
PHYSIOLOGICAL AND BIOMECHANICAL APPROACH FOR HUMAN FINGER MOVEMENT: MODELING, SIMULATION AND...
19
PHYSIOLOGICAL AND BIOMECHANICAL APPROACH FOR HUMAN FINGER MOVEMENT: MODELING, SIMULATION AND EXPERIMENTAL VALIDATION SAMAR ALLOUCH * ,†,‡ , RAFIC YOUN ES * , § , SOFIANE BOUDAOUD †,¶ and MOHAMAD KHALIL * * EDST- AZM Centre for Biotechnology Research, Lebanese University, France † University of Technology of Compi egne, UMR 7338 BMBI, France ‡ [email protected] § [email protected] ¶ sofi[email protected] Received 13 October 2013 Revised 12 August 2013 Accepted 17 November 2013 Published The work presented in this paper deals with the description of an analytic modeling of the neuromusculoskeletal system responsible for the finger movement. This simulation task is complex due to the interacting processes (physiological and biomechanical) represented by muscles, joints and bones. In this study, we focused on the presentation of a complete model for the finger motion decomposed in quasi-static positions. In fact, this model can be considered as a preliminary step before dynamic modeling. The proposed model is composed of several compartments: biomechanical finger model, mechanical muscle model and muscle/neural activation model. The main objective of this study is to estimate, by inverse procedure, the muscle forces, muscle activations and neural activations that are responsible for generating a given finger movement decomposed in successive quasi-static positions. The anatomical model contains six muscles which control the decomposed movement of the three joints of the system. To estimate the model unknowns, an optimization technique is proposed for improving robustness to initial conditions and physiological reliability. After, an experimental protocol for recording surface electromyogram (sEMG) data, from three extrinsic muscles, according to specific finger positions is applied on five subjects to evaluate the model reliability. From analysis of the obtained results, both in simulation and experiment, the presented model seems to be able to mimic, in a realistic way, the finger movement decomposed in quasi- static positions. Finally, results, model limitations and further developments are discussed. Keywords: Nomenclature a i :Muscle activation of muscle i. u i :Neural activation of muscle i December 10, 2013 3:30:17pm WSPC/170-JMMB 1450040 ISSN: 0219-5194 Page Proof 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 Journal of Mechanics in Medicine and Biology Vol. 14, No. 3 (2014) 1450040 (19 pages) ° c World Scientific Publishing Company DOI: 10.1142/S0219519414500407 1450040-1
Transcript of PHYSIOLOGICAL AND BIOMECHANICAL APPROACH FOR HUMAN FINGER MOVEMENT: MODELING, SIMULATION AND...

PHYSIOLOGICAL AND BIOMECHANICAL APPROACH
FOR HUMAN FINGER MOVEMENT: MODELING,
SIMULATION AND EXPERIMENTAL VALIDATION
SAMAR ALLOUCH*,†,‡, RAFIC YOUN�ES*,§,
SOFIANE BOUDAOUD†,¶ and MOHAMAD KHALIL*
*EDST- AZM Centre for Biotechnology Research, Lebanese University, France
†University of Technology of Compi�egne, UMR 7338 BMBI, France‡[email protected]§[email protected]
Received 13 October 2013
Revised 12 August 2013
Accepted 17 November 2013
Published
The work presented in this paper deals with the description of an analytic modeling of the
neuromusculoskeletal system responsible for the finger movement. This simulation task is
complex due to the interacting processes (physiological and biomechanical) represented by
muscles, joints and bones. In this study, we focused on the presentation of a complete model for
the finger motion decomposed in quasi-static positions. In fact, this model can be considered as
a preliminary step before dynamic modeling. The proposed model is composed of several
compartments: biomechanical finger model, mechanical muscle model and muscle/neural
activation model. The main objective of this study is to estimate, by inverse procedure, the
muscle forces, muscle activations and neural activations that are responsible for generating a
given finger movement decomposed in successive quasi-static positions. The anatomical model
contains six muscles which control the decomposed movement of the three joints of the system.
To estimate the model unknowns, an optimization technique is proposed for improving
robustness to initial conditions and physiological reliability. After, an experimental protocol
for recording surface electromyogram (sEMG) data, from three extrinsic muscles, according to
specific finger positions is applied on five subjects to evaluate the model reliability.
From analysis of the obtained results, both in simulation and experiment, the presented
model seems to be able to mimic, in a realistic way, the finger movement decomposed in quasi-
static positions. Finally, results, model limitations and further developments are discussed.
Keywords:
Nomenclature
ai:Muscle activation of muscle i.
ui:Neural activation of muscle i
December 10, 2013 3:30:17pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Journal of Mechanics in Medicine and Biology
Vol. 14, No. 3 (2014) 1450040 (19 pages)
°c World Scientific Publishing Company
DOI: 10.1142/S0219519414500407
1450040-1
Administrator
Text Box
AQ: Please provide keywords.

"i:Muscle deformation of muscle i.
Fi:Muscle force of muscle i.
eðtÞ:Post processed EMG.
Pi:Phalanx i
DIP:Distal interphalangeal joint.
PIP:Proximal interphalangeal joint.
MCP:Metacarpophalangeal joint.
FDS:Flexor digitorum superficialis muscle.
FDP:Flexor digitorum profundus muscle.
EDC:Extensor digitorum communis muscle.
LU:Lumbricalis muscle.
RI:Dorsal interossei muscle located on the radial side of the finger.
UI:Dorsal interossei muscle.
�i:Force distribution coefficient of muscle i or muscular bound i.
Mext1:external moment applied on the system in Fig. 3.
Mext2:external moment applied on the system in Fig. 3.
Mext3:external moment applied on the system in Fig. 3.
�1:Flexion angle of DIP joint.
�2:Flexion angle of PIP joint.
�3:Flexion angle of MCP joint.
Fmaxi :Maximal force contraction (MVC) of muscle i.
1. Introduction
Since the beginning of the 20th century, man has tried to understand, analyze and
model body motions that he carries out, like walking, waving and grasping with
applications including surgery, functional rehabilitation, diagnosis and prevention.1
The hand is a particularly complex and necessary functional part that performs
various daily activities,2,3 and that increases the need for a realistic hand model
based on its physiology.4 Due to its importance, a lot of studies, which model human
hand, were done.2,3,5,6 A recent study, which gave inspiration to the proposed work,
for predicting muscular force in the hand and forearm system was presented by
Chalfoun.7,8 The estimation of muscular force, activation and deformation during
the simulation of static positions of the hand were the general framework of his
work. He studied the hand’s kinematics; the system that he considered was linear
because he did not take into account the variations of the extensor mechanism of the
fingers at different positions of the land. According to the human movement theory,
the extensor mechanism is defined as the magnitude of the tension transmitted in
different bands. For finger movement, it is necessary to improve the modeling
procedure in terms of anatomical issues and this will increase the complexity and
nonlinear behavior as depicted in the recent following studies9–12 correlated to the
proposed study.
December 10, 2013 3:30:17pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
S. Allouch et al.
1450040-2

Indeed, Vigouroux et al.9 worked recently on the biomechanical modeling of the
human hand. Its model aimed to deduce muscle forces from movement. He took into
account, in his model, the torque of nonmuscle and passive structures (ligaments).
In addition, he used surface electromyogram (sEMG) information in the optimiz-
ation procedure. Buchanan et al.10 presented an overview of dynamic neuro-
musculoskeletal modeling for the upper limb. The aim of such models is to estimate
or predict muscle forces, joint moments, and/or joint kinematics from neural intent
extracted from sEMG signals. This work is similar to what is proposed in this study,
but in the reverse direction.
Qi Shao et al.11 presented an sEMG driven musculoskeletal model to estimate
muscle forces and joint moments using joint kinematics and sEMG as inputs. In the
proposed study, we incorporated the anatomical model, described in this study, as a
part of our model. Paclet et al.12 have focused their research efforts on the study of
biomechanics of the upper limb tendon transfers, including consideration of co-
contraction activity estimated from sEMG recording on extensor and finger flexor
muscles. The biomechanical model of the hand is further developed by including
muscle length, and the wrist joint in his model. This work is limited to the deduction
of muscular forces.
The presented work consists of the proposition of a realistic neuromusculoske-
letal model of human middle finger in quasi-static conditions. This model contains
three important submodels as depicted in Fig. 1. The first submodel is the finger
biomechanical model. It deals with the finger anatomy and the phalanx positions as
input and provides us with estimated involved muscle forces, by inverse optimiz-
ation procedure. The second submodel is the mechanical muscle model. This model
links the provided muscle force with the muscle deformation (length modification)
and the muscle activation (correlated to the number of active Motor Units in the
muscle). We propose in this study, an inverse optimization procedure that incor-
porates the two depicted submodels, and allows the estimation of muscle activations
from the phalanx positions. Finally, the third submodel, namely the neural muscle
activation, permits the modeling of the relation linking the neural intent, estimated
Fig. 1. Schematic view of the model structure and the validation procedure.
December 10, 2013 3:30:18pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Physiological and Biomechanical Approach for Human Finger Movement
1450040-3

from the sEMG data, and the muscle activation. It represents the neural part of the
presented neuromusculoskeletal model. We used the same term, namely the neural
activation, introduced by Buchanan et al.10 to describe the intermediate stage
between the recorded sEMG signal and muscle activation.
Using this complete model, the aim is to deduce the neural intent from finger
data position as shown in Fig. 1. Validation of the proposed model is performed by
comparing neural activations, estimated by the model, and neural activations
deduced from sEMG recorded on three extrinsic muscles, involved in the finger
decomposed movement, following a specific experimental protocol.
In other words, the proposed model uses the three angles of finger joints and the
three external joint moments as inputs to estimate the individual muscle forces,
muscle activation and neural activation. Each submodel is explained and detailed
by imposing some hypotheses and simplifications that are necessary to reduce model
complexity. The innovation of the proposed model is the coupling between bio-
mechanical and neurophysiological aspects using physical models to simulate the
complete inverse finger motion (decomposed in quasi-static positions) chain from
the finger phalanx position to the neural intent.
The proposed study will be decomposed as follows. In Sec. 2, we present and
detail the finger biomechanical model. Then, the mechanical muscle model is
described in Sec. 3. Later, we present the used neural/muscle activation model in
Sec. 4. In Sec. 5, the methodology to estimate the models unknowns, by a new suited
optimization procedure, is described and an example of application is presented to
enhance clarity. Some simulated data, from the proposed model, are presented in
Sec. 6 and compared to the experimental data obtained by a specific protocol in
Sec. 7. Finally, we conclude the obtained results and propose further possible
improvements for the model and the validation methodology.
2. Finger Biomechanical Model
In this work, we focused on the biomechanical modeling of the third finger, namely
the middle finger. To obtain a realistic modeling, we included physiological aspects
concerning the knowledge on bones, joints and muscles constituting this finger. In
addition, the extensor mechanism and the biomechanics used are detailed.
2.1. Bones and joints
Middle finger is composed of a metacarpal bone P4 (ossa metacarpalia) and three
phalanges (see Fig. 2), the proximal phalanx P1, the media phalanx P2 and the
distalis phalanx P3. These four bones are mobilized around three joints. The
metacarpophalangeal articulation (MCP) binds metacarpal bone to the first pha-
lanx through a joint \asymmetrical condylar". The proximal interphalangeal joint
(PIP) and distal interphalangeal joint (DIP) bind the first, second and third pha-
lanx. These joints are of type \trochlea".13
December 10, 2013 3:30:18pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
S. Allouch et al.
1450040-4

2.2. Muscles
The three joints are mobilized by six muscles shown in Fig. 3. Three muscles are
classified as \extrinsic" in hand. These muscles are located in the forearm and act on
the hand through long tendons14:
. Flexor digitorum profundus muscle (FDP) which flexes the wrist, MCP, PIP and
DIP.
. Flexor digitorum superficialis muscle (FDS) flexes the elbow joint, wrist, MCP
and PIP.
. Extensor digitorum communis muscle (EDC) attaches to the epicondyle of the
humerus and mobilizes the four fingers through the tendons that attach to the
proximal phalanx and the extensor mechanism (see Sec. 2.3) of the fingers.
Through this mechanism it extends the DIP and PIP joints. Three other muscles
are classified as \intrinsic" to the hand. Their muscular bodies are located in the
hand and act on the three MCP, PIP and DIP joints.
. The muscle lumbricalis (LU).
Fig. 3. Muscles and tendons mobilizing middle finger. The top schematic represents tendon insertions
and strips of the extensor mechanism.9
Fig. 2. The phalanges and joints of human major finger.
December 10, 2013 3:30:18pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Physiological and Biomechanical Approach for Human Finger Movement
1450040-5

. The dorsal interossei muscle located on the radial side of the finger (RI).
. The dorsal interossei muscle located on the ulnar side of the finger (UI).
LU, RI and UI muscles are flexors of MCP joint. LU and RI muscles are adductors of
the MCP joint while the abductor muscle is UI.2 The intrinsic muscles of the hand
have the distinction of having some of their insertions located on the finger extensor
mechanism.8 These muscles therefore have an action extension at PIP and DIP
joints.
2.3. Extensor mechanism
The symmetrical model8,15 is used to describe this mechanism (Fig. 3). To model the
action of muscles on DIP and PIP joints through the extensor mechanism, it is
necessary to assess the magnitude of the tension transmitted in different bands. Chao
et al.13measured the angle of bands and tendons at each node on the hands of cadavers.
From these angles, authors estimated the value of the coefficient of stress distribution
in the bands of extensor mechanism.
Those coefficient values were measured at a position where all the joints are zero
degrees of flexion. But the extensor mechanism has the distinction of being
deformable by finger posture. The angles of the nodes and the lengths of the bands
change according to flexion of DIP and PIP joints.16 To resolve this problem,
Brook17 has proposed to add variables (�), which change with angles flexion and
illustrate the distribution of tensions (forces) transmitted in different bands, and
then they obtained the following equations:
FTE ¼ 0:992ðFRBÞ þ 0:995ðFUBÞ;FRB ¼ �EDCFEDC þ �LUFLU þ �RIFRI;
FUB ¼ �EDCFEDC þ �UIFUI;
FES ¼ ð1� �UIÞFUI þ ð1� �LUÞFLU þ ð1� 2�EDCÞFEDC;
ð1Þ
where FEDC, FUI and FLU are the tensions of EDC, UI and LU, FTE, FRB, FUB and
FES are the tensions in the bands TE, RB, UB and ES.
The coefficients �EDC, �UI, �LU and �RI are unknown coefficients reflecting the
transmission of forces in the extensor mechanism according to the posture of the
finger. They are determined in accordance with the following inequalities:
1 � 2 � �EDC � 0;
1 � �UI � 0;
1 � �RI � 0;
1 � �LU � 0:
ð2Þ
2.4. Biomechanical model
The model presented here is inspired from the work done by Paclet12 in 2010 where,
bones are modeled as four nondeformable solids. There is only one degree of freedom
December 10, 2013 3:30:21pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
S. Allouch et al.
1450040-6
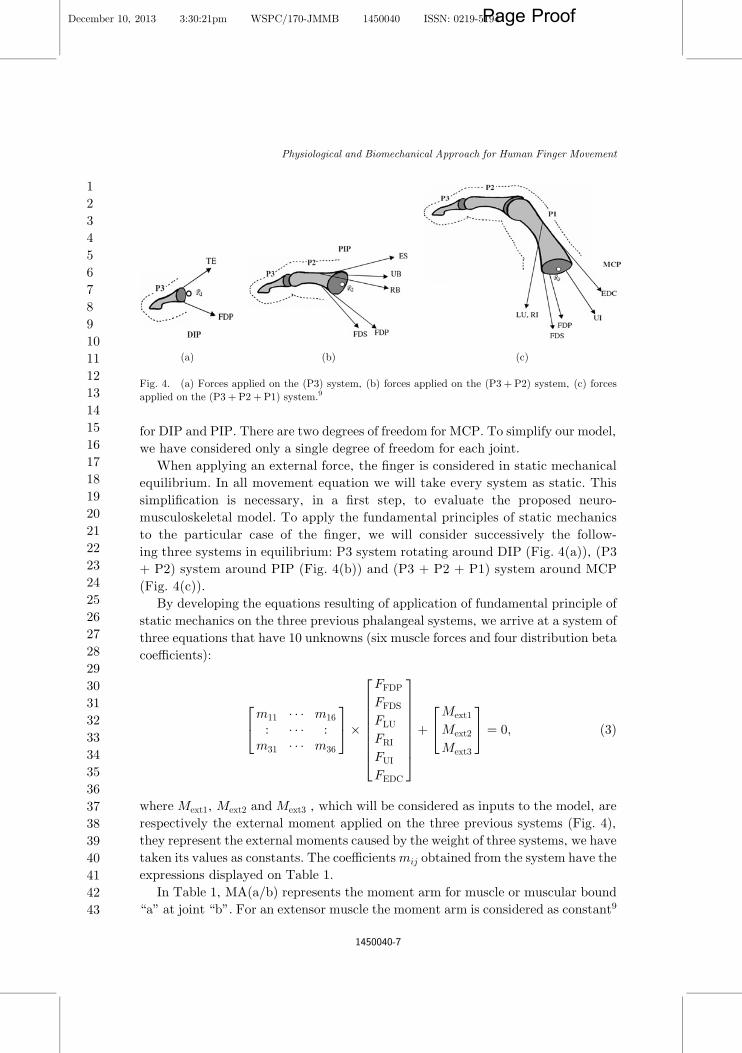
for DIP and PIP. There are two degrees of freedom for MCP. To simplify our model,
we have considered only a single degree of freedom for each joint.
When applying an external force, the finger is considered in static mechanical
equilibrium. In all movement equation we will take every system as static. This
simplification is necessary, in a first step, to evaluate the proposed neuro-
musculoskeletal model. To apply the fundamental principles of static mechanics
to the particular case of the finger, we will consider successively the follow-
ing three systems in equilibrium: P3 system rotating around DIP (Fig. 4(a)), (P3
þ P2) system around PIP (Fig. 4(b)) and (P3 þ P2 þ P1) system around MCP
(Fig. 4(c)).
By developing the equations resulting of application of fundamental principle of
static mechanics on the three previous phalangeal systems, we arrive at a system of
three equations that have 10 unknowns (six muscle forces and four distribution beta
coefficients):
m11 � � � m16
: � � � :m31 � � � m36
24
35�
FFDP
FFDS
FLU
FRI
FUI
FEDC
266666664
377777775þ
Mext1
Mext2
Mext3
24
35 ¼ 0; ð3Þ
where Mext1, Mext2 and Mext3 , which will be considered as inputs to the model, are
respectively the external moment applied on the three previous systems (Fig. 4),
they represent the external moments caused by the weight of three systems, we have
taken its values as constants. The coefficientsmij obtained from the system have the
expressions displayed on Table 1.
In Table 1, MA(a/b) represents the moment arm for muscle or muscular bound
\a" at joint \b". For an extensor muscle the moment arm is considered as constant9
(a) (b) (c)
Fig. 4. (a) Forces applied on the (P3) system, (b) forces applied on the (P3þ P2) system, (c) forces
applied on the (P3þ P2þ P1) system.9
December 10, 2013 3:30:21pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Physiological and Biomechanical Approach for Human Finger Movement
1450040-7

