Speckle from rough, moving objects
13
Speckle from rough, moving objects* Nicholas George California Institute of Technology, Pasadena, California 91125 (Received 26 May 1976; revision received 25 August 1976) A general theory is presented for the characteristics of speckle when electromagnetic waves are scattered by a rotating, rough surface which has underlying shape features. An expression is derived for the cross-correlation function of the electric field scattered to two different observation points, with the two states including wavelength changes as well as object motion. This function is the basic building block from which to study remote sensing of object features using FM-laser systems or to study the spectral broadening caused by object rotation. Illustrative calculations are presented for rotating cylinders and for roughened spheres. I. INTRODUCTION Studies of the spatial and wavelength dependences of speckle by many investigators have led to important new methods for measuring surface height profiles. Speckle contrast at a fixed wavelength, at various angles of in- cidence, and then intensity decorrelation with wave- 1182 J. Opt. Soc. Am., Vol. 66, No. 11, November 1976 length are among the basic methods. 1 Curving the un- derlying surface does not cause any appreciable effect on the speckle statistics since the large regular phase terms, added in, do not disrupt the random walk dis- tribution of the electric field. However, it does radical- ly alter the wavelength dependence. For example, if one monitors the far-field speckle pattern due to a Copyright i 1976 by the Optical Society of America 1182
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of Speckle from rough, moving objects

Speckle from rough, moving objects*Nicholas George
California Institute of Technology, Pasadena, California 91125(Received 26 May 1976; revision received 25 August 1976)
A general theory is presented for the characteristics of speckle when electromagnetic waves are scattered by arotating, rough surface which has underlying shape features. An expression is derived for the cross-correlationfunction of the electric field scattered to two different observation points, with the two states includingwavelength changes as well as object motion. This function is the basic building block from which to studyremote sensing of object features using FM-laser systems or to study the spectral broadening caused by objectrotation. Illustrative calculations are presented for rotating cylinders and for roughened spheres.
I. INTRODUCTION
Studies of the spatial and wavelength dependences ofspeckle by many investigators have led to important newmethods for measuring surface height profiles. Specklecontrast at a fixed wavelength, at various angles of in-cidence, and then intensity decorrelation with wave-
1182 J. Opt. Soc. Am., Vol. 66, No. 11, November 1976
length are among the basic methods. 1 Curving the un-derlying surface does not cause any appreciable effecton the speckle statistics since the large regular phaseterms, added in, do not disrupt the random walk dis-tribution of the electric field. However, it does radical-ly alter the wavelength dependence. For example, ifone monitors the far-field speckle pattern due to a
Copyright i 1976 by the Optical Society of America 1182

rough plate and then from a rough ball, the latter willexhibit decorrelation effects (fixed observation pointwith tunable laser) at very small wavelength offsets AX,given approximately by X2/AX zL, where L is the radiusof the ball. For the rough plate when the illumination isincident along the normal, this inverse height to wave-length-offset relationship causes the required AX to beorders of magnitude higher.
In prior studies of remote sensing using the frequencydependence of speckle, it has been indicated that oneadvantage to the surface's being rough is that there isappreciable return from all illuminated portions. 2' 3
When this is not the case, the backscatter is dominatedby the specular return, its frequency sensitivity is poor,and pattern recognition using FM- CW methods is notpromising.
Earlier studies of the frequency broadening due to ro-tation of monochromatically illuminated rough objectshave been made in radar and radar astronomy.4-6 Elec-tromagnetic problems involving rotating bodies havebeen analyzed using relativistic principles."' 5 Specificcalculations for plasma columns and roughened cylin-ders have also been treated.9 "0
In laser-related studies Teich measured the frequen-cy spectrum backscattered from a rotating aluminumwheel with a rough surface. He showed that the spec-tral width of this signal is given, as expected, by theDoppler-shifted reflection from the portions of the ob-ject which move at the highest relative velocity. 1" Anal-yses of the statistical properties of echos from objectsfor the laser case have been made by Goodman. 12,13
In the present paper a multidimensional cross-corre-lation function is derived for the electric field scatteredto two observation points. Other variables are time ofarrival, object rotation, and illumination wavelength.It is hoped that this unified analysis will make it easierto understand the common features that connect specklephenomena resulting from different experiments. Inthe context of remote sensing, interesting experimentsare (1) object rotation with monochromatic illumination,(2) multifrequency illumination with a stationary object,and (3) object motion with multiple source or detectorpositions.
In the analysis we start with an expression for thevector potential at an observation point arising from thescattering by an object Qf arbitrary shape. This iswritten in terms of retarded time in order to include ob-ject motion. For a rough perfect conductor, the ex-pression for the vector potential takes the form of asimple integration over whatever portion of the objectis illuminated, if the usual approximations are maderelating the surface current density to the incident mag-netic field. The additional complexity of retarded timeleads to cumbersome forms in the integrand, both inphase and amplitude terms. However, restricting our-selves to slow rotation rates and making the usual ap-proximations in evaluating integrals which are dominatedby phasor terms, we derive an expression for the crosscorrelation of the electric field scattered to two differ-ent points using two different wavelengths. This cross-
1183 J. Opt. Soc. Am., Vol. 66, No. 11, November 1976
correlation function is defined as the expected value ofthe product E,, E,2 * taken over an ensemble of diffuseobjects, where E,, and E,2 are the respective valuesfor the electric field. The basic result can be ex-pressed in terms of the characteristic function for thedensity of heights, so that the assumption of a Gaussiandistribution of heights from the mean surface is not anessential restriction of the result. Cross-polarizedterms are ignored herein; however, they could be cal-culated in a similar fashion if an estimate is made oftheir amplitude at the object.
II. ELECTRIC FIELD SCATTERED FROM AROTATING ROUGH OBJECT
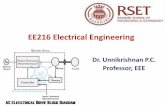
Consider a rough, conducting surface S located nearthe origin of a spherical coordinate system (r, 0, 0),as in Fig. 1. It is illuminated by a polarized, mono-chromatic wave incident from a source A at r = e_ r, ofharmonic time dependence exp(iwt), where ex is the x-directed unit vector and w is the frequency. For largedistances ro, the transverse electric and magnetic fieldcomponents are in the ratio (uO/E0)' /2, where E. is thedielectric constant and AO the permeability. Hence, foran incident magnetic field given by
Hinc(x, y, z, t) = ey Ho expi(wt-kRp)} , (1)
the corresponding incident electric field is approxi-mately
Einc(x, y, z, t) = e,(I/eO)l /2Ho expti(wt- kRap)} , (2)
where Rap is the distance AP from the transmitter to apoint P on the surface and e,, e,, e, are the unit vectorsalong the positive x, y, z axes, respectively. Ho is theincident magnetic field strength, k = wic, and c is thespeed of light. Let the surface S be perfectly conductingand stationary. It is assumed that the surface currentdistribution is given by the incident tangential magneticfield. Thus, we write
K=2nxHine, (3)
where K is the surface current density and n is the out-ward unit normal. The vector potential A, which satis-fies the inhomogeneous wave equation, can be expressed
S
Rpb
FIG. 1. Rough surface S illuminated by a monochromaticsource at A with the scattered field monitored at B.
Nicholas George 1183

in terms of K as follows:
A(x, y, z 4 t) =7T J R ds (4)
where R2 = (x _ X)2 + (Y - y')2 + (z - z')2, and the integra-tion is over the illuminated portion of S.
