The success of GPS collar deployments on mammals in Australia
19
The success of GPS collar deployments on mammals in Australia Alison Matthews A,S , Laura Ruykys B , Bill Ellis C , Sean FitzGibbon C , Daniel Lunney D , Mathew S. Crowther E , Alistair S. Glen F , Brad Purcell G , Katherine Moseby B,H , Jenny Stott H , Don Fletcher I , Claire Wimpenny I , Benjamin L. Allen J , Linda Van Bommel K , Michael Roberts L , Nicole Davies C , Ken Green M , Thomas Newsome E , Guy Ballard N , Peter Fleming O , Christopher R. Dickman E , Achim Eberhart P , Shannon Troy Q , Clive McMahon R and Natasha Wiggins K A Institute for Land, Water and Society, School of Environmental Sciences, Charles Sturt University, PO Box 789, Albury, NSW 2640, Australia. B University of Adelaide, Adelaide, SA 5005, Australia. C University of Queensland, St Lucia, Qld 4072, Australia. D Biodiversity Conservation Science Section, Scientific Services, Office of Environment and Heritage, Department of Premier and Cabinet, Hurstville, NSW 2220, Australia. E School of Biological Sciences, University of Sydney, Sydney, NSW 2006, Australia. F WA Department of Environment and Conservation, and Invasive Animals CRC, Dwellingup, WA 6213, Australia. G University of Western Sydney, Penrith, NSW 2751, Australia. H Arid Recovery, Roxby Downs, SA 5725, Australia. I ACT Land Management and Planning, Canberra, ACT 2601, Australia. J University of Queensland, Gatton, Qld 4343, Australia. K University of Tasmania, Hobart, Tas. 7001, Australia. L Macquarie University, North Ryde, NSW 2109, Australia. M National Parks and Wildlife Service, Jindabyne, NSW 2627, Australia. N Vertebrate Pest Research Unit, NSW Department of Primary Industries, Armidale, NSW 2351, Australia. O Vertebrate Pest Research Unit, NSW Department of Primary Industries, Orange, NSW 2800, Australia. P University of Melbourne, Melbourne, Vic. 3010, Australia. Q University of Tasmania, School of Zoology, and CRC Forestry, Hobart, Tas. 7001, Australia. R Charles Darwin University, Darwin, NT 0909, Australia. S Corresponding author. Email: [email protected] Abstract. Global Positioning System (GPS) wildlife telemetry collars are being used increasingly to understand the movement patterns of wild mammals. However, there are few published studies on which to gauge their general utility and success. This paper highlights issues faced by some of the first researchers to use GPS technology for terrestrial mammal tracking in Australia. Our collated data cover 24 studies where GPS collars were used in 280 deployments on 13 species, including dingoes or other wild dogs (Canis lupus dingo and hybrids), cats (Felis catus), foxes (Vulpes vulpes), kangaroos (Macropus giganteus), koalas (Phascolarctos cinereus), livestock guardian dogs (C. l. familiaris), pademelons (Thylogale billardierii), possums (Trichosurus cunninghami), quolls (Dasyurus geoffroii and D. maculatus), wallabies (Macropus rufogriseus and Petrogale lateralis), and wombats (Vombatus ursinus). Common problems encountered were associated with collar design, the GPS, VHF and timed-release components, and unforseen costs in retrieving and refurbishing collars. We discuss the implications of collar failures for research programs and animal welfare, and suggest how these could be avoided or improved. Our intention is to provide constructive advice so that researchers and manufacturers can make informed decisions about using this technology, and maximise the many benefits of GPS while reducing the risks. Additional keywords: field performance, fix success, location data, satellite, wildlife tracking. Received 1 May 2012, accepted 4 July 2012, published online 4 February 2013 Introduction Global Positioning System (GPS) collars are being used increasingly by researchers and wildlife managers to track medium-to-large-sized mammals. However, there are still very few studies published from Australia on which to gauge their success (but see Claridge et al. 2009; Moseby et al. 2009; Robley Journal compilation Ó Australian Mammal Society 2013 www.publish.csiro.au/journals/am CSIRO PUBLISHING Australian Mammalogy, 2013, 35, 65–83 http://dx.doi.org/10.1071/AM12021
Transcript of The success of GPS collar deployments on mammals in Australia

The success of GPS collar deployments on mammals in Australia
Alison MatthewsAS Laura RuykysB Bill EllisC Sean FitzGibbonC Daniel LunneyDMathew S Crowther E Alistair S GlenF Brad PurcellG Katherine MosebyBH Jenny StottHDon FletcherI ClaireWimpennyI Benjamin L AllenJ Linda Van BommelK Michael RobertsLNicoleDaviesC KenGreenM ThomasNewsome EGuyBallardN Peter FlemingO ChristopherR DickmanE Achim EberhartP Shannon TroyQ Clive McMahonR and Natasha WigginsK
AInstitute for Land Water and Society School of Environmental Sciences Charles Sturt UniversityPO Box 789 Albury NSW 2640 Australia
BUniversity of Adelaide Adelaide SA 5005 AustraliaCUniversity of Queensland St Lucia Qld 4072 AustraliaDBiodiversity Conservation Science Section Scientific Services Office of Environment and Heritage Departmentof Premier and Cabinet Hurstville NSW 2220 Australia
ESchool of Biological Sciences University of Sydney Sydney NSW 2006 AustraliaFWADepartment of Environment and Conservation and Invasive Animals CRC DwellingupWA 6213 AustraliaGUniversity of Western Sydney Penrith NSW 2751 AustraliaHArid Recovery Roxby Downs SA 5725 AustraliaIACT Land Management and Planning Canberra ACT 2601 AustraliaJUniversity of Queensland Gatton Qld 4343 AustraliaKUniversity of Tasmania Hobart Tas 7001 AustraliaLMacquarie University North Ryde NSW 2109 AustraliaMNational Parks and Wildlife Service Jindabyne NSW 2627 AustraliaNVertebrate Pest Research Unit NSW Department of Primary Industries Armidale NSW 2351 AustraliaOVertebrate Pest Research Unit NSW Department of Primary Industries Orange NSW 2800 AustraliaPUniversity of Melbourne Melbourne Vic 3010 AustraliaQUniversity of Tasmania School of Zoology and CRC Forestry Hobart Tas 7001 AustraliaRCharles Darwin University Darwin NT 0909 AustraliaSCorresponding author Email almatthewscsueduau
Abstract Global Positioning System (GPS) wildlife telemetry collars are being used increasingly to understand themovement patterns of wild mammals However there are few published studies on which to gauge their general utility andsuccess This paper highlights issues faced by some of the first researchers to use GPS technology for terrestrial mammaltracking in Australia Our collated data cover 24 studies where GPS collars were used in 280 deployments on 13 speciesincluding dingoes or other wild dogs (Canis lupus dingo and hybrids) cats (Felis catus) foxes (Vulpes vulpes) kangaroos(Macropus giganteus) koalas (Phascolarctos cinereus) livestock guardian dogs (C l familiaris) pademelons (Thylogalebillardierii) possums (Trichosurus cunninghami) quolls (Dasyurus geoffroii and D maculatus) wallabies (Macropusrufogriseus and Petrogale lateralis) and wombats (Vombatus ursinus) Common problems encountered were associatedwith collar design the GPS VHF and timed-release components and unforseen costs in retrieving and refurbishing collarsWe discuss the implications of collar failures for research programs and animal welfare and suggest how these could beavoided or improved Our intention is to provide constructive advice so that researchers and manufacturers can makeinformed decisions about using this technology and maximise the many benefits of GPS while reducing the risks
Additional keywords field performance fix success location data satellite wildlife tracking
Received 1 May 2012 accepted 4 July 2012 published online 4 February 2013
Introduction
Global Positioning System (GPS) collars are being usedincreasingly by researchers and wildlife managers to track
medium-to-large-sized mammals However there are still veryfew studies published from Australia on which to gauge theirsuccess (but see Claridge et al 2009Moseby et al 2009 Robley
Journal compilation Australian Mammal Society 2013 wwwpublishcsiroaujournalsam
CSIRO PUBLISHING
Australian Mammalogy 2013 35 65ndash83httpdxdoiorg101071AM12021
et al 2010 Ellis et al 2011 Ruykys et al 2011 Matthews andGreen 2012 Allen 2012) Many researchers have experienceddifficulties with the technology some of which have beenovercome with time and experience Several previousinternational studies have dealt with the issue of GPSperformance For example the success of GPS data acquisitionand the precision of locations in relation to collar position havebeen reported (Moen et al 1996 DrsquoEon and Delparte 2005) andin some cases compared among habitats with differentvegetation cover and terrain (Dussault et al 1999 Di Orio et al2003 Cain et al 2005 Recio et al 2011) At this time we areaware of only a small number of studies that have examinedthe long-term performance and reliability of GPS collars underfield conditions and these were undertaken in Africa (Hemson2002) North America (Johnson et al 2002 Gau et al 2004)central Asia (Kaczensky et al 2010) and New Zealand (Blackie2010) Various studies on animal ecology (eg home rangeresource selection) report individual issues including releasefailures (eg Burdett et al 2007 Kochanny et al 2009) VHFtransmitter failures (eg Kochanny et al 2009) and erratic orpremature GPS failures (eg Girard et al 2002 Andersen et al2008 Zweifel-Schielly et al 2009) but assessment of collarperformance was not a focus of these papers Furthermoresince unsuccessful studies or collar failures tend not to bepublished information on the prevalence of total collar failureis not readily available Such information is important whenwildlife scientists are compelled to work within tight budgetsshort timeframes and limited resources and is needed for theuptake and ultimate success of GPS technology (Lizcano andCavelier 2004)
The aim of this paper is to provide researchers who plan to useGPS telemetry with background knowledge of project logisticsand information about the strengths and weaknesses of GPStelemetry gained through our numerous field studies on 13species of mammals in Australia Manufacturers of GPS collarsmay also benefit from a greater understanding of the mostcommon sources of failure and the costs to researchers when thetechnology does not meet expectations We restricted oursynthesis to studies involving non-volant terrestrial mammalsbut note that GPS technology also has been used on marinemammals (eg Sheppard et al 2006) and flying-foxes (egSpencer and Miller 2006) in Australia Specific objectives wereto (1) determine the success of collars or conversely the typesand rates of failures (2) investigate issues in relation to collardesign and theGPSVHFand timed-release components and (3)identify problems relating to unforeseen costs of collar retrievalrefurbishment and reconfiguration and possible impacts on thewelfare of animals after collar deployment Our intention is toprovide this information in a constructive manner so thatresearchers and manufacturers can be fully informed whenmaking decisions to use this technology
Methods
We compiled data from 24 studies across Australia (Fig 1) inwhich GPS collars were used in 280 deployments on terrestrialmammals weighing 1ndash74 kg including dingoes or other wilddogs (Canis lupus dingo and C l familiaris and their hybrids)feral cats (Felis catus) foxes (Vulpes vulpes) kangaroos(Macropus giganteus) koalas (Phascolarctos cinereus)
DINGO_NT
DINGO_SA DINGO_QLDKOALA_SWQ
KOALA_NSW
ROO_ACT
MARE2_VIC
FERAL_SA
QUOLL_WA
POSS_VIC
QUOLL_TAS
KOALA_SEQ
MARE_NSW
DINGO_NSW
ROO_NSW
WOMB_NSW
MARE1_VIC
PADE_TAS
BFRW_SA
N
Fig 1 The locations of GPS collar deployments for each study in Australia Refer to Table 1 for species and locationdescriptions
66 Australian Mammalogy A Matthews et al
livestock guardian dogs (C l familiaris) pademelons (Thylogalebillardierii) possums (Trichosurus cunninghami) quolls(Dasyurus geoffroii and D maculatus) wallabies (Macropusrufogriseus rufogriseus and Petrogale lateralis) and wombats(Vombatus ursinus) The collars used in these studies weremanufactured by Blue Sky Telemetry (Aberfeldy Scotland)Followit Wildlife (Lindesberg Sweden) Precision AgricultureResearchGroup (ArmidaleAustralia) Sirtrack (HavelockNorthNew Zealand) Sigma Delta Technologies (Floreat Australia)Telemetry Solutions (Concord California USA) and TitleyElectronics (Lawnton Australia) Where different collarsprogrammed settings (such as scheduledfix interval) or locationswere used within a research program these were separated intodifferent studies for analysis Collars were deployed for up to12 months with most studies being shorter than six months(Fig 2)
Data were collated on the species and locations of collardeployments habitat types collar types and manufacturers thereliability of GPS components VHF components and timed-release devices statistics on GPS performance costs and animalwelfare While these data provide descriptive statistics on GPScollar utility and success they do not permit a comparativeevaluation of one collar brand with another because collars weredeployed on different species in widely different habitats andlocations
Appendix 1 provides descriptions of each study the collarsused and dates of deployment Appendix 2 contains a descriptionof the components ofGPS collars and how they operate aswell asa glossary of terms associated with the technology
Results
Of the 280deployments ofGPS collars 249were retrieved andordownloaded remotely However retrieval rates ranged from 0 to
100amongstudies (Table1)Reasons for lossof collars (or non-retrieval) included loss of VHF signal due to presumed batteryfailure or damage to the antenna animals moving out of rangeand the release of collars in burrows where they could not beretrievedWhilewe cannot accurately account for each lost collarwe were able to discern the reasons for losses from some collarsthat were considered lost and later found through extensiveground and aerial searches Of the 249 collars that were retrievedandor downloaded 96 had recorded some data However dueto shortened operating life intermittent failure andor disruptionsto the fix schedules and duty cycles the number of recordedlocations often was less than expected
The averageoperating life (ie real lifespan) of theGPScollarswas 1017 days and amounted to 677 of the expected meanOnly 53 of collars operated for their full deployment orexpected life (Table 2) and operating success was higher forstudies of shorter duration (Fig 3) In only five studies was theGPS receiver on all collars still functioning at the end of thedeployment period which in these cases was less than 92 daysThe longest time a GPS operated successfully was 403 days on adingo collar programmed to record eight fixes per day Eightstudies (40) reported at least one collar failing to collect GPSlocations within 10 days of deployment and a further six studies(30) reported a collar failing within 40 days Suggested reasonsfor prematureGPS failure includedwear and tear (eg breakdownof the GPS aerial andor aerial cables) poor battery quality andexhaustion of the battery from sample rate malfunctions (seebelow)
Unintended shifts in duty cycle or sample rate occurred in 18ofdeployments but in anyone study this problemaffected0ndash70of collars deployed (excluding the study in which only one collarwith data was retrieved) On average shifts from programmedsample rates occurred after 59 days from those deploymentsIntermittent collar failures in which a collar did not log a locationfor one or several days occurred in 31 of deployments(Table 2) Loss of data was often considerable For example onekoala collar logged erratically over 159 days and provided only11 days of useable data
Fix (ie GPS location) acquisition over the deployment periodwas generally lower than programmed rates even for studies inopen (eg desert) environments where there was an unimpededview of the sky However two studies reported a higher thanexpected number of fixes per collar (Table 3) While on averageonly 66 of expected fixes per collar were collected thetotal number of fixes for each study generally was high(mean = 16 698 range = 233ndash58 575) Mean horizontal dilutionof precision (HDOP) was 30 (range = 15ndash50) (Table 4)Locations with lower HDOP values are considered to be moreprecise (DrsquoEon and Delparte 2005) and the percentage of fixeswith HDOP lt5 ranged from 67 to 99 among studies
VHF transmitter failure was reported in 9 of 24 studies(Table 5) In two cases the VHF transmitter was programmed toactivate on a set date but did not initialise In the other sevenstudies theVHF transmitter stoppedoperating sometimeswithina fewdaysof deployment (average = 29months) In somecollarsVHF transmitter failure was caused by water ingression Otherpossible causes included faulty batteries or circuitry and cheweddamaged antennas which reduced transmission strength belowthat which could be detected
6
5
4
3
Num
ber
of s
tudi
es
2
1
01 2 3 4 5 6
Duration (months)
7 8 9 10 11 12
Fig 2 Duration of GPS collar deployments among compiled studies ofmammals in Australia
Success of GPS collar deployments Australian Mammalogy 67
Timed-release deviceswerefitted to collars in nine studies buttwo studies retrieved collars before the programmed releasedates and in one study all the collars were lost when the VHFtransmitter failed Thus only six studies were available to assessthe performance of the timed-release mechanism Of the 83collars involved in these studies 5 released before or afterthe programmed timedate and a further 19 failed to release atall (Table 5)
In total we spent AU$684 832 on collars and equipment frommanufacturers An additional 25 of initial costs was spent post-deployment on unexpected costs associated with refurbishmentor retrieval of failed collars labour extra searches (eg aerialsearches purchase of additional equipment such as burrowcameras) travel (fuel accommodation) and animal capture (egdarting) The costs associated with locating and retrieving lsquolostrsquocollars were up to $50 000 (mean = $6040) and 1760 person-
Table 1 Summary of GPS collar deployments and retrieval success for each study (or research case) of mammals in Australia
Study Species Location Collar type No ofdeployments
retrievedA withdata
BFRW_SA Black-footedrock-wallaby
Anangu PitjantjatjaraYankunytjatjara Landsnorth-west South Australia
Sigma DeltaTechnologies
10 80 13
DINGO1_NSW Dingo Blue Mountains New SouthWales
Sirtrack 12 58 100
DINGO2_NSW Dingo Blue Mountains New SouthWales
Sirtrack 5 100 100
DINGO1_NT Dingo Tanami Desert NorthernTerritory
Sirtrack 15 87 100
DINGO2_NT Dingo Tanami Desert NorthernTerritory
Blue Sky Telemetry 7 29 0
DINGO_Qld Dingo Maroochy Shire south-eastQueensland
Sirtrack 9 100 100
DINGO_SA Dingo North-east South Australia Sirtrack 16 81 100FERAL_SA Red fox and Cat Arid Recovery northern South
AustraliaSirtrack 18 94 100
KOALA_NSW Koala Gunnedah New South Wales Sirtrack 31 100 100KOALA1_SEQ Koala Coomera south-east
QueenslandSirtrack 9 89 100
KOALA2_SEQ Koala Coomera south-eastQueensland
Sirtrack 6 100 100
KOALA_SWQ Koala Mulga Lands south-westQueensland
Titley Scientific 7 57 100
MARE_NSW Livestock guardiandog (Maremma)
Yarrowitch New SouthWales UNETracker 3 100 67
MARE1_Vic Livestock guardiandog (Maremma)
Buchan Victoria Telemetry Solutions 3 100 100
MARE2_Vic Livestock guardiandog (Maremma)
Tallangatta Victoria Telemetry Solutions 4 100 100
PADE_Tas Tasmanian pademelonand Bennettrsquoswallaby
Scottsdale Tasmania Followit Wildlife 30 100 100
POSS1_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 3 100 100
POSS2_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 6 100 100
POSS3_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 20 100 100
QUOLL_Tas Spotted-tailed quoll Cape Grim north-westTasmania
Telemetry Solutions 9 100 100
QUOLL_WA Western quoll Northern jarrah forestWestern Australia
Sigma DeltaTechnologies
6 0 ndash
ROO_ACT Eastern grey kangaroo Canberra Australian CapitalTerritory
Sirtrack 26 96 100
ROO_NSW Eastern grey kangaroo Jooriland New South Wales Sirtrack 12 100 100WOMB_NSW Common wombat SnowyMountains New South
WalesSirtrack 13 85 100
Total 280 89 96
ACollar retrieved or GPS data downloaded remotely
68 Australian Mammalogy A Matthews et al
hours (average = 180) (Table 6) over and above the investmentthat had already been allocated towards retrieving collars Indeedproject running costs that included travel labour and outlaysassociatedwith capture anddata analyseswould add a substantialamount to these figures Using just the initial cost of collars andanyadditional expenses associatedwith tracking and retrievalwecalculated a cost per fix and found that it varied considerablyamong studies (mean = $223 range = $002 to $129)withhigheramounts for studies that experienced catastrophic collar failuressuch that no locations were recorded (Table 6)
Across all studies 168 (60) collared individuals wererecaptured allowing potential animal welfare issues to beassessed The most frequently reported problem was loss of furaround the neck (12 of recaptured animals) Three pademelonsdied as a consequence of animal handling related to GPS collardeployment (McMahon et al in press) while four individuals(one quoll one fox and two kangaroos in captive trials) sustainedminor injuries (eg skin lacerations) that prompted the researcherto change the collar design Most researchers contributing to thisreview were the first to use GPS collars on their study speciesConsequently 48 of studies involved changing the originalcollar design often by returning the collars to the manufacturer
Discussion
GPS telemetry has become an important tool in wildlife researchto investigate animal movements (DrsquoEon and Delparte 2005Thomas et al 2011) with the expectation that it offers severalsalient advantages over traditional techniques Chief among theseis the ability to collect higher numbers of locations automaticallyremotely and more precisely than with VHF and satellite-basedmethods (Hulbert and French 2001 Johnson et al 2002 Gravesand Waller 2006 Bandeira de Melo et al 2007 Mattisson et al2010 Thomas et al 2011)With a greater number of fixes whichcan be taken independently of season weather time of dayor year and without the disturbance of a researcher tracking theanimal GPS telemetry is potentially less susceptible to bias thanVHF radio-tracking (Johnson et al 2002 Mattisson et al 2010Robley et al 2010) Thus GPS collars can gather more data at asignificant cost saving per location and with greater researchersafety (Johnson et al 2002) Such data often facilitate the
Table 2 Operational success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study Mean no of daysoperating (range)
of expecteddays
collars operatedover full deployment
collars withintermittent failure
BFRW_SA 7 (0ndash28) 6 0 100DINGO1_NSW 269 (130ndash403) 74 43 86DINGO2_NSW 53 (52ndash54) 152 100 0DINGO1_NT 198 (33ndash300) 66 47 8DINGO_Qld 23 (5ndash43) 66 100 0DINGO_SA 180 (7ndash320) 56 62 0FERAL_SA 61 (8ndash126) 66 23 88KOALA_NSW 100 (4ndash179) 61 61 39KOALA1_SEQ 109 (17ndash154) 115 80 13KOALA2_SEQ 95 (81ndash163) 91 83 17KOALA_SWQ 114 (64ndash160) 95 50 50MARE_NSW 44 100 67 0MARE1_Vic 57 (19ndash78) 37 0 100MARE2_Vic 118 (9ndash160) 76 50 25PADE_Tas 220 (30ndash240) 92 27 0POSS1_Vic 129 (87ndash155) 140 100 33POSS2_Vic 74 (36ndash115) 86 67 100POSS3_Vic 77 (4ndash120) 46 40 20QUOLL_Tas 31 (7ndash35) 112 100 0ROO_ACT 42 (3ndash103) 22 44 naROO_NSW 62 (35ndash70) 100 100 0WOMB_NSW 157 (26ndash346) 47 18 91
Total 988 654 524 305
100
90
80
70
60
50
40
30
20
10
00 50 100 150 200
Expected GPS life or duration of deployment (days)
250 300 350 400
c
olla
rs o
pera
ted
over
full
depl
oym
ent
Fig 3 Relationship between the expected GPS life (or time in the field)and the percentage of collars operating at the end of the deployment period ineach study (n= 22) The trend line is significantly negative (r= ndash059P= 0004)
Success of GPS collar deployments Australian Mammalogy 69
Table 3 Fix success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study No of programmedfixes per day
Mean fixesper dayA (range)
operating dayswith 0 fixes (range)
Mean no of fixesper collar (range)
of expected fixesper collarB
Total fixes
BFRW_SA 16 83 (6ndash11) 77 233 12 233DINGO1_NSW 6ndash8 57 (1ndash8) 338 (0ndash663) 1537 (802ndash2302) 87 10 762DINGO2_NSW 144 1375 (62ndash145) 0 7317 (6978ndash7534) 96 36 585DINGO1_NT 24 208 (2ndash24) 01 (0ndash17) 4109 (713ndash6752) 57 53 424DINGO_Qld 200 138 (12ndash196) 0 3522 (920ndash6870) 50 31 702DINGO_SA 48 39 (6ndash48) 0 5432 (749ndash11043) 35 58 575FERAL_SA 6 4 (3ndash6) 32 (2ndash93) 258 (23ndash622) 47 4383KOALA_NSW 4 43 (1ndash1296) 19 (0ndash209) 429 (13ndash2074) 65 13 303KOALA1_SEQ 12 106 (1ndash65) 01 (0ndash93) 1280 (222ndash1812) 110 8839KOALA2_SEQ 5 46 (1ndash5) 002 (0ndash13) 746 68 2601KOALA_SWQ 6 5 (1ndash6) 93 (18ndash238) 550 (318ndash694) 77 2200MARE_NSW 144 1179 0 4440 61 16 952MARE1_Vic 48 46 (1ndash48) 219 (64ndash526) 2280 (371ndash3338) 30 6839MARE2_Vic 48 476 (26ndash48) 92 (0ndash368) 5600 (354ndash7639) 75 21 808PADE_Tas 9 89 (6ndash9) 0 1744 95 54 859POSS1_Vic 9 10 (1ndash154) 3 (0ndash10) 1233 107 3698POSS2_Vic 10 12 (1ndash972) 7 (1ndash17) 755 94 4530POSS3_Vic 14 13 (4ndash40) 10 (0ndash97) 902 65 18 036QUOLL_Tas 12C 74 (1ndash12) 0 241 (182ndash280) 64 5150QUOLL_WA 3 na na na na 0ROO_ACT 24 232 (3ndash36) na 1448 (70ndash3944) 32 naROO_NSW 32 32 0 1779 (1006ndash2028) 93 21 351WOMB_NSW 8 53 (1ndash30) 226 (0ndash596) 748 (40ndash2235) 28 8227
MeanTotal 122 (0ndash97) (13ndash11043) 658 384 057
AFor those days when at least one fix was recordedBFor expected life of collar This differs from fix success calculated over actual operating lifeC12 fixes for 5 days of the week and 72 or 96 fixes per day for the remaining 2 days Data presented formean fixes per day andmean fixes per collar for those dayswith 12 fixes per day
Table 4 GPS data performance statistics for collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT MARE_NSW PADE_Tas and QUOLL_WA no data
Study fixes with3 satellites
fixes with4 satellites
fixes with5 satellites
fixes with6 satellites
fixes with7+ satellites
HDOP(mean plusmn sd)
fixes withHDOP lt5
BFRW_SA 50 plusmn 39 67DINGO1_NSW 471 294 143 57 35 32 plusmn 22 77DINGO2_NSW 445 316 155 57 26 34 plusmn 25 82DINGO1_NT 34 93 234 290 34 18 plusmn 13 98DINGO_Qld 54 30 12 3 1 35 88DINGO_SA 0 5 21 32 42 2 98FERAL_SA 20 18 25 18 21 27 94KOALA_NSW 324 227 173 118 157 30 plusmn 26 86KOALA1_SEQ 389 249 182 11 7 32 plusmn 26 86KOALA2_SEQ 372 259 180 107 82 33 plusmn 27 84KOALA_SWQ 0 146 187 176 491 17 plusmn 12 98MARE1_Vic 2 5 14 24 55 17 plusmn 09 99MARE2_Vic 1 4 9 16 69 15 plusmn 09 99POSS1_Vic 559 275 113 39 14 40 plusmn 30 77POSS2_Vic 412 170 164 158 96 32 plusmn 26 85POSS3_Vic 576 256 97 46 25 39 plusmn 29 78QUOLL_Tas 80 164 188 167 401 20 plusmn 14 94ROO_ACT 356 216 154 131 143 31 plusmn 26A 86ROO_NSW 440 297 168 68 28 35 plusmn 27 84WOMB_NSW 466 258 126 76 74 35 plusmn 26 83
Total 30
AHDOP=38 28 excluding periods of collar failure
70 Australian Mammalogy A Matthews et al
investigation of animal behaviour at much finer scales than thoseachievable with VHF technology such as the actual speed ananimal travels the locations it visits and the true time spent in agiven habitat (eg Allen 2007) However capital costs of collarsand equipment satellite signal reception longevity under fieldconditions and the potential for failure present possiblecounterbalances to these advantages (Johnson et al 2002) Ourevaluation of 23 studies using GPS collars on mammals inAustralia revealed several common problems including a shorterthan expected GPS life intermittent failures (ie days with nolocations collected) fewerfixes per day than expected changes tothe fix schedule or duty cycle early VHF transmitter and timed-release failures and collar design issues (Table 7)
Lessons learntCollar returns
Aswith conventional radio-tracking studies it is expected thata proportion of collars will be lost such as from animalsdispersing moving out of range of the VHF or from transmitterfailure (Harris et al 1990) Losses from GPS also can beexperienced with catastrophic equipment failures defined byFrair et al (2010) as computer glitches or failed breakawaydevices We were unable to retrieve 31 collars from 280deployments and a further 10 collars that were retrieved did notcollect any GPS locations Thus 15 of collar deployments did
not return animal location information to the research programsand we conclude that these losses are relatively common
Operating life
Manufacturers typically quote an expected operating life thatis determined by fix schedule duty cycle and battery capacity Inthe field however maximum operational life is rarely attainedThis is because operating life is influenced by environmentalconditions (eg temperature and humidity) the time it takes for aposition to be acquired (time to fix) and the batteries themselvesIn locations with an obstructed view of the sky due to densecanopy cover steep terrain or the animal being underground orcovered by rocks or logs itmay take longer for theGPS to acquirea fix ndash if at all ndash and consequently more battery power will beused (though fix acquisition lsquotime-outsrsquo can help reduce this lossof battery capacity during periods of poor satellite reception) Ourresults showed that actual operating lifewas~68of the expectedlife but there was high variability among individual collars andstudies A comparison of three collar brands by Blackie (2010)found similar percentages of operational life expectancy amongbrands but also with high variability among individual collars(range 59ndash1072) Some manufacturers take into account asafetymarginwhen calculating expected battery life ndash rather thanpublishing a best-case scenario ndash and it is certainly informative toenquire about this when planning the purchase of GPS devices
Table 5 Success of VHF transmitter and timed-release components of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details MARE_NSW no data na not available
Study No of collars withVHF transmitter failure[ of total deployed]
Mean no of monthsto failure (range)
expectedmonths
collars withtimed-release
failure
collars releasedbefore or after
timedate
BFRW_SA 10 [100] 17 (0ndash7)A na naDINGO1_NSW 2 [17] 3 (2ndash4) 18 17 8DINGO2_NSW 0 na na 0 0DINGO1_NT 0 na na 13 0DINGO2_NT 7 [100] 1 10 na 29DINGO_Qld 0 na na 0 0DINGO_SA 0 na na na naFERAL_SA 1 [6] 0 0 na naKOALA_NSW 0 na na na naKOALA1_SEQ 1 [11] 2 8 na naKOALA2_SEQ 0 na na na naKOALA_SWQ 5 [71] 32 (1ndash4) 27 na naMARE1_Vic 0 na na na naMARE2_Vic 0 na na na naPADE_Tas 0 na na 37 0POSS1_Vic 0 na na na naPOSS2_Vic 0 na na na naPOSS3_Vic 0 na na na naQUOLL_Tas 0 na na na naQUOLL_WA 6 [100] ndash
B na naROO_ACT 4 [15] 2 (003ndash4) 6 na naROO_NSW 0 na na na naWOMB_NSW 4 [31] 9 (5ndash14) 50 8 25
Total 143 29 19 5
AVHFtransmitterwasprogrammed to activateon afixeddate but only3of 10didOf these by the7thmonth into the10-monthVHFcollar deployment nonewereworkingBVHF transmitter was programmed to activate on a fixed date but did not
Success of GPS collar deployments Australian Mammalogy 71
The studies with shorter intended deployments had highersuccess mainly because problems contributing to shortenedoperating life generally occurred only after some time in the fieldThus while GPS collars appear to be suitable for collectinganimal movement data over several seasons or throughoutthe year only a small proportion of collars operated reliably forsuch extendedperiodsOur experience confirms the suggestion ofGau et al (2004) that the reliability and performance of GPScollars decreases as time in the field increases
Fix acquisition
Fix rates (ie the number of successful fixes divided by thenumber attempted) are frequently lower on GPS collars that areattached to free-ranging animals This is mainly due to canopycover topography collar orientationfix interval and collar brand(Frair et al 2010) However obtaining intermittent fixes (dayswith no fixes) was a common problem in our studies and thereasons for its high incidence may differ from those mentionedaboveOften assessments offix success of collars under differentconditions are conducted over short periods (eg 24 hRecio et al2011) and this may not provide a true assessment of fix success
over the life of the collar In addition to locationor signal precisionissues intermittent fixes may arise from a programming failurewhere the collar does not turn on at the specified time andor ahardware failure such as an interruption on the battery leadAlthough some collar brands record fix attempts others do nothowever having this information would help to distinguishmanufacturing faults from satellite positioning problems
In controlled tests of fix rates by Recio et al (2011) collarswere programmed to attemptfixes in less than2-h intervals In thismode the GPS receiver estimates positions in a lsquohot startrsquo withcurrent almanac time location and ephemeris data (Tomkiewiczet al 2010) and time to fix is improvedWhen collars are inactivefor greater time intervals (~2ndash4 h) they may begin in a lsquowarmstartrsquo whereby they need to acquire new ephemeris and time tofix can be longer (resulting in greater power consumption) Evenlonger intervals (eg gt6 h from the previous fix) result in a lsquocoldstartrsquo whereby collars need to acquire new almanac timelocation and ephemeris (Tomkiewicz et al 2010) and the effecton fix rates and accuracy of locations may be relatively large Inour studies programming of sample rates or duty cycles meantthat fixes frequently were recorded gt2 h later than previous fixes
Table 6 Costs of GPS tracking equipment and additional unexpected costs incurred by studies for the retrieval of failed collarsSee Table 1 for Study details Costs are those of the research project and do not include costs covered by manufacturers working to further develop or fix faultyproducts The calculation of cost per fix incorporates both the initial costs of equipment and additional costs of retrieval but does not include other project-related
costs such as capture tracking and data analysis na not available
Study Initial cost of collarsand hardwaresoftware (AU$)
additionalcosts of refurbishment
or repair
additional costsof retrieving failed
collarsA
Time retrievingfailed collarsA
(person-hours)
Cost per fix(AU$)
BFRW_SA 29 975 0 0 0 129DINGO1_NSW 37 640 0D 53 1760 5DINGO2_NSW 5623 0 0 0 lt1DINGO1_NT 45 600 0D 9 300 lt1DINGO2_NT 15 400 0E 13 100 15 400G
DINGO_Qld 9000 11 11 40 lt1DINGO_SA 83 000 5 1 40 1FERAL_SA 43 700 0D 57 160 15KOALA_NSW 77 500B 40 0 0 8KOALA1_SEQ 17 300 6F 17 15 2KOALA2_SEQ 12 500 4F 0 0 5KOALA_SWQ 11 880 0D 72 180 9MARE_NSW 350 0 0 0 lt1MARE1_Vic 17 500C 0D 0 0 3MARE2_Vic 17 500C 7 0 0 1PADE_Tas 70 000 0 14 60 1POSS_Vic 18 894 0D 0 0 lt1QUOLL_Tas 28 370 0D 0 4 5QUOLL_WA 15 000 0 7 14 16 000G
ROO_ACT 74 700 0D 67 552 naROO_NSW 21 000 0 0 30 1WOMB_NSW 32 400C 5 20 700 5
Total 684 832 6 19 3955 223
AUnanticipated additional costs and time beyond that allocated to the standard retrieval of data-logging collarsBCost is for 19 collars deployed more than onceCApproximate cost converted from US$ or NZ$DFixed or replaced by manufacturer at no costENot fixed or replaced by manufacturerFCosts of refurbishment for additional deploymentsGTotal cost with no fixes recorded
72 Australian Mammalogy A Matthews et al
and the devices were likely to have operated in warm or cold startmodes To allow for the initial inaccuracy of lsquofirstrsquo fixes someGPS engines discard a set number of fixes and store the third orlater fix as the final position The GPS firmware potentially couldbe programmed to discard an even higher number of fixes (egrecording the fifth or later position) if needed
Shifts in sample rates and duty cycles
These shifts can have profound effects on the operating life ofthe collar and the usefulness of the collected data Several studiesreported shifts in sample rates to higher frequencies whichsignificantly reduced the operating life of the collars In the caseofone koala collar and one feral cat collar scheduled 4-h fixesshifted to record locations everyminute resulting in exhaustionofthe GPS battery within two days Similarly shifts in duty cyclepresumably also caused significant reductions of operating lifeFor example wombat collars were scheduled to turn off duringthe day when animals were expected to be in a burrow and out ofview of the satellites In this case a shift in the duty cycle causednot only significant reductions in the number of position fixesbecause the collars were not logging at night when the wombatswere active but the collars were on during the day and rapidlydrained the batteries when the GPS tried to acquire hourly fixeswhile underground To avoid rapid exhaustion of batteries inlocations or periods with poor satellite reception somemanufacturers offer the option of programming devices with atime-out period Thismeans that theGPS receiver will stop tryingto acquire a fix if it has not been successful after a certain period(usually a fewminutes)However evenwith this time-out featurea shift in duty cycle (eg to a period of underground activity) canresult in considerably shortened operating life and reduced dataacquisition
VHF transmitter failures
The VHF component of GPS collars typically is not used fordata acquisition Rather the VHF transmitter is critical for theretrieval of store-on-board GPS data-logging collars because itis usually the onlymeans of locating them In general retrieval ofGPS data-logging collars is more likely when collars are usedon relatively sedentary species that are not expected to move farfrom their release location For more mobile species capable of
travelling large distances (eg dingoeswhich have been recordedto disperse gt550 km from their point of origin in 31 days Allen2009) satellite-linkedGPS collars offer a practical solution to theloss of collars (and data) should the VHF transmitter failHowever this solution incurs the cost of additionalweight powerconsumption and expense for data-downloads (approximatelyAU$800 per collar per year where collars are transmitting for 6 hper day) Considering the many possible reasons for prematureexhaustion of the GPS battery it is crucial that the GPS and VHFcomponents in the collar are powered by separate batteries Thismeans that the device can still be located collected data retrievedand the collar refurbished even after the GPS has stoppedoperating albeit with some difficulty Nevertheless problemsmay still arise when separate batteries are used to power the VHFbeacon as was the case in our studies with VHF transmitterfailure Despite VHF technology having been around forconsiderably longer than GPS there are still frequent reports ofunit failure from insufficient packaging (Gau et al 2004 Blackie2010) A robust and completely waterproof design is needed topreventwater ingress anddamage to transmitters and aerials needto be positioned in the collar to minimise their risk of beingchewed or broken
Timed-release problems and failures
Our experience showed that timed-release devices do notalways result in the collar dropping off the animal on theprogrammed time and date For example activation of the releasemechanism may occur but dirt and debris may prevent themechanism from separating until the animal grooms the collaraway This is a problem if the animal spends time underground ina tree or on a cliff and the collar drops to where it cannot berelocated or reached Thus researchers are left with someuncertainty about when if ever they will be able to recover theircollars When collars release early or not at all this is more likelyto be due to a programming fault or hardware failure These issuesmight become more problematic if animals are left wearingcollars for the remainder of their lives
Data accuracy
Inmost cases it is unlikely that all the locations recordedwith aGPS collar will be accurate enough to be used for the studypurposes (unless a coarse resolution is acceptable for theobjective) An HDOP value (or sometimes a PDOP value) istypically ascribed to each recordedGPSfix andmany researchersuse this as the primary means of discriminating and excludingfixes that are likely to be too inaccurate (DrsquoEon and Delparte2005 see Appendix 2) However it is important to note that thereis no limit to the potential level of inaccuracyof anyfix even thosewith low HDOP values may still have low accuracy RatherHDOP values reflect the likelihood that the fixes were accuratelyacquired therefore not all fixes with high HDOP values will beinaccurate but a greater proportion will be and vice versa