Fig. 5(a), and for an flexor muscle MA is geometrically calculated using the model
presented in Fig. 5(b).
3. Mechanical Muscle Model
In this section, the mechanical model linking the muscle force to muscle deformation
(length) and muscle activation related to the number of active motor units is
described. The model is of hill type with no pennation angle hypothesis (the muscle
fibers are aligned with the tendons). This last simplification has reduced effects in
anisometric context as in our study.18,19
The muscle tendon unit was modeled as a contractile element (Ec) in serial with
a passive element (Es) and in parallel with a passive element (Ep).20 The total
muscle force FM is the sum of a passive force and an active force. Since the simu-
lated movements are decomposed on static positions, the velocity of the contraction
was not taken into account. Only a force–length relationship was established. The
forces were normalized to the maximum isometric force for each muscle. The general
form of the equation of the force produced by the muscle-tendon unit is given by
Audu.21
FM ¼ FT ¼ Fmax½aðtÞfð"Þ þ fpð"Þ�; ð4Þ
Table 1. The coefficient of biomechanical model presented in Eq. (3).
m11 ¼ MA(FDP/DIP) m21 ¼ MA(FDP/PIP) m31 ¼ MA(FDP/MCP)
m12 ¼ 0 m22 ¼ MA(FDS/PIP) m32 ¼ MA(FDS/MCP)
m13 ¼ �0:992�MAðTE=DIPÞ � �LU m23 ¼ �MAðRB=PIPÞ � �LU �MAðES=PIPÞ � ð1� �LUÞ
m33 ¼ �MAðLU=MCPÞ
m14 ¼ �0:992�MAðTE=DIPÞ � �RI m24 ¼ ��RI �MAðRB=PIPÞ m34 ¼ �MAðRI=MCPÞm15 ¼ �0:995�MAðTE=DIPÞ � �UI m25 ¼ �MAðUB=PIPÞ � �UI �
MAðES=PIPÞ � ð1� �UIÞm35 ¼ �MAðUI=MCPÞ
m16 ¼ �1:987�MAðTE=DIPÞ � �EDC m26 ¼ �MAðUB=PIPÞ � �EDC �MAðRB=PIPÞ � �EDC �MAðES=PIPÞ � ð1� 2�EDCÞ
m36 ¼ �MAðEDC=MCPÞ
(a) (b)
Fig. 5. (a) Moment arm for extensor muscle,9 (b) moment arm for flexor muscle.9
December 10, 2013 3:30:23pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
S. Allouch et al.
1450040-8

where aðtÞ is the activation at time t, " ¼ ðl� l0Þ=l0 is the muscle deformation, l is
the muscle fiber length at time t, l0 is the optimal fiber length at which maximum
muscle force could be obtained, the numerical value of l0 can be found in Refs. 22
and 23. The parallel passive elastic muscle force fpð"Þ and fð"Þ is the force-length
relationship in the contractile element and it is given by Maurel24:
fð"Þ ¼ e� ð"þ1Þ0:96343� 1� 1
iað Þ�1
0:35327�ð1�iaÞ
� �2
ia < 1;
fð"Þ ¼ e�½2:727277�lnð"þ1Þ�2 ia ¼ 1;
ð5Þ
where ia (anatomy index) represents the ratio between the fiber length and the
muscle length. The ratio of the muscles is given by Maurel.24 The parallel passive
elastic muscle force fpð"Þ was obtained from an exponential relationship used by
Maurel,24 and has the following form:
fpð"Þ ¼ b1 � eb2�" � b1; ð6Þ
where b1 and b2 are muscle constants determined experimentally by Hill.25
These constants are taken to be 0.03 and 7, respectively. It has been proven22
that the effective operating range of muscle begins at roughly 0.5 l0 and ends at
1.5 l0. A muscle cannot generate active force beyond these lengths. This will
give us a displacement range of �0:5 < " < 0:5. In addition, when muscle is
stretched to lengths greater than 1.2 l0, it generates a significant amount of
passive force.24
4. Neural Activation-Muscle Activation Model
In this section, we present a relationship model between neural activation uðtÞ andmuscle activation aðtÞ from the work of Manal and Buchanan.26 The model is tuned
by one parameter A. The value for A defines the curvature (nonlinearity) of the
relationship, which can range from a linear curve to a family of nonlinear curves that
fit the data from the biceps brachii muscle and given by Woods and Bigland-
Ritchie27 as depicted on Fig. 6. The coordinates of the node point (P) reported on
Fig. 6, were approximately fixed to u0 ¼ 0:222 and a0 ¼ 0:395.
The degree of curvature and location of the node point for each curve in this
family of piecewise curves is related to the distance from point O along the A-line in
the direction of point P. Point O (0.3085, 0.3085) lies at the perpendicular inter-
section of a ¼ u and the A-line.26
The relationship between parameter A and the (u; a) coordinates of the node
point (u0; a0) are given by
u0 ¼ 0:3085� A cos 45�;
a0 ¼ 0:3085� A sin 45�:
ð7Þ
December 10, 2013 3:30:23pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Physiological and Biomechanical Approach for Human Finger Movement
1450040-9

