The value and costs of modularity: a problem‐solving perspective
13
The value and costs of modularity: a problem-solving perspective Stefano Brusoni 1 , Luigi Marengo 2 , Andrea Prencipe 3,4 , Marco Valente 5 1 CESPRI, Universita ` Bocconi, Milano, Italy 2 LEM – Scuola Superiore S. Anna, Pisa, Italy 3 Universita ` G. D’Annunzio Chieti-Pescara, Italy 4 SPRU University of Sussex, Brighton, UK 5 Universita ` dell’Aquila, L’Aquila, Italy Correspondence: Luigi Marengo, LEM – Scuola Superiore S. Anna, Piazza Martiri Liberta `, Pisa, I-56127, Italy. Tel: þ 39 05088343; Fax: þ 39 05088344; E-mail: [email protected] Abstract This paper discusses the issue of modularity from a problem-solving perspective. Modularity is in fact a decomposition heuristic, through which a complex problem is decomposed into independent or quasi-independent sub-problems. By means of a model of problem decomposition, this paper studies the trade-offs of modularity: on the one hand finer modules increase the speed of search, but on the other hand they usually determine lock-in into sub-optimal solutions. How to balance effectively this trade-off depends upon the problem environment and in particular on its complexity and volatility: we show that in stationary and complex environments there exists an evolutionary advantage to over-modularization, while in highly volatile environments, contrary to usual wisdom, modular search is inefficient in the long run. The empirical relevance of our findings is discussed especially with reference to the literature on systems integration. European Management Review (2007) 4, 121–132. doi:10.1057/palgrave.emr.1500079 Keywords: modularity; near-decomposability; problem-solving; design Introduction I n recent years, the concept of modularity has gained great visibility in a number of disciplines as diverse as management (e.g. Schilling, 2000), organizational sciences (e.g. Brusoni et al., 2001), economics (e.g. Langlois, 2002; Marengo et al., 2005), biology (e.g. Callebaut and Rasskin-Gutman, 2005), cognitive sciences (e.g. Fodor, 1983), American studies (e.g. Blair, 1988), architectural and engineering design (e.g. Alexander, 1969; Suh, 1990). Overall, modularity has been proposed as a powerful organizing principle of the evolutionary processes of both artificial and natural complex systems. Within social sciences, modularity principles have been applied to explain the evolution of products, organizational design and knowledge management, on the one hand; and the emerging patterns, and dynamics, of coordination and division of labour between firms, on the other. It is often argued that, by adopting modular design strategies, firms can take responsibility for the design and development of separate modules. Thus, they can develop new products at a faster pace, as the integration of the final product is a matter of mix and match of ‘black boxes’ (e.g. Sanchez and Mahoney, 1996; Baldwin and Clark, 2000; Baldwin and Clark, 2001). This is made possible by advanced technological knowledge about component inter- actions that can be used to fully specify and standardize component interfaces and, therefore, to decouple the design of the product architecture (i.e. arrangement of functional elements) from the design of each module. Modularity, by simplifying design and development processes, would allow a greater division of labour across firms. As a consequence, firms can focus their capabilities on few modules or on the architecture. To fully exploit modularity, a ‘grammar of action’ (Argyres, 1999), or ‘design rules’ (Baldwin and Clark, 2000) have to be set in terms of neat and powerful routines that govern interfaces at product and organiza- tional level. Modularity emerges as a specific kind of problem-solving strategy, which entails a specific pattern of knowledge and tasks partitioning. On this basis, formal models start from the already set grammar, or rules, and focusses on the exploitative aspects of modular design principles (Baldwin and Clark, 2000). Such grammar of action sets the rules of interaction across European Management Review (2007) 4, 121–132 & 2007 EURAM Palgrave Macmillan Ltd. All rights reserved 1740-4754/07 $30.00 palgrave-journals.com/emr
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of The value and costs of modularity: a problem‐solving perspective

The value and costs of modularity:
a problem-solving perspectiveStefano Brusoni1, Luigi Marengo2, Andrea Prencipe3,4, Marco Valente5
1CESPRI, Universita Bocconi, Milano, Italy2LEM – Scuola Superiore S. Anna, Pisa, Italy3Universita G. D’Annunzio Chieti-Pescara, Italy4SPRU University of Sussex, Brighton, UK5Universita dell’Aquila, L’Aquila, Italy
Correspondence:Luigi Marengo, LEM – Scuola Superiore S. Anna, Piazza Martiri Liberta, Pisa, I-56127, Italy.Tel: þ 39 05088343;Fax: þ 39 05088344;E-mail: [email protected]
AbstractThis paper discusses the issue of modularity from a problem-solving perspective.Modularity is in fact a decomposition heuristic, through which a complex problem isdecomposed into independent or quasi-independent sub-problems. By means of a modelof problem decomposition, this paper studies the trade-offs of modularity: on the onehand finer modules increase the speed of search, but on the other hand they usuallydetermine lock-in into sub-optimal solutions. How to balance effectively this trade-offdepends upon the problem environment and in particular on its complexity and volatility:we show that in stationary and complex environments there exists an evolutionaryadvantage to over-modularization, while in highly volatile environments, contrary to usualwisdom, modular search is inefficient in the long run. The empirical relevance of ourfindings is discussed especially with reference to the literature on systems integration.European Management Review (2007) 4, 121–132. doi:10.1057/palgrave.emr.1500079Keywords: modularity; near-decomposability; problem-solving; design
Introduction
In recent years, the concept of modularity has gainedgreat visibility in a number of disciplines as diverseas management (e.g. Schilling, 2000), organizational
sciences (e.g. Brusoni et al., 2001), economics (e.g. Langlois,2002; Marengo et al., 2005), biology (e.g. Callebaut andRasskin-Gutman, 2005), cognitive sciences (e.g. Fodor,1983), American studies (e.g. Blair, 1988), architecturaland engineering design (e.g. Alexander, 1969; Suh,1990). Overall, modularity has been proposed as a powerfulorganizing principle of the evolutionary processes ofboth artificial and natural complex systems. Within socialsciences, modularity principles have been applied toexplain the evolution of products, organizational designand knowledge management, on the one hand; and theemerging patterns, and dynamics, of coordination anddivision of labour between firms, on the other.
It is often argued that, by adopting modular designstrategies, firms can take responsibility for the design anddevelopment of separate modules. Thus, they can developnew products at a faster pace, as the integration of the finalproduct is a matter of mix and match of ‘black boxes’ (e.g.
Sanchez and Mahoney, 1996; Baldwin and Clark, 2000;Baldwin and Clark, 2001). This is made possible byadvanced technological knowledge about component inter-actions that can be used to fully specify and standardizecomponent interfaces and, therefore, to decouple the designof the product architecture (i.e. arrangement of functionalelements) from the design of each module. Modularity, bysimplifying design and development processes, would allowa greater division of labour across firms. As a consequence,firms can focus their capabilities on few modules or on thearchitecture. To fully exploit modularity, a ‘grammar ofaction’ (Argyres, 1999), or ‘design rules’ (Baldwin andClark, 2000) have to be set in terms of neat and powerfulroutines that govern interfaces at product and organiza-tional level. Modularity emerges as a specific kind ofproblem-solving strategy, which entails a specific pattern ofknowledge and tasks partitioning.
On this basis, formal models start from the already setgrammar, or rules, and focusses on the exploitative aspectsof modular design principles (Baldwin and Clark, 2000).Such grammar of action sets the rules of interaction across
European Management Review (2007) 4, 121–132& 2007 EURAM Palgrave Macmillan Ltd. All rights reserved 1740-4754/07 $30.00
palgrave-journals.com/emr

module, but also defines the organization of problem-solving activities in terms of division of tasks, and theirallocation to decoupled design teams. A modular architec-ture generates more options than an integral architecturebecause experimentation takes place at the level of themodules, rather than at the level of the entire product(Baldwin and Clark, 2000). The finer the detail with whichmodules’ interfaces are defined, the faster the pace ofexperimentation. That is to say, by adopting a modularproduct design strategy firms can speed up the process ofexploitation of a given (modular) architecture.
When Baldwin and Clark (2001) discuss the advantagesof modularity in terms of option value, they assume that amodular design is able to generate more options, and thusmore value. They do so analysing ‘modularity as a financialforce y [that] adds options to and thereby increases thefinancial value of complex design’ (Baldwin and Clark,2001: 1, italics in original).
We approach instead modularity as a specific example ofproblem-solving strategy. From this complementary stand-point, it becomes interesting to analyse what kind ofproblems can be framed and solved in a modular fashion(as opposed to an integral one), what are the characteristicsof the search spaces generated by alternative problem-solving strategies, and what are the properties of thesolutions so identified in the presence of varying degrees ofenvironmental uncertainty.
We can consider product development as an example ofproblem-solving activity regularly taking place in firmsand also across firms. Modular product design meansthat a particular decomposition of the design problem hasbeen already decided upon and independent teams canwork independently on the various sub-problems withoutexplicit coordination. Product architecture defines theinterfaces among modules, and new designs of specificmodules are accepted only if they improve the overallproduct performance given the current configuration of theremaining modules. This process will, in general, be subjectto lock-in into local optima because potentially superiormodule designs might not be accepted as the other modulesare not co-adapted. On the other hand non-modular orintegral search modules and interfaces are not pre-definedand search takes place by varying potentially all compo-nents together and accepting new product if its perfor-mance is higher. It must be indeed pointed out that thelatter model of integral search might not be entirely realisticas also in that firms do usually work upon temporaryproblem decomposition (Schaefer, 1999) and frequentconsultations among team (Siggelkow and Levinthal,2003); however, it is useful as a reference model of a pureintegral strategy, in which potentially all design parametersare subject to search and evaluation.
More specifically, this paper develops a formal model,broadly inspired by Stuart Kauffman’s work on fitnesslandscapes (Kauffman, 1993), in order to shed some lighton two related questions concerning the dynamic proper-ties of modular search strategies. First, given the compe-titive environment, we want to understand whether there isa trade-off between the ‘speed’ of search (enabled bymodularity) and the ‘breadth’ of search (enabled by non-modular search strategies). Apparently, modular searchstrategies are indeed highly efficient in the short term (i.e.
they provide ‘higher value’), enabling fast searches within apredefined search space. However, these gains mightdisappear in the long term, as ‘slower’ (i.e. less modular)search strategies catch up and reach better solutions as theycan explore broader search spaces, exactly because they relyon less tightly defined ‘design rules’. Second, and morefundamentally, we want to explore the relationship betweenalternative search strategies and changing competitiveenvironments. Does modularity pay off in the presence offundamental uncertainty? This is a basic question because,in dynamic terms, modularity may entail some risks: themore defined is the grammar, and the search space itenables, the more structured, limited, and limiting is thesearch process. Firms may miss value-generating alter-natives because they cannot escape the boundaries set bythe existing modular design strategies.
This paper is organized as follows. The next sectionfocusses on recent empirical research on modularity tohighlight a few facts that demand an explanation andoutlines our problem-solving perspective. The succeedingsection introduces the model that helps us addressing a fewkey issues related to the dynamic properties of modularity.The penultimate section presents some results we obtain bysimulating the model and, finally, in the last section wedraw some conclusions.
Modularity and problem-solving in organizationsOne of the fundamental contributions of recent research onmodularity is the identification of a series of constructs andkey relationships that allows studying the connectionbetween what firms do, how they do it, and what theyneed to know in order to do it. Research on modularityreminds us about the complexity of the relationshipbetween conceptualizations of firms as knowledge struc-tures, and of firms as producers of goods and services. Theneed to disentangle this complex relationship is ofparamount importance for both practical and theoreticalreasons. First, in the context of increasingly globalizedmarkets, ever more complex supply chains, and interna-tional manufacturing networks, corporate decision-makingprocesses involve more and more actors, variables andcriteria that lead to less and less transparency about who isdeciding what, and on what basis. Second, and relatedly, thenotion of ‘means of production’ has less and less to do withhardware, and more and more to do with information andspecialized knowledge. Management tasks increasinglyinvolve the monitoring, control, and coordination of awidening range of useful, but highly heterogeneous,scientific, and technological disciplines that are embodiedin products of increasing complexity, in terms of compo-nents and functionalities.
Modularity, as a product and organizational designstrategy, provides one possible way to understand how thiscomplex relationship is governed by modern corporations.Modularity allows the decoupling of complex artefacts intoless-complex, self-contained modules; each module, at theextreme, could become the sole business of specialist firms.Modularity makes complexity manageable by makingpossible to run experiments at the level of modules, ratherthan the entire artefact, and in parallel (Baldwin and Clark,2001), by exploiting the coordinating properties of markets
Modularity and problem-solving Stefano Brusoni et al.
122

on which modules can be transacted. Moreover, modularityis ‘tolerant of uncertainty’ because particular elements of amodular design may be changed after unforeseen con-tingencies emerge, as long as the design rules are obeyed(ibid.).
The advantages of modularity seem to be particularlycompelling in high technology settings, such as the aircraftengine industry. For example, two competing aircraftengine architectures are employed in the industry, namelytwo-shaft and three-shaft. According to industry experts,the three-shaft (launched by Rolls-Royce in the early 1970s)has turned out to be more effective in accommodatingevolving customer requirements in terms of engine powerdue to its more modular architecture. In a three-shaftengine, the compression work is split across threecompressors (low-, intermediate-, and high-pressure). Eachcompressor can be driven by its own turbine at its optimumspeed. In a three-shaft design the mapping betweenfunctions and physical structures tends to be more one toone. A three-shaft engine, therefore, is more modular than atwo-shaft engine. In a two-shaft design, in fact, thecompression work is split between two compressors. Thefan and the booster run on the same shaft. They rotate atrelatively low speed to maintain the fan tip speed belowsupersonic. This limits the compression that can beachieved in the first part of the engine leaving high dutyon the high-pressure compressor.
The embedded modularity of the three-shaft designenabled Rolls-Royce to exploit the same architecture, hencecutting the high development costs of new engines, to caterfor a broader range of power requirements. The so-calledthrust growth capability of the three-shaft has been muchlarger than the two-shaft’s. The thrust ratings of the JT9Dand CF6 two-shaft engine families go from 44,250 to56,000 lb and from 40,000 to 64,500 lb, respectively. Due tothe exhausted growth potential of the JT9D and CF6 enginesand to increasing thrust requirements asked by airlines topower larger aircraft, Pratt & Whitney and GE AircraftEngines had to develop new engine families, the PW4000and the GE90, respectively. The three-shaft architecture hasbeen instead characterized by higher thrust growth. Rolls-Royce stretched the same engine architecture (the RB211)to develop engines from 42,000 to 115,000 lb. The in-builtgrowth capability of the three-shaft design – due to its moremodular architecture – conferred Rolls-Royce a clearcompetitive advantage in terms of speed of developmentof new engines. In fact, they were able to introduceincremental changes in the original architecture by (mixingand matching components) to meet a wider variety ofaircraft makers’ needs than their competitors. Emblematicis the example of the Trent engine 500 that has become thesole engine for the Airbus A340-500/600.
However, as noted by Baldwin and Clark (2000), theadoption of modular design strategies brings about coststoo. First, the creation and dissemination of design rules isa rather expensive activity. Experimenting and testing ondifferent modules is also costly. Moreover, increasingdivision of labour among firms also entail the traditionalcosts associated with the use of the market system (i.e.transaction costs) as well as agency costs related to thehold-up problem. The costs of creating the designrules deserve particular attention. Developing modular
architectures is more difficult than developing integralones. Achieving modularity requires a very precise under-standing of the product functionalities, how they areallocated to components, and how the components interact.Thus, the choice of product architecture should be relatedto a company’s product strategy. Ulrich (1995) argued thatif a company wants to stress product performances, thenthe most appropriate choice would be the integralarchitecture, since global performance characteristics areoptimized through this type of architecture. On the otherhand, companies wanting to emphasize product change andvariety, flexibility and upgradeability, may well choose amodular architecture.
