Renewal-Reward Process Formulation of Motor Protein Dynamics
31
Bull Math Biol (2011) 73:2452–2482 DOI 10.1007/s11538-011-9632-x ORIGINAL ARTICLE Renewal-Reward Process Formulation of Motor Protein Dynamics Arjun Krishnan · Bogdan I. Epureanu Received: 12 December 2009 / Accepted: 18 January 2011 / Published online: 17 February 2011 © Society for Mathematical Biology 2011 Abstract Renewal-reward processes are used to provide a framework for the math- ematical description of single-molecule bead-motor assays for processive motor pro- teins. The formulation provides a more powerful, general approach to the fluctua- tion analysis of bead-motor assays begun by Svoboda et al. (Proc. Natl. Acad. Sci. USA 91(25):11782, 1994). Fluctuation analysis allows one to gain insight into the mechanochemical cycle of motor proteins purely by measuring the statistics of the displacement of the cargo (e.g., bead) the protein transports. The statistical parame- ters of interest are shown to be the steady-state slopes (in time) of the cumulants of the bead (the cumulant rates). The first two cumulant rates are the steady-state velocity and slope of the variance. The cumulant rates are shown to be insensitive to exper- imental disturbances such as the initial state of the enzyme and from the viewpoint of modeling, unaffected by substeps. Two existing models—Elston (J. Math. Biol. 41(3):189–206, 2000) and Peskin and Oster (Biophys. J. 68(4):202S–211S, 1995)— are formulated as renewal-reward processes to demonstrate the insight that the for- mulation affords. A key contribution of the approach is the possibility of account- ing for wasted hydrolyses and backward steps in the fluctuation analysis. For exam- ple, the randomness parameter defined in the first fluctuation analysis of optical trap based bead-motor assays (Svoboda et al. in Proc. Natl. Acad. Sci. USA 91(25):11782, 1994), loses its original purpose of estimating the number of rate-determining steps in the chemical cycle when backward steps and wasted hydrolyses are present. As a A. Krishnan · B.I. Epureanu ( ) Department of Mechanical Engineering, University of Michigan, 2350 Hayward, Ann Arbor, MI 48109-2125, USA e-mail: [email protected] Present address: A. Krishnan Courant Institute of Mathematical Sciences, New York University, 251 Mercer St., New York, NY 10012, USA e-mail: [email protected]
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Renewal-Reward Process Formulation of Motor Protein Dynamics

Bull Math Biol (2011) 73:2452–2482DOI 10.1007/s11538-011-9632-x
O R I G I NA L A RT I C L E
Renewal-Reward Process Formulation of MotorProtein Dynamics
Arjun Krishnan · Bogdan I. Epureanu
Received: 12 December 2009 / Accepted: 18 January 2011 / Published online: 17 February 2011© Society for Mathematical Biology 2011
Abstract Renewal-reward processes are used to provide a framework for the math-ematical description of single-molecule bead-motor assays for processive motor pro-teins. The formulation provides a more powerful, general approach to the fluctua-tion analysis of bead-motor assays begun by Svoboda et al. (Proc. Natl. Acad. Sci.USA 91(25):11782, 1994). Fluctuation analysis allows one to gain insight into themechanochemical cycle of motor proteins purely by measuring the statistics of thedisplacement of the cargo (e.g., bead) the protein transports. The statistical parame-ters of interest are shown to be the steady-state slopes (in time) of the cumulants of thebead (the cumulant rates). The first two cumulant rates are the steady-state velocityand slope of the variance. The cumulant rates are shown to be insensitive to exper-imental disturbances such as the initial state of the enzyme and from the viewpointof modeling, unaffected by substeps. Two existing models—Elston (J. Math. Biol.41(3):189–206, 2000) and Peskin and Oster (Biophys. J. 68(4):202S–211S, 1995)—are formulated as renewal-reward processes to demonstrate the insight that the for-mulation affords. A key contribution of the approach is the possibility of account-ing for wasted hydrolyses and backward steps in the fluctuation analysis. For exam-ple, the randomness parameter defined in the first fluctuation analysis of optical trapbased bead-motor assays (Svoboda et al. in Proc. Natl. Acad. Sci. USA 91(25):11782,1994), loses its original purpose of estimating the number of rate-determining stepsin the chemical cycle when backward steps and wasted hydrolyses are present. As a
A. Krishnan · B.I. Epureanu (�)Department of Mechanical Engineering, University of Michigan, 2350 Hayward, Ann Arbor,MI 48109-2125, USAe-mail: [email protected]
Present address:A. KrishnanCourant Institute of Mathematical Sciences, New York University, 251 Mercer St., New York,NY 10012, USAe-mail: [email protected]

Renewal-Reward Process Formulation of Motor Protein Dynamics 2453
simple application of our formulation, we extend the randomness parameter’s scopeby showing how it can be used to infer the presence of wasted hydrolyses and back-ward steps with certainty. A more powerful fluctuation analysis using higher cumu-lant rate measurements is proposed: the method allows one to estimates the numberof intermediate reactions, the average chemical rate, and the probability of steppingbackward or forward. The stability of the method in the presence of measurementerrors is demonstrated numerically to encourage its use in experiments.
Keywords Bead-motor assays · Optical trap · Motor proteins · Renewal-rewardprocesses · Fluctuation analysis · Kinesin · Myosin V
1 Introduction
Motor proteins are enzymes that use energy from adenosine triphosphate (ATP) hy-drolysis to produce mechanical work. Different classes of motor proteins are involvedin a variety of biological processes that range from cellular transport to DNA tran-scription. Examples of such enzymes include kinesin, myosin, the rotary molecularmotor F1-ATPase, the bacterial flagellar motor, RNA-polymerase, etc. Motors likekinesin, myosin, or RNA-polymerase are usually described as linear, since they typ-ically move along linear tracks made of tubulin dimers, actin filaments, or DNAstrands (Howard 2001). Rotary motor proteins have similar mechanisms, but forthese, each hydrolysis is accompanied by the rotation of a radial appendage by acertain angle. For example, the rotation of F1-ATPase is composed of three separaterotations of 120 degrees, each accompanied by the hydrolysis of one ATP molecule(Boyer 1997).
Myosin II and dynein work together in large numbers to produce the large-scale motive force of muscles and cilia, respectively (Howard 1997, 2001; Mehtaet al. 1999a). They typically detach from their tracks after one or two produc-tive ATP hydrolyses. In contrast, kinesin and myosin V are responsible for thetransport of organelles, vesicles, and nutrients in the crowded cytoplasm of eu-karyotic cells. They have adapted to their function by being processive: single ki-nesin and myosin V molecules do not leave their tracks for many hundreds of cat-alytic cycles while attached to their cargoes (Howard 1997; Mehta et al. 1999b;Svoboda et al. 1993). DNA processing also requires processivity, and hence DNApolymerases and helicases undergo many catalytic cycles with their binding part-ners (Mehta 2001). The focus of this manuscript will be on linear processive motorproteins such as kinesin and myosin V, although the methods are easily extended torotary motor proteins using the methods developed by Santos et al. (2005).
Linear processive enzymes walk on tracks that have a set of regularly spacedchemical binding sites. Kinesin, its relative ncd, and dynein walk on microtubules(MTs), whereas myosins walk on actin filaments (Howard 1997). The motors walk bymoving from one binding site to another in a preferred direction (Schief and Howard2001). Once ATP binds to the motor protein, hydrolysis takes place in a sequence ofchemical and mechanical processes. In one of these mechanochemical processes, themotor protein biases its diffusion in a preferred direction by undergoing a conforma-tional change: kinesin undergoes changes in its neck-linker (Howard 1996; Rice et al.

