Ontogenetic Allometry and Cranial Shape Diversification Among Human Populations From South America
Upload
independentCategory
view
0download
0
www.elsevier.com/locate/rse
Remote Sensing of Environm
Shadow allometry: Estimating tree structural parameters using
hyperspatial image analysis
Jonathan Asher Greenberga,*, Solomon Z. Dobrowskib, Susan L. Ustinb
aNASA Ames Research Center, Moffett Field, CA, United StatesbCalspace, University of California, Davis, United States
Received 19 January 2005; received in revised form 24 February 2005; accepted 26 February 2005
Abstract
We present a novel approach to generating regional scale aboveground biomass estimates for tree species of the Lake Tahoe Basin using
hyperspatial (<1 m2 ground resolution) remote sensing imagery. Tree crown shadows were identified and delineated as individual polygons.
The area of shadowed vegetation for each tree was related to two tree structural parameters, diameter-at-breast height (DBH) and crown area.
We found we could detect DBH and crown area with reasonable accuracy (field measured to image derived cross correlation results were
0.67 and 0.77 for DBH and crown area, respectively). Furthermore, the counts of the delineated polygons in a region generated overstory
stem densities validated to manually photointerpreted stem densities (photointerpreted vs. image-derived stem densities correlation was 0.87).
We demonstrate with accurate classification maps and allometric equations relating DBH or crown area to biomass, that these crown-level
parameters can be used to generate regional scale biomass estimates without the signal saturation common to coarse-scale optical and
RADAR sensors.
D 2005 Elsevier Inc. All rights reserved.
Keywords: Biomass; Allometry; DBH; Crown area; Stem density; Trees; Shadow; Vectorization; Forestry; Hyperspatial imagery; IKONOS; Lake Tahoe Basin
1. Introduction
Minimizing uncertainties in estimating landscape level
carbon sequestration is a critical component to under-
standing many ecosystem processes ranging in scale, from
regional fuel loading for fire risk assessments (Pyne et al.,
1996) to global climate models (Post, 1993). The reason for
much of our uncertainty about biomass levels lays primarily
in the inability to link small-scale, precise carbon estimates
using ground-based sampling and large-scale sampling from
remote sensing technologies. Optical and RADAR sensors
are generally ineffective for detecting the high biomass
levels found in much of the world’s forests (Kasischke et al.,
1997). LIDAR sensors, although proving to be highly
capable at detecting high biomass levels (Hurtt et al., 2004;
0034-4257/$ - see front matter D 2005 Elsevier Inc. All rights reserved.
doi:10.1016/j.rse.2005.02.015
* Corresponding author.
E-mail address: [email protected] (J.A. Greenberg).
Riano et al., 2003), suffer from a lack of available orbital
platforms with profiling capabilities, which limits their
usefulness to only highly localized analyses. An alternate
method of detecting biomass could be provided by the new
generation of high resolution, spaceborne satellites such as
IKONOS and Quickbird which have potential to generate
regional-scale biomass estimates, especially through the
fusion of digital image analysis techniques with ground-
based forestry. Our research goal was to determine estimates
of aboveground tree biomass for the Lake Tahoe basin,
located in both California and Nevada. Additionally, we
wish to test whether biomass estimates can be accurately
detected beyond the published upper limits of optical and
RADAR sensors.
Direct measurement of tree biomass can be accom-
plished only by destructive removal and weighing of
entire trees or, minimally, by estimating tree component
volumes (e.g. stem, branches, leaves) and using species-
and component-specific density measurements to extrap-
ent 97 (2005) 15 – 25

J.A. Greenberg et al. / Remote Sensing of Environment 97 (2005) 15–2516
olate whole-tree biomass. If large-scale field sampling of
tree biomass is required, researchers typically first
generate site and species-specific allometric equations
relating rapidly measurable tree parameters such as
diameter at breast height (DBH) or sapwood area to
destructively sampled biomass. Once these equations are
generated and validated, they are applied to future field-
collected tree parameters.
Although ground-based techniques are accurate for
estimating aboveground biomass, regional scale assess-
ments of biomass can only be approached through remote
sensing technologies, as it is impossible to generate
regional-level estimates of biomass by ground sampling
alone. As such, there has been an emphasis within the
remote sensing community to generate relationships
between spectral signals received by the orbital or airborne
sensor to biomass. These relationships are necessarily
empirical, typically using regression and correlation techni-
ques (Lu et al., 2004).
Hyperspatial sensors, defined as sensors with less than or
equal to 1 m2 ground resolution, open a new possibility for
approaching the problem of estimating aboveground bio-
mass at a landscape scale. Photogrammetrists routinely
estimate crown area (and, subsequently, DBH) on an
individual tree basis through manual photointerpretation
(Bertolette & Spotskey, 1999; Clark et al., 2004). Although
trained analysts can estimate individual tree sizes, to be
usable for landscape-level analyses, this process must be
automated to increase analyst efficiency. Automatic extrac-
tion of crown area, DBH and biomass at the tree level is a
relatively new type of image-analysis capability. All current
techniques rely on delineating a tree crown from back-
ground soil and vegetation, and adjacent trees (Erikson,
2004; Gougeon, 1999; Leckie et al., 2003; Pouliot et al.,
2002). This discrimination produces a GIS layer of vectors
that represent every tree crown resolvable by the particular
vectorization technique. The vectors contain data that can be
used for classification (Brandtberg, 2002; Erikson, 2004;
Leckie et al., 2003) and crown parameter estimation (e.g.
polygon area=crown area) (Maltamo et al., 2003). Although
these techniques are extremely promising, they seem
unlikely to succeed with ‘‘coarser’’ and potentially off-nadir
hyperspatial sensors such as IKONOS (4 m multispectral
which can be pansharpened to 1 m) (Pouliot et al., 2002).