Besides, there are other costs related to developing amodular architecture. One must also consider the costs ofthe foregone opportunities that might have been exploitedadopting different architectural choices. This problem isparticularly cogent in an innovative context. The crucialpoint is the change of unit of selection that modularityimply with respect to an integral system: having ‘fine’ ratherthan ‘coarse’ units of selection makes the search processfaster (selection operates on the finer scale of modules andtherefore the selection environment is in a sense ‘richer’)but essentially ‘local’ and gets quickly locked into a localoptimum, whereas in an integral system search is global,which implies that there is no lock-in, but search is muchslower and in complex space there is a lot of wasteful searchas non-sensical options can be generated.
Generally speaking, modularity can indeed highlyincrease the number of options generated and the speedof search for each module by creating standard interfacesbetween modules, but cannot avoid the lock-in. Modularitywill make the system climb the local optimum faster, butcannot make it jump to another, higher valued, localoptimum (Fleming and Sorenson, 2001). This can only bedone by changing the architecture of modules. However, ifcompanies embedded in a modular network design theirinterface, and specialized capabilities, around the currentproduct architecture, how can they learn about alternativearchitectures? ‘[L]earning about changes in the architectureof the product is unlikely to occur naturally’ (Hendersonand Clark, 1990: 28). Not only does learning about thearchitecture require dedicated efforts, but it also entailsdifferent kinds of organizations, people, and skills (Brusoniand Prencipe, 2001). Moreover, ‘architectural knowledgecan emerge only after an organization has developedsufficient experience with a problem to be able to fragmentit into elements without losing critical information’(Henderson, 1992: 127). Once an organization recognizesan architectural innovation as such, it has to change its‘orientation from one of refinement within a stablearchitecture to one of active search for new solutions’(Henderson and Clark, 1990: 17).
This change of orientation is what ‘systems integrating’firms can do. Systems integrators are companies that relyon wide and dispersed networks of suppliers of specializedcomponents and capabilities, yet maintain broad and deepin-house capabilities. These are firms that ‘know more thanthey make’ (Brusoni et al., 2001) in order to be able tocoordinate loosely coupled networks of suppliers, but alsointroduce new product architectures. The case of Fujitsuexemplifies the role played by systems integrator in the case
Modularity and problem-solving Stefano Brusoni et al.
123

of the hard disk drive network. Fujitsu successfullymanaged the introduction of a new product architecture,stemming from a major technological breakthrough embo-died into the magneto-resistive head, a component thatdisplaced the pre-existing mechanical-based technology.Relying on the modular architecture of the establishedproduct, Fujitsu, like other firms, relied on a decouplednetwork of external suppliers. However, unlike its compe-titors, Fujitsu continued to invest ‘in systems knowledgeand materials and component technology in its R&D labs’(Chesbrough and Kusunoki, 2001: 218). Fujitsu’s systemsknowledge went well beyond the range of products andcomponents that the company produced in house. Itenabled the firm to master the new, fast-moving technologyand to navigate the dangerous waters of architecturalinnovation stemming from it. By knowing more than itneeded for its own design and production, Fujitsu managedto avoid competency traps such as those described byChesbrough and Kusunoki (2001) and Henderson andClark (1990).
Brusoni et al. (2001) argued that cases like Fujitsu’s showthat decoupled, modular networks coordinated throughmarkets and the exchange of codified knowledge (Sturgeon,2002) are but particular cases of a more general model,which link firms’ knowledge and production boundaries.They argued that truly modular networks could emergeonly when product interdependencies are predictable andwhen the specialized bodies of knowledge are at the samestage of development. Interdependencies across compo-nents are predictable when a change in the design of onecomponent entails a well-understood change in the designof other components and vice versa. The personal computerindustry seems to fall into this situation (Langlois andRobertson, 1992). However, in the presence of product-levelcontingencies that cannot be fully predicted, ‘co-ordinatedactivity is required to secure agreement about the estimatesthat will be used as a basis for action. Vertical integrationfacilitates such co-ordination’ (Teece, 1976: 13). Theautomotive industry seems to provide an illustration tothis case (Sako and Murray, 1999). Similarly, Davies (1999)studied the case of mobile phone systems, that is, productscharacterized by unpredictable interdependencies acrosscomponents as well as imbalances at the technological level.He showed that under high technological and environ-mental uncertainty, tightly coupled organizations in whichintegrated firms maintain in house both the knowledge andthe production activities involved in the design andproduction of their final products and component units,have a competitive advantage. The advantage of a ‘singlevendor solution’ lies in the supplier’s experience indelivering ‘a verified system in which all the componentswork well together, and can be integrated, tested and readyfor service more rapidly than is possible in multivendorsolutions’ (Davies, 1999: 120). Specifically, Davies arguedthat the key advantage of Ericsson, the world leaderthroughout the 1990s, was its constant involvement in botharchitectural and component innovations, as well as itsefforts to control production costs. It is worth noting thatEricsson adopted such a broad innovation strategy whileintroducing a modular approach to system design, in whichcore systems – centrally designed – were then adapted byregional ‘competence centres’ (Edquist, 2003). However,
this modular approach was accompanied, and enabled, bythe development of in-house ‘system competency’, that is,the competencies to design, build, market, and support theentire system (McKelvey and Texier, 2000).
This is a key insight for understanding the dynamictrade-off implied by modular search strategies. Companieslike Ericsson, operating under conditions of fundamentaltechnological and environmental uncertainty, have notdisintegrated to be replaced by modular networks ofspecialized innovators. Quite the opposite, they havezealously invested into both the exploitation of the currentstandard, and into explorative activities to shape the nextgeneration standards. Given the incredibly rapid rate ofchange in the technologies, regulatory environments, andcompetitive landscapes, firms like Ericsson could not runthe risk of remaining stuck in any one specific researchtrajectory. Hence, the need to be involved throughout the1990s in all the major development efforts that led theindustry from the 1G mobile phone systems, to the stillrecent launch of 3G. Firms that followed more specializedstrategies lost their role of leaders despite their very earlyentry in the arena.
The above discussion informs the modelling exercisereported in the next section. First, we analyse formally theadvantages brought about by modularity in terms of speedof adaptation to changing customer needs, highlighted bythe Rolls-Royce case. We show that the speed of adaptationcan give evolutionary advantages even though over-modular search strategies may not be the most efficientproblem-solving strategy. Second, we explore the dynamictrade-offs of modular and integral problem-solving strate-gies under conditions of fundamental uncertainty. Buildingupon the evidence summarized above, which focus on therole played by ‘systems integrators’, we show that integralproblem-solving strategies may provide a way out to firmscaught by surprise by unexpected changes in theircompetitive environment. Modular problem-solving strate-gies instead prevent organizations from rapidly abandoningtheir established way of doing things.
Model structureOur model is made up of two elements: the problem spacethat is exogenously given and characterized by a givendegree of difficulty (expressed in terms of sub-problemdecomposability) and the problem-solving organization thatsearches in the problem space for superior solutions andtries to implement them. We assume that the organizationis boundedly rational and therefore carries out its activitiesthrough a process of adaptive trial and error; at the sametime, we also assume that this adaptive search is not purelyrandom but is based on a (albeit possibly wrong)representation of the problem space.
Problem spaceThe problem space is an extension and generalization ofKauffman’s NK model of fitness landscapes (Kauffman,1993). A fitness landscape is simply a mapping from avector characterizing an entity’s form to a payoff value. Theoriginal structure developed by Kauffman postulated arandom interaction structure where a given elementinteracted with K randomly specified other elements. In
Modularity and problem-solving Stefano Brusoni et al.
