Power-Efficient Data Propagation Protocols for Wireless Sensor Networks
14
http://sim.sagepub.com SIMULATION DOI: 10.1177/0037549705056220 2005; 81; 399 SIMULATION Azzedine Boukerche, Ioannis Chatzigiannakis and Sotiris Nikoletseas Power-Efficient Data Propagation Protocols for Wireless Sensor Networks http://sim.sagepub.com/cgi/content/abstract/81/6/399 The online version of this article can be found at: Published by: http://www.sagepublications.com On behalf of: Society for Modeling and Simulation International (SCS) can be found at: SIMULATION Additional services and information for http://sim.sagepub.com/cgi/alerts Email Alerts: http://sim.sagepub.com/subscriptions Subscriptions: http://www.sagepub.com/journalsReprints.nav Reprints: http://www.sagepub.com/journalsPermissions.nav Permissions: © 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.com Downloaded from
Transcript of Power-Efficient Data Propagation Protocols for Wireless Sensor Networks

http://sim.sagepub.com
SIMULATION
DOI: 10.1177/0037549705056220 2005; 81; 399 SIMULATION
Azzedine Boukerche, Ioannis Chatzigiannakis and Sotiris Nikoletseas Power-Efficient Data Propagation Protocols for Wireless Sensor Networks
http://sim.sagepub.com/cgi/content/abstract/81/6/399 The online version of this article can be found at:
Published by:
http://www.sagepublications.com
On behalf of:
Society for Modeling and Simulation International (SCS)
can be found at:SIMULATION Additional services and information for
http://sim.sagepub.com/cgi/alerts Email Alerts:
http://sim.sagepub.com/subscriptions Subscriptions:
http://www.sagepub.com/journalsReprints.navReprints:
http://www.sagepub.com/journalsPermissions.navPermissions:
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

Power-Efficient Data Propagation Protocolsfor Wireless Sensor NetworksAzzedine BoukercheSITEUniversity of Ottawa, [email protected]
Ioannis ChatzigiannakisSotiris NikoletseasComputer Technology Institute and Department ofComputer Engineering and InformaticsUniversity of Patras26500 Patras, Greece
Wireless sensor networks are composed of a vast number of ultra-small, fully autonomous comput-ing, communication, and sensing devices, with very restricted energy and computing capabilities,that cooperate to accomplish a large sensing task. Such networks can be very useful in practice.Theauthors propose extended versions of two data propagation protocols: the Sleep-Awake ProbabilisticForwarding (SW-PFR) protocol and the Hierarchical Threshold-Sensitive Energy-Efficient Network(H-TEEN) protocol.These nontrivial extensions aim at improving the performance of the original pro-tocols by introducing sleep-awake periods in the PFR case to save energy and introducing a hierarchyof clustering in the TEEN case to better cope with large network areas.The authors implemented thetwo protocols and performed an extensive comparison via simulation of various important measuresof their performance with a focus on energy consumption. Data propagation under this approachexhibits high fault tolerance and increases network lifetime.
Keywords: Wireless sensor networks, data propagation, power awareness, distributed protocols,performance evaluation
1. Introduction
Recent dramatic developments in micro-electro-mechanical (MEMS) systems, wireless communications,and digital electronics have already led to the developmentof small-sized, low-power, low-cost sensor devices. Suchextremely small devices integrate sensing, data processing,and communication capabilities. Large numbers of sensornodes can be deployed in areas of interest (such as inacces-sible terrain or disaster places) and use self-organizationand collaborative methods to form a sensor network.
Their wide range of applications is based on the possibleuse of various sensor types (i.e., thermal, visual, seismic,acoustic, radar, magnetic, etc.) to monitor a wide variety ofconditions (e.g., temperature, object presence and move-ment, humidity, pressure, noise levels, etc.). Thus, sensornetworks can be used for continuous sensing, event detec-tion, location sensing, and micro-sensing. Hence, sensornetworks have important applications, including (a) mil-itary (e.g., forces and equipment monitoring, battlefield
||||
SIMULATION, Vol. 81, Issue 6, June 2005 399-411©2005 The Society for Modeling and Simulation International
DOI: 10.1177/0037549705056220
surveillance, targeting, nuclear, biological and chemicalattack detection), (b) environmental applications (e.g., firedetection, flood detection, precision agriculture), (c) healthapplications (e.g., telemonitoring of human physiologicaldata), and (d) home applications (e.g., smart environmentsand home automation). For an excellent survey of wirelesssensor networks, see Akyildiz, Sankarasubramaniam, andCayirci [1].
Note, however, that the efficient and robust realizationof such large, highly dynamic, complex, nonconventionalnetworking environments is a challenging algorithmic andtechnological task. Features, including the huge number ofsensor devices involved, the severe power, computationaland memory limitations, their dense deployment, and fre-quent failures, pose new design and implementation as-pects that are essentially different not only with respect todistributed computing and systems approaches but also toad hoc networking techniques.
1.1 Contribution
We study the problem of multiple event detection andpropagation—that is, the local sensing of a series of cru-cial events and the energy-efficient propagation of datareporting the realization of these events to a (fixed or
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

Boukerche, Chatzigiannakis, and Nikoletseas
mobile) control center. The control center could, in fact, besome human authorities responsible for taking action uponthe realization of the crucial event. We use the term sink forthis control center. We note that this problem generalizesthe single-event propagation problem (with regard to [2-6]) and poses new challenges for designing power-efficientdata propagation protocols. The protocols we present herecan also be used for the more general problem of datapropagation in sensor networks (see [7]).
Under these more general and realistic (in terms of moti-vation by practice applications) modeling assumptions, wehave implemented and experimentally evaluated two infor-mation propagation protocols: (1) the Sleep-Awake Prob-abilistic Forwarding (SW-PFR) protocol, which avoidsflooding by favoring in a probabilistic way certain “close tooptimal” data transmissions and also allows particles to al-ternate between sleeping and awake modes to save energy,and (2) the hierarchical version of the Threshold-SensitiveEnergy-Efficient Network (H-TEEN) protocol, where par-ticles self-organize into clusters and build a tree of trans-missions, propagating data only to their parent (clusterhead) in this tree. We note that we had to carefully designthe protocols to work under the new network models.
Using simulation, we propose, implement, and evalu-ate a modified version of the Threshold-Sensitive Energy-Efficient Network (TEEN) protocol introduced in Man-jeshwar and Agrawal [8]. In particular, we extended theconcept of clustering used in the original TEEN proto-col to that of hierarchical clustering. This possibility wasdiscussed in the original paper, but no such protocol wasdesigned. We show that in large-area networks and whenthe number of layers in the hierarchy is small, TEEN tendsto consume a lot of energy because of long-distance trans-missions. On the other hand, when the number of layersincreases, the transmissions become shorter, but there is asignificant overhead in the setup phase as well as the oper-ation of the network. In light of the above, we chose to im-plement a four-layer hierarchical clustering. The main ideabehind the hierarchical clustering is to enable the TEENprotocol to operate in networks that occupy large areas.
As opposed to Chatzigiannakis, Kinalis, and Nikolet-seas [9] (where a 2-D lattice deployment of wireless sen-sor devices has been used), we extend the network modelhere to the general case of particle deployment accordingto a random, uniform distribution. We further extend theProbabilistic Forwarding (PFR) protocol and the networkmodel by enabling the wireless sensor particles to periodi-cally enter a power save mode, which we call the sleepingmode. Finally, we implement PFR so as to efficiently han-dle not only a single event, as described in Chatzigiannakiset al. [2, 3, 10], but to propagate multiple events.