2454 A. Krishnan, B.I. Epureanu
1999) and myosin undergoes a rotation of its lever arm (Geeves and Holmes 1999;Mehta 2001). With the help of thermal fluctuations (in the fluid medium), the motorcompletes a step by chemically attaching itself to the next binding site on the track.
Experiments focus on different aspects of the chemical and mechanical phe-nomena. Solution kinetic experiments determine nucleotide binding and hydrol-ysis rates (Cross 2004; Gilbert et al. 1995; Spudich 1994). Some studies focuson characterizing structural aspects like the different conformations of the pro-tein and how these help it function (Geeves and Holmes 1999; Rice et al. 1999;Schief and Howard 2001). The experiments most relevant to the work herein are(optical trap based) single molecule bead-motor assays. Since the early in vitro visu-alizations of single kinesins (Howard et al. 1989) and myosins (Sheetz and Spudich1983) moving a silica or polystyrene bead, (optical trap based) single molecule assayshave become increasingly sophisticated. In such an assay, a sphere of micrometer sizeis coupled to the motor in a fluid medium containing ATP. A force is applied to thebead using optical (or magnetic) tweezers to simulate the effect of the cargo on themotor. This force, in turn, is transmitted to the motor, and the position of the beadis optically measured. The early (optical trap based) bead-motor assay on kinesin(Block et al. 1990) has evolved to such an extent that the load on the motor pro-tein can be precisely controlled (Visscher et al. 1999), and individual steps on thenanometer scale can be identified (Carter and Cross 2005; Guydosh and Block 2006;Rief et al. 2000). Fluctuation analysis (or statistical properties) of bead traces in theseassays have been used to gain insight into the mechanochemical cycle of the motorprotein (Santos et al. 2005; Svoboda et al. 1994).
Motor proteins have lengths of the order of several hundred nanometers andoperate in the water-like cytoplasm. Due to the small size of the motor, the flowaround it has a very low Reynolds number. Hence, the inertia of the fluid can beignored. The viscous (Stokes) force created by the fluid on the motor protein isusually written in terms of a friction coefficient (γ ). Considering the motor pro-tein and its cargo as point-masses, the inertia (m) affects only the fast time-scale(m/γ ) in the governing equations. In a bead-motor assay, this time-scale is ofthe order of fractions of a microsecond even for (large) micrometer-sized beads,whereas chemical dwell periods are of the order of milliseconds for kinesin (Carterand Cross 2005) and tens of milliseconds for myosin V (Mehta et al. 1999b;Rief et al. 2000) at their highest velocities. Hence, the effect of the inertia on thedynamics of such bead-motor systems is negligible (Krishnan 2008; Purcell 1977).
The small size of the protein also makes them particularly susceptible to thermalnoise. Astumian and Haenggi (2002) argue that kinesin, for example, consumes about10 to 1,000 molecules of ATP per second. ATP releases about 30 kJ of useful energyper hydrolysis—Gibb’s free energy of the reaction—and this corresponds to an inputpower of about 30 × 106/(6.023 × 1023) ≈ 10−16 W. In contrast, the order of magni-tude of the thermal energy is kBT , and the relaxation time of the collisions is about10−13 s, which gives a thermal power of about 10−8 W. Thus, thermal fluctuationsare nearly 108 times larger than the energy available to drive the motion. Hence, it iscommonly accepted that thermal fluctuations play a significant role in the functioningof these motor proteins, much like Feynman’s Brownian ratchets.
The motion of motor proteins is modeled on many length and time scales. Contin-uous, diffusion approximations with no internal details of the chemistry or mechanics
Renewal-Reward Process Formulation of Motor Protein Dynamics 2455
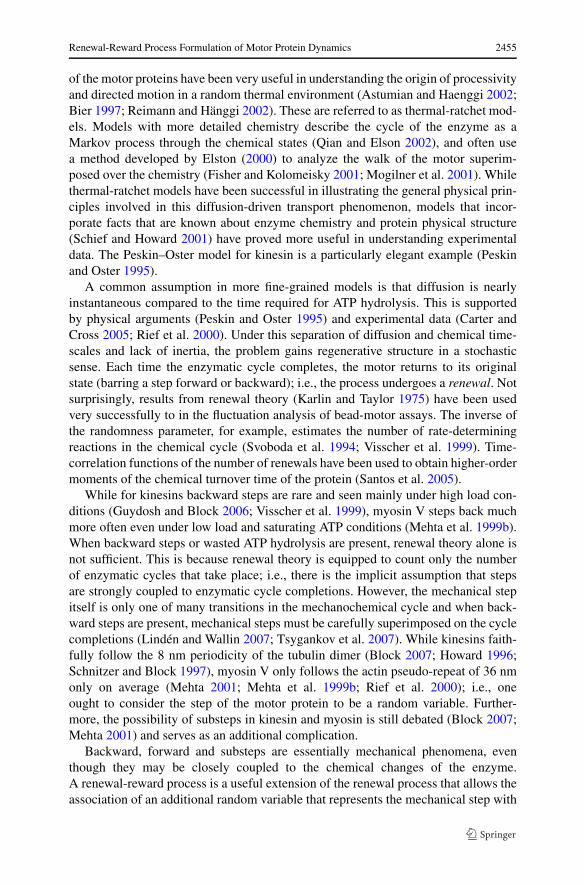
of the motor proteins have been very useful in understanding the origin of processivityand directed motion in a random thermal environment (Astumian and Haenggi 2002;Bier 1997; Reimann and Hänggi 2002). These are referred to as thermal-ratchet mod-els. Models with more detailed chemistry describe the cycle of the enzyme as aMarkov process through the chemical states (Qian and Elson 2002), and often usea method developed by Elston (2000) to analyze the walk of the motor superim-posed over the chemistry (Fisher and Kolomeisky 2001; Mogilner et al. 2001). Whilethermal-ratchet models have been successful in illustrating the general physical prin-ciples involved in this diffusion-driven transport phenomenon, models that incor-porate facts that are known about enzyme chemistry and protein physical structure(Schief and Howard 2001) have proved more useful in understanding experimentaldata. The Peskin–Oster model for kinesin is a particularly elegant example (Peskinand Oster 1995).
A common assumption in more fine-grained models is that diffusion is nearlyinstantaneous compared to the time required for ATP hydrolysis. This is supportedby physical arguments (Peskin and Oster 1995) and experimental data (Carter andCross 2005; Rief et al. 2000). Under this separation of diffusion and chemical time-scales and lack of inertia, the problem gains regenerative structure in a stochasticsense. Each time the enzymatic cycle completes, the motor returns to its originalstate (barring a step forward or backward); i.e., the process undergoes a renewal. Notsurprisingly, results from renewal theory (Karlin and Taylor 1975) have been usedvery successfully to in the fluctuation analysis of bead-motor assays. The inverse ofthe randomness parameter, for example, estimates the number of rate-determiningreactions in the chemical cycle (Svoboda et al. 1994; Visscher et al. 1999). Time-correlation functions of the number of renewals have been used to obtain higher-ordermoments of the chemical turnover time of the protein (Santos et al. 2005).
While for kinesins backward steps are rare and seen mainly under high load con-ditions (Guydosh and Block 2006; Visscher et al. 1999), myosin V steps back muchmore often even under low load and saturating ATP conditions (Mehta et al. 1999b).When backward steps or wasted ATP hydrolysis are present, renewal theory alone isnot sufficient. This is because renewal theory is equipped to count only the numberof enzymatic cycles that take place; i.e., there is the implicit assumption that stepsare strongly coupled to enzymatic cycle completions. However, the mechanical stepitself is only one of many transitions in the mechanochemical cycle and when back-ward steps are present, mechanical steps must be carefully superimposed on the cyclecompletions (Lindén and Wallin 2007; Tsygankov et al. 2007). While kinesins faith-fully follow the 8 nm periodicity of the tubulin dimer (Block 2007; Howard 1996;Schnitzer and Block 1997), myosin V only follows the actin pseudo-repeat of 36 nmonly on average (Mehta 2001; Mehta et al. 1999b; Rief et al. 2000); i.e., oneought to consider the step of the motor protein to be a random variable. Further-more, the possibility of substeps in kinesin and myosin is still debated (Block 2007;Mehta 2001) and serves as an additional complication.
Backward, forward and substeps are essentially mechanical phenomena, eventhough they may be closely coupled to the chemical changes of the enzyme.A renewal-reward process is a useful extension of the renewal process that allows theassociation of an additional random variable that represents the mechanical step with

2456 A. Krishnan, B.I. Epureanu
the chemical turnover time. The first aim of this paper is to establish the validity ofthis approach and address the drawbacks inherent in using plain renewal processes tomodel the dynamics. The tools of renewal-reward processes can be used to calculateand relate the long-time slopes of the cumulants of the bead displacement (referredto henceforth as cumulant rates) to the mechanochemical cycle of the motor proteinwhich carries the bead. The second aim of this paper is to establish the robustness ofcumulant rate measurements under experimental conditions, and to address modelingconcerns. The third and final goal is to demonstrate how cumulant rates can be used togeneralize the fluctuation analysis begun by Svoboda and Block (1994). New boundson the randomness parameter are obtained in more general conditions than Svobodaand Block (1994), and it is shown how the bounds can be used to determine if wastedhydrolyses or backward steps are taking place. To overcome some of the drawbacksof using the randomness parameter alone, an alternative approach is proposed usingthe higher cumulant rates. To demonstrate the use of the approach, it is shown how itis possible to obtain estimates for the average chemical rate constants, for the numberof rate-determining steps in the chemical reaction, and for the probabilities of for-ward steps, backward steps, and wasted hydrolyses. The stability of the method whenexperimental measurement errors are present is demonstrated numerically.
Section 2 describes the renewal-reward formulation of motor protein dynamicsand the main results that follow from it. It also contains a discussion about commonlyused Markov chain models for enzymatic cycles. Technical details, mathematical ex-position, and proofs can be found in Appendix A. In Sect. 3, the methods are appliedto two models (Elston 2000 and Peskin and Oster 1995) to illustrate the insight thatthe formulation affords. Section 4 is dedicated to fluctuation analysis, and Sect. 5discusses extensions and drawbacks of the proposed approach.
2 Renewal-Reward Formulation of Bead Motor Assays
2.1 Basic Setup
A renewal process N(t) is a nonnegative, integer-valued stochastic process that reg-isters successive occurrences of an event during the time interval (0, t] (Cinlar 1975;Grimmett and Stirzaker 2001; Karlin and Taylor 1975; Ross 1983). The time intervalsbetween successive events are given by a sequence of positive, identically distrib-uted random variables {Xi}∞i=1, where Xi is the time interval between the (i − 1)thand the ith events. These random variables are called renewal increments and cor-respond to enzymatic cycle times (also called chemical turnover times) of the motorprotein. If the load on the motor protein is held constant (as is done in experimentssuch as Guydosh and Block 2006; Visscher et al. 1999), the time-intervals Xi can beassumed to be identically distributed since each cycle takes place under the samephysical conditions. However, experimentally measured dwell times between ob-served mechanical steps in an experiment may not be interpreted as chemical turnovertimes. Indeed, it might prove nearly impossible to directly measure enzymatic cy-cle completions from the bead displacement graph alone (Lindén and Wallin 2007;Tsygankov et al. 2007).
Next, one associates a second sequence of identically distributed random variables{Hi}∞i=1 (called rewards) with the sequence of renewal increments, and one obtains a

Renewal-Reward Process Formulation of Motor Protein Dynamics 2457
renewal-reward process (Karlin and Taylor 1975). The interpretation of Hi is rathersubtle in a biological context. It represents the position of the motor after the comple-tion of the chemical cycle. What goes on during the enzymatic cycle is relevant onlyby how it affects the final position of the motor after a cycle completes. For example,one would track the position of the motor with a simple definition of the form
Hi =⎧⎨
⎩
L with probability p
0 with probability 1 − p − q
−L with probability q
. (1)
For kinesin, L is the 8 nm repeat of the tubulin dimer (Howard 1996). In the case ofmyosin V, the step of the motor may not correspond exactly to the 36 nm pseudore-peat of the actin filament (Mehta 2001). Each step is 36–40 nm on average, with a6–10 nm variance about the mean. Equation (1) can be easily modified to include thisvariance.
There is no reason to believe that the direction of the mechanical step is indepen-dent of the chemistry; i.e., whether a motor steps backward or forward must dependon the sequence of chemical reactions the enzyme undergoes. Hence, the step Hi mustdepend on the chemical turnover time Xi . Upon completion of a mechanochemicalcycle, however, the enzyme loses its memory due to the lack of inertia in the system,and hence the tuples (Xi,Hi) and (Xj ,Hj ) must be considered to be independent fori �= j . The definitions of these random variables are illustrated in Fig. 1.
The variable of interest is the position of the motor, and this is given by the sumof the individual steps Hi . Define the cumulative process or cumulative reward R(t)
as (Karlin and Taylor 1975)
R(t) =N(t)∑
i=1
Hi. (2)
If the motor steps uniformly forward, Hi = 1 and R(t) is just N(t), the number ofcompleted enzymatic cycles. R(t) in (2) is not a true representation of the motorposition since the definition of the rewards Hi in (1) does not take into account whatgoes on during the enzymatic cycle. For example, Hi may accumulate as a number ofsmaller substeps or the motor may step backward and forward multiple times beforea cycle completes. To include these possibilities, a terminal reward H is introducedand the cumulative reward R(t) can written as
R(t) = R(t) + H . (3)
In an experiment, the position of the motor is only measured indirectly throughthe bead. Hence, one must account for thermal agitation of the bead in (2). The wig-gling of the trajectories in Fig. 1 represents this effect, and can be taken into accountby adding a Gaussian random variable to Hi . This is described in greater detail inSect. 3.2 (see (24)).
The nth waiting time Sn is defined to be the time taken to complete n renewals.The time elapsed since the last renewal is a standard random variable called the cur-rent life, and can be written as δ(t) = t −SN(t) (Karlin and Taylor 1975). The terminal