Since site conditions (eg canopy cover terrain) impactsatellite reception it is strongly recommended that therelationship between HDOP values and on-ground accuracies beexamined This can be done either before collar deploymentsthrough stationary collar tests in a range of environments at theproposed study site (eg Recio et al 2011) or after deploymentsto gauge the accuracy of the fixes obtained (eg Allen 2012) An
Table7 Summaryof commonproblemsamongstudiesofGPStrackingof mammals in Australia
Issue No of studies collarsAffected Not affected
Shorter GPS life than expected 15 7 47Intermittent fixes (days
without recording)14 7 31
Fewer fixes per day thanexpected
16 6 ndash
Changes tofix scheduleor dutycycle
11 7 18
VHF transmitter failure 9 14 14Timed-release failure 4 2 19Collar design issues requiring
change10 12 ndash
Additional unexpected costs 13 10 ndash
Success of GPS collar deployments Australian Mammalogy 73
assessment of HDOP values against on-ground accuracies willpermit researchers to determine the appropriate HDOP thresholdndash rather than choosing an arbitrary numberndash for inclusion offixesand to establish the likelihood that fixes are accurate withinacceptable bounds Selection of accuracy thresholds should beheavily influenced by the study objectives and the level ofmovement resolution required (Ellis et al 2011) For example fargreater resolution is necessary to determine which backyards arevisited by dingoes in urban areas than to estimate home-rangesizes of highly mobile dingoes in remote locations
Welfare issues
Until recently most studies using GPS collars have done sowith collars weighing gt500 g on medium-to-large mammalsusually predators andor their prey For example Johnson et al(2002) used 18-kg collars for caribou while Merrill et al (1998)had 920-g collars for wolves and white-tailed deer There is littlepublished information on use of GPS collars lt300 g on small andmedium-sized mammals (Blackie 2010 Mattisson et al 2010)but recent assessments indicate that they are suitable (Dennis et al2010 Recio et al 2011) Here we present data from speciesweighing 1ndash74 kg including several smaller species (koalaspossums pademelons rock-wallabies and quolls) weighing lessthan 10 kg When collars are attached to wild animals severalwelfare issues need to be considered including the need forcollars to be well fitted (not too tight or too loose) to preventinjury to avoid disruption of daily activities (eg grooming andsleeping) and to avoid interference with normal movementbehaviour (Casper 2009) We found few instances of collarscausing injury to study animals but therewereminor problems ofhair loss and skin abrasions A few pademelons died as a result ofcapture myopathy (McMahon et al in press) a condition that iscommonly seen in macropods following capture and handling(Vogelnest and Portas 2008) Consequently the additional stressof handling while fitting collars needs to be considered forsusceptible species We were not aware of any of our studyanimals changingbehaviour as a result of theGPScollar althoughthis would be difficult to identify and in any case was notexplicitly studied
One of the benefits of GPS tracking is that animals do not needto be followed to gather location information thus reducing bothlabour costs and disturbance to study animals In addition someresearch programs use timed-release units so that animals do nothave to be recaptured during the study Consequently there maybe no regular monitoring of animal welfare following releaseAmong our studies 60 of animals were recaptured after collardeployment which meant that animal welfare could be assessedfor example through an examination of changes in bodyweight orcondition thefit of collars and injuries incurredSuchmonitoringgives researchers the capacity to respond to problems when theyarise and improve animal welfare However for some animalsrecapture may not be a practical option In these cases VHFtracking remains a valuable tool for monitoring animal welfare ofhighly visible species in real time or for monitoring unusualmovement behaviour of more cryptic species For example ifanimal locations do not change as expected or if collars are fittedwith a mortality signal (whereby VHF signal frequency changesafter a predefined period of inactivity) lack of movement mightprovide an early indication ofwelfare issuesWhileVHF tracking
somewhat defeats the advantages of GPS collars it may be usedto monitor animal welfare for short intervals throughout a study
Timed-release devices allow collars to be recovered fromanimals without the need for recapture and avoid restraint andhandling of animals which may cause stress However wefound that 18 of timed-release devices failed leaving collarsattached to animals This may be a significant issue if animalsare encumbered with GPS collars indefinitely Casper (2009)suggested that researchers should consider some of theanticipated consequences of attaching equipment to animalsand that they should be careful to avoid situations where thewelfare of animals is compromised An important considerationwith regard to timed-release devices is the likelihood of theanimal being recaptured to remove the collar if the mechanismfails In particular the use of timed-release collars on growingjuveniles warrants careful thought because strangulation bythe collar is possible if it does not release and it cannot beremoved Alternatively several options for collar design couldbe considered to allow for the possibility of a timed-release unitfailing Options include expanding collars or elastic insertswhich permit growth and the inclusion of weak links (eg asection of natural rubber) which eventually will fail therebyensuring that animals do not have to cope with wearing a failedcollar for a long time
An issue that needs tobe explicitly addressed is thepreparationof protocols for the use of GPS collars on mammals forsubmission and approval by animal ethics committees (AECs)The central question is whether the welfare of animals is likely tobe compromised to a point that is unacceptable to an AEC It isacknowledged that the use of animals for scientific researchmay involve interference with the animal such as capture andthe imposition of a collar for the duration of the study The firstquestion to address is whether the collar causes injury to theanimal or prevents it from carrying out its normal activities Thesecondquestion is the reliability of collar retrieval at the endof thestudy As pointed out in Lunney (2012) and Jones et al (2012) itis in the interests of the researcher to develop protocols thatpresent a reasoned case for the approach and the level of risk andnot leave this to the AEC who may be less knowledgeable aboutthe species or study system
Costs
Wildlife tracking inherently is an expensive pursuit but tocomplicate the situation costs vary significantly depending onproject objectives (Thomas et al 2011) Given that ~75 ofthe case studies considered in this paper incurred additionalunexpected costs we believe it to be imperative that whenplanning projects researchers obtain funds not only for the initialcosts of equipment and labour but also to cover costs associatedwith poor collar performance (additional searches andor captureof animals collar refurbishment andor replacement) Althoughit is impossible to provide a definitive measure of how largethis contingency fund should be if our results are indicativeallocating at least 25 of initial project costs would be advisable
Our most significant unexpected fiscal expenditures relatedto attempts to retrieve lost collars as well as for battery andorcollar replacement or repair Indeed the cost of refurbishment canrise after purchase to nearly half the cost of a newcollarHoweverother potential costs include those associated with researchers
74 Australian Mammalogy A Matthews et al
disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam
et al 2010 Ellis et al 2011 Ruykys et al 2011 Matthews andGreen 2012 Allen 2012) Many researchers have experienceddifficulties with the technology some of which have beenovercome with time and experience Several previousinternational studies have dealt with the issue of GPSperformance For example the success of GPS data acquisitionand the precision of locations in relation to collar position havebeen reported (Moen et al 1996 DrsquoEon and Delparte 2005) andin some cases compared among habitats with differentvegetation cover and terrain (Dussault et al 1999 Di Orio et al2003 Cain et al 2005 Recio et al 2011) At this time we areaware of only a small number of studies that have examinedthe long-term performance and reliability of GPS collars underfield conditions and these were undertaken in Africa (Hemson2002) North America (Johnson et al 2002 Gau et al 2004)central Asia (Kaczensky et al 2010) and New Zealand (Blackie2010) Various studies on animal ecology (eg home rangeresource selection) report individual issues including releasefailures (eg Burdett et al 2007 Kochanny et al 2009) VHFtransmitter failures (eg Kochanny et al 2009) and erratic orpremature GPS failures (eg Girard et al 2002 Andersen et al2008 Zweifel-Schielly et al 2009) but assessment of collarperformance was not a focus of these papers Furthermoresince unsuccessful studies or collar failures tend not to bepublished information on the prevalence of total collar failureis not readily available Such information is important whenwildlife scientists are compelled to work within tight budgetsshort timeframes and limited resources and is needed for theuptake and ultimate success of GPS technology (Lizcano andCavelier 2004)
The aim of this paper is to provide researchers who plan to useGPS telemetry with background knowledge of project logisticsand information about the strengths and weaknesses of GPStelemetry gained through our numerous field studies on 13species of mammals in Australia Manufacturers of GPS collarsmay also benefit from a greater understanding of the mostcommon sources of failure and the costs to researchers when thetechnology does not meet expectations We restricted oursynthesis to studies involving non-volant terrestrial mammalsbut note that GPS technology also has been used on marinemammals (eg Sheppard et al 2006) and flying-foxes (egSpencer and Miller 2006) in Australia Specific objectives wereto (1) determine the success of collars or conversely the typesand rates of failures (2) investigate issues in relation to collardesign and theGPSVHFand timed-release components and (3)identify problems relating to unforeseen costs of collar retrievalrefurbishment and reconfiguration and possible impacts on thewelfare of animals after collar deployment Our intention is toprovide this information in a constructive manner so thatresearchers and manufacturers can be fully informed whenmaking decisions to use this technology
Methods
We compiled data from 24 studies across Australia (Fig 1) inwhich GPS collars were used in 280 deployments on terrestrialmammals weighing 1ndash74 kg including dingoes or other wilddogs (Canis lupus dingo and C l familiaris and their hybrids)feral cats (Felis catus) foxes (Vulpes vulpes) kangaroos(Macropus giganteus) koalas (Phascolarctos cinereus)
DINGO_NT
DINGO_SA DINGO_QLDKOALA_SWQ
KOALA_NSW
ROO_ACT
MARE2_VIC
FERAL_SA
QUOLL_WA
POSS_VIC
QUOLL_TAS
KOALA_SEQ
MARE_NSW
DINGO_NSW
ROO_NSW
WOMB_NSW
MARE1_VIC
PADE_TAS
BFRW_SA
N
Fig 1 The locations of GPS collar deployments for each study in Australia Refer to Table 1 for species and locationdescriptions
66 Australian Mammalogy A Matthews et al
livestock guardian dogs (C l familiaris) pademelons (Thylogalebillardierii) possums (Trichosurus cunninghami) quolls(Dasyurus geoffroii and D maculatus) wallabies (Macropusrufogriseus rufogriseus and Petrogale lateralis) and wombats(Vombatus ursinus) The collars used in these studies weremanufactured by Blue Sky Telemetry (Aberfeldy Scotland)Followit Wildlife (Lindesberg Sweden) Precision AgricultureResearchGroup (ArmidaleAustralia) Sirtrack (HavelockNorthNew Zealand) Sigma Delta Technologies (Floreat Australia)Telemetry Solutions (Concord California USA) and TitleyElectronics (Lawnton Australia) Where different collarsprogrammed settings (such as scheduledfix interval) or locationswere used within a research program these were separated intodifferent studies for analysis Collars were deployed for up to12 months with most studies being shorter than six months(Fig 2)
Data were collated on the species and locations of collardeployments habitat types collar types and manufacturers thereliability of GPS components VHF components and timed-release devices statistics on GPS performance costs and animalwelfare While these data provide descriptive statistics on GPScollar utility and success they do not permit a comparativeevaluation of one collar brand with another because collars weredeployed on different species in widely different habitats andlocations
Appendix 1 provides descriptions of each study the collarsused and dates of deployment Appendix 2 contains a descriptionof the components ofGPS collars and how they operate aswell asa glossary of terms associated with the technology
Results
Of the 280deployments ofGPS collars 249were retrieved andordownloaded remotely However retrieval rates ranged from 0 to
100amongstudies (Table1)Reasons for lossof collars (or non-retrieval) included loss of VHF signal due to presumed batteryfailure or damage to the antenna animals moving out of rangeand the release of collars in burrows where they could not beretrievedWhilewe cannot accurately account for each lost collarwe were able to discern the reasons for losses from some collarsthat were considered lost and later found through extensiveground and aerial searches Of the 249 collars that were retrievedandor downloaded 96 had recorded some data However dueto shortened operating life intermittent failure andor disruptionsto the fix schedules and duty cycles the number of recordedlocations often was less than expected
The averageoperating life (ie real lifespan) of theGPScollarswas 1017 days and amounted to 677 of the expected meanOnly 53 of collars operated for their full deployment orexpected life (Table 2) and operating success was higher forstudies of shorter duration (Fig 3) In only five studies was theGPS receiver on all collars still functioning at the end of thedeployment period which in these cases was less than 92 daysThe longest time a GPS operated successfully was 403 days on adingo collar programmed to record eight fixes per day Eightstudies (40) reported at least one collar failing to collect GPSlocations within 10 days of deployment and a further six studies(30) reported a collar failing within 40 days Suggested reasonsfor prematureGPS failure includedwear and tear (eg breakdownof the GPS aerial andor aerial cables) poor battery quality andexhaustion of the battery from sample rate malfunctions (seebelow)
Unintended shifts in duty cycle or sample rate occurred in 18ofdeployments but in anyone study this problemaffected0ndash70of collars deployed (excluding the study in which only one collarwith data was retrieved) On average shifts from programmedsample rates occurred after 59 days from those deploymentsIntermittent collar failures in which a collar did not log a locationfor one or several days occurred in 31 of deployments(Table 2) Loss of data was often considerable For example onekoala collar logged erratically over 159 days and provided only11 days of useable data
Fix (ie GPS location) acquisition over the deployment periodwas generally lower than programmed rates even for studies inopen (eg desert) environments where there was an unimpededview of the sky However two studies reported a higher thanexpected number of fixes per collar (Table 3) While on averageonly 66 of expected fixes per collar were collected thetotal number of fixes for each study generally was high(mean = 16 698 range = 233ndash58 575) Mean horizontal dilutionof precision (HDOP) was 30 (range = 15ndash50) (Table 4)Locations with lower HDOP values are considered to be moreprecise (DrsquoEon and Delparte 2005) and the percentage of fixeswith HDOP lt5 ranged from 67 to 99 among studies
VHF transmitter failure was reported in 9 of 24 studies(Table 5) In two cases the VHF transmitter was programmed toactivate on a set date but did not initialise In the other sevenstudies theVHF transmitter stoppedoperating sometimeswithina fewdaysof deployment (average = 29months) In somecollarsVHF transmitter failure was caused by water ingression Otherpossible causes included faulty batteries or circuitry and cheweddamaged antennas which reduced transmission strength belowthat which could be detected
6
5
4
3
Num
ber
of s
tudi
es
2
1
01 2 3 4 5 6
Duration (months)
7 8 9 10 11 12
Fig 2 Duration of GPS collar deployments among compiled studies ofmammals in Australia
Success of GPS collar deployments Australian Mammalogy 67
Timed-release deviceswerefitted to collars in nine studies buttwo studies retrieved collars before the programmed releasedates and in one study all the collars were lost when the VHFtransmitter failed Thus only six studies were available to assessthe performance of the timed-release mechanism Of the 83collars involved in these studies 5 released before or afterthe programmed timedate and a further 19 failed to release atall (Table 5)
In total we spent AU$684 832 on collars and equipment frommanufacturers An additional 25 of initial costs was spent post-deployment on unexpected costs associated with refurbishmentor retrieval of failed collars labour extra searches (eg aerialsearches purchase of additional equipment such as burrowcameras) travel (fuel accommodation) and animal capture (egdarting) The costs associated with locating and retrieving lsquolostrsquocollars were up to $50 000 (mean = $6040) and 1760 person-
Table 1 Summary of GPS collar deployments and retrieval success for each study (or research case) of mammals in Australia
Study Species Location Collar type No ofdeployments
retrievedA withdata
BFRW_SA Black-footedrock-wallaby
Anangu PitjantjatjaraYankunytjatjara Landsnorth-west South Australia
Sigma DeltaTechnologies
10 80 13
DINGO1_NSW Dingo Blue Mountains New SouthWales
Sirtrack 12 58 100
DINGO2_NSW Dingo Blue Mountains New SouthWales
Sirtrack 5 100 100
DINGO1_NT Dingo Tanami Desert NorthernTerritory
Sirtrack 15 87 100
DINGO2_NT Dingo Tanami Desert NorthernTerritory
Blue Sky Telemetry 7 29 0
DINGO_Qld Dingo Maroochy Shire south-eastQueensland
Sirtrack 9 100 100
DINGO_SA Dingo North-east South Australia Sirtrack 16 81 100FERAL_SA Red fox and Cat Arid Recovery northern South
AustraliaSirtrack 18 94 100
KOALA_NSW Koala Gunnedah New South Wales Sirtrack 31 100 100KOALA1_SEQ Koala Coomera south-east
QueenslandSirtrack 9 89 100
KOALA2_SEQ Koala Coomera south-eastQueensland
Sirtrack 6 100 100
KOALA_SWQ Koala Mulga Lands south-westQueensland
Titley Scientific 7 57 100
MARE_NSW Livestock guardiandog (Maremma)
Yarrowitch New SouthWales UNETracker 3 100 67
MARE1_Vic Livestock guardiandog (Maremma)
Buchan Victoria Telemetry Solutions 3 100 100
MARE2_Vic Livestock guardiandog (Maremma)
Tallangatta Victoria Telemetry Solutions 4 100 100
PADE_Tas Tasmanian pademelonand Bennettrsquoswallaby
Scottsdale Tasmania Followit Wildlife 30 100 100
POSS1_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 3 100 100
POSS2_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 6 100 100
POSS3_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 20 100 100
QUOLL_Tas Spotted-tailed quoll Cape Grim north-westTasmania
Telemetry Solutions 9 100 100
QUOLL_WA Western quoll Northern jarrah forestWestern Australia
Sigma DeltaTechnologies
6 0 ndash
ROO_ACT Eastern grey kangaroo Canberra Australian CapitalTerritory
Sirtrack 26 96 100
ROO_NSW Eastern grey kangaroo Jooriland New South Wales Sirtrack 12 100 100WOMB_NSW Common wombat SnowyMountains New South
WalesSirtrack 13 85 100
Total 280 89 96
ACollar retrieved or GPS data downloaded remotely
68 Australian Mammalogy A Matthews et al
hours (average = 180) (Table 6) over and above the investmentthat had already been allocated towards retrieving collars Indeedproject running costs that included travel labour and outlaysassociatedwith capture anddata analyseswould add a substantialamount to these figures Using just the initial cost of collars andanyadditional expenses associatedwith tracking and retrievalwecalculated a cost per fix and found that it varied considerablyamong studies (mean = $223 range = $002 to $129)withhigheramounts for studies that experienced catastrophic collar failuressuch that no locations were recorded (Table 6)
Across all studies 168 (60) collared individuals wererecaptured allowing potential animal welfare issues to beassessed The most frequently reported problem was loss of furaround the neck (12 of recaptured animals) Three pademelonsdied as a consequence of animal handling related to GPS collardeployment (McMahon et al in press) while four individuals(one quoll one fox and two kangaroos in captive trials) sustainedminor injuries (eg skin lacerations) that prompted the researcherto change the collar design Most researchers contributing to thisreview were the first to use GPS collars on their study speciesConsequently 48 of studies involved changing the originalcollar design often by returning the collars to the manufacturer
Discussion
GPS telemetry has become an important tool in wildlife researchto investigate animal movements (DrsquoEon and Delparte 2005Thomas et al 2011) with the expectation that it offers severalsalient advantages over traditional techniques Chief among theseis the ability to collect higher numbers of locations automaticallyremotely and more precisely than with VHF and satellite-basedmethods (Hulbert and French 2001 Johnson et al 2002 Gravesand Waller 2006 Bandeira de Melo et al 2007 Mattisson et al2010 Thomas et al 2011)With a greater number of fixes whichcan be taken independently of season weather time of dayor year and without the disturbance of a researcher tracking theanimal GPS telemetry is potentially less susceptible to bias thanVHF radio-tracking (Johnson et al 2002 Mattisson et al 2010Robley et al 2010) Thus GPS collars can gather more data at asignificant cost saving per location and with greater researchersafety (Johnson et al 2002) Such data often facilitate the
Table 2 Operational success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study Mean no of daysoperating (range)
of expecteddays
collars operatedover full deployment
collars withintermittent failure
BFRW_SA 7 (0ndash28) 6 0 100DINGO1_NSW 269 (130ndash403) 74 43 86DINGO2_NSW 53 (52ndash54) 152 100 0DINGO1_NT 198 (33ndash300) 66 47 8DINGO_Qld 23 (5ndash43) 66 100 0DINGO_SA 180 (7ndash320) 56 62 0FERAL_SA 61 (8ndash126) 66 23 88KOALA_NSW 100 (4ndash179) 61 61 39KOALA1_SEQ 109 (17ndash154) 115 80 13KOALA2_SEQ 95 (81ndash163) 91 83 17KOALA_SWQ 114 (64ndash160) 95 50 50MARE_NSW 44 100 67 0MARE1_Vic 57 (19ndash78) 37 0 100MARE2_Vic 118 (9ndash160) 76 50 25PADE_Tas 220 (30ndash240) 92 27 0POSS1_Vic 129 (87ndash155) 140 100 33POSS2_Vic 74 (36ndash115) 86 67 100POSS3_Vic 77 (4ndash120) 46 40 20QUOLL_Tas 31 (7ndash35) 112 100 0ROO_ACT 42 (3ndash103) 22 44 naROO_NSW 62 (35ndash70) 100 100 0WOMB_NSW 157 (26ndash346) 47 18 91
Total 988 654 524 305
100
90
80
70
60
50
40
30
20
10
00 50 100 150 200
Expected GPS life or duration of deployment (days)
250 300 350 400
c
olla
rs o
pera
ted
over
full
depl
oym
ent
Fig 3 Relationship between the expected GPS life (or time in the field)and the percentage of collars operating at the end of the deployment period ineach study (n= 22) The trend line is significantly negative (r= ndash059P= 0004)
Success of GPS collar deployments Australian Mammalogy 69
Table 3 Fix success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study No of programmedfixes per day
Mean fixesper dayA (range)
operating dayswith 0 fixes (range)
Mean no of fixesper collar (range)
of expected fixesper collarB
Total fixes
BFRW_SA 16 83 (6ndash11) 77 233 12 233DINGO1_NSW 6ndash8 57 (1ndash8) 338 (0ndash663) 1537 (802ndash2302) 87 10 762DINGO2_NSW 144 1375 (62ndash145) 0 7317 (6978ndash7534) 96 36 585DINGO1_NT 24 208 (2ndash24) 01 (0ndash17) 4109 (713ndash6752) 57 53 424DINGO_Qld 200 138 (12ndash196) 0 3522 (920ndash6870) 50 31 702DINGO_SA 48 39 (6ndash48) 0 5432 (749ndash11043) 35 58 575FERAL_SA 6 4 (3ndash6) 32 (2ndash93) 258 (23ndash622) 47 4383KOALA_NSW 4 43 (1ndash1296) 19 (0ndash209) 429 (13ndash2074) 65 13 303KOALA1_SEQ 12 106 (1ndash65) 01 (0ndash93) 1280 (222ndash1812) 110 8839KOALA2_SEQ 5 46 (1ndash5) 002 (0ndash13) 746 68 2601KOALA_SWQ 6 5 (1ndash6) 93 (18ndash238) 550 (318ndash694) 77 2200MARE_NSW 144 1179 0 4440 61 16 952MARE1_Vic 48 46 (1ndash48) 219 (64ndash526) 2280 (371ndash3338) 30 6839MARE2_Vic 48 476 (26ndash48) 92 (0ndash368) 5600 (354ndash7639) 75 21 808PADE_Tas 9 89 (6ndash9) 0 1744 95 54 859POSS1_Vic 9 10 (1ndash154) 3 (0ndash10) 1233 107 3698POSS2_Vic 10 12 (1ndash972) 7 (1ndash17) 755 94 4530POSS3_Vic 14 13 (4ndash40) 10 (0ndash97) 902 65 18 036QUOLL_Tas 12C 74 (1ndash12) 0 241 (182ndash280) 64 5150QUOLL_WA 3 na na na na 0ROO_ACT 24 232 (3ndash36) na 1448 (70ndash3944) 32 naROO_NSW 32 32 0 1779 (1006ndash2028) 93 21 351WOMB_NSW 8 53 (1ndash30) 226 (0ndash596) 748 (40ndash2235) 28 8227
MeanTotal 122 (0ndash97) (13ndash11043) 658 384 057
AFor those days when at least one fix was recordedBFor expected life of collar This differs from fix success calculated over actual operating lifeC12 fixes for 5 days of the week and 72 or 96 fixes per day for the remaining 2 days Data presented formean fixes per day andmean fixes per collar for those dayswith 12 fixes per day
Table 4 GPS data performance statistics for collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT MARE_NSW PADE_Tas and QUOLL_WA no data
Study fixes with3 satellites
fixes with4 satellites
fixes with5 satellites
fixes with6 satellites
fixes with7+ satellites
HDOP(mean plusmn sd)
fixes withHDOP lt5
BFRW_SA 50 plusmn 39 67DINGO1_NSW 471 294 143 57 35 32 plusmn 22 77DINGO2_NSW 445 316 155 57 26 34 plusmn 25 82DINGO1_NT 34 93 234 290 34 18 plusmn 13 98DINGO_Qld 54 30 12 3 1 35 88DINGO_SA 0 5 21 32 42 2 98FERAL_SA 20 18 25 18 21 27 94KOALA_NSW 324 227 173 118 157 30 plusmn 26 86KOALA1_SEQ 389 249 182 11 7 32 plusmn 26 86KOALA2_SEQ 372 259 180 107 82 33 plusmn 27 84KOALA_SWQ 0 146 187 176 491 17 plusmn 12 98MARE1_Vic 2 5 14 24 55 17 plusmn 09 99MARE2_Vic 1 4 9 16 69 15 plusmn 09 99POSS1_Vic 559 275 113 39 14 40 plusmn 30 77POSS2_Vic 412 170 164 158 96 32 plusmn 26 85POSS3_Vic 576 256 97 46 25 39 plusmn 29 78QUOLL_Tas 80 164 188 167 401 20 plusmn 14 94ROO_ACT 356 216 154 131 143 31 plusmn 26A 86ROO_NSW 440 297 168 68 28 35 plusmn 27 84WOMB_NSW 466 258 126 76 74 35 plusmn 26 83
Total 30
AHDOP=38 28 excluding periods of collar failure
70 Australian Mammalogy A Matthews et al
investigation of animal behaviour at much finer scales than thoseachievable with VHF technology such as the actual speed ananimal travels the locations it visits and the true time spent in agiven habitat (eg Allen 2007) However capital costs of collarsand equipment satellite signal reception longevity under fieldconditions and the potential for failure present possiblecounterbalances to these advantages (Johnson et al 2002) Ourevaluation of 23 studies using GPS collars on mammals inAustralia revealed several common problems including a shorterthan expected GPS life intermittent failures (ie days with nolocations collected) fewerfixes per day than expected changes tothe fix schedule or duty cycle early VHF transmitter and timed-release failures and collar design issues (Table 7)
Lessons learntCollar returns
Aswith conventional radio-tracking studies it is expected thata proportion of collars will be lost such as from animalsdispersing moving out of range of the VHF or from transmitterfailure (Harris et al 1990) Losses from GPS also can beexperienced with catastrophic equipment failures defined byFrair et al (2010) as computer glitches or failed breakawaydevices We were unable to retrieve 31 collars from 280deployments and a further 10 collars that were retrieved did notcollect any GPS locations Thus 15 of collar deployments did
not return animal location information to the research programsand we conclude that these losses are relatively common
Operating life
Manufacturers typically quote an expected operating life thatis determined by fix schedule duty cycle and battery capacity Inthe field however maximum operational life is rarely attainedThis is because operating life is influenced by environmentalconditions (eg temperature and humidity) the time it takes for aposition to be acquired (time to fix) and the batteries themselvesIn locations with an obstructed view of the sky due to densecanopy cover steep terrain or the animal being underground orcovered by rocks or logs itmay take longer for theGPS to acquirea fix ndash if at all ndash and consequently more battery power will beused (though fix acquisition lsquotime-outsrsquo can help reduce this lossof battery capacity during periods of poor satellite reception) Ourresults showed that actual operating lifewas~68of the expectedlife but there was high variability among individual collars andstudies A comparison of three collar brands by Blackie (2010)found similar percentages of operational life expectancy amongbrands but also with high variability among individual collars(range 59ndash1072) Some manufacturers take into account asafetymarginwhen calculating expected battery life ndash rather thanpublishing a best-case scenario ndash and it is certainly informative toenquire about this when planning the purchase of GPS devices
Table 5 Success of VHF transmitter and timed-release components of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details MARE_NSW no data na not available
Study No of collars withVHF transmitter failure[ of total deployed]
Mean no of monthsto failure (range)
expectedmonths
collars withtimed-release
failure
collars releasedbefore or after
timedate
BFRW_SA 10 [100] 17 (0ndash7)A na naDINGO1_NSW 2 [17] 3 (2ndash4) 18 17 8DINGO2_NSW 0 na na 0 0DINGO1_NT 0 na na 13 0DINGO2_NT 7 [100] 1 10 na 29DINGO_Qld 0 na na 0 0DINGO_SA 0 na na na naFERAL_SA 1 [6] 0 0 na naKOALA_NSW 0 na na na naKOALA1_SEQ 1 [11] 2 8 na naKOALA2_SEQ 0 na na na naKOALA_SWQ 5 [71] 32 (1ndash4) 27 na naMARE1_Vic 0 na na na naMARE2_Vic 0 na na na naPADE_Tas 0 na na 37 0POSS1_Vic 0 na na na naPOSS2_Vic 0 na na na naPOSS3_Vic 0 na na na naQUOLL_Tas 0 na na na naQUOLL_WA 6 [100] ndash
B na naROO_ACT 4 [15] 2 (003ndash4) 6 na naROO_NSW 0 na na na naWOMB_NSW 4 [31] 9 (5ndash14) 50 8 25
Total 143 29 19 5
AVHFtransmitterwasprogrammed to activateon afixeddate but only3of 10didOf these by the7thmonth into the10-monthVHFcollar deployment nonewereworkingBVHF transmitter was programmed to activate on a fixed date but did not
Success of GPS collar deployments Australian Mammalogy 71
The studies with shorter intended deployments had highersuccess mainly because problems contributing to shortenedoperating life generally occurred only after some time in the fieldThus while GPS collars appear to be suitable for collectinganimal movement data over several seasons or throughoutthe year only a small proportion of collars operated reliably forsuch extendedperiodsOur experience confirms the suggestion ofGau et al (2004) that the reliability and performance of GPScollars decreases as time in the field increases
Fix acquisition
Fix rates (ie the number of successful fixes divided by thenumber attempted) are frequently lower on GPS collars that areattached to free-ranging animals This is mainly due to canopycover topography collar orientationfix interval and collar brand(Frair et al 2010) However obtaining intermittent fixes (dayswith no fixes) was a common problem in our studies and thereasons for its high incidence may differ from those mentionedaboveOften assessments offix success of collars under differentconditions are conducted over short periods (eg 24 hRecio et al2011) and this may not provide a true assessment of fix success
over the life of the collar In addition to locationor signal precisionissues intermittent fixes may arise from a programming failurewhere the collar does not turn on at the specified time andor ahardware failure such as an interruption on the battery leadAlthough some collar brands record fix attempts others do nothowever having this information would help to distinguishmanufacturing faults from satellite positioning problems
In controlled tests of fix rates by Recio et al (2011) collarswere programmed to attemptfixes in less than2-h intervals In thismode the GPS receiver estimates positions in a lsquohot startrsquo withcurrent almanac time location and ephemeris data (Tomkiewiczet al 2010) and time to fix is improvedWhen collars are inactivefor greater time intervals (~2ndash4 h) they may begin in a lsquowarmstartrsquo whereby they need to acquire new ephemeris and time tofix can be longer (resulting in greater power consumption) Evenlonger intervals (eg gt6 h from the previous fix) result in a lsquocoldstartrsquo whereby collars need to acquire new almanac timelocation and ephemeris (Tomkiewicz et al 2010) and the effecton fix rates and accuracy of locations may be relatively large Inour studies programming of sample rates or duty cycles meantthat fixes frequently were recorded gt2 h later than previous fixes
Table 6 Costs of GPS tracking equipment and additional unexpected costs incurred by studies for the retrieval of failed collarsSee Table 1 for Study details Costs are those of the research project and do not include costs covered by manufacturers working to further develop or fix faultyproducts The calculation of cost per fix incorporates both the initial costs of equipment and additional costs of retrieval but does not include other project-related
costs such as capture tracking and data analysis na not available
Study Initial cost of collarsand hardwaresoftware (AU$)
additionalcosts of refurbishment
or repair
additional costsof retrieving failed
collarsA
Time retrievingfailed collarsA
(person-hours)
Cost per fix(AU$)
BFRW_SA 29 975 0 0 0 129DINGO1_NSW 37 640 0D 53 1760 5DINGO2_NSW 5623 0 0 0 lt1DINGO1_NT 45 600 0D 9 300 lt1DINGO2_NT 15 400 0E 13 100 15 400G
DINGO_Qld 9000 11 11 40 lt1DINGO_SA 83 000 5 1 40 1FERAL_SA 43 700 0D 57 160 15KOALA_NSW 77 500B 40 0 0 8KOALA1_SEQ 17 300 6F 17 15 2KOALA2_SEQ 12 500 4F 0 0 5KOALA_SWQ 11 880 0D 72 180 9MARE_NSW 350 0 0 0 lt1MARE1_Vic 17 500C 0D 0 0 3MARE2_Vic 17 500C 7 0 0 1PADE_Tas 70 000 0 14 60 1POSS_Vic 18 894 0D 0 0 lt1QUOLL_Tas 28 370 0D 0 4 5QUOLL_WA 15 000 0 7 14 16 000G
ROO_ACT 74 700 0D 67 552 naROO_NSW 21 000 0 0 30 1WOMB_NSW 32 400C 5 20 700 5
Total 684 832 6 19 3955 223
AUnanticipated additional costs and time beyond that allocated to the standard retrieval of data-logging collarsBCost is for 19 collars deployed more than onceCApproximate cost converted from US$ or NZ$DFixed or replaced by manufacturer at no costENot fixed or replaced by manufacturerFCosts of refurbishment for additional deploymentsGTotal cost with no fixes recorded
72 Australian Mammalogy A Matthews et al
and the devices were likely to have operated in warm or cold startmodes To allow for the initial inaccuracy of lsquofirstrsquo fixes someGPS engines discard a set number of fixes and store the third orlater fix as the final position The GPS firmware potentially couldbe programmed to discard an even higher number of fixes (egrecording the fifth or later position) if needed
Shifts in sample rates and duty cycles
These shifts can have profound effects on the operating life ofthe collar and the usefulness of the collected data Several studiesreported shifts in sample rates to higher frequencies whichsignificantly reduced the operating life of the collars In the caseofone koala collar and one feral cat collar scheduled 4-h fixesshifted to record locations everyminute resulting in exhaustionofthe GPS battery within two days Similarly shifts in duty cyclepresumably also caused significant reductions of operating lifeFor example wombat collars were scheduled to turn off duringthe day when animals were expected to be in a burrow and out ofview of the satellites In this case a shift in the duty cycle causednot only significant reductions in the number of position fixesbecause the collars were not logging at night when the wombatswere active but the collars were on during the day and rapidlydrained the batteries when the GPS tried to acquire hourly fixeswhile underground To avoid rapid exhaustion of batteries inlocations or periods with poor satellite reception somemanufacturers offer the option of programming devices with atime-out period Thismeans that theGPS receiver will stop tryingto acquire a fix if it has not been successful after a certain period(usually a fewminutes)However evenwith this time-out featurea shift in duty cycle (eg to a period of underground activity) canresult in considerably shortened operating life and reduced dataacquisition
VHF transmitter failures
The VHF component of GPS collars typically is not used fordata acquisition Rather the VHF transmitter is critical for theretrieval of store-on-board GPS data-logging collars because itis usually the onlymeans of locating them In general retrieval ofGPS data-logging collars is more likely when collars are usedon relatively sedentary species that are not expected to move farfrom their release location For more mobile species capable of
travelling large distances (eg dingoeswhich have been recordedto disperse gt550 km from their point of origin in 31 days Allen2009) satellite-linkedGPS collars offer a practical solution to theloss of collars (and data) should the VHF transmitter failHowever this solution incurs the cost of additionalweight powerconsumption and expense for data-downloads (approximatelyAU$800 per collar per year where collars are transmitting for 6 hper day) Considering the many possible reasons for prematureexhaustion of the GPS battery it is crucial that the GPS and VHFcomponents in the collar are powered by separate batteries Thismeans that the device can still be located collected data retrievedand the collar refurbished even after the GPS has stoppedoperating albeit with some difficulty Nevertheless problemsmay still arise when separate batteries are used to power the VHFbeacon as was the case in our studies with VHF transmitterfailure Despite VHF technology having been around forconsiderably longer than GPS there are still frequent reports ofunit failure from insufficient packaging (Gau et al 2004 Blackie2010) A robust and completely waterproof design is needed topreventwater ingress anddamage to transmitters and aerials needto be positioned in the collar to minimise their risk of beingchewed or broken
Timed-release problems and failures
Our experience showed that timed-release devices do notalways result in the collar dropping off the animal on theprogrammed time and date For example activation of the releasemechanism may occur but dirt and debris may prevent themechanism from separating until the animal grooms the collaraway This is a problem if the animal spends time underground ina tree or on a cliff and the collar drops to where it cannot berelocated or reached Thus researchers are left with someuncertainty about when if ever they will be able to recover theircollars When collars release early or not at all this is more likelyto be due to a programming fault or hardware failure These issuesmight become more problematic if animals are left wearingcollars for the remainder of their lives
Data accuracy