For a receiver at point B, located at (ro cosp1 ,r, sinol, 0) in Cartesian coordinates, the vector poten-tial is computed by substitution of Eqs. (1) and (3) into(4), and the result is
A(x, y, z, t)
_ f nx(eH 0 c ds' , (527J Rb( C 1)
+ 262w2 sin 20{sino cosP + sin(P - 0k1) cos(G - 0P)I,
(7)where 0, P are the coordinates of ds in the rest frameof A, B. The rotating surface S is defined by the radialfunction w(Or, qPr) in spherical coordinates Or, 0r in itsrest frame. In Eq. (7), the time dependence is im-plicit in the object profile w, since for the point P onS, its azimuthal angle in the frame of A, B is given by
(P) = +2t .(8)
In the integrand of Eq. (6), amplitude terms are ap-proximated setting [Rpb] r, and [n]i zn. Then, if therotation rate, object size and distance are small enoughthat
where Rpb is the distance PB, in Fig. 1, from the pointon the surface to the receiver.
If the surface S moves at constant velocity with re-spect to the rest frame of the transmitter and the re-ceiver at points A, B, respectively, then this problemis within the framework of the special theory of relativ-ity. The essential modification to be made to Eq. (5)for A(rb, t) is to compute Rap +Rpb in the integrand witha time retardation which accurately takes into accountthe constant velocity of light for all observers (the sec-ond postulate of special relativity). A discussion of theDoppler effect and the principle of phase invariance forplane waves is given by Papas. 14
For A at a time t, the distances must be computed atan earlier time given by t, = t - [Rpb] /C, where [Rpbj isthe distance PB in the rest frame of A and B at the ear-lier time te. The bracket [- * * ] is used to signify eval-uation at the time te. While Eq. (4) leads to an exactsolution of Maxwell's equations if K is not approximatedand S is at rest, this is not strictly so when the surfacemoves. The boundary conditions in the rest frame atS are no longer nxE =0 and nxH=K. A derivation ofthe appropriate boundary conditions has been given byVan Bladel, together with a discussion of their applica-bility for rotating frames. 15 In this context it is inter-esting to note that for symmetrical rotating conductingbodies, the velocity and the surface normal are orthog-onal and by Eq. (7) in Ref. 15, in the rest frame of Aand B, nax H =K and nxE = 0 are appropriate boundaryconditions again.
In the analysis of rotating conducting bodies, herein,we use Eq. (5) rewritten with the retarded distances,as follows:
(6)
where A(t) is the vector potential at point B and timet, the integration is over the illuminated portion of S,and the prime has been dropped for the coordinates ofP. In the exponential of Eq. (6), the distance at re-tarded time is approximated as shown in Appendix A by
[Rap +RPb] = 2rO - w sin0{cos(p) +cos(( - 0,)l
- c20w sine{sinp +sin(p- -1)}
C
1184 J. Opt. Soc. Am., Vol. 66, No. I11, November 1976
80wro/Xc < 1 (9)
that last two terms in Eq. (7) can be dropped, causing aphase error in the integrand of Eq. (6) which is lessthan ' yr. Equation (9) represents a nontrivial restric-tion on object size and rotation rate. With this as-sumption, Eq. (6) reduces to the following quasistaticapproximation for the vector potential at B:
Ab(t) = pH. exp{i(wt 2krp)}
x f nxey exp(ikw sin0{cosf +cos(p - ,)})ds, (10)
where k = w/c and B is at (ro, X7, 01) in spherical coor-dinates.
Denote the z component of the electric field scatteredto B by E,, or E0(w1, p1, t). From Eq. (10), using E,=- e.- (aAb/at) and neglecting higher-order time depen-dences, we obtain
E~clS 12t) -i (g 1HO exp[i(wlt - 2klro)]E,(w 1 , (P,, t)=-- Ho -
x f exp(iklw sin0{coso + cos(G - pl)})(n * e.) ds
(11)The roughness of the surface is contained in the func-tion W(r, ¢P,) and the term (n a e.) ds, both of which con-tain a random component. It should be emphasized thatthis echo is written in an analytic signal notation, andit contains many frequency components when S rotates.In this context one should note that in the argument ofE,(wl, P,, t) the wl refers to the frequency transmittedfrom A, while the (1 specifies the azimuthal angle tothe receiver at B.
III. CROSS-CORRELATION FUNCTION FOR THESCATTERED FIELD
Consider the field scattered to position BI at (ro,2ar, ( 1) and B2 at (ro, 2 X, P2) from the surface S withthe transmitter fixed at (ro, 2 7, 0), as in Fig. 1. Letthe surface be described by an underlying shape func-tion wo(Or, (Pr) and a random component h(or, OPr) mea-sured radially. Then, W(Or, (Pr) in Eq. (11) is given by
(12)W(09, q 7r) =Wo(0(, O r) +h(0, str)
or using Eq. (8) by
Nicholas George 1184
A,(t) = "O f [nlx(e YH 0) ep ,, (t _ [R,, + Rlb ds' ,27T [RObl C

w(O, p - nt) =wo(O, 0 - 6t) +h(O, - 0t) . (13)
In the study of speckle from rotating, rough surfaces,a useful cross-correlation function to calculate is theexpected value of E,(w,, p,, t,)Ez*(w2, 02, t2) denoted by
Re=(E,(w1, (P,, tl) E*' (w, 412, 12)) , (14)
where ( ... ) indicates an ensemble average over the ran-dom process of heights h(&, q - S2t). The electric fieldE2, =E.(w,, (P, t1) is calculated at position B1, time t1,and for transmitter frequency wl, while the state IIfield E,2 =E,(w2, 02, t2) is correspondingly for B2, timet2, and transmitter frequency w2. In Eq. (14) the in-corporation of frequencies wl and w2 enables one to cal-culate the effect of wavelength tuning or transmitterfrequency diversity. The object motion leads to spec-tral broadening; this effect is included by virtue of thetwo different echo reception times t, and t2. The spec-trum follows by taking a Fourier transform with respectto the lag time T= t2 - t1. A general form for the crosscorrelation of the electric field at two receiver positionsqP, and (P with two transmitter frequencies co and w2is obtained by substitution of Eqs. (11) and (13) into(14). The result is
Re =lo exp{ikw'sin' [cos' +cos(O'- 01)]
- ik2wO' sinG" [cosO" +cos(q" - 02)1}
x F (rn, "1 ;rl2B(n' * e.,, n' *j xds' ds(15)
with the following definitions for
IO = [HO2/(XX,Er 2)] exp{i[w, t, - W2 t1 - 2rO(k, - k2)I}
kl, 2 =27T/X,, 2 , (16)
Wo = IVo (O q, -Qt W)It,1
wo =wo(0(" (P" - t
The area differentials ds', ds" denote two integrationsover the illuminated surface. The characteristic func-tion F has been defined as the following expected value:
F( - ij1'; rl, 2) = (exp(in1hl - il h2" (17)
Just a single member h of the ensemble in heights ap-pears in the expectation, Eq. (17), i.e., the notationfor h, and h2 is defined by
h,=h(O', -' Qt1,) , (18)
h2 =h(O", 4i -E2
The generalized frequency variables q', r' have thesame angular dependences, respectively, as the termswhich multiply w', w' in Eq. (15); they are given by
r7'=ksinO'[cos4 +cos(P' - )(19)
ru'=k2 sine"[cos)" +cos(p" - 02)J -
In Eq. (16), the function B results from taking the fol-lowing expectation: (exp(i77'hl - i7"'h ) n * eX n" * e.). Inderiving Eq. (11), the term n' - ex dsr means the dotproduct of ex with the actual local normal, and the in-finitesimal area is that of the rough surface. This termis [cos(p' + 6$) ds'/cosr], where O' + tr is the angle be-tween the actual normal to the rough surface and ex.