The extensive simulations we have performed show thatboth protocols are successful. In the setting we considered,SW-PFR seems more robust in the case of high rates ofevent generation and large networks (considering the areathey occupy), while H-TEEN seems to perform better insmaller networks. We also concluded that the values of
certain parameters, such as the radius of transmission, arehighly critical for the performance of the SW-PFR proto-col, given the network area and the number of the particlesspread, and we investigate the precise effect of such param-eters on performance. In light of the above, we also proposeand discuss a hybrid protocol combining the two proto-cols and an intermediate randomization switching phasebetween them. This hybrid protocol can be parameterizedtoward achieving certain desired goals and trade-offs.
1.2 Previous and Related Work
In the past few years, wireless sensor networks have at-tracted a lot of attention from researchers at all levels ofthe system hierarchy, from the physical layer and commu-nication protocols up to the application layer.
A family of negotiation-based information dissemina-tion protocols suitable for wireless sensor networks ispresented in Heinzelman, Kulik, and Balakrishnan [11].Sensor Protocols for Information via Negotiation (SPIN)focus on the efficient dissemination of individual sensorobservations to all the sensors in a network. However, incontrast to classic flooding, in SPIN, sensors negotiate witheach other about the data they possess using meta-datanames. These negotiations ensure that nodes only transmitdata when necessary, reducing the energy consumption foruseless transmissions.
A data dissemination paradigm called directed diffu-sion for sensor networks is presented in Intanagonwiwat,Govindan, and Estrin [7], where data generated by sen-sor nodes are named by attribute-value pairs. An observerrequests data by sending interests for named data; datamatching the interest are then “drawn” down toward thatnode by selecting a single path or through multiple paths byusing a low-latency tree. Intanagonwiwat et al. [12] presentan alternative approach that constructs a greedy incremen-tal tree that is more energy efficient and improves pathsharing.
Furthermore, this work is related to previous research ofChatzigiannakis, Nikoletseas, and Spirakis [5], where newlocal detection and propagation protocols are proposed thatare very energy and time efficient, as shown by a rigor-ous average case analysis performed in these works undercertain simplifying assumptions. In particular, the LocalTarget Protocol (LTP) uses local optimization to select thenext-hop neighbor.
For a detailed discussion on data propagation protocolsin wireless sensor networks, see also Boukerche and Niko-letseas [13]. For a comparative study of the multi-path-delivery PFR protocol to single-path delivery (the LTP),see Chatzigiannakis et al. [2, 3] and Chatzigiannakis, Niko-letseas, and Spirakis [5]. For other important aspects ofenergy efficiency (such as energy balance), see Boukercheand Nikoletseas [14] and Efthymiou, Rolim, and Nikolet-seas [15]. For a discussion of challenges in wireless sensornetworks research, see Spirakis [16].
400 SIMULATION Volume 81, Number 6
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

DATA PROPAGATION PROTOCOLS FOR WIRELESS SENSOR NETWORKS
2. The Model
Sensor networks are composed of a vast number of ultra-small homogeneous sensors, which we here call particles.Each particle is a fully autonomous computing and com-munication device, characterized mainly by its availablepower supply (battery) and the energy cost of computa-tion and transmission of data. Such particles (in our modelhere) cannot move. We adopt here (as a starting point) a2-D (plane) framework: a wireless sensor network (a set ofparticles) is spread in an area (for a graphical presentation,see Fig. 1). Note that a 2-D setting is also used by otherresearchers [7, 8, 11, 12, 17, 18].
DEFINITION 1. Let n be the number of wireless sen-sor devices, and let d (usually measured in numbers ofparticles/m2) be the density of particles in the area.
There is a single point in the network area, which wecall the sink S, and it represents a control center wheredata should be propagated to. Furthermore, we assume thatthere is a setup phase of the wireless sensor network, duringwhich the smart cloud is dropped in the terrain of interest;when using special control messages (which are very short,cheap, and transmitted only once), each sensor particle isprovided with the direction of S. By assuming that eachsmart dust particle has individually a sense of direction andby using these control messages, each particle is aware ofthe general location of S. We here note that these mod-eling assumptions can be relaxed by alternatives, such asintroducing a preprocessing phase where sensors use local-ization techniques by executing an underlying protocol fto decide on fictitious virtual coordinates [18] and thus beable to estimate directions and distances of transmissions.
Each particle is equipped with a set of monitors (sen-sors) for light, pressure, humidity, temperature, and so on.Each particle has a broadcast (digital radio) beacon mode,which can be also a directed transmission of angle α arounda certain line (possibly using some special kind of antenna;see Fig. 2). The transmission range (which we denote by R)can vary, while the transmission angle (let it be α) is fixedand cannot change throughout the operation of the network(since this would require a modification or movement ofthe antenna used). Note that the protocols we study in thiswork can operate even under the broadcast communicationmode (i.e., α = 2π).
Each particle can be in one of four different modes atany given time regarding the energy consumption. Thesemodes are as follows: (a) transmission of a message, (b) re-ception of a message, (c) sensing of events, and (d) sleep-ing. During the sleeping mode, particle ceases any com-munication with the environment, and thus it is unable toreceive any message. In our model, we assume that the en-ergy consumption of a sleeping particle is negligible, butit needs a certain amount of energy to return to the sensingstate.
Following Heinzelman, Chandrakasan, and Balakrish-nan [17], for the case of transmitting and receiving a mes-
Sensor nodesSensor field
Control Center
Figure 1. A smart dust cloud
S
p'beacon circle
R
o
-o
Figure 2. Directed transmission of angle α
sage, we assume the following simple model in which theradio dissipates Eelec to run the transmitter and receivercircuitry and εamp for the transmit amplifier to achieve ac-ceptable SNR (signal-to-noise ratio). We also assume anr2 energy consumption due to channel transmission at dis-tance r . Thus, to transmit a k-bit message at distance r inour model, the radio expends
ET (k, r) = ET −elec(k) + ET −amp(k, r),
ET (k, r) = Eelec · k + εamp · k · r2,
and to receive this message, the radio expends
ER(k) = ER−elec(k),
ER(k, r) = Eelec · k,
where ET −elec, ER−elec stand for the energy consumed bythe transmitter’s and receiver’s electronics, respectively.
Concluding, there are four different kinds of energy dis-sipation, which are as follows:
• ET : energy dissipation for transmission• ER : energy dissipation for receiving• Eidle: energy dissipation for idle state• Epowerup: energy dissipation for returning from sleeping
state
For the idle state, we assume that the energy consumedfor the circuitry is constant for each time unit and equalsEelec (the time unit is 1 second). On the other hand, the
Volume 81, Number 6 SIMULATION 401
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

Boukerche, Chatzigiannakis, and Nikoletseas
power-up energy equals three times the amount of energyconsumed in a time unit during the idle state, that is, 3·Eelec.In our simulations, we explicitly measure the above energycosts by adjusting εtrans , εrecv, and Eidle to match as close aspossible the specifications of the mica platform [19] (seesection 3).
The particles in the H-TEEN protocol do not exploit theability to get to the sleeping mode; thus, in that case, theenergy dissipation is characterized by the rest of the threetypes of energy consumption. We also assume that eachparticle, in protocol H-TEEN, does not spend any amountof energy to listen to what the other nodes of its cluster sendto the cluster head. This assumption is also made for TEENin Manjeshwar and Agrawal [8], where transmissions fromparticles to cluster heads are done according to a TimeDivision Multiple Access (TDMA) schedule broadcast byeach cluster.
