
SIMULASI OTOMATISASI SUPPLY BEBAN MENGGUNAKAN ...
95
SIMULASI OTOMATISASI SUPPLY BEBAN MENGGUNAKAN PROGRAMMABLE LOGIC CONTROLLERS (PLC) DI OBSERVATORIUM GEOMAGNETIK LOMBOK Tugas Akhir Untuk memenuhi sebagian persyaratan Mencapai derajat Sarjana S-1 Jurusan Teknik Elektro Oleh : IMRAN F1B 114 020 JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS MATARAM Maret 2019
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of SIMULASI OTOMATISASI SUPPLY BEBAN MENGGUNAKAN ...

SIMULASI OTOMATISASI SUPPLY BEBAN MENGGUNAKAN
PROGRAMMABLE LOGIC CONTROLLERS (PLC) DI
OBSERVATORIUM GEOMAGNETIK LOMBOK
Tugas Akhir Untuk memenuhi sebagian persyaratan
Mencapai derajat Sarjana S-1 Jurusan Teknik Elektro
Oleh :
IMRAN
F1B 114 020
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS MATARAM Maret 2019

ii

iii

iv
PERNYATAAN KEASLIAN TUGAS AKHIR
Dengan ini saya menyatakan bahwa dalam penulisan Tugas Akhir yang berjudul
“Simulasi Otomatisasi Supply Beban Menggunakan Programmable Logic Controller
(PLC) Di Observatorium Geomagnetik Lombok” tidak terdapat karya yang pernah
diajukan untuk memperoleh gelar kesarjanaan di suatau perhuruan tinggi dan sepanjang
pengetahuan saya juga tidak terdapat karya atau pendapat yang pernah ditulis atau
diterbitkan oleh orang lain, kecuali yang secara tertulis diacu dalam naskah ini dan
disebut dalam daftar pustaka.
Demikian surat pernyataan ini saya buat tanpa tekanan dari pihak manapun
dengan kesadaran penuh terhadap tanggung jawab dan konsekuensi serta menyatakan
bersedia menerima sanksi terhadap pelanggaran dari pernyataan tersebut.
Mataram, Maret 2019
Imran F1B114020

v
PRAKATA
Puji syukur penulis panjatkan kepada Allah Subhanahu Wata’ala Yang Maha
Pengasih lagi Maha Penyayang atas segala nikmat, karunia, dan hidayah-Nya sehingga
penulis dapat menyelesaikan penyusunan Tugas Akhir dengan judul “Simulasi
Otomatisasi Supply Beban Menggunakan Programmable Logic Controller (PLC) Di
Observatorium Geomagnetik Lombok”.
Pembuatan Tugas Akhir ini dilaksanakan di Laboratorium Sistem Tenaga,
Jurusan Teknik Elektro Universitas Mataram. Tujuan dari penelitian ini adalah
merancang suatu sistem kontrol yang bekerja secara otomatis memindahkan sumber
energi PLTS yang terhubung ke beban ke sumber energi PLN dan memindahkan
sumber energi PLN yang tehubung ke beban ke sumber energi PLTS menggunakan
PLC Omron CP1E N30RD-A, dengan alat pendukung lainnya, yaitu sensor tegangan
dari PLTS terdiri dari PV dan baterai, sensor tegangan dari PLN, Arduino Nano, dan
driver relay. Tugas Akhir ini juga merupakan salah satu persyaratan kelulusan guna
mencapai gelar kesarjanaan S-1 di Jurusan Teknik Elektro, Fakultas Teknik Universitas
Mataram.
Akhir kata, semoga tugas akhir ini dapat bermanfaat untuk masyarakat dan juga
pembaca.
Mataram, Maret 2019
Imran F1B114020

vi
UCAPAN TERIMA KASIH
Tugas Akhir ini dapat diselesaikan berkat bimbingan dan dukungan ilmiah
maupun materil dari berbagai pihak, oleh karena itu pada kesempatan ini penulis
menyampaikan ucapan terima kasih yang setulus-tulusnya kepada :
1. Allah ajawazalla
2. Kedua orang tua (H. A Rahim dan Faridah Yasin), kakak tercinta umrah, serta
keluarga besar penulis atas segala nasehat, doa, motivasi, perhatian, arahan,
kesabaran dan kasih sayang yang tak terbalaskan.
3. Bapak Akmaluddin, ST., M.Sc (Eng)., Ph.D., Selaku Dekan Fakultas Teknik
Unram.
4. Bapak Muhamad Syamsu Iqbal, ST., MT., Ph.D., selaku Ketua Jurusan Teknik
Elektro Fakultas Teknik Universitas Mataram.
5. Bapak Paniran, ST., MT., selaku dosen pembimbing utama yang telah memberikan
bimbingan dan arahan kepada penulis selama penyusunan Tugas Akhir ini sehingga
dapat terselesaikan dengan baik.
6. Ibu Dr. rer. nat. Teti Zubaidah, ST.,MT., selaku dosen pembimbing pendamping yng
telah memberikan bimbingan dan arahan selama menyusun tugas akhir ini.
7. Bapak Supriono, ST., MT., sebagai dosen Pembimbing Akademik.
8. Bapak Sabar Nababan, ST., MT., Bapak Supriono, ST., MT., selaku dosen penguji
yang telah memberikan masukan-masukan selama proses penyusunan Tugas Akhir
ini.
9. Keluarga besar UKK As Siraaj yang telah mewadahi dan membimbing penulis
selama menjalankan masa perkuliahan sehingga Tugas Akhir yang dibuat dapat
bermanfaat untuk orang lain.
10. Sahabat yang telah memberikan dukungan secara langsung maupun tidak langsung
dalam menyelesaikan Tugas Akhir ini, khususnya Hidayatur Rahman, Sofian
Tsaury, ST., dan Muhsan, ST.
11. Seluruh teman-teman angkatan 2014 yang sudah mendukung penulis dengan
memberikan masukan dan menemani dalam pembuatan Tugas Akhir ini.
12. Semua pihak yang tidak dapat penulis sebutkan satu persatu, yang telah memberikan
bimbingan kepada penulis dalam menyelesaikan tugas akhir ini.
Semoga Allah Subhanahu Wata’ala memberikan balasan yang lebih baik ata
bantuan dan dukungan yang diberikan kepada penulis.

vii
DAFTAR ISI HALAMAN JUDUL ................................................................................................. i
LEMBAR PENGESAHAAN PEMBIMBING ........................................................ ii
LEMBAR PENGESAHAAN PEMBIMBING ........................................................ iii
PERNYATAAN KEASLIAN TUGAS AKHIR ...................................................... iv
PRAKATA .................................................................................................................. v
UCAPAN TERIMA KASIH ..................................................................................... vi
DAFTAR ISI ............................................................................................................. vii
DAFTAR GAMBAR .................................................................................................. x
DAFTAR TABEL ...................................................................................................... xii
DAFTAR LAMPIRAN .............................................................................................. xiii
ABSTRAK .................................................................................................................. xiv
BAB I PENDAHULUAN .......................................................................................... 1
1.1 Latar Belakang ..................... 1
1.2 Rumusan Masalah ............................................................................................ 2
1.3 Batasan Masalah ............................................................................................... 2
1.4 Tujuan Penelitian ............................................................................................. 3
1.5 Manfaat Penelitian ........................................................................................... 3
1.6 Sistematika Penulisan ...................................................................................... 3
BAB II TINJAUAN PUSTAKA DAN DASAR TEORI ........................................ 5
2.1 Tinjauan Pustaka ............................................................................................... 5
2.2 Dasar Teori ........................................................................................................ 6
2.2.1 Photovoltaic (PV) ................................................................................... 6
2.2.2 Accumulator/Baterai. ............................................................................... 8
2.2.3 PLC (programmable Logic Kontrol). ..................................................... 13
2.2.3.1 Sistem Koordinasi PLC ................................................................. 14
2.2.3.2 PLC Input/Output Device .............................................................. 15
2.2.3.3 Macam-macam Gerbang Logika ................................................... 16
2.2.3.3.1 AND dan NAND. .............................................................. 16
2.2.3.3.2 OR dan NOR. ..................................................................... 17
2.2.4 Model Pemrograman ................................................................................ 18
2.2.5 Automatic Transfer Switch. ...................................................................... 19
2.2.6 Sistem Catu Daya ..................................................................................... 21

viii
2.2.7 Peralatan Penunjang. ................................................................................ 21
2.2.7.1 SCC (Solar Charge Controller). .................................................... 21
2.2.7.2 Inverter. .......................................................................................... 23
2.2.7.3 Kontaktor. ...................................................................................... 25
2.2.7.4 Relai. .............................................................................................. 27
2.2.7.4.1 Prinsip Kerja. ..................................................................... 27
2.2.7.5 MCB (Miniatur Circuit Breaker). ................................................ 28
BAB III METODE PERANCANGAN/PEMBUATAN.......................................... 32
3.1 Metode Perancangan ........................................................................................ 32
3.2 Lokasi Penelitian .............................................................................................. 33
3.3 Alat dan Bahan Penelitian ................................................................................ 33
3.4 Perancangan Sistem. ........................................................................................ 34
3.4.1 Perancangan Perangkat Keras. ................................................................ 34
3.4.2 Perancangan Sensor Tegangan................................................................ 35
3.4.2.1 Perancangan Sensor Tegangan Baterai >=51.5V dan >=48V ....... 35
3.4.2.2 Perancangan Senosr Tegangan PV ................................................ 37
3.4.2.3 Perancangan Sensor Tegangan PLN .............................................. 38
3.4.3 Arduono Nano ......................................................................................... 40
3.4.4 Perancangan Pemrograman Sensor Tegangan pada Mikrokontroller ..... 41
3.4.5 Perancangan Driver Relay ...................................................................... 41
3.4.6 PLC CP1E N40DR-A. ............................................................................ 44
3.4.7 Perancangan Perangkat Lunak Pengendalian PLC ................................. 44
3.4.8 Perancangan Pemrograman Ladder ......................................................... 47
3.4.9 Power Suplai 24VDC dan 5VDC ............................................................... 50
3.5 Diagram Alir Penelitian dan Pengujian. .......................................................... 50
3.6 Teknik Pengujian PLC. .................................................................................... 54
BAB IV HASIL DAN PEMBAHSAN ...................................................................... 55
4.1 Pengujian Sistem .............................................................................................. 55
4.1.1 Pengujian Rangakain Sensor Tegangan .................................................. 55
4.1.1.1 Pengujian Sensor Tegangan Baterai >=51.5V dan 48V ................ 56
4.1.1.2 Pengujian Sensor Tegangan Modul PV ......................................... 58
4.1.1.3 Pengujian Sensor Tegangan PLN .................................................. 59
4.1.2 Pengujian Rangkaian Driver Relay ......................................................... 61

ix
4.1.3 Pengujian PLC .............................................................................................. 63
4.1.3.1 Pemrogaman Ladder ...................................................................... 63
4.1.3.2 Hasil Pengujian .............................................................................. 68
BAB V PENUTUP ..................................................................................................... 72
5.1 Kesimpulan ...................................................................................................... 72
5.2 Saran ................................................................................................................ 72
DAFTAR PUSTAKA .................................................................................................. 73

x
DAFTAR GAMBAR
Gambar 2.1 Prinsip Kerja Sel Surya ............................................................................ 7
Gambar 2.2 Beban Sel Surya ....................................................................................... 7
Gambar 2.3 Discharging dan Charging pada Baterai ................................................. 9
Gambar 2.4 Kurva Charging dan Discharging pada Baterai ...................................... 10
Gambar 2.5 State Of Charge dan Depth Of Discharge pada Baterai .......................... 10
Gambar 2.6 PLC Omron CP1E-E40DR-A .................................................................. 14
Gambar 2.7 Jalur Koordinasi PLC ............................................................................... 14
Gambar 2.8 PLC Komponen Diagram ........................................................................ 15
Gambar 2.9 Logika AND dan NAND. ........................................................................ 16
Gambar 2.10 Rangkaian Elektrik AND ....................................................................... 16
Gambar 2.11 Ladder Diagram AND ............................................................................ 17
Gambar 2.12 Logika OR dan NOR ............................................................................. 17
Gambar 2.13 Rangkaian Elektrik OR .......................................................................... 17
Gambar 2.14 Diagram Ladder OR ............................................................................... 18
Gambar 2.15 Ladder Diagram ..................................................................................... 18
Gambar 2.16 Solar Charger Controller ........................................................................ 22
Gambar 2.18 Prinsip Kerja Inverter ............................................................................. 24
Gambar 2.18.a Bentuk Gelombang dari Inverter Setengah Gelombang ..................... 24
Gambar 2.18.b Bentuk Gelombang dari Inverter Gelombang Penuh .......................... 24
Gambar 2.19 Inverter ................................................................................................... 26
Gambar 2.20 Kontaktor ............................................................................................... 26
Gambar 2.21 Skema Relay Elektromekanik ................................................................ 28
Gambar 2.22 Relay Omron Tipe MK2P-I ................................................................... 28
Gambar 2.23 MCB ....................................................................................................... 29
Gambar 3.1 Prinsip Dasar Kontrol PLC ...................................................................... 32
Gambar 3.2 Perancangan Diagram Pengawatan .......................................................... 35
Gambar 3.3 Rangkaian Sensor Tegangan Baterai >=51.5V dan >=48V ..................... 36
Gambar 3.4 Rangkaian Sensor Tegangan PV. ............................................................. 37
Gambar 3.5 Rangkaian Sensor Tegangan PLN. .......................................................... 38
Gambar 3.6 Arduino Nano. .......................................................................................... 40
Gambar 3.7 Program Sensor Tegangan pada Arduino ............................................. 41

xi
Gambar 3.8 Rangkaian Driver Relay. .......................................................................... 44
Gambar 3.9 PLC Omron CP1E N40DR-A .................................................................. 44
Gambar 3.10 Program Ladder Diagram PLC .............................................................. 47
Gambar 3.11 Internal Relay Sebagai Pengunci (Latching) .......................................... 47
Gambar 3.12 Operaso timer 00 .................................................................................... 48
Gambar 3.13 Kontak Inverter ...................................................................................... 48
Gambar 3.14 Kontaktor PLTS ..................................................................................... 49
Gambar 3.15 Operasi timer 01 ..................................................................................... 49
Gambar 3.16 Kontaktor PLN ....................................................................................... 49
Gambar 3.17 Rangkaian Regulator 24VDC .................................................................. 50
Gambar 3.18 Diagram Alir Penelitian. ........................................................................ 51
Gambar 3.19 Diagram Alir Pengujian Sensor Tegangan pada Arduino. ..................... 52
Gambar 3.20 Diagram Alir Pengujian PLC. ................................................................ 53
Gambar 4.1 Pengujian Sensor Tegangan Baterai >=51.5V dan >=48V ...................... 56
Gambar 4.2 Grafik Pengujian Sensor Tegangan Saat Kapasitas Penyimpanan Daya
Baterai >=80% dan >=50%......................................................................57
Gambar 4.3 Pengujian Sensor Tegangan PV ............................................................... 58
Gambar 4.4 Grafik Pengujian Sensor Teganga PV ..................................................... 59
Gambar 4.5 Pengujian Sensor Tegangan PLN ............................................................ 60
Gambar 4.6 Grafik Pengujian Sensor Tegangan PLN ................................................. 61
Gambar 4.7 Pengujian Driver Relay ............................................................................ 62
Gambar 4.8 Latching ................................................................................................... 64
Gambar 4.9 Kondisi Normal PLTS ............................................................................. 65
Gambar 4.10 Perpindahan Suplai PLTS ke Suplai PLN ............................................. 66
Gambar 4.11 Perpindahan Suplai PLN ke Suplai PLTS dengan Delay Waktu ........... 67

xii
DAFTAR TABEL
Tabel 2.1 Tegangan yang dihasilkan oleh PV ............................................................. 8
Tabel 2.2 Pengukuran kapasitas penyimpanan daya baterai saat (AC ON/OFF)
dan semua peralatan ON ............................................................................. 12
Tabel 2.3 Logika AND dan NAND ............................................................................ 16
Tabel 2.4 Logika OR dan NOR .................................................................................. 17
Tabel 2.5 Spesifikasi MPPT Solar Charge Controller ................................................ 23
Tabel 2.6 Spesifikasi Inverter Luminous ..................................................................... 25
Tabel 2.7 Persamaan untuk menentukan arus beban MCB ........................................ 29
Tabel 3.1 Spesifikasi Arduino Nano. .......................................................................... 40
Tabel 3.2 Dafrtar Input/Output dan Timer ................................................................... 45
Tabel 3.3 Metode Pengujian Program diagram ladder PLC ........................................ 46
Tabel 4.1 Nilai Tegangan Input dan Output Sensor Tegangan Baterai >=51.5V dan
>=48V.......................................................................................................... 57
Tabel 4.2 Nilai Tegangan Input dan Output Sensor Tegangan PV ............................. 58
Tabel 4.3 Nilai Tegangan Input dan Output Sensor Tegangan PLN ........................... 60
Tabel 4.4 Pengujian saat Kondisi Normal ................................................................... 68
Tabel 4.5 Pengujian saat PV dan Baterai PLTS kurang 80% dan PLN Suplai Beban 69
Tabel 4.6 Pengujian saat PLN padam dan Baterai PLTS >=50% ............................... 70

xiii
DAFTAR LAMPIRAN
Lampiran 1. Program Sensor Tegangan pada Arduino ................................................ 75
Lampiran 2. Program Ladder Diagram PLC ............................................................... 76
Lampiran 3. Latching ................................................................................................... 77
Lampiran 4. Kondisi Normal PLTS ............................................................................. 78
Lampiran 5. Perpindahan Suplai PLTS yang terhubung ke Baban ke Suplai PLN ..... 79
Lampiran 6. Pemindahan Suplai PLN yang terhubung ke Beban ke Suplai PLTS ..... 80