Inmost cases it is unlikely that all the locations recordedwith aGPS collar will be accurate enough to be used for the studypurposes (unless a coarse resolution is acceptable for theobjective) An HDOP value (or sometimes a PDOP value) istypically ascribed to each recordedGPSfix andmany researchersuse this as the primary means of discriminating and excludingfixes that are likely to be too inaccurate (DrsquoEon and Delparte2005 see Appendix 2) However it is important to note that thereis no limit to the potential level of inaccuracyof anyfix even thosewith low HDOP values may still have low accuracy RatherHDOP values reflect the likelihood that the fixes were accuratelyacquired therefore not all fixes with high HDOP values will beinaccurate but a greater proportion will be and vice versa
Since site conditions (eg canopy cover terrain) impactsatellite reception it is strongly recommended that therelationship between HDOP values and on-ground accuracies beexamined This can be done either before collar deploymentsthrough stationary collar tests in a range of environments at theproposed study site (eg Recio et al 2011) or after deploymentsto gauge the accuracy of the fixes obtained (eg Allen 2012) An
Table7 Summaryof commonproblemsamongstudiesofGPStrackingof mammals in Australia
Issue No of studies collarsAffected Not affected
Shorter GPS life than expected 15 7 47Intermittent fixes (days
without recording)14 7 31
Fewer fixes per day thanexpected
16 6 ndash
Changes tofix scheduleor dutycycle
11 7 18
VHF transmitter failure 9 14 14Timed-release failure 4 2 19Collar design issues requiring
change10 12 ndash
Additional unexpected costs 13 10 ndash
Success of GPS collar deployments Australian Mammalogy 73
assessment of HDOP values against on-ground accuracies willpermit researchers to determine the appropriate HDOP thresholdndash rather than choosing an arbitrary numberndash for inclusion offixesand to establish the likelihood that fixes are accurate withinacceptable bounds Selection of accuracy thresholds should beheavily influenced by the study objectives and the level ofmovement resolution required (Ellis et al 2011) For example fargreater resolution is necessary to determine which backyards arevisited by dingoes in urban areas than to estimate home-rangesizes of highly mobile dingoes in remote locations
Welfare issues
Until recently most studies using GPS collars have done sowith collars weighing gt500 g on medium-to-large mammalsusually predators andor their prey For example Johnson et al(2002) used 18-kg collars for caribou while Merrill et al (1998)had 920-g collars for wolves and white-tailed deer There is littlepublished information on use of GPS collars lt300 g on small andmedium-sized mammals (Blackie 2010 Mattisson et al 2010)but recent assessments indicate that they are suitable (Dennis et al2010 Recio et al 2011) Here we present data from speciesweighing 1ndash74 kg including several smaller species (koalaspossums pademelons rock-wallabies and quolls) weighing lessthan 10 kg When collars are attached to wild animals severalwelfare issues need to be considered including the need forcollars to be well fitted (not too tight or too loose) to preventinjury to avoid disruption of daily activities (eg grooming andsleeping) and to avoid interference with normal movementbehaviour (Casper 2009) We found few instances of collarscausing injury to study animals but therewereminor problems ofhair loss and skin abrasions A few pademelons died as a result ofcapture myopathy (McMahon et al in press) a condition that iscommonly seen in macropods following capture and handling(Vogelnest and Portas 2008) Consequently the additional stressof handling while fitting collars needs to be considered forsusceptible species We were not aware of any of our studyanimals changingbehaviour as a result of theGPScollar althoughthis would be difficult to identify and in any case was notexplicitly studied
One of the benefits of GPS tracking is that animals do not needto be followed to gather location information thus reducing bothlabour costs and disturbance to study animals In addition someresearch programs use timed-release units so that animals do nothave to be recaptured during the study Consequently there maybe no regular monitoring of animal welfare following releaseAmong our studies 60 of animals were recaptured after collardeployment which meant that animal welfare could be assessedfor example through an examination of changes in bodyweight orcondition thefit of collars and injuries incurredSuchmonitoringgives researchers the capacity to respond to problems when theyarise and improve animal welfare However for some animalsrecapture may not be a practical option In these cases VHFtracking remains a valuable tool for monitoring animal welfare ofhighly visible species in real time or for monitoring unusualmovement behaviour of more cryptic species For example ifanimal locations do not change as expected or if collars are fittedwith a mortality signal (whereby VHF signal frequency changesafter a predefined period of inactivity) lack of movement mightprovide an early indication ofwelfare issuesWhileVHF tracking
somewhat defeats the advantages of GPS collars it may be usedto monitor animal welfare for short intervals throughout a study
Timed-release devices allow collars to be recovered fromanimals without the need for recapture and avoid restraint andhandling of animals which may cause stress However wefound that 18 of timed-release devices failed leaving collarsattached to animals This may be a significant issue if animalsare encumbered with GPS collars indefinitely Casper (2009)suggested that researchers should consider some of theanticipated consequences of attaching equipment to animalsand that they should be careful to avoid situations where thewelfare of animals is compromised An important considerationwith regard to timed-release devices is the likelihood of theanimal being recaptured to remove the collar if the mechanismfails In particular the use of timed-release collars on growingjuveniles warrants careful thought because strangulation bythe collar is possible if it does not release and it cannot beremoved Alternatively several options for collar design couldbe considered to allow for the possibility of a timed-release unitfailing Options include expanding collars or elastic insertswhich permit growth and the inclusion of weak links (eg asection of natural rubber) which eventually will fail therebyensuring that animals do not have to cope with wearing a failedcollar for a long time
An issue that needs tobe explicitly addressed is thepreparationof protocols for the use of GPS collars on mammals forsubmission and approval by animal ethics committees (AECs)The central question is whether the welfare of animals is likely tobe compromised to a point that is unacceptable to an AEC It isacknowledged that the use of animals for scientific researchmay involve interference with the animal such as capture andthe imposition of a collar for the duration of the study The firstquestion to address is whether the collar causes injury to theanimal or prevents it from carrying out its normal activities Thesecondquestion is the reliability of collar retrieval at the endof thestudy As pointed out in Lunney (2012) and Jones et al (2012) itis in the interests of the researcher to develop protocols thatpresent a reasoned case for the approach and the level of risk andnot leave this to the AEC who may be less knowledgeable aboutthe species or study system
Costs
Wildlife tracking inherently is an expensive pursuit but tocomplicate the situation costs vary significantly depending onproject objectives (Thomas et al 2011) Given that ~75 ofthe case studies considered in this paper incurred additionalunexpected costs we believe it to be imperative that whenplanning projects researchers obtain funds not only for the initialcosts of equipment and labour but also to cover costs associatedwith poor collar performance (additional searches andor captureof animals collar refurbishment andor replacement) Althoughit is impossible to provide a definitive measure of how largethis contingency fund should be if our results are indicativeallocating at least 25 of initial project costs would be advisable
Our most significant unexpected fiscal expenditures relatedto attempts to retrieve lost collars as well as for battery andorcollar replacement or repair Indeed the cost of refurbishment canrise after purchase to nearly half the cost of a newcollarHoweverother potential costs include those associated with researchers
74 Australian Mammalogy A Matthews et al
disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

livestock guardian dogs (C l familiaris) pademelons (Thylogalebillardierii) possums (Trichosurus cunninghami) quolls(Dasyurus geoffroii and D maculatus) wallabies (Macropusrufogriseus rufogriseus and Petrogale lateralis) and wombats(Vombatus ursinus) The collars used in these studies weremanufactured by Blue Sky Telemetry (Aberfeldy Scotland)Followit Wildlife (Lindesberg Sweden) Precision AgricultureResearchGroup (ArmidaleAustralia) Sirtrack (HavelockNorthNew Zealand) Sigma Delta Technologies (Floreat Australia)Telemetry Solutions (Concord California USA) and TitleyElectronics (Lawnton Australia) Where different collarsprogrammed settings (such as scheduledfix interval) or locationswere used within a research program these were separated intodifferent studies for analysis Collars were deployed for up to12 months with most studies being shorter than six months(Fig 2)
Data were collated on the species and locations of collardeployments habitat types collar types and manufacturers thereliability of GPS components VHF components and timed-release devices statistics on GPS performance costs and animalwelfare While these data provide descriptive statistics on GPScollar utility and success they do not permit a comparativeevaluation of one collar brand with another because collars weredeployed on different species in widely different habitats andlocations
Appendix 1 provides descriptions of each study the collarsused and dates of deployment Appendix 2 contains a descriptionof the components ofGPS collars and how they operate aswell asa glossary of terms associated with the technology
Results
Of the 280deployments ofGPS collars 249were retrieved andordownloaded remotely However retrieval rates ranged from 0 to
100amongstudies (Table1)Reasons for lossof collars (or non-retrieval) included loss of VHF signal due to presumed batteryfailure or damage to the antenna animals moving out of rangeand the release of collars in burrows where they could not beretrievedWhilewe cannot accurately account for each lost collarwe were able to discern the reasons for losses from some collarsthat were considered lost and later found through extensiveground and aerial searches Of the 249 collars that were retrievedandor downloaded 96 had recorded some data However dueto shortened operating life intermittent failure andor disruptionsto the fix schedules and duty cycles the number of recordedlocations often was less than expected
The averageoperating life (ie real lifespan) of theGPScollarswas 1017 days and amounted to 677 of the expected meanOnly 53 of collars operated for their full deployment orexpected life (Table 2) and operating success was higher forstudies of shorter duration (Fig 3) In only five studies was theGPS receiver on all collars still functioning at the end of thedeployment period which in these cases was less than 92 daysThe longest time a GPS operated successfully was 403 days on adingo collar programmed to record eight fixes per day Eightstudies (40) reported at least one collar failing to collect GPSlocations within 10 days of deployment and a further six studies(30) reported a collar failing within 40 days Suggested reasonsfor prematureGPS failure includedwear and tear (eg breakdownof the GPS aerial andor aerial cables) poor battery quality andexhaustion of the battery from sample rate malfunctions (seebelow)
Unintended shifts in duty cycle or sample rate occurred in 18ofdeployments but in anyone study this problemaffected0ndash70of collars deployed (excluding the study in which only one collarwith data was retrieved) On average shifts from programmedsample rates occurred after 59 days from those deploymentsIntermittent collar failures in which a collar did not log a locationfor one or several days occurred in 31 of deployments(Table 2) Loss of data was often considerable For example onekoala collar logged erratically over 159 days and provided only11 days of useable data
Fix (ie GPS location) acquisition over the deployment periodwas generally lower than programmed rates even for studies inopen (eg desert) environments where there was an unimpededview of the sky However two studies reported a higher thanexpected number of fixes per collar (Table 3) While on averageonly 66 of expected fixes per collar were collected thetotal number of fixes for each study generally was high(mean = 16 698 range = 233ndash58 575) Mean horizontal dilutionof precision (HDOP) was 30 (range = 15ndash50) (Table 4)Locations with lower HDOP values are considered to be moreprecise (DrsquoEon and Delparte 2005) and the percentage of fixeswith HDOP lt5 ranged from 67 to 99 among studies
VHF transmitter failure was reported in 9 of 24 studies(Table 5) In two cases the VHF transmitter was programmed toactivate on a set date but did not initialise In the other sevenstudies theVHF transmitter stoppedoperating sometimeswithina fewdaysof deployment (average = 29months) In somecollarsVHF transmitter failure was caused by water ingression Otherpossible causes included faulty batteries or circuitry and cheweddamaged antennas which reduced transmission strength belowthat which could be detected
6
5
4
3
Num
ber
of s
tudi
es
2
1
01 2 3 4 5 6
Duration (months)
7 8 9 10 11 12
Fig 2 Duration of GPS collar deployments among compiled studies ofmammals in Australia
Success of GPS collar deployments Australian Mammalogy 67
Timed-release deviceswerefitted to collars in nine studies buttwo studies retrieved collars before the programmed releasedates and in one study all the collars were lost when the VHFtransmitter failed Thus only six studies were available to assessthe performance of the timed-release mechanism Of the 83collars involved in these studies 5 released before or afterthe programmed timedate and a further 19 failed to release atall (Table 5)
In total we spent AU$684 832 on collars and equipment frommanufacturers An additional 25 of initial costs was spent post-deployment on unexpected costs associated with refurbishmentor retrieval of failed collars labour extra searches (eg aerialsearches purchase of additional equipment such as burrowcameras) travel (fuel accommodation) and animal capture (egdarting) The costs associated with locating and retrieving lsquolostrsquocollars were up to $50 000 (mean = $6040) and 1760 person-
Table 1 Summary of GPS collar deployments and retrieval success for each study (or research case) of mammals in Australia
Study Species Location Collar type No ofdeployments
retrievedA withdata
BFRW_SA Black-footedrock-wallaby
Anangu PitjantjatjaraYankunytjatjara Landsnorth-west South Australia
Sigma DeltaTechnologies
10 80 13
DINGO1_NSW Dingo Blue Mountains New SouthWales
Sirtrack 12 58 100
DINGO2_NSW Dingo Blue Mountains New SouthWales
Sirtrack 5 100 100
DINGO1_NT Dingo Tanami Desert NorthernTerritory
Sirtrack 15 87 100
DINGO2_NT Dingo Tanami Desert NorthernTerritory
Blue Sky Telemetry 7 29 0
DINGO_Qld Dingo Maroochy Shire south-eastQueensland
Sirtrack 9 100 100
DINGO_SA Dingo North-east South Australia Sirtrack 16 81 100FERAL_SA Red fox and Cat Arid Recovery northern South
AustraliaSirtrack 18 94 100
KOALA_NSW Koala Gunnedah New South Wales Sirtrack 31 100 100KOALA1_SEQ Koala Coomera south-east
QueenslandSirtrack 9 89 100
KOALA2_SEQ Koala Coomera south-eastQueensland
Sirtrack 6 100 100
KOALA_SWQ Koala Mulga Lands south-westQueensland
Titley Scientific 7 57 100
MARE_NSW Livestock guardiandog (Maremma)
Yarrowitch New SouthWales UNETracker 3 100 67
MARE1_Vic Livestock guardiandog (Maremma)
Buchan Victoria Telemetry Solutions 3 100 100
MARE2_Vic Livestock guardiandog (Maremma)
Tallangatta Victoria Telemetry Solutions 4 100 100
PADE_Tas Tasmanian pademelonand Bennettrsquoswallaby
Scottsdale Tasmania Followit Wildlife 30 100 100
POSS1_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 3 100 100
POSS2_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 6 100 100
POSS3_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 20 100 100
QUOLL_Tas Spotted-tailed quoll Cape Grim north-westTasmania
Telemetry Solutions 9 100 100
QUOLL_WA Western quoll Northern jarrah forestWestern Australia
Sigma DeltaTechnologies
6 0 ndash
ROO_ACT Eastern grey kangaroo Canberra Australian CapitalTerritory
Sirtrack 26 96 100
ROO_NSW Eastern grey kangaroo Jooriland New South Wales Sirtrack 12 100 100WOMB_NSW Common wombat SnowyMountains New South
WalesSirtrack 13 85 100
Total 280 89 96
ACollar retrieved or GPS data downloaded remotely
68 Australian Mammalogy A Matthews et al
hours (average = 180) (Table 6) over and above the investmentthat had already been allocated towards retrieving collars Indeedproject running costs that included travel labour and outlaysassociatedwith capture anddata analyseswould add a substantialamount to these figures Using just the initial cost of collars andanyadditional expenses associatedwith tracking and retrievalwecalculated a cost per fix and found that it varied considerablyamong studies (mean = $223 range = $002 to $129)withhigheramounts for studies that experienced catastrophic collar failuressuch that no locations were recorded (Table 6)
Across all studies 168 (60) collared individuals wererecaptured allowing potential animal welfare issues to beassessed The most frequently reported problem was loss of furaround the neck (12 of recaptured animals) Three pademelonsdied as a consequence of animal handling related to GPS collardeployment (McMahon et al in press) while four individuals(one quoll one fox and two kangaroos in captive trials) sustainedminor injuries (eg skin lacerations) that prompted the researcherto change the collar design Most researchers contributing to thisreview were the first to use GPS collars on their study speciesConsequently 48 of studies involved changing the originalcollar design often by returning the collars to the manufacturer
Discussion
GPS telemetry has become an important tool in wildlife researchto investigate animal movements (DrsquoEon and Delparte 2005Thomas et al 2011) with the expectation that it offers severalsalient advantages over traditional techniques Chief among theseis the ability to collect higher numbers of locations automaticallyremotely and more precisely than with VHF and satellite-basedmethods (Hulbert and French 2001 Johnson et al 2002 Gravesand Waller 2006 Bandeira de Melo et al 2007 Mattisson et al2010 Thomas et al 2011)With a greater number of fixes whichcan be taken independently of season weather time of dayor year and without the disturbance of a researcher tracking theanimal GPS telemetry is potentially less susceptible to bias thanVHF radio-tracking (Johnson et al 2002 Mattisson et al 2010Robley et al 2010) Thus GPS collars can gather more data at asignificant cost saving per location and with greater researchersafety (Johnson et al 2002) Such data often facilitate the
Table 2 Operational success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study Mean no of daysoperating (range)
of expecteddays
collars operatedover full deployment
collars withintermittent failure
BFRW_SA 7 (0ndash28) 6 0 100DINGO1_NSW 269 (130ndash403) 74 43 86DINGO2_NSW 53 (52ndash54) 152 100 0DINGO1_NT 198 (33ndash300) 66 47 8DINGO_Qld 23 (5ndash43) 66 100 0DINGO_SA 180 (7ndash320) 56 62 0FERAL_SA 61 (8ndash126) 66 23 88KOALA_NSW 100 (4ndash179) 61 61 39KOALA1_SEQ 109 (17ndash154) 115 80 13KOALA2_SEQ 95 (81ndash163) 91 83 17KOALA_SWQ 114 (64ndash160) 95 50 50MARE_NSW 44 100 67 0MARE1_Vic 57 (19ndash78) 37 0 100MARE2_Vic 118 (9ndash160) 76 50 25PADE_Tas 220 (30ndash240) 92 27 0POSS1_Vic 129 (87ndash155) 140 100 33POSS2_Vic 74 (36ndash115) 86 67 100POSS3_Vic 77 (4ndash120) 46 40 20QUOLL_Tas 31 (7ndash35) 112 100 0ROO_ACT 42 (3ndash103) 22 44 naROO_NSW 62 (35ndash70) 100 100 0WOMB_NSW 157 (26ndash346) 47 18 91
Total 988 654 524 305
100
90
80
70
60
50
40
30
20
10
00 50 100 150 200
Expected GPS life or duration of deployment (days)
250 300 350 400
c
olla
rs o
pera
ted
over
full
depl
oym
ent
Fig 3 Relationship between the expected GPS life (or time in the field)and the percentage of collars operating at the end of the deployment period ineach study (n= 22) The trend line is significantly negative (r= ndash059P= 0004)
Success of GPS collar deployments Australian Mammalogy 69
Table 3 Fix success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study No of programmedfixes per day
Mean fixesper dayA (range)
operating dayswith 0 fixes (range)
Mean no of fixesper collar (range)
of expected fixesper collarB
Total fixes
BFRW_SA 16 83 (6ndash11) 77 233 12 233DINGO1_NSW 6ndash8 57 (1ndash8) 338 (0ndash663) 1537 (802ndash2302) 87 10 762DINGO2_NSW 144 1375 (62ndash145) 0 7317 (6978ndash7534) 96 36 585DINGO1_NT 24 208 (2ndash24) 01 (0ndash17) 4109 (713ndash6752) 57 53 424DINGO_Qld 200 138 (12ndash196) 0 3522 (920ndash6870) 50 31 702DINGO_SA 48 39 (6ndash48) 0 5432 (749ndash11043) 35 58 575FERAL_SA 6 4 (3ndash6) 32 (2ndash93) 258 (23ndash622) 47 4383KOALA_NSW 4 43 (1ndash1296) 19 (0ndash209) 429 (13ndash2074) 65 13 303KOALA1_SEQ 12 106 (1ndash65) 01 (0ndash93) 1280 (222ndash1812) 110 8839KOALA2_SEQ 5 46 (1ndash5) 002 (0ndash13) 746 68 2601KOALA_SWQ 6 5 (1ndash6) 93 (18ndash238) 550 (318ndash694) 77 2200MARE_NSW 144 1179 0 4440 61 16 952MARE1_Vic 48 46 (1ndash48) 219 (64ndash526) 2280 (371ndash3338) 30 6839MARE2_Vic 48 476 (26ndash48) 92 (0ndash368) 5600 (354ndash7639) 75 21 808PADE_Tas 9 89 (6ndash9) 0 1744 95 54 859POSS1_Vic 9 10 (1ndash154) 3 (0ndash10) 1233 107 3698POSS2_Vic 10 12 (1ndash972) 7 (1ndash17) 755 94 4530POSS3_Vic 14 13 (4ndash40) 10 (0ndash97) 902 65 18 036QUOLL_Tas 12C 74 (1ndash12) 0 241 (182ndash280) 64 5150QUOLL_WA 3 na na na na 0ROO_ACT 24 232 (3ndash36) na 1448 (70ndash3944) 32 naROO_NSW 32 32 0 1779 (1006ndash2028) 93 21 351WOMB_NSW 8 53 (1ndash30) 226 (0ndash596) 748 (40ndash2235) 28 8227
MeanTotal 122 (0ndash97) (13ndash11043) 658 384 057
AFor those days when at least one fix was recordedBFor expected life of collar This differs from fix success calculated over actual operating lifeC12 fixes for 5 days of the week and 72 or 96 fixes per day for the remaining 2 days Data presented formean fixes per day andmean fixes per collar for those dayswith 12 fixes per day
Table 4 GPS data performance statistics for collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT MARE_NSW PADE_Tas and QUOLL_WA no data
Study fixes with3 satellites
fixes with4 satellites
fixes with5 satellites
fixes with6 satellites
fixes with7+ satellites
HDOP(mean plusmn sd)
fixes withHDOP lt5
BFRW_SA 50 plusmn 39 67DINGO1_NSW 471 294 143 57 35 32 plusmn 22 77DINGO2_NSW 445 316 155 57 26 34 plusmn 25 82DINGO1_NT 34 93 234 290 34 18 plusmn 13 98DINGO_Qld 54 30 12 3 1 35 88DINGO_SA 0 5 21 32 42 2 98FERAL_SA 20 18 25 18 21 27 94KOALA_NSW 324 227 173 118 157 30 plusmn 26 86KOALA1_SEQ 389 249 182 11 7 32 plusmn 26 86KOALA2_SEQ 372 259 180 107 82 33 plusmn 27 84KOALA_SWQ 0 146 187 176 491 17 plusmn 12 98MARE1_Vic 2 5 14 24 55 17 plusmn 09 99MARE2_Vic 1 4 9 16 69 15 plusmn 09 99POSS1_Vic 559 275 113 39 14 40 plusmn 30 77POSS2_Vic 412 170 164 158 96 32 plusmn 26 85POSS3_Vic 576 256 97 46 25 39 plusmn 29 78QUOLL_Tas 80 164 188 167 401 20 plusmn 14 94ROO_ACT 356 216 154 131 143 31 plusmn 26A 86ROO_NSW 440 297 168 68 28 35 plusmn 27 84WOMB_NSW 466 258 126 76 74 35 plusmn 26 83
Total 30
AHDOP=38 28 excluding periods of collar failure
70 Australian Mammalogy A Matthews et al
investigation of animal behaviour at much finer scales than thoseachievable with VHF technology such as the actual speed ananimal travels the locations it visits and the true time spent in agiven habitat (eg Allen 2007) However capital costs of collarsand equipment satellite signal reception longevity under fieldconditions and the potential for failure present possiblecounterbalances to these advantages (Johnson et al 2002) Ourevaluation of 23 studies using GPS collars on mammals inAustralia revealed several common problems including a shorterthan expected GPS life intermittent failures (ie days with nolocations collected) fewerfixes per day than expected changes tothe fix schedule or duty cycle early VHF transmitter and timed-release failures and collar design issues (Table 7)
Lessons learntCollar returns
Aswith conventional radio-tracking studies it is expected thata proportion of collars will be lost such as from animalsdispersing moving out of range of the VHF or from transmitterfailure (Harris et al 1990) Losses from GPS also can beexperienced with catastrophic equipment failures defined byFrair et al (2010) as computer glitches or failed breakawaydevices We were unable to retrieve 31 collars from 280deployments and a further 10 collars that were retrieved did notcollect any GPS locations Thus 15 of collar deployments did
not return animal location information to the research programsand we conclude that these losses are relatively common
Operating life
Manufacturers typically quote an expected operating life thatis determined by fix schedule duty cycle and battery capacity Inthe field however maximum operational life is rarely attainedThis is because operating life is influenced by environmentalconditions (eg temperature and humidity) the time it takes for aposition to be acquired (time to fix) and the batteries themselvesIn locations with an obstructed view of the sky due to densecanopy cover steep terrain or the animal being underground orcovered by rocks or logs itmay take longer for theGPS to acquirea fix ndash if at all ndash and consequently more battery power will beused (though fix acquisition lsquotime-outsrsquo can help reduce this lossof battery capacity during periods of poor satellite reception) Ourresults showed that actual operating lifewas~68of the expectedlife but there was high variability among individual collars andstudies A comparison of three collar brands by Blackie (2010)found similar percentages of operational life expectancy amongbrands but also with high variability among individual collars(range 59ndash1072) Some manufacturers take into account asafetymarginwhen calculating expected battery life ndash rather thanpublishing a best-case scenario ndash and it is certainly informative toenquire about this when planning the purchase of GPS devices
Table 5 Success of VHF transmitter and timed-release components of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details MARE_NSW no data na not available
Study No of collars withVHF transmitter failure[ of total deployed]
Mean no of monthsto failure (range)
expectedmonths
collars withtimed-release
failure
collars releasedbefore or after
timedate
BFRW_SA 10 [100] 17 (0ndash7)A na naDINGO1_NSW 2 [17] 3 (2ndash4) 18 17 8DINGO2_NSW 0 na na 0 0DINGO1_NT 0 na na 13 0DINGO2_NT 7 [100] 1 10 na 29DINGO_Qld 0 na na 0 0DINGO_SA 0 na na na naFERAL_SA 1 [6] 0 0 na naKOALA_NSW 0 na na na naKOALA1_SEQ 1 [11] 2 8 na naKOALA2_SEQ 0 na na na naKOALA_SWQ 5 [71] 32 (1ndash4) 27 na naMARE1_Vic 0 na na na naMARE2_Vic 0 na na na naPADE_Tas 0 na na 37 0POSS1_Vic 0 na na na naPOSS2_Vic 0 na na na naPOSS3_Vic 0 na na na naQUOLL_Tas 0 na na na naQUOLL_WA 6 [100] ndash
B na naROO_ACT 4 [15] 2 (003ndash4) 6 na naROO_NSW 0 na na na naWOMB_NSW 4 [31] 9 (5ndash14) 50 8 25
Total 143 29 19 5
AVHFtransmitterwasprogrammed to activateon afixeddate but only3of 10didOf these by the7thmonth into the10-monthVHFcollar deployment nonewereworkingBVHF transmitter was programmed to activate on a fixed date but did not
Success of GPS collar deployments Australian Mammalogy 71
The studies with shorter intended deployments had highersuccess mainly because problems contributing to shortenedoperating life generally occurred only after some time in the fieldThus while GPS collars appear to be suitable for collectinganimal movement data over several seasons or throughoutthe year only a small proportion of collars operated reliably forsuch extendedperiodsOur experience confirms the suggestion ofGau et al (2004) that the reliability and performance of GPScollars decreases as time in the field increases
Fix acquisition
Fix rates (ie the number of successful fixes divided by thenumber attempted) are frequently lower on GPS collars that areattached to free-ranging animals This is mainly due to canopycover topography collar orientationfix interval and collar brand(Frair et al 2010) However obtaining intermittent fixes (dayswith no fixes) was a common problem in our studies and thereasons for its high incidence may differ from those mentionedaboveOften assessments offix success of collars under differentconditions are conducted over short periods (eg 24 hRecio et al2011) and this may not provide a true assessment of fix success
over the life of the collar In addition to locationor signal precisionissues intermittent fixes may arise from a programming failurewhere the collar does not turn on at the specified time andor ahardware failure such as an interruption on the battery leadAlthough some collar brands record fix attempts others do nothowever having this information would help to distinguishmanufacturing faults from satellite positioning problems
In controlled tests of fix rates by Recio et al (2011) collarswere programmed to attemptfixes in less than2-h intervals In thismode the GPS receiver estimates positions in a lsquohot startrsquo withcurrent almanac time location and ephemeris data (Tomkiewiczet al 2010) and time to fix is improvedWhen collars are inactivefor greater time intervals (~2ndash4 h) they may begin in a lsquowarmstartrsquo whereby they need to acquire new ephemeris and time tofix can be longer (resulting in greater power consumption) Evenlonger intervals (eg gt6 h from the previous fix) result in a lsquocoldstartrsquo whereby collars need to acquire new almanac timelocation and ephemeris (Tomkiewicz et al 2010) and the effecton fix rates and accuracy of locations may be relatively large Inour studies programming of sample rates or duty cycles meantthat fixes frequently were recorded gt2 h later than previous fixes
Table 6 Costs of GPS tracking equipment and additional unexpected costs incurred by studies for the retrieval of failed collarsSee Table 1 for Study details Costs are those of the research project and do not include costs covered by manufacturers working to further develop or fix faultyproducts The calculation of cost per fix incorporates both the initial costs of equipment and additional costs of retrieval but does not include other project-related
costs such as capture tracking and data analysis na not available
Study Initial cost of collarsand hardwaresoftware (AU$)
additionalcosts of refurbishment
or repair
additional costsof retrieving failed
collarsA
Time retrievingfailed collarsA
(person-hours)
Cost per fix(AU$)
BFRW_SA 29 975 0 0 0 129DINGO1_NSW 37 640 0D 53 1760 5DINGO2_NSW 5623 0 0 0 lt1DINGO1_NT 45 600 0D 9 300 lt1DINGO2_NT 15 400 0E 13 100 15 400G
DINGO_Qld 9000 11 11 40 lt1DINGO_SA 83 000 5 1 40 1FERAL_SA 43 700 0D 57 160 15KOALA_NSW 77 500B 40 0 0 8KOALA1_SEQ 17 300 6F 17 15 2KOALA2_SEQ 12 500 4F 0 0 5KOALA_SWQ 11 880 0D 72 180 9MARE_NSW 350 0 0 0 lt1MARE1_Vic 17 500C 0D 0 0 3MARE2_Vic 17 500C 7 0 0 1PADE_Tas 70 000 0 14 60 1POSS_Vic 18 894 0D 0 0 lt1QUOLL_Tas 28 370 0D 0 4 5QUOLL_WA 15 000 0 7 14 16 000G
ROO_ACT 74 700 0D 67 552 naROO_NSW 21 000 0 0 30 1WOMB_NSW 32 400C 5 20 700 5
Total 684 832 6 19 3955 223
AUnanticipated additional costs and time beyond that allocated to the standard retrieval of data-logging collarsBCost is for 19 collars deployed more than onceCApproximate cost converted from US$ or NZ$DFixed or replaced by manufacturer at no costENot fixed or replaced by manufacturerFCosts of refurbishment for additional deploymentsGTotal cost with no fixes recorded
72 Australian Mammalogy A Matthews et al
and the devices were likely to have operated in warm or cold startmodes To allow for the initial inaccuracy of lsquofirstrsquo fixes someGPS engines discard a set number of fixes and store the third orlater fix as the final position The GPS firmware potentially couldbe programmed to discard an even higher number of fixes (egrecording the fifth or later position) if needed
Shifts in sample rates and duty cycles
These shifts can have profound effects on the operating life ofthe collar and the usefulness of the collected data Several studiesreported shifts in sample rates to higher frequencies whichsignificantly reduced the operating life of the collars In the caseofone koala collar and one feral cat collar scheduled 4-h fixesshifted to record locations everyminute resulting in exhaustionofthe GPS battery within two days Similarly shifts in duty cyclepresumably also caused significant reductions of operating lifeFor example wombat collars were scheduled to turn off duringthe day when animals were expected to be in a burrow and out ofview of the satellites In this case a shift in the duty cycle causednot only significant reductions in the number of position fixesbecause the collars were not logging at night when the wombatswere active but the collars were on during the day and rapidlydrained the batteries when the GPS tried to acquire hourly fixeswhile underground To avoid rapid exhaustion of batteries inlocations or periods with poor satellite reception somemanufacturers offer the option of programming devices with atime-out period Thismeans that theGPS receiver will stop tryingto acquire a fix if it has not been successful after a certain period(usually a fewminutes)However evenwith this time-out featurea shift in duty cycle (eg to a period of underground activity) canresult in considerably shortened operating life and reduced dataacquisition
VHF transmitter failures
The VHF component of GPS collars typically is not used fordata acquisition Rather the VHF transmitter is critical for theretrieval of store-on-board GPS data-logging collars because itis usually the onlymeans of locating them In general retrieval ofGPS data-logging collars is more likely when collars are usedon relatively sedentary species that are not expected to move farfrom their release location For more mobile species capable of
travelling large distances (eg dingoeswhich have been recordedto disperse gt550 km from their point of origin in 31 days Allen2009) satellite-linkedGPS collars offer a practical solution to theloss of collars (and data) should the VHF transmitter failHowever this solution incurs the cost of additionalweight powerconsumption and expense for data-downloads (approximatelyAU$800 per collar per year where collars are transmitting for 6 hper day) Considering the many possible reasons for prematureexhaustion of the GPS battery it is crucial that the GPS and VHFcomponents in the collar are powered by separate batteries Thismeans that the device can still be located collected data retrievedand the collar refurbished even after the GPS has stoppedoperating albeit with some difficulty Nevertheless problemsmay still arise when separate batteries are used to power the VHFbeacon as was the case in our studies with VHF transmitterfailure Despite VHF technology having been around forconsiderably longer than GPS there are still frequent reports ofunit failure from insufficient packaging (Gau et al 2004 Blackie2010) A robust and completely waterproof design is needed topreventwater ingress anddamage to transmitters and aerials needto be positioned in the collar to minimise their risk of beingchewed or broken
Timed-release problems and failures
Our experience showed that timed-release devices do notalways result in the collar dropping off the animal on theprogrammed time and date For example activation of the releasemechanism may occur but dirt and debris may prevent themechanism from separating until the animal grooms the collaraway This is a problem if the animal spends time underground ina tree or on a cliff and the collar drops to where it cannot berelocated or reached Thus researchers are left with someuncertainty about when if ever they will be able to recover theircollars When collars release early or not at all this is more likelyto be due to a programming fault or hardware failure These issuesmight become more problematic if animals are left wearingcollars for the remainder of their lives
Data accuracy
Inmost cases it is unlikely that all the locations recordedwith aGPS collar will be accurate enough to be used for the studypurposes (unless a coarse resolution is acceptable for theobjective) An HDOP value (or sometimes a PDOP value) istypically ascribed to each recordedGPSfix andmany researchersuse this as the primary means of discriminating and excludingfixes that are likely to be too inaccurate (DrsquoEon and Delparte2005 see Appendix 2) However it is important to note that thereis no limit to the potential level of inaccuracyof anyfix even thosewith low HDOP values may still have low accuracy RatherHDOP values reflect the likelihood that the fixes were accuratelyacquired therefore not all fixes with high HDOP values will beinaccurate but a greater proportion will be and vice versa
Since site conditions (eg canopy cover terrain) impactsatellite reception it is strongly recommended that therelationship between HDOP values and on-ground accuracies beexamined This can be done either before collar deploymentsthrough stationary collar tests in a range of environments at theproposed study site (eg Recio et al 2011) or after deploymentsto gauge the accuracy of the fixes obtained (eg Allen 2012) An
Table7 Summaryof commonproblemsamongstudiesofGPStrackingof mammals in Australia
Issue No of studies collarsAffected Not affected
Shorter GPS life than expected 15 7 47Intermittent fixes (days
without recording)14 7 31
Fewer fixes per day thanexpected
16 6 ndash
Changes tofix scheduleor dutycycle
11 7 18
VHF transmitter failure 9 14 14Timed-release failure 4 2 19Collar design issues requiring
change10 12 ndash
Additional unexpected costs 13 10 ndash
Success of GPS collar deployments Australian Mammalogy 73
assessment of HDOP values against on-ground accuracies willpermit researchers to determine the appropriate HDOP thresholdndash rather than choosing an arbitrary numberndash for inclusion offixesand to establish the likelihood that fixes are accurate withinacceptable bounds Selection of accuracy thresholds should beheavily influenced by the study objectives and the level ofmovement resolution required (Ellis et al 2011) For example fargreater resolution is necessary to determine which backyards arevisited by dingoes in urban areas than to estimate home-rangesizes of highly mobile dingoes in remote locations
Welfare issues
Until recently most studies using GPS collars have done sowith collars weighing gt500 g on medium-to-large mammalsusually predators andor their prey For example Johnson et al(2002) used 18-kg collars for caribou while Merrill et al (1998)had 920-g collars for wolves and white-tailed deer There is littlepublished information on use of GPS collars lt300 g on small andmedium-sized mammals (Blackie 2010 Mattisson et al 2010)but recent assessments indicate that they are suitable (Dennis et al2010 Recio et al 2011) Here we present data from speciesweighing 1ndash74 kg including several smaller species (koalaspossums pademelons rock-wallabies and quolls) weighing lessthan 10 kg When collars are attached to wild animals severalwelfare issues need to be considered including the need forcollars to be well fitted (not too tight or too loose) to preventinjury to avoid disruption of daily activities (eg grooming andsleeping) and to avoid interference with normal movementbehaviour (Casper 2009) We found few instances of collarscausing injury to study animals but therewereminor problems ofhair loss and skin abrasions A few pademelons died as a result ofcapture myopathy (McMahon et al in press) a condition that iscommonly seen in macropods following capture and handling(Vogelnest and Portas 2008) Consequently the additional stressof handling while fitting collars needs to be considered forsusceptible species We were not aware of any of our studyanimals changingbehaviour as a result of theGPScollar althoughthis would be difficult to identify and in any case was notexplicitly studied