124

the spirit of Simon’s work on nearly decomposable systemsand building on the modelling approaches of Marengo et al.(2000) and Marengo and Dosi (2005), we characterizeproblem environments as potentially consisting of morestructured patterns of interaction. In particular, we developand use two notions of complexity of a problem environ-ment, namely decompositions and near-decompositions,which give a precise indication of the degree to which theproblem can be decomposed into independent or quasi-independent sub-problems (modules). As shown also inFrenken et al. (1999), Kauffman’s ‘K’ can be a bad indicatorof the decomposability of the problem: since blocks ofepistatic interactions overlap and because of the random-ness of fitness contributions, also problems with very low Kvalues can be de facto non-decomposable.
More formally, the problem space is defined by Ninterdependent features1 which, for simplicity and withoutloss of generality, can assume only two states, labelled 0 and1. The set of features comprising the problem space consistsof @¼ {x1, x2,y, xN}, with xiA{0,1}. A particular configura-tion, that is a possible solution to the problem, is a stringxi ¼ xi
1xi2yxi
N. The set of configurations is characterized as:X¼ x1, x2,y, x2N
. The value, or fitness function, consists ofa mapping from the set of configurations to the positive realnumbers: V : X ! <þ. A problem is therefore defined bythe couple (X,V).
As the size of the set of configurations is exponential inthe number of components, whenever the latter is largeenough, the state space of problem becomes much too vastto be extensively searched by agents with boundedcomputational capabilities. One way of reducing its size isto decompose it into sub-spaces.2 Let = ¼ f1; 2; . . . ; Ng bethe set of indexes, and let a block di = be a non-emptysubset of this set, and let |di| be the size of block di, that is,its cardinality.
We define a decomposition scheme (or simply decom-position) of the space @ as a set of blocks:
D ¼ fd1; d2; . . . ; dkg such that[k
i¼1
di ¼ =
Note that a decomposition does not necessarily have to be apartition; that is, there may be some overlap among theparticular decompositions di.
Decompositions structure the nature of the organiza-tional and technological search process. Search for alter-native basis of action does not take place on a holistic,system-wide basis but tends to be local and to approachdifferent facets of the problem in a sequential manner(Cyert and March, 1956). In this spirit, a new configurationis generated and tested by picking a block djAD at randomand some (at least one and up to all) components in thisblock (and only in this block) are mutated, obtaining a newconfiguration xh, which may differ from the originalconfiguration xi only in those components belonging toblock di. If V(xh)XV(xi), then xh is retained and becomesthe new current configuration; otherwise, xh is discardedand xi continues to be the current configuration.
We say that a decomposition scheme D* is an optimaldecomposition of the problem if multiple iterations of thissearch procedure are always able (after repeated randommutations) to locate the globally optimal configuration(s),
starting from any initial configurations. That is, the schemeis such that there is no lock-in into sub-optimal configura-tions. In general, there can be many optimal decomposition.3
For instance, if D* is an optimal decomposition, alldecompositions that can be obtained by the union of someof its blocks will also be optimal decomposition. However,among the set of decompositions satisfying this criterion, weare particularly interested in the finest optimal decomposi-tion(s), that is, the one(s) whose blocks have minimalcardinality. Blocks in the finest optimal decompositionsrepresent the finest sub-problems into which the overallproblem can be decomposed and still be optimally solved.
We can classify problems in terms of their finest optimaldecomposition. In particular, the following types will bewidely referred to in our subsequent analysis:
1. Non-decomposable problem, for which the finest optimaldecomposition is the degenerate one: D*¼ {1, 2,y, N}
2. Nearly decomposable problems (Simon, 1981), whosefinest optimal decomposition is made of non-disjoint(partially overlapping) blocks. Two cases are particularlyinteresting:
partially overlapping blocks, such as for instance:D*¼ {1, 2, 3, 4}, {3, 4, 5, 6}, {5, 6, 7, 8},
nested blocks, such as for instance: D*¼ {1}, {1, 2},{1, 2, 3, 4},y,{1, 2, 3, 4, 5, 6, 7, 8}
3. Decomposable problems, whose optimal decompositionis made only of disjoint blocks. Furthermore, thisdecomposition of disjoint blocks can be:
coarse, if blocks are not all singletons (i.e. they containmore than one component) and
fine, if all blocks are singletons (i.e. they contain onlyone component).
Only in this last case is the problem ‘simple’ and optimallysolvable through N separate local search processes andtherefore fully modularizable.
Techno-organizational problem-solvingA decomposition scheme is a sort of template thatdetermines how new configurations are generated and cantherefore be tested by a selection mechanism. In large searchspaces in which only a very small subset of all possibleconfigurations can be generated and undergo testing, theprocedure employed to generate such new configurationsplays a key role in defining the set of attainable finalconfigurations. Blocks in our model can be considered as aformalization of the notion of modules and decompositionschemes are a formalization of the notion of systemarchitecture, which defines the set of modules in which atechnological system or an organization are decomposed.
We will assume that boundedly rational agents can onlysearch locally in directions that are given by the decom-position scheme: new configurations are generated andtested in the neighbourhood of the given one, whereneighbours are new configurations obtained by changingsome (possibly all) components within a given module.
Among all the decomposition schemes of a givenproblem, we are especially interested in those for whichthe global optimum becomes reachable from any initial
Modularity and problem-solving Stefano Brusoni et al.
125

configuration. One such decomposition always exists, andis the degenerate decomposition D¼ {{1, 2, 3,y, N}} forwhich of course there exists only one local optimum and itcoincides with the global one. But obviously we areinterested in – if they exist – finer decompositions and inparticular in those of minimum size. These latter decom-positions represent the maximum extent to which thesearch space can be subdivided into independent modulescoordinated by a simple selection mechanism, with theproperty that such selection processes can eventually leadto optimality from any starting condition. On the contrary,even finer decompositions will not in general (unless thestarting configuration is ‘by chance’ within the basin ofattraction of the global optimum) allow decentralizedselection processes to optimize.
Minimum size decomposition schemes can be foundrecursively with the following procedure that we describeinformally4:
Let us re-arrange all the configurations in X by descendingrank X¼ {x0, x1,y, x2N�1} where xi
Xxiþ 1.
The minimum size decomposition can be computed asfollows:
(1) Start with the finest decomposition D0 ¼ {{1},{2},y, {N}}.
(2) Check whether x0AP(xi, D) 8xi i¼ 1, 2,y, 2N�1, that is,if there is a path leading to the global optimum fromevery other configuration for decomposition , if yesSTOP.
(3) If no, build a new decomposition D1 by union of thefinest blocks for which condition (2) was violated andgo back to (2).
Let us finally provide an example for illustration. Considera system of three binary components and imagine having aselection (value) landscape described by the following table:
If the system is fully modular (i.e. there are three modules{1}, {2} and {3}) and the current state is 001, then searchwill always be locked into the local optimum 010 and neverreach the higher value solution 100. To see this, just noticethat there is no one-mutation and value-increasing pathleading from 001 to 100: for instance, the first module,which is initially set to 0 can never switch to its optimalconfiguration 1 because switching to 1 always decreasesvalue given the other modules. In order to ensure thatmaximum value can always be achieved one needs coarsermodules: for instance, in this example, the finest possibleset of modules is composed by two modules: {1,2} and{3}.
Near decomposabilityWhen building a decomposition scheme for a problem, wehave looked so far for perfect decomposability. In otherwords, we require each single block to be optimizedindependently from the others. In this way, we areguaranteed to decompose the problem into perfectlyisolated components, which can be solved independently.This is however very stringent a requirement: even wheninterdependencies are rather weak, but diffused across allcomponents, we easily tend to observe problems for whichno perfect decomposition exists.
One can soften the requirement of perfect decomposa-bility into one of near-decomposability: one no longerrequires the problem to be decomposed into completelyseparated sub-problems, that is, sub-problems that fullycontain all interdependencies, but only wants sub-problemsto contain the most ‘relevant’ interdependencies while less-relevant ones can persist across sub-problems. In this way,optimizing each sub-problem independently will notnecessarily lead to the global optimum, but to a ‘good’solution. In other words, we construct near-decompositionsthat give a precise measure of the trade-off betweendecentralization and optimality: higher degrees of decen-tralization and market coordination, and therefore higherspeed of adaptation, can be obtained at expenses of theoptimality of the solutions that can be reached.