xiv
ABSTRAK
Observatorium Geomagnetik Lombok (LOK) berupaya menerapkan PLTS sebagai penunjang sistem kelistrikan primer di instansinya. Karena Observatorium hingga saat ini sering terjadi pemadaman listrik dari sistem suplai PLN, sehingga dikhawatirkan dapat menimbulkan kerusakan peralatan-peralatan dan tidak dapat memenuhi standar Internatioanl Association of Geomagnetism and Aeronomy (IAGA) karena data yang didapat tidak kontinu. Pada penelitian tugas akhir ini, dirancang suatu sistem kontrol yang bekerja secara otomatis memindahkan sumber energi PLTS yang terhubung dengan beban ke sumber energi PLN dan memindahkan sumber energi PLN yang tehubung dengan beban ke sumber energi PLTS menggunakan PLC Omron CP1E N30RD-A. Pemindahan sumber energi secara otomatis menggunakan PLC sudah berjalan dengan baik yaitu, dari sumber energi PLTS yang terhubung dengan beban ke sumber energi PLN membutuhkan waktu 3 detik dan begitu juga sebaliknya pemindahan sumber energi dari PLN yang terhubung dengan beban ke sumber energi PLTS membutuhkan waktu 3 detik.
Kata Kunci : PLTS, PLN, PLC, Sensor Tegangan, Arduino Nano, Driver Relay, Kontrol Otomatis

xv
ABSTRACT
The Lombok Geomagnetic Observatory (LOK) seeks to implement the PLTS as supporting primary electrical system in their institutions. Because the observatory until now frequent power outages from PLN supply system, so it is feared could lead to damage to equipment and can not meet the standards Internatioanl Association of Geomagnetism and Aeronomy (IAGA) because the data obtained is not continuous. In this research, design a control system that works automatically move energy sources from solar power connected with the load to an energy source PLN and move the energy source from PLN the connected with the load to an energy source PLTS using Omron PLC CP1E N30RD-A. The transfer of energy resources automatically using PLC is running well, from an energy source that is connected with the load solar power energy source to PLN takes 3 seconds and vice versa removal of the energy source that is connected with the load PLN to solar power energy source takes 3 seconds.
Keywords: PLTS, PLN, PLC, Voltage Sensor, Arduino Nano, Relay Driver, Automatic Control
1
BAB I
PENDAHULUAN 1.1 Latar Belakang
Pulau Lombok memiliki intensitas radiasi matahari yang cukup tinggi yaitu 5,4
kWh/𝑚2/hari, dengan penyinaran matahari yang rata-rata diatas 50% setiap bulannya.
Tingkat radiasi matahari yang tinggi ini dapat dimanfaatkan sebagai sumber energi
terbarukan. (NASA Surface meteorology and solar energy, 2014 dalam Yulianti, 2014).
Observatorium Geomagnetic Lombok berupaya menerapkan PLTS sebagai
penunjang sistem kelistrikan primer di instansinya. Observatorium hingga saat ini
sering terjadi pemadaman listrik dari sistem suplai PLN, sehingga dikhawatirkan dapat
menimbulkan kerusakan peralatan-peralatan dan tidak dapat memenuhi standar
Internatioanl Association of Geomagnetism and Aeronomy (IAGA) karena data yang
didapat tidak kontinu.
PLTS dalam penggunaannya tidak dapat digunakan selama sehari penuh
melayani beban tanpa adanya baterai/aki sebagai penyimpan daya, karena sumber
energi matahari hanya tersedia pada siang hari. Meskipun telah tersedia baterai maka
tetap dibutuhkan sumber energi dari PLN, dengan tujuan untuk melayani kebutuhan
daya listrik secara kontinu pada sisi beban. Untuk itu dibutuhkan suatu alat bantu untuk
melakukan pengontrolan secara otomatis memindahkan sumber energi PLTS yang
tehubung ke beban ke sumber energi PLN dan mengambil alih suplai daya listrik ke
beban saat sumber dari PLTS kekurangan daya dan begitu pula sebaliknya.
Pengontrol otomatis tersebut yaitu Programmable Logic Control (PLC) dengan
merancang sensor tegangan sebagai alat tambahan yang mampu mendeteksi tegangan
dari PV, Baterai, dan PLN. Sensor tegangan ini mampu memerintahkan driver relay
yang terhubung ke PLC, sehingga PLC bekerja sesuai perintah program. Kontrol
menggunakan PLC merupakan solusi tepat untuk mengatasi masalah ini, dimana
pekerjaan yang seharusnya menggunakan tenaga manusia digantikan dengan perangkat
yang dikendalikan secara otomatis, dengan begitu pekerjaan dapat selesai dalam waktu
yang relatif singkat dan efisien. Selain itu PLC dapat diprogram ulang apabila jika
diinginkan suatu perubahan dalam proses, sehingga lebih praktis karena kita tidak perlu
membongkar ulang yang telah ada, khususnya dalam wiring, melainkan programnya
saja yang diubah.

2
Sehingga dalam penelitian tugas akhir ini, akan merancang suatu sistem
kontrol yang bekerja secara otomatis memindahkan sumber energi PLTS yang
terhubung ke beban ke sumber energi PLN dan memindahkan sumber energi PLN
yang tehubung ke beban ke sumber energi PLTS menggunakan PLC Omron
CP1E N30RD-A, dengan alat pendukung lainnya, yaitu sensor tegangan dari
PLTS terdiri dari PV dan baterai, sensor tegangan dari PLN, Arduino Nano, dan
driver relay. Dimana sensor ini nantinya mampu mendeteksi tegangan dari PLTS
dan PLN yang akan di kontrol menggunakan Arduino, selanjutnya arduino ini
mampu menjalankan driver relay yang terhubung ke PLC, sehingga PLC dapat
bekerja sesuai yang di programkan.
1.2 Rumusan Masalah
Permasalahan yang diangkat dalam penelitian ini adalah
1. Merancang sensor tegangan yang mampu mendeteksi tegangan dari PV,
baterai, dan PLN.
2. Merancang program PLC sebagai sistem pengontrol yang mampu
memindahkan sumber energi dari PLTS yang terhubung ke beban ke sumber
energi PLN atau dari sumber energi PLN yang terhubung ke beban ke
sumber energi PLTS secara otomatis.
3. Memindahkan sumber energi PLTS yang terhubung ke beban ke sumber
energi PLN dan memindahkan sumber energi PLN yang terhubung ke beban
ke sumber energi PLTS secara otomatis menggunakan PLC.
1.3 Batasan Masalah
Untuk menghindari agar tidak menyimpang dan luasnya pembahasan dalam
tugas akhir ini, maka penulis akan memberikan beberapa batasan, yaitu:
1. Menggunakan 2 catu daya yaitu PLN dan PLTS (terdiri dari PV dan Batrai),
dengan mengoptimalkan penggunaan PLTS dan menganggap PLN sebagai
back up.
2. Sistem menggunakan pengontrol PLC Omron CP1E N30DR-A.
3. Sumber PLTS akan hidup jika tegangan PV >65V dan kapasitas
penyimpanan daya baterai terisi >=80% sebanding dengan tegangan >51.5V,
jika sumber PLN mati maka sumber PLTS akan hidup dengan syarat

3
kapasitas penyimpanan daya baterai terisi >=50% sebanding dengan
tegangan >48V, dan tetap mensuplai PLN jika keadaan baterai <50%.
4. Dua buah variabel power supply DC digunakan sebagai modul PV dan
baterai.
5. Pengujian peralatan menggunakan simulasi di Laboratorium Sistem Tenaga.
1.4 Tujuan Penulisan
Penulisan tugas akhir ini bertujuan untuk:
1. Dapat merancang sensor tegangan yang mampu mendeteksi tegangan dari
PV, baterai, dan PLN.
2. Mempelajari penggunaan PLC sebagai salah satu alat kontrol otomatis.
3. Dapat mengetahui pemindahan sumber energi PLTS yang terhubung ke
beban ke sumber energi PLN dan pemindahan sumber energi PLN yang
terhubung ke beban ke sumber energi PLTS secara otomatis menggunakan
PLC.
1.5 Manfaat Penelitian
Adapun manfaat dalam penulisan tugas akhir ini adalah
1. Alat ini dapat membantu teman-teman teknisi di Observatorium dalam
meringankan pekerjaannya, dimana pekerjaan yang seharusnya
menggunakan tenaga manusia digantikan dengan alat yang dikendalikan
secara otomatis. Dengan begitu pekerjaan dapat selesai dalam waktu yang
relatif singkat dan efisien.
2. Pengontrol otomatis menggunakan PLC juga mampu memindahkan sumber
energi listrik dalam mengatasi kehilangan daya listrik dari catu daya PLTS
yang terhubung ke beban ke catu daya PLN dan begitu pula sebaliknya.
3. Bagi penulis, penelitian ini dapat memperluas wawasan tentang penggunaan
PLC sebagai alat kontrol otomatis.
1.6 Sistematika Penulisan
Dalam penyusunan laporan ini, penulis menggunakan sistematika penulisan
sebagai berikut:

4
BAB I : PENDAHULUAN
Pada bab ini secara ringkas dibahas latar belakang penulisan, perumusan
masalah, batasan masalah, tujuan penelitian, manfaat yang diharapkan, dan sistematika
penulisan.
BAB II : TEORI DASAR
Memuat tentang tinjauan pustaka yang menjabarkan hasil penelitian sebelumnya
yang berkaitan dengan penelitian dan landasan teori yang menjabarkan tentang PLC,
catu daya, Batrai, Photovoltaic dan dasar teori yang berhubungan dengan penelitian ini.
BAB III : PERANCANGAN SISTEM
Memuat tentang lokasi dan waktu penelitian, objek penelitian, alat dan bahan,
langkah-langkah penelitian, dan perancangan sistem.
BAB IV : HASIL DAN PEMBAHASAN
Memuat tentang hasil pengujian sensor yang digunakan dan hasil pengujian
keseluruhan sistem, pembahasan dan analisa.
BAB V : PENUTUP
Memuat tentang kesimpulan penelitian dan saran bagi peneliti selanjutnya.

5
BAB II
TINJAUAN PUSTAKA DAN DASAR TEORI
2.1. TINJAUAN PUSTAKA
Alfian, (2015), melakukan penelitian tentang bagaimana merancang
suatu kontroler switching sistem hibrid berbasis PLC yang dapat dioperasikan secara
otomatis maupun manual. PLC digunakan sebagai switch control sistem hibrid yang
bekerja secara otomatis dan manual dalam megatur waktu operasi dari masing–masing
unit pembangkit dalam upaya mensuplai beban. Dimana controller dari PLC ini bekerja
sesuai instruksi yang telah dibuat oleh perancang dalam bentuk bahasa
pemrograman ladder diagram, sehingga pengaturan waktu operasi dari masing–masing
pembangkit ini dapat di tentukan secara fleksibel sesuai keinginan kita.
Raharjo, (2013), melakukan penelitian tentang merancang sistem hybrid antara
solar cell, baterai, PLN untuk mensuplai beban DC 12V. Sistem ini menggunakan solar
cell sebesar 100wp dan mengalami keadaan puncak pada pukul 13.00 dengan
menghasilkan tegangan 20,03V, arus 4,52A dan daya sebesar 90,52W. Hasil dari
pengujian sistem ini menunjukan bahwa Sistem hibrid bekerja berdasarkan sensor
tegangan solar sell dan sensor tegangan baterai. Jika sensor 1 pada kondisi Off dan
sensor 2 pada kondisi Off maka beban akan disuplai oleh PLN, dan PLN akan
mencharging baterai, jika sensor 1 pada kondisi OFF dan sensor 2 ON maka beban akan
disuplai oleh baterai .jika sensor 1 pada kondisi On dan Sensor 2 pada kondisi Off maka
beban akan disuplai oleh Solar Cell dan melakukan proses charging, dan jika kedua
sensor pada kondisi On maka Beban akan disupai oleh Solar Cell dan tidak melakukan
proses charging.
Aliyu, dkk, (2015), melakukan penelitian tentang rancang bangun prototipe
sistem pengambilan dan pemuatan kemasan (palletizing) yang bekerja berdasarkan
kendali yang diberikan melalui PLC untuk tujuan edukasi. Penelitian ini dibagi atas dau
bagian, yaitu perancangan perangkat-keras dan perangkat-lunak. Perangkat-kerasnya
adalah prototipe sistem palletizing baik bagian mekanik maupun elektriknya sedangkan
perangkat-lunaknya adalah pemrograman melalui PLC. Hasil pengujian rangkaian
kedekatan menunjukkan bahwa rangkaian sensor kedekatan berfungsi dengan baik,
6
yaitu ketika sensor tidak terhalang sebuah objek maka tegangan luarannya sebesar 0,67
volt dan ketika sensor terhalang objek sebesar 6,74 volt. Bahwa berdasarkan
pengukuran respon sensor terhadap ada tidaknya kemasan diperoleh jarak baca sensor
berkisar kurang lebih 3,6 cm. Hasil pengujian aplikasi PLC terhadap mekanik
menunjukkan bahwa program yang diisikan ke PLC memberikan luaran sebagaimana
diharapkan. Berdasarkan hasil pengujian keseluruhan sistem menunjukkan bahwa
sistem mampu bekerja sesuai yang diharapkan.
Rahman, dkk, (2015), melakukan penelitian tentang merancang ATS/AMF
sebagai pengalihan catu daya otomatis berbasis Programmable logic controller (PLC).
ATS/AMF ini dikendalikan dengan PLC sebagai control otomatis sehingga
memudahkan dalam pembuatan dan meminimalisir biaya dalam penggunaan komponen.
Hasil dari penelitian alat ini, bahwa proses peralihan suplai energi listrik dari PLN ke
genset membutuhkan waktu peralihan yang digunakan sebagai proses untuk
mempersiapkan suplai energilistrik dari genset seperti starting genset selama 5 detik,
pemanasan genset 10 detik.
Yuliadi, (2017), melakukan penelitian tentang mendesain sebuah control ATS
PLN – sel surya. Dimana ketika suplai dari PLN terjadi pemadaman maka untuk
mengganti suplai energi di alihkan ke sel surya. Hasil dari pengujian alat ini, bahwa
Automatic Transfer Switch (ATS) memudahkan pergantian antara dua sumber yang
berbeda yaitu sumber PLN dan Sumber Sel Surya. Apabila terjadinya pemadaman
energi listrik pada sumber PLN maka pada Sel Surya akan bekerja untuk mengsupply
sumber energy listrik. Sumber tegangan yang didapatkan oleh panel sel surya dapat
disimpan kedalam baterai atau aki.
2.2 DASAR TEORI
2.2.1 Photovoltaic (PV)
Photovoltaic atau Sel surya ialah sebuah alat yang tersusun dari material
semikonduktor yang dapat mengubah sinar matahari menjadi tenaga listrik secara
langsung. Sering juga dipakai istilah photovoltaic atau fotovoltaik. Sel surya pada
dasarnya terdiri atas sambungan P-N yang sama fungsinya dengan sebuah dioda.
Sederhananya, ketika sinar matahari mengenai permukaan sel surya, energi yang dibawa
oleh sinar matahari ini akan diserap oleh elektron pada sambungan P-N untuk berpindah

7
dari bagian dioda P ke N dan untuk selanjutnya mengalir ke luar melalui kabel yang
terpasang ke sel.
Gambar 2.1 Prinsip kerja sel surya (Purba, 2013)
Pembangkit listrik tenaga surya konsepnya sederhana. Yaitu mengubah cahaya
matahari menjadi energi listrik. Cahaya matahari merupakan salah satu bentuk energi
dari sumber daya alam. Sumber daya alam matahari ini sudah banyak digunakan untuk
memasok daya listrik melalui sel surya. Sel surya ini dapat menghasilkan energi listrik
dalam jumlah yang tidak terbatas langsung diambil dari matahari, tanpa ada bagian yang
berputar dan tidak memerlukan bahan bakar. Sehingga sistem sel surya sering dikatakan
bersih dan ramah lingkungan.
Gambar 2.2 Beban sel surya (Purba, 2013)
Sistem sel surya yang digunakan di permukaan bumi terdiri dari panel sel surya,
rangkaian kontroler pengisian (charge controller), dan aki (baterai) 12 volt. Panel sel
surya merupakan modul yang terdiri beberapa sel surya yang digabung dalam hubungan
seri dan paralel tergantung ukuran dan kapasitas yang diperlukan. Yang sering
digunakan adalah modul sel surya 20 watt atau 30 watt.

