Operador Nacional de Electricidad CENACE
76
68 14.99 11.976 8.9572 5.9382 2.9191 -0.1000 [s] -4.00 -6.00 -8.00 -10.00 -12.00 -14.00 [deg] Santa_Rosa_230\B1: Ángulo Barra Santa Rosa 230 kV Totoras_230\B1: Ángulo Barra Totoras 230 kV Actuación del Recierre 9.980 s -7.538 deg 9.943 s -11.299 deg 14.99 11.976 8.9572 5.9382 2.9191 -0.1000 [s] 242.50 230.00 217.50 205.00 192.50 180.00 [kV] Santa_Rosa_230\B1: Voltaje Santa Rosa 230 kV Totoras_230\B1: Voltaje Totoras 230 kV Actuación del Recierre 10.000 s 235.229 kV 10.000 s 234.020 kV Figura 4: Comportamiento de magnitud y ángulo de voltaje durante el recierre a los 10 segundos de un circuito de la L/T Santa Rosa- Totoras 230 kV Una vez analizadas las diferentes salidas de un circuito de las líneas de doble circuito en el anillo de 230 kV, para diferentes escenarios de operación, no se encontraron líneas que requieran un recierre rápido (el sistema es estable con el tiempo muerto para recierre en 10 segundos), por lo que con el fin de incrementar la probabilidad de conseguir un recierre exitoso, se deberá parametrizar el tiempo muerto en valores mayores. Con estos antecedentes, se proponen los siguientes valores para sincronización y recierre a nivel de 230 kV: Tabla 4: Valores recomendados de los parámetros de sincronización y recierre a nivel de 230 kV Desviación de magnitud de voltaje (ΔV), % 10% del voltaje nominal Desviación de ángulo de voltaje (ΔV), ° 35° Desviación de frecuencia (Δf), Hz 0.1 Hz Tiempo muerto para recierre, segundos 30 segundos 5. CONCLUSIONES Y RECOMENDACIONES • Se propone un ángulo de sincronización de 35° para el sistema de 230 kV del SNI, lo que permite preservar la integridad de las unidades de generación durante su vida útil y equipos primarios del Sistema Nacional de Transmisión. • El incremento de 15° en el ángulo de sincronización permitirá optimizar los tiempos de reposición del sistema de transmisión posterior a un evento y, una disminución del sobrecosto operativo debido a un menor requerimiento de ingreso de generación con el fin de alcanzar los parámetros de sincronización establecidos • Se ha determinado que las centrales Sopladora, Mazar y San Francisco son las que presentan el valores más restrictivos del ángulo de sincronización; sin embargo, hay que considerar que estas unidades son hidráulicas y podrían soportar unas mayores variaciones transitorias de potencia. • Una vez analizadas diferentes salidas de líneas de transmisión a nivel de 230 kV, en diferentes escenarios de operación, no se encontraron líneas que requieran un recierre rápido. Por tanto, se recomienda, con el fin de incrementar la probabilidad de un recierre exitoso en el SNT, se parametrice el tiempo muerto en un valor de 30 segundos, tiempo posterior al cual se contará con el circuito energizado. • Los valores determinados en el presente documento serán evaluados en un plan piloto en dos líneas de transmisión de 230 kV que presenten las mayores tasas de salida. Luego de su evaluación, los parámetros serán implementados a nivel de todas las subestaciones de 230 kV del SNI. • Dependiendo de los requerimientos del sistema, se podrá evaluar la recomendación de generalizar el ángulo del sincronización para todas la barras de 230 kV del SNI en 35°, teniendo como referencia los siguientes valores máximos para aquellas barras que se permiten tener ángulos mayores a 35°: Barra i Barra j ∆Ѳ máximo que se podría parametrizar Totoras Molino 45° Pascuales Molino 45° Milagro Zhoray 45° Santo Domingo Quevedo 40° Santo Domingo Santa Rosa 40° AGRADECIMIENTOS Se agradece al grupo de trabajo interinstitucional que permitió evaluar todos los escenarios de operación probables, tanto de CENACE como de CELEC EP TRANSELECTRIC. Con especial mención los Ingenieros Roberto Aguirre, Carlos Soria, Wilmer Gamboa. REFERENCIAS BIBLIOGRÁFICAS [1] Siemens, “Tie Circuit Breakers and Out-of-Phase Applications,” TechTopics N° 95, 2013. [2] P. Kundur, “Power System Stability and Control,” Chapter 15, McGraw Hill, 1994. Edición No. 13, Enero 2017
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Operador Nacional de Electricidad CENACE

68
V V
caso 1 234.97 11.89 234.86 33.37 0.11caso 2 232.70 18.56 232.88 50.62 0.18caso 3 226.37 27.93 230.77 65.65 4.40caso 4 228.97 41.58 229.97 81.61 1.00caso 5 232.60 26.06 230.18 67.87 2.42
Potencia Nominal Potencia Potencia
(MW) Previa (MW) Posterior (MW)San Francisco 113.00 105.88 156.84 50.96 45% SI
TG3 Santa Rosa 17.00 14.99 9.30 5.70 34% SISan Francisco 113.00 105.88 160.35 54.47 48% SI
TG3 Santa Rosa 17.00 14.99 8.52 6.48 38% SISan Francisco 113.00 105.88 165.88 60.00 53% NO
TG3 Santa Rosa 17.00 14.99 7.84 7.16 42% SIcaso 1 Ninguna 1.00 0.00 0% SIcaso 2 Ninguna 1.00 0.00 0% SIcaso 3 San Francisco 113.00 105.88 75.60 30.28 27% SIcaso 4 San Francisco 113.00 105.88 75.26 30.62 27% SIcaso 5 San Francisco 113.00 105.88 73.00 32.88 29% SI
Condiciones previos al evento de sincronización (Estado Estable)
41.81
21.4832.0637.7240.03
228.68 50.856.46 225.95 36.25 3.21
37.97Santa Rosa Totoras
caso 1 229.16
Barra i Barra j Barra i Barra jV
29.7933.35caso2 227.42 17.50
Totoras Molino
Barra i Barra j
Santa Rosa Totoras
caso 1
caso2
caso 3
Totoras Molino
Condiciones posteriores al evento de sincronización (Estado Dinamico)
Caso de análisis
Caso de análisis Cumple IERCentral / Unidad que
limita la sincronización Pgen (MW) Pgen (pu)
1.26caso 3 224.99 22.29 227.83 60.26 2.84
3.9732.9551.9370.918-0.100 [s]
1.501.301.100.900.700.50
G_HEMB_PUCA_U1: Positive-Sequence, Active Power in p.u. (base: 38.00 MW)G_HPAS_AGOY_U1: Positive-Sequence, Active Power in p.u. (base: 79.90 MW)G_HPAS_CCS_U1: Positive-Sequence, Active Power in p.u. (base: 184.50 MW)G_HPAS_SFRA_U1: Positive-Sequence, Active Power in p.u. (base: 113.13 MW)G_TMCI_CCAS_U1_U4: s:P1G_TMCI_DAYU_U1: Positive-Sequence, Active Power in p.u. (base: 1.09 MW)G_TMCI_JIV1_U1_U6: s:P1G_TMCI_JIV2_U1_U2: Positive-Sequence, Active Power in p.u. (base: 5.00 MW)G_TMCI_JIV3_U1: Positive-Sequence, Active Power in p.u. (base: 10.50 MW)G_TMCI_LORE_U1: Positive-Sequence, Active Power in p.u. (base: 1.09 MW)G_TTGA_SROS_TG3: Positive-Sequence, Active Power in p.u. (base: 17.00 MW)
1.005 s 1.388 p.u.
1.005 s 0.547 p.u.
0.813 s 0.937 p.u.
0.923 s 0.882 p.u.
3.9732.9551.9370.918-0.100 [s]
240.00190.00140.00
90.0040.00
-10.00
G_HEMB_PUCA_U1: Positive-Sequence, Active Power in MWG_HPAS_AGOY_U1: Positive-Sequence, Active Power in MWG_HPAS_CCS_U1: Positive-Sequence, Active Power in MWG_HPAS_SFRA_U1: Positive-Sequence, Active Power in MWG_TMCI_CCAS_U1_U4: c:firelG_TMCI_DAYU_U1: Rotor angle with reference to reference machine angle in degG_TMCI_JIV1_U1_U6: c:firelG_TMCI_JIV2_U1_U2: Rotor angle with reference to reference machine angle in degG_TMCI_JIV3_U1: Rotor angle with reference to reference machine angle in degG_TMCI_LORE_U1: Rotor angle with reference to reference machine angle in degG_TTGA_SROS_TG3: Rotor angle with reference to reference machine angle in deg
G_Santo Rosa
Date: 5/6/2016
Annex: /6
14.99511.9768.95725.93822.9191-0.1000 [s]
-4.00
-6.00
-8.00
-10.00
-12.00
-14.00
[deg]
Santa_Rosa_230\B1: Ángulo Barra Santa Rosa 230 kVTotoras_230\B1: Ángulo Barra Totoras 230 kV
Actu
ació
n de
l Rec
ierre
9.980 s-7.538 deg
9.943 s-11.299 deg
14.99511.9768.95725.93822.9191-0.1000 [s]
242.50
230.00
217.50
205.00
192.50
180.00
[kV]
Santa_Rosa_230\B1: Voltaje Santa Rosa 230 kVTotoras_230\B1: Voltaje Totoras 230 kV
Actu
ació
n de
l Rec
ierre
10.000 s235.229 kV
10.000 s234.020 kV
Project
Date: 11/21/2016
Annex: /9
DIgS
ILEN
T
Figura 4: Comportamiento de magnitud y ángulo de voltaje durante el recierre a los 10 segundos de un circuito de la L/T
Santa Rosa- Totoras 230 kV
Una vez analizadas las diferentes salidas de un circuito de las líneas de doble circuito en el anillo de 230 kV, para diferentes escenarios de operación, no se encontraron líneas que requieran un recierre rápido (el sistema es estable con el tiempo muerto para recierre en 10 segundos), por lo que con el fin de incrementar la probabilidad de conseguir un recierre exitoso, se deberá parametrizar el tiempo muerto en valores mayores.
Con estos antecedentes, se proponen los siguientes valores para sincronización y recierre a nivel de 230 kV:
Tabla 4: Valores recomendados de los parámetros de sincronización y recierre a nivel de 230 kV
Desviación de magnitud de voltaje (ΔV), % 10% del voltaje nominal
Desviación de ángulo de voltaje (ΔV), ° 35°
Desviación de frecuencia (Δf), Hz 0.1 Hz
Tiempo muerto para recierre, segundos 30 segundos
5. CONCLUSIONES Y RECOMENDACIONES
• Se propone un ángulo de sincronización de 35° para el sistema de 230 kV del SNI, lo que permite preservar la integridad de las unidades de generación durante su vida útil y equipos primarios del Sistema Nacional de Transmisión.
• El incremento de 15° en el ángulo de sincronización permitirá optimizar los tiempos de reposición del sistema de transmisión posterior a un evento y, una disminución del sobrecosto operativo debido a un menor requerimiento de ingreso de generación con el fin de alcanzar los parámetros de sincronización establecidos
• Se ha determinado que las centrales Sopladora, Mazar y San Francisco son las que presentan
el valores más restrictivos del ángulo de sincronización; sin embargo, hay que considerar que estas unidades son hidráulicas y podrían soportar unas mayores variaciones transitorias de potencia.
• Una vez analizadas diferentes salidas de líneas de transmisión a nivel de 230 kV, en diferentes escenarios de operación, no se encontraron líneas que requieran un recierre rápido. Por tanto, se recomienda, con el fin de incrementar la probabilidad de un recierre exitoso en el SNT, se parametrice el tiempo muerto en un valor de 30 segundos, tiempo posterior al cual se contará con el circuito energizado.
• Los valores determinados en el presente documento serán evaluados en un plan piloto en dos líneas de transmisión de 230 kV que presenten las mayores tasas de salida. Luego de su evaluación, los parámetros serán implementados a nivel de todas las subestaciones de 230 kV del SNI.
• Dependiendo de los requerimientos del sistema, se podrá evaluar la recomendación de generalizar el ángulo del sincronización para todas la barras de 230 kV del SNI en 35°, teniendo como referencia los siguientes valores máximos para aquellas barras que se permiten tener ángulos mayores a 35°:
Barra i Barra j ∆Ѳ máximo que se podría parametrizar
Totoras Molino 45°
Pascuales Molino 45°
Milagro Zhoray 45°
Santo Domingo Quevedo 40°
Santo Domingo Santa Rosa 40°
AGRADECIMIENTOS
Se agradece al grupo de trabajo interinstitucional que permitió evaluar todos los escenarios de operación probables, tanto de CENACE como de CELEC EP TRANSELECTRIC. Con especial mención los Ingenieros Roberto Aguirre, Carlos Soria, Wilmer Gamboa.
REFERENCIAS BIBLIOGRÁFICAS
[1] Siemens, “Tie Circuit Breakers and Out-of-Phase Applications,” TechTopics N° 95, 2013.
[2] P. Kundur, “Power System Stability and Control,” Chapter 15, McGraw Hill, 1994.
Edición No. 13, Enero 2017

69
[3] P. Pourbeik, D. Ramey, N. Abi-Samra, D. Brooks, A. Gaikwad, “Vulnerability of Large Steam Turbine Generators to Torsional Interactions During Electrical Grid Disturbances,” IEEE Transactions on Power Systems, August 2007.
[4] IEEE Working Group Report, “IEEE Screening Guide for Planned Steady-State Switching Operations to Minimize Harmful Effects on Steam Turbine-Generators,” IEEE Transactions on Power Apparatus and Systems, July/August 1980.
[5] W. Elmore, “Protective Relaying Theory and Applications,” Chapter 16, Marcel Dekker Inc., 2004.
[6] “Procedimientos de Despacho y Operación V2.0”
Aimara et al. / Metodología para la Determinación de Ángulos de Sincronismo y Tiempos de Recierre en el S.N.I.
José Xavier Aimara Guaita.- Nació en Píllaro Provincia del Tungurahua el 1 de octubre de 1987. Los estudios superiores los cursó en la Escuela Politécnica Nacional, donde obtuvo el título de Ingeniero Eléctrico en 2012. En el 2012 trabajó en Proyectos
Integrales del Ecuador PIL S. A, desarrollando estudios transitorios de energización, utilizando el programa EMTP-ATP. Actualmente se desempeña en el cargo de ingeniero de planeamiento eléctrico en el Operador Nacional de Electricidad, CENACE. Sus áreas de interés radican en la planificación y operación de sistemas de potencia.
Jefferson Fabricio Ordoñez Girón.- Nació en Machala en 1980. Recibió su título de Ingeniero Eléctrico de la Escuela Politécnica Nacional en 2005, y la Maestría en Ciencias Aplicadas de la Universidad de Waterloo en 2015. Actualmente, se
encuentra laborando como especialista de gestión de operación en la Unidad de Negocio Transelectric, perteneciente a la Corporación Eléctrica del Ecuador, CELEC EP.

70
Resumen
Este trabajo presenta una nueva metodología para identificar las Áreas de Control de Voltaje ACV en un sistema de potencia. Cada ACV está constituido por un grupo de barras del sistema que exhiben patrones de comportamiento de voltaje similares cuando el sistema de potencia está sometido a perturbaciones que podrían originar problemas de inestabilidad de voltaje. Una vez identificadas las ACV, el operador del sistema puede realizar un control coordinado y establecer estrategias de supervisión con el fin de mejorar el comportamiento del voltaje en estas barras. En este sentido, el concepto de distancia eléctrica ha sido usado para identificar las ACV utilizando una nueva metodología basada en minería de datos. La metodología ha sido aplicada para identificar las ACV del Sistema Nacional Interconectado SNI de Ecuador, lo que permitirá a futuro establecer estrategias de supervisión y control por parte del Operador Nacional de Electricidad CENACE en el SNI y mejorar la seguridad del sistema.
Palabras clave— Áreas de Control de Voltaje, Estabilidad de Voltaje, Distancia Eléctrica, Minería de Datos.
Abstract
This paper presents a new methodology in order to identify the Voltage Control Areas VCA in a power system. Each VCA is constituted by a group of system buses exhibiting similar voltage behavior patterns when the power system is subjected to perturbations that could originate voltage instability problems. Once identified the VCA, the system operator can perform proper coordinated control and supervisory strategies in order to improve the voltage behavior in these buses. In this sense, the electrical distance concept has been used in order to identify the VCA using a new methodology based on data mining. The methodology has been applied in order to identify the VCA of the National Interconnected System of Ecuador SNI; this will establish the monitoring and control strategies by the National Electricity Operator CENACE in the SNI and improve the system security.
Index terms— Voltage Control Areas, Voltage Stability, Electrical Distance, Data Mining.
Aplicación Práctica / Practical Issues
Recibido: 12-09-2016, Aprobado tras revisión: 09-12-2016 Forma sugerida de citación: Echeverría D., Flores V., Villa W., Cepeda J., (2017). “Identificación de las Áreas de Control de Voltaje en el Sistema Nacional Interconectado utilizando Minería de Datos”. Revista Técnica “energía”. No. 13, Pp. 70-78 ISSN 1390-5074.
Identificación de Áreas de Control de Voltaje en el Sistema Nacional Interconectado de Ecuador utilizando Minería de Datos
D.E. Echeverría1 V.M. Flores1 W.M. Villa2 J.C. Cepeda1 1Operador Nacional de Electricidad - CENACE
E-mail: [email protected], [email protected], [email protected] 2Universidad de Antioquia, GIMEL, Medellín, Colombia
E-mail: [email protected]

71
1. INTRODUCCIÓN
La estabilidad de voltaje en los sistemas de potencia eléctrica se ha convertido en un fenómeno de gran importancia para garantizar la operación segura y confiable, esta estabilidad está íntimamente relacionada con la disponibilidad de potencia reactiva que permiten mantener los niveles de voltaje adecuados en el sistema. En la evaluación de estabilidad de voltaje, es de particular interés determinar las áreas críticas del sistema eléctrico de potencia, que están expuestas a un déficit de potencia reactiva bajo ciertas condiciones de operación. Esta deficiencia resultante da lugar a un desequilibrio de la potencia reactiva, lo cual puede causar problemas de estabilidad de voltaje en algunas áreas del sistema [1].
Se ha propuesto dividir el sistema de potencia en zonas que son propensas a los problemas de inestabilidad de voltaje, se han denominado como Áreas de Control de Voltaje (ACV), estás son conformadas por un grupo de barras del sistema de potencia que presentan patrones de comportamiento de voltaje similares cuando el sistema está sometido a perturbaciones que podrían originar problemas de estabilidad de voltaje. A este conjunto formado por las barras de generación y carga que tienen alta participación en los fenómenos de estabilidad de voltaje subyacentes se ha denominado como grupo de barras coherentes. Las barras que pueden alcanzar su límite de capacidad para inyectar potencia reactiva en la red debido a los incrementos de carga se consideran como barras de generación o fuentes de potencia reactiva del área, tales como: generadores síncronos, compensadores síncronos, los dispositivos de compensación de potencia reactiva SVC, entre otros [2]–[4].
Las barras de generación en cada ACV forman la Reserva Base de Reactiva (RBR) para esta área, la mayor parte de los incrementos de carga de potencia reactiva dentro de una ACV es suministrada por la RBR, por lo que la RBR desempeña un papel muy importante en la determinación del límite de carga reactiva de cada barra de carga y la reserva de potencia reactiva en cada área [4].
Con esta información es posible identificar las barras de carga más propensas a la inestabilidad de voltaje, como también las fuentes de potencia reactiva relacionadas con estas barras, esto le permite al operador del sistema realizar un control coordinado y establecer estrategias de supervisión con el fin de mejorar el comportamiento del voltaje en estas barras [4].
Se han realizado diferentes investigaciones para establecer métodos que permitan dividir el sistema en ACV. Algunas de las metodologías propuesta se basan en la condición de operación actual, sin considerar salidas de elementos en el sistema, tales como: líneas, generadores y dispositivos de compensación de potencia reactiva [2]–[9]. En la referencia [4], se presenta un método de identificación de ACV usando análisis de la Curva QV, con el problema que el cálculo es intensivo ya que se debe realizar este análisis a cada barra de carga del sistema. Se plantea un método sistemático que plantea método efectivo para determinar las ACV para sistema de potencia en Francia [5]. En este artículo por primera vez se propone el concepto de “Distancia Eléctrica” entre las barras del sistema, además un método de análisis topológico.
En la referencia [6] se ha usado la distancia eléctrica para analizar los problemas de estabilidad de voltaje local como también la seguridad de voltaje del sistema; por otra parte, en las referencias [7], [8] se propone una algoritmo de clasificación jerárquica para identificar las ACV usando el concepto de distancia eléctrica.
En este trabajo se presenta una nueva metodología para la identificación de ACV en sistemas de potencia eléctrica. En la metodología propuesta se hace uso de la matriz de distancia eléctrica, análisis topológico y herramientas de minerías de datos; propiamente, la matriz de similitud, coordenadas principales y herramientas de agrupamiento de datos (Clustering). La metodología propuesta para identificación de ACV fue aplicada al Sistema Nacional Interconectado (SNI) de Ecuador considerando diferentes escenarios de generación y carga, así como también se ha considerado las nuevas instalaciones que están en construcción, como por ejemplo el sistema de transmisión de 500 kV y la central de generación hidroeléctrica Coca Codo Sinclair de 1500 MW.
2. METODOLOGÍA PARA IDENTIFICAR LAS DE ÁREAS DE CONTROL DE VOLTAJE
Un conjunto de barras en el sistema de potencia puede ser clasificado como un área de control de voltaje si las barras son suficientemente desacopladas eléctricamente, desde sus áreas vecinas. Y la potencia reactiva controlable en el área debe ser suficiente para soportar los cambios de voltaje en las barras de la zona. Un criterio para la definición de las áreas de control de voltaje, según [10], es que el perfil de voltaje de un área de control es principalmente dominado por las fuentes de potencia reactiva en esa zona, y los controles dentro del área tienen mucha menos influencia de otras áreas.
Edición No. 13, Enero 2017

72
En el presente trabajo, se propone una nueva metodología para la identificación de las áreas de control de voltaje de un sistema de potencia. La metodología se divide en dos etapas:
a) Calcular la distancia eléctrica entre todos los nodos en el sistema de potencia.
b) Calcular las áreas de control de voltaje utilizando minería de datos usando la matriz de las distancias eléctricas entre barras. Además del análisis topológico de conectividad de las barras en cada ACV.
En la Fig. 1 se presenta un diagrama de flujo de la metodología desarrollada en este trabajo.
Figura 1: Diagrama de Flujo de la Metodología
2.1. Distancia eléctrica de un sistema de potencia
El concepto de distancia eléctrica envuelve la matriz [ / ]∂ ∂Q V , misma que es parte de la matriz Jacobiana J, y su inversa [ / ]∂ ∂V Q , llamada como matriz de sensibilidad, ambas matrices son reales y no simétricas [5].
Los elementos de [ / ]∂ ∂V Q reflejan la propagación de la variación del voltaje después de la inyección de potencia reactiva en una barra, la magnitud de acoplamiento de voltaje entre dos barras puede ser cuantificada por la atenuación máxima
de variación de voltaje entre estas dos barras. Estas atenuaciones se obtienen a partir de la matriz [ / ]∂ ∂V Q , mediante la división de los elementos de cada columna por el término diagonal de la matriz. Con esta información se dispone de una matriz de atenuaciones entre todas las barras del sistema de potencia, cuyos términos son escritos como . Por lo tanto se tiene:
i ij jV Va∆ = ∆ (1)
Donde:
(2)
Generalmente . Con el fin de tener una propiedad simétrica en la distancia eléctrica, la siguiente formulación se utiliza para definir la distancia eléctrica entre dos nodos i y j [5].
(3)
Dij es la distancia eléctrica entre los nodos i y j, cuyas propiedades son: positiva y simétrica. Esta distancia eléctrica representa el grado de influencia derivado de los cambios de voltaje en otras barras.
La metodología paso a paso para obtener las áreas de control de voltaje ACV se explica a continuación:
a) Se calcula la matriz Jacobiana J para obtener la sub-matriz J4, donde
b) Se invierte la matriz J4. Se tiene, , y los elementos de la matriz B
son escritos como bij, donde ij i jb V Q= ∂ ∂
c) Se obtiene la matriz de atenuación, , entre todos los nodos:
d) Se calcula la matriz de distancias Dij
e) Se normaliza las distancias eléctricas como sigue:
2.2. Identificación de áreas de control de voltaje
En esta sección se presenta una nueva metodología para la identificación de áreas de control de voltaje a partir de las distancias eléctricas utilizando minería de datos.
Una vez definida la matriz de distancia eléctrica Dij, se procede a determinar las ACV a partir del uso de minería de datos, como se presenta a continuación.
Echeverría et al. / Identificación de Áreas de Control de Voltaje en el S.N.I. de Ecuador utilizando Minería de Datos

73
Con la Matriz D=Dij, se construye la correspondiente Matriz de Similitud (Q) a partir de , donde I es la matriz de identidad y 1 es el vector unitario [11], [12]. Estas matrices representan la variabilidad entre elementos (similar a las matrices de covarianza representando la variabilidad entre variables).
1 1 12 n n ′ ′= − − −
Q I 11 D I 11 (4)
Usando los autovalores (Λr) y autovectores (Vr) de la matriz Q, es posible calcular sus correspondientes coordenadas principales [11], [12], y escribir una matriz de datos espacial multidimensional (X), como se muestra en y . Yr es una matriz que contiene las nuevas variables ortogonales que conservan las distancias originales (coordenadas principales) [11].
(5)
r =X Y (6)
Una vez que la matriz X es determinada, los puntos de datos multidimensionales son agrupados en conjuntos usando el algoritmo Fuzzy C-Means (FCM) [13]. Este algoritmo de clúster permite agrupar las barras del sistema de potencia en grupos de ACV.
El algoritmo FCM es un método que usa partición difusa, con el objetivo de encontrar grupos de datos (clúster), donde cada punto de dato (observación) pertenece a un clúster con cierto grado de pertenencia, por lo tanto, un punto de datos dado puede pertenecer a varios grupos con su propio grado de pertenencia entre 0 y 1, cuya formulación general se pueden encontrar en [13].
Dado que el algoritmo de FCM es una herramienta de análisis de datos, el mismo no considera la configuración natural de la red eléctrica, de hecho, los grupos de barras que resultan de la aplicación de la FCM no corresponden necesariamente a las áreas eléctricas reales, por lo que es necesario añadir una rutina adicional al algoritmo de agrupamiento que compruebe la conectividad de las barras.
En este sentido, con el objetivo de identificar la conectividad de las barras se utiliza un algoritmo que emplea la teoría de Goderya’s [14] . A continuación se presenta un resumen del algoritmo.
2.2.1 Conectividad de las barras en la definición de las áreas de control de voltaje
Sea Ar(mxn) la matriz de incidencia (rama-nodo) de un área r del sistema, entonces la matriz de conectividad Cr(nxn) puede ser definida como sigue [15]:
Tr r rC A A= ⋅ (7)
Donde m es el número de ramas (líneas o transformadores), y n es el número de barras pertenecientes al área r.
Qr(nxn) y Rr(nxn) representan la descomposición ortogonal-triangular de la matriz Cr, por lo tanto:
r r rC Q R= ⋅ (8)
Basado en la matriz Rr, es posible definir el vector columna de verificación de conectividad cv(nx1) como sigue:
(9)
Donde i representa la fila y j representa la columna de la matriz Rr, y Rr(i,j) es el elemento (i, j) de Rr. El número de elementos nulos de cv representa el número de sub-áreas formadas dentro del área r debido a la falta de conectividad.
3. APLICACIÓN DE LA METODOLOGÍA EN EL SISTEMA NACIONAL INTERCONECTADO
A continuación se presenta una visión general del Sistema Nacional Interconectado de Ecuador, sobre el cual se realizaran los análisis de identificación de áreas de control de voltaje. Cabe indicar que el estudio se centrará en identificar las ACV a nivel de 500 kV y 230 kV, por tal razón se detalla el equipamiento y configuración del SNI en estos niveles de voltaje.
3.1. Sistema Nacional Interconectado de Ecuador
La Fig. 2 muestra un diagrama simplificado del Sistema Nacional Interconectado (SNI), en el cual se destaca su anillo de transmisión 230 kV y el sistema troncal de transmisión de 500 kV, los cuales conectan los principales centros de generación con los puntos de entrega de los sistemas de distribución. En 2015, la producción neta total de energía fue de 22 591,40 GWh, la cual comprende de: 12 414,60 GWh (55,0%) de hidroeléctricas, 8 722,60 GWh
Edición No. 13, Enero 2017

74
(38,6%) de térmicas, 947,5 GWh (4,2%) de centrales renovables no convencionales, y 506,7 GWh (2,2%) correspondiente a las importaciones de Colombia y Perú. La demanda máxima alcanzó un valor de 3 656,6 MW (un incremento de alrededor de 5,00% con respecto al año anterior) [16].
A nivel de 230 kV existen 1.285 km de líneas en doble circuito y 556 km en simple circuito, gran parte de ellas formando un anillo entre las subestaciones Molino, Zhoray, Milagro, Dos Cerritos, Pascuales (Guayaquil), Quevedo, Santo Domingo, Santa Rosa (Quito), Totoras (Ambato) y Riobamba, vinculando de
El sistema de transmisión de 500 kV se encuentra en pleno proceso de construcción. Las principales obras de este proyecto son líneas y subestaciones a 500 kV requeridas para la evacuación de la energía de la Central Coca Sinclair al Sistema Nacional Interconectado (SNI) en las cercanías de Quito (Subestación El Inga), y desde allí hasta la ciudad de Guayaquil (Subestación Chorrillo), pasando por el centro del país (Subestación Tisaleo), con lo cual se tendrá una troncal de 500 kV de alrededor de 492 km. Hasta la fecha se encuentra concluida la línea de transmisión El Inga-San Rafael de 500 kV y San Rafael-Coca Codo Sinclair de 500 kV.
3.2. Implementación de la Metodología en el S.N.I.
La identificación de ACV del Sistema Nacional Interconectado se basará en el análisis de las barras de voltaje de 500 kV y 230 kV del S.N.I. En este sentido
forma directa a los principales centros de generación con los grandes centros de consumo del país [17].
En cuanto a capacidad de transformación y equipamiento de maniobra a nivel de 230 kV, en el sistema de transmisión se cuenta con 17 subestaciones, distribuidas de la siguiente manera:
• 15 subestaciones de transformación de relación 230/138/69 kV.
• 2 subestaciones de seccionamiento, una a 230 kV y otra a 138 kV.
en la Tabla 1 y Tabla 2 se presenta una lista con las barras del sistema a ser analizadas:
Barras de 500 kV
Tabla 1: Barras de 500 kV del S.N.I.
Chorrillos_500 San_Rafael_500El_Inga_500 Tisaleo_500
Barras de 230 kV
Tabla 2: Barras de 230 kV del S.N.I.
Baba_230 Quevedo_230Chorrillos_230 Riobamba_230Dos_Cerritos_230 San_Gregorio_230Dos_Cerritos_Movil_230 Santa_Rosa_230El_Inga_230 Santo_Domingo_230Esclusas_230 Sinincay_230Machala_230 Sopladora_230
B_EAR1_Esclusas_230
B_San_Bartolo_230
Coca_Codo_500/B2
Coca_Codo_500/B1
Dos_Cerritos_230/B1
El_Inga_500/B2
El_Inga_500/B1
Totoras_230/B1
Totoras_230/B2
San_Rafael_500/B1
San_Rafael_500/B2
Pomasqui_230/B1
Santa_Rosa_138/BT
Santa_Rosa_138/BP
Santa_Rosa_230/B1
Santa_Rosa_230/B2
Pomasqui_230/B2
El_Inga_230/B1
El_Inga_230/B2
Esclusas_230/B1
Esclusas_230/B2
Trinitaria_230/B1
Nueva_Prosperina_230/B1
Nueva_Prosperina_230/B2Molino_138/B1
Molino_138/B2
Baba_230/B1
Riobamba_230/B1
Riobamba_230/B2
Baba_230/B2
Molino_230/B2
Pascuales_230/B1
Quevedo_230/B1
Quevedo_230/B2
Sopladora_230/B1
Sopladora_230/B2
Santo_Domingo_230/B1
Pascuales_230/B2
Santo_Domingo_230/B2
Milagro_230/B1
Milagro_230/B2
Zhoray_230/B1
Zhoray_230/B2
Molino_230/B1
17
2
0
3
0
0
3
0
0
11
1
0
2
0
11
1
1
1
1
1
1
1
1
0
1
00
1
00
1
0
DIgS
ILEN
T
Figura 2: Diagrama Unifilar del Sistema Nacional Interconectado de Ecuador
Echeverría et al. / Identificación de Áreas de Control de Voltaje en el S.N.I. de Ecuador utilizando Minería de Datos

75
Milagro_230 Tisaleo_230Molino_230 Totoras_230Nueva_Prosperina_230 Trinitaria_230Pascuales_230 Zhoray_230Pomasqui_230
Como se mencionó en la Sección 2, la metodología se basa en definir en primer lugar las distancias eléctricas de las barras del S.N.I. para luego proceder a la identificación de las ACV utilizando minería de datos.
Para el cálculo de las distancias eléctricas se procede en primer lugar a obtener la matriz [ / ]∂ ∂V Q , en este sentido, se utiliza el programa computacional PowerFactory de DIgSILENT [18], el cual permite calcular de matriz de sensibilidades a partir del cálculo de Flujos de Potencia.
El cálculo de la sensibilidad de Flujo de Potencia en una barra del S.N.I., permite determinar el efecto producido por la inyección de reactivos ( Q∆ ) en la barra seleccionada con respecto a todas las barras del S.N.I. Este proceso debe ser realizado para cada una de las barras de 500 kV y 230 kV del S.N.I., para lo cual se utilizó el lenguaje de programación DPL (DIgSILENT Programming Language) para automatizar el proceso [18].
Una vez obtenida la matriz [ / ]∂ ∂V Q del S.N.I. para las barras de 500 kV y 230 kV, se procedió al cálculo de la matriz de distancias Dij, para lo cual se utilizó el programa MATLAB® de Mathworks [19] y se determinó las matrices de distancia para cada escenario de operación.
Finalmente una vez que la matriz de distancias es determinada, se procede a la identificación de las ACV usando la metodología descrita en 2.2 y 2.2.1, la cual fue desarrollada en el programa MATLAB® de Mathworks.
4. RESULTADOS
En esta sección se presentará los resultados de la identificación de las ACV del Sistema Nacional Interconectado. En este sentido, se han considerado varios escenarios de operación para verificar que las ACV identificadas se mantienen para distintos niveles de generación y demanda.
Los casos de operación a ser considerados en el análisis son los siguientes:
Caso 1: Central Coca Codo Sinclair a plena carga (1500 MW)
Caso 2: Central Coca Codo Sinclair a plena carga (1500 MW) y exportación a Colombia de 300 MW.
Caso 3: Central Paute a plena carga (1100 MW).
Caso 4: Central Paute a plena carga (1100 MW) y exportando a Colombia 300 MW.
Caso 5: Sin las centrales Agoyán (156 MW) y San Francisco (212 MW).
Para cada uno de los casos presentados se considerará el análisis para cada escenario de demanda, es decir, para demanda punta, media y base. Por lo tanto, en total serán considerados 15 escenarios de operación del S.N.I. para la identificación de las ACV.
A continuación, se presenta los resultados de las Áreas de Control de Voltaje del S.N.I., con el ingreso de del sistema de 500 kV y la central Coca Codo Sinclair (1500 MW).
En la Tabla 3 se presenta los resultados de la definición de ACV del Sistema Nacional Interconectado, identificándose cuatro áreas:
Tabla 3: Áreas de Control de Voltaje del S.N.I.
Área 1: Área 2:
Tisaleo_500 Molino_230Tisaleo_230 Zhoray_230Pomasqui_230 Sinincay_230
El_Inga_230 Área 4:
El_Inga_500 Chorrillos_230Riobamba_230 Chorrillos_500San_Rafael_500 Dos_Cerritos_230Santa_Rosa_230 Machala_230Totoras_230 Milagro_230
Área 3Dos_Cerritos_Movil_230Sopladora_230
Baba_230 Esclusas_230Quevedo_230 Nueva_Prosperina_230San_Gregorio_230 Pascuales_230Santo_Domingo_230 Trinitaria_230
Las cuatro ACV identificadas se cumplen para todos los 15 escenarios de operación establecidos en el presente estudio. Además, se ha verificado que las áreas identificadas contengan barras PQ (barras de carga) y PV (barras de generación), con lo cual se pueda realizar control de voltaje frente a cambios en las condiciones de operación del sistema.
Edición No. 13, Enero 2017
Tabla 2: Barras de 230 kV del S.N.I. (Continuación)
76
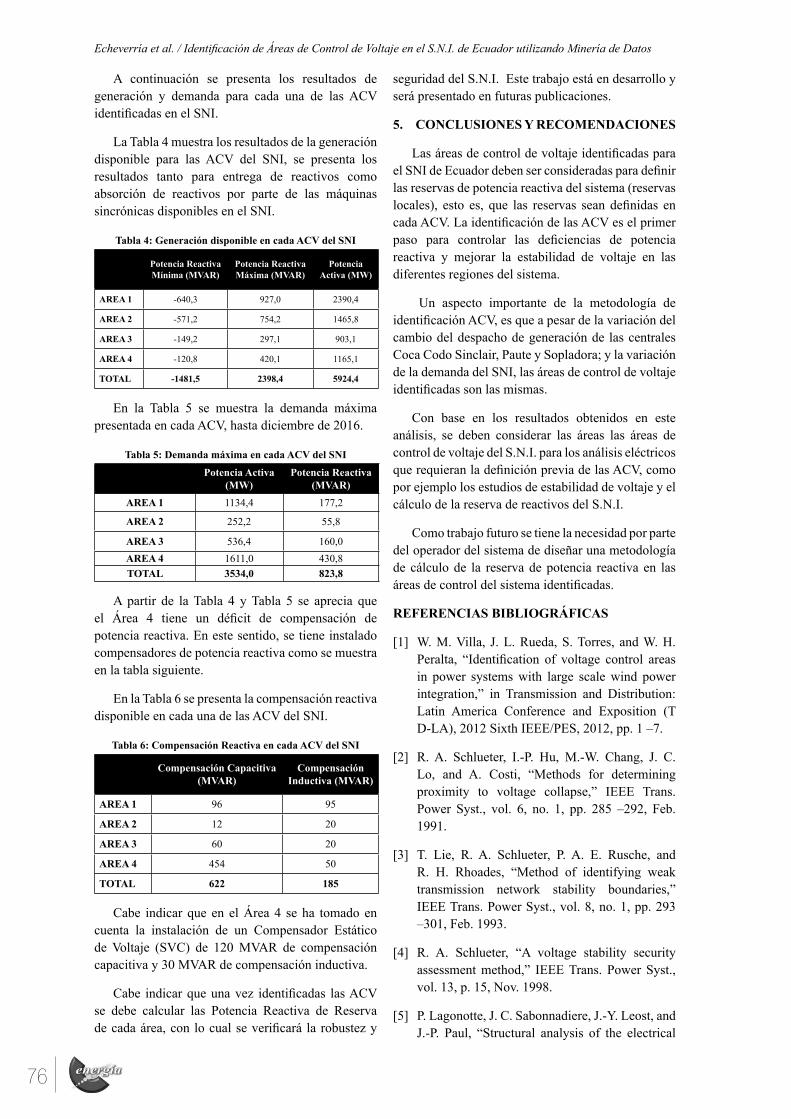
A continuación se presenta los resultados de generación y demanda para cada una de las ACV identificadas en el SNI.
La Tabla 4 muestra los resultados de la generación disponible para las ACV del SNI, se presenta los resultados tanto para entrega de reactivos como absorción de reactivos por parte de las máquinas sincrónicas disponibles en el SNI.
Tabla 4: Generación disponible en cada ACV del SNI
Potencia Reactiva Mínima (MVAR)
Potencia Reactiva Máxima (MVAR)
Potencia Activa (MW)
AREA 1 -640,3 927,0 2390,4
AREA 2 -571,2 754,2 1465,8
AREA 3 -149,2 297,1 903,1
AREA 4 -120,8 420,1 1165,1
TOTAL -1481,5 2398,4 5924,4
En la Tabla 5 se muestra la demanda máxima presentada en cada ACV, hasta diciembre de 2016.
Tabla 5: Demanda máxima en cada ACV del SNI
Potencia Activa
(MW)Potencia Reactiva
(MVAR)AREA 1 1134,4 177,2
AREA 2 252,2 55,8
AREA 3 536,4 160,0AREA 4 1611,0 430,8TOTAL 3534,0 823,8
A partir de la Tabla 4 y Tabla 5 se aprecia que el Área 4 tiene un déficit de compensación de potencia reactiva. En este sentido, se tiene instalado compensadores de potencia reactiva como se muestra en la tabla siguiente.
En la Tabla 6 se presenta la compensación reactiva disponible en cada una de las ACV del SNI.
Tabla 6: Compensación Reactiva en cada ACV del SNI
Compensación Capacitiva (MVAR)
Compensación Inductiva (MVAR)
AREA 1 96 95
AREA 2 12 20
AREA 3 60 20
AREA 4 454 50
TOTAL 622 185
Cabe indicar que en el Área 4 se ha tomado en cuenta la instalación de un Compensador Estático de Voltaje (SVC) de 120 MVAR de compensación capacitiva y 30 MVAR de compensación inductiva.
Cabe indicar que una vez identificadas las ACV se debe calcular las Potencia Reactiva de Reserva de cada área, con lo cual se verificará la robustez y
seguridad del S.N.I. Este trabajo está en desarrollo y será presentado en futuras publicaciones.
5. CONCLUSIONES Y RECOMENDACIONES
Las áreas de control de voltaje identificadas para el SNI de Ecuador deben ser consideradas para definir las reservas de potencia reactiva del sistema (reservas locales), esto es, que las reservas sean definidas en cada ACV. La identificación de las ACV es el primer paso para controlar las deficiencias de potencia reactiva y mejorar la estabilidad de voltaje en las diferentes regiones del sistema.
Un aspecto importante de la metodología de identificación ACV, es que a pesar de la variación del cambio del despacho de generación de las centrales Coca Codo Sinclair, Paute y Sopladora; y la variación de la demanda del SNI, las áreas de control de voltaje identificadas son las mismas.
Con base en los resultados obtenidos en este análisis, se deben considerar las áreas las áreas de control de voltaje del S.N.I. para los análisis eléctricos que requieran la definición previa de las ACV, como por ejemplo los estudios de estabilidad de voltaje y el cálculo de la reserva de reactivos del S.N.I.
Como trabajo futuro se tiene la necesidad por parte del operador del sistema de diseñar una metodología de cálculo de la reserva de potencia reactiva en las áreas de control del sistema identificadas.
REFERENCIAS BIBLIOGRÁFICAS
[1] W. M. Villa, J. L. Rueda, S. Torres, and W. H. Peralta, “Identification of voltage control areas in power systems with large scale wind power integration,” in Transmission and Distribution: Latin America Conference and Exposition (T D-LA), 2012 Sixth IEEE/PES, 2012, pp. 1 –7.
[2] R. A. Schlueter, I.-P. Hu, M.-W. Chang, J. C. Lo, and A. Costi, “Methods for determining proximity to voltage collapse,” IEEE Trans. Power Syst., vol. 6, no. 1, pp. 285 –292, Feb. 1991.
[3] T. Lie, R. A. Schlueter, P. A. E. Rusche, and R. H. Rhoades, “Method of identifying weak transmission network stability boundaries,” IEEE Trans. Power Syst., vol. 8, no. 1, pp. 293 –301, Feb. 1993.
[4] R. A. Schlueter, “A voltage stability security assessment method,” IEEE Trans. Power Syst., vol. 13, p. 15, Nov. 1998.
[5] P. Lagonotte, J. C. Sabonnadiere, J.-Y. Leost, and J.-P. Paul, “Structural analysis of the electrical
Echeverría et al. / Identificación de Áreas de Control de Voltaje en el S.N.I. de Ecuador utilizando Minería de Datos

77
system: application to secondary voltage control in France,” IEEE Trans. Power Syst., vol. 4, no. 2, pp. 479 –486, May 1989.
[6] H. Liu, A. Bose, and V. Venkatasubramanian, “A fast voltage security assessment method using adaptive bounding,” IEEE Trans. Power Syst., vol. 15, no. 3, pp. 1137 –1141, Aug. 2000.
[7] A. Bose, “A New Scheme for Voltage Control in a Competitive Ancillary Service Market,” 2002. .
[8] J. Zhong, E. Nobile, A. Bose, and K. Bhattacharya, “Localized reactive power markets using the concept of voltage control areas,” IEEE Trans. Power Syst., vol. 19, no. 3, pp. 1555 – 1561, Aug. 2004.
[9] G. E. Tovar, G. J. G. Calderon, V. E. de la Torre, and F. I. Nieva, “Reactive reserve determination using coherent clustering applied to the Mexican Norwest control area,” in Power Systems Conference and Exposition, 2004. IEEE PES, 2004, pp. 1036 – 1043 vol.2.
[10] R. A. Schlueter, S.-Z. Liu, and K. Ben-Kilani, “Justification of the voltage stability security assessment and diagnostic procedure using a bifurcation subsystem method,” IEEE Trans. Power Syst., vol. 15, no. 3, pp. 1105–1111, Aug. 2000.
[11] J. C. Cepeda, J. L. Rueda, I. Erlich, and D. G. Colomé, “Probabilistic approach-based PMU placement for real-time power system vulnerability assessment,” in 2012 3rd IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), 2012, pp. 1–8.
[12] D. Peña, Análisis de Datos Multivariantes, 1st ed. Madrid: McGraw-Hill, 2002.
[13] K. Hammouda and F. Karray, “A comparative Study of Data Clustering Techniques.” University of Waterloo, 19-Jun-2013.
http://www.pami.uwaterloo.ca/pub/hammouda/sde625-paper.pdf.
[14] F. Goderya, A. A. Metwally, and O. Mansour, “Fast Detection and Identification of Islands in Power Networks,” IEEE Trans. Power Appar. Syst., vol. PAS-99, no. 1, pp. 217–221, Jan. 1980.
[15] J. C. Cepeda, “Evaluación de la Vulnerabilidad del Sistema Eléctrico de Potencia en Tiempo Real usando Tecnología de Medición Sincrofasorial,” Tesis Doctoral, Universidad Nacional de San Juan, San Juan, Argentina, 2013.
[16] CENACE, “Informe Anual 2015”, Operador Nacional de Electricidad CENACE,” CENACE, Quito, Ecuador, Technical Report.
[17] ARCONEL, “Plan Maestro de Electrificación 2013 - 2022”, Agencia de Regulación y Control de Electricidad ARCONEL,” ARCONEL, Quito, Ecuador, 2014.
[18] DIgSILENT Power Factory, “User’s Manual Version 15.0,” DIgSILENT, Gomaringen, Germany, 2014.
[19] Math Works, Inc., MATLAB. Natick: Math Works, Inc. www.mathworks.com
Diego E. Echeverría Jurado.- Recibió su título de Ingeniero Eléctrico de la Escuela Politécnica Nacional de Quito, en 2006. Se encuentra realizando sus estudios de Doctorado en Ingeniería Eléctrica en el Instituto de Energía Eléctrica (IEE), de la Universidad
Nacional de San Juan. Actualmente trabaja en el Operador Nacional de Electricidad CENACE de Ecuador en la Subgerencia Nacional de Investigación y Desarrollo. Sus áreas de interés son: Estabilidad de Sistemas de Potencia en Tiempo Real, Sistemas de medición sincrofasoriales PMU’s y Control de Emergencia de Sistemas de Potencia.
María Verónica Flores Soria.- Nació en Latacunga, Ecuador, Recibió su título de Ingeniera Eléctrica de Escuela Politécnica Nacional en el 2000, de Máster en Economía y Regulación de Servicios Públicos de la Universidad de Barcelona, especialidad
Energía, España en el 2004, Máster Dirección de Empresas de la Universidad Andina en el 2009, especialidad Finanzas. Actualmente se desempeña en el cargo de ingeniera de planeamiento eléctrico en el Operador Nacional de Electricidad, CENACE. Sus áreas de interés radican en la planificación y operación de sistemas de potencia.
Edición No. 13, Enero 2017

78
Walter M. Villa Acevedo Nació en Medellín Colombia. Ingeniero electricista de la Universidad de Antioquia, Colombia. Realizó estudios de doctorado en la Universidad Nacional de San Juan, Argentina. Actualmente es Profesor Auxiliar en el Departamento de
Ingeniería Eléctrica y investigador del Grupo en Manejo Eficienciente de la Energía, GIMEL de la Universidad de Antioquia en Medellín, Colombia. Sus áreas de interés incluyen compatibilidad electromagnética, sistemas de puesta a tierra, analisis de transitorios eleectromagnéticos y estabilidad de tensión en sistemas de potencia e inteligencia artificial.
Echeverría et al. / Identificación de Áreas de Control de Voltaje en el S.N.I. de Ecuador utilizando Minería de Datos
Jaime Cristóbal Cepeda.- Nació en Latacunga en 1981. Recibió el título de Ingeniero Eléctrico en la Escuela Politécnica Nacional en 2005 y el de Doctor en Ingeniería Eléctrica en la Universidad Nacional de San Juan en 2013. Entre 2005 y 2009 trabajó en
Schlumberger y en el CONELEC. Colaboró como investigador en el Instituto de Energía Eléctrica, Universidad Nacional de San Juan, Argentina y en el Instituto de Sistemas Eléctricos de Potencia, Universidad Duisburg-Essen, Alemania entre 2009 y 2013. Actualmente, se desempeña como Subgerente Nacional de Investigación y Desarrollo de CENACE. Sus áreas de interés incluyen los sistemas de medición fasorial, la evaluación de vulnerabilidad en tiempo real y el desarrollo de Smart Grids.

79
Resumen
De forma general, las fallas que afectan a los Sistemas Eléctricos de Potencia (SEP) se caracterizan por ser de muy corta duración y tener grandes variaciones de magnitud. Razones por las cuales de no tomar acciones correctivas oportunas, podrían llevar a un colapso completo del sistema eléctrico. Las fallas en líneas de transmisión son ocasionadas en su mayoría por inconvenientes de origen técnico y medio ambiental. En este contexto, el presente trabajo busca brindar una aplicación práctica para la Transformada Wavelet enfocada en la localización de fallas en sistemas eléctricos y más concretamente en líneas de transmisión, empleando el método de onda viajera. Para este fin, se desarrolló un algoritmo en MatLab, el mismo que recrea y después determina la distancia en la cual se produjo la falla. Finalmente, el algoritmo propuesto fue probado en tres casos reales de fallas suscitadas en el sistema eléctrico ecuatoriano y los resultados obtenidos muestran que la herramienta posee un excelente grado de precisión con respecto a la localización de fallas con una exactitud promedio del 91% para los casos simulados.
Palabras clave— Capacitancia, inductancia, líneas de transmisión, localización de fallas, onda viajera, Transformada Wavelet.
Abstract
Generally, failures caused in Electrical Power Systems (EPS) are characterized to be short duration and have large magnitude variations, for this reason if do not take proper corrective actions, these failures could be able to lead an entire collapse of the electrical system. Failures in transmission lines are often produced by technical and environmental reasons. In this context, the present paper proposes a practical application for the wavelet transform with regard to locate faults in electrical systems, specially applied on transmission lines by using the principle of traveling wave. For that, an algorithm was developed in MatLab, which recreates and next determines the distance to the failure happened. Finally, this algorithm has been tested in three real failure events of the Ecuadorian electrical system, and the results show that this tool has an excellent accuracy rate to locate transmission lines failures, 91% in average for the simulations done.
Index terms— Capacitance, Failure location, Frequency, Inductance, Transmission line, Traveling wave, Wavelet Transform.
Artículo Académico / Academic Paper
Localización de Fallas Mediante la Transformada Wavelet en Líneas de Transmisión
L. Cruz1 D. Carrión1 A. Riofrio2
1Universidad Politécnica Salesiana, UPSE-mail: [email protected];[email protected]
2Operador Nacional de Electricidad - CENACEE-mail:[email protected]
Recibido: 09-09-2016, Aprobado tras revisión: 09-12-2016 Forma sugerida de citación: Cruz, L.; Carrión, D.; Riofrío J. (2017) “Localización de Fallas Mediante la Transformada Wavelet en Líneas de Transmisión”. Revista Técnica “energía”. No. 13, Pp. 79-89 ISSN 1390-5074.

80
1. INTRODUCCIÓN
El inconveniente en la delimitación de fallas es tan antiguo como la industria de la energía. Al comienzo, la ubicación de fallas en sistemas de transmisión era hecha directamente, a través de una inspección visual en la(s) línea(s) [1]electrical vehicles, data centers, etc. Faulty EES elements, i.e., open-circuited or short-circuited EES elements, which result in a shortening of the system lifetime, are inevitable especially for long-term use of EES systems. Manual EES element fault detection and elimination incur significant overhead and require the EES system to stop operation during the fault detection process. Therefore, online fault detection and tolerance methods without manual intervention provide great benefit in operability of the EES system. Existing EES system diagnosis techniques have limitations in that (i[2]. Al momento de inspeccionar una línea visualmente, inmediatamente sea por tierra o por aire, resulta siempre en un proceso extremamente demoroso ya que está sujeto a circunstancias de la ubicación en campo y a las condiciones medioambientales del momento. Adicionalmente, la inspección visual no siempre garantiza que la falla será encontrada debido a que en muchos casos las fallas no dejan una evidencia física del suceso. Los sistemas de transmisión mejor proyectados están sujetos a que ocurran acontecimientos impredecibles que pueden llevarlos fuera de los límites planeados [3]. Cuando uno de estos disturbios ocurre en una línea, es necesario que los sistemas de protección y control tomen acciones para prevenir la degradación del sistema y lo restauren a un estado estable en el menor periodo de tiempo posible [3][5][6].
Uno de los primeros pasos en el proceso de rectificación es la localización de la propia falla. Sin embargo, en varios de los acontecimientos es extremamente difícil demarcar de una forma directa donde ocurrió la falla, debido a que las líneas de transmisión inevitablemente pasan por divisiones extensas o de difícil acceso, y operan bajo condiciones ambientales difíciles [7]. Por lo tanto, el plazo requerido para una inspección física es demasiado largo. Investigaciones sobre técnicas de delimitación de fallas demuestran que un método preciso y rápido se vuelve de gran utilidad y valor práctico en estos casos [8][9]. Además, la inclusión de métodos de localización de fallas ayuda a incrementar los índices de confiabilidad y por ende la calidad de la energía suministrada por el sistema bajo análisis, más aún si este cuenta con una alta participación de generación renovable o generación distribuida [10].
Este artículo busca brindar una alternativa que ayude a satisfacer las necesidades existentes de localización de fallas en líneas de transmisión considerando las características presentes en los
sistemas eléctricos modernos. Para ello, se dividió al artículo en dos secciones, una teórica y otra práctica o de simulación. La sección teórica muestra una definición general de la ubicación de fallas mediante la Transformada Wavelet, así como también un análisis crítico de los diferentes métodos existentes; mostrando las ventajas y desventajas de cada uno de ellos con sus respectivas aplicaciones [11]current computational methods for the indicators have noticeable drawbacks with respect to the accuracy. Wavelet transform-based multiresolution analysis (WT-based MRA[12]. Mientras que en la sección práctica o de simulación, se presenta un análisis comparativo entre los resultados obtenidos para la distancia de localización de fallas, el tiempo de duración del evento y la velocidad de propagación del mismo, al hacer uso del modelo propuesto y los valores medidos en tiempo real al suscitarse la falla , para esto se simuló el comportamiento de tres diferentes líneas de trasmisión del sistema eléctrico ecuatoriano durante contingencias reales, buscando de esta forma comprobar la sensibilidad de los resultados obtenidos ante cambios en la frecuencia de muestreo de los registros, tal como se sugiere en [13].
2. FUNCIÓN WAVELET
Los orígenes de la función wavelet (FW) se remontan a 1930, donde ésta surge como una mejora a los estudios hechos por Joseph Fourier (Series y Transformada de Fourier) y Alfred Haar en cuanto a realizar análisis de funciones en más de un dominio. En este sentido, la FW corresponde a un grupo de funciones que presentan una buena localización de oscilaciones tanto en el dominio del tiempo f (t) como en el de la frecuencia F (s), lo que la hace una importante herramienta en el análisis de fenómenos transitorios, no estacionarios y variables en el tiempo (señales) así como también de aquellos que presenten discontinuidades. Razón por la cual se vuelve aplicable a varias ramas de la ingeniería. La Fig.1 muestra los campos de mayor importancia donde FW es actualmente utilizada.
Figura 1: Áreas de aplicación de la función wavelet
Edición No. 13, Enero 2017

81
2.1. Transformada Wavelet
Esta transformada fue desarrollada como una opción para pasar los problemas de resolución de la Transformada de Fourier en tiempo reducido (STFT), haciendo una buena imagen de una señal tanto en el dominio del tiempo como el de la frecuencia de manera simultánea, por lo que el estudio wavelet representa el subsiguiente paso a la STFT que es una regla a través de ventanas con demarcaciones de tamaño variable [14].
Las funciones de la Transformada son generadas a partir de una representación wavelet básica como se indica en el esquema de la Fig.2, por medio de traslaciones (tiempo) y ampliaciones (frecuencia). Estas funciones son centrales para la reconstrucción de la función original por medio de la transformada inversa [14].
Figura 2: Esquema de la Transformada Wavelet
De la siguiente manera es bastante general la representación de la transformada, la descomposición de ƒ (t) en un conjunto de interpretaciones , que forman una base y son llamadas “wavelets” como aparece en (1), definida como:
(1)
Las wavelets son generadas a partir de la traslación y cambio de escala de una misma representación wavelet , llamada “wavelet madre” [15]. Este renombre se deriva de dos importantes propiedades del estudio wavelet y se define en (2) como:
(2)
En la cual, s corresponde al factor de escala y τ es el factor de traslación como se indica a continuación:
Traslación:
(3)
Cambio de escala:
(4)
Traslación y cambio de escala:
(5)
Existe también la familia denominada biortonormales, que es utilizada para la reconstrucción de señales por disponer de una propiedad de fase lineal, se usa una para la descomposición y otra para la reconstrucción de cualquier señal propuesta [16].
2.1.1 Wavelet de Haar
Haar expresa en (6) que existen wavelets definidas por la función:
(6)
2.1.2 Wavelet Morlet
De igual forma existe la ecuación dada por Morlet que se expresa como una onda compuesta por una exponencial y consta en (7).
(7)
2.1.3 Wavelet Sombrero Mexicano
La wavelet conocida como sombrero mexicano constituye la segunda derivada de la función de distribución Gaussiana definida en (8).
(8)
2.2. Tipos de Transformada Wavelet
Se encuentran definidos dos tipos de transformadas que se denominan: Transformada Wavelet Discreta (DWT) y la Transformada Wavelet Continua (CWT), que a continuación serán nombradas para identificar cada una de ellas [17].
2.2.1 Transformada Wavelet Continua (CWT)
La Transformada CWT está definida para una señal en la siguiente expresión (9).
(9)
En (9) se muestra que es la escala y es la traslación en ambos números reales y es la función
Cruz et al. / Localización de Fallas Mediante la Transformada de Wavelet en Líneas de Transmisión

82
a analizar [18]. De igual manera se aprecia también que si el coeficiente de escalamiento se hace cero, la wavelet no existiría y el análisis sería indeterminado [19].
2.2.2 Transformada Wavelet Discreta (DWT)
Sea la señal a analizar una función discreta, para este caso la Transformada Wavelet está definida por (10).
(10)
Donde representa una nueva wavelet discreta definida en (11) [18].
(11)
3. LOCALIZACIÓN DE FALLAS EN LÍNEAS DE TRANSMISIÓN
La delimitación rápida de una falla en una línea de transmisión con una precisión aceptable permite proceder con las acciones necesarias para restituir el suministro de energía, disminuyendo de esta forma el periodo de indisponibilidad y mejorando la confiabilidad del sistema eléctrico.
3.1. Definición de localización de fallas
Tiempo atrás, la ubicación de fallas era realizada mediante una inspección visual de la línea en el sitio del evento. Pero, esta inspección visual se torna en un proceso complicado debido a la cantidad de recursos y tiempo necesarios para ello, especialmente para líneas con longitudes considerablemente largas. Además, esta búsqueda se encuentra condicionada al estado del terreno de las zonas de emplazamiento y a las condiciones medioambientales del momento. Por otro lado, la inspección visual no siempre asegura que la falla será encontrada debido a que, en muchos casos, las fallas no dejan una evidencia física [20].
Los métodos de ubicación de fallas son técnicas que buscan identificar con la mayor precisión posible, todas aquellas condiciones no comunes en el sistema, que desvíen la corriente de la línea de transmisión provocando fallas al sistema. En la actualidad, estas técnicas son usadas previo a la inspección visual, a fin de reducir el área de trabajo a una pequeña sección de la línea [21].
Según el tipo de dato usado para el análisis, los métodos de ubicación de fallas pueden ser clasificados en dos categorías: los que se basan en cálculo de impedancia y los que se basan en onda viajera. Este artículo abordará únicamente los métodos basados en
onda viajera, mismos que pueden sustentar su análisis en la Transformada Wavelet.
3.2. Localización de fallas por onda viajera
Los métodos utilizados para la ubicación de fallas basadas en ondas viajeras, sustentan su funcionamiento en evaluar el tiempo que le llevará al frente de onda en propagarse desde el punto de falla sobre la línea hasta el lugar donde se encuentra el equipo de medición, generalmente situado en uno o ambos extremos de la misma. Partiendo de esto, es posible determinar la distancia alcanzada por el frente de onda si se conoce la velocidad con la que ésta viaja [22]. Todos los métodos basados en onda viajera se caracterizan por tener una rápida respuesta y alta precisión. Sin embargo, existen también varios problemas técnicos insuperables como la precisión de los equipos de medición o la vulnerabilidad de éstos ante señales externas.
La precisión para ubicar fallas en un SEP depende en gran medida de la frecuencia de muestreo, ya que ésta es muy importante para determinar el lugar exacto del incidente. Debido a que la velocidad a la cuál viaja la onda sobre la línea es casi la velocidad de la luz, para alcanzar una alta precisión se vuelve necesario contar con una frecuencia de muestreo realmente alta. Por lo que se necesita de equipos complejos y costosos. Se encuentran varias dificultades para fallas ocurridas cerca del ángulo cero de la señal de voltaje debido a que si el voltaje es cero cuando la falla comienza, entonces no existirá un cambio abrupto en la continuidad del medio de propagación y será muy difícil su detección.
Los métodos de detección de fallas son muchos, sin embargo el método de onda viajera para ubicación de fallas en SEP presenta una mejor eficiencia y son aplicables a casos como el que presenta este estudio.
3.3. Análisis de fallas basado en Wavelet
La Transformada Wavelet ha encontrado aplicaciones diferentes en el área de la ingeniería como se mostró en la Fig.1 debido a su gran capacidad de analizar discontinuidades locales en las ondas. Para el caso puntual de la ingeniería eléctrica y en particular de los sistemas eléctricos, la Transformada Wavelet fue aprovechada inicialmente en el campo de los sistemas de potencia para las descomposiciones de transitorios electromagnéticos [23].
La aplicación ideal en SEP para esta transformada es detectar cuando llega el frente de onda al factor de proporción. Comparando dos de estos lapsos de llegada, es posible apreciar cuanto tiempo ha viajado el frente de onda, con lo que se puede saber la etapa a la falla [24].
Edición No. 13, Enero 2017

83
4. MODELO DE DETECCIÓN DE FALLAS PROPUESTO
Al momento de suscitarse una falla en las líneas de transmisión de un SEP el comportamiento de las ondas de voltaje y corriente sufren variaciones abruptas caracterizadas por la presencia de picos crecientes o decrecientes a lo largo de toda su extensión. Estas variaciones se llevan a cabo en tiempos muy cortos, generalmente del orden de los microsegundos o milisegundos [15].
Por lo que su análisis se complica y obliga a la utilización de herramientas de gran precisión para poder determinar los puntos exactos de variación. Como ya se detalló en el apartado anterior del presente trabajo, la Transformada Wavelet puede ser utilizada para el tratamiento exhaustivo de señales hasta llegar a conocer sus componentes fundamentales. En el campo específico del análisis de fallas, esta información resulta útil para la determinación exacta del tiempo de suceso de la falla y por ende de la distancia aproximada en dónde se pudo haber presentado esta. Tomando como base esto, se ha desarrollado un modelo de aplicación de fallas basado en la Transformada Wavelet que incluye una interface gráfica para la detección de fallas aleatorias en MatLab, mismo que va ser descrito con detalle a continuación.
4.1. Algoritmo de detección de fallas propuesto
Con la finalidad de facilitar la comprensión del modelo de ubicación de fallas propuesto, se ha dividido la explicación de las acciones que éste realiza en los pasos del siguiente algoritmo:
Paso 1: en esta sección, se busca parametrizar la línea de transmisión (L.T) a ser estudiada, para esto es importante considerar los parámetros mostrados en la Fig. 3, y que corresponde al circuito equivalente de una L.T.
Figura 3: Circuito equivalente de una línea de transmisión
Donde R es la resistencia de la L.T, misma que se vuelve despreciable para longitudes largas como aquellas que serán analizadas a continuación, XL corresponde a la inductancia y XC a la capacitancia.
Los valores de capacitancia e inductancia son propios y característicos del tipo de línea a ser estudiada, adicional a éstos es necesario también conocer los valores de voltaje y frecuencia del SEP en el cual trabaja la L.T. Por esta razón, estos valores deben ser ingresados por teclado a través de una interfaz gráfica desarrollada especialmente para este modelo.
Paso 2: en esta parte del modelo propuesto, se busca emular el comportamiento de las señales de voltaje o corriente durante el suceso de una falla aleatoria, es decir, sin importar su origen (técnico o ambiental), y que afecta a un SEP. Para ello el algoritmo presenta dos opciones, la primera es ingresar directamente los datos al entorno de MatLab mediante una estructura matricial, esto será posible si se tiene acceso a los sistemas de medición. La segunda y la cual fue empleada para las simulaciones detalladas en el siguiente apartado es utilizar la herramienta de MatLab llamada “Grabit” que permite extraer los datos de cada uno de los puntos que conforman una curva. Adicionalmente, para la simulación de fallas aleatorias se considerado según lo expuesto en [25], que la frecuencia de muestreo debe ser de al menos 1 MHz y también que ésta pueda ser fácilmente modificada en el código de programación con la finalidad de adaptar el algoritmo propuesto a diferentes casos de estudio.
Paso 3: una vez construida la forma de la señal de voltaje o corriente que incluye a la falla transitoria producida en la L.T, utilizando la Transformada Wavelet para la ubicación de la misma, en base al cálculo de los tiempos de llegada de los frentes de onda según (12) [25].
(12)
Donde es la distancia a la falla, y son inductancia y capacitancia respectivamente de la L.T, son los tiempos de llegada de los dos primeros frentes de onda consecutivos dados para el mismo terminal de línea, también se calcula la velocidad de propagación de la onda (V) durante el evento de falla mediante la expresión (13) [26].
(13)
En esta aplicación se utilizó el comando wavedec, mismo que permite un análisis unidimensional multinivel mediante la descomposición de la señal en altas y bajas frecuencias a través del uso de filtros pasa bajos y altos [27]. Este proceso es llevado a cabo un número finito de veces hasta llegar a encontrar la
Cruz et al. / Localización de Fallas Mediante la Transformada de Wavelet en Líneas de Transmisión

84
perturbación en la señal, para el algoritmo propuesto se ha utilizado cuatro filtros. La Fig. 4 sintetiza el proceso realizado por esta herramienta.
Figura 4: Descomposición de señales para análisis realizado por el comando wavedec, a) muestreo completo de señal y b)
muestreo reducido con coeficientes wavelet
Paso 4: finalmente la interfaz gráfica muestra los resultados obtenidos, así como también las gráficas de la señal de voltaje o corriente con la falla aleatoria reconstruida y otra con el detalle de la magnitud de la falla y el tiempo total en el cual ésta ocurre, entre los extremos de la línea en análisis. La Tabla 1 contiene el algoritmo propuesto de manera detallada.
Tabla 1: Algoritmo para Ubicación de Fallas con Transformada Wavelet
Inicio
Paso 1: Parametrización de la L.T. a ser analizada.
Paso 2: Datos de entrada para L.T. y sistema eléctrico.
lLT =Longitud de L.T. [km]ILT =Inductancia de L.T. [H/km]CLT=Capacitancia de L.T. [F/km]
Vsis=Voltaje del Sistema [V]fsis=Frecuencia del Sistema
[Hz]
Paso 3: Salidas.
Senal= Señal del sistematiempo_falla= Tiempo de falla
senal(tiempo_falla)= Señal de fallafo1= frente de onda 1
fo2= frente de onda 2v= Vel. Propagación onda
tdon= Tiempo de propagación
Paso 4: Reconstrucción de la señal con falla transitoria.
Si: hay acceso a datos[num,text]=xlsread(Archivo,Hoja,Rango)
Plot (num,text Caso contrario:
function grabit(fname)Senal=[fname]
Plot (senal) Fin si.
Paso 5: Ubicación de falla con Transformada Wavelet.
[c,l]=wavedec(senal,2,’db4’)fo1=wrcoef(‘d’,c,l,’db4’,1)fo2=wrcoef(‘d’,c,l,’db4’,2)
Paso 6: Detección del tiempo de falla.
[valor,t1]= max(fo1)[valor,t2]= max(fo2)
Paso 7: Calculo de la velocidad de falla.
v=1/( ILT * CLT).^(1/2)tdon= lLT /v
Paso 8: Gráfica de resultados.
Fin
5. ANÁLISIS DE RESULTADOS
Con la finalidad de verificar la precisión y la viabilidad de uso del modelo propuesto, se lo validó en la determinación de la distancia de falla para tres casos reales de contingencias suscitadas en líneas de transmisión que conforman el Sistema Nacional Interconectado (SNI) del Ecuador, para esto se tomó como referencia los datos de medición en tiempo real proporcionados por el Operador Nacional de Electricidad (CENACE) y que constan en los respectivos informes de falla de cada contingencia En la Fig.5 se muestra la ubicación geográfica de las L. T utilizadas para la verificación.
Esta sección está dividida en tres apartados que corresponde a cada una de las simulaciones de las L.T. tomadas como base para el estudio. Es importante mencionar que las fallas replicadas a continuación son unifilares y por esta razón el análisis se lo ha hecho solo en la fase afectada.
Figura 5: Emplazamiento geográfico de las líneas de trasmisión a ser estudiadas
5.1. Caso 1
En este caso se consideró una falla presentada en la línea Milagro – Zhoray de 230 [kV], cuyo trayecto va desde el límite fronterizo de las provincias de Azuay y Morona Santiago hasta la provincia del Guayas con una distancia total de 120,8 km. La Tabla 2 muestra los datos propios de esta L.T.
Edición No. 13, Enero 2017

85
Tabla 2: Datos eléctricos de la L.T. a ser modelada – Caso 1
Datos Valores
Frecuencia [Hz] 60
Inductancia [H/km] 0,15e-3
Capacitancia [F/km] 6,29e-3
Longitud [km] 120,8
La reconstrucción de la señal de voltaje durante la contingencia para esta L.T. haciendo uso del paso 4 del algoritmo propuesto aparece en la Fig. 6. Mientras, que en la Fig. 7 se aprecia una ampliación de la falla aleatoria recreada para este caso. Aquí se ha marcado con una línea continua de color magenta el momento del despeje de la falla en el sistema analizado.
En la Tabla 3 se encuentran sintetizados los resultados obtenidos al aplicar la Transformada Wavelet para la localización de fallas, el tiempo de duración y la velocidad de propagación. De igual forma, se pueden apreciar los resultados medidos por los equipos de protección de esta línea en el instante de la falla, además del porcentaje de precisión entre los valores calculados gracias al modelo propuesto y los valores reales. Para este caso la herramienta presenta una precisión del 89,76% en cuanto a la localización de la falla y un 94,19% en relación a la duración de la misma.
Figura 6: Reconstrucción señal de voltaje durante falla aleatoria – Caso 1
Figura 7: Detalle de falla aleatoria – Caso 1
Tabla 3: Resultados localización de falla – Caso 1
Resulta-dos calcu-
lados
Valores medidos por CENACE
% de exactitud
Distancia detección de falla [km] 18,79 20,93 89,76%
Tiempo de falla [s] 0,06902 0,07335 94,10%
Velocidad propaga-ción [km/s] 1 029,51 - -
5.2. Caso 2
Para este caso se replicó una falla transitoria generada en la L.T. Molino - Pascuales con un nivel de voltaje de 230 kV y una longitud de 188,5 km, comprendida desde la provincia del Azuay hasta la provincia del Guayas. En la Tabla 4 se presentan los datos característicos utilizados para ésta línea.
Tabla 4: Datos eléctricos de la L.T. a ser modelada – Caso 2.
Datos Valores
Frecuencia [Hz] 60
Inductancia [H/km] 0,24e-3
Capacitancia [F/km] 4,16e-3
Longitud [km] 188,5
Las Fig. 8 y Fig. 9 muestran la simulación y reconstrucción de la señal de voltaje con la inclusión de la falla y el detalle de esta respectivamente. Al igual que en el caso simulado anteriormente, se utilizó una línea de color magenta para identificar el momento de finalización de la falla.
Figura 8: Reconstrucción señal de voltaje durante falla aleatoria – Caso 2
Cruz et al. / Localización de Fallas Mediante la Transformada de Wavelet en Líneas de Transmisión

86
Figura 9: Detalle de falla aleatoria – Caso 2
Para este caso, los resultados obtenidos indican que en cuanto a la detección de la distancia de falla la herramienta diseñada tuvo una precisión del 90,92 % y un 95,71 % en relación al tiempo. Los resultados para este caso de simulación se encuentran en la Tabla 5.
Tabla 5: Resultados localización de falla – Caso 2
Resultados calculados
Valores me-didos por CENACE
% de exactitud
Distancia detec-ción de falla [km] 18,73 20,60 90,92%
Tiempo de falla [s]
0,06007 0,06276 95,71%
Velocidad propa-gación [km/s] 1 000,80 - -
5.3. Caso 3
Para el último caso de simulación, se analizó una falla transitoria generada en el circuito número cuatro de la L.T. Pomasqui – Jamondino, la cual tiene un voltaje nominal de 230 kV y recorre una distancia total de 212,2 km desde la provincia de Pichincha en Ecuador hasta el departamento de Nariño en Colombia, distancia que se encuentra bajo concesión y supervisión de las entidades eléctricas ecuatorianas. Esta línea se caracteriza por ser una de las más largas del sistema eléctrico ecuatoriano y de vital importancia dentro de las transacciones internacionales de energía eléctrica (TIE).
Para el caso puntual de está simulación y considerando que la falla recreada tuvo su origen en el sistema eléctrico colombiano, se decidió extender la longitud de la L.T. aproximadamente a 300 km para mejorar el grado de exactitud en la localización del percance. Considerando este particular, los
parámetros eléctricos utilizados para la simulación de ésta línea aparecen resumidos en la Tabla 6.
Tabla 6: Datos eléctricos de la L.T. a ser modelada – Caso 3
Datos Valores
Frecuencia [Hz] 60
Inductancia [H/km] 0,27e-3
Capacitancia [F/km] 3,73e-3
Longitud [km] ≈ 300
En la Fig. 10 se muestra el comportamiento de la señal de voltaje reconstruida durante el estado de falla. Mientras que la Fig. 11 muestra una ampliación del suceso recreado y al igual que en los casos anteriores se han marcado con la línea continua de color magenta el fin de la contingencia bajo análisis.
Figura 10: Reconstrucción señal de voltaje durante falla aleatoria – Caso 3
Figura 11: Detalle de falla aleatoria – Caso 3
Los resultados obtenidos para este caso de simulación aparecen en la Tabla 7, dónde se observa que la herramienta calculó la distancia del evento con un 92,47 % de precisión, mientras que en cuanto al tiempo de duración de la falla lo hizo con un 93,95 % de exactitud.
Edición No. 13, Enero 2017

87
Tabla 7: Resultados localización de falla – Caso 3
Resultados calculados
Valores medidos por CENACE
% de exactitud
Distancia detec-ción de falla [km] 228,31 246,90 92,47%
Tiempo de falla [s] 0,07480 0,07962 93,95%
Velocidad propa-gación [km/s] 996,47 - -
6. CONCLUSIONES Y RECOMENDACIONES
Este artículo presenta una aplicación práctica de la Transformada Wavelet, aplicándola en la localización de fallas en líneas de trasmisión, buscando de esta forma brindar una nueva herramienta para el análisis de contingencias.
Herramientas como las propuestas en el presente trabajo se presentan como una gran ayuda y brindan una opción extra de verificación. Que pueden ser utilizadas como un complemento a las herramientas de análisis que poseen los sistemas de protección, con los que cuentan las empresas del sector eléctrico, especialmente en las etapas de análisis post operativo.
De los casos de estudio planteados, se puede concluir que el algoritmo propuesto alcanza una mayor precisión en L.T. de mayor longitud, por lo que se recomienda su aplicación en aquellas que tengan una distancia mayor o igual a los 180 km.
Si bien la herramienta propuesta tiene una precisión promedio igual al 91,05% en cuanto a la localización de fallas para los casos simulados, es importante mencionar que estos resultados no pueden ser tomados como definitivos, razón por la cual es recomendable realizar una comparación de estos con otros software de análisis de contingencias y para casos prácticos lo ideal sería confirmar los resultados obtenidos con visitas de personal técnico especializado al lugar del evento.
Por otro lado, se ha podido demostrar que la Transformada Wavelet constituye una herramienta interesante en cuanto al análisis y reconstrucción de señales eléctricas. Además, como se mostró en este trabajo es conveniente realizar un análisis utilizando un número igual o superior a 4 filtros pasa altos y bajos con la finalidad de tener una buena resolución de análisis.
En cuanto a trabajos futuros, sería interesante estudiar la aplicación el desempeño de la herramienta wavelet aplicada en otro tipo de contingencias que pueden presentarse en sistemas eléctricos, así como también su aplicación en sistemas de monitoreo en tiempo real.
AGRADECIMIENTOS
Los autores de este trabajo desean manifestar su más sincero y profundo agradecimiento al Operador Nacional de Electricidad (CENACE), en especial a la Unidad de Análisis de Eventos por la información facilitada para su desarrollo y de igual forma a la Universidad Politécnica Salesiana (UPS) por las facilidades prestadas durante su ejecución.
REFERENCIAS BIBLIOGRÁFICAS
[1] Y. Wang, L. Xue, M. Pedram, and C. Naehyuck, “Online Fault Detection and Fault Tolerance in Electrical Energy Storage Systems,” PES Gen. Meet. | Conf. Expo. 2014 IEEE, pp. 1–5, 2014.
[2] A. Aguila, D. Carrión, and L. Ortiz, “Analysis of power losses in the asymmetric construction of electric distribution systems,” IEEE Lat. Am. Trans., vol. 13, no. 7, pp. 2190–2194, 2015.
[3] R. A. Keswani, “Identification of fault in HVDC converters using wavelet based multi-resolution analysis,” Proc. - 1st Int. Conf. Emerg. Trends Eng. Technol. ICETET 2008, vol. 16, no. 4, pp. 954–959, 2008.
[4] P. F. Gale, J. Stokoe, and P. A. Crossley, “Practical Experience With Travelling Wave Fault Locators on Scottish power’s 275 & 400 kv transmission system,” pp. 192–196, 1993.
[5] E. Inga, D. Carrión, A. Aguila, E. García, R. Hincapié, and J. W. González, “Minimal Deployment and Routing Geographic of PMUs on Electrical Power System based on MST Algorithm,” IEE Lat. Am. Trans., vol. 14, no. 5, pp. 2264–2270, 2016.
[6] D. Carrión, E. Inga, J. W. Gonzalez, and R. Hincapié, “Optimal Geographical Placement of Phasor Measurement Units based on Clustering Techniques,” in 51st International Universities’ Power Engineering Conference, 2016.
[7] J. Da Silva, F. Costa, and E. Santos, “High Impedance Fault Location – Case Study Using Wavelet Transform And Artificial Neural Networks,” 22nd Int. Conf. Electr. Distrib., vol. 5, no. 663, pp. 10–13, 2013.
[8] L. J. Lewis, “Traveing Wave Relations Power-System Fault Locators,” IEEE Journals Mag., vol. 70, no. 2, pp. 1671–1680, 1951.
[9] C. Cueva and D. Carrión, “Modelación para la localización de fallas en líneas de transmisión de doble circuito,” Universidad Politécnica Salesiana, 2015.
Cruz et al. / Localización de Fallas Mediante la Transformada de Wavelet en Líneas de Transmisión

88
[10] A. Riofrio, D. Carrión, and D. Vaca, “Propuesta de Modelo de Operación Aplicado a Micro Redes Fotovoltaicas en Generación Distribuida,” Rev. Técnica Energía, vol. 12, no. ISSN 1390-5074, pp. 216–229, 2016.
[11] W. Gao and J. Ning, “Wavelet-Based Disturbance Analysis For Power System Wide-Area Monitoring,” IEEE Trans. Smart Grid, vol. 2, no. 1, pp. 121–130, 2011.
[12] L. Cruz and D. Carrión, “Aplicación de la Transformada de Wavelet para ubicación de fallas en sistemas eléctricos de potencia,” Universidad Politécnica Salesiana, 2016.
[13] H. Livani, S. Member, and C. Y. Evrenosoglu, “A Traveling Wave Based Single-Ended Fault Location Algorithm using DWT for Overhead Lines Combined with Underground Cables,” IEEE PES Gen. Meet., pp. 4–9, 2010.
[14] F. B. Costa, B. A. Souza, S. Member, and N. S. D. Brito, “Real-Time Classification of Transmission Line Faults Based on Maximal Overlap Discrete Wavelet Transform,” pp. 1–8, 2012.
[15] E. Bashier, M. T. Orner, and A. I. Aziz, “Transmission Line Faults Detection, Classification and Location using Artificial Neural Network,” pp. 1–5, 2012.
[16] N. Moslemi and D. JALALI, “Fault Location for Radial Distribution Systems Using Fault Generated High-Frequency Transients and Wavelet Analysis,” 18th Int. Conf. Electr. Distrib., no. June, pp. 1–4, 2005.
[17] T. Patcharoen, A. Ngaopitakkul, and A. Kunakorn, “Identification of fault types for a three-bus transmission network using discrete Wavelet Transform and Probabilistic Neural Networks,” pp. 1579–1584, 2007.
[18] X. Gu, “Wavelet Transform Based Approach to Harmonic Analysis,” 2011.
[19] S. Yunhui and R. Qiuqi, “Continuous Wavelet Transforms,” Proc. 7th Int. Conf. Signal Process. 2004. Proceedings. ICSP ’04. 2004., vol. 1, pp. 207–210, 2005.
[20] P. Jun, S. Wenxia, T. Jun, and Z. Jun, “Fault location for transmission line based on traveling waves using correlation analysis method,” 2008 Int. Conf. High Volt. Eng. Appl., pp. 681–684, 2008.
[21] M. B. Dewe, S. Sankar, and J. Arrillaga, “Application of satellite time references to
HVDC fault location,” IEEE Trans. Power Deliv., vol. 8, no. 3, pp. 1295–1302, 1993.
[22] L. Zewen, H. Huanhuan, D. Feng, Z. Xiangjun, and Y. Kun, “Power grid fault traveling wave network location method,” Conf. Rec. - IAS Annu. Meet. (IEEE Ind. Appl. Soc., pp. 1–6, 2013.
[23] O. I. Camps, J. S. Mayer, and W. B. Gish, “Wavelets And Electromagnetic Power System Transients,” vol. 11, no. 2, pp. 1050–1058, 1996.
[24] P. K. Murthy, J. Amarnath, S. Kamakshiah, and B. P. Singh, “Wavelet Transform Approach for Detection and Location of Faults in HVDC System,” IEEE Reg. 10 Colloq. 3rd Int. Conf. Ind. Inf. Syst. ICIIS 2008, pp. 6–11, 2008.
[25] L. De Andrade and T. P. De Leão, “Fault Location for Transmission Lines Using Wavelet,” vol. 12, no. 6, pp. 1043–1048, 2014.
[26] V. K. Gupta and D. N. Vishwakarma, “Transmission Line Fault Location using Traveling Wave,” Int. J. Invent. Reasearch, Eng. Sci. Technol., vol. 1, no. 1, pp. 24–28, 2014.
[27] S. Mallat, “A Theory for Multiresolution Signal Decomposition: The Wavelet Representation,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 11, no. 7, pp. 674–693, 1989.
Luis Rubén Cruz Andaluz.- Nació en Quito en 1988. Recibió su título de Ingeniero Eléctrico de la Universidad Politécnica Salesiana (UPS) en 2016. Al momento, se desempeña como Ingeniero de diseño en Grupo Synergy E&P Ecuador. Sus campos
de investigación están relacionados con el diseño de circuitos para la Industria Petrolera y el estudio de estabilidad de sistemas eléctricos.
Diego Francisco Carrión Galarza.- Nació en Quito en 1981. Sus estudios superiores los realizó en la Universidad Politécnica Salesiana, obteniendo el título de Ingeniero Eléctrico en 2010. Actualmente, se encuentra cursando sus estudios de Doctorado en la
Universidad Pontificia Bolivariana – Medellín, Colombia. Su campo de investigación se encuentra relacionado con
Edición No. 13, Enero 2017

89
el análisis de Sistemas de Transmisión de Electricidad en Alto Voltaje y las Redes Inteligentes. Es profesor de la Universidad Politécnica Salesiana – Sede Quito y miembro del Grupo de Investigación en Redes Eléctricas Inteligentes – GIREI.
Augusto Jonathan Riofrio Trujillo.- Nació en Quito D.M en 1990. Recibió su título de Ingeniero Eléctrico de la Universidad Politécnica Salesiana (UPS) en 2015. Se ha desempeñado como Analista Técnico en el Instituto Nacional
de Eficiencia Energética y Energías Renovables (INER) y actualmente ejerce el cargo de Ingeniero de Liquidación y Facturación de energía eléctrica en la Gerencia Nacional de Transacciones Comerciales del Operador Nacional de Electricidad (CENACE). Sus intereses investigativos están relacionados con el desarrollo de herramientas para la seguridad de Sistemas Eléctricos de Potencia, pérdidas en Sistemas de Trasmisión de Electricidad, Energías Renovables especialmente Fotovoltaica, Micro redes de generación e inclusión de fuentes renovables para generación de electricidad en sistemas eléctricos convencionales.
Cruz et al. / Localización de Fallas Mediante la Transformada de Wavelet en Líneas de Transmisión

90
Resumen
La expansión de las redes eléctricas por el continuo crecimiento urbanístico genera inconvenientes al momento de la planificación de las mismas y aún más cuando se toma en consideración las diferentes políticas en cuanto a que las redes de distribución no deben afectar al urbanismo, siendo el caso de las redes soterradas. En el presente trabajo se plantea la solución al problema de ubicación de transformadores de distribución para cierta cantidad de usuarios en una zona determinada mediante una heurística de ubicación óptima, considerando minimizar costos de conectividad en la red de distribución hacia una subestación eléctrica; así como también el costo de interconexión con la red de transmisión eléctrica y capacidad de transformadores. La heurística considera k-means como la alternativa para dividir a los usuarios y ubicar los transformadores de distribución, luego mediante análisis de distancias y costos mínimos se logra determinar la mejor ubicación de la subestación y mediante el uso de Steiner Tree se logra generar la línea de distribución que une los transformadores y la subestación. El mismo criterio se usa para la conexión de la subestación al punto de enlace con la red de transmisión. Al finalizar la simulación se logró establecer las ubicaciones óptimas de cada elemento constituyente de la red eléctrica.
Palabras clave— Heurística, Minimización de costos, Planeación eléctrica, Redes de distribución, Transformadores de distribución.
Abstract
The expansion of electricity networks by the continued urban growth creates problems when planning them and even more when taking into account the different policies regarding the distribution networks should not affect the planning, being the case the underground networks. In This paper the solution to the problem of distribution transformer location for a Certain amount of users in GIVEN area was proposed by a heuristic optimal location, Considering minimize connectivity costs in the distribution network to an electrical substation; as well as the cost of interconnection to the electricity transmission network and power transformers capacity. K-means is consider by the heuristic model as the best alternative to divide the users and locate the distribution power transformers, after between the distances comparison and the minimal cost is achieved determine the best location of the substation and using Steiner Tree is achieved by generating the line linking distribution and substation transformers. The same idea is used to connect the substation to the point of connection to the transmission network. After the simulation is able to establish the optimum locations of each network element.
Index terms— Cost minimization, Distribution networks, Electrical planning, Heuristic, Power Transformers
Aplicación Práctica / Practical Issues
Método Heurístico de Ubicación Óptima de Centros de Transformación y Enrutamiento de Redes Eléctricas de Distribución
D. Carrión1 E. García1 J. W. González2 I. A. Isaac2 G. J. López2 R. Hincapié2
1Universidad Politécnica SalesianaE-mail: [email protected]; [email protected]
2Universidad Pontificia Bolivariana, Medellín, ColombiaE-mail: [email protected]; [email protected]; [email protected];
Recibido: 09-09-2016, Aprobado tras revisión: 09-12-2016 Forma sugerida de citación: Carrión, D.; García, E.; González, J.; Isaac, I.; López, G.; Hincapié, R. (2017). “Método Heurístico de Ubicación Óptima de Centros de Transformación y Enrutamiento de Redes Eléctricas de Distribución”. Revista Técnica “energía”. No. 13, Pp. 90-96 ISSN 1390-5074.

91
1. INTRODUCCIÓN
Los sistemas de distribución de energía están directamente relacionados con el usuario final, estos sistemas tienen como principio fundamental mantener altos niveles de calidad y confiabilidad en el suministro de la energía entregada frente a las necesidades crecientes de la población [1]–[5].
Los sistemas eléctricos operan como un todo, pero dada la cantidad de elementos y la magnitud de los cálculos necesarios para el análisis es conveniente dividir el sistema eléctrico en varios subsistemas o categorías para lograr simplificaciones en su manejo. El número de divisiones dependerá de la complejidad del sistema y de la información disponible. Es frecuente considerar las siguientes divisiones, ya que ellas presentan ciertas características comunes. Así se puede dividir al sistema eléctrico en: Generación, Transmisión y Distribución (Fig. 1) [6].
Figura 1: Sistema Eléctrico con consideración de crecimiento urbanístico
Debido a las exigencias y a la sensibilidad de las cargas que existen actualmente, este trabajo presenta algunas propuestas que las empresas de distribución podrían implementar para mejorar la calidad del servicio e influenciar de manera positiva en la confianza de los abonados. La metodología utilizada en primer lugar es la ubicación de los centros de carga en plano el cual podría ser georreferenciada, para luego proceder a determinar la capacidad dela subestación que alimentará a dichas cargas, esta capacidad dependerá la cantidad de usuarios que se entregará el servicio, tercero se procede a realizar la implementación del algoritmo para la ubicación de estas subestaciones y el diseño del trazado de las líneas de distribución y por último se determina la ruta idónea del primario de alimentación.
En [7] se analiza la ubicación de generación distribuida mediante k-means que es una técnica de clusterización, en la cual se considera el crecimiento de la demanda y la no saturación de las redes eléctricas ya existentes y mediante agrupación encuentra la ubicación de las diferentes fuentes de generación, criterio que puede ser usado para la localización de centros de transformación. En [8] se usa el algoritmo de Branch and Bound para generar el enrutamiento de las redes de distribución en el cual se consideran criterios técnicos y económicos, el diseño de la red propuesto busca minimizar el costo de la red al igual que las pérdidas mediante MINLP.
En [9] se desarrolla una heurística que soluciona el problema de los árboles de distribución encontrando una solución para la topología cuasi óptima de la red, aproximándose al comportamiento del análisis de los árboles mínimos de Steiner, lo cual es un problema de optimización combinatoria [10]–[12].
En la presente investigación se propone el enrutamiento del sistema eléctrico bajo análisis, el cual se lo realiza planteando una heurística la que considera en su desarrollo k-means como la técnica de agrupamiento de los barrios, steiner tree para realizar el tendido de los conductores y mediante búsqueda inteligente la heurística delimita los parámetros técnicos y económicos buscando un mínimo cuasi óptimo.
En adelante este artículo se organiza de la siguiente manera: en la sección II se explica el problema planteado y la metodología con la que se resuelve mediante k-means y Steiner Tree, en la sección III se presenta el análisis de resultados y en la sección IV finalmente concluimos este artículo.
2. PLANTEAMIENTO DEL PROBLEMA
Se considera como caso de estudio el crecimiento urbanístico de una ciudad, lo cual afecta directamente al sistema eléctrico de potencia, en especial a la red de distribución. Se parte de la hipótesis que una urbanización está siendo construida con N usuarios (1). La distribución de los barrios se lo hace considerando un plano coordenado XY y para que el modelo planteado sea genérico la ubicación de cada edificación se la realiza de manera aleatoria.
(1)
Donde representa la iésima coordenada en el eje X, representa la iésima coordenada en el eje Y y n representa la cantidad de usuarios a incrementar.
Edición No. 13, Enero 2017

92
También se supone que para cubrir las necesidades eléctricas se deben colocar M centros de transformación que den servicio a los diferentes usuarios. Para realizar el tendido de la red de media tensión se debe considerar cuidadosamente criterios técnicos y económicos de tal manera que se ubique los centros de transformación en sitios donde el costo de implementación sea el mínimo y la capacidad instalada no sea inferior a la carga.
Para encontrar la solución al problema de ubicación óptima de centros de transformación se plantea usar la técnica de clusterización de k-means considerando la capacidad de cada centro de transformación, para lo cual se usa lo planteado en el Algoritmo 1. En la tabla I se detalla las variables empleadas en los algoritmos de ubicación de centros de transformación en el universo de estudio.
Tabla 1: Notaciones
Símbolo Descripción
Número de Usuarios
Capacidad del Transformador
Costo de la Subestación
Costo de la Línea de transmisión
Usuario del sistema
Posición en X
Posición en Y
Conjunto de vértices y enlaces
Posibles lugares para los centros de control
Distancia de enlace (i, j)
Número de transformadores
Ubicación de los usuarios
Sitios disponibles
Solución
Para ubicar de manera uniforme los transformadores de distribución se plantea el uso de k-means como técnica de agrupamiento, k-means es una técnica en la cual todas las variables son cuantitativas y la distancia cuadrática euclidiana (2) es la que difiere entre cada uno de los elementos. Los elementos que tienen distancia cuadrática euclidiana mínima y similar a un solo objeto llegan a formar parte de un cluster, estos elementos tienen un centroide, que no es más que el centro de distancias menores a cada elemento del cluster [13]–[16].
(2)
Donde representa la distancia cuadrática euclidiana, representa el punto inicial,
representa el punto final y representa la cantidad de elementos del universo a estudiar.
El algoritmo una vez que converge, no quiere decir que el punto seleccionado sea el mínimo. Esto se debe a que el algoritmo es una heurística de un problema no convexo y converge en un mínimo local. El algoritmo finaliza cuando los valores no cambian de una iteración a la siguiente. Para la selección de los clusters existen dos metodologías la partición randómica y el método de Forgy (Algoritmo 1).
Una vez localizado la ubicación correcta de las subestaciones se advierte la necesidad de un enrutamiento considerando el costo más bajo para el enlace con cable hacia los centros de carga. Además se debe tener en cuenta el enlace que se genera entre la subestación de distribución y la subestación de subtransmisión, de la misma manera este enlace es el mínimo costo, y por último el costo del enlace hacia el sistema de transmisión de energía, de esta manera se tienen así todos los costos para la instalación del sistema.
Algoritmo 1 Algoritmo k-means
Paso 1: Inicialización del centro de los clusters
Paso 2: Selección centroide más cercano a cada elemento:
Paso 3: Establecer los elementos de cada cluster
Paso 4: Repetir desde los pasos 2 y 3 hasta converger
Para realizar el enrutamiento de las líneas de distribución y el enlace con el sistema de transmisión se realiza aplicando un árbol mínimo de expansión basado en la heurística Steiner Tree, con lo cual se obtiene la ruta óptima considerando la no generación de lazos [17][18].
Carrión et al. / Método Heurístico de Planeación Óptima para el Diseño de Redes Eléctricas
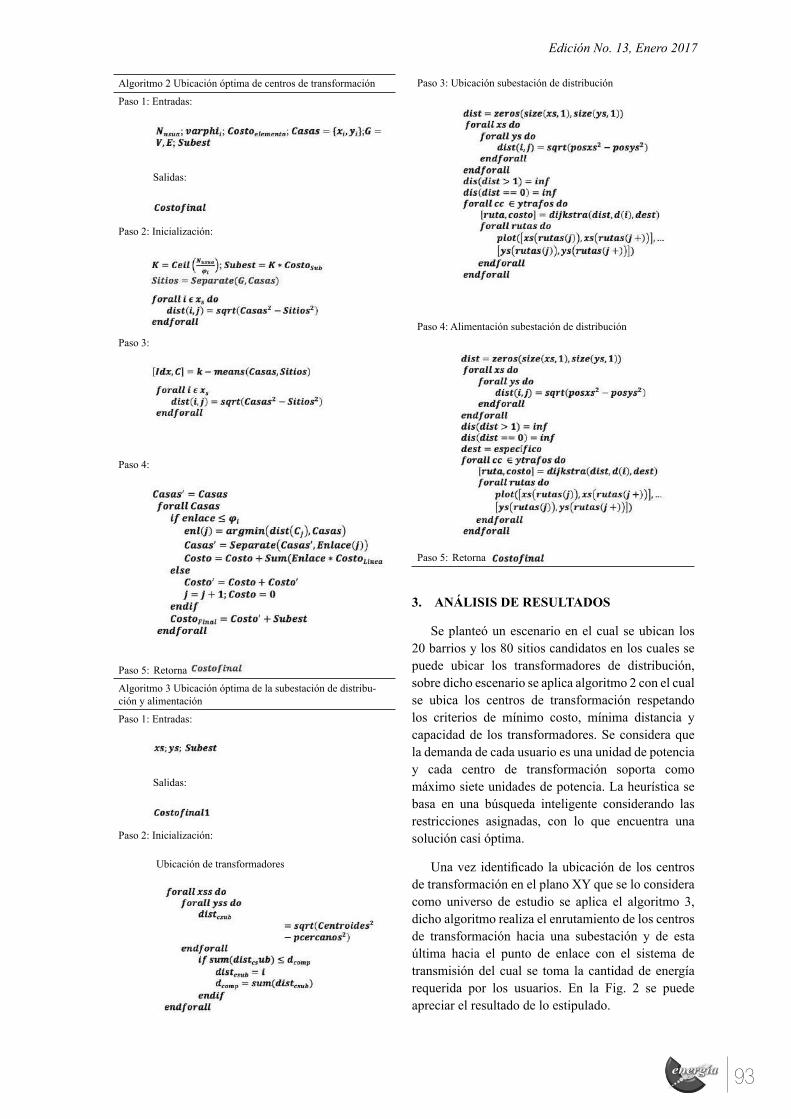
93
Algoritmo 2 Ubicación óptima de centros de transformación
Paso 1: Entradas:
Salidas:
Paso 2: Inicialización:
Paso 3:
Paso 4:
Paso 5: Retorna
Algoritmo 3 Ubicación óptima de la subestación de distribu-ción y alimentación
Paso 1: Entradas:
Salidas:
Paso 2: Inicialización:
Ubicación de transformadores
Paso 3: Ubicación subestación de distribución
Paso 4: Alimentación subestación de distribución
Paso 5: Retorna
3. ANÁLISIS DE RESULTADOS
Se planteó un escenario en el cual se ubican los 20 barrios y los 80 sitios candidatos en los cuales se puede ubicar los transformadores de distribución, sobre dicho escenario se aplica algoritmo 2 con el cual se ubica los centros de transformación respetando los criterios de mínimo costo, mínima distancia y capacidad de los transformadores. Se considera que la demanda de cada usuario es una unidad de potencia y cada centro de transformación soporta como máximo siete unidades de potencia. La heurística se basa en una búsqueda inteligente considerando las restricciones asignadas, con lo que encuentra una solución casi óptima.
Una vez identificado la ubicación de los centros de transformación en el plano XY que se lo considera como universo de estudio se aplica el algoritmo 3, dicho algoritmo realiza el enrutamiento de los centros de transformación hacia una subestación y de esta última hacia el punto de enlace con el sistema de transmisión del cual se toma la cantidad de energía requerida por los usuarios. En la Fig. 2 se puede apreciar el resultado de lo estipulado.
Edición No. 13, Enero 2017

94
Figura 2: Ubicación óptima de los centros de transformación y red de distribución
La ejecución de la heurística planteada permite realizar la búsqueda de la menor distancia entre la posible ubicación de la subestación y los consumidores, lo que se representa en la Fig. 3.
La Fig. 3 demuestra el comportamiento de búsqueda inteligente de la heurística planteada para cada uno de los tres cluster obtenidos de la capacidad de carga que cada uno de ellos puede tener, una vez encontrado la distancia mínima sin sobrepasar capacidad de potencia se determina como el lugar óptimo de instalación de la misma, además se procede a realizar las conexiones entre los centros de transformación y la subestación de distribución, el criterio de ubicación física de la subestación de distribución es exactamente el mismo que el usado para ubicar los centros de transformación.
La variabilidad de las distancias encontradas de las tres subestaciones a cada grupo de clientes y determinando cuál es la mayor y la menor distancia se compara entre las tres y se obtiene que es de 3%, lo que implica que los sistemas están equilibrados en sus distancias y elementos repartidos, como se representa en la Fig. 4.
Figura 3: Respuesta de la búsqueda del costo y distancia mínima para la ubicación de la S/E
Figura 4: Rango de variación entre la distancia mínima y máxima de cada cluster
4. CONCLUSIONES Y RECOMENDACIONES
En el presente trabajo se implementó una heurística la cual es capaz de determinar al menor costo la ubicación de las subestaciones de distribución junto a las cargas de los usuarios de acuerdo a la capacidad que esta pueda abastecer, además tomando encuentra el costo del conductor.
Mediante la aplicación de la técnica de cauterización K-means se agrupo los barrios más cercanos de acuerdo a la capacidad máxima de las subestaciones la cual viene dada en función de la cantidad de barrios que se va a servir de energía eléctrica. Para lo cual se aplicó una restricción que los lugares factibles de ubicar las S/E es el conjunto formado por el espacio asignado para la ciudad menos la ubicación de los barrios.
Para poder energizar las subestaciones de distribución se debe conectar con la subestación de subtransmisión o un nodo del SEP del cual factible, para ello se consideró el enlace más corto y además que la ubicación de esta tiene que estar en un lugar factible el cual no debe coincidir con los barrios ni con la subestaciones de distribución manteniendo el mismo criterio de minimización.
REFERENCIAS BIBLIOGRÁFICAS
[1] A. Garcés, O. Gómez, and A. Arias, “Reliability improvement on distributions power systems by means of primary feeder reconfiguration,” Sci. Tech. Año XIV, no. 38, pp. 59–64, 2008.
[2] A. Rastgou and J. Moshtagh, “Improved harmony search algorithm for transmission expansion planning with adequacy–security considerations in the deregulated power system,” Int. J. Electr. Power Energy Syst., vol. 60, pp. 153–164, Sep. 2014.
Carrión et al. / Método Heurístico de Planeación Óptima para el Diseño de Redes Eléctricas

95
[3] A. Aguila, D. Carrión, and L. Ortiz, “Analysis of power losses in the asymmetric construction of electric distribution systems,” IEEE Lat. Am. Trans., vol. 13, no. 7, pp. 2190–2194, 2015.
[4] E. M. García, A. Águila, I. Isaac, J. W. González, and G. López, “Analysis of Voltage Profile to determine Energy Demand using Monte Carlos algorithms and Markov Chains ( MCMC ),” in 51st International Universities’ Power Engineering Conference, 2016, no. Mcmc.
[5] E. García and I. Isaac, “Demand response systems for integrating energy storage batteries for residential users,” in Ecuador Technical Chapters Meeting (ETCM), IEEE, 2016.
[6] T. Gonen, Electric Power Distribution Engineering, Third Edition. CRC Press, 2014.
[7] F. Scarlatache, G. Grigora, G. Chicco, and G. Câr, “Using k-Means Clustering Method in Determination of the Optimal Placement of Distributed Generation Sources in Electrical Distribution Systems,” IEEE Optim. Electr. Electron. Equip. (OPTIM), 2012 13th Int. Conf., pp. 953–958, 2012.
[8] M. J. Rider, A. V Garcia, and R. Romero, “Transmission system expansion planning by a branch-and-bound algorithm,” IET Gener. Transm. Distrib., vol. 2, no. 1, pp. 90–99, 2008.
[9] V. Parada, J. a. Ferland, M. Arias, P. Schwarzenberg, and L. S. Vargas, “Heuristic determination of distribution trees,” IEEE Trans. Power Deliv., vol. 25, no. 2, pp. 861–869, 2010.
[10] T. Sudhakar, “Power Restoration in Distribution Network Using MST Algorithms,” Intechopen.Com.
[11] A. Nagarajan and R. Ayyanar, “Application of Minimum Spanning Tree Algorithm for Network Reduction of Distribution Systems,” 2014.
[12] E. Inga, D. Carrión, A. Aguila, E. García, R. Hincapié, and J. W. González, “Minimal Deployment and Routing Geographic of PMUs on Electrical Power System based on MST Algorithm,” IEE Lat. Am. Trans., vol. 14, no. 5, pp. 2264–2270, 2016.
[13] G. Cartina, G. Grigoras, E. C. Bobric, and D. Comanescu, “Improved fuzzy load models by clustering techniques in optimal planning of distribution networks,” 2009 IEEE Bucharest PowerTech Innov. Ideas Towar. Electr. Grid Futur., pp. 2–7, 2009.
[14] G. Grigoras, G. Cartina, and F. Rotaru, “Using K-Means Clustering Method in Determination of the Energy Losses Levels from Electric Distribution Systems,” Math. METHODS Comput. Tech. Electr. Eng., pp. 52–56, 2012.
[15] F. Rotaru, G. Chicco, G. Grigoras, and G. Cartina, “Two-stage distributed generation optimal sizing with clustering-based node selection,” Int. J. Electr. Power Energy Syst., vol. 40, no. 1, pp. 120–129, 2012.
[16] D. Carrión, E. Inga, J. W. Gonzalez, and R. Hincapié, “Optimal Geographical Placement of Phasor Measurement Units based on Clustering Techniques,” in 51st International Universities’ Power Engineering Conference, 2016.
[17] D. P. Montoya, J. M. Ramirez, and a G. Theory, “A minimal spanning tree algorithm for distribution networks con fi guration,” 2012 IEEE Power Energy Soc. Gen. Meet., pp. 1–7, 2012.
[18] A. Cárcamo-Gallardo, L. G. Santander, and J. E. Pezoa, “Reconfiguracion de redes eléctricas de media tension basada en el algorithmo de PRIM / Reconfiguration of medium voltage networks based on PRIM’s algorithm,” Ingeniare. Rev. Chil. Ing., vol. 15, no. 1, pp. 83–91, 2007.
Diego Carrión.- Nació en Quito en 1981. Sus estudios superiores los realizo en la Universidad Politécnica Salesiana (UPS), obteniendo el título de Ingeniero Eléctrico en el año 2010. En la actualidad se encuentra en proceso de obtención
de su título de PhD en Ingeniería Eléctrica en la Universidad Pontificia Bolivariana (UPB) en Medellín-Colombia. Actualmente se desempeña como Docente de la Carrera de Ingeniería Eléctrica de la Universidad Politécnica Salesiana - Sede Quito y forma parte del Grupo de Investigación en Redes Eléctricas Inteligentes - GIREI.
Edwin García.- Nació en Ambato en 1978. Sus estudios superiores los realizo en la Universidad Politécnica Salesiana (UPS), obteniendo el título de Ingeniero Eléctrico en el año 2005; en el año 2016 obtuvo su título de Master
Edición No. 13, Enero 2017

96
en gestión de Energías en la Universidad Técnica de Cotopaxi (UTC). En la actualidad se encuentra en proceso de obtención de su título de PhD en Ingeniería Eléctrica en la Universidad Pontificia Bolivariana (UPB) en Medellín-Colombia. Actualmente se desempeña como Docente de la Carrera de Ingeniería Eléctrica de la Universidad Politécnica Salesiana - Sede Quito y forma parte del Grupo de Investigación en Redes Eléctricas Inteligentes - GIREI.
Jorge W. González.- Ingeniero Electricista, Magíster y Doctor en Ingeniería Eléctrica. Con formación de investigador en las Universidades de Erlangen y Kempten en Alemania, en Sistemas Eléctricos de Potencia. Posee experiencia profesional de 21 años. Es
docente Titular de planta en pregrado, posgrado e investigador de La Universidad Pontificia Bolivariana, área de sistemas eléctricos de potencia. Es miembro del Grupo de Investigación en Transmisión y Distribución de Energía Eléctrica. En la UPB ha ejecutado proyectos con empresas del sector eléctrico. Como investigador es autor de una importante cantidad de artículos y software para simulación de sistemas de potencia. Fue consultor de la empresa HMV durante 8 años. También laboró para la empresa Siemens PTD, Erlangen, Alemania. Es par evaluador de Colciencias y de la IEEE.
Idi A. Isaac.- Es Ingeniero Electricista, Especialista y Magíster en Ingeniería Área Transmisión y Distribución de Energía Eléctrica de la Universidad Pontificia Bolivariana de Medellín. Desde 1999 pertenece al Grupo de Investigación en
Transmisión y Distribución de Energía Eléctrica TyD-UPB, con el cual ha participado en múltiples proyectos para empresas del sector eléctrico como EPM, ISA, XM, Isagen, en áreas como los FACTS y la transmisión en corriente directa HVdc. Realizó sus estudios doctorales en el marco de un convenio de la UPB con la Universidad de Ciencias Aplicadas de Kempten, Alemania. Dentro de su investigación ha efectuado pasantías formativas en la Dirección de Gestión de la Operación de Interconexión Eléctrica S.A -ISA- y en la Universidad Pontificia Comillas de Madrid, España. Su área actual de interés es la solución de problemas asociados con las micro-redes inteligentes, particularmente en lo que atañe a la integración de generación distribuida, almacenamiento de energía, transporte eléctrico y supervisión de dichos sistemas.
Gabriel J. López.- Ingeniero Electricista, Magíster y Doctor en Ingeniería Eléctrica de la Universidad Pontificia Bolivariana de Medellín. Es docente Titular de planta en pregrado, posgrado e investigador de La Universidad Pontificia Bolivariana en el
área de sistemas eléctricos de potencia. Es miembro del Grupo de Investigación en Transmisión y Distribución de Energía Eléctrica. En la UPB ha ejecutado proyectos con empresas del sector eléctrico como XM, ISA, EPM, CIDET, IEB entre otras. Como investigador es autor de una importante cantidad de artículos, software para simulación de sistemas de potencia, productos de nuevo conocimiento y proyectos de investigación.
Roberto Hincapié.- Recibió el grado de B.S. en ingeniería electrónica, grado de M.S. en ingeniería y el grado de Ph.D. en ingeniería por la Universidad Pontificia Bolivariana, Medellín, Colombia en los años de 1996, 2005, y 2009, respectivamente. En la actualidad es profesor
asistente de ingeniería de telecomunicaciones con la Universidad Pontificia Bolivariana – Colombia – Medellín y es miembro el Grupo de Investigación GIDATI. Su trabajo se basa en técnicas de modelado y simulación matemáticos. Sus intereses de investigación incluyen la asignación de recursos en redes malladas inalámbricas, planificación de redes e ingeniería de tele-tráfico, con aplicaciones a la calidad del servicio y la cobertura rural.
Carrión et al. / Método Heurístico de Planeación Óptima para el Diseño de Redes Eléctricas

97
Resumen
En el artículo se presentan la comparación de la modelación de los elementos en las redes eléctricas en presencia de armónicos superiores de corriente y tensión. Se muestra que en el cálculo de los regímenes de trabajo de la red, resulta necesario considerar el efecto piel (Skin Effect) y las corrientes de Eddy. Al tener en cuenta estos elementos, el error en los cálculos del consumo de energía eléctrica se reduce en gran medida. Se programó una herramienta computacional (DYCSE) para determinar el flujo armónico por el método de Gauss-Seidel que fue comparado con el cálculo realizado por el software Easy Power que utiliza la técnica de inyección de corriente y así demostrar la factibilidad de uso del DYCSE a partir del grado de coincidencia en los resultados obtenidos por ambos método en un esquema patrón.
Palabras clave— redes eléctricas, armónicos, factor de potencia, voltaje, flujo de potencia
Abstract
This article shows comparison compares different methods of modeling elements of the electrical network in the presence of harmonics in voltage and current, but also studied and compared. It is shown that when calculating the power network should be considered a surface effect and the effect on the occurrence of eddy currents. When accounting for these factors, the calculation error mode power consumption is significantly reduced. A computational tool (DYCSE) is designed to determine the harmonic flow by the Gauss-Seidel method to be compared with the calculation performed with Easy Power software that uses the technique of current injection and demonstrate the feasibility of using the DYCSE to from the degree of agreement in the results for both method in a pattern scheme.
Index Terms— electrical network, harmonics, power factor, voltage, power flow.
Aplicación Práctica / Practical Issues
Modelación de Regímenes de Redes Eléctricas en Presencia de Distorsión Armónica
I. González1 S. Marrero1 A. Legra2 A. León1 X. Proaño1
1Universidad Técnica de Cotopaxi.E-mail: [email protected]; [email protected];
[email protected]; xavier.proañ[email protected] Superior Minero Metalúrgico de Moa, ISMMM, Cuba
E-mail: [email protected]
Recibido: 04-07-2016, Aprobado tras revisión: 09-12-2016 Forma sugerida de citación: González, P. I.; Marrero, R. S.; Legra, L. A.; León, S. A.; Proaño, M. X. (2017). “Modelación de regímenes de redes eléctricas en presencia de distorsión armónica”. Revista Técnica “energía”. No. 13, Pp. 97-105 ISSN 1390-5074

98
1. INTRODUCCIÓN
El mejoramiento de la eficiencia en las redes eléctricas, en la actualidad ha adquirido una nueva dimensión, debido al incremento de cargas no lineales en el sector industrial. Uno de los problemas a resolver es la elección de los métodos de cálculo de los flujos de potencia, para evaluar el funcionamiento de la red y obtener las diferentes variables eléctricas con valores cercanos a los indicadores del sistema analizado. Obviamente, antes de seleccionar el método de cálculo, es necesario definir los modelos para los diferentes elementos que componen la red teniendo en cuenta cada uno de los parámetros a considerar para el análisis de los flujos de potencia armónicos. Es por eso que el planteamiento de la tarea en este trabajo, se divide en dos partes: el modelado de la red eléctrica y la selección adecuada del método de cálculo.
En el sector residencial, existen numerosos aparatos eléctricos que generan armónicos de voltaje y de corriente e incrementan las pérdidas de potencia, contaminan las líneas de suministro eléctrico, y ocasionan daños tanto a las propias redes de energía como a otras cargas vecinas. Un estudio de este fenómeno y su impacto aparece en el trabajo [1] donde se realiza un análisis matemático del contenido armónico de corriente en un circuito residencial con cargas no lineales, mostrando la contaminación armónica que éstas introducen a la red, además se propone el modelo que para este tipo de carga generadora de armónico se debe considerar.
Por otro lado en la actualidad también se requiere dar respuesta a necesidades surgidas con la tecnología FACTS (Flexible AC Transmission Systems), basada en la electrónica de potencia, y el desarrollo de herramientas de flujo de carga que modelan y simulan la red, donde se emplean métodos como por ejemplo el de la carga equivalente de rápida convergencia, variables de estado con algoritmos de Newton-Raphson (NR) y la inyección de potencia en las barras que tiene como ventaja que solo modifica los ∆ P y ∆Q de las barras entre las cuales se encuentra instalado el dispositivo, este último método si bien resulta más robusto que los anteriores, presenta el inconveniente de requerir muchas interacciones para la convergencia sin el uso de un vector de arranque [2].
Otro aspecto a considerar, es el incremento de las unidades de generación distribuida integradas en las redes de distribución. La red de distribución deja de comportarse como una red pasiva y por lo tanto, los métodos tradicionales para flujo de carga en sistemas de distribución deben ser modificados. En este sentido el trabajo [4] propone un algoritmo de flujo de potencia trifásico desbalanceado con generación
distribuida que opera de forma satisfactoria, aunque no se tuvo en cuenta la presencia de componentes armónicas en la red.
2. MATERIALES Y MÉTODOS
Los principales elementos de la red de suministro eléctrico industrial se definen como: líneas de transmisión, transformadores, motores, reactores, y generadores fundamentalmente.
Tabla 1: Valores de Rexp y FCТ para diferentes elementos de la red
ElementosResistencia
Rexp FCTTransformador 0,5-1,0 1,0-3,0
Sistema 0,0-0,8 -Generador 0,3-0,6 -Línea/cable 0,5 -
Reactor 0,5-1,0 0,8-3,0Motor 0,2-0,4 -
Cuando se considera solo la primera armónica, la resistencia activa R1L y la reactancia X1L de la línea de transmisión son magnitudes constantes. Sin embargo en presencia de armónicos superiores la resistencia real, según diferentes estudios [5, 6], puede representarse en las siguientes formas.
(1)
donde A, B son coeficientes que tienen valores entre 0.5 y 1.5 respectivamente y n es el número de armónico
(2)
donde Rexp es un coeficiente que se determina experimentalmente y es igual a 0.5
(3)
donde FCT – factor de las corrientes de Eddy
De la misma manera se debe proceder con el resto de los elemento, cabe señalar que las expresiones mostradas para la resistencia han sido obtenidas de forma experimentalmente [6].
Autores como [7, 8, 9] señalan que la detección y la predicción de armónicos constituyen los dos campos principales del análisis digital de armónicos y que permiten hacer una evaluación efectiva de la
Edición No. 13, Enero 2017

99
calidad de la energía. En primer lugar se determina y procesa en tiempo real la información del contenido armónico monitoreado en el sistema, mientras que por último se predice la distorsión armónica en la red mediante modelos analíticos implementados para simulación digital.
Entre las metodologías para el análisis de armónicos se destacan las propuesta por [7, 8], donde se señala el método de dominio Armónico, que linealiza el sistema alrededor de un punto particular de operación de componentes no lineales y variantes en el tiempo para obtener así una relación lineal entre voltajes y corrientes armónicas, lo que resulta solo válido en la proximidad al punto de operación. Obteniéndose como resultado un equivalente Norton armónico, en donde explícitamente está representado el efecto de acoplamiento entre armónicos y desbalance entre fases.
También el método del Dominio del tiempo, utilizado para describir elementos no lineales y variantes en el tiempo a través de una ecuación diferencial (ẋ = f (x, t)) con el uso de un vector de estado de m elementos, ha confrontado limitaciones por el uso de la integración numérica Runge - Kutta. Esto ha dado lugar a la aparición de métodos como la convergencia al Ciclo Limite, utilizando técnicas de aceleración de la convergencia de las variables de estado mediante el método NR en el dominio del tiempo, que han sido desarrolladas para incrementar la eficiencia y eliminar la limitante en la aplicación de los métodos convencionales
Entre los métodos más utilizados para el análisis de armónico se encuentra el dominio de la frecuencia, que utiliza el marco de referencia de las componentes de secuencia para determinar la propagación de corrientes armónicas, características mediante inyección de fuentes de corriente ideales en la red eléctrica. Este método unido a diferentes modelos de elementos de la red fue utilizado por [10] para evaluar cuáles de los elementos de una red industrial tienen un mayor nivel de afectación por la presencia de armónicos en función del % de cargas lineales y no líneas existentes en una nodo.
Por lo tanto, a partir de los resultados de los estudios anteriores [8, 10] realizados para la modelación de la red eléctrica, y de acuerdo con el contenido armónico de la tensión y la corriente, existen diferentes métodos para realizar este análisis. Si consideramos los resultados de la comparación de los diferentes estudios realizados, podemos deducir que la expresión (3) da los resultados más precisos, y ante las dificultades técnicas para determinar FCТ,
entonces se asume con frecuencia la expresión que utiliza la resistencia Rexp en la expresión (2).
2.1. Cálculo de flujo de potencia
Entre los métodos más conocidos para el cálculo de las redes eléctricas se destacan principalmente los métodos Gauss-Seidel (GS), NR, NR modificado, inyección de corriente y potencia [11, 12, 13, 14] entre otros. Todos estos métodos en su mayoría implican la solución del sistema de ecuación:
[Y] [V] = [I] (4)
Donde [Y], [V], [I] son las matrices de admitancia, tensión y corriente respectivamente en las ramas y nodos del esquema equivalente de la red en forma compleja.
El método de GS se caracteriza por el hecho de que su solución se logra, incluso cuando los valores iniciales de U y I, están lejos de los valores reales. Por lo tanto, como consecuencia, el proceso de cálculo y convergencia resulta lento. En este caso, es posible utilizar un factor de aceleración, lo que resulta su principal ventaja.
El método NR es ampliamente conocido por su fiabilidad y rápida convergencia. Sin embargo, algunos expertos, como Sainz [15] argumentan que en este caso, la solución puede no converger, si los valores de las condiciones iniciales no están lo suficientemente cerca del valor real.
Autores como [7, 16] y los diseñadores del software Easy Power (aplicación informática que permite el cálculo de flujos de potencia en redes industriales), plantean el uso de la técnica de inyección de corriente (Fig.1) que presentan un mejor rendimiento en comparación con los métodos anteriores al utilizar un algoritmo más robusto y preciso con técnicas únicas de algoritmos de dispersión para encontrar las condiciones de estado estable del flujo de potencia de un sistema en operación, lo que ha tenido poca utilización y no ha sido muy difundida la información al respecto.
En el algoritmo de la Fig.1 se ejecuta en dos pasos, primeramente se hace un barrido desde los nodos terminales hasta el nodo fuente aplicando la primera ley de Kirchhoff (Im - balance de corriente en los nodos m, Ikm - corriente de los elementos k) y luego se hace el barrido desde la fuente hasta los nodos terminales aplicando la segunda ley de Kirchhoff (Vm tensión de nodos). La convergencia ocurre cuando la diferencia de las pérdidas de potencia de dos iteraciones consecutivas ΔP, alcanza una tolerancia preestablecida.
González et al. /Modelación de regímenes de redes eléctricas en presencia de distorsión armónica

100
También en publicaciones como [11] se muestra una herramienta computacional APSd (Analizador de sistemas de potencia y distribución) que permite la evaluación de régimen permanente de sistemas potencia con el método NR combinado con el método propuesto por D. Shimohammadi [12] para resolver un sistema de ecuaciones no lineales que expresan la potencia real y reactiva en términos de los voltajes de barra a frecuencia fundamental, cuyos resultados fueron satisfactorios al ser validados con otras herramientas de corridas de flujo, pero solo para el armónico fundamental.
Inicio
Construcción de la base de datos
Datos nodales (P, Q)
Datos de ramas. Ordenamiento nodal
Asignación de condiciones iniciales
Calcular corrientes nodales inyectadas
Flujo de corriente por los elementos
Partiendo del nodo Slack se calculan voltajes nodales
Vm = Vk – Ikm Zkm
Convergencia
PL = PLk+1 - PL
k
Si
Salida
NO
Figura 1: Algoritmo del método de inyección de corriente
También resulta necesario señalar como desventaja de GS, que posee una convergencia lineal, lo que resulta lento en comparación con NR que tiene una convergencia cuadrática
Soria S. L., 2003, [17] en una análisis comparativo realizado entre los métodos NR y GS señala que mientras la formulación en formato rectangular en GS trabaja bien, en el caso NR se requiere más memoria por utilizar un formato polar. Además GS requiere menos operaciones aritméticas por interacción, lo que constituye una ventaja en relación a NR que requiere más tiempo al necesitar calcular los elementos de la matriz Jacobiana en cada interacción. Esto hace que una iteración en NR equivalga a 7 iteraciones de GS aproximadamente para un sistema de gran dimensión.
Otra desventaja de GS es que el número de iteraciones se incrementa con el aumento de los nodos de la red, mientras que en NR esto no sucede, pues permanece constante.
Villa W. Metal, 2016 [18] ha propuesto el uso de algoritmos genéticos con una función de adaptación tradicional para lograr un flujo de potencia reactivo óptimo y reducir las pérdidas. En la actualidad también se han desarrollo métodos para el análisis de flujo armónico de cargas, que permiten obtener la tensión fundamental y armónica en todos los nodos de la red, así como los parámetros que caracterizan el comportamiento de los dispositivos no lineales para un estado de carga dado. Con base en lo anteriormente expuesto, se seleccionó el método GS atendiendo a sus ventajas de fácil programación, el uso eficiente de la memoria y su factibilidad de rápida convergencia en sistemas de dimensiones no elevadas, al utilizar un coeficiente de ajuste. Para el estudio del flujo de carga armónico en un sistema eléctrico, se confeccionó la herramienta informática DYCSE con el algoritmo mostrado en la Fig. 2, de n nodos considerando los siguientes parámetros primarios:
• La matriz de admitancia del sistema [Y] (compleja, cuadrada y de orden n). Se obtiene a partir de los valores de resistencia y reactancia REXP en las ramas del sistema eléctrico;
• EL vector de orden n de potencias (P + j Q) donde P es la potencia activa y Q es la potencia reactiva (cada elemento del vector representa los valores de estas potencias en el nodo);
• El vector de orden n de voltajes (UR + j UI) donde UR es la componente real de la tensión y UI es la componente imaginaria (cada elemento del vector representa los valores
Edición No. 13, Enero 2017

101
de la tensión nominal en un nodo y pueden expresarse también por sus magnitudes de tensión |U| y el ángulo θU).
Preliminarmente, se deben realizar las siguientes tareas antes de calcular los flujos de cargas:
1) La determinación de la matriz [Y] que se expresa en valores por unidad (PU).
2) La determinación de los vectores (P + j Q) y (U) = (UR + j UI) que permiten expresar el vector de corrientes (I) donde P + j Q están expresados en PU.
3) Establecer las matrices del sistema de ecuaciones [Y] (U) = (I) considerando que:
(5)
Para p =1, 2,…, n; donde n- cantidad de nodos; Pp y Qp - potencia activa y reactiva de las ramas p respectivamente; URp y UIp - potencia activa y reactiva de los nodos respectivamente; Ypp y Ypq – Matriz admitancia propia y mutua compleja de las rama p y q; Up tensión en los nodos.
Figura 2: Algoritmo utilizado para el cálculo de flujo de potencia
Fuente: El autor
Es necesario precisar que los nodos del sistema eléctrico se van a clasificar en tres grupos: de balance (normalmente existe uno solo, mientras son conocidas la tensión y ángulo), de tensión controlada, que son aquellos donde se especifica el módulo, el valor de potencia activa y reactiva (P, Q) y el ángulo de tensión y de carga, aquí se conocen las potencias activa P y reactiva Q, y las incógnitas son las tensiones y el ángulo. Para modelar los elementos del sistema fueron analizados los modelos propuestos por la IEEE Std 399-1997 [19], Anderson EEH 2003 [20], Fiodorov A.A. 1986 [21], Electrical Systems Analysis, Ins .Ltd 1991-2006 [22] y Ríos P.C. 2003 [23]. Donde se observa que existen diferentes tendencias para la determinación de la resistencia (Rh) y la reactancia (Xh) armónica evalúan por las expresiones (2) y (3) mientras que Fiodorov A. A, 1986 [21] considera el siguiente modelo aproximado:
Rh = R1 (6)
Xh = X1 * h * K (7)
donde Rh y R1 son las resistencias armónica superiores y del armónico fundamental respectivamente, Xh la reactancia armónica y k representa un coeficiente que depende del tipo de elemento, estos modelos fueron experimentados por los autores en [10].
Teniendo en cuenta que en la literatura consultada se explican diferentes modelos para el análisis de flujo armónico, en el programa DYCSE se ha implementado la posibilidad de usar los modelos propuestos en [19, 21].
3. ESTUDIO DE CASO
Para validar los resultados de la modelación en los
flujos de potencia se realizaron dos pruebas con diferentes esquemas, la primera fue una comparación con los resultados de las corridas de flujo efectuadas con los modelos propuestos por ESA (Electrical Systems Analysis, Ins de EEUU) en [22] en el software Easy Power que presupone el cálculo de la reactancia armónica para las líneas y motores mediante las expresiones (2) y (3). Para esta comparación se procedió a resolver el sistema de cinco nodos (mostrado en la Fig.8.8 del Capítulo 8) del Stagg El Abiad [24] que se muestra en la Fig. 3. (ver resultados en la tabla 2).
González et al. /Modelación de regímenes de redes eléctricas en presencia de distorsión armónica

102
Figura 3: Red de prueba de Stagg & Abiad
Tabla 2: Comparación de resultados de cálculo
Des
de u
n no
do a
otr
o
Resultado
Stagg & Abiad
Resultado
DYCSE
% error
P
MW
Q
MVAr
P
MW
Q
MVAr
MW
%
MVAr
%
1 - 2 88.800 8.600 88.856 8.579 0.063 0.243
1 - 3 40.700 1.100 40.719 1.155 0.022 0.640
2 - 1 -87.400 6.200 -87.446 6.157 0.052 0.500
2 - 3 24.700 3.500 24.692 3.545 0.009 0.523
2 - 4 27.900 3.000 27.935 2.962 0.040 0.445
2 - 5 54.800 7.400 54.822 7.343 0.025 0.663
3 - 1 -39.500 -3.000 -39.528 -3.011 0.031 0.131
3 - 2 -24.300 -6.800 -24.340 -6.783 0.045 0.195
3 - 4 18.800 -5.100 18.882 -5.198 0.092 1.142
4 - 2 -27.500 -5.900 -27.494 -5.927 0.007 0.316
4 - 3 -18.800 -3.200 -18.847 -3.208 0.053 0.098
4 - 5 6.300 -2.300 6.333 -2.284 0.037 0.186
5 - 2 -53.700 -7.200 -53.697 -7.169 0.003 0.359
5 - 4 6.300 -2.800 6.303 -2.833 0.003 0.384
Fuente: El autor
En la segunda prueba para la validación del flujo armónico se utilizó el esquema de la Fig. 4. En la tabla 3 se muestran los flujos de potencia a frecuencia fundamental por ambos softwares y en las tablas 4 y 5 las tensiones armónicas. Se pudo observar la cercanía de los resultados con un error admisible.
Figura 4: Esquema para validación de las tensiones armónicas calculadas con ambos software
Tabla 3: Comparación resultados de la comparación de los valores de P y Q obtenidos en el software DYCSE y Easy
Power
NodoEasy
Power P (MW)
DYCSEP (MW) % error
Easy Power
Q (MVAr)
DYCSEQ (MVAr) % error
01-2,66 -2,66 0,00 0,64 0,64 0,03
2,66 2,66 0,00 -0,64 -0,64 0,03
025,57 5,57 0,01 -0.36 -0,36 0,04
-5,57 -5,57 0,01 0.36 0,36 0,04
03
2,66 2,66 0,00 -0,60 -0,60 0,03
2,21 2,21 0,00 1,34 1,34 0,00
3,01 3,01 0,02 1,85 1,85 0,00
1,82 1,83 0,01 1,19 1,19 0,01
0,76 0,77 0,00 0,50 0,50 0,00
-1,50 -10,50 0,00 -4,27 -4,28 0,04
04
8,00 8,00 0,00 5,13 5,13 0,04
-5,56 -5,56 0,01 0,53 0,52 0,04
2,08 2,08 0,02 1,42 1,42 0,01
6,36 6,36 0,00 0,00 0,00 0,00
2,66 2,66 0,00 1,64 1,64 0,00
2,44 2,44 0,01 1,53 1,53 0,01
05
-2,21 -2,21 0,00 -1,34 -1,34 0,00
1,24 1,24 0,00 0,77 0,77 0,00
0,97 0,97 0,00 0,56 0,56 0,00
06
-3,01 -3,01 0,01 -1,85 -1,85 0,00
0,35 0,35 0,00 0,20 0,20 0,00
2,66 2,66 0,00 1,64 1,64 0,00
07
-2,08 -2,08 0,03 -1,42 -1,42 0,03
0,42 0,42 0,00 0,30 0,30 0,00
1,66 1,65 0,02 1,11 1,11 0,01
08 -6,36 -6,36 0,01 0,00 0,00 0,00
Fuente: El autor
Edición No. 13, Enero 2017

103
Tabla 4: Tensiones obtenidas en el cálculo realizado con el Easy Power
Armónico
Tensiones ( kV ) para los diferentes armónicos obtenidos en el Easy Power
3 5 7 9 11 13
1 13,80 13,80 13,80 0,48 0,48 0,48
5 0,08 0,08 0,08 0,005 0,005 0,011
7 0,061 0,062 0,062 0,004 0,004 0,008
11 0,026 0,026 0,027 0,002 0,002 0,004
13 0,031 0,031 0,031 0,002 0,002 0,004
17 0,027 0,027 0,027 0,002 0,002 0,004
19 0,026 0,026 0,026 0,002 0,002 0,003
THD % 0,832 0,836 0,836 1,505 1,505 3,226
Fuente: El autor
Tabla 5: Tensiones obtenidas en el cálculo con el DYCE
Armónico
3 5 7 9 11 13
1 13.80 13.80 13.80 0.480 0.480 0.480
5 0.080 0.081 0.081 0.005 0.005 0.010
7 0.061 0.062 0.062 0.003 0.003 0.007
11 0.026 0.026 0.026 0.001 0.001 0.003
13 0.031 0.061 0.061 0.001 0.001 0.004
17 0.027 0.027 0.027 0.001 0.001 0.003
19 0.025 0.025 0.025 0.001 0.001 0.003
THD % 0.830 0.850 0.85 1.53 1.53 3.080
Fuente: El autor
El mayor error observado en la comparación de los cálculos es, en las tensiones (tabla 4 y 5) con ambos software siendo de 2,8%. Sin embargo, hay que señalar que los resultados de los cálculos con el DYCSE se hicieron con una precisión hasta las centésimas, a pesar de esto, se puede observar que el método de GS utilizado en el DYCSE con un factor de aceleración, puede calcular el flujo satisfactoriamente para red considerando el armónico fundamental o en presencia de distorsión armónica, donde se hace necesario aplicar la corrección con los factores que tienen en cuenta la influencia de los armónicos en todos los elementos de la red eléctrica, incluyendo transformadores y cargas.
4. ANÁLISIS DE RESULTADOS
La comparación de los resultados de los cálculos obtenidos por los dos métodos se presenta en las tablas desde 2 a 5, donde se observa un error absoluto máximo de 1,142% en los cálculos, comparando el circuito original con el mostrado en el Stagg El Abiad, lo que confirma la buena convergencia y la factibilidad del uso de GS.
5. CONCLUSIONES Y RECOMENTACIONES
En el trabajo se dan los fundamentos teóricos para desarrollar una herramienta computacional en el software Easy Power para redes radiales. Se han mostrado los algoritmos de cálculos de ambos métodos. Los procedimientos matemáticos utilizados han mostrado que son adecuadas y se adaptan correctamente a los cálculos efectuados por el nivel de error obtenido.
Como continuidad de la investigación es necesario adecuar los procedimientos y herramientas de cálculo para los casos de regímenes de carga asimétricos y dinámicos. La veracidad de los resultados ha sido comprobada con los cálculos de la red de pruebas de Stagg & Abiad de 5 nodos, donde se pudo observar que el error obtenido está en entorno de los rangos admisibles y esto permite validar la herramienta diseñada y asegurar que sus resultados son satisfactorios.
REFERENCIAS BIBLIOGRÁFICAS
[1] Mora B. M. Contaminación armónica producida por cargas no lineales de baja potencia: modelo matemático y casos prácticos. Revista Ingeniería Investigación y Tecnología. Vol. XI. Núm.2. 2010 pp.189-198.
[2] Centeno A., Lagoa D. Optimización metaheurística aplicada al cálculo del flujo de carga optimo en redes eléctricas de potencia con variables de control asociadas de tipo mixto. Revista Ingeniería UC, Vol. 20, No. 3, Diciembre 2013, pp. 71 - 78
[3] INELEC I. L. Comparación de flujos de carga probabilísticos empleados en sistemas de distribución levemente enmallados. Scientia et Technica Año XIX, Vol. 19, No. 2, junio 2014, pp. 153-162. Universidad Tecnológica de Pereira.
[4] Gallego L. A. López L. J. Mejías G. D. Flujo de potencia trifásico desbalanceado en sistemas de distribución con generación distribuida. Scientia et Technica. Año XV, No 43, Diciembre de 2009.
[5] IEEE. Recommended Practice for Industrial and Commercial Power Systems Analysis. USA. 1997. pp. 118.
[6] INELEC I. L. The graphical solution for power system analysis. USA.2006. pp 230.
[7] Carvajal W., Ordóñez G., Moreno A., Duarte C. Simulación de sistemas eléctricos con cargas no lineales y variantes en el tiempo. Ingeniare. Revista chilena de ingeniería, vol. 19 Nº 1, 2011, pp. 76-92
González et al. /Modelación de regímenes de redes eléctricas en presencia de distorsión armónica

104
[8] Martin D., “Implementación de Técnicas de estimación de estado armónico en sistemas eléctricos de distribución”, Tesis de maestría, Universidad Nacional de rio cuarto, Argentina, 2014.
[9] Valencia D., Quispe E., Sousa V. “Estudio del efecto de la distorsión armónica de tensión sobre la operación del motor trifásico de inducción en estado estacionario. Revista Energética. No. 43, pp. 67-77. junio, 2014. Universidad Nacional de Colombia.
[10] González P. I., Marrero R. S. Legra L. A., Mendiola E. D. Metaheuristics Based on the Variables Integration Method Applied to Reactive Power Compensation in Multi-Objective Optimization. Proceedings of the International Conference on Applied Mathematics, Computational Science & Engineering (AMCSE 2015) pp. 207-212. Grete. October 2015.
[11] González F, Palencia E. Desarrollo de un programa para el cálculo de flujos de potencia en sistema de distribución. 3er Congreso Iberoamericano de estudiante de ingeniería eléctrica (III CIBELEC 2008).
[12] Juan D. Gallego J., Cano J., Muñoz N. Análisis de Flujos de Potencias Ineficientes Producidos por Convertidores de Potencia. Revista Información Tecnológica, Análisis de Flujos, Vol. 25, No 3, pp. 93-102, 2014.
[13] Centeno A. et al. Algoritmo de búsqueda armónica modificado aplicado al cálculo del flujo óptimo de potencia. Revista Ingeniería UC, Vol. 17, No. 3, Diciembre, 2010, Pp 7 – 18, ISSN 1316-6832.
[14] López V. G. Flujo de Potencia Óptimo multiobjetivo para el análisis de sistemas potencia con generación eólica. Energética. No 44. Diciembre 2014. Pp. 41 – 47, ISSN 0120-9833.
[15] Sainz S. L. Formulation of the Harmonic Load Current.// IEEE Transaction on Power Systems Vol 13 N011995. p. 123–135.
[16] Hernández A. L. “Identification de Fuentes armónicas por el método de estimación en sistemas eléctricos de potencia”. Tesis maestría Dpto. Ingeniería Eléctrica, Instituto Politécnico Nacional, Mexico 2012
[17] Soria C. L. Modelado y operación en líneas de transmisión. ITM-DIE. 2003.
[18] Villa W. M., Jesús M. López L. J., Velilla E. Flujo óptimo reactivo para minimización de pérdidas:
Nueva Propuesta de Función de Adaptación y Manejo de Restricciones. Información Tecnológica. Vol. 27, N0 2, Pp.131-140, 2016.
[19] IEEE. “Recommended Practice for Industrial and Commercial Power Systems Analysis”. STD 399-1997.
[20] Anderson EEH. “Modelling and analysis of Electric Power systems”. Lectures 35-526, ITET ETH Zurich.March 2003.
[21] Fiodorov, A.A. Catálogo de Suministro Eléctrico y Equipamiento Eléctrico. Energoizdat, Moscú, 1986.
[22] ESA. “The graphical solution for power system analysis”. User’s Manual. Easy Power. Version 8.0.175. Copyright 1991-2006. , INELEC Intl. Ltd.
[23] Ríos P. C., Naranjo A. M. y Escobar Z. A. Modelado de sistemas eléctricos en presencia de armónicos. Scientia et Technica Año IX, No 22, Octubre 2003.
[24] Stagg, G. W. and El-Abiad, A. H. Computer Methods in Power System Analysis. New York: McGraw-Hill, 1968. Pp. 2.
Iliana González Palau, graduada de Ing. Electricista del Instituto de Minas de Moscú 1983. Es graduada de PhD. en Ing. Eléctrica en 2011 de la Universidad Estatal de Minas de Sant Petersburgo, Rusia. Actualmente es docente de tiempo completo
de la Carrera de Ing. Eléctrica en la UTC, Ecuador. Su área de interés incluye optimización de sistemas eléctricos, eficiencia energética y calidad de la energía eléctrica.
Secundino Marrero Ramírez, graduado de Ing. Electrónica Industrial en 1983 del Instituto Politécnico de Kiev, (Universidad Técnica de Ucrania,), PhD. en automatización en 1989 de la Universidad Estatal de Minas de Sant Petersburgo, Rusia.
Docente de tiempo completo de la Carrera de Ing. Eléctrica en la UTC, Ecuador. Investiga en eficiencia y calidad de la energía eléctrica, optimización y automatización industrial.
Edición No. 13, Enero 2017

105
Aristides Legra Lobaina, Licenciado en Matemática. Graduado de Ph.D en el Instituto Superior Politécnico, CUJAE de la Habana - Cuba, Profesor de tiempo complete del Dpto. de Matemática del Instituto Superior Minero Metalúrgico de Moa, Cuba.
Investiga en las áreas de matemática aplicada a la modelación, optimización y programación de sistemas informáticos.
Ángel León Segovia, Graduado de Ingeniero en Ejecución en Electrónica e Instrumentación en la ESPE en el año 1997. Ingeniero en Informática y Ciencias Computacionales en la UTC, en el año 2011. MSc en Gestión de Energías en la
UTC en el año 2014. Actualmente es docente de planta a tiempo completo de la Carrera de Ing. Eléctrica en la UTC, Ecuador. Se desarrolla en el campo de las energías alternativas y en programación de sistemas.
Xavier Proaño Maldonado, Graduado de Ing. Eléctrico en la Politécnica Nacional de Ecuador en 2010. MSc en Gestión de Energía de la UTC en 2013. Se desarrolla en la temática de las energías alternativas, alto voltaje y sistemas de potencia. Docente
de planta a tiempo completo de la Carrera de Ing. Eléctrica en la UTC, Ecuador.
González et al. /Modelación de regímenes de redes eléctricas en presencia de distorsión armónica

106
Resumen
En este trabajo, basados en el estado del arte, se presentan los criterios usados para la modelación y validación de los cables tripolares subterráneo y submarino del sistema de subtransmisión Baltra – Santa Cruz. Para modelar los cables en rutinas Cable Parameters incluida en programas del tipo EMTP, se realizó un tratamiento previo de los datos de diseño y constructivos de los cables; además, para analizar el cable tripolar subterráneo fue necesario agregar a su modelo una armadura ficticia de tal manera que se pueda modelar como un cable tipo “tubo” (Pipe). El estudio de transitorios electromagnéticos de energización de la línea se realizó usando el software ATP, pero debido a que el estado del arte indica limitaciones en el modelo de cables y líneas aéreas no simétricas cuando se usa Bergeron o JMarti, incorporados en ATP, se realizó un análisis que permitió determinar hasta qué punto es válido el modelo JMarti mediante una comparación de sus respuestas transitorias de voltaje con las ofrecidas por el modelo WideBand, incorporado en EMTP-RV el cual es considerado el modelo más preciso de líneas y cables en la actualidad. Para este propósito los modelos JMarti de cable submarino y subterráneo fueron ajustados con un valor de frecuencia de acuerdo a lo sugerido por CIGRÉ. Los resultados indican que el modelo JMarti ofrece señales de voltaje aceptables únicamente para el conductor energizado, mientras que para voltajes inducidos en otros conductores de fase y pantallas y armaduras metálicas el modelo falla.
Palabras clave— Cables tripolares, Modelamiento, ATP, EMTP-RV, JMarti, WideBand, sobrevoltajes.
Abstract
In this paper, the criteria used for modeling and validation of underground and submarine tripolar cables of Baltra Santa Cruz power system are presented. To model cables with Cable Parameters routines, inserted in EMTP type programs, pretreatment of design data and construction of the cables was performed. Also, to analyze the underground cable was necessary to add to your model a fictional armor so that can be modeled as type “Pipe”. The study of electromagnetic transients line energization was performed using the ATP software, but because the state of the art indicates limitations on cable and not symmetrical aerial transmission lines when Bergeron or JMarti models, incorporated into ATP, an analysis was carried out that allowed to determine to what extent is valid the JMarti model by comparing its transient response voltage with those offered by the WideBand model, built in EMTP-RV, which is considered the most accurate line and cable model today. For this purpose, the JMarti models for submarine and underground cable were adjusted with a frequency value according to suggested by CIGRÉ. The results indicate that the JMarti model provides acceptable voltage signals only to the energized conductor, while for other voltages induced in phase conductors and screens and metal armatures model fails.
Index Terms— Tripolar Cable, Modeling, ATP, EMTP-RV, JMarti, WideBand, overvoltage.
Aplicación Práctica / Practical Issues.
Modelación y Validación en ATP de los Cables Subterráneo y Submarino del Sistema de Subtransmisión Baltra - Santa Cruz
L. Dután
CELEC EP [email protected]
Recibido: Colocar fecha de envío: 11-09-2016 Aprobado tras revisión: 09-12-2016 Forma sugerida de citación: Dután, L. (2017). “Modelación y Validación en ATP de los Cables Subterráneo y Submarino del Sistema de Subtransmisión Baltra - Santa Cruz”. Revista Técnica “energía”. No. 13, Pp. 106-116 ISSN 1390-5074.

107
1. INTRODUCCIÓN
Una línea de trasmisión eléctrica (línea aérea o cable) está formada por elementos (parámetros) resistivos (R), capacitivos (C) e inductivos (L) cuyos valores no son constantes sino que varían con la frecuencia de acuerdo al tipo de transitorio desarrollado. Los estudios de transitorios electromagnéticos de frente lento y rápido que involucren la conexión de líneas aéreas y/o cables subterráneos son importantes debido a que pueden sugerir la presencia de altos valores de voltajes en el extremo abierto y en puntos de variación de impedancia debido a cambios de línea aérea a cable subterráneo y viceversa; los resultados obtenidos de simulaciones deben basarse en un correcto modelamiento de los elementos del circuito bajo estudio y en el conocimiento de las bondades y limitaciones de los modelos usados en programas del tipo ElectroMagnetic Transients Program (EMTP). El software Alternative Transients Program (ATP) es uno de ellos y usa el modelo Frequency Dependance (FD), conocido también como modelo JMarti (JM), para modelar líneas y cables, mismo que debe ser ajustado de una manera especial para que presente resultados confiables; aun así, para cierto tipo de estudios, únicamente algunos valores de los resultados son certeros mientras que otros no son confiables o, incluso, erróneos. El modelo WideBand (WB) es el más avanzado en la actualidad y no necesita de un ajuste especial, su formulación y solución de las ecuaciones se realizan en cantidades de fase; viene incorporado en el software EMTP-RV.
En general, las líneas aéreas y cables tienen un comportamiento fuertemente dependiente de la frecuencia. En programas del tipo EMTP, que solucionan las ecuaciones de línea y/o cable en el dominio modal (como por ejemplo ATP), esta dependencia es tomada en cuenta mediante una función de transferencia matricial (matriz Q cuyos elementos son dependientes de la frecuencia) que sirve para pasar el modelo de línea/cable del dominio de fase al dominio modal, solucionar las ecuaciones en ese marco de referencia y las soluciones a pasar al dominio de fase. Este proceso es matemáticamente muy complejo y difícil de implementar por lo que en modelos tipo Bergeron o JM, presentes en ATP, Q usa un valor fijo de frecuencia que es ingresado por el usuario (para líneas aéreas simétricas este valor es de 5000 Hz [2] con muy buenos resultados); si este valor no es adecuado los resultados se alejarán de lo real, incluso puede provocar la no convergencia del modelo. El reporte técnico WG C4.502 de CIGRÉ [1] sugiere un método de cálculo, usado en este trabajo, que estima este valor de frecuencia para modelar cables en modelos Bergeron o JM; esta es
una solución aproximada por lo que resulta necesario conocer sus límites analizando la respuesta transitoria del modelo. Una manera de validar consiste en comparar la respuesta de señales de voltajes de núcleos y pantallas en el extremo abierto de la línea/cable con la respuesta (señales de voltaje) obtenidos con un modelo avanzado como el WB. Para generar las señales de salida se aplica una fuente de voltaje continuo en el núcleo de una sola fase, mientras las otras fases y pantallas están puestas a tierra en un extremo. Entonces, las respuestas de JM y WB son comparadas.
El caso de estudio corresponde a la línea de subtransmisión Baltra – Santa Cruz, a 34.5 kV, formada por dos tramos aéreos, un submarino y un subterráneo. De acuerdo al estado del arte, se aplica una metodología para preparar los datos de los cables ofrecidos por el fabricante de tal manera que puedan ser ingresados en cualquier programa del tipo EMTP. El cable tripolar subterráneo no puede ser modelado directamente por lo que resulta necesario modificar su diseño mediante la inclusión de una armadura ficticia para usar el modelo “tubo” (Pipe en inglés).
Basados en el documento de CIGRÉ [1] se seleccionan los valores de la frecuencia mínima y máxima para el modelo JM con el objeto de determinar el rango de frecuencia con el cual este modelo ofrecerá ciertos resultados válidos, mientras que otros serán irreales debido a la capacidad computacional y, sobretodo, al algoritmo de solución de las ecuaciones de línea que toman en cuenta la dependencia de la frecuencia.
Este trabajo tiene importancia ya que actualmente CELEC EP Transelectric ha sido delegado para realizar el diseño, construcción y puesta en operación del sistema eléctrico petrolero a 138 kV que incluye, de manera preliminar, decenas de kilómetros de cable subterráneo, por lo que resulta necesario conocer a profundidad la modelación de cables para fines de diseño y operación en una red eléctrica.
El documento inicia presentando al sistema de subtransmisión Baltra – Santa Cruz, a 34.5 kV, con especial interés en los datos de diseño del cable subterráneo y submarino. Se realiza una revisión de los modelos de cables dependientes de la frecuencia que vienen incorporados en programas del tipo EMTP poniendo de manifiesto las limitaciones del modelo JM. Luego se realiza un tratamiento de datos eléctricos y constructivos de los cables para poder implementarlos en los programas ATP y EMTP-RV. Se muestra la adaptación realizada al cable subterráneo con la inclusión de una armadura ficticia para simularlo con el modelo Pipe. Para las
Edición No. 13, Enero 2017
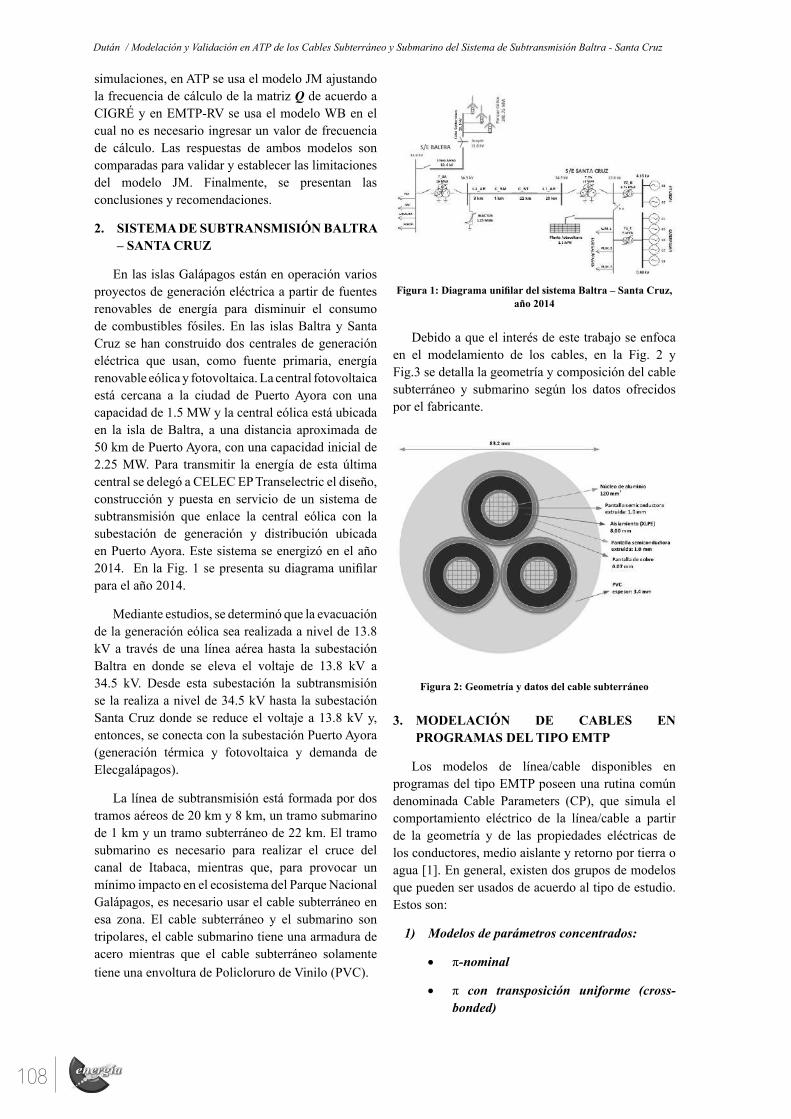
108
simulaciones, en ATP se usa el modelo JM ajustando la frecuencia de cálculo de la matriz Q de acuerdo a CIGRÉ y en EMTP-RV se usa el modelo WB en el cual no es necesario ingresar un valor de frecuencia de cálculo. Las respuestas de ambos modelos son comparadas para validar y establecer las limitaciones del modelo JM. Finalmente, se presentan las conclusiones y recomendaciones.
2. SISTEMA DE SUBTRANSMISIÓN BALTRA – SANTA CRUZ
En las islas Galápagos están en operación varios proyectos de generación eléctrica a partir de fuentes renovables de energía para disminuir el consumo de combustibles fósiles. En las islas Baltra y Santa Cruz se han construido dos centrales de generación eléctrica que usan, como fuente primaria, energía renovable eólica y fotovoltaica. La central fotovoltaica está cercana a la ciudad de Puerto Ayora con una capacidad de 1.5 MW y la central eólica está ubicada en la isla de Baltra, a una distancia aproximada de 50 km de Puerto Ayora, con una capacidad inicial de 2.25 MW. Para transmitir la energía de esta última central se delegó a CELEC EP Transelectric el diseño, construcción y puesta en servicio de un sistema de subtransmisión que enlace la central eólica con la subestación de generación y distribución ubicada en Puerto Ayora. Este sistema se energizó en el año 2014. En la Fig. 1 se presenta su diagrama unifilar para el año 2014.
Mediante estudios, se determinó que la evacuación de la generación eólica sea realizada a nivel de 13.8 kV a través de una línea aérea hasta la subestación Baltra en donde se eleva el voltaje de 13.8 kV a 34.5 kV. Desde esta subestación la subtransmisión se la realiza a nivel de 34.5 kV hasta la subestación Santa Cruz donde se reduce el voltaje a 13.8 kV y, entonces, se conecta con la subestación Puerto Ayora (generación térmica y fotovoltaica y demanda de Elecgalápagos).
La línea de subtransmisión está formada por dos tramos aéreos de 20 km y 8 km, un tramo submarino de 1 km y un tramo subterráneo de 22 km. El tramo submarino es necesario para realizar el cruce del canal de Itabaca, mientras que, para provocar un mínimo impacto en el ecosistema del Parque Nacional Galápagos, es necesario usar el cable subterráneo en esa zona. El cable subterráneo y el submarino son tripolares, el cable submarino tiene una armadura de acero mientras que el cable subterráneo solamente tiene una envoltura de Policloruro de Vinilo (PVC).
Figura 1: Diagrama unifilar del sistema Baltra – Santa Cruz, año 2014
Debido a que el interés de este trabajo se enfoca en el modelamiento de los cables, en la Fig. 2 y Fig.3 se detalla la geometría y composición del cable subterráneo y submarino según los datos ofrecidos por el fabricante.
Figura 2: Geometría y datos del cable subterráneo
3. MODELACIÓN DE CABLES EN PROGRAMAS DEL TIPO EMTP
Los modelos de línea/cable disponibles en programas del tipo EMTP poseen una rutina común denominada Cable Parameters (CP), que simula el comportamiento eléctrico de la línea/cable a partir de la geometría y de las propiedades eléctricas de los conductores, medio aislante y retorno por tierra o agua [1]. En general, existen dos grupos de modelos que pueden ser usados de acuerdo al tipo de estudio. Estos son:
1) Modelos de parámetros concentrados:
• π-nominal
• π con transposición uniforme (cross-bonded)
Dután / Modelación y Validación en ATP de los Cables Subterráneo y Submarino del Sistema de Subtransmisión Baltra - Santa Cruz

109
• π-exacto
2) Modelos dependientes de la frecuencia:
• Parámetros constantes distribuidos (CP)
• Modelo de línea dependiente de la frecuencia (FD)
Figura 3: Geometría y datos del cable submarino
3.1. Modelos de parámetros concentrados
Consiste de circuitos polifásicos π-acoplados, donde los parámetros R, L y C son calculados a una frecuencia dada (normalmente la frecuencia de estado estable). La principal desventaja de este modelo es que presenta una pobre respuesta de la frecuencia más allá de la frecuencia a la cual fueron evaluados los parámetros. Para estudios de frente lento y rápido estos modelos no son aplicables; su utilidad se enfoca a estudios de estado estable, armónicos, resonancias, entre otros. Una revisión detallada se encuentra en [1].
3.2. Modelos de parámetros distribuidos
Toman en cuenta la naturaleza distribuida de los parámetros del cable, basado en la teoría de las ondas viajeras. En programas del tipo EMTP, las ecuaciones diferenciales que describen el comportamiento de una línea aérea o un cable con n conductores en cantidades de fase tienen un primer tratamiento que consiste en desacoplar estas cantidades de fase en n ecuaciones diferenciales sin acoplamientos en el dominio modal por medio de una matriz de transformación lineal (cambio de referencia) Q de componentes real e imaginaria, tal como se muestra en (1) y (2) [11]. El sistema de ecuaciones es solucionado en el dominio modal. Luego, la misma transformación lineal es usada para convertir la solución modal a cantidades de fase y esta transformación es la
que mayor complejidad matemática presenta en su implementación debido a que Q es dependiente de la frecuencia, por lo que resulta necesario, para disminuir la carga computacional, calcular Q con un solo valor de frecuencia (en programas este valor es ingresado por el usuario) y usar únicamente su parte real, (las columnas de Q son rotadas para minimizar las partes imaginarias de sus elementos y los términos imaginarios resultantes son descartados)[5], lo que implica que Q se vuelve constante (Q); esto reduce el tiempo de cálculo, pero sus resultados son exactos únicamente en líneas aéreas simétricas. En la Fig. 4 se esquematiza este proceso.
(1)
(2)
Figura 4: Esquema de solución de ecuaciones de línea en el dominio modal. [5]
3.2.1 Modelo de parámetros constantes distribuidos (CP)
Los parámetros R, L y C se asumen constantes y la conductancia G en paralelo es ignorada. La matriz Q se asume constante y real. Como el modelo está basado en una representación de la línea sin pérdidas, únicamente L y C son distribuidos y R está concentrada en las tres fases. Debido a que Q se asume constante y real, no es posible obtener una respuesta precisa en altas y bajas frecuencias. Este modelo puede ser suficiente para simular cables secundarios.
3.2.2 Modelo de línea dependiente de la frecuencia (FD line)
La dependencia de la frecuencia y la naturaleza distribuida de los parámetros tienen una buena aproximación siempre que Q pueda ser asumida constante y real [2, 3]. El modelo necesita que el usuario ingrese el valor de una frecuencia (Frec. matrix en ATP) con el cual la matriz de transformación es calculada. Si bien este modelo es muy preciso para simular líneas aéreas simétricas, este modelo puede presentar problemas en el caso de cables, debido a que los elementos de Q pueden cambiar muy drásticamente con la frecuencia.
3.3 Modelos Avanzados
Existen modelos avanzados de cable que toman en cuenta la dependencia de la frecuencia y que vienen implementados en el software EMTP-RV, estos son:
Edición No. 13, Enero 2017
110
3.3.1 Modelo Q dependiente de la frecuencia (FDQ)
Toma en cuenta la dependencia de la frecuencia de los parámetros del cable y de la matriz de transformación modal Q. Este modelo tiene una gran precisión incluso representando el comportamiento del cable en altas y bajas frecuencias en la misma simulación [11].
3.3.2 Modelo de línea de ancho de banda Wideband (WB)
Es el modelo más avanzado que existe en la actualidad. Está basado en el Modelo Universal de Línea propuesto por Gustavsen et. al. [4]. A diferencia de los modelos anteriores que resolvían las ecuaciones en el dominio modal, este resuelve las ecuaciones directamente en el dominio de fases, por lo que ningún cambio de referencia es necesario. El comportamiento de la línea/cable es descrito por dos matrices dependientes de la frecuencia: YC y H [5]. Los valores de cada elemento de las matrices son obtenidos mediante el proceso matemático Vector Fitting [6]. Este proceso requiere más tiempo de simulación y demanda mayor trabajo computacional por lo que los investigadores se han esforzado en mejorar este método, para que los tiempos de cálculo y recursos computacionales sean menores [7] y [8].
3.4 Modelación de cables tripolares en software tipo EMTP
Los cables tripolares, esencialmente, consisten de tres cables monopolares contenidos dentro de una envoltura común. El diseño de la mayoría de los cables tripolares se apegan a una de las dos formas siguientes [5]:
1) Una pantalla metálica (sheath en inglés) para cada cable monopolar, los cables monopolares están encerrados dentro de un tubo o armadura metálica (pipe en inglés) tal como se presenta en la Fig. 5. Este diseño puede ser modelado usando la representación tipo “Pipe” presente en las rutinas CP.
Figura 5: Cables tripolares encerrados en un tubo metálico [5]
2) Una pantalla metálica (sheath) por cada cable monopolar; a su vez, los cables monopolares están encerrados dentro de una tubería de material aislante, tal como se presenta en la Fig. 6. Hasta la actualidad, ninguna de las rutinas CP pueden modelar directamente este tipo de diseño de cables debido al aislamiento común que encierra a cada cable.
Figura 6: Cables tripolares encerrados en un tubo aislante [5]
Esta limitación puede ser resuelta mediante dos aproximaciones [5]:
i. Colocar un material conductor muy delgado en el interior de la tubería aislante que no presente ferromagnetismo. Entonces, el cable puede ser representado como tipo Pipe en una rutina CP.
ii. Asumir que los tres cables monopolares están directamente en la tierra, es decir, se ignora la tubería aislante.
4. TRATAMIENTO DE DATOS PARA MODELAMIENTO DE CABLES
Las rutinas CP simulan los cables aislados a partir de los datos geométricos y propiedades de los materiales del cable que son ofrecidos por el fabricante; sin embargo, estos datos no pueden ser ingresados de manera directa en las rutinas CP, por lo que un tratamiento es necesario. Según [9], esto se debe, principalmente, a:
1) Los datos pueden ser diferentes a los requeridos en los modelos de las rutinas CP.
2) Las rutinas CP no consideran ciertas características del cable como pantallas semiconductoras o pantallas formadas por hilos conductores, tal como se muestra en la Fig. 7.
Además, los datos de construcción del cable pueden ser diferentes a los datos de diseño.
Dután / Modelación y Validación en ATP de los Cables Subterráneo y Submarino del Sistema de Subtransmisión Baltra - Santa Cruz

111
Figura 7: Modelo de cable monopolar en rutinas CP de programas del tipo EMTP
Con base en [9], a continuación se presenta un breve resumen de los elementos cuyos datos necesitan tratados.
4.1. Núcleo
Las rutinas CP asumen un conductor homogéneo (sólido o cilíndrico). Para modelar el conductor del núcleo, las rutinas necesitan el radio y la resistividad del conductor; sin embargo, normalmente el núcleo es formado por hilos conductores. Por lo tanto, es necesario incrementar la resistividad ρ’
c del material del núcleo para tomar en cuenta el espaciamiento entre los hilos conductores, según (3).
(3)
donde Ac es la sección transversal eficiente (nominal) del núcleo y r1 es el radio del conductor del núcleo. En la Tabla 1 se presenta las resistividades ρ de algunos materiales usados en cables.
Tabla 1: Resistividad de Materiales que Componen el Núcleo, Pantallas Metálicas y Armadura de Cables
Material Cobre Aluminio Plomo Acero
ρ (Ω · m) 1.72 E-8 2.83 E-8 22 E-8 18 E-8
Resistividad de materiales conductivos
Si el fabricante proporciona la resistencia dc para el núcleo, la resistividad deseada puede calcularse de acuerdo a (4).
(4)
4.2 Aislamiento y pantallas semiconductoras
Las pantallas semiconductoras pueden tener un efecto apreciable en las características de propagación de un cable en términos de la velocidad de la onda, impedancia de la onda y la atenuación de la onda. Las
rutinas CP no permiten una representación explícita de las pantallas semiconductoras por lo que, para tener en cuenta su efecto, es necesario un procedimiento (aproximado) de conversión de datos según (5) y (6), que consiste en:
1) Cálculo de r2:
(5)
donde r1 es el radio del conductor del núcleo, dPS es el espesor de la pantalla semiconductora y dAP es el espesor del aislante principal.
2) Cálculo de la permitividad relativa:
(6)
donde C es el valor de la capacitancia del cable dado por el fabricante y ε0 = 8.854E-12.
Si C es desconocida, εr1 puede ser calculada usando la permitividad relativa, εrins, del aislamiento principal, según (7).
(7)
donde a y b son el radio interno y el radio externo, respectivamente, del aislamiento principal. Para el XLPE, εrins es igual a 2,3.
4.3. Pantalla de conductores
Cuando la pantalla está formada por hilos conductores, el procedimiento consiste en reemplazarlos mediante un conductor tubular que tenga su área de sección transversal igual al área total de los conductores que forman la pantalla As. Con un radio interno de pantalla de r2, el radio externo se obtiene según (8).
(8)
4.4. Imprecisión en datos ofrecidos por el fabricante
Las normas sobre cables (IEC 840 e IEC 60502) ofrecen valor límites al mínimo espesor de cada capa del cable con respecto al espesor nominal, pero no el máximo espesor. Por este motivo, el fabricante es
Edición No. 13, Enero 2017

112
libre de usar capas más gruesas que las nominales (por ejemplo, para tomar en cuenta la variación de las medidas por efectos mismos de la producción y para contrarrestar el efecto del envejecimiento). Esta situación está presente en el aislamiento principal, en el aislamiento por encima de la pantalla y en las pantallas semiconductoras. Para obtener datos reales, es necesario realizar mediciones de campo.
5. MODELACIÓN DE LOS CABLES SUBMARINO Y SUBTERRÁNEO DEL SISTEMA BALTRA – SANTA CRUZ
Los estudios de transitorios electromagnéticos del sistema Baltra – Santa Cruz son desarrollados en ATP, por lo que se debe realizar una adecuación del cable subterráneo y la validación de los modelos de cables.
5.1. Adaptación del cable subterráneo a modelos incorporados en programas del tipo EMTP
Como se indicó anteriormente, las rutinas CP de programas del tipo ETMP no poseen modelos específicos para simular el cable subterráneo del sistema de transmisión Baltra – Santa Cruz. Por lo tanto, de las soluciones presentadas en 3.4 y en base a consultas realizadas a investigadores dedicados al modelamiento de cables, se agregó a su modelo una armadura ficticia delgada cercana a la superficie del aislante PVC. Según los expertos, las características de este elemento deben tomar en cuenta lo siguiente:
1) El espesor tiene que ser el mínimo posible que permita el programa sin que se produzcan errores de simulación (oscilaciones numéricas). En el caso del cable subterráneo del sistema Baltra – Santa Cruz, este valor fue de 0.8 mm.
2) La resistividad del material es la del aluminio con una permeabilidad igual a la del aire, lo que implica que el material no presenta ferromagnetismo.
En la Fig. 8 se presenta la sección transversal del cable subterráneo simulado en ATP.
Figura 8: Modelo de cable subterráneo con inclusión de armadura ficticia
5.2 Ajuste de frecuencia para matriz Q
Para obtener el valor de frecuencia con la que será calculada Q en el modelo JM, CIGRÉ [1] sugiere ajustar el modelo de cables con valores bajos de frecuencia lo que permitiría obtener resultados conservativos. Existen dos valores de frecuencia que deben ser calculados: frecuencia característica fs (9) y la frecuencia crítica fc (10). Entonces, el valor de la frecuencia objetivo fo con la que debe ser calculada Q se seleccionada de acuerdo a los siguientes aspectos:
• Debido a que la frecuencia de interés está entre la frecuencia característica y la frecuencia crítica en la mayoría de los casos de cables largos, la frecuencia con que se calcula Q debe ser seleccionada entre las dos frecuencias.
• La fo debe ser seleccionada como el valor más bajo de fs o fc para producir resultados conservativos con bajo amortiguamiento.
(9)
(10)
donde ρs es la resistividad de la pantalla metálica en Ω/m, µs es la permeabilidad de la pantalla metálica en H/m, d es el espesor de la pantalla metálica en metros y S es la separación entre cables en metros.
En este trabajo usando (9) y (10) se tienen los siguientes resultados:
• Cable subterráneo:
− fs = 16252 Hz
− fc = 891264 Hz
por lo tanto fo = 16260 Hz
• Cable submarino:
− fs = 8133 Hz
− fc = 270766 Hz
por lo tanto fo = 8135 Hz
Una vez seleccionado el valor de la fo, se debe confirmar, mediante simulaciones, que no conduce a una situación irreal en estado estable y transitorio.
Dután / Modelación y Validación en ATP de los Cables Subterráneo y Submarino del Sistema de Subtransmisión Baltra - Santa Cruz

113
Edición No. 13, Enero 2017
5.3. Intervalo de frecuencia
De acuerdo a CIGRÉ [1] cuando se usan modelos de líneas y/o cables dependientes de la frecuencia pueden ocurrir simulaciones inestables causadas, a menudo, por violaciones pasivas del modelo del cable. Las soluciones a estos problemas contemplan reducir el límite inferior de la curva de ajuste de frecuencia, incrementar el límite superior de la curva del ajuste de frecuencia, entre otros que se exponen de una manera detallada en la Tabla 4-3 del documento de CIGRÉ [1]. Esta información es presentada en este trabajo mediante la Tabla 2.
Basados en la sugerencia de CIGRÉ, la frecuencia mínima con la que se ajustaron los modelos de cables submarino y subterráneo en el modelo JM es de 0.001 Hz, mientras que para la frecuencia superior se ingresó un valor de 9 décadas con 10 puntos por década. Valores inferiores a 0.001 Hz y superiores a 9 décadas provocaron oscilaciones numéricas en el modelo de cables. Estos valores también fueron ingresados en el modelo WB.
6. RESPUESTA DE LOS CABLES
Para validar y determinar las limitaciones del modelo JM se compara su respuesta de voltaje con la del modelo WB.
6.1. Método de evaluación de respuesta transitoria de cables
Los modelos de cables subterráneo y submarino son probados mediante la aplicación de una señal de voltaje continuo de magnitud 1 V en una fase, mientras que las restantes y los conductores de pantalla se encuentran aterrados en un extremo (donde se realiza la conexión) y abiertos en el otro. En la Fig. 9 se presenta un diagrama de esta prueba y en la Fig. 10 se presenta la implementación del cable subterráneo en ATP, mientras que en la Fig. 11 se muestra la implementación en EMTP-RV. Para el cable submarino se usan los mismos circuitos de prueba tanto en ATP como en EMTP-RV.
Tabla 2: Guía de CIGRÉ para Selección del Rango de
Frecuencia en Modelos Frequency Dependance. [1]
Figura 9: Diagrama para evaluar respuestas de modelos de cable
Figura 10: Implementación en ATP para evaluar respuesta del cable subterráneo
La longitud de cada cable se ajustó en 1 km. De acuerdo a CIGRÉ, todas las resistencias del circuito de prueba tienen un valor de 1 Ω. El objetivo es obtener el voltaje en el extremo abierto de la fase donde se aplica la señal y los voltajes inducidos en las fases restantes y conductores de pantalla de los extremos abiertos.

114
Los resultados de voltajes en núcleo y pantallas para el cable subterráneo usando ATP y EMTP RV se presentan en la Fig. 12 y Fig. 13, respectivamente. Las señales en las fases B y C, y en las pantallas A, B y C son voltajes inducidos y es en estos elementos donde, según [10], el ATP ofrece resultados erróneos debido a que Q se calcula con una valor fijo de frecuencia. Para la fase energizada el resultado es aceptable.
Figura 11: Implementación en EMTP-RV para evaluar respuesta del cable subterráneo
Esta prueba es considerada adecuada para evaluar, no solamente el cable que se ha modelado, sino el mismo algoritmo que cada software posee para modelamiento de línea/cable. Pruebas adicionales [1] pueden ser realizadas conectando a tierra las pantallas y armaduras, con lo que el algoritmo “eliminará” estos conductores con la consecuencia que no se podrá evaluar los sobrevoltajes inducidos en pantallas y armadura.
Según [5], los voltajes inducidos en elementos conductores por encima de las pantallas son mínimos y no son de importancia en estudios de energización, por lo que la armadura ficticia en el modelo del cable subterráneo y la armadura del cable submarino se conectan a tierra sin que esto influya a los voltajes del núcleo y pantallas.
Figura 12: Respuesta del cable subterráneo usando ATP
Figura 13: Respuesta del cable subterráneo usando EMTP-RV
6.2 Comparación de respuestas para cable subterráneo y submarino
Para una adecuada interpretación de las gráficas siguientes, la leyenda de las figuras hacen referencia primeramente al software utilizado (EMTP-RV o ATP), luego se indica el conductor donde se mide la señal (núcleo C o pantalla S), a continuación se indica el tipo de cable (subterráneo ST o submarino SM), finalmente se indica la fase en la que se mide (A o B) considerando que por el arreglo de las fases en triángulo equilátero en ambos cables los voltajes en los núcleos B y C en pantallas B y C son los mismos.
En la Fig. 14 y Fig 15 se presentan los resultados del voltaje en el extremo abierto del núcleo de la fase A. Se observa que el modelo JMarti ofrece resultados similares al modelo WB para el primer pico lo que permite asegurar que el modelo JMarti es adecuado para evaluar el primer pico transitorio. En la Fig. 16, Fig 17 y Fig. 18 se observan los voltajes inducidos en fases restantes y pantallas del cable subterráneo donde se puede afirmar que el modelo JMarti falla.
Figura 14: Respuestas de cable subterráneo en fase A usando ATP y EMTP-RV
Figura 15: Respuestas de cable submarino en fase A usando ATP y EMTP-RV
Dután / Modelación y Validación en ATP de los Cables Subterráneo y Submarino del Sistema de Subtransmisión Baltra - Santa Cruz

115
Figura 16: Respuestas (voltajes inducidos) de cable subterráneo en fase B y C usando ATP y EMTP-RV
Figura 17: Respuestas (voltajes inducidos) de cable subterráneo en pantallas de fase A usando ATP y EMTP-RV.
Figura 18: Respuestas (voltajes inducidos) de cable subterráneo en pantallas de fase B y C usando ATP y
EMTP-RV.
Comportamientos similares se observan en las respuestas del cable submarino y que se presentan en la Fig. 19, Fig. 20 y Fig. 21.
Figura 19: Respuestas (voltajes inducidos) de cable submarino en fase B y C usando ATP y EMTP-RV
Figura 20: Respuestas (voltajes inducidos) de cable submarino en pantallas de fase A usando ATP y EMTP-RV
Figura 21: Respuestas (voltajes inducidos) de cable submarino en pantallas de fase B y C usando ATP y EMTP-RV
7. CONCLUSIONES Y RECOMENDACIONES
El modelamiento de cables en programas del tipo ETMP requiere de un procesamiento de los datos geométricos y eléctricos del cable ofrecidos por el fabricante antes de ser ingresados en la rutina CP. Esto permite tomar en cuenta el núcleo y pantallas metálicas que están formados por hilos conductores y tomar en cuenta el efecto de las pantallas semiconductoras.
El diseño del cable subterráneo del sistema de subtransmisión Baltra – Santa Cruz no corresponde a ningún modelo presente en rutinas CP por lo que resultó necesario agregarle una pantalla ficticia para usar el modelo Pipe. Los resultados de este trabajo se basan en este artificio el cual, si bien es sugerido por el estado del arte e investigadores, aún no tiene pruebas publicadas que lo respalden. Este artificio no es válido para evaluar corrientes de cortocircuito a tierra debido a que la corriente encontrará un camino a través de la armadura lo cual afectará la valoración de la corriente de falla.
Las validaciones realizadas en este trabajo se obtuvieron para sobrevoltajes de frente lento. Es necesario realizar validaciones para sobrevoltajes de frente rápido donde se ven involucradas frecuencias más altas. En el sistema Baltra – Santa Cruz no fue
Edición No. 13, Enero 2017

116
necesario analizar sobrevoltajes de frente rápido debido a que en las islas la presencia de descargas atmosféricas es casi nula.
Para simular sobrevoltajes de maniobra en líneas de transmisión eléctrica que contengan cables, el modelo JMarti debe ser ajustado con una frecuencia con la cual la matriz Q permita obtener resultados aceptables. Esta frecuencia debe ser seleccionada del menor valor de la frecuencia característica y frecuencia crítica del cable, según CIGRÉ. Los resultados muestran que el modelo JMarti da valores confiables para voltajes transitorios de fases, mientras que para valorar voltajes transitorios inducidos en fases, pantallas y armaduras el modelo falla. Por tal motivo, no es posible usar ATP para estudios que permitan incluir descargadores (pararrayos) en pantallas como medio de control de sobrevoltajes.
Ante la incertidumbre de los resultados de las simulaciones, en el cable subterráneo del sistema de subtransmisión Baltra – Santa Cruz, se optó por colocar a tierra las pantallas cada tres kilómetros como un medio para controlar los sobrevotlajes inducidos. Normalmente, una buena práctica exige, a lo mucho, colocar de dos a tres puestas de tierra en cables largos.
Los resultados de este trabajo, especialmente para el cable subterráneo, no deberían ser tomados como concluyentes debido a las simplificaciones y criterios asumidos. Para una mejor validación del modelo de cables, se recomienda que en las especificaciones técnicas se solicite al fabricante la respuesta de un cable de 1 kilómetro ante un voltaje continuo para comparar y validar los modelos usados en los estudios.
REFERENCIA BIBLIOGRÁFICA
[1] CIGRÉ, “Power System Technical Performance Issues Related to the Application of Long HVAC Cables”, WG C4.502, 2013.
[2] H. Dommel, “EMTP Theory Book”, Canadian/American EMTP User Group, July 1995.
[3] F. Alvarado, “Electromagnetic Transients Program (EMTP): Workbook II”, Electric Power Research Institute, June 1989.
[4] A. Morched, B. Gustavsen and M. Tartibi, “A universal model for accurate calculation of electromagnetic transients on overhead lines and underground cables”, IEEE Trans. on Power
Delivery, vol. 14, no. 3, pp 1032-1038, July 1999.
[5] J. Martinez-Velasco et. al., “Power System Transients – Parameter Determination”, CRC Press, 2010.
[6] B. Gustavsen and A. Semlyen, “Simulation of Transmission Line Transients Using Vector Fitting and Modal Decomposition”, IEEE Trans. on Power Delivery, vol. 13, no. 2, April 1998.
[7] O. Ramos-Leaños et. al., “A Wideband Line/Cable Model for Real-Time Simulations of Power System Transients”, IEEE Trans. on Power Delivery, vol. 27, no. 4, October 2012.
[8] O. Ramos-Leaños, “A Wideband Line/Cable Model for Real-Time and Off-Line Simulations of Electromagnetic Transients”, École Polytechnique de Montréal, Avril 2013.
[9] B. Gustavsen, “Panel Session on Data for Modeling System Transients Insulated Cable”, SINTEF Energy Research - Trondheim, Norway.
[10] H. K. Hoidalen and A. Soloot, “Cable Modelling in ATP – from Noda to TYPE 94”, Norwegian University of Technology Trondheim, Norway.
[11] L. Marti, R.H. Brierley and T.E. Grainger, “Analysis of Electromagnetic Transients in Cross-Bonded Cable Systems Using Frequency Dependent Cable Models”, International Conference on Power System Transients, IPST 95, Lisbon, September 1995.
Luis Manuel Dután Amay.- Nació en la parroquia Guapán de la ciudad de Azogues, provincia de Cañar. Recibió su título de Ingeniero Eléctrico de la Escuela Politécnica Nacional donde también ha cursado estudios de Maestría en Ingeniería Eléctrica. Desde
el 2009 es colaborador de la Corporación Eléctrica del Ecuador CELEC EP - Unidad de Negocio Transelectric en el departamento de Planificación y desde 2014 en la Subgerencia de Proyectos de Expansión – Área de Diseño de Subestaciones. Su campo de investigación se encuentra relacionado con transitorios electromagnéticos, equipo primario de subestaciones y coordinación de aislamiento de líneas de transmisión y subestaciones.
Dután / Modelación y Validación en ATP de los Cables Subterráneo y Submarino del Sistema de Subtransmisión Baltra - Santa Cruz

117
Resumen
El presente artículo busca entender el funcionamiento del método de detección y corrección de errores que se maneja dentro de la norma ISDB-TB. Se elabora un algoritmo para el codificador y decodificador utilizando Matlab y posterior implementación en la tarjeta FPGA Spartan 3E en lenguaje VHDL. Con el fin de facilitar la comprensión y el uso de los algoritmos se parte de un Reed-Solomon (15,9), el cual ayudará a facilitar los procesos matemáticos que posteriormente serán ejecutados en Matlab y con los cuales se desarrolla una interfaz gráfica amigable en donde se puede interactuar con la tarjeta FPGA desplegando la simulación y así verificar el análisis a continuación descrito.
Palabras clave— FPGA (Field Programmable Gate Array), Reed-Solomon, MATLAB (MATrix LABoratory), VHDL y ISDB-Tb.
Abstract
This article seeks to understand the operation of the method of error detection and correction is handled within the ISDB-TB standard. An algorithm for the encoder and decoder using Matlab and subsequent implementation in Spartan 3E FPGA VHDL card is made. In order to facilitate the understanding and use of algorithms is part of a Reed-Solomon (15,9), which will help facilitate mathematical processes that will later be executed in Matlab and with which a user-friendly graphical interface is developed where you can interact with the FPGA card displaying the simulation and thus verify the analysis.
Index terms— FPGA (Field Programmable Gate Array), Reed-Solomon, MATLAB (MATrix LABoratory, VHDL and ISDB-Tb.
Aplicación Práctica / Practical Issues
Análisis y Simulación en Matlab del Método de Detección y Corrección de Errores Reed-Solomon (204,188) Utilizado en la Norma ISDB-TB e
Implementación en un FPGA
L. Aguirre E. Gordón
CELEC EP TRANSELECTRICE-mail: [email protected], [email protected]
Recibido: 09-09-2016, Aprobado tras revisión: 09-12-2016Forma sugerida de citación: Aguirre, L; Gordón, E. (2017). “Análisis y Simulación en Matlab del Método de Detección y Corrección de Errores Reed-Solomon (204,188) Utilizado en la Norma ISDB-TB e Implementación en un FPGA” Revista Técnica “energía”. No. 13, Pp. 117-126 ISSN 1390-5074.

118
1. INTRODUCCIÓN
La codificación Reed-Solomon (RS) es un esquema de codificación de bloque que puede detectar y corregir ráfagas de errores hasta un cierto límite, determinado por la cantidad de redundancia con la que se ha diseñado el código y se utiliza en el estándar ISDB-Tb. Este tipo de código surge de una familia llamada códigos de bloque, en que el codificador procesa un bloque de símbolos, a los que agrega redundancia para generar otro bloque de una longitud mayor de símbolos codificados. Se tiene una gran complejidad en el proceso computacional, pero este problema ha sido superado gracias a la implementación de circuitos integrados en gran escala. Los códigos Reed-Solomon son códigos FEC, no binarios, bloque lineal, cíclicos y son una subclase de los códigos BCH (su nombre hace referencia a las siglas de sus tres autores Bose, Ray-Chandhuri y Hocquengheim). El código fue inventado por Irving S. Reed y Gustave Solomon (de ahí su nombre) en el año de 1960. En el presente trabajo se creará un algoritmo a través del cual se puede generar el código RS de cualquier longitud y el cual podrá ser aplicado a varias aplicaciones.
2. RS(204,188) CARACTERÍSTICAS GENERALES
Las señales de audio, video y datos ingresan al compresor MPEG, del cual se derivan las salidas TS (Transport Stream), estas múltiples salidas alimentan al remultiplexor el cual las transforma en un haz de transporte TSP (Transport Stream Packet), señal ráfaga de 188 bytes. Se debe entonces obligatoriamente aplicar el código Reed Solomon para que el TSP resultante sea convertido en otro de longitud de 204 bytes, consistiendo en 188 bytes de datos de programa y 16 bytes de paridad. El flujo de bits ya no es llamado TSP sino BTS (Broadcast Transport Stream). Debido al tamaño del TSP (204 bytes), un RS abreviado (204,188) se debe aplicar obligatoriamente en cada TSP como un código externo.
La codificación RS abreviada (204,188) se debe generar agregando 51 bytes en el comienzo de la entrada de los datos del código RS (255,239), y entonces después de aplicar la codificación externa esos 51 bytes se deben remover obligatoriamente. El código RS abreviado (204,188) puede corregir hasta 8 bytes aleatorios erróneos entre los 204 bytes [2].
A. Aritmética de Módulo 2
El presente estudio se basa en códigos binarios, en los cuales se utiliza un alfabeto simple con dos bits 0 y 1. La codificación y decodificación en este tipo de códigos envuelve operaciones de aritmética binaria de suma y multiplicación módulo 2 (⊕,*), su correspondencia en la lógica binaria, es la operación OR EXCLUSIVA y AND respectivamente.
B. Teoría de los Campos de Galois
En un campo o extensión de un anillo se definen las dos operaciones conocidas como suma y multiplicación módulo dos en dicho campo, sus elementos cumplen los siguientes axiomas.
o Clausurativo
(1)
o Asociativo
(2)o Existencia de neutro
(3)o Existencia del inverso
(4)o Conmutativo
(5)o Distributivo
(6) Al evaluar los axiomas en un campo se pueden dar dos opciones, la primera si el campo cumple con los axiomas conmutativo y existencia del neutro, se dice que el campo es un anillo con elemento neutro y si el campo es un anillo conmutativo con elemento neutro, y cumple con los axiomas de existencia de inverso y de neutro respecto a la operación suma módulo 2, se dice que el campo es un campo de Galois GF.[3] Dado un polinomio en , donde es el campo correspondiente a este polinomio, se asocia con a un grupo de elementos denominado el grupo de Galois de . Las raíces del polinomio tienen una estrecha relación con su grupo de Galois. El grupo de Galois resulta ser el conjunto de permutaciones de las raíces del polinomio. El grupo de Galois de queda definido como un cierto grupo de automorfismo del campo de descomposición de sobre , es decir el conjunto de todas las raíces del polinomio. Los subgrupos del grupo de Galois y los subcampos del
Edición No. 13, Enero 2017

119
campo de descomposición, mantienen una dualidad que expresa el teorema fundamental de la teoría de Galois [4].
C. Estructura del código RS
En la codificación (RS) se usa la representación RS que tiene las siguientes características:
• bits consecutivos agrupados que forman un símbolo.
• símbolos de información en cada secuencia codificada.
• símbolos de paridad en cada secuencia codificada.
• Longitud de la secuencia codificada, símbolos.
• , donde es el número total de símbolos en el campo de Galois ( ) con los que se forma la secuencia codificada.
• Corrige hasta t símbolos erróneos en la secuencia codificada, donde .
• Distancia mínima del código.
(7)
El está formado por elementos, en donde siempre es un número primo. El campo se
lo puede extender a un campo de elementos, en donde es cualquier número entero positivo que tiene un valor mayor que 2. Para la generación de códigos RS, los elementos del campo de Galois serán . Los elementos del campo de Galois se representan con el 0, 1, y los subsiguientes se generan multiplicando el anterior por . Para cerrar la secuencia y dar un campo finito de elementos en
se establece:
(8)
Mediante la condición mencionada, cualquier elemento del campo que tenga una potencia igual o mayor que se puede transformar a un elemento con una potencia menor que :
(9)
El campo finito , está conformado por elementos consolidados de la siguiente manera:
(10)
D. Polinomio Primitivo
Se define un polinomio primitivo o no reducible como aquel que no se puede factorizar en un producto de polinomios de menor grado [5].
Tabla 1: Polinomios primitivos de grado 2 a 8
Los polinomios primitivos se utilizan para la generación de los campos finitos de Galois, estos últimos permiten la generación de los códigos RS.
Se presenta los polinomios primitivos de grado 2 a 8 (ver Tabla 1).
E. Polinomio Generador
En general el polinomio y sus factores, son una parte importante en la creación del RS. El polinomio generador ayuda a encontrar los elementos de un campo de Galois GF(2^n) [6].
Se constituye como:
(11)
Donde el coeficiente es igual a 0 o 1.
3. ALGORITMO DE CODIFICACIÓN REED-SOLOMON (15,9)
Para el entendimiento del proceso de codificación y decodificación, se describirá un código RS(15,9). Este proceso se puede generalizar para códigos más grandes, ya que no se altera la estructura y características, se puede decir que crecen linealmente con el tamaño de procesamiento de información [7].
Como ejemplo se desea codificar la secuencia 1111 0000 0000 1100 0000 0000 0000 0000 1000 empleando un código RS con símbolos de información, símbolos de tamaño de palabra código, bits individuales en cada símbolo y capaz de corregir errores. Para generar este código se emplean los campos de Galois de orden . Para el RS(15,9), el campo de Galios es el siguiente:
Aguirre et al. / Método de Detección y Corrección de Errores Reed-Solomon, Norma ISDB-TB

120
(12)
Cualquier operación que se realice sobre un elemento genera otro elemento del campo, de esta manera el campo tiene un tamaño finito. Para el ejemplo RS(15,9) se emplea el polinomio primitivo de de orden , obtenido de la Tabla 1.
(13)
El grado del polinomio primitivo es . Con esto se obtiene elementos en el campo definido por . Se evalúa el polinomio con diferentes valores de x para determinar cuando el polinomio da como resultado . Los elementos binarios 1 y 0 no dan como resultado 0, ya que con la suma módulo 2, se tiene:
(14)
(15)
Se evalúa el polinomio con obteniendo lo siguiente:
(16)
(17)
(18)
Dado que en el campo binario +1 =-1 y debido a que , con lo cual se puede representar como:
(19)
(20)
se expresa como una suma términos que tienen órdenes inferiores. De hecho todas las potencias de
pueden ser expresadas de la misma forma. Por ejemplo en se tiene:
(21)
De la misma manera se obtienen resultados similares para los demás exponentes de . Además se puede comprobar que cualquier elemento que se encuentra fuera del campo de Galios es igual a uno de los elementos del campo
de la siguiente manera:
(22)
Esto quiere decir que la serie de elementos se repiten, entonces se tienen los 16 elementos del campo finito de .
A. Representación Polinomial y Vectorial de los Elementos GF
Para un mejor entendimiento del campo de Galois se presenta su estructura en términos de 0s y 1s y de esta manera se relacionan los símbolos binarios (vectores) con los elementos del campo . Diferentes formas en las cual se puede representar el campo generado por el polinomio primitivo correspondiente (ver Tabla 2).
Tabla 2: Campos de Galois
B. Determinación del Polinomio Generador
Con el polinomio generador se encuentran los símbolos de paridad. Para la construcción del polinomio se deben tomar raíces consecutivas, de tal forma que el polinomio generador representado por tiene la siguiente forma:
(23)
(24)
(25)
También se muestra el polinomio a utilizar en el codificador RS (15,9). Se observa que el grado del polinomio generador es igual al número de símbolos de paridad.
Edición No. 13, Enero 2017

121
C. Cálculo de la Palabra Codificada
Para codificar la secuencia binaria se seleccionan los bits de información de cuatro en cuatro que constituyen los símbolos de la secuencia de información y se construye el polinomio transformando cuatro bits en un elemento de a partir de su representación polinómica, lo que da como resultado:
i=1111 0000 0000 1100 0000 0000 0000 0000 1000
Polinomio de los símbolos de información
(26)
Al realizar la codificación RS es fundamental tomar en cuenta la estructura de la palabra de información o mensaje y de la paridad .
Tabla 3: Ejemplo RS (15,9)
Para realizar la codificación se requiere desplazar los coeficientes del mensaje en posiciones:
(27)
(28)
(29)
Posteriormente se divide para :
(30)
Como residuo de la división se tiene:
La palabra codificada se encuentra expresada como:
(31)
(32)
(33)
(34)
La Palabra codificada con la representación es:
Finalmente la palabra codificada con la representación binaria:
|0111|1111|0101|0010|1100|0111|1111|0000|0000|1100|0000|0000|0000|0000|1000
D. Ejemplo de Decodