Pushing Predicates into Recursive SQL Common Table Expressions

Photon Netw Commun (2013) 26:1–12DOI 10.1007/s11107-013-0403-5
Optimal K-survivable backward-recursive path computation(BRPC) in multi-domain PCE-based networks
Francesco Paolucci · Isabella Cerutti · Filippo Cugini ·Luca Valcarenghi · Piero Castoldi
Received: 17 October 2012 / Accepted: 29 May 2013 / Published online: 13 June 2013© Springer Science+Business Media New York 2013
Abstract The path computation element (PCE) enablesoptimal path computation in single-domain (G)MPLS net-works. To overcome the lack of traffic engineering (TE)information in multi-domain networks and to preserveboth computation optimality and domain confidentiality, thebackward-recursive PCE-based computation (BRPC) proce-dure has been standardized. BRPC procedure is based onPCE protocol (PCEP) and enables synchronized computa-tion of TE label-switched paths with the requested level ofreliability and quality of service requirements (i.e., guaran-teed bandwidth). In this paper, the problem of computing K -survivable optimal multi-domain paths by resorting to BRPCprocedure is analyzed. Extensions to PCEP protocol are dis-cussed to achieve path optimality when domain informationis kept confidential. The optimality is theoretically proved,and the computational complexity is shown to be more effi-cient than existing approaches. The discussed extensions areexperimentally validated in an MPLS network test bed basedon commercial equipments and are shown to have perfor-mance comparable to standard PCEP approach.
Keywords GMPLS · Path protection · Path computation ·PCE · Multi-domain · BRPC · PCEP
F. Paolucci (B) · I. Cerutti · L. Valcarenghi · P. CastoldiTeCIP Institute, Scuola Superiore San’Anna, Via Moruzzi 1,56124 Pisa, Italye-mail: [email protected]
F. CuginiConsorzio Nazionale Interuniversitario per le Telecomunicazioni(CNIT), Via Moruzzi 1, 56124 Pisa, Italy
1 Introduction
In networks employing Generalized Multi-Protocol LabelSwitching (GMPLS) control plane, traffic engineering (TE)techniques are of paramount importance in order to dynami-cally establish label-switched paths (LSPs) that ensure therequested level of quality of service (QoS) requirements(e.g., guaranteed bandwidth) and optimize some QoS met-ric (e.g., minimize the hop count). Additionally, for sensi-tive and valuable data traffic, TE techniques must providerobustness to failures and meet the requested level of ser-vice availability. High robustness, or survivability, to nodeor link failures can be achieved by resorting to dedicatedpath protection, i.e., by establishing a protection LSP thatis node-disjoint or link-disjoint with respect to the workingpath.
In a single-domain network, TE can be performed by thepath computation element (PCE) [1]. In this scenario, thePCE has a full knowledge of the domain state, and it is ableto compute the LSPs that are (1) optimal with respect to theQoS requirements and (2) robust to failures.
In multi-domain networks, each PCE may not disclosedetailed TE information of its own domain (e.g., domaintopology, link state) to the PCEs in other domains, for admin-istrative and security reasons [2]. Therefore, IETF extendedthe PCE protocol (PCEP) [3] that allows PCEs to exchangerequests (and replies) for establishing inter-domain LSPs.Based on the information exchanged using PCEP, PCEs cancompute inter-domain paths by resorting to a backward-recursive PCE-based computation (BRPC) [4] procedure. InBRPC, path computation is carried out along a predeterminedsequence of domains and is based on the QoS weights of thecandidate downstream paths that are computed by the down-stream PCEs. By exploiting PCEP and BRPC, administrativeand security policies are observed since only the QoS weights
123

2 Photon Netw Commun (2013) 26:1–12
and loose path information are disseminated to the upstreamPCEs.
When survivability needs to be guaranteed along withQoS, computation of the working and protection path(s)needs to be carried out jointly to ensure the disjointness andoptimality of the paths. Few solutions have been proposed [5–8]. However, they fail to either guarantee the optimality ofthe inter-domain survivable-path computation or satisfy theadministrative and security policies, existing in multi-domain(G)MPLS networks. The problem is that, typically, domainconfidentiality and path disjointness are mutually incom-patible requirements in multi-domain multi-carrier networkscontrolled by PCEs.
In this paper, the problem of computing optimal inter-domain survivable (i.e., link-disjoint or node-disjoint) LSPswith QoS requirements is considered in a multi-domain(G)MPLS network. Inter-domain optimality is defined as thesurvivable inter-domain paths minimizing the joint additiveQoS metric (e.g., TE metric)—consistent in each domain—asit would be obtained in the absence of multiple domains [4].Survivability is defined as 100 % robustness to K or less net-work failures (i.e., node or link failures), which could takeplace simultaneously or sequentially in any domain, and itis referred to as K -survivability. K -survivability is achievedby using dedicated path protection. Optimal path compu-tation of K -survivable paths based on BRPC is discussed.To achieve the optimal solution, additional PCEP extensionsare discussed. Optimality of the computed inter-domain K -survivable paths is proven. The optimality assumes that (1)the domain path (i.e., the sequence of domains along whichLSPs are routed) of the K -survivable LSP is fixed and com-puted before the inter-domain protocol is activated and (2)the network state is maintained during BRPC. Disjointnessand optimality of K -survivable paths are achieved by the pro-posed approach, even in the presence of domain confidential-ity. Computational complexity of the discussed approachesis quantified and compared against classical solutions, notcompliant with BRPC and PCEP. Finally, an experimentalimplementation of a PCE computing protected paths requestsexploiting BRPC is presented, showing that the additionalcomplexity of BRPC does not significantly impact the pathcomputation process.
2 Previous work
Several studies address and solve the problem of comput-ing a pair of link and node-disjoint paths between the samesource and destination nodes in intra-domain scenarios. Theproposed approaches are based on the well-known algorithmof Suurballe and Tarjan [9] and Bhandari [10].
The exchange of control plane information betweendomains can be conveyed by an inter-domain routing pro-tocol, such as Border Gateway Protocol (BGP). Typically,
for scalability purposes, BGP disseminates only destinationreachability information. Therefore, QoS and path disjoint-ness may not even be determined. To overcome the limita-tions imposed by BGP, a control plane based on PCEs isproposed in [5].
A hierarchically distributed architecture of PCEs (H-PCE)can be implemented to compute survivable inter-domainpaths. The H-PCE architecture is proposed in [6,11] and eval-uated in [12]. In H-PCE, each PCE (also called child PCE) isresponsible for its own domain, while inter-domain compu-tation is delegated to an inter-domain PCE (also called Par-ent PCE), having full knowledge of the inter-domain opticallayer. Such PCE decides the domains and the border nodes(BNs) while the routing in the optical domains is computed byeach child PCE. The presence of an inter-domain PCE allowsdiverse domain sequence computation [13]. However, thisapproach may violate the autonomous administrative con-trol by network providers and may not ensure the necessarylevel of confidentiality and independence in multi-providernetworks. For this reason, this approach is suitable for single-provider scenarios.