8
Rangkaian kontroler pengisian aki dalam sistem sel surya merupakan rangkaian
elektronik yang mengatur proses pengisian aki. Kontroler ini dapat mengatur tegangan
aki dalam selang tegangan 12 volt plus minus 10 persen. Bila tegangan turun sampai
10,8 volt, maka kontroler akan mengisi aki dengan panel surya sebagai sumber dayanya.
Tentu saja proses pengisian itu akan terjadi bila berlangsung pada saat ada cahaya
matahari. Jika penurunan tegangan itu terjadi pada malam hari, maka kontroler akan
memutus pemasokan energi listrik. Setelah proses pengisian itu berlangsung selama
beberapa jam, tegangan aki itu akan naik. Bila tegangan aki itu mencapai 13,2 volt,
maka kontroler akan menghentikan proses pengisian aki itu. Setelah baterai terisi penuh
sumber dc, maka jika ingin digunakan maka di perlu komponen tamban yaitu berupa
inverter yang akan merubah tegangan DC menjadi tegangan AC sehingga dapat
digunakan untuk mensupalai beban yang membutuhkan sumber AC.
Berikut merupakan hasil pengukuran saat melakukan penelitian, dimana terdapat
12 modul PV yang diseri 4, paralel 3 dengan tegangan masing-masing panel 12 V dapat
dilihat pada Tabel 2.1 di bawah ini.
Tabel 2.1 Tegangan yang dihasilkan oleh PV
No Tegangan PV Seluruh Panel (V) Satu Panel (V)
1 60 15 2 65 16.25 3 70 17.5 4 75 18.75 5 80 20 6 85 21.25 7 90 22.5
Berdasarkan hasil pengukuran dilapangan dalam penelitian menggunakan 12
modul PV yang terpasang dimana 4 modul diseri kemudian diparalel 3 dan saat kondisi
sinar matahari masih cerah, maka didapat tegangan yang dihasilkan oleh PV yaitu
sebesar >65V. Tegangan >65V ini diasumsikan bisa menghasilkan energi yang dapat
men-charging baterai.
2.2.2 Accumulator/Baterai
Accumulator atau sering disebut aki, adalah salah satu komponen utama dalam
kendaraan bermotor, baik mobil atau motor, semua memerlukan aki untuk dapat

9
menghidupkan mesin kendaraan (mencatu arus pada dinamo stater kendaraan). Aki
mampu mengubah tenaga kimia menjadi tenaga listrik.
Dikenal dua jenis elemen yang merupakan sumber arus searah (DC) dari proses
kimiawi, yaitu elemen primer dan elemen sekunder. Elemen primer terdiri dari elemen
basah dan elemen kering. Reaksi kimia pada elemen primer yang menyebabkan elektron
mengalir dari elektroda negatif (katoda) ke elektroda positif (anoda) tidak dapat dibalik
arahnya. Maka jika muatannya habis, maka elemen primer tidak dapat dimuati kembali
dan memerlukan penggantian bahan pereaksinya (elemen kering). Sehingga dilihat dari
sisi ekonomis elemen primer dapat dikatakan cukup boros. Contoh elemen primer
adalah batu baterai (dry cells).
Elemen sekunder dalam pemakaiannya harus diberi muatan terlebih dahulu
sebelum digunakan, yaitu dengan cara mengalirkan arus, tidak seperti elemen primer,
elemen sekunder dapat dimuati kembali berulang kali. Elemen sekunder ini lebih
dikenal dengan aki. Dalam sebuah aki berlangsung proses elektrokimia yang reversibel
(bolak-balik) dengan efisiensi yang tinggi. Yang dimaksud dengan proses elektrokimia
reversibel yaitu di dalam aki saat dipakai berlangsung proses pengubahan kimia menjadi
tenaga listrik (discharging). Sedangkan saat diisi atau dimuati, terjadi proses tenaga
listrik menjadi tenaga kimia (charging).
Gambar 2.3 Discharging dan Charging pada baterai (Albert ng, 2018)
Tegangan nominal baterai adalah nilai tegangan yang tercantum pada label
baterai, pada sistem PV, umumnya menggunakan 12V, 24V, atau 48V. Tegangan
nominal belum tentu sama dengan nilai tersebut, tergantung kapasitas sisa energi yang
masih terkandung dalam baterai state of charge (SOC), kondisi pengisian (charging),

10
atau kondisi pengosongan (discharging).
Gambar 2.4 Kurva Charging dan Discharging pada baterai (Albert ng, 2018)
Dalam sebuah sirkuit elektronik, baterai dapat dianggap sebagai sumber
tegangan Vb dengan beban seri Ri. Pada gambar kiri, kondisi pengisian baterai
(charging), arus listrik I mengalir ke terminal (+) baterai Vb, oleh karenanya ada selisih
tegangan pada beban seri. Artinya, tegangan V yang terukur saat pengisian baterai, lebih
besar dari Vb (V > Vb). Pada gambar kanan, kondisi pengosongan baterai (discharging),
arus listrik I mengalir ke arah sebaliknya, yakni keluar dari terminal (+) baterai Vb.
Tegangan V yang terukur saat pengosongan baterai, lebih kecil dari Vb (V <
Vb), tegangan pada beban seri tetap sama namun dengan polaritas yang berbalik. Vb
disebut juga tegangan buka open circuit voltage (VOC).
State of Charge adalah prosentase kapasitas baterai yang masih tersedia
(tersisa), terhadap kapasitas maksimumnya. Sebaliknya Depth of Discharge adalah
prosentase kapasitas baterai yang telah dikosongkan (terpakai), terhadap kapasitas
maksimumnya. Contoh: sebuah baterai berkapasitas 10Ah telah dikosongkan
(terpakai) 2Ah, artinya SoC=80% dan DoD=20%.
Gambar 2.5 State Of Charge dan Depth Of Discharge pada Baterai
(Albert ng, 2018)

11
Siklus Hidup (Cycle Life) Baterai
Baterai dalam sistem PV mengalami berulang kali siklus pengisian dan
pengosongan selama umur pakainya. Siklus hidup (cycle life) baterai adalah banyaknya
pengisian dan pengosongan hingga kapasitas baterai turun (melemah) dan tersisa 80%
dari kapasitas nominalnya. Dari grafik di atas, terlihat pada suhu operasional baterai
yang lebih rendah, maka siklus hidup baterai lebih lama. Siklus hidup baterai juga
tergantung dari DOD, artinya baterai yang dikosongkan hanya 50% dari kapasitasnya
berumur lebih lama jika dibandingkan dengan dikosongkan hingga 80%.
Hasil pengukuran saat melakukan penelitian dapat dilihat pada Tebel 2.2
dibawah ini.

12
Tabel 2.2 Pengukuran kapasitas penyimpanan daya baterai saat (AC ON/OFF) dan semua peralatan ON
No AC ON/OFF
No
AC ON/OFF No
Semua ON MPPT/SCC
% Baterai (V) AC
ON Baterai (V) AC
OFF MPPT/SCC
% Baterai (V) AC
ON Baterai (V) AC
OFF MPPT/SCC
% Baterai
1 100 52.4-49.8 53.1 21 51 49.3-48.6 49.9 1 100 52.2 2 95 53.8 22 50 48.5 49.7 2 95 51.8 3 92 52 55.4 23 45 49.7 3 90 51.7 4 91 50.4-49.5 51.3 24 44 48.9-48.5 49.7 4 85 51.6 5 90 52.1 25 43 48.4 49.7 5 80 51.5 6 89 52-49.2 53.3 26 40 49.7 6 75 51.4 7 88 49.3 27 37 49.3-48.4 49.6 7 70 50.9 8 85 52-49.1 53.4 28 36 48.3 49.5 8 65 50.5 9 81 52 55.7 29 35 49.5 9 60 50.4
10 80 49.5 30 32 49.1-48.1 49.4 10 55 49.8 11 78 49.5 51.6 31 31 48.3-47.8 49.4 11 50 48 12 75 51.3 32 30 47.8 49 12 49 47.8 13 71 51.6-49.6 52 33 29 48.7 13 48 Mati 14 70 48.8 50.8 34 28 48.7
15 65 51.7-49.7 52.3 35 27 48.7 16 64 49.3 50.8 36 26 48.7 17 60 50.8 37 25 48.1-47.6 48.7 18 58 50.1-49.2 50.7 38 23 43.2-41.7 46.8 19 57 49.1 50.4 39 22 41.4-40 Mati 20 55 50.6

13
Berdasarkan data yang didapat dari lokasi penelitian bahwa kapasitas pengisian
daya baterai 100% saat AC ON dan AC OFF, sebanding dengan tegangan 52.4V-49.8V.
Sedangkan kapasitas pengisian daya baterai 100% saat semua peralatan ON, sebanding
dengan tegangan baterai 52.2 V. Setelah kapasitas daya baterai mencapai 22% saat AC
ON dan AC OFF, sebanding dengan tegangan 41.4V dan kapasitas daya baterai 48%
saat semua peralatan ON, sebanding dengan tegangan 47.8V maka suplai PLTS
langsung mati, karena baterai tidak mampu meberikan suplai ke beban.
1.2.3 PLC (Programmable Logic Controller)
Defenisi PLC sesuai oleh National Electrical Manufactural Association
(NEMA) pada tahun 1979 adalah: “Peralatan elektronika yang beroperasi secara digital,
yang menggunakan programmable memori untuk menyimpan internal bagi intruksi-
intruksi fungsi spesifik seperti logika, sekuenting, timing, counting dan aritmatika untuk
mengendalikan secara digital atau analog input maupun output, berbagai tipe mesin, dan
proses’’.
PLC adalah kependekan dari Programmable Logic Controller yang merupakan
hasil dari tuntutan kebutuhan akan kontroler yang murah, yang dapat digunakan untuk
segala kondisi dan mudah dalam pengoperasiannya. PLC juga merupakan sistem
kontrol yang berdasarkan Central Processing Unit (CPU) yang menggunakan perangkat
keras dan memori untuk mengendalikan proses. Kontrol jenis ini didesain untuk
menggantikan hardware relay dan timer logic (M. Budiyanto dan A. Wijaya, 2003:12).
PLC menyediakan kemudahan pengendalian berdasarkan pemrograman dan
pelaksanaan instruksi logic yang sederhana. PLC mempunyai fungsi internal seperti
timer, counter dan shift register sehingga kontrol yang rumit dapat diwujudkan dengan
sesederhana mungkin.

14
Gambar 2.6 PLC Omron CP1E-E40DR-A (Aliyu, 2015)
2.2.3.1 Sistem Koordinasi PLC
Gambar. 2.7 Jalur Koordinasi PLC (Ramadhan, 2014)
CPU mengeksekusi pengkodean intruksi dari memori, menghasilkan sinyal/data
kendali yang ditransfer ke I/O (input-output) atau ke memori. Programming Device
(PD) adalah perangkat untuk membuat, mengedit, atau debugging program PLC,
menggunakan PC dengan adapter communication PLC. Programming Memori (PM)
berfungsi menyimpan intruksi, program dan data program PLC, berupa RAM , EPROM
ataupun EEPROM. Modul input/output (I/O) adalah parameter input dan output dari
peralatan yang dikontrol. Modul ini berupa I/O discrete dan special I/O.

15
2.2.3.2 PLC Input/Output Devices
Gambar. 2.8 PLC Komponen Diagram (Zimmerman, 2008)
PLC memiliki input device yang disebut sensor, output device serta controller.
Peralatan yang dihubungkan pada PLC yang berfungsi mengirim sebuah sinyal ke PLC
disebut input device. Sinyal input masuk pada PLC disebut input poin. Input poin ini
ditempatkan dalam lokasi memori sesuai dengan statusnya on atau off.
Secara umum, cara kerja sistem yang dikendalikan PLC cukup sederhana.
1. PLC mendapatkan sinyal dari input device
2. Akibatnya PLC mengerjakan logika program yang ada di dalamnya
3. PLC memberikan sinyal output device
Dari penjelasan di atas, didapatkan definisi sebagai berikut:
• PLC Input device: benda fisik yang memicu eksekusi logika/program pada
PLC.
Contoh: saklar (switch/toggle switch, push button) dan sensor.
• PLC Output device: benda fisik yang diaktifkan oleh PLC sebagai hasil
eksekusi program. Contoh ialah motor DC, motor AC, solenoid, relay dan
lain-lain.

16
Pada input device yang menjadi sensor adalah push button dengan masukan arus.
Sinyal yang diterima atau dihasilkan oleh peralatan berupa sinyal “discrete” ataupun
“analog”. Discrete input device menghasilkan sinyal 0 dan 1, sedang analog input
device menghasilkan sinyal dengan range tertentu (0, 1, 2, 3, 4,…..). demikian juga
discrete output device diaktifkan sinya 0 dan 1, sedang analog output device dapat
diaktifkan oleh sinyal dengan range tertentu (0, 1, 2, 3, 4,….).
2.2.3.3 Macam-macam Gerbang Logika
2.2.3.3.1 AND dan NAND
Logika pensaklaran AND seperti sakelar NO dan NAND seperti saklar NC.
Simbol ladder diagram dari AND dan NAND seperti Gambar 2.4 di bawah ini:
Gambar 2.9 Logika AND dan NAND Tabel 2.3 Logika AND dan NAND
S2 S1 AND NAND 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1 0
Gambar 2.10 Rangkaian Elektrik AND
Gambar 2.11 Ladder diagram AND

17
2.2.3.3.2 OR dan NOR
Logika pensaklaran OR seperti saklar NO dan logika pensaklaran NOR
seperti saklar NC. Simbol ladder diagram dari OR dan NOT OR seperti Gambar di
bawah ini:
Gambar 2.12 Logika OR dan NOR
Tabel 2.4 Logika OR dan NOR
S2 S1 OR NOR 0 0 0 1 0 1 1 0 1 0 1 0 1 1 1 0
Gambar 2.13 Rangkaian Elektrik OR
Gambar 2.14 Ladder diagram OR

18
1.2.4 Model Pemrograman
Menurut Setiawan, (2006), berkaitan dengan pemrograman PLC, ada lima model
atau metode yang distandarnisasi penggunaannya oleh IEC (International Electrical
Commission), yaitu:
1. Instruction List (Daftar Instruksi)
Pemrograman dengan menggunakan instruksi-instruksi bahasa level
rendah (mnemonic), seperti LD/STR, NOT, AND, dan sebagainya.
2. Ladder Digram (Diagram Tangga)
Pemrograman berbasis logika relay, cocok digunakan untuk persolan-
persoalan kontrol diskrit yang kondisi input outputnya hanya memiliki dua
kondisi yaitu ON dan OFF, seperti pada sistem control konveyor, lift, dan
motor-motor industri.
3. Function Block Diagram (Diagram Blok Fungsional)
Pemrograman berbasis aliran data secara grafis. Banyak digunakan untuk
tujuan kontrol proses yang melibatkan perhitungan-perhitungan kompleks
dan akuisisi data analog.
4. Sequential Function Charts (Diagram Fungsi Sekuensial)
Metode grafis untuk pemrograman terstruktur yang banyak melibatkan
langkah-langkah rumit, seperti pada bidang robotika, perakitan kendaraan,
batch control, dan sebagainya.
5. Structured Text (Teks Terstruktur)
Pemrograman ini menggunakan statemen-statemen yang umum dijumpai
pada bahasa level tinggi (high level programming) seperti If/Then, Do/While,
Case, For/Next, dan sebagainya. Dalam aplikasinya, model ini cocok
digunakan untuk perhitungan-perhitungan matematis yang kompleks,
pemrosesan tabel dan data, serta fungsi-fungsi kontrol yang memerlukan
algoritma khusus.
Walaupun hampir semua vendor PLC telah mendukung kelima model
pemrograman tersebut, tetapi secara de facto sampai saat ini yang sangat luas
penggunaannya terutama di industri adalah Ladder Diagram. Alasan utamanya adalah

19
karena diagram ini mirip dengan diagram kontrol elektromekanis yang sebelumnya
sudah banyak digunakan di industri.
Software yang digunakan pada PLC ini adalah CX Programmer dengan model
pemrograman ladder diagram. Contoh tampilan CX Programmer :
Gambar 2.15 Ladder diagram
2.2.5 Automatic Transfer Switch
ATS adalah singkatan dari Automatic Transfer Switch, yaitu proses pemindahan
penyulang dari penyulang/sumber listrik yang satu ke sumber listrik yang lain secara
otomatis sesuai perintah pemrograman, ATS adalah pengembangan dari COS (Change
Over Switch), beda keduanya adalah terletak pada sistem kerjanya, untuk ATS kendali
kerja dilakukan secara otomatis, sedangkan COS dikendalikan atau dioperasikan secara
manual. Namun kerja otomatis ATS berdasarkan memungkinkan jika sumber listrik dari
PLN terputus atau mengalami pemadaman maka sakelar akan berpindah ke sumber
listrik yang lainnya misalnya Inverter.
Automatic Transfer Switch merupakan rangkaian kontrol sakelar power inverter
dengan PLN yang sudah full automatic. Alat ini berguna untuk menghidupkan dan
menghubungkan power inverter ke beban secara otomatis pada saat PLN padam. Pada
saat PLN hidup kembali, alat ini akan memindahkan sumber daya ke beban dari power
inverter ke PLN.
Dalam perkembangan teknologi dunia elektrikal akhirnya merekayasa hal
tersebut kemudian dijalankan secara automatic yang disingkat ATS yang difungsikan
secara otomatis untuk memindahkan daya sesuai dengan kebutuhan tanpa menggunakan

20
tenaga manusia untuk mengoprasikannya. Beberapa jenis ATS dibedakan menurut
kapasitas daya yang dibutuhkan atau berdasar phasa dan ampere yang melalui panel
tersebut, namun untuk prinsip kerjanya sama.
Pada dasarnya pembuatan ATS adalah memainkan penalaran logika matematika
dengan merangkaikan beberapa alat seperti relay, timer, dan MCB. Alat-alat tersebut
pada prinsipnya adalah sebagai saklar atau pemutus hubungan.
Pemakaian panel ATS ini dibedakan pada besar kecilnya pemakaian listrik.
Semakin tinggi pemakaian daya listrik, tentunya akan semakin besar pula spesifikasi
komponen-komponennya terutama breaker dan kontaktornya dan juga ukuran kabel.
Pemakaian sistem otomatisasi ini memiliki beberapa keuntungan antara lain:
1. Sistem pemindahan dari PLN ke PLTS dan sebaliknya hanya perlu waktu yang
sangat singkat, hanya dengan hitungan detik saja bahkan bisa dengan sekejap
setelah PLTS padam, ganti sumber listrik dari PLTS ke PLN.
2. Meringankan tugas teknisi listrik, bahkan gedung perkantoran sering tidak
memiliki teknisi listrik, dengan panel ATS ini semuanya menjadi mudah.
3. Memberi perlindungan terhadap alat observasi seperti computer, AC dan alat
pengambilan data, seringkali terjadi tegangan listrik PLN maupun PLTS tiba-
tiba turun maupun naik sampai-sampai jauh diluar batas toleransi normal untuk
alat-alat elektronik, bahkan sering pula ada salah satu fasa listrik yang hilang
(untuk sistem 3 fasa), turun dan naiknya tegangan, maupun hilannya tegangan
ini kadang tak terdeteksi dengan kasat mata.
a. Change Over adalah sistem yang berfungsi sebagai media tukar sumber,
jenis dari media change over ini bisa MCCB yang dilengkapi dengan
motorized, bisa menggunakan kontaktor magnetik, bisa juga menggunakan
Change Over Switch yang dilengkapi dengan sistem motorized atau
solenoid.
b. Metering yang berfungsi sebagai media indikator kondisi kelistrikan.
c. Battery Charger yang berfungsi sebagai charging battery genset.
d. Modul Controller yang berfungsi sebagai media start-stop genset dan
change over.
e. Sensor yang berfungsi sebagai pendeteksi ada tidaknya tegangan.