2458 A. Krishnan, B.I. Epureanu
Fig. 1 A schematic of a typical path of a motor protein is used to illustrate the definitions of Xi , Hi , andH . The motor’s step size is chosen to be ±8 nm (like kinesin). In this particular realization, H1 = 8 nm,H2 = −8 nm, H3 = 8 nm, H4 = 8 nm and H = −3 nm. Note that sub-, forward and backward steps areallowed to accumulate in any fashion during the enzymatic cycle. The rewards Hi track only the finalmovement on completion of the cycle. The terminal reward accounts for the intermediate movement, butit is unnecessary to define it carefully for our purposes (see Proposition 1). The exact moments of cyclecompletion are nearly impossible to measure just by examining the bead trace, but X1 through X4 areshown here for the purposes of illustration
reward (or substep) H must depend on the time elapsed since the previous step; i.e.,it depends on the current life and may be written as H (δ(t)). Defining the substepin such a fashion may prove overly complicated in practice. Fortunately, the termi-nal reward turns out to be irrelevant for the fluctuation analysis. That is, there willbe no need to define this random variable at all (see Sect. 2.4). An easily justifiedmathematical necessity is that the rewards Hi and H are bounded.
2.2 Cumulants of the Bead-Motor System
Standard results in renewal theory are asymptotic, long time results. For example, thesteady-state velocity of the motor may be identified with the long term slope of theexpectation of R(t) as
limt→∞
E[R(t)]t
= E[Hi]E[Xi] . (4)
Equation (4) may be interpreted as follows: the steady-state velocity is the averagedistance the motor travels per cycle times the average number of cycles per second(the inverse of the average cycle time). Let μX , μH , σ 2
X and σ 2H be the means and
variances of Xi and Hi . Let ρ represent their correlation coefficient. Then the long-time variance of R(t) takes the form (Smith 1958)
limt→∞
Var[R]t
= 1
μX
(
σ 2H − 2ρσXσH
μH
μX
+ σ 2X
μ2X
μ2H
)
. (5)
The moments and cumulants of a renewal-reward process are most easily com-puted from its moment and cumulant generating functions. For a random variable X

Renewal-Reward Process Formulation of Motor Protein Dynamics 2459
taking a countable number of values {λk}∞k=0, one may define the moment generatingfunction φX(s) and cumulant generating function gX(s) as
φX(s) =∞∑
k=0
esλk P(X = λk),
gX(s) = log(φX(s)
).
(6)
Then the nth cumulant of X (κX,n) is just the nth derivative of gX(s) at s = 0. Thefirst two cumulants of X are its mean and variance. For the cumulative process R(t),the cumulant generating function takes a particularly simple form if Xi and Hi canbe considered to be independent. A standard derivation based on the sum in (2) gives(Ross 1983)
gR(t)(s) = gN(t)
(gHi
(s)). (7)
Smith (1959) showed that the cumulants of N(t) satisfy
κN,n(t) = ant + bn + o(t), (8)
where an and bn are known constants dependent on the first n + 1 moments of Xi .The simple relationship between the cumulant generating functions of N(t) and R(t)
in (7) lets us derive an asymptotic relationship for κR,n(t) using Faa di Bruno’s for-mula (Johnson 2002) for the derivative of a composition:
κR,n(t) = cnt + dn + o(t), (9)
where cn and dn are known constants dependent on the first n + 1 moments of Xi
and Hi . Equation (9) implies that the cumulants of R(t) are asymptotically linearand have a steady-state slope. Hence, for any given bead-motor assay in which theindependence assumption holds, we are assured that all cumulant rates for the beadwill exist, provided that the cumulants of Xi are finite.
The experimentalist may protest that asymptotic, long-term results have no real-world significance. The mean trajectory, its variance and its higher cumulants areaverages taken over many bead traces (translated to have the same origin). In our ex-perience, the cumulant rates settle down almost instantaneously to their steady-staterates even in fairly complicated scenarios.1 It is now only left to justify the indepen-dence of Xi and Hi , a seemingly nonintuitive result. This leads us to the discussionabout typical models of cyclic mechanochemical schemes for motor proteins in thenext section.
2.3 Markov Models for Cyclic Chemical Schemes
The theory of Markov processes lends itself easily to the study of chemical cycles ofsingle-molecule enzymes (Hill 1989; Peskin and Oster 1995; Qian and Elson 2002).
1For example, Krishnan and Epureanu (2008) simulated multiple kinesins pulling a cargo. The motorssynchronized and the bead variance grew linearly at its steady-slope within about 100 ms. This correspondsto about 10 dwell periods. Note that kinesins and myosins walk for hundreds of steps (Mehta 2001).
2460 A. Krishnan, B.I. Epureanu
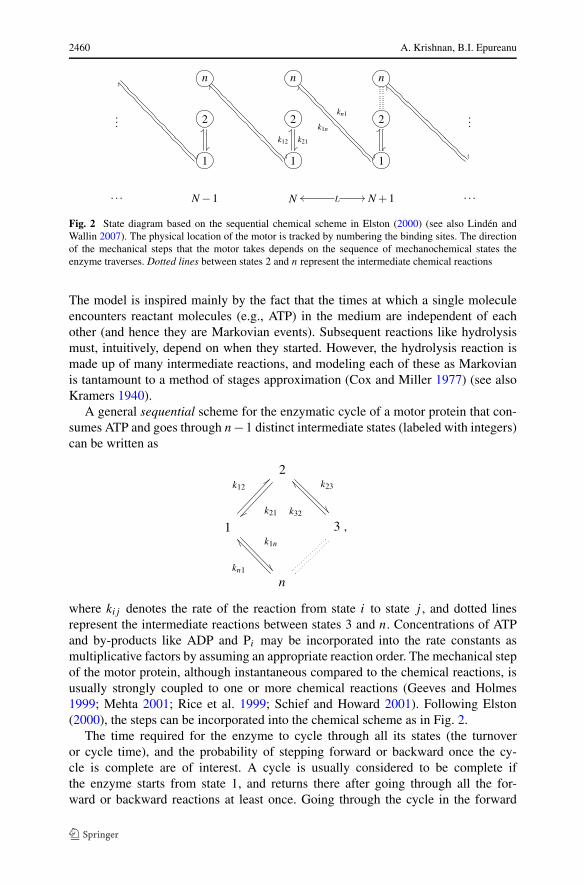
Fig. 2 State diagram based on the sequential chemical scheme in Elston (2000) (see also Lindén andWallin 2007). The physical location of the motor is tracked by numbering the binding sites. The directionof the mechanical steps that the motor takes depends on the sequence of mechanochemical states theenzyme traverses. Dotted lines between states 2 and n represent the intermediate chemical reactions
The model is inspired mainly by the fact that the times at which a single moleculeencounters reactant molecules (e.g., ATP) in the medium are independent of eachother (and hence they are Markovian events). Subsequent reactions like hydrolysismust, intuitively, depend on when they started. However, the hydrolysis reaction ismade up of many intermediate reactions, and modeling each of these as Markovianis tantamount to a method of stages approximation (Cox and Miller 1977) (see alsoKramers 1940).
A general sequential scheme for the enzymatic cycle of a motor protein that con-sumes ATP and goes through n−1 distinct intermediate states (labeled with integers)can be written as
2
k21
k23
1
k12
k1n
3 ,
k32
n
kn1
where kij denotes the rate of the reaction from state i to state j , and dotted linesrepresent the intermediate reactions between states 3 and n. Concentrations of ATPand by-products like ADP and Pi may be incorporated into the rate constants asmultiplicative factors by assuming an appropriate reaction order. The mechanical stepof the motor protein, although instantaneous compared to the chemical reactions, isusually strongly coupled to one or more chemical reactions (Geeves and Holmes1999; Mehta 2001; Rice et al. 1999; Schief and Howard 2001). Following Elston(2000), the steps can be incorporated into the chemical scheme as in Fig. 2.
The time required for the enzyme to cycle through all its states (the turnoveror cycle time), and the probability of stepping forward or backward once the cy-cle is complete are of interest. A cycle is usually considered to be complete ifthe enzyme starts from state 1, and returns there after going through all the for-ward or backward reactions at least once. Going through the cycle in the forward

Renewal-Reward Process Formulation of Motor Protein Dynamics 2461
Fig. 3 Markov chain to find Hi
and Xi (at binding site i). Theabsorbing states have beenindicated with a double circle.Absorption into states with thesubscripts b,f determineswhether a backward step or aforward step has taken place
direction results in a forward step and in the reverse direction, a backward step.Calculating the probability density for the chemical turnover time Xi and the for-ward/backward step probabilities for Hi is done by constructing an absorption prob-lem in Markov chains as shown in Fig. 3. Let pij (t) represent the transition prob-ability from state i to state j in time t . If the enzyme starts in state 1, the proba-bility distribution function for Xi is just p1,1b
(t) + p1,1f(t) (Cox and Miller 1977;
Van Kampen 2007). The rewards Hi may be defined as
Hi ={
L if absorbed into 1b,
−L if absorbed into 1f .(10)
The reader is referred to Wang and Qian (2007) and Lindén and Wallin (2007) formore elaborate models and discussions of such first-passage problems in the contextof enzyme chemistry and motor proteins.
A critical question here is of the independence of Hi and Xi . The conditionalprobability of absorption into state 1f given that absorption has taken place in (0, t)
can be written as
P(Absorption into 1f |Absorption in (0, t)
) = p1,1f (t)
p1,1f (t) + p1,1b(t). (11)
If the expression in (11) is a constant, it follows that Hi and Xi are independent. Thisalso implies that p1,1f
(t) must be a constant multiple of p1,1b(t). This symmetry
has been seen before in Hill (1989) and in Wang and Qian (2007). It holds for amuch larger class of models relevant to motor protein chemistry.2 Strong couplingbetween ATP hydrolysis and stepping is not a necessary condition for independence.For example, wasted hydrolyses are present in both the Peskin–Oster (Peskin andOster 1995) and the Elston model (Elston 2000), but independence holds in one, butnot the other. These models are discussed in greater detail in Sect. 3.
2.4 Robustness of Cumulant Rate Measurements and Modeling Considerations
The abstract definition of the mechanical step in Sect. 2.1 appears to have the fol-lowing difficulties. First, the mechanical step can accumulate as a series of sub-steps during the course of the chemical cycle. Second, if the mechanical stepis associated with a single transition (as in Fig. 2), the motor can step back-ward and forward many times before a renewal completes (Tsygankov et al. 2007;
2The authors developed the proof independently for the purposes of this paper (see Sect. A.3). The essentialidea used in the proof is identical to that used by both Wang and Qian (2007) and Lindén and Wallin (2007).