One of the benefits of GPS tracking is that animals do not needto be followed to gather location information thus reducing bothlabour costs and disturbance to study animals In addition someresearch programs use timed-release units so that animals do nothave to be recaptured during the study Consequently there maybe no regular monitoring of animal welfare following releaseAmong our studies 60 of animals were recaptured after collardeployment which meant that animal welfare could be assessedfor example through an examination of changes in bodyweight orcondition thefit of collars and injuries incurredSuchmonitoringgives researchers the capacity to respond to problems when theyarise and improve animal welfare However for some animalsrecapture may not be a practical option In these cases VHFtracking remains a valuable tool for monitoring animal welfare ofhighly visible species in real time or for monitoring unusualmovement behaviour of more cryptic species For example ifanimal locations do not change as expected or if collars are fittedwith a mortality signal (whereby VHF signal frequency changesafter a predefined period of inactivity) lack of movement mightprovide an early indication ofwelfare issuesWhileVHF tracking
somewhat defeats the advantages of GPS collars it may be usedto monitor animal welfare for short intervals throughout a study
Timed-release devices allow collars to be recovered fromanimals without the need for recapture and avoid restraint andhandling of animals which may cause stress However wefound that 18 of timed-release devices failed leaving collarsattached to animals This may be a significant issue if animalsare encumbered with GPS collars indefinitely Casper (2009)suggested that researchers should consider some of theanticipated consequences of attaching equipment to animalsand that they should be careful to avoid situations where thewelfare of animals is compromised An important considerationwith regard to timed-release devices is the likelihood of theanimal being recaptured to remove the collar if the mechanismfails In particular the use of timed-release collars on growingjuveniles warrants careful thought because strangulation bythe collar is possible if it does not release and it cannot beremoved Alternatively several options for collar design couldbe considered to allow for the possibility of a timed-release unitfailing Options include expanding collars or elastic insertswhich permit growth and the inclusion of weak links (eg asection of natural rubber) which eventually will fail therebyensuring that animals do not have to cope with wearing a failedcollar for a long time
An issue that needs tobe explicitly addressed is thepreparationof protocols for the use of GPS collars on mammals forsubmission and approval by animal ethics committees (AECs)The central question is whether the welfare of animals is likely tobe compromised to a point that is unacceptable to an AEC It isacknowledged that the use of animals for scientific researchmay involve interference with the animal such as capture andthe imposition of a collar for the duration of the study The firstquestion to address is whether the collar causes injury to theanimal or prevents it from carrying out its normal activities Thesecondquestion is the reliability of collar retrieval at the endof thestudy As pointed out in Lunney (2012) and Jones et al (2012) itis in the interests of the researcher to develop protocols thatpresent a reasoned case for the approach and the level of risk andnot leave this to the AEC who may be less knowledgeable aboutthe species or study system
Costs
Wildlife tracking inherently is an expensive pursuit but tocomplicate the situation costs vary significantly depending onproject objectives (Thomas et al 2011) Given that ~75 ofthe case studies considered in this paper incurred additionalunexpected costs we believe it to be imperative that whenplanning projects researchers obtain funds not only for the initialcosts of equipment and labour but also to cover costs associatedwith poor collar performance (additional searches andor captureof animals collar refurbishment andor replacement) Althoughit is impossible to provide a definitive measure of how largethis contingency fund should be if our results are indicativeallocating at least 25 of initial project costs would be advisable
Our most significant unexpected fiscal expenditures relatedto attempts to retrieve lost collars as well as for battery andorcollar replacement or repair Indeed the cost of refurbishment canrise after purchase to nearly half the cost of a newcollarHoweverother potential costs include those associated with researchers
74 Australian Mammalogy A Matthews et al
disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

Timed-release deviceswerefitted to collars in nine studies buttwo studies retrieved collars before the programmed releasedates and in one study all the collars were lost when the VHFtransmitter failed Thus only six studies were available to assessthe performance of the timed-release mechanism Of the 83collars involved in these studies 5 released before or afterthe programmed timedate and a further 19 failed to release atall (Table 5)
In total we spent AU$684 832 on collars and equipment frommanufacturers An additional 25 of initial costs was spent post-deployment on unexpected costs associated with refurbishmentor retrieval of failed collars labour extra searches (eg aerialsearches purchase of additional equipment such as burrowcameras) travel (fuel accommodation) and animal capture (egdarting) The costs associated with locating and retrieving lsquolostrsquocollars were up to $50 000 (mean = $6040) and 1760 person-
Table 1 Summary of GPS collar deployments and retrieval success for each study (or research case) of mammals in Australia
Study Species Location Collar type No ofdeployments
retrievedA withdata
BFRW_SA Black-footedrock-wallaby
Anangu PitjantjatjaraYankunytjatjara Landsnorth-west South Australia
Sigma DeltaTechnologies
10 80 13
DINGO1_NSW Dingo Blue Mountains New SouthWales
Sirtrack 12 58 100
DINGO2_NSW Dingo Blue Mountains New SouthWales
Sirtrack 5 100 100
DINGO1_NT Dingo Tanami Desert NorthernTerritory
Sirtrack 15 87 100
DINGO2_NT Dingo Tanami Desert NorthernTerritory
Blue Sky Telemetry 7 29 0
DINGO_Qld Dingo Maroochy Shire south-eastQueensland
Sirtrack 9 100 100
DINGO_SA Dingo North-east South Australia Sirtrack 16 81 100FERAL_SA Red fox and Cat Arid Recovery northern South
AustraliaSirtrack 18 94 100
KOALA_NSW Koala Gunnedah New South Wales Sirtrack 31 100 100KOALA1_SEQ Koala Coomera south-east
QueenslandSirtrack 9 89 100
KOALA2_SEQ Koala Coomera south-eastQueensland
Sirtrack 6 100 100
KOALA_SWQ Koala Mulga Lands south-westQueensland
Titley Scientific 7 57 100
MARE_NSW Livestock guardiandog (Maremma)
Yarrowitch New SouthWales UNETracker 3 100 67
MARE1_Vic Livestock guardiandog (Maremma)
Buchan Victoria Telemetry Solutions 3 100 100
MARE2_Vic Livestock guardiandog (Maremma)
Tallangatta Victoria Telemetry Solutions 4 100 100
PADE_Tas Tasmanian pademelonand Bennettrsquoswallaby
Scottsdale Tasmania Followit Wildlife 30 100 100
POSS1_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 3 100 100
POSS2_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 6 100 100
POSS3_Vic Mountain brushtailpossum
Strathbogie Ranges Victoria Sirtrack 20 100 100
QUOLL_Tas Spotted-tailed quoll Cape Grim north-westTasmania
Telemetry Solutions 9 100 100
QUOLL_WA Western quoll Northern jarrah forestWestern Australia
Sigma DeltaTechnologies
6 0 ndash
ROO_ACT Eastern grey kangaroo Canberra Australian CapitalTerritory
Sirtrack 26 96 100
ROO_NSW Eastern grey kangaroo Jooriland New South Wales Sirtrack 12 100 100WOMB_NSW Common wombat SnowyMountains New South
WalesSirtrack 13 85 100
Total 280 89 96
ACollar retrieved or GPS data downloaded remotely
68 Australian Mammalogy A Matthews et al
hours (average = 180) (Table 6) over and above the investmentthat had already been allocated towards retrieving collars Indeedproject running costs that included travel labour and outlaysassociatedwith capture anddata analyseswould add a substantialamount to these figures Using just the initial cost of collars andanyadditional expenses associatedwith tracking and retrievalwecalculated a cost per fix and found that it varied considerablyamong studies (mean = $223 range = $002 to $129)withhigheramounts for studies that experienced catastrophic collar failuressuch that no locations were recorded (Table 6)
Across all studies 168 (60) collared individuals wererecaptured allowing potential animal welfare issues to beassessed The most frequently reported problem was loss of furaround the neck (12 of recaptured animals) Three pademelonsdied as a consequence of animal handling related to GPS collardeployment (McMahon et al in press) while four individuals(one quoll one fox and two kangaroos in captive trials) sustainedminor injuries (eg skin lacerations) that prompted the researcherto change the collar design Most researchers contributing to thisreview were the first to use GPS collars on their study speciesConsequently 48 of studies involved changing the originalcollar design often by returning the collars to the manufacturer
Discussion
GPS telemetry has become an important tool in wildlife researchto investigate animal movements (DrsquoEon and Delparte 2005Thomas et al 2011) with the expectation that it offers severalsalient advantages over traditional techniques Chief among theseis the ability to collect higher numbers of locations automaticallyremotely and more precisely than with VHF and satellite-basedmethods (Hulbert and French 2001 Johnson et al 2002 Gravesand Waller 2006 Bandeira de Melo et al 2007 Mattisson et al2010 Thomas et al 2011)With a greater number of fixes whichcan be taken independently of season weather time of dayor year and without the disturbance of a researcher tracking theanimal GPS telemetry is potentially less susceptible to bias thanVHF radio-tracking (Johnson et al 2002 Mattisson et al 2010Robley et al 2010) Thus GPS collars can gather more data at asignificant cost saving per location and with greater researchersafety (Johnson et al 2002) Such data often facilitate the
Table 2 Operational success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study Mean no of daysoperating (range)
of expecteddays
collars operatedover full deployment
collars withintermittent failure
BFRW_SA 7 (0ndash28) 6 0 100DINGO1_NSW 269 (130ndash403) 74 43 86DINGO2_NSW 53 (52ndash54) 152 100 0DINGO1_NT 198 (33ndash300) 66 47 8DINGO_Qld 23 (5ndash43) 66 100 0DINGO_SA 180 (7ndash320) 56 62 0FERAL_SA 61 (8ndash126) 66 23 88KOALA_NSW 100 (4ndash179) 61 61 39KOALA1_SEQ 109 (17ndash154) 115 80 13KOALA2_SEQ 95 (81ndash163) 91 83 17KOALA_SWQ 114 (64ndash160) 95 50 50MARE_NSW 44 100 67 0MARE1_Vic 57 (19ndash78) 37 0 100MARE2_Vic 118 (9ndash160) 76 50 25PADE_Tas 220 (30ndash240) 92 27 0POSS1_Vic 129 (87ndash155) 140 100 33POSS2_Vic 74 (36ndash115) 86 67 100POSS3_Vic 77 (4ndash120) 46 40 20QUOLL_Tas 31 (7ndash35) 112 100 0ROO_ACT 42 (3ndash103) 22 44 naROO_NSW 62 (35ndash70) 100 100 0WOMB_NSW 157 (26ndash346) 47 18 91
Total 988 654 524 305
100
90
80
70
60
50
40
30
20
10
00 50 100 150 200
Expected GPS life or duration of deployment (days)
250 300 350 400
c
olla
rs o
pera
ted
over
full
depl
oym
ent
Fig 3 Relationship between the expected GPS life (or time in the field)and the percentage of collars operating at the end of the deployment period ineach study (n= 22) The trend line is significantly negative (r= ndash059P= 0004)
Success of GPS collar deployments Australian Mammalogy 69
Table 3 Fix success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study No of programmedfixes per day
Mean fixesper dayA (range)
operating dayswith 0 fixes (range)
Mean no of fixesper collar (range)
of expected fixesper collarB
Total fixes
BFRW_SA 16 83 (6ndash11) 77 233 12 233DINGO1_NSW 6ndash8 57 (1ndash8) 338 (0ndash663) 1537 (802ndash2302) 87 10 762DINGO2_NSW 144 1375 (62ndash145) 0 7317 (6978ndash7534) 96 36 585DINGO1_NT 24 208 (2ndash24) 01 (0ndash17) 4109 (713ndash6752) 57 53 424DINGO_Qld 200 138 (12ndash196) 0 3522 (920ndash6870) 50 31 702DINGO_SA 48 39 (6ndash48) 0 5432 (749ndash11043) 35 58 575FERAL_SA 6 4 (3ndash6) 32 (2ndash93) 258 (23ndash622) 47 4383KOALA_NSW 4 43 (1ndash1296) 19 (0ndash209) 429 (13ndash2074) 65 13 303KOALA1_SEQ 12 106 (1ndash65) 01 (0ndash93) 1280 (222ndash1812) 110 8839KOALA2_SEQ 5 46 (1ndash5) 002 (0ndash13) 746 68 2601KOALA_SWQ 6 5 (1ndash6) 93 (18ndash238) 550 (318ndash694) 77 2200MARE_NSW 144 1179 0 4440 61 16 952MARE1_Vic 48 46 (1ndash48) 219 (64ndash526) 2280 (371ndash3338) 30 6839MARE2_Vic 48 476 (26ndash48) 92 (0ndash368) 5600 (354ndash7639) 75 21 808PADE_Tas 9 89 (6ndash9) 0 1744 95 54 859POSS1_Vic 9 10 (1ndash154) 3 (0ndash10) 1233 107 3698POSS2_Vic 10 12 (1ndash972) 7 (1ndash17) 755 94 4530POSS3_Vic 14 13 (4ndash40) 10 (0ndash97) 902 65 18 036QUOLL_Tas 12C 74 (1ndash12) 0 241 (182ndash280) 64 5150QUOLL_WA 3 na na na na 0ROO_ACT 24 232 (3ndash36) na 1448 (70ndash3944) 32 naROO_NSW 32 32 0 1779 (1006ndash2028) 93 21 351WOMB_NSW 8 53 (1ndash30) 226 (0ndash596) 748 (40ndash2235) 28 8227
MeanTotal 122 (0ndash97) (13ndash11043) 658 384 057
AFor those days when at least one fix was recordedBFor expected life of collar This differs from fix success calculated over actual operating lifeC12 fixes for 5 days of the week and 72 or 96 fixes per day for the remaining 2 days Data presented formean fixes per day andmean fixes per collar for those dayswith 12 fixes per day
Table 4 GPS data performance statistics for collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT MARE_NSW PADE_Tas and QUOLL_WA no data
Study fixes with3 satellites
fixes with4 satellites
fixes with5 satellites
fixes with6 satellites
fixes with7+ satellites
HDOP(mean plusmn sd)
fixes withHDOP lt5
BFRW_SA 50 plusmn 39 67DINGO1_NSW 471 294 143 57 35 32 plusmn 22 77DINGO2_NSW 445 316 155 57 26 34 plusmn 25 82DINGO1_NT 34 93 234 290 34 18 plusmn 13 98DINGO_Qld 54 30 12 3 1 35 88DINGO_SA 0 5 21 32 42 2 98FERAL_SA 20 18 25 18 21 27 94KOALA_NSW 324 227 173 118 157 30 plusmn 26 86KOALA1_SEQ 389 249 182 11 7 32 plusmn 26 86KOALA2_SEQ 372 259 180 107 82 33 plusmn 27 84KOALA_SWQ 0 146 187 176 491 17 plusmn 12 98MARE1_Vic 2 5 14 24 55 17 plusmn 09 99MARE2_Vic 1 4 9 16 69 15 plusmn 09 99POSS1_Vic 559 275 113 39 14 40 plusmn 30 77POSS2_Vic 412 170 164 158 96 32 plusmn 26 85POSS3_Vic 576 256 97 46 25 39 plusmn 29 78QUOLL_Tas 80 164 188 167 401 20 plusmn 14 94ROO_ACT 356 216 154 131 143 31 plusmn 26A 86ROO_NSW 440 297 168 68 28 35 plusmn 27 84WOMB_NSW 466 258 126 76 74 35 plusmn 26 83
Total 30
AHDOP=38 28 excluding periods of collar failure
70 Australian Mammalogy A Matthews et al
investigation of animal behaviour at much finer scales than thoseachievable with VHF technology such as the actual speed ananimal travels the locations it visits and the true time spent in agiven habitat (eg Allen 2007) However capital costs of collarsand equipment satellite signal reception longevity under fieldconditions and the potential for failure present possiblecounterbalances to these advantages (Johnson et al 2002) Ourevaluation of 23 studies using GPS collars on mammals inAustralia revealed several common problems including a shorterthan expected GPS life intermittent failures (ie days with nolocations collected) fewerfixes per day than expected changes tothe fix schedule or duty cycle early VHF transmitter and timed-release failures and collar design issues (Table 7)
Lessons learntCollar returns
Aswith conventional radio-tracking studies it is expected thata proportion of collars will be lost such as from animalsdispersing moving out of range of the VHF or from transmitterfailure (Harris et al 1990) Losses from GPS also can beexperienced with catastrophic equipment failures defined byFrair et al (2010) as computer glitches or failed breakawaydevices We were unable to retrieve 31 collars from 280deployments and a further 10 collars that were retrieved did notcollect any GPS locations Thus 15 of collar deployments did
not return animal location information to the research programsand we conclude that these losses are relatively common
Operating life
Manufacturers typically quote an expected operating life thatis determined by fix schedule duty cycle and battery capacity Inthe field however maximum operational life is rarely attainedThis is because operating life is influenced by environmentalconditions (eg temperature and humidity) the time it takes for aposition to be acquired (time to fix) and the batteries themselvesIn locations with an obstructed view of the sky due to densecanopy cover steep terrain or the animal being underground orcovered by rocks or logs itmay take longer for theGPS to acquirea fix ndash if at all ndash and consequently more battery power will beused (though fix acquisition lsquotime-outsrsquo can help reduce this lossof battery capacity during periods of poor satellite reception) Ourresults showed that actual operating lifewas~68of the expectedlife but there was high variability among individual collars andstudies A comparison of three collar brands by Blackie (2010)found similar percentages of operational life expectancy amongbrands but also with high variability among individual collars(range 59ndash1072) Some manufacturers take into account asafetymarginwhen calculating expected battery life ndash rather thanpublishing a best-case scenario ndash and it is certainly informative toenquire about this when planning the purchase of GPS devices
Table 5 Success of VHF transmitter and timed-release components of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details MARE_NSW no data na not available
Study No of collars withVHF transmitter failure[ of total deployed]
Mean no of monthsto failure (range)
expectedmonths
collars withtimed-release
failure
collars releasedbefore or after
timedate
BFRW_SA 10 [100] 17 (0ndash7)A na naDINGO1_NSW 2 [17] 3 (2ndash4) 18 17 8DINGO2_NSW 0 na na 0 0DINGO1_NT 0 na na 13 0DINGO2_NT 7 [100] 1 10 na 29DINGO_Qld 0 na na 0 0DINGO_SA 0 na na na naFERAL_SA 1 [6] 0 0 na naKOALA_NSW 0 na na na naKOALA1_SEQ 1 [11] 2 8 na naKOALA2_SEQ 0 na na na naKOALA_SWQ 5 [71] 32 (1ndash4) 27 na naMARE1_Vic 0 na na na naMARE2_Vic 0 na na na naPADE_Tas 0 na na 37 0POSS1_Vic 0 na na na naPOSS2_Vic 0 na na na naPOSS3_Vic 0 na na na naQUOLL_Tas 0 na na na naQUOLL_WA 6 [100] ndash
B na naROO_ACT 4 [15] 2 (003ndash4) 6 na naROO_NSW 0 na na na naWOMB_NSW 4 [31] 9 (5ndash14) 50 8 25
Total 143 29 19 5
AVHFtransmitterwasprogrammed to activateon afixeddate but only3of 10didOf these by the7thmonth into the10-monthVHFcollar deployment nonewereworkingBVHF transmitter was programmed to activate on a fixed date but did not
Success of GPS collar deployments Australian Mammalogy 71
The studies with shorter intended deployments had highersuccess mainly because problems contributing to shortenedoperating life generally occurred only after some time in the fieldThus while GPS collars appear to be suitable for collectinganimal movement data over several seasons or throughoutthe year only a small proportion of collars operated reliably forsuch extendedperiodsOur experience confirms the suggestion ofGau et al (2004) that the reliability and performance of GPScollars decreases as time in the field increases
Fix acquisition
Fix rates (ie the number of successful fixes divided by thenumber attempted) are frequently lower on GPS collars that areattached to free-ranging animals This is mainly due to canopycover topography collar orientationfix interval and collar brand(Frair et al 2010) However obtaining intermittent fixes (dayswith no fixes) was a common problem in our studies and thereasons for its high incidence may differ from those mentionedaboveOften assessments offix success of collars under differentconditions are conducted over short periods (eg 24 hRecio et al2011) and this may not provide a true assessment of fix success
over the life of the collar In addition to locationor signal precisionissues intermittent fixes may arise from a programming failurewhere the collar does not turn on at the specified time andor ahardware failure such as an interruption on the battery leadAlthough some collar brands record fix attempts others do nothowever having this information would help to distinguishmanufacturing faults from satellite positioning problems
In controlled tests of fix rates by Recio et al (2011) collarswere programmed to attemptfixes in less than2-h intervals In thismode the GPS receiver estimates positions in a lsquohot startrsquo withcurrent almanac time location and ephemeris data (Tomkiewiczet al 2010) and time to fix is improvedWhen collars are inactivefor greater time intervals (~2ndash4 h) they may begin in a lsquowarmstartrsquo whereby they need to acquire new ephemeris and time tofix can be longer (resulting in greater power consumption) Evenlonger intervals (eg gt6 h from the previous fix) result in a lsquocoldstartrsquo whereby collars need to acquire new almanac timelocation and ephemeris (Tomkiewicz et al 2010) and the effecton fix rates and accuracy of locations may be relatively large Inour studies programming of sample rates or duty cycles meantthat fixes frequently were recorded gt2 h later than previous fixes
Table 6 Costs of GPS tracking equipment and additional unexpected costs incurred by studies for the retrieval of failed collarsSee Table 1 for Study details Costs are those of the research project and do not include costs covered by manufacturers working to further develop or fix faultyproducts The calculation of cost per fix incorporates both the initial costs of equipment and additional costs of retrieval but does not include other project-related
costs such as capture tracking and data analysis na not available
Study Initial cost of collarsand hardwaresoftware (AU$)
additionalcosts of refurbishment
or repair
additional costsof retrieving failed
collarsA
Time retrievingfailed collarsA
(person-hours)
Cost per fix(AU$)
BFRW_SA 29 975 0 0 0 129DINGO1_NSW 37 640 0D 53 1760 5DINGO2_NSW 5623 0 0 0 lt1DINGO1_NT 45 600 0D 9 300 lt1DINGO2_NT 15 400 0E 13 100 15 400G
DINGO_Qld 9000 11 11 40 lt1DINGO_SA 83 000 5 1 40 1FERAL_SA 43 700 0D 57 160 15KOALA_NSW 77 500B 40 0 0 8KOALA1_SEQ 17 300 6F 17 15 2KOALA2_SEQ 12 500 4F 0 0 5KOALA_SWQ 11 880 0D 72 180 9MARE_NSW 350 0 0 0 lt1MARE1_Vic 17 500C 0D 0 0 3MARE2_Vic 17 500C 7 0 0 1PADE_Tas 70 000 0 14 60 1POSS_Vic 18 894 0D 0 0 lt1QUOLL_Tas 28 370 0D 0 4 5QUOLL_WA 15 000 0 7 14 16 000G
ROO_ACT 74 700 0D 67 552 naROO_NSW 21 000 0 0 30 1WOMB_NSW 32 400C 5 20 700 5
Total 684 832 6 19 3955 223
AUnanticipated additional costs and time beyond that allocated to the standard retrieval of data-logging collarsBCost is for 19 collars deployed more than onceCApproximate cost converted from US$ or NZ$DFixed or replaced by manufacturer at no costENot fixed or replaced by manufacturerFCosts of refurbishment for additional deploymentsGTotal cost with no fixes recorded
72 Australian Mammalogy A Matthews et al
and the devices were likely to have operated in warm or cold startmodes To allow for the initial inaccuracy of lsquofirstrsquo fixes someGPS engines discard a set number of fixes and store the third orlater fix as the final position The GPS firmware potentially couldbe programmed to discard an even higher number of fixes (egrecording the fifth or later position) if needed
Shifts in sample rates and duty cycles
These shifts can have profound effects on the operating life ofthe collar and the usefulness of the collected data Several studiesreported shifts in sample rates to higher frequencies whichsignificantly reduced the operating life of the collars In the caseofone koala collar and one feral cat collar scheduled 4-h fixesshifted to record locations everyminute resulting in exhaustionofthe GPS battery within two days Similarly shifts in duty cyclepresumably also caused significant reductions of operating lifeFor example wombat collars were scheduled to turn off duringthe day when animals were expected to be in a burrow and out ofview of the satellites In this case a shift in the duty cycle causednot only significant reductions in the number of position fixesbecause the collars were not logging at night when the wombatswere active but the collars were on during the day and rapidlydrained the batteries when the GPS tried to acquire hourly fixeswhile underground To avoid rapid exhaustion of batteries inlocations or periods with poor satellite reception somemanufacturers offer the option of programming devices with atime-out period Thismeans that theGPS receiver will stop tryingto acquire a fix if it has not been successful after a certain period(usually a fewminutes)However evenwith this time-out featurea shift in duty cycle (eg to a period of underground activity) canresult in considerably shortened operating life and reduced dataacquisition
VHF transmitter failures
The VHF component of GPS collars typically is not used fordata acquisition Rather the VHF transmitter is critical for theretrieval of store-on-board GPS data-logging collars because itis usually the onlymeans of locating them In general retrieval ofGPS data-logging collars is more likely when collars are usedon relatively sedentary species that are not expected to move farfrom their release location For more mobile species capable of
travelling large distances (eg dingoeswhich have been recordedto disperse gt550 km from their point of origin in 31 days Allen2009) satellite-linkedGPS collars offer a practical solution to theloss of collars (and data) should the VHF transmitter failHowever this solution incurs the cost of additionalweight powerconsumption and expense for data-downloads (approximatelyAU$800 per collar per year where collars are transmitting for 6 hper day) Considering the many possible reasons for prematureexhaustion of the GPS battery it is crucial that the GPS and VHFcomponents in the collar are powered by separate batteries Thismeans that the device can still be located collected data retrievedand the collar refurbished even after the GPS has stoppedoperating albeit with some difficulty Nevertheless problemsmay still arise when separate batteries are used to power the VHFbeacon as was the case in our studies with VHF transmitterfailure Despite VHF technology having been around forconsiderably longer than GPS there are still frequent reports ofunit failure from insufficient packaging (Gau et al 2004 Blackie2010) A robust and completely waterproof design is needed topreventwater ingress anddamage to transmitters and aerials needto be positioned in the collar to minimise their risk of beingchewed or broken
Timed-release problems and failures
Our experience showed that timed-release devices do notalways result in the collar dropping off the animal on theprogrammed time and date For example activation of the releasemechanism may occur but dirt and debris may prevent themechanism from separating until the animal grooms the collaraway This is a problem if the animal spends time underground ina tree or on a cliff and the collar drops to where it cannot berelocated or reached Thus researchers are left with someuncertainty about when if ever they will be able to recover theircollars When collars release early or not at all this is more likelyto be due to a programming fault or hardware failure These issuesmight become more problematic if animals are left wearingcollars for the remainder of their lives
Data accuracy
Inmost cases it is unlikely that all the locations recordedwith aGPS collar will be accurate enough to be used for the studypurposes (unless a coarse resolution is acceptable for theobjective) An HDOP value (or sometimes a PDOP value) istypically ascribed to each recordedGPSfix andmany researchersuse this as the primary means of discriminating and excludingfixes that are likely to be too inaccurate (DrsquoEon and Delparte2005 see Appendix 2) However it is important to note that thereis no limit to the potential level of inaccuracyof anyfix even thosewith low HDOP values may still have low accuracy RatherHDOP values reflect the likelihood that the fixes were accuratelyacquired therefore not all fixes with high HDOP values will beinaccurate but a greater proportion will be and vice versa
Since site conditions (eg canopy cover terrain) impactsatellite reception it is strongly recommended that therelationship between HDOP values and on-ground accuracies beexamined This can be done either before collar deploymentsthrough stationary collar tests in a range of environments at theproposed study site (eg Recio et al 2011) or after deploymentsto gauge the accuracy of the fixes obtained (eg Allen 2012) An
Table7 Summaryof commonproblemsamongstudiesofGPStrackingof mammals in Australia
Issue No of studies collarsAffected Not affected
Shorter GPS life than expected 15 7 47Intermittent fixes (days
without recording)14 7 31
Fewer fixes per day thanexpected
16 6 ndash
Changes tofix scheduleor dutycycle
11 7 18
VHF transmitter failure 9 14 14Timed-release failure 4 2 19Collar design issues requiring
change10 12 ndash
Additional unexpected costs 13 10 ndash
Success of GPS collar deployments Australian Mammalogy 73
assessment of HDOP values against on-ground accuracies willpermit researchers to determine the appropriate HDOP thresholdndash rather than choosing an arbitrary numberndash for inclusion offixesand to establish the likelihood that fixes are accurate withinacceptable bounds Selection of accuracy thresholds should beheavily influenced by the study objectives and the level ofmovement resolution required (Ellis et al 2011) For example fargreater resolution is necessary to determine which backyards arevisited by dingoes in urban areas than to estimate home-rangesizes of highly mobile dingoes in remote locations
Welfare issues
Until recently most studies using GPS collars have done sowith collars weighing gt500 g on medium-to-large mammalsusually predators andor their prey For example Johnson et al(2002) used 18-kg collars for caribou while Merrill et al (1998)had 920-g collars for wolves and white-tailed deer There is littlepublished information on use of GPS collars lt300 g on small andmedium-sized mammals (Blackie 2010 Mattisson et al 2010)but recent assessments indicate that they are suitable (Dennis et al2010 Recio et al 2011) Here we present data from speciesweighing 1ndash74 kg including several smaller species (koalaspossums pademelons rock-wallabies and quolls) weighing lessthan 10 kg When collars are attached to wild animals severalwelfare issues need to be considered including the need forcollars to be well fitted (not too tight or too loose) to preventinjury to avoid disruption of daily activities (eg grooming andsleeping) and to avoid interference with normal movementbehaviour (Casper 2009) We found few instances of collarscausing injury to study animals but therewereminor problems ofhair loss and skin abrasions A few pademelons died as a result ofcapture myopathy (McMahon et al in press) a condition that iscommonly seen in macropods following capture and handling(Vogelnest and Portas 2008) Consequently the additional stressof handling while fitting collars needs to be considered forsusceptible species We were not aware of any of our studyanimals changingbehaviour as a result of theGPScollar althoughthis would be difficult to identify and in any case was notexplicitly studied
One of the benefits of GPS tracking is that animals do not needto be followed to gather location information thus reducing bothlabour costs and disturbance to study animals In addition someresearch programs use timed-release units so that animals do nothave to be recaptured during the study Consequently there maybe no regular monitoring of animal welfare following releaseAmong our studies 60 of animals were recaptured after collardeployment which meant that animal welfare could be assessedfor example through an examination of changes in bodyweight orcondition thefit of collars and injuries incurredSuchmonitoringgives researchers the capacity to respond to problems when theyarise and improve animal welfare However for some animalsrecapture may not be a practical option In these cases VHFtracking remains a valuable tool for monitoring animal welfare ofhighly visible species in real time or for monitoring unusualmovement behaviour of more cryptic species For example ifanimal locations do not change as expected or if collars are fittedwith a mortality signal (whereby VHF signal frequency changesafter a predefined period of inactivity) lack of movement mightprovide an early indication ofwelfare issuesWhileVHF tracking
somewhat defeats the advantages of GPS collars it may be usedto monitor animal welfare for short intervals throughout a study
Timed-release devices allow collars to be recovered fromanimals without the need for recapture and avoid restraint andhandling of animals which may cause stress However wefound that 18 of timed-release devices failed leaving collarsattached to animals This may be a significant issue if animalsare encumbered with GPS collars indefinitely Casper (2009)suggested that researchers should consider some of theanticipated consequences of attaching equipment to animalsand that they should be careful to avoid situations where thewelfare of animals is compromised An important considerationwith regard to timed-release devices is the likelihood of theanimal being recaptured to remove the collar if the mechanismfails In particular the use of timed-release collars on growingjuveniles warrants careful thought because strangulation bythe collar is possible if it does not release and it cannot beremoved Alternatively several options for collar design couldbe considered to allow for the possibility of a timed-release unitfailing Options include expanding collars or elastic insertswhich permit growth and the inclusion of weak links (eg asection of natural rubber) which eventually will fail therebyensuring that animals do not have to cope with wearing a failedcollar for a long time
An issue that needs tobe explicitly addressed is thepreparationof protocols for the use of GPS collars on mammals forsubmission and approval by animal ethics committees (AECs)The central question is whether the welfare of animals is likely tobe compromised to a point that is unacceptable to an AEC It isacknowledged that the use of animals for scientific researchmay involve interference with the animal such as capture andthe imposition of a collar for the duration of the study The firstquestion to address is whether the collar causes injury to theanimal or prevents it from carrying out its normal activities Thesecondquestion is the reliability of collar retrieval at the endof thestudy As pointed out in Lunney (2012) and Jones et al (2012) itis in the interests of the researcher to develop protocols thatpresent a reasoned case for the approach and the level of risk andnot leave this to the AEC who may be less knowledgeable aboutthe species or study system
Costs
Wildlife tracking inherently is an expensive pursuit but tocomplicate the situation costs vary significantly depending onproject objectives (Thomas et al 2011) Given that ~75 ofthe case studies considered in this paper incurred additionalunexpected costs we believe it to be imperative that whenplanning projects researchers obtain funds not only for the initialcosts of equipment and labour but also to cover costs associatedwith poor collar performance (additional searches andor captureof animals collar refurbishment andor replacement) Althoughit is impossible to provide a definitive measure of how largethis contingency fund should be if our results are indicativeallocating at least 25 of initial project costs would be advisable
Our most significant unexpected fiscal expenditures relatedto attempts to retrieve lost collars as well as for battery andorcollar replacement or repair Indeed the cost of refurbishment canrise after purchase to nearly half the cost of a newcollarHoweverother potential costs include those associated with researchers
74 Australian Mammalogy A Matthews et al
disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

hours (average = 180) (Table 6) over and above the investmentthat had already been allocated towards retrieving collars Indeedproject running costs that included travel labour and outlaysassociatedwith capture anddata analyseswould add a substantialamount to these figures Using just the initial cost of collars andanyadditional expenses associatedwith tracking and retrievalwecalculated a cost per fix and found that it varied considerablyamong studies (mean = $223 range = $002 to $129)withhigheramounts for studies that experienced catastrophic collar failuressuch that no locations were recorded (Table 6)
Across all studies 168 (60) collared individuals wererecaptured allowing potential animal welfare issues to beassessed The most frequently reported problem was loss of furaround the neck (12 of recaptured animals) Three pademelonsdied as a consequence of animal handling related to GPS collardeployment (McMahon et al in press) while four individuals(one quoll one fox and two kangaroos in captive trials) sustainedminor injuries (eg skin lacerations) that prompted the researcherto change the collar design Most researchers contributing to thisreview were the first to use GPS collars on their study speciesConsequently 48 of studies involved changing the originalcollar design often by returning the collars to the manufacturer
Discussion
GPS telemetry has become an important tool in wildlife researchto investigate animal movements (DrsquoEon and Delparte 2005Thomas et al 2011) with the expectation that it offers severalsalient advantages over traditional techniques Chief among theseis the ability to collect higher numbers of locations automaticallyremotely and more precisely than with VHF and satellite-basedmethods (Hulbert and French 2001 Johnson et al 2002 Gravesand Waller 2006 Bandeira de Melo et al 2007 Mattisson et al2010 Thomas et al 2011)With a greater number of fixes whichcan be taken independently of season weather time of dayor year and without the disturbance of a researcher tracking theanimal GPS telemetry is potentially less susceptible to bias thanVHF radio-tracking (Johnson et al 2002 Mattisson et al 2010Robley et al 2010) Thus GPS collars can gather more data at asignificant cost saving per location and with greater researchersafety (Johnson et al 2002) Such data often facilitate the
Table 2 Operational success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study Mean no of daysoperating (range)
of expecteddays
collars operatedover full deployment
collars withintermittent failure
BFRW_SA 7 (0ndash28) 6 0 100DINGO1_NSW 269 (130ndash403) 74 43 86DINGO2_NSW 53 (52ndash54) 152 100 0DINGO1_NT 198 (33ndash300) 66 47 8DINGO_Qld 23 (5ndash43) 66 100 0DINGO_SA 180 (7ndash320) 56 62 0FERAL_SA 61 (8ndash126) 66 23 88KOALA_NSW 100 (4ndash179) 61 61 39KOALA1_SEQ 109 (17ndash154) 115 80 13KOALA2_SEQ 95 (81ndash163) 91 83 17KOALA_SWQ 114 (64ndash160) 95 50 50MARE_NSW 44 100 67 0MARE1_Vic 57 (19ndash78) 37 0 100MARE2_Vic 118 (9ndash160) 76 50 25PADE_Tas 220 (30ndash240) 92 27 0POSS1_Vic 129 (87ndash155) 140 100 33POSS2_Vic 74 (36ndash115) 86 67 100POSS3_Vic 77 (4ndash120) 46 40 20QUOLL_Tas 31 (7ndash35) 112 100 0ROO_ACT 42 (3ndash103) 22 44 naROO_NSW 62 (35ndash70) 100 100 0WOMB_NSW 157 (26ndash346) 47 18 91
Total 988 654 524 305
100
90
80
70
60
50
40
30
20
10
00 50 100 150 200
Expected GPS life or duration of deployment (days)
250 300 350 400
c
olla
rs o
pera
ted
over
full
depl
oym
ent
Fig 3 Relationship between the expected GPS life (or time in the field)and the percentage of collars operating at the end of the deployment period ineach study (n= 22) The trend line is significantly negative (r= ndash059P= 0004)
Success of GPS collar deployments Australian Mammalogy 69
Table 3 Fix success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study No of programmedfixes per day
Mean fixesper dayA (range)