A distributed algorithm that allows PCEs to find survivableinter-domain paths is proposed in [7]. Inter-PCE commu-nications are based on a distributed protocol (distinct fromBGP) that advertises an aggregate representation (AR) ofeach domain. The source PCE computes the optimal dis-joint path pair on the combined AR using an extended ver-sion of the Suurballe and Tarjan algorithm [9]. However, thisapproach has some limitations. First, it requires the AR ofeach domain, and this may introduce issues of confidential-ity. Second, it may lack of scalability when K >2 survivablepaths are required. Finally, it is not compliant nor practicallyapplicable to PCEP (i.e., for confidentiality purposes, PCEProuting details are typically encrypted).
To overcome these limitations, two different approachesare proposed in [8]. One approach combines path computa-tion with signaling, and another approach separates the twophases. The former approach is based on the resource reser-vation protocol with traffic engineering extension (RSVP-TE) [14]. The sequence of crossed domains is assumed tobe known a priori. During forward signaling of the workingpath, the BN of each domain computes the secondary path inthe domain and stores it in a proposed object. Once the work-ing path is reserved, the protection path is signaled using suchinformation. Per-domain computation is performed leadingto suboptimal solution. In the other approach the path com-putation is carried out during PCE signaling. While relevant,this approach needs to be extended to ensure interoperabilitywith PCEP and BRPC.
The work [15] proposes two-disjoint-path computationthat utilizes the forward path computation chain phase toselect the sequence of domains and the subsequent backwardBRPC on previously selected domain. The work [16] pro-
123

Photon Netw Commun (2013) 26:1–12 3
poses BRPC-based computation of two disjoint paths witha reduced computational complexity, achieved by comput-ing a reduced set of candidate disjoint path pairs originatingfrom transit domains. Finally, the recent work [17] intro-duces domain-disjoint BRPC, in which domain-disjoint vir-tual shortest path trees are considered. Such approach is suit-able for multi-domain single-provider networks.
In this paper, domain sequence is assumed to be precom-puted to ensure compliance with BRPC.
3 Survivable multi-domain PCE-based pathcomputation
Consider a network composed of a number of domains, eachone controlled by PCE. Each PCE promptly collects detailedinformation about the resource availability in its own domainand stores it in a database. Such information is not disclosedto the other PCEs due to the large amount of data and to theprivacy and confidentiality policy imposed by the networkproviders. Therefore, each PCE is assumed to be capableof optimally computing survivable paths (e.g., by minimiz-ing the TE metric) with QoS guarantees only within its owndomain.
3.1 PCE protocol (PCEP)
PCEP [3] is a protocol designed for communications betweena path computation client (PCC) and a PCE, or between twoPCEs as shown in Fig. 1.
To request a path computation, the PCC (or a PCE) sendsa PCReq message to a PCE, triggering PCE computation. Ifa path is successfully computed and satisfies any requestedconstraints, the PCE replies to PCC (or to PCE) with aPCRepmessage, containing the computed path.
Both the PCReq and the PCRep must contain the requestparameters (RP) object that specifies the characteristics ofthe requested path computation (e.g., priority). In addition,for survivable-path computation, the synchronization vector(SVEC) object has to be included in the PCReq. Compu-tation of link-disjoint, node-disjoint, or Shared Risk LinkGroup (SRLG)-disjoint paths is invoked by setting the SVECflags indicated as L, N, or S, respectively. The QoS met-ric to be optimized can be indicated in the Metric object ofthe PCReq. The PCRep carries the computed path(s) in theexplicit route object (ERO) (possibly encrypted [18]) and its(their) weight(s) in the Metric object.
3.2 Backward-recursive PCE-based computation (BRPC)
BRPC procedure [4] makes use of a predetermined domainpath (i.e., sequence of domains). According to the domainpath, it is possible to define the entry (exit) set of BNs thatare connected to the upstream (downstream) domain. It isassumed that a consistent metric is used in each domain.
PCC requests an inter-domain path to the PCE, by sendinga PCReq, containing the RP object with the BRPC flag set to1. PCReq is forwarded to the PCEs through a client–serverchain along the domain path. The destination PCE computes
Fig. 1 Multi-domain scenario with BRPC procedure
123
4 Photon Netw Commun (2013) 26:1–12
a tree of potential paths, referred to as virtual shortest pathtree (VSPT), from the entry BNs in its domain to the destina-tion node, which acts as the root of the VSPT. VSPT paths areincluded in an explicit or loose way (i.e., by indicating onlythe entry BNs) in the ERO object. The corresponding weightsare included in the Metric object of PCRep. PCRep is thenforwarded to the upstream PCE, as shown in Fig. 1. In turn,each PCE computes the VSPT from its own entry BN to thedestination, and then it forwards the PCRep message withupdated information to the upstream PCE. On receipt of thePCRep, the source PCE computes the end-to-end path usingthe VSPT and informs the PCC. The sequence of PCReqand PCRep exchanged between the PCEs of three domainsis displayed in Fig. 1. In particular, each ERO enclosed inthe VSPT of packet 4 of the figure may be encoded withdifferent strategies: as strict explicit (i.e., the full explicitsequence) , as loose explicit (i.e., the explicit sequence ofBN, e.g., BN3-BN6-BN9-T), as sequence of path keys andBNs (e.g., BN3-PathKey1-BN6-BN9-Pathkey2-T), or, even,as a sequence of subsequent path keys (i.e., each one enclos-ing the entry point of the next path key, e.g., BN3-PathKey1-PathKey2-T) [18]. The last two strategies are suitable forinter-provider path computations. The extreme level of con-fidentiality is achieved by the latter strategy that preservesalso external BNs sequence information. However, as dis-cussed next, it may suffer from incorrect TE informationexchange and requires PCEP extensions. For this reason, itis considered as the reference ERO encoding mechanism inthe rest of the paper.
Note that BRPC avoids the sharing of domain-relatedinformation: Only aggregate information on the possibilityof and the weight for reaching the destination from a BNis disseminated. Also, it lacks to explicitly indicate the algo-rithm to use for path computation. Effects of these limitationsare discussed next.
