Military Tactical Wheeled Vehicle Technician Certification ...
Upload
independentCategory
view
2download
0
FOCUS
Optimization of interval type-2 fuzzy logic controllersusing evolutionary algorithms
O. Castillo • P. Melin • A. Alanis • O. Montiel •
R. Sepulveda
Published online: 12 March 2010
� Springer-Verlag 2010
Abstract A method for designing optimal interval type-2
fuzzy logic controllers using evolutionary algorithms is
presented in this paper. Interval type-2 fuzzy controllers
can outperform conventional type-1 fuzzy controllers when
the problem has a high degree of uncertainty. However,
designing interval type-2 fuzzy controllers is more difficult
because there are more parameters involved. In this paper,
interval type-2 fuzzy systems are approximated with the
average of two type-1 fuzzy systems, which has been
shown to give good results in control if the type-1 fuzzy
systems can be obtained appropriately. An evolutionary
algorithm is applied to find the optimal interval type-2
fuzzy system as mentioned above. The human evolutionary
model is applied for optimizing the interval type-2 fuzzy
controller for a particular non-linear plant and results are
compared against an optimal type-1 fuzzy controller. A
comparative study of simulation results of the type-2 and
type-1 fuzzy controllers, under different noise levels, is
also presented. Simulation results show that interval type-2
fuzzy controllers obtained with the evolutionary algorithm
outperform type-1 fuzzy controllers.
Keywords Interval type-2 fuzzy logic �Evolutionary algorithms � Fuzzy control
1 Introduction
The design of intelligent controllers for non-linear plants is
a complicated problem due to the complex interactions
between the plant’s components, the nonlinearities present
in the plant’s model, and also due to the high number of
design parameters involved. For this reason machine
learning and cybernetics, concepts are used to automate the
design process with the goal of finding optimal controllers.
In this sense, machine learning and cybernetics play a
fundamental role in automating the design of optimal
controllers based on existing historical data. In addition, in
the real world there are many sources of uncertainty
present, which complicates even more the problem. For
this reason, fuzzy controllers can offer a way to manage
uncertainties present in real world processes.
Uncertainty affects decision-making and appears in a
number of different forms. The concept of information is
fully connected with the concept of uncertainty. The most
fundamental aspect of this connection is that uncertainty is
involved in any problem-solving situation because of some
information deficiency, which may be incomplete, impre-
cise, fragmentary, not fully reliable, vague, contradictory,
or deficient in some other way (Klir and Yuan 1995). The
general framework of fuzzy reasoning allows handling
most of this uncertainty. Traditional fuzzy systems employ
type-1 fuzzy sets, which represent uncertainty by numbers
in the [0, 1] range. When something is uncertain, like a
measurement, it is difficult to determine its exact value,
and of course type-1 fuzzy sets make more sense than using
crisp sets (Zadeh 1975a, b). However, it is not reasonable
to use an accurate membership function for something
uncertain, so in this case what we need is another type of
fuzzy sets, those which are able to handle these uncer-
tainties, the so called type-2 fuzzy sets (Mendel 2000). The
O. Castillo (&) � P. Melin � A. Alanis
Tijuana, Institute of Technology, Tijuana, BC, Mexico
e-mail: [email protected]
O. Montiel � R. Sepulveda
Center for Research in Digital Systems, IPN, Tijuana, BC,
Mexico
123
Soft Comput (2011) 15:1145–1160
DOI 10.1007/s00500-010-0588-9

effects of uncertainty in a system can be handled in a better
way by using type-2 fuzzy logic because it offers better
capabilities to cope with linguistic uncertainties by mod-
eling vagueness and unreliability of information (Karnik
and Mendel 2001a, b; Mendel 1999; Liang and Mendel
2000; Yager 1980).
Recently, we have seen the use of type-2 fuzzy sets in
fuzzy logic systems to deal with uncertain information
(Karnik et al. 2001; Mendel 1998). So we can find some
papers emphasizing on the implementation of a type-2
fuzzy logic system (FLS) (Karnik et al. 1999); in others, it
is explained how type-2 fuzzy sets let us model and
minimize the effects of uncertainties in rule-base FLSs
(Mendel and John 2002). Some research works are devoted
to solve real world applications in different areas, for
example, in signal processing type-2 fuzzy logic is applied
in prediction in Mackey–Glass chaotic time-series with
uniform noise presence (Mendel 2000; Karnik and Mendel
1999: Castro et al. 2009). In medicine, an expert system
was developed for solving the problem of Umbilical Acid–
Base (UAB) assessment (Ozen and Garibaldi 2003). In
industry, type-2 fuzzy logic and neural networks are used
in the control of non-linear dynamic plants (Melin and
Castillo 2002, 2003; Castillo and Melin 2004; Mizumoto
and Tanaka 1976; Melin and Castillo 2004; Hagras 2004).
In all of these previous works, the type-2 fuzzy systems
have been designed manually, with no automatic design
based on optimizing an objective criterion (Castillo and
Melin 2007). In this paper, an automatic design procedure
for type-2 fuzzy systems is proposed based on the use of an
evolutionary algorithm.
This paper deals with the optimization of interval type-2
membership functions in a fuzzy logic controller (FLC),
the behavior of the FLC after optimization of the MFs
under different range values for the Footprint of Uncer-
tainty (FOU) and different noise values is presented. It is a
known fact, that in the control of real systems, the instru-
mentation elements (instrumentation amplifier, sensors,
digital to analog, analog to digital converters, etc.) intro-
duce in the collected information some sort of unpredict-
able values (Castillo and Melin 2001). The controllers
designed under idealized conditions tend to behave in an
inappropriate manner (Castillo and Melin 2003). Since,
uncertainty is inherent in real world applications (Sepulv-
eda et al. 2007), we study the effects of uncertainty using a
set of comparative tests for type-1 and type-2 FLCs, in
order to determine which method can offer the most reli-
able control output for a given input.
In the first set of tests, an interval type-2 FLC is used to
measure the effect of uncertainty and compare it with the
results of using a type-1 FLC. We are making the com-
parison with experimental results, qualitative observations,
and quantitative measures of errors (Castillo and Melin
2008). For quantifying the errors, we utilized three widely
used performance criteria, these are: integral of square
error (ISE), integral of the absolute value of the error
(IAE), and integral of the time multiplied by the absolute
value of the error (ITAE) (Deshpande and Ash 1988). The
comparison is made under different noise values to mea-
sure the effect of uncertainty (Martinez et al. 2009).
In a second set of tests, the parameters of the Gaussian
membership functions (MFs) of the interval type-2 FLC
were obtained with the optimization method known as
Human Evolutionary Model (HEM), which is described in
Sect. 3, using ISE, IAE and ITAE as the fitness functions.
To evaluate the influence of the FOU size in the optimi-
zation search process, in this test we choose three different
range values for the FOU and in each case, the MFs were
optimized for a 24 db Signal to Noise Ratio (SNR).
Finally, in the third set of tests, the MFs of the FLC were
optimized for a 24 db SNR using the HEM as a global
optimization method. As in the second set of tests, three
different range values for the FOUs were used, but in this
case, we used the average of two type-1 fuzzy systems to
implement the type-2 FLC.
This paper is organized as follows: Sect. 2 presents an
introductory description of type-1 and type-2 FLCs and
the performance criteria for evaluating the transient and
steady state closed-loop response in a control system.
Section 3 describes the HEM, which is an intelligent
global optimization method; Sect. 4 is devoted to show
the simulation results; in this section, we are showing
details of the implementation of the feedback control
system used, we are presenting results from several
experiments, the plant was tested using several signal to
noise ratio, and we are including a performance com-
parison between type-1 and type-2 fuzzy logic controllers,
versus optimized type-2 FLCs. An analysis of the results
of optimized MFs for different ranges of the FOU and
different noise levels is also presented. Section 5 presents
a discussion about the results; finally, in Sect. 6, we have
the conclusions.