1185 J. Opt. Soc. Am., Vol. 66, No. 11, November 1976
The random component is t', the local mean value isO', and ds' is the area infinitesimal of the mean sur-face w0. Hagfors has shown that this expectation is ap-proximately given by the product of F in Eq. (17) withB given by4
B(p') =1/[cosp']2 , (20)in which coso' = coso'sinG'.
A. Evaluation for short correlation lengths
The cross-correlationfunctionof the electric field, Eq.(15), can be reduced to a far simpler, more usableform if we assume the following:
(i) The surface is relatively rough, (h2)> (2 )';
(ii) The stochastic process h(O,, (pr) can be de-scribed by a spatially stationary, jointly normal sec-ond-order density function;
(iii) The length a, over which height fluctuations arecorrelated is also small.
The simplification depends upon the sharply peaked na-ture of the characteristic function. This function oftenappears in statistical problems in electromagnetic the-ory since the solution of the wave equation involves re-tarded potential terms; hence, higher-order correla-tions invariably contain characteristic functions. Acomprehensive report of the use of two-dimensionalcharacteristic functions in the analysis of scatteringfrom rough plates is given by Beckmann, 16 Mathemat-ically similar problems occur when light is scattered bysmall particles. 17
Here, in the analysis of a curved surface, the essen-tial departure is that both the generalized frequency
7q, ru2 in Eq. (19) and the correlation coefficient rl, (de-fined below) have spatial dependences which must be in-cluded in the surface integrations in Eq. (15). Also forthe treatment herein, we prefer the use of a correlationcoefficient which is identically zero outside of a speci-fied area.
In accord with the assertions above, the density func-tionf (h,, h2, r,2 ) for the heights defined in Eq. (18) canbe written as follows 3 "16:
f(he, h2; r12) =2 7T,2 (1- 122)
f, - 2rh2h;h +
x exp(- hi 2 hiha+ha) (21)
in which the mean-square height is o2 and the correla-tion coefficient is r12 . For the density in Eq. (21), thecharacteristic function computed by Eq. (17) is given by
F(4, --12; r, 2 ) = exp[- 2 o(ij'2 - 2rl2j ql' + ',q 2)] . (22)
The correlation coefficient is the normalized covari-ance of hl, h2; i.e., r12 (hl, h2) =(hlh2)/0r 2 , where thevariance r 2= (h2) = (h2). By hypothesis, we have takenthe surface statistics to be stationary and the correla-tion distance al measured along the surface S to besmall relative to the object dimensions. Based onthese assumptions, a useful idealization for r1 2 is thefollowing expression:
Nicholas George 1185

(1 - (p,/Ci,) 2 when (p 5 /a 1 )2 < 1rl 2 (h,, h.) = (23)
(0 otherwise
in which ps is the distance on S between the heights h,=h(0,1, qGir) and h. =h(0r2, 'krd). The correlation areaAl is defined as A, = ircl.
Equation (15) can be integrated over 0", P" using thecharacteristic function and correlation coefficient inEqs. (22) and (23). In Appendix B for the integrationover ds", S is divided into two regions: one wherer12 : 0 and the other where r1 2 = 0. The resulting formfor Re =(ElE, 2 *) is given by
Re = Rea + (Ei) (Et *) ,
The limits of the integration over q5" from - Iv7 to 7were explicitly included in the integrand of Eq. (15) us-ing the function rect(o"/7r) which is unity for I 0"/7r I<2 and zero otherwise. This gives rise to the termrect[O' - Q(01 - t 2)/7r] above. Implicitly, there is also arect(p'/br) in Eq. (25), i. e., the illuminated portion ofthe object. The product of these two limit functionsshows this term in the cross correlation going to zeroif the difference Q(t, - t.) 7r.
In the above equation the term A77 is computed fromEq. (19) using the definition A71 =Ž1.0 - 1; the resultfollows:
(24) A7) =k2 sin8'{cos[(p' - fl(tl - t2)] + cos[4" - Q1(t - t2)- )2]l}
in which the covariance Rea is as follows:
x P(0', p', t1 - t2) rect(0' - l- 2)) B(P') ds' . (25)
LJ
(26)
An equivalent expression for Eq. (26) that is more use-ful when there are small variations in the transmitterfrequency is obtained using well-known trigonometricidentities:
A= 2Ak sin' cos[(P '- n(t, - t2) - 2' 2] COS(A 0 2) + 2k1 sin0'(sin[ 2 Q(t, - t2)1 sin[' - A S2(tl - t2)]
+ sin{2[iŽ(t1 - t2) + 02 - ¢ 1]} Sin{b - A I W(t4 - t2 ) +Pt + 42]} ) I
where Ak = k2 - k1 . If there is no rotation and if the ob-servation points are the same, i. e., pl = 02, then thesecond member in Eq. (27) disappears. In this instanceletting the transmitter offset go to zero insures Aj- 0.If there is rotation, the assumption that Atq goes to zerois not strictly so, and more careful evaluation of Eq.(27) is required.
Also in Eq. (25), the function P resulting from theintegration over the correlation element is defined byEq. (B13); and the exact result of the integration isgiven by Eqs. (B16) and (B17). An asymptotic form isgiven in Eq. (B20), consisting of three parts: P= P1
+ P2 + P3. By considering a nonrotating sphere of largeradius, with roughness a> X, it is shown in Table I thatP1 is the dominant term. From Eq. (B20), a good ap-proximation for P in Eq. (24) is given by
TABLE I. Relative values for terms in the cross correlationof the electric field, computed from Eqs. (B22)-(B26).
Component Value at Ale=0 Relative valuea
R. 0- 233 IoAoQ41 1Rei kik2 (
2u)l
kik2(2o)' 2[2ci~ k'a+7 2)I -
R03 [2o-y' +kl)]3 1501 1(2kaE )) F* 1
aComputed normalized to Rei with ao = °. 5 mm, X = 0. 5 pum, or=5. 0 pm, Ak=0, and co=1.
1186 J. Opt. Soc. Am., Vol. 66, No. 11, November 1976
(27)
P1 =exp[- (2Cab) 2/]/p . (28)
It does not give accurate numerical values as p.- 0.While a different correlation coefficient has been used,this asymptotic portion is essentially equivalent to thatin Eq. (5. 59) by Beckmann, attributed therein to Isa-kovich (1952).16
In Eq. (28) the term b is given by
b = 2k2 cos(2 0 2 ) {1 - sin20' cos2 [(p - t2)- )12 02± }
(29)
And from Eq. (Bll), the angle-dependent parameter p. is
p. = r2k1k s7120 [
,u= r2 kAk sin 20 [COS01 + COS(¢ sp )
X{COS[ ' +QT]+COS[p' +iT- 2} - (30)
The time difference T= t2 - t1. The notation subzeromeans evaluation at 0"' = 0" - 0' = 0 and 0"'=(" - Qt2 )- (P' - fŽti) = 0. An explicit form is written for (E,1)x(E, 2 *) in Eq. (B8). In Eq. (B26) it is shown to be or-ders of magnitude smaller than Re,, the component ofRa using only the term P1 in Eq. (28).
While these integrals have been written in sphericalcoordinates, for surfaces wo(0r, 0,) which are essential-ly spherical, it is clear in retracing the derivation thatAl is the correlation area along the surface. Also, thederivation for any curvilinear coordinate system willlead to equations analogous to Eqs. (25)-(28). For ex-ample, in cylindrical coordinates (p, p, z), the appro-priate form of these equations is obtained replacingsinG', sinG" by 1, the infinitesimal area ds = pdo dz, andWo wo (4r, Zr). Likewise the angle 0 between the meansurface normal and the x axis, given by cosp = sin0 cos4P
Nicholas George 1186
- -
- k, sinO'[COSO' + COS (0, - 01)] .