3.3 Challenges of PCEP and BRPC for the disjoint pathcomputation
Consider the problem of computing two link-disjoint paths(K = 1) from a node S to a node T as shown in Fig. 2.A PCReq is forwarded to the destination PCE. The PCReqcontains the SVEC object including the Link Disjoint flagwith the request of two LSPs between the same source anddestination. For each request, a reply with the computedVSPT(s) must be signaled to the adjacent upstream PCE.Two approaches are possible:
1. Disjoint VSPT computation: The PCE computes a VSPTfor the working LSP and another for the protection LSP;
2. Joint VSPT computation: The PCE computes a VSPT forboth the working and the protection LSPs.
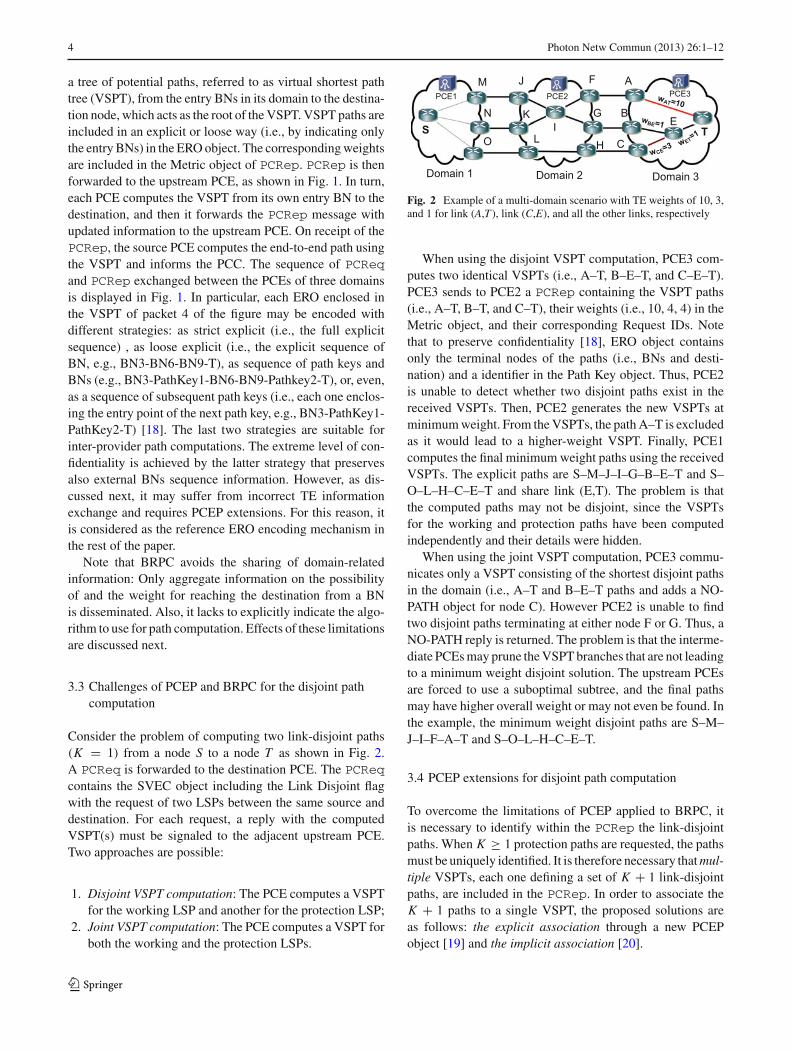
Fig. 2 Example of a multi-domain scenario with TE weights of 10, 3,and 1 for link (A,T ), link (C,E), and all the other links, respectively
When using the disjoint VSPT computation, PCE3 com-putes two identical VSPTs (i.e., A–T, B–E–T, and C–E–T).PCE3 sends to PCE2 a PCRep containing the VSPT paths(i.e., A–T, B–T, and C–T), their weights (i.e., 10, 4, 4) in theMetric object, and their corresponding Request IDs. Notethat to preserve confidentiality [18], ERO object containsonly the terminal nodes of the paths (i.e., BNs and desti-nation) and a identifier in the Path Key object. Thus, PCE2is unable to detect whether two disjoint paths exist in thereceived VSPTs. Then, PCE2 generates the new VSPTs atminimum weight. From the VSPTs, the path A–T is excludedas it would lead to a higher-weight VSPT. Finally, PCE1computes the final minimum weight paths using the receivedVSPTs. The explicit paths are S–M–J–I–G–B–E–T and S–O–L–H–C–E–T and share link (E,T). The problem is thatthe computed paths may not be disjoint, since the VSPTsfor the working and protection paths have been computedindependently and their details were hidden.
When using the joint VSPT computation, PCE3 commu-nicates only a VSPT consisting of the shortest disjoint pathsin the domain (i.e., A–T and B–E–T paths and adds a NO-PATH object for node C). However PCE2 is unable to findtwo disjoint paths terminating at either node F or G. Thus, aNO-PATH reply is returned. The problem is that the interme-diate PCEs may prune the VSPT branches that are not leadingto a minimum weight disjoint solution. The upstream PCEsare forced to use a suboptimal subtree, and the final pathsmay have higher overall weight or may not even be found. Inthe example, the minimum weight disjoint paths are S–M–J–I–F–A–T and S–O–L–H–C–E–T.
3.4 PCEP extensions for disjoint path computation
To overcome the limitations of PCEP applied to BRPC, itis necessary to identify within the PCRep the link-disjointpaths. When K ≥ 1 protection paths are requested, the pathsmust be uniquely identified. It is therefore necessary that mul-tiple VSPTs, each one defining a set of K + 1 link-disjointpaths, are included in the PCRep. In order to associate theK + 1 paths to a single VSPT, the proposed solutions areas follows: the explicit association through a new PCEPobject [19] and the implicit association [20].
123

Photon Netw Commun (2013) 26:1–12 5
Domain 1
S T
BN0
Domain 2 Domain 3
RepID
2
VSPT Metric Obj1 BN9-T , BN10-T w9+w10
2 w9+w11
3 BN10-T , BN11-T w10+w11
BN9-T , BN11-T
RepID VSPT Metric Obj1 BN3-T , BN4-T w3+w4
2 w3+w5
3 BN4-T , BN5-T w4+w5
BN3-T , BN5-T
14 3
PcRep Msg, Req ID 1, 2
BN1
BN2
BN3
BN4
BN5
BN6
BN7
BN8
BN9
BN10
BN11
SVECNode-disjoint flag
PcReq MsgReq ID 1
S->T Req ID 2
S->T SVEC
Node-disjoint flag
PcReq Msg
Req ID 1S->T
Req ID 2S->T
PcRep Msg, Req ID 1, 2
PCE 1 PCE 2 PCE 3
Fig. 3 BRPC procedure for 1+1 disjoint path computation using RepID object
The explicit association requires the introduction of theReply ID (RepID) object in the PCRep to uniquely identifyeach VSPT, which defines a set of K + 1 disjoint paths. Byso doing, the PCE receiving the PCRep is informed aboutthe association between the disjoint path solutions (EROspossibly encrypted [18]) and their Metric object. An exampleofPCRepwith RepID objects is shown in Fig. 3. In particular,for each RepID object, the message encloses a VSPT in theform of a list of EROs. Moreover, it carries one Metric objectper RepID, meaning that the metric is referred to the entireVSPT.
With the implicit association, the novel object RepID isavoided by using an ordered list of EROs identifying the pathsassociated with the same VSPT. The indexes of the orderedlist identify different disjoint VSPTs.
Consider again Fig. 2. Two VSPTs are computed by PCE3.The tree (A–T, B–E–T) is identified with RepID 1, while thetree (A–T, C–E–T) is identified with RepID 2. The tree (B–E–T, C–E–T) is omitted since it defines two paths that sharea link, i.e., link (E–T). Then, PCE2 computes its VSPTs,i.e., (J–I–F–A–T, L–H–C–E–T) with RepID 1 and (K–I–F–A–T, L–H–C–E–T) with RepID 2. Finally, PCE1 selects thetree (S–M–J–I–F–A–T, S–O–L–H–C–E–T), which definesthe optimal link-disjoint paths.
4 Problem definition
The considered multi-domain network can be representedas a graph G(V, E), where V is the set of nodes and E
is the set of links. The graph is divided into M subgraphsG j (Vj , E j ), j = 1, 2, . . . , M . Subgraph G j represents net-work domain j . Vj is the set of nodes in domain j , andE j is the set of links in domain j (i.e., the set of linkswhose terminal nodes are in Vj ). The set of inter-domainlinks from domain i to domain j (i.e., links from a nodein Vi to a node in Vj ) is Ei, j . Therefore, V = ∪ j V j , andE = (∪i Ei ) ∪ (∪i, j Ei, j ). Each link is assigned a positiveweight. This paper considers additive weight metric, i.e., theweight of a path is defined as the summation of the weights ofits links. It is assumed that PCE of domain j has full knowl-edge about the weights of links in E j and inter-domain linksin Ei, j . Let S and T be the source node and the destinationnode of the working LSP. Let K +1 be the number of node-disjoint or link-disjoint LSPs to be set up from S to T . Thesequence of domains through which the K +1 node-disjoint(or link-disjoint) LSPs are routed is given. Without loss ofgenerality, let us assume that domain 1 is the source domainand domain D is the destination domain and that domainpath is π = 1, 2, . . . , j, j + 1, . . . D, where D ≥ 2. For thegiven domain path π , the objective is to find K+1 link-disjoint(or node-disjoint) paths from S to T , whose weight summa-tion is minimum. In BRPC, π is given. Thus, the links inE j, j+1 (∀ j < D) are a cut [21] from S to T . The set of entryBNs of domain j (i.e., the set of BNs belonging to domain jand connected to domain j −1) is Bin
j . Similarly, the set ofexit BNs of domain j is Bout
j . To simplify the notation, theERO objects associated with a RepID (or implicitly associ-ated) are identified by the set of exit BNs. More specifically,for domain j , the i th set of K +1 exit BNs which are associ-
123

6 Photon Netw Commun (2013) 26:1–12
ated with RepID i (or are implicitly associated) are indicatedas r j (i). All the sets of r j (i) contained in the PCRep sentby PCE of domain j to PCE of domain j−1 are indicated asr j . The weight associated with r j (i) is w j (i). The vector w j
includes all the weights w j (i) in the PCRep sent by PCE ofdomain j to PCE of domain j −1.
4.1 Non-survivable minimum weight inter-domain paths
The optimal single (non-protected) minimum weight inter-domain path can be found based on the following lemma.
Lemma When K = 0, if the element w j+1(i) indicates theminimum weight of the path from node r j+1(i) to T and ifr j+1 contains all the nodes in Bin
j+1, then PCE of domain jis able to optimally compute the minimum weight of a pathfrom a node in its own domain, to T , in polynomial time.Thus, source PCE is able to compute the minimum weight ofthe path from S to T .
Proof in the “Appendix.” ��Based on the proof, the destination PCE can compute the
VSPT containing the minimum weight path from each nodem ∈ Bin
D to T by running a shortest path algorithm (e.g.,Dijkstra). The intermediate PCE of domain j computes theVSPT containing the minimum weight path from each nodem ∈ Bin
j to T by running an instance of a shortest path algo-rithm on an auxiliary graph G ′
j . G ′j is the graph obtained
by adding to G j the nodes in Binj+1, a dummy node δ, the
inter-domain links E j, j+1, and a link connecting each nodem ∈ Bin
j+1 to δ. Weights of links (m, δ) are given by ele-ments in w j+1. Finally, the source PCE can optimally com-pute the minimum weight path from S to T by running asingle instance of a shortest path algorithm on an auxiliarygraph G ′
1. G ′1 is the graph obtained by adding to G1 the
nodes in Bin2 , a dummy node δ, the inter-domain links E1,2,
and a link connecting each node m ∈ Bin2 to δ. Weights of
links (m, δ) are given by elements in w2. The computationsperformed by PCE of domain j consist in running a singleinstance of a shortest path algorithm for each m ∈ Bin
j , on
the auxiliary graph G ′j that has n = |Vj |+ |Bin
j+1|+ 1 nodes
and e = |E j | + |E j, j+1| + |Binj+1| links. Thus, at PCE j , the
worst-case computation complexity is |Binj |O(n log(n)+e).
The cardinality (i.e., number of elements) of r j and w j vec-tors is |Bin
j |.
4.2 Inter-domain paths survivable to K link faults
Based on the PCEP extensions proposed in Sect. 3.4 for theK survivability case, let r j (i) ⊆ Bin
j be i th subset containingK+1 BNs, with 1 ≤ j ≤ D, in the ERO object. Let w j+1(i)be the set of weights of the K +1 link-disjoint paths from
the set of nodes indicated in r j+1(i) (i.e., K +1 of the nodesin Bin
j+1), to destination T . After presenting link-disjointnessproperty of inter-domain paths, a strategy for computing link-disjoint inter-domain paths is presented and the optimality isthen proved.
Link-disjointness property: If there exist a set of K +1link-disjoint paths in the source domain from S (as indicatedby the nodes in r2(i)) and a set of K+1 link-disjoint paths ineach intermediate domain 2 ≤ j < D−1 (i.e., from nodesin the subset r j (h) to nodes in the subset r j+1(l)) and a setof K +1 link-disjoint paths in the destination domain (i.e.,from nodes in rD−1(l) to T ), then the K +1 paths obtainedby interconnecting them in any way1 are also link-disjoint,for any i, j, h, l.
This property asserts that if link-disjointness is guaranteedfor each path computed in each domain (including inter-domain links), then the paths from S to T are also link-disjoint. Thus, each PCE (e.g., in domain j) can computeK +1 link-disjoint paths from a subset of K +1 BN nodes(i.e., Bin
j ) indicated in r j (h) to another subset of K +1 BN
nodes (i.e., Binj+1) indicated in r j+1(l). Among them, the
minimum weight K +1 link-disjoint paths can be found byusing the following approach. Optimality is then proved.