2 Fuzzy controllers
2.1 Type-1 fuzzy controllers
Soft computing techniques have been applied recently in
the design of intelligent controllers (Jang et al. 1997).
These techniques have tried to avoid the above-mentioned
drawbacks, and they allow us to obtain efficient controllers,
which utilize the human experience instead of the con-
ventional mathematical approach (Zadeh 1971, 1973,
1975a, b). In the cases in which a mathematical represen-
tation of the controlled systems cannot be obtained, it is
1146 O. Castillo et al.
123

possible to express the relationships between them, that is,
their process behavior (Sepulveda et al. 2007).
A FLS described completely in terms of type-1 fuzzy
sets is called a type-1 fuzzy logic system (type-1 FLS). It is
composed by a knowledge base that comprises the infor-
mation given by the process operator in form of linguistic
control rules; a fuzzification interface, that has the effect of
transforming crisp data into fuzzy sets; an inference sys-
tem, that uses the fuzzy sets in conjunction with the
knowledge base to make an inference by means of a rea-
soning method; and a defuzzification interface, which
translates the resulting fuzzy set to a real control action
using a defuzzification method (Castillo and Melin 2001).
In this paper, the implementation of the fuzzy controller
in terms of type-2 and type-1 fuzzy sets, has two input
variables: the error e(t), the difference between the refer-
ence signal and the output of the process; and the error
variation De(t),
eðtÞ ¼ rðtÞ � yðtÞ ð1ÞDeðtÞ ¼ eðtÞ � eðt � 1Þ ð2Þ
In Fig. 1, we show the block diagram that was used as a
framework to test the different experiments of this paper
(Mamdani 1993).
2.2 Type-2 fuzzy controllers
If we have a type-1 membership function as in Fig. 2, and
we are blurring it to the left and to the right then, at a
specific value x0; the membership function value u0;, takes
on different values which may not all be weighted the
same, so we can assign an amplitude distribution to all of
those points. By doing this for all x 2 X; we create a three-
dimensional membership function—a type-2 membership
function—that characterizes a type-2 fuzzy set (Mendel,
2001). A type-2 fuzzy set ~A; is characterized by:
~A ¼ ðx; uÞ; l ~Aðx; uÞ� �
j8x 2 X; 8u 2 Jx � ½0; 1�� �
ð3Þ
in which 0� l ~Aðx; uÞ� 1: Another expression for ~A is,
~A ¼Z
x2X
Z
u2Jx
l ~Aðx; uÞ=ðx; uÞ Jx � ½0; 1� ð4Þ
whereRR
denotes the union over all admissible input vari-
ables x and u. For discrete universes of discourseR
is
replaced byP
(Mendel 2001). In fact Jx � ½0; 1� repre-
sents the primary membership of x and l ~Aðx; uÞ is a type-1
fuzzy set known as the secondary set.
This uncertainty is represented by a region called foot-
print of uncertainty (FOU). When l ~Aðx; uÞ ¼ 1; 8 u 2 Jx �½0; 1� we have an interval type-2 membership function, as
shown in Fig. 3. The uniform shading for the FOU repre-
sents the entire interval type-2 fuzzy set and it can be
described in terms of an upper membership function �l ~AðxÞand a lower membership function l ~A
ðxÞ.A FLS described using at least one type-2 fuzzy set is
called a type-2 FLS. Type-1 FLSs are unable to directly
Fig. 1 Experimental framework used for testing the fuzzy controllers
Fig. 2 Blurred type-1 membership function
Fig. 3 Interval type-2 membership function
Optimization of interval type-2 fuzzy logic controllers using evolutionary algorithms 1147
123

handle uncertainties, because they use type-1 fuzzy sets
that are certain (Mendel and Mouzouris 1999). On the other
hand, type-2 FLSs, are very useful in circumstances where
it is difficult to determine an exact membership value, and
there are uncertainties because of the real system measures
(Mendel 2000).
It is known that type-2 fuzzy sets let us model and
minimize the effects of uncertainties in rule-based FLS.
Unfortunately, type-2 fuzzy sets are more difficult to use
and understand than type-1 fuzzy sets; hence, their use is
not widespread yet. In a broad sense for type-1 FLSs,
uncertainties can be classified in four groups (Mendel and
John 2002):
1. The meanings of the words that are used in the
antecedents and consequents of rules can be uncertain
(words mean different things to different people).
2. Consequents may have histogram of values associated
with them, especially when knowledge is extracted
from a group of experts who do not all agree.
3. Measurements that activate a type-1 FLS may be noisy
and therefore uncertain.
4. The data used to tune the parameters of a type-1 FLS
may also be noisy.
All of these uncertainties affect directly the optimal
settings of the fuzzy set membership functions. Type-1
fuzzy sets are not able to directly model knowledge vari-
ations in crisp membership functions that are totally crisp.
On the other hand, type-2 fuzzy sets are able to model such
uncertainties because their membership functions are
themselves fuzzy.
Similar to a type-1 FLS, a type-2 FLS includes
fuzzifier, rule base, fuzzy inference engine, and output
processor. The output processor includes type-reducer
and defuzzifier; it generates a type-1 fuzzy set output
(from the type-reducer) or a crisp number (from the
defuzzifier) (Mendel 2005; Karnik and Mendel 2001a, b).
A type-2 FLS is again characterized by IF–THEN rules,
but its antecedent or consequent sets are now of type-2.
Type-2 FLSs, can be used when circumstances are so
uncertain that it is difficult to determine exact member-
ship grades such as when training data is corrupted by
noise.
In this paper, we are simulating the fact that the
instrumentation elements (instrumentation amplifier, sen-
sors, digital to analog, analog to digital converters, etc.) are
introducing some sort of unpredictable values in the col-
lected information (Castillo and Melin 2004). In the case of
the implementation of the type-2 FLC, we have the same
characteristics as in type-1 FLC, but we used type-2 fuzzy
sets as membership functions for the inputs and for the
output. The type-2 fuzzy sets should be designed appro-
priately so that they can capture the corresponding
uncertainty, and therefore the behavior of the type-2 FLC
can be better than their type-1 counterpart.
2.3 Performance criteria
For evaluating the transient closed-loop response of a
computer control system, we can use the same criteria that
normally are used for adjusting constants in proportional
integral derivative (PID) controllers. These are defined as
(Deshpande and Ash 1988):
1. Integral of Square Error (ISE).
ISE ¼Z1
0
eðtÞ½ �2dt ð5Þ
2. Integral of the Absolute value of the Error (IAE).
IAE ¼Z1
0
jeðtÞjdt ð6Þ
3. Integral of the Time multiplied by the Absolute value
of the Error (ITAE).
ITAE ¼Z1
0
tjeðtÞjdt ð7Þ
In our case we will useP; instead of
R: Each measure
is based in the error accumulation, and the selection
depends on the type of response desired, errors will
contribute different for each criterion, so we have that large
errors will increase the value of ISE more heavily than to
IAE. ISE will favor responses with smaller overshoot for
load changes, but ISE will give longer settling time. In
ITAE, time appears as a factor, and therefore ITAE will
penalize heavily errors that occur late in time, but virtually
ignore errors that occur early in time. Designing using
ITAE will give us the shortest settling time, but it will
produce the largest overshoot among the three criteria
considered. Designing considering IAE will give an
intermediate result, in this case, the settling time will not
be as large than with ISE and not so small than using ITAE,
and the same applies for the overshoot response. The
selection of a particular criterion depends on the type of
desired response.