21
2.2.6. Sistem Catu Daya
Catu daya listrik digunakan untuk memberikan pasokan catu daya ke seluruh
bagian PLC (termasuk CPU, memori dan lain-lain). Kebanyakan PLC bekerja pada
catu daya 24 VDC atau 220 VAC. Beberapa PLC catu dayanya terpisah (sebagai
modul tersendiri). Yang demikian biasanya merupakan PLC besar, sedangkan
yang medium atau kecil, catu dayanya sudah menyatu. Pengguna harus
menentukan berapa besar arus yang diambil dari modul keluaran/masukan untuk
memastikan catu daya yang bersangkutan menyediakan sejumlah arus yang memang
dibutuhkan.
Catu daya listrik ini biasanya tidak digunakan untuk memberikan catu
daya langsung ke masukan maupun kelauran, artinya masukan dan keluaran murni
merupakan saklar (baik relay maupun opto isolator). Pengguna harus menyediakan
sendiri catu daya terpisah untuk masukan dan keluaran PLC.
Dalam perancangan sistem ATS ini menggunakan 3 catu daya, yaitu:
1. PLTS sebagai sumber utama.
2. Batrai sebagai sumber cadangan
3. PLN sebagai sumber cadangan ketika sumber dari PLTS dan Batrai mati/padam.
2.2.7 Peralatan Penunjang
2.2.7.1 SCC (Solar Charge Controller)
Solar charge controller, adalah komponen penting dalam sistem Pembangkit
Listrik Tenaga Surya. Solar Charge Controller berfungsi untuk:
1. Charging mode: Mengisi baterai (kapan baterai diisi, menjaga pengisian ketika
baterai penuh).
2. Operation mode: Penggunaan baterai ke beban (baterai ke beban diputus ketika
baterai sudah mulai kosong).
Solar Charge Controller biasanya terdiri dari 1 input (2 terminal) yang terhubung
dengan output panel surya/solar cell, 1 output (2 terminal) yang terhubung dengan
baterai/aki dan 1 output (2 terminal) yang terhubung dengan beban (load). Arus listrik
DC yang berasal dari baterai tidak mungkin masuk ke panel sel surya karena biasanya
terdapat dioda protection yang hanya melewatkan arus listrik DC dari panel surya/

22
solar cell ke baterai, bukan sebaliknya. Pada Solar Charge Controller jenis teknologi
yang umum digunakan dan salah satunya yaitu:
• MPPT (Maximun Power Point Tracker)
Maximum Power Point Tracer (MPPT) merupakan sebuah metode untuk menentukan
titik dimana daya maksimum dihasilkan oleh panel surya. MPPT dapat mengoptimalkan
kinerja antara array surya (panel PV) dan aki. Dengan kata lain, alat ini mampu
mengkonversi tegangan tinggi output DC dari panel surya ke tegangan lebih rendah
yang diperlukan aki/baterai. MPPT memerlukan dua komponen pengukung dalam
pengoperasiannya: arus input (I) dan tegangan input (V). Dua komponen ini
dikombinasikan untuk mendapatkan nilai daya (P). Contoh Solar charge controller
dapat di lihat pada Gambar 2.13.
Gambar 2.16 Solar charge controller
(https://www.epsolarpv.com)
Spesifikasi MPPT Solar Charge Controller

23
Tabel 2.5 Spesifikasi MPPT Solar Charge Controller
Model IT6415ND Tegangan sistem nominal 12/24/36/48V auto work
Nilai arus baterai 60A Nilai arus beban 60A Mak. Tegangan rangkaian terbuka PV 150V (pada suhu lingkungan operasi minimum)
Rentang tegangan input baterai 8~68V
Maks. Daya input PV
800W (12V) 1600W (24V) 2400W (36V) 3200W (48V)
Konsumsi daya 1.4~2.6W Equalize charging voltage Sealed: 14.6V, Flooded: 14.8V, User-defined: 9~17V
Boost charging voltage Gel: 14.2V, Sealed: 14.4V, Flooded: 14.6V, User-defined: 9~17V
Float charging voltage Gel /Sealed /Flooded: 13.8V, User-defined: 9~17V Low voltage reconnect voltage Gel /Sealed /Flooded: 12.6V, User-defined: 9~17V
Low voltage disconnect voltage Gel /Sealed /Flooded: 11.1V, User-defined: 9~17V
Grounding Common negative
2.2.7.2 Inverter
Power Inverter atau biasanya disebut dengan Inverter adalah suatu rangkaian
atau perangkat elektronika yang dapat mengubah arus listrik searah (DC) ke arus listrik
bolak-balik (AC) pada tegangan dan frekuensi yang dibutuhkan sesuai dengan
perancangan rangkaiannya. Sumber-sumber arus listrik searah atau arus DC yang
merupakan Input dari Power Inverter tersebut dapat berupa baterai, aki maupun Sel
Surya (Solar Cell). Inverter ini akan sangat bermanfaat apabila digunakan di daerah-
daerah yang memiliki keterbatasan pasokan arus listrik AC.

24
Gambar 2.18 Prinsip Kerja Inverter (Abidin, 2014)
Prinsip kerja inverter dapat dijelaskan dengan menggunakan 4 sakelar seperti
yang ditunjukkan pada Gambar 2.18 di atas. Bila sakelar S1 dan S2 dalam kondisi ON
maka akan mengalir aliran arus DC ke beban R dari arah kiri ke kanan, jika yang hidup
adalah sakelar S3 dan S4 maka akan mengalir aliran arus DC ke beban R dari arah
kanan ke kiri.
Gambar 2.18.a Bentuk Gelombang dari Inverter Setengah Gelombang
(Abidin, 2014)
Inverter Gelombang Penuh.
Gambar 2.18.b Bentuk Gelombang dari Inverter Gelombang Penuh (Abidin, 2014)

25
Inverter gelombang penuh ditunjukkan pada Gambar 12.8.b. Ketika transistor
Q1 dan Q2 bekerja (ON), tegangan Vs akan mengalir ke beban tetapi Q3 dan Q4 tidak
bekerja (OFF). Selanjutnya, transistor Q3 dan Q4 bekerja (ON) sedangkan Q1 dan Q2
tidak bekerja (OFF), maka pada beban akan timbul tegangan –Vs.
Gambar 2.19 Inverter (Luminous, 2006)
Spesifikasi Inverter Luminous
Tabel 2.6 Spesifikasi Inverter Luminous
Model 3.5KVA Kapasitas 3500VA/48V
Input Tegangan 100-285V
Output maks. Beban Bohlam 2800 Watt
Baterai Maks. Pengisian Arus 21A
2.2.7.3 Kontaktor
Kontaktor adalah komponen elektromekanik yang dapat berfungsi sebagai
penyambung dan pemutus rangkaian, yang dapat dikendalikan dari jarak jauh

26
pergerakan kontak-kontaknya terjadi karena adanya gaya elektromagnet.
Kontaktor magnet merupakan sakelar yang bekerja berdasarkan kemagnetan,
artinya bekerja bila ada induksi elektromagnetik. Magnet berfungsi sebagai penarik dan
pelepas kontak-kontak. Kontaktor magnet akan bekerja normal bila tegangannya
mencapai 85% tegangan kerjanya, bila tegangan turun kontaktor akan bergetar. Ukuran
dari kontaktor ditentukan oleh batas kemampuan arusnya. Kontak-kontak pada
kontaktor ada dua macam yaitu kontak utama dan kontak bantu. Sedangkan menurut
kerjanya, kontak-kontak dibedakan menjadi dua yaitu Normally Open (NO) dan
Normally Close (NC). Kontak NO adalah pada saat kontaktor tidak mendapat suplai
daya listrik kontak terbuka, sedangkan pada saat kontaktor mendapat suplai daya listrik
maka kontak akan tertutup. Sedangkan kontak NC adalah pada saat kontaktor tidak
mendapat suplai daya listrik, kontak tertutup sedangkan pada saat kontaktor mendapat
suplai daya listrik, kontak terbuka.
Gambar 2.20 Kontaktor (Januar, 2017)
Kontaktor magnet adalah suatu alat penghubung rangkaian listrik(saklar) yang
bekerja atas dasar magnet listrik. Kontaktor itu ada 2 jenis yaitu kontaktor magnet arus
searah (DC) dan kontaktor dengan arus bolak-balik (AC). kontaktor arus searah
kumparannya tidak menggunakan kumparan hubung singkat, sedang kontaktor arus
bolak-balik inti magnet dipasang kumparan hubung singkat.
a) Kontaktor dibedakan menjadi 2 (dua) yaitu ;
Kontaktor utama
Kontaktor bantu
b) Kode angka yang terdapat pada kontaktor ;
Masukan kontak utama biasanya dihubungkan dengan nomor kode terminal
1,3,5 atau L1,L2,L3 dan untuk keluarannya melalui nomor kode terminal 2,4,6 atau
T1,T2,T3.

27
2.2.7.4 Relay
Relay adalah suatu komponen yang bekerja secara elektro magnetik apabila
diberikan arus. Fungsi dari relay adalah untuk memutuskan dan menghubungkan
rangkaian kontrol.
D a l a m duni a e l e kt r on i ka , r e l a y di ke na l s e ba g a i kom pone n y a n g d a p a t
mengimplementasikan logika switching. Sebelum tahun 70-an, relay merupakan
“otak” dari rangkaian pengendali. Baru setelah itu muncul PLC yang mulai
menggantikan posisi relay. Relay yang paling sederhana ialah relay elektromekanis
yang memberikan pergerakan mekanis saat mendapatkan energi listrik. Secara
sederhana relay elektromekanis ini didefinisikan sebagai berikut :
a. Alat yang menggunakan gaya elektromagnetik untuk menutup (atau
membuka) kontak saklar.
b. Saklar yang digerakkan (secara mekanis) oleh daya/energi listrik.
Relay bekerja karena adanya torsi yang timbul akibat dari perubahan sistem
yang dilindungi sampai melebihi harga batas yang telah ditentukan. Syarat-syarat
yang harus dimiliki oleh suatu relay antara lain:
1. kecepatan bereaksi
2. selektivitas
3. kepekaan
4. keandalan
Secara umum, relay digunakan untuk memenuhi fungsi-fungsi berikut :
a. Remote control : dapat menyalakan atau mematikan alat dari jarak
jauh.
b. Penguatan daya: menguatkan arus atau tegangan, contohnya adalah
starting relay pada mesin mobil.
c. Pengatur logika kontrol suatu sistem.
2.2.5.5.1 Prinsip Kerja
Relay terdiri dari coil dan contact. Coil adalah gulungan kawat yang mendapat
arus listrik, sedang contact adalah sejenis saklar yang pergerakannya tergantung
dari ada tidaknya arus listrik di coil. Contact ada 2 jenis : Normally Open (kondisi

28
awal sebelum diaktifkan open), dan Normally Closed (kondisi awal sebelum
diaktifkan close). Secara sederhana berikut ini prinsip kerja dari Relay: ketika Coil
mendapat energi listrik, akan timbul gaya elektromagnet yang akan menarik
armature yang berpegas, dan contact akan menutup.
Gambar 2.21 Skema relay elektromekanik (Noer, 2010) Selain berfungsi sebagai komponen elektronik, Relay juga mempunyai
fungsi sebagai pengendali sistem. Sehingga Relay mempunyai 2 macam simbol
yang digunakan pada :
a. Rangkaian listrik (hardware)
b. Program (software)
Gambar 2.22 Relay Omron tipe MK2P-I (Noer, 2010)
2.2.7.5 MCB (Miniatur Circuit Breaker)
Pengaman sistem catu daya menggunakan sekering atau Miniatur Circuit
Breaker (MCB). MCB sering disebut juga pengaman otomatis. Pengaman otomatis ini
memutuskan sirkit secara otomatis apabila arusnya melebihi setting dari MCB tersebut.
Pengaman otomatis dapat langsung dioperasikan kembali setelah mengalami
pemutusan (trip) akibat adanya gangguan arus hubung singkat dan beban lebih.
Dibawah ini adalah persamaan yang perlu di perhatikan dalam pemilihan MCB.

29
Tabel 2.7 Persamaan untuk menentukan arus beban MCB
3 fasa 1 fasa
P = √3 V I cos ϕ
I = 𝑃√3Vcosϕ
Misalkan:
P = 3kVA, V= 380V
cosϕ = 0.9 maka
I = 3000√3 380 0.9
I = 6.9 A
MCB yang digunakan 6.9A
atau 7 A.
P = V I cos ϕ
I = 𝑃Vcosϕ
Misalkan:
P = 3kVA, V= 220V
cosϕ = 0.9 maka
I = 3000 220 0.9
I = 12 A
Sehingga MCB yang
digunakan 12 A.
Persamaan diatas adalah persamaan yang dapat digunakan dalam menentukan
besar arus beban yang di tanggung MCB.
MCB merupakan kependekan dari Miniature Circuit Breaker (bahasa Inggris).
Biasanya MCB digunakan oleh pihak PLN untuk membatasi arus sekaligus sebagai
pengaman dalam suatu instalasi listrik. MCB berfungsi sebagai pengaman hubung
singkat (konsleting) dan juga berfungsi sebagai pengaman beban lebih. MCB akan
secara otomatis dengan segera memutuskan arus apabila arus yang melewatinya
melebihi dari arus nominal yang telah ditentukan pada MCB tersebut. Arus nominal
yang terdapat pada MCB adalah 1A, 2A, 4A, 6A, 10A, 16A, 20A, 25A, 32A dan
lain sebagainya. Nominal MCB ditentukan dari besarnya arus yang bisa ia
hantarkan, satuan dari arus adalah Ampere.
Gambar 2.23 MCB (Ramadhan, 2014)

30
Adapun prinsip kerja dari MCB hampir sama dengan sekring, apabila
terjadi hubung singkat atau beban lebih maka MCB akan bekerja secara otomatis
memutuskan arus listrik tersebut.
Adapun karakteristik dari MCB adalah sebagai berikut: MCB merupakan
pengaman beban lebih dan gangguan arus hubung singkat. Fungsi MCB sebagai
pengaman beban lebih dimana alat ini bekerja dengan sistem pemanasan logam
bimetal, jadi apabila beban yang terpasang pada rangkaian melebihi kemampuan
peralatan maka bimetal pada MCB akan panas dan pada saat itulah logam ini
akan melengkung yang akhirnya akan menyebabkan putusnya rangkaian. Selanjutnya
setelah bimetal ini dingin maka logam ini akan kembali kebentuk semula dan akhirnya
rangkaian akan dapat terhubung kembali.
Sedang untuk gangguan arus hubung singkat, MCB menggunakan kumparan
elektromagnetik yang akan bekerja apabila arus yang terlalu besar melewati kumparan
elektromagnetik ini yang akan menimbulkan panas sehingga akan memutuskan anak
kontak ke koil.
MCB memiliki beberapa keunggulan dibandingkan dengan sekering:
1. Secara otomatis mematikan sirkuit listrik selama kondisi abnormal dari
jaringan berarti lebih dari kondisi beban serta kondisi yang salah. Sekering
tidak merasakan tapi miniatur circuit breaker melakukannya dengan cara yang
lebih dapat diandalkan. MCB jauh lebih sensitif terhadap arus lebih dari
sekering.
2. Keuntungan lain adalah, sebagai tombol operasi saklar datang pada posisi off
selama tersandung, zona rusak dari rangkaian listrik dengan mudah dapat
diidentifikasi. Tapi dalam kasus sekering, kabel sekering harus diperiksa
dengan membuka sekering pegangan atau potongan dari dasar sekering , untuk
mengkonfirmasikan pukulan kawat sekering.
3. Restorasi Cepat pasokan tidak dapat mungkin dalam kasus sekering
sebagai sekering karena harus dikabelkan atau diganti untuk memulihkan
pasokan . Tapi dalam kasus MCB, restorasi cepat adalah mungkin dengan
hanya beralih pada operasi.
4. Penanganan MCB lebih elektrik aman daripada sekering. Karena banyak
keuntungan dari MCB atas unit sekering, dalam jaringan listrik tegangan

31
rendah modern, miniatur circuit breaker ini kebanyakan digunakan sebagai
pengganti surut unit sekering .Hanya satu kelemahan dari MCB atas sekering
adalah bahwa sistem ini lebih mahal daripada sekering unit sistem .

