
simulação computacional de composição de fundo de poço
101
SIMULAÇÃO COMPUTACIONAL DE COMPOSIÇÃO DE FUNDO DE POÇO DA FASE 17½” COM ABSORVEDORES DE CHOQUE EM POÇOS EXPLORATÓRIOS PROFUNDOS André Pena de Oliveira DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA OCEÂNICA. Aprovada por: ____________________________________________________ Prof. Murilo Augusto Vaz, Ph.D. ____________________________________________________ Prof. Severino Fonseca da Silva Neto, D.Sc. ____________________________________________________ Jésus Jorge Pereira, Ph.D. ____________________________________________________ João Carlos Ribeiro Plácido, Ph.D. RIO DE JANEIRO, RJ – BRASIL MARÇO DE 2008
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of simulação computacional de composição de fundo de poço

SIMULAÇÃO COMPUTACIONAL DE COMPOSIÇÃO DE FUNDO DE POÇO
DA FASE 17½” COM ABSORVEDORES DE CHOQUE EM POÇOS
EXPLORATÓRIOS PROFUNDOS
André Pena de Oliveira
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM
ENGENHARIA OCEÂNICA.
Aprovada por:
____________________________________________________ Prof. Murilo Augusto Vaz, Ph.D.
____________________________________________________ Prof. Severino Fonseca da Silva Neto, D.Sc.
____________________________________________________ Jésus Jorge Pereira, Ph.D.
____________________________________________________ João Carlos Ribeiro Plácido, Ph.D.
RIO DE JANEIRO, RJ – BRASIL
MARÇO DE 2008

ii
OLIVEIRA, ANDRÉ PENA
Simulação Computacional de Composição de Fundo de Poço da Fase de 17 ½” com Absorvedores de Choque em Poços Exploratórios Profundos [Rio de Janeiro] 2008 V, 96p, 29,7cm (COPPE/ UFRJ, M.Sc., Engenharia Oceânica, 2008 Dissertação – Universidade Federal do Rio de Janeiro, COPPE 1.Perfuração Exploratória I. COPPE/UFRJ II. Título (série)

iii
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.).
SIMULAÇÃO COMPUTACIONAL DE COMPOSIÇÃO DE FUNDO DE POÇO DA FASE DE 17 ½” COM ABSORVEDORES DE CHOQUE EM POÇOS
EXPLORATÓRIOS PROFUNDOS
André Pena de Oliveira
Março / 2008
Orientador: Murilo Augusto Vaz, Ph.D. Programa: Engenharia Oceânica
Este trabalho tem como objetivo analisar a utilização de shock sub em um
Bottom Hole Assembly (BHA) de 17 ½”, em poços exploratórios de grande
profundidade, através de simulações computacionais, tendo como finalidade a
possibilidade de prolongamento da referida fase, minimizando a necessidade da
perfuração de uma fase slim-hole. Além disso, serão apresentadas as características dos
poços exploratórios, a natureza das operações de perfuração exploratória, definidos o
ambiente e algumas situações específicas que ocorrem na prática, para o melhor
entendimento do estudo. Serão abordados assuntos referentes às composições de
colunas de perfuração utilizadas e principais parâmetros para o controle da perfuração.
O estudo apresenta uma análise de flambagem de BHA’s de 17 ½” usualmente
utilizados para a perfuração da fase, baseados no Modelo de Dawson-Paslay.
Posteriomente, através de uma análise de vibração baseado no Método dos Elementos
Finitos, o estudo define o melhor posicionamento da ferramenta na coluna
Os resultados obtidos teoricamente mostram que o shock sub de 9 ½”em um
BHA de 17 ½”não é um ponto fraco quanto à flambagem para um peso sobre broca
inferior a 60Klb, geralmente um valor máximo aplicado nesta fase. Ainda, a
composição com shock sub acima do 1º comando é a que apresenta as menores tensões
causadas por vibração.

iv
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
COMPUTATIONAL SIMULATION OF 17 ½” BOTTOM HOLE ASSEMBLIES WITH SHOCK SUBS IN DEEP EXPLORATORY WELLS
André Pena de Oliveira
March / 2008
Advisor: Murilo Augusto Vaz, Ph.D. Department: Ocean Engineering
This study aims to analyse the use of shock sub in a 17 ½” Bottom Hole
Assembly (BHA), in ultra-deep exploratory wells, through computational simulations,
in order to check the possibility of extending this section, thus reducing the need of a
slim-hole section drilling. Besides, exploratory well features will be presented and
exploratory drilling operational nature will be discussed, to assess the scenario and
several practical situations in order to achieve a better understanding of the simulations.
There will be issues discussed regarding the drill string composition and main
parameters used in drilling management.
The study presents a buckling analysis of 17 ½” BHA’s generally used to drill
the section, based on Dawson-Paslay Model. Afterwards, throughout a vibration
analysis based on Finite Elements Method, the study defines the best shock sub
placement in the string.
The results show that the 9 ½”shock sub in a 17 ½” BHA is not a weak point
regarding buckling in a drilling with weight on bit lower than 60Klb. At last, the BHA
with shock sub above the first drill collar is the best composition once the stress caused
by vibration is lower than in the others compositions.

v
ÍNDICE
RESUMO .........................................................................................................................................................iii
ABSTRACT.......................................................................................................................................................iv
1 INTRODUÇÃO....................................................................................................................................... 1
2 REVISÃO BIBLIOGRÁFICA............................................................................................................... 4 2.1 FLAMBAGEM ............................................................................................................................... 4 2.2 VIBRAÇÃO.................................................................................................................................. 13
3 DESCRIÇÃO SUCINTA DO SOFTWARE UTILIZADO..................................................................22
4 ANÁLISE COMPUTACIONAL ......................................................................................................... 28 4.1 FLAMBAGEM ............................................................................................................................. 28 4.2 VIBRAÇÃO......................... ......................................................................................................... 49
5 CONCLUSÕES..................................................................................................................................... 66
6 REFERÊNCIAS BIBLIOGRÁFICAS................................................................................................ 68
APÊNDICE I - POÇOS EXPLORATÓRIOS.............................................................................................. 71 I.1 OBJETIVOS...................................................................................................................................... 72 I.2 CLASSIFICAÇÃO............................................................................................................................ 72 I.3 FASES ............................................................................................................................................... 73 I.4 PLANEJAMENTO............................................................................................................................ 75
APÊNDICE II - PERFURAÇÃO EXPLORATÓRIA ................................................................................ 77 II.1 COMPONENTES DA COLUNA DE PERFURAÇÃO................................................................... 78 II.2 PARÂMETROS DE PERFURAÇÃO ............................................................................................. 89 II.3 CONTROLE DE VERTICALIDADE ............................................................................................. 91 II.4 ECD (Equivalent Circulating Density) e GEOPRESSÕES ............................................................. 93 II.5 TORQUE E ARRASTE ................................................................................................................... 96
1
1 INTRODUÇÃO
A Perfuração Exploratória é parte relevante de um projeto que visa aumentar a
reserva provada de uma companhia de petróleo. Este projeto é iniciado com a execução de
um estudo sísmico de uma área e uma posterior interpretação dos resultados, com o intuito
de definir a melhor locação, isto é, a locação com maior probabilidade de ocorrência de
hidrocarbonetos, em intervalos de interesse estimados com certa precisão. A aquisição de
dados sísmicos consiste na geração de uma perturbação mecânica (canhões de ar
comprimido) em um ponto da superfície e o registro das reflexões em centenas de canais de
recepção ao longo de uma linha reta (cabo com hidrofones). Com a locação definida, parte-
se para a elaboração de um projeto de perfuração. O planejamento da perfuração é definido
a partir de duas fontes de informação: as obtidas a partir da sísmica e de poços de
correlação. Para poços exploratórios em áreas pouco exploradas ou desconhecidas, onde os
poços de correlação estão localizados a grandes distâncias, o mapeamento da área por
intermédio da sísmica passa a ser a informação preponderante.
Com o preço do barril de petróleo acima dos 60 dólares, a grande maioria dos
projetos de desenvolvimento dos campos passa a ser viável economicamente.
Um poço exploratório é na maioria dos casos vertical (inclinação inferior a 3º),
podendo ou não ser aproveitado para o desenvolvimento do campo. A perfuração é
realizada em diversas fases, caracterizadas pelos diferentes diâmetros das brocas utilizadas
na coluna de perfuração. Ao atingir determinada profundidade (final da fase), a coluna é
retirada do poço e é descida imediatamente uma coluna de revestimento de aço com
diâmetro inferior ao da broca que perfurou a fase. O espaço anular entre o revestimento
descido e a parede do poço é cimentado com o intuito de isolar as formações, permitindo o
prosseguimento da perfuração de forma segura. Após a cimentação é descida novamente
uma coluna com broca de menor diâmetro que o revestimento cimentado. Estas operações
de perfuração e descida e cimentação do revestimento são realizadas sucessivamente até
que a zona de interesse seja atingida.
Uma vez caracterizando-se a presença de um reservatório com hidrocarbonetos no
poço perfurado através de perfilagens, a operação subsequente para que a reserva seja
provada é o teste do poço. Este teste consiste basicamente na descida de uma coluna de

2
produção provisória e na produção do reservatório do poço por um curto intervalo de
tempo. A partir deste teste, pode-se estimar o volume de hidrocarbonetos presente no
reservatório.
A operação de perfuração é a que requer maior investimento. Esta operação, a
depender da geometria do poço, profundidade final e complexidade do projeto, pode levar
de 1 a 6 meses, podendo haver casos em que se estenda por mais tempo. Este longo período
de perfuração, somado ao custo diário de uma sonda variando entre 300 e 450 mil dólares
por dia, demanda um planejamento meticuloso com o intuito de minimizar os custos da
operação. Neste planejamento, a definição de uma coluna de perfuração adequada para
cada fase do poço e para formação que se espera perfurar visa às maiores taxas de
perfuração, isto é, a razão ente metros perfurados e tempo, assim como o menor número de
manobras (tempo gasto para retirar a coluna do fundo, substituir componentes da coluna e
retornar com a mesma ao fundo). Em poços exploratórios, que em quase toda sua totalidade
são verticais, o controle da verticalidade torna-se um ponto importante para redução do
tempo de sonda, evitando-se a perfuração orientada, que notoriamente apresenta taxas de
penetração menores. Outro fator importante para a redução do custo é o conhecimento
prévio da área em que se perfura, utilizando-se neste caso poços de correlação.
Não obstante, é válido lembrar que as maiores perdas de tempo de sonda estão
relacionadas à operação de perfuração, tais como perda de controle do poço, prisão de
coluna e pescaria (perda e recuperação de um ou vários componentes da coluna de
perfuração no interior do poço).
O conhecimento, seja obtido por experiências passadas ou por estudos específicos
para cada projeto, é a ferramenta mais eficaz para otimização da perfuração e para redução
do tempo relacionado a esta operação.
Este estudo apresenta uma análise da utilização de shock sub em Bottom Hole
Assembly (BHA) de 17 ½”. Geralmente não se utiliza esta ferramenta na fase 17 ½”, onde
historicamente as formações encontram-se em profundidades superficiais e intermediárias.
São registradas taxas de penetração entre superiores a 15m/h, não havendo a necessidade
da utilização de shock subs, ferramentas mais apropriadas para serem utilizadas em BHA’s
para perfurar formações mais duras e consolidadas.

3
À medida que se perfuram poços cada vez mais profundas, há a necessidade de se
prolongar e aprofundar a fase 17 ½”, encontrando assim, no final da fase, formações mais
competentes, onde se observam taxas de penetração bem inferiores àquelas obtidas em
formações mais superficiais.
Nestes casos, seria factível e razoável o uso de shock sub’s com o intuito de
minimizar os efeitos do bit bounce (mecanismo que gera vibração axial na coluna),
característico de formações duras e poços verticais. O efeito mais crítico das vibrações
axiais é o desgaste prematuro da broca e falha das demais ferramentas do BHA,
principalmente as que contém componentes eletrônicos.
Esta ferramenta seria utilizada com o intuito de prolongamento da fase de 17 ½”,
reduzindo a necessidade da perfuração de uma fase slim hole (diâmetros inferiores a sete
polegadas), operação que apresenta grande limitação de disponibilidade de ferramentas.
Serão apresentadas as teorias sobre flambagem em poços de petróleo mais aceitas
atualmente. Em seguida, será apresentado um capítulo sobre vibração de coluna, onde serão
apresentadas as condições mais prováveis, principais efeitos e recomendações para evitá-la.
Ainda relacionada à vibração, serão mencionados os modelos matemáticos mais utilizados
para prever e evitar ao máximo a perfuração utilizando freqüências próximas às críticas.
Através de simulações utilizando um software comercial, será realizada uma
análise de flambagem para verificar se o shock sub é um ponto fraco do BHA e em seguida,
uma análise de vibração com o intuito de definir uma velocidade ótima de rotação da
coluna de perfuração.
Finalmente, serão apresentadas nos Apêndices I e II as características dos poços
exploratórios, a natureza das operações de perfuração exploratória e definidos o ambiente e
algumas situações específicas que ocorrem na prática, para o melhor entendimento do
estudo. Serão abordados assuntos referentes às composições de colunas mais utilizadas e
principais parâmetros de perfuração.

4
2 REVISÃO BIBLIOGRÁFICA 2.1 FLAMBAGEM
Flambagem, torque e arraste são resultados diretos de uma série de fatores, dentre
os quais trajetória e diâmetro do poço, composição da coluna de perfuração, limpeza do
poço e fluido de perfuração utilizado. São efeitos que causam limitações durante a
perfuração.
Flambagem da coluna de perfuração é um fenômeno relativamente comum e
controlável em poços direcionais. A flambagem da coluna dificulta a transmissão de peso
sobre a broca, reduzindo a taxa de penetração. O BHA deve trabalhar com a linha neutra
localizada nos elementos de maior rigidez, como comandos e heavy weight drill pipes
(HWDP), preferencialmente abaixo do drilling jar, pois o fato desta ferramenta trabalhar
comprimida reduz sua vida útil em até 50%.
O primeiro trabalho de estabilidade da coluna de perfuração foi desenvolvido por
Lubinski [1]. Em seu trabalho pioneiro, uma análise bi-dimensional de flambagem da
coluna de perfuração em poços verticais e os efeitos na trajetória do poço, forças de contato
e momento fletor foram apresentados e discutidos.
A solução de Lubinski [1] para a carga crítica de flambagem utilizava-se de série de
potências para resolver a equação diferencial que rege a instabilidade estrutural. O uso da
solução de Lubinski [1], ainda que para uma condição particular, levava a um resultado
bastante acurado em forma de série de potência. Entretanto, para uma coluna extensa, os
termos da série de potência tornavam-se suficientemente grandes e a partir de certo
comprimento podiam gerar resultados distorcidos e não confiáveis.
Para solucionar esta limitação, Lubinski [1] propôs que para colunas extensas, a
carga crítica fosse calculada para o primeiro modo de flambagem como:
F = 1,94 x (EI)1/3 x W2/3 (1a)
onde:
E: módulo de elasticidade
I: momento de inércia
W: peso por unidade de comprimento

5
Wang [2] propôs que a constante mais adequada para a fórmula (1a) de Lubinski
seria 1,018793, assim:
F = 1,018793 x (EI)1/3 x W2/3 (1b)
Posteriormente, Lubinski et al [3] publicaram um artigo onde pela primeira vez a
flambagem helicoidal foi abordada em tubos de produção.Também pela primeira vez, o
efeito do fluxo do fluido na flambagem foi apresentado. Neste artigo, a equação que
relacionava força e passo (p) foi definida como:
F= 8 x π2 x EI / p2 (2)
Expressões para o deslocamento lateral, momento fletor, energia de deformação de
flexão e compressão foram desenvolvidas. Foi o primeiro artigo a diferenciar o processo
inicial da flambagem, também chamada flambagem senoidal ou ainda lateral, bi-
dimensional, e o caso mais crítico de flambagem, denominada helicoidal.
Utilizando a Teoria de vigas esbeltas, Mitchell [4] apresentou as equações de
equilíbrio para flambagem helicoidal em tubos de produção.
Nos últimos vinte anos, Mitchell tem apresentado grande contribuição ao estudo de
flambagem de tubulação no interior de poços.
Dawson e Paslay [5] mostraram pela primeira vez a expressão da força crítica de
flambagem senoidal para tubulações no interior de poços inclinados (Eq.3). Neste estudo
foi demonstrado ainda que em poços de alta inclinação, a tubulação mostra-se mais
resistente à flambagem devido ao apoio e arraste das paredes do poço.
F = 2 x (EI x W x sen α / r)1/2 (3)
onde:
α : inclinação do poço em relação ao eixo horizontal
r: distância entre parede do poço e diâmetro externo do tubo

6
Mitchell [6], utilizando a Teoria de vigas esbeltas, apresentou uma análise de
flambagem levando em consideração o efeito da fricção. Foi evidenciado que o histórico do
carregamento é importante para determinar o estado final do sistema com a fricção.
O artigo também apresentava equações relacionando o coeficiente de fricção à força
crítica de flambagem. Ficou comprovada que a fricção tinha um papel significante na
variação de comprimento da coluna devido ao carregamento axial.
Cheatham e Chen [7] apresentaram uma análise de resultados experimentais para
flambagem helicoidal. Os autores formularam equações para forças de contato entre a
coluna e as paredes do poço (vertical ou direcional) em situações de carregamento e
descarregamento. Chegaram à conclusão de que as forças de carregamento e
descarregamento são distintas.
Em 1988 Mitchell [8] apresentou uma solução generalizada para flambagem
helicoidal, resultando em uma helicóide de passo variável devido à consideração do peso e
rigidez da tubulação. Uma equação para o carregamento de contato entre o revestimento e a
tubulação também foi desenvolvida.
Chen et al [9] apresentaram uma nova análise para flambagem de coluna em poços
horizontais. Formularam-se equações para força crítica de flambagem senoidal e helicoidal.
Os resultados deste artigo indicavam que a força necessária para se atingir a flambagem
helicoidal era 1,4 vez superior àquela necessária para atingir a senoidal. A equação (4)
desenvovida no trabalho de Chen et al [9] é idêntica à equação (3) encontrada por Dawson
e Paslay [5].
F sen = 2 x (EI x W / r)1/2 (4)
F hel = 2 x (2 x EI x W/ r)1/2 (5)
Em 1991, Schuh [10] apresentou uma análise da influência da curvatura na força
crítica de flambagem. Nesse trabalho, as equações de flambagem aplicadas ao trecho reto
do poço foram adaptadas para poços com curvatura através de um ajuste da geometria da
tubulação levando em conta a forma do tubo flambado no poço com curvatura. Deve ser
mencionado que nesse estudo, Schuh [10] assumiu que a equação (3) de Dawson e Paslay

7
[5] seria para flambagem helicoidal, ao contrário do que preconizavam os autores. Essa
consideração gera respostas conservativas uma vez que as cargas para se atingir o modo
helicoidal são superiores àquelas que resultam em flambagem senoidal. Um dos muitos
estudos confirmando essa hipótese foi apresentado por Wu et al [11]. Nesse estudo, o
resultado para flambagem senoidal coincidia com os resultados anteriores de Chen et al [9]
e Dawson e Paslay [5]. Entretanto, a força crítica para flambagem helicoidal era distinta
daquelas apresentadas anteriormente:
F hel = 2 x (2 √2 -1) x (EI x W/ r)1/2 (6)
Paslay [12] apresentou um artigo sobre análise de tensões de coluna de perfuração
incluindo torque na solução de flambagem. Posteriormente, Miska e Cunha [13]
apresentaram uma solução distinta para o mesmo problema. Deve ser enfatizado que ambos
os estudos concluíram que o torque tem pouca influência no processo de flambagem.
Miska e Cunha [14] aprofundaram seus estudos sobre a influência do torque em
colunas para poços horizontais e direcionais. Os exemplos práticos apresentados nesse
artigo reafirmaram que o torque pode ser desconsiderado na maioria das operações de
campo, o que também pode ser verificado em Cunha [15]. Ainda, uma análise de pós-
flambagem baseada no princípio de conservação de energia foi realizada. A equação
concebida para o carregamento crítico de flambagem helicoidal é:
F = 4 x (2 x EI x W x sen α / r)1/2 (7)
Mitchell [16] aprofundou seu reconhecido trabalho sobre a influência da fricção,
desenvolvendo uma solução numérica para a flambagem helicoidal de tubulações. O artigo
apresentava exemplos de cálculo e comparações entre os métodos numéricos e analíticos.
Um ponto relevante nesta revisão bibliográfica é que diferentes autores
apresentaram resultados conflitantes a respeito da força crítica de flambagem. Em alguns
casos, os resultados foram distintos porque as considerações iniciais não coincidiam.
As referências [9] (eq.5), [10] (eq.3), [11] (eq.6) e [14] (eq.7) têm fórmulas distintas
para flambagem helicoidal. Ainda que Schuh [10] parta do pressuposto de que a força

8
crítica de flambagem senoidal cause flambagem helicoidal, as outras três referências
apresentam deduções matemáticas coerentes, gerando mesmo assim resultados diferentes.
É largamente aceito que uma coluna no interior de um poço, sob ação de uma força
axial igual ou levemente superior à força crítica de flambagem, mudará sua forma reta para
um formato senoidal, referido por Mitchell [16] como flambagem lateral. Também é
amplamente aceito que se a força que causa flambagem senoidal continuar aumentando até
determinado patamar, haverá novamente uma mudança de forma, de senoidal para
helicoidal, aumentando assim os pontos de contato entre a tubulação e as paredes do poço.
Certamente, a flambagem não ocorrerá necessariamente em toda coluna ao mesmo
tempo. Em colunas extensas, a força axial age em cada parte da coluna com intensidade
distinta, o que causa flambagem parcial da coluna. Ainda, pontos da parte flambada da
coluna podem experimentar estágios diferentes do processo de flambagem, isto é, alguns
pontos estarão sob flambagem senoidal e outros, helicoidal. Não obstante, mesmo a parte
sob flambagem helicoidal pode apresentar hélices com diferentes medidas de passo, como
apresentado por Mitchell [16].
A diferença dos resultados apresentados por Chen et al [9] e Wu et al [11] não
ocorreu devido a erros de premissas. Os autores apresentaram expressões de cargas críticas
que causariam flambagem helicoidal da coluna no interior do poço, considerando as
condições assumidas em seus respectivos modelos. A razão da diferença nos resultados é
causada pela maneira distinta da mudança de forma da coluna, de retilínea para helicoidal,
assumida pelos autores.
Chen et al [9] e Wu et al [11] chegaram à mesma equação de energia do sistema,
estando a coluna sob flambagem helicoidal em um poço horizontal, dada por:
Ehs = 8 x π4 x EI x r2 x L /p4 + WrL (8)
Chen et al [9] assumem em seu artigo que a força axial agindo na coluna seria
constante em todo o processo de flambagem. Ao contrário, Wu et al [11] assumem que a
mudança no formato da coluna, de retilíneo para helicoidal, ocorreria em dois estágios:
flambagem senoidal com carregamento constante e flambagem helicoidal devido ao
carregamento incrementado linearmente a partir da carga de flambagem senoidal.