Let us re-arrange all the configurations in X bydescending rank X¼ {x0, x1,y, x2N�1} where xi
Xxiþ 1, andlet Xm¼ {x0, x1,y, xm�1} with 0pmp2N�1 be the ordered setof the best m configurations.
We say that Xm is reachable from a configuration yeXm
and for decomposition D if there exist a configurationxiAXm such that xiAP(y, D).
We call basin of attraction C(Xm, D) of Xm fordecomposition D the set of all configurations from whichXm is reachable. If C(Xm, D)¼X we say that D is am-decomposition for the problem.
m-decompositions of minimum size can be foundalgorithmically with a straightforward generalization ofthe above algorithm, which computes minimum sizedecompositions schemes for optimal decompositions.
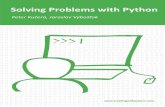
Higher degrees of decomposition and decentralizationcan be attained by giving up optimality and allow providinga precise measure for this trade-off. In order to provide anexample, we generated random problems5 of size N¼ 12 allcharacterized by |D|¼ 12 (i.e. they are not decomposable).Figure 1 shows the sizes of the minimum size decomposi-tion schemes as we vary the number m of acceptableconfigurations (average on 100 random landscapes).
It shows that sharp reductions of complexity and time ofsearch6 can be obtained by accepting sub-optimal ‘satisfi-cing’ solutions. Thus there is a trade-off between optimalityand speed of search, which has interesting implications thatwill be examined in the next section.
Speed and optimality of search strategies
The evolutionary advantage of excess modularitySo far, we have characterized a system in terms of itsdecomposability, now, using this toolbox we are able toconstruct a problem whose structure is perfectly known and
Configurations Ranking
100 1010 2110 3011 4001 5000 6111 7101 8
Modularity and problem-solving Stefano Brusoni et al.
126
then test the relative efficiency of different search strategies.We will concentrate on the comparison among searchstrategies based upon different degrees of modularity. Asearch strategy consists of a rule that produces a newconfiguration starting from a current one: if the newconfiguration is better than the previous one it is retained,otherwise it is discarded.
In general, fully modular search strategies, that is, thosein which each component is optimized independently of theothers, are not optimal (Kauffman, 1993) as they can locatethe globally optimal configuration only if there are nointerdependencies among components.
In Frenken et al. (1999), the properties of other searchstrategies based upon coarser modules are analysed. In fact,we can consider a search strategy that divides the Ncomponents of the configuration into modules, eachcontaining a given number of components, say S.7 Thegeneralized S-search strategy consists of choosing onemodule (instead of a single component) and mutating oneor more components in the module.
Put it more precisely, the steps of a generalized S-searchstrategy are: (1) choose randomly one of the N/S modules;(2) choose randomly an integer number Z in the range[1,S]; (3) choose randomly Z bits among the S of the chosenmodule; (4) switch the state of the selected bits; (5) test thefitness of the newly produced string; and (6) accept the newstring if it produces a higher fitness than the current string,or reject it otherwise.8
We can draw a parallel between the complexity of theproblem (decomposability) and the search strategy (mod-ularity). For example, suppose that we consider a problemwhose minimal decomposition is:
{{1, 2, 3, 4, 5}, {6, 7, 8, 9, 10},y,{N�4, N�3, N�2, N�1, N}}.
Obviously, an S-strategy based upon the same modules isalways able to reach the optimal configuration. Instead, lowerdimensional S-strategies (finer modules) are usually lockedinto local optima. Higher level S-strategies (larger modules)may be able to find the global maximum, but they take longer.
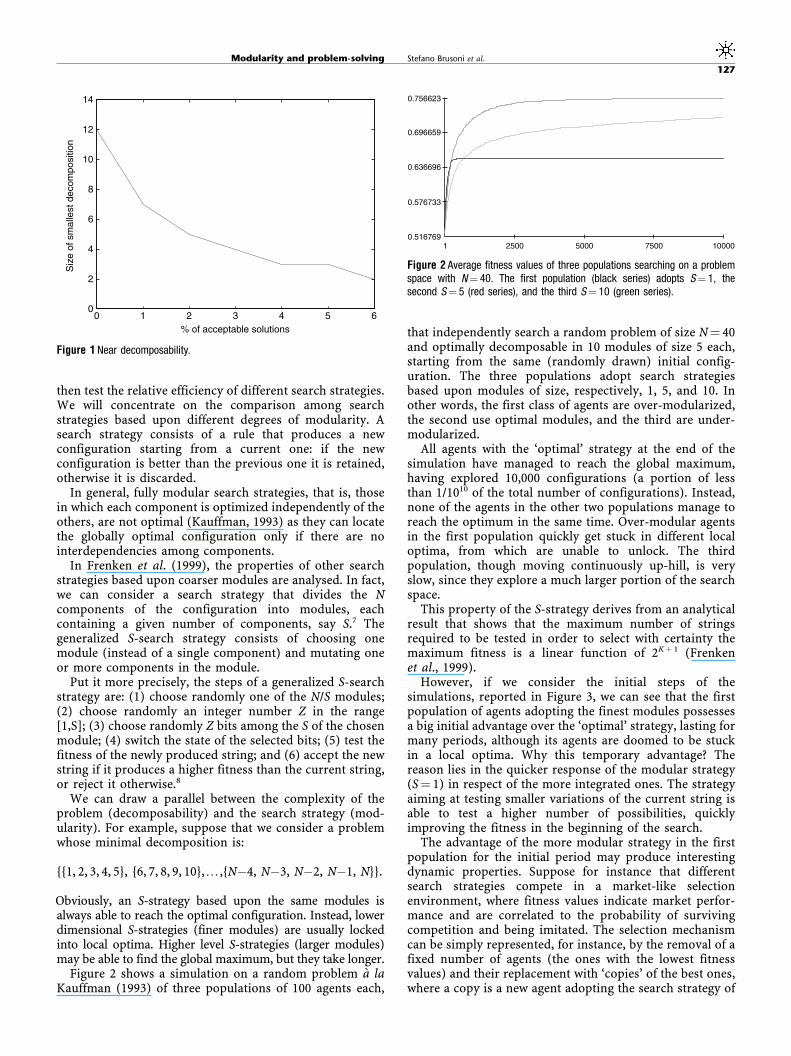
Figure 2 shows a simulation on a random problem a laKauffman (1993) of three populations of 100 agents each,
that independently search a random problem of size N¼ 40and optimally decomposable in 10 modules of size 5 each,starting from the same (randomly drawn) initial config-uration. The three populations adopt search strategiesbased upon modules of size, respectively, 1, 5, and 10. Inother words, the first class of agents are over-modularized,the second use optimal modules, and the third are under-modularized.
All agents with the ‘optimal’ strategy at the end of thesimulation have managed to reach the global maximum,having explored 10,000 configurations (a portion of lessthan 1/1010 of the total number of configurations). Instead,none of the agents in the other two populations manage toreach the optimum in the same time. Over-modular agentsin the first population quickly get stuck in different localoptima, from which are unable to unlock. The thirdpopulation, though moving continuously up-hill, is veryslow, since they explore a much larger portion of the searchspace.
This property of the S-strategy derives from an analyticalresult that shows that the maximum number of stringsrequired to be tested in order to select with certainty themaximum fitness is a linear function of 2Kþ 1 (Frenkenet al., 1999).
However, if we consider the initial steps of thesimulations, reported in Figure 3, we can see that the firstpopulation of agents adopting the finest modules possessesa big initial advantage over the ‘optimal’ strategy, lasting formany periods, although its agents are doomed to be stuckin a local optima. Why this temporary advantage? Thereason lies in the quicker response of the modular strategy(S¼ 1) in respect of the more integrated ones. The strategyaiming at testing smaller variations of the current string isable to test a higher number of possibilities, quicklyimproving the fitness in the beginning of the search.