Current research has shown good results with data ranging
between 3 (Erikson, 2004) and 60 cm2 (Gougeon et al.,
1999). However, at 1 m2 resolution, the edges of trees are
difficult to detect even with photointerpretation. We
approach the problem of estimating tree-level biomass by
first estimating tree-level DBH and crown area and, through
field-based allometric relationships, biomass. To do this, we
delineated individual crown shadows, rather than the more
complex task of identifying entire tree crowns. The
shadowed areas are then related to DBH and crown area.
DBH was estimated to fit into existing biomass allometric
equations, but we included crown area here due to its
expected higher accuracy, and better fusion with remote
sensing technologies.
2. Methods
2.1. Site information
The Lake Tahoe Basin area spans the California and
Nevada border between the Carson and Sierra Nevada
mountain ranges. The total land area in the basin is
approximately 82,000 ha, roughly half of which are public
lands, including the Tahoe, Toiyabe, and Eldorado National
Forests. The elevation of the basin ranges between 1900 m
(a.s.l.) at lake level to 3400 m (a.s.l.) at the top of the highest
peaks.
2.2. Image acquisition and preprocessing
Space Imaging’s IKONOS sensor is on a polar orbiting
satellite. The sensor includes four (4) 4 m ground resolution
multispectral bands (blue, green, red, and near-infrared) and
one (1) 1 m panchromatic band. The east–west spatial
extent of a single IKONOS flightline is approximately 12
km. Four (4) IKONOS images were acquired between 19
and 22 July 2002, between 19:03 and 19:11 GMT (12:03–
12:11 pm local). IKONOS has a pointable sensor to provide
more frequent acquisition of local targets, and consequently
our imagery was collected at different sensor zeniths and
azimuth angles. Three images were collected at 15- zenith
and one was collected at nadir. Each image was collected at
a different azimuth: the three off-nadir images were
collected pointing north, south and west. Flightlines were
labeled 1–4 from west to east.
Preprocessing included 6 steps: orthorectification, topo-
graphic shade correction, atmospheric correction, empirical
line calibration to ground collected spectra, image-to-image
radiometric normalization, and pansharpening. Orthorectifi-
cation was provided by Space Imaging. Field analysis with a
Trimble Pro XRS differential GPS showed a relatively high
geographic accuracy in flat terrain (T3–5 m), but more
significant errors in steeper regions. Using ATCOR3
(Richter, 2003) in combination with a Shuttle Radar
Topography Mission (SRTM) 30 m digital elevation model
(DEM), we topographically flattened all 4 and 1 m imagery
using the ray-tracing capability in ATCOR which reduced
shadowing effects from the extremely heterogeneous terrain
present throughout the basin. In addition, ATCOR3 was
used to perform the initial atmospheric correction using the
‘‘us_standard_urban’’ atmosphere profile.
ATCOR3 was not able to precisely estimate the ground
reflectance for all four flightlines, which was confirmed by
examining the spectra of pixels with a primarily Lamber-
tian surface in the overlapping regions between images
(e.g. sand and asphalt). We measured ground spectra using
a GER1500 spectrometer at 21 sites within flightline 3 and

1 2 3 4
740000 750000 760000 770000120˚W
740000 750000 760000 770000
120˚W120˚15'W
4 2900
004 3
00000
4 3100
004 3
20000
4 3300
004 3
40000
4 3500
00
4290000
4300000
4310000
4320000
4330000
4340000
4350000
0 1 2
0 2 4 6 8 10Km
Miles3 4 5 6 7
EW
S
N
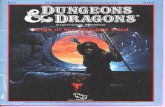
Fig. 1. Lake Tahoe Basin with flightlines 1–4 overlaid. UTM Zone 10,
NAD83.
Table 1
TBEVM 3.0 tree species’ names, codes and classification accuracies
Tree species Species code Producer’s (%) User’s (%)
Abies concolor ABCO 69.2 52.4
Abies magnifica ABMA 36.3 29.5
Juniperus occidentalis JUOC 9.6 38.3
Pinus albicaulis PIAL 27.1 54.9
Pinus contorta PICO 32.6 35.6
Pinus jeffreyi PIJE 47.4 48.9
Pinus monticola PIMO 21.0 20.8
Populus tremuloides POTR 44.5 70.4
Tsuga mertensiana TSME 18.2 36.7
Average 34.0 43.1
J.A. Greenberg et al. / Remote Sensing of Environment 97 (2005) 15–25 17
acquired its geographic position using differential GPS
(ground accuracy was approximately 50–75 cm). These
ground spectra were resampled to the IKONOS band
centers and full width at half maximum (FWHM)
response function using ENVI 3.6 (Research Systems,
2004). Using the empirical line technique (Roberts et al.,
1985), we performed a linear regression between the ground
spectra and the corresponding pixel spectra extracted from
flightline 3.
We performed an image-to-image radiometric normal-
ization using the empirical line technique between flightlines
2 and 4, and flightline 3. This required selecting approx-
imately 50 pixels in the overlap zones between flightlines of
varying brightness. Areas with significant bi-directional
reflectance effects such as forests and shallow water were
avoided in this selection. Using Excel to view the data, any
obvious outliers were removed from the analysis, and the
empirical line was computed using the remaining pixels.
This process was repeated on flightline 1 using the newly
calibrated flightline 2 as the reference image.
The next preprocessing step involved using Principle
Components pansharpening (Welch & Ahlers, 1987) to
sharpen the 4 m multispectral data to 1 m resolution using
the brightness values from the 1 m panchromatic band as a
guide. All four images were then combined into a single
mosaic. Finally, a mask of the Lake Tahoe Basin boundaries
was applied to the mosaic. Fig. 1 shows a color-infrared
(RGB=NIR, Red and Green bands, respectively) of the final
image with the individual image boundaries overlaid.
‘‘Seam lines’’ are still seen within the lake, which are
caused by waves on the water creating specular scattering,
not by poor image-to-image calibration.
2.3. Tahoe Basin Existing Vegetation Map (TBEVM) v 3.0
classification image
We used two products from the pre-existing Tahoe Basin
Existing Vegetation Map v 3.0 (Dobrowski & Greenberg,
2004). The raster classification map was used to determine
the species of vectorized tree crown shadows, used for
calculating the DBH, crown area and stem density estimates.
The mean user’s accuracy for tree species in TBEVM 3.0
was 43.1% (range 20.8–70.4%, see Table 1 for a full listing
of species used in this analysis, their species codes, and a
summary of user’s and producer’s accuracies). In addition,
we estimated landscape level stem density and biomass
based on vector layer generated by segmenting the 4 m
imagery using eCognition 4.0 (Definiens Imaging, 2004).
2.4. Generation of shadowed vegetation raster and GIS
layer
To generate a mask of shadowed vegetation, we created
two separate masks: 1) shadow/not-shadow and 2) vegeta-

J.A. Greenberg et al. / Remote Sensing of Environment 97 (2005) 15–2518
tion/not-vegetation. We found that basing the shadow purely
on a single-band threshold vastly overestimated the shadow
coverage caused by vegetation, particularly where tree
shadows were projected onto bare soil, or where there was
confusion between shadow and water. To produce the
shadow mask, we randomly selected 100 pixels that were
visually identified as belonging to the shadowed portion of a
tree crown. The mean and standard deviation of the red band
was used to determine the shadowed pixels. We visually
inspected the effects of various shadow/not-shadow thresh-
olds by stepping through mean plus various multiples of the
standard deviation. We found that the best threshold to
capture a tree crown shadow, but not significantly over- or
under-estimate the shadow coverage was the mean red
reflectance+2 standard deviations, or 4.2% reflectance in
the red band.
To generate a mask of vegetated/not-vegetated, we used a
regression of aerial vegetation cover estimates of known
plots vs. the mean normalized difference vegetation index
(NDVI) values for pixels found in these plots. We used
inventory plots acquired from local resource agencies,
including the Natural Resource Conservation Service and
the USDA Forest Service. These plots were collected
following Terrestrial Ecological Unit Inventory (TEUI)
standards (Winthers et al., 2003). Aerial cover is defined
as a ground estimate of the % cover for a given cover class if
viewed from above. Vegetated pixels are defined as having
aerial cover exceeding 1% (Brewer et al., 2004). We found
the relationship to be:
NDVI¼ 0:0033�% aerial cover þ 0:2511; RMSE 0:15:
The threshold, therefore, is classified as vegetation if
NDVI> 0.25. These results were confirmed visually by
Fig. 2. (a) Color infrared image of a forest/wet meadow edge and (b) correspond
stemmed and multi-stemmed shadowed vegetation regions can be seen. (For interp
to the web version of this article.)
inspecting pixels known to be vegetated or non-vegetated
regions.
We combined these two masks to generate a binary mask
in which the pixel value was 1 if the pixel was both shadowed
(red�4.2% reflectance) and vegetated (NDVI>0.25), and 0
otherwise. Fig. 2 shows an example of a shadowed vegetation
mask compared to a CIR image.
We performed a raster-to-vector conversion using ENVI
4.1 on the shadowed vegetation mask. This generated a
polygon coverage of contiguous shadowed vegetation
pixels across the entire landscape. Due to software
limitations, we had to perform this vectorization on spatial
subsets, ranging from 2500 to 10,000 lines. Each
shadowed vegetation polygon was assigned an area
(number of pixels that comprised the contiguous region),
a species (from the TBEVM 3.0 class map, using the most
common pixel class falling in a shadowed vegetation
polygon), a flightline number, and the ID of the TBEVM
polygon in which the particular shadowed vegetation
polygon falls.
2.5. Field and GIS data
We opportunistically collected training samples for each
common tree species found in the basin using differential
GPS, combined with Solo Field software (Tripod Data
Systems, 2004) and the false-color IKONOS imagery as a
background. Common tree species were defined as those
species that comprise prevalent vegetation communities in
the basin as described by regional ecologists. Because of
GPS error and image misregistration, rather than the
traditional method of taking GPS data and using it to re-
register the imagery to fit the GPS coordinates, we used the
GPS in the field to navigate close to a visually identified
ing shadowed vegetation mask (white=shadowed vegetation). Both single
retation of the references to colour in this figure legend, the reader is referred

Table 2
Ninety percent DBH quantile threshold used for single tree/multiple tree
discrimination
Species code 90% DBH quantile (cm)
ABCO 95.9
ABMA 105.7
JUOC 97.4
PICO 73.8
PIJE 104.9
PIMO 124.1
POTR 62.6
TSME 102.3
Table 3
Basin-wide median DBH for trees less than the 90% quantile threshold
Species Median DBH
ABCO 50.9
ABMA 56.5
JUOC 70.2
PICO 46.1
PIJE 58.2
PIMO 69.0
POTR 34.7
TSME 48.2
J.A. Greenberg et al. / Remote Sensing of Environment 97 (2005) 15–25 19
tree. Then, the tree center was manually selected in the
IKONOS imagery by visually identifying the vegetation.
This technique produced much higher precision in pixel
selection since there was no reliance on high accuracy of the
image orthorectification. Crown width and DBH were
collected for all measured trees. We used a tape measure
at breast height and visual estimation of the edge of the
crown to determine crown radius to the nearest 0.5 m.
Crowns were assumed to be symmetric, so a single radius
was determined in a random direction. Crown radius was
not corrected for the radius of the bole. In cases where trees
appeared as multistemmed individuals (most common in
Juniperus occidentalis and Pinus albicaulis), crown width
was recorded but not DBH. In cases where trees could not
be distinguished as individuals, they were recorded as
clusters of trees that were homogenous in species compo-
sition, patch radius and species, but varied in DBH or crown
width (most common in Populus tremuloides and Abies
concolor). In total, 804 trees (or patches of trees) were
collected.
We created a polygon coverage using the crown radius or
patch radius for each data point to create a circular feature,
multiplying the radius by 75% to guarantee that the true
location of the pixels were within the buffer and solely
within the cover class. Using STARSPAN (Rueda &
Greenberg, 2004), we extracted the 1-m pansharpened
multispectral pixel data with the shadowed vegetation mask
from the region within the buffers. The area of shadowed
vegetation within each crown was determined (number of
pixels of shadow/number of pixels in crown buffer). In
addition, the flightline in which the field data was collected
was determined by performing a spatial join in ArcGIS 9.0
(ESRI, 2004).
2.6. DBH and crown area estimation
We randomly subsetted the field data into two
equivalent sized groups to perform cross-validation
(unscreened n =402 trees per subset). We performed a
natural-log transform on the shadowed vegetation area
(SVA), crown area (CA) and Diameter at Breast Height
(DBH). A multiple regression predicting ln (DBH) and ln
(CA) was performed using ln (SVA) as a continuous
explanatory variable and flightline and species as two
nominal explanatory variables. Outliers from the field data
were identified and removed if: a) the recorded DBH was
greater than the maximum published DBH for that
particular species (indicating an error in data collection),
b) the shadow area was less than 1 m2 (e.g. presence of at
least one shadow pixel), and c) the polygon was not a
patch of trees. Once the outliers and missing data were
removed, the sample size became n =150 and 149 for the
two subsets for DBH. All crown area data collected was
used. One regression was performed for each subset. There
was insufficient data to predict DBH based on shadowed
vegetation area for Pinus albicaulis, so this species was
dropped from further analysis.
Double cross-validation was performed using regression
equations from each of the two subsets to predict DBH and
crown area for the other subset. A Pearson product-moment
correlation coefficient between actual and predicted DBH
and crown area was performed for each subset. High
correlation coefficients (approaching 1.0) would indicate a
good cross-validation.
2.7. Application of regression parameters and multiple
crown correction
We randomly selected one of the two regression
equations generated from the previous step, and applied
them to all shadowed vegetation polygons extracted from
the imagery. Visual inspection revealed that in dense
forests, particularly in off-nadir imagery, crown shadows
often overlapped creating a single large shadow polygon
that was comprised of multiple crowns. To correct for
this error, a histogram of DBH values for each species
was created using the GIS of the entire basin. The 90%
quantile for DBH was used as a threshold to distinguish
single-crown polygons from multiple-crowned polygons.
Table 2 provides the DBH thresholds used by
species.
2.8. Tree density
To validate estimates of tree density, we performed
photointerpretation on 49 randomly chosen 1 ha (100�100

Table 4
DBH (‘‘dbh_pred_cor’’) to aboveground biomass allometric equations
Cover class AGB equation
ABCO1 Exp(4.36982+(2.5043*Log(dbh_pred_cor)))/1000
ABMA1 Exp(2.61856+2.9121*Log(dbh_pred_cor))/1000
JUOC3 Exp((�8.3939)+2.6344*Log(dbh_pred_cor*Pi()))+
Exp((�7.3115)+2.3337*Log(dbh_pred_cor*Pi()))+
Exp((�11.846)+2.8323*Log(dbh_pred_cor*Pi()))+
Exp((�4.243)+1.5606*Log(dbh_pred_cor*Pi()))
PICO1 (�0.463)+0.106*dbh_pred_cor
PIJE2 Exp((�4.2847)+2.718*Log(dbh_pred_cor))+
Exp((�4.2062)+2.2475*Log(dbh_pred_cor))+
Exp((�5.29)+2.6524*Log(dbh_pred_cor))+
Exp((�3.7969)+1.7426*Log(dbh_pred_cor))+
Exp((�3.9739)+2.0039*Log(dbh_pred_cor))
PIMO2 Exp((�4.2847)+2.718*Log(dbh_pred_cor))+
Exp((�4.2062)+2.2475*Log(dbh_pred_cor))+
Exp((�5.29)+2.6524*Log(dbh_pred_cor))+
Exp((�3.7969)+1.7426*Log(dbh_pred_cor))+
Exp((�3.9739)+2.0039*Log(dbh_pred_cor))
POTR1 Exp((�2.3778)+2.4085*Log(dbh_pred_cor))
TSME1 Exp(3.69564+2.37489*Log(dbh_pred_cor))/1000
DBHs are in centimeters and AGB are in kilograms.1From Jenkins et al. (2004); 2P. jeffreyi and P. monticola eqs. were
unavailable; we used generic Pinus spp. from Jenkins et al. (2004); 3 From
Gholz (1980).
Table 5
Predicted parameter values for the random subsets i and ii for a) species and
b) flightline for the DBH to shadowed vegetation area relationship
a.
Species SPi SPii
ABCO �0.323 �0.203
ABMA 0.093 0.127
JUOC 0.367 0.352
PICO �0.205 �0.207
PIJE �0.087 0.027
PIMO 0.285 0.328
POTR �0.398 �0.360
TSME 0.269 �0.065
b.
Flightline FLi FLii
1 0.043 0.012
2 0.047 0.098
3 0.011 0.091
4 �0.101 �0.201
J.A. Greenberg et al. / Remote Sensing of Environment 97 (2005) 15–2520
pixels) image subsets stratified by flightline, but weighted
according to the area each flightline contributed to the final
mosaic (flightlines 1, 2, 3 and 4 had 2, 14, 15 and 19
random subsets chosen, respectively). A single researcher
performed the photointerpretation, and used both a false-
color infrared and NDVI image to place points on all
identifiable crowns. A polygon layer of the subset bounda-
ries was used to select the shadowed vegetation polygons
falling within the subsets, and then to clip these polygons to
the subset boundaries.
The image-derived stem density was calculated by
adding the number of single crowned polygons to
the corrected multiple crowned polygons. The number
of stems in a multiple crowned polygon was calcu-
lated as the predicted DBH for the polygon divided
by the median DBH for all trees of that species
falling in the 90% quantile range (see Table 3). A
correlation was performed to determine the relation-
ship between photointerpreted and image-derived stem
densities.
2.9. Biomass estimation
We applied published species-specific allometric equa-
tions (Table 4) relating DBH to aboveground biomass of
all tree species in the Lake Tahoe Basin to generate a map
of biomass per hectare (kg/ha) for TBEVM 3.0 polygons.
In the case of multiple-crowned polygons, we used the
predicted biomass given the median DBH per species,
multiplied by the predicted number of stems contained by
the multiple-crowned polygon.
3. Results
3.1. DBH estimation
The regression equations used for the two random
subsets i and ii (n =141 and 139, respectively) to predict
DBH from shadow area, species and flightline was found
to be:
ln DBHið Þ ¼ 4:025þ SPi þ FLi þ 0:145Tln SVAið Þ; andð1Þ
ln DBHiið Þ ¼ 3:808þSPii þ FLii þ 0:207Tln SVAiið Þ: ð2Þ
Species (SPi and SPii) and flightline (FLi and FLii)
parameters are summarized in Table 5a and b, respectively.
Root mean square error (RMSE) for subset i and ii was
and 0.315 and 0.263, respectively. The double cross-
validation results yielded a Pearson product-moment
correlation coefficients between the field-measured DBH
and the DBH predicted from the regression coefficients as
0.69 and 0.66 (mean 0.67; see Fig. 3a and b for the
scatterplots for subsets i and ii). Based on these equations
(using shadow area=1 m2, or 1 pixel), flightline 4 had the
smallest resolvable DBH. The mean minimum DBH for all
species on flightline 4 was 37.9 cm, as contrasted with a
minimum 51.2 cm for flightline 2. Overall mean minimum
resolvable DBH for all species on all flightlines was 46.7
cm. Species appeared to have a relatively small impact on
overall DBH estimation: the coefficients for both random
subsets ranged from �0.398 (0.7 cm DBH) to 0.367 (1.4
cm DBH) or only a 0.7 cm range of values between all

DB
H (
cm),
imag
e de
rived
DB
H (
cm),
imag
e de
rived
DBH (cm), field measured DBH (cm), field measured
a. b.
Fig. 3. Cross-validation results for field measured DBH vs. image derived DBH for subsets i (a) and ii (b). Dashed line is the 1 :1 line, solid line is the least-
squares line fit to the actual results.
Table 7
Predicted parameter values for the random subsets i and ii for a) species and
b) flightline for the crown area to shadowed vegetation area relationship
a.
Species SPi SPii
ABCO 0.342 0.254
ABMA 0.102 0.301
J.A. Greenberg et al. / Remote Sensing of Environment 97 (2005) 15–25 21
species. Table 6 shows a summary of minimum resolvable
DBH by species and flightline.
3.2. Crown area estimation
The regression equations for crown area for the two
random subsets i and ii (n =378 and 374) were:
ln CAið Þ ¼ 1:960þ SPi þ FLi þ 0:630Tln SVAið Þ; and ð3Þ
ln CAiið Þ ¼ 2:006þ SPii þ FLii þ 0:628Tln SVAiið Þ; ð4Þ
where the parameters SP and FL are described in Table
7a and b, respectively. The RMSE for the two subsets i
and ii was 0.641 and 0.627 respectively. The double
cross-correlation yielded coefficients of 0.71 and 0.83
(mean 0.77; see Fig. 4a and b for the corresponding
scatterplots).
Table 6
Minimum resolvable DBH (cm) by species and flightline
Species Flightline 1 Flightline 2 Flightline 3 Flightline 4
ABCO 37.2 40.6 40.3 30.1
ABMA 51.8 56.5 56.0 41.8
JUOC 64.8 70.7 70.2 52.4
PICO 37.1 40.4 40.1 30.0
PIJE 46.8 51.1 50.7 37.8
PIMO 63.3 69.0 68.5 51.1
POTR 31.8 34.7 34.4 25.7
TSME 42.7 46.6 46.2 34.5
3.3. Tree density
The Pearson product-moment correlation between photo-
interpreted stem density and the image-derived stem density
counting was 0.87. Fig. 5 shows the scatterplot of photo-
interpreted vs. image-derived stem density results. Fig. 6
shows the basin wide distribution of tree densities. Stem
densities for vegetated polygons ranged from 0.1 to 625
stems/ha (99.5% interval 0.4–132.4 stems/ha, mean 47.1
stems/ha). For tree dominated communities (tree cov-
er�25%, (Tart et al., 2004)), the 99.5% stem density range
was 5.0–146.5 stems/ha, mean 72.8 stems/ha.
JUOC 0.127 0.218
PIAL 0.202 �0.129
PICO �0.303 �0.194
PIJE 0.087 �0.070
PIMO 0.177 �0.179
POTR �0.297 �0.109
TSME �0.437 �0.092
b.
Flightline FLi FLii
1 0.786 0.813
2 �0.754 �0.731
3 0.147 �0.018
4 �0.179 �0.065

Fig. 4. Cross-validation results for field measured crown area vs. image derived crown area for subsets i (a) and ii (b). Dashed line is the 1 :1 line, solid line is
the least-squares line fit to the actual results.
J.A. Greenberg et al. / Remote Sensing of Environment 97 (2005) 15–2522
3.4. Aboveground tree biomass estimation
Fig. 7 displays the basin-wide estimation of biomass (kg/
ha). Biomass for vegetated polygons ranged from 0.0 to
748.0 Mg/ha (99.5% interval 0.0–308.1 Mg/ha, mean 77.5
Mg/ha). For tree dominated communities, the 99.5% range
for biomass/ha range was 2.1–334.9 Mg/ha, and a mean of
120.7 Mg/ha.
Fig. 5. Photointerpreted vs. image derived stem density estimations.
Dashed line is the 1 :1 line, solid line is the least-squares line fit to the
actual results. Fig. 6. Stem density for TBEVM 3.0 management polygons.

J.A. Greenberg et al. / Remote Sensing of Environment 97 (2005) 15–25 23
4. Conclusions
Identification of vegetation shadows and vectorization of
these small pixel clusters of shadows is a promising technique
for estimating DBH, crown area, and stem density over
landscape scales. Through this process, a wealth of related
biophysical parameters can be accessed by using allometric
equations to relate crown parameters to biomass. These
techniques leverage both the strengths of hyperspatial
imagery and comparatively simple vectorization techniques
(compared to Erikson, 2004; Gougeon, 1999; Leckie et al.,
2003; Pekkarinen, 2002; Pouliot et al., 2002). DBH, crown
area and stem density showed good correlations between
image-derived estimates and field/photointerpreted results,
although to differing degrees of success.
For DBH, crown area and stem density estimation, a
major limiting factor was the vectorization process. We
implemented the single most basic raster-to-vector conver-
sion currently available: treat all connected pixels as
Fig. 7. Estimated aboveground tree biomass per ha (Mg/ha) for TBEVM 3.0
management polygons.
belonging to a single polygon. A more complex vectoriza-
tion could have improved the estimations by potentially
eliminating the need to set somewhat arbitrary thresholds to
distinguish single crowned polygons from multiple crowned
polygons. This became a critical issue in dense forests,
where entire stands of trees might be included in a single
shadow polygon. We plan on investigating other forms of
vectorization for future analyses.
Although promising, DBH estimation was the least
effective relationship generated due, in addition to the
vectorization issues, to a number of complications. The
DBH estimation showed a significant effect of flightline
number, probably a result of differing sensor angles, which
could have been avoided early in the study by acquiring
only nadir imagery. The imagery request was designed to be
acquired over a short time frame to avoid significant
phenological changes that could have led to significant
changes in detected spectral signatures. However, although
phenological changes probably would have resulted in
significant spectral changes in the herbaceous and, poten-
tially, shrub communities, they are unlike to have had a
serious affect on tree signals (with the exception of the
single broadleaf Populus tremuloides). Acquisition of
entirely nadir imagery, even if it took a much longer span
of time to collect, would have vastly simplified the analysis
and would probably have improved our ability to estimate
DBH. In addition to the effects of flightlines, species were
also found to have a significant, but limited, effect on
estimated DBH. The lack of a more pronounced effect of
species was probably the relatively similar architecture of
many of the species used, suggesting this technique may be
useful even in the absence of more accurate species maps.
With that said, the more unique architectures, particularly
Juniperus occidentalis, did show significantly different
coefficients than the other conifer species so we cannot
discount the importance of, minimally, an architecture-
specific classification maps and allometric relationships.
Crown area was much more accurate than DBH, as
shown by the larger correlation coefficients. Like DBH,
complicating factors also reduced the potential accuracy,
which also related to the different sensor angles and
uncertainty in our species assignments. Crown area, unlike
DBH, is directly viewable by the sensor (particularly for
nadir sensors), so the shadow to crown area relationship is
largely geometric, and not complicated by more complex
physiological relationships.