operating dayswith 0 fixes (range)
Mean no of fixesper collar (range)
of expected fixesper collarB
Total fixes
BFRW_SA 16 83 (6ndash11) 77 233 12 233DINGO1_NSW 6ndash8 57 (1ndash8) 338 (0ndash663) 1537 (802ndash2302) 87 10 762DINGO2_NSW 144 1375 (62ndash145) 0 7317 (6978ndash7534) 96 36 585DINGO1_NT 24 208 (2ndash24) 01 (0ndash17) 4109 (713ndash6752) 57 53 424DINGO_Qld 200 138 (12ndash196) 0 3522 (920ndash6870) 50 31 702DINGO_SA 48 39 (6ndash48) 0 5432 (749ndash11043) 35 58 575FERAL_SA 6 4 (3ndash6) 32 (2ndash93) 258 (23ndash622) 47 4383KOALA_NSW 4 43 (1ndash1296) 19 (0ndash209) 429 (13ndash2074) 65 13 303KOALA1_SEQ 12 106 (1ndash65) 01 (0ndash93) 1280 (222ndash1812) 110 8839KOALA2_SEQ 5 46 (1ndash5) 002 (0ndash13) 746 68 2601KOALA_SWQ 6 5 (1ndash6) 93 (18ndash238) 550 (318ndash694) 77 2200MARE_NSW 144 1179 0 4440 61 16 952MARE1_Vic 48 46 (1ndash48) 219 (64ndash526) 2280 (371ndash3338) 30 6839MARE2_Vic 48 476 (26ndash48) 92 (0ndash368) 5600 (354ndash7639) 75 21 808PADE_Tas 9 89 (6ndash9) 0 1744 95 54 859POSS1_Vic 9 10 (1ndash154) 3 (0ndash10) 1233 107 3698POSS2_Vic 10 12 (1ndash972) 7 (1ndash17) 755 94 4530POSS3_Vic 14 13 (4ndash40) 10 (0ndash97) 902 65 18 036QUOLL_Tas 12C 74 (1ndash12) 0 241 (182ndash280) 64 5150QUOLL_WA 3 na na na na 0ROO_ACT 24 232 (3ndash36) na 1448 (70ndash3944) 32 naROO_NSW 32 32 0 1779 (1006ndash2028) 93 21 351WOMB_NSW 8 53 (1ndash30) 226 (0ndash596) 748 (40ndash2235) 28 8227
MeanTotal 122 (0ndash97) (13ndash11043) 658 384 057
AFor those days when at least one fix was recordedBFor expected life of collar This differs from fix success calculated over actual operating lifeC12 fixes for 5 days of the week and 72 or 96 fixes per day for the remaining 2 days Data presented formean fixes per day andmean fixes per collar for those dayswith 12 fixes per day
Table 4 GPS data performance statistics for collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT MARE_NSW PADE_Tas and QUOLL_WA no data
Study fixes with3 satellites
fixes with4 satellites
fixes with5 satellites
fixes with6 satellites
fixes with7+ satellites
HDOP(mean plusmn sd)
fixes withHDOP lt5
BFRW_SA 50 plusmn 39 67DINGO1_NSW 471 294 143 57 35 32 plusmn 22 77DINGO2_NSW 445 316 155 57 26 34 plusmn 25 82DINGO1_NT 34 93 234 290 34 18 plusmn 13 98DINGO_Qld 54 30 12 3 1 35 88DINGO_SA 0 5 21 32 42 2 98FERAL_SA 20 18 25 18 21 27 94KOALA_NSW 324 227 173 118 157 30 plusmn 26 86KOALA1_SEQ 389 249 182 11 7 32 plusmn 26 86KOALA2_SEQ 372 259 180 107 82 33 plusmn 27 84KOALA_SWQ 0 146 187 176 491 17 plusmn 12 98MARE1_Vic 2 5 14 24 55 17 plusmn 09 99MARE2_Vic 1 4 9 16 69 15 plusmn 09 99POSS1_Vic 559 275 113 39 14 40 plusmn 30 77POSS2_Vic 412 170 164 158 96 32 plusmn 26 85POSS3_Vic 576 256 97 46 25 39 plusmn 29 78QUOLL_Tas 80 164 188 167 401 20 plusmn 14 94ROO_ACT 356 216 154 131 143 31 plusmn 26A 86ROO_NSW 440 297 168 68 28 35 plusmn 27 84WOMB_NSW 466 258 126 76 74 35 plusmn 26 83
Total 30
AHDOP=38 28 excluding periods of collar failure
70 Australian Mammalogy A Matthews et al
investigation of animal behaviour at much finer scales than thoseachievable with VHF technology such as the actual speed ananimal travels the locations it visits and the true time spent in agiven habitat (eg Allen 2007) However capital costs of collarsand equipment satellite signal reception longevity under fieldconditions and the potential for failure present possiblecounterbalances to these advantages (Johnson et al 2002) Ourevaluation of 23 studies using GPS collars on mammals inAustralia revealed several common problems including a shorterthan expected GPS life intermittent failures (ie days with nolocations collected) fewerfixes per day than expected changes tothe fix schedule or duty cycle early VHF transmitter and timed-release failures and collar design issues (Table 7)
Lessons learntCollar returns
Aswith conventional radio-tracking studies it is expected thata proportion of collars will be lost such as from animalsdispersing moving out of range of the VHF or from transmitterfailure (Harris et al 1990) Losses from GPS also can beexperienced with catastrophic equipment failures defined byFrair et al (2010) as computer glitches or failed breakawaydevices We were unable to retrieve 31 collars from 280deployments and a further 10 collars that were retrieved did notcollect any GPS locations Thus 15 of collar deployments did
not return animal location information to the research programsand we conclude that these losses are relatively common
Operating life
Manufacturers typically quote an expected operating life thatis determined by fix schedule duty cycle and battery capacity Inthe field however maximum operational life is rarely attainedThis is because operating life is influenced by environmentalconditions (eg temperature and humidity) the time it takes for aposition to be acquired (time to fix) and the batteries themselvesIn locations with an obstructed view of the sky due to densecanopy cover steep terrain or the animal being underground orcovered by rocks or logs itmay take longer for theGPS to acquirea fix ndash if at all ndash and consequently more battery power will beused (though fix acquisition lsquotime-outsrsquo can help reduce this lossof battery capacity during periods of poor satellite reception) Ourresults showed that actual operating lifewas~68of the expectedlife but there was high variability among individual collars andstudies A comparison of three collar brands by Blackie (2010)found similar percentages of operational life expectancy amongbrands but also with high variability among individual collars(range 59ndash1072) Some manufacturers take into account asafetymarginwhen calculating expected battery life ndash rather thanpublishing a best-case scenario ndash and it is certainly informative toenquire about this when planning the purchase of GPS devices
Table 5 Success of VHF transmitter and timed-release components of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details MARE_NSW no data na not available
Study No of collars withVHF transmitter failure[ of total deployed]
Mean no of monthsto failure (range)
expectedmonths
collars withtimed-release
failure
collars releasedbefore or after
timedate
BFRW_SA 10 [100] 17 (0ndash7)A na naDINGO1_NSW 2 [17] 3 (2ndash4) 18 17 8DINGO2_NSW 0 na na 0 0DINGO1_NT 0 na na 13 0DINGO2_NT 7 [100] 1 10 na 29DINGO_Qld 0 na na 0 0DINGO_SA 0 na na na naFERAL_SA 1 [6] 0 0 na naKOALA_NSW 0 na na na naKOALA1_SEQ 1 [11] 2 8 na naKOALA2_SEQ 0 na na na naKOALA_SWQ 5 [71] 32 (1ndash4) 27 na naMARE1_Vic 0 na na na naMARE2_Vic 0 na na na naPADE_Tas 0 na na 37 0POSS1_Vic 0 na na na naPOSS2_Vic 0 na na na naPOSS3_Vic 0 na na na naQUOLL_Tas 0 na na na naQUOLL_WA 6 [100] ndash
B na naROO_ACT 4 [15] 2 (003ndash4) 6 na naROO_NSW 0 na na na naWOMB_NSW 4 [31] 9 (5ndash14) 50 8 25
Total 143 29 19 5
AVHFtransmitterwasprogrammed to activateon afixeddate but only3of 10didOf these by the7thmonth into the10-monthVHFcollar deployment nonewereworkingBVHF transmitter was programmed to activate on a fixed date but did not
Success of GPS collar deployments Australian Mammalogy 71
The studies with shorter intended deployments had highersuccess mainly because problems contributing to shortenedoperating life generally occurred only after some time in the fieldThus while GPS collars appear to be suitable for collectinganimal movement data over several seasons or throughoutthe year only a small proportion of collars operated reliably forsuch extendedperiodsOur experience confirms the suggestion ofGau et al (2004) that the reliability and performance of GPScollars decreases as time in the field increases
Fix acquisition
Fix rates (ie the number of successful fixes divided by thenumber attempted) are frequently lower on GPS collars that areattached to free-ranging animals This is mainly due to canopycover topography collar orientationfix interval and collar brand(Frair et al 2010) However obtaining intermittent fixes (dayswith no fixes) was a common problem in our studies and thereasons for its high incidence may differ from those mentionedaboveOften assessments offix success of collars under differentconditions are conducted over short periods (eg 24 hRecio et al2011) and this may not provide a true assessment of fix success
over the life of the collar In addition to locationor signal precisionissues intermittent fixes may arise from a programming failurewhere the collar does not turn on at the specified time andor ahardware failure such as an interruption on the battery leadAlthough some collar brands record fix attempts others do nothowever having this information would help to distinguishmanufacturing faults from satellite positioning problems
In controlled tests of fix rates by Recio et al (2011) collarswere programmed to attemptfixes in less than2-h intervals In thismode the GPS receiver estimates positions in a lsquohot startrsquo withcurrent almanac time location and ephemeris data (Tomkiewiczet al 2010) and time to fix is improvedWhen collars are inactivefor greater time intervals (~2ndash4 h) they may begin in a lsquowarmstartrsquo whereby they need to acquire new ephemeris and time tofix can be longer (resulting in greater power consumption) Evenlonger intervals (eg gt6 h from the previous fix) result in a lsquocoldstartrsquo whereby collars need to acquire new almanac timelocation and ephemeris (Tomkiewicz et al 2010) and the effecton fix rates and accuracy of locations may be relatively large Inour studies programming of sample rates or duty cycles meantthat fixes frequently were recorded gt2 h later than previous fixes
Table 6 Costs of GPS tracking equipment and additional unexpected costs incurred by studies for the retrieval of failed collarsSee Table 1 for Study details Costs are those of the research project and do not include costs covered by manufacturers working to further develop or fix faultyproducts The calculation of cost per fix incorporates both the initial costs of equipment and additional costs of retrieval but does not include other project-related
costs such as capture tracking and data analysis na not available
Study Initial cost of collarsand hardwaresoftware (AU$)
additionalcosts of refurbishment
or repair
additional costsof retrieving failed
collarsA
Time retrievingfailed collarsA
(person-hours)
Cost per fix(AU$)
BFRW_SA 29 975 0 0 0 129DINGO1_NSW 37 640 0D 53 1760 5DINGO2_NSW 5623 0 0 0 lt1DINGO1_NT 45 600 0D 9 300 lt1DINGO2_NT 15 400 0E 13 100 15 400G
DINGO_Qld 9000 11 11 40 lt1DINGO_SA 83 000 5 1 40 1FERAL_SA 43 700 0D 57 160 15KOALA_NSW 77 500B 40 0 0 8KOALA1_SEQ 17 300 6F 17 15 2KOALA2_SEQ 12 500 4F 0 0 5KOALA_SWQ 11 880 0D 72 180 9MARE_NSW 350 0 0 0 lt1MARE1_Vic 17 500C 0D 0 0 3MARE2_Vic 17 500C 7 0 0 1PADE_Tas 70 000 0 14 60 1POSS_Vic 18 894 0D 0 0 lt1QUOLL_Tas 28 370 0D 0 4 5QUOLL_WA 15 000 0 7 14 16 000G
ROO_ACT 74 700 0D 67 552 naROO_NSW 21 000 0 0 30 1WOMB_NSW 32 400C 5 20 700 5
Total 684 832 6 19 3955 223
AUnanticipated additional costs and time beyond that allocated to the standard retrieval of data-logging collarsBCost is for 19 collars deployed more than onceCApproximate cost converted from US$ or NZ$DFixed or replaced by manufacturer at no costENot fixed or replaced by manufacturerFCosts of refurbishment for additional deploymentsGTotal cost with no fixes recorded
72 Australian Mammalogy A Matthews et al
and the devices were likely to have operated in warm or cold startmodes To allow for the initial inaccuracy of lsquofirstrsquo fixes someGPS engines discard a set number of fixes and store the third orlater fix as the final position The GPS firmware potentially couldbe programmed to discard an even higher number of fixes (egrecording the fifth or later position) if needed
Shifts in sample rates and duty cycles
These shifts can have profound effects on the operating life ofthe collar and the usefulness of the collected data Several studiesreported shifts in sample rates to higher frequencies whichsignificantly reduced the operating life of the collars In the caseofone koala collar and one feral cat collar scheduled 4-h fixesshifted to record locations everyminute resulting in exhaustionofthe GPS battery within two days Similarly shifts in duty cyclepresumably also caused significant reductions of operating lifeFor example wombat collars were scheduled to turn off duringthe day when animals were expected to be in a burrow and out ofview of the satellites In this case a shift in the duty cycle causednot only significant reductions in the number of position fixesbecause the collars were not logging at night when the wombatswere active but the collars were on during the day and rapidlydrained the batteries when the GPS tried to acquire hourly fixeswhile underground To avoid rapid exhaustion of batteries inlocations or periods with poor satellite reception somemanufacturers offer the option of programming devices with atime-out period Thismeans that theGPS receiver will stop tryingto acquire a fix if it has not been successful after a certain period(usually a fewminutes)However evenwith this time-out featurea shift in duty cycle (eg to a period of underground activity) canresult in considerably shortened operating life and reduced dataacquisition
VHF transmitter failures
The VHF component of GPS collars typically is not used fordata acquisition Rather the VHF transmitter is critical for theretrieval of store-on-board GPS data-logging collars because itis usually the onlymeans of locating them In general retrieval ofGPS data-logging collars is more likely when collars are usedon relatively sedentary species that are not expected to move farfrom their release location For more mobile species capable of
travelling large distances (eg dingoeswhich have been recordedto disperse gt550 km from their point of origin in 31 days Allen2009) satellite-linkedGPS collars offer a practical solution to theloss of collars (and data) should the VHF transmitter failHowever this solution incurs the cost of additionalweight powerconsumption and expense for data-downloads (approximatelyAU$800 per collar per year where collars are transmitting for 6 hper day) Considering the many possible reasons for prematureexhaustion of the GPS battery it is crucial that the GPS and VHFcomponents in the collar are powered by separate batteries Thismeans that the device can still be located collected data retrievedand the collar refurbished even after the GPS has stoppedoperating albeit with some difficulty Nevertheless problemsmay still arise when separate batteries are used to power the VHFbeacon as was the case in our studies with VHF transmitterfailure Despite VHF technology having been around forconsiderably longer than GPS there are still frequent reports ofunit failure from insufficient packaging (Gau et al 2004 Blackie2010) A robust and completely waterproof design is needed topreventwater ingress anddamage to transmitters and aerials needto be positioned in the collar to minimise their risk of beingchewed or broken
Timed-release problems and failures
Our experience showed that timed-release devices do notalways result in the collar dropping off the animal on theprogrammed time and date For example activation of the releasemechanism may occur but dirt and debris may prevent themechanism from separating until the animal grooms the collaraway This is a problem if the animal spends time underground ina tree or on a cliff and the collar drops to where it cannot berelocated or reached Thus researchers are left with someuncertainty about when if ever they will be able to recover theircollars When collars release early or not at all this is more likelyto be due to a programming fault or hardware failure These issuesmight become more problematic if animals are left wearingcollars for the remainder of their lives
Data accuracy
Inmost cases it is unlikely that all the locations recordedwith aGPS collar will be accurate enough to be used for the studypurposes (unless a coarse resolution is acceptable for theobjective) An HDOP value (or sometimes a PDOP value) istypically ascribed to each recordedGPSfix andmany researchersuse this as the primary means of discriminating and excludingfixes that are likely to be too inaccurate (DrsquoEon and Delparte2005 see Appendix 2) However it is important to note that thereis no limit to the potential level of inaccuracyof anyfix even thosewith low HDOP values may still have low accuracy RatherHDOP values reflect the likelihood that the fixes were accuratelyacquired therefore not all fixes with high HDOP values will beinaccurate but a greater proportion will be and vice versa
Since site conditions (eg canopy cover terrain) impactsatellite reception it is strongly recommended that therelationship between HDOP values and on-ground accuracies beexamined This can be done either before collar deploymentsthrough stationary collar tests in a range of environments at theproposed study site (eg Recio et al 2011) or after deploymentsto gauge the accuracy of the fixes obtained (eg Allen 2012) An
Table7 Summaryof commonproblemsamongstudiesofGPStrackingof mammals in Australia
Issue No of studies collarsAffected Not affected
Shorter GPS life than expected 15 7 47Intermittent fixes (days
without recording)14 7 31
Fewer fixes per day thanexpected
16 6 ndash
Changes tofix scheduleor dutycycle
11 7 18
VHF transmitter failure 9 14 14Timed-release failure 4 2 19Collar design issues requiring
change10 12 ndash
Additional unexpected costs 13 10 ndash
Success of GPS collar deployments Australian Mammalogy 73
assessment of HDOP values against on-ground accuracies willpermit researchers to determine the appropriate HDOP thresholdndash rather than choosing an arbitrary numberndash for inclusion offixesand to establish the likelihood that fixes are accurate withinacceptable bounds Selection of accuracy thresholds should beheavily influenced by the study objectives and the level ofmovement resolution required (Ellis et al 2011) For example fargreater resolution is necessary to determine which backyards arevisited by dingoes in urban areas than to estimate home-rangesizes of highly mobile dingoes in remote locations
Welfare issues
Until recently most studies using GPS collars have done sowith collars weighing gt500 g on medium-to-large mammalsusually predators andor their prey For example Johnson et al(2002) used 18-kg collars for caribou while Merrill et al (1998)had 920-g collars for wolves and white-tailed deer There is littlepublished information on use of GPS collars lt300 g on small andmedium-sized mammals (Blackie 2010 Mattisson et al 2010)but recent assessments indicate that they are suitable (Dennis et al2010 Recio et al 2011) Here we present data from speciesweighing 1ndash74 kg including several smaller species (koalaspossums pademelons rock-wallabies and quolls) weighing lessthan 10 kg When collars are attached to wild animals severalwelfare issues need to be considered including the need forcollars to be well fitted (not too tight or too loose) to preventinjury to avoid disruption of daily activities (eg grooming andsleeping) and to avoid interference with normal movementbehaviour (Casper 2009) We found few instances of collarscausing injury to study animals but therewereminor problems ofhair loss and skin abrasions A few pademelons died as a result ofcapture myopathy (McMahon et al in press) a condition that iscommonly seen in macropods following capture and handling(Vogelnest and Portas 2008) Consequently the additional stressof handling while fitting collars needs to be considered forsusceptible species We were not aware of any of our studyanimals changingbehaviour as a result of theGPScollar althoughthis would be difficult to identify and in any case was notexplicitly studied
One of the benefits of GPS tracking is that animals do not needto be followed to gather location information thus reducing bothlabour costs and disturbance to study animals In addition someresearch programs use timed-release units so that animals do nothave to be recaptured during the study Consequently there maybe no regular monitoring of animal welfare following releaseAmong our studies 60 of animals were recaptured after collardeployment which meant that animal welfare could be assessedfor example through an examination of changes in bodyweight orcondition thefit of collars and injuries incurredSuchmonitoringgives researchers the capacity to respond to problems when theyarise and improve animal welfare However for some animalsrecapture may not be a practical option In these cases VHFtracking remains a valuable tool for monitoring animal welfare ofhighly visible species in real time or for monitoring unusualmovement behaviour of more cryptic species For example ifanimal locations do not change as expected or if collars are fittedwith a mortality signal (whereby VHF signal frequency changesafter a predefined period of inactivity) lack of movement mightprovide an early indication ofwelfare issuesWhileVHF tracking
somewhat defeats the advantages of GPS collars it may be usedto monitor animal welfare for short intervals throughout a study
Timed-release devices allow collars to be recovered fromanimals without the need for recapture and avoid restraint andhandling of animals which may cause stress However wefound that 18 of timed-release devices failed leaving collarsattached to animals This may be a significant issue if animalsare encumbered with GPS collars indefinitely Casper (2009)suggested that researchers should consider some of theanticipated consequences of attaching equipment to animalsand that they should be careful to avoid situations where thewelfare of animals is compromised An important considerationwith regard to timed-release devices is the likelihood of theanimal being recaptured to remove the collar if the mechanismfails In particular the use of timed-release collars on growingjuveniles warrants careful thought because strangulation bythe collar is possible if it does not release and it cannot beremoved Alternatively several options for collar design couldbe considered to allow for the possibility of a timed-release unitfailing Options include expanding collars or elastic insertswhich permit growth and the inclusion of weak links (eg asection of natural rubber) which eventually will fail therebyensuring that animals do not have to cope with wearing a failedcollar for a long time
An issue that needs tobe explicitly addressed is thepreparationof protocols for the use of GPS collars on mammals forsubmission and approval by animal ethics committees (AECs)The central question is whether the welfare of animals is likely tobe compromised to a point that is unacceptable to an AEC It isacknowledged that the use of animals for scientific researchmay involve interference with the animal such as capture andthe imposition of a collar for the duration of the study The firstquestion to address is whether the collar causes injury to theanimal or prevents it from carrying out its normal activities Thesecondquestion is the reliability of collar retrieval at the endof thestudy As pointed out in Lunney (2012) and Jones et al (2012) itis in the interests of the researcher to develop protocols thatpresent a reasoned case for the approach and the level of risk andnot leave this to the AEC who may be less knowledgeable aboutthe species or study system
Costs
Wildlife tracking inherently is an expensive pursuit but tocomplicate the situation costs vary significantly depending onproject objectives (Thomas et al 2011) Given that ~75 ofthe case studies considered in this paper incurred additionalunexpected costs we believe it to be imperative that whenplanning projects researchers obtain funds not only for the initialcosts of equipment and labour but also to cover costs associatedwith poor collar performance (additional searches andor captureof animals collar refurbishment andor replacement) Althoughit is impossible to provide a definitive measure of how largethis contingency fund should be if our results are indicativeallocating at least 25 of initial project costs would be advisable
Our most significant unexpected fiscal expenditures relatedto attempts to retrieve lost collars as well as for battery andorcollar replacement or repair Indeed the cost of refurbishment canrise after purchase to nearly half the cost of a newcollarHoweverother potential costs include those associated with researchers
74 Australian Mammalogy A Matthews et al
disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam
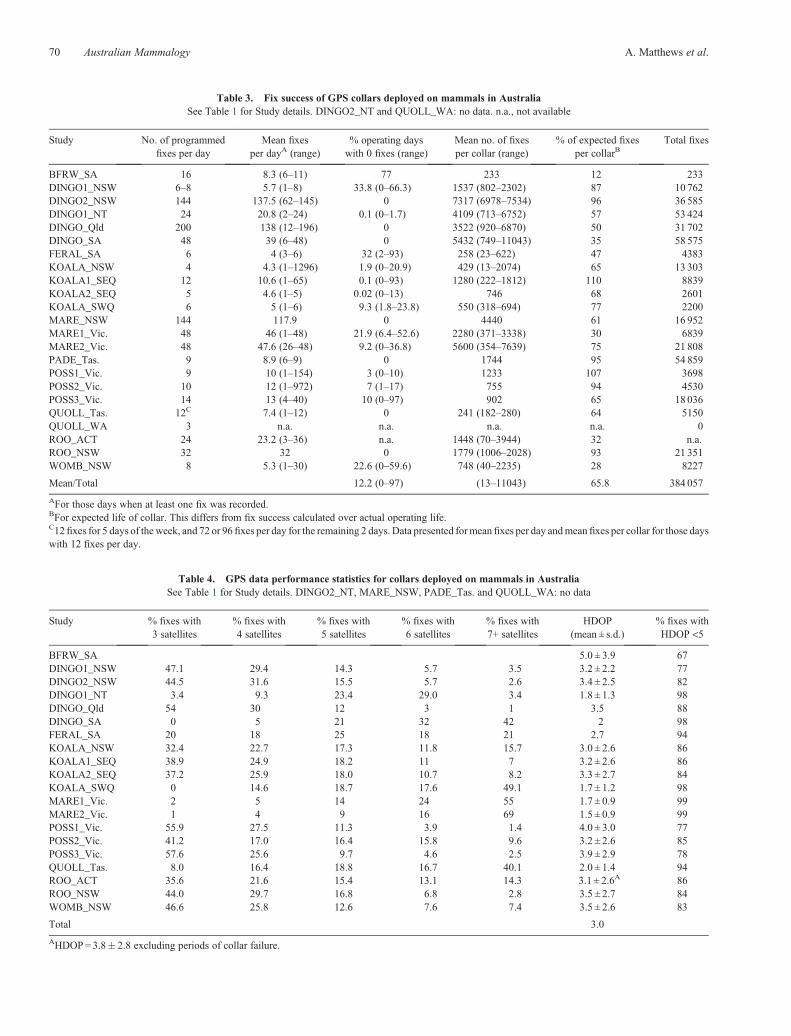
Table 3 Fix success of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT and QUOLL_WA no data na not available
Study No of programmedfixes per day
Mean fixesper dayA (range)
operating dayswith 0 fixes (range)
Mean no of fixesper collar (range)
of expected fixesper collarB
Total fixes
BFRW_SA 16 83 (6ndash11) 77 233 12 233DINGO1_NSW 6ndash8 57 (1ndash8) 338 (0ndash663) 1537 (802ndash2302) 87 10 762DINGO2_NSW 144 1375 (62ndash145) 0 7317 (6978ndash7534) 96 36 585DINGO1_NT 24 208 (2ndash24) 01 (0ndash17) 4109 (713ndash6752) 57 53 424DINGO_Qld 200 138 (12ndash196) 0 3522 (920ndash6870) 50 31 702DINGO_SA 48 39 (6ndash48) 0 5432 (749ndash11043) 35 58 575FERAL_SA 6 4 (3ndash6) 32 (2ndash93) 258 (23ndash622) 47 4383KOALA_NSW 4 43 (1ndash1296) 19 (0ndash209) 429 (13ndash2074) 65 13 303KOALA1_SEQ 12 106 (1ndash65) 01 (0ndash93) 1280 (222ndash1812) 110 8839KOALA2_SEQ 5 46 (1ndash5) 002 (0ndash13) 746 68 2601KOALA_SWQ 6 5 (1ndash6) 93 (18ndash238) 550 (318ndash694) 77 2200MARE_NSW 144 1179 0 4440 61 16 952MARE1_Vic 48 46 (1ndash48) 219 (64ndash526) 2280 (371ndash3338) 30 6839MARE2_Vic 48 476 (26ndash48) 92 (0ndash368) 5600 (354ndash7639) 75 21 808PADE_Tas 9 89 (6ndash9) 0 1744 95 54 859POSS1_Vic 9 10 (1ndash154) 3 (0ndash10) 1233 107 3698POSS2_Vic 10 12 (1ndash972) 7 (1ndash17) 755 94 4530POSS3_Vic 14 13 (4ndash40) 10 (0ndash97) 902 65 18 036QUOLL_Tas 12C 74 (1ndash12) 0 241 (182ndash280) 64 5150QUOLL_WA 3 na na na na 0ROO_ACT 24 232 (3ndash36) na 1448 (70ndash3944) 32 naROO_NSW 32 32 0 1779 (1006ndash2028) 93 21 351WOMB_NSW 8 53 (1ndash30) 226 (0ndash596) 748 (40ndash2235) 28 8227
MeanTotal 122 (0ndash97) (13ndash11043) 658 384 057
AFor those days when at least one fix was recordedBFor expected life of collar This differs from fix success calculated over actual operating lifeC12 fixes for 5 days of the week and 72 or 96 fixes per day for the remaining 2 days Data presented formean fixes per day andmean fixes per collar for those dayswith 12 fixes per day
Table 4 GPS data performance statistics for collars deployed on mammals in AustraliaSee Table 1 for Study details DINGO2_NT MARE_NSW PADE_Tas and QUOLL_WA no data
Study fixes with3 satellites
fixes with4 satellites
fixes with5 satellites
fixes with6 satellites
fixes with7+ satellites
HDOP(mean plusmn sd)
fixes withHDOP lt5
BFRW_SA 50 plusmn 39 67DINGO1_NSW 471 294 143 57 35 32 plusmn 22 77DINGO2_NSW 445 316 155 57 26 34 plusmn 25 82DINGO1_NT 34 93 234 290 34 18 plusmn 13 98DINGO_Qld 54 30 12 3 1 35 88DINGO_SA 0 5 21 32 42 2 98FERAL_SA 20 18 25 18 21 27 94KOALA_NSW 324 227 173 118 157 30 plusmn 26 86KOALA1_SEQ 389 249 182 11 7 32 plusmn 26 86KOALA2_SEQ 372 259 180 107 82 33 plusmn 27 84KOALA_SWQ 0 146 187 176 491 17 plusmn 12 98MARE1_Vic 2 5 14 24 55 17 plusmn 09 99MARE2_Vic 1 4 9 16 69 15 plusmn 09 99POSS1_Vic 559 275 113 39 14 40 plusmn 30 77POSS2_Vic 412 170 164 158 96 32 plusmn 26 85POSS3_Vic 576 256 97 46 25 39 plusmn 29 78QUOLL_Tas 80 164 188 167 401 20 plusmn 14 94ROO_ACT 356 216 154 131 143 31 plusmn 26A 86ROO_NSW 440 297 168 68 28 35 plusmn 27 84WOMB_NSW 466 258 126 76 74 35 plusmn 26 83
Total 30
AHDOP=38 28 excluding periods of collar failure
70 Australian Mammalogy A Matthews et al
investigation of animal behaviour at much finer scales than thoseachievable with VHF technology such as the actual speed ananimal travels the locations it visits and the true time spent in agiven habitat (eg Allen 2007) However capital costs of collarsand equipment satellite signal reception longevity under fieldconditions and the potential for failure present possiblecounterbalances to these advantages (Johnson et al 2002) Ourevaluation of 23 studies using GPS collars on mammals inAustralia revealed several common problems including a shorterthan expected GPS life intermittent failures (ie days with nolocations collected) fewerfixes per day than expected changes tothe fix schedule or duty cycle early VHF transmitter and timed-release failures and collar design issues (Table 7)
Lessons learntCollar returns
Aswith conventional radio-tracking studies it is expected thata proportion of collars will be lost such as from animalsdispersing moving out of range of the VHF or from transmitterfailure (Harris et al 1990) Losses from GPS also can beexperienced with catastrophic equipment failures defined byFrair et al (2010) as computer glitches or failed breakawaydevices We were unable to retrieve 31 collars from 280deployments and a further 10 collars that were retrieved did notcollect any GPS locations Thus 15 of collar deployments did
not return animal location information to the research programsand we conclude that these losses are relatively common
Operating life
Manufacturers typically quote an expected operating life thatis determined by fix schedule duty cycle and battery capacity Inthe field however maximum operational life is rarely attainedThis is because operating life is influenced by environmentalconditions (eg temperature and humidity) the time it takes for aposition to be acquired (time to fix) and the batteries themselvesIn locations with an obstructed view of the sky due to densecanopy cover steep terrain or the animal being underground orcovered by rocks or logs itmay take longer for theGPS to acquirea fix ndash if at all ndash and consequently more battery power will beused (though fix acquisition lsquotime-outsrsquo can help reduce this lossof battery capacity during periods of poor satellite reception) Ourresults showed that actual operating lifewas~68of the expectedlife but there was high variability among individual collars andstudies A comparison of three collar brands by Blackie (2010)found similar percentages of operational life expectancy amongbrands but also with high variability among individual collars(range 59ndash1072) Some manufacturers take into account asafetymarginwhen calculating expected battery life ndash rather thanpublishing a best-case scenario ndash and it is certainly informative toenquire about this when planning the purchase of GPS devices
Table 5 Success of VHF transmitter and timed-release components of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details MARE_NSW no data na not available
Study No of collars withVHF transmitter failure[ of total deployed]
Mean no of monthsto failure (range)
expectedmonths
collars withtimed-release
failure
collars releasedbefore or after
timedate
BFRW_SA 10 [100] 17 (0ndash7)A na naDINGO1_NSW 2 [17] 3 (2ndash4) 18 17 8DINGO2_NSW 0 na na 0 0DINGO1_NT 0 na na 13 0DINGO2_NT 7 [100] 1 10 na 29DINGO_Qld 0 na na 0 0DINGO_SA 0 na na na naFERAL_SA 1 [6] 0 0 na naKOALA_NSW 0 na na na naKOALA1_SEQ 1 [11] 2 8 na naKOALA2_SEQ 0 na na na naKOALA_SWQ 5 [71] 32 (1ndash4) 27 na naMARE1_Vic 0 na na na naMARE2_Vic 0 na na na naPADE_Tas 0 na na 37 0POSS1_Vic 0 na na na naPOSS2_Vic 0 na na na naPOSS3_Vic 0 na na na naQUOLL_Tas 0 na na na naQUOLL_WA 6 [100] ndash
B na naROO_ACT 4 [15] 2 (003ndash4) 6 na naROO_NSW 0 na na na naWOMB_NSW 4 [31] 9 (5ndash14) 50 8 25
Total 143 29 19 5
AVHFtransmitterwasprogrammed to activateon afixeddate but only3of 10didOf these by the7thmonth into the10-monthVHFcollar deployment nonewereworkingBVHF transmitter was programmed to activate on a fixed date but did not
Success of GPS collar deployments Australian Mammalogy 71
The studies with shorter intended deployments had highersuccess mainly because problems contributing to shortenedoperating life generally occurred only after some time in the fieldThus while GPS collars appear to be suitable for collectinganimal movement data over several seasons or throughoutthe year only a small proportion of collars operated reliably forsuch extendedperiodsOur experience confirms the suggestion ofGau et al (2004) that the reliability and performance of GPScollars decreases as time in the field increases
Fix acquisition
Fix rates (ie the number of successful fixes divided by thenumber attempted) are frequently lower on GPS collars that areattached to free-ranging animals This is mainly due to canopycover topography collar orientationfix interval and collar brand(Frair et al 2010) However obtaining intermittent fixes (dayswith no fixes) was a common problem in our studies and thereasons for its high incidence may differ from those mentionedaboveOften assessments offix success of collars under differentconditions are conducted over short periods (eg 24 hRecio et al2011) and this may not provide a true assessment of fix success
over the life of the collar In addition to locationor signal precisionissues intermittent fixes may arise from a programming failurewhere the collar does not turn on at the specified time andor ahardware failure such as an interruption on the battery leadAlthough some collar brands record fix attempts others do nothowever having this information would help to distinguishmanufacturing faults from satellite positioning problems
In controlled tests of fix rates by Recio et al (2011) collarswere programmed to attemptfixes in less than2-h intervals In thismode the GPS receiver estimates positions in a lsquohot startrsquo withcurrent almanac time location and ephemeris data (Tomkiewiczet al 2010) and time to fix is improvedWhen collars are inactivefor greater time intervals (~2ndash4 h) they may begin in a lsquowarmstartrsquo whereby they need to acquire new ephemeris and time tofix can be longer (resulting in greater power consumption) Evenlonger intervals (eg gt6 h from the previous fix) result in a lsquocoldstartrsquo whereby collars need to acquire new almanac timelocation and ephemeris (Tomkiewicz et al 2010) and the effecton fix rates and accuracy of locations may be relatively large Inour studies programming of sample rates or duty cycles meantthat fixes frequently were recorded gt2 h later than previous fixes
Table 6 Costs of GPS tracking equipment and additional unexpected costs incurred by studies for the retrieval of failed collarsSee Table 1 for Study details Costs are those of the research project and do not include costs covered by manufacturers working to further develop or fix faultyproducts The calculation of cost per fix incorporates both the initial costs of equipment and additional costs of retrieval but does not include other project-related
costs such as capture tracking and data analysis na not available
Study Initial cost of collarsand hardwaresoftware (AU$)
additionalcosts of refurbishment
or repair
additional costsof retrieving failed
collarsA
Time retrievingfailed collarsA
(person-hours)
Cost per fix(AU$)
BFRW_SA 29 975 0 0 0 129DINGO1_NSW 37 640 0D 53 1760 5DINGO2_NSW 5623 0 0 0 lt1DINGO1_NT 45 600 0D 9 300 lt1DINGO2_NT 15 400 0E 13 100 15 400G
DINGO_Qld 9000 11 11 40 lt1DINGO_SA 83 000 5 1 40 1FERAL_SA 43 700 0D 57 160 15KOALA_NSW 77 500B 40 0 0 8KOALA1_SEQ 17 300 6F 17 15 2KOALA2_SEQ 12 500 4F 0 0 5KOALA_SWQ 11 880 0D 72 180 9MARE_NSW 350 0 0 0 lt1MARE1_Vic 17 500C 0D 0 0 3MARE2_Vic 17 500C 7 0 0 1PADE_Tas 70 000 0 14 60 1POSS_Vic 18 894 0D 0 0 lt1QUOLL_Tas 28 370 0D 0 4 5QUOLL_WA 15 000 0 7 14 16 000G
ROO_ACT 74 700 0D 67 552 naROO_NSW 21 000 0 0 30 1WOMB_NSW 32 400C 5 20 700 5
Total 684 832 6 19 3955 223
AUnanticipated additional costs and time beyond that allocated to the standard retrieval of data-logging collarsBCost is for 19 collars deployed more than onceCApproximate cost converted from US$ or NZ$DFixed or replaced by manufacturer at no costENot fixed or replaced by manufacturerFCosts of refurbishment for additional deploymentsGTotal cost with no fixes recorded
72 Australian Mammalogy A Matthews et al
and the devices were likely to have operated in warm or cold startmodes To allow for the initial inaccuracy of lsquofirstrsquo fixes someGPS engines discard a set number of fixes and store the third orlater fix as the final position The GPS firmware potentially couldbe programmed to discard an even higher number of fixes (egrecording the fifth or later position) if needed
Shifts in sample rates and duty cycles
These shifts can have profound effects on the operating life ofthe collar and the usefulness of the collected data Several studiesreported shifts in sample rates to higher frequencies whichsignificantly reduced the operating life of the collars In the caseofone koala collar and one feral cat collar scheduled 4-h fixesshifted to record locations everyminute resulting in exhaustionofthe GPS battery within two days Similarly shifts in duty cyclepresumably also caused significant reductions of operating lifeFor example wombat collars were scheduled to turn off duringthe day when animals were expected to be in a burrow and out ofview of the satellites In this case a shift in the duty cycle causednot only significant reductions in the number of position fixesbecause the collars were not logging at night when the wombatswere active but the collars were on during the day and rapidlydrained the batteries when the GPS tried to acquire hourly fixeswhile underground To avoid rapid exhaustion of batteries inlocations or periods with poor satellite reception somemanufacturers offer the option of programming devices with atime-out period Thismeans that theGPS receiver will stop tryingto acquire a fix if it has not been successful after a certain period(usually a fewminutes)However evenwith this time-out featurea shift in duty cycle (eg to a period of underground activity) canresult in considerably shortened operating life and reduced dataacquisition
VHF transmitter failures
The VHF component of GPS collars typically is not used fordata acquisition Rather the VHF transmitter is critical for theretrieval of store-on-board GPS data-logging collars because itis usually the onlymeans of locating them In general retrieval ofGPS data-logging collars is more likely when collars are usedon relatively sedentary species that are not expected to move farfrom their release location For more mobile species capable of
travelling large distances (eg dingoeswhich have been recordedto disperse gt550 km from their point of origin in 31 days Allen2009) satellite-linkedGPS collars offer a practical solution to theloss of collars (and data) should the VHF transmitter failHowever this solution incurs the cost of additionalweight powerconsumption and expense for data-downloads (approximatelyAU$800 per collar per year where collars are transmitting for 6 hper day) Considering the many possible reasons for prematureexhaustion of the GPS battery it is crucial that the GPS and VHFcomponents in the collar are powered by separate batteries Thismeans that the device can still be located collected data retrievedand the collar refurbished even after the GPS has stoppedoperating albeit with some difficulty Nevertheless problemsmay still arise when separate batteries are used to power the VHFbeacon as was the case in our studies with VHF transmitterfailure Despite VHF technology having been around forconsiderably longer than GPS there are still frequent reports ofunit failure from insufficient packaging (Gau et al 2004 Blackie2010) A robust and completely waterproof design is needed topreventwater ingress anddamage to transmitters and aerials needto be positioned in the collar to minimise their risk of beingchewed or broken
Timed-release problems and failures
Our experience showed that timed-release devices do notalways result in the collar dropping off the animal on theprogrammed time and date For example activation of the releasemechanism may occur but dirt and debris may prevent themechanism from separating until the animal grooms the collaraway This is a problem if the animal spends time underground ina tree or on a cliff and the collar drops to where it cannot berelocated or reached Thus researchers are left with someuncertainty about when if ever they will be able to recover theircollars When collars release early or not at all this is more likelyto be due to a programming fault or hardware failure These issuesmight become more problematic if animals are left wearingcollars for the remainder of their lives
Data accuracy
Inmost cases it is unlikely that all the locations recordedwith aGPS collar will be accurate enough to be used for the studypurposes (unless a coarse resolution is acceptable for theobjective) An HDOP value (or sometimes a PDOP value) istypically ascribed to each recordedGPSfix andmany researchersuse this as the primary means of discriminating and excludingfixes that are likely to be too inaccurate (DrsquoEon and Delparte2005 see Appendix 2) However it is important to note that thereis no limit to the potential level of inaccuracyof anyfix even thosewith low HDOP values may still have low accuracy RatherHDOP values reflect the likelihood that the fixes were accuratelyacquired therefore not all fixes with high HDOP values will beinaccurate but a greater proportion will be and vice versa
Since site conditions (eg canopy cover terrain) impactsatellite reception it is strongly recommended that therelationship between HDOP values and on-ground accuracies beexamined This can be done either before collar deploymentsthrough stationary collar tests in a range of environments at theproposed study site (eg Recio et al 2011) or after deploymentsto gauge the accuracy of the fixes obtained (eg Allen 2012) An
Table7 Summaryof commonproblemsamongstudiesofGPStrackingof mammals in Australia
Issue No of studies collarsAffected Not affected
Shorter GPS life than expected 15 7 47Intermittent fixes (days
without recording)14 7 31
Fewer fixes per day thanexpected
16 6 ndash
Changes tofix scheduleor dutycycle
11 7 18
VHF transmitter failure 9 14 14Timed-release failure 4 2 19Collar design issues requiring
change10 12 ndash
Additional unexpected costs 13 10 ndash
Success of GPS collar deployments Australian Mammalogy 73
assessment of HDOP values against on-ground accuracies willpermit researchers to determine the appropriate HDOP thresholdndash rather than choosing an arbitrary numberndash for inclusion offixesand to establish the likelihood that fixes are accurate withinacceptable bounds Selection of accuracy thresholds should beheavily influenced by the study objectives and the level ofmovement resolution required (Ellis et al 2011) For example fargreater resolution is necessary to determine which backyards arevisited by dingoes in urban areas than to estimate home-rangesizes of highly mobile dingoes in remote locations
Welfare issues
Until recently most studies using GPS collars have done sowith collars weighing gt500 g on medium-to-large mammalsusually predators andor their prey For example Johnson et al(2002) used 18-kg collars for caribou while Merrill et al (1998)had 920-g collars for wolves and white-tailed deer There is littlepublished information on use of GPS collars lt300 g on small andmedium-sized mammals (Blackie 2010 Mattisson et al 2010)but recent assessments indicate that they are suitable (Dennis et al2010 Recio et al 2011) Here we present data from speciesweighing 1ndash74 kg including several smaller species (koalaspossums pademelons rock-wallabies and quolls) weighing lessthan 10 kg When collars are attached to wild animals severalwelfare issues need to be considered including the need forcollars to be well fitted (not too tight or too loose) to preventinjury to avoid disruption of daily activities (eg grooming andsleeping) and to avoid interference with normal movementbehaviour (Casper 2009) We found few instances of collarscausing injury to study animals but therewereminor problems ofhair loss and skin abrasions A few pademelons died as a result ofcapture myopathy (McMahon et al in press) a condition that iscommonly seen in macropods following capture and handling(Vogelnest and Portas 2008) Consequently the additional stressof handling while fitting collars needs to be considered forsusceptible species We were not aware of any of our studyanimals changingbehaviour as a result of theGPScollar althoughthis would be difficult to identify and in any case was notexplicitly studied
One of the benefits of GPS tracking is that animals do not needto be followed to gather location information thus reducing bothlabour costs and disturbance to study animals In addition someresearch programs use timed-release units so that animals do nothave to be recaptured during the study Consequently there maybe no regular monitoring of animal welfare following releaseAmong our studies 60 of animals were recaptured after collardeployment which meant that animal welfare could be assessedfor example through an examination of changes in bodyweight orcondition thefit of collars and injuries incurredSuchmonitoringgives researchers the capacity to respond to problems when theyarise and improve animal welfare However for some animalsrecapture may not be a practical option In these cases VHFtracking remains a valuable tool for monitoring animal welfare ofhighly visible species in real time or for monitoring unusualmovement behaviour of more cryptic species For example ifanimal locations do not change as expected or if collars are fittedwith a mortality signal (whereby VHF signal frequency changesafter a predefined period of inactivity) lack of movement mightprovide an early indication ofwelfare issuesWhileVHF tracking
somewhat defeats the advantages of GPS collars it may be usedto monitor animal welfare for short intervals throughout a study
Timed-release devices allow collars to be recovered fromanimals without the need for recapture and avoid restraint andhandling of animals which may cause stress However wefound that 18 of timed-release devices failed leaving collarsattached to animals This may be a significant issue if animalsare encumbered with GPS collars indefinitely Casper (2009)suggested that researchers should consider some of theanticipated consequences of attaching equipment to animalsand that they should be careful to avoid situations where thewelfare of animals is compromised An important considerationwith regard to timed-release devices is the likelihood of theanimal being recaptured to remove the collar if the mechanismfails In particular the use of timed-release collars on growingjuveniles warrants careful thought because strangulation bythe collar is possible if it does not release and it cannot beremoved Alternatively several options for collar design couldbe considered to allow for the possibility of a timed-release unitfailing Options include expanding collars or elastic insertswhich permit growth and the inclusion of weak links (eg asection of natural rubber) which eventually will fail therebyensuring that animals do not have to cope with wearing a failedcollar for a long time
An issue that needs tobe explicitly addressed is thepreparationof protocols for the use of GPS collars on mammals forsubmission and approval by animal ethics committees (AECs)The central question is whether the welfare of animals is likely tobe compromised to a point that is unacceptable to an AEC It isacknowledged that the use of animals for scientific researchmay involve interference with the animal such as capture andthe imposition of a collar for the duration of the study The firstquestion to address is whether the collar causes injury to theanimal or prevents it from carrying out its normal activities Thesecondquestion is the reliability of collar retrieval at the endof thestudy As pointed out in Lunney (2012) and Jones et al (2012) itis in the interests of the researcher to develop protocols thatpresent a reasoned case for the approach and the level of risk andnot leave this to the AEC who may be less knowledgeable aboutthe species or study system
Costs
Wildlife tracking inherently is an expensive pursuit but tocomplicate the situation costs vary significantly depending onproject objectives (Thomas et al 2011) Given that ~75 ofthe case studies considered in this paper incurred additionalunexpected costs we believe it to be imperative that whenplanning projects researchers obtain funds not only for the initialcosts of equipment and labour but also to cover costs associatedwith poor collar performance (additional searches andor captureof animals collar refurbishment andor replacement) Althoughit is impossible to provide a definitive measure of how largethis contingency fund should be if our results are indicativeallocating at least 25 of initial project costs would be advisable
Our most significant unexpected fiscal expenditures relatedto attempts to retrieve lost collars as well as for battery andorcollar replacement or repair Indeed the cost of refurbishment canrise after purchase to nearly half the cost of a newcollarHoweverother potential costs include those associated with researchers
74 Australian Mammalogy A Matthews et al
disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

investigation of animal behaviour at much finer scales than thoseachievable with VHF technology such as the actual speed ananimal travels the locations it visits and the true time spent in agiven habitat (eg Allen 2007) However capital costs of collarsand equipment satellite signal reception longevity under fieldconditions and the potential for failure present possiblecounterbalances to these advantages (Johnson et al 2002) Ourevaluation of 23 studies using GPS collars on mammals inAustralia revealed several common problems including a shorterthan expected GPS life intermittent failures (ie days with nolocations collected) fewerfixes per day than expected changes tothe fix schedule or duty cycle early VHF transmitter and timed-release failures and collar design issues (Table 7)
Lessons learntCollar returns
Aswith conventional radio-tracking studies it is expected thata proportion of collars will be lost such as from animalsdispersing moving out of range of the VHF or from transmitterfailure (Harris et al 1990) Losses from GPS also can beexperienced with catastrophic equipment failures defined byFrair et al (2010) as computer glitches or failed breakawaydevices We were unable to retrieve 31 collars from 280deployments and a further 10 collars that were retrieved did notcollect any GPS locations Thus 15 of collar deployments did
not return animal location information to the research programsand we conclude that these losses are relatively common
Operating life
Manufacturers typically quote an expected operating life thatis determined by fix schedule duty cycle and battery capacity Inthe field however maximum operational life is rarely attainedThis is because operating life is influenced by environmentalconditions (eg temperature and humidity) the time it takes for aposition to be acquired (time to fix) and the batteries themselvesIn locations with an obstructed view of the sky due to densecanopy cover steep terrain or the animal being underground orcovered by rocks or logs itmay take longer for theGPS to acquirea fix ndash if at all ndash and consequently more battery power will beused (though fix acquisition lsquotime-outsrsquo can help reduce this lossof battery capacity during periods of poor satellite reception) Ourresults showed that actual operating lifewas~68of the expectedlife but there was high variability among individual collars andstudies A comparison of three collar brands by Blackie (2010)found similar percentages of operational life expectancy amongbrands but also with high variability among individual collars(range 59ndash1072) Some manufacturers take into account asafetymarginwhen calculating expected battery life ndash rather thanpublishing a best-case scenario ndash and it is certainly informative toenquire about this when planning the purchase of GPS devices
Table 5 Success of VHF transmitter and timed-release components of GPS collars deployed on mammals in AustraliaSee Table 1 for Study details MARE_NSW no data na not available
Study No of collars withVHF transmitter failure[ of total deployed]
Mean no of monthsto failure (range)
expectedmonths
collars withtimed-release
failure
collars releasedbefore or after
timedate
BFRW_SA 10 [100] 17 (0ndash7)A na naDINGO1_NSW 2 [17] 3 (2ndash4) 18 17 8DINGO2_NSW 0 na na 0 0DINGO1_NT 0 na na 13 0DINGO2_NT 7 [100] 1 10 na 29DINGO_Qld 0 na na 0 0DINGO_SA 0 na na na naFERAL_SA 1 [6] 0 0 na naKOALA_NSW 0 na na na naKOALA1_SEQ 1 [11] 2 8 na naKOALA2_SEQ 0 na na na naKOALA_SWQ 5 [71] 32 (1ndash4) 27 na naMARE1_Vic 0 na na na naMARE2_Vic 0 na na na naPADE_Tas 0 na na 37 0POSS1_Vic 0 na na na naPOSS2_Vic 0 na na na naPOSS3_Vic 0 na na na naQUOLL_Tas 0 na na na naQUOLL_WA 6 [100] ndash
B na naROO_ACT 4 [15] 2 (003ndash4) 6 na naROO_NSW 0 na na na naWOMB_NSW 4 [31] 9 (5ndash14) 50 8 25
Total 143 29 19 5
AVHFtransmitterwasprogrammed to activateon afixeddate but only3of 10didOf these by the7thmonth into the10-monthVHFcollar deployment nonewereworkingBVHF transmitter was programmed to activate on a fixed date but did not
Success of GPS collar deployments Australian Mammalogy 71
The studies with shorter intended deployments had highersuccess mainly because problems contributing to shortenedoperating life generally occurred only after some time in the fieldThus while GPS collars appear to be suitable for collectinganimal movement data over several seasons or throughoutthe year only a small proportion of collars operated reliably forsuch extendedperiodsOur experience confirms the suggestion ofGau et al (2004) that the reliability and performance of GPScollars decreases as time in the field increases
Fix acquisition
Fix rates (ie the number of successful fixes divided by thenumber attempted) are frequently lower on GPS collars that areattached to free-ranging animals This is mainly due to canopycover topography collar orientationfix interval and collar brand(Frair et al 2010) However obtaining intermittent fixes (dayswith no fixes) was a common problem in our studies and thereasons for its high incidence may differ from those mentionedaboveOften assessments offix success of collars under differentconditions are conducted over short periods (eg 24 hRecio et al2011) and this may not provide a true assessment of fix success
over the life of the collar In addition to locationor signal precisionissues intermittent fixes may arise from a programming failurewhere the collar does not turn on at the specified time andor ahardware failure such as an interruption on the battery leadAlthough some collar brands record fix attempts others do nothowever having this information would help to distinguishmanufacturing faults from satellite positioning problems
In controlled tests of fix rates by Recio et al (2011) collarswere programmed to attemptfixes in less than2-h intervals In thismode the GPS receiver estimates positions in a lsquohot startrsquo withcurrent almanac time location and ephemeris data (Tomkiewiczet al 2010) and time to fix is improvedWhen collars are inactivefor greater time intervals (~2ndash4 h) they may begin in a lsquowarmstartrsquo whereby they need to acquire new ephemeris and time tofix can be longer (resulting in greater power consumption) Evenlonger intervals (eg gt6 h from the previous fix) result in a lsquocoldstartrsquo whereby collars need to acquire new almanac timelocation and ephemeris (Tomkiewicz et al 2010) and the effecton fix rates and accuracy of locations may be relatively large Inour studies programming of sample rates or duty cycles meantthat fixes frequently were recorded gt2 h later than previous fixes
Table 6 Costs of GPS tracking equipment and additional unexpected costs incurred by studies for the retrieval of failed collarsSee Table 1 for Study details Costs are those of the research project and do not include costs covered by manufacturers working to further develop or fix faultyproducts The calculation of cost per fix incorporates both the initial costs of equipment and additional costs of retrieval but does not include other project-related
costs such as capture tracking and data analysis na not available
Study Initial cost of collarsand hardwaresoftware (AU$)
additionalcosts of refurbishment
or repair
additional costsof retrieving failed
collarsA
Time retrievingfailed collarsA
(person-hours)
Cost per fix(AU$)
BFRW_SA 29 975 0 0 0 129DINGO1_NSW 37 640 0D 53 1760 5DINGO2_NSW 5623 0 0 0 lt1DINGO1_NT 45 600 0D 9 300 lt1DINGO2_NT 15 400 0E 13 100 15 400G
DINGO_Qld 9000 11 11 40 lt1DINGO_SA 83 000 5 1 40 1FERAL_SA 43 700 0D 57 160 15KOALA_NSW 77 500B 40 0 0 8KOALA1_SEQ 17 300 6F 17 15 2KOALA2_SEQ 12 500 4F 0 0 5KOALA_SWQ 11 880 0D 72 180 9MARE_NSW 350 0 0 0 lt1MARE1_Vic 17 500C 0D 0 0 3MARE2_Vic 17 500C 7 0 0 1PADE_Tas 70 000 0 14 60 1POSS_Vic 18 894 0D 0 0 lt1QUOLL_Tas 28 370 0D 0 4 5QUOLL_WA 15 000 0 7 14 16 000G
ROO_ACT 74 700 0D 67 552 naROO_NSW 21 000 0 0 30 1WOMB_NSW 32 400C 5 20 700 5
Total 684 832 6 19 3955 223
AUnanticipated additional costs and time beyond that allocated to the standard retrieval of data-logging collarsBCost is for 19 collars deployed more than onceCApproximate cost converted from US$ or NZ$DFixed or replaced by manufacturer at no costENot fixed or replaced by manufacturerFCosts of refurbishment for additional deploymentsGTotal cost with no fixes recorded
72 Australian Mammalogy A Matthews et al
and the devices were likely to have operated in warm or cold startmodes To allow for the initial inaccuracy of lsquofirstrsquo fixes someGPS engines discard a set number of fixes and store the third orlater fix as the final position The GPS firmware potentially couldbe programmed to discard an even higher number of fixes (egrecording the fifth or later position) if needed
Shifts in sample rates and duty cycles
These shifts can have profound effects on the operating life ofthe collar and the usefulness of the collected data Several studiesreported shifts in sample rates to higher frequencies whichsignificantly reduced the operating life of the collars In the caseofone koala collar and one feral cat collar scheduled 4-h fixesshifted to record locations everyminute resulting in exhaustionofthe GPS battery within two days Similarly shifts in duty cyclepresumably also caused significant reductions of operating lifeFor example wombat collars were scheduled to turn off duringthe day when animals were expected to be in a burrow and out ofview of the satellites In this case a shift in the duty cycle causednot only significant reductions in the number of position fixesbecause the collars were not logging at night when the wombatswere active but the collars were on during the day and rapidlydrained the batteries when the GPS tried to acquire hourly fixeswhile underground To avoid rapid exhaustion of batteries inlocations or periods with poor satellite reception somemanufacturers offer the option of programming devices with atime-out period Thismeans that theGPS receiver will stop tryingto acquire a fix if it has not been successful after a certain period(usually a fewminutes)However evenwith this time-out featurea shift in duty cycle (eg to a period of underground activity) canresult in considerably shortened operating life and reduced dataacquisition
VHF transmitter failures
The VHF component of GPS collars typically is not used fordata acquisition Rather the VHF transmitter is critical for theretrieval of store-on-board GPS data-logging collars because itis usually the onlymeans of locating them In general retrieval ofGPS data-logging collars is more likely when collars are usedon relatively sedentary species that are not expected to move farfrom their release location For more mobile species capable of
travelling large distances (eg dingoeswhich have been recordedto disperse gt550 km from their point of origin in 31 days Allen2009) satellite-linkedGPS collars offer a practical solution to theloss of collars (and data) should the VHF transmitter failHowever this solution incurs the cost of additionalweight powerconsumption and expense for data-downloads (approximatelyAU$800 per collar per year where collars are transmitting for 6 hper day) Considering the many possible reasons for prematureexhaustion of the GPS battery it is crucial that the GPS and VHFcomponents in the collar are powered by separate batteries Thismeans that the device can still be located collected data retrievedand the collar refurbished even after the GPS has stoppedoperating albeit with some difficulty Nevertheless problemsmay still arise when separate batteries are used to power the VHFbeacon as was the case in our studies with VHF transmitterfailure Despite VHF technology having been around forconsiderably longer than GPS there are still frequent reports ofunit failure from insufficient packaging (Gau et al 2004 Blackie2010) A robust and completely waterproof design is needed topreventwater ingress anddamage to transmitters and aerials needto be positioned in the collar to minimise their risk of beingchewed or broken
Timed-release problems and failures
Our experience showed that timed-release devices do notalways result in the collar dropping off the animal on theprogrammed time and date For example activation of the releasemechanism may occur but dirt and debris may prevent themechanism from separating until the animal grooms the collaraway This is a problem if the animal spends time underground ina tree or on a cliff and the collar drops to where it cannot berelocated or reached Thus researchers are left with someuncertainty about when if ever they will be able to recover theircollars When collars release early or not at all this is more likelyto be due to a programming fault or hardware failure These issuesmight become more problematic if animals are left wearingcollars for the remainder of their lives
Data accuracy
Inmost cases it is unlikely that all the locations recordedwith aGPS collar will be accurate enough to be used for the studypurposes (unless a coarse resolution is acceptable for theobjective) An HDOP value (or sometimes a PDOP value) istypically ascribed to each recordedGPSfix andmany researchersuse this as the primary means of discriminating and excludingfixes that are likely to be too inaccurate (DrsquoEon and Delparte2005 see Appendix 2) However it is important to note that thereis no limit to the potential level of inaccuracyof anyfix even thosewith low HDOP values may still have low accuracy RatherHDOP values reflect the likelihood that the fixes were accuratelyacquired therefore not all fixes with high HDOP values will beinaccurate but a greater proportion will be and vice versa
Since site conditions (eg canopy cover terrain) impactsatellite reception it is strongly recommended that therelationship between HDOP values and on-ground accuracies beexamined This can be done either before collar deploymentsthrough stationary collar tests in a range of environments at theproposed study site (eg Recio et al 2011) or after deploymentsto gauge the accuracy of the fixes obtained (eg Allen 2012) An
Table7 Summaryof commonproblemsamongstudiesofGPStrackingof mammals in Australia
Issue No of studies collarsAffected Not affected
Shorter GPS life than expected 15 7 47Intermittent fixes (days
without recording)14 7 31
Fewer fixes per day thanexpected
16 6 ndash
Changes tofix scheduleor dutycycle
11 7 18
VHF transmitter failure 9 14 14Timed-release failure 4 2 19Collar design issues requiring
change10 12 ndash
Additional unexpected costs 13 10 ndash
Success of GPS collar deployments Australian Mammalogy 73
assessment of HDOP values against on-ground accuracies willpermit researchers to determine the appropriate HDOP thresholdndash rather than choosing an arbitrary numberndash for inclusion offixesand to establish the likelihood that fixes are accurate withinacceptable bounds Selection of accuracy thresholds should beheavily influenced by the study objectives and the level ofmovement resolution required (Ellis et al 2011) For example fargreater resolution is necessary to determine which backyards arevisited by dingoes in urban areas than to estimate home-rangesizes of highly mobile dingoes in remote locations
Welfare issues
Until recently most studies using GPS collars have done sowith collars weighing gt500 g on medium-to-large mammalsusually predators andor their prey For example Johnson et al(2002) used 18-kg collars for caribou while Merrill et al (1998)had 920-g collars for wolves and white-tailed deer There is littlepublished information on use of GPS collars lt300 g on small andmedium-sized mammals (Blackie 2010 Mattisson et al 2010)but recent assessments indicate that they are suitable (Dennis et al2010 Recio et al 2011) Here we present data from speciesweighing 1ndash74 kg including several smaller species (koalaspossums pademelons rock-wallabies and quolls) weighing lessthan 10 kg When collars are attached to wild animals severalwelfare issues need to be considered including the need forcollars to be well fitted (not too tight or too loose) to preventinjury to avoid disruption of daily activities (eg grooming andsleeping) and to avoid interference with normal movementbehaviour (Casper 2009) We found few instances of collarscausing injury to study animals but therewereminor problems ofhair loss and skin abrasions A few pademelons died as a result ofcapture myopathy (McMahon et al in press) a condition that iscommonly seen in macropods following capture and handling(Vogelnest and Portas 2008) Consequently the additional stressof handling while fitting collars needs to be considered forsusceptible species We were not aware of any of our studyanimals changingbehaviour as a result of theGPScollar althoughthis would be difficult to identify and in any case was notexplicitly studied
One of the benefits of GPS tracking is that animals do not needto be followed to gather location information thus reducing bothlabour costs and disturbance to study animals In addition someresearch programs use timed-release units so that animals do nothave to be recaptured during the study Consequently there maybe no regular monitoring of animal welfare following releaseAmong our studies 60 of animals were recaptured after collardeployment which meant that animal welfare could be assessedfor example through an examination of changes in bodyweight orcondition thefit of collars and injuries incurredSuchmonitoringgives researchers the capacity to respond to problems when theyarise and improve animal welfare However for some animalsrecapture may not be a practical option In these cases VHFtracking remains a valuable tool for monitoring animal welfare ofhighly visible species in real time or for monitoring unusualmovement behaviour of more cryptic species For example ifanimal locations do not change as expected or if collars are fittedwith a mortality signal (whereby VHF signal frequency changesafter a predefined period of inactivity) lack of movement mightprovide an early indication ofwelfare issuesWhileVHF tracking
somewhat defeats the advantages of GPS collars it may be usedto monitor animal welfare for short intervals throughout a study
Timed-release devices allow collars to be recovered fromanimals without the need for recapture and avoid restraint andhandling of animals which may cause stress However wefound that 18 of timed-release devices failed leaving collarsattached to animals This may be a significant issue if animalsare encumbered with GPS collars indefinitely Casper (2009)suggested that researchers should consider some of theanticipated consequences of attaching equipment to animalsand that they should be careful to avoid situations where thewelfare of animals is compromised An important considerationwith regard to timed-release devices is the likelihood of theanimal being recaptured to remove the collar if the mechanismfails In particular the use of timed-release collars on growingjuveniles warrants careful thought because strangulation bythe collar is possible if it does not release and it cannot beremoved Alternatively several options for collar design couldbe considered to allow for the possibility of a timed-release unitfailing Options include expanding collars or elastic insertswhich permit growth and the inclusion of weak links (eg asection of natural rubber) which eventually will fail therebyensuring that animals do not have to cope with wearing a failedcollar for a long time
An issue that needs tobe explicitly addressed is thepreparationof protocols for the use of GPS collars on mammals forsubmission and approval by animal ethics committees (AECs)The central question is whether the welfare of animals is likely tobe compromised to a point that is unacceptable to an AEC It isacknowledged that the use of animals for scientific researchmay involve interference with the animal such as capture andthe imposition of a collar for the duration of the study The firstquestion to address is whether the collar causes injury to theanimal or prevents it from carrying out its normal activities Thesecondquestion is the reliability of collar retrieval at the endof thestudy As pointed out in Lunney (2012) and Jones et al (2012) itis in the interests of the researcher to develop protocols thatpresent a reasoned case for the approach and the level of risk andnot leave this to the AEC who may be less knowledgeable aboutthe species or study system
Costs
Wildlife tracking inherently is an expensive pursuit but tocomplicate the situation costs vary significantly depending onproject objectives (Thomas et al 2011) Given that ~75 ofthe case studies considered in this paper incurred additionalunexpected costs we believe it to be imperative that whenplanning projects researchers obtain funds not only for the initialcosts of equipment and labour but also to cover costs associatedwith poor collar performance (additional searches andor captureof animals collar refurbishment andor replacement) Althoughit is impossible to provide a definitive measure of how largethis contingency fund should be if our results are indicativeallocating at least 25 of initial project costs would be advisable
Our most significant unexpected fiscal expenditures relatedto attempts to retrieve lost collars as well as for battery andorcollar replacement or repair Indeed the cost of refurbishment canrise after purchase to nearly half the cost of a newcollarHoweverother potential costs include those associated with researchers
74 Australian Mammalogy A Matthews et al
disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

The studies with shorter intended deployments had highersuccess mainly because problems contributing to shortenedoperating life generally occurred only after some time in the fieldThus while GPS collars appear to be suitable for collectinganimal movement data over several seasons or throughoutthe year only a small proportion of collars operated reliably forsuch extendedperiodsOur experience confirms the suggestion ofGau et al (2004) that the reliability and performance of GPScollars decreases as time in the field increases
Fix acquisition
Fix rates (ie the number of successful fixes divided by thenumber attempted) are frequently lower on GPS collars that areattached to free-ranging animals This is mainly due to canopycover topography collar orientationfix interval and collar brand(Frair et al 2010) However obtaining intermittent fixes (dayswith no fixes) was a common problem in our studies and thereasons for its high incidence may differ from those mentionedaboveOften assessments offix success of collars under differentconditions are conducted over short periods (eg 24 hRecio et al2011) and this may not provide a true assessment of fix success
over the life of the collar In addition to locationor signal precisionissues intermittent fixes may arise from a programming failurewhere the collar does not turn on at the specified time andor ahardware failure such as an interruption on the battery leadAlthough some collar brands record fix attempts others do nothowever having this information would help to distinguishmanufacturing faults from satellite positioning problems
In controlled tests of fix rates by Recio et al (2011) collarswere programmed to attemptfixes in less than2-h intervals In thismode the GPS receiver estimates positions in a lsquohot startrsquo withcurrent almanac time location and ephemeris data (Tomkiewiczet al 2010) and time to fix is improvedWhen collars are inactivefor greater time intervals (~2ndash4 h) they may begin in a lsquowarmstartrsquo whereby they need to acquire new ephemeris and time tofix can be longer (resulting in greater power consumption) Evenlonger intervals (eg gt6 h from the previous fix) result in a lsquocoldstartrsquo whereby collars need to acquire new almanac timelocation and ephemeris (Tomkiewicz et al 2010) and the effecton fix rates and accuracy of locations may be relatively large Inour studies programming of sample rates or duty cycles meantthat fixes frequently were recorded gt2 h later than previous fixes
Table 6 Costs of GPS tracking equipment and additional unexpected costs incurred by studies for the retrieval of failed collarsSee Table 1 for Study details Costs are those of the research project and do not include costs covered by manufacturers working to further develop or fix faultyproducts The calculation of cost per fix incorporates both the initial costs of equipment and additional costs of retrieval but does not include other project-related
costs such as capture tracking and data analysis na not available
Study Initial cost of collarsand hardwaresoftware (AU$)
additionalcosts of refurbishment
or repair
additional costsof retrieving failed
collarsA
Time retrievingfailed collarsA
(person-hours)
Cost per fix(AU$)
BFRW_SA 29 975 0 0 0 129DINGO1_NSW 37 640 0D 53 1760 5DINGO2_NSW 5623 0 0 0 lt1DINGO1_NT 45 600 0D 9 300 lt1DINGO2_NT 15 400 0E 13 100 15 400G
DINGO_Qld 9000 11 11 40 lt1DINGO_SA 83 000 5 1 40 1FERAL_SA 43 700 0D 57 160 15KOALA_NSW 77 500B 40 0 0 8KOALA1_SEQ 17 300 6F 17 15 2KOALA2_SEQ 12 500 4F 0 0 5KOALA_SWQ 11 880 0D 72 180 9MARE_NSW 350 0 0 0 lt1MARE1_Vic 17 500C 0D 0 0 3MARE2_Vic 17 500C 7 0 0 1PADE_Tas 70 000 0 14 60 1POSS_Vic 18 894 0D 0 0 lt1QUOLL_Tas 28 370 0D 0 4 5QUOLL_WA 15 000 0 7 14 16 000G
ROO_ACT 74 700 0D 67 552 naROO_NSW 21 000 0 0 30 1WOMB_NSW 32 400C 5 20 700 5
Total 684 832 6 19 3955 223
AUnanticipated additional costs and time beyond that allocated to the standard retrieval of data-logging collarsBCost is for 19 collars deployed more than onceCApproximate cost converted from US$ or NZ$DFixed or replaced by manufacturer at no costENot fixed or replaced by manufacturerFCosts of refurbishment for additional deploymentsGTotal cost with no fixes recorded
72 Australian Mammalogy A Matthews et al
and the devices were likely to have operated in warm or cold startmodes To allow for the initial inaccuracy of lsquofirstrsquo fixes someGPS engines discard a set number of fixes and store the third orlater fix as the final position The GPS firmware potentially couldbe programmed to discard an even higher number of fixes (egrecording the fifth or later position) if needed
Shifts in sample rates and duty cycles
These shifts can have profound effects on the operating life ofthe collar and the usefulness of the collected data Several studiesreported shifts in sample rates to higher frequencies whichsignificantly reduced the operating life of the collars In the caseofone koala collar and one feral cat collar scheduled 4-h fixesshifted to record locations everyminute resulting in exhaustionofthe GPS battery within two days Similarly shifts in duty cyclepresumably also caused significant reductions of operating lifeFor example wombat collars were scheduled to turn off duringthe day when animals were expected to be in a burrow and out ofview of the satellites In this case a shift in the duty cycle causednot only significant reductions in the number of position fixesbecause the collars were not logging at night when the wombatswere active but the collars were on during the day and rapidlydrained the batteries when the GPS tried to acquire hourly fixeswhile underground To avoid rapid exhaustion of batteries inlocations or periods with poor satellite reception somemanufacturers offer the option of programming devices with atime-out period Thismeans that theGPS receiver will stop tryingto acquire a fix if it has not been successful after a certain period(usually a fewminutes)However evenwith this time-out featurea shift in duty cycle (eg to a period of underground activity) canresult in considerably shortened operating life and reduced dataacquisition
VHF transmitter failures
The VHF component of GPS collars typically is not used fordata acquisition Rather the VHF transmitter is critical for theretrieval of store-on-board GPS data-logging collars because itis usually the onlymeans of locating them In general retrieval ofGPS data-logging collars is more likely when collars are usedon relatively sedentary species that are not expected to move farfrom their release location For more mobile species capable of
travelling large distances (eg dingoeswhich have been recordedto disperse gt550 km from their point of origin in 31 days Allen2009) satellite-linkedGPS collars offer a practical solution to theloss of collars (and data) should the VHF transmitter failHowever this solution incurs the cost of additionalweight powerconsumption and expense for data-downloads (approximatelyAU$800 per collar per year where collars are transmitting for 6 hper day) Considering the many possible reasons for prematureexhaustion of the GPS battery it is crucial that the GPS and VHFcomponents in the collar are powered by separate batteries Thismeans that the device can still be located collected data retrievedand the collar refurbished even after the GPS has stoppedoperating albeit with some difficulty Nevertheless problemsmay still arise when separate batteries are used to power the VHFbeacon as was the case in our studies with VHF transmitterfailure Despite VHF technology having been around forconsiderably longer than GPS there are still frequent reports ofunit failure from insufficient packaging (Gau et al 2004 Blackie2010) A robust and completely waterproof design is needed topreventwater ingress anddamage to transmitters and aerials needto be positioned in the collar to minimise their risk of beingchewed or broken
Timed-release problems and failures
Our experience showed that timed-release devices do notalways result in the collar dropping off the animal on theprogrammed time and date For example activation of the releasemechanism may occur but dirt and debris may prevent themechanism from separating until the animal grooms the collaraway This is a problem if the animal spends time underground ina tree or on a cliff and the collar drops to where it cannot berelocated or reached Thus researchers are left with someuncertainty about when if ever they will be able to recover theircollars When collars release early or not at all this is more likelyto be due to a programming fault or hardware failure These issuesmight become more problematic if animals are left wearingcollars for the remainder of their lives
Data accuracy
Inmost cases it is unlikely that all the locations recordedwith aGPS collar will be accurate enough to be used for the studypurposes (unless a coarse resolution is acceptable for theobjective) An HDOP value (or sometimes a PDOP value) istypically ascribed to each recordedGPSfix andmany researchersuse this as the primary means of discriminating and excludingfixes that are likely to be too inaccurate (DrsquoEon and Delparte2005 see Appendix 2) However it is important to note that thereis no limit to the potential level of inaccuracyof anyfix even thosewith low HDOP values may still have low accuracy RatherHDOP values reflect the likelihood that the fixes were accuratelyacquired therefore not all fixes with high HDOP values will beinaccurate but a greater proportion will be and vice versa
Since site conditions (eg canopy cover terrain) impactsatellite reception it is strongly recommended that therelationship between HDOP values and on-ground accuracies beexamined This can be done either before collar deploymentsthrough stationary collar tests in a range of environments at theproposed study site (eg Recio et al 2011) or after deploymentsto gauge the accuracy of the fixes obtained (eg Allen 2012) An