32
BAB III
METODE PERANCANGAN/PEMBUATAN
3.1 Metode Perancangan
Penelitian ini diawali dengan perancangan perangkat keras meliputi: rangkaian
sensor tegangan PV, sensor tegangan baterai, sensor tegangan PLN, arduino nano, dan
rangkaian driver relay. Perancangan perangkat lunak meliputi ladder diagram PLC
serta analisis. Proses peralihan daya dari sumber PLTS yang terhubung ke beban ke
sumber PLN maupun sebaliknya atau proses pengontrol otomatis menggunakan
Programmable Logic Control (PLC). Prinsip dasar perangkat ini dapat di tunjukan pada
Gambar 3.1.
PLC Omron CP1E N30DR-A
Modul PV PLN
Inverter
MPPT
Baterai
PLTS
Sensor Tegangan
PV
Sensor Tegangan
Baterai
Sensor Tegangan
PLN
Beban
Arduino Nano
Relai 1 Relai 3Relai 2
Relai ON/OFF
K2
K1
Gambar 3.1 Prinsip Dasar Kontrol PLC

33
Gambar 3.1 di atas menunjukan dasar sistem perangontrolan berbasis PLC.
Dimana terdapat dua catu daya yang tersedia, PLC bekerja memindahkan catu daya
PLTS ke catu daya cadangan PLN. Catu daya PLN digunakan sebagai suplai daya
sementara hingga PV mendapatkan intensitas cahaya matahari yang cukup dan kapasitas
penyimpanan daya baterai >=80%. Ketika tegangan PV >65V, kapasitas penyimpanan
daya baterai PLTS terisi >=80%, maka arduino memberikan perintah untuk
mengaktifkan relai 1. Jika PLN hidup maka arduino memberikan perintah untuk
mengaktifkan relai 3. Saat kapasitas penyimpanan daya baterai >=50% maka arduino
memberikan perintah untuk mengaktifkan relai 2. Relai 1, relai 2 dan relai 3 merupakan
inputan dari PLC. Relai 1 aktif, PLC bekerja mengaktifkan inverter kemudian beberapa
saat kontaktor PLTS di aktifkan sehingga suplai PLTS terhubung ke beban. Jika relai 1
tidak mendeteksi tegangan masukan dari arduino, PLC memutuskan switch pada
inverter. Nonaktifnya inverter membuat kontaktor PLTS yang terhubung ke beban
terputus, kemudian dialihkan kerelai 3, selanjutnya relai 3 memberikan masukan pada
PLC untuk mengaktifkan kontaktor PLN sehingga suplai PLN terhubung ke beban. Jika
relai 3 tidak mendeteksi tegangan masukan dari arduino maka PLC memutuskan
kontaktor PLN sehingga suplai PLN yang terhubung ke beban terputus, kemudian
dialihkan ke relai 2, selanjutnya relai 2 memberikan masukan pada PLC untuk
mengaktifkan inverter, sehingga inverter mengaktifkan kontaktor PLTS dan Suplai
PLTS terhubung ke beban.
Sumber energi yang di kontrol yaitu sumber energi dari PLTS dan sumber
energi dari PLN, hal ini akan di control menggunakan PLC.
3.2 Lokasi Penelitian
Penelitian Simulasi Otomatisasi Suplai Beban Menggunakan PLC dilakukan di
Laboratorium Sistem Tenaga Teknik Elektro Fakultas Teknik Universitas Mataram..
3.3 Alat dan Bahan Penelitian
Perangkat keras yang digunakan pada penelitian ini adalah
a. Seperangkat computer Tipe Asus E2 vision dengan processor AMD E-450
APU with Radeon(tm) HD Graphics 1.65 GHz dengan memori 2 GB.
Dengan perangkat lunak sistem operasi Windows 8 64-bit, untuk simulasi
dan perancangan program digunakan CX Programer, dan penyusunan

34
laporan digunakan Microsoft Office 2007. Perancangan line diagram
menggunakan Visio Professional 2007.
b. PV merk Skytech Solar 12 x 100 Wp
c. Batrai : 12 x 100Ah
d. Inverter : Luminous Cruze 3.5KVA
e. MPPT : Solar Charge Controller iTrace IT6415ND
f. PLC : Omron CP1E N30DR-A
g. Kontaktor
h. MCB
i. Multimeter DT9205A
j. Relai
k. Arduino Nano (ATmega328)
l. Resistor
m. Diode
n. PCB
o. Led
p. Kabel Penghubung
3.4 Perancangan Sistem
Pada tugas akhir ini akan dibahas perancangan sistem simulasi otomatisasi
suplai beban menggunakan PLC. Pengontrolan dilakukan simulasi di Laboratorium
Sistem Tenaga Teknik Elektro Fakultas Teknik Universitas Mataram.
3.4.1 Perancangan Perangkat Keras
Tahap ini dilakukan perancangan tempat, jalur-jalur, bentuk, dan letaknya
berdasarkan kegunaan dan fungsinya masing- masing. Desain yang dibuat adalah
berupa diagram pengawatan dimana di rancang sesuai dengan proses kerja dari
perancangan kontrol otomatis mrnggunakan PLC. Hal ini dimaksudkan untuk
memudahkan dalam merancang dan merangkai komponen-komponen dalam panel
kontrol. Desain berupa diagram pengawatan bisa di lihat Gambar 3.2 di bawah ini.

35
Beban
PLN
PV
BATERAI
INVE
RTER
R1 R2 R3
02< Relai 103< Relai 3
04< Relai 4
L2/N L1
R1 120k
RV1
100K
C1 470u
F
R1 180k
RV1
100K
C1 470u
F
TR1
TRAN-2P2S
BR1
B125C1000
R1200k
R24.7k
C1470uF
VR1VARISTO
R4
K1 K2
NO NC NO NCC1100uF
C3100uF
VI1
VO3
GND2
U17824
VI1
VO3
GND2
U27805
C410uF
C20.103uF
Q1TIP31
R15D1LED-GREEN
R3100D2LED-GREEN
D3DIODE
D4DIODE
Gambar 3.2 Perancangan Diagram Pengawatan
3.4.2 Perancangan Sensor Tegangan
Fungsi sensor tegangan pada perancangan ini adalah untuk mendeteksi ada
atau tidaknya tegangan pada sumber. Tegangan maksimum yang diperbolehkan masuk
ke mikrokontroller adalah 5 VDC. Karena itu, tegangan yang akan masuk ke pin ADC
perlu diatur terlebih dahulu. Pada perancangan alat ini, dibutuhkan tiga sensor
tegangan, yaitu sensor tegangan PLN (AC), sensor tegangan PV, dan sensor tegangan
saat kapasitas penyimpanan daya baterai 80%, dan 50% sebanding dengan tegangan
51.5V dan 48V.
3.4.2.1 Perancangan Sensor Tegangan Baterai >=51.5V dan >=48V
Rangkaian pembagi tegangan digunakan untuk pembacaan data tegangan pada
sistem monitoring baterai PLTS.

36
Gambar 3.3 Rangkaian Sensor Tegangan >=51.5V dan >=48V
Rangkaian pembagi tegangan digunakan untuk membuat suatu tegangan
referensi dari sumber tegangan yang lebih besar untuk titik referensi pada sensor. Hal
ini dikarenakan tegangan baterai yang akan diukur adalah saat kapasitas penyimpanan
daya baterai >=80% yaitu 51.5V – 56V dan saat kapasitas penyimpanan daya baterai
>=50% yaitu 48V – 56V, sedangkan pin ADC arduino memiliki batasan pembacaan
tegangan sebesar 5V. oleh karena itu, rangkaian pembagi tegangan digunakan untuk
memperkecil tegangan sesuai dengan perbandingan yang telah dihitung dengan
persamaan berikut ini:
a. Kondisi saat kapasitas penyimpanan daya baterai >=80% sebanding dengan
tegangan 51.5V
𝑉𝑡ℎ = Rv1R1+Rv1
x Vin
Diasumsikan :
Vo = 4 V (tegangan masuk pin arduino)
Maka,
4𝑉 = Rv1R1+Rv1
x 51.5V
51.5𝑅𝑣1 = 4R1 + 4Rv1
4𝑅1 = 51.5Rv1− 4Rv1
𝑅1 = 47.1Rv14
𝑅1 = 11.7Rv1 kΩ ≈ 12 kΩ
Jika R1 = 12 kΩ, maka Rv1
4 𝑉 = Rv112000Ω+Rv1 x 51.5V
51.5𝑅𝑣1 = 48000 + 4Rv1
51.5𝑅𝑣1 − 4𝑅𝑣1 = 48000
𝑅𝑣1 =48000
47.1
𝑅𝑣1 = 1019.1 Ω
R112k RV1
100K
BAT151.5V C1
470nF
A6 Mikrokontroller
GND Mikrokontroller
37
Untuk mendapatkan nilai Rv1 = 1019.1 Ω, maka digunakan resistor variabel 100 kΩ
b. Kondisi saat kapasitas penyimpanan daya beterai >=50% sebanding dengan
tegangan 48V
𝑉𝑡ℎ = Rv1
R1 + Rv1 x Vin
Diketahui,
R1 = 12 kΩ
R2 = 1019.1 Ω
Maka,
𝑉𝑡ℎ = 1019.1Ω12000Ω+1019.1Ω
x 48 v
𝑉𝑡ℎ = 485040130105
𝑉𝑡ℎ = 3.76 V
Dari perhitungan diatas didapat nilai tegangan output sensor sebesar 3.76V. Tegangan
3.76V merupakan tegangan minimum output pada sensor tegangan saat kapasitas
penyimpanan daya baterai sebesar 50%.
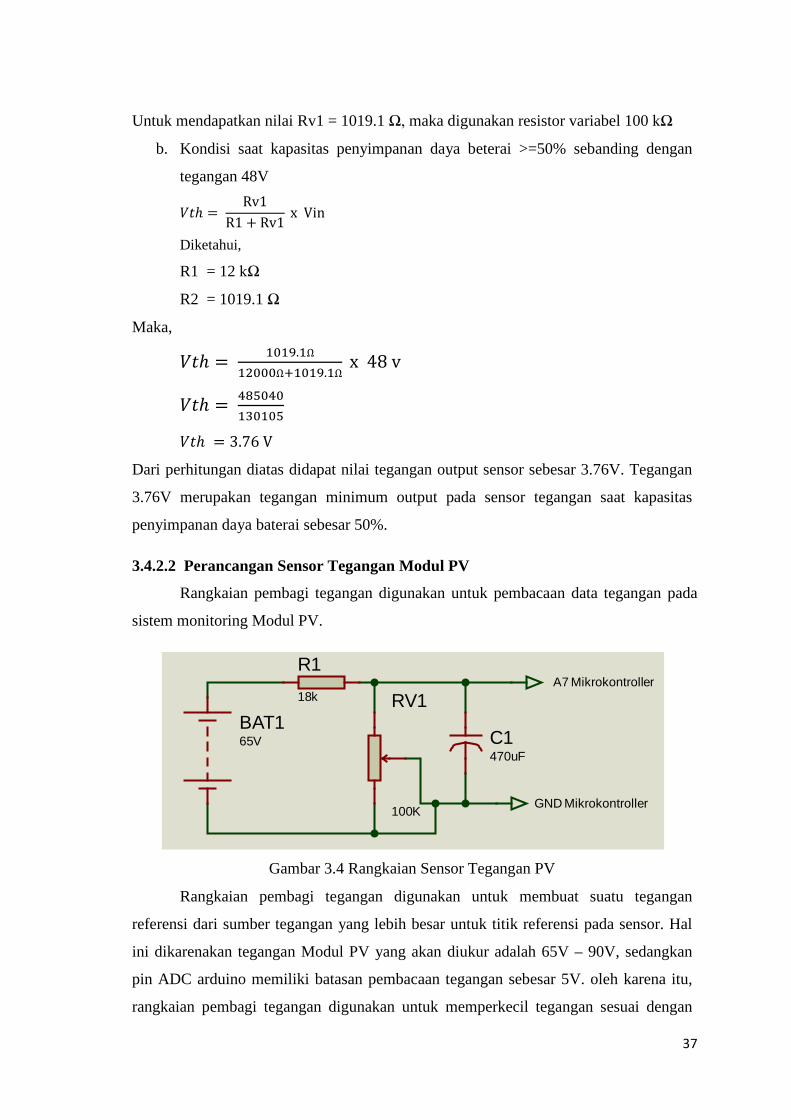
3.4.2.2 Perancangan Sensor Tegangan Modul PV
Rangkaian pembagi tegangan digunakan untuk pembacaan data tegangan pada
sistem monitoring Modul PV.
Gambar 3.4 Rangkaian Sensor Tegangan PV
Rangkaian pembagi tegangan digunakan untuk membuat suatu tegangan
referensi dari sumber tegangan yang lebih besar untuk titik referensi pada sensor. Hal
ini dikarenakan tegangan Modul PV yang akan diukur adalah 65V – 90V, sedangkan
pin ADC arduino memiliki batasan pembacaan tegangan sebesar 5V. oleh karena itu,
rangkaian pembagi tegangan digunakan untuk memperkecil tegangan sesuai dengan
R118k RV1
100K
BAT165V C1
470uF
A7 Mikrokontroller
GND Mikrokontroller

38
perbandingan yang telah dihitung dengan persamaan berikut ini:
𝑉𝑡ℎ =Rv1
R1 + Rv1 x Vin
Diasumsikan :
Vo = 3.5 V (tegangan masuk pin arduino)
Maka,
3.5 = Rv1R1+Rv1
x 65
65𝑅𝑣1 = 3.5R1 + 3.5Rv1
3.5𝑅1 = 65Rv1 − 3.5Rv1
𝑅1 = 61.5Rv13.5
𝑅1 = 17.5Rv1 kΩ ≈ 18 kΩ
Jika R1 = 18 kΩ, maka Rv1
3.5 = Rv118000+R1
x 65
65𝑅𝑣1 = 63000 + 3.5Rv1
65𝑅𝑣1 – 3.5𝑅𝑣1 = 63000
𝑅𝑣1 =63000
61.5
𝑅𝑣1 = 1024.39 Ω
Untuk mendapatkan nilai Rv1 = 1024.39 Ω, maka digunakan resistor variabel 100 kΩ
yang dapat diputar sesuai dengan yang diinginkan.
3.4.2.3 Perancangan Sensor Tegangan PLN
Rangkaian pembagi tegangan digunakan untuk pembacaan data tegangan pada
sistem monitoring PLN.
Gambar 3.5 Rangkaian Sensor Tegangan PLN
Sensor tegangan ini menggunakan trafo ZMPT101B yang bekerja pada arus
TR1
TRAN-2P2S
BR1
B125C1000
R1200k
R24.7k
C1470uF
VR1VARISTOR
A4 Mikrokontroller
GND Mikrokontroller

39
maksimal 2 mA, 4 buah diode sebuah kapasitor untuk mencegah terjadinya riak dan
variable resistor untuk mengatur tegangan output sesuai yang diinginkan, dengan
demikian tegangan keluaran yang diinginkan sebesar 5 Volt. Berdsarkan gambar 4.4
diatas dapat dibuktikan dengan menggunakan persamaan untuk memperkecil tegangan
sesuai dengan perbandingan yang telah dihitung dengan persamaan berikut ini:
𝑅 =Vin
I
Diasumsikan :
Vin = 220 V (tegangan inputan PLN)
I = 1.1 mA (arus yang masuk melewati trafo ZMPT101B)
Maka,
𝑅1 = 2200.0011
𝑅1 = 200000 Ω ≈ 200 kΩ
Sedangkan tegangan output maksimal adalah Vout = 5 Volt
Sehingga,
𝑅2 = VoutVint
X R1
𝑅2 = 5220
X 200000
𝑅2 = 4545.45 Ω ≈ 4.7 kΩ
Dari perhitungan diatas didapat nilai tahanan resistor R1 = 200kΩ dan R2 = 4.7kΩ.
Sehingga,
Vout DC = 5V – 1.4V
= 3.6 Volt DC
Dari transformator tegangan yang dikonversi tegangan 220V menjadi 5V
kemudian di searahkan dengan penyearah gelombang penuh. Kalibrasi tegangan
dilakukan dengan menempatkan resistor variable 100kΩ pada ujung rangkaian
sehingga tegangan yang dihasilkan dapat diatur, sebelum resistor variable, dipasang
sebuah filter kapasitor untuk menghasilkan tegangan DC terhadap tegangan yang
dibutuhkan oleh ADC.
3.4.3 Arduino Nano
Arduino yang digunakan pada penilitian ini adalah Arduino Nano. Arduino ini
memiliki pin I\O yang cukup banyak, sejumlah 14 buah digital I\O pin (6 pin
daintararnya adalah PWM), 8 pin analog input. Arduino Nano memiliki 8 pin sebagai

40
input analog, diberi label A0 sampai dengan A7, yang masing-masing menyediakan
resolusi 10 bit (yaitu 1024 nilai yang berbeda). Secara default pin ini dapat
diukur/diatur dari mulai ground sampai dengan 5 Volt, juga memungkinkan untuk
mengubah titik jangkauan tertinggi atau terendah menggunakan fungsi
analogReference(). Pin Analog 6 dan 7 tidak dapat digunakan sebagai pin digital.
Arduino Nano dapat dilihat pada Gambar 3.6.
Gambar 3.6 Arduino Nano (ATmega328)
Spesifiksi arduino nano dapat dapat dilihat pada tabel 3.1 di bawah ini.
Tabel 3.1 Spesifikasi Arduino Nano
Mikrokontroler Atmel ATmega168 atau ATmega328
Tegangan Operasi 5V
Input Voltage
(disarankan) 7-12V
Input Voltage (limit) 6-20V
Pin Digital I/O 14 (6 pin digunakan sebagai output PWM)
Pins Input Analog 8
Arus DC per pin I/O 40 mA
Flash Memory 16KB (ATmega168) atau 32KB (ATmega328) 2KB
digunakan oleh Bootloader
SRAM 1 KB (ATmega168) atau 2 KB (ATmega328)
EEPROM 512 byte (ATmega168) atau 1KB (ATmega328)
Clock Speed 16 MHz
Ukuran 1.85cm x 4.3cm

41
3.4.4 Perancangan Pemrograman Sensor Tegangan pada Mikrokontroller
Mikrokontroller yang digunakan pada penelitian ini adalah mikrokontroller
ATMega328 yang terdapat di dalam minimum sistem Arduino menggunakan bahasa
processing. Program sensor tegangan dibuat untuk menjalankan relay output dari
mikrokontroller yang terhubung ke PLC. Gambar 3.7 di bawah ini merupakan
program sensor tegangan dari PV, baterai, dan PLN.

