
Optimizing achievable throughput for cognitive radio network using swarm intelligence
14
A. Abd Manaf et al. (Eds.): ICIEIS 2011, Part II, CCIS 252, pp. 407–420, 2011. © Springer-Verlag Berlin Heidelberg 2011 Optimizing Distributed Cooperative Sensing Performance Using Swarm Intelligence Rozeha A. Rashid, Yacub S. Baguda, N. Fisal, M. Adib Sarijari, S.K.S. Yusof, S.H.S. Ariffin, N.M.A. Latiff, and Alias Mohd Faculty of Electrical Engineering, Universiti Teknologi Malaysia, Johor, Malaysia {rozeha,adib_sairi,sheila,sharifah,kamilah, muazzah,alias}@fke.utm.my, [email protected] Abstract. Cognitive radio (CR) technology offers attractive solution to overcome spectrum scarcity problem and improve spectrum utilization. Opportunistic spectrum access concept adopted by a CR network allows unlicensed or cognitive users (CUs) to access a frequency band that is not in use by the licensed or primary users (PUs). In enabling such spectrum-aware communication protocol, spectrum sensing becomes the fundamental requirement to exploit the unused spectrum and effectively protect the quality of service (QoS) of PUs. An increase in sensing time results in a higher detection probability (Pd) and lower false alarm probability (Pf), which leads to better protection of the primary users from harmful interference in addition to improved utilization of the available unused spectrum. However, this will reduce the amount of time for data transmission and hence, affects the achievable throughput of CUs. In this paper, this sensing-throughput tradeoff is addressed in terms of distributed approach of cooperative channel sensing. In order to find the optimal sensing time that maximizes the throughput of an OSA based CR network, the decision fusion scheme of OR rule are subjected to particle swarm optimization (PSO). The results show that a lower sensing time is achieved under PSO based cooperative sensing. The maximum achievable normalized throughput also increases with the increase of sensing terminals under optimal fusion scheme compared to normal fusion technique. Keywords: Cognitive Radio, Spectrum sensing, Probability of detection, Probability of false alarm, Throughput, Sensing time, Particle swarm optimization. 1 Introduction The growing demand for larger amount of spectrum to satisfy the required Quality of Service (QoS) for emerging wireless services has led to current spectrum scarcity problem. However, several spectrum occupancy measurements [1-3] show an inefficient spectrum usage as the workload in different spectrum bands varies significantly where some bands are overcrowded while other portions are moderately or sparsely utilized. Cognitive radio (CR) is a new wireless communication paradigm
-
Upload
teknologimalaysia -
Category
Documents
-
view
1 -
download
0
Transcript of Optimizing achievable throughput for cognitive radio network using swarm intelligence

A. Abd Manaf et al. (Eds.): ICIEIS 2011, Part II, CCIS 252, pp. 407–420, 2011. © Springer-Verlag Berlin Heidelberg 2011
Optimizing Distributed Cooperative Sensing Performance Using Swarm Intelligence
Rozeha A. Rashid, Yacub S. Baguda, N. Fisal, M. Adib Sarijari, S.K.S. Yusof, S.H.S. Ariffin, N.M.A. Latiff, and Alias Mohd
Faculty of Electrical Engineering, Universiti Teknologi Malaysia, Johor, Malaysia
{rozeha,adib_sairi,sheila,sharifah,kamilah, muazzah,alias}@fke.utm.my, [email protected]
Abstract. Cognitive radio (CR) technology offers attractive solution to overcome spectrum scarcity problem and improve spectrum utilization. Opportunistic spectrum access concept adopted by a CR network allows unlicensed or cognitive users (CUs) to access a frequency band that is not in use by the licensed or primary users (PUs). In enabling such spectrum-aware communication protocol, spectrum sensing becomes the fundamental requirement to exploit the unused spectrum and effectively protect the quality of service (QoS) of PUs. An increase in sensing time results in a higher detection probability (Pd) and lower false alarm probability (Pf), which leads to better protection of the primary users from harmful interference in addition to improved utilization of the available unused spectrum. However, this will reduce the amount of time for data transmission and hence, affects the achievable throughput of CUs. In this paper, this sensing-throughput tradeoff is addressed in terms of distributed approach of cooperative channel sensing. In order to find the optimal sensing time that maximizes the throughput of an OSA based CR network, the decision fusion scheme of OR rule are subjected to particle swarm optimization (PSO). The results show that a lower sensing time is achieved under PSO based cooperative sensing. The maximum achievable normalized throughput also increases with the increase of sensing terminals under optimal fusion scheme compared to normal fusion technique.