Table7 Summaryof commonproblemsamongstudiesofGPStrackingof mammals in Australia
Issue No of studies collarsAffected Not affected
Shorter GPS life than expected 15 7 47Intermittent fixes (days
without recording)14 7 31
Fewer fixes per day thanexpected
16 6 ndash
Changes tofix scheduleor dutycycle
11 7 18
VHF transmitter failure 9 14 14Timed-release failure 4 2 19Collar design issues requiring
change10 12 ndash
Additional unexpected costs 13 10 ndash
Success of GPS collar deployments Australian Mammalogy 73
assessment of HDOP values against on-ground accuracies willpermit researchers to determine the appropriate HDOP thresholdndash rather than choosing an arbitrary numberndash for inclusion offixesand to establish the likelihood that fixes are accurate withinacceptable bounds Selection of accuracy thresholds should beheavily influenced by the study objectives and the level ofmovement resolution required (Ellis et al 2011) For example fargreater resolution is necessary to determine which backyards arevisited by dingoes in urban areas than to estimate home-rangesizes of highly mobile dingoes in remote locations
Welfare issues
Until recently most studies using GPS collars have done sowith collars weighing gt500 g on medium-to-large mammalsusually predators andor their prey For example Johnson et al(2002) used 18-kg collars for caribou while Merrill et al (1998)had 920-g collars for wolves and white-tailed deer There is littlepublished information on use of GPS collars lt300 g on small andmedium-sized mammals (Blackie 2010 Mattisson et al 2010)but recent assessments indicate that they are suitable (Dennis et al2010 Recio et al 2011) Here we present data from speciesweighing 1ndash74 kg including several smaller species (koalaspossums pademelons rock-wallabies and quolls) weighing lessthan 10 kg When collars are attached to wild animals severalwelfare issues need to be considered including the need forcollars to be well fitted (not too tight or too loose) to preventinjury to avoid disruption of daily activities (eg grooming andsleeping) and to avoid interference with normal movementbehaviour (Casper 2009) We found few instances of collarscausing injury to study animals but therewereminor problems ofhair loss and skin abrasions A few pademelons died as a result ofcapture myopathy (McMahon et al in press) a condition that iscommonly seen in macropods following capture and handling(Vogelnest and Portas 2008) Consequently the additional stressof handling while fitting collars needs to be considered forsusceptible species We were not aware of any of our studyanimals changingbehaviour as a result of theGPScollar althoughthis would be difficult to identify and in any case was notexplicitly studied
One of the benefits of GPS tracking is that animals do not needto be followed to gather location information thus reducing bothlabour costs and disturbance to study animals In addition someresearch programs use timed-release units so that animals do nothave to be recaptured during the study Consequently there maybe no regular monitoring of animal welfare following releaseAmong our studies 60 of animals were recaptured after collardeployment which meant that animal welfare could be assessedfor example through an examination of changes in bodyweight orcondition thefit of collars and injuries incurredSuchmonitoringgives researchers the capacity to respond to problems when theyarise and improve animal welfare However for some animalsrecapture may not be a practical option In these cases VHFtracking remains a valuable tool for monitoring animal welfare ofhighly visible species in real time or for monitoring unusualmovement behaviour of more cryptic species For example ifanimal locations do not change as expected or if collars are fittedwith a mortality signal (whereby VHF signal frequency changesafter a predefined period of inactivity) lack of movement mightprovide an early indication ofwelfare issuesWhileVHF tracking
somewhat defeats the advantages of GPS collars it may be usedto monitor animal welfare for short intervals throughout a study
Timed-release devices allow collars to be recovered fromanimals without the need for recapture and avoid restraint andhandling of animals which may cause stress However wefound that 18 of timed-release devices failed leaving collarsattached to animals This may be a significant issue if animalsare encumbered with GPS collars indefinitely Casper (2009)suggested that researchers should consider some of theanticipated consequences of attaching equipment to animalsand that they should be careful to avoid situations where thewelfare of animals is compromised An important considerationwith regard to timed-release devices is the likelihood of theanimal being recaptured to remove the collar if the mechanismfails In particular the use of timed-release collars on growingjuveniles warrants careful thought because strangulation bythe collar is possible if it does not release and it cannot beremoved Alternatively several options for collar design couldbe considered to allow for the possibility of a timed-release unitfailing Options include expanding collars or elastic insertswhich permit growth and the inclusion of weak links (eg asection of natural rubber) which eventually will fail therebyensuring that animals do not have to cope with wearing a failedcollar for a long time
An issue that needs tobe explicitly addressed is thepreparationof protocols for the use of GPS collars on mammals forsubmission and approval by animal ethics committees (AECs)The central question is whether the welfare of animals is likely tobe compromised to a point that is unacceptable to an AEC It isacknowledged that the use of animals for scientific researchmay involve interference with the animal such as capture andthe imposition of a collar for the duration of the study The firstquestion to address is whether the collar causes injury to theanimal or prevents it from carrying out its normal activities Thesecondquestion is the reliability of collar retrieval at the endof thestudy As pointed out in Lunney (2012) and Jones et al (2012) itis in the interests of the researcher to develop protocols thatpresent a reasoned case for the approach and the level of risk andnot leave this to the AEC who may be less knowledgeable aboutthe species or study system
Costs
Wildlife tracking inherently is an expensive pursuit but tocomplicate the situation costs vary significantly depending onproject objectives (Thomas et al 2011) Given that ~75 ofthe case studies considered in this paper incurred additionalunexpected costs we believe it to be imperative that whenplanning projects researchers obtain funds not only for the initialcosts of equipment and labour but also to cover costs associatedwith poor collar performance (additional searches andor captureof animals collar refurbishment andor replacement) Althoughit is impossible to provide a definitive measure of how largethis contingency fund should be if our results are indicativeallocating at least 25 of initial project costs would be advisable
Our most significant unexpected fiscal expenditures relatedto attempts to retrieve lost collars as well as for battery andorcollar replacement or repair Indeed the cost of refurbishment canrise after purchase to nearly half the cost of a newcollarHoweverother potential costs include those associated with researchers
74 Australian Mammalogy A Matthews et al
disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

and the devices were likely to have operated in warm or cold startmodes To allow for the initial inaccuracy of lsquofirstrsquo fixes someGPS engines discard a set number of fixes and store the third orlater fix as the final position The GPS firmware potentially couldbe programmed to discard an even higher number of fixes (egrecording the fifth or later position) if needed
Shifts in sample rates and duty cycles
These shifts can have profound effects on the operating life ofthe collar and the usefulness of the collected data Several studiesreported shifts in sample rates to higher frequencies whichsignificantly reduced the operating life of the collars In the caseofone koala collar and one feral cat collar scheduled 4-h fixesshifted to record locations everyminute resulting in exhaustionofthe GPS battery within two days Similarly shifts in duty cyclepresumably also caused significant reductions of operating lifeFor example wombat collars were scheduled to turn off duringthe day when animals were expected to be in a burrow and out ofview of the satellites In this case a shift in the duty cycle causednot only significant reductions in the number of position fixesbecause the collars were not logging at night when the wombatswere active but the collars were on during the day and rapidlydrained the batteries when the GPS tried to acquire hourly fixeswhile underground To avoid rapid exhaustion of batteries inlocations or periods with poor satellite reception somemanufacturers offer the option of programming devices with atime-out period Thismeans that theGPS receiver will stop tryingto acquire a fix if it has not been successful after a certain period(usually a fewminutes)However evenwith this time-out featurea shift in duty cycle (eg to a period of underground activity) canresult in considerably shortened operating life and reduced dataacquisition
VHF transmitter failures
The VHF component of GPS collars typically is not used fordata acquisition Rather the VHF transmitter is critical for theretrieval of store-on-board GPS data-logging collars because itis usually the onlymeans of locating them In general retrieval ofGPS data-logging collars is more likely when collars are usedon relatively sedentary species that are not expected to move farfrom their release location For more mobile species capable of
travelling large distances (eg dingoeswhich have been recordedto disperse gt550 km from their point of origin in 31 days Allen2009) satellite-linkedGPS collars offer a practical solution to theloss of collars (and data) should the VHF transmitter failHowever this solution incurs the cost of additionalweight powerconsumption and expense for data-downloads (approximatelyAU$800 per collar per year where collars are transmitting for 6 hper day) Considering the many possible reasons for prematureexhaustion of the GPS battery it is crucial that the GPS and VHFcomponents in the collar are powered by separate batteries Thismeans that the device can still be located collected data retrievedand the collar refurbished even after the GPS has stoppedoperating albeit with some difficulty Nevertheless problemsmay still arise when separate batteries are used to power the VHFbeacon as was the case in our studies with VHF transmitterfailure Despite VHF technology having been around forconsiderably longer than GPS there are still frequent reports ofunit failure from insufficient packaging (Gau et al 2004 Blackie2010) A robust and completely waterproof design is needed topreventwater ingress anddamage to transmitters and aerials needto be positioned in the collar to minimise their risk of beingchewed or broken
Timed-release problems and failures
Our experience showed that timed-release devices do notalways result in the collar dropping off the animal on theprogrammed time and date For example activation of the releasemechanism may occur but dirt and debris may prevent themechanism from separating until the animal grooms the collaraway This is a problem if the animal spends time underground ina tree or on a cliff and the collar drops to where it cannot berelocated or reached Thus researchers are left with someuncertainty about when if ever they will be able to recover theircollars When collars release early or not at all this is more likelyto be due to a programming fault or hardware failure These issuesmight become more problematic if animals are left wearingcollars for the remainder of their lives
Data accuracy
Inmost cases it is unlikely that all the locations recordedwith aGPS collar will be accurate enough to be used for the studypurposes (unless a coarse resolution is acceptable for theobjective) An HDOP value (or sometimes a PDOP value) istypically ascribed to each recordedGPSfix andmany researchersuse this as the primary means of discriminating and excludingfixes that are likely to be too inaccurate (DrsquoEon and Delparte2005 see Appendix 2) However it is important to note that thereis no limit to the potential level of inaccuracyof anyfix even thosewith low HDOP values may still have low accuracy RatherHDOP values reflect the likelihood that the fixes were accuratelyacquired therefore not all fixes with high HDOP values will beinaccurate but a greater proportion will be and vice versa
Since site conditions (eg canopy cover terrain) impactsatellite reception it is strongly recommended that therelationship between HDOP values and on-ground accuracies beexamined This can be done either before collar deploymentsthrough stationary collar tests in a range of environments at theproposed study site (eg Recio et al 2011) or after deploymentsto gauge the accuracy of the fixes obtained (eg Allen 2012) An
Table7 Summaryof commonproblemsamongstudiesofGPStrackingof mammals in Australia
Issue No of studies collarsAffected Not affected
Shorter GPS life than expected 15 7 47Intermittent fixes (days
without recording)14 7 31
Fewer fixes per day thanexpected
16 6 ndash
Changes tofix scheduleor dutycycle
11 7 18
VHF transmitter failure 9 14 14Timed-release failure 4 2 19Collar design issues requiring
change10 12 ndash
Additional unexpected costs 13 10 ndash
Success of GPS collar deployments Australian Mammalogy 73
assessment of HDOP values against on-ground accuracies willpermit researchers to determine the appropriate HDOP thresholdndash rather than choosing an arbitrary numberndash for inclusion offixesand to establish the likelihood that fixes are accurate withinacceptable bounds Selection of accuracy thresholds should beheavily influenced by the study objectives and the level ofmovement resolution required (Ellis et al 2011) For example fargreater resolution is necessary to determine which backyards arevisited by dingoes in urban areas than to estimate home-rangesizes of highly mobile dingoes in remote locations
Welfare issues
Until recently most studies using GPS collars have done sowith collars weighing gt500 g on medium-to-large mammalsusually predators andor their prey For example Johnson et al(2002) used 18-kg collars for caribou while Merrill et al (1998)had 920-g collars for wolves and white-tailed deer There is littlepublished information on use of GPS collars lt300 g on small andmedium-sized mammals (Blackie 2010 Mattisson et al 2010)but recent assessments indicate that they are suitable (Dennis et al2010 Recio et al 2011) Here we present data from speciesweighing 1ndash74 kg including several smaller species (koalaspossums pademelons rock-wallabies and quolls) weighing lessthan 10 kg When collars are attached to wild animals severalwelfare issues need to be considered including the need forcollars to be well fitted (not too tight or too loose) to preventinjury to avoid disruption of daily activities (eg grooming andsleeping) and to avoid interference with normal movementbehaviour (Casper 2009) We found few instances of collarscausing injury to study animals but therewereminor problems ofhair loss and skin abrasions A few pademelons died as a result ofcapture myopathy (McMahon et al in press) a condition that iscommonly seen in macropods following capture and handling(Vogelnest and Portas 2008) Consequently the additional stressof handling while fitting collars needs to be considered forsusceptible species We were not aware of any of our studyanimals changingbehaviour as a result of theGPScollar althoughthis would be difficult to identify and in any case was notexplicitly studied
One of the benefits of GPS tracking is that animals do not needto be followed to gather location information thus reducing bothlabour costs and disturbance to study animals In addition someresearch programs use timed-release units so that animals do nothave to be recaptured during the study Consequently there maybe no regular monitoring of animal welfare following releaseAmong our studies 60 of animals were recaptured after collardeployment which meant that animal welfare could be assessedfor example through an examination of changes in bodyweight orcondition thefit of collars and injuries incurredSuchmonitoringgives researchers the capacity to respond to problems when theyarise and improve animal welfare However for some animalsrecapture may not be a practical option In these cases VHFtracking remains a valuable tool for monitoring animal welfare ofhighly visible species in real time or for monitoring unusualmovement behaviour of more cryptic species For example ifanimal locations do not change as expected or if collars are fittedwith a mortality signal (whereby VHF signal frequency changesafter a predefined period of inactivity) lack of movement mightprovide an early indication ofwelfare issuesWhileVHF tracking
somewhat defeats the advantages of GPS collars it may be usedto monitor animal welfare for short intervals throughout a study
Timed-release devices allow collars to be recovered fromanimals without the need for recapture and avoid restraint andhandling of animals which may cause stress However wefound that 18 of timed-release devices failed leaving collarsattached to animals This may be a significant issue if animalsare encumbered with GPS collars indefinitely Casper (2009)suggested that researchers should consider some of theanticipated consequences of attaching equipment to animalsand that they should be careful to avoid situations where thewelfare of animals is compromised An important considerationwith regard to timed-release devices is the likelihood of theanimal being recaptured to remove the collar if the mechanismfails In particular the use of timed-release collars on growingjuveniles warrants careful thought because strangulation bythe collar is possible if it does not release and it cannot beremoved Alternatively several options for collar design couldbe considered to allow for the possibility of a timed-release unitfailing Options include expanding collars or elastic insertswhich permit growth and the inclusion of weak links (eg asection of natural rubber) which eventually will fail therebyensuring that animals do not have to cope with wearing a failedcollar for a long time
An issue that needs tobe explicitly addressed is thepreparationof protocols for the use of GPS collars on mammals forsubmission and approval by animal ethics committees (AECs)The central question is whether the welfare of animals is likely tobe compromised to a point that is unacceptable to an AEC It isacknowledged that the use of animals for scientific researchmay involve interference with the animal such as capture andthe imposition of a collar for the duration of the study The firstquestion to address is whether the collar causes injury to theanimal or prevents it from carrying out its normal activities Thesecondquestion is the reliability of collar retrieval at the endof thestudy As pointed out in Lunney (2012) and Jones et al (2012) itis in the interests of the researcher to develop protocols thatpresent a reasoned case for the approach and the level of risk andnot leave this to the AEC who may be less knowledgeable aboutthe species or study system
Costs
Wildlife tracking inherently is an expensive pursuit but tocomplicate the situation costs vary significantly depending onproject objectives (Thomas et al 2011) Given that ~75 ofthe case studies considered in this paper incurred additionalunexpected costs we believe it to be imperative that whenplanning projects researchers obtain funds not only for the initialcosts of equipment and labour but also to cover costs associatedwith poor collar performance (additional searches andor captureof animals collar refurbishment andor replacement) Althoughit is impossible to provide a definitive measure of how largethis contingency fund should be if our results are indicativeallocating at least 25 of initial project costs would be advisable
Our most significant unexpected fiscal expenditures relatedto attempts to retrieve lost collars as well as for battery andorcollar replacement or repair Indeed the cost of refurbishment canrise after purchase to nearly half the cost of a newcollarHoweverother potential costs include those associated with researchers
74 Australian Mammalogy A Matthews et al
disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

assessment of HDOP values against on-ground accuracies willpermit researchers to determine the appropriate HDOP thresholdndash rather than choosing an arbitrary numberndash for inclusion offixesand to establish the likelihood that fixes are accurate withinacceptable bounds Selection of accuracy thresholds should beheavily influenced by the study objectives and the level ofmovement resolution required (Ellis et al 2011) For example fargreater resolution is necessary to determine which backyards arevisited by dingoes in urban areas than to estimate home-rangesizes of highly mobile dingoes in remote locations
Welfare issues
Until recently most studies using GPS collars have done sowith collars weighing gt500 g on medium-to-large mammalsusually predators andor their prey For example Johnson et al(2002) used 18-kg collars for caribou while Merrill et al (1998)had 920-g collars for wolves and white-tailed deer There is littlepublished information on use of GPS collars lt300 g on small andmedium-sized mammals (Blackie 2010 Mattisson et al 2010)but recent assessments indicate that they are suitable (Dennis et al2010 Recio et al 2011) Here we present data from speciesweighing 1ndash74 kg including several smaller species (koalaspossums pademelons rock-wallabies and quolls) weighing lessthan 10 kg When collars are attached to wild animals severalwelfare issues need to be considered including the need forcollars to be well fitted (not too tight or too loose) to preventinjury to avoid disruption of daily activities (eg grooming andsleeping) and to avoid interference with normal movementbehaviour (Casper 2009) We found few instances of collarscausing injury to study animals but therewereminor problems ofhair loss and skin abrasions A few pademelons died as a result ofcapture myopathy (McMahon et al in press) a condition that iscommonly seen in macropods following capture and handling(Vogelnest and Portas 2008) Consequently the additional stressof handling while fitting collars needs to be considered forsusceptible species We were not aware of any of our studyanimals changingbehaviour as a result of theGPScollar althoughthis would be difficult to identify and in any case was notexplicitly studied
One of the benefits of GPS tracking is that animals do not needto be followed to gather location information thus reducing bothlabour costs and disturbance to study animals In addition someresearch programs use timed-release units so that animals do nothave to be recaptured during the study Consequently there maybe no regular monitoring of animal welfare following releaseAmong our studies 60 of animals were recaptured after collardeployment which meant that animal welfare could be assessedfor example through an examination of changes in bodyweight orcondition thefit of collars and injuries incurredSuchmonitoringgives researchers the capacity to respond to problems when theyarise and improve animal welfare However for some animalsrecapture may not be a practical option In these cases VHFtracking remains a valuable tool for monitoring animal welfare ofhighly visible species in real time or for monitoring unusualmovement behaviour of more cryptic species For example ifanimal locations do not change as expected or if collars are fittedwith a mortality signal (whereby VHF signal frequency changesafter a predefined period of inactivity) lack of movement mightprovide an early indication ofwelfare issuesWhileVHF tracking
somewhat defeats the advantages of GPS collars it may be usedto monitor animal welfare for short intervals throughout a study
Timed-release devices allow collars to be recovered fromanimals without the need for recapture and avoid restraint andhandling of animals which may cause stress However wefound that 18 of timed-release devices failed leaving collarsattached to animals This may be a significant issue if animalsare encumbered with GPS collars indefinitely Casper (2009)suggested that researchers should consider some of theanticipated consequences of attaching equipment to animalsand that they should be careful to avoid situations where thewelfare of animals is compromised An important considerationwith regard to timed-release devices is the likelihood of theanimal being recaptured to remove the collar if the mechanismfails In particular the use of timed-release collars on growingjuveniles warrants careful thought because strangulation bythe collar is possible if it does not release and it cannot beremoved Alternatively several options for collar design couldbe considered to allow for the possibility of a timed-release unitfailing Options include expanding collars or elastic insertswhich permit growth and the inclusion of weak links (eg asection of natural rubber) which eventually will fail therebyensuring that animals do not have to cope with wearing a failedcollar for a long time
An issue that needs tobe explicitly addressed is thepreparationof protocols for the use of GPS collars on mammals forsubmission and approval by animal ethics committees (AECs)The central question is whether the welfare of animals is likely tobe compromised to a point that is unacceptable to an AEC It isacknowledged that the use of animals for scientific researchmay involve interference with the animal such as capture andthe imposition of a collar for the duration of the study The firstquestion to address is whether the collar causes injury to theanimal or prevents it from carrying out its normal activities Thesecondquestion is the reliability of collar retrieval at the endof thestudy As pointed out in Lunney (2012) and Jones et al (2012) itis in the interests of the researcher to develop protocols thatpresent a reasoned case for the approach and the level of risk andnot leave this to the AEC who may be less knowledgeable aboutthe species or study system
Costs
Wildlife tracking inherently is an expensive pursuit but tocomplicate the situation costs vary significantly depending onproject objectives (Thomas et al 2011) Given that ~75 ofthe case studies considered in this paper incurred additionalunexpected costs we believe it to be imperative that whenplanning projects researchers obtain funds not only for the initialcosts of equipment and labour but also to cover costs associatedwith poor collar performance (additional searches andor captureof animals collar refurbishment andor replacement) Althoughit is impossible to provide a definitive measure of how largethis contingency fund should be if our results are indicativeallocating at least 25 of initial project costs would be advisable
Our most significant unexpected fiscal expenditures relatedto attempts to retrieve lost collars as well as for battery andorcollar replacement or repair Indeed the cost of refurbishment canrise after purchase to nearly half the cost of a newcollarHoweverother potential costs include those associated with researchers
74 Australian Mammalogy A Matthews et al
disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

disassembling collars themselves (Blackie 2010) Incalculablecosts include those associated with loss of time data andreputation (Kaczensky et al 2010) and consequently a failure tofulfil project outcomes For example one of our case studiesexperienced so many problems in the first year that the projectneeded to be extended into a second Since virtually all wildlifeprojects are conducted under tight timeframes and budgets suchdelays canhave serious ramificationsDelays andormass failuresof GPS collars that occur during student projects can haveparticularly grave consequences
In spite of the inherent risks we do believe that GPS telemetryis a powerful technique worthy of continued investment and onewhich with continued advances will become both more reliableand less costly Indeed despitewide variation the current studyrsquosaverage cost per fix of $223 was substantially below that ofprevious estimates (eg US$14 per fix in one year and $8 in thesecond year Hemson 2002) Cost perfix of our individual studiesranged between $002 and $129 showing how the success ofcollars impacts on this figure Despite such variation we concurwith Thomas et al (2011) that GPS is the most cost-effectivetracking method for studies that require large sample sizes
Recommendations for potential users
There is no doubt that GPS telemetry in many cases is the mosteffective technique to monitor the movements of animals andshould be utilised to its full capacity Manufacturers arecontinually improving designs and incorporating newtechnology and while some of our technical problems may nowbe rectified several issues remain On the basis of ourexperiences we provide the following recommendations forpotential users1 Talk to researchers who already have used GPS collars
There is no substitute for this hard-gained knowledge andexperience from previous field deployments
2 Undertake a stationary collar test and pilot studywith one ortwocollars in the studyenvironment to assess the efficacyofan approach before investing in expensive collarsDiscovering what the collars can and cannot do in aparticular study area (eg fix success and accuracy) enablesadjustments to be made to study objectives andor dutycycles to accommodate site or species-related issues beforethe start of a costly and time-consuming field-study
3 Consider options tomonitor operation of collars in thefieldsuch as a VHF or UHF communication link remotedownload satellite link or recapture program(a) Awithin-deployment communication linkbetween the
GPS unit and the researcher will allow for remotemonitoring of the GPS performance For examplesome GPS collars indicate whether the last fix attemptwas successful by transmitting a particular sequence ofVHF lsquobeepsrsquo (Merrill et al 1998 Millspaugh andMarzluff 2001) Without such an arrangement it isimpossible to determine whether collars are operatinguntil they are retrieved In remote areas recurrentrecapture often is not feasible and by the timeresearchers realise that the units are malfunctioningresolving andor repeating the study may not bepossible
(b) Several remote download methods are available torecover data from store-on-board GPS devices(Tomkiewicz et al 2010 Thomas et al 2011) Close-proximity remote download allows researchers todownload the GPS locations on the data-logger to ahandheld computerwhen in close rangeof the collar orvia an unattended automatic remote download systemIf remote download is attempted on a regular basisproper functioning of GPS collars can be monitoredUse of this technology in combination with a remotetimed-release system would allow researchers toretrieve collars immediately when they are found to befaulty Remote download technology alsowould allowthe retrieval of data from collars dropped insideburrows or dens even though the devices themselvesmay not be recovered However some researchers alsoreport problems with the remote download procedures(Gau et al 2004) particularly for animals that travelquickly and move out of range of the radio-signalduring transmission This may not be a problem forspecies that can be easily approached or are relativelyinactive during the day Remote download was usedwith our Televilt Tellus GPS collars (PADE_Tas) andTelemetry Solutions Quantum 4000 Enhanced GPScollars (QUOLL_Tas) with great success and on therare occasion when remote download wasunsuccessful it was eventually achieved by simplygetting closer to the animal In most cases the distancerequired for a successful remote download wassubstantially closer than the remote download distancequoted by manufacturers Dense understorey canopycover weather and topography may all influencedistance requirements It may be useful to test theaccuracy and distance required for successful remotedownload before collar deployment for species thatare likely to be flushed on approach It should be notedthat GPS collars that offer the option to remotelydownload location data tend to be considerably moreexpensive than standard data-loggers and frequentremote downloads will significantly increase powerconsumption and reduce battery life Remotedownload also may require a laptop device to be takeninto the field making weather conditions importantin planning activities Features such as mobile phonedownloadmay suit someprojects better although theremay be additional costs to factor in for this featureFurthermore we note that not all manufacturers offerremote download options
(c) Satellite-linked collars (eg GPSArgos GPSIridiumor GPSGlobalstar) hopefully will continuedownloading data even if the GPS receiver or VHFtransmitter fail allowing the collar to be retrievedwhenthe animal dies or the collar releases Receivingsatellite transmissions add substantial costs but usingsatellite-linked GPS loggers for mobile species orthose that are remote and difficult to reach may bedeemed worthwhile
(d) Capturing checking whether the collar is functioningand recollaring individuals as required every
Success of GPS collar deployments Australian Mammalogy 75
2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

2ndash3 months could be considered if researchers areattempting to follow animals for more than afew months and a communication link or remotedownload is not available or if battery capacity doesnot permit extended monitoring periods Recapturinganimals would also allow the monitoring of potentialanimal welfare issues However researchers shouldcarefully consider how repeated capture and handlingmay influence the welfare of animals their behaviourand the studyrsquos objectives
4 Consider the timing of collar deployments If a particulartime of the year is critical to the study it is advisable todeploy or check collars immediately before this period Inthe case of seasonal comparisons and if sufficient collarsare available we recommend as a precaution againstpremature failure and loss of performance over time that aproportion of the devices be deployed at the start of eachseason rather than all at once
5 Understand where study animals are likely to be becauseVHF tracking sometimes cannot be reliedon tohelp retrievecollars at the completion of the study Thismeans that someconventional tracking at discrete intervals is required tolocate study animals during deployment
6 Samplemore often than is needed Doing somay overcomethe problem of not acquiring all the fixes needed tomeet thestudy objectives and it is better to havemore data than lessThe frequencyoffixes (or duty cycle)will have a substantialinfluence on the types of analyses that are achievable Ifpossible know something about the fine-scale movementsof your animal before you start and then sample asfrequently as practicable While there is little value incollecting a multitude of fixes in one spot for an animal thatsits in the same place all day it is important not to missmovements of animals that wander Expected home-rangesize battery life and study objectives should determine theduty cycle and not the other way around
7 Understand how the data to be collected will be used oranalysed Many of the analytical and statistical techniquesfor animal movement data were developed for radio-telemetry data and may become outdated or superseded bymoremodern approachesMethods of space use calculationare in drastic need of revision now that much finer-resolution data can be collected to track where the animalhas been
8 Factor into research budgets the additional costs requiredfor recovery of failed collars (also recommended by Gauet al 2004) Within a tight budget there is often a desire tomaximise the number of collars deployed However it maybebetter to investmoremoney inmonitoring collar functionduring the deployment period and recovering data fromcollars when they fail
9 Consider using user-replaceable GPS batteries becauserefurbishment of collars by the manufacturer to replacebatteries housed in an epoxy-moulded casing can beexpensive and usually takes several weeks Note that thesebatteries are likely to be a different voltage than standardbatteries and often are more expensive (about AU$25each for AA or $50 for D-cell lithium chloride) butare nonetheless essential Most manufacturers can
accommodate custom design specifications so if theresearcherrsquos choice is to use replaceable batteries this needsto be specified to the manufacturer before purchase so thatthe capsules holding the batteries (one for the VHFtransmitter the other for the GPS unit) are provided with aremovable cap It should be noted however that thesecapsules add to the weight and cost of the collar and maynot be as rugged or waterproof as a moulded casingFurthermore user-replaceable batteries places the onus onthe researcher to change the batteries and do extensivetesting on each collar before redeployment
10 Ensure that collar manufacturers have had experience inmaking collars for the required conditions andor speciesgiven that GPS collars for wildlife require a specialisedunderstanding of animal behaviour field conditions andterrainCollarsmust beoperational at the timeof attachmentto the study animal so users must be confident thatpreattachment tests are reliable In our experience it isbetter to pay a higher price for more robust equipment thantrying to save money with substandard or untestedequipment Ultimately the acquisition of reliable data ismost important and studies may end unsuccessfully whenequipment fails Researchers should expect lowerperformance than is stated in manufacturersrsquo specificationsfor the collars (often theoretical lsquobest-casersquo) and factor in amargin of error when designing a study by increasing thenumber of fixes or deploying more collars From ourexperience we recommend deploying 20 more collarsthan what is needed for adequate sample sizes Orderequipment several months in advance becausemanufacturers usually have a backlog of orders and maydeliver the products later than anticipated This affects thetimeframes allocated to deploy collars in the field whichcould involve hiring trappers traps booking vehiclesaccommodation arranging volunteers and various otherlogistical procedures A good relationship with themanufacturer is therefore important
11 The weight of the collar and its physical dimensionsbecomes increasingly important as smaller species arestudied The standard configuration is to place the bulk oftheVHFGPSunit in one place ndash typically under the chin toprovide a counterweight to theGPS antenna at the top of thecollar consider a customised design to shape or spread theload around the collar and consult the manufacturer on theadvantages and disadvantages of alternative collar designsfor your study species The weight of the timed-release unitalso adds to total collar weight so consider dispensing withthe timed-release unit when study animals are easilyrecaptured
12 Collar-tightness is an animal ethics matter as well as one ofpractical concern When too tight the skin around theanimalrsquos neck is rubbed even broken when too loose thecollar may fall off or the animal might be able to push a legthrough the collar and become stuck A pilot study on acaptive animal (eg zoo animal in care or in the universityanimal yard) can be useful to test suitable collar tightnessFormostmedium-sizedmammals 3ndash4fingersfitting underthe collar and a singlefinger for smallermammals are goodrules-of-thumb If it is thefirst time that theGPScollars have
76 Australian Mammalogy A Matthews et al
been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

been used on the study species trialling one collar on acaptive animal before ordering all of the collars allowsresearchers to observe the behaviour of collared animalsand may assist in optimising collar design