We believe that our model depicts accurately enoughthe technological specifications of real wireless sensor sys-tems. Similar models are being used by other researchers tostudy sensor networks (see [8, 17]). The above assumptionssuggest a strong model that, however, does not trivializethe problem; we believe that even assuming such a model,the design of power-efficient protocols is still a challengingtask. In contrast to Intanagonwiwat, Govindan, and Estrin[7] and Karp [20], our model is weaker in the sense thatno geolocation abilities are assumed (e.g., a Global Po-sitioning System [GPS] device) for the particles, leadingto more generic and thus stronger results. In Hollar [21],a thorough comparative study and description of wirelesssensor systems is given, from the technological point ofview.
3. Technological Specifications of WirelessSensor Devices
New technology is changing the nature of sensors andthe way they interface with data acquisition and con-trol systems. Researchers have developed an open-sourcehardware and software platform that combines sensing,communications, and computing into a complete archi-tecture. The first commercial generation of this platformwas dubbed the Rene Mote, and several thousand of thesesensors have been deployed at commercial and researchinstitutions worldwide to promote the development andapplication of wireless sensor networks.
The platforms development community is based on theopen-source model, which has become well known withthe increasingly popular Linux operating system. Mostdevelopment work is done in the public domain, and itincludes the hardware design and software source code.Users of the technology contribute their developments backto the community so that the base of code and hardwaredesign grows rapidly. Currently, a number of research in-stitutions in the United States are working on centimeter-scale (and even smaller) distributed sensor networks [22,23].
3.1 Hardware Design of Wireless Sensors
The basic mica hardware uses a fraction of a watt ofpower and consists of commercial components a squareinch in size. The hardware design consists of a small, low-power radio and processor board (known as a mote proces-sor/radio, or MPR, board) and one or more sensor boards(known as a mote sensor, or MTS, board). The combinationof the two types of boards forms a networkable wirelesssensor.
The MPR board includes a processor, radio, A/D con-verter, and battery. The processor is an ATMEL ATMEGA,but there are other processors that would meet the powerand cost targets. The processor runs at 4 MHz and has 128KB of flash memory and 4 KB of SDRAM. In a givennetwork, thousands of sensors could be continuously re-porting data, creating heavy data flow. Thus, the overallsystem is memory constrained, but this characteristic is acommon design challenge in any wireless sensor network.
The MPR modules contain various sensor interfaces,which are available through a small 51-pin connector thatlinks the MPR and MTS modules. The interface includesan 8-channel, 10-bit A/D converter; a serial UART port;and an I2C serial port. This allows the MPR module toconnect to a variety of MTS sensor modules, includingMTS modules that use analog sensors as well as digitalsmart sensors. The MPR module has a guaranteed unique,hard-coded 64-bit address.
The processors, radio, and a typical sensor load con-sume about 100 mW in active mode. This figure shouldbe compared with the 30-µA draw when all componentsare in sleep mode. The MTS sensor boards currently in-clude light/temperature, two-axis acceleration, and mag-netic sensors and 420-mA transmitters. The wireless trans-mission is at a 4-Kbps rate, and the transmission range mayvary. Researchers are also developing a GPS board and amultisensor board that incorporates a small speaker andlight, temperature, magnetic, acceleration, and acoustic(microphone) sensing devices. The mica developers com-munity welcomes additional sensor board designs.
3.2 Software and the TinyOS
A considerable portion of the challenge faced by the de-velopers of mica devices is in the software embedded inthe sensors. The software runs the hardware and network,making sensor measurements, routing measurement data,and controlling power dissipation. In effect, it is the keyingredient that makes the wireless sensor network produceuseful information.
To this end, a lot of effort has gone into the design of asoftware environment that supports wireless sensors. Theresult is a very small operating system named TinyOS, orTiny micro-threading Operating System, which allows thenetworking, power management, and sensor measurementdetails to be abstracted from the core application develop-ment. The operating system also creates a standard method
402 SIMULATION Volume 81, Number 6
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

DATA PROPAGATION PROTOCOLS FOR WIRELESS SENSOR NETWORKS
CPU Speed 4 MHzMemory ROM: 128Kb FLASH
SDRAM: 4KbEEPROM: 4Kb
Power Supply 2X AA batteriesPower Consumption 0.75 mWProcessor Current Draw 5.5 mA (active current)
< 20 µΑ (sleep mode)Radio Current Draw 12 mA (transmit current)
1.8 mA (receive current)< 1 µΑ (sleep mode)
Output Device 3 LEDsI/O Port Expansion Connected (51 pin)
Serial port (Proprietary 16-pin)Network Wireless 4 Kbits/sec at 916 MHz (ISM band)
Radio range depends on antennae configuration
Figure 3. MPR300CB specifications
Software Footprint 3.4 KbTransmission Cost 1 µϑ/BitInactive State < 25 µΑPeak Load 20 mATypical CPU Usage < 50 %Events Propagate Thru Stack < 40 µΣ
Figure 4. TinyOS key facts
of developing applications and extending the hardware.Although tiny, this operating system is quite efficient, asshown by the small stack-handling time.
4. The Problem
Assume the realization of a series of K crucial eventsEi , with each event being sensed by a single particle pi
(i = 1, 2, . . . , K). Then the multiple-event propagationproblem P is the following:
How can each particle pi (i = 1, 2, . . . , K),via cooperation with the rest of the grain par-ticles, efficiently (mainly with respect to en-ergy) propagate information info(Ei) reportingrealization of event Ei to the sink S?
We remark that this problem is a generalization of thesingle-event propagation problem, which is more difficultto cope with. Certainly, because of the dense deploymentof sensor particles close to each other, communication be-tween two particles is much more energy efficient thandirect transmission to the sink. Furthermore, short-rangehop-by-hop transmissions can effectively overcome someof the signal propagation effects in long-distance transmis-sions and may help to smoothly adjust propagation aroundobstacles. Finally, the low energy transmission in multihopcommunication may enhance security, protecting from theundesired discovery of the data propagation operation.
On the other hand, long-range transmissions requirethe participation of few particles and therefore reduce theoverhead on particle resources and provide better networkresponse times. Furthermore, long-range communicationpermits the deployment of clustering and other efficienttechniques, developed for ad hoc wireless networks. In par-ticular, a clustering scheme enables cluster heads to reducethe amount of transmitted data by aggregating information.
The above suggest that many diverse approaches existto the solution of the multiple-event propagation problemP . In any case, the objective is to propagate most, if notall, of the events Ei to the sink efficiently. Note that, be-cause of the multiplicity of events sensed and the small en-ergy supplies, it is not obvious at all that all events sensedmanage to be reported to the sink. Efficiency means mini-mizing the energy consumption in the sensor network, ei-ther by minimizing the number of transmissions and alsothe duplicate messages, observed in multihop delivery, orby reducing data size (by aggregations techniques) andthe number of transmissions (by clustering) in long-rangecommunication. Note that an appropriate Medium AccessControl (MAC) protocol is required in either case to han-dle collisions and avoid message retransmissions [9, 29].Furthermore, an interesting aspect of the problem underinvestigation is the lifetime of particles since it affects theability of the network to propagate data to the sink becauseavailable routes are reduced as more particles consumetheir energy resources and “die” (see also [15]).