The advantage of the more modular strategy in the firstpopulation for the initial period may produce interestingdynamic properties. Suppose for instance that differentsearch strategies compete in a market-like selectionenvironment, where fitness values indicate market perfor-mance and are correlated to the probability of survivingcompetition and being imitated. The selection mechanismcan be simply represented, for instance, by the removal of afixed number of agents (the ones with the lowest fitnessvalues) and their replacement with ‘copies’ of the best ones,where a copy is a new agent adopting the search strategy of
1000075005000250010.516769
0.576733
0.636696
0.696659
0.756623
Figure 2 Average fitness values of three populations searching on a problemspace with N¼ 40. The first population (black series) adopts S¼ 1, thesecond S¼ 5 (red series), and the third S¼ 10 (green series).
0
2
4
6
8
10
12
14
Siz
e of
sm
alle
st d
ecom
posi
tion
% of acceptable solutions0 1 2 3 4 5 6
Figure 1 Near decomposability.
Modularity and problem-solving Stefano Brusoni et al.
127

the copied agent (i.e. the same modularity), and beingassigned an initial random configuration. Figure 4 showsthe number of agents in each population with the samesettings as above, with the selection mechanism actingevery 50 iterations.
Clearly, the first population can exploit its initialadvantage, while the ‘optimal’ strategy (and even more soless modular) do not have the time to unfold theirsuperiority. In other terms, while strategy with S¼ 5 isglobally optimal, under the selection pressure it can becomeevolutionary dominated by a modular strategy that, thoughbound to long-run sub-optimality, quickly locates andclimbs ‘satisficing’ local optima. This property gives themodular strategy an evolutionary edge over integratedstrategies.
These results show that there exists a trade-off betweenspeed and optimality. Aiming at the optimal solution of aproblem entails the necessity to take into account all theinterdependencies among components. However, this en-larges enormously the space to be searched and thereforethe time required to explore it. Conversely, an over-modular approach focussed on the exploration of eachcomponent independently from the others, may be doomedto be limited in the maximum performance that can befinally obtained, but has the advantage of providing quick-and-dirty improvements that, in a highly competitiveenvironment, may be the key to evolutionary success.Competitive selection pressure provides a strong drivetowards excess, higher-than-optimal modularization.
Volatility and the revenge of integrated systemsWe have seen that a modular search strategy enjoys anevolutionary advantage both when the problem space isactually decomposable and also when it is not so, becauseof higher speed of adaptation. There are, however, caseswhen an integrated search strategy outperforms modularones: this happens, contrary to the current wisdom,9 whenthe environment is highly volatile.
In this section, in fact, we show that when the fitnessvalues of configurations change rapidly, then even if at anymoment in time the problem space is fully decomposable,modular strategies are rapidly outperformed by integratedones. A modular search strategy consistently climbs upfrom its current position with ‘steps’, which are smaller, thefiner the modules. On the contrary, an integrated searchstrategy can ‘jump’ to locations far away from the currentone. In a stable environment, the former strategy is moreeffective as it quickly climbs a local optimum while thelatter spends a long time wandering around the problemspace. But in a highly volatile environment, it can happenthat an agent finds itself in a location with very low fitness(the bottom of a ‘well’ or trough) – in this case local shortsteps will be too slow a strategy for climbing out of the low-fitness area, while long jumps have a high probability ofquickly finding a higher fitness level.10 Conversely, whenagents are in high-fitness location, the integrated strategyhas a much lower probability of bringing a furtherimprovement than a modular one, but the latter can onlybring small improvements.
The superiority of integrated strategies is the outcome oftwo factors: probability of fitness improvements andexpected size of fitness improvements. Concerning theformer, a modular strategy is only slightly more likely toprovide a fitness improvement when applied to low-fitnesspoints than to high-fitness ones. Instead, integratedstrategies are much more likely to provide improvementswhen the current fitness is low and very unlikely when it ishigh. To confirm this statement, in Figure 5 we show thepercentage of successful mutations produced in twopopulations using a modular and a integrated searchstrategy, respectively. The figure is obtained from simula-tion performed with N¼ 1000 and K¼ 0. The two popula-tions are made of 50 agents each, running for 10,000 timesteps, each time step all agents are relocated in the same(randomly chosen) point.
As to the size of the improvement, the integrated strategyis likely to provide large improvements when starting fromlow-fitness locations, while it will provide low improve-ments when the starting location has high fitness. Themodular approach will provide small improvements in bothcircumstances, as shown in Figure 6, obtained under thesame conditions as Figure 5.
This result contradicts the common wisdom thatmodularity provides robustness against volatile environ-ments. In fact, it shows that the opposite is true. In highlyvolatile environments, the systemic recombination allowedby integrated and non-modular search strategies allow forradical change that is more effective in highly uncertain andvolatile environments than the local search enabled bymodular strategies.
This result is confirmed also when the volatility concernsonly part of the system and agents know which parts are
100075050025010
75
150
225
300
Figure 4 Number of agents in the three populations with S¼ 1 (black), S¼ 5(red), and S¼ 10 (green). Selection applies every 50 time steps, replacing 20agents.
3002251507510.516769
0.553122
0.589474
0.625826
0.662179
Figure 3 First 300 steps of the same results shown in Figure 2.
Modularity and problem-solving Stefano Brusoni et al.
128

affected. That is, we use a shock that modifies randomly thefitness provided by half of the available dimensions, insteadof modifying all of them. When the shock occurs, agentsknow which half of their environment has been affected anddirect the mutation efforts to repair that portion of theircurrent activities.
For this second experiment we defined two populationsof agents, where the integrated strategy can modify eitherthe first or the second half of the string. We allowed agentsto apply their strategy for 20 time steps, after which a shockproduces the modification of the fitness contributionsprovided by half of the bits. Immediately after the shock,agents attempt a mutation choosing one (for modularstrategies) or more (for integrated ones) of the bits affectedby the shock.
The results do not change sensibly, although in thisexperiment modular agents were allowed to climb a stableenvironment for some time, and the shock affected onlyhalf of the environment. It can be noticed that the ‘clouds’of points is in fact centred above the expected fitness value
of 0.5, since agents are able to climb somewhat from theaverage level during the 20 stable periods.
Figures 7 and 8 report the same statistics seen above forthis new set up, considering only the time steps immedi-ately after the shocks. Figure 8 reports the average gainfrom successful mutations while Figure 7 reports thepercentage of successful mutations for integrated andmodular strategies.
Discussion and conclusionsTaking a complementary perspective to Baldwin andClark’s option value view of modularity, this paper hasattempted to single out the advantages and disadvantages ofproblem-solving strategies in relation to the time horizon ofthe search and the volatility of the environment. Simulationresults show that modular search strategies are particularlyefficient in the short term. This is due to the fact that
0
0.2
0.4
0.6
0.8
1
0.42 0.44 0.46 0.48 0.5 0.52 0.54 0.56 0.58
Sha
re o
f suc
cess
ful m
utat
ions
Average fitness
Modular agentsIntegral agents
Figure 7 Percentage of successful mutations for two populations of ‘modular’and ‘integrated’. N¼ 100, K¼ 50, and a shock affecting either the first or thesecond 50 dimensions occur every 20 steps. Agents ‘know’ which half of theenvironment underwent the shock and attempt to repair that part. Data usedfor the figure concern only the periods just after a shock.
0
0.01
0.02
0.03
0.04
0.05
0.06
0.42 0.44 0.46 0.48 0.5 0.52 0.54 0.56 0.58
Ave
rage
gai
n (s
ucce
ssfu
l mut
atio
ns o
nly)
Average fitness
Modular agentsIntegral agents
Figure 8 Average gain from successful mutations for two populations of‘modular’ and ‘integrated’ agents with random changes of fitness contribu-tions on half of the components. Same conditions as in Figure 7.
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.42 0.44 0.46 0.48 0.5 0.52 0.54 0.56 0.58
Ave
rage
Gai
n fr
om S
ucc.