13 Work with manufacturers to improve collars Providefeedback on equipment performance both good and badThis is especially important with regards to physical designas manufacturers tend to be staffed by highly trainedengineers who may lack field experience fitting collars toanimals For example some manufactures supply collarsthat require tiny nuts and bolts for attachment butalternative designs that are quick to deploy easy to releaseand that can be fitted by one person may be available onrequest Collars that are easily and quickly fitted may helpreduce the likelihood of capture-related problems (such asthose described above for pademelons) from developing
14 Finally be prepared for the unexpected Try not to beconfined by preconceived ideas about animal behaviour(eg inactive during the day) because much of ourknowledge comes from studies that have not been able toevaluate this easily In many cases with novel technologyand insight we have learned that animals do not alwaysbehave in conventional ways
Acknowledgements
This study arose from informal discussions among the authors at scientificmeetings of the Australian Mammal Society (AMS) and the InternationalMammalogical Congress All studies were undertaken with approval fromAnimal Ethics Committees and details can be obtained from individualauthors Each research program was generously supported by numerousvolunteers organisations and funding bodies that have been acknowledged inindividual study publications or will be in future publications of ongoingwork AMatthews thanks the Institute for LandWater and Society for travelassistance to deliver this paper to the joint meeting of the American Society ofMammalogists and theAMS in 2011We thankChrisMuller fromSirtrack forhis critical comments on a draft of this manuscript
References
Allen B L (2007) The spatial ecology and zoonoses of urban dingoes andthe use of TraversedArea Polygons (TAPs) to calculate home range sizesIn lsquoProceedings of the Workshop on the Remote Monitoring of WildCanids and Felids Australian National University Canberra 21ndash22March 2007rsquo (Eds P Fleming and D Jenkins) p 14 (Invasive AnimalsCooperative Research Centre Canberra)
Allen B L (2012) Do desert dingoes drink daily Visitation rates at remotewaterpoints in theStrzeleckiDesertAustralianMammalogy34 251ndash256
Allen L R (2009) Best practice baiting dispersal and seasonalmovement ofwild dogs (Canis lupus familiaris) In lsquoTechnical Highlights InvasivePlant and Animal Research 2008ndash09rsquo pp 61ndash62 (QueenslandDepartment of Employment Economic Development and InnovationBrisbane)
Andersen M Derocher A E Wiig Oslash and Aars J (2008) Movements oftwo Svalbard polar bears recorded using geographical positioning systemsatellite transmitters Polar Biology 31 905ndash911 doi101007s00300-008-0428-x
Bandeira deMelo L F Lima SaacutebatoMA VazMagni EMYoung R Jand Coelho C M (2007) Secret lives of maned wolves (Chrysocyonbrachyurus Illiger 1815) as revealed by GPS tracking collars Journal ofZoology 271 27ndash36 doi101111j1469-7998200600176x
Blackie H M (2010) Comparative performance of three brands oflightweight global positioning system collars Journal of WildlifeManagement 74 1911ndash1916 doi1021932009-412
Burdett C L Moen R A Niemi G J and Mech L D (2007) Definingspace use and movements of Canada lynx with global positioning systemtelemetry Journal of Mammalogy 88 457ndash467 doi10164406-MAMM-A-181R1
Cain J I Krausman P Jansen B and Morgart J (2005) Influence oftopography and GPS fix interval on GPS collar performance WildlifeSociety Bulletin 33 926ndash934 doi1021930091-7648(2005)33[926IOTAGF]20CO2
Casper R M (2009) Guidelines for the instrumentation of wild birds andmammals Animal Behaviour 78 1477ndash1483 doi101016janbehav200909023
Claridge A Mills D Hunt R Jenkins D and Bean J (2009) Satellitetracking of wild dogs in south-eastern mainland Australian forestsimplications formanagement of a problematic top-order carnivoreForestEcology and Management 258 814ndash822 doi101016jforeco200905030
DrsquoEon R and Delparte D (2005) Effects of radio-collar position andorientation on GPS radio-collar performance and the implications ofPDOP in data screening Ecology 42 383ndash388
Dennis T E ChenWC Koefoed IM Lacoursiere C JWalkerMMLaube P and Forer P (2010) Performance characteristics ofsmall global-positioning-system tracking collars for terrestrialanimals Wildlife Biology in Practice 6 14ndash31 doi102461wbp201062
Di Orio A Callas R and Schaefer R (2003) Performance of two GPStelemetry collars under different habitat conditions Wildlife SocietyBulletin 31 372ndash379
Dussault C Courtois R Ouellet J and Huot J (1999) Evaluation of GPStelemetry collar performance for habitat studies in the boreal forestWildlife Society Bulletin 27 965ndash972
Eberhart A (2011) Impacts of habitat fragmentation on dispersal of nativemammals PhD Thesis University of Melbourne
EllisWBercovitch F FitzGibbon S Roe PWimmer JMelzerA andWilson R (2011) Koala bellows and their association with the spatialdynamics of free-ranging koalas Behavioral Ecology 22 372ndash377doi101093behecoarq216
Frair J L Fieberg J Hebblewhite M Cagnacci F DeCesare N J andPedrotti L (2010) Resolving issues of imprecise and habitat-biasedlocations in ecological analyses using GPS telemetry data PhilosophicalTransactions of the Royal Society B 365 2187ndash2200 doi101098rstb20100084
Gau R Mulders R Ciarniello L M Heard D C Chetkiewicz C-L BBoyce M Munro R Stenhouse G Chruszcz B Gibeau M LMilakovicB andParkerKL (2004)UncontrolledfieldperformanceofTelevilt GPS-Simplex collars on grizzly bears in western and northernCanada Wildlife Society Bulletin 32 693ndash701 doi1021930091-7648(2004)032[0693UFPOTG]20CO2
Girard I Ouellet J P Courtois R Dussault C and Breton L (2002)Effects of sampling effort based on GPS telemetry on home-rangesize estimations Journal of Wildlife Management 66 1290ndash1300doi1023073802962
Graves T A and Waller J S (2006) Understanding the causes of missedglobal positioning system telemetry fixes Journal of WildlifeManagement 70 844ndash851 doi1021930022-541X(2006)70[844UTCOMG]20CO2
Harris S Cresswell W J Forde P G Trewhella W J Woollard T andWray S (1990) Home-range analysis using radio-tracking data ndash areview of problems and techniques particularly as applied to the study ofmammalsMammal Review 20 97ndash123 doi101111j1365-29071990tb00106x
Success of GPS collar deployments Australian Mammalogy 77
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam
Hemson G (2002) The potential for using GPS-collars on wild African lion(Panthera leo) some lessons from experience In lsquoLion ConservationResearch Workshop 2 Modelling Conflictrsquo (Eds A J LoveridgeT Lynam and D W Macdonald) pp 59ndash65 (Wildlife ConservationResearch Unit Oxford)
Hulbert I A R and French J (2001) The accuracy of GPS for wildlifetelemetry and habitat mapping Journal of Applied Ecology 38 869ndash878doi101046j1365-2664200100624x
Johnson C Heard D and Parker K (2002) Expectations and realities ofGPS animal location collars results of three years in the field WildlifeBiology 8 153ndash159
Jones M Hamede R and McCallum H (2012) The devil is in the detailconservation biology animal philosophies and the role of animal ethicscommittees In lsquoScience Under Siege Zoology Under Threatrsquo (EdsP Banks D Lunney and C Dickman) (Royal Zoological Society ofNew South Wales Sydney)
Kaczensky P Ito T Y and Walzer C (2010) Satellite telemetry of largemammals in Mongolia what expectations should we have for collarfunction Wildlife Biology in Practice 6 108ndash126
KochannyCODelgiudiceGD andFieberg J (2009)Comparingglobalpositioning system and very high frequency telemetry home ranges ofwhite-tailed deer Journal of Wildlife Management 73 779ndash787doi1021932008-394
Lizcano D J and Cavelier J (2004) Using GPS collars to study mountaintapirs (Tapiruspinchaque) in thecentralAndesofColombiaNewsletter ofthe IUCNSSC Tapir Specialist Group 132 18ndash23
LunneyD (2012) Ethics andAustralianmammalogy reflections on15years(1991ndash2006) on an Animal Ethics Committee Australian Mammalogy34 1ndash17 doi101071AM10010
Lunney D Crowther M S Wallis I Foley W J Lemon J Wheeler RMadani G Orscheg C Griffith J E Krockenberger M RetamalesM and Stalenberg E (2012) Koalas and climate change a case studyon the Liverpool Plains north-west NSW In lsquoWildlife and ClimateChange Towards Robust Conservation Strategies for Australian Faunarsquo(Eds D Lunney and P Hutchings) pp 150ndash168 (Royal ZoologicalSociety of New South Wales Sydney)
Matthews A and Green K (2012) Seasonal and altitudinal influences onthe home range and movements of common wombats in the AustralianSnowy Mountains Journal of Zoology 287 24ndash33 doi101111j1469-7998201100881x
Mattisson J Andren H Persson J and Segerstrom P (2010) Effects ofspecies behavior on global positioning system collar fix rates Journal ofWildlife Management 74 557ndash563 doi1021932009-157
McMahon C RWiggins N L French VMcCallum H I and BowmanD M J S (In press) Capture myopathy in the Tasmanian pademelonAnimal Welfare (South Mimms England)
Merrill S Adams L Nelson M and Mech L (1998) Testing releasableGPS radiocollars on wolves and white-tailed deer Wildlife SocietyBulletin 26 830ndash835
Millspaugh J and Marzluff J (2001) lsquoRadio Tracking and AnimalPopulationsrsquo (Academic Press San Diego)
Moen R Pastor J Cohen Y and Schwartz C (1996) Effects of moosemovement and habitat use onGPS collar performance Journal ofWildlifeManagement 60 659ndash668 doi1023073802085
Moseby K Stott J and Crisp H (2009) Movement patterns of feralpredators in an arid environment ndash implications for control throughpoisonbaiting Wildlife Research 36 422ndash435 doi101071WR08098
Purcell B V (2010) Order in the pack ecology of Canis lupus dingo in thesouthern Greater Blue Mountains World Heritage Area PhD ThesisUniversity of Western Sydney
Recio M R Mathieu R Denys P Sirguey P and Seddon P J (2011)LightweightGPS-tagsonegiant leap forwildlife trackingAnassessmentapproach PLoS ONE 6 e28225 doi101371journalpone0028225
Robley A Gormley A Forsyth D Wilton A and Stephens D (2010)Movements and habitat selection by wild dogs in eastern VictoriaAustralian Mammalogy 32 23ndash32 doi101071AM09030
Rodgers A R (2001) Tracking animals with GPS the first 10 years InlsquoTracking Animals with GPS An International Conference Held at theMacaulay Land Use Research Institutersquo Available at httpwwwmacaulayacukgpsgps_abstract_2001pdf [accessed 27 February2012]
Rodgers A R Rempel R S and Abraham K F (1996) A GPS-basedtelemetry system Wildlife Society Bulletin 24 559ndash566
RuykysLWardM J TaggartDA andBreedWG (2011) Preliminaryspatial behaviour of warru (Petrogale lateralisMacDonnell Ranges race)in the Anangu Pitjantjatjara Yankunytjatjara Lands South AustraliaAustralian Mammalogy 33 181ndash188 doi101071AM10034
Sheppard J K Preen A R Marsh H Lawler I R Whiting S D andJones R E (2006)Movement heterogeneity of dugongsDugong dugon(Muumlller) over large spatial scales Journal of Experimental MarineBiology and Ecology 334 64ndash83 doi101016jjembe200601011
Spencer H and Miller T (2006) Flying-fox GPS logger-collar progressreport Australasian Bat Society Newsletter 27 10ndash15
Thomas B Holland J D and Minot E O (2011) Wildlife trackingtechnology options and cost considerations Wildlife Research 38653ndash663 doi101071WR10211
Tomkiewicz S M Fuller M R Kie J G and Bates K K (2010) Globalpositioning system and associated technologies in animal behaviour andecological research Philosophical Transactions of the Royal Society B365 2163ndash2176 doi101098rstb20100090
Vogelnest L and Portas T (2008) Macropods In lsquoMedicine of AustralianMammalsrsquo (Eds L Vogelnest and R Woods) pp 133ndash225 (CSIROPublishing Melbourne)
Wiggins N L and Bowman D M J S (2011) Macropod habitat use andresponse to management interventions in an agriculturalndashforest mosaic innorth-eastern Tasmania as inferred by scat surveysWildlife Research 38103ndash113 doi101071WR10116
Wiggins N L Williamson G J McCallum H I McMahon C R andBowman DM J S (2010) Shifts in macropod home ranges in responseto wildlife management interventions Wildlife Research 37 379ndash391doi101071WR09144
Zweifel-Schielly B Kreuzer M Ewald K and Suter W (2009) Habitatselection by an alpine ungulate the significance of forage characteristicsvaries with scale and season Ecography 32 103ndash113 doi101111j1600-0587200805178x
78 Australian Mammalogy A Matthews et al
Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

Appendix 1
Study descriptions
BFRW_SA Ten black-footed rock-wallabies (Petrogale lateralis MacDonnell Ranges race) were collared in the AnanguPitjantjatjara Yankunytjatjara Lands north-western South Australia in June 2008 (Ruykys et al 2011) Each rock-wallaby was fittedwith a custom-made collar (Sigma Delta Technologies Western Australia) which weighed 80 g Collars had an active deployment of10 months during which time the VHF component was programmed to operate for 4 h per day and the GPS component to operate forfourmonths During these four lsquoactiversquomonths the GPSwas programmed to acquire a location fix every 15 h Collar components weremounted onTeflon tubular ribbonwith the Teflon strands held together using an epoxyndashresinmix and veterinary sutures The study areawas in granitic mountains in the arid zone and experiences annual mean temperature ranges of 1338C and unreliable low (average255mm) rainfall
DINGO1_NSW Twelve dingoes (Canis lupus dingo) were collared in the southern section of the Greater BlueMountainsWorldHeritageArea during 2005ndash06 (Purcell 2010) SixGPS data-logging collars thatwere programmed to store data on seasonalmovementswere deployed during the breeding season (April) in 2005 and 2006 (n= 12 over two years) GPS receivers were mounted on leathercollars fitted with automatic timed-release drop-off mechanisms (Sirtrackreg Havelock North New Zealand) A VHF transmitter wasalso built-in to aid recovery of collars The final weight of each collar was 350 g Collars were programmed to store one location on thehour for 3 h followed by an 8-h interval to obtain a cyclic dataset The timed release mechanism was programmed to release during the14thmonthofdeploymentThe studyarea comprised~2200 km2between latitudes334300000 and341800000 and longitudes1500000000
and 1503000000 Climate was temperate with average temperatures ranging between 5C and 16C during cooler months and 16C and29CinwarmermonthsAnnual rainfall for this area ranges from8126mmto1410mmAltitude varied from160m to1158mabove sealevel (asl) from the eastern to the western borders of the study area respectively Predominant vegetation communities include dryforests (45) woodlands (38) and heaths low woodlands moist forests and rainforests Some areas remain cleared of nativevegetation due to previous agricultural practices
DINGO2_NSW Five dingoeswere collared in the southern section of theGreater BlueMountainsWorldHeritageArea during thebreeding season (March) in 2007 (Purcell 2010) GPS collars were programmed to store one location every 10min to collect data onshort-termmovements over a deployment period of 52ndash54 days Collar type and site descriptionwas the same asDINGO1_NSWabove
DINGO1_NT Fifteen dingoes were fitted with GPS collars (new and refurbished) in the Tanami Desert Northern TerritorybetweenApril 2008 andApril 2010 Collars weremanufactured by Sirtrackreg (HavelockNorth NewZealand) andwere programmed toobtain one fix every hour for up to 10 months All collars contained a GPS data-logger VHF transmitter and a preprogrammed timed-release unit Nine of the collars had an Argos-linked satellite transmitter The climate of the Tanami Desert is semiarid and monsoonaland habitats are dominated by loamy sandplain with hummock grasses Less extensive habitats include lateritic sand-plains rocky rises(chert and laterite) and elevated drainage depressions
DINGO2_NT Seven dingoeswerefittedwithGPS collars in theTanamiDesert Northern Territory betweenApril 2008 andApril2010 Collars weremanufactured byBlueSkyTelemetryreg (Aberfeldy Scotland) andwere programmed to obtain onefix every hour forup to 10monthsAll collars contained aGPSdata-loggerVHF transmitter and a preprogrammed timed-release unit Site descriptionwasthe same as DINGO1_NT
DINGO_Qld Nine dingoes (10ndash32 kg) living in urban areas of north Brisbane and the Sunshine Coast were collared betweenOctober 2005 andMay 2006 SirtrackregGPS collars (weighing ~450 g)were programmed to acquire oneGPS location every 5min from1700 to 0900 hours and one GPS location each hour outside these times during the day The collars contained a GPS data-logger VHFtransmitter and a preprogrammed timed-release unit The GPS data-logger was expected to collect and store location information theVHF transmitter was used to recover the collar and the timed-release unit was used to avoid the need for recapture The area containedfragmented urban agricultural (primarily sugarcane) and forested landscapes Mean annual rainfall was ~1650mm and averagetemperatures ranged between 75C (July) and 292C (January)
DINGO_SA Sixteen dingoes (13ndash23 kg) living in arid desert areas of north-eastern South Australia were collared betweenNovember 2008 and June 2010 Sirtrackreg GPS collars (weighing ~450 g) were programmed to acquire one GPS location each 30mincontinuously The collars contained aGPS data-loggerVHF transmitter and anArgos-linked satellite transmitter TheGPS data-loggerwas expected to collect and store location information theVHF transmitter was used to recover the collar and theArgos linkwas used tomonitor the location of the animals weekly to save time trying to locate the collars solely with VHF The area was predominantly opengrasslandwith sparsely vegetateddrainage lines Temperatures rangedbetween4Cand54C andmeanannual rainfallwas~160mm
FERAL_SA Fourteen feral cats (Felis catus) and four foxes (Vulpes vulpes)were collared betweenApril andAugust 2006within a50-kmradius of theAridRecoveryReserve innorthernSouthAustralia (Moseby et al 2009)Each adult cat and foxwasfittedwith a135-g Sirtrackreg (Havelock North New Zealand) GPS data-logging collar made of synthetic belting with the units housed in epoxy resinCollars were programmed to record GPS locations every 4 h and the VHF transmitter had a mortality sensor triggered after more than24 h without movement The study area is typically hot and dry with 160mm annual mean rainfall Mean minimum and maximumtemperature during the studywas 54Cand206C respectively The study area supports a variety of habitats and associated vegetationincluding dunes (dominated by Acacia ligulata and Dodonaea viscosa) sandplains (A aneura and Calitris glaucophylla) chenopodswales (Atriplex vesicaria andMaireana astrotricha) swamps (Eragrostis australasica) claypans and creeklines with less than 5overstorey canopy cover
Success of GPS collar deployments Australian Mammalogy 79
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam
KOALA_NSW GPS collars were fitted to 51 koalas (Phascolarctos cinereus) on the Liverpool Plains near Gunnedah NSWduring2008ndash11 (Lunney et al 2012) The study area consistedof a combinationof naturalwoodlandandenvironmental tree plantingsonfarmland Koalas were fitted with GPS collars that were custom-made (Sirtrackreg Havelock North New Zealand) and initially weighed180 g (the koalas weighed 4ndash10 kg) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter andbattery component housing andGPSbattery (mounted at the base of the collar loop so as to sit beneath the animalrsquos chin)Collars were initially programmed at manufacture to log their position every 4 h during the evening starting at 1700 hours with the GPSunit turned off for 8 h during the day After the final deployment the programwas for every 4 h ie yielding 6 readings per day For thepurposes of thecalculationsweused the31koalas that hadbeen trackedwhen the study for this paperwas initiated but a further 20koalaswere tracked during the last year of the study The collarweight on thesefinal deploymentswas reduced to 150 g by leaving out the timedrelease There were fewer problems with the collars in the last year of the study
KOALA1_SEQ GPS collars were fitted to nine koalas (Phascolarctos cinereus) in the east Coomera area of south-eastQueensland during 2009ndash10 The study site comprised numerous forest fragments (dominated by Eucalyptus robusta andMelaleucaquinquenervia) that were separated by recent urban residential development Forest fragments were searched on foot for koalas whichwere then caught andfittedwithGPScollars thatwere custom-made (SirtrackregHavelockNorthNewZealand) andweighed150 g (lt4of themass of the smallest collared koala) Each collar contained a GPS receiver (mounted at the top of the collar loop) as well as a VHFtransmitter and battery componentry housing and GPS battery (mounted at the base of the collar loop so as to sit beneath the animalrsquoschin) Collars were programmed at manufacture to log their position every 2 h (ie 12 fixes per 24-h period)
KOALA2_SEQ As forKOALA1_SEQexcept that theGPScollarswere programmedon adifferent logging schedule andfitted tosix koalas Collars were programmed at manufacture to log their position at 4-h intervals using a duty cycle of 16 h on and 8 h off (ie 5fixes per 24-h period)Collarswere activatedwith amagnet at 1600 hours and therefore entered the 8-h off period at 0800 hours eachday
KOALA_SWQ Seven koalas were collared in the semiarid areas of south-western Queensland comprising portions of theMulgaLands Mitchell Grass Downs and Brigalow Belt South bioregions Rainfall is variable and unreliable but annual averages range from750mm in the east to 250mm in the west During the hottest months the mean maximum and minimum temperatures are ~35C and19C respectively while during the coolest months mean maximum and minimum temperatures are ~19C and 5C respectivelySeven GPS data-logger collars (Titley Scientific) modified to fit koalas were programmed to record a fix every 4 h Tracking wasconducted from August to December 2010
MARE_NSW ThreeMaremma livestock-guarding dogs were collared on a sheep property fronting the Apsley River gorge nearYarrowitch New South Wales in summer 2009 The study area is a tablelands agricultural property adjoining other semicleared andpasturedproperties to thewest south andeast and separated fromthe forestedgorgecountry to thenorthbyadog-proof fenceThe terrainis undulating with patches of woodland and forest and ranging in elevation from 900 and 1076m above sea level The area has a cooltemperate climatewith frosts common inwinter and annualmean temperature ranging between~6 and20C andmean annual rainfall of8005mm Each collar comprised aGPS logger housed in a waterproof box attached to an adjustable strap that ensured theGPS antennaremained at the top of the animalrsquos neck throughout deployment Each collar weighed ~400 g and was programmed to take a locationevery 10min from deployment until the battery ran out In practice the collars were collected after 44 days and the batteries were stillfunctioning
MARE1_Vic ThreeMaremma sheepdogswere collared in central EastGippslandVictoria in June 2009 Each collar consisted ofaGPSdevice andVHFunitmountedonabiothanecollarTheGPS logged thedata but alsohada remotedownloadand reprogramoptionavailable Each collar weighed ~600 g andwas programmed to take a location every 30min until the battery ran out The study areawasan agricultural property surrounded on all sides by a mixture of dry and wet sclerophyll forest with some patches of native vegetationremaining on the property itself The terrain is undulating with an approximate elevation between 250 and 450m above sea level on theproperty itself but going up to 700ndash800m in the area surrounding the property The area has a temperate climate with an annual meantemperature ranging between 6 and 25C and a mean annual rainfall of 813mm
MARE2_Vic Four Maremma sheepdogs were collared in north-eastern Victoria in March 2010 Collar type was the same asMARE1_Vic above The collars were set to take a location every 30min until the battery ran out but their programmingwas changed acouple of times through remote communication to take a location every 15min for 24 h followed by a location every 2min for 1 hfollowed by a location every 15min for 24 h again afterwhich theywent back to their normal 30-min schedule The research areawas anagricultural property situated in an agricultural zone Surrounding the property are other agricultural enterprises and pine plantationsLarge tracts of uncleared native vegetation remain in the area which mostly comprise grassy dry forest The research property is hillywith an elevation of ~200m above sea level in a river valley and ~800m on the hill tops Slopes are steep The climate is temperate withmean temperatures ranging between 43 and 309C and a mean annual rainfall of 693mm
PADE_Tas Thirteen Tasmanian pademelons (Thylogale billardierii) and 17 red-necked wallabies (Bennettrsquos wallabiesMacropus rufogriseus rufogriseus) were collared in north Scottsdale north-eastern Tasmania in December 2008 (Wiggins et al 2010Wiggins and Bowman 2011) Each pademelon was fitted with a Televilt Tellus Basic 3H2A GPS collar equipped with a TellusRC_DropOffmechanism (FollowitWildlife Lindesberg Sweden)Collarswere deployed for eightmonthswith collars programmed torecord daily positions in the following three time blocks (1) 0150 0200 0210 hours (2) 0550 0600 0610 hours and (3) 2150 22002210 hours during summer or 1 h earlier during winter These times were selected to collect information on crepuscular and nocturnal
Appendix 1 (Continued)
80 Australian Mammalogy A Matthews et al
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam
activity patterns when animals are most active Each GPS collar contained a remote UHF data-download feature which was accessedwith an RCD-04 Portable Terminal (Tellus GPS System ZoHa EcoWorks Calgary Canada) and data viewed using the Tellus ProjectManager (TPM) Software package (Followit Wildlife Lindesberg Sweden) The study area was concentrated around two agriculturalproperties spanning an approximate area of 285 ha Dry eucalypt forestwoodland and agricultural landwere the dominant habitat typesin this area
POSS_Vic In order to study dispersal and ranging behaviour 29 mountain brushtail possums (or bobucks Trichosuruscunninghami) were collared in the Strathbogie Ranges in north-easternVictoria during 2007ndash10 (Eberhart 2011) Deployment periodswere four months and always included the dispersal period in FebruaryMarch or SeptemberOctober The total weight of theWildlifeGPS data-loggers (Sirtrack) comprising a VHF transmitter and GPS receiver mounted on a synthetic fabric collar ranged between 110and 130 g TheVHFbeaconwas only operational during the day whereas theGPSwas programmed to acquire one locationfix every 60or 45min during the night The Strathbogie Ranges form a plateau at ~700m altitude where temperate climate prevails with monthlymean maximum temperatures of 1018C in winter and 1927C during summer and an average annual rainfall of 970mm Most ofthe area is cleared for pasture however bobucks only rarely leave the remaining sclerophyll forest
QUOLL_Tas Seven adult female spotted-tailedquolls (Dasyurusmaculatus)were collared inMarchandApril 2011atCapeGrimnorth-western Tasmania Each quoll was fitted with a 70-g Telemetry Solutions Quantum 4000 Enhanced GPS collar equipped with aGPS logger single-stageVHF transmitter andUHF transmitter mounted on suede fabric TheGPS logger was programmed to record alocation every 2 h forfive days perweek and every 15 or 20min for two days perweek TheVHF transmitter was used as a real-time tooltomonitor the collared quollsrsquowelfare collect information on den use and to recover collars TheUHFwas used to downloadGPS dataremotely to a computer via an antenna connected to the computer and abase stationThe study area spanned~4400 haof aflat undulatingagricultural property with maximum elevation 120m annual mean rainfall of 762mm and temperature range of 82ndash195C Theproperty is heavily cleared for beef and sheep farming and pasture is extensive Remnant vegetation comprises dry eucalypt forest andwoodland coastal scrub and heath grassland melaleuca swamp forest and small patches of wet eucalypt forest
QUOLL_WA Six western quolls (Dasyurus geoffroii) were collared in the northern jarrah forest of Western Australia duringFebruary 2008Eachquollwasfittedwith a custom-made trackingdevice (SigmaDeltaTechnologies FloreatWA)which incorporatedaGPSdata-logger andVHF transmittermounted on aTeflon ribbon collar Each unitweighed~25 gTheGPSunitswere programmed torecord a location fix every 8 h for 90 days before deactivating At a fixed date shortly thereafter theVHF transmitter was programmed toactivate to aid retrieval of the collar The study area was in dry sclerophyll forest (~30 canopy cover) in flat to moderately undulatingterrain around300mabove sea level The area experiences aMediterranean climatewith hot dry summers and coolwetwintersAnnualmean temperature ranges from 10 to 30C and annual mean rainfall is 1250mm
ROO_ACT Twenty-six eastern grey kangaroos (Macropus giganteus) were collared during 2009ndash11 in the urban area ofCanberra following a one-year design trial Data-logging collarsmanufactured bySirtrackreg (HavelockNorthNewZealand)werefittedto kangaroos with an internal timed release but all collars were retrieved before programmed release time Collars were programmed torecord locations everyhour onaduty cycleof 24 honand3daysoffThe studyarea iswithin theurbanmatrix ofCanberrawith someopengrassy areas woodland and forest Canopy cover ranges from lt2 to gt50 Mean minimum and maximum temperatures in Canberraare 64C and 196C respectively and annual mean rainfall is 616mm
ROO_NSW Twelve eastern grey kangaroos (Macropus giganteus) were collared at Jooriland in theWarragamba Special Area ofNew South Wales Each kangaroo was fitted with a GPS data-logging collar from Sirtrackreg (Havelock North New Zealand) that wasprogrammed to recordone location every45minwith abattery life of~60daysThecollars also comprisedaVHFassembly operating inthe frequency range of 150ndash151MHz and emitting an individual signal of 40 pulses minndash1 A mortality sensor was added to eachtransmitter whereby a rate of 80 pulses minndash1 was emitted if there was no movement after 24 h After ~60 days each animal was radio-tracked its location was determined and it was recaptured to remove the GPS collar The study area contains large areas of improvedpasture from former farming practices and patches of regenerating box gumwoodland and riparian vegetation (10ndash15canopy cover)Mean minimum and maximum temperatures are 16C and 29C respectively and annual mean rainfall is 603mm
WOMB_NSW Thirteen common wombats (Vombatus ursinus) were collared in the Snowy Mountains during 2008ndash09(Matthews and Green 2012) Each wombat was fitted with a custom GPS data-logging collar from Sirtrackreg (Havelock North NewZealand) which incorporated a programmed external timed-release unit and weighed ~300 g Collars were programmed on a 60-minsample rate on a duty cycle of 8 h on 16 h off and were estimated to operate for 12 months The study area was in subalpine woodland(~15canopycover) inundulating tomoderately rugged terrain from~1500 to1900mabove sea levelAnnualmean temperature rangesfrom 0 to 11C and annual mean rainfall is 1800mm falling as snow during winter
Appendix 1 (Continued)
Success of GPS collar deployments Australian Mammalogy 81
Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

Appendix 2
Here we describe the components of GPS collars and how they operate and provide definitions and explanations for some termsassociated with the technology (see also Tomkiewicz et al 2010 for a glossary of terms of GPS and associated technology)
Satellite versus GPS
Satellite collars incorporate a platform transmitter terminal (PTT) which transmits a radio signal to overhead satellites (in the Argossystem) As the satellite passes overhead it receives these signals in successive intervals and a Doppler positioning technique is used todetermine the location of the transmitter on the ground (Rodgers et al 1996 Thomas et al 2011) With GPS telemetry the roles oftransmitter and receiver are reversed such that continuously broadcast radio signals from the (NAVSTAR) satellites are received andstored in the collar The configuration of multiple satellites is used to calculate the location of the animal Consequently the largest on-ground difference between satellite and GPS tracking is the resolution of the location For satellite tracking the resolution isapproximately1 km which will not provide the fine detail needed to follow the movement of animals in small home ranges For GPStracking the accuracy of locations is constrained by the capabilities of the hardware and is typically lt30m (Tomkiewicz et al 2010Recio et al 2011)
Satellite-linked versus data-logging (store-on-board)
Satellite-linked (orArgos-linked)GPScollarsmaybeconfusedwith satellite (PTT) collarsHowever satellite-linkedcollars use theGPSsystem toacquire locations that are storedwithin the collarAtprogrammeduplinkperiods these data are then transferred inmessagesviathe Service Argos satellite system to the ground-station processing centres in Landover USA or Toulouse France (Rodgers 2001)While theArgos linkmaybeused to retrieve storedGPSdata doing so is very expensive and this functionality has typically beenusedbyAustralian researchers to check the location of the collar intermittently in order to reduce the time it takes to locate the collar using VHFtracking at a later stage A further limitation of the Argos link is that it is highly unlikely that all the GPS data will be received becausetransmissions toArgos need to coincidewith a satellite pass overhead Each position needs to be repeated at least 30 times to increase thechance of it being received but there are still no guarantees Alternative satellite download methods include Iridium and Globalstar(Thomas et al 2011)
Data-logging (or store-on-board) collars store theGPS locations on board the collar and the collar must be retrieved to download thedataRetrieveddata are transferred from the collar to a computer using a cable and interfaceunit ThusGPSdata canbedownloaded fromthe collar while it is attached to the animal provided that the animal can be restrained or once the collar is removed
Scheduled fix intervals and duty cycles
Scheduled fix intervals are programmed (often by the collar manufacturer) before deployment and determine the frequency with whichthe collarwill attempt to acquire aGPS locationCompromisesmust bemadebetween thenumber of locations per day and theduration ofthe study and this depends on the research questions being asked At issue here is the capacity of the battery ndash the more times it is usedper day the fewer days can be studied For example establishing fine-scale movements may require a fix schedule of one fix per hour orshorter whereas annual home-range estimates may require just one fix per day or longer To increase battery life collars can also beprogrammed to turnoff andbackonagain at definedperiods (eg 12 hon 12 hoff) This is knownas the duty cycle and canbevaluable attimeswhen the animalrsquos position is not required (eg at night) The duty cycle is generally activatedwhen the collar is started rather thanbeing programmed to a set time of the day Thus the timing of collar deploymentmust eitherfit inwith this schedule or collars need to bestarted at the appropriate time before animals are captured
Almanac update
To estimate its position and time of day eachGPS collar receiver needs to acquire navigationmessages fromGPS satellites at or near thelocation where it will be deployed The navigation message includes both satellite ephemeris (a correction term applied to the orbit of aGPS satellite) and almanac data (parameters used to determine the approximate position of all satellites) (Tomkiewicz et al 2010) Thusbefore collars are fitted to animals they should be stationed in an open area at or near the study site and left turned on for a short period(~30min) for the navigationmessage to be received and the almanac to be updated Thiswill ensure that subsequentfixes are acquired inthe fastest possible time (within ~30 s) once deployed compared with 12ndash13min if a random search for satellites needs to be initiated(Rodgers et al 1996 Tomkiewicz et al 2010) Fixes takengt4 h apartmay need to acquire a new almanac (Rodgers et al 1996) and timetofixwill be slower for collars that are in a lsquocold startrsquo condition comparedwith a lsquowarmstartrsquoor lsquohot startrsquo (Tomkiewicz et al 2010) Therequirement for a valid almanac may be less of an issue with newer more sensitive GPS devices
Horizontal dilution of precision
The horizontal dilution of precision (HDOP) is a measure of the precision of a location that takes into account satellite geometry Othermeasures of dilution of precision are vertical (VDOP) 3D positional (PDOP) and time (TDOP)When data are downloaded fromGPScollars anHDOPvalue is usually recordedwith each location as aunitless number up to99AnHDOPvalue close to10 indicates that thesatellites used todetermine the collar locationwere favourably arranged (satellites are further apart andhavewider angular separation) for
82 Australian Mammalogy A Matthews et al
theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam

theGPShardware thesefixes are generally themost accurate (usually 2ndash4merror on-ground)Conversely a highHDOPvalue indicatesthat the satellite arrangement was less favourable these fixes are generally but not always less accurate (DrsquoEon and Delparte 2005Recio et al 2011)
In addition to HDOP some manufacturers quote a circular error probability (CEP) estimate which indicates the percentage of fixesthatwill be obtainedwithin a specific range of on-ground accuracy For exampleCEP80 forGPScollarswith 10-maccuracy indicatesthat 80 of fixes will be within 10m but conversely 20 of positions will be outside this range
GPS is designed to work best by running continuously and averaging asmany positions as possible to achieve a statistically accuratepositionUnfortunately its highpower requirementsmake this verydifficult forwildlife trackingwhere a small battery is used to keep theweight down and battery life is critical to achieve long deployment timesWildlife GPS engines are usually required to turn on take a fixas quickly as possible with little or no time for averaging then turn off again Therefore GPS positions collected by wildlife telemetryGPS engines can reasonably be expected to be less accurate than lsquoregularrsquo GPS positions
Timed-release unit
Several remote releasemechanisms have been developed to aid retrieval ofGPS collars Timed-release units are programmed to activateon a set time and date while others can be programmed to drop off when the battery system nears exhaustion (Rodgers 2001) In somedevices the release mechanism is triggered by the researcher using a radio signal when in range of the animal (Rodgers 2001) Externaltimed-release mechanisms are self-contained units that are incorporated into the attachment point of the collar They have separateprogramming hardware and software and will need to be activated along with the GPS unit and VHF transmitter when the collar isdeployed
Collar hardware software and firmware
Knowing the difference between hardware software and firmware helps to identify any problems experienced with GPS collars andcommunicate them back to the manufacturer Hardware refers to all the physical electronic equipment including the GPS batteryantenna download interface and cables Software is the term for the programs that runon thehardwareThis is theprogramneeded for thecollar and computer to communicate Firmware is software that is placed inside the hardware ndash it is the internal collar software ndash thatgoverns the on-board programming such as the duty cycle fix schedule and time-out period
Appendix 2 (Continued)
Success of GPS collar deployments Australian Mammalogy 83
wwwpublishcsiroaujournalsam