in the spherical coordinate system becomes simplycoso = cos(p for the cylindrical case, i. e., it is essen-tially e. * n.
B. Discussion of the solution
The general solution for the correlation function Reais given by Eq. (25) in which the term P is derived inAppendix B. The function B(o') resulting from consid-ering the biased mean of surface slopes is written inEq. (20), from Hagfors.4 While the various componentsin P, Eq. (B20), are similar in form, one should notethat Re, has the smallest damping. Using Schwarz'sinequality, one comes to the conclusion that the ampli-tude of these terms usually orders as IRei I > IRe2 I> IRe3 I. In some simple cases, for example with spher-ical or cylindrical objects, these terms can be evaluatedin closed form. In particular when there is no motionand the observers are at (p, = (P2 =0, then precise calcu-lations are relatively easy.
In order to illustrate the relative sizes of the compo-nent terms in Re, solution forms for a sphere of radiusao are detailed in Eqs. (B22)-(B26). These are writtenin terms of the incomplete gamma function using theimaginary argument if one wants a form asymptotic in2AkaO or the real argument for a denominator in terms,say, of 2a?2(k0 +k ), as shown in Eq. (B24). Table Isummarizes the relative values evaluated at Ak = 0, us-ing upper bounds on Re2 and Re3 in order to simplify thecalculation. The important point to notice is that R,, isthe dominant contributor to the total correlation func-tion (E,1E, 2*). It can be stated more generally that thevalue of any of these terms has an upper bound whentAn=0. Thus, in the example, since IRei(Xl, A1) I- IRe2,3(XI, A1) 1, we can conclude that IRe,(XI, XA)>> IRe2 ,3(Xl, XA) I ' IRe2 , 3 (Xi, A2) I
IV. WAVELENGTH DEPENDENCE OF SPECKLE
In application to speckle topics, three separate prob-lems are posed in Secs. IV-VI. A general statement ismade first as to the reduced form of the correlationfunction Re which is appropriate for each class of prob-lem. This is followed by an explicit calculation using asimple object shape.
Consider a curved rough surface that is illuminatedby a tunable laser. The reflected signal is detected inthe far zone using a photodetector that is much smallerthan the speckle size. What is the wavelength depen-dence of the detected current? The object is not rotat-ing. For this case, limiting ourselves to one observa-tion point, the appropriate form of Eq. (14) is obtainedsetting (Pl = P2 and t, = t2, as follows:
(31)
Equation (31) gives us a function proportional to the ex-pected value of the correlation function of the currenti(X1) and i(X2) at the twowavelengths. 2' 3 Thus, the spec-trum of the detected current will have an expected valuegiven by the Fourier transform of Eq. (31) with respectto Ak = (w 2 - w 1 )/c -
1187 J. Opt. Soc. Am., Vol. 66, No. 11, November 1976
z(a)
A-
fLLUM7 m
(b)
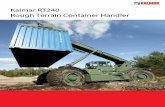
FIG. 2. Configurations for(a) the wavelength sensitivityof backscatter from a station-ary sphere, and (b) the cylin-der is rotating about the zaxis at 12 rad/s.
ILLUM
A. Backscatter from a roughened sphere
Consider a rough, stationary sphere of radius a0 , asin Fig. 2(a). It is illuminated by a laser of wavelengthAl at t, and then A2 at t2 . A heterodyne receiver is lo-cated at Al = (2 =0 to detect the backscatter. We calcu-late the correlation function described in Eq. (31) usingthe general form. Substitution of Eqs. (27), (29), (30)into (25) and rearranging give the following result:
ea 4k 2 a2
x f exp[- i2aOAk cosp - 2(crAk cosp)2 - (I rtank)]
x sino doFcrs ]4
(32)
In Eq. (32) B=[cosop]2 is used, a, is the correlationlength of the roughness height a, AO = 2iraO , and 0 is theangle between Od and OA in Fig. 1. This formula is amore accurate representation of our earlier result,where in effect the case treated corresponded to thechoice PB ;coS20 instead of the respective values inEqs. (20) and (28).3
In the evaluation of Eq. (32) it is noted that for zerooffset frequency the damping term exp[- 2(aAk coso)2]is unity. Provided rAk << 1, then a power series expan-sion and term by term integration is an efficient methodof solution. By analogy to Eq. (B24), expanding in termsof (2Akao), one can show thatwhen 2Akao»>>JrAk, thefirst term in the expansion gives an accurate answer.Computationally, it is found that about a 1% differenceoccurs for a ranging from 0 to 10 Aim for a sphere of25 mm diam and AX= 6 A. We omit the details of thiscomputation.
An excellent approximation to Eq. (32) is obtained ex-panding exp(- i2aOAk coso) into a power series, makinga change of variables to use Eq. 3. 381.3 of Ref. 19, andintegrating. The solution is given by
- IoA= A 4 (- i2a0Ak)m cexp(cd) 2(m+3Rea 2 V 2 , co
(33)
Nicholas George 1187
-

1.0
0 . 8
0.6
0 . 4 -
0.2 -
o .0 o0 .0 0 .0 2 0 .0 30.0
2 aAk
FIG. 3. The amplitude of the real part of the autocorrelationfunction I ReR,, I vs the offset wavelength parameter, 2aoAk.Plotted from Eq. (33) for c0 of (0) 0. 63, (A) 1, (+) 2.
where c0 is defined by c0 = a, /(2cr). The complementaryincomplete gamma function is computed from a contin-ued fraction representation valid for negative indices.
The wavelength sensitivity of this correlation functionis shown in Figs. 3-5. In Fig. 3 the normalized am-plitude of the real part of Rea is plotted versus the pa-rameter 2a.Ak with the following values of the slope-roughness parameter c8 = (o) 0. 63, (A)1, (+)2, corre-sponding approximately to microscopic rms slope anglesof 480, 350, and 200, respectively. 1
6 The lobes ofReR'a are alternately positive and negative. Figure 4
I .0
0.8
0 .6
0 . 4
0 . 2
o . o I0 .0 I0.0 20.0
2 a. A k30. 0
FIG. 4. The wavelength sensitivity of backscatter from rough-ened spheres is shown in plots of the amplitude I Real vs 2aoAkfor the labeled values of the roughness parameter c0 = a1/(2 a).
1188 J. Opt. Soc. Am., Vol. 66, No. I 1, November 1976
0.8
I0.6L
I0.4
0.2 -
0.0 I 0.0 2 0.0 3 0 .02 a. A k
FIG. 5. Curves of I R' I vs 2aoAk for roughened spheres butusing the function B = cos2o (for comparison to the biased slopecase in Fig. 4 where B = 1/cos 2?o).
shows IR' I vs 2aAk for the same c0 . The real andimaginary parts of Rea oscillate roughly in phase quad-rature, and this explains the smoothing which is seencomparing Fig. 4 to Fig. 3. To illustrate the capabil-ity for remotely sensing object depth features, notethat when 2ao = 100 mm, the wavelength offset corre-sponding to the abscissa value 30 is AX=0. 119 A at X=0. 5 pim. If the diameter is increased tenfold sinceAk = 27r AX/X2, then the correlation function traces outthe same values in only 0.0119 A. These curves arenot extremely sensitive to the power of the cost in theslope distribution-biased slope term, PB. For ex-ample, arbitrarily letting B =[cosp] 2 in Eq. (32) givesthe results in Fig. 5, after obvious modifications to theindices in Eq. (33). This is due to the dominance ofexp[- cO2/A] as b- 90g.