2462 A. Krishnan, B.I. Epureanu
Lindén and Wallin 2007). The existence of substeps in the dynamics of kinesin hasbeen a subject of debate over the past decade, and many different substep sizes anddurations have been reported in the literature (Block 2007). Experimentalists have ar-gued that for kinesin, substeps of duration greater than 30 µs do not exist (Carter andCross 2005). However, crystallographic and structural studies indicate the existenceof a conformational change that accompanies nucleotide binding (Rice et al. 1999).For this and other reasons, it is hypothesized that a substep of some sort must exist inkinesin’s mechanical cycle (Schief and Howard 2001). Similarly, it is unclear whethermyosin V shows substeps, although structural studies indicate their existence (Mehta2001). Under the conditions of the renewal-reward formulation, one can mathemat-ically prove that substeps do not have any effect on the steady-state cumulant rates.Stated another way, substep information is lost in the cumulant rates. The main prop-erty of cumulants that is exploited in the proof is that cumulants satisfy an “additivityproperty” for independent random variables. That is, if X and Y are independentrandom variables and κ(·),n is the nth cumulant,
κX+Y,n = κX,n + κY,n. (12)
This is the familiar property for the variance when n = 2. For any (Borel) measurablefunction f (x), such that V (X) = E[f (X)] satisfies this additivity property, we havethe following proposition (see Sect A.2 for the trivial proof).
Proposition 1 (Substep Information is Lost in the Cumulants) Let V (·) satisfy theadditivity property stated above. Let R(t) include a terminal substep H as in (3), andlet limt→∞ V (R(t))/t exist. Let H be bounded, and let H be independent of the Hi
preceding it. Then
limt→∞
V (R(t))
t= lim
t→∞V (R(t))
t. (13)
The proposition is easy to understand intuitively. In a sequential scheme (likeFig. 2), although many backward and forward steps may take place during a chemi-cal cycle, two successive backward or forward steps cannot take place. It follows thatthe terminal reward (and hence its cumulants) are bounded. As time goes to infinity,the number of completed chemical cycles also approaches infinity with probability 1(Karlin and Taylor 1975). The small contribution of H does not alter R(t) enoughto change the cumulant rates of R(t). Note that the independence of the steps Hi
and turnover times Xi did not need to be assumed. The independence of the sub-step/terminal reward from the previous turnover time, on the other hand, follows fromthe lack of memory (lack of inertia) in the system. Since the conditions of the proposi-tion appear to be justifiable by physical arguments, the conclusion of the propositionshould be valid in most experimental situations. The most important consequence ofthe proposition from a modeling point of view is that it is not necessary to constructa renewal-reward process that exactly matches the displacement of the bead-motorsystem, but only a computationally convenient one that closely follows it, not morethan a step (a bounded distance) away.
Another subject of concern is the initial condition of the enzyme. Experimentally,it is hard to determine the exact chemical state of the motor protein when it begins
Renewal-Reward Process Formulation of Motor Protein Dynamics 2463
its run along a track. Identifying a mechanical step in the bead trace is not indicativeof a cycle completion (Lindén and Wallin 2007; Tsygankov et al. 2007), and thiscomplicates the problem. To overcome this difficulty when modeling motor proteindynamics, it is usually assumed that the initial state of the enzyme is given by theequilibrium probabilities of the chemical states in the Markov chain describing theenzymatic cycle (Elston 2000; Fisher and Kolomeisky 2001; Mogilner et al. 2001).
We stated that the turnover time Xi in Fig. 3 was calculated assuming that theenzyme started in state 1. Whatever the initial state of the enzyme, it must returnto state 1 at some point and the analysis using renewal-reward processes would bevalid from that point on. Then a related question for the purposes of modeling wouldbe how the particular choice of the starting state and initial conditions affect thecalculations.
It is intuitively obvious that these should not affect the steady-state cumulantrates—a small change in the cumulative reward cannot change its asymptotic slope.In an identical manner to Proposition 1, we can trivially show that regardless of theinitial time and the size of the initial step (initial conditions), the cumulant rates arethe same. This result also does not explicitly require the independence of Xi and Hi ,and relies only on the existence of the relevant cumulant rate. This result has beennoted in particular applications like the derivation of the randomness parameter inWang (2007). The obvious fact that the turnover time should not depend on what weconsider to be the starting state of the enzyme follows from the independence proofin Sect. A.3.
To setup this calculation, let the renewal-reward pairs (Xk,Hk) be independent,but consider that only (X2,X3, . . . ) and (H2,H3, . . . ) are identically distributed. De-fine, a “delayed” cumulative process RD(t) and the regular cumulative process R(t)
by excluding the first renewal-reward pair for the latter as
RD(t) =N(t)∑
i=1
Hi, R(t) =N(t)∑
i=2
Hi. (14)
Proposition 2 Let V be an additive, continuous function of the moments, and letlimt→∞ V (R)/t exist L. Then
limt→∞
V (R)
t= lim
t→∞V (RD)
t. (15)
Since formulas for the intercepts dn in (9) are known and can be written in termsof the cumulants of Hi and Xi , it appears on first sight that they can be used to gainadditional information about the underlying mechanochemical cycle. Although thelong-time cumulant rates of RD(t) and R(t) defined in (14) and (3), respectively,are unaffected by substeps and initial conditions, their corresponding intercepts mostcertainly are. Due to the difficulties associated with determining the exact chemicalstate of the motor protein just by observing its mechanical steps as stated earlier, it ishard to exclude the effects of initial conditions on the measured intercepts. Hence, theintercepts of the cumulants are discarded and not included in the fluctuation analysisin this paper.

2464 A. Krishnan, B.I. Epureanu
3 Examples
In this section, the renewal-reward formulation is applied to two existing models:the Elston model (Elston 2000) and the Peskin–Oster (PO) model (Peskin and Os-ter 1995). The Elston model is a Markov process formulation for a motor pro-tein undergoing a cyclic chemical reaction. The Elston model embeds the steps ina general mechanochemical cycle that is similar to Fig. 2 and does not considerthe physics in detail. In contrast, the PO model was developed specifically for ki-nesin, and the mechanics of the steps are taken into account. Although less gen-eral than Elston’s model, the PO model is useful to illustrate at what time- andlength-scales the physical approximations are made to model the bead-motor as-say as a renewal-reward process. In the context of this paper, the essential differ-ence between the models is their approach to the reward function. For the Elstonmodel, independence between the steps and chemical turnover time does not holdin general. However, when the wasted hydrolyses are disallowed (the “strong cou-pling” hypothesis for kinesin and myosin V (Block 2007; Lindén and Wallin 2007;Mehta et al. 1999a)) independence is regained. On the other hand, the PO model al-lows for wasted hydrolyses and yet, independence holds. Some of their results arerecaptured and insights gained using the renewal-reward formulation are discussednext.
3.1 The Elston Model
It is common to embed the discrete steps of a motor protein in a continuous en-velope dynamics. The probability density p(x, t) of the position of the motor canbe characterized by an equation of the form (Bier 2005; Peskin and Oster 1995;Prager et al. 2005)
Deff∂2p
∂x2− v
∂p
∂x− ∂p
∂t= 0, (16)
where Deff is the effective diffusion coefficient, and v is the average velocity of themotor. The transport properties in (16) describe how effective the motor is in con-ducting unidirectional transport.
The Elston model shows how these transport properties can be related to an under-lying chemical cycle. The state diagram is nearly identical to the one in Fig. 2, andthe corresponding absorption problem is as shown in Fig. 4. The reward function Hi
defined by (10) can be written as
Hi =⎧⎨
⎩
L if absorbed into 1f
0 if absorbed into 1w
−L if absorbed into 1b
. (17)
In the chemical scheme shown in Fig. 4, Hi and Xi are not independent. Nev-ertheless, the probabilities of absorption and the density of the passage time can beeasily calculated using the standard methods described in Cox and Miller (1977) andVan Kampen (2007). Equations (4) and (5) can be used to calculate the steady-state

Renewal-Reward Process Formulation of Motor Protein Dynamics 2465
Fig. 4 The diagram is identical to Fig. 3 except for the possibility of a jump from state n directly tostate 1. In Elston (2000), k′′
n1 = k′n1. The possibility of a wasted hydrolysis is indicated by absorption into
state 1w . Independence between Hi and Xi is lost in this absorption problem except when k′′1n
= k′′n1 = 0
slopes of the variance and mean. When the rates k′′n1 and k′′
n1 are set to zero, the inde-pendence structure is regained and the higher cumulants can be calculated using (7)and the formulas in Sect. B.1. Then, the conditional absorption probabilities in (11)are constants independent of time, and we can write
p11b(t) = f (t)k1nkn,n−1 · · ·k21, (18)
p11f(t) = f (t)k12k23 · · ·kn1, (19)
p11w(t) = f (t)k12k23 · · ·k′n1, (20)
where f (t) represents the time-dependent component of these probabilities (see theconvolution in (45) in Sect. A.3 and Lindén and Wallin 2007; Wang and Qian 2007).
Elston states solutions for the velocity and diffusion coefficient only for the casewhere the backward rates k21, k32, . . . , kn,n−1, and the primed rate k′
1n are zero. Thissimplifies the algebra considerably since backward steps are no longer possible (butwasted hydrolyses are). Again, the independence structure is regained and it is just amatter of substitution and algebraic manipulation to verify that v = limt→∞ κR,1(t)/t
and Deff = (1/2) limt→∞ κR,2/t .
3.2 The Peskin-Oster Model
The Peskin–Oster (PO) model was developed specifically for kinesin. It describesforce-velocity and randomness parameter data in bead-motor assays (Svoboda andBlock 1994; Svoboda et al. 1994) using solution kinetic data for the chemical rateconstants from Gilbert et al. (1995). The physical assumptions that have to be madeto analyze the PO model as a renewal-reward process are important. To this end, abrief description of kinesin and the PO model is provided, and it is then cast as arenewal-reward process.
As described in Sect. 1, there are several members of the kinesin family of motorproteins and many of these are processive (Goodson et al. 1994). Kinesin has twoheads made of globular proteins where most of its mass is concentrated. These headsare connected to each other through string-like structures called neck-linkers. A longtether connects the cargo to the point of joining of the neck-linkers. MTs have reg-ularly spaced chemical binding sites. Kinesin heads have chemical binding sites forboth MTs and ATP. Kinesin walks by alternately detaching and reattaching its heads
2466 A. Krishnan, B.I. Epureanu
from the MT. It derives the energy required for this process from ATP hydrolysis(Howard 1996).
The PO model describes the mechanochemical cycle of kinesin as follows. Kinesinstarts with both heads bound to a MT. ATP binds to one of these heads, and dependingon which head it binds to, either the forward head or backward head detaches. Onceone of the two heads detaches, kinesin undergoes a conformational change in its neck-linker and the lagging head is thrown forward (Rice et al. 1999; Schief and Howard2001). This power-stroke is a consequence of detachment and the release of internalstrain in the molecule. It is represented as a diffusion of the head not bound to theMT (along with the bead) in the fluid medium. The potential in which the diffusiontakes place is biased towards the forward binding site on the MT. ATP hydrolysistakes place simultaneously with the power-stroke. Once the hydrolysis completes,the diffusing head regains its affinity for the MT and begins a diffusional search forthe next binding site. Since the diffusing head begins its search closer to the forwardbinding site (as consequence of the power stroke), the motor steps forward moreoften than backward (giving kinesin its directionality). The process of ATP bindingand either trailing or leading head detachment is quantified by the rate constants βb
and βf , respectively. ATP hydrolysis takes place with a rate α. The tendency forthe diffusing head to find the forward binding site is captured in an external force-dependent (f ) probability (p(f )). The mechanochemical cycle of the PO model isrepresented as a Markov chain in Fig. 5.
The mechanical diffusion must be modeled to calculate p(f ). To this end, thetether attached to the bead and the two neck-linkers are modeled as linear elas-tic springs, and the heads and bead are modeled as point masses—of course, theirmasses will not appear in this approximation since the dynamics is considered tobe overdamped. Let xb represent the bead position, and let x1 and x2 represent thepositions of the two heads. Each time the motor steps, either x1 or x2 is translatedby ±(L = 16 nm). The position of the motor (or hinge location xh = (x1 + x2)/2)is translated by ±(L = 8 nm), the distance between the binding sites. As discussedearlier, there are two distinct chemical states of the enzyme: one in which both headsare bound strongly to the MT, and one in which one head is bound strongly while theother is diffusing. Corresponding to these two states, there are two system potentialenergies given by
φ1(f, xb) = f (xb − xh) + 1
2Kth(xb − xh)
2,
φ2(f, xb, x) = f (xb − xh) + 1
2Kth(xh − xb)
2 + W(xh − xbnd),
(21)
where xbnd is equal to x1 or x2 depending on which head is free and which is bound.W(x) denotes an interaction potential that biases the diffusing head towards the for-ward binding-site (the power-stroke). Following Atzberger and Peskin (2006), the in-teraction potential is modeled as W(x) = (1/2)Kbias(x − x0)
2, where x0 determinesthe equilibrium position of the diffusing head once the power-stroke is taken.
Two critical time-scale separations are made in Peskin and Oster (1995). First,since the bead is nearly 1000 times larger than each of the heads, its diffusion coef-ficient is proportionally smaller, and hence the heads diffuse 1000 times faster than