5. The Sleep-Awake Probabilistic ForwardingProtocol
The basic idea of the protocol lies in probabilistically fa-voring transmissions toward the sink within a thin zone ofparticles around the line connecting the particle sensingthe event E and the sink (see Fig. 5 for graphical repre-sentation). Although data propagation along this line isoptimal with respect to energy and time cost, such prop-agation is not always feasible. This is true because, evenif initially this direct line was appropriately occupied bysensors, certain sensors on this line might become inac-tive, either permanently (because their energy has been ex-hausted) or temporarily (because these sensors might entera sleeping mode to save energy). The protocol evolves intwo phases:
Phase 1: The “Front” Creation Phase.During this ini-tial phase, a sufficiently large front is built to ensure thatthe data propagation process survives for an appropriatelylarge period of time. This front is created by using a “flood-ing” mechanism for a configurable number of steps. Ac-cording to this mechanism, the header of each message in-cludes a counter called β. This counter is set to a predefinedvalue by the source particle, when the latter generates themessage relative to the sensed event. Following this initial-ization, each particle, upon receiving a pertinent messagecontaining a positive β counter, reduces its value by 1 and
Volume 81, Number 6 SIMULATION 403
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

Boukerche, Chatzigiannakis, and Nikoletseas
S
E
Particles thatparticiapate in
forwarding path
Figure 5. Thin zone of particles around the line connectingthe particle sensing the event E and the sink S
deterministically forwards the message toward the sink. Todo so, each particle uses directed “angle” transmission tobroadcast data to all of its neighbors that lie in the directionof the sink. When the β counter becomes zero, the particleproceeds to the second phase of the SW-PFR protocol. Ul-timately, the beta counter determines the length of the firstphase of the SW-PFR protocol.
Phase 2: The Probabilistic Forwarding Phase.In thissecond phase, data propagation is done in a probabilisticmanner. Each particle calculates a probability of participa-tion in the propagation process. The closer a particle is tothe optimal transmission line, connecting the source nodeE detecting an event and the sink S, the higher its prob-ability to forward data pertinent to that particular senseevent.
The “forwarding probability” IPf wd is chosen to be
IPf wd = φ
π,
where φ is the angle defined by (a) the line connecting theparticle performing the random choice and the sensor thatinitially sensed the event and (b) the line connecting thisnode to the sink. Remark that, indeed, a bigger angle φsuggests a sensor position closer to the direct line betweenE and S. Figure 6 displays this graphically. Clearly, whenφ = π, then the sensor lies on this line. Thus, we get thatφ1 > φ2 implies that for the corresponding particles, p1,p2, p1 is closer to the E-S line than p2; thus, IPf wd(p1) =φ1
π >φ2
π = IPf wd(p2).
Angle φ calculation. Under appropriate (and realistic)modeling assumptions for sensor particles, angle φ can belocally calculated running a simple subprotocol (see [10]for detailed discussion). Such modeling assumptions in-clude the ability of sensor particles (a) to estimate the direc-tion of a received transmission (e.g., by direction-sensingantennae), (b) to estimate the distance from a nearby par-ticle that did the transmission (e.g., via signal attenuationestimation techniques), (c) to have a common a common
S
E
p1
p2
1
2
Figure 6. Angle φ and closeness to optimal line
coordinates system, and (d) to know the direction towardthe sink (this is possibly done during a setup phase). Theabove assumptions suggest a strong model that, however,does not trivialize the problem; we believe that even as-suming such a model, the design of our protocol is stilla challenging task. Furthermore, some of our assumptionsare realistic (e.g., it is indeed possible to apply smart anten-nas in tiny sensors; see [25]) or may become realistic in thenear future. Furthermore, some modeling assumptions canbe relaxed by alternatives, such as introducing a prepro-cessing phase in which sensors use localization techniquesby executing an underlying protocol f to decide on ficti-tious virtual coordinates [18] and thus be able to estimatedirections and distances of transmissions. Notice that GPSinformation is not needed for the PFR protocol. Also, thereis no need to know the global structure of the network (i.e.,the size of the network, the positions of other particles,etc.).
The SW-PFR protocol proposed in this article is ac-tually a nontrivial modification of the PFR protocol pro-posed in Chatzigiannakis et al. [10]. There are two majoradditions made to that protocol. First, the current versionof PFR, SW-PFR, targets sensor networks with multiple-event generations. In particular, at any given time, therecould be more than one event being propagated toward thesink. To avoid repeated transmissions and infinite loops,each particle is provided with a limited “cache memory.”In this cache, the particle registers the event IDs for eachdistinct event it has “heard of.” Each event ID’s unique-ness is guaranteed, by choosing it to be a concatenationof the source particle ID and the time stamp of the sensedevent. Upon the receipt of a message, a particle checkswhether the pertinent event is enlisted in its cache. If thatevent is not in the particle’s cache, it is registered, and thenthe particle proceeds to the proper actions defined by thePFR protocol. However, if the event was already seen, themessage is dropped, and no further action is taken.
Presumably, a relatively small amount of memory (e.g.,up to 2 MB) would be adequate for such purpose. Notethat in the future, the particle cache could enforce apolicy of limited lifetime for each of its contents, thus
404 SIMULATION Volume 81, Number 6
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

DATA PROPAGATION PROTOCOLS FOR WIRELESS SENSOR NETWORKS
reducing the space requirements to a minimum. Data ag-gregation also poses a challenge for further study and effi-ciency assessment.
As a second modification, this version of PFR, SW-PFR,encompasses an intriguing sleep-awake scheme. Accord-ing to this scheme, each particle goes through alternatingperiods of “sleeping” and “awake.” During a sleeping pe-riod, the particles cease any communication with the en-vironment; thus, the power consumption is assumed to beminimal and practically insignificant, whereas when a par-ticle is awake, it consumes the regular amount of energy. Inaddition, a special energy amount is considered to be spentduring the transition from “sleep” to “awake.” We assumethat the sleeping/awake time periods alternate stochasti-cally independently in each particle and have durationss, w, respectively.
DEFINITION 2. The energy-saving specification is en =s
s+w(a typical value for en may be 0.5).
6. A Hierarchical Threshold-Sensitive EnergyEfficient Network Protocol
TEEN was introduced in Manjeshwar and Agrawal [8] andis essentially an interesting modification of the fundamen-tal Low-Energy Adaptive Clustering Hierarchy (LEACH)protocol [17] for reactive sensor networks. By reactive sen-sor networks, we mean networks in which particles imme-diately react only to sudden and drastic changes in the valueof a sensed attribute. The basic concepts in TEEN are theclustering of particles and the use of thresholds to decidewhether a particle should transmit data to the sink.
TEEN uses particle self-organization into clusters, orig-inally proposed in LEACH, to reduce transmissions. Wehave extended the concept of clustering to a hierarchicalclustering, a proposal also made in the original paper. Atree of transmissions is built, where each particle transmitsdata only to its parent (cluster head) in this tree. To be morespecific, TEEN’s operation is divided into rounds, and ev-ery round is further divided into a short setup phase, inwhich the organization in clusters occurs, and a relativelylong steady phase, which is the phase in which normalnetwork operation occurs.
Setup phase.In this phase, each particle decides onwhether it should become a cluster head. This decisionis based on a fixed probability IPc (in our simulations,IPc = 0.05) and on whether it has been a cluster headin the last 1/IPc rounds. Specifically, a particle n picks arandom number from 0 to 1 and compares it to a thresholdT (n), which is calculated in every round as
T (n) ={ IPc
1−IPc ·(rmod 1IPc
)
0
if n ∈ G
otherwise
Here, r is the current round and G is the set of particlesthat have not been elected as cluster heads in the last 1/IPc
rounds. As we can see, this threshold is growing as roundspass, and so we can ensure that every node alive will be-come a cluster head at some point within 1/IPc rounds.The same process begins again after 1/IPc rounds. Aftera particle decides to become a cluster head, it broadcastsan advertisement message to the entire network. The otherparticles hear the advertisements from all the cluster headsand choose the cluster head they belong to based on thestrength of the signal they received.