2.4 Main idea of paper
This paper deals with the optimization of interval type-2
membership functions in a fuzzy logic controller, the
1148 O. Castillo et al.
123

behavior of the FLC after optimization of the MFs under
different range values for the FOU and different noise
values is presented. It is a known fact, that in the control of
real systems, the instrumentation elements (instrumentation
amplifier, sensors, digital to analog, analog to digital con-
verters, etc.) introduce in the collected information some
sort of unpredictable values (Castillo and Melin 2001). The
controllers designed under idealized conditions tend to
behave in an inappropriate manner (Castillo and Melin
2003). Since, uncertainty is inherent in real world appli-
cations (Sepulveda et al. 2007), we study the effects of
uncertainty using a set of comparative tests for type-1 and
type-2 FLCs, in order to determine which method can offer
the most reliable control output for a given input.
A method for designing optimal interval type-2 fuzzy
logic controllers using evolutionary algorithms is presented
in this paper. Interval type-2 fuzzy controllers can out-
perform conventional type-1 fuzzy controllers when the
problem has a high degree of uncertainty. However,
designing interval type-2 fuzzy controllers is more difficult
because there are more parameters involved. In this paper,
interval type-2 fuzzy systems are approximated with the
average of two type-1 fuzzy systems, which has been
shown to give good results in control if the type-1 fuzzy
systems can be obtained appropriately. An evolutionary
algorithm is applied to find the optimal interval type-2
fuzzy system as mentioned above. The human evolutionary
model is applied for optimizing the interval type-2 fuzzy
controller for a particular non-linear plant and results are
compared against an optimal type-1 fuzzy controller.
3 The human evolutionary model
The human evolutionary model (HEM) is a particular type
of an evolutionary algorithm (Montiel et al. 2007). In this
paper, the HEM has been adapted to the problem at hand,
and the details provided here in this paper are for solving
the problem of optimizing fuzzy systems of type-1 and
type-2. The difference between HEM and other evolu-
tionary algorithms is that it includes the human part to
adapt parameters by learning the experience of human
experts on this kind of problems. The HEM model can be
formally defined as follows:
HEM ¼ H;AIIS;P;O; S;E;L;TL=PS;VRL; POSð Þ ð8Þ
where H Human, AIIS Adaptive Intelligent Intuitive Sys-
tem, P Population of size N individuals, O Single or a
multiple objective optimization goals, S Evolutionary
strategy used for reaching the objectives expressed in O, E
Environment, here we can have predators, etc., L Land-
scape, i.e., the scenario where the evolution must be per-
formed, TL/PS Tabu List formed by the bests solutions
found/Pareto Set, VRL Visited Regions List, POS Pareto
Optimal Set.
In Fig. 4, we have a general description of HEM con-
taining six main blocks. In the first block, we show that the
human or group of humans is part of the system. HEM is an
intelligent evolutionary algorithm that learns from experts
their rational and intuitive procedures that they use to solve
optimization problems. In this model, we consider that we
have two kinds of humans: real human beings and artificial
humans. In the first block of Fig. 4, we show that real
human beings form one class. In the second block, the
artificial human implemented in the AIIS of the HEM is
shown. Humans as part of the system are in charge of
teaching the artificial human all the knowledge needed for
realizing the searching task. HEM has a feedback control
system formed by blocks three and four; and they work
coordinately for monitoring and evaluating the evolution of
the problem to be solved. In the fifth block, we have a
single objective optimization (SOO) method for solving
single objective optimization problems (SOOP). In addi-
tion, using the SOO method we can to find the ideal, uto-
pian and nadir vectors for multiple objective optimization
problems (MOOP) (Deb 2002). In the sixth block, we have
a multiple objective optimization (MOO) method, which is
dedicated to find the Pareto optimal set (POS) in MOOP
(Kumar and Bauer 2009).
Fig. 4 General structure of the HEM
Optimization of interval type-2 fuzzy logic controllers using evolutionary algorithms 1149
123

A particular characteristic of individuals in HEM is
that we are not only including the decision variables;
also, each individual has associated other variables that
are called genetic effects (GE) that will influence the
searching process. An individual in HEM is composed of
three parts:
A genetic representation (gr), that can be codified using
binary or floating-point representation. Decision variables
are codified in this part.
A set of genetic effects (ge), that are attributes of each
individual such as ‘‘physical structure’’, ‘‘gender’’, ‘‘actual
age’’, ‘‘maximum age allowed’’, ‘‘pheromone level’’, etc.
For example, the genetic attribute gender of individual n at
generation x is defined as ge 3ð Þn;x¼ ge genderð Þn;x; and the
actual age as ge 4ð Þn;x; etc. In general, we have the defini-
tion given by the next expression, where we have omitted
the generation number for simplicity
gen ¼ ðgeðmin StrÞn; geðmax StrÞn; geðgenderÞn;geðactAgeÞn; geðmax AgeÞn; geðphLevelÞn; . . .; geðmÞnÞ
The third part in the individual representation is devoted
to the individual’s objective values. Objective values are
codified in vector form, the size of the vector is determined
by the number of objectives that the problem requires. For
single objective (SO) problems, we will use only one ov
value. For multiple objectives (MO) problems, we will use
ov(1),…,ov(M). Figure 5 shows an individual pn ¼grn; gen; ovnð Þ where grn ¼ gr 1ð Þn; . . .; gr 2ð Þn
� �is a vector
(a row) in the GRN�Q matrix. The genetic effects gen are
rows in the matrix GEN�R:
In Montiel et al. (2007), the HEM is described in more
technical detail and it is shown why it is a global optimi-
zation method (as other evolutionary algorithms are, such
as the GA). In that paper, the HEM is tested with a set of
benchmark functions and compared with other algorithms,
such as the GA, to verify that it was faster and more
accurate. For these reasons it was decided to apply HEM to
the problem of optimizing interval type-2 fuzzy systems in
control applications, which is a more challenging and
important problem to consider.
4 Simulation results
Figure 1 shows, the feedback control system that was used
for performing the simulation with the proposed method.
The controller was implemented in the Matlab environment
(Ingle and Proakis 2000) where it was designed to follow
the input as close as possible. The non-linear plant was
modeled using Eq. 9
y ið Þ ¼ 0:2 � y i� 3ð Þ � 0:07y i� 2ð Þ þ 0:9 � y i� 1ð Þþ 0:05 � u i� 1ð Þ þ 0:5 � u i� 2ð Þ ð9Þ
The controller’s output was directly applied to the
plant’s input. Since we are interested in comparing the
performance between type-1 and type-2 FLC systems, and
optimized interval type-2 FLCs versus optimized type-2
FLCs, using the average of two type-1 FLCs, under
different ranges of the FOU and for 24 db of SNR, we have
the following four cases:
1. Considering the system as ideal, that is, we did not
introduce any source of uncertainty to the modules of
the control system. See experiments 1 and 2.
2. Simulating the effects of uncertain modules (subsys-
tems) response introducing some uncertainty at differ-
ent noise levels. See experiments 3, 4 and 5.
3. Optimizing the MFs of an interval type-2 FLC with
different FOU sizes for 24 db of SNR and then obtain
ISE, IAE and ITAE for different noise levels. See
experiment 6.
4. Optimizing the MFs of a type-2 FLC using the average
of two type-1 FLCs also for 24 db of SNR and with
different sizes of the FOU, then repeat last part of
experiment 6. See experiment 7.
For case 1, as it is shown in Fig. 1, the system’s output
is connected directly to the summing junction, but in the
second case, the uncertainty was simulated introducing
random noise with a normal distribution (the dashed square
in Fig. 1). We added noise to the system’s output y(i) using
the Matlab’s function ‘‘randn’’ which generates random
numbers with Gaussian distribution. The signal and the
additive noise in turn, were obtained with expression (10),
the result y ið Þ was introduced to the summing junction of
the controller system. For experiments 3 and 4 we used
a = 0.05, and in the set of tests for experiment 5 we varied
the a value to obtain different SNR values.
yðiÞ ¼ yðiÞ þ a � randn ð10Þ
We tested the system using as input, a unit step
sequence, free of noise, rðiÞ: For evaluating the system’s
response and the comparison between type-1 and type-2
fuzzy controllers, we used the performance criteria: ISE,
IAE, and ITAE. In Table 3, we summarized the valuesFig. 5 Representing one individual in HEM
1150 O. Castillo et al.
123

obtained for each criterion considering 200 units of time.
For calculating ITAE, we considered a sampling time
Ts ¼ 0:1 s.
For experiments 1, 2, 3, and 4 the reference input r is
stable and noise free. In experiments 3 and 4, although the
reference appears to be clean, the feedback at the summing
junction is noisy since we introduced deliberately noise for
simulating the overall existing uncertainty in the system; in
consequence, the controller’s inputs e (error), and De
contains uncertainty data.
In Experiment 5, we tested the systems, type-1 and type-
2 FLC, introducing different values of noise g, that is
modifying the signal to noise ratio SNR (Montiel et al.
2007), see Eq. 11,
SNR ¼P
sj j2P
gj j2¼ Psignal
Pnoise
ð11Þ
Because many signals have a very wide dynamic range
[37], SNRs are usually expressed in terms of the
logarithmic decibel scale, SNR(db), as we can see in
Eq. 12,
SNRðdbÞ ¼ 10 log10
Psignal
Pnoise
� �ð12Þ
In Table 4, we show for different values of SNR(db), the
behavior of ISE, IAE, ITAE for type-1 and type-2 FLCs. In
almost all the cases, the results for type-2 FLC are better
than type-1 FLC.
In type-1 FLC, we selected Gaussian membership
functions (Gaussian MFs) for the inputs and for the output.
A Gaussian MF is specified by two parameters {c,r}:
lAðxÞ ¼ e�12
x�crð Þ
2
ð13Þ
where c represents the MFs center and r determines the
MFs standard deviation.
For each input of the type-1 FLC, e and De, we defined
three type-1 fuzzy Gaussian MFs: negative, zero, positive.
The universe of discourse for these membership functions
is in the range [-10 10]; their centers are -10, 0 and 10,
respectively, with the same standard deviation of 4.24 for
all of them.
For the output of the type-1 FLC, we have five type-1
fuzzy Gaussian MFs: NG, N, Z, P and PG. These are in the
interval [-10 10], their centers are -10, -0.5, 0, 5, and 10,
respectively; and with the same standard deviation of
2.1233. Table 1 illustrates the characteristics of the inputs
and output of the type-1 FLC.
For the type-2 FLC, as in type-1 FLC we also
selected Gaussian MFs for the inputs and for the output,
but in this case we have interval type-2 Gaussian MFs
with a constant center, c, and an uncertain standard
deviation, r, i.e.,
lAðxÞ ¼ e�12
x�crð Þ
2
ð14Þ
In terms of the upper and lower membership functions,
we have for �l ~AðxÞ;�l ~AðxÞ ¼ Nðc; r2; xÞ ð15Þ
and for the lower membership function l ~AðxÞ;
l ~AðxÞ ¼ Nðc; r1; xÞ ð16Þ
where N c; r2; xð Þ � e�1
2x�cr2
� 2
;e�1
2x�cr2
� 2
, and N c; r1; xð Þ �
e�1
2x�cr1
� 2
; (Mendel 2000).
Hence, in the type-2 FLC, for each input we defined three
interval type-2 fuzzy Gaussian MFs: negative, zero, positive
in the interval [-10 10], as illustrated in Figs. 6 and 7; for
computing the output we have five interval type-2 fuzzy
Gaussian MFs NG, N, Z, P and PG, with uncertain center
and fixed standard deviations in the interval [-10 10], as
Table 1 Characteristics of the inputs and output of the type-1 FLC
Variable Term Center c Standard deviation r
Input e Negative -10 4.2466
Zero 0 4.2466
Positive 10 4.2466
Input De Negative -10 4.2466
Zero 0 4.2466
Positive 10 4.2466
Output cde NG -10 2.1233
N -5 2.1233
Z 0 2.1233
P 5 2.1233
PG 10 2.1233
Fig. 6 Input e membership functions for the type-2 FLC
Optimization of interval type-2 fuzzy logic controllers using evolutionary algorithms 1151
123

can be seen in Fig. 8. Table 2 shows the characteristics of
the inputs and output of the interval type-2 FLC.
4.1 Type-1 and Interval Type-2 FLC for ideal system
and with uncertainty
In this case, we consider four experiments performed to the
FLC. First, we consider in experiments 1 and 2 controlling
an ideal system (no uncertainty) with a type-1 FLC and
with Interval Type-2 FLC. Then, we consider in experi-
ments 3 and 4 the control of the system with a particular
level of uncertainty with a type-1 FLC and with an Interval
Type-2 FLC. Finally, in experiment 5 we change the level
of uncertainty to appreciate the effect on the results of the
controllers.
Experiment 1 Ideal system using a Type-1 FLC.
In this experiment, we did not add uncertainty data to
the control system and in Table 3 we show the obtained
values of the ISE, IAE, and ITAE for this experiment.
Experiment 2 Ideal system using a Type-2 FLC.
In this case, we used the same test conditions of
Experiment 1; but now we implemented the controller’s
algorithm with interval type-2 fuzzy logic. The corre-
sponding performance criteria are listed in Table 3.
Experiment 3 System with uncertainty using a Type-1
FLC.
In this case, we simulated, using Eq. 23, the effects of
uncertainty introduced to the system by transducers,
amplifiers, and any other element that in real world
applications affects expected values. In Table 3, we can see
the obtained values for the ISE, IAE, and ITAE perfor-
mance criteria for a simulated 24 db signal to noise ratio.
For the case of an ‘ideal system’, the results of type-1
should be equal to type-2 when the FOU is zero. However,
when the FOU is not zero, the interval type-2 is not the
same as the type-1 and the results are not equal. Of course,
the difference is small due to the lack of uncertainty in this
case, as can be appreciated in Table 3.
Experiment 4 System with uncertainty using a Type-2
FLC. In this experiment, we introduced uncertainty into the
system, in the same way as in Experiment 3. In this case,
we used an interval type-2 FLC and we improved those
results obtained with a type-1 FLC (Experiment 3), see
Table 3.
Experiment 5 Varying the signal to noise ratio in Type-1
and Type-2 FLCs.
To test the robustness of the type-1 and interval type-2
FLCs, we repeated experiments 3 and 4 providing different
noise levels, going from 30 db to 8 db of SNR ratio in each
experiment. In Table 4, we summarized the values for ISE,
IAE, and ITAE considering 200 units of time with a Psignal
of 22.98 db in all cases. As it can be seen in Table 4, in
presence of diverse noise levels, in general the behavior of
the interval type-2 FLC is better than the type-1 FLC.
From Table 4, considering two examples, which are the
extreme cases; we have for an SNR ratio of 8 db, in the
type-1 FLC the following performance values
ISE = 321.1, IAE = 198.1, ITAE = 2234.1; and for the
same case, in type-2 FLC, we have ISE = 299.4,
IAE = 194.1, ITAE = 2023.1. For 30 db of SNR ratio, we
have for the type-1 FLC, ISE = 8.5, IAE = 25.9,
Fig. 7 Input De membership functions for the type-2 FLC
Fig. 8 Output cde membership functions for the type-2 FLC
1152 O. Castillo et al.
123

ITAE = 164.9, and for the type-2 FLC, ISE = 7,
IAE = 23.3, ITAE = 152.6.
These values indicate a better performance of the type-2
FLC with respect to the type-1 FLC, because the errors are
consistently lower for the interval type-2 fuzzy controller
with different noise levels.