V. ROTATIONAL DECORRELATION OF SPECKLEPATTERNS
Consider a symmetrical object that is rotating slowlyat QŽ rad/s. It is illuminated by a monochromaticsource, and the speckle pattern is observed on a screenin the far zone. The individual speckles appear to tra-verse this screen at an angular rate 2E2. After a fewdegrees, nT, a particular bright speckle will fade.What is the decorrelation angle for this pattern? Clear-ly, it is larger than the angular size of a speckle and itcannot be monitored by a single fixed observer. Howdoes it vary with object size?
To study this decorrelation with rotation, using inten-sity detection, the appropriate correlation function tocompute is given by
or
R= (E,,EZ* EZ2EZ2*) ,
(34)
(35)
Nicholas George 1188
l. 0
01, t1)u(U)1, my td)

where the intensity u is E,1E2 l. Now using Reed's the-orem, one can immediately reduce the problem aboveto the calculation of several second-order correlations.All of the salient information is contained simply by cal-culating the correlation function in Eq. (25).
In general one could simply calculate (E2 (w,, 0,, t,)XE* (w j, 12, t2 )) considering ¢P2 to be time dependent andthen develop a criterion so as to stay on the maximumof the correlation function. However, it is simpler tonote at the outset from Eq. (11) that for small rotationsQT, the pattern shifts by 20T. This can also be provedby picking q2 to minimize the value of A77 or li, in Eqs.(26) or (30). Thus one can study global decorrelationof a speckle pattern by computing the following:
Rea=(EZ(w1, 0, tl)E,*(wi, 2QT, t,+ T)) . (36)
For a cylinder of radius ao spinning at S2 rad/s, thecorrelation function in Eq. (36) can be written explicit-ly. The illumination is monochromatic, and the ob-server is at (l =0 at t1 and at 2 =2gQ(t2 - t,) at t2. LetT = t2 - t1 and substitute these values into Eqs. (27), (29),(30). The forms for Aq, ,u, b are given by
AN = - 4k sin 2 (pŽT/2) COSO
b = 2k sinO cos(E27) , (37)
p. =4(kacos) 2 COS(0T)
For a large object it is expected that the speckle willdecorrelate in small angles 0T; hence cos62T 1 is as-sumed in writing the correlation function. Also theexp{- 2[kasin 2 (1 nT) cosp]2 } is omitted from Eq. (38)since for small SŽT and with ao - a its effect is negligi-ble. Let the area A2 = a0L, the following formula is ob-tained for a cylinder:
ea 4k2 cr2
f T/2 2.A QT al2a2 dX 2 exp i4ka, sin (-)cos(p -
(38)
This equation can be expressed in closed form by ex-panding the exponential in ka., making the appropriatevariable change to use Eq. 3.471.2 of Ref. 19, and in-tegration. The result is given by
Rea =I2AlA27r ' 2exp[co]
(c)cm-5) /2 2Xt E 1 0 -W(-m3) / 4 (m 3 / 4(c2)
m=O M
readily obtained by taking the angle term PB 1. Then,Eq. (38) becomes
JI0A 1A~ (Ir/2epiRea 4k~ 2 2 | 2exp(ic coso)do , (41)
Rea= 10AA2 [7rJ0(cl ) -i7TE,(c)]4k 2 a2
where Weber's function of zero order E,(c,) = (- 2/70)X~m=0 J2 m+i(cl)/(2m + 1). The amplitude I Rea I drops sig-nificantly when c, = 27r or when the angular rotation (QT)0
is given by
(42)
For an angular speckle size on the order of X/(2ao),then the number N of speckles passing a fixed observerduring the decorrelation angle (Qr)0 is given approxi-mately by
N= 4(a/X)/2 . (43)
VI. SPECTRAL BROADENING DUE TO ROTATION
A monochromatically illuminated object is rotating atQ rad/s. If a single observer at 01 = P2 records the cur-rent i(t) detected by a superheterodyne at t1 and a latertime t2 for the same member of the ensemble, then theexpected value (i(t1 )i*(t2 )) gives the time-dependent cor-relation function for this current. Hence its spectralbroadening, or spectrum, is obtained by taking theFourier transform of this function with respect to r = t2- t1. The appropriate form for Re is given by setting01 = 02 = 0 and w1 = w2, as follows:
Re=(Ez(Wi, 0, t1)E *(W1, 0, t2)) - (44)
Another illustrative calculation is included to showthe temporal frequency broadening caused when mono-chromatic laser light is backscattered from a roughenedcylinder of radius ao and length L, rotating at R rad/sabout the z axis, as shown in Fig. 2(b). The entire cyl-inder is illuminated by the incident radiation so that theintegrations are to be evaluated for - I 74 -- 0' 2I r andfor - 'L-z ' L. Equations (28) and (20) are com-bined setting k1 =k2 , ¢ 1 =02 =0, and 7i2T= Q(t2 - t,). Wewrite the product P1 B separately so that its time depen-dence is evident:
exp{- c02sin 2(p -Q)A[coso cos(o +QT)]}P1B =- 4k2 ar2[coSO cos(o + QT) ]2
(39) From Eq. (25), we obtain the correlation function:
(45)
in which c= a1/(2or), c, =4kao sin2 (a QT), and W, (z) isWhittaker's function.
Of more interest herein than this direct evaluation isto compare the integrand of Eq. (38) to that in Eq. (32)for the wavelength dependence of speckle backscatteredfrom a sphere. It is noted that there is a strong corre-spondence between the two factors:
2a0Akcosyb and kao(nT) 2 cosp , (40
even though they arise in different physical situations.
An approximate value for this decorrelation angle is
1189 J. Opt. Soc. Am., Vol. 66, No. 11, November 1976
Ra =10A1A2
x ff/2 exp(- i2klao0 - 2(kcar)2) rect + ) P1B dp'(46)
in which
(b=-2sin('6QTr)sin(q + z7-) . (47)
These equations are accurate for high rotation rates.In general the time dependence of the angle dampingterm P1B, as well as that in @, contribute to the spec-tral broadening in the backscattering. Accurate calcu-
Nicholas George 1189
, 2(07-)o ;z� [ X /aol' .

lations for the spectra of signals with various types ofexponential envelopes are described by Rowe.2 0
In this paper our interest is to present only an ap-proximate spectrum, by considering the case in whichthe Doppler shift from extremities is orders of magni-tude higher than L. If we wish to consider objects forwhich 2ao 1O cm spinning at s1/27T=IO Hz, it is notedthat the Doppler shift is ± 2x10 6 Hz for a =0. 5 ,Am.In general we assume ao >> a> A.
Inspecting the time dependence of Eq. (46) one seesthat the term exp[- i2kla,,, b(T)] is a phase-modulatedkernel which can be expanded in Bessel functions of theform Jn[4klao] sin( nSrT). From FM fundamentals basedon Bessel function properties, we know the spectralterms for this case can include important contributions,at most, up to an index slightly greater than no =4kla0 .For the sinusoid, this corresponds to a frequency4klaoSn/2.
Now for a spectrum which is ± 2 MHz with a finestructure at 0/2 (5 Hz in our example), it is obviousthat its buildup time in the receiver is short, on theorder of 10-6 s. Each little irregularity on the surfacecan be viewed as a bit. Finally, the spectral contentof the term P1B is extremely low and can be ignored.
Denoting the Fourier transform with respect to 7 byscript i, we summarize the discussion above. If Rea=L{fif 2 1 in which fi (-r, (p) has large spectral contentwhile f2 (T. p ) is a slowly varying envelope, the $ ReazL{F 1f2 (o, 0)} where L is the integral over 4 and&fi = F1 .
As a mathematical convenience, we restrict our con-sideration to the limiting case for which
sinQT z lT << I . (48)
The difference in the limits of the integration caused bythe rect functions can be shown to be negligible. HenceEq. (46) is approximately given by
1/2Rca =IAIA 2 I exp[i2klaoQT sinO'
- 2(k~a 2T sino )2 ] P1Bdo'. (49)
The spectral intensity Se(w) is defined by
Se(@) = f Rea(T) e dT . (50)
If the incoming signal has been heterodyned by a localoscillator tone at exp(iw0 t), then the analytic represen-tation for the signal detected is given by simply replac-ing the time dependence of IO in Eq. (16) withexp[i(w1 - wo)t], where wc - w0 is the intermediate orcenter frequency. Let wa = wl - w0, substitute Eq. (49)into (50), and integrate using Eq. 3. 322.2 of Ref. 19.The resulting spectral representation is given by
1/2 (f)/Se,(w) =I 1 A 1A 2 f 2~~ne( 1 2 -v7,2 kluQsin¢o'
Xexp{- ( w ( kao2 sino')2 )PB dop' , (51)
1190 J. Opt. Soc. Am., Vol. 66, No. I1, November 1976
in which I4 is defined as 10 in Eq. (16) but with its timedependence suppressed.
Equation (51) is a basic result; and it is seen that theDoppler spectrum is a superposition of terms centeredabout the intermediate frequency w,. The spectral com-ponent arising from the differential surface at anazimuthal angle p' has a center Doppler shift given by- 2kla0g sino'. The roughness causes a broadening ofthis tone by an amount proportional to the root of thedenominator in the exponential, i.e., proportional tok1crusincp'. This broadening is much less influential inshaping the overall spectrum than the Doppler shift it-self since a. >> a.
A Gaussian limit form for the Dirac delta function6(w) is given by
6(w) = lim exp(- rWw2/A,2 )A-0 A (52)
Comparing to Eq. (51) we see that in the limit of smalla, the spectral intensity of the backscattered radiationis given by
/2S,(w) =IALA2J 6(w- w+2k1aonsinp')PBdo'
(53)and the function P1B is given in Eq. (45) but with r = 0.It is recalled that PI is an asymptotic form. The exactform for P can be used in Eq. (53); it is given in Eq.(B16). It is noted that Eq. (53) can be written directlyfrom Eq. (49), transforming by Eq. (50) and simplyneglecting the damped exponential.
VII. CONCLUSIONS
The radiation backscattered from a rotating, roughobject is calculated approximately by an assumed fielddistribution method which includes the effect of motionof the scattering object. With an analytic signal nota-tion, the cross correlation function of the electric fieldis given in integral form in Eq. (25). In the two states,source frequency, observer position, and time can alsobe different. It is not particularly difficult to retainthese three dimensions in our correlation function, andit has the advantage of enabling one to analyze a varietyof speckle problems with the same formalism. Thefunction P resulting from integration of the character-istic function is expressed in an exact form, Eq. (B16),and then in an asymptotic form, Eq. (B20), which agreeswith the literature.
In the analysis of speckle from curved surfaces, threeproblems are analyzed. Relatively little literature hasbeen found on these, and they serve to illustrate distinctreduced forms, Eqs. (31), (36), (44), ofthegeneralcor-relation function. In the first problem new results arepresented for the wavelength sensitivity of backscatter-ing from a roughened sphere. It has been found thatwhile the assumption of a rough surface a> X is neces-sary to derive the basic equation, as in Eq. (32), in theevaluation a good approximation is obtained letting a 0.As shown in Eq. (33), the wavelength dependence is afunction of the object's large scale features.
Nicholas George 1190

Secondly, an expression has been derived for the"global" decorrelation of a speckle pattern. For a ro-tating object illuminated by a laser, the pattern tends torotate as a whole, decorrelating slowly in comparisonto the rate at which speckles pass a fixed observer.This decorrelation function is given in Eq. (39) in aform suited to numerical evaluation. A simpler ap-proximate form is also derived, Eqs. (42) and (43),showing that an angular rotation of several hundredspeckles is required to decorrelate the pattern on aglobal basis. Finally, spectral broadening due to ob-ject rotation is analyzed. The spectral output is foundto be a mapping of the angle dependent reflection termPB, as in Fq. (53).
ACKNOWLEDGMENTS
Numerous conversations and computer evaluations byA. C. Livanos are acknowledged. Helpful conversa-tions with C. J. Buczek, G. M. Morris, C. H. Papas,B. S. White, and E. L. Wilkinson are also gratefullyacknowledged.
APPENDIX A: DISTANCE AT RETARDED TIME
Let the surface S in Fig. 1 rotate with an angularspeed Q rad/s about the z axis. Light is transmittedfrom A to P and then scattered. That reaching B attime t has traveled a distance denoted by [Rap +Rpb] andcomputed by 2 '
Rap+pb={ 1 +[13ap]2 - 2[0ap] Cos[ II ]}
{l +[I3p ] - 2[ 3Pb] COS[l1pb]}"2 (Al)
where Owap = S2W sinO/c, 0ap is the angle between the veloc-ity vector for P on S and the vector PA. The squarebrackets [ ... ] denote retarded values, and the sub-scripts pb denote analogous terms for the distance fromP to the receiver at B.
The distance Rpb is given exactly by
Rpb = {r2 + w2 - 2wrOsincos( - )}/2 (A2)
where the time dependence is implicit in the azimuthalangle, i. e., ' = 'r + Qt. For far-zone calculations, theusual approximation is
Rpb ; - w sinG cos(0 -'Al) , (A3)
where by Eq. (6), the object surface is defined by
W(0r, =r)=UX,0 - at) , (A4)
where 0r, 'Pr coordinates are in the rest frame of the ob-ject S.
The angle 0bpb between the instantaneous velocity ofpoint P and the vector from P to B is given exactly by
COSpb =- sin(O - if)
1 + - 2 w sinO cos(o - ¢1\\~r 0 / ro
An expression for [Rpb] is found by substitution ofEqs. (A3) and (A6) into the second member of Eq. (Al).Neglecting terms of order ,32 and setting [I Ppbi = 0pb, oneobtains
[RPb] = ro - w sin9 cos(o - 'P)- 2nwr0 sin0 sin('P - Xl)C
I 200 sin20 sin('P - P,) cos(qP - 'l) .C
The analogous expression for [Rap] is obtainedting 'P =0 in Eq. (A7). Thus, from Eq. (A7),tarded distance [Rap +Rpbi is written in Eq. (7)main text.
(A7)
by set-the re-of the
APPENDIX B: INTEGRATION OF THECHARACTERISTIC FUNCTION
Equation (15) for the cross correlation of the electricfield, Re = (E,, E,2 *), can be rewritten, as follows:
Re =Io JJds ds " GiG N1N2 P,2 B , (Bi)
where B is defined in Eq. (20) and the space-dependentterms G', G" are defined by
G' =expJiklw 0(0', ''- Žt,) sin0'[cosqP +cos(,P - l)1]},
G2'=exp{ik 2wo(G", ')"- Qt 2) sinO"[cosp +cos(q - 02 .
(B2)In Eq. (Bi) the notation N1N P12 for the character-
istic function, F in Eq. (22), is defined by
F( ', - i/"; r12) =N'N2 P12 2 (B3)
with individual negative and positive exponentials givenby
Nl' =exp[- 2 (1)]
(B4)NP = exp[- I (0 2 )2]
P12 = exp (0,2 r2771' 721) ,
where the single prime denotes a dependence, via 7',on 0', (' and t, and so on. When ps > a,, by Eq. (22),the term P,2 =l and F =N'N". In this instance thecharacteristic function is quite small unless 77' 71 0.