When a particle decides on which cluster it wants tobelong to, it transmits a response back to the cluster headof the corresponding cluster. This is probably done usingsome kind of Carrier Sense MultipleAccess MAC protocolto avoid collisions. The cluster head at some point decidesthat it has heard all of the responses from the particles in itscluster using a timeout and then sets up a TDMA schedulefor transmissions. It then broadcasts this schedule to theparticles in its cluster.
At this time, the next level of hierarchy can be built.We extended the original TEEN paper with the followingscheme for hierarchical clustering. The nodes that havebecome cluster heads decide on whether they should passon the next level of hierarchy with the same probabilityIPh (in our simulations, IPh = 0.1) and on whether thenumber of cluster-head advertisements in the previous levelof hierarchy received is less than eight. If a particle decideson moving to the next level of hierarchy, it broadcasts anadvertisement message again. Only cluster heads of theprevious level decide to which cluster head of the nextlevel they belong to, and this process is repeated for thenext levels. In our simulation, we have used four levels ofhierarchy.
Steady phase.After all the levels of clustering have beenset up, the actual data transmissions from particles canbegin. The transmissions from particles to cluster heads aredone according to the TDMA schedule of each cluster. Toreduce interference between different neighboring clusters,any cluster head picks randomly a code from a certainlist, and so particles in each cluster use different CDMAcodes. Finally, there are two thresholds, the “hard” and the“soft” thresholds, which determine when a particle musttransmit data to the base station since particles sense thefield continuously. The first one is a value beyond whichthe particle enters an alarm state. The second one is a smallchange in the value of the sensed attribute that took placein the field.
By the first time the hard threshold is reached, the par-ticle stores the sensed value and transmits it to the basestation. If the next sample differs from the stored valueby at least the soft threshold, this information should betransmitted back to the base station. An example of thesethresholds is when the measured attribute is temperature;we set the hard threshold to be 30deg and the soft thresh-old any change over 0.5deg. In our simulations, we used thenotion of an event, meaning a situation in which particlesmust report to the base station, rather than just random
Volume 81, Number 6 SIMULATION 405
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

Boukerche, Chatzigiannakis, and Nikoletseas
values of the sensed attributes. So, when an event occurs,it is implied that these thresholds are outreached.
Some preliminary discussion on the protocol presentedhere was included in Nikoletseas et al. [26].
7. Implementation Details
For the purpose of the comparative study of the previouslydescribed protocols, we have designed a new simulator,named simDust, that was implemented in Linux using C++and the LEDA [27] algorithmic and data structures library.Another interesting feature of our simulator is the ability toexperiment with very large networks. In fact, the complex-ity of extending existing network simulators and their (incases of large instances) time-consuming execution weretwo major reasons for creating this simulator. simDust en-ables the protocol designer to implement the protocol usingjust C++ and avoids complicated procedures that involvethe use of more than one programming language. In addi-tion, simDust generates all the necessary statistics at theend of each simulation based on a big variety of metrics thatare implemented (such as delivery percentage, energy con-sumption, delivery delay, longevity, etc.). The key pointsin simDust’s implementation are the following:
Operation in rounds: A basic concept used in the simu-lator is that its operation is divided into discrete rounds,both in SW-PFR and H-TEEN. One round represents atime interval in which a particle can transmit or receivea message and process it according to the protocol that isbeing simulated.
MAC layer assumptions: simDust leaves transmissioncollisions to be handled by lower MAC-layer protocols anddoes not take them into account. It is our intention to con-sider them in next versions of this simulator. Some MACprotocols for avoiding collisions can be found in Chatzi-giannakis, Kinalis, and Nikoletseas [9] andYe, Heidemann,and Estrin [24].
Energy assumptions:We have included an energy dis-sipation scheme for both protocols implemented. In par-ticular, we have assumed that a particle consumes a stan-dard amount of energy Eelec per round while being awake.Furthermore, in each transmission, energy fading is pro-portional to the square of the distance. For each receive, anode is credited with an amount of energy that practicallyreflects the power needed to run the transceiver circuit—namely, Eelec. Finally, a particle can switch over to the sleepstate to save energy. No energy consumption virtually takesplace while the particle remains in the sleep mode since itkeeps its transceiver and its sensors shut down.
Size of messages:Regarding the communication cost interms of the bits transmitted per message, we assume thatinformation messages require 1 Kbyte, plus a 40-bit header,containing a 32-bit identifier for the sender particle and an8-bit code that determines the message type.
SW-PFR specific assumptions:We assume that the pro-tocol’s execution is preceded by an initialization phase,in which each particle discovers all the neighboring par-ticles that are both within transmission range and withinthe cycle sector demarcated by a predefined angle value.The transmission range of each particle’s transmitter is setto be fixed and preferably of a value significantly smallerthan the network diameter. The sensed events that can trig-ger data propagation in the network can occur at any givenround. In addition, in the process of embedding a sleep-awake scheme in the SW-PFR protocol, we have used twoconfigurable variables that effectively define the ratio be-tween the duration of the sleep and awake periods. Finally,the required memory where each particle stores the eventsit has previously seen is considered to be of infinite capac-ity for reasons of keeping the implementation complexityconsiderably low.
H-TEEN specific assumptions:Our hierarchical imple-mentation uses four levels of hierarchy.We used a relativelylarge interval of 24 rounds between successive cluster setuprounds. Finally, we have calculated the size of the trans-mission schedule that is broadcast by each cluster head asa header of 40 bits followed by 32 bits (size of particle ID)times the number of particles included in that particularcluster.
8. Efficiency Metrics
On each execution of the experiment, let K be the totalnumber of crucial events (E1, E2, . . . , EK) and k the numberof events that were successfully reported to the sink S.Then, we define the success rate as follows:
DEFINITION 3. The success rate, IPs , is the fraction of thenumber of events successfully propagated to the sink overthe total number of events, that is, IPs = k
K.
Another crucial efficiency measure is the average avail-able energy of each particle in the network over time:
DEFINITION 4. Let Ei be the available energy for particlei. Then, Eavg =
∑ni Ei
nis the average energy per particle in
the wireless sensor network, where n is the number of thetotal particles dropped.
Finally, we consider the number of alive particles as ameasure of efficiency and the network survivability in eachcase. As in the case of energy, the more particles that arealive, the better. A source of valuable information is alsothe particular manner in which particles die over time.
DEFINITION 5. Let hA (for “active”) be the number of“active” sensor particles participating in the sensor net-work.
We also give another definition concerning the way theevents are generated in the network. This parameter criti-cally influences the efficiency measures defined above.
406 SIMULATION Volume 81, Number 6
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

DATA PROPAGATION PROTOCOLS FOR WIRELESS SENSOR NETWORKS
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 200 400 600 800 1000 1200 1400 1600
Network Size
Su
cces
sR
ate
PFR 0.05
PFR 0.8
H-TEEN 0.05
H-TEEN 0.8
Figure 7. Success rate for various network sizes for injectionrates 0.05 and 0.8
DEFINITION 6. Let Is be the injection rate, measured asthe probability of occurrence of a crucial event during around.
9. Simulation Results
We evaluate the performance of the two protocols by con-ducting a comparative experimental study. In our exper-iments, we generate a variety of sensor fields. The fieldsize ranges from 200 by 200 m to 1500 by 1500 m. Wenote that these network size studies are significantly largerthan those usually investigated in the relevant research andenable a study of the scalability of the network. In thesefields, we drop n ∈ [500, 3000] particles randomly uni-formly distributed on the smart dust plane.
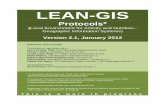
We start by examining the success rate of the protocolswith respect to the network size for two different injectionrates, Is (0.05 and 0.8). We focus on two extreme values toinvestigate the divergent protocol behavior in correspond-ing extreme settings.
In Figure 7, the success rate of the protocols is depictedas the network size increases. It is clear that for small di-mensions (200 × 200 m, 500 × 500 m), both protocolsachieve high performance (≥ 0.85), while performancedrops as network size increases. However, SW-PFR’s suc-cess rate remains quite high (i.e., ≥ 0.7), even for very largenetworks (i.e., 1500 × 1500 m), while SW-PFR seems tobehave well in both the case of low and high event gen-eration rates. On the contrary, H-TEEN seems to performpoorly in the case of frequent events since its success ratedrops below 0.3 in that case.
We continue by examining the success rate of the pro-tocols with respect to the Is for two different network sizes(Fig. 8). Initially, for low injection rates, in small networks(500 × 500 m), both protocols behave almost optimally,achieving a success rate close to 1, and decrease as the in-jection rate increases. However, for a larger network size,
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Event Rate
Su
cces
sR
ate
PFR 500x500
PFR 1500x1500
H-TEEN 500x500
H-TEEN 1500x1500
Figure 8. Success rate for various injection rates and networkarea 500 × 500, 1500 × 1500
the impact of the injection rate seems to be more signifi-cant. In particular, H-TEEN’s success rate drops from 85%to almost 30%, while PFR, even though its initial successrate is about 70%, seems to be less affected by the increasein injection rate.
The apparent dependence of TEEN protocol’s perfor-mance from the injection rate is due to its clusteringscheme. As injection rate increases, a cluster head is re-sponsible for delivering more events, and thus it consumesmore energy during its leadership. If the injection rate be-comes too high, cluster heads are more likely to exhausttheir energy supplies before a new cluster head is elected.When a cluster head “dies,” the cluster ceases to function,and all events that occur on that cluster are lost until a newcluster head is elected. Furthermore, large network sizesworsen this phenomenon because more energy is requiredfrom the cluster head to propagate an event to the sink(since the energy spent in one hop is of the order of thesquare of the transmission distance).
On the other hand, the SW-PFR protocol is mostly un-affected by high injection rates but influenced by largernetwork sizes. This is due to its multihop nature since morehops are required for the propagation of an event.
We move on by examining the average energy con-sumed per particle in time. We remind the reader that eachparticle dropped to the smart dust plane has 1 Joule of en-ergy at its disposal. Figure 9 depicts the average amount ofenergy that each particle has available in each round, fornetwork areas of (500 × 500 m) and (1000 × 1000 m),where the injection rate is Is = 0.05. Note that in bothcases, the success rate, IPs , is more than 80%. For the caseof the small network, H-TEEN consumes less energy thanSW-PFR, while on the larger network, SW-PFR seems lessexpensive.
To explain this phenomenon, we have to consider thenature of the event propagation of the two protocols. TheH-TEEN protocol uses a constant number of hops to
Volume 81, Number 6 SIMULATION 407
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

Boukerche, Chatzigiannakis, and Nikoletseas
0.5
0.6
0.7
0.8
0.9
1
0 1000 2000 3000 4000 5000 6000 7000 8000
Simulation Rounds
Ave
rag
eE
ner
gy
per
Par
ticl
e(J
)
PFR 500x500
PFR 1000x1000
H-TEEN 500x500
H-TEEN 1000x1000
Figure 9. Average energy per particle for Is = 0.05 andnetwork size 500 × 500, 1000 × 1000
propagate the messages, having its cluster heads transmit-ting directly to the next level of the hierarchy, while SW-PFR uses short-ranged multihop transmissions to deliverthe message to the sink. When the network area is fairlysmall, the transmissions of cluster heads cost less thanthe multiple multihop transmissions of SW-PFR. How-ever, when the network area increases, the cluster headshave also to increase its transmitting power by an orderof R2, as the radio range R increases, in contrast to SW-PFR, where the multihop transmissions increase linearly.So, for the case of large-area networks, SW-PFR seemsmore appropriate than H-TEEN.
Finally, we examine the way the number of alive parti-cles varies with time. In Figure 10, the number of aliveparticles is presented for network sizes 500 by 500 mand 1000 by 1000 m, for injection rate Is = 0.05. Notethat more particles are dropped in a 1000-by-1000 m net-work, so that both protocols deal with more or less similardensities.
We notice that for the H-TEEN protocol for both net-work sizes, the number of alive nodes decreases at a con-stant rate, while for the SW-PFR protocol, there is a suddendecrease in the number of alive particles. This observationdepicts the property of the H-TEEN protocol to evenlydistribute the energy dissipation to all the particles in thenetwork. On the contrary, the SW-PFR protocol stressesmore the particles that are placed closer to the sink, so at apoint in time, these particles start to “die” rapidly.
On the other hand, in the larger network area (1000× 1000 m), the particles in H-TEEN protocol “die” morerapidly than those of SW-PFR. This was expected becausein H-TEEN, protocol particles are forced to transmit inlarger distances than those in SW-PFR, so they consumemore energy and “die” faster. We should also notice thesame behavior of SW-PFR as in Figure 10—from a pointin time and on, particles start to die faster than before, andthis is because SW-PFR stresses more the particles that lie
1100
1350
1600
1850
2100
2350
2600
0 3000 6000 9000 12000 15000
Simulation Rounds
Aliv
eP
arti
cles
PFR 500x500
PFR 1000x1000
H-TEEN 500x500
H-TEEN 1000x1000
Figure 10. Number of alive particles for Is = 0.05 and networksize 500 × 500, 1000 × 1000
near the sink, forcing them to propagate the majority of themessages that occur in the smart dust network.
For the SW-PFR protocol, we adjusted some extra pa-rameters such as the radio transmission range (R) andsleep-awake ratio (en) to achieve good performance fora fixed network density, while the values of the parametersdefined for the H-TEEN protocol are set as described insection 7. The choice of values for the SW-PFR protocolis crucial for its performance (thus, SW-PFR seems more“programmable”), while the H-TEEN protocol seems tobenefit less from adjusting its parameters. In Figure 11, wegive an example of how the success rate of the protocolcan vary for different values of the radio range (R) in a500-by-500 m network with 1500 particles. We notice thatthere is a strict area of the radio range where the proto-col behaves well, while outside this area, its performancedrops quickly. Thus, we provide an indication of how toexactly adjust the radio range to get a high success rate(i.e., for a success rate at least 0.8, R should be between35 and 60 m in the particular setting).
Some first simulation results were presented in Niko-letseas et al. [26].
10. Toward a Hybrid Protocol
Overall, for the H-TEEN protocol, the simulation suggeststhat in large-area networks and when the number of lay-ers in the hierarchy is small, TEEN tends to consume a lotof energy because of long-distance transmissions. On theother hand, when the number of layers increases, the trans-missions become shorter, but there is a significant overheadin the setup phase as well as the operation of the network.Thus, H-TEEN exhibits a certain trade-off behavior withrespect to the number—let it be c, the numbers of lay-ers used in the hierarchy. Here, we have implemented andevaluated the (rather intermediate) value c = 4. We planto further investigate, both by analytical and experimentalmeans, this trade-off.
408 SIMULATION Volume 81, Number 6
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

DATA PROPAGATION PROTOCOLS FOR WIRELESS SENSOR NETWORKS
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 10 20 30 40 50 60 70 80 90 100 110
Transmission Range
Su
cces
sR
ate
Figure 11. Success rate of the Sleep-Awake ProbabilisticForwarding (SW-PFR) protocol for various values of radiorange
Furthermore, the main findings of this work are thefollowing:
1. SW-PFR seems to be more energy efficient in net-works covering large geographical areas. In suchnetworks, H-TEEN seems to be expensive.
2. On the other hand, H-TEEN tends to be more effi-cient in small-area networks and also tends to some-how evenly distribute energy consumption amongthe particles locating the event.
In light of the above two findings, we propose a possiblehybrid combination of the protocols in large-area networks.This hybrid protocol should have three distinct phases (welist below phase 2 last in order, to better discuss how thisintermediate phase works).
Phase 1:Initially, and for a sufficiently large part of thenetwork area, SW-PFR is used to propagate data.
Phase 3:When data get appropriately close to the sink,H-TEEN is employed.
Phase 2:Since H-TEEN’s energy consumption character-istics heavily depend on the spatial distribution of eventoccurrence, and since H-TEEN performs better in the caseof rather uniform event placement, we introduce an inter-mediate phase between phase 1 (SW-PFR) and phase 3 (H-TEEN). This phase may use a “load-balancing” technique,such as randomization, to rather uniformly further prop-agate data, to avoid worst-case behavior for the H-TEENprotocol that would arise if data transmissions reach theH-TEEN employment area around the same, more or less,cluster heads. This randomization can be implemented inthe following way: the particles in the “phase 2” applicationarea select the next particle to propagate data by randomlyand uniformly choosing the angle of transmission and thetransmission radius, in some range.
We note that the details of this hybrid protocol’s de-sign (i.e., how long each of the three phases should be,what is the range of the parameters [angle, radius] in therandomization phase, etc.) are quite complicated, so weplan to study them and implement and evaluate the hybridprotocol in a separate work.
11. Using Varying Transmission Range
In addition to choosing between long or short trans-missions, certain additional trade-offs are introduced bychoosing between fixed or varying transmission range. Inparticular, we wish to focus on the following importantproperties:
(a) Obstacle avoidance: This may be achieved by increasingthe transmission range when an obstacle is encountered.
(b) Fault tolerance: Increasing range may reach active sensorswhen the current range does not succeed, either becauseof faulty or “sleeping” sensors close to the sensor that iscurrently transmitting or in the case of very low networkdensities.
(c) Network longevity: An interesting aspect of the problemunder investigation is the lifetime of particles since it af-fects the ability of the network to propagate data to thesink because available routes are reduced as more parti-cles consume their energy resources and “die.” Varyingthe transmission range may bypass the sensors lying closeto the sink, which tend to be overused in the case of fixed-range transmissions, since all data pass through them inthis case. The same holds also in the case of a geographicalconcentration of event generation.
Based on the above, we now propose theVariable Trans-mission Range Protocol (VTRP), where each particle p′
that has received info(E) from p (via, possibly, other par-ticles) does the following:
Phase 1: The search phase.It uses a periodic low-energybroadcast of a beacon to discover a particle nearer toS thanitself. Among the particles returned, p′ selects a uniqueparticle p′′ that is “best” with respect to progress towardthe sink. More specifically, the particle p′′
Ethat, among all
particles found, achieves the bigger progress on the p′Sline should be selected (see Fig. 2).
Phase 2: The direct transmission phase.Then, p′ sendsinfo(E) to p′′ and sends a success message to p (i.e., to theparticle that it originally received the information from).
Phase 3: The transmission range variation phase.If thesearch phase fails to discover a particle nearer to S, p′ en-ters the transmission range variation phase. More specifi-cally, each particle maintains a local counter τ, with initialvalue τ = 0. Every time the search phase fails, this counteris increased by 1. Thus, τ is an indication of the number offailures to locate an active particle. Based on τ, the particlemodifies its transmission range R according to a changefunction F(τ). Here, we consider four different functionsfor varying the transmission range:
Volume 81, Number 6 SIMULATION 409
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

Boukerche, Chatzigiannakis, and Nikoletseas
(a) Constant progress. This choice is more suitable in the casewhere the network is composed of a large number of par-ticles; thus, a small increment of the transmission rangewill probably suffice to locate an active particle. Based onthis assumption, the change function is defined as follows:
F(τ) = Rnew = Rinit + c · τ , where c is a constant
set to a small value (i.e., c = 10).
This is considered as the “basis” VTRP and is denoted asVTRPc.
(b) Multiplicative progress. In this case, the transmissionrange of the particle is increased more drastically. We callthis variation of our protocol VTRPm.
F(τ) = Rnew = Rinit + Rinit · m · τ , where m is a
constant set to a small value (i.e., m = 3).
This drastic change has a bigger probability of finding anactive particle, but it leads to higher energy consumption.
(c) Power progress. In this case, the transmission range ofthe particle is increased even faster using the followingscheme:
F(τ) = Rnew = Rinit + R√
(τ+1)init
.
We call this protocol VTRPp.(d) Random progress. When the density of the network is not
known in advance, we use randomization to avoid bad be-havior due to the worst-case input distributions for eachchoice above (i.e., small modifications to the transmissionrange in VTRPc in case of low densities and big modifi-cations resulting from VTRPp in high-particle densities).We call this variation VTRPr and is defined as follows:
F(0) = Rinit ,
F(τ) = F(τ − 1) + Rinit · r , where r ∈ (0, 8],a random value.
The analysis of the properties of the VTRP protocol (ef-ficiency, correctness, fault tolerance, etc.) is a quite com-plicated task. In Antoniou et al. [28], we presented somepreliminary results (based on simulation). We intend tofurther study these properties (extending the simulationfindings and carrying onto a rigorous analysis) in futurework.
12. Conclusions
We presented in this work two extended versions of theprotocols PFR and TEEN (i.e., SW-PFR and H-TEEN) forinformation propagation in sensor networks. We have im-plemented the new protocols and conducted an extensivecomparative experimental study on networks of large sizeto validate their performance and investigate their scalabil-ity. Our results basically show that the SW-PFR protocolachieves high success rates under specific conditions ofnetwork density and radio range (R), and it is resistant to
frequent events and operates efficiently in large-area net-works. On the other hand, the H-TEEN protocol achieveshigh success rates in small-area networks, but there is a de-terioration of its performance when the size of the networkor the injection rate increases.
We plan to study different network shapes, various dis-tributions used to drop the sensors in the area of interest,and the fault-tolerance of the protocols. Finally, we planto provide performance comparisons with other protocolsmentioned in the related work section, as well as implementand evaluate hybrid approaches that combine the SW-PFRand H-TEEN protocols in a parameterized way, exploitingtheir relative advantages. We note that the latter task (thehybrid protocol) is highly complicated, so we plan to do itin a separate work.
13. Acknowledgments
This work has been partially supported by NSERC,OIT/Distinguished ResearcherAward, CFI and Canada Re-search Chair Programs, and by the IST Programme of theEuropean Union under contract numbers IST-2004-001907(DELIS) and the Programme PYTHAGORAS under theEuropean Social Fund (ESF) and Operational Program forEducational and Vocational Training II (EPEAEK II). Apreliminary version of this work has appeared in Antoniouet al. [28] and Nikoletseas et al. [26].
14. References
[1] Akyildiz, I. F., W. Su, Y. Sankarasubramaniam, and E. Cayirci. 2002.Wireless sensor networks: A survey. Journal of Computer Net-works 38: 393-422.