4.2 Optimization of the fuzzy controllers with HEM
In this case, we consider an experiment performed to the
FLC in which now the controllers are optimized with
HEM. In Experiment 6, we show the results of optimizing
the FOU of the membership functions with HEM to
Table 2 Characteristics of the inputs and output of the type-2 FLC
Variable Term Center c Standard deviation r1 Standard deviation r2
Input e Negative -10 5.2466 3.2466
Zero 0 5.2466 3.2466
Positive 10 5.2466 3.2466
Input De Negative -10 5.2466 3.2466
Zero 0 5.2466 3.2466
Positive 10 5.2466 3.2466
Output cde NG -10 2.6233 1.6233
N -5 2.6233 1.6233
Z 0 2.6233 1.6233
P 5 2.6233 1.6233
PG 10 2.6233 1.6233
Table 3 Comparison of performance criteria for type-1 and type-2 fuzzy logic controllers for 24 DB SNR values obtained after 200 samples
Performance Criteria Type-1 FLC Type-2 FLC
Ideal System System with uncertainty Ideal System System with uncertainty
ISE 7.65 11.9 6.8 10.3
IAE 17.68 36.2 16.4 32.5
ITAE 62.46 289 56.39 264.2
Table 4 Behavior of type-1 and type-2 fuzzy logic controllers after variation of the SNR values obtained for 200 samples
Noise variation Type-1 FLC Type-2 FLC
SNR (db) SNR SumNoise SumNoise (db) ISE IAE ITAE ISE IAE ITAE
8 6.4 187.42 22.72 321.1 198.1 2234.1 299.4 194.1 2023.1
10 10.058 119.2 20.762 178.1 148.4 1599.4 168.7 142.2 1413.5
12 15.868 75.56 18.783 104.7 114.5 1193.8 102.1 108.8 1057.7
14 25.135 47.702 16.785 64.1 90.5 915.5 63.7 84.8 814.6
16 39.883 30.062 14.78 40.9 72.8 710.9 40.6 67.3 637.8
18 63.21 18.967 12.78 27.4 59.6 559.1 26.6 54.2 504.4
20 100.04 11.984 10.78 19.4 49.5 444.2 18.3 44.8 402.9
22 158.54 7.56 8.78 14.7 42 356.9 13.2 37.8 324.6
24 251.3 4.77 6.78 11.9 36.2 289 10.3 32.5 264.2
26 398.2 3.01 4.78 10.1 31.9 236.7 8.5 28.6 217.3
28 631.5 1.89 2.78 9.1 28.5 196.3 7.5 25.5 180.7
30 1,008 1.19 0.78 8.5 25.9 164.9 7 23.3 152.6
Optimization of interval type-2 fuzzy logic controllers using evolutionary algorithms 1153
123

improve the performance of the interval type-2 fuzzy
controller. Of course, the comparison is also with an
optimized version of the type-1 fuzzy controller.
Experiment 6 Optimizing the interval type-2 MFs of the
inputs of the FLC for 24 db of SNR, for different ranges of
the FOU.
To evaluate the effects of varying the size of the FOU
in the optimization of the type-2 MFs, for 24 db signal
to noise ratio, we established different search intervals
for the shadow of the MFs. We maintain the centers
constant and the upper standard deviation of the
Gaussian MFs of the inputs and the lower standard
deviations were varied.
After using HEM as the optimization method, and tak-
ing ISE as the fitness function, we found the best values of
the MFs, as can be seen in Table 5.
We started with a narrow interval and finished with
the wider one. The first interval was in the range of
3.74–4.75. After optimization, we calculated the ISE,
IAE and ITAE values for the noise levels from 8 to 30
db of SNR.
The next step was to increase the search interval as
follows, an interval between 3.24 and 5.25 for the terms of
inputs e and De; and after the optimization the ISE, IAE
and ITAE values were calculated.
Finally, the broader search interval was used, between
2.74 and 5.75 for all the MFs of the inputs terms. In
Table 5, we can see the optimized values for the standard
deviations of the MFs and in Table 6 we have the obtained
values for the ISE, IAE and ITAE.
4.3 Optimization of the interval type-2 fuzzy controller
with the average of two type-1 fuzzy systems using
HEM
In this case, we use the approximation of an interval type-2
fuzzy system using the average of two type-1 fuzzy sys-
tems that are found using HEM. The use of the HEM
algorithm is to find the optimal Type-1 FLCs so that the
average of these type-1 fuzzy systems can better approxi-
mate the values of the real interval type-2 FLC. In
Experiment 7, we describe the details of this case for dif-
ferent FOU values.
Experiment 7 Optimizing the interval Type-2 MFs of the
FLC for 24 db of SNR, using the average of two Type-1
FLCs, varying the FOU.
To optimize the interval type-2 MFs of the FLC, we
simulated the system using two type-1 FLCs. We main-
tained constant the centers and upper standard deviations of
the Gaussian MFs of the inputs, and we varied the lower
values of the standard deviations. After optimization and
taking ISE as the fitness function, we found the best values
of the MFs. For performing the optimization of the con-
trollers, we used again the HEM as the optimization
method.
For varying the range of the shadow of the FOU we
repeated the steps of Experiment 6. Table 7 shows the
optimized values for the standard deviations of the MFs
and in Table 8 we can see the comparison between the
results obtained for the ISE, IAE and ITAE for each vari-
ation of the FOU.
Table 5 Comparison of the characteristics of the optimized MFs of the type-2 FLC for different intervals of the FOU, for 24 DB of SNR
Variable Type-2 FLC Intervals of the MFs of e, Dea Type-2 FLC Intervals of the MFs of e, Deb Type-2 FLC Intervals of the MFs of e, Dec
Center
c1
Standard
deviation r1
Standard
deviation r2
Center
c1
Standard
deviation r1
Standard
deviation r2
Center
c1
Standard
deviation r1
Standard
deviation r2
Input e -10 4.75 3.74 -10 5.25 3.2400 -10 5.75 2.9307
0 4.75 4.7131 0 5.25 4.9291 0 5.75 5.1232
10 4.75 3.74 10 5.25 3.2400 10 5.75 3.0478
Input De -10 4.75 4.74 -10 5.25 5.2400 -10 5.75 5.3438
0 4.75 4.6743 0 5.25 4.3890 0 5.75 4.6317
10 4.75 4.7397 10 5.25 5.2400 10 5.75 5.3430
Output cde -10 2.6233 1.6233 -10 2.6233 1.6233 -10 2.6233 1.6233
-5 2.6233 1.6233 -5 2.6233 1.6233 -5 2.6233 1.6233
0 2.6233 1.6233 0 2.6233 1.6233 0 2.6233 1.6233
5 2.6233 1.6233 5 2.6233 1.6233 5 2.6233 1.6233
10 2.6233 1.6233 10 2.6233 1.6233 10 2.6233 1.6233
a r between 3.74 and 4.75 for the three termsb r between 3.24 and 5.25 for the three termsc r between 2.74 and 5.75 for the three terms