Mut
atio
ns
Av. Payoff
Modular SearchIntegral Search
Figure 6 Average gain from successful mutations as a function of the averagefitness values.
0
0.2
0.4
0.6
0.8
1
0.42 0.44 0.46 0.48 0.5 0.52 0.54 0.56 0.58
Per
c. o
f Suc
cess
ful M
utat
ions
Av. Payoff
Modular SearchIntegral Search
Figure 5 Average percentage of agents producing a successful mutation as afunction of the average fitness values for two populations: the first applies aone-bit search strategy (highly modular); the second applies a N-bit searchstrategy (integral).
Modularity and problem-solving Stefano Brusoni et al.
129

modular search strategies are relatively better at quicklyclimbing a local optimum. In other words, a highly modulardesign favours a rapid exploitation of the local improve-ments allowed by the design itself. Speed of search andadaptation and incremental innovation are thereforeimportant advantages of modularity. Our results also showthat there is a trade-off between speed of search andbreadth of search. In the long term, integral searchstrategies can reach higher performance by not being stuckinto the local optima determined by a fixed (and inevitablysub-optimal) design. However, if the system is made ofmany components that interact in a complex and largelynot understood fashion, such integral search is haunted bycomplexity limits and will be evolutionary inferior in aselective environment.
Short-term advantages may lead to sustainable evolu-tionary advantages at population level. That is to say,populations of organizations that rely on over-modularproblem-solving strategies may come to dominate popula-tions of organizations that rely on the ‘right’ pattern ofmodularization. In a rather speculative manner, one mightargue that this result captures a key feature of thecompetitive struggle in the PC industry. The open andmodular architecture of IBM-compatible PCs has givenMicrosoft (and Intel) a great competitive advantage overApple with its proprietary and more integrated architec-ture. Despite some experts’ opinion that Apple can deliverbetter technical solutions, the so-called WIntel architecturedefinitely dominates the market.
We also analysed the effectiveness of alternative searchstrategies in relation to different characteristics of thecompetitive environment and in particular its stability orvolatility. Simulations showed that in stable environments,modular search strategies are more effective becauseof the above-mentioned fast rate of adaptation and localimprovement. For example, one might argue that thisis the situation enjoyed by Rolls-Royce in the 1980s and1990s, that is, two decades during which the civil aviationindustry went through a phase of continuous and stablegrowth. Whether the competitive advantage built uponthe modular architecture of the three-shaft engine isdefendable in a more turbulent environment is to be seen.Our simulation results would suggest some form ofscepticism.
In highly volatile, fast-changing environments in fact,modular search strategies are shown to have a highprobability of being trapped into low-fitness zones of thelandscape and, since they can only change locally, they taketoo long to get out. Integral search strategies on thecontrary perform search on a broader spectrum and cantherefore jump out of low-fitness zones of the landscapes inwhich sooner or later everybody will fall in a highly volatileenvironment. In our view, this result captures the key roleplayed by systems-integrating companies. For example,evidence from the mobile phone industry suggests thatsystems integrators need to remain involved in exploratoryresearch that look beyond the boundaries set by currentarchitectures to be able to lead the process of developmentof successive generations of mobile telephony systems. Thenarrow, but fast, search enabled by highly modularproblem-solving strategies might lock incumbents into sortof competency traps from which they cannot escape if
changing environments require more radical re-design ofthe system.
The line of reasoning presented in this paper needs beextended in several directions. Two seem most promisingto us. First, in this paper we have conceptualized, andmodelled, organizations as ‘pure’ problem solvers. Whileproblem-solving is a fundamental activity performed byorganizations, it is not the only one. It is necessary to buildmodels capable of providing richer characterizations offirms’ behaviour. This is not just a quest for realism. In aprevious paper, we argued that decisions to outsourceproduction (and other functions) are different fromdecisions to outsource technological knowledge. In otherwords, there is a gap between firms’ production andknowledge boundaries (Brusoni and Prencipe, 2001;Brusoni et al., 2001). Such a gap is fundamental to explainhow incumbents manage to react to rapid technical change,like Fujitsu did in the hard disk drive industry. We need todevelop new families of models capable of distinguishing,and cope with the joint dynamics, of the division of labourand that of knowledge. A recent paper by (Dosi et al., 2003)begins to explore these issues.
Second, and related, we need to explore further therelationship between firms’ organization and environmen-tal changes. Specialization and loose coupling are oftenadvocated as a suitable way of organizing business in thecontext of fast environmental changes. For example,Levinthal (1997) argued that ‘[t]ightly coupled organiza-tions can not engage in exploration without foregoing thebenefits of exploitation’ (p. 949). However, cases likeFujitsu and Ericsson, show that some incumbents canactually manage both exploration and exploitation activ-ities. In our view, to make organizational sense of theseissues one need to clearly distinguish between theorganization of manufacturing activities, and the organiza-tion of more knowledge-intensive activities. Moreover,learning and manufacturing processes are embedded indense networks that link manufacturers of the final productto suppliers of components and specialized knowledge. Ininnovative, fast-changing environments, it becomes moreand more difficult to pinpoint ‘firms’ (whether systemsintegrators or mere assemblers) as the correct unit ofanalysis. Problems are solved ‘socially’, and understandinghow problem-solving strategies unfold within communitiesof specialists that cut across firms’ boundaries is a challengeto both practitioners and scholars.
Concerning product development, the analysis presentedin this paper should be expanded in order to account forsome important elements that are still missing in ourmodel. First, comparing modular and integral search inproduct development is in some sense comparing two quiteradically different search processes, which are also nor-mally occurring at different stages. In modular search, thearchitecture of the product is kept constant, whereas inintegral search firms are looking for better product and forbetter designs at the same time, and search also providesinformation about interdependencies and attainable per-formance goals (Ulrich and Eppinger, 1995). In a richermodel, therefore, we should compare a world in whichfirms and teams only search for better performing moduleswithin a given architecture, starting from a much higherlevel of understanding of the design problem, to one in
Modularity and problem-solving Stefano Brusoni et al.
130

which they also search for better architecture and moreappropriate performance standards (Ethiraj and Levinthal,2004). More radically, product development involves alsothe very re-definition of the search landscape as inter-dependencies are to some extent modified in the process. Inthe preliminary model, we investigated in this paper, the‘true’ modularity of the problem is exogenously given andkept constant, and different search strategies are evaluatedon this same performance landscape. In reality, on thecontrary, firms often make a deliberate effort to reduce theamount of interdependencies in the product developmentproblem.
Finally, in product development modular and integralsearch strategies also entail quite different mechanisms ofknowledge accumulation. The question is whether highlyspecialized and relatively independent teams can outper-form generalists in being able to change the interdepen-dencies (Postrel, 2002), or generalist knowledge andsystems integrators are always needed in order to indicatethe directions of search and modify product architecture(Gavetti and Levinthal, 2000; Brusoni et al., 2001).
AcknowledgementsWe thank Koen Frenken and two anonymous referees of thisjournal for helpful suggestions. The usual caveat applies.
Notes
1 In this paper, we refer essentially to informational andtechnical interdependencies and not to those arising fromincentives. An investigation of the relationship between thetwo within a model of the same family can be found in Dosiet al. (2003).
2 A decomposition can be considered as a special case of a searchheuristic. Search heuristics are in fact ways of reducing thenumber of configurations to be considered in a search process.
3 See Marengo and Dosi (2005) for a more formal and detailedaccount of the properties of optimal and sub-optimaldecompositions and for an algorithmic procedure thatcomputes them.
4 The complete algorithm is quite lengthy to describe inexhaustive and precise terms. Its Pascal and Cþ þ imple-mentations are available from the authors upon request. Seealso Marengo and Dosi (2005) for a more formal treatment ofdecompositions and their properties.
5 Here problems are random NK landscapes a la Kauffman(1993) with N¼ 12 and K¼ 5.
6 Every reduction of 1 in the size of the decomposition schemesimplies that the number of solutions to be tested and theexpected time of search are cut down by one-half.