[2] Chatzigiannakis, I., T. Dimitriou, M. Mavronicolas, S. Nikoletseas,and P. Spirakis. 2003. A comparative study of protocols for effi-cient data propagation in smart dust networks. In 9th InternationalConference on Parallel and Distributed Computing (EUROPAR2003), Lecture Notes in Computer Science vol. 2790, 1003-16.New York: Springer-Verlag.
[3] Chatzigiannakis, I., T. Dimitriou, M. Mavronicolas, S. Nikoletseas,and P. Spirakis. 2003. A comparative study of protocols for effi-cient data propagation in smart dust networks. Journal of ParallelProcessing Letters 13 (4): 615-27.
[4] Chatzigiannakis, I., and S. Nikoletseas. 2003. A sleep-awake proto-col for information propagation in smart dust networks. In 3rdInternational Workshop on Mobile, Ad-hoc and Sensor Networks(WMAN 2003), p. 225.
[5] Chatzigiannakis, I., S. Nikoletseas, and P. Spirakis. 2002. Smart dustprotocols for local detection and propagation. In 2nd ACM Inter-national Annual Workshop on Principles of Mobile Computing(POMC 2002), pp. 9-16.
[6] Chatzigiannakis, I., S. Nikoletseas, and P. Spirakis. 2005. Efficientand robust protocols for local detection and propagation in smartdust networks. Journal of Mobile Networks and Applications10 (1): 133-49.
[7] Intanagonwiwat, C., R. Govindan, and D. Estrin. 2000. Directed dif-fusion: A scalable and robust communication paradigm for sensornetworks. In 6th ACM/IEEE Annual International Conference onMobile Computing (MOBICOM 2000), pp. 56-67.
[8] Manjeshwar, A., and D. P. Agrawal. 2002. TEEN: A routing proto-col for enhanced efficiency in wireless sensor networks. In 2ndInternational Workshop on Parallel and Distributed ComputingIssues inWireless Networks and Mobile Computing (WPIM 2002),p. 195b.
410 SIMULATION Volume 81, Number 6
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from

DATA PROPAGATION PROTOCOLS FOR WIRELESS SENSOR NETWORKS
[9] Chatzigiannakis, I., A. Kinalis, and S. Nikoletseas. 2004. Wirelesssensor networks protocols for efficient collision avoidance in mul-tipath data propagation. In ACM Workshop on Performance Eval-uation of Wireless Ad Hoc, Sensor, and Ubiquitous Networks (PE-WASUN 2004), pp. 8-16.
[10] Chatzigiannakis, I., T. Dimitriou, S. Nikoletseas, and P. Spirakis.2004. A probabilistic forwarding protocol for efficient data prop-agation in sensor networks. In 5th European Wireless Conferenceon Mobile and Wireless Systems beyond 3G (EW 2004), pp. 344-50.
[11] Heinzelman, W. R., J. Kulik, and H. Balakrishnan. 1999. Adaptiveprotocols for information dissemination in wireless sensor net-works. In 5th ACM/IEEE Annual International Conference onMobile Computing (MOBICOM 1999), pp. 174-85.
[12] Intanagonwiwat, C., D. Estrin, R. Govindan, and J. Heidemann.2001. Impact of network density on data aggregation in wirelesssensor networks. Tech. Rep. 01-750, University of Southern Cal-ifornia, Computer Science Department.
[13] Boukerche, A., and S. Nikoletseas. 2004. Protocols for data propa-gation in wireless sensor networks: A survey. In Wireless commu-nications systems and networks, edited by M. Guizani. NewYork:Kluwer Academic.
[14] Boukerche, A., and S. Nikoletseas. 2004. Energy efficient algo-rithms in wireless sensor networks. In Wireless Networks, editedby A. Safwat. New York: Springer-Verlag. In print.
[15] Efthymiou, C., J. Rolim, and S. Nikoletseas. 2004. Energy bal-anced data propagation in wireless sensor networks. In 4th In-ternational Workshop on Mobile, Ad-hoc and Sensor Networks(WMAN 2004), p. 225.
[16] Spirakis, P. 2004. Algorithmic and foundational aspects of sensorsystems. In 1st International Workshop on Algorithmic Aspects ofWireless Sensor Networks (ALGOSENSORS 2004), Lecture Notesin Computer Science vol. 3121, 3-8. New York: Springer-Verlag.
[17] Heinzelman, W. R., A. Chandrakasan, and H. Balakrishnan. 2000.Energy-efficient communication protocol for wireless microsen-sor networks. In 33rd IEEE Hawaii International Conference onSystem Sciences (HICSS 2000), p. 8020.
[18] Rao, A., S. Ratnasamy, C. Papadimitriou, S. Shenker, and I. Stoica.2003. Geographic routing without location information. In 9thACM/IEEE Annual International Conference on Mobile Comput-ing (MOBICOM 2003), San Diego, pp. 96-108.
[19] Crossbow Technology, Inc. n.d. Mica motes. http://www.xbow.com/Products/productsdetails.aspx?sid=71
[20] Karp, B. 2000. Geographic routing for wireless networks. Ph.D.diss., Harvard University, Cambridge, MA.
[21] Hollar, S. E. A. 2000. Cots dust. MSc thesis, Engineering-Mechanical Engineering, University of California, Berkeley.
[22] Berkeley Wireless Research Center, http://bwrc.eecs.berkeley.edu[23] Wireless integrated sensor networks, http:/www.janet.ucla.edu/
WINS/[24] Ye, W., J. Heidemann, and D. Estrin. 2002.An energy-efficient MAC
protocol for wireless sensor networks. In 21st Annual IEEE In-ternational Conference on Computer Communications and Net-working (INFOCOM 2002), pp. 947-57.
[25] Dimitriou, T., and A. Kalis. 2004. Efficient delivery of informa-tion in sensor networks using smart antennas. In 1st InternationalWorkshop on Algorithmic Aspects of Wireless Sensor Networks(ALGOSENSORS 2004), Lecture Notes in Computer Science vol.3121, 109-22. New York: Springer-Verlag.
[26] Nikoletseas, S., I. Chatzigiannakis, H. Euthimiou, A. Kinalis,T. Antoniou, and G. Mylonas. 2004. Energy efficient protocolsfor sensing multiple events in smart dust networks. In 37th An-nual Simulation Symposium (ANSS 2004), pp. 15-24.
[27] Mehlhorn, K., and S. Näher. 1999. LEDA: A platform for combi-natorial and geometric computing. Cambridge, UK: CambridgeUniversity Press.
[28] Antoniou, T., A. Boukerche, I. Chatzigiannakis, G. Mylonas, andS. Nikoletseas. 2004. A new energy efficient and fault-tolerantprotocol for data propagation in smart dust networks using vary-ing transmission range. In 37th Annual Simulation Symposium(ANSS 2004), pp. 43-52.
Azzedine Boukerche is a full professor and holds a Canada Re-search Chair position in wireless and mobile networking at theUniversity of Ottawa. He is the founding director of PARADISEResearch Laboratory at Ottawa University.
Ioannis Chatzigiannakis is a researcher at the Computer Tech-nology Institute in Patras, Greece, and a senior researcher in theDepartment of Computer Engineering and Informatics, Univer-sity of Patras, Patras, Greece.
Sotiris Nikoletseas is a senior researcher at the Computer Tech-nology Institute in Patras, Greece, and a lecturer professor in theDepartment of Computer Engineering and Informatics, Univer-sity of Patras, Patras, Greece.
Volume 81, Number 6 SIMULATION 411
© 2005 Simulation Councils Inc.. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on April 17, 2008 http://sim.sagepub.comDownloaded from