1154 O. Castillo et al.
123
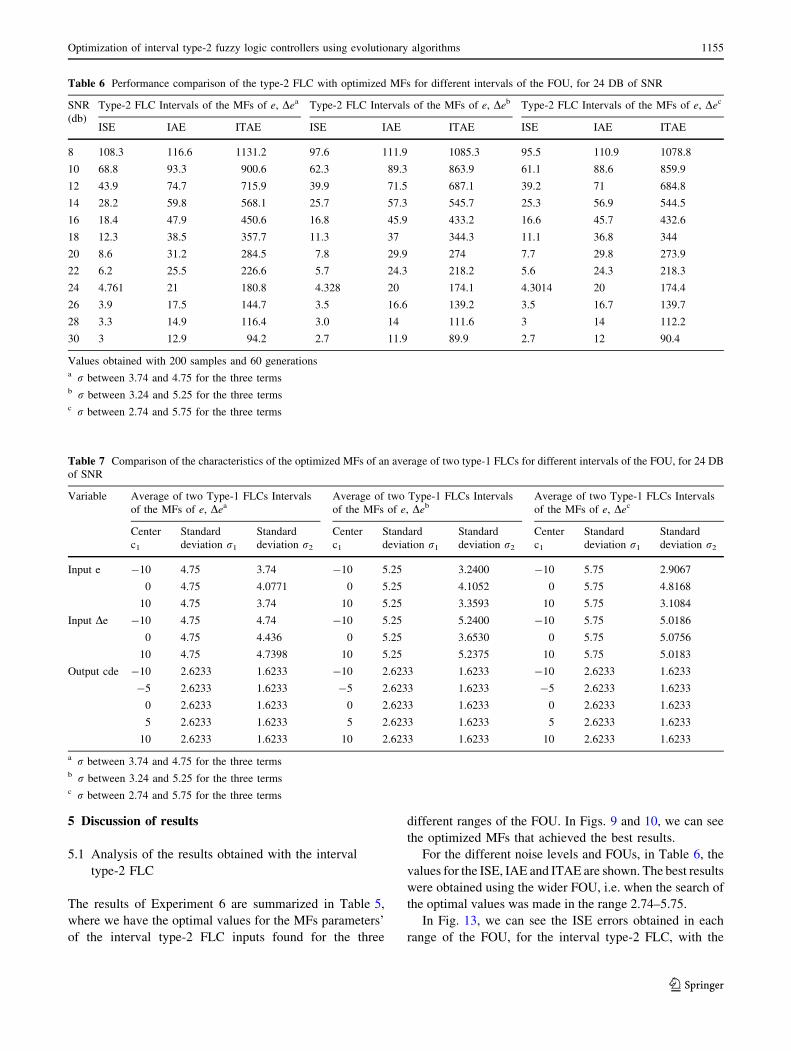
5 Discussion of results
5.1 Analysis of the results obtained with the interval
type-2 FLC
The results of Experiment 6 are summarized in Table 5,
where we have the optimal values for the MFs parameters’
of the interval type-2 FLC inputs found for the three
different ranges of the FOU. In Figs. 9 and 10, we can see
the optimized MFs that achieved the best results.
For the different noise levels and FOUs, in Table 6, the
values for the ISE, IAE and ITAE are shown. The best results
were obtained using the wider FOU, i.e. when the search of
the optimal values was made in the range 2.74–5.75.
In Fig. 13, we can see the ISE errors obtained in each
range of the FOU, for the interval type-2 FLC, with the
Table 6 Performance comparison of the type-2 FLC with optimized MFs for different intervals of the FOU, for 24 DB of SNR
SNR
(db)
Type-2 FLC Intervals of the MFs of e, Dea Type-2 FLC Intervals of the MFs of e, Deb Type-2 FLC Intervals of the MFs of e, Dec
ISE IAE ITAE ISE IAE ITAE ISE IAE ITAE
8 108.3 116.6 1131.2 97.6 111.9 1085.3 95.5 110.9 1078.8
10 68.8 93.3 900.6 62.3 89.3 863.9 61.1 88.6 859.9
12 43.9 74.7 715.9 39.9 71.5 687.1 39.2 71 684.8
14 28.2 59.8 568.1 25.7 57.3 545.7 25.3 56.9 544.5
16 18.4 47.9 450.6 16.8 45.9 433.2 16.6 45.7 432.6
18 12.3 38.5 357.7 11.3 37 344.3 11.1 36.8 344
20 8.6 31.2 284.5 7.8 29.9 274 7.7 29.8 273.9
22 6.2 25.5 226.6 5.7 24.3 218.2 5.6 24.3 218.3
24 4.761 21 180.8 4.328 20 174.1 4.3014 20 174.4
26 3.9 17.5 144.7 3.5 16.6 139.2 3.5 16.7 139.7
28 3.3 14.9 116.4 3.0 14 111.6 3 14 112.2
30 3 12.9 94.2 2.7 11.9 89.9 2.7 12 90.4
Values obtained with 200 samples and 60 generationsa r between 3.74 and 4.75 for the three termsb r between 3.24 and 5.25 for the three termsc r between 2.74 and 5.75 for the three terms
Table 7 Comparison of the characteristics of the optimized MFs of an average of two type-1 FLCs for different intervals of the FOU, for 24 DB
of SNR
Variable Average of two Type-1 FLCs Intervals
of the MFs of e, DeaAverage of two Type-1 FLCs Intervals
of the MFs of e, DebAverage of two Type-1 FLCs Intervals
of the MFs of e, Dec
Center
c1
Standard
deviation r1
Standard
deviation r2
Center
c1
Standard
deviation r1
Standard
deviation r2
Center
c1
Standard
deviation r1
Standard
deviation r2
Input e -10 4.75 3.74 -10 5.25 3.2400 -10 5.75 2.9067
0 4.75 4.0771 0 5.25 4.1052 0 5.75 4.8168
10 4.75 3.74 10 5.25 3.3593 10 5.75 3.1084
Input De -10 4.75 4.74 -10 5.25 5.2400 -10 5.75 5.0186
0 4.75 4.436 0 5.25 3.6530 0 5.75 5.0756
10 4.75 4.7398 10 5.25 5.2375 10 5.75 5.0183
Output cde -10 2.6233 1.6233 -10 2.6233 1.6233 -10 2.6233 1.6233
-5 2.6233 1.6233 -5 2.6233 1.6233 -5 2.6233 1.6233
0 2.6233 1.6233 0 2.6233 1.6233 0 2.6233 1.6233
5 2.6233 1.6233 5 2.6233 1.6233 5 2.6233 1.6233
10 2.6233 1.6233 10 2.6233 1.6233 10 2.6233 1.6233
a r between 3.74 and 4.75 for the three termsb r between 3.24 and 5.25 for the three termsc r between 2.74 and 5.75 for the three terms
Optimization of interval type-2 fuzzy logic controllers using evolutionary algorithms 1155
123

optimized parameters of the MFs. The ISE T2-1 corresponds
to the FOU range of 3.74–4.75, the ISE T-2 to the FOU range
of 3.24–4.75, and finally the ISE T-3 represents the value
when the range is from 2.74 to 5.75. The difference between
the ISE T-2 and ISE T-3 is minimum, see Table 6.
5.2 Analysis of the results obtained with the average
of two Type-1 FLCs
In order to evaluate the performance of an interval type-2
FLC using the average of two type-1 FLCs, experiment 7
was done under the same conditions of Experiment 6.
In Table 7, we show the optimal values of the MFs of
the two type-1 FLCs for each FOU search range. Fig-
ures 11 and 12 show the optimized MFs that achieved the
best results, and as in Experiment 6, they were obtained for
the wider search range.
In Table 8, we have the values for the ISE, IAE and
ITAE errors, for the different noise levels and FOU. In this
case, as in Experiment 6, the best results were obtained
with the wider FOU, in the range between 2.74 and 5.75.
Table 8 Performance comparison of the average of two type-1 FLCs with optimized MFs for different intervals of the FOU for 24 DB of SNR
values obtained with 200 samples and 60 generations
SNR (db) Average of two Type-1 FLCs
Intervals of the MFs of e, DeaAverage of two Type-1 FLCs
Intervals of the MFs of e, DebAverage of two Type-1 FLCs Intervals
of the MFs of e, Dec
ISE IAE ITAE ISE IAE ITAE ISE IAE ITAE
8 104.4 114.9 1113.1 95.6 110.8 1074.8 96.1 111 1074.4
10 66.4 91.8 886.3 61.1 88.4 855.3 61.3 88.59 854.6
12 42.4 73.5 704.5 39.1 70.7 680 39.3 70.7 679.3
14 27.3 58.8 558.9 25.2 56.6 539.9 25.3 56.6 539.3
16 17.8 47.1 443 16.5 45.4 428.5 16.5 45.3 427.9
18 11.9 37.8 351.6 11 36.5 340.5 11 36.5 339.9
20 8.2 30.6 279.5 7.6 29.5 270.9 7.6 29.5 270.4
22 6 24.9 222.5 5.5 24 215.6 5.5 23.9 215.1
24 4.5619 20.5 177.4 4.2024 19.7 171.9 4.195 19.6 171.4
26 3.7 17 141.8 3.4 16.3 137.2 3.4 16.2 136.8
28 3.2 14.4 113.8 2.9 13.7 109.9 2.9 13.6 109.5
30 2.9 12.4 92 2.6 11.6 88.4 2.6 11.6 88.1
a r between 3.74 and 4.75 for the three termsb r between 3.24 and 5.25 for the three termsc r between 2.74 and 5.75 for the three terms
Fig. 9 Optimized MFs of the input e for the type-2 FLC, for a range
of the FOU between 2.74 and 5.75Fig. 10 Optimized MFs of the input delta e of the type-2 FLC, for a
range of the FOU between 2.74 and 5.75
1156 O. Castillo et al.
123

5.2.1 Comparison of the ISE error obtained for different
FOU ranges, using the average of two Type-1 FLCs,
for each different noise level
In Figs. 13 and 14, we can see the ISE errors obtained in each
range of the FOU, for the average of two Type-1 FLCs, with
the optimized parameters of the MFs. ISE PROM-1 corre-
sponds for the range between 3.74 and 4.75 of the FOU, ISE
PROM-2 for the range 3.24 and 4.75 of the FOU, finally ISE
PROM-3 represents the value when the range is 2.74 and
5.75. In addition, in this case, the difference between the ISE
PROM-2 and ISE PROM-3 is minimal.
5.3 Comparison of the results with the interval type-2
FLC and the average of two type-1 FLCs
In order to know which system behaves in a better way in
the experiments where we simulated uncertainty through
different noise levels, we first are going to compare the
values of the ISE, IAE and ITAE errors obtained with the
optimized parameters of the MFs of the interval type-2
FLC and the average of the two type-1 FLCs. This com-
parison is made with the best results obtained with each
FLC, which, in accordance to Tables 6 and 8, correspond
to those obtained for the wider FOU. The second com-
parison is made with the standard deviation values and the
variance obtained in each optimization process to get the
Fig. 11 Optimized MFs of the input e for the average of two type-1
FLCs, for a range of the FOU between 2.74 and 5.75
Fig. 12 Optimized MFs of the input delta e for the average of two
type-1 FLCs, for a range of the FOU between 2.74 and 5.75
Fig. 13 Comparison of the ISE errors for the optimized interval type-
2 FLCs. The ISE T2-1 corresponds for a search interval of the FOU of
3.74–4.75, the ISE T2-2 for a FOU of 3.24–5.25, and the ISE T2-3 for
a FOU of 3.74–5.75, for 24 db of SNR
Fig. 14 Comparison of the ISE errors for the optimized average of
two type-1 FLCs. The ISE PROM-1 corresponds for a search interval
of the FOU of 3.74–4.75, ISE PROM2-2 for a FOU of 3.24–5.25, ISE
PROM-3 for a FOU of 3.74–5.75, for 24 db of SNR
Optimization of interval type-2 fuzzy logic controllers using evolutionary algorithms 1157
123

optimal parameters of the MFs for the minimal ISE, IAE
and ITAE errors.
5.3.1 Comparison of the ISE, IAE and ITAE errors
obtained with the interval Type-2 FLC and the
average of two Type-1 FLCs
We can see in Tables 6 and 8 that with the average of two
type-1 FLCs optimized with the wider FOU, it was
obtained a minimum advantage in the values of ISE, IAE
and ITAE errors with respect to the optimized interval
type-2 FLC under the same conditions than the type-1 for
the wider FOU. In Figs. 15, 16, and 17 it is shown that this
advantage is more significant for a low noise level.
5.3.2 Analysis of the results of the interval type-2 FLC
and the average of the two Type-1 FLCs
We can see in Table 9, the values obtained in the optimi-
zation process of the optimal parameters for the MFs after
30 tests, of the variance, the Standard deviation, best ISE
value, average ISE obtained with the optimized interval
type-2 FLC, and average ISE with the average of two
optimized type-1 FLCs.
To analyze the statistical behavior of the tests realized
with the interval type-2 FLC and the average of two type-1
FLCs, the hypothesis test using the statistical distribution
known as the t student was made, where we have the fol-
lowing hypothesis:
H0 : l1 ¼l2
H1 : l1 6¼l2
In this case, H0 corresponds to the null hypothesis and
H1 the alternative hypothesis. The intention is to show if
the average of the two type-1 FLCs could be used properly
instead of the interval type-2 FLC. This can be
demonstrated if the null hypothesis is accepted, or on the
contrary if the alternative hypothesis is rejected.
Fig. 15 Comparison of the ISE errors for optimized interval type-2
FLC and the optimized average of two type-1 FLCs, for different
noise levels. It is observed a minimal advantage of the optimized
average of two type-1 FLCs for low noise levels
Fig. 16 Comparison of the IAE errors for optimized interval type-2
FLC and the optimized average of two type-1 FLCs, for different
noise levels. They behave almost the same, but it is observed a
minimal advantage of the optimized average of two type-1 FLCs for
low noise levels
Fig. 17 Comparison of the ITAE errors for optimized interval type-2
FLC and the optimized average of two type-1 FLCs, for different
noise levels, which basically shows no difference
1158 O. Castillo et al.
123

In Table 10, it is shown that as the search interval of the
FOU increases, the average of two type-1 FLCs has the
opportunity to perform as well as the interval type-2 FLC
and can be considered as a good approximation in this
particular situation. This is concluded because the statisti-
cal values decrease in the t test as the search interval
increases, which means that both statistical processes look
almost the same. Of course, this is possible because the
optimized type-1 FLCs are used in the approximation of
the interval type-2 FLC. The advantage of this approxi-
mation is that it is simpler to implement two interval type-1
FLCs than a complete interval type-2 FLC and also the real
time responses are faster, which is needed for real world
applications. It remains to be studied if the approximation
of an interval type-2 FLC with two type-1 FLCs can be
extended to more general situations or even to other types
of problems.
In comparing the results with other ones reported in
the literature, the results presented in Tables 5, 6, 7, 8, 9,
and 10 of this paper are better than those presented in
(Sepulveda et al. 2007) for the same non-linear plant. The
main reason for this statement is that now in this paper the
optimization method has been applied to design in an
appropriate fashion the type-2 membership functions for
the problem. An optimal design of the parameter values in
the type-2 fuzzy sets is very important to achieve perfor-
mance of the fuzzy controller, which is in this case
achieved using the HEM.
6 Conclusions
We can conclude that using the ISE, IAE, and ITAE as
performance criteria that in systems without uncertainty
(ideal systems) it is a better choice to select a type-1 FLC
since it works a little better than a type-2 FLC, and it is
easier to implement it. It is also well known that a type-1
FLC can handle nonlinearities, and uncertainties up to
some extent.
In the simulation of real systems, with a higher degree of
uncertainty (for example, due to noise in measurements or
other types of noise), we can conclude that lower overshoot
errors and the best settling times are obtained using an
interval type-2 FLC. The results presented in Table 4 show
that the performance of this kind of controllers is better
under high noise levels.
We can conclude that using an interval type-2 FLC in
real world applications can be potentially a good option
since this type of system is a more suitable choice to
manage high levels of uncertainty, as we can see in the
results shown in Tables 3 and 4.
We also discovered that optimizing the membership
functions (MFs) for the inputs of an interval type-2 system
increases the performance of the system for high noise
levels. In addition, when the search interval for optimizing
the MFs is wider, we obtained better results in the per-
formance of the system, as can be seen in the ISE, IAE, and
ITAE values of Tables 7 and 8, so these results indicate
that the interval type-2 fuzzy system can handle in a better
way the uncertainty introduced to the control system.
We have also shown with statistical evidence that the
performance of the optimized average of two interval type-
1 FLCs can approximate very closely the real behavior of
an interval type-2 FLC in this particular situation, and can
be considered as a potential good approximation for real
world control applications because it is simpler to imple-
ment and can produce faster real time responses.