Stem counting by isolating shadow clusters proved to be
an excellent way to assess stem density. However, the stem
counts were based on photointerpretation, and not from
ground-based measurements. Therefore, some uncertainty
exists for the accuracy of the photointerpreted based map. A
qualitative comparison to ground-based records of old-
growth sites in the Lake Tahoe Basin (Barbour et al., 2002)
showed that our stem densities are in the right range in the
context of this particular watershed, but only for large,
overstory trees (>40 cm DBH). Understory tree densities

J.A. Greenberg et al. / Remote Sensing of Environment 97 (2005) 15–2524
were unrepresented in our analysis since, like all optical and
RADAR sensors, there is little reflected spectral information
from the subcanopy that can be easily decoupled from the
dominant canopy signature. Full waveform LIDAR is
currently the only type of sensor capable of detecting
subcanopy biomass levels, particularly at this spatial scale
(Hurtt et al., 2004). In addition, due to limitations of the
spatial resolution of the IKONOS sensor, the two smallest
Federal Geographic Data Committee (FGDC) subclasses
(0–5� and 5–10� DBH, Brewer et al., 2004) fall below the
minimum resolvable DBH. Only higher spatial resolution
sensors or more empirical approaches to analysis are likely
to improve these estimates.
Biomass estimates could not be directly validated at this
time, but several observations can be made. Like stem
density, at best this approach will provide accurate
estimations of canopy biomass, but not understory biomass,
which will lead to somewhat underestimated aboveground
biomass. However, what is promising from this approach is
that detection of tree size (be it DBH or crown area) does
not have any inherent upper limits, since the only thing that
restrict our estimates are sensor resolution and crown
overlap. Individual trees are known to have biomass levels
far exceeding any optical or RADAR sensor: the world’s
largest white fir, for instance, has an estimated biomass/ha
of 5421.5 Mg/ha (based on a 276� circumference and 39Vcrown spread), compared to the upper biomass limits
demonstrated by RADAR technology which is about 360
Mg/ha, Kasischke et al., 1997).
To fully exploit these techniques, further advances need to
be made in the fields and technology of forestry, image
classification and computer vision. All future field derived
allometric biomass equations should include crown area or
radius in addition to DBH. There is an overemphasis on
relating DBH to biomass, which leads to greater error when
trying to predict tree biomass using remote sensing. Crown
radius can be rapidly acquired in conjunction with DBH, and
the benefits will far outweigh the small additional time it
takes to collect this data as part of an effort to derive biomass
equations and provide a direct link to hyperspatial remote
sensing data. In terms of classification, species mapping on
the scale of hyperspatial data remains error-prone. Advances
in both the techniques of producing classification maps from
existing hyperspatial sensors, and a push towards using
newer technologies such as hyperspectral sensors will likely
improve this input. Finally, individual tree (or relevant tree
component) extraction is a new but growing field of
applications. Pixel-level analyses are no longer relevant at
this scale, since the objects in question are larger than a pixel.
Advances in pattern recognition, image segmentation, and
computer vision will lead to better extraction of tree crowns,
leading to improved estimations of crown area, and poten-
tially to more precise spectral and textural information which
can be used to perform classification. With further advances
along these lines, these techniques should be widely
applicable across a wide range of tree-dominated ecosystems,
and could potentially lead to major improvements in our
understanding of climate change processes at a microscale
across a landscape.
Acknowledgements
This project was funded by the Tahoe Regional Planning
Agency (TRPA) and the Forest Service (USFS). Special
thanks to Mike Vollmer (TRPA), Shane Romsos (USFS),
Hugh Safford (USFS), George Scheer, Lawrence Ross,
Shawn Kefauver, Jaylee Tuil, Missy Voight, Ben Addle-
stone, Jennifer Riddell, Dylan Burge, Shannon Murphy and
Jessica Gorin.
References
Barbour, M., Kelley, E., Maloney, P., Rizzo, D., Royce, E., & Fites-
Kaufmann, J. (2002). Present and past old-growth forests of the Lake
Tahoe Basin, Sierra Nevada, US. Journal of Vegetation Science, 13(4),
461–472.
Bertolette, D. R., & Spotskey, D. B. (1999). Fuel model and forest type
mapping for FARSITE input. In G. E. Gollberg (Ed.), The joint fire
science conference and workshop. Boise, ID’ University of Idaho and
International Association of Wildland Fire.
Brandtberg, T. (2002). Individual tree-based species classification in high
spatial resolution aerial images of forests using fuzzy sets. Fuzzy Sets
and Systems, 132, 371–387.
Brewer, C. K., Schwind, B., Warbington, R. J., Clerke, W., Krosse, P. C.,
Suring, L. H., et al. (2004). Appendix 1B: Overview of the NVCS
physiognomic hierarchy. In R. J. Brohman, & L. D. Bryant (Eds.),
Existing vegetation classification and mapping technical guide.
Washington’ USDA Forest Service.
Clark, D. B., Read, J. M., Clark, M. L., Cruz, A. M., Dotti, M. F., & Clark,
D. A. (2004). Application of 1-m and 4-m resolution satellite data to
ecological studies of tropical rain forests. Ecological Applications,
14(1), 61–74.
Definiens Imaging. (2004). eCognition. Munchen’ Professional.