42
Gambar 3.7 Program Sensor Tegangan pada Arduino
3.4.5 Perancangan Driver Relay
Rangkaian driver relai berfungsi sebagai inputan dari PLC, sehingga PLC dapat
mengaktifkan kontaktor yang terhubung ke sumber energi listrik. Relay ini dapat
dikendalikan melalui mikrokontroller. Rangkaian ini bekerja setelah semua sensor
memenuhi kriteria yang telah di tentukan. Agar relay dapat bekerja sehingga mampu
memutus dan menghubungkan tegangan maka rangakain relay perlu dirancang dengan
baik dengan melakukan perhitungan nilai komponen yang akan digunakan pada
rangkaian tersebut.
Rangkaian driver relai dapat dilihat pada Gambar 3.8.
Gambar 3.8 Rangkaian Driver Relai
Dari gambar diatas dapat dilihat bahwa tahanan RC adalah tahanan dari coil
R11k
Q2BD139
D1DIODED2
LED-YELLOW
R22.2k
MIKROKONTROL
VCC 24V
RL1OMIH-SH-124L

43
relay (RC = RRelay) sehingga adapun data relay yang diperoleh dari data sheet sebagai
berikut:
VRelay = 24 V
RLilitan = 1600 Ω
ISaturasi = 9 mA
Berdasarkan data tersebut dapat diketahui bahwa untuk menggerakkan relay
dibutuhkan arus sebesar 9 mA yang melalui lilitan pada relay. Data tersebut digunakan
untuk menentukan komponen yang digunakan pada rangkaian driver kontaktor.
Adapun persamaan yang digunakan sebagai berikut:
ILed = 20 mA
IC = ISaturasi + ILed
= 9 mA + 20 mA
= 29 mA
Diperoleh nilai arus yang melalui terminal collector yaitu 29 mA. Nilai arus ini
lebih kecil dari 150 mA, sehingga berdasarkan data sheet transistor yang digunakan
diperoleh nilai penguatan arus (hFE) minimal sebesar 25 kali, sehingga untuk mencari
nilai RB dapat dilakukan dengan langkah sebagai berikut.
IB = 𝐼𝑐
ℎ𝐹𝐸
IB = 29 𝑚𝐴
25
= 1.16 mA
Dari persamaan: IB . RB + VBE = VB maka diperoleh:
𝑅𝑏 =Vb − Vbe
Ib
VB merupakan input yang diperoleh dari pin mikrokontroler yang berlogika 1
(5V) sedangkan VBE bernilai 0.7V (transistor menggunakan diode silikon), sehingga:
𝑅𝑏 =5 − 0.7
1.16 mA
= 3.707 Ω ≈ 3kΩ
Maka diperoleh nilai tahanan basis (RB) sebesar 3 kΩ
Kondisi awal driver relay dalam keadaan terbuka (NO). Ketika arduino
menerima tegangan masukan dari masing-masing sensor, maka pin 4, pin 5, dan pin 6
(yang digunakan di mikrokontroller) akan memberikan tegangan 5V ke relay dan akan

44
bekerja menggerakkan koil kontaktor. Pada kondisi ini, PLC akan terhubung dengan
sumber tegangan yang kemudian memberikan masukuan pada PLC untuk bekerja.
3.4.6 PLC CP1E N30DR-A
PLC ini memiliki 18 masukan dan 12 keluaran dan kapasitas program 8K step
serta kapasitas data memori 8K words, konsumsi arus 0.21 A pada tegangan 5 V dan
0.07 A pada tegangan 24 V, tipe keluaran yaitu Relay. Bekerja pada tegangan rata-rata
85-264 VAC dan suplai tegangan 100-240 VAC. Frekuensi masukan 50/60 Hz, arus 20
A pada 120 VAC untuk maksimal 8 ms dan 40 A pada 240 VAC untuk maksimal 8
ms, konsumsi daya dalam VA adalah maksimal 50 VA dan tegangan sebesar 100-240
VAC. PLC omron CP1E N30DR-A dapat dilihat pada Gambar 3.8.
Gambar 3.9 PLC Omron CP1E N30DR-A
3.4.7 Perancangan Perangkat Lunak Pengendalian PLC
Alokasi memori input/output dan timer yang digunakan pada proses
pengontrolan dan metode pengujian pada PLC tersebut, diperlihatkan pada Tabel 3.2
dan Tabel 3.3 berikut ini:

45
Tabel 3.2 Daftar Input/Output dan Timer
No. Device Fungsi Kondisi
1 0.00 Tombol START NO
2 0.01 Tombol STOP NC
3 0.02 Relai 1 ON saat sensor tegangan baterai 1 mendeteksi adanya tegangan pada PV dan baterai PLTS saat kondisi >=80% yaitu sebesar >65 VDC dan >51.5 VDC
NO
4 0.03 Relai 3 ON saat sensor tegangan PLN mendeteksi adanya tegangan pada PLN
NO
5 0.04 Relai 2 ON saat sensor tegangan baterai 2 mendeteksi adanya tegangan pada baterai PLTS saat kondisi >=50% yaitu sebesar >48 VDC.
NO
6 20.00 Internal relai keluaran sekaligus kontak untuk mengunci program saat dijalankan
NO
7 T000 Timer untuk delai waktu ON inverter (100.04) selama 3 detik
NO
8 T001 Timer untuk delai waktu ON kontaktor PLN (100.03) selama 3 detik
NO
9 100.02 Keluaran sekaligus kontak untuk kontaktor PLTS yang menghubungkan suplai PLTS ke beban
NO
10 100.03 Keluaran sekaligus kontak untuk kontaktor PLN yang menghubungkan suplai PLN ke beban
NO
11 100.04 Keluaran sekaligus kontak untuk inverter NO

46
Tabel 3.3 Metode pengujian program diagram ladder PLC
No 0.00
Start
0.01
Stop
0.02
Relay 1
PV &
Bat.
80%
0.03
Bat.
50%
0.04
PLN
20.00
Internal
Relay
T000
Timer
T001
Timer
Q.100.02
Kontaktor
PLTS
Q.100.03
Kontaktor
PLN
Q.100.04
Inverter
Keterangan
1 ON OFF OFF OFF OFF ON OFF OFF OFF OFF OFF PLC ON
2 ON OFF ON ON ON ON ON OFF ON OFF ON PLTS
menanggung
beban
3 ON OFF OFF ON ON ON OFF ON OFF ON OFF PLN
menanggung
beban
4 ON OFF OFF OFF ON ON ON OFF ON OFF ON PLTS
menanggung
beban

47
3.4.8 Perancangan Pemrograman Diagram Ladder PLC
Software yang digunakan oleh PLC ini adalah CX Programmer dengan model
Ladder Digram (Diagram Tangga). Ladder Diagram ini berupa pemrograman berbasis
logika relai, cocok digunakan untuk persoalan-persoalan kontrol diskrit yang kondisi
input outputnya hanya memiliki dua kondisi yaitu ON dan OFF.
Diagram ini sendiri terdiri dari dua buah garis vertikal yang
melambangkan daya. Komponen-komponen rangkaian disambungkan sebagai garis-
garis horisontal yang merupakan anak tangga. Gambar 3.9 dibawah ini adalah model
dalam bentuk ladder diagram.
Gambar 3.10 Program Ladder Diagram PLC
a. Latching (Penguncian)
Internal relay di sini berefungsi untuk menahan suatu keluaran (output) untuk
suatu masukan yang sifatnya sementara. Hal ini diperlihatkan pada Gambar 3.11 di
bawah ini.
Gambar 3.11 Internal relay sebagai pengunci (latching)

48
Pada Gambar 3.11 di atas bahwa input 0.00 (Star) normaly open (NO) dan
kontak 0.01 (Stop) normaly close (NC). Ketika input 0.00 (Star) dalam kondisi ON
maka internal relay 20.00 akan mengunci output kontak-kontak lain tetap dalam
kondisi ON walaupun input 0.00 (Star) krmbali pada kondisi OFF.
b. Timmer 00
Timer 00 pada Program ini menggunakan timer on-delay yaitu jenis timer
yang akan aktif setelah waktu tunda yang telah ditetapkan tercapai. Hal ini
diperlihatkan pada Gambar 3.12 di bawah ini.
Gambar 3.12 Operasi Timer 00
Pada Gambar 3.12 di atas bahwa internal relay 20.00 terhubung dengan
kontak 0.02 (relay 1) NO yang di pasang paralel dengan kontak 0.04 (relay 2) NO
dan anak kontak lain yaitu kontak (0.02 dan kontak 0.03) normaly close (NC).
Ketika kontak 0.02 dan 0.04 ON (aktif) maka anak kontaktor 0.02 yang tadinya
normaly close (NC) maka akan terbuka sehingga mengaktifkan timer dengan delay
waktu 3 detik.
c. Kontak Inverter
Kontak inverter digunakan sebagai output pada PLC yang menghidupkan dan
mematikan tombol switch ON/OFF pada inverter. Hal ini dapat diperlihatkan pada
Gambar 3.13 di bawah ini.
Gambar 3.13 Kontak Inverter
Pada Gambar 3.13 di atas bahwa internal relay terhubung dengan kontak
T000 (Timer) dan anak Kontak 100.03 (kontaktor PLN) normaly close. Ketika timer
aktif dengan delay waktu 3 detik telah tercapai, maka T000 akan mengaktifkan
output 100.04 (inverte) sehingga switch pada inverter ON atau inveter hidup.
d. Kontaktor PLTS
Kontakor PLTS pada program ini digunakan untuk mengubungkan suplai
PLTS ke beban. Hal ini diperlihatkan pada Gambar 3.14 di bawah ini.

49
Gambar 3.14 Kontaktor PLTS
Pada Gambar 3.14 di atas bahwa internal relay terhubung langsung dengan
kontak 100.04 (inverter). Ketika inverter telah aktif maka kontak inverter
mengaktifkan output 100.02 (Kontaktor PLTS) sehingga supalai PLTS terhubung ke
beban.
e. Timmer 01
Timer 01 pada Program ini menggunakan timer on-delay yaitu jenis timer
yang akan aktif setelah waktu tunda yang telah ditetapkan tercapai. Hal ini
diperlihatkan pada Gambar 3.15 di bawah ini.
Gambar 3.15 Opersai Timer 01
Pada Gambar 3.15 di atas bahwa internal ralay yang terhubung dengan
kontak 0.03 (relay 3) NO dan anak kontak 0.02 (relay 1) NC. Ketika kontak 0.03
(relay 3) aktif (ON) maka akan mengaktifkan timer 01 dengan waktu delay 3 detik.
f. Kontaktor PLN
Kontak PLN pada program ini digunakan untuk mengubungkan suplai PLN
ke beban. Hal ini diperlihatkan pada Gambar 3.16 di bawah ini.
Gambar 3.16 Kontaktor PLN
Pada Gambar 3.16 di atas bahwa internal relay terhubung dengan kontak 0.03
(relay 3), T001 (Timer 01) dan anak kontak lainnya yaitu kontak 100.02 (kontaktor
PLTS) normaly close). Ketika kontak 0.03 (relay 3) aktif maka akan mengaktifkan
output 100.03 (Kontaktor PLN) sehingga suplai PLN terhubung ke beban.

50
3.4.9 Power Suplai 24 VDC dan 5 VDC Sulpai 24 VDC di hubungkan ke baterai PLTS untuk menyuplai PLC, karena
PLC harus tetap ON ketika beroperasi memindahkan suplai PLTS yang terhubung ke
beban ke suplai PLN dan begitu pula sebaliknya. Tegangan baterai yang digunakan
yaitu sebesar 26 V – 40 V sedangakan suplai PLC membutuhkan 24 VDC, untuk itu
dirancang sebuah regulator 24 VDC menggunakan LM7824 supaya tegangan keluaran
regulator tetap konstan 24 VDC. LM7824 memilik tegangan kerja minimum 26 V dan
maksimum 40 V dengan toleransi tegangan outputnya sebesar ±2% - 4%. Suplai 5 VDC
digunakan untuk menyuplai arduino nano saat menjalankan program yang disensor oleh
sensor tegangan. Rangakain regulator 24 V dan 5 VDC dapat dilihat pada Gambar 3.17.
Gambar 3.17 Rangakaian Regulator 24 VDC
Pada Gambar 3.16 di atas tegangan baterai yang digunakan antara 26 V – 40 V
kemudian di turunkan menjadi 24 V konstan yang nantinya digunakan untuk menyuplai
PLC selanjutnya dari 24 V diturunkan menjadi 5 V untuk menyuplai arduino nano.
3.5 Diagram Alir Penelitian dan Pengujian
Diagram alir ini merupakan petunjuk dasar tentang garis besar cara
merancangan kontrol otomatis menggunakan PLC. Blok yang dimaksud dapat dilihat
pada Gambar 3.18.
BAT12.5V
C1100uF
C3100uF
VI1 VO 3
GN
D2
U17824
VI1 VO 3
GN
D2
U27805
C410uF
C20.103uF
Q1TIP31
R110
D1LED-GREEN
R3100
D2LED-GREEN
D3DIODE
BAT112.5V
BAT212.5V
D4DIODE

51
Mulai
Inisialisasi Sensor TeganganModul PV dan Baterari >=80%
Baterai >=50%PLN
Baca Sensor Tegangan Modul PV dan Baterai >=80%
Tegangan Modul PV dan Baterai >=80%
Mencukupi?
Relay 1 Aktif
A
Ada Tegangan PLN?
Baca Sensor Tegangan PLN
Relay 3 Aktif
A
Tegangan 50% Mencukupi?
Baca Sensor Tegangan Baterai >=50%
Relay 2 Aktif
Tegangan Baterai OFF dan Tegangan PLN OFF?
Stop
A
A
Ya
Ya
Ya
Tidak
Ya
Tidak
Delay 3 detik Inverter ON
Inverter dan Kontaktor PLTS ON
PLTS Menanggung Beban
Kontaktor PLN ON
PLN Menanggung Beban
Delay 3 detik Kontaktor PLN ON
Tidak
Tidak
Gambar 3.18 Diagram Alir Penelitian

52
Mulai
Inisialisasi Sensor TeganganModul PV dan Baterari >=80%
Baterai >=50%PLN
Baca Sensor Tegangan Modul PV dan Baterai >=80%
Tegangan Modul PV dan Baterai >=80%
Mencukupi?
Relay 1 Aktif
A
Ada Tegangan PLN?
Baca Sensor Tegangan PLN
Relay 3 Aktif
A
Tegangan 50% Mencukupi?
Baca Sensor Tegangan Baterai >=50%
Relay 2 Aktif
Tegangan Baterai OFF dan Tegangan PLN OFF?
Stop
A
A
Ya
Ya
Ya
Tidak
Tidak
Tidak
Ya
Tidak
Gambar 3.19 Diagram Alir Pengujian Sensor Tegangan pada Ardiuno

53
Mulai
Inisialisasi Relay:Relay 1Relay 2Relay3
Relay 2 Aktif?Relay 1 Aktif? Relay 3 Aktif?
Relay2Relay 1 Relay 3
Delay 3 detik Inverter ON
Kontaktor PLN ON
Inverter dan Kontaktor PLTS ON
PLTS Menanggung Beban
PLN Menanggung Beban
A B
B
Ya Ya
Tidak
Suplai PLTS OFF dan Suplai PLN OFF?
Ya
Stop
Ya
TidakC
C
Tidak
A
A
Tidak
Gambar 3.20 Diagram Alir Pengujian PLC

54
3.6 Teknik Pengujian PLC
Setelah alat ini jadi sesuai dengan perancangan atau sesuai dengan perintah yang
diinginkan yaitu dapat memindahkan sumber utama PLTS yang terhubung ke beban ke
sumber cadangan PLN dan begitu pula sebaliknya secara otomatis menggunakan PLC,
maka alat ini akan dilakukan beberapa pengujian diantaranya :
• Pengujian saat kondisi normal
• Pengujian saat PV <65V dan baterai PLTS saat kapasitas penyimpanan daya
kurang 80% yaitu <51.5V dan PLN suplai beban
• Pengujian saat PLN padam dan kapasitas penyimpanan daya baterai PLTS
>=50% yaitu >48V
55
BAB IV
HASIL DAN PEMBAHASAN
4.1 Pengujian Sistem
Dalam melakukan pengujian perlu mengetahui kinerja dan kemampuan sistem
yang dirancang, maka dilakukan beberapa pengujian peralatan baik pengujian
perangkat keras (hardware) maupun pengujian perangkat lunak (software), untuk
memudahkan penulis dalam melakukan proses pengujian alat, maka pengujian
dilakukan secara terpisah dan secara keseluruhan. Adapun proses pengujian yang
dilakukan meliputi:
1. Pengujian Rangkaian Sensor Tegangan
2. Pengujain Rangkaian Driver Relay
3. Pengujian PLC
a. Pengujian Program Ladder
b. Hasil Pengujian
4.1.1 Pengujian Rangkaian Sensor Tegangan
Rangkaian sensor tegangan berfungsi sebagai mendetekis tegangan, baik
teganga dari modul PV, Baterai maupun dari PLN, hal ini dilakukan agar sensor dapat
dideteksi dengan menggunakan mikrokontroller. Rangkaian sensor tegangan ini terdiri
dari :
1. Sensor tegangan dari modul PV, dimana tegangan yang di sensor yaitu
tegangan >65 Volt.
2. Sensor tegangan dari baterai, dimana tegangan yang di sensor disini
memiliki dua kondisi yaitu, kondisi pertama saat kapasitas penyimpanan
daya 80% - 100% dimana pada kondisi ini sebanding dengan tegangan
sebesar 51.5 Volt – 52.5 Volt. Kondisi kedua saat kapasitas penyimpanan
daya 50% - 100% dimana pada kondisi ini sebanding dengan tegangan
sebesar 48.0 Volt – 52.5 Volt.
3. Sensor tegangan dari PLN, dimana tegangan yang di sensor yaitu tegangan
antara 200 Volt – 220 Volt.

