sm141501 - magnetohidrodinamik tak tunak dengan konveksi ...
239
TUGAS AKHIR - SM141501 MAGNETOHIDRODINAMIK TAK TUNAK DENGAN KONVEKSI PAKSA PADA FLUIDA MICROPOLAR YANG MELALUI BOLA BERPORI RAHAYU OKTAVIA PUTRI NRP 06111440000042 Dosen Pembimbing: Prof. Dr. Basuki Widodo, M.Sc Dra. Nur Asiyah, M.Si DEPARTEMEN MATEMATIKA Fakultas Matematika, Komputasi, dan Sains Data Institut Teknologi Sepuluh Nopember Surabaya 2018
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of sm141501 - magnetohidrodinamik tak tunak dengan konveksi ...

TUGAS AKHIR - SM141501
MAGNETOHIDRODINAMIK TAK TUNAKDENGAN KONVEKSI PAKSA PADA FLUIDAMICROPOLAR YANG MELALUI BOLA BERPORI
RAHAYU OKTAVIA PUTRINRP 06111440000042
Dosen Pembimbing:Prof. Dr. Basuki Widodo, M.ScDra. Nur Asiyah, M.Si
DEPARTEMEN MATEMATIKAFakultas Matematika, Komputasi, dan Sains DataInstitut Teknologi Sepuluh NopemberSurabaya 2018


FINAL PROJECT - SM141501
UNSTEADY MAGNETOHYDRODYNAMICS WITHFORCED CONVECTION IN MICROPOLAR FLUIDFLOWS THROUGH A POROUS SPHERE
RAHAYU OKTAVIA PUTRINRP 06111440000042
Supervisors:Prof. Dr. Basuki Widodo, M.ScDra. Nur Asiyah, M.Si
DEPARTMENT OF MATHEMATICSFaculty of Mathematics, Computing, and Data SciencesInstitut Teknologi Sepuluh NopemberSurabaya 2018




MAGNETOHIDRODINAMIK TAK TUNAKDENGAN KONVEKSI PAKSA PADA FLUIDA
MICROPOLAR YANG MELALUI BOLABERPORI
Nama Mahasiswa : RAHAYU OKTAVIA PUTRINRP : 06111440000042Departemen : Matematika FMKSD-ITSPembimbing : 1. Prof. Dr. Basuki Widodo, M.Sc
2. Dra. Nur Asiyah, M.Si
AbstrakPenelitian mengenai manufaktur dan energi semakin
berkembang. Salah satu studi yang tekait denganpenelitian ini adalah fluida. Pada penelitian ini digunakanpemodelan matematika untuk menyelesaikan permasalahantersebut. Penelitian ini mengkaji mengenai aliran fluidamagnetohidrodinamik tak tunak dengan konveksi paksa padafluida micropolar yang melewati bola berpori bermagnet.Persamaan pembangun yang digunakan pada penelitian inididapat dari persamaan kontinuitas, persamaan momentum,persamaan momentum angular, dan persamaan energi.Persamaan pembangun dimensional ditransformasikankedalam persamaan non dimensional kemudian dirubahkedalam persamaan similaritas dan diselesaikan secaranumerik dengan menggunakan skema Keller-Box. Hasilsimulasi menunjukkan kurva kecepatan menurun ketikaparameter magnetik, porositas, dan micropolar meningkat.Kurva mikro rotasi dan temperatur meningkat seiringmeningkatnya parameter magnetik, parameter porositas, danparameter micropolar. Tetapi kurva temperatur menurunketika bilangan prandtl meningkat.
Kata-kunci: Magnetohidrodinamik, Fluida micropolar,Bola berpori bermagnet, Keller-Box
vii

UNSTEADY MAGNETOHYDRODYNAMICSWITH FORCED CONVECTION IN
MICROPOLAR FLUID FLOWS THROUGH APOROUS SPHERE
Name : RAHAYU OKTAVIA PUTRINRP : 06111440000042Department : Mathematics FMKSD-ITSSupervisors : 1. Prof. Dr. Basuki Widodo, M.Sc
2. Dra. Nur Asiyah, M.Si
AbstractThe research of manufacturing and energy is growing.
One of the studies about this research is fluids. Thisresearch uses mathematical modeling to solve the problem.This research considers unsteady magnetohydrodynamics withforced convection of micropolar fluid through a magneticporous sphere. Governing equations that used derivatedby continuity, momentum, angular momentum, and energyequations. Dimensional equations are transformed to non-dimensional equations and then, it will be converted tosimilarity equations. The similarity equations are solvednumerically using Keller-Box scheme. It could be concludedthat the velocity curve decreases when magnetic, porosity,and micropolar parameters increase. Microrotation andtemperature curve increase when the magnetic, porosity, andmicropolar parameters increase. But temperature declines withthe increasing of Prandtl number.
Keywords: Magnetohydrodynamics, micropolar fluids,magnetic porous sphere, Keller-box
ix


KATA PENGANTAR
Assalamu’alaikum Wr. Wb.Alhamdulillaahirobbil’alamin, segala puji dan syukur
penulis panjatkan ke hadirat Allah SWT yang telahmemberikan limpahan rahmat, taufik serta hidayah-Nya,sehingga penulis dapat menyelesaikan Tugas Akhir yangberjudul
”MAGNETOHIDRODINAMIK TAK TUNAKDENGAN KONVEKSI PAKSA PADA FLUIDA
MICROPOLAR YANG MELALUI BOLABERPORI”
sebagai salah satu syarat kelulusan Program SarjanaDepartemen Matematika FMKSD Institut Teknologi SepuluhNopember (ITS) Surabaya.
Tugas Akhir ini dapat terselesaikan dengan baik berkatbantuan dan dukungan dari berbagai pihak. Oleh karena itu,penulis menyampaikan ucapan terima kasih dan penghargaankepada:
1. Bapak Dr. Imam Mukhlash, S.Si, MT selaku KepalaDepartemen Matematika ITS yang telah memberikandukungan dan motivasi selama perkuliahan hinggaterselesaikannya Tugas Akhir ini.
2. Bapak Dr. Didik Khusnul Arif, S.Si, M.Si selakuKaprodi Sarjana Matematika FMKSD-ITS yang telahmemberikan dukungan dan motivasi selama perkuliahanhingga terselesaikannya Tugas Akhir ini.
3. Bapak Prof. Dr. Basuki Widodo, M.Sc dan Ibu Dra.Nur Asiyah, M.Si selaku dosen pembimbing atas segala
xi

bimbingan dan motivasinya kepada penulis sehinggadapat terselesaikan dengan baik.
4. Bapak Drs. Suhud Wahyudi, M.Si, bapak Dr. ChairulImron, MI.Komp, dan Prof. DR. Mohammad IsaIrawan, MT selaku dosen penguji atas semua saran danmasukan yang telah diberikan.
5. Bapak Drs. Iis Herisman, M.Si selaku koordinator TugasAkhir.
6. Bapak Dr. Chairul Imron, MI.Komp. selaku dosen waliyang telah memberikan arahan akademik selama penulismenempuh pendidikan di Departemen MatematikaFMKSD ITS.
7. Bapak dan Ibu dosen serta para staf JurusanMatematika ITS yang tidak dapat penulis sebutkansatu-persatu.
9. Keluarga tercinta yang selalu mendoakan saya danmemberikan semangat agar bisa menyelesaikan TugasAkhir ini.
10. Intan Vallentine yang selalu menemani danmenyemangati saya serta membimbing dan memberisaran untuk penulisan Tugas Akhir ini.
11. Saudara Wik Jung dan Riska yang bersedia menemanimengerjakan Tugas Akhir.
12. Kepada Mam Tar, Maya, Agil, Wulan, Ica, danNella yang telah menemani penulis, memotivasi, danmengajak jalan-jalan agar lebih semangat dalammenyelesaikan Tugas Akhir ini.
xii

Penulis juga menyadari bahwa dalam pengerjaan inimasih terdapat kekurangan. Oleh sebab itu, kritik dan saranyang bersifat membangun sangat penulis harapkan demikesempurnaan Tugas Akhir ini. Akhirnya, penulis berharapsemoga penulisan ini dapat bermanfaat bagi banyak pihak.
Surabaya, Juli 2018
Penulis
xiii


DAFTAR ISI
Hal
HALAMAN JUDUL i
LEMBAR PENGESAHAN vi
ABSTRAK vii
ABSTRACT ix
KATA PENGANTAR xi
DAFTAR ISI xv
DAFTAR GAMBAR xix
DAFTAR TABEL xxi
DAFTAR SIMBOL xxiii
BAB I Pendahuluan 1
1.1 Latar Belakang Masalah . . . . . . . . . . . . . . . . . . 1
1.2 Rumusan Masalah . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Batasan Masalah . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 Asumsi Penelitian . . . . . . . . . . . . . . . . . . . . . . . . 4
1.5 Tujuan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.6 Manfaat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.7 Sistematika Penulisan . . . . . . . . . . . . . . . . . . . . 5
BAB II TINJAUAN PUSTAKA 7
2.1 Penelitian Terdahulu . . . . . . . . . . . . . . . . . . . . . 7
2.2 Fluida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.1 Fluida Non-Newtonian . . . . . . . . . . . . . . 10
2.2.2 Fluida Micropolar . . . . . . . . . . . . . . . . . . 11
xv

2.3 Aliran Tak Mampu Mampat Satu Fasa . . . . . 11
2.4 Tipe Aliran Fluida Berdasarkan KriteriaWaktu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Konveksi Paksa . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6 Aliran Lapisan Batas . . . . . . . . . . . . . . . . . . . . . 13
2.7 Magnetohidrodinamik . . . . . . . . . . . . . . . . . . . . 14
2.8 Porositas dan Permeabilitas . . . . . . . . . . . . . . . 16
2.9 Skema Keller-Box . . . . . . . . . . . . . . . . . . . . . . . . 17
BAB III METODE PENELITIAN 21
3.1 Tahapan Penelitian . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Diagram Alir Metodologi Penelitian . . . . . . . . 24
BAB IV Model Matematika 25
4.1 Persamaan Pembangun . . . . . . . . . . . . . . . . . . . 27
4.1.1 Persamaan Kontinuitas . . . . . . . . . . . . . . 27
4.1.2 Persamaan Momentum . . . . . . . . . . . . . . 34
4.1.3 Persamaan Momentum Anguler . . . . . . 46
4.1.4 Persamaan Energi . . . . . . . . . . . . . . . . . . 50
4.2 Penurunan Persamaan Pembangun . . . . . . . . . 55
4.2.1 Persamaan Momentum . . . . . . . . . . . . . . 55
4.2.2 Persamaan Momentum Anguler . . . . . . 58
4.2.3 Persamaan Energi . . . . . . . . . . . . . . . . . . 60
4.2.4 Transformasi Variabel Tak Berdimensi 64
4.2.5 Pendekatan Lapisan Batas . . . . . . . . . . . 66
4.2.6 Fungsi Alir . . . . . . . . . . . . . . . . . . . . . . . . 68
4.2.7 Persamaan Similaritas . . . . . . . . . . . . . . 69
BAB V PENYELESAIAN MODEL MATEMATIKA 77
5.1 Penyelelarasan Notasi . . . . . . . . . . . . . . . . . . . . 77
5.2 Diskritisasi Model . . . . . . . . . . . . . . . . . . . . . . . . 79
5.3 Pelinieran Model . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.4 Penyelesaian Sistem Persamaan Linier . . . . . . 93
5.5 Validasi model . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.6 Hasil Simulasi Numerik . . . . . . . . . . . . . . . . . . . 105
xvi

5.6.1 Pengaruh Variasi Parameter Magnetik 1055.6.2 Pengaruh Variasi Parameter Micropolar 1105.6.3 Pengaruh Variasi Parameter Porositas . 1145.6.4 Pengaruh Variasi Parameter Bilangan
Prandtl . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
BAB VI PENUTUP 1216.1 Kesimpulan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1216.2 Saran . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
PERNYATAAN RESMI 125
DAFTAR PUSTAKA 127
LAMPIRAN A Penurunan Persamaan Tegangan 131
LAMPIRAN B Kecepatan Aliran Bebas 137
LAMPIRAN C Transformasi Persamaan Pembangun kePersamaan non-Dimensional 139
LAMPIRAN D Fungsi Alur 151
LAMPIRAN E Persamaan Similaritas 155
LAMPIRAN F Penurunan Kondisi Awal 177
LAMPIRAN G Diskritisasi Model 187
LAMPIRAN H Linierisasi dengan Metode Newton 199
LAMPIRAN I Listing Program Matlab Skema Keller-Box 203
BIODATA PENULIS 215
xvii


DAFTAR GAMBAR
Hal
Gambar 2.1 Skema Keller-Box . . . . . . . . . . . . . . . . . . . 18
Gambar 3.1 Diagram Alir Metodologi Penelitian . . . 24
Gambar 4.1 (a) Model dari Keadaan Fisik FluidaMicropolar yang Melewati BolaBerpori Mengandung Magnet, (b)Sketsa Aliran dari Fluida yangMelewati Bola Berpori Bermagnet, (c)Bentuk dari Volume Kendali . . . . . . . . . 25
Gambar 4.2 Koordinat Bola 3 Dimensi . . . . . . . . . . . 26
Gambar 4.3 Volume kendali berbentuk kubus . . . . . . 30
Gambar 4.4 Aliran keluar masuk massa padasumbu x . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Gambar 4.5 Aliran Massa Sistem pada VolumeKendali . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Gambar 4.6 Gambaran fisik gaya permukaan . . . . . . 38
Gambar 4.7 Komponen tegangan permukaanelemen fluida searah sumbu x, y, dan z 38
Gambar 4.8 Komponen aliran heat flux padapermukaan elemen fluida . . . . . . . . . . . . . 52
Gambar 5.1 Skema Beda Hingga Keller-Box . . . . . . . 79
Gambar 5.2 Validasi profil kecepatan . . . . . . . . . . . . . 103
Gambar 5.3 Validasi profil mikro rotasi . . . . . . . . . . . 104
Gambar 5.4 Pengaruh variasi parameter magnetikterhadap kecepatan fluida . . . . . . . . . . . . 106
xix

Gambar 5.5 Pengaruh variasi parameter magnetikterhadap mikro rotasi . . . . . . . . . . . . . . . 108
Gambar 5.6 Pengaruh variasi parameter magnetikterhadap temperatur . . . . . . . . . . . . . . . . 109
Gambar 5.7 Pengaruh variasi parameter micropolarterhadap kecepatan fluida . . . . . . . . . . . . 110
Gambar 5.8 Pengaruh variasi parameter micropolarterhadap mikro rotasi . . . . . . . . . . . . . . . 112
Gambar 5.9 Pengaruh variasi parameter micropolarterhadap temperatur . . . . . . . . . . . . . . . . 113
Gambar 5.10 Pengaruh variasi parameter porositasterhadap kecepatan fluida . . . . . . . . . . . . 114
Gambar 5.11 Pengaruh variasi parameter porositasterhadap mikro rotasi . . . . . . . . . . . . . . . 115
Gambar 5.12 Pengaruh variasi parameter porositasterhadap temperatur . . . . . . . . . . . . . . . . 116
Gambar 5.13 Pengaruh variasi bilangan prandtlterhadap temperatur . . . . . . . . . . . . . . . . 119
xx

DAFTAR TABEL
Hal
Tabel 5.1 Data hasil simulasi numerik . . . . . . . . . . . . 105Tabel 5.2 Nilai magnetik pada bahan . . . . . . . . . . . . . 106Tabel 5.3 Pengaruh variasi bilangan prandtl
terhadap kecepatan fluida . . . . . . . . . . . . . . 117Tabel 5.4 Pengaruh variasi bilangan prandtl
terhadap mikro rotasi . . . . . . . . . . . . . . . . . 118
xxi


Daftar Simbol
a Jari-jari Bola.B Gaya Magnet.b Induksi Medan Magnet.E Medan Magnet.σ Konduktivitas Listrik.erf error function.F Gaya.g Gaya Gravitasi.J Kerapatan Arus. Densitas Mikro rotasi.K Parameter Micropolar.M Parameter Magnetik.N Daerah Mikro Rotasi.N Dimensional Mikro Rotasi.N Non Dimensional Mikro Rotasin Konsentrasi.p Tekanan.r(x) Dimensional Jari-jari.r(x) Jari-jari.Re Reynolds Number.t Dimensional Waktu.t Non Dimensional Waktu.u Kecepatan Fluida pada Vektor.u Kecepatan Searah Sumbu x.v Kecepatan Searah Sumbu y.ue Kecepatan Free Stream.U∞ Kecepatan Aliran Bebas.ρ Densitas.µ Viskositas Dinamik.φ Parameter Porositas.
xxiii

K∗ Parameter Permeabilitas.κ Vortex.ν Viskositas Kinematik.γ Spin Gradien.ψ Fungsi Alir.η Variabel Similaritas.Pr Bilangan Prandtl.
xxiv

BAB IPENDAHULUAN
Pada bab ini dibahas latar belakang yang mendasaripenulisan Tugas Akhir. Kemudian didalamnya jugamencakup permasalahan pada topik Tugas Akhir. Kemudiandirumuskan menjadi permasalahan yang diberikan batasan-batasan untuk membatasi pembahasan pada Tugas Akhir ini.
1.1 Latar Belakang Masalah
Kebutuhan manusia dalam bidang manufaktur dan energiyang semakin tinggi menyebabkan pelaku industri berupayamencari solusi untuk memecahkannya. Pada akhirnyakemajuan teknologi dan juga industri terutama dalam bidangmaterial merupakan salah satu faktor pemacu pengembanganilmu pengetahuan. Dalam proses manufaktur industri,seperti ekstruksi aerodinamis lembaran plastik, meniupkaca, lembaran logam dan polimer, banyak memanfaatkanprinsip perpindahan panas pada permukaan perengganganyang dilalui oleh suatu fluida[1]. Akan tetapi penelitiansecara fisik dalam bidang industri membutuhkan biaya yangsangat mahal. Oleh karena itu dibutuhkan studi ilmu yangdapat merepresentasikan permasalahan dalam dunia nyatatersebut. Salah satunya adalah menggunakan pemodelanmatematika. Dalam bidang matematika, penelitian mengenaiperpindahan panas pada permukaan perenggangan telahbanyak dilakukan. Pemanfaatan magnet merupakan salahsatu solusi yang kerap ditawarkan[2].
Magnetohidramik merupakan studi ilmu yang membahasmengenai aliran fluida penghantar arus listrik yang
1

2
diakibatkan oleh adanya pengaruh medan magnet[3].Berdasarkan tegangan gesernya fluida dibagi menjadidua yaitu fluida Newtonian dan non-Newtonian[4]. Padapermasalahan nyata fluida non-Newtonian kerap kalidijumpai, salah satunya yaitu fluida micropolar. Fluidamicropolar adalah fluida yang memiliki struktur mikro dandapat melakukan mikro rotasi dengan dirinya sendiri[5]. Sifatdari fluida micropolar berpotensi untuk diaplikasikan dalambidang teknik[6]. Oleh karena itu pengembangan pada fluidamicropolar menarik untuk dikembangkan.
Penelitian mengenai fluida micropolar denganmagnetohidrodinamik untuk saat ini mulai sering dijumpai.Pada tahun 2015 Anggriani[7] melakukan sebuah penelitianmengenai magnetohidrodinamik fluida micropolar yangmelalui bola berpori. Dalam penelitiannya dibahas mengenaipengaruh parameter magnetik dan parameter permeabilitasterhadap laju kecepatan fluida dan mikro rotasi. Selanjutnyapenelitian fluida micropolar dikembangkan oleh Rizky[8]pada tahun 2017 dengan menambahkan magnet pada fluida.Penelitian tersebut membahas mengenai pengaruh parametermagnetik dan parameter bahan terhadap kecepatan danmikro rotasi pada fluida.
Akan tetapi pengembangan penelitian pada fluidamicropolar perlu dikembangkan lebih lanjut. Hal inidiperlukan sebagai referensi dalam pengembangan bidangindustri. Penelitian yang telah ada membahas mengenaimagnetohidrodinamik pada fluida micropolar denganpengaruh magnet yang terdapat pada fluida. Oleh karenaitu dalam penelitian ini akan dikembangkan suatu modeldari magnetohidrodinamik tak tunak pada fluida micropolardengan menggunakan konveksi paksa. Penelitian ini mengkajimengenai pengaruh parameter pada bola berpori yangmengandung magnet terhadap laju kecepatan fluida, mikro
3
rotasi, dan temperatur. Parameter yang digunakan antaralain parameter magnetik, parameter micropolar, parameterporositas, dan bilangan prandtl. Model matematika yangterbentuk kemudian diselesaikan secara numerik denganmenggunakan skema Keller-Box.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang telah diuraikan, pokokpermasalahan yang dikaji dalam tugas akhir ini adalah :
1. Bagaimana model matematika darimagnetohidrodinamik tak tunak dengan konveksipaksa pada fluida micropolar yang melalui bolaberpori?
2. Bagaimana penyelesaian numerik dari modelmatematika magnetohidrodinamik tak tunak dengankonveksi paksa pada fluida micropolar yang melaluibola berpori dengan menggunakan skema Keller-Box?
3. Bagaimana pengaruh magnetohidrodinamik tak tunakdengan konveksi paksa pada fluida micropolar yangmelalui bola berpori terhadap parameter magnetik (M),parameter micropolar (K), parameter porositas (φ), danbilangan Prandtl (Pr), terhadap kurva kecepatan fluida,mikro rotasi, dan temperatur fluida pada lapisan batas?
1.3 Batasan Masalah
Penulisan tugas akhir ini difokuskan pada pembahasandengan beberapa batasan masalah sebagai berikut :
1. Aliran fluida dari bawah ke atas.
2. Daerah yang diamati pada lapisan batas bola berporiyaitu titik stagnasi (x = 0).

4
3. Penelitian difokuskan pada aliran lapisan batas dengankonveksi paksa.
4. Fluida yang diamati adalah fluida micropolar.
5. Pada penelitian ini yang diamati adalah bola berporimengandung medan magnet.
6. Untuk mendapatkan penyelesaian dari persamaanpembangun model digunakan metode Keller-Box.
1.4 Asumsi PenelitianPenulisan tugas akhir ini difokuskan pada pembahasan
dengan beberapa asumsi sebagai berikut :
1. Aliran fluida incompressible dan tak tunak.
2. Tegangan pada aliran fluida diasumsikan sangat kecilsekali mendekati nol sehingga medan magnetnya nol.
1.5 TujuanBerdasarkan rumusan masalah di atas, tujuan dari
penulisan tugas akhir ini adalah sebagai berikut :
1. Menyusun model matematika magnetohidrodinamik taktunak dengan konveksi paksa pada fluida micropolaryang melalui bola berpori.
2. Menyelesaikan secara numerik modelmagnetohidrodinamik tak tunak dengan konveksipaksa pada fluida micropolar yang melalui bola berporidengan skema Keller-Box.
3. Menganalisa pengaruh magnetohidrodinamik tak tunakdengan konveksi paksa pada fluida micropolar yangmelalui bola berpori terhadap parameter magnetik (M),parameter micropolar (K), parameter porositas (φ), danbilangan Prandtl (Pr), terhadap kurva kecepatan, mikrorotasi, dan temperatur pada lapisan batas.

5
1.6 Manfaat
Manfaat dari penulisan tugas akhir ini adalah sebagaibentuk kontribusi dalam pengembangan ilmu matematikaterapan dan diharapkan dapat digunakan sebagai referensiserta bermanfaat dibidang teknologi dan industri.
1.7 Sistematika Penulisan
Tugas Akhir ini disusun berdasarkan sistematika penulisansebagai berikut:
1. BAB I PENDAHULUANBab ini berisi tentang latar belakang, rumusan masalah,asumsi penelitian, batasan masalah, tujuan, manfaat,dan sistematika penulisan Tugas Akhir.
2. BAB II TINJAUAN PUSTAKABab ini menjelaskan tentang penelitian terdahulu,fluida, fluida non-newtonian, fluida micropolar, alirantak mampu mampat satu fasa, tipe aliran fluidaberdasarkan kriteria waktu, konveksi paksa (forcedconvection flow), aliran lapisan batas (boundary layer),porositas dan permeabilitas, magnetohidrodinamik, danskema Keller-Box.
3. BAB III METODE PENELITIANBab ini berisi tentang langkah-langkah sistematis yangdilakukan dalam proses pengerjaan Tugas Akhir.
4. BAB IV MODEL MATEMATIKAPada bab ini menjelaskan mengenai PersamaanPembangun (governing equation) untuk membangunmodel matematika dari magnetohidrodinamik tak tunakdengan konveksi paksa pada fluida micropolar yangmelalui bola berpori.

6
5. BAB V ANALISIS DAN PEMBAHASANBab ini menjelaskan mengenai penyelesaian dansimulasi numerik dari model matematika darimagnetohidrodinamik tak tunak dengan konveksipaksa pada fluida micropolar yang melalui bola berpori.
6. BAB VI PENUTUPBab ini berisi kesimpulan dan saran berdasarkan hasilanalisis data dan pembahasan Tugas Akhir ini.

BAB IITINJAUAN PUSTAKA
Pada bab ini dibahas landasan teori yang mendasaripenulisan Tugas Akhir. Didalamnya mencakup penelitianterdahulu, karakteristik fluida, magnetohidrodinamik danmetode Keller-Box.
2.1 Penelitian Terdahulu
Berdasarkan viskositasnya fluida dibagi menjadi duayaitu fluida Newtonian dan non-Newtonian. Salah satucontoh dari fluida non-Newtonian adalah fluida micropolar.Pada tahun 2011 Md. Zainul Haque[9] dan kawan-kawanmelakukan penelitian mengenai fluida micropolar padamagnetohidrodinamik dengan konveksi bebas. Dalampenelitiannya Zainul Haque mengkaji mengenai efekdari parameter terhadap kecepatan, mikro rotasi, suhu,dan medan konsentrasi pada fluida yang diberi magnet.Penelitian tersebut menunjukkan bahwa parameter yangdigunakan memiliki pengaruh terhadap gesekan kulit padapelat. Gerakan fluida micropolar, gesekan kulit, suhu fluida,dan konsentrasi lebih besar untuk partikel ringan danudara daripada partikel air yang lebih berat. Akan tetapiberbanding terbalik dengan gerakan sudut fluida micropolar.
Seiring berjalannya waktu penelitian mengenai fluidanon-Newtonian yang bermagnet semakin berkembang.Widodo dan kawan-kawan[10] melakukan penelitian yangditulis dalam jurnal Viscoelastic Fluid Flow Pass a PorousCircular Cylinder When the Magnetic Field Included padatahun 2016. Dalam penelitian tersebut Widodo Basuki
7

8
menunjukkan bahwa kecepatan aliran fluida meningkat ketikaparameter viskoelastik, parameter porositas, dan variasibilangan Prandtl meningkat, tetapi berbanding terbalikdengan meningkatnya parameter konveksi campuran danparameter magnetik. Temperatur fluida meningkat ketikaparameter viskoelastik, parameter konveksi campuran, danparameter magnetik meningkat. Tetapi berbanding terbalikdengan meningkatnya variasi bilangan Prandtl.
Pada tahun yang sama Anggriani[7] melakukan penelitianmengenai magnetohidrodinamik yang menggunakan fluidamicropolar bermagnet dengan benda berupa bola perpori.Hasil yang diperoleh dari solusi dan simulasi numerikmenunjukkan bahwa semakin meningkatnya parametermagnetik pada aliran pekat, maka semakin menurunkecepatan rotasi partikel micropolar dan diawali keadaandiam tetapi pada aliran agak pekat semakin meningkatnyaparameter magnetik maka semakin meningkat kecepatanrotasi partikel micropolar.
Penelitian selanjutnya dilakukan oleh Nadya Rahma[11]dalam rangka menyelesaikan tesis yang berjudul KonveksiPaksa dari Aliran Fluida Magnetohidrodinamik Tak Tunakyang Melalui Bola Berpori. Penelitian ini menggunakan fluidaNewtonian dan mengkaji mengenai pengaruh parametermagnetik, parameter konveksi paksa, parameter porositas,parameter permeabilitas, dan bilangan Prandtl terhadapkecepatan dan suhu pada fluida. Hasil tesis tersebutmenunjukkan bahwa semakin besar parameter magnetik,parameter konveksi paksa, dan parameter porositas makasemakin meningkat pula kecepatan aliran fluida, sedangkanpertambahan parameter permeabilitas mengakibatkanpenurunan kecepatan aliran fluida.
Pada penelitian Rizky Verdyanto[8] pada tahun 2017mengenai magnetohidrodinamik aliran fluida mikrokutub

9
mengkaji mengenai kecepatan fluida dan mikro rotasipartikelnya yang dipengaruhi oleh parameter dengn fluidabermagnet. Hasil dari penelitian tersebut adalah ketikaparameter magnetik meningkat maka kecepatan fluidameningkat tetapi mikro rotasi semakin menurun. Selain ituparameter bahan juga berpengaruh kecepatan aliran fluidaserta mikro rotasi.
2.2 FluidaFluida mempunyai tiga fase zat yang tersebar dialam
yaitu padat, cair, dan gas. Karena fase gas dan cairtidak dapat mempertahankan bentuk yang tepat, makakeduanya mempunyai kemampuan mengalir, dengan demikiankeduanya disebut dengan fluida. Perbedaan zat cairdan gas terletak pada kemampuan kemampatan keduazat tersebut. Zat cair merupakan zat yang tak mampumampat (incompressible) sedangkan zat gas mampu mampat(compressible). Fluida adalah zat yang berubah bentuk secarakontinu apabila terkena tegangan geser berapapun tegangangeser tersebut[12]. Tegangan geser adalah perbandingan gayageser dengan luas penampang. Secara matematis ditulissebagai :
τ =F
A(2.2.1)
dengan :τ = tegangan geser ( N
m2 )F = gaya geser (N)A = luas permukaan (m2)Gaya geser adalah komponen gaya yang menyinggungpermukaan.
Fluida mempunyai dua sifat fisik yaitu viskositas dandensitas. Dimana viskositas adalah sifat fluida yangdiberikannya tahanan terhadap tegangan geser oleh fluida

10
tersebut. Besar kecilnya viskositas fluida tergantung padasuhu fluida tersebut. Untuk fluida cair, makin tinggi suhunya,maka viskositasnya makin kecil, sedang untuk fluida gas,makin tinggi suhunya, maka viskositasnya makin besar.Sedangkan densitas atau kerapatan suatu fluida didefinisikansebagai massa per satuan volume [12]. Berdasarkan tegangangeser (shear stress) dan laju geser atau laju regangan geser(shear rate) fluida dibagi menjadi dua yaitu fluida Newtoniandan fluida Non-Newtonian[13].
Fluida diklasifikasikan sebagai fluida Newtonian dan non-Newtonian. Fluida Newtonian adalah suatu fluida yangmemiliki kurva tegangan/regangan linier. Keunikannya terusmengalir sekalipun terdapat gaya yang bekerja pada fluidatersebut. Namun, apabila fluida yang tegangan gesernyatidak berhubungan secara linier terhadap laju regangan geserdinamakan Fluida non-Newtonian[13].
2.2.1 Fluida Non-Newtonian
Fluida non-Newtonian adalah fluida yang tidak tahanterhadap tegangan geser (shear stress), gradient kecepatan(shear rate) dan temperatur. Dengan kata lain kekentalan(viscosity) merupakan fungsi daripada waktu. Fluida non-Newtonian tidak mengikuti hukum Newton tentang aliran.Jika terdapat gaya didalamnya maka fluida tidak terusmengalir sehingga viskositas fluida akan berubah (tidakkonstan). Sebagai contoh dari fluida non-Newtonian antaralain : cat, minyak pelumas, lumpur, darah, obat-obatan cair,bubur kertas, dsb. Rumus untuk tengangan geser pada fluidanon-Newtonian adalah sebagai berikut[9] :
σ = 2(λ+ µ)∂ui∂xi
(2.2.2)
τ = (µ+ κ)
(∂uj∂xi
+∂ui∂xj
)(2.2.3)

11
dengan :σ = tegangan normalµ = viskositas dinamikτ = tegangan geserκ = vortex∂u∂x = gradien kecepatan fluida
2.2.2 Fluida Micropolar
Fluida micropolar merupakan fluida non-Newtonian.Fluida micropolar adalah fluida dengan stuktur mikro.Fluida micropolar bersifat kaku, partikel berorientasi acakdengan dirinya sendiri dan microrotation, tergantung padamedium viskositas. Dalam fluida micropolar, partikel yangkaku termuat didalam elemen kecil volume yang dapatberotasi dipusat elemen volume, hal ini dideskripsikan sebagaivektor microrotation. Dalam teori fluida micropolar, hukummekanika kuantum klasik ditingkatkan dengan persamaantambahan yang menjelaskan konversi saat mikro rotasi dankeseimbangan stress moment pertama yang timbul karenapertimbangan struktur mikro dalam suatu material. Dengandemikian variabel kinematika, misalnya gyration tensor danmikro inersia tensor dan konsep body momen, stress momendan micro stress yang dikombinasikan dengan mekanikakontinum klasik[9].
2.3 Aliran Tak Mampu Mampat Satu Fasa
Aliran satu fasa hanya mengandung satu jenis fluida,misalnya cair atau gas tanpa ada partikel lain. Aliran air,minyak, gas alami, udara, dan lain-lain merupakan contohaliran satu fasa. Sebuah aliran dikatakan incompressible (takmampu mampat) jika pada suatu sistem aliran memiliki massajenis tetap. Sebuah aliran dikatakan homogen jika densitasnyakonstan sepanjang aliran. Sebuah aliran incompressible satu

12
fasa merupakan aliran homogen, sedangkan aliran mampumampat (compressible) merupakan aliran non homogen.Secara normal, cairan dan gas diperlakukan sebagai aliranincompressible. Namun, aliran tidak dapat dikatakanincompressible jika kecepatan gas mendekati, sama ataumelebihi kecepatan suara [13].
2.4 Tipe Aliran Fluida Berdasarkan Kriteria Waktu
Tipe aliran fluida yang memiliki pengaruh terhadapperubahan waktu pada umumnya dibagi menjadi dua[4],yaitu:Aliran Tunak (Steady Flow) Aliran tunak yaitu kecepatanaliran fluida tidak dipengaruhi oleh perubahan waktu. Padaaliran tunak berlaku:
∂u
∂t= 0
Aliran Tak Tunak (Unsteady Flow) Aliran tak tunak yaitukecepatan aliran fluida yang dipengaruhi oleh perubahanwaktu. Pada aliran tak tunak berlaku:
∂u
∂t6= 0
2.5 Konveksi Paksa
Konveksi dilakukan untuk menunjukkan perpindahanpanas yang akan terjadi antara permukaan dan fluida yangbergerak ketika mereka berada pada perbedaan temperatur.Perpindahan panas konveksi dapat diklasifikasikan dalam tigakategori yaitu konveksi bebas (free convection), konveksipaksa (forced convection), dan konveksi campuran (mixtureconvection). Bila gerakan mencampur berlangsung semata-mata sebagai akibat dari perbedaan kerapatan yangdisebabkan gradien temperatur, maka dikatakan sebagaikonveksi bebas/alamiah (natural), sedangkan bila gerakan
13
mencampur disebabkan oleh suatu alat tertentu dari luardikatakan sebagai konveksi paksa dan gerakan mencampurberlangsung disebabkan akibat dari perbedaan kerapatandan alat dari luar dikatakan sebagai konveksi campuran[14].Konveksi paksa adalah perpindahan panas yang manaalirannya tersebut berasal dari luar, seperti dari blower ataukran dan pompa. Konveksi paksa dalam pipa merupakanpersoalan perpindahan konveksi untuk aliran dalam atau yangdisebut dengan internal flow. Adapun aliran yang terjadidalam pipa adalah fluida yang dibatasi oleh suatu permukaan.Sehingga lapisan batas tidak dapat berkembang secara bebasseperti halnya pada aliran luar[14].
2.6 Aliran Lapisan Batas
Konsep lapisan batas pertama kali dikemukakan olehilmuan Jerman, Prandtl, pada tahun 1940. Lapisan batasmerupakan suatu lapisan tipis pada permukaan padat yangdilewati oleh fluida saat mengalir. Lapisan batas dipengaruhioleh viskositas dan gaya inersia beda tersebut. Pada dasarnyalapisan batas membagi daerah aliran sekitar benda ke dalamdua domain, yaitu 1) lapisan tipis yang meliputi permukaanbenda tersebut dimana gradien kecepatan dan gaya viskosnyabesar dan 2) daerah di luar lapisan batas tersebut yangmana kecepatan hampir sama dengan nilai aliran bebas(free-stream) serta efek viskositas dapat diabaikan.
Dengan memakai konsep lapisan batas, persamaan gerakyang biasanya disebut Navier-Stokes, dapat diturunkanke bentuk yang dapat diselesaikan. Pengaruh viskositasterhadap aliran batas ditentukan dan koefisien gesekansepanjang permukaan benda dapat dihitung[15].
Bilangan Reynold untuk suatu aliran fluida dapatdihitung dengan menggunakan rumus berikut:

