cálculo.
C
H
I
L
E
PARAGUAY
URUGUAY
PUNTO TRIGONOMETRICOPILAR DE ACIMUTPUNTO ASTRONOMICOPUNTO FIJOPUNTOS NUEVOSPUNTOS PACSAGAOTROS ORGANISMOS
RED POSGAR
La red está compuesta de 127 puntos, separados en promedio por una distancia de 200 km,
lo que asegura la posibilidad de que todas las redes geodésicas provinciales puedan vincular-
se a ella mediante por lo menos cuatro puntos ubicados dentro del territorio provincial o en
sus cercanías.
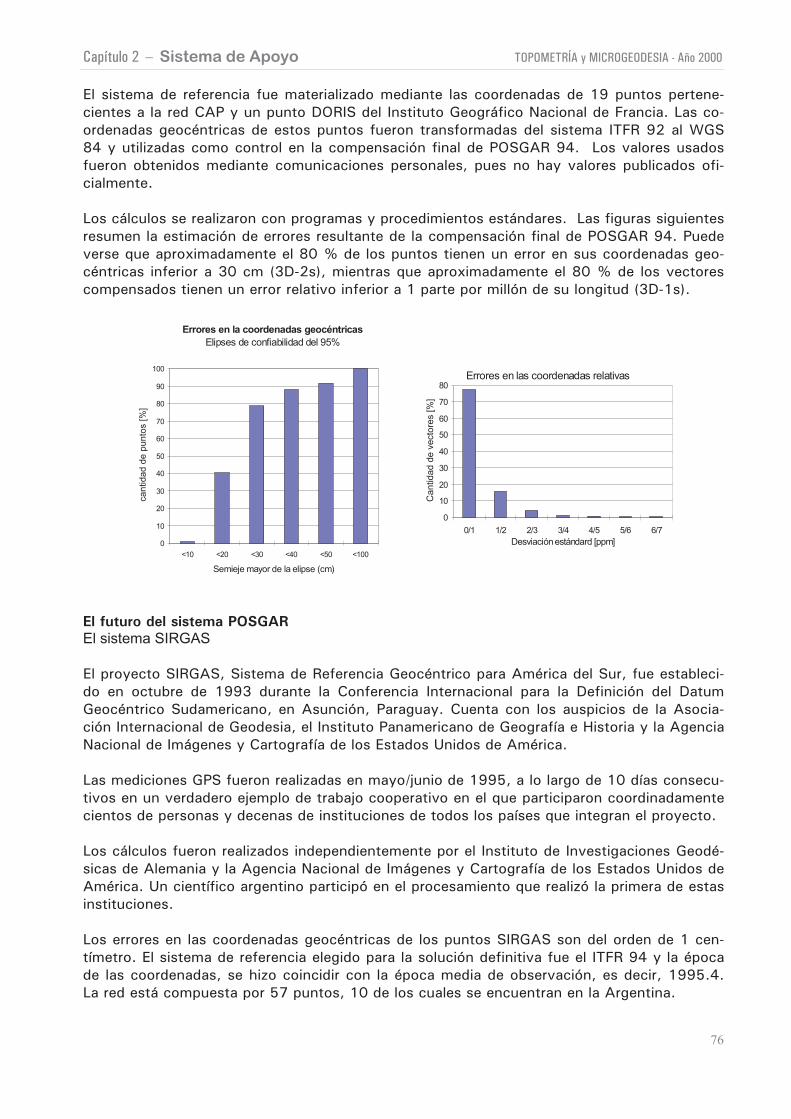
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
76
El sistema de referencia fue materializado mediante las coordenadas de 19 puntos pertene-
cientes a la red CAP y un punto DORIS del Instituto Geográfico Nacional de Francia. Las co-
ordenadas geocéntricas de estos puntos fueron transformadas del sistema ITFR 92 al WGS
84 y utilizadas como control en la compensación final de POSGAR 94. Los valores usados
fueron obtenidos mediante comunicaciones personales, pues no hay valores publicados ofi-
cialmente.
Los cálculos se realizaron con programas y procedimientos estándares. Las figuras siguientes
resumen la estimación de errores resultante de la compensación final de POSGAR 94. Puede
verse que aproximadamente el 80 % de los puntos tienen un error en sus coordenadas geo-
céntricas inferior a 30 cm (3D-2s), mientras que aproximadamente el 80 % de los vectores
compensados tienen un error relativo inferior a 1 parte por millón de su longitud (3D-1s).
Errores en la coordenadas geocéntricas
Elipses de confiabilidad del 95%
0
10
20
30
40
50
60
70
80
90
100
<10 <20 <30 <40 <50 <100
Semieje mayor de la elipse (cm)
ca
ntid
ad
de
pu
nto
s [
%]
Errores en las coordenadas relativas
0
10
20
30
40
50
60
70
80
0/1 1/2 2/3 3/4 4/5 5/6 6/7
Desviación estándard [ppm]
Cantidad d
e v
ecto
res [%
]
El futuro del sistema POSGAR
El sistema SIRGAS
El proyecto SIRGAS, Sistema de Referencia Geocéntrico para América del Sur, fue estableci-
do en octubre de 1993 durante la Conferencia Internacional para la Definición del Datum
Geocéntrico Sudamericano, en Asunción, Paraguay. Cuenta con los auspicios de la Asocia-
ción Internacional de Geodesia, el Instituto Panamericano de Geografía e Historia y la Agencia
Nacional de Imágenes y Cartografía de los Estados Unidos de América.
Las mediciones GPS fueron realizadas en mayo/junio de 1995, a lo largo de 10 días consecu-
tivos en un verdadero ejemplo de trabajo cooperativo en el que participaron coordinadamente
cientos de personas y decenas de instituciones de todos los países que integran el proyecto.
Los cálculos fueron realizados independientemente por el Instituto de Investigaciones Geodé-
sicas de Alemania y la Agencia Nacional de Imágenes y Cartografía de los Estados Unidos de
América. Un científico argentino participó en el procesamiento que realizó la primera de estas
instituciones.
Los errores en las coordenadas geocéntricas de los puntos SIRGAS son del orden de 1 cen-
tímetro. El sistema de referencia elegido para la solución definitiva fue el ITFR 94 y la época
de las coordenadas, se hizo coincidir con la época media de observación, es decir, 1995.4.
La red está compuesta por 57 puntos, 10 de los cuales se encuentran en la Argentina.
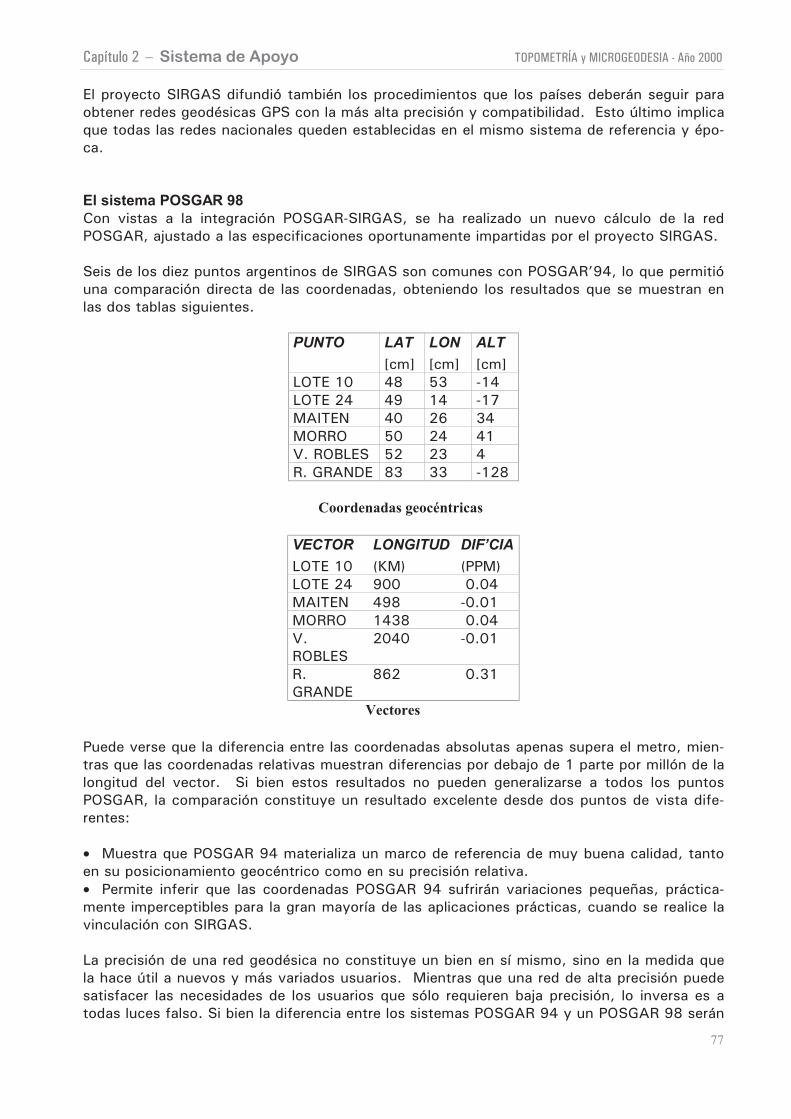
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
77
El proyecto SIRGAS difundió también los procedimientos que los países deberán seguir para
obtener redes geodésicas GPS con la más alta precisión y compatibilidad. Esto último implica
que todas las redes nacionales queden establecidas en el mismo sistema de referencia y épo-
ca.
El sistema POSGAR 98
Con vistas a la integración POSGAR-SIRGAS, se ha realizado un nuevo cálculo de la red
POSGAR, ajustado a las especificaciones oportunamente impartidas por el proyecto SIRGAS.
Seis de los diez puntos argentinos de SIRGAS son comunes con POSGAR’94, lo que permitió
una comparación directa de las coordenadas, obteniendo los resultados que se muestran en
las dos tablas siguientes.
PUNTO LAT
[cm]
LON
[cm]
ALT
[cm]
LOTE 10 48 53 -14
LOTE 24 49 14 -17
MAITEN 40 26 34
MORRO 50 24 41
V. ROBLES 52 23 4
R. GRANDE 83 33 -128
Coordenadas geocéntricas
VECTOR
LOTE 10
LONGITUD
(KM)
DIF’CIA
(PPM)
LOTE 24 900 0.04
MAITEN 498 -0.01
MORRO 1438 0.04
V.
ROBLES
2040 -0.01
R.
GRANDE
862 0.31
Vectores
Puede verse que la diferencia entre las coordenadas absolutas apenas supera el metro, mien-
tras que las coordenadas relativas muestran diferencias por debajo de 1 parte por millón de la
longitud del vector. Si bien estos resultados no pueden generalizarse a todos los puntos
POSGAR, la comparación constituye un resultado excelente desde dos puntos de vista dife-
rentes:
• Muestra que POSGAR 94 materializa un marco de referencia de muy buena calidad, tanto
en su posicionamiento geocéntrico como en su precisión relativa.
• Permite inferir que las coordenadas POSGAR 94 sufrirán variaciones pequeñas, práctica-
mente imperceptibles para la gran mayoría de las aplicaciones prácticas, cuando se realice la
vinculación con SIRGAS.
La precisión de una red geodésica no constituye un bien en sí mismo, sino en la medida que
la hace útil a nuevos y más variados usuarios. Mientras que una red de alta precisión puede
satisfacer las necesidades de los usuarios que sólo requieren baja precisión, lo inversa es a
todas luces falso. Si bien la diferencia entre los sistemas POSGAR 94 y un POSGAR 98 serán
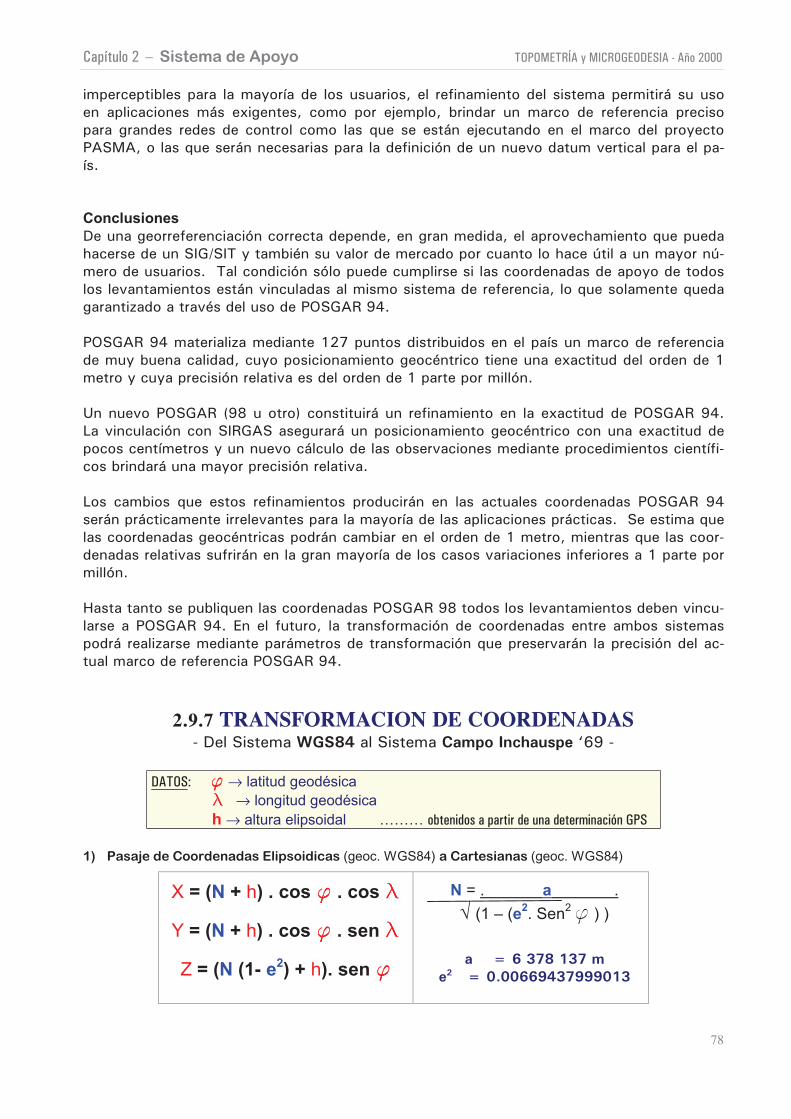
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
78
imperceptibles para la mayoría de los usuarios, el refinamiento del sistema permitirá su uso
en aplicaciones más exigentes, como por ejemplo, brindar un marco de referencia preciso
para grandes redes de control como las que se están ejecutando en el marco del proyecto
PASMA, o las que serán necesarias para la definición de un nuevo datum vertical para el pa-
ís.
Conclusiones
De una georreferenciación correcta depende, en gran medida, el aprovechamiento que pueda
hacerse de un SIG/SIT y también su valor de mercado por cuanto lo hace útil a un mayor nú-
mero de usuarios. Tal condición sólo puede cumplirse si las coordenadas de apoyo de todos
los levantamientos están vinculadas al mismo sistema de referencia, lo que solamente queda
garantizado a través del uso de POSGAR 94.
POSGAR 94 materializa mediante 127 puntos distribuidos en el país un marco de referencia
de muy buena calidad, cuyo posicionamiento geocéntrico tiene una exactitud del orden de 1
metro y cuya precisión relativa es del orden de 1 parte por millón.
Un nuevo POSGAR (98 u otro) constituirá un refinamiento en la exactitud de POSGAR 94.
La vinculación con SIRGAS asegurará un posicionamiento geocéntrico con una exactitud de
pocos centímetros y un nuevo cálculo de las observaciones mediante procedimientos científi-
cos brindará una mayor precisión relativa.
Los cambios que estos refinamientos producirán en las actuales coordenadas POSGAR 94
serán prácticamente irrelevantes para la mayoría de las aplicaciones prácticas. Se estima que
las coordenadas geocéntricas podrán cambiar en el orden de 1 metro, mientras que las coor-
denadas relativas sufrirán en la gran mayoría de los casos variaciones inferiores a 1 parte por
millón.
Hasta tanto se publiquen las coordenadas POSGAR 98 todos los levantamientos deben vincu-
larse a POSGAR 94. En el futuro, la transformación de coordenadas entre ambos sistemas
podrá realizarse mediante parámetros de transformación que preservarán la precisión del ac-
tual marco de referencia POSGAR 94.
2.9.7 TRANSFORMACION DE COORDENADAS- Del Sistema WGS84 al Sistema Campo Inchauspe ‘69 -
DATOS: ffff → latitud geodésica
llll → longitud geodésica
h → altura elipsoidal ……… obtenidos a partir de una determinación GPS
1) Pasaje de Coordenadas Elipsoidicas (geoc. WGS84) a Cartesianas (geoc. WGS84)
X = (N + h) . cos ffff . cos llll
Y = (N + h) . cos ffff . sen llll
Z = (N (1- e2) + h). sen ffff
N = . a .
√ (1 – (e2. Sen
2 f ) )
a = 6 378 137 m
e2 = 0.00669437999013
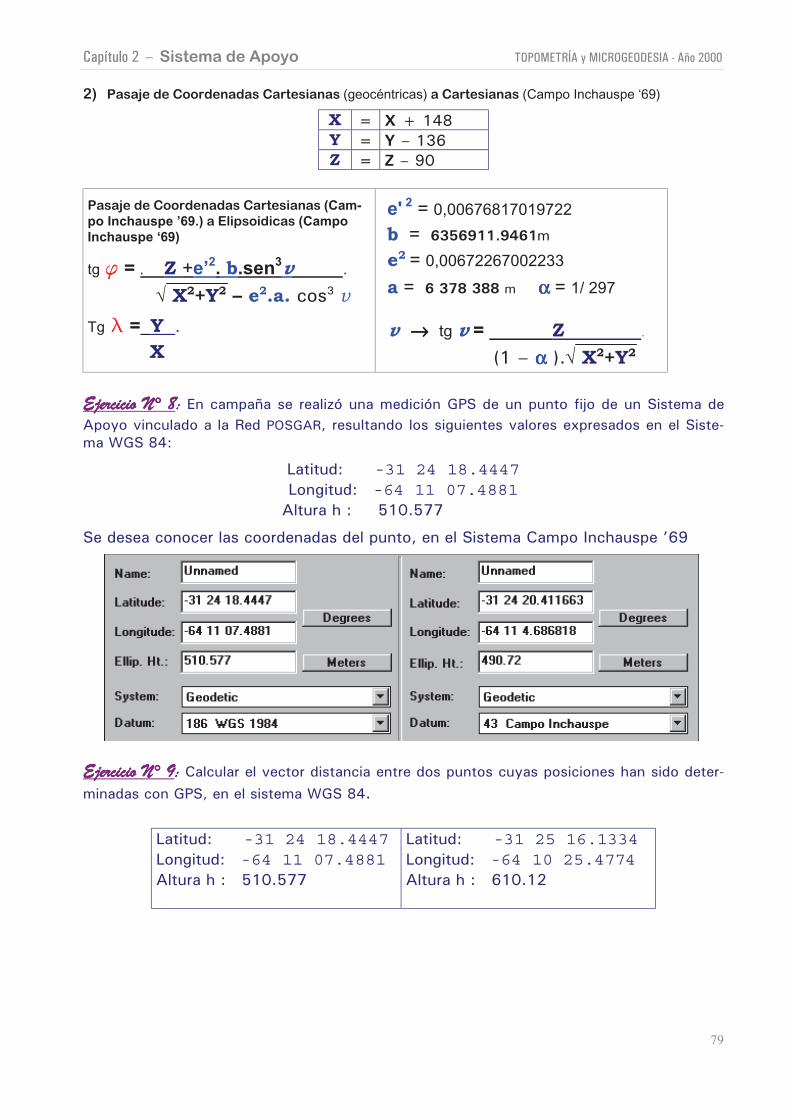
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
79
2) Pasaje de Coordenadas Cartesianas (geocéntricas) a Cartesianas (Campo Inchauspe ‘69)
X = X + 148Y = Y – 136
Z = Z – 90
Pasaje de Coordenadas Cartesianas (Cam-
po Inchauspe ’69.) a Elipsoidicas (Campo
Inchauspe ‘69)
tg ffff = . Z +e’2. b.sen3v .
√ X2+Y
2 – e
2.a. cos3
v
Tg llll = Y .
X
e' 2 = 0,00676817019722
b = 6356911.9461m
e2 = 0,00672267002233
a = 6 378 388 m α α α α = 1/ 297
v →→→→ tg v = Z .
(1 – αααα ).√ X2+Y
2
Ejercicio N° 8Ejercicio N° 8Ejercicio N° 8Ejercicio N° 8:::: En campaña se realizó una medición GPS de un punto fijo de un Sistema de
Apoyo vinculado a la Red POSGAR, resultando los siguientes valores expresados en el Siste-
ma WGS 84:
Latitud: -31 24 18.4447
Longitud: -64 11 07.4881
Altura h : 510.577
Se desea conocer las coordenadas del punto, en el Sistema Campo Inchauspe ’69
Ejercicio N° 9Ejercicio N° 9Ejercicio N° 9Ejercicio N° 9:::: Calcular el vector distancia entre dos puntos cuyas posiciones han sido deter-
minadas con GPS, en el sistema WGS 84.
Latitud: -31 24 18.4447
Longitud: -64 11 07.4881
Altura h : 510.577
Latitud: -31 25 16.1334
Longitud: -64 10 25.4774
Altura h : 610.12
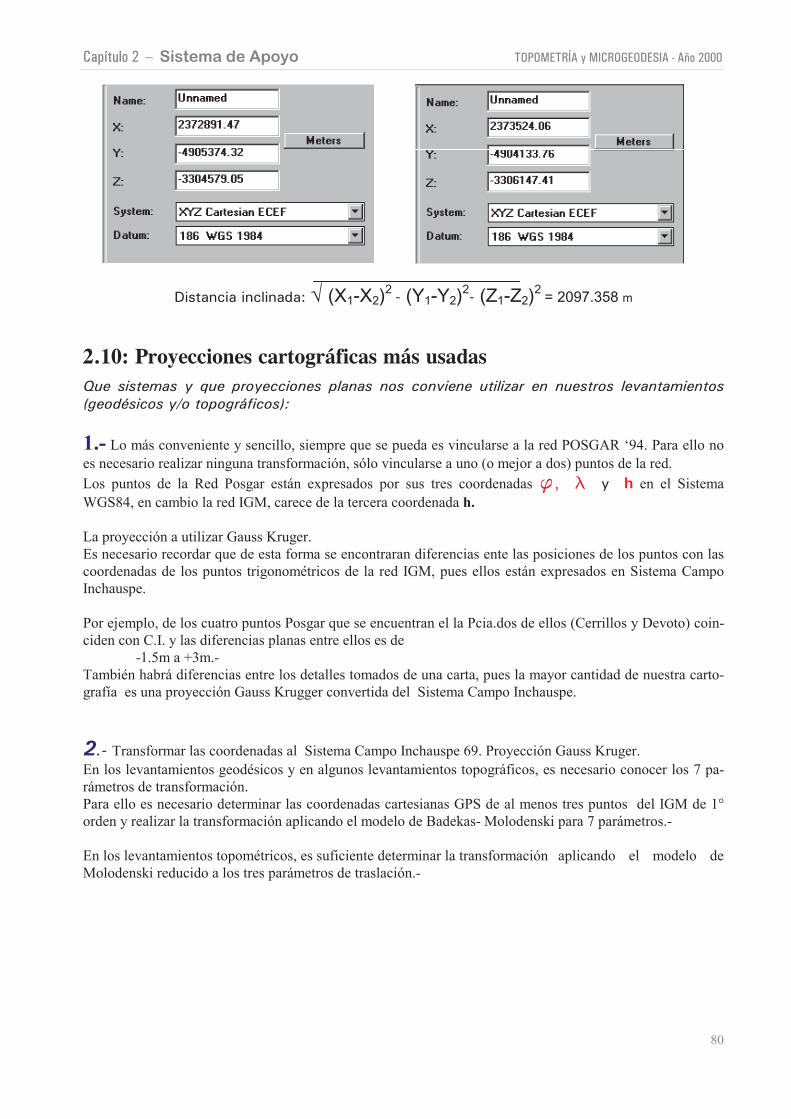
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
80
Distancia inclinada: √ (X1-X2)2 - (Y1-Y2)
2- (Z1-Z2)
2 = 2097.358 m
2.10: Proyecciones cartográficas más usadas
Que sistemas y que proyecciones planas nos conviene utilizar en nuestros levantamientos
(geodésicos y/o topográficos):
1.- Lo más conveniente y sencillo, siempre que se pueda es vincularse a la red POSGAR ‘94. Para ello no
es necesario realizar ninguna transformación, sólo vincularse a uno (o mejor a dos) puntos de la red.
Los puntos de la Red Posgar están expresados por sus tres coordenadas ffff, l , l , l , l y h en el Sistema
WGS84, en cambio la red IGM, carece de la tercera coordenada h.
La proyección a utilizar Gauss Kruger.
Es necesario recordar que de esta forma se encontraran diferencias ente las posiciones de los puntos con las
coordenadas de los puntos trigonométricos de la red IGM, pues ellos están expresados en Sistema Campo
Inchauspe.
Por ejemplo, de los cuatro puntos Posgar que se encuentran el la Pcia.dos de ellos (Cerrillos y Devoto) coin-
ciden con C.I. y las diferencias planas entre ellos es de
-1.5m a +3m.-
También habrá diferencias entre los detalles tomados de una carta, pues la mayor cantidad de nuestra carto-
grafía es una proyección Gauss Krugger convertida del Sistema Campo Inchauspe.
2.- Transformar las coordenadas al Sistema Campo Inchauspe 69. Proyección Gauss Kruger.
En los levantamientos geodésicos y en algunos levantamientos topográficos, es necesario conocer los 7 pa-
rámetros de transformación.
Para ello es necesario determinar las coordenadas cartesianas GPS de al menos tres puntos del IGM de 1°
orden y realizar la transformación aplicando el modelo de Badekas- Molodenski para 7 parámetros.-
En los levantamientos topométricos, es suficiente determinar la transformación aplicando el modelo de
Molodenski reducido a los tres parámetros de traslación.-
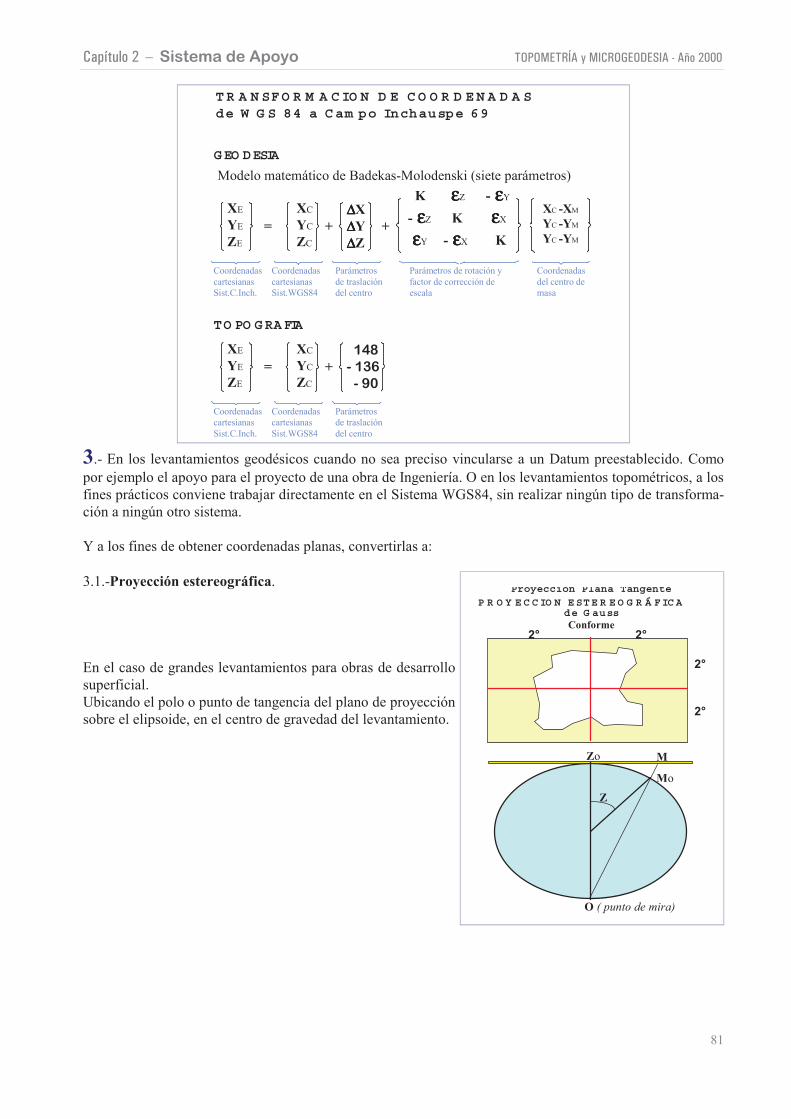
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
81
GEO DESIA
TR A N SFO R M A C IO N D E C O O R D EN A D A Sde W G S 84 a Cam po Inchauspe 69
Modelo matemático de Badekas-Molodenski (siete parámetros)
XE
YE
ZE
K ε ε ε εZ - ε ε ε εY
- ε ε ε εZ K εεεεX
ε ε ε εY - ε ε ε εX K=
XC
YC
ZC
+
∆∆∆∆X
∆∆∆∆Y
∆∆∆∆Z
+
XC -XM
YC -YM
YC -YM
Coordenadas
cartesianas
Sist.C.Inch.
Coordenadas
cartesianas
Sist.WGS84
Parámetros
de traslación
del centro
Parámetros de rotación y
factor de corrección de
escala
Coordenadas
del centro de
masa
TO PO GRAFIA
XE
YE
ZE
=
XC
YC
ZC
+
148
- 136
- 90
Coordenadas
cartesianas
Sist.C.Inch.
Coordenadas
cartesianas
Sist.WGS84
Parámetros
de traslación
del centro
3.- En los levantamientos geodésicos cuando no sea preciso vincularse a un Datum preestablecido. Como
por ejemplo el apoyo para el proyecto de una obra de Ingeniería. O en los levantamientos topométricos, a los
fines prácticos conviene trabajar directamente en el Sistema WGS84, sin realizar ningún tipo de transforma-
ción a ningún otro sistema.
Y a los fines de obtener coordenadas planas, convertirlas a:
3.1.-Proyección estereográfica.
En el caso de grandes levantamientos para obras de desarrollo
superficial.
Ubicando el polo o punto de tangencia del plano de proyección
sobre el elipsoide, en el centro de gravedad del levantamiento.
Proyección Plana Tangente
P R O Y E C C IO N E STE R E O G R Á FIC Ade G aussConforme
Zo
O ( punto de mira)
Z
M
Mo
2° 2°
2°
2°

Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
82
3.2.-Gauss Kruger
En el caso de levantamientos Lineales cuya
dirección sea sensiblemente de Norte - Sur,
adoptando un meridiano de tangencia cen-
trado al área del levantamiento.
O
Proyección Cilíndrica TangenteTransversa
P R O Y E CC IO N G A U SS-K R U G E R
Conforme
1°30’ 1°30’
3.3.-UTM
En el caso de levantamientos Linea-
les cuya dirección sea sensiblemente
de Este - Oeste, adoptando el meri-
diano central en la mitad de la faja
del levantamiento.
Proyección Cilíndrica SecanteTransversa
P R O Y ECCIO N U .T.M .
Conforme
O
3° 3°
Ejercicio N° 10 Ejercicio N° 10 Ejercicio N° 10 Ejercicio N° 10 Hemos definido la posición de un punto, mediante el empleo de un equipo GPS. Sus coor-
denadas se encuentran expresadas en el Sistema WGS84
latitud = -31 24 18.4447
longitud = -64 11 07.4881
altura = 520.577
2 ) Convertir las coordenadas elipsóidicas a coordenadas cartesianas
(siempre en el sistema WGS84):
3 ) Realizar la transformación de coordenadas del sistema WGS84 a Campo Inchauspe. Lo haremos reali-
zando las corrección de traslación del centro del elipsoide de referencia.
No se consideran las rotaciones ni la corrección por factor de escala:
Xi = Xw + ∆X = X + 148 m =
Yi = Yw + ∆X = X - 136 m =
Zi = Zw + ∆X = X - 90 m =
4 ) Convertir las coordenadas cartesianas Campo Inchauspe en coordenadas elipsóidicas
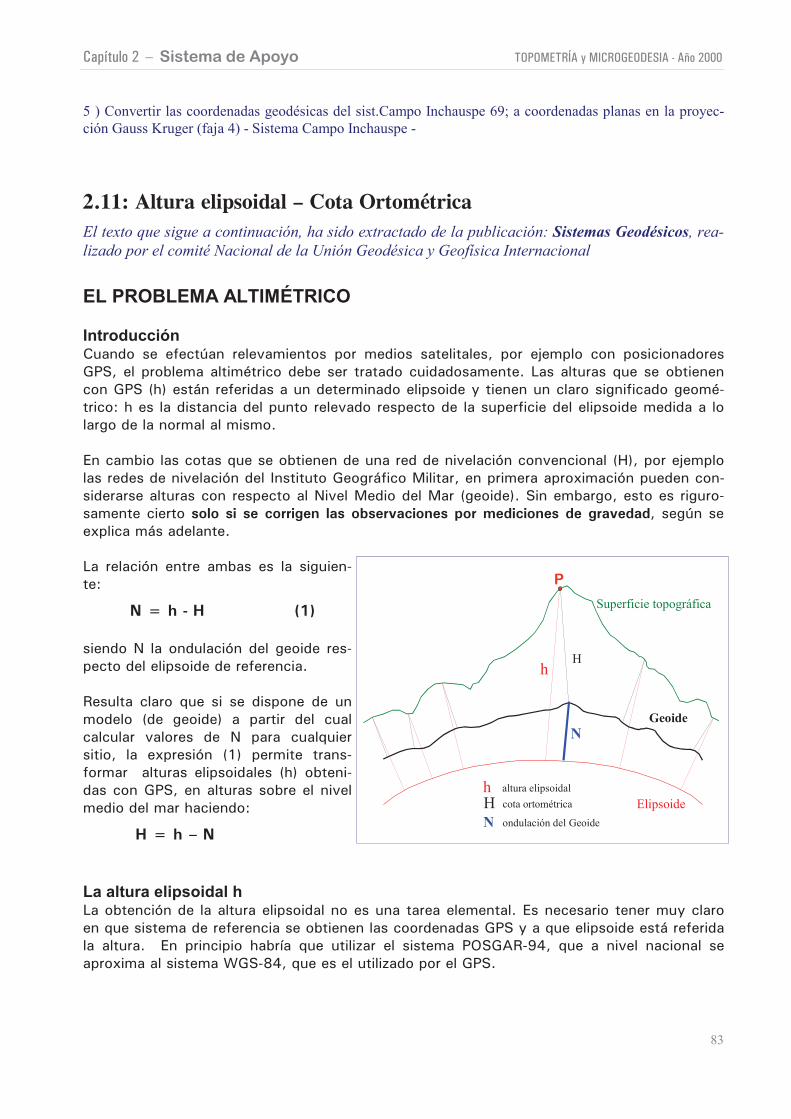
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
83
5 ) Convertir las coordenadas geodésicas del sist.Campo Inchauspe 69; a coordenadas planas en la proyec-
ción Gauss Kruger (faja 4) - Sistema Campo Inchauspe -
2.11: Altura elipsoidal – Cota Ortométrica
El texto que sigue a continuación, ha sido extractado de la publicación: Sistemas Geodésicos, rea-
lizado por el comité Nacional de la Unión Geodésica y Geofísica Internacional
EL PROBLEMA ALTIMÉTRICO
IntroducciónCuando se efectúan relevamientos por medios satelitales, por ejemplo con posicionadoresGPS, el problema altimétrico debe ser tratado cuidadosamente. Las alturas que se obtienencon GPS (h) están referidas a un determinado elipsoide y tienen un claro significado geomé-trico: h es la distancia del punto relevado respecto de la superficie del elipsoide medida a lolargo de la normal al mismo.
En cambio las cotas que se obtienen de una red de nivelación convencional (H), por ejemplolas redes de nivelación del Instituto Geográfico Militar, en primera aproximación pueden con-siderarse alturas con respecto al Nivel Medio del Mar (geoide). Sin embargo, esto es riguro-samente cierto solo si se corrigen las observaciones por mediciones de gravedad, según seexplica más adelante.
La relación entre ambas es la siguien-te:
N = h - H (1)
siendo N la ondulación del geoide res-pecto del elipsoide de referencia.
Resulta claro que si se dispone de unmodelo (de geoide) a partir del cualcalcular valores de N para cualquiersitio, la expresión (1) permite trans-formar alturas elipsoidales (h) obteni-das con GPS, en alturas sobre el nivelmedio del mar haciendo:
H = h – N
Superficie topográfica
Geoide
Elipsoide
N
h
h altura elipsoidal
H cota ortométrica
N ondulación del Geoide
H
P
La altura elipsoidal hLa obtención de la altura elipsoidal no es una tarea elemental. Es necesario tener muy claroen que sistema de referencia se obtienen las coordenadas GPS y a que elipsoide está referidala altura. En principio habría que utilizar el sistema POSGAR-94, que a nivel nacional seaproxima al sistema WGS-84, que es el utilizado por el GPS.
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
84
Este punto es muy delicado porque como se puede advertir en (1), las ondulaciones del geoi-de (N) también se refieren a un sistema determinado (y a un elipsoide asociado) que tieneque ser el mismo que el utilizado para el cálculo de h.
La precisión con que se obtienen las alturas elipsóidicas (h) mediante observaciones GPS di-ferenciales depende de una serie de factores, algunos de los cuales inciden también en laprecisión planimétrica (ver Estandares Geodésicos). En general se ha observado en redes dealta precisión que los errores de h son algo mayores que los observados para la latitud y lon-gitud (entre 1,5 y 2 veces más grandes).
La cota H sobre el nivel medio del mar (geoide)El 70% de la tierra, la superficie media de los océanos, materializa una superficie de nivel delcampo de gravedad terrestre ( superficie de potencial gravitatorio constante o equipotencial).Se puede suponer que está extendida debajo de los continentes y determinada por la atrac-ción producida por la distribución desigual de las masas terrestres. A esta superficie se ladesigna como GEOIDE y se la puede definir como la superficie de nivel que mejor se ajusta alnivel medio del mar.
El geoide no es una superficie analítica, por lo que no es apto como referencia para la deter-minación de posiciones. En cambio, sí es adecuado como superficie de referencia para dife-rencias de potencial o altura, dadas por nivelación directa (geométrica) en combinación conmediciones de gravedad.
Para establecer el origen del geoide como una superficie de referencia para las alturas, el ni-vel del agua del océano se registra en áreas costeras utilizando aparatos registradores de ma-rea (mareógrafos), y se promedia para períodos largos, idealmente unos 19 años. El nivelmedio del mar así obtenido representa una aproximación al geoide. En nuestro país el origenlo proporcionó el mareógrafo ubicado en el puerto de Mar del Plata, y constituye el 0 (cero)oficial de nuestro país.
En la actualidad se está analizando el origen de la red de nivelación argentina mediante lavinculación altimétrica de la misma a varios mareógrafos ubicados a lo largo de la costa(D’Onofrio et al, 1981).
Las cotas publicadas por el IGM son en muchos casos, cotas geométricas compensadas (ver
public. IGM en referencias). Es decir que los resultados de los desniveles medidos se com-
pensaron de forma que "cierren" los anillos y polígonos. Sin embargo para que dichas cotaspuedan considerarse ALTURAS ORTOMETRICAS, respecto del geoide, se requiere que lasmismas se corrijan con mediciones de gravedad para compensar la falta de paralelismo delas superficies equipotenciales a lo largo de la trayectoria. Algunas redes de alta precisión delIGM han sido recalculadas utilizando valores de gravedad normal (que es función de latituden el elipsoide de referencia elegido) obteniendo así ALTURAS ORTOMÉTRICAS TEÓRICAS.
En regiones llanas el efecto de esta corrección ortométrica sobre las cotas geométricas no essignificativo (unos pocos milímetros), pero sí puede ser importante en zonas montañosas (al-gunos decímetros). Sin embargo esta afirmación debe tomarse con mucha precaución porquepara estar seguro de la realidad de una región, es necesario calcular la magnitud de las co-rrecciones con datos gravimétricos reales.
Cabe aclarar que tanto la ausencia de corrección ortométrica como la posibilidad de que exis-ta un error en el origen de las redes de nivelación en uso, afectan de igual forma a los levan-tamientos altimétricos tradicionales como a los satelitales. Es decir que un trabajo de nivela-
Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
85
ción que toma como origen un punto de la red altimétrica, tiene desde el comienzo los mis-mos errores que el punto de partida cualquiera sea la técnica empleada.
Los modelos de geoide
Los modelos de geoide disponibles para nuestro país, son modelos globales, es decir queajustan observaciones de distinto tipo a lo largo de todo el mundo y producen una solución aescala global. Este tipo de modelos, cuya precisión ha ido en rápido aumento en los últimosaños, tienen poca resolución. Esto significa que no pueden dar cuenta de las ondulacionesdel geoide que se producen a escala de pocos kilómetros. Los de uso mas frecuente son losdesarrollados en la Ohio State University denominados OSU89 y OSU91A (Rapp et al, 1991),y más recientemente, el modelo EGM96 de NIMA (Lemoine et al, 1996).
Estos modelos constituyen una buena referencia general y se pueden tomar como base paradesarrollos localizados. Se está trabajando en el desarrollo de un geoide regional mas apro-piado para la zona (Blitzkow et al, 1997; Gil et al,1997; Font et al, 1997).
Metodología GPS para el análisis de un modelo de geoideSe mide una red GPS sobre puntos de nivelación cuya H sea conocida. La red GPS debe te-ner un origen bien definido (POSGAR-94), una estructura y una metodología de medición(tiempos de ocupación, equipamiento, software, etc.), que dependen de la precisión que sedesea alcanzar en la determinación de h.
Se calculan las ondulaciones puntuales del geoide a partir de la ecuación (1).
Nobs = h - H
Se comparan los valores obtenidos (Nobs) con los que se obtienen del modelo existente(Ncal), por ejemplo con el OSU91a o el EGM96.
Cabe esperar que haya apartamientos sistemáticos entre Nobs y Ncal debido a los problemasde orígen mencionados en los puntos 1 y 2, las correcciones ortométricas ausentes en H,como también los que provienen del propio modelo global. En tal caso, puede estimarse unadiferencia media y eliminarla de todas las diferencias individuales (desviaciones respecto delpromedio).
Lo que interesa analizar son las variaciones de las diferencias Nobs-Ncal. Si estas son gran-des en relación con la precisión deseada, es evidente que el modelo no ajusta correctamentelas ondulaciones de N en la región. Es necesario contar con una red GPS suficientementedensa para describir apropiadamente las correcciones a aplicar a Ncal sobre toda la zona. Silas diferencias se mantienen constantes o suavemente variables (como para permitir una in-terpolación sencilla), entonces se pueden utilizar directamente las diferencias así calculadaspara corregir los valores del modelo en la zona de trabajo. Varios trabajos sobre el particularse pueden encontrar en Perdomo et al, 1997 y 1998.
Cotas GeopotencialesLas alturas definidas hasta aquí no son geopotenciales. Puntos de igual altura elipsóidica o deigual altura ortométrica no necesariamente pertenecen a la misma superficie de nivel.

Capítulo 2 – Sistema de Apoyo TOPOMETRÍA y MICROGEODESIA - Año 2000
86
La definición de cota geopotencial se puede obtener también a partir de las observacionesgravimétricas. La cota geopotencial se mide en unidades de gravedad por metro (Gal × m), ysuele dividirse por un valor de gravedad fijo a efectos de obtener un valor de cota en metros.
Tipos de alturasEl problema planteado y la metodología expuestos en este capítulo tienen, en muchos aspec-tos, un carácter local o nacional. Es conveniente, asimismo, tener presentes los esfuerzos decooperación internacional en la búsqueda de la necesaria homogeneidad de tratamiento. Asíes que en el marco del proyecto SIRGAS se estableció un grupo de trabajo (Grupo III, Siste-ma Vertical de Referencia) cuya misión es establecer las bases conceptuales y metodológicaspara la adopción de un sistema vertical común para los países de la América del Sur. Es porello que se incluyen como anexo, al final del documento, las definiciones elaboradas por di-cho grupo.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
87
Algunas palabras sobre la responsabilidad de los jóvenes….
“… La ciencia y la experiencia pueden crecer andando la vida, pero la vivacidad, la prontitud, la firme-
za, los ideales y otras loables cualidades son virtud solo de la juventud, las cuales se marchitan y langui-
decen al sobrevivir la vejez…”
LUCRECIO 452.-
“…cada individuo a los 20 años anuncia lo que de él puede esperarse, ninguna alma oscura a esa edad
se vuelve luminosa después. Todas las grandes acciones de la historia han sido escritas antes de los 30
años…”
MONTAIGNE 1535.-
“ …toda juventud es inquieta, el impulso hacia la creación, hacia lo mejor, solo puede esperarse de per-
sonas muy jóvenes, jamás de los enmohecidos, ni de los seniles.
Y solo es juventud la sana e iluminada, la que mira al frente y no a las espaldas; nunca los decrépitos de
pocos años, prematuramente domesticados por la rutina… lo que en ellos debió ser primavera es solo
tibieza otoñal, ilusión de aurora que es ya un apagamiento de crepúsculo…solo hay juventud, en los que
trabajan y viven con entusiasmo ”
JOSE INGENIEROS 1910
“ …toda juventud es inquieta, el impulso hacia la creación, hacia lo mejor, solo puede esperarse de per-
sonas muy jóvenes, jamás de los enmohecidos, ni de los seniles.
Y solo es juventud la sana e iluminada, la que mira al frente y no a las espaldas; nunca los decrépitos de
pocos años, prematuramente domesticados por la rutina… lo que en ellos debió ser primavera es solo
tibieza otoñal, ilusión de aurora que es ya un apagamiento de crepúsculo…solo hay juventud, en los que
trabajan y viven con entusiasmo ”
JOSE INGENIEROS 1910
FRIEDRICH NIETZSCHE
“… - dadme primero la vida, luego os proporcionaré con ella una cultura !,
así grita cada uno de esta nueva generación, y todos ellos se reconocerán en ese
grito… y quién ?... quien les va a dar esa vida ??
- ningún dios y ningún ser humano... ¡ Solo vuestra propia juventud !
Liberadla, y habréis liberado la vida con ella ...”
“ Se es joven únicamente con la condición de que el alma no bostece, no anhele la
paz...”
“ También la juventud tiene su forma propia de razonar: una razón que crece en
la vida, en el amor y en la esperanza.”
También sobre nuestra responsabilidad … la de los docentes
“… algunas academias suelen ser cementerios donde se glorifica a los hombres que ya han de-
jado de existir para su ciencia o su arte. Es natural que en ella cursen estudiantes también ya
muertos o agonizantes; si a ella concurriese un joven significaría enterrarlo en vida…”JOSE INGENIEROS 1910
“... retrocediendo en el camino de la vida, descubrir igualmente que hay algo que es irreparable: la desa-
parición de nuestra juventud, cuando nuestros educadores no han empleado esos años ardientes y ávidos
de saber, para conducirnos ante el conocimiento de las cosas.” FRIEDRICH NIETZSCHE 1875
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
88
Capitulo 3. Captura de datos
3.1: Objetivos
El objeto es la construcción de un “modelo” conceptual de la realidad.
Dice A.Felicísimo (Madrid) Un modelo es:
según una definición: “una representación simplificada de la realidad en la que solo se expresan
algunas de sus propiedades”.
Y otra definición dice: “ objeto, concepto o conjunto de relaciones que se utiliza para representar y
estudiar de forma simple y comprensible, una porción de la realidad empírica”
Los modelos se construyen para conocer o predecir propiedades del objeto real.
Esta maqueta virtual, en nuestro caso nos servirá de infraestructura básica sobre el cual se
concretará el proyecto ejecutivo, por lo tanto, cuanto más fielmente se ajuste el modelo a la
realidad, más veraz resultará el proyecto.
Esto le plantea un verdadero desafío al profesional, ya que un modelo perfecto sería el que
represente los infinitos puntos que componen la realidad, pero como esto es imposible, ya que
tal emprendimiento le insumiría toda una vida, deberá realizar una selección, es decir tomar el
número de puntos necesario y suficiente para elaborar un modelo que se aproxime lo más po-
sible a la realidad.
Para ello el profesional deberá elegir, posicionar y relevar los puntos más significativos
del terreno, de tal forma que al generalizar la información, la dispersión quede encerra-
da dentro de un margen de confianza previamente establecido.
La precisión o calidad de un modelo, puede valorarse sometiendo una parte de los resultados a
una prueba, o control experimental. Al ser el modelo una representación simplificada de la rea-
lidad, siempre existirá un error de modelo, el cual se podrá reducir hasta encerrarlo en un en-
torno, pero nunca podrá ser eliminado.
La reducción del error de modelo puede hacerse por dos caminos:
aumentando la precisión de las mediciones
aumentando el universo del muestreo.
Esta simplificación o síntesis, será consecuencia del criterio del Agrimensor, como así también
lo será la elección de la proyección, la escala de representación, equidistancia de las curvas de
nivel, las exactitudes previstas, el sistema y marco de referencia, etc.
El criterio se va construyendo, a partir de las pautas básicas que el alumno adquiere de los cur-
sos de las Topografías, y se continúa elaborando con el aporte de la propia experiencia profe-
sional.
Para ello, en cada trabajo que el Agrimensor encare, deberá realizar un minucioso análisis de
las variables que intervienen y de las inter relaciones que entre ellas se generan; y al concluir el
emprendimiento, un análisis crítico que le permita ponderar si se alcanzaron todos los objetivos
propuestos y si el análisis previo fue el correcto.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
89
La captura de datos incluye el levantamiento plani altimétrico de puntos que definen la topografía y el
relieve del terreno, que serán la base para la elaboración de los MAT (modelos analógicos del terreno),
MDT (Modelo Digital del Terreno); o MDE (Modelo Digital de Elevaciones): sostén sobre el cual se vol-
cará toda la información sobre los hechos que existen y conforman la realidad, y la información adicional
que en cada caso en particular requiera el proyectista.
Topografía y Forma del relieve
Información
El modelo digital pertenece al grupo de los denominados modelos simbólicos, los cuales repre-
sentan al objeto real mediante una codificación matemática: cifras.
Un modelo digital del terreno (MDT); es una estructura numérica de datos que representan la
distribución espacial de una variable cuantitativa y de distribución continua.
Un plano topográfico o una carta temática, son también modelos de la realidad, sin embargo
no es un modelo digital sino que es un modelo analógico, también denominados MAT (modelos
analógicos del terreno).
Ambos tipos de modelos se complementan y es muy difícil que en un futuro, uno pueda re-
emplazar totalmente al otro. Sin embargo el empleo de los MDT sobre los analógicos ofrece
innumerables ventajas, tales como:
poder generar el trabajo bajando los datos en forma directa desde una colectora
poder realizar modificaciones, ediciones y actualizaciones de una manera automati-
zada.
la enorme posibilidad que nos permite realizar simulaciones de procesos reales
la comparación entre dos MDT
la generación de modelos digitales derivados.
De todos los modelos digitales del terreno posibles de elaborar, quizás los más importantes
sean los modelos en 3D (también denominados de malla de alambre), y los MDE (modelos digi-
tales de elevación).
Un MDE modelo digital de elevación, es un modelo digital del terreno, que tiene la particulari-
dad de poseer altura, en todos y cada uno, de los infinitos puntos encerrados dentro de un
área planimétrica pre determinada (zona de inclusión).- Los modelos más simples de MDE, nos
permiten construir modelos digitales derivados, tales como perfiles transversales en cualquier
lugar y con cualquiera orientación. Incorporando al MDE información auxiliar, es posible obte-
ner la construcción de complejos modelos de simulación.
Según A.Felicísimo: “Un modelo digital de elevaciones es una estructura numérica de datos, que representa
la distribución espacial de la altitud de la superficie del terreno”.-
3.2: Topografía y Forma del Relieve
Es menester aclarar, que no siempre es necesario contar con un modelo digital de elevaciones,
o un modelo en 3D, en algunos casos, en especial cuando el objeto es un plano topográfico
para realizar estudios de alternativas previas o de anteproyectos, el plano base puede tratarse
de tan solo una representación plana del terreno.
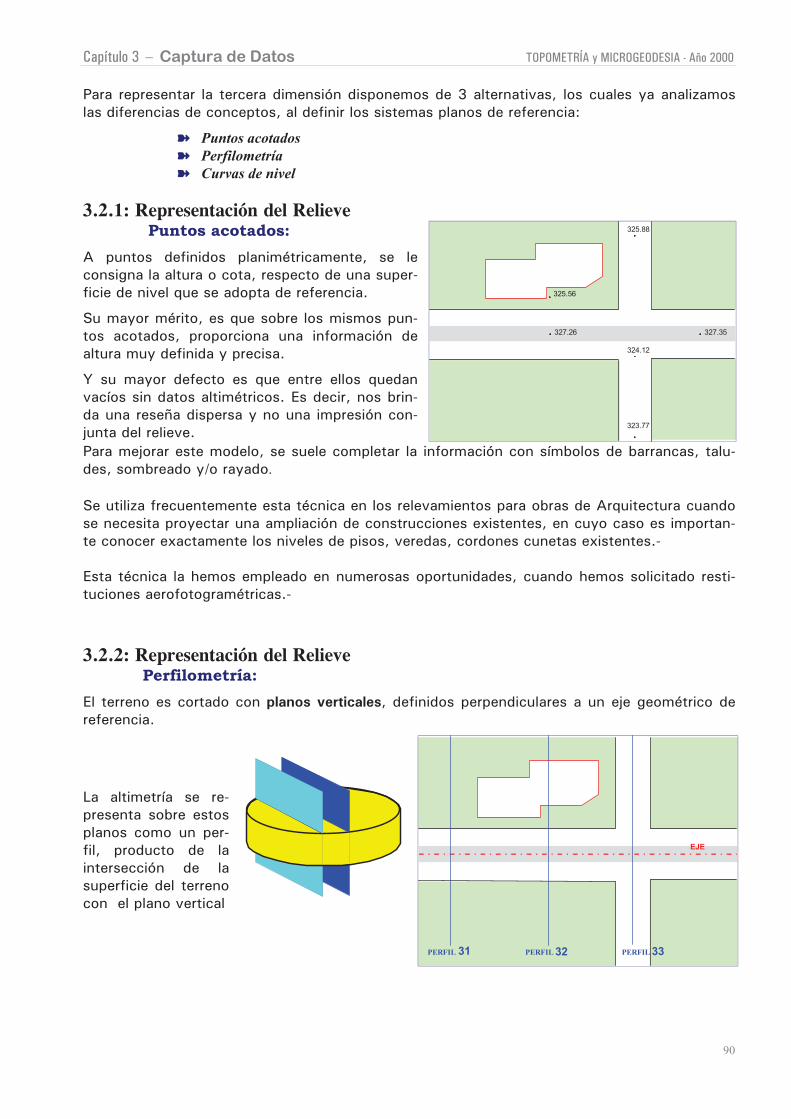
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
90
Para representar la tercera dimensión disponemos de 3 alternativas, los cuales ya analizamos
las diferencias de conceptos, al definir los sistemas planos de referencia:
Puntos acotados
Perfilometría
Curvas de nivel
3.2.1: Representación del Relieve Puntos acotados:
A puntos definidos planimétricamente, se le
consigna la altura o cota, respecto de una super-
ficie de nivel que se adopta de referencia.
Su mayor mérito, es que sobre los mismos pun-
tos acotados, proporciona una información de
altura muy definida y precisa.
Y su mayor defecto es que entre ellos quedan
vacíos sin datos altimétricos. Es decir, nos brin-
da una reseña dispersa y no una impresión con-
junta del relieve.
325.56
327.26
324.12
323.77
325.88
327.35
Para mejorar este modelo, se suele completar la información con símbolos de barrancas, talu-
des, sombreado y/o rayado.
Se utiliza frecuentemente esta técnica en los relevamientos para obras de Arquitectura cuando
se necesita proyectar una ampliación de construcciones existentes, en cuyo caso es importan-
te conocer exactamente los niveles de pisos, veredas, cordones cunetas existentes.-
Esta técnica la hemos empleado en numerosas oportunidades, cuando hemos solicitado resti-
tuciones aerofotogramétricas.-
3.2.2: Representación del Relieve Perfilometría:
El terreno es cortado con planos verticales, definidos perpendiculares a un eje geométrico de
referencia.
La altimetría se re-
presenta sobre estos
planos como un per-
fil, producto de la
intersección de la
superficie del terreno
con el plano vertical
PERFIL32 PERFIL33PERFIL 31
EJE
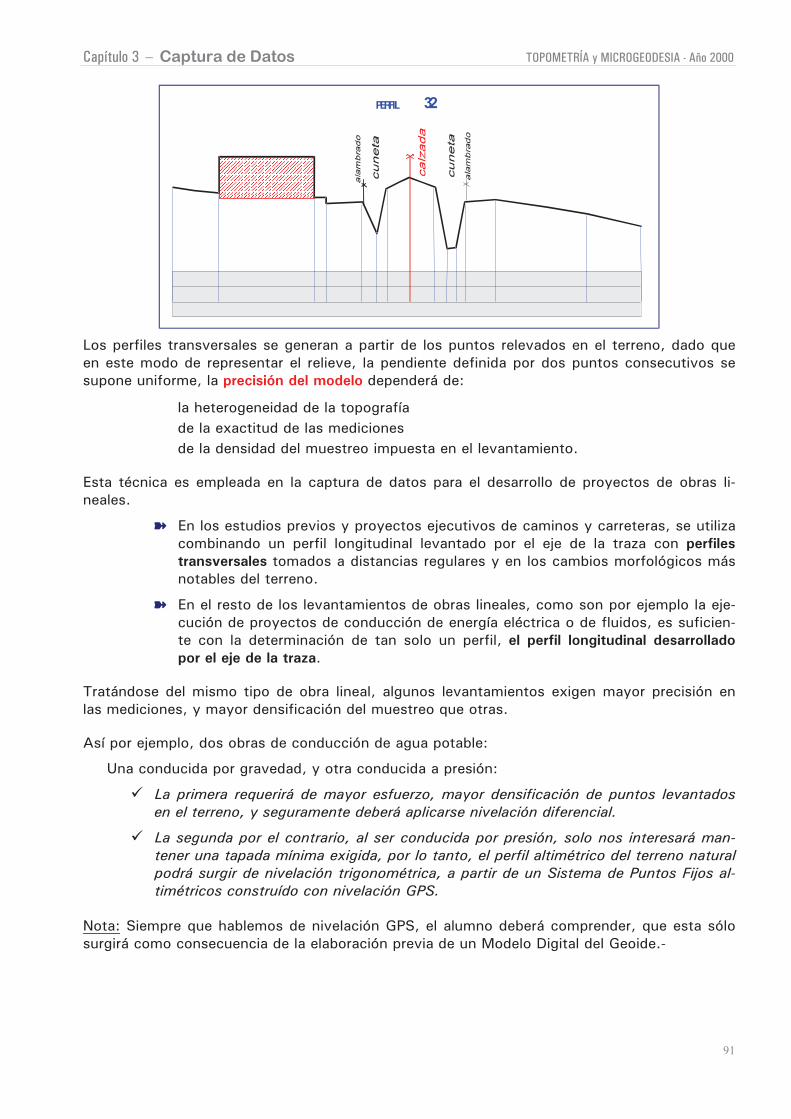
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
91
PERFIL 32
Los perfiles transversales se generan a partir de los puntos relevados en el terreno, dado que
en este modo de representar el relieve, la pendiente definida por dos puntos consecutivos se
supone uniforme, la precisión del modelo dependerá de:
la heterogeneidad de la topografía
de la exactitud de las mediciones
de la densidad del muestreo impuesta en el levantamiento.
Esta técnica es empleada en la captura de datos para el desarrollo de proyectos de obras li-
neales.
En los estudios previos y proyectos ejecutivos de caminos y carreteras, se utiliza
combinando un perfil longitudinal levantado por el eje de la traza con perfiles
transversales tomados a distancias regulares y en los cambios morfológicos más
notables del terreno.
En el resto de los levantamientos de obras lineales, como son por ejemplo la eje-
cución de proyectos de conducción de energía eléctrica o de fluidos, es suficien-
te con la determinación de tan solo un perfil, el perfil longitudinal desarrollado
por el eje de la traza.
Tratándose del mismo tipo de obra lineal, algunos levantamientos exigen mayor precisión en
las mediciones, y mayor densificación del muestreo que otras.
Así por ejemplo, dos obras de conducción de agua potable:
Una conducida por gravedad, y otra conducida a presión:
La primera requerirá de mayor esfuerzo, mayor densificación de puntos levantados
en el terreno, y seguramente deberá aplicarse nivelación diferencial.
La segunda por el contrario, al ser conducida por presión, solo nos interesará man-
tener una tapada mínima exigida, por lo tanto, el perfil altimétrico del terreno natural
podrá surgir de nivelación trigonométrica, a partir de un Sistema de Puntos Fijos al-
timétricos construído con nivelación GPS.
Nota: Siempre que hablemos de nivelación GPS, el alumno deberá comprender, que esta sólo
surgirá como consecuencia de la elaboración previa de un Modelo Digital del Geoide.-
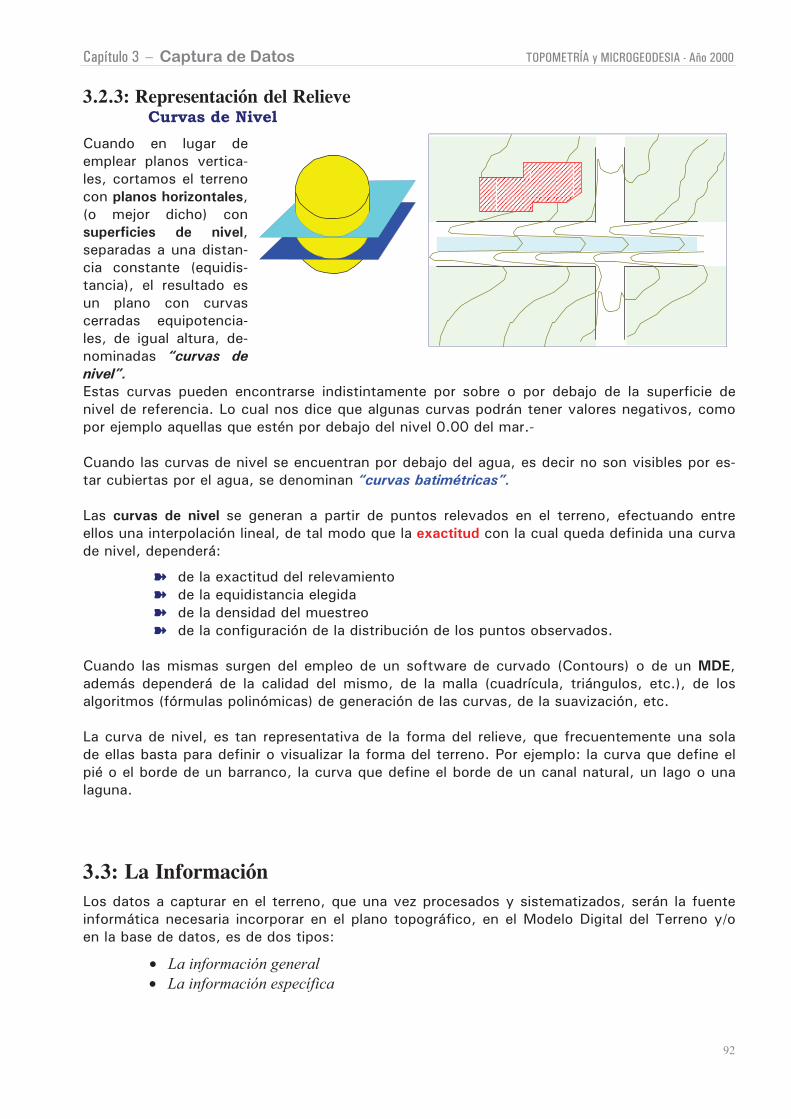
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
92
3.2.3: Representación del Relieve Curvas de Nivel
Cuando en lugar de
emplear planos vertica-
les, cortamos el terreno
con planos horizontales,
(o mejor dicho) con
superficies de nivel,
separadas a una distan-
cia constante (equidis-
tancia), el resultado es
un plano con curvas
cerradas equipotencia-
les, de igual altura, de-
nominadas “curvas de
nivel”.
Estas curvas pueden encontrarse indistintamente por sobre o por debajo de la superficie de
nivel de referencia. Lo cual nos dice que algunas curvas podrán tener valores negativos, como
por ejemplo aquellas que estén por debajo del nivel 0.00 del mar.-
Cuando las curvas de nivel se encuentran por debajo del agua, es decir no son visibles por es-
tar cubiertas por el agua, se denominan “curvas batimétricas”.
Las curvas de nivel se generan a partir de puntos relevados en el terreno, efectuando entre
ellos una interpolación lineal, de tal modo que la exactitud con la cual queda definida una curva
de nivel, dependerá:
de la exactitud del relevamiento
de la equidistancia elegida
de la densidad del muestreo
de la configuración de la distribución de los puntos observados.
Cuando las mismas surgen del empleo de un software de curvado (Contours) o de un MDE,
además dependerá de la calidad del mismo, de la malla (cuadrícula, triángulos, etc.), de los
algoritmos (fórmulas polinómicas) de generación de las curvas, de la suavización, etc.
La curva de nivel, es tan representativa de la forma del relieve, que frecuentemente una sola
de ellas basta para definir o visualizar la forma del terreno. Por ejemplo: la curva que define el
pié o el borde de un barranco, la curva que define el borde de un canal natural, un lago o una
laguna.
3.3: La Información
Los datos a capturar en el terreno, que una vez procesados y sistematizados, serán la fuente
informática necesaria incorporar en el plano topográfico, en el Modelo Digital del Terreno y/o
en la base de datos, es de dos tipos:
• La información general
• La información específica
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
93
3.3.1: La información GeneralEs la información que debe contener cualquier plano topográfico sea cual fuere el fin, es la in-
formación clásica que el alumno ya conoció en las topografías, la de todo levantamiento de
detalles que tiene por objeto representar la planimetría del terreno, es decir:
Cerramientos de límites: alambrados, cercas, muros, pircas, líneas de edificación, líneas
municipales, ...
Calzadas: cordones, cordones cunetas, bordes de calzadas, ...
Líneas de conducción: postes de alumbrado público, líneas de conducción eléctrica (ba-
ja, media, alta tensión), teléfono, video-cable, ...
Cámaras: bocas de registro de desagues pluviales, cloacales, telefonía, ...
construcciones importantes, etc.
3.3.2: La información Específica
dependerá del fin al cual será destinado el plano, por ejemplo:
Si se trata de un levantamiento para una obra de conducción eléctrica, una línea
de alta tensión urbana por ejemplo: importará definir la línea municipal y las lí-
neas medianeras de cada parcela, ubicar todos los accesos a las propiedades y
los garajes. Además todas las interferencias aérea que afecten la futura traza,
tal como líneas de baja y de media tensión, teléfono, TV cable, etc. Con la ubi-
cación de los postes y la altura de las catenarias en cada cruce.
Si por el contrario se trata del proyecto de una red clocal, importa detectar todas
las interferencias subterráneas tales como redes domiciliarias de agua, cruces
subterráneos de cables, pozos ciegos, anchos de veredas, cámaras de teléfonos,
desagües pluviales, tipo estructural de los pavimentos de calles a cruzar, anchos
de calles, etc.
3.3.3: Modos de obtener los datos
Tanto los puntos necesarios para generar el modelo digital, como los puntos que trasmiten la
información pueden ser obtenidos en forma directa mediante un levantamiento en el terreno, o
de forma indirecta a partir de la captura de información ya existente.
3.3.3.a: Modo Directo
Mediante medición directa en el terreno, los datos se incorporan a una base de datos a
tiempo real mediante una colectora electrónica de datos , o se transcriben en planillas o
libretas de campo que luego en gabinete se digitalizan mediante una hoja o planilla de
cálculo Qpro ó Excel.
Los datos que definen la forma del terreno así obtenidos, tienen el formato de
una información estrictamente numérica, cada punto capturado se encontrará
expresado
por 3 coordenadas (X, Y, Z)
por la expresión polar de su vector (rumbo, magnitud y distancia ceni-
tal).
Por otra parte, aquellos datos que trasmiten información, se le adosa un
quinto campo como “atributo” del punto. El resultado es ahora alfa numérico,
a las coordenadas del punto se le ha asociado un código o texto. Ej.:
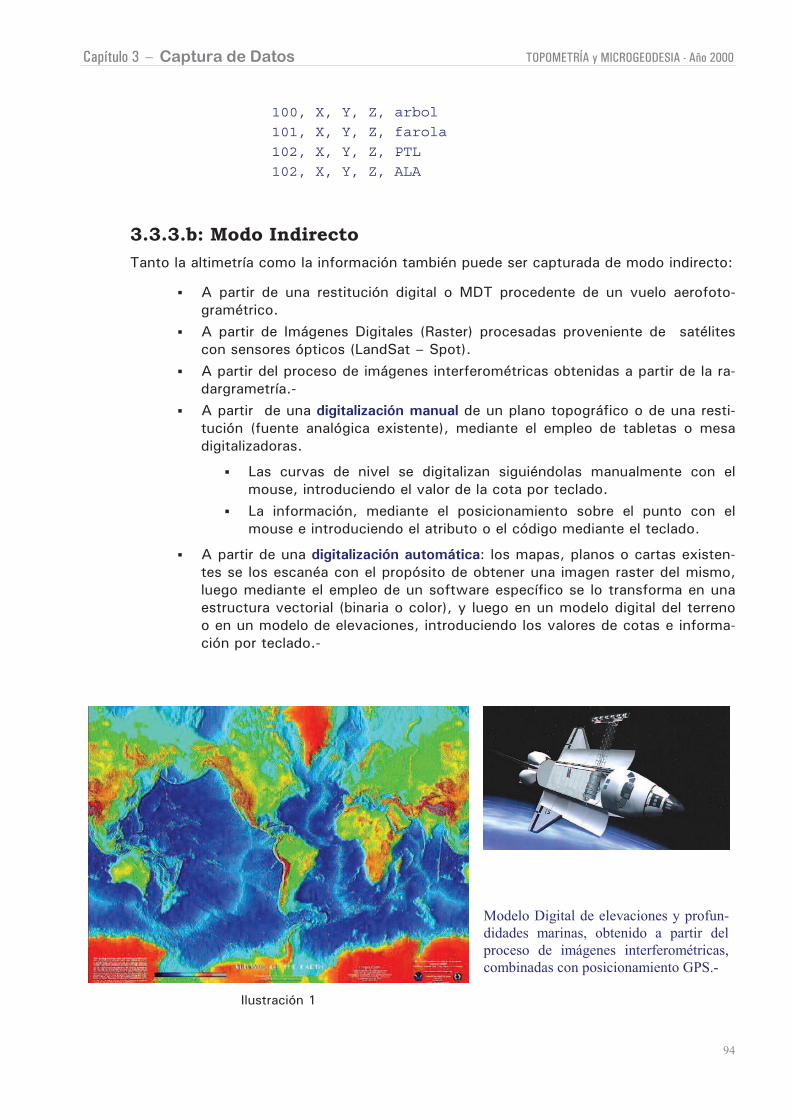
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
94
100, X, Y, Z, arbol
101, X, Y, Z, farola
102, X, Y, Z, PTL
102, X, Y, Z, ALA
3.3.3.b: Modo Indirecto
Tanto la altimetría como la información también puede ser capturada de modo indirecto:
A partir de una restitución digital o MDT procedente de un vuelo aerofoto-
gramétrico.
A partir de Imágenes Digitales (Raster) procesadas proveniente de satélites
con sensores ópticos (LandSat – Spot).
A partir del proceso de imágenes interferométricas obtenidas a partir de la ra-
dargrametría.-
A partir de una digitalización manual de un plano topográfico o de una resti-
tución (fuente analógica existente), mediante el empleo de tabletas o mesa
digitalizadoras.
Las curvas de nivel se digitalizan siguiéndolas manualmente con el
mouse, introduciendo el valor de la cota por teclado.
La información, mediante el posicionamiento sobre el punto con el
mouse e introduciendo el atributo o el código mediante el teclado.
A partir de una digitalización automática: los mapas, planos o cartas existen-
tes se los escanéa con el propósito de obtener una imagen raster del mismo,
luego mediante el empleo de un software específico se lo transforma en una
estructura vectorial (binaria o color), y luego en un modelo digital del terreno
o en un modelo de elevaciones, introduciendo los valores de cotas e informa-
ción por teclado.-
Ilustración 1
Modelo Digital de elevaciones y profun-
didades marinas, obtenido a partir del
proceso de imágenes interferométricas,
combinadas con posicionamiento GPS.-
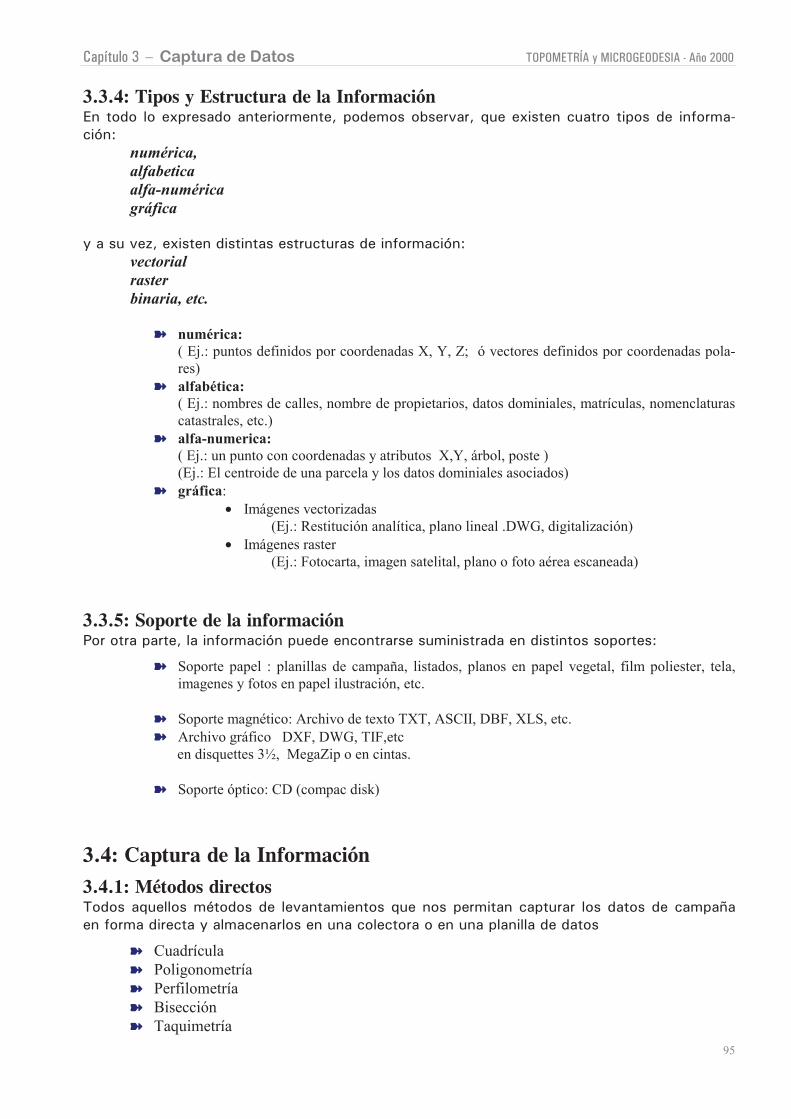
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
95
3.3.4: Tipos y Estructura de la InformaciónEn todo lo expresado anteriormente, podemos observar, que existen cuatro tipos de informa-
ción:
numérica,
alfabetica
alfa-numérica
gráfica
y a su vez, existen distintas estructuras de información:
vectorial
raster
binaria, etc.
numérica:
( Ej.: puntos definidos por coordenadas X, Y, Z; ó vectores definidos por coordenadas pola-
res)
alfabética:
( Ej.: nombres de calles, nombre de propietarios, datos dominiales, matrículas, nomenclaturas
catastrales, etc.)
alfa-numerica:
( Ej.: un punto con coordenadas y atributos X,Y, árbol, poste )
(Ej.: El centroide de una parcela y los datos dominiales asociados)
gráfica:
• Imágenes vectorizadas
(Ej.: Restitución analítica, plano lineal .DWG, digitalización)
• Imágenes raster
(Ej.: Fotocarta, imagen satelital, plano o foto aérea escaneada)
3.3.5: Soporte de la informaciónPor otra parte, la información puede encontrarse suministrada en distintos soportes:
Soporte papel : planillas de campaña, listados, planos en papel vegetal, film poliester, tela,
imagenes y fotos en papel ilustración, etc.
Soporte magnético: Archivo de texto TXT, ASCII, DBF, XLS, etc.
Archivo gráfico DXF, DWG, TIF,etc
en disquettes 3½, MegaZip o en cintas.
Soporte óptico: CD (compac disk)
3.4: Captura de la Información
3.4.1: Métodos directosTodos aquellos métodos de levantamientos que nos permitan capturar los datos de campaña
en forma directa y almacenarlos en una colectora o en una planilla de datos
Cuadrícula
Poligonometría
Perfilometría
Bisección
Taquimetría
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
96
Trilateraciones
Libre estacionamiento
GPS diferencial
GPS diferencial con estación base virtual o radio faro
GPS con estación base permanente y todos los modos: (estático, fast-static, stop & go,
dinámico, etc.)
3.4.2: Métodos indirectosTodos aquellos métodos de levantamientos que nos permitan capturar los datos para la obten-
ción de la forma del relieve del terreno, ó la información general y especifica, de un modo indi-
recto.-
Fotogrametría Terrestre
Fotogrametría aérea
Fotos de satélites
Teledetección Satelitaria
Sensores ópticos
Radargrametría
Teledetección desde aviones y transbordadores espaciales.(shuttle)
Cartografía existente
3.4.3: Clasificación de los objetos
desde un punto de vista Geométrico
OBJETOS PUNTUALES: Puntos de forma del terreno (colectoras, dorsales, rupturas),
mojones, marcas, señales, válvulas, postes de energía eléctrica, farolas, árboles,
postes esquineros de alambrado, esquineros de construcciones.
OBJETOS LINEALES: Alambrados, cercos, muros, lineas municipales, límites de pro-
piedades, bordes de calzada, cordón cuneta, líneas eléctricas, canales de riego.
BLOQUES: Construcciones, obras de arte, cámaras, bocas de registro, grupo de
árboles.
3.4.4: Clasificación de los objetos conforme a la visibilidad
OBJETOS VISIBLES: Son todos los objetos explicitados en el punto anterior, de los
cuales no corresponde realizar mayor comentario.
El mayor cuidado debemos ponerlo en el levantamiento de los puntos que no podemos ver, los
cuales necesariamente deberán quedar necesariamente representados, precisamente a causa
de su invisibilidad.
OBJETOS OCULTOS:
3.4.4.a: Los objetos tienen existencia real pero están ocultos a la vista:
a1.- Ocultos bajo la superficie del agua:
Cuando una obra atraviesa o interfiere una superficie cubierta por agua en forma
permanente o temporal, ya sea ésta natural o artificial, es necesario conocer la
forma del relieve del terreno que está oculta bajo las aguas.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
97
Por ejemplo, un puente carretero que cruza un río (interesa determinar las curvas
batimétricas, el eje de baguada, presencia de bancos de arena, etc.), lo mismo
ocurre si se tratase del proyecto de un puerto fluvial o marítimo.
a2.- Ocultos bajo un manto de árboles:
En el caso de las restituciones realizadas a partir de un vuelo fotogramétrico, fre-
cuentemente ocurre que parte de la información a relevar a quedado oculta en
uno de los pares (o en los dos) por un grupo de arboles, por tal motivo es nece-
sario encarar campañas de levantamiento terrestre a fin de registrar la posición
de esos puntos que no pudo ser capturada de forma indirecta.
a3.- Ocultos bajo la tierra:
La información más peligrosa es la que no se puede ver por encontrarse bajo tie-
rra: Conductos subterráneos (electro ductos, poli ductos, minero ductos, gaso-
ductos, red de agua potable, red cloacal, desagües pluviales, red de telefonía,
etc.)
Ejemplos de distintas consecuencias que podría tener, el haber ejecutado un pro-
yecto sin tomar en cuenta la presencia de conductos subterráneos:
Si se proyecta y se construye un canal, el cual se excavará con zanjadora o
con retro excavadora, si las máquinas cortan una tubería de agua, lo más
probable es que todo un barrio se quede, por varios días sin la provisión del
líquido vital
Si en cambio a su paso encuentra y corta un electroducto de alta tensión el
riesgo es mayor, ya que puede ocasionar la muerte por electrocución de uno
o más operarios
Si por el contrario lo que destruye es un gasoducto de alta presión, seguro
que el accidente tendrá característica de catástrofe.
Por tal causa y para que estas cosas no sucedan, es importantísimo detectar y
relevar las interferencias subterráneas.
Esta información se construye a partir de mediciones directas de campaña, de los
hechos visibles (bocas de registros, válvulas, cámaras, aireadores, etc.) y se
complementa con la información indirecta recopilada, procedente de planos con-
formes a obras, catastros de ductos, etc.
OBJETOS NO VISIBLES:
3.4.4.b: Los objetos no tienen existencia real
b1.- Porque son derechos reales, actos de levantamiento territorial o parcela-
rios que sólo tienen existencia legal. Por ejemplo el límite de un derecho de pro-
piedad, el límite de un radio municipal, la faja de afectación de servidumbre de
electroducto, servidumbre de paso, expropiación, restricción al dominio, la línea
de ribera, el perilago, un loteo aún no materializado, etc.
b2.- Porque solo tienen existencia ideal, como por ejemplo el proyecto apro-
bado de una obra civil, que a pesar que aun no ha sido ejecutada, o todavía no
se iniciaron las acciones legales de exprpiación o afectación de servidumbre; es
necesario respetar.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
98
3.5: Clasificación de los Levantamientos
Así como a las obras las clasificamos desde un punto de vista geométrico, de igual modo y
con el mismo criterio podemos clasificar a los levantamientos en:
levantamientos superficiales
levantamientos lineales
Y a su vez, subdividirlos conforme a la extensión de los mismos.
Levantamientos superficiales
1: de extensión muy reducida:
Directo: bisección.
Indirecto: fotogrametría terrestre
2: de extensión media:
Directo: Poligonometría, Perfilometría, bisección, taquimetría, trilateracio-
nes, libre estacionamiento, cuadrícula. GPS diferencial, GPS diferencial
con base virtual, GPS diferencial con estación permanente y todos los
modos: Estático, fast-static, stop & go, dinámico, etc..
Indirecto: Teledetección desde aviones, fotogrametría aérea a partir de un
vuelo existente, fotogrametría terrestre.
3 : de gran extensión:
Directo: Poligonometría, trilateración, GPS, DGPS.
Indirecto: Teledetección , fotogrametría aérea
Levantamientos lineales
1 : de longitud media:
Directo: Poligonometría, Perfilometría. GPS diferencial, GPS diferencial
con base virtual, GPS diferencial con estación permanente y todos los
modos: Estático, fast-static, stop & go, dinámico, etc.
2 : de gran longitud:
Directo: Poligonometría, Perfilometría. GPS diferencial, GPS dife-
rencial con base virtual, GPS diferencial con estación permanente y
todos los modos: Estático, fast-static, stop & go, dinámico, etc.
Indirecto: Teledetección , fotogrametría aérea
Conforme sea el tipo de levantamiento a realizar, teniendo en cuenta la extensión del mismo, las
exactitudes finales que se requieran; y un correcto análisis de costos, se estudiará y se establecerá
para cada emprendimiento:
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
99
a) EXACTITUDES
• Acotación de errores
Precisión requerida del MDT, MDE o MAT
Exactitud en las curvas de nivel
Exactitud requerida en los puntos del muestreo
Precisión del Sistema de Apoyo
b) SISTEMA DE APOYO
b1) Elección del Sistema de Referencia
• Planimétrico
local arbitrario, local vinculado, general (Inchauspe 69), mundial (WGS84)
• Altimétrico
local arbitrario, local vinculado, geoide local (IGM - nivel del mar), geoide global,
modelo de geoide.
b2) Planificación y construcción del Marco de Referencia
• monumentación, monografías
• método de medición/ compensación
Triangulación, trilateración, poligonación
redes GPS - PAF - PCI
nivelación diferencial --> rodeos, intercalación
nivelación trigonométrica (simultánea y recíproca)
• elección del instrumental
c) METODOLOGIA de MEDICION
Conforme al análisis de: Exactitudes - Tiempos - Costos
• Levantamientos terrestres
Polar: Taquimetría clásica - Taquimetría electrónica
Perfilometría – Cuadrícula – Bisección
GPS
• Elección del instrumental
• Batimetría
Polar: Taquimetría electrónica
Perfilometría – Bisección
Sondeos: Varillas - Ecosonda
• levantamientos fotogramétricos
Terrestre - aéreo – satelital
• Teledetección
Sensores ópticos
Radar.
d) SISTEMA de REPRESENTACION
• elección de la proyección
• directa: ortogonal
• Conforme: escenográfica, Gauss Kruger, UTM.
• Equivalente
• Resultado Final: Elección del software de MDT, confección de planos, láminas, In-
formes, Carpetas. Elección del soporte
Nota: Este análisis no es secuencial, por el contrario debe ser interactivo.
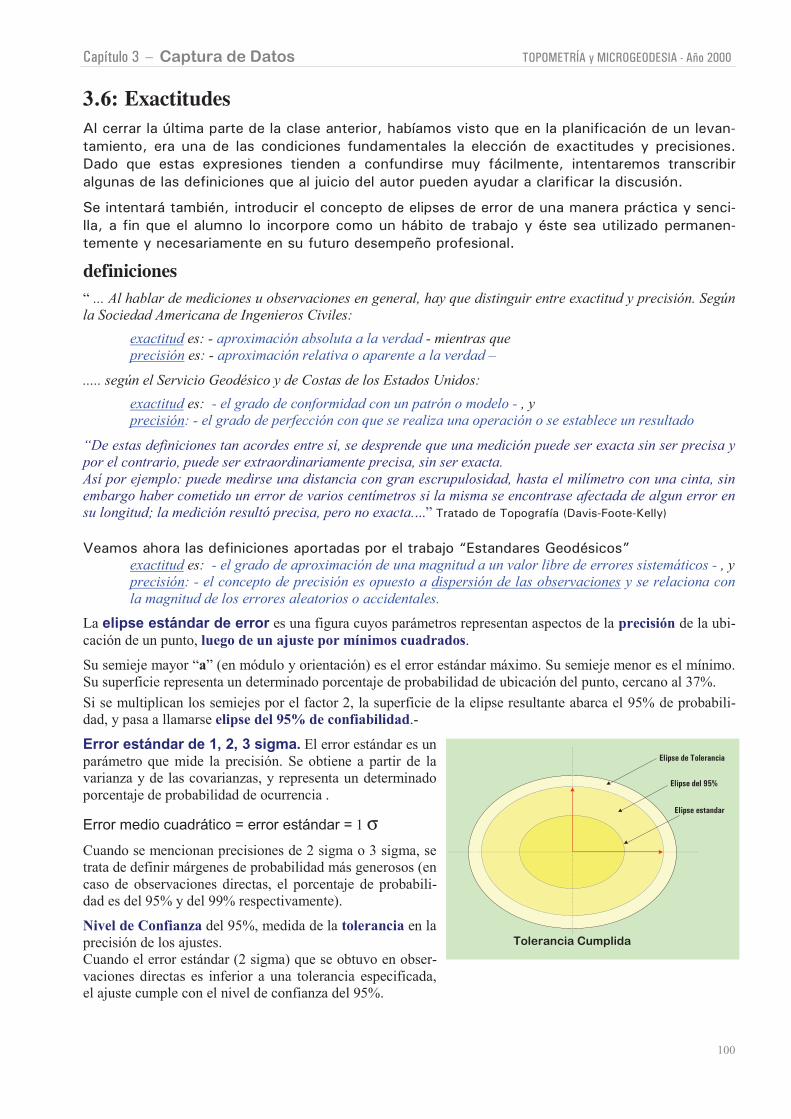
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
100
3.6: Exactitudes
Al cerrar la última parte de la clase anterior, habíamos visto que en la planificación de un levan-tamiento, era una de las condiciones fundamentales la elección de exactitudes y precisiones.Dado que estas expresiones tienden a confundirse muy fácilmente, intentaremos transcribiralgunas de las definiciones que al juicio del autor pueden ayudar a clarificar la discusión.
Se intentará también, introducir el concepto de elipses de error de una manera práctica y senci-lla, a fin que el alumno lo incorpore como un hábito de trabajo y éste sea utilizado permanen-temente y necesariamente en su futuro desempeño profesional.
definiciones
“ ... Al hablar de mediciones u observaciones en general, hay que distinguir entre exactitud y precisión. Según
la Sociedad Americana de Ingenieros Civiles:
exactitud es: - aproximación absoluta a la verdad - mientras que
precisión es: - aproximación relativa o aparente a la verdad –
..... según el Servicio Geodésico y de Costas de los Estados Unidos:
exactitud es: - el grado de conformidad con un patrón o modelo - , y
precisión: - el grado de perfección con que se realiza una operación o se establece un resultado
“De estas definiciones tan acordes entre sí, se desprende que una medición puede ser exacta sin ser precisa y
por el contrario, puede ser extraordinariamente precisa, sin ser exacta.
Así por ejemplo: puede medirse una distancia con gran escrupulosidad, hasta el milímetro con una cinta, sin
embargo haber cometido un error de varios centímetros si la misma se encontrase afectada de algun error en
su longitud; la medición resultó precisa, pero no exacta....” Tratado de Topografía (Davis-Foote-Kelly)
Veamos ahora las definiciones aportadas por el trabajo “Estandares Geodésicos”exactitud es: - el grado de aproximación de una magnitud a un valor libre de errores sistemáticos - , y
precisión: - el concepto de precisión es opuesto a dispersión de las observaciones y se relaciona con
la magnitud de los errores aleatorios o accidentales.
La elipse estándar de error es una figura cuyos parámetros representan aspectos de la precisión de la ubi-
cación de un punto, luego de un ajuste por mínimos cuadrados.
Su semieje mayor “a” (en módulo y orientación) es el error estándar máximo. Su semieje menor es el mínimo.
Su superficie representa un determinado porcentaje de probabilidad de ubicación del punto, cercano al 37%.
Si se multiplican los semiejes por el factor 2, la superficie de la elipse resultante abarca el 95% de probabili-
dad, y pasa a llamarse elipse del 95% de confiabilidad.-
Error estándar de 1, 2, 3 sigma. El error estándar es un
parámetro que mide la precisión. Se obtiene a partir de la
varianza y de las covarianzas, y representa un determinado
porcentaje de probabilidad de ocurrencia .
Error medio cuadrático = error estándar = 1 σCuando se mencionan precisiones de 2 sigma o 3 sigma, se
trata de definir márgenes de probabilidad más generosos (en
caso de observaciones directas, el porcentaje de probabili-
dad es del 95% y del 99% respectivamente).
Nivel de Confianza del 95%, medida de la tolerancia en la
precisión de los ajustes.
Cuando el error estándar (2 sigma) que se obtuvo en obser-
vaciones directas es inferior a una tolerancia especificada,
el ajuste cumple con el nivel de confianza del 95%.
Elipse de Tolerancia
Elipse del 95%
Elipse estandar
Tolerancia Cumplida
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
101
Cuando los errores son tri dimensionales, la elipse de error se transforma en un elipsoide estándarde error. Y de igual modo elipsoide de confianza.
Cuando en error es unidimensional, como el caso de la nivelación diferencial, la elipse se transfor-ma en un segmento vertical, y la llamamos Intervalo estándar de error y de igual modo intervalode confianza.
3.7: Sistema de Apoyo del Relevamiento
3.7.1: Marco de Referencia
Elegido el Sistema de Referencia, el próximo paso es la planificación de la materialización delmarco de referencia, su medición y cálculo.
La planificación de la configuración del Sistema, se encontrará sujeta en primer lugar a laforma de desarrollo del proyecto (superficial - lineal), en segundo lugar a las posiblesubicaciones de la obra dentro del área de trabajo, y finalmente a la metodología de me-dición e instrumental
La planificación de la metodología de trabajo y el instrumental de medición, será conse-cuencia de la acotación de errores deducida a partir de las tolerancias prefijadas.
3.7.2: Precisión de las redes de apoyo
Cuando se planifica un levantamiento topográfico, se fijan pautas de tolerancia, dentro de cuyaelipse deben encontrarse los puntos relevados. A partir de dichas tolerancias prefijadas debededucirse la exactitud de la red de apoyo.Sin embargo en muchas ocasiones, las exactitudes requeridas no están claramente expresadas,en tal caso es conveniente y a veces hasta imprescindible adaptarse a normas o estandares yaestablecidos para redes de control o sistemas de apoyo.-Cuando la red esté encerrada dentro del ámbito espacial establecido para la Microgeodesia po-demos guiarnos por el Manual MGEO, cuando el espaciado ingresa al dominio de la Geodesia,podemos guiarnos por los Estándares Geodésicos
3.7.3: MGEO
Lo que a continuación sigue, es una copia extractada del “ Manual de Normas y Especificacio-
nes para Levantamientos Geodésicos de Alta Precisión en Areas Pequeñas” publicada por el IPGH(Instituto Panamericano de Geografía e Historia), cuyo mayor referente en la comisión redactora fue el desta-cado geodesta, y microgeodesta Exequiel Pallejá.-
El manual define 4 (cuatro) ordenes de precisión: A+, A, B y C (cuyos ejemplos de aplicación son)
A+: Mediciones Industriales, Movimientos de la Corteza terrestre, Movimientos de Estructuras, Ali-neamientos de estructuras.A : Mediciones Industriales, Movimientos de la Corteza terrestre, Movimientos de Estructuras, Ali-neamientos de estructuras, Control geodésico del primer orden y densificación de redes en zonas urba-nas.B : Redes de apoyo para Cartografía y Catastros en zona urbana, proyectos de Ingeniería Civil, Controlpara fines múltiples.C : Redes de apoyo para levantamientos catastrales en zona urbana, Catastro rural, relevamientos deservicios.
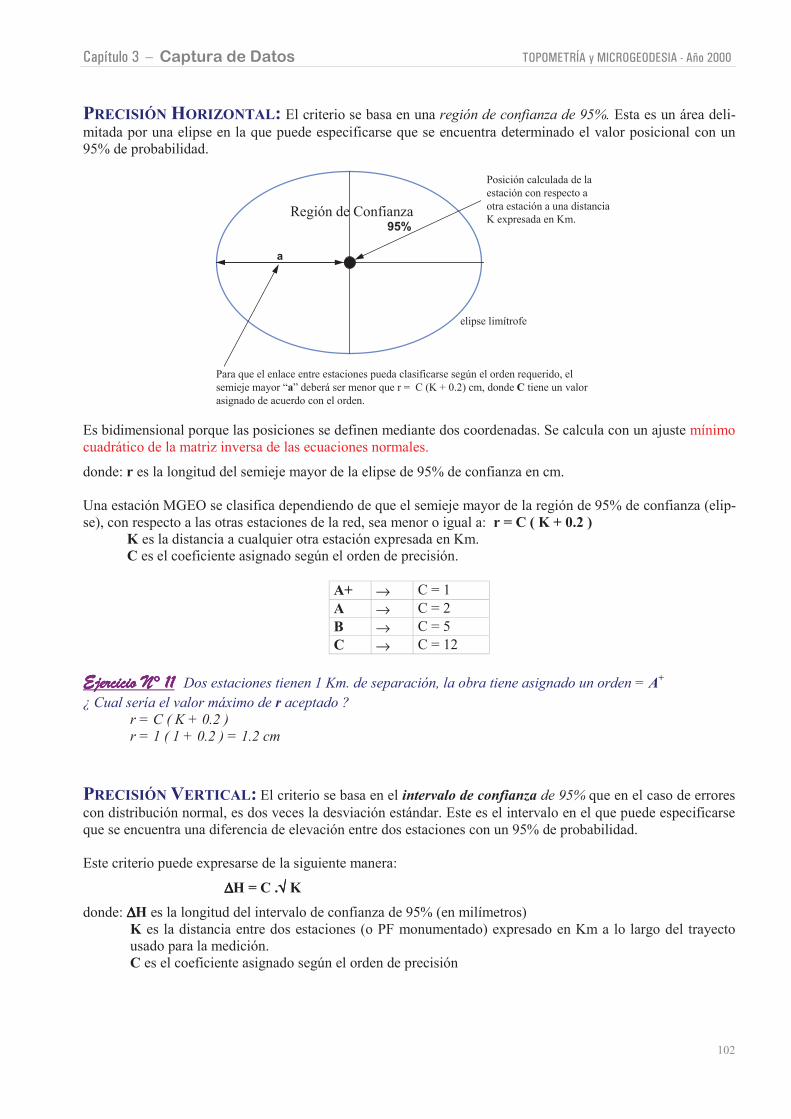
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
102
PRECISIÓN HORIZONTAL: El criterio se basa en una región de confianza de 95%. Esta es un área deli-
mitada por una elipse en la que puede especificarse que se encuentra determinado el valor posicional con un95% de probabilidad.
a
Región de Confianza95%
Posición calculada de la
estación con respecto a
otra estación a una distancia
K expresada en Km.
elipse limítrofe
Para que el enlace entre estaciones pueda clasificarse según el orden requerido, el
semieje mayor “a” deberá ser menor que r = C (K + 0.2) cm, donde C tiene un valor
asignado de acuerdo con el orden.
Es bidimensional porque las posiciones se definen mediante dos coordenadas. Se calcula con un ajuste mínimocuadrático de la matriz inversa de las ecuaciones normales.
donde: r es la longitud del semieje mayor de la elipse de 95% de confianza en cm.
Una estación MGEO se clasifica dependiendo de que el semieje mayor de la región de 95% de confianza (elip-se), con respecto a las otras estaciones de la red, sea menor o igual a: r = C ( K + 0.2 ) K es la distancia a cualquier otra estación expresada en Km. C es el coeficiente asignado según el orden de precisión.
A+ → C = 1
A → C = 2
B → C = 5
C → C = 12
Ejercicio N° 11Ejercicio N° 11Ejercicio N° 11Ejercicio N° 11 Dos estaciones tienen 1 Km. de separación, la obra tiene asignado un orden = A+
¿ Cual sería el valor máximo de r aceptado ?
r = C ( K + 0.2 )
r = 1 ( 1 + 0.2 ) = 1.2 cm
PRECISIÓN VERTICAL: El criterio se basa en el intervalo de confianza de 95% que en el caso de errores
con distribución normal, es dos veces la desviación estándar. Este es el intervalo en el que puede especificarseque se encuentra una diferencia de elevación entre dos estaciones con un 95% de probabilidad.
Este criterio puede expresarse de la siguiente manera:
∆∆∆∆H = C .√√√√ K
donde: ∆∆∆∆H es la longitud del intervalo de confianza de 95% (en milímetros)K es la distancia entre dos estaciones (o PF monumentado) expresado en Km a lo largo del trayectousado para la medición.C es el coeficiente asignado según el orden de precisión
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
103
La siguiente tabla muestra los diversos ordenes de precisión para las diferencias en elevación especificadaspara MGEO.
A+ → C = 1
A → C = 2
B → C = 4
C → C = 8
Ejercicio N° 12Ejercicio N° 12Ejercicio N° 12Ejercicio N° 12Necesitamos planificar el sistema de apoyo altimétrico, para un acueducto que tiene 93Km. de longitud
Nos imponemos un error de cierre ω = 5 cm.
Para tal fin, emplearemos una nivelación diferencial, fijando un intervalo de confianza de 95%.-
¿ Cual es el orden de precisión de la red altimétrica solicitada?
∆H = ± ω / 2 = ± 2.5 cm (intervalo de confianza 95%)
∆H = C .√ K = C .√ 93 → C = 25 / √ 93 = 25 / 9.64 = 2.6 mm
Por lo tanto, su clasificación corresponde al orden “ B”
Diseño de Redes. Métodos de Control Horizontal
Punto 4.1 del Manual MGEO Redes horizontales ...4.1.1 Diseño
La precisión total de una red de control horizontal n depende solamente de la precisión de las mediciones decampo (minimización de los efectos de los errores sistemáticos y accidentales), sino también de su configura-ción.Para que una red sea fuerte y confiable, deberá ser razonablemente homogénea y tener muchas medicionesredundantes y figuras individuales de forma definida.Las estaciones deberán encontrarse espaciadas lo más uniformemente posible, y todos los pares adyacentes deestaciones de la red deberán estar enlazados preferiblemente por mediciones directas. La razón de la longitudde la línea más larga a la de la línea más corta nunca debe ser mayor que cinco y normalmente es mucho me-nor.No obstante, a menudo resulta imposible lograr todas estas condiciones deseables. Debido a dificultades que sepresentan en la práctica, hay redes donde los puntos adyacentes no pueden enlazares en una forma convenien-te. Pueden ocurrir variaciones muy grandes en las distancias entre estaciones y es posible que estas tengan quemedirse con diversos instrumentos cuyas precisiones difieren significativamente.El que diseña la red debe tener en cuenta todas estas divergencias respecto al modelo ideal.
A fin de diseñar una red de control horizontal, que permita obtener las precisiones especificadas, la personaresponsable debe contar con buenas estimaciones a priori de la precisión de medición de cada uno de los ins-trumentos que van a usarse. Dichas estimaciones no solo deberán reflejar la coherencia de varias medicionesde la misma cantidad con el mismo instrumento, usando un intervalo corto de tiempo y bajo condiciones idea-les, sino también los posibles efectos de errores aleatorios normales que pueden ocurrir en las operacionesregulares de campo en condiciones típicas de trabajo y con personal medianamente cuidadoso.Además, las estimaciones deberán contemplar también ciertos errores sistemáticos que quizás no resulten evi-dentes en un levantamiento normal; por ejemplo, un error por corrimiento del cero no corregido en los instru-mentos electrónicos de medición de distancias (EDM), errores meteorológicos sistemáticos producidos portécnicas de medición no perfeccionadas, etc.Los apéndices 2A y 2C indican las desviaciones estándares que generalmente pueden esperarse en ciertas cir-cunstancias y aquellas que pueden usarse para estimar los pesos observacionales en los proyectos de diseño deredes.Es posible estimar pesos más altos si se toman precauciones extraordinarias en la calibración y medición.
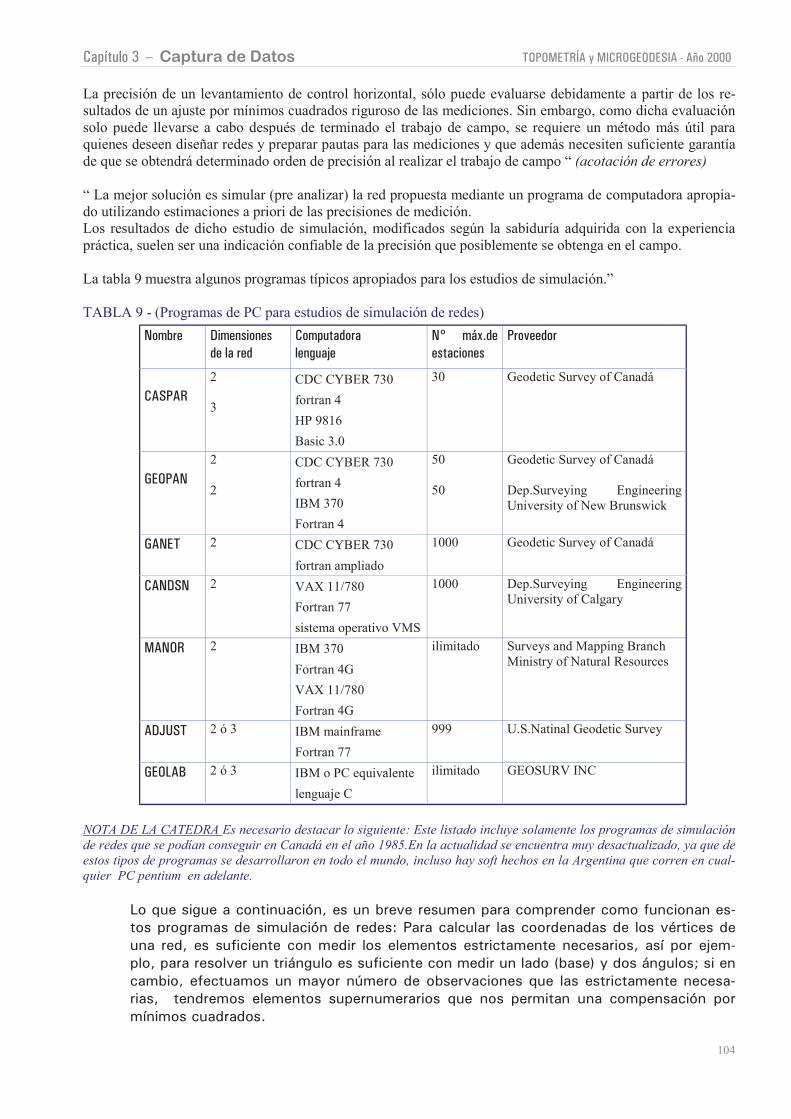
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
104
La precisión de un levantamiento de control horizontal, sólo puede evaluarse debidamente a partir de los re-sultados de un ajuste por mínimos cuadrados riguroso de las mediciones. Sin embargo, como dicha evaluaciónsolo puede llevarse a cabo después de terminado el trabajo de campo, se requiere un método más útil paraquienes deseen diseñar redes y preparar pautas para las mediciones y que además necesiten suficiente garantíade que se obtendrá determinado orden de precisión al realizar el trabajo de campo “ (acotación de errores)
“ La mejor solución es simular (pre analizar) la red propuesta mediante un programa de computadora apropia-do utilizando estimaciones a priori de las precisiones de medición.Los resultados de dicho estudio de simulación, modificados según la sabiduría adquirida con la experienciapráctica, suelen ser una indicación confiable de la precisión que posiblemente se obtenga en el campo.
La tabla 9 muestra algunos programas típicos apropiados para los estudios de simulación.”
TABLA 9 - (Programas de PC para estudios de simulación de redes)
Nombre Dimensionesde la red
Computadoralenguaje
N° máx.deestaciones
Proveedor
CASPAR2
3
CDC CYBER 730
fortran 4
HP 9816
Basic 3.0
30 Geodetic Survey of Canadá
GEOPAN2
2
CDC CYBER 730
fortran 4
IBM 370
Fortran 4
50
50
Geodetic Survey of Canadá
Dep.Surveying EngineeringUniversity of New Brunswick
GANET 2 CDC CYBER 730
fortran ampliado
1000 Geodetic Survey of Canadá
CANDSN 2 VAX 11/780
Fortran 77
sistema operativo VMS
1000 Dep.Surveying EngineeringUniversity of Calgary
MANOR 2 IBM 370
Fortran 4G
VAX 11/780
Fortran 4G
ilimitado Surveys and Mapping BranchMinistry of Natural Resources
ADJUST 2 ó 3 IBM mainframe
Fortran 77
999 U.S.Natinal Geodetic Survey
GEOLAB 2 ó 3 IBM o PC equivalente
lenguaje C
ilimitado GEOSURV INC
NOTA DE LA CATEDRA Es necesario destacar lo siguiente: Este listado incluye solamente los programas de simulación
de redes que se podían conseguir en Canadá en el año 1985.En la actualidad se encuentra muy desactualizado, ya que de
estos tipos de programas se desarrollaron en todo el mundo, incluso hay soft hechos en la Argentina que corren en cual-
quier PC pentium en adelante.
Lo que sigue a continuación, es un breve resumen para comprender como funcionan es-tos programas de simulación de redes: Para calcular las coordenadas de los vértices deuna red, es suficiente con medir los elementos estrictamente necesarios, así por ejem-plo, para resolver un triángulo es suficiente con medir un lado (base) y dos ángulos; si encambio, efectuamos un mayor número de observaciones que las estrictamente necesa-rias, tendremos elementos supernumerarios que nos permitan una compensación pormínimos cuadrados.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
105
El resultado final será un valor que aceptamos como el valor más probable y resultará deajustar el conjunto de las observaciones o el conjunto de los resultados:
l0 + v = la + dl = l
donde: l0 valor de la magnitud observada
v corrección de la observación
la valor aproximado de cálculo
dl corrección calculada
l valor final ajustado
Si aceptamos el carácter diferencial de “dl” la anterior expresión puede escribirse:
v = dl/δx dX + dl/δy dY +.....+ la - l0
de esta forma se obtiene un sistema, donde habrá tantas ecuaciones como observacio-nes realizdas y tantas incognitas como coordenadas.Expresándolo en forma matricial resulta:
v = A X + L
donde: A es la matriz dependiente de la configuración del sistema
X es la matriz de las incognitas
L es la matriz de los términos independientes
La matriz A depende únicamente de la configuración del sistema, de la forma de la figuray por ende de los enlaces establecidos entre los vértices. Si se cambia un vértice de lu-gar, o se agregan ataduras, cambian los resultados.
De tal modo, que dibujando sobre una carta la configuración de un sistema de apoyo,puede obtenerse previamente una correcta acotación de errores de una manera iteracti-va, rápida, eficaz y dinámica.
MÉTODOS: Los métodos convencionales que generalmente se utilizan son triangulación, trilate-ración y poligonación.Todos ellos tienen la desventaja de que, además de las estaciones de control requeridas ac-tualmente por razones prácticas, es necesario proporcionar estaciones intermedias adicionalespara que haya intervisibilidad, sin la cual no sería posible propagar la red.La triangulación: tiene la ventaja que por lo general, el reconocimiento no resulta muy difícil ypermite aplicar a las observaciones en el campo comprobaciones muy sencillas. En las redes detriangulación los usuarios obtienen con facilidad las direcciones (orientación y es posible quedeseen extender sus poligonales desde las estaciones de control ). Además resulta fácil esta-blecer puntos de control” (o de orientación) “adicionales tales como torres de iglesias...” (para-
rrayos en torres, antenas y edificios)
“...por medio de intersecciones directas sin que sea necesario que el punto se encuentre ocu-pado por una señal, reflector u operador.Una de las desventajas de la triangulación es que la precisión se ve afectada por la refracciónhorizontal, la cual es muy difícil de medir y corregir. Se necesita buen tiempo y observacionesde gran precisión que probablemente deberán efectuarse de noche.Salvo en el caso de redes sencillas, la triangulación requiere que una gran cantidad de estacio-nes sean ocupadas a la vez. Por consiguiente, muchas veces se necesita una brigada de camponumerosa.Si se requieren torres para garantizar la intervisibilidad, estas deben ser sumamente resistentesy complicadas (torres internas y externas separadas para el instrumento y el observador).
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
106
Las redes de trilateración: se ven menos afectadas por la refracción ” (lateral) “que las de trian-
gulación, especialmente si se utilizan instrumentos EDM electroópticos para medir las líneas. La
intervisibilidad entre estaciones no es tan crítica” (relativamente) “Si se requieren torres para
este fin, pueden ser razonablemente livianas y portátiles. Las mediciones de las líneas desde
una torre normalmente no se ven afectadas por los movimientos causados por los elementos ”
(giro de la torre por calentamiento diferencial, viento ) “ o el observador. Sin embargo, las redes
de trilateración suelen requerir más líneas por estación, y esto hace que el reconocimiento sea
más difícil, especialmente en áreas urbanas. Además, la trilateración por lo general requiere
algunas mediciones angulares como refuerzo esencial. Las redes extensas requieren control
acimutal frecuente. Es necesario medir las distancias con mayor precisión (en términos propor-
sionales) para obtener la misma precisión general en las estaciones. Las direcciones no pueden
obtenerse facilmente en el caso de usuarios que deseen iniciar las poligonales desde una esta-
ción de la red.
Tampoco pueden establecerse facilmente las líneas acimutales para dichos usuarios cuando se
extiende la red principal.
La poligonación es el método más sencillo para establecer control. El reconocimiento resulta
relativamente sencillo porque hay menos observaciones desde y hacia cada estación. Las ruti-
nas de observación son relativamente cortas y sencillas. Por este motivo, la brigada de campo
puede ser mucho más pequeña que las requeridas para la triangulación y trilateración. Los
usuarios pueden obtener facilmente las direcciones (orientación).
No obstante, la fuerza geométrica de las poligonales es por lo general baja, especialmente en
ángulo recto a la dirección principal del avance. Esto requiere un preanálisis y diseño más cui-
dadoso de la red.
Esta debilidad inherente a la poligonación puede minimizarse, trazando las poligonales en un
patrón de red con muchos puntos nodales de intersección.
De lo contrario, se requieren acimuts de control con relativa frecuencia para mantener la preci-
sión de la orientación.
Como en el caso de las triangulaciones, las observaciones de las poligonales pueden verse afec-
tadas considerablemente por la refracción horizontal.
Con frecuencia se combinan dos métodos convencionales o más, para formar una red híbrida
optima a un menor costo. Esta combinación de métodos resulta mucho más fácil si se utilizan
técnicas de simulación por computadora para diseñar las redes, según se menciona en 4.1.1.
Luego pueden intentarse diversos planes alternos para evaluar rápidamente sus posibles efec-
tos. Los cambios pueden efectuarse rápidamente hasta obtener el diseño más práctico en poco
tiempo.
Cualquiera que sea el método utilizado, todos los levantamientos deben incluir los siguientes
pasos:
a) compilación de la informaciónb) diseño de la red - primer borrador- Diseño preliminar - cartas, fotos, etc
Elección del método e instrumental
Acotación de errores
c) reconocimiento y diseño formal de la redElección del método e instrumental
Acotación de errores
d) amojonamientoe) dibujo, descripciones, itinerario, fotografía Monografías
y fotoidentificación de los hitos en algunos casos.
f) observaciones y cálculo de campo
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
107
g) cálculos y ajuste final.
NOTA DE LA CATEDRA: Tenga presente el alumno, que al momento de la publicación de este manual, año 1985, el
sistema GPS era aún casi una utopía, sin embargo en ese momento el manual decía:
“... Aunque el GPS se encuentra aún en sus inicios - actualmente solo hay seis satélites experimentales - elsistema ya está compitiendo con los métodos convencionales de precisión horizontal para los levantamientosde extensión limitada a que se refiere este manual. Ya se ha logrado una precisión horizontal de 3ppm a distan-cias de 2Km y de 2 ppm. a distancias de 10Km o más. Resulta inevitable que a medida que continúe desarro-llándose el sistema, las precisiones sean cada vez mayores.También se han obtenido alturas precisas determinadas por medio del GPS. Son sin embargo, alturas elipsoi-dales. Aunque resultan muy apropiadas para vigilar los movimientos de la tierra y de las estructuras - dondesolo interesan los cambios de altura con respecto al tiempo - sólo si se conoce con precisión el Geoide local,podrán obtenerse buenas estimaciones de las alturas ortométricas a partir de las mediciones GPS.El rendimiento del GPS ( por entonces) sigue siendo generalmente inferior al de los métodos convencionalespara MGEO. Esto se debe a que en la actualidad hay pocos satélites disponibles (lo cual limita los períodos deobservación a unas cuantas horas diarias) y al alto costo de los receptores (U$ 40.000 a U$ 150.000 cadauno!!). La brecha está disminuyendo rapidamente. Conforme se lancen más satélites y bajen los precios del
equipo, al aumentar la producción para suplir la demanda, es casi seguro que el GPS se convertirá dentro de
poco en el método más usado para determinar con mucha precisión las diferencias posicionales, no solo para
los levantamientos más extensos, sino para MGEO también...”
NOTA DE LA CATEDRA Realmente visionarios fueron los del Comité Geodésico que redactaron este manual, hoy en día
GPS se ha convertido en el método más preciso, más rápido y más cómodo para las mediciones de control planimétrico,
descartando las triangulaciones y las trilateraciones por obsoletas, y quedando solamente en vigencia en la actualidad la
poligonal.
Podemos destacar tres formas de proceder:
1.- El Sistema de apoyo se construye con una poligonación como método principal, y el GPS se emplea para
Control.( Método de captura: Estático ó Fast-estático).
Ej. 1) Se observa con GPS ambos extremos de la poligonal y se compensa como poligonal doblemente
atada aplicando mínimos cuadrados.
Ej. 2) Se colocan dos puntos GPS en cada extremo de la poligonal asegurando la intervisibilidad entre
cada par y se compensa como poligonal doblemente atada y orientada aplicando mínimos cuadrados.
Ej. 3) Se mide con GPS en ambos extremos y en algunos vértices intermedios, donde puede suponer-
se que es más débil la poligonal.
2.- La red principal se mide con GPS .( Método de captura: Estático ó Fast-estático) y se emplea la poligona-
ción como auxiliar con el objeto de densificar la red. Esta manera de proceder, obliga a que exista visibilidad
entre los puntos GPS, a fin de tener orientación en todos los vértices.
3.- La red se mide totalmente con GPS .( Método de captura: Estático ó Fast-estático). y la densificación tam-
bién se realiza con GPS .( Método de captura: Stop & Go) la poligonal es solo una figura geométrica. Esta
manera de proceder, obliga a que exista horizonte GPS en todos los vértices. Aquellos que no puedan ser re-
sueltos deberán ser densificados mediante Estación Total.
Diseño de Redes. Métodos de Control Vertical
Punto 4.2 del Manual MGEO Redes Verticales...4.2.1 Diseño
“...Se da por sentado que las redes de control vertical para MGEO (objeto principal de este manual) se estable-
cerán por medio de nivelación diferencial. ”
NOTA DE LA CATEDRA: No debe descartarse la nivelación trigonométrica simultánea y recíproca en los casos en que
la acotación de errores lo justifique.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
108
“ Dada su extensión limitada, puede suponerse además que el efecto de los errores sitemáticos en esta redes no
serán significativos. Gran parte de la propagación de errores en una red se debe a errores accidentales.
Al diseñar una red vertical para MGEO, se utilizan intervalos de confianza y no elipses de error, simplificán-
dose así la tarea. Los estudios de simulación por computadora pueden realizarse al igual que para las redes de
control horizontal según el párrafo 4.1, usando los programas enumerados en la tabla 10. En este caso también,
es indispensable modificar los resultados aplicando el sentido común basado en experiencias anteriores. Ade-
más debe tenerse presente las siguientes reglas empíricas. Los circuitos de nivelación deben estar debidamente
condicionados; deberán evitarse los circuitos largos y angosto. La distancia entre puntos de referencia medida
a lo largo del trayecto nivelado no debe ser mayor que cuatro veces la distancia entre ellos en línea recta. To-
dos los puntos de referencia que se encuentren cerca entre sí deberán enlazarse con mediciones directas. Gene-
ralmente deben evitarse las lineas ramificadas, apartadas o de extremos abiertos porque aumentan la posibili-
dad de que pasen inadvertidas las equivocaciones y porque no pueden ajustarse a la red general....”
…4.2.2 Nivelación diferencial
Las redes de nivelación diferencial generalmente se establecen en la forma de circuitos bien condicionados y
enlazados entre sí. Esto proporciona suficiente redundancia para poder evaluar las precisiones y ajustar riguro-
samente las diferencias de alturas observadas. La geometría general de la red tiene menos importancia que el
número de redundancias y los pesos asignados a las observaciones. Estos pesos pueden asignarse como una
función de las distancias a lo largo de cada tramo de la red, de acuerdo con la expresión:
W = M
K
donde K es la distancia en Km y M depende de la metodología utilizada (ver 2.4). Los elementos estadísticos
que se calculan como resultado del proceso de ajuste deben utilizarse para evaluar la precisión final: desvia-
ción estándar de peso unitario, varianza de referencia, matriz de varianza-covarianza, etc.
Aunque las redes de nivelación diferencial MGEO deberían estar basadas en, o enlazadas a, dátums geodési-
cos, no siempre resulta posible debido a la escasez de puntos de referencia geodésica. En estos casos sólo se
necesita una red independiente basada en un dátum local.
…4.2.3 Nivelación trigonométrica e híbrida
En la nivelación trigonométrica pueden formarse diferentes clases de redes, sin embargo es indispensable que
toda nivelación de este tipo esté constituída por observaciones recíprocas simultáneas (excepto para distancias
muy cortas). El proceso de ajuste es similar al de la nivelación diferencial. Los pesos deberán calcularse me-
diante la expresión:
W = M
K2
donde K es la distancia expresada en Km. y M es una variable que depende de la metodología empleada (ver
2.3). Si una red tiene nivelaciones trigonométricas y diferenciales, hay que determinar una matriz de pesos
apropiada. Los elementos de la diagonal deben reflejar el peso de cada porción de la red.
…4.2.4 Sistemas de elevación y la gravedad
Muchas veces deben aplicarse correcciones a las observaciones para nivelación diferencial por los efectos de la
gravedad. Dichas correcciones suelen ser necesarias cuando:
a) Se requiere una precisión sumamente alta
b) El area de trabajo es montañosa
c) Las poligonales de nivelación son largas, especialmente cuando tienen una dirección Norte-Sur.
Los dos sistemas de altura mejor conocidos (que toman en cuenta el efecto gravitacional) son:
a) el sistema dinámicob) el sistema ortométrico
Según el sistema dinámico, se da por sentado que todos los puntos de una superficie nivelada tienen la misma
altura. La altura se deduce mediante la expresión:
C = ∫ g. dh
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
109
donde C es el “número geopotencial”; g es la aceleración de la gravedad (variable).La unidad se conoce como Unidad Geopotencial (GPU),donde 1GPU = 1 Kgal-metro = 10 m/seg.
La forma práctica de calcular las alturas dinámicas es por medio de la expresión:
C = Σ g. dh
Por esta razón, se divide la línea entera de nivelación en intervalos. Hay que conocer la gravedad (por medi-ciones o interpolaciones precisas) en cada punto de división . Los intervalos escogidos entre estaciones de gra-vedad dependen de la inclinación de la línea....
Pendiente media > 8% intervalo de estaciones de gravedad 1 KmPendiente media > 4% a 7 % intervalo de estaciones de gravedad 1.5 a 2 KmPendiente media < 3 % intervalo de estaciones de gravedad 5 a 10 Km
Todos los intervalos están limitados para un máximo de 100m de diferencia en altura
La precisión de las observaciones gravimétricas deben ser del orden de 1 mgal o menores.
Las alturas ortométricas representan alturas sobre el geoide, medidas a lo largo de la plomada. Pueden cal-cularse a partir de los números geopotenciales mediante la expresión:
Ho = C gm
donde gm es el valor medio de la gravedad medida a lo largo de la plomada entre el geoide y la estación....”
gm = Σ g
n
En el caso de MGEO, resulta preferible utilizar las alturas dinámicas para proyectos que comprenden el flujode fluidos o la determinación del movimiento de la corteza terrestre.Podría ser necesario aplicar correcciones ortométricas al integrar la nivelación MGEO a un sistema único deelevaciones y deben tomarse en cuenta al calcular los errores de cierre de los circuitos....”
NOTA DE LA CATEDRA: - Esto último significa que en un cálculo de compensación de una red, no pueden incluirse
nivelaciones de altura geométricas en forma conjunta con otros sistemas de elevación. Es conveniente profundizar los
conceptos, la cátedra recomienda reverlos nuevamente (especialmente estos temas) con la bibliografía especificada.-
Lo que hemos visto hasta el momento era la opinión de los autores del MGEO, por lo tanto apli-cable a las redes de extensión cuyo alcance le corresponde a la Microgeodesia, para el caso delas redes geodésicas veamos que dicen los...
3.7.4: Estándares Geodésicos
Lo que a continuación sigue, es una copia extractada de “ Estándares Geodésicos ” publicada por el Gru-
po de trabajo de los estándares geodésicos. Al igual que en hicimos con el grupo de trabajo del IPGH, al
mencionar su principal mentor, de igual modo aquí estamos obligados a destacar la labor de su principal
promotor, el Agrim. Rubén Rodriguez.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
110
Diseño y geometría de una red Geodésica
Estructura de la red
La ubicación y la disposición relativa de las estaciones de una red GPS básica o de densifica-ción, es independiente de su forma y de las condiciones de Intervisibilidad, que fueron factoresdominantes en la triangulación y poligonación.
La disponibilidad de la red POSGAR es el marco nacional de referencia al que deben vincularsetodas las nuevas redes que se implanten.Un mínimo de tres puntos comunes deben ser incluidos en todo nuevo proyecto.En general resulta conveniente ocupar un numero mayor de puntos comunes, que el minimoseñalado, a fin de asegurar la correcta vinculación y consistencia de la red.
Las estaciones de referencia tienen mejor disposición cuando se encuentran situadas en la peri-feria de la zona del proyecto. En el caso de existir estaciones “activas” o permanentes, deberser usadas como contralor.
Selección de sitios y monumentación
Reconocimiento
Una vez diseñado el proyecto de la red, se inicia el reconocimiento.Lo primero es verificar la existencia y condiciones de los puntos de la red de orden superior conlos cuales se va a vincular.En cuanto a las estaciones nuevas, éstas deberán reunir las siguientes condiciones:
1) Cielo despejado 10° sobre el horizonte
2) Evitar la existencia de superficies reflectantes en las proximidades.
3) Evitar la presencia de redes de transmisión de energia o microondas.-
4) Evitar la presencia de grandes arboledas
5) Facil acceso con vehículos automotores y lugar apropiado para su estacionamientoevitando interferencias.
6) Terreno estable para garantizar la permanencia de la marca.
Confeccionar una monografía del punto (croquis, coordenadas de navegador, etc)
Monumentación
Señalaremos tres tipos de marcas:
1) La mas segura, es la instalación de una varilla roscada inserta con resina epoxi en la rocamadre.
2) Soldar la varilla roscada a una placa de acero, e insertar ésta a una construcción existen-te.
3) Insertar la placa de acero sobre pilares de hormigón armado.
En todos los casos la marca debe tener alguna identificación, como numero o código, y si fueseposible también, alguna forma de poder identificar a quien creo la red para solicitar información.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
111
Receptores
Los receptores GPS cubren las mas diversas posibilidades de aplicación de este sistema. Si losordenamos de menor a mayor prestación, los podemos clasificar:
1) Navegadores simples: Codigo C/A. No son aptos para técnicas diferenciales, precisioninferior a 30m (cuando no se aplica la S/A), sino hay que hablar de mas de 100m.
2) Receptores de codigo con la posibilidad de realizar posicionamiento diferencial: estosequipos permiten conservar en memoria los datos observados y realizar una diferencia-ción en pos proceso. Precisiones de 1 a 5 m.
3) Receptores similar al anterior pero al codigo incorporan la posibilidad de capturar tam-bien la fase de la portadora L1. Precisiones con C/A de 1 a 5 m., con la fase de L1 sub-métrico (0.20m a 0.30m)
4) Receptores de medicion de fase en una sola frecuencia: trabajan con la onda portadoraL1 de la señal GPS, acumulando información que una vez procesadas permiten obtenerprecisiones centimetricas.
5) Receptores geodésicos de doble frecuencia: agregan al anterior la medicion de la fase dela portadora L2, lo que permite la disminución de ciertos errores sistemáticos, especial-mente los errores ionosfericos. Mayor precision con vectores mas largos
6) Receptores geodésicos de doble frecuencia y doble codigo: Mayor versatilidad en suuso, particularmente a tiempo real.-
Datos GPS
La información trasmitida a los receptores GPS puede dividirse:
1) Observaciones GPS propiamente dicha: comprende mediciones de pseudo distancias,fases, Doppler. Una frecuencia o dos frecuencias, con longitud de onda completa o se-mi-longitud de onda, según sea el tipo de receptor en uso.
2) Posiciones satelitales: conocida como efemérides y almanaques. Brindan los elementosque permiten el calculo de la posición del satelite en el instante de la emisión de la se-ñal. Esta información es almacenada por la mayoria de los receptores. Cuando se re-quiere el empleo de información mas precisa (efemérides precisas) se las puede solicitaral IGS (international Geodynamics Service).
3) Datos de la estacion: comprende información metereologica, temperatura, presion at-mosferica y humedad relativa, tambien la posición de la antena GPS (altura y excentri-cidad). Datos recolectados por el operador y luego introducidos al receptor o softwarede calculo.
4) Coordenadas: los receptores mas sencillos solo almacenan las coordenadas de los pun-tos medidos.
Compensación
La compensación de las observaciones GPS se han planteado en diferentes programas con pa-rametrizaciones mas o menos complejas. Estas van desde simple promedio de coordenadas ocomponentes vectoriales hasta determinación de parámetros ligados a la ionosfera y/o troposfe-ra y algunas constantes instrumentales. Algunos programas científicos incluyen el mejoramientoorbital.
Los programas mas complejos tratan simultáneamente todos los vectores de una sesion, y cal-culan la matriz de varianza – covarianza entre todas las componentes vectoriales y en general
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
112
entre estas y las ambigüedades determinadas. La compensación definitiva multiestacion – mul-tisesion se efctua teniendo en cuenta estas matrices.-
Clasificación de los levantamientos
Los levantamientos geodésicos, ya sean efectuados con tecnología tradicional o con GPS, ocon una combinación de ambas, pueden clasificarse de diversas maneras y según los criteriosque para cada caso se fijen.La geodesia, en su definición más tradicional tiene por objetivo la ubicación, medición y mate-rialización de puntos de referencia sobre la superficie terrestre, que sirvan de apoyo y contralorde otros tipos de traabajos (topográficos, fotogramétricos, cartográficos, geofísicos, etc.).Sin embargo, a la luz de los adelantos tecnológicos actuales y sobre todo mediante el adveni-miento del GPS, algunos trabajos geodésicos exceden el papel de proveedores de puntos dereferencia, llegando a proporcionar relevamientos parciales o completos de la realidad.Por lo tanto, los objetivos finales de las tareas geodésicas deben tenerse en cuenta para cual-quier tipo de clasificación, considerando que iguales objetivos pueden ser satisfechos por diver-sos métodos.Otro factor de fundamental importancia es la precisión y la exactitud, tanto de los trabajos decampo (observaciones) como de los resultados finales obtenidos. Este es un criterio de clasifi-cación bastante difundido y aceptado, pero que requiere una cuidadosa explicación de cada unode los elementos que contribuyen a definir la precisión. En ese sentido, el conocimiento delksignificado de los parámetros de precisión como las varianzas, covarianzas, errores estandar,elipses de error, confiabilidad, etces requisito básico para comprender los criterios de clasifica-ción relacionado a estos conceptos.-La extensión física abarcada por los trabajos geodésicos es también un criterio válido de clasifi-cación. Desde los trabajos microgeodésicos, cuya extensión no supera algunos centenares demetros, hasta los grandes proyectos nacionales o continentales, el área efectivamente relevadadefine las metodologías, el instrumental, la forma de procesamiento de la información y en ge-neral todos los aspectos prácticos de los levantamientos.-
En resumen, los criterios que se adoptarán para la clsificación de los trabajos geodésicos será:
1) Precisión2) Extensión3) Finalidad
1A.- PRECISIÓN PLANIMÉTRICA:La elipse del 95% de confiabilidad es el elemento geom´petrico más apropiado para me-dir el grado de precisión en el posicionamiento de puntos geodésicos.El área encerrada por esta elipse, cuyos parámetros se obtienen a partir del proceso decálculo y compensación, representa un porcentaje de probabilidad de ubicación del puntoen un 95%.El criterio a seguir será el siguiente:Para que un levantamiento de puntos geodésicos esté dentro de una tolerancia determi-nada, es necesario que todas las elipses del 95% cumplan con la condición de que susemieje mayor sea menor que el radio de tolerancia fijado.El tamaño y forma de la elipse 95% depende:
En los levantamientos tradicionales de la geometría de la red de puntos, del tipode observaciones y del grado de precisión de las mismas.
En los levantamientos GPS, de la constelación satelital observada, los factores dedilución DOP, metodología de trabajo diferencial y muchos otros elementos.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
113
1B.- PRECISIÓN PLANI ALTIMÉTRICA:El GPS es un sistema tridimensional, capaz de ubicar puntos en sus tres dimensiones es-paciales. Sin embargo, cuando se obtienen los resultados en coordenadas geodésicas(latitud, longitud, altura elipsóidica), esta última debe ser transformada a cota ortométri-ca, lo que implica la aplicación de un modelo de geoide. Esta corrección implica en la ac-tualidad un error apreciable.
En los trabajos plani altimétricos, a los efectos de determinar radios de tolerancia, hayque reemplazar la elipse de error por el elipsoide de error (*) correspondiente.
(*)elipsoide estándar de error: El elipsoide de error es inherente a la com-pensación de puntos en tres dimensiones.-
El semieje mayor del elipsoide deberá ser en este caso menor que el radio de tolerancia.En lo que hace a la cota altimétrica, habrá que adicionar al valor estadístico del semiejecorrespondiente (lo que surge de la aplicación de los programas de ajuste de redes), laindeterminación esperada de la respectiva corrección por separación geoide-elipsoide an-tes de establecer la comparación con el radio de tolerancia.
Categoría A: precisión subcentimétrica. El radio de tolerancia es inferior a 1 cm.En las determinaciones planimétricas, el error estandar deberá ser de 4mm o me-nor.
Categoría B: precisión centimétrica. Los radios de tolerancia se ubican entre 1cmy 10cm. En las determinaciones planimétricas , el error estándar deberá oscilarentre 4mm y 4 cm.
Categoría C: precisión submétrica. Radio de tolerancia entre 10cm y 1m. El errorestandar planimétrico, deberá ser entre 4cm y 40cm.
Categoría D: precisión métrica. Radio de tolerancia entre 1m y 10m. El error es-tandar planimétrico, deberá ser entre 40cm y 4m.-
Categoría E: precisión de decenas de metros. Radio de tolerancia entre 10m y100m. El error estandar planimétrico, deberá ser entre 4m y 40m.
2.- EXTENSIÓN:Según la extensión de los trabajos, y según la distancia media que separa a dos puntosvecinos, se clasificarán los trabajos geodésicos según la siguiente categoría:
Categoría 0: Extensión muy grande. Los puntos se encuentran separados entre100Km y 1000Km. La zona abarcada es de miles de kilómetros.
Categoría 1: Gran extensión. Los puntos se encuentran separados entre 10Km y100Km. La zona abarcada es de centenares de kilómetros.
Categoría 2: Extensión media. Los puntos se encuentran separados entre 1Km y10Km. La zona abarcada es de decenas de kilómetros.
Categoría 3: Extensión reducida. Los puntos se encuentran separados entre 100my 1Km. La zona es de pocos kilómetros de extensión total.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
114
Descripción de las categorías
Categoría A1:
Son redes cuyos vértices están separados por más de 10Km y donde se requiereprecisión subcentimétrica. Son trabajos muy especiales, de muy difícil realización,relacionados principalmente con la geodinámica.
Se debe trabajar con equipos geodésicos de doble frecuencia, en diferencial defase, sesiones prolongadas, preferentemente con tres o más receptores en multi-sesión, para ajustar la red en forma rigurosa.
Categoría A2:
Son redes cuyos vértices están separados por más de 1Km (de 2Km a 5Km), ydonde se requiere precisión subcentimétrica. Son trabajos muy especiales, de muydifícil realización, relacionados principalmente con la industria y la geodinámica.
Se debe trabajar con equipos geodésicos, en diferencial de fase, sesiones prolon-gadas, preferentemente con tres o más receptores en multisesión, para ajustar lared en forma rigurosa.
Categoría A3:
Son redes de puntos cercanos cuyos vértices están separados por distancias me-nores de 1Km (de 200m a 500m), y donde se requiere precisión subcentimétrica.Se trabaja con errores relativos inferiores a 1ppm. Son redes ultra precisas quesirven especialmente para trabajos de microgeodesia, relacionados con el monito-reo de deformaciones de obras civiles (auscultación), o del suelo
Se debe trabajar con equipos geodésicos de doble frecuencia, en diferencial defase, sesiones prolongadas, preferentemente con tres o más receptores en multi-sesión, para ajustar la red en forma rigurosa.
En este tipo de trabajos se prestará especial atención a la centración del instru-mental, así como a la marcación.
Cuidado: No siempre es posible alcanzar los requerimientos de esta especificacióncon GPS.
Categoría B1:
Son redes cuyos vértices están separados por más de 10Km (20 a 50Km), y dondese requiere precisión centimétrica.
Se debe trabajar con equipos geodésicos de doble frecuencia en vectores mayoresa los 30Km, en diferencial de fase, preferentemente con tres o más receptores enmultisesión, para ajustar la red en forma rigurosa.
Categoría B2:
Son redes cuyos vértices están separados por más de 1Km (de 2Km a 5Km), ydonde se requiere precisión centimétrica..
Se debe trabajar con equipos geodésicos, en diferencial de fase, sesiones prolon-gadas, preferentemente con tres o más receptores en multisesión, para ajustar lared en forma rigurosa.
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
115
Categoría B3:
Son redes de puntos cercanos cuyos vértices están separados por distancias me-nores de 1Km (de 200m a 500m), y donde se requiere precisión de pocos centíme-tros. Estas redes se utilizan como marco de referencia para catastros urbanos ysuburbanos, y algunos trabajos de microgeodesia. También en la construcción degrandes obras de ingeniería, puentes túneles, etc. Los trabajos topográficos deapoyo a la exploración sísmica conocidos como “3D” se ajustan a la especifica-ción.
Se debe trabajar con equipos geodésicos de simple o doble frecuencia, en diferen-cial de fase, Métodos estático, pseudo dinámico y estático rápido pueden utilizar-se. También algunos equipos que agregan a estas características el tiempo real.
Categoría C1:
Son redes cuyos vértices están separados por más de 10Km (20 a 50Km), y dondese requiere precisión de unos decímetros.
Se debe trabajar con equipos geodésicos, en diferencial de fase, preferentementedoble frecuencia a una distancia mayor de 30Km.
También algunos equipos que agregan a estas características el tiempo real.-
Categoría C2:
Son redes cuyos vértices están separados por más de 1Km (2 a 5Km), y donde serequiere precisión de unos decímetros.
Los puntos tienen aplicación en relevamientos topográficos expeditivos, redes deapoyo a GIS, relevamiento de servicios públicos. También exploración sismica ycatastros rurales.
Se puede trabajar con equipos geodésicos, en diferencial de fase, con sesiones depoca duración, o apelar a equipos topográficos que permitan precisiones submétri-cas
Categoría C3:
Son redes de puntos cercanos , separados por distancias menores a 1Km (200m a500m). Se requiere trabajar con precisiones de pocos decímetros (20cm a 40 cm).
Los puntos tienen aplicación en relevamientos topográficos expeditivos, apoyo deGIS, relevamiento de servicios públicos, exploración sismica y catastros rurales.Se puede trabajar con equipos geodésicos con sesiones de poca duración o topo-gráficos, pero siempre en modo diferencial.-
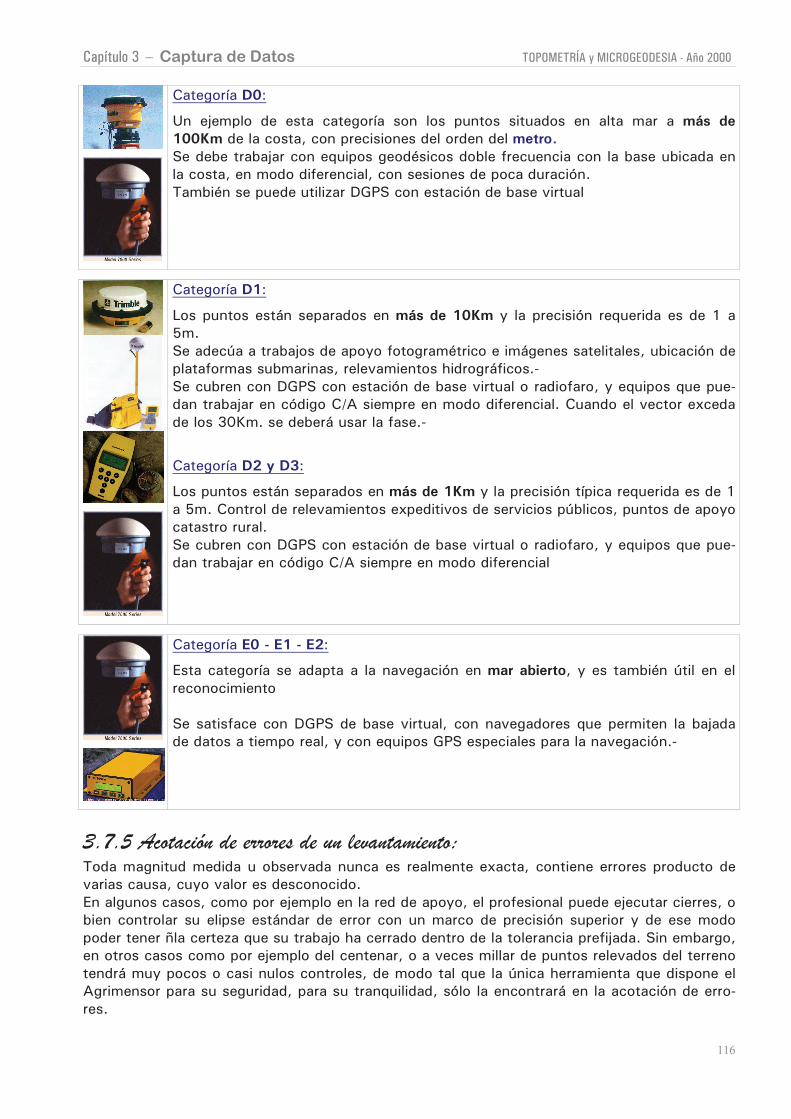
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
116
Categoría D0:
Un ejemplo de esta categoría son los puntos situados en alta mar a más de100Km de la costa, con precisiones del orden del metro.Se debe trabajar con equipos geodésicos doble frecuencia con la base ubicada enla costa, en modo diferencial, con sesiones de poca duración.También se puede utilizar DGPS con estación de base virtual
Categoría D1:
Los puntos están separados en más de 10Km y la precisión requerida es de 1 a5m.Se adecúa a trabajos de apoyo fotogramétrico e imágenes satelitales, ubicación deplataformas submarinas, relevamientos hidrográficos.-Se cubren con DGPS con estación de base virtual o radiofaro, y equipos que pue-dan trabajar en código C/A siempre en modo diferencial. Cuando el vector excedade los 30Km. se deberá usar la fase.-
Categoría D2 y D3:
Los puntos están separados en más de 1Km y la precisión típica requerida es de 1a 5m. Control de relevamientos expeditivos de servicios públicos, puntos de apoyocatastro rural.Se cubren con DGPS con estación de base virtual o radiofaro, y equipos que pue-dan trabajar en código C/A siempre en modo diferencial
Categoría E0 - E1 - E2:
Esta categoría se adapta a la navegación en mar abierto, y es también útil en elreconocimiento
Se satisface con DGPS de base virtual, con navegadores que permiten la bajadade datos a tiempo real, y con equipos GPS especiales para la navegación.-
3.7.5 Acotación de errores de un levantamiento:Toda magnitud medida u observada nunca es realmente exacta, contiene errores producto devarias causa, cuyo valor es desconocido.En algunos casos, como por ejemplo en la red de apoyo, el profesional puede ejecutar cierres, obien controlar su elipse estándar de error con un marco de precisión superior y de ese modopoder tener ñla certeza que su trabajo ha cerrado dentro de la tolerancia prefijada. Sin embargo,en otros casos como por ejemplo del centenar, o a veces millar de puntos relevados del terrenotendrá muy pocos o casi nulos controles, de modo tal que la única herramienta que dispone elAgrimensor para su seguridad, para su tranquilidad, sólo la encontrará en la acotación de erro-res.
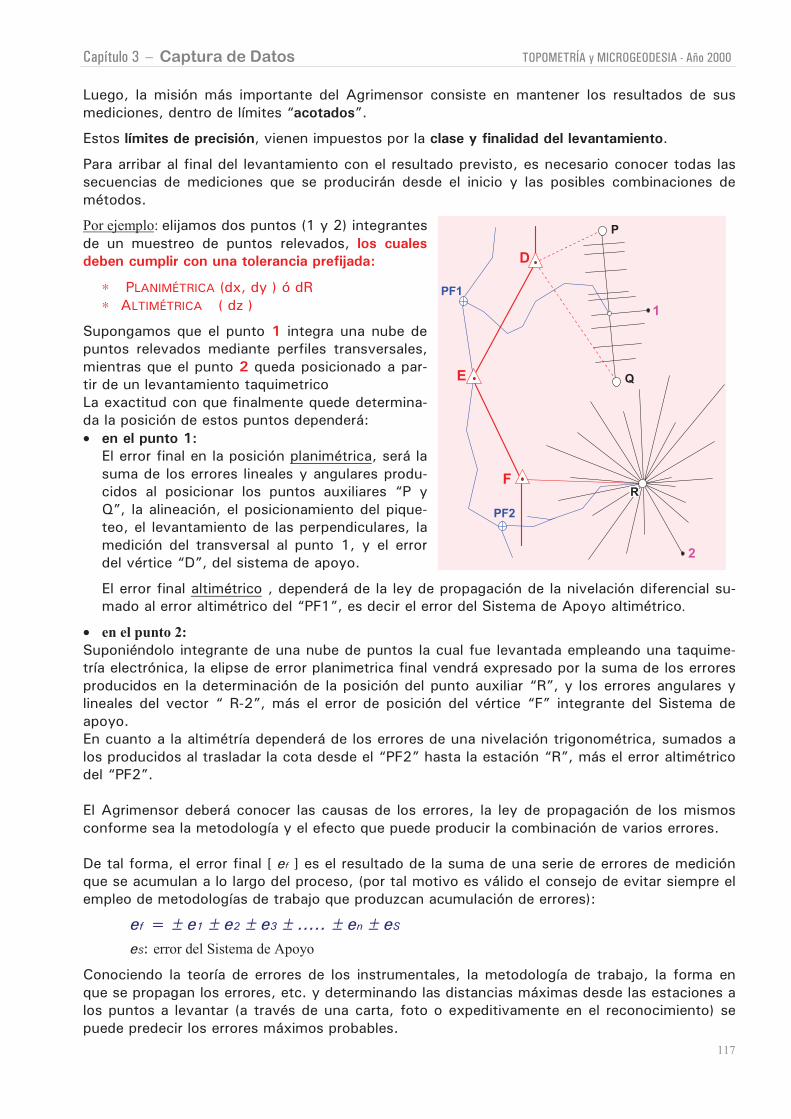
Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
117
Luego, la misión más importante del Agrimensor consiste en mantener los resultados de susmediciones, dentro de límites “acotados”.
Estos límites de precisión, vienen impuestos por la clase y finalidad del levantamiento.
Para arribar al final del levantamiento con el resultado previsto, es necesario conocer todas lassecuencias de mediciones que se producirán desde el inicio y las posibles combinaciones demétodos.
Por ejemplo: elijamos dos puntos (1 y 2) integrantesde un muestreo de puntos relevados, los cualesdeben cumplir con una tolerancia prefijada:
∗ PLANIMÉTRICA (dx, dy ) ó dR∗ ALTIMÉTRICA ( dz )
Supongamos que el punto 1 integra una nube depuntos relevados mediante perfiles transversales,mientras que el punto 2 queda posicionado a par-tir de un levantamiento taquimetricoLa exactitud con que finalmente quede determina-da la posición de estos puntos dependerá:• en el punto 1:
El error final en la posición planimétrica, será lasuma de los errores lineales y angulares produ-cidos al posicionar los puntos auxiliares “P yQ”, la alineación, el posicionamiento del pique-teo, el levantamiento de las perpendiculares, lamedición del transversal al punto 1, y el errordel vértice “D”, del sistema de apoyo.
D
E
F
P
Q
1
2
R
PF1
PF2
El error final altimétrico , dependerá de la ley de propagación de la nivelación diferencial su-mado al error altimétrico del “PF1”, es decir el error del Sistema de Apoyo altimétrico.
• en el punto 2:Suponiéndolo integrante de una nube de puntos la cual fue levantada empleando una taquime-tría electrónica, la elipse de error planimetrica final vendrá expresado por la suma de los erroresproducidos en la determinación de la posición del punto auxiliar “R”, y los errores angulares ylineales del vector “ R-2”, más el error de posición del vértice “F” integrante del Sistema deapoyo.En cuanto a la altimétría dependerá de los errores de una nivelación trigonométrica, sumados alos producidos al trasladar la cota desde el “PF2” hasta la estación “R”, más el error altimétricodel “PF2”.
El Agrimensor deberá conocer las causas de los errores, la ley de propagación de los mismosconforme sea la metodología y el efecto que puede producir la combinación de varios errores.
De tal forma, el error final [ ef ] es el resultado de la suma de una serie de errores de mediciónque se acumulan a lo largo del proceso, (por tal motivo es válido el consejo de evitar siempre elempleo de metodologías de trabajo que produzcan acumulación de errores):
ef = ± e1 ± e2 ± e3 ± ..... ± en ± eS
eS: error del Sistema de Apoyo
Conociendo la teoría de errores de los instrumentales, la metodología de trabajo, la forma enque se propagan los errores, etc. y determinando las distancias máximas desde las estaciones alos puntos a levantar (a través de una carta, foto o expeditivamente en el reconocimiento) sepuede predecir los errores máximos probables.

Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
118
Determinando cada uno de los errores (e1 ; e2 ; e3 .. ) se puede determinar la suma de ellos
K = ±e1 ± e2 ± e3..........
De esta forma la ecuación original quedará reducida a una ecuación con una sola incognita. - elerror admisible en el Sistema de Apoyo -
ef = ± K ± eS
ef 2 = K2 + eS 2
luego : eS 2 = ef 2 - K2 → eS = ± √ (ef 2 - K2 )
Continuando con el ejemplo antes expuesto, analicemos el caso del punto determinado por unlevantamiento polar y analicemos el siguiente
Ejemplo: supongamos se utilice una estación total PENTAX PCS 315 - cuya
precisión en la medición de la distancia (apuntando a prismas ubicados so-bre una base nivelante ) dl = ± 3 mm (y ubicando los prismas sobre unbastón centrador con verticalizador) dl = ± 2 cm.Y una precisión angular: da = ± 7” (para la doble posición)
y da = ± 10” (para una observación en una sola posición, sin considerar
los errores instrumentales: colimación - inclinación – verticalidad - etc.).-
Partiendo del supuesto que el error planimétrico admisible para cualquier punto levantado (errorfinal) sea inferior a : dR = ±±±± 10cm (círculo de error de radio R= 0.10m); y el error altimétrico
máximo admisible: dh = ±±±± 20cm.
Estimando la distancia FR = 150m y suponiendo que en R se coloca una estaca, lo cual permi-
te colocar un prisma montado sobre una base nivelante de centración forzosa, asegurando un
error en la medición de la distancia de medir el ángulo en las dos posiciones resulta:
∆X = L . cos ϕ → diferenciando → dx = L. (-sen ϕ ) . dϕ + cos ϕ . dL
∆Y = L . sen ϕ → diferenciando → dy = L. ( cos ϕ ) . dϕ + sen ϕ . dL
en nuestro ejemplo: ±dx ± dy = dR = ± 10cm.
dR = L. (-sen ϕ ) . dϕ ± cos ϕ . dL ± L. ( cos ϕ ) . dϕ ± sen ϕ . dL
La precisión en la medición angular que nos brinda el equipo es de 7”
Pero resulta que realizamos dos apuntes: Uno cuando forzamos un valor angular para orientar
el instrumento y otro cuando tomamos lectura sobre la señal de puntería en “R”, es decir he-
mos realizado dos apuntes y hemos tomado dos lecturas, por tal motivo la precisión del resul-
tado se verá perjudicado en:
dϕ = ± 7” . √ 2
Por otra parte, si al ángulo lo medimos en dos posiciones, la precisión del resultado se verá
mejorado en √ 2.
finalmente: dϕ = ±±±± 7” → por otra parte, como en nuestro análisis no nos interesa el error de
orientación, podemos adoptar alguno de los valores extremos, lo cual se cumpliría para
ϕ = 0°00’ ó para ϕ = 90°00’. Luego haciendo ϕ = 0°00’ ,resulta:
dm = ± 1 . dL ± L. dϕ /ρ → dm = ± 3mm ± 150m. 7” /206265
dm = ± 3mm ± 5.1 mm
dm = ±±±± 5mm

Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
119
Y estacionándonos ahora en el punto “ R” para determinar las coordenadas de un punto cual-quiera, elegimos de todos ellos el punto que se encuentre más lejos de la estación:Supongamos L = 200m
Pero como es este caso los puntos relevados no estarán materializados, sobre ellos se medirá ladistancia con un prisma ubicado sobre un bastón centrador y el rumbo mediante una sola pun-tería, resulta:
dm = ± dL ± L. dϕ /ρ → dm = ± 2 cm ± 200m. 7”.√ 2 /206265
dm = ± 20mm ± 9.9mm
dm = ±±±± 23mm
Ahora estamos en condiciones de encontrar el valor de “K”, (acumulación de los errores de me-dición)
K = ±e1 ± e2 ± e3..........
K = ± 5mm ± 23mmK = ± 23.5 mm
Finalmente, si el error planimétrico esperado es de ± 10 cm en cada punto, y si queremos estardentro de una elipse de error del 95% de confianza, entonces debemos adoptar un σ = 2, con
lo cual el error máximo admisible será de 10cm/2 = 5 cm. → ef = ±±±± 50 mm.
eS = ± √ (ef 2 - K2 ) → eS = ± √ (502 - 23.52 ) → eS = ± 44 mm
Por lo tanto, al planificar el Sistema de Apoyo, habrá que tener en cuenta como condición ne-cesaria y suficiente que cada uno de los vértices, que sea utilizado para la colocación de auxi-liares, desde donde luego se realizará un levantamiento taquimétrico, deberá estar encerradodentro de una elipse de error de 4.4cm.
En cuanto a la exactitud altimétrica:
eS = ± √ (ef 2 - K2 ), reemplazando eS = ± √ (10cm2 - K2 ), y donde K es la suma de dos errores :K = ±e1 ± e2
• el error producido al efectuar el traslado de la nivelación diferencial desde el sistema deapoyo altimétrico hasta el punto auxiliar “R”.
• el error altimétrico cometido al realizar la nivelación trigonométrica.
1.- Suponiendo se emplee un nivel de precisión dh = ± 2.5 mm .√ L Km y suponiendo una distancia máxima de 500m es decir 0.5Km.resulta dh1 = ± 2.5 mm .√ 0.5
dh1 = ± 1.8 mm
2.- La nivelación trigonométrica se realiza con la estación total antes mencionada, luegopara la mayor distancia que estimamos en 200m.
∆h = L.tg α + (1-k) . L2 / 2R + i - sdiferenciando
dh = ± L. dα / cos2α ± tg α.dL ± (L2 / 2R) . dk ± di ± ds
reemplazando por valores (suponiendo una pendiente máxima del 30%) : α= 16°41’57”suponemos también un instrumento al cual se ha corregido el error de índice.

Capítulo 3 – Captura de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
120
Expresando las distancias en cm.:
dh2= ± 20000 x 10”/ (0.917451x 206265) ± 0.3 x 2cm ± 0.31cm x 0.13 ±0.15 ± 0.1 ± 20000 x 1”/ (0.917451x 206265) (error del compensador)
dh2 = ± 1.05 cm ± 0.6 cm ± 0.04 cm ± 0.15 cm ± 0.1cm ± 0.1cmdh2 = ± 1.23 cm
Finalmente dh = ± dh1 ± dh2
dh = ± 2.2 cm.
eS = ± √ (ef 2 - K2 )
eS = ± √ (10 2 - 2.22 )
eS = ± 9.7 cm
Lo cual es un valor muy generoso para el intervalo de confianza de un punto del sistema de
apoyo altimétrico.
Este resultado obtenido, nos tienta a realizar la vinculación desde el Sistema de Apoyo altimé-
trico al punto “R”, empleando nivelación trigonométrica, veamos:
dh1= ± 50000 x 10”/ (0.917451x 206265) ± 0.3 x 0.3cm ± 1.96cm x 0.13 ±0.15 ± 0.1 ± 50000 x 1”/ (0.917451x 206265) (error del compensador)
dh1 = ± 2.64cm ± 0.09cm ± 0.25cm ± 0.15cm ± 0.1cm ± 0.26cmdh1 = ± 2.67cm
Nuevamente dh = ± dh1 ± dh2 = ± 2.67 ± 1.23 dh = ± 3 cm.
eS = ± √ (ef 2 - K2 )eS = ± √ (10 2 - 32 )eS = ± 9.5 cm
Lo cual sigue siendo un valor muy generoso que inducirá a pensar también en realizar la nivela-ción del sistema altimétrico empleando nivelación trigonométrica simultánea y recíproca.
En las redes altimétricas, de aplicarse nivelación trigonométrica, ésta deberá ser siempre simul-tánea y recíproca.
Realizando la reciprocidad corregimos el error de esfericidad de la tierra y realizando la simulta-neidad, el error de refracción.Es precisamente éste último un valor desconocido, estimado normalmente en 0.13 o 0.20 paralos cálculos, y estimado el error de su determinación con un valor igual al valor mismo, es decirdK = 0.13; sin embargo en una serie de 48 observaciones que se realizaron en un práctico enun curso de años anteriores, determinamos un valor de k > 1.6
Igual observación realizamos en la Cordillera de los Andes a 5000m de altura, la determinación del va-lor de k arrojó resultados muy variados y dispares.-
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
121
“ Cuando pones la proa visionaria hacia una estrella, y tiendes el ala hacia tal excelsitud ina-
sible, afanoso de perfección y rebelde a la mediocridad, llevas en tí el resorte misterioso de un
ideal. Es ascua sagrada, capaz de templarte para grandes acciones.
Custódiala; si la dejas apagar no se reenciende jamás. Y si ella muere en ti, quedas inerte; fría
bazofia humana.
Solo vives por esa partícula de ensueño que te sobrepone a lo real. Ella es el lis de tu blasón,
el penacho de tu temperamento…
Es de pocos esa inquietud de perseguir ávidamente alguna quimera, venerando a filósofos,
artistas y pensadores, que fundieron en síntesis supremas sus visiones del ser y de la eterni-
dad, volando más allá de lo real. Los seres de esta estirpe, cuya imaginación se puebla de
ideales y cuyo sentimiento polariza hacia ellos la personalidad entera, forman raza aparte en la
humanidad: son los idealistas… ”
Símbolo: En el vaivén eterno de las eras, el porvenir es siempre de los visionarios. La intermi-
nable contienda entre el idealismo y la mediocridad tiene su símbolo… Perseo exhibiendo la
cabeza de Medusa, cuyo cuerpo se agita con contorsiones de reptil bajo los pies alados de
Perseo…
Perseo le dice a los jóvenes que toda lucha por un ideal es santa, aunque sea ilusorio el resul-
tado; que es loable seguir su temperamento y pensar con el corazón, ello contribuirá a crear
una personalidad firme.
Le dice también, que todo germen de romanticismo debe alentarse para llenar de auroras la
única primavera que no vuelve jamás.
…y a los maduros, los instiga a custodiar sus
ideales bajo el palio de la más severa dignidad,
frente a las continuas tentaciones que conspi-
ran para encenagarlos en la Estigia donde
abisman los mediocres. …
... y en el gesto del bronce de la plaza de Flo-
rencia, parece que el idealismo decapitara a la
mediocridad, entregando su cabeza al juicio de
los siglos.-
El Hombre Mediocre - JOSE INGENIEROS Bs.As 1910.-
El mundo
Un hombre del pueblo de Neguá, en la costa de Colombia, pudo subir
al alto cielo.
A la vuelta, contó. Dijo que había contemplado, desde allá arriba, la
vida humana. Y dijo que somos un mar de fueguitos.
—El mundo es eso — reveló—. Un montón de gente, un mar de fueguitos.
Cada persona brilla con luz propia entre todas las demás.
No hay dos fuegos iguales. Hay fuegos grandes y fuegos chicos y fuegos de todos los colo-
res. Hay gente de fuego sereno, que ni se entera del viento, y gente de fuego loco, que llena
el aire de chispas. Algunos fuegos, fuegos bobos, no alumbran ni queman; pero otros arden la
vida con tantas ganas que no se puede mirarlos sin parpadear, y quien se acerca, se encien-
de.
El Libro de los Abrazos - Eduardo Galeano - Montevideo.-
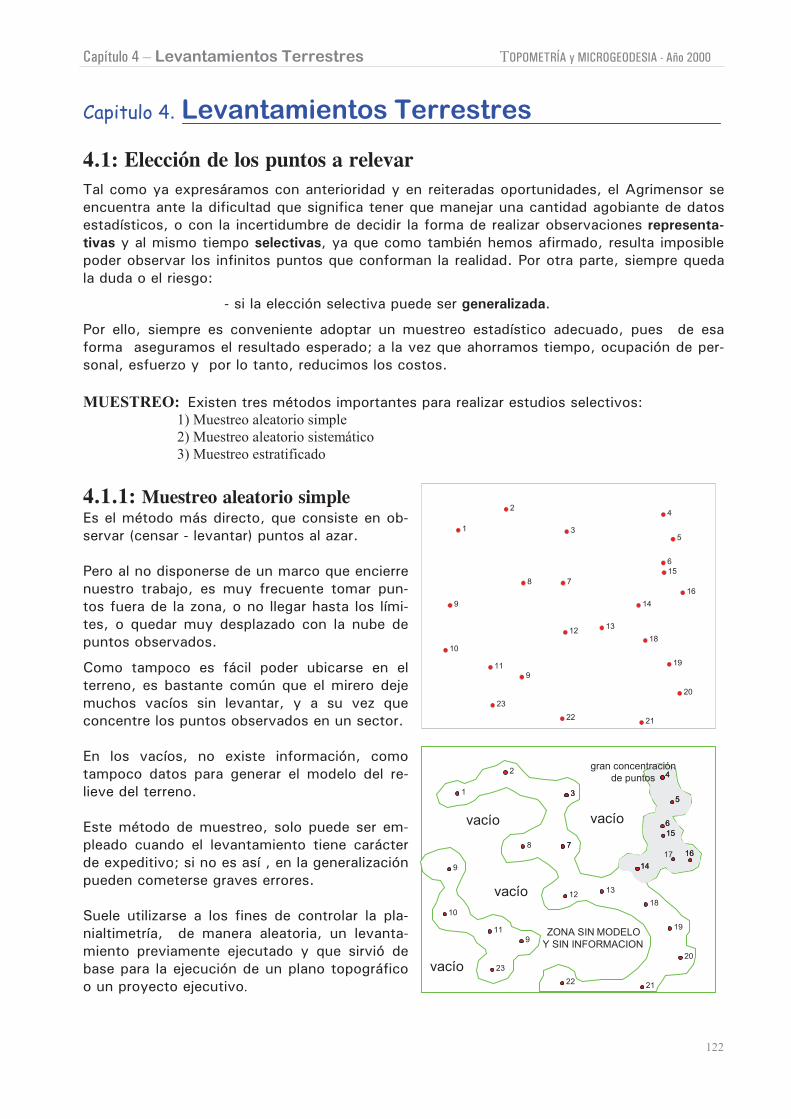
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
122
Capitulo 4. Levantamientos Terrestres
4.1: Elección de los puntos a relevar
Tal como ya expresáramos con anterioridad y en reiteradas oportunidades, el Agrimensor se
encuentra ante la dificultad que significa tener que manejar una cantidad agobiante de datos
estadísticos, o con la incertidumbre de decidir la forma de realizar observaciones representa-
tivas y al mismo tiempo selectivas, ya que como también hemos afirmado, resulta imposible
poder observar los infinitos puntos que conforman la realidad. Por otra parte, siempre queda
la duda o el riesgo:
- si la elección selectiva puede ser generalizada.
Por ello, siempre es conveniente adoptar un muestreo estadístico adecuado, pues de esa
forma aseguramos el resultado esperado; a la vez que ahorramos tiempo, ocupación de per-
sonal, esfuerzo y por lo tanto, reducimos los costos.
MUESTREO: Existen tres métodos importantes para realizar estudios selectivos:
1) Muestreo aleatorio simple
2) Muestreo aleatorio sistemático
3) Muestreo estratificado
4.1.1: Muestreo aleatorio simpleEs el método más directo, que consiste en ob-
servar (censar - levantar) puntos al azar.
Pero al no disponerse de un marco que encierre
nuestro trabajo, es muy frecuente tomar pun-
tos fuera de la zona, o no llegar hasta los lími-
tes, o quedar muy desplazado con la nube de
puntos observados.
Como tampoco es fácil poder ubicarse en el
terreno, es bastante común que el mirero deje
muchos vacíos sin levantar, y a su vez que
concentre los puntos observados en un sector.
1
2
3
4
5
6
78
9
10
11
1213
14
15
16
18
19
9
20
2122
23
En los vacíos, no existe información, como
tampoco datos para generar el modelo del re-
lieve del terreno.
Este método de muestreo, solo puede ser em-
pleado cuando el levantamiento tiene carácter
de expeditivo; si no es así , en la generalización
pueden cometerse graves errores.
Suele utilizarse a los fines de controlar la pla-
nialtimetría, de manera aleatoria, un levanta-
miento previamente ejecutado y que sirvió de
base para la ejecución de un plano topográfico
o un proyecto ejecutivo.
1
2
3
78
9
10
11
1213
18
19
9
20
2122
23
ZONA SIN MODELO
Y SIN INFORMACION
3
7
gran concentración
de puntos 4
5
6
14
15
16
4
5
6
14
15
1617
vacío vacío
vacío
vacío
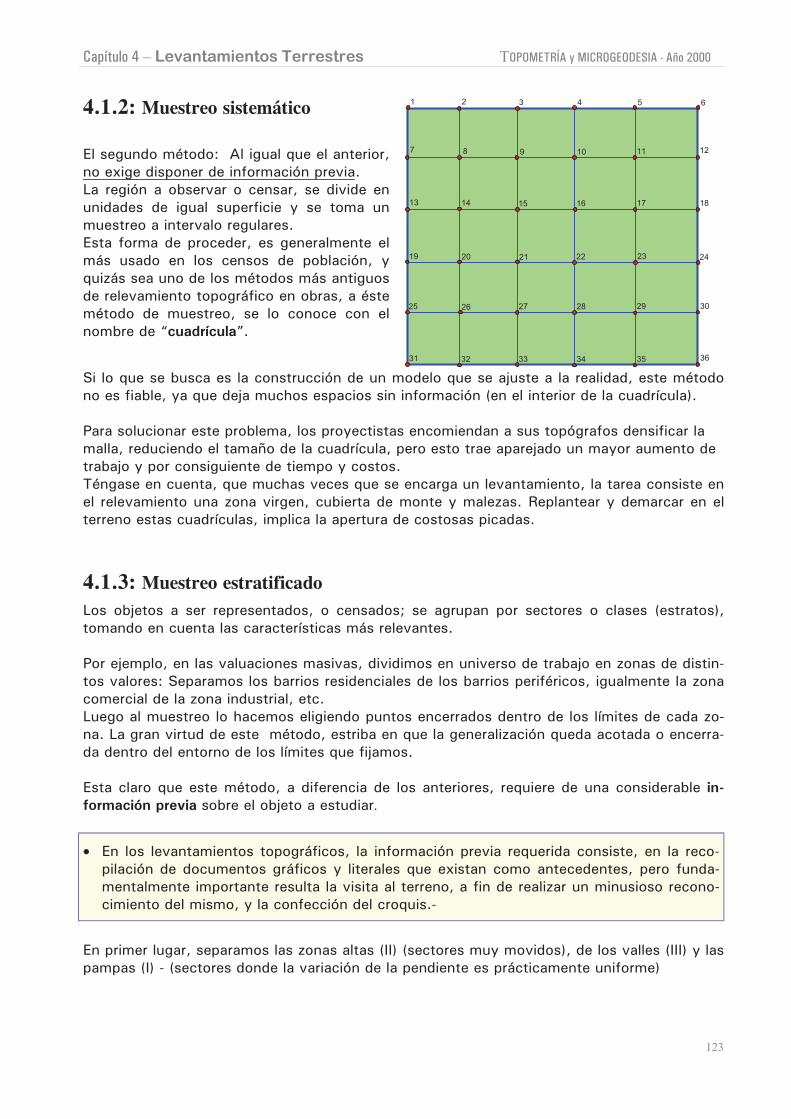
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
123
4.1.2: Muestreo sistemático
El segundo método: Al igual que el anterior,
no exige disponer de información previa.
La región a observar o censar, se divide en
unidades de igual superficie y se toma un
muestreo a intervalo regulares.
Esta forma de proceder, es generalmente el
más usado en los censos de población, y
quizás sea uno de los métodos más antiguos
de relevamiento topográfico en obras, a éste
método de muestreo, se lo conoce con el
nombre de “cuadrícula”.
1 2 3 4 5
7 8 9 10 11 12
13 14 15 16
6
17 18
19 20 21 22 23 24
25 26 27 28 29 30
31 32 33 34 35 36
Si lo que se busca es la construcción de un modelo que se ajuste a la realidad, este método
no es fiable, ya que deja muchos espacios sin información (en el interior de la cuadrícula).
Para solucionar este problema, los proyectistas encomiendan a sus topógrafos densificar la
malla, reduciendo el tamaño de la cuadrícula, pero esto trae aparejado un mayor aumento de
trabajo y por consiguiente de tiempo y costos.
Téngase en cuenta, que muchas veces que se encarga un levantamiento, la tarea consiste en
el relevamiento una zona virgen, cubierta de monte y malezas. Replantear y demarcar en el
terreno estas cuadrículas, implica la apertura de costosas picadas.
4.1.3: Muestreo estratificado
Los objetos a ser representados, o censados; se agrupan por sectores o clases (estratos),
tomando en cuenta las características más relevantes.
Por ejemplo, en las valuaciones masivas, dividimos en universo de trabajo en zonas de distin-
tos valores: Separamos los barrios residenciales de los barrios periféricos, igualmente la zona
comercial de la zona industrial, etc.
Luego al muestreo lo hacemos eligiendo puntos encerrados dentro de los límites de cada zo-
na. La gran virtud de este método, estriba en que la generalización queda acotada o encerra-
da dentro del entorno de los límites que fijamos.
Esta claro que este método, a diferencia de los anteriores, requiere de una considerable in-
formación previa sobre el objeto a estudiar.
• En los levantamientos topográficos, la información previa requerida consiste, en la reco-
pilación de documentos gráficos y literales que existan como antecedentes, pero funda-
mentalmente importante resulta la visita al terreno, a fin de realizar un minusioso recono-
cimiento del mismo, y la confección del croquis.-
En primer lugar, separamos las zonas altas (II) (sectores muy movidos), de los valles (III) y las
pampas (I) - (sectores donde la variación de la pendiente es prácticamente uniforme)
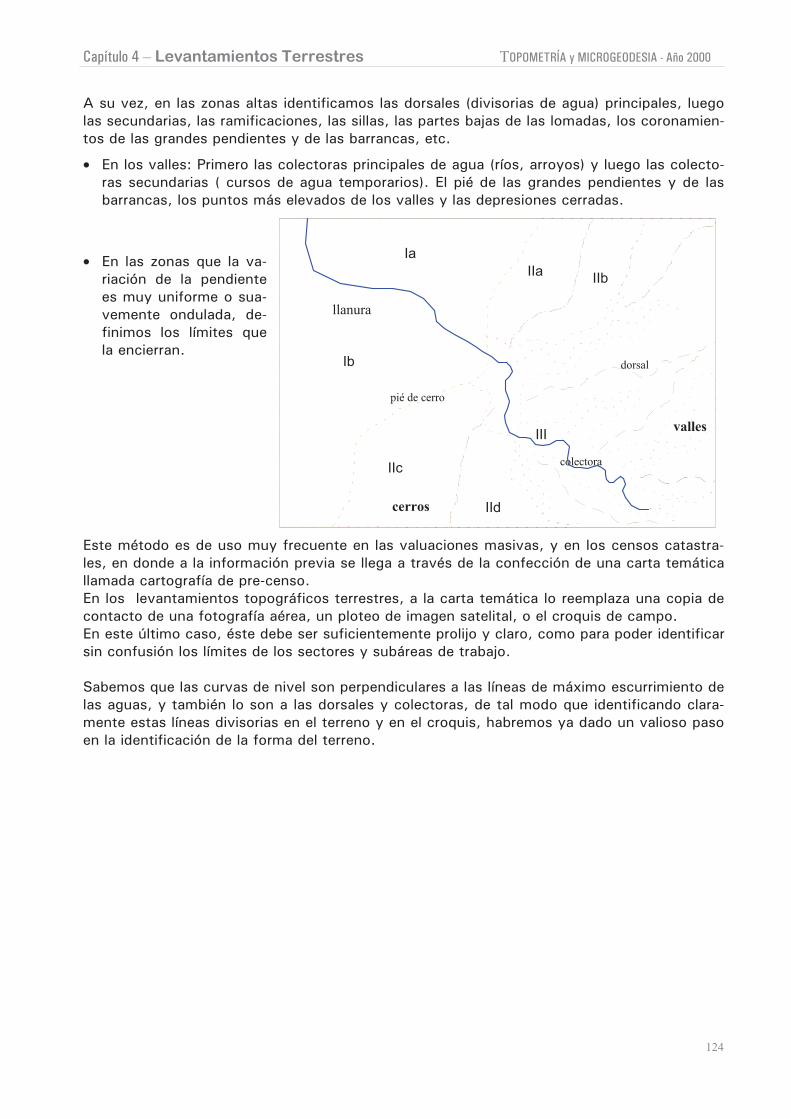
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
124
A su vez, en las zonas altas identificamos las dorsales (divisorias de agua) principales, luego
las secundarias, las ramificaciones, las sillas, las partes bajas de las lomadas, los coronamien-
tos de las grandes pendientes y de las barrancas, etc.
• En los valles: Primero las colectoras principales de agua (ríos, arroyos) y luego las colecto-
ras secundarias ( cursos de agua temporarios). El pié de las grandes pendientes y de las
barrancas, los puntos más elevados de los valles y las depresiones cerradas.
• En las zonas que la va-
riación de la pendiente
es muy uniforme o sua-
vemente ondulada, de-
finimos los límites que
la encierran.
Ia
Ib
IIaIIb
IIc
IId
III
colectora
dorsal
pié de cerro
cerros
valles
llanura
Este método es de uso muy frecuente en las valuaciones masivas, y en los censos catastra-
les, en donde a la información previa se llega a través de la confección de una carta temática
llamada cartografía de pre-censo.
En los levantamientos topográficos terrestres, a la carta temática lo reemplaza una copia de
contacto de una fotografía aérea, un ploteo de imagen satelital, o el croquis de campo.
En este último caso, éste debe ser suficientemente prolijo y claro, como para poder identificar
sin confusión los límites de los sectores y subáreas de trabajo.
Sabemos que las curvas de nivel son perpendiculares a las líneas de máximo escurrimiento de
las aguas, y también lo son a las dorsales y colectoras, de tal modo que identificando clara-
mente estas líneas divisorias en el terreno y en el croquis, habremos ya dado un valioso paso
en la identificación de la forma del terreno.
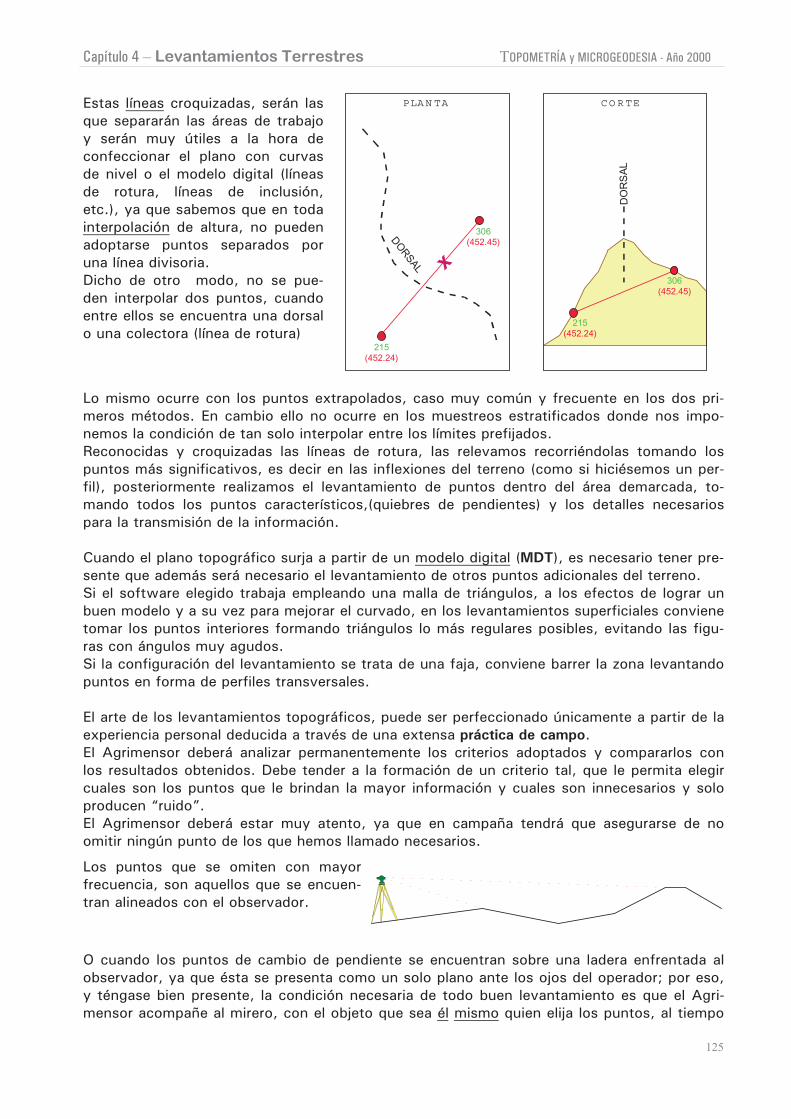
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
125
Estas líneas croquizadas, serán las
que separarán las áreas de trabajo
y serán muy útiles a la hora de
confeccionar el plano con curvas
de nivel o el modelo digital (líneas
de rotura, líneas de inclusión,
etc.), ya que sabemos que en toda
interpolación de altura, no pueden
adoptarse puntos separados por
una línea divisoria.
Dicho de otro modo, no se pue-
den interpolar dos puntos, cuando
entre ellos se encuentra una dorsal
o una colectora (línea de rotura)
PLA N TA
215
(452.24)
306
(452.45)
DO
RSAL X
C O R TE
215
(452.24)
306
(452.45)
DO
RS
AL
Lo mismo ocurre con los puntos extrapolados, caso muy común y frecuente en los dos pri-
meros métodos. En cambio ello no ocurre en los muestreos estratificados donde nos impo-
nemos la condición de tan solo interpolar entre los límites prefijados.
Reconocidas y croquizadas las líneas de rotura, las relevamos recorriéndolas tomando los
puntos más significativos, es decir en las inflexiones del terreno (como si hiciésemos un per-
fil), posteriormente realizamos el levantamiento de puntos dentro del área demarcada, to-
mando todos los puntos característicos,(quiebres de pendientes) y los detalles necesarios
para la transmisión de la información.
Cuando el plano topográfico surja a partir de un modelo digital (MDT), es necesario tener pre-
sente que además será necesario el levantamiento de otros puntos adicionales del terreno.
Si el software elegido trabaja empleando una malla de triángulos, a los efectos de lograr un
buen modelo y a su vez para mejorar el curvado, en los levantamientos superficiales conviene
tomar los puntos interiores formando triángulos lo más regulares posibles, evitando las figu-
ras con ángulos muy agudos.
Si la configuración del levantamiento se trata de una faja, conviene barrer la zona levantando
puntos en forma de perfiles transversales.
El arte de los levantamientos topográficos, puede ser perfeccionado únicamente a partir de la
experiencia personal deducida a través de una extensa práctica de campo.
El Agrimensor deberá analizar permanentemente los criterios adoptados y compararlos con
los resultados obtenidos. Debe tender a la formación de un criterio tal, que le permita elegir
cuales son los puntos que le brindan la mayor información y cuales son innecesarios y solo
producen “ruido”.
El Agrimensor deberá estar muy atento, ya que en campaña tendrá que asegurarse de no
omitir ningún punto de los que hemos llamado necesarios.
Los puntos que se omiten con mayor
frecuencia, son aquellos que se encuen-
tran alineados con el observador.
O cuando los puntos de cambio de pendiente se encuentran sobre una ladera enfrentada al
observador, ya que ésta se presenta como un solo plano ante los ojos del operador; por eso,
y téngase bien presente, la condición necesaria de todo buen levantamiento es que el Agri-
mensor acompañe al mirero, con el objeto que sea él mismo quien elija los puntos, al tiempo
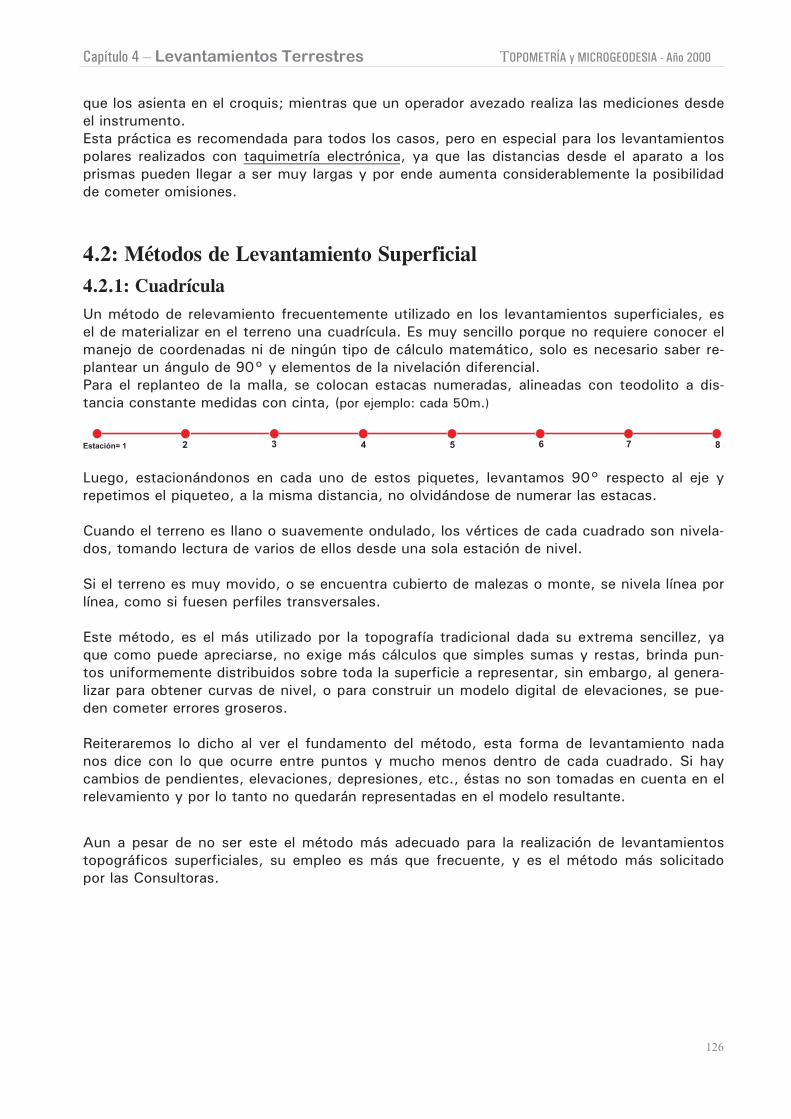
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
126
que los asienta en el croquis; mientras que un operador avezado realiza las mediciones desde
el instrumento.
Esta práctica es recomendada para todos los casos, pero en especial para los levantamientos
polares realizados con taquimetría electrónica, ya que las distancias desde el aparato a los
prismas pueden llegar a ser muy largas y por ende aumenta considerablemente la posibilidad
de cometer omisiones.
4.2: Métodos de Levantamiento Superficial
4.2.1: Cuadrícula
Un método de relevamiento frecuentemente utilizado en los levantamientos superficiales, es
el de materializar en el terreno una cuadrícula. Es muy sencillo porque no requiere conocer el
manejo de coordenadas ni de ningún tipo de cálculo matemático, solo es necesario saber re-
plantear un ángulo de 90° y elementos de la nivelación diferencial.
Para el replanteo de la malla, se colocan estacas numeradas, alineadas con teodolito a dis-
tancia constante medidas con cinta, (por ejemplo: cada 50m.)
Estación= 1 2 3 4 5 6 7 8
Luego, estacionándonos en cada uno de estos piquetes, levantamos 90° respecto al eje y
repetimos el piqueteo, a la misma distancia, no olvidándose de numerar las estacas.
Cuando el terreno es llano o suavemente ondulado, los vértices de cada cuadrado son nivela-
dos, tomando lectura de varios de ellos desde una sola estación de nivel.
Si el terreno es muy movido, o se encuentra cubierto de malezas o monte, se nivela línea por
línea, como si fuesen perfiles transversales.
Este método, es el más utilizado por la topografía tradicional dada su extrema sencillez, ya
que como puede apreciarse, no exige más cálculos que simples sumas y restas, brinda pun-
tos uniformemente distribuidos sobre toda la superficie a representar, sin embargo, al genera-
lizar para obtener curvas de nivel, o para construir un modelo digital de elevaciones, se pue-
den cometer errores groseros.
Reiteraremos lo dicho al ver el fundamento del método, esta forma de levantamiento nada
nos dice con lo que ocurre entre puntos y mucho menos dentro de cada cuadrado. Si hay
cambios de pendientes, elevaciones, depresiones, etc., éstas no son tomadas en cuenta en el
relevamiento y por lo tanto no quedarán representadas en el modelo resultante.
Aun a pesar de no ser este el método más adecuado para la realización de levantamientos
topográficos superficiales, su empleo es más que frecuente, y es el método más solicitado
por las Consultoras.
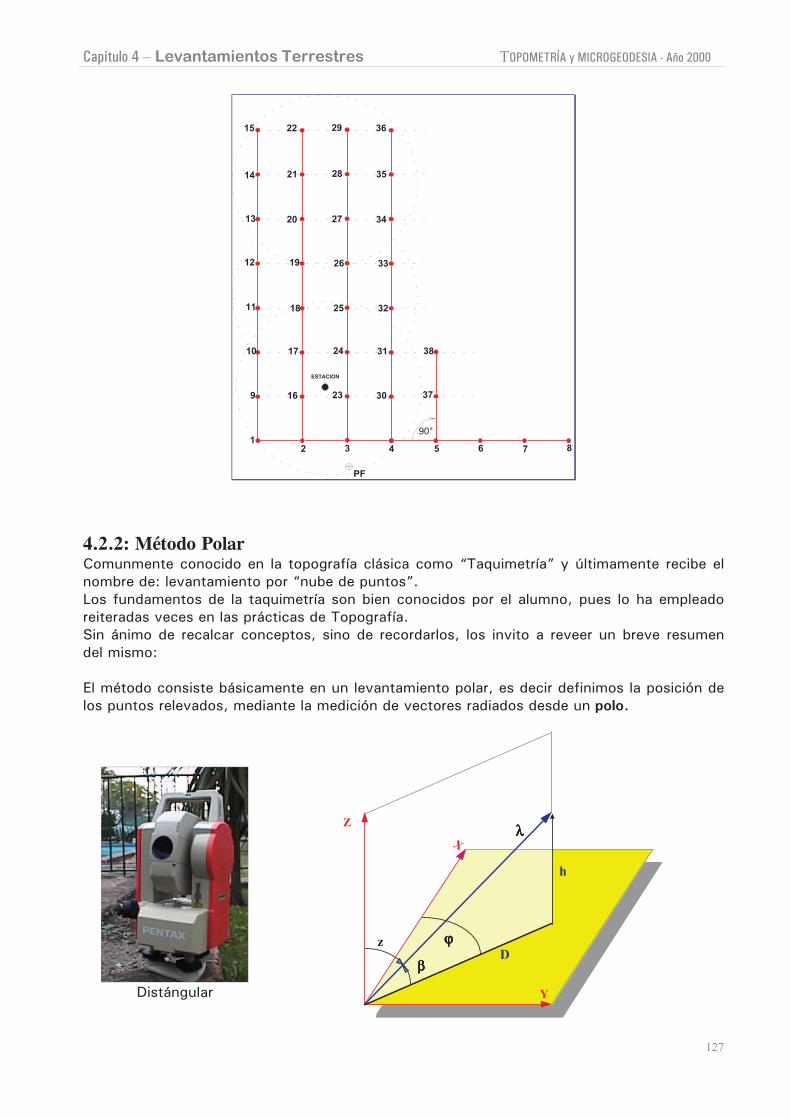
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
127
3 4 5 6 7 8
14
13
12
11
10
9
1
15
2
21
20
19
18
17
16
22
37
38
90°
28
27
26
25
24
23
29
35
34
33
32
31
30
36
ESTACION
PF
4.2.2: Método PolarComunmente conocido en la topografía clásica como “Taquimetría” y últimamente recibe el
nombre de: levantamiento por “nube de puntos”.
Los fundamentos de la taquimetría son bien conocidos por el alumno, pues lo ha empleado
reiteradas veces en las prácticas de Topografía.
Sin ánimo de recalcar conceptos, sino de recordarlos, los invito a reveer un breve resumen
del mismo:
El método consiste básicamente en un levantamiento polar, es decir definimos la posición de
los puntos relevados, mediante la medición de vectores radiados desde un polo.
Distángular Y
Z
X
ϕϕϕϕz
λλλλ
h
Dββββ
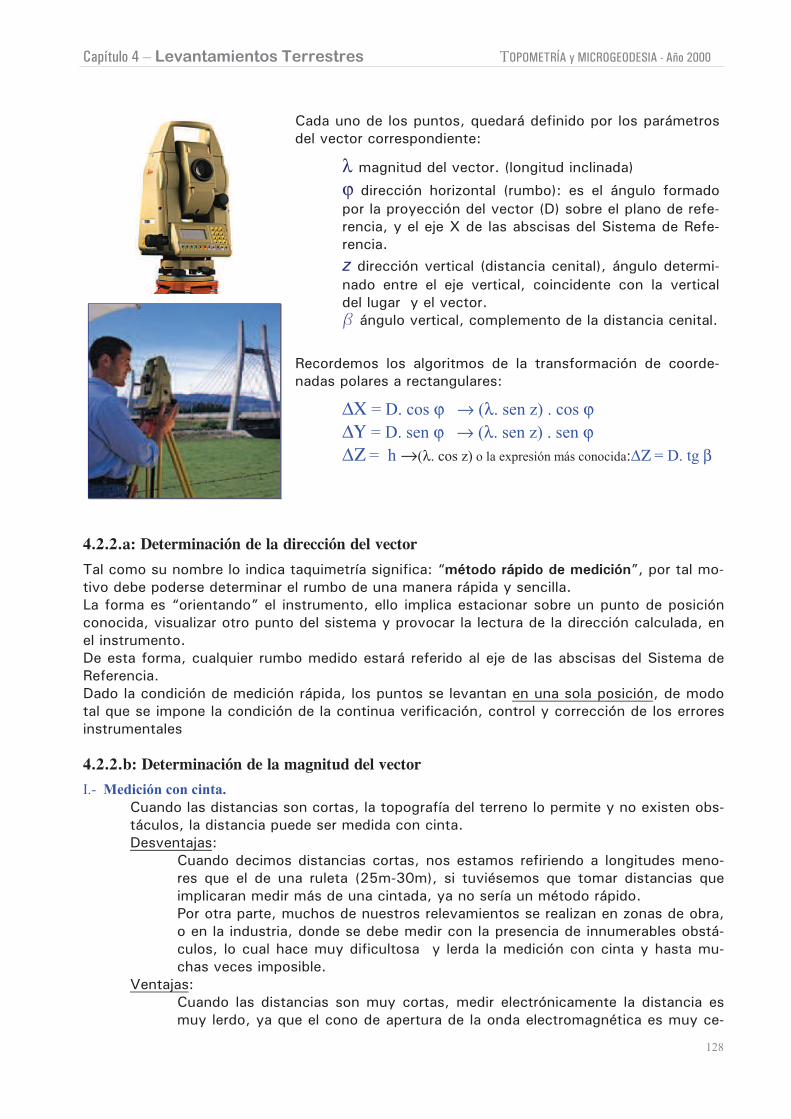
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
128
Cada uno de los puntos, quedará definido por los parámetros
del vector correspondiente:
λ magnitud del vector. (longitud inclinada)
ϕ dirección horizontal (rumbo): es el ángulo formado
por la proyección del vector (D) sobre el plano de refe-
rencia, y el eje X de las abscisas del Sistema de Refe-
rencia.
z dirección vertical (distancia cenital), ángulo determi-
nado entre el eje vertical, coincidente con la vertical
del lugar y el vector.
b ángulo vertical, complemento de la distancia cenital.
Recordemos los algoritmos de la transformación de coorde-
nadas polares a rectangulares:
∆Χ = D. cos ϕ → (λ. sen z) . cos ϕ∆Υ = D. sen ϕ → (λ. sen z) . sen ϕ∆Ζ = h →(λ. cos z) o la expresión más conocida:∆Ζ = D. tg β
4.2.2.a: Determinación de la dirección del vector
Tal como su nombre lo indica taquimetría significa: “método rápido de medición”, por tal mo-
tivo debe poderse determinar el rumbo de una manera rápida y sencilla.
La forma es “orientando” el instrumento, ello implica estacionar sobre un punto de posición
conocida, visualizar otro punto del sistema y provocar la lectura de la dirección calculada, en
el instrumento.
De esta forma, cualquier rumbo medido estará referido al eje de las abscisas del Sistema de
Referencia.
Dado la condición de medición rápida, los puntos se levantan en una sola posición, de modo
tal que se impone la condición de la continua verificación, control y corrección de los errores
instrumentales
4.2.2.b: Determinación de la magnitud del vector
I.- Medición con cinta.Cuando las distancias son cortas, la topografía del terreno lo permite y no existen obs-
táculos, la distancia puede ser medida con cinta.
Desventajas:
Cuando decimos distancias cortas, nos estamos refiriendo a longitudes meno-
res que el de una ruleta (25m-30m), si tuviésemos que tomar distancias que
implicaran medir más de una cintada, ya no sería un método rápido.
Por otra parte, muchos de nuestros relevamientos se realizan en zonas de obra,
o en la industria, donde se debe medir con la presencia de innumerables obstá-
culos, lo cual hace muy dificultosa y lerda la medición con cinta y hasta mu-
chas veces imposible.
Ventajas:
Cuando las distancias son muy cortas, medir electrónicamente la distancia es
muy lerdo, ya que el cono de apertura de la onda electromagnética es muy ce-

Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
129
rrado y no abarca el diámetro del prisma, y al moverse éste, se interrumpe el
proceso de medición. Por tal motivo, por rapidez, las distancias muy cortas
conviene que sean medidas con cinta.
Precisiones que se pueden obtener en la medición del vector con cinta:
Ruleta de fibra de vidrio - cinta de acero 1: 5000 a 1: 10000 (midiendo entre dos
puntos definidos al mm )
II. - Medición estadimétrica
Otra manera de determinar la distancia, es de forma indirecta empleando los hilos es-
tadimétricos.
Ventajas: Es un método rápido si se tiene práctica.
Es práctica usual realizar la lectura de la distancia cenital a una altura igual que la del
instrumento a fin de evitar realizar una suma y una resta. (i-s).
Desventajas: dada la limitación en las exactitudes, sólo permite levantar puntos de
forma del terreno, cuando los terrenos son muy movidos y los resultados pretendidos
no son muy exigentes. No debe emplearse para el levantamiento de la información es-
pecífica.
Generalmente la constante estadimétrica es 100. Las precisiones posibles en la medi-
ción de distancias es de 1: 500 hasta 100m y de 1: 300 hasta 150m.
III. - Medición con distanciómetro
La manera más práctica de medir el vector es en forma indi-
recta a través de la medición de fase de una onda electro-
magnética.
Lo más conveniente es el empleo de Estaciones Totales, ya
que el empleo de distanciómetros montados sobre los an-
teojos o sobre los montantes de la alidada, son más lerdos y
lo que en nuestro caso siempre perseguimos es la mayor
velocidad operativa posible
Con la taquimetría electrónica podemos abarcar un mayor radio de
levantamiento, midiendo distancias hasta de 3000m, desde una sola
estación, por supuesto que generalmente será difícil que podamos
abarcar esas longitudes, debido a la topografía del terreno y a los obs-
táculos.
La mayoría de las estaciones totales modernas, permiten obtener en
forma directa las coordenadas X, Y y Z del punto visado en el display
del instrumento, o bajarlos a una tarjeta o colectora de datos, para ser
transferidos a una PC.
Trabajando con colectoras de datos, con tarjetas PCMCIA o con teclados desmontables, se
agilizan considerablemente los trabajos de medición, la digitalización y el proceso CAD de
dibujo.
En el terreno: porque el operador que está realizando el levantamiento sólo se limita a apun-
tar el prisma y a dar entrada a la medición. Además de la seguridad que significa no cometer
errores de lectura y/o errores de anotación.
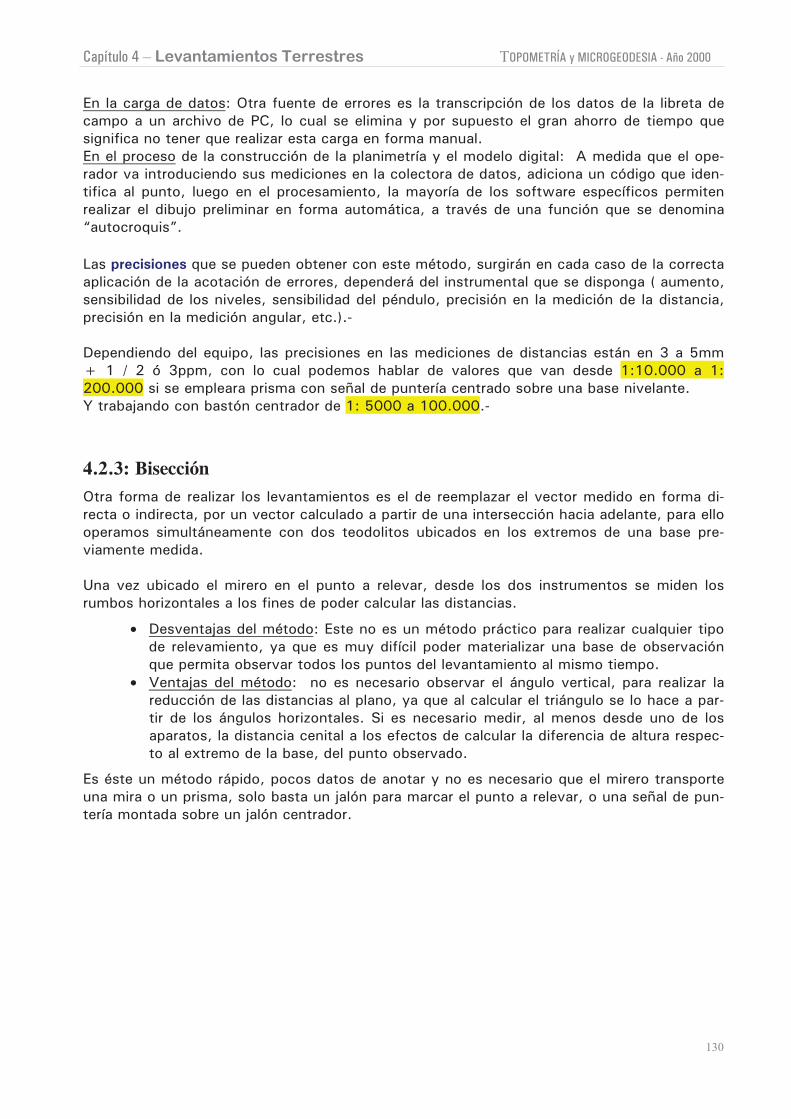
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
130
En la carga de datos: Otra fuente de errores es la transcripción de los datos de la libreta de
campo a un archivo de PC, lo cual se elimina y por supuesto el gran ahorro de tiempo que
significa no tener que realizar esta carga en forma manual.
En el proceso de la construcción de la planimetría y el modelo digital: A medida que el ope-
rador va introduciendo sus mediciones en la colectora de datos, adiciona un código que iden-
tifica al punto, luego en el procesamiento, la mayoría de los software específicos permiten
realizar el dibujo preliminar en forma automática, a través de una función que se denomina
“autocroquis”.
Las precisiones que se pueden obtener con este método, surgirán en cada caso de la correcta
aplicación de la acotación de errores, dependerá del instrumental que se disponga ( aumento,
sensibilidad de los niveles, sensibilidad del péndulo, precisión en la medición de la distancia,
precisión en la medición angular, etc.).-
Dependiendo del equipo, las precisiones en las mediciones de distancias están en 3 a 5mm
+ 1 / 2 ó 3ppm, con lo cual podemos hablar de valores que van desde 1:10.000 a 1:
200.000 si se empleara prisma con señal de puntería centrado sobre una base nivelante.
Y trabajando con bastón centrador de 1: 5000 a 100.000.-
4.2.3: Bisección
Otra forma de realizar los levantamientos es el de reemplazar el vector medido en forma di-
recta o indirecta, por un vector calculado a partir de una intersección hacia adelante, para ello
operamos simultáneamente con dos teodolitos ubicados en los extremos de una base pre-
viamente medida.
Una vez ubicado el mirero en el punto a relevar, desde los dos instrumentos se miden los
rumbos horizontales a los fines de poder calcular las distancias.
• Desventajas del método: Este no es un método práctico para realizar cualquier tipo
de relevamiento, ya que es muy difícil poder materializar una base de observación
que permita observar todos los puntos del levantamiento al mismo tiempo.
• Ventajas del método: no es necesario observar el ángulo vertical, para realizar la
reducción de las distancias al plano, ya que al calcular el triángulo se lo hace a par-
tir de los ángulos horizontales. Si es necesario medir, al menos desde uno de los
aparatos, la distancia cenital a los efectos de calcular la diferencia de altura respec-
to al extremo de la base, del punto observado.
Es éste un método rápido, pocos datos de anotar y no es necesario que el mirero transporte
una mira o un prisma, solo basta un jalón para marcar el punto a relevar, o una señal de pun-
tería montada sobre un jalón centrador.
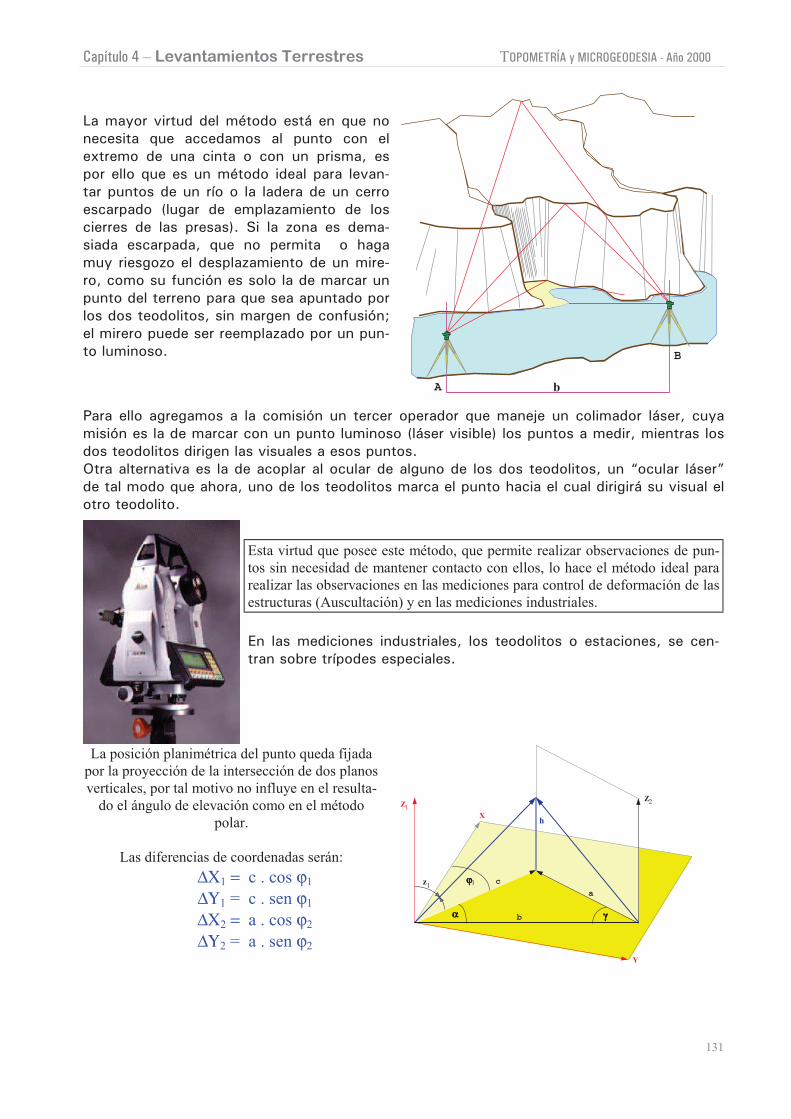
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
131
La mayor virtud del método está en que no
necesita que accedamos al punto con el
extremo de una cinta o con un prisma, es
por ello que es un método ideal para levan-
tar puntos de un río o la ladera de un cerro
escarpado (lugar de emplazamiento de los
cierres de las presas). Si la zona es dema-
siada escarpada, que no permita o haga
muy riesgozo el desplazamiento de un mire-
ro, como su función es solo la de marcar un
punto del terreno para que sea apuntado por
los dos teodolitos, sin margen de confusión;
el mirero puede ser reemplazado por un pun-
to luminoso.
A
B
b
Para ello agregamos a la comisión un tercer operador que maneje un colimador láser, cuya
misión es la de marcar con un punto luminoso (láser visible) los puntos a medir, mientras los
dos teodolitos dirigen las visuales a esos puntos.
Otra alternativa es la de acoplar al ocular de alguno de los dos teodolitos, un “ocular láser”
de tal modo que ahora, uno de los teodolitos marca el punto hacia el cual dirigirá su visual el
otro teodolito.
Esta virtud que posee este método, que permite realizar observaciones de pun-
tos sin necesidad de mantener contacto con ellos, lo hace el método ideal para
realizar las observaciones en las mediciones para control de deformación de las
estructuras (Auscultación) y en las mediciones industriales.
En las mediciones industriales, los teodolitos o estaciones, se cen-
tran sobre trípodes especiales.
La posición planimétrica del punto queda fijada
por la proyección de la intersección de dos planos
verticales, por tal motivo no influye en el resulta-
do el ángulo de elevación como en el método
polar.
Las diferencias de coordenadas serán:
∆Χ1 = c . cos ϕ1
∆Υ1 = c . sen ϕ1
∆Χ2 = a . cos ϕ2
∆Υ2 = a . sen ϕ2
Y
Z
X
ϕϕϕϕz
h
αααα
1 1
γγγγ
a
c
b
1
Z2
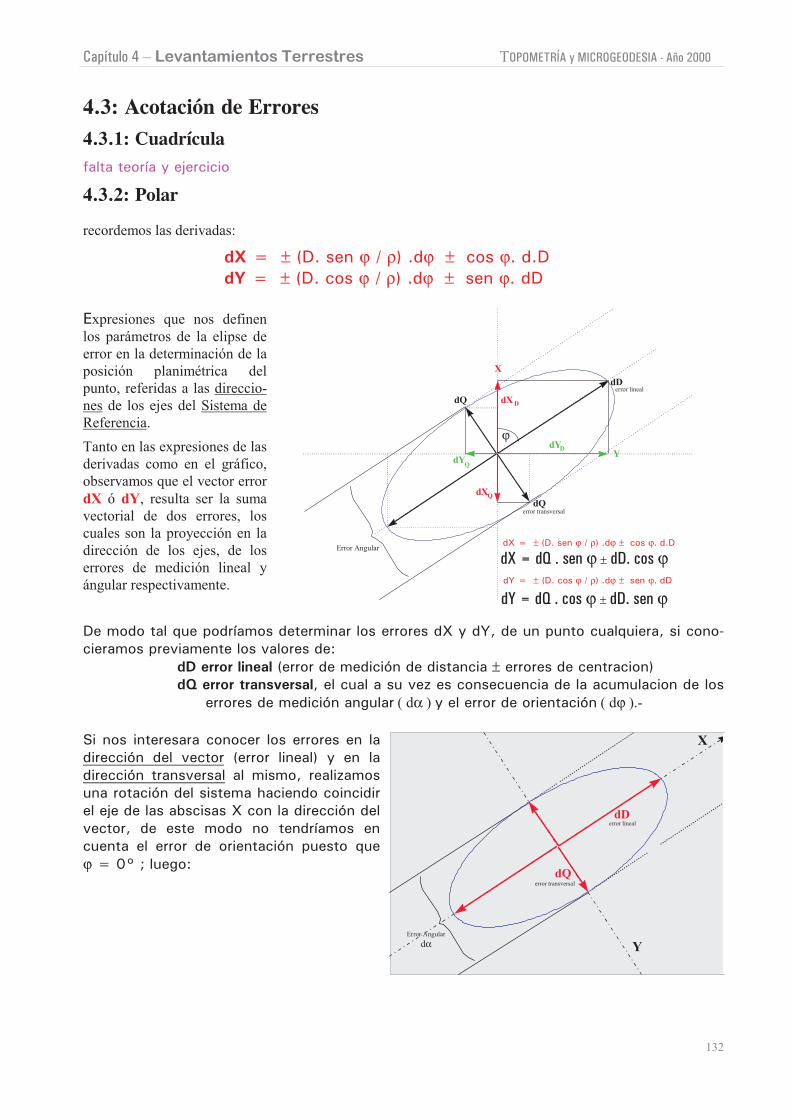
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
132
4.3: Acotación de Errores
4.3.1: Cuadrícula
falta teoría y ejercicio
4.3.2: Polar
recordemos las derivadas:
dX = ± (D. sen ϕ / ρ) .dϕ ± cos ϕ. d.D
dY = ± (D. cos ϕ / ρ) .dϕ ± sen ϕ. dD
Expresiones que nos definen
los parámetros de la elipse de
error en la determinación de la
posición planimétrica del
punto, referidas a las direccio-
nes de los ejes del Sistema de
Referencia.
Tanto en las expresiones de las
derivadas como en el gráfico,
observamos que el vector error
dX ó dY, resulta ser la suma
vectorial de dos errores, los
cuales son la proyección en la
dirección de los ejes, de los
errores de medición lineal y
ángular respectivamente.
ϕ
X
Y
dX
dX
dY
dY
dD
D
D
dQ
dQ
Q
Q
error lineal
error transversal
Error AngulardX = ± (D. sen ϕ / ρ) .dϕ ± cos ϕ. d.D
dY = ± (D. cos ϕ / ρ) .dϕ ± sen ϕ. dD
dX = dQ . sen ϕ ± dD. cos ϕ
dY = dQ . cos ϕ ± dD. sen ϕ
De modo tal que podríamos determinar los errores dX y dY, de un punto cualquiera, si cono-
cieramos previamente los valores de:
dD error lineal (error de medición de distancia ± errores de centracion)
dQ error transversal, el cual a su vez es consecuencia de la acumulacion de los
errores de medición angular ( dα ) y el error de orientación ( dϕ ).-
Si nos interesara conocer los errores en la
dirección del vector (error lineal) y en la
dirección transversal al mismo, realizamos
una rotación del sistema haciendo coincidir
el eje de las abscisas X con la dirección del
vector, de este modo no tendríamos en
cuenta el error de orientación puesto que
ϕ = 0° ; luego:
X
dD
dQ
error lineal
error transversal
Error Angular
dα Y
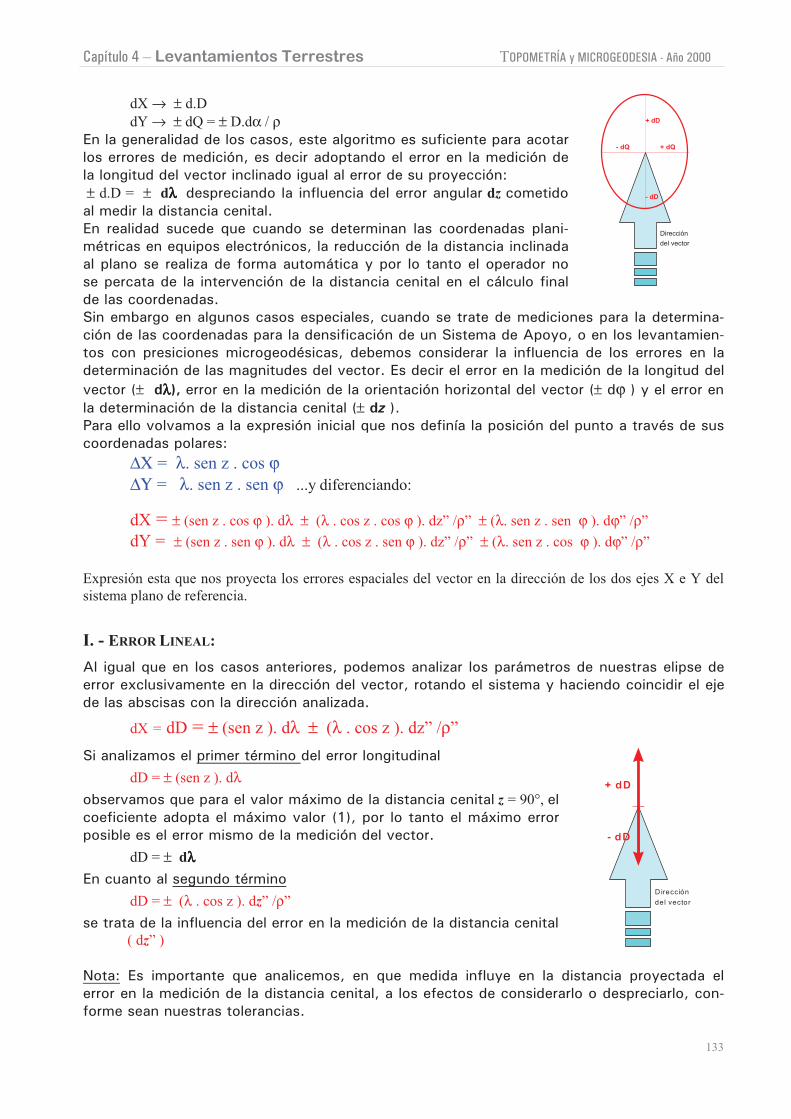
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
133
dX → ± d.D
dY → ± dQ = ± D.dα / ρEn la generalidad de los casos, este algoritmo es suficiente para acotar
los errores de medición, es decir adoptando el error en la medición de
la longitud del vector inclinado igual al error de su proyección:
± d.D = ± dλλλλ despreciando la influencia del error angular dz cometido
al medir la distancia cenital.
En realidad sucede que cuando se determinan las coordenadas plani-
métricas en equipos electrónicos, la reducción de la distancia inclinada
al plano se realiza de forma automática y por lo tanto el operador no
se percata de la intervención de la distancia cenital en el cálculo final
de las coordenadas.
- dQ + dQ
- dD
+ dD
Dirección
del vector
Sin embargo en algunos casos especiales, cuando se trate de mediciones para la determina-
ción de las coordenadas para la densificación de un Sistema de Apoyo, o en los levantamien-
tos con presiciones microgeodésicas, debemos considerar la influencia de los errores en la
determinación de las magnitudes del vector. Es decir el error en la medición de la longitud del
vector (± dλλλλ), error en la medición de la orientación horizontal del vector (± dϕ ) y el error en
la determinación de la distancia cenital (± dz ).
Para ello volvamos a la expresión inicial que nos definía la posición del punto a través de sus
coordenadas polares:
∆Χ = λ. sen z . cos ϕ∆Υ = λ. sen z . sen ϕ ...y diferenciando:
dX = ± (sen z . cos ϕ ). dλ ± (λ . cos z . cos ϕ ). dz” /ρ” ± (λ. sen z . sen ϕ ). dϕ” /ρ”
dY = ± (sen z . sen ϕ ). dλ ± (λ . cos z . sen ϕ ). dz” /ρ” ± (λ. sen z . cos ϕ ). dϕ” /ρ”
Expresión esta que nos proyecta los errores espaciales del vector en la dirección de los dos ejes X e Y del
sistema plano de referencia.
I. - ERROR LINEAL:
Al igual que en los casos anteriores, podemos analizar los parámetros de nuestras elipse de
error exclusivamente en la dirección del vector, rotando el sistema y haciendo coincidir el eje
de las abscisas con la dirección analizada.
dX = dD = ± (sen z ). dλ ± (λ . cos z ). dz” /ρ”
Si analizamos el primer término del error longitudinal
dD = ± (sen z ). dλ
observamos que para el valor máximo de la distancia cenital z = 90°, el
coeficiente adopta el máximo valor (1), por lo tanto el máximo error
posible es el error mismo de la medición del vector.
dD = ± dλλλλ
En cuanto al segundo término
dD = ± (λ . cos z ). dz” /ρ”
se trata de la influencia del error en la medición de la distancia cenital
( dz” )
- dD
D irección
del vector
+ dD
Nota: Es importante que analicemos, en que medida influye en la distancia proyectada el
error en la medición de la distancia cenital, a los efectos de considerarlo o despreciarlo, con-
forme sean nuestras tolerancias.
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
134
Por tal motivo, a continuación se adjunta una tabla con las variables que intervienen.
• En la primera columna distancias que van desde 100m a 3000m.
• En la segunda columna la distancia cenital, variando desde 85°, hasta un valor ya casi improbable
de 30°.
• En la tercera columna se estipula un error probable del ángulo vertical (distancia cenital), el cual
se lo toma desde un valor mínimo de 10” hasta un valor max.probable de 30”.
• Finalmente la cuarta columna representa el valor de “dD” expresado en centímetros.
En color amarillo la faja comprendida entre 1cm y 5cm - la que sigue (color naranja) la faja entre
5cm y 10cm y por último la faja que contiene a los errores mayores a 10cm.
Si analizamos la tabla podemos ver que en los levantamientos topométricos, en líneas gene-
rales, para el levantamiento de puntos de forma del terreno, el error en la medición del ángulo
vertical puede ser despreciado. Pero es muy necesario tenerlos presente cuando se requiera
levantar puntos característicos que exijan elevada precisión y fundamentalmente en las medi-
ciones de vectores del Sistema de Apoyo.
Los valores expresados en la tabla de errores angulares son bastante posibles, recordemos
que la mayoría de los teodolitos topográficos miden el ángulo vertical con una precisión de
20”.
Si tenemos en cuenta el posible error debido a la descorrección del compensador del péndulo,
seguramente se estaría en un entorno próximo a los 30” de error, valor máximo que hemos
supuesto en la tabla.
Recuerde el alumno que siempre hablamos de errores accidentales, los errores sistemáticos
instrumentales, como por ejemplo el error de índice, en este análisis lo suponemos corregido.-
Cuidado ! : Un error de índice puede superar muchas veces los valores consignados en la
tabla.
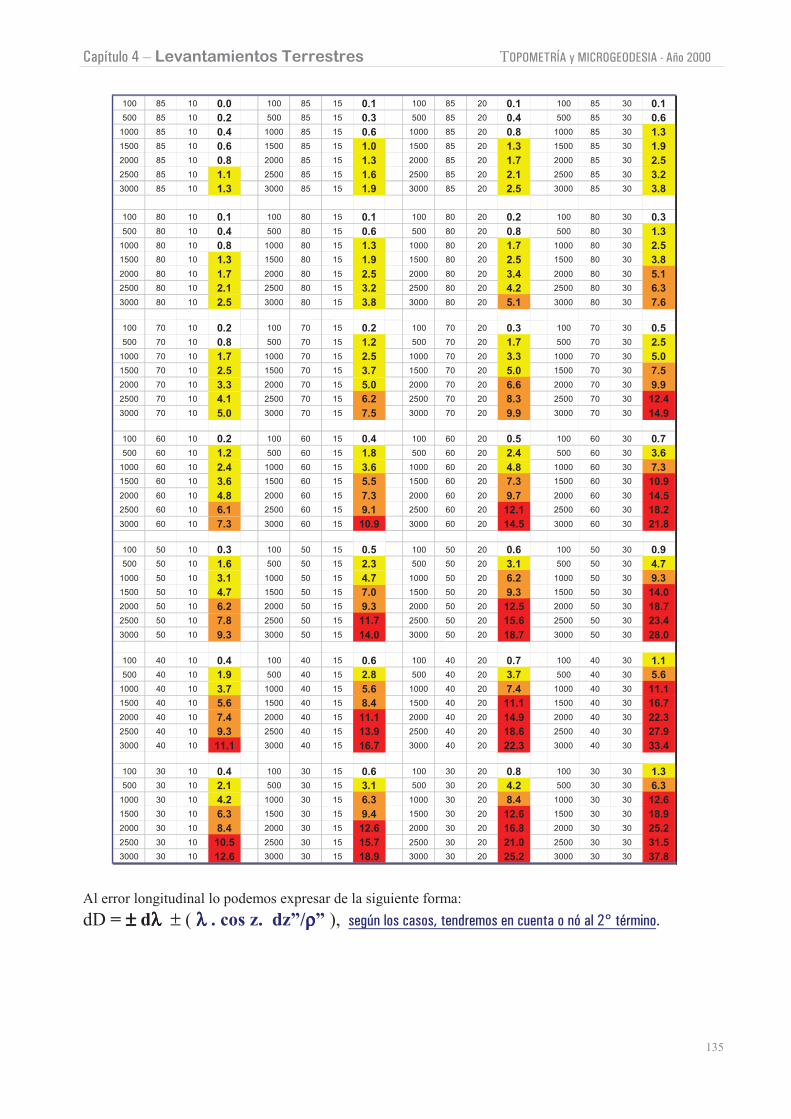
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
135
100 85 10 0.0 100 85 15 0.1 100 85 20 0.1 100 85 30 0.1
500 85 10 0.2 500 85 15 0.3 500 85 20 0.4 500 85 30 0.6
1000 85 10 0.4 1000 85 15 0.6 1000 85 20 0.8 1000 85 30 1.3
1500 85 10 0.6 1500 85 15 1.0 1500 85 20 1.3 1500 85 30 1.9
2000 85 10 0.8 2000 85 15 1.3 2000 85 20 1.7 2000 85 30 2.5
2500 85 10 1.1 2500 85 15 1.6 2500 85 20 2.1 2500 85 30 3.2
3000 85 10 1.3 3000 85 15 1.9 3000 85 20 2.5 3000 85 30 3.8
100 80 10 0.1 100 80 15 0.1 100 80 20 0.2 100 80 30 0.3
500 80 10 0.4 500 80 15 0.6 500 80 20 0.8 500 80 30 1.3
1000 80 10 0.8 1000 80 15 1.3 1000 80 20 1.7 1000 80 30 2.5
1500 80 10 1.3 1500 80 15 1.9 1500 80 20 2.5 1500 80 30 3.8
2000 80 10 1.7 2000 80 15 2.5 2000 80 20 3.4 2000 80 30 5.1
2500 80 10 2.1 2500 80 15 3.2 2500 80 20 4.2 2500 80 30 6.3
3000 80 10 2.5 3000 80 15 3.8 3000 80 20 5.1 3000 80 30 7.6
100 70 10 0.2 100 70 15 0.2 100 70 20 0.3 100 70 30 0.5
500 70 10 0.8 500 70 15 1.2 500 70 20 1.7 500 70 30 2.5
1000 70 10 1.7 1000 70 15 2.5 1000 70 20 3.3 1000 70 30 5.0
1500 70 10 2.5 1500 70 15 3.7 1500 70 20 5.0 1500 70 30 7.5
2000 70 10 3.3 2000 70 15 5.0 2000 70 20 6.6 2000 70 30 9.9
2500 70 10 4.1 2500 70 15 6.2 2500 70 20 8.3 2500 70 30 12.4
3000 70 10 5.0 3000 70 15 7.5 3000 70 20 9.9 3000 70 30 14.9
100 60 10 0.2 100 60 15 0.4 100 60 20 0.5 100 60 30 0.7
500 60 10 1.2 500 60 15 1.8 500 60 20 2.4 500 60 30 3.6
1000 60 10 2.4 1000 60 15 3.6 1000 60 20 4.8 1000 60 30 7.3
1500 60 10 3.6 1500 60 15 5.5 1500 60 20 7.3 1500 60 30 10.9
2000 60 10 4.8 2000 60 15 7.3 2000 60 20 9.7 2000 60 30 14.5
2500 60 10 6.1 2500 60 15 9.1 2500 60 20 12.1 2500 60 30 18.2
3000 60 10 7.3 3000 60 15 10.9 3000 60 20 14.5 3000 60 30 21.8
100 50 10 0.3 100 50 15 0.5 100 50 20 0.6 100 50 30 0.9
500 50 10 1.6 500 50 15 2.3 500 50 20 3.1 500 50 30 4.7
1000 50 10 3.1 1000 50 15 4.7 1000 50 20 6.2 1000 50 30 9.3
1500 50 10 4.7 1500 50 15 7.0 1500 50 20 9.3 1500 50 30 14.0
2000 50 10 6.2 2000 50 15 9.3 2000 50 20 12.5 2000 50 30 18.7
2500 50 10 7.8 2500 50 15 11.7 2500 50 20 15.6 2500 50 30 23.4
3000 50 10 9.3 3000 50 15 14.0 3000 50 20 18.7 3000 50 30 28.0
100 40 10 0.4 100 40 15 0.6 100 40 20 0.7 100 40 30 1.1
500 40 10 1.9 500 40 15 2.8 500 40 20 3.7 500 40 30 5.6
1000 40 10 3.7 1000 40 15 5.6 1000 40 20 7.4 1000 40 30 11.1
1500 40 10 5.6 1500 40 15 8.4 1500 40 20 11.1 1500 40 30 16.7
2000 40 10 7.4 2000 40 15 11.1 2000 40 20 14.9 2000 40 30 22.3
2500 40 10 9.3 2500 40 15 13.9 2500 40 20 18.6 2500 40 30 27.9
3000 40 10 11.1 3000 40 15 16.7 3000 40 20 22.3 3000 40 30 33.4
100 30 10 0.4 100 30 15 0.6 100 30 20 0.8 100 30 30 1.3
500 30 10 2.1 500 30 15 3.1 500 30 20 4.2 500 30 30 6.3
1000 30 10 4.2 1000 30 15 6.3 1000 30 20 8.4 1000 30 30 12.6
1500 30 10 6.3 1500 30 15 9.4 1500 30 20 12.6 1500 30 30 18.9
2000 30 10 8.4 2000 30 15 12.6 2000 30 20 16.8 2000 30 30 25.2
2500 30 10 10.5 2500 30 15 15.7 2500 30 20 21.0 2500 30 30 31.5
3000 30 10 12.6 3000 30 15 18.9 3000 30 20 25.2 3000 30 30 37.8
Al error longitudinal lo podemos expresar de la siguiente forma:
dD = ±±±± dλλλλ ± ( λλλλ . cos z. dz”/ρρρρ” ), según los casos, tendremos en cuenta o nó al 2° término.
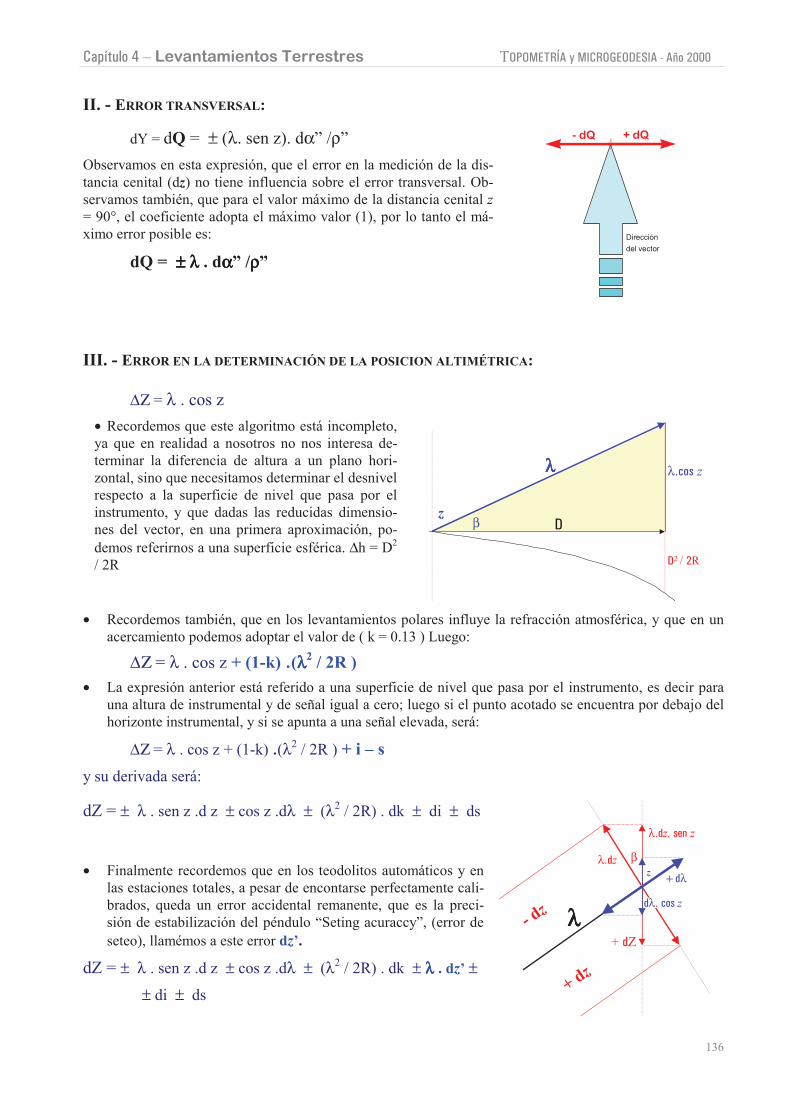
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
136
II. - ERROR TRANSVERSAL:
dY = dQ = ± (λ. sen z). dα” /ρ”
Observamos en esta expresión, que el error en la medición de la dis-
tancia cenital (dz) no tiene influencia sobre el error transversal. Ob-
servamos también, que para el valor máximo de la distancia cenital z
= 90°, el coeficiente adopta el máximo valor (1), por lo tanto el má-
ximo error posible es:
dQ = ±±±± λλλλ . dαααα” /ρρρρ”
- dQ
Dirección
del vector
+ dQ
III. - ERROR EN LA DETERMINACIÓN DE LA POSICION ALTIMÉTRICA:
∆Ζ = λ . cos z
• Recordemos que este algoritmo está incompleto,
ya que en realidad a nosotros no nos interesa de-
terminar la diferencia de altura a un plano hori-
zontal, sino que necesitamos determinar el desnivel
respecto a la superficie de nivel que pasa por el
instrumento, y que dadas las reducidas dimensio-
nes del vector, en una primera aproximación, po-
demos referirnos a una superficie esférica. ∆h = D2
/ 2R
λλλλ
βz
λ.cos z
D
D2 / 2R
• Recordemos también, que en los levantamientos polares influye la refracción atmosférica, y que en un
acercamiento podemos adoptar el valor de ( k = 0.13 ) Luego:
∆Ζ = λ . cos z + (1-k) .(λλλλ2 / 2R )
• La expresión anterior está referido a una superficie de nivel que pasa por el instrumento, es decir para
una altura de instrumental y de señal igual a cero; luego si el punto acotado se encuentra por debajo del
horizonte instrumental, y si se apunta a una señal elevada, será:
∆Ζ = λ . cos z + (1-k) .(λ2 / 2R ) + i – s
y su derivada será:
dZ = ± λ . sen z .d z ± cos z .dλ ± (λ2 / 2R) . dk ± di ± ds
• Finalmente recordemos que en los teodolitos automáticos y en
las estaciones totales, a pesar de encontarse perfectamente cali-
brados, queda un error accidental remanente, que es la preci-
sión de estabilización del péndulo “Seting acuraccy”, (error de
seteo), llamémos a este error dz’.
dZ = ± λ . sen z .d z ± cos z .dλ ± (λ2 / 2R) . dk ± λλλλ . dz’ ±
± di ± ds
λλλλ- dz
+ dz
βλ.dz
λ.dz. sen z
+ dZ
z+dλ
dλ. cos z
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
137
Ejercicio N° 14Ejercicio N° 14Ejercicio N° 14Ejercicio N° 14: : : : Deseamos saber los parámetros de la elipse de error probable en un punto, cuya
posición se determinó mediante un levantamiento polar. Partiendo de la premisa que se trabajó
midiendo los ángulos en una sola posición del círculo, pero todos los errores instrumentales siste-
máticos se encontraban corregidos.
Máxima longitud de vector λ= 365.2 m
Error probable en la determinación de la distancia inclinada dλ = ± 2 cm
Mínima distancia cenital ó (máx. áng. de elevación β max = 30°)
Precisión en la medición angular δϕ = δα = δβ = ± 20”
Precisión en la estabilización del péndulo dz’ = ± 10”
D = λ. cos β = 365.2 . cos 30° = 316.3m
1.- dD = ±±±± dλλλλ ± (λ . cos z. dz”/ρ” )
dD = ± 2 cm ± (365.2 . cos 60°. 20”/ 206265 )
dD = ± 2 cm ± 1.8 cm
dD = ± 2.7 cm
2.- dQ = ±±±± λλλλ . dϕϕϕϕ” /ρρρρ”
dQ = ± 365.2m . 20” / 206265
dQ = ± 3.5 cm
3.- dZ = ± (λ . sen z / ρ”).d z ± cos z .dλ ± (λ2 / 2R) . dk ± (λ / ρ”).dβ’ ± di ± ds
dZ = ± (36520 . sen 60° / 206265).20” ± cos 60° .2 ±
(365202 / 2x637000000) . 0.13 ± (36520 / 206265).10”’ ± 0.15 cm ± 0.15cm
dZ = ± 3.06 cm ± 1cm ± 1.04 cm ± 1.8 cm ± 0.15 cm ± 0.15cm
dZ = ± 4 cm
Ejercicio N° 15Ejercicio N° 15Ejercicio N° 15Ejercicio N° 15: : : : Se determinará la posición de un punto empleando método polar. Se desea saber,
con que exactitud habrá que medir el rumbo, la distancia cenital y la distancia del vector, para
estar dentro de un elipsoide de confianza del 95%, sabiendo que:
La Tolerancia fijada es de 8 cm. para la planimetría y de 10cm. para la altimetría.
La distancia máxima a medir es de aprox. 350m
La pendiente máxima es del 25%
Emplearemos 2σ; luego
dD = dQ = Tp /2 = ± 8cm / 2 = ± 4 cm ;
dh = Th /2 = ± 10cm/ 2 = ± 5 cm
tg β = 25% = 0.25 → β = 14° .... → z = 76°
1.- dD = ± sen z . dλ ± (λ . cos z. dz”/ρ” )
± 4 cm = ± sen 76°. dλ ± (35000cm . cos 76°.../206265). dz” = ± 0.97. dλ ± 0.04. dz”

Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
138
± 4 cm = ± 0.97. dλ ± 0.04 . dz”
± 0.97. dλ < ± 4 cm → dλ < ± 3.8 cm
± 0.04 dz” < ± 4 cm → dz” < √ (42 / 0.04
2 ) < 100”
2.- dQ = ± λ . dϕ” /ρ”
± 4 cm = ± (350m / 206265). dϕ” = ± ( 0.17 ). dϕ”
dϕ” = ± 4 / ( 0.17 ). = ± 23”
3.- dZ = ± ( D / cos2 β . ρ” ). d β ± D. d β’/ ρ” ± tg β .dD ± (D
2 / 2R) . dk ± di ± ds
5cm = ± (350m / cos2 14° . 206265 ). d β ± 350m. 10”/ 206265
± tg 14° . 4 cm ± 0.14 cm ± 0.15 cm ± 0.1 cm
5cm = ± (0.18 ). d β ± 1.69 cm ± 1cm ± 0.14 cm ± 0.15 cm ± 0.1 cm
52 = ± (0.18 )
2. d β 2 ± 2 cm
(0.18 )2. d β 2 = ± (5)
2 - (2)
2
(0.18 )2. d β 2 = ± 21
d β 2 = ± 21 / 0.0324
d β = ± √648.15 = ± 25”
Llegamos a la conclusión, que para estar dentro de las tolerancias establecidas, debemos
medir con las siguientes exactitudes:
La longitud del vector : ± 3 cm
Los rumbos: ± 20”
Las distancias cenitales: ± 25”
Ejercicio N° 16Ejercicio N° 16Ejercicio N° 16Ejercicio N° 16::::
Se determinará la posición planimétrica de puntos insertos en un encadenado de hormigón, em-
pleando método polar. Se desea saber, con que exactitud habrá que medir el rumbo, la distancia
cenital y la distancia del vector, para estar dentro de una elipse de confianza del 95%, sabiendo
que:La Tolerancia fijada en X es de 1 cm.
La Tolerancia fijada en Y es de 3 cm.
La distancia máxima a medir es de 22m
El rumbo del vector correspondiente a la máx. distancia 63°25’16”
El ángulo de elevación máx. 10°36’12”
Emplearemos un 2σ ; luego
dX = TX / 2 = ± 1cm/ 2 = ± 0.5 cm
dY = TY / 2 = ± 3 cm/ 2 = ± 1.5 cm
β = 10° 36’ 12”.... → z = 79°23'48"
1.- dX = -/+ (λ. sen z).sen ϕ .dϕ ± cos ϕ. (sen z . dλ) ± cos ϕ . (λ . cos z. dz )
2.- dY = ± (λ. sen z).cos ϕ . dϕ ± sen ϕ. (sen z . dλ) ± sen ϕ . (λ . cos z. dz)
1.- 0.5 cm = -/+ (22m . sen 79°23'48". sen 63°25’16”/ 206265 ).dϕ ± (cos 63°25’16”. sen 79°23'48") . dλ ± (22m . cos 63°25’16” . cos 79°23'48"/ 206265 ). dz
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
139
1.- 5 mm = -/+ 0.09 . dϕ ± 0.44 . dλ ± 0.009. dz
2.- 1.5 cm = ± (22m. sen 79°23'48". cos 63°25’16” / 206265 ).dϕ ± (sen 63°25’16”. sen 79°23'48"). dλ ± (22m . sen 63°25’16”. cos 79°23'48" / 206265 ). dz
2.- 15 mm = ± 0.05 . dϕ ± 0.88 dλ ± 0.02 dz
5 = -/+ 0.09 . dϕ ± 0.44 . dλ ± 0.009. dz
15 = ± 0.05 . dϕ ± 0.88 dλ ± 0.02 dz
5 = -/+ 0.09 . dϕ → dϕ < ± 55”
15 = ± 0.05 . dϕ → dϕ < ± 300”
5 = ± 0.44 . dλ → dλ < ± 11mm
15 = ± 0.88 dλ → dλ < ± 17mm
5 = ± 0.009. dz → dz < ± 555”
15 = ± 0.02 dz → dz < ± 750”
Para cumplir simultáneamente con los requerimientos dX- dY, debemos adoptar los valores
más ajustados. Debemos elegir el instrumental de medición adecuado y el método que nos
garantice poder medir el ángulo horizontal con una precisión mejor que 50” y la distancia con
una precisión mejor que: 11mm/22000mm= 1: 2000.
Ejercicio N° 17Ejercicio N° 17Ejercicio N° 17Ejercicio N° 17: : : : Deseamos saber cual será la exactitud planimétrica probable en un punto de densifica-
ción, expresado como error relativo,y en las direcciones X e Y, cuya posición se determinó mediante un
levantamiento polar. Partiendo de la premisa que se trabajó con una estación total, apuntando a un prisma
montado sobre base nivelante, midiendo los ángulos en las dos posiciónes del círculo.
Longitud de vector = 1.250 m
Error probable en la determinación de la distancia inclinada = ± 5mm +1ppm.
Distancia cenital = 55°
Rumbo del punto visado = 75°26’18”
Precisión en la medición angular = ± 10”
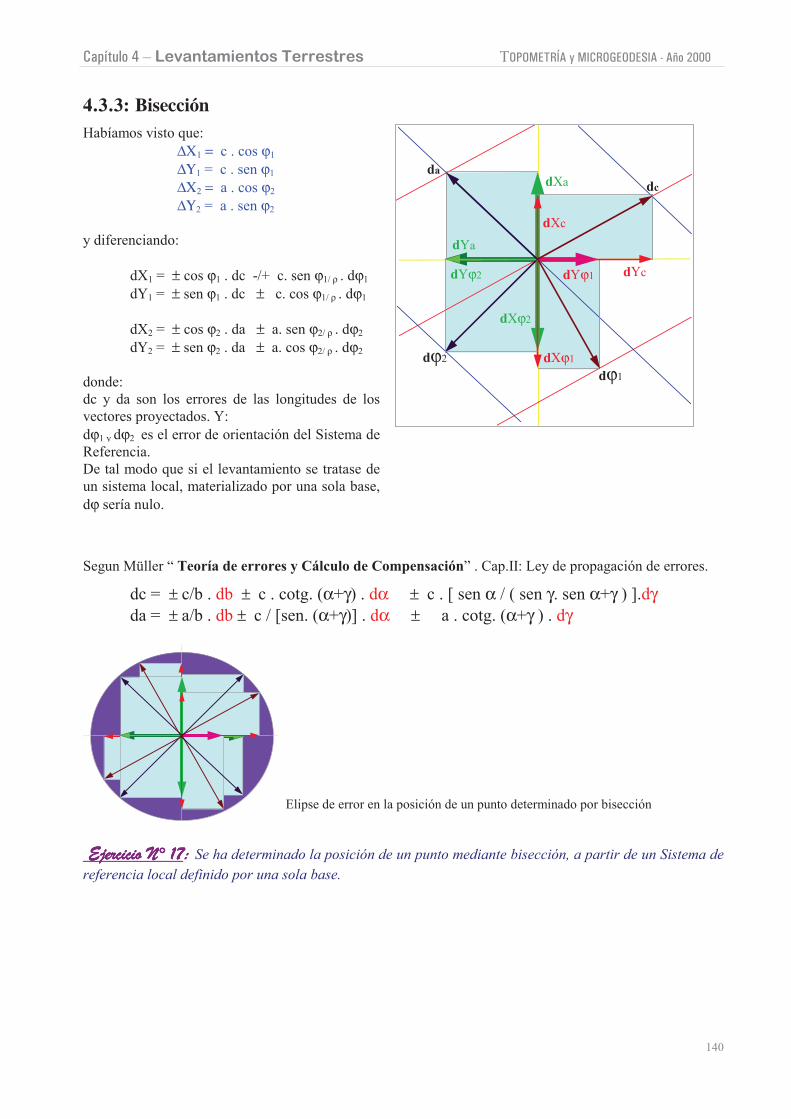
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
140
4.3.3: Bisección
Habíamos visto que:
∆Χ1 = c . cos ϕ1
∆Υ1 = c . sen ϕ1
∆Χ2 = a . cos ϕ2
∆Υ2 = a . sen ϕ2
y diferenciando:
dX1 = ± cos ϕ1 . dc -/+ c. sen ϕ1/ ρ . dϕ1
dY1 = ± sen ϕ1 . dc ± c. cos ϕ1/ ρ . dϕ1
dX2 = ± cos ϕ2 . da ± a. sen ϕ2/ ρ . dϕ2
dY2 = ± sen ϕ2 . da ± a. cos ϕ2/ ρ . dϕ2
donde:
dc y da son los errores de las longitudes de los
vectores proyectados. Y:
dϕ1 y dϕ2 es el error de orientación del Sistema de
Referencia.
De tal modo que si el levantamiento se tratase de
un sistema local, materializado por una sola base,
dϕ sería nulo.
dc
da
dϕ1
dϕ2
dXa
dXc
dXϕ2
dXϕ1
dYcdYϕ1
dYa
dYϕ2
Segun Müller “ Teoría de errores y Cálculo de Compensación” . Cap.II: Ley de propagación de errores.
dc = ± c/b . db ± c . cotg. (α+γ) . dα ± c . [ sen α / ( sen γ. sen α+γ ) ].dγda = ± a/b . db ± c / [sen. (α+γ)] . dα ± a . cotg. (α+γ ) . dγ
Elipse de error en la posición de un punto determinado por bisección
Ejercicio N° 17 Ejercicio N° 17 Ejercicio N° 17 Ejercicio N° 17: : : : Se ha determinado la posición de un punto mediante bisección, a partir de un Sistema de
referencia local definido por una sola base.
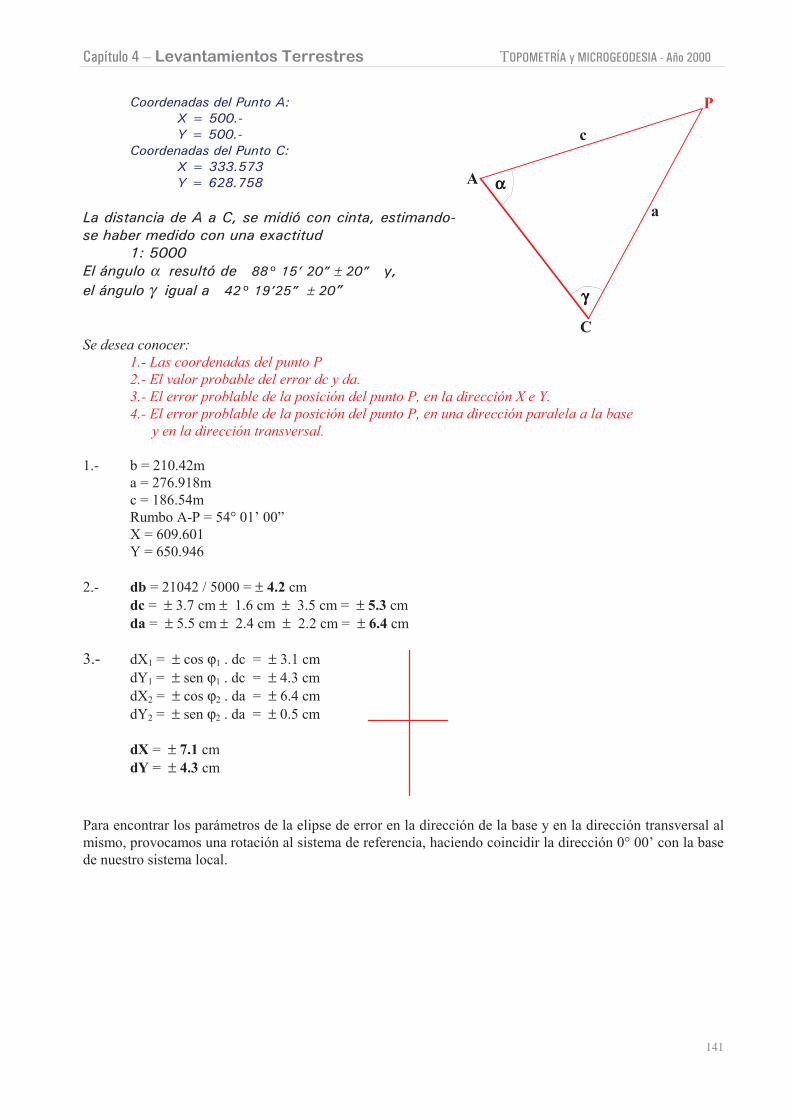
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
141
Coordenadas del Punto A:
X = 500.-
Y = 500.-
Coordenadas del Punto C:
X = 333.573
Y = 628.758
La distancia de A a C, se midió con cinta, estimando-
se haber medido con una exactitud
1: 5000
El ángulo α resultó de 88° 15’ 20” ± 20” y,
el ángulo γ igual a 42° 19’25” ± 20”
αααα
γγγγ
A
C
c
a
P
Se desea conocer:
1.- Las coordenadas del punto P
2.- El valor probable del error dc y da.
3.- El error problable de la posición del punto P, en la dirección X e Y.
4.- El error problable de la posición del punto P, en una dirección paralela a la base
y en la dirección transversal.
1.- b = 210.42m
a = 276.918m
c = 186.54m
Rumbo A-P = 54° 01’ 00”
X = 609.601
Y = 650.946
2.- db = 21042 / 5000 = ± 4.2 cm
dc = ± 3.7 cm ± 1.6 cm ± 3.5 cm = ± 5.3 cm
da = ± 5.5 cm ± 2.4 cm ± 2.2 cm = ± 6.4 cm
3.- dX1 = ± cos ϕ1 . dc = ± 3.1 cm
dY1 = ± sen ϕ1 . dc = ± 4.3 cm
dX2 = ± cos ϕ2 . da = ± 6.4 cm
dY2 = ± sen ϕ2 . da = ± 0.5 cm
dX = ± 7.1 cm
dY = ± 4.3 cm
Para encontrar los parámetros de la elipse de error en la dirección de la base y en la dirección transversal al
mismo, provocamos una rotación al sistema de referencia, haciendo coincidir la dirección 0° 00’ con la base
de nuestro sistema local.
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
142
4.- Giramos el Sistema en 37° 43’ 40”
ϕ1= 91° 44’ 40” y ϕ2 = 42°19’25”
dL1 = ± cos ϕ1 . dc = ± 0.16 cm
dt 1 = ± sen ϕ1 . dc = ± 5.3 cm
dL2 = ± cos ϕ2 . da = ± 4.7 cm
dt 2 = ± sen ϕ2 . da = ± 4.3 cm
dL = ± 4.7 cm
dt = ± 6.8 cm
Es necesario aclarar, que estas elipses de error así determinadas son siempre una manera apróximada de
realizar la acotación de errores, la forma más apropiada de resolverlo es mediante el uso de un software
de elipses de error o de simulación de redes.
Sin embargo los algoritmos aquí empleados son de fácil solución, se pueden aplicar a un punto aislado
aún cuando no se disponga de una red; resulta una manera práctica de arribar a una buena solución, y es
muy gráfica a los fines didácticos para observar el comportamiento de los coeficientes.
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
143
Aforismos
“… Al hombre excelente se lo reconoce porque es capaz de renunciar a toda prebenda
que tenga por precio una partícula de su dignidad…”
“… Los grandes cerebros ascienden por la senda exclusiva del mérito; o por ninguna…”
“…el joven que no cultiva su mente, va derecho a la disgregación de su personalidad.
No desbaratar la propia ignorancia, es perecer en vida…”
”… el que aspira a ser águila debe mirar lejos y volar alto. El que se resigna a arrastrar-
se como un gusano renuncia al derecho de protestar si lo aplastan…”
“ La rebeldía es vida: la sumisión es muerte.”
“ Hay que soñar, pero a condición de creer seriamente en nuestro sueño, de examinar
con atención la vida real, de confrontar nuestras observaciones con nuestro sueño, de
realizar escrupulosamente nuestra fantasía.”
“ Quien siembra en su propio espíritu, planta un árbol a larga fecha.”
“ Es mejor no saber nada de nada, que saber muchas cosas a medias.”
“ El que sabe que es profundo, se esfuerza por ser claro.
El que quiere parecer profundo, se esfuerza por ser oscuro.”
No treparás nunca en vano por las montañas de la verdad, ya sea que hoy llegues a
subir muy alto, o que ejercites tus fuerzas para poder subir más alto mañana.”
“ La pasión puesta en la búsqueda del conocimiento y la verdad, que está por encima
de toda consideración personal (agradable o desagradable), es lo más alto.”
“ No vivimos propiamente para el conocimiento, sino para el pasmoso y abundante pla-
cer que la búsqueda y el encuentro de éste nos proporciona y nos embriaga”
“ Solo nuestra obra y nuestros ejemplos, son los que le dan al navío de nuestra vida
brújula y dirección.”
“ ¡ Imprimamos el sello de la eternidad en nuestra obra y a nuestra vida !!!
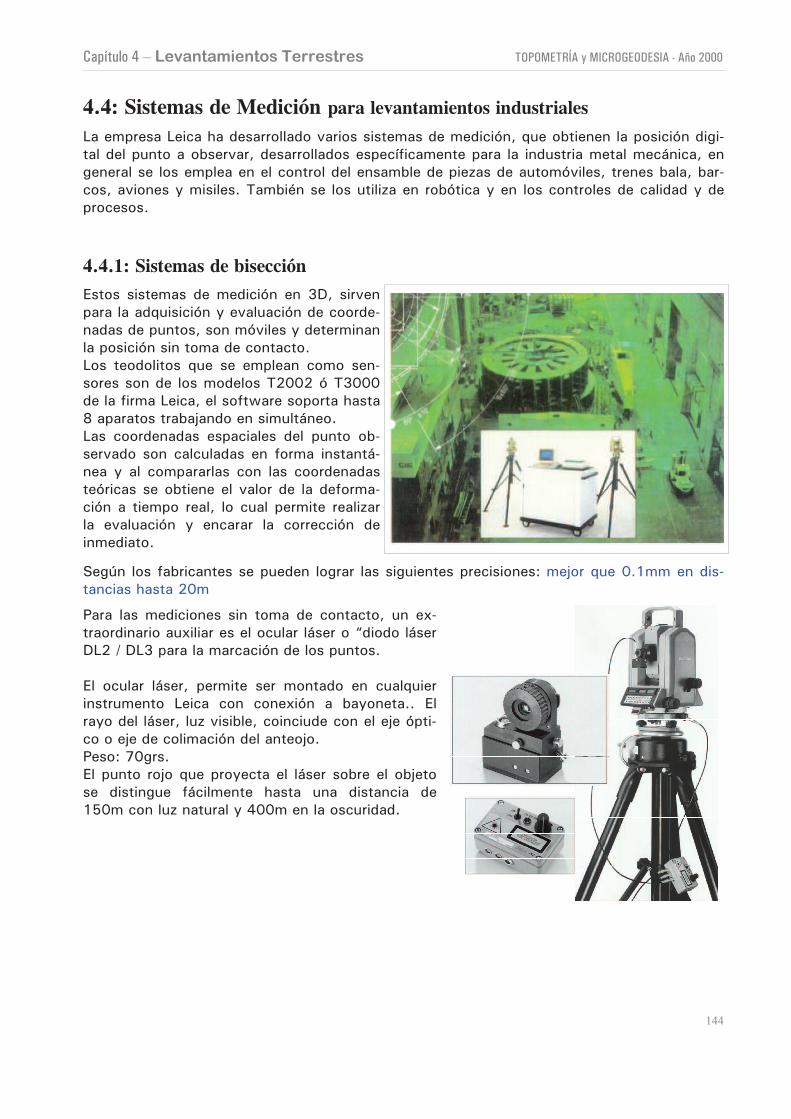
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
144
4.4: Sistemas de Medición para levantamientos industriales
La empresa Leica ha desarrollado varios sistemas de medición, que obtienen la posición digi-
tal del punto a observar, desarrollados específicamente para la industria metal mecánica, en
general se los emplea en el control del ensamble de piezas de automóviles, trenes bala, bar-
cos, aviones y misiles. También se los utiliza en robótica y en los controles de calidad y de
procesos.
4.4.1: Sistemas de bisección
Estos sistemas de medición en 3D, sirven
para la adquisición y evaluación de coorde-
nadas de puntos, son móviles y determinan
la posición sin toma de contacto.
Los teodolitos que se emplean como sen-
sores son de los modelos T2002 ó T3000
de la firma Leica, el software soporta hasta
8 aparatos trabajando en simultáneo.
Las coordenadas espaciales del punto ob-
servado son calculadas en forma instantá-
nea y al compararlas con las coordenadas
teóricas se obtiene el valor de la deforma-
ción a tiempo real, lo cual permite realizar
la evaluación y encarar la corrección de
inmediato.
Según los fabricantes se pueden lograr las siguientes precisiones: mejor que 0.1mm en dis-
tancias hasta 20m
Para las mediciones sin toma de contacto, un ex-
traordinario auxiliar es el ocular láser o “diodo láser
DL2 / DL3 para la marcación de los puntos.
El ocular láser, permite ser montado en cualquier
instrumento Leica con conexión a bayoneta.. El
rayo del láser, luz visible, coinciude con el eje ópti-
co o eje de colimación del anteojo.
Peso: 70grs.
El punto rojo que proyecta el láser sobre el objeto
se distingue fácilmente hasta una distancia de
150m con luz natural y 400m en la oscuridad.

Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
145
4.4.2: Sistemas de medición polar
Este sistema de precisión milimétrica, que está integrado por un software,
una PC notebook y una estación total de alta precisión.
El sistema es manejado por un solo operador.
Para la medición de las distancias se emplean dianas reflectantes au-
toadhesivas, de una amplia gama de tamaños y adaptaciones.-
Se puede utilizar también el ocular láser DL2 para visualizar los puntos le-
vantados.
4.4.3: Sistemas de videogrametría
El Sistema V-Stars de la compañía norteamericana Geodetic Services Inc. (GSI) es un sistema
móvil de medición de coordenadas en 3D, muy compacto y altamente preciso.
Para la captación del objeto se sirve de videocámaras, y para la
determinación de la posición, se basa en los principios de la foto-
grametría terrestre. Este sistema permite captar una gran cantidad
de puntos de control en muy poco tiempo, al mismo tiempo que
solucionan problemas que hasta este momento eran irrealizables,
por ejemplo la medición de objetos en movimientos.
Beneficios que ofrece:
• Alta precisión: Generalmente por debajo de 1:100000 del tamaño del objeto (0.1 mm para
un objeto de 10 m)
• Rápidos resultados: En minutos, usando el sistema Off-line. En segundos usando el siste-
ma On-line.
• Portátil: Todos los componentes son transportables
• Inmune a vibraciones: El V-STARS opera aún en un entorno poco estable, con vibraciones
• Software poderoso: trabaja bajo Windows 95/98 y NT.
• Análisis en CAD: mediante un Software interfaz permite efectuar análisis con software
tales como AxyzCAD, CADmess, Metrolog II, etc.
• Costos de operación reducidos
1) Solución V-Stars /M (multiple camera system)
El sistema V-Stars /M está integrado por 2 o más cámaras liga-
da a una PC notebook.
El sistema trabaja a tiempo real, tridimensional, es ideal para el levantamiento de puntos mó-
viles.

Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
146
• Con Sonda inalámbrica para tocar el objeto
• Reconocimiento automático de la sonda
• Evaluación On-line del punto tocado por la sonda
• Muestra en segundos la información espacial del objeto en el monitor
Soporta los siguientes software:
CATS 3D by CATS - HOLOS NT by Zeiss - Metrosoft CM3 by MetromecMetrolog II by Metrologic - CAM2 by FARO - Power Inspect by DELCAM - Axyz by Leica
1) Solución V-Stars /S (Single camera system)
El sistema V-Stars /M está integrado por una sola cámara ligada
a una PC notebook.
El sistema trabaja únicamente en pos proceso, bidimensional.
• Ideal para inspeccionar herramientas y productos de tamaño
mayor que 1 metro y hasta 20 metros
• Toma imágenes digitales del objeto en varias direcciones
• Minimiza los tiempos de inspección
• Imágenes disponibles
Mediante proceso automático de software se pueden determinar dimensiones geométricas
4.4.4: Sistemas de rastreos láser
Este sistema de medición en 3D, permite capturar la posición en for-
ma muy precisa (apenas algunas micras) de objetos que se encuen-
tran en movimientos, operando con un único sensor. El sistema per-
mite medir hasta 500 posiciones por segundo, se lo emplea para el
control periódico de instalaciones y brazos robóticos, es muy cómo-
do su empleo pues no requiere del empleo de trípodes o piezas espe-
ciales y puede ser usado en recintos muy estrechos.
3D Laser Tracking System
Integrated - Intelligent - Industrial. Industrial measurement with 3D Laser Trackers and
the Leica state-of-the art platform Axyz
Leica LT500Application Demands
Modern manufacturing technology places increasingly higher demands on industrial measurement systems. The trend
to very large structures in composite materiel poses the question: how can the contours of components and tooling be
accurately inspected for compliance with a CAD model. ¿ How can surfaces be digitized accurately and fast? If large
machine tools are being used for manufacturing, how can accuracy be determined quickly and with a minimum of
downtime and, if possible, for the whole working envelope?
Find out how NASA rely on the Leica Laser tracker
The measuring equipment
Leica's Laser trackers can very largely fulfill the above mentioned demands to a measuring system.
The LT500
Laser Tracker with a high accuracy tracking 3D laser interferometer and high precision angular encoders.
The LTD500
Laser Tracker with a high accuracy tracking 3D laser interferometer and high precision angular encoders PLUS an
integrated high precision absolute distance meter.
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
147
Flexible Application
• Instrument is light and portable
• Set-up independent of object size or space res-
trictions
• 3D determination of large objects
Confidence
• Internal automatic function control
• Certificate proves accuracy
Tracking
• Max target speed < 6.0 m/s
Range of measurement
• horizontal ± 235°
• vertical ± 45°
• distance 0-35 m
Accuracy
• Angle resolution 0.14"
• Distance resolution 1.26 µm
• Absolute accuracy (2σσσσ) of a coordinate:
± 10 ppm (µm/m)
Absolute Distance meter
• Resolution 1 µm
• Accuracy (2!) ± 0.05 mm
• Range 2 -35m
Application on the shop floor
• Introducing CAD data
• Building of points
• Automatic inspection of built object-points to
conformity with the design Real time results with
Leica's Axyz SW platform)
Accessories
• Various retro-reflectors
• Various reflector supports magnetic non magne-
tic
• Voice recognition
• Remote control
• Climate monitor
4.5: Métodos de Levantamiento Lineal: Perfilometría
Repitiendo conceptos ya vertidos con anterioridad, en las obras de desarrollo lineal (Líneas de
alta tensión, acueductos, caminos, etc.) se emplea otro modo de RELEVAMIENTO. En lugar
de generar un modelo digital a partir de un levantamiento superficial, se hace una planimetría
general abarcando toda el ancho de la faja de estudio, (es decir la zona de ocupación de la
futura obra), representando en la misma la información a trasmitir.
Mientras que el relieve del terreno se representa en planos verticales, dibujando perfiles
transversales perpendiculares al eje de la obra.
En algunos levantamientos superficiales, suele ser de uso frecuente además de representar el
relieve mediante curvas de nivel, agregar perfiles como complemento y para una mejor visua-
lización de los cambios de pendientes.
Es común también, realizar dibujos de perfiles a partir de curvas de nivel, éstos pueden ser de
gran ayuda en la descripción y explicación de las formas del terreno.
Hemos definido el perfil: Como la intersección de un plano vertical, con la superficie del te-
rreno.
Un perfil característico es el denominado “Perfil edafológico”.
Simultáneamente se realizan las tareas de levantamiento topográfico, otro grupo de profesio-
nales, geólogos (especialistas en mecánica de suelos), lleva adelante los estudios del suelos,
que servirán a los proyectistas para el cálculo y proyecto del paquete estructural. Los estu-
dios (sondeos) realizados en el terreno en las progresivas más convenientes, se asientan en el
perfil longitudinal, generando una sección transversal de la estructura componente del suelo.
(ver croquis).
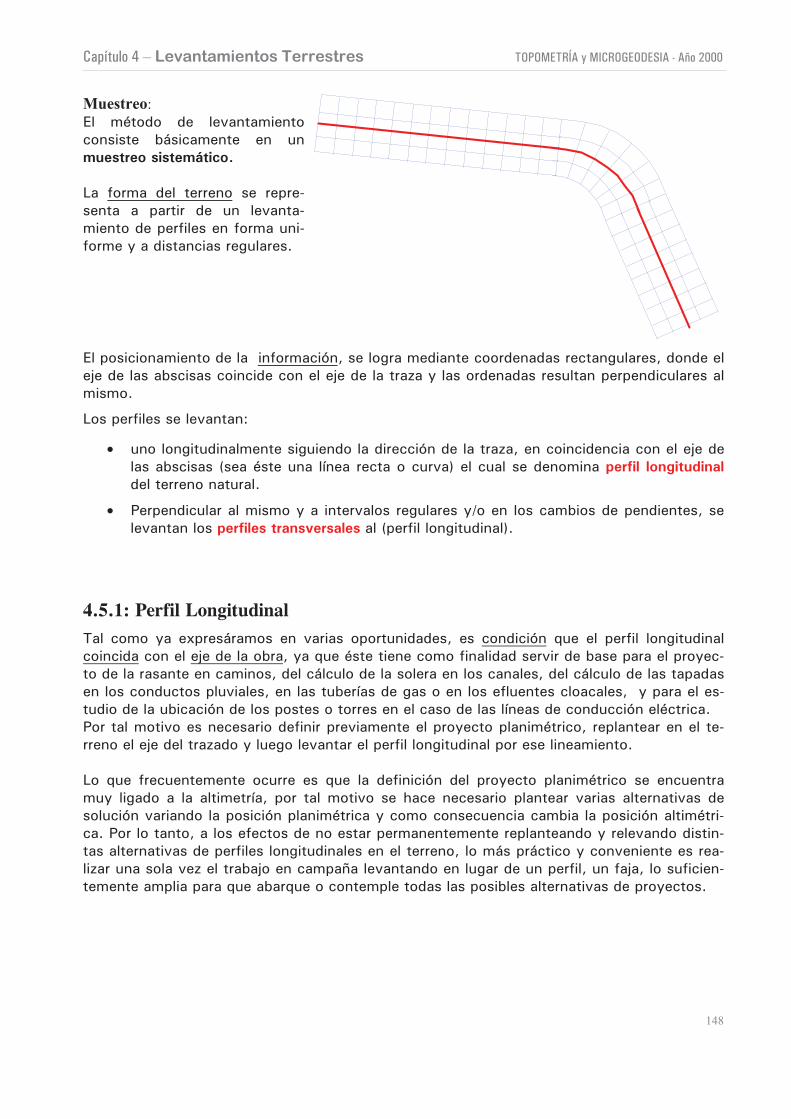
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
148
Muestreo:El método de levantamiento
consiste básicamente en un
muestreo sistemático.
La forma del terreno se repre-
senta a partir de un levanta-
miento de perfiles en forma uni-
forme y a distancias regulares.
El posicionamiento de la información, se logra mediante coordenadas rectangulares, donde el
eje de las abscisas coincide con el eje de la traza y las ordenadas resultan perpendiculares al
mismo.
Los perfiles se levantan:
• uno longitudinalmente siguiendo la dirección de la traza, en coincidencia con el eje de
las abscisas (sea éste una línea recta o curva) el cual se denomina perfil longitudinal
del terreno natural.
• Perpendicular al mismo y a intervalos regulares y/o en los cambios de pendientes, se
levantan los perfiles transversales al (perfil longitudinal).
4.5.1: Perfil Longitudinal
Tal como ya expresáramos en varias oportunidades, es condición que el perfil longitudinal
coincida con el eje de la obra, ya que éste tiene como finalidad servir de base para el proyec-
to de la rasante en caminos, del cálculo de la solera en los canales, del cálculo de las tapadas
en los conductos pluviales, en las tuberías de gas o en los efluentes cloacales, y para el es-
tudio de la ubicación de los postes o torres en el caso de las líneas de conducción eléctrica.
Por tal motivo es necesario definir previamente el proyecto planimétrico, replantear en el te-
rreno el eje del trazado y luego levantar el perfil longitudinal por ese lineamiento.
Lo que frecuentemente ocurre es que la definición del proyecto planimétrico se encuentra
muy ligado a la altimetría, por tal motivo se hace necesario plantear varias alternativas de
solución variando la posición planimétrica y como consecuencia cambia la posición altimétri-
ca. Por lo tanto, a los efectos de no estar permanentemente replanteando y relevando distin-
tas alternativas de perfiles longitudinales en el terreno, lo más práctico y conveniente es rea-
lizar una sola vez el trabajo en campaña levantando en lugar de un perfil, un faja, lo suficien-
temente amplia para que abarque o contemple todas las posibles alternativas de proyectos.
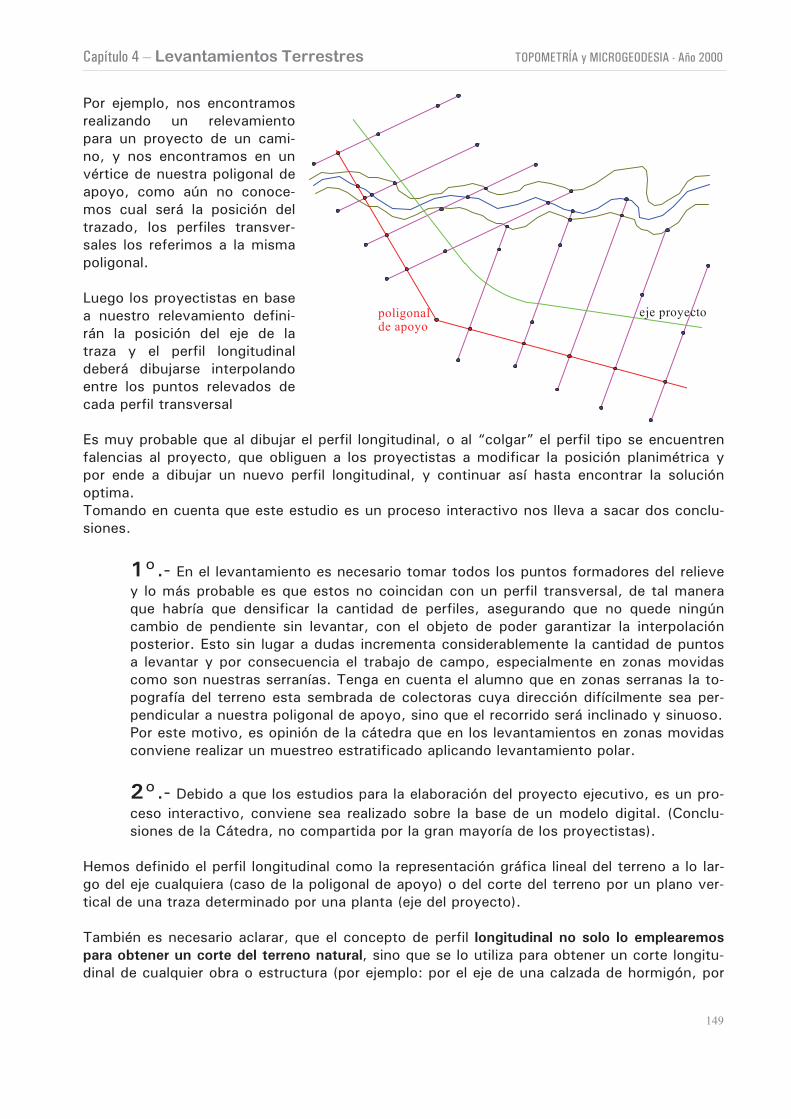
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
149
Por ejemplo, nos encontramos
realizando un relevamiento
para un proyecto de un cami-
no, y nos encontramos en un
vértice de nuestra poligonal de
apoyo, como aún no conoce-
mos cual será la posición del
trazado, los perfiles transver-
sales los referimos a la misma
poligonal.
Luego los proyectistas en base
a nuestro relevamiento defini-
rán la posición del eje de la
traza y el perfil longitudinal
deberá dibujarse interpolando
entre los puntos relevados de
cada perfil transversal
poligonalde apoyo
eje proyecto
Es muy probable que al dibujar el perfil longitudinal, o al “colgar” el perfil tipo se encuentren
falencias al proyecto, que obliguen a los proyectistas a modificar la posición planimétrica y
por ende a dibujar un nuevo perfil longitudinal, y continuar así hasta encontrar la solución
optima.
Tomando en cuenta que este estudio es un proceso interactivo nos lleva a sacar dos conclu-
siones.
1°.- En el levantamiento es necesario tomar todos los puntos formadores del relieve
y lo más probable es que estos no coincidan con un perfil transversal, de tal manera
que habría que densificar la cantidad de perfiles, asegurando que no quede ningún
cambio de pendiente sin levantar, con el objeto de poder garantizar la interpolación
posterior. Esto sin lugar a dudas incrementa considerablemente la cantidad de puntos
a levantar y por consecuencia el trabajo de campo, especialmente en zonas movidas
como son nuestras serranías. Tenga en cuenta el alumno que en zonas serranas la to-
pografía del terreno esta sembrada de colectoras cuya dirección difícilmente sea per-
pendicular a nuestra poligonal de apoyo, sino que el recorrido será inclinado y sinuoso.
Por este motivo, es opinión de la cátedra que en los levantamientos en zonas movidas
conviene realizar un muestreo estratificado aplicando levantamiento polar.
2°.- Debido a que los estudios para la elaboración del proyecto ejecutivo, es un pro-
ceso interactivo, conviene sea realizado sobre la base de un modelo digital. (Conclu-
siones de la Cátedra, no compartida por la gran mayoría de los proyectistas).
Hemos definido el perfil longitudinal como la representación gráfica lineal del terreno a lo lar-
go del eje cualquiera (caso de la poligonal de apoyo) o del corte del terreno por un plano ver-
tical de una traza determinado por una planta (eje del proyecto).
También es necesario aclarar, que el concepto de perfil longitudinal no solo lo emplearemos
para obtener un corte del terreno natural, sino que se lo utiliza para obtener un corte longitu-
dinal de cualquier obra o estructura (por ejemplo: por el eje de una calzada de hormigón, por
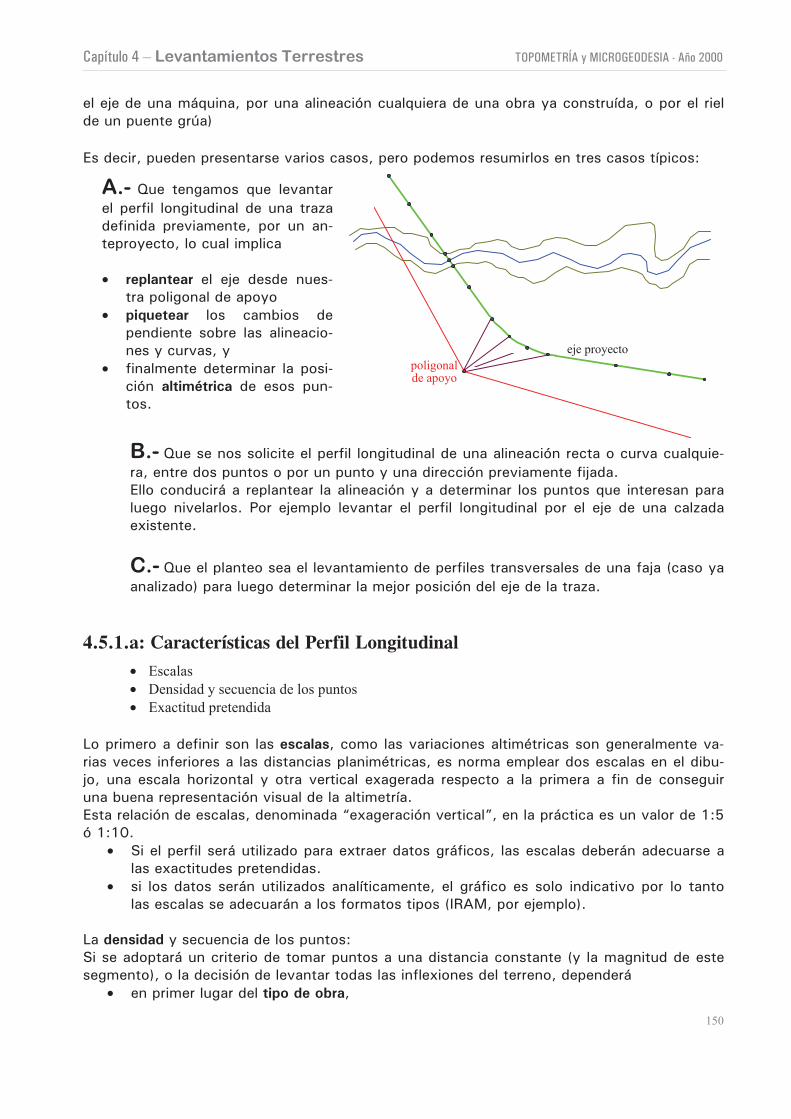
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
150
el eje de una máquina, por una alineación cualquiera de una obra ya construída, o por el riel
de un puente grúa)
Es decir, pueden presentarse varios casos, pero podemos resumirlos en tres casos típicos:
A.- Que tengamos que levantar
el perfil longitudinal de una traza
definida previamente, por un an-
teproyecto, lo cual implica
• replantear el eje desde nues-
tra poligonal de apoyo
• piquetear los cambios de
pendiente sobre las alineacio-
nes y curvas, y
• finalmente determinar la posi-
ción altimétrica de esos pun-
tos.
poligonalde apoyo
eje proyecto
B.- Que se nos solicite el perfil longitudinal de una alineación recta o curva cualquie-
ra, entre dos puntos o por un punto y una dirección previamente fijada.
Ello conducirá a replantear la alineación y a determinar los puntos que interesan para
luego nivelarlos. Por ejemplo levantar el perfil longitudinal por el eje de una calzada
existente.
C.- Que el planteo sea el levantamiento de perfiles transversales de una faja (caso ya
analizado) para luego determinar la mejor posición del eje de la traza.
4.5.1.a: Características del Perfil Longitudinal
• Escalas• Densidad y secuencia de los puntos• Exactitud pretendida
Lo primero a definir son las escalas, como las variaciones altimétricas son generalmente va-
rias veces inferiores a las distancias planimétricas, es norma emplear dos escalas en el dibu-
jo, una escala horizontal y otra vertical exagerada respecto a la primera a fin de conseguir
una buena representación visual de la altimetría.
Esta relación de escalas, denominada “exageración vertical”, en la práctica es un valor de 1:5
ó 1:10.
• Si el perfil será utilizado para extraer datos gráficos, las escalas deberán adecuarse a
las exactitudes pretendidas.
• si los datos serán utilizados analíticamente, el gráfico es solo indicativo por lo tanto
las escalas se adecuarán a los formatos tipos (IRAM, por ejemplo).
La densidad y secuencia de los puntos:
Si se adoptará un criterio de tomar puntos a una distancia constante (y la magnitud de este
segmento), o la decisión de levantar todas las inflexiones del terreno, dependerá
• en primer lugar del tipo de obra,
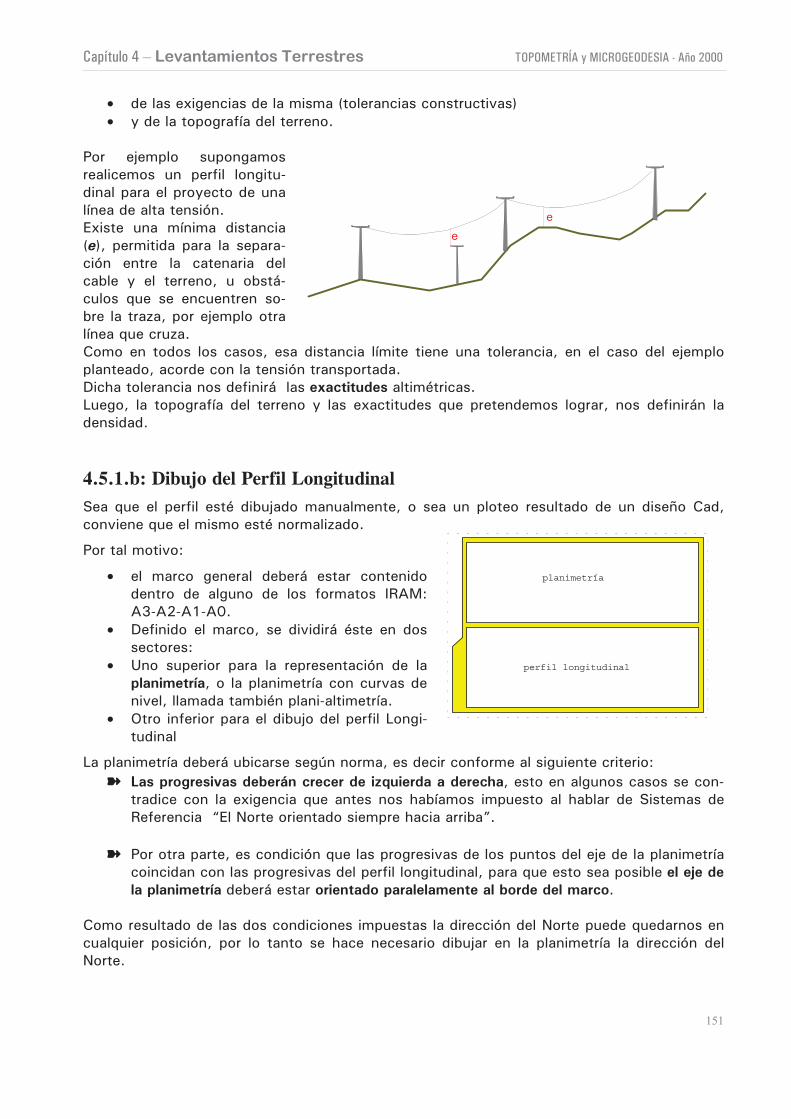
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
151
• de las exigencias de la misma (tolerancias constructivas)
• y de la topografía del terreno.
Por ejemplo supongamos
realicemos un perfil longitu-
dinal para el proyecto de una
línea de alta tensión.
Existe una mínima distancia
(e), permitida para la separa-
ción entre la catenaria del
cable y el terreno, u obstá-
culos que se encuentren so-
bre la traza, por ejemplo otra
línea que cruza.
e
e
Como en todos los casos, esa distancia límite tiene una tolerancia, en el caso del ejemplo
planteado, acorde con la tensión transportada.
Dicha tolerancia nos definirá las exactitudes altimétricas.
Luego, la topografía del terreno y las exactitudes que pretendemos lograr, nos definirán la
densidad.
4.5.1.b: Dibujo del Perfil Longitudinal
Sea que el perfil esté dibujado manualmente, o sea un ploteo resultado de un diseño Cad,
conviene que el mismo esté normalizado.
Por tal motivo:
• el marco general deberá estar contenido
dentro de alguno de los formatos IRAM:
A3-A2-A1-A0.
• Definido el marco, se dividirá éste en dos
sectores:
• Uno superior para la representación de la
planimetría, o la planimetría con curvas de
nivel, llamada también plani-altimetría.
• Otro inferior para el dibujo del perfil Longi-
tudinal
planimetría
perfil longitudinal
La planimetría deberá ubicarse según norma, es decir conforme al siguiente criterio:
Las progresivas deberán crecer de izquierda a derecha, esto en algunos casos se con-
tradice con la exigencia que antes nos habíamos impuesto al hablar de Sistemas de
Referencia “El Norte orientado siempre hacia arriba”.
Por otra parte, es condición que las progresivas de los puntos del eje de la planimetría
coincidan con las progresivas del perfil longitudinal, para que esto sea posible el eje de
la planimetría deberá estar orientado paralelamente al borde del marco.
Como resultado de las dos condiciones impuestas la dirección del Norte puede quedarnos en
cualquier posición, por lo tanto se hace necesario dibujar en la planimetría la dirección del
Norte.
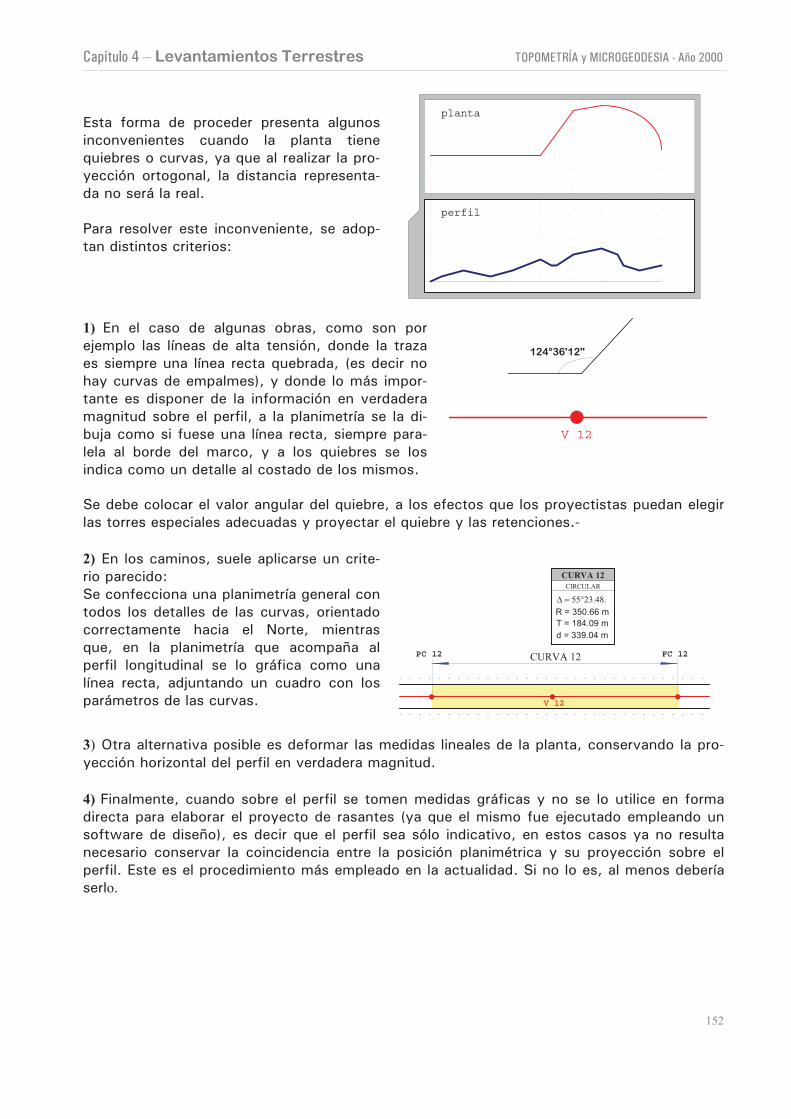
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
152
Esta forma de proceder presenta algunos
inconvenientes cuando la planta tiene
quiebres o curvas, ya que al realizar la pro-
yección ortogonal, la distancia representa-
da no será la real.
Para resolver este inconveniente, se adop-
tan distintos criterios:
planta
perfil
1) En el caso de algunas obras, como son por
ejemplo las líneas de alta tensión, donde la traza
es siempre una línea recta quebrada, (es decir no
hay curvas de empalmes), y donde lo más impor-
tante es disponer de la información en verdadera
magnitud sobre el perfil, a la planimetría se la di-
buja como si fuese una línea recta, siempre para-
lela al borde del marco, y a los quiebres se los
indica como un detalle al costado de los mismos.
V 12
124°36'12"
Se debe colocar el valor angular del quiebre, a los efectos que los proyectistas puedan elegir
las torres especiales adecuadas y proyectar el quiebre y las retenciones.-
2) En los caminos, suele aplicarse un crite-
rio parecido:
Se confecciona una planimetría general con
todos los detalles de las curvas, orientado
correctamente hacia el Norte, mientras
que, en la planimetría que acompaña al
perfil longitudinal se lo gráfica como una
línea recta, adjuntando un cuadro con los
parámetros de las curvas.
PC 12 FC 12
V 12
CURVA 12
CURVA 12CIRCULAR
∆ = 55°23.48.
R = 350.66 mT = 184.09 md = 339.04 m
3) Otra alternativa posible es deformar las medidas lineales de la planta, conservando la pro-
yección horizontal del perfil en verdadera magnitud.
4) Finalmente, cuando sobre el perfil se tomen medidas gráficas y no se lo utilice en forma
directa para elaborar el proyecto de rasantes (ya que el mismo fue ejecutado empleando un
software de diseño), es decir que el perfil sea sólo indicativo, en estos casos ya no resulta
necesario conservar la coincidencia entre la posición planimétrica y su proyección sobre el
perfil. Este es el procedimiento más empleado en la actualidad. Si no lo es, al menos debería
serlo.
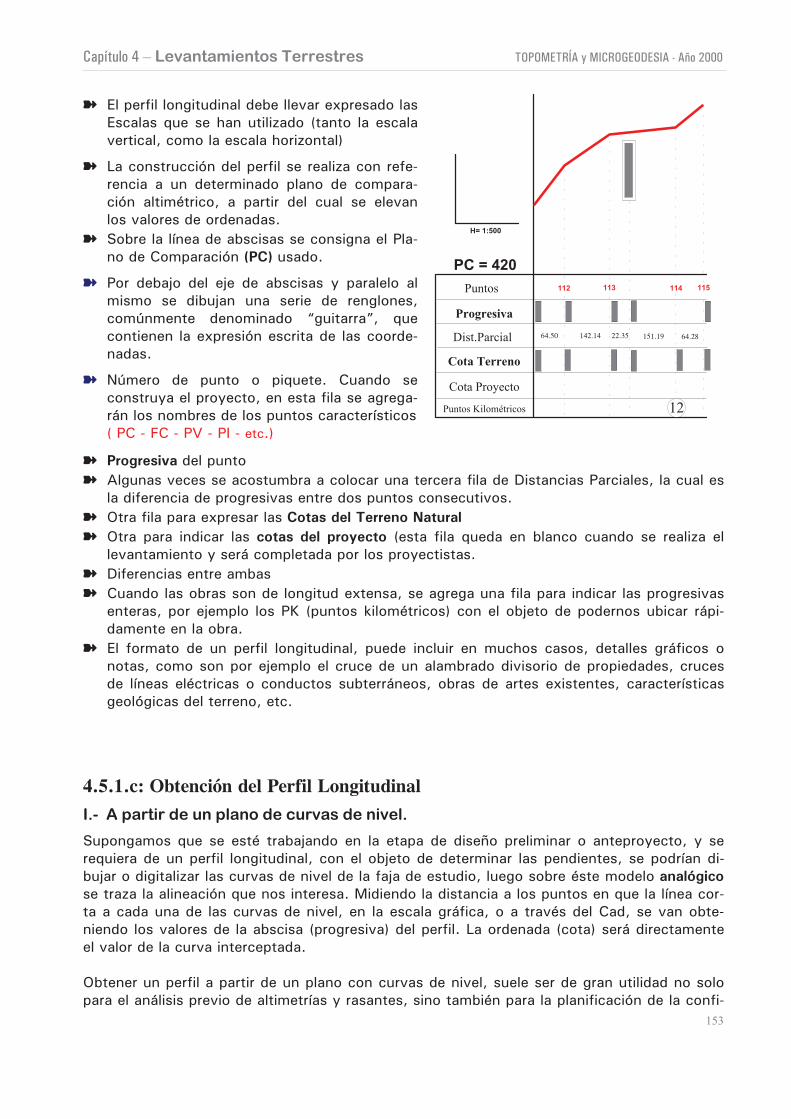
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
153
El perfil longitudinal debe llevar expresado las
Escalas que se han utilizado (tanto la escala
vertical, como la escala horizontal)
La construcción del perfil se realiza con refe-
rencia a un determinado plano de compara-
ción altimétrico, a partir del cual se elevan
los valores de ordenadas.
Sobre la línea de abscisas se consigna el Pla-
no de Comparación (PC) usado.
Por debajo del eje de abscisas y paralelo al
mismo se dibujan una serie de renglones,
comúnmente denominado “guitarra”, que
contienen la expresión escrita de las coorde-
nadas.
Número de punto o piquete. Cuando se
construya el proyecto, en esta fila se agrega-
rán los nombres de los puntos característicos
( PC - FC - PV - PI - etc.)
Puntos Kilométricos
Cota Proyecto
Cota Terreno
Dist.Parcial
Progresiva
Puntos
12
112 113 114 115
64.50 142.14 22.35 151.19 64.28
PC = 420
H= 1:500
Progresiva del punto
Algunas veces se acostumbra a colocar una tercera fila de Distancias Parciales, la cual es
la diferencia de progresivas entre dos puntos consecutivos.
Otra fila para expresar las Cotas del Terreno Natural
Otra para indicar las cotas del proyecto (esta fila queda en blanco cuando se realiza el
levantamiento y será completada por los proyectistas.
Diferencias entre ambas
Cuando las obras son de longitud extensa, se agrega una fila para indicar las progresivas
enteras, por ejemplo los PK (puntos kilométricos) con el objeto de podernos ubicar rápi-
damente en la obra.
El formato de un perfil longitudinal, puede incluir en muchos casos, detalles gráficos o
notas, como son por ejemplo el cruce de un alambrado divisorio de propiedades, cruces
de líneas eléctricas o conductos subterráneos, obras de artes existentes, características
geológicas del terreno, etc.
4.5.1.c: Obtención del Perfil Longitudinal
I.- A partir de un plano de curvas de nivel.
Supongamos que se esté trabajando en la etapa de diseño preliminar o anteproyecto, y se
requiera de un perfil longitudinal, con el objeto de determinar las pendientes, se podrían di-
bujar o digitalizar las curvas de nivel de la faja de estudio, luego sobre éste modelo analógico
se traza la alineación que nos interesa. Midiendo la distancia a los puntos en que la línea cor-
ta a cada una de las curvas de nivel, en la escala gráfica, o a través del Cad, se van obte-
niendo los valores de la abscisa (progresiva) del perfil. La ordenada (cota) será directamente
el valor de la curva interceptada.
Obtener un perfil a partir de un plano con curvas de nivel, suele ser de gran utilidad no solo
para el análisis previo de altimetrías y rasantes, sino también para la planificación de la confi-
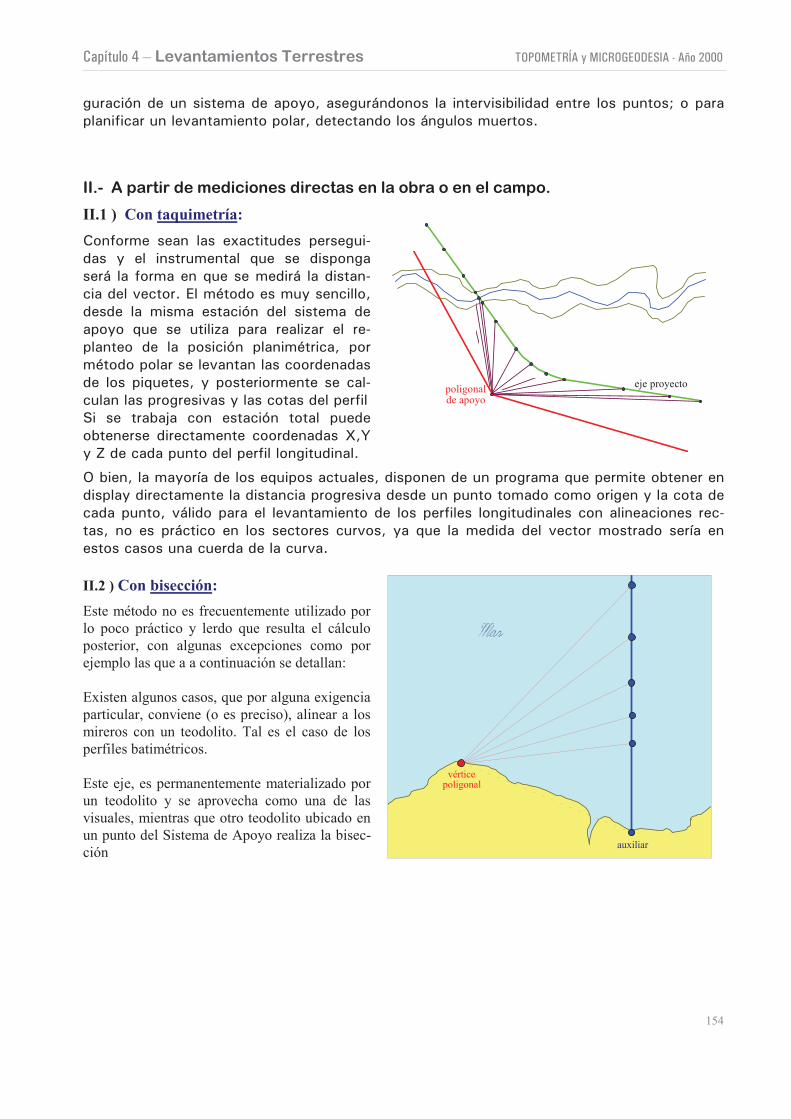
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
154
guración de un sistema de apoyo, asegurándonos la intervisibilidad entre los puntos; o para
planificar un levantamiento polar, detectando los ángulos muertos.
II.- A partir de mediciones directas en la obra o en el campo.
II.1 ) Con taquimetría:
Conforme sean las exactitudes persegui-
das y el instrumental que se disponga
será la forma en que se medirá la distan-
cia del vector. El método es muy sencillo,
desde la misma estación del sistema de
apoyo que se utiliza para realizar el re-
planteo de la posición planimétrica, por
método polar se levantan las coordenadas
de los piquetes, y posteriormente se cal-
culan las progresivas y las cotas del perfil
Si se trabaja con estación total puede
obtenerse directamente coordenadas X,Y
y Z de cada punto del perfil longitudinal.
poligonalde apoyo
eje proyecto
O bien, la mayoría de los equipos actuales, disponen de un programa que permite obtener en
display directamente la distancia progresiva desde un punto tomado como origen y la cota de
cada punto, válido para el levantamiento de los perfiles longitudinales con alineaciones rec-
tas, no es práctico en los sectores curvos, ya que la medida del vector mostrado sería en
estos casos una cuerda de la curva.
II.2 ) Con bisección:
Este método no es frecuentemente utilizado porlo poco práctico y lerdo que resulta el cálculoposterior, con algunas excepciones como porejemplo las que a a continuación se detallan:
Existen algunos casos, que por alguna exigenciaparticular, conviene (o es preciso), alinear a losmireros con un teodolito. Tal es el caso de losperfiles batimétricos.
Este eje, es permanentemente materializado porun teodolito y se aprovecha como una de lasvisuales, mientras que otro teodolito ubicado enun punto del Sistema de Apoyo realiza la bisec-ción
vérticepoligonal
auxiliar

Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
155
II.3) Con nivelación diferencial
No vamos a detenernos en abundaren detalles sobre la manera de pro-ceder, pues se supone conocida porel alumno, e incluso ha realizado yanumerosas prácticas en las topogra-fías.
De todas las maneras de obtener unperfil longitudinal, sin dudas éstemétodo asegura las mejores preci-siones altimétricas.
pp
pp
36
3738
39
40
41
Las exactitudes perseguidas en éste tipo de levantamiento son varias veces inferiores a la de un sistema deapoyo altimétrico, por lo que no será necesario estacionar el altímetro en la distancia media entre dos pi-quetes, pero sí será conveniente estacionarse apróximadamente en la mitad de la distancia entre el punto depaso anterior y posterior.
Cuando la longitud de un perfil longitudinal sea muy extensa, a fin de cubrir con éxito la tolerancia estable-cida para todos los puntos, será necesario efectuar una acotación de errores. Ésta nos dirá cual es la distancialímite y hasta donde podemos trabajar, sin el apoyo de una red altimétricaSi el trabajo encargado supera dicho límite, habrá que planificar una red de apoyo o itinerarios adicionalesde vinculación a una red altimétrica de orden superior.Aún cuando la acotación de errores nos informe de la no necesidad de plantear un sistema de apoyo altimé-trico, deberá preverse la realización de una nivelación en vuelta, pasando solamente por los puntos de paso.(estos puntos de transferencia de altitud “pp”, obviamente serán estaqueados, y la lectura será a cabeza deestaca).
Nivel marca Leica modelo NAK2Precisión: 0.7mm por Km 2niv.
0.3mm (with parallel-plate micrometer)Compensator setting accuracy: 0.3''
Magnification standard 32xLa placa plano paralela permite lectu-
ras de 0.1mm y estimar: 0.01mm
. Nivel marca PENTAX modelo AL300
Precisión: 1.5mm por Km 2niv.Compensator setting accuracy: 0.3''
Magnification standard 30x
Nivel marca Leica modelo NA700Precisión: 2.5mm por Km 2niv.
Setting Accuracy < 0.5"

Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
156
Las mediciones de las progresivas, conforme el
plan de exactitudes y al cronograma de tiempos,
podrá resolverse mediante la medición:
• con cinta
• distanciómetro
• GPS en modo Stop and Go
• DGPS.-
Cuando se trabaja con Nivel digital, al realizar la
observación queda grabado en la memoria, tanto
las lecturas como la distancia progresiva.-
Nivel digital marca Leica modelo NA3003
Precisión: 0.1mm por Km 2niv.
Setting Accuracy < 0.2"
III) A partir de fotogrametría aerea:
Cuando el perfil a determinar es de una longitud muy extensa, pongamos como ejemplo una
línea de alta tensión de una o más centenas de kilómetros, no se debe dejar de analizar la
posibilidad de obtener el perfil a partir de una restitución aerofotogramétrica
Cuando las longitudes son largas, o las condiciones topográficas del terreno muy agreste, los
costos se equiparan y en muchos casos la fotogrametría resulta una alternativa muy favora-
ble, en especial las obras lineales que se desarrollan en nuestro litoral, donde el suelo está
tapizado de bañados, o en la patagonia donde no existe una red vial adecuada, como para
encarar un levantamiento terrestre, y con mucho más razón en la cordillera de los Andes.
Generalmente pueden aprovecharse los vuelos ya existentes con lo cual se reducen los cos-
tos, sin embargo el costo del vuelo no resulta muy elevado, ya que sólo necesitamos volar
con superposición la estrecha faja de nuestra zona de estudio y gracias a los modernos equi-
pamientos con GPS en la cabina del piloto, el vuelo se realiza automáticamente siguiendo la
ruta prevista.
En cuanto a la colocación de PAF, utilizando técnicas GPS, podemos colocar éstos de forma
estratégica tal que se pueda optimizar los caminos transitables existentes.
En cuanto a los resultados altimétricos, estamos hablando de una dispersión de escasos cen-
tímetros, dependiendo de la escala del vuelo, siempre y cuando los PAF y los puntos de con-
trol de nivelación hayan sido acotados con la precisión adecuada
“...No obstante sus indudables ventajas, los perfiles obtenidos por este método, no poseen una altimetría
tan precisa como la necesaria para el replanteo de una rasante, aunque desde luego, a efectos de calcular
la cubicación del movimiento de tierras, su precisión es suficiente, así como para la evaluación de otros
datos de proyecto...” TOPOGRAFIA Y REPLANTEO DE OBRAS DE INGENIERÍA - ANTONIO SANTOS MORA- ESPAÑA.
Las precisiones aumentan cuando éste no surge de una restitución aerofotogramétrica
tradicional, es decir a partir de una digitalización de curvas de nivel, sino que el opera-
dor fotogrametrista toma valores puntuales del terreno virtual.-
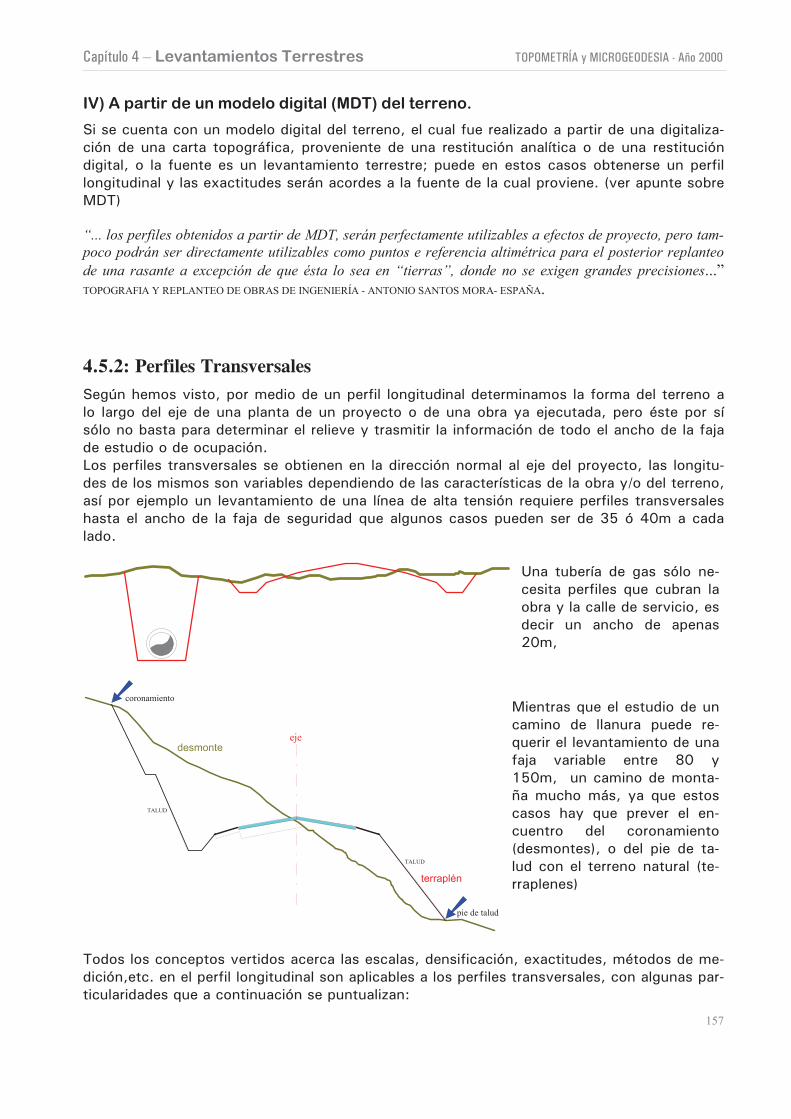
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
157
IV) A partir de un modelo digital (MDT) del terreno.
Si se cuenta con un modelo digital del terreno, el cual fue realizado a partir de una digitaliza-
ción de una carta topográfica, proveniente de una restitución analítica o de una restitución
digital, o la fuente es un levantamiento terrestre; puede en estos casos obtenerse un perfil
longitudinal y las exactitudes serán acordes a la fuente de la cual proviene. (ver apunte sobre
MDT)
“... los perfiles obtenidos a partir de MDT, serán perfectamente utilizables a efectos de proyecto, pero tam-
poco podrán ser directamente utilizables como puntos e referencia altimétrica para el posterior replanteo
de una rasante a excepción de que ésta lo sea en “tierras”, donde no se exigen grandes precisiones...”TOPOGRAFIA Y REPLANTEO DE OBRAS DE INGENIERÍA - ANTONIO SANTOS MORA- ESPAÑA.
4.5.2: Perfiles Transversales
Según hemos visto, por medio de un perfil longitudinal determinamos la forma del terreno a
lo largo del eje de una planta de un proyecto o de una obra ya ejecutada, pero éste por sí
sólo no basta para determinar el relieve y trasmitir la información de todo el ancho de la faja
de estudio o de ocupación.
Los perfiles transversales se obtienen en la dirección normal al eje del proyecto, las longitu-
des de los mismos son variables dependiendo de las características de la obra y/o del terreno,
así por ejemplo un levantamiento de una línea de alta tensión requiere perfiles transversales
hasta el ancho de la faja de seguridad que algunos casos pueden ser de 35 ó 40m a cada
lado.
Una tubería de gas sólo ne-
cesita perfiles que cubran la
obra y la calle de servicio, es
decir un ancho de apenas
20m,
eje
coronamiento
TALUD
TALUD
pie de talud
terraplén
desmonte
Mientras que el estudio de un
camino de llanura puede re-
querir el levantamiento de una
faja variable entre 80 y
150m, un camino de monta-
ña mucho más, ya que estos
casos hay que prever el en-
cuentro del coronamiento
(desmontes), o del pie de ta-
lud con el terreno natural (te-
rraplenes)
Todos los conceptos vertidos acerca las escalas, densificación, exactitudes, métodos de me-
dición,etc. en el perfil longitudinal son aplicables a los perfiles transversales, con algunas par-
ticularidades que a continuación se puntualizan:
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
158
Tradicionalmente, sobre el dibujo de las secciones transversales se calculaban las superficies
mediante el empleo de un planímetro y se realizaban los proyectos de forma manual, por tal
motivo la escala de dibujo debía ser lo suficientemente generosa y el dibujo muy preciso, hoy
con el empleo de software todos los cálculos se realizan de forma analítica y los gráficos son
solo indicativos, por tal motivo pueden emplearse software de diseño que “acomodan” en
una sola lámina varios perfiles transversales (con la guitarra de c/u), y a una escala visual-
mente agradable.
En cuanto a la densidad de puntos a levantar y la exactitud altimétrica, dependerá como ya
hemos visto del tipo de obra a proyectar y de la topografía del terreno.
En cuanto al método para la obtención de los perfiles transversales, difícilmente pueda em-
plearse algún otro método que no sea el levantamiento directo en el terreno, ya que se trate
del movimiento de suelos o del cálculo del proyecto, en la mayoría de los casos se precisa
una información más fidedigna que en el perfil longitudinal.
Por ejemplo, en el caso de los cómputos de movimientos de suelo, en casi todas las obras se
persigue una compensación lateral de volúmenes y es especialmente importante en las obras
donde el suelo a mover es roca con voladuras, cuyo costo es muchas veces superior al mo-
vimiento solo con máquinas.
En cuanto al replanteo de los proyectos, toda obra comienza con la marcación de los puntos
característicos del movimiento de suelos, tal como está expresado en el croquis, con la de-
marcación de los puntos donde se realizará el pre corte del desmonte, o el pie del talud del
terraplén. Estos puntos tienen que ser replanteados en el lugar preciso, lo cual obliga a que el
modelo resultante de los perfiles relevados hayan sido ejecutados con una estrecha aproxi-
mación a la realidad.
Volviendo a los métodos de levantamiento, tal como ya dijimos podemos utilizar dos formas:
a) Taquimetría:ventajas: Es muy rápido en el campo, especialmente en zonas de topografía movida y casi deempleo obligatorio en zona de montaña, exactitudes aceptables en practicamente todos loscasos. La velocidad y comodidad de trabajo permiten planificar una mayor densidad de le-vantamiento.desventajas: Exige un mayor trabajo de gabinete. En caso de terrenos cubiertos de maleza ymontes requiere del empleo de torres especiales o de mayor costo en apertura de picadas.
b) Nivel y cinta:ventajas: mayor exactitud en la altimetría (ésto generalmente es innecesario), en caso de te-rrenos cubiertos de maleza y montes requiere de menor costo en apertura de picadas.Requiere de un tiempo de cálculo de gabine inferior a la taquimetría.desventajas: El método requiere del replanteo y piqueteo de un eje, además del levantado dela perpendicular al mismo en cada punto, la medición con cinta reduciendo al horizonte encada punto y la colocación de muchos puntos de paso de nivel, cuando el terreno es movido,lo cual lo hace un método más lerdo que el anterior.
Recordemos que los perfiles transversales, el cero de las abscisas se ubica en el eje y por lo
tanto serán negativas las distancias al eje a la izquierda del mismo y positivas a la derecha,
considerando a un observador parado en el eje mirando hacia el sentido de avance de las
progresivas.
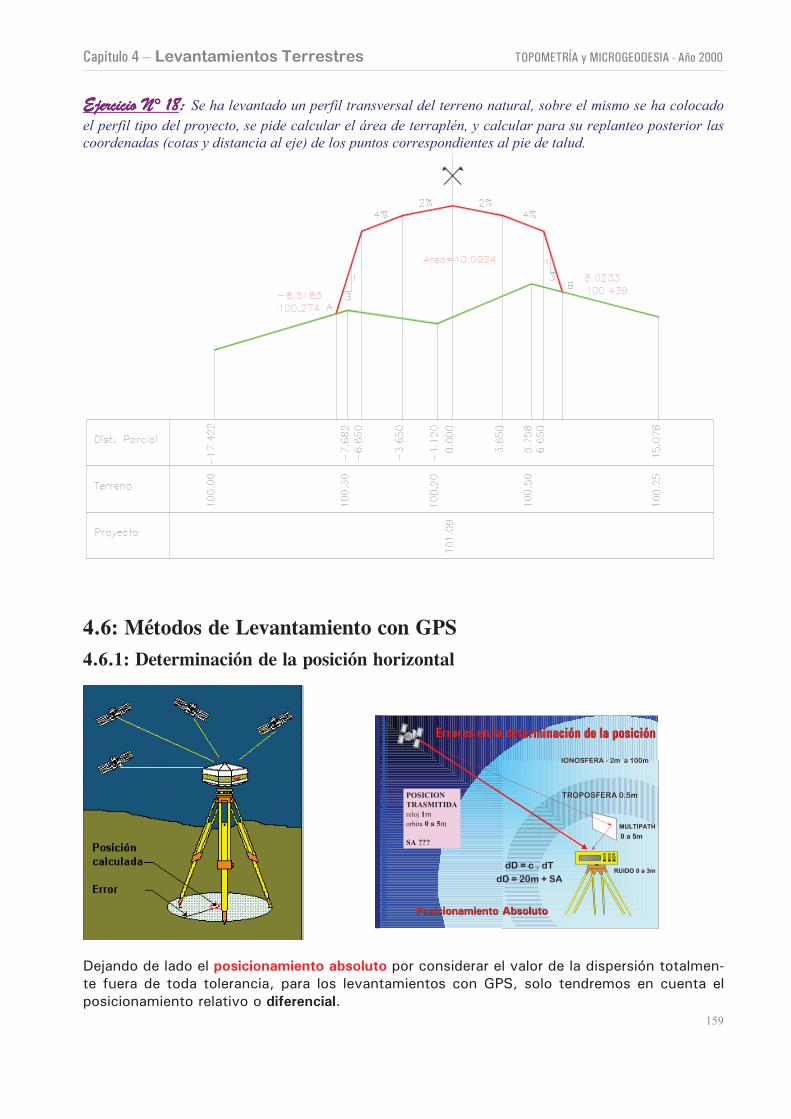
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
159
Ejercicio N° 18Ejercicio N° 18Ejercicio N° 18Ejercicio N° 18: : : : Se ha levantado un perfil transversal del terreno natural, sobre el mismo se ha colocado
el perfil tipo del proyecto, se pide calcular el área de terraplén, y calcular para su replanteo posterior las
coordenadas (cotas y distancia al eje) de los puntos correspondientes al pie de talud.
4.6: Métodos de Levantamiento con GPS
4.6.1: Determinación de la posición horizontal
IONOSFERA - 2m a 100mIONOSFERA - 2m a 100m
POSICIONTRASMITIDAreloj 1morbita 0 a 5m
SA ???
TROPOSFERA 0.5m TROPOSFERA 0.5m
MULTIPATH
0 a 5m
RUIDO 0 a 3m
Errores en la determinación de la posiciónErrores en la determinación de la posición
dD = c . dT
dD = 20m + SA
Posicionamiento AbsolutoPosicionamiento Absoluto
Dejando de lado el posicionamiento absoluto por considerar el valor de la dispersión totalmen-
te fuera de toda tolerancia, para los levantamientos con GPS, solo tendremos en cuenta el
posicionamiento relativo o diferencial.
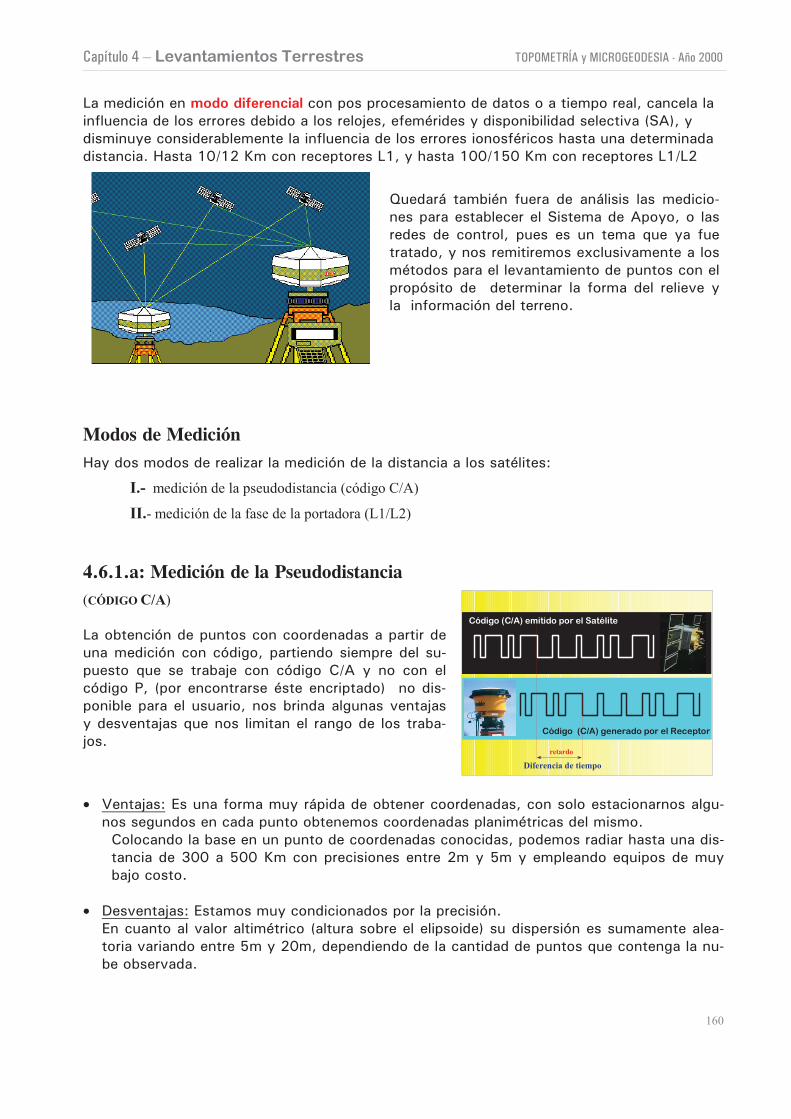
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
160
La medición en modo diferencial con pos procesamiento de datos o a tiempo real, cancela la
influencia de los errores debido a los relojes, efemérides y disponibilidad selectiva (SA), y
disminuye considerablemente la influencia de los errores ionosféricos hasta una determinada
distancia. Hasta 10/12 Km con receptores L1, y hasta 100/150 Km con receptores L1/L2
Quedará también fuera de análisis las medicio-
nes para establecer el Sistema de Apoyo, o las
redes de control, pues es un tema que ya fue
tratado, y nos remitiremos exclusivamente a los
métodos para el levantamiento de puntos con el
propósito de determinar la forma del relieve y
la información del terreno.
Modos de Medición
Hay dos modos de realizar la medición de la distancia a los satélites:
I.- medición de la pseudodistancia (código C/A)
II.- medición de la fase de la portadora (L1/L2)
4.6.1.a: Medición de la Pseudodistancia
(CÓDIGO C/A)
La obtención de puntos con coordenadas a partir de
una medición con código, partiendo siempre del su-
puesto que se trabaje con código C/A y no con el
código P, (por encontrarse éste encriptado) no dis-
ponible para el usuario, nos brinda algunas ventajas
y desventajas que nos limitan el rango de los traba-
jos.
Diferencia de tiempo
Código (C/A) emitido por el Satélite
Código (C/A) generado por el Receptor
retardo
• Ventajas: Es una forma muy rápida de obtener coordenadas, con solo estacionarnos algu-
nos segundos en cada punto obtenemos coordenadas planimétricas del mismo.
Colocando la base en un punto de coordenadas conocidas, podemos radiar hasta una dis-
tancia de 300 a 500 Km con precisiones entre 2m y 5m y empleando equipos de muy
bajo costo.
• Desventajas: Estamos muy condicionados por la precisión.
En cuanto al valor altimétrico (altura sobre el elipsoide) su dispersión es sumamente alea-
toria variando entre 5m y 20m, dependiendo de la cantidad de puntos que contenga la nu-
be observada.
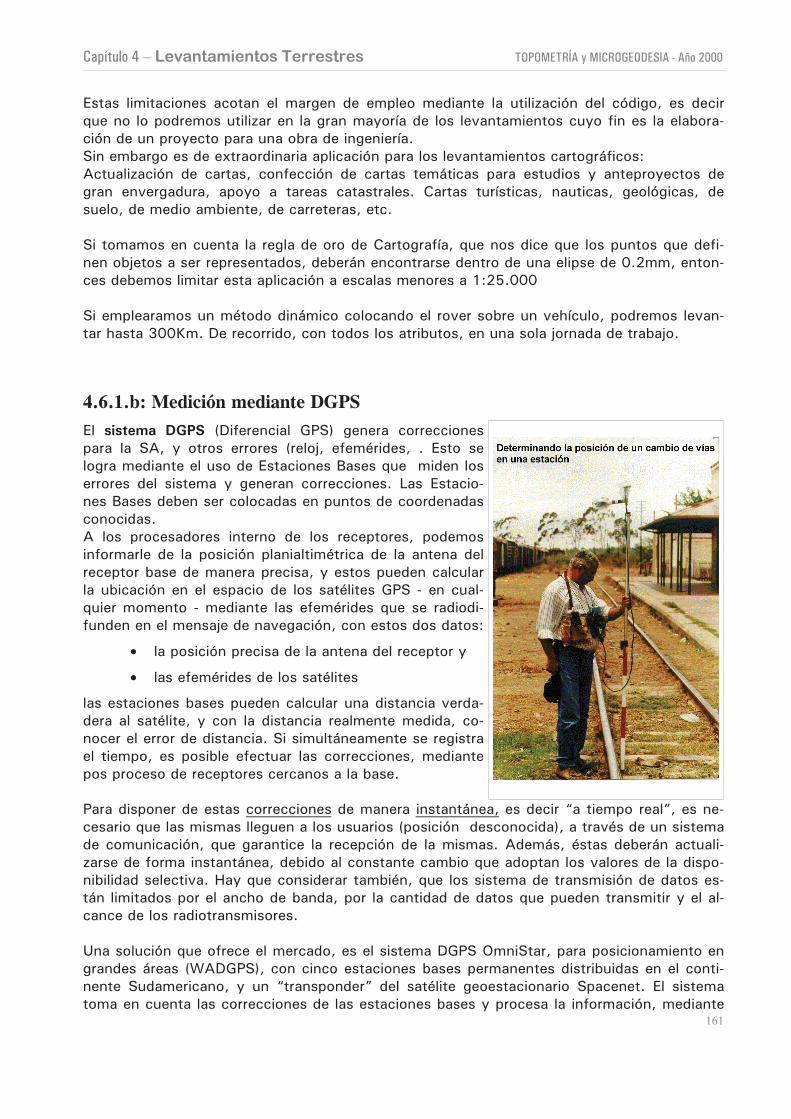
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
161
Estas limitaciones acotan el margen de empleo mediante la utilización del código, es decir
que no lo podremos utilizar en la gran mayoría de los levantamientos cuyo fin es la elabora-
ción de un proyecto para una obra de ingeniería.
Sin embargo es de extraordinaria aplicación para los levantamientos cartográficos:
Actualización de cartas, confección de cartas temáticas para estudios y anteproyectos de
gran envergadura, apoyo a tareas catastrales. Cartas turísticas, nauticas, geológicas, de
suelo, de medio ambiente, de carreteras, etc.
Si tomamos en cuenta la regla de oro de Cartografía, que nos dice que los puntos que defi-
nen objetos a ser representados, deberán encontrarse dentro de una elipse de 0.2mm, enton-
ces debemos limitar esta aplicación a escalas menores a 1:25.000
Si emplearamos un método dinámico colocando el rover sobre un vehículo, podremos levan-
tar hasta 300Km. De recorrido, con todos los atributos, en una sola jornada de trabajo.
4.6.1.b: Medición mediante DGPS
El sistema DGPS (Diferencial GPS) genera correcciones
para la SA, y otros errores (reloj, efemérides, . Esto se
logra mediante el uso de Estaciones Bases que miden los
errores del sistema y generan correcciones. Las Estacio-
nes Bases deben ser colocadas en puntos de coordenadas
conocidas.
A los procesadores interno de los receptores, podemos
informarle de la posición planialtimétrica de la antena del
receptor base de manera precisa, y estos pueden calcular
la ubicación en el espacio de los satélites GPS - en cual-
quier momento - mediante las efemérides que se radiodi-
funden en el mensaje de navegación, con estos dos datos:
• la posición precisa de la antena del receptor y
• las efemérides de los satélites
las estaciones bases pueden calcular una distancia verda-
dera al satélite, y con la distancia realmente medida, co-
nocer el error de distancia. Si simultáneamente se registra
el tiempo, es posible efectuar las correcciones, mediante
pos proceso de receptores cercanos a la base.
Para disponer de estas correcciones de manera instantánea, es decir “a tiempo real”, es ne-
cesario que las mismas lleguen a los usuarios (posición desconocida), a través de un sistema
de comunicación, que garantice la recepción de la mismas. Además, éstas deberán actuali-
zarse de forma instantánea, debido al constante cambio que adoptan los valores de la dispo-
nibilidad selectiva. Hay que considerar también, que los sistema de transmisión de datos es-
tán limitados por el ancho de banda, por la cantidad de datos que pueden transmitir y el al-
cance de los radiotransmisores.
Una solución que ofrece el mercado, es el sistema DGPS OmniStar, para posicionamiento en
grandes áreas (WADGPS), con cinco estaciones bases permanentes distribuidas en el conti-
nente Sudamericano, y un “transponder” del satélite geoestacionario Spacenet. El sistema
toma en cuenta las correcciones de las estaciones bases y procesa la información, mediante

Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
162
una solución inversa cuadrática mínima de ponderación de distancias, el resultado de este
cálculo de mínimos cuadrados, es un mensaje de corrección RTCM-104 sintetizado, que es
optimizado para la ubicación del usuario.
Como funciona el Sistema ONMISTAR
La Red OnmiStar Sudamericana posee cinco estaciones bases
permanentes que están esparcidas alrededor de todo nuestro
continente. Estas Estaciones rastrean todos los satélites GPS,
sobre cinco grados de elevación y computan las correcciones
cada 600 milisegundos. Las correcciones vienen en forma de
un mensaje industrial estándar, el formato RTCM-104 Versión
II., estas son enviadas al Centro de Control de Red de (Network
Control Centrer - NCC) a través de líneas arrendadas, con un
discado de respaldo. En la NCC, los mensajes son revisados,
comprimidos y empaquetados para la transmisión a nuestro
satélite transponder. Esto sucede cada 2 o 3 segundos aproxi-
madamente. Un paquete contiene los últimos datos de cada
una de las cinco estaciones base.
Todos los equipos usuarios OnmiStar reciben estos paquetes de
datos del satélite transponder. Al principio, los mensajes son
descodificados del formato de transmisión de espectro amplio y
luego descomprimidos.
En este momento, el mensaje es un duplicado
exacto de los datos que fueron generados por
cada estación base. Después se corrigen los erro-
res atmosféricos. Cada estación base corrige au-
tomáticamente los errores atmosféricos de su
ubicación, pero el usuario no esta localizado cerca
a ninguna de estas bases, por lo tanto, las co-
rrecciones no están optimizadas para el usuario, y
el receptor no tiene ninguna información sobre la
ubicación de cada individuo.
Estación Control
BASEBASE
DGPSusuario
SATELITES
GPS20.200Km
SATELITE
geo estacionario500Km
NCCCentro Control
de la Red
Si se van a optimizar los errores para cada lugar en particular, esto tiene que ser hecho en
cada receptor OnmiStar que portan los usuarios. Por este motivo cada equipo Usuario debe
proveer una aproximación de su ubicación.
La aproximación solo tiene que estar entre 80 a 160 Km. de su posición verdadera. Al tener
dicha información, el equipo usuario, puede eliminar la mayoría de las correcciones atmosfé-
ricas del mensaje de cada Estación Base y substituir una corrección para su propia ubicación.
A pesar de la aproximación inexacta de la ubicación del usuario, esta información es crucial
para el proceso.
OnmiStar, hace que la operación sea totalmente automática, con mínima intervención del
operador y tan útil en precisión como para cumplir con los trabajos de pocisionamiento sub-
metrico. En el caso de no considerar los efectos atmosféricos los errores que obtendría cada
usuario podrían llegar a superar los 10 metros.
Afortunadamente, este requisito de dar la ubicación aproximada del equipo receptor que por-
ta el usuario se resuelve fácilmente.
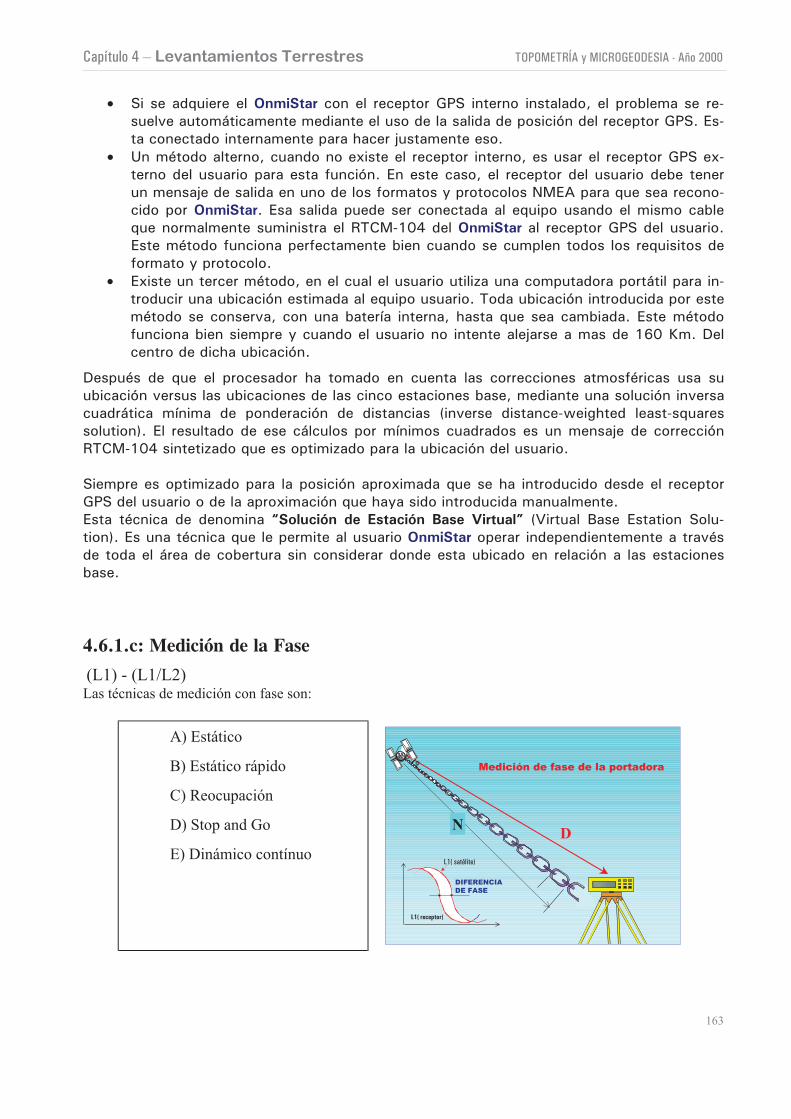
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
163
• Si se adquiere el OnmiStar con el receptor GPS interno instalado, el problema se re-
suelve automáticamente mediante el uso de la salida de posición del receptor GPS. Es-
ta conectado internamente para hacer justamente eso.
• Un método alterno, cuando no existe el receptor interno, es usar el receptor GPS ex-
terno del usuario para esta función. En este caso, el receptor del usuario debe tener
un mensaje de salida en uno de los formatos y protocolos NMEA para que sea recono-
cido por OnmiStar. Esa salida puede ser conectada al equipo usando el mismo cable
que normalmente suministra el RTCM-104 del OnmiStar al receptor GPS del usuario.
Este método funciona perfectamente bien cuando se cumplen todos los requisitos de
formato y protocolo.
• Existe un tercer método, en el cual el usuario utiliza una computadora portátil para in-
troducir una ubicación estimada al equipo usuario. Toda ubicación introducida por este
método se conserva, con una batería interna, hasta que sea cambiada. Este método
funciona bien siempre y cuando el usuario no intente alejarse a mas de 160 Km. Del
centro de dicha ubicación.
Después de que el procesador ha tomado en cuenta las correcciones atmosféricas usa su
ubicación versus las ubicaciones de las cinco estaciones base, mediante una solución inversa
cuadrática mínima de ponderación de distancias (inverse distance-weighted least-squares
solution). El resultado de ese cálculos por mínimos cuadrados es un mensaje de corrección
RTCM-104 sintetizado que es optimizado para la ubicación del usuario.
Siempre es optimizado para la posición aproximada que se ha introducido desde el receptor
GPS del usuario o de la aproximación que haya sido introducida manualmente.
Esta técnica de denomina “Solución de Estación Base Virtual” (Virtual Base Estation Solu-
tion). Es una técnica que le permite al usuario OnmiStar operar independientemente a través
de toda el área de cobertura sin considerar donde esta ubicado en relación a las estaciones
base.
4.6.1.c: Medición de la Fase
(L1) - (L1/L2)Las técnicas de medición con fase son:
A) Estático
B) Estático rápido
C) Reocupación
D) Stop and Go
E) Dinámico contínuo
DIFERENCIA
DE FASE
L1( satélite)
L1( receptor)
Medición de fase de la portadora
DN

Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
164
A) El método estático requiere que el receptor se en-
cuentre estacionado sobre el punto que se quiere es-
tablecer su posición, durante un período de tiempo
variable según el instrumento que que puede estar
entre los 40 minutos a 3 o más horas; por ende éste
método muy usado para las redes de control, debe
ser descartado en los levantamientos por ser muy
lerdo, obteniendo elevadas precisiones que no son
necesarias.
Se obtienen muy buenas precisiones, mejor que un
cm por punto.
Redes Geodésicas - Microgeodésicas
Con un equipo de doble frecuen-cia L1/L2, se pueden determinarla magnitud de un vector con unaprecisión de 0.1 ppm, o encerrarel error dentro de una elipse me-nor a 5 mm.-
GPS marca Trimble serie 3000
GPS marca Trimble modelo 4800
B) En el método estático rápido, se requiere estar esta-
cionado entre 10 y 20 minuto por puntos, para
equipos de una sola frecuencia, y entre 5 y 8 minu-
tos para equipos de doble frecuencia. Por tal motivo
y a pesar de su nombre, tampoco es suficientemente
rápido como para realizar un levantamiento de pun-
tos.
La magnitud de los vectores debe ser inferior a
10Km/ 12Km en L1 y hasta 70 a 100Km en L1/L2.
Utiliza una estación de referencia y pueden emplear-
se una o más estaciones móviles.
Precisiones: entre 2cm y 5cm. Por puntos
Redes topométricas - PAF - Redes e itinerarios geofísicos.
Densificación de redes. Levantamientos catastrales
C) En el método de reocupación, podemos estar sobre el punto apenas unos escasos segun-
dos, pero requiere que el punto se vuelva a observar luego de haber transcurrido un espa-
cio de tiempo (aprox. Mayor de 2Hs.), a los efectos de que haya cambiado la constela-
ción. De este modo se pueden combinar los datos de un punto tomados en un determina-
do momento con los datos del mismo punto tomado en otro intervalo de tiempo.
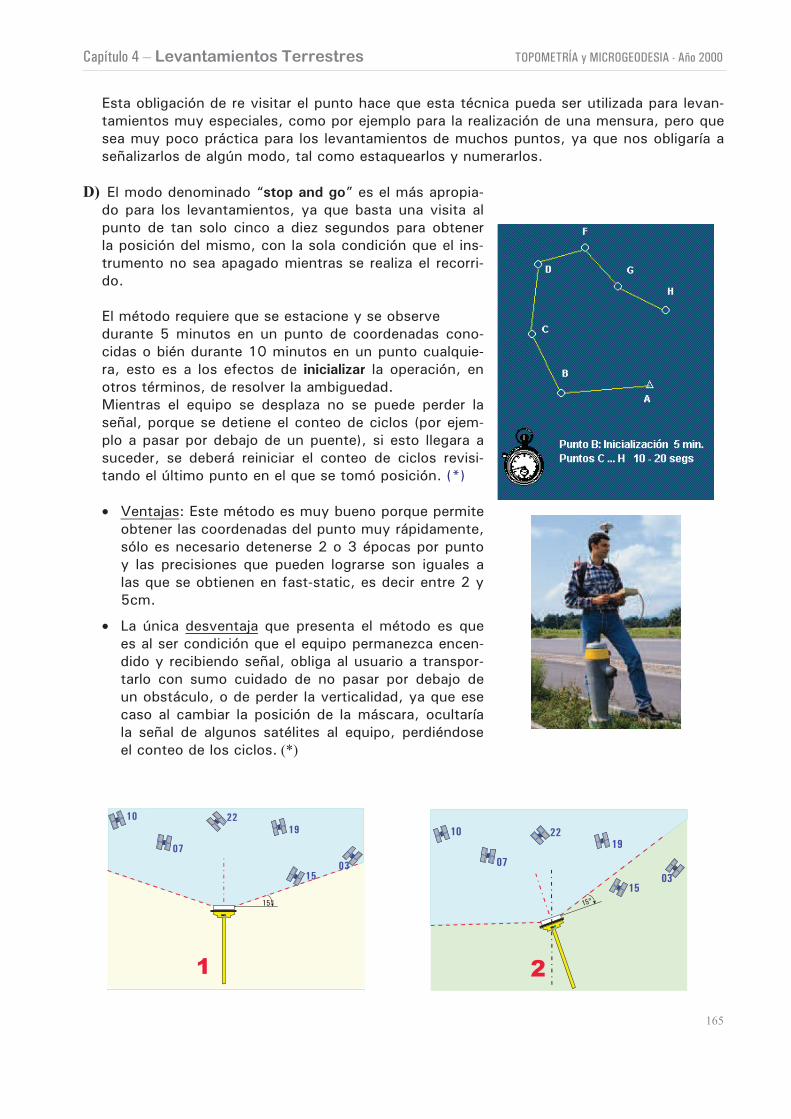
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
165
Esta obligación de re visitar el punto hace que esta técnica pueda ser utilizada para levan-
tamientos muy especiales, como por ejemplo para la realización de una mensura, pero que
sea muy poco práctica para los levantamientos de muchos puntos, ya que nos obligaría a
señalizarlos de algún modo, tal como estaquearlos y numerarlos.
D) El modo denominado “stop and go” es el más apropia-
do para los levantamientos, ya que basta una visita al
punto de tan solo cinco a diez segundos para obtener
la posición del mismo, con la sola condición que el ins-
trumento no sea apagado mientras se realiza el recorri-
do.
El método requiere que se estacione y se observe
durante 5 minutos en un punto de coordenadas cono-
cidas o bién durante 10 minutos en un punto cualquie-
ra, esto es a los efectos de inicializar la operación, en
otros términos, de resolver la ambiguedad.
Mientras el equipo se desplaza no se puede perder la
señal, porque se detiene el conteo de ciclos (por ejem-
plo a pasar por debajo de un puente), si esto llegara a
suceder, se deberá reiniciar el conteo de ciclos revisi-
tando el último punto en el que se tomó posición. (*)
• Ventajas: Este método es muy bueno porque permite
obtener las coordenadas del punto muy rápidamente,
sólo es necesario detenerse 2 o 3 épocas por punto
y las precisiones que pueden lograrse son iguales a
las que se obtienen en fast-static, es decir entre 2 y
5cm.
• La única desventaja que presenta el método es que
es al ser condición que el equipo permanezca encen-
dido y recibiendo señal, obliga al usuario a transpor-
tarlo con sumo cuidado de no pasar por debajo de
un obstáculo, o de perder la verticalidad, ya que ese
caso al cambiar la posición de la máscara, ocultaría
la señal de algunos satélites al equipo, perdiéndose
el conteo de los ciclos. (*)
10
07
22
19
1503
15°
1
10
07
2219
1503
2
15°
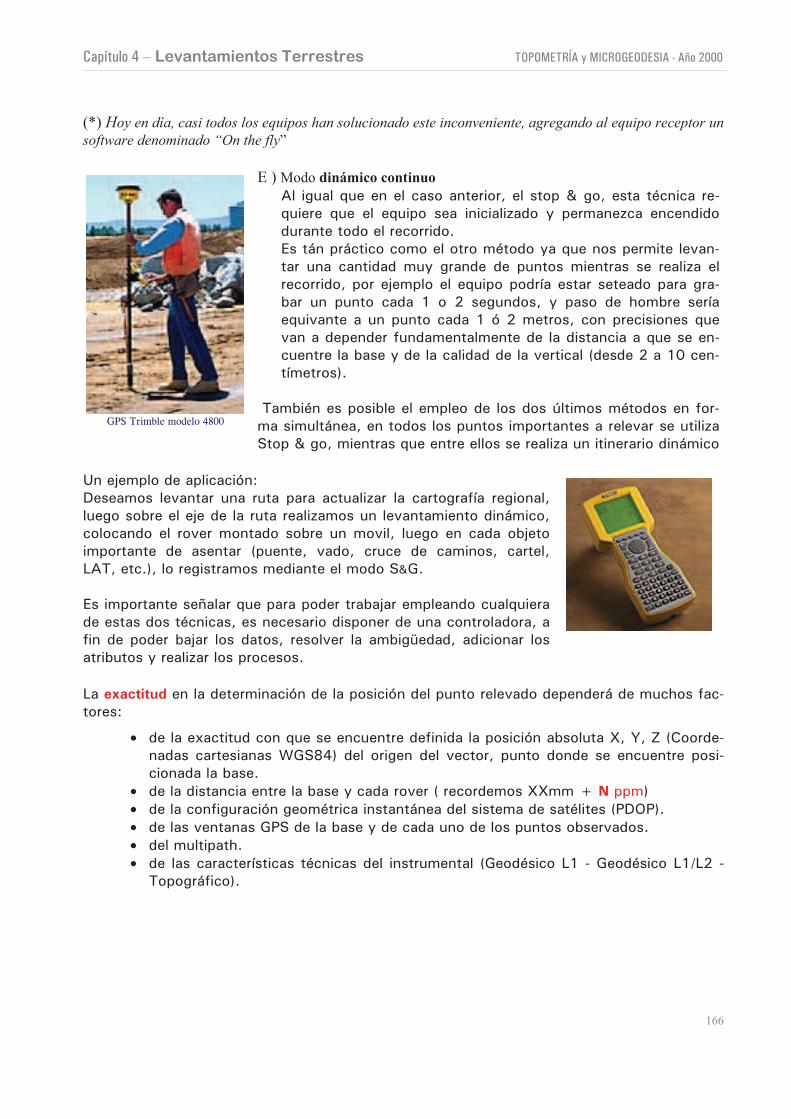
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
166
(*) Hoy en día, casi todos los equipos han solucionado este inconveniente, agregando al equipo receptor un
software denominado “On the fly”
GPS Trimble modelo 4800
E ) Modo dinámico continuoAl igual que en el caso anterior, el stop & go, esta técnica re-
quiere que el equipo sea inicializado y permanezca encendido
durante todo el recorrido.
Es tán práctico como el otro método ya que nos permite levan-
tar una cantidad muy grande de puntos mientras se realiza el
recorrido, por ejemplo el equipo podría estar seteado para gra-
bar un punto cada 1 o 2 segundos, y paso de hombre sería
equivante a un punto cada 1 ó 2 metros, con precisiones que
van a depender fundamentalmente de la distancia a que se en-
cuentre la base y de la calidad de la vertical (desde 2 a 10 cen-
tímetros).
También es posible el empleo de los dos últimos métodos en for-
ma simultánea, en todos los puntos importantes a relevar se utiliza
Stop & go, mientras que entre ellos se realiza un itinerario dinámico
Un ejemplo de aplicación:
Deseamos levantar una ruta para actualizar la cartografía regional,
luego sobre el eje de la ruta realizamos un levantamiento dinámico,
colocando el rover montado sobre un movil, luego en cada objeto
importante de asentar (puente, vado, cruce de caminos, cartel,
LAT, etc.), lo registramos mediante el modo S&G.
Es importante señalar que para poder trabajar empleando cualquiera
de estas dos técnicas, es necesario disponer de una controladora, a
fin de poder bajar los datos, resolver la ambigüedad, adicionar los
atributos y realizar los procesos.
La exactitud en la determinación de la posición del punto relevado dependerá de muchos fac-
tores:
• de la exactitud con que se encuentre definida la posición absoluta X, Y, Z (Coorde-
nadas cartesianas WGS84) del origen del vector, punto donde se encuentre posi-
cionada la base.
• de la distancia entre la base y cada rover ( recordemos XXmm + N ppm)
• de la configuración geométrica instantánea del sistema de satélites (PDOP).
• de las ventanas GPS de la base y de cada uno de los puntos observados.
• del multipath.
• de las características técnicas del instrumental (Geodésico L1 - Geodésico L1/L2 -
Topográfico).
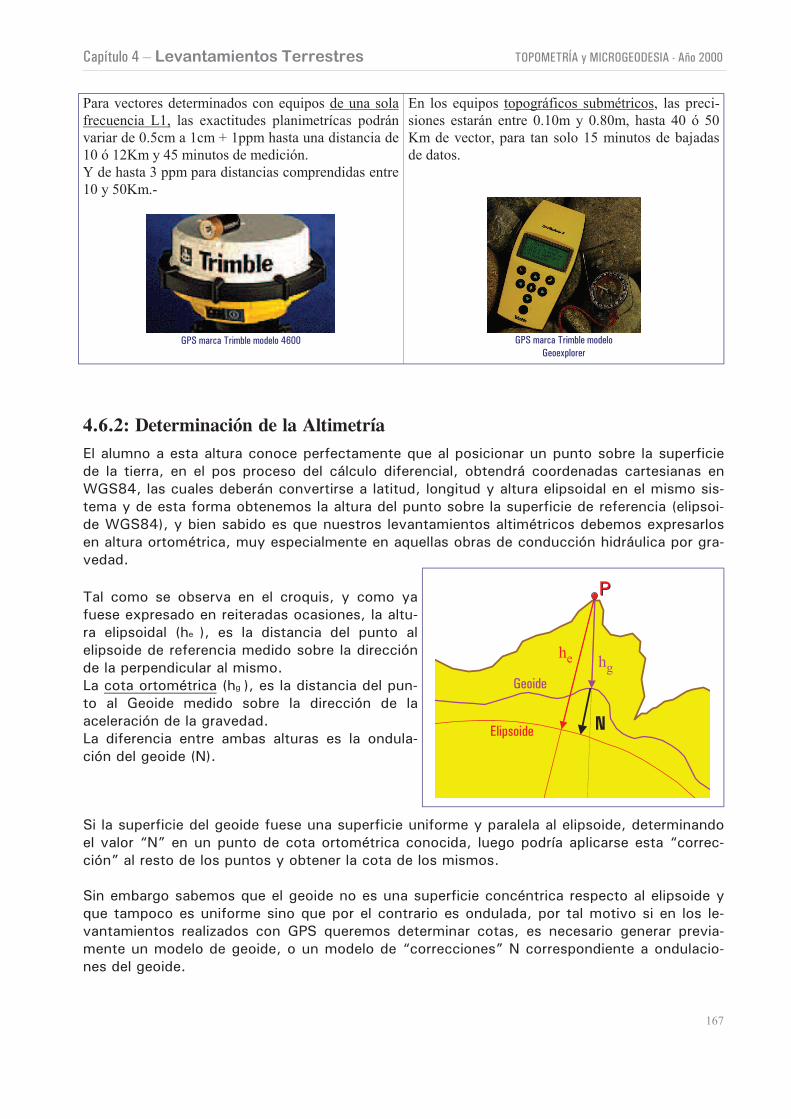
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
167
Para vectores determinados con equipos de una solafrecuencia L1, las exactitudes planimetrícas podránvariar de 0.5cm a 1cm + 1ppm hasta una distancia de10 ó 12Km y 45 minutos de medición.Y de hasta 3 ppm para distancias comprendidas entre10 y 50Km.-
GPS marca Trimble modelo 4600
En los equipos topográficos submétricos, las preci-siones estarán entre 0.10m y 0.80m, hasta 40 ó 50Km de vector, para tan solo 15 minutos de bajadasde datos.
GPS marca Trimble modeloGeoexplorer
4.6.2: Determinación de la Altimetría
El alumno a esta altura conoce perfectamente que al posicionar un punto sobre la superficie
de la tierra, en el pos proceso del cálculo diferencial, obtendrá coordenadas cartesianas en
WGS84, las cuales deberán convertirse a latitud, longitud y altura elipsoidal en el mismo sis-
tema y de esta forma obtenemos la altura del punto sobre la superficie de referencia (elipsoi-
de WGS84), y bien sabido es que nuestros levantamientos altimétricos debemos expresarlos
en altura ortométrica, muy especialmente en aquellas obras de conducción hidráulica por gra-
vedad.
Tal como se observa en el croquis, y como ya
fuese expresado en reiteradas ocasiones, la altu-
ra elipsoidal (he ), es la distancia del punto al
elipsoide de referencia medido sobre la dirección
de la perpendicular al mismo.
La cota ortométrica (hg ), es la distancia del pun-
to al Geoide medido sobre la dirección de la
aceleración de la gravedad.
La diferencia entre ambas alturas es la ondula-
ción del geoide (N).
PP
he
Elipsoide
Geoide
hg
N
Si la superficie del geoide fuese una superficie uniforme y paralela al elipsoide, determinando
el valor “N” en un punto de cota ortométrica conocida, luego podría aplicarse esta “correc-
ción” al resto de los puntos y obtener la cota de los mismos.
Sin embargo sabemos que el geoide no es una superficie concéntrica respecto al elipsoide y
que tampoco es uniforme sino que por el contrario es ondulada, por tal motivo si en los le-
vantamientos realizados con GPS queremos determinar cotas, es necesario generar previa-
mente un modelo de geoide, o un modelo de “correcciones” N correspondiente a ondulacio-
nes del geoide.
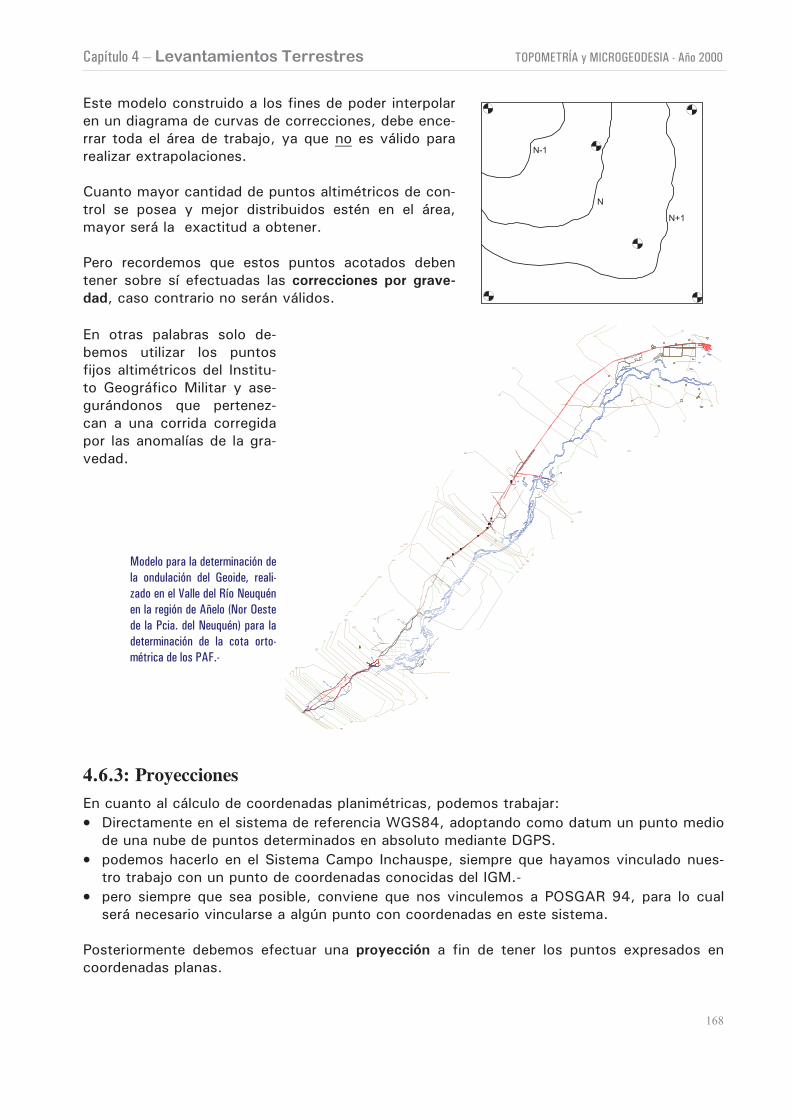
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
168
Este modelo construido a los fines de poder interpolar
en un diagrama de curvas de correcciones, debe ence-
rrar toda el área de trabajo, ya que no es válido para
realizar extrapolaciones.
Cuanto mayor cantidad de puntos altimétricos de con-
trol se posea y mejor distribuidos estén en el área,
mayor será la exactitud a obtener.
Pero recordemos que estos puntos acotados deben
tener sobre sí efectuadas las correcciones por grave-
dad, caso contrario no serán válidos.
N-1
N+1
N
En otras palabras solo de-
bemos utilizar los puntos
fijos altimétricos del Institu-
to Geográfico Militar y ase-
gurándonos que pertenez-
can a una corrida corregida
por las anomalías de la gra-
vedad.
Modelo para la determinación dela ondulación del Geoide, reali-zado en el Valle del Río Neuquénen la región de Añelo (Nor Oestede la Pcia. del Neuquén) para ladeterminación de la cota orto-métrica de los PAF.-
4.6.3: Proyecciones
En cuanto al cálculo de coordenadas planimétricas, podemos trabajar:
• Directamente en el sistema de referencia WGS84, adoptando como datum un punto medio
de una nube de puntos determinados en absoluto mediante DGPS.
• podemos hacerlo en el Sistema Campo Inchauspe, siempre que hayamos vinculado nues-
tro trabajo con un punto de coordenadas conocidas del IGM.-
• pero siempre que sea posible, conviene que nos vinculemos a POSGAR 94, para lo cual
será necesario vincularse a algún punto con coordenadas en este sistema.
Posteriormente debemos efectuar una proyección a fin de tener los puntos expresados en
coordenadas planas.
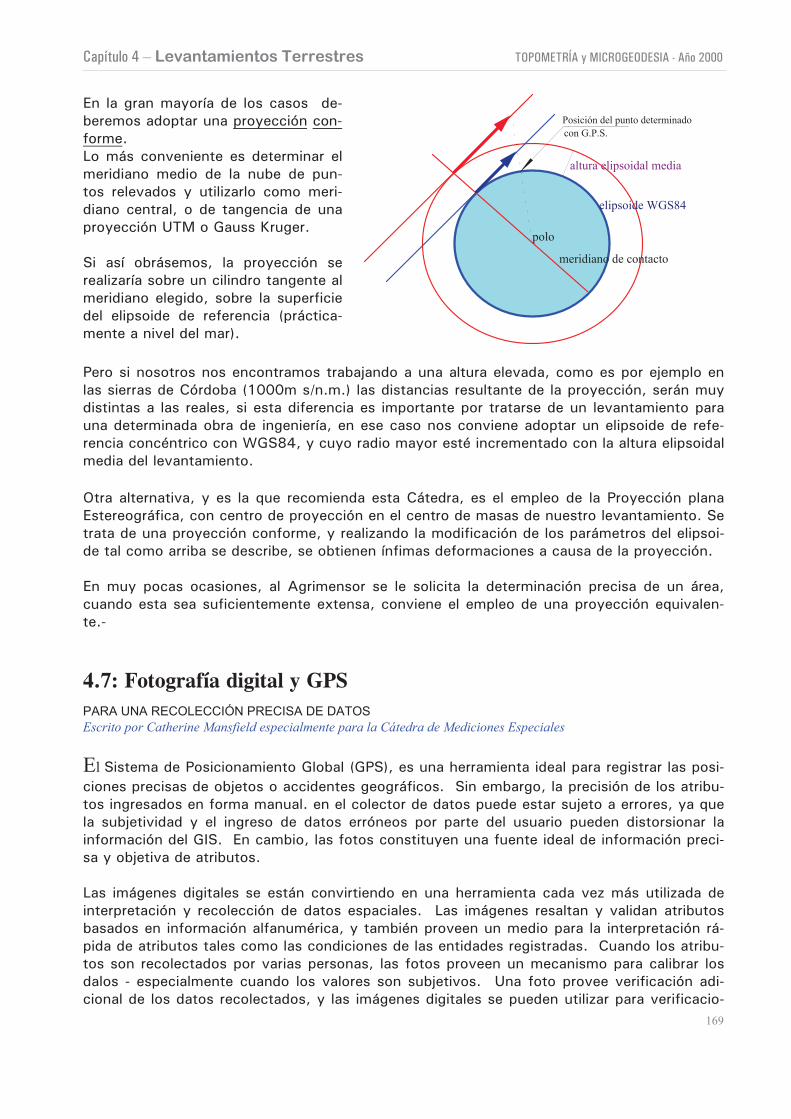
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
169
En la gran mayoría de los casos de-
beremos adoptar una proyección con-
forme.
Lo más conveniente es determinar el
meridiano medio de la nube de pun-
tos relevados y utilizarlo como meri-
diano central, o de tangencia de una
proyección UTM o Gauss Kruger.
Si así obrásemos, la proyección se
realizaría sobre un cilindro tangente al
meridiano elegido, sobre la superficie
del elipsoide de referencia (práctica-
mente a nivel del mar).
altura elipsoidal media
meridiano de contacto
polo
elipsoide WGS84
Posición del punto determinadocon G.P.S.
Pero si nosotros nos encontramos trabajando a una altura elevada, como es por ejemplo en
las sierras de Córdoba (1000m s/n.m.) las distancias resultante de la proyección, serán muy
distintas a las reales, si esta diferencia es importante por tratarse de un levantamiento para
una determinada obra de ingeniería, en ese caso nos conviene adoptar un elipsoide de refe-
rencia concéntrico con WGS84, y cuyo radio mayor esté incrementado con la altura elipsoidal
media del levantamiento.
Otra alternativa, y es la que recomienda esta Cátedra, es el empleo de la Proyección plana
Estereográfica, con centro de proyección en el centro de masas de nuestro levantamiento. Se
trata de una proyección conforme, y realizando la modificación de los parámetros del elipsoi-
de tal como arriba se describe, se obtienen ínfimas deformaciones a causa de la proyección.
En muy pocas ocasiones, al Agrimensor se le solicita la determinación precisa de un área,
cuando esta sea suficientemente extensa, conviene el empleo de una proyección equivalen-
te.-
4.7: Fotografía digital y GPS
PARA UNA RECOLECCIÓN PRECISA DE DATOSEscrito por Catherine Mansfield especialmente para la Cátedra de Mediciones Especiales
El Sistema de Posicionamiento Global (GPS), es una herramienta ideal para registrar las posi-
ciones precisas de objetos o accidentes geográficos. Sin embargo, la precisión de los atribu-
tos ingresados en forma manual. en el colector de datos puede estar sujeto a errores, ya que
la subjetividad y el ingreso de datos erróneos por parte del usuario pueden distorsionar la
información del GIS. En cambio, las fotos constituyen una fuente ideal de información preci-
sa y objetiva de atributos.
Las imágenes digitales se están convirtiendo en una herramienta cada vez más utilizada de
interpretación y recolección de datos espaciales. Las imágenes resaltan y validan atributos
basados en información alfanumérica, y también proveen un medio para la interpretación rá-
pida de atributos tales como las condiciones de las entidades registradas. Cuando los atribu-
tos son recolectados por varias personas, las fotos proveen un mecanismo para calibrar los
dalos - especialmente cuando los valores son subjetivos. Una foto provee verificación adi-
cional de los datos recolectados, y las imágenes digitales se pueden utilizar para verificacio-
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
170
nes al azar. Se puede cotejar un porcentaje de los datos recolectados desde la oficina contra
una imagen digital asociada y con ello se obtendrá una idea de la calidad y cantidad de la
información.
A diferencia de las fotografías aéreas o las imágenes satelitales, la imagen digital de una en-
tidad (edificio, instalación, montaña) es una imagen en perspectiva (es decir, una fotografía
común) y no requiere georreferenciación ni ajustes de coordenadas para superponerla con
datos cartográficos existentes. Por ejemplo, un poste de algún servicio público, las coorde-
nadas del poste no son una parte intrínseca de la foto. El valor de la foto reside en la infor-
mación descriptiva que ofrece, tal como la condición del poste. A pesar de que la imagen no
necesita ser georreferenciada, si necesita ser geocodificada, ya que carece de valor sin una
conexión con su ubicación geográfica.
Existen dos maneras de establecer enlaces de posiciones del GPS con fotos:
1. almacenar la posición del GPS en la cámara
2. establecer un enlace con el nombre del archivo de la foto digital en la ubicación del
GPS.
COMO ALMACENAR POSICIONES DEL GPS EN UNA CAMARA
Algunas de las sofisticadas cámaras actuales pueden almacenar información adicional, tal
como una posición del GPS, tomada de otro dispositivo digital. Para grabar una posición con
la imagen digital, se necesita una cámara que acepte datos de un dispositivo externo y un
receptor de GPS que sea capaz de exportar información a otro dispositivo. Generalmente, la
cadena (string) de caracteres de la NMEA (National Marine Electronics Association), la Aso-
ciación Nacional de Electrónica Marina de los EE. UU es la mejor opción para exportar infor-
mación de una posición, ya que es un formato emitido por varios receptores de cartografía
mediante GPS. La información de la NMEA contiene, entre otras cosas, información de posi-
ciones GPS. La posición es aparcada con la imagen actual, lo que permite ubicarla espacial-
mente en el GIS.
Una vez que una posición GPS ha sido exportada a una cámara, ya no puede ser corregida
diferencialmente, Por lo tanto, es importante que el receptor de GPS emita posiciones corre-
gidas diferencialmente en tiempo real para obtener una lectura más precisa que una distancia
de 100 metros.
Este método para conectar imágenes y posiciones es más apropiado para la recopilación de
datos en la cual la imagen digital es la única fuente de información sobre atributos. Si se
registra otra información alfanumérica, también debe establecerse un enlace con ella. En
esta situación, es necesario trabajar con un sistema GPS/GIS que sea capaz de registrar in-
formación sobre posiciones y atributos mientras se exporta la posición a la cámara.
COMO ALMACENAR UNA FOTO CON UN ARCHIVO DEL GPS
En vez de utilizar una posición para establecer el enlace de una imagen y otra información
sobre atributos, se puede emplear como enlace el nombre del archivo de la imagen. Las cá-
maras digitales generan un nombre de archivo para cada imagen, y éste puede almacenarse
como atributo de una enti dad. Se identifica entonces la imagen digital correcta mediante el
nombre del archivo en el GIS.
Los nombres de archivos se pueden ingresar en forma manual o exportarse automáticamente
al GIS. Los sistemas más avanzados de recolección de datos de GPS que se ejecutan en una
computadora con lector óptico, o en una computadora notebook, pueden seleccionar auto-
máticamente un archivo de una cámara digital, bajarlo a la computadora, y almacenar el
Capítulo 4 – Levantamientos Terrestres TOPOMETRÍA y MICROGEODESIA - Año 2000
171
nombre del mismo en un campo específico para la entidad GPS que está siendo registrada en
ese momento.
Este método es ideal cuando se usa una imagen digital para complementar otras formas de
recopilación de datos de atributos. Además, debido a que las posiciones GPS no están alma-
cenadas en la cámara, pueden ser corregidas diferencialmente si ello resulta necesario.
Sin que importe si se guarda una posición del GPS en un archivo de imagen digital o si se
almacena el nombre de una imagen digital en un archivo GPS, el uso combinado de fotos
digitales y GPS mejora notablemente la calidad y validez la información del GIS. No hay nada
como una foto para representar la realidad.
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
172
Utopía
Se echó al monte la Utopía
perseguida por lebreles
que se criaron en sus rodillas
y que al no poder seguir su paso,
la traicionaron !
...y hoy funcionarios
del negociado de sueños dentro de un orden
son partidarios
de capar al cochino para que engorde.
Ay, Utopía !
Cabalgadura que nos vuelve gigantes en miniatura
Ay, Utopía !
Dulce como el pan nuestro de cada día.
Quieren prender a la aurora
porque llena la cabeza de pajaritos
Embaucadora!
que encandila a los ilusos y a los benditos
Por Hechicera!
que hace que el ciego vea y el mudo hable
Por Subversiva!
de lo que está mandado, mande quién mande.
Ay, Utopía !
Incorregible!
que no tienes bastante con lo posible
Ay, Utopía !
que levantas huracanes de rebeldía!
Quieren ponerle cadenas
pero quién es, quién le pone...puertas al monte
no pases pena
que antes que lleguen los perros, será un buen Hombre,
el que la encuentre
y la cuide hasta que lleguen mejores días.
Sin Utopía
la vida sería un ensayo para la muerte!
Ay, Utopía !
Como te quiero!
porque les alborotas el gallinero
Ay, Utopía !
que alumbras los candiles del nuevo día.
JOAN MANUEL SERRAT
UTOPIA: Proyecto irrealizable
(sin.: quimera)
QUIMERA: Lo que se propone la imagi-
nación como posible o verdadero, no
siéndolo.
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
173
Capitulo 5. Levantamientos Hidrográficos
5.1: ObjetivosDentro de la Captura de datos, tratamos por separado los levantamientos terrestres, para
diferenciarlos de los relevamientos aéreos y de los levantamientos hidrográficos. Estos se
realizan con el propósito de determinar la forma de las costas, y de los lechos de los ríos,
lagunas y mares.
Los levantamiento hidrográficos sirven de base para:
La planificación, desarrollo, mejoramiento y mantenimiento de las vías navegablesen Ríos y mares.
La planificación y control de proyectos de obras de Ingeniería que se desarrollan
bajo la superficie de las aguas. Veamos algunos ejemplos en ríos: las fundaciones
de las pilas de los puentes carreteros, los túneles sub fluviales y los diques; y en
ríos navegables y mares: dársenas, defensas de costas y puertos
Los levantamientos hidrográficos son además imprescindibles para la determinación de Líneas
de Ribera (en los ríos), Perilago (en los lagos) y Líneas de Costas (en el mar), operación fun-
damental para la definición del deslinde entre la propiedad pública y privada, y de necesario
conocimiento a la hora de proyectar cualquier obra pública.-
Los métodos de levantamiento a aplicar, no se apartan en absoluto de los vistos y analizado
en los levantamientos terrestres, con dos variantes fundamentales:
La superficie a levantar no es visible
La superficie a levantar se encuentra sometida a permanentes cambios
Por el hecho de ser una superficie no visible, quedan excluidos como métodos de levanta-
miento la fotogrametría y la teledetección, salvo para la porción terrestre.
A fin de analizar la metodología a aplicar, tomando en cuenta la dificultad que estas variantes
nos presentan, para determinar la posición de los puntos sumergidos, trataremos en forma
independiente:
La posición planimétrica: Cordenadas X e Y
La posición altimétrica: Cota Ortométrica
Se podrá emplear los métodos ya vistos en los levantamientos areales o superficiales (polar y
bisección) y obtener como resultado un modelo digital de elevaciones MDE, y/o un plano con
curvas de nivel MAT.-
Dado que las curvas de nivel se encuentran sumergidas, para diferenciarlas de las terrestres
se las dibuja en un color azúl y se las llaman curvas batimétricas, el levantamiento recibe el
nombre de batimetría (cuando la superficie relevada se encuentra totalmente sumergida) y
topo-batimétrico (cuando el levantamiento incluye sectores sumergidos y áreas visibles).
También podrán emplearse las alineaciones y obtener perfiles transversales del lecho de un
río o las costas del mar. O bien, una solución híbrida, emplear el método polar o la bisección,
combinada con los perfiles transversales.
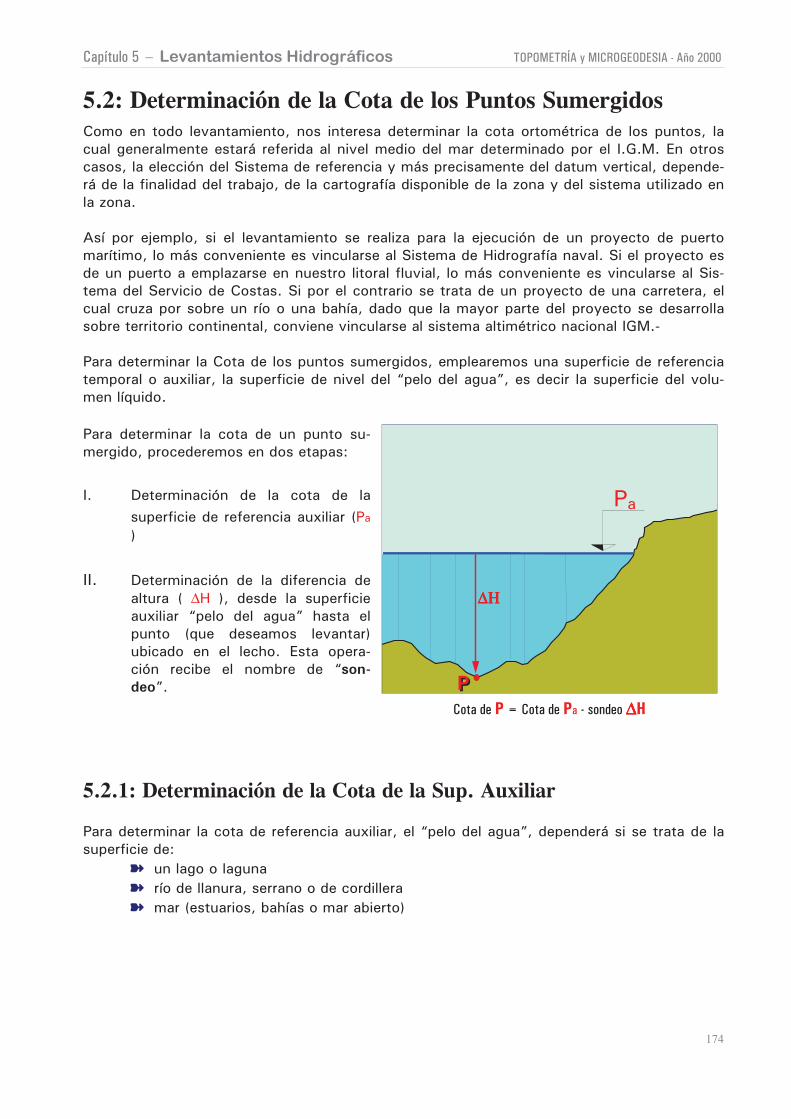
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
174
5.2: Determinación de la Cota de los Puntos Sumergidos
Como en todo levantamiento, nos interesa determinar la cota ortométrica de los puntos, la
cual generalmente estará referida al nivel medio del mar determinado por el I.G.M. En otros
casos, la elección del Sistema de referencia y más precisamente del datum vertical, depende-
rá de la finalidad del trabajo, de la cartografía disponible de la zona y del sistema utilizado en
la zona.
Así por ejemplo, si el levantamiento se realiza para la ejecución de un proyecto de puerto
marítimo, lo más conveniente es vincularse al Sistema de Hidrografía naval. Si el proyecto es
de un puerto a emplazarse en nuestro litoral fluvial, lo más conveniente es vincularse al Sis-
tema del Servicio de Costas. Si por el contrario se trata de un proyecto de una carretera, el
cual cruza por sobre un río o una bahía, dado que la mayor parte del proyecto se desarrolla
sobre territorio continental, conviene vincularse al sistema altimétrico nacional IGM.-
Para determinar la Cota de los puntos sumergidos, emplearemos una superficie de referencia
temporal o auxiliar, la superficie de nivel del “pelo del agua”, es decir la superficie del volu-
men líquido.
Para determinar la cota de un punto su-
mergido, procederemos en dos etapas:
I. Determinación de la cota de la
superficie de referencia auxiliar (Pa
)
II. Determinación de la diferencia de
altura ( ∆H ), desde la superficie
auxiliar “pelo del agua” hasta el
punto (que deseamos levantar)
ubicado en el lecho. Esta opera-
ción recibe el nombre de “son-deo”. PP
∆Η∆Η∆Η∆Η
Pa
Cota de P = Cota de Pa - sondeo ∆∆∆∆H
5.2.1: Determinación de la Cota de la Sup. Auxiliar
Para determinar la cota de referencia auxiliar, el “pelo del agua”, dependerá si se trata de la
superficie de:
un lago o laguna
río de llanura, serrano o de cordillera
mar (estuarios, bahías o mar abierto)
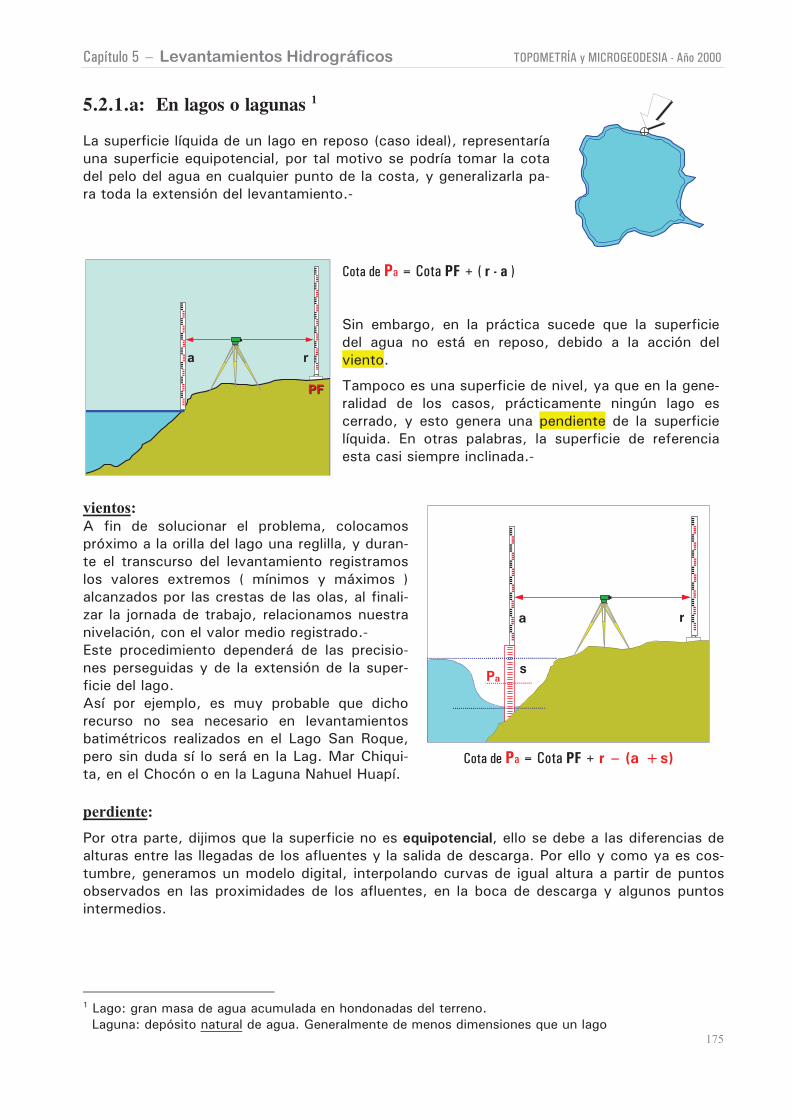
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
175
5.2.1.a: En lagos o lagunas 1
La superficie líquida de un lago en reposo (caso ideal), representaría
una superficie equipotencial, por tal motivo se podría tomar la cota
del pelo del agua en cualquier punto de la costa, y generalizarla pa-
ra toda la extensión del levantamiento.-
PFPF
ra
Cota de Pa = Cota PF + ( r - a )
Sin embargo, en la práctica sucede que la superficie
del agua no está en reposo, debido a la acción del
viento.
Tampoco es una superficie de nivel, ya que en la gene-
ralidad de los casos, prácticamente ningún lago es
cerrado, y esto genera una pendiente de la superficie
líquida. En otras palabras, la superficie de referencia
esta casi siempre inclinada.-
vientos:A fin de solucionar el problema, colocamos
próximo a la orilla del lago una reglilla, y duran-
te el transcurso del levantamiento registramos
los valores extremos ( mínimos y máximos )
alcanzados por las crestas de las olas, al finali-
zar la jornada de trabajo, relacionamos nuestra
nivelación, con el valor medio registrado.-
Este procedimiento dependerá de las precisio-
nes perseguidas y de la extensión de la super-
ficie del lago.
Así por ejemplo, es muy probable que dicho
recurso no sea necesario en levantamientos
batimétricos realizados en el Lago San Roque,
pero sin duda sí lo será en la Lag. Mar Chiqui-
ta, en el Chocón o en la Laguna Nahuel Huapí.
PF
ra
sPa
Cota de Pa = Cota PF + r – (a +s)
perdiente:
Por otra parte, dijimos que la superficie no es equipotencial, ello se debe a las diferencias de
alturas entre las llegadas de los afluentes y la salida de descarga. Por ello y como ya es cos-
tumbre, generamos un modelo digital, interpolando curvas de igual altura a partir de puntos
observados en las proximidades de los afluentes, en la boca de descarga y algunos puntos
intermedios.
1 Lago: gran masa de agua acumulada en hondonadas del terreno.
Laguna: depósito natural de agua. Generalmente de menos dimensiones que un lago
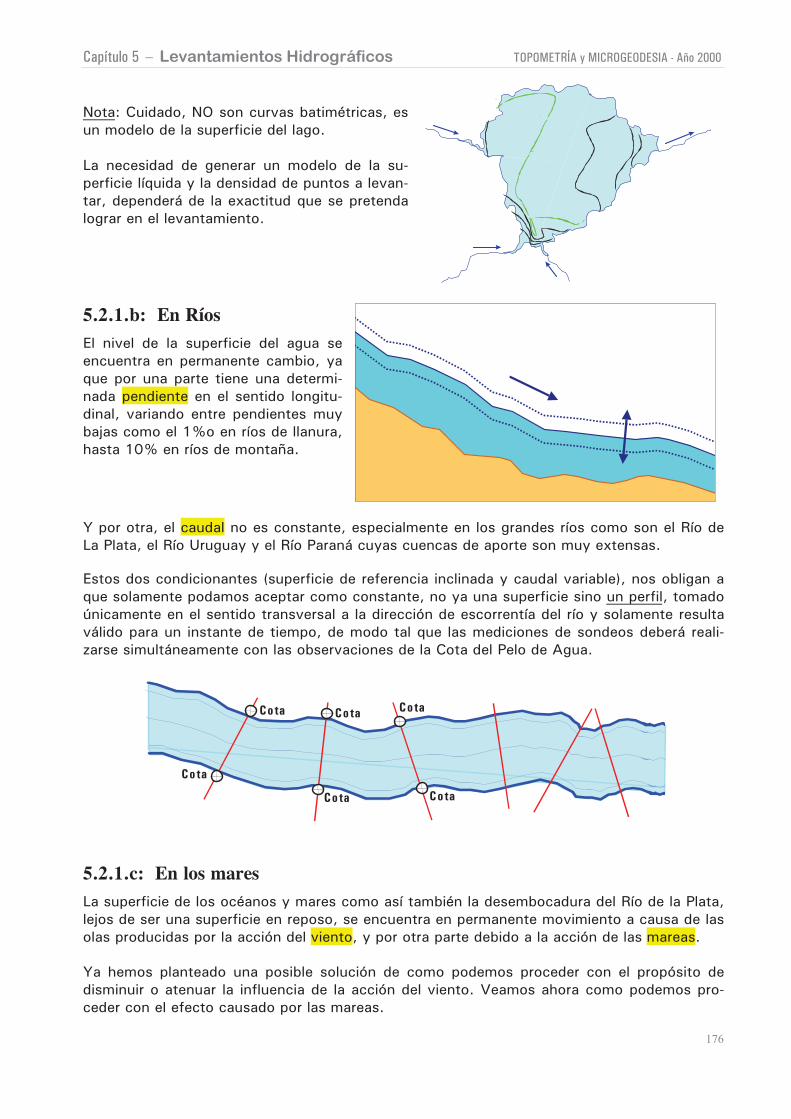
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
176
Nota: Cuidado, NO son curvas batimétricas, es
un modelo de la superficie del lago.
La necesidad de generar un modelo de la su-
perficie líquida y la densidad de puntos a levan-
tar, dependerá de la exactitud que se pretenda
lograr en el levantamiento.
5.2.1.b: En Ríos
El nivel de la superficie del agua se
encuentra en permanente cambio, ya
que por una parte tiene una determi-
nada pendiente en el sentido longitu-
dinal, variando entre pendientes muy
bajas como el 1%o en ríos de llanura,
hasta 10% en ríos de montaña.
Y por otra, el caudal no es constante, especialmente en los grandes ríos como son el Río de
La Plata, el Río Uruguay y el Río Paraná cuyas cuencas de aporte son muy extensas.
Estos dos condicionantes (superficie de referencia inclinada y caudal variable), nos obligan a
que solamente podamos aceptar como constante, no ya una superficie sino un perfil, tomado
únicamente en el sentido transversal a la dirección de escorrentía del río y solamente resulta
válido para un instante de tiempo, de modo tal que las mediciones de sondeos deberá reali-
zarse simultáneamente con las observaciones de la Cota del Pelo de Agua.
Cota
Cota
Cota
Cota
Cota
Cota
5.2.1.c: En los mares
La superficie de los océanos y mares como así también la desembocadura del Río de la Plata,
lejos de ser una superficie en reposo, se encuentra en permanente movimiento a causa de las
olas producidas por la acción del viento, y por otra parte debido a la acción de las mareas.
Ya hemos planteado una posible solución de como podemos proceder con el propósito de
disminuir o atenuar la influencia de la acción del viento. Veamos ahora como podemos pro-
ceder con el efecto causado por las mareas.
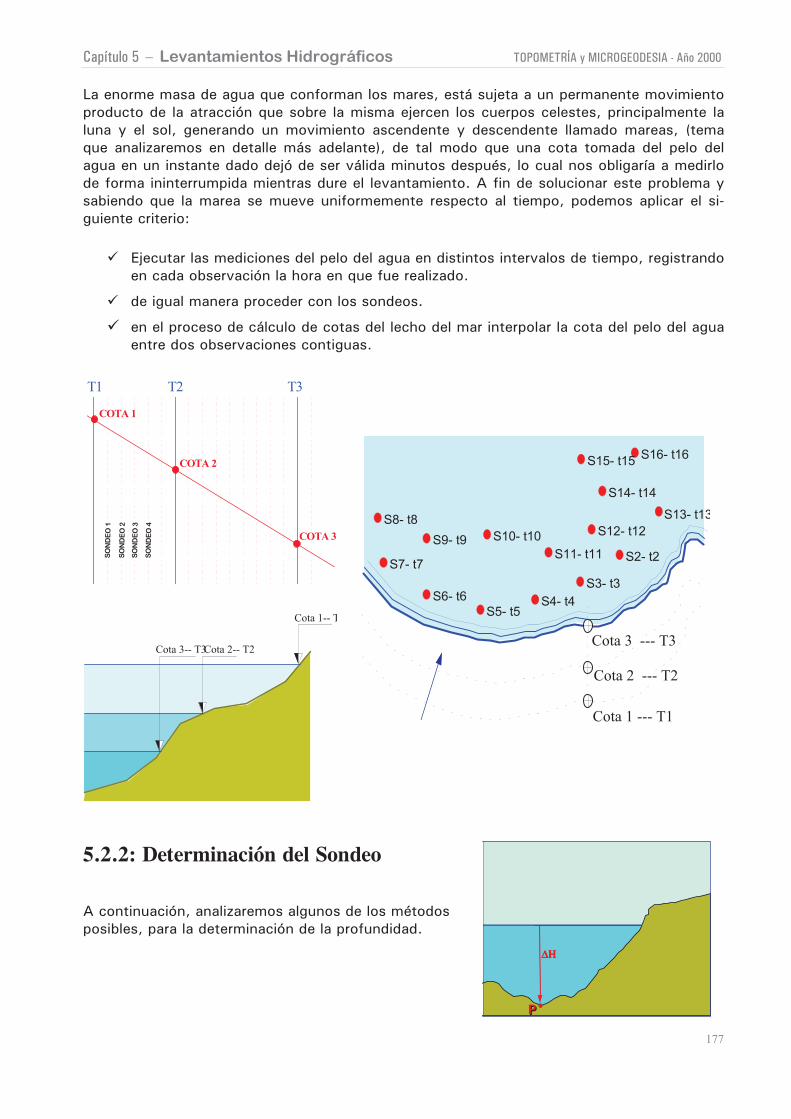
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
177
La enorme masa de agua que conforman los mares, está sujeta a un permanente movimiento
producto de la atracción que sobre la misma ejercen los cuerpos celestes, principalmente la
luna y el sol, generando un movimiento ascendente y descendente llamado mareas, (tema
que analizaremos en detalle más adelante), de tal modo que una cota tomada del pelo del
agua en un instante dado dejó de ser válida minutos después, lo cual nos obligaría a medirlo
de forma ininterrumpida mientras dure el levantamiento. A fin de solucionar este problema y
sabiendo que la marea se mueve uniformemente respecto al tiempo, podemos aplicar el si-
guiente criterio:
Ejecutar las mediciones del pelo del agua en distintos intervalos de tiempo, registrando
en cada observación la hora en que fue realizado.
de igual manera proceder con los sondeos.
en el proceso de cálculo de cotas del lecho del mar interpolar la cota del pelo del agua
entre dos observaciones contiguas.
T1 T2 T3
COTA 1
COTA 2
COTA 3
SO
ND
EO
1
SO
ND
EO
2
SO
ND
EO
3
SO
ND
EO
4
Cota 1-- T
Cota 2-- T2Cota 3-- T3
Cota 1 --- T1
Cota 2 --- T2
Cota 3 --- T3
S6- t6
S5- t5S4- t4
S3- t3
S2- t2
S13- t13
S11- t11
S12- t12
S14- t14
S16- t16
S7- t7
S8- t8
S9- t9 S10- t10
S15- t15
5.2.2: Determinación del Sondeo
A continuación, analizaremos algunos de los métodos
posibles, para la determinación de la profundidad.
PP
∆Η∆Η∆Η∆Η
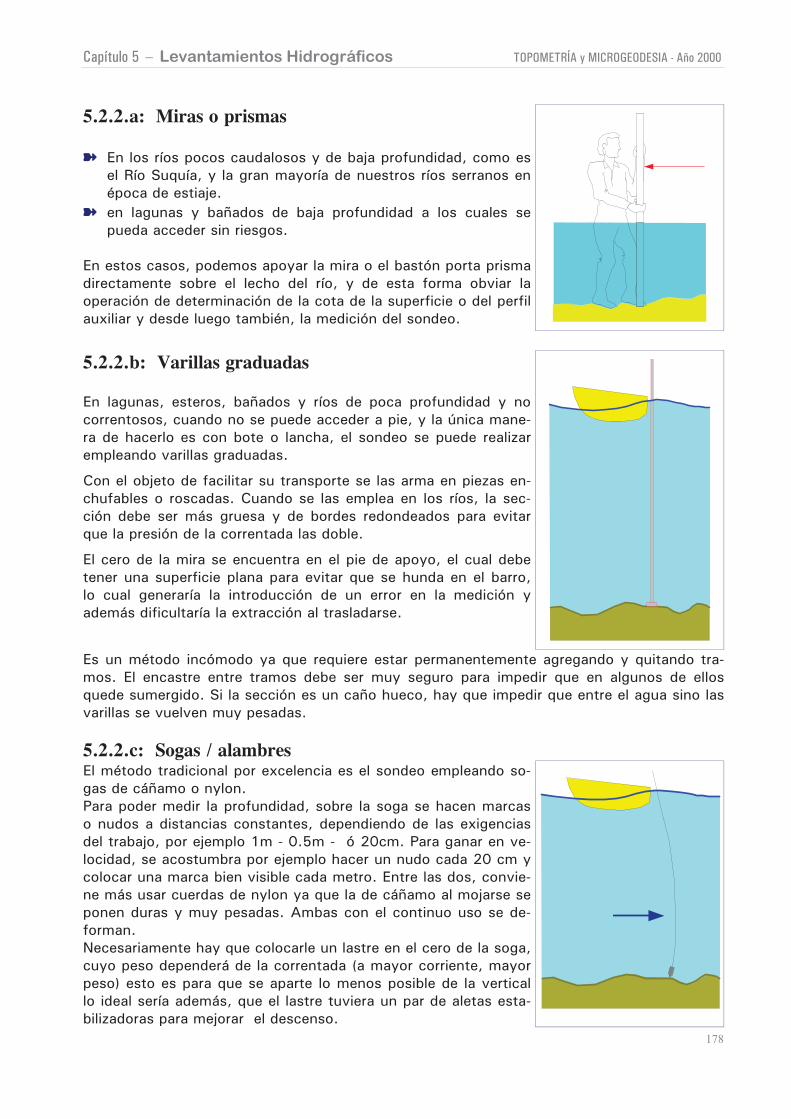
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
178
5.2.2.a: Miras o prismas
En los ríos pocos caudalosos y de baja profundidad, como es
el Río Suquía, y la gran mayoría de nuestros ríos serranos en
época de estiaje.
en lagunas y bañados de baja profundidad a los cuales se
pueda acceder sin riesgos.
En estos casos, podemos apoyar la mira o el bastón porta prisma
directamente sobre el lecho del río, y de esta forma obviar la
operación de determinación de la cota de la superficie o del perfil
auxiliar y desde luego también, la medición del sondeo.
5.2.2.b: Varillas graduadas
En lagunas, esteros, bañados y ríos de poca profundidad y no
correntosos, cuando no se puede acceder a pie, y la única mane-
ra de hacerlo es con bote o lancha, el sondeo se puede realizar
empleando varillas graduadas.
Con el objeto de facilitar su transporte se las arma en piezas en-
chufables o roscadas. Cuando se las emplea en los ríos, la sec-
ción debe ser más gruesa y de bordes redondeados para evitar
que la presión de la correntada las doble.
El cero de la mira se encuentra en el pie de apoyo, el cual debe
tener una superficie plana para evitar que se hunda en el barro,
lo cual generaría la introducción de un error en la medición y
además dificultaría la extracción al trasladarse.
Es un método incómodo ya que requiere estar permanentemente agregando y quitando tra-
mos. El encastre entre tramos debe ser muy seguro para impedir que en algunos de ellos
quede sumergido. Si la sección es un caño hueco, hay que impedir que entre el agua sino las
varillas se vuelven muy pesadas.
5.2.2.c: Sogas / alambresEl método tradicional por excelencia es el sondeo empleando so-
gas de cáñamo o nylon.
Para poder medir la profundidad, sobre la soga se hacen marcas
o nudos a distancias constantes, dependiendo de las exigencias
del trabajo, por ejemplo 1m - 0.5m - ó 20cm. Para ganar en ve-
locidad, se acostumbra por ejemplo hacer un nudo cada 20 cm y
colocar una marca bien visible cada metro. Entre las dos, convie-
ne más usar cuerdas de nylon ya que la de cáñamo al mojarse se
ponen duras y muy pesadas. Ambas con el continuo uso se de-
forman.
Necesariamente hay que colocarle un lastre en el cero de la soga,
cuyo peso dependerá de la correntada (a mayor corriente, mayor
peso) esto es para que se aparte lo menos posible de la vertical
lo ideal sería además, que el lastre tuviera un par de aletas esta-
bilizadoras para mejorar el descenso.
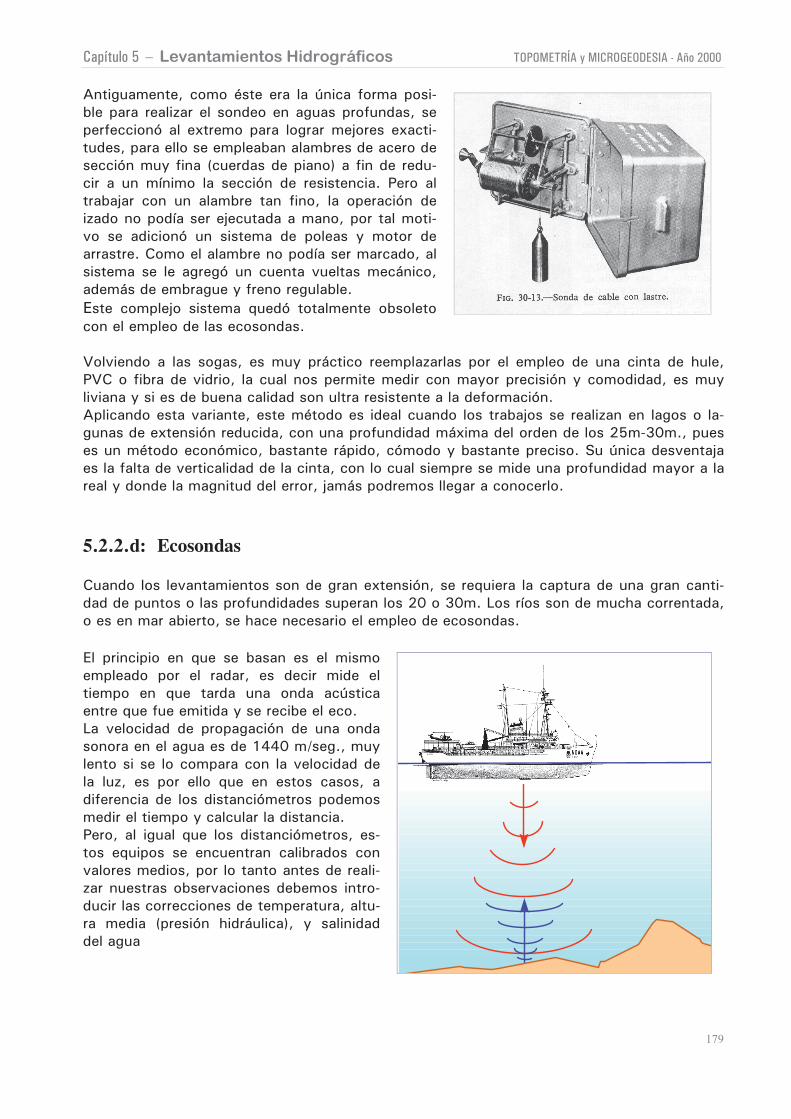
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
179
Antiguamente, como éste era la única forma posi-
ble para realizar el sondeo en aguas profundas, se
perfeccionó al extremo para lograr mejores exacti-
tudes, para ello se empleaban alambres de acero de
sección muy fina (cuerdas de piano) a fin de redu-
cir a un mínimo la sección de resistencia. Pero al
trabajar con un alambre tan fino, la operación de
izado no podía ser ejecutada a mano, por tal moti-
vo se adicionó un sistema de poleas y motor de
arrastre. Como el alambre no podía ser marcado, al
sistema se le agregó un cuenta vueltas mecánico,
además de embrague y freno regulable.
Este complejo sistema quedó totalmente obsoleto
con el empleo de las ecosondas.
Volviendo a las sogas, es muy práctico reemplazarlas por el empleo de una cinta de hule,
PVC o fibra de vidrio, la cual nos permite medir con mayor precisión y comodidad, es muy
liviana y si es de buena calidad son ultra resistente a la deformación.
Aplicando esta variante, este método es ideal cuando los trabajos se realizan en lagos o la-
gunas de extensión reducida, con una profundidad máxima del orden de los 25m-30m., pues
es un método económico, bastante rápido, cómodo y bastante preciso. Su única desventaja
es la falta de verticalidad de la cinta, con lo cual siempre se mide una profundidad mayor a la
real y donde la magnitud del error, jamás podremos llegar a conocerlo.
5.2.2.d: Ecosondas
Cuando los levantamientos son de gran extensión, se requiera la captura de una gran canti-
dad de puntos o las profundidades superan los 20 o 30m. Los ríos son de mucha correntada,
o es en mar abierto, se hace necesario el empleo de ecosondas.
El principio en que se basan es el mismo
empleado por el radar, es decir mide el
tiempo en que tarda una onda acústica
entre que fue emitida y se recibe el eco.
La velocidad de propagación de una onda
sonora en el agua es de 1440 m/seg., muy
lento si se lo compara con la velocidad de
la luz, es por ello que en estos casos, a
diferencia de los distanciómetros podemos
medir el tiempo y calcular la distancia.
Pero, al igual que los distanciómetros, es-
tos equipos se encuentran calibrados con
valores medios, por lo tanto antes de reali-
zar nuestras observaciones debemos intro-
ducir las correcciones de temperatura, altu-
ra media (presión hidráulica), y salinidad
del agua
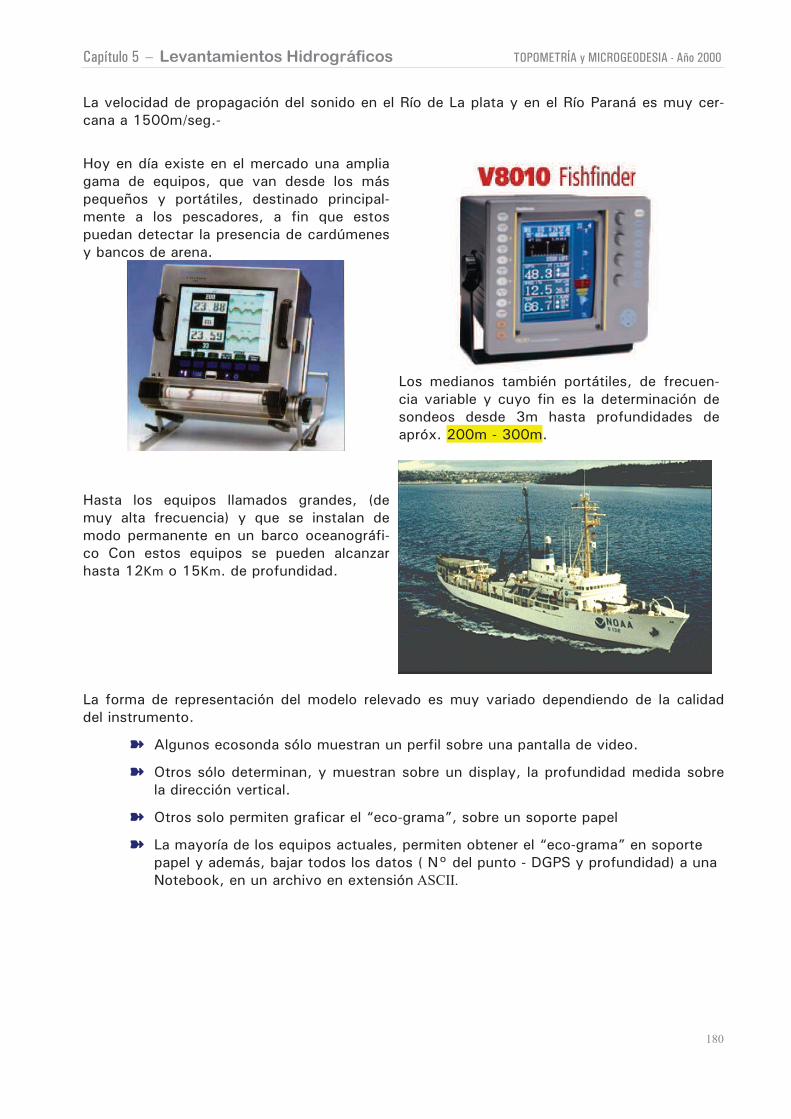
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
180
La velocidad de propagación del sonido en el Río de La plata y en el Río Paraná es muy cer-
cana a 1500m/seg.-
Hoy en día existe en el mercado una amplia
gama de equipos, que van desde los más
pequeños y portátiles, destinado principal-
mente a los pescadores, a fin que estos
puedan detectar la presencia de cardúmenes
y bancos de arena.
Los medianos también portátiles, de frecuen-
cia variable y cuyo fin es la determinación de
sondeos desde 3m hasta profundidades de
apróx. 200m - 300m.
Hasta los equipos llamados grandes, (de
muy alta frecuencia) y que se instalan de
modo permanente en un barco oceanográfi-
co Con estos equipos se pueden alcanzar
hasta 12Km o 15Km. de profundidad.
La forma de representación del modelo relevado es muy variado dependiendo de la calidad
del instrumento.
Algunos ecosonda sólo muestran un perfil sobre una pantalla de video.
Otros sólo determinan, y muestran sobre un display, la profundidad medida sobre
la dirección vertical.
Otros solo permiten graficar el “eco-grama”, sobre un soporte papel
La mayoría de los equipos actuales, permiten obtener el “eco-grama” en soporte
papel y además, bajar todos los datos ( N° del punto - DGPS y profundidad) a una
Notebook, en un archivo en extensión ASCII.
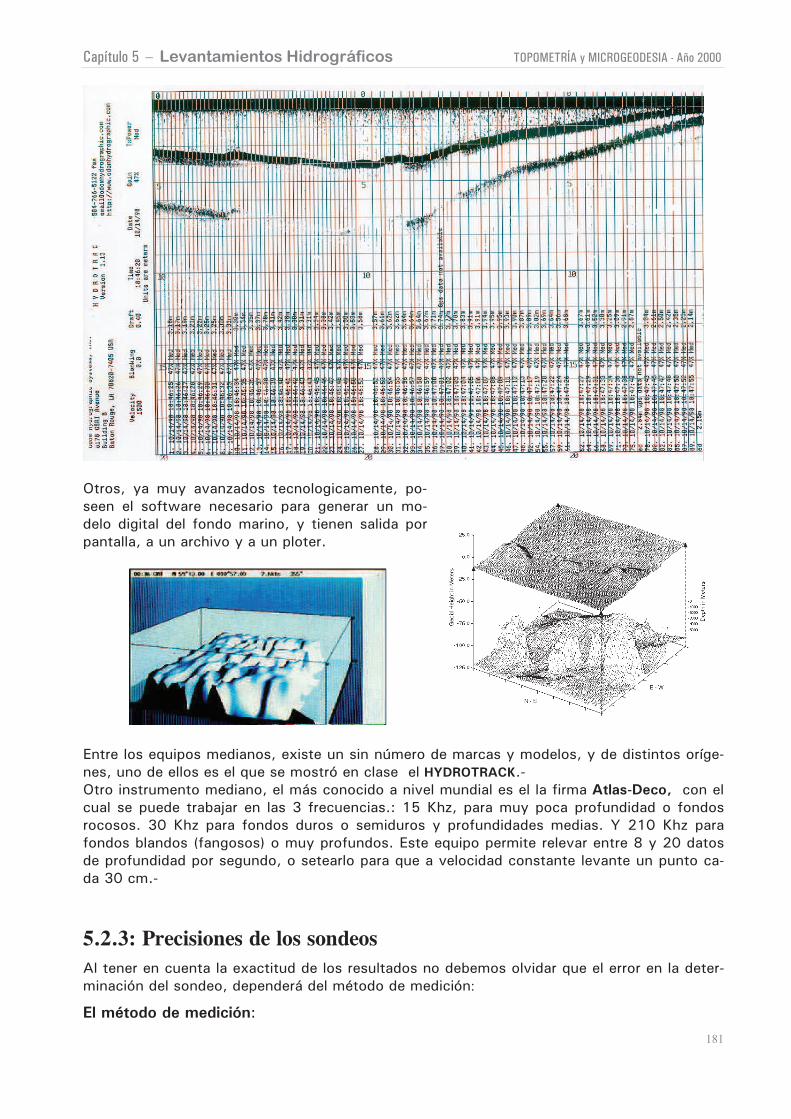
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
181
Otros, ya muy avanzados tecnologicamente, po-
seen el software necesario para generar un mo-
delo digital del fondo marino, y tienen salida por
pantalla, a un archivo y a un ploter.
Entre los equipos medianos, existe un sin número de marcas y modelos, y de distintos oríge-
nes, uno de ellos es el que se mostró en clase el HYDROTRACK.-
Otro instrumento mediano, el más conocido a nivel mundial es el la firma Atlas-Deco, con el
cual se puede trabajar en las 3 frecuencias.: 15 Khz, para muy poca profundidad o fondos
rocosos. 30 Khz para fondos duros o semiduros y profundidades medias. Y 210 Khz para
fondos blandos (fangosos) o muy profundos. Este equipo permite relevar entre 8 y 20 datos
de profundidad por segundo, o setearlo para que a velocidad constante levante un punto ca-
da 30 cm.-
5.2.3: Precisiones de los sondeos
Al tener en cuenta la exactitud de los resultados no debemos olvidar que el error en la deter-
minación del sondeo, dependerá del método de medición:
El método de medición:
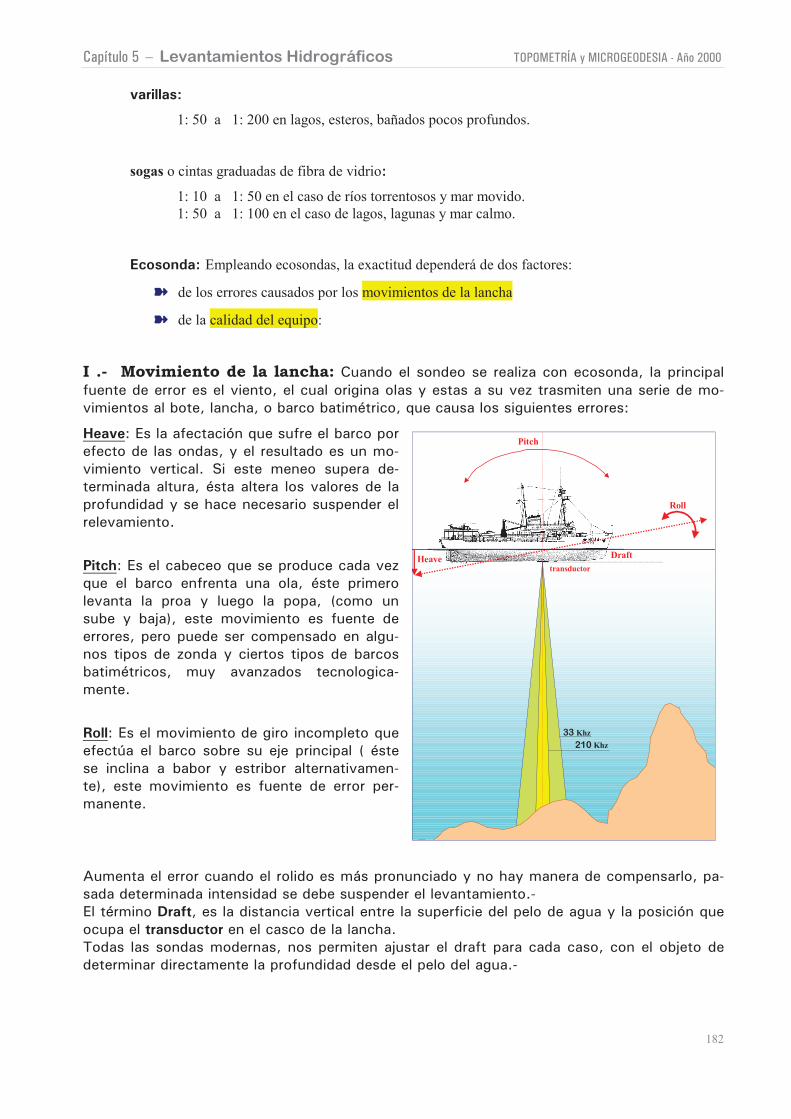
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
182
varillas:
1: 50 a 1: 200 en lagos, esteros, bañados pocos profundos.
sogas o cintas graduadas de fibra de vidrio:
1: 10 a 1: 50 en el caso de ríos torrentosos y mar movido.
1: 50 a 1: 100 en el caso de lagos, lagunas y mar calmo.
Ecosonda: Empleando ecosondas, la exactitud dependerá de dos factores:
de los errores causados por los movimientos de la lancha
de la calidad del equipo:
I .- Movimiento de la lancha: Cuando el sondeo se realiza con ecosonda, la principal
fuente de error es el viento, el cual origina olas y estas a su vez trasmiten una serie de mo-
vimientos al bote, lancha, o barco batimétrico, que causa los siguientes errores:
Heave: Es la afectación que sufre el barco por
efecto de las ondas, y el resultado es un mo-
vimiento vertical. Si este meneo supera de-
terminada altura, ésta altera los valores de la
profundidad y se hace necesario suspender el
relevamiento.
Pitch: Es el cabeceo que se produce cada vez
que el barco enfrenta una ola, éste primero
levanta la proa y luego la popa, (como un
sube y baja), este movimiento es fuente de
errores, pero puede ser compensado en algu-
nos tipos de zonda y ciertos tipos de barcos
batimétricos, muy avanzados tecnologica-
mente.
Roll: Es el movimiento de giro incompleto que
efectúa el barco sobre su eje principal ( éste
se inclina a babor y estribor alternativamen-
te), este movimiento es fuente de error per-
manente.
Heave
Pitch
Roll
transductor
Draft
33 Khz
210 Khz
Aumenta el error cuando el rolido es más pronunciado y no hay manera de compensarlo, pa-
sada determinada intensidad se debe suspender el levantamiento.-
El término Draft, es la distancia vertical entre la superficie del pelo de agua y la posición que
ocupa el transductor en el casco de la lancha.
Todas las sondas modernas, nos permiten ajustar el draft para cada caso, con el objeto de
determinar directamente la profundidad desde el pelo del agua.-
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
183
II .- Calidad del equipo: A mayor frecuencia de emisión, menor amplitud del cono de
sonido, menor posibilidad de interferencias y por lo tanto mayor precisión.
1: 50 a 1: 100 en los equipos chicos............Frecuencia: 15 Khz.
1: 200 a 1: 500 en los equipos medianos........Frecuencia: 33 Khz.
1: 2500 o mayor precisión: en los de alta frecuencia y sondeos de gran profundidad.
Frecuencia: 210 Khz.
5.3: Determinación de la Posición Planimétrica
Los métodos que podemos emplear en la determinación de la posición planimétrica de los
puntos sondeados, no difiere en casi nada de lo que ya hemos visto en los levantamientos
terrestres.
1.- Areales o superficiales2.- G.P.S.3.- Perfilometría4.- Híbridos
5.3.1: Areales o superficiales
Recordemos cuales eran los métodos de los levantamientos superficiales:
Cuadrícula Polar: Taquimetría clásica - Taquimetría electrónica
Bisección.
Libre estacionamiento. Intersección Inversa
Evidentemente la Cuadrícula como método de muestreo sistemático en estos casos no podrá
aplicarse, ya que no puede replantearse y estaquearse una cuadrícula sobre el agua.
5.3.1.a: Método polar
El método de levantamiento polar o taquimetría, es el método de levantamiento ideal para
realizar un muestreo estratitificado, sin embargo habíamos mencionado la necesidad de dis-
poner de información previa de la zona a estudiar, es decir un buen croquis demarcando
áreas delimitadas por colectoras y dorsales. En nuestros levantamientos hidrográficos, gene-
ralmente no disponemos del croquis previo debido a que no es posible observar directamente
la superficie a relevar.
Muchas veces, se nos encarga un levantamiento de una zona cuya mayor parte queda visible
en la baja mar, pero su inaccesibilidad (lodazal, cangrejal), nos impide realizar el trabajo en
forma directa como si fuese un levantamiento terrestre, por ende debe ser encarado como un
levantamiento batimétrico. En estos casos, una fotografía aérea es de gran utilidad para con-
feccionar el mapa previo de trabajo, determinando con un buen grado de aproximación la
posición del canal principal de navegación, los canales secundarios, las restingas2 , los ban-
cos de arena, etc.
2 RESTINGA: Lengua de coral o de piedra, situada por debajo del nivel del agua y a poca profundidad.
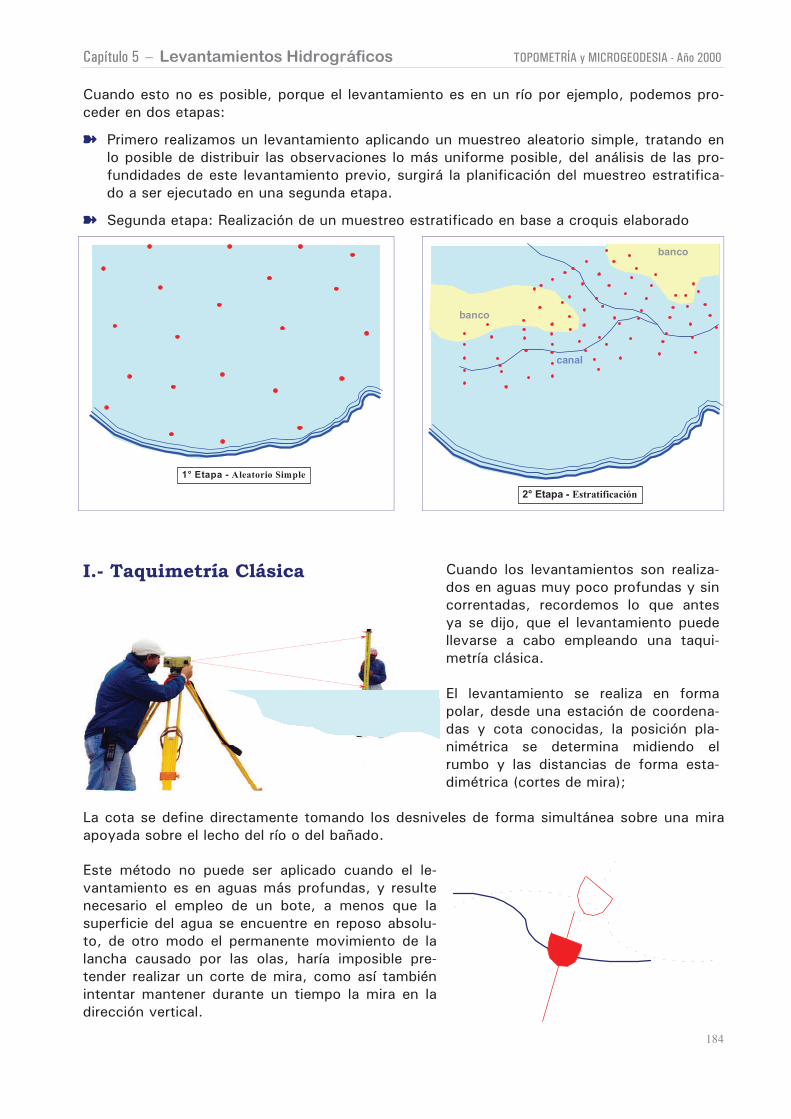
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
184
Cuando esto no es posible, porque el levantamiento es en un río por ejemplo, podemos pro-
ceder en dos etapas:
Primero realizamos un levantamiento aplicando un muestreo aleatorio simple, tratando en
lo posible de distribuir las observaciones lo más uniforme posible, del análisis de las pro-
fundidades de este levantamiento previo, surgirá la planificación del muestreo estratifica-
do a ser ejecutado en una segunda etapa.
Segunda etapa: Realización de un muestreo estratificado en base a croquis elaborado
1° Etapa - Aleatorio Simple
banco
banco
canal
2° Etapa - Estratificación
I.- Taquimetría Clásica Cuando los levantamientos son realiza-
dos en aguas muy poco profundas y sin
correntadas, recordemos lo que antes
ya se dijo, que el levantamiento puede
llevarse a cabo empleando una taqui-
metría clásica.
El levantamiento se realiza en forma
polar, desde una estación de coordena-
das y cota conocidas, la posición pla-
nimétrica se determina midiendo el
rumbo y las distancias de forma esta-
dimétrica (cortes de mira);
La cota se define directamente tomando los desniveles de forma simultánea sobre una mira
apoyada sobre el lecho del río o del bañado.
Este método no puede ser aplicado cuando el le-
vantamiento es en aguas más profundas, y resulte
necesario el empleo de un bote, a menos que la
superficie del agua se encuentre en reposo absolu-
to, de otro modo el permanente movimiento de la
lancha causado por las olas, haría imposible pre-
tender realizar un corte de mira, como así también
intentar mantener durante un tiempo la mira en la
dirección vertical.
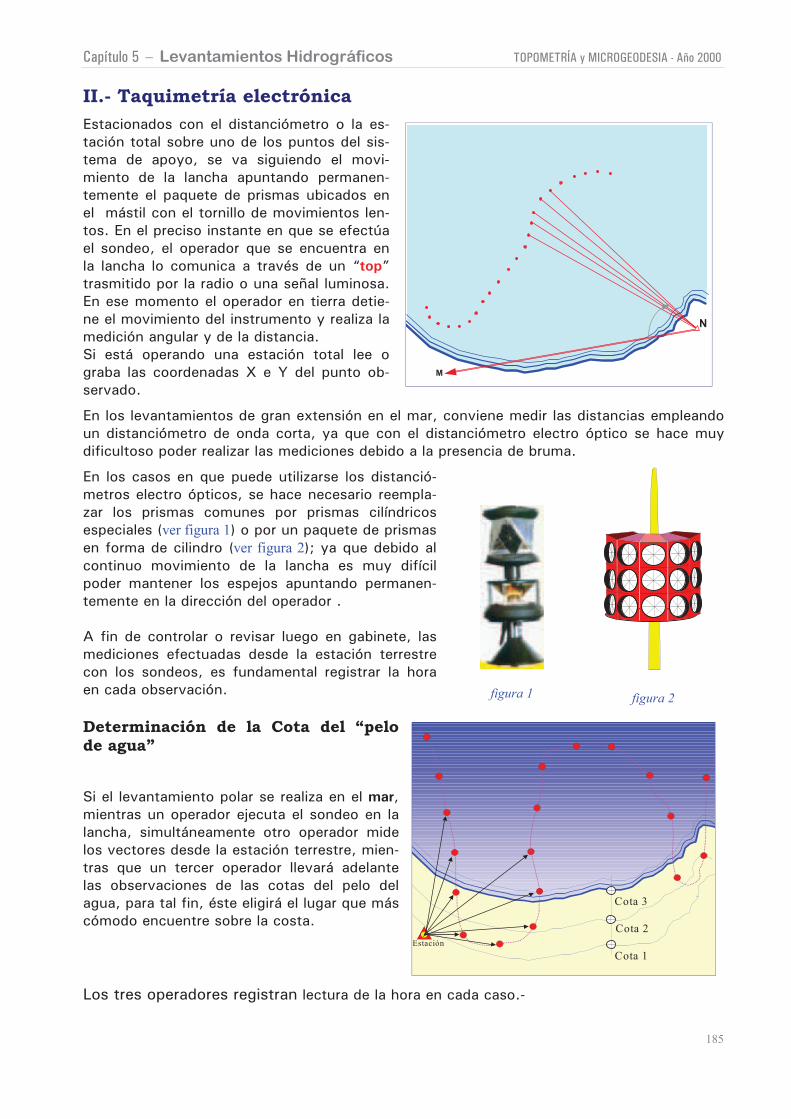
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
185
II.- Taquimetría electrónica
Estacionados con el distanciómetro o la es-
tación total sobre uno de los puntos del sis-
tema de apoyo, se va siguiendo el movi-
miento de la lancha apuntando permanen-
temente el paquete de prismas ubicados en
el mástil con el tornillo de movimientos len-
tos. En el preciso instante en que se efectúa
el sondeo, el operador que se encuentra en
la lancha lo comunica a través de un “top”
trasmitido por la radio o una señal luminosa.
En ese momento el operador en tierra detie-
ne el movimiento del instrumento y realiza la
medición angular y de la distancia.
Si está operando una estación total lee o
graba las coordenadas X e Y del punto ob-
servado.
N
M
En los levantamientos de gran extensión en el mar, conviene medir las distancias empleando
un distanciómetro de onda corta, ya que con el distanciómetro electro óptico se hace muy
dificultoso poder realizar las mediciones debido a la presencia de bruma.
En los casos en que puede utilizarse los distanció-
metros electro ópticos, se hace necesario reempla-
zar los prismas comunes por prismas cilíndricos
especiales (ver figura 1) o por un paquete de prismas
en forma de cilindro (ver figura 2); ya que debido al
continuo movimiento de la lancha es muy difícil
poder mantener los espejos apuntando permanen-
temente en la dirección del operador .
A fin de controlar o revisar luego en gabinete, las
mediciones efectuadas desde la estación terrestre
con los sondeos, es fundamental registrar la hora
en cada observación. figura 1 figura 2
Determinación de la Cota del “pelode agua”
Si el levantamiento polar se realiza en el mar,mientras un operador ejecuta el sondeo en la
lancha, simultáneamente otro operador mide
los vectores desde la estación terrestre, mien-
tras que un tercer operador llevará adelante
las observaciones de las cotas del pelo del
agua, para tal fin, éste eligirá el lugar que más
cómodo encuentre sobre la costa.
Cota 1
Cota 2
Cota 3
Estación
Los tres operadores registran lectura de la hora en cada caso.-
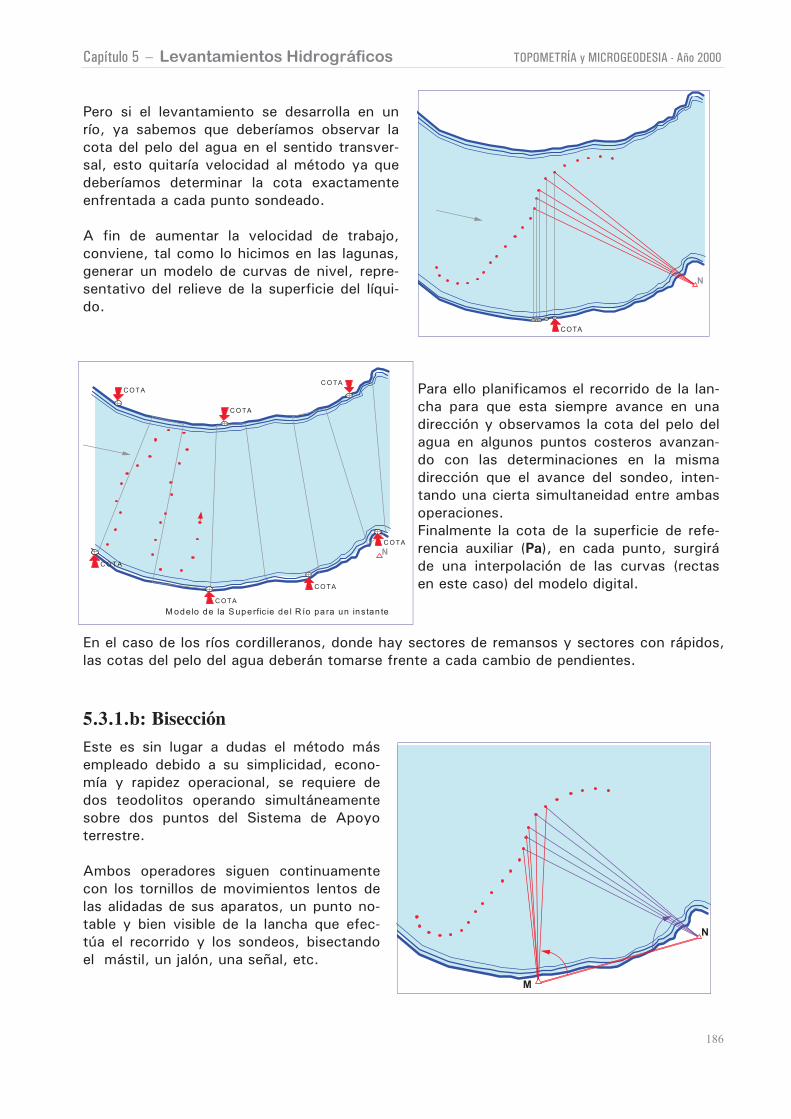
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
186
Pero si el levantamiento se desarrolla en un
río, ya sabemos que deberíamos observar la
cota del pelo del agua en el sentido transver-
sal, esto quitaría velocidad al método ya que
deberíamos determinar la cota exactamente
enfrentada a cada punto sondeado.
A fin de aumentar la velocidad de trabajo,
conviene, tal como lo hicimos en las lagunas,
generar un modelo de curvas de nivel, repre-
sentativo del relieve de la superficie del líqui-
do.
N
COTA
N
C O TA
C O TA
C O TA
C O TA
C O TA
C O TA
C O TA
M odelo de la S uperfic ie de l R ío pa ra un instan te
Para ello planificamos el recorrido de la lan-
cha para que esta siempre avance en una
dirección y observamos la cota del pelo del
agua en algunos puntos costeros avanzan-
do con las determinaciones en la misma
dirección que el avance del sondeo, inten-
tando una cierta simultaneidad entre ambas
operaciones.
Finalmente la cota de la superficie de refe-
rencia auxiliar (Pa), en cada punto, surgirá
de una interpolación de las curvas (rectas
en este caso) del modelo digital.
En el caso de los ríos cordilleranos, donde hay sectores de remansos y sectores con rápidos,
las cotas del pelo del agua deberán tomarse frente a cada cambio de pendientes.
5.3.1.b: Bisección
Este es sin lugar a dudas el método más
empleado debido a su simplicidad, econo-
mía y rapidez operacional, se requiere de
dos teodolitos operando simultáneamente
sobre dos puntos del Sistema de Apoyo
terrestre.
Ambos operadores siguen continuamente
con los tornillos de movimientos lentos de
las alidadas de sus aparatos, un punto no-
table y bien visible de la lancha que efec-
túa el recorrido y los sondeos, bisectando
el mástil, un jalón, una señal, etc.
N
M
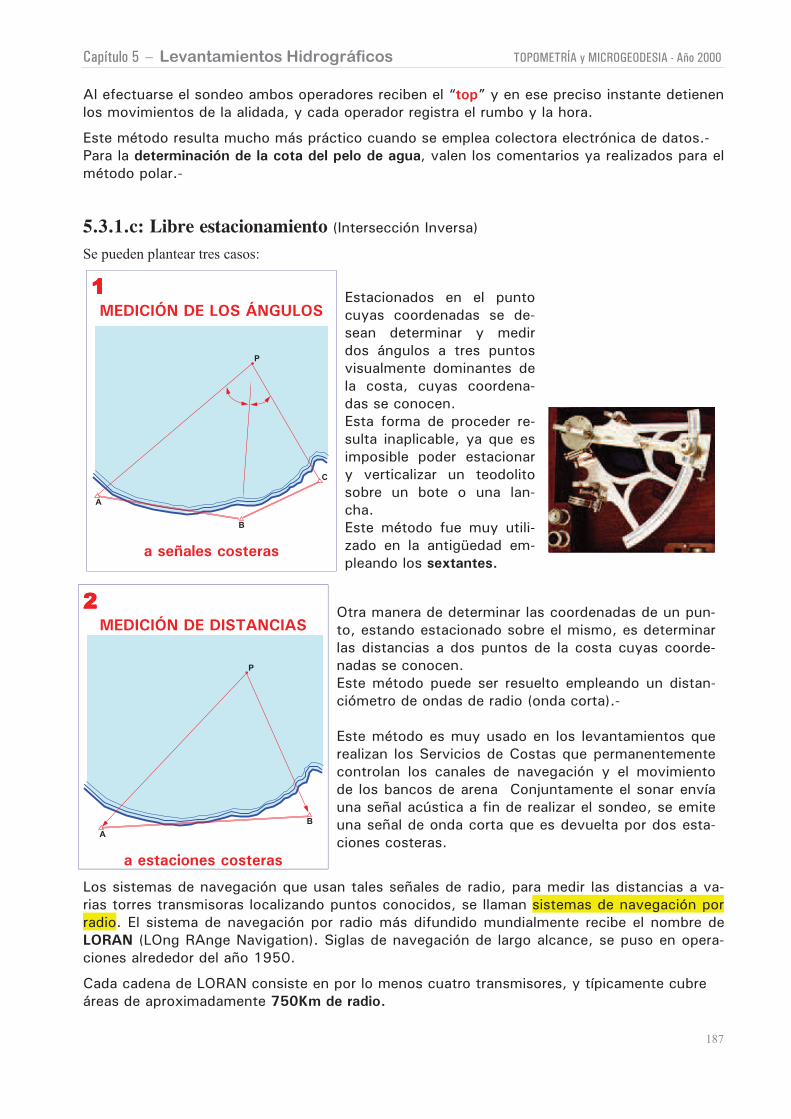
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
187
Al efectuarse el sondeo ambos operadores reciben el “top” y en ese preciso instante detienen
los movimientos de la alidada, y cada operador registra el rumbo y la hora.
Este método resulta mucho más práctico cuando se emplea colectora electrónica de datos.-
Para la determinación de la cota del pelo de agua, valen los comentarios ya realizados para el
método polar.-
5.3.1.c: Libre estacionamiento (Intersección Inversa)
Se pueden plantear tres casos:
1111MEDICIÓN DE LOS ÁNGULOS
C
B
A
P
a señales costeras
Estacionados en el punto
cuyas coordenadas se de-
sean determinar y medir
dos ángulos a tres puntos
visualmente dominantes de
la costa, cuyas coordena-
das se conocen.
Esta forma de proceder re-
sulta inaplicable, ya que es
imposible poder estacionar
y verticalizar un teodolito
sobre un bote o una lan-
cha.
Este método fue muy utili-
zado en la antigüedad em-
pleando los sextantes.
2222MEDICIÓN DE DISTANCIAS
B
A
P
a estaciones costeras
Otra manera de determinar las coordenadas de un pun-
to, estando estacionado sobre el mismo, es determinar
las distancias a dos puntos de la costa cuyas coorde-
nadas se conocen.
Este método puede ser resuelto empleando un distan-
ciómetro de ondas de radio (onda corta).-
Este método es muy usado en los levantamientos que
realizan los Servicios de Costas que permanentemente
controlan los canales de navegación y el movimiento
de los bancos de arena Conjuntamente el sonar envía
una señal acústica a fin de realizar el sondeo, se emite
una señal de onda corta que es devuelta por dos esta-
ciones costeras.
Los sistemas de navegación que usan tales señales de radio, para medir las distancias a va-
rias torres transmisoras localizando puntos conocidos, se llaman sistemas de navegación por
radio. El sistema de navegación por radio más difundido mundialmente recibe el nombre de
LORAN (LOng RAnge Navigation). Siglas de navegación de largo alcance, se puso en opera-
ciones alrededor del año 1950.
Cada cadena de LORAN consiste en por lo menos cuatro transmisores, y típicamente cubre
áreas de aproximadamente 750Km de radio.
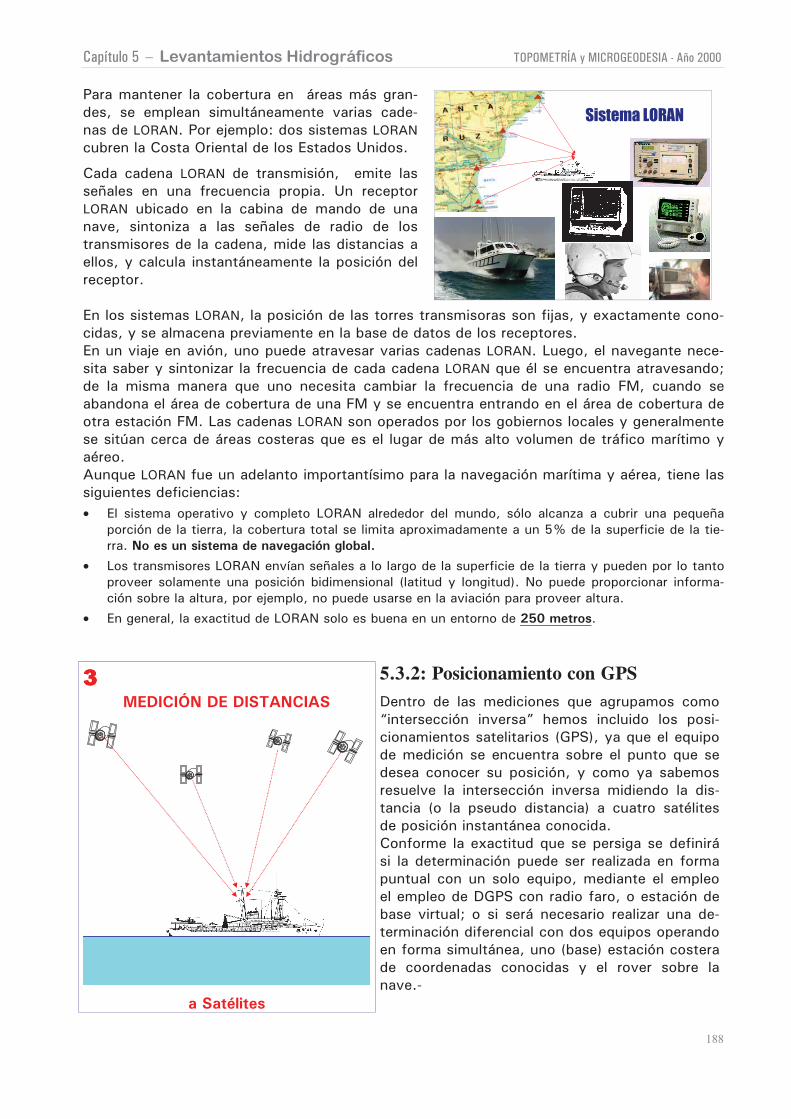
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
188
Para mantener la cobertura en áreas más gran-
des, se emplean simultáneamente varias cade-
nas de LORAN. Por ejemplo: dos sistemas LORAN
cubren la Costa Oriental de los Estados Unidos.
Cada cadena LORAN de transmisión, emite las
señales en una frecuencia propia. Un receptor
LORAN ubicado en la cabina de mando de una
nave, sintoniza a las señales de radio de los
transmisores de la cadena, mide las distancias a
ellos, y calcula instantáneamente la posición del
receptor.
Sistema LORAN
En los sistemas LORAN, la posición de las torres transmisoras son fijas, y exactamente cono-
cidas, y se almacena previamente en la base de datos de los receptores.
En un viaje en avión, uno puede atravesar varias cadenas LORAN. Luego, el navegante nece-
sita saber y sintonizar la frecuencia de cada cadena LORAN que él se encuentra atravesando;
de la misma manera que uno necesita cambiar la frecuencia de una radio FM, cuando se
abandona el área de cobertura de una FM y se encuentra entrando en el área de cobertura de
otra estación FM. Las cadenas LORAN son operados por los gobiernos locales y generalmente
se sitúan cerca de áreas costeras que es el lugar de más alto volumen de tráfico marítimo y
aéreo.
Aunque LORAN fue un adelanto importantísimo para la navegación marítima y aérea, tiene las
siguientes deficiencias:
• El sistema operativo y completo LORAN alrededor del mundo, sólo alcanza a cubrir una pequeña
porción de la tierra, la cobertura total se limita aproximadamente a un 5% de la superficie de la tie-
rra. No es un sistema de navegación global.
• Los transmisores LORAN envían señales a lo largo de la superficie de la tierra y pueden por lo tanto
proveer solamente una posición bidimensional (latitud y longitud). No puede proporcionar informa-
ción sobre la altura, por ejemplo, no puede usarse en la aviación para proveer altura.
• En general, la exactitud de LORAN solo es buena en un entorno de 250 metros.
3333MEDICIÓN DE DISTANCIAS
a Satélites
5.3.2: Posicionamiento con GPS
Dentro de las mediciones que agrupamos como
“intersección inversa” hemos incluido los posi-
cionamientos satelitarios (GPS), ya que el equipo
de medición se encuentra sobre el punto que se
desea conocer su posición, y como ya sabemos
resuelve la intersección inversa midiendo la dis-
tancia (o la pseudo distancia) a cuatro satélites
de posición instantánea conocida.
Conforme la exactitud que se persiga se definirá
si la determinación puede ser realizada en forma
puntual con un solo equipo, mediante el empleo
el empleo de DGPS con radio faro, o estación de
base virtual; o si será necesario realizar una de-
terminación diferencial con dos equipos operando
en forma simultánea, uno (base) estación costera
de coordenadas conocidas y el rover sobre la
nave.-
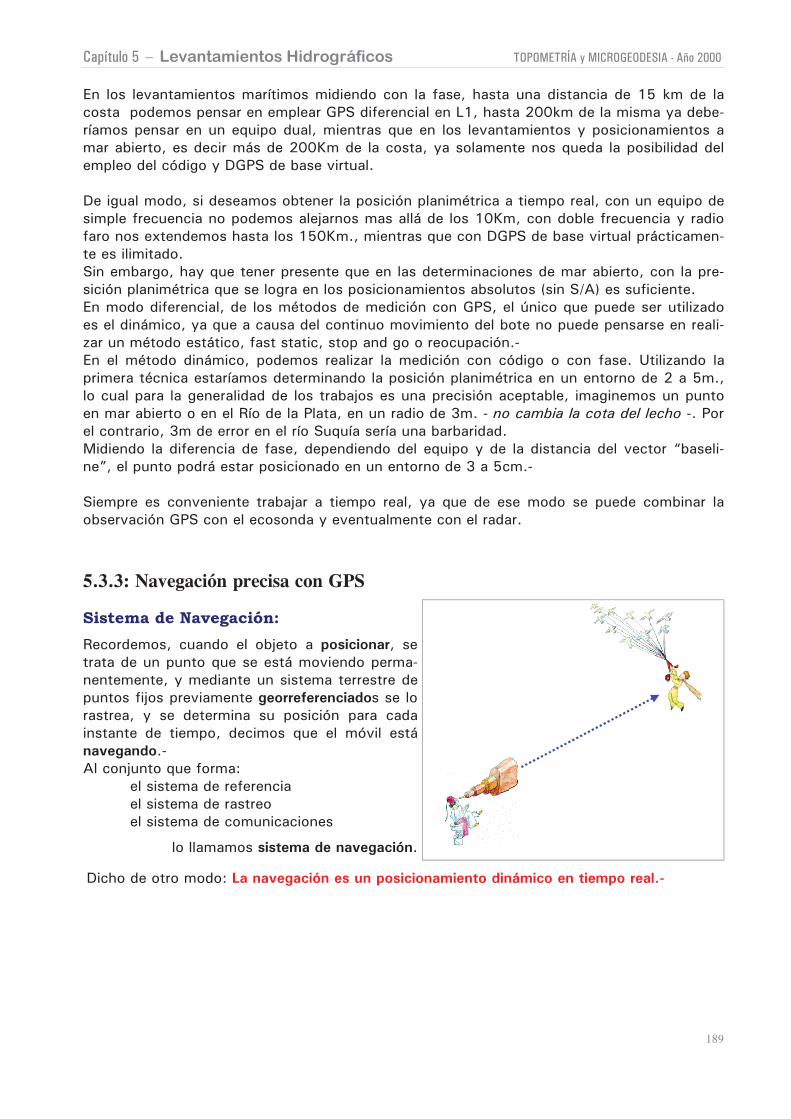
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
189
En los levantamientos marítimos midiendo con la fase, hasta una distancia de 15 km de la
costa podemos pensar en emplear GPS diferencial en L1, hasta 200km de la misma ya debe-
ríamos pensar en un equipo dual, mientras que en los levantamientos y posicionamientos a
mar abierto, es decir más de 200Km de la costa, ya solamente nos queda la posibilidad del
empleo del código y DGPS de base virtual.
De igual modo, si deseamos obtener la posición planimétrica a tiempo real, con un equipo de
simple frecuencia no podemos alejarnos mas allá de los 10Km, con doble frecuencia y radio
faro nos extendemos hasta los 150Km., mientras que con DGPS de base virtual prácticamen-
te es ilimitado.
Sin embargo, hay que tener presente que en las determinaciones de mar abierto, con la pre-
sición planimétrica que se logra en los posicionamientos absolutos (sin S/A) es suficiente.
En modo diferencial, de los métodos de medición con GPS, el único que puede ser utilizado
es el dinámico, ya que a causa del continuo movimiento del bote no puede pensarse en reali-
zar un método estático, fast static, stop and go o reocupación.-
En el método dinámico, podemos realizar la medición con código o con fase. Utilizando la
primera técnica estaríamos determinando la posición planimétrica en un entorno de 2 a 5m.,
lo cual para la generalidad de los trabajos es una precisión aceptable, imaginemos un punto
en mar abierto o en el Río de la Plata, en un radio de 3m. - no cambia la cota del lecho -. Por
el contrario, 3m de error en el río Suquía sería una barbaridad.
Midiendo la diferencia de fase, dependiendo del equipo y de la distancia del vector “baseli-
ne”, el punto podrá estar posicionado en un entorno de 3 a 5cm.-
Siempre es conveniente trabajar a tiempo real, ya que de ese modo se puede combinar la
observación GPS con el ecosonda y eventualmente con el radar.
5.3.3: Navegación precisa con GPS
Sistema de Navegación:
Recordemos, cuando el objeto a posicionar, se
trata de un punto que se está moviendo perma-
nentemente, y mediante un sistema terrestre de
puntos fijos previamente georreferenciados se lo
rastrea, y se determina su posición para cada
instante de tiempo, decimos que el móvil está
navegando.-
Al conjunto que forma:
el sistema de referencia
el sistema de rastreo
el sistema de comunicaciones
lo llamamos sistema de navegación.
Dicho de otro modo: La navegación es un posicionamiento dinámico en tiempo real.-
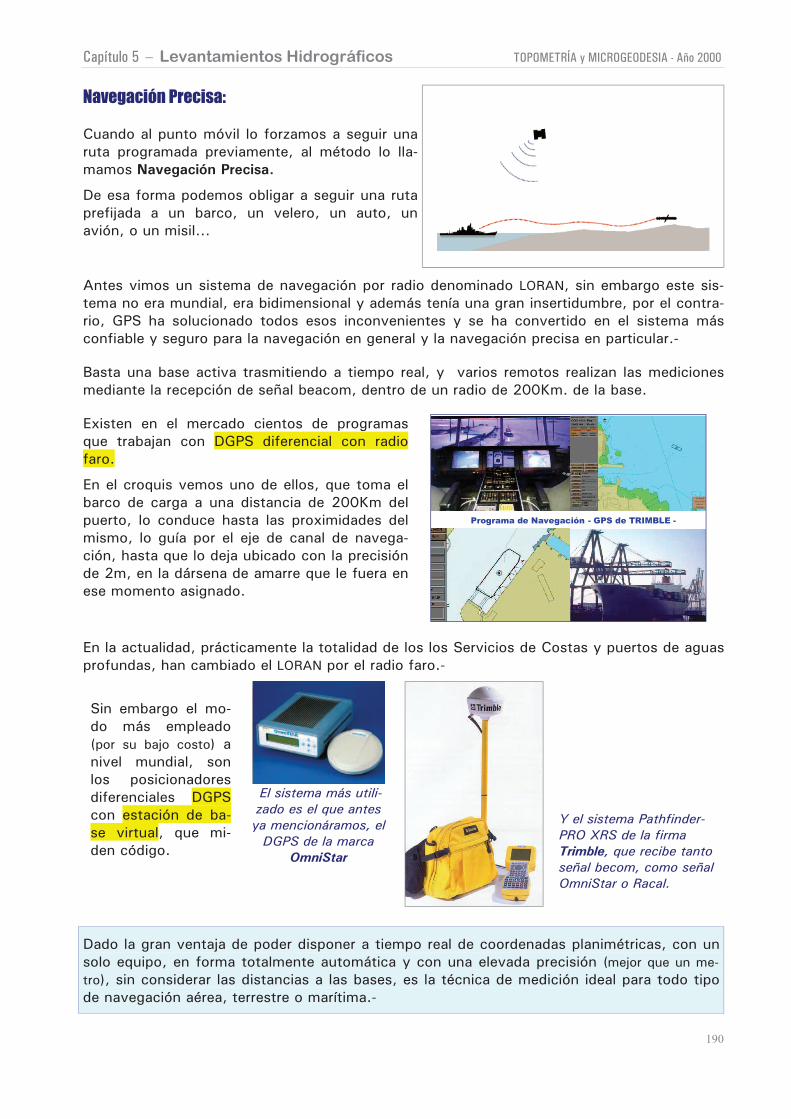
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
190
Navegación Precisa:
Cuando al punto móvil lo forzamos a seguir una
ruta programada previamente, al método lo lla-
mamos Navegación Precisa.
De esa forma podemos obligar a seguir una ruta
prefijada a un barco, un velero, un auto, un
avión, o un misil...
Antes vimos un sistema de navegación por radio denominado LORAN, sin embargo este sis-
tema no era mundial, era bidimensional y además tenía una gran insertidumbre, por el contra-
rio, GPS ha solucionado todos esos inconvenientes y se ha convertido en el sistema más
confiable y seguro para la navegación en general y la navegación precisa en particular.-
Basta una base activa trasmitiendo a tiempo real, y varios remotos realizan las mediciones
mediante la recepción de señal beacom, dentro de un radio de 200Km. de la base.
Existen en el mercado cientos de programas
que trabajan con DGPS diferencial con radio
faro.
En el croquis vemos uno de ellos, que toma el
barco de carga a una distancia de 200Km del
puerto, lo conduce hasta las proximidades del
mismo, lo guía por el eje de canal de navega-
ción, hasta que lo deja ubicado con la precisión
de 2m, en la dársena de amarre que le fuera en
ese momento asignado.
Programa de Navegación - GPS de TRIMBLE -
En la actualidad, prácticamente la totalidad de los los Servicios de Costas y puertos de aguas
profundas, han cambiado el LORAN por el radio faro.-
Sin embargo el mo-
do más empleado
(por su bajo costo) a
nivel mundial, son
los posicionadores
diferenciales DGPS
con estación de ba-
se virtual, que mi-
den código.
El sistema más utili-
zado es el que antes
ya mencionáramos, el
DGPS de la marca
OmniStar
Y el sistema Pathfinder-
PRO XRS de la firma
Trimble, que recibe tanto
señal becom, como señal
OmniStar o Racal.
Dado la gran ventaja de poder disponer a tiempo real de coordenadas planimétricas, con un
solo equipo, en forma totalmente automática y con una elevada precisión (mejor que un me-
tro), sin considerar las distancias a las bases, es la técnica de medición ideal para todo tipo
de navegación aérea, terrestre o marítima.-

Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
191
Exponemos aquí tan solo un ejemplo de
los cientos que podríamos mencionar del
sistema DGPS empleado en la navegación
precisa, el software “Hydro”
Tal sea el caso de un barco sonda, que
debe recorrer y relevar periódicamente el
fondo marino o el lecho de un río, a fin de
poder determinar el estado de embanque
de los canales de navegación.
LevantamientoBatimétrico,
control y mantenimientode las Vías Navegables
LevantamientoBatimétrico,
control y mantenimientode las Vías Navegables
Para ello combina el posicionamiento GPS con la perfilometría, todos los días
replantea y releva la posición de los mismos perfiles transversales. Y dado la par-
ticularidad de tratarse de perfiles dibujados sobre el agua, su continuo replanteo sería
imposible de no contar con la técnica de la navegación precisa.-
En croquis mostramos algunos módulos
del programa “Hydro” que sin dudas algu-
na es el software comercial más completo
y más utilizado en todo el mundo.
Este software fue elaborado entre las dos
grandes empresas TRIMBLE de GPS y
ATLASDECO, la empresa de mayor venta
de ecosondas en todo el mundo.
Permite la bajada de datos simultáneas del
DGPS, la ecosonda, el radar y LORAN si
hubiere.
Registra y procesa los datos y permite realizar perfiles, modelos digitales del lecho del río,
procesa dos MDT en forma simultánea, calcula volúmenes de extracción de embanques y
además puede realizar un maceo electrónico continuo.-
La gran mayoría de los software desarrollados para las
mediciones hidrográficas, tienen una amplia versatili-
dad.
Combinan la medición del sonar para la determinación
del sondeo, con el DGPS para la determinación de la
posición planimétrica, y con el radar a fin de poder
navegar de noche, o con niebla muy cerrada.
Radar
Echo Sounder
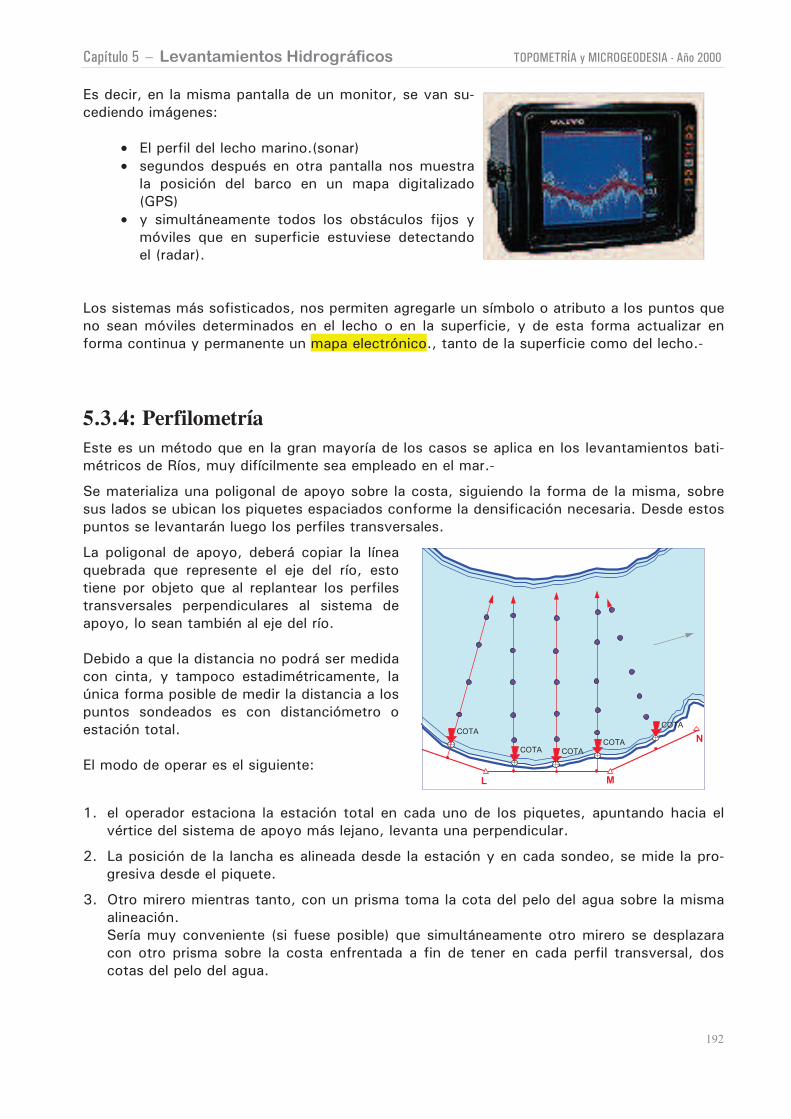
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
192
Es decir, en la misma pantalla de un monitor, se van su-
cediendo imágenes:
• El perfil del lecho marino.(sonar)
• segundos después en otra pantalla nos muestra
la posición del barco en un mapa digitalizado
(GPS)
• y simultáneamente todos los obstáculos fijos y
móviles que en superficie estuviese detectando
el (radar).
Los sistemas más sofisticados, nos permiten agregarle un símbolo o atributo a los puntos que
no sean móviles determinados en el lecho o en la superficie, y de esta forma actualizar en
forma continua y permanente un mapa electrónico., tanto de la superficie como del lecho.-
5.3.4: Perfilometría
Este es un método que en la gran mayoría de los casos se aplica en los levantamientos bati-
métricos de Ríos, muy difícilmente sea empleado en el mar.-
Se materializa una poligonal de apoyo sobre la costa, siguiendo la forma de la misma, sobre
sus lados se ubican los piquetes espaciados conforme la densificación necesaria. Desde estos
puntos se levantarán luego los perfiles transversales.
La poligonal de apoyo, deberá copiar la línea
quebrada que represente el eje del río, esto
tiene por objeto que al replantear los perfiles
transversales perpendiculares al sistema de
apoyo, lo sean también al eje del río.
Debido a que la distancia no podrá ser medida
con cinta, y tampoco estadimétricamente, la
única forma posible de medir la distancia a los
puntos sondeados es con distanciómetro o
estación total.
El modo de operar es el siguiente:
NCOTA
ML
COTA COTA
COTA
COTA
1. el operador estaciona la estación total en cada uno de los piquetes, apuntando hacia el
vértice del sistema de apoyo más lejano, levanta una perpendicular.
2. La posición de la lancha es alineada desde la estación y en cada sondeo, se mide la pro-
gresiva desde el piquete.
3. Otro mirero mientras tanto, con un prisma toma la cota del pelo del agua sobre la misma
alineación.
Sería muy conveniente (si fuese posible) que simultáneamente otro mirero se desplazara
con otro prisma sobre la costa enfrentada a fin de tener en cada perfil transversal, dos
cotas del pelo del agua.
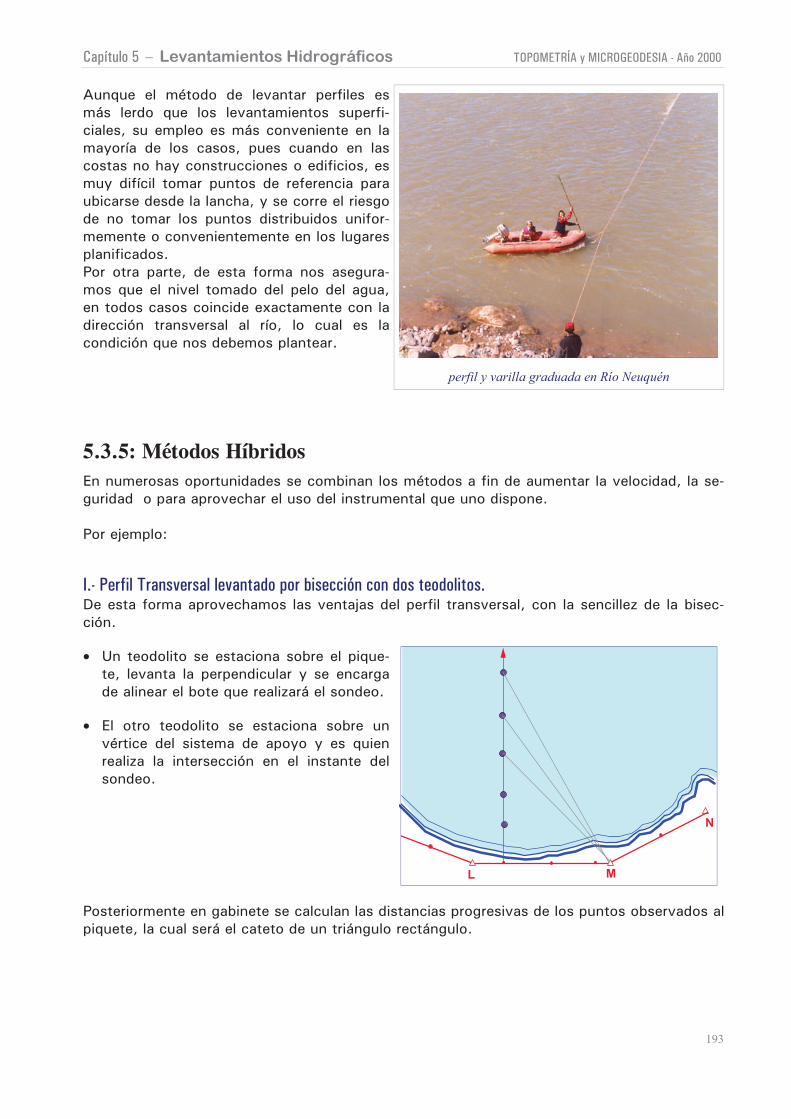
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
193
Aunque el método de levantar perfiles es
más lerdo que los levantamientos superfi-
ciales, su empleo es más conveniente en la
mayoría de los casos, pues cuando en las
costas no hay construcciones o edificios, es
muy difícil tomar puntos de referencia para
ubicarse desde la lancha, y se corre el riesgo
de no tomar los puntos distribuidos unifor-
memente o convenientemente en los lugares
planificados.
Por otra parte, de esta forma nos asegura-
mos que el nivel tomado del pelo del agua,
en todos casos coincide exactamente con la
dirección transversal al río, lo cual es la
condición que nos debemos plantear.
perfil y varilla graduada en Río Neuquén
5.3.5: Métodos Híbridos
En numerosas oportunidades se combinan los métodos a fin de aumentar la velocidad, la se-
guridad o para aprovechar el uso del instrumental que uno dispone.
Por ejemplo:
I.- Perfil Transversal levantado por bisección con dos teodolitos.De esta forma aprovechamos las ventajas del perfil transversal, con la sencillez de la bisec-
ción.
• Un teodolito se estaciona sobre el pique-
te, levanta la perpendicular y se encarga
de alinear el bote que realizará el sondeo.
• El otro teodolito se estaciona sobre un
vértice del sistema de apoyo y es quien
realiza la intersección en el instante del
sondeo.
N
ML
Posteriormente en gabinete se calculan las distancias progresivas de los puntos observados al
piquete, la cual será el cateto de un triángulo rectángulo.
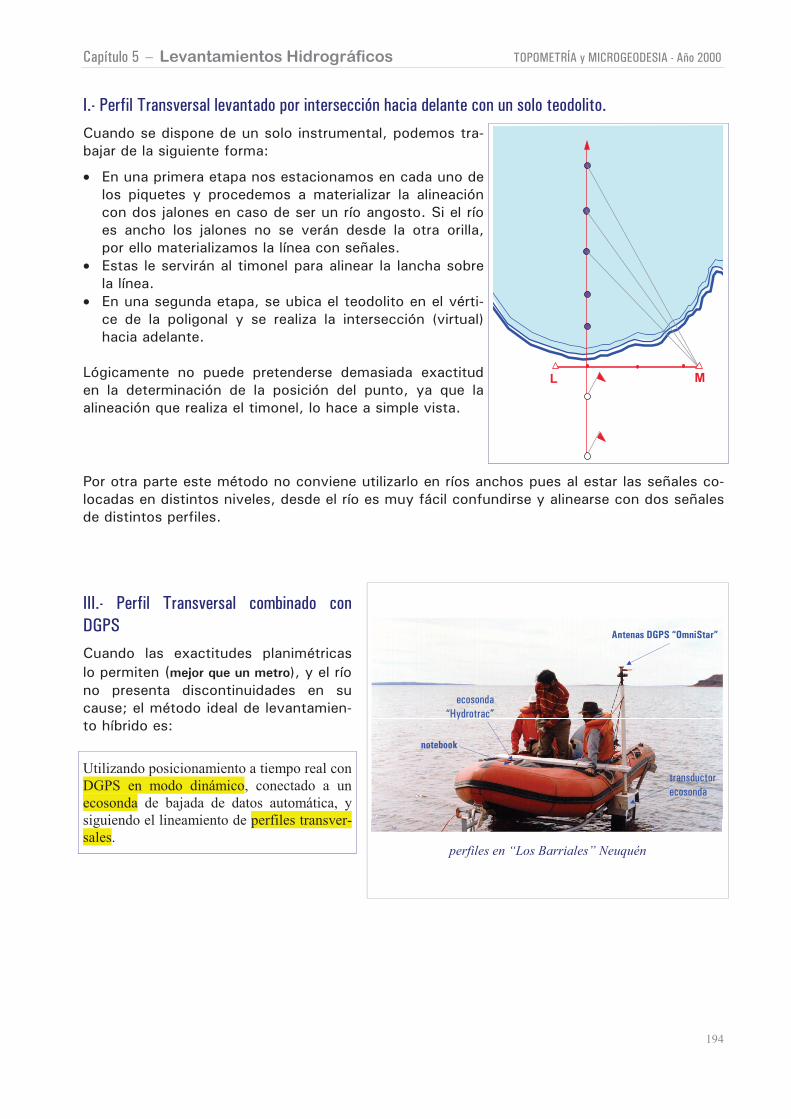
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
194
I.- Perfil Transversal levantado por intersección hacia delante con un solo teodolito.
Cuando se dispone de un solo instrumental, podemos tra-
bajar de la siguiente forma:
• En una primera etapa nos estacionamos en cada uno de
los piquetes y procedemos a materializar la alineación
con dos jalones en caso de ser un río angosto. Si el río
es ancho los jalones no se verán desde la otra orilla,
por ello materializamos la línea con señales.
• Estas le servirán al timonel para alinear la lancha sobre
la línea.
• En una segunda etapa, se ubica el teodolito en el vérti-
ce de la poligonal y se realiza la intersección (virtual)
hacia adelante.
Lógicamente no puede pretenderse demasiada exactitud
en la determinación de la posición del punto, ya que la
alineación que realiza el timonel, lo hace a simple vista.
ML
Por otra parte este método no conviene utilizarlo en ríos anchos pues al estar las señales co-
locadas en distintos niveles, desde el río es muy fácil confundirse y alinearse con dos señales
de distintos perfiles.
III.- Perfil Transversal combinado conDGPS
Cuando las exactitudes planimétricas
lo permiten (mejor que un metro), y el río
no presenta discontinuidades en su
cause; el método ideal de levantamien-
to híbrido es:
Utilizando posicionamiento a tiempo real con
DGPS en modo dinámico, conectado a un
ecosonda de bajada de datos automática, y
siguiendo el lineamiento de perfiles transver-
sales.
Antenas DGPS “OmniStar”
transductorecosonda
ecosonda“Hydrotrac”
notebook
perfiles en “Los Barriales” Neuquén
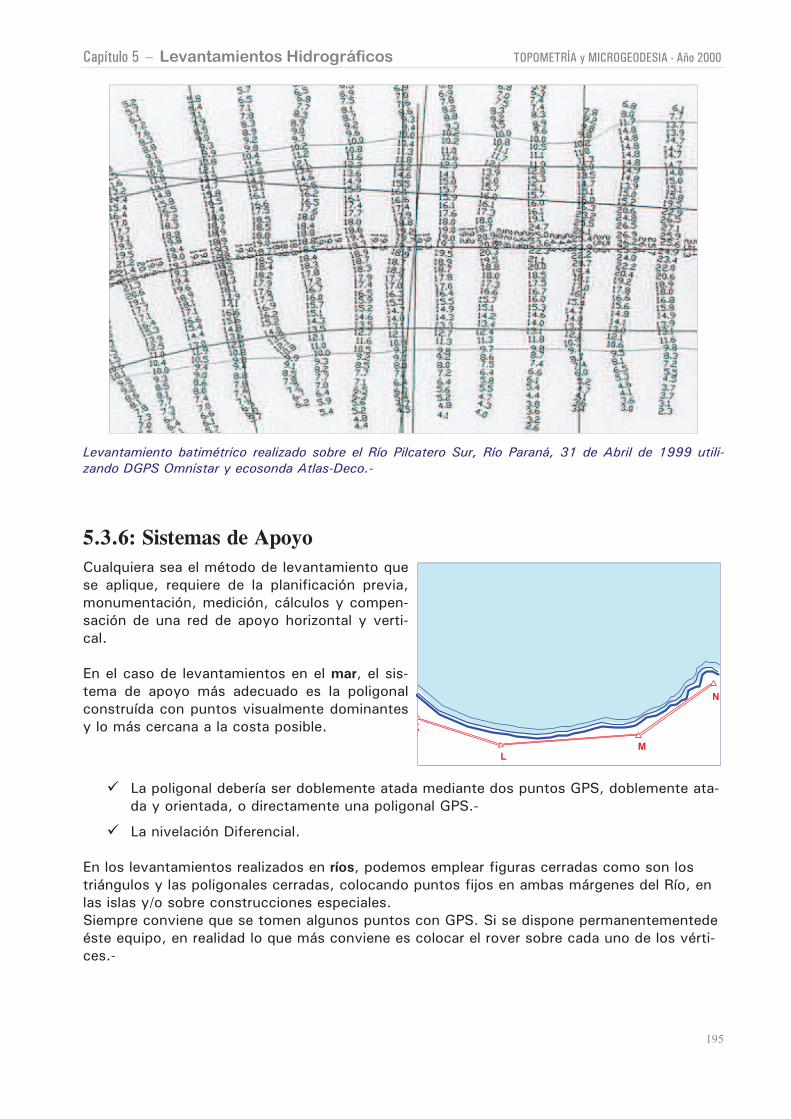
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
195
Levantamiento batimétrico realizado sobre el Río Pilcatero Sur, Río Paraná, 31 de Abril de 1999 utili-
zando DGPS Omnistar y ecosonda Atlas-Deco.-
5.3.6: Sistemas de Apoyo
Cualquiera sea el método de levantamiento que
se aplique, requiere de la planificación previa,
monumentación, medición, cálculos y compen-
sación de una red de apoyo horizontal y verti-
cal.
En el caso de levantamientos en el mar, el sis-
tema de apoyo más adecuado es la poligonal
construída con puntos visualmente dominantes
y lo más cercana a la costa posible.
N
K
ML
La poligonal debería ser doblemente atada mediante dos puntos GPS, doblemente ata-
da y orientada, o directamente una poligonal GPS.-
La nivelación Diferencial.
En los levantamientos realizados en ríos, podemos emplear figuras cerradas como son los
triángulos y las poligonales cerradas, colocando puntos fijos en ambas márgenes del Río, en
las islas y/o sobre construcciones especiales.
Siempre conviene que se tomen algunos puntos con GPS. Si se dispone permanentementede
éste equipo, en realidad lo que más conviene es colocar el rover sobre cada uno de los vérti-
ces.-
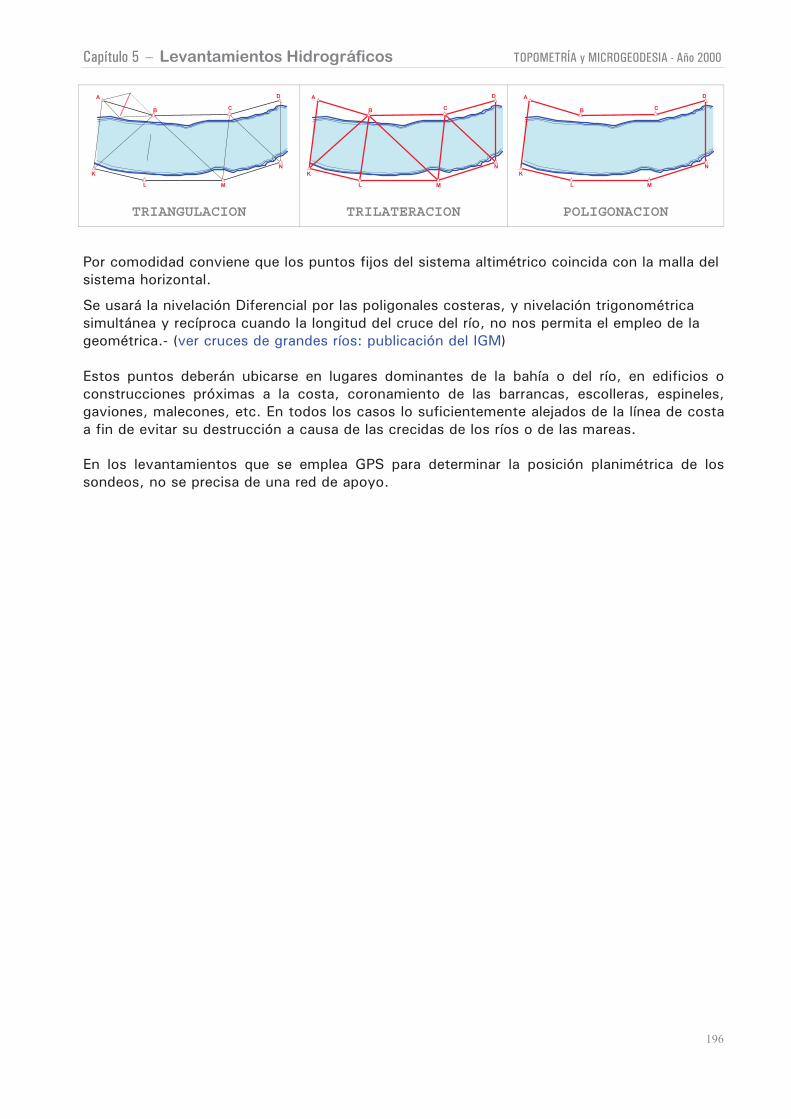
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
196
N
ML
K
A
B C
D
TRIANGULACION
N
ML
K
A
B C
D
TRILATERACION
N
ML
K
A
B C
D
POLIGONACION
Por comodidad conviene que los puntos fijos del sistema altimétrico coincida con la malla del
sistema horizontal.
Se usará la nivelación Diferencial por las poligonales costeras, y nivelación trigonométrica
simultánea y recíproca cuando la longitud del cruce del río, no nos permita el empleo de la
geométrica.- (ver cruces de grandes ríos: publicación del IGM)
Estos puntos deberán ubicarse en lugares dominantes de la bahía o del río, en edificios o
construcciones próximas a la costa, coronamiento de las barrancas, escolleras, espineles,
gaviones, malecones, etc. En todos los casos lo suficientemente alejados de la línea de costa
a fin de evitar su destrucción a causa de las crecidas de los ríos o de las mareas.
En los levantamientos que se emplea GPS para determinar la posición planimétrica de los
sondeos, no se precisa de una red de apoyo.
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
197
5.4: Cruce altimétrico de grandes ríospublicación del Instituto Geográfico Militar
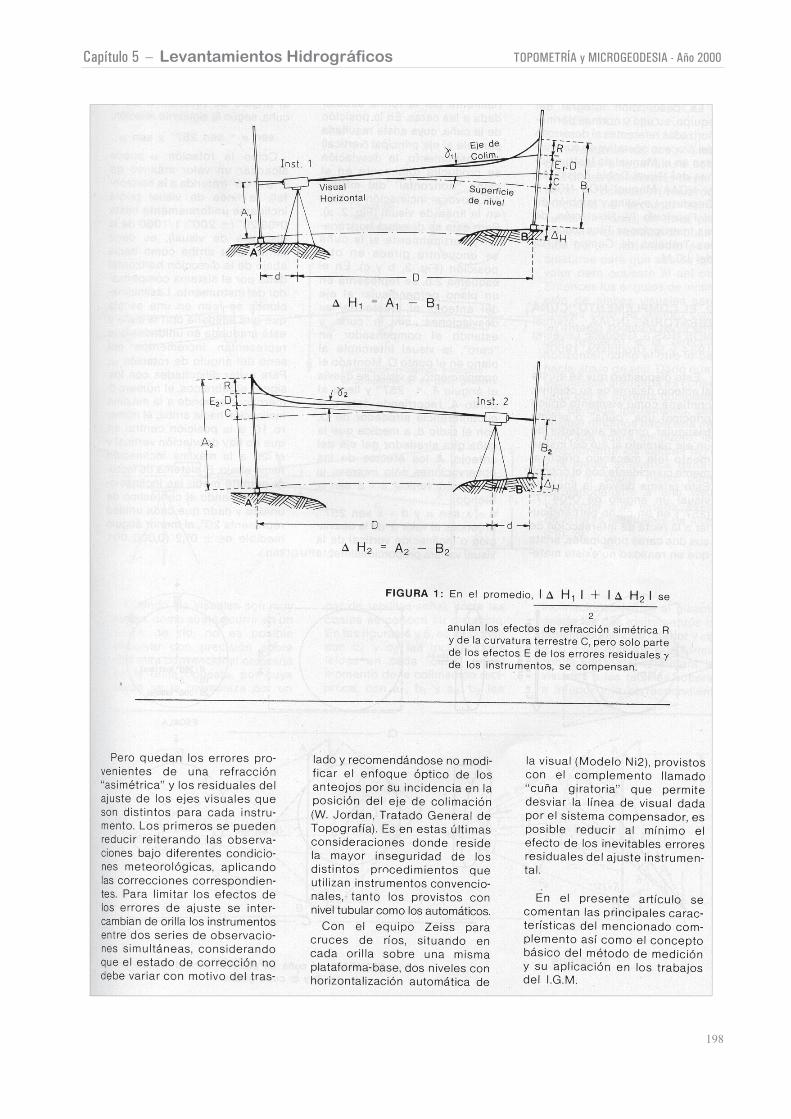
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
198
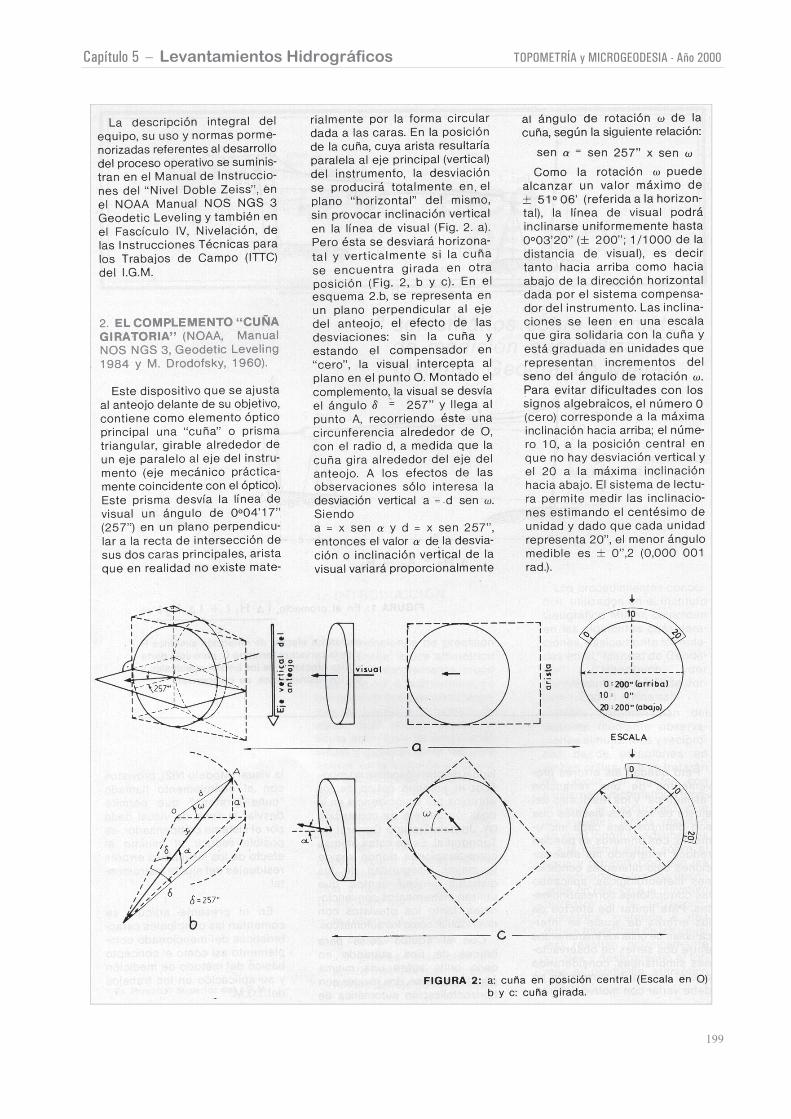
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
199
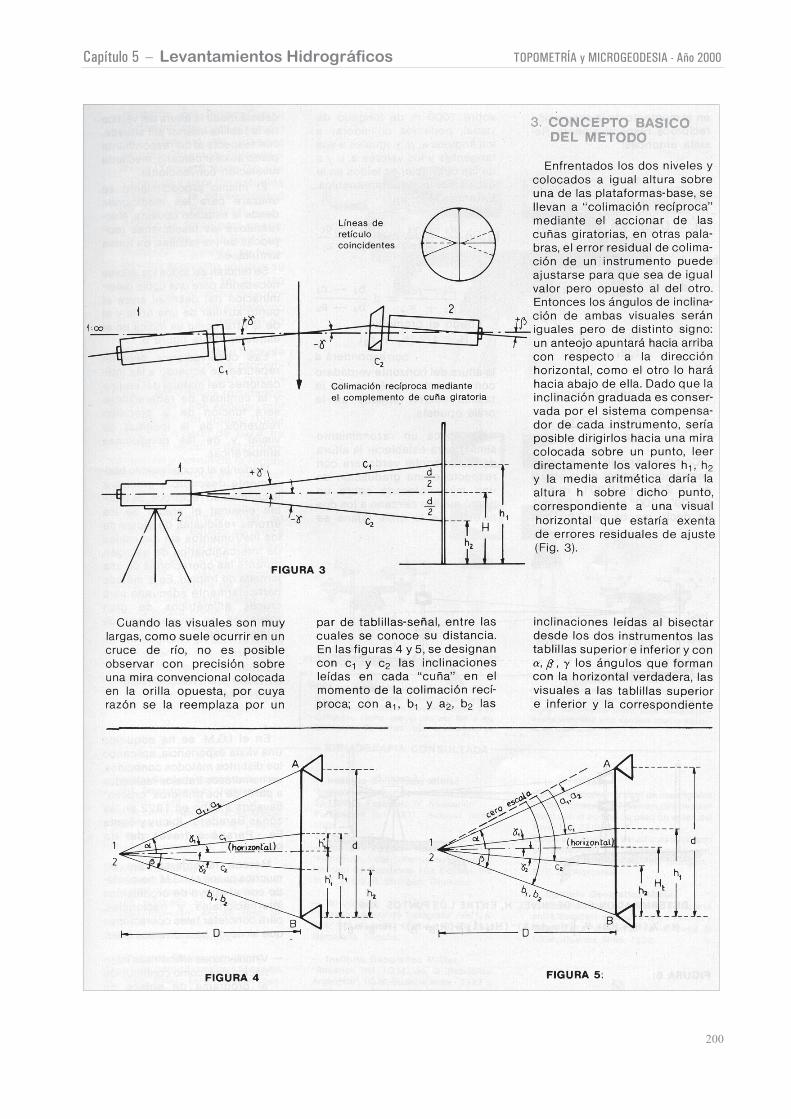
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
200
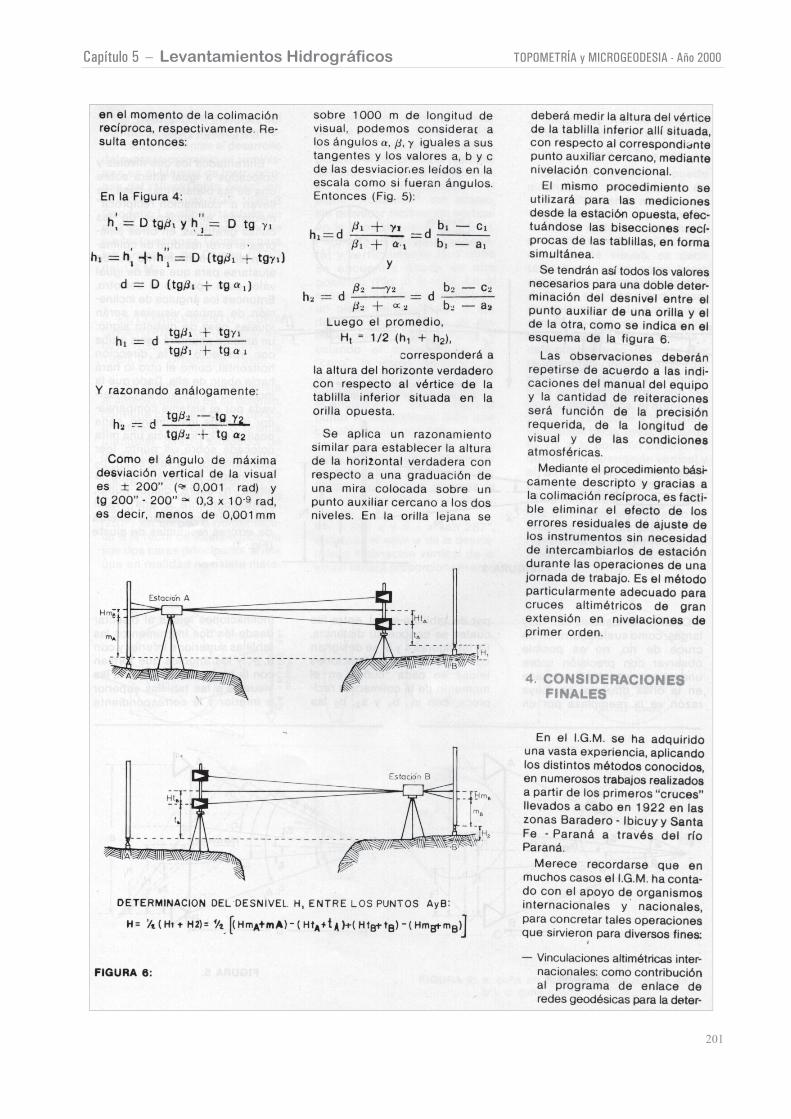
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
201
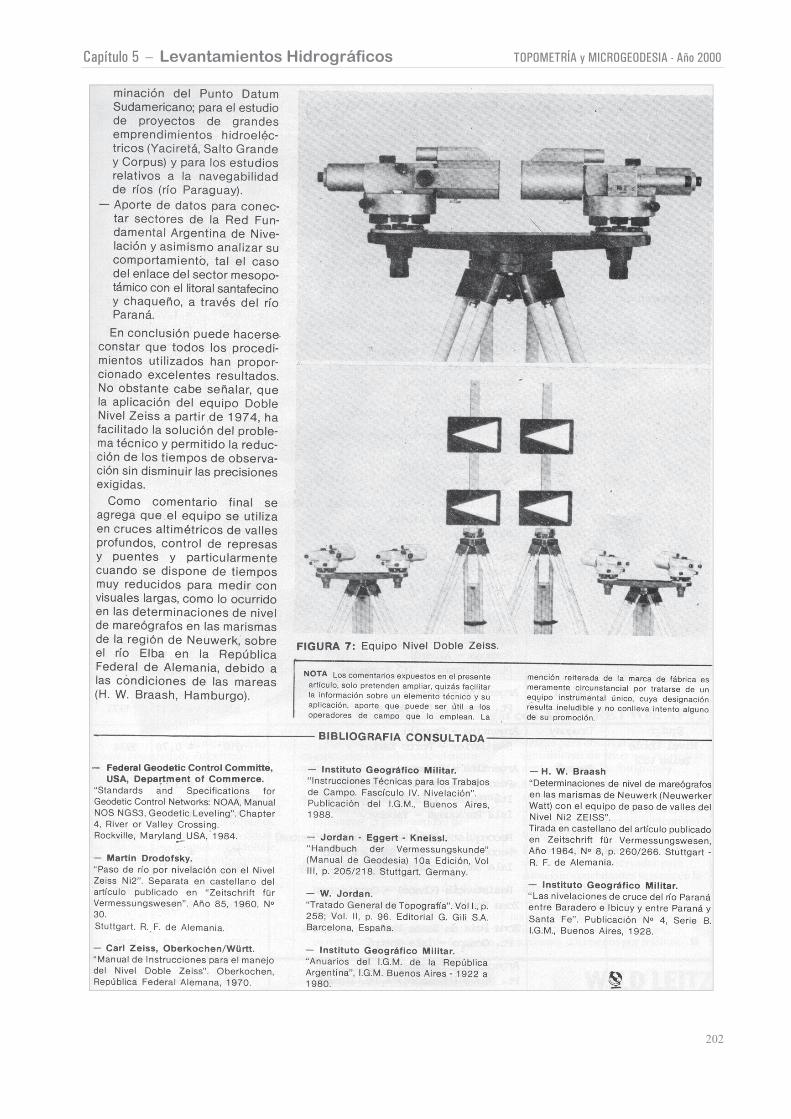
Capítulo 5 – Levantamientos Hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
202
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
203
La frase que transcribo a continuación, me la regaló un alumno para que yo la escribiera
aquí:
“ Un buen docente no es aquel que se apega a los programas, sino el que enciende pasiones ”
… y me dijo que lo dijo, el Sr. Ernesto Sábato.
Capitulo 6. Aplicaciones de los
Levantamientos Hidrográficos
6.1: Vías NavegablesEscrito especialmente para la Cátedra por el Profesor Agrim. Fernando Fontella
Una de las Aplicaciones más importantes que tienen los levantamientos batimétricos, es la Planificación,el desarrollo, el mantenimiento y mejoramiento de las vías navegables que en nuestro país está alcanzandoun nivel casi óptimo.Hoy por hoy, el flete más barato a nivel mundial es el del transporte fluvial – marítimo. Como dato ilustra-tivo podemos agregar que una barcaza, según la mercadería que transporte, puede llevar un promedio decarga de 2.000 Tn. Y para una mayor información, podemos agregar que en el Paraná superior ya se estánmoviendo trenes de barcazas en formación de 4x4 (16 barcazas), (calcule el alumno la capacidad de cargatransportada) y con un solo empuje.-A medida que bajamos por la misma cuenca, es decir en el Paraná medio, Paraná Inferior y Río de LaPlata, podemos encontrar barcos Over-Panamax o Capshaw de hasta 280m de eslora y que transportan untonelaje superior a las 60.000 toneladas.-Este tipo de levantamiento se lleva a cabo con lanchas o barcos hidrográficos, con valores de eslora de15m a 30m o más, con potencias que pueden alcanzar varios miles de caballos, equipada con el siguienteinstrumental:
Sistema DGPS a tiempo real.- Sonda Digital / analógica, preparada para trabajar simultáneamente con el DGPS y el Soft-
ware de la PC. PC y Software específico y adecuado, que permita determinar para cada punto los valores X,
e Y y la profundidad correspondiente que determine la ecosonda. El software más común-mente usado es el HIDRO
Impresora y Ploter
Previamente, se calibra en forma muy precisa la sonda tanto en forma gráfica como analógica.En general, los programas para este tipo de levantamiento permiten trazar el tipo de malla estableciendosobre una pantalla la misma, y permitiendo al timonel seguir también a través de una pantalla adicional,tanto en forma gráfica como numérica, y efectuar las correcciones necesarias. Los programas permitentambién, registrar fechas y horas de cada observación.-Estos trabajos, implican la presencia permanente de un surveyor a bordo, que operará todo el sistema co-ordinando con el timonel los movimientos de la lancha. Además deberá contarse como condición necesaria,un segundo timonel, maquinista y auxiliar de a bordo.-También es condición fundamental recibir en tiempo real, los datos de alturas de mareas de los hidrómetrosy mareógrafos, a fin de efectuar las correcciones necesarias.-Recordemos, que las profundidades de las vías navegables, están referidas a algún cero local o general, loscuales están estrechamente vinculados a los análisis estadísticos de los registros hidrométricos. En nuestropaís, estos registros alcanzan a 100 años de datos confiables.-
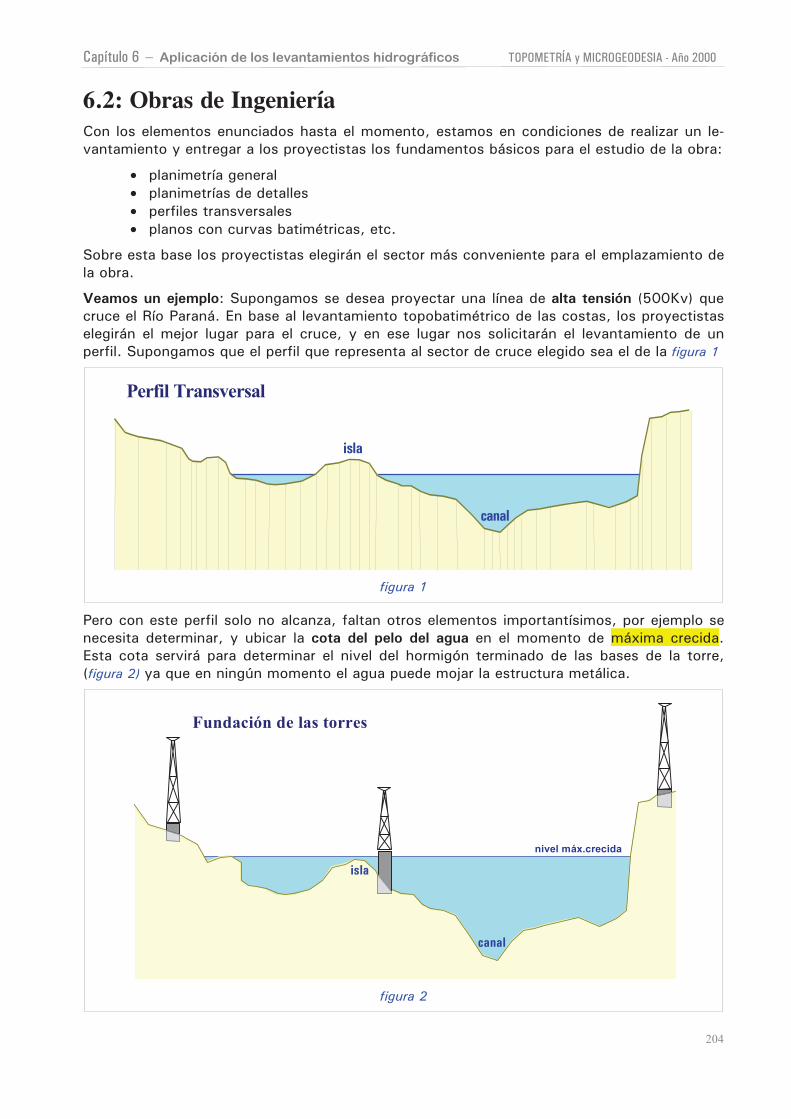
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
204
6.2: Obras de Ingeniería
Con los elementos enunciados hasta el momento, estamos en condiciones de realizar un le-
vantamiento y entregar a los proyectistas los fundamentos básicos para el estudio de la obra:
• planimetría general
• planimetrías de detalles
• perfiles transversales
• planos con curvas batimétricas, etc.
Sobre esta base los proyectistas elegirán el sector más conveniente para el emplazamiento de
la obra.
Veamos un ejemplo: Supongamos se desea proyectar una línea de alta tensión (500Kv) que
cruce el Río Paraná. En base al levantamiento topobatimétrico de las costas, los proyectistas
elegirán el mejor lugar para el cruce, y en ese lugar nos solicitarán el levantamiento de un
perfil. Supongamos que el perfil que representa al sector de cruce elegido sea el de la figura 1
Perfil Transversal
isla
canal
figura 1
Pero con este perfil solo no alcanza, faltan otros elementos importantísimos, por ejemplo se
necesita determinar, y ubicar la cota del pelo del agua en el momento de máxima crecida.
Esta cota servirá para determinar el nivel del hormigón terminado de las bases de la torre,
(figura 2) ya que en ningún momento el agua puede mojar la estructura metálica.
Fundación de las torres
nivel máx.crecida
isla
canal
figura 2
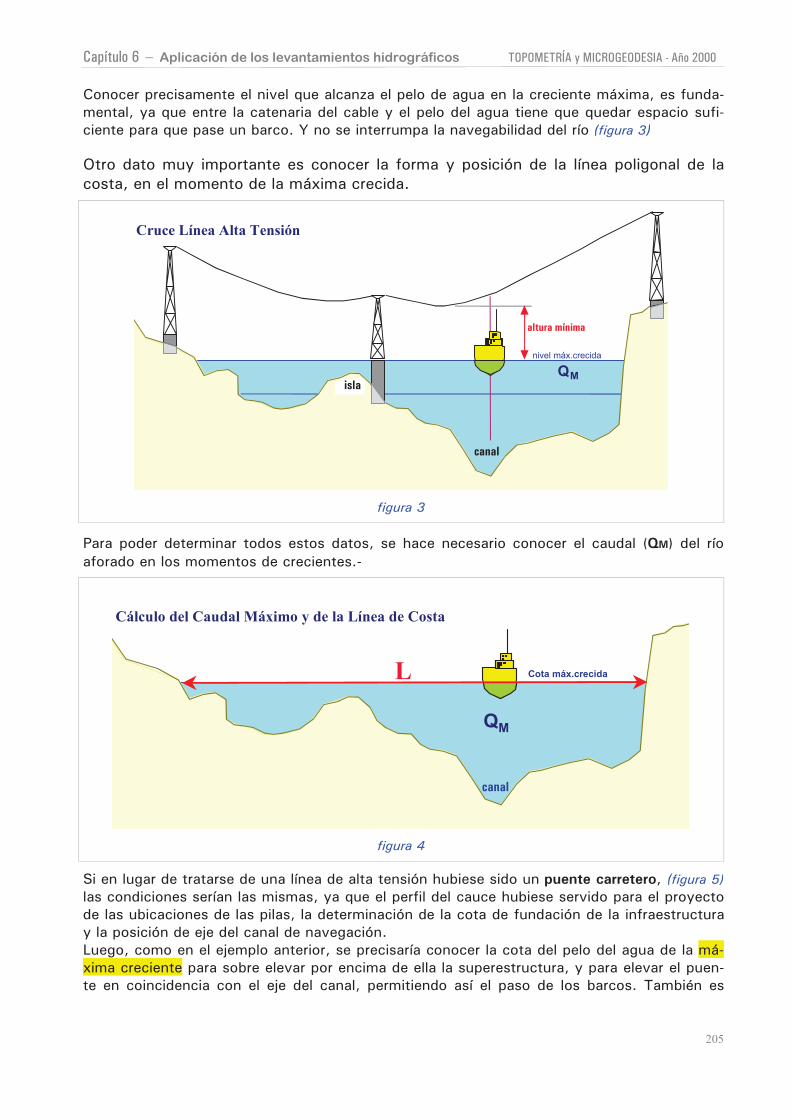
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
205
Conocer precisamente el nivel que alcanza el pelo de agua en la creciente máxima, es funda-
mental, ya que entre la catenaria del cable y el pelo del agua tiene que quedar espacio sufi-
ciente para que pase un barco. Y no se interrumpa la navegabilidad del río (figura 3)
Otro dato muy importante es conocer la forma y posición de la línea poligonal de la
costa, en el momento de la máxima crecida.
isla
altura mínima
nivel máx.crecida
Cruce Línea Alta Tensión
canal
QM
figura 3
Para poder determinar todos estos datos, se hace necesario conocer el caudal (QM) del río
aforado en los momentos de crecientes.-
Isla
Cota máx.crecida
Cálculo del Caudal Máximo y de la Línea de Costa
canal
QM
L
figura 4
Si en lugar de tratarse de una línea de alta tensión hubiese sido un puente carretero, (figura 5)
las condiciones serían las mismas, ya que el perfil del cauce hubiese servido para el proyecto
de las ubicaciones de las pilas, la determinación de la cota de fundación de la infraestructura
y la posición de eje del canal de navegación.
Luego, como en el ejemplo anterior, se precisaría conocer la cota del pelo del agua de la má-
xima creciente para sobre elevar por encima de ella la superestructura, y para elevar el puen-
te en coincidencia con el eje del canal, permitiendo así el paso de los barcos. También es
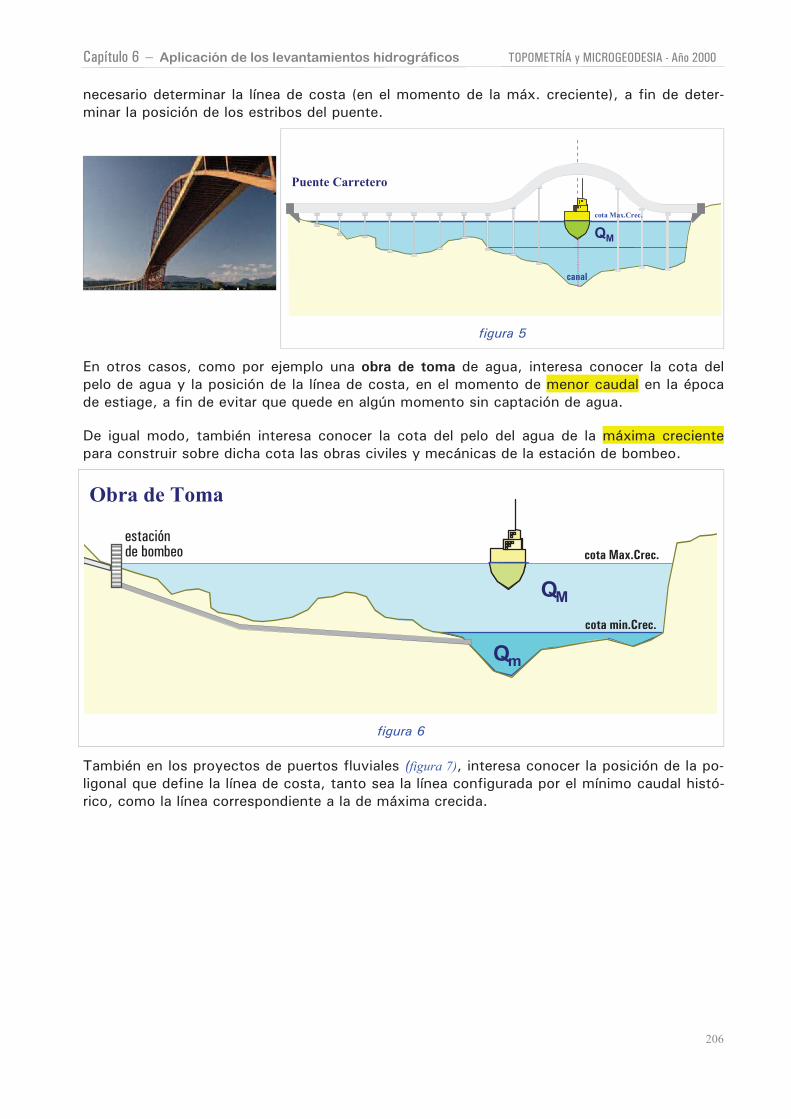
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
206
necesario determinar la línea de costa (en el momento de la máx. creciente), a fin de deter-
minar la posición de los estribos del puente.
cota Max.Crec.
Puente Carretero
QM
canal
figura 5
En otros casos, como por ejemplo una obra de toma de agua, interesa conocer la cota del
pelo de agua y la posición de la línea de costa, en el momento de menor caudal en la época
de estiage, a fin de evitar que quede en algún momento sin captación de agua.
De igual modo, también interesa conocer la cota del pelo del agua de la máxima creciente
para construir sobre dicha cota las obras civiles y mecánicas de la estación de bombeo.
QM
cota Max.Crec.
cota min.Crec.
Qm
estaciónde bombeo
Obra de Toma
figura 6
También en los proyectos de puertos fluviales (figura 7), interesa conocer la posición de la po-
ligonal que define la línea de costa, tanto sea la línea configurada por el mínimo caudal histó-
rico, como la línea correspondiente a la de máxima crecida.
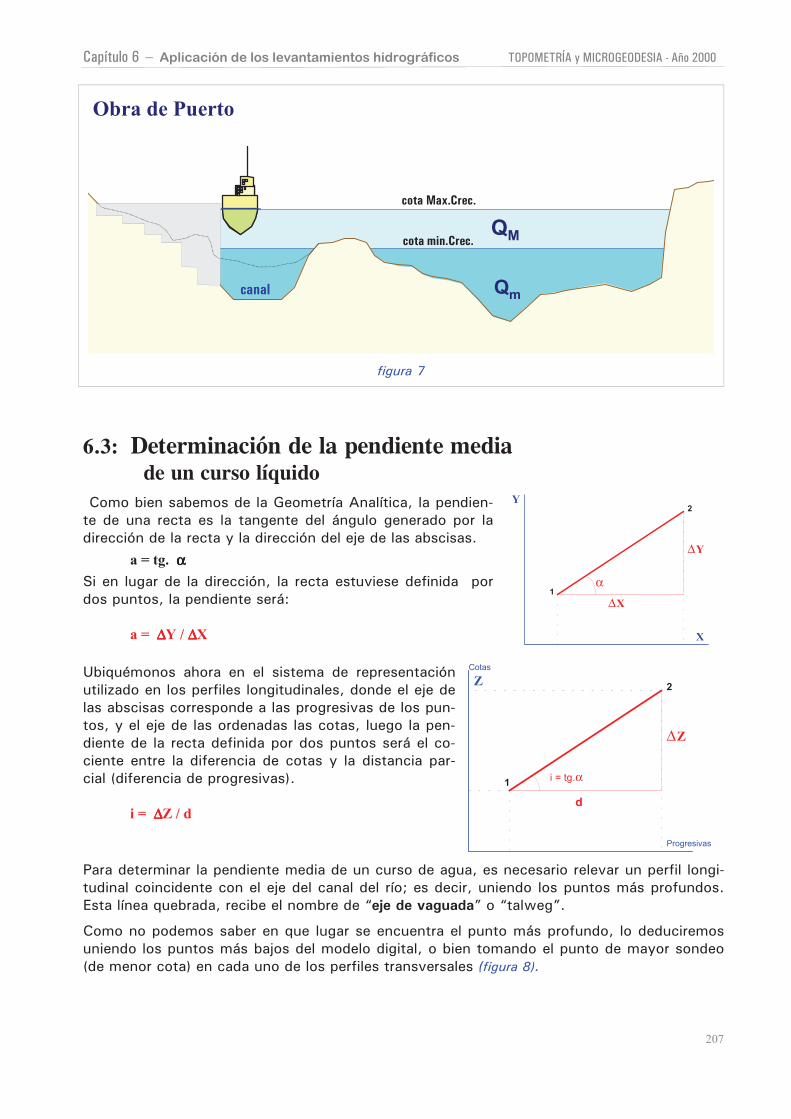
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
207
cota Max.Crec.
cota min.Crec.
Obra de Puerto
QM
Qm
cota min.Crec.
Qmcanal
figura 7
6.3: Determinación de la pendiente mediade un curso líquido
Como bien sabemos de la Geometría Analítica, la pendien-
te de una recta es la tangente del ángulo generado por la
dirección de la recta y la dirección del eje de las abscisas.
a = tg. αααα
Si en lugar de la dirección, la recta estuviese definida por
dos puntos, la pendiente será:
a = ∆∆∆∆Y / ∆∆∆∆X
α
∆
∆X
X
Y
Y
1
2
Ubiquémonos ahora en el sistema de representación
utilizado en los perfiles longitudinales, donde el eje de
las abscisas corresponde a las progresivas de los pun-
tos, y el eje de las ordenadas las cotas, luego la pen-
diente de la recta definida por dos puntos será el co-
ciente entre la diferencia de cotas y la distancia par-
cial (diferencia de progresivas).
i = ∆∆∆∆Z / d
∆Z
Z
1
2
d
Progresivas
i = tg.α
Cotas
Para determinar la pendiente media de un curso de agua, es necesario relevar un perfil longi-
tudinal coincidente con el eje del canal del río; es decir, uniendo los puntos más profundos.
Esta línea quebrada, recibe el nombre de “eje de vaguada” o “talweg”.
Como no podemos saber en que lugar se encuentra el punto más profundo, lo deduciremos
uniendo los puntos más bajos del modelo digital, o bien tomando el punto de mayor sondeo
(de menor cota) en cada uno de los perfiles transversales (figura 8).
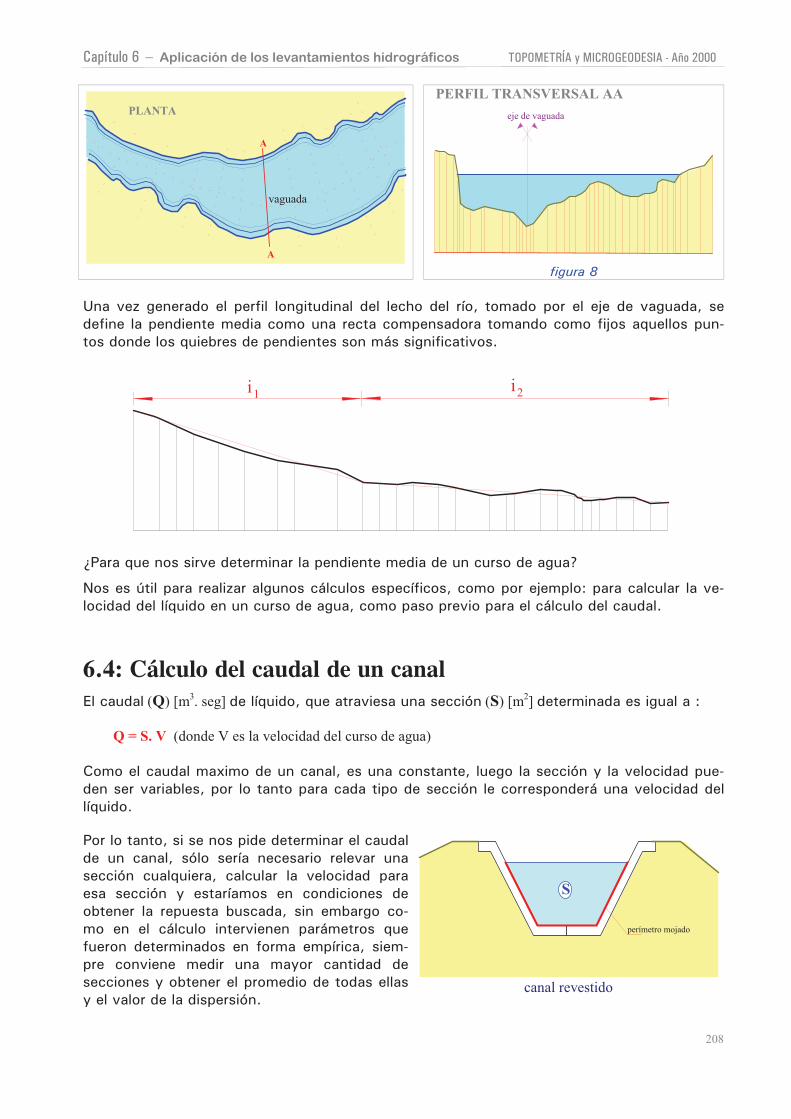
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
208
PLANTA
vaguada
A
A
eje de vaguada
PERFIL TRANSVERSAL AA
figura 8
Una vez generado el perfil longitudinal del lecho del río, tomado por el eje de vaguada, se
define la pendiente media como una recta compensadora tomando como fijos aquellos pun-
tos donde los quiebres de pendientes son más significativos.
i1i2
¿Para que nos sirve determinar la pendiente media de un curso de agua?
Nos es útil para realizar algunos cálculos específicos, como por ejemplo: para calcular la ve-
locidad del líquido en un curso de agua, como paso previo para el cálculo del caudal.
6.4: Cálculo del caudal de un canal
El caudal (Q) [m3. seg] de líquido, que atraviesa una sección (S) [m
2] determinada es igual a :
Q = S. V (donde V es la velocidad del curso de agua)
Como el caudal maximo de un canal, es una constante, luego la sección y la velocidad pue-
den ser variables, por lo tanto para cada tipo de sección le corresponderá una velocidad del
líquido.
Por lo tanto, si se nos pide determinar el caudal
de un canal, sólo sería necesario relevar una
sección cualquiera, calcular la velocidad para
esa sección y estaríamos en condiciones de
obtener la repuesta buscada, sin embargo co-
mo en el cálculo intervienen parámetros que
fueron determinados en forma empírica, siem-
pre conviene medir una mayor cantidad de
secciones y obtener el promedio de todas ellas
y el valor de la dispersión.
S
perímetro mojado
canal revestido
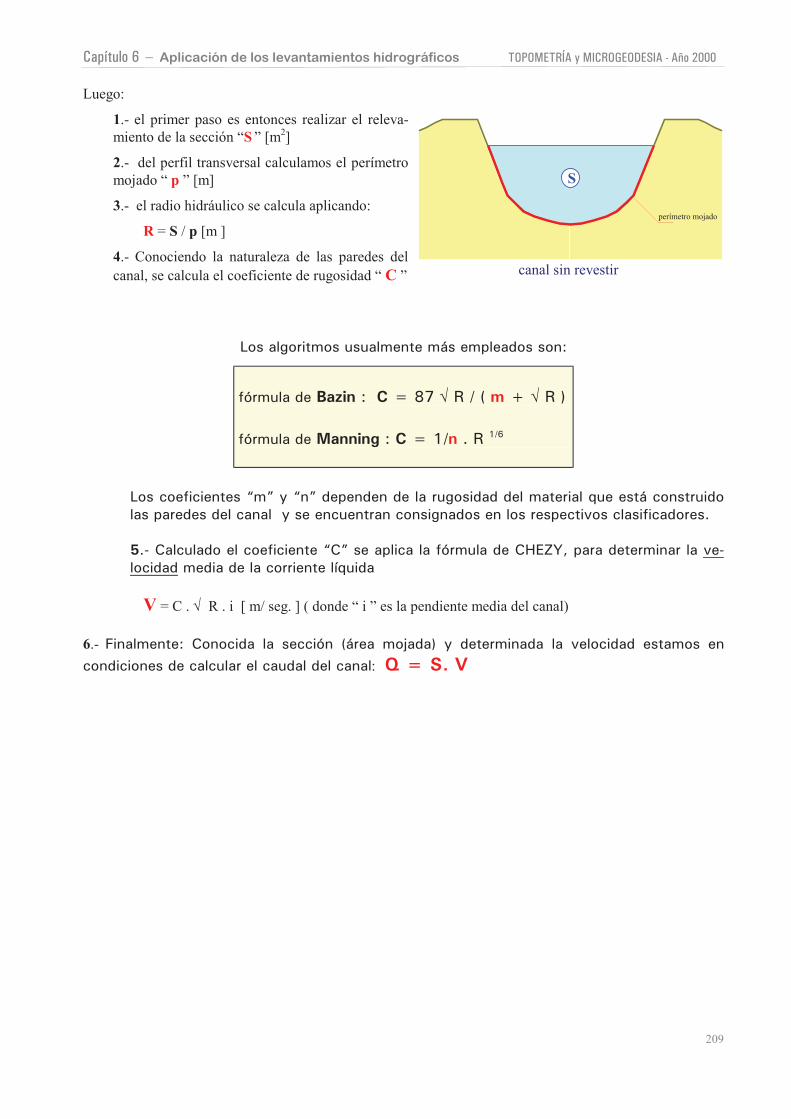
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
209
Luego:
1.- el primer paso es entonces realizar el releva-
miento de la sección “S ” [m2]
2.- del perfil transversal calculamos el perímetro
mojado “ p ” [m]
3.- el radio hidráulico se calcula aplicando:
R = S / p [m ]
4.- Conociendo la naturaleza de las paredes del
canal, se calcula el coeficiente de rugosidad “ C ”
S
perímetro mojado
canal sin revestir
Los algoritmos usualmente más empleados son:
fórmula de Bazin : C = 87 √ R / ( m + √ R )
fórmula de Manning : C = 1/n . R 1/6
Los coeficientes “m” y “n” dependen de la rugosidad del material que está construido
las paredes del canal y se encuentran consignados en los respectivos clasificadores.
5.- Calculado el coeficiente “C” se aplica la fórmula de CHEZY, para determinar la ve-
locidad media de la corriente líquida
V = C . √ R . i [ m/ seg. ] ( donde “ i ” es la pendiente media del canal)
6.- Finalmente: Conocida la sección (área mojada) y determinada la velocidad estamos en
condiciones de calcular el caudal del canal: Q = S. V
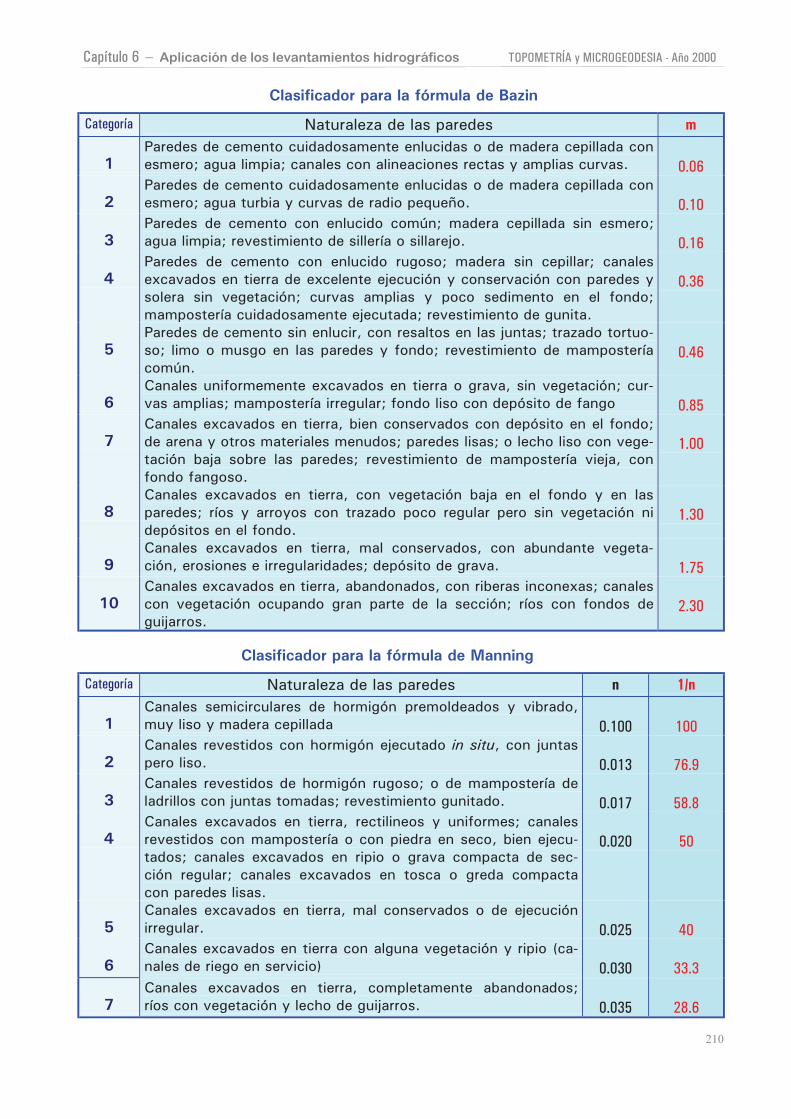
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
210
Clasificador para la fórmula de Bazin
Categoría Naturaleza de las paredes m
1Paredes de cemento cuidadosamente enlucidas o de madera cepillada con
esmero; agua limpia; canales con alineaciones rectas y amplias curvas. 0.06
2Paredes de cemento cuidadosamente enlucidas o de madera cepillada con
esmero; agua turbia y curvas de radio pequeño. 0.10
3Paredes de cemento con enlucido común; madera cepillada sin esmero;
agua limpia; revestimiento de sillería o sillarejo. 0.16
4Paredes de cemento con enlucido rugoso; madera sin cepillar; canales
excavados en tierra de excelente ejecución y conservación con paredes y
solera sin vegetación; curvas amplias y poco sedimento en el fondo;
mampostería cuidadosamente ejecutada; revestimiento de gunita.
0.36
5Paredes de cemento sin enlucir, con resaltos en las juntas; trazado tortuo-
so; limo o musgo en las paredes y fondo; revestimiento de mampostería
común.0.46
6Canales uniformemente excavados en tierra o grava, sin vegetación; cur-
vas amplias; mampostería irregular; fondo liso con depósito de fango 0.85
7Canales excavados en tierra, bien conservados con depósito en el fondo;
de arena y otros materiales menudos; paredes lisas; o lecho liso con vege-
tación baja sobre las paredes; revestimiento de mampostería vieja, con
fondo fangoso.
1.00
8Canales excavados en tierra, con vegetación baja en el fondo y en las
paredes; ríos y arroyos con trazado poco regular pero sin vegetación ni
depósitos en el fondo.1.30
9Canales excavados en tierra, mal conservados, con abundante vegeta-
ción, erosiones e irregularidades; depósito de grava. 1.75
10Canales excavados en tierra, abandonados, con riberas inconexas; canales
con vegetación ocupando gran parte de la sección; ríos con fondos de
guijarros.2.30
Clasificador para la fórmula de Manning
Categoría Naturaleza de las paredes n 1/n
1Canales semicirculares de hormigón premoldeados y vibrado,
muy liso y madera cepillada 0.100 100
2Canales revestidos con hormigón ejecutado in situ, con juntas
pero liso. 0.013 76.9
3Canales revestidos de hormigón rugoso; o de mampostería de
ladrillos con juntas tomadas; revestimiento gunitado. 0.017 58.8
4Canales excavados en tierra, rectilineos y uniformes; canales
revestidos con mampostería o con piedra en seco, bien ejecu-
tados; canales excavados en ripio o grava compacta de sec-
ción regular; canales excavados en tosca o greda compacta
con paredes lisas.
0.020 50
5Canales excavados en tierra, mal conservados o de ejecución
irregular. 0.025 40
6Canales excavados en tierra con alguna vegetación y ripio (ca-
nales de riego en servicio) 0.030 33.3
7Canales excavados en tierra, completamente abandonados;
ríos con vegetación y lecho de guijarros. 0.035 28.6
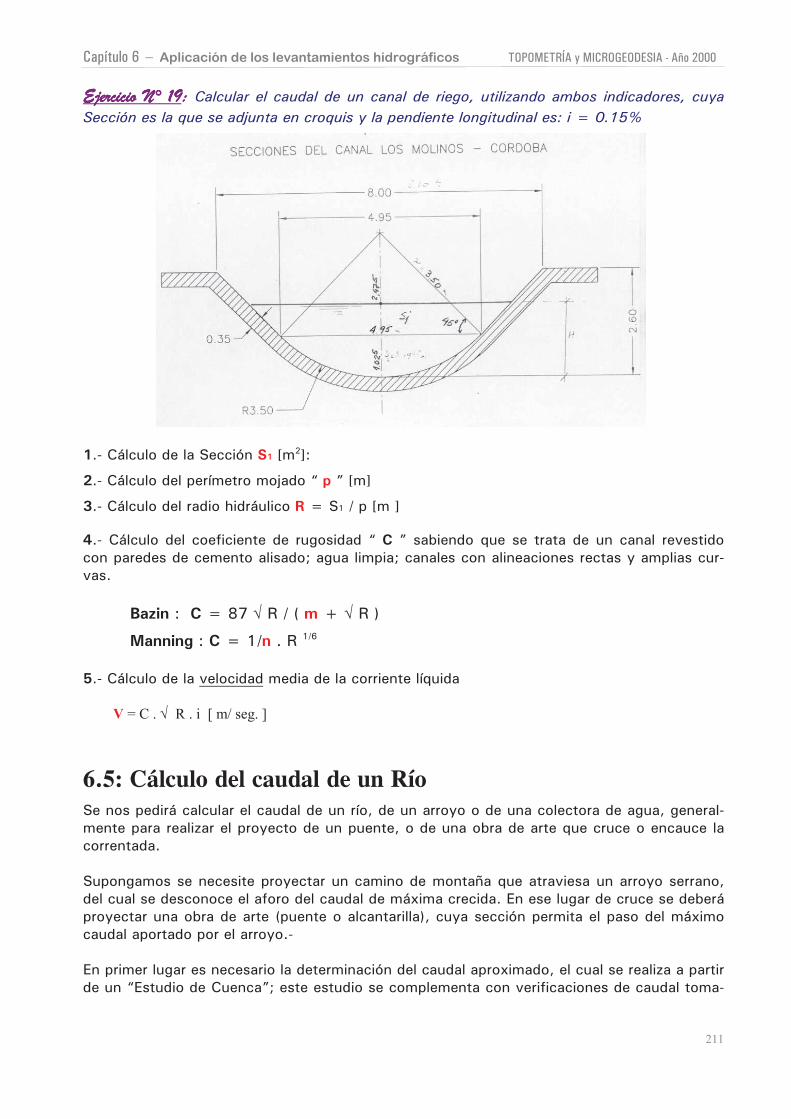
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
211
Ejercicio N° 19Ejercicio N° 19Ejercicio N° 19Ejercicio N° 19: : : : Calcular el caudal de un canal de riego, utilizando ambos indicadores, cuya
Sección es la que se adjunta en croquis y la pendiente longitudinal es: i = 0.15%
1.- Cálculo de la Sección S1 [m2]:
2.- Cálculo del perímetro mojado “ p ” [m]
3.- Cálculo del radio hidráulico R = S1 / p [m ]
4.- Cálculo del coeficiente de rugosidad “ C ” sabiendo que se trata de un canal revestido
con paredes de cemento alisado; agua limpia; canales con alineaciones rectas y amplias cur-
vas.
Bazin : C = 87 √ R / ( m + √ R )
Manning : C = 1/n . R 1/6
5.- Cálculo de la velocidad media de la corriente líquida
V = C . √ R . i [ m/ seg. ]
6.5: Cálculo del caudal de un Río
Se nos pedirá calcular el caudal de un río, de un arroyo o de una colectora de agua, general-
mente para realizar el proyecto de un puente, o de una obra de arte que cruce o encauce la
correntada.
Supongamos se necesite proyectar un camino de montaña que atraviesa un arroyo serrano,
del cual se desconoce el aforo del caudal de máxima crecida. En ese lugar de cruce se deberá
proyectar una obra de arte (puente o alcantarilla), cuya sección permita el paso del máximo
caudal aportado por el arroyo.-
En primer lugar es necesario la determinación del caudal aproximado, el cual se realiza a partir
de un “Estudio de Cuenca”; este estudio se complementa con verificaciones de caudal toma-
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
212
dos “in situ”, mediante perfiles transversales, en los lugares del cruce de la colectora con la
traza de la obra en estudio.
6.5.1: Estudio de CuencaEscrito especialmente para la Cátedra por el Ing.Civil Daniel Martos
6.5.1.a Definición de la cuenca y tiempo de concentración.
Se denomina cuenca a la totalidad del área en la cual se acumula y encauza un determinado
caudal (es así como por ejemplo, la cuenca de una alcantarilla esta constituida por la super-
ficie en que escurre el agua que pasa por ella).
Para delimitar una cuenca lo primero es identificar las dorsales (divisorias de agua) que sepa-
ran los sentidos de escurrimiento. Las dorsales definen polígonos que constituyen las distin-
tas cuencas.
Toda esta tarea se realiza en base a cartografía de línea con curvas de nivel, restitucciones
aerofotogramétricas, modelos digitales de elevaciones del terreno, en distintas escalas y
equidistancias.
Una vez definida la cuenca según sus características (regularidad, extensión, topografía, es-
currimientos, etc) , el tipo de proyecto (camino, río, dique, barrio, etc.) y las características
de la lluvia con que se diseña, se estudia si es necesario dividir la misma en varias subcuen-
cas.
La definición de subcuencas según estas características se hace por lo general para zonas de
distintos tiempos de concentración.
Corresponde aquí definir lo que se denomina tiempo de concentración que es el tiempo en
que tarda la gota de agua que cae en el punto mas alejado de la cuenca en llegar al fin de la
misma.
Para definir el tiempo de concentración no solo es necesario determinar el área de la cuenca
sino también deben conocerse las características del terreno (tales como vegetación, material
que constituye el suelo, etc.), obras realizadas (como canales, urbanizaciones, etc.) que fre-
nen o aceleren el libre escurrimiento de las aguas y también los caudales. Por lo tanto todavía
no estamos en condiciones de hacerlo, es por ello que, la división en subcuencas es, en mu-
chos casos, subjetiva y depende bastante de la experiencia del proyectista.
Es así como hemos definido áreas de cuencas y/o subcuencas.
6.5.1.b Definición de la lluvia de diseño
Es necesario definir para nuestro proyecto cual es la lluvia de diseño para ello vale aclarar,
aunque suene obvio que, la misma dependerá de la importancia de la obra a ejecutar.
Es así como por ejemplo se puede permitir que cada 5 años en un camino vecinal el agua
desborde su sistema de desague anegándolo durante tres o cuatro horas, cosa que ya no es
lógica si en vez de un camino vecinal el proyecto es de un camino o paso internacional.
Surge así el concepto de recurrencia como el tiempo promedio en que se repitiría, en función
de datos estadísticos, la intensidad de lluvia que utilizamos para diseñar la obra. Por supues-
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
213
to mientras los tiempos de recurrencia sean mas grandes, mas los serán las lluvias de diseño
y la obra a realizar.
En función de datos obtenidos mediante pluviómetros organismos como el CIRSA , hidráuli-
ca, etc., vienen obteniendo datos de las lluvias.
Con estos datos y en base a algoritmos estadísticos confeccionan Curvas Recurrencia-
Intensidad de lluvia .
De estas curvas con la recurrencia ya definida se obtiene la intensidad de diseño.
6.5.1.c Calculo de caudales.
• Con la determinación del área de aporte, con la rugosidad y la recurrencia, y mediante
el empleo de tablas empíricas, se obtienen las velocidades de escurrimiento y final-
mente los caudales de cada sub-cuenca.-
• Con los caudales y velocidades, se obtienen los tiempos de escorrentía, es decir el
tiempo que tarda cada caudal el llegar hasta la sección en estudio.
• Finalmente, sumando los valores de los caudales que lleguen al punto en el mismo ins-
tante, los proyectistas obtendrán el máximo caudal que deberá evacuar la obra.-
• Determinado el caudal máximo, se podrá deducir la sección necesaria de la obra de ar-
te.-
6.5.2: Perfiles transversales
1.- En primer lugar habrá que levantar un perfil longitudinal por el eje de vaguada del
río, o deducirlo a partir de la medición de perfiles transversales, al menos 500m aguas
arriba de la sección de estudio, y en caso de ser una pendiente muy baja (< 1.5%),
será necesario relevar también al menos unos 300m aguas abajo. Calcular la pendiente
media del curso.
2.- Levantar tres o mas perfiles transversales, a fin de calcular la sección del agua,
elegida en los lugares en que se manifiesten claramente los vestigios de las crecientes
máximas.
Siempre además, conviene asesorarse con los lugareños. En las sierras de Córdoba,
por ejemplo es importante consultar a los nativos, hasta donde llegó la creciente de
Enero del ‘92.
3.- Procesado el perfil transversal, calculamos la sección “S” y la longitud del pelo de
agua “L” [m] , o sea el ancho de la superficie libre del líquido.
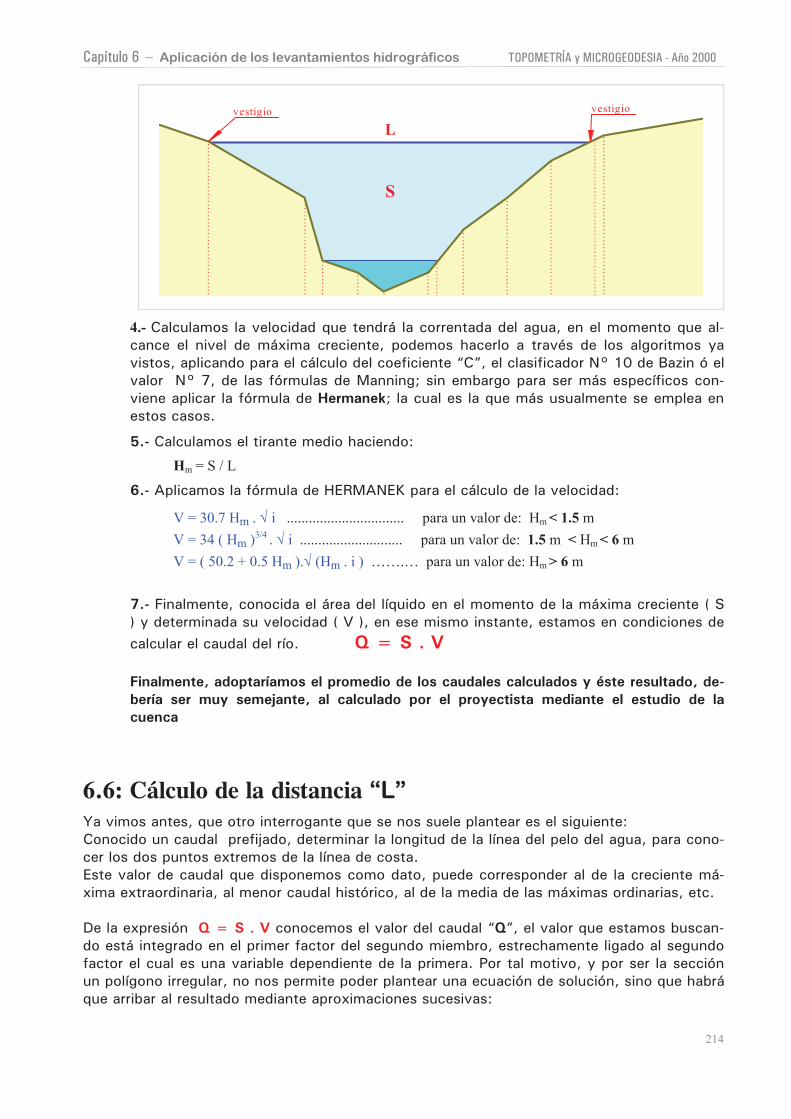
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
214
vestigio vestigio
L
S
4.- Calculamos la velocidad que tendrá la correntada del agua, en el momento que al-
cance el nivel de máxima creciente, podemos hacerlo a través de los algoritmos ya
vistos, aplicando para el cálculo del coeficiente “C”, el clasificador N° 10 de Bazin ó el
valor N° 7, de las fórmulas de Manning; sin embargo para ser más específicos con-
viene aplicar la fórmula de Hermanek; la cual es la que más usualmente se emplea en
estos casos.
5.- Calculamos el tirante medio haciendo:
Hm = S / L
6.- Aplicamos la fórmula de HERMANEK para el cálculo de la velocidad:
V = 30.7 Hm . √ i ................................ para un valor de: Hm < 1.5 m
V = 34 ( Hm )3/4
. √ i ............................ para un valor de: 1.5 m < Hm < 6 m
V = ( 50.2 + 0.5 Hm ).√ (Hm . i ) …….… para un valor de: Hm > 6 m
7.- Finalmente, conocida el área del líquido en el momento de la máxima creciente ( S
) y determinada su velocidad ( V ), en ese mismo instante, estamos en condiciones de
calcular el caudal del río. Q = S . V
Finalmente, adoptaríamos el promedio de los caudales calculados y éste resultado, de-
bería ser muy semejante, al calculado por el proyectista mediante el estudio de la
cuenca
6.6: Cálculo de la distancia “L”
Ya vimos antes, que otro interrogante que se nos suele plantear es el siguiente:
Conocido un caudal prefijado, determinar la longitud de la línea del pelo del agua, para cono-
cer los dos puntos extremos de la línea de costa.
Este valor de caudal que disponemos como dato, puede corresponder al de la creciente má-
xima extraordinaria, al menor caudal histórico, al de la media de las máximas ordinarias, etc.
De la expresión Q = S . V conocemos el valor del caudal “Q”, el valor que estamos buscan-
do está integrado en el primer factor del segundo miembro, estrechamente ligado al segundo
factor el cual es una variable dependiente de la primera. Por tal motivo, y por ser la sección
un polígono irregular, no nos permite poder plantear una ecuación de solución, sino que habrá
que arribar al resultado mediante aproximaciones sucesivas:
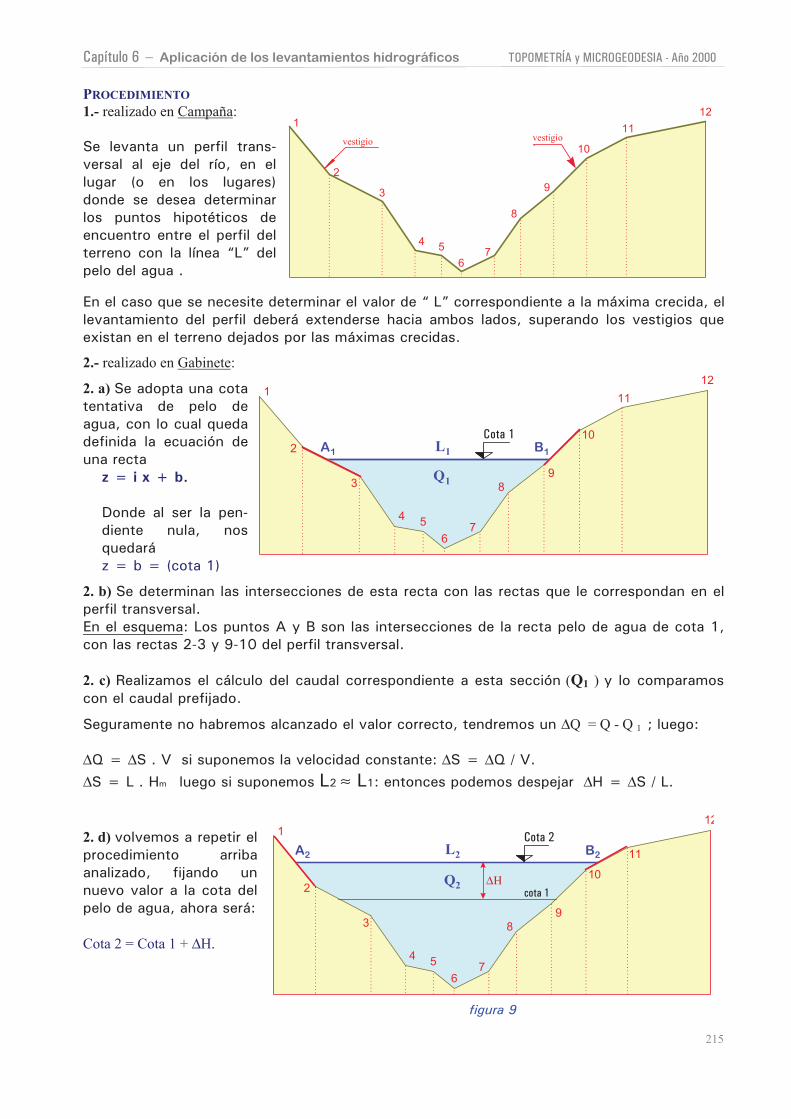
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
215
PROCEDIMIENTO
1.- realizado en Campaña:
Se levanta un perfil trans-
versal al eje del río, en el
lugar (o en los lugares)
donde se desea determinar
los puntos hipotéticos de
encuentro entre el perfil del
terreno con la línea “L” del
pelo del agua .
1
2
3
45
67
8
9
10
11
12
vestigiovestigio
En el caso que se necesite determinar el valor de “ L” correspondiente a la máxima crecida, el
levantamiento del perfil deberá extenderse hacia ambos lados, superando los vestigios que
existan en el terreno dejados por las máximas crecidas.
2.- realizado en Gabinete:
2. a) Se adopta una cota
tentativa de pelo de
agua, con lo cual queda
definida la ecuación de
una recta
z = i x + b.
Donde al ser la pen-
diente nula, nos
quedará
z = b = (cota 1)
1
2
3
45
67
8
9
10
11
12
A1 L1 B1
Q1
Cota 1
2. b) Se determinan las intersecciones de esta recta con las rectas que le correspondan en el
perfil transversal.
En el esquema: Los puntos A y B son las intersecciones de la recta pelo de agua de cota 1,
con las rectas 2-3 y 9-10 del perfil transversal.
2. c) Realizamos el cálculo del caudal correspondiente a esta sección (Q1 ) y lo comparamos
con el caudal prefijado.
Seguramente no habremos alcanzado el valor correcto, tendremos un ∆Q = Q - Q 1 ; luego:
∆Q = ∆S . V si suponemos la velocidad constante: ∆S = ∆Q / V.
∆S = L . Hm luego si suponemos L2 ≈ L1: entonces podemos despejar ∆H = ∆S / L.
2. d) volvemos a repetir el
procedimiento arriba
analizado, fijando un
nuevo valor a la cota del
pelo de agua, ahora será:
Cota 2 = Cota 1 + ∆H.
1
2
3
45
67
8
9
10
11
12
A2 L2 B2
Q2
Cota 2
cota 1∆Η
figura 9
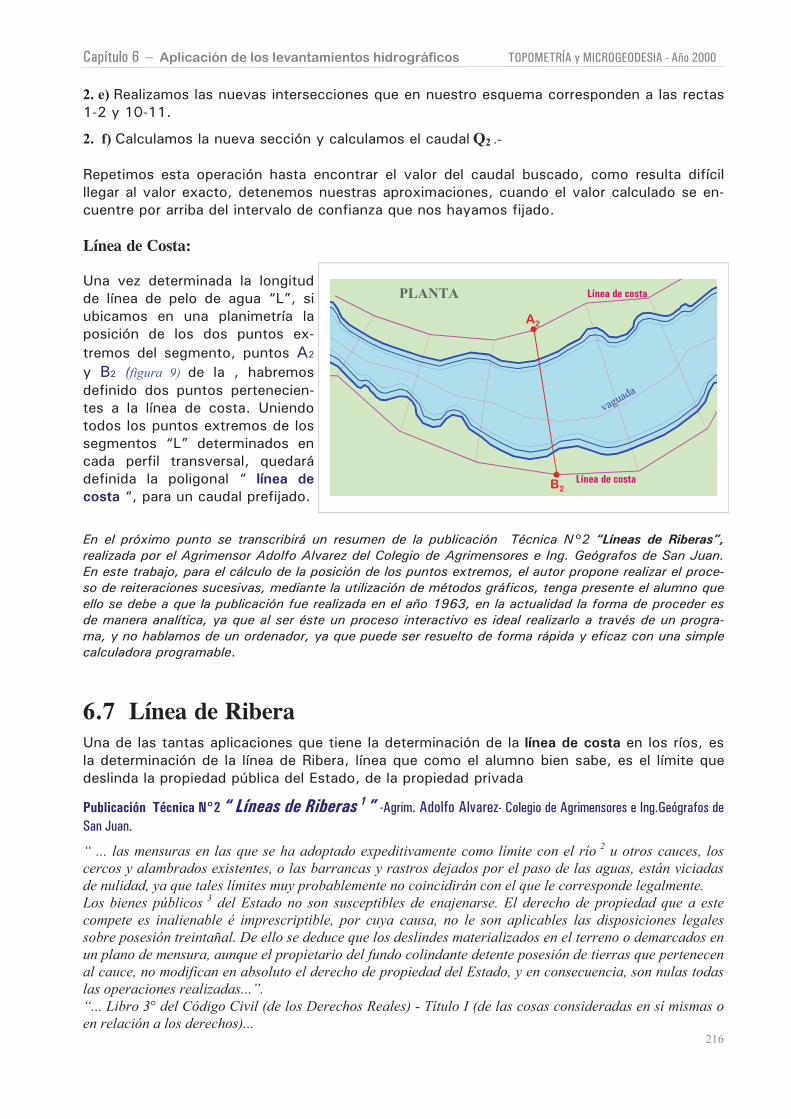
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
216
2. e) Realizamos las nuevas intersecciones que en nuestro esquema corresponden a las rectas
1-2 y 10-11.
2. f) Calculamos la nueva sección y calculamos el caudal Q2 .-
Repetimos esta operación hasta encontrar el valor del caudal buscado, como resulta difícil
llegar al valor exacto, detenemos nuestras aproximaciones, cuando el valor calculado se en-
cuentre por arriba del intervalo de confianza que nos hayamos fijado.
Línea de Costa:
Una vez determinada la longitud
de línea de pelo de agua “L”, si
ubicamos en una planimetría la
posición de los dos puntos ex-
tremos del segmento, puntos A2
y B2 (figura 9) de la , habremos
definido dos puntos pertenecien-
tes a la línea de costa. Uniendo
todos los puntos extremos de los
segmentos “L” determinados en
cada perfil transversal, quedará
definida la poligonal “ línea de
costa “, para un caudal prefijado.
PLANTA
vaguada
A2
B2Línea de costa
Línea de costa
En el próximo punto se transcribirá un resumen de la publicación Técnica N°2 “Líneas de Riberas”,
realizada por el Agrimensor Adolfo Alvarez del Colegio de Agrimensores e Ing. Geógrafos de San Juan.
En este trabajo, para el cálculo de la posición de los puntos extremos, el autor propone realizar el proce-
so de reiteraciones sucesivas, mediante la utilización de métodos gráficos, tenga presente el alumno que
ello se debe a que la publicación fue realizada en el año 1963, en la actualidad la forma de proceder es
de manera analítica, ya que al ser éste un proceso interactivo es ideal realizarlo a través de un progra-
ma, y no hablamos de un ordenador, ya que puede ser resuelto de forma rápida y eficaz con una simple
calculadora programable.
6.7 Línea de Ribera
Una de las tantas aplicaciones que tiene la determinación de la línea de costa en los ríos, es
la determinación de la línea de Ribera, línea que como el alumno bien sabe, es el límite que
deslinda la propiedad pública del Estado, de la propiedad privada
Publicación Técnica N°2 “ Líneas de Riberas 1
” -Agrim. Adolfo Alvarez- Colegio de Agrimensores e Ing.Geógrafos deSan Juan.
“ ... las mensuras en las que se ha adoptado expeditivamente como límite con el río 2 u otros cauces, loscercos y alambrados existentes, o las barrancas y rastros dejados por el paso de las aguas, están viciadasde nulidad, ya que tales límites muy probablemente no coincidirán con el que le corresponde legalmente.Los bienes públicos 3 del Estado no son susceptibles de enajenarse. El derecho de propiedad que a estecompete es inalienable é imprescriptible, por cuya causa, no le son aplicables las disposiciones legalessobre posesión treintañal. De ello se deduce que los deslindes materializados en el terreno o demarcados enun plano de mensura, aunque el propietario del fundo colindante detente posesión de tierras que pertenecenal cauce, no modifican en absoluto el derecho de propiedad del Estado, y en consecuencia, son nulas todaslas operaciones realizadas...”.“... Libro 3° del Código Civil (de los Derechos Reales) - Título I (de las cosas consideradas en sí mismas oen relación a los derechos)...
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
217
Artículo 2339: Las cosas son bienes públicos del Estado general que forma la Nación, o de los Estadosparticulares de que ella se compone, según la distribución de los poderes hecha por la Constitución Nacio-nal: o son bienes privados del Estado general o de los Estados particulares.
Artículo 2340: Son bienes públicos del Estado general o de los Estados particulares:1° Los mares adyacentes...etc.2° Los mares interiores...etc.3° LOS RÍOS Y SUS CAUCES Y TODAS LAS AGUAS QUE CORREN POR CAUCESNATURALES...”
“... Libro 3°- Título V (del dominio de las cosas y modos de adquirirlo)Capítulo III (accesión): ... cuandoalguna cosa mueble o inmueble acreciere a otra por adherencia natural o artificial...DEL ALUVIÓN:Artículo 2572: son accesorios de los terrenos confinantes con la ribera de los ríos, los acrecentamientos detierra que reciben paulatina e insensiblemente por efectos de las corrientes de agua y pertenecen a los due-ños de las heredades ribereñas.Siendo en las costas del mar o de ríos navegables, pertenecen al Estado.Artículo 2573: Pertenecen también a los ribereños los terrenos que el curso de las aguas dejare a descu-bierto, retirándose insensiblemente de una de las riberas hacia la otra.Artículo 2574: El derecho de aluvión no corresponde sino a los propietarios de tierras que tienen por lí-mite la corriente del agua de los ríos o arroyos; pero no corresponde a los ribereños de un río canalizado ycuyas márgenes son formadas por diques artificiales.Artículo 2575: Si lo que confina con el río fuere un camino público, el terreno de aluvión corresponderá alEstado o a la Municipalidad del lugar, según que el camino corresponda al municipio o al Estado.Artículo 2576: La reunión de tierra no constituye aluvión, por inmediata que se encuentre a la ribera delrío, cuando está separada por una corriente de agua que haga parte del río y que no sea intermitente.Artículo 2577: tampoco constituyen aluvión las arenas o fangos que se encuentran EN LOS LÍMITES DELLECHO DEL RIO, DETERMINADO POR LA LÍNEA A QUE LLEGAN LAS MAS ALTAS AGUAS EN SUESTADO NORMAL.Artículo 2581: El terreno de aluvión no se adquiere sino cuando está definitivamente formado, y no se con-sidera tal sino CUANDO ESTA ADHERIDO A LA RIBERA Y HA CESADO DE HACER PARTE DELLECHO DEL RÍO.Artículo 2582: Cuando se forma un terreno de aluvión a lo largo de muchas heredades, LA DIVISIÓN SEHACE ENTRE LOS PROPIETARIOS QUE PUEDAN TENER DERECHO A ELLA, EN PROPORCIÓN DELANCHO DE CADA UNA DE LAS HEREDADES PRESENTES SOBRE EL ANTIGUO RÍO....”“ ...El problema de riberas se plantea en los siguientes términos: es preciso determinar la línea divisorialegal entre ríos o arroyos propiedad pública del Estado y los predios particulares colindantes con los mis-mos. En otros términos debe calcularse la altura que alcanzan las aguas y el ancho que ocupan cuando elcauce soporta el caudal medio de los máximos normales, excluidos los correspondientes a crecientes ex-traordinarias. En pro de la solución del problema planteado, es necesario procurar el conocimiento de lossiguientes elementos básicos:
a) Plani altimetría del cauce y zonas circunvecinas en una longitud no inferior a 1000m.
Su obtención se lleva a cabo utilizando la taquimetría clásica, apoyada en una poligonal aproximadamenteparalela al cauce en todos sus tramos. Esta poligonal deberá reunir los siguientes condiciones: sus vérticesserán firmemente amojonados y luego nivelados en ida y vuelta.... por lo menos dos de sus vértices se avali-zarán de ser posible, respecto de 4 puntos fijos notables. Se hará un cierre de la poligonal siguiendo uncamino cualquiera... A este efecto, incluso con fines de su posterior ubicación y eventual restitución se su-giere la conveniencia de hacer que la poligonal básica forme parte de la poligonal de rodeo de la propie-dad, cuando la línea de ribera se determine con el fin de mensurar la misma... esta poligonal servirá deapoyo para el relevamiento planialtimétrico de la zona de estudio, el que deberá incluir alambrados y cer-cos existentes, caminos, puentes y vías férreas vecinas, construcciones aledañas, barrancas y rastros ribe-reños del paso de las aguas, etc.-NOTA: Para evitar los problemas derivados de un río crecido, la determinación de líneas de riberas debeefectuarse en épocas de estiaje, en que el caudal se reduce al mínimo...”
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
218
“. ...b) Perfiles transversales del cauce tomados cada veinte a veinticinco metros (máximo 50m)
Estos perfiles que servirán para determinar las secciones de pasaje para el caudal Q, son fundamentalespara la posterior aplicación del método que aquí se desarrolla. El relevamiento taquimétrico de los mismos,apoyados en los lados de la poligonal básica, se efectuará trazándolos normalmente a esos lados. Los pun-tos que correspondan a cada perfil serán tantos como lo exijan las características altimétricas, más o me-nos accidentadas del lecho. La elección de esos puntos queda supeditada al criterio topográfico del profe-sional actuante, el que deberá estaquear todos aquellos que sean posibles, incluso el correspondiente alcruce del perfil con el lado poligonal de apoyo......Cada perfil relevado debe abarcar, y aún rebasar el ancho del cauce hacia ambas márgenes. Su desarro-llo debe incluir los puntos marginales del ancho de la superficie libre del líquido, y además un punto im-portante del río, el correspondiente al lugar más profundo del lecho, que debe buscarse con la mira aúndentro del agua... este punto pertenece a una línea característica del lecho denominada “Línea o eje devaguada”; la que se obtendrá en el dibujo como una línea quebrada al unir entre sí los puntos de mayorprofundidad correspondientes a cada perfil...línea de vaguada es sinónimo de “talweg”, conocida tambiéncomo “línea de valle” o “línea de recogida” porque a ella concurren las líneas de máxima pendiente de lacuenca considerada , como tendiendo a “encausarse” según esa línea cartográfica característica que es laantítesis de la “línea dorsal” o “divisoria de las aguas”...de la cual divergen las líneas de máxima pen-diente...
...con tales elementos debe procederse al cálculo y dibujo de la planimetría general y de los perfiles trans-versales a una escala adecuada para las determinaciones gráficas de distancias. Para ello se adapta ... laescala 1: 1000 u otra mayor. En cuanto a los perfiles, conviene dibujarlos sobrealzados a fin de destacar laaltimetría, y así facilitar luego las operaciones posteriores que, por procedimientos gráficos se realizaránsobre ellos.
c) Perfil longitudinal de la línea de vaguada.
Este perfil sobrealzado, cuyo dibujo se realiza en las mismas escala que los perfiles transversales, nospermite calcular las pendientes medias ( i ) del cauce....
d) Caudal medio de los máximos normales (Q)
“...este dato es fundamental para nuestro calculo posterior, puede obtenerse de la estadística de aforos quedebe suministrar el organismo estatal encargado de la administración de los cursos de agua. En su defecto,la determinación del caudal debe realizarse en base a la carta topográfica de la cuenca del río y susafluentes, y la estadística de las precipitaciones medias anuales, mediante la aplicación de una fórmulaempírica denominada de “ Burkli-Ziegler”....”“.... de las estadísticas de aforos mencionada es importante excluir los datos de caudales que provengan decrecientes o de bajantes extraordinarias. Con ello se da cumplimiento a las disposiciones del Código Civilart. 2577....”
“... a los efectos de solucionar nuestro problema, recordaremos que el caudal que pasa por una secciónnormal de un cauce responde a la fórmula: Q = S. V ... donde S es la superficie de la sección normal de lacorriente de agua y V es la velocidad media del líquido a su paso por dicha sección... para el cálculo de Vexiste una fórmula moderna, utilizada para grandes cauces naturales, conocida como “formula de Herma-nek” cuya expresión es la siguiente: V = k’ √√√√ h . i , en el cual “ i ” es la pendiente media por metro, de lalínea de vaguada en la sección en estudio; k’ es un coeficiente variable cuyo valor se calcula con ayuda delas fórmulas:
k’ = 30.7 √√√√ h para h < 1.5 mk’ = 34 √√√√ h para 1.5 m < h < 6 mk’ = (50.2 + 0.5 h ) . √√√√ h . i para h > 6 m
a su vez, h = S / L (profundidad media adoptada)
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
219
donde L es la longitud del pelo de agua en la sección transversal considerada, o ancho de la superficielibre del líquido.... y con ello aplicar la fórmula de Hermanek...”
“.... el producto de S por V así obtenido, debe coincidir con el valor de Q. Ello generalmente no ocurre enla primera tentativa, pero si se logra en sucesivos tanteos ejecutados por el mismo procedimiento. Se consi-dera alcanzado el objetivo cuando el resultado difiere con Q en no más de un 3% como máximo. Ello eslógico aceptarlo así si se tiene en cuenta que todo el método, como cualquier otro que se intente, sólo es deresultados aproximados. En él hay errores acumulados propios del relevamiento topográfico, del dibujo, dela imprecisión de las fórmulas hidráulicas...como así también de la determinación del caudal prefijado....”
“.... Conseguidos para cada perfil transversal la posición de la línea pelo de agua que corresponda al cau-dal Q, se miden gráficamente sobre el dibujo del perfil las distancias horizontales existentes entre la poli-gonal base y los puntos de intersección del perfil del cauce con la línea del pelo de agua ( puntos de la líneade riberas), además de las distancias desde los mismos puntos a la línea de vaguada...Obtenidos los datosque permiten la ubicación relativa, respecto de la poligonal base, de los sucesivos puntos de las líneas deriberas de ambas márgenes, se procede a continuación a volcar los mismos sobre el dibujo de la planime-tría de la zona en estudio. Las líneas de riberas aparecerán así en el plano representadas por líneas que-bradas, tanto más sinuosas cuanto más cercanos entre sí se tomen los perfiles transversales. No hay razónvaledera que mueva a adoptar como definitivas tales líneas que solo introducen irregularidades en el linde,además del trabajo que representa su replanteo. Es preferible reemplazarlas por una poligonal de ladosmás largos... enlazados entre sí por alineamientos curvos entre tramos de inflexión notable. Este reempla-zo...debe hacerse gráficamente, con criterio compensador de superficies en forma estimativa, de modo talque una fracción de tierra quitada a un propietario por la línea compensadora...se vea compensada porotra fracción equivalente que se le adjudique por el nuevo trazado. Tales líneas rectificadas son las que se
adoptan como líneas de riberas definitivas, debidamente autorizadas por los propietarios de los fundoscolindantes...y por el Estado por intermedio de la oficina autorizada para ello...”
“... finalmente se procede al replanteo y amojonamiento de las líneas de riberas en el terreno,...controlando en todos los vértices que hayan quedado enfrentados que se cumpla la condición de tener lamisma cota...”
Nota de la Cátedra: Téngase presente que si compara la fórmula de Hermanek aplicada en esta publica-
ción, con las expuestas más arriba existen diferencias para alturas medias superiores a 1.5m., estas
fueron tomadas del libro de “hidráulica aplicada” del Ing. Stevenazzi y son las que empleaba la ex Direc-
ción Provincial de Hidráulica (hoy DAS) de la Provincia de Córdoba.
Se adjunta para ser incluido en el material bibliográfico, un trabajo presentado en el VIII Congreso Na-
cional de Cartografía “ La determinación efectiva de la Línea de Ribera en los cursos de agua no nave-
gables”, realizado por los Agrimensores José Belaga y Benito Vicioso, docentes de la Universidad Na-
cional de Rosario.
6.8: Determinación del Perilago
La poligonal límite que separa la propiedad públida y
privada en lagos y lagunas, se denomina Perilago.
Suponiendo con muchísima aproximación, que la su-
perficie de la laguna es una supuerficie equiponten-
cial, en ese caso resulta evidente que la línea de cos-
ta es una “curva de nivel”, cuyo valor es el de la cota
del vertedero.
(figura 10).
A ese valor, se le adiciona una altura de resguardo, el cual surge de calcular el máximo cau-
dal de embalse, que corresponde a una crecida extraordinaria de 100 años de recurrencia.
Esta nueva cota así definida determina una nueva curva de nivel, la curva del perilago.
Por ejemplo, en el Lago San Roque, la cota 35 es la altura del vertedero y la cota 38 es la
cota de perilago.
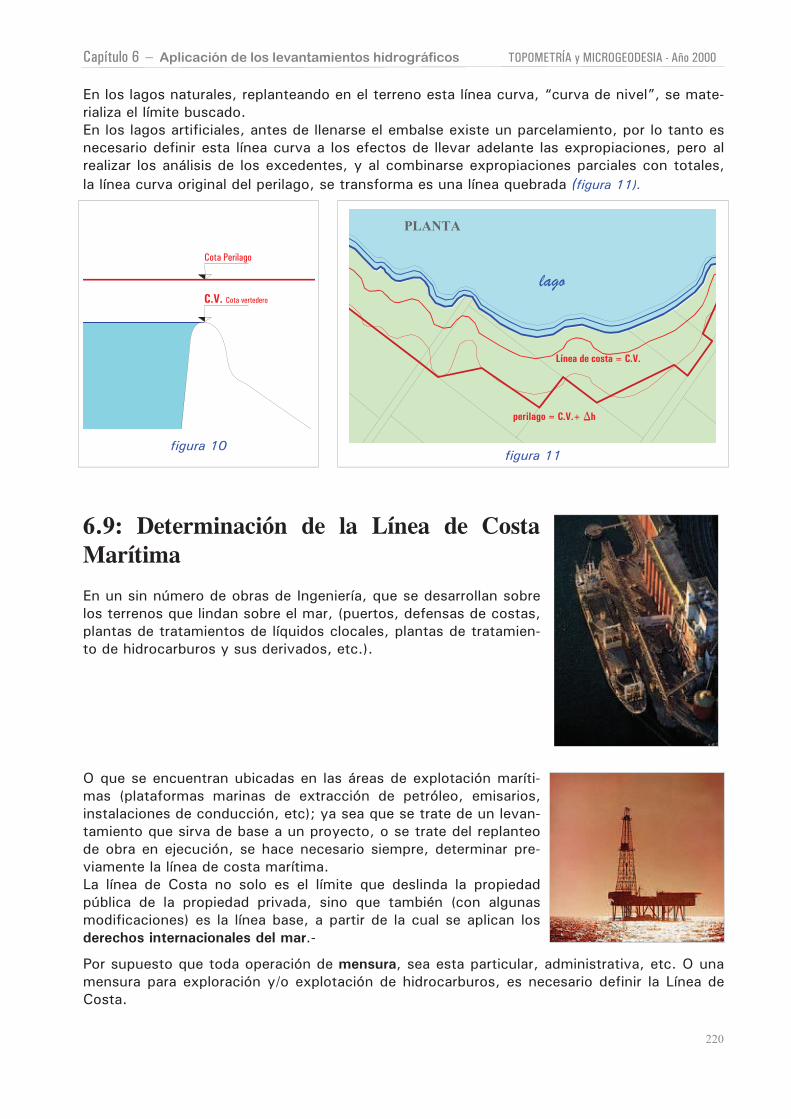
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
220
En los lagos naturales, replanteando en el terreno esta línea curva, “curva de nivel”, se mate-
rializa el límite buscado.
En los lagos artificiales, antes de llenarse el embalse existe un parcelamiento, por lo tanto es
necesario definir esta línea curva a los efectos de llevar adelante las expropiaciones, pero al
realizar los análisis de los excedentes, y al combinarse expropiaciones parciales con totales,
la línea curva original del perilago, se transforma es una línea quebrada (figura 11).
C.V. Cota vertedero
Cota Perilago
figura 10
PLANTA
Línea de costa = C.V.
lago
perilago = C.V.+ DDDDh
figura 11
6.9: Determinación de la Línea de Costa
Marítima
En un sin número de obras de Ingeniería, que se desarrollan sobre
los terrenos que lindan sobre el mar, (puertos, defensas de costas,
plantas de tratamientos de líquidos clocales, plantas de tratamien-
to de hidrocarburos y sus derivados, etc.).
O que se encuentran ubicadas en las áreas de explotación maríti-
mas (plataformas marinas de extracción de petróleo, emisarios,
instalaciones de conducción, etc); ya sea que se trate de un levan-
tamiento que sirva de base a un proyecto, o se trate del replanteo
de obra en ejecución, se hace necesario siempre, determinar pre-
viamente la línea de costa marítima.
La línea de Costa no solo es el límite que deslinda la propiedad
pública de la propiedad privada, sino que también (con algunas
modificaciones) es la línea base, a partir de la cual se aplican los
derechos internacionales del mar.-
Por supuesto que toda operación de mensura, sea esta particular, administrativa, etc. O una
mensura para exploración y/o explotación de hidrocarburos, es necesario definir la Línea de
Costa.
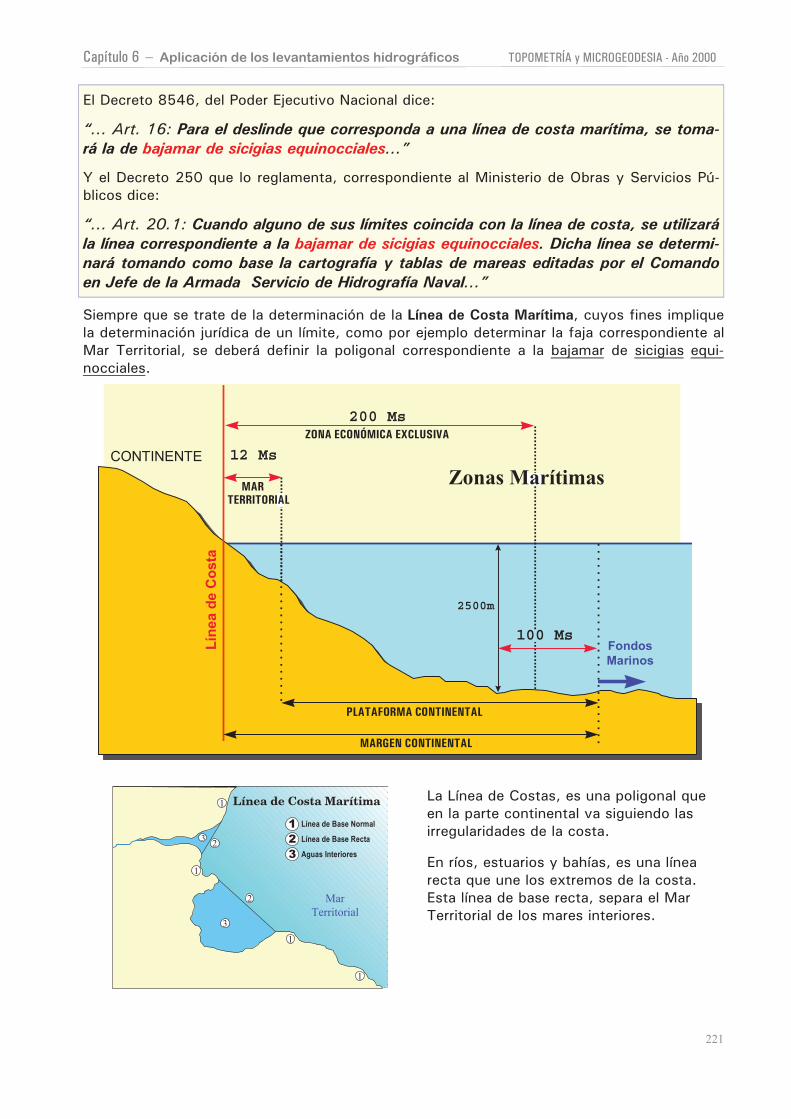
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
221
El Decreto 8546, del Poder Ejecutivo Nacional dice:
“... Art. 16: Para el deslinde que corresponda a una línea de costa marítima, se toma-
rá la de bajamar de sicigias equinocciales...”
Y el Decreto 250 que lo reglamenta, correspondiente al Ministerio de Obras y Servicios Pú-
blicos dice:
“... Art. 20.1: Cuando alguno de sus límites coincida con la línea de costa, se utilizará
la línea correspondiente a la bajamar de sicigias equinocciales. Dicha línea se determi-
nará tomando como base la cartografía y tablas de mareas editadas por el Comando
en Jefe de la Armada Servicio de Hidrografía Naval...”
Siempre que se trate de la determinación de la Línea de Costa Marítima, cuyos fines implique
la determinación jurídica de un límite, como por ejemplo determinar la faja correspondiente al
Mar Territorial, se deberá definir la poligonal correspondiente a la bajamar de sicigias equi-
nocciales.
Lín
ea d
e C
osta
CONTINENTE
MAR
12 Ms
ZONA ECONÓMICA EXCLUSIVA
200 Ms
2500m
Fondos
Marinos
MARGEN CONTINENTAL
PLATAFORMA CONTINENTAL
Zonas MarítimasTERRITORIAL
100 Ms
Línea de Costa Marítima
Línea de Base Normal1
Línea de Base Recta2
Aguas Interiores3
1
1
1
1
2
2
3
3
Mar
Territorial
La Línea de Costas, es una poligonal que
en la parte continental va siguiendo las
irregularidades de la costa.
En ríos, estuarios y bahías, es una línea
recta que une los extremos de la costa.
Esta línea de base recta, separa el Mar
Territorial de los mares interiores.
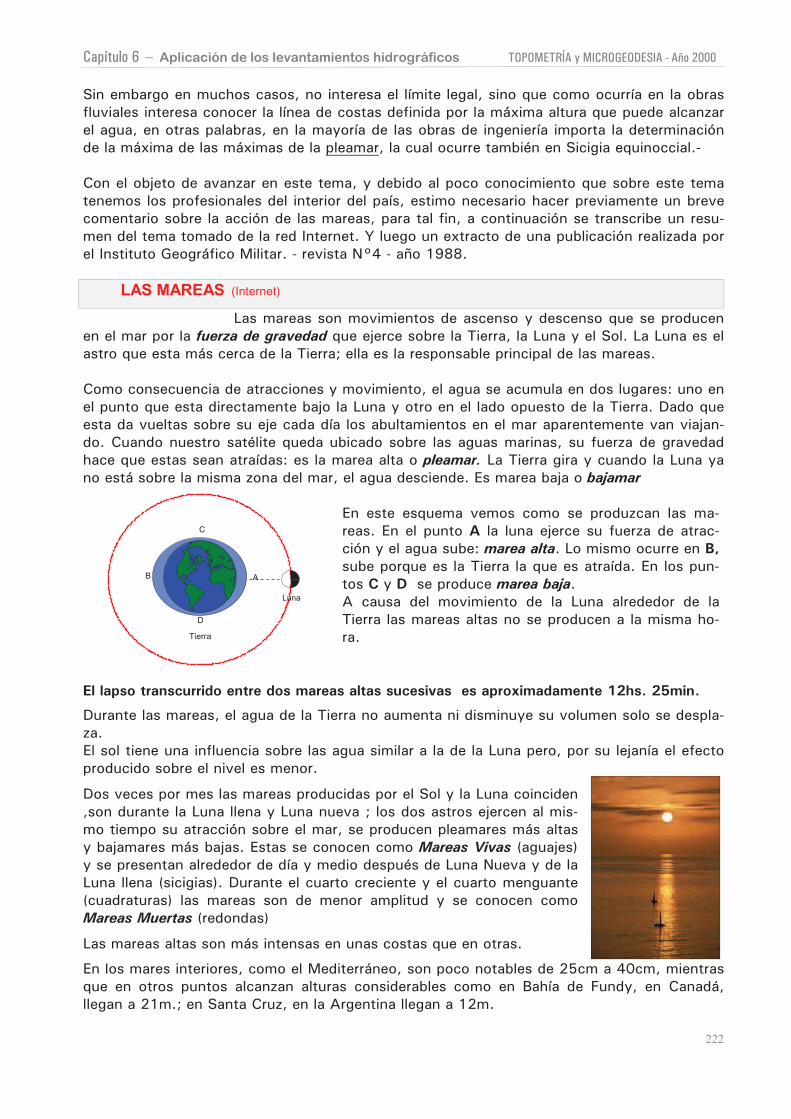
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
222
Sin embargo en muchos casos, no interesa el límite legal, sino que como ocurría en la obras
fluviales interesa conocer la línea de costas definida por la máxima altura que puede alcanzar
el agua, en otras palabras, en la mayoría de las obras de ingeniería importa la determinación
de la máxima de las máximas de la pleamar, la cual ocurre también en Sicigia equinoccial.-
Con el objeto de avanzar en este tema, y debido al poco conocimiento que sobre este tema
tenemos los profesionales del interior del país, estimo necesario hacer previamente un breve
comentario sobre la acción de las mareas, para tal fin, a continuación se transcribe un resu-
men del tema tomado de la red Internet. Y luego un extracto de una publicación realizada por
el Instituto Geográfico Militar. - revista N°4 - año 1988.
LAS MAREAS (Internet)
Las mareas son movimientos de ascenso y descenso que se producen
en el mar por la fuerza de gravedad que ejerce sobre la Tierra, la Luna y el Sol. La Luna es el
astro que esta más cerca de la Tierra; ella es la responsable principal de las mareas.
Como consecuencia de atracciones y movimiento, el agua se acumula en dos lugares: uno en
el punto que esta directamente bajo la Luna y otro en el lado opuesto de la Tierra. Dado que
esta da vueltas sobre su eje cada día los abultamientos en el mar aparentemente van viajan-
do. Cuando nuestro satélite queda ubicado sobre las aguas marinas, su fuerza de gravedad
hace que estas sean atraídas: es la marea alta o pleamar. La Tierra gira y cuando la Luna ya
no está sobre la misma zona del mar, el agua desciende. Es marea baja o bajamar
Tierra
C
D
AB
Luna
En este esquema vemos como se produzcan las ma-
reas. En el punto A la luna ejerce su fuerza de atrac-
ción y el agua sube: marea alta. Lo mismo ocurre en B,
sube porque es la Tierra la que es atraída. En los pun-
tos C y D se produce marea baja.
A causa del movimiento de la Luna alrededor de la
Tierra las mareas altas no se producen a la misma ho-
ra.
El lapso transcurrido entre dos mareas altas sucesivas es aproximadamente 12hs. 25min.
Durante las mareas, el agua de la Tierra no aumenta ni disminuye su volumen solo se despla-
za.
El sol tiene una influencia sobre las agua similar a la de la Luna pero, por su lejanía el efecto
producido sobre el nivel es menor.
Dos veces por mes las mareas producidas por el Sol y la Luna coinciden
,son durante la Luna llena y Luna nueva ; los dos astros ejercen al mis-
mo tiempo su atracción sobre el mar, se producen pleamares más altas
y bajamares más bajas. Estas se conocen como Mareas Vivas (aguajes)
y se presentan alrededor de día y medio después de Luna Nueva y de la
Luna llena (sicigias). Durante el cuarto creciente y el cuarto menguante
(cuadraturas) las mareas son de menor amplitud y se conocen como
Mareas Muertas (redondas)
Las mareas altas son más intensas en unas costas que en otras.
En los mares interiores, como el Mediterráneo, son poco notables de 25cm a 40cm, mientras
que en otros puntos alcanzan alturas considerables como en Bahía de Fundy, en Canadá,
llegan a 21m.; en Santa Cruz, en la Argentina llegan a 12m.
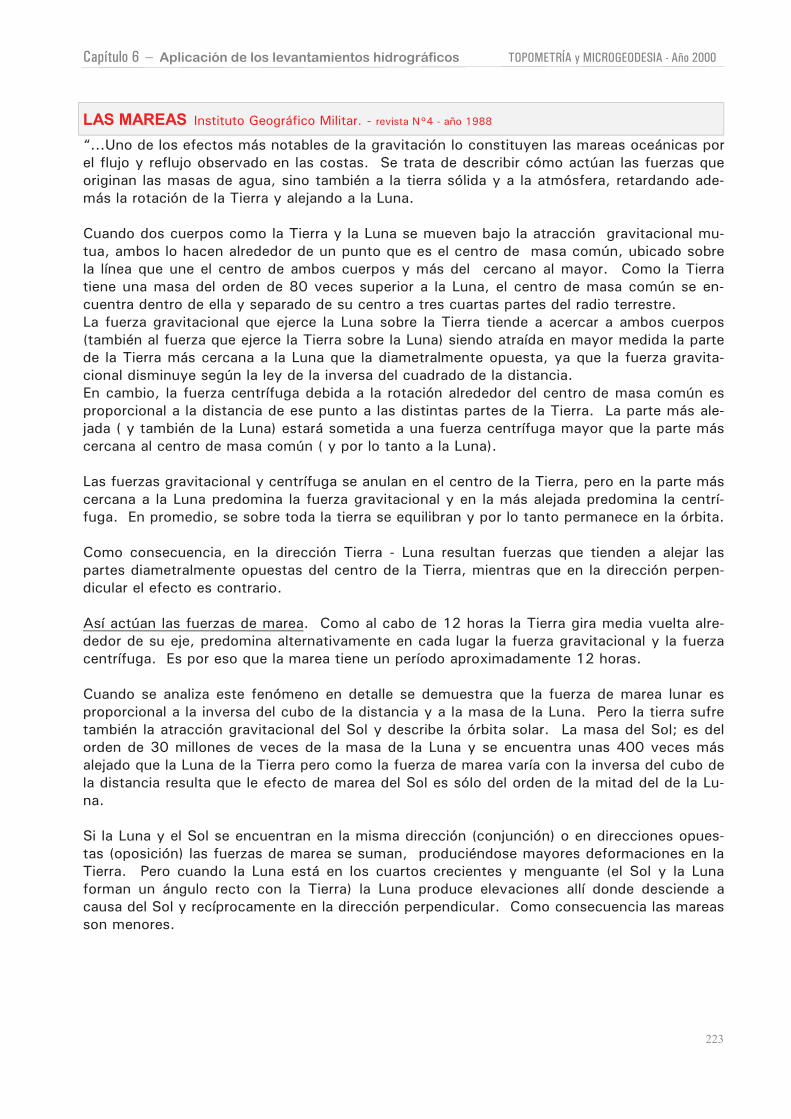
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
223
LAS MAREAS Instituto Geográfico Militar. - revista N°4 - año 1988
“...Uno de los efectos más notables de la gravitación lo constituyen las mareas oceánicas por
el flujo y reflujo observado en las costas. Se trata de describir cómo actúan las fuerzas que
originan las masas de agua, sino también a la tierra sólida y a la atmósfera, retardando ade-
más la rotación de la Tierra y alejando a la Luna.
Cuando dos cuerpos como la Tierra y la Luna se mueven bajo la atracción gravitacional mu-
tua, ambos lo hacen alrededor de un punto que es el centro de masa común, ubicado sobre
la línea que une el centro de ambos cuerpos y más del cercano al mayor. Como la Tierra
tiene una masa del orden de 80 veces superior a la Luna, el centro de masa común se en-
cuentra dentro de ella y separado de su centro a tres cuartas partes del radio terrestre.
La fuerza gravitacional que ejerce la Luna sobre la Tierra tiende a acercar a ambos cuerpos
(también al fuerza que ejerce la Tierra sobre la Luna) siendo atraída en mayor medida la parte
de la Tierra más cercana a la Luna que la diametralmente opuesta, ya que la fuerza gravita-
cional disminuye según la ley de la inversa del cuadrado de la distancia.
En cambio, la fuerza centrífuga debida a la rotación alrededor del centro de masa común es
proporcional a la distancia de ese punto a las distintas partes de la Tierra. La parte más ale-
jada ( y también de la Luna) estará sometida a una fuerza centrífuga mayor que la parte más
cercana al centro de masa común ( y por lo tanto a la Luna).
Las fuerzas gravitacional y centrífuga se anulan en el centro de la Tierra, pero en la parte más
cercana a la Luna predomina la fuerza gravitacional y en la más alejada predomina la centrí-
fuga. En promedio, se sobre toda la tierra se equilibran y por lo tanto permanece en la órbita.
Como consecuencia, en la dirección Tierra - Luna resultan fuerzas que tienden a alejar las
partes diametralmente opuestas del centro de la Tierra, mientras que en la dirección perpen-
dicular el efecto es contrario.
Así actúan las fuerzas de marea. Como al cabo de 12 horas la Tierra gira media vuelta alre-
dedor de su eje, predomina alternativamente en cada lugar la fuerza gravitacional y la fuerza
centrífuga. Es por eso que la marea tiene un período aproximadamente 12 horas.
Cuando se analiza este fenómeno en detalle se demuestra que la fuerza de marea lunar es
proporcional a la inversa del cubo de la distancia y a la masa de la Luna. Pero la tierra sufre
también la atracción gravitacional del Sol y describe la órbita solar. La masa del Sol; es del
orden de 30 millones de veces de la masa de la Luna y se encuentra unas 400 veces más
alejado que la Luna de la Tierra pero como la fuerza de marea varía con la inversa del cubo de
la distancia resulta que le efecto de marea del Sol es sólo del orden de la mitad del de la Lu-
na.
Si la Luna y el Sol se encuentran en la misma dirección (conjunción) o en direcciones opues-
tas (oposición) las fuerzas de marea se suman, produciéndose mayores deformaciones en la
Tierra. Pero cuando la Luna está en los cuartos crecientes y menguante (el Sol y la Luna
forman un ángulo recto con la Tierra) la Luna produce elevaciones allí donde desciende a
causa del Sol y recíprocamente en la dirección perpendicular. Como consecuencia las mareas
son menores.
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
224
El campo de gravedad terrestre y las fuerzas de marea.
Como es sabido, la fuerza de atracción terrestre actúa sobre todos los cuerpos y hacia el
centro de la Tierra. Esta fuerza resulta de la atracción gravitacional sobre la masa de esos
cuerpos ejercida por la masa de la Tierra y de la fuerza centrífuga debida a la rotación, mucho
menor que la primera. Es la fuerza de gravedad observada o peso de los cuerpos sobre la
tierra.
Como la fuerza peso de un cuerpo depende de la masa de ese cuerpo, cabe independizarse
de la masa, considerándola igual a la unidad. La fuerza de gravedad sobre la unidad de masa
tiene como equivalente exacto la aceleración de la gravedad, de acuerdo con la segunda ley
de Newton. Se la indica con g y es de aproximadamente 9.8m/seg². Su valor verdadero
varía con la latitud, altitud y las condiciones topográficas y geológicas locales. Definen el
campo gravitacional terrestre.
Del mismo modo, la fuerza de marea que actúa sobre la unidad de masa será la aceleración
de marea. Interesa mostrar cómo afecta la marea al campo de gravedad terrestre.
La aceleración de la gravedad es alterada tanto en intensidad como en dirección.
La mecánica celeste proporcional los elementos para el cálculo teórico del potencial de ma-
reas (la aceleración de marea es el gradiente de ese potencial) que se desarrolla en una serie
de numerosas funciones armónicas, llamadas ondas de mareas teóricas, las cuales se agru-
pan según el período en componentes semidiurnos, diurnos t de largo período (períodos de
aproximadamente 12 horas, 24 horas y meses respectivamente) que caracterizan los distin-
tos parámetros usados (excentricidad orbital, declinación de la Luna y del Sol, etc.).
Mareas oceánicas y atmosféricas
Lo expuesto hasta ahora resulta más intuitivo si se refiere al mar, no obstante la complejidad
de los factores que intervienen (fondos, costas, efectos termodinámicos, etc.).
Si la Tierra estuviera cubierta totalmente por el océano, se calcula teóricamente que se eleva-
rá en el orden de 60 cm. en Luna llena y Luna nueva. Pero en las costas se observan mareas
muy diferentes, aunque la información satelitaria indica que en medio del océano las mareas
no difieren mucho de la teoría.
Las mareas alcanzan gran altura si la línea costera tiene forma tal que el agua quede atrapada
en canales que se van estrechando (bahías) donde pueden alcanzar más de 12 metros. Fuera
de allí pueden ser muy pequeñas. En mares pequeños (Báltico, Negro) tales que en toda su
extensión están al mismo tiempo en pleamar o bajamar, no hay prácticamente mareas.
Un efecto importante de la mareas es el rozamiento. Al desplazarse los abultamientos de las
mareas alrededor de la Tierra debido a la rotación, se producen rozamientos en el fondo
oceánico, sobre todo en mares extensos y poco profundos. Como resultado se produce una
disipación de energía y la Tierra aumenta su periodo de rotación en el orden de 2 x 10-8 seg.
por día, que se acumulan a medida que transcurre el tiempo.
Hace 1988 años los días tenían 0,0145 segundos menos. Desde aquella época el retardo
acumulado resultaría la suma de los términos de la progresión aritmética: 0,0145 x 1988 x
325.25/2 = 1h 28m.
• Esto demuestra que la Tierra no es un buen reloj, particularmente para predicciones astro-
nómicas a largo plazo.
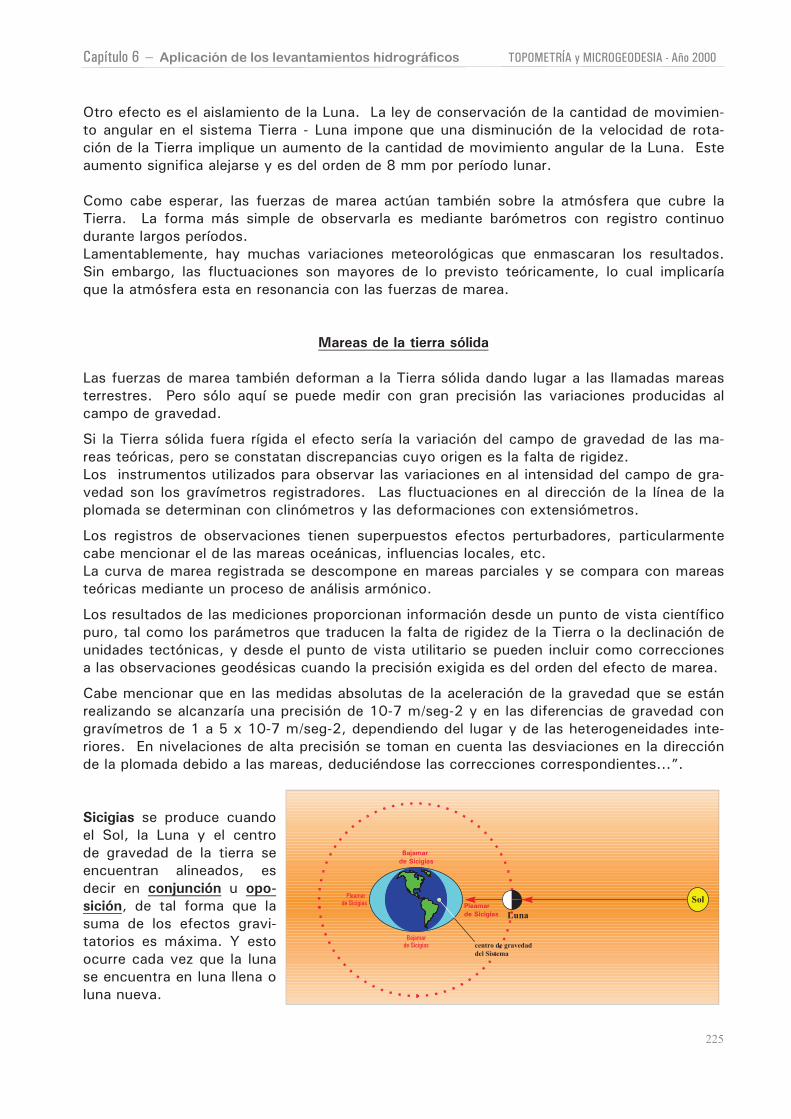
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
225
Otro efecto es el aislamiento de la Luna. La ley de conservación de la cantidad de movimien-
to angular en el sistema Tierra - Luna impone que una disminución de la velocidad de rota-
ción de la Tierra implique un aumento de la cantidad de movimiento angular de la Luna. Este
aumento significa alejarse y es del orden de 8 mm por período lunar.
Como cabe esperar, las fuerzas de marea actúan también sobre la atmósfera que cubre la
Tierra. La forma más simple de observarla es mediante barómetros con registro continuo
durante largos períodos.
Lamentablemente, hay muchas variaciones meteorológicas que enmascaran los resultados.
Sin embargo, las fluctuaciones son mayores de lo previsto teóricamente, lo cual implicaría
que la atmósfera esta en resonancia con las fuerzas de marea.
Mareas de la tierra sólida
Las fuerzas de marea también deforman a la Tierra sólida dando lugar a las llamadas mareas
terrestres. Pero sólo aquí se puede medir con gran precisión las variaciones producidas al
campo de gravedad.
Si la Tierra sólida fuera rígida el efecto sería la variación del campo de gravedad de las ma-
reas teóricas, pero se constatan discrepancias cuyo origen es la falta de rigidez.
Los instrumentos utilizados para observar las variaciones en al intensidad del campo de gra-
vedad son los gravímetros registradores. Las fluctuaciones en al dirección de la línea de la
plomada se determinan con clinómetros y las deformaciones con extensiómetros.
Los registros de observaciones tienen superpuestos efectos perturbadores, particularmente
cabe mencionar el de las mareas oceánicas, influencias locales, etc.
La curva de marea registrada se descompone en mareas parciales y se compara con mareas
teóricas mediante un proceso de análisis armónico.
Los resultados de las mediciones proporcionan información desde un punto de vista científico
puro, tal como los parámetros que traducen la falta de rigidez de la Tierra o la declinación de
unidades tectónicas, y desde el punto de vista utilitario se pueden incluir como correcciones
a las observaciones geodésicas cuando la precisión exigida es del orden del efecto de marea.
Cabe mencionar que en las medidas absolutas de la aceleración de la gravedad que se están
realizando se alcanzaría una precisión de 10-7 m/seg-2 y en las diferencias de gravedad con
gravímetros de 1 a 5 x 10-7 m/seg-2, dependiendo del lugar y de las heterogeneidades inte-
riores. En nivelaciones de alta precisión se toman en cuenta las desviaciones en la dirección
de la plomada debido a las mareas, deduciéndose las correcciones correspondientes...”.
Sicigias se produce cuando
el Sol, la Luna y el centro
de gravedad de la tierra se
encuentran alineados, es
decir en conjunción u opo-
sición, de tal forma que la
suma de los efectos gravi-
tatorios es máxima. Y esto
ocurre cada vez que la luna
se encuentra en luna llena o
luna nueva.
Sol
Bajamar
de Sicigias
Bajamarde Sicigias
Luna
Pleamar de Sicigias Pleamar
de Sicigias
centro de gravedad
del Sistema
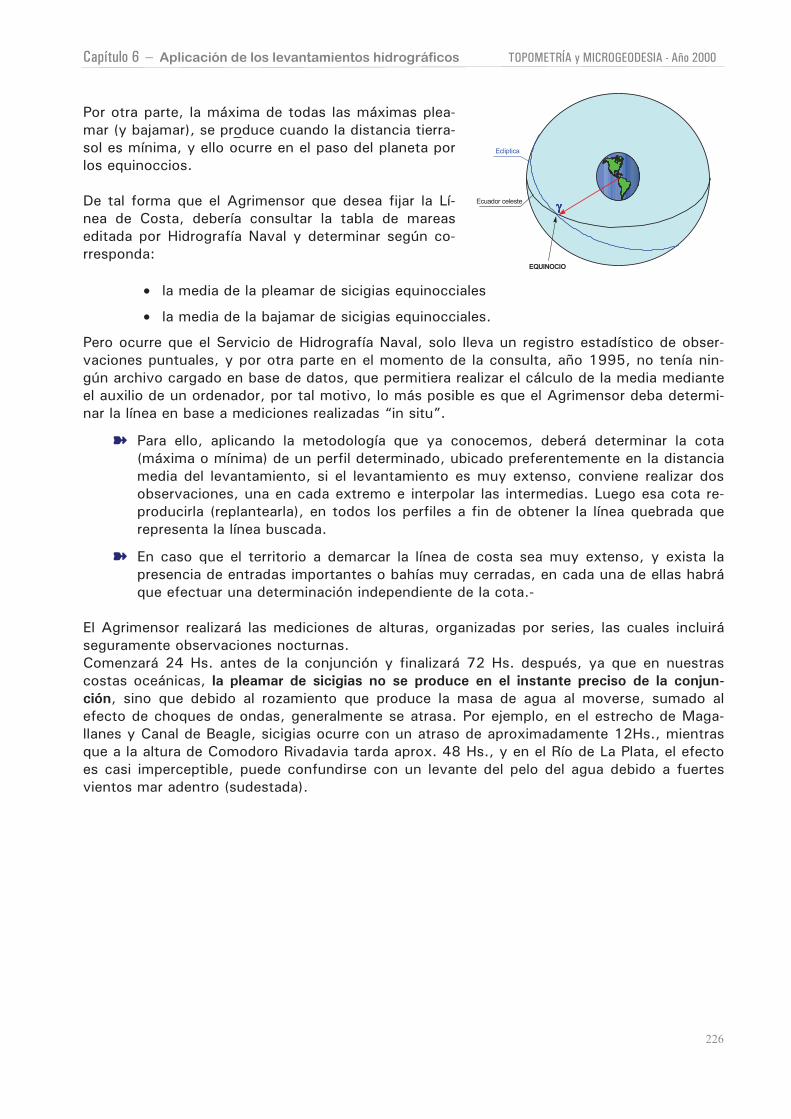
Capítulo 6 – Aplicación de los levantamientos hidrográficos TOPOMETRÍA y MICROGEODESIA - Año 2000
226
Por otra parte, la máxima de todas las máximas plea-
mar (y bajamar), se produce cuando la distancia tierra-
sol es mínima, y ello ocurre en el paso del planeta por
los equinoccios.
De tal forma que el Agrimensor que desea fijar la Lí-
nea de Costa, debería consultar la tabla de mareas
editada por Hidrografía Naval y determinar según co-
rresponda:
Ecuador celeste
Ecliptica
EQUINOCIO
γγγγ
• la media de la pleamar de sicigias equinocciales
• la media de la bajamar de sicigias equinocciales.
Pero ocurre que el Servicio de Hidrografía Naval, solo lleva un registro estadístico de obser-
vaciones puntuales, y por otra parte en el momento de la consulta, año 1995, no tenía nin-
gún archivo cargado en base de datos, que permitiera realizar el cálculo de la media mediante
el auxilio de un ordenador, por tal motivo, lo más posible es que el Agrimensor deba determi-
nar la línea en base a mediciones realizadas “in situ”.
Para ello, aplicando la metodología que ya conocemos, deberá determinar la cota
(máxima o mínima) de un perfil determinado, ubicado preferentemente en la distancia
media del levantamiento, si el levantamiento es muy extenso, conviene realizar dos
observaciones, una en cada extremo e interpolar las intermedias. Luego esa cota re-
producirla (replantearla), en todos los perfiles a fin de obtener la línea quebrada que
representa la línea buscada.
En caso que el territorio a demarcar la línea de costa sea muy extenso, y exista la
presencia de entradas importantes o bahías muy cerradas, en cada una de ellas habrá
que efectuar una determinación independiente de la cota.-
El Agrimensor realizará las mediciones de alturas, organizadas por series, las cuales incluirá
seguramente observaciones nocturnas.
Comenzará 24 Hs. antes de la conjunción y finalizará 72 Hs. después, ya que en nuestras
costas oceánicas, la pleamar de sicigias no se produce en el instante preciso de la conjun-
ción, sino que debido al rozamiento que produce la masa de agua al moverse, sumado al
efecto de choques de ondas, generalmente se atrasa. Por ejemplo, en el estrecho de Maga-
llanes y Canal de Beagle, sicigias ocurre con un atraso de aproximadamente 12Hs., mientras
que a la altura de Comodoro Rivadavia tarda aprox. 48 Hs., y en el Río de La Plata, el efecto
es casi imperceptible, puede confundirse con un levante del pelo del agua debido a fuertes
vientos mar adentro (sudestada).
Capítulo 6 – Línea de Ribera TOPOMETRÍA y MICROGEODESIA - Año 2000JOSE D. BELAGA - BENITO M. VICIOSO
227
VIII CONGRESO NACIONALDE CARTOGRAFÍA
Comité de HidrografíaTEMA: LÍNEA DE RIBERA
LA DETERMINACIÓN EFECTIVA DE LA LINEA DE RIBERAEN LOS CURSOS DE AGUA NO NAVEGABLES
AUTORES: Prof. Agrim. JOSE D. BELAGAProf. Agrim. BENITO M. VICIOSO
DEPARTAMENTO DE ORDENAMIENTO TERRITORIALESCUELA DE AGRIMENSURAFACULTAD DE CIENCIAS EXACTAS, INGENIERIA Y AGRIMENSURAUNIVERSIDAD NACIONAL DE ROSARIO
Abril 1991
Capítulo 6 – Línea de Ribera TOPOMETRÍA y MICROGEODESIA - Año 2000JOSE D. BELAGA - BENITO M. VICIOSO
228
LA DETERMINACIÓN EFECTIVA DE LA LINEA DE RIBERA
EN LOS CURSOS DE AGUA NO NAVEGABLES
I.- INTRODUCCIÓN
El problema de la determinación de la Línea de Ribera ha sido ampliamente abordado através del tiempo desde diferentes ópticas y especialidades. A pesar de ello, continúan aún sinresolución satisfactoria algunos aspectos que resulten de vital importancia. Entre ellos, entendemosque el principal es resolver la dicotomía jurídica originada por la Ley Nacional Nº 17.711, entrelos artículos 2.340 inciso 4º y 2.577 del Código Civil, al sentar dos criterios técnicos incompatibles,cuales son: “las crecidas medias ordinarias” y “las más altas aguas en su estado normal”.
Sin embargo en este trabajo, nos referiremos a otro aspecto de la problemática relacionada.con la Línea de Ribera que también adquiere singular trascendencia, como lo es su efectivadeterminación en los cursos de agua no navegables independientemente de cual sea el criterio deinterpretación jurídica de los mencionados artículos del Código Civil que se decida adoptar para suresolución.
Il.- COMPETENCIA EN LA DETERMINACIÓN DE LA LINEA DE RIBERA
La fijación sobre el terreno de la Línea de Ribera es de competencia de la AdministraciónPublica, al respecto es claro el Articulo 2.750 (2da. parte) del Código Civil: “El deslinde de losfundos que dependen del dominio publico corresponde a la jurisdicción administrativa”. Ahorabien, en los cursos de agua no navegables - ya sean éstos provinciales o interprovinciales lacompetencia para la determinación y fijación de la Línea de Ribera es provincial (salvo que elterritorio sea federal, en cuyo caso el dominio del curso de agua también lo es), ya que el territoriopor donde corre el curso de agua es de dominio publico provincial.
Por otra parte por tratarse de un limite territorial de orden público (deslinda el dominiopúblico), debe ser registrado, cartografiado y publicitado a través del organismo administrativo delCatastro Territorial, sin perjuicio de que una vez determinado, amojonado y registrado en elCatastro Provincial, también sea registrada en los Catastros Municipales donde el curso de aguaatraviesa jurisdicción Municipal o Comunal.
III.- DETERMINACIÓN DE LA COTA DE LINEA DE RIBERA EN LOS CURSOS DEAGUA NO NAVEGABLES
Con respecto al método para la resolución técnica de la Línea de Ribera, el tema lo hemosconsiderado intensamente en un anterior trabajo (1), proponiendo incluso una metodología técnico- hidrológica aplicable a cursos de agua de llanura - basada en la utilización de modeloshidrológicos de simulación de crecidas en función de los parámetros geomorfológicos,edafológicos, pluviométricos y de escorrentía de la cuenca en estudio- por lo cual no nosreiteraremos aquí.
Sin embargo, cabe destacar que en la Provincia de Santa Fe, como ocurre en la mayoría delas restantes provincias, no existe metodología alguna aprobada o reconocida por las autoridadescompetentes (Catastro e Hidráulica) para los cursos de agua no navegables.
Las Instrucciones para Agrimensores y los Códigos de Aguas Provinciales traen, en general,disposiciones referidas al replanteo topográfico de la Línea de Ribera, dejando, por lo común, acriterio del perito interviniente la determinación de su ubicación territorial (en la Provincia de Santa
Capítulo 6 – Línea de Ribera TOPOMETRÍA y MICROGEODESIA - Año 2000JOSE D. BELAGA - BENITO M. VICIOSO
229
Fe, ver artículos 33, 34 y 35 de las Instrucciones Generales para Mensuras – Resolución Nº 6.075 yDecretos Nº 9.967 y Nº 965).
IV.- LA ACTUACION DEL AGRIMENSOR EN LA REALIZACION DE MENSURAS DEINMUEBLES COLINDANTES A CURSOS DE AGUA NO NAVEGABLES
1.Estudio e interpretación del título de propiedad del inmueble a mensurar.
Es muy común observar en los títulos de propiedad de inmuebles linderos con ríos oarroyos, en la parte correspondiente a su descripción literal, expresiones tales como que el terrenose extiende “hasta el arroyo”, ó “hasta la orilla del arroyo” ó “hasta la barranca ” ó, lo que espeor, “hasta el medio del arroyo” y hasta incluso que el título “incluye el arroyo”. Desde luego,sea cual fuere la expresión usada en el título el límite del inmueble con el curso de agua no es otroque la Línea de Ribera.
Ello es así porque el curso de agua es dominio público (Articulo 2.340 Inciso 3º, y 2.657 “infine” del Código Civil), por tanto, no puede ser susceptible de apropiación privada, ya que éste, deacuerdo al Código Civil, es imprescriptible, inalienable e inembargable. El dominio publico tienepreeminencia en nuestro derecho sobre el dominio privado.
Por otra parte, el Articulo 3.270 del Código Civil preceptúa: “Nadie puede trasmitir a otrosobre un objeto, un derecho mejor o más extenso que el que gozaba; y recíprocamente nadie puedeadquirir sobre un objeto un derecho mejor y más extenso que el que tenia aquel de quien loadquiere”.
En forma análoga el Articulo 2.571 del Código Civil al tratar el tema de la posesión,establece; ”La posesión de buena fe de mayor parte de terrenos que la que expresan los títulos, noaprovecha al que la ha tenido”.
De modo tal que más allá de la expresión que se utilice en el título para definir la extensiónmaterial del derecho en relación al curso de agua, éste llega hasta la Línea de Ribera., por lo que elAgrimensor al realizar la mensura deberá respetar necesariamente este límite para no contrariar laletra y el espíritu del Código Civil.
Por ende, el dominio del propietario ribereño llega hasta el límite con el dominio público,pues de ninguna manera pueden constituirse o trasmitirse derechos reales sobre los que no se tienetitularidad, mucho menos cuando ésta le corresponde al Estado.
De modo tal que la mensura deberá extenderse hasta la Línea de Ribera y no incluir, comolo hemos verificado en algunos planos inscriptos en la Dirección Provincial de Catastro, extensionesde terreno más allá de la misma, por ejemplo, extendiendo la propiedad hasta el eje del curso deagua mediante una extrapoligonal. Desde luego, en estos casos, hay una responsabilidad solidariaentre el profesional interviniente y la Dirección Provincial de Catastro, por no hacer respetar eldominio público del Estado, con el agravante de que estos planos pueden dar lugar, a posteriori, anuevos títulos de propiedad que originen derechos nulos o inválidos sobre esas fracciones (Confr.Artículos 2.336, 2.337, 2.411, 2.468, 3.270, 4.007 y concordantes Código Civil). Esto se agrava aúnmás en numerosos casos en que las provincias han realizado expropiaciones parciales o totales deinmuebles linderos a cursos de agua para realizar determinadas obras publicas, habiendo pagado lascorrespondientes indemnizaciones por la extensión señalada en los títulos, es decir, que se hallegado a la incongruencia de indemnizar a particulares por fracciones que siempre han pertenecido,y no han dejado de hacerlo, al dominio publico provincial.
Desde luego, lo antedicho es válido también para los cursos de agua navegables - porejemplo el río Paraná -; sin embargo, en éstos el problema es menor ya que existen cotas de Línea
Capítulo 6 – Línea de Ribera TOPOMETRÍA y MICROGEODESIA - Año 2000JOSE D. BELAGA - BENITO M. VICIOSO
230
de Ribera fijadas en distintos puntos del río por lo que la labor del Agrimensor se reduce a trasladartopográficamente la cota al lugar de la mensura y replantearla luego en el terreno, procediendofinalmente al amojonamiento de los puntos por donde pasa la Línea de Ribera.
2. La determinación y materialización de la Línea de Ribera
Decíamos anteriormente que la competencia para la determinación de la Línea de Riberacorresponde a la autoridad administrativa provincial. Para ello, ésta debe contar con unprocedimiento técnico reconocido oficialmente. En nuestra provincia, al no estar aprobada aun talmetodología, la Dirección Provincial de Catastro no exige la fijación de la Línea de Ribera en losplanos de mensura, por lo que, en el mejor de los casos, el profesional actuante desarrolla unapoligonal que sigue aproximadamente las formas del cauce incluyendo a veces una extrapoligonalque llega hasta la barranca - si la hay- y, muy excepcionalmente, determinando un “límiteprovisorio” (equivalente a la “Línea de Resaca” marítima), utilizando criterios geomorfológicos yedafológicos expeditivos.
Estos criterios son, en mayor o menor medida, incorrectos, puesto que el limite preciso conel dominio público queda indefinido, pendiente de su efectiva y correcta determinación ydemarcación, dando lugar inclusive a la “confusión de límites”, tipificada en el Código Civil en suArtículo Nº 2.746.
3.Criterios adoptados en otras Provincias
Si bien para la determinación de la Línea de Ribera en los cursos de agua no navegables noexisten en general, como ya lo hemos señalado, metodologías oficialmente aprobadas por lasautoridades competentes, al menos en algunas provincias se utilizan criterios expeditivos opragmáticos que, aunque no son la solución correcta desde el punto de vista jurídico - hidrológicodel problema ni tampoco pueden dar lugar a que se releve de la determinación efectiva del límite,constituyen en algunos casos una aproximación aceptable hasta tanto se adopten criteriosdefinitivos.
Un punto de partida para estas soluciones provisorias, si bien aplicada al litoral marítimo, loconstituye la Resolución Nº 26 del IV Congreso Nacional de Cartografía de 1978 que propuso laadopción de la “Línea de Resaca”, la cual es determinada por la naturaleza y puede ser definidamediante criterios edafo - geomorfológicos a partir de la observación y peritaje sobre el terreno porparte del agrimensor actuante.
Uno de los criterios que podría tenerse en cuenta es el adoptado en la Provincia de Córdobapor la Dirección Provincial de Hidráulica por Resolución Nº 11.821/85 y 2.147/88, que en su primerArtículo establece:
ARTICULO 1: “ En todo trabajo de mensura y/o subdivisión, con excepción de los loteos, depropiedades ubicadas en zonas rurales, que implique algún límite frente a cursos naturales de agua,lagos ó lagunas y que, en consecuencia, debe someterse a visación por parte de esta Repartición enrelación con la línea de ribera, se deberá consignar en el plano a visar, la siguiente leyenda: “EL LÍMITE DEL INMUEBLE CON EL CAUCE DEL (RIO Ó ARROYO) QUEDA FIJADO EN EL PRESENTEPLANO EN FORMA PROVISORIA Y AL SOLO EFECTO DE SU INSCRIPCION, SIENDO EL LÍMITE DEFINITIVOEL QUE RESULTE DE LA OPORTUNA DETERMINACION TECNICA DE LA LÍNEA DE RIBERA”.En el caso de propiedades atravesadas por cursos naturales de agua, se incluirá en el plano lasiguiente leyenda:“LA SUPERFICIE OCUPADA POR EL CAUCE DEL (RIO Ó ARROYO) QUE CRUZA EL INMUEBLEMENSURADO, ES DE DOMINIO PÚBLICO DEL ESTADO, QUEDANDO SUS LÍMITES SUJETOS A LAOPORTUNA DETERMINACION TÉCNICA DE LA LÍNEA DE RIBERA.”
Para los casos donde él o los inmuebles estuvieran colindando con cursos y a su vez
Capítulo 6 – Línea de Ribera TOPOMETRÍA y MICROGEODESIA - Año 2000JOSE D. BELAGA - BENITO M. VICIOSO
231
atravesados por otros, deberían incluirse ambas leyendas.Asimismo para el caso particular de loteos y urbanizaciones, la Provincia de Córdoba
establece que el Agrimensor deberá calcular el caudal del río o arroyo correspondiente a lasmayores crecidas ordinarias utilizando fórmulas empíricas como Hermanek y Burkli- Ziegler,juntamente con la realización de relevamientos topográficos y perfiles del curso de agua quepermitan ubicar territorialmente las cotas correspondientes a la Línea de Ribera, lo cual deberá seraprobado par la Dirección de Hidráulica previo a la inscripción del plano de mensura en Catastro.
La Provincia de San Luis, a través de la Publicación Técnica Nº1 del Colegio deAgrimensores, he establecido una metodología para la determinación de las mayores crecidasordinarias asociadas a la Línea de Ribera, introduciendo el análisis de frecuencia. Si bien elconcepto es correcto, la manera de ser aplicado no resulta satisfactoria, siendo conveniente surevisión a fin de su perfeccionamiento.
V.- PROPUESTA PARA LOS PLANOS DE MENSURA
Hasta tanto se adopten a nivel oficial las metodologías destinadas a la determinación de lascotas correspondientes a la Línea de Ribera en los cursos de agua no navegables, resulta acertadodesde el punto de vista jurídico y de la Teoría de Limites Territoriales incorporar en los planos demensura y demás documentos cartográficos que representen inmuebles linderos a cursos de agua decarácter registrable, los textos adoptados por la Provincia de Córdoba, a través de la Resolución Nº11.821/85 y Nº 2.147/88 de la Dirección Provincial de Hidráulica transcriptos anteriormente.
Esta propuesta se fundamenta en la existencia de ciertas condiciones esenciales para ladeterminación de límites territoriales:
1.La existencia de dos causas jurídicas homogéneas, distintas y contiguas.
2.Que esas causas jurídicas homogéneas pueden ser aplicadas al terreno unívocamente.
3.La existencia de uno o más titulares (propietarios o poseedores) de esas causas jurídicashomogéneas.
En el caso que nos ocupa se cumplen las condiciones l y 3 (dominio público provincial delcurso de agua y dominio privado de los inmuebles fronteros al mismo), pero no se cumple lacondición 2 en virtud de que la incertidumbre sobre la ubicación efectiva de la Línea de Ribera (queindiscutiblemente debe ser única) condiciona la extensión territorial y el deslinde de ambas causasjurídicas, pudiendo dar lugar, inclusive, al condominio por confusión de límites tipificado en elArticulo 2.746 y s.s. del Código Civil.
Asimismo, consideramos que las referidas leyendas incluidas en los planos de mensuradebieran transcribirse, además, en el cuerpo de les escrituras y demás instrumentos públicosconstitutivos o traslativos de dominio a los efectos de lograr la correcta publicidad registral de talessituaciones. En aquellas jurisdicciones donde se encuentre vigente el certificado catastral comorequisito previo a la constitución, transmisión o modificación de derechos reales sobre inmuebles,las leyendas debieran transcribirse en su cuerpo a fin de alcanzar la más amplia y efectivapublicidad territorial.
Es importante destacar también, la necesidad de representar cartográficamente la traza de laLínea de Ribera en los planos catastrales, utilizando para ello la simbología adecuada que permitadistinguir plenamente los diferentes casos que se originen.
VI.- CONCLUSIONES
La adopción en las diferentes provincias de metodologías que permitan determinarcorrectamente la Línea de Ribera en los cursos de agua no navegables es imprescindible realizarla
Capítulo 6 – Línea de Ribera TOPOMETRÍA y MICROGEODESIA - Año 2000JOSE D. BELAGA - BENITO M. VICIOSO
232
cuanto antes, pues regularizará el aspecto legal encuadrado dentro del Código Civil estableciendo eldeslinde de los predios ribereños con el dominio público y, por otra parte, contribuirá a un adecuadodesarrollo parcelario fundamental para la implementación y ejecución de una política armónica enmateria de Ordenamiento Territorial.
A modo de complemento nos permitimos proponer la siguiente ponencia:
EL CONGRESO NACIONAL DE CARTOGRAFIA RESUELVE:
1) Recomendar a las provincias que a través de sus organismos competentes adopten metodologíasoficiales para le determinación de las cotas correspondientes a la Línea de Ribera en los cursos deagua no navegables.
2) Recomendar se incorpore en los documentos cartográficos portadores de actos de levantamientoterritoriales de carácter registrable, en forma provisoria y hasta tanto se ponga en vigencia elcorrespondiente procedimiento técnico, las siguientes leyendas según corresponda:
a. “EL LÍMITE DEL INMUEBLE CON EL CAUCE DEL (RIO Ó ARROYO) QUEDA FIJADO ENEL PRESENTE PLANO EN FORMA PROVISORIA Y AL SOLO EFECTO DE SUINSCRIPCION, SIENDO EL LÍMITE DEFINITIVO EL QUE RESULTE DE LA OPORTUNADETERMINACION TECNICA DE LA LÍNEA DE RIBERA”.
b. “LA SUPERFICIE OCUPADA POR EL CAUCE DEL (RIO Ó ARROYO) QUE CRUZA ELINMUEBLE MENSURADO, ES DE DOMINIO PÚBLICO DEL ESTADO, QUEDANDO SUSLÍMITES SUJETOS A LA OPORTUNA DETERMINACION TÉCNICA DE LA LÍNEA DERIBERA.”
3) Recomendar se otorgue a los referidos textos la más amplia publicidad registral y catastral.
NOTA: (1) Belaga, J. y Vicioso B.; “La Línea de Ribera en los cursos de agua no navegables”, Revista Topografía yCartografía TOPCART, Vol 1 Nº1, Ene-feb 1984, Madrid
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
233
EL REPARTO DE SUEÑOS (Fragmento)
Sueños rojos, azules y verdes,Tengo sueños de todos los colores.Sueños blancos y sueños rosados
Para todas las pibas de Flores.Hay un sueño, tan largo
Que al soñarlo se escapa la vida.Y uno corto que es como un suspiroQuien lo sueña, sueña que suspira.
En esta canastayo traigo, señores
los sueños famososdel barrio de Flores.
Tengo un sueño, dorado, imposible,Tan hermoso que todos lo quierenY otro negro, perverso y terrible:El que no se despierta se muere.Tengo aquí, para dar a los pobres
Lujosisimos sueños reales .Son los mismos que sueñan los reyes,
al soñar somos todos iguales.En esta canasta
yo traigo, señores,los sueños famosos
del barrio de Flores.
Repasemos algunos rasgos del Angel Gris en los quecoinciden la mayoría de los autores consultados. * El ángel era invisible. Se sabe sin embargo, quellevaba una túnica gris y que sus alas estaban un pocosucias. "Que puede ofrecer un ángel que no sea fantasía o algún humilde milagro de cuarta categoría." * Se creía que había sido castigado por alguna transgre-sión. Su pecado debió haber sido también humilde, puesno había nada de satánico en susprocedimientos. * Era servicial, pero todos procuraban evitar su ayuda.Por alguna razón, el Angel creía que la melancolía y eldesencuentro eras cosas deseables y entonces recompen-saba a sus entenados con tristezas permanentes. * Se ha dicho que odiaba a los automovilistas y por esointerfería el funcionamiento de los semáforos. * Siempre le gustaron las canciones tristes. A vecesdictaba composiciones al músico Ives Castagnino. Lasrubias de la calle Caracas han oído serenatas angelicalesque parecían surgir de la sombra o de la nada.
* Participaba en todos los juegos del barrio. El rusoSalzman afirmaba que la probabilidad de hacer un siete en elpase ingles era dos veces mayor en Flores que en cualquierotro lugar. Carlos Menendez, un renombrado ventajero de lacalle Bolivia, juro que en diez años de actividad en todas lastimbas de la barriada jamas le había tocado el siete de oros,carta que recibía con razonable frecuencia en Caseros o enPalermo. * Repartía sueños desde el anochecer hasta el alba, llevandouna canasta de panadero. * No le estaba permitido salir de Flores. Los duendes, losfantasmas y los demonios de otros rumbos se burlaban de el.Sin pretensión de antología, damos a conocer seguidamentealgunos textos y datos biográficos de los escritores oscurosque se ocuparon del Angel Gris. Manuel Mandeb solía jactarse de haber olvidado la teoría dela relatividad, cuando en verdad jamas la había conocido. Enel mismo sentido, Pérez Brunetto, con fingida amargura,decía que era un escritor olvidado: jamas alcanzo semejanterango. Pese a todo, algunos de sus cuentos impresionaban asus primas hasta limites que el propio artista trato de ocultar:CARLOS Y AMELIA: El primer corazón lo encontró pinta-do en la pared del frente de su casa. En su interior, entrefiruletes, se leía "Carlos y Amelia". Aunque se llamaba Car-los no se dio por aludido, pues no conocía ninguna Amelia.El segundo lo impresiono un poco mas. Estaba dibujado adedo limpio en la vidriera del bar "Tío Fritz." Al tercercorazón comprendió que el asunto lo concernía. Se le apare-ció de repente al despegar del ropero una foto de Laura Hi-dalgo. Después empezó a encontrar corazones por todaspartes: en el baño de la cancha de Velez, detrás del almana-que de una tintorería, en un cuaderno viejo y en un árbol dela plaza a una altura impracticable para cualquier enamorado.No le costo nada sospechar algo prodigioso. Ninguno de susamigos tenia ingenio ni tesón para una broma semejante. Elultimo corazón se presento en un barrilete que acababa dearriar y que carecía de toda inscripción al ser remontado. Lohabían dibujado en el cielo. Días mas tarde, Carlos conocióa Amelia. Era hermosa pero triste y fría. Ahorraremos trami-tes literarios si decimos que se enamoro de ella. Averiguodonde vivía, fingió encuentros casuales, trato de interesarlade cien diferentes maneras. Finalmente le confeso su amor,suplico, se humillo, pero la mujer no le presto atención. Nodebe haber existido jamas un rechazo tan inapelable comoaquel. Después ya no aparecieron nuevos corazones. Carlosno vio a Amelia nunca mas, pero por su culpa envejeció sinamores. Un día supo por una bruja que el Angel Gris preparaestos sucesos para que algunos privilegiados vivan la raraexperiencia del amor imposible. Y una tarde, paseando frentea la casa abandonada de la mujer terca, descubrió la borrosasombra de un corazón pintado bajo la ventana. Entre firuletesse leía "Amelia y Ernesto.
"LITERATURAS DEL ANGEL GRIS(Alejandro Dolina)
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
234
Capitulo 7. Procesos de Datos- Trabajo elaborado y expuesto en clases por el Sr. OMAR SERANTES –
7.1: Introducción
En este capitulo trataremos del manejo de la información1 que esencialmente se referirá a datos
2 de rele-vamientos o mediciones de campo. Debe destacarse que es común utilizar la palabra dato como sinónimode información, no lo será para nosotros.
Antes de pasar a desarrollar el tema principal de este capitulo creo necesario fijar un concepto que esfundamental tener siempre presente; y es la importancia que tiene la planificación en esta área, paraaquellos casos donde el volumen de la información será tal que, primero involucra a varias personas (ej. :grupo de campaña, grupo de procesamiento, grupo de control, calculo, proyecto y diseño, etc.) y segun-do la cantidad de datos que serán tan “pesados “ que no será posible considerar las particularidades quese dan en campaña y que después las podemos aclarar/corregir cuando regresamos para terminar en gabi-nete.Lo primero al realizar trabajos, donde dada su magnitud, se verán involucradas un grupo de personas,será establecer las convenciones, pautas y normas que se fijaran como estándares para la realización delmismo. Hasta, si fuera necesario hacer un ensayo, para conocer en este caso en particular como funcio-nan esas normas. Esto se potencia más aún cuando desde campaña los equipos envían datos diarios desdesu lugar de tareas (vía módem, discos, CD u otro medio) al grupo de procesamiento en gabinete.
Esto es muy importante establecerlo a tiempo, pues una vez que se inician las tareas, unas pocas correc-ciones a mitad de la misma, traerá consecuencias peores que el hecho de no haberlas hecho. Pues a partirde ese momento tendremos mas una base de datos, antes, durante y después de cada cambio. Llegado elcaso será más fácil realizar un proceso automatizado de corrección partiendo del concepto que tenemosuna base de datos es homogénea.
Pongamos un ejemplo; en los procesos iterativos o informatizados es relativamente sencillo plantear unalgoritmo que corrija un error sistemático; por caso al codificar mal una característica, o también el ta-maño asignado a los campos que tiene cada dato, etc., en cambio si no esta normalizada la base de datoslo único que quedara será corregir secuencialmente uno a uno.
Un párrafo especial merece el árbol de directorios y la nomenclatura que se utiliza para los archivos quese generan en todo trabajo, dada la gran variedad y cantidad que habrá hasta el final del mismo y la nece-sidad de poder de consultarlos posteriormente por cada integrante del grupo
Será entonces razonable decir que si hemos planificado bien, poseemos una estructura que funcionacomo un “sistema de procesamiento de la información que transforma datos en bruto en información
organizada, significativa y útil”
1Información: Implica datos procesados y organizados.2Datos: Representación de algún hecho, concepto o entidad real (los datos pueden tomar diferentes formas; por ejemplo palabrasescritas o habladas, números y dibujos)
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
235
7.2: Procesos CAD
Lo que sigue es un breve repaso de como y cuando fueron creándose los medios para poder llegar a dis-poner los productos (software y hardware) con el desarrollo de estos dias.Nótese también el poco tiempo transcurrido, apenas 7 años desde que se comienza a crear la computacióngráfica.Fue entre 1982 a l992 cuando la computación gráfica comenzó a tener forma, claro que en forma gra-
dual, y atendiendo el mercado a aplicaciones corporativas.
Es a partir de 1992 con tecnologías VGA y de SVGA, resolución de 640x480 que pega el primer salto,
hasta hay ejemplos de animación en baja resolución.
A esta altura los equipos eran muy caros y todavía no alcanzaban un resultado optimo.
En 1993 comienza a estar disponibles cierta cantidad de software en el mercado Argentino, las placas
de vídeo son de 24 bits, periféricos más accesibles (impresoras color, scanners, etc.); llega el boom del
Multimedia. Hewlett Packard incorpora tecnología Inkjet.
Para el año 1994 se generaliza el uso de equipos 486/Pentium, sistemas poderosos de almacenamiento,
disco óptico, cinta, etc.
Hoy en día existen monitores de pantalla plana, microprocesadores de 500Mhz y RAM de 128Mb, dis-
cos Ultra2 SCSI de 9Giga, almacenamiento en CD grabable, o en disquete magneto óptico de 3 ½ con
capacidad de 230 Mb
Es la Publicidad el mayor motor que tubo y tienen los entornos gráficos, (caso Silicon Graphic en uso
por muchos estudios de cine y televisión) que luego se extiende al área técnica. Además el CAD facilita
la realización de trabajos en 3D, un poco para la Agrimensura y más para las demás especialidades
(Arquitectura, maquetas tridimensionales, Mecánica el CAD/CAM -Computer Aided Manufacturing-
simplifica el diseño más complejo, etc.)
Parámetros a considerar al evaluar la adquisición de un software:
1.Funciones de dibujo y edición: se incluyen las opciones de dibujo simple en 2D (texto, línea,arco, círculo, elipse, curva, etc.), la generación de primitivas 3D (esferas, prisma, cono, superficie, etc.),y las funciones complejas de específicas del CAD (relleno, acotación, .....). También se contemplan lasopciones de edición básicas del programa (desplazar, recortar, borrar, alargar, copiar, etc.) y las opcionescomplejas de transformación típicas de CAD (matrices, operaciones booleanas, etc.)
2.Funciones de ayuda al diseño: se examinan opciones como las rejillas, las capas, la selec-ción condicional de objetos, los puntos de control, las previsualizaciones, la automatización, de condi-ciones geométricas, la capacidad de "arrastrar y soltar", la copia de seguridad automática, la agrupaciónde entidades, etc.
3.Capacidad de personalización y comunicación con otras aplicaciones: se valora tanto lo querespecta al aprovechamiento de las posibilidades de Windows 98/NT, como es el control de la interfaz,como lo que se refiere a las propias capacidades del programa (lenguajes de programación, gestión demacros, creación de tipos de líneas, etc. ). También se tienen en cuenta los enlaces entre ficheros, losdocumentos compuestos, la gestión de símbolos, el correo electrónico, la importación/exportación deformatos y el trabajo multiusuario.
4.Potencia del programa: se tiene encuentra las exigencias de equipamiento, la velocidad detrabajo, los controladores especiales para la gestión de la pantalla y la capacidad de instalación platafor-mas. También se incluyen las visualizaciones previas, las posibilidades de trazado externas, la gestión delos formatos y la calidad final de trazado.
5.Valor añadido: abarca la disponibilidad de utilidades adicionales, ya sea en el propio paqueteo en el mercado.
6.Precio: sin tener en cuenta condiciones especiales, como ofertas a ciertos sectores o actuali-zaciones.
7.Idioma: tanto en lo que respecta al programa como a los manuales.Compatibilidad
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
236
Productividad
Afinidad con las tareas
Dicho de otra manera sería:
1. Que sea un producto probado, no que sea la Versión 1.02. Que este tan difundido que sea un estándar, y esto es muy importante dado que el intercam-
bio de información es muy común y los “traductores” que importan o exportan de un for-mato a otro nunca son 100% compatibles, y difícilmente todas nuestras tareas se puedanrealizar con una sola aplicación.
3. Que partiendo de una plataforma genérica, se pueda crear un “entorno” a medida o sea quepermita el desarrollo del usuario, para poder desarrollar funciones y personalizar esa insta-lación. (Caso Programas LSP o IPAS - (Image processing Procedural modeling AnimateStand-in Solid pattern o Visual Basic para Autocad y tambien para el paquete de Office).
4. Que reconozca y sea reconocido por la mayoría de los otros formatos existentes (raster y devectores) del mercado.
5. Que tenga compatibilidad con el instrumental topográfico (Marca) que se haya o se esté poradquirir.
6. Que no tengan, si es posible, métodos de protección de copia, físicos (hardlock), ServerCode u otros que se inventen. Y esto se basa en que a la corta o a la larga, lo que fue dise-ñado para usuarios ilegales, termina perjudicando a usuarios legales (incompatibilidades,roturas o perdidas).
“Encontrar el programa que se adecue a los propios requerimientos exige, ante todo, saber
cuales son esos requerimientos. “