9
Paralelamente à hipótese de flambagem em dois estágios assumida por Wu et al
[11], os autores também assumem que os deslocamentos observados na flambagem
senoidal (1º estágio) são pequenos, podendo ser desconsiderados. Na realidade, trata-se de
uma análise de pós-flambagem, uma vez que descreve o comportamento da tubulação
submetida à flambagem.
Ambos os modelos são coerentes dentro das hipóteses assumidas. Prever
exatamente o que ocorrerá em uma situação real de campo é extremamente difícil. Não
obstante, a hipótese de uma força axial gradualmente crescente sendo aplicada à coluna, em
detrimento de outra constante durante todo o processo, é mais representativa daquilo que
seria esperado na realidade. Com isso, os resultados obtidos a partir da equação (6) devem
ser mais confiáveis. A equação (5) representa a força mínima necessária para gerar o efeito
helicoidal. Consequentemente, valores críticos mais elevados devem ser esperados.
Corroborando com o trabalho de Wu et al [11], alguns testes experimentais
realizados por Saliés [17] e Saliés et al [18] indicaram que a coluna, sob a ação de força
axial, primeiramente assume forma senoidal. Posteriormente, caso a força axial
aumentasse, a amplitude da senóide também aumentaria até um limite de instabilidade a
partir do qual o processo helicoidal seria observado.
O modelo apresentado por Chen et al [9] prevê teoricamente a força crítica mínima
capaz de gerar flambagem helicoidal a uma coluna no interior de um poço. A força crítica
máxima capaz de gerar o mesmo efeito foi apresentada por Miska e Cunha [14]. Essa
condição de pós-flambagem foi concebida utilizando-se a conservação de energia (equação
(7)). É esperado que qualquer ponto da coluna onde a força axial atuante seja igual ou
superior ao valor teórico encontrado através da equação (7) esteja sofrendo flambagem
helicoidal.
É válido enfatizar que os valores encontrados para a relação passo-comprimento por
Miska e Cunha [14] são exatamente iguais aqueles obtidos por Chen et al [9]. Essa
coincidência era esperada uma vez que partiam de hipóteses e condições idênticas de
geometria e quantidade de energia da coluna. A diferença nos modelos está na maneira
como a energia é transferida para a coluna.
As tabelas 1, 2 e 3 apresentam equações para cargas críticas e o correspondente
estado da coluna. Pode-se notar que trabalhos distintos alcançaram resultados bem

10
similares. Analisando as três tabelas, as equações das tabelas 1 e 2 apresentam boa
concordância. Comparando as tabelas 1 e 2 com a tabela 3, vê-se grande diferença
relacionada à mínima força crítica para mudança do estado senoidal para helicoidal.
O ponto relevante é que os três trabalhos apresentam o mesmo valor necessário para
iniciar o processo, assim como concordam no valor crítico o qual manterá a coluna sob
flambagem helicoidal.
Tabela 1 – Carregamento crítico de flambagem ( Ref.14)
N-1P Efeito na coluna
N-1P < 1 normal
1< N-1P < √2 Flambagem lateral (senoidal)
√2< N-1P < 2√2 Flambagem senoidal ou helicoidal
2√2< N-1P Flambagem helicoidal
onde:
NP = (4 x EI x W x sen α / r)1/2
F
Tabela 2 - Carregamento crítico de flambagem (Ref.13)
Carregamento Axial Efeito na coluna
F < 2K retilíneo
2K< F < 2√2K Flambagem senoidal
2√2K< F < 4√2K Flambagem senoidal ou helicoidal
4√2K < F Flambagem helicoidal
onde:
K = (EI x W x sen α / r)1/2

11
Tabela 3 - Carregamento crítico de flambagem (Ref.17)
Carregamento Efeito na coluna
F < 2K retilíneo
2K< F < 3,75K Flambagem senoidal
3,75K< F < 4√2K Flambagem senoidal ou helicoidal
4√2K < F Flambagem helicoidal
A flambagem terá um grande efeito na transmissão de cargas axiais ao longo da
coluna. Em um poço vertical, após o início do processo, a tubulação entrará em contato
com a parede do poço e consequentemente desenvolverá forças de atrito. Em poços
direcionais e horizontais, as forças de atrito estão presentes normalmente. Nestes casos,
essas forças serão ainda maiores em caso de flambagem da coluna, principalmente quando
se tratar do processo helicoidal.
Kuru et al [19] apresentaram um artigo sobre comportamento de flambagem de
tubulações e sua influência na transmissão de cargas axiais em poços direcionais. No
artigo, foram desenvolvidas expressões para as forças de atrito entre a tubulação e a parede
do poço para três situações:
� Coluna sem flambagem
� Coluna em processo senoidal
� Coluna em processo helicoidal
Os autores também apresentaram comparações dos resultados dos simuladores com
dados experimentais, que se mostraram bastante acurados. Finalmente, apresentaram quatro
padrões de flambagem (vide tabela 4) que podem ser utilizadas na análise do
comportamento de flambagem de tubulações em poços horizontais e de alta inclinação.
Estes resultados são coincidentes com aqueles apresentados na tabela 3.

12
Tabela 4 - Carregamento crítico de flambagem (Ref.19)
Carregamento “Padrões de Flambagem”
F < Fs retilíneo
Fs < F < F* Flambagem senoidal
F* < F < Fh Flambagem senoidal instável
F > Fh Flambagem helicoidal
onde:
Fs = 2K;
F* = 1,875 Fs;
Fh = 2√2 Fs.
Mitchell [20] apresentou um estudo de flambagem para poços horizontais que inclui
equações para cargas críticas, passo variável, mudança de comprimento devido à
flambagem e forças de atrito. Este artigo apresenta também um estudo onde aborda a
possibilidade de ocorrência de hélice reversa no processo helicoidal.
O artigo apresenta dois aspectos interessantes relacionados ao processo de
flambagem em poços de longa extensão (Extended Reach Wells – ERW). Mostra que a
ruptura de tubulação é improvável devido exclusivamente à flambagem e ainda que, uma
vez no processo helicoidal, pode-se gerar forças de atrito elevadas o suficiente para impedir
a transmissão de carga até a broca (lock-up).

13
2.2 VIBRAÇÃO
As análises de vibração na coluna de perfuração permitem a localização de
possíveis ocorrências de falhas. As falhas podem ser seguidas por fadiga do material,
especialmente nos comandos e drill pipes devido à concentração de tensões. Paralelamente,
são associados à vibração problemas como a diminuição da taxa de penetração e
arrombamento (do inglês, enlargement) do diâmetro do poço. A vibração na região
superior da coluna onde estão os drill pipes é tolerável. Entretanto, a vibração na região do
BHA, principalmente onde estão os sensores de Logging While Drilling (LWD) e
Measurement While Drilling (MWD), deve ser minimizada, uma vez que esses sensores
realizam medições contínuas sobre importantes parâmetros da formação e da trajetória do
poço.
Os três tipos de esforços que aparecem devido à vibração de coluna são longitudinal
(axial), torcional e lateral, conforme ilustrado na Figura 1. Estes efeitos combinados ou
mesmo isolados podem ocasionar problemas como falha em elementos da coluna por
fadiga do material, quando ocorre a combinação dos efeitos; instabilidade da parede do
poço devido aos choques laterais e redução da taxa de penetração devido aos efeitos de
vibração axial.
Alguns termos relativos a problemas de vibração empregados na indústria do
petróleo são stick-slip (torcional), whirl (lateral) e bit bounce (longitudinal ou axial).
Figura 1 - Modos de Vibração

14
� Stick-Slip
Torção que faz a broca parar de girar por alguns instantes. A energia armazenada e
gerada pela parada é posteriormente liberada, acelerando a rotação do restante do BHA.
São oscilações torcionais que induzem torques friccionais não-lineares entre a broca e a
formação.
O problema de torção na coluna é considerado o maior causador de danos à mesma
quando se está perfurando em baixa rotação. Este distúrbio consiste em pulsos de torção se
propagando nos dois sentidos entre a broca e a mesa rotativa em poucos segundos,
forçando a broca ao stick-slip por extensos períodos de tempo na superfície da rocha
(parede do poço). Em colunas com comprimentos em torno de 5000 metros, a amplitude
dessa torção pode ser de 2 a 4 vezes maior do que a velocidade média angular, geralmente
entre 30 e 150 rotações por minuto, podendo aumentar com a flutuação de torque na
coluna, causando invariavelmente danos à broca e à coluna. Ainda, baixas amplitudes de
stick-slip são consideradas como principais causadores de desgaste prematuro da broca. A
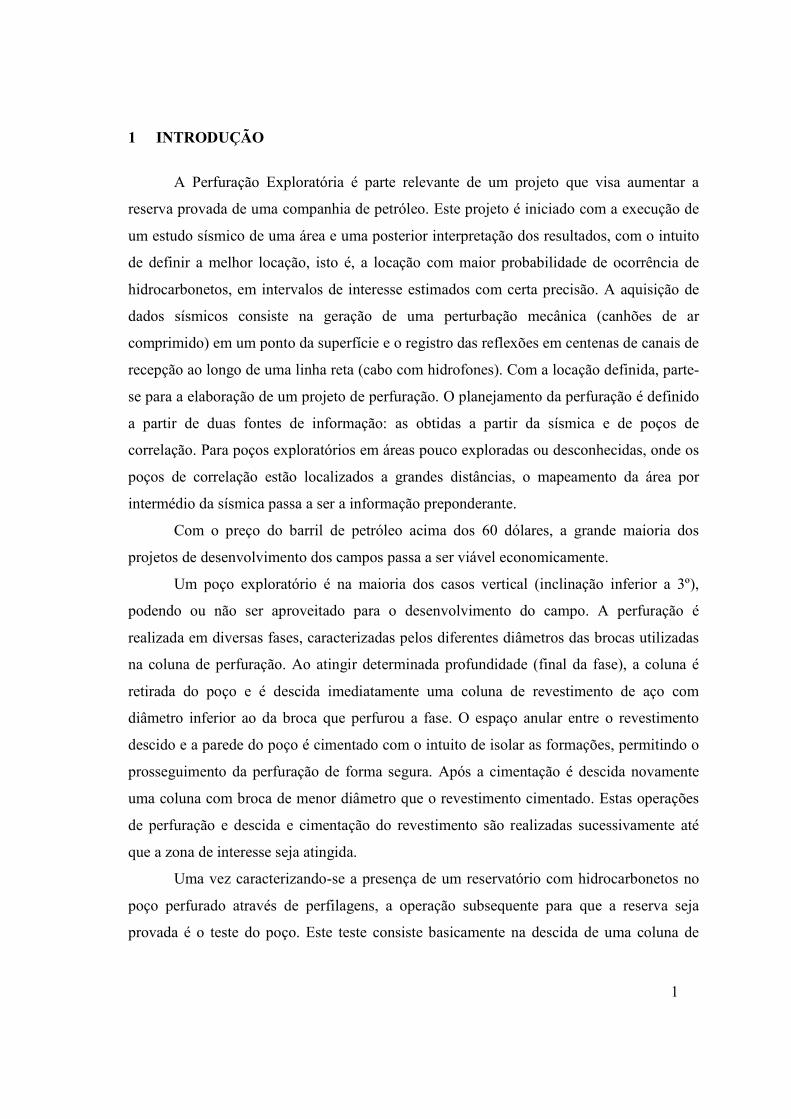
tabela 5 resume as condições mais propícias e ações corretivas para evitar o stick-slip.
Como conseqüências do Stick-Slip, pode-se citar o desgaste acentuado das lâminas
dos estabilizadores e broca, fadiga precoce das conexões da coluna e em casos extremos,
washouts e back-offs das conexões da coluna de perfuração.
15
Condições típicas Ações corretivas
imediatas
Ações corretivas
nas próximas
operações
Rochas abrasivas Utilizar fluido base
óleo
Poços de alta
tortuosidade
Utilizar brocas
menos agressivas
STIC
K - S
LIP
Brocas PDC
(Polycrystalline
Diamond Bit) agressivas
e estabilizadores full-
gauge no BHA
Manter broca no fundo e
diminuir o peso,
aumentando a rotação
gradativamente. Caso
persista, retirar coluna do
fundo e reiniciar
perfuração com peso
menor e rotação maior
Utilizar
estabilização que
diminua o torque
(menos lâminas ou
roller reamer)
� Bit Whirl
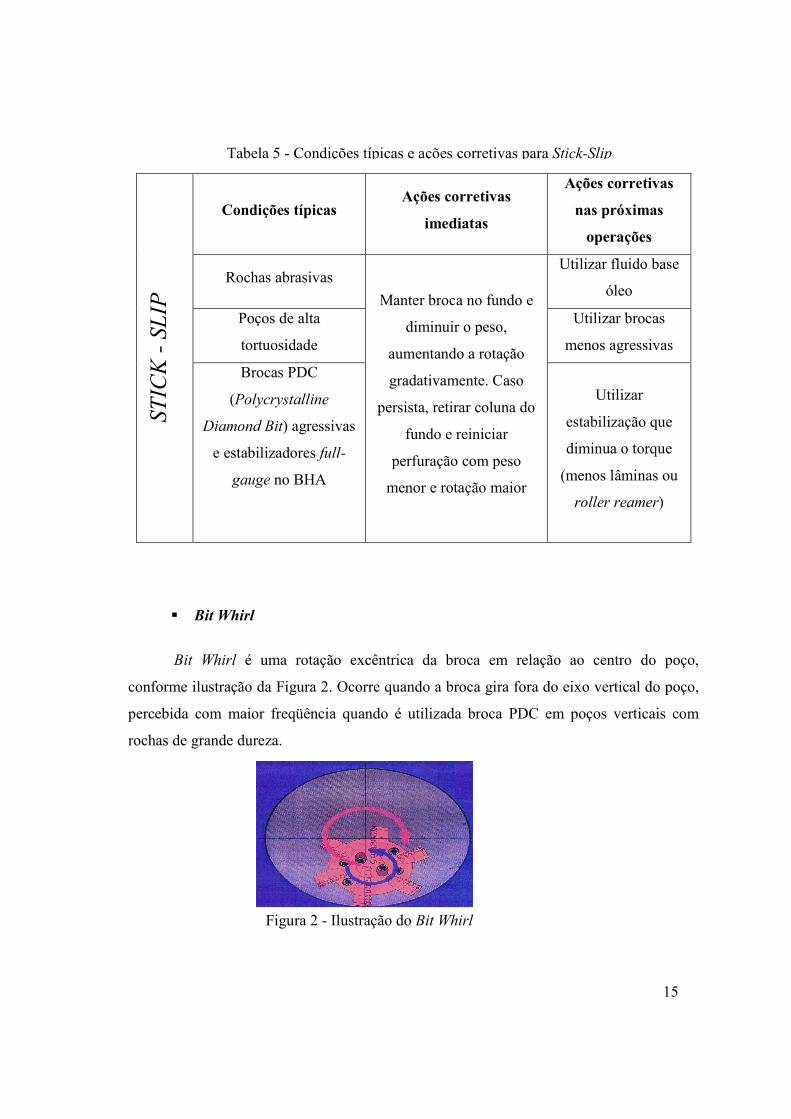
Bit Whirl é uma rotação excêntrica da broca em relação ao centro do poço,
conforme ilustração da Figura 2. Ocorre quando a broca gira fora do eixo vertical do poço,
percebida com maior freqüência quando é utilizada broca PDC em poços verticais com
rochas de grande dureza.
Tabela 5 - Condições típicas e ações corretivas para Stick-Slip
Figura 2 - Ilustração do Bit Whirl
16
Este mecanismo induz impactos entre a coluna e a parede do poço, causando
vibração lateral na broca e na coluna de perfuração.
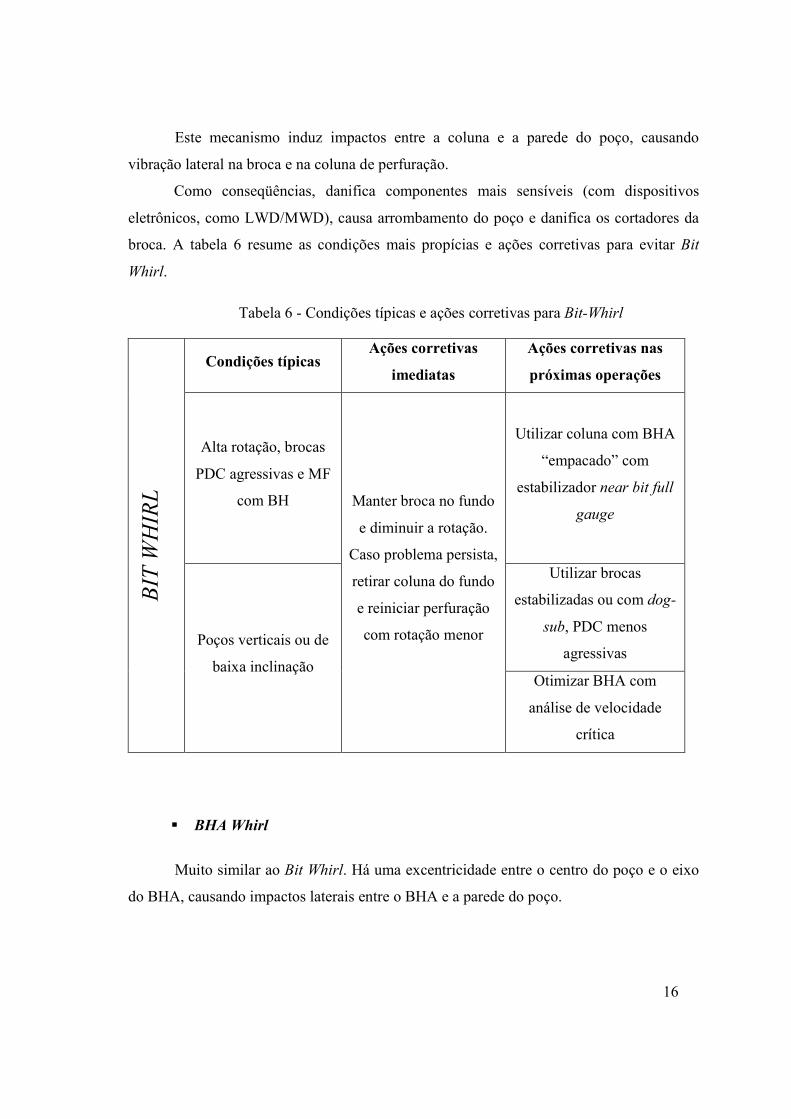
Como conseqüências, danifica componentes mais sensíveis (com dispositivos
eletrônicos, como LWD/MWD), causa arrombamento do poço e danifica os cortadores da
broca. A tabela 6 resume as condições mais propícias e ações corretivas para evitar Bit
Whirl.
� BHA Whirl
Muito similar ao Bit Whirl. Há uma excentricidade entre o centro do poço e o eixo
do BHA, causando impactos laterais entre o BHA e a parede do poço.
Condições típicas Ações corretivas
imediatas
Ações corretivas nas
próximas operações
Alta rotação, brocas
PDC agressivas e MF
com BH
Utilizar coluna com BHA
“empacado” com
estabilizador near bit full
gauge
Utilizar brocas
estabilizadas ou com dog-
sub, PDC menos
agressivas
BIT
WH
IRL
Poços verticais ou de
baixa inclinação
Manter broca no fundo
e diminuir a rotação.
Caso problema persista,
retirar coluna do fundo
e reiniciar perfuração
com rotação menor
Otimizar BHA com
análise de velocidade
crítica
Tabela 6 - Condições típicas e ações corretivas para Bit-Whirl