Renewal-Reward Process Formulation of Motor Protein Dynamics 2467
the bead. Therefore, one may assume that in the overdamped low Reynolds numberenvironment of the cytoplasm, the diffusing head is in mechanical equilibrium withthe bead at all times. Second, the diffusion of the bead itself is considered to be muchfaster than the chemical rates and hence, diffusing times are insignificant on the time-scale of the experiment. Thus, the bead relaxes to its equilibrium probability densitynearly instantaneously. These two time-scale separations allow the calculation of theprobability of binding forward p(f ), once the hydrolysis completes.3 Since the POmodel has a both-heads-bound state, the motor position on completion of a step in-creases or decreases only in 8 nm increments even in the presence of thermal noise.However, it is still necessary to account for bead diffusion.
Since φ1(f, xb) is quadratic in xb, the stochastic differential equation describingthe diffusion is in the form of the Ornstein–Uhlenbeck process (Uhlenbeck and Orn-stein 1930). That is,
dXb(t) = Kth
γ(xeq − Xb)dt + σ dWt, (22)
where Xb is the random variable representing the bead position, σ = 2γ kBT is thenoise intensity, γ = 6πμR is the friction coefficient given by Stokes’ law for a spherein a low Reynolds number flow, xeq is the equilibrium position of the bead (the mini-mum of φ1(f, xb)), and Wt is the standard Wiener process. As usual, kB is the Boltz-mann constant, and T is the absolute temperature. Given Xb(0) = x0, the Fokker–Plank equations may be solved to find the mean and variance of the bead position asa function of time (Cox and Miller 1977) as
E[Xb(t)
] = xeq + x0e−Ktht/γ ,
Var[Xb(t)
] = kBT
Kth
(1 − e−2Ktht/γ
).
(23)
Then Xb(t) relaxes at a time-scale of γ /Kth to a normal distribution with meanand variance given by the long time limits of (23). The stiffness of the tether Kth maybe obtained from physical estimates or from a careful analysis of bead-motor assays(Atzberger and Peskin 2006), and turns out to be around 1.5 × 10−4 N/m. For anaverage bead size of 1 µm and γ ≈ 10−8 N s/m, one obtains a time scale of around10−5 s. The velocity of kinesin is up to about 800 nm/s at saturating ATP. Given thatthe binding site separation is L = 8 nm, the chemical time is obtained to be about10−2 s. Hence, the time required for the relaxation of the bead-motor system to itsequilibrium probability density may be neglected.
In a particular experimental run when all external conditions (like the force andATP concentration) are held constant, the minimum of φ1(f, xb) jumps (or not, ifthere is a wasted hydrolysis) by ±8 nm each time a mechanochemical cycle com-pletes. That is, the minimum of the potential is a constant distance away from the
3p(f ) is calculated as a hitting or absorption probability. Since the diffusion coefficient of the head is somuch larger than the bead, one may consider the bead to be fixed and calculate p(f ) conditional on thebead position. The second time-scale separation allows us to assume that the bead’s position itself is givenby its equilibrium probability density (Gibb’s), and one can use this to calculate p(f ) (Peskin and Oster1995).

2468 A. Krishnan, B.I. Epureanu
Fig. 5 The state transition matrix to find the moments of the first-passage time and reward function in thePO model. Absorption into 1f , 1b or 1w indicates that a forward step, backward step, or wasted hydrolysishas taken place, respectively. Note that renewal is complete if two successive transitions take place
motor position. The bead relaxes to its equilibrium density about this minimum po-sition rapidly after each cycle completes. In other words, under this time-scale sep-aration, the bead position equals the motor position plus a constant offset (c) plus arandom variable (Y ): If R(t) is the cumulative process for the motor, the bead posi-tion is given by Rb(t) = R(t) + c + Y . The random variable Y can be assumed to beGaussian with mean and variance given by the long-term limits of (23). This is justanother terminal reward, and Proposition 1 assures us that the motor and bead haveidentical cumulant rates. It is important to emphasize that this counter-intuitive resultis only true because of the following assumptions in the highly idealized PO-model:the MT is unaffected by thermal noise and the motor heads are rigidly bound to theMT binding sites when waiting for an ATP molecule to arrive. In general, one wouldexpect thermal noise to add to the variance of the bead.
Figure 5 shows a Markov chain that can be used to calculate Xi and Hi . It is easierto note, however, that Xi is just a sum of two exponentially distributed random vari-ables: the waiting time for ATP binding, and the time for ATP hydrolysis. Since thechemical scheme is simple, one can verify by direct calculation of the probabilitiesin (11) that Hi and Xi are independent. The reward increment for the location of themotor can be written as
Hi =
⎧⎪⎪⎨
⎪⎪⎩
L with probability βb
βb+βfp(f ),
0 with probability βb
βb+βf(1 − p(f )) + βf
βb+βfp(f ),
−L with probabilityβf
βb+βf(1 − p(f )),
(24)
like in (2). With the reward and renewal increments defined, it is just a matter ofapplying (4) and (9) to find expressions for the steady-state velocity and variance rateof the bead. The expressions obtained are identical to those obtained by Peskin andOster (1995), and are omitted for the sake of brevity.
The PO model displays substeps. The size of the substep is dependent on the ex-ternal force, as can be seen from the potential energy φ2 in (21): once ATP binds, thelagging (leading) head is thrown forward (backward) in a power-stroke to a positionbetween two binding sites. Although the substep must be included in R(t) to accu-rately track the motor position, Proposition 1 reassures us that this substep will notaffect its cumulant rates, and can be safely ignored.

Renewal-Reward Process Formulation of Motor Protein Dynamics 2469
4 The Randomness Parameter and Fluctuation Analysis
4.1 General Bounds for the Randomness Parameter
The randomness parameter or the inverse of the Péclet number has seen ubiquitoususe in the analysis of bead-motor assays since its description by Svoboda et al. (1994).It is commonly defined as
r = limt→∞
Var[xb(t)]E[xb(t)]L , (25)
where xb(t) is the (measured) position of the bead, and L is the distance betweenadjacent binding sites. Recalling the discussion in Sect. 2.2, it seems clear that it isbeneficial to exclude the effect of the unreliable intercept. Hence, the randomnessparameter is better defined as
r = limt→∞
Var[xb(t)]t
t
E[xb(t)]1
L. (26)
When wasted chemical cycles and backward steps are not allowed, the motor stepsuniformly forward. In this particular scenario, the randomness parameter is very use-ful. Suppose the chemical cycle of the enzyme can be approximated by a set of n
Markovian steps with rate constants (λ1, λ2, . . . , λn). Then the cycle time or the re-newal increment Xi is just a sum of n independent exponential random variables.Let λmin and λmax be the minimum and maximum rate constants. Then, the followinginequality holds (Svoboda et al. 1994)
1
n
λmin
λmax≤ rN =
∑ni=1
1λ2
i
(∑n
i=11λi
)2≤ 1. (27)
The subscript N has been used in (27) to highlight the fact that the randomness rN isof just the renewal process alone—we will refer to this as the renewal randomness.
If, however, wasted hydrolyses are present, the upper bound in (27) does not hold.This was anticipated by Svoboda et al. (1994) when the parameter was originally in-troduced. Moreover, if backward steps are allowed, its failure is dramatic. To demon-strate this, let Xi be the simple unidirectional scheme as above, and define Hi asin (1), but with the probabilities of stepping forward and backward replaced by p
and q . Suppose ρ is the correlation between Hi and Xi as in (5). The randomnessparameter of the cumulative process (the cumulative randomness rR) can be writtenas
rR = p + q − (p − q)2
p − q− 2ρ
√
rN(p + q − (p − q)2
) + rN(p − q). (28)
The correlation is bounded in absolute value by 1; i.e., −1 ≤ ρ ≤ 1. Using the boundsfor rN in (27), assuming for simplicity that λmin = λmax, and that the motor stepsforward (p ≥ q), the bounds for rR are
p + q
p − q+ 2
√
p + q − (p − q)2
n− (p − q)
n − 1
n

2470 A. Krishnan, B.I. Epureanu
≤ rR ≤ p + q
p − q+ 2
√
p + q − (p − q)2. (29)
The left-hand side of (29) shows that when the motor is close to stall and p and q arepossibly close to each other, rR may become really large. The relationship betweenthe cumulative and renewal randomness is illustrated in Fig. 6.
An important upper bound to consider is when there are no backward steps(q = 0):
rR ≤ 1 + 2√
p(1 − p) ≤ 2. (30)
Using the upper bounds in (27) and (29), the following proposition follows.
Proposition 3 Suppose a bead-motor assay is described by a renewal-rewardprocess. If the randomness of the chemical turnover time rN ≤ 1, the following istrue:
1. If the cumulative randomness (measured bead randomness) is greater than 1,wasted hydrolyses or backward steps must be taking place.
2. If the cumulative randomness is greater than 2, backward steps must be takingplace.
Importantly, since Proposition 3 uses (5), it does not require independence be-tween Hi and Xi . Proposition 3 also allows for the dependence of the chemistry onthe load. In Guydosh and Block (2006) and Visscher et al. (1999), the randomnessparameter is greater than 1 close to stall and at low ATP concentrations. Proposition 3implies that wasted hydrolyses or backward steps must be taking place. The powerof the renewal-reward formulation is illustrated vividly by Proposition 3; its strengthlies in the fluctuation analysis.
The bounds on the renewal randomness in (27) depend on the chemical schemein question. The upper bound is required for Proposition 3. The bound holds for theunidirectional n-step scheme considered in this section, and it can be shown to betrue for the cyclic chemical scheme in Fig. 2 using the path decomposition idea inAppendix A.3 and an elementary inequality. The upper bound holds in these casesbecause of the exponentially distributed holding times in the Markov chain. This istrue for the unidirectional n-step scheme considered in this section, and we conjecturethat it is true in the cyclic chemical scheme given by Fig. 2.
While the randomness parameter might help indicate the existence of backwardsteps and wasted hydrolyses, it loses its original purpose in their presence. Figure 6shows that the cumulative randomness deviates significantly from the renewal ran-domness close to stall. In other words, when backward steps and/or wasted hydroly-ses become significant, we cannot use the measured randomness in an experiment toestimate the number of rate determining steps in the enzymatic cycle. It has been seenin experiments (in which individual steps are resolvable) that the ratio of backwardto forward steps varies from 10−4 at high ATP concentrations and low loads to 10close to stall (Carter and Cross 2005). Hence, it is desirable to be able to quantify the

Renewal-Reward Process Formulation of Motor Protein Dynamics 2471
Fig. 6 Variation of the cumulative randomness with the ratio q/p. The graph on the left shows the vari-ation of rR with different rN values. Note that rR values become nearly identical as q/p approaches 1.The figure on the right shows the singularity at p = q where velocity of the motor is zero
effects of ATP concentration and load on the rate of the chemical cycle, on the num-ber of rate-determining intermediate reactions, and on the probabilities of steppingbackward and forward. That is, one would like to be able to perform a more elaboratefluctuation analysis. One such analysis utilizing higher cumulants is presented in thefollowing section.
4.2 A Fluctuation Analysis Using Higher Cumulant Rates
Given measurements of the first two cumulant rates of the bead position, in essence,the randomness parameter fits these rates to a model. This model assumes that themotor steps uniformly forward, and that the chemical cycle is Erlang distributed withparameters n and λ. The model to which the bead experimental data will be mappedis henceforth referred to as the test model.
As discussed in the previous section, the test model is insufficient if backwardsteps and wasted chemical cycles are considered. A reward function Hi which ac-counts for forward, backward and wasted steps as in (1) may be considered alongwith the unidirectional chemical cycle as in the previous section. There are four un-knowns in the model: λ, n, and the probabilities p and q . Then it is reasonable tobelieve that the first four cumulant rates of the bead are enough to determine theseparameters uniquely.
The constants an in (8) are needed. The first eight values are available in Smith(1959), and the first four are given in Sect. B.1 (with a small extension). For thetest model with the Erlang distributed Xi , ai = λ/ni . While this result is hard to inferfrom (52) and (51), there is an intuitive way of deriving this result using the propertiesof the Poisson process and Proposition 1 (see Sect. B.2). Then the cumulant rates cn
in (9) for the test model can be calculated. The first two are
c1 = λ
(p − q
n
)
,
c2 = λ
((p + q) − (p − q)2
n2+ (p − q)2
n
)
,
(31)

2472 A. Krishnan, B.I. Epureanu
and the remaining two, although easily calculated, are left out in the interest ofbrevity.
Let the experimentally measured slopes of the first four cumulants be si . Settingsi = ci for i = 1, . . . ,4, the resulting polynomial equations may be solved numeri-cally for the unknowns λ,n,p and q .
To illustrate this fitting procedure, the cumulants for the PO model and the Elstonmodel may be obtained separately and plugged into the si in (31). These would cor-respond to experimentally measured cumulants for the purposes of illustration. Asnoted in Sect. 3.2, the renewal increment of the PO model is a sum of two exponen-tials with rates α and βb + βf . So, it is reasonable to expect that n should be in thevicinity of 2, and that λ should be close to the average of the two rates. It turns outthat for this special case, λ and n take exactly those values.4 The full solution is
n = 2,
λ = α + βb + βf
2,
p = 4p(f )αβb
(α + βb + βf )2,
q = 4(1 − p(f ))αβf
(α + βb + βf )2,
(32)
where, as before, p(f ) is the force-dependent probability of stepping forward. Sincep + q < 1 in (32), it may be inferred that wasted hydrolyses are present in the POmodel.
The results are different for the special case of the Elston model considered inSect. 3.1. The set of four equations may be reduced to two, but the analytical solutionof these simultaneous cubic equations in n and λ is not easily obtained. However,the approach based on (31) may be tested numerically to reassure ourselves that themethod works satisfactorily. To that aim, the number of steps was fixed at n = 3,the forward rate constants k12, k23, and k31 were fixed to certain arbitrary values,and the reverse rate k′
31 was varied over a range. The results are as expected: n isclose to 3 over the entire range and λ is the close to the average rate of chemicalturnover (k12 + k23 + k31 + k′
31)/3; q is 0, which indicates that there are no backwardsteps; p + q is less than 1 and varies with k′
31 (not shown), which implies that thereare wasted hydrolyses. The randomness parameter, in contrast, tells us that there areabout 1.3 steps in the cycle and nothing more. The results are shown in Fig. 7.
To demonstrate the robustness of the procedure in the presence of experimentalerrors, artificial errors were introduced into the slopes of the cumulants. The rate k′
31was first fixed at 9.2, and 1,000 separate sets of uniformly distributed errors (±10%)
were added to each of the four slopes. Of course, it is not reasonable to expect thatan exact solution will exist under an arbitrary perturbation such as this. Hence, the
4It may be noted here that the analytical result was guessed by first examining numerical solutions. In anexperiment, of course, only numerical results are available.

Renewal-Reward Process Formulation of Motor Protein Dynamics 2473
Fig. 7 The values of the rate constants in the Elston model for n = 3 were fixed. The backward rates wereset to 0, k12 = 10, k21 = 15 and k31 = 5. k′
31 was varied in a range, and λ,n,p, and q were solved for. Ascan be seen in both figures, n,λ and q are close to the values they are intuitively expected to have
Fig. 8 The values of the rate constants in the Elston model for n = 3 were as in Fig. 7, and k′31 was fixed
at 9.2. Errors in a ±10% range were added to the four slopes, and λ, n, p, and q were solved for. Thefigure on the left shows a histogram of the n values obtained. All the values fall in the (2.6,3.4) interval.N(n, s) is a normal distribution, where n and s are the sample mean and variance of n. The figure on theright shows the variation of λ with n. Note that λ appears to vary linearly with n
Euclidean norm of the set of four residuals of (31) was minimized instead. The val-ues obtained for n had a mean of 2.988 and a sample variance of 0.12. The valuesobtained for q fell in the interval (−0.002,0.002). The residuals had an upper boundof about 10−14. A histogram for n and other results are shown in Fig. 8. These resultsshow that the proposed approach is satisfactory.
In practice, such a simple chemical scheme might not work very well. Instead,one might add backward reactions to the unidirectional scheme in this section orconsider a cyclic sequential scheme as in Fig. 2 with constant forward and backwardrates. Then one has an additional parameter μ that represents the overall rate of thereverse reactions. Now, the first five cumulant rates have to be considered. Ratherthan applying the approach proposed herein to another model, this procedure maymore fruitfully be tested in an actual experiment. It is not unreasonable to believe

2474 A. Krishnan, B.I. Epureanu
that quantifying the effects of ATP and external force on λ,μ,n,p, and q will proveparticularly insightful.
5 Conclusions and Outlook
Renewal-reward processes were used in this paper to analyze time traces of the beaddisplacement in single molecule bead-motor assays of motor proteins. The approxi-mations involved in this approach were justified by physical arguments related to thelength and time-scales in the dynamics. The statistical parameters of interest wereshown to be the cumulant rates of the bead, both for their ease of calculation andfor their robustness under experimental measurement noise. Formulas for calculatingthe cumulant rates to arbitrary order were provided for cases where the renewal in-crements (the cycle time of the enzyme) and the reward increments (the associatedmechanical step) could be assumed to be independent—this was shown to be a goodassumption in a large class of models typically used to model cyclic enzyme kinetics.
The most important use of the renewal-reward process formulation is in the fluc-tuation analysis. The cumulant rate formulas let us prove a simple bound that extendsthe usefulness of the randomness parameter: It indicates the presence of backwardsteps and wasted hydrolyses. An extension of the fluctuation analysis using the highercumulant rates was presented. This approach allows us to quantify the effects of back-ward steps and wasted hydrolysis in terms of probabilities. This approach was shownto yield useful information about the underlying chemistry and mechanical steppingof the motor. The robustness of the novel approach in the presence of artificially in-troduced errors was demonstrated.
Although renewal-reward processes are particularly well-suited to calculating cu-mulant rates, the details of the underlying chemistry and physics are embedded in acycle-time variable Xi and an associated reward increment Hi . Hence, the approachhas a few drawbacks. For example, detachment and reattachment phenomena resultin the loss of regenerative structure. One may think of such a phenomenon as aninfinite chemical turnover time; i.e., P(Xi = ∞) > 0. Such a process is termed a ter-minating renewal process. One possible approach is to calculate the cumulant ratesconditioned on detachment not occurring, and separately calculate detachment ratesbased on the underlying Markov chain representing the chemical cycle (see Sect. A.1and Mogilner et al. 2001).
One of the major advantages of using the cumulant rates of the bead displace-ment is that it is not really necessary to be able to resolve individual steps. However,when individual steps can be resolved, the methods herein can be supplemented byother approaches to gain more insight. For example, measuring the step-step corre-lation and testing dwell-time symmetry from Lindén and Wallin (2007) will indicatewhether a sequential chemical cycle as in Fig. 2 is appropriate. Xi and Hi basedon such a cycle are independent, and the higher cumulant rates in (9) can be easilycalculated. While the large class of models in Wang and Qian (2007), Lindén andWallin (2007) and this manuscript satisfy the independence requirement between thereward and renewal increments Xi and Hi , this cannot be assumed in general. If thisindependence does not hold, (7) cannot be used to derive formulas for the cumulants.

Renewal-Reward Process Formulation of Motor Protein Dynamics 2475
For the variance, the more complicated expression in (5) must be used to take thecorrelation of Hi and Xi into account.
Renewal-reward processes are easily applied when motion takes place in one-dimension, where the regenerative structure is more obvious. However, the theorydiscussed herein has to be extended to capture multidimensional effects in experi-ments (such as those in Block 2003). Spatial- and time-periodic situations are idealcandidates for analysis using the methods of renewal theory.
Acknowledgements The authors gratefully acknowledge the partial financial support of the NationalScience Foundation (Dynamical Systems Program, Dr. Edwardo Misawa, Program Director). Also, theauthors thank Professor Charles Peskin for catching an error in the independence proof and for illuminatingdiscussions of the subject.
Appendix A
The Appendix is divided into two parts. The first one contains mathematical noteson the introductory section on renewal theory, and the proofs of Propositions 1, 2,and the independence result described in Sect. 2.3. The second Appendix containsthe cumulant rate formulas in (8) from Smith (1959), and some miscellaneous resultsused in the text.
A.1 Notes on Renewal Theory
Given the basic definition of the renewal process in Sect. 2.1, we note that if F(t) isthe distribution function of Xi , it is generally assumed that F(0) = 0. This ensuresthat Xi is a positive random variable, and pathological cases like E[Xi] = 0 in (4) areavoided. It is also assumed that F(∞) = 1 to ensure that the process never terminates;i.e., if there were a chance that Xi = ∞, then the chance that the process terminatesafter k steps is given by a geometric distribution (Karlin and Taylor 1975). In thecontext of motor proteins, this could mean that the motor detached from the track andnever completed its step at some point. We could calculate the velocity and variancerate of the protein conditioned on the fact that the motor does not detach, with thepossibility of detachment after n steps accounted for by a geometrically distributedrandom variable.
Let μ and σ 2 be the mean and variance of Xi , both finite. The strong law and thecentral limit theorem apply to Sn and it follows that (Karlin and Taylor 1975)
limt→∞
1
tN(t) = 1
μ, (33)
N(t) ∼ N(
t
μ,σ 2t
μ3
)
, (34)
where N (μ,σ 2) represents a normal distribution with mean μ and variance σ 2.A central result in renewal theory concerns the asymptotic behavior of E[N(t)] as
given by (4) with Hi = 1. Smith (1959) provides formulas for the higher cumulants
2476 A. Krishnan, B.I. Epureanu
(see also Sect. 2.2, and Sect. B.1). Equation (8) can be written as
κN,n(t) = ant + bn + λ(t)
(1 + t)p, (35)
when the moments up to (n + p + 1)th order of the renewal increment Xi are finite,p ≥ 0, and λ(t) is a function of bounded variation which tends to zero as t → ∞.When all the moments of Xi are finite, (35) is exactly linear for all t .
A.2 Proof of Proposition 1 and Proposition 2
Proof Trivially,
limt→∞
∣∣∣∣E(V (R(t)|N(t) = n) − E(V (R(t)|N(t) = n))
t
∣∣∣∣ = lim
t→∞
∣∣∣∣V (H )
t
∣∣∣∣ = 0, (36)
using the independence of H and R(t), the additivity of V , and the boundednessof H . The proof of Proposition 2 is identical. �
A.3 Independence Between Xi and Hi for Sequential Cycles
We will calculate p1,1x (t) (where x = b,f ) in (11) by distinguishing between thedifferent paths to absorption in Fig. 3. Suppose we are interested in p1,1f
. Let the al-lowable paths to absorption into 1f be indexed by some set D. Let ri(t) be the prob-ability density of the event that absorption takes place in (t, t + dt) through path i.Since taking different paths to absorption are mutually exclusive,
d
dtp1,1f
(t) =∑
i∈Dri(t). (37)
Suppose path i corresponds to the sequence of states
i ≡ 1 2 3 . . . n 1f .
The probability density for the time spent in path i can be written as
ri(t) = k12e−(k12+k1n)t ∗ k23e
−(k23+k21)t ∗ · · · ∗ kn1e−(kn,n−1+kn1)t
=n∏
i=1
∗ ki,i+1ai(t), (38)
where∏∗ is taken to mean convolution, ai(t) = e−(ki,i+1+ki,i−1)t , and the cyclic iden-
tification n + 1 ≡ 1 is made for convenience. Note that the exponentials in (38) areonly dependent on the state i from which the step is taking place, and hence theshorthand ai(t) can be adopted. Before proceeding further it is useful to introducethe following definitions.

Renewal-Reward Process Formulation of Motor Protein Dynamics 2477
Fig. 9 Forward and backwardsections of Fig. 3
Definition 1 (Forward and Backward Paths) A forward path is defined to be a gen-eral realization that ends up in absorption into state 1f . A backward path, similarly,ends up in absorption into state 1b . Consider the forward and backward sections ofthe Markov chain in Fig. 3 to be as in Fig. 9. Primed numbers have been used todistinguish the backward states from the forward states for notational convenience.Of course, ki,i+1 = ki′,(i+1)′ and ki+1,i = k(i+1)′,i′ for i = 1 . . . n.
Definition 2 (Successful Attempt) A subpath is a forward (resp. backward) success-ful attempt if it never visits the states {2′, . . . , n′} (resp. {2, . . . , n}), does not returnto the starting state 1 and ends up in absorption in state 1f (resp. 1b). Successfulattempts will be denoted by S. Any forward successful attempt Sf may be written as
Sf ≡ 1 2 s1 s2 . . . sk n 1f , (39)
where the sj are some allowable intermediate states.
Definition 3 (Failed Attempt) A subpath is a failed attempt if it begins in state 1 andreturns to state 1 without being absorbed into either 1f or 1b . Failed attempts will bedenoted by F .
With these two definitions, it is easy to see that any general allowable path toabsorption will be a succession of failed attempts followed by a single successfulattempt. It is obvious that any failed attempt can be part of either a backward or aforward path.
Next, the strategy is to establish a 1 − 1 correspondence between forward andbackward paths, calculate p1,1f
(t) and p1,1b(t) and show that the ratio in (11) is a
constant.
Lemma 1 Let a forward successful attempt be represented as in (39). With the pe-riodic identification n + 1 ≡ 1f , there are n transitions of the form i → i + 1 fori = 1, . . . , n and k pairs of transitions of the form sj → sj + 1 and sj + 1 → sjwhere sj ∈ {2, . . . , n − 1} for j = 1, . . . , k.
Proof In any successful attempt, all the states 1 through n and then finally 1f mustbe visited at some point. Consider the transitions at which each essential state i ∈1, . . . , n,1f is first visited. Then the successful attempt can be written as
Sf = 1 2 3 Q31 Q32 . . . n Qn1 . . . Qnr n 1f , (40)
where the Qij represent excursions from state i → i, and j is just a free index usedto enumerate the excursions. From the structure of the chain, it is clear that each

2478 A. Krishnan, B.I. Epureanu
excursion must have an even number of transitions. If the transition i → i + 1 is partof an excursion, i + 1 → i must also be part of it, since the excursion results in nonet movement. Since there are n other transitions of the form i → i + 1, the lemmafollows. �
Lemma 2 There exists a 1−1 correspondence (a mapping A) from the set of forwardpaths to the set of backward paths.
Proof Note that any forward successful attempt can be converted into a backwardsuccessful attempt by reversing the path. Let Sf be as in (40) and consider a backwardsuccessful attempt Sb . Now, by considering the transitions at which each essentialstate i ∈ n′, . . . ,2′,1b is last visited, the structure of the chains in Fig. 9 lets us write
Sb = A(Sf ) ≡ 1 n′ Qnr . . . Qn1 n′ . . . Q32 Q31 3′ 2′ 1b, (41)
using the same excursions Qij as in (40). This is where the cyclic structure of theMarkov chain is exploited. Now that the action of A on any forward successful pathhas been established, we can generalize this to any path x given by
x ≡ F1F2 · · ·Sf . (42)
Then A(x) may be defined as
A(x) ≡ F1F2 · · ·A(Sf ), (43)
where A(Sf ) is as in (41). Then we have a 1−1 mapping (since it is clearly invertible)between the forward and backward paths. �
Lemma 3 If x and A(x) are a pair of forward and backward paths, let rx(t) andrA(x)(t) represent their associated probability densities. Then
rx(t)
k12k23 · · ·kn1= rA(x)(t)
k1nkn,n−1 · · ·k21.
Proof Consider the paths x and A(x) in the forms specified by (42) and (43). Let Tx
and TA(x) be the times to absorption for the paths in question. It is clear from (38),(42), and (43) that
Tx =∑
i
TF i + TSf,
TA(x) =∑
i
TF i + TSb,
(44)
with obvious notation. Since the failed attempts are identical in x and A(x), it isenough to focus on the successful attempts given by (40) and (41). Then the proba-bility density for the time spent in the successful attempt (TSf
) is
rSf(t) =
(n∏
i=1
∗ ki,i+1ai(t)
)
∗(
2k∏
j=1
∗ ksj ,sj+1asj (t)
)
. (45)

Renewal-Reward Process Formulation of Motor Protein Dynamics 2479
To obtain the density for A(Sf ), the rates ki,i+1 in the first term on the right-handside of (45) must be replaced with ki+1,i . However, ai(t) = ai′(t), and the secondconvolution in (45) is identical in both Sf and Sb. Then
rSb(t) =
(n∏
i=1
∗ki+1,iai(t)
)
∗(
2k∏
j=1
∗ksj ,sj+1asj (t)
)
. (46)
From (44), (45), and (46), the lemma follows. �
Theorem 1 The events absorption into state 1x (x = b,f ) and absorption in (0, t)
are independent.
Proof From the relationship between the densities in Lemma 3, we deduce that theconditional probability in (11) can be written as
P(Absorption into 1f |Absorption in (0, t)
) =∏n
i=1 ki,i+1∏n
i=1 ki,i+1 + ∏ni=1 ki+1,i
, (47)
and a similar expression holds for absorption into 1b . Since this is a constant andabsorption is certain, it follows that the events are independent. �
Appendix B
B.1 Formulas for Cumulants of a General Renewal Process
To find formulas for the constants ai and bi in (8), Smith (1959) finds the cumulantsψn(t) of a function of N(t) which has a moment generating function given by
�(η) = E
[1
(1 − η)N(t)+1
]
.
Thenψn(t) has the form
ψi(t) = αit + βi + λ(t). (48)
where λ(t) → 0 as t → ∞ as described in Sect. A.1.Let μn be the nth moment of the renewal increments Xi , and let its distribution
function be F . For the first n moments of Xi to be finite, a necessary and sufficientcondition is that there exists another distribution Fk such that
F ∗(s) = 1 − μ1s + μ2
2! s2 − · · · + μn−1
(n − 1)! (−s)n−1 + μn
n! F ∗k (s), (49)
where F ∗(s) = sL(F (t)), with L(F (t)) being the Laplace Transform of F(t). Ifz1(η) is the solution of F ∗(s) = 1 − η such that z1(0) = 0, αi can be written as
αi = n!2πi
∮
C′z1(η)
ηn+1dη, (50)
2480 A. Krishnan, B.I. Epureanu
and the constants an can be written in terms of αi as
a1 = α1,
a2 = α2 − α1,
a3 = α3 − 3α2 + α1,
a4 = α4 − 6α3 + 7α2 − α1.
(51)
The values for αi , i = 1, . . . ,8 are given in Smith (1959), but μ1 is set to 1. For theformulas to hold, the appropriate moments of F have to be finite. Hence, F has tohave a representation as in (49). Then setting μ1 = 1 is equivalent to a coordinatetransformation s = sμ1 in (49). Then setting αi → μ1αi for i ≥ 1, and μi → μi/μ
i1
for i > 1, Smith (1959) provides the needed formulas. The first four αi are
α1 = 1
μ1,
α2 = μ2
μ31
,
α3 = −μ3
μ41
+ 3μ2
2
μ51
,
α4 = μ4
μ51
− 10μ2μ3
μ61
+ 15μ3
2
μ71
.
(52)
B.2 Cumulants of a Renewal Process with an Erlang Distributed Increment
Let N(t) be the renewal process with renewal increment Xi that corresponds to asingle exponential variable with rate λ. This is the well-understood Poisson process(Ross 1983). The moment generating function of the Poisson process φN(z) is givenby
φN(z) =∞∑
i=0
exp(−λt(ez − 1)
). (53)
Since the cumulant generating function is ψN(z) = log(φN(z)), the slopes of thecumulants N(t) are all λ. The objective is to find the cumulants of the renewal processN(t) with Xi ∼ Erlang[k,λ]. This is a sum of k exponential random variables withrate λ. Then
N(t) =[N(t)
k
]
, (54)
where [·] denotes the greatest integer function. Next, one may associate a cumula-tive process R(t) with N(t) that has increments Hi = 1/k and a terminal rewardH (t) = [N(t)/k] − N(t)/k. The terminal reward subtracts out the excess steps inN(t), and the number of renewals in N(t) is the same as the value of R(t). Propo-sition 1 states that the terminal reward has no effect on the cumulants of R(t), and