14
Re =U∞a
ν(2.6.1)
dengan :Re = Bilangan ReynoldsU∞ = Kecepatan pada aliran bebas (ms )a = Panjang karakteristikν = Viskositas kinematik
Proses transfer yang berlangsung pada fluida dan bendapadat adalah momentum massa dan perpindahan panas. Padasaat memformulasikan hukum kekekalan massa, momentum,dan energi, hukum termodinamik dan gas dinamik juga harusdiperhatikan. Sehingga dapat disimpulkan bahwa bersamadengan aliran boundary layer, ada juga thermal boundarylayer dan pengaruh timbal balik dari lapisan-lapisan bataslain juga harus diperhitungkan. Teori mengenai lapisanbatas digunakan pada berbagai ilmu teknik sains, sepertihidrodinamik, aerodinamik, automobile, dan teknik[16].
2.7 Magnetohidrodinamik
Magnetohidrodinamik (MHD) adalah studi mengenaipergerakan aliran fluida yang dapat menghantarkan listrik(konduksi listrik) yang dipengaruhi oleh medan magnet[3].Contoh fluida yang dapat menghantarkan listrik adalahplasma, logam cair, dan air garam atau elektrolit. MHDdiperkenalkan dan dikembangkan oleh Hannes Alfven seorangfisikawan yang pernah mendapatkan nobel dalam fisikapada tahun 1970[3]. MHD berperan penting dalam fisikasolar, astrofisika, fisika plasma, dan eksperimen plasmalaboratorium. Himpunan persamaan yang menggambarkanMHD adalah kombinasi dari persamaan Navier-Stokespada dinamika fluida dan persamaan Maxwell padaelektromagnetik[3]. Persamaan diferensial MHD harus

15
diselesaikan secara simultan, baik analitik maupun numerik.Bentuk persamaan MHD terdiri dari persamaan fluida
yakni persamaan kontinuitas, persamaan momentum, danuntuk persamaan pada medan magnetnya menggunakanpersamaan Maxwell. Berikut ini adalah persamaan-persamaan dasar untuk membuat persamaan MHD yang ideal:Persamaan momentum:
ρdu
dt= −∇p+ J×B
Persamaan konservasi massa:
∂ρ
∂t+ ρ(∇ · u) = 0
Persamaan konservasi energi:
d
dt
(p
ργ
)= 0
Persamaan Maxwell:
∇ ·E =1
ε0p (2.7.1)
∇ ·B = 0 (2.7.2)
∇×E = −∂B∂t
∇×B = µ0J + ε0µ0∂E
∂t
dengan:B = Medan magnetE = Medan listriku = Kecepatan massa fluidaJ = Kerapatan arusρ = Massa jenis

16
p = Tekanan fluidat = Waktuµ0 = Permeabilitas ruang hampa
(4π × 10−7 N
A2
)dimana
∇ =∂
∂xi+
∂
∂yj +
∂
∂zk
Pada persamaan MHD di atas, persamaan (2.7.2) padapersamaan Maxwell tidak digunakan. Persamaan (2.7.2)hanya dipakai saat kondisi awal saja. Selain itu, untukkecepatan rendah, perpindahan arusnya bisa diabaikan ataudianggap nol[17]. Sehingga persamaan umum dari MHDmenjadi:
−∇×E =∂B
∂t(2.7.3)
∂ρ
∂t+ ρ(∇ · u) = 0 (2.7.4)
−∇p+ J×B = ρ
(du
dt
)(2.7.5)
∇×B = µ0J (2.7.6)
untuk mencari besar medan listrik, digunakan formulasiberikut :
E + u×B = ηJ (2.7.7)
jika η = 0 maka persamaan MHD dikatakan ideal.
2.8 Porositas dan Permeabilitas
Porositas adalah kemampuan suatu benda/media berpori(misalnya batuan atau tanah) untuk menyerap dan menahansuatu fluida di dalamnya. Porositas suatu benda erat
17
kaitannya dengan permeabilitas. Permeabilitas padamekanika fluida (biasanya dilambangkan dengan (K∗))adalah suatu parameter yang menunjukkan kemampuansuatu benda/media berpori (misalnya batuan, tanah, ataubenda tidak terkonsolidasi) untuk memungkinkan suatufluida mengalir melewatinya. Dalam mekanika fluidamedia berpori, persamaan momentum atau keseimbangankekuatan memenuhi pengamatan eksperimen yang secaramatematis sebagai hukum Darcy. Observasi ini pertamakali dilakukan oleh Darcy, yang menemukan bahwa daerahrata-rata kecepatan fluida melalui suatu kolom bahan berporisebanding dengan tekanan gradien dibentuk sepanjang kolom.Percobaan selanjutnya membuktikan bahwa daerah-rata-ratakecepatan berbanding terbalik dengan viskositas µ dari cairanyang merembes melalui bahan berpori. Dengan mengacu padapengamatan Darcy diterapkan [11]:
u =K∗
µ
(−dPdx
)danφ =
aµ
ρU∞K∗
dimana K∗ merupakan permeabilitas dan φ merupakanparameter porositas.
2.9 Skema Keller-BoxMetode Keller-Box adalah salah satu teknik untuk
menyelesaikan persamaan parabolik, terutama persamaanlapisan batas. Skema ini merupakan bentuk implisit dengankeakurasiannya orde kedua baik terhadap ruang maupunwaktu yang mana step size untuk waktu dan ruang tidak harussama (non-uniform). Persamaan yang mempunyai bentukpersamaan diferensial parsial parabolik dapat diselesaikandengan lebih efisien dan tepat dengan menggunakan metodeini. Berikut merupakan langkah-langkah penyelesaian denganmenggunakan metode Keller-box :1. Persamaan orde dua atau orde tinggi diubah menjadi

18
persamaan diferensial orde satu.2. Dilakukan diskritisasi dengan menggunakan beda hinggapusat.3. Dilakukan linierisasi persamaan yang telah didiskritkankemudian dijadikan dalam bentuk vektor matrik.4. Hasil linierisasi diselesaikan dengan teknik eliminasimatriks blok tridiagonal.Pada langkah diskritisasi dilakukan dengan menggunakanbeda hingga pusat dengan skema seperti berikut
Gambar 2.1: Skema Keller-Box
dengan pemisalahan bahwa
u = f ′
maka
u =∂f
∂η
uni− 1
2
=fni − fni−1∇x

19
sedangkan untuk
u =∂f
∂t
un− 1
2i =
fni − fn−1i
∇t


BAB IIIMETODE PENELITIAN
Pada bab ini dijelaskan mengenai langkah-langkah yangdigunakan dalam penyelesaian masalah Tugas Akhir. Selainitu, dijelaskan prosedur dan proses tiap-tiap langkah yangdilakukan dalam penyelesaian Tugas Akhir.
3.1 Tahapan PenelitianPenelitian Tugas Akhir ini dilakukan langkah-langkah
sebagai berikut :
a. Studi LiteraturPada tahap ini akan dilakukan identifikasi masalahmengenai model matematika magnetohidrodinamik taktunak dengan konveksi paksa pada fluida micropolaryang melalui bola berpori berdasarkan referensi yangdidapat seperti referensi dari jurnal, buku, penelitiantesis, dan media-media lain yang dapat menunjangpenelitian.
b. Mengkaji ModelPada tahap ini akan dilakukan kajian mengenai modelmatematika dari referensi dengan mempertimbangkankarakteristik model untuk dihubungkan dengan modelmatematika magnetohidrodinamik tak tunak dengankonveksi paksa pada fluida micropolar yang melalui bolaberpori yang akan dibentuk.
c. Analisis studi terkaitPada tahap ini dilakukan analisis terhadap studiilmu yang berkaitan dengan model matematika
21

22
magnetohidrodinamik tak tunak dengan konveksi paksapada fluida micropolar yang melalui bola berpori.Analisis mengenai hukum-hukum fisika atau studi lainyang berkaitan.
d. Mengembangkan modelPada tahap ini akan dilakukan pengembangan modelmagnetohidrodinamik tak tunak dengan konveksi paksapada fluida micropolar yang melalui bola berporimenggunakan continuum principle dan hukum-hukumfisika.
e. Metode Keller-BoxPada tahap ini dilakukan pengembangan metodebeda hingga implisit dengan skema Keller-Box untukmenyelesaikan model magnetohidrodinamik tak tunakdengan konveksi paksa pada fluida micropolar yangmelalui bola berpori secara numerik.
f. Membuat Algoritma ProgramPada tahap ini, akan dibuat algoritma programdari pengelesaian beda hingga implisit dengan skemaKeller-Box untuk menyelesaikan model matematikamagnetohidrodinamik tak tunak dengan konveksi paksapada fluida micropolar yang melalui bola berpori.
g. Membuat ProgramPada tahap ini dilakukan pembuatan program denganmenggunakan MATLAB R2013a.
h. Running (Verifikasi Model)Program yang telah dibuat dijalankan dengancara memasukkan inputan dan dianalisa hasil daripenyelesaian numeriknya. Pada tahap ini akandiverifikasi kembali tahap pembangunan model

23
matematik dari magnetohidrodinamik tak tunakdengan konveksi paksa pada fluida micropolar yangmelalui bola berpori sampai pada hasil output.
i. Validasi modelValidasi model dilakukan untuk mengevaluasikeakuratan dan keandalan model yang telahdikembangkan. Pada tahap validasi akan dibandingkanhasil dari pengembangan model matematikmagnetohidrodinamik tak tunak dengan konveksipaksa pada fluida micropolar yang melalui bola berporidengan penelitian yang dilakukan oleh Rizky[8].
j. Simulasi ProgramDengan menggunakan program yang telah dibuat akandilakukan simulasi dengan menggunakan beberapa nilaiparameter inputan.
k. Analisis Hasil dan PembahasanDengan menggunakan hasil dari simulasi akan dilakukananaliasis dan dibahas, untuk dicari solusi numerikterbaik dari model matematika magnetohidrodinamiktak tunak dengan konveksi paksa pada fluida micropolaryang melalui bola berpori.
l. Penarikan Kesimpulan dan Pemberian SaranPada tahap ini, akan dilakukan penarikan kesimpulanberdasarkan hasil akhir yang telah didapat sertapemberian saran untuk penelitian selanjutnya.
m. Penyusunan Laporan Hasil PenelitianPada tahap ini dilakukan penyususan hasil penelitianberdasarkan hasil analisis dan penelitian yang telahdilakukan.

24
3.2 Diagram Alir Metodologi Penelitian
Gambar 3.1: Diagram Alir Metodologi Penelitian

BAB IV
MODEL MATEMATIKA
Pada bab ini akan dijelaskan mengenai pembentukanmodel matematika dari sistem magnetohidrodinamik taktunak dengan konveksi paksa pada fluida micropolar yangmelalui bola berpori. Berikut merupakan gambaran daripermasalahan yang akan di teliti pada tugas akhir ini
Gambar 4.1: (a) Model dari Keadaan Fisik FluidaMicropolar yang Melewati Bola Berpori Mengandung Magnet,(b) Sketsa Aliran dari Fluida yang Melewati Bola BerporiBermagnet, (c) Bentuk dari Volume Kendali
25

26
Permasalahan pada penelitian ini adalah fluida micropolaryang tidak memuat medan magnet mengalir dari bawahke atas dengan suhu tertentu dan kemudian bergerakmelewati bola berpori yang mengandung magnet, sehinggaterjadi tumbukan antara fluida dengan bola berpori yangmengakibatkan adanya gesekan antara kedua benda tersebut.Gesekan antara fluida micropolar dan bola berpori akanmembentuk suatu lapisan disepanjang permukaan bola yangdisebut dengan lapisan batas [4]. Persamaan lapisan batasdapat dicari dengan menggunakan pendekatan volume kendaliyang berbentuk kubus. Pada lapisan batas akan diambilelemen kecil yang kemudian disebut dengan volume kendali.Pada gambar diketahui bahwa sebelum melewati bola berpori,fluida micropolar memiliki kecepatan sebesar U∞ dan suhusebesar T∞. Ketika fluida micropolar melewati bola berporidengan konveksi paksa terjadi perbedaan suhu pada fluidadan permukaan bola, dimana dalam penelitian ini suhu padapermukaan bola menjadi sebesar Tw. Berikut merupakankoordinat bola 3 dimensi
Gambar 4.2: Koordinat Bola 3 Dimensi
Pada penelitian ini konveksi yang digunakan adalah

27
konveksi paksa yang diberikan dari pematik api sehinggamenyebar ke segala arah. Berdasarkan permasalahan tersebutpada bab ini akan dijelaskan mengenai pembentukan modelmatematika yang dimensional, kemudian ditransformasikankedalam bentuk non-dimensional dan dilanjutkan denganmembentuk model similaritas. Kemudian persamaansimilaritas yang telah didapat akan diselesaikan secaranumerik dengan menggunakan skema Keller-Box.
4.1 Persamaan Pembangun
Persamaan pembangun yang digunakan pada sistemmodel matematika magnetohidrodinamik tak tunak dengankonveksi paksa pada fluida micropolar yang melewati bolaberpori diperoleh dari persamaan Kontinuitas, persamaanMomentum, persamaan Momentum Angular, dan persamaanEnergi. Berikut merupakan penjelasan dari penurunanpersamaan pembangun.
4.1.1 Persamaan Kontinuitas
Persamaan Kontinuitas didapat dari prinsip fisika yaituHukum Konservasi Massa [19]. Adapun isi dari HukumKonservasi Massa adalah total massa dalam suatu sistembernilai konstan, dimana aliran massa yang melaluipermukaan volume kontrol bernilai sama dengan lajuperubahan massa terhadap waktu didalam volume kontrol,atau dengan kata lain laju perubahan massa terhadap waktudalam sistem sama dengan nol [19]. Secara matematis hukumkekekalan massa dapat ditulis sebagai berikut :
DM∀Dt
= 0 (4.1.1)
dengan DDt merupakan substantial derivative yang
menunjukkan laju perubahan suatu material terhadapwaktu, dimana M∀ adalah massa sistem yang diamati dan

28
∀ sebagai volume dari fluida. Definisi substantial derivativeapabila ditulis dalam bentuk koordinat cartesian adalah [19]
D
Dt≡ ∂
∂t+ u
∂
∂x+ v
∂
∂y+ w
∂
∂z
Massa sistem didefinisikan sebagai jumlahan dari perkalianantara densitas fluida dengan volume fluida [20], sehinggasecara matematis M∀ dapat ditulis sebagai berikut :
M∀ =
∫∫∫∀
ρ d∀ (4.1.2)
dari definisi diatas dapat diketahui bahwa densitas dari fluidaadalah ρ, dan d∀ menunjukkan elemen volume dari volumekendali. Karena sistem adalah tak tunak dimana u, v, wmerupakan fungsi dari waktu, maka besaran skalar daridensitas didefinisikan dengan
ρ = ρ(x, y, z, t)
Berdasarkan definisi yang ditunjukkan pada Persamaan(4.1.2) dan dilanjutkan dengan mensubstitusikan Persamaanyang didapat kedalam Persamaan (4.1.1) maka lajuperubahan massa sistem terhadap waktu dapat didefinisikandengan
DM∀Dt
=D
Dt
∫∫∫∀
ρ d∀
⇐⇒ 0 =D
Dt
∫∫∫∀
ρ d∀ (4.1.3)
untuk menyelesaikan Persamaan (4.1.3) akan digunakansebuah teorema untuk menurunkan laju perubahan

29
massa terhadap waktu. Teorema yang digunakanuntuk menyelesaikan permasalahan ini adalah TeoremaPengangkutan Reynolds dimana laju perubahan massasistem dapat ditulis dengan persamaan sebagai berikut :
D
Dt
∫∫∫∀
ρ d∀ =∂
∂t
∫∫∫∀
ρ d∀+
∫∫A
ρ (u · n) dA (4.1.4)
∂∂t merupakan turunan parsial terhadap waktu, u adalahkecepatan fluida yang tegak lurus terhadap volume kendaliyang memiliki komponen kecepatan yaitu u = (u, v, w), nadalah vektor normal terhadap elemen luas (dA) dengan Ayaitu luas permukaan volume kendali. Kemudian denganmensubstitusi Persamaan (4.1.4) ke Persamaan (4.1.3) akandiperoleh Persamaan sebagai berikut :
0 =∂
∂t
∫∫∫∀
ρ d∀+
∫∫A
ρ (u · n) dA (4.1.5)
Untuk menyelesaikan Persamaan (4.1.5) integralpermukaan akan dirubah kedalam integral volume denganmenggunakan Teorema Divergensi Gauss. Integral permukaandidefinisikan sebagai :∫∫
A
ρ (u · n) dA =
∫∫∫∀
ρ∇ · u d∀ (4.1.6)
Kemudian dengan mensubstitusikan Persamaan (4.1.6)kedalam Persamaan (4.1.5) akan didapat persamaan sebagaiberikut
∂
∂t
∫∫∫∀
ρ d∀+
∫∫∫∀
ρ∇ · u d∀ = 0 (4.1.7)

30
Misalkan diambil elemen kecil yang berbentuk kubusuntuk menggambarkan volume kendali, maka akan didapatsuatu kondisi seperti yang terlihat pada gambar berikut :
Gambar 4.3: Volume kendali berbentuk kubus
Pada bagian pusat elemen volume kendali terdapatdensitas (ρ) dan vektor kecepatan dengan komponen u, v, w.Sehingga untuk menggambarkan laju aliran dari massa sistemakan diuraikan berdasarkan aliran massa yang keluar masukpada masing-masing sumbu koordinat yang terdapat padavolume kendali. Berdasaran Hukum Konservasi Massa aliranmassa yang masuk pada volume kendali bernilai sama denganaliran massa yang keluar dari volume kendali. Sehingga jikaaliran yang diambil adalah sumbu x maka aliran yang keluarmasuk elemen adalahAliran massa sistem yang masuk pada sumbu-x adalah
ρu = ρu|x− 12δx
dengan menggunakan deret Taylor maka didapat penyelesaiansebagai berikut :
ρu(x− 12δx) = ρu− ∂ρu
∂x
1
2δx+ 0

31
= ρu− ∂ρu
∂x
1
2δx
dengan cara yang sama pada aliran yang masuk pada sumbu-xmaka aliran massa sistem yang keluar pada sumbu-x adalah
ρu = ρu|x+ 12δx
ρux+ 12δx = ρu+
∂ρu
∂x
1
2δx
berikut merupakan aliran keluar masuk pada sumbu x
Gambar 4.4: Aliran keluar masuk massa pada sumbu x
Volume kendali memiliki koordinat sumbu 3 dimensi yaitux, y, dan z. Gambar (4.4) menunjukkan bahwa jumlah aliranmassa yang keluar pada arah-x didefinisikan sebagai :∫∫∫
∀
ρu d∀ =
[ρu+
∂ρu
∂x
1
2δx
]δyδz −
[ρu
−∂ρu∂x
1
2δx
]δyδz∫∫∫
∀
ρu d∀ =∂ρu
∂xδxδyδz (4.1.8)
Berdasarkan pada Gambar (4.4) mengenai aliran keluarmasuk massa pada sumbu x maka hal yang sama berlaku pada

32
sumbu y dan z. Berikut merupakan alur keluar-masuk aliranmassa dalam elemen kubus :
Gambar 4.5: Aliran Massa Sistem pada Volume Kendali
sehingga jumlah aliran massa yang keluar pada arah-ydidefinisikan sebagai :∫∫∫
∀
ρv d∀ =
[ρv +
∂ρv
∂y
1
2δy
]δxδz −
[ρv
−∂ρv∂y
1
2δy
]δxδz∫∫∫
∀
ρv d∀ =∂ρv
∂yδxδyδz (4.1.9)
Jumlah aliran massa yang keluar pada arah-z didefinisikansebagai : ∫∫∫
∀
ρw d∀ =
[ρw +
∂ρw
∂z
1
2δz
]δxδy−

33[ρw − ∂ρw
∂z
1
2δz
]δxδy∫∫∫
∀
ρw d∀ =∂ρw
∂zδxδyδz (4.1.10)
dari Persamaan (4.1.8), (4.1.9), dan (4.1.10) akan didapatPersamaan sebagai berikut :∫∫∫∀
ρ∇ · u d∀ =
∫∫∫∀
ρu d∀+
∫∫∫∀
ρv d∀+
∫∫∫∀
ρw d∀
=∂ρu
∂xδxδyδz +
∂ρv
∂yδxδyδz +
∂ρw
∂zδxδyδz
sehingga total dari aliran massa adalah∫∫∫∀
∇ · ρu d∀ =
[∂ρu
∂x+∂ρv
∂y+∂ρw
∂z
]δxδyδz (4.1.11)
sedangkan laju perubahan massa terhadap waktu darijumlahan massa sistem dalam volume kendali yaitu :
∂
∂t
∫∫∫∀
ρ d∀ ≈ ∂ρ
∂tδxδyδz (4.1.12)
kemudian dengan mensubstitusikan Persamaan (4.1.11) dan(4.1.12) ke Persamaan (4.1.7) didapat penyelesaian sebagaiberikut :
∂ρ
∂tδxδyδz +
[∂ρu
∂x+∂ρv
∂y+∂ρw
∂z
]δxδyδz = 0[
∂ρ
∂t+∂ρu
∂x+∂ρv
∂y+∂ρw
∂z
]δxδyδz = 0
∂ρ
∂t+∂ρu
∂x+∂ρv
∂y+∂ρw
∂z= 0 (4.1.13)

34
dengan merubah penulisan diatas menjadi notasi vektor untukkomponen kecepatan massa maka Persamaan (4.1.13) dapatditulis menjadi :
∂ρ
∂t+ ρ(∇ · u) = 0 (4.1.14)
Karena fluida diasumsikan bersifat incompressible yangmenunjukkan bahwa laju perubahan densitas fluida tidakbergantung terhadap waktu, oleh karena itu ∂ρ
∂t = 0 , sehinggaPersamaan (4.1.14) menjadi :
ρ(∇ · u) = 0
∇ · u = 0 (4.1.15)
Berdasarkan persamaan kontinuitas dari fluida micropolaryang melewati bola berpori seperti yang ditunjukkan olehPersamaan (4.1.15) maka secara dimensional aliran fluidayang melewati bola dapat ditulis sebagai berikut
∂ru
∂x+∂rv
∂y+∂rw
∂z= 0 (4.1.16)
dengan r adalah dimensional jari-jari.
4.1.2 Persamaan MomentumPersamaan momentum didapatkan dari prinsip fisika
yaitu Hukum II Newton. Adapun isi dari Hukum IINewton adalah jumlah gaya yang bekerja pada suatusistem merupakan hasil perkalian dari massa sistem denganpercepatan. Momentum didefinisikan sebagai perkalianantara massa dengan kecepatan. Jumlah gaya yang bekerjapada sistem bernilai sama dengan laju perubahan momentumlinier. Sehingga apabila digunakan Hukum II Newton makapersamaan momentum dapat ditulis sebagai berikut
Ma = ΣF

35
dengan a merupakan laju perubahan kecepatan terhadapwaktu yang didefinisikan sebagai berikut
a =du
dt
dan
M∀ = konstan
sehingga secara matematis Hukum II Newton dapat ditulisdengan [21]
M∀du
dt= ΣF
d(M∀u)
dt= ΣF
d
dt
∫∫∫∀
ρu d∀ = ΣF (4.1.17)
dengan F adalah gaya yang bekerja pada sistem.Persamaan Momentum pada Persamaan (4.1.17) dapat
diturunkan dengan menggunakan Teorema PengangkutanReynolds sehingga menjadi Persamaan sebagai berikut
d
dt
∫∫∫∀
ρu d∀ =∂
∂t
∫∫∫∀
ρu d∀+
∫∫A
ρu(u · n)dA
d
dt
∫∫∫∀
ρu d∀ =∂
∂t
∫∫∫∀
ρu d∀+
∫∫∫∀
ρu(∇ · u)d∀
d
dt
∫∫∫∀
ρu d∀ =
∫∫∫∀
∂(ρu)
∂td∀+
∫∫∫∀
(ρu)∇ · ud∀
d
dt
∫∫∫∀
ρu d∀ =
∫∫∫∀
ρu
[∂
∂t+∇ · u
]d∀

36
d
dt
∫∫∫∀
ρu d∀ =
∫∫∫∀
ρ
[∂
∂t+∇ · u
]ud∀
d
dt
∫∫∫∀
ρu d∀ =
∫∫∫∀
ρ
[∂u
∂t+∇ · (uu)
]d∀(4.1.18)
dengan menggunakan sifat divergensi akan didapat :
∇ · (uu) = ((u · ∇)u) + (u(∇ · u))
Pada persamaan kontinuitas diketahui bahwa ∇ · u = 0sehingga
∇ · (uu) = (u · ∇)u (4.1.19)
substitusi Persamaan (4.1.19) ke Persamaan (4.1.18) makadidapat
d
dt
∫∫∫∀
ρu d∀ =
∫∫∫∀
ρ
[∂u
∂t+ (u · ∇)u
]d∀
d
dt
∫∫∫∀
ρu d∀ = ρ
[∂u
∂t+ (u · ∇)u
]δxδyδz (4.1.20)
kemudian dengan mensubstitusikan Persamaan (4.1.20) kePersamaan (4.1.17) maka didapat Persamaan
ρ
[∂u
∂t+ (u · ∇)u
]δxδyδz = ΣF (4.1.21)
Gaya-gaya yang bekerja pada permukaan bola berporimeliputi gaya permukaan Fs, Gaya Apung Fbuo, gaya yangterjadi pada bola Fmag, dan gaya yang diakibatkan karenaadanya pori pada bola Fpori sehingga dapat ditulis sebagaiberikut
ΣF = Fs + Fbuo − Fmag − Fpori (4.1.22)

37
Pada penelitian sebelumnya telah dibahas aliran fluidadengan menggunakan fluida bermagnet, sedangkan dalamTugas Akhir ini diteliti mengenai fluida tidak bermagnetsedangkan bola berpori mengandung magnet. Hal inimengakibatkan Fmag dan Fpori bernilai negatif, karena bolaberpori mengeluarkan medan magnet. Oleh karena itu gayayang bekerja pada sistem dinyatakan sebagai berikut
ρ
[∂u
∂t+ (u · ∇)u
]=
Fsδxδyδz
+Fbuoδxδyδz
− Fmagδxδyδz
− Fporiδxδyδz
(4.1.23)
4.1.2.1 Gaya PermukaanGaya permukaan (Fs) terjadi karena adanya interaksi
antara gaya yang bekerja pada elemen dengan sekitarnya,dimana gaya ini dinyatakan dalam bentuk tegangan-tegangan.Terdapat dua jenis tegangan yang bekerja pada volumekendali atara lain :
1. normal stress (σ) yaitu tegangan yang arahnya tegaklurus volume kendali.
2. shear stress (τ) yaitu tegangan yang sejajar denganvolume kendali.
dimana tegangan permukaan untuk fluida micropolardidefinisikan dengan [3]:
σxx = 2(λ+ µ)∂u
∂x
σyy = 2(λ+ µ)∂v
∂y
σzz = 2(λ+ µ)∂w
∂z
τxy = τyx = (µ+ κ)
(∂v
∂x+∂u
∂y
)

38
Dengan menggunakan definisi diatas maka gaya permukaanyang terjadi pada volume kendali berbentuk 3 dimensi dandigambarkan oleh Gambar 4.6 dan 4.7 sebagai berikut
Gambar 4.6: Gambaran fisik gaya permukaan
Gambar 4.7: Komponen tegangan permukaan elemen fluidasearah sumbu x, y, dan z
dengan memperhatikan Gambar (4.7) didapat dari arah-x

39
tegangan yang masuk adalah
Fsx =
[−ρ− ∂ρ
∂x
δx
2
]δyδz +
[σxx −
∂σxx∂x
δx
2
]δyδz
+
[τxy −
∂τxy∂x
δx
2
]δyδz +
[τxz −
∂τxz∂x
δx
2
]δyδz
dari arah-x tegangan yang keluar adalah
Fsx =
[−ρ+
∂ρ
∂x
δx
2
]δyδz +
[σxx +
∂σxx∂x
δx
2
]δyδz
+
[τxy +
∂τxy∂x
δx
2
]δyδz +
[τxz +
∂τxz∂x
δx
2
]δyδz
jumlah aliran gaya yang keluar pada arah-x didefinisikansebagai :
Fsx =
[−∂ρ∂x
+∂σxx∂x
+∂τxy∂x
+∂τxz∂x
]δxδyδz
dengan cara yang sama maka untuk jumlah aliran gaya yangkeluar pada arah-y didefinisikan sebagai :
Fsy =
[−∂ρ∂y
+∂σyy∂y
+∂τyx∂y
+∂τyz∂y
]δxδyδz
Sedangkan jumlah aliran gaya yang keluar pada arah-zdidefinisikan sebagai :
Fsz =
[−∂ρ∂z
+∂σzz∂z
+∂τzx∂z
+∂τzy∂z
]δxδyδz
40
sehingga didapat :
Fs = Fsx + Fsy + Fsz
=
[−∂ρ∂x
+∂σxx∂x
+∂τxy∂x
+∂τxz∂x
]δxδyδz +[
−∂ρ∂y
+∂σyy∂y
+∂τyx∂y
+∂τyz∂y
]δxδyδz +[
−∂ρ∂z
+∂σzz∂z
+∂τzx∂z
+∂τzy∂z
]δxδyδz
Fsδxδyδz
= −∂ρ∂x− ∂ρ
∂y− ∂ρ
∂z+∂σxx∂x
+∂σyy∂y
+∂σzz∂z
+∂τxy∂x
+∂τxz∂x
+∂τyx∂y
+∂τyz∂y
+∂τzx∂z
+∂τzy∂z
(4.1.24)
Pada fluida micropolar tegangan yang terjadi pada permukaanvolume kendali dinyatakan dalam Tij , sehingga gayapermukaan dapat ditulis dengan Persamaan sebagai berikut
Fsδxδyδz
= ∇T (4.1.25)
dengan tegangan yang didefinisikan sebagai (Vijay, 1984) :
Tij = (−p+ λUk,k)δij + (µ)(Ui,j + Uj,i)
+κ(Uj,i − εijkωk)= −pδij + λUi,j + (µ)Ui,j + µUj,i + κUj,i − κεijkωk= −pδij + (λ + µ)Ui,j + (µ + κ)Uj,i − κεijkωk= −pδij + (λ + µ)Ui,j + (µ + κ)Uj,i − κN
dimana κ adalah pergerakan mikro rotasi. Sehingga dengandemikian maka :
∇T = Tij,i
= −p,i+ (λ + µ)Ui,ij + (µ + κ)Uj,ii − κN,j
= −p,i+ (λ + µ)(Ui,i)j + (µ + κ)(Uj,i)i
−κN,j

41
⇐⇒ ∇T =
[−∂p∂x
+ (λ+ µ)∂σxx∂x
+ (µ+ κ)∂τxy∂x
+
(µ+ κ)∂τxz∂x
+ κ∂N
∂y
]i+
[−∂p∂y
+
(λ+ µ)∂σyy∂y
+ (µ+ κ)∂τyx∂y
+ (µ+ κ)∂τyz∂y−
κ∂N
∂x
]j +
[−∂p∂z
+ (λ+ µ)∂σzz∂z
+
(µ+ κ)∂τzx∂z
+ (µ+ κ)∂τzy∂z
]z (4.1.26)
dari Persamaan (4.1.26) didapat Ui,i = σ dan Uj,i = τ makaPersamaan (4.1.25) dapat difenisikan dengan
Fsδxδyδz
=
[−∂p∂x
+ (λ+ µ)∂σxx∂x
+ (µ+ κ)∂τxy∂x
+
(µ+ κ)∂τxz∂x
+ κ∂N
∂y
]i+
[−∂p∂y
+
(λ+ µ)∂σyy∂y
+ (µ+ κ)∂τyx∂y
+ (µ+ κ)∂τyz∂y
−κ∂N
∂x
]j +
[−∂p∂z
+ (λ+ µ)∂σzz∂z
+
(µ+ κ)∂τyx∂z
+ (µ+ κ)∂τyz∂z
]z (4.1.27)
penyelesaian dari Persamaan (4.1.27) adalah
Fsδxδyδz
= −∇p+ 6(λ + µ)∇(∇ · u) + (µ + κ)
[∂2u
∂x2
+∂2u
∂y2+∂2u
∂z2+∂2v
∂y2+∂2v
∂x2+∂2v
∂z2+∂2w
∂z2+
∂2w
∂x2+∂2w
∂y2
]+ κ(∇×N)

42
berdasarkan Persamaan Kontinuitas diketahui bahwa nilaidari ∇ · u = 0 sehingga
Fsδxδyδz
= −∇p+ (µ + κ)∇2u + κ(∇×N) (4.1.28)
4.1.2.2 Gaya ApungTekanan (p) yang terjadi pada gaya permukaan dapat
diuraikan menjadi
p = pd + ph
dimana pd merupakan tekanan dinamik, sedangkan ph adalahtekanan hisdrostatis. Tekanan hidrostatis ph adalah tekananyang dipengaruhi oleh kedalaman suatu fluida [19]. Gayaapung Fbuo didefinisikan dengan
Fbuo = ρg δxδyδz
sehingga tekanan yang terjadi pada persamaan gayapermukaan diberikan Persamaan sebagai berikut :
∇ph = ρ∞g (4.1.29)
dengan ρ∞ adalah densitas diluar lapisan batas. Gayagravitasi didefinisikan oleh g = (gx, gy, gz) sehingga tekanandidefinikan dengan
∂ph∂x
= ρ∞gx
∂ph∂y
= ρ∞gy
∂ph∂z
= ρ∞gz

43
Berdasarkan definisi dari Persamaan (4.1.29) untuk turunandari tekanan terhadap sumbu-x ditulis sebagai
−∂p∂x
= −∂pd∂x− ∂ph
∂x= −∂pd
∂x− ρ∞gx
turunan tekanan terhadap sumbu-y ditulis sebagai
−∂p∂y
= −∂pd∂y− ∂ph
∂y= −∂pd
∂y− ρ∞gy
turunan tekanan terhadap sumbu-z ditulis sebagai
−∂p∂z
= −∂pd∂z− ∂ph
∂z= −∂pd
∂z− ρ∞gz
sehingga untuk −∇p pada Persamaan (4.1.28) dapat ditulissebagai
−∇p = −(∂p
∂x+∂p
∂y+∂p
∂z
)+ (ρ− ρ∞ )g (4.1.30)
dengan mensubstitusi Persamaan (4.1.30) ke dalamPersamaan (4.1.28) maka diperoleh penyelesaian sebagaiberikut
Fsδxδyδz
= −∇p+ (µ + κ)∇2u + (ρ− ρ∞)g
+κ(∇×N) (4.1.31)
4.1.2.3 Gaya MagnetAliran fluida micropolar yang melewati bola berpori
mengandung magnet sehingga terdapat gaya Lorent yangbekerja pada sistem akibat adanya medan magnet. GayaLorent didefinisikan sebagai
Fmagδxδyδz
= E + J × B (4.1.32)

44
dengan :E = medan listrikJ = massa jenis arusB = total medan magnetMassa jenis arus dapat ditulis dalam bentuk
J = σ(E + u × B) (4.1.33)
dengan σ adalah konduktifitas listrik. Kemudian denganmensubstitusi Persamaan (4.1.33) ke Persamaan (4.1.32)maka didapat
Fmagδxδyδz
= E + σ(E + u × B) × B (4.1.34)
Pada tugas akhir ini diasumsikan bahwa tidak adategangan listrik yang terjadi pada aliran fluida, sehinggamengakibatkan medan listrik E bernilai sama dengan 0.Dengan demikian maka Persamaan (4.1.34) menjadi
Fmagδxδyδz
= σ(u × B) × B (4.1.35)
sebagaimana yang telah disebutkan bahwa B merupakan totalmedan magnet dari bola berpori yang mengandung magnet(B0) dengan medan magnet yang berasal dari fluida yangterinduksi oleh bola berpori yang bermagnet yaitu b, atauapabila ditulis secara matematis ditunjukkan sebagai berikut
B = b+B0
karena pada penelitian tugas akhir ini bola berporimengandung magnet sedangkan fluida micropolar tidakmenggandung magnet maka nilai dari b sangat kecil sehinggadiabaikan. Hal ini mengakibatkan nilai dari total medanmagnet adalah sebagai berikut
B = B0 (4.1.36)

45
kemudian dengan mensubstitusikan Persamaan (4.1.36) kePersamaan (4.1.35) diperoleh
Fmagδxδyδz
= σ(u × B0) × B0 (4.1.37)
dimana
(u×B0) =
∣∣∣∣∣∣i j ku v w0 0 B0
∣∣∣∣∣∣maka penyelesaian dari (u ×B0) adalah
(u ×B0) = (i(v)(B0) + j(w)(0) + k(u)(0))−((k(v)(0)+i(w)(0) + j(u)(B0))
⇐⇒ (u ×B0) = (vB0)i− (uB0)j
dengan demikian maka penyelesaian dari Persamaan (4.1.37)berikut adalah
(u×B0)×B0 = (vB0)i− (uB0)j ×B0
(u×B0)×B0 =
∣∣∣∣∣∣i j k
v(B0) −u(B0) 00 0 (B0)
∣∣∣∣∣∣(u×B0)×B0 = (−u(B0)(B0))i− (v(B0)(B0))j
⇐⇒ (u×B0)×B0 = (−uB20)i− (vB2
0)j
penyelesaian dari persamaan (4.1.37) adalah
Fmagδxδyδz
= {σ(−uB20), σ(−vB2
0), 0}
⇐⇒ Fmagδxδyδz
= {σ(−uB20), σ(−vB2
0)}
⇐⇒ Fmagδxδyδz
= −σB20u (4.1.38)

46
4.1.2.4 Gaya Pada Bola BerporiKetika fluida melewati bola berpori maka parameter
porositas dan permeabilitas harus diperhatikan. Oleh karenaitu akan digunakan Hukum Darcy untuk menyelesaikanpermasalahan tersebut. Berdasarkan Hukum Darcy gaya yangbekerja pada fluida adalah
Fpori = − µ
K∗u (4.1.39)
Kemudian dengan mensubstitusikan Persamaan (4.1.31),(4.1.38) dan (4.1.39) ke Persamaan (4.1.23) sehingga didapat
ρ
[∂u
∂t+ (u · ∇)u
]= −∇p+ (µ+ κ)∇2u + (ρ− ρ∞)g
+κ(∇×N) + σB20u +
µ
K∗u
4.1.3 Persamaan Momentum Anguler
Pada penelitian yang dilakukan oleh Anggriani persamaankonservasi momentum linier didefinisikan sebagai :
d
dt
∫∫∫∀
ρu d∀ =
∫∫∫∀
ρf d∀+
∫∫A
tndA
Definisi dari momentum anguler dapat diasumsikan kedalamHukum Kekekalan Momentum Anguler yang didefinisikandengan
d
dt
∫∫∫∀
ρ(x× u) d∀ =
∫∫∫∀
ρ(x× f) d∀
+
∫∫A
x× tndA (4.1.40)

47
dengan ∫∫∫∀
tnd∀ =
∫∫∫∀
∇Td∀ (4.1.41)
sehingga∫∫A
x× tndA =
∫∫∫∀
x× (∇T ) + Tx d∀ (4.1.42)
Tx adalah vektor εijkωk, sehingga dengan mensubstitusipersamaan (4.1.42) ke persamaan (4.1.40) akan didapat
d
dt
∫∫∫∀
ρ(x× u)d∀ =
∫∫∫∀
ρ(x× f)d∀+
∫∫∫∀
x× (∇T )
+Tx d∀∫∫∫∀
d
dtρ(x× u) d∀ =
∫∫∫∀
ρ(x× f)d∀+
∫∫∫∀
x× (∇T )
+Txd∀
terdapat dua hal yang diperhitungkan dalam menyelesaikanpersamaan momentum anguler yaitu ρx × u, dan pl. Padafluida polar terdapat body torque persatuan massa g padabody forces f , dan couple stress cn pada normal stress tn.Keseimbangan momentum anguler didefinisikan sebagai
d
dt
∫∫∫∀
ρ(l + x× u) d∀ =
∫∫∫∀
ρ(g + x× f) d∀
+
∫∫A
(cn + x× tn)dA

48
C adalah couple stress tensor sehingga
d
dt
∫∫∫∀
ρ(l + x× u)d∀ =
∫∫∫∀
ρ(g + x× f)d∀
+
∫∫A
(nC + x× nT )dA
d
dt
∫∫∫∀
ρ(l + x× u)d∀ =
∫∫∫∀
ρ(g + x× f)d∀
+
∫∫∫∀
∇(C + x× T )d∀
∫∫∫∀
d
dtρ(l + x× u)d∀ =
∫∫∫∀
ρ(g + x× f)d∀
+
∫∫∫∀
∇(C + x× T )d∀
sehingga didapat
ρd
dt(l + x× u) = ρ(g + x× f) +∇(C + x× T ) (4.1.43)
Dengan mengasumsikan bahwa momentum anguler dituliskansebagai vektor dengan li = ikωk maka
ik = δik
dimana adalah skalar dari koefisien mikro rotasi, sehinggaPersamaan (4.1.43) menjadi
ρd
dt(l + x× u) = ρ(g + x× f) +∇C +∇(x× T )
ρdN
dt= ρg +∇ · C + Tx (4.1.44)

49
Persamaan akan diturunkan dengan menggunakan TeoremaPengangkutan Reynolds sehingga∫∫∫
∀
ρdN
dtd∀ =
∫∫∫∀
∂
∂tρN d∀ +
∫∫∫∀
ρu · ∇N d∀
ρdN
dt= ρ
DN
Dt+ ρu · ∇N
ρdN
dt= ρ
[DN
Dt+ u · (∇N)
](4.1.45)
dengan mensubstitusi Persamaan (4.1.45) ke Persamaan(4.1.44) maka didapat
ρ
[dN
dt+ u · (∇N)
]= ρg +∇ · C + Tx (4.1.46)
Fluida micropolar didefinisikan sebagai fluida isotropicdengan couple tensor C dan Tx [7] dan ditulis sebagai
Cij = αωk,kδij + βωi,j + γωj,i (4.1.47)
dengan
Tx = εijkωk = κεijkωm,k − 2κωi (4.1.48)
Dengan demikian maka
Cij = αωk,kδij + βωi,j + γωj,i
= (α + β)ωi,j + γωj,i
Cij,i = (α + β)ωi,ij + γωj,ii
= (α + β)ω(i,i)j + γω(j,i)i
∇C = (α + β)∇ · ∇ · ω + γ∇×∇× ω= (α + β)∇ · ∇ · ω + γ∇×∇× ω= (α + β)∇∇ · ω + γ∇2ω
= (α + β)∇ · ∇ω + γ∇∇ · ω − γ∇× (∇ × ω)
= (α + β + γ)∇ · ∇ · ω − γ∇× (∇ × ω)

50
dengan menggunakan persamaan kontinuitas maka didapat
∇C = −γ∇× (∇ × ω) (4.1.49)
dan
Tx = κ∇ × u− 2κω (4.1.50)
dengan dilakukan substitusi tensor C dan Tx dimana ω = Nsehingga Persamaan (4.1.46) menjadi
ρ
[∂N
∂t+ u · ∇N
]= −γ∇× (∇ ×N) + κ∇ × u− 2κN
4.1.4 Persamaan Energi
Persamaan energi didapat dari prinsip fisika yaituHukum I Termodinamika. Hukum I Termodinamikamenyatakan bahwa kenaikan energi internal pada suatu sistemtermodinamika bernilai sama dengan jumlah energi panasyang ditambahkan kedalam sistem dikurangi dengan kerjayang dilakukan oleh sistem terhadap lingkungan. Hukum ITermodinamika dapat ditulis sebagai [21]
DE
Dt=DQ
Dt− DW
Dt
jika energi internal didefinisikan sebagai hasil perkalian antaraenergi total dan massa maka kenaikan energi internal dapatditulis dengan
D
Dt
∫∫∫∀
eρ d∀ =DQ
Dt− DW
Dt
dimana
e = u+ v2
2 + gz

51
dengan e adalah energi total yang tersimpan per satuan massadari setiap partikel didalam sistem, u adalah energi dalamper satuan massa, v2
2 merupakan energi kinetik persatuanmassa dan gz adalah energi potensial persatuan massa. Untukmendapatkan persamaan energi akan digunakan TeoremaPengangkutan Reynolds yaitu :
D
Dt
∫∫∫∀
eρ d∀ =∂
∂t
∫∫∫∀
eρ d∀ +
∫∫A
eρ(u · n) dA
=
∫∫∫∀
∂
∂teρ d∀ +
∫∫∫∀
ρ∇ · (eu) d∀
sehingga∫∫∫∀
∂
∂teρ d∀ +
∫∫∫∀
ρ∇ · (eu) d∀ =DQ
Dt− DW
Dt(4.1.51)
Pada Tugas Akhir ini diasumsikan bahwa benda dalamkeadaan diam sehingga tidak ada perpindahan posisi yangterjadi pada benda tersebut, hal ini mengakibatkan nilaiDWDt = 0 karena tidak ada usaha yang terjadi pada benda.
Oleh karena itu Persamaan (4.1.51) menjadi∫∫∫∀
∂
∂teρ d∀ +
∫∫∫∀
ρ∇ · (eu) d∀ =DQ
Dt∫∫∫∀
∂
∂teρ d∀ +
∫∫∫∀
ρ∇ · (eu) d∀ = Q (4.1.52)
Berikut merupakan penjabaran dari aliran keluar masuk padamasing-masing sumbu dari volume kendali :Jumlah aliran heat flux yang keluar pada sumbu-x adalah
kx = −∂kx∂x
δxδyδz

52
Gambar dari volume kendali pada proses aliran energi 3dimensi adalah
Gambar 4.8: Komponen aliran heat flux pada permukaanelemen fluida
Sedangkan jumlah aliran heat flux yang keluar pada sumbu-yadalah
ky = −∂ky∂y
δxδyδz
Jumlah aliran heat flux yang keluar pada sumbu-z adalah
kz = −∂kz∂z
δxδyδz
sehingga jumlah aliran pada sistem adalah
k = −∂kx∂x
δxδyδ − ∂ky∂y
δxδyδz − ∂kz∂z
δxδyδz
= −∇k δxδyδz (4.1.53)

53
Gradien temperatur yang berkaitan dengan konduksipanas didefinisikan oleh Hukum Fourier sebagai berikut :
kx = −c∂T∂x
ky = −c∂T∂y
kz = −c∂T∂z
k = −c∂T∂x− c∂T
∂y− c∂T
∂z
= −[c
(∂T
∂x+∂T
∂y+∂T
∂z
)]= −c∇T (4.1.54)
dengan mensubstitusi Permasamaan (4.1.53) ke Persamaan(4.1.54) maka diperoleh
−∇ · k δxδyδz = ∇ · (c∇T )δxδyδz
sehingga Persamaan (4.1.51) menjadi∫∫∫∀
∂
∂teρ d∀ +
∫∫∫∀
ρ∇ · (eu) d∀ =
∫∫∫∀
∇ · (c∇T ) d∀
ρ
[∂e
∂t+∇ · (eu)
]= ∇ · (c∇T ) (4.1.55)
entalpi didefinisikan sebagai [18]
h = e+p
ρ
Pada Termodinamika, Persamaan energi dapat ditulismenjadi entalpi sehingga
ρ∂e
∂t= ρ
[∂h
∂t− ∂
∂t
(p
ρ
)]

54
ρ∂e
∂t= ρ
∂h
∂t− p∂p
∂t+p
ρ
∂ρ
∂t
Pada tekanan yang konstan ∂p∂t = 0, karena fluida diasumsikan
incompressible maka ∂ρ∂t = 0 sehingga
ρ∂e
∂t= ρ
∂h
∂t
∂e
∂t=
∂h
∂t(4.1.56)
kemudian substitusikan Persamaan (4.1.56) ke Persamaan(4.1.55)
ρ
[∂h
∂t+∇ · (hu)
]= ∇ · (c∇T ) (4.1.57)
dengan mensubstitusi ∂h∂t = cp∂T∂t ke Persamaan (4.1.57) maka
ρ
[cp∂T
∂t+∇ · (cpTu)
]= ∇ · (c∇T )
ρcp
[∂T
∂t+∇ · (Tu)
]= ∇ · (c∇T )
dengan
∇ · (Tu) = u · (∇T ) + T (∇ · u)
Kemudian dengan menggunakan Persamaan Kontinuitasmaka akan didapat
∇ · (Tu) = u · (∇T )
sehingga didapat persamaan
ρcp
[∂T
∂t+ u · (∇T )
]= ∇ · (c∇T ) (4.1.58)

55
4.2 Penurunan Persamaan Pembangun
Pada Persamaan Pembangun tanda bar (¯) menunjukkanbahwa variabel tersebut merupakan variabel dimensional.Persamaan Pembangun dari magnetohidrodinamik tak tunakdengan konveksi paksa pada fluida micropolar yang melaluibola berpori adalah:a. Persamaan Kontinuitas
∂ru
∂x+∂rv
∂y+∂rw
∂z= 0 (4.2.1)
b. Persamaan Momentum
ρ
[∂u
∂t+ (u · ∇)u
]= −∇p+ (µ+ κ)∇2u + (ρ− ρ∞)g
+κ(∇× N) + σB20u +
µ
K∗u (4.2.2)
c. Persamaan Momentum Anguler
ρ
[∂N
∂t+ u · ∇N
]= −γ∇× (∇ × N) + κ∇ × u
−2κN (4.2.3)
d. Persamaan Energi
ρcp
[∂T
∂t+ u · (∇T )
]= ∇ · (c∇T ) (4.2.4)
4.2.1 Persamaan Momentum
Pada Persamaan (4.2.2) terdapat operator ∇ yangmerupakan notasi vektor. Oleh karena itu perlu dilakukanpenjabaran notasi vektor kedalam Persamaan searah sumbu-x, sumbu-y, dan sumbu-z. Berikut merupakan penjabarandari Persamaan Momentum (4.2.2).

56
Pada ruas kiri untuk ∂u∂t didapat
∂u
∂t=
∂
∂t(ui+ vj + wk)
⇐⇒ ∂u
∂t=
∂u
∂ti+
∂v
∂tj +
∂w
∂tk
Pada ruas kiri untuk (u · ∇)u didapat
(u · ∇)u =
[(ui+ vj + wk) ·
(∂
∂xi+
∂
∂yj +
∂
∂zk
)](ui+ vj + wk)
⇐⇒ (u · ∇)u =
[u∂
∂x+ v
∂
∂y+ w
∂
∂z
](ui+ vj + wk)
⇐⇒ (u · ∇)u =
[u∂u
∂x+ v
∂u
∂y+ w
∂u
∂z
]i+
[u∂v
∂x+ v
∂v
∂y
+w∂v
∂z
]j +
[u∂w
∂x+ v
∂w
∂y+ w
∂w
∂z
]k
Pada ruas kanan untuk −∇p didapat
−∇p = −(∂
∂xi+
∂
∂yj +
∂
∂zk
)p
⇐⇒ −∇p = −∂p∂xi− ∂p
∂yj − ∂p
∂zk
Pada ruas kanan untuk ∇2u didapat
∇2u =
(∂2
∂x2+
∂2
∂y2+
∂2
∂z2
)(ui+ vj + wk)
⇐⇒ ∇2u =
[∂2u
∂x2+∂2u
∂y2+∂2u
∂z2
]i+
[∂2v
∂x2+∂2v
∂y2+
∂2v
∂z2
]j +
[∂2w
∂x2+∂2w
∂y2+∂2w
∂z2
]k

57
Pada ruas kanan untuk (ρ− ρ∞)g didapat
(ρ− ρ∞)g = (ρ− ρ∞)(gxi+ gyj + gzk)
⇐⇒ (ρ− ρ∞)g = (ρ− ρ∞)gxi+ (ρ− ρ∞)gyj +
(ρ− ρ∞)gzk
Pada ruas kanan untuk ∇×N didapat
∇×N =
(∂
∂xi+
∂
∂yj +
∂
∂zk
)× (N)
⇐⇒ ∇×N =
(∂N
∂yi− ∂N
∂xj
)Pada ruas kanan untuk σB0
2u didapat
σB02u = σB0
2(ui+ vj)
⇐⇒ σB02u = σB0
2ui+ σB02vj
Pada ruas kanan untuk µK∗u didapat
µ
K∗u =
µ
K∗(ui+ vj + wk)
⇐⇒ µ
K∗u =
µ
K∗ui+
µ
K∗vj +
µ
K∗wk
Pada penurunan persamaan pembangun dari fluidamicropolar dilakukan pendekatan Boussineq yaitu variabel-variabel yang berpengaruh dalam persamaan momentumdiabaikan, kecuali kerapatan. Menurut [22], diasumsikanbahwa nilai maksimum (T − T∞) kecil sehingga berdasarkandefinisi dilakukan pendekatan Deret Taylor yaitu
ρ∞ρ
= 1 + β(T − T∞) + 0(T − T∞)2
ρ∞ρ
= 1 + β(T − T∞)
ρ∞ − ρρ
= β(T − T∞)
ρ∞ − ρ = ρβ(T − T∞)

58
β merupakan koefisien ekspansi panas dimana β didefinisikandengan
β = −1
ρ
(∂ρ
∂T
)p
dengan demikian maka didapat persamaan momentum padasumbu-x adalah
ρ
[∂u
∂t+ u
∂u
∂x+ v
∂u
∂y+ w
∂u
∂z
]= −∂p
∂x+ (µ+ κ)
[∂2u
∂x2+
∂2u
∂y2+∂2u
∂z2
]− ρβ(T − T∞)gx + κ
∂N
∂y+ σB2
0u+
µ
K∗u (4.2.5)
persamaan momentum pada sumbu-y adalah
ρ
[∂v
∂t+ u
∂v
∂x+ v
∂v
∂y+ w
∂v
∂z
]= −∂p
∂y+ (µ+ κ)
[∂2v
∂x2+
∂2v
∂y2+∂2v
∂z2
]− ρβ(T − T∞)gy − κ
∂N
∂x+ σB2
0v +
µ
K∗v (4.2.6)
persamaan momentum pada sumbu-z adalah
ρ
[∂w
∂t+ u
∂w
∂x+ v
∂w
∂y+ w
∂w
∂z
]= −∂p
∂z+ (µ+ κ)
[∂2w
∂x2+
∂2w
∂y2+∂2w
∂z2
]− ρβ(T − T∞)gz +
µ
K∗w (4.2.7)
4.2.2 Persamaan Momentum AngulerPada Persamaan Momentum Anguler terdapat operator
vektor dan N yang merupakan daerah mikro rotasi denganN = (0, 0, N), κ merupakan viskositas vortex, sebagai

59
densitas mikro rotasi dan γ yaitu gradien viskositas.Penjabaran dari Persamaan Momentum Anguler adalahsebagai berikut :Ruas kiri untuk u · ∇N didapat
u · ∇N = (ui+ vj + wk) ·[(
∂
∂xi+
∂
∂yj +
∂
∂zk
)(N)
]⇐⇒ u · ∇N = (ui+ vj + wk) ·
(∂N
∂xi+
∂N
∂yj +
∂N
∂zk
)⇐⇒ u · ∇N = u
∂N
∂x+ v
∂N
∂y+ w
∂N
∂z
Ruas kanan untuk ∇× (∇×N) didapat
∇× (∇×N) = ∇(∇ ·N)−∇2N
dengan menggunakan Persamaan Kontinuitas maka ∇·N = 0sehingga
∇× (∇×N) = −∇2N
⇐⇒ ∇× (∇×N) = −(∂2
∂x2+
∂2
∂y2+
∂2
∂z2
)(N)
⇐⇒ ∇× (∇×N) = −(∂2N
∂x2+∂2N
∂y2+∂2N
∂z2
)Ruas kanan untuk ∇× u didapat
∇× u =
(∂
∂xi+
∂
∂yj +
∂
∂zk
)× (ui+ vj + wk)
⇐⇒ ∇× u =
(∂w
∂y− ∂v
∂z
)i+
(∂u
∂z− ∂w
∂x
)j
+
(∂v
∂x− ∂u
∂y
)k

60
sehingga persamaan momentum anguler menjadi
ρ
[∂N
∂t+ u
∂N
∂x+ v
∂N
∂y+ w
∂N
∂z
]= −γ
[∂2N
∂x2+∂2N
∂y2+
∂2N
∂z2
]+ κ
[(∂w
∂y− ∂v
∂z
)i+
(∂u
∂z− ∂w
∂x
)j+(
∂v
∂x− ∂u
∂y
)k
]− 2κN
ρ
[∂N
∂t+ u
∂N
∂x+ v
∂N
∂y+ w
∂N
∂z
]= −γ
[∂2N
∂x2+∂2N
∂y2+
∂2N
∂z2
]− κ
[2κN +
(∂w
∂y− ∂v
∂z
)i+
(∂u
∂z− ∂w
∂x
)j+(
∂v
∂x− ∂u
∂y
)k
](4.2.8)
4.2.3 Persamaan EnergiPada Persamaan Energi terdapat operator ∇ sehingga
perlu dilakukan penurunan Persamaan untuk menyelesaikanpermasalahan pada persamaan energi. Dengan
u · (∇T ) = (ui+ vj + wk) ·(∂T
∂xi+
∂T
∂yj + +
∂T
∂zk
)⇐⇒ u · (∇T ) = u
∂T
∂x+ v
∂T
∂y+ w
∂T
∂z
dan
∇ · (c∇T ) = c∇ · (∇T )
⇐⇒ ∇ · (c∇T ) = c
(∂
∂xi+
∂
∂yj +
∂
∂zk
)·(∂T
∂xi+
∂T
∂yj
+∂T
∂zk
)⇐⇒ ∇ · (c∇T ) = c
[∂2T
∂x2+∂2T
∂y2+∂2T
∂z2
]

61
maka persamaan (4.2.4) menjadi
ρcp
[∂T
∂t+ u
∂T
∂x+ v
∂T
∂y+ w
∂T
∂z
]= c
[∂2T
∂x2+∂2T
∂y2+∂2T
∂z2
](4.2.9)
Dengan demikian maka didapat persamaan pembangundimensional sebagai berikut :a. Persamaan Kontinuitas
∂ru
∂x+∂rv
∂y+∂rw
∂z= 0 (4.2.10)
b. Persamaan MomentumPada arah sumbu-x
ρ
[∂u
∂t+ u
∂u
∂x+ v
∂u
∂y+ w
∂u
∂z
]= −∂p
∂x+ (µ+ κ)
[∂2u
∂x2+
∂2u
∂y2+∂2u
∂z2
]− ρβ(T − T∞)gx + κ
∂N
∂y+ σB2
0 u
+µ
K∗u (4.2.11)
Pada arah sumbu-y
ρ
[∂v
∂t+ u
∂v
∂x+ v
∂v
∂y+ w
∂v
∂z
]= −∂p
∂y+ (µ+ κ)
[∂2v
∂x2+
∂2v
∂y2+∂2v
∂z2
]− ρβ(T − T∞)gy − κ
∂N
∂x+ σB2
0 v
+µ
K∗v (4.2.12)
Pada arah sumbu-z
ρ
[∂w
∂t+ u
∂w
∂x+ v
∂w
∂y+ w
∂w
∂z
]= −∂p
∂z+ (µ+ κ)
[∂2w
∂x2+
∂2w
∂y2+∂2w
∂z2
]− ρβ(T − T∞)gz +
µ
K∗w (4.2.13)

62
c. Persamaan Momentum Anguler
ρ
[∂N
∂t+ u
∂N
∂x+ v
∂N
∂y+ w
∂N
∂z
]= −γ
[∂2N
∂x2+∂2N
∂y2+
∂2N
∂z2
]− κ
[2κN +
∂u
∂y− ∂w
∂y− ∂v
∂x− ∂w
∂x+
∂u
∂z+∂v
∂z
](4.2.14)
d. Persamaan Energi
ρcp
[∂T
∂t+ u
∂T
∂x+ v
∂T
∂y+ w
∂T
∂z
]= c
[∂2T
∂x2+∂2T
∂y2+∂2T
∂z2
](4.2.15)
dengan kondisi batas berdimensi yaitu :
t < 0 : u = v = w = N = 0, T = T∞ untuk setiap x, y
t ≥ 0 : u = v = w = 0, N = −n∂u∂y, T = Tw untuk y = 0
u = ue(x), N = 0, T = T∞ untuk y →∞
Pada Tugas Akhir profil yang akan diamati adalah profilkecepatan, pergerakan mikro rotasi, dan temperatur. Olehkarena itu bagian yang akan terlihat adalah pada permukaanbola. Hal ini mengakibatkan bola terlihat 2 dimensi, sehinggakoordinat yang akan digunakan merupakan persamaan 2dimensi pada arah sumbu x dan y sedangkan sumbu zdiabaikan berikut merupakan persamaan pembangun yangdigunakana. Persamaan Kontinuitas
∂ru
∂x+∂rv
∂y= 0 (4.2.16)

63
b. Persamaan MomentumPada arah sumbu-x
ρ
[∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
]= −∂p
∂x+ (µ+ κ)
[∂2u
∂x2+∂2u
∂y2
]− ρβ(T − T∞)gx + κ
∂N
∂y+ σB2
0 u+µ
K∗u (4.2.17)
Pada arah sumbu-y
ρ
[∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
]= −∂p
∂y+ (µ+ κ)
[∂2v
∂x2+∂2v
∂y2
]− ρβ(T − T∞)gy − κ
∂N
∂x+ σB2
0 v +µ
K∗v (4.2.18)
c. Persamaan Momentum Anguler
ρ
[∂N
∂t+ u
∂N
∂x+ v
∂N
∂y
]= −γ
[∂2N
∂x2+∂2N
∂y2+
]−κ[2κN +
∂u
∂y− ∂v
∂x
](4.2.19)
d. Persamaan Energi
ρcp
[∂T
∂t+ u
∂T
∂x+ v
∂T
∂y
]= c
[∂2T
∂x2+∂2T
∂y2
](4.2.20)
dengan kondisi batas berdimensi yaitu :
t < 0 : u = v = N = 0, T = T∞ untuk setiap x, y
t ≥ 0 : u = v = 0, N = −n∂u∂y, T = Tw untuk y = 0
u = ue(x), N = 0, T = T∞ untuk y →∞

64
4.2.4 Transformasi Variabel Tak BerdimensiPada pembentukan model matematika telah didapat
persamaan model berdimensi. Persamaan pembangundimensional yang telah diperoleh dikonstruksi kedalamPersamaan non-dimensional dengan menggunakantransformasi variabel non-dimensional. Variabel non-dimensional yang digunakan adalah sebagai berikut [9]:
x =x
a, y =
Re12 y
a, r(x) =
r(x)
a, t =
U∞t
a,
u =u
U∞, b =
b
a, v =
Re12 v
U∞, p =
p
ρU∞2 ,
T =T − T∞Tw − T∞
, N =Re
12aN
U∞, gx = −gsin
( xa
),
gy = gcos( xa
)dengan
M =aσB0
2
ρU∞
α =GrRe
Gr =gβ(Tw − T∞)a3
ν2
Pr =νρCpc
φ =aµ
ρU∞K∗
K =κ
µ
dimana M adalah parameter magnetik, α adalah parameterkonveksi, Gr adalah parameter grashof, Pr adalah bilanganprandtl, ψ adalah parameter porositas, dan K merupakan
65
parameter micropolar. Selain itu persamaan pembangunjuga dipengaruhi oleh Re = U∞a
ν yang merupakan bilanganReynolds, ν merupakan viskositas kinematik yang ditulissebagai ν = µ
ρ dan γ = (µ + κ2 ) dengan = ν
c . Selanjutnyadilakukan substitusi variabel-variabel tak berdimensi diataske dalam persamaan pembangun yang telah didapatkan padapersamaan-persamaan sebelumnnya. Sehingga PersamaanPembangun menjadia. Persamaan Kontinuitas
∂ru
∂x+∂rv
∂y= 0 (4.2.21)
b. Persamaan MomentumMomentum pada sumbu-x[
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
]= −∂p
∂x+
(1 +K)
Re
∂2u
∂x2
+(1 +K)∂2u
∂y2+ αTsin(x) +K
∂N
∂y+ (M + φ)u(4.2.22)
Momentum pada sumbu-y
1
Re
[∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
]= −∂p
∂y+
(1 +K)
Re
∂2v
∂x2
+(1 +K)∂2v
∂y2− αTcos(x) +K
∂N
∂x+ (M + φ)v (4.2.23)
c. Persamaan Momentum Angular[∂N
∂t+ u
∂N
∂x+ v
∂N
∂y
]=
(1 +
K
2
)[1
Re
∂2N
∂x2+∂2N
∂y2
]−K
[2N +
∂u
∂y− 1
Re
∂v
∂x
](4.2.24)
d. Persamaan Energi[∂T
∂t+ u
∂T
∂x+ v
∂T
∂y
]=
1
Pr
1
Re
∂2T
∂x2+
1
Pr
∂2T
∂y2(4.2.25)

66
dengan kondisi batas variabel tak berdimensional yaitu :
t < 0 : u = v = N = 0, T = 0 untuk setiapx, y
t ≥ 0 : u = v = 0, N = −n∂u∂y, T = 1 pada saat y = 0
u = ue(x), N = T = 0 pada saat y →∞
4.2.5 Pendekatan Lapisan Batas
Pada pendekatan lapisan batas diasumsikan bahwaBilangan Reynolds Re→∞ sehingga 1
Re = 0 maka persamaanpembangun akan berubah menjadi sebagai berikuta. Persamaan Kontinuitas
∂ru
∂x+∂rv
∂y= 0 (4.2.26)
b. Persamaan MomentumMomentum pada sumbu-x[
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
]= −∂p
∂x+ (1 +K)
∂2u
∂y2+ αTsin(x)
+K∂N
∂y+ (M + φ)u (4.2.27)
Momentum pada sumbu-y
0 = −∂p∂y
(4.2.28)
c. Persamaan Momentum Angular[∂N
∂t+ u
∂N
∂x+ v
∂N
∂y
]=
(1 +
K
2
)∂2N
∂y2
−K[2N +
∂u
∂y
](4.2.29)

67
d. Persamaan Energi[∂T
∂t+ u
∂T
∂x+ v
∂T
∂y
]=
1
Pr
∂2T
∂y2(4.2.30)
Pada persamaan momentum sumbu-y, nilai dari tekananpada aliran p bebas dari y bernilai 0. Hal ini menunjukkanbahwa tekanan dari aliran p bergantung atau variasinyahanya pada x. Oleh karena itu pada persamaan momentumhanya ada persamaan dari sistem pada sumbu-x. Denganmemasukkan bahwa u = ue(x) maka evaluasi persamaan padalapisan batas menjadi
∂ue∂t
+ ue∂ue∂x
+ v∂ue∂y
= −∂p∂x
+ (1 +K)∂2ue∂y2
+ αT sin(x)
+K∂N
∂y+ (M + φ)ue (4.2.31)
Dengan menggunakan kecepatan aliran bebas ue = 32sinx
maka
∂ue∂t
=∂(32sinx
)∂t
= 0
∂ue∂y
=∂(32sinx
)∂y
= 0
∂2ue∂y2
=∂2(32sinx
)∂y2
= 0
∂N
∂y= 0
maka Persamaan (4.2.31) menjadi
ue∂ue∂x
= −∂p∂x
+ αT sin(x) + (M + φ)ue (4.2.32)

68
Ketika T = 0 maka Persamaan (4.2.32) menjadi
ue∂ue∂x
= −∂p∂x
+ (M + φ)ue
−∂p∂x
=∂ue∂x
ue − (M + φ)ue (4.2.33)
Dengan mensubstitusi Persamaan (4.2.33) ke Persamaan(4.2.27) maka
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y=
∂ue∂x
ue − (M + φ)ue + (1 +K)∂2u
∂y2
+αT sin(x) +K∂N
∂y+ (M + φ)u
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y=
∂ue∂x
ue + (M + φ)(u− ue) + (1 +K)
∂2u
∂y2+ αT sin(x) +K
∂N
∂y(4.2.34)
4.2.6 Fungsi AlirPada penelitian ini terdapat kecepatan u dan v yang
terletak pada sumbu x dan y. Oleh karena itu dibutuhkansebuah penghubung untuk menghubungkan dua sumbukecepatan, salah satunya yaitu dengan menggunakan fungsiarus atau fungsi alir. Fungsi arus akan menyederhanakanPersamaan dan membuat komputasi dalam bentuk satuvariabel. Berikut merupakan definisi dari fungsi alir
u =1
r
∂ψ
∂ydan v = −1
r
∂ψ
∂x(4.2.35)
Substitusi Persamaan (4.2.35) ke dalam Persamaan (4.2.26),(4.2.34), (4.2.29) dan (4.2.30) sehingga diperoleha. Persamaan Kontinuitas
∂2ψ
∂x∂y=
∂2ψ
∂y∂x(4.2.36)

69
b. Persamaan Momentum
1
r
∂2ψ
∂t∂y+
1
r2∂ψ
∂y
∂2ψ
∂x∂y− 1
r3∂r
∂x
(∂ψ
∂y
)2
− 1
r2∂ψ
∂x
∂2ψ
∂y2
=∂ue∂x
ue + (M + φ)(1
r
∂ψ
∂y− ue) +
(1 +K)
r
∂3ψ
∂y3
+αT sin(x) +K∂N
∂y(4.2.37)
c. Persamaan Momentum Angular
∂N
∂t+
1
r
∂ψ
∂y
∂N
∂x− 1
r
∂ψ
∂x
∂N
∂y=
(1 +
K
2
)+∂2N
∂y2
−K(
2N +1
r
∂2ψ
∂y2
)(4.2.38)
d. Persamaan Energi
∂T
∂t+
1
r
∂ψ
∂y
∂T
∂x− 1
r
∂ψ
∂x
∂T
∂y=
1
Pr
∂2T
∂y2(4.2.39)
Dengan kondisi batas
t < 0 : ψ =∂ψ
∂y= N = T = 0 untuk setiapx, y
t ≥ 0 : ψ =∂ψ
∂y= 0, N = −n∂
2ψ
∂y2, T = 1 ketika y = 0
∂ψ
∂y= ue(x), N = T = 0 ketika y →∞
4.2.7 Persamaan Similaritas
Persamaan momentum, momentum angular, danpersamaan energi yang telah di rubah kedalam fungsialir kemudian ditransformasikan kedalam bentuk variabelsimilaritas. Untuk mendapatkan persamaan similaritas