The curvilinear portion of the piecewise curve was modeled using the following
equations.
a ¼ � lnð�uþ 1Þ ð0 � u � u0Þa ¼ muþ c ðu0 � u � 1Þ ð8Þ
Here �, �, m and c are constants that all can be determined from the single par-
ameter \A" (for details, see Ref. 26). According to the following model we should
deduce the constant A for each muscle resolving a tuning problem. The physical
meaning of A is nothing more than the path length from point O to P, which is used
to characterize the degree of nonlinearity between neural activation and muscle
activation. We searched values of the parameter \A" in the literature26 and used the
following values in our study and respecting physiological limits (0:0 < A � 0:12)
for the six studied muscles: AFDP ¼ 0:1, AFDS ¼ 0:015, ALU ¼ 0:004, ARI ¼ 0:002,
AUI ¼ 0:01, AEDC ¼ 0:0058.
5. Estimation Procedure
In this section, the estimation of the model unknowns by means of optimization
procedure is described in detail. In fact, a new optimization function is proposed for
estimating the muscle forces, deformations, and activations using the equation
Fig. 6. Nonlinearization of neural activation, uðtÞ; to muscle activation, aðtÞ: The open circles represent
data for the biceps reported by Woods and Bigland-Ritchie (1983).26
December 10, 2013 3:30:23pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
S. Allouch et al.
1450040-10

system in Eq. (3) and the muscle mechanical model defined in the last section. The
problem to optimize respects the following equations:
MinX
ðFið"i; aiÞ=F 2maxi þ a2
i þ "i="2maxÞ
m11 � � � m16
: � � � :m31 � � � m36
24
35�
FFDP
:
Fið"i; aiÞ:
FEDC
266664
377775þ
Mext1
Mext2
Mext3
24
35 ¼ 0
lb <
"iai�j
24
35 < ub
8>>>>>>>>>>>>>><>>>>>>>>>>>>>>:
9>>>>>>>>>>>>>>=>>>>>>>>>>>>>>;
; ð9Þ
where Fi represents the force value of each muscle finger and Fmaxi is the corre-
sponding max force value. In this optimization cost function, the forces Fi are not
directly estimated since we put its expression, using the Hill model, in terms of
deformation and activation Fi ¼ Fmaxi ½aiðtÞfið"iÞ þ fið"iÞ�. In this way we obtain a
system of 3 equations with 16 variables "i; ai and �j.
The resolution of such system corresponds to search results by optimizing
deformation and activation of each muscle without finding the values of muscular
forces. It should be noted that the function to be minimized isP
Fið"i; aiÞ=Fmaxi2,
where Fið"i; aiÞ is an expression of muscular force as a function of "i and ai. By
minimizing the cost function f ¼ P ðFið"i; aiÞ=Fmaxi2 þ a2
i þ "i="max2Þ with respect
to lower lb and upper bounds ub of variables, the system unknowns are estimated
using suitable initial conditions. Estimated forces are obtained by using the esti-
mated "i and ai and the Hill model equation. This new optimization cost function
prevents from numerical instability and aberrant estimating parameters compared
to classical ones based on the minimization of the quadratic sum of normalized
muscle forces.8,9
5.1. Estimation methodology
In this subsection, an example, to illustrate the estimation process, is provided. As
described before, the estimation methodology consists of resolving one optimization
problem Eq. (9) for estimating muscle activation ai and muscle deformation "i for
each finger muscle in addition to the coefficient distribution �i.
As a first step, we introduce external moments applied on the finger (Mext1,
Mext2, Mext3Þ and the finger position, which is represented by the three joint angles
(�1, �2, �3), to our model as input to obtain after optimization the muscle acti-
vation, muscle deformation of each finger muscle and the distribution coefficient
introduced in extensor mechanism depicted in Fig. 7. The values that we have used
as input and the result are presented in the Table 2.
For numerical implementation, we used the optimization toolbox in Matlab.
After estimating muscle activations and deformations, we calculate muscle forces
December 10, 2013 3:30:24pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Physiological and Biomechanical Approach for Human Finger Movement
1450040-11

from the Hill model in Eq. (4). We obtain six following values: FFDP ¼ 0:1113N;
FFDS ¼ 0:5098N; FLU ¼ 0:0061N; FRI ¼ 0:0105N; FUI ¼ 0:6557N; FEDC ¼0:2094N. We searched neural activation from the model presented in Eq. (12) which
relies on muscle activation. We obtained the following neural activation values
normalized of each finger muscle: uFDP ¼ 0; uFDS ¼ 0:0028; uLU ¼ 0:0007; uRI ¼ 0;
uUI ¼ 0:0070; uEDC ¼ 0:0030.
6. Simulation Results
We simulated the finger motion (finger closing and opening), depicted in Fig. 8, by
decomposing it into 300 static positions. At each position corresponding to a specific
joint angle triplet (�1i, �2i, �3i) with reduced external moments (no hand load),
we estimated muscle forces, activation, muscle deformations and neural activations.
We considered the hand in closing and opening movement with slow velocity. As can
be seen in the Fig. 8 in the order 1 ! 6, our finger system is dynamic and not static,
Fig. 7. Estimation methodology.
Fig. 8. Simulated finger motion.8
Table 2. Inputs and estimated outputs of the finger
biomechanical model at a specific position.
Model inputs Estimated model outputs
Mext1 ¼ 0:50N.m �EDC ¼ 0:5; �LU ¼ 1:0
Mext2 ¼ 0:35N.m �UI ¼ 1:0; �RI ¼ 0:0001
Mext3 ¼ 0:15N.m aFDP ¼ 0; "FDP ¼ �0:0037m
�1 ¼ 2:0735 rd aFDS ¼ 0:0034; "FDS ¼ 0:0004m
�2 ¼ 2:0735 rd aLU ¼ 0:0008; "LU ¼ 0:0002m
�3 ¼ 2:0735 rd aRI ¼ 0; "RI ¼ �0:0005m
aUI ¼ 0:0083; "UI ¼ 0:0009m
aEDC ¼ 0:0035; "EDC ¼ 0:0003m
December 10, 2013 3:30:25pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
S. Allouch et al.
1450040-12

so our methodology consists of taking several successive positions of the finger, hand
opening and then hand closing. In this case we divided the finger movement, by the
desired accuracy, into static positions to allow the estimation procedure depicted in
Sec. 4.
Then, we obtained the following curves presented in Fig. 9 that represents force,
deformation, activation and neural activation for each of the six muscles obtained
after optimization procedure.
The position 1 corresponds to the full extension of the finger and the position 150
corresponds to the full flexion. From the position 1 to 150, this part represents the
hand closing and the second part which is from the position 150 to 300 is about hand
opening. Observing the curve shape of FDP and FDS muscle forces, we notice that
they havemaximumvalues at the full flexion and extension, and aminimumvalues at
the position where the hand is relaxing (from the position 15 to 135). Those results are
convincing because the two muscles FDP and FDS are responsible for hand flexion.
The deformation has the same curve shape as muscle force for the six muscles,
but the deformations have values that are between �0.004m and 0.008m which are
acceptable. About muscle activation, it also has the same curve shapes as muscle
force with obtained values between 0 and 0.05 is also acceptable.
0 50 100 150 200 250 300-5
0
5
10
15
20
positions
Fro
ces
[N]
Forces
FDPFDSLURIUIEDC
0 50 100 150 200 250 300-0.05
0
0.05
0.1
0.15
Positions
Nor
mal
ised
Act
ivat
ion
Muscle Activation
FDPFDS
LU
RI
UIEDC
0 50 100 150 200 250 300-5
0
5
10
15x 10
-3
positions
Def
orm
atio
n [m
]
Muscle Deformation
FDPFDSLURIUIEDC
0 50 100 150 200 250 300-0.05
0
0.05
0.1
0.15
Positions
Nor
mal
ised
Act
ivat
ion
Neuronal Activation
FDPFDSLURIUIEDC
Fig. 9. Estimated muscle force, activation, deformation and neural activation curves for the six studied
muscles.
December 10, 2013 3:30:25pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Physiological and Biomechanical Approach for Human Finger Movement
1450040-13

As we can see on Fig. 9, the obtained neuronal activation and muscle activation
curves are relatively similar. This is due to the linearity between the two functions
since the highest possible muscle activation is 0.04 and is inside the linear part
(0 < A < 0:04) of the neural activation/muscle activation relationship function.
7. Evaluation with Experimental Data
To validate the simulation results, we conducted experiments to measure sEMG
signals of accessible muscles during several positions of the same motion (the
opening and closing of the hand) depicted in Sec. 6. To compare experimental with
simulated results, we can compare neural activations estimated by simulation with
that computed from experiment using a neural activation/sEMG model which
allows deducing neural activation from sEMG signal. For this operation, we have
used the model presented by Buchanan et al. in 2004,10 which is represented by the
following equation:
uðtÞ ¼ �eðt� dÞ � �1uðt� 1Þ � �2uðt� 2Þ; ð10Þwhere d is the electromechanical delay and �, �1 and �2 are the coefficients that
define the second-order dynamics. These parameters (d, �, �1 and �2Þ map the
EMG values, eðtÞ, to the neural activation values, uðtÞ. In this study, these par-
ameters are fixed according to the study presented by Barrett et al.28
The sEMG signals were recorded from the FDP, FDS and EDC, using bipolar
electrodes, as presented in Fig. 10. Those muscles were identified by palpating the
skin during appropriate finger movements of the studied subjects.
Bipolar electrodes (disposable surface electrodes (Al/AgCl) with 10mm diam-
eter) were located on the skin overlying each muscle with a 2 cm inter-electrode
distance. Before the electrode application, the skin was cleaned for reducing skin
impedance (< 10 k�). The EMG signals were measured by portable transmitter
system (TeleMyo 2400T G2 transmitter, Noraxon) combined with the receptor
(TeleMyo 2400R G2 receiver, Noraxon). Signals are band pass filtered (10–500Hz),
digitized (1000 samples/s) and saved on the hard disk of a personal computer.
We made the measurements on five persons, aged 25� 2 years, 180 cm size and
weight close to 80� 3 kg. The proposed protocol is in accordance with the
Declaration of Helsinki and after association of the local ethic comity. None of the
Fig. 10. Bipolar electrodes placements for FDP, FDS and EDC muscles.
December 10, 2013 3:30:26pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
S. Allouch et al.
1450040-14

volunteers were regular exercise practitioners. They did not present any symptoms
of neuromuscular or ligament disorders, and were not using anti-inflammatory
medication or muscle relaxants during the experimental sessions. Written informed
consent had been given by all subjects prior to the sessions.
We took seven critical hand positions (that belong to the simulated position
vector). In fact, each subject was asked to put his arm on a horizontal plane to
ensure immobility of the wrist. Right besides the hand, the seven positions are
plotted on a vertical plane where the subject tries to respect by visual checking. The
subject must fix his hand at each position for 10 s, and then he should move his hand
slowly to reach the next position avoiding fast transition from one position to
another to reduce the risk of getting sEMG peak value due to dynamic behavior.
The sEMG signals are then recorded for each subject, normalized and rectified. For
each subject we have repeated the measurement five times. Then, we did the
average of those measurements to obtain finally representative sEMG data from
FDP, FDS and EDC at the same 13 positions between hand opening, closing and
opening again. Where we have 10 s for each position, the values thus obtained are
used as inputs for the EMG-neuronal activation model depicted in Eq. (10) to get
the neural activation corresponding values. To have accurate neural activation
value for each position, the calculus was done on 10 s duration and then averaged.
By this way, we obtained 13 pairs of neural activation values and positions.
In Fig. 11, we represented the neural activation curves (green and blue) of
respectively FD, FDS and EDC muscles looked by experiment for two subjects (the
same curves have been observed on the other subjects). Those curves represent the
Subject 1
Subject 2
0 50 100 150 200 250 300-0.01
0
0.01
0.02
0.03
0.04
Positions
Neu
ral A
ctiv
atio
n
FDP Neural Activation
Simulation
Experimentation
0 50 100 150 200 250 3000
0.02
0.04
0.06
0.08
0.1
0.12
Positions
Neu
ral A
ctiv
atio
n
FDS Neural Activation
Simulation
Experimentation
0 50 100 150 200 250 3000
1
2
3
4
5x 10
-3 EDC Neural Activation
Positions
Neu
ral A
ctiv
atio
n
0 50 100 150 200 250 300-0.01
0
0.01
0.02
0.03
0.04
Positions
Neu
ral A
ctiv
atio
n
FDP Neural Activation
Simulation
Experimentation
0 50 100 150 200 250 3000
0.02
0.04
0.06
0.08
0.1
0.12
Positions
Neu
ral A
ctiv
atio
n
FDS Neural Activation
Simulation
Experimentation
0 50 100 150 200 250 3000
2
4
6
8x 10
-3 EDC Neural Activation
Positions
Neu
ral A
ctiv
atio
n
Fig. 11. (Color online) Neural activations of FDS, FDP and EDC muscles estimated by simulation and
experiment for two subjects.
December 10, 2013 3:30:27pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Physiological and Biomechanical Approach for Human Finger Movement
1450040-15

neural activation calculated from sEMG data measured at the 13 static positions of
the hand closing and opening slow motion. We also represented the simulated curves
(blue) obtained (Sec. 6).
We observe, in Fig. 11, that the simulation curves are in agreement with the
experimental result in the shape of the curve during the closing and opening of the
hand. In fact, the curves corresponding to the neural activations of FDP and FDS
flexor muscles fit the simulated curves during both hand extension, with a plateau
near zero, and the hand flexion (total closure), with maximum values.
It is important to notice here that we normalized both experimental and simu-
lation curves in order to compare tendencies. In fact, it is clear that many par-
ameters in the model are taken without any calibration when comparing to
experimental data. Another difference between experiment and simulation is the
high obtained values for FDP and FDS neural activations at the position 0, 150 and
300 in the simulation. This simulated result should be explained by numerical
instability in the optimization procedure at those positions due to the supposed zero
values of the three finger joint angles.
As we can also see on Fig. 11, we do not have a similarity but inversion between
the EDC muscle curves in experiment and simulation. This should be explained by
biased estimation due to simplifications applied in the proposed biomechanical
model. In fact, the obtained experimental result is relevant due to the maximum
value of the neural activation for EDC muscle at the full hand extension, and also
the small contribution of this muscle at full hand flexing observed for both subjects
(especially for subject 1).
8. Discussions and Conclusion
The presented work concerned the proposition of a system of models including
biomechanical and electrophysiological aspects of the finger movement. The model
contained six muscles and one degree of freedom representing the free movements of
the three joints of the finger system. In fact, an optimization procedure has been
proposed to estimate muscle forces, muscle activations, muscle deformations and
neural activations during quasi-static positions of the finger. This optimization
procedure has been improved to guarantee both initialization stability and ana-
tomical realism.
To assess the model reliability, a validation procedure was proposed using
experimental sEMG recordings. In fact, for three important and accessible extrinsic
muscles (FDP, FDS and EDC) activations calculated by optimization have been
compared to those coming from the sEMG signals measured by surface electrodes.
According to the obtained results, a similarity between patterns of the normalized
simulated and experimental results has been found for FDP and FDS muscles. For
these muscles, the proposed model seems to qualitatively mimic experimental
observations. However, differences still remain for EDC muscle data. These differ-
ences are due to hypotheses and simplifications supposed in the several used models.
December 10, 2013 3:30:28pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
S. Allouch et al.
1450040-16

In fact, information from real muscle and neural activations should be incorporated
in future optimization procedure to increase physiological realism.
The novelty in our work first appears in taking into account the nonlinearity in
the finger system by adding the force distribution coefficient between muscles and
muscle bands as additional variables to the six muscle forces. This is an
improvement in the optimization procedure and biomechanical study of the
system compared to the study done by Chalfoun in 2005.8 Another important and
novel idea in this study is the optimization function which depends not only on
forces but also on muscle activations and muscle deformations. This type of
optimization function ensures a unique solution for different initial values. After a
simulation of the system, experiments were carried out on five adult males, it is a
novelty compared to studies done by Chalfoun, Vigouroux and Paclet8,9,12 who
have not made experimental measurements on several subjects and even for more
muscles.
By comparing experimental results with those of Chalfoun,8 the curves we
obtained in simulation and experimentation are acceptable, especially during the
total closure of the hand. In this study we sought neural activations in addition to
muscle forces and muscle deformations from the kinematic data that is an additional
step compared to similar studies that are on hand and finger biomechanical mod-
eling and using kinematic data as inputs.
Futures works will include the improvement of the anatomical modeling by
taking into account forces of tendons in the biomechanical model. In addition, the
system will be studied in dynamic i.e., joint speeds will be considered nonzero and
the biomechanical model will be supplemented with kinematic parameters. For this
purpose, a new validation protocol should be proposed that incorporates both
kinematic data (joint moments) estimated by motion analysis methods coupled to
sEMG data recording to evaluate the model efficiency.
References
1. Tavakol M, Mohagheghi MA, Dennick R, Assessing the skills of surgical residents usingsimulation, J Surg Educ 65(2):77–83, 2008.
2. Domalain M, Vigouroux L, Berton É, Mod�elisation biom�ecanique de la main: Influencedes caract�eristiques de l’objet sur la distribution des tensions des tendons lors d’une tâchede pr�ehension, Staps 81(3):7, 2008.
3. Haken H, Kelso JAS, Bunz H, A theoretical model of phase transitions in human handmovements, Biol Cybern 51(5):347–356, 1985.
4. van der Hulst FP, Schatzle S, Preusche C, Schiele A, A functional anatomy basedkinematic human hand model with simple size adaptation, Robotics and Automation(ICRA), 2012 IEEE Int Conf, pp. 5123–5129, 2012.
5. Wu Y, Huang TS, Human hand modeling, analysis and animation in the context of HCI,Image Processing, 1999. ICIP 99. Proc 1999 Int Conf Vol. 3, pp. 6–10, 1999.
6. Boughdiri R, Nasser H, Bezine H, M’Sirdi NK, Alimi AM, Naamane A, Dynamicmodeling and control of a multi-fingered robot hand for grasping task, Procedia Eng41:923–931, 2012.
December 10, 2013 3:30:28pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Physiological and Biomechanical Approach for Human Finger Movement
1450040-17

7. Chalfoun J, Renault M, Younes R, Ouezdou FB, Muscle forces prediction of the humanhand and forearm system in highly realistic simulation, Intelligent Robots and Systems,2004. (IROS 2004). Proc 2004 IEEE/RSJ Int Conf Vol. 2, pp. 1293–1298, 2004.
8. Chalfoun J, Pr�ediction des efforts musculaires dans le syst�eme main avant-bras: Mod-�elisation, simulation, optimisation et validation, PhD Thesis in Bio-Robotics, Universityof Versailles Saint-Quentin-en Yvelines, 2005.
9. Vigouroux L, Mod�elisation biom�ecanique des syst�eme musculo-squelettique sousd�etermin�es. Analyse statique des tensions des tendons mobilisant le doigt, PhD Thesis inScience and Techniques of Physical and Sports Activities, Joseph Fourier University,Grenoble, 2005.
10. Buchanan TS, Lloyd DG, Manal K, Besier TF, Neuromusculoskeletal modeling: Esti-mation of muscle forces and joint moments and movements from measurements of neuralcommand, J Appl Biomech 20(4):367, 2004.
11. Shao Q, Bassett DN, Manal K, Buchanan TS, An EMG-driven model to estimatemuscle forces and joint moments in stroke patients, Comput Biol Med 39(12):1083–1088,2009.
12. Paclet F, Analyse biom�ecanique des transferts tendineux de la main (technique Tsug�e)Mod�elisation des tensions Suivi longitudinal des patients, PhD Thesis in Biomechanics,Joseph Fourier University, Grenoble, 2010.
13. Chao EY, Biomechanics of the Hand: A Basic Research Study, World Scientific Pub CoInc, 1989.
14. Yu H-L, Chase RA, Strauch B, Atlas of Hand Anatomy and Clinical Implications,Mosby, 2004.
15. Zancolli E, Structural and Dynamic bases of Hand Surgery, Lippincott, 1979.16. Garcia-Elias M, An K-N, Berglund L, Linscheid RL, Cooney WP III, Chao EYS,
Extensor mechanism of the fingers. I. A quantitative geometric study, J Hand Surg 16(6):1130–1136, 1991.
17. Brook N, Mizrahi J, Shoham M, Dayan J, A biomechanical model of index fingerdynamics, Med Eng Phys 17(1):54–63, 1995.
18. Scott SH, Winter DA, A comparison of three muscle pennation assumptions and theireffect on isometric and isotonic force, J Biomech 24(2):163–167, 1991.
19. Herbert RD, Gandevia SC, Changes in pennation with joint angle and muscle torque: Invivo measurements in human brachialis muscle, J Physiol 484(2):523–532, 1995.
20. Zajac FE et al., Muscle and tendon: Properties, models, scaling, and application tobiomechanics and motor control, Crit Rev Biomed Eng 17(4):359, 1989.
21. Audu M, Davy D, The influence of muscle model complexity in musculoskeletal motionmodeling, J Biomech Eng 107:147, 1985.
22. Garner BA, Pandy MG, Estimation of musculotendon properties in the human upperlimb, Ann Biomed Eng 31(2):207–220, 2003.
23. Lieber RL, Skeletal muscle is a biological example of a linear electro-active actuator,Proc SPIE’s 6th Annual Int Symp on Smart Structures and Materials pp. 3669–3703,1999.
24. Maurel W, 3D Modeling of the human upper limb including the biomechanics of joints,muscles and soft tissues, PhD Thesis in Biomechanics Swiss Federal Institute of Tech-nology, Lausanne, 1999.
25. Hill A, The heat of shortening and the dynamic constants of muscle, Proc R Soc Lond BBiol Sci 126(843):136–195, 1938.
26. Manal K, Buchanan TS, A one-parameter neural activation to muscle activation model:Estimating isometric joint moments from electromyograms, J Biomech 36(8):1197–1202, 2003.
December 10, 2013 3:30:28pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
S. Allouch et al.
1450040-18

27. Woods J, Bigland-Ritchie B et al., Linear and non-linear surface EMG/force relation-ships in human muscles. An anatomical/functional argument for the existence of both,Am J Phys Med, 62(6):287, 1983.
28. Barrett RS, Besier TF, Lloyd DG, Individual muscle contributions to the swing phase ofgait: An EMG-based forward dynamics modelling approach, Simul Model Pr Theory 15(9):1146–1155, 2007.
December 10, 2013 3:30:28pm WSPC/170-JMMB 1450040 ISSN: 0219-5194Page Proof
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Physiological and Biomechanical Approach for Human Finger Movement
1450040-19




