Consider the i th element of r j , i.e., r j (i), that contains aset of K + 1 nodes. For each element h of r j+1 received inthe PCRep, the auxiliary graph G̃i,h
j should be created andthe Suurballe and Tarjan algorithm should be executed asfollows. Let G̃i,h
j be the auxiliary graph obtained by addingto G j the nodes in r j+1(h), the intra-domain links E j, j+1 tothe nodes in r j+1(h), two dummy nodes σ and δ, a link fromeach node in r j+1(h) to node δ, and a link from σ to eachnode in r j (i). Note that the same node may be repeated inr j (i) (r j+1(h)), and thus, multiple parallel links representingthe link-disjoint paths departing from the same BN and arriv-ing to T may exist from σ (such node) to such node (to δ).The links from σ and to δ should be set to null weight. PCEof domain j can compute the minimum weight K +1 link-disjoint paths on G̃i,h
j from σ to δ using Suurballe and Tarjan
algorithm [9]. Let ci,hj be the summation of the weights of the
K +1 link-disjoint paths. Among the optimal solutions forany element h of r j+1, the one at minimum weight is selectedand the weight corresponding to the link-disjoint paths fromr j (i) is set to w j (i) = minh
(ci,h
j + w j+1(h)). An example
is given in Fig. 4 for PCE of domain j and K = 1. Thereceived PCRep is as indicated in the figure and containsthree ERO objects associated with three Metric objects. Foreach of them, the auxiliary graph is created and the Suurballeand Tarjan algorithm is solved as sketched in the figure. Theminimum weight of such solution is inserted in the Metricobject to be sent to PCE of domain j−1 and associated with
1 Notice that link-disjoint paths are not required to be also node-disjoint.
123

Photon Netw Commun (2013) 26:1–12 7
Fig. 4 Example of minimumweight link-disjoint(1-survivable) path computation,accounting for r j vector (EROobject) and w j vector (Metricobject)
the node pair B N3, B N4. We now prove the optimality ofthe approach.
Theorem If element w j+1(i) indicates the minimum weightof the link-disjoint paths from nodes in r j+1(i) to T and ifr j+1 contains all the subsets of K +1 nodes (with repeti-tion) of Bin
j+1, then PCE of domain j is able to compute theminimum weight link-disjoint paths (if they exist), which areK -survivable to link faults, from any node in its own domainto T , e.g., using Suurballe and Tarjan algorithm [9]. Thus,the source PCE is able to compute the minimum weight link-disjoint paths from S to T , which are K -survivable to linkfaults.
Proof in the “Appendix.” ��The Surballe and Tarjan algorithm has a computational
complexity which is K times the computational complexityof a shortest path algorithm, that is, K (n log(n) + e), wherethe numbers of nodes (n) and links (e) are obtained from theauxiliary graph G̃i,h
j , i.e., n = |Vj |−|Binj |+2(K +1)+2 and
e = |E j | + |E j, j+1| + 2(K + 1).
4.3 Inter-domain paths survivable to K node and link faults
Let us now discuss the procedure for computing inter-domainpaths, survivable to K node or link failures, and prove itsoptimality.
Corollary If element w j (i) indicates the minimum weightof the node-disjoint paths from nodes in r j (i) to T and ifr j contains all the sets of K +1 nodes of Bin
j , then PCE ofdomain j −1 is able to compute the minimum weight node-disjoint paths from any set of K+1 nodes (without repetition)
of its own domain to T . Thus, source PCE is able to computethe minimum weight node-disjoint paths from S to T , whichare K -survivable to node and link faults.
Proof It is possible to find minimum weight node-disjointpaths on a graph using the node splitting technique proposedin [10,22]. Weights of the arcs between the split nodes arenull, and thus, they do not affect the overall weight. Node-disjointness is ensured thanks to the splitting technique. Theproof of the corollary derives from one of the previous theo-rem in which graphs are modified with node splitting strategy.The optimality is reached as node splitting technique findsthe optimal (i.e., minimum weight) set of K+1 node-disjointpaths. ��
5 Complexity estimation
This section estimates the complexity of the above-presentedalgorithms and PCEP extensions, in terms of signalingrequirements and computational complexity. The perfor-mance is compared against the source-PCE-based computa-tion (SPC) procedure proposed in [7]. Using the algorithmsproposed in [7], SPC procedure is able to find the joint domainrouting and inter-domain path at minimum weight. Tables 1and 2 evaluate the size (i.e., number of elements) of arraysr j and w j forwarded by PCE of domain j and the complex-ity of the computations to be carried out by the same PCE,respectively. The computational complexity is derived as afunction of the number of elements in the vectors, i.e., |.|.The three different survivability cases are considered: non-survivable path, paths K -survivable to link faults, and paths
123

8 Photon Netw Commun (2013) 26:1–12
Table 1 Single-domain:computational complexity inBRPC procedure
Survivability Computational complexity
No surv.∣∣w j
∣∣[ (∣
∣Vj∣∣ +
∣∣∣Bin
j+1
∣∣∣ + 1
)· log
(∣∣Vj
∣∣ +
∣∣∣Bin
j+1
∣∣∣ + 1
)
(K = 0) + ∣∣E j∣∣ + ∣∣E j, j+1
∣∣ +∣∣∣Bin
j+1
∣∣∣]
Link-surv. K ·∣∣w j∣∣·∣∣w j+1
∣∣·[(∣∣Vj
∣∣−∣∣∣Bin
j
∣∣∣+2(K +1)+2
)·log
(∣∣Vj∣∣−
∣∣∣Bin
j
∣∣∣+2(K +1)+2
)
(K ≥ 1) + ∣∣E j
∣∣ + ∣
∣E j, j+1∣∣ + 2(K + 1)
]
Node-surv. K · ∣∣w j
∣∣ · ∣
∣w j+1∣∣·
[2
(∣∣Vj
∣∣ −
∣∣∣Bin
j
∣∣∣ + 2(K +1) + 2
)
(K ≥ 1) · log(
2(∣∣Vj
∣∣ −∣∣∣Bin
j
∣∣∣ + 2(K +1) + 2
))+ ∣∣E j
∣∣ + ∣∣E j, j+1∣∣ + 2(K +1)
]
Table 2 Single-domain: objectsizes in BRPC procedure Survivability # Candidate paths in r j |r j | or |w j |
No survivability (K = 0) |Binj | |Bin
j |Link-survivability (K ≥ 1)
( |Binj | + K
K +1
)(K +1)
( |Binj | + K
K +1
)
Node-survivability (K ≥ 1)
( |Binj |
K +1
)(K +1)
( |Binj |
K +1
)
Table 3 Multi-domain:signaling overhead in SPC andBRPC procedures
Survivability Signaling overhead
No survivability: SPC b2 D
No survivability: BRPC b(D−1)
Link-survivability: SPC∑K
h=0 b2(h+1) D = Hs D
Link-survivability: BRPC
(b+KK +1
)(D−1) = Hb(D−1)
K -survivable to node and link faults. Providing survivabil-ity increases the computational times not only because Kdisjoint paths need to be computed, but also because it isnecessary to evaluate all the combinations of elements in w j
and w j+1, if optimality is sought. This also increases theobject sizes, i.e., |r j | and |w j |.
Tables 3,4 compare the signaling overhead and the com-putational complexity, respectively, of the proposed BRPCagainst the SPC approach [7]. To simplify the comparison,it is assumed that in both cases the network is composedof D domains and that each domain has the same numberof nodes (v = |V |
D ), the same number of links (e = |E |D ),
and the same number of entry BN (b) and exit BN (b). Thecomputational complexity is evaluated as the complexity ofthe computations to be performed by all the PCEs in BRPC
or by the source PCE in SPC. The asymptotic computationcomplexity is derived under the assumptions that b � v and|E j, j+1| � e ∀ j . In the tables, the parameter C is equal toC = [|V |(log(|V |) − log(D)) + |E |].