Dobrowski, S., & Greenberg, J. A. (2004). Tahoe basin existing vegetation
map v 3.0. Tahoe Regional Planning Agency, Stateline.
Erikson, M. (2004). Species classification of individually segmented tree
crowns in high-resolution aerial images using radiometric and
morphologic image measures. Remote Sensing of Environment,
91(3–4), 469–477.
ESRI. (2004). ArcGIS. Redlands’ ESRI.
Gholz, H. L. (1980). Structure and productivity of Juniperus occidentalis in
central Oregon USA. American Midland Naturalist, 103(2), 251–261.
Gougeon, F. A. (1999). Automatic individual tree crown delineation using a
valley-following algorithm and a rule-based system. In D. A. Hill, & D.
G. Leckie (Eds.), Proceedings of the international forum on automated
interpretation of high spatial resolution digital imagery for forestry,
February 10–12, 1998, Victoria, B.C., Canada (pp. 11–23).
Gougeon, F. A., Leckie, D. G., Paradine, D., & Scott, I. (1999). Individual
tree crown species recognition: The Nahmint study. Automated
interpretation of high spatial resolution digital imagery for forestry,
International Forum, PG, 1999.
Hurtt, G. C., Dubayah, R., Drake, J., Moorcroft, P. R., Pacala, S. W., Blair,
J. B., et al. (2004). Beyond potential vegetation: Combining lidar data
and a height-structured model for carbon studies. Ecological Applica-
tions, 14(3), 873–883.
Jenkins, J. C., Chojnacky, D. C., Heath, L. S., & Birdsey, R. A. (2004).
Comprehensive database of diameter-based biomass regressions for

J.A. Greenberg et al. / Remote Sensing of Environment 97 (2005) 15–25 25
North American tree species. U.S. Department of Agriculture. Newtown
Square’ Forest Service, Northeastern Research Station.
Kasischke, E. S., Melack, J. M., & Dobson, M. C. (1997). The use of
imaging radars for ecological applications—a review. Remote Sensing
of Environment, 59(2), 141–156.
Leckie, D. G., Gougeon, F. A., Walsworth, N., & Paradine, D. (2003). Stand
delineation and composition estimation using semi-automated individual
tree crown analysis. Remote Sensing of Environment, 85(3), 355–369.
Lu, D., Mausel, P., Brondizio, E., & Moran, E. (2004). Relationships
between forest stand parameters and Landsat TM spectral responses
in the Brazilian Amazon Basin. Forest Ecology and Management,
198(1–3), 149–167.
Maltamo, M., Tokola, T., & Lehikoinen, M. (2003). Estimating stand
characteristics by combining single tree pattern recognition of digital
video imagery and a theoretical diameter distribution model. Forest
Science, 49(1), 98–109.
Pekkarinen, A. (2002). Image segment-based spectral features in the
estimation of timber volume. Remote Sensing of Environment,
82(2–3), 349–359.
Post, W. M. (1993). Uncertainties in the terrestrial carbon cycle. In A. M.
Solomon, & H. H. Shugart (Eds.), Vegetation dynamics and global
change (pp. 116–132). London’ Chapman and Hall.
Pouliot, D. A., King, D. J., Bell, F. W., & Pitt, D. G. (2002). Automated tree
crown detection and delineation in high-resolution digital camera
imagery of coniferous forest regeneration. Remote Sensing of Environ-
ment, 82(2–3), 322–334.
Pyne, S. J., Andrews, P. L., & Laven, R. D. (1996). Introduction to wildland
fire. New York’ Wiley and Sons.
Research Systems, Inc. (2004). ENVI: The environment for visualizing
images. Boulder’ Research Systems, Inc.
Riano, D., Meier, E., Allgower, B., Chuvieco, E., & Ustin, S. L. (2003).
Modeling airborne laser scanning data for the spatial generation of
critical forest parameters in fire behavior modeling. Remote Sensing of
Environment, 86(2), 177–186.
Richter, R. (2003). Atmospheric/topographic correction for satellite
imagery: ATCOR-2/3 user guide, version 5.5, January 2003. Wessling’
ReSe Applications Schlapfer.
Roberts, D. A., Yamaguchi, Y., & Lyon, R. J. P. (1985). Calibration of
airborne imaging spectrometer data to percent reflectance using field
spectral measurements. 19th international symposium on remote
sensing of environment, Ann Arbor, MI.
Rueda, C., & Greenberg, J. A. (2004). STARSpan. Davis’ University of
California, Davis.
Tart, D., Williams, C. K., Brewer, C. K., DiBenedetto, J. P., & Schwind, B.
(2004). Section 1: Existing vegetation protocol framework. In R. J.
Brohman, & L. D. Bryant (Eds.), Existing vegetation classification and
mapping technical guide. Washington’ USDA Forest Service.
Tripod Data Systems, Inc. (2004). SOLO field. Corvallis’ Tripod Data
Systems, Inc.
Welch, R., & Ahlers, W. (1987). Merging multiresolution SPOT HRV and
landsat TM data. Photogrammetric Engineering and Remote Sensing,
53, 301–303.
Winthers, E., Fallon, D., Haglund, J., Demeo, T., Tart, D., Ferwerda, M.,
et al. (2003). Terrestrial ecological unit inventory technical guide.
USDA Forest Service, Washington Office-Ecosystem Management
Coordination Staff, 125 pp.
Copyright © 2022 FDOKUMEN