70
terdapat 2 tipe waktu yaitu, small time dan large time.Berikut merupakan bentuk persamaan similaritas dengan
menggunakan small time (t ≤ t∗) dengan sebarang nilai t∗
yaitu
ψ = t12ue(x)r(x)f(x, η, t)
T = s(x, η, t)
η =y
t12
N = t−12ue(x)h(x, η, t)
Dengan menerapkan small time maka didapatkan persamaansimilaritas sebagai berikuta. Persamaan Momentum
(1 +K)∂3f
∂η3+η
2
∂2f
∂η2+K
∂h
∂η+ (M + φ)t
(∂f
∂η− 1
)+ t
∂ue∂x
[1−
(∂f
∂η
)2
+ f∂2f
∂η2
]+
t
ueαt sin(x)s
= uet
[∂f
∂η
∂2f
∂x∂η− 1
r
∂r
∂x
(∂f
∂η
)2
− ∂f
∂x
∂2f
∂η2
]
+ t∂2f
∂t∂η(4.2.40)
b. Persamaan Momentum Angular(1 +
K
2
)∂2h
∂η2+η
2
∂h
∂η+
1
2h+ t
∂ue∂x
(f∂h
∂η− h∂f
∂η
)= t
∂h
∂t+ tue
(∂f
∂η
∂h
∂x− f
r
∂r
∂x
∂h
∂η− ∂f
∂x
∂h
∂η
)+Kt
(2h+
∂2f
∂η2
)(4.2.41)

71
c. Persamaan Energi
1
2ηPr
∂s
∂η+∂2s
∂η2+ Prtf
∂ue∂x
∂s
∂η= Prt
[∂s
∂t+ ue
(∂f
∂η
∂s
∂x
−f 1
r
∂r
∂x
∂s
∂η− ∂f
∂x
∂s
∂η
)](4.2.42)
dengan kondisi batas, yaitu
t < 0 : f =∂f
∂η= h = s = 0 untuk setiapx, η
t ≥ 0 : f =∂f
∂η, h = −n∂
2f
∂η2, s = 1 pada η = 0
∂f
∂η= 1, h = 0, s = 0 untuk η →∞
Sedangkan bentuk Persamaan Similaritas untuk large timedengan t∗ sebarang nilai yaitu
ψ = ue(x)r(x)F (x, Y, t)
T = S(x, η, t)
Y = y
N = ue(x)H(x, Y, t)
sehingga didapat Persamaan Similaritas sebagai berikuta. Persamaan Momentum
(1 +K)∂3F
∂Y 3+ (M + φ)
(∂F
∂Y− 1
)+K
∂H
∂Y+∂ue∂x[
1 + F∂2F
∂Y 2−(∂F
∂Y
)2]
+ αS =∂2F
∂t∂Y
+ ue
(∂F
∂Y
∂2F
∂x∂Y− 1
rF∂r
∂x
∂2F
∂Y 2− ∂F
∂x
∂2F
∂Y 2
)(4.2.43)

72
b. Persamaan Momentum Angular(1 +
K
2
)∂2H
∂Y 2+∂ue∂x
(F∂H
∂Y−H∂F
∂Y
)=∂H
∂t
+ ue
(∂F
∂Y
∂H
∂x− F
r
∂r
∂x
∂H
∂Y− ∂F
∂x
∂H
∂Y
)+K
(2H +
∂2F
∂Y 2
)(4.2.44)
c. Persamaan Energi
∂2S
∂Y 2+ PrF
∂ue∂x
∂S
∂Y= Pr
[∂S
∂t+ ue
(∂F
∂Y
∂S
∂x
−F 1
r
∂r
∂x
∂S
∂Y− ∂F
∂x
∂S
∂Y
)](4.2.45)
dengan kondisi batas yaitu
F =∂F
∂Y= 0, H = −n∂
2F
∂Y 2, S = 1 ketikaY = 0
∂F
∂Y= 1, H = 0, S = 0 ketikaY →∞
Pada Tugas Akhir ini bagian yang diteliti merupakanbagian pada titik stagnansi x ≈ 0 sehingga nilai dari ue(x) = 0
dan ∂ue(x)∂x = 3
2 . Hal ini menyebabkan Persamaan (4.2.40) -(4.2.42) untuk small time menjadi :a. Persamaan Momentum
(1 +K)∂3f
∂η3+η
2
∂2f
∂η2+K
∂h
∂η+ (M + φ)t
(∂f
∂η− 1
)+
3
2
[1−
(∂f
∂η
)2
+ f∂2f
∂η2
]+
2
3αts = t
∂2f
∂t∂η(4.2.46)

73
b. Persamaan Momentum Angular(1 +
K
2
)∂2h
∂η2+η
2
∂h
∂η+
1
2h+
3
2t
(f∂h
∂η− h∂f
∂η
)= t
∂h
∂t+Kt
(2h+
∂2f
∂η2
)(4.2.47)
c. Persamaan Energi
1
2ηPr
∂s
∂η+∂2s
∂η2+
3
2Prtf
∂s
∂η= Prt
∂s
∂t
(4.2.48)
dengan kondisi batas, yaitu
t < 0 : f =∂f
∂η= h = s = 0 untuk setiapx, η
t ≥ 0 : f =∂f
∂η, h = −n∂
2f
∂η2, s = 1 ketika η = 0
∂f
∂η= 1, h = 0, s = 0 ketika η →∞
Sedangkan pada saat large time persamaan (4.2.43) -(4.2.46) menjadi :a. Persamaan Momentum
(1 +K)∂3F
∂Y 3+ (M + φ)
(∂F
∂Y− 1
)+K
∂H
∂Y+
2
3αS
+3
2
[1 + F
∂2F
∂Y 2−(∂F
∂Y
)2]
=∂2F
∂t∂Y(4.2.49)
b. Persamaan Momentum Angular(1 +
K
2
)∂2H
∂Y 2+
3
2
(F∂H
∂Y−H ∂f
∂Y
)=∂H
∂t
+K
(2H +
∂2F
∂Y 2
)(4.2.50)

74
c. Persamaan Energi
∂2S
∂Y 2+
3
2PrF
∂S
∂Y= Pr
∂S
∂t(4.2.51)
dengan kondisi batas yaitu
F =∂F
∂Y= 0, H = −n∂
2F
∂Y 2, S = 1 ketikaY = 0
∂F
∂Y= 1, H = 0, S = 0 ketikaY →∞
Misalkan ∂f∂η = f ′, ∂s
∂η = s′, dan ∂h∂η = h′ maka persamaan
untuk small time menjadia. Persamaan Momentum
(1 +K)f ′′′ +η
2f ′′ +Kh′ + (M + φ)t
(f ′ − 1
)+
2
3αts
+3
2t(
1−(f ′)2
+ f · f ′′)
= t∂f ′
∂t(4.2.52)
b. Persamaan Momentum Angular(1 +
K
2
)h′′ +
η
2h′ +
1
2h+
3
2t(fh′ − hf ′
)= t
∂h
∂t
+Kt(2h+ f ′′
)(4.2.53)
c. Persamaan Energi
1
2ηPrs′ + s′′ +
3
2Prtfs′ = Prt
∂s
∂t(4.2.54)
dengan kondisi batas, yaitu
t < 0 : f =∂f
∂η= h = s = 0 untuk setiapx, η
t ≥ 0 : f =∂f
∂η, h = −n∂
2f
∂η2, s = 1 ketika η = 0
∂f
∂η= 1, h = 0, s = 0 ketika η →∞
75
Sedangkan untuk large time dengan memisalkan ∂F∂Y = F ′,
∂S∂Y = S′, dan ∂H
∂Y = H ′ maka didapat persamaana. Persamaan Momentum
(1 +K)F ′′′ + (M + φ)(F ′ − 1
)+KH ′ +
2
3αS
+3
2
[1 + F · F ′′ −
(F ′)2]
=∂F ′
∂t(4.2.55)
b. Persamaan Momentum Angular(1 +
K
2
)H ′′ +
3
2
(FH ′ −HF ′
)=∂H
∂t
+K(2H + F ′′
)(4.2.56)
c. Persamaan Energi
S′′ +3
2PrFS′ = Pr
∂S
∂t(4.2.57)
dengan kondisi batas yaitu
F = F ′ = 0, H = −nF”, S = 1 ketikaY = 0
F ′ = 1, H = 0, S = 0 ketikaY →∞
Dengan mensubstitusi t = 0 kedalam Persamaan (4.2.52) -(4.2.54) dan menggunakan fungsi error f maka didapat kondisiawal sebagai berikut :a. Kondisi Awal Persamaan Momentum
f = η erf
[η
2
√1
1 +K(1− n)+
2√π(1 +K(1− n))(
e−η2
4(1+K(1−n)) − 1
)]f ′ = erf
η
2√
1 +K(1− n)
f ′′ =1√
π(1 +K(1− n))e
−η24(1+K(1−n))

76
b. Kondisi Awal Persamaan Mikro rotasi
h =−n√
π(1 +K(1− n))e
−η24(1+K(1−n))
h′ =nη
2(1 +K(1− n))√π(1 +K(1− n))
e−η2
4(1+K(1−n))
c. Kondisi Awal Persamaan Energi
s = −erf(η
2
√Pr)
+ 1
s′ = −√Pr
πe−1
4Prη2

BAB VPENYELESAIAN MODEL MATEMATIKA
Pada bab ini dijelaskan mengenai penyelesaian modelmatematika magnetohidrodinamik tak tunak dengan konveksipaksa pada fluida micropolar yang melalui bola berporisecara numerik dengan menggunakan skema Keller-Box.Langkah pertama dalam penyelesaian skema Keller-Boxdilakukan dengan memisalkan persamaan berorde tinggimenjadi persamaan orde pertama, kemudian langkah keduadengan cara diskrititasi, selanjutnya dilakukan pelinearisasidengan Metode Newton, dan langkah terkahir menyelesaikanhasil linearisasi dengan menggunakan emilinasi matriks bloktridiagonal. Simulasi menunjukkan pengaruh dari parametermagnetik, parameter micropolar, parameter prandtl, danparameter porositas terhadap kecepatan aliran fluida, mikrorotasi, dan temperatur fluida.
5.1 Penyelelarasan Notasi
Langkah pertama dalam penyelesian dengan metodeKeller-Box adalah dengan merubah persamaan orde tinggimenjadi persamaan orde pertama. Oleh karena itu perludilakukan pemisalan fungsi agar bisa diselesaikan secaranumerik. Pemisalan yang dilakukan adalah sebagai berikut:
1. Small timedengan memisalkan :
f ′ = u (5.1.1)
u′ = v (5.1.2)
h′ = p (5.1.3)
77

78
s′ = q (5.1.4)
maka didapat persamaan momentum, momentum angular,dan energi masing-masing sebagai berikut :a. Persamaan Momentum
(1 +K)v′ +η
2v +Kp+ (M + φ)t (u− 1)
+3
2
(1− (u)2 + f · v
)+
2
3αts = t
∂u
∂t(5.1.5)
b. Persamaan Momentum Angular(1 +
K
2
)p′ +
η
2p+
1
2h+
3
2t (fp− hu) = t
∂h
∂t
+Kt (2h+ v) (5.1.6)
c. Persamaan Energi
1
2ηPrq + q′ +
3
2Prtfq = Prt
∂s
∂t(5.1.7)
2. Large smalldengan memisalkan
F ′ = U (5.1.8)
U ′ = V (5.1.9)
H ′ = P (5.1.10)
S′ = Q (5.1.11)
maka didapat persamaan momentum, momentum angular,dan energi sebagai berikut :a. Persamaan Momentum
(1 +K)V ′ + (M + φ) (U − 1) +KP
+3
2
(1 + F · V − (U)2
)+
2
3αS =
∂U
∂t(5.1.12)

79
b. Persamaan Momentum Angular(1 +
K
2
)P ′ +
3
2(FP −HU) =
∂H
∂t
+K (2H + V ) (5.1.13)
c. Persamaan Energi
Q′ +3
2PrFQ = Pr
∂S
∂t(5.1.14)
5.2 Diskritisasi ModelPersamaan yang telah dirubah menjadi Persamaan orde
pertama selanjutnya didiskrititasi dengan menggunakanmetode numerik beda hingga dengan skema seperti yangterlihat pada gambar sebagai berikut
Gambar 5.1: Skema Beda Hingga Keller-Box
Beda hingga pusat akan digunakan untuk menyelesaikanPersamaan (5.1.1) - (5.1.4) dan Persamaan (5.1.8) - (5.1.11)

80
dengan menggunakan titik tengah(ηj− 1
2, tn)
pada ruas P1
dan P2. Sedangkan untuk menyelesaikan Persamaan (5.1.5)- (5.1.7) dan Persamaan (5.1.12) - (5.1.14) akan digunakan
titik tengah(ηj− 1
2, tn−
12
)pada ruas P1, P2, P3 dan P4.
1. small timeHasil dari diskritisasi Persamaan small time dengan
menggunakan skema Keller-Box adalah(fnj − fnj−1
)lj
= unj− 1
2
(5.2.1)(unj − unj−1
)lj
= vnj− 1
2
(5.2.2)(hnj − hnj−1
)lj
= pnj− 1
2
(5.2.3)(snj − snj−1
)lj
= qnj− 1
2
(5.2.4)
a. Persamaan Momentum
(1 +K)
(vnj − vnj−1
)lj
+ηj− 1
2
2vnj− 1
2
+Kpnj− 1
2
+ (M + φ)tn(unj− 1
2
− 1)
+3
2tn(
1−(unj− 1
2
)2+ fn
j− 12
· vnj− 1
2
)+
2
3αtnsn
j− 12
− 2tn−
12
knunj− 1
2
= −(1 +K)(vn−1j − vn−1j−1
)lj
−ηj− 1
2
2vn−1j− 1
2
−Kpn−1j− 1
2

81
− (M + φ)tn−1(un−1j− 1
2
− 1
)− 3
2tn−1
(1−
(un−1j− 1
2
)2
+fn−1j− 1
2
· vn−1j− 1
2
)− 2
3αtn−1sn−1
j− 12
− 2tn−
12
knun−1j− 1
2
(5.2.5)
b. Persamaan Momentum Angular
(1 +
K
2
) (pnj − pnj−1)lj
+ηj− 1
2
2pnj− 1
2
+1
2hnj− 1
2
+3
2tn(
fnj− 1
2
pnj− 1
2
− hnj− 1
2
unj− 1
2
)−Ktn
(2hn
j− 12
+ vnj− 1
2
)− 2
tn−12
knhnj− 1
2
= −(
1 +K
2
) (pn−1j − pn−1j−1
)lj
−ηj− 1
2
2pn−1j− 1
2
− 1
2hn−1j− 1
2
− 3
2tn−1
(fn−1j− 1
2
pn−1j− 1
2
−hn−1j− 1
2
un−1j− 1
2
)+Ktn−1
(2hn−1
j− 12
+ vn−1j− 1
2
)− 2
tn−12
knhn−1j− 1
2
(5.2.6)
c. Persamaan Energi
1
2ηj− 1
2Pr qn
j− 12
+
(qnj − qnj−1
)lj
+3
2Prtnfn
j− 12
qnj− 1
2
−
2Prtn−
12
knsnj− 1
2
= −1
2ηj− 1
2Prqn−1
j− 12
−
(qn−1j − qn−1j−1
)lj
− 3
2Prtn−1fn−1
j− 12
qn−1j− 1
2
− 2Prtn−
12
knsn−1j− 1
2
(5.2.7)

82
2. Large timeHasil dari diskritisasi Persamaan large time dengan
menggunakan skema Keller-Box adalah
(Fnj − Fnj−1
)lj
= Unj− 1
2
(5.2.8)(Unj − Unj−1
)lj
= V nj− 1
2
(5.2.9)(Hnj −Hn
j−1
)lj
= Pnj− 1
2
(5.2.10)(Snj − Snj−1
)lj
= Qnj− 1
2
(5.2.11)
a. Persamaan Momentum
(1 +K)
(V nj − V n
j−1
)lj
+KPnj− 1
2
+ (M + φ)(Unj− 1
2
− 1)
+3
2
(1−
(Unj− 1
2
)2+ Fn
j− 12
V nj− 1
2
)+
2
3αSn
j− 12
− 2Unj− 1
2
kn= −(1 +K)
(V n−1j − V n−1
j−1
)lj
−KPn−1j− 1
2
− (M + φ)
(Un−1j− 1
2
− 1
)− 3
2
(1−
(Un−1j− 1
2
)2
+ Fn−1j− 1
2
V n−1j− 1
2
)− 2
3αSn−1
j− 12
− 2Un−1j− 1
2
kn(5.2.12)

83
b. Persamaan Momentum Angular
(1 +
K
2
) (Pnj − Pnj−1)lj
+3
2
(Fnj− 1
2
Pnj− 1
2
−Hnj− 1
2
Unj− 1
2
)−K
(2Hn
j− 12
+ V nj− 1
2
)− 2
Hnj− 1
2
kn= −
(1 +
K
2
)(Pn−1j − Pn−1j−1
)lj
− 3
2
(Fn−1j− 1
2
Pn−1j− 1
2
−Hn−1j− 1
2
Un−1j− 1
2
)
+K
(2Hn−1
j− 12
+ V n−1j− 1
2
)− 2
Hn−1j− 1
2
kn(5.2.13)
c. Persamaan Energi
(Qnj −Qnj−1
)lj
+3
2PrFn
j− 12
Qnj− 1
2
− 2PrSnj− 1
2
kn
= −
(Qn−1j −Qn−1j−1
)lj
− 3
2PrFn−1
j− 12
Qn−1j− 1
2
− 2PrSn−1j− 1
2
kn(5.2.14)
dimana lj menunjukkan step size dari η dan kn merupakanstep size dari waktu.
5.3 Pelinieran Model
Pelinieran model matematik dilakukan denganmenggunakan metode Newton [23]. Iterasi dari metode

84
Newton diberikan sebagai berikut :
f(i+1)j = f
(i)j + δf
(i)j
u(i+1)j = u
(i)j + δu
(i)j
v(i+1)j = v
(i)j + δv
(i)j
h(i+1)j = h
(i)j + δh
(i)j
p(i+1)j = p
(i)j + δp
(i)j
s(i+1)j = s
(i)j + δs
(i)j
q(i+1)j = q
(i)j + δq
(i)j
Kemudian dilakukan substitusi iterasi Newton ke sistemPersamaan (5.2.1)-(5.2.14) sehingga diperoleh1. small timeHasil linearisasi dari Persamaan small time diberikan sebagaiberikut :
(δfj − δfj−1)−lj2
(δuj − δuj−1) = −(fnj − fnj−1
)+lj2(
unj − unj−1)
(5.3.1)
(δuj − δuj−1)−lj2
(δvj − δvj−1) = −(unj − unj−1
)+lj2(
vnj − vnj−1)
(5.3.2)
(δhj − δhj−1)−lj2
(δpj − δpj−1) = −(hnj − hnj−1
)+lj2(
pnj − pnj−1)
(5.3.3)
(δsj − δsj−1)−lj2
(δqj − δqj−1) = −(snj − snj−1
)+lj2(
qnj − qnj−1)
(5.3.4)

85
dengan melakukan pemisalan pada Persamaan (5.3.1) - (5.3.4)menjadi
(r1)j = −(fnj − fnj−1
)+lj2
(unj − unj−1
)(r2)j = −
(unj − unj−1
)+lj2
(vnj − vnj−1
)(r3)j = −
(hnj − hnj−1
)+lj2
(pnj − pnj−1
)(r4)j = −
(snj − snj−1
)+lj2
(qnj − qnj−1
)sehingga Persamaan (5.3.1) - (5.3.4) menjadi
(δfj − δfj−1)−lj2
(δuj − δuj−1) = (r1)j (5.3.5)
(δuj − δuj−1)−lj2
(δvj − δvj−1) = (r2)j (5.3.6)
(δhj − δhj−1)−lj2
(δpj − δpj−1) = (r3)j (5.3.7)
(δsj − δsj−1)−lj2
(δqj − δqj−1) = (r4)j (5.3.8)
Dengan cara yang sama yaitu melakukan pemisalan makapersamaan (5.2.5)-(5.2.7) menjadi
(r5)j = −(1 +K)
(vnj − vnj−1
)lj
−ηj− 1
2
2vnj− 1
2
−Kpnj− 1
2
−(M + φ)tn(unj− 1
2
− 1)− 3
2tn(
1−(unj− 1
2
)2+fn
j− 12
· vnj− 1
2
)− 2
3αtnsn
j− 12
+ 2tn−
12
knunj− 1
2
−(1 +K)
(vn−1j − vn−1j−1
)lj
−ηj− 1
2
2vn−1j− 1
2
−Kpn−1j− 1
2

86
−(M + φ)tn−1(un−1j− 1
2
− 1
)− 3
2tn−1
(1−
(un−1j− 1
2
)2
+fn−1j− 1
2
· vn−1j− 1
2
)− 2
3αtn−1sn−1
j− 12
− 2tn−
12
knun−1j− 1
2
(5.3.9)
(r6)j = −(
1 +K
2
) (pnj − pnj−1)lj
−ηj− 1
2
2pnj− 1
2
− 1
2hnj− 1
2
− 3
2tn(
fnj− 1
2
pnj− 1
2
− hnj− 1
2
unj− 1
2
)+Ktn
(2hn
j− 12
+ vnj− 1
2
)+2
tn−12
knhnj− 1
2
−(
1 +K
2
) (pn−1j − pn−1j−1
)lj
−ηj− 1
2
2pn−1j− 1
2
− 1
2hn−1j− 1
2
− 3
2tn−1
(fn−1j− 1
2
pn−1j− 1
2
−hn−1j− 1
2
un−1j− 1
2
)+Ktn−1
(2hn−1
j− 12
+ vn−1j− 1
2
)−2
tn−12
knhn−1j− 1
2
(5.3.10)
(r7)j = −1
2ηj− 1
2Pr qn
j− 12
−
(qnj − qnj−1
)lj
− 3
2Prtnfn
j− 12
qnj− 1
2
+2Prtn−
12
knsnj− 1
2
= −1
2ηj− 1
2Prqn−1
j− 12
−
(qn−1j − qn−1j−1
)lj
−3
2Prtn−1fn−1
j− 12
qn−1j− 1
2
− 2Prtn−
12
knsn−1j− 1
2
(5.3.11)
dengana. Persamaan Momentum
(a1)j =3
4tnvn
j− 12
(a2)j = (a1)j

87
(a3)j = −(M + φ)
2tn − 3
2tnun
j− 12
− tn−12
kn
(a4)j = (a3)j
(a5)j =(1 +K)
lj+ηj− 1
2
4+
3
4tnfn
j− 12
(a6)j = −(1 +K)
lj+ηj− 1
2
4+
3
4tnfn
j− 12
(a7)j =K
2(a8)j = (a7)j
(a9)j =1
3αtn
(a10)j = (a9)j (5.3.12)
b. Persamaan Momentum Angular
(b1)j =
(1 + k
2
)lj
+ηj− 1
2
2+
3
2tnfn
j− 12
(b2)j = −(1 + k
2
)lj
+ηj− 1
2
2+
3
2tnfn
j− 12
(b3)j =1
4− 3
2tnuj− 1
2−Ktn − tn−
12
kn
(b4)j = (b3)j
(b5)j =3
4tnpn
j− 12
(b6)j = (b5)
(b7)j = −3
4tnhn
j− 12
(b8)j = (b7)j
(b9)j = −Ktn
2(b10)j = (b9)j (5.3.13)

88
c. Persamaan Energi
(c1)j =1
4ηj− 1
2Pr +
3
4Prtnfn
j− 12
+1
lj
(c2)j =1
4ηj− 1
2Pr +
3
4Prtnfn
j− 12
− 1
lj
(c3)j =3
4Prtnqn
j− 12
− 1
lj
(c4)j = (c3)j
(c5)j = −Pr tn− 1
2
kn
(c6)j = (c5)j (5.3.14)
Kemudian dengan mensubstitusi Persamaan (5.3.12) kePersamaan (5.3.9), Persamaan (5.3.13) ke Persamaan (5.3.10),dan Persamaan (5.3.14) ke Persamaan (5.3.11) maka diperolehbentuk Persamaan sebagai berikut
(a1)jδfj + (a2)jδfj−1 + (a3)jδuj + (a4)jδuj−1 + (a5)jδvj
+ (a6)jδvj−1 + (a7)jδpj + (a8)jδpj−1 + (a9)jδsj
+ (a10)jδsj−1 = (r5)j (5.3.15)
(b1)jδpj + (b2)jδpj−1 + (b3)jδhj + (b4)jδhj−1 + (b5)jδfj
+ (b6)jδfj−1 + (b7)jδuj + (b8)jδuj−1 + (b9)jδvj
+ (b10)jδvj−1 = (r6)j (5.3.16)
(c1)jδqj + (c2)jδqj−1 + (c3)jδfj + (c4)jδfj−1 + (c5)jδsj
+ (c6)jδsj−1 (5.3.17)
Melihat pada kondisi batas maka dapat dinyatakan bahwaδf0 = 0, δu0 = 0, δs0 = 0, δuN = 0, δhN = 0 dan δsN = 0.
2. Large timeHasil linearisasi dari Persamaan large time diberikan sebagai

89
berikut :
(δFj − δFj−1)−lj2
(δUj − δUj−1) = −(Fnj − Fnj−1
)+lj2(
Unj − Unj−1)
(5.3.18)
(δUj − δUj−1)−lj2
(δVj − δVj−1) = −(Unj − Unj−1
)+lj2(
V nj − V n
j−1)
(5.3.19)
(δHj − δHj−1)−lj2
(δPj − δPj−1) = −(Hnj −Hn
j−1)
+lj2(
Pnj − Pnj−1)
(5.3.20)
(δSj − δSj−1)−lj2
(δQj − δQj−1) = −(Snj − Snj−1
)+lj2(
Qnj −Qnj−1)
(5.3.21)
dengan melakukan pemisalan pada Persamaan (5.3.18) -(2.3.21) menjadi
(r1)j = −(Fnj − Fnj−1
)+lj2
(Unj − Unj−1
)(r2)j = −
(Unj − Unj−1
)+lj2
(V nj − V n
j−1)
(r3)j = −(Hnj −Hn
j−1)
+lj2
(Pnj − Pnj−1
)(r4)j = −
(Snj − Snj−1
)+lj2
(Qnj −Qnj−1
)sehingga Persamaan (5.3.18) - (2.3.21) menjadi
(δFj − δFj−1)−lj2
(δUj − δUj−1) = (r1)j (5.3.22)
(δUj − δUj−1)−lj2
(δVj − δVj−1) = (r2)j (5.3.23)
(δHj − δHj−1)−lj2
(δPj − δPj−1) = (r3)j (5.3.24)
(δSj − δSj−1)−lj2
(δQj − δQj−1) = (r4)j (5.3.25)

90
Dengan cara yang sama yaitu melakukan pemisalan makapersamaan (5.2.22)-(5.2.25) menjadi
(r5)j = −(1 +K)
(V nj − V n
j−1
)lj
−KPnj− 1
2
−(M + φ)(Unj− 1
2
− 1)− 3
2
[1−
(Unj− 1
2
)2+Fn
j− 12
· V nj− 1
2
]− 2
3αSn
j− 12
+ 2tn−
12
knUnj− 1
2
−(1 +K)
(V n−1j − V n−1
j−1
)lj
−KPn−1j− 1
2
−(M + φ)
(Un−1j− 1
2
− 1
)− 3
2
[1−
(Un−1j− 1
2
)2
+Fn−1j− 1
2
· V n−1j− 1
2
]− 2
3αSn−1
j− 12
− 2Un−1j− 1
2
kn(5.3.26)
(r6)j = −(
1 +K
2
) (Pnj − Pnj−1)lj
− 3
2
(Fnj− 1
2
Pnj− 1
2
−Hnj− 1
2
Unj− 1
2
)+K
(2Hn
j− 12
+ V nj− 1
2
)+ 2
Hnj− 1
2
kn
−(
1 +K
2
) (Pn−1j − Pn−1j−1
)lj
− 3
2
(Fn−1j− 1
2
Pn−1j− 1
2
−Hn−1j− 1
2
Un−1j− 1
2
)+K
(2Hn−1
j− 12
+ V n−1j− 1
2
)
−2Hn−1j− 1
2
kn(5.3.27)
(r7)j = −
(Qnj −Qnj−1
)lj
− 3
2PrFn
j− 12
Qnj− 1
2
+ 2PrSnj− 1
2
kn

91
−
(Qn−1j −Qn−1j−1
)lj
− 3
2PrFn−1
j− 12
Qn−1j− 1
2
−2PrSn−1j− 1
2
kn(5.3.28)
dengana. Persamaan Momentum
(a1)j =3
4tnV n
j− 12
(a2)j = (a1)j
(a3)j = −(M + φ)
2− 3
4Unj− 1
2
− 1
kn
(a4)j = (a3)j
(a5)j =(1 +K)
lj+
3
4Fnj− 1
2
(a6)j = −(1 +K)
lj+
3
4Fnj− 1
2
(a7)j =K
2(a8)j = (a7)j
(a9)j =1
3α
(a10)j = (a9)j (5.3.29)
b. Persamaan Momentum Angular
(b1)j =
(1 + K
2
)lj
+3
2Fnj− 1
2
(b2)j = −(1 + K
2
)lj
+3
2Fnj− 1
2
(b3)j = −3
4Uj− 1
2−K − 1
kn

92
(b4)j = (b3)j
(b5)j =3
2Pnj− 1
2
(b6)j = (b5)
(b7)j = −3
4Hnj− 1
2
(b8)j = (b7)j
(b9)j = −K2
(b10)j = (b9)j (5.3.30)
c. Persamaan Energi
(c1)j =3
2PrFn
j− 12
+1
lj
(c2)j =3
2PrFn
j− 12
− 1
lj
(c3)j =3
2PrQn
j− 12
(c4)j = (c3)j
(c5)j = −Pr 1
kn
(c6)j = (c5)j (5.3.31)
Kemudian dengan mensubstitusi Persamaan (5.3.29) kePersamaan (5.3.26), Persamaan (5.3.30) ke Persamaan(5.3.27), dan Persamaan (5.3.31) ke Persamaan (5.3.28) makadiperoleh bentuk Persamaan sebagai berikut
(a1)jδFj + (a2)jδFj−1 + (a3)jδUj + (a4)jδUj−1 + (a5)jδVj
+ (a6)jδVj−1 + (a7)jδPj + (a8)jδPj−1 + (a9)jδSj
+ (a10)jδSj−1 = (r5)j (5.3.32)
(b1)jδPj + (b2)jδPj−1 + (b3)jδHj + (b4)jδHj−1 + (b5)jδFj
+ (b6)jδFj−1 + (b7)jδUj + (b8)jδUj−1 + (b9)jδVj

93
+ (b10)jδVj−1 = (r6)j (5.3.33)
(c1)jδQj + (c2)jδQj−1 + (c3)jδFj + (c4)jδFj−1 + (c5)jδSj
+ (c6)jδSj−1 (5.3.34)
Melihat pada kondisi batas maka dapat dinyatakan bahwaδF0 = 0, δU0 = 0, δS0 = 0, δUN = 0, δHN = 0 dan δSN = 0.
5.4 Penyelesaian Sistem Persamaan LinierPersamaan (5.3.5) - (5.3.8), (5.3.15) - (5.3.17), (5.3.22)
- (5.3.25), dan (5.3.32) - (5.3.34) merupakan Persamaansistem linier dan akan diselesaikan dengan menggunakanteknik eliminasi blok [9]. Pada penyelesaian numerikmenggunakan skema Keller-Box elemen-elemen yang adadalam blok tridiagonal merupakan sebuah matriks, sehinggadiperlukan penentuan elemen-elemen untuk membentukmatrik. Persamaan yang didapat akan diselesaikan denganmenggunakan tiga kondisi yaitu pada saat j = 1, j = N − 1,dan j = N . Berikut merupakan penjabaran dari tiga kondisiyang dimaksud1. Saat j = 1Persamaan yang didapat ketika memasukkan nilai j = 1 padaPersamaan (5.3.5) - (5.3.8) dan Persamaan (5.3.15) - (5.3.22)adalah
(δf1 − δf0)−l12
(δu1 − δu0) = (r1)j
(δu1 − δu0)−l12
(δv1 − δv0) = (r2)j
(δh1 − δh0)−l12
(δp1 − δp0) = (r3)j
(δs1 − δs0)−l12
(δq1 − δq0) = (r4)j
(a1)1δf1 + (a2)1δf0 + (a3)1δu1 + (a4)1δu0 + (a5)1δv1
+ (a6)1δv0 + (a7)1δp1 + (a8)1δp0 + (a9)1δs1

94
+ (a10)1δs0 = (r5)j
(b1)1δp1 + (b2)1δp0 + (b3)1δh1 + (b4)1δh0 + (b5)1δf1
+ (b6)1δf0 + (b7)1δu1 + (b8)1δu0 + (b9)1δv1
+ (b10)1δv0 = (r6)j
(c1)1δq1 + (c2)1δq0 + (c3)1δf1 + (c4)1δf0 + (c5)1δs1
+ (c6)1δs0
Berdasarkan sistem Persamaan diatas maka matrik yangdapat dibentuk adalah sebagai berikut
0 0 0 1 0 0 0l12 0 0 0 − l1
2 0 0
0 l12 0 0 0 − l1
2 0
0 0 l12 0 0 0 − l1
2(a6)1 (a8)1 0 (a1)1 (a5)1 (a7)1 0(b10)1 (b2)1 0 (b5)1 (b9)1 (b1)1 0
0 0 (c2)1 (c3)1 0 0 (c1)1
δv0δp0δq0δf1δv1δp1δq1
+
− l12 0 0 0 0 0 0
1 0 0 0 0 0 00 1 0 0 0 0 00 0 1 0 0 0 0
(a3)1 0 (a9)1 0 0 0 0(b7)1 (b3)1 0 0 0 0 0
0 0 (c5)1 0 0 0 0
δu1δh1δs1δf2δv2δp2δq2
=
(r1)1(r2)1(r3)1(r4)1(r5)1(r6)1(r7)1

95
Matriks yang telah terbentuk pada saat j = 1 dapat ditulisdengan
[A1][δ1] + [C1][δ2] = [r1]
2. Saat j = N − 1Persamaan yang didapat ketika memasukkan nilai j = N − 1pada Persamaan (5.3.5) - (5.3.8) dan Persamaan (5.3.15) -(5.3.22) adalah
(δfN−1 − δfN−2)−lN−1
2(δuN−1 − δuN−2) = (r1)N−1
(δuN−1 − δuN−2)−lN−1
2(δvN−1 − δvN−2) = (r2)N−1
(δhN−1 − δhN−2)−lN−1
2(δpN−1 − δpN−2) = (r3)N−1
(δsN−1 − δsN−2)−lN−1
2(δqN−1 − δqN−2) = (r4)N−1
(a1)N−1δfN−1 + (a2)N−1δfN−2 + (a3)N−1δuN−1
+ (a4)N−1δuN−2 + (a5)N−1δvN−1 + (a6)N−1
δvN−2 + (a7)N−1δpN−1 + (a8)N−1δpN−2
+ (a9)N−1δsN−1 + (a10)N−1δsN−2 = (r5)N−1
(b1)N−1δpN−1 + (b2)N−1δpN−2 + (b3)N−1δhN−1
+ (b4)N−1δhN−2 + (b5)N−1δfN−1 + (b6)N−1
δfN−2 + (b7)N−1δuN−1 + (b8)N−1δuN−2
+ (b9)N−1δvN−1 + (b10)N−1δvN−2 = (r6)N−1
(c1)N−1δqN−1 + (c2)N−1δqN−2 + (c3)N−1δfN−1
+ (c4)N−1δfN−2 + (c5)N−1δsN−1
+ (c6)N−1δsN−2 = (r7)N−1
Berdasarkan sistem Persamaan diatas maka matrik yangdapat dibentuk adalah sebagai berikut