Una conclusión personal es optar entre el producto de Autodesk (AutoCAD R14 o 2000) o MicroSta-tion/J como las dos opciones más completas o más integrales. En el caso de AutoCAD está disponible lapersonalización en lenguaje Visual LISP (versión actual del Auto LISP), y en Visual Basic que es el len-guaje que mayor difusión y crecimiento ha tenido entre los usuarios de conocimientos medio.
7.2.1: Análisis de distintos Software de Cad
Cualquier lista que pretenda mencionar los software existentes en elmercado para procesar datos topográficos, siempre será incompleta,pero respetando solo un orden cronológico podemos mencionar:SURFER, MAP CAD (SOKKIA), EAGLE POINT,CADWARE,CARTOMAP, CIVIL SURVEY hoy AUTOCAD LANDDEVELOPMENT DESKTOP (Autodesk), ETC.
Una características que son comunes en casi todos ellos es la organiza-ción por MÓDULOS de tal manera que un mismo Soft tendrá mayoreso menores herramientas según la necesidad o capacidad económica delusuario.
CAD general o específico?
La decisión de trabajar con programas de CAD general (el que no estáespecializado) o de CAD específico (el que ha sido diseñado para una
única disciplina) es la primera medida que debe tomar un usuario que desea entrar en el mundo del CAD.
En principios, los usuarios del CAD valoran ante todo su tiempo y su productividad. No hay duda que lasaplicaciones verticales (CAD específicos) es la mejor solución, pero adquirir un programa de CAD espe-cífico suele llevar consigo la compra de un sistema propietario, y en consecuencia, la dependencia totalde una sola empresa. Esto implica una gran comodidad, ya que la empresa se encarga de todo (librerías,
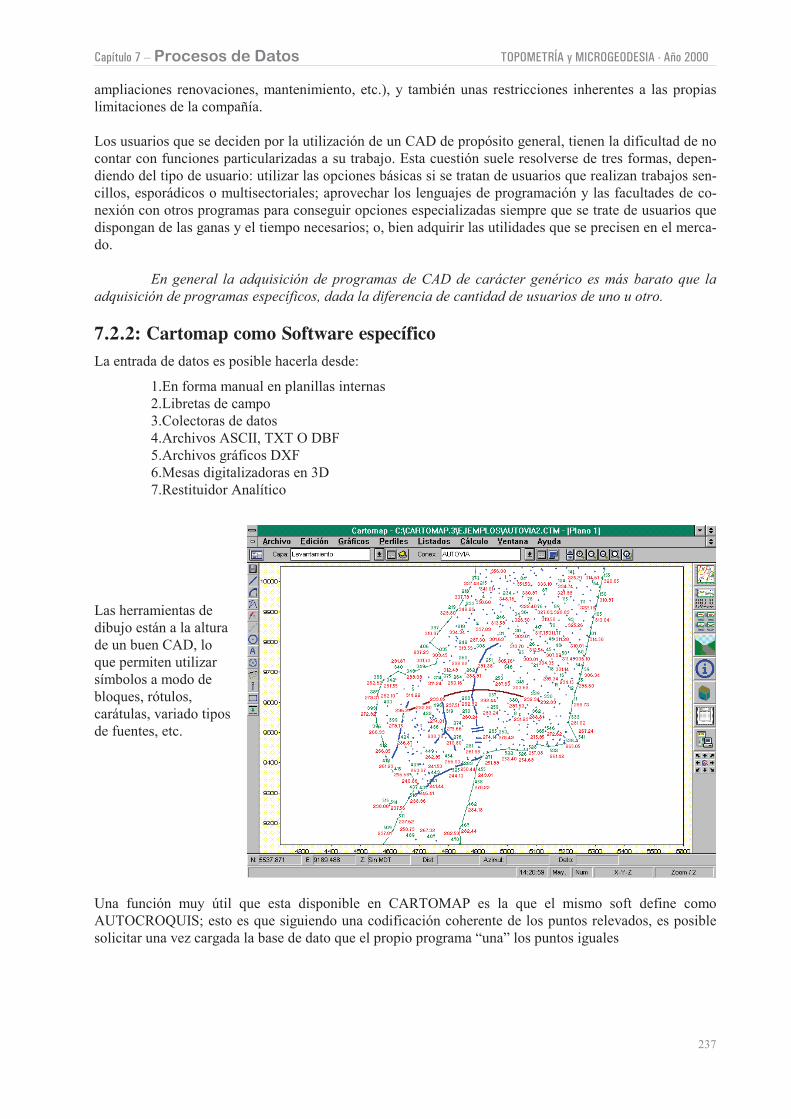
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
237
ampliaciones renovaciones, mantenimiento, etc.), y también unas restricciones inherentes a las propiaslimitaciones de la compañía.
Los usuarios que se deciden por la utilización de un CAD de propósito general, tienen la dificultad de nocontar con funciones particularizadas a su trabajo. Esta cuestión suele resolverse de tres formas, depen-diendo del tipo de usuario: utilizar las opciones básicas si se tratan de usuarios que realizan trabajos sen-cillos, esporádicos o multisectoriales; aprovechar los lenguajes de programación y las facultades de co-nexión con otros programas para conseguir opciones especializadas siempre que se trate de usuarios quedispongan de las ganas y el tiempo necesarios; o, bien adquirir las utilidades que se precisen en el merca-do.
En general la adquisición de programas de CAD de carácter genérico es más barato que la
adquisición de programas específicos, dada la diferencia de cantidad de usuarios de uno u otro.
7.2.2: Cartomap como Software específico
La entrada de datos es posible hacerla desde:
1. En forma manual en planillas internas2. Libretas de campo3. Colectoras de datos4. Archivos ASCII, TXT O DBF5. Archivos gráficos DXF6. Mesas digitalizadoras en 3D7. Restituidor Analítico
Las herramientas dedibujo están a la alturade un buen CAD, loque permiten utilizarsímbolos a modo debloques, rótulos,carátulas, variado tiposde fuentes, etc.
Una función muy útil que esta disponible en CARTOMAP es la que el mismo soft define comoAUTOCROQUIS; esto es que siguiendo una codificación coherente de los puntos relevados, es posiblesolicitar una vez cargada la base de dato que el propio programa “una” los puntos iguales
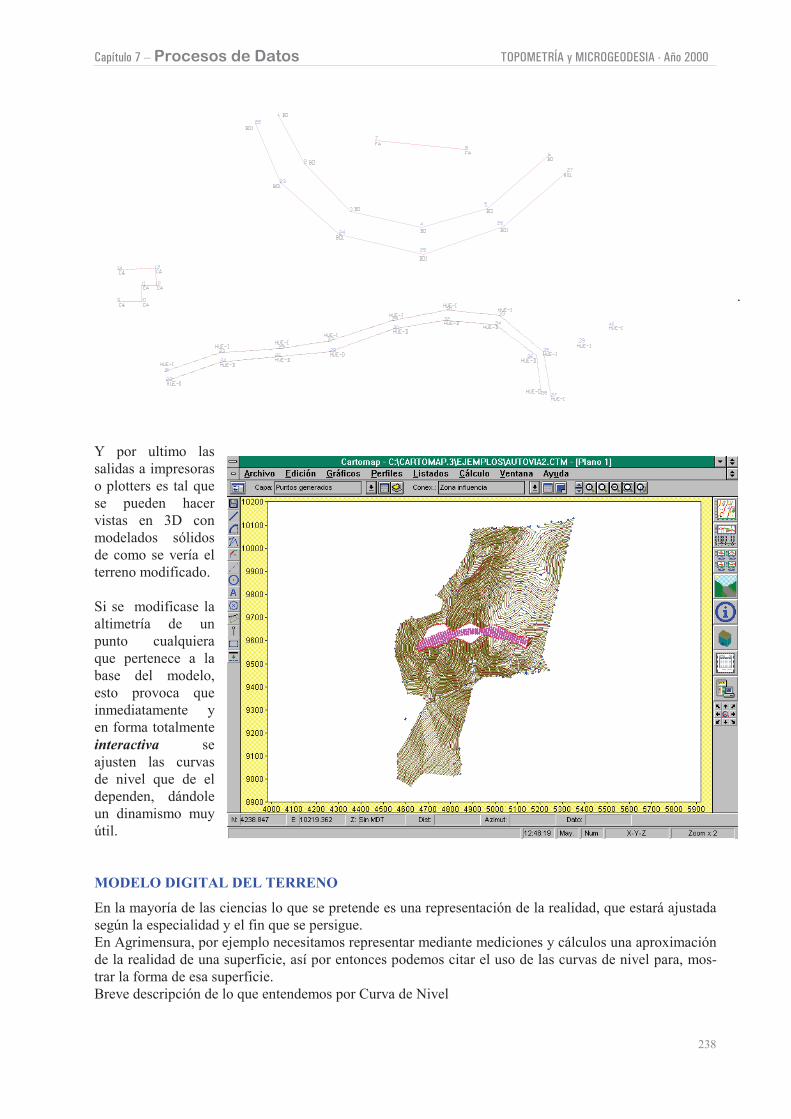
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
238
.
Y por ultimo lassalidas a impresoraso plotters es tal quese pueden hacervistas en 3D conmodelados sólidosde como se vería elterreno modificado.
Si se modificase laaltimetría de unpunto cualquieraque pertenece a labase del modelo,esto provoca queinmediatamente yen forma totalmenteinteractiva seajusten las curvasde nivel que de eldependen, dándoleun dinamismo muyútil.
MODELO DIGITAL DEL TERRENO
En la mayoría de las ciencias lo que se pretende es una representación de la realidad, que estará ajustadasegún la especialidad y el fin que se persigue.En Agrimensura, por ejemplo necesitamos representar mediante mediciones y cálculos una aproximaciónde la realidad de una superficie, así por entonces podemos citar el uso de las curvas de nivel para, mos-trar la forma de esa superficie.Breve descripción de lo que entendemos por Curva de Nivel
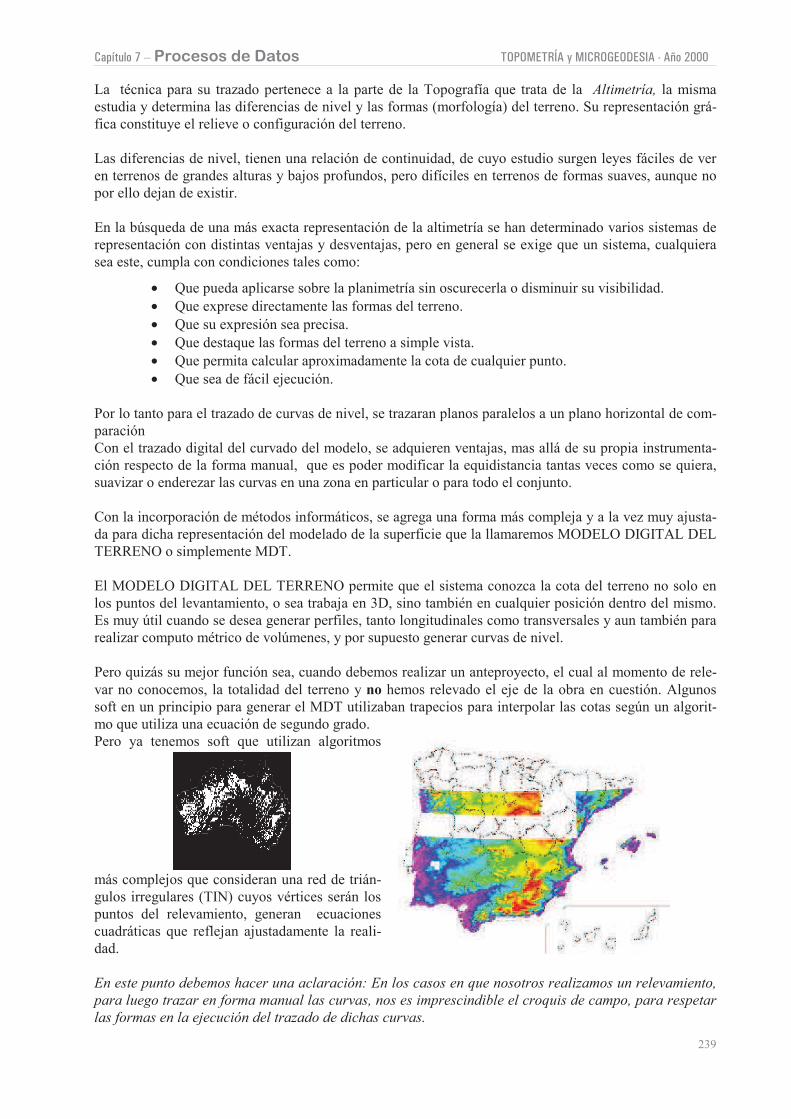
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
239
La técnica para su trazado pertenece a la parte de la Topografía que trata de la Altimetría, la mismaestudia y determina las diferencias de nivel y las formas (morfología) del terreno. Su representación grá-fica constituye el relieve o configuración del terreno.
Las diferencias de nivel, tienen una relación de continuidad, de cuyo estudio surgen leyes fáciles de veren terrenos de grandes alturas y bajos profundos, pero difíciles en terrenos de formas suaves, aunque nopor ello dejan de existir.
En la búsqueda de una más exacta representación de la altimetría se han determinado varios sistemas derepresentación con distintas ventajas y desventajas, pero en general se exige que un sistema, cualquierasea este, cumpla con condiciones tales como:
• Que pueda aplicarse sobre la planimetría sin oscurecerla o disminuir su visibilidad.• Que exprese directamente las formas del terreno.• Que su expresión sea precisa.• Que destaque las formas del terreno a simple vista.• Que permita calcular aproximadamente la cota de cualquier punto.• Que sea de fácil ejecución.
Por lo tanto para el trazado de curvas de nivel, se trazaran planos paralelos a un plano horizontal de com-paraciónCon el trazado digital del curvado del modelo, se adquieren ventajas, mas allá de su propia instrumenta-ción respecto de la forma manual, que es poder modificar la equidistancia tantas veces como se quiera,suavizar o enderezar las curvas en una zona en particular o para todo el conjunto.
Con la incorporación de métodos informáticos, se agrega una forma más compleja y a la vez muy ajusta-da para dicha representación del modelado de la superficie que la llamaremos MODELO DIGITAL DELTERRENO o simplemente MDT.
El MODELO DIGITAL DEL TERRENO permite que el sistema conozca la cota del terreno no solo enlos puntos del levantamiento, o sea trabaja en 3D, sino también en cualquier posición dentro del mismo.Es muy útil cuando se desea generar perfiles, tanto longitudinales como transversales y aun también pararealizar computo métrico de volúmenes, y por supuesto generar curvas de nivel.
Pero quizás su mejor función sea, cuando debemos realizar un anteproyecto, el cual al momento de rele-var no conocemos, la totalidad del terreno y no hemos relevado el eje de la obra en cuestión. Algunossoft en un principio para generar el MDT utilizaban trapecios para interpolar las cotas según un algorit-mo que utiliza una ecuación de segundo grado.Pero ya tenemos soft que utilizan algoritmos
más complejos que consideran una red de trián-gulos irregulares (TIN) cuyos vértices serán lospuntos del relevamiento, generan ecuacionescuadráticas que reflejan ajustadamente la reali-dad.
En este punto debemos hacer una aclaración: En los casos en que nosotros realizamos un relevamiento,
para luego trazar en forma manual las curvas, nos es imprescindible el croquis de campo, para respetar
las formas en la ejecución del trazado de dichas curvas.
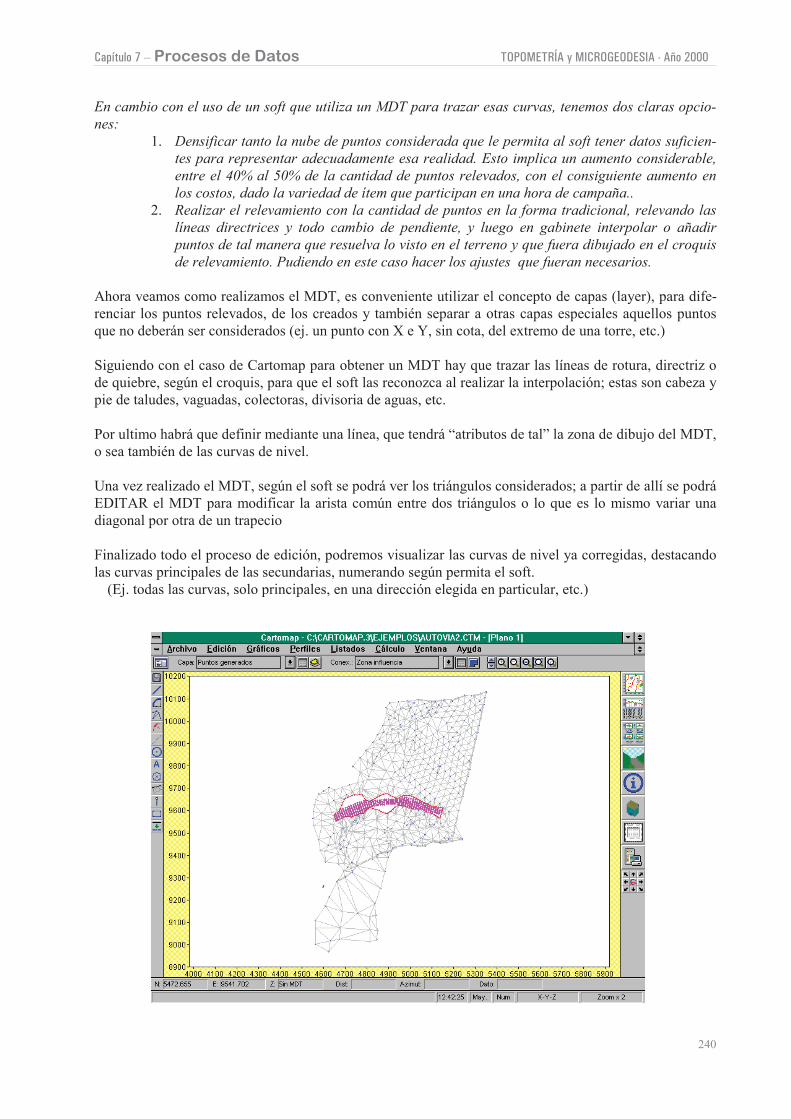
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
240
En cambio con el uso de un soft que utiliza un MDT para trazar esas curvas, tenemos dos claras opcio-
nes:
1. Densificar tanto la nube de puntos considerada que le permita al soft tener datos suficien-
tes para representar adecuadamente esa realidad. Esto implica un aumento considerable,
entre el 40% al 50% de la cantidad de puntos relevados, con el consiguiente aumento en
los costos, dado la variedad de ítem que participan en una hora de campaña..
2. Realizar el relevamiento con la cantidad de puntos en la forma tradicional, relevando las
líneas directrices y todo cambio de pendiente, y luego en gabinete interpolar o añadir
puntos de tal manera que resuelva lo visto en el terreno y que fuera dibujado en el croquis
de relevamiento. Pudiendo en este caso hacer los ajustes que fueran necesarios.
Ahora veamos como realizamos el MDT, es conveniente utilizar el concepto de capas (layer), para dife-renciar los puntos relevados, de los creados y también separar a otras capas especiales aquellos puntosque no deberán ser considerados (ej. un punto con X e Y, sin cota, del extremo de una torre, etc.)
Siguiendo con el caso de Cartomap para obtener un MDT hay que trazar las líneas de rotura, directriz ode quiebre, según el croquis, para que el soft las reconozca al realizar la interpolación; estas son cabeza ypie de taludes, vaguadas, colectoras, divisoria de aguas, etc.
Por ultimo habrá que definir mediante una línea, que tendrá “atributos de tal” la zona de dibujo del MDT,o sea también de las curvas de nivel.
Una vez realizado el MDT, según el soft se podrá ver los triángulos considerados; a partir de allí se podráEDITAR el MDT para modificar la arista común entre dos triángulos o lo que es lo mismo variar unadiagonal por otra de un trapecio
Finalizado todo el proceso de edición, podremos visualizar las curvas de nivel ya corregidas, destacandolas curvas principales de las secundarias, numerando según permita el soft.
(Ej. todas las curvas, solo principales, en una dirección elegida en particular, etc.)
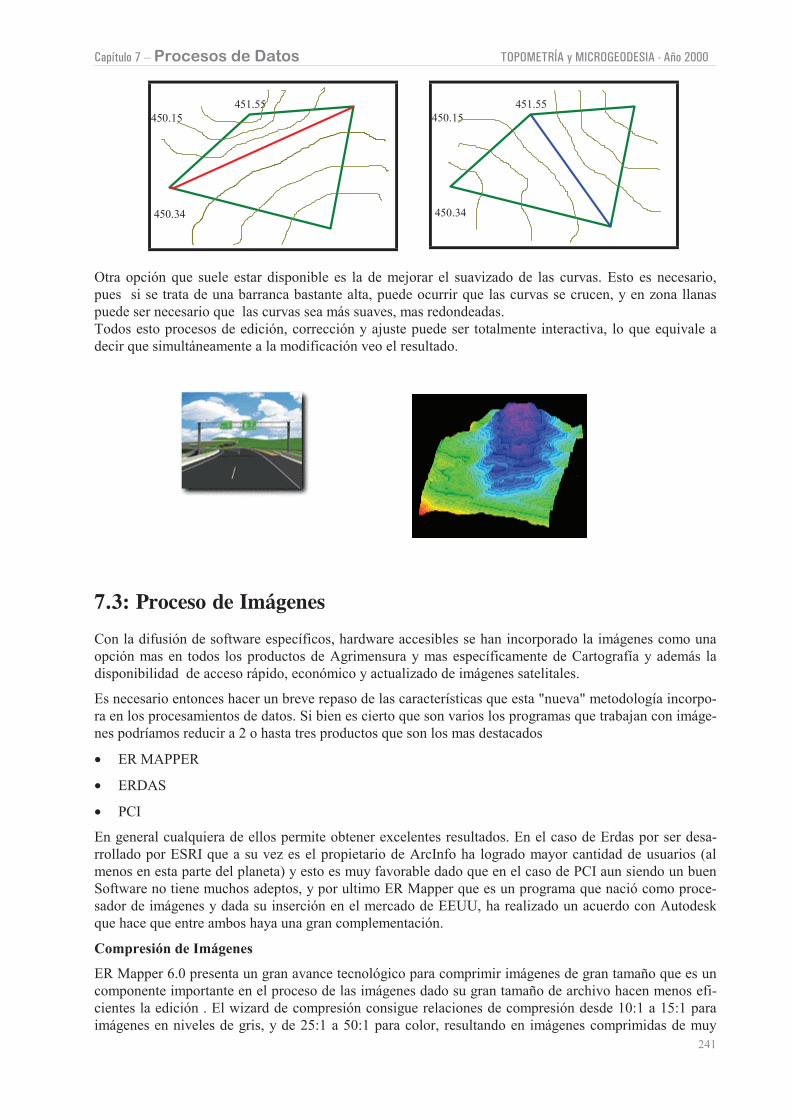
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
241
451.55450.15
450.34
451.55450.15
450.34
Otra opción que suele estar disponible es la de mejorar el suavizado de las curvas. Esto es necesario,pues si se trata de una barranca bastante alta, puede ocurrir que las curvas se crucen, y en zona llanaspuede ser necesario que las curvas sea más suaves, mas redondeadas.Todos esto procesos de edición, corrección y ajuste puede ser totalmente interactiva, lo que equivale adecir que simultáneamente a la modificación veo el resultado.
7.3: Proceso de Imágenes
Con la difusión de software específicos, hardware accesibles se han incorporado la imágenes como unaopción mas en todos los productos de Agrimensura y mas específicamente de Cartografía y además ladisponibilidad de acceso rápido, económico y actualizado de imágenes satelitales.
Es necesario entonces hacer un breve repaso de las características que esta "nueva" metodología incorpo-ra en los procesamientos de datos. Si bien es cierto que son varios los programas que trabajan con imáge-nes podríamos reducir a 2 o hasta tres productos que son los mas destacados
• ER MAPPER
• ERDAS
• PCI
En general cualquiera de ellos permite obtener excelentes resultados. En el caso de Erdas por ser desa-rrollado por ESRI que a su vez es el propietario de ArcInfo ha logrado mayor cantidad de usuarios (almenos en esta parte del planeta) y esto es muy favorable dado que en el caso de PCI aun siendo un buenSoftware no tiene muchos adeptos, y por ultimo ER Mapper que es un programa que nació como proce-sador de imágenes y dada su inserción en el mercado de EEUU, ha realizado un acuerdo con Autodeskque hace que entre ambos haya una gran complementación.
Compresión de Imágenes
ER Mapper 6.0 presenta un gran avance tecnológico para comprimir imágenes de gran tamaño que es uncomponente importante en el proceso de las imágenes dado su gran tamaño de archivo hacen menos efi-cientes la edición . El wizard de compresión consigue relaciones de compresión desde 10:1 a 15:1 paraimágenes en niveles de gris, y de 25:1 a 50:1 para color, resultando en imágenes comprimidas de muy
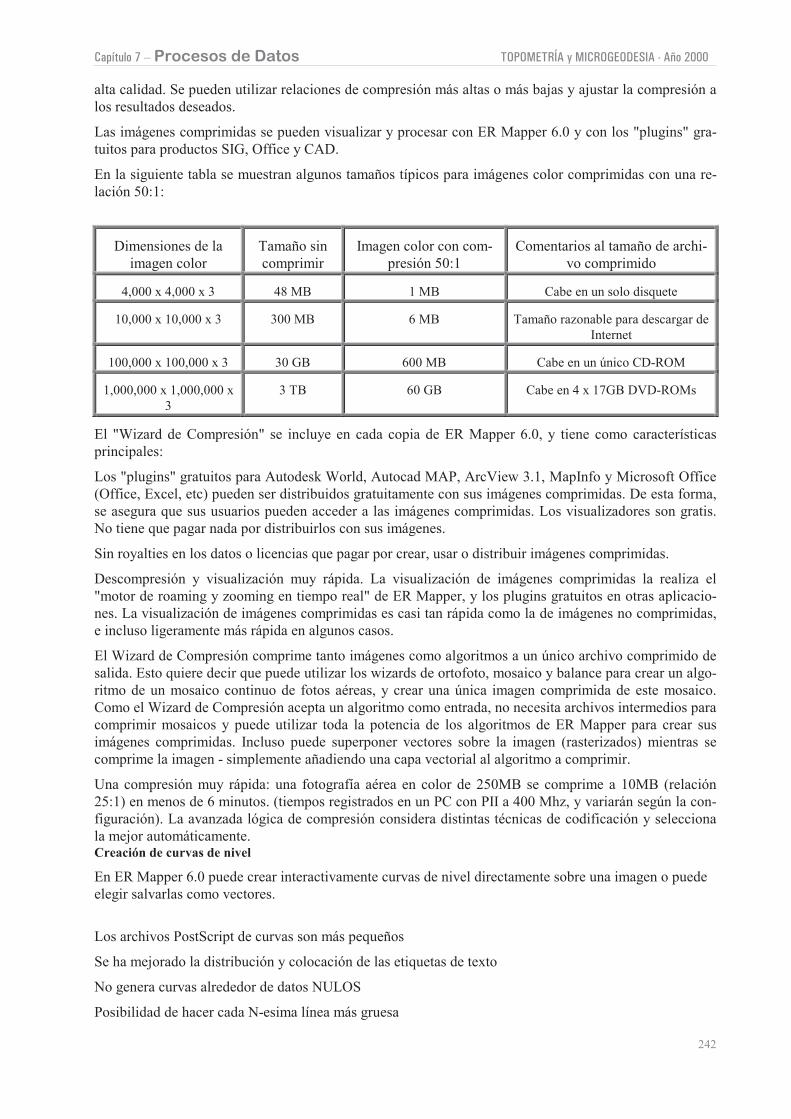
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
242
alta calidad. Se pueden utilizar relaciones de compresión más altas o más bajas y ajustar la compresión alos resultados deseados.
Las imágenes comprimidas se pueden visualizar y procesar con ER Mapper 6.0 y con los "plugins" gra-tuitos para productos SIG, Office y CAD.
En la siguiente tabla se muestran algunos tamaños típicos para imágenes color comprimidas con una re-lación 50:1:
Dimensiones de laimagen color
Tamaño sincomprimir
Imagen color con com-presión 50:1
Comentarios al tamaño de archi-vo comprimido
4,000 x 4,000 x 3 48 MB 1 MB Cabe en un solo disquete
10,000 x 10,000 x 3 300 MB 6 MB Tamaño razonable para descargar deInternet
100,000 x 100,000 x 3 30 GB 600 MB Cabe en un único CD-ROM
1,000,000 x 1,000,000 x3
3 TB 60 GB Cabe en 4 x 17GB DVD-ROMs
El "Wizard de Compresión" se incluye en cada copia de ER Mapper 6.0, y tiene como característicasprincipales:
Los "plugins" gratuitos para Autodesk World, Autocad MAP, ArcView 3.1, MapInfo y Microsoft Office(Office, Excel, etc) pueden ser distribuidos gratuitamente con sus imágenes comprimidas. De esta forma,se asegura que sus usuarios pueden acceder a las imágenes comprimidas. Los visualizadores son gratis.No tiene que pagar nada por distribuirlos con sus imágenes.
Sin royalties en los datos o licencias que pagar por crear, usar o distribuir imágenes comprimidas.
Descompresión y visualización muy rápida. La visualización de imágenes comprimidas la realiza el"motor de roaming y zooming en tiempo real" de ER Mapper, y los plugins gratuitos en otras aplicacio-nes. La visualización de imágenes comprimidas es casi tan rápida como la de imágenes no comprimidas,e incluso ligeramente más rápida en algunos casos.
El Wizard de Compresión comprime tanto imágenes como algoritmos a un único archivo comprimido desalida. Esto quiere decir que puede utilizar los wizards de ortofoto, mosaico y balance para crear un algo-ritmo de un mosaico continuo de fotos aéreas, y crear una única imagen comprimida de este mosaico.Como el Wizard de Compresión acepta un algoritmo como entrada, no necesita archivos intermedios paracomprimir mosaicos y puede utilizar toda la potencia de los algoritmos de ER Mapper para crear susimágenes comprimidas. Incluso puede superponer vectores sobre la imagen (rasterizados) mientras secomprime la imagen - simplemente añadiendo una capa vectorial al algoritmo a comprimir.
Una compresión muy rápida: una fotografía aérea en color de 250MB se comprime a 10MB (relación25:1) en menos de 6 minutos. (tiempos registrados en un PC con PII a 400 Mhz, y variarán según la con-figuración). La avanzada lógica de compresión considera distintas técnicas de codificación y seleccionala mejor automáticamente.Creación de curvas de nivel
En ER Mapper 6.0 puede crear interactivamente curvas de nivel directamente sobre una imagen o puedeelegir salvarlas como vectores.
Los archivos PostScript de curvas son más pequeños
Se ha mejorado la distribución y colocación de las etiquetas de texto
No genera curvas alrededor de datos NULOS
Posibilidad de hacer cada N-esima línea más gruesa
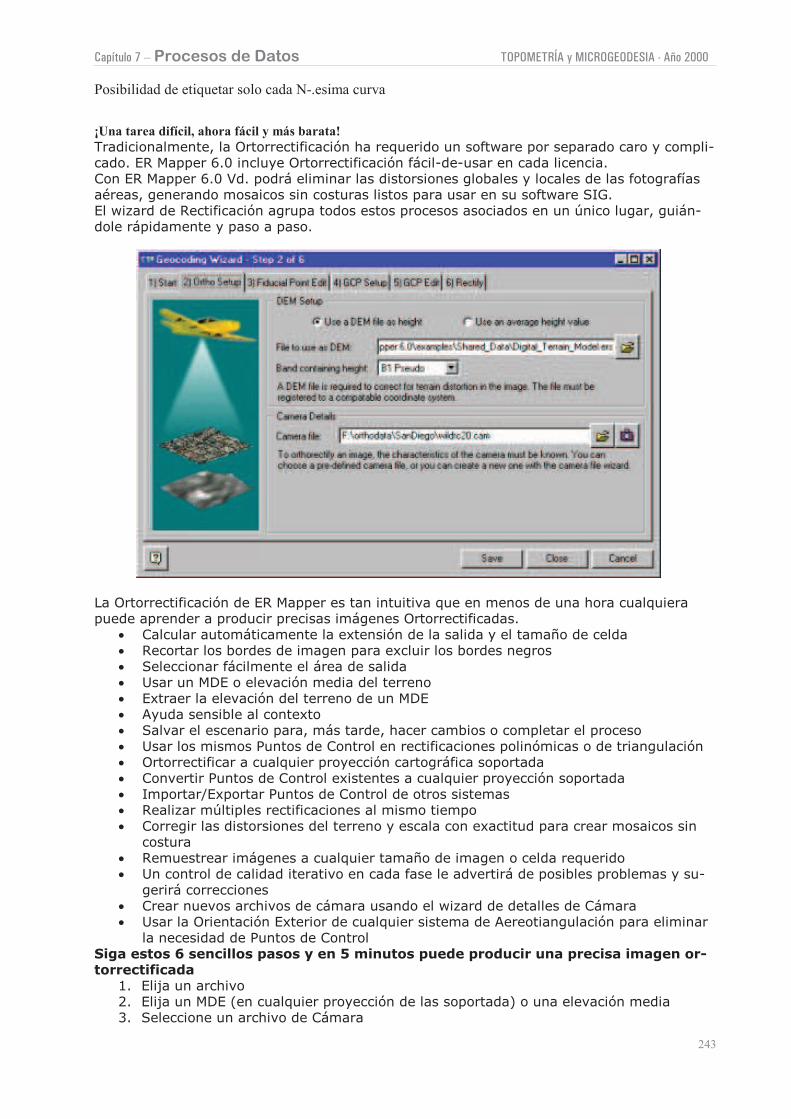
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
243
Posibilidad de etiquetar solo cada N-.esima curva
¡Una tarea difícil, ahora fácil y más barata!
Tradicionalmente, la Ortorrectificación ha requerido un software por separado caro y compli-cado. ER Mapper 6.0 incluye Ortorrectificación fácil-de-usar en cada licencia.Con ER Mapper 6.0 Vd. podrá eliminar las distorsiones globales y locales de las fotografíasaéreas, generando mosaicos sin costuras listos para usar en su software SIG.El wizard de Rectificación agrupa todos estos procesos asociados en un único lugar, guián-dole rápidamente y paso a paso.
La Ortorrectificación de ER Mapper es tan intuitiva que en menos de una hora cualquierapuede aprender a producir precisas imágenes Ortorrectificadas.
• Calcular automáticamente la extensión de la salida y el tamaño de celda• Recortar los bordes de imagen para excluir los bordes negros• Seleccionar fácilmente el área de salida• Usar un MDE o elevación media del terreno• Extraer la elevación del terreno de un MDE• Ayuda sensible al contexto• Salvar el escenario para, más tarde, hacer cambios o completar el proceso• Usar los mismos Puntos de Control en rectificaciones polinómicas o de triangulación• Ortorrectificar a cualquier proyección cartográfica soportada• Convertir Puntos de Control existentes a cualquier proyección soportada• Importar/Exportar Puntos de Control de otros sistemas• Realizar múltiples rectificaciones al mismo tiempo• Corregir las distorsiones del terreno y escala con exactitud para crear mosaicos sin
costura• Remuestrear imágenes a cualquier tamaño de imagen o celda requerido• Un control de calidad iterativo en cada fase le advertirá de posibles problemas y su-
gerirá correcciones• Crear nuevos archivos de cámara usando el wizard de detalles de Cámara• Usar la Orientación Exterior de cualquier sistema de Aereotiangulación para eliminar
la necesidad de Puntos de ControlSiga estos 6 sencillos pasos y en 5 minutos puede producir una precisa imagen or-torrectificada
1. Elija un archivo2. Elija un MDE (en cualquier proyección de las soportada) o una elevación media3. Seleccione un archivo de Cámara
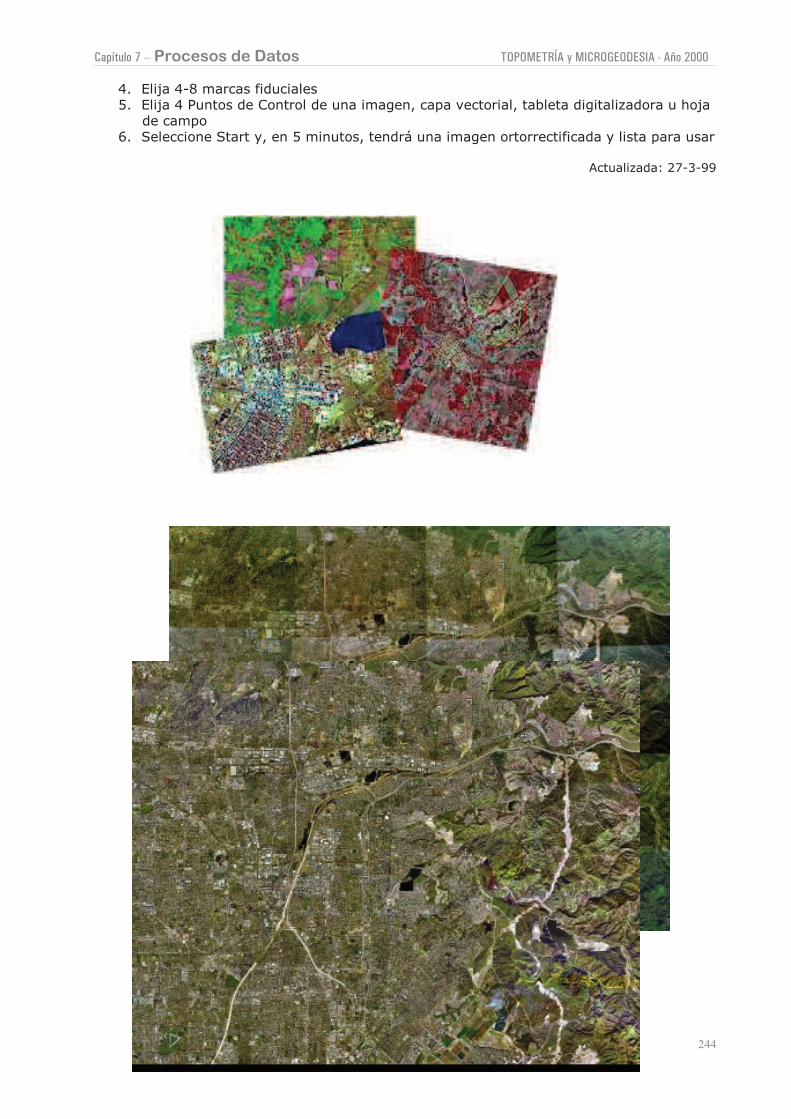
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
244
4. Elija 4-8 marcas fiduciales5. Elija 4 Puntos de Control de una imagen, capa vectorial, tableta digitalizadora u hoja
de campo6. Seleccione Start y, en 5 minutos, tendrá una imagen ortorrectificada y lista para usar
Actualizada: 27-3-99
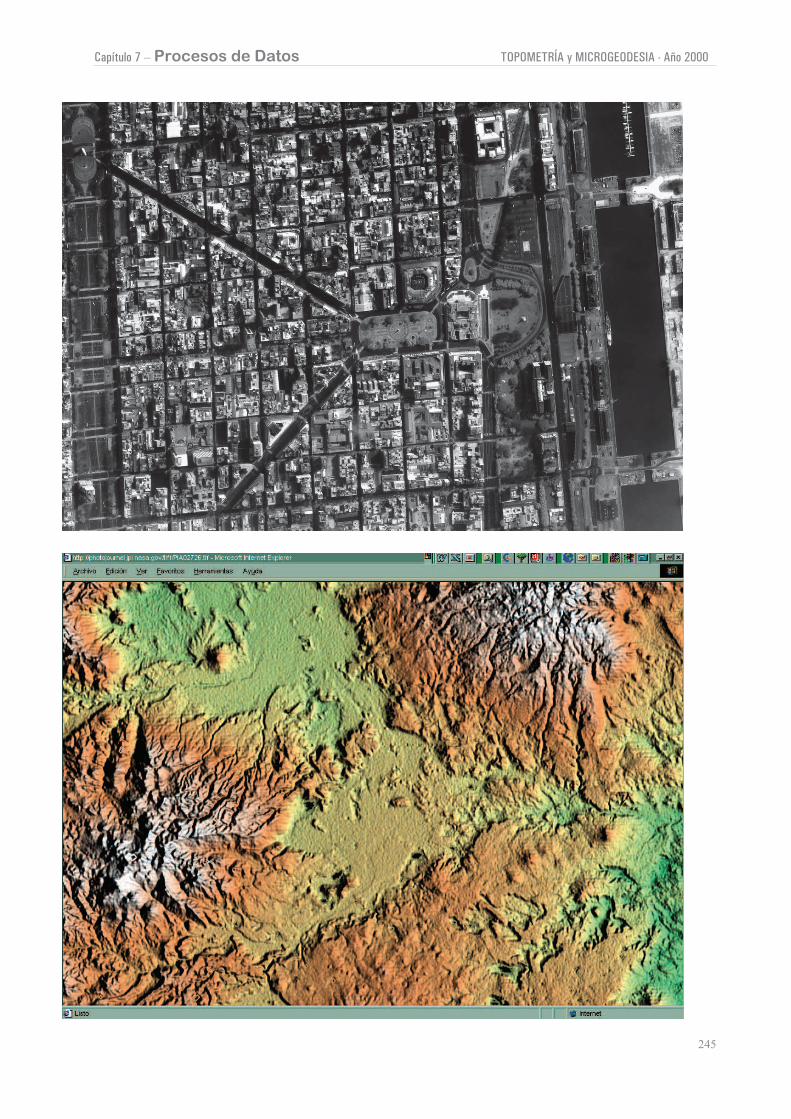
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
245
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
246
7.4: Relación con los SIG
La instrumentación de un SIG. es definitivamente una tarea MULTIDICIPLINARIA por lo tanto la defi-nición del Procesamiento de la Información, deberá analizarse para cada caso en que se esté diseñandosu realización.
En la etapa de diseño será necesario ajustar un método de permanente autocontrol para garantizar la ho-mogeneidad y clasificación de la variedad de datos que allí se traten.
Las funciones que cumplen todos los GIS pueden agruparse en cinco grandes partes o módulos:
1. (AG) Análisis geográficos2. (MAP) Cartografía3. (PDI) Procesos de análisis de imagen4. (G3D) Modelado numérico del terreno5. (RED) Gestión de redes
Los datos son, quizás, el aspecto más crítico del GIS. Para aumentar la complejidad presentan una ampliavariedad de posibles implementaciones de almacenamiento. Éstas dependen, a su vez, de los motores queel GIS vaya a utilizar. La definición de la estructura y consiguiente implementación de los datos es, con-trariamente a lo que se piensa, el problema más complicado del diseño de sistemas.
Decía un gran profesor, que “un Sistema no se valora tanto por lo que hace sino por calidad de su Base
de Datos” y nada mas ajustado para este caso, pues la base de datos Gráfica es un elemento trascendente,pero básica, inicial y generalmente de poca “movilidad”; en cambio los datos alfanuméricos son variados,numerosos y de permanente actualización.
Todo esto es para explicar la complejidad del manejo de Datos en un SIG y por que debe ser materia
exclusiva de otro capitulo.
7.5: Impresión de los Trabajos
El papel, producto que la humanidad inventó para almacenar lenguajes, pese al avance de la tecnología,sigue acrecentando su valor. En muchos casos además de convivir con la tecnología se ubica al serviciode su uso. También es destacable que, pese al crecimiento de las posibilidades de visualización que ofre-cen los sistemas CAD, no se descuiden en ellos las herramientas para facilitar la tarea de imprimir, su-mando excelentes funciones de control y armado de láminas. La evolución de los equipos de impresióndemuestra la persistente necesidad de utilizar el papel como medio de comunicación, aún para informa-ción de origen digital.
Aunque la aparentemente la tecnología avanza hacia la sustitución del papel (enciclopedias en CD, trans-ferencias de documentación comercial en formato digital, etc.) en consumo y por ende la producciónestán en permanente aumento.
La primera opción que un usuario de CAD tiene para llegar al papel, si no posee un equipo, es la contra-tación de un servicio, cuya característica puede variar desde el "mandar el disquete", hasta la modernaconcepción de un proveedor como otro periférico conectado a la computadora. Sin moverse desde su casaenvía su información a través de Internet a un proveedor, y luego en un par de horas golpean a su puertapara entregarle los planos.
PLOTEOS DESDE AUTOCAD
El funcionamiento bajo Windows sostiene el manejo de todos los periféricos a partir del entorno. Cual-quier programa que pueda correr bajo dicho entorno será capaz de emplear sus configuraciones genera-les, sin necesidad de un driver complementario.
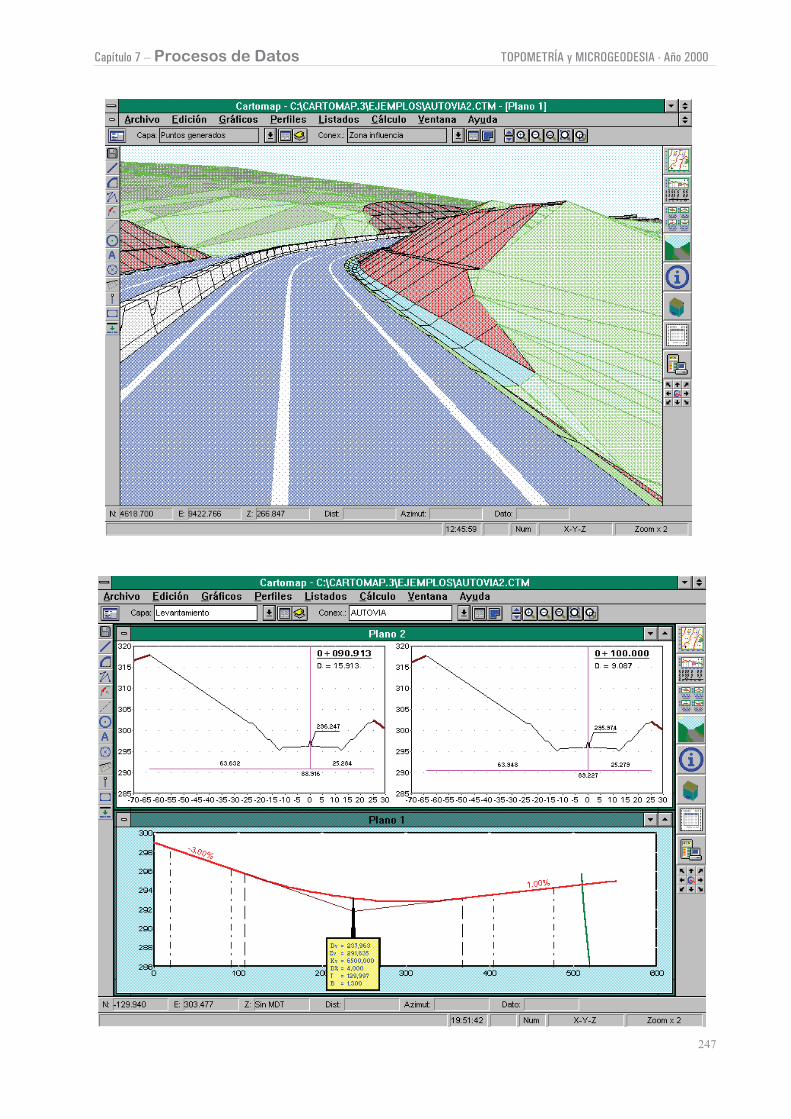
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
247
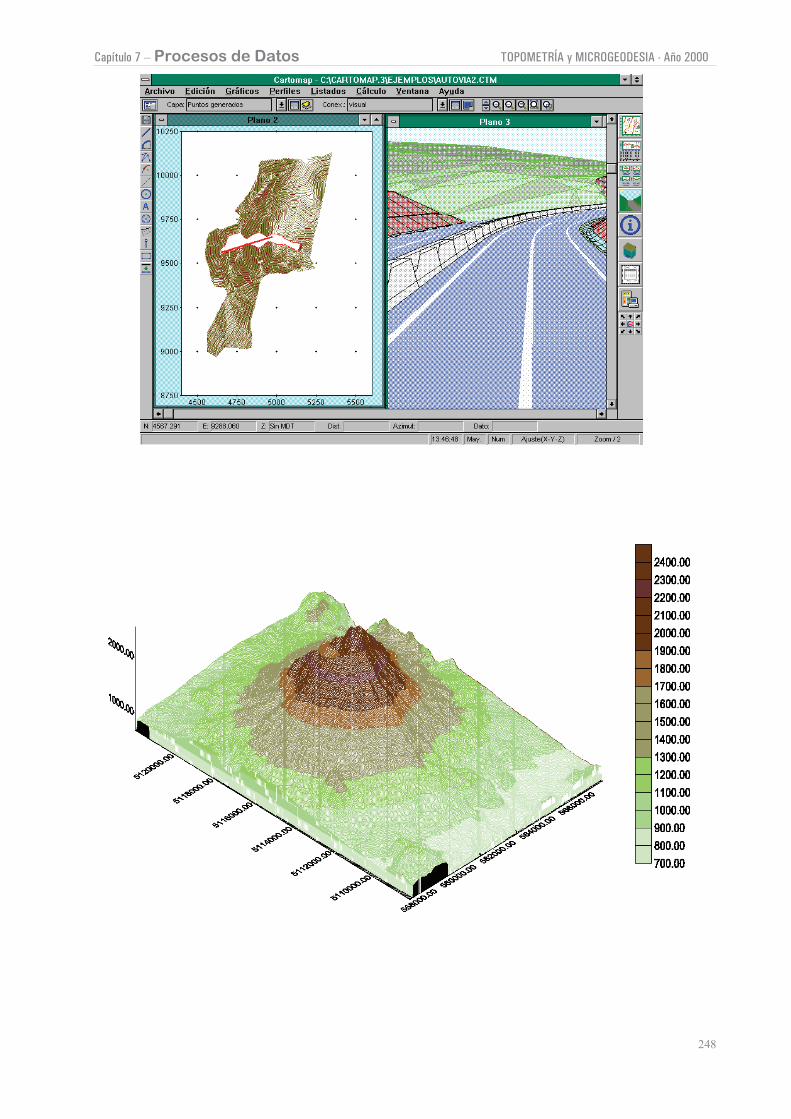
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
248
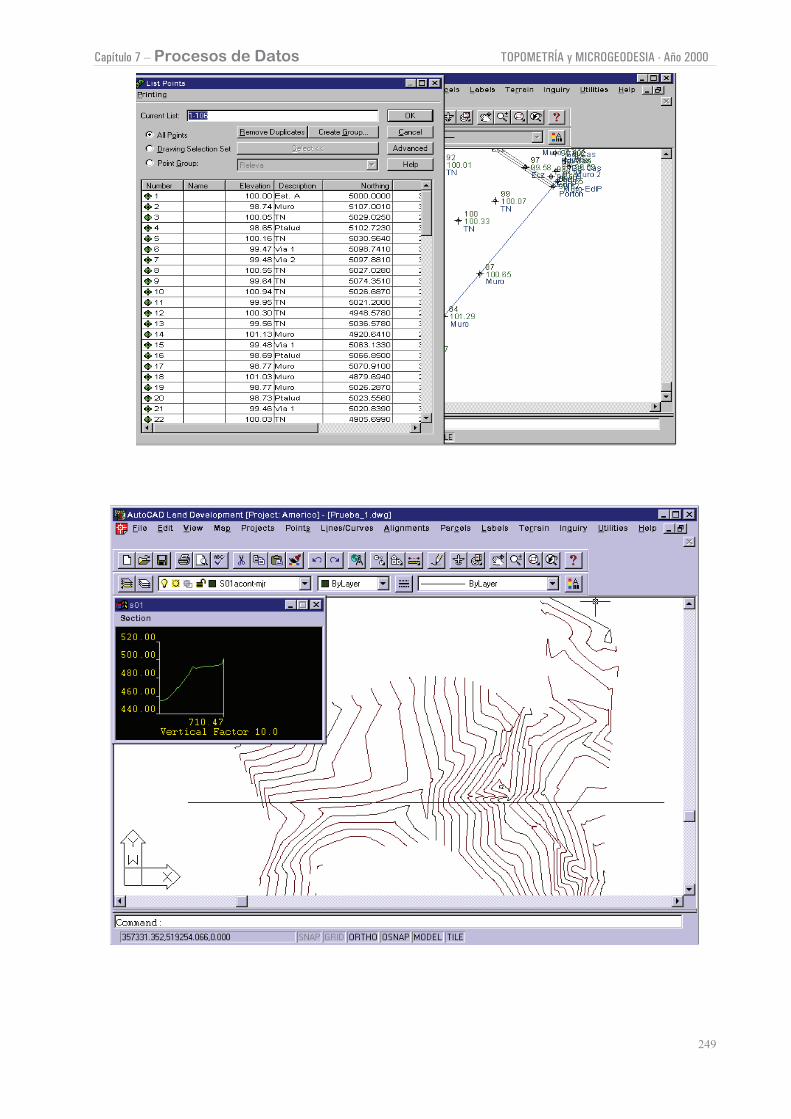
Capítulo 7 – Procesos de Datos TOPOMETRÍA y MICROGEODESIA - Año 2000
249
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
250
Hay momentos en la vida, que resulta necesario realizar un replanteo a tiempo.
MOMENTOS
Si pudiera vivir nuevamente mi vida
En la próxima trataría de cometer más errores
No intentaría ser tan perfecto, me relajaría más
Seria mas tonto de lo que he sido, de hecho
tomaría muy pocas cosas con seriedad
Seria menos higiénico
Correría más riesgos, haría más viajes, contemplaría
más atardeceres, subiría más montañas, nadaría más ríos
Iría a más lugares adonde nunca he ido, comería
más helados y menos habas, tendría más problemas
reales y menos imaginarios
Yo fui una de esas personas que vivió sensata y prolíficamente
cada minuto de su vida, claro que tuve momentos de alegría
Pero si pudiera volver atrás trataría de tener
solamente buenos momentos...
Por si no lo saben, de eso esta hecha la vida, solo de momentos
no te pierdas el ahora
Yo era uno de esos que nunca iban a ninguna parte sin un termómetro,
una bolsa de agua caliente, un paraguas y un paracaídas;
si pudiera volver a vivir, viajaría más liviano.
Si pudiera volver a vivir comenzaría a andar descalzo a principios
de la primavera y seguiría así hasta concluir el otoño.
Daría más vueltas en la calesita, contemplaría más amaneceres y
jugaría con más niños, si tuviera otra vez la vida por delante ...
Pero ya ven, tengo 85 años, y se que me estoy muriendo.
Remordimiento
He cometido el peor de los pecados
Que un hombre puede cometer. No he sido Feliz.
Que los glaciares del olvido
Me arrastren y me pierdan, despiadados.
Mis padres me engendraron para el juego
Humano de las noches y los días.
Para la tierra, el agua, el aire, el fuego.
Los defraudé. No fui feliz. Cumplida
No fue su joven voluntad. Mi mente
Se aplicó a las simétricas porfías
Del arte, que entreteje naderías.
Me legaron valor. No fui valiente.
No me abandona. Siempre está a mi lado
La sombra de haber sido un desdichado.
JORGE LUIS BORGES
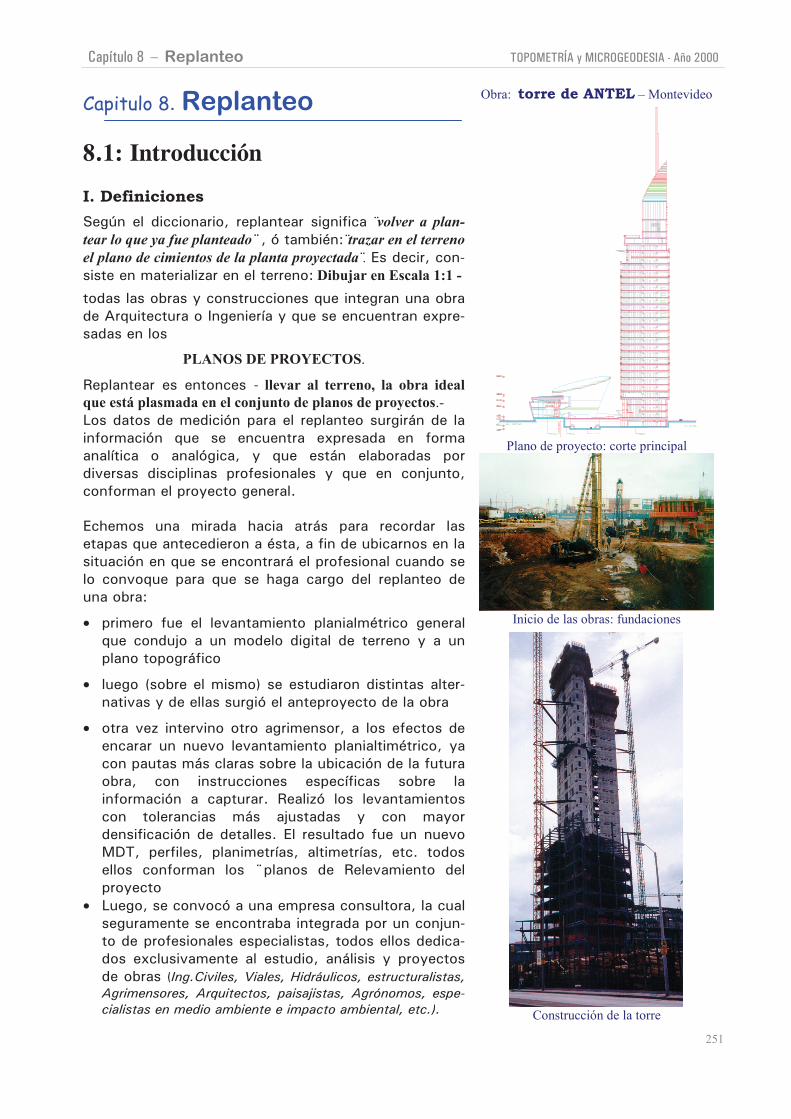
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
251
Capitulo 8. Replanteo
8.1: Introducción
I. Definiciones
Según el diccionario, replantear significa ¨volver a plan-
tear lo que ya fue planteado¨, ó también:¨trazar en el terreno
el plano de cimientos de la planta proyectada¨. Es decir, con-
siste en materializar en el terreno: Dibujar en Escala 1:1 -
todas las obras y construcciones que integran una obra
de Arquitectura o Ingeniería y que se encuentran expre-
sadas en los
PLANOS DE PROYECTOS.
Replantear es entonces - llevar al terreno, la obra ideal
que está plasmada en el conjunto de planos de proyectos.-
Los datos de medición para el replanteo surgirán de la
información que se encuentra expresada en forma
analítica o analógica, y que están elaboradas por
diversas disciplinas profesionales y que en conjunto,
conforman el proyecto general.
Echemos una mirada hacia atrás para recordar las
etapas que antecedieron a ésta, a fin de ubicarnos en la
situación en que se encontrará el profesional cuando se
lo convoque para que se haga cargo del replanteo de
una obra:
• primero fue el levantamiento planialmétrico general
que condujo a un modelo digital de terreno y a un
plano topográfico
• luego (sobre el mismo) se estudiaron distintas alter-
nativas y de ellas surgió el anteproyecto de la obra
• otra vez intervino otro agrimensor, a los efectos de
encarar un nuevo levantamiento planialtimétrico, ya
con pautas más claras sobre la ubicación de la futura
obra, con instrucciones específicas sobre la
información a capturar. Realizó los levantamientos
con tolerancias más ajustadas y con mayor
densificación de detalles. El resultado fue un nuevo
MDT, perfiles, planimetrías, altimetrías, etc. todos
ellos conforman los ¨planos de Relevamiento del
proyecto
• Luego, se convocó a una empresa consultora, la cual
seguramente se encontraba integrada por un conjun-
to de profesionales especialistas, todos ellos dedica-
dos exclusivamente al estudio, análisis y proyectos
de obras (Ing.Civiles, Viales, Hidráulicos, estructuralistas,
Agrimensores, Arquitectos, paisajistas, Agrónomos, espe-
cialistas en medio ambiente e impacto ambiental, etc.).
Obra: torre de ANTEL – Montevideo
Plano de proyecto: corte principal
Inicio de las obras: fundaciones
Construcción de la torre
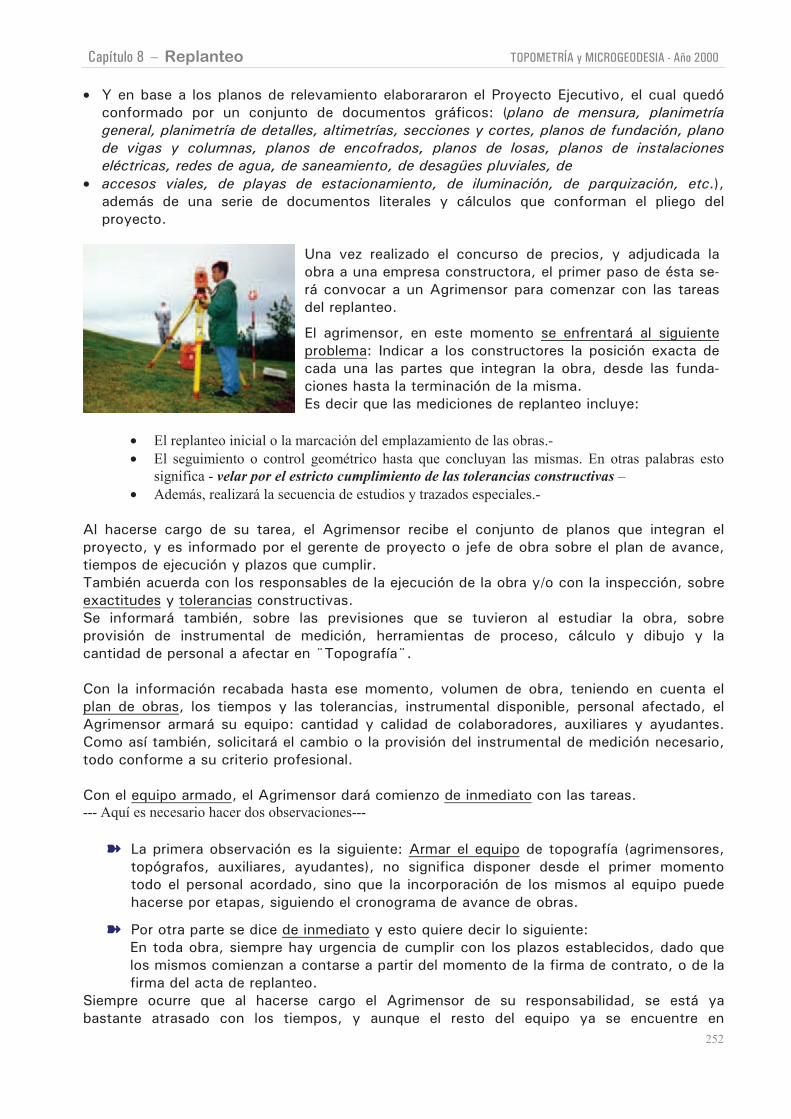
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
252
• Y en base a los planos de relevamiento elaborararon el Proyecto Ejecutivo, el cual quedó
conformado por un conjunto de documentos gráficos: (plano de mensura, planimetría
general, planimetría de detalles, altimetrías, secciones y cortes, planos de fundación, plano
de vigas y columnas, planos de encofrados, planos de losas, planos de instalaciones
eléctricas, redes de agua, de saneamiento, de desagües pluviales, de
• accesos viales, de playas de estacionamiento, de iluminación, de parquización, etc.),
además de una serie de documentos literales y cálculos que conforman el pliego del
proyecto.
Una vez realizado el concurso de precios, y adjudicada la
obra a una empresa constructora, el primer paso de ésta se-
rá convocar a un Agrimensor para comenzar con las tareas
del replanteo.
El agrimensor, en este momento se enfrentará al siguiente
problema: Indicar a los constructores la posición exacta de
cada una las partes que integran la obra, desde las funda-
ciones hasta la terminación de la misma.
Es decir que las mediciones de replanteo incluye:
• El replanteo inicial o la marcación del emplazamiento de las obras.-
• El seguimiento o control geométrico hasta que concluyan las mismas. En otras palabras esto
significa - velar por el estricto cumplimiento de las tolerancias constructivas –
• Además, realizará la secuencia de estudios y trazados especiales.-
Al hacerse cargo de su tarea, el Agrimensor recibe el conjunto de planos que integran el
proyecto, y es informado por el gerente de proyecto o jefe de obra sobre el plan de avance,
tiempos de ejecución y plazos que cumplir.
También acuerda con los responsables de la ejecución de la obra y/o con la inspección, sobre
exactitudes y tolerancias constructivas.
Se informará también, sobre las previsiones que se tuvieron al estudiar la obra, sobre
provisión de instrumental de medición, herramientas de proceso, cálculo y dibujo y la
cantidad de personal a afectar en ¨Topografía¨.
Con la información recabada hasta ese momento, volumen de obra, teniendo en cuenta el
plan de obras, los tiempos y las tolerancias, instrumental disponible, personal afectado, el
Agrimensor armará su equipo: cantidad y calidad de colaboradores, auxiliares y ayudantes.
Como así también, solicitará el cambio o la provisión del instrumental de medición necesario,
todo conforme a su criterio profesional.
Con el equipo armado, el Agrimensor dará comienzo de inmediato con las tareas.
--- Aquí es necesario hacer dos observaciones---
La primera observación es la siguiente: Armar el equipo de topografía (agrimensores,
topógrafos, auxiliares, ayudantes), no significa disponer desde el primer momento
todo el personal acordado, sino que la incorporación de los mismos al equipo puede
hacerse por etapas, siguiendo el cronograma de avance de obras.
Por otra parte se dice de inmediato y esto quiere decir lo siguiente:
En toda obra, siempre hay urgencia de cumplir con los plazos establecidos, dado que
los mismos comienzan a contarse a partir del momento de la firma de contrato, o de la
firma del acta de replanteo.
Siempre ocurre que al hacerse cargo el Agrimensor de su responsabilidad, se está ya
bastante atrasado con los tiempos, y aunque el resto del equipo ya se encuentre en
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
253
condiciones de comenzar con los movimientos de suelo, instalar plantas de cemento, oficinas
y obradores, nadie, ninguno de ellos, podrá hacer absolutamente nada hasta que el
Agrimensor no realice el movimiento inicial, por tal motivo desde el primer día el profesional
será el depositario de todos los apremios, tensiones, angustias y confusiones que se vivan en
la obra.
Pero a pesar del apuro, el Agrimensor no podrá aun iniciar sus trabajos, deberá realizar antes
una serie de pasos, tendientes a asegurar que el mismo encare bien su tarea desde el
principio hasta el día final, y en este sentido se le recomienda a los futuros profesionales ser
inflexibles, no dar ningún paso en falso, no permitir el inicio de ninguna obra si no se está
absolutamente seguro, deberán ser firmes y fuertes para soportar las presiones y los
apremios, pero la única garantía de terminar una obra coronado en el éxito, es haber
comenzado bien desde un principio, con un plan de trabajo, con la acotación de errores
elaborada, con el conocimiento absoluto de toda la obra. Un movimiento mal hecho, un
cálculo errado, un replanteo mal realizado puede costarle muy caro a la obra en su conjunto,
y más aun al Agrimensor.
8.2: Modelos de Solución
En las mediciones especiales como en muchas tareas de la agrimensura, pero muy
especialmente en las mediciones para los replanteos de obra y en las mediciones industriales,
el Agrimensor se verá enfrentado permanentemente a resolver problemas con éxito y en
tiempos muy breves, y a pesar que en nuestra vida diaria de relación esto se nos presente
muy frecuentemente, es muy poco lo que sabemos sobre métodos generales para resolver
problemas, ( sabemos que algunas personas los resuelven con mayor facilidad que otros y
pensamos que ello es así porque hay personas más talentosas que otras ), sin embargo ello
se debe a que estas personas se han ejercitado intuitivamente1 más que los otros, en la
resolución de problemas. Hacemos este breve comentario, a los efectos de alentar a los
alumnos al ejercicio de solución de problemas aplicando los siguientes pasos:
El proceso que conduce a la solución correcta de problemas se presenta en fases bien
definidas.
8.2.1: Formulación precisa
Una de las mayores causa de dificultades es que la naturaleza del problema no se conoce
adecuadamente, no existe posibilidad alguna de obtener una solución correcta cuando el
problema ha sido planteado con vaguedad. Es necesario tomar conciencia de esto, muchas
veces ante un problema de cualquier tipo, no podemos arribar a solución alguna, o bien todas
las soluciones a que llegamos son falsas. Es casi una certeza afirmar que la mayor causa o
dificultad se debe a la falta de datos o de información.
O bien, que estos se encuentran dispersos y confundidos en la formulación.
En la formulación necesitamos conocer con total seguridad el punto final al que se quiere
arribar, y los resultados que esperamos obtener.
1 Intuición: Razonamiento breve, elaborado en base a un gran caudal de conocimientos previos acumu-
lados. No se lo debe confundir con corazonada, lo cual no implica ningún tipo de razonamiento.
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
254
8.2.2: Desarrollo de un modelo
Comprende dos fases bien definidas:
• La identificación clara y precisa de las variables que intervienen
• La identificación de las relaciones existentes entre las variables, y entre éstas y la solución final.
Las relaciones entre las variables en los modelos matemáticos responden leyes o funciones
(ecuaciones), en la vida cotidiana responden a leyes sociales o causas y efectos conocidos.
Transformado el problema en un conjunto de relaciones, muy estrechas y vinculadas entre sí,
queda ideado un primer modelo de solución.
8.2.3: Análisis del modelo
Ya conocemos perfectamente a donde queremos llegar, sabemos con qué contamos, y
hemos elaborado nuestro modelo de solución, pasamos a continuación a ponerlo a prueba
antes de aplicarlo en la realidad, es decir realizamos un análisis del modelo, lo que
intentaremos además en esta etapa es clarificarlo y reducirlo a formas más simples, más
dinámicas y comprensibles.
De como esté planteado el modelo, dependerá la exactitud de la solución. A veces se
pretende lograr una mayor exactitud que lo que el modelo tiene por sí mismo (error de
modelo).
Finalmente, sólo resta ponerlo en práctica, enfrentándolo a la situación real y realizar un
seguimiento del mismo para observar como se comporta, permitiéndonos ir realizando las
correcciones que fuesen necesario aplicar.
8.3: Tareas previas
La primera de las tareas a encarar, será la de reunir, ordenar y compatibilizar toda la
información disponible:
(a) la que se encuentra en el terreno.
(b) la que está contenida en los planos de proyectos.
(a) El primer movimiento del agrimensor será: el Reconocimiento y análisis de la información
existente en el terreno
Como siempre lo destacamos, desde que el alumno cursa su primera topografía, la
importancia que reviste el reconocimiento del terreno, una visita con sus colaboradores y
planos en manos, ubicándose en la obra, buscando mojones existentes, marcas y señales
que lo puedan orientar, (que lo ayuden a ubicarse más rápidamente), pero
fundamentalmente porque necesita nexos de unión con las etapas que lo antecedieron.
Al mismo tiempo realizará un inventario mental sobre la visibilidad entre puntos, detalles
importantes del terreno, como así también sobre los obstáculos y construcciones
existentes que puedan afectar los trabajos de mediciones.
Si se trata de una obra de arquitectura o de ingeniería de desarrollo superficial, ésta
deberá encontrarse contenida dentro de un límite de propiedad, el cual debería estar
materializado con mojones y responder a un plano de mensura, habrá también
mojones o marcas que materializarán el sistema de apoyo del levantamiento que dio
origen al proyecto, especialmente interesa encontrar PF del sistema altimétrico.
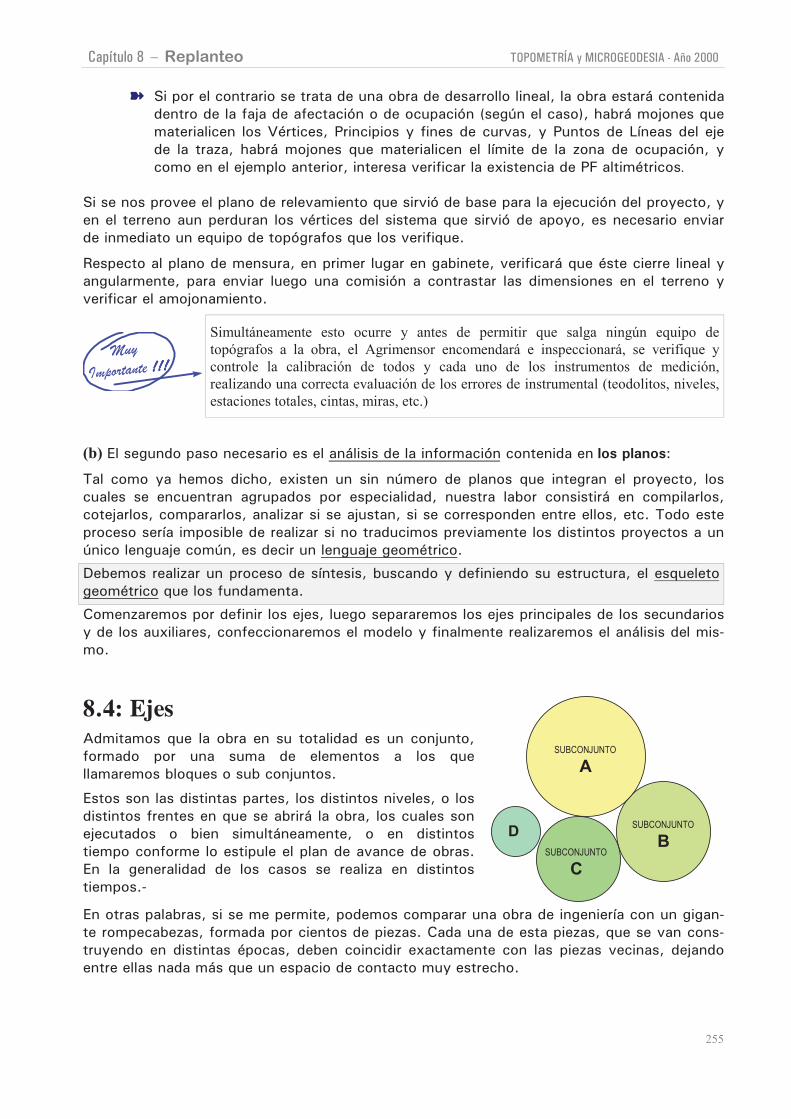
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
255
Si por el contrario se trata de una obra de desarrollo lineal, la obra estará contenida
dentro de la faja de afectación o de ocupación (según el caso), habrá mojones que
materialicen los Vértices, Principios y fines de curvas, y Puntos de Líneas del eje
de la traza, habrá mojones que materialicen el límite de la zona de ocupación, y
como en el ejemplo anterior, interesa verificar la existencia de PF altimétricos.
Si se nos provee el plano de relevamiento que sirvió de base para la ejecución del proyecto, y
en el terreno aun perduran los vértices del sistema que sirvió de apoyo, es necesario enviar
de inmediato un equipo de topógrafos que los verifique.
Respecto al plano de mensura, en primer lugar en gabinete, verificará que éste cierre lineal y
angularmente, para enviar luego una comisión a contrastar las dimensiones en el terreno y
verificar el amojonamiento.
Muy
Importante !!! !!! !!! !!!
Simultáneamente esto ocurre y antes de permitir que salga ningún equipo de
topógrafos a la obra, el Agrimensor encomendará e inspeccionará, se verifique y
controle la calibración de todos y cada uno de los instrumentos de medición,
realizando una correcta evaluación de los errores de instrumental (teodolitos, niveles,
estaciones totales, cintas, miras, etc.)
(b) El segundo paso necesario es el análisis de la información contenida en los planos:
Tal como ya hemos dicho, existen un sin número de planos que integran el proyecto, los
cuales se encuentran agrupados por especialidad, nuestra labor consistirá en compilarlos,
cotejarlos, compararlos, analizar si se ajustan, si se corresponden entre ellos, etc. Todo este
proceso sería imposible de realizar si no traducimos previamente los distintos proyectos a un
único lenguaje común, es decir un lenguaje geométrico.
Debemos realizar un proceso de síntesis, buscando y definiendo su estructura, el esqueleto
geométrico que los fundamenta.
Comenzaremos por definir los ejes, luego separaremos los ejes principales de los secundarios
y de los auxiliares, confeccionaremos el modelo y finalmente realizaremos el análisis del mis-
mo.
8.4: EjesAdmitamos que la obra en su totalidad es un conjunto,
formado por una suma de elementos a los que
llamaremos bloques o sub conjuntos.
Estos son las distintas partes, los distintos niveles, o los
distintos frentes en que se abrirá la obra, los cuales son
ejecutados o bien simultáneamente, o en distintos
tiempo conforme lo estipule el plan de avance de obras.
En la generalidad de los casos se realiza en distintos
tiempos.-
SUBCONJUNTO
A
SUBCONJUNTO
BSUBCONJUNTO
C
D
En otras palabras, si se me permite, podemos comparar una obra de ingeniería con un gigan-
te rompecabezas, formada por cientos de piezas. Cada una de esta piezas, que se van cons-
truyendo en distintas épocas, deben coincidir exactamente con las piezas vecinas, dejando
entre ellas nada más que un espacio de contacto muy estrecho.
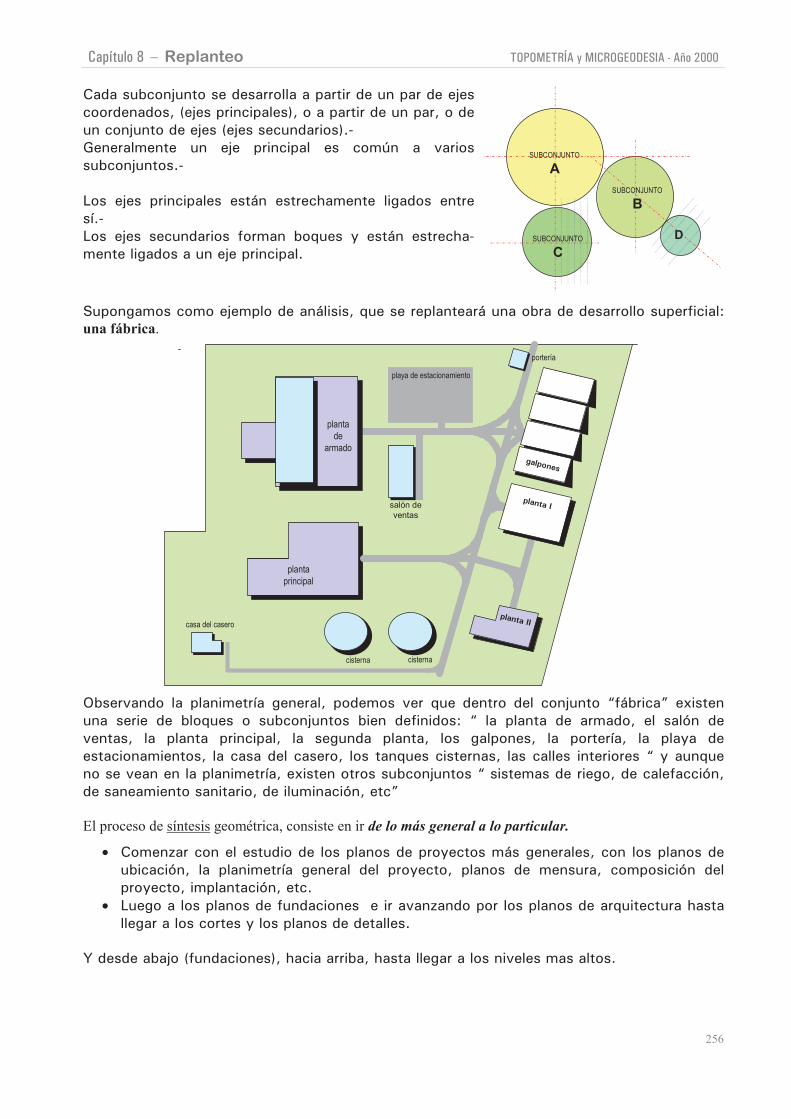
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
256
Cada subconjunto se desarrolla a partir de un par de ejes
coordenados, (ejes principales), o a partir de un par, o de
un conjunto de ejes (ejes secundarios).-
Generalmente un eje principal es común a varios
subconjuntos.-
Los ejes principales están estrechamente ligados entre
sí.-
Los ejes secundarios forman boques y están estrecha-
mente ligados a un eje principal.
SUBCONJUNTO
A
SUBCONJUNTO
B
SUBCONJUNTO
C
D
Supongamos como ejemplo de análisis, que se replanteará una obra de desarrollo superficial:
una fábrica.
portería
playa de estacionamiento
galpones
planta I
planta II
planta
principal
planta
de
armado
salón de
ventas
cisternacisterna
casa del casero
Observando la planimetría general, podemos ver que dentro del conjunto “fábrica” existen
una serie de bloques o subconjuntos bien definidos: “ la planta de armado, el salón de
ventas, la planta principal, la segunda planta, los galpones, la portería, la playa de
estacionamientos, la casa del casero, los tanques cisternas, las calles interiores “ y aunque
no se vean en la planimetría, existen otros subconjuntos “ sistemas de riego, de calefacción,
de saneamiento sanitario, de iluminación, etc”
El proceso de síntesis geométrica, consiste en ir de lo más general a lo particular.
• Comenzar con el estudio de los planos de proyectos más generales, con los planos de
ubicación, la planimetría general del proyecto, planos de mensura, composición del
proyecto, implantación, etc.
• Luego a los planos de fundaciones e ir avanzando por los planos de arquitectura hasta
llegar a los cortes y los planos de detalles.
Y desde abajo (fundaciones), hacia arriba, hasta llegar a los niveles mas altos.
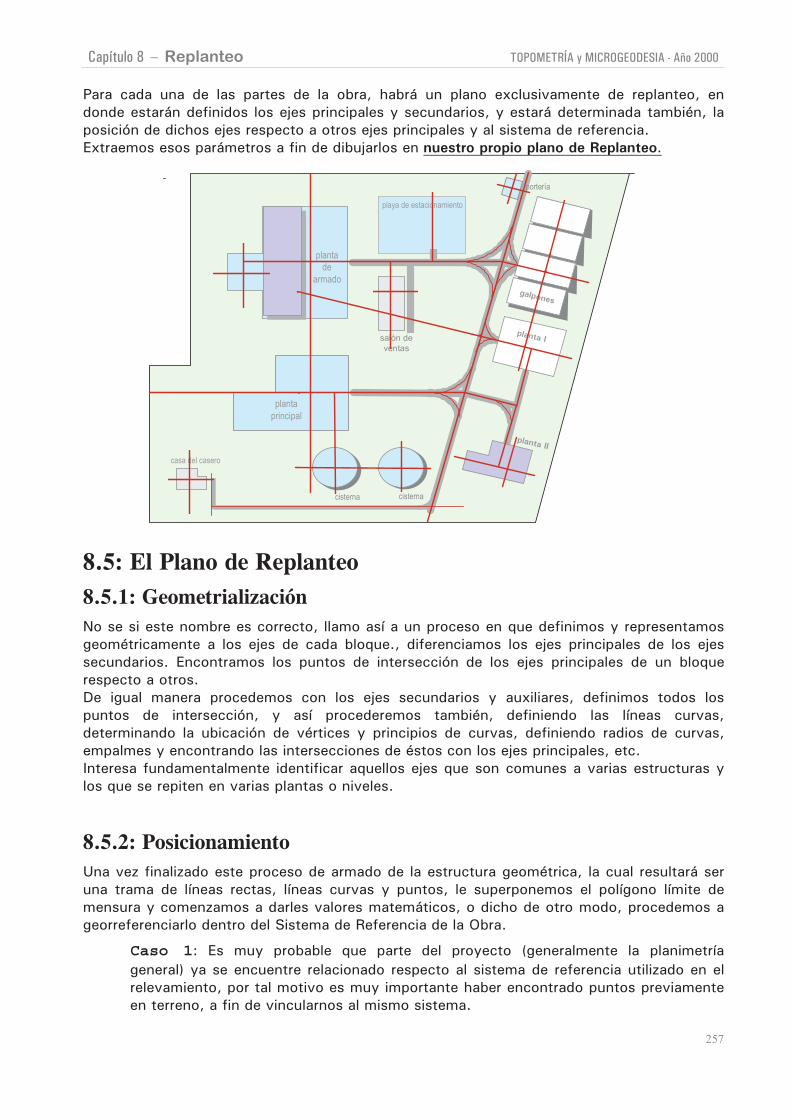
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
257
Para cada una de las partes de la obra, habrá un plano exclusivamente de replanteo, en
donde estarán definidos los ejes principales y secundarios, y estará determinada también, la
posición de dichos ejes respecto a otros ejes principales y al sistema de referencia.
Extraemos esos parámetros a fin de dibujarlos en nuestro propio plano de Replanteo.
portería
playa de estacionamiento
galpones
planta I
planta II
planta
principal
planta
de
armado
salón de
ventas
cisternacisterna
casa del casero
8.5: El Plano de Replanteo
8.5.1: Geometrialización
No se si este nombre es correcto, llamo así a un proceso en que definimos y representamos
geométricamente a los ejes de cada bloque., diferenciamos los ejes principales de los ejes
secundarios. Encontramos los puntos de intersección de los ejes principales de un bloque
respecto a otros.
De igual manera procedemos con los ejes secundarios y auxiliares, definimos todos los
puntos de intersección, y así procederemos también, definiendo las líneas curvas,
determinando la ubicación de vértices y principios de curvas, definiendo radios de curvas,
empalmes y encontrando las intersecciones de éstos con los ejes principales, etc.
Interesa fundamentalmente identificar aquellos ejes que son comunes a varias estructuras y
los que se repiten en varias plantas o niveles.
8.5.2: Posicionamiento
Una vez finalizado este proceso de armado de la estructura geométrica, la cual resultará ser
una trama de líneas rectas, líneas curvas y puntos, le superponemos el polígono límite de
mensura y comenzamos a darles valores matemáticos, o dicho de otro modo, procedemos a
georreferenciarlo dentro del Sistema de Referencia de la Obra.
Caso 1: Es muy probable que parte del proyecto (generalmente la planimetría
general) ya se encuentre relacionado respecto al sistema de referencia utilizado en el
relevamiento, por tal motivo es muy importante haber encontrado puntos previamente
en terreno, a fin de vincularnos al mismo sistema.
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
258
El resto de los planos estarán vinculados entre sí, o a un par de ejes de referencia
definido en la planimetría general.
Caso 2: Otra posibilidad es que los consultores hayan referenciado el proyecto
respecto a un sistema propio en el AutoCad, que no existe en el terreno, (lo cual
ocurre en la generalidad de las obras de arquitectura), se trata de un par de ejes
ortogonales entre sí, coincidente con las direcciones principales de los ejes de los
edificios.
El punto de intersección de los ejes principales de la Obra, es en el proyecto el origen
del sistema, por tal motivo habrá que realizar previamente en el terreno, un
levantamiento topógráfico de varios puntos en común, para lograr la vinculación entre
el sistema que se utilizó en el relevamiento original, con éste nuevo sistema,
encontrando los parámetros de traslación y rotación.
Caso 3: Idem que el caso 2, con la desventaja que los agrimensores o topógrafos
que realizaron el relevamiento previo, también emplearon un sistema de referencia
local y arbitrario, del cual no se pudo encontrar en el terreno ni un solo punto para ser
vinculado.
En este caso, el Agrimensor deberá realizar el relevamiento nuevamente, confeccionar
el plano en el sistema de referencia elegido y “encajar” el proyecto en el nuevo
sistema.
8.5.3: Confección del plano de replanteo
En todos los casos, confeccionamos un plano especial, un plano sólo destinado a los
encargados del replanteo de la obra. En el sistema de referencia definitivo, volcamos la trama
antes armada, de tal modo que ahora, cada recta y cada curva tendrá una definición
matemática, su ecuación.
Y cada uno de los puntos (intersecciones, vértices, principios de curvas, etc) estarán
definidos por coordenadas en único sistema de referencia.
A partir de allí, y con las referencia extraídas de los distintos planos de obras (distancias a
ejes), verificamos o re calculamos y corregimos las coordenadas de los puntos de
intersección, las ecuaciones de curvas y rectas, los parámetros de las curvas, etc.
Quedarán polígonos cerrados, de cuales se deberán verificar sus cierres lineales y angulares.
Muy
Importante !!! !!! !!! !!!
Asegurándonos que todos los polígonos o figuras cierren, estaremos
asegurando gran parte del éxito del replanteo, pues estaremos partiendo
de un modelo geométrico ajustado y controlado.
Si en cambio las figuras no cierran, (y no somos consiente de ello como para hacerlo corregir
por los proyectistas antes de comenzar con las obras), trasladaremos esos errores al campo y
el resultado de nuestra gestión será un total fracaso debido a que partiremos de un modelo
geométrico defectuoso.
8.6: Clasificación de los ejes
La clasificación de los ejes empleada en este apunte, en principales y secundarios, es
totalmente subjetiva. Por tal motivo es muy difícil que coincidamos con algunos
colegas de la profesión, con mayor razón con profesionales de otras disciplinas.
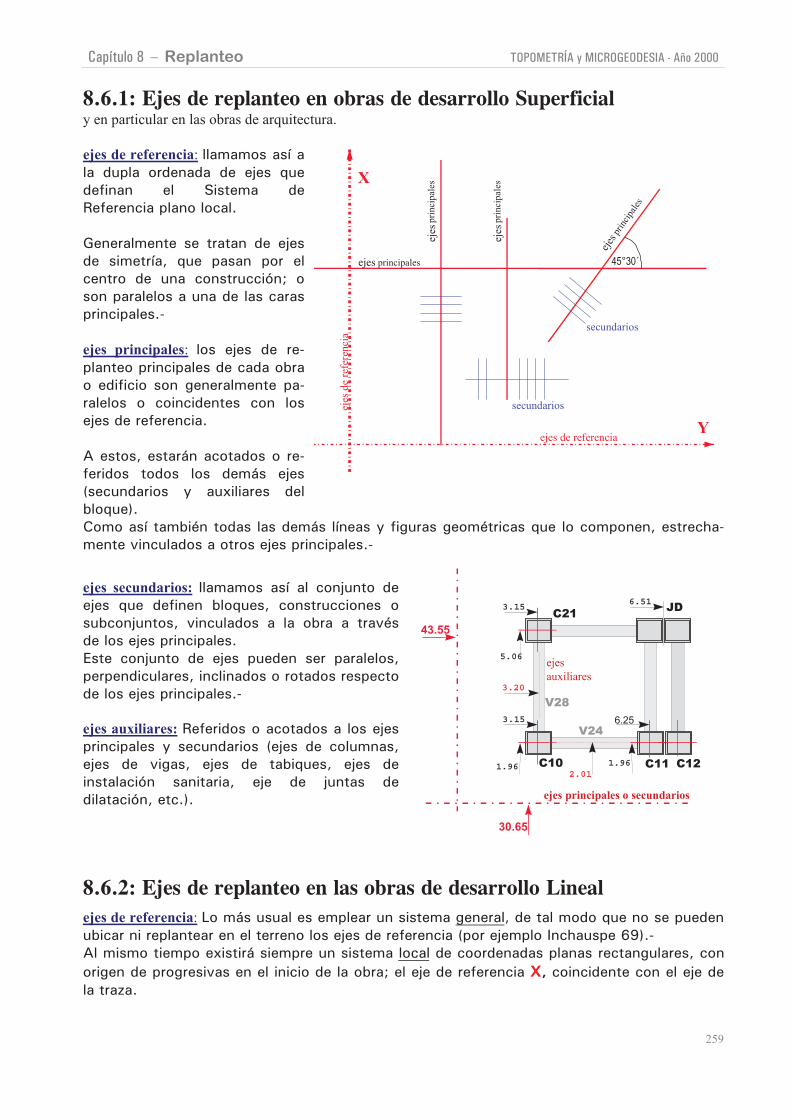
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
259
8.6.1: Ejes de replanteo en obras de desarrollo Superficialy en particular en las obras de arquitectura.
ejes de referencia: llamamos así a
la dupla ordenada de ejes que
definan el Sistema de
Referencia plano local.
Generalmente se tratan de ejes
de simetría, que pasan por el
centro de una construcción; o
son paralelos a una de las caras
principales.-
ejes principales: los ejes de re-
planteo principales de cada obra
o edificio son generalmente pa-
ralelos o coincidentes con los
ejes de referencia.
A estos, estarán acotados o re-
feridos todos los demás ejes
(secundarios y auxiliares del
bloque).
X
Y
45°30´
ejes de referencia
ejes
de
refe
ren
cia
ejes principales
ejes
pri
nci
pal
es
ejes
prin
cipa
les
ejes
pri
nci
pal
es
secundarios
secundarios
Como así también todas las demás líneas y figuras geométricas que lo componen, estrecha-
mente vinculados a otros ejes principales.-
ejes secundarios: llamamos así al conjunto de
ejes que definen bloques, construcciones o
subconjuntos, vinculados a la obra a través
de los ejes principales.
Este conjunto de ejes pueden ser paralelos,
perpendiculares, inclinados o rotados respecto
de los ejes principales.-
ejes auxiliares: Referidos o acotados a los ejes
principales y secundarios (ejes de columnas,
ejes de vigas, ejes de tabiques, ejes de
instalación sanitaria, eje de juntas de
dilatación, etc.).
3.15
1.96 C10
6.25
1.96 C112.01
V24
3.15
5.06
C21
3.20
V28
43.55
30.65
ejes principales o secundarios
ejes
auxiliares
C12
6.51JD
8.6.2: Ejes de replanteo en las obras de desarrollo Lineal
ejes de referencia: Lo más usual es emplear un sistema general, de tal modo que no se pueden
ubicar ni replantear en el terreno los ejes de referencia (por ejemplo Inchauspe 69).-
Al mismo tiempo existirá siempre un sistema local de coordenadas planas rectangulares, con
origen de progresivas en el inicio de la obra; el eje de referencia X, coincidente con el eje de
la traza.
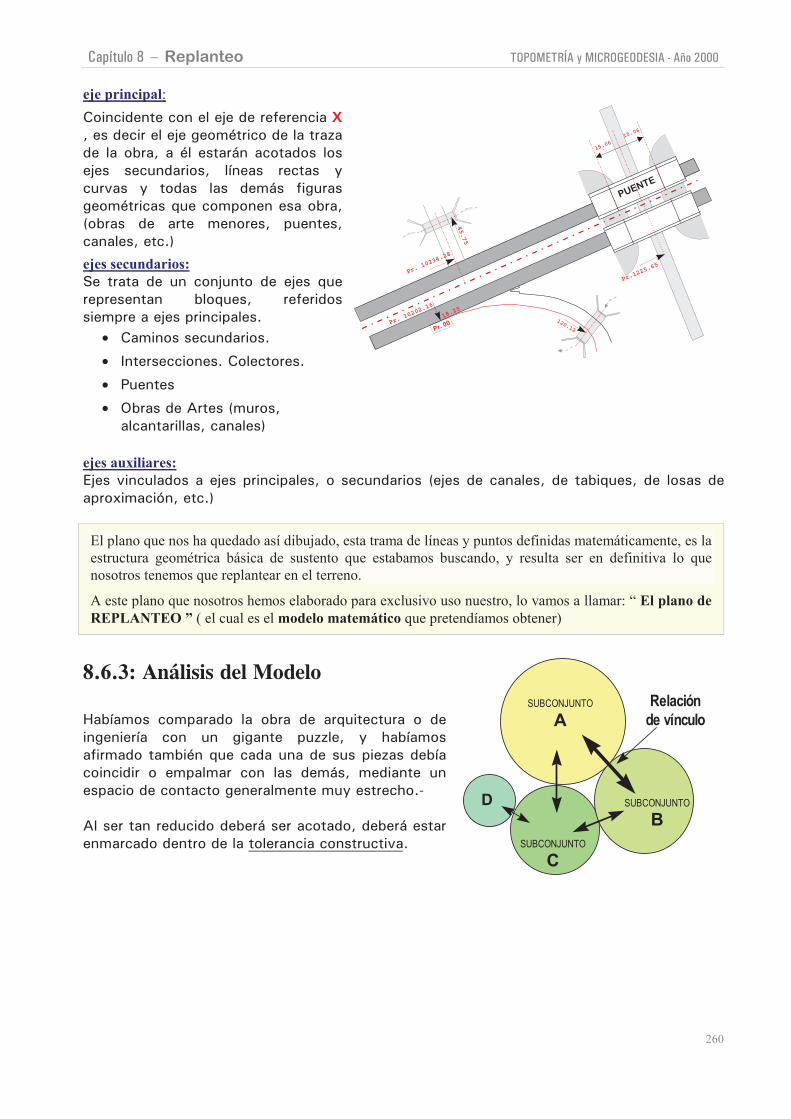
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
260
eje principal:
Coincidente con el eje de referencia X
, es decir el eje geométrico de la traza
de la obra, a él estarán acotados los
ejes secundarios, líneas rectas y
curvas y todas las demás figuras
geométricas que componen esa obra,
(obras de arte menores, puentes,
canales, etc.)
ejes secundarios:
Se trata de un conjunto de ejes que
representan bloques, referidos
siempre a ejes principales.
• Caminos secundarios.
• Intersecciones. Colectores.
• Puentes
• Obras de Artes (muros,
alcantarillas, canales)
Pr.1225.65
45.75
Pr. 10234.28
120.12
18.25
PUENTE
Pr. 10202.16
Pr. 00
15.06
15.06
ejes auxiliares:
Ejes vinculados a ejes principales, o secundarios (ejes de canales, de tabiques, de losas de
aproximación, etc.)
El plano que nos ha quedado así dibujado, esta trama de líneas y puntos definidas matemáticamente, es la
estructura geométrica básica de sustento que estabamos buscando, y resulta ser en definitiva lo que
nosotros tenemos que replantear en el terreno.
A este plano que nosotros hemos elaborado para exclusivo uso nuestro, lo vamos a llamar: “ El plano de
REPLANTEO ” ( el cual es el modelo matemático que pretendíamos obtener)
8.6.3: Análisis del Modelo
Habíamos comparado la obra de arquitectura o de
ingeniería con un gigante puzzle, y habíamos
afirmado también que cada una de sus piezas debía
coincidir o empalmar con las demás, mediante un
espacio de contacto generalmente muy estrecho.-
Al ser tan reducido deberá ser acotado, deberá estar
enmarcado dentro de la tolerancia constructiva.
SUBCONJUNTO
A
SUBCONJUNTO
B
SUBCONJUNTO
C
D
Relación
de vínculo
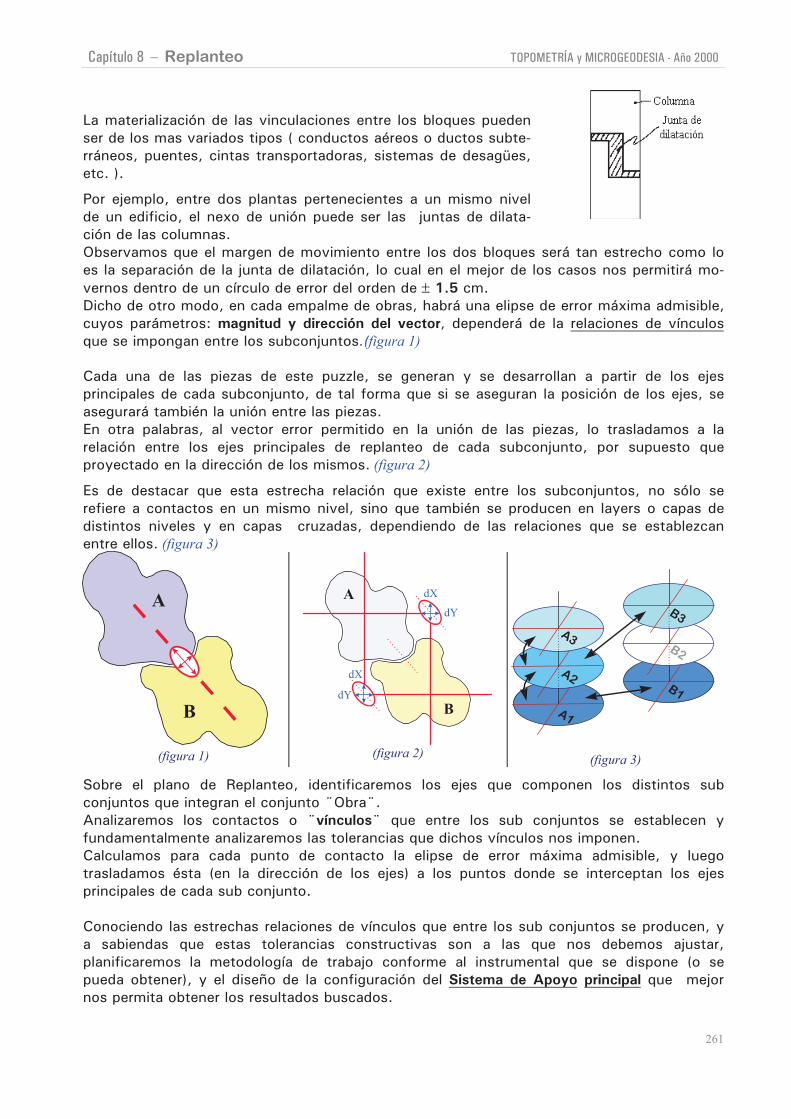
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
261
La materialización de las vinculaciones entre los bloques pueden
ser de los mas variados tipos ( conductos aéreos o ductos subte-
rráneos, puentes, cintas transportadoras, sistemas de desagües,
etc. ).
Por ejemplo, entre dos plantas pertenecientes a un mismo nivel
de un edificio, el nexo de unión puede ser las juntas de dilata-
ción de las columnas.
Observamos que el margen de movimiento entre los dos bloques será tan estrecho como lo
es la separación de la junta de dilatación, lo cual en el mejor de los casos nos permitirá mo-
vernos dentro de un círculo de error del orden de ± 1.5 cm.
Dicho de otro modo, en cada empalme de obras, habrá una elipse de error máxima admisible,
cuyos parámetros: magnitud y dirección del vector, dependerá de la relaciones de vínculos
que se impongan entre los subconjuntos.(figura 1)
Cada una de las piezas de este puzzle, se generan y se desarrollan a partir de los ejes
principales de cada subconjunto, de tal forma que si se aseguran la posición de los ejes, se
asegurará también la unión entre las piezas.
En otra palabras, al vector error permitido en la unión de las piezas, lo trasladamos a la
relación entre los ejes principales de replanteo de cada subconjunto, por supuesto que
proyectado en la dirección de los mismos. (figura 2)
Es de destacar que esta estrecha relación que existe entre los subconjuntos, no sólo se
refiere a contactos en un mismo nivel, sino que también se producen en layers o capas de
distintos niveles y en capas cruzadas, dependiendo de las relaciones que se establezcan
entre ellos. (figura 3)
A
B
(figura 1)
A
B
dX
dY
dX
dY
(figura 2)
A1
A2
A3
B1
B2
B3
(figura 3)
Sobre el plano de Replanteo, identificaremos los ejes que componen los distintos sub
conjuntos que integran el conjunto ¨Obra¨.
Analizaremos los contactos o ¨vínculos¨ que entre los sub conjuntos se establecen y
fundamentalmente analizaremos las tolerancias que dichos vínculos nos imponen.
Calculamos para cada punto de contacto la elipse de error máxima admisible, y luego
trasladamos ésta (en la dirección de los ejes) a los puntos donde se interceptan los ejes
principales de cada sub conjunto.
Conociendo las estrechas relaciones de vínculos que entre los sub conjuntos se producen, y
a sabiendas que estas tolerancias constructivas son a las que nos debemos ajustar,
planificaremos la metodología de trabajo conforme al instrumental que se dispone (o se
pueda obtener), y el diseño de la configuración del Sistema de Apoyo principal que mejor
nos permita obtener los resultados buscados.
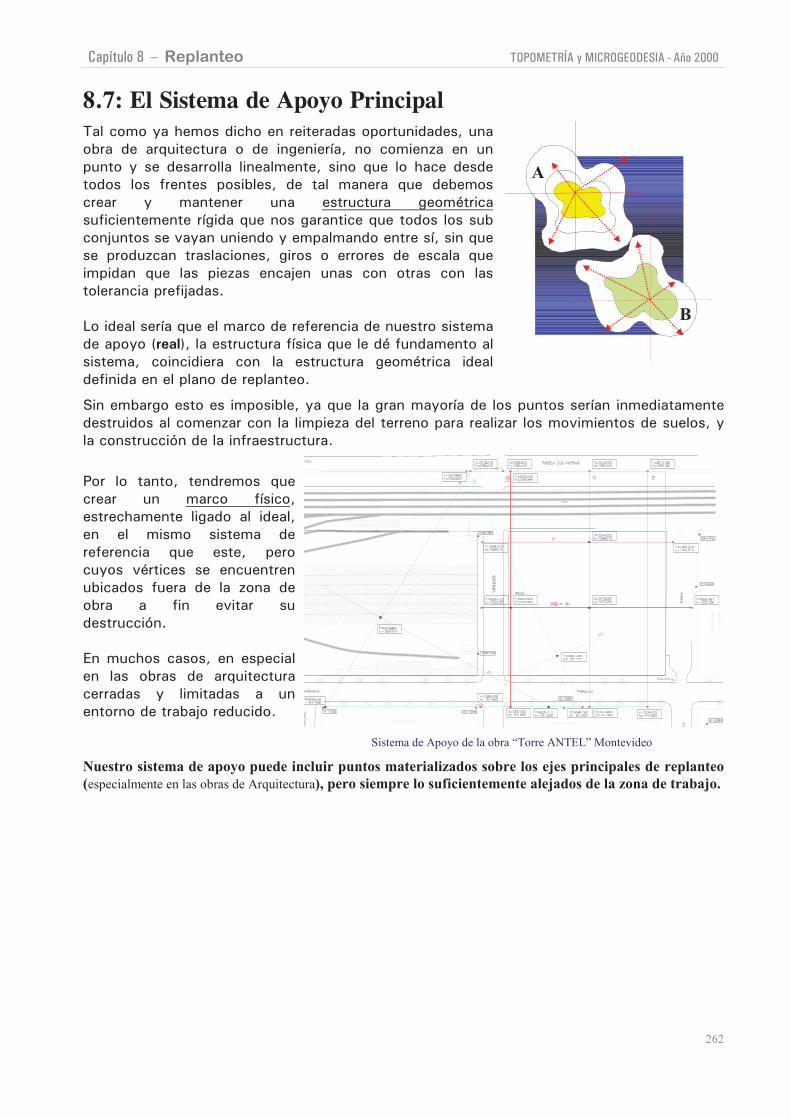
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
262
8.7: El Sistema de Apoyo Principal
Tal como ya hemos dicho en reiteradas oportunidades, una
obra de arquitectura o de ingeniería, no comienza en un
punto y se desarrolla linealmente, sino que lo hace desde
todos los frentes posibles, de tal manera que debemos
crear y mantener una estructura geométrica
suficientemente rígida que nos garantice que todos los sub
conjuntos se vayan uniendo y empalmando entre sí, sin que
se produzcan traslaciones, giros o errores de escala que
impidan que las piezas encajen unas con otras con las
tolerancia prefijadas.
Lo ideal sería que el marco de referencia de nuestro sistema
de apoyo (real), la estructura física que le dé fundamento al
sistema, coincidiera con la estructura geométrica ideal
definida en el plano de replanteo.
A
B
Sin embargo esto es imposible, ya que la gran mayoría de los puntos serían inmediatamente
destruidos al comenzar con la limpieza del terreno para realizar los movimientos de suelos, y
la construcción de la infraestructura.
Por lo tanto, tendremos que
crear un marco físico,
estrechamente ligado al ideal,
en el mismo sistema de
referencia que este, pero
cuyos vértices se encuentren
ubicados fuera de la zona de
obra a fin evitar su
destrucción.
En muchos casos, en especial
en las obras de arquitectura
cerradas y limitadas a un
entorno de trabajo reducido.
Sistema de Apoyo de la obra “Torre ANTEL” Montevideo
Nuestro sistema de apoyo puede incluir puntos materializados sobre los ejes principales de replanteo
(especialmente en las obras de Arquitectura), pero siempre lo suficientemente alejados de la zona de trabajo.
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
263
Imaginemos el fracaso de nuestro trabajo, si alguno de los
bloques mencionados experimentase un desplazamiento,
una rotación, un cambio de escala o un hundimiento. Esto
puede ocurrir por alguna de las siguientes causas:
a un error del modelo matemático no detectado al realizar el
Plano de Replanteo.-
por un error de cálculo de coordenadas.
por una mala acotación de los errores de medición al
materializar el sistema
por la acumulación de sucesivos errores de replanteo.
por la destrucción o movimiento de alguno de los vértices del
sistema al que habíamos considerado ¨Punto Fijo¨.
A
B
Expodré a continuación algunos criterios que considero deberían ser requisitos a tener en
cuenta en el momento de la planificación, el diseño y construcción del Sistema de Apoyo
principal del replanteo.
1. Buscar la mejor configuración del sistema
2. Que sea fijo y superviva a la obra.
3. Que englobe o encierre a toda la obra.
4. Que la elipse de error en cada vértice, asegure se cumplan las exactitudes de
vínculos exigidas en el replanteo.
8.7.1: Configuración del Sistema
Sobre el plano de Replanteo, teniendo en cuenta la distribución de los ejes, planificamos la fi-
gura y la forma de nuestro sistema de apoyo. Acercando dos o más vértices a las zonas de
mayor exigencias de replanteo, (tanto en lo que se refiere a exigencias en cuanto a la canti-
dad de puntos a replantear, como también exigencias en cuanto a las exactitudes a conside-
rar).
El sistema además, deberá adecuarse a la topografía del terreno, asegurando la intervisibili-
dad entre los puntos. En este aspecto, un elemento fundamental a tener presente es el plan
de avance de obras, a fin de garantizar la permanente visibilidad. Al comienzo, y mientras du-
ren los trabajos de movimientos de suelo y construcción de la infraestructura, todos los pun-
tos serán visibles entre sí, sin embargo, a medida que las obras vayan creciendo en altura, se
perderá esta ventaja, si es que no lo prevemos con suficiente tiempo de antelación.
El mejor diseño será el que contenga la mayor cantidad de figuras cerradas, de formas regu-
lares y lo más homogénea posible, lo cual garantice rigidéz al sistema.
Siempre será conveniente, una vez diseñada la configuración del sistema, probarlo utilizando
un software de “proceso de simulación de redes”.
8.7.2: Permanencia en el tiempo
Reiterando conceptos ya antes expuestos, hablamos sobre la necesidad de mantener durante
todo el tiempo que dure la obra, un sistema de apoyo totalmente rígido. Ello solo se consigue
si los vértices que conforman el sistema son puntos fijos y estables.
Una vez construida la red de control, medida y compensada; se ha transformado en un mo-
delo global, de tal modo que si se destruye algunos de sus vértices, por más que se reponga
con el mayor de los cuidados, habrá causado un daño que habrá afectado a todo el conjunto
de la red. De tal manera, que al construir nuestro sistema de apoyo deberemos hacerlo con la
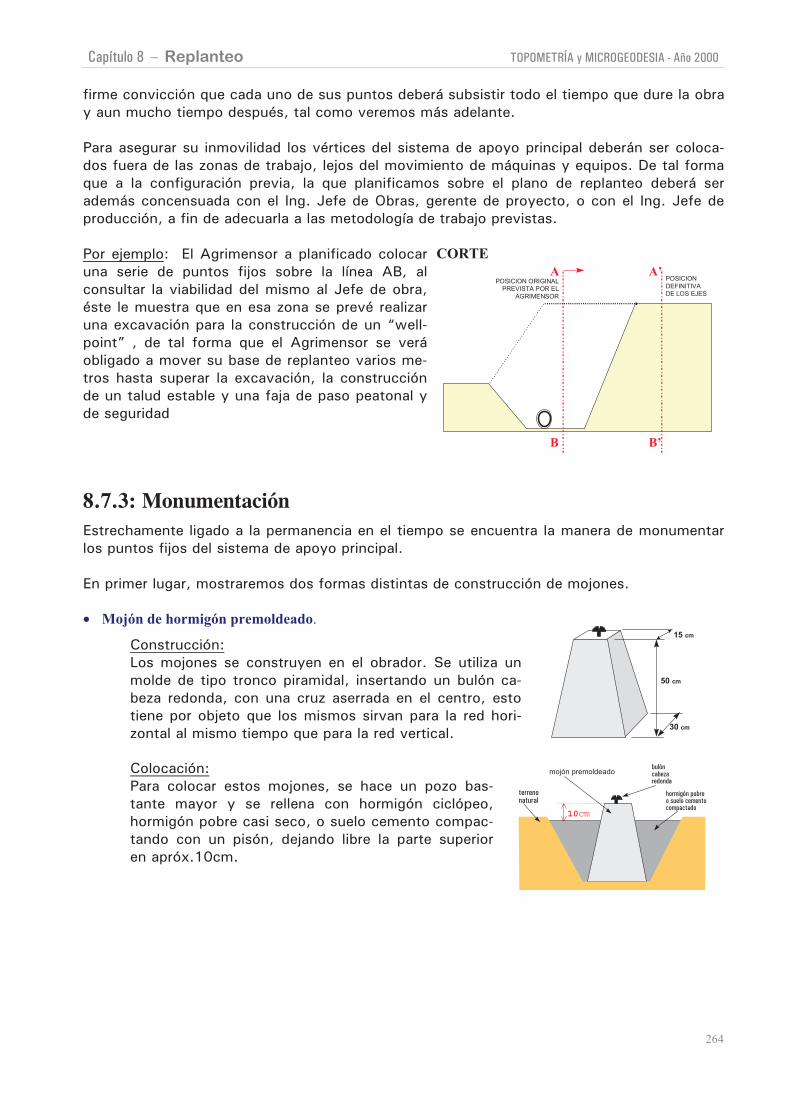
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
264
firme convicción que cada uno de sus puntos deberá subsistir todo el tiempo que dure la obra
y aun mucho tiempo después, tal como veremos más adelante.
Para asegurar su inmovilidad los vértices del sistema de apoyo principal deberán ser coloca-
dos fuera de las zonas de trabajo, lejos del movimiento de máquinas y equipos. De tal forma
que a la configuración previa, la que planificamos sobre el plano de replanteo deberá ser
además concensuada con el Ing. Jefe de Obras, gerente de proyecto, o con el Ing. Jefe de
producción, a fin de adecuarla a las metodología de trabajo previstas.
Por ejemplo: El Agrimensor a planificado colocar
una serie de puntos fijos sobre la línea AB, al
consultar la viabilidad del mismo al Jefe de obra,
éste le muestra que en esa zona se prevé realizar
una excavación para la construcción de un “well-
point” , de tal forma que el Agrimensor se verá
obligado a mover su base de replanteo varios me-
tros hasta superar la excavación, la construcción
de un talud estable y una faja de paso peatonal y
de seguridad
CORTE
A
B
A’
B’
POSICION ORIGINAL
PREVISTA POR EL
AGRIMENSOR
POSICION
DEFINITIVA
DE LOS EJES
8.7.3: Monumentación
Estrechamente ligado a la permanencia en el tiempo se encuentra la manera de monumentar
los puntos fijos del sistema de apoyo principal.
En primer lugar, mostraremos dos formas distintas de construcción de mojones.
• Mojón de hormigón premoldeado.
Construcción:
Los mojones se construyen en el obrador. Se utiliza un
molde de tipo tronco piramidal, insertando un bulón ca-
beza redonda, con una cruz aserrada en el centro, esto
tiene por objeto que los mismos sirvan para la red hori-
zontal al mismo tiempo que para la red vertical.
15 cm
30 cm
50 cm
Colocación:
Para colocar estos mojones, se hace un pozo bas-
tante mayor y se rellena con hormigón ciclópeo,
hormigón pobre casi seco, o suelo cemento compac-
tando con un pisón, dejando libre la parte superior
en apróx.10cm.
mojón premoldeado
hormigón pobreo suelo cementocompactado
terrenonatural
bulón cabeza redonda
10cm
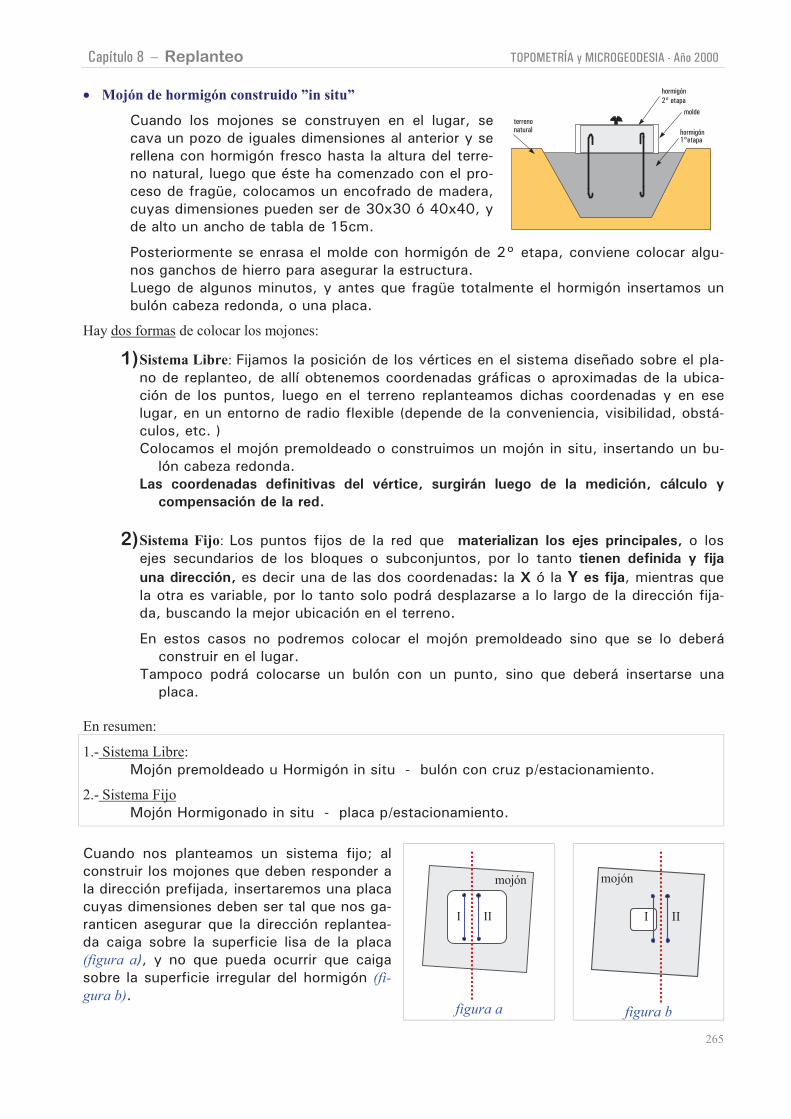
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
265
• Mojón de hormigón construido ”in situ”
Cuando los mojones se construyen en el lugar, se
cava un pozo de iguales dimensiones al anterior y se
rellena con hormigón fresco hasta la altura del terre-
no natural, luego que éste ha comenzado con el pro-
ceso de fragüe, colocamos un encofrado de madera,
cuyas dimensiones pueden ser de 30x30 ó 40x40, y
de alto un ancho de tabla de 15cm.
hormigón 2° etapa
terrenonatural hormigón
1°etapa
molde
Posteriormente se enrasa el molde con hormigón de 2° etapa, conviene colocar algu-
nos ganchos de hierro para asegurar la estructura.
Luego de algunos minutos, y antes que fragüe totalmente el hormigón insertamos un
bulón cabeza redonda, o una placa.
Hay dos formas de colocar los mojones:
1) Sistema Libre: Fijamos la posición de los vértices en el sistema diseñado sobre el pla-
no de replanteo, de allí obtenemos coordenadas gráficas o aproximadas de la ubica-
ción de los puntos, luego en el terreno replanteamos dichas coordenadas y en ese
lugar, en un entorno de radio flexible (depende de la conveniencia, visibilidad, obstá-
culos, etc. )
Colocamos el mojón premoldeado o construimos un mojón in situ, insertando un bu-
lón cabeza redonda.
Las coordenadas definitivas del vértice, surgirán luego de la medición, cálculo y
compensación de la red.
2) Sistema Fijo: Los puntos fijos de la red que materializan los ejes principales, o los
ejes secundarios de los bloques o subconjuntos, por lo tanto tienen definida y fija
una dirección, es decir una de las dos coordenadas: la X ó la Y es fija, mientras que
la otra es variable, por lo tanto solo podrá desplazarse a lo largo de la dirección fija-
da, buscando la mejor ubicación en el terreno.
En estos casos no podremos colocar el mojón premoldeado sino que se lo deberá
construir en el lugar.
Tampoco podrá colocarse un bulón con un punto, sino que deberá insertarse una
placa.
En resumen:
1.- Sistema Libre:
Mojón premoldeado u Hormigón in situ - bulón con cruz p/estacionamiento.
2.- Sistema Fijo
Mojón Hormigonado in situ - placa p/estacionamiento.
Cuando nos planteamos un sistema fijo; al
construir los mojones que deben responder a
la dirección prefijada, insertaremos una placa
cuyas dimensiones deben ser tal que nos ga-
ranticen asegurar que la dirección replantea-
da caiga sobre la superficie lisa de la placa
(figura a), y no que pueda ocurrir que caiga
sobre la superficie irregular del hormigón (fi-
gura b).
mojón
I II
figura a
mojón
I II
figura b
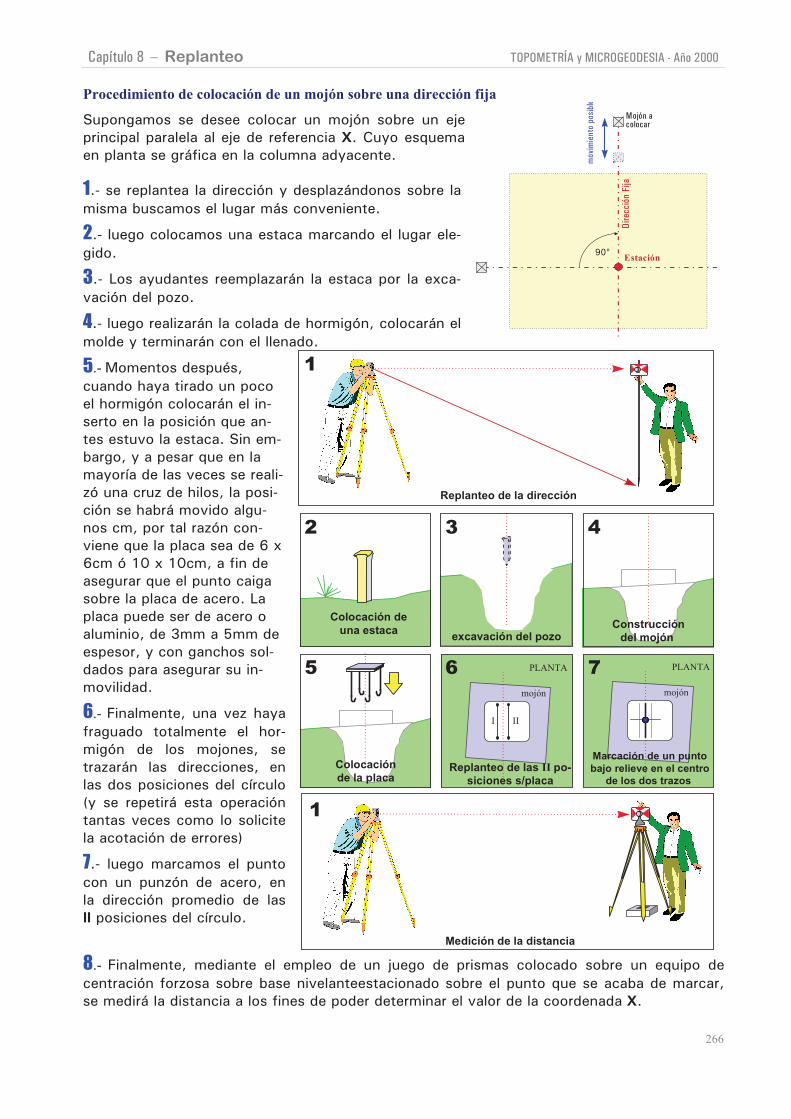
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
266
Procedimiento de colocación de un mojón sobre una dirección fija
Supongamos se desee colocar un mojón sobre un eje
principal paralela al eje de referencia X. Cuyo esquema
en planta se gráfica en la columna adyacente.
1.- se replantea la dirección y desplazándonos sobre la
misma buscamos el lugar más conveniente.
2.- luego colocamos una estaca marcando el lugar ele-
gido.
3.- Los ayudantes reemplazarán la estaca por la exca-
vación del pozo.
4.- luego realizarán la colada de hormigón, colocarán el
molde y terminarán con el llenado.
90°Estación
mov
imie
nto
posi
ble
Mojón acolocar
Dire
cció
n Fi
ja
5.- Momentos después,
cuando haya tirado un poco
el hormigón colocarán el in-
serto en la posición que an-
tes estuvo la estaca. Sin em-
bargo, y a pesar que en la
mayoría de las veces se reali-
zó una cruz de hilos, la posi-
ción se habrá movido algu-
nos cm, por tal razón con-
viene que la placa sea de 6 x
6cm ó 10 x 10cm, a fin de
asegurar que el punto caiga
sobre la placa de acero. La
placa puede ser de acero o
aluminio, de 3mm a 5mm de
espesor, y con ganchos sol-
dados para asegurar su in-
movilidad.
6.- Finalmente, una vez haya
fraguado totalmente el hor-
migón de los mojones, se
trazarán las direcciones, en
las dos posiciones del círculo
(y se repetirá esta operación
tantas veces como lo solicite
la acotación de errores)
7.- luego marcamos el punto
con un punzón de acero, en
la dirección promedio de las
II posiciones del círculo.
Replanteo de la dirección
1
3
excavación del pozo
42
Colocación de
una estaca Construcción
del mojón
6
Replanteo de las II po-
siciones s/placa
75
Colocación
de la placa
PLANTA
mojón
PLANTA
mojón
I II
Marcación de un punto
bajo relieve en el centro
de los dos trazos
Medición de la distancia
1
8.- Finalmente, mediante el empleo de un juego de prismas colocado sobre un equipo de
centración forzosa sobre base nivelanteestacionado sobre el punto que se acaba de marcar,
se medirá la distancia a los fines de poder determinar el valor de la coordenada X.
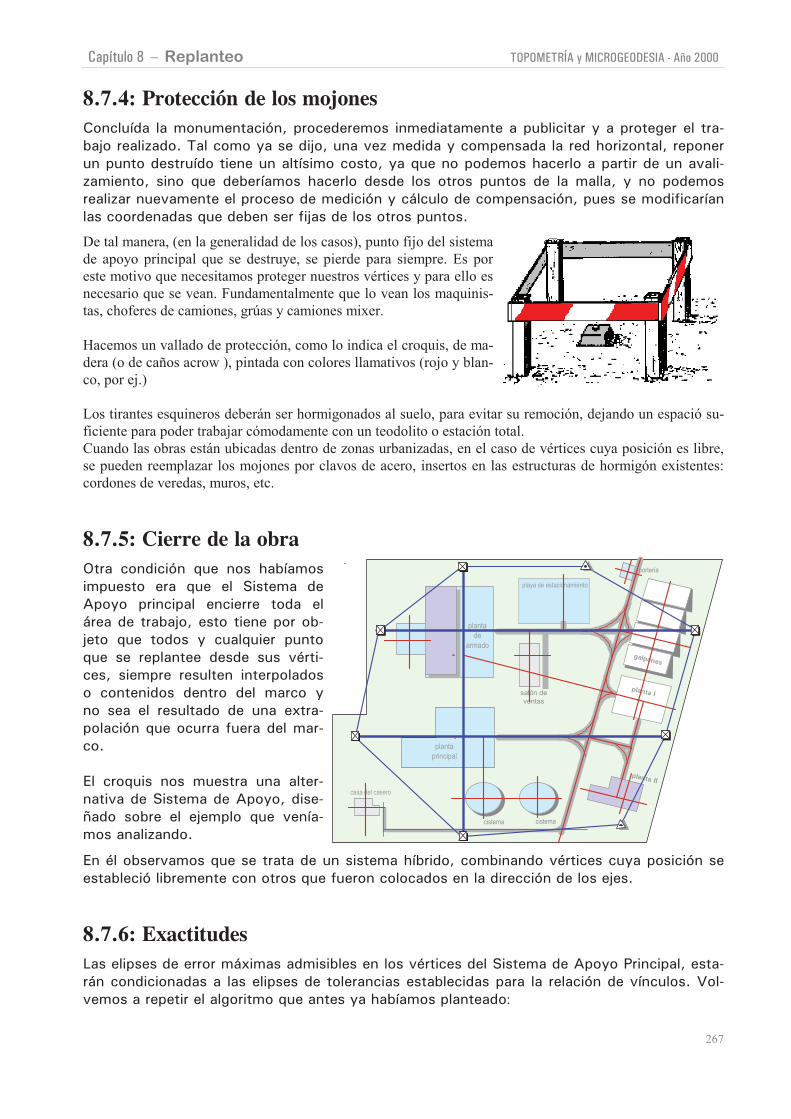
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
267
8.7.4: Protección de los mojones
Concluída la monumentación, procederemos inmediatamente a publicitar y a proteger el tra-
bajo realizado. Tal como ya se dijo, una vez medida y compensada la red horizontal, reponer
un punto destruído tiene un altísimo costo, ya que no podemos hacerlo a partir de un avali-
zamiento, sino que deberíamos hacerlo desde los otros puntos de la malla, y no podemos
realizar nuevamente el proceso de medición y cálculo de compensación, pues se modificarían
las coordenadas que deben ser fijas de los otros puntos.
De tal manera, (en la generalidad de los casos), punto fijo del sistema
de apoyo principal que se destruye, se pierde para siempre. Es por
este motivo que necesitamos proteger nuestros vértices y para ello es
necesario que se vean. Fundamentalmente que lo vean los maquinis-
tas, choferes de camiones, grúas y camiones mixer.
Hacemos un vallado de protección, como lo indica el croquis, de ma-
dera (o de caños acrow ), pintada con colores llamativos (rojo y blan-
co, por ej.)
Los tirantes esquineros deberán ser hormigonados al suelo, para evitar su remoción, dejando un espació su-
ficiente para poder trabajar cómodamente con un teodolito o estación total.
Cuando las obras están ubicadas dentro de zonas urbanizadas, en el caso de vértices cuya posición es libre,
se pueden reemplazar los mojones por clavos de acero, insertos en las estructuras de hormigón existentes:
cordones de veredas, muros, etc.
8.7.5: Cierre de la obra
Otra condición que nos habíamos
impuesto era que el Sistema de
Apoyo principal encierre toda el
área de trabajo, esto tiene por ob-
jeto que todos y cualquier punto
que se replantee desde sus vérti-
ces, siempre resulten interpolados
o contenidos dentro del marco y
no sea el resultado de una extra-
polación que ocurra fuera del mar-
co.
El croquis nos muestra una alter-
nativa de Sistema de Apoyo, dise-
ñado sobre el ejemplo que venía-
mos analizando.
portería
playa de estacionamiento
galpones
planta I
planta II
planta
principal
planta
de
armado
salón de
ventas
cisternacisterna
casa del casero
En él observamos que se trata de un sistema híbrido, combinando vértices cuya posición se
estableció libremente con otros que fueron colocados en la dirección de los ejes.
8.7.6: Exactitudes
Las elipses de error máximas admisibles en los vértices del Sistema de Apoyo Principal, esta-
rán condicionadas a las elipses de tolerancias establecidas para la relación de vínculos. Vol-
vemos a repetir el algoritmo que antes ya habíamos planteado:
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
268
eP = ± eS ± er
Es decir:
Entre dos bloques tenemos definido una tolerancia constructiva (vínculo).
Trasladamos dicha elipse de error a los ejes de replanteo.
El radio mayor de dicha elipse de error, deberá ser inferior a (eP ), el cual es la suma de
dos errores, el error de medición de replanteo (er ) y el error de sistema de apoyo (eS )
Por tal motivo, y de igual forma como lo hicimos antes, fijando el método de replanteo, co-
nociendo el instrumental que se utilizará, deduciremos la elipse de exactitud para cada vértice
de la red.
.
eS = ± √ eP2
- er2
.
En los puntos fijos que están colocados en la dirección de los ejes principales, estos serán
usados para aplicar un método de replanteo denominado “alineaciones”, lo cual según vere-
mos más tarde, en el empleo de este método NO realizamos mediciones angulares Ni medi-
ciones lineales, por lo tanto en estos vértices, la elipse del sistema se reduce a la siguiente
expresión:
er = 0 ; eS = ± √ eP2
= ± eP
en otras palabras, la elipse de tolerancia se traslada directamente al vértice del Sistema Prin-
cipal, de tal modo que el radio mayor de la elipse exactitud, deberá ser al menos dos veces
inferior al anterior.
8.8: Los Sistemas de Apoyo Secundarios
Los vértices del Sistema de apoyo principal, sólo se utilizarán para replantear los vértices de
los sistemas secundarios y los puntos auxiliares.
A su vez, desde el sistema de apoyo secundario se replantearán los ejes auxiliares, los pun-
tos singulares y la obra en sí.
S is tem a P rin c ip a l S is tem a S e cu n d ario O b ra
M E D IC IO N E S M E D IC IO N E S
R E P L A N T E O R E P L A N T E O
El Sistema Principal se preocupa por todo el rompecabezas, por que todas las piezas encajen en
su lugar y con las tolerancias de vínculos.
Los Sistemas secundarios se encargan de cada una de las piezas, se preocupa que cierre dentro
de las tolerancias fijadas cada uno de los bloques.
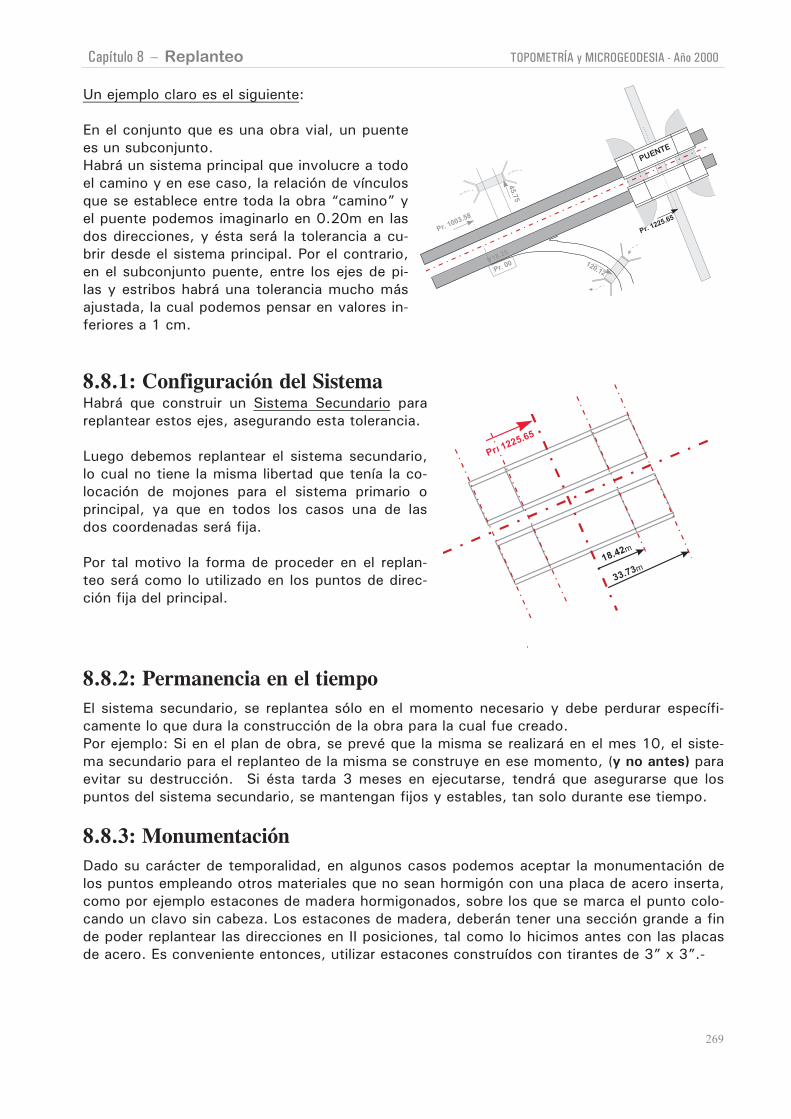
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
269
Un ejemplo claro es el siguiente:
En el conjunto que es una obra vial, un puente
es un subconjunto.
Habrá un sistema principal que involucre a todo
el camino y en ese caso, la relación de vínculos
que se establece entre toda la obra “camino” y
el puente podemos imaginarlo en 0.20m en las
dos direcciones, y ésta será la tolerancia a cu-
brir desde el sistema principal. Por el contrario,
en el subconjunto puente, entre los ejes de pi-
las y estribos habrá una tolerancia mucho más
ajustada, la cual podemos pensar en valores in-
feriores a 1 cm.
Pr. 1225.65
45.7
5
Pr. 1003.58
Pr. 00 120.12
18.25
PUENTE
8.8.1: Configuración del SistemaHabrá que construir un Sistema Secundario para
replantear estos ejes, asegurando esta tolerancia.
Luego debemos replantear el sistema secundario,
lo cual no tiene la misma libertad que tenía la co-
locación de mojones para el sistema primario o
principal, ya que en todos los casos una de las
dos coordenadas será fija.
Por tal motivo la forma de proceder en el replan-
teo será como lo utilizado en los puntos de direc-
ción fija del principal.
Pr. 1225.65
33.73m
18.42m
8.8.2: Permanencia en el tiempo
El sistema secundario, se replantea sólo en el momento necesario y debe perdurar específi-
camente lo que dura la construcción de la obra para la cual fue creado.
Por ejemplo: Si en el plan de obra, se prevé que la misma se realizará en el mes 10, el siste-
ma secundario para el replanteo de la misma se construye en ese momento, (y no antes) para
evitar su destrucción. Si ésta tarda 3 meses en ejecutarse, tendrá que asegurarse que los
puntos del sistema secundario, se mantengan fijos y estables, tan solo durante ese tiempo.
8.8.3: Monumentación
Dado su carácter de temporalidad, en algunos casos podemos aceptar la monumentación de
los puntos empleando otros materiales que no sean hormigón con una placa de acero inserta,
como por ejemplo estacones de madera hormigonados, sobre los que se marca el punto colo-
cando un clavo sin cabeza. Los estacones de madera, deberán tener una sección grande a fin
de poder replantear las direcciones en II posiciones, tal como lo hicimos antes con las placas
de acero. Es conveniente entonces, utilizar estacones construídos con tirantes de 3” x 3”.-
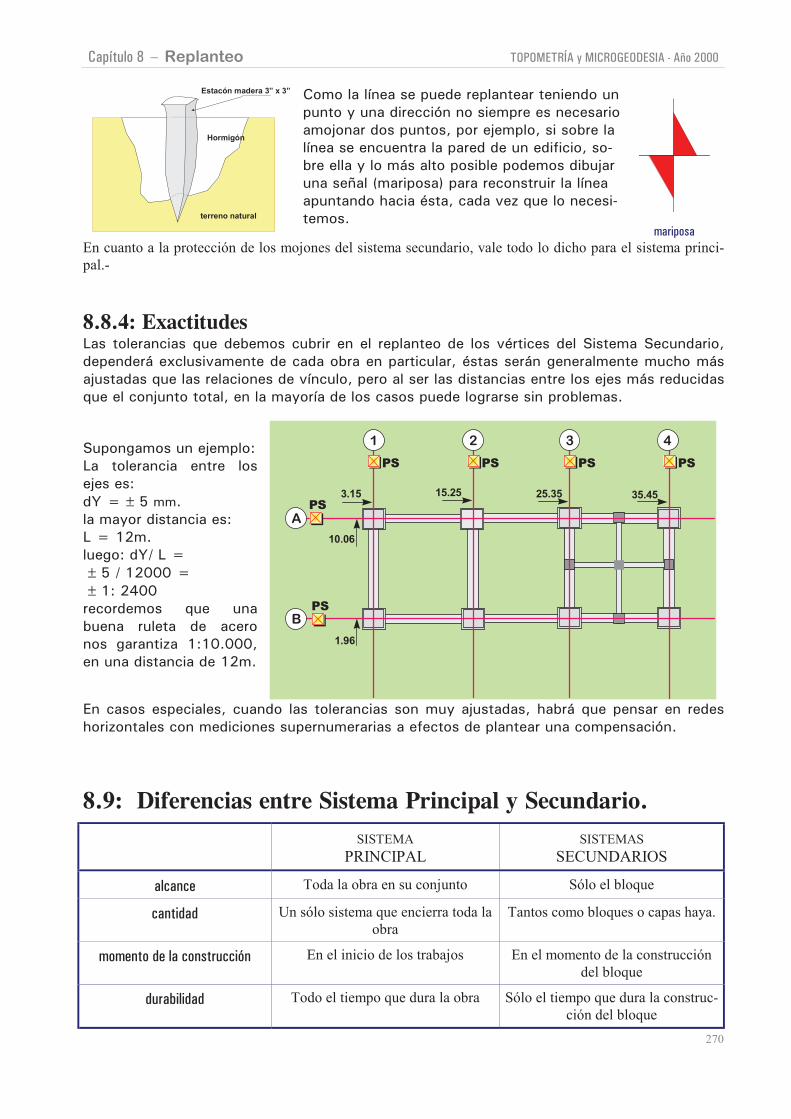
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
270
Estacón madera 3” x 3”
Hormigón
terreno natural
Como la línea se puede replantear teniendo un
punto y una dirección no siempre es necesario
amojonar dos puntos, por ejemplo, si sobre la
línea se encuentra la pared de un edificio, so-
bre ella y lo más alto posible podemos dibujar
una señal (mariposa) para reconstruir la línea
apuntando hacia ésta, cada vez que lo necesi-
temos.mariposa
En cuanto a la protección de los mojones del sistema secundario, vale todo lo dicho para el sistema princi-
pal.-
8.8.4: ExactitudesLas tolerancias que debemos cubrir en el replanteo de los vértices del Sistema Secundario,
dependerá exclusivamente de cada obra en particular, éstas serán generalmente mucho más
ajustadas que las relaciones de vínculo, pero al ser las distancias entre los ejes más reducidas
que el conjunto total, en la mayoría de los casos puede lograrse sin problemas.
Supongamos un ejemplo:
La tolerancia entre los
ejes es:
dY = ± 5 mm.
la mayor distancia es:
L = 12m.
luego: dY/ L =
± 5 / 12000 =
± 1: 2400
recordemos que una
buena ruleta de acero
nos garantiza 1:10.000,
en una distancia de 12m.
1.96
3.15
10.06
25.3515.25 35.45
1 2 3 4
A
B
PS PS PS PS
PS
PS
En casos especiales, cuando las tolerancias son muy ajustadas, habrá que pensar en redes
horizontales con mediciones supernumerarias a efectos de plantear una compensación.
8.9: Diferencias entre Sistema Principal y Secundario.
SISTEMA
PRINCIPAL
SISTEMAS
SECUNDARIOS
alcance Toda la obra en su conjunto Sólo el bloque
cantidad Un sólo sistema que encierra toda la
obra
Tantos como bloques o capas haya.
momento de la construcción En el inicio de los trabajos En el momento de la construcción
del bloque
durabilidad Todo el tiempo que dura la obra Sólo el tiempo que dura la construc-
ción del bloque
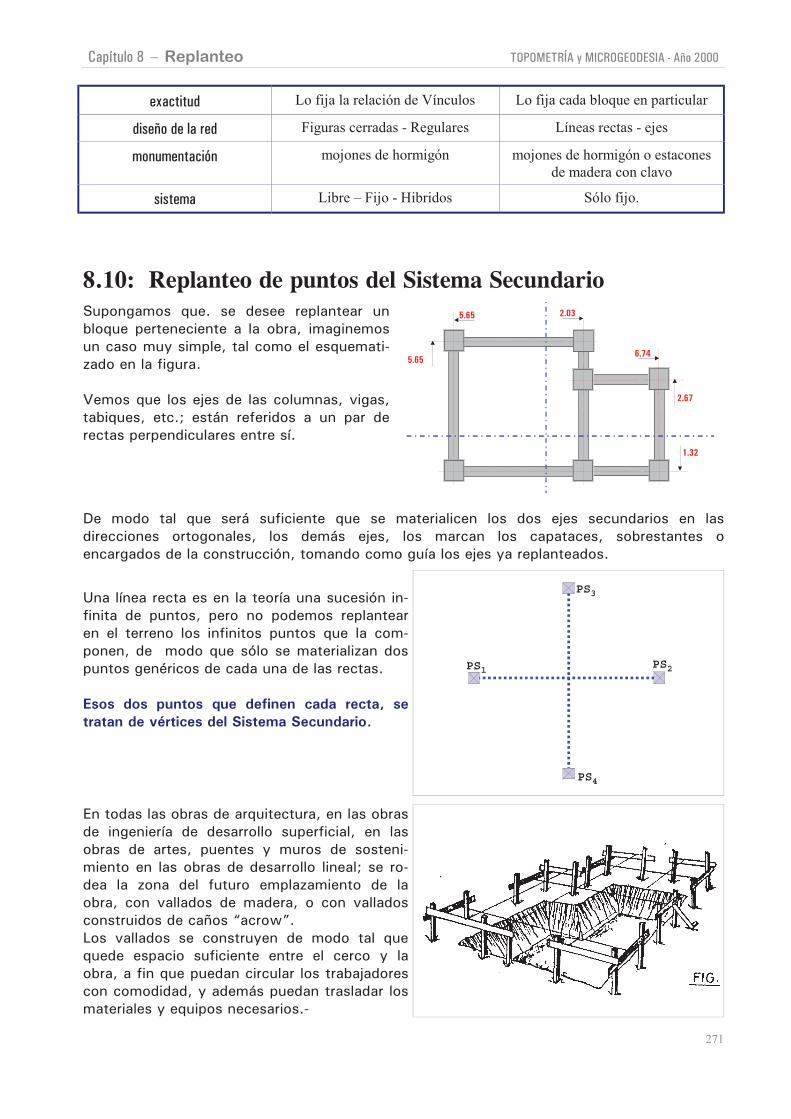
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
271
exactitud Lo fija la relación de Vínculos Lo fija cada bloque en particular
diseño de la red Figuras cerradas - Regulares Líneas rectas - ejes
monumentación mojones de hormigón mojones de hormigón o estacones
de madera con clavo
sistema Libre – Fijo - Hibridos Sólo fijo.
8.10: Replanteo de puntos del Sistema Secundario
Supongamos que. se desee replantear un
bloque perteneciente a la obra, imaginemos
un caso muy simple, tal como el esquemati-
zado en la figura.
Vemos que los ejes de las columnas, vigas,
tabiques, etc.; están referidos a un par de
rectas perpendiculares entre sí.
5.65 2.03
6.74
1.32
5.65
2.67
De modo tal que será suficiente que se materialicen los dos ejes secundarios en las
direcciones ortogonales, los demás ejes, los marcan los capataces, sobrestantes o
encargados de la construcción, tomando como guía los ejes ya replanteados.
Una línea recta es en la teoría una sucesión in-
finita de puntos, pero no podemos replantear
en el terreno los infinitos puntos que la com-
ponen, de modo que sólo se materializan dos
puntos genéricos de cada una de las rectas.
Esos dos puntos que definen cada recta, se
tratan de vértices del Sistema Secundario.
PS1
PS2
PS3
PS4
En todas las obras de arquitectura, en las obras
de ingeniería de desarrollo superficial, en las
obras de artes, puentes y muros de sosteni-
miento en las obras de desarrollo lineal; se ro-
dea la zona del futuro emplazamiento de la
obra, con vallados de madera, o con vallados
construidos de caños “acrow”.
Los vallados se construyen de modo tal que
quede espacio suficiente entre el cerco y la
obra, a fin que puedan circular los trabajadores
con comodidad, y además puedan trasladar los
materiales y equipos necesarios.-
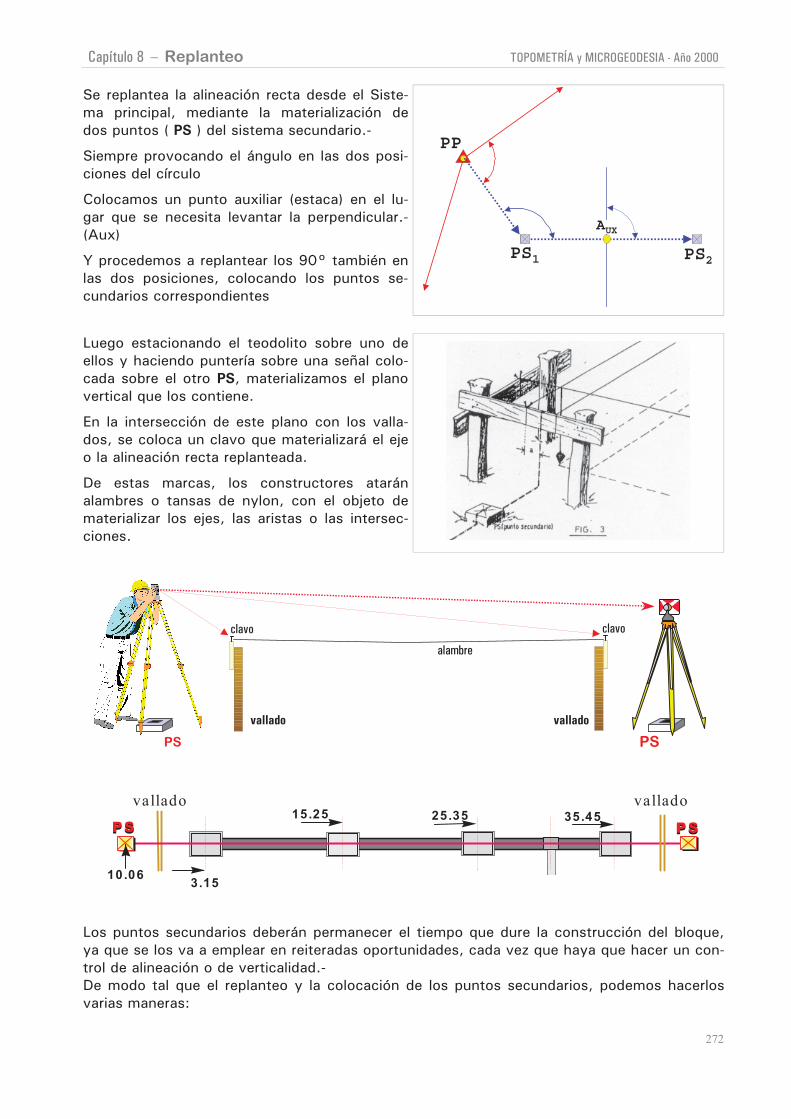
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
272
Se replantea la alineación recta desde el Siste-
ma principal, mediante la materialización de
dos puntos ( PS ) del sistema secundario.-
Siempre provocando el ángulo en las dos posi-
ciones del círculo
Colocamos un punto auxiliar (estaca) en el lu-
gar que se necesita levantar la perpendicular.-
(Aux)
Y procedemos a replantear los 90° también en
las dos posiciones, colocando los puntos se-
cundarios correspondientes
PS2
PS1
PP
AUX
Luego estacionando el teodolito sobre uno de
ellos y haciendo puntería sobre una señal colo-
cada sobre el otro PS, materializamos el plano
vertical que los contiene.
En la intersección de este plano con los valla-
dos, se coloca un clavo que materializará el eje
o la alineación recta replanteada.
De estas marcas, los constructores atarán
alambres o tansas de nylon, con el objeto de
materializar los ejes, las aristas o las intersec-
ciones.
PS PS
clavo clavo
vallado vallado
alambre
3.1510.06
25.3515.25 35.45PSPS PSPS
vallado vallado
Los puntos secundarios deberán permanecer el tiempo que dure la construcción del bloque,
ya que se los va a emplear en reiteradas oportunidades, cada vez que haya que hacer un con-
trol de alineación o de verticalidad.-
De modo tal que el replanteo y la colocación de los puntos secundarios, podemos hacerlos
varias maneras:
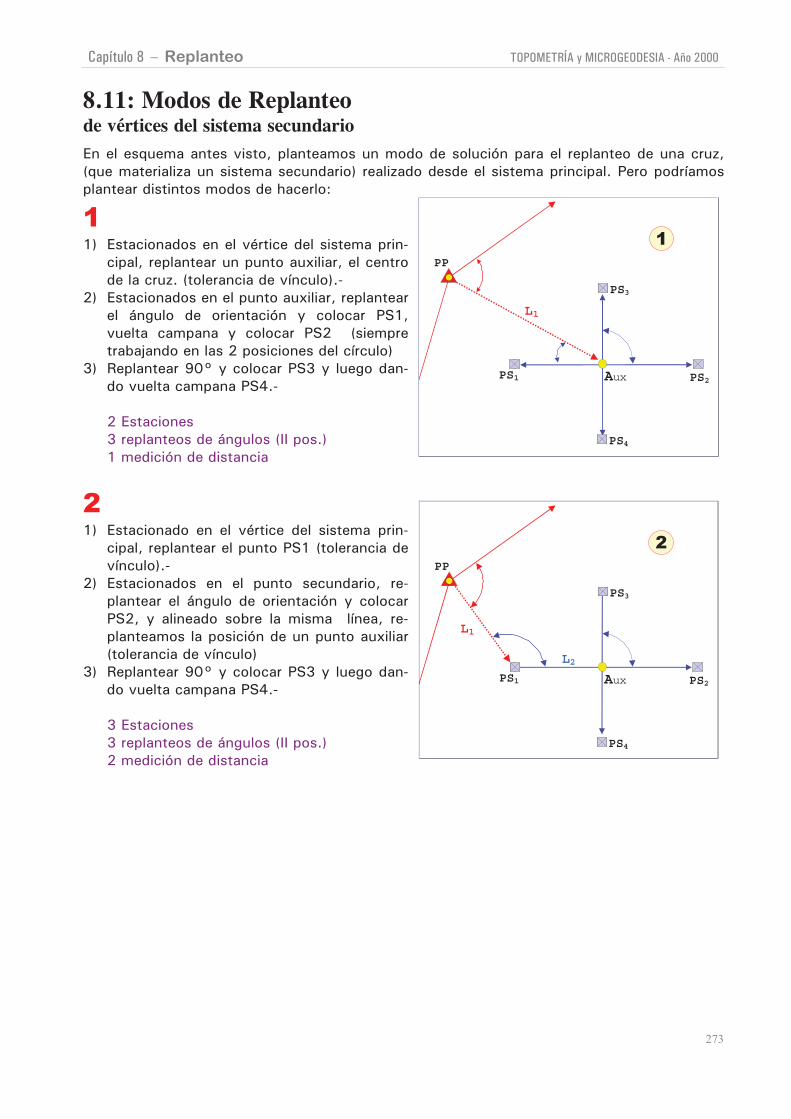
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
273
8.11: Modos de Replanteode vértices del sistema secundario
En el esquema antes visto, planteamos un modo de solución para el replanteo de una cruz,
(que materializa un sistema secundario) realizado desde el sistema principal. Pero podríamos
plantear distintos modos de hacerlo:
11) Estacionados en el vértice del sistema prin-
cipal, replantear un punto auxiliar, el centro
de la cruz. (tolerancia de vínculo).-
2) Estacionados en el punto auxiliar, replantear
el ángulo de orientación y colocar PS1,
vuelta campana y colocar PS2 (siempre
trabajando en las 2 posiciones del círculo)
3) Replantear 90° y colocar PS3 y luego dan-
do vuelta campana PS4.-
2 Estaciones
3 replanteos de ángulos (II pos.)
1 medición de distancia
PS1
PP
Aux PS2
L1
PS3
PS4
1
21) Estacionado en el vértice del sistema prin-
cipal, replantear el punto PS1 (tolerancia de
vínculo).-
2) Estacionados en el punto secundario, re-
plantear el ángulo de orientación y colocar
PS2, y alineado sobre la misma línea, re-
planteamos la posición de un punto auxiliar
(tolerancia de vínculo)
3) Replantear 90° y colocar PS3 y luego dan-
do vuelta campana PS4.-
3 Estaciones
3 replanteos de ángulos (II pos.)
2 medición de distancia
PS1
PP
Aux PS2
L1
PS3
PS4
2
L2
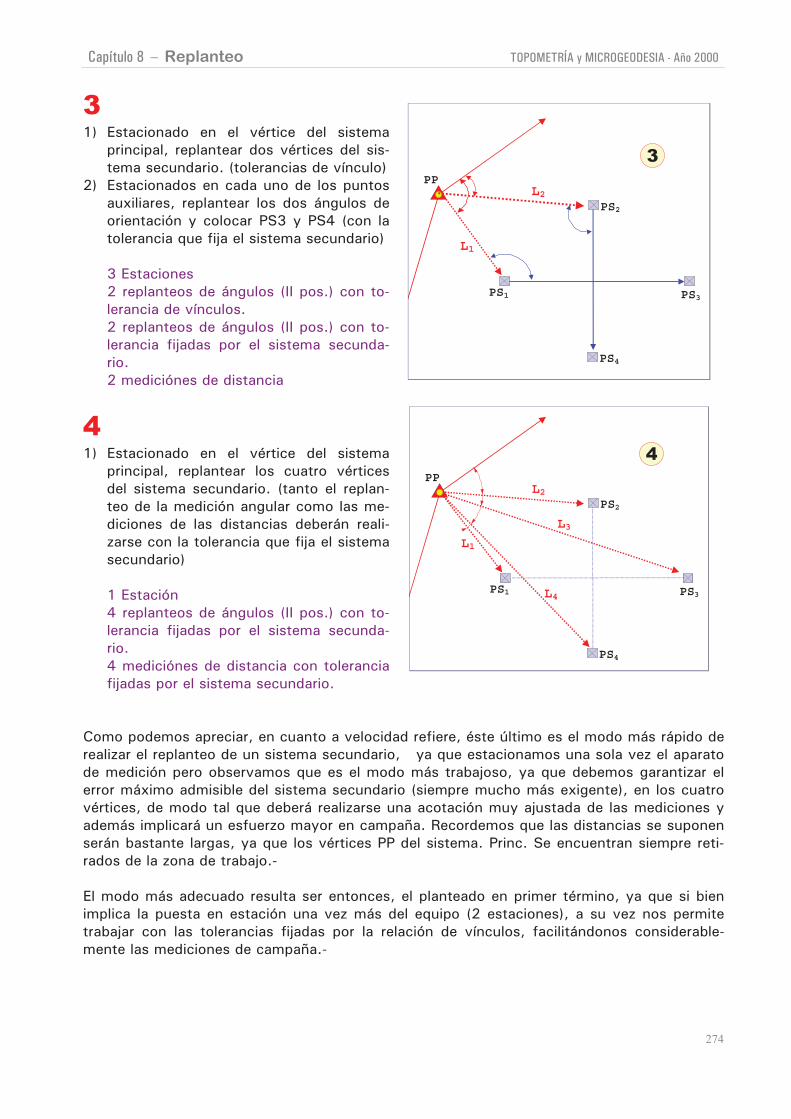
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
274
31) Estacionado en el vértice del sistema
principal, replantear dos vértices del sis-
tema secundario. (tolerancias de vínculo)
2) Estacionados en cada uno de los puntos
auxiliares, replantear los dos ángulos de
orientación y colocar PS3 y PS4 (con la
tolerancia que fija el sistema secundario)
3 Estaciones
2 replanteos de ángulos (II pos.) con to-
lerancia de vínculos.
2 replanteos de ángulos (II pos.) con to-
lerancia fijadas por el sistema secunda-
rio.
2 mediciónes de distancia
PS1
PP
PS3
L1
PS2
PS4
3
L2
41) Estacionado en el vértice del sistema
principal, replantear los cuatro vértices
del sistema secundario. (tanto el replan-
teo de la medición angular como las me-
diciones de las distancias deberán reali-
zarse con la tolerancia que fija el sistema
secundario)
1 Estación
4 replanteos de ángulos (II pos.) con to-
lerancia fijadas por el sistema secunda-
rio.
4 mediciónes de distancia con tolerancia
fijadas por el sistema secundario.
PS1
PP
PS3
L1
PS2
PS4
4
L2
L3
L4
Como podemos apreciar, en cuanto a velocidad refiere, éste último es el modo más rápido de
realizar el replanteo de un sistema secundario, ya que estacionamos una sola vez el aparato
de medición pero observamos que es el modo más trabajoso, ya que debemos garantizar el
error máximo admisible del sistema secundario (siempre mucho más exigente), en los cuatro
vértices, de modo tal que deberá realizarse una acotación muy ajustada de las mediciones y
además implicará un esfuerzo mayor en campaña. Recordemos que las distancias se suponen
serán bastante largas, ya que los vértices PP del sistema. Princ. Se encuentran siempre reti-
rados de la zona de trabajo.-
El modo más adecuado resulta ser entonces, el planteado en primer término, ya que si bien
implica la puesta en estación una vez más del equipo (2 estaciones), a su vez nos permite
trabajar con las tolerancias fijadas por la relación de vínculos, facilitándonos considerable-
mente las mediciones de campaña.-
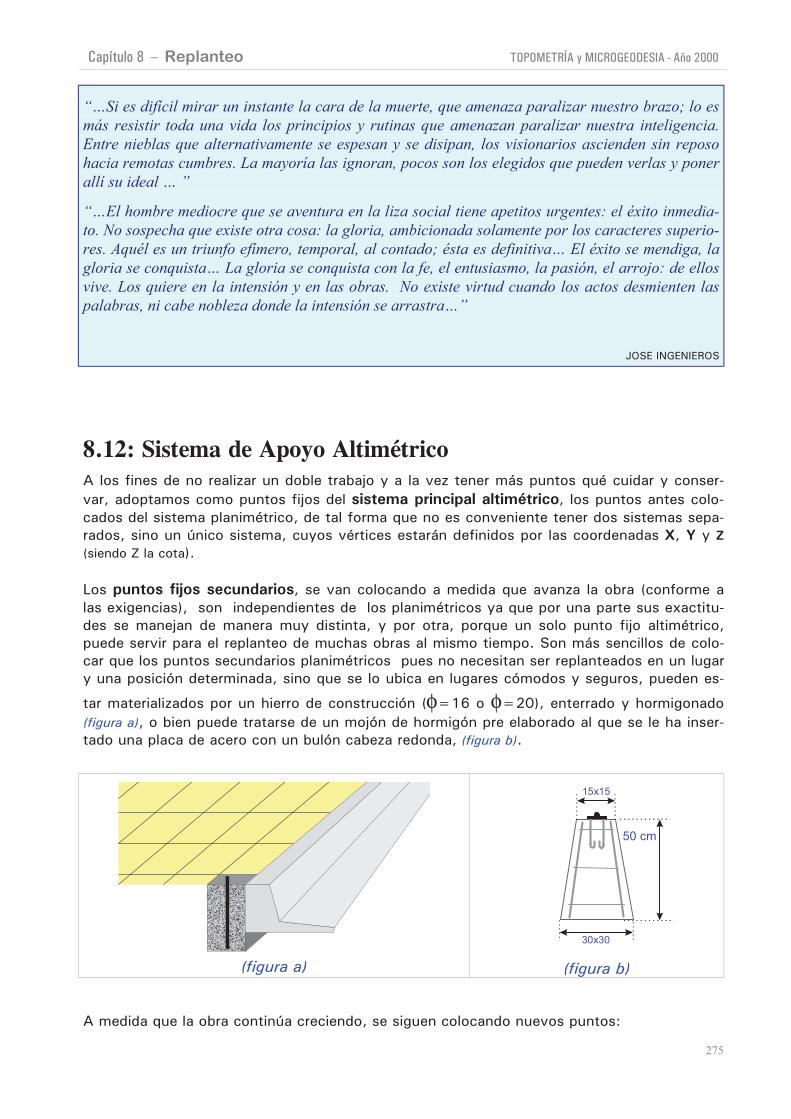
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
275
“…Si es difícil mirar un instante la cara de la muerte, que amenaza paralizar nuestro brazo; lo es
más resistir toda una vida los principios y rutinas que amenazan paralizar nuestra inteligencia.
Entre nieblas que alternativamente se espesan y se disipan, los visionarios ascienden sin reposo
hacia remotas cumbres. La mayoría las ignoran, pocos son los elegidos que pueden verlas y poner
allí su ideal … ”
“…El hombre mediocre que se aventura en la liza social tiene apetitos urgentes: el éxito inmedia-
to. No sospecha que existe otra cosa: la gloria, ambicionada solamente por los caracteres superio-
res. Aquél es un triunfo efímero, temporal, al contado; ésta es definitiva… El éxito se mendiga, la
gloria se conquista… La gloria se conquista con la fe, el entusiasmo, la pasión, el arrojo: de ellos
vive. Los quiere en la intensión y en las obras. No existe virtud cuando los actos desmienten las
palabras, ni cabe nobleza donde la intensión se arrastra…”
JOSE INGENIEROS
8.12: Sistema de Apoyo Altimétrico
A los fines de no realizar un doble trabajo y a la vez tener más puntos qué cuidar y conser-
var, adoptamos como puntos fijos del sistema principal altimétrico, los puntos antes colo-
cados del sistema planimétrico, de tal forma que no es conveniente tener dos sistemas sepa-
rados, sino un único sistema, cuyos vértices estarán definidos por las coordenadas X, Y y Z
(siendo Z la cota).
Los puntos fijos secundarios, se van colocando a medida que avanza la obra (conforme a
las exigencias), son independientes de los planimétricos ya que por una parte sus exactitu-
des se manejan de manera muy distinta, y por otra, porque un solo punto fijo altimétrico,
puede servir para el replanteo de muchas obras al mismo tiempo. Son más sencillos de colo-
car que los puntos secundarios planimétricos pues no necesitan ser replanteados en un lugar
y una posición determinada, sino que se lo ubica en lugares cómodos y seguros, pueden es-
tar materializados por un hierro de construcción (φ=16 o φ=20), enterrado y hormigonado
(figura a), o bien puede tratarse de un mojón de hormigón pre elaborado al que se le ha inser-
tado una placa de acero con un bulón cabeza redonda, (figura b).
(figura a)
15x15
30x30
50 cm
(figura b)
A medida que la obra continúa creciendo, se siguen colocando nuevos puntos:
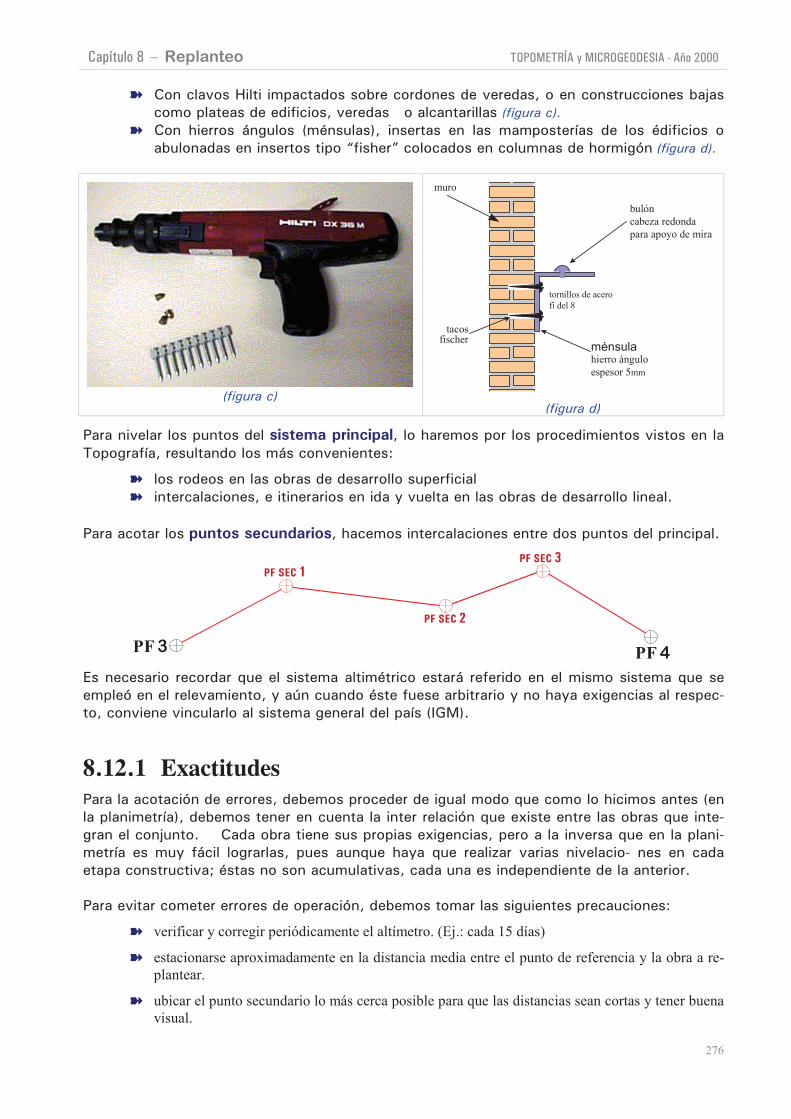
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
276
Con clavos Hilti impactados sobre cordones de veredas, o en construcciones bajas
como plateas de edificios, veredas o alcantarillas (figura c).
Con hierros ángulos (ménsulas), insertas en las mamposterías de los édificios o
abulonadas en insertos tipo “fisher” colocados en columnas de hormigón (figura d).
(figura c)
muro
ménsulahierro ángulo
espesor 5mm
bulón
cabeza redonda
para apoyo de mira
tornillos de acero
fi del 8
tacosfischer
(figura d)
Para nivelar los puntos del sistema principal, lo haremos por los procedimientos vistos en la
Topografía, resultando los más convenientes:
los rodeos en las obras de desarrollo superficial
intercalaciones, e itinerarios en ida y vuelta en las obras de desarrollo lineal.
Para acotar los puntos secundarios, hacemos intercalaciones entre dos puntos del principal.
PF 3 PF 4
PF SEC 1
PF SEC 2
PF SEC 3
Es necesario recordar que el sistema altimétrico estará referido en el mismo sistema que se
empleó en el relevamiento, y aún cuando éste fuese arbitrario y no haya exigencias al respec-
to, conviene vincularlo al sistema general del país (IGM).
8.12.1 Exactitudes
Para la acotación de errores, debemos proceder de igual modo que como lo hicimos antes (en
la planimetría), debemos tener en cuenta la inter relación que existe entre las obras que inte-
gran el conjunto. Cada obra tiene sus propias exigencias, pero a la inversa que en la plani-
metría es muy fácil lograrlas, pues aunque haya que realizar varias nivelacio- nes en cada
etapa constructiva; éstas no son acumulativas, cada una es independiente de la anterior.
Para evitar cometer errores de operación, debemos tomar las siguientes precauciones:
verificar y corregir periódicamente el altímetro. (Ej.: cada 15 días)
estacionarse aproximadamente en la distancia media entre el punto de referencia y la obra a re-
plantear.
ubicar el punto secundario lo más cerca posible para que las distancias sean cortas y tener buena
visual.
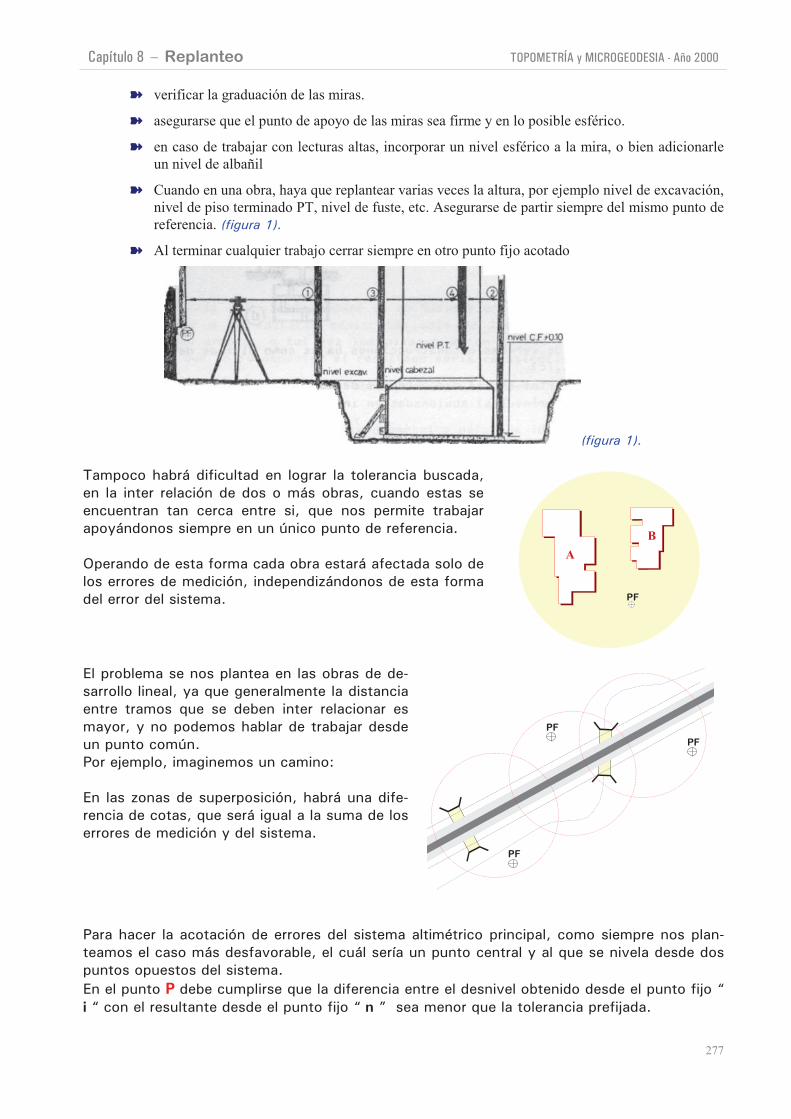
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
277
verificar la graduación de las miras.
asegurarse que el punto de apoyo de las miras sea firme y en lo posible esférico.
en caso de trabajar con lecturas altas, incorporar un nivel esférico a la mira, o bien adicionarle
un nivel de albañil
Cuando en una obra, haya que replantear varias veces la altura, por ejemplo nivel de excavación,
nivel de piso terminado PT, nivel de fuste, etc. Asegurarse de partir siempre del mismo punto de
referencia. (figura 1).
Al terminar cualquier trabajo cerrar siempre en otro punto fijo acotado
(figura 1).
Tampoco habrá dificultad en lograr la tolerancia buscada,
en la inter relación de dos o más obras, cuando estas se
encuentran tan cerca entre si, que nos permite trabajar
apoyándonos siempre en un único punto de referencia.
Operando de esta forma cada obra estará afectada solo de
los errores de medición, independizándonos de esta forma
del error del sistema. PF
A
B
El problema se nos plantea en las obras de de-
sarrollo lineal, ya que generalmente la distancia
entre tramos que se deben inter relacionar es
mayor, y no podemos hablar de trabajar desde
un punto común.
Por ejemplo, imaginemos un camino:
En las zonas de superposición, habrá una dife-
rencia de cotas, que será igual a la suma de los
errores de medición y del sistema.
PF
PF
PF
Para hacer la acotación de errores del sistema altimétrico principal, como siempre nos plan-
teamos el caso más desfavorable, el cuál sería un punto central y al que se nivela desde dos
puntos opuestos del sistema.
En el punto P debe cumplirse que la diferencia entre el desnivel obtenido desde el punto fijo “
i “ con el resultante desde el punto fijo “ n ” sea menor que la tolerancia prefijada.
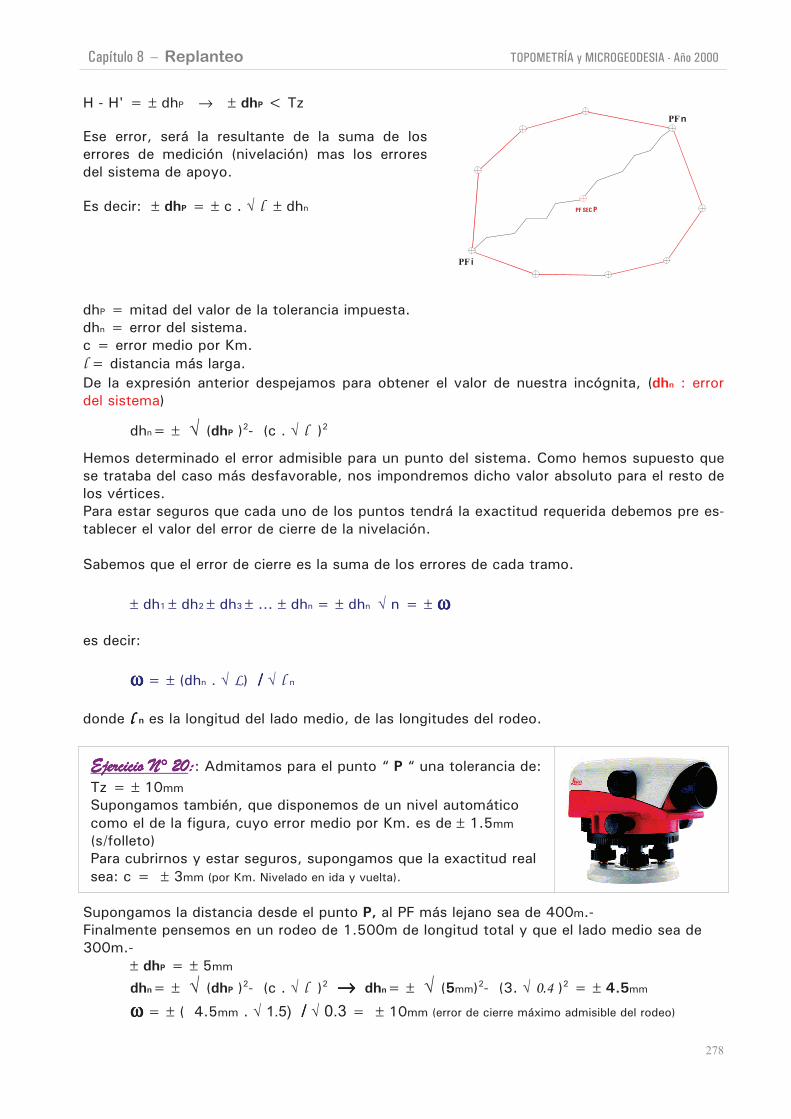
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
278
H - H' = ± dhP → ± dhP < Tz
Ese error, será la resultante de la suma de los
errores de medición (nivelación) mas los errores
del sistema de apoyo.
Es decir: ± dhP = ± c . √ l ± dhn
PF i
PF n
PF SEC P
dhP = mitad del valor de la tolerancia impuesta.
dhn = error del sistema.
c = error medio por Km.
l = distancia más larga.
De la expresión anterior despejamos para obtener el valor de nuestra incógnita, (dhn : error
del sistema)
dhn= ± √ (dhP )2- (c . √ l )2
Hemos determinado el error admisible para un punto del sistema. Como hemos supuesto que
se trataba del caso más desfavorable, nos impondremos dicho valor absoluto para el resto de
los vértices.
Para estar seguros que cada uno de los puntos tendrá la exactitud requerida debemos pre es-
tablecer el valor del error de cierre de la nivelación.
Sabemos que el error de cierre es la suma de los errores de cada tramo.
± dh1 ± dh2 ± dh3 ± ... ± dhn = ± dhn √ n = ± ωωωω
es decir:
ω ω ω ω = ± (dhn . √ L) / / / / √ l n
donde llll n es la longitud del lado medio, de las longitudes del rodeo.
Ejercicio N° 20Ejercicio N° 20Ejercicio N° 20Ejercicio N° 20::::: Admitamos para el punto “ P “ una tolerancia de:
Tz = ± 10mm
Supongamos también, que disponemos de un nivel automático
como el de la figura, cuyo error medio por Km. es de ± 1.5mm
(s/folleto)
Para cubrirnos y estar seguros, supongamos que la exactitud real
sea: c = ± 3mm (por Km. Nivelado en ida y vuelta).
Supongamos la distancia desde el punto P, al PF más lejano sea de 400m.-
Finalmente pensemos en un rodeo de 1.500m de longitud total y que el lado medio sea de
300m.-
± dhP = ± 5mm
dhn= ± √ (dhP )2- (c . √ l )2 →→→→ dhn= ± √ (5mm)2- (3. √ 0.4 )2 = ± 4.5mm ω ω ω ω = ± ( 4.5mm . √ 1.5) / / / / √ 0.3 = ± 10mm (error de cierre máximo admisible del rodeo)
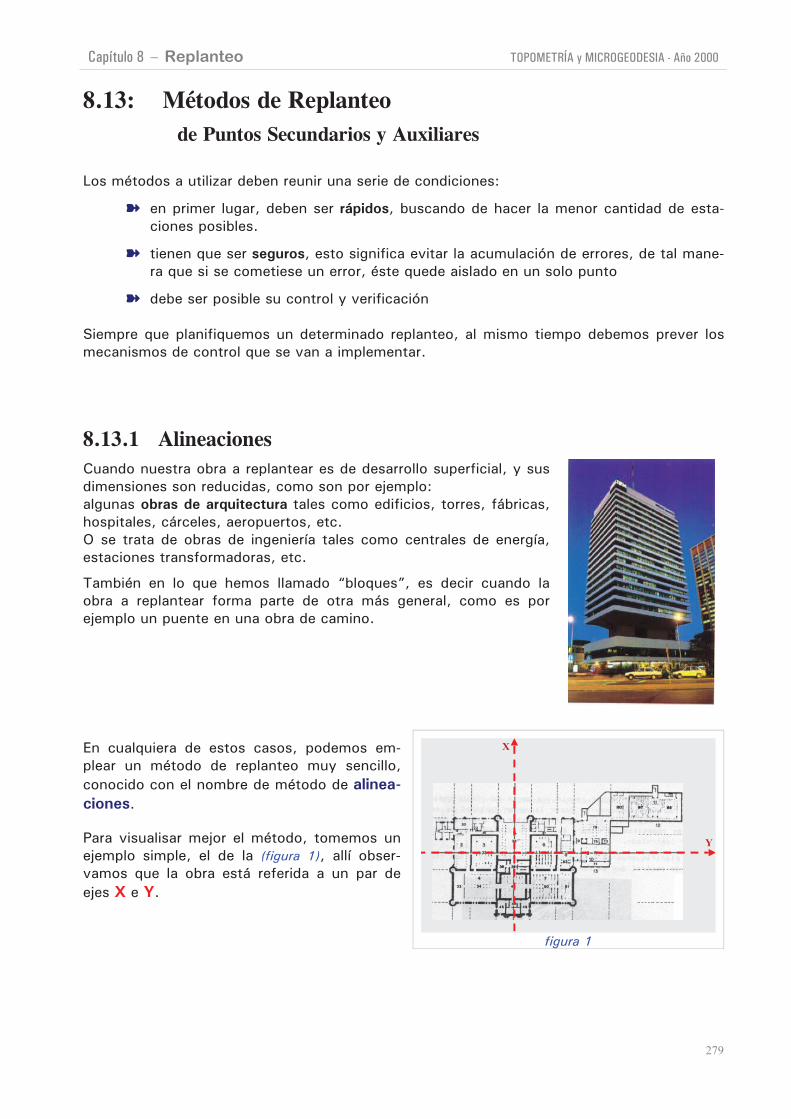
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
279
8.13: Métodos de Replanteo
de Puntos Secundarios y Auxiliares
Los métodos a utilizar deben reunir una serie de condiciones:
en primer lugar, deben ser rápidos, buscando de hacer la menor cantidad de esta-
ciones posibles.
tienen que ser seguros, esto significa evitar la acumulación de errores, de tal mane-
ra que si se cometiese un error, éste quede aislado en un solo punto
debe ser posible su control y verificación
Siempre que planifiquemos un determinado replanteo, al mismo tiempo debemos prever los
mecanismos de control que se van a implementar.
8.13.1 Alineaciones
Cuando nuestra obra a replantear es de desarrollo superficial, y sus
dimensiones son reducidas, como son por ejemplo:
algunas obras de arquitectura tales como edificios, torres, fábricas,
hospitales, cárceles, aeropuertos, etc.
O se trata de obras de ingeniería tales como centrales de energía,
estaciones transformadoras, etc.
También en lo que hemos llamado “bloques”, es decir cuando la
obra a replantear forma parte de otra más general, como es por
ejemplo un puente en una obra de camino.
En cualquiera de estos casos, podemos em-
plear un método de replanteo muy sencillo,
conocido con el nombre de método de alinea-
ciones.
Para visualisar mejor el método, tomemos un
ejemplo simple, el de la (figura 1), allí obser-
vamos que la obra está referida a un par de
ejes X e Y.
X
Y
figura 1
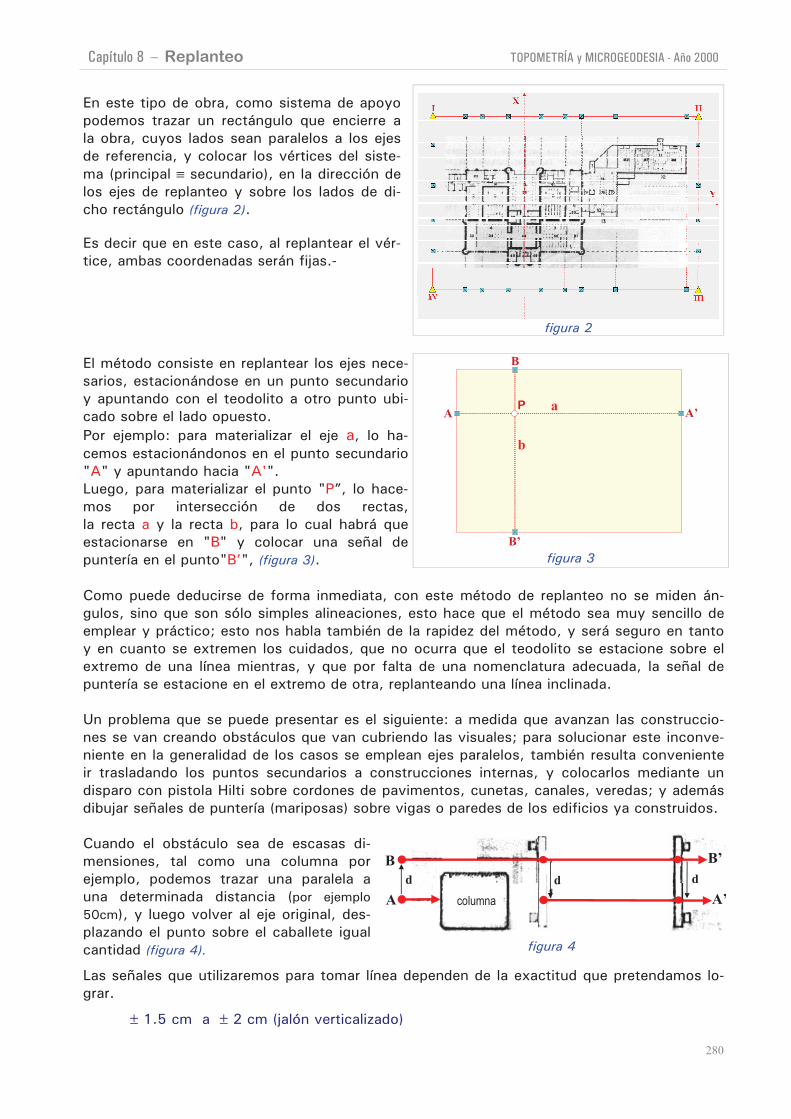
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
280
En este tipo de obra, como sistema de apoyo
podemos trazar un rectángulo que encierre a
la obra, cuyos lados sean paralelos a los ejes
de referencia, y colocar los vértices del siste-
ma (principal ≡ secundario), en la dirección de
los ejes de replanteo y sobre los lados de di-
cho rectángulo (figura 2).
Es decir que en este caso, al replantear el vér-
tice, ambas coordenadas serán fijas.-
figura 2
El método consiste en replantear los ejes nece-
sarios, estacionándose en un punto secundario
y apuntando con el teodolito a otro punto ubi-
cado sobre el lado opuesto.
Por ejemplo: para materializar el eje a, lo ha-
cemos estacionándonos en el punto secundario
"A" y apuntando hacia "A'".
Luego, para materializar el punto "P”, lo hace-
mos por intersección de dos rectas,
la recta a y la recta b, para lo cual habrá que
estacionarse en "B" y colocar una señal de
puntería en el punto"B’", (figura 3).
PA A’
B
B’
a
b
figura 3
Como puede deducirse de forma inmediata, con este método de replanteo no se miden án-
gulos, sino que son sólo simples alineaciones, esto hace que el método sea muy sencillo de
emplear y práctico; esto nos habla también de la rapidez del método, y será seguro en tanto
y en cuanto se extremen los cuidados, que no ocurra que el teodolito se estacione sobre el
extremo de una línea mientras, y que por falta de una nomenclatura adecuada, la señal de
puntería se estacione en el extremo de otra, replanteando una línea inclinada.
Un problema que se puede presentar es el siguiente: a medida que avanzan las construccio-
nes se van creando obstáculos que van cubriendo las visuales; para solucionar este inconve-
niente en la generalidad de los casos se emplean ejes paralelos, también resulta conveniente
ir trasladando los puntos secundarios a construcciones internas, y colocarlos mediante un
disparo con pistola Hilti sobre cordones de pavimentos, cunetas, canales, veredas; y además
dibujar señales de puntería (mariposas) sobre vigas o paredes de los edificios ya construidos.
Cuando el obstáculo sea de escasas di-
mensiones, tal como una columna por
ejemplo, podemos trazar una paralela a
una determinada distancia (por ejemplo
50cm), y luego volver al eje original, des-
plazando el punto sobre el caballete igual
cantidad (figura 4).
d d d
columnaA A’
B B’
figura 4
Las señales que utilizaremos para tomar línea dependen de la exactitud que pretendamos lo-
grar.
± 1.5 cm a ± 2 cm (jalón verticalizado)
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
281
± 0.5 cm a ± 1 cm (ficha)
El uso de fichas es muy limitado, pues a veces es dificultoso
hacer un buen apunte debido a la cantidad de obstáculos que
hay a nivel de piso de una obra. (excavaciones, herramientas,
máquinas, materiales de construcción, etc.)
Por ello, es conveniente bisectar a una señal de puntería esta-
cionada sobre trípode, y centrada con plomada óptica, (figura 5)
con estas señales, podemos asegurar la centración entre:
± 1 mm a ± 2 mm (señal de puntería)
figura 5
8.13.1.a Procedimiento
Para la colocación de los vértices (principal ≡ secundario), en la dirección de los ejes de re-
planteo y sobre los lados del rectángulo (ver figura 2)., se hace también por alineacion.
Estacionándose en uno de los vértices del rectángulo de apoyo ( I ), se apunta hacia el vérti-
ce opuesto ( II ) y colocamos todos los puntos intermedios a la distancia que corresponde.
No es necesario extremar los cuidados en el replanteo de la alineación, ya que no nos intere-
sa el error transversal que se pueda producir, sino el longitudinal, por ello en la colocación de
los puntos lo importante es la medición lineal, y la exactitud necesaria será directamente la
deducida de la tolerancia constructiva.
Si la medición se realiza con cinta métrica, es necesario densificar previamente el sistema de
apoyo; colocando puntos sobre los lados de tal forma que entre ellos medie una distancia
menor, que el de la longitud total de la ruleta que luego se utilizará. Esto tiene por objeto que
los puntos secundarios puedan ser replanteados sin superar la cintada y al mismo tiempo dis-
poner de un control, para verificar no se haya movido el mojón o evitar de cometer un error
de lectura de la cinta.
Si en cambio, el replanteo se realiza con una estación total, no es necesario densificar con
más puntos de apoyo sobre los lados del rectángulo, pues los puntos secundarios se coloca-
rán midiendo directamente desde uno de los extremos.
1. Estacionamos el instrumento en un extremo ( I ), y haciendo puntería en el otro ( II ), ali-
neamos estacas de madera, fichas o hierros midiendo las distancias en modo tracking.
El modo tracking (replanteo), que posee la gran mayoría de los distaciómetros electro óp-
ticos, permite al operador del instrumento obtener una distancia medida en muy corto
tiempo entre 1seg. y 3 seg. con una precisión en el aparato de ± 1 cm. Esto permite que
el ayudante (que está colocando las estacas), se mueva sobre la línea, con un prisma co-
locado sobre un bastón centrador; hasta que el operador le informe que se encuentra en
la distancia correcta.
Los bastones provistos por las fábricas de instrumental, tienen incorporados un nivel esfé-
rico para asegurar la verticalidad del mismo. Como la operación es rápida y el bastón se
está moviendo, el error que se comete en la medición puede estar en el orden de 1cm a
3cm.
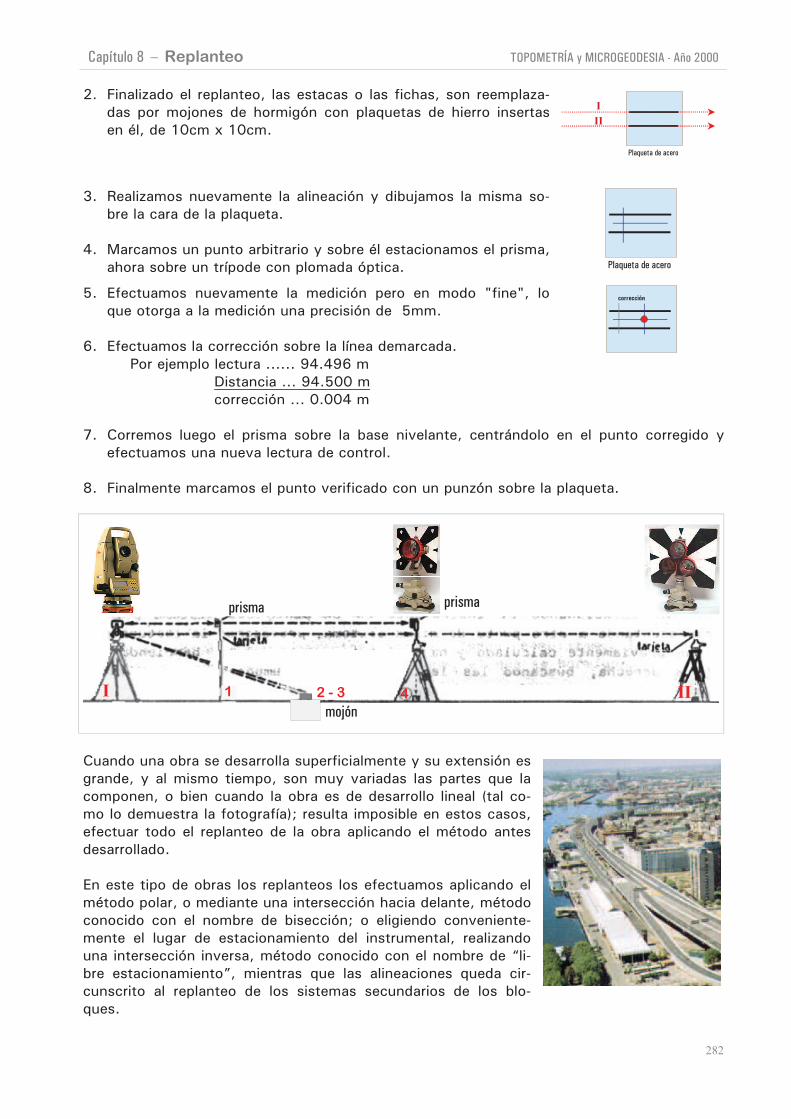
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
282
2. Finalizado el replanteo, las estacas o las fichas, son reemplaza-
das por mojones de hormigón con plaquetas de hierro insertas
en él, de 10cm x 10cm.
Plaqueta de acero
I
II
3. Realizamos nuevamente la alineación y dibujamos la misma so-
bre la cara de la plaqueta.
4. Marcamos un punto arbitrario y sobre él estacionamos el prisma,
ahora sobre un trípode con plomada óptica. Plaqueta de acero
5. Efectuamos nuevamente la medición pero en modo "fine", lo
que otorga a la medición una precisión de 5mm.
6. Efectuamos la corrección sobre la línea demarcada.
corrección
Por ejemplo lectura ...... 94.496 m
Distancia ... 94.500 m
corrección ... 0.004 m
7. Corremos luego el prisma sobre la base nivelante, centrándolo en el punto corregido y
efectuamos una nueva lectura de control.
8. Finalmente marcamos el punto verificado con un punzón sobre la plaqueta.
2 - 3
mojónI II1 4
prisma prisma
Cuando una obra se desarrolla superficialmente y su extensión es
grande, y al mismo tiempo, son muy variadas las partes que la
componen, o bien cuando la obra es de desarrollo lineal (tal co-
mo lo demuestra la fotografía); resulta imposible en estos casos,
efectuar todo el replanteo de la obra aplicando el método antes
desarrollado.
En este tipo de obras los replanteos los efectuamos aplicando el
método polar, o mediante una intersección hacia delante, método
conocido con el nombre de bisección; o eligiendo conveniente-
mente el lugar de estacionamiento del instrumental, realizando
una intersección inversa, método conocido con el nombre de “li-
bre estacionamiento”, mientras que las alineaciones queda cir-
cunscrito al replanteo de los sistemas secundarios de los blo-
ques.
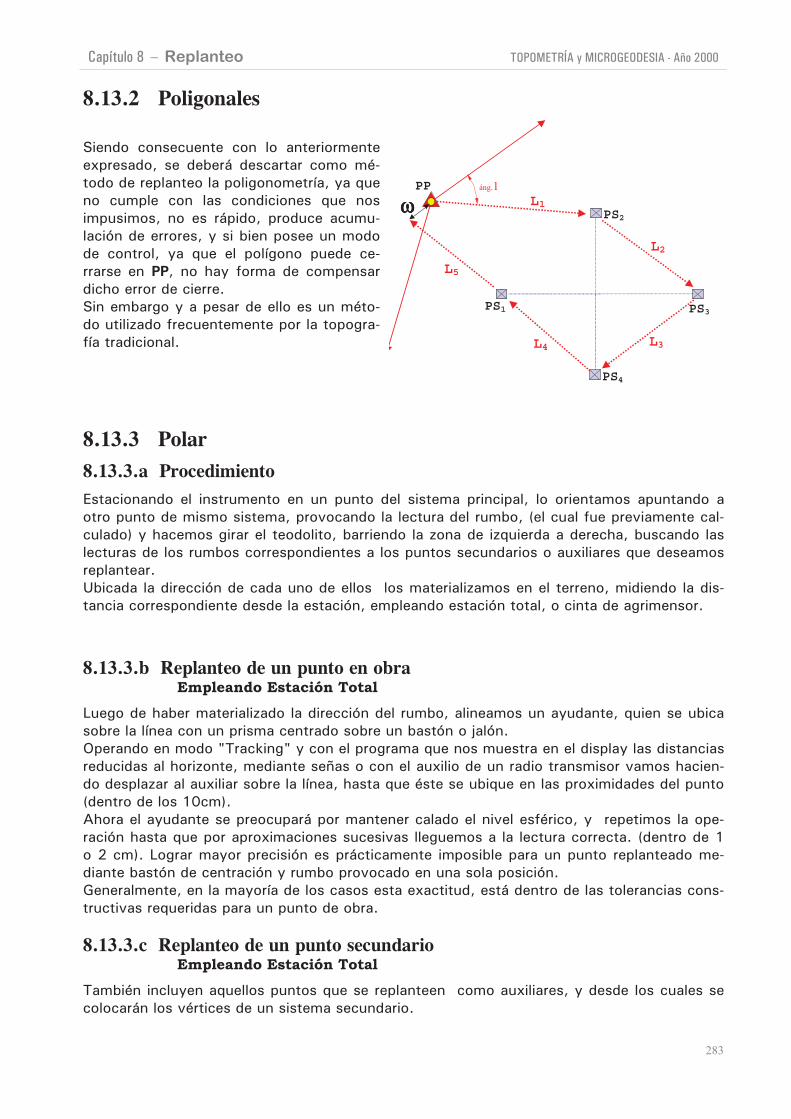
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
283
8.13.2 Poligonales
Siendo consecuente con lo anteriormente
expresado, se deberá descartar como mé-
todo de replanteo la poligonometría, ya que
no cumple con las condiciones que nos
impusimos, no es rápido, produce acumu-
lación de errores, y si bien posee un modo
de control, ya que el polígono puede ce-
rrarse en PP, no hay forma de compensar
dicho error de cierre.
Sin embargo y a pesar de ello es un méto-
do utilizado frecuentemente por la topogra-
fía tradicional.
PS1
PP
PS3
L1PS2
PS4
L2
L3L4
áng.1
L5
ωωωω
8.13.3 Polar
8.13.3.a Procedimiento
Estacionando el instrumento en un punto del sistema principal, lo orientamos apuntando a
otro punto de mismo sistema, provocando la lectura del rumbo, (el cual fue previamente cal-
culado) y hacemos girar el teodolito, barriendo la zona de izquierda a derecha, buscando las
lecturas de los rumbos correspondientes a los puntos secundarios o auxiliares que deseamos
replantear.
Ubicada la dirección de cada uno de ellos los materializamos en el terreno, midiendo la dis-
tancia correspondiente desde la estación, empleando estación total, o cinta de agrimensor.
8.13.3.b Replanteo de un punto en obraEmpleando Estación Total
Luego de haber materializado la dirección del rumbo, alineamos un ayudante, quien se ubica
sobre la línea con un prisma centrado sobre un bastón o jalón.
Operando en modo "Tracking" y con el programa que nos muestra en el display las distancias
reducidas al horizonte, mediante señas o con el auxilio de un radio transmisor vamos hacien-
do desplazar al auxiliar sobre la línea, hasta que éste se ubique en las proximidades del punto
(dentro de los 10cm).
Ahora el ayudante se preocupará por mantener calado el nivel esférico, y repetimos la ope-
ración hasta que por aproximaciones sucesivas lleguemos a la lectura correcta. (dentro de 1
o 2 cm). Lograr mayor precisión es prácticamente imposible para un punto replanteado me-
diante bastón de centración y rumbo provocado en una sola posición.
Generalmente, en la mayoría de los casos esta exactitud, está dentro de las tolerancias cons-
tructivas requeridas para un punto de obra.
8.13.3.c Replanteo de un punto secundarioEmpleando Estación Total
También incluyen aquellos puntos que se replanteen como auxiliares, y desde los cuales se
colocarán los vértices de un sistema secundario.
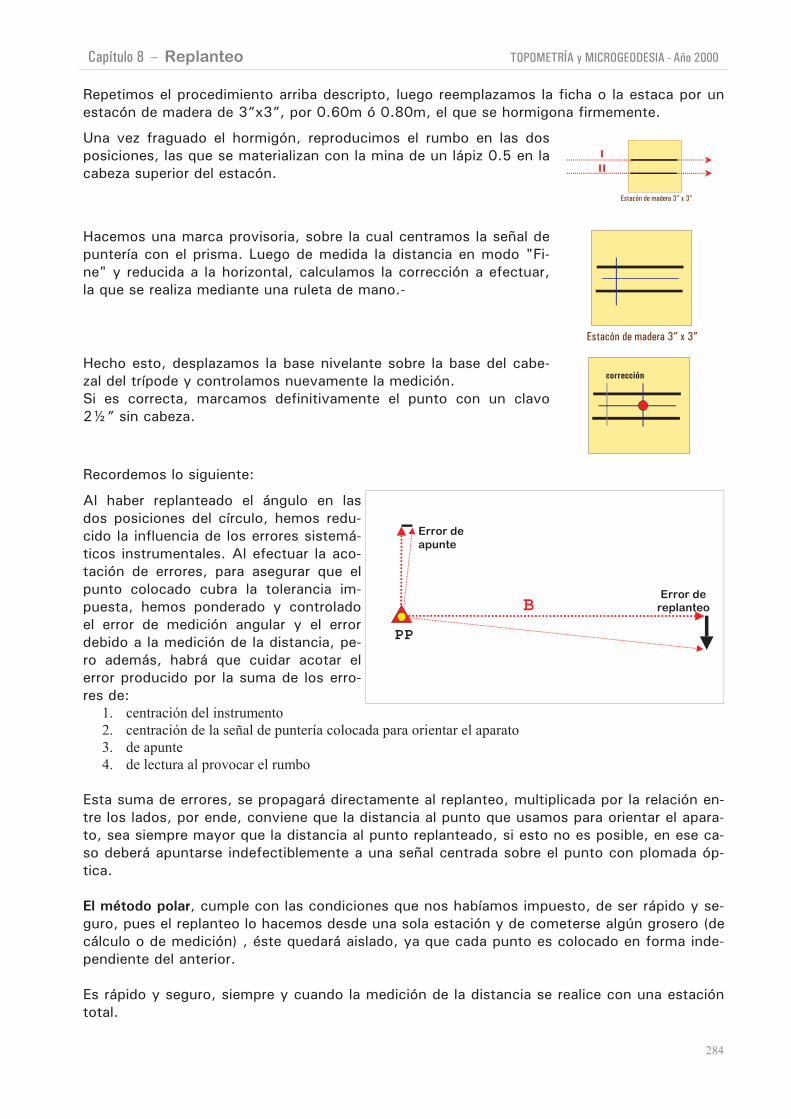
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
284
Repetimos el procedimiento arriba descripto, luego reemplazamos la ficha o la estaca por un
estacón de madera de 3”x3”, por 0.60m ó 0.80m, el que se hormigona firmemente.
Una vez fraguado el hormigón, reproducimos el rumbo en las dos
posiciones, las que se materializan con la mina de un lápiz 0.5 en la
cabeza superior del estacón.
Estacón de madera 3” x 3”
I
II
Hacemos una marca provisoria, sobre la cual centramos la señal de
puntería con el prisma. Luego de medida la distancia en modo "Fi-
ne" y reducida a la horizontal, calculamos la corrección a efectuar,
la que se realiza mediante una ruleta de mano.-
Estacón de madera 3” x 3”
Hecho esto, desplazamos la base nivelante sobre la base del cabe-
zal del trípode y controlamos nuevamente la medición.
Si es correcta, marcamos definitivamente el punto con un clavo
2½” sin cabeza.
corrección
Recordemos lo siguiente:
Al haber replanteado el ángulo en las
dos posiciones del círculo, hemos redu-
cido la influencia de los errores sistemá-
ticos instrumentales. Al efectuar la aco-
tación de errores, para asegurar que el
punto colocado cubra la tolerancia im-
puesta, hemos ponderado y controlado
el error de medición angular y el error
debido a la medición de la distancia, pe-
ro además, habrá que cuidar acotar el
error producido por la suma de los erro-
res de:
PP
BError de
replanteo
Error de
apunte
1. centración del instrumento
2. centración de la señal de puntería colocada para orientar el aparato
3. de apunte
4. de lectura al provocar el rumbo
Esta suma de errores, se propagará directamente al replanteo, multiplicada por la relación en-
tre los lados, por ende, conviene que la distancia al punto que usamos para orientar el apara-
to, sea siempre mayor que la distancia al punto replanteado, si esto no es posible, en ese ca-
so deberá apuntarse indefectiblemente a una señal centrada sobre el punto con plomada óp-
tica.
El método polar, cumple con las condiciones que nos habíamos impuesto, de ser rápido y se-
guro, pues el replanteo lo hacemos desde una sola estación y de cometerse algún grosero (de
cálculo o de medición) , éste quedará aislado, ya que cada punto es colocado en forma inde-
pendiente del anterior.
Es rápido y seguro, siempre y cuando la medición de la distancia se realice con una estación
total.

Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
285
No ocurre lo mismo si lo hacemos con cinta, ya hemos mencionado que las distancias que
separan a los puntos del sistema principal del punto secundario o auxiliar, generalmente es
bastante grande, además, también hemos comentado que en toda obra hay demasiados obs-
táculos a nivel de piso como para efectuar una rápida, cómoda y segura medición. De tal
manera que este método, empleando cinta, sólo lo emplearemos en aquellos casos en que las
distancias de replanteo sean muy cortas, o bien las tolerancias sean tan generosas que así lo
permitan.
Como control, proponemos lo siguiente: al estacionarse el operador en el punto secundario
auxiliar colocado para efectuar el replanteo del resto de los vértices; previo a ello se verifique
apuntando y midiendo el rumbo y/o la distancia, hacia otro punto del sistema principal.
8.13.3.d Acotación de errores
Recordemos que el error final de replanteo del punto auxiliar, o del vértice del sistema secun-
dario (eR) resulta ser la suma vectorial de dos errores:
(eS): El error de los puntos del sistema de apoyo principal
(eM): Los errores de medición en el momento de efectuar el replanteo del punto.
(eR) = ± (eS) ± (eM)
Dejamos el primer término del segundo miembro de lado, pues suponemos que en base a la
acotación de errores establecida, el sistema principal fue construido, y posteriormente medi-
do a los efectos de constatar que las exactitudes de cada vértice resultaron ser las previa-
mente impuestas.
eM = ± √ (eR)2 - (eS)
2
Analizaremos entonces, el error de medición. Emplearemos un procedimiento tal que sea lo suficiente-
mente aproximado pero fundamentalmente sencillo y rápido, como para poder resolver el problema en obra.
Cada punto de la obra tendrá un cierto grado de libertad, que será la tolerancia constructiva ( TC ), que como
ya hemos mencionado, se traslada a los puntos secundarios y auxiliares.
Adoptamos para el error final de replanteo, o máximo error admisible el valor eR = TC / 2
Los errores de medición, generan una incerti-
dumbre en la determinación de la posición del
punto, cuya figura geométrica es una elipse de
error , cuyos vectores se encuentran expresa-
dos: Uno, el error de medición lineal (dL), en la
dirección longitudinal del vector, y el otro, el
error de medición angular (dαααα) en la dirección
transversal al mismo.
dX = ± (D. sen ϕ) .dϕ ± cos ϕ. dL
dY = ± (D. cos ϕ) .dϕ ± sen ϕ. dL
+dL
-dL
+dQ
-dQ
Sin embargo, el resultado de la combinación de dichos errores se hará manifiesto en las di-
recciones de los ejes principales o secundarios de replanteo.
Así por ejemplo, si se trata de una obra de arquitectura, y los
ejes principales son paralelos a los ejes de referencia, los
movimientos que nos interesa acotar, seán: dX y dY
X
Y

Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
286
Pero bien podría ser una obra de desarrollo lineal, en
cuyo caso los dos errores máximos admisibles, se en-
contrarían expresados en las direcciones longitudinal
al eje de traza ,y el otro transversal al mismo. dL y dQ
QL
0 bien, el punto podría estar ubicado sobre una curva,
como por ejemplo pertenecer a la pantalla de una pre-
sa, en cuyo caso tendríamos una tolerancia radial y
otra tangencial. dR y dT
RT
8.13.3.e Acotación de erroresen la dirección de los ejes de referencia
dX = ± (D. sen ϕ) .dϕ ± cos ϕ. dD
dY = ± (D. cos ϕ) .dϕ ± sen ϕ. dD
Conociendo los valores pre impuestos de los errores dX y dY ; podemos despejar los valores buscados de
dϕ y dL
Ejercicio N° 21Ejercicio N° 21Ejercicio N° 21Ejercicio N° 21:::: Se necesita determinar los errores máximos admisibles para el replanteo de
un punto, realizado por método polar.-
La Tolerancia fijada en X es de 4 cm.
La Tolerancia fijada en Y es de 8 cm.
La longitud del vector: 86m
El rumbo del vector 78°25’16”

Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
287
8.13.3.e Acotación de erroresen una dirección determinada
Cuando las direcciones de los
vectores del error se encuen-
tren giradas respecto al Siste-
ma de Referencia (figura 1),
podemos emplear el mismo al-
goritmo anterior, pero rotando
el sistema, es decir creando un
nuevo sistema de referencia,
rotado respecto al anterior, de
modo tal que coincidan las di-
recciones de los ejes. (figura 2)
+dR
-dR
+dT
-dT
X
Y
figura 1
+dR
-dR
+dT
-dT
X
Y
figura 2
Ejercicio N° 22Ejercicio N° 22Ejercicio N° 22Ejercicio N° 22:::: Se necesita determinar los errores máximos admisibles para el replanteo de
un punto, realizado por método polar.- Dirección del vector error longitudinal:
ϕR = 312°35’10”
La Tolerancia fijada en la dirección de R es de ±4 cm.
La Tolerancia fijada en la dirección deT es de ±8 cm.
La longitud del vector: 101.16m
El rumbo del vector 08°25’25”
8.13.4 Bisección
Lo anteriormente expuesto, no significa que si no disponemos de una estación total en obra,
no podemos trabajar. Podemos buscar algún otro método que nos permita reemplazar el mé-
todo polar, como por ejemplo:
en lugar de medir la distancia directamente, lo hacemos indirectamente a través de una inter-
sección hacia delante, trabajando simultáneamente con dos operadores y dos teodolitos.
8.13.4.a Procedimiento
Estacionados sobre dos puntos del sistema principal, tal como ya antes lo hiciéramos, trans-
formamos las coordenadas rectangulares de los puntos secundarios o auxiliares, en coorde-
nadas polares, y confeccionamos para cada estación una planilla con los rumbos a replantear.
Realizada la operación de estacionamiento y orientación de los instrumentos, se busca en
ambos, el rumbo correspondiente al punto a replantear, el ayudante con un jalón se alinea en
la dirección de uno de ellos, luego se va moviendo manteniendo esa dirección hasta quedar
alineado con el otro aparato; seguramente se habrá desplazado algo de la anterior, así es que
deberá solicitar nuevamente al primer operador que verifique la alineación, y así seguirá, por
aproximaciones sucesivas hasta encontrar el punto de intersección de ambas rectas.
Cuando el entorno quede reducido al dm. trabajará (depende el caso) con una ficha o un jalón
verticalizado.
Luego reemplazamos la ficha por un estacón de madera de 3”x 3" hormigonado, o una pla-
queta de acero de 10 x lOcm inserta en un mojón de hormigón.
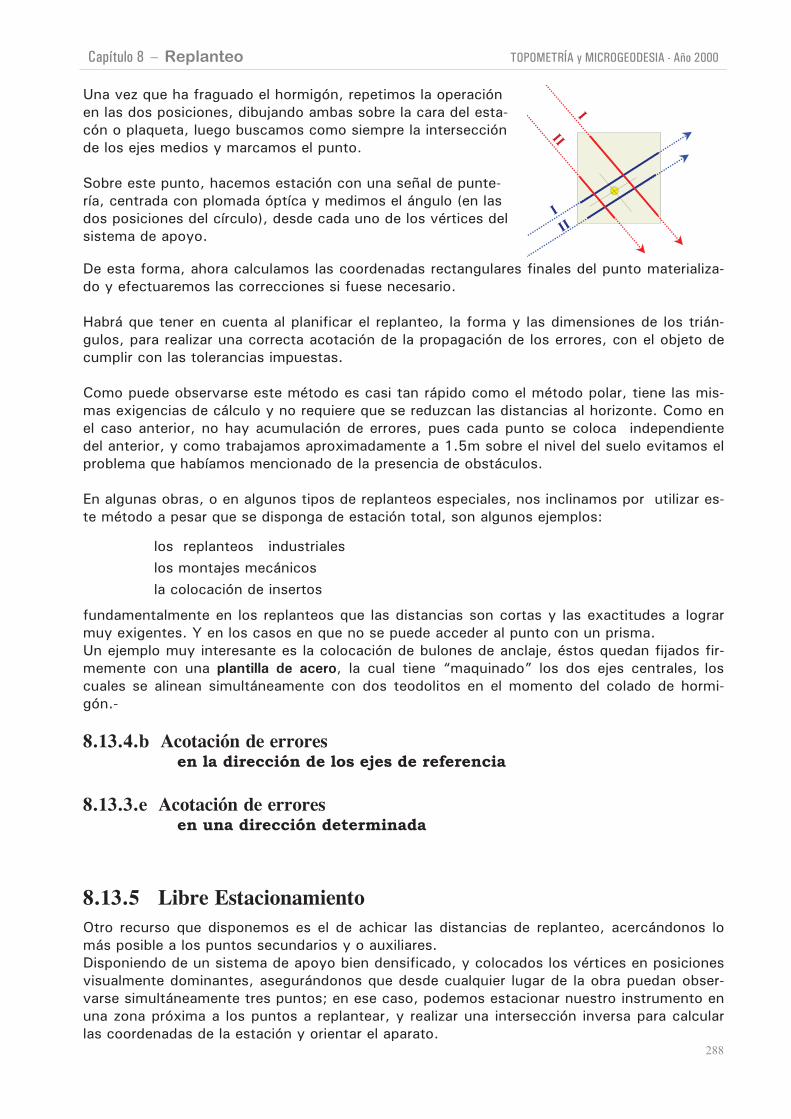
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
288
Una vez que ha fraguado el hormigón, repetimos la operación
en las dos posiciones, dibujando ambas sobre la cara del esta-
cón o plaqueta, luego buscamos como siempre la intersección
de los ejes medios y marcamos el punto.
Sobre este punto, hacemos estación con una señal de punte-
ría, centrada con plomada óptíca y medimos el ángulo (en las
dos posiciones del círculo), desde cada uno de los vértices del
sistema de apoyo.
I
II
I
II
De esta forma, ahora calculamos las coordenadas rectangulares finales del punto materializa-
do y efectuaremos las correcciones si fuese necesario.
Habrá que tener en cuenta al planificar el replanteo, la forma y las dimensiones de los trián-
gulos, para realizar una correcta acotación de la propagación de los errores, con el objeto de
cumplir con las tolerancias impuestas.
Como puede observarse este método es casi tan rápido como el método polar, tiene las mis-
mas exigencias de cálculo y no requiere que se reduzcan las distancias al horizonte. Como en
el caso anterior, no hay acumulación de errores, pues cada punto se coloca independiente
del anterior, y como trabajamos aproximadamente a 1.5m sobre el nivel del suelo evitamos el
problema que habíamos mencionado de la presencia de obstáculos.
En algunas obras, o en algunos tipos de replanteos especiales, nos inclinamos por utilizar es-
te método a pesar que se disponga de estación total, son algunos ejemplos:
los replanteos industriales
los montajes mecánicos
la colocación de insertos
fundamentalmente en los replanteos que las distancias son cortas y las exactitudes a lograr
muy exigentes. Y en los casos en que no se puede acceder al punto con un prisma.
Un ejemplo muy interesante es la colocación de bulones de anclaje, éstos quedan fijados fir-
memente con una plantilla de acero, la cual tiene “maquinado” los dos ejes centrales, los
cuales se alinean simultáneamente con dos teodolitos en el momento del colado de hormi-
gón.-
8.13.4.b Acotación de erroresen la dirección de los ejes de referencia
8.13.3.e Acotación de erroresen una dirección determinada
8.13.5 Libre Estacionamiento
Otro recurso que disponemos es el de achicar las distancias de replanteo, acercándonos lo
más posible a los puntos secundarios y o auxiliares.
Disponiendo de un sistema de apoyo bien densificado, y colocados los vértices en posiciones
visualmente dominantes, asegurándonos que desde cualquier lugar de la obra puedan obser-
varse simultáneamente tres puntos; en ese caso, podemos estacionar nuestro instrumento en
una zona próxima a los puntos a replantear, y realizar una intersección inversa para calcular
las coordenadas de la estación y orientar el aparato.
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
289
8.13.5.a Procedimiento
Determinando aproximadamente el lugar, donde estarán ubicado los puntos secundarios o
auxiliares que se desee replantear, estacionamos un teodolito en las inmediaciones, cuidando
que desde allí no tengamos obstáculos ni interferencia para medir tramos cortos con ruleta.
Tomando lectura a tres puntos del sistema principal, calculamos los ángulos, compensamos
el cierre de la estación, calculamos las coordenadas del instrumento, hacemos la diferencia
de coordenadas con el punto a replantear y calculamos el rumbo con el punto del sistema de
apoyo más lejano y que mejor se vea.
Provocamos esta lectura y buscamos el rumbo del punto a replantear, luego operamos igual
que con el método polar.
Las ventajas de este método son las siguientes:
Es muy rápido, ya que sólo hacemos una estación. Ahorramos tiempo al estacionar el apara-
to, por que al teodolito lo ubicamos libre y arbitrariamente, no tenemos que centrar el equipo
sobre ningún punto. Siempre vamos a tener visuales hacia los puntos a replantear, pues así
fue como elegimos la ubicación de la estación, cosa que no ocurre todas las veces con los
otros métodos, trabajamos en un sector reducido medimos distancias cortas, mientras que
los apuntes son efectuados a distancias, largas. No acumula error, salvo un error de cálculo
de la intersección inversa, sin embargo éste es muy fácil de controlar, si en lugar de medir 2
ángulos midiésemos 3, podríamos calcular la elipse de error del punto estación.
Cuando las obras se desarrollan en zonas urbanas, disponemos de un poderoso recurso, le
fijamos coordenadas a puntos ya existentes en el terreno, visualmente dominantes, tales co-
mo pararrayos de edificios, antenas de radio o televisión, o a señales que colocamos para tal
fin sobre tanques de agua elevados, lo que facilita considerablemente el empleo de este mé-
todo.
8.14: Replanteo de Obras
8.14.1 Replanteo de Obras de Desarrollo Superficial
Luego de haber replanteado los puntos secundarios, el paso siguiente es replantear los cua-
tros esquineros de la excavación necesaria de realizar, a los efectos de construir las obras de
fundaciones.
Como siempre, en la creencia que la mejor forma de visualizar un tema es a partir del análisis
de un ejemplo, imaginemos que la obra a replantear sea el estribo de un puente.
En algunos tipos de obras, y debido a las características de los suelos, es necesario fundar la
estructura sobre pilotes.
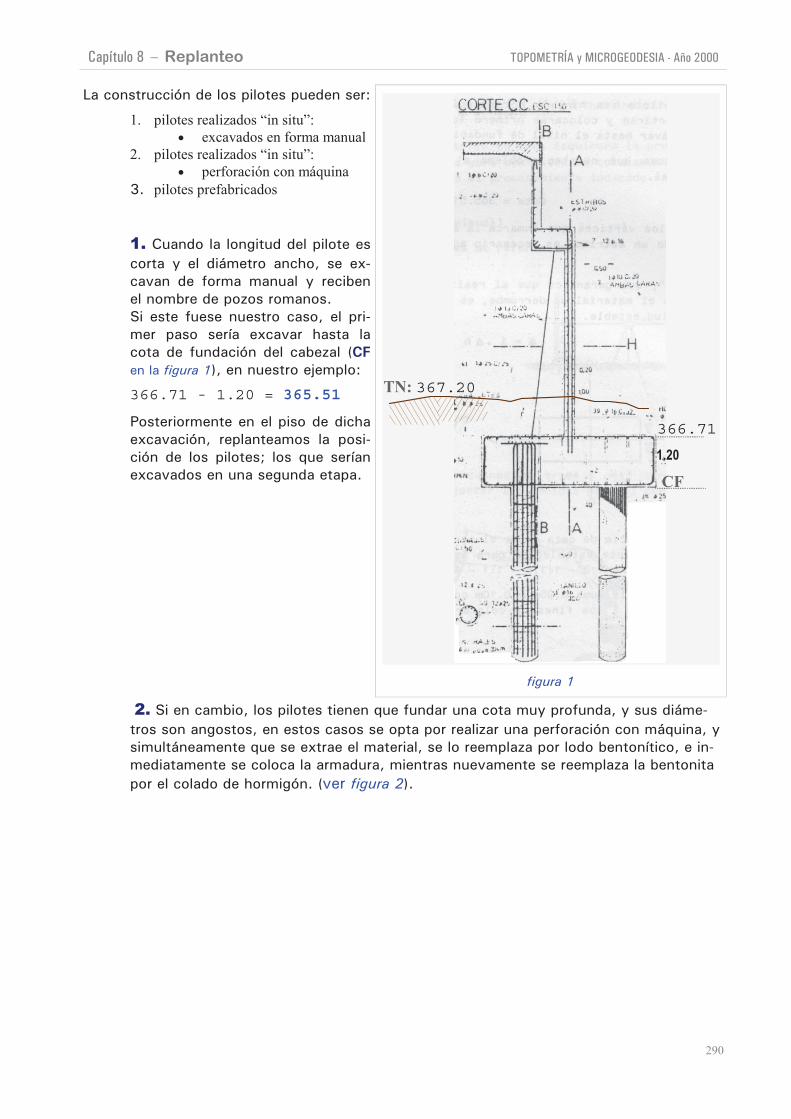
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
290
La construcción de los pilotes pueden ser:
1. pilotes realizados “in situ”:
• excavados en forma manual
2. pilotes realizados “in situ”:
• perforación con máquina
3. pilotes prefabricados
1. Cuando la longitud del pilote es
corta y el diámetro ancho, se ex-
cavan de forma manual y reciben
el nombre de pozos romanos.
Si este fuese nuestro caso, el pri-
mer paso sería excavar hasta la
cota de fundación del cabezal (CF
en la figura 1), en nuestro ejemplo:
366.71 - 1.20 = 365.51
Posteriormente en el piso de dicha
excavación, replanteamos la posi-
ción de los pilotes; los que serían
excavados en una segunda etapa.
TN: 367.20
366.71
CF
1.20
figura 1
2. Si en cambio, los pilotes tienen que fundar una cota muy profunda, y sus diáme-
tros son angostos, en estos casos se opta por realizar una perforación con máquina, y
simultáneamente que se extrae el material, se lo reemplaza por lodo bentonítico, e in-
mediatamente se coloca la armadura, mientras nuevamente se reemplaza la bentonita
por el colado de hormigón. (ver figura 2).
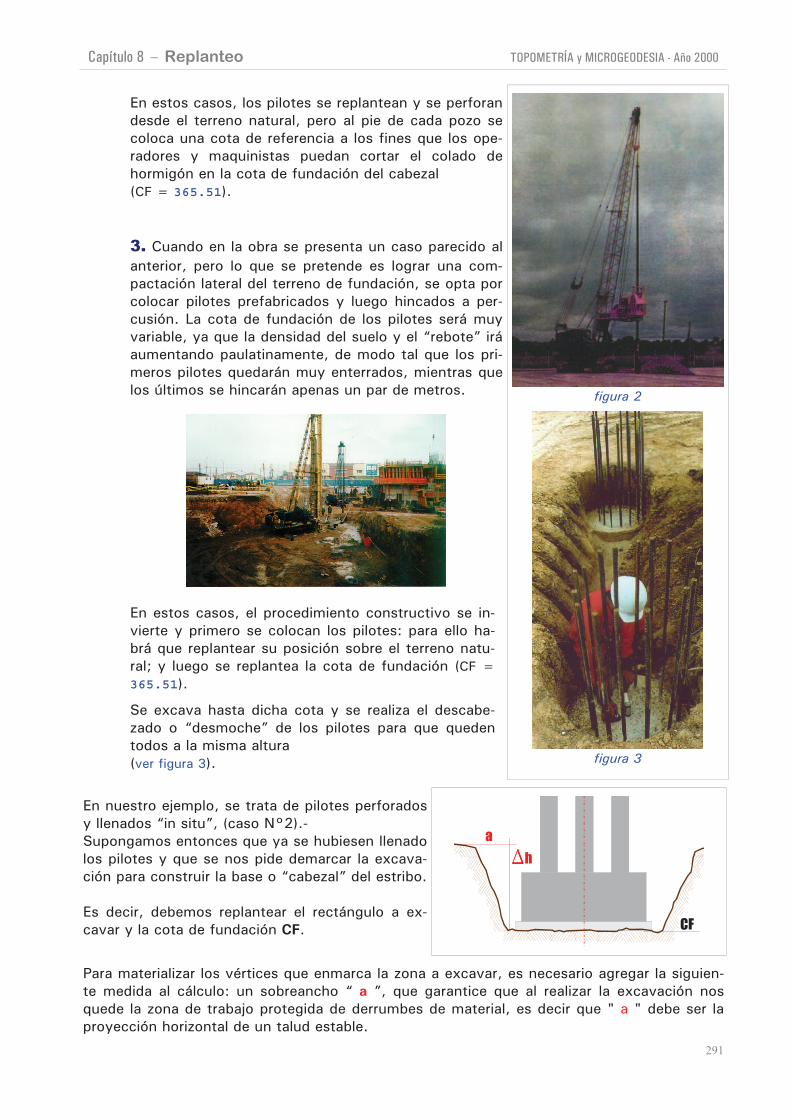
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
291
En estos casos, los pilotes se replantean y se perforan
desde el terreno natural, pero al pie de cada pozo se
coloca una cota de referencia a los fines que los ope-
radores y maquinistas puedan cortar el colado de
hormigón en la cota de fundación del cabezal
(CF = 365.51).
3. Cuando en la obra se presenta un caso parecido al
anterior, pero lo que se pretende es lograr una com-
pactación lateral del terreno de fundación, se opta por
colocar pilotes prefabricados y luego hincados a per-
cusión. La cota de fundación de los pilotes será muy
variable, ya que la densidad del suelo y el “rebote” irá
aumentando paulatinamente, de modo tal que los pri-
meros pilotes quedarán muy enterrados, mientras que
los últimos se hincarán apenas un par de metros.
En estos casos, el procedimiento constructivo se in-
vierte y primero se colocan los pilotes: para ello ha-
brá que replantear su posición sobre el terreno natu-
ral; y luego se replantea la cota de fundación (CF =
365.51).
Se excava hasta dicha cota y se realiza el descabe-
zado o “desmoche” de los pilotes para que queden
todos a la misma altura
(ver figura 3).
figura 2
figura 3
En nuestro ejemplo, se trata de pilotes perforados
y llenados “in situ”, (caso N°2).-
Supongamos entonces que ya se hubiesen llenado
los pilotes y que se nos pide demarcar la excava-
ción para construir la base o “cabezal” del estribo.
Es decir, debemos replantear el rectángulo a ex-
cavar y la cota de fundación CF.
a
DDDDh
CF
Para materializar los vértices que enmarca la zona a excavar, es necesario agregar la siguien-
te medida al cálculo: un sobreancho “ a ”, que garantice que al realizar la excavación nos
quede la zona de trabajo protegida de derrumbes de material, es decir que " a " debe ser la
proyección horizontal de un talud estable.
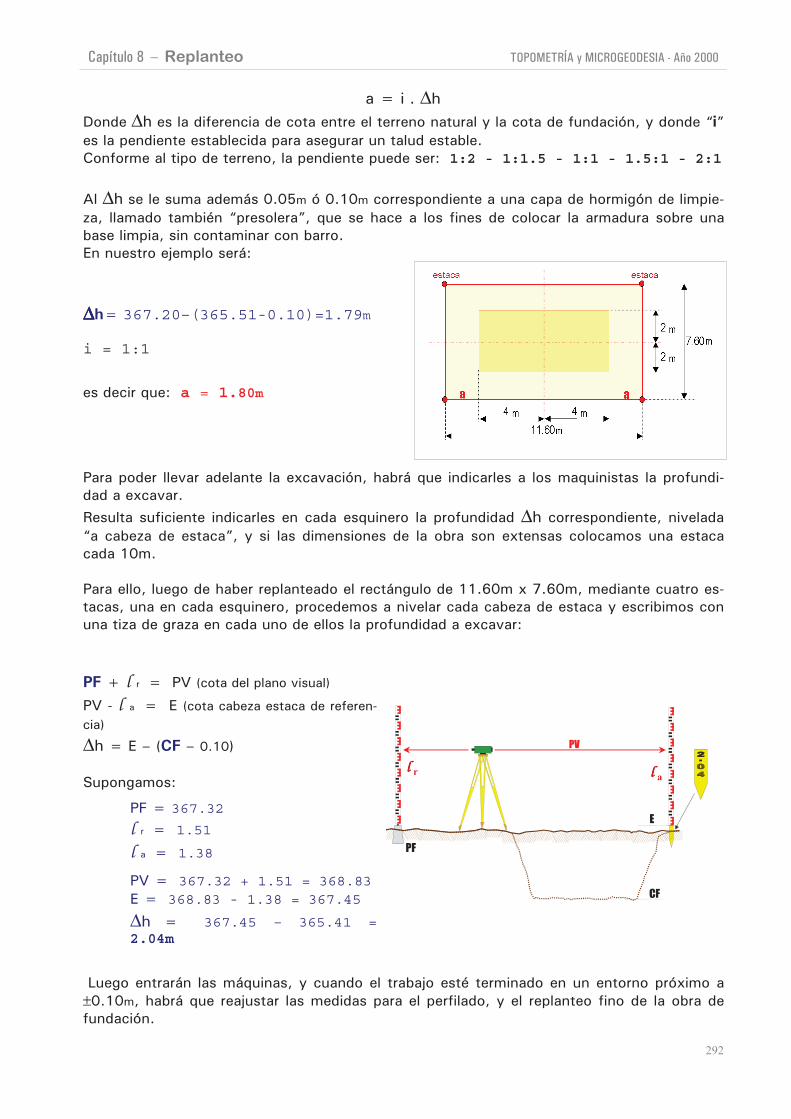
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
292
a = i . ∆h
Donde ∆h es la diferencia de cota entre el terreno natural y la cota de fundación, y donde “i”
es la pendiente establecida para asegurar un talud estable.
Conforme al tipo de terreno, la pendiente puede ser: 1:2 - 1:1.5 - 1:1 - 1.5:1 - 2:1
Al ∆h se le suma además 0.05m ó 0.10m correspondiente a una capa de hormigón de limpie-
za, llamado también “presolera”, que se hace a los fines de colocar la armadura sobre una
base limpia, sin contaminar con barro.
En nuestro ejemplo será:
∆∆∆∆h= 367.20–(365.51-0.10)=1.79m
i = 1:1
es decir que: a = 1.80m
Para poder llevar adelante la excavación, habrá que indicarles a los maquinistas la profundi-
dad a excavar.
Resulta suficiente indicarles en cada esquinero la profundidad ∆h correspondiente, nivelada
“a cabeza de estaca”, y si las dimensiones de la obra son extensas colocamos una estaca
cada 10m.
Para ello, luego de haber replanteado el rectángulo de 11.60m x 7.60m, mediante cuatro es-
tacas, una en cada esquinero, procedemos a nivelar cada cabeza de estaca y escribimos con
una tiza de graza en cada uno de ellos la profundidad a excavar:
PF + l r = PV (cota del plano visual)
PV - l a = E (cota cabeza estaca de referen-
cia)
∆h = E – (CF – 0.10)
Supongamos:
PF = 367.32
l r = 1.51
l a = 1.38
PV = 367.32 + 1.51 = 368.83
E = 368.83 - 1.38 = 367.45
∆h = 367.45 – 365.41 =
2.04m
CF
E
PF
l l l l r l l l l a
PV
Luego entrarán las máquinas, y cuando el trabajo esté terminado en un entorno próximo a
±0.10m, habrá que reajustar las medidas para el perfilado, y el replanteo fino de la obra de
fundación.
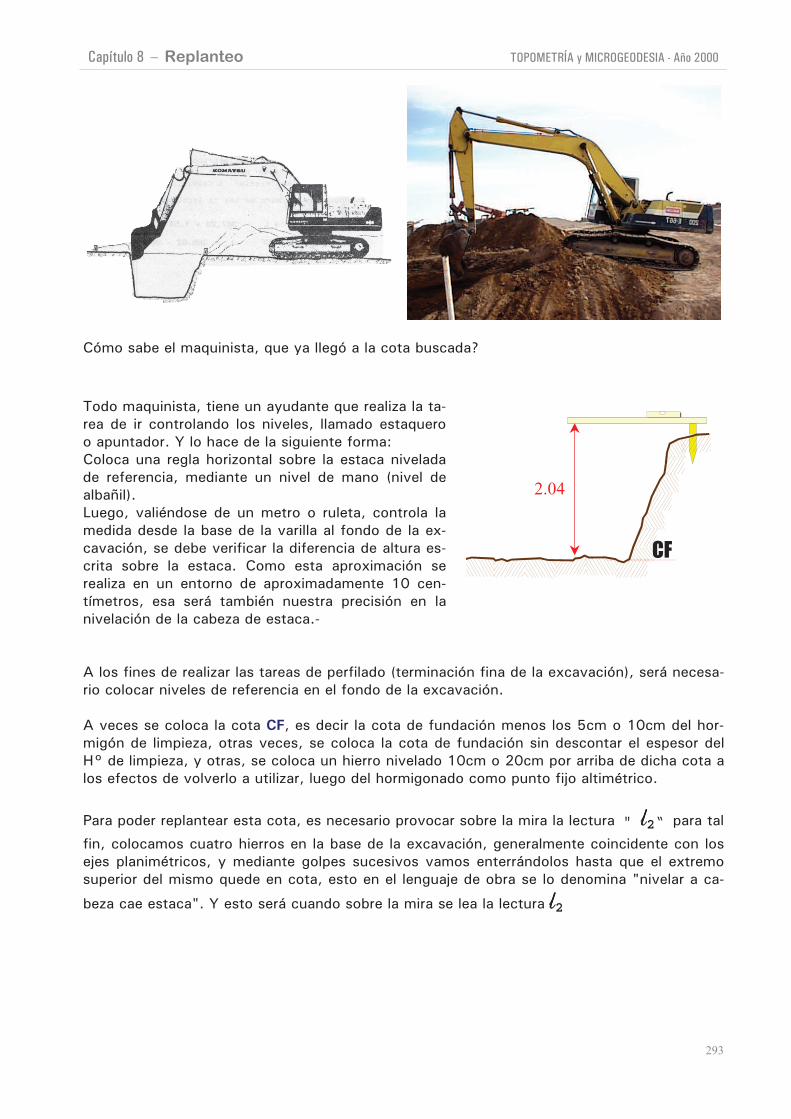
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
293
Cómo sabe el maquinista, que ya llegó a la cota buscada?
Todo maquinista, tiene un ayudante que realiza la ta-
rea de ir controlando los niveles, llamado estaquero
o apuntador. Y lo hace de la siguiente forma:
Coloca una regla horizontal sobre la estaca nivelada
de referencia, mediante un nivel de mano (nivel de
albañil).
Luego, valiéndose de un metro o ruleta, controla la
medida desde la base de la varilla al fondo de la ex-
cavación, se debe verificar la diferencia de altura es-
crita sobre la estaca. Como esta aproximación se
realiza en un entorno de aproximadamente 10 cen-
tímetros, esa será también nuestra precisión en la
nivelación de la cabeza de estaca.-
CF
2.04
A los fines de realizar las tareas de perfilado (terminación fina de la excavación), será necesa-
rio colocar niveles de referencia en el fondo de la excavación.
A veces se coloca la cota CF, es decir la cota de fundación menos los 5cm o 10cm del hor-
migón de limpieza, otras veces, se coloca la cota de fundación sin descontar el espesor del
H° de limpieza, y otras, se coloca un hierro nivelado 10cm o 20cm por arriba de dicha cota a
los efectos de volverlo a utilizar, luego del hormigonado como punto fijo altimétrico.
Para poder replantear esta cota, es necesario provocar sobre la mira la lectura " llll2“ para tal
fin, colocamos cuatro hierros en la base de la excavación, generalmente coincidente con los
ejes planimétricos, y mediante golpes sucesivos vamos enterrándolos hasta que el extremo
superior del mismo quede en cota, esto en el lenguaje de obra se lo denomina "nivelar a ca-
beza cae estaca". Y esto será cuando sobre la mira se lea la lectura llll2
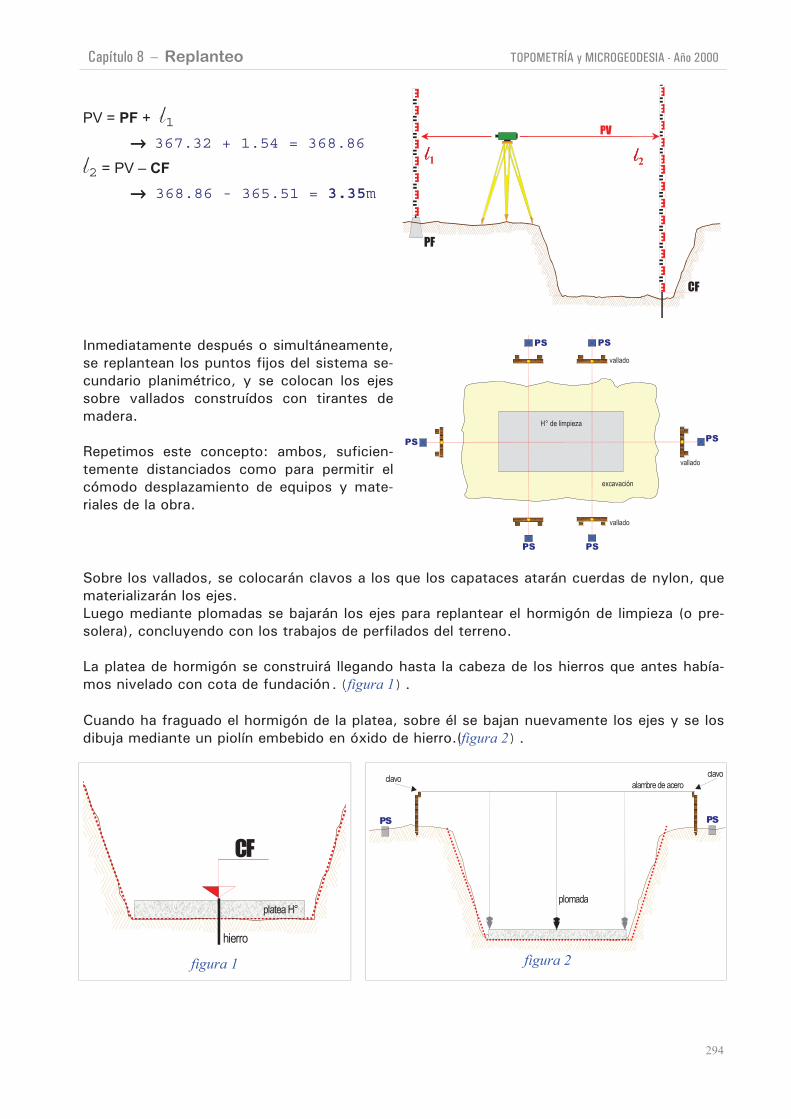
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
294
PV = PF + l1
→→→→ 367.32 + 1.54 = 368.86
l2 = PV – CF
→→→→ 368.86 - 365.51 = 3.35m
CF
PF
llll1 llll2
PV
Inmediatamente después o simultáneamente,
se replantean los puntos fijos del sistema se-
cundario planimétrico, y se colocan los ejes
sobre vallados construídos con tirantes de
madera.
Repetimos este concepto: ambos, suficien-
temente distanciados como para permitir el
cómodo desplazamiento de equipos y mate-
riales de la obra.
vallado
PS PS
H° de limpieza
vallado
PS
PS
excavación
vallado
PS
PS
Sobre los vallados, se colocarán clavos a los que los capataces atarán cuerdas de nylon, que
materializarán los ejes.
Luego mediante plomadas se bajarán los ejes para replantear el hormigón de limpieza (o pre-
solera), concluyendo con los trabajos de perfilados del terreno.
La platea de hormigón se construirá llegando hasta la cabeza de los hierros que antes había-
mos nivelado con cota de fundación.(figura 1).
Cuando ha fraguado el hormigón de la platea, sobre él se bajan nuevamente los ejes y se los
dibuja mediante un piolín embebido en óxido de hierro.(figura 2).
hierro
CF
platea H°
figura 1
PS PS
alambre de acero
clavoclavo
plomada
figura 2
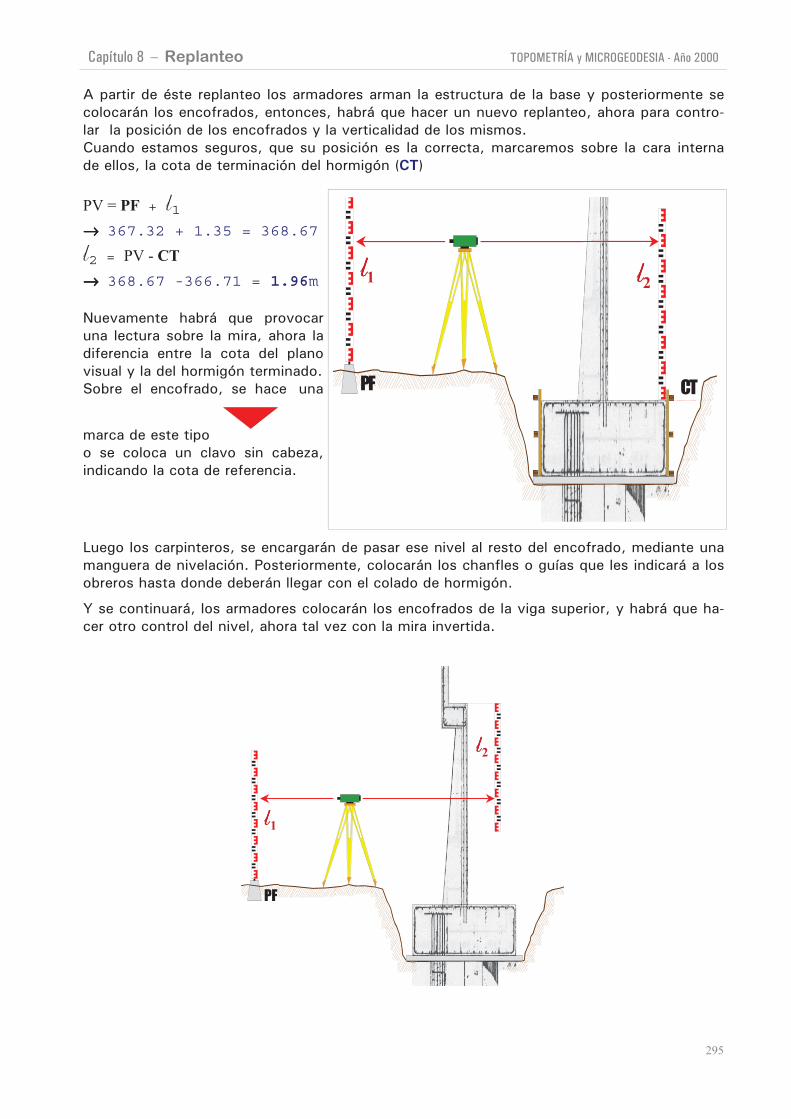
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
295
A partir de éste replanteo los armadores arman la estructura de la base y posteriormente se
colocarán los encofrados, entonces, habrá que hacer un nuevo replanteo, ahora para contro-
lar la posición de los encofrados y la verticalidad de los mismos.
Cuando estamos seguros, que su posición es la correcta, marcaremos sobre la cara interna
de ellos, la cota de terminación del hormigón (CT)
PV = PF + l1
→→→→ 367.32 + 1.35 = 368.67
l2 = PV - CT
→→→→ 368.67 -366.71 = 1.96m
Nuevamente habrá que provocar
una lectura sobre la mira, ahora la
diferencia entre la cota del plano
visual y la del hormigón terminado.
Sobre el encofrado, se hace una
marca de este tipo
o se coloca un clavo sin cabeza,
indicando la cota de referencia.
CTPF
llll1 llll2
PV
llll2
Luego los carpinteros, se encargarán de pasar ese nivel al resto del encofrado, mediante una
manguera de nivelación. Posteriormente, colocarán los chanfles o guías que les indicará a los
obreros hasta donde deberán llegar con el colado de hormigón.
Y se continuará, los armadores colocarán los encofrados de la viga superior, y habrá que ha-
cer otro control del nivel, ahora tal vez con la mira invertida.
PF
llll1 llll2
PV
llll2
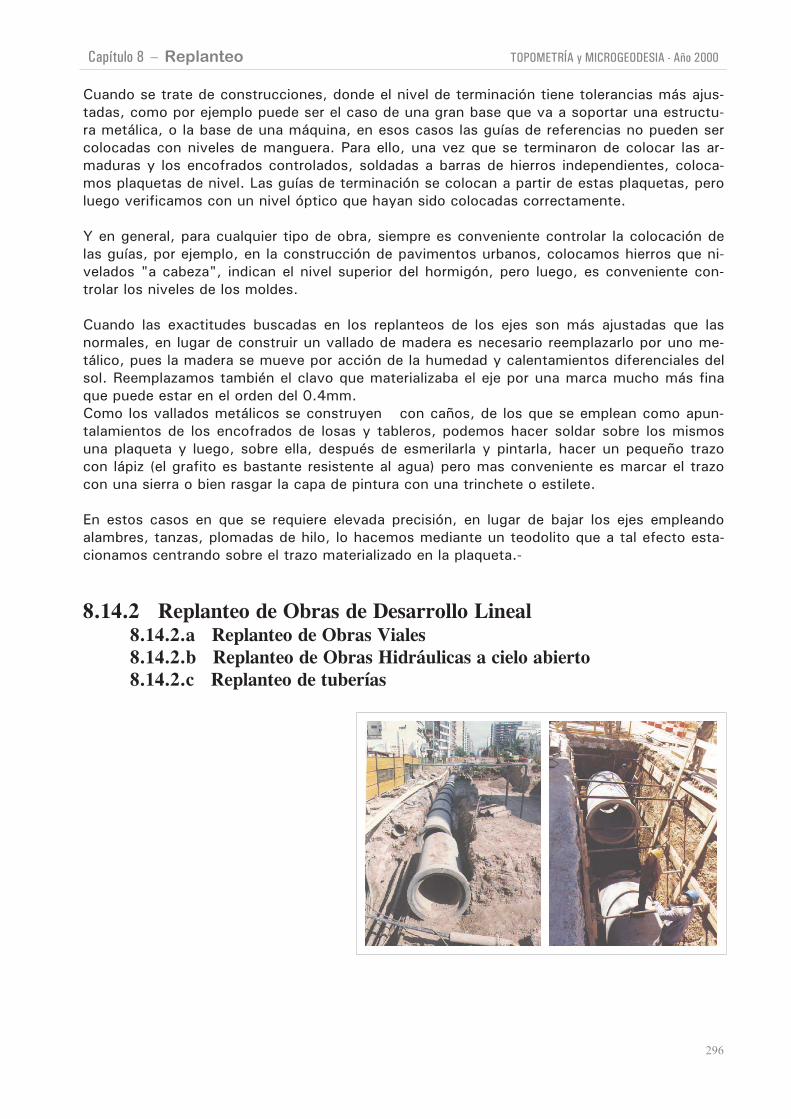
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
296
Cuando se trate de construcciones, donde el nivel de terminación tiene tolerancias más ajus-
tadas, como por ejemplo puede ser el caso de una gran base que va a soportar una estructu-
ra metálica, o la base de una máquina, en esos casos las guías de referencias no pueden ser
colocadas con niveles de manguera. Para ello, una vez que se terminaron de colocar las ar-
maduras y los encofrados controlados, soldadas a barras de hierros independientes, coloca-
mos plaquetas de nivel. Las guías de terminación se colocan a partir de estas plaquetas, pero
luego verificamos con un nivel óptico que hayan sido colocadas correctamente.
Y en general, para cualquier tipo de obra, siempre es conveniente controlar la colocación de
las guías, por ejemplo, en la construcción de pavimentos urbanos, colocamos hierros que ni-
velados "a cabeza", indican el nivel superior del hormigón, pero luego, es conveniente con-
trolar los niveles de los moldes.
Cuando las exactitudes buscadas en los replanteos de los ejes son más ajustadas que las
normales, en lugar de construir un vallado de madera es necesario reemplazarlo por uno me-
tálico, pues la madera se mueve por acción de la humedad y calentamientos diferenciales del
sol. Reemplazamos también el clavo que materializaba el eje por una marca mucho más fina
que puede estar en el orden del 0.4mm.
Como los vallados metálicos se construyen con caños, de los que se emplean como apun-
talamientos de los encofrados de losas y tableros, podemos hacer soldar sobre los mismos
una plaqueta y luego, sobre ella, después de esmerilarla y pintarla, hacer un pequeño trazo
con lápiz (el grafito es bastante resistente al agua) pero mas conveniente es marcar el trazo
con una sierra o bien rasgar la capa de pintura con una trinchete o estilete.
En estos casos en que se requiere elevada precisión, en lugar de bajar los ejes empleando
alambres, tanzas, plomadas de hilo, lo hacemos mediante un teodolito que a tal efecto esta-
cionamos centrando sobre el trazo materializado en la plaqueta.-
8.14.2 Replanteo de Obras de Desarrollo Lineal8.14.2.a Replanteo de Obras Viales
8.14.2.b Replanteo de Obras Hidráulicas a cielo abierto
8.14.2.c Replanteo de tuberías
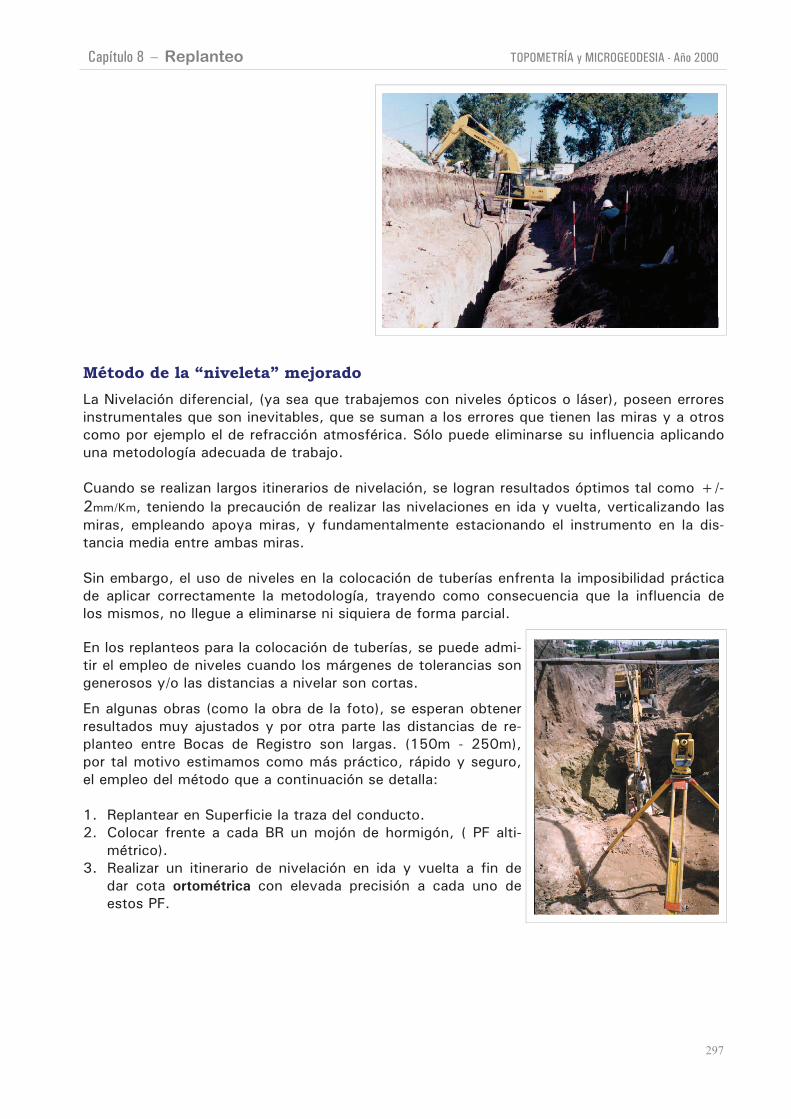
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
297
Método de la “niveleta” mejorado
La Nivelación diferencial, (ya sea que trabajemos con niveles ópticos o láser), poseen errores
instrumentales que son inevitables, que se suman a los errores que tienen las miras y a otros
como por ejemplo el de refracción atmosférica. Sólo puede eliminarse su influencia aplicando
una metodología adecuada de trabajo.
Cuando se realizan largos itinerarios de nivelación, se logran resultados óptimos tal como +/-
2mm/Km, teniendo la precaución de realizar las nivelaciones en ida y vuelta, verticalizando las
miras, empleando apoya miras, y fundamentalmente estacionando el instrumento en la dis-
tancia media entre ambas miras.
Sin embargo, el uso de niveles en la colocación de tuberías enfrenta la imposibilidad práctica
de aplicar correctamente la metodología, trayendo como consecuencia que la influencia de
los mismos, no llegue a eliminarse ni siquiera de forma parcial.
En los replanteos para la colocación de tuberías, se puede admi-
tir el empleo de niveles cuando los márgenes de tolerancias son
generosos y/o las distancias a nivelar son cortas.
En algunas obras (como la obra de la foto), se esperan obtener
resultados muy ajustados y por otra parte las distancias de re-
planteo entre Bocas de Registro son largas. (150m - 250m),
por tal motivo estimamos como más práctico, rápido y seguro,
el empleo del método que a continuación se detalla:
1. Replantear en Superficie la traza del conducto.
2. Colocar frente a cada BR un mojón de hormigón, ( PF alti-
métrico).
3. Realizar un itinerario de nivelación en ida y vuelta a fin de
dar cota ortométrica con elevada precisión a cada uno de
estos PF.
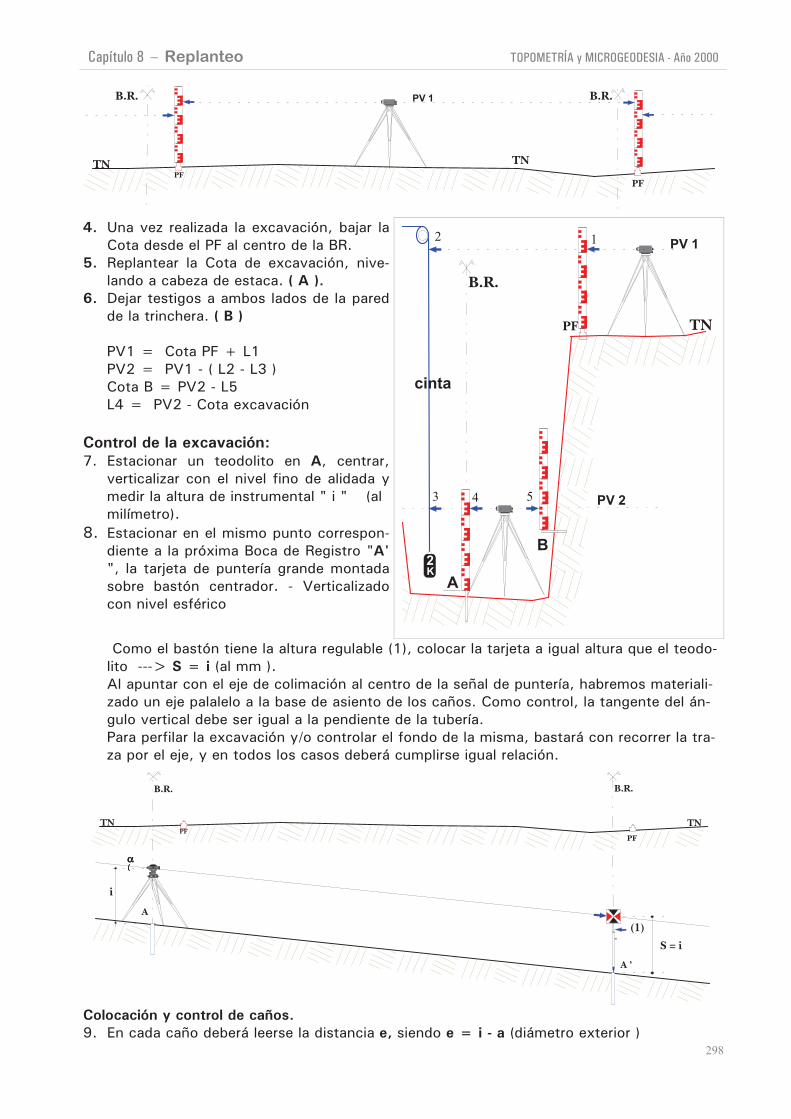
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
298
B.R. B.R.
TNPF
PF
TN
PV 1
4. Una vez realizada la excavación, bajar la
Cota desde el PF al centro de la BR.
5. Replantear la Cota de excavación, nive-
lando a cabeza de estaca. ( A ).
6. Dejar testigos a ambos lados de la pared
de la trinchera. ( B )
PV1 = Cota PF + L1
PV2 = PV1 - ( L2 - L3 )
Cota B = PV2 - L5
L4 = PV2 - Cota excavación
Control de la excavación:
7. Estacionar un teodolito en A, centrar,
verticalizar con el nivel fino de alidada y
medir la altura de instrumental " i " (al
milímetro).
8. Estacionar en el mismo punto correspon-
diente a la próxima Boca de Registro "A'
", la tarjeta de puntería grande montada
sobre bastón centrador. - Verticalizado
con nivel esférico
B.R.
TNPF
2K
PV 1
PV 2
A
B
cinta
12
3 4 5
Como el bastón tiene la altura regulable (1), colocar la tarjeta a igual altura que el teodo-
lito ---> S = i (al mm ).
Al apuntar con el eje de colimación al centro de la señal de puntería, habremos materiali-
zado un eje palalelo a la base de asiento de los caños. Como control, la tangente del án-
gulo vertical debe ser igual a la pendiente de la tubería.
Para perfilar la excavación y/o controlar el fondo de la misma, bastará con recorrer la tra-
za por el eje, y en todos los casos deberá cumplirse igual relación.
B.R. B.R.
TNPF
PF
TN
A
A '
i
αααα
S = i
(1)
Colocación y control de caños.
9. En cada caño deberá leerse la distancia e, siendo e = i - a (diámetro exterior )
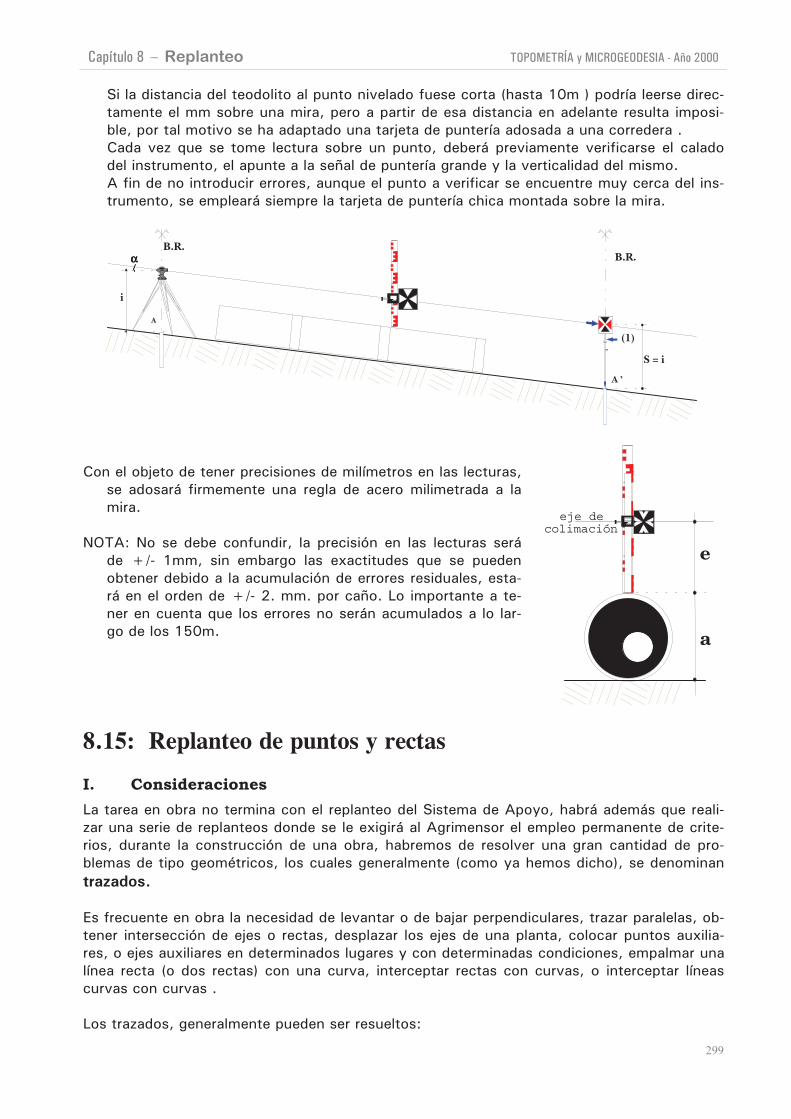
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
299
Si la distancia del teodolito al punto nivelado fuese corta (hasta 10m ) podría leerse direc-
tamente el mm sobre una mira, pero a partir de esa distancia en adelante resulta imposi-
ble, por tal motivo se ha adaptado una tarjeta de puntería adosada a una corredera .
Cada vez que se tome lectura sobre un punto, deberá previamente verificarse el calado
del instrumento, el apunte a la señal de puntería grande y la verticalidad del mismo.
A fin de no introducir errores, aunque el punto a verificar se encuentre muy cerca del ins-
trumento, se empleará siempre la tarjeta de puntería chica montada sobre la mira.
B.R.B.R.
A
A '
i
S = i
(1)
Con el objeto de tener precisiones de milímetros en las lecturas,
se adosará firmemente una regla de acero milimetrada a la
mira.
NOTA: No se debe confundir, la precisión en las lecturas será
de +/- 1mm, sin embargo las exactitudes que se pueden
obtener debido a la acumulación de errores residuales, esta-
rá en el orden de +/- 2. mm. por caño. Lo importante a te-
ner en cuenta que los errores no serán acumulados a lo lar-
go de los 150m.
e
a
eje de colimación
8.15: Replanteo de puntos y rectas
I. Consideraciones
La tarea en obra no termina con el replanteo del Sistema de Apoyo, habrá además que reali-
zar una serie de replanteos donde se le exigirá al Agrimensor el empleo permanente de crite-
rios, durante la construcción de una obra, habremos de resolver una gran cantidad de pro-
blemas de tipo geométricos, los cuales generalmente (como ya hemos dicho), se denominan
trazados.
Es frecuente en obra la necesidad de levantar o de bajar perpendiculares, trazar paralelas, ob-
tener intersección de ejes o rectas, desplazar los ejes de una planta, colocar puntos auxilia-
res, o ejes auxiliares en determinados lugares y con determinadas condiciones, empalmar una
línea recta (o dos rectas) con una curva, interceptar rectas con curvas, o interceptar líneas
curvas con curvas .
Los trazados, generalmente pueden ser resueltos:
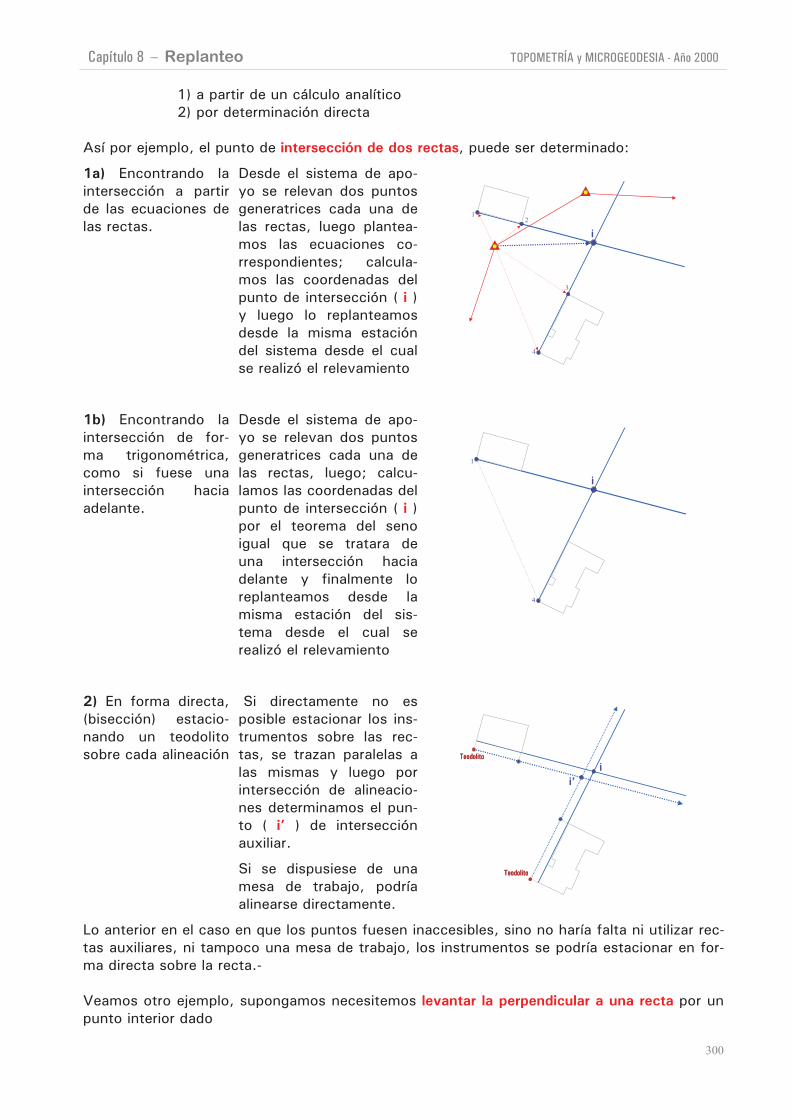
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
300
1) a partir de un cálculo analítico
2) por determinación directa
Así por ejemplo, el punto de intersección de dos rectas, puede ser determinado:
1a) Encontrando la
intersección a partir
de las ecuaciones de
las rectas.
Desde el sistema de apo-
yo se relevan dos puntos
generatrices cada una de
las rectas, luego plantea-
mos las ecuaciones co-
rrespondientes; calcula-
mos las coordenadas del
punto de intersección ( i )
y luego lo replanteamos
desde la misma estación
del sistema desde el cual
se realizó el relevamiento
i
12
3
4
1b) Encontrando la
intersección de for-
ma trigonométrica,
como si fuese una
intersección hacia
adelante.
Desde el sistema de apo-
yo se relevan dos puntos
generatrices cada una de
las rectas, luego; calcu-
lamos las coordenadas del
punto de intersección ( i )
por el teorema del seno
igual que se tratara de
una intersección hacia
delante y finalmente lo
replanteamos desde la
misma estación del sis-
tema desde el cual se
realizó el relevamiento
i
1
4
2) En forma directa,
(bisección) estacio-
nando un teodolito
sobre cada alineación
Si directamente no es
posible estacionar los ins-
trumentos sobre las rec-
tas, se trazan paralelas a
las mismas y luego por
intersección de alineacio-
nes determinamos el pun-
to ( i’ ) de intersección
auxiliar.
Si se dispusiese de una
mesa de trabajo, podría
alinearse directamente.
i
i’
TeodolitoTeodolito
TeodolitoTeodolito
Lo anterior en el caso en que los puntos fuesen inaccesibles, sino no haría falta ni utilizar rec-
tas auxiliares, ni tampoco una mesa de trabajo, los instrumentos se podría estacionar en for-
ma directa sobre la recta.-
Veamos otro ejemplo, supongamos necesitemos levantar la perpendicular a una recta por un
punto interior dado
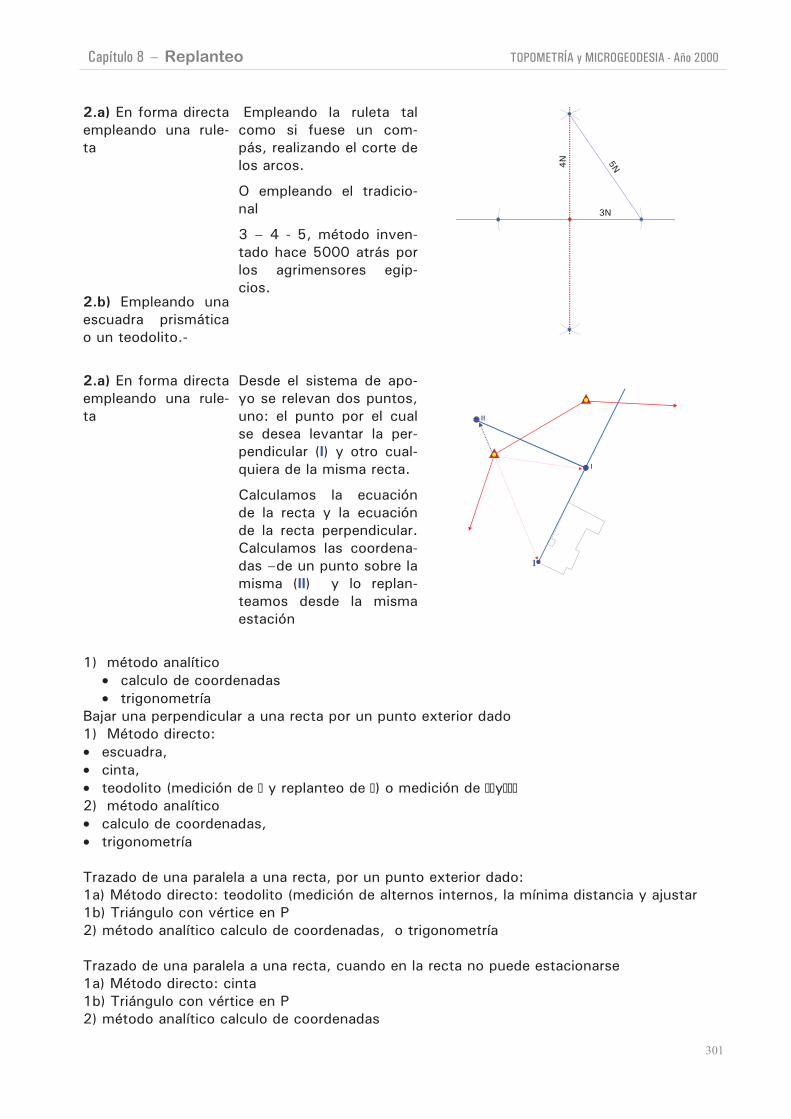
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
301
2.a) En forma directa
empleando una rule-
ta
2.b) Empleando una
escuadra prismática
o un teodolito.-
Empleando la ruleta tal
como si fuese un com-
pás, realizando el corte de
los arcos.
O empleando el tradicio-
nal
3 – 4 - 5, método inven-
tado hace 5000 atrás por
los agrimensores egip-
cios.
3N
4N 5
N
2.a) En forma directa
empleando una rule-
ta
Desde el sistema de apo-
yo se relevan dos puntos,
uno: el punto por el cual
se desea levantar la per-
pendicular (I) y otro cual-
quiera de la misma recta.
Calculamos la ecuación
de la recta y la ecuación
de la recta perpendicular.
Calculamos las coordena-
das –de un punto sobre la
misma (II) y lo replan-
teamos desde la misma
estación
I
1
II
1) método analítico
• calculo de coordenadas
• trigonometría
Bajar una perpendicular a una recta por un punto exterior dado
1) Método directo:
• escuadra,
• cinta,
• teodolito (medición de " y replanteo de ") o medición de ""y"""
2) método analítico
• calculo de coordenadas,
• trigonometría
Trazado de una paralela a una recta, por un punto exterior dado:
1a) Método directo: teodolito (medición de alternos internos, la mínima distancia y ajustar
1b) Triángulo con vértice en P
2) método analítico calculo de coordenadas, o trigonometría
Trazado de una paralela a una recta, cuando en la recta no puede estacionarse
1a) Método directo: cinta
1b) Triángulo con vértice en P
2) método analítico calculo de coordenadas
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
302
Error de apunte
Transmisión del error de orientación
Acumulación de errores
Error de lectura
Replanteo de alineaciones curvas: Una línea curva, se marca también por medio de una serie
de puntos colocados sobre la curva, en una determinada secuencia.
Metodos de replanteo de curvas:
Abscisas y Ordenadas
Deflexión
Polar
Bisección
Cuarto de flecha-
Replanteo de puntos por método polar
Replanteo de puntos por bisección
8.16: Replanteo de Curvas Horizontales Circulares8.16.1 Métodos de replanteo
8.16.1.a Abscisas y Ordenadas
8.16.1.b Deflexión
8.16.1.c Polar
8.16.1.d Bisección
8.17: Replanteo de Curvas Horizontales EspiralesClotoide
8.17.1 Método de replanteo
8.18: Replanteo de Curvas VerticalesParábola
8.19: Control del Replanteo
Hasta ahora, hemos visto cuáles son los pasos a seguir para efectuar el replanteo de una
obra.
El control del replanteo, corresponde a una etapa posterior, y sólo en aquellas obras de inge-
niería o arquitectura, donde se cumple que su desarrollo no es lineal ni superficial, sino
que lo es en altura o profundidad.
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
303
Podemos enumerar, como ejemplo de obras de desarrollo
en altura:
Los edificios en torres, las viviendas en monoblock, hote-
les, hospitales, estadios, teatros, presas de hormigón con
galerías, silos, chimeneas, tanques elevados, etc.
Y como obras de desarrollo en profundidad:
Los subsuelos de los edificios, pozos de ventilación, acce-
sos a túneles subterráneos, túneles, etc.
8.19.1 Obras de Altura
La diferencia fundamental con las obras bajas de desarrollo superficial, es que en éstas reali-
zamos el replanteo una sola vez, mientras que en las obras de altura tenemos que repetir el
replanteo tantas veces como plantas o niveles tenga la estructura.
En realidad no realizamos un nuevo replanteo cada vez, sino que "controlamos" o repetimos
el replanteo original realizado en la planta baja (a nivel del suelo).
Una vez concluidas las construcciones de las fundaciones, la obra comienza a crecer hacia
arriba, luego en cada piso o en cada nivel de losa habrá que realizar las siguientes tareas:
1. CONTROL PLANIMETRICO de los encofrados de las vigas, de la posición de
las columnas, de las instalaciones e insertos.
2. CONTROL DEL NIVEL del fondo del encofrado de la losa y de las vigas. Lue-
go del armado de los encofrados y colocación de las armaduras correspondien-
tes, y antes de llenarlas con hormigón, habrá que colocar los niveles de hormi-
gón termina- do que indiquen los planos. Luego del colado de hormigón de la
losa y vigas, se comienzan las tareas de colocar las armaduras de las columnas
que conducen al próximo nivel superior, en este momento habrá que efectuar
un nuevo control planimétrico de la posición del arranque de las columnas. Co-
locados ya los encofrados de las columnas y antes de proceder al colado de
ellas, habrá que efectuar un tercer control.
3. CONTROL DE VERTICALIDAD de los encofrados de las columnas.
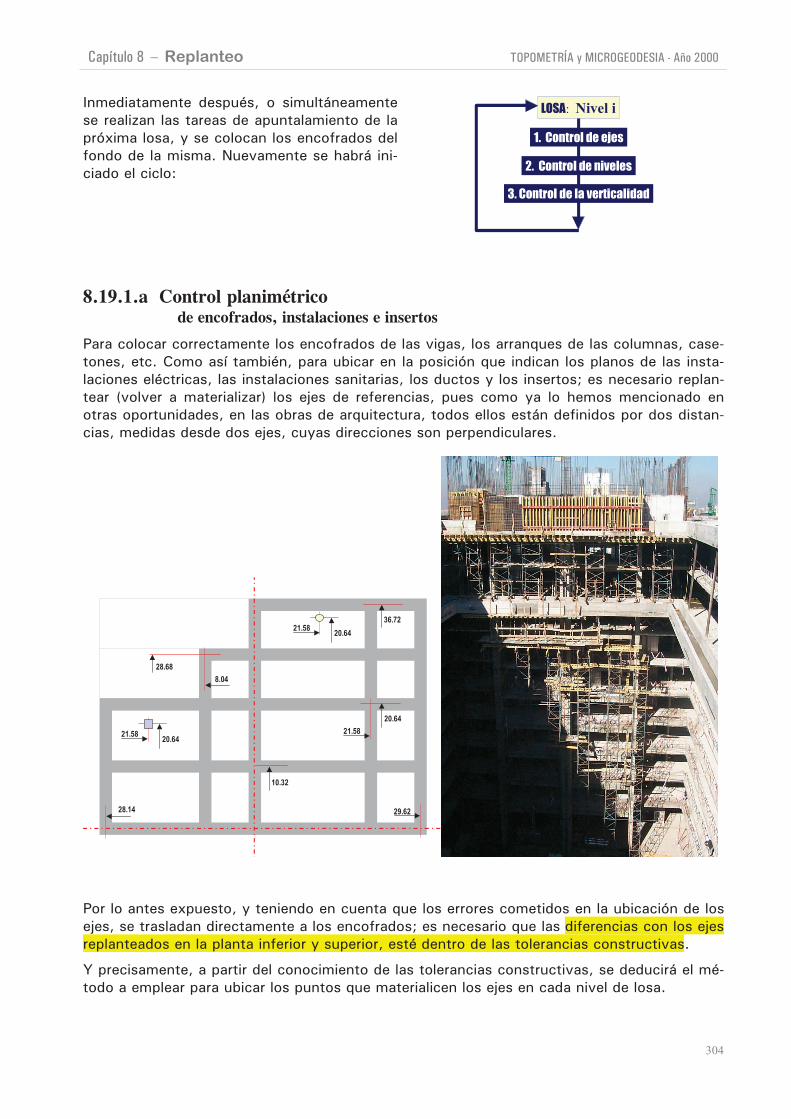
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
304
Inmediatamente después, o simultáneamente
se realizan las tareas de apuntalamiento de la
próxima losa, y se colocan los encofrados del
fondo de la misma. Nuevamente se habrá ini-
ciado el ciclo:
LOSA: Nivel i
1. Control de ejes
2. Control de niveles
3. Control de la verticalidad
8.19.1.a Control planimétricode encofrados, instalaciones e insertos
Para colocar correctamente los encofrados de las vigas, los arranques de las columnas, case-
tones, etc. Como así también, para ubicar en la posición que indican los planos de las insta-
laciones eléctricas, las instalaciones sanitarias, los ductos y los insertos; es necesario replan-
tear (volver a materializar) los ejes de referencias, pues como ya lo hemos mencionado en
otras oportunidades, en las obras de arquitectura, todos ellos están definidos por dos distan-
cias, medidas desde dos ejes, cuyas direcciones son perpendiculares.
10.32
20.64
28.68
36.72
8.04
28.14
21.58
29.62
20.6421.58
20.6421.58
Por lo antes expuesto, y teniendo en cuenta que los errores cometidos en la ubicación de los
ejes, se trasladan directamente a los encofrados; es necesario que las diferencias con los ejes
replanteados en la planta inferior y superior, esté dentro de las tolerancias constructivas.
Y precisamente, a partir del conocimiento de las tolerancias constructivas, se deducirá el mé-
todo a emplear para ubicar los puntos que materialicen los ejes en cada nivel de losa.
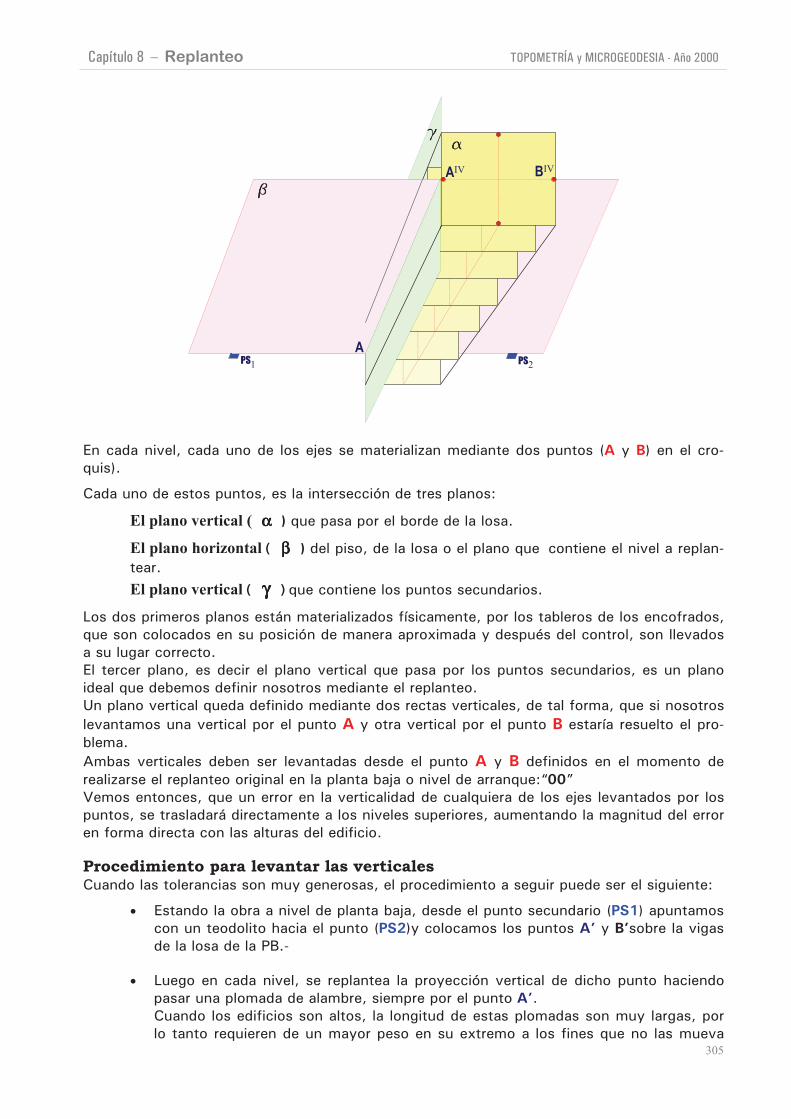
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
305
aaaa
bbbb
gggg
AIV BIV
PS1 PS2
A
En cada nivel, cada uno de los ejes se materializan mediante dos puntos (A y B) en el cro-
quis).
Cada uno de estos puntos, es la intersección de tres planos:
El plano vertical ( αααα ) que pasa por el borde de la losa.
El plano horizontal( ββββ ) del piso, de la losa o el plano que contiene el nivel a replan-
tear.
El plano vertical( γγγγ )que contiene los puntos secundarios.
Los dos primeros planos están materializados físicamente, por los tableros de los encofrados,
que son colocados en su posición de manera aproximada y después del control, son llevados
a su lugar correcto.
El tercer plano, es decir el plano vertical que pasa por los puntos secundarios, es un plano
ideal que debemos definir nosotros mediante el replanteo.
Un plano vertical queda definido mediante dos rectas verticales, de tal forma, que si nosotros
levantamos una vertical por el punto A y otra vertical por el punto B estaría resuelto el pro-
blema.
Ambas verticales deben ser levantadas desde el punto A y B definidos en el momento de
realizarse el replanteo original en la planta baja o nivel de arranque:“00”
Vemos entonces, que un error en la verticalidad de cualquiera de los ejes levantados por los
puntos, se trasladará directamente a los niveles superiores, aumentando la magnitud del error
en forma directa con las alturas del edificio.
Procedimiento para levantar las verticalesCuando las tolerancias son muy generosas, el procedimiento a seguir puede ser el siguiente:
• Estando la obra a nivel de planta baja, desde el punto secundario (PS1) apuntamos
con un teodolito hacia el punto (PS2)y colocamos los puntos A’ y B’sobre la vigas
de la losa de la PB.-
• Luego en cada nivel, se replantea la proyección vertical de dicho punto haciendo
pasar una plomada de alambre, siempre por el punto A’.
Cuando los edificios son altos, la longitud de estas plomadas son muy largas, por
lo tanto requieren de un mayor peso en su extremo a los fines que no las mueva
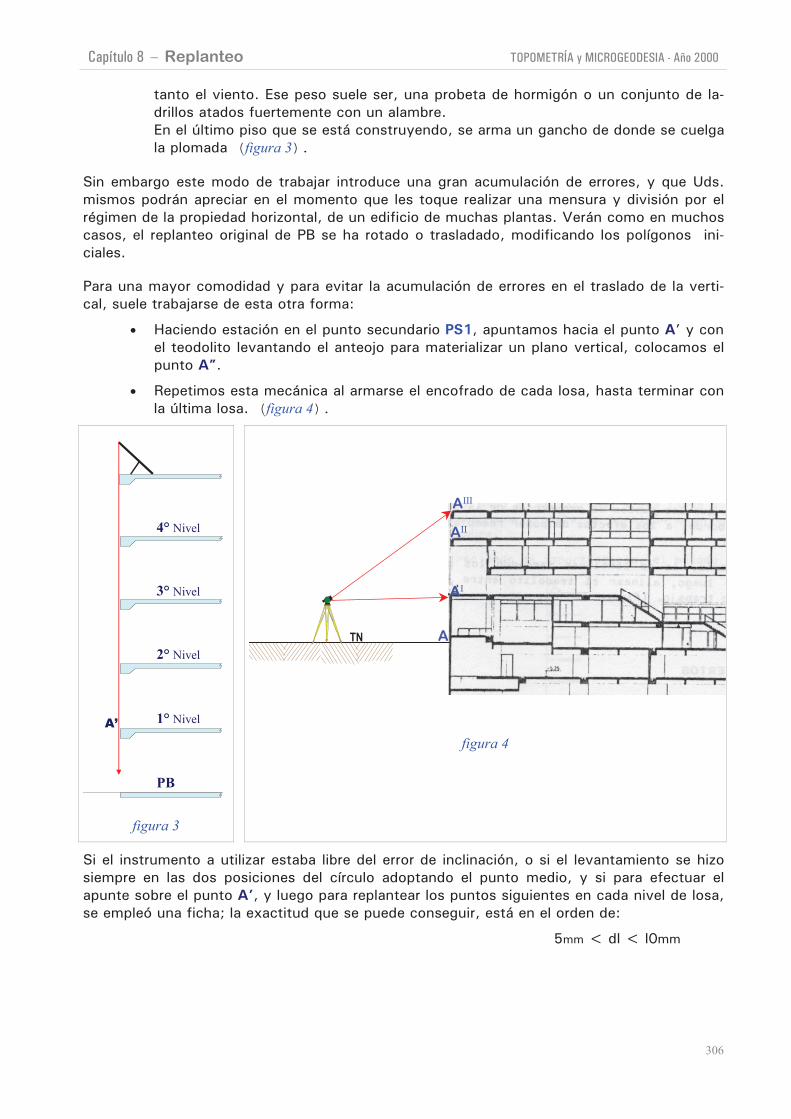
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
306
tanto el viento. Ese peso suele ser, una probeta de hormigón o un conjunto de la-
drillos atados fuertemente con un alambre.
En el último piso que se está construyendo, se arma un gancho de donde se cuelga
la plomada (figura 3).
Sin embargo este modo de trabajar introduce una gran acumulación de errores, y que Uds.
mismos podrán apreciar en el momento que les toque realizar una mensura y división por el
régimen de la propiedad horizontal, de un edificio de muchas plantas. Verán como en muchos
casos, el replanteo original de PB se ha rotado o trasladado, modificando los polígonos ini-
ciales.
Para una mayor comodidad y para evitar la acumulación de errores en el traslado de la verti-
cal, suele trabajarse de esta otra forma:
• Haciendo estación en el punto secundario PS1, apuntamos hacia el punto A’ y con
el teodolito levantando el anteojo para materializar un plano vertical, colocamos el
punto A”.
• Repetimos esta mecánica al armarse el encofrado de cada losa, hasta terminar con
la última losa. (figura 4).
A’
PB
1° Nivel
2° Nivel
3° Nivel
4° Nivel
figura 3
TN A
AI
AII
AIII
figura 4
Si el instrumento a utilizar estaba libre del error de inclinación, o si el levantamiento se hizo
siempre en las dos posiciones del círculo adoptando el punto medio, y si para efectuar el
apunte sobre el punto A’, y luego para replantear los puntos siguientes en cada nivel de losa,
se empleó una ficha; la exactitud que se puede conseguir, está en el orden de:
5mm < dl < l0mm
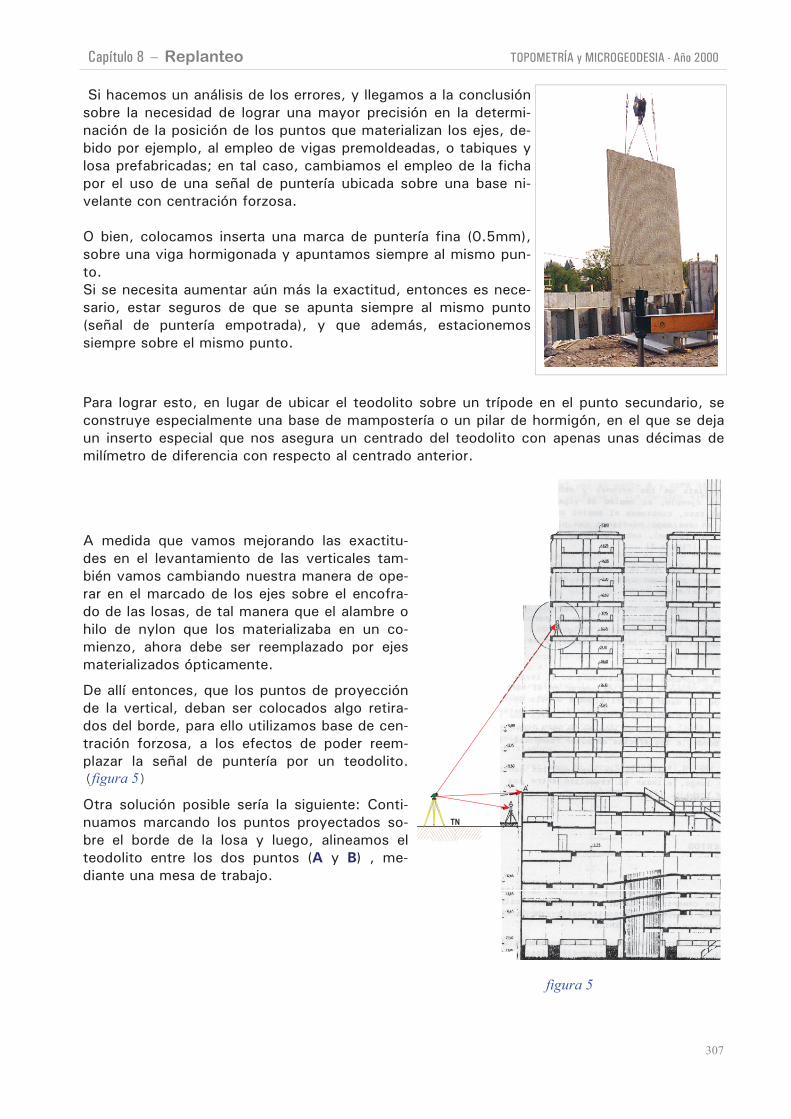
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
307
Si hacemos un análisis de los errores, y llegamos a la conclusión
sobre la necesidad de lograr una mayor precisión en la determi-
nación de la posición de los puntos que materializan los ejes, de-
bido por ejemplo, al empleo de vigas premoldeadas, o tabiques y
losa prefabricadas; en tal caso, cambiamos el empleo de la ficha
por el uso de una señal de puntería ubicada sobre una base ni-
velante con centración forzosa.
O bien, colocamos inserta una marca de puntería fina (0.5mm),
sobre una viga hormigonada y apuntamos siempre al mismo pun-
to.
Si se necesita aumentar aún más la exactitud, entonces es nece-
sario, estar seguros de que se apunta siempre al mismo punto
(señal de puntería empotrada), y que además, estacionemos
siempre sobre el mismo punto.
Para lograr esto, en lugar de ubicar el teodolito sobre un trípode en el punto secundario, se
construye especialmente una base de mampostería o un pilar de hormigón, en el que se deja
un inserto especial que nos asegura un centrado del teodolito con apenas unas décimas de
milímetro de diferencia con respecto al centrado anterior.
A medida que vamos mejorando las exactitu-
des en el levantamiento de las verticales tam-
bién vamos cambiando nuestra manera de ope-
rar en el marcado de los ejes sobre el encofra-
do de las losas, de tal manera que el alambre o
hilo de nylon que los materializaba en un co-
mienzo, ahora debe ser reemplazado por ejes
materializados ópticamente.
De allí entonces, que los puntos de proyección
de la vertical, deban ser colocados algo retira-
dos del borde, para ello utilizamos base de cen-
tración forzosa, a los efectos de poder reem-
plazar la señal de puntería por un teodolito.
(figura 5)
Otra solución posible sería la siguiente: Conti-
nuamos marcando los puntos proyectados so-
bre el borde de la losa y luego, alineamos el
teodolito entre los dos puntos (A y B) , me-
diante una mesa de trabajo.
TN
figura 5
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
308
Replanteo de Insertos
En algunos tipos de obras, tales como la foto del comienzo de este tema, que se trata de una
torre donde el núcleo es de hormigón armado, mientras que el resto del edificio es una es-
tructura de acero y vidrio soldada a los insertos (placas de acero) ubicadas en el núcleo de
H°, y en general, en cualquier obra que vaya a ser destinada a alojar una industria metál me-
cánica.-
En estos casos, la construcción de la obra ci-
vil, responde a los lineamientos que establece
el montaje de la obra mecánica.
Pero no tan sólo fábricas e industrias, tam-
bién podemos incluir en este grupo, las cen-
trales de energía, (termoeléctricas - hidroeléc-
tricas), las estaciones transformadoras, las
destilerías, las plantas químicas, etc.
En estas obras, instalaciones, máquinas y equipos (construidas a veces fuera del país), son
fijadas a firmes bases de hormigón, mediante bulones de anclajes que se dejan (previamente)
insertos en el hormigón.
Las exactitudes que debemos lograr, no responden ya a las tolerancias constructivas de la
obra civil, sino que debemos buscar el límite de nuestros errores admisibles, en las relaciones
que se establezcan entre los agujeros de anclajes de una máquina y el díametro de los bulo-
nes de anclaje (por ejemplo).
8.19.1.b Control de nivelesde encofrados, instalaciones e insertos
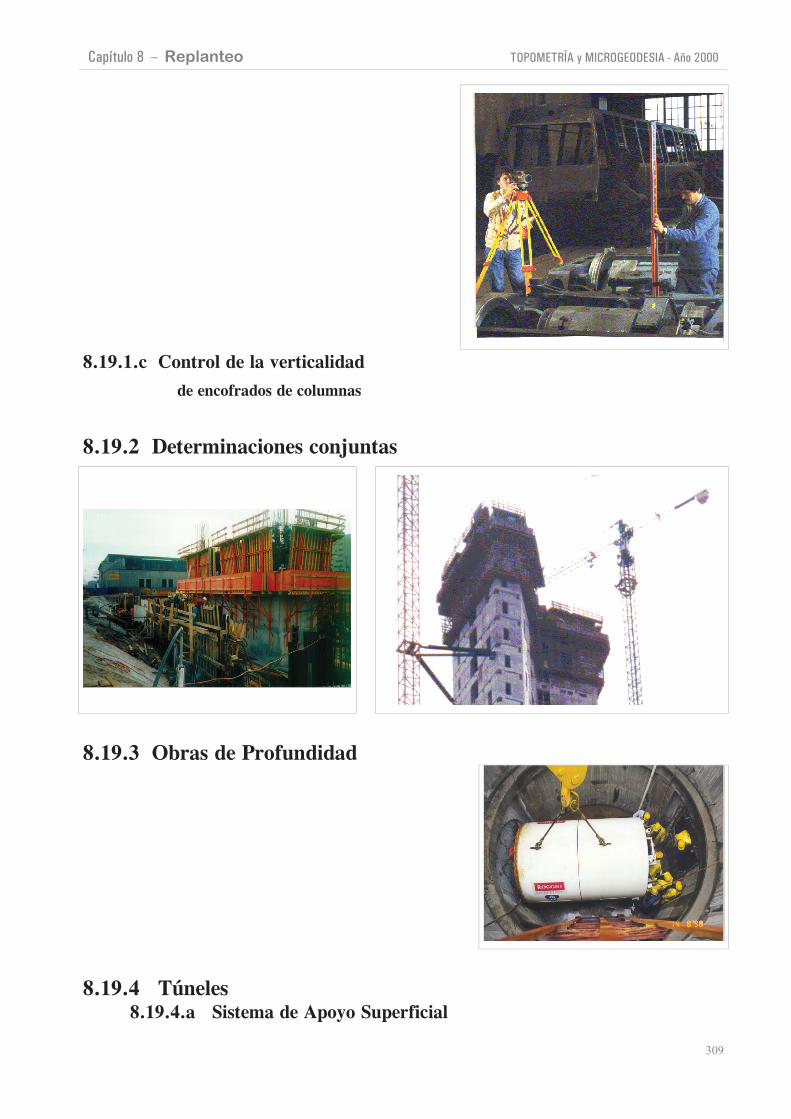
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
309
8.19.1.c Control de la verticalidad
de encofrados de columnas
8.19.2 Determinaciones conjuntas
8.19.3 Obras de Profundidad
8.19.4 Túneles8.19.4.a Sistema de Apoyo Superficial
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
310
8.19.4.b Orientación Interior
8.19.4.c Control de la vertical de los pozos
8.19.4.d Excavación manual. Replanteo
8.19.4.e Excavación con tunelera. Replanteo

Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
311
8.19.4.f Monitoreo de tuneleras automatizadas
CAPTURA DEL CENTRO DEL PRISMA
SEGUIMIENTO AUTOMATICO
DEL PRISMA
COMUNICACION A TIEMPO REAL
PROCESO DE CAPTURA PROCESO DE BUSQUEDA
N O T E B O O K
P R IS MA D E
MO N IT O R E O D E
L A T U N E L E R A MO N IT O R
Mo n ito r
P R IMA S D E C O N T R O L
D E L S IS T E MA E S T A C IO N T O T A L
R O B O T IC A
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
312
Fábrica de Premoldeados
- Desmolde de Dovela -
Capitulo 9. Mediciones Posteriores
9.1: Movimiento de suelos9.1.1 Métodos de medición y cálculo de volúmenes
9.2: Ductos subterráneos9.2.1 Planos conforme a obras
Capítulo 8 – Replanteo TOPOMETRÍA y MICROGEODESIA - Año 2000
313
9.2.2 Catastro de ductos
9.3: Medición de deformaciones9.3.1 Nivelación de alta precisión
9.3.2 Red de Control y Malla Testigo
9.3.3 Prueba de Cargas: Puentes, losas, vigas, pilas.
figura 1 figura 2
figura 3
figura 4 figura 5
9.3.4 Auscultación de presas9.3.4.a Métodos directos o clásicos
9.3.4.b Métodos geodésicos c/acceso a los puntos testigos.
9.3.4.c Métodos geodésicos s/acceso a los puntos testigos.
9.3.4.d Sensores remotos. Instrumental especial
Capítulo 10 – Aplicaciones TOPOMETRÍA y MICROGEODESIA - Año 2000
314
Capitulo 10. Aplicaciones
10.1: Mediciones para la exploración y explotación mineraTexto de la disertación que sobre el tema “Mediciones para la exploración y explotación minera”
expusiera el Ing. Agrim. Mario Curto, a especial solicitud de la Cátedra.-
10.1.1: Introducción
La actividad minera comenzó a tener su auge en nuestro país recientemente en la década pa-
sada.
El gobierno colaboró con nuevas leyes aportando la base legal, y la aparición del Proyecto
Pasma en el aspecto técnico.
“Proyecto Pasma: Participan agrimensores con el fin de proveer cartografía de la zona, y elabo-
rar una red de apoyo para las mensuras mineras.”
Esta es una actividad interdisciplinaria ya que participan, diversos profesionales como geólo-
gos, agrimensores, ingenieros en minas e ingenieros geofísicos.
La tendencia actual de las explotaciones es hacerlas, pese al impacto ambiental, a cielo abierto
con grandes movimientos de suelo, dejándose de lado las explotaciones subterráneas. Ya que
la relación costo beneficio, no es rentable para estas.
Nuestra incumbencia en esta actividad se divide en dos partes: Legal y Técnica
Legal: comprende las mensuras, que sirven para asegurar la propiedad minera. Estas
mensuras son el resultado final, de cateos anteriores; los cuales surgen de exploracio-
nes en extensas zonas, en las cuales los geólogos toman muestras para detectar las
áreas más favorables.
Técnica: el objetivo es proveer la cartografía básica, beneficiándose fundamentalmente
los geólogos, que la utilizan para su cartografía temática. Los geólogos realizan sus sis-
temas de apoyo expeditivos ayudándose con cinta y brújula por lo que se debe ajustar
esos polígonos, para disminuir los errores que se cometen en dicho levantamiento.
También corresponde al agrimensor la tarea de amojonar la mensura.
10.1.2: Precisiones
Se conocen dos tipos de errores: los accidentales y los sistemáticos.
Hoy en día el avance tecnológico ha hecho que disminuyan muchísimo la influencia de estos
errores.
Pero existe un tercer error que no tiene nada que ver con la tecnología, o los métodos de me-
dición, que es el error de concepto. ¿Qué representa este error?
Es un error no detectable fácilmente, en el que el profesional utiliza un criterio equivocado,
este surge de una mala interpretación y/o aplicación de los conocimientos adquiridos.
Ejemplo: Trabajar en un sistema geodésico distinto al que se debe utilizar, determinar un rumbo
astronómico sin tener en cuenta la convergencia de meridianos, medir distancias largas en
grandes alturas sin realizar la correspondiente reducción al nivel del mar.
Capítulo 10 – Aplicaciones TOPOMETRÍA y MICROGEODESIA - Año 2000
315
10.1.3: Sistema de Referencia
Antiguamente se usaban accidentes geográficos para delimitar los cateos, como ser la con-
fluencia de dos ríos, el pico más alto, etc., siendo suficiente para aquella época. Las coordena-
das se pedían en Gauss-Krügger, pero como no había puntos del IGM para atarse, se obtenían
a través de cartas a escala 1:100 000, por lo que la representación de un punto tenía una in-
certidumbre de ± 20m a 30m.
La exigencia hasta años anteriores era utilizar el sistema Campo Inchauspe ’69. Como en vas-
tas zonas de nuestra cordillera no hay puntos del Marco de Refrencia, las vinculaciones a este
sistema se hace en la mayoría de los casos, de forma gráfica a través de una carta del Instituto
Geográfico Militar
Con las nuevas leyes se comenzó a exigir POSGAR. Como algunos de los cateos que fueron
pedidos son anteriores a la nueva legislación, se siguen exigiendo las mensuras en Campo In-
chauspe.
10.1.4: Etapas
“Se va de lo grande a lo pequeño”.
En la etapa preliminar se realizan levantamientos expeditivos de grandes áreas donde las preci-
siones son generosas. Los cateos van disminuyendo en su magnitud o pueden quedar iguales.
A medida que los estudios van avanzando, las exigencias en la precisión van aumentando, has-
ta que se solicita el permiso de mina, que es el reclamo del derecho minero.
En las etapas de cateo se utilizan imágenes satelitales, fotografías aéreas, cartas geológicas, ó
cartas existentes del IGM, combinando en lo posible con técnicas GPS y mediciones con esta-
ciones totales.
Una vez otorgado el Derecho Minero, los geólogos van tomando muestras, densificando cada
vez más el área de exploración, por lo que la cartografía se tiene que ir actualizando constan-
temente, lo mismo sucede con morfología del terreno, lo que implica también la actualización
de la carta topográfica (curvas de nivel).
Otra labor del agrimensor es la de documentar el emplazamiento de las obras civiles, como ser
caminos, etc.
10.1.5: Labores subterráneas
• Son más onerosas.
• Se restringen los grados de libertad.
• Los puntos se materializan en el techo de los túneles.
• Los lados de la poligonal son cortos, lo que lleva a la
propagación de errores más acentuada. Sobre todo en
los pozos.-
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
316
El curso que presento en estas páginas es un escueto resumen de un original bastante más
extenso impartido en algunas Universidades.
Como bien sabéis, la creación de documentos HTML extensos es trabajosa, por lo que pido
disculpas por los errores y por el escaso tiempo que he dedicado a su revisión.
Poco a poco iré completando los diferentes temas, actualizando las referencias y añadiendo
las imágenes necesarias.
Como es lógico, agradeceré vuestras correcciones y
sugerencias.
http://www.etsimo.uniovi.es/usr/feli/Correo.html
Tema 1 Concepto y construcción del modelo digital de elevaciones
Conceptos
•Introducción
•¿Qué es un modelo?
•Tipos de modelosModelos icónicos, análogos y simbólicos
Modelos analógicos y digitales
•Modelos digitales del terreno
•Los MDT y los mapas
•Simulación de procesos con los MDT
El modelo digital de elevaciones
•Introducción
•Origen del MDE
•Definición del MDE
•Estructuras de datos en el MDE
•Modelo vectorialContornos
TIN
•Modelo rasterMatrices regulares
Quadtrees
•¿Qué estructura usar?
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
317
La construcción del MDE
•Introducción
•Captura de datos
•Métodos directosAltímetros
GPS
Estaciones topográficas
•Métodos indirectos, 1Restitución fotogramétrica
Radargrametría
•Métodos indirectos, 2Digitalización automática
•Métodos indirectos, 3Digitalización manual
•Elementos de la estructura topográfica
•Métodos de interpolaciónMétodo general
La hipótesis de la variable regionalizada
•Métodos basados en triangulacionesLa red irregular de triángulos
La transformación vector-raster
•La continuidad hidrológica
Tema 2 Valoración del error en el MDE
Introducción Las fuentes del error
•El error de las fuentes primariasImágenes de satélite
Radargrametría
•El error de las fuentes secundariasError en la digitalización
Análisis del error de la digitalización
Cuantificación del error posicional
El error cartográficoLa calidad de los mapas
La deformación de los mapas
La medida del error atributivo
•Análisis del error aleatorioValoración
Los puntos de control
•Análisis de los grandes errores
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
318
La propagación del error
•El análisis de sensibilidadMétodos de Monte Carlo
El efecto de la autocorrelación
•El error y el relieve
Tema 3 Descripción y análisis del Relieve
Las variables topográficas
•El gradiente
•La pendiente
•La orientación
•La curvatura
•La rugosidad
En estos momentos el curso sólo está disponible hasta aquí. La primera parte
del Tema 3 ha sido añadida el 26/09/97. Espero ir moviendo este aviso hacia
abajo hasta hacerlo desaparecer
Caracterización morfométrica
•Los elementos del relieve
•Los métodos de clasificación
La descripción estadística
•Estadísticos básicos para variables lineales
•Estadísticos básicos para variables circulares
•Otros descriptoresLa entropía como medida de la diversidad
La medida de la autocorrelación
La dimensión fractal
Tema 4 Simulación de procesos
Cuencas Hidrológicas
•Autómatas celulares
•La generación de líneas de flujo
•La definición de cuencas hidrológicas
•La estimación de caudales máximos
Cuencas visuales
•Estimación de cotas
•Perfiles topográficos
•Intervisibilidad entre dos puntos
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
319
•Identificación de cuencas visuales
La observación del relieve
•Modelos de reflectancia
•La reducción del efecto topográfico
Modelos climáticos
•La trayectoria solar
•Análisis del ocultamiento topográfico
•Análisis de la insolación potencial
•Análisis de la irradiancia
Tema 5 Modelos de prospección y predicción
Las herramientas
•Métodos lógicos o booleanos
•Métodos bayesianos
•La regresión logística
•La lógica borrosa
Los resultados
•Métodos booleanos: identificación de formas
•Métodos bayesianos: clasificación del relieve
•La regresión logística: análisis de idoneidad de hábitat
•La lógica borrosa: análisis de potencialidad de vegetación
La estructura del índice puede variar según se vaya introduciendo el texto correspondiente. La estructura
del Tema 5 está sometida a revisión y sólo se apuntan los temas que pretendo tocar.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
320
AAllam, M.M. (1978): "DTM application in topographic mapping". Photogrammetric Engineering and
Remote Sensing, 44(12): 1513-1520.
Aracil, J. (1986): Máquinas, sistemas y modelos. Un ensayo sobre sistémica. Tecnos, 282 pág.
Madrid.
BBalce, A.E. (1987): "Determination of optimum sampling interval in grid digital elevation models (DEM)
data adquisition. Photogrammetric Engineering and Remote Sensing, 53(3): 323-330.
Band, Lawrence E. (1986): "Topographic partition of watersheds with digital elevation models". Water
Resources Research, 22(1): 15-24.
Band, Lawrence E. (1989): "Spatial aggregation of complex terrain". Geographical Analysis, 21(4):
279-293.
Bernstein, Ralph (1983): "Image geometry and rectification". En Colwell (Ed.)(1983): 873-922.
Berry, J.K. (1987): "Computer assisted map analysis: potential and pitfalls". Photogrammetric
Engineering and Remote Sensing, 53(10): 1405-1410.
Berry, J.K. (1988): "Maps as data: fundamental considerations in computer-assisted map analysis".
GIS/LIS'88 Proceedings: 273-284. San Antonio, Texas.
Blakemore, Michael (1983): "Generalization and error in spatial databases". Proceedings Auto-Carto, 6:
313-322. Falls Church, Virginia.
Burrough, P.A.; Deursen, W. van; Heuvelink, G. (1988): "Linking spatial process models and GIS: a
marriage of convenience or a blossoming parthership ?". GIS/LIS'88 Proceedings: 598-607. San
Antonio, Texas.
Buttenfield, B.P.; Mackaness, W.A. (1991): "Visualization". En Maguire et al. (1991), vol. 1: 427-443.
CCanters, Frank (1994): "Simulating error in triangulated irregular network models". EGIS/MARI '94,
Fifth European Conference and Exhibition on Geographical Information Systems: 169-178.
Carrara, A.; Cardinali, M.; Detti, R.; Guzetti, F.; Pasqui, V.; Reichenbach, P. (1991): "GIS techniques
and statistical models in evaluating landslide hazard". Earth Surface Processes and Landforms, 16:
427-445.
Carter, J.R. (1988): "Digital representation of topographic surfaces". Photogrammetric Engineering and
Remote Sensing, 54(11): 1577-1580.
Cayley, A. (1859). On contour and slope lines. The London, Edinburgh, and Dublin Philosophical
Magazine and Journal of Science. XVIII: 264-268. En Wood (1996, Ap. 2.2).
Chapman, C.A. (1952): "A new quantitative method of topographic analysis". American Journal of
Science, 250: 428-452.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
321
Chorley, R.J. (Ed.) (1972): Spatial analysis in geomorphology, 393 pág. Methuen, London.
Chuvieco, E.; Congalton, R.G. (1989): "Application of remote sensing and Geographic Information
Systems to forest fire hazard mapping". Remote Sensing of the Environnement, 29: 147-159.
Chuvieco, Emilio (1990): Fundamentos de teledetección espacial. Ediciones Rialp, 453 pág. Madrid.
Cignoni, P.; Laforenza, D.; Montani, C.; Perego, R.; Scopigno, R. (1994): "Evaluation of parallelization
strategies for an incremental Delaunay triangulator in E3".21 p. [internet, sin referencias]
Clarke, Keith C. (1988): "Scale-based simulation of topographic relief". The American Cartographer,
15(2): 173-181.
Clarke, Keith C. (1990): Analytical and computer cartography. Prentice Hall, 290 pág. Englewood
Cliffs, New Jersey.
Claus, M. (1984): "Digital terrain models through digital stereo correlation". Photogrammetria, 39(4-6):
183-192.
Collins, Stanley H. (1975): "Terrain parameters directly from a digital terrain model". The Canadian
Surveyor, 29(5): 507-518.
Colwell, Robert N. (Ed.)(1983): Manual of remote sensing. American Society of Photogrammetry, 2
vol., 2440 pág. Virginia.
Connelly, Daniel S. (1972): "Geomorphology and information theory". En Chorley (Ed.) (1972): 91-
108.
Craig, R.G.; Craft, J.L. (Eds.)(1980): Applied Geomorphology. Proceedings of the "Binghamton"
Geomorphology Symposium, 11 th. Kent State University.
Craig, R.G. (1980): "Criteria for constructing optimal digital terrain models". En Craig y Craft
(Eds.)(1980): 108-130.
DDavis, John C. (1973): Statistics and data analysis in geology. Kansas Geological Survey, 550 pág.
John Wiley & Sons. New York.
Day, T.; Muller, J.P. (1989): "Digital elevation model production by stereo image pairs: a comparison
of algorithms". Image Vision Comput., 7(2): 95-101.
Devereux, B.J. (1985): "The construction of digital terrain models on small computers". Computers &
Geosciences, 11(6): 713-724.
Dolton, L.; Dueker, K.J. (1986): "A comparison of functionality of grid and vector data structures in a
microcomputer environment". En Niemann (Ed.)(1986), vol. 1: 214-231.
Douglas, David H. (1986): "Experiments to locate ridges and channels to create a new type of digital
elevation model". Cartographica, 23(4): 29-61.
Doyle, F.J. (1978): "Digital terrain models: an overview". Photogrammetric Engineering and Remote
Sensing, 44(12): 1481-1485.
Dozier, Jeff; Strahler, Alan H. (1983): Ground investigations in support of remote sensing. En Colwell
(Ed.)(1983): 959-986.
Dubayah, Ralph; Rich, Paul M. (1995): "Topographic solar radiation mdels for GIS". International
Journal of Geographical Information Systems, 9(4): 405-419.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
322
Duda, R.D.; Hart, P.E. (1973): Pattern classification and scene analysis. John Wilwy and Sons, 482
pág. New York. En Schowengerdt (1983): 145.
EEastman, J. Ronald (1992): Idrisi Version 4.0. Technical Reference, 229 p. Clark University.
Massachussetts.
Ebner, Heinrich; Reinhardt, Wolfgang (1984): Progressive sampling and DEM interpolation by finite
elements. Sonderdruck aus BuL 3a, 9 pág. Zeiss, Oberkochen.
Ebner, Heinrich; Reinhardt, Wolfgang; Hößler, Rainer (1984): "Generation, management and utilization
of high fidelity digital terrain models". International Archives of Photogrammetry and Remote Sensing,
27(B11): 556-566.
Erdas (1991a): Erdas Field Guide. Version 7.5. Erdas Inc., 394 pág. Atlanta.
Erdas (1991b): Terrain analysis. Erdas Inc., 40 pág. Atlanta.
ESRI (1989): Users Guide. Arc/Info. Volume 2. Command References. Environmental Systems
Research Institute. Redlands, California.
Evans, Ian S. (1972): General geomorphometry, derivatives of altitude, and descriptive statistics. En
Chorley (Ed.) (1972): 17-90.
Evans, D.L. (Ed.) (1995): Spaceborne Synthetic Aperture Radar: current status and future directions.
NASA Technical Memorandum 4679, Committee on Earth Science. (Acceso:
http://southport.jpl.nasa.gov/nrc/nrcT_of_C.html)
FFelicísimo Pérez, A.M.; Fernández Cepedal, G. (1984): "Estimación de la radiación solar incidente en
laderas con pendiente y orientación variables". Studia Oecologica, 3(1/2): 267-283.
Felicísimo, A.M.; García-Manteca, P. (1990): "Corrección del efecto topográfico de las imágenes
Landsat mediante el uso de un modelo digital de elevaciones". III Reunión Científica del Grupo de
Trabajo en Teledetección: 209-216. Asociación Española de Teledetección. Madrid.
Felicísimo, A.M.; García-Manteca, P.; Marquínez, J. (1991): Influencia del relieve en la cartografía de la
vegetación con imágenes de satélite. Universidad de Oviedo, 45 pág. (informe inédito).
Felicísimo, A.M.; García-Manteca, P.; Marquínez, J. (1993): "Efectos de la corrección del efecto
topográfico en las imágenes Landsat sobre la clasificación de la vegetación y usos del suelo".
Teledetección y Medio Ambiente. IV Reunión Científica Asociación Española de Teledetección: 251-
256. Sevilla, 1991.
Felicísimo, A.M. (1992): Aplicaciones de los modelos digitales del terrenoen las ciencias ambientales.
Tesis Doctoral, 235 pág. Instituto de Recursos Naturales y Ordenación del Territorio (indurot),
Universidad de Oviedo.
Felicísimo, Angel Manuel (1994). Modelos digitales del terreno. Introducción y aplicaciones en las
ciencias ambientales. Biblioteca de Historia Natural, 3. 220 p. Pentalfa Ediciones, Oviedo.
Felicísimo, Angel M. (1994): "Parametric estatistical method for error detection in digital elevation
models". ISPRS Journal of Photogrammetry and Remote Sensing, 49(4): 29-33.
Felicísimo, Angel M. (1995): "Error propagation analysis in slope estimation by means of digital
elevation models". 17th International Cartographic Conference Proceddings, 1: 94-98. Barcelona.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
323
Fernández Cepedal, G; Felicísimo, A.M. (1987): "Método de cálculo de la radiación solar incidente en
áreas con apantallamiento topográfico". Revista de Biología de la Universidad de Oviedo, 5: 109-119.
Fisher, N.I. (1993): Statistical analysis of circular data, 277 p. Cambridge University Press. Cambridge.
Flach, J.D.; Chidley, T.R.E. (1988): "Digital elevation models and their application to remote sensing of
water resources". Proceedings of the 1988 International Geoscience and Remote Sensing Symposium
(Igarss), vol. 3: 1545-1546. Aston University.
Franklin, S.E.; LeDrew, E.F. (1983): "An assessment of information from DEM variables and Landsat
MSS data for an area of high relief". 9th Canadian Symposium on Remote Sensing: 451-460.
Franklin, Steven E. (1987a): "Geomorphometric processing of digital elevation models". Computers &
Geosciences, 13(6): 603-609.
Franklin, Steven E. (1987b): "Terrain analysis from digital patterns in geomorphometry and Landsat
MSS spectral response". Photogrammetric Engineering and Remote Sensing, 53(1): 59-65.
Franklin, Steven E.; Peddle, Derek R. (1987): "Texture analysis of digital image data using spatial
coocurrence". Computers & Geosciences, 13(3): 293-311.
Freeman, H. (1961): "On the encoding of arbitrary geomatric configurations". Transactions on
Electronic Computers, EC(10): 260-268.
GGarcía Asensio, L.; Lumbreras Crespo, J. Javier (1992): "El modelo digital del terreno MDT200 del
Instituto Geográfico Nacional: descripción general y resultados". Mapping, 1(3): 38-42.
Garland, Michael; Heckbert, Paul S. (1995): "Fast polygonal approximation of terrains and height fiels".
Technical Report CMU-CS-95-181, 37 p. Computer Science Department, Carnegie Mellon University.
(Tech. Rep.: http://www.cs.cmu.edu/˜garland/scape)
Garnier, B.J.; Ohmura, Atsumu (1968): "A method of calculating the direct shortwave radiation income
of slopes". Journal of Applied Meteorology, 7(10): 796-800.
Geertman, Stan; Ruddijs, Sebastiaan (1994): "Geographical sensitivity analysis: some procedures for
generating meta-information". EGIS/MARI '94, Fifth European Conference and Exhibition on
Geographical Information Systems: 151-158.
Gonçalves, P.P.; Diogo, P.M. (1994): "Geographic information systems and cellular automata: a new
approach to forest fire simulation". EGIS/MARI '94, Fifth European Conference and Exhibition on
Geographical Information Systems: 702-712.
Goolchild, Michael F.; Mark, David M. (1987): "The fractal nature of the geographic phenomena".
Annals of the Association of the American Geographers, 77(2): 265-278.
Goshtasby, A.; Stockman, G.C.; Page, C.V. (1986): "A region-based approach to digital image
transformation with subpixel accuracy". IEEE Transactions on Geoscience and Remote Sensing, GE-
24(3): 390-399.
Goshtasby, A. (1988): "Registration of images with geometric distortions". IEEE Transactions on
Geoscience and Remote Sensing, 26(1): 60-64.
Gregory, K.J.; Walling, D.E. (1973): Drainage basin, form and process. A geomorphological approach.
Edward Arnold, 458 pág. London.
Guindon, B.; Goodenough, D.G.; Teillet, P.M. (1982): "The role of digital terrain models in the remote
sensing of forests". Canadian Journal of Remote Sensing, 8(1): 4-16.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
324
HHannah, M.J. (1981): "Error detection and correction in Digital Terrain Models". Photogrammetric
Engineering and Remote Sensing, 47(1): 63-69.
Harrington, Steven (1987): Computer graphics. A programming approach. Computer Science Series,
466 pág. McGraw-Hill Book Co, Singapore.
Heywood, H. (1964): "Standard date periods with declination limits". Nature, 204: 768.
Hinse, Mario; Gwyn, Q.H.J.; Bonn, F. (1988): "Radiometric correction of C-band imagery for
topographic effects in regions of moderate relief". IEEE Transactions on Geoscience and Remote
Sensing, 26(2): 122-132.
Hobson, R.D. (1967): Fortran IV programs to determine surface roughness in topography for the CDC
3400 computer. Nortwestern University. Evanston, 28 pág. Illinois.
Hobson, R.D. (1972): "Surface roughness in topography: quantitative approach". En Chorley (1972):
221-245.
Holben, Brent N.; Justice, Christopher O. (1980): "The topographic effect on spectral response from
nadir-pointing sensors". Photogrammetric Engineering and Remote Sensing, 46(9): 1191-1200.
Horn, Berthold K.P.; Sjoberg, Robert W. (1979): "Calculating the reflectance map". Applied Optics,
18(11): 1770-1779.
Horn, B.K.P. (1981): "Hill-shading and the reflectance map". Proceedings of the IEEE, 69(1):14-47.
Horton, R.E. (1932): "Drainage basin characteristics". Transactions of the American Geophysical
Union, 13: 350-361.
Horton, R.E. (1945): "Erosional development of streams and their drainage basins: hydrophysical
approach to quantitative geomorphology". Geological Society American Bulletin, 56(3): 275-370.
Hunter, Gary J.; Goodchild, Michael F. (1994): "Design and application of a methodology for reporting
uncertainty in spatial databases". URISA Proceedings, 1994: 771-786. Milwaukee, Washington.
Hutchinson, M.F. (1989): "A new procedure for gridding elevation and stream line data with automatic
removal of spurious pits". Journal of Hydrology, 106: 211-232.
Hutchinson, M.F.; Dowling, T.I. (1991): "A continental hydrological assessment of a new grid-based
digital elevation model of Australia". Hydrological Processes, 5: 45-58.
JJames, Mike (1988): Pattern recognition. John Wiley & Sons, 144 pág. New York.
Jeffery, Tom (1987): "Mimicking mountains". Byte, 12(12): 337-344.
Jenson, S.K.; Domingue, J.O. (1988): "Extracting topographic structure from digital elevation data for
geographic information system analysis". Photogrammetric Engineering and Remote Sensing, 54(11):
1593-1600.
João, Elsa Maria (1995): "The importance of quantifying the effects of generalization". En Müller et al.
(1995: 183-193).
Joly, F. (1988): La cartografía. Oikos-Tau. Barcelona.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
325
Jones, A.R.; Settle, J.J.; Wyatt, B.K. (1988): "Use of digital terrain data in the interpretation of SPOT-
1 HRV multispectral imagery". International Journal of Remote Sensing, 9(4): 669-682.
KKaufmann, D.S.; Haja, S.R. (1988): "Extraction of dense digital elevation models from SPOT stereo
imagery". Proceedings of the 1988 International Geoscience and Remote Sensing Symposium, vol. 1:
477-478. Igarss.
Keates, John S. (1988): Cartographic design and production. Longman Scientific & Technical, 2ª ed.,
261 pág. New York.
Keefer, B.J.; Smith, J.L.; Gregoire, T.G. (1988): "Simulating manual digitizing error with statistical
models". GIS/LIS '88 Proceedings, vol. 1: 475-483. San Antonio.
Klein, Dennis H. (1988): "User expectations for selecting a microcomputer-based municipal automated
mapping/land information system (AM/LIS). GIS/LIS'88 Proceedings, vol. 2: 550-560. San Antonio,
Texas.
Kubik, Kurt; Wu, Xiaoliang (1995): "Mapping from SPOT images using digital photogrammetric
workstation". 17th International Cartographic Conference Proceddings, 1: 266-274. Barcelona.
LLanter, D.P.; Veregin, H. (1990): "A lineage meta-database program for propagating error in geographic
information systems". GIS/LIS '90 Proceedings: 144-153.
Lapedes, Daniel N. (Red.)(1981): Diccionario de términos científicos y técnicos, vol 5. (pág. 2163-
2839). McGraw-Hill-Boixareu Ed. Barcelona-México.
Lebart, Ludovic; Morineau, Alain; Fénelon, Jean-Pierre (1985): Tratamiento estadístico de datos.
Métodos y programas. Marcombo, 520 pág. Barcelona.
Lee, Jay; Marion, Louis K. (1994): "Analysis of spatial autocorrelation of U.S.G.S. 1:250,000 Digital
Elevation Models". GIS/LIS '94 Proceedings: 504-513.
Ley, R. (1986): "Accuracy assessment of digital terrain models". Proceedings Auto-Carto London, 1:
455-464. (En Li, 1991:1334).
Li, Zhilin (1991): "Effects of check points on the reliability of DTM accuracy estimates obtanied from
experimental tests". Photogrammetric Engineering and Remote Sensing, 57(10): 1333-1340.
Lowell, Kim (1995): "Manipulating uncertainty-based digital maps to perform like polygon-based
thematic maps". 17th International Cartographic Conference Proceddings, 1: 168-175. Barcelona.
MMaguire, D.J. (1989): Computers in geography. Longman Scientific & Technical, 239 pág. London.
Maguire, D.J.; Goodchild, M.F.; Rhind, D.W. (Eds.)(1991): Geographical Information Systems.
Principles and applications, 2 vol., 649+447 pág. Longman Scientific & Technical. Methuen, London.
Makarovic, B. (1973): "Progressive sampling for digital terrain models". ITC Journal, xx(xx): 397-416.
Maling, D.H. (1968): "How long is a piece of string?". The Cartographic Journal, 5(2): 147-156.
Mandelbrot, Benoît (1967): "How long is the coast of Britanin? Statistical self-similarity and fractional
dimension". Science, 156: 636-638.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
326
Mandelbrot, Benoît (1984): "De los monstruos de Cantor y Peano a la geometría fractal de la
naturaleza". Pensar la Matemática: 111-138. Cuadernos Infimos, 114. Tusquets Editores. Barcelona.
Mardia, K.V. (1972): Statistics of directional data. Academic Press. London.
Mark, David M. (1975): "Geomorphometric parameters: a review and evaluation". Geografiska Annaler,
57A (3-4): 165-177.
Mark, David M. (1979): "Phenomenon-based data-structuring and digital terrain modelling". Geo-
Processing, 1: 27-36.
Menéndez Díaz, Agustín (1992): Caracterización de un sistema gráfico orientado a la ingeniería del
terreno. Tesis Doctoral, 155 pág. Departamento de Explotación y Prospección de Minas, Universidad
de Oviedo (inédita).
Merchant, D.C. (1987): "Spatial accuracy specification for large scale topographic maps".
Photogrammetric Engineering and Remote Sensing, 53(7): 958-961. En Veregin (1989a).
Mike, James (1985): Classification algorithms. Collins, 209 pág. London.
Miller, C.L.; Laflamme, R.A. (1958): "The digital terrain model-theory and application".
Photogrammetric Engineering, 24(3): 433-442.
Minnaert, M. (1941): "The reciprocity principle in Lunat photometry". Astrophysics Journal, 93: 403-
410. En Woodham y Lee (1985).
Moellering, H. (1983): "Designing interactive cartographic systems using the concepts of real and
virtual maps". En Clarke, K.C. (1990:5).
Moore, I.D.; O'Loughlin, E.M.; Burch, G.J. (1988): "A contour-based topographic model for
hydrological and ecological applications". Earth Surface Processes and Landforms, 13: 305-320.
Mukai, Yukio; Sugimura, Toshiro; Iijima, Tetsuji; Ayabe, Koichi; Tachi, Kazuo; Nakazawa, Takashi
(1989): Automatic computation of elevation data of side-lap area using system corrected Landsat TM
data. Remote Sensing Technology Center of Japan, Tokyo. Original no publicado, 8 p.
Mukai, Yukio; Sugimura, Toshiro; Arai, Kohei (1990): "Automated generation of digital elevation model
using system corrected SPOT data". Twenty-Third International Symposium on Remote Sensing of
Environment: 1107-1115. Bangkok, Thailand.
Mulla, David J. (1988): "Using geostatistics and spectral analysis to study spatial patterns in the
topography of southeastern Washington State, U.S.A.". Earth Surface Processes and Landforms, 13:
389-405.
Müller, Jean-Clude; Lagrange, Jean-Philippe; Weibel, Robert (1995): GIS and generalization. Gisdata
Series 1, 257 p. Taylor & Francis. London.
NNiemann, B.J. (Ed.)(1986): Papers from Annual Conference of the Urban and Regional Information
Systems Association, 2 vol. Denver.
OO'Loughlin, E.M. (1986): "Prediction of surface saturation zones in natural catchments by topographic
analysis". Water Resources Research, 22(5): 794-804.
Oliver, M.A.; Webster, R. (1990): "Kriging: a method of interpolation for geographical information
systems". International Journal of Geographic Information Systems, 4(3): 313-332.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
327
Oswald, H.; Raestzsch, H. (1984): "System for generation and display of digital elevation models". Geo
Processing, 2(2): 197-218.
PPapo, H.B.; Gelbman, E. (1984): "Digital terrain models for slopes and curvatures". Photogrammetric
Engineering and Remote Sensing, 50(6): 695-701.
Park, S.K.; Schowengerdt, R.A. (1982): "Image reconstruction by parametric cubic convolution". En
Colwell (Ed.)(1983:735).
Peled, Ammatzia; Fradkin, Kiril (1994): "Automatic acquisition of hypsographic maps". ASPRS/ACSM
Proceedings: 245-249.
Perkal, J. (1966): "On the length of empirical curves". Discussion Paper 10 Ann Arbor, Michigan Inter-
University Community of Mathematical Geographers (citado en Blakemore, 1983)
Peucker, T.K.; Fowler, R.J.; Little, J.J.; Mark, D.M. (1978): "The triangulated irregular network".
Proceedings of the ASP Digital Terrain Models (DTM) Symposium: 516-540. American Society of
Photogrammetry. Falls Church, Virginia.
Peuker, T.; Douglas, D.H. (1975): "Detection of surface-specific points by local parallel processing of
discrete terrain-elevation data". Computer Graphics and Image Processing, 4(4): 375-387.
Pike, Richard J. (1988): "The geometric signature: quantifying landslide-terrain types from digital
elevation models". Mathematical Geology, 20(5): 491-510.
Poiker, T.K.; Fowler, J.J.; Mark, D.M. (1978): "The triangulated irregular network". Proceedings of the
Digital Terrain Models Symposium: 516-540. St. Louis, Mississippi.
Polidori, Laurent (1992): "Aptitudes et limitations de radar à ouverture synthétique pour la
cartographie". Bulletin de la Société Française de Photogrammétrie et Télédétection, (125): 41-49.
Popper, Karl R. (1984): Post Scriptum a La lógica de la investigación científica. Vol. II. El universo
abierto. Un argumento a favor del indeterminismo. Tecnos, 208 pág. Madrid.
Press, William H.; Flannery, Brian P.; Teukolsky, Saul A.; Vetterling, William T. (1986): Numerical
recipes. The art of scientific computing. Cambridge University Press, 797 pág. Cambridge.
Priebbenow, Russell (1988): "Cartographic applications of SPOT imagery. The Queensland experience".
7th Australasian Cartographic Conference. Sydney.
RRich, Paul M.; Hetrick, William A.; Saving, Shawn C; Dubayah, Ralph (1994): "Using viewshed models
to calculate intercepted solar radiation: applications in ecology". ASPRS/ACSM Proceedings: 524-529.
Ríos, Sixto (1995): Modelización. AU 822. Alianza Ediciones. Madrid.
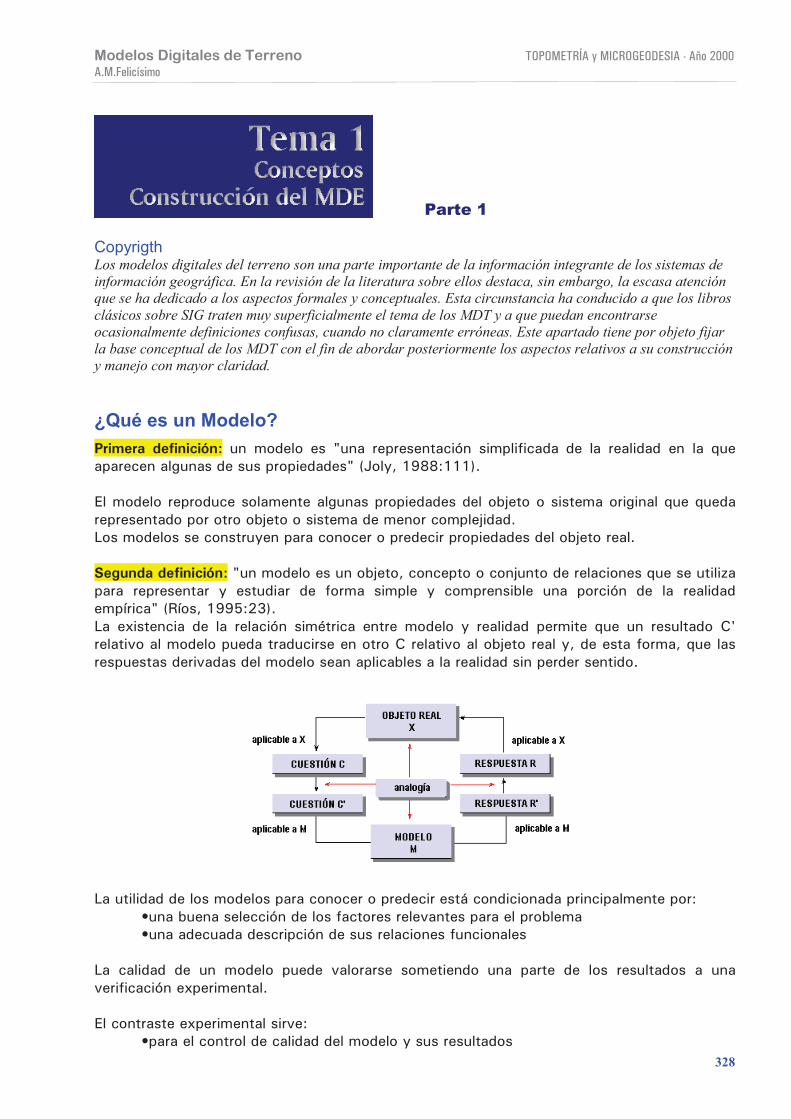
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
328
Parte 1
CopyrigthLos modelos digitales del terreno son una parte importante de la información integrante de los sistemas de
información geográfica. En la revisión de la literatura sobre ellos destaca, sin embargo, la escasa atención
que se ha dedicado a los aspectos formales y conceptuales. Esta circunstancia ha conducido a que los libros
clásicos sobre SIG traten muy superficialmente el tema de los MDT y a que puedan encontrarse
ocasionalmente definiciones confusas, cuando no claramente erróneas. Este apartado tiene por objeto fijar
la base conceptual de los MDT con el fin de abordar posteriormente los aspectos relativos a su construcción
y manejo con mayor claridad.
¿Qué es un Modelo?
Primera definición: un modelo es "una representación simplificada de la realidad en la que
aparecen algunas de sus propiedades" (Joly, 1988:111).
El modelo reproduce solamente algunas propiedades del objeto o sistema original que queda
representado por otro objeto o sistema de menor complejidad.
Los modelos se construyen para conocer o predecir propiedades del objeto real.
Segunda definición: "un modelo es un objeto, concepto o conjunto de relaciones que se utiliza
para representar y estudiar de forma simple y comprensible una porción de la realidad
empírica" (Ríos, 1995:23).
La existencia de la relación simétrica entre modelo y realidad permite que un resultado C'
relativo al modelo pueda traducirse en otro C relativo al objeto real y, de esta forma, que las
respuestas derivadas del modelo sean aplicables a la realidad sin perder sentido.
La utilidad de los modelos para conocer o predecir está condicionada principalmente por:
•una buena selección de los factores relevantes para el problema
•una adecuada descripción de sus relaciones funcionales
La calidad de un modelo puede valorarse sometiendo una parte de los resultados a una
verificación experimental.
El contraste experimental sirve:
•para el control de calidad del modelo y sus resultados
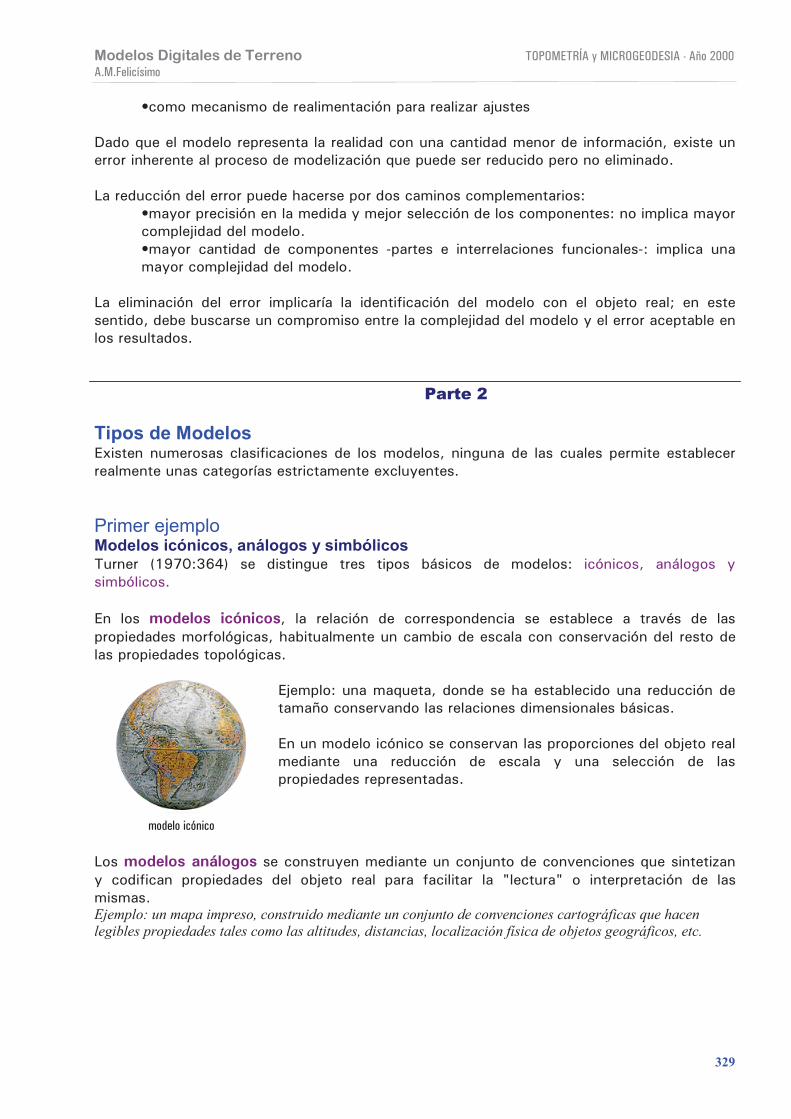
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
329
•como mecanismo de realimentación para realizar ajustes
Dado que el modelo representa la realidad con una cantidad menor de información, existe un
error inherente al proceso de modelización que puede ser reducido pero no eliminado.
La reducción del error puede hacerse por dos caminos complementarios:
•mayor precisión en la medida y mejor selección de los componentes: no implica mayor
complejidad del modelo.
•mayor cantidad de componentes -partes e interrelaciones funcionales-: implica una
mayor complejidad del modelo.
La eliminación del error implicaría la identificación del modelo con el objeto real; en este
sentido, debe buscarse un compromiso entre la complejidad del modelo y el error aceptable en
los resultados.
Parte 2
Tipos de ModelosExisten numerosas clasificaciones de los modelos, ninguna de las cuales permite establecer
realmente unas categorías estrictamente excluyentes.
Primer ejemploModelos icónicos, análogos y simbólicos Turner (1970:364) se distingue tres tipos básicos de modelos: icónicos, análogos y
simbólicos.
En los modelos icónicos, la relación de correspondencia se establece a través de las
propiedades morfológicas, habitualmente un cambio de escala con conservación del resto de
las propiedades topológicas.
modelo icónico
Ejemplo: una maqueta, donde se ha establecido una reducción de
tamaño conservando las relaciones dimensionales básicas.
En un modelo icónico se conservan las proporciones del objeto real
mediante una reducción de escala y una selección de las
propiedades representadas.
Los modelos análogos se construyen mediante un conjunto de convenciones que sintetizan
y codifican propiedades del objeto real para facilitar la "lectura" o interpretación de las
mismas.Ejemplo: un mapa impreso, construido mediante un conjunto de convenciones cartográficas que hacen
legibles propiedades tales como las altitudes, distancias, localización física de objetos geográficos, etc.
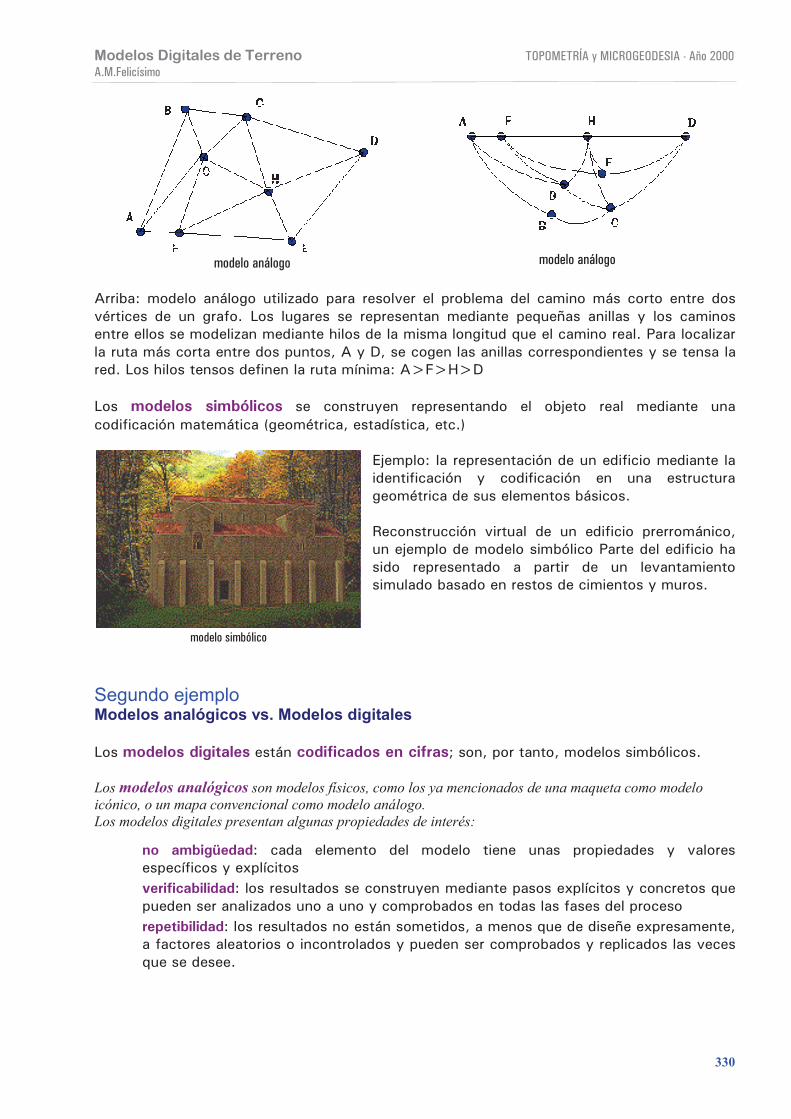
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
330
modelo análogo modelo análogo
Arriba: modelo análogo utilizado para resolver el problema del camino más corto entre dos
vértices de un grafo. Los lugares se representan mediante pequeñas anillas y los caminos
entre ellos se modelizan mediante hilos de la misma longitud que el camino real. Para localizar
la ruta más corta entre dos puntos, A y D, se cogen las anillas correspondientes y se tensa la
red. Los hilos tensos definen la ruta mínima: A>F>H>D
Los modelos simbólicos se construyen representando el objeto real mediante una
codificación matemática (geométrica, estadística, etc.)
modelo simbólico
Ejemplo: la representación de un edificio mediante la
identificación y codificación en una estructura
geométrica de sus elementos básicos.
Reconstrucción virtual de un edificio prerrománico,
un ejemplo de modelo simbólico Parte del edificio ha
sido representado a partir de un levantamiento
simulado basado en restos de cimientos y muros.
Segundo ejemploModelos analógicos vs. Modelos digitales
Los modelos digitales están codificados en cifras; son, por tanto, modelos simbólicos.
Los modelos analógicos son modelos físicos, como los ya mencionados de una maqueta como modelo
icónico, o un mapa convencional como modelo análogo.
Los modelos digitales presentan algunas propiedades de interés:
no ambigüedad: cada elemento del modelo tiene unas propiedades y valores
específicos y explícitos
verificabilidad: los resultados se construyen mediante pasos explícitos y concretos que
pueden ser analizados uno a uno y comprobados en todas las fases del proceso
repetibilidad: los resultados no están sometidos, a menos que de diseñe expresamente,
a factores aleatorios o incontrolados y pueden ser comprobados y replicados las veces
que se desee.
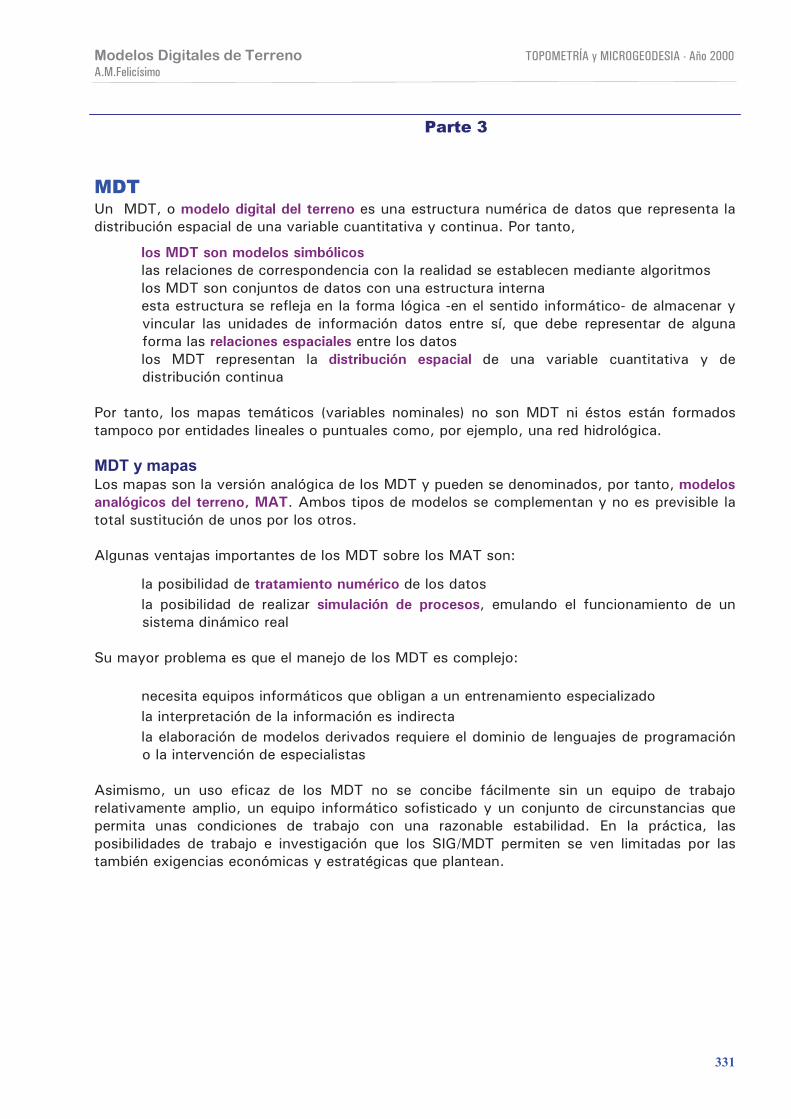
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
331
Parte 3
MDTUn MDT, o modelo digital del terreno es una estructura numérica de datos que representa la
distribución espacial de una variable cuantitativa y continua. Por tanto,
los MDT son modelos simbólicos
las relaciones de correspondencia con la realidad se establecen mediante algoritmos
los MDT son conjuntos de datos con una estructura interna
esta estructura se refleja en la forma lógica -en el sentido informático- de almacenar y
vincular las unidades de información datos entre sí, que debe representar de alguna
forma las relaciones espaciales entre los datos
los MDT representan la distribución espacial de una variable cuantitativa y de
distribución continua
Por tanto, los mapas temáticos (variables nominales) no son MDT ni éstos están formados
tampoco por entidades lineales o puntuales como, por ejemplo, una red hidrológica.
MDT y mapasLos mapas son la versión analógica de los MDT y pueden se denominados, por tanto, modelos
analógicos del terreno, MAT. Ambos tipos de modelos se complementan y no es previsible la
total sustitución de unos por los otros.
Algunas ventajas importantes de los MDT sobre los MAT son:
la posibilidad de tratamiento numérico de los datos
la posibilidad de realizar simulación de procesos, emulando el funcionamiento de un
sistema dinámico real
Su mayor problema es que el manejo de los MDT es complejo:
necesita equipos informáticos que obligan a un entrenamiento especializado
la interpretación de la información es indirecta
la elaboración de modelos derivados requiere el dominio de lenguajes de programación
o la intervención de especialistas
Asimismo, un uso eficaz de los MDT no se concibe fácilmente sin un equipo de trabajo
relativamente amplio, un equipo informático sofisticado y un conjunto de circunstancias que
permita unas condiciones de trabajo con una razonable estabilidad. En la práctica, las
posibilidades de trabajo e investigación que los SIG/MDT permiten se ven limitadas por las
también exigencias económicas y estratégicas que plantean.
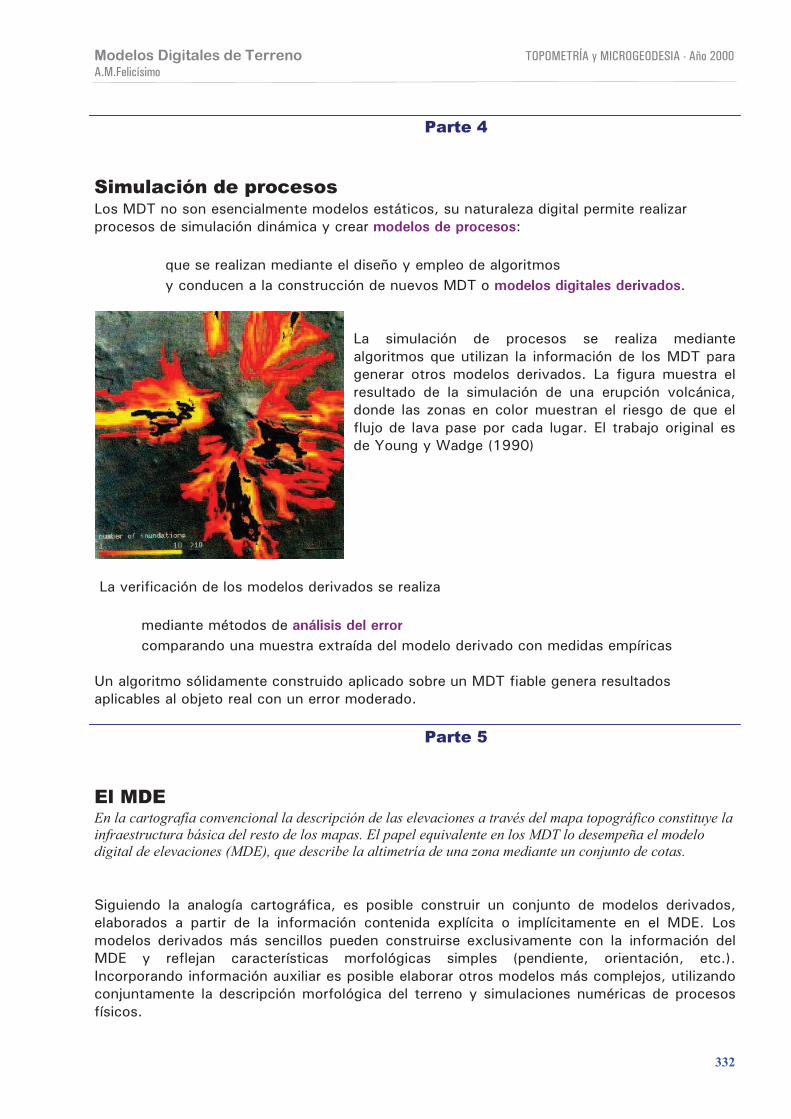
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
332
Parte 4
Simulación de procesosLos MDT no son esencialmente modelos estáticos, su naturaleza digital permite realizar
procesos de simulación dinámica y crear modelos de procesos:
que se realizan mediante el diseño y empleo de algoritmos
y conducen a la construcción de nuevos MDT o modelos digitales derivados.
La simulación de procesos se realiza mediante
algoritmos que utilizan la información de los MDT para
generar otros modelos derivados. La figura muestra el
resultado de la simulación de una erupción volcánica,
donde las zonas en color muestran el riesgo de que el
flujo de lava pase por cada lugar. El trabajo original es
de Young y Wadge (1990)
La verificación de los modelos derivados se realiza
mediante métodos de análisis del error
comparando una muestra extraída del modelo derivado con medidas empíricas
Un algoritmo sólidamente construido aplicado sobre un MDT fiable genera resultados
aplicables al objeto real con un error moderado.
Parte 5
El MDEEn la cartografía convencional la descripción de las elevaciones a través del mapa topográfico constituye la
infraestructura básica del resto de los mapas. El papel equivalente en los MDT lo desempeña el modelo
digital de elevaciones (MDE), que describe la altimetría de una zona mediante un conjunto de cotas.
Siguiendo la analogía cartográfica, es posible construir un conjunto de modelos derivados,
elaborados a partir de la información contenida explícita o implícitamente en el MDE. Los
modelos derivados más sencillos pueden construirse exclusivamente con la información del
MDE y reflejan características morfológicas simples (pendiente, orientación, etc.).
Incorporando información auxiliar es posible elaborar otros modelos más complejos, utilizando
conjuntamente la descripción morfológica del terreno y simulaciones numéricas de procesos
físicos.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
333
Origen del MDEEl término digital terrain model se originó en el Laboratorio de Fotogrametría del Instituto de
Tecnología de Massachussetts en la década de los años 50.
En el trabajo pionero de Miller y Laflamme (1958) se establecen ya los primeros principios del
uso de los modelos digitales para el tratamiento de problemas tecnológicos, científicos y
militares.
El objeto de su trabajo fue acelerar el diseño de carreteras mediante el tratamiento digital de
datos del terreno adquiridos por fotogrametría, planteando una serie de algoritmos para la
obtención de pendientes, áreas, etc. El problema del número de datos se fue crítico, dada la
escasa capacidad de almacenamiento de los ordenadores en aquella época, y una buena parte
del esfuerzo del proyecto se dedicó a desarrollar métodos de representar los perfiles
topográficos de la forma más sintética posible.
Las aplicaciones informáticas de uso menos aplicado tuvieron que esperar algunos años más
y, habitualmente, surgieron en un contexto SIG que incorporaba la información topográfica
para el manejo de cartografía digital en términos más generales. El Harvard Laboratory for
Computer Graphics and Spatial Analysis marcó un hito cuando presentó SYMAP en 1967.
SYMAP era una aplicación formada por un conjunto de programas de manejo de cartografía
digital que incluía algoritmos de interpolación para generar mapas de isopletas a partir de
puntos acotados distribuidos irregularmente.
En los últimos años han surgido ya multitud de aplicaciones informáticas capaces de manejar
eficazmente los MDT. A pesar de ello, aún queda pendiente, lo mismo que en los SIG en
general, la resolución de problemas básicos como, por ejemplo, conseguir una estructura de
datos idónea, conseguir algoritmos eficientes, o facilitar el uso de los sistemas por parte de
los usuarios.
Parte 6
Definición
Un modelo digital de elevaciones es una estructura numérica de datos que representa la distribución
espacial de la altitud de la superficie del terreno.
Un terreno real puede describirse de forma genérica como una función bivariable continua:
donde z representa la altitud del terreno en el punto de coordenadas (x, y) y z es una función que relaciona
la variable con su localización geográfica..
En un modelo digital de elevaciones se aplica la función anterior sobre un dominio espacial concreto, D.
En consecuencia, un MDE puede describirse genéricamente como MDE=(D,z).
En la práctica, la función no es continua sino que se resuelve a intervalos discretos, por lo que el MDE está
compuesto por un conjunto finito y explícito de elementos. Esta generalización implica una pérdida de
información que incrementa el error del MDE y, en consecuencia, se propaga a los modelos derivados.
Estructuras de datos
De forma general, la unidad básica de información en un MDE es un punto acotado, definido como una
terna compuesta por un valor de altitud z, al que acompañan los valores correspondientes de x e y.
La estructuración de los datos elementales se ha realizado según dos modelos:
el modelo de datos vectorial está basado en entidades u objetos geométricos definidos por las
coordenadas de sus nodos y vértices
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
334
el modelo de datos raster está basado en localizaciones espaciales, a cada una de las cuales se les
asigna el valor de la variable para la unidad elemental de superficie
Las potenciales estructuras se han reducido en la práctica a las siguientes:
estructuras vectoriales
contornos: polilíneas de altitud constante más puntos acotados
TIN: red de triángulos adosados
estructuras raster
matriz regular: cotas distribuidas sobre una malla cuadrada
quadtrees: matrices jerárquicas imbricadas
Parte 7
Modelo vectorial
El modelo de contornos o isohipsas
Un modelo de contornos está formado por polilíneas:
un vector de n pares de coordenadas (x, y) que describe la trayectoria de las
curvas de nivel
el número de elementos de cada vector es variable
el MDE está constituido por el conjunto de las curvas de nivel (n>1) más un
conjunto de puntos acotados (n=1)
El uso directo del modelo de contornos es poco útil pero casi todos los SIG tienen
herramientas para incorporarlos y transformarlos a otras estructuras (TIN o matrices).
El modelo TIN, de mosaico de triángulos
Un TIN (triangulated irregular network, Peucker et al., 1978) está formado por triángulos
irregulares:
se construyen ajustando un plano a tres puntos cercanos no colineales
se adosan sobre el terreno formando un mosaico
se adaptan a la superficie con diferente grado de detalle, en función de la
complejidad del relieve.
Los triángulos se construyen ajustándose a una estructura anterior de puntos
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
335
Parte 8
Modelos raster
El modelo matricial regularLas matrices regulares se construyen superponiendo una retícula sobre el terreno y extrayendo la
altitud media de cada celda. Normalmente,
la retícula es una red regular de malla cuadrada
la localización espacial de cada dato está determinada de forma implícita por su
situación en la matriz, definidos el origen y el valor del intervalo entre filas y
columnas
La matriz regular es la estructura más utilizada para construir los MDE debido a su cómodo
manejo informático y simplicidad estructural.
El modelo matricial jerárquico o quadtrees
En los quadtrees, las celdas de la matriz pueden ser
datos elementales, como en las matrices regulares
nuevas matrices de luz más reducida
La estructura final es un árbol jerárquico de matrices elementales
de profundidad arbitraria (n niveles, si n=1 se trata de una matriz regular simple)
cuya resolución espacial se duplica en cada nivel
Los quadtrees se han utilizado en el tratamiento de variables nominales (Samet et al.,
1984). Los trabajos pioneros en MDE parecen corresponder a Ebner y Reinhardt (1984,
1988),que utilizan un modelo mixto de matrices jerárquicas y estructuras TIN.
Otras estructurasSe han descrito muchas variantes y alternativas para el archivo y tratamiento de los MDE:
perfiles (Yoeli, 1983:21)
codificación de contornos mediante ecuaciones polinómicas (Miller y Laflamme,
1958:437)
id. mediante secuencias de segmentos de Bézier (Walton, 1989)
polígonos irregulares adosados (Moore et al., 1988)
redes hexagonales regulares (Roessel, 1988)
Cada uno aduce en cada caso ventajas para aplicaciones concretas pero su uso no se ha generalizado
hasta el momento.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
336
Parte 9
¿vectorial o raster?
La adopción de una estructura de datos concreta:
supone decidir el método de construcción del modelo e, indirectamente, sobre qué tipo
de información va a ser representada y cuál descartada
implica un esquema concreto de almacenamiento y gestión informática de los datos
implica la necesidad de traducir los algoritmos a formas compatibles con la estructura
de datos elegida
supone aceptar las limitaciones que aplicaciones informáticas puedan tener para
gestionar la información en el formato elegido
Es decir, la elección de la estructura de datos es importante porque condiciona el futuro
manejo de la información.
Los SIG y algunas aplicaciones dedicadas expresamente al tratamiento de los MDT usan, en la
práctica, sólo dos de las alternativas anteriores: matrices regulares y TIN.
El papel del modelo de contornos ha quedado reducido a ser una etapa intermedia en la
captura de información: la de digitalización del mapa topográfico.
Los quadtrees han despertado un mayor interés y existen aplicaciones que los usan como
estructura básica pero, a pesar de tratarse de una estructura teóricamente adecuada para el
tratamiento de la topografía, presentan serios problemas en el diseño de algoritmos.
Entre las dos alternativas restantes, dominan ampliamente las matrices regulares, probablemente por su
simplicidad conceptual y su cómodo tratamiento informático
Parte 10
Construcción del MDE
La captura de la información hipsométrica constituye el paso inicial en el proceso de
construcción del MDE, e incluye la fase de transformación de la realidad geográfica a la
estructura digital de datos. Se trata de una fase de gran trascendencia porque la calidad de
los datos es el principal factor limitante para los tratamientos que se realicen posteriormente.
Tras obtener los datos, éstos deben ser estructurados para formar el MDE de alguna de las
formas presentadas en el apartado anterior.
captura de datos
Los métodos básicos para la conseguir los datos de altitudes son:
métodos directos: medida directa de los datos de altitud sobre el terreno (fuentes
primarias)
altimetría: altímetros transportados por plataformas aéreas
GPS, global positioning system, localización mediante triangulación vía satélite
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
337
topografía: estaciones topográficas con grabación de datos
métodos indirectos: medida a partir de documentos previamente elaborados (fuentes secundarias)
restitución
fuente digital (SPOT)
fuente analógica (cámaras métricas)
digitalización
automática (escáner)
manual (tablero digitalizador)
Parte 11
métodos directos
altímetros, GPS y estaciones topográficas
Los altímetros transportados por satélites permiten el registro directo de los datos de altitud en formato
digital:
son extremadamente precisos: el error nominal puede ser de unos centímetros (Bruzzi y
Wooding, 1990:13)
esta precisión es relativa, es decir, el altímetro evalúa de forma muy precisa diferencias
entre medidas sucesivas
Otros problemas relacionados con la fuerte dispersión de la señal en zonas rugosas y con una
resolución espacial reducida han limitado prácticamente su uso hasta el presente al análisis de
la topografía de la superficie marina y seguimiento de los hielos polares (Francis et al.,
1991:42-43).
Los sistemas de localización geográfica conocidos como GPS -global positioning system-
utilizan un conjunto de satélites de referencia y, mediante métodos de triangulación, permiten
obtener valores de las tres coordenadas espaciales para un lugar concreto de la superficie
terrestre:
es un método muy preciso en ciertas condiciones (GPS diferencial, con una segunda estación de
apoyo)
entre sus limitaciones:
es necesario acceder físicamente al lugar de medida
es necesario el acceso directo y simultáneo a un mínimo de cuatro satélites
la cubierta vegetal sobre la antena receptora dificulta la medida
Estos problemas han convertido al método GPS en un recurso de apoyo, pero no en un
sistema básico de captura de datos para construir el MDE.
Finalmente, las estaciones topográficas más avanzadas pueden generar y almacenar los
resultados de sus medidas en formato digital. Algunos sistemas de información geográfica
incorporan utilidades que permiten el tratamiento e incorporación de estos datos (ver, por
ejemplo, ESRI, 1991).
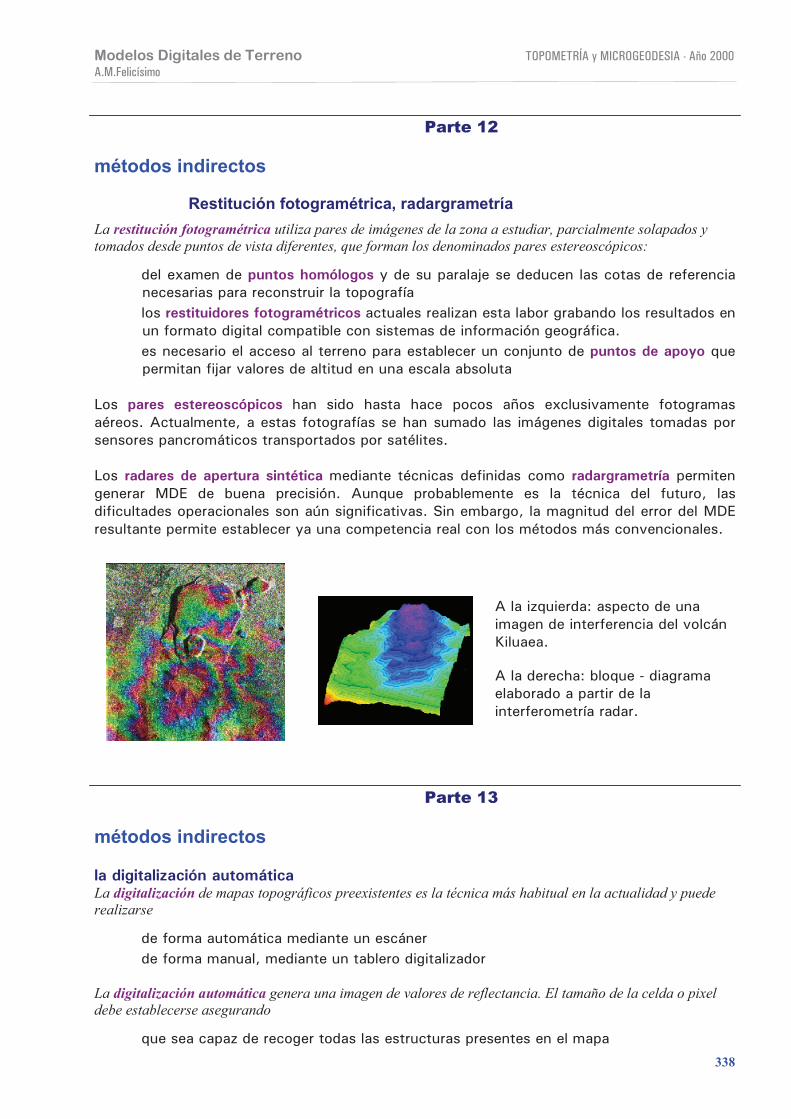
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
338
Parte 12
métodos indirectos
Restitución fotogramétrica, radargrametría
La restitución fotogramétrica utiliza pares de imágenes de la zona a estudiar, parcialmente solapados y
tomados desde puntos de vista diferentes, que forman los denominados pares estereoscópicos:
del examen de puntos homólogos y de su paralaje se deducen las cotas de referencia
necesarias para reconstruir la topografía
los restituidores fotogramétricos actuales realizan esta labor grabando los resultados en
un formato digital compatible con sistemas de información geográfica.
es necesario el acceso al terreno para establecer un conjunto de puntos de apoyo que
permitan fijar valores de altitud en una escala absoluta
Los pares estereoscópicos han sido hasta hace pocos años exclusivamente fotogramas
aéreos. Actualmente, a estas fotografías se han sumado las imágenes digitales tomadas por
sensores pancromáticos transportados por satélites.
Los radares de apertura sintética mediante técnicas definidas como radargrametría permiten
generar MDE de buena precisión. Aunque probablemente es la técnica del futuro, las
dificultades operacionales son aún significativas. Sin embargo, la magnitud del error del MDE
resultante permite establecer ya una competencia real con los métodos más convencionales.
A la izquierda: aspecto de una
imagen de interferencia del volcán
Kiluaea.
A la derecha: bloque - diagrama
elaborado a partir de la
interferometría radar.
Parte 13
métodos indirectos
la digitalización automáticaLa digitalización de mapas topográficos preexistentes es la técnica más habitual en la actualidad y puede
realizarse
de forma automática mediante un escáner
de forma manual, mediante un tablero digitalizador
La digitalización automática genera una imagen de valores de reflectancia. El tamaño de la celda o pixel
debe establecerse asegurando
que sea capaz de recoger todas las estructuras presentes en el mapa
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
339
que la dimensión de los ficheros permitan el tratamiento con los medios informáticos
disponibles
Las fases del proceso son:
toma de la imagen mediante el escáner; la imagen puede ser binaria (blanco y negro) pero también
es posible usar el color para separar elementos
filtrado de la misma para separar las estructuras de interés y descartar el resto
vectorización de la imagen contrastada, de forma que los pixeles adyacentes se
estructuren en líneas, generándose una estructura vectorial
reconocimiento de los valores de elevación escritos en el mapa, en un proceso de
varios pasos:
una aplicación OCR -optical character recognition- identifica los dígitos del mapa
se restituyen los rótulos de elevaciones a partir de los dígitos
se asigna la elevación a los contornos a ambos lados del rótulo
se unen ambos extremos de contornos y se eliminan los rótulos
edición manual, para la corrección de los errores topológicos y la asignación de
altitudes a las líneas no etiquetadas
Los mapas originales suelen ser complejos, con mucha más información que la estrictamente
deseable. En consecuencia, la fase de revisión y corrección de los errores topológicos (Peled y
Fradkin, 1994:246) es muy costosa.
Por este motivo, y a pesar del coste cada vez más asumible de los escáneres de gran
formato, la digitalización manual es un método usado muy frecuentemente por los equipos de
pequeña entidad.
Parte 14
métodos indirectos
la digitalización manual
La digitalización manual se realiza con un tablero digitalizador sobre el que se coloca el
mapa:
las curvas de nivel se siguen manualmente con un cursor
el ordenador recibe a ciertos intervalos las coordenadas que definen la
trayectoria de la línea
los intervalos pueden ser fijos o variables
Los trabajos de digitalización son, en la práctica, de calidad muy irregular. Existen
algunas normas que ayudan a conseguir un trabajo de mayor calidad:
deben usarse mapas en buen estado, evitando los mapas doblados, deformados
o mal conservados
la referencia espacial debe registrarse con precisión mediante puntos de control
debe valorarse el método de digitalización a utilizar, incremental o punto a punto
no es deseable introducir un número excesivamente elevado de puntos en las
curvas de nivel
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
340
Según Flach y Chidley (1988) obtendrán buenos resultados en los procesos de
generación del MDE cuando la distancia entre puntos a lo largo de una línea sea similar
a la distancia entre líneas.
Parte 15
¿qué digitalizar?
los elementos que definen la estructura topográfica
¿Qué digitalizar? Lo más evidente es transferir todas las curvas de nivel del mapa
topográfico. Pero hay más cuestiones a tener en cuenta.
La calidad de un MDE puede mejorarse significativamente complementando las curvas de nivel con
datos auxiliares de diversos tipos. En general, el listado de elementos que pueden aportar
información para construir un MDE es:
curvas de nivel, descompuestos o no en puntos acotados -mass points- previa
generalización o reducción de la densidad de vértices de la línea
puntos acotados singulares o vips -de very important points-: cumbres de picos,
fondos de dolinas, etc.
líneas estructurales, que definen elementos lineales con valores de altitud
asociados a cada vértice
líneas de inflexión o rotura – breaklines -, que definen la posición de elementos
lineales sin valores de altitud explícitos que rompen la continuidad de la
superficie.
zonas de altitud constante: polígonos que encierran una superficie de altitud
única (p. ej. lagos)
zonas de recorte, polígono que define los límites externos del MDE
zonas vacías, donde no es deseable asignar altitudes (p. ej. zonas inundadas o
cubiertas de nieve)
Todas las estructuras anteriores pueden y deben usarse para generar un MDE a fin de aprovechar
adecuada y eficazmente la información topográfica disponible.
La construcción de un MDE matricial a partir de la información anterior es básicamente
un problema de interpolación: se definen las localizaciones de los puntos problema -
intersecciones de filas y columnas-y se estima la altitud de cada uno de ellos en
función de los datos del entorno existentes en el modelo vectorial. Los algoritmos de
interpolación deben tener en cuenta, asimismo, las diversas estructuras auxiliares para
introducir variantes en los mecanismos de cálculo.
En el caso de la creación de una estructura TIN, en lugar de interpolar, se realiza una
selección de puntos descartando los que no aporten una información relevante para la
descripción de la altitud.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
341
Parte 16
la interpolación
Método general: IDW (ponderación por distancia)
La interpolación del punto problema se realiza asignando pesos a los datos del entorno
en función inversa de la distancia que los separa -inverse distance weighting, IDW-.
La fórmula general es:
Donde es el valor estimado para el punto j ; n es el número de puntos usados en
la interpolación; zi el valor en el punto i-ésimo y kij el peso asociado al dato i en el
cálculo del nodo j. Los pesos k varían entre 0 y 1 para cada dato y la suma total de
ellos es la unidad
Para establecer una función de proporcionalidad entre el peso y la distancia, la fórmula
general queda como sigue:
donde y b es un exponente de ponderación que controla la
forma en la que el peso disminuye con la distancia.
Esta familia de métodos permite la generación del MDE de una forma rápida y simple.
Sin embargo, se trata esencialmente de una media ponderada y, por tanto, el resultado
se encuentra siempre incluido dentro del rango de variación de los datos. Por este
motivo, el correcto tratamiento de las formas cóncavas y convexas depende
estrechamente de la distribución de los puntos originales y la presencia de datos
auxiliares se hace muy conveniente.
La hipótesis de la variable regionalizada (kriging)
El kriging es un método de interpolación con una expresión general similar a la anterior.
La diferencia básica es que asume que la altitud puede definirse como una variable
regionalizada.
Esta hipótesis supone que la variación espacial de la variable a representar puede ser
explicada al menos parcialmente mediante funciones de correlación espacial: la
variación espacial de los valores de z puede deducirse de los valores circundantes de
acuerdo con unas funciones homogéneas en toda el área.
Las funciones pueden deducirse analizando la correlación espacial entre los datos en
función de la distancia entre ellos midiendo la semivarianza entre datos separados por
distancias diferentes (Oliver y Webster, 1990:315, Royle et al., 1981).
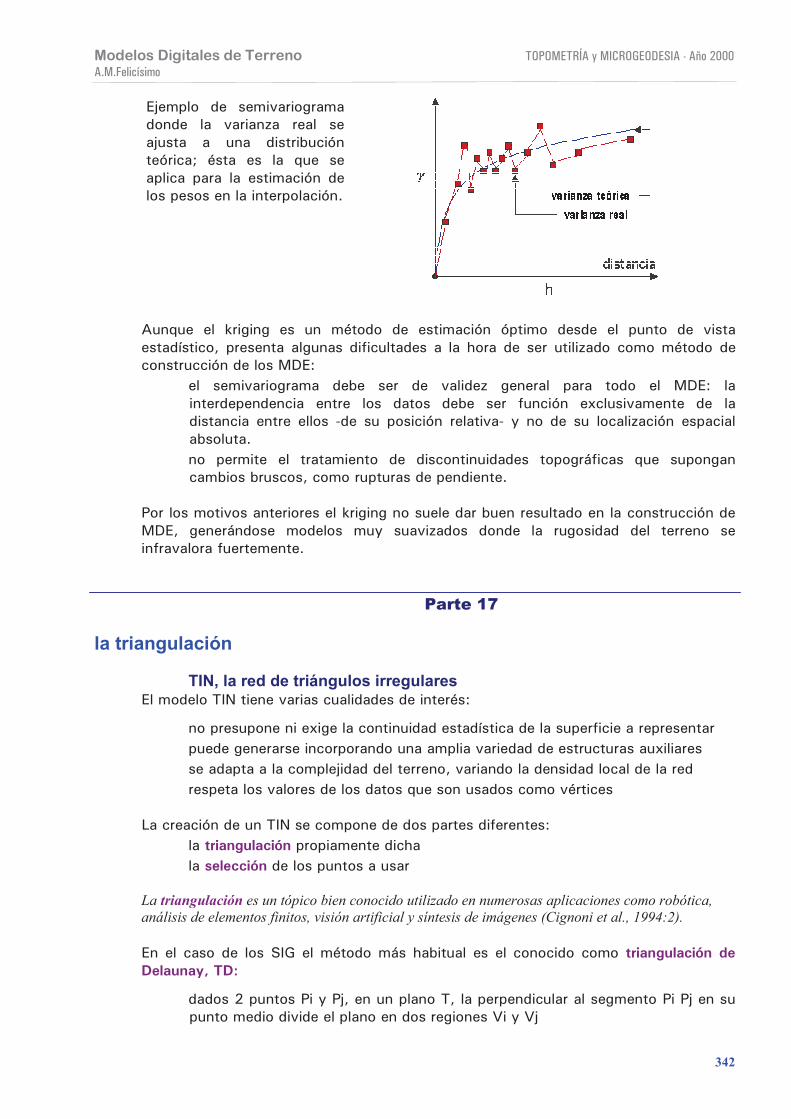
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
342
Ejemplo de semivariograma
donde la varianza real se
ajusta a una distribución
teórica; ésta es la que se
aplica para la estimación de
los pesos en la interpolación.
Aunque el kriging es un método de estimación óptimo desde el punto de vista
estadístico, presenta algunas dificultades a la hora de ser utilizado como método de
construcción de los MDE:
el semivariograma debe ser de validez general para todo el MDE: la
interdependencia entre los datos debe ser función exclusivamente de la
distancia entre ellos -de su posición relativa- y no de su localización espacial
absoluta.
no permite el tratamiento de discontinuidades topográficas que supongan
cambios bruscos, como rupturas de pendiente.
Por los motivos anteriores el kriging no suele dar buen resultado en la construcción de
MDE, generándose modelos muy suavizados donde la rugosidad del terreno se
infravalora fuertemente.
Parte 17
la triangulación
TIN, la red de triángulos irregularesEl modelo TIN tiene varias cualidades de interés:
no presupone ni exige la continuidad estadística de la superficie a representar
puede generarse incorporando una amplia variedad de estructuras auxiliares
se adapta a la complejidad del terreno, variando la densidad local de la red
respeta los valores de los datos que son usados como vértices
La creación de un TIN se compone de dos partes diferentes:
la triangulación propiamente dicha
la selección de los puntos a usar
La triangulación es un tópico bien conocido utilizado en numerosas aplicaciones como robótica,
análisis de elementos finitos, visión artificial y síntesis de imágenes (Cignoni et al., 1994:2).
En el caso de los SIG el método más habitual es el conocido como triangulación de
Delaunay, TD:
dados 2 puntos Pi y Pj, en un plano T, la perpendicular al segmento Pi Pj en su
punto medio divide el plano en dos regiones Vi y Vj
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
343
la región Vi contiene todos y sólo los puntos cuya distancia a Pi es menor que a
Pj y viceversa
el concepto se extiende a múltiples puntos Pn de forma que cada uno de ellos
se asocia a una región Vn
si el concepto se aplica a un dominio cerrado se genera un conjunto de
polígonos convexos que teselan el plano denominados regiones de Voronoi
si se conectan entre sí los puntos que comparten un borde de una región se
obtiene una triangulación de Delaunay
La forma más trivial de construir un TIN es usar todos los vértices y nodos de las
curvas de nivel, así como los puntos singulares como vértices de triángulos. Este
modelo masivo no es deseable:
por la enorme cantidad de elementos que sería necesario construir y manejar
para una zona de cierta extensión
por la redundancia debida a que muchos puntos procedentes de una
digitalización rutinaria no aportan una información significativa.
Formalmente, el problema puede plantearse como sigue:
dado un conjunto H de n puntos acotados, elegir un subconjunto mínimo S de H
constituido por m puntos, a partir del cual pueda reconstruirse H con el menor
error posible.
Los dos enfoques básicos son:
1. Hacer la selección antes de la triangulación y realizar posteriormente un modelo
masivo. La estrategia es suministrar al algoritmo de TD los puntos básicos ya
elegidos mediante la adecuada generalización cartográfica de las curvas de nivel
y una selección de puntos críticos.
2. Utilizar un algoritmo de TD que realice la selección según realiza la construcción
de la red.
Los métodos de construcción de TIN más utilizados pueden agruparse en las siguientes
clases:
inserción incremental, que comienza con una triangulación mínima y a la que se
añaden progresiva y selectivamente nuevos puntos como vértices de la red.
reducción selectiva, por eliminación de puntos a partir de un modelo masivo
mediante criterios de incremento mínimo del error.
La transformación vector- rasterLos modelos basados en triángulos generan una estructura más difícil de manejar que
la matriz regular.
Por este motivo, lo más usual es crear un MDE según el modelo TIN y, posteriormente,
generar un MDE matricial convencional.
Aunque la estructura matricial no puede representar puntos singulares ni estructuras
lineales como el TIN, el proceso aprovecha parcialmente la capacidad del TIN para
integrar discontinuidades en la generación del MDE por lo que es preferible a la
generación directa de la matriz regular a partir de los datos de entrada.
La interpolación puede realizarse por dos métodos básicos:
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
344
interpolación lineal, donde la altitud del punto problema se estima directamente
a partir la ecuación del plano definido por los tres vértices del triángulo que lo
contiene
interpolación quíntica, que considera la superficie definida por el TIN como un
continuo y, por tanto, suaviza las zonas de los vértices y lados; para esta
interpolación se utiliza una ecuación polinómica bivariable de quinto grado.
Parte 18
Otros métodos
La conservación de la continuidad hidrológica
Un problema característico en la creación de MDE es la aparición de concavidades o pozos a lo
largo de los fondos de valles. Este tipo de artefactos se genera por el uso de funciones de
interpolación de grado superior en zonas conflictivas.
La presencia de concavidades tiene importancia en el caso de simulación de procesos
hidrológicos ya que interrumpen las líneas de flujo.
La corrección de concavidades de los MDE ya existentes es posible mediante
algoritmos que simulan la inundación y relleno de los pozos (Jenson y Domingue,
1988:1594). Este proceso modifica el modelo de elevaciones original por lo que en
algunos casos -zonas kársticas, por ejemplo- debe ser aplicado con enorme precaución.
Una forma de evitar el problema es introducir la red hidrológica como líneas de rotura
en la generación del modelo TIN. De esta forma, la triangulación utilizará estas líneas
como lados de los triángulos trazando correctamente las líneas de flujo.
Hutchinson (1989:213) ha propuesto un método específico para la creación de un
MDE libre de pozos que impone restricciones al proceso de interpolación forzando su
ajuste a la red hidrológica. El trazado fluvial debe ser introducido como información
auxiliar.
El mayor problema de este método es que, en su estado actual, no permite la
introducción de todas las estructuras auxiliares mencionadas al comienzo de este
apartado.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
345
Tema 2Valoración
del error en el MDE
IntroducciónLos ordenadores y programas utilizados para el manejo de la información cartográfica
permiten definir localizaciones con una precisión casi arbitraria. Esta precisión se transmite
aparentemente al resto de las operaciones de forma que unos buenos gráficos, una
leyenda fácilmente legible y otros aspectos formales de la presentación tienen como
resultado una sobrevaloración de la calidad de la información presentada.
Sin embargo, la realidad muestra que los problemas inherentes al manejo de las bases de datos
cartográficas se deben, en una buena parte, a su mala calidad. Muchos documentos digitales han
sido "capturados" de mapas impresos de naturaleza muy heterogénea, generados con unos objetivos
y expectativas que no tienen porqué coincidir con los actuales. La potente maquinaria actual y los
sofisticados programas informáticos permiten obtener un resultado que replica fielmente todos los
defectos del original y añade algunos nuevos. Sin embargo, su naturaleza digital induce a creer
frecuentemente que el contenido de la base de datos es mejor que el original analógico.
El problema se incrementa con el tiempo, cuando unos datos originales han sido
usados para diferentes modelizaciones, cuyos resultados son, asimismo, tomados
como ciertos y reutilizados en otros procesos. El proceso sigue hasta el punto de
olvidar el origen de la cadena y perdiendo, por tanto, toda referencia con la realidad.
Por estos motivos es cada vez más necesario incorporar lo que se ha llamado meta-
información en los productos SIG: información sobre la información, de la cual la
referente al error es uno de los elementos de mayor importancia (Geertman y Ruddijs,
1994:152).
Las fuentes del error
El modelo digital de elevaciones es el origen de todas las modelizaciones total o
parcialmente dependientes de la topografía. Por este motivo, la utilidad y validez de los
resultados derivados están estrechamente relacionadas con la calidad del modelo
original.
La calidad de un MDE depende del tipo y magnitud de los errores implicados. La
información es necesariamente imprecisa debido a la simplificación inherente al
proceso de modelización. El problema básico consiste en conocer y controlar esta
imprecisión, de forma que sea posible saber la fiabilidad de los resultados.
Los errores en los MDE pueden ser separados en dos categorías:
los errores posicionales implican una deficiente localización geográfica de la
cota o de la trayectoria de la curva de nivel y afectan, por tanto, a la situación
en el plano XY
los errores atributivos suponen una asignación imprecisa de la altitud asociada a
la cota o a la curva e implican a las coordenadas en el eje Z
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
346
Estos dos tipos de errores han sido denominados también, de forma más genérica,
cartográficos —error en la localización de elementos—, y temáticos —error en el
atributo cartografiado— (Veregin, 1989b:12).
Los errores posicionales afectan a los modelos vectoriales, como los basados en
contornos o en las redes de triángulos, que manejan entidades geométricas. Los
modelos raster, basados en localizaciones definidas implícitamente no se ven afectados
por errores de posición.
Los errores atributivos afectan tanto a modelos vectoriales como raster. En el primer
caso suele tratarse de errores en el sentido más básico de la palabra —blunders—, es
decir, fallos groseros y locales en la asignación de la altitud. En el caso de las matrices
regulares, el origen del error suele estar en las múltiples operaciones geométricas
implicadas en la construcción del MDE. En este caso, el error es de naturaleza
estadística y global, pudiendo considerarse un atributo que define y caracteriza el MDE.
El error de las fuentes primarias
La construcción del MDE con imágenes de satélite
Las imágenes de algunos sensores transportados por satélite han sido utilizadas para
generar modelos digitales de elevaciones de forma, hasta ahora, experimental.
En un primer ensayo, Mukai et al. (1989) han utilizado pares de imágenes Landsat-TM
para calcular altitudes en la zona de solapamiento entre dos órbitas. Los resultados que
presentan señalan un error cuadrático medio, ECM, de 92 m, lo que supone 3 veces el
tamaño del pixel de la imagen original —30 m—. La zona, de 40x45 km y situada en
los Alpes centrales de Japón, posee un desnivel máximo de 2200 m. Para el cálculo
del ECM se utilizó un total de 60 puntos de control.
El satélite SPOT es claramente más adecuado para el cálculo de altitudes debido a dos
circunstancias. La primera, que el tamaño de pixel de las imágenes es de 10 m en
modo pancromático, lo que supone un incremento muy significativo de la resolución.
La segunda es que el SPOT puede tomar pares de imágenes estereoscópicas de la zona
que se desee girando las cámaras, lo que permite cubrir cualquier zona de la superficie
terrestre.
Mukai et al. (1990), usando técnicas similares a las de su anterior trabajo con Landsat-
TM, consiguen en este caso valores del ECM de 26 m partiendo de las imágenes SPOT
pancromáticas. Sasowsky et al. (1992) realizan pruebas similares en un área de 25
km2 de Alaska y proponen una magnitud del ECM de 19 m, con errores entre –13 y
+48 m. En este caso, los errores no tienen media nula, lo que significa que el MDE
derivado de las imágenes SPOT tiene una tendencia significativa a proponer altitudes
más elevadas que el mapa de referencia —escala 1:6.000—.
Priebbenow (1988) presenta resultados de una experiencia realizada en Australia con
valores del ECM de 5,4 m. Su conclusión es que las imágenes SPOT pancromáticas
permiten generar cartografía con una precisión geométrica elevada y compatible con
los estándares de la escala 1:50.000.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
347
Finalmente, Kubik y Wu (1995) presentan los resultados del tratamiento de imágenes
SPOT mediante estaciones de trabajo fotogramétricas con un ECM de 6 m en altitud.
La conclusión general es que las imágenes SPOT permiten construir modelos con
valores del ECM variables en función del relieve y de los métodos utilizados. La
magnitud del error limita sus aplicaciones en grandes escalas pero, como veremos
posteriormente, puede ser razonable si se generan modelos matriciales donde el ECM
sea aproximadamente un 10% del tamaño de la malla —distancia entre filas y
columnas—.
La construcción del MDE mediante radarLa interferometría radar es una técnica que usa las diferencias de fase entre dos
imágenes para estimar la distancia entre la superficie y el satélite o avión. La fase de
un pixel es la suma de dos componentes: la fase específica —relacionada con la
naturaleza del terreno— y un desfase que depende de la distancia entre el terreno y el
radar. Superponiendo y hallando la diferencia entre dos imágenes diferentes la fase
específica puede eliminarse. La resultante es el componente debido a la diferencia de
distancia entre los dos pasos del satélite. A partir de esta imagen de interferencia es
posible estimar la altitud absoluta con precisión variable en función de diferentes
parámetros.
La construcción de MDE mediante radar tiene se más reciente muestra en el TOPSAR
—topographic synthetic aperture radar—, desarrollado por el Jet Propulsion Laboratory
de California. El TOPSAR, en funcionamiento conjunto con el JPL Aircraft SAR,
adquiere imágenes cenitales de la superficie terrestre con una resolución horizontal de
5 m y un error en la determinación de la altitud de 1 a 3 m, en función del tipo de
relieve. El TOPSAR/AIRSAR es transportado por un DC-8 a una altitud típica de 9 km.
El sistema está dotado de un sistema GPS para la localización, lo que permite un
referenciación geográfica precisa de la trayectoria del vuelo y, por tanto, del conjunto
de los datos medidos.
Thompson et al. (1995:99) indican que la satisfactoria experiencia del TOPSAR
anuncia un posible satélite topográfico que podría tener un error altitudinal de unos 2
m con una resolución horizontal de 30 m. Sin embargo, en Evans (1995) se indica que
los radares actuales transportados por satélites no pueden ser utilizados de forma
rutinaria para determinar la superficie topográfica. La razón principal reside en la
desconocida influencia de la ionosfera en el retraso de la señal; este problema puede
ser resuelto mediante radares de doble longitud de onda, o reducido tomando los datos
durante la noche —lo que limita la cobertura y periodo de las tomas—.
El error de las fuentes secundariasEl error posicional, que afecta a las estructuras vectoriales, puede tener varios
orígenes. El más frecuente es el derivado de la digitalización de mapas, tanto más
debido a la tendencia a infravalorarlo, probablemente por la dificultad de su corrección.
Cabe destacar que una magnitud elevada del error posicional puede obligar a un uso de
los mapas exclusivamente cualitativo, limitando severamente la utilidad de la
información.
La digitalización manual de mapas sigue siendo el método más usual de incorporar
información topográfica. La razón probablemente estriba en que la digitalización
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
348
automática es dificultosa a partir de los complejos mapas editados, que son los más
fácilmente disponibles.
La digitalización manual ha sido reconocida como una importante fuente de error
cartográfico cuyas causas pueden dividirse en dos categorías, en función de su origen:
las causas externas están relacionadas generalmente con la deformación de los
documentos —mapas antiguos, en mal estado de conservación, referenciación
geográfica deficiente o, simplemente, de mala calidad—
las causas operacionales hacen referencia a los procesos de digitalización y
manipulación posterior de los datos: por ejemplo, el error introducido en el
proceso de digitalización se debe básicamente a la inexacta colocación del
cursor sobre la curva de nivel.
Los errores debidos a deformaciones del documento digitalizado pueden rectificarse, al
menos parcialmente, mediante un proceso global de corrección geométrica. Este proceso
está integrado habitualmente en los propios programas de digitalización y son capaces de
modificar coherentemente la localización de las entidades cartografiadas en función de un
conjunto de puntos de referencia —ver apartado siguiente—.
El error de la digitalizaciónEn el caso de los errores derivados de la digitalización manual, cabe distinguir tres casos
diferentes:
el error topológico, provocado por que el operador sigue una línea equivocada
debido a una mala interpretación del mapa
el error estocástico, generado por la imprecisión en el seguimiento de las líneas
debido a una deficiente colocación del cursor
el error de generalización, debido a la simplificación del trazado de las curvas, que
son digitalizadas como una cadena de segmentos rectilíneos
Los errores topológicos son simples de detectar y corregir mediante un simple análisis
visual debido a los rígidos patrones de distribución de las curvas de nivel —paralelismo,
coherencia topológica—. Por este motivo, este tipo de errores se elimina en la primera
etapa del control de calidad y no tiene una influencia relevante en la calidad del modelo
final. Como ya se ha indicado en el tema anterior, el error topológico es mucho más
frecuente en la digitalización automática mediante escáner (Peled y Fradkin, 1994:246),
donde la experiencia y capacidad de interpretación del operador no pueden ser aplicadas.
Los errores estocásticos de digitalización pueden ser debidos esporádicamente a causas
fisiológicas —temblores causados por el cansancio y otros movimientos bruscos—. En
este caso, el operador suele detectarlos y corregirlos sobre la marcha.
Quedan, sin embargo, las imprecisiones debidas a la imposibilidad física de replicar
exactamente la trayectoria de las curvas de nivel. En este caso se ha propuesto que los
errores de colocación están autocorrelacionados y son, al menos parcialmente, procesos
no aleatorios dependientes de los puntos previamente introducidos (Keefer, 1988:477). El
motivo es que el operador tiende a un trazado inercial de la línea rebajando o excediendo
la trayectoria según su morfología.
Esta circunstancia está clara en el caso de la digitalización en modo continuo —stream
mode—, donde el cursor está en movimiento y las coordenadas se introducen de forma
automática cada cierta distancia sin control por el operador. En el caso de la digitalización
punto a punto —point mode—, se ha propuesto que el error puede ser aleatorio y no
autocorrelacionado. El motivo es que existe una pausa entre punto y punto, durante la
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
349
cual el operador coloca el cursor sobre la línea. Si el tiempo entre puntos sucesivos es
suficiente el error en cada punto será independiente de los anteriores. Sin embargo, existe
la tendencia a mantener el cursor en continuo movimiento, pulsando de forma secuencial
y continua. En este caso, el modo punto a punto se asemeja al modo continuo y el
fenómeno de autocorrelación se hace significativo.
La presencia de autocorrelación puede detectarse mediante pruebas de aleatoriedad,
donde la variable independiente es el tiempo o, más exactamente, la secuencia ordenada
de puntos digitalizados. El análisis es básicamente equivalente a una serie temporal donde
se asume que los puntos son digitalizados a intervalos constantes.
Finalmente, el error de generalización se produce por la reducción de la línea curva original
a otra compuesta por pequeños segmentos rectilíneos entre los puntos digitalizados. Cabe
distinguir dos tipos diferentes de generalización:
la generalización cartográfica —graphic-oriented generalization— es utilizada para
representar gráficamente la información a diferentes escalas. Se trata de un
proceso básicamente gráfico donde las líneas son redondeadas, comprimidas,
colapsadas o simplificadas con el objetivo de facilitar su lectura y no de conservar
una extrema fidelidad al original.
la generalización para la modelización —model-oriented generalization—tiene como
objetivo la simplificación controlada de los datos para la conservación de
propiedades relevantes del original. El proceso se realiza para utilizar el modelo en
simulación y análisis por lo que es importante la valoración y el control de la
propagación del error.
El problema de la digitalización es que se realiza para la modelización pero partiendo de
originales sometidos a una generalización cartográfica. La conclusión es que el error
cometido es frecuentemente desconocido y no cuantificable.
En la digitalización, las curvas de nivel originales quedan representadas mediante un
conjunto reducido de vértices. El producto final son polilíneas de menor complejidad
que las originales. La razón de efectuar la generalización es la reducción del volumen
de datos pero a costa de una pérdida de información que supone un incremento del
error.
El error de generalización tiende a reducirse cuando el número de puntos aumenta, y se
incrementa generalmente con la complejidad de la línea original. La forma de reducir el
error manteniendo un volumen de datos moderado es realizar una buena selección de los
puntos críticos de la curva. La experiencia del operador es un factor importante en esta
selección pero probablemente es preferible realizar una digitalización densa y aplicar
posteriormente algoritmos de generalización automática. Estos algoritmos, en términos
generales, conservan la longitud y ángulos satisfactoriamente y, sobre todo, desplazan
mucho menos las líneas que la generalización manual, luego causan mucha menos
distorsión (João, 1995:188).
El análisis del error de digitalización
Como se ha indicado anteriormente, el análisis del error de la digitalización puede ser
asimilado al de las series temporales. En el caso de existir autocorrelación, el error en un
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
350
punto j, ej puede ser representado como una suma ponderada de un número finito n de
errores anteriores más un término aleatorio a propio de cada punto:
Además del proceso autorregresivo puro —AR, autoregression—, es posible la existencia
de otros que expliquen la secuencia temporal. Si el operador se da cuenta de la tendencia
de sus errores puede introducir sesgos voluntarios para corregirlos. En este caso aparece
un proceso de media móvil —MA, movil average— donde la suma ponderada de los
anteriores términos aleatorios a explica una parte de la varianza:
Se ha planteado la hipótesis de que el error puede explicarse mediante el modelo
autorregresivo, el de media móvil o una combinación de ambos —modelo ARMA—(Keefer,
1988:479).
El uso de modelos ARMA puede ser un camino para modificar los ficheros procedentes de
la digitalización y reducir el error posicional global. En efecto, si se demuestra que el
modelo es coherente y puede explicar una fracción significativa del error, puede ser
aplicado a posteriori para realizar una corrección de las coordenadas. Al menos, la parte
del error explicada por autocorrelación podría ser reducida para mejorar la calidad del
proceso. Sin embargo, esta hipótesis debe ser aún comprobada ya que no se han
localizado trabajos en la bibliografía que lo hayan llevado a la práctica.
La cuantificación del error posicional
Cuando una curva de nivel se digitaliza y se define por un número de segmentos, la
incertidumbre debida al error posicional de los vértices afecta a una banda o pasillo
alrededor de la línea.
La banda de probabilidad suele denominarse banda épsilon y representa un entorno de
probabilidad de la localización real de la curva de nivel alrededor de la línea digitalizada. Si
la banda es simétrica normalmente a la línea, se asume que no existe sesgo en la
digitalización, es decir, no ha existido una tendencia significativa a digitalizar a un lado
concreto de la línea.
La banda épsilon fue utilizada originalmente por Perkal (1966) como método de generalizar
objetivamente una línea. El algoritmo más utilizado en la actualidad para generalizar las
líneas (Peuker y Douglas, 1975) es básicamente un procedimiento iterativo que maneja
implícitamente el concepto de banda e al definir una distancia umbral para la "limpieza" de
las líneas —weed tolerance—. El valor de e puede usarse, sin embargo, como un índice de
calidad al valorar el proceso de digitalización.
Interpretada como una banda de probabilidad, la anchura de la banda e crecerá en función
directa de la magnitud del error en la digitalización. La banda épsilon puede representarse,
por tanto, codificada en valores de gris de acuerdo con el valor de probabilidad asignado a
cada zona alrededor de la línea —ver figura—.
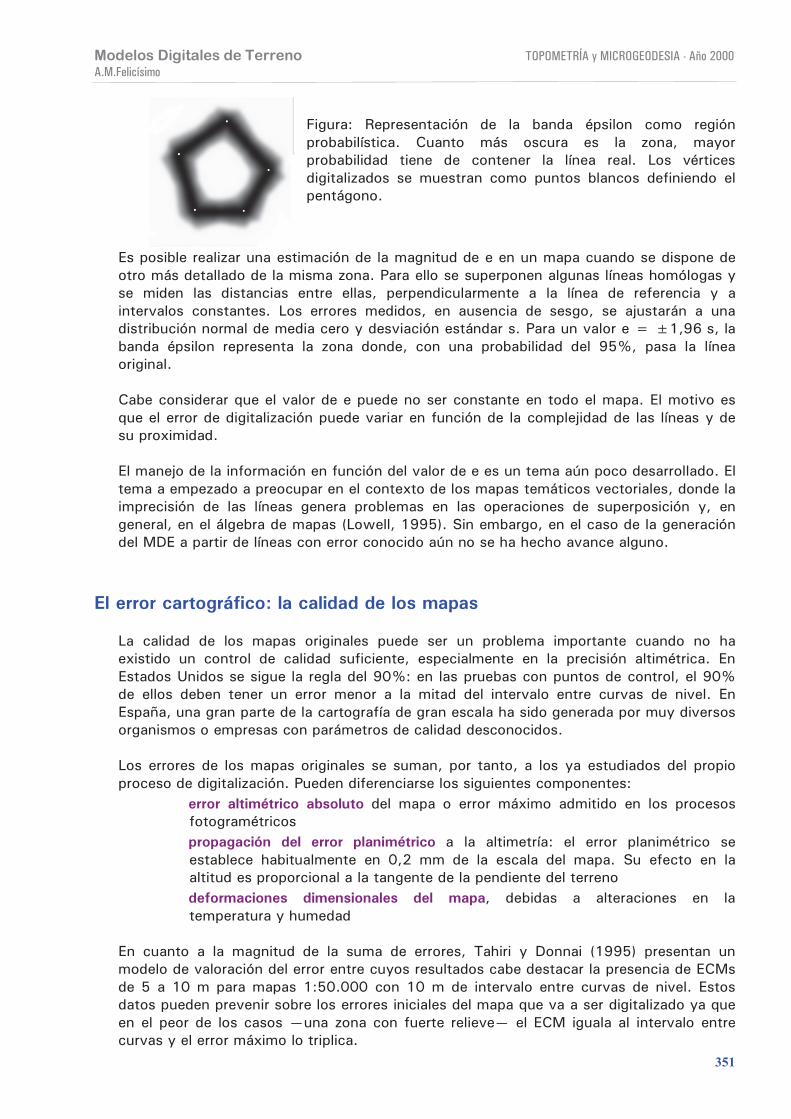
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
351
Figura: Representación de la banda épsilon como región
probabilística. Cuanto más oscura es la zona, mayor
probabilidad tiene de contener la línea real. Los vértices
digitalizados se muestran como puntos blancos definiendo el
pentágono.
Es posible realizar una estimación de la magnitud de e en un mapa cuando se dispone de
otro más detallado de la misma zona. Para ello se superponen algunas líneas homólogas y
se miden las distancias entre ellas, perpendicularmente a la línea de referencia y a
intervalos constantes. Los errores medidos, en ausencia de sesgo, se ajustarán a una
distribución normal de media cero y desviación estándar s. Para un valor e = ±1,96 s, la
banda épsilon representa la zona donde, con una probabilidad del 95%, pasa la línea
original.
Cabe considerar que el valor de e puede no ser constante en todo el mapa. El motivo es
que el error de digitalización puede variar en función de la complejidad de las líneas y de
su proximidad.
El manejo de la información en función del valor de e es un tema aún poco desarrollado. El
tema a empezado a preocupar en el contexto de los mapas temáticos vectoriales, donde la
imprecisión de las líneas genera problemas en las operaciones de superposición y, en
general, en el álgebra de mapas (Lowell, 1995). Sin embargo, en el caso de la generación
del MDE a partir de líneas con error conocido aún no se ha hecho avance alguno.
El error cartográfico: la calidad de los mapas
La calidad de los mapas originales puede ser un problema importante cuando no ha
existido un control de calidad suficiente, especialmente en la precisión altimétrica. En
Estados Unidos se sigue la regla del 90%: en las pruebas con puntos de control, el 90%
de ellos deben tener un error menor a la mitad del intervalo entre curvas de nivel. En
España, una gran parte de la cartografía de gran escala ha sido generada por muy diversos
organismos o empresas con parámetros de calidad desconocidos.
Los errores de los mapas originales se suman, por tanto, a los ya estudiados del propio
proceso de digitalización. Pueden diferenciarse los siguientes componentes:
error altimétrico absoluto del mapa o error máximo admitido en los procesos
fotogramétricos
propagación del error planimétrico a la altimetría: el error planimétrico se
establece habitualmente en 0,2 mm de la escala del mapa. Su efecto en la
altitud es proporcional a la tangente de la pendiente del terreno
deformaciones dimensionales del mapa, debidas a alteraciones en la
temperatura y humedad
En cuanto a la magnitud de la suma de errores, Tahiri y Donnai (1995) presentan un
modelo de valoración del error entre cuyos resultados cabe destacar la presencia de ECMs
de 5 a 10 m para mapas 1:50.000 con 10 m de intervalo entre curvas de nivel. Estos
datos pueden prevenir sobre los errores iniciales del mapa que va a ser digitalizado ya que
en el peor de los casos —una zona con fuerte relieve— el ECM iguala al intervalo entre
curvas y el error máximo lo triplica.
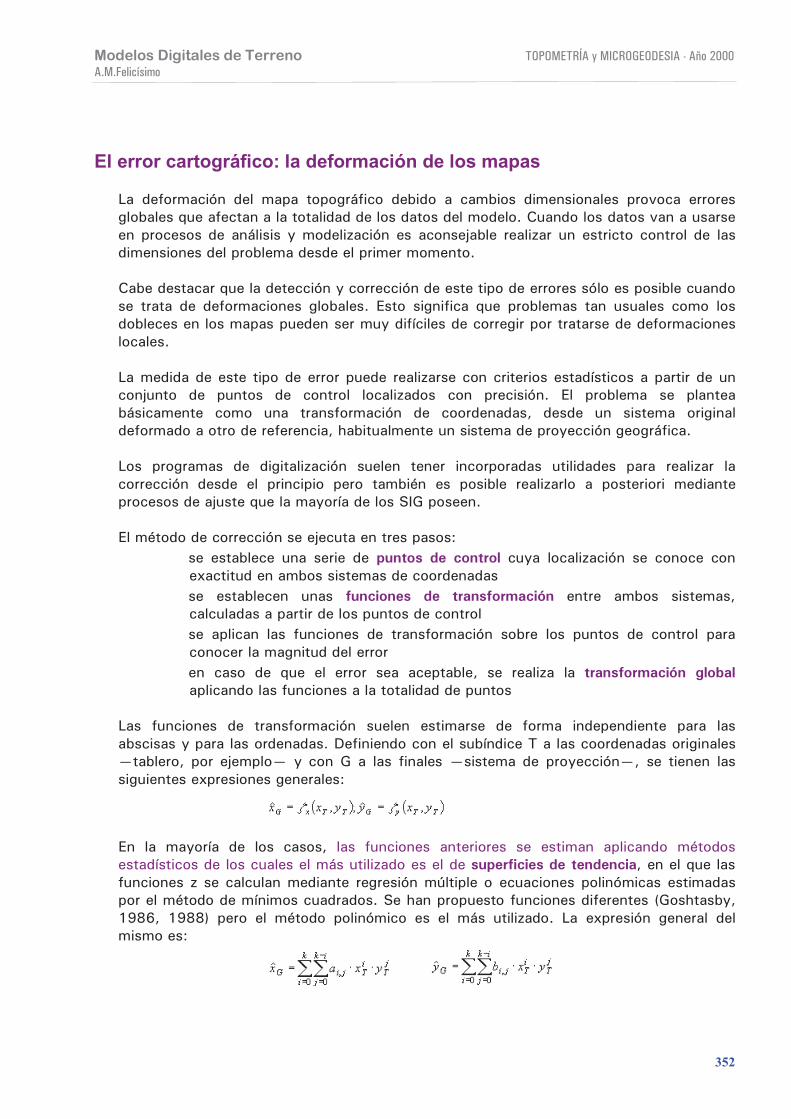
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
352
El error cartográfico: la deformación de los mapas
La deformación del mapa topográfico debido a cambios dimensionales provoca errores
globales que afectan a la totalidad de los datos del modelo. Cuando los datos van a usarse
en procesos de análisis y modelización es aconsejable realizar un estricto control de las
dimensiones del problema desde el primer momento.
Cabe destacar que la detección y corrección de este tipo de errores sólo es posible cuando
se trata de deformaciones globales. Esto significa que problemas tan usuales como los
dobleces en los mapas pueden ser muy difíciles de corregir por tratarse de deformaciones
locales.
La medida de este tipo de error puede realizarse con criterios estadísticos a partir de un
conjunto de puntos de control localizados con precisión. El problema se plantea
básicamente como una transformación de coordenadas, desde un sistema original
deformado a otro de referencia, habitualmente un sistema de proyección geográfica.
Los programas de digitalización suelen tener incorporadas utilidades para realizar la
corrección desde el principio pero también es posible realizarlo a posteriori mediante
procesos de ajuste que la mayoría de los SIG poseen.
El método de corrección se ejecuta en tres pasos:
se establece una serie de puntos de control cuya localización se conoce con
exactitud en ambos sistemas de coordenadas
se establecen unas funciones de transformación entre ambos sistemas,
calculadas a partir de los puntos de control
se aplican las funciones de transformación sobre los puntos de control para
conocer la magnitud del error
en caso de que el error sea aceptable, se realiza la transformación global
aplicando las funciones a la totalidad de puntos
Las funciones de transformación suelen estimarse de forma independiente para las
abscisas y para las ordenadas. Definiendo con el subíndice T a las coordenadas originales
—tablero, por ejemplo— y con G a las finales —sistema de proyección—, se tienen las
siguientes expresiones generales:
En la mayoría de los casos, las funciones anteriores se estiman aplicando métodos
estadísticos de los cuales el más utilizado es el de superficies de tendencia, en el que las
funciones z se calculan mediante regresión múltiple o ecuaciones polinómicas estimadas
por el método de mínimos cuadrados. Se han propuesto funciones diferentes (Goshtasby,
1986, 1988) pero el método polinómico es el más utilizado. La expresión general del
mismo es:

Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
353
El grado del polinomio de ajuste puede ser variable. Cuando vale 1 es posible efectuar
transformaciones afines, es decir, operaciones de translación, rotación y cambio de
escala. Los grados superiores permiten recuperar distorsiones geométricas más complejas.
En el primer caso, las ecuaciones de transformación se reducen a un plano de regresión:
La estimación del error cometido en la transformación: se realiza comparando las
coordenadas de los puntos de control con las resultantes de aplicar las funciones de
transformación sobre los mismos puntos. El error suele estimarse como error cuadrático
medio, ECM, separable para las componentes x e y:
El límite aceptable para el error cuadrático máximo de los puntos o para el ECM debe
fijarse en función de la aplicación a la que va destinado el MDE, así como de la escala de
partida, primer determinante de la precisión geométrica de un modelo. En la digitalización
manual puede proponerse un límite empírico que sería la distancia que corresponde a 0,25
mm del mapa a la escala de trabajo. Con un original a escala 1:50.000 este valor es de
12,5 m y corresponde aproximadamente a la precisión máxima que un operador
experimentado puede obtener en la digitalización manual.
Esquema del proceso de
corrección geométrica de
los documentos
digitalizados a partir de
originales deformados
En caso de errores excesivos deben examinarse individualmente los puntos de control para
comprobar si existe alguno especialmente anómalo. Posteriormente, puede variarse el
grado de la transformación para intentar mejores ajustes. De forma general, la
transformación de primer grado sólo permite efectuar ajustes lineales por lo que, si el
mapa está distorsionado, serán necesarias previsiblemente transformaciones de grado
superior. Existe un límite práctico derivado de la precisión de los cálculos implicados en las
operaciones matriciales necesarias.
Finalmente, debe destacarse que los puntos de control del mapa se digitalizan
manualmente por lo que una introducción descuidada puede una causa complementaria de
error muy significativa.
La medida del error atributivo
Como ya se ha indicado, en el error atributivo puede afectar tanto a los modelos
vectoriales como a los matriciales. En el primer caso, la mayoría de las veces se trata de
errores locales, equivocaciones al asignar la altitud a las curvas de nivel o a los puntos
acotados.
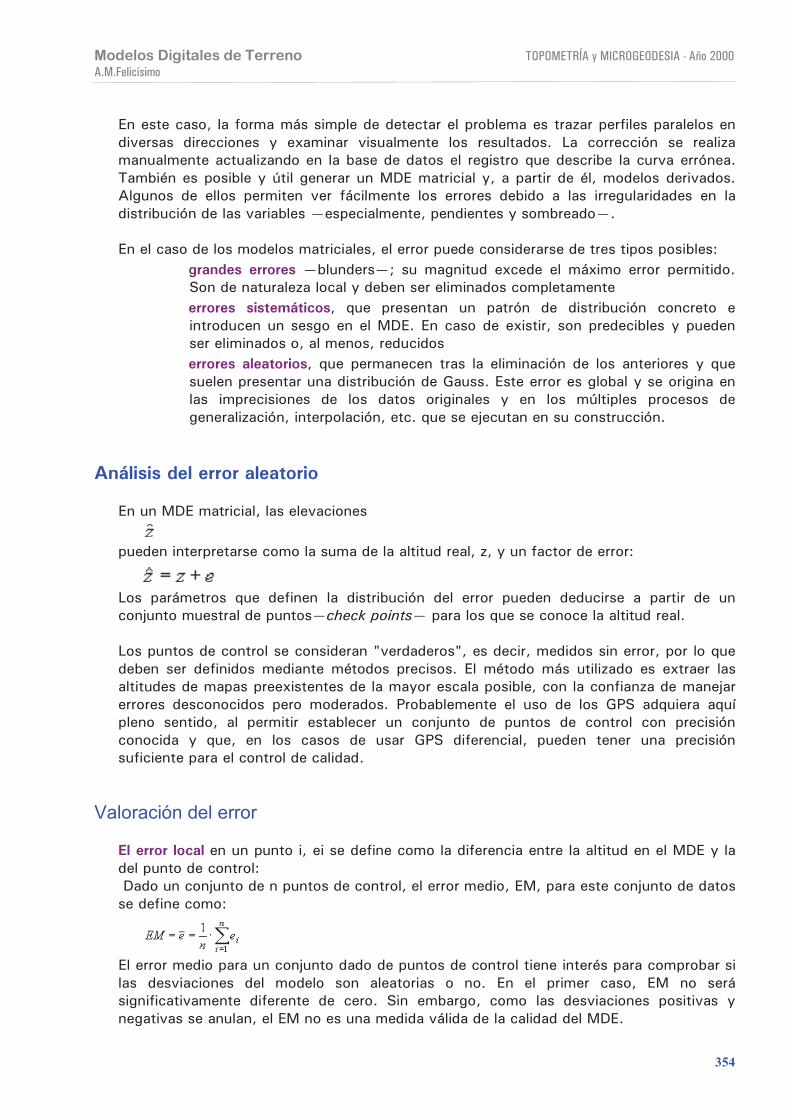
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
354
En este caso, la forma más simple de detectar el problema es trazar perfiles paralelos en
diversas direcciones y examinar visualmente los resultados. La corrección se realiza
manualmente actualizando en la base de datos el registro que describe la curva errónea.
También es posible y útil generar un MDE matricial y, a partir de él, modelos derivados.
Algunos de ellos permiten ver fácilmente los errores debido a las irregularidades en la
distribución de las variables —especialmente, pendientes y sombreado—.
En el caso de los modelos matriciales, el error puede considerarse de tres tipos posibles:
grandes errores —blunders—; su magnitud excede el máximo error permitido.
Son de naturaleza local y deben ser eliminados completamente
errores sistemáticos, que presentan un patrón de distribución concreto e
introducen un sesgo en el MDE. En caso de existir, son predecibles y pueden
ser eliminados o, al menos, reducidos
errores aleatorios, que permanecen tras la eliminación de los anteriores y que
suelen presentar una distribución de Gauss. Este error es global y se origina en
las imprecisiones de los datos originales y en los múltiples procesos de
generalización, interpolación, etc. que se ejecutan en su construcción.
Análisis del error aleatorio
En un MDE matricial, las elevaciones
pueden interpretarse como la suma de la altitud real, z, y un factor de error:
Los parámetros que definen la distribución del error pueden deducirse a partir de un
conjunto muestral de puntos—check points— para los que se conoce la altitud real.
Los puntos de control se consideran "verdaderos", es decir, medidos sin error, por lo que
deben ser definidos mediante métodos precisos. El método más utilizado es extraer las
altitudes de mapas preexistentes de la mayor escala posible, con la confianza de manejar
errores desconocidos pero moderados. Probablemente el uso de los GPS adquiera aquí
pleno sentido, al permitir establecer un conjunto de puntos de control con precisión
conocida y que, en los casos de usar GPS diferencial, pueden tener una precisión
suficiente para el control de calidad.
Valoración del error
El error local en un punto i, ei se define como la diferencia entre la altitud en el MDE y la
del punto de control:
Dado un conjunto de n puntos de control, el error medio, EM, para este conjunto de datos
se define como:
El error medio para un conjunto dado de puntos de control tiene interés para comprobar si
las desviaciones del modelo son aleatorias o no. En el primer caso, EM no será
significativamente diferente de cero. Sin embargo, como las desviaciones positivas y
negativas se anulan, el EM no es una medida válida de la calidad del MDE.
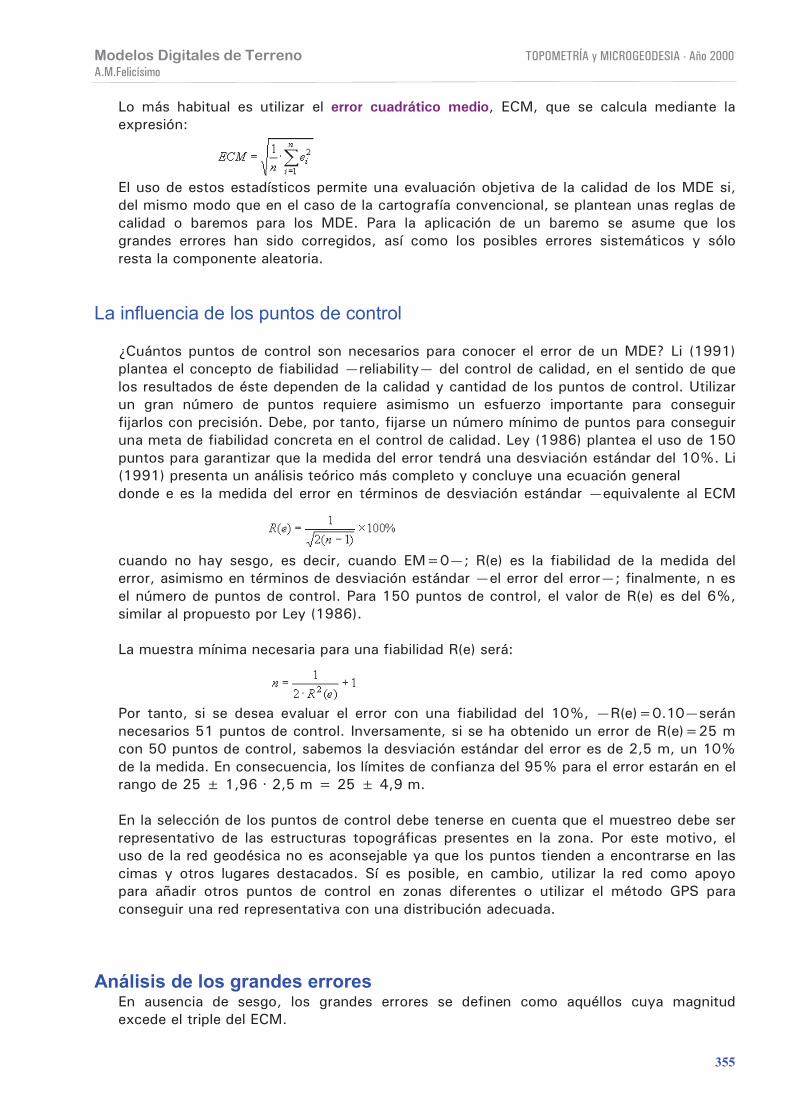
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
355
Lo más habitual es utilizar el error cuadrático medio, ECM, que se calcula mediante la
expresión:
El uso de estos estadísticos permite una evaluación objetiva de la calidad de los MDE si,
del mismo modo que en el caso de la cartografía convencional, se plantean unas reglas de
calidad o baremos para los MDE. Para la aplicación de un baremo se asume que los
grandes errores han sido corregidos, así como los posibles errores sistemáticos y sólo
resta la componente aleatoria.
La influencia de los puntos de control
¿Cuántos puntos de control son necesarios para conocer el error de un MDE? Li (1991)
plantea el concepto de fiabilidad —reliability— del control de calidad, en el sentido de que
los resultados de éste dependen de la calidad y cantidad de los puntos de control. Utilizar
un gran número de puntos requiere asimismo un esfuerzo importante para conseguir
fijarlos con precisión. Debe, por tanto, fijarse un número mínimo de puntos para conseguir
una meta de fiabilidad concreta en el control de calidad. Ley (1986) plantea el uso de 150
puntos para garantizar que la medida del error tendrá una desviación estándar del 10%. Li
(1991) presenta un análisis teórico más completo y concluye una ecuación general
donde e es la medida del error en términos de desviación estándar —equivalente al ECM
cuando no hay sesgo, es decir, cuando EM=0—; R(e) es la fiabilidad de la medida del
error, asimismo en términos de desviación estándar —el error del error—; finalmente, n es
el número de puntos de control. Para 150 puntos de control, el valor de R(e) es del 6%,
similar al propuesto por Ley (1986).
La muestra mínima necesaria para una fiabilidad R(e) será:
Por tanto, si se desea evaluar el error con una fiabilidad del 10%, —R(e)=0.10—serán
necesarios 51 puntos de control. Inversamente, si se ha obtenido un error de R(e)=25 m
con 50 puntos de control, sabemos la desviación estándar del error es de 2,5 m, un 10%
de la medida. En consecuencia, los límites de confianza del 95% para el error estarán en el
rango de 25 ± 1,96 2,5 m = 25 ± 4,9 m.
En la selección de los puntos de control debe tenerse en cuenta que el muestreo debe ser
representativo de las estructuras topográficas presentes en la zona. Por este motivo, el
uso de la red geodésica no es aconsejable ya que los puntos tienden a encontrarse en las
cimas y otros lugares destacados. Sí es posible, en cambio, utilizar la red como apoyo
para añadir otros puntos de control en zonas diferentes o utilizar el método GPS para
conseguir una red representativa con una distribución adecuada.
Análisis de los grandes erroresEn ausencia de sesgo, los grandes errores se definen como aquéllos cuya magnitud
excede el triple del ECM.
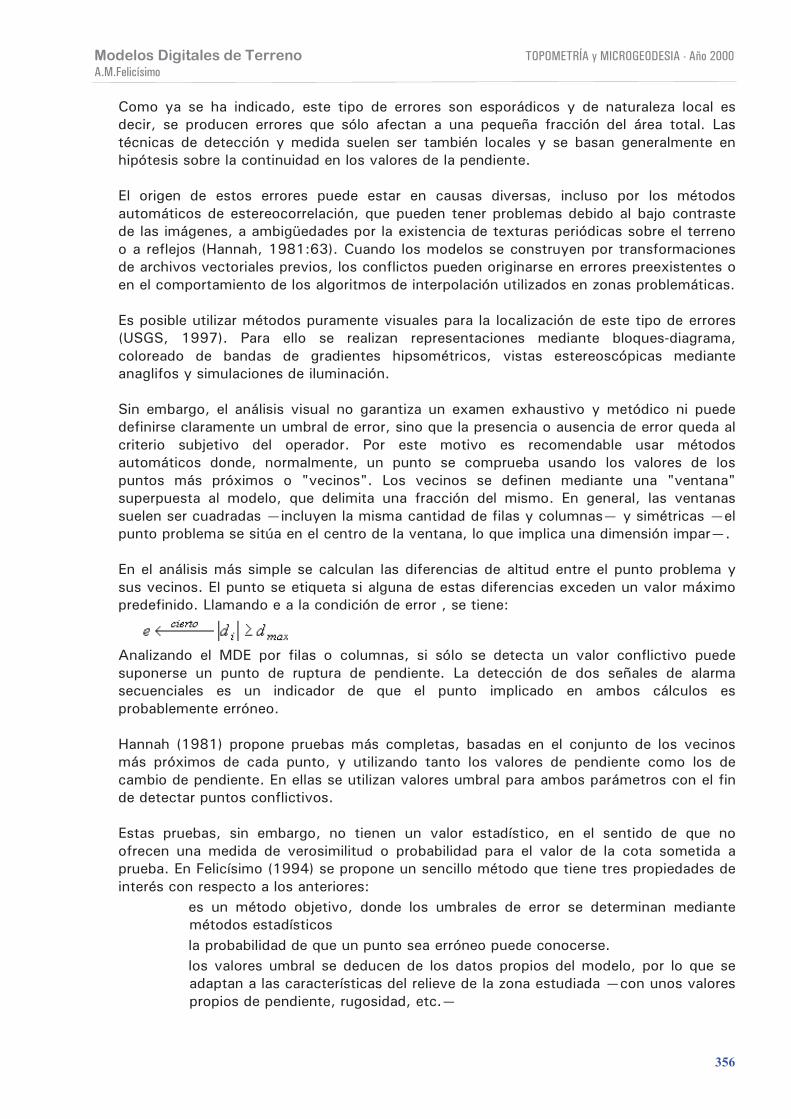
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
356
Como ya se ha indicado, este tipo de errores son esporádicos y de naturaleza local es
decir, se producen errores que sólo afectan a una pequeña fracción del área total. Las
técnicas de detección y medida suelen ser también locales y se basan generalmente en
hipótesis sobre la continuidad en los valores de la pendiente.
El origen de estos errores puede estar en causas diversas, incluso por los métodos
automáticos de estereocorrelación, que pueden tener problemas debido al bajo contraste
de las imágenes, a ambigüedades por la existencia de texturas periódicas sobre el terreno
o a reflejos (Hannah, 1981:63). Cuando los modelos se construyen por transformaciones
de archivos vectoriales previos, los conflictos pueden originarse en errores preexistentes o
en el comportamiento de los algoritmos de interpolación utilizados en zonas problemáticas.
Es posible utilizar métodos puramente visuales para la localización de este tipo de errores
(USGS, 1997). Para ello se realizan representaciones mediante bloques-diagrama,
coloreado de bandas de gradientes hipsométricos, vistas estereoscópicas mediante
anaglifos y simulaciones de iluminación.
Sin embargo, el análisis visual no garantiza un examen exhaustivo y metódico ni puede
definirse claramente un umbral de error, sino que la presencia o ausencia de error queda al
criterio subjetivo del operador. Por este motivo es recomendable usar métodos
automáticos donde, normalmente, un punto se comprueba usando los valores de los
puntos más próximos o "vecinos". Los vecinos se definen mediante una "ventana"
superpuesta al modelo, que delimita una fracción del mismo. En general, las ventanas
suelen ser cuadradas —incluyen la misma cantidad de filas y columnas— y simétricas —el
punto problema se sitúa en el centro de la ventana, lo que implica una dimensión impar—.
En el análisis más simple se calculan las diferencias de altitud entre el punto problema y
sus vecinos. El punto se etiqueta si alguna de estas diferencias exceden un valor máximo
predefinido. Llamando e a la condición de error , se tiene:
Analizando el MDE por filas o columnas, si sólo se detecta un valor conflictivo puede
suponerse un punto de ruptura de pendiente. La detección de dos señales de alarma
secuenciales es un indicador de que el punto implicado en ambos cálculos es
probablemente erróneo.
Hannah (1981) propone pruebas más completas, basadas en el conjunto de los vecinos
más próximos de cada punto, y utilizando tanto los valores de pendiente como los de
cambio de pendiente. En ellas se utilizan valores umbral para ambos parámetros con el fin
de detectar puntos conflictivos.
Estas pruebas, sin embargo, no tienen un valor estadístico, en el sentido de que no
ofrecen una medida de verosimilitud o probabilidad para el valor de la cota sometida a
prueba. En Felicísimo (1994) se propone un sencillo método que tiene tres propiedades de
interés con respecto a los anteriores:
es un método objetivo, donde los umbrales de error se determinan mediante
métodos estadísticos
la probabilidad de que un punto sea erróneo puede conocerse.
los valores umbral se deducen de los datos propios del modelo, por lo que se
adaptan a las características del relieve de la zona estudiada —con unos valores
propios de pendiente, rugosidad, etc.—
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
357
La base del test reside en el análisis de las diferencias existentes entre dos valores de
altitud para cada punto: la presente en el MDE —correcta o errónea— y un valor estimado
mediante un proceso de interpolación a partir de las cotas vecinas. Para un punto situado
en la fila i, columna j, el valor interpolado es:
La diferencia entre la cota del modelo y la cota estimada es:
El proceso se realiza para el total de los n puntos del MDE y se obtiene la diferencia media
y su desviación estándar:
los valores anteriores definen la función de distribución de las diferencias, una distribución
de Gauss,
que permite realizar un test de significación para los valores individuales de las diferencia.
Con este test se puede aceptar o rechazar la hipótesis de que el valor individual de
desviación observado pertenece a la población de desviaciones. Para ello se utiliza un test
de la t de Student, que debe realizarse para cada punto del modelo calculando el valor del
estadístico mediante la expresión:
El valor anterior se considera una desviación tipificada y se compara su magnitud con el
valor
como el número de datos del modelo digital será habitualmente muy elevado, se usa el
valor infinito para los grados de libertad. El modelo digital constituye la población, por lo
cual los valores que definen la distribución pueden considerarse parámetros poblacionales
y no estadísticos muestrales.
La probabilidad de error de Tipo I puede definirse con el fin de detectar solamente las
diferencias muy significativas. En consecuencia, la condición de error vendrá dada, por
ejemplo, por
La hipótesis nula es
y la alternativa
La localización de puntos con un valor de t significativamente elevado no implica
necesariamente un error de cota pero es un buen indicador de alarma.
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
358
La propagación del errorLas operaciones con números inciertos permiten obtener resultados inciertos. Esta
circunstancia aconseja controlar estrictamente el error cuando las medidas van a ser
utilizadas en la determinación de otras magnitudes a través de procesos de simulación. La
influencia del error en la incertidumbre de un resultado se denomina propagación del error
e ignorarlo puede conducir a dar por válidos resultados que no lo son en absoluto.La
influencia del error en los procesos derivados del MDE ha sido mucho menos estudiada
que el error de las fuentes. Los trabajos existentes tienen por objeto llamar la atención
sobre los efectos de la propagación del error en algunas simulaciones, especialmente las
relacionadas con las pendientes y orientaciones del terreno. Sin embargo, los métodos
prácticos de "vivir con el error" en una base de datos cartográfica y de controlar sus
efectos de forma general no están aún claros.
En el caso de la realización práctica de modelizaciones, se han citado tres formas de tratar
el problema de propagación del error (Hunter y Goodchild, 1994:771):
omitir toda referencia al mismo
proporcionar un descriptor estadístico
proporcionar varios productos finales dentro del posible rango de variación
El primer caso es, sin duda, el más frecuente y la forma más simple de tratar el problema,
pero obviar el problema puede tener consecuencias negativas en función de las decisiones
que se tomen a partir de la información defectuosa.
En el segundo caso se presenta información sintética mediante descriptores como las
bandas épsilon, los valores de ECM, etc. Estas medidas pueden poner sobre aviso de la
calidad de los datos por lo que suponen un avance notable sobre la primera actitud. Sin
embargo, no dan cuenta de los posibles efectos del error en el producto final cuando éste
es el resultado de una modelización compleja.
Con el último planteamiento se presentarían diferentes resultados generados dentro del
rango de error real con el fin de ilustrar las variaciones permitidas por la incertidumbre de
los datos originales.
Queda, finalmente, una cuarta opción que la presentación de los resultados clave para una
decisión asociados a su nivel de incertidumbre y no de forma determinística estricta. Por
ejemplo, si es necesario delimitar las zonas con pendiente menor de 5º, el modelo que se
presente puede tener una frontera difusa entre la clase p<5º y el resto, con un significado
similar a la banda épsilon.
Las normas de propagación del error no son necesariamente simples, por lo que su
solución analítica puede ser inabordable. Asimismo, dependen estrechamente de los
algoritmos utilizados y, ocasionalmente, pueden cambiar en función de las características
del relieve de la zona.
El análisis de sensibilidadLa propagación del error se ha estudiado habitualmente realizando un análisis de
sensibilidad del proceso concreto. El análisis se realiza generando diferentes modelos de
error para los datos originales y estudiando los resultados producidos. Se trata, por tanto,
de producir a partir de un MDE original, otros MDE con diversos grados de distorsión y
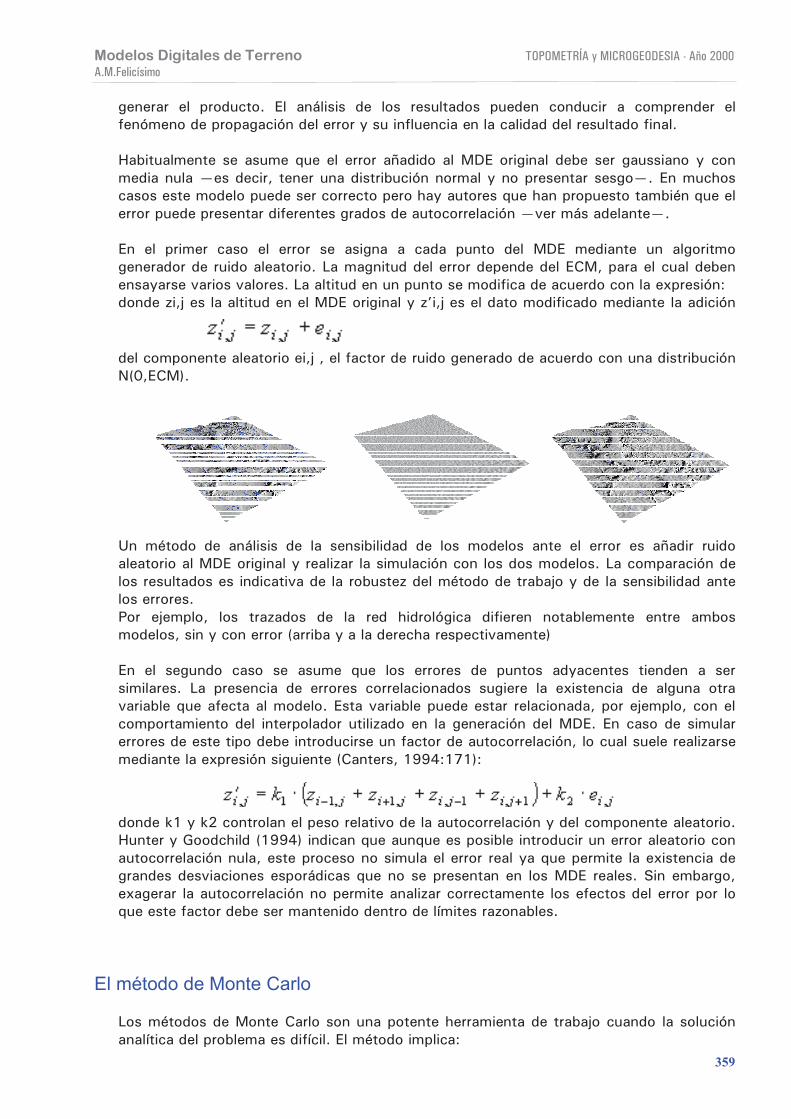
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
359
generar el producto. El análisis de los resultados pueden conducir a comprender el
fenómeno de propagación del error y su influencia en la calidad del resultado final.
Habitualmente se asume que el error añadido al MDE original debe ser gaussiano y con
media nula —es decir, tener una distribución normal y no presentar sesgo—. En muchos
casos este modelo puede ser correcto pero hay autores que han propuesto también que el
error puede presentar diferentes grados de autocorrelación —ver más adelante—.
En el primer caso el error se asigna a cada punto del MDE mediante un algoritmo
generador de ruido aleatorio. La magnitud del error depende del ECM, para el cual deben
ensayarse varios valores. La altitud en un punto se modifica de acuerdo con la expresión:
donde zi,j es la altitud en el MDE original y z’i,j es el dato modificado mediante la adición
del componente aleatorio ei,j , el factor de ruido generado de acuerdo con una distribución
N(0,ECM).
Un método de análisis de la sensibilidad de los modelos ante el error es añadir ruido
aleatorio al MDE original y realizar la simulación con los dos modelos. La comparación de
los resultados es indicativa de la robustez del método de trabajo y de la sensibilidad ante
los errores.
Por ejemplo, los trazados de la red hidrológica difieren notablemente entre ambos
modelos, sin y con error (arriba y a la derecha respectivamente)
En el segundo caso se asume que los errores de puntos adyacentes tienden a ser
similares. La presencia de errores correlacionados sugiere la existencia de alguna otra
variable que afecta al modelo. Esta variable puede estar relacionada, por ejemplo, con el
comportamiento del interpolador utilizado en la generación del MDE. En caso de simular
errores de este tipo debe introducirse un factor de autocorrelación, lo cual suele realizarse
mediante la expresión siguiente (Canters, 1994:171):
donde k1 y k2 controlan el peso relativo de la autocorrelación y del componente aleatorio.
Hunter y Goodchild (1994) indican que aunque es posible introducir un error aleatorio con
autocorrelación nula, este proceso no simula el error real ya que permite la existencia de
grandes desviaciones esporádicas que no se presentan en los MDE reales. Sin embargo,
exagerar la autocorrelación no permite analizar correctamente los efectos del error por lo
que este factor debe ser mantenido dentro de límites razonables.
El método de Monte Carlo
Los métodos de Monte Carlo son una potente herramienta de trabajo cuando la solución
analítica del problema es difícil. El método implica:

Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
360
la suposición de las distribuciones de probabilidad de las variables influyentes y
el uso de generadores de números aleatorios para muestrear de forma simulada
la población de sucesos.
A partir de los puntos anteriores es posible generar modelizaciones numéricas del proceso
en número suficiente como para construir empíricamente la función de probabilidad de la
variable resultado.
Los métodos de Monte Carlo han comenzado a ser prácticos y útiles cuando los
ordenadores han estado disponibles de forma generalizada. Los generadores de números
aleatorios son rutinas bien conocidas con las cuales es posible generar series de números
cuyas distribuciones pueden ajustarse a múltiples modelos.
En el caso que se trata aquí, podemos asumir un error gaussiano o con cierto grado de
autocorrelación. Los errores serán añadidos a datos simulados y aplicados los algoritmos
que ejecutan la simulación. De los resultados podemos deducir las características de la
propagación del error.
Felicísimo (1995) aplica este método al análisis de la propagación del error altitudinal al
cálculo de la pendiente. Los pasos seguidos son los siguientes:
se genera un MDE con valores de altitud iguales, simulando un terreno plano
se genera un valor de error para cada punto de acuerdo con un distribución de
Gauss N(0,ECM)
la altitud de cada punto se altera añadiéndole el valor de error
se calcula la pendiente en cada punto de acuerdo con el algoritmo que se desee
utilizar se construye la distribución de los valores de la pendiente resultantes de
la modelización y se compara con la distribución del MDE "real"
Obviamente, la pendiente esperada en ausencia de error es nula ya que el MDE de partida
muestra un terreno plano. Los resultados más notorios son los siguientes:
la distribución del error en la pendiente no es de media nula lo que significa que
la construcción de un modelo digital de pendientes a partir de un MDE
infravalora las pendientes bajas proporcionalmente a la magnitud del error en el
MDE
el error medio de la pendiente en función del ECM es el siguiente:
ECM 5% 10% 20%
Error 1,4º 2,9º 5,8º
el ECM se establece en porcentaje del tamaño de la malla del MDE; por ejemplo, para un
MDE de 30 m de intervalo entre datos, un ECM del 10% corresponde a 3 m
del análisis de frecuencias de error acumuladas, se deducen los siguientes
resultados: para un MDE con ECM=10%, el 50% de los datos tendrán un error
de al menos 2º; el 25% de 3,5º y el 5% de 5º o más
un MDE con ECM=20%, el 50% de los datos tendrán un error de al menos 5º;
el 25% de 7º y el 5% de 11º o más.
en el caso de un MDE con pendiente superior a 0º, la influencia del error
disminuye proporcionalmente a la misma.
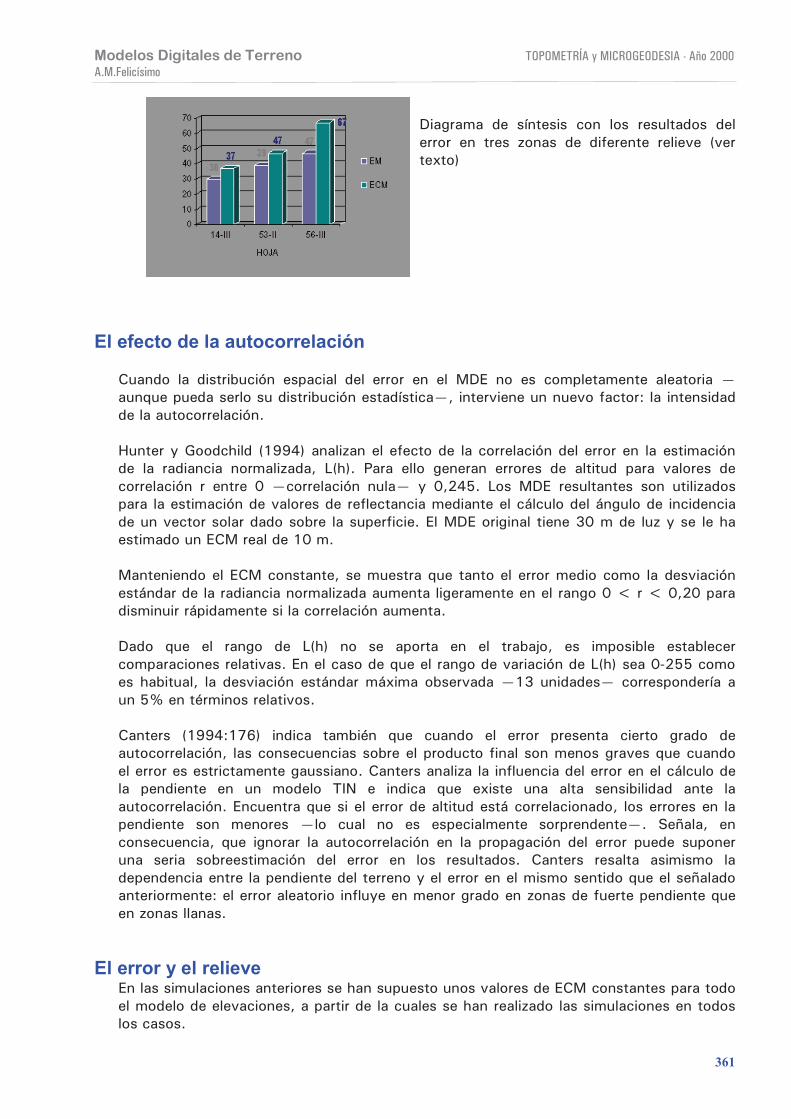
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
361
Diagrama de síntesis con los resultados del
error en tres zonas de diferente relieve (ver
texto)
El efecto de la autocorrelación
Cuando la distribución espacial del error en el MDE no es completamente aleatoria —
aunque pueda serlo su distribución estadística—, interviene un nuevo factor: la intensidad
de la autocorrelación.
Hunter y Goodchild (1994) analizan el efecto de la correlación del error en la estimación
de la radiancia normalizada, L(h). Para ello generan errores de altitud para valores de
correlación r entre 0 —correlación nula— y 0,245. Los MDE resultantes son utilizados
para la estimación de valores de reflectancia mediante el cálculo del ángulo de incidencia
de un vector solar dado sobre la superficie. El MDE original tiene 30 m de luz y se le ha
estimado un ECM real de 10 m.
Manteniendo el ECM constante, se muestra que tanto el error medio como la desviación
estándar de la radiancia normalizada aumenta ligeramente en el rango 0 < r < 0,20 para
disminuir rápidamente si la correlación aumenta.
Dado que el rango de L(h) no se aporta en el trabajo, es imposible establecer
comparaciones relativas. En el caso de que el rango de variación de L(h) sea 0-255 como
es habitual, la desviación estándar máxima observada —13 unidades— correspondería a
un 5% en términos relativos.
Canters (1994:176) indica también que cuando el error presenta cierto grado de
autocorrelación, las consecuencias sobre el producto final son menos graves que cuando
el error es estrictamente gaussiano. Canters analiza la influencia del error en el cálculo de
la pendiente en un modelo TIN e indica que existe una alta sensibilidad ante la
autocorrelación. Encuentra que si el error de altitud está correlacionado, los errores en la
pendiente son menores —lo cual no es especialmente sorprendente—. Señala, en
consecuencia, que ignorar la autocorrelación en la propagación del error puede suponer
una seria sobreestimación del error en los resultados. Canters resalta asimismo la
dependencia entre la pendiente del terreno y el error en el mismo sentido que el señalado
anteriormente: el error aleatorio influye en menor grado en zonas de fuerte pendiente que
en zonas llanas.
El error y el relieveEn las simulaciones anteriores se han supuesto unos valores de ECM constantes para todo
el modelo de elevaciones, a partir de la cuales se han realizado las simulaciones en todos
los casos.
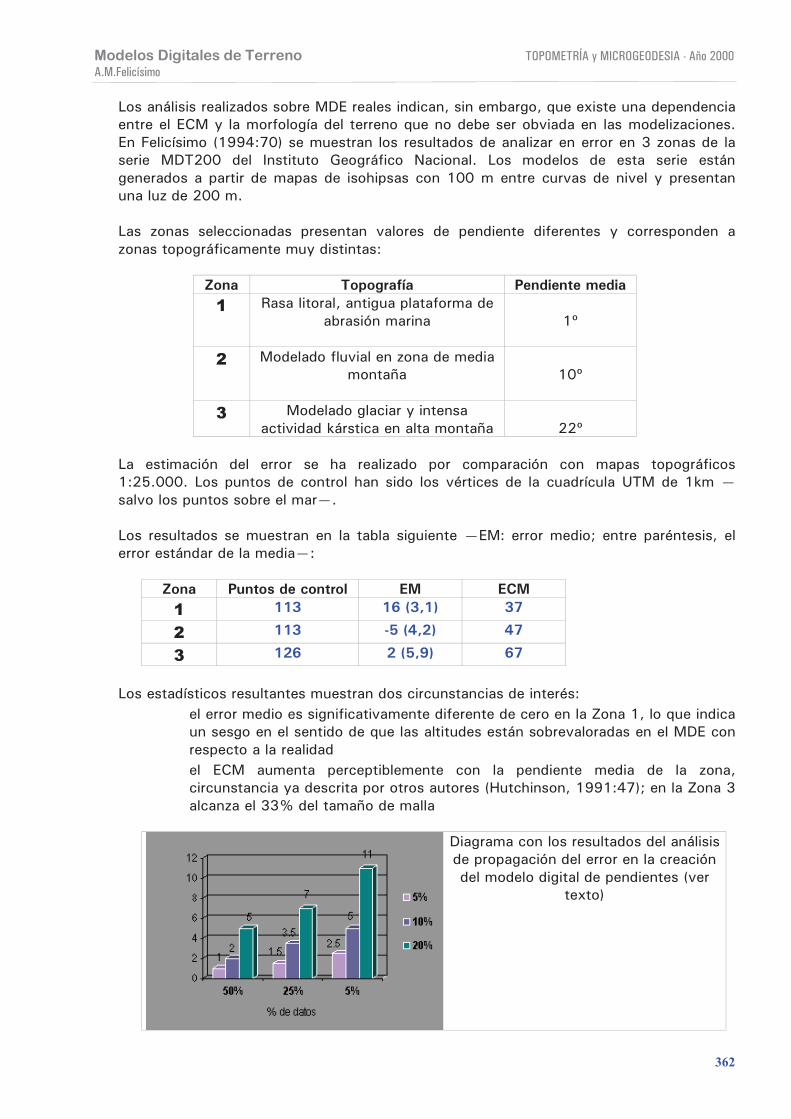
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
362
Los análisis realizados sobre MDE reales indican, sin embargo, que existe una dependencia
entre el ECM y la morfología del terreno que no debe ser obviada en las modelizaciones.
En Felicísimo (1994:70) se muestran los resultados de analizar en error en 3 zonas de la
serie MDT200 del Instituto Geográfico Nacional. Los modelos de esta serie están
generados a partir de mapas de isohipsas con 100 m entre curvas de nivel y presentan
una luz de 200 m.
Las zonas seleccionadas presentan valores de pendiente diferentes y corresponden a
zonas topográficamente muy distintas:
Zona Topografía Pendiente media
1 Rasa litoral, antigua plataforma de
abrasión marina 1º
2 Modelado fluvial en zona de media
montaña 10º
3 Modelado glaciar y intensa
actividad kárstica en alta montaña 22º
La estimación del error se ha realizado por comparación con mapas topográficos
1:25.000. Los puntos de control han sido los vértices de la cuadrícula UTM de 1km —
salvo los puntos sobre el mar—.
Los resultados se muestran en la tabla siguiente —EM: error medio; entre paréntesis, el
error estándar de la media—:
Zona Puntos de control EM ECM
1 113 16 (3,1) 37
2 113 -5 (4,2) 47
3 126 2 (5,9) 67
Los estadísticos resultantes muestran dos circunstancias de interés:
el error medio es significativamente diferente de cero en la Zona 1, lo que indica
un sesgo en el sentido de que las altitudes están sobrevaloradas en el MDE con
respecto a la realidad
el ECM aumenta perceptiblemente con la pendiente media de la zona,
circunstancia ya descrita por otros autores (Hutchinson, 1991:47); en la Zona 3
alcanza el 33% del tamaño de malla
Diagrama con los resultados del análisis
de propagación del error en la creación
del modelo digital de pendientes (ver
texto)
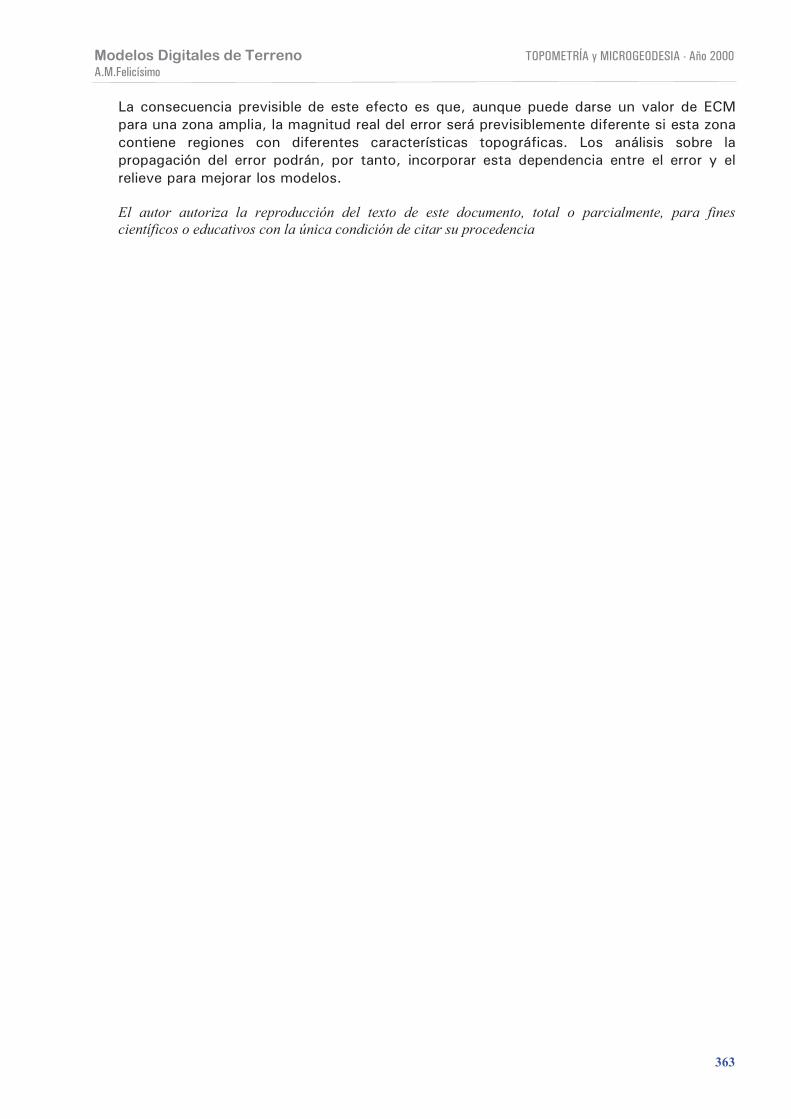
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
363
La consecuencia previsible de este efecto es que, aunque puede darse un valor de ECM
para una zona amplia, la magnitud real del error será previsiblemente diferente si esta zona
contiene regiones con diferentes características topográficas. Los análisis sobre la
propagación del error podrán, por tanto, incorporar esta dependencia entre el error y el
relieve para mejorar los modelos.
El autor autoriza la reproducción del texto de este documento, total o parcialmente, para fines
científicos o educativos con la única condición de citar su procedencia
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
364
Los modelos digitales del terreno contienen información de dos tipos diferentes: in-
formación explícita, recogida en los datos concretos del atributo del modelo, como la
altitud en el caso del MDE, e información implícita, relativa a las relaciones espaciales
entre los datos, como la distancia o la vecindad.
Ambos tipos de información son complementarios y permiten obtener información so-
bre la morfología del relieve de forma objetiva y exhaustiva. La objetividad se deriva
del carácter digital de los datos y de los procesos de análisis, configurados por algo-
ritmos. La exhaustividad se refiere a que estos procesos son aplicables a la totalidad
del área analizada y no sólo a una muestra de la misma.
IntroducciónLa medida y caracterización de las formas de terreno ha merecido atención desde hace
más de 100 años (Cayley, 1859). Como podía esperarse, el desarrollo de las técnicas
de medida se ha beneficiado de las técnicas de almacenamiento y representación de la
información. La referencia a esta disciplina fue acuñado por Chorley et al. (1957) bajo
el término geomorfometría. Posteriormente, Evans (1972) introdujo la distinción entre
la geomorfometría específica —specific geomorphometry— de la general —general
geomorphometry—. La primera trata de la distinción entre elementos geomorfológicos
específicos y la segunda a la medida y análisis de la características morfológicas apli-
cables a cualquier superficie.
Bajo esta concepción la caracterización de las formas del relieve puede realizarse de
dos formas:
mediante descriptores globales, que generan información estadística sintética no
representable espacialmente como, por ejemplo, medidas de dispersión, histogra-
mas, correlogramas, etc. lo que correspondería con la geomorfometría general
mediante descriptores locales, que generan información de naturaleza espacial y
son representables, a su vez, como modelos digitales del terreno, lo que correspon-
dería con la geomorfometría específica.
Ambos tipos de descriptores pueden utilizarse conjuntamente para analizar y caracteri-
zar el relieve y sus componentes. Dado que los procesos geológicos externos dejan
una huella morfológica sobre las áreas afectadas, el MDE y sus modelos derivados
pueden ser un instrumento de análisis objetivo de potencial utilidad.
Parte 2
Las variables topográficas
La descripción del relieve a partir del MDE se realiza mediante un conjunto de medidas
que definen características geométricas del terreno a diferentes escalas. Este proceso
se conoce como parametrización del relieve: generación un conjunto de medidas que
describen las formas topográficas permitiendo distinguir diferentes tipos de relieve o,
en resumen, la descripción numérica de formas topográficas. Los parámetros pueden
ser descriptores globales o locales pero los primeros informan únicamente sobre el
conjunto del MDE por lo que son más útiles para la comparación de modelos de dife-
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
365
rentes zonas. Los descriptores locales aportan un conjunto de datos que puede ser
analizado con el mismo nivel de resolución que el MDE original.
La parametrización del relieve debe cumplir algunas condiciones para ser útil:
los parámetros deben tener relación con los procesos geomorfológicos que modelan
el relieve
el conjunto de parámetros no debe proporcionar información redundante, es decir,
deben medir características distintas
la parametrización debe incluir información sobre la influencia de la escala ya que
existen parámetros cuya magnitud depende de la resolución del muestreo y, por
tanto, de la escala de trabajo
Existen varias propuestas sobre las variables que deben incluirse en la parametrización
del relieve. Entre ellas, la menos discutida es la pendiente, aunque también son usadas
con frecuencia en geomorfología la orientación y la curvatura (Weibel y Heller,
1991:283). Franklin y Peddle (1987:294) mencionan cinco parámetros básicos en este
contexto: elevación, pendiente, orientación, convexidad y relieve. El relieve, definido
en este caso como la variabilidad de la superficie, es lo que otros autores denominan
rugosidad.
En Mark (1975) puede encontrarse una revisión del estado del tema en los momentos
previos al tratamiento informático, donde se analizan las relaciones entre diversos pa-
rámetros mediante análisis de correlación.
Todas estas variables pueden ser representadas como modelos digitales derivados con
la misma resolución que el MDE original. Como veremos, esta circunstancia permitirá
posteriormente el análisis multivariable del relieve, teniendo en cuenta simultáneamente
la totalidad de los descriptores topográficos.
Parte 3
El gradienteEn un modelo digital de elevaciones, la altitud en el entorno inmediato de un punto
puede describirse de forma aproximada mediante un plano de ajuste, cuya expresión
es:
Se deduce directamente que los coeficientes <Imagen> y <Imagen> representan las
derivadas primeras de la altitud con respecto a los ejes X e Y:
Los coeficientes a10 y a01 representan la tasa de cambio de la altitud respecto a los
ejes X —filas— e Y —columnas— respectivamente, es decir, los componentes de la
pendiente sobre los ejes X, Y.
El par de valores (a10 , a01) se denomina gradiente de z en el punto (x,y) y ha sido
mencionado porque va a mostrarse útil en el cálculo de los modelos digitales deriva-
dos.
Aspecto de los componentes a10 y a01
Los componentes direccionales del gradiente pueden representarse como MDT. En las
figuras de abajo se han codificado en tonos de gris (los valores negativos son todos
negros)
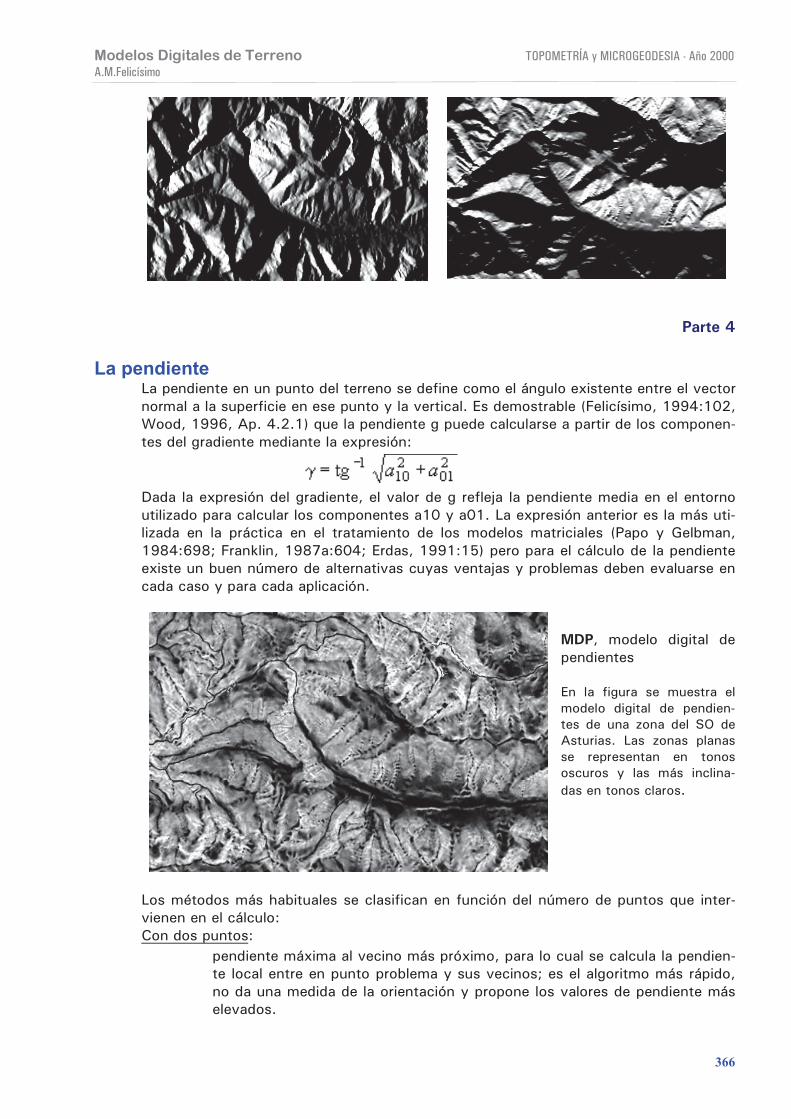
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
366
Parte 4
La pendienteLa pendiente en un punto del terreno se define como el ángulo existente entre el vector
normal a la superficie en ese punto y la vertical. Es demostrable (Felicísimo, 1994:102,
Wood, 1996, Ap. 4.2.1) que la pendiente g puede calcularse a partir de los componen-
tes del gradiente mediante la expresión:
Dada la expresión del gradiente, el valor de g refleja la pendiente media en el entorno
utilizado para calcular los componentes a10 y a01. La expresión anterior es la más uti-
lizada en la práctica en el tratamiento de los modelos matriciales (Papo y Gelbman,
1984:698; Franklin, 1987a:604; Erdas, 1991:15) pero para el cálculo de la pendiente
existe un buen número de alternativas cuyas ventajas y problemas deben evaluarse en
cada caso y para cada aplicación.
MDP, modelo digital de
pendientes
En la figura se muestra el
modelo digital de pendien-
tes de una zona del SO de
Asturias. Las zonas planas
se representan en tonos
oscuros y las más inclina-
das en tonos claros.
Los métodos más habituales se clasifican en función del número de puntos que inter-
vienen en el cálculo:
Con dos puntos:
pendiente máxima al vecino más próximo, para lo cual se calcula la pendien-
te local entre en punto problema y sus vecinos; es el algoritmo más rápido,
no da una medida de la orientación y propone los valores de pendiente más
elevados.

Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
367
Idrisi (Eastman, 1992:181) utiliza este método limitado a los 4 vecinos más próximos.
MicroDEM lo utiliza con los 8 vecinos ponderando la distancia en diagonal —la luz de
malla por √ 2
En este último caso:
Con tres puntos:
O’Neill y Mark (1987) proponen el uso del punto problema y de los vecinos
Norte y Este para definir un plano. La pendiente de éste se asigna al punto
problema. La selección de los vecinos mencionados es arbitraria y cambiar-
los puede modificar el resultado tanto de la pendiente como de la orienta-
ción. La formulación sería equivalente a la expresión general, donde los
componentes del gradiente son locales:
Con cuatro puntos:
utiliza los valores del gradiente calculados con los 4 vecinos más próximos,
lo que equivale a estimar la pendiente del plano de ajuste a estos puntos. El
punto problema no interviene en el cálculo.
Con ocho puntos:
Sharpnack y Akin (1988:248) proponen el operador de Prewitt para estimar la
pendiente, con lo que los ocho vecinos tienen el mismo peso en el cálculo del
gradiente. Es el método usado en Erdas™. El punto problema no tiene in-
fluencia en la pendiente.
Horn (1981) usa el operador de Sobel, que pondera más los 4 vecinos más pró-
ximos que los situados en las diagonales. Es el método usado en
Arc/Info™ y el punto problema tampoco interviene en el cálculo.
El uso de cualquiera de los métodos anteriores debe valorarse en función del tipo de
aplicación a desarrollar posteriormente. Los algoritmos basados en la pendiente local
tienen a su favor que no introducen suavización en los datos como los basados en 4 y
8 puntos. El uso de sólo 4 vecinos no tiene justificación aparente y parece más ade-
cuada la búsqueda de pendiente máxima con la totalidad de vecinos con control de la
distancia en el caso de las diagonales. Los métodos basados en operadores de Prewitt
y Sobel son menos sensibles al error en el MDE ya que, al intervenir un número eleva-
do de puntos, las posibles desviaciones individuales pierden peso y pueden compen-
sarse parcialmente entre ellas. En estos últimos, sin embargo, la altitud del punto pro-
blema no interviene en los datos por lo que la información del mismo se desaprove-
cha.
Parte 5
La orientación

Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
368
La orientación en un punto puede definirse como el ángulo existente entre el vector
que señala el Norte y la proyección sobre el plano horizontal del vector normal a la su-
perficie en ese punto.
Como en el caso de la pendiente, el valor de orientación se estima directamente a par-
tir de los valores del gradiente:
La discusión sobre las formas de valorar la orientación son similares a las planteadas
con la pendiente.
MDO, modelo digital de
orientaciones
Modelo digital de orientacio-
nes del valle de Degaña. La
orientación es una variable
de distribución circular que
se ha codificado en tonos de
gris desde el Norte (negro),
aclarándose progresivamente
en sentido horario. Las
orientaciones al Sur están
representadas en tonos gris-
medio.
Parte 6
La curvaturaLa curvatura en un punto, h , puede definirse como la tasa de cambio en la pendiente y
depende, por tanto, de las derivadas de segundo grado de la altitud —es decir, de los
cambios de pendiente en el entorno del punto—.
Para el cálculo de la derivadas de segundo grado no es posible utilizar la aproximación
simple empleada en la estimación de la pendiente y orientación, basada en un plano de
ajuste. En este caso se utiliza una superficie de ajuste de segundo grado de acuerdo
con la expresión general:
Para simplificar, representaremos el punto problema y sus vecinos con la notación que
se muestra en la columna izquierda.
Z1 Z2 Z3
Z4 Z5 Z6
Z7 Z8 Z9

Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
369
En el caso concreto de la ventana de 3x3 centrada en el punto problema, los coeficien-
tes de la ecuación cuadrática se calculan mediante las expresiones siguientes (Evans,
1979:29):
a00 = (2 (z2+z4+z6+z8)-(z1+z3+z7+z9)+5z5)/9
a10 = (z3+z6+z9-z1-z4-z7)/6d
a01 = (z1+z2+z3-z7-z8-z9)/6d
a11 = (z3+z7-z1-z9)/4d2
a20 = (z1+z3+z4+z6+z7+z9)/6d2 - (z2+z5+z8)/3d2
a02 = (z1+z2+z3+z7+z8+z9)/6d2 - (z4+z5+z6)/3d2
Se ha planteado la medida de la curvatura de tres formas distintas. La primera es la
curvatura media, h, donde se mide la concavidad/convexidad general de la forma defi-
nida por el punto problema y sus 8 vecinos. Una expresión simple para el cálculo ha
sido propuesta por Papo (1984:697), mediante la suma de las derivadas parciales de
segundo orden con respecto a los ejes X e Y, de la forma siguiente:
Según el mismo autor, este método de estimación no es completamente exacto, ya
que la curvatura depende de expresiones más complejas, pero presenta errores de pe-
queña magnitud para pendientes bajas y medias.
Las derivadas primeras de la expresión general son,
por tanto, las segundas:
y, sustituyendo obtenemos que
La curvatura media puede ser descompuesta en dos componentes ortogonales: la cur-
vatura longitudinal hL —longitudinal convexity— que mide la concavidad/convexidad
en el sentido de la máxima pendiente, y la curvatura transversal hT —cross-sectional
convexity—, normal a la anterior. Wood (1996, Ap. 4.2.2) plantea las siguientes ex-
presiones para su cálculo:
Puede observarse que sumando hL y hT se obtiene la misma expresión que para la
curvatura general,

Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
370
El signo negativo se debe a una convención que asume curvatura negativa cuando
existe una concavidad y curvatura positiva en caso de formas convexas.
MDC, modelo digital de
curvatura
Modelo digital de curvatura
del valle de Degaña. Las
zonas cóncavas se repre-
sentan en blanco y las con-
vexas en tonos oscuros.
El problema de las expresiones de curvatura basadas en las líneas de pendiente es que
pueden aparecer casos donde los coeficientes a10 y a01 son nulos aunque los otros
no lo sean. Para prevenir esta circunstancia, Young (1978) propuso unas expresiones
basadas en los otros coeficientes y que permiten conocer los valores de curvatura má-
xima y mínima independientemente de su dirección:
Las expresiones anteriores serán las más utilizadas para el reconocimiento de elemen-
tos morfológicos.
Parte 7
La rugosidadAl contrario de lo que ocurre con la pendiente, la orientación y la curvatura, no existen
criterios uniformes para llevar a cabo la medida de la rugosidad. Diversos autores han
aplicado métodos significativamente distintos para su evaluación; por ejemplo, Balce
(1987:324) utiliza la pendiente media como estimador de un factor de rugosidad.
Evans (1972:27-33) realiza una revisión de métodos, entre los cuales menciona desde
rangos de altitud hasta la desviación estándar de la elevación en entornos limitados.
Hobson (1967, 1972) propone que, dado un punto del terreno, se calculen los vecto-
res unitarios perpendiculares a la superficie en él y en los puntos de su entorno. Si el
terreno es uniforme la suma vectorial será elevada y la dispersión baja; en el caso de
terrenos rugosos, con cambios en orientaciones y pendientes, la suma vectorial será
pequeña y la dispersión elevada.

Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
371
De acuerdo con Franklin (1987a:605), las estimaciones de la rugosidad deben ser in-
dependientes de otros parámetros del relieve para reducir la información redundante.
Parece deseable, además, cierta independencia de la escala del análisis, lo cual elimina
algunas aproximaciones excesivamente simples como las que usan el rango de altitud.
Una variante del método de Hobson es la siguiente:
1.1.1.1. Se calculan los vectores normales a los segmentos que conectan al punto problema
y sus vecinos más próximos. Para ello se calcula la pendiente local
y se le asigna la orientación que le corresponda fi , predeterminada por la posi-
ción del punto. De acuerdo con la notación utilizada anteriormente (página previa):
(z1-z5)/1.414d (z2-z5)/d (z3-z5)/1.414d
Pendiente, gggg (z4-z5)/d ... (z6-z5)/d
(z7-z5)/1.414d (z8-z5)/d (z9-z5)/1.414d
315º 0º 45º
Orientación, ffff 270º … 90º
225º 180º 135º
2.2.2.2. A partir de los vectores resultantes, definidos por sus valores (g , f ), se calculan
las coordenadas rectangulares del vector unitario normal a cada uno de ellos. Las
expresiones son (Upton y Fingleton, 1989:312):
3.3.3.3. se calcula el módulo del vector suma de los vectores unitarios, R :
4.4.4.4. se calcula la varianza esférica,
como el complementario del módulo medio
que es el módulo del vector suma normalizado al dividirlo por el número de vectores
unitarios (Band, 1989:286):
Modelos Digitales de Terreno TOPOMETRÍA y MICROGEODESIA - Año 2000A.M.Felicísimo
372
La varianza esférica tendrá el valor cero para una rugosidad nula —alineamiento com-
pleto de los vectores unitarios—y tenderá a la unidad según se incrementa la rugosidad
y, consecuentemente, la dispersión de los vectores unitarios.
MDR, modelo digital de
rugosidad
Modelo digital de rugosidad
del valle de Degaña, cons-
truido a partir de la desvia-
ción estándar de la pendien-
te. Las zonas rugosas se
representan en tonos claros
y las lisas en tonos oscu-
ros.
Este método de cálculo sobre las pendientes locales basado en la varianza esférica de
los vectores unitarios normales tiene la ventaja de ofrecer estimaciones de la rugosidad
independientes de la escala. Al basarse en el módulo normalizado, los resultados son
comparables para cualquier tamaño de ventana que se use: 8 vecinos en una de 3x3,
24 en una de 5x5, etc. Esta normalización de la escala de medida permite analizar
adecuadamente las relaciones entre la rugosidad y la resolución del modelo.