In BRPC, the signaling overhead is evaluated in terms ofoverall size of messages |w j |. In the SPC, signaling overheadis evaluated in terms of overall amount of information (i.e.,weight values) contained in all the messages exchanged byPCEs. The computational complexity and the signaling over-head of SPC are driven by the computation of the aggregatedrepresentation of each domain, carried out by each PCE. Theaggregated representation (AR) consists of a fully meshedgraph in which the nodes are the BNs. For K = 0 the linkweight is proportional to the shortest path length on the orig-inal graph. For K > 0 an AR graph is required for each link
Table 4 Multi-domain:computational complexity inSPC and BRPC procedures
Survivability Asymptotic overall computational complexity
No survivability: SPC (v log(v) + e)Db ≈ C BD
No survivability: BRPC [(v + b) log(v + b) + e + b]Db ≈ C BD
Link-survivability: SPC (v log(v) + e) Hsb D ≈ C Hs
b
Link-survivability: BRPC K [(v − b + 2K ) log(v − b + 2K ) + e]H2b · D ≈ CK H2
b
123

Photon Netw Commun (2013) 26:1–12 9
of each AR graph derived for (K − 1) and can be found byapplying the technique of reversing each link of the AR graphfor (K − 1) as in Suurballe and Tarjan algorithm [9,10]. Theend-to-end disjoint paths are found on the AR of the variousdomains. Therefore, in SPC the signaling overhead as wellas the computational complexity is driven by the AR of thedifferent domains.
When comparing the computational complexity (Table 4),the ratio Hs/b can be shown to be equal to (for K = 0) orgreater (for K > 1) than the product K · Hb for any valueof b, leading to a lower computational complexity of BRPCwith respect to SPC. Also, the signaling overhead (Table 3)results to be significantly lower than that of SPC for anyvalue of b and K . The best performance of BRPC is paid interms of optimality. Indeed, BRPC with the extension hereproposed is able to find the optimal K -survivable path on aprecomputed domain routing, whereas SPC is able to find anoptimal set of K -survivable paths on all the possible domainrouting at the expense of higher computational complexityand signaling overhead.
6 SPaCe prototype: an experimental evaluation
A PCE prototype, named Survivable PCE (SPaCE), hasbeen developed, based on the modular architecture proposedin [23] and [24,25] for inter-domain TE and multi-bit-rateoptical networks, respectively. SPaCE is a C++ module thatimplements the functionalities required for supporting BRPCand PCEP with the RepID extension described in Sect. 3.3.The SPaCE architecture is depicted in Fig. 5. The TrafficEngineering Database (TED) module collects domain infor-mation by means of the OSPF-TE protocol peering. TEDis synchronized by providing routing info in the form ofan XML file, which describes the topology and the linkavailable bandwidth. The PCEP Server module accepts newLSP requests coming from a PCC. It is implemented as aTCP socket server that accepts the PCReq and replies with
Fig. 5 Functional architecture of the SPaCE prototype
PCRep, enriched with the proposed extensions. The PCEPClient module is triggered by LSP requests that the PCEPServer recognizes as external to its domain. The PCEP Clientmodule forwards the PCReq to the downstream PCE andcollects the related PCRep from the upstream PCE. ThePCEP Client module is implemented as a TCP socket client.The Autonomous System Database (ASD) is loaded withthe Autonomous System (e.g., domain) information stati-cally retrieved by the BGP and contains the list of the BNs,the domain policies, the adjacent ASes list, and their adja-cency information. The Path Solver (PS) module implementsBRPC. PS module collects the multiple VSPTs from thePCEP Client (or from PCEP Server, if PCE domain containsthe destination) by means of thePCRep info and jointly com-putes the disjoint paths for each incoming BN couple. The PSmodule can accept single or multiple LSP requests, and, incase of multiple requests, it computes independent or disjointpaths. Modules exchange information using XML files.
SPaCE is tested in a network consisting of IP/MPLSmetro-core commercial routers supporting logical router con-figuration and equipped with Fast Ethernet and Optical Giga-bit Ethernet Interfaces. The topology is the one shown inFig. 2, and all the links experience a negligible round-trip-time (i.e., less than 1 ms). SPaCE prototypes and one PCC indomain 1 run on Linux PC boxes (CPU QuadCore 2.33 GHz,2 GB RAM, Ubuntu OS). Each domain is made of a sin-gle OSPF-TE area, and external BGP peering is activatedamong BNs. A node-disjoint 1-survivable LSP is requestedfrom S to T and is computed using the standard PCEPapproaches (Sect. 3.3) and the multiple VSPT approacheswith the explicit association of the RepID object (Sect. 3.4).For the standard PCEP, both the disjoint and the joint VSPTcomputations of Sect. 3.3 have been tested. The proposedRepID extension has also been tested and led to the solu-tion described in Sect. 3.4). For all the three approaches, thePS module was able to perform BRPC in a time range oftB R PC = 5 − 8 ms. This indicates that PCEP extensions donot increase the execution time of the experiments. However,optimal solution is achieved only with RepID. The total deliv-ery time of the optimal solution is ttot = 3tB R PC + tPC E P =105 ms, where tPC E P = 80 ms is the time needed by PCEPto forward the request and retrieve the trees (it includes thetime to generate, transmit, receive, and decode the packets).Results show that the proposed implementation is time effi-cient. Standard and extended PCEP approaches are evaluatedalso in terms of generated PCEP traffic. In particular, the twomost efficient approaches are compared: the standard PCEPwith joint VSPT and the multiple VSPT approach with RepIdobject. When PCC asks for the protection path, the PCReqis forwarded to the last PCE3 using a TCP segment with 84bytes payload, generating a layer-2 frame of 150 bytes. WithPCEP extensions, the PCRep of PCE3 is forwarded with a140-byte-long payload TCP segment (instead of 148 as in
123

10 Photon Netw Commun (2013) 26:1–12
the standard PCEP approach) generating a layer-2 frame of206 bytes (instead of 214). These results show that RepIDachieves the optimal solution with a more efficient PCEPexchange.
7 Conclusions
This paper discussed BRPC extension for the optimal compu-tation of inter-domain K -survivable paths. The inter-domainpath computation provides the joint optimal solution of theprimary and backup paths by minimizing their additive TEmetric summation. The paper showed that, when using theBRPC with the proposed PCEP extensions, the protection(e.g., link-disjoint or node-disjoint) and the path optimalitycan be achieved even in the presence of domain confiden-tiality, i.e., even if only the set of entry BNs and weights areforwarded by each domain PCE. The proposed approach issuitable also for finding optimal paths that are SRLG dis-joint, provided that distinct domains define distinct SRLGs.The BRPC procedure outperforms the existing SPC proce-dure [7] in terms of computational complexity and signalingoverhead. Signaling overhead and computational complexityincrease with K and number of boundary nodes. When a largenumber of boundary node exist, heuristics algorithms may berequired to reduce the complexity and signaling overhead, atthe expense of the optimality. Discussed methods are exper-imentally validated on the SPaCE prototype, thus showingthe efficiency of the solution in terms of the overall amountof information exchanged among PCEs.