Finally, we can mention that the case study of control-
ling a particular non-linear plant appears to be an isolated
situation, but we think that it represents well a general class
of non-linear plants and that the results would be similar
for many cases, even for problems of other areas of
application. Of course, in control problems is where it may
be more crucial to have a quick response for real time
applications and this is when using the proposed method of
an average of two optimized type-1 fuzzy systems to
approximate an interval type-2 fuzzy system may be more
Table 9 Comparison of the variance, the standard deviation, best ISE value, ISE average, obtained with the optimized interval type-2 FLC and
the optimized average of two type-1 FLCs
Search
Interval
Type-2 FLC Average of two Type-1 FLCs
Best ISE value ISE Average Standard deviation Variance Best ISE value ISE Average Standard deviation Variance
3.74–4.75 4.761 4.9942 0.1649 0.0272 4.5619 4.7701 0.1498 0.0224
3.24–5.25 4.328 4.5060 0.1460 0.0213 4.2024 4.4009 0.1568 0.0246
2.74–5.75 4.3014 4.4005 0.1653 0.0273 4.1950 4.3460 0.1424 0.0203
Table 10 Results of the t-student test
Search interval t0 tpdf_r
3.74–4.75 5.5096 1.6384 9 10-6
3.24–5.25 2.6869 0.0125
2.74–5.75 1.3682 0.1556
Optimization of interval type-2 fuzzy logic controllers using evolutionary algorithms 1159
123

important. We leave as future work the task of considering
more general cases and or other types of application for this
proposed approximation of interval type-2 fuzzy systems.
References
Castillo O, Melin P (2001) Soft computing for control of non-linear
dynamical systems. Springer, Heidelberg
Castillo O, Melin P (2003) Soft computing and fractal theory for
intelligent manufacturing. Springer, Heidelberg
Castillo O, Melin P (2004) A new approach for plant monitoring
using type-2 fuzzy logic and fractal theory. Int J Gen Syst
33:305–319
Castillo O, Melin P (2007) Type-2 fuzzy logic: theory and applica-
tions. Springer, Heidelberg
Castillo O, Melin P (2008) Intelligent systems with interval type-2
fuzzy logic. Int J Innovat Comput Inf Control 4:771–783
Castro JR, Castillo O, Melin P, Rodriguez-Diaz A (2009) A hybrid
learning algorithm for a class of interval type-2 fuzzy neural
networks. Inf Sci 179:2175–2193
Deb K (2002) Multi-objective optimization using evolutionary
algorithms. Wiley, Great Britain
Deshpande PB, Ash RH (1988) Computer process control with
advanced control applications. Instrument Society of America,
USA
Hagras HA (2004) Hierarchical type-2 fuzzy logic control architec-
ture for autonomous mobile robots. IEEE Trans Fuzzy Syst
12:524–539
Ingle VK, Proakis JG (2000) Digital signal processing using
MATLAB. Brooks/Cole Publishing Company
Jang JSR, Sun CT, Mizutani E (1997) Neuro-fuzzy and soft
computing, a computational approach to learning and machine
intelligence, Matlab Curriculum Series. Prentice Hall, New
Jersey
Karnik NN, Mendel JM (1999) Applications of type-2 fuzzy logic
systems to forecasting of time-series. Inf Sci 120:89–111
Karnik NN, Mendel JM (2001a) Operations on type-2 fuzzy sets. Int J
Fuzzy Sets Syst 122:327–348
Karnik NN, Mendel JM (2001b) Centroid of a type-2 fuzzy set. Inf
Sci 132(1–4):195–220
Karnik NN, Mendel JM, Liang Q (1999) Type-2 fuzzy logic systems.
IEEE Trans Fuzzy Syst 7:643–658
Karnik NN, Liang Q, Mendel JM (2001) Type-2 fuzzy logic software.
Available online at http://sipi.usc.edu/mendel/software/
Klir GJ, Yuan B (1995) Fuzzy sets and fuzzy logic: theory and
applications. Prentice Hall, New York
Kumar P, Bauer P (2009) Progressive design methodology for
complex engineering systems based on multiobjective genetic
algorithms and linguistic decision making. Soft Comput 13:649–
679
Liang Q, Mendel JM (2000) Interval type-2 fuzzy logic systems:
theory and design. IEEE Trans Fuzzy Syst 8:535–550
Mamdani EH (1993) Twenty years of fuzzy control: experiences
gained and lessons learn. In: Marks RJ (ed) Fuzzy Logic
Technology and Applications. IEEE Press, New Jersey
Martinez R, Castillo O, Aguilar LT (2009) Optimization of interval
type-2 fuzzy logic controllers for a perturbed autonomous
wheeled mobile robot using Genetic Algorithms. Inf Sci
179:2158–2174
Melin P, Castillo O (2002) Intelligent control of non-linear dynamic
plants using type-2 fuzzy logic and neural networks. In:
Proceedings of the Annual Meeting of the North American
Fuzzy Information Processing Society
Melin P, Castillo O (2003) A new method for adaptive model-based
control of non-linear plants using type-2 fuzzy logic and neural
networks intelligent control of non-linear dynamic plants using
type-2 fuzzy logic and neural networks. In: Proceedings of the
12th IEEE conference on fuzzy systems
Melin P, Castillo O (2004) A new method for adaptive control of non-
linear plants using type-2 fuzzy logic and neural networks. Int J
Gen Syst 33:289–304
Mendel JM (1998) Type-2 fuzzy logic systems: type-reduction. In:
Proceedings of IEEE syst., man, cybern. conf., San Diego
Mendel JM (1999) Computing with words, when words can mean
different things to different people. In: Int. ICSC Congress
Computat. Intell. Methods Applications, Rochester, New York
Mendel JM (2000) Uncertainty, fuzzy logic, and signal processing.
Signal Process J 80:913–933
Mendel JM (2001) Uncertain rule-based fuzzy logic systems:
introduction and new directions. Prentice Hall, New York
Mendel JM (2005) On a 50% savings in the computation of the
centroid of a symmetrical interval type-2 fuzzy set. Inf Sci
172:417–430
Mendel JM, John RI (2002) Type-2 fuzzy sets made simple. IEEE
Trans Fuzzy Syst 10:117–127
Mendel JM, Mouzouris GC (1999) Type-2 fuzzy logic systems. IEEE
Trans Fuzzy Syst 7:643–658
Mizumoto M, Tanaka K (1976) Some properties of fuzzy sets of type-
2. Inf Control 31:312–340
Montiel O, Castillo O, Melin P, Diaz AR, Sepulveda R (2007) Human
evolutionary model: a new approach to optimization. Inf Sci
177(10):2075–2098
Ozen T, Garibaldi JM (2003) Investigating adaptation in type-2 fuzzy
logic systems applied to umbilical acid-base assessment. In:
European symposium on intelligent technologies, hybrid systems
and their implementation on smart adaptive systems (EUNITE
2003), Oulu, Finland
Sepulveda R, Castillo O, Melin P, Rodriguez-Diaz A, Montiel O
(2007) Experimental study of intelligent controllers under
uncertainty using type-1 and type-2 fuzzy logic. Inf Sci
177:2023–2048
Yager RR (1980) Fuzzy subsets of type II in decisions. J Cybern
10:137–159
Zadeh LA (1971) Similarity relations and fuzzy ordering. Inf Sci
3:177–206
Zadeh LA (1973) Outline of a new approach to the analysis of
complex systems and decision processes. IEEE Trans Syst Man
Cybern 3:28–44
Zadeh LA (1975a) The concept of a linguistic variable and its
application to approximate reasoning. Inf Sci 8:43–80
Zadeh LA (1975b) The concept of a linguistic variable and its
application to approximate reasoning, Part 1. Inf Sci 8:199–249
1160 O. Castillo et al.
123
Copyright © 2022 FDOKUMEN