17
É comprovadamente a maior causa de falhas dos componentes do BHA. Causa
ainda desgastes dos estabilizadores e dos tool-joints dos tubos de perfuração. A tabela 7
resume as condições mais propícias e ações corretivas para evitar BHA Whirl.
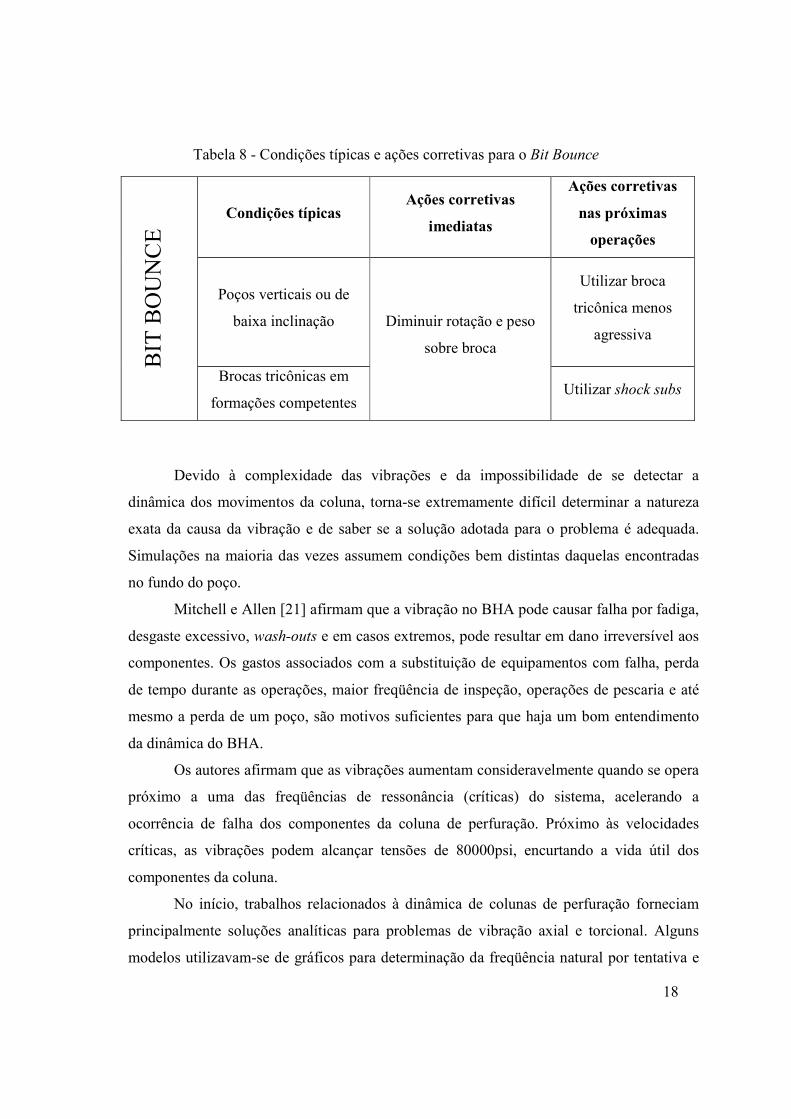
� Bit bounce
Mecanismo causado por uma excessiva variação no peso sobre a broca, que altera
intermitentemente a intensidade do contato da broca com a formação, causando vibrações
axiais na coluna. Essas variações do peso sob broca são provenientes de falha ou limitação
do sistema de compensação da coluna e heave elevado.
Estes choques podem danificar não só a broca, mas também as demais ferramentas
do BHA. A tabela 8 resume as condições mais propícias e ações corretivas para se evitar o
Bit bounce.
Condições típicas Ações corretivas
imediatas
Ações corretivas
nas próximas
operações
Coluna de perfuração
com BHA pouco
estabilizado em poços
verticais ou de baixa
inclinação
Utilizar motor de
fundo
BHA W
HIR
L
Alta rotação em rochas
de dureza elevada
Manter broca no fundo e
diminuir a rotação. Caso
problema persista, retirar
coluna do fundo e
reiniciar perfuração com
menos rotação
Utilizar BHA bem
estabilizado com
estabilizadores full
gauge
Tabela 7 - Condições típicas e ações corretivas para BHA Whirl
18
Devido à complexidade das vibrações e da impossibilidade de se detectar a
dinâmica dos movimentos da coluna, torna-se extremamente difícil determinar a natureza
exata da causa da vibração e de saber se a solução adotada para o problema é adequada.
Simulações na maioria das vezes assumem condições bem distintas daquelas encontradas
no fundo do poço.
Mitchell e Allen [21] afirmam que a vibração no BHA pode causar falha por fadiga,
desgaste excessivo, wash-outs e em casos extremos, pode resultar em dano irreversível aos
componentes. Os gastos associados com a substituição de equipamentos com falha, perda
de tempo durante as operações, maior freqüência de inspeção, operações de pescaria e até
mesmo a perda de um poço, são motivos suficientes para que haja um bom entendimento
da dinâmica do BHA.
Os autores afirmam que as vibrações aumentam consideravelmente quando se opera
próximo a uma das freqüências de ressonância (críticas) do sistema, acelerando a
ocorrência de falha dos componentes da coluna de perfuração. Próximo às velocidades
críticas, as vibrações podem alcançar tensões de 80000psi, encurtando a vida útil dos
componentes da coluna.
No início, trabalhos relacionados à dinâmica de colunas de perfuração forneciam
principalmente soluções analíticas para problemas de vibração axial e torcional. Alguns
modelos utilizavam-se de gráficos para determinação da freqüência natural por tentativa e
Condições típicas Ações corretivas
imediatas
Ações corretivas
nas próximas
operações
Poços verticais ou de
baixa inclinação
Utilizar broca
tricônica menos
agressiva
BIT
BOUNCE
Brocas tricônicas em
formações competentes
Diminuir rotação e peso
sobre broca
Utilizar shock subs
Tabela 8 - Condições típicas e ações corretivas para o Bit Bounce

19
erro. Nos primeiros trabalhos, o amortecimento não era considerado. Posteriormente,
modelos mais complexos utilizando soluções analíticas considerando o amortecimento
foram apresentados. Entretanto, Mitchell e Allen [21] afirmam que soluções analíticas são
aplicáveis exclusivamente a problemas simplificados de vibração axial e torcional.
Os trabalhos relacionados ao fenômeno de vibração que se sucederam apresentaram
como ferramenta matemática o método dos elementos finitos, com o intuito de prover uma
análise dinâmica do BHA.
Millheim et al [22] desenvolveram um modelo de análise dinâmica utilizando o
método dos elementos finitos. O modelo era capaz de analisar qualquer configuração de
BHA em todo o tipo de poço, considerando variáveis relevantes as quais eram ignoradas
em trabalhos anteriores, tais como: empuxo, diâmetros e posição dos estabilizadores,
trajetória do poço e modo de vibração lateral.
Dunayevski et al [23,24] apresentaram um modelo para estimar os parâmetros
operacionais que provavelmente resultariam em vibração de coluna. O modelo determinava
as velocidades críticas que causariam as tensões de maior magnitude. Os autores utilizavam
o modelo para realizar estudos paramétricos, simulando os efeitos do peso sobre a broca,
comprimento do BHA e da coluna. Este modelo mostrava-se adequado para BHA’s de
baixa rigidez ou estabilização. Os autores afirmam que as duas principais fontes de
vibração são as interações entre a broca / formação e também entre coluna de perfuração /
parede do poço.
Baird et al [25,26] desenvolveram um modelo computacional para análises
dinâmicas utilizando elementos finitos, capaz de simular o comportamento do BHA no
poço. Este modelo foi o primeiro a considerar a interação entre broca e rocha, além de
possibilitar a inserção de tipos distintos de estabilizadores, diâmetro do poço, seções
transversais do poço não circulares e variação da dureza da rocha.
As verificações de modelos de vibração de BHA’s requerem dados de campo,
particularmente dados de vibração. Sistemas e equipamentos para medição de fundo de
vibrações têm sido desenvolvidos e utilizados para calibrar e validar os modelos existentes.
Concernente à instabilidade das paredes do poço, Santos et al [27] mostram que a
interação físico-química entre o fluido de perfuração e a formação pode ser irrelevante em
certos casos, quando comparada à vibração excessiva da coluna. A influência da vibração

20
de coluna no arrombamento é visível em vários casos, principalmente em formações duras
e muito duras.
Dunayevsky et al [24] e Dykstra et al [28] abordaram o fato de que medições de
superfície assim como de fundo realizadas no campo mostraram claramente que a coluna
de perfuração, principalmente o BHA, está sujeita a vibração intensa. Os autores
apresentaram estudos sobre os mecanismos de vibração enfatizando a vibração lateral. Os
autores apontam falha por fadiga da coluna de perfuração, arrombamento do poço e
dificuldade de controle direcional como as conseqüências de vibração excessiva.
Segundo Santos et al [27], ainda que um dos efeitos de vibração de coluna seja o
arrombamento do poço, as conseqüências da vibração excessiva na integridade das paredes
do poço não são bem entendidas. Os autores afirmam que para formações duras, a vibração
da coluna pode ser o fenômeno que mais afeta a estabilidade das paredes do poço. Grandes
amplitudes de vibração, levando a impactos da coluna contra as paredes do poço, danificam
a formação e criam uma grande área de fratura. A penetração do fluido de perfuração
nestas fraturas seria responsável pelo desmoronamento de blocos da formação para o
interior do poço. A fim de se ter maior certeza sobre as causas da instabilidade das paredes
do poço, o autor recomenda o monitoramento das vibrações de coluna especialmente
quando perfurando formações duras ou formações fraturadas.
De acordo com Field et al [29], dois casos mostram a relação entre vibração de
coluna e arrombamento do poço. Grandes deslocamentos laterais na parte inferior do BHA
foram causados em decorrência da vibração gerada por uma rotação de coluna muito
próxima à velocidade crítica. Esta análise foi realizada após a falha por fadiga da
ferramenta de MWD. O perfil de calibre do poço (caliper) mostrava que o poço estava
arrombado em mais de três polegadas. Em outro caso, houve falha do MWD logo após o
início da perfuração com rotação 25% abaixo da velocidade crítica, segundo a análise de
vibração para um poço com o diâmetro nominal da broca. Entretanto, o caliper evidenciava
que o poço tinha um arrombamento entre 1 e 2,5 polegadas. Para o poço arrombado, a
análise realizada mostrava que a velocidade crítica seria muito próxima àquela utilizada no
campo antes da falha da ferramenta.
As brocas trabalham cisalhando e também impactando a formação através de
sucessivas percurssões. Em ambos os casos, apenas parte da energia fornecida pelo top

21
drive é utilizada pela broca. A parte restante é transferida para a coluna de perfuração sob a
forma de vibração, que pode inclusive ser percebida na superfície em alguns casos.
Segundo Henneuse [30], a presença de vibração é um limitante para a transferência
eficiente de energia para o BHA através da coluna. A energia cinética pode ser dissipada
em forma de calor ou pelo impacto contra as paredes do poço. Segundo o autor, o impacto
é o maior responsável por danos à parede do poço.

22
3 DESCRIÇÃO SUCINTA DO SOFTWARE UTILIZADO
O Software utilizado para o estudo é um programa comercial Wellplan composto de
vários módulos:
� Torque e Arraste
� Hidráulica
� Controle de Poço
� Cimentação
� Velocidade Crítica
� BHA
� Coluna Presa
A seguir, será apresentado um breve resumo dos dois módulos utilizados neste
trabalho para realizar as simulações propostas:
Torque e Arraste
Este módulo pode ser usado para estimar pesos e torques esperados durante a
manobra, perfuração (convencional e orientada) e “repassamento”.
Essa informação é usada para determinar se o poço pode ser perfurado ou avaliar o
que ocorre durante a perfuração. Este módulo é capaz de analisar colunas de perfuração e
de revestimento.
O módulo Torque e Arraste é baseado no Modelo de Dawson-Paslay, onde a coluna
analisada é tratada como um cabo estendido sem resistência à flexão.
O aplicativo assume que a fricção age no sentido contrário ao movimento.
As forças axiais necessárias para causar flambagem da coluna são determinadas e
caso ocorra flambagem, o modo do efeito (senoidal ou helicoidal) é indicado. A carga
crítica de flambagem é calculada a partir da equação de Dawson e Paslay apresentada
anteriormente:
F = 2 x (EI x W x sen α / r)1/2 (3)

23
Todas as análises do módulo Torque e Arraste utilizam informações sobre a
geometria do poço, características do fluido, registros direcionais (MWD) e coluna de
perfuração utilizada, além dos parâmetros de perfuração (peso, rotação, vazão).
Os resultados da análise podem ser exibidos em gráficos, tabelas e relatórios.
Velocidade Crítica
O módulo de Velocidade Crítica do software é utilizado para identificar as
velocidades críticas de rotação e áreas de alta concentração de tensões nas colunas de
perfuração.
Este módulo baseia-se em soluções por Elementos Finitos que levam em
consideração as forças intermitentes de contato/fricção, freqüências de excitação, empuxo
(buoyancy) e outros efeitos que podem ocorrer durante a perfuração.
Este módulo foi projetado para analisar as respostas de vibração do BHA em três
dimensões: axial, lateral e torcional.
Segundo Robello et al [31], é importante ressaltar que este módulo não fornece
soluções exatas para freqüências críticas. Os resultados são tensões relativas, indicando as
freqüências que são mais prováveis de causar vibração.
Como dados de entrada, o aplicativo solicita as Condições de Contorno e a
Densidade da Malha.
Nas Condições de Contorno são definidas as restrições físicas para o topo e a base
da coluna modelada por uma malha de elementos finitos.
Com a Densidade da Malha desejada, cada elemento finito será inicialmente
analisado e posteriormente as soluções de cada elemento serão integradas para que se
obtenha o estado de tensões de toda a coluna.
O modelo de análise dinâmica é baseado em respostas forçadas de freqüência. A
formulação matemática inclui mecanismos de amortecimento axial, torcional e relacionado
à viscosidade. Utilizando-se dados de entrada adequados e avaliando criteriosamente os
resultados obtidos, é possível estimar um intervalo no qual as vibrações poderiam ser
evitadas. Ainda, a análise fornece uma estimativa das tensões relacionadas à flexão, forças
de cisalhamento e deslocamento lateral do BHA utilizado.
24
O modelo resolve a forma linearizada de uma equação composta pelas matrizes de
rigidez, de massa e de amortecimento, na qual todos os deslocamentos e forças variam
harmonicamente no tempo em uma mesma freqüência.
Uma vez que o modelo desenvolvido por Robello e Mista [31] assume
comportamento cíclico, efeitos transientes, como forças de impacto que podem ter um
importância na vida útil de um componente do BHA não podem ser modeladas. O modelo
assume que o BHA está sujeito a uma forma variante harmonicamente da excitação {p}
dada por:
{p(t)}= {ps}sen ωt + {pc}cos ωt (9)
a qual produz um deslocamento resultante de:
{u(t)}= {us}sen ωt + {uc}cos ωt (10)
A freqüência angular ω é relacionada à velocidade de rotação através de um fator de
excitação. O fator de excitação define quantas vezes uma excitação ocorre por revolução.
Substituindo as equações (9) e (10) na equação geral do modelo, um sistema
linearizado do deslocamento de forças complexas pode ser escrito como:
{pc} + i{ps}= ( [k] – ω² [M] + iω [C] ) ({uc}+ i{us}) (11)
onde:
ω : frequência angular,
[k] : matriz de rigidez
i = √ -1,
A solução da equação (11) para um intervalo de velocidades de operação pode
resultar na descoberta da velocidade crítica ou em um intervalo de velocidades críticas
onde uma pequena oscilação forçada em um ponto de aplicação causará grandes

25
deslocamentos e tensões na coluna de perfuração. Tais deslocamentos podem causar
instabilidade do BHA.
O modelo assume [31] uma função força na broca. A cada rotação da broca, há um
número de impulsos definido como “Fator Freqüência de Excitação”. Para uma velocidade
de rotação por minuto (rpm) específica, o impulso ocorre a uma taxa de (rpm x “Fator
Freqüência de Excitação”). Um fator de excitação igual a três, por exemplo, implica em
três impulsos por rotação. O número de rotações por minuto requerido pelo modelo é o
aplicado efetivamente à broca. Em caso de haver um motor de fundo no BHA, o rpm a ser
alimentado no modelo é o somatório dos rpm’s da coluna (top drive) e os rpm’s gerados
pelo motor de fundo na broca. Isto se deve ao fato de só haver função força na broca. O
somatório dos rpm’s na broca multiplicado pelo fator de freqüência, resulta na freqüência
da função força.
Esta é uma das limitações do modelo quando é utilizado um motor de fundo na
coluna. Neste caso especificamente, a rotação da coluna acima do motor de fundo será
bastante inferior à rotação da broca, entretanto o modelo irá considerar uma única
velocidade de rotação para a coluna inteira, isto é, a velocidade de rotação da broca. Como
se espera amplitudes de vibrações menores para velocidades de rotação menores, os valores
das tensões fornecidos pelo modelo para a parte do BHA acima do motor de fundo estarão
super dimensionados.
O modelo assume um deslocamento e momento para cada impulso da função força
na broca. O deslocamento pode ser na forma de movimentos axial, lateral ou torcional, ou
ainda uma combinação dos três efeitos.
Embora as excitações ocorram principalmente na broca, excitações adicionais
podem ser provenientes dos pontos de contato dos estabilizadores, motor de fundo, under-
reamer e hole-opener, caso façam parte da coluna de perfuração.
A experiência mostra o Fator Freqüência de Excitação para brocas tricônicas é três,
enquanto para brocas PDC’s este fator está associado ao número de lâminas. Não obstante,
fatores elevados representam comportamento complexo, tal como Bit Whirl.
A relação entre rpm, “Fator Freqüência de Excitação” e freqüência da broca é dada
pela equação (12):

26
N = f x 60 / EF (12)
onde:
N: velocidade de rotação em rpm,
F: freqüência,
EF: “Fator Freqüência de Excitação”,
Atualmente, a otimização dos parâmetros de perfuração é obtida através de
fórmulas empíricas, como a equação (13). Um dos parâmetros relacionados à otimização da
taxa de penetração é a rotação, a qual é restringida por freqüências críticas que levam à
vibrações excessivas. Qualquer rotação analisada em uma otimização não deve pertencer
ao intervalo que resulta em vibrações e tensões altas.
MÁX ROP (W,N) = Kf (W/d)a1 x (N/100)a2 (13)
onde:
a1 e a2: constantes,
N: número de rotações por minuto da broca,
W: peso aplicado à broca (Lb),
D: diâmetro da broca,
Kf : fator relacionado ao tipo da formação,
Robello e Miska [32] utilizam um método para alcançar uma combinação ótima de
peso e rotação que levaria à máxima taxa de penetração. Este método, denominado “ROP
Parameter” é definido na equação (14) e leva em consideração as respostas do simulador
relativas a deslocamentos e tensões. Este parâmetro pode ser utilizado como guia para
eliminar pares de peso e rotação indesejados, que resultariam em picos de vibração. Quanto
maior o “ROP Parameter”, maior a probabilidade de os pares de parâmetros selecionados
levar a uma taxa de penetração otimizada. Ainda, este parâmetro auxilia a encontrar regiões
estáveis de operação onde não haja vibrações excessivas.
ROP param = [((W x N) / µ ) / Ev]1/2
(14)

27
onde:
µ : viscosidade (cP),
Ev : várias respostas da solução de deslocamentos nodais (forças relativas, tensões, etc)

28
4 ANÁLISE COMPUTACIONAL 4.1 Flambagem: comparação e análise do comportamento da coluna de perfuração
utilizando shock sub de diâmetros distintos (8 1/2" e 9 1/2") em BHA de 17 1/2"
Este estudo tem como objetivo analisar a possibilidade da utilização de shock sub
em BHA’s de 17 ½”. Geralmente não se utiliza esta ferramenta na fase 17 ½”, onde
historicamente as formações encontram-se em profundidades superficiais e intermediárias.
São registradas taxas de penetração superiores a 20m/h, não havendo a necessidade da
utilização de shock subs, ferramentas mais apropriadas para serem utilizadas em BHA’s
para perfurar formações mais duras e consolidadas.
O poço em análise apresenta grandes extensões de intercalações de formações
argilosas com arenitos e rochas vulcânicas. O projeto do poço prevê o aprofundamento da
fase 17 ½” devido ao fato da profundidade da zona de interesse ser superior a 5500m. Após
a descida do revestimento 13 3/8”, o projeto contempla a perfuração da fase 12 ¼”. A
descida do revestimento 9 5/8” e a perfuração da fase 8 ½” é condicionada ao resultado da
perfilagem intermediária, que ocorre logo após a perfuração da fase 12 ¼”.
À medida que se perfuram poços cada vez mais profundos, há a necessidade de se
estender e aprofundar a fase 17 ½”, encontrando assim, ao final da fase, formações mais
competentes, onde se observam taxas de penetração entre 5 e 10 m/h (bem inferiores
àquelas obtidas em formações mais superficiais), mesmo com peso sobre broca variando
entre 50 e 70Klb (pesos geralmente altos para as fases 17 ½”).
Nestes casos, seria factível e razoável o uso de shock subs com o intuito de
minimizar os efeitos do bit bounce (mecanismo que gera vibração axial na coluna),
característico de formações duras e poços verticais. O efeito mais crítico das vibrações
axiais é o desgaste prematuro da broca.
A análise será realizada inserindo-se um shock sub abaixo das ferramentas de
LWD/MWD no BHA proposto acima. Utilizando pesos sobre broca entre 50 e 70Klb, a
linha neutra estará nas seções de comando imediatamente abaixo do drilling jar. Neste
caso, o shock sub estará sob compressão. Como supostamente se trata de um ponto fraco da
coluna, esta compressão excessiva pode levar a uma ruptura da estrutura por flambagem.

29
Analisando a equação de Dawson-Paslay (eq.3), Fc= 2 x (EI x W x sen α / r)1/2,
conclui-se que a força crítica de flambagem (Fc) é inversamente proporcional à raiz
quadrada da distância entre o corpo do elemento tubular e a parede do poço. Esta análise
torna-se relevante uma vez que nas simulações, mais especificamente nos estabilizadores, o
aplicativo leva em consideração o diâmetro externo do corpo do tubo e não o diâmetro das
camisas (sleeve type) e/ou o maior diâmetro (integral blade). Assim, pode-se dizer que o
aplicativo é conservador principalmente quando se trata de um BHA estabilizado, como
nos casos que serão tratados a seguir.
Na tabela 9 é apresentada a geometria do poço, onde verifica-se a sapata do
revestimento de 20” na profundidade de 1695m e uma extensão de 2635m de poço aberto
na fase 17 ½”.
Na tabela 10, discrimina-se a composição da coluna de perfuração utilizada no poço
e na tabela 11 os dados do shock sub fornecidos pelo fabricante da ferramenta, que será
integrada à coluna para viabilizar o estudo. O fluido de perfuração é base-água, com peso
10,1ppg, viscosidade plástica de 23,6cP e limite de escoamento de 22,8 lb/ 100pe.
Tabela 9 - Geometria do poço
Fase Prof.(m) Comp.(m) Diâmetro interno(pol)
Observação
Riser 1090 1090 19 ¾ LDA = 1090m
Revestimento 1695 605 18 Rev. 20”
Poço aberto 4330 2635 17 ½ Arrombamento: 5%

30
Tabela 10 - Coluna de Perfuração analisada
Tabela 11- Dados do shock sub (Fonte: fabricante)
Diâmetro externo (pol) 8 9 ½
Diâmetro interno (pol) 2,625 3
Área de aço (pol2) 44,85 63,81
Comprimento (m) 6,5 7,4
Peso unitário (lb/pe) 144 188
Máx. carga recomendada (lb) 91000 91000
Primeiramente, considerando o BHA 17 ½” descrito acima (sem shock sub), tal qual
foi utilizado em um poço exploratório, utilizando peso de 60Klb, 110 rpm e 1000gpm de
vazão, parâmetros utilizados na perfuração deste poço, chega-se ao seguinte gráfico:
Ferramenta Prof.(m) Comp.(m) Diâmetro externo (pol)
Diâmetro interno (pol)
Peso (lb/pe)
Tubo DP 5” 4077,27 4077,27 5 4 19,5 HWDP 5” 4105,41 28,14 5 3 49,7 Comando 4133,36 27,95 6 ¾ 2 13/16 100,62
Sub redução 4134,69 1,33 7 ½ 2 ¾ 129,2 Comando 4153,04 18,35 8 ½ 2 ½ 176,38
Drilling Jar 4161,81 8,77 8 2 13/16 138,4 Comando 4282,2 120,39 8 ½ 2 ½ 176,38 Float sub 4283,21 1,01 8 3 147
Estabilizador NM 4292,41 9,2 8 ½ 3 169,06 Comando NM 4301,31 8,9 8 3 152,76
MWD 4306,51 5,2 9 ½ 4 192,18
LWD 4315,01 8,5 9 ½ 2 3/8 192,18
Estabilizador 4317,11 2,1 8 ½ 3 169,06
Comando 4326,47 9,36 8 ¼ 3 168,21
Estabilizador 4328,69 2,22 9 3 192,45
Sub broca 4329,6 0,91 7 29/32 3 ¼ 142,83
Broca tricônica 4330 0,40 17,5 415

31
Tension (kip)-100 0 100 200 300 400 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800
Mea
sure
d D
epth
(m)
0
500
1000
1500
2000
2500
3000
3500
4000
4500
L E G E N D
Tension LimitHelical Buckling (Non Rotating)Helical Buckling (Rotating)Sinusoidal Buckling (all operations)Rotate Off BottomRotate On BottomTripping OutTripping In
Gráfico 1a - Limite de flambagem x tensão durante perfuração sem shock sub
O aumento da força crítica de flambagem (curvas Helical Buckling Rotating – cor
vermelha e Sinusoidal Buckling – cor vinho) a partir da profundidade de 4100m
(aproximadamente) é relacionado ao incremento da rigidez dos componentes do BHA.
Verifica-se uma tensão efetiva (curva Rotate on bottom – cor laranja) superior ao limite de
flambagem na região do BHA
Ampliando a área onde há a interseção entre a tensão efetiva e o limite de
flambagem (gráfico 1b), nota-se que a partir de 4260m a coluna sofre flambagem senoidal,
partindo para flambagem helicoidal próximo a 4300m.

32
A curva verde indica os esforços durante a descida e retirada da coluna. A
flambagem nestes casos pode ser considerada inexistente uma vez que em caso de arraste, o
atrito se dará na sua totalidade pelo contato entre os estabilizadores e a parede do poço.
Gráfico 1b – Detalhe do gráfico 1a
O resultado obtido pelo simulador é amplamente questionável por 3 distintas
razões:
1ª razão: este BHA foi utilizado em um poço e não apresentou falha mecânica durante a
operação, tampouco ganho de ângulo acentuado
2ª razão: como foi dito anteriormente, o simulador não leva em consideração o fato de os
estabilizadores estarem apoiados na parede do poço, minimizando o risco de flambagem
3ª razão: como os poços não são perfeitamente verticais, com a compressão dos
componentes inferiores do BHA, há uma tendência natural de os mesmos fletirem e se
apoiarem no lado baixo do poço (low side)
O programa gera também uma tabela de saída analisando se o componente está
sofrendo flambagem, definindo ainda o tipo (helicoidal e/ou senoidal). A tabela 12
apresenta esta análise para um BHA 17 ½” sem shock sub.

33
O sinal negativo nas cargas efetivas e limites de flambagem indicam compressão.
Pode-se observar que a linha neutra, para um peso sobre broca de 60Klb, está nos
Profundidade (m) Componente
Distância da broca
(m)
Carga axial efetiva (Kpsi)
Flambagem Senoidal
(Kpsi)
Flambagem Helicoidal
(Kpsi) F
4330 BIT 0 -63,2 -22,4 -31,7 H 4328,69 BS 1,31 -62,7 -22,4 -31,7 H 4328,69 IBS 1,31 -62,7 -35,9 -50,8 H 4326,47 IBS 3,53 -61,6 -35,9 -50,8 H 4326,47 DC 3,53 -61,6 -27,2 -38,4 H 4317,11 DC 12,89 -57,2 -27,2 -38,4 H 4317,11 IBS 12,89 -57,2 -29,2 -41,2 H 4315,01 IBS 14,99 -56,3 -29,2 -41,2 H 4315,01 MWD 14,99 -56,3 -39,1 -55,3 H 4306,51 MWD 23,49 -51,9 -39,1 -55,3 S 4306,51 MWD 23,49 -51,9 -39 -55,2 S 4301,31 MWD 28,69 -49,2 -39 -55,2 S 4301,31 DC 28,69 -49,2 -23 -32,5 H 4292,41 DC 37,59 -45,4 -23 -32,5 H 4292,41 IBS 37,59 -45,4 -29,1 -41,2 H 4289,89 IBS 40,11 -44,1 -29,1 -41,2 H 4289,89 BS 40,11 -44,1 -22,8 -32,2 H 4288,88 BS 41,12 -43,8 -22,8 -32,2 H 4288,88 DC 41,12 -43,8 -29,8 -42,2 H 4280,28 DC 49,72 -39,6 -29,8 -42,2 S 4271,68 DC 58,32 -35,3 -29,8 -42,2 S 4263,08 DC 66,92 -31,1 -29,8 -42,1 S 4254,48 DC 75,52 -27 -29,8 -42,1 ~ 4245,88 DC 84,12 -22,8 -29,8 -42,1 ~ 4237,28 DC 92,72 -18,7 -29,7 -42,1 ~ 4228,69 DC 101,31 -14,5 -29,7 -42 ~ 4220,09 DC 109,91 -10,3 -29,7 -42 ~ 4211,49 DC 118,51 -6,2 -29,7 -42 ~ 4202,89 DC 127,11 -2 -29,7 -42 ~ 4194,29 DC 135,71 2,2 -29,7 -41,9 ~ 4185,69 DC 144,31 6,4 -29,6 -41,9 ~ 4177,09 DC 152,91 10,6 -29,6 -41,9 ~ 4168,49 DC 161,51 14,8 -29,6 -41,9 ~ 4168,49 JAR 161,51 14,8 -21,5 -30,4 ~ 4159,72 JAR 170,28 18,1 -21,5 -30,4 ~ 4159,72 DC 170,28 18,1 -29,6 -41,8 ~
Tabela 12 - Análise de flambagem de BHA 17 ½” sem shock sub

34
comandos abaixo do drilling jar. Isto é previamente calculado para que a ferramenta
sempre trabalhe tracionado, prolongando sua vida útil.
Segundo a planilha, teoricamente a flambagem ocorreria ao longo dos 69,6m
inferiores do BHA, comprimento obtido interpolando os dados da planilha linearmente.
Há mudança do tipo de flambagem sofrido nas ferramentas de LWD/MWD devido
à sua grande rigidez (9 ½” x 2 3/8”; 192,18ppg). Estas ferramentas sofreriam flambagem
senoidal ao contrário dos componentes acima e abaixo das mesmas, que sofreriam
flambagem helicoidal.
A partir do 4º comando 8 ½” acima do último estabilizador, não haveria mais
flambagem. Entretanto, na prática, desconsidera-se a possibilidade de flambagem em
comandos, principalmente aqueles de maior diâmetro externo (9 ½”, 8 ½”, 8 ¼” e 8”).
A simulação a seguir é feita incluindo-se no BHA 17 ½” proposto, um shock sub de
8” abaixo do LWD/MWD. Isto aumentará o offset (distância entre broca e perfil) das
ferramentas de LWD, mas como a fase de 17 ½” não contem os intervalos de interesse e/ou
objetivos do poço, a inclusão seria interessante, caso possível.
Os parâmetros de perfuração serão os mesmos do exemplo anterior (60Klb, 110 rpm
e 1000gpm), de modo que a única variação nesta análise paramétrica seja a inclusão do
shock sub no BHA de 17 ½”. A seguir, o gráfico 2a apresenta as tensões ao longo da
profundidade medida do poço.

35
Tension (kip)-100 0 100 200 300 400 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800
Mea
sure
d D
epth
(m)
0
500
1000
1500
2000
2500
3000
3500
4000
4500
L E G E N D
Tension LimitHelical Buckling (Non Rotating)Helical Buckling (Rotating)Sinusoidal Buckling (all operations)Rotate Off BottomRotate On BottomTripping OutTripping In
Gráfico 2a - Limite de flambagem x tensão durante perfuração com shock sub 8”
Graficamente, o comportamento é muito similar ao BHA sem shock sub (gráfico
1a). Ampliando a zona de interseção (gráfico 2b), constata-se que assim como no exemplo
anterior, as partes mais inferiores do BHA estão sob efeito de flambagem. Não obstante, as
três razões citadas anteriormente, que tornam o resultado um tanto quanto discutível,
também são aplicadas neste exemplo.
Nota-se que aproximadamente a 4260m a estrutura experimenta flambagem
senoidal, caminhando para helicoidal em torno de 4290m.

36
Gráfico 2b – Detalhe do gráfico 2a
Segundo a planilha de saída (tabela 13), a linha neutra para 60Klb de peso sobre
broca está nos comandos abaixo do drilling jar.
A coluna estaria flambando entre a extremidade (4330m) e 4258,5m (distância de
71,5m da broca), havendo inversão do tipo de flambagem nas ferramentas de LWD, assim
como no exemplo anterior.
Para melhor quantificar a intensidade da flambagem e definir o ponto fraco do BHA
relacionado a este efeito, foi criada uma coluna com a diferença entre o limite mínimo de
flambagem (senoidal) e a tensão axial (∆ (B – σ)). Pode-se detectar que o shock sub de 8” é
o que apresenta uma das maiores diferenças (entre 30 e 33Klb).

37
Profundidade (m)
Componente Distância da broca
(m)
Carga axial
efetiva (Kpsi)
Flambagem Senoidal
(Kpsi)
Flambagem Helicoidal
(Kpsi))
F ∆(B–σ) (Kpsi)
4330 BIT 0 -63,2 -22,4 -31,7 H -40,8
4328,69 BS 1,31 -62,7 -22,4 -31,7 H -40,3 4328,69 IBS 1,31 -62,7 -35,9 -50,8 H -26,8 4326,47 IBS 3,53 -61,6 -35,9 -50,8 H -25,7 4326,47 DC 3,53 -61,6 -27,2 -38,4 H -34,4 4317,11 DC 12,89 -57,2 -27,2 -38,4 H -30 4317,11 IBS 12,89 -57,2 -29,2 -41,2 H -28 4315,01 IBS 14,99 -56,3 -29,2 -41,2 H -27,1 4315,01 BS 14,99 -56,3 -23,1 -32,7 H -33,2 4308,5 BS 21,5 -53,6 -23,1 -32,7 H -30,5 4308,5 MWD 21,5 -53,6 -39,1 -55,3 S -14,5 4300 MWD 30 -49,3 -39,1 -55,2 S -10,2 4300 MWD 30 -49,3 -39 -55,2 S -10,3
4294,8 MWD 35,2 -46,8 -39 -55,2 S -7,8 4294,8 DC 35,2 -46,8 -23 -32,5 H -23,8 4285,9 DC 44,1 -43 -23 -32,5 H -20 4285,9 IBS 44,1 -43 -29,1 -41,1 H -13,9 4283,38 IBS 46,62 -41,7 -29,1 -41,1 H -12,6 4283,38 BS 46,62 -41,7 -22,7 -32,2 H -19 4282,37 BS 47,63 -41,3 -22,7 -32,2 H -18,6 4282,37 DC 47,63 -41,3 -29,8 -42,2 S -11,5 4273,77 DC 56,23 -37,1 -29,8 -42,2 S -7,3 4265,17 DC 64,83 -33 -29,8 -42,1 S -3,2 4256,57 DC 73,43 -28,8 -29,8 -42,1 ~ 1 4247,97 DC 82,03 -24,6 -29,8 -42,1 ~ 5,2 4239,37 DC 90,63 -20,5 -29,8 -42,1 ~ 9,3 4230,77 DC 99,23 -16,3 -29,7 -42 ~ 13,4 4222,18 DC 107,82 -12,1 -29,7 -42 ~ 17,6 4213,58 DC 116,42 -7,9 -29,7 -42 ~ 21,8 4204,98 DC 125,02 -3,7 -29,7 -42 ~ 26 4196,38 DC 133,62 0,5 -29,7 -42 ~ 30,2 4187,78 DC 142,22 4,7 -29,6 -41,9 ~ 34,3 4179,18 DC 150,82 9 -29,6 -41,9 ~ 38,6 4170,58 DC 159,42 13,2 -29,6 -41,9 ~ 42,8 4161,98 DC 168,02 17,4 -29,6 -41,9 ~ 47 4161,98 JAR 168,02 17,4 -21,5 -30,4 ~ 38,9 4153,21 JAR 176,79 20,7 -21,5 -30,4 ~ 42,2 4153,21 DC 176,79 20,7 -29,6 -41,8 ~ 50,3
Tabela 13 - Análise de flambagem de BHA 17 ½” com shock sub 8”

38
Finalmente, incluí-se ao BHA proposto um shock sub 9 ½” imediatamente abaixo
do LWD/MWD, referente aos gráficos 3a e 3b a seguir .
Tension (kip)-100 0 100 200 300 400 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800
Mea
sure
d D
epth
(m)
0
500
1000
1500
2000
2500
3000
3500
4000
4500
L E G E N D
Tension LimitHelical Buckling (Non Rotating)Helical Buckling (Rotating)Sinusoidal Buckling (all operations)Rotate Off BottomRotate On BottomTripping OutTripping In
Gráfico 3a - Limite de flambagem x tensão durante perfuração com shock sub 9 ½”
Gráfico 3b – Detalhe do gráfico 3a

39
De acordo com os gráficos 3a e 3b, assim, como nos dois BHA’s anteriores, a parte
inferior do BHA (até 70m da broca) estaria sob o efeito de flambagem, a linha neutra
estaria nos comandos abaixo do drilling jar, as ferramentas de LWD/MWD estariam sob
flambagem senoidal, as três considerações feitas no 1º caso seriam pertinentes.
Entretanto, analisando a coluna ∆ (B – σ) da tabela 14, percebe-se que o shock sub
não é mais o ponto fraco deste BHA. Os sensíveis aumentos da área de aço e por extensão
de sua rigidez, aumentam consideravelmente os limites de flambagem se comparados com
o shock sub de 8”, passando de 23,1 (senoidal) e 32,7 Kpsi (helicoidal) para 40,2 e 56,9
Kpsi em uma ferramenta de 9 ½”.
Assim, a coluna ∆ (B – σ) que no BHA com a ferramenta de 8” variava entre 33,2 e
30,5 Kpsi, passa a variar entre 16,1 e 12,3 Kpsi com a ferramenta de 9 ½”, valores
significativamente inferiores se comparados aos dos demais componentes teoricamente sob
efeito de flambagem, não representando um ponto crítico neste caso.
Após analisar os três casos, pode-se concluir que:
� o simulador é incoerente ao considerar o diâmetro do corpo em detrimento do
diâmetro das lâminas dos estabilizadores
� de acordo com os resultados obtidos, seria recomendado a utilização de um BHA 17
½” sem shock sub ou com a ferramenta de 9 ½”
Com o intuito de alcançar um resultado mais preciso e confiável, onde não seja
necessário a utilização de comparações das diferenças entre o limite mínimo de flambagem
(senoidal) e a tensão axial (∆ (B – σ)) de distintos BHAs, sugere-se o desenvolvimento de
um modelo utilizando o Método dos Elementos Finitos (MEF), como o modelo
desenvolvido por Akgun et al [33]. Este modelo utiliza o MEF para prever a carga crítica
de flambagem em poços direcionais em trechos com perda de ângulo (dropping hole),
assim como apresenta um estudo experimental para prever a carga crítica em um trecho do
poço com ganho de ângulo (building hole).
Saliés et al [34] desenvolveram um modelo em MEF para analisar flambagem
helicoidal, considerando a fricção durante a flambagem. Os autores afirmam que as
soluções obtidas pelo modelo foram coerentes com os resultados obtidos em testes
experimentais.

40
Como sugestões para utilização de absorvedores em BHA 17 ½”, é possível
trabalhar com duas opções: com motor de fundo ou com mais um estabilizador e um
comando curto logo acima da broca, sem motor de fundo. Estas duas sugestões seriam
satisfatórias no que tange ao controle de verticalidade.
Utilizando-se motor de fundo (MF), em caso de ganho de ângulo excessivo,
podería-se corrigir a inclinação. O mesmo deveria ser de diâmetro 9 5/8”, com camisa
Profundidade (m) Componente
Distância da broca
(m)
Carga axial efetiva (Kpsi)
Flambagem Senoidal
(Kpsi)
Flambagem Helicoidal
(Kpsi) F
∆(B–σ) (Kpsi)
4330 BIT 0 -63,2 -22,4 -31,7 H -40,8 4328,69 BS 1,31 -62,7 -22,4 -31,7 H -40,3 4328,69 IBS 1,31 -62,7 -35,9 -50,8 H -26,8 4326,47 IBS 3,53 -61,6 -35,9 -50,8 H -25,7 4326,47 DC 3,53 -61,6 -27,2 -38,4 H -34,4 4317,11 DC 12,89 -57,2 -27,2 -38,4 H -30 4317,11 IBS 12,89 -57,2 -29,2 -41,2 H -28 4315,01 IBS 14,99 -56,3 -29,2 -41,2 H -27,1 4315,01 BS 14,99 -56,3 -40,2 -56,9 S -16,1 4307,67 BS 22,33 -52,5 -40,2 -56,9 S -12,3 4307,67 MWD 22,33 -52,5 -39,1 -55,3 S -13,4 4299,17 MWD 30,83 -48,1 -39,1 -55,2 S -9 4299,17 MWD 30,83 -48,1 -39 -55,2 S -9,1 4293,97 MWD 36,03 -45,5 -39 -55,2 S -6,5 4293,97 DC 36,03 -45,5 -23 -32,5 H -22,5 4285,07 DC 44,93 -41,8 -23 -32,5 H -18,8 4285,07 IBS 44,93 -41,8 -29,1 -41,1 H -12,7 4282,55 IBS 47,45 -40,5 -29,1 -41,1 S -11,4 4282,55 BS 47,45 -40,5 -22,7 -32,2 H -17,8 4281,54 BS 48,46 -40 -22,7 -32,2 H -17,3 4281,54 DC 48,46 -40 -29,8 -42,2 S -10,2 4272,94 DC 57,06 -35,9 -29,8 -42,2 S -6,1 4264,34 DC 65,66 -31,7 -29,8 -42,1 S -1,9 4255,74 DC 74,26 -27,6 -29,8 -42,1 ~ 2,2 4247,14 DC 82,86 -23,4 -29,8 -42,1 ~ 6,4 4238,54 DC 91,46 -19,2 -29,8 -42,1 ~ 10,6 4229,94 DC 100,06 -15,1 -29,7 -42 ~ 14,6 4221,34 DC 108,65 -10,9 -29,7 -42 ~ 18,8 4212,75 DC 117,25 -6,7 -29,7 -42 ~ 23
Tabela 14 - Análise de flambagem de BHA 17 ½” com shock sub 9 ½”

41
levemente under gauge. O shock sub de 9 ½”, assim como nos casos analisados, deveria ser
incluído logo abaixo das ferramentas de LWD/MWD.
Analisando esta hipótese, ve-se no gráfica 4 que há flambagem senoidal e
helicoidal.
Gráfico 4 - Limite de flambagem x tensão com motor de fundo e shock sub 9 ½”
Verificando a tabela 15 e comparando a diferença entre o limite de flambagem e a
tensão axial no shock sub com os demais componentes do BHA, conclui-se que o mesmo
não é o ponto fraco da coluna.

42
Profundidade (m) Componente
Distância da broca
(m)
Tensão axial
efetiva (Klb)
Flambagem Senoidal
(Klb)
Flambagem Helicoidal
(Klb) F
∆ (B – σ ) (Klb)
4330 BIT 0 -63,2 -22,4 -31,7 H -40,8 4320,46 BHM 9,54 -57,9 -42,8 -60,5 S -15,1 4320,46 IBS 9,54 -57,9 -35,9 -50,8 H -22 4318,24 IBS 11,76 -56,6 -35,9 -50,8 H -20,7 4318,24 BS 11,76 -56,6 -40,2 -56,9 S -16,4 4310,84 BS 19,16 -52,6 -40,2 -56,9 S -12,4 4310,84 MWD 19,16 -52,6 -39,1 -55,3 S -13,5 4302,34 MWD 27,66 -44 -39,1 -55,3 S -4,9 4302,34 MWD 27,66 -44 -39 -55,2 S -5 4297,14 MWD 32,86 -43,9 -39 -55,2 S -4,9 4297,14 DC 32,86 -43,9 -23 -32,5 H -20,9 4288,24 DC 41,76 -40,2 -23 -32,5 H -17,2 4288,24 IBS 41,76 -40,2 -29,1 -41,2 S -11,1 4285,72 IBS 44,28 -39,1 -29,1 -41,2 S -10 4285,72 BS 44,28 -39,1 -22,8 -32,2 H -16,3 4284,71 BS 45,29 -38,7 -22,8 -32,2 H -15,9 4284,71 DC 45,29 -38,7 -29,8 -42,2 S -8,9 4276,11 DC 53,89 -34,5 -29,8 -42,2 S -4,7 4267,51 DC 62,49 -30,3 -29,8 -42,2 S -0,5 4258,91 DC 71,09 -26,1 -29,8 -42,1 ~ 3,7
Outra opção seria a utilização de um comando curto acima do estabilizador near bit
(NB) e sem motor de fundo. Com esta composição, tería-se um BHA de maior estabilidade,
caracterizando maior dificuldade em ganhar excessiva inclinação.
Acima do estabilizador near bit seria incluído um comando curto (SDC), seguido de
um estabilizador full gauge ou levemente under gauge, um comando, estabilizador, shock
sub 9 ½”, LWD/MWD. O gráfico 5 mostra que o BHA sofre flambagem durante a
perfuração.
Tabela 15 - Análise de flambagem de BHA 17 ½” com shock sub 9 ½” e MF
43
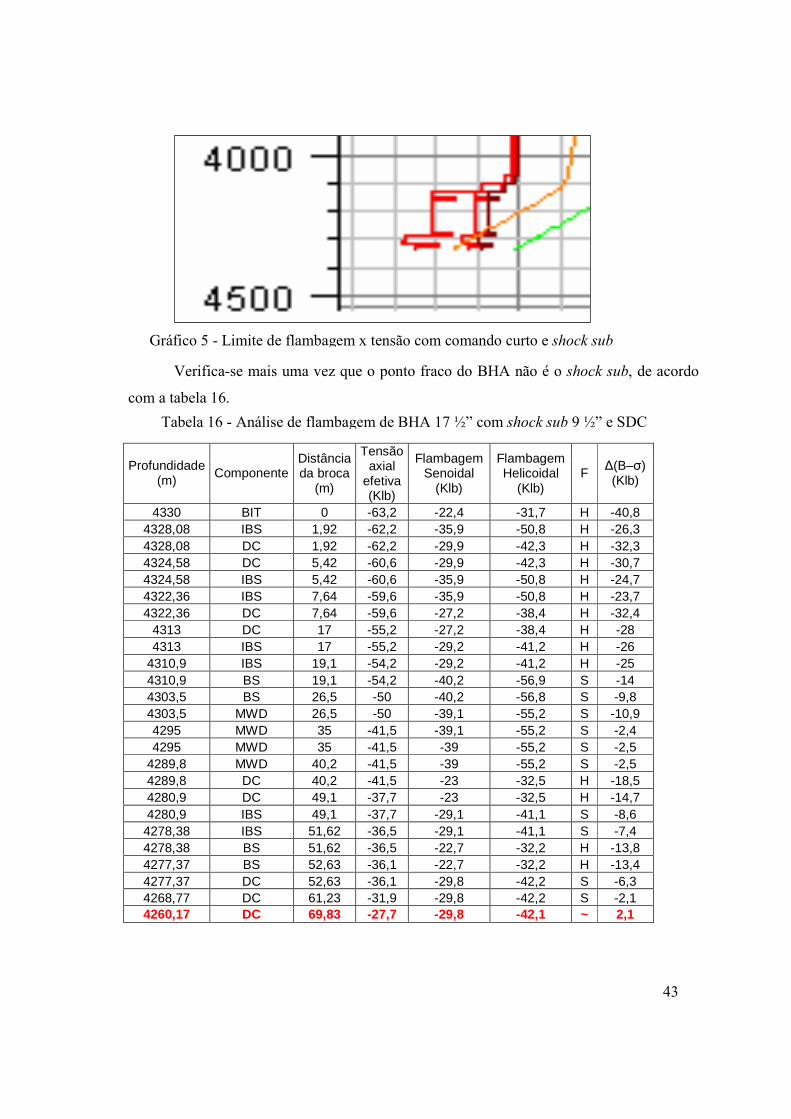
Verifica-se mais uma vez que o ponto fraco do BHA não é o shock sub, de acordo
com a tabela 16.
Profundidade (m)
Componente Distância da broca
(m)
Tensão axial
efetiva (Klb)
Flambagem Senoidal
(Klb)
Flambagem Helicoidal
(Klb) F
∆(B–σ) (Klb)
4330 BIT 0 -63,2 -22,4 -31,7 H -40,8 4328,08 IBS 1,92 -62,2 -35,9 -50,8 H -26,3 4328,08 DC 1,92 -62,2 -29,9 -42,3 H -32,3 4324,58 DC 5,42 -60,6 -29,9 -42,3 H -30,7 4324,58 IBS 5,42 -60,6 -35,9 -50,8 H -24,7 4322,36 IBS 7,64 -59,6 -35,9 -50,8 H -23,7 4322,36 DC 7,64 -59,6 -27,2 -38,4 H -32,4
4313 DC 17 -55,2 -27,2 -38,4 H -28 4313 IBS 17 -55,2 -29,2 -41,2 H -26
4310,9 IBS 19,1 -54,2 -29,2 -41,2 H -25 4310,9 BS 19,1 -54,2 -40,2 -56,9 S -14 4303,5 BS 26,5 -50 -40,2 -56,8 S -9,8 4303,5 MWD 26,5 -50 -39,1 -55,2 S -10,9 4295 MWD 35 -41,5 -39,1 -55,2 S -2,4 4295 MWD 35 -41,5 -39 -55,2 S -2,5
4289,8 MWD 40,2 -41,5 -39 -55,2 S -2,5 4289,8 DC 40,2 -41,5 -23 -32,5 H -18,5 4280,9 DC 49,1 -37,7 -23 -32,5 H -14,7 4280,9 IBS 49,1 -37,7 -29,1 -41,1 S -8,6
4278,38 IBS 51,62 -36,5 -29,1 -41,1 S -7,4 4278,38 BS 51,62 -36,5 -22,7 -32,2 H -13,8 4277,37 BS 52,63 -36,1 -22,7 -32,2 H -13,4 4277,37 DC 52,63 -36,1 -29,8 -42,2 S -6,3 4268,77 DC 61,23 -31,9 -29,8 -42,2 S -2,1 4260,17 DC 69,83 -27,7 -29,8 -42,1 ~ 2,1
Tabela 16 - Análise de flambagem de BHA 17 ½” com shock sub 9 ½” e SDC
Gráfico 5 - Limite de flambagem x tensão com comando curto e shock sub
44
Utilizando-se um software comercial (Abaqus) que utiliza Método dos Elementos
Finitos para análise estrutural, a coluna proposta na tabela 16, com comando curto e shock
sub abaixo da ferramenta de LWD, foi modelada (figura 3). Como premissas do modelo
foram consideradas:
1. Plano bi-dimensional
2. Componentes da coluna definidos como vigas de seção circulares
3. Restrição de deslocamento lateral nos estabilizadores
4. Carga de tração aplicada na superfície igual ao peso molhado da coluna (linha
neutra na broca)
5. Broca com restrição à rotação (rotulada)
A análise de flambagem (Buckle) no Abaqus, em um processo de perturbação
linear, é realizada estimando-se os auto-valores que satisfaçam a equação:
(Kmn (0) + λ(i). KΔmn ). vm (i)= 0, (15)
onde:
Kmn (0) é a matriz de rigidez sem carregamento (“estado base”);
λ(i) é o auto-valor para i-nésimo modo de flambagem;
KΔmn é a matriz de rigidez após a aplicação de carregamento
vm (i) é o auto-vetor (matriz deslocamento);
mn referem-se aos graus de liberdade da estrutura;
Auto-valores são geralmente utilizados para estimar a carga crítica de flambagem de
estruturas rígidas, que apresentam pequenas deformações devido a carga axial inferiores ao
1º modo de flambagem. O exemplo clássico de estrutura rígida é a coluna de Euler, que se
comporta sem deformações sob o efeito de cargas axiais de intensidade inferiores às cargas
críticas de flambagem. Uma vez submetida à carga axial superior à carga crítica, ocorre
instabilidade da estrutura e consequentemente, grandes deformações.
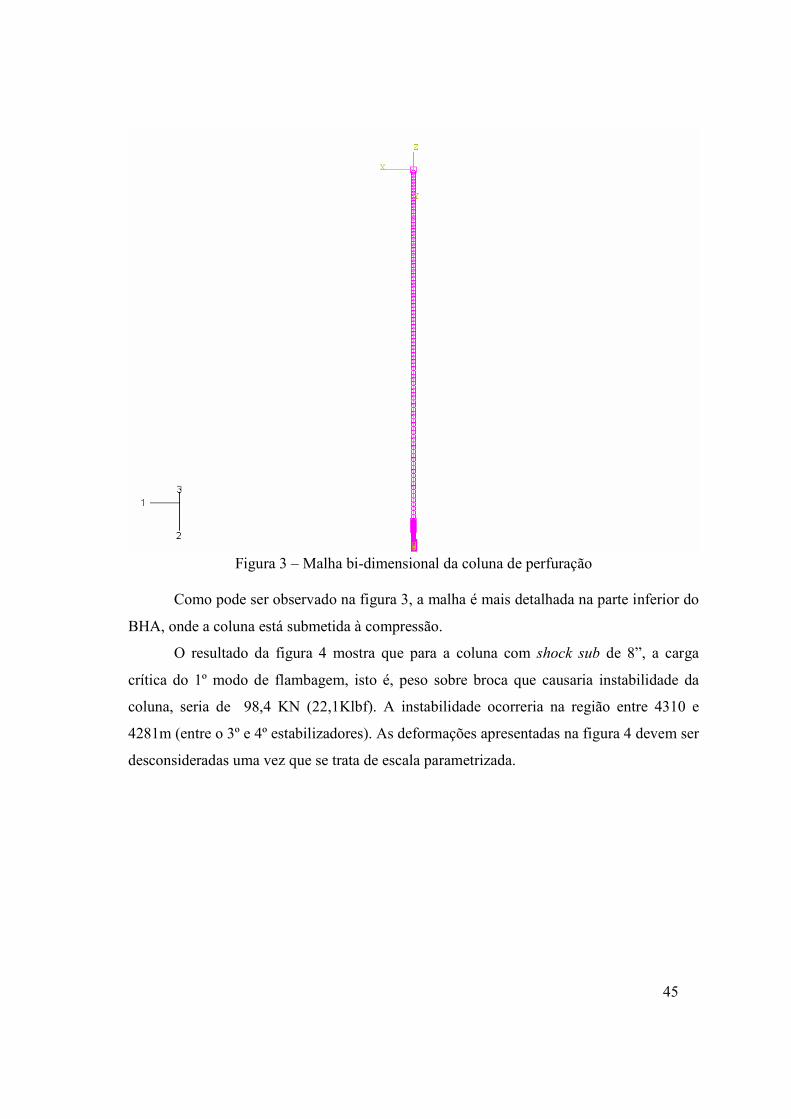
45
Figura 3 – Malha bi-dimensional da coluna de perfuração
Como pode ser observado na figura 3, a malha é mais detalhada na parte inferior do
BHA, onde a coluna está submetida à compressão.
O resultado da figura 4 mostra que para a coluna com shock sub de 8”, a carga
crítica do 1º modo de flambagem, isto é, peso sobre broca que causaria instabilidade da
coluna, seria de 98,4 KN (22,1Klbf). A instabilidade ocorreria na região entre 4310 e
4281m (entre o 3º e 4º estabilizadores). As deformações apresentadas na figura 4 devem ser
desconsideradas uma vez que se trata de escala parametrizada.

46
Figura 4 – Deformação para o 1º modo de flambagem com shock sub 8”
A figura 5 mostra o resultado para coluna com shock sub de 9,5”. Para esta
composição, a carga crítica seria de 366,2KN (82,3Klbf). Assim como no caso anterior, a
instabilidade para o 1º modo ocorreria entre o 3º e 4º estabilizadores.

47
Figura 5 – Deformação para o 1º modo de flambagem com shock sub 9,5”
A figura 6 mostra o resultado para a coluna sem o 4º estabilizador. Para esta
composição, a carga crítica seria de 133,6KN (30Klbf). Nota-se neste caso que a
instabilidade não estaria confinada entre o 3º e 4º estabilizadores como nas análises
anteriores, mas ao longo da coluna a partir do 3º estabilizador. Como esperado, as maiores
deformações ocorrem na parte inferior da coluna, mesmo os componentes apresentando
maior rigidez, uma vez que estão submetidos a tensões de maior intensidade.

48
Figura 6 – Deformação para o 1º modo de flambagem da coluna sem 4º estabilizador

49
4.2 Vibração: Análise de vibração do BHA 17 ½”com comando curto (SDC) e shock
sub 9 ½” proposto no item 4.1
Esta análise tem como objetivo identificar o melhor posicionamento do shock sub e
estimar as vibrações em um BHA 17 ½” proposto no item 4.1, com shock sub 9 ½” (sem
motor de fundo), comando curto e estabilizador logo acima da broca.
Serão verificadas as velocidades críticas de rotação da broca, as quais causarão
picos de vibração, deslocamentos e tensões, diminuindo a vida útil dos componentes do
BHA.
Serão determinados os componentes do BHA onde ocorrem as maiores intensidades
de vibrações e tensões. Para essa análise, o aplicativo toma como referência a posição da
broca e estima as intensidades ao longo do BHA para todas as distâncias a partir da broca.
Ainda, será definida uma rotação ótima a qual causará menos tensão à coluna de
perfuração.
Segundo Santos et al [27], as vibrações são potencializadas quando se opera
próximo às frequências naturais (ou ressonantes) da estrutura, causando desgaste prematuro
dos componentes do BHA. Quando se perfura com velocidades críticas, frequências
harmônicas destrutivas podem gerar tensões de grande intensidade, encurtando a vida útil
dos componentes por fadiga. Segundo os autores, um grande percentual de falhas por
fadiga são relacionadas às vibrações harmônicas laterais.
A geometria do poço é a mesma apresentada na tabela 9. O fluido utilizado tem as
mesmas características apresentadas anteriormente. A coluna de perfuração analisada é
apresentada na tabela 17. Esta composição foi uma das duas opções sugeridas no item 4.1,
apresentando um estabilizador e um comando curto a mais que a coluna utilizada para
perfurar o poço. Para definir o melhor posicionamento do shock sub neste BHA 17 ½”, o
mesmo será inserido em quatro posições distintas:
� 1ª composição: abaixo do 1º comando ( a 9,96m da broca)
� 2ª composição: acima do 1º comando ( a 19,32m da broca)
� 3ª composição: abaixo das ferramentas de LWD ( a 21,42m da broca)
� 4ª composição: acima das ferramentas de LWD ( a 35,12m da broca)

50
Tabela 17 - Coluna de Perfuração analisada
Para a 1ª composição, isto é, shock sub abaixo do 1º comando, foram gerados
gráficos das tensões em uma faixa de velocidade de rotação entre 50 e 200rpm. O gráfico 6
mostra que há dois grandes picos de tensões, nas velocidades de 130 e 175rpm. Estes picos
indicam frequências rotacionais que podem causar alta concentração de tensão nos
componentes do BHA. Ainda de acordo com o gráfico 6, grande parte das tensões geradas
por vibração no poço em questão são axiais, à exceção do pico de tensões obtidos com
rotação de 175rpm.
O gráfico 7 mostra as tensões resultantes para as velocidades de rotação entre 50 e
200rpm. O modelo assume a tensão “Equivalent Resultant Stress” como sendo uma
composição entre tensão axial e tensão causada pela flexão (Bending Stress). Pode-se notar
que os incrementos de tensão mais abruptos ocorrem a 130 e 175rpm para este caso.
Ainda em relação ao gráfico 7, de acordo com a Teoria de Mohr, a máxima tensão
principal (Principal (max) Resultant Stress) é a maior tensão a qual um elemento
infinitesimal em um plano bi-dimensional está submetido, estando defasada da mínima
tensão principal em 90º. A máxima tensão cisalhante (Shear (max) Resultant Stress) ocorre
em um plano a 45º entre a mínima e máxima tensões principais.
Ferramenta Prof.(m) Comp.(m) OD (pol) ID (pol) Peso (lb/pe)
Tubo DP 5” 4063,44 4063,44 5 4 19,5 HWDP 5” 4091,58 28,14 5 3 49,7 Comando 4119,53 27,95 6 ¾ 2 13/16 100,62
Sub redução 4120,86 1,33 7 ½ 2 ¾ 129,2 Comando 4139,21 18,35 8 ½ 2 ½ 176,38
Drilling Jar 4147,98 8,77 8 2 13/16 138,4 Comando 4268,37 120,39 8 ½ 2 ½ 176,38 Float sub 4269,38 1,01 8 3 147
Estabilizador NM 4278,58 9,2 8 ½ 3 169,06 Comando NM 4287,48 8,9 8 3 152,76
MWD 4292,68 5,2 9 ½ 4 192,18
LWD 4301,18 8,5 9 ½ 2 3/8 192,18
Estabilizador 4310,68 2,1 8 ½ 3 169,06
Comando 4320,04 9,36 9 3 192,45
Estabilizador 4322,26 2,22 9 3 192,83
Comando curto 4327,68 5,42 8 ½ 2 ½ 176,38
Estabilizador 4329,6 1,92 9 3 192,83
Broca tricônica 4330 0,40 17,5 415

51
Rotational Speed (rpm)50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Stre
ss (p
si)
0
500
1000
1500
2000
2500
3000
3500
L E G E N D
Axial StressBending StressTorsional StressShear Stress
Gráfico 6 - Tensões x Rotação
Rotational Speed (rpm)50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Stre
ss (p
si)
500
1000
1500
2000
2500
3000
3500
4000
L E G E N D
Principal (max) Resultant StressPrinclipal (min) Resultant StressShear (max) Resultant StressEquivalent Resultant Stress
Gráfico 7 - Tensões Resultantes x Rotação

52
O modelo provê também gráficos de saída do deslocamento, momento fletor e
tensões ao longo do BHA, a partir da broca, para uma velocidade de rotacão definida Para
este caso, a rotação que mais interessa é a que apresenta as maiores tensões resultantes,
175rpm.
No gráfico 8, Deslocamentos tranversais ou laterais (y) e axias (x) ao longo do
BHA para a velocidade de 175rpm, percebe-se um pico de deslocamento nas proximidades
da broca (primeiros 10m), devido à grande estabilização da composição de fundo próximo
à broca. A partir de 50m da broca há um declínio suave e constante dos deslocamentos.
Segundo Robello et al [31], o modelo assume que o deslocamento inicial na broca, tanto
axial quanto lateral, é de 0,1 polegada, e o deslocamento causado pela torção é de 0,1
radiano, independente do carregamento e da rotação ao qual o BHA está submetido. Por
este motivo, a análise de vibração fornecida pelo modelo deve ser interpretada
qualitativamente.
Distance From Bit (m)0 50 100 150 200 250 300 350 400 450 500 550 600
Dis
plac
emen
t (")
0,00
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0,90
1,00
L E G E N D
Vertical (X)Transverse (Y)
Gráfico 8 – Deslocamentos ao longo do BHA a 175rpm

53
O gráfico 9, Momento Fletor ao longo do BHA discrimina o momento em
transversal e vertical. O Momento Transversal é causado pela força de contato entre coluna
de perfuração e parede do poço e o Momemto Vertical é causado pelo produto entre
carregamento axial e o deslocamento transversal / lateral, tendo o mesmo comportamento
do gráfico 8 (deslocamentos).
Distance From Bit (m)0 50 100 150 200 250 300 350 400 450 500 550 600
Ben
ding
Mom
ent (
lbf*
pé)
0
1000
2000
3000
4000
5000
6000L E G E N D
Transverse (Theta X)Vertical (Theta Y)
Gráfico 9 – Momento Fletor ao longo do BHA a 175rpm
Os gráficos 10 e 11 mostram os componentes das tensões e as tensões resultantes
ao longo do BHA para a velocidade de 175rpm.
Verifica-se que a região de maior tensão resultante localiza-se nos 10 primeiros
metros do BHA, havendo um pico de tensão em torno de 4000psi devido aos dois
estabilizadores contidos nessa região. Nota-se um incremento acentuado das tensões axiais,
de flexão e por extensão da tensão equivalente resultante, na distância de 250m da broca,
onde termina o BHA e se inicia a coluna de DP 5” 19,5 libra/pe.
De acordo com o gráfico 7, recomenda-se trabalhar com rotações entre 90 e
115rpm para este caso, que gerariam tensões variando entre 1200 e 1700psi. As rotações
entre 120 e 150rpm devem ser evitadas, assim como 175rpm.

54
Distance From Bit (m)0 50 100 150 200 250 300 350 400 450 500 550 600
Stre
ss (p
si)
0
200
400
600
800
1000
1200
1400 L E G E N D
AxialBendingTorsionalShear
Gráfico 10 – Tensões ao longo do BHA para 175rpm
Distance From Bit (m)0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340
Stre
ss (p
si)
0
500
1000
1500
2000
2500
3000
3500
4000 L E G E N D
Principal (max)Principal (min)Shear (max)Equivalent
Gráfico 11 – Tensões resultantes ao longo do BHA para 175rpm

55
Deve ser feita uma ressalva em relação aos valores de tensões equivalentes
calculadas pelo modelo. Devido a grande dificuldade de modelagem dos fenômenos de
vibração e pelo fato de muitos dados de entrada serem padronizados, não levando em
consideração as características e propriedades mecânicas da formação, a análise passa a ser
puramente qualitativa. Os pontos onde ocorrem os picos de tensão podem ser tomados
como verdadeiros.
Para a 2ª composição, isto é, shock sub acima do 1º comando, os gráficos 12 e 13
gerados mostram que ocorre um pico de tensão a 160rpm.
Rotational Speed (rpm)50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Stre
ss (p
si)
0
1000
2000
3000
4000
5000
6000 L E G E N D
Axial StressBending StressTorsional Stress
Gráfico 12 - Tensões x Rotação

56
Rotational Speed (rpm)50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Stre
ss (p
si)
1000
2000
3000
4000
5000
6000
7000L E G E N D
Principal (max) Resultant StressPrinclipal (min) Resultant StressShear (max) Resultant StressEquivalent Resultant Stress
Gráfico 13 - Tensões Resultantes x Rotação
Analisando os deslocamentos e os momentos fletores dos gráficos 14 e 15,
respectivamente, percebe-se que a região de maior deslocamento, momento e por extensão,
tensão, ocorre, assim como para a 1ª composição, nos primeiros 10m a partir da broca.

57
Distance From Bit (m)0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340
Dis
plac
emen
t (")
0,000
0,050
0,100
0,150
0,200
0,250
0,300
0,350
L E G E N D
Vertical (X)Transverse (Y)
Gráfico 14 – Deslocamentos ao longo do BHA a 160rpm
Distance From Bit (m)0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340
Ben
ding
Mom
ent (
lbf*
pé)
0
200
400
600
800
1000
1200
1400
1600
1800
L E G E N D
Transverse (Theta X)Vertical (Theta Y)
Gráfico 15 – Momento Fletor ao longo do BHA a 160rpm

58
Verificando os gráficos de tensões 12 e 13, recomenda-se para esta composição a
perfuração da fase com rotação variando ente 90 e 150rpm, evitando utilizar rotação em
torno de 160rpm.
A 3ª composição, com shock sub abaixo das ferramentas de LWD/MWD, os
gráficos 16 e 17 evidenciam um pico de tensão (3900psi) na velocidade de 175rpm. O
gráfico 17 mostra que para as velocidades variando entre 110 e 160rpm, que são
empregadas na prática para a perfuração da fase, são geradas tensões principais em torno de
1600psi.
Analisando os gráficos 18 e 19, respectivamente Deslocamento e Momento Fletor
ao longo do BHA para 175rpm, percebe-se grandes deslocamentos (superiores a 2
polegadas), gerando Momento Fletor da ordem de 12000 libra x pe, superiores àqueles
obtidos nas duas primeiras composições.
Nos gráficos 20 e 21, Tensões ao longo do BHA para 175rpm, nota-se que as
maiores tensões ocorrem nos primeiros 10m acima da broca, devido à grande estabilização
da região. Esta resposta ratifica as saídas obtidas nos gráficos de deslocamento e momento
fletor (18 e 19 respectivamente), onde as maiores intensidades ocorriam na mesma região.
Rotational Speed (rpm)50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Stre
ss (p
si)
0
500
1000
1500
2000
2500
3000
L E G E N D
Axial StressBending StressTorsional StressShear Stress
Gráfico 16 - Tensões x Rotação

59
Rotational Speed (rpm)50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Stre
ss (p
si)
500
1000
1500
2000
2500
3000
3500L E G E N D
Principal (max) Resultant StressPrinclipal (min) Resultant StressShear (max) Resultant StressEquivalent Resultant Stress
Gráfico 17 - Tensões Resultantes x Rotação
Distance From Bit (m)0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340
Dis
plac
emen
t (")
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
1,80
2,00 L E G E N D
Vertical (X)Transverse (Y)
Gráfico 18 – Deslocamentos ao longo do BHA a 175rpm

60
Distance From Bit (m)0 50 100 150 200 250 300 350 400 450 500 550
Be
ndin
g M
ome
nt (l
bf*p
é)
0
2000
4000
6000
8000
10000
12000 L E G E N D
Transverse (Theta X)Vertical (Theta Y)
Gráfico 19 – Momento Fletor ao longo do BHA a 175rpm
Distance From Bit (m)0 50 100 150 200 250 300 350 400 450 500 550 600
Stre
ss (p
si)
0
500
1000
1500
2000
2500
3000
L E G E N D
AxialBendingTorsionalShear
Gráfico 20 – Tensões ao longo do BHA para 175rpm
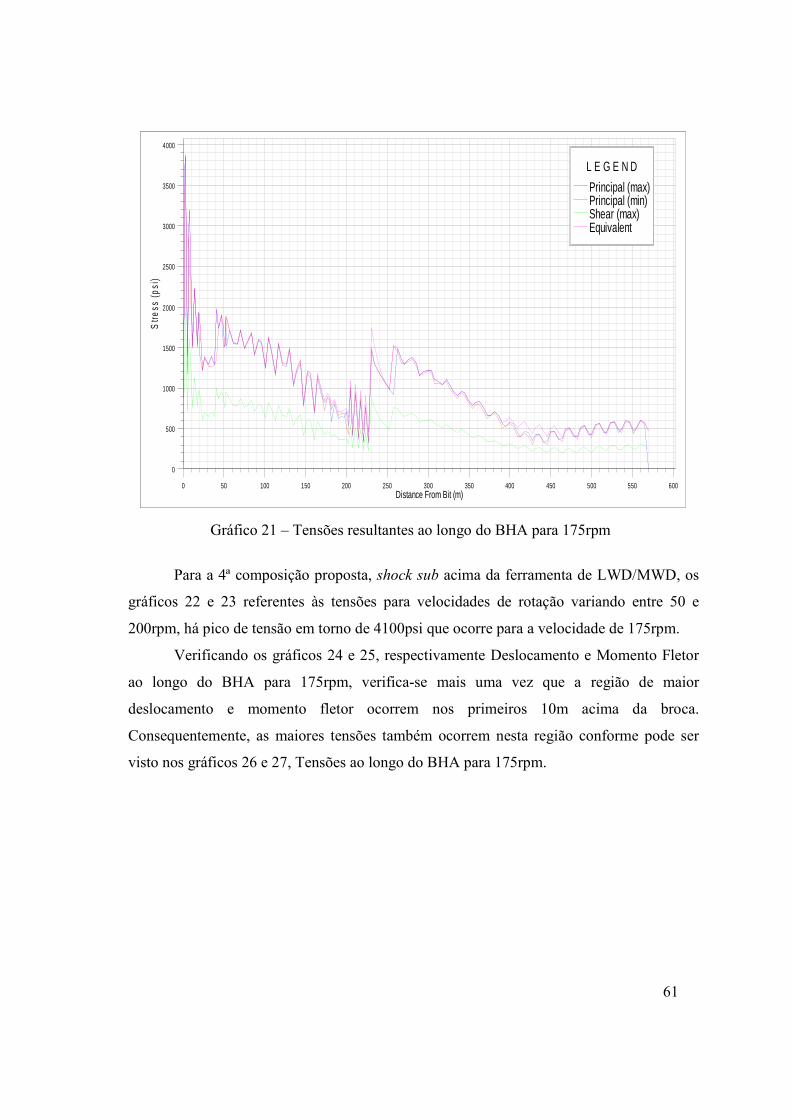
61
Distance From Bit (m)0 50 100 150 200 250 300 350 400 450 500 550 600
Stre
ss (p
si)
0
500
1000
1500
2000
2500
3000
3500
4000
L E G E N D
Principal (max)Principal (min)Shear (max)Equivalent
Gráfico 21 – Tensões resultantes ao longo do BHA para 175rpm
Para a 4ª composição proposta, shock sub acima da ferramenta de LWD/MWD, os
gráficos 22 e 23 referentes às tensões para velocidades de rotação variando entre 50 e
200rpm, há pico de tensão em torno de 4100psi que ocorre para a velocidade de 175rpm.
Verificando os gráficos 24 e 25, respectivamente Deslocamento e Momento Fletor
ao longo do BHA para 175rpm, verifica-se mais uma vez que a região de maior
deslocamento e momento fletor ocorrem nos primeiros 10m acima da broca.
Consequentemente, as maiores tensões também ocorrem nesta região conforme pode ser
visto nos gráficos 26 e 27, Tensões ao longo do BHA para 175rpm.

62
Rotational Speed (rpm)50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Stre
ss (p
si)
0
500
1000
1500
2000
2500
3000
L E G E N D
Axial StressBending StressTorsional StressShear Stress
Gráfico 22 - Tensões x Rotação
Rotational Speed (rpm)50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Stre
ss (p
si)
500
1000
1500
2000
2500
3000
3500
4000
L E G E N D
Principal (max) Resultant StressPrinclipal (min) Resultant StressShear (max) Resultant StressEquivalent Resultant Stress
Gráfico 23 – Tensões Resultantes x Rotação

63
Distance From Bit (m)0 50 100 150 200 250 300 350 400 450 500 550 600
Dis
plac
emen
t (")
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
1,80
2,00
2,20
L E G E N D
Vertical (X)Transverse (Y)Average Net Lateral
Gráfico 24 – Deslocamentos ao longo do BHA a 175rpm
Segundo Robello et al [31], a curva “Average Net Lateral” do gráfico 24 representa
a raiz quadrada do somatório das diferenças ao quadrado dos deslocamentos verticais pela
média dos deslocamentos laterais, divididos pelo número de pontos analisados. Esta curva
não tem significado físico, ao contrário das curvas de deslocamento vertical e transversal /
lateral.

64
Distance From Bit (m)0 50 100 150 200 250 300 350 400 450 500 550
Ben
ding
Mom
ent (
lbf*
pé)
0
2000
4000
6000
8000
10000
12000
14000
L E G E N D
Transverse (Theta X)Vertical (Theta Y)
Gráfico 25 – Momento Fletor ao longo do BHA a 175rpm
Distance From Bit (m)0 50 100 150 200 250 300 350 400 450 500 550 600
Stre
ss (p
si)
0
500
1000
1500
2000
2500
3000L E G E N D
AxialBendingTorsionalShear
Gráfico 26 – Tensões ao longo do BHA para 175rpm

65
Distance From Bit (m)0 50 100 150 200 250 300 350 400 450 500 550 600
Stre
ss (p
si)
0
500
1000
1500
2000
2500
3000
3500
4000 L E G E N D
Principal (max)Principal (min)Shear (max)Equivalent
Gráfico 27 – Tensões Resultantes ao longo do BHA para 175rpm
Uma faixa de velocidades de rotação aplicável para a perfuração da fase 17 ½” com
peso sobre broca de 60Klb varia entre 100 e 140rpm. Comparando as respostas do software
para as quatro composições sugeridas nessa faixa de rotação, conclui-se que a composição
que desenvolve as menores tensões equivalentes é a 2ª, com shock sub acima do 1º
comando, conforme pode ser verificado no gráfico 13, com tensões variando entre 1000 e
1250psi.
Segundo as respostas do software, a pior composição é a 1ª, com shock sub abaixo
do 1º comando. Para esta composição, há um pico de tensão de 3400psi a 130rpm.
As 3ª e 4ª composições, shock sub abaixo e acima do LWD respectivamente, as
tensões geradas são levemente superiores quando comparadas à 2ª composição, com
tensões médias de 1400psi para a faixa de 90 a 140rpm. Estas duas composições poderiam
ser utilizadas e têm a seu favor o fato de apresentarem melhor estabilização que a 2ª
composição.

66
5 CONCLUSÕES
O aumento da complexidade das operações de perfuração em poços exploratórios,
combinado com taxas diárias de sondas extremamente altas, formam um ambiente
desafiador para as companhias de petróleo.
Para superar condições de sub-superfície cada vez mais agressivas, os investimentos
em pesquisa e desenvolvimento de novas tecnologias devem ser pesados, assim como os
investimentos para o aprimoramento das tecnologias já disponíveis no mercado.
A utilização de modelos matemáticos, com o intuito de simular as condições de
fundo que serão encontradas e prever possíveis problemas durante a perfuração, são
ferramentas importantes na fase de planejamento das operações. A acurácia das estimativas
providas pelos modelos é diretamente proporcional à qualidade das informações que o
alimentam.
Para análise de flambagem proposto no item 4.1, o aplicativo mostrou-se ineficaz
devido às limitações do modelo. O aplicativo fornece uma solução analítica para o estudo e
não executa uma análise dinâmica dos esforços aos quais a coluna é submetida. Outra
limitação relevante é o fato do aplicativo não levar em consideração o diâmetro externo dos
estabilizadores, superestimando assim o efeito de flambagem.
A análise de flambagem foi realizada através de comparações com o BHA utilizado
na prática para perfurar o poço. Uma vez que a intensidade das tensões experimentadas
pelo BHA utilizado apresentaram-se superiores às tensões sofridas pelo BHA com shock-
sub 9 ½” proposto e partindo do pressuposto de que o BHA utilizado na prática não sofreu
o efeito de flambagem, pode-se deduzir que teoricamente o BHA proposto não sofreria
flambagem e tampouco o shock sub 9 ½” seria o ponto fraco do BHA de perfuração, de
acordo com a Tabela 22. De acordo com o modelo gerado no programa Abaqus, ocorreria
flambagem com 60Klbf exclusivamente para a composição com shock sub de 8”.
A análise de vibração desenvolvida no item 4.2 foi realizada utilizando-se o mesmo
cenário do item 4.1, com o BHA 17 ½” contendo shock sub 9 ½” . Utilizando um modelo
baseado na Teoria dos Elementos Finitos, conclui-se que para uma faixa de velocidades de
rotação variando entre 100 e 140rpm, a melhor composição de coluna é a que utiliza o

67
shock sub acima do 1º comando, uma vez que desenvolve tensões inferiores quando
comparada às demais composições.
Para um melhor entendimento dos fenômenos de vibração a fim de que se
desenvolvam modelos mais fiéis aos cenários encontrados no poço, a utilização de sensores
de vibração, principalmente nas ferramentas de MWD/LWD é recomendada por
especialistas.
Finalmente, em poços de grande profundidade vertical, a utilização de um shock sub
na fase 17 ½”, e por extensão, o aprofundamento desta fase, pode evitar a perfuração de
fase slim-hole, isto é, diâmetro de fase inferior a 7 polegadas. A perfuração slim-hole,
geralmente com broca de 6 1/8”, torna-se crítica pela falta de disponibilidade de
ferramentas, além de implicar em Teste de Formação exclusivamente em poço aberto, uma
vez que não há disponibilidade no mercado de ferramentas de teste para diâmetros menores
que 7”. Ainda, é um complicador para a perfilagem a cabo do poço, devido também à
indisponibilidade das ferramentas.

68
6 REFERÊNCIAS BIBLIOGRÁFICAS
1. Lubinski,A.: “A Study on the Buckling of rotary strings”, API Drilling Production
Practices , pp. 178-214, 1950.
2. Wang C.Y.: “A Critical Review of the Heavy Elastica”, International Journal of
Mechanical Science, Vol.28, #8, pp.549-559, 1986.
3. Lubinski,A., Althouse, W.S. e Logan,J.L.: “Helical Buckling of Tubing Sealed in
Packers”, JPT,1962
4. Mitchell, R.F.: “Buckling Behavior of Well Tubing”, Conferência do SPE,
Dallas,1980
5. Dawson, R. e Paslay, P.R.: “Drill Pipe Buckling On Inclined Holes”, Artigo
apresentado na Conferência do SPRE em Nova Orleans, 1982
6. Mitchell, R.F.: “Frictional Forces in Helical Buckling of Tubing”, Artigo SPE
13064, 1984
7. Cheatham, J.B. e Chen , Y.C.: “New Design Considerations For Tubing and Casing
Buckling in Inclined Wells”, OTC 5826, 1988
8. Mitchell, R.F.: “New Concepts For Helical Buckling”, SPE Drilling
Engineering,1988
9. Chen , Y.C., Lin, Y.H. e Cheatham, J.B.: “An Analysis of Tubing and Casing
Buckling in Horizontal Wells”, Artigo apresentado na OTC, Houston, 1989
10. Schuh, F.J.: “The Critical Buckling Force and Stresses for Pipe in Inclined Curved
Boreholes”, Artigo SPE/IADC 21942, 1991
11. Wu,J., Juvkam-Wold, H.C. e Lu, R: “Preventing Helical Buckling of Pipes in
Extended Reached and Horizontal Wells”, 1993
12. Paslay, P.R: “Stress Analysis of Drill Srings”, Artigo SPE 27976, 1994
13. Miska,S. e Cunha,J.C.S.: “Helical Buckling of Weightless Long Strings Subjected
to Axial and Torcional Loads”, Artigo 1995
14. Miska,S. e Cunha,J.C.S.: “An Analysis of Helical Buckling of Tubulars Subjected
to Aial and Torcional Loading in Inclined Wells”, Artigo SPE 29460, 1995
15. Cunha,J.C.S.: Buckling Behaviors of Tubulars in Oil and Gas Wells. A Theoretical
and Experimental Study with Emphasis on the Torque Effect, Dissertação de
Doutorado, Universidade de Tulsa, 1995
69
16. Mitchell, R.F.: “Comprehensive Analysis of Buckling With Friction”, Artigo SPE
29457,1995
17. Salies,J.B.: Experimental Study and Mathematical Modeling of Helical Buckling of
Tubulars in Inclined Wellbores, Dissertação de PhD, Universidade de Tulsa, 1994
18. Salies,J.B., Cunha,J.C.S., Azar,J.J. e Soren Jr., J.R.: “Experimental and Analytical
Study of Sinusoidal Buckling in Vertical Wells”, Artigo SPE 29164, 1994
19. Kuru, E. , Martinez, A. e Miska,S.: “The Buckling Behavior of Pipes and Its
Influence on the Axial Force Transfer in Directional Wells”, Artigo SPEIADC
52840, 1999
20. Mitchell, R.F.: “New Buckling Solutions for Extended Reach Wells”, Artigo SPE
74566, 2002
21. Mitchell,R.F. e Allen,M.B, “Case Studies of BHA Vibration Failure”, Artigo SPE
16675, 1987
22. Millheim,K., Jordan,S. e Ritter,C, “BHA Analysis Using the Finite-Element
Method”, Journal of Petroleum Technology, 1978
23. Dunayevski,V.A., Judzis,A. e Mills, W.H, “Onset of Drillstring Precession in a
Directional Borehole”, Artigo SPE 13027, 1984
24. Dunayevski,V.A., Judzis,A. e Mills, W.H, “Dynamic Stability of Drillstrings Under
Fluctuating Weights-on-Bit”, Artigo SPE 14329, 1985
25. Baird,J.A., Caskey,B.C., Tinianow,M.A. e Stone,C.M, “GEODYN: A Geological
Formation/Drillstring Dynamics Computer Program”, Artigo SPE 13023, 1984
26. Baird,J.A., Caskey,B.C., Tinianow,M.A. e Stone,C.M, “GEODYN 2: A Bottomhole
Assembly/Geological Formation Dynamic Interaction Computer Program”, Artigo
SPE 14328, 1985
27. Santos,H., Placido,J.C.R. e Wolter,C, “Consequences and Relevance of Drillstring
Vibration on Wellbore Stability”, Artigo SPE 52820, 1999
28. Dykstra,M.W., Chen,D.C-K., Warren,T.M. e Azar,J.J., “Drillstring Component
Mass Imbalance: A Major Source of DownholeVibrations”, Artigo SPE/IADC
29350, 1995

70
29. Field, D.J., Swarbrick, A.J. e Haduch, G.A.: “Techniques for Successful
Application of Dynamic Analysis in the Prevention of Field-Induced Vibration
Damage in MWD Tools”, Artigo SPE/IADC 25773, 1993
30. Henneuse,H.: “Surface Detection of Vibrations and Drilling Optimization: Field
Experience”, Artigo SPE/IADC 23888, 1992
31. Robello, S., Schottle, G., Gupta, D.B.: “Vibration Analysis, Model Prediction and
Avoidance: A Case History”, Artigo SPE 10213, 2006
32. Robello, S. e Miska, S., “Optimization of Drilling Parameters with the Performance
of Multilobe Positive Displacement Motor (PDM)”, SPE 47791, 2002
33. Akgun, F., Gurakin, G., Mitchell, B.J., Eustes, A. e Rahman, S.: “Theoretical and
Experimental Evaluation of Drill Pipe Stability Conditions in Slim Hole”, SPE
37392, 1996
34. Salies, J.B., Azar, J.J. e Sorem, J.R.: “Experimental and Mathematical Modeling of
Helical Buckling of Tubulars in Directional Wellbores”, SPE 28713, 1994
35. Triggia,A.A, Correio,C.A, Thomas, J.E, et al .: Fundamentos da Engenharia de
Petróleo, 2 ed. Salvador, Editora Interciência, 2004.
36. Rocha, L.A.S., Azuaga, D., Andrade, et al: Perfuração Direcional, 1 ed. Rio de
Janeiro, Editora Interciência, 2006.

71
APÊNDICE I - POÇOS EXPLORATÓRIOS

72
I.1 OBJETIVOS
De acordo com Triggia et al [35], os objetivos principais de um poço exploratório
são: caracterizar a estratigrafia da formação, detectar a zona produtora, verificar o topo e a
base do reservatório, assim como os contatos gás / óleo e óleo / água, identificar os
intervalos do reservatório de melhor permeabilidade.
I.2 CLASSIFICAÇÃO
Dentre todos os 9 tipos de poços, consideram-se [35] 6 como poços exploratórios:
1- Pioneiro : perfurados com o intuito de detectar a presença de hidrocarbonetos baseado
em indicadores obtidos por métodos geológicos e/ ou geofísico (sísmica).
2- Estratigráfico : perfurados visando obter dados sobre a disposição sequencial das rochas
de subsuperfície, sem necessariamente dispor-se de informações geológicas completas da
área. Estes dados serão utilizados para programações exploratórias posteriores ou estudos
específicos. Eventualmente o poço poderá converter-se em produtor de hidrocarboneto.
3- Extensão : perfurado fora dos limites provados de uma jazida visando ampliá-la ou
delimitá-la. Poderá resultar como descobridor de uma nova jazida, independente daquele
para qual foi locado.
4- Pioneiro adjacente : perfurado após a delimitação preliminar do campo visando
descobrir novas jazidas adjacentes. Caso haja sucesso será descobridor de nova jazida; caso
fique provado que faz parte da mesma jazida será reclassificado como poço de extensão.
5- Jazida mais rasa : poço perfurado dentro dos limites de um campo, visando descobrir
jazidas mais rasas.
6- Jazida mais profunda : poço perfurado dentro dos limites de um campo, visando
descobrir jazidas mais profundas.

73
A característica comum a todos os 6 tipos de poços exploratórios é que se trata
quase sempre de poços verticais, salvo raras exceções.
Outra classificação muito relevante para o projeto de um poço é a referente à lâmina
d’água. Atualmente, os poços exploratórios perfurados são profundos ou ultra-profundos,
de acordo com a tabela I.1 abaixo [35]:
I.3 FASES
Basicamente, os poços perfurados pelo Departamento Exploratório da Petrobras têm as seguintes geometrias / designs:
� Perfuração da fase de 36”, descida e cimentação do revestimento de 30” ou jateamento do revestimento de 30”.
� Perfuração da fase 26”, descida e cimentação do revestimento de 20” em poços
convencionais ou Perfuração da fase 17 ½”, descida e cimentação do revestimento
de 13 3/8” para poços slender.
� Perfuração da fase 17 ½”, descida e cimentação do revestimento de 13 3/8”
� Perfuração da fase 12 ¼”, descida e cimentação do revestimento 9 5/8” caso haja
indício ou presença de reservatório portador de hidrocarboneto nesta fase. A
depender da taxa de penetração e/ou profundidade final do poço, após a descida do
Tabela I.1 – Classificação de lâmina d’água

74
revestimento 9 5/8” pode-se perfurar a fase 8 ½” e assim como na fase anterior,
vincular a descida do revestimento de 7” à presença de hidrocarbonetos.
Nota-se que não há perfuração da fase 26” e descida do revestimento de 20” para
poços slender. A construção deste tipo de poço é em média 2 a 3 dias mais rápida que a de
um poço convencional.
A fase de 36” é a mais curta. São perfurados apenas poucos metros da formação,
geralmente 36m, o que corresponde a 3 juntas de revestimento (em média 12 metros cada
junta). Mesmo não havendo retorno de fluido para a sonda, é recomendada a utilização de
fluido de perfuração, pois comprovadamente a água causa o arrombamento do poço.
Após o final da perfuração da fase, é bombeado e deslocado um fluido a base de
amido com a finalidade de manter a estabilidade do poço até a descida do revestimento de
30”.
Na fase 17 ½” de um poço slender e na fase de 26” de um poço convencional, a
perfuração também é realizada sem retorno, uma vez que a instalação do BOP no alojador
de alta pressão ocorre após a descida do revestimento de 13 3/8” no poço de 17 ½” ou 20”,
no caso da fase de 26”. Nesta fase é necessário o bombeamento de colchões de fluido
viscoso com o intuito de auxiliar a limpeza do poço. No início da fase, as taxas de
penetração obtidas são altas, acima de 30m/h, gerando grande quantidade de cascalhos (32
barris de cascalho por hora, considerando taxa de 30m/h e 0,75” de arrombamento do poço
de 17 ½”).
A viscosidade da água do mar é baixa e mesmo com altas vazões (1000gpm, por
exemplo), o carreamento dos cascalhos gerados pela perfuração da formação não é
suficiente para limpeza do poço. Por esse motivo, faz-se necessário o bombeamento de um
fluido de viscosidade elevada, geralmente de 5 em 5 seções perfuradas, diminuindo o risco
de prisão de coluna por acunhamento.
Trata-se de uma fase curta, entre 300 e 500m geralmente, atravessando formações
superficiais e de baixa resistência. Com o intuito de diminuir o tempo de exposição da
formação com o fluido até a descida do revestimento, tem-se como padrão montar o
conjunto running tool + suspensor do revestimento + tubo curto de revestimento antes do

75
início da perfuração da fase, assim como estaleirar o BHA na torre após a retirada,
deixando para desmontá-lo após a descida do revestimento.
Antes da retirada da coluna de perfuração do poço, assim como na fase de 36”, é
bombeado e deslocado um fluido a base de amido, com o intuito de manter a estabilizadade
do poço e diminuir a probabilidade de o revestimento de 13 3/8” ou 20” topar e ser retirado
para condicionamento do poço.
I.4 PLANEJAMENTO
Obtidas as informações da litologia disponibilizadas pelo Departamento de
Geologia do poço que se pretende perfurar, um grupo de engenheiros e técnicos de
diferentes especialidades fica responsável pelo planejamento da perfuração.
A depender da disposição das camadas da formação, será definida a geometria de
poço que melhor se adeqüa àquela formação e também a profundidade de cada fase. A
escolha da sonda fica condicionada à lâmina d’água da locação, assim como a
profundidade final estimada do poço, pois no contrato de arrendamento de cada sonda estão
definidos seus limites de operação.
Para cada fase, deve ser definido uma coluna de perfuração com BHA (Bottom Hole
Assembly) capaz de imprimir uma boa taxa de penetração, manter a verticalidade do poço e
fornecer dados da formação que está sendo perfurada para o Departamento de Geologia.
O fluido de perfuração deve ser escolhido criteriosamente. Segundo Triggia et al
[33], possuem a função de carrear os cortes da formação gerados pela broca (cascalhos) e
conseqüente limpeza do poço, resfriar e lubrificar a coluna de perfuração e manter a
hidrostática no fundo do poço maior que a pressão da formação, impedindo que durante a
perfuração haja influxo de fluido proveniente da formação. Particularmente em poços
exploratórios, a determinação do peso do fluido é crítico devido ao fato de na maioria das
vezes haver disponível exclusivamente a pressão da formação estimada por modelos
matemáticos.
Segundo Rocha et al [36], fluidos sintéticos apresentam maior grau de inibição, não
formam filtrado para a formação e conseqüentemente geram menos danos nos reservatórios
que fluidos base água .
76
Em poços de lâmina d’água profunda, pode ocorrer uma limitação na limpeza do
poço na altura do riser, mesmo perfurando-se com vazões recomendadas para cada fase do
poço. A depender da taxa de penetração e por conseqüência, do volume de cascalho gerado,
faz-se necessária a utilização de uma bomba alinhada para a linha booster do riser.
O conhecimento das limitações técnicas e o alcance da excelência operacional
requerem planejamento apropriado. Na prática, o planejamento é apenas uma variante da
equação. A complexidade do ambiente de sub-superfície muitas vezes leva a desvios do
programa definido. Os maiores desafios estão associados às falhas das ferramentas dos
BHA’s, cada vez mais complexos e sofisticados, e com a vibração da coluna de perfuração.

77
APÊNDICE II - PERFURAÇÃO EXPLORATÓRIA
78
II.1 COMPONENTES DA COLUNA DE PERFURAÇÃO
Uma coluna de perfuração é formada basicamente por tubos de perfuração (drill
pipes) e por um BHA. Os drill pipes, cuja função é transmitir rotação e conduzir o fluido de
perfuração, têm diferentes diâmetros, sendo o mais comumente usado o de 5” de diâmetro
externo. Em casos onde seja necessário melhorar a hidráulica, são usados tubos de 5 ½” ou
6 5/8”, que reduzem a perda de carga no interior do tubo.
Admite-se [36] que o BHA é a parte da coluna de perfuração que afeta a trajetória
da broca e conseqüentemente do poço. Sua composição pode ser simples, apenas com
broca, estabilizadores, comandos e tubos de perfuração, ou bastante complexa, com
ferramentas que transmitem informações da formação e da trajetória do poço por pulso
positivo ou negativo de pressão (Logging While Drilling -LWD e Measurement While
Drilling - MWD ), absorvedor de choque, percurssor, motor de fundo, válvula flutuante
(Float Sub), comandos de diferentes diâmetros e tubos de perfuração pesados ( Heavy
Weight Drill Pipe – HWDP ), adicionados à coluna para proporcionar uma transição de
rigidez suave .
As ferramentas que usualmente fazem parte de um BHA são:
Broca : componente básico de qualquer BHA, a broca é responsável por perfurar a
formação. Podem ser classificadas de acordo com sua parte cortante, móvel, no caso de
brocas tricônicas ou fixas, em brocas PDC e de diamantes naturais.
As brocas tricônicas (figura II.1) têm a vantagem de perfurar com bom desempenho
uma grande variedade de formações. Entretanto, como contém partes móveis, este tipo de
broca é mais suscetível ao desgaste, principalmente do seu rolamento.
As brocas PDC são indicadas para perfurar uma formação homogênea com alto teor
de argila ( folhelho ). Quando são submetidas a formações com muitas intercalações, têm
queda de rendimento e o desgaste dos cortadores fixos é acentuado.

79
A abertura dos jatos da broca é um assunto chave concernente à hidráulica. Deve-se
definir uma área de abertura ao fluxo (TFA) que seja capaz de garantir a limpeza do poço
dentro das limitações da bomba da sonda, assim como alcançar um impacto para auxiliar na
perfuração da formação.
Estabilizadores : são elementos tubulares (figura II.2) com diâmetro externo igual ou bem
próximo ao diâmetro da broca. Têm como função manter o BHA centralizado e controlar a
trajetória do poço. São pontos de apoio da coluna na parede do poço. Podem ter camisas
integrais ou ajustáveis.
Figura II.1 - Brocas tricônicas de diferentes diâmetros, cedida pela Petrobras

80
Absorvedor de choque : são ferramentas que absorvem as vibrações da coluna de
perfuração induzidas pela broca, principalmente quando perfurando uma formação com
grande variação de dureza das rochas.
Percurssor ( Drilling Jar ) : equipamento (figura II.3) utilizado em caso de prisão de
coluna. Atua nos 2 sentidos, tendo que ser tracionado para atuar para cima e comprimido
para atuar para baixo, liberando uma carga de impacto (energia) que é transmitida por
ondas de choque com velocidade de propagação do som no metal. Podem ser hidráulicos
ou mecânicos.
Para acioná-los, devem ser comprimidos por um período determinado pelo
fabricante (30 Klb durante vinte segundos) e posteriormente tracionados (80Klb). O
impacto se dará poucos segundos após o acionamento. Em caso de falha, repetir o
procedimento.
Figura II.2 - Estabilizadores de 8 ½”, cedida pela Halliburton

81
Float Sub : elemento tubular de comprimento reduzido que contem em seu interior uma
válvula “flutuante” (Float valve) que permite passagem apenas do interior da coluna para o
espaço anular. Durante a perfuração, o peso equivalente da coluna hidrostática do anular é
maior do que o do interior da coluna, devido ao cascalho cortado que se mistura ao fluido
do anular. Esta válvula impede que haja um fluxo do anular para o interior da coluna, fato
que poderia causar o entupimento dos jatos da broca, assim como danificar os
equipamentos de MWD e LWD.
MWD / LWD : MWD é uma ferramenta de medição contínua de direção e
inclinação do poço. Os dados são transmitidos para superfície por pulsos de pressão através
do fluido de perfuração. Para se obter um registro da direção do poço, basta interromper a
perfuração e ciclar (desligar e ligar) as bombas da sonda com vazão pré-determinada. LWD
é uma ferramenta muito valiosa pois fornece perfis básicos ( raios gama, resistividade,
densidade, entre outros ) da formação durante a perfuração. Geralmente, têm um off-set
Figura II.3 - Esquema de percurssor, cedido pela Smith

82
(distância entre a ferramenta e a broca) de 12 a 15 metros. A figura II.4 mostra os gráficos
de saída de perfis da ferramenta.
Motor de fundo : é um motor hidráulico (figura II.5), de deslocamento positivo, conectado
imediatamente acima da broca. Tem como função transmitir rotação e torque à broca,
independente da rotação da coluna. A rotação é gerada pelo fluxo de fluido de perfuração
que circula no interior da seção de potência do motor (rotor e estator). Os motores
possuem uma seção com bent housing que são ajustados de acordo com a necessidade da
taxa de ganho ou perda de ângulo. Para poços verticais, utiliza-se bent housing igual a zero
ou próximo a zero, como contingência caso seja necessário fazer alguma correção. Há
Figura II.4 - Gráfico de saída do LWD com perfis, cedido pela Schlumberger

83
muitos tipos de motores de fundo, como os de alta rotação, de alto torque, que são
utilizados de acordo com a as características da formação que se pretende perfurar.
Atualmente, perfuram-se poços cada vez mais profundos e formações compactadas
e muito duras, utilizando-se parâmetros de perfuração próximos aos limites das ferramentas
com o intuito de otimizar as taxas de penetração. Nestas condições, um BHA composto por
motor de fundo de alta rotação ou por uma turbina, mostra-se uma opção excelente.
Um motor de fundo de alta rotação (high speed) tem um fator (razão entre rotação
por minuto e vazão em galões por minuto) entre 1,5 e 1,75, o que imprime na broca, para
uma fase de 8 ½” sendo perfurada com 500gpm, de 750 a 875rpm. São motores muito mais
sensíveis que os convencionais, com limite de torque de trabalho em torno de 3 a 4Klb.pe.
Motores convencionais de 6 ¾” adequados para a fase de 8 ½”, têm um fator que variam
entre 0,29 e 0,40 rpm/gpm e torque entre 5 a 8Klb.pe.
Utilizando motores de alta rotação,deve-se trabalhar com baixíssimo peso sobre
broca, em média 10Klb para um poço de 8 ½”.
Figura II.5 - Esquema de um motor de fundo convencional, cedido pela Halliburton

84
A mecânica de corte é bem distinta. A alta rotação e o baixo peso sobre broca geram
cascalhos de diâmetro bem inferior àquele obtido com motores convencionais. A
interpretação da amostra de calha da formação torna-se tarefa com elevado grau de
dificuldade.
Uma opção para o mesmo tipo de formação, profunda e extremamente dura, é a
utilização de turbinas. Se comparadas ao motor de alta rotação, têm o mesmo mecanismo
de corte, trabalham com os mesmos parâmetros, isto é, baixos peso e torque e alta rotação.
A grande vantagem da turbina é o fato de poder perfurar grandes extensões de formação, ao
contrário dos motores de alta rotação que devido ao desgaste excessivo dos rolamentos têm
limitação de uso.
Para perfuração em formações muito profundas, as taxas de penetração giram em
torno de 1 a 3m/h. Nestes casos, o uso de turbinas é uma opção eficiente e econômica.
Eficiente porque tem desempenho superior ao motor de alta rotação, com taxas de
penetração significativamente maiores. Econômica porque em um poço de profundidade
em torno de 5000m, a manobra para troca de ferramentas (broca, motor), leva de 36 a 48
horas, a depender da extensão do poço aberto. Com a utilização de uma turbina e broca
impregnada, pode-se perfurar a fase inteira sem manobrar.
Comandos (Drill Collars – DC): tubos de perfuração pesados e de grande rigidez (figura
II.6) usados principalmente para transmitir peso à broca. Podem ter parede lisa ou
espiralada, sendo que este último é usado na maioria das vezes, pois diminui o contato com
a parede do poço, reduzindo o risco de prisão de coluna por diferencial de pressão. Os
diâmetros mais utilizados são 8 ½”, 8” e 6 ¾”.

85
Heavy Weight Drill Pipe (HWDP): assim como os comandos, também têm função de
transmitir peso à broca. O mais utilizado tem diâmetro externo de 5” e diâmetro interno de
3”. São usualmente utilizados entre os comandos e os drill pipes para permitir uma
mudança de rigidez suave, atenuando a concentração de esforços entre elementos de rigidez
diferentes. Seguem abaixo exemplos de composições de coluna utilizadas para as fases de
17 ½”, 12 ¼” e 8 ½”, fases estas mais usualmente perfuradas.
Figura II.6 - Comandos de 8”, cedida pela Diamond Offshore

86
FASE 17 ½”
Componentes L (m) L
Acum.(m) OD (pol) ID (pol) Peso
(libra/pe) Peso
acum.(lb) BROCA Tricônica 17 1/2" 0,40 0,40 17,50 3,75 565,00 742 MOTOR DE FUNDO 9,39 9,79 9,75 7,88 194,29 6727 ESTABILIZADOR 2,02 11,81 17,25 2,81 149,92 7721 FLOAT SUB 0,91 12,72 8,00 2,88 149,91 8170 MWD/LWD 9,14 21,87 8,00 3,00 147,01 12581 SUB 0,92 22,79 8,00 2,88 149,90 13033 ESTABILIZADOR NM 1,71 24,50 17,25 2,88 149,92 13875 COMANDO NM 8,83 33,33 8,00 2,88 152,76 18300 COMANDO 93,26 126,59 8,25 2,88 168,20 69767 JAR 8,75 135,34 8,00 2,88 136,48 73685 COMANDO 9,35 144,69 8,25 2,88 168,21 78846 REDUÇÃO 0,94 145,63 8,00 2,88 149,91 79308 COMANDO 56,38 202,01 6,75 2,88 100,62 97921 HEAVY WEIGHT 55,47 257,48 5,00 3,00 49,70 106966
Componentes L (m) L
Acum.(m) OD (pol) ID
(pol) Peso
(libra/pe) Peso
acum.(lb) BROCA PDC 17 1/2" 0,43 0,43 17,5 0 532,00 751 SUB-BROCA 1,12 1,55 9,5 3,5 194,29 1465 ESTABILIZADOR 1,70 3,25 17,5 3 149,92 2301 COMANDO CURTO 3,51 6,76 8 0 149,91 4027 ESTABILIZADOR 1,71 8,47 17,5 3 147,01 4852 COMANDO 9,26 17,73 8 3 149,90 9406 ESTABILIZADOR 1,71 19,44 17,25 3 149,92 10247 FLOAT SUB 0,6 20,04 8 3 152,76 10548 LWD 7,5 27,54 8 1,938 147,01 14166 PWD 1,39 28,93 8 1,938 147,01 14836 MWD 9,10 38,03 8 1,938 147,01 19225 REDUÇÃO 0,86 38,89 8 3 149,91 19648 COMANDO NM 2,17 41,06 8 3 100,62 20365 COMANDO 81,99 123,05 8,25 3 168,21 65615 DRILLING JAR 9,63 132,68 8 3 136,48 69927 COMANDO 9,00 141,68 8 3 149,90 74353 REDUÇÃO 1,12 142,80 8 3 149,91 74904 COMANDO 55,97 198,77 6,75 2 13/16 100,62 93382 HEAVY WEIGHT 28,15 226,92 5 3 49,70 97972
Tabela II.1a - BHA 17 ½” com Motor de fundo
Tabela II.1b - BHA 17 ½” sem Motor de fundo

87
FASE 12 1/4”
Componentes L (m) L Acum.(m) OD (pol) ID (pol)
Peso (libra/pe)
Peso acum.(lb)
BROCA Tricônica 12 1/4" 0,33 0,33 12,25 360 390 ESTABILIZADOR NB 1,7 2,03 12 3,25 160,35 1284 COMANDO 2,81 4,84 8 2,812 155,76 2720 ESTABILIZADOR 2,02 6,86 12,125 2,812 160,37 3783 COMANDO 9,36 16,22 8 2,812 155,76 8566 ESTABILIZADOR 1,71 17,93 11,875 2,813 160,37 9466 FLOAT SUB 1,04 18,97 8 2,812 155,76 9998 LWD 7,68 26,65 8 2,812 140,98 13550 PWD 1,37 28,02 8 5 142,831 14192 MWD 9 37,02 8 5 149,92 18619 REDUÇÃO 0,92 37,94 8 2,812 149,91 19072 ESTABILIZADOR NM 1,72 39,66 11,875 2,812 160,372 19977 COMANDO NM 8,83 48,49 8 2,875 155,76 24489 SHOCK SUB 5,61 54,10 8 2,812 147 27195 COMANDO 82,9 137,00 8,25 2,875 168,21 72947 JAR 9,3 146,30 8 2,875 136,48 77112 COMANDO 9,2 155,50 8,25 2,812 168,21 82189 SUB 0,94 156,44 8 2,812 149,91 82652 COMANDO 56,38 212,82 6,75 2,875 100,62 101264 HEAVY WEIGHT 55,47 268,29 5 3 49,7 110310
Componentes L (m) L
Acum.(m) OD (pol) ID (pol)
Peso (libra/pe)
Peso acum.(lb)
BROCA PDC 12 1/4" 0,37 0,37 12,25 342,3 416 MOTOR DE FUNDO 9,87 10,24 9,625 7,812 192,45 6648 ESTABILIZADOR 1,71 11,95 12,125 2,812 165,23 7575 FLOAT SUB 1,04 12,99 8 2,812 149,91 8086 LWD 7,53 20,52 8 5 142,831 11615 PWD 1,35 21,87 8 5 142,831 12248 MWD 8,92 30,79 8 5 149,92 16635 REDUÇÃO 0,92 31,71 8 2,812 149,91 17088 ESTABILIZADOR NM 1,72 33,43 12 2,812 160,372 17993 COMANDO NM 8,83 42,26 8 2,875 155,76 22505 SHOCK SUB 4,9 47,16 8 2,812 147 24869 COMANDO 65,12 112,28 8,25 2,875 168,21 60808 JAR 9,3 121,58 8 2,875 136,48 64973 COMANDO 9,2 130,78 8,25 2,812 168,21 70050 SUB 0,94 131,72 8 2,812 149,91 70513 COMANDO 56,38 188,10 6,75 2,875 100,62 89126 HEAVY WEIGHT 55,47 243,57 5 3 49,7 98171
Tabela II.2b - BHA 12 ¼” com Motor de fundo
Tabela II.2a - BHA 12 ¼” sem Motor de fundo

88
FASE 8 ½”
Componentes L (m) L Acum.(m) OD (pol) ID (pol) Peso
(libra/pe) Peso
acum.(lb) BROCA PDC 8 1/2" 0,2 0,20 8,5 2,25 269 177 MOTOR DE FUNDO 8,8 9,00 6,75 2,5 79,2 2463 ESTABILIZADOR 1,69 10,69 8,375 2,812 98 3007 FLOAT SUB 0,57 11,26 6,72 3 97,72 3189 LWD 7,45 18,71 6,75 3 97,726 5578 PWD 1,42 20,13 6,75 5 142,831 6244 MWD 9,08 29,21 6,75 4,875 149,92 10710 REDUÇÃO 0,66 29,87 6,5 2,8 149,91 11035 ESTABILIZADOR NM 1,98 31,85 6,5 2,8 160,372 12076 COMANDO NM 9,36 41,21 6,75 2,8 100,62 15166 SHOCK SUB 5,35 46,56 6,25 2,75 147 17747 COMANDO 82,4 128,96 6,75 3 100,62 44950 JAR 9,14 138,10 6,5 2,75 136,48 49043 COMANDO 27,92 166,02 6,75 2,813 100,62 58260 HEAVY WEIGHT 55,47 221,49 5 3 49,7 67305
Componentes L (m) L
Acum.(m) OD (pol) ID (pol) Peso
(libra/pe) Peso
acum.(lb) BROCA Tricônica 8 1/2" 0,24 0,24 8,5 2,25 311 245 ESTABILIZADOR NB 1,69 1,93 8,375 2,812 78,56 681 COMANDO 2,87 4,80 6,75 1,75 100,62 1628 ESTABILIZADOR 1,8 6,60 8,5 2,813 75,08 2071 FLOAT SUB 0,57 7,17 6,75 2,88 149,91 2352 LWD 7,78 14,95 6,25 4,39 142,831 5998 PWD 1,38 16,33 6,75 5 142,831 6644 MWD 9,17 25,50 6,75 4,875 149,92 11155 REDUÇÃO 0,55 26,05 6,5 2,8 149,91 11426 ESTABILIZADOR NM 2,95 29,00 8 2,8 125,34 12639 COMANDO NM 9,36 38,36 6,75 2,8 104,63 15852 SHOCK SUB 5,35 43,71 6,25 2,75 147 18432 COMANDO 82,4 126,11 6,75 3 100,62 45635 JAR 9,14 135,25 6,5 2,75 136,48 49728 COMANDO 27,92 163,17 6,75 2,813 100,62 58945 HEAVY WEIGHT 55,47 218,64 5 3 49,7 67991
Tabela II.3b - BHA 8 ½” sem Motor de fundo
Tabela II.3a - BHA 8 ½” com Motor de fundo

89
II.2 PARÂMETROS DE PERFURAÇÃO
Pode-se dividir os parâmetros de perfuração em dois segmentos [35]:
Parâmetros Mecânicos: são rotação e peso sobre broca. Estes parâmetros podem ser
determinados através de poços de correlação ou modelos matemáticos para maximizar a
taxa de penetração e minimizar o desgaste da broca. Utilizando-se estes modelos, podem
ser escolhidos os parâmetros que minimizam o custo do metro perfurado.
Teoricamente, assume-se que nenhuma taxa de penetração considerável é obtida até
atingirem peso mínimo sobre a broca [35]. Quanto mais mole a formação, menor este valor
mínimo. Após este valor, a taxa aumenta rapidamente com o aumento do peso, tornando-se
linear para valores moderados. Finalmente, para pesos extremos, nota-se um decréscimo da
taxa de penetração. Teoricamente, nesta situação não só os cortadores estariam em contato
com a formação, mas também a face do cone e este decréscimo da taxa de penetração seria
explicado pela diminuição de peso por inserto ou dente.
A tabela II.4 mostra os pesos recomendados para perfuração das fases 17 ½”, 12 ¼”
e 8 ½”, relacionado ao tipo de broca utilizado:
Diâmetro da fase do poço Tipo de broca Pesos recomendados(Klb)
PDC 35 a 50 17 ½”
Tricônica 45 a 85
PDC 25 a 40 12 ¼”
Tricônica 35 a 60
PDC 20 a 30 8 ½”
Tricônica 25 a 40
Em formações muito duras e compactas, trabalha-se com peso sobre broca superior
ao recomendado. Este excesso de peso pode causar ganho de inclinação do poço. Nestes
casos, a depender do raio de tolerância para o afastamento do alvo, faz-se necessário a
correção da inclinação com o intuito de manter a verticalidade do poço. A perfuração para
correção é feita no modo orientado, utilizando na broca apenas a rotação gerada pelo motor
Tabela II.4 - Pesos sobre brocas recomendados para diferentes fases [36]

90
de fundo. Notoriamente, as taxas de penetração no modo orientado são inferiores àquelas
obtidas na perfuração rotativa.
Parâmetros Hidráulicos: a má utilização da energia hidráulica resulta em uma ação
deficiente da broca sobre a rocha a ser perfurada, uma vez que os dentes ou insertos da
broca têm que retrabalhar os cascalhos acumulados no fundo do poço, além de os cones se
apoiarem no colchão formado pelos cascalhos.
Diversas teorias foram desenvolvidas [36] para se encontrar o ponto ótimo dos
parâmetros hidráulicos. As mais empregadas são:
• Máxima velocidade e potência nos jatos: utilizando a máxima pressão permissível
na bomba
• Máxima força de impacto
• Máxima força de impacto efetiva
É possível também melhorar as condições hidráulicas tamponando um dos jatos de
broca ou estendendo todos eles até mais perto da formação [35]. Em formações muito
plásticas é possível utilizar brocas com maior quantidade de jatos, evitando assim o
acúmulo de fragmentos de rocha entre os dentes (enceramento). A tabela II.5 apresenta as
vazões recomendadas para as diferentes fases da perfuração.
Diâmetro da fase do
poço Vazões desejadas (gpm)
Mínimas vazões( gpm)
associadas às taxas de
penetração
17 ½” 900 a 1200 800gpm a 20m/h
12 ¼” 800 a 1100 700gpm a 15m/h
900gpm a 30m/h
8 ½” 450 a 600 500gpm a 20m/h
Tabela II.5 - Vazões recomendados para diferentes fases [36]

91
À pedido do Departamento de Geologia, a perfuração de um reservatório pode ser
realizada com vazões menores àquelas recomendadas, com a finalidade de minimizar danos
e arrombamento da formação portadora de hidrocarbonetos.
Os danos serão uma barreira em caso de produção do poço, ocasionando perda de
carga localizada na interface formação – poço (drawdown).
O arrombamento do poço (calibre superior ao diâmetro da broca utilizada) torna-se
um complicador para a perfilagem. As ferramentas de perfilagem trabalham centralizadas,
o que não será possível caso o poço esteja arrombado .
II.3 CONTROLE DE VERTICALIDADE
A maioria dos poços exploratórios é vertical, com o objetivo de atravessar as
camadas litológicas da formação com a menor quantidade de metros perfurados possível.
Por isso, a composição do BHA apresenta grande estabilização e por conseqüência, rigidez.
Na figura II.7, o primeiro BHA (II.7a) representa uma composição de fundo
bastante rígida, utilizada para manter a inclinação do poço. O segundo BHA (II.7b) é uma
composição para perder ângulo, conhecida como pêndulo. Neste caso, os estabilizadores e
a broca trabalham no “lado baixo” do poço (low side) tendendo a diminuir a inclinação do
mesmo. Finalmente, o terceiro BHA (II.7c) ilustra uma composição para ganhar ângulo.
Entretanto, o fato de perfurar com uma composição de fundo estabilizada não
garante necessariamente que a inclinação final do poço será inferior a 3º. Fatores como
formação e peso aplicado sobre a broca podem causar problemas indesejados de inclinação
excessiva. Camadas de formação inclinadas e falhas geológicas causam tendência a ganho
de ângulo. Nestes casos, mesmo perfurando no modo orientado, a correção de verticalidade
torna-se uma operação difícil e muitas vezes ineficaz.
Peso excessivo sobre a broca acarreta em grande compressão da parte inferior do
BHA. Caso haja um estabilizador under gauge acima do motor de fundo, a compressão
causaria flexão da coluna e as lâminas do estabilizador tenderiam a encostar na parte baixa
do poço (low side), gerando uma alavanca que resultaria em ganho de ângulo.

92
A figura II.8 acima representa esquemas reais de BHA’s utilizados na perfuração de
poços. O primeiro BHA (figura II.8a) é uma composição para manter ângulo, uma vez que
A
B
C
a
b
c
Figura II.7 - esquema de rigidez de BHA [36]
a
b
c
Figura II.8 - esquema de rigidez de BHA
[34]

93
nele há dois estabilizadores levemente under gauge. O segundo BHA (figura II.8b)
representa uma composição para ganho de ângulo, uma vez que o estabilizador mais
distante da broca tem o diâmetro muito inferior ao diâmetro do poço. O terceiro BHA
(figura II.8c) é utilizado para perder ângulo. O estabilizador próximo à broca é levemente
under gauge, enquanto o mais distante é full gauge.
Existe disponível no mercado um motor de fundo propício para o controle e
correção de verticalidade. Este motor tem ao redor do seu corpo algumas aletas que são
acionadas por comandos de pressão, variando a pressão de bombeio segundo uma
seqüência pré-determinada. De acordo com a inclinação e direção do poço obtidas pela
ferramenta de MWD, aciona-se a aleta que atuará no lado alto do poço (high side),
impondo uma verticalização do poço. No que tange ao controle de verticalidade, este motor
de fundo mostra-se bastante eficiente. Não obstante, caso as correções ocorram
repetidamente e em direções diversas, observa-se na prática grande incidência de
“repassamento” nos trechos perfurados, devido ao fato de deixar uma trajetória irregular no
poço. “Repassamento” ocorre quando há necessidade de circular e girar a coluna durante as
manobras para retirar ou descer a coluna de perfuração, devido ao arraste causado pelo
contato da broca e principalmente dos estabilizadores com a formação, demandando em
média o dobro do tempo de uma manobra normal.
II.4 ECD (Equivalent Circulating Density) e GEOPRESSÕES
Perdas de carga no anular causadas pelo escoamento do fluido de perfuração entre
as paredes do poço e a coluna de perfuração fazem com que a pressão ao longo do poço
aumente e fique maior que a pressão hidrostática do fluido utilizado. Considera-se [36] que
essa pressão, quando expressa em termos de peso de fluido de perfuração, gera o que se
chama de densidade equivalente de circulação ou mais comumente de ECD (Equivalent
Circulating Density). Portanto, planejar um fluido de perfuração que reduza a perda de
carga é uma boa prática a ser seguida.
O ECD deverá ser analisado não só durante a fase de perfuração, mas também
durante as manobras de coluna. O efeito de “pistoneio” causado pela retirada da coluna de
perfuração chamado de swab e surge na descida da coluna no poço, irão afetar as pressões
no poço, limitando a velocidade de manobra da coluna. Caso a velocidade de retirada da

94
coluna seja elevada o suficiente para gerar uma pressão no poço menor que a pressão de
poros, haverá um influxo (kick) da formação para o poço. Por outro lado, se a velocidade de
descida da coluna for alta o suficiente para gerar uma pressão no poço maior que a pressão
de fratura, haverá perda de circulação devido à fratura da formação, mais provavelmente
logo abaixo da sapata, pois é o ponto de menor resistência da fase.
O termo Geopressões refere-se [36] aos gradientes de pressão de poros, fratura e
colapso, que são a base da construção de qualquer poço. A caracterização desses gradientes
de pressão irá influenciar na escolha do peso do fluido de perfuração a ser usado e na
profundidade para assentamento das sapatas de revestimentos das fases do poço.
Uma correta estimativa dos gradientes de pressão de poros é importante para evitar
influxo de fluido da formação no poço. Não existe uma relação que indique que as chances
de ocorrência de influxos sejam maiores em poços direcionais que em poços verticais.
O mesmo não pode ser dito em relação à prisão diferencial, a qual ocorre quando a
pressão exercida pela coluna de fluido de perfuração é maior que a dos fluidos da
formação. Em zonas permeáveis, o filtrado do fluido irá fluir do poço para a formação,
aumentando o reboco (filter cake) na parede do poço. Caso a coluna de perfuração,
principalmente os comandos, fique parada (sem girar e reciprocar) por algum tempo em
contato com esses intervalos permeáveis, poderá ocorrer prisão de coluna por pressão
diferencial. Como a coluna de perfuração em poços direcionais está sempre em contato
com a parede do poço e muitas vezes parada devido à perfuração em modo orientado, onde
apenas a broca gira por intermédio da ação do motor de fundo, admite-se [36] que a chance
de prisão por diferencial é significativamente maior nesses tipos de poços.
Uma solução nestes casos é a redução do peso do fluido, reduzindo-se assim o
diferencial de pressão entre o poço e a formação de zona permeável. Porém, esta técnica
não deve ser empregada em detrimento ao controle do poço, para não ocorrer kicks. O uso
de lubrificadores na área afetada pode ser outra solução, apesar do longo tempo despendido
para essa operação. Ainda para o caso de prisão, recomenda-se a utilização de um drilling
jar na coluna de perfuração, que quando acionado aplica uma força de impacto à coluna
forçando a sua liberação.
Segundo Rocha et al [36], ruptura à compressão, também conhecida como colapso,
é provocada por peso insuficiente do fluido de perfuração comparado com a resistência da

95
rocha e as tensões na parede do poço. O colapso pode se apresentar como uma diminuição
do diâmetro do poço ou desmoronamento das paredes do poço, de acordo com o
comportamento dúctil ou frágil das rochas solicitadas.
Problemas relacionados ao gradiente de colapso são conhecidos como instabilidade
mecânica de poços e afetam tanto poços verticais quanto direcionais, dependendo do estado
de tensão in situ, as quais são compostas por uma componente vertical e duas horizontais.
Exceto para áreas com domos salinos (evaporitos em geral, como anidrita e halita), onde as
tensões horizontais tendem a ser maiores que as verticais, tem-se geralmente a tensão
vertical (overburden ou tensão de sobrecarga) predominando em relação às tensões
horizontais.
Para poços de lâmina d’água profunda, como a densidade da água é muito menor
que a densidade das rochas, o gradiente de sobrecarga, assim como o gradiente de fratura,
diminui com o aumento da lâmina d’água, aproximando-se do gradiente da pressão de
poros, conforme ilustrado na figura II.9. Nestes casos, a janela operacional é restringida e a
perfuração torna-se uma operação de risco, podendo a diferença ente gradiente de fratura e
de pressão de poros chegar a 0,1 libra/galão.
Figura II.9 - ilustração de faixa operacional de água rasa e profunda [36]

96
II.5 TORQUE E ARRASTE
A limitação de torque está relacionado ao limite de torque das conexões dos
componentes da coluna de perfuração e dos equipamentos da sonda, como top drive e
rotativa.
O arraste ou drag, geralmente se torna um problema para poços com grandes
profundidades medidas, e também em casos de a sonda ter baixa capacidade de carga [36].
Problemas de arraste que ocorrem tanto na retirada (pick-up drag) quanto na descida
(slack-off) de colunas. O arraste aumenta com a inclinação do poço e afeta a perfuração do
mesmo, pois reduz a transmissão de peso para a broca.
Torque e arraste são sensíveis ao fator de fricção observado em cada cenário de
perfuração [35]. O fator de fricção depende do tipo de fluido, da rugosidade e tortuosidade
do poço e se a coluna está em contato com a parte do poço revestida ou exposta à
formação.




