Appendix
Lemma When K = 0, if the element w j+1(i) indicates theminimum weight of the path from node r j+1(i) to T and ifr j+1 contains all the nodes in Bin
j+1, then PCE of domain jis able to optimally compute the minimum weight of a pathfrom a node in its own domain, to T , in polynomial time.Thus, source PCE is able to compute the minimum weight ofthe path from S to T .
Proof It is a well-known property of the minimum weightpath (with additive weights) that, for a given minimum weightpath such as p = {S, 1, 2, . . . m, m + 1, . . . , q, . . . , T }, thesubpath of p from a node m ∈ p to another node q ∈ p isalso a minimum weight path from m to q. In other words, ifwe know that nodes m and q belong to the minimum weightpath p, then it is possible to compute the path from S to Tby joining together the minimum weight path from S to m,with the minimum weight path from m to q, and with theminimum weight path from q to T . Note that this principlecan be extended for any arbitrary number of subpaths of p.
Based on this property, the lemma is proven for the fol-lowing two distinct cases.
Case 1: A single inter-domain link exists between any pairof adjacent domains, i.e., |E j, j+1| = |Bin
j+1| =|Bout
j | = 1 ∀ 1 ≤ j < D. Then, the minimumweight path from S to T in G is forced to pass oneach link in the sets E j, j+1 ∀ 1 ≤ j < D. By apply-ing the aforementioned principle, the path from S toT can be optimally found by connecting the mini-mum weight path from S to the single node in Bin
2 ,with the minimum weight path from the single nodein Bin
2 to the node in Bin3 and so on, with finally the
minimum weight path from BinD to T . Therefore, the
computation of the minimum weight path from S toT could be even carried out by computing in paral-lel the minimum weight paths in each domain andjoining them. Vectors r j and w j would not even berequired, i.e., need not be included in PCRep mes-sage. In this case, computation by each PCE (evencarried out in parallel) leads to optimal solution, andthus, the lemma holds.
Case 2: The number of inter-domain links between any twodomains is greater than one, i.e., |E j, j+1| ≥ 1 forany 1 ≤ j < D. Then the minimum weight pathfrom S to T should pass through one of the links ofE j, j+1 as they form a cut, but it is not possible toknow a priori through which one (i.e., through whichnode in Bin
j+1).
First, the lemma is proved for the case of D = 2, i.e., S andT are in two adjacent domains, and then for the case D > 2.When D = 2, the optimal path is the one at minimum weightamong the set of minimum weight paths from S to T and hasas intermediate node one of the nodes in Bin
2 , i.e., m ∈ Bin2 .
Thus, in order to compute the optimal path from S to Tacross two domains, it is necessary and sufficient to computethe minimum weight paths (pmT ) from any node m ∈ Bin
2to T and minimum weight paths (pSm) from S to any nodem ∈ Bin
2 . It is a sufficient condition, because, since the linksarriving at Bin
2 (i.e., E1,2) form a cut, the minimum weightpath must pass through one of them, i.e., one of m ∈ Bin
2 .It is a necessary condition, since if node m′ ∈ Bin
2 is notconsidered and thus neither are the corresponding subpathsp′
Sm′ = (S, . . . , m′) and p′m′,T = (m′, . . . , T ), the optimal
minimum weight path from S to T may pass through m′ andthus may not be found.
When D > 2, the same arguments can be repeated recur-sively for each domain pair. For example, let D = 3. Then,the previous demonstration can be applied to the minimumweight path from any node m ∈ Bin
2 to T , i.e., the sourcenode is a BN in Bin
2 . PCE of domain 2 can compute the min-imum weight of paths from m to T on an auxiliary graph
123

Photon Netw Commun (2013) 26:1–12 11
G ′2. G ′
2 is the graph obtained by adding to G2 the nodes inBin
3 , a dummy node δ, the inter-domain links E2,3, and alink connecting each node m ∈ Bin
3 to δ. Weights of links(m, δ) are given by elements in w3. With the computed r2
and w2, the same arguments apply also at the source domain,for the minimum weight path from S to T passing throughany m ∈ Bin
1 . ��
Theorem If element w j+1(i) indicates the minimum weightof the link-disjoint paths from nodes in r j+1(i) to T and ifr j+1 contains all the subsets of K +1 nodes (with repeti-tion) of Bin
j+1, then PCE of domain j is able to compute theminimum weight link-disjoint paths (if they exist), which areK -survivable to link faults, from any node in its own domainto T , using Suurballe and Tarjan algorithm [9]. Thus, sourcePCE is able to compute the minimum weight link-disjointpaths from S to T , which are K -survivable to link faults.
Proof From the link-disjointness property, the link-disjointness is preserved when interconnecting link-disjointpaths. Let us prove the optimality of the link-disjoint pathsby contradiction.
By contradiction, a set of inter-domain K -survivable pathsfrom BNs of domain j to T exist but cannot be computed opti-mally by using Suurballe and Tarjan algorithm on the domain,using the received weights of the downstream domains. Thismeans that either at least one of the K +1 link-disjoint pathsshould traverse another BN or other path(s) should have beenselected within domain j . The former case is not possible asall the combinations (with repetition) of BNs leading to K +1link-disjoint paths are considered in set r j+1, by assumption.The latter case means that either 1) the Suurballe and Tarjanalgorithm [9] computing the minimum weight link-disjointpaths does not find the optimal solution on the auxiliary graphrepresenting the domain or 2) the choice of considering onlyK+1 link-disjoint paths that have minimum weight sum is notoptimal. The first option is not correct as the Suurballe andTarjan algorithm is optimal and is run on the domain graphin which additional links at null weight are added. The sec-ond option means that other K +1 paths (i.e., another subsetof BNs) to T on the downstream domains should have beenselected, although the summation of their weights is not min-imum. This would imply that weight sum of the link-disjointpaths from BNs of domain j +1 to T is increased, i.e., thesolution is not optimal, but it contradicts the hypothesis. ��
References
[1] Farrel A., Vasseur, J.-P., Ash, J.: RFC 4655, IETF (2006)[2] Chamania, M., Jukan, A.: A survey of inter-domain peering and
provisioning solutions for the next generation optical networks.IEEE Commun. Surv. Tutor. 11(1), 33–51 (2009)
[3] Vasseur, J.-P., Le Roux, J.: RFC 5440, IETF, Mar 2009
[4] Vasseur, J.-P., Zhang, R., Bitar, N., Le Roux, J.: RFC 5441, IETF,Apr 2009
[5] Yannuzzi, M., Masip-Bruin, X., Sanchez, S., Domingo-Pascual, J.,Oreda, A., Sprintson, A.: On the challenges of establishing disjointQoS IP/MPLS paths across multiple domains. IEEE Commun.Mag. 44, 60–66 (2006)