Renewal-Reward Process Formulation of Motor Protein Dynamics 2481
hence the terminal reward H (t) can be dropped. Then R(t) = N(t)/k, and it followsfrom (2) and a standard property of cumulants that
κR,n(t) = λ
kn. (55)
References
Astumian, R. D., & Haenggi, P. (2002). Brownian motors. Phys. Today, 55(11), 33–39.Atzberger, P. J., & Peskin, C. S. (2006). A Brownian dynamics model of kinesin in three dimensions
incorporating the force-extension profile of the coiled-coil cargo tether. Bull. Math. Biol., 68(1), 131–160.
Bier, M. (1997). Brownian ratchets in physics and biology. Contemp. Phys., 38(6), 371–379.Bier, M. (2005). Modelling processive motor proteins: moving on two legs in the microscopic realm.
Contemp. Phys., 46(1), 41–51.Block, S. M. (2003). Probing the kinesin reaction cycle with a 2 D optical force clamp. Proc. Natl. Acad.
Sci. USA, 100(5), 2351–2356.Block, S. M. (2007). Kinesin motor mechanics: binding, stepping, tracking, gating, and limping. Biophys.
J., 92(9), 2986–2995.Block, S. M., Goldstein, L. S. B., & Schnapp, B. J. (1990). Bead movement by single kinesin molecules
studied with optical tweezers. Nature, 348, 348–352.Boyer, P. D. (1997). The ATP synthase-a splendid molecular machine. Annu. Rev. Biochem., 66(1), 717–
749.Carter, N. J., & Cross, R. A. (2005). Mechanics of the kinesin step. Nature, 435(7040), 308–312.Cinlar, E. (1975). Introduction to stochastic processes. Englewood Cliffs: Prentice-Hall.Cox, D. R., & Miller, H. D. (1977). The theory of stochastic processes. London: Chapman & Hall/CRC.Cross, R. A. (2004). The kinetic mechanism of kinesin. Trends Biochem. Sci., 29(6), 301–309.Elston, T. C. (2000). A macroscopic description of biomolecular transport. J. Math. Biol., 41(3), 189–206.Fisher, M. E., & Kolomeisky, A. B. (2001). Simple mechanochemistry describes the dynamics of kinesin
molecules. Proc. Natl. Acad. Sci. USA, 98(14), 7748–7753.Geeves, M. A., & Holmes, K. C. (1999). Structural mechanism of muscle contraction. Annu. Rev. Biochem.,
68(1), 687–728.Gilbert, S. P., Webb, M. R., Brune, M., & Johnson, K. A. (1995). Pathway of processive ATP hydrolysis
by kinesin. Nature, 373(6516), 671–676.Goodson, H. V., Kang, S. J., & Endow, S. A. (1994). Molecular phylogeny of the kinesin family of micro-
tubule motor proteins. J. Cell. Sci., 107(7), 1875.Grimmett, G., & Stirzaker, D. (2001). Probability and random processes. Cambridge: Oxford University
Press.Guydosh, N. R., & Block, S. M. (2006). Backsteps induced by nucleotide analogs suggest the front head
of kinesin is gated by strain. Proc. Natl. Acad. Sci. USA, 103(21), 8054–8059.Hill, T. L. (1989). Free energy transduction and biochemical cycle kinetics. Berlin: Springer.Howard, J. (1996). The movement of kinesin along microtubules. Annu. Rev. Physiol., 58(1), 703–729.Howard, J. (1997). Molecular motors: structural adaptations to cellular functions. Nature, 389(6651), 561–
567.Howard, J. (2001). Mechanics of motor proteins and the cytoskeleton. Sunderland: Sinauer.Howard, J., Hudspeth, A. J., & Vale, R. D. (1989). Movement of microtubules by single kinesin molecules.
Nature, 342(6246), 154.Johnson, W. P. (2002). The curious history of Faà di Bruno’s formula. Am. Math. Mon., 109, 217–234.Karlin, S., & Taylor, H. M. (1975). A first course in stochastic processes. New York: Academic Press.Kramers, H. A. (1940). Brownian motion in a field of force and the diffusion model of chemical reactions.
Physica, 7(4), 284–304.Krishnan, A. (2008). The random walker: stochastic mechano-chemical models for motor proteins. Mas-
ter’s thesis, Mechanical Engineering, University of Michigan.
2482 A. Krishnan, B.I. Epureanu
Krishnan, A., & Epureanu, B. I. (2008). A stochastic mechano-chemical model for cooperative motorprotein dynamics. In Proceedings of SMASIS 2008. New York: ASME.
Lindén, M., & Wallin, M. (2007). Dwell time symmetry in random walks and molecular motors. Biophys.J., 92(11), 3804–3816.
Mehta, A. (2001). Myosin learns to walk. J. Cell. Sci., 114(11), 1981.Mehta, A. D., Rief, M., Spudich, J. A., Smith, D. A., & Simmons, R. M. (1999a). Single-molecule biome-
chanics with optical methods. Science, 283(5408), 1689.Mehta, A. D., Rock, R. S., Rief, M., Spudich, J. A., Mooseker, M. S., & Cheney, R. E. (1999b). Myosin-V
is a processive actin-based motor. Nature, 400(6744), 590–596.Mogilner, A., Fisher, A. J., & Baskin, R. J. (2001). Structural changes in the neck linker of kinesin explain
the load dependence of the motor’s mechanical cycle. J. Theor. Biol., 211(2), 143–157.Peskin, C. S., & Oster, G. (1995). Coordinated hydrolysis explains the mechanical behavior of kinesin.
Biophys. J., 68(4), 202S–211S.Prager, T., Schimansky-Geier, L., & Sokolov, I. M. (2005). Periodic driving controls random motion of
Brownian steppers. J. Phys., Condens. Matter, 17(47), 3661–3672.Purcell, E. M. (1977). Life at low Reynolds number. Am. J. Phys., 45(1), 3–11.Qian, H., & Elson, E. L. (2002). Single-molecule enzymology: stochastic Michaelis–Menten kinetics.
Biophys. Chem., 101, 565–576.Reimann, P., & Hänggi, P. (2002). Introduction to the physics of Brownian motors. Appl. Phys. A, Mater.
Sci. Process., 75(2), 169–178.Rice, S., Lin, A. W., Safer, D., Hart, C. L., Naber, N., Carragher, B. O., Cain, S. M., Pechatnikova, E.,
Wilson-Kubalek, E. M., & Whittaker, M. (1999). A structural change in the kinesin motor proteinthat drives motility. Nature, 402, 778–784.
Rief, M., Rock, R. S., Mehta, A. D., Mooseker, M. S., Cheney, R. E., & Spudich, J. A. (2000). Myosin-Vstepping kinetics: a molecular model for processivity. Proc. Natl. Acad. Sci. USA, 97(17), 9482.
Ross, S. M. (1983). Stochastic processes [M]. New York: Willey.Santos, J. E., Franosch, T., Parmeggiani, A., & Frey, E. (2005). Renewal processes and fluctuation analysis
of molecular motor stepping. Phys. Biol., 2, 207–222.Schief, W. R., & Howard, J. (2001). Conformational changes during kinesin motility. Curr. Opin. Cell
Biol., 13(1), 19–28.Schnitzer, M. J., & Block, S. M. (1997). Kinesin hydrolyses one ATP per 8-nm step. Nature, 388(6640),
386–390.Sheetz, M. P., & Spudich, J. A. (1983). Movement of myosin-coated fluorescent beads on actin cables in
vitro. Nature, 303(5912), 31–35.Smith, W. L. (1958). Renewal theory and its ramifications. J. R. Stat. Soc., Ser. B, Stat. Methodol., 20,
243–302.Smith, W. L. (1959). On the cumulants of renewal processes. Biometrika, 46(1–2), 1–29.Spudich, J. A. (1994). How molecular motors work. Nature, 372, 515.Svoboda, K., & Block, S. M. (1994). Force and velocity measured for single kinesin molecules. Cell,
77(5), 773–784.Svoboda, K., Schmidt, C. F., Schnapp, B. J., & Block, S. M. (1993). Direct observation of kinesin stepping
by optical trapping interferometry. Nature, 365(6448), 721–727.Svoboda, K., Mitra, P. P., & Block, S. M. (1994). Fluctuation analysis of motor protein movement and
single enzyme kinetics. Proc. Natl. Acad. Sci. USA, 91(25), 11782.Tsygankov, D., Lindén, M., & Fisher, M. E. (2007). Back-stepping, hidden substeps, and conditional dwell
times in molecular motors. Phys. Rev. E, 75(2), 021909.Uhlenbeck, G. E., & Ornstein, L. S. (1930). On the theory of the Brownian motion. Phys. Rev., 36(5),
823–841.Van Kampen, N.G. (2007). Stochastic processes in physics and chemistry. Amsterdam: North-Holland.Visscher, K., Schnitzer, M. J., & Block, S. M. (1999). Single kinesin molecules studied with a molecular
force clamp. Nature, 400(6740), 184–189.Wang, H. (2007). A new derivation of the randomness parameter. J. Math. Phys., 48(10), 103301.Wang, H., & Qian, H. (2007). On detailed balance and reversibility of semi-Markov processes and single-
molecule enzyme kinetics. J. Math. Phys., 48(1), 013303.