96
0 0 0 0 0 0 0lN−1
2 0 0 0 0 0 0
0lN−1
2 0 0 0 0 0
0 0lN−1
2 0 0 0 0(a6)N−1 (a8)N−1 0 0 0 0 0(b10)N−1 (b2)N−1 0 0 0 0 0
0 0 (c2)N−1 0 0 0 0
δvN−1δpN−2δqN−2δfNδvNδpNδqN
+
lN−1
2 0 0 1 0
−1 0 0 0 − lN−1
20 −1 0 0 00 0 −1 0 0
(a4)N−1 0 (a10)N−1 (a1)N−1 (a5)N−1(b8)N−1 (b4)N−1 0 (b5)N−1 (b9)N−1
0 0 (c6)N−1 (c6)N−1 0
0 00 0
− lN−1
2 0
0 − lN−1
2(a7)N−1 0(b1)N−1 0
0 (c1)N−1
δuN−2δhN−2δsN−2δfN−1δvN−1δpN−1δqN−1
+
0 0 0 −1 0 0 0
0 0 0 0 − lN−1
2 0 0
0 0 0 0 0 − lN−1
2 0
0 0 0 0 0 0 − lN−1
20 0 0 (a2)N−1 (a6)N−1 (a8)N−1 00 0 0 (b6)N−1 (b10)N−1 (b2)N−1 00 0 0 (c4)N−1 0 0 (c2)N−1

97
δuNδhNδsNδfN−2δvN−2δpN−2δqN−2
=
(r1)N−1(r2)N−1(r3)N−1(r4)N−1(r5)N−1(r6)N−1(r7)N−1
Matriks yang telah terbentuk pada saat j = N − 1 dapatditulis dengan
[Bj ][δj−1] + [Aj ][δj ] + [Cj ][δJ+1] = [rj ]
untuk setiap j = 1, 2, 3, ..., N − 1.
3. Saat j = NPersamaan yang didapat ketika memasukkan nilai j = Npada Persamaan (5.3.5) - (5.3.8) dan Persamaan (5.3.15) -(5.3.22) adalah
(δfN − δfN−1)−lN2
(δuN − δuN−1) = (r1)N
(δuN − δuN−1)−lN2
(δvN − δvN−1) = (r2)N
(δhN − δhN−1)−lN2
(δpN − δpN−1) = (r3)N
(δsN − δsN−1)−lN2
(δqN − δqN−1) = (r4)N
(a1)NδfN + (a2)NδfN−1 + (a3)NδuN + (a4)NδuN−1
+ (a5)NδvN + (a6)NδvN−1 + (a7)NδpN
+ (a8)NδpN−1 + (a9)NδsN + (a10)NδsN−1
= (r5)N
(b1)NδpN + (b2)NδpN−1 + (b3)NδhN + (b4)NδhN−1
+ (b5)NδfN + (b6)NδfN−1 + (b7)NδuN

98
+ (b8)nδuN−1 + (b9)NδvN + (b10)NδvN−1
= (r6)N
(c1)NδqN + (c2)NδqN−1 + (c3)NδfN + (c4)NδfN−1
+ (c5)NδsN + (c6)NδsN−1 = (r7)N
Berdasarkan sistem Persamaan diatas maka matrik yangdapat dibentuk adalah sebagai berikut
0 0 0 −1 0 0 0
− lN2 0 0 0 lN
2 0 0
0 − lN2 0 0 0 lN
2 0
0 0 − lN2 0 0 0 lN
2(a5)N (a7)N 0 (a2)N (a6)N (a8)N 0(b9)N (b1)N 0 (b6)N (b10)N (b2)N 0
0 0 (c1)N (c4)N 0 0 (c2)N
δvNδpNδqNδfN−1δvN−1δpN−1δqN−1
+
− lN2 0 0 0 0 0 0
1 0 0 0 0 0 00 1 0 0 0 0 00 0 1 0 0 0 0
(a3)N 0 (a9)N 0 0 0 0(b7)N (b3)N 0 0 0 0 0
0 0 (c5)N 0 0 0 0
δuNδhNδsNδfN+1
δvN+1
δpN+1
δqN+1
=
(r1)N(r2)N(r3)N(r4)N(r5)N(r6)N(r7)N
Matriks yang telah terbentuk pada saat j = N dapat ditulisdengan
[Bj ][δj−1] + [Aj ][δj ] = [rj ]

99
untuk nilai j = 1, 2, 3, ..., N . Oleh karena itu secarasederhana untuk j = N dapat ditulis dengan
j = 1 : [A1][δ1] + [C1][δ2] = [r1]
j = 2 : [B2][δ1] + [A2][δ2] + [C2][δ3] = [r2]
......
j = N − 1 : [BN−1][δN−2] + [AN−1][δN−1] + [CN−1][δN−1]
= [rN−1]
j = N : [BN ][δN−1] + [AN ][δN ] = [rN ]
dan dapat ditulis seperti beikut
Aδ = r (5.4.1)
dengan
A =
[A1] [C1][B2] [A2] [C2]
. . .
. . .
. . .
BN−1 AN−1 CN−1BN AN
δ =
[δ1][δ2]
...[δN−1][δN ]

100
dan
r =
[r1][r2]
...[rN−1][rN ]
Pada Persamaan (5.4.1) diketahui bahwa matrik A
merupakan matriks tridiagonal dan matriks non-singular.Oleh sebab itu matriks A dapat diselesaikan denganmenggunakan teknik eliminasi blok dan dapat difaktorkansebagai
A = LU (5.4.2)
dengan
L =
[α1] 0 0 0 0 0 0[B2] [α1] 0 0 0 0 0
0. . .
. . . 0 0 0 0
0 0. . .
. . . 0 0 0
0 0 0. . .
. . . 0 00 0 0 0 [BN−1] [αN−1] 00 0 0 0 0 [BN ] [αN ]
dan
U =
[I] [τ1] 0 0 0 0 00 [I] [τ2] 0 0 0 0
0 0. . .
. . . 0 0 0
0 0 0. . .
. . . 0 0
0 0 0 0. . .
. . . 00 0 0 0 0 [I] [τN−1]0 0 0 0 0 0 [I]

101
dimana [I] merupakan matriks identitas dengan ukuran 7 x 7.[αj ] dan [τj ] merupakan matriks yang berukuran 7 x 7 denganelemen seperti berikut
[αj ] = [A1]
[A1] [τj ] = [C1]
[αj ] = [Aj ]− [Bj ][τj−1]
dengan j − 2, 3, 4, ..., N
[αj ] [τj ] = [Cj ]
dengan j = 2, 3, 4, ..., N − 1. Langkah selanjutnyaadalah mensubstitusi Persamaan (5.4.2) ke Persamaan (5.4.1)sehingga didapat Persamaan sebagai berikut
LUδ = r (5.4.3)
dengan mendefinisikan bahwa
Uδ = W (5.4.4)
maka Persamaan (5.4.3) menjadi
LW = r (5.4.5)
dengan
W =
[W1][W2]
...[WN−1][WN ]
[Wj ] merupakan matriks yang berukuran 7 x 1 dengan elemen-elemennya yaitu
[α1][W1] = [r1]
[αj ] [Wj ] = [rj ]− [Bj ][Wj−1], 2 ≤ j ≤ N

102
Setelah mendapatkan elemen dalam matriks W, kemudianakan dicari penyelesaian dari δ pada Persamaan (5.4.2) denganmenggunakan persamaan sebagai berikut
[δj ] = [W1]
[δj ] = [Wj ]− [rj ][δj+1], 1 ≤ j ≤ N
Nilai δ yang telah didapatkan digunakan untuk menyelesaikanPersamaan (5.3.1) dengan cara melakukan iterasi. Iterasiyang dilakukan akan berhenti apabila memenuhi kriteriakonvergen. Kriteria konvergen yang dimaksud adalahdengan menggunakan v(0, t) maka iterasi berhenti pada saat|δv(0, t)| < ε. Pada tugas akhir ini digunakan ε = 10−5.
5.5 Validasi model
Pada Tugas Akhir ini penulis melakukan modifikasi padamodel. Modifikasi yang dilakukan adalah dengan merubahletak pemberian magnet dari fluida kedalam benda yangdilalui oleh fluida, dalam Tugas Akhir ini benda yangdimaksud adalah bola berpori. Oleh karena itu dilakukanvalidasi model untuk membuktikan bahwa model matematikayang didapatkan telah sesuai.
Validasi model adalah usaha untuk membuktikan bahwamodel pada sistem dapat mewakili realitas yang dikajisehingga model yang didapat valid. Sedangkan validasi adalahperbandingan hasil dari solusi numerik dengan hasil padapenelitian yang telah ada dan dinyatakan sesuai. PadaTugas Akhir ini model matematika yang telah didapatpada bab 4 akan divalidasi dengan model matematika daripenelitian Rizky[8] yang berjudul ”MagnetohidrodinamikaFluida Mikrokutub yang Mengalir Melalui Bola Pejal diBawah Pengaruh Medan Magnet”. Validasi dilakukan denganmenggunakan perbandingan pada kurva kecepatan dan mikrorotasi. Nilai dari parameter yang digunakan adalah M = 0,
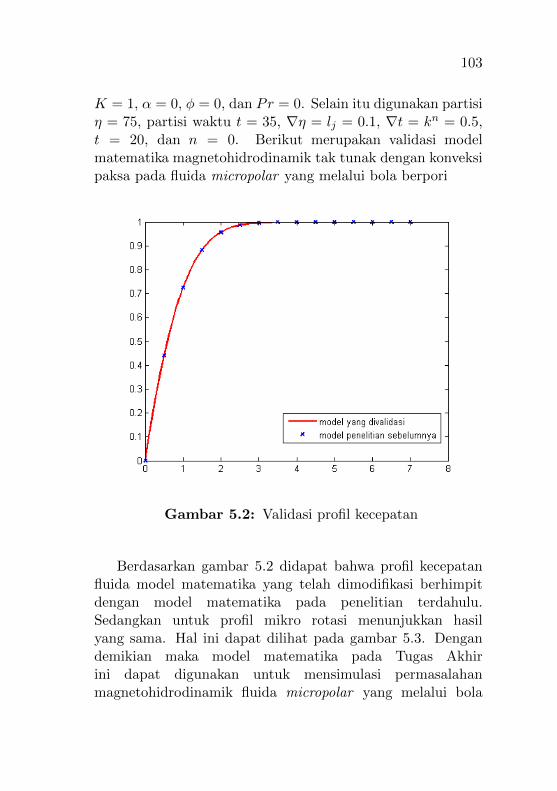
103
K = 1, α = 0, φ = 0, dan Pr = 0. Selain itu digunakan partisiη = 75, partisi waktu t = 35, ∇η = lj = 0.1, ∇t = kn = 0.5,t = 20, dan n = 0. Berikut merupakan validasi modelmatematika magnetohidrodinamik tak tunak dengan konveksipaksa pada fluida micropolar yang melalui bola berpori
Gambar 5.2: Validasi profil kecepatan
Berdasarkan gambar 5.2 didapat bahwa profil kecepatanfluida model matematika yang telah dimodifikasi berhimpitdengan model matematika pada penelitian terdahulu.Sedangkan untuk profil mikro rotasi menunjukkan hasilyang sama. Hal ini dapat dilihat pada gambar 5.3. Dengandemikian maka model matematika pada Tugas Akhirini dapat digunakan untuk mensimulasi permasalahanmagnetohidrodinamik fluida micropolar yang melalui bola

104
berpori bermagnet dengan konveksi paksa. Parameter yangakan digunakan adalah parameter magnetik, parametermicropolar, parameter porositas, dan bilangan prandtl.Berikut merupakan validasi profil mikro rotasi
Gambar 5.3: Validasi profil mikro rotasi
Pada gambar (5.2) dan (5.3) diketahui bahwa grafik hasilmodel yang diteliti dengan model sebelumnya berhimpit.Berikut merupakan data dari validasi yang dilakukan:
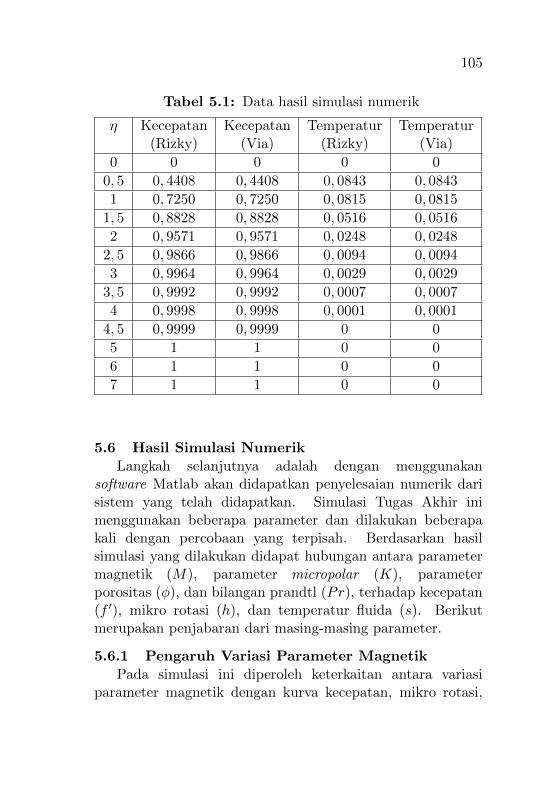
105
Tabel 5.1: Data hasil simulasi numerik
η Kecepatan Kecepatan Temperatur Temperatur(Rizky) (Via) (Rizky) (Via)
0 0 0 0 0
0, 5 0, 4408 0, 4408 0, 0843 0, 0843
1 0, 7250 0, 7250 0, 0815 0, 0815
1, 5 0, 8828 0, 8828 0, 0516 0, 0516
2 0, 9571 0, 9571 0, 0248 0, 0248
2, 5 0, 9866 0, 9866 0, 0094 0, 0094
3 0, 9964 0, 9964 0, 0029 0, 0029
3, 5 0, 9992 0, 9992 0, 0007 0, 0007
4 0, 9998 0, 9998 0, 0001 0, 0001
4, 5 0, 9999 0, 9999 0 0
5 1 1 0 0
6 1 1 0 0
7 1 1 0 0
5.6 Hasil Simulasi Numerik
Langkah selanjutnya adalah dengan menggunakansoftware Matlab akan didapatkan penyelesaian numerik darisistem yang telah didapatkan. Simulasi Tugas Akhir inimenggunakan beberapa parameter dan dilakukan beberapakali dengan percobaan yang terpisah. Berdasarkan hasilsimulasi yang dilakukan didapat hubungan antara parametermagnetik (M), parameter micropolar (K), parameterporositas (φ), dan bilangan prandtl (Pr), terhadap kecepatan(f ′), mikro rotasi (h), dan temperatur fluida (s). Berikutmerupakan penjabaran dari masing-masing parameter.
5.6.1 Pengaruh Variasi Parameter Magnetik
Pada simulasi ini diperoleh keterkaitan antara variasiparameter magnetik dengan kurva kecepatan, mikro rotasi,

106
dan temperatur pada fluida. Berikut merupakan bahan-bahanyang digunakan untuk mendapatkan nilai dari parametermagnetik
Tabel 5.2: Nilai magnetik pada bahan
Bahan ρ (kg/m3) σ M
Zn / Zinc / Seng 7, 14 g/cm3 1, 68 · 107 2,3
Fe / Iron / Besi 7, 87 g/cm3 1, 04 · 107 1,3
Steel / Baja 7, 75 g/cm3 1, 61 · 107 2
Kobalt / Baja 8, 86 g/cm3 1, 6 · 107 1,8
Berikut merupakan hasil simulasi yang didapat
Gambar 5.4: Pengaruh variasi parameter magnetikterhadap kecepatan fluida

107
Variasi parameter magnetik yang digunakan adalahM = 0, 1.3, 1.8, 2. Parameter magnetik ditetapkanberdasarkan pemilihan bahan yang digunakan sebagaibola. Sebagaimana yang telah diketahui bahwa setiap bahanmemiliki densitas dan kemampuan menghantarkan magnetyang berbeda-beda. Oleh karena itu untuk mengetahuipengaruh medan magnet digunakan variasi bahan sepertiyang terlihat dalam tabel (5.2). Sedangkan untuk nilaiparameter yang lainnya adalah K = 1, α = 0, φ = 1, danPr = 1, selain itu digunakan banyaknya partisi η = 48,partisi waktu t = 20, ∆η = lj = 0.1, ∆t = kn = 0.05, t = 20,dan komsentrasi n = 0.
Hasil simulasi pada gambar 5.4 menunjukkan bahwaparameter magnetik mempengaruhi kurva kecepatan fluidayang mengalami peningkatan dari f ′ = 0 sampai f ′ ≈ 1.Berdasarkan hasil simulasi yang telah didapat kecepatanfluida semakin menurun ketika nilai parameter bertambah.Hal ini dapat dilihat ketika 0 ≤ η ≤ 4.4 pertambahanparameter mengakibatkan penurunan kecepatan hinggakemudian menuju satu titik yang sama. Berdasarkan
rumus matematis dari parameter magnetik yaitu M =aσB2
0ρU∞
diketahui bahwa parameter magnetik sebanding denganB0 dan berbanding terbalik dengan densitas fluida (ρ).B0 merupakan gaya Lorenz yang terdapat pada bolaberpori bermagnet. Hal ini menunjukkan bahwa semakinbertambahnya nilai parameter magnetik yang diberikan, gayaLorenz yang terdapat pada bola akan semakin meningkat.Sedangkan densitas fluida akan semakin kecil. Berdasarkanpersamaan momentum, medan magnet yang terdapat padabola berpori memperlambat kecepatan fluida. Semakin dekatfluida dengan bola maka kecepatan fluida akan semakinlambat atau semakin menurun, karena bola berpori yangmengandung magnet menyebabkan gaya tolak terhadap aliran
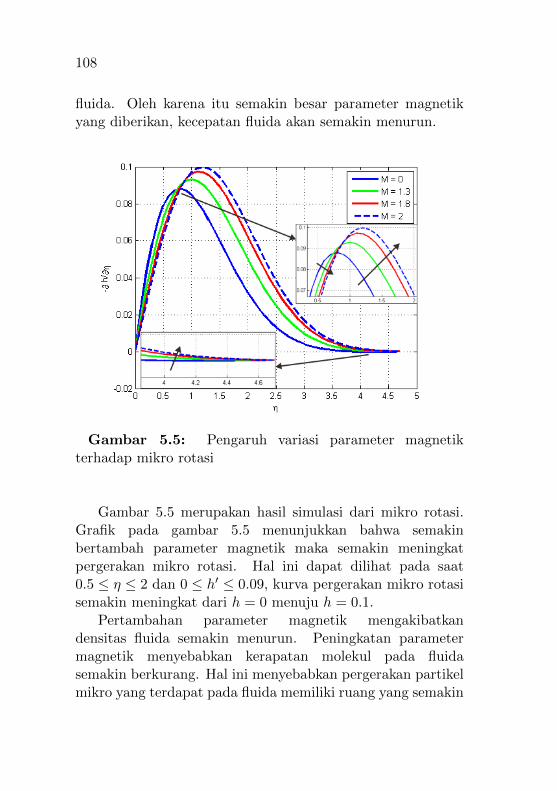
108
fluida. Oleh karena itu semakin besar parameter magnetikyang diberikan, kecepatan fluida akan semakin menurun.
Gambar 5.5: Pengaruh variasi parameter magnetikterhadap mikro rotasi
Gambar 5.5 merupakan hasil simulasi dari mikro rotasi.Grafik pada gambar 5.5 menunjukkan bahwa semakinbertambah parameter magnetik maka semakin meningkatpergerakan mikro rotasi. Hal ini dapat dilihat pada saat0.5 ≤ η ≤ 2 dan 0 ≤ h′ ≤ 0.09, kurva pergerakan mikro rotasisemakin meningkat dari h = 0 menuju h = 0.1.
Pertambahan parameter magnetik mengakibatkandensitas fluida semakin menurun. Peningkatan parametermagnetik menyebabkan kerapatan molekul pada fluidasemakin berkurang. Hal ini menyebabkan pergerakan partikelmikro yang terdapat pada fluida memiliki ruang yang semakin

109
luas sehingga pergerakan rotasi meningkat secara signifikan.Oleh karena itu semakin bertambah parameter magnetikmaka semakin meningkat pergerakan mikro rotasi karenakerapatan fluida semakin menurun. Ketika fluida mendekatititik stagnasi x ≈ 0 pergerakan mikro rotasi akan kembalimenurun menuju 0.
Gambar 5.6: Pengaruh variasi parameter magnetikterhadap temperatur
Hasil simulasi pada gambar 5.6 menunjukkan bahwatemperatur fluida semakin meningkat seiring denganpeningkatan parameter magnetik. Kurva temperaturmengalami penurunan dari s = 1 sampai s ≈ 0. Ketika0 ≤ η ≤ 3.4, temperatur semakin meningkat seiring denganparameter magnetik yang semakin meningkat. Energiinternal fluida menurun karena pengaruh medan magnet

110
dan densitas semakin berkurang yang diakibatkan olehbertambahnya parameter magnetik. Karena energi internalmenurun maka energi yang digunakan oleh fluida semakinmenurun sehingga mengakibatkan temperatur pada fluidamicropolar mengalami peningkatan.
5.6.2 Pengaruh Variasi Parameter Micropolar
Pada subbab akan dibahas mengenai pengaruh parametermicropolar. Pemilihan parameter didasarkan pada porositas,tidak berdasarkan bentuk dari pori yang terdapat pada bola.
Gambar 5.7: Pengaruh variasi parameter micropolarterhadap kecepatan fluida
Pada simulasi ini diperoleh keterkaitan antara variasiparameter micropolar dengan kurva kecepatan, mikro rotasi,

111
dan temperatur pada fluida. Variasi parameter micropolaryang digunakan adalah K = 0.25, 0.5, 0.75, 1. Sedangkanuntuk nilai parameter yang lainnya adalah M = 1, α = 0, φ =1, dan Pr = 1, selain itu digunakan banyaknya partisi η = 48,partisi waktu t = 20, ∆η = lj = 0.1, ∆t = kn = 0.05, t = 20,dan konsentrasi n = 0.
Hasil simulasi pada gambar 5.7 menunjukkan bahwaparameter micropolar mempengaruhi kurva kecepatan fluidayang mengalami peningkatan dari f ′ = 0 sampai f ′ ≈ 1.Kecepatan fluida semakin menurun ketika nilai parameterbertambah. Hal ini dapat dilihat ketika 0 ≤ η ≤ 3.5pertambahan parameter mengakibatkan penurunan kecepatanhingga kemudian menuju satu titik yang sama. Padasaat 3.5 < η ≤ 4.8 kecepatan fluida adalah stabildengan nilai f ′ ≈ 1. Akan tetapi ketika memasuki η =3, 5 kecepatan fluida menjadi 0.9781, pada saat η = 3kecepatannya adalah 0.9637, ketika η = 2.5 kecepatannyaadalah 0.8375 dan terus mengalami penurunan hinggakemudian berhenti pada η = 0 dengan kecepatan 0 untukpemberian nilai parameter micropolar K = 1. Berdasarkanrumus matematis dari parameter micropolar yaitu K = κ
µdiketahui bahwa parameter micropolar sebanding denganpergerakan mikro rotasi (vortex ) κ dan berbanding terbalikdengan viskositas dinamik (µ). Artinya semakin besar nilaiparameter micropolar yang diberikan maka nilai vortex akansemakin besar, sedangkan viskositas dinamik akan semakinkecil. Menurunnya viskositas dan adanya pengaruh magnetpada bola berpori mengakibatkan ketahanan fluida semakinmenurun, sehingga semakin besar parameter micropolar yangdiberikan, kurva kecepatan semakin menurun.
Gambar 5.8 merupakan hasil simulasi dari mikro rotasi.Grafik pada gambar 5.8 menunjukkan bahwa semakinbertambah parameter micropolar maka semakin meningkat

112
pergerakan mikro rotasi. Hal ini dapat dilihat pada saat0 ≤ η ≤ 4 seperti yang terlihat pada gambar
Gambar 5.8: Pengaruh variasi parameter micropolarterhadap mikro rotasi
Kurva pergerakan mikro rotasi semakin meningkat dari h = 0menuju h ≈ 0.1 hingga kembali di h = 0. Peningkatanparameter micropolar menyebabkan pergerakan mikro rotasipada fluida semakin meningkat. Seperti yang telahdijelaskan pada penjelasan sebelumnya, terjadi penurunannilai viskositas dinamik ketika parameter micropolar semakinmeningkat. Peristiwa tersebut menyebabkan pergerakanpartikel mikro yang terdapat pada fluida memiliki ruang yangsemakin luas sehingga pergerakan rotasi semakin meningkat.Oleh karena itu semakin bertambah parameter micropolarmaka semakin meningkat pergerakan mikro rotasi.

113
Hasil simulasi pada gambar 5.9 menunjukkan pengaruhparameter micropolar terhadap temperatur.
Gambar 5.9: Pengaruh variasi parameter micropolarterhadap temperatur
Hasil simulasi menunjukkan bahwa temperatur fluida semakinmeningkat seiring dengan peningkatan parameter micropolar.Kurva temperatur mengalami penurunan dari s = 1sampai s ≈ 0. Ketika 0 ≤ η ≤ 3, temperatursemakin meningkat seiring dengan parameter micropolar yangmeningkat. Energi internal fluida menurun karena pengaruhpergerakan mikro rotasi yang meningkat dan viskositas yangsemakin berkurang. Besar kecilnya viskositas dipengaruhioleh suhu pada fluida. Karena energi internal menurunmaka energi yang digunakan oleh fluida semakin menurunsehingga mengakibatkan temperatur pada fluida micropolar

114
mengalami peningkatan seiring bertambahnya nilai parametermicropolar.
5.6.3 Pengaruh Variasi Parameter Porositas
Pada simulasi ini diperoleh keterkaitan antara variasiparameter porositas dengan kurva kecepatan, mikro rotasi,dan temperatur pada fluida. Variasi parameter micropolaryang digunakan adalah φ = 0.25, 0.5, 0.75, 1. Sedangkanuntuk nilai parameter yang lainnya adalah M = 1, α =0, K = 1, dan Pr = 1, selain itu digunakan banyaknya partisiη = 48, partisi waktu t = 20, ∆η = lj = 0.1, ∆t = kn = 0.5,t = 20, dan komsentrasi n = 0.
Gambar 5.10: Pengaruh variasi parameter porositasterhadap kecepatan fluida
Hasil simulasi pada gambar 5.10 menunjukkan bahwa

115
parameter porositas mempengaruhi kurva kecepatan fluidayang mengalami peningkatan dari f ′ = 0 sampai f ′ ≈ 1.Ketika 0 ≤ η ≤ 4 pertambahan parameter mengakibatkanpenurunan kecepatan. Parameter porositas sebanding denganviskositas dinamik µ dan berbanding terbalik dengan densitasfluida (ρ) dan U∞. Oleh karena itu simulasi menunjukkanbahwa semakin bertambahnya parameter porositas, viskositasdinamik pada aliran fluida semakin meningkat dengandensitas fluida semakin menurun dan kecepatan aliranbebas semakin menurun. Menurunnya densitas fluida sertaparameter porositas yang semakin meningkat, bola bermagnetmenolak fluida dan mengakibatkan kecepatan fluida menurun.
Gambar 5.11: Pengaruh variasi parameter porositasterhadap mikro rotasi

116
Grafik pada gambar 5.11 menunjukkan bahwa semakinbertambah parameter porositas maka semakin menurunpergerakan mikro rotasi. Hal ini dapat dilihat pada saat0.6 ≤ η ≤ 0.8 dan 0.105 ≤ −∂h
∂η ≤ 0.115. Selain itu terjadipeningkatan pergerakan mikro rotasi dari 0.8 < η ≤ 4.2dengan adanya variasi parameter porositas. Peningkatanparameter porositas menyebabkan tegangan geser pada fluidasemakin meningkat. Sedangkan densitas fluida semakinmenurun. Hal ini menyebabkan pergerakan partikel mikroyang terdapat pada fluida memiliki ruang yang semakin luassehingga pergerakan rotasi semakin meningkat. Oleh karenaitu semakin bertambah parameter porositas maka semakinmeningkat pergerakan mikro rotasi.
Gambar 5.12: Pengaruh variasi parameter porositasterhadap temperatur

117
Hasil simulasi pada gambar 5.12 menunjukkan bahwatemperatur fluida semakin meningkat seiring denganpeningkatan parameter porositas. Kurva temperaturmengalami penurunan dari s = 1 sampai s ≈ 0. Ketika0 ≤ η ≤ 3, temperatur semakin meningkat ketika parameterporositas semakin meningkat. Densitas fluida berbandingterbalik dengan parameter porositas. Semakin tinggi nilaiparameter porositas maka densitas akan semakin rendah.Hal ini mengakibatkan molekul yang terdapat pada fluidasemakin renggang, sehingga suhu pada fluida semakin cepatnaik.
5.6.4 Pengaruh Variasi Parameter Bilangan Prandtl
Pada simulasi ini diperoleh keterkaitan antara variasibilangan prandtl dengan kurva kecepatan, mikro rotasi,dan temperatur pada fluida. Variasi bilangan Prandtl yangdigunakan adalah Pr = 0.72, 1, 1.5, 2.36. Sedangkan untuknilai parameter yang lainnya adalah M = 1, α = 0, φ = 1,dan φ = 1, selain itu digunakan banyaknya partisi η = 48,partisi waktu t = 20, ∆η = lj = 0.1, ∆t = kn = 0.5, t = 20,dan komsentrasi n = 0.
Tabel 5.3: Pengaruh variasi bilangan prandtl terhadapkecepatan fluida
η Pr = 0.72 Pr = 1
0 0 0
0.5 0, 196997478037471 0, 196997478037471
1 0, 460029522593950 0, 460029522593950
1.5 0, 683663633035879 0, 683663633035879
2 0, 837534938168166 0, 837534938168166
2.5 0, 924122663340438 0, 924122663340438

118
3 0, 963774303963805 0, 963774303963805
3.5 0, 978147114598496 0, 978147114598496
4 0, 981766967276046 0, 981766967276046
4.5 0.981758305328015 0.98175830532801
4.8 0, 981226588930323 0, 981226588930323
Tabel 5.3 menunjukkan bahwa pemberian variasibilangan prandtl tidak mempengaruhi kecepatan aliran fluidamicropolar. Besarnya variasi bilangan prandtl yang diberikanmenunjukkan nilai kecepatan yang sama pada masing-masingnilai. Hal ini ditunjukkan dari grafik masing-masing nilaiyang berhimpit. Hal yang sama berlaku pada profil mikrorotasi. Berikut merupakan hasil simulasi dari profil mikrorotasi
Tabel 5.4: Pengaruh variasi bilangan prandtl terhadapmikro rotasi
η Pr = 0.72 Pr = 1
0 0 0
0.5 0, 0645871520267301 0, 0645871520267301
1 0, 0913866662400319 0, 0913866662400319
1.5 0, 0782364503829425 0, 0782364503829425
2 0, 0500578662791889 0, 0500578662791889
2.5 0, 0250003289909444 0, 0250003289909444
3 0, 00976245079821970 0, 00976245079821970
3.5 0, 00287665886344681 0, 00287665886344681
4 0, 000546989698845640 0, 000546989698845640
4.5 1, 95816009529352e− 05 1, 95816009529352e− 05
4.8 0 0

119
Gambar 5.13: Pengaruh variasi bilangan prandtl terhadaptemperatur
Hasil simulasi pada gambar 5.13 menunjukkan bahwatemperatur fluida semakin menurun seiring denganpeningkatan bilangan prandtl. Kurva temperatur mengalamipenurunan dari s = 1 sampai s ≈ 0. Ketika 0 ≤ η ≤ 3.5,temperatur semakin meningkat ketika bilangan prandtlsemakin menurun. Energi internal fluida meningkatkarena pengaruh densitas dan viskositas kinematik semakinmeningkat. Besar kecilnya viskositas dipengaruhi olehsuhu pada fluida. Karena energi internal meningkat makaenergi yang digunakan oleh fluida semakin meningkatsehingga mengakibatkan temperatur pada fluida micropolarmenurunan seiring bertambahnya nilai bilangan prandtl.


BAB VIPENUTUP
Pada bab ini, diberikan kesimpulan yang diperoleh dariTugas Akhir serta saran untuk penelitian selanjutnya.
6.1 Kesimpulan
Berdasarkan analisis dan pembahasan yang telah disajikanpada bab sebelumnya, dapat disimpulkan beberapa halsebagai berikut :
1. Model matematika dari magnetohidrodinamik taktunak dengan konveksi paksa pada fluida micropolaryang melalui bola berpori didapat dari persamaankontinuitas, persamaan momentum, persamaanmomentum angular, dan persamaan energi. Persamaankontinuitas didapat dari hukum konservasi massa yangmenyatakan bahwa laju perubahan massa terhadapwaktu sama dengan nol. Persamaan momentumdidapat dari Hukum II Newton yang menyatakanbahwa besarnya laju perubahan momentum samadengan jumlah semua gaya yang bekerja padasistem. Dalam persamaan momentum pemberianmagnet pada bola menyebabkan persamaan pada gayamagnet bernilai negatif yang menunjukkan bahwamedan magnet menolak aliran fluida. Persamaanmomentum angular didapat dari Hukum KekekalanMomentum Angular dengan mengasumsikan bahwasemua torsi muncul dari gaya macroskopik. Sedangkanpersamaan energi didapat dari Hukum Termodinamika
121

122
I. Persamaan Pembangun dimensional kemudianditrasnformasikan kedalam bentuk non-dimensional,selanjutnya dilakukan pendekatan lapisan batas,fungsi alir, dan dirubah kedalam bentuk persamaansimilaritas.
2. Penyelesaian numerik dari model matematikamagnetohidrodinamik tak tunak dengan konveksipaksa pada fluida micropolar yang melalui bolaberpori dilakukan dengan menyelaraskan notasi yaitumengubah persamaan orde tinggi menjadi orde pertama.Kemudian melakukan diskritisasi persamaan similaritasdengan menggunak skema Keller-Box beda hinggapusat, melakukan pelinieran model dengan MetodeNewton, dan dilanjutkan pembentukan matriks bloktridiagonal.
3. Meningkatnya parameter magnetik mengakibatkankecepatan fluida menurun pada saat fluida beradapada jarak 4, 4 dari bola, mikro rotasi meningkatpada saat aliran fluida berada pada jarak 2 sampai0, 5 dari permukaan bola, dan temperatur meningkatpada saat aliran fluida berada pada jarak 3, 4dari bola. Meningkatnya parameter micropolarmengakibatkan kecepatan fluida menurun pada saatberada 3, 5 dari titik stagnasi x = 0, mikro rotasimeningkat pada saat fluida berada pada jarak 4dari bola hingga mendekati bola, dan temperaturmeningkat pada saat aliran fluida berada pada jarak3 sampai berada pada permukaan bola. Meningkatnyaparameter porositas mengakibatkan kecepatan fluidameningkat pada saat fluida berada pada jarak 4 sampaimendekati permukaan bola, mikro rotasi meningkatpada saat fluida berjarak 4, 2 sampai dengan 0, 8

123
dari permukaan bola, dan temperatur meningkat saataliran fluida berjarak 3 sampai mendekati permukaanbola. Sedangkan meningkatnya bilangan prandtlmengakibatkan temperatur menurun pada saat aliranfluida berjarak 3.5 dari permukaan bola, tetapi tidakberpengaruh terhadap kecepatan dan mikro rotasi padaaliran fluida.
6.2 Saran
Pada Tugas Akhir ini hanya dibahas mengenai aliran fluidapada titik stagnasi = 0. Oleh karena itu disarankan untukmengembangan studi lapisan batas tidak pada titik stagnansisehingga dapat mengamati dan membandingkan pengaruhmedan magnet terhadap aliran fluida yang melewati bolaberpori bermagnet.

PERNYATAAN RESMI
Penulis mengucapkan terima kasih kepada LembagaPenelitian dan Pengembangan Masyarakat(LPPM), InstitutTeknologi Sepuluh Nopember Surabaya - Jawa Timur,Indonesia yang telah memberikan dana penelitian dengannomor persetujuan 970/PKS/ITS/2018. Pemberian danauntuk penelitian ini diharapkan mampu untuk memberikankontribusi dalam pengembangan penelitian maupun industri.
125


DAFTAR PUSTAKA
[1] Abbas, Z., dan Hayat, T. 2008. Radiation Effect onMHD flow in a porous space. International Journal ofHeat and Mass Transfer. 51 (2008) 1024-1033.
[2] Khuzaimah, S.S., Yusof, Z.M., Aziz, A.S.A., danKechil, S.A. 2012. Magnetohydrodynamics BoundaryLayer Flows over a Stretching Surface with RadiationEffeact and Embedded in Porous Medium. WorldAcademy of Science, Engineering and Technology.International Journal of Physical and MathematicalSciences. Vol : 6, No: 8.
[3] Widodo, B., Khalimah, D.A., Zainal, F.D.S., danImron,C.. 2015a. Numerical Solution of Heat TransferUnsteady Boundary Layer Magnetohydrodynamics inMicropolar Fluid Past A Sphere. International Journalof Far East Journal of Mathematical Sciences. PusphaPublishing House. India.
[4] Widodo, B. 2012. Pemodelan Matematika. ITSPress.Surabaya.
[5] Kasim, A.R.M. 2014. ”Convective Boundary LayerFlow of Viscouselastic Fluid”. Universiti TechnologyMalaysia. Malaysia.
[6] Eringen, A.C. 1965. Teori of Micropolar Fluidas.Technical Report. DTIC Document.
[7] Anggriani, I. 2016. ”Pengaruh Magnetohidrodinamik(MHD) pada Fluida Micropolar yang Melewati Bola
127
128
Berpori”. Tesis Magister. Institut Teknologi SepuluhNopember. Surabaya.
[8] Widodo, B., dan Imron, C., Verdyanto, Rizky P.2017. Magnetohidrodinamika Fluida Mikrokutub yangMengalir Melalui Bola Pejal di Bawah PengaruhMedan Magnet. Prosiding Seminar Nasional dan RapatTahunan MIPAnet 2017. Institut Teknologi SepuluhNopember. Surabaya.
[9] Haque, MD. Z., Alam, MD. M., Ferdows, M.,Postelnicu, A. 2011. ”Micropolar Fluid Behaviors OnSteady MHD Free Convection And Mass TransferFlow With Constant Heat And Mass Fluxes, JouleHeating And Viscous Dissipation”. journal of KingSaud University Engineering Science 24, 71-84.
[10] Widodo, B., Imron, C., Asiyah, N., Siswono,Galuh O., Rahayuningsih, T., dan Purbandini.(2016).Viscoelastic Fluid Flow Pass a Porous CircularCylinder When the Magnetic Field Included,International Journal of Far East Journal ofMathematical Sciences. Puspha Publishing House.India.
[11] Rahma, Nadya A. 2017. ”Konveksi Paksa Dari AliranFluida Magnetohirodinamik Tak Tunak Yang MelaluiBola Berpori”. Tesis Magister. Institut TeknologiSepuluh Nopember, Surabaya.
[12] Elseth, G. 2001. An Experimental Study of Oil/WaterFlow in Horizontal Pipes. Tess Ph.D. TelemarkUniversity College. Norwegia.

129
[13] Fox, R.W., McDonald, A.T., dan Pritchard, P.J. 2011.Introduction to Fluid Mechanics. 8th edition. JohnWiley and Sons. United States Of America.
[14] Walujodjati, A. 2009. Pengaruh Kecepatan FanTerhadap Temperatur Perpindahan Panas AliranUdara dalam Pipa dengan Fluks Panas PermukaanKonstan. Momentum. Vol. 5, No. 2. hal. 46-49.
[15] Imron, C., Suhariningsih, Widodo, B., dan Yuwono, T.2011. Solusi Nemerik dari Persamaan Navier-Stokes.Jurnal Mathematics and Its Application. Vol.8, No.2.
[16] Hussanan, A., Ismail, Z., Khan, I., Hussein, A., danShafie, S. 2014. Unsteady Boundary Layer MHD FreeConvection Flow in a Porous Medium with ConstantMass Diffusion and Newtonian Heating. The EuropeanPhysical Journal Plus. hal. 1-16.
[17] Arber, T. 2003. Fundamental ofMagnetohydrodynamics (MHD). Lecture handout:University of Warwick. UK.
[18] Mohammad, N. F. 2014. UnsteadyMagnetohydrodynamic Convective Boundary LayerFlow Past a Sphere In Viscous and Micropolar Fluids.Thesis Doctor of Philosophy (Mathematics). UiversitiTeknologi Malaysia. Malysia.
[19] Anderson, J. D. Jr. 1995. Computational FluidDynamics. Departement of Aerospace EngineeringUniversity of Maryland.
[20] Potter, M.C., Wiggert, D.C., dan Ramadan, B.H. 2015.Mechanics of Fluids. 4th Edition. Cengange Learning.USA.

130
[21] White, M. F. 2015. Fluid Mechanics. 8th Edition.McGraw-Hill Education Publications. New York.
[22] Lienhard, J. H. 2002. Heat Transfer Textbook. CourierDover Publications.
[23] Leal, L. 1992. Laminar Flow and Convective TransportProcesses: Scaling Principles and Asymptotic Analysis.Butterworth-Heinemann.

LAMPIRAN APenurunan Persamaan Tegangan
Pada penurunan Persamaan tegangan terdapat 2 jenistegangan yaitu tegangan normal dan tegangan geser. Berikutmerupakan penurunan Persamaan tegangan.untuk i = j = x maka
∂σxx∂x
= (λ+ µ)∂
∂x
(∂u
∂x+∂u
∂x
)+ (µ+ κ)
∂
∂x
(∂u
∂x+∂u
∂x
)= (λ+ µ)
∂
∂x
(2∂u
∂x
)+ (µ+ κ)
∂
∂x
(2∂u
∂x
)= 2(λ+ µ)
∂2u
∂x2+ 2(µ+ κ)
∂2u
∂x2
untuk i = x dan j = y maka
∂τxy∂x
= (λ+ µ)∂
∂x
(∂u
∂x+∂u
∂x
)+ (µ+ κ)
∂
∂x
(∂v
∂x+∂u
∂y
)= (λ+ µ)
∂
∂x
(2∂u
∂x
)+ (µ+ κ)
(∂2v
∂x2+
∂2u
∂x∂y
)= 2(λ+ µ)
∂2u
∂x2+ (µ+ κ)
(∂2v
∂x2+
∂
∂y
(∂u
∂x
))untuk i = x dan j = z maka
∂τxz∂x
= (λ+ µ)∂
∂x
(∂u
∂x+∂u
∂x
)+ (µ+ κ)
∂
∂x
(∂w
∂x+∂u
∂z
)= (λ+ µ)
∂
∂x
(2∂u
∂x
)+ (µ+ κ)
(∂2w
∂x2+
∂2u
∂x∂z
)= 2(λ+ µ)
∂2u
∂x2+ (µ+ κ)
(∂2w
∂x2+
∂
∂z
(∂u
∂x
))131

132
dengan menggunakan Persamaan Kontinuitas maka didapat
∂u
∂x+∂v
∂y+∂w
∂z= 0
∂u
∂x= −∂v
∂y− ∂w
∂z
sehingga
∂τxy∂x
= 2(λ+ µ)∂2u
∂x2+ (µ+ κ)
(∂2v
∂x2+
∂
∂y
(−∂v∂y− ∂w
∂z
))= 2(λ+ µ)
∂2u
∂x2+ (µ+ κ)
(∂2v
∂x2− ∂2v
∂y2− ∂2w
∂y∂z
)∂τxz∂x
= 2(λ+ µ)∂2u
∂x2+ (µ+ κ)
(∂2w
∂x2+
∂
∂z
(−∂v∂y− ∂w
∂z
))= 2(λ+ µ)
∂2u
∂x2+ (µ+ κ)
(∂2w
∂x2− ∂2w
∂z2− ∂2v
∂z∂y
)untuk i = y dan j = y maka
∂σyy∂y
= (λ+ µ)∂
∂y
(∂v
∂y+∂v
∂y
)+ (µ+ κ)
∂
∂y
(∂v
∂y+∂v
∂y
)= (λ+ µ)
∂
∂y
(2∂v
∂y
)+ (µ+ κ)
∂
∂y
(2∂v
∂y
)+ κ
∂N
∂y
= 2(λ+ µ)∂2v
∂y2+ 2(µ+ κ)
∂2v
∂y2
untuk i = y dan j = x maka
∂τyx∂y
= (λ+ µ)∂
∂y
(∂v
∂y+∂v
∂y
)+ (µ+ κ)
∂
∂y
(∂u
∂y+∂v
∂x
)= (λ+ µ)
∂
∂y
(2∂v
∂y
)+ (µ+ κ)
(∂2u
∂y2+
∂2v
∂y∂x
)

133
= 2(λ+ µ)
(∂2v
∂y2
)+ (µ+ κ)
(∂2u
∂y2+
∂
∂x
(∂v
∂y
))= 2(λ+ µ)
(∂2v
∂y2
)+ (µ+ κ)
(∂2u
∂y2+
∂
∂x
(−∂u∂x− ∂w
∂z
))= 2(λ+ µ)
∂2v
∂y2+ (µ+ κ)
(∂2u
∂y2− ∂2u
∂x2− ∂2w
∂x∂z
)untuk i = y dan j = z maka
∂τyz∂y
= (λ+ µ)∂
∂y
(∂v
∂y+∂v
∂y
)+ (µ+ κ)
∂
∂y
(∂w
∂y+∂v
∂z
)= (λ+ µ)
∂
∂y
(2∂v
∂y
)+ (µ+ κ)
(∂2w
∂y2+
∂2v
∂y∂z
)= 2(λ+ µ)
(∂2v
∂y2
)+ (µ+ κ)
(∂2w
∂y2+
∂
∂z
(∂v
∂y
))= 2(λ+ µ)
∂2v
∂y2+ (µ+ κ)
(∂2w
∂y2+
∂
∂z
(−∂u∂x− ∂w
∂z
))= 2(λ+ µ)
∂2v
∂y2+ (µ+ κ)
(∂2w
∂y2− ∂2w
∂z2− ∂2u
∂x∂z
)untuk i = z dan j = z maka
∂σzz∂z
= (λ+ µ)∂
∂z
(∂w
∂z+∂w
∂z
)+ (µ+ κ)
∂
∂z
(∂w
∂z+∂w
∂z
)= (λ+ µ)
∂
∂z
(2∂w
∂z
)+ (µ+ κ)
∂
∂z
(2∂w
∂z
)= 2(λ+ µ)
∂2w
∂z2+ 2(µ+ κ)
∂2w
∂z2
untuk i = z dan j = x maka
∂τzx∂z
= (λ+ µ)∂
∂z
(∂w
∂z+∂w
∂z
)+ (µ+ κ)
∂
∂z
(∂u
∂z+∂w
∂x
)= (λ+ µ)
∂
∂z
(2∂w
∂z
)+ (µ+ κ)
(∂2u
∂z2+
∂2w
∂z∂x
)

134
= 2(λ+ µ)
(∂2w
∂z2
)+ (µ+ κ)
(∂2u
∂z2+
∂
∂x
(∂w
∂z
))= 2(λ+ µ)
(∂2w
∂z2
)+ (µ+ κ)
(∂2u
∂z2+
∂
∂x
(−∂u∂x− ∂v
∂y
))= 2(λ+ µ)
∂2w
∂z2+ (µ+ κ)
(∂2u
∂w2− ∂2u
∂x2− ∂2v
∂x∂y
)untuk i = z dan j = y maka
∂τzy∂y
= (λ+ µ)∂
∂z
(∂w
∂z+∂w
∂z
)+ (µ+ κ)
∂
∂z
(∂v
∂z+∂w
∂y
)= (λ+ µ)
∂
∂z
(2∂w
∂z
)+ (µ+ κ)
(∂2v
∂z2+
∂2w
∂z∂y
)= 2(λ+ µ)
(∂2w
∂z2
)+ (µ+ κ)
(∂2v
∂z2+
∂
∂y
(∂w
∂z
))= 2(λ+ µ)
∂2w
∂z2+ (µ+ κ)
(∂2v
∂z2+
∂
∂y
(−∂u∂x− ∂v
∂y
))= 2(λ+ µ)
∂2w
∂z2+ (µ+ κ)
(∂2v
∂z2− ∂2v
∂y2− ∂2u
∂x∂y
)dengan demikian maka Persamaan (4.1.26) menjadi
∇T = −∂p∂x
+ 2(λ+ µ)∂2u
∂x2+ 2(µ+ κ)
∂2u
∂x2+ 2(λ+ µ)
∂2u
∂x2+ (µ+ κ)
(∂2v
∂x2− ∂2v
∂y2− ∂2w
∂y∂z
)+ 2(λ+ µ)
∂2u
∂x2+ (µ+ κ)
(∂2w
∂x2− ∂2w
∂z2− ∂2v
∂z∂y
)+ κ
∂N
∂x
−∂p∂y
+ 2(λ+ µ)∂2v
∂y2+ 2(µ+ κ)
∂2v
∂y2+ κ
∂N
∂y+ 2(λ+ µ)
∂2v
∂y2+ (µ+ κ)
(∂2u
∂y2− ∂2u
∂x2
)

135
= −∂p∂x− ∂p
∂y+ 2(λ+ µ)
(∂2u
∂x2+∂2u
∂x2+∂2v
∂y2+∂2v
∂y2
)+2(µ+ κ)
(∂2u
∂x2+∂2v
∂y2
)+ (µ+ κ)
(∂2v
∂x2− ∂2v
∂y2
+∂2u
∂y2− ∂2u
∂x2
)+ κ
∂N
∂x+ κ
∂N
∂y
= −∂p∂x− ∂p
∂y+ 2(λ+ µ)
(2∂2u
∂x2+ 2
∂2v
∂y2
)+∂2u
∂x2
(2(µ+ κ)− (µ+ κ)) +∂2v
∂y2(2(µ+ κ)− (µ+ κ))
+(µ+ κ)
(∂2v
∂x2+∂2u
∂y2
)+ κ
(∂N
∂y+∂N
∂x
)= −
(∂p
∂x− ∂p
∂y
)+ 4(λ+ µ)
(∂2u
∂x2+∂2v
∂y2
)+∂2u
∂x2(µ+ κ) +
∂2v
∂y2(µ+ κ) + (µ+ κ)
(∂2v
∂x2
+∂2u
∂y2
)+ κ
(∂N
∂y+∂N
∂x
)= −
(∂p
∂x− ∂p
∂y
)+ 4(λ+ µ)
(∇(∂u
∂x+∂v
∂y
))+(µ+ κ)
(∂2u
∂x2+∂2v
∂y2+∂2v
∂x2+∂2u
∂y2
)+ κ(∇×N)
∇T = −(∇p) + 4(λ+ µ)(∇(∇ · u)) + (µ+ κ)
(∂2u
∂x2+∂2u
∂y2
)i
+(µ+ κ)
(∂2v
∂y2+∂2v
∂x2
)j + κ(∇×N)
dengan menggunakan Persamaan kontinuitas dimana∇·u = 0maka
∇T = −(∇p) + (µ+ κ)∇×∇× u + κ(∇×N)


LAMPIRAN BKecepatan Aliran Bebas
Pada koordinat bola kecepatan aliran bebas didefinisikansebagai
Ur = −U∞cosθ (2.0.1)
Uθ = U∞sinθ (2.0.2)
U∅ = 0 (2.0.3)
Menurut (John, 2010) Streamline dapat ditulis sebagai
U = ∇ϕ
⇐⇒ U =µ
2φ
cosθ
r3er +
µ
4φ
sinθ
r3eθ + 0e∅ (2.0.4)
Kemudian mensubstitusikan Persamaan (2.0.1), (2.0.2), dan(2.0.3) ke Persamaan (2.0.4) maka didapat
Ur = −U∞cosθ +µ
2φ
cosθ
r3
⇐⇒ Ur = −(U∞ −
µ
2φr3
)cosθ (2.0.5)
Uθ = U∞sinθ +µ
4φ
sinθ
r3
⇐⇒ Uθ =
(U∞ +
µ
4φr3
)sinθ (2.0.6)
U∅ = 0 (2.0.7)
Dalam menentukan titik stagnasi maka diberikan Ur = Uθ =0. Karena Uθ = 0 nilai dari sinθ = 0 dengan θ menunjukkan
137

138
titik stagnasi x = 0. Pada Persamaan (2.0.5) dengan Ur = 0maka dapat diperoleh :
U∞ −µ
2πR3= 0 (2.0.8)
dimana R menunjukkan jari-jari dari titik stagnasi. Daripersamaan (2.0.8) maka diperoleh
R =
(µ
2πU∞
)(2.0.9)
dengan mensubstitusi Persamaan (2.0.9) ke Persamaan (6.0.5)maka diperoleh :
Ur = −(U∞ −
µ
2πR3cosθ
)⇐⇒ Ur = −
(U∞ −
µ
2π
(2πU∞µ
))cosθ
⇐⇒ Ur = −(U∞ − U∞)coθ
⇐⇒ Ur = 0 (2.0.10)
Dari Persamaan (2.0.10) diketahui bahwa Ur = 0 ketika r = Runtuk setiap θ dan ∅. Pada permukaan bola berpori denganr = R kecepatan tangensial didefinisikan sebagai berikut
Uθ =(U∞ +
µ
4πr3
)sinθ (2.0.11)
dimana
µ = 2πR3U∞ (2.0.12)
dengan mensubstitusikan Persamaan (2.0.12) ke Persamaan(2.0.11) maka diperoleh
Uθ =
(Uθ +
1
4π
2πR3U∞R3
)sinθ
Uθ =3
2U∞sinθ (2.0.13)

LAMPIRAN C
Transformasi Persamaan Pembangun kePersamaan non-Dimensional
Persamaan Kontinuitas
∂ru
∂x+∂rv
∂y= 0
∂ (rauU∞)
∂(xa)+∂(ravU∞Re
− 12
)∂(yaRe−
12
) = 0
aU∞a
∂ (ru)
∂x+aU∞Re
− 12
aRe−12
∂ (rv)
∂y= 0
U∞∂ (ru)
∂x+ U∞
∂ (rv)
∂y= 0
U∞
(∂ (ru)
∂x+∂ (rv)
∂y
)= 0
∂ru
∂x+∂rv
∂y= 0
Momentum pada sumbu-x adalah
ρ
(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)= −∂p
∂x+ (µ+ κ)
(∂2u
∂x2+∂2u
∂y2
)+
ρβ(T − T∞
)g sin
( xa
)+ κ
∂N
∂y+
σB02u+
µ
K∗u
139

140
Ruas Kiri
ρ
(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)
= ρ
∂(uU∞)
∂(taU∞
) + uU∞∂(uU∞)
∂(xa)+vU∞
R12e
∂(uU∞)
∂
(ya
R12e
)
= ρ
U∞aU∞
∂u
∂t+uU2∞a
∂u
∂x+vU2∞R
12e
aR12e
∂u
∂y
= ρ
(U2∞a
∂u
∂t+U2∞au∂u
∂x+U2∞av∂u
∂y
)= ρ
U2∞a
(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)Ruas Kanan
−∂p∂x
+ (µ+ κ)
(∂2u
∂x2+∂2u
∂y2
)+ ρβ
(T − T∞
)g sin
( xa
)+κ
∂N
∂y+ σB0
2u+µ
K∗u
= −∂(pρU2∞)
∂(xa)+ (µ+Kµ)
∂2(uU∞)
∂(xa)2+∂2(uU∞)
∂
(ya
R12e
)2
+ ρβT
(Tw − T∞) g sin(x) +Kµ
∂
(N U∞
aR− 1
2e
)∂
(ya
R12e
) + σB02uU∞
+µ
K∗uU∞

141
= −ρU2∞a
∂p
∂x+ µ(1 +K)
(U∞a2
∂2u
∂x2+U∞Rea2
∂2u
∂y2
)+ ρβT
(Tw − T∞) g sin(x) +KµU∞R
12e
a2R− 1
2e
∂N
∂y+ σB0
2uU∞
+µ
K∗uU∞
= −ρU2∞a
∂p
∂x+ µ(1 +K)
U∞a2
(∂2u
∂x2+Re
∂2u
∂y2
)+ ρβT
(Tw − T∞) g sin(x) +KµU∞Rea2
∂N
∂y+ σB0
2uU∞
+µ
K∗uU∞
Menyelesaikan ruas kiri dan kanan
ρU2∞a
(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)= −ρU
2∞a
∂p
∂x+ µ(1 +K)
U∞a2(
∂2u
∂x2+Re
∂2u
∂y2
)+ ρβT (Tw − T∞) g sin(x) +
KµU∞Rea2
∂N
∂y+ σB0
2uU∞ +µ
K∗uU∞
Kedua ruas dibagi ρU2∞a(
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)= −∂p
∂x+µ
ρ
(1 +K)
aU∞
(∂2u
∂x2+Re
∂2u
∂y2
)+βTa (Tw − T∞) g sin(x)
U2∞
+Kµ
ρ
ReU∞a
∂N
∂y
+σB0
2ua
ρ∞+
µua
K∗ρU∞(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)= −∂p
∂x+ν(1 +K)
aU∞
(∂2u
∂x2+Re
∂2u
∂y2
)

142
(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)= −∂p
∂x+ν(1 +K)
aU∞
(∂2u
∂x2+Re
∂2u
∂y2
)+gβ (Tw − T∞) a3
ν2ν2
a2U2∞T sin(x) +K
νReU∞a
∂N
∂y
+σB0
2a
ρ∞u+
µa
K∗ρU∞u
dengan menggunakan(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)= −∂p
∂x+
(1 +K)
Re
(∂2u
∂x2+Re
∂2u
∂y2
)+Gr
Re2T sin(x) +K
Re
Re
∂N
∂y+Mu+ φu(
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)= −∂p
∂x+
(1 +K)
Re
(∂2u
∂x2+Re
∂2u
∂y2
)+αT sin(x) +K
∂N
∂y+ (M + φ)u(
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)= −∂p
∂x+
(1 +K)
Re
∂2u
∂x2+ (1 +K)
∂2u
∂y2
+αT sin(x) +K∂N
∂y+ (M + φ)u
Pada arah sumbu-y adalah
ρ
(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)= −∂p
∂y+ (µ+ κ)
(∂2v
∂x2+∂2v
∂y2
)−
ρβ(T + T∞
)g cos
( xa
)+ κ
∂N
∂x+ σB0
2v +µ
K∗v
Ruas Kiri
ρ
(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)

143
= ρ
∂(vU∞
Re12
)∂(taU∞
) + uU∞
∂(vU∞
Re12
)∂(xa)
+vU∞
Re12
∂(vU∞
Re12
)∂(
ya
Re12
)
= ρ
(U∞
Re12
U∞a
∂v
∂t+uU∞a
U∞
Re12
∂v
∂x+vU∞
Re12
U∞
Re12
Re12
a
∂v
∂y
)
= ρ
(U2∞
aRe12
∂v
∂t+ u
U2∞
aRe12
∂v
∂x+ v
U2∞
aRe12
∂v
∂y
)= ρ
U2∞
aRe12
(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)Ruas Kanan
−∂p∂y
+ (µ+ κ)
(∂2v
∂x2+∂2v
∂y2
)− ρβ
(T + T∞
)g cos
( xa
)+ κ
∂N
∂x+ σB0
2v +µ
K∗v
= −∂(pρU2∞)
∂(
ya
Re12
) + (µ+Kµ)
∂2(vU∞
Re12
)∂(xa)2
+∂2(vU∞
Re12
)∂
(ya
R12e
)2
−
ρβT (Tw − T∞) g cos(x) +Kµ
∂
(N U∞
aR− 1
2e
)∂(xa)
+σB02 vU∞
Re12
+µ
K∗vU∞
Re12
= −ρU2∞Re
12
a
∂p
∂y+ µ(1 +K)
(U∞
Re12
1
a2∂2v
∂x2+
U∞
Re12
Re
a2∂2v
∂y2
)− ρβT (Tw − T∞) g cos(x)
+KµU∞
a2Re−12
∂N
∂x+ σB0
2 vU∞
Re12
+µ
K∗vU∞
Re12

144
= −ρU2∞Re
12
a
∂p
∂y+ µ(1 +K)
U∞
a2Re12
(∂2v
∂x2+Re
∂2v
∂y2
)−ρβT (Tw − T∞) g cos(x) +Kµ
U∞
a2Re−12
∂N
∂x+
σB02 vU∞
Re12
+µ
K∗vU∞
Re12
Menyelesaikan ruas kiri dan kanan
ρU2∞
aRe12
(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)= −ρU
2∞Re
12
a
∂p
∂y+ µ(1 +K)
U∞
a2Re12
(∂2v
∂x2+Re
∂2v
∂y2
)− ρβT (Tw − T∞) g cos(x)
+KµU∞
a2Re−12
∂N
∂x+ σB0
2 vU∞
Re12
+µ
K∗vU∞
Re12
Kedua ruas dibagai ρU2∞Re
12
a maka(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)= −Re∂p
∂y+ (1 +K)
µ
ρ
1
aU∞
(∂2v
∂x2+
Re∂2v
∂y2
)− ρβgaRe
12 (Tw − T∞)
U2∞
T cos(x) +
Kµ
ρ
Re
ρaU∞
∂N
∂x+σB0
2a
ρU∞v +
µ
K∗a
ρU∞v(
∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)= −Re∂p
∂y+ (1 +K)
ν
aU∞
(∂2v
∂x2+
Re∂2v
∂y2
)− βga3Re
12 (Tw − T∞)
ν2ν2Re
12
a2U2∞T cos(x)
+KνRe
ρaU∞
∂N
∂x+Mv + φv(
∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)= −Re∂p
∂y+
(1 +K)
Re
(∂2v
∂x2

145
+Re∂2v
∂y2
)−GrRe
12
Re2T cos(x) +K
Re
Re
∂N
∂x
+ (M + φ)v(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)= −Re∂p
∂y+
(1 +K)
Re
(∂2v
∂x2
+Re∂2v
∂y2
)− αRe
12T cos(x) +K
∂N
∂x
+ (M + φ)v
Kedua Ruas dibagai Re
1
Re
(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)= −∂p
∂y+
(1 +K)
Re2
(∂2v
∂x2
+Re∂2v
∂y2
)− α
Re12
T cos(x) +K
Re
∂N
∂x
+1
Re(M + φ)v
1
Re
(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)= −∂p
∂y+
(1 +K)
Re2∂2v
∂x2
+(1 +K)
Re2Re
∂2v
∂y2− α
Re12
T cos(x) +K
Re
∂N
∂x
+1
Re(M + φ)v
Persamaan momentum angular
ρ
(∂N
∂t+ u
∂N
∂x+ v
∂N
∂y
)= γ
(∂2N
∂x2+∂2N
∂y2
)− κ
(2N
+∂u
∂y− ∂v
∂x
)penyelesaian ruas kiri
= ρν
c
∂(NU∞a
−1Re12
)∂(taU−1∞
) + uU∞∂(NU∞a
−1Re12
)∂(xa)
+

146
vU∞
Re12
∂(NU∞a
−1Re12
)∂(yaRe−
12
)
= ρν
c
(U∞
aRe−12
U∞a
∂N
∂t+ uU∞
U∞
aRe−12
1
a
∂N
∂x+vU∞
Re12
U∞
aRe−12
Re12
a
∂N
∂y
)
= ρν
c
(U2∞
a2Re−12
∂N
∂t+ u
U2∞
a2Re−12
∂N
∂x+ v
U2∞
a2Re12
∂N
∂y
)= ρ
ν
c
U2∞
a2Re−12
(∂N
∂t+ u
∂N
∂x+ v
∂N
∂y
)Penyelesaian Ruas kanan
γ
(∂2N
∂x2+∂2N
∂y2
)− κ
(2N +
∂u
∂y− ∂v
∂x
)
=(µ+
κ
2
) νc
∂2(NU∞a
−1Re12
)∂(xa)2
+∂2(NU∞a
−1Re12
)∂(yaRe−
12
)2
−κ
2NU∞
aRe−12
+∂(uU∞)
∂(yaRe−
12
) − ∂(vU∞Re− 1
2 )
∂(xa)
=
(µ+
µK
2
)ν
c
(U∞
aRe−12
1
a2∂2N
∂x2+
U∞
aRe−12
Re
a2∂2N
∂y2
)−µK
(2
U∞
aRe−12
N +U∞
aRe−12
∂u
∂y− U∞
aRe−12
Re−1∂v
∂x
)= µ
(1 +
K
2
)ν
c
U∞
a3Re−12
(∂2N
∂x2+Re
∂2N
∂y2
)−µK U∞
aRe−12
(2N +
∂u
∂y−Re−1 ∂v
∂x
)

147
Menyelesaikan ruas kiri dan kanan
ρν
c
U2∞
a2Re−12
(∂N
∂t+ u
∂N
∂x+ v
∂N
∂y
)= µ
(1 +
K
2
)ν
c
U∞
a3Re−12(
∂2N
∂x2+Re
∂2N
∂y2
)− µK U∞
aRe−12
(2N +
∂u
∂y−Re−1 ∂v
∂x
)kedua Ruas dibagi ρνc
U2∞
a2Re−12
maka
∂N
∂t+ u
∂N
∂x+ v
∂N
∂y=µ
ρ
(1 + K
2
)aU∞
(∂2N
∂x2+Re
∂2N
∂y2
)− µKca
ρνU∞
(2N +
∂u
∂y−Re−1 ∂v
∂x
)∂N
∂t+ u
∂N
∂x+ v
∂N
∂y=ν(1 + K
2
)aU∞
(∂2N
∂x2+Re
∂2N
∂y2
)− µKa
ρU∞
(2N +
∂u
∂y−Re−1 ∂v
∂x
)∂N
∂t+ u
∂N
∂x+ v
∂N
∂y=
(1 + K
2
)Re
(∂2N
∂x2+Re
∂2N
∂y2
)− µKνa
ρνU∞
(2N +
∂u
∂y−Re−1 ∂v
∂x
)∂N
∂t+ u
∂N
∂x+ v
∂N
∂y=
(1 +
K
2
)(1
Re
∂2N
∂x2+∂2N
∂y2
)− µK
ρν
(2N +
∂u
∂y− 1
Re
∂v
∂x
)∂N
∂t+ u
∂N
∂x+ v
∂N
∂y=
(1 +
K
2
)(1
Re
∂2N
∂x2+∂2N
∂y2
)− µK
µ
(2N +
∂u
∂y− 1
Re
∂v
∂x
)∂N
∂t+ u
∂N
∂x+ v
∂N
∂y=
(1 +
K
2
)(1
Re
∂2N
∂x2+∂2N
∂y2
)

148
−K(
2N +∂u
∂y− 1
Re
∂v
∂x
)Persamaan Energi
ρCp
(∂T
∂t+ u
∂T
∂x+ v
∂T
∂y
)= c
(∂2T
∂x2+∂2T
∂y2
)Penyelesaian ruas kiri
ρCp
(∂T
∂t+ u
∂T
∂x+ v
∂T
∂y
)= ρCp
(∂ (T (Tw − T∞) + T∞)
∂(taU−1∞
) + uU∞
∂ (T (Tw − T∞) + T∞)
∂(xa)+vU∞
Re12
∂ (T (Tw − T∞) + T∞)
∂(yaRe
12
)
= ρCp
(U∞ (Tw − T∞)
a
∂T
∂t+U∞a
∂T∞∂t
+U∞ (Tw − T∞)
a
u∂T
∂x+U∞au∂T∞∂x
+U∞ (Tw − T∞)
av∂T
∂y+U∞av∂T∞∂y
)= ρCp
(U∞ (Tw − T∞)
a
(∂T
∂t+ u
∂T
∂x+ v
∂T
∂y
)+U∞a
(∂T∞∂t
+ u∂T∞∂x
+ v∂T∞∂y
))Karena T∞ adalah suatu konstanta maka ∂T∞
∂t = ∂T∞∂x =
∂T∞∂y = 0 sehingga
ρCp
(∂T
∂t+ u
∂T
∂x+ v
∂T
∂y
)= ρCp
(U∞ (Tw − T∞)
a
(∂T
∂t+ u
∂T
∂x+ v
∂T
∂y
))

149
Penyelesaian ruas kanan
c
(∂2T
∂x2+∂2T
∂y2
)
= c
∂2 (T (Tw − T∞) + T∞)
∂(xa)2+∂2 (T (Tw − T∞) + T∞)
∂(yaRe
12
)2
= c
((Tw − T∞)
a2∂2T
∂x2+
1
a2∂2T∞∂x2
+Re (Tw − T∞)
a2∂2T
∂y2
+Re
a2∂2T∞∂y2
)= c
((Tw − T∞)
a2
(∂2T
∂x2+Re
∂2T
∂y2
)+
1
a2
(∂2T∞∂x2
+Re∂2T∞∂y2
))= c
(Tw − T∞)
a2
(∂2T
∂x2+Re
∂2T
∂y2
)Menyelesaikan ruas kiri dan kanan
ρCpU∞ (Tw − T∞)
a
(∂T
∂t+ u
∂T
∂x+ v
∂T
∂y
)= c
(Tw − T∞)
a2
(∂2T
∂x2+Re
∂2T
∂y2
)
Kedua ruas dibagi dengan ρCpU∞(Tw−T∞)a maka
∂T
∂t+ u
∂T
∂x+ v
∂T
∂y=
c
ρCpaU∞
(∂2T
∂x2+Re
∂2T
∂y2
)∂T
∂t+ u
∂T
∂x+ v
∂T
∂y=
c
ρCpaU∞Re
(1
Re
∂2T
∂x2+∂2T
∂y2
)

150
∂T
∂t+ u
∂T
∂x+ v
∂T
∂y=
c
ρCpν
(1
Re
∂2T
∂x2+∂2T
∂y2
)∂T
∂t+ u
∂T
∂x+ v
∂T
∂y=
1
Pr
(1
Re
∂2T
∂x2+∂2T
∂y2
)∂T
∂t+ u
∂T
∂x+ v
∂T
∂y=
1
Pr
1
Re
∂2T
∂x2+
1
Pr
∂2T
∂y2

LAMPIRAN DFungsi Alur
u =1
r
∂ψ
∂y, v = −1
r
∂ψ
∂x
Persamaan Kontinuitas
∂ru
∂x+∂rv
∂y= 0
∂r(1r∂ψ∂y
)∂x
+∂r(−1r∂ψ∂x
)∂y
= 0
∂
∂x
(∂ψ
∂y
)− ∂
∂y
(∂ψ
∂x
)= 0
∂2ψ
∂x∂y− ∂2ψ
∂y∂x= 0
∂2ψ
∂x∂y=
∂2ψ
∂y∂x(4.0.1)
Persamaan Momentum
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y=
∂ue∂x
ue + (M + φ)(u− ue) + (1 +K)
∂2u
∂y2+ αT sin(x) +K
∂N
∂y
Penyelesaian Ruas kiri
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
=∂(1r∂ψ∂y
)∂t
+1
r
∂ψ
∂y
∂(1r∂ψ∂y
)∂x
+
(−1
r
∂ψ
∂x
) ∂(1r∂ψ∂y
)∂y
151
152
=1
r
∂2ψ
∂t∂y+
1
r
∂ψ
∂y
∂
∂x
(1
r
∂ψ
∂y
)− 1
r2∂ψ
∂x
∂2ψ
∂y2
=1
r
∂
∂t
(∂ψ
∂y
)+
1
r
∂ψ
∂y
∂
∂x
(1
r
∂ψ
∂y
)− 1
r
∂ψ
∂x
1
r
∂
∂y
(∂ψ
∂y
)Misalkan
u =1
r, u′ = − 1
r2∂r
∂x
v =∂ψ
∂y, v′ =
∂2ψ
∂x∂y
uv = uv′ + u′v
∂
∂x
(1
r
∂ψ
∂y
)=
1
r
∂2ψ
∂x∂y− 1
r2∂r
∂x
∂ψ
∂y
sehingga
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
=1
r
∂2ψ
∂t∂y+
1
r
∂ψ
∂y
(1
r
∂2ψ
∂x∂y− 1
r2∂r
∂x
∂ψ
∂y
)− 1
r2∂ψ
∂x
∂2ψ
∂y2
=1
r
∂2ψ
∂t∂y+
1
r2∂ψ
∂y
∂2ψ
∂x∂y− 1
r3∂r
∂x
(∂ψ
∂y
)2
− 1
r2∂ψ
∂x
∂2ψ
∂y2
Penyelesaian ruas kanan
∂ue∂x
ue + (M + φ)(u− ue) + (1 +K)∂2u
∂y2+ αT sin(x)
+K∂N
∂y
=∂ue∂x
ue + (M + φ)(1
r
∂ψ
∂y− ue) + (1 +K)
∂2
∂y2
(1
r
∂ψ
∂y
)+αT sin(x) +K
∂N
∂y
=∂ue∂x
ue + (M + φ)(1
r
∂ψ
∂y− ue) +
(1 +K)
r
∂3ψ
∂y3

153
+αT sin(x) +K∂N
∂y
Penyelesaian ruas kiri dan kanan
1
r
∂2ψ
∂t∂y+
1
r2∂ψ
∂y
∂2ψ
∂x∂y− 1
r3∂r
∂x
(∂ψ
∂y
)2
− 1
r2∂ψ
∂x
∂2ψ
∂y2
=∂ue∂x
ue + (M + φ)(1
r
∂ψ
∂y− ue) +
(1 +K)
r
∂3ψ
∂y3
+αT sin(x) +K∂N
∂y
Momentum Angular
∂N
∂t+ u
∂N
∂x+ v
∂N
∂y=
(1 +
K
2
)+∂2N
∂y2−K
(2N +
∂u
∂y
)Penyelesaian ruas kiri
∂N
∂t+ u
∂N
∂x+ v
∂N
∂y=
∂N
∂t+
1
r
∂ψ
∂y
∂N
∂x− 1
r
∂ψ
∂x
∂N
∂y
Penyelesaian ruas kanan(1 +
K
2
)+∂2N
∂y2−K
(2N +
∂u
∂y
)=
(1 +
K
2
)+∂2N
∂y2−K
(2N +
∂
∂y
(1
r
∂ψ
∂y
))=
(1 +
K
2
)+∂2N
∂y2
−K(
2N +1
r
∂2ψ
∂y2
)Penyelesaian ruas kiri dan kanan
∂N
∂t+
1
r
∂ψ
∂y
∂N
∂x− 1
r
∂ψ
∂x
∂N
∂y=
(1 +
K
2
)+∂2N
∂y2
−K(
2N +1
r
∂2ψ
∂y2
)

154
Persamaan Energi
∂T
∂t+ u
∂T
∂x+ v
∂T
∂y=
1
Pr
∂2T
∂y2
∂T
∂t+
1
r
∂ψ
∂y
∂T
∂x− 1
r
∂ψ
∂x
∂T
∂y=
1
Pr
∂2T
∂y2

LAMPIRAN EPersamaan Similaritas
Small time (t ≤ t∗) dengan t∗ sebarang nilai
ψ = t12ue(x)r(x)f(x, η, t)
T = s(x, η, t)
η =y
t12
N = t−12ue(x)h(x, η, t)
sehingga
∂η
∂y=
∂
∂y
(y
t12
)=
1
t12
∂η
∂t=
∂
∂t
(y
t12
)= −y
2t−
32
= −1
2
y
t12
1
t
= −1
2
η
t∂ψ
∂y=
∂ψ
∂η· ∂η∂y
=∂(t
12ue(x)r(x)f(x, η, t))
∂η· 1
t12
=t12ue(x)r(x)
t12
∂f(x, η, t)
∂η
155

156
= ue(x)r(x)∂f(x, η, t)
∂η
∂ψ
∂x=
∂(t12ue(x)r(x)f(x, η, t))
∂x
= t12∂(ue(x)r(x)f(x, η, t))
∂x
= t12
(∂(ue(x)r(x))
∂xf(x, η, t) + ue(x)r(x)
∂f(x, η, t)
∂x
)= t
12
((∂ue(x)
∂xr(x) + ue(x)
∂r(x)
∂x
)f(x, η, t)
+ue(x)r(x)∂f(x, η, t)
∂x
)∂ψ
∂x= t
12 r(x)
∂ue(x)
∂xf(x, η, t) + t
12ue(x)f(x, η, t)
∂r(x)
∂x
+t12ue(x)r(x)
∂f(x, η, t)
∂x∂2ψ
∂t∂y=
∂
∂t
(∂ψ
∂y
)=
∂
∂t
(ue(x)r(x)
∂f(x, η, t)
∂η
)=
∂
∂η
(ue(x)r(x)
∂f(x, η, t)
∂η
)∂η
∂t+ ue(x)r(x)
∂2f(x, η, t)
∂t∂η
= ue(x)r(x)∂2f(x, η, t)
∂η2
(−1
2
η
t
)+ ue(x)r(x)
∂2f(x, η, t)
∂t∂η
= −ue(x)r(x)
2t
∂2f(x, η, t)
∂η2+ ue(x)r(x)
∂2f(x, η, t)
∂t∂η

157
∂2ψ
∂x∂y=
∂
∂x
(∂ψ
∂y
)=
∂
∂x
(ue(x)r(x)
∂f(x, η, t)
∂η
)=
∂(ue(x)r(x))
∂x
∂f(x, η, t)
∂η+ ue(x)r(x)
∂2f(x, η, t)
∂x∂η
=
(∂ue(x)
∂xr(x) + ue(x)
∂r(x)
∂x
)∂f(x, η, t)
∂η
+ue(x)r(x)∂2f(x, η, t)
∂x∂η
= r(x)∂ue(x)
∂x
∂f(x, η, t)
∂η+ ue(x)
∂r(x)
∂x
∂f(x, η, t)
∂η
+ue(x)r(x)∂2f(x, η, t)
∂x∂η
∂2ψ
∂y2=
∂
∂y
(∂ψ
∂y
)∂2ψ
∂y2=
∂
∂y
(ue(x)r(x)
∂f(x, η, t)
∂η
)=
∂
∂η
(ue(x)r(x)
∂f(x, η, t)
∂η
)∂η
∂y
= ue(x)r(x)∂2f(x, η, t)
∂η2
(1
t12
)=
ue(x)r(x)
t12
∂2f(x, η, t)
∂η2
∂3ψ
∂y3=
∂
∂y
(∂2ψ
∂y2
)=
∂
∂y
(ue(x)r(x)
t12
∂2f(x, η, t)
∂η2
)

158
=∂
∂η
(ue(x)r(x)
t12
∂2f(x, η, t)
∂η2
)∂η
∂y
=ue(x)r(x)
t12
∂3f(x, η, t)
∂η31
t12
=ue(x)r(x)
t
∂3f(x, η, t)
∂η3
∂N
∂y=
∂N
∂η· ∂η∂y
=∂(t−
12ue(x)h(x, η, t)
)∂η
· 1
t12
=t−
12Ue
t12
∂h(x, η, t)
∂η
=Uet
∂h(x, η, t)
∂η
∂N
∂x=
∂(t−
12ue(x)h(x, η, t)
)∂x
= t−12∂ (ue(x)h(x, η, t))
∂x∂N
∂x= t−
12
(ue(x)
∂h(x, η, t)
∂x+∂ue(x)
∂xh(x, η, t)
)= t−
12ue(x)
∂h(x, η, t)
∂x+ t−
12h(x, η, t)
∂ue(x)
∂x
∂N
∂t=
∂(t−
12ue(x)h(x, η, t)
)∂t
= ue(x)∂(t−
12h(x, η, t)
)∂t
= ue(x)
(−1
2t−
32h(x, η, t) + t−
12∂h(x, η, t)
∂t
)

159
= ue(x)
(− t− 3
2
2h(x, η, t) + t−
12
[∂h(x, η, t)
∂η
∂η
∂t
+∂h(x, η, t)
∂t
])= ue(x)
(− t− 3
2
2h(x, η, t) + t−
12
[∂h(x, η, t)
∂η
−1
2
η
t
+∂h(x, η, t)
∂t
])=
ue(x)
t12
(− 1
2th(x, η, t)− η
2t
∂h(x, η, t)
∂η
+∂h(x, η, t)
∂t
)∂2N
∂y2=
∂
∂y
(∂N
∂y
)=
∂
∂y
(uet
∂h(x, η, t)
∂η
)=
∂
∂η
(uet
∂h(x, η, t)
∂η
)∂η
∂y
∂2N
∂y2=
uet
∂2h(x, η, t)
∂η21
t12
=uet
1
t12
∂2h(x, η, t)
∂η2
∂T
∂t=
∂s(x, η, t)
∂η· ∂η∂t
+∂s(x, η, t)
∂t
= −1
2
η
t
∂s(x, η, t)
∂η+∂s(x, η, t)
∂t
∂T
∂x=
∂s(x, η, t)
∂x∂T
∂y=
∂s(x, η, t)
∂η· ∂η∂y

160
=1
t12
∂s(x, η, t)
∂η
∂2T
∂y2=
∂
∂y
(∂T
∂y
)=
∂
∂y
(1
t12
∂s(x, η, t)
∂η
)=
1
t12
∂
∂η
(∂s(x, η, t)
∂η
)∂η
∂y
=1
t12
∂
∂η
(∂s(x, η, t)
∂η
)1
t12
=1
t
∂2s(x, η, t)
∂η2
Persamaan Momentum
1
r
∂2ψ
∂t∂y+
1
r2∂ψ
∂y
∂2ψ
∂x∂y− 1
r3∂r
∂x
(∂ψ
∂y
)2
− 1
r2∂ψ
∂x
∂2ψ
∂y2
=∂ue∂x
ue + (M + φ)(1
r
∂ψ
∂y− ue) +
(1 +K)
r
∂3ψ
∂y3
+αT sin(x) +K∂N
∂y
Penyeleaian ruas kiri
1
r
∂2ψ
∂t∂y+
1
r2∂ψ
∂y
∂2ψ
∂x∂y− 1
r3∂r
∂x
(∂ψ
∂y
)2
− 1
r2∂ψ
∂x
∂2ψ
∂y2
=1
r
(−uerη
2t
∂2f
∂η2+ uer
∂2f
∂t∂η
)+
1
r2
(uer
∂f
∂η
)(r∂ue∂x
∂f
∂η
+ue∂r
∂x
∂f
∂η+ uer
∂2f
∂x∂η
)− 1
r3∂r
∂x
(uer
∂f
∂η
)2
− 1
r2
(t12 r∂ue∂x
f + t12uef
∂r
∂x+ t
12uer
∂f
∂x
)(uer
t12
∂2f
∂η2
)= −1
r
uerη
2t
∂2f
∂η2+
1
ruer
∂2f
∂t∂η+
1
r2uer
∂f
∂ηr∂ue∂x
∂f
∂η

161
+1
r2uer
∂f
∂ηue∂r
∂x
∂f
∂η+
1
r2uer
∂f
∂ηuer
∂2f
∂x∂η
− 1
r3∂r
∂xu2er
2
(∂f
∂η
)2
− 1
r2t12 r∂ue∂x
fuer
t12
∂2f
∂η2
− 1
r2t12uef
∂r
∂x
uer
t12
∂2f
∂η2− 1
r2t12uer
∂f
∂x
uer
t12
∂2f
∂η2
= −ueη2t
∂2f
∂η2+ ue
∂2f
∂t∂η+ ue
∂ue∂x
(∂f
∂η
)2
+1
ru2e
(∂f
∂η
)2
∂r
∂x+ u2e
∂f
∂η
∂2f
∂x∂η− 1
r
∂r
∂xu2e
(∂f
∂η
)2
− fue∂ue∂x
∂2f
∂η2
−1
ru2ef
∂r
∂x
∂2f
∂η2+ u2e
∂f
∂x
∂2f
∂η2
= −ueη2t
∂2f
∂η2+ ue
∂2f
∂t∂η+ ue
∂ue∂x
(∂f
∂η
)2
+1
ru2e
(∂f
∂η
)2
∂r
∂x− 1
ru2ef
∂r
∂x
∂2f
∂η2+ u2e
∂f
∂η
∂2f
∂x∂η− fue
∂ue∂x
∂2f
∂η2
−1
r
∂r
∂xu2e
(∂f
∂η
)2
− u2e∂f
∂x
∂2f
∂η2
= −ueη2t
∂2f
∂η2+ ue
∂2f
∂t∂η+ ue
∂ue∂x
(∂f
∂η
)2
+ u2e∂f
∂η
∂2f
∂x∂η
−fue∂ue∂x
∂2f
∂η2− 1
r
∂r
∂xu2e
(∂f
∂η
)2
− u2e∂f
∂x
∂2f
∂η2
Penyelesaian ruas kanan
ue∂ue∂x
+ (M + φ)(1
r
∂ψ
∂y− ue) +
(1 +K)
r
∂3ψ
∂y3
+αT sin(x) +K∂N
∂y
= ue∂ue∂x
+ (M + φ)(1
ruer
∂f
∂η− ue) +
(1 +K)
r
uer
t
∂3f
∂η3
162
+αT sin(x) +Kuet
∂h
∂η
= ue∂ue∂x− (M + φ)ue + (M + φ)ue
∂f
∂η+
(1 +K)
tue∂3f
∂η3
+αT sin(x) +Kuet
∂h
∂η
Menyelesaikan ruas kiri dan kanan
−ueη2t
∂2f
∂η2+ ue
∂2f
∂t∂η+ ue
∂ue∂x
(∂f
∂η
)2
+ u2e∂f
∂η
∂2f
∂x∂η
− fue∂ue∂x
∂2f
∂η2− 1
r
∂r
∂xu2e
(∂f
∂η
)2
− u2e∂f
∂x
∂2f
∂η2
= ue∂ue∂x− (M + φ)ue + (M + φ)ue
∂f
∂η+
(1 +K)
tue∂3f
∂η3+ αT sin(x) +K
uet
∂h
∂η
Kedua ruas dibagi uet sehingga diperoleh
−η2
∂2f
∂η2+ t
∂2f
∂t∂η+ t
∂ue∂x
(∂f
∂η
)2
+ uet∂f
∂η
∂2f
∂x∂η− ft∂ue
∂x
∂2f
∂η2− 1
ruet
∂r
∂x
(∂f
∂η
)2
− uet∂f
∂x
∂2f
∂η2= t
∂ue∂x
− (M + φ)t+ (M + φ)t∂f
∂η+ (1 +K)
∂3f
∂η3
+t
ueαt sin(x)s+K
∂h
∂η
−η2
∂2f
∂η2+ t
∂2f
∂t∂η+ t
∂ue∂x
((∂f
∂η
)2
− f ∂2f
∂η2− 1
)+ uet(
∂f
∂η
∂2f
∂x∂η− 1
r
∂r
∂x
(∂f
∂η
)2
− ∂f
∂x
∂2f
∂η2
)

163
= (M + φ)t
(∂f
∂η− 1
)+ (1 +K)
∂3f
∂η3+
t
ueαt sin(x)s+K
∂h
∂η
(1 +K)∂3f
∂η3+η
2
∂2f
∂η2+K
∂h
∂η+ (M + φ)t
(∂f
∂η− 1
)+ t
∂ue∂x
(1−
(∂f
∂η
)2
+ f∂2f
∂η2
)= t
∂2f
∂t∂η+
uet
(∂f
∂η
∂2f
∂x∂η− 1
r
∂r
∂x
(∂f
∂η
)2
− ∂f
∂x
∂2f
∂η2
)− t
ueαt sin(x)s
Momentum Angular
∂N
∂t+
1
r
∂ψ
∂y
∂N
∂x− 1
r
∂ψ
∂x
∂N
∂y=
(1 +
K
2
)+∂2N
∂y2
−K(
2N +1
r
∂2ψ
∂y2
)
Ruas kiri
∂N
∂t+
1
r
∂ψ
∂y
∂N
∂x− 1
r
∂ψ
∂x
∂N
∂y
=ue
t12
(− 1
2th− η
2t
∂h
∂η+∂h
∂t
)+
1
ruer
∂f
∂η
(t−
12ue
∂h
∂x
+t−12h∂ue∂x
)− 1
r
(t12 rf
∂ue∂x
+ t12uef
∂r
∂x+
t12uer
∂f
∂x
)Uet
∂h
∂η

164
=ue
t12
(− 1
2th− η
2t
∂h
∂η+∂h
∂t
)+
1
t12
u2e∂f
∂η
∂h
∂x+
1
t12
ueh∂f
∂η
∂ue∂x− 1
t12
fue∂ue∂x
∂h
∂η− 1
t12
u2ef
r
∂r
∂x
∂h
∂η−
1
t12
u2e∂f
∂x
∂h
∂η
Penyelesaian ruas kanan(1 +
K
2
)∂2N
∂y2−K
(2N +
1
r
∂2ψ
∂y2
)=
(1 +
K
2
)uet
1
t12
∂2h
∂η2−K
(2
1
t12
ueh+1
r
uer
t12
∂2f
∂η2
)=
(1 +
K
2
)uet
1
t12
∂2h
∂η2− 2K
1
t12
ueh+Kue
t12
∂2f
∂η2
Menyelesaiakan ruas kiri dan kanan
ue
t12
(− 1
2th− η
2t
∂h
∂η+∂h
∂t
)+
1
t12
u2e∂f
∂η
∂h
∂x+
1
t12
ueh∂f
∂η
∂ue∂x
− 1
t12
fue∂ue∂x
∂h
∂η− 1
t12
u2ef
r
∂r
∂x
∂h
∂η− 1
t12
u2e∂f
∂x
∂h
∂η
=
(1 +
K
2
)uet
1
t12
∂2h
∂η2− 2K
1
t12
ueh+Kue
t12
∂2f
∂η2
Kedua ruas dibagai uet
1
t12
sehingga
−1
2h− η
2
∂h
∂η+ t
∂h
∂t+ tue
∂f
∂η
∂h
∂x+ th
∂f
∂η
∂ue∂x− tf ∂ue
∂x
∂h
∂η
− tuef
r
∂r
∂x
∂h
∂η− tue
∂f
∂x
∂h
∂η=
(1 +
K
2
)∂2h
∂η2
− 2Kth+Kt∂2f
∂η2
−1
2h− η
2
∂h
∂η+ t
∂h
∂t+ tue
(∂f
∂η
∂h
∂x− f
r
∂r
∂x
∂h
∂η− ∂f
∂x
∂h
∂η
)

165
+ t∂ue∂x
(h∂f
∂η− f ∂h
∂η
)=
(1 +
K
2
)∂2h
∂η2
−Kt(
2h+∂2f
∂η2
)(
1 +K
2
)∂2h
∂η2+η
2
∂h
∂η+
1
2h+ t
∂ue∂x
(h∂f
∂η− f ∂h
∂η
)= t
∂h
∂t+Kt
(2h+
∂2f
∂η2
)+ tue
(∂f
∂η
∂h
∂x−
f
r
∂r
∂x
∂h
∂η− ∂f
∂x
∂h
∂η
)Persamaan Energi
∂T
∂t+
1
r
∂ψ
∂y
∂T
∂x− 1
r
∂ψ
∂x
∂T
∂y=
1
Pr
∂2T
∂y2
−1
2
η
t
∂s
∂η+∂s
∂t+
1
ruer
∂f
∂η
∂s
∂x− 1
r
(t12 r∂ue∂x
f + t12uef
∂r
∂x
+t12uer
∂f
∂x
)1
t12
∂s
∂η=
1
Pr
1
t
∂2s
∂η2
Kedua ruas dikali Prt sehingga
−1
2ηPr
∂s
∂η+ Prt
∂s
∂t+ Prtue
∂f
∂η
∂s
∂x− Prt
rt12
f
(t12 r∂ue∂x
+t12uef
∂r
∂x+ t
12uer
∂f
∂x
)∂s
∂η=∂2s
∂η2
−1
2ηPr
∂s
∂η+ Prt
∂s
∂t+ Prtue
∂f
∂η
∂s
∂x− Prtf ∂ue
∂x
∂s
∂η
− Prt
r
(uef
∂r
∂x+ uer
∂f
∂x
)∂s
∂η=∂2s
∂η2
−1
2ηPr
∂s
∂η− Prtf ∂ue
∂x
∂s
∂η+ Prt
(∂s
∂t+ ue
(∂f
∂η
∂s
∂x
−f 1
r
∂r
∂x
∂s
∂η− ∂f
∂x
∂s
∂η
))=∂2s
∂η2

166
1
2ηPr
∂s
∂η+∂2s
∂η2+ Prtf
∂ue∂x
∂s
∂η= Prt
(∂s
∂t+ ue
(∂f
∂η
∂s
∂x
−f 1
r
∂r
∂x
∂s
∂η− ∂f
∂x
∂s
∂η
))
Large time (t ≥ t∗) dengan t∗ sebarang nilai
ψ = ue(x)r(x)F (x, Y, t)
T = S(x, η, t)
Y = y
N = ue(x)H(x, Y, t)
sehingga
∂Y
∂y= 1
∂Y
∂t= 0
∂Y
∂y=
∂ψ
∂Y· ∂Y∂y
=∂(ue(x)r(x)F (x, Y, t))
∂Y
= ue(x)r(x)∂F (x, Y, t)
∂Y∂ψ
∂x=
∂(ue(x)r(x)F (x, Y, t))
∂x
= ue(x)r(x)∂F (x, Y, t)
∂x+∂(ue(x)r(x))
∂xF (x, Y, t)
= ue(x)r(x)∂F (x, Y, t)
∂x+
(∂ue(x)
∂xr(x) + ue(x)
∂r(x)
∂x
)F (x, Y, t)

167
∂ψ
∂x= r(x)
∂ue(x)
∂xF (x, Y, t) + ue(x)F (x, Y, t)
∂r(x)
∂x
+ue(x)r(x)∂F (x, Y, t)
∂x∂2ψ
∂t∂y=
∂
∂t
(∂ψ
∂y
)=
∂
∂t
(ue(x)r(x)
∂F (x, Y, t)
∂Y
)=
∂
∂Y
(ue(x)r(x)
∂F (x, Y, t)
∂Y
)∂Y
∂t
+∂
∂t
(ue(x)r(x)
∂F (x, Y, t)
∂Y
)= ue(x)r(x)
∂2F (x, Y, t)
∂t∂Y∂2ψ
∂x∂y=
∂
∂x
(∂ψ
∂y
)=
∂
∂x
(ue(x)r(x)
∂F (x, Y, t)
∂Y
)=
∂(ue(x)r(x))
∂x
∂F (x, Y, t)
∂Y+ ue(x)r(x)
∂2F (x, Y, t)
∂x∂Y
=
(∂ue(x)
∂xr(x) + ue(x)
∂r(x)
∂x
)∂F (x, Y, t)
∂Y
+ue(x)r(x)∂2F (x, Y, t)
∂x∂Y
= r(x)∂ue(x)
∂x
∂F (x, Y, t)
∂Y+ ue(x)
∂r(x)
∂x
∂F (x, Y, t)
∂Y
+ue(x)r(x)∂2F (x, Y, t)
∂x∂Y∂2ψ
∂y2=
∂
∂y
(∂ψ
∂y
)∂2ψ
∂y2=
∂
∂y
(ue(x)r(x)
∂F (x, Y, t)
∂Y
)

168
=∂
∂Y
(ue(x)r(x)
∂F (x, Y, t)
∂Y
)∂Y
∂y
= ue(x)r(x)∂2F (x, Y, t)
∂η2
∂3ψ
∂y3=
∂
∂y
(∂2ψ
∂y2
)=
∂
∂y
(ue(x)r(x)
∂2F (x, Y, t)
∂Y 2
)=
∂
∂Y
(ue(x)r(x)
∂2F (x, Y, t)
∂Y 2
)∂Y
∂y
= ue(x)r(x)∂3F (x, Y, t)
∂Y 3
∂N
∂y=
∂N
∂Y· ∂Y∂y
=∂ (ue(x)H(x, Y, t))
∂Y
= ue(X)∂H(x, Y, t)
∂Y∂N
∂x=
∂ (ue(x)H(x, Y, t))
∂x
=∂ue(x)
∂xH(x, Y, t) + ue(x)
∂H(x, Y, t)
∂x∂N
∂t=
∂ (ue(x)H(x, Y, t))
∂t
=∂ (Ue(x)H(x, Y, t))
∂Y· ∂Y∂t
+∂ (Ue(x)H(x, Y, t))
∂t
= ue(x)∂H(x, Y, t)
∂t∂2N
∂y2=
∂
∂y
(∂N
∂y
)=
∂
∂y
(ue(x)
∂H(x, Y, t)
∂Y
)

169
=∂
∂Y
(ue(x)
∂H(x, Y, t)
∂Y
)∂Y
∂y
= ue(x)∂2H(x, Y, t)
∂Y 2
∂T
∂t=
∂S(x, Y, t)
∂Y· ∂Y∂t
+∂S(x, Y, t)
∂t
=∂S(x, Y, t)
∂t∂T
∂x=
∂S(x, Y, t)
∂x∂T
∂y=
∂S(x, Y, t)
∂Y· ∂Y∂y
=∂S(x, Y, t)
∂Y∂2T
∂y2=
∂
∂y
(∂T
∂y
)=
∂
∂y
(∂S(x, Y, t)
∂Y
)=
∂
∂Y
(∂S(x, Y, t)
∂Y
)∂Y
∂y
=∂2S(x, Y, t)
∂Y 2
Persamaan Momentum
1
r
∂2ψ
∂t∂y+
1
r2∂ψ
∂y
∂2ψ
∂x∂y− 1
r3∂r
∂x
(∂ψ
∂y
)2
− 1
r2∂ψ
∂x
∂2ψ
∂y2
=∂ue∂x
ue − (M + φ)(1
r
∂ψ
∂y− ue) +
(1 +K)
r
∂3ψ
∂y3− αT sin(x)
+K∂N
∂y

170
Penyeleaian ruas kiri
1
r
∂2ψ
∂t∂y+
1
r2∂ψ
∂y
∂2ψ
∂x∂y− 1
r3∂r
∂x
(∂ψ
∂y
)2
− 1
r2∂ψ
∂x
∂2ψ
∂y2
=1
ruer
∂2F
∂t∂Y+
1
r2uer
∂F
∂Y
(r∂ue∂x
∂F
∂Y+ ue
∂r
∂x
∂F
∂Y
+uer∂2F
∂x∂Y
)− 1
r3∂r
∂x
(uer
∂F
∂Y
)2
− 1
r2
(r∂ue∂x
F
+ueF∂r
∂x+ uer
∂F
∂x
)uer
∂2F
∂Y 2
= ue∂2F
∂t∂Y+ ue
∂ue∂x
(∂F
∂Y
)2
+1
ru2e∂r
∂x
(∂F
∂Y
)2
+u2e∂F
∂Y
∂2F
∂x∂Y− u2e
r
∂r
∂x
(∂F
∂Y
)2
− ueF∂ue∂x
(∂F
∂Y
)2
−1
ru2eF
∂r
∂x
∂2F
∂Y 2− u2e
∂F
∂x
∂2F
∂Y 2
Penyelesaian ruas kanan
ue∂ue∂x
+ (M + φ)(1
r
∂ψ
∂y− ue) +
(1 +K)
r
∂3ψ
∂y3
+αT sin(x) +K∂N
∂y
= ue∂ue∂x
+ (M + φ)(1
ruer
∂F
∂Y− ue) +
(1 +K)
ruer
∂3F
∂Y 3
+αT sin(x) +Kue∂H
∂Y
= ue∂ue∂x
+ (M + φ)ue
(∂F
∂Y− 1
)+
(1 +K)
u e
∂3F
∂Y 3
+αT sin(x) +Kue∂H
∂Y

171
Menyelesaikan ruas kiri dan kanan
ue∂2F
∂t∂Y+ ue
∂ue∂x
(∂F
∂Y
)2
+1
ru2e∂r
∂x
(∂F
∂Y
)2
+ u2e∂F
∂Y
∂2F
∂x∂Y− u2e
r
∂r
∂x
(∂F
∂Y
)2
− ueF∂ue∂x
(∂F
∂Y
)2
−
1
ru2eF
∂r
∂x
∂2F
∂Y 2− u2e
∂F
∂x
∂2F
∂Y 2= ue
∂ue∂x
+ (M + φ)ue
(∂F
∂Y− 1
)+
(1 +K)
u e
∂3F
∂Y 3
+ αT sin(x) +Kue∂H
∂Y
Kedua ruas dibagi ue sehingga diperoleh
∂2F
∂t∂Y+∂ue∂x
(∂F
∂Y
)2
+1
rue∂r
∂x
(∂F
∂Y
)2
+ ue∂F
∂Y
∂2F
∂x∂Y
− 1
rue∂r
∂x
(∂F
∂Y
)2
− F ∂ue∂x
(∂F
∂Y
)2
− 1
rueF
∂r
∂x
∂2F
∂Y 2− ue
∂F
∂x
∂2F
∂Y 2=∂ue∂x
+ (M + φ)(∂F
∂Y− 1
)+ (1 +K)
∂3F
∂Y 3+ αt sin(x)s
+K∂H
∂Y
∂2F
∂t∂Y+∂ue∂x
(∂F
∂Y
)2
+ ue∂F
∂Y
∂2F
∂x∂Y− F ∂ue
∂x
∂2F
∂Y 2
− 1
rueF
∂r
∂x
∂2F
∂Y 2− ue
∂F
∂x
∂2F
∂Y 2=∂ue∂x
+ (M + φ)
(∂F
∂Y− 1
)+ (1 +K)
∂3F
∂Y 3

172
+ αt sin(x)s+K∂H
∂Y
∂2F
∂t∂Y+∂ue∂x
((∂F
∂Y
)2
− F ∂2F
∂Y 2− 1
)+ ue
(∂F
∂Y
∂2F
∂x∂Y
−1
rF∂r
∂x
∂2F
∂Y 2− ∂F
∂x
∂2F
∂Y 2
)=∂ue∂x
+ (M + φ)(∂F − 1
∂Y
)+ (1 +K)
∂3F
∂Y 3+ αt sin(x)s+K
∂H
∂Y
∂2F
∂t∂Y− ∂ue
∂x
(1 + F
∂2F
∂Y 2−(∂F
∂Y
)2)
+ ue
(∂F
∂Y
∂2F
∂x∂Y
−1
rF∂r
∂x
∂2F
∂Y 2− ∂F
∂x
∂2F
∂Y 2
)=∂ue∂x
+ (M + φ)(∂F
∂Y− 1
)+ (1 +K)
∂3F
∂Y 3+ αt sin(x)s+K
∂H
∂Y
(1 +K)∂3F
∂Y 3+ (M + φ)
(∂F
∂Y− 1
)+K
∂H
∂Y+∂ue∂x
(1
+F∂2F
∂Y 2−(∂F
∂Y
)2)
=∂2F
∂t∂Y+ ue
(∂F
∂Y
∂2F
∂x∂Y
−1
rF∂r
∂x
∂2F
∂Y 2− ∂F
∂x
∂2F
∂Y 2
)− αt sin(x)s
Momentum Angular
∂N
∂t+
1
r
∂ψ
∂y
∂N
∂x− 1
r
∂ψ
∂x
∂N
∂y=
(1 +
K
2
)+∂2N
∂y2
−K(
2N +1
r
∂2ψ
∂y2
)Ruas kiri
∂N
∂t+
1
r
∂ψ
∂y
∂N
∂x− 1
r
∂ψ
∂x
∂N
∂y

173
=ue
t12
(− 1
2th− η
2t
∂h
∂η+∂h
∂t
)+
1
ruer
∂f
∂η
(t−
12ue
∂h
∂x
+t−12h∂ue∂x
)− 1
r
(t12 rf
∂ue∂x
+ t12uef
∂r
∂x+ t
12uer
∂f
∂x
)Uet
∂h
∂η
=ue
t12
(− 1
2th− η
2t
∂h
∂η+∂h
∂t
)+
1
t12
u2e∂f
∂η
∂h
∂x+
1
t12
ueh∂f
∂η
∂ue∂x− 1
t12
fue∂ue∂x
∂h
∂η− 1
t12
u2ef
r
∂r
∂x
∂h
∂η− 1
t12
u2e∂f
∂x
∂h
∂η
Penyelesaian ruas kanan(1 +
K
2
)∂2N
∂y2−K
(2N +
1
r
∂2ψ
∂y2
)=
(1 +
K
2
)uet
1
t12
∂2h
∂η2−K
(2
1
t12
ueh+1
r
uer
t12
∂2f
∂η2
)=
(1 +
K
2
)uet
1
t12
∂2h
∂η2− 2K
1
t12
ueh+Kue
t12
∂2f
∂η2
Menyelesaikan ruas kiri dan kanan
ue
t12
(− 1
2th− η
2t
∂h
∂η+∂h
∂t
)+
1
t12
u2e∂f
∂η
∂h
∂x+
1
t12
ueh∂f
∂η
∂ue∂x
− 1
t12
fue∂ue∂x
∂h
∂η− 1
t12
u2ef
r
∂r
∂x
∂h
∂η− 1
t12
u2e∂f
∂x
∂h
∂η
=
(1 +
K
2
)uet
1
t12
∂2h
∂η2− 2K
1
t12
ueh+Kue
t12
∂2f
∂η2
Kedua ruas dibagai uet
1
t12
sehingga
−1
2h− η
2
∂h
∂η+ t
∂h
∂t+ tue
∂f
∂η
∂h
∂x+ th
∂f
∂η
∂ue∂x− tf ∂ue
∂x
∂h
∂η− tue
f
r
∂r
∂x
∂h
∂η− tue
∂f
∂x
∂h
∂η=
(1 +
K
2
)∂2h
∂η2
174
− 2Kth+Kt∂2f
∂η2
−1
2h− η
2
∂h
∂η+ t
∂h
∂t+ tue
(∂f
∂η
∂h
∂x− f
r
∂r
∂x
∂h
∂η− ∂f
∂x
∂h
∂η
)+ t
∂ue∂x
(h∂f
∂η− f ∂h
∂η
)=
(1 +
K
2
)∂2h
∂η2
−Kt(
2h+∂2f
∂η2
)(
1 +K
2
)∂2h
∂η2+η
2
∂h
∂η+
1
2h+ t
∂ue∂x
(h∂f
∂η− f ∂h
∂η
)= t
∂h
∂t+Kt
(2h+
∂2f
∂η2
)+ tue
(∂f
∂η
∂h
∂x
−fr
∂r
∂x
∂h
∂η− ∂f
∂x
∂h
∂η
)Persamaan Energi
∂T
∂t+
1
r
∂ψ
∂y
∂T
∂x− 1
r
∂ψ
∂x
∂T
∂y=
1
Pr
∂2T
∂y2
−1
2
η
t
∂s
∂η+∂s
∂t+
1
ruer
∂f
∂η
∂s
∂x− 1
r
(t12 r∂ue∂x
f + t12uef
∂r
∂x
+t12uer
∂f
∂x
)1
t12
∂s
∂η=
1
Pr
1
t
∂2s
∂η2
Kedua ruas dikali Prt sehingga
−1
2ηPr
∂s
∂η+ Prt
∂s
∂t+ Prtue
∂f
∂η
∂s
∂x− Prt
rt12
f
(t12 r∂ue∂x
+t12uef
∂r
∂x+ t
12uer
∂f
∂x
)∂s
∂η=∂2s
∂η2
−1
2ηPr
∂s
∂η+ Prt
∂s
∂t+ Prtue
∂f
∂η
∂s
∂x− Prtf ∂ue
∂x
∂s
∂η
− Prt
r
(uef
∂r
∂x+ uer
∂f
∂x
)∂s
∂η=∂2s
∂η2

175
−1
2ηPr
∂s
∂η− Prtf ∂ue
∂x
∂s
∂η+ Prt
(∂s
∂t+ ue
(∂f
∂η
∂s
∂x
−f 1
r
∂r
∂x
∂s
∂η− ∂f
∂x
∂s
∂η
))=∂2s
∂η2
1
2ηPr
∂s
∂η+∂2s
∂η2+ Prtf
∂ue∂x
∂s
∂η= Prt
(∂s
∂t+
ue
(∂f
∂η
∂s
∂x− f 1
r
∂r
∂x
∂s
∂η− ∂f
∂x
∂s
∂η
))


LAMPIRAN FPenurunan Kondisi Awal
a. Persamaan Momentum
(1 +K)f ′′′ +η
2f ′′ +Kh′ + (M + φ)t
(f ′ − 1
)+
2
3αts
+3
2
(1−
(f ′)2
+ f · f ′′)
= t∂f ′
∂t(6.0.1)
b. Persamaan Momentum Angular(1 +
K
2
)h′′ +
η
2h′ +
1
2h+
3
2t(fh′ − hf ′
)= t
∂h
∂t
+Kt(2h+ f ′′
)(6.0.2)
c. Persamaan Energi
1
2ηPrs′ + s′′ +
3
2Prtfs′ = Prt
∂s
∂t(6.0.3)
dengan kondisi batas, yaitu
t < 0 : f =∂f
∂η= h = s = 0 untuk setiapx, η
t ≥ 0 : f =∂f
∂η, h = −n∂
2f
∂η2, s = 1 ketika η = 0
∂f
∂η= 1, h = 0, s = 0 ketika η →∞
ketika t = 0 maka
(1 +K)f ′′′ +η
2f ′′ +Kh′ = 0
177

178
dengan memisalkan f ′′ = b maka
(1 +K)b′ +η
2b+Kh′ = 0
karena h = −nf ′′ maka
(1 +K)b′ +η
2b+K
(∂
∂η(−nb)
)= 0
(1 +K)b′ +η
2b−Knb′ = 0
(1 +K(1− n))b′ +η
2b = 0
dengan b′ = ∂b∂η maka
(1 +K(1− n))∂b
∂η+η
2b = 0
kemudian kedua ruas dikali dengan 1bdη maka
(1 +K(1− n))
bdb+
η
2dη = 0∫
(1 +K(1− n))
bdb+
∫η
2dη =
∫0dη
(1 +K(1− n))lnb+η2
4= = c1
(1 +K(1− n))lnb = c1 −η2
4
lnb =c1
(1 +K(1− n))
− η2
4(1 +K(1− n))
b = ec1
(1+K(1−n))−η2
4(1+K(1−n))
karena b = f ′′ maka
f ′′ = ec1
(1+K(1−n))−η2
4(1+K(1−n))

179
f ′ =
∫e
c1(1+K(1−n))−
η2
4(1+K(1−n))dη
f ′ = ec1
(1+K(1−n))
∫e− η2
4(1+K(1−n))dη
dengan menggunakan fungsi error f maka∫e−cx
2dx =
√π
4cerf(√cx)
jika c = 14(1+K(1−n)) dan x2 = η2 maka∫e− η2
4(1+K(1−n))dη =
√π
4( 14(1+K(1−n)))
erf
(√1
4(1 +K(1− n))η
)=
√π(1 +K(1− n))erf(√
1
4(1 +K(1− n))η
)+ c2
=√π(1 +K(1− n))erf(η
2
√1
(1 +K(1− n))
)+ c2
sehingga
f ′ = ec1
1+K(1−n)√π(1 +K(1− n))erf
(η
2
√1
(1 +K(1− n))
)+c2
karena h = −nf ′′ maka
h = −nec1
(1+K(1−n))−η2
4(1+K(1−n))
h′ = −nec1
(1+K(1−n))d
dηe− η2
4(1+K(1−n))

180
dengan
d
dηe− η2
4(1+K(1−n)) = −21
4(1 +K(1− n))e− η2
4(1+K(1−n))
=−1
2(1 +K(1− n))e− η2
4(1+K(1−n))
sehingga
h′ = −nec1
(1+K(1−n))−1
2(1 +K(1− n))e− η2
4(1+K(1−n))
=n
2(1 +K(1− n))e
(c1
(1+K(1−n))−η2
4(1+K(1−n))
)
Dengan memasukkan kondisi batas ketika η = 0 maka
f ′ = ec1
1+K(1−n)√π(1 +K(1− n))erf
(η
2
√1
(1 +K(1− n))
)+c2
0 = ec1
1+K(1−n)√π(1 +K(1− n))erf (0) + c2
0 = c2 (6.0.4)
ketika η →∞ maka
f ′ = ec1
1+K(1−n)√π(1 +K(1− n))erf
(η
2
√1
(1 +K(1− n))
)+c2
1 = ec1
1+K(1−n)√π(1 +K(1− n))erf (∞) + 0
1 = ec1
1+K(1−n)√π(1 +K(1− n))
ec1
1+K(1−n) =1√
π(1 +K(1− n))

181
dengan mensubstitusikan persamaan diatas maka didapat
f ′ = ec1
1+K(1−n)√π(1 +K(1− n))erf
(η
2
√1
(1 +K(1− n))
)+c2
f ′ =1√
π(1 +K(1− n))
√π(1 +K(1− n))erf
(η
2
√1
(1 +K(1− n))
)
f ′ = erf
(η
2
√1
(1 +K(1− n))
)
f ′ = erf
(η
2√
(1 +K(1− n))
)
f ′′ =1√
π(1 +K(1− n))e
−η24(1+K(1−n))
f =
∫f ′dη
f =
∫erf
(η
2√
(1 +K(1− n))
)dη
f = ηerf
(η
2√
(1 +K(1− n))
)+
2e−η2
4(1+K(1−n))√π(1 +K(1− n))
+ c3
ketika η = 0 maka
0 =2e∞√
π(1 +K(1− n))+ c3
0 =2√
π(1 +K(1− n))+ c3
c3 =−2√
π(1 +K(1− n))

182
sehingga
f = ηerf
(η
2√
(1 +K(1− n))
)+
2e−η2
4(1+K(1−n))√π(1 +K(1− n))
− 2√π(1 +K(1− n))
f = ηerf
(η
2√
(1 +K(1− n))
)+
2√π(1 +K(1− n))(
e−η2
4(1+K(1−n)) − 1
)
Persamaan Momentum Angular(1 +
K
2
)h′′ +
η
2h′ +
1
2h+
3
2t(fh′ − hf ′
)= t
∂h
∂t
+Kt(2h+ f ′′
)ketika t = 0 maka(
1 +K
2
)h′′ +
η
2h′ +
1
2h = 0
dengan menggunakan kondisi batas ketika η = 0 maka
h = −n∂2f
∂η2
h =−n√
π(1 +K(1− n))e
−η24(1+K(1−n))
h′ =d
dη
−n√π(1 +K(1− n))
e−η2
4(1+K(1−n))
h′ =−n√
π(1 +K(1− n))
d
dηe
−η24(1+K(1−n))

183
h′ =−n√
π(1 +K(1− n))
−2η
4(1 +K(1− n))e
−η24(1+K(1−n))
h′ =nη
2(1 +K(1− n))√π(1 +K(1− n))
e−η2
4(1+K(1−n))
Persamaan Energi
1
2ηPrs′ + s′′ +
3
2Prtfs′ = Prt
∂s
∂t
Ketika t = 0 maka
1
2ηPrs′ + s′′ = 0
dengan memisalkan bahwa s′ = j maka
1
2ηPrj + j′ = 0
diketahui bahwa j′ = ∂j∂η sehingga
1
2ηPrj +
∂j
∂η= 0
Kedua ruas dikalikan dengan 1j dη maka
1
2ηPrdη +
1
jdj = 0∫
1
2ηPrdη +
∫1
jdj =
∫0dη
1
4η2Pr + lnj = c4
lnj = c4 −1
4η2Pr
j = e(c4−14η2Pr)

184
karena j = s′ maka
s′ = ec4e−14η2Pr
s =
∫ec−4e−
14η2Prdη
s = ec4∫e−
14η2Prdη
dengan menggunakan integral eksponensial maka∫e−
14η2Prdη =
√π
Prerf
(√1
4Prη
)+ c5∫
e−14η2Prdη =
√π
Prerf
(η2
√Pr)
+ c5
sehingga
s = ec4√
π
Prerf
(η2
√Pr)
+ c5
dengan menggunakan kondisi batas makas = 1 ketika η = 0
1 = ec4√
π
Prerf (0) + c5
c5 = 1
ketika η →∞ maka
0 = ec4√
π
Prerf (∞) + 1
−1 = ec4√
π
Pr
ec4 = −√Pr
π

185
sehingga diperoleh
s = −√Pr
π
√π
Prerf
(η2
√Pr)
+ 1
s = −erf(η
2
√Pr)
+ 1
s′ = ec4e−14Prη2
s′ = e−√Prπ e
−14Prη2
s′ = −√Pr
πe−14Prη2


LAMPIRAN GDiskritisasi Model
1. Small time Dilakukan pemisalan untuk mendapatkanorde pertama sebagai berikut
f ′ = u
u′ = v
h′ = p
s′ = q
(1 +K)v′ +η
2v +Kp− (M + φ)t (u− 1)
+3
2
(1− (u)2 + f · v
)+
2
3αts = t
∂u
∂t(1 +
K
2
)p′ +
η
2p+
1
2h+
3
2t (hu− fp) = t
∂h
∂t
+Kt (2h+ v)
1
2ηPrq + q′ +
3
2Prtfq = Prt
∂s
∂t
dapat didiskritisasi menjadi
1.1
lj
(fnj − fnj−1
)= un
j− 12
⇒ 1
lj
(fnj − fnj−1
)=
1
2
(unj − unj−1
)2.
1
lj
(unj − unj−1
)= vn
j− 12
⇒ 1
lj
(unj − unj−1
)=
1
2
(vnj − vnj−1
)187

188
3.1
lj
(hnj − hnj−1
)= pn
j− 12
⇒ 1
lj
(hnj − hnj−1
)=
1
2
(pnj − pnj−1
)4.
1
lj
(snj − snj−1
)= qn
j− 12
⇒ 1
lj
(snj − snj−1
)=
1
2
(qnj − qnj−1
)5.
1
2
[(L1)
nj− 1
2+ (L1)
n−1j− 1
2
]= tn−
12
unj− 12
+ un−1j− 1
2
kn
dengan
(L1)nj− 1
2=
[(1 +K)v′ +
η
2v +Kp− (M + φ)t (u− 1)
+3
2
(1− (u)2 + f · v
)+
2
3αts
]nj− 1
2
= (1 +K)
(vnj − vnj−1
)lj
+ηj− 1
2
2vnj− 1
2
+Kpnj− 1
2
−(M + φ)tn(unj− 1
2
− 1)
+3
2tn(
1−(unj− 1
2
)2+fn
j− 12
· vnj− 1
2
)+
2
3αtnsn
j− 12
(L1)n−1j− 1
2
=[(1 +K)v′ +
η
2v +Kp− (M + φ)t (u− 1)
+3
2
(1− (u)2 + f · v
)+
2
3αts
]n−1j− 1
2
= (1 +K)
(vn−1j − vn−1j−1
)lj
+ηj− 1
2
2vn−1j− 1
2
+Kpn−1j− 1
2
−(M + φ)tn−1(un−1j− 1
2
− 1
)+
3
2tn−1 (1−

189
(un−1j− 1
2
)2
+ fn−1j− 1
2
· vn−1j− 1
2
)+
2
3αtnsn−1
j− 12
sehingga didapat
1
2
(1 +K)
(vnj − vnj−1
)lj
+ηj− 1
2
2vnj− 1
2
+Kpnj− 1
2
−
(M + φ)tn(unj− 1
2
− 1)
+3
2tn(
1−(unj− 1
2
)2+
fnj− 1
2
· vnj− 1
2
)+
2
3αtnsn
j− 12
+ (1 +K)(vn−1j − vn−1j−1
)lj
+ηj− 1
2
2vn−1j− 1
2
+Kpn−1j− 1
2
−(M + φ)tn(un−1j− 1
2
− 1
)+
3
2tn−1 (1−(
un−1j− 1
2
)2
+fn−1j− 1
2
· vn−1j− 1
2
)+
2
3αtnsn−1
j− 12
]
=tn−
12
knunj− 1
2
− tn−12
knun−1j− 1
2
(1 +K)
(vnj − vnj−1
)lj
+ηj− 1
2
2vnj− 1
2
+Kpnj− 1
2
− (M + φ)tn(unj− 1
2
− 1)
+3
2tn(
1−(unj− 1
2
)2+fn
j− 12
· vnj− 1
2
)+
2
3αtnsn
j− 12
= −(1 +K)(vn−1j − vn−1j−1
)lj
−ηj− 1
2
2vn−1j− 1
2
−Kpn−1j− 1
2
+
(M + φ)tn−1(un−1j− 1
2
− 1
)− 3
2tn−1 (1−
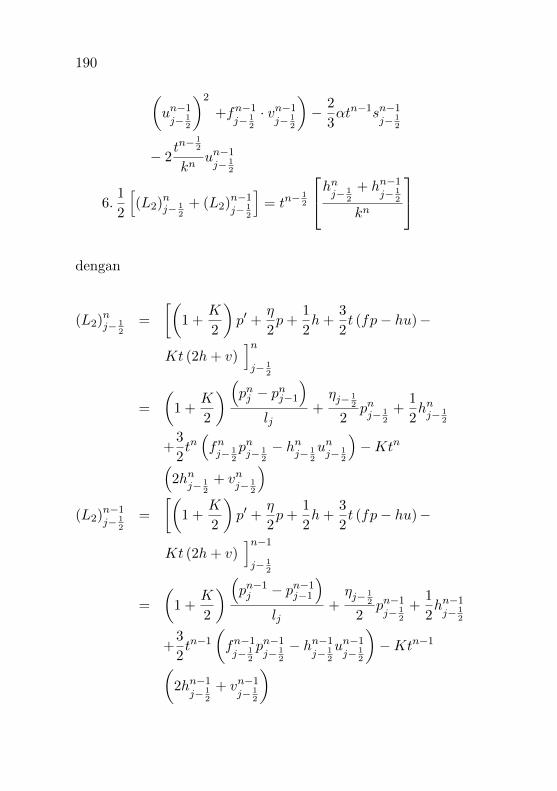
190
(un−1j− 1
2
)2
+fn−1j− 1
2
· vn−1j− 1
2
)− 2
3αtn−1sn−1
j− 12
− 2tn−
12
knun−1j− 1
2
6.1
2
[(L2)
nj− 1
2+ (L2)
n−1j− 1
2
]= tn−
12
hnj− 12
+ hn−1j− 1
2
kn
dengan
(L2)nj− 1
2=
[(1 +
K
2
)p′ +
η
2p+
1
2h+
3
2t (fp− hu)−
Kt (2h+ v)]nj− 1
2
=
(1 +
K
2
) (pnj − pnj−1)lj
+ηj− 1
2
2pnj− 1
2
+1
2hnj− 1
2
+3
2tn(fnj− 1
2
pnj− 1
2
− hnj− 1
2
unj− 1
2
)−Ktn(
2hnj− 1
2
+ vnj− 1
2
)(L2)
n−1j− 1
2
=
[(1 +
K
2
)p′ +
η
2p+
1
2h+
3
2t (fp− hu)−
Kt (2h+ v)]n−1j− 1
2
=
(1 +
K
2
) (pn−1j − pn−1j−1
)lj
+ηj− 1
2
2pn−1j− 1
2
+1
2hn−1j− 1
2
+3
2tn−1
(fn−1j− 1
2
pn−1j− 1
2
− hn−1j− 1
2
un−1j− 1
2
)−Ktn−1(
2hn−1j− 1
2
+ vn−1j− 1
2
)

191
sehingga didapat
1
2
(1 +K
2
) (pnj − pnj−1)lj
+ηj− 1
2
2pnj− 1
2
+1
2hnj− 1
2
+3
2tn
(fnj− 1
2
pnj− 1
2
− hnj− 1
2
unj− 1
2
)−Ktn
(2hn
j− 12
+ vnj− 1
2
)+
(1 +
K
2
) (pn−1j − pn−1j−1
)lj
+ηj− 1
2
2pn−1j− 1
2
+1
2hn−1j− 1
2
+3
2tn−1
(fn−1j− 1
2
pn−1j− 1
2
− hn−1j− 1
2
un−1j− 1
2
)−Ktn−1(
2hn−1j− 1
2
+ vn−1j− 1
2
)]=tn−
12
knhnj− 1
2
− tn−12
knhn−1j− 1
2(1 +
K
2
) (pnj − pnj−1)lj
+ηj− 1
2
2pnj− 1
2
+1
2hnj− 1
2
+3
2tn(
fnj− 1
2
pnj− 1
2
− hnj− 1
2
unj− 1
2
)−Ktn
(2hn
j− 12
+ vnj− 1
2
)− 2
tn−12
knhnj− 1
2
= −(
1 +K
2
) (pn−1j − pn−1j−1
)lj
−
ηj− 12
2pn−1j− 1
2
+1
2hn−1j− 1
2
− 3
2tn−1
(fn−1j− 1
2
pn−1j− 1
2
−
hn−1j− 1
2
un−1j− 1
2
)+Ktn−1
(2hn−1
j− 12
+ vn−1j− 1
2
)− 2
tn−12
knhn−1j− 1
2
7.1
2
[(L3)
nj− 1
2+ (L3)
n−1j− 1
2
]= Prtn−
12
snj− 12
+ sn−1j− 1
2
kn

192
dengan
(L3)nj− 1
2=
[1
2ηPrq + q′ +
3
2Prtfq
]nj− 1
2
=1
2ηj− 1
2Pr qn
j− 12
+
(qnj − qnj−1
)lj
+3
2Prtn
fnj− 1
2
qnj− 1
2
(L3)n−1j− 1
2
=
[1
2ηPrq + q′ +
3
2Prtfq
]n−1j− 1
2
=1
2ηj− 1
2Pr qn−1
j− 12
+
(qn−1j − qn−1j−1
)lj
+3
2Prtn−1
fn−1j− 1
2
qn−1j− 1
2
sehingga didapat
1
2
1
2ηj− 1
2Pr qn
j− 12
+
(qnj − qnj−1
)lj
+3
2Prtnfn
j− 12
qnj− 1
2
+1
2ηj− 1
2Pr qn−1
j− 12
+
(qn−1j − qn−1j−1
)lj
+3
2Prtn−1
fn−1j− 1
2
qn−1j− 1
2
]= Pr
tn−12
knsnj− 1
2
− Pr tn− 1
2
knsn−1j− 1
2
1
2ηj− 1
2Pr qn
j− 12
+
(qnj − qnj−1
)lj
+3
2Prtnfn
j− 12
qnj− 1
2
−
2Prtn−
12
knsnj− 1
2
= −1
2ηj− 1
2Pr qn−1
j− 12
−
(qn−1j − qn−1j−1
)lj
− 3
2Prtn−1fn−1
j− 12
qn−1j− 1
2
− 2Prtn−
12
knsn−1j− 1
2
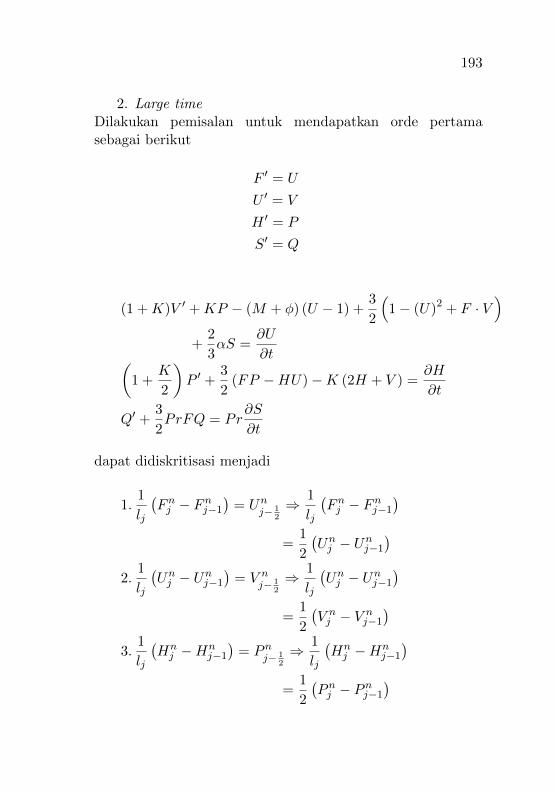
193
2. Large timeDilakukan pemisalan untuk mendapatkan orde pertamasebagai berikut
F ′ = U
U ′ = V
H ′ = P
S′ = Q
(1 +K)V ′ +KP − (M + φ) (U − 1) +3
2
(1− (U)2 + F · V
)+
2
3αS =
∂U
∂t(1 +
K
2
)P ′ +
3
2(FP −HU)−K (2H + V ) =
∂H
∂t
Q′ +3
2PrFQ = Pr
∂S
∂t
dapat didiskritisasi menjadi
1.1
lj
(Fnj − Fnj−1
)= Un
j− 12
⇒ 1
lj
(Fnj − Fnj−1
)=
1
2
(Unj − Unj−1
)2.
1
lj
(Unj − Unj−1
)= V n
j− 12
⇒ 1
lj
(Unj − Unj−1
)=
1
2
(V nj − V n
j−1)
3.1
lj
(Hnj −Hn
j−1)
= Pnj− 1
2
⇒ 1
lj
(Hnj −Hn
j−1)
=1
2
(Pnj − Pnj−1
)
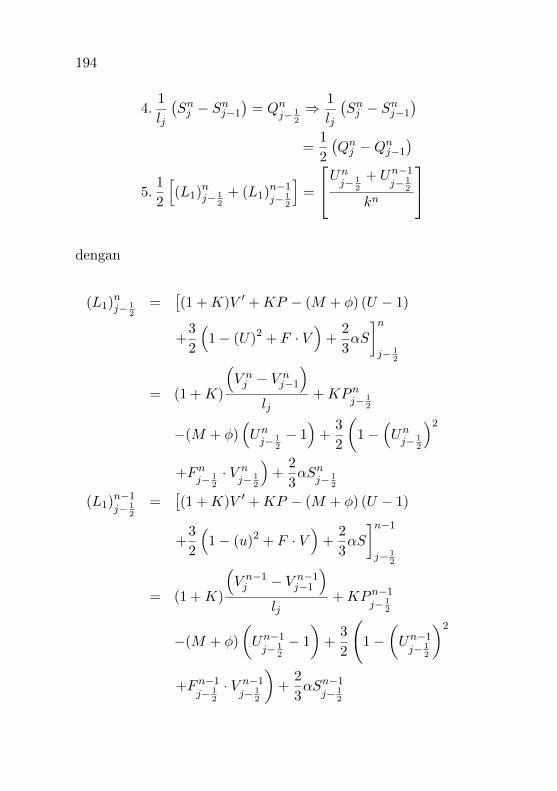
194
4.1
lj
(Snj − Snj−1
)= Qn
j− 12
⇒ 1
lj
(Snj − Snj−1
)=
1
2
(Qnj −Qnj−1
)5.
1
2
[(L1)
nj− 1
2+ (L1)
n−1j− 1
2
]=
Unj− 12
+ Un−1j− 1
2
kn
dengan
(L1)nj− 1
2=
[(1 +K)V ′ +KP − (M + φ) (U − 1)
+3
2
(1− (U)2 + F · V
)+
2
3αS
]nj− 1
2
= (1 +K)
(V nj − V n
j−1
)lj
+KPnj− 1
2
−(M + φ)(Unj− 1
2
− 1)
+3
2
(1−
(Unj− 1
2
)2+Fn
j− 12
· V nj− 1
2
)+
2
3αSn
j− 12
(L1)n−1j− 1
2
=[(1 +K)V ′ +KP − (M + φ) (U − 1)
+3
2
(1− (u)2 + F · V
)+
2
3αS
]n−1j− 1
2
= (1 +K)
(V n−1j − V n−1
j−1
)lj
+KPn−1j− 1
2
−(M + φ)
(Un−1j− 1
2
− 1
)+
3
2
(1−
(Un−1j− 1
2
)2
+Fn−1j− 1
2
· V n−1j− 1
2
)+
2
3αSn−1
j− 12

195
sehingga didapat
1
2
(1 +K)
(V nj − V n
j−1
)lj
+KPnj− 1
2
− (M + φ)
(Unj− 1
2
− 1)
+3
2
(1−
(Unj− 1
2
)2+Fn
j− 12
· V nj− 1
2
)+
2
3αSn
j− 12
+ (1 +K)
(V n−1j − V n−1
j−1
)lj
+KPn−1j− 1
2
−(M + φ)
(Un−1j− 1
2
− 1
)+
3
2
(1−
(Un−1j− 1
2
)2
+Fn−1j− 1
2
· V n−1j− 1
2
)+
2
3αSn−1
j− 12
]=Unj− 1
2
kn−Un−1j− 1
2
kn
(1 +K)
(V nj − V n
j−1
)lj
+KPnj− 1
2
− (M + φ)(Unj− 1
2
− 1)
+3
2
(1−
(Unj− 1
2
)2+Fn
j− 12
· V nj− 1
2
)+
2
3αSn
j− 12
− 2Unj− 1
2
kn= −(1 +K)
(V n−1j − V n−1
j−1
)lj
−KPn−1j− 1
2
+ (M + φ)
(Un−1j− 1
2
− 1
)− 3
2(1−
(Un−1j− 1
2
)2
+Fn−1j− 1
2
· V n−1j− 1
2
)− 2
3αSn−1
j− 12
− 2Un−1j− 1
2
kn
6.1
2
[(L2)
nj− 1
2+ (L2)
n−1j− 1
2
]=
Hnj− 1
2
+Hn−1j− 1
2
kn

196
dengan
(L2)nj− 1
2=
[(1 +
K
2
)P ′ +
3
2(FP −HU)−
K (2H + V )]nj− 1
2
=
(1 +
K
2
) (Pnj − Pnj−1)lj
+3
2
(Fnj− 1
2
Pnj− 1
2
−Hnj− 1
2
Unj− 1
2
)−K
(2Hn
j− 12
+ V nj− 1
2
)(L2)
n−1j− 1
2
=
[(1 +
K
2
)P ′ +
3
2(FP −HU)−
K (2H + V )]n−1j− 1
2
=
(1 +
K
2
) (Pn−1j − Pn−1j−1
)lj
+3
2
(Fn−1j− 1
2
Pn−1j− 1
2
−Hn−1j− 1
2
Un−1j− 1
2
)−K
(2Hn−1
j− 12
+ V n−1j− 1
2
)sehingga didapat
1
2
(1 +K
2
) (Pnj − Pnj−1)lj
+3
2
(Fnj− 1
2
Pnj− 1
2
−Hnj− 1
2
Unj− 1
2
)−K
(2Hn
j− 12
+ V nj− 1
2
)+
(1 +
K
2
) (Pn−1j − Pn−1j−1
)lj
+3
2
(Fn−1j− 1
2
Pn−1j− 1
2
−Hn−1j− 1
2
Un−1j− 1
2
)−K
(2Hn−1
j− 12
+ V n−1j− 1
2
)]
=Hnj− 1
2
kn−Hn−1j− 1
2
kn

197
(1 +
K
2
) (Pnj − Pnj−1)lj
+3
2
(Fnj− 1
2
Pnj− 1
2
−Hnj− 1
2
Unj− 1
2
)−K
(2Hn
j− 12
+ V nj− 1
2
)− 2
Hnj− 1
2
kn= −
(1 +
K
2
)(Pn−1j − Pn−1j−1
)lj
− 3
2
(Fn−1j− 1
2
Pn−1j− 1
2
−Hn−1j− 1
2
Un−1j− 1
2
)
+K
(2Hn−1
j− 12
+ V n−1j− 1
2
)− 2
Hn−1j− 1
2
kn
7.1
2
[(L3)
nj− 1
2+ (L3)
n−1j− 1
2
]= Pr
Snj− 12
+ Sn−1j− 1
2
kn
dengan
(L3)nj− 1
2=
[Q′ +
3
2PrFQ
]nj− 1
2
=
(Qnj −Qnj−1
)lj
+3
2PrFn
j− 12
Qnj− 1
2
(L3)n−1j− 1
2
=
[Q′ +
3
2PrFQ
]n−1j− 1
2
=
(Qn−1j −Qn−1j−1
)lj
+3
2PrFn−1
j− 12
Qn−1j− 1
2
sehingga didapat
1
2
(Qnj −Qnj−1
)lj
+3
2PrFn
j− 12
Qnj− 1
2
+
(Qn−1j −Qn−1j−1
)lj
+3
2PrFn−1
j− 12
Qn−1j− 1
2
]= Pr
Snj− 1
2
kn− Pr
Sn−1j− 1
2
kn

198 (Qnj −Qnj−1
)lj
+3
2PrFn
j− 12
Qnj− 1
2
− 2PrSnj− 1
2
kn
= −
(Qn−1j −Qn−1j−1
)lj
− 3
2PrFn−1
j− 12
Qn−1j− 1
2
− 2PrSn−1j− 1
2
kn

LAMPIRAN HLinierisasi dengan Metode Newton
1. small time
1.lj2
(fnj − fnj−1
)+lj2
(δfj − δfj−1) =1
2
(unj + unj−1
)+
1
2
(δunj + δunj−1
)(δfj − δfj−1)−
lj2
(δunj + δunj−1
)= −
(fnj − fnj−1
)+lj2
(unj + unj−1
)2.lj2
(unj − unj−1
)+lj2
(δuj − δuj−1) =1
2
(vnj + vnj−1
)+
1
2
(δvnj + δvnj−1
)(δuj − δuj−1)−
lj2
(δvnj + δvnj−1
)= −
(unj − unj−1
)+lj2
(vnj + vnj−1
)3.lj2
(hnj − hnj−1
)+lj2
(δhj − δhj−1) =1
2
(pnj + pnj−1
)+
1
2
(δpnj + δpnj−1
)(δhj − δhj−1)−
lj2
(δpnj + δpnj−1
)= −
(hnj − hnj−1
)+lj2
(pnj + pnj−1
)199

200
4.lj2
(snj − snj−1
)+lj2
(δsj − δsj−1) =1
2
(qnj + qnj−1
)+
1
2
(δqnj + δqnj−1
)(δsj − δsj−1)−
lj2
(δqnj + δqnj−1
)= −
(snj − snj−1
)+lj2
(qnj + qnj−1
)
5.
−(1 +K)
(vnj − vnj−1
)lj
+(δvj + δvj−1)
lj
− ηj− 12
2
(vnj− 1
2
+
+(δvj + δvj−1)
2
)−K
(pnj− 1
2
+(δpj + δpj−1)
2
)− (M + φ)tn(
unj− 1
2
+
((δuj + δuj−1)
2
)− 1
)− 3
2tn[1−
(unj− 1
2
+
(δuj + δuj−1)
2
)2
+
(fnj− 1
2
+(δfj + δfj−1)
2
)·(vnj− 1
2
+
(δvj + δvj−1)
2
)]− 2
3αtn
(snj− 1
2
+(δsj + δsj−1)
2
)+ 2
tn−12
kn(unj− 1
2
+(δuj + δuj−1)
2
)= R1
6. −(
1 +K
2
)(pnj − pnj−1
)lj
+(δpj + δpj−1)
lj
− η
2
(pnj− 1
2
+(δpj + δpj−1)
2
)− 1
2
(hnj− 1
2
+(δhj + δhj−1)
2
)− 3
2tn[(
fnj− 1
2
+(δfj + δfj−1)
2
)(pnj− 1
2
+(δpj + δpj−1)
2
)−

201(hnj− 1
2
+(δhj + δhj−1)
2
)(unj− 1
2
+(δuj + δuj−1)
2
)]+
Ktn[2
(hnj− 1
2
+(δhj + δhj−1)
2
)+(vnj− 1
2
+(δvj + δvj−1)
2
)]+ 2
tn−12
kn
(hnj− 1
2
+(δhj + δhj−1)
2
)= R2
7. −1
2η
(qnj− 1
2
+(δqj + δqj−1)
2
)−
(qnj − qnj−1
)lj
+
(δqj + δqj−1)
lj
]− 3
2Prtn
(fnj− 1
2
+(δfj + δfj−1)
2
)(qnj− 1
2
+(δqj + δqj−1)
2
)+ Pr
tn−12
kn
(snj− 1
2
+
(δsj + δsj−1)
2
)= R3


LAMPIRAN IListing Program Matlab Skema Keller-Box
203

204

205

206

207

208

209

210

211
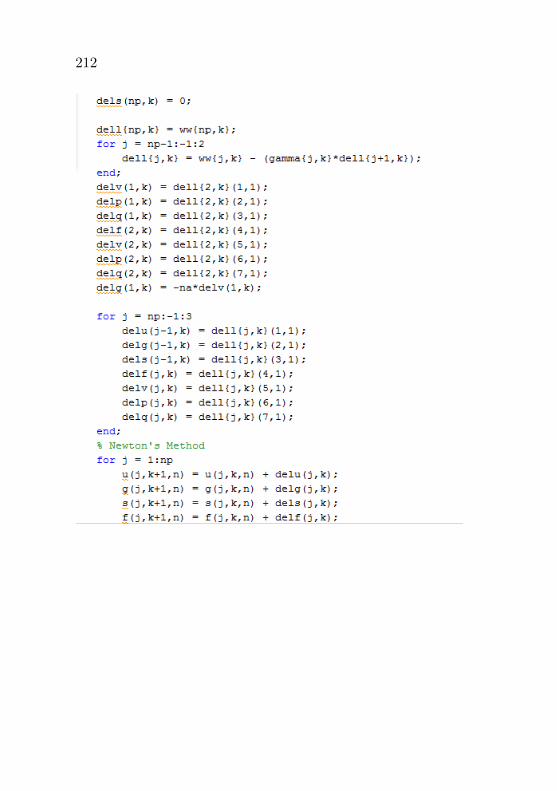
212

213


Biodata Penulis
Penulis bernama Rahayu OktaviaPutri, lahir di Tuban, 01 Oktober1995. Jenjang pendidikan formal yangditempuh oleh penulis dimulai dari TKSidoasri (2000-2002), SD N SidoharjoI (2002-2008), SMP Negeri 1 Jatirogo(2008-2011), SMA Negeri 1 Tuban(2011-2014). Lulus dari SMAN 1 Tubanpenulis melanjutkan studi ke jenjang S1
di Departemen Matematika ITS pada tahun 2014-sekarangmelalui jalur SNMPTN dengan NRP 06111440000042. DiDepartemen Matematika ITS penulis mengambil BidangMinat Matematika Terapan. Penulis aktif berorganisasidi KM ITS sebagai staff Departemen External Affair(2015-2017). Kemudian juga aktif dala Big Event OMITS(2015-2016) dan (2016-2017).
Informasi lebih lanjut mengenai Tugas Akhirini dapat ditujukan ke penulis melalui email:[email protected]