In computing cross correlations when there is. wave-length dependence, interpretation is aided by the follow-ing exact factorization of Eq. (21), yielding
F(77', - rij; r12 ) = exp[- 2 1 - 7'2 I- C2 11'(l -f
(B5)
It is noted, from Eq. (B5), that when r, 2 =-l, F=expl 2 2 (7 -11 ')2] which is the one-dimensional char-acteristic form, as is expected by direct inspection ofEq. (17) for the case when p, = 0 and h, h2 .
Equation (Bi) can be integrated over ds". Since byEq. (22), P,2 = 1 when p, > a,, we write the integral intwo parts, as follows:
R-I =fIofds'BG'N' (f ds G*" N2
and approximated at large ro/w by
cosOPb =- sin(o --l) (A6)+IO ds'B GcN' ( ds B' G*1hN2 )
1191 J. Opt. Soc. Am., Vol. 66, No. 11, November 1976
(B6)
Nicholas George

where the first part includes only the region in whichr1 2 # 0 and the second is for the region in which rl 2 = 0.B, is the slope factor arising from the evaluation(exp(iiq hi) e. * n' ds$, and similarly for B2. 4 If the sec-ond member of Eq. (B6) is made to include the regionr12 #0, but with its integrand unchanged, this is com-pensated by changing P12 to P1 2 - 1 in the first member.Thus, we have
R =Io f ds BG'N [f ds" G "N,(P 12 -1)]
+ (El) (E*2) , (B7)where the expected values (E,1 ) and (E,2) are given by
( 1/2) exp[i(r~t1-2kiro)]fdslB;G;N X
(E* ) = I /o exp[-i(W2t 2 - if~'"j ds" B' G~"'Nt
(B8)Equation (B7) is the standard form for the cross corre-lation in terms of the covariance (first member), Rea,plus the product of the mean values, i. e., for two ran-dom variables z1, z 2, we have in general ((zi - (z,))X (4 - (4))) = (zI42*) - (Zr) (4).
Since rl2 (hl, h2).0 only if the heights are identical, itis necessary that the rest-frame coordinates be equal,i. e., 0,l = 9 r, and 0r1 = 0P,. For simple rotation of Sabout the z axis (Fig. 1), by Eq. (8), this is equivalentto 0" = ' and '- nt, = q" - ot2 in Eq. (B6) above.More generally then, one can define the integration vari-ables 0"', .p"' in the rest frame of the transmitterwhich are zero when rl2 peaks to unity, as follows:
0 =9 - 0, (B9)
0R" = ¢> - O>' + 0(t, - t2)
The first member in Eq. (B7) is integrated over thesmall correlation area A, on S for which rl2 # 0. Theamplitude term N" ~N20, while the phase term is ap-proximated by G0 = G20 exp(iwO dn'), in which din' is thedifferential in 7 with respect to local curvilinear co-ordinates on S. Using Eqs. (22) and (B5) in Eq. (BW),one readily obtains the form
Rea = (EsE*o)-(E, 1) (E*)
Rea =1of ds' BG G *oN;N, 0 exp(+ JA)
x [f ds" exp(- iw" dq') {exp[ (r 12 - 1)]- exp(- t)J] .
(B10)in which the integration ds is over the region rl2 #0.This is essentially the form given by Beckmann if weset Q2 = 0 and k1 = k 2. 16 The exponential factor A. andother new symbols are defined by
,A =, o.2771 712012''
720=k 2 sin9'{COSB¢P' - Q(t 1 - t2 )]
+COS[0 -0QJtl- 2)- ¢52]}
N2 = exp{- 2 ',)?X
1192 J. Opt. Soc. Am., Vol. 66, No. I 1, November 1976
G20 = exp(ik 2w0 (9', ' - Žt,) sin0'{cos[p' - Q(t, - t2)]
+ cos[p' - 1(t - O2) - ¢2 1}) A
where the subscript zero means evaluation at 09'=- ''' = 0.
(B11)
In Eq. (B11) for G', it is noted that the argumentsfor the object coordinate in the radial shape function w0are identical with those entering from w0' in G', Eq.(B2). However, in the trigonometric portions of G20,the arguments are seen to differ from those in G'. Thereason for this is that w' and w"' in Eq. (15) are "cou-pled" by the peaking of the characteristic function atr12 =1, given by Eq. (B9), while the trigonometricforms for 0, qP in G', G'0 follow separately from the inte-gration.
Integration of Eq. (Bl0) over ds"' leads to a J,(bp5 )term which is then integrated over the radial coordi-nate, together with the assumed quadratic for r12 . Theresulting form for the covariance Rea is
Rea =IoAf ds'BG G*'N1 N20 exp(+p.)P(9', qJt,-t 2 )
(B1 2)in which the function P(9', P', t, - t2) is given by
P= (27r/A )fI dp5 p5Jo(bp5){exp[ (rl2 )]exp(- 1i)}l(B1 3)
and the term b in the argument of J0 is exactly
b = 2k2 cos(2 p2 ){l - sink coS2 [ - Q(t1 - t2 ) - 2 J2]}
(B14)The correlation of the roughness over several cycles ofthe argument in G"' leads to the term J0 . On physicalgrounds it is clear that an approximate form for theangular dependence of b in the argument of Jo is ade-quate. Hence, it is noted for later use that this depen-dence is approximately given by
b z2k 2 COS(- P2) sing' , (B135)
where O' is the polar angle to the point P in Fig. 1 mea-sured from the x axis, i. e., cosO' = sin9'cos4/.
The Bessel function J0 in Eq. (B13) is replaced by itsseries representation and grouped with the exponentialin r12 so that the integral over p, can be transformedinto an incomplete gamma function. Using Eqs. (8.441)and (8. 350) of Ref. 19, one finds an exact result:
p E (- 1)m=(b)2M-= 2 2 m Im 1
X y(m +1, - exp(- /.) J(alb)p.1 (oe b /2) - (B16)
This form is particularly useful since p. is large overmost of the surface S, when it is rough. The first fewterms form an excellent asymptotic expansion.
An alternate representation in Bessel functions canbe found using Eqs. (6. 5.4) and (6. 5. 29) of Ref. 18.After some algebra, but again exactly, and convergingfor all real A., we find:
Nicholas George 1192

,=exp(- ALi J, d(a ,b)G =n ex(A -°b (BI 7)
AL n=2 (2 alb) B7
The sum starts at n =2 since the second member of Eq.(B16) has been incorporated, just cancelling the n = 1term. The term P(e', 0'% , - t2) is sharply dependenton the angles 0', p' which define the local normal of thesurface infinitesimal ds' in Eq. (B12). This dependenceis implicit in ,A, given by Eqs. (B11) and (19), and in bof Eq. (B14). As the angle q/ goes to 27r, the value of1- 0, and b is large. Equation (B17) is convenient toobserve that for small AL, the term P is approximately
J2 (a~b)PgAL ( 1 )2 when 7-T1r . (Bl8)
Now consider A. to be large, i.e., -> 1. Then, not-ing that y(a, x) = r(a) - r(a, x) we can substitute anasymptotic expansion for r(a, x), Eq. (6.5.32) of Ref.18 into Eq. (B16). An essentially equivalent form isobtained using the generating function, Eq. (9.1.41) ofRef. 18 substituted into Eq. (B17). The following resultis found, valid except when 1. = 0:
P=P1+P2 +P3 (B19)
in which the separate terms are defined by
exp[ - Q e.lb)'1uP1=-
p -exp(-) Z (_ l)m (alb) J(alb) , (B20)
P3 = - exp(- 1i) J1 (a 1b)/(2 ab) .