7 Without loss of generality and for the sake of simplicity, weassume that each module contains exactly S components and,therefore, that N/S is an integer number.
8 Obviously, the S-search strategy with S¼ 1 is the one-bitmutation.
9 Baldwin and Clark (2000) for instance maintains thatmodularity is especially advantageous in uncertain andchanging environments. See also Langlois (2002).
10 A more formal treatment of this proposition can be found inValente (2003), where it is shown that when fitness levelsrapidly change, the expected gains of integrated strategies arehigher than those of modular strategies.
References
Alexander, Christopher, 1969, Notes on the synthesis of form. Cambridge, MA:
Harvard University Press.
Argyres, Nicholas, 1999, ‘‘The impact of information technology on
coordination: Evidence from the B–2’’. Organization Science, 10:
162–180.
Baldwin, Carliss and Kim Clark, 2000, Design rules: The power of modularity.
Cambridge, MA: MIT Press.
Baldwin, Carliss and Kim Clark, 2001, ‘‘The value and costs of modularity’’.
Mimeo, Harvard Business School.
Blair, John, 1988, Modular America cross-cultural perspectives on the emergence
of an American way. Westport, CT: Greenwood Press.
Brusoni, Stefano and Andrea Prencipe, 2001, ‘‘Unpacking the black box of
modularity: Technologies, products, organisations’’. Industrial and
Corporate Change, 10: 179–205.
Brusoni, Stefano, Andrea Prencipe and Keith Pavitt, 2001, ‘‘Knowledge
specialisation, organisational coupling, and the boundaries of the firm: Why
do firms know more than they make?’’. Administrative Science Quarterly, 46:
597–621.
Callebaut, Werner and Diego Rasskin-Gutman, 2005, Modularity:
Understanding the development and evolution of complex natural systems.
Cambridge, MA: The Vienna series in theoretical biology, MIT Press.
Chesbrough, Henry and Ken Kusunoki, 2001, ‘‘The modularity trap:
Innovation, technology phase-shifts, and the resulting limits of virtual
organizations’’. In I. Nonaka and D. Teece (eds) Managing industrial
knowledge: Creation, transfer and utilization. Thousand Oaks, CA: Sage
Publications.
Cyert, Richard and James March, 1956, A behavioral theory of the firm.
Englewood Cliffs, NJ: Prentice-Hall.
Davies, Aandrew, 1999, ‘‘Innovation and competitiveness in complex product
systems: The case of mobile phone systems’’. In S. Mitter and M.-I. Bastos
(eds) Europe and developing countries in the globalised information economy.
London: UNU Press.
Dosi, Giovanni, Luigi Marengo and Daniel Levintahl, 2003, ‘‘Bridging contested
terrain: Linking incentive-based and learning perspectives on organizational
evolution’’. Industrial and Corporate Change, 12: 413–436.
Edquist, Charles (ed.) 2003, The internet and mobile telecommunications
system of innovation: Developments in equipment, access and content.
Cheltenham, UK: Edward Elgar.
Ethiraj, Sendil and Daniel Levinthal, 2004, ‘‘Modularity and innovation in
complex systems’’. Management Science, 50: 159–173.
Fleming, Lee and Olav Sorenson, 2001, ‘‘The dangers of modularity’’. Harvard
Business Review, 79(8): 20–21.
Fodor, Jerry, 1983, The modularity of mind. Cambridge, MA: MIT Press.
Frenken, Koen, Luigi Marengo and Marco Valente, 1999, ‘‘Interdependencies,
nearly-decomposability and adaptation’’. In T. Brenner (ed.) Computational
techniques to model learning in economics. Kluwer Academics.
Gavetti, Giovanni and Daniel Levinthal, 2000, ‘‘Looking forward and looking
backward: Cognitive and experiential search’’. Administrative Science
Quarterly, 45: 113–137.
Henderson, Rebecca, 1992, ‘‘Technological change and the management of
architectural knowledge’’. In T. Kochan and M. Useem (eds) Transforming
organisations. Oxford: Oxford University Press.
Henderson, Rebecca and Kim Clark, 1990, ‘‘Architectural innovation: The
reconfiguration of existing product technologies and the failure of
established firms’’. Administrative Science Quarterly, 35: 9–30.
Kauffman, Stuart, 1993, The origins of order. Oxford: Oxford University Press.
Langlois, Richard, 2002, ‘‘Modularity in technology and organization’’. Journal
of Economic Behavior and Organization, 49: 19–37.
Langlois, Richard and Paul Robertson, 1992, ‘‘Networks and innovation in a
modular system: Lessons from the microcomputer and stereo component
industries’’. Research Policy, 21: 297–313.
Levinthal, Daniel, 1997, ‘‘Adaptation on rugged landscapes’’. Management
Science, 43: 934–950.
Marengo, Luigi and Giovanni Dosi, 2005, ‘‘Division of labor, organizational
coordination and market mechanism in collective problem-solving’’. Journal
of Economic Behavior and Organization, 58: 303–326.
Marengo, Luigi, Giovanni Dosi, Paolo Legrenzi and Corrado Pasquali, 2000,
‘‘The structure of problem-solving knowledge and the structure of
organizations’’. Industrial and Corporate Change, 9: 757–788.
Modularity and problem-solving Stefano Brusoni et al.
131

Marengo, Luigi, Corrado Pasquali and Marco Valente, 2005, ‘‘Decomposability
and modularity of economic interactions’’. In W. Callebaut and D. Rasskin-
Gutman (eds) Modularity: Understanding the development and evolution of
complex natural systems. Cambridge, MA: MIT Press.
McKelvey, Maureen and Francois Texier, 2000, ‘‘Surviving technological
discontinuities through evolutionary systems of innovation: Ericsson and
mobile telecommunication’’. In P. P. Saviott and B. Noteboom (eds)
Technology and knowledge: From the firm to innovation system. Cheltenham,
UK: Edward Elgar.
Postrel, Steven, 2002, ‘‘Islands of shared knowledge: Specialization and mutual
understanding in problem-solving teams’’. Organization Science, 13: 303–320.
Sako, Mari and Fiona Murray, 1999, ‘‘Modules in design, production and use:
Implications for the global automotive industry’’. Mimeo, Paper presented at
the International Motor Vehicle Program (IMVP) Annual Sponsors Meeting,
Cambridge, MA.
Sanchez, Ron and Joseph Mahoney, 1996, ‘‘Modularity flexibility, and
knowledge management in product and organization design’’. Strategic
Management Journal, 17: 63–76.
Schaefer, Scott, 1999, ‘‘Product design partitions with complementary
components’’. Journal of Economic Behavior and Organization, 38: 311–330.
Schilling, Melissa, 2000, ‘‘Towards a general modular systems theory and its
application to inter-firm product modularity’’. Academy of Management
Review, 25: 312–324.
Siggelkow, Nicolaj and Daniel Levinthal, 2003, ‘‘Temporarily divide to conquer:
Centralized, decentralized, and reintegrated organizational approaches to
exploration and adaptation’’. Organization Science, 14: 650–669.
Simon, Herbert, 1981, The sciences of the artificial, 2nd edn. Cambridge, MA:
MIT Press.
Sturgeon, Timothy, 2002, ‘‘Modular production networks: A new model of
industrial organization’’. Industrial and Corporate Change, 11: 451–496.
Suh, Nam, 1990, The principles of design. New York: Oxford University Press.
Teece, David, 1976, Vertical integration and vertical divestiture in the US oil
industry. Stanford, CA: Stanford University Institute for Energy Studies.
Ulrich, Karl, 1995, ‘‘The role of product architecture in the manufacturing
firm’’. Research Policy, 24: 419–440.
Ulrich, Karl and Steven Eppinger, 1995, Product design and development.
New York: McGraw-Hill.
Valente, Marco, 2003, Well theorem: Failure of modularity in volatile modular
landscapes Mimeo, University of L’Aquila, Italy.
Modularity and problem-solving Stefano Brusoni et al.
132

Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.