56
Berikut ini merupakan sensor tegangan yang telah di buat berdasarkan
perbandingan dari masing-masing sensor yaitu: sensor tegangan PV perbandingannya
65:3.5, artinya apabila tegangan input sensor 65 VDC maka tegangan output sensor
adalah 3.5 VDC. Sensor tegangan baterai saat kapasitas penyimpanan daya baterai
>=50% perbandingannya 48:3.76, artinya apabila tegangan input sensor 48 VDC maka
tegangan output sensor adalah 3.76 VDC. Sensor tegangan baterai saat kapasitas
penyimpanan daya baterai >=80% perbandingannya 51.5:4, artinya apabila tegangan
input sensor 51.5 VDC maka tegangan output sensor adalah 4 VDC. Sensor tegangan
PLN perbandingan 220:3.6, artinya apabila tegangan input sensor 220 VAC maka
tegangan output sensor adalah 3.6 VDC. Penelitian ini menggunakan variabel power
supply yang ada di Laboratorium Sistem Tenaga agar tegangan yang masuk ke dalam
sensor dapat di ubah-ubah sehingga hasilnya adalah semakin besar tegangan input
sensor maka tegangan output sensor juga semakin besar.
4.1.1.1 Pengujian Sensor Tegangan Baterai >=51.5V dan >=48V
Rangkaian pembagi tegangan digunakan untuk pembacaan data tegangan pada
baterai PLTS.
Gambar 4.1 Pengujian Sensor Tegangan Baterai >=51.5V dan >=48V
Hasil pengukuran tegangan keluaran dari sensor tegangan baterai >=51.5V dan
>=48V dapat dilihat pada Tabel 4.1.

57
Tabel 4.1 Nilai tegangan input dan output sensor tegangan baterai
>=51.5V dan >=48V
No Kapasitas
penyimpanan daya Baterai
Vint (VDC)
Vout (VDC)
1
>=50%
48 3.7 2 49 3.8 3 50 3.9 4 51 3.9 5
>=80%
51.5 4 6 52 4 7 53 4.1 8 54 4.2 9 55 4.3 10 56 4.4
Dari Tabel 4.1 di atas dapat dilihat bahwa sensor mendeteksi adanya tegangan
saat kapasitas penyimpanan daya baterai >=50% tegangan inputnya >=48V dan tegagan
outputnya >=3.7V maka output arduino pin 5 mengaktifkan relai 2 yang terhubung ke
PLC, apabila tegangan kurang dari 48V maka relai 2 tidak bekerja atau dinonaktifkan.
Saat kapasitas penyimpanan daya baterai >=80% tegangan inputnya >=51.5V dan
tegagan outputnya >=4V maka output arduino pin 4 mengaktifkan relai 1 yang
terhubung ke PLC, apabila tegangan kurang dari 51.5V maka relai 1 tidak bekerja atau
di nonaktifkan. Sehinnga untuk menguji apakah sensor tegangan dapat bekerja, dari
hasil pengujian tersebut kemudian dibuat grafik pengujian sensor.
Grafik Pengujian Sensor Tegangan Saat Kapasitasd Penyimpanan Daya Baterai
>=80% dan >=50%
Gambar 4.2 Grafik Pengujian Sensor Tegangan Saat Kapasitas Penyimpanan
Daya Baterai >=80% dan >=50%
3.7 3.8 3.9 3.9 4 4 4.1 4.2 4.2 4.4
3.23.43.63.8
44.24.44.6
48 49 50 51 51.5 52 53 54 55 56
Vout
put
Vinput

58
Setelah diperoleh nilai keluaran dari sensor tegangan yang digunakan, kemudian
dikonversikan nilai-nilai tegangan output tersebut kedalam nilai ADC.
Standar sensor tegangan yang digunakan yaitu:
1. Tegangan input batas bawah saat kapasitas penyimpanan daya baterai 80%
yaitu 51.5 VDC yang diwakili dengan tegangan output sebesar 4 VDC, dan
saat penyimpanan daya baterai 50% yaitu 48 VDC yang diwakili dengan
tegangan outpu sebesar 3.7 VDC.
2. Tegangan input batas atas saat kapasitas penyimpanan daya baterai (80%
dan 50%) adalah 56 VDC yang diwakili dengan tegangan output sebesar 4.4
VDC.
4.1.1.2 Pengujian Sensor Tegangan Modul PV
Rangkaian pembagi tegangan digunakan untuk pembacaan data tegangan pada
sistem monitoring Modul PV.
Gambar 4.3 Pengujia Sensor Tegangan PV
Hasil pengukuran tegangan keluaran dari sensor tegangan baterai PV dapat
dilihat pada Tabel 4.2.
Tabel 4.2 Nilai tegangan input dan output sensor tegangan PV
No. VInput (VDC) VOutput (VDC)
1 65 3.5
2 70 3.9
3 75 4.2
4 80 4.5
5 85 4.6
6 90 4.6

59
Dari Tabel 4.2 di atas dapat dilihat bahwa sensor mendeteksi adanya tegangan
pada PV yaitu tegangan inputnya >65V dan tegangan outputnya >3.5V maka output
arduino pin 4 mengaktifkan relai 1 yang terhubung ke PLC, apabila tegangan kurang
dari 65V maka relai 1 tidak bekerja atau dinonaktifkan. Sehingga untuk menguji apakah
sensor tegangan dapat bekerja, dari hasil pengujian tersebut kemudian dibuat grafik
pengujian sensor.
Grafik Pengujian Sensor Tegangan PV
Gambar 4.4 Grafik Pengujian Sensor Tegangan PV
Setelah diperoleh nilai keluaran dari sensor tegangan yang digunakan, kemudian
dikonversikan nilai-nilai tegangan output tersebut kedalam nilai ADC.
Standar sensor tegangan yang digunakan yaitu:
1. Tegangan input batas bawah 65 VDC yang diwakili dengan tegangan output
sebesar 3.5 VDC.
2. Tegangan input batas atas 90 VDC yang diwakili dengan tegangan output
sebesar 4.6 VDC.
4.1.1.3 Pengujian Sensor Tegangan PLN
Rangkaian pembagi tegangan digunakan untuk pembacaan data tegangan pada
sistem monitoring PLN.
3.5 3.9
4.2 4.5 4.6 4.6
00.5
11.5
22.5
33.5
44.5
5
65 70 75 80 85 90

60
Gambar 4.5 Pengujian Sensor Tegangan PLN
Hasil pengukuran tegangan keluaran dari sensor tegangan PLN dapat dilihat
pada Tabel 4.3.
Tabel 4.3 Nilai tegangan input dan output sensor tegangan PLN
No. VInput (VAC) VOutput (VDC)
1 190 3.1
2 200 3.3
3 210 3.4
4 220 3.6
5 230 3.8
6 240 3.9
Dari Tabel 4.3 di atas dapat dilihat bahwa sensor mendeteksi adanya tegangan
PLN yaitu tegangan inputnya >200 VAC dan tegangan outputnya >3.3VDC maka output
arduino pin 6 mengaktifkan relai 3 yang terhubung ke PLC, apabila tegangn kurang dari
200VAC maka relai tidak bekerja atau dinonaktifkan. Sehingga untuk menguji apakah
sensor tegangan dapat bekerja, dari hasil pengujian tersebut kemudian dibuat grafik
pengujian sensor.
TR1
TRAN-2P2S
BR1
B125C1000
R1200k
R24.7k
C1470uF
VR1VARISTOR
DIG
ITA
L (~
PW
M)
AN
AL
OG
IN
AT
ME
GA
328P
-PU
1121
~~
~
~~
~
AP
K-T
EC
H | te
ch
no
-ap
k.b
log
sp
ot.c
om
TXRX PD0/RXD 0PD1/TXD 1PD2/INT0 2PD3/INT1 3PD4/T0/XCK 4PD5/T1 5PD6/AIN0 6PD7/AIN1 7
PB0/ICP1/CLKO 8PB1/OC1A 9PB2/SS/OC1B 10PB3/MOSI/OC2A 11PB4/MISO 12PB5/SCK 13
AREF
PC5/ADC5/SCLA5 PC4/ADC4/SDAA4 PC3/ADC3A3 PC2/ADC2A2 PC1/ADC1A1 PC0/ADC0A0
RESET
DUINO1
ARDUINO UNO R3
+88.8Volts

61
Grafik Pengujian Sensor Tegangan PLN
Gambar 4.6 Grafik Pengujian Sensor Tegangan PLN
Setelah diperoleh nilai keluaran dari sensor tegangan yang digunakan, kemudian
dikonversikan nilai-nilai tegangan output tersebut kedalam nilai ADC.
Standar sensor tegangan yang digunakan yaitu:
1. Tegangan input batas bawah 200 VAC yang diwakili dengan tegangan
output sebesar 3.3 VDC.
2. Tegangan input batas atas 240 VAC yang diwakili dengan tegangan output
sebesar 3.9 VDC.
4.1.2 Pengujain Rangkaian Driver Relay
Rangkaian pensaklaran berfungsi sebagai driver relay, hal ini bertujuan sebagai
inputan dari PLC, sehingga PLC dapat mengaktifkan kontaktor yang terhubung ke
sumber energi listrik. Relay ini dapat dikendalikan melalui mikrokontroller. Pengujian
rangkaian driver relay bertujuan untuk mengetahui kemampuan rangkaian driver
dalam menggerakkan relay dengan tegangan masukan dari pin (4, 5, dan 6) arduino.
Rangkaian driver relay ini berfungsi setelah semua sensor memenuhi kriteria yang
telah di tentukan. Untuk lebih jelas pengujian rangkaian driver relay yang dilakukan
dapat dilihat pada Gambar 4.7.
3.1 3.3 3.4 3.6 3.8 3.9
0
1
2
3
4
5
190 200 210 220 230 240
Vout
put (
V)
Vinput (V)

62
Gambar 4.7 Pengujian Driver Relay
Pengujian driver relay dilakukan dengan mengukur tegangan masukan driver
relay (Vinput) yang terhubung dengan pin (4, 5, dan 6) dan tegangan relay (Vrelay) untuk
mengetahui arus yang mengalir melalui relay. Hasil pengukuran tegangan masukan
driver relay dari arduino yaitu sebesar 4.2 V. Sedangkan hasil pengukuran tegangan
relay yaitu sebesar 23.2 V. Berdasarkan hasil pengukuran tersebut dapat diketahui arus
yang melalui relay dan arus penguatan pada driver relay menggunakan persamaan
berikut.
IRelay = 𝑉𝑟𝑒𝑙𝑎𝑦𝑅𝑙𝑖𝑙𝑖𝑡𝑎𝑛
(4-1)
= 23.2 𝑉
1600 Ω
= 14.5 mA
ILed = (𝑉𝑟𝑒𝑙𝑎𝑦−𝑉𝑙𝑒𝑑)
𝑅𝑙𝑒𝑑 (4-2)
= 23.2 𝑉− 1.6 𝑉
2200 Ω
= 9.82 mA
IC = IRelay + ILED (4-3)
= 14.5 mA + 9.82 mA
= 24.32 mA
IB = (𝑉𝑖𝑛𝑝𝑢𝑡−𝑉𝐵𝐸)
𝑅𝐵 (4-4)
= 4.2 𝑉− 0.7 𝑉
3000 Ω
= 1.167 mA
R11k
Q2BD139
D1DIODE
R22.2k
VCC 24V
RL1OMIH-SH-124L
D2LED-YELLOW
DIG
ITAL (~PWM
)
ANALO
G IN
ATM
E GA3
28P-
PU11
21
~~
~
~~
~
AP
K-T
EC
H | techno-apk.blogspot.com
TXRX PD0/RXD 0PD1/TXD 1PD2/INT0 2PD3/INT1 3PD4/T0/XCK 4PD5/T1 5PD6/AIN0 6PD7/AIN1 7
PB0/ICP1/CLKO 8PB1/OC1A 9PB2/SS/OC1B 10PB3/MOSI/OC2A 11PB4/MISO 12PB5/SCK 13
AREF
PC5/ADC5/SCLA5 PC4/ADC4/SDAA4 PC3/ADC3A3 PC2/ADC2A2 PC1/ADC1A1 PC0/ADC0A0
RESET
DUINO1
ARDUINO UNO R3
+88.8Volts
+88.8Volts
D3
LED-YELLOW
B124V

63
Berikut ini keterangan dari persamaan (4-1) sampai persamaan (4-5) yaitu:
IRelay = Arus yang melalui relay (A)
VRelay = Tegangan pada lilitan realy (V)
Rlilitan = Hambatan lilitan ralay (Ω)
ILED = Arus yang melalui LED (A)
IC = Arus yang melalui terminal collector (A)
IB = Arus yang melalui terminal basis (A)
VLED = Tegangan pada LED (V)
RLED = Hambatan yang terhubung dengan LED (V)
Vinput = Tegangan masukan driver relay (V)
Dari persamaan (4-1) dan (4-2) diperoleh arus yang mengalir melalui relay
sebesar 14.5 mA dan arus yang melalui LED sebesar 9.82 mA, sehingga dengan
persamaan (4-3) diperoleh arus yang melalui terminal collector sebesar 24.32 mA,
untuk persamaan (4-4) diperoleh arus yang memalui terminal basis sebesar 1.167 mA.
Hasil pengujiannya adalah ketika kondisi awal driver relay dalam keadaan terbuka
(NO), arduino menerima tegangan masukan dari masing-masing sensor, maka pin 4,
pin 5, dan pin 6 (yang digunakan di mikrokontroller) akan memberikan tegangan 4.2 V
ke relay dan akan mengaktifkan kontak koil yang ada pada inputan PLC. Pada kondisi
ini, PLC langsung memberikan perintah untuk menjalankan program yang sudah
dibuat.
3.1.3 Pengujian PLC
Pengujian ini dilakukan untuk mengetahui apakah PLC yang digunakan dapat
mengendalikan sinyal input/output dengan baik dan benar, untuk itu dilakukan
pengujian dengan menjalankan program pengujian dengan langkah-langkah sebagai
berikut:
4.1.3.1 Pemrograman Ladder
a. Latching
Latching adalah program penguncian, disajikan pada Gambar 4.8.

64
Gambar 4.8 Latching
Berdasarkan Gambar 4.8 Coil internal PLC (20.00) disini bekerja sebagai
latching, sehingga ketika 20.00 aktif satu kali, maka 20.00 akan tetap aktif dan
mengaktifkan anak kontak 20.00 dan tetap memberikan suplai pada ladder yang lain
ketika akan aktif. Koil 0.00 merupakan kontak (ON) untuk mengaktifkan program
pada PLC dan koil 0.01 merupakan kontak (OFF) untuk mematikan program.
b. Kondisi Normal PLTS
Diagram ladder pada Gambar 4.9 merupakan pemindahan suplai PLTS yang
terhubung ke beban ketika koil relai 1 (0.02) mendeteksi adanya teganngan baterai dan
PV yaitu sebesar >51.5V dan >65V.
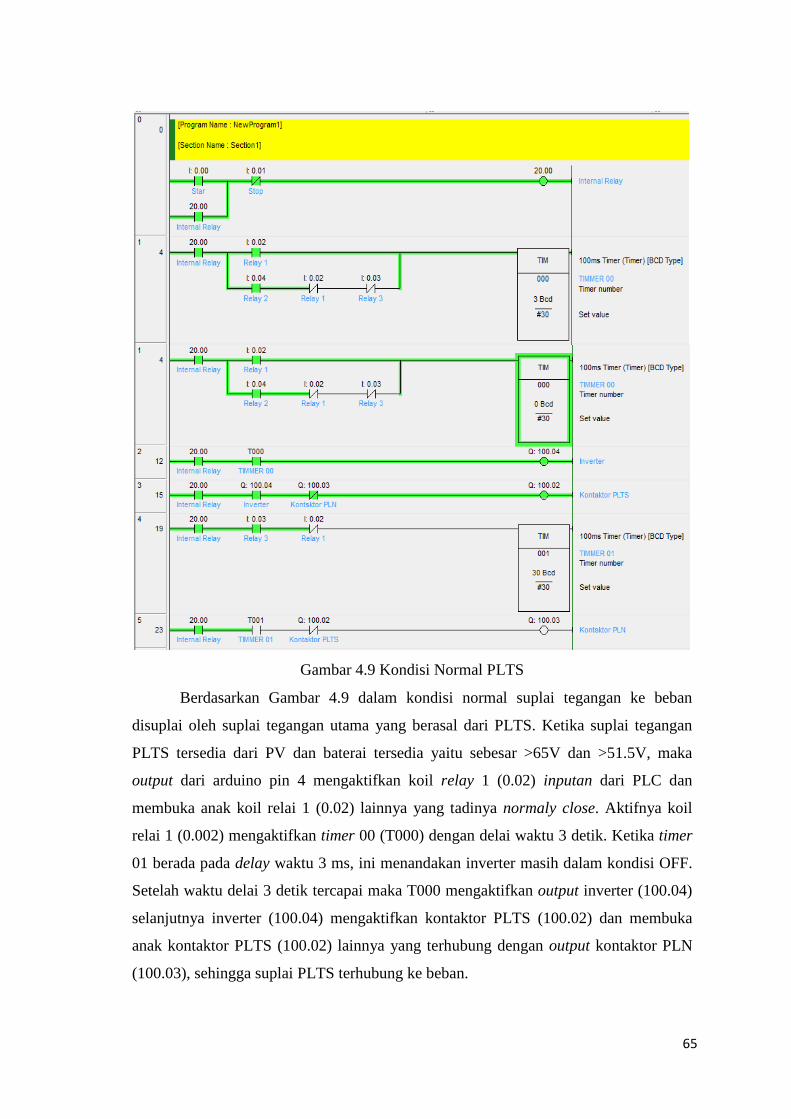
65
Gambar 4.9 Kondisi Normal PLTS
Berdasarkan Gambar 4.9 dalam kondisi normal suplai tegangan ke beban
disuplai oleh suplai tegangan utama yang berasal dari PLTS. Ketika suplai tegangan
PLTS tersedia dari PV dan baterai tersedia yaitu sebesar >65V dan >51.5V, maka
output dari arduino pin 4 mengaktifkan koil relay 1 (0.02) inputan dari PLC dan
membuka anak koil relai 1 (0.02) lainnya yang tadinya normaly close. Aktifnya koil
relai 1 (0.002) mengaktifkan timer 00 (T000) dengan delai waktu 3 detik. Ketika timer
01 berada pada delay waktu 3 ms, ini menandakan inverter masih dalam kondisi OFF.
Setelah waktu delai 3 detik tercapai maka T000 mengaktifkan output inverter (100.04)
selanjutnya inverter (100.04) mengaktifkan kontaktor PLTS (100.02) dan membuka
anak kontaktor PLTS (100.02) lainnya yang terhubung dengan output kontaktor PLN
(100.03), sehingga suplai PLTS terhubung ke beban.

66
c. Pemindahan PLTS ke PLN
Diagram ladder pada Gambar 4.10 merupakan pemindahan suplai PLTS yang
terhubung ke beban ke suplai PLN ketika koil relai 1 (0.02) kekurangan daya.
Gambar 4.10 Perpindahan suplai PLTS yang terhubung ke beban ke suplai PLN
Berdasarkan Gambar 4.10 apabila suplai PLTS yang terhubung ke beban
terputus, maka koil relai 1 (0.02) tidak mendeteksi tegangan masukkan dari output
arduino pin 4 yaitu tegangan baterai dan PV (>51,5V dan >65V), sehingga
memutuskan output koil kontaktor PLTS (100.02) yang terhubung ke beban dan koil
inverter (100.04) serta menutup kembali anak koil relai 1 (0.02) lainnya yang tadinya
terbuka. Koil relai 3 (0.03) aktif jika tegangan output dari arduino pin 6 yaitu tegangan
PLN terdeteksi sebesar >200VAC. Aktifnya koil relai 3 (0.03) mengaktifkan timer 01
(T001) dengan delai waktu 3 detik dan membuka anak kontak relai 3 (0.03) lainnya
yang tadinya normaly close. Ketika timer 01 berada pada delay waktu 5 ms, ini
menandakan kontaktor PLN masih dalam kondisi OFF. Setelah waktu delai 3 detik
tercapai maka T001 mengaktifkan output kontaktor PLN (100.03) dan membuka anak

67
kontaktor PLN (100.03) lainnya yang terhubung dengan output komtaktor PLTS
(100.02), sehingga suplai PLN terhubung ke beban.
d. Perpindahan PLN ke PLTS
Diagram ladder pada Gambar 4.11 merupakan pemindahan dari suplai daya
PLN yang terhubung ke beban ketika mengalami pemadaman ke suplai daya PLTS.
Gambar 4.11 Pemindahan suplai PLN yang terhubunh kek beban ke suplai PLTS
Berdasarkan gambar 4.11 apabila suplai PLN yang terhubung ke beban
mengalami pemadaman, maka koil relai 3 (0.03) tidak mendeteksi tegangan masukkan
dari output arduino pin 6 yaitu tegangan PLN >200VAC, sehingga memutuskan output
koil kontaktor PLN (100.03) yang terhubung ke beban dan menutup kembali anak koil

68
kontaktor PLN (100.03) dan anak koil relai 3 (0.03) lainnya yang tadinya terbuka. Koil
relai 2 aktif jika tegangan dari output arduino pin 5 yaitu teganga baterai terdeteksi
sebesar >48V. Aktifnya koil relai 2 (0.04) mengaktifkan timer 00 (T000) dengan delai
waktu 3 detik. Ketika timer 00 (T000) berada pada delay waktu 13 ms, ini menandakan
inverter masih dalam kondisi OFF. Setelah waktu delai 3 detik tercapai maka T000
mengaktifkan output inverter (100.04) selanjutnya inverter (100.04) mengaktifkan
kontaktor PLTS (100.02) dan membuka anak kontaktor PLTS (100.02) lainnya yang
terhubung dengan output kontaktor PLN (100.03), sehingga suplai PLTS terhubung ke
beban.
4.1.3.2 Hasil Pengujian
a. Pengujian saat kondisi normal
Tabel 4.4 Pengujian saat kondisi normal
No
Relay 1
PV & Baterai
>=80%
Relay 2
Baterai
>=50%
Relay 3
PLN
Inverter Kontaktor
PLTS Kontaktor
PLN Waktu
1 On On On On On Off -
Pada Tabel 4.4 merupakan hasil pengujian pada saat kondisi normal. Pada
pengujian ini, Relay 1, Relay 2, Relay 3, dan inverter berada pada posisi ON. Pada
posisi ini suplai energi listrik tetap di ambil alih oleh Kontaktor PLTS, sehingga switch
PLTS bekerja menghubungkan suplai PLTS ke beban sedangkan kontaktor PLN dalam
kondisi terbuka (OFF).
b. Pengujian saat PV <65V dan Baterai PLTS saat kapasitas penyimpanan daya kurang
80% yaitu <51.5V dan PLN suplai Beban

69
Tabel 4.5 Pengujian saat PV <65V dan Baterai PLTS saat kapasitas penyimpanan daya
kurang 80% yaitu <51.5V dan PLN suplai Beban
No
Relay 1 Relay 2 Relay 3
PLN Inverter Kont. PLTS
Kont. PLN Waktu Ket PV &
Baterai >=80%
Baterai >=50%
1 On On On On On Off -
PLTS suplai beban
2 Off On On Off Off
Off 5 ms
Switch PLTS OFF, dan switch inverter OFF, switch PLN masih OFF
On 3 s
switch PLN On, suplai PLN terhubung ke beban
Pada Tabel 4.5 merupakan hasil dari pengujian saat PV <65V dan kapasitas
penyimpanan daya baterai PLTS kurang 80% yaitu <51.5V dan PLN suplai beban.
Pada saat melakukan pengujian, relay 2 dan relay 3 berada pada posisi ON sedangkan
relay 1 OFF. Setelah relai 1 OFF maka PLC memerintahkan output-nya untuk
memutuskan (OFF) inverter dan memutuskan (OFF) switch kontaktor PLTS yang
terhubung ke beban. suplai PLTS OFF mengakibatkan suplai energi listrik dari suplai
utama PLTS tidak tersedia, sehingga switch kontaktor PLTS tidak bekerja/memutuskan
hubungan dari suplai PLTS ke beban. Tidak tersedianya energi listrik dari suplai utama
akan di back-up sementara oleh suplai PLN hingga PLTS mendapatkan suplai daya
yang cukup. Disamping itu proses pemindahan suplai energi listrik PLTS yang
terhubung ke beban ke suplai energi listrik PLN membutuhkan waktu delai 3 detik.
Ketika waktu delai berada pada 5 ms menandakan bahwa PLN masih dalam kondisi
OFF. Setelah delai waktu 3 detik tercapai maka switch kontaktor PLN langsung ON
sehingga switch kontaktor PLN bekerja untuk menghubungkan suplai PLN ke beban

70
c. Pengujian saat PLN padam dan kapasitas penyimpanan daya Baterai PLTS >=50%
yaitu >48V
Tabel 4.6 Pengujian saat PLN padam dan kapasitas penyimpanan daya Baterai PLTS
>=50% yaitu >48V
No
Relay 1 Relay 2 Relay 3
Inverter Kont. PLTS
Kont. PLN Waktu Ket PV &
Baterai >=80%
Baterai >=50% PLN
1 Off On On Off Off On - PLN suplai beban
2 Off On Off
Off Off Off 13 ms
Switch kontaktor PLN OFF dan switch inverter masih OFF
On
Off Off 3 s
Switch inverter ON dan switch kontaktor PLTS OFF
On On -
switch PLTS ON, suplai PLTS tergubung ke beban
Pada Tabel 4.6 merupakan hasil dari pengujian pada saat PLN padam dan
kapasitas penyimpanan daya Baterai PLTS >=50% yaitu >48V. Setelah beberapa saat
PLN beroperasi dan memberikan suplai daya listrik ke beban. Selanjutnya suplai PLN
mengalami pemadaman listrik sehingga PLTS mengambil alih suplai ke beban dengan
kapasitas penyimpanan daya baterai >=50% yaitu >51.5V. Pada saat melakukan
pengujian, relay 2 ON sedangkan relay 1 dan relay 3 berada pada posisi OFF. Setelah
suplai PLN OFF maka PLC memertintahkan output-nya untuk memutuskan (OFF)
switch kontaktor PLN yang terhubung ke beban. Tidak tersedianya energi listrik dari
suplai PLN akan di back-up sementara oleh suplai PLTS dengan kondisi kapasitas
penyimpanan daya baterai >=50% yaitu >51.5V, sehingga switch kontaktor PLTS
menghubungkan suplai PLTS ke beban. Disamping itu proses pemindahan suplai
energi listrik dari PLN yang terhubung ke beabn ke suplai energi listrik PLTS
membutuhkan waktu delai 3 detik. Ketika waktu delai berada pada 13 ms menandakan

71
bahwa inverter dan switch kontaktor PLTS masih dalam kondisi OFF. Setelah delay
waktu 3 detik tercapai maka inverter langsung ON. Setelah inverter ON maka inverter
mengaktifkan switch kontaktor PLTS. Setelah kontaktor PLTS aktif maka suplai energi
listrik PLTS terhubung ke beban.
72
BAB V
PENUTUP
5.1 Kesimpulan
Adapun kesimpulan yang bisa diambil dari simulasi otomatisasi suplai beban
menggunakan PLC di Observatorium Geomagnetik Lombok ini adalah:
1. Sensor tegangan baterai (50% dan 80%), PV, dan PLN memiliki tegangan input
batas bawah yaitu sebesar (48 VDC dan 51.5 VDC), 65 VDC, dan 200 VAC yang di
wakili dengan tegangan output yaitu sebesar (3.7 VDC dan 4 VDC), 3.5 VDC, dan
3.3 VDC. Sedangkan input batas atas sensor tegangan baterai (50% dan 80%),
PV, dan PLN yaitu sebesar 56 VDC, 90 VDC, dan 240 VAC yang di wakili dengan
tegangan output yaitu sebesar 4.4 VDC, 4.6 VDC, dan 3.9 VDC.
2. Program PLC yang dibuat sudah berjalan dengan baik dan dapat dijanlankan
sesuai yang diinginkan.
3. Pemindahan sumber energi secara otomatis menggunakan PLC yaitu, dari
sumber energi PLTS yang terhubung ke beban ke sumber energi PLN
membutuhkan waktu 3 detik dan begitu juga sebaliknya pemindahan sumber
energi dari PLN yang terhubung ke beban ke sumber energi PLTS
membutuhkan waktu 3 detik.
5.2 Saran
Dalam pengerjaan dan penyelesaian tugas akhir ini tentu tidak lepas dari
berbagai macam kekurangan dan kelemahan, baik pada perangkat keras atau pengkat
lunak yang di rancang. Untuk memperbaiki kekurangan tersebut, maka perlu dilakukan
hal-hal sebagai berikut:
1. Alat ini sebaiknya dilengkapi dengan alat instrumen seperti sensor temrperatur.
2. Peneliti selanjutnya dapat mengembangkan penggunaan PLC sebagai control
otomatisasi dalam dunia kelistrikan.

73
DAFTAR PUSTAKA
Abidin, Z. (2014). Penyedia Daya Cadangan Menggunakan Inverter. Jurnal INTEKNA,
Tahun XIV, (2), 102-209.
Alfian, M. Perancangan Miniatur Sistem Hibrid Plts-Pln-Baterai Berbasis PLC Omron
CPM1A-30 CDR-A-VI. Jurnal Online Mahasiswa (JOM) Bidang Teknik
Elektro, 2015, 2.2.
Aliyu, A., Basuki, A., Rudy, R. Rancang Bangun Sistem Pengambilan dan Pemuatan
Kemasan yang dikendalikan melalui PLC Omron CP1E-E40DR-A.
In: Prosiding Seminar Nasional ReTII. 2015.
Budiyanto, M. dan Wijaya, A. Pengenalan Dasar–Dasar PLC (Programmable Logic
Controller) disertai contoh Aplikasinya. Gava Media, Yogyakarta, 2003.
Fadhil F. M. Kajian Potensi Energi Surya di Indonsia. I Care Indonesia, 2017.
https://icare-indonesia.org/kajian-potensi-energi-surya-di-indonesia-2/. Diakses
tanggal 4 september 2018.
Ng, Albert. Karakteristik Baterai, 2018.
https://netsolar.wordpress.com/2018/03/04/karakteristik-baterai/.
Diakses tanggal 15 Januari 2019.
Noer, A. P. Pemodelan Alat Penyiraman Tanaman Secara Otomatis Berbasis
Programmable Logic Controller (PLC) Omron Tipe CPM2A. 2010. Tugas
Akhir. Institut Teknologi Nasional Bandung.
P, Januar. Kontaktor Magnet, 2017. https://kopilis.blogspot.com/2017/03/kontaktor-
magnet.html. Diakses tanggal 5 Juni 2018
Raharjo, P. Perancangan Sistem Hibrid Solar Cell–Baterai–PLN Menggunakan
Programmable Logic Controllers. 2013. Rahman, F., Abdul N., Giri Wahyu W. Rancang Bangun ATS/AMF Sebagai Pengalih
Catu Daya Otomatis Berbasis Programmable Logic Control. NTB: Jurnal
Dielektrika ISSN, 2015, 2086-9487

74
Setiawan, I. Programmable Logic Controller dan Teknik Perancangan Sistem Kontrol,
2006.
Susanto, E. Automatic Transfer Switch (Suatu Tinjauan). Jurnal Teknik Elektro, 2015,
5.1.
Yuliadi, A. Pengontrolan Panel Hybrid (PLN-Solar Cell) Berbasis Programmable Logic
Controller (PLC). 2017. PhD Thesis. Politeknik Negeri Padang.
Yulianti T. 2014. Perancangan Pembangkit Tenaga Listrik Tenaga Surya Sistem BIPV
di Bank Indonesia (BI). FakultasTeknik. Mataram. UNRAM.
Yoedie. Panel Kontrol Listrik, 2016.
https://utakatikmikro.com/2011/06/07/menerima-pembuatan-panel-listrik-
untuk-industri-dan-perumahan/. Diakses tanggal 19 februari 2019.
Zimmerman, Greg, P. Programmable Logic Controllers and Ladder Logic, 2008.
http://ourmumbaicity.com/File_PLC_and_LadderLogic.html. Diakses tanggal 2
Juni 2018.
https://www.luminousindia.com/media/catalog_pdf/Cruze%20and%20Pro%20UPS%20
Catalogue.pdf. Diakses tanggal 19 februari 2019.
https://www.shop-e.gr/images/product_pdf/06.06.0024_iTracer-Series-Datasheet-IT341
5ND-Solar-Charge-Controller.pdf. Diakses tanggal 19 februari 2019.
http://yohannes-purba.blogspot.com/2013/04/apa-itu-panel-surya.html. Diakses tanggal
2 Juni 2018.

75
Lampiran 1. Program Sensor Tegangan pada Arduino
//sensor tegagan int NilaiPV = A6; int NilaiBat = A7; int NilaiPLN = A4; int Relay1 = 4; int Relay2 = 5; int Relay3 = 6; float V_PV = 0.0; float V_Bat = 0.0; float V_PLN = 0.0; void setup() // komunikasi serial 9600 bit per sekon: Serial.begin(9600); pinMode(NilaiPV, INPUT); pinMode(NilaiBat, INPUT); pinMode(NilaiPLN, INPUT); pinMode(Relay1, OUTPUT); pinMode(Relay2, OUTPUT); pinMode(Relay3, OUTPUT); void loop() //baca input analog pada pin A2, A3, A4: int NilaiPV = analogRead(A6); int NilaiBat = analogRead(A7); int NilaiPLN = analogRead(A4); //Konversi Nilai sensor (dari 0 - 1023) menjadi tegangan (0 - 5V): float V_PV = NilaiPV*(4.4/1023.0); float V_Bat = NilaiBat*(4.6/1023.0); float V_PLN = NilaiPLN*(4.6/1023.0); if(V_PV >= 3.68 && V_PV <= 4.6 && V_Bat >= 4.39 && V_Bat <= 4.6) digitalWrite(Relay1, HIGH); else digitalWrite(Relay1, LOW); delay(100); if(V_Bat >= 4.10 && V_Bat <= 4.6) digitalWrite(Relay2, HIGH); else
76
digitalWrite(Relay2, LOW); delay(100); if(V_PLN > 3.21 && V_PLN <= 4.6) digitalWrite(Relay3, HIGH); else digitalWrite(Relay3, LOW); delay(100); // Menampilkan hasil: Serial.print(" V_PV = "); Serial.print(V_PV); Serial.print("\t"); Serial.print(" V_Bat = "); Serial.print(V_Bat); Serial.print("\t"); Serial.print(" V_PLN = "); Serial.println(V_PLN); delay(1000);

77
Lampiran 2. Program Ladder Diagram PLC
Lampiran 3. Latching

78
Lampiran 4. Kondisi Normal PLTS

79
Lampiran 5. Perpindahan Suplai PLTS yang terhubung ke Beban ke Suplai PLN

80
Lampiran 6. Pemindahan Suplai PLN yang terhubung ke Beban ke Suplai PLTS




