Also separate elements of the covariance Rea =Rel +Re2+Re, are designated by the numeric subscript corre-sponding to the component P 1,2,3.
In general it would be desirable to substitute Eq.(B16) or (B17) for P into Eq. (B12) and integrate overds'. So far the general complexity of P has been anobstacle in completing this. However, for the veryrough object, it is possible to approximate P (by Pl) andthen to obtain approximate solutions for the covarianceRea. This latter approach, while not rigorous, does letus make important interpretations about speckle fromcurved, rotating objects.
The range of AL and alb for a rough object are com-puted from Eqs. (B11) and (B15) using (X/X= 10 and cal/A = 20, as follows:
AL=1.6x104 and alb=0 for p=0,
= 1 72 and a lb= 250 for 0 = 84° . (B21)
From these values it is seen that the exp(- AL) termwhich multiplies P2 and P3 is a significant factor in di-minishing their contribution to P at essentially all an-gles for which this expansion is valid. PI does appearto dominate. In its behavior the term P1 is relativelyconstant as O' increases from zero, the decreasing ALbeing approximately compensated by the numerator.For example, when the correlation length to roughnessparameter a1 /(2g) =1, the value of P1 starting at 1/(4ka)2 drops only to half this value at 0' 52°. Afurther aspect to note in this dominance of P1 is that
1193 J. Opt. Soc. Am., Vol. 66, No. 11, November 1976
both P2 and P 3 are highly oscillatory since the argu-ment of the Bessel function range from 0 to 250 inEq. (B21). In subsequent integration this furtherlessens their contribution.
In order to compare the magnitude of the terms inEq. (B20), an illustrative calculation for a sphere of ra-dius a, is summarized. For the sake of simplicity,takeQ =0, q51 = =20, B=B = B = 1, and assume a.>> a and k1,2 »>> k =k2 - k 1. Further, assume that onehemisphere is illuminated. Defining the angle 4 withrespect to the x axis, i. e. , coso = sin. coso, one canreduce Eq. (B12) to the following:
R., = IoAc,41e- klk 2 (2 a)2
1
x fdu exp{- i2Akaou - 2(uAku)2 - c29[(1 - u 2)/u 2 ]},fo
(B22)where the variable of integration u = cos4, c, = a,1(2u),and AO = 7ra . At Ak =0, the value is given by
( Co /2exp(co) I(- 2 C0) c 0 A 0A,Rel° ~[klk2(2 g)2 ]
For an upper bound on the m = 0 term of P2 in Eq.(B20), use the value exp(- ,1)/A in Eq. (B12) with thesame sphere as in Eq. (B22). The upper bound is givenby
Re IA 0A1kkk2 (2a)2
xf du exp[- i2Akaou - 2a2(k2+ k2)u] . (B23)
From Eq. (8.35) of Ref. 19, one can express Eq. (B23)in two forms using the incomplete gamma function:
e2 klk 2 (2a-)2
Aim (-2AkaO)'Y[' (m +1), 2or2 (k2+ k2)]
im=0 m! 2[2a 2(k' + k')](m+) /2 . (B24)
or
e2 klk 2 (2 a) 2
x E i [2 g2(k2 + k2,)]m y(2m + 1, i2Aka0 )-0 m (2Akao)2m+l
For Ak - 0, the first is appropriate; however, when2AkaO >[2 a2 (kl2+k2)]1/2 , then the second form should beused.
A series expansion for Re3 follows analogously notingthat the integrand is as in Eq. (B23) with an additionalmultiplicative AL. Again an upper bound of unity is takenfor the Bessel function term. The result is
Re 3 =- 10AoA1
im (- 2AkaO)m y [2 (m + 3), 2a 2(k 2+ k2)]m=O m! 2[22(k + k2)] (m+) z
(B25)
Finally, from Eq. (B8), the term (Eel) (Ee*) is also ex-pressed in the incomplete gamma function series; anapproximate form is given by
Nicholas George

(Eel) (E*2) = 10ADA0
x - (sky) y(2n + 2, i2klao) 2
E. (2k~ao)2 n+2
Table I shows the relative values for the terms in Eq.(B19) computed for an illuminated sphere. A diameter2ao of 1 mm is assumed, together with a = 5 gim, X = 0. 5,m, and a, = 10 Am. It is seen that R,, is the dominantterm when Ak = 0.
*Invited paper at the Topical Meeting on Speckle at Asilomar,February 1976. This research was supported by the AirForce Office of Scientific Research.
'These are discussed and referenced in the topics volume editedby J. C. Dainty, Laser Speckle and Related Phenomena(Springer-Verlag, Berlin, 1975).
'N. George, "The wavelength sensitivity of back-scattering,"Opt. Commun. 16, 328-333 (1976).
3N. George, A. C. Livanos, J. A. Roth, and C. H. Papas,"Remote sensing of large roughened spheres," Opt. Acta 23,367-387 (1976).
4 J. V. Evans and Tor Hagfors, Radar Astronomy (McGraw-Hill, New York, 1968).
5R. M. Goldstein, Radar Exploration of Venus (Ph. D. thesis,California Institute of Technology, Pasadena, 1962).
6R. F. Broderick and H. S. Hayre, "Doppler Return From aRandom Rough Surface," IEEE Trans. Aerosp. Electron.Sys. AES-5, 441-449 (1969).
7 J. van Bladel, "Electromagnetic Fields in the Presence ofRotating Bodies," Proc. IEEE 64, 301-318 (1976).
8 T. C. Mo, "Theory of electrodynamics in media in noninertialframes and applications," J. Math. Phys. 11, 2589-2610
(1970).9 C. Yeh, "Scattering of obliquely incident microwaves by a
moving plasma column " J. Appl. Phys. 40, 5066-5075 (1969).'OH. S. Cabayan and R. C. Murphy, "Scattering of Electro-
magnetic Waves by Rough Perfectly Conducting Circular Cyl-inders," IEEE Trans. Antennas Propag. AP21 893 -895(1973).
"M. C. Teich, "Homodyne Detection of Infrared Radiationfrom a Moving Diffuse Target," Proc. IEEE 57, 786-792(1969).
12j. W. Goodman, "Some effects of target-induced scintillationon optical radar performance," Proc. IE EE 53, 1688-1700(1965).
i3 J. W. Goodman, "Degredation of image quality and velocitymeasurement accuracy by speckle phenomena, " StanfordUniversity, Stanford, Calif., unpublished memorandum.
14C. H. Papas, Theory of Electromagnetic Wave Propagation(McGraw-Hill, New York, 1965).
i5J. Van Bladel, "Relativistic Theory of Rotating Disks, " Proc.IEEE 61, 260-268 (1973).
' 6p. Beckmann and A. Spizzichino, The Scattering of Electro-magnetic Waves from Rough Surfaces (Pergamon, Oxford,1963).
i7B. Crosignani, P. DiPorto, and M. Bertolotti, StatisticalProperties of Scattered Light (Academic, New York, 1975).
18M. Abramowitz and I. A. Stegun, Handbook of MathematicalFunctions (National Bureau of Standards, Washington, D. C.,1964).
191. S. Gradshteyn and I. M. Ryzhik, Table of Integrals, Se-ries, and Products (Academic, New York, 1965).
20H. E. Rowe, Signals and Noise in Communication Systems(Van Nostrand Reinhold, New York, 1965).
2"W. R. Symthe, Static and Dynamic Electricity, 3rd ed. (Mc-Graw-Hill, New York, 1968).
Copyright i 1976 by the Optical Society of America 11941194 J. Opt. Soc. Am., Vol. 66, No. I 1, November 1976