Keywords: Cognitive Radio, Spectrum sensing, Probability of detection, Probability of false alarm, Throughput, Sensing time, Particle swarm optimization.
1 Introduction
The growing demand for larger amount of spectrum to satisfy the required Quality of Service (QoS) for emerging wireless services has led to current spectrum scarcity problem. However, several spectrum occupancy measurements [1-3] show an inefficient spectrum usage as the workload in different spectrum bands varies significantly where some bands are overcrowded while other portions are moderately or sparsely utilized. Cognitive radio (CR) is a new wireless communication paradigm

408 R.A. Rashid et al.
to enhance utilization of limited spectral resources by adopting the concept of Opportunistic Spectrum Access (OSA). OSA allows secondary or cognitive users (CUs) to sense the idle periods of primary users (PUs), opportunistically access such spectrum holes and thus improves spectral efficiency. However, CUs need to be sufficiently agile to vacate the space (time, frequency or spatial) once PUs are detected as not to cause harmful interference [4][5]. Hence, spectrum sensing is an important aspect of OSA based CR network.
There are two probabilities that are of interest in spectrum sensing. First is the probability of correctly detecting the PU when it is active. Another is the probability of false alarm which is a wrong detection of PU when it is inactive. A longer sensing time gives a higher probability of detection that increases PU protection, and reduces probability of false alarm, thus enhances spectrum usability for CUs. However, in a conventional frame structure consisting of a sensing and data transmission timeslots respectively, a longer sensing time leads to lower transmission time. Consequently, this will decrease the achievable throughput of CUs. In addition, stand-alone sensing technologies such as energy detection, matched filter and feature detection often suffer from noise uncertainty, fading and shadowing [6]. They can also experience low sensing probabilities at specific geographical locations, and thus, increase the interference on PUs.
A natural solution to cope with the problems above is nodes’ cooperation. This approach is found to be robust to possible unbalance of the channel qualities of different CUs [7]. Cooperative communication technology can considerably improve the sensing efficiency and reliability by facilitating the sharing of sensing load between network nodes. In addition, it solves the latency and power consumption problems that occur in large-scale spectrum sensing [7]. The probabilities of detection and false alarm are also improved [6]. Cooperative sensing can be classified into centralized or distributed approach. In centralized sensing, information from different CUs is fused at a base station or fusion center to reach a global decision of PU’s activity. This scheme is complex as it requires a backbone infrastructure and effective information sharing algorithm [6]. In contrast, even though CUs share sensing information among each other in distributed approach, they make their own decisions. Hence, no backbone infrastructure is needed.
Many research works on cooperative sensing are on improving the sensing performance metrics of probability of detection, Pd, and probability of false alarm, Pf. Authors in [6] proposes a decision fusion scheme based on weighting factor in distributed sensing to reduce the probabilities of false alarm and miss-detection. However, no relation to achievable throughput of CUs is made. In [8], the performance of cooperative sensing is optimized using constant detection rate (CDR) where Pd is fixed and Pf is optimized (minimized) and constant false alarm rate (CFAR) where Pf is fixed and Pd is optimized (maximized). The analysis is carried out in terms of cooperating number of users to get the optimum performance. Again, there is no consideration for achievable throughput of CUs. Studies in [9] and [10] address the sensing-throughput tradeoff but only in the perspective of a stand-alone CU. The work in [11] addresses the sensing-throughput tradeoff in terms of maximizing achievable throughput for CUs under the constraint that PUs are sufficiently protected for distributed cooperative sensing using Majority-rule decision

Optimizing Distributed Cooperative Sensing Performance Using Swarm Intelligence 409
fusion. In this paper, the fundamental tradeoff between sensing time and achievable throughput of the CU in distributed approach cooperative sensing is also studied. Based on energy detection scheme, we investigate the peformance of decision fusion scheme OR rule that are subjected to particle swarm optimization (PSO) with the objectives of minimizing sensing time to maximize the achievable throughput for CUs for a given frame duration.
The rest of the paper is organized as follows. Section II presents the performance metrics and system parameters of channel sensing. The problem formulation regarding the sensing-throughput tradeoff and OR-rule decision fusion for cooperative sensing are also included. The PSO algorithm and the objectives of the optimization problem are introduced in Section III while Section IV gives the results and discussion. The conclusion of this paper is outlined in Section V.
2 Channel Sensing
In the following, a brief review of sensing hypotheses, the energy detection scheme and its relation to the sensing performance metrics of probabilities of detection and false alarm are provided. The formulation of sensing-throughput tradeoff, channel efficiency and OR-rule cooperative sensing are also presented for the purpose of addressing the optimization problem.
2.1 Sensing Hypotheses
The sensed signal, X[n] of CU will have two hypotheses as follows:
H0: X[n] =W[n] if PU is absent H1: X[n] =W[n] + S[n] if PU is present (1)
where n = 1, …, N; N is the number of samples. The noise W[n] is assumed to be additive white Gaussian (AWGN) with zero mean and variance σw
2. S[n] is the PU’s signal and is assumed to be a random Gaussian process with zero mean and variance σx
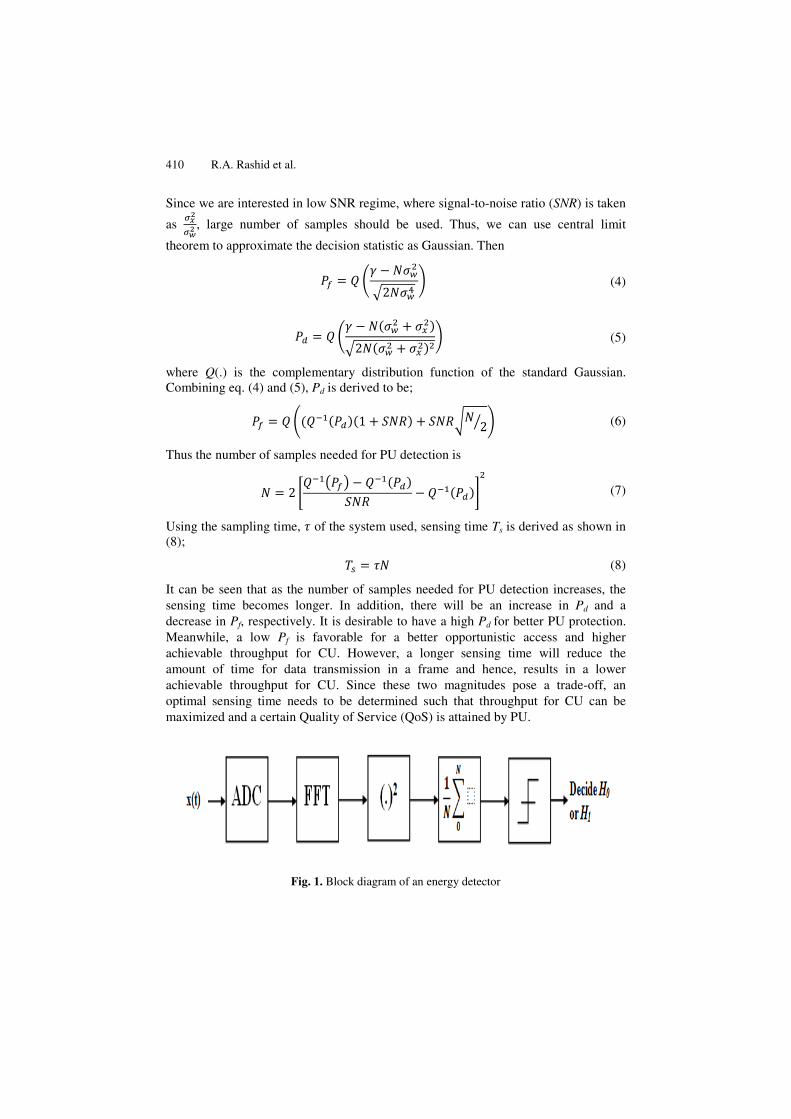
2. A block diagram of an energy detector is given in Figure 1. The output of the
energy detector, Y, which serves as decision statistic, is described by [12]: 1 (2)
Comparing with a threshold, γ, and based on optimal decision yielded by the likelihood ratio Neyman-Pearson hypothesis testing [12], Pd and Pf can now be defined as the probabilities that the CU’s sensing algorithm detects a PU under H0 and H1, respectively.
Pf = P(Y > γ | H0) Pd = P(Y > γ | H1) (3)
410 R.A. Rashid et al.
Since we are interested in low SNR regime, where signal-to-noise ratio (SNR) is taken
as , large number of samples should be used. Thus, we can use central limit
theorem to approximate the decision statistic as Gaussian. Then
2 (4)
2 (5)
where Q(.) is the complementary distribution function of the standard Gaussian. Combining eq. (4) and (5), Pd is derived to be; 1 2 (6)
Thus the number of samples needed for PU detection is
2 (7)
Using the sampling time, of the system used, sensing time Ts is derived as shown in (8);
(8)
It can be seen that as the number of samples needed for PU detection increases, the sensing time becomes longer. In addition, there will be an increase in Pd and a decrease in Pf, respectively. It is desirable to have a high Pd for better PU protection. Meanwhile, a low Pf is favorable for a better opportunistic access and higher achievable throughput for CU. However, a longer sensing time will reduce the amount of time for data transmission in a frame and hence, results in a lower achievable throughput for CU. Since these two magnitudes pose a trade-off, an optimal sensing time needs to be determined such that throughput for CU can be maximized and a certain Quality of Service (QoS) is attained by PU.
Fig. 1. Block diagram of an energy detector

Optimizing Distributed Cooperative Sensing Performance Using Swarm Intelligence 411
2.2 Sensing-Throughput Tradeoff
In this work, we consider CU to operate in a frame-by frame basis. The frame structure with duration Tf is shown in Figure 2. The structure consists of sensing slot with duration Ts and transmission slot with time Tt. The sensing task is executed at the beginning of the frame to assess the status of a channel whether it is active or idle. If the channel is idle, CU will transmit to its intended receiver in the remaining duration of a frame. At the end of the frame, if PU is detected, CU’s data transmission will be ceased to protect the PU from harmful interference. Otherwise, CU will access the frequency band again in the next frame. The process is repeated. Obviously, the relationship is as given below;
(9)
Fig. 2. Frame Structure for CU System
The utilization of licensed channel by PU follows a Markov chain process of exponential ON/OFF states. During the ON period, generated packets of PU is transmitted immediately on the channel.
Two scenarios where the CU can operate in the licensed channel is reported in [9]. First scenario is when the PU is absent and no false alarm is generated by CU. The achievable throughput is then given by; 1 (10)
In the second scenario, CU doest not detect the PU although it is active. Therefore, the achievable throughput is represented as; 1 (11)
where and denote the throughput of CU operating in the absence of PU and the throughput of CU operating the presence of PU, respectively. If we define SNRcu as the received signal-to-noise ratio of the CU’s transmission at the CU receiver and

412 R.A. Rashid et al.
SNRpu as the signal-to-noise ratio of PU received at the same receiver, then 1 and 1 . In the case of only one transmission in
the CR network, we will have > . The average achievable throughput of a CU system with the frame structure of
Figure 2 can be expressed as [11];
(12)
where is the probability of PU being active in the sensed channel and 1 . The challenge of sensing-throughput tradeoff is to find an optimal sensing time that
leads to maximized transmission time, and therefore, higher throughput for the CU. The optimization problem can be described mathematically as; max (13)
s.t (14)
where is the target probability of detection for PU to be sufficiently protected. In this work, is set at 98% based on the statistical distribution of locally captured data.
By assuming is small (<0.2) [11] and taking note of the condition of > , the second term of the optimization problem will dominate and simplifies the
equation to become max 1 (15)
under similar contraint for the target probability of detection. The relationship of sensing time and achievable throughput for CU can further be
defined for energy detection scheme. Choosing , the achievable throughput for CU system is given by
1 1 (16)
where √2 1 . It can be seen obviously in (16) that the achievable thoughput of the CU system is a function of sensing time .
Channel efficiency is measured by the product of spectrum opportunity and normalized transmission time and described as given as follows [13]; 1 1 (17)
2.3 Distributed Cooperative Sensing
As mentioned, a stand-alone CU often suffers from noise uncertainty, fading, shadowing and hidden node problems. Multiple CUs can be coordinated to perform spectrum sensing

Optimizing Distributed Coop
cooperatively and the sensinhave a better chance of detec
In a cooperative spectrube present if any of the CUthere are M identical andsystem, the cooperative prousing OR-rule are given by
where Pd and Pf are respecalarm of a stand-alone cogn
In this work, distributeindependently senses the enlike a data fusion center anAn example of the distribuThere are several assumptio
Fig. 3. D
CU2
u2
x2 x
xi – sensing information ui – stand-alone decision u- cooperative decision a
perative Sensing Performance Using Swarm Intelligence
ng information exchanged between neighbors is expectedcting PU compared to individual sensing. um sensing system using OR-rule, the PU is consideredUs detects the presence of the primary user. Assuming td independent CUs in the cooperative spectrum sensobability of detection Qd and probability of false alarm[7]: 1 1 , (
1 1 , (
ctively the probability of detection and probability of fanitive radio. ed approach of cooperative sensing is used. Each nvironment for the presence of PU. Each CU then becomnd derives its own cooperative decision based on OR ruuted spectrum sensing architecture is shown in Figureons considered [6]:
Distributed Spectrum Sensing Architecture
PU link
CU3
CU1
CUM
u1
u3 uM
x1 x3 xM
at CU1
u
413
d to
d to that sing
m Qf
(18)
(19)
alse
CU mes ule. e 3.
414 R.A. Rashid et al.
• Energy detection is used as stand-alone spectrum sensing in a distributed system as it has low computational and implementation complexities and requires no knowledge on PU’s features such as modulation and frame format. CUs
• CUs are synchronized and they sense PU in the same spectrum segements • All exchanged information among CUs recaches its destination succesfully
and noiselessly • The exchanging process does not cause any interference to channel
environment.
3 Optimizing Distributed Sensing Performance
Particle swarm optimization (PSO) is a population based and stochastic optimization approach designed primarily to mimic the social behaviour of school of fish or flock of birds [14][15][16]. This social behaviour has been used in solving more complex optimization problems in a more sophisticated and efficient manner. The particles are grouped into swarm and each particle is a potential solution to the optimization problem. Each particle within a neighbourhood moves toward the best optimal solution in the neighbourhood depending on its past experience and neighbours as well. This clearly shows the unique behaviour PSO in which it cooperatively takes decision to achieved optimal solution. In a nutshell, it has been referred as symbiotic cooperative algorithm [17]. It is very obvious that the performance of each particle is determined by the fitness function. PSO has been applicable to other fields but not much work has been done related to spectrum sensing in cognitive radio networks. The key success to the deployment of PSO in many optimization problems is due to the fact that it is very simple, high convergence and searching capability [18][19].
PSO is primarily governed by two fundamental equations representing the velocity and position of the particle at any particular time. After each iteration, the particle position and velocity is updated until the termination condition has been reached. The termination condition can be based on the number of iteration and achievable output required. Once the required number of iterations or predetermined output has been achieved, the searching process is terminated automatically. For a particle with n dimension can be represented by vector , … … … . The position of the particcles at time t can be mathematically expressed as P , … … … while the corresponding velocity of the particles is represented as , … … … . In general, the velocity and position of the particles at t+1 can be mathematically represented using equation (20) and (21) respectively 1 (20)
1 1 (21)

Optimizing Distributed Cooperative Sensing Performance Using Swarm Intelligence 415
Equation (20) describes the velocity of the particles at time t+1. ω is the inertia weight which keeps track of the previous velocity history on the current velocity of each particles. It balances the trade-off between the local and global exploration of the swarm. v(t) ensures that the particles are on the right flight direction and it prevents the particle from sudden change in direction. (Pl−x(t)) computes the performance of the particle relative to the past performance. In a nutshell, it draws the particles to their best known position. (Pg−x(t)) measures the performance of particle relative to its neighbours.
Both the cognitive and social components depend greatly on and respectively. It is very important to note that the global best (Pg) determines the best possible solution for the entire swarm. The global best used star structure which converges faster [16], but can be trapped in local minima. The position can be computed using (21) whenever the velocity is determined. These special and unique features of PSO have been used in this work to select the minimal sensing time required in order to achieve high throughput. The detrimental impact of reducing the sensing time on other parameters is considered in our optimization problem. The flow chart for the PSO based optimal sensing algorithm for distributed cooperative sensing is given in Figure 4.
The objective of this work is to reduce sensing time and subsequently increase the throughput as result of using the required optimal sensing time needed at any particular time depending on the probability of false alarm for a distributed sensing. Given the frame duration is set at 100 ms and represents the sensing time as the objective function, an optimal normalized achievable throughput, , can thus be derived using (22);
Minimize 100
Minimize
100 100 1 11 (22)
arg min 0 0 1 0 1
The impact of the derived optimal sensing time on channel efficiency of the distributed cooperative system is also studied.

416 R.A. Rashid et al.
Check if the loopcounter is > than number
of particles
Check if termination conditionhas been reached
Update particles velocity and
position
Update local and global best
Evaluate the objective function
f(x)
Sense Channel Condition
Initialize position and velocity
Initialize PSO configuration parameters (C1, C2, w)
Set loop counter to initial value
Allocate Tt based on optimal
decision (Ts)
N2 N3 NnCooperative Users
Fig. 4. Flow chart for the PSO-based optimal sensing algorithm for distributed cooperative sensing
4 Results and Discussion
The scenario for optimal sensing is simulated in MATLAB and the following settings of Table 1 have been used for the experimentation:

Optimizing Distributed Cooperative Sensing Performance Using Swarm Intelligence 417
Table 1. Parameter setting
Parameters
Value
Number of particles 30 Number of iteration/users 30 Learning factors φ1 & φ2 1 Inertia weight ω 1 Sensing time 10 mS Data transmission time 90 mS Frame time 100mS Target Pd 0.98 SNR -30 dB
As mentioned in previous section, to give PU its desired level of protection, Pd is
fixed at 0.98. In addition, the primary goal is to minimize sensing time and at the same time achieve high throughput. The trade-off between sensing time and throughput is then achieved through PSO scheme. This approach has been able to counter the problem of achieving high throughput for CUs and at the the same time protecting the PU as well. In order to verify the efficiency of the developed scheme, we used exponential function to generate the traffic which varies exponentially with time for each CU. As can be seen from (22), the probability of false alarm is related to data transmission and frame duration time. This has allowed us to optimally minimized the required time to sense for the presence of PU within certain constraints of probability of false alarm, frame duration and data transmission time, in a distributed cooperative sensing scenario based on OR rule decision fusion.
As observed from Figure 5, it is reported in previous work that a stand-alone CU system achieves an optimal sensing time of 2 ms under PSO [20]. This is a reduction of 80% from the original setting of 10 ms or 10% of the frame duration, as given in Table 1. Decision fusion subjected to PSO seems to further reduce the optimal sensing time to 1 ms. The decrease in sensing time contributes significantly to lower energy spent on sensing for distributed CU system with PSO. Furthermore, this finding tallies with the result in [11] where sensing time is significantly reduced when cooperative sensing is deployed.
The performance of decision fusion subjected to PSO in terms of normalized achievable throughput is shown in Figure 6. The maximum achievable normalized throughput increases with the increase of sensing terminals under optimal fusion scheme compared to normal fusion technique.
The trend is similarly displayed for the performance of channel efficiency for the optimized and normal OR-rule as can be seen in Figure 7. The channel efficiency is significantly improved by introducing PSO scheme in its decision fusion scheme. The improvement is also linearly related to the number of cooperating users.

418 R.A. Rashid et al.
Fig. 5. Comparison of optimal sensing time derived for stand-alone and distributed cooperative sensing
Fig. 6. Normalized achievable throughput for optimal and normal OR decision fusion

Optimizing Distributed Cooperative Sensing Performance Using Swarm Intelligence 419
Fig. 7. Channel efficiency for optimal and normal OR decision fusion
5 Conclusion
The issue of sensing-throughput tradeoff in cooperative sensing scenario is studied. It is seen that optimal sensing time is reduced when distributed channel sensing is applied. Using energy detection, the proposed scheme of PSO based OR-rule decision fusion gives encouraging results. The maximum achievable normalized throughput increases with the increase of sensing terminals. Channel efficiency also reflects the same trend as it improves with the increasing number of cooperating users. In addition, optimized OR-rule gives a better performance in terms of both achievable throughput and channel efficiency compared to the normal OR fused technique.
Future works will include implementing PSO approach into an SDR platform and extend the strategy to AND rule based cooperative sensing.
Acknowledgment. The authors wish to express their gratitude to Ministry of Higher Education (MOHE), Malaysia and Research Management Center (RMC), Universiti Teknologi Malaysia for the financial support of this project under GUP research grant no: Q.J130000.7107.03J81.
References
1. McHenry, M.A., Tenhula, P.A., McCloskey, D., Roberson, D.A., Hood, C.S.: Chicago spectrum occupancy measurements & analysis and a long-term studies proposal. In: 1st International Workshop on Technology And Policy For Accessing Spectrum, Boston, Massachusetts, August 05 (2006)

420 R.A. Rashid et al.
2. Cabric, D., Mishra, S.M., Brodersen, R.W.: Implementation Issues in Spectrum Sensing for Cognitive Radios. In: Asilomar Conference on Signals, Systems, and Computers, vol. 1, pp. 772–776 (November 2004)
3. Akyildiz, F., Lee, W.-Y., Vuran, M.C., Mohanty, S.: Next Generation Dynamic Spectrum Access Cognitive Radio Wireless Networks: A Survey. Computer Networks 50, 2127–2159 (2006)
4. Rashid, R.A., Fisal, N.: Issues of Spectrum Sensing in Cognitive Radio based System. In: 3rd South East Asia Technical Universities Consortium (SEATUC) 2009, Johor, Malaysia, February 25-26 (2009)
5. Hamid, M.: Dynamic Spectrum Access in Cognitive Radio Networks: Aspects of Mac Layer Sensing. Master Thesis, Blekinge Institute of Technology, Ronneby, Sweden (December 2008)
6. Duong, N.D., et al.: A Novel Architecture for Distributed Spectrum Sensing for Cognitive Radio Applications. In: TENCON 209, Singapore, November 23-26 (2009)
7. Rashid, R.A., Aripin, N.M., Fisal, N., Ariffin, S.H.S., Yusof, S.K.S.: Integration of Cooperative Sensing and Transmission: Performance Evaluation of Cooperation Strategies in Cognitive Radio. IEEE Vehicular Technology Magazine 5(3), 46–53 (2010)
8. Peh, E., Liang, Y.-C.: Optimization for Cooperative Sensing in Cognitive Radio Network. In: WCNC 2007, Hong Kong, March 11-15 (2007)
9. Pei, Y., Hoang, A.T., Liang, Y.-C.: Sensing-Throughput Tradeoff in Cognitive Radio Networks: How Frequently Should Spectrum Sensing be Carried Out? In: IEEE 18th International Symposium on Personal, Indoor and Mobile Radio Communications, PIMRC 2007, Athens, September 3-7, pp. 1–5 (2007)
10. Stotas, S., Nallanathan, A.: Overcoming the Sensing-Throughput Tradeoff in Cognitive Radio Networks. In: IEEE ICC 2010 (2010)
11. Liang, Y.-C., Zeng, Y., Peh, E.C.Y., Hoang, A.T.: Sensingthroughput tradeoff for cognitive radio networks. IEEE Trans. Wireless Commun. 7(4), 1326–1337 (2008)
12. Poor, H.V.: An Introduction to signal detection and estimation, 2nd edn. Springer, New York (1994)
13. Gong, S., Wang, P., Liu, W., Yuan, W.: Maximize Secondary User Throughput via Optimal Sensing in Multi-channel Cognitive Radio Networks. In: GLOBECOM 2010, Miami, Florida, USA, December 6-10 (2010)
14. Kennedy, J., Eberhart, R.C.: Particle swarm optimization. In: Proc. IEEE International Conference on Neural Networks, Australia (1995)
15. Kennedy, J., Eberhart, R.C.: Swarm Intelligence. Morgan Kauffman Publishers, California (2001)
16. Løvberg, M., Krink, T.: Extending Particle Swarm Optimisers with Self-Organized Criticality. In: Proceedings of the IEEE Congress on Evolutionary Computation (2002)
17. Engelbrecht, A.P.: Computational Intelligence. Wiley, England (2007) 18. Mendis, C., Guru, S.M., Halgamuge, S., Fernando, S.: Optimized Sink node Path using
Particle Swarm Optimization. In: 20th International Conference on Advanced Information Networking and Applications. IEEE Computer Society (2006)
19. Gheitanchi, S., Ali, F., Stipidis, E.: Particle swarm optimization for Resource Allocation in OFDMA. IEEE (2007)
20. Rashid, R.A., Baguda, Y.S., Fisal, N., Adib Sarijari, M., Yusof, S.K.S., Ariffin, S.H.S.: Optimizing Achievable Throughput for Cognitive Radio Network Using Swarm Intelligence. In: APCC 2011, Kota Kinabalu, Sabah, Malaysia, November 10-12 (in press, 2011)




