[6] Matsuura, H., Morita, N., Murakami, T., Takami, K.: Hierarchi-cally distributed PCE for backup strategies on an optical network:In IEEE First International Conference on Communications andElectronics (ICCE), pp. 135–140, Oct 2006
[7] Sprintson, A., Yannuzzi, M., Orda, A., Masip-Bruin, X.: Reli-able routing with QoS guarantees for multi-domain IP/MPLS net-works. In: 26th IEEE International Conference on Computer Com-munications (INFOCOM), pp. 1820–1828, May 2007
[8] Ricciato, F., Monaco, U., Ali, D.: Distributed Schemes for diversepath computation in multidomain MPLS networks. IEEE Com-mun. Mag. 43, 138–146 (2005)
[9] Suurballe, J., Tarjan, R.: A quick method for finding shortest pairsof disjoint paths. Networks 14, 325–336 (1984)
[10] Bhandari, R.: Survivable Networks: Algorithms for Diverse Rout-ing. Kluwer Academic Publishers, Boston (1999)
[11] King, D., Farrel, A.: RFC 6805. PCE WG, IETF, Nov 2012[12] Giorgetti, A., Paolucci, F., Cugini, F., Castoldi P.: Hierarchical
PCE in GMPLS-based multi-domain wavelength switched opticalnetworks. In: Optical Fiber Communication Conference (OFC)Technical Digest, Mar 2011
[13] Xu, F., Gu, F., Alazemi, H., Peng, M., Ghani N.: Novel path protec-tion scheme for multi-domain networks. In: GLOBECOM Work-shops, Dec 2011
[14] Awduche, D., Berger, L., Gan, D., Li, T., Srinivasan, V., Swallow,G.: RFC 3209, Dic., IETF (2001)
[15] Zhang, Q., Hasan, M., Wang, X., Palacharla, P., Sekiya, M.: Effi-cient PCE-based survivable path computation in multi-domainnetworks. In: IEEE Conference on Computer CommunicationsWorkshops (INFOCOM), pp. 139–144, Apr 2011
[16] Chen, Z., Peng, Y., Wang, Z., Wang, Y., Chen, X., Long, K.:An enhanced backward recursive pce-based computation schemefor end-to-end disjoint paths in multi-domain networks. PhotonicNetw. Commun. 24(1), 22–28 (2012)
[17] Hernandez-Sola, G., Perello’, J., Agraz, F., Velasco, L., Spadaro,S., Junyent, G.: Enhanced domain disjoint backward recursive TEpath computation for PCE-based multi-domain networks. Pho-tonic Netw. Commun. 21, 141–151 (2011)
[18] Bradford, R., Vasseur, J.-P., Farrel, A.: RFC 5520, IETF, Apr 2009[19] Paolucci, F., Cugini, F., Valcarenghi, L., Castoldi P.: Enhancing
backward recursive PCE-based computation (BRPC) for inter-domain protected LSP provisioning. In: Optical Fiber Conference(OFC), San Diego, U.S.A., pp. 24–28, Feb 2008
[20] Nishioka I., King D.: RFC 6007, IETF, Sept 2010[21] Gondran, M., Minoux, M.: Graphs and Algorithms. Wiley, New
York (1979)[22] Bhandari, R.: Optimal diverse routing in telecommunication fiber
networks. In: IEEE International Conference on Computer Com-munications (INFOCOM) (1994)
[23] Cugini, F., Paolucci, F., Valcarenghi, L., Castoldi, P., Welin, A.:PCE communication protocol for resource advertisement in multi-domain BGP-based networks. In: Optical Fiber CommunicationConference, San Diego, U.S.A., Mar 2009
[24] Paolucci, F., Sambo, N., Cugini, F., Giorgetti, A., Castoldi, P.:Experimental demonstration of impairment-aware PCE for multi-bit-rate WSONs. IEEE/OSA J. Opt. Commun. Netw. 3(8), 610–619 (2011)
[25] Meloni, G., Paolucci, F., Sambo, N., Cugini, F., Secondini, M.,Gerardi, L., Poti, L., Castoldi, P.: PCE architecture for flexibleWSON enabling dynamic rerouting with modulation format adap-tation. In: Proceedings of ECOC (2011)
123

12 Photon Netw Commun (2013) 26:1–12
Author Biographies
Francesco Paolucci holds aLaurea degree in Telecommu-nications Engineering from theUniversity of Pisa, Italy, anda Ph.D. in TelecommunicationsEngineering at Scuola Superi-ore Sant’Anna in Pisa, Italy.His main interests are Com-munication Network reliability,Quality of Service in networkinfrastructure for Grid Comput-ing, MPLS/GMPLS architecturesand Traffic Engineering protocolextensions, Inter-Domain Rout-ing, and PCE-based architectures
Isabella Cerutti holds a Ph.D.and a Laurea degree in electri-cal engineering from the Uni-versity of Texas at Dallas, USA(2002), and from the Politecnicodi Torino, Italy (1998), respec-tively. From 2002 to 2006, she wasa Postdoctoral Research Asso-ciate at the University of Texas atDallas and then at Scuola Superi-ore Sant’Anna, Italy. She is cur-rently an Assistant Professor atScuola Superiore Sant’Anna. Shehas co-authored more than 50publications in international jour-nals and conference proceedings.
Her research interests include performance evaluation and design ofoptical and wireless networks, with special emphasis on the energyefficiency
Filippo Cugini received theLaura degree in Telecommunica-tion Engineering in 2000 fromthe University of Parma, Italy.Since 2001, he has been with theNational Laboratory of PhotonicNetworks, Consorzio NazionaleInteruniversitario per le Teleco-municazioni (CNIT), Pisa, Italy.He is a co-author of ten inter-national patents and more thaneighty IEEE publications.
Luca Valcarenghi holds a Laureadegree in Electronics Engineer-ing (1997) from the Politecnico diTorino, Italy, a M.S.E.E. (1999),and a Ph.D. in E.E.-Telecomm.(2001) both from the Univer-sity of Texas at Dallas (UTD).Since September 2002, he is anAssistant Professor at the ScuolaSuperiore Sant’Anna, Pisa, Italy.His main research interests areoptical networks design, analysis,and optimization; artificial intel-ligence optimization techniques;communication networks reliabil-ity; IP over WDM networking;
QoS in network infrastructures for grid computing; fixed and mobilenetwork integration; fixed network backhauling for mobile networks;and energy efficiency in communications networks.
Piero Castoldi (Ph.D. in Infor-mation Technology) has beenAssociate Professor at ScuolaSuperiore Sant’Anna, Pisa, Italy,since 2001. He spent abroad atPrinceton University (USA) over-all about two years in 1996, 1997,1999, and 2000, and in 2001 hehas visited for two months Uni-versity of Texas at Dallas, USA.He has also served as ProjectManager of many projects ofthe Inter-university National Con-sortium for Telecommunications(CNIT), and since January 2005,he has been Director of the CNIT
National Laboratory of Photonic Networks. He is also currently Leaderof the “Networks and Services” research area at the TeCIP Institute atScuola Superiore Sant’Anna. His research interests cover telecommuni-cations networks and system both wired and wireless, and more recentlyreliability, switching paradigms, and control of optical networks, includ-ing application-network cooperation mechanisms, in particular for gridsand clouds. He is an IEEE Member, and he is author of more than 200publications in international journals and conference proceedings.
123
Copyright © 2022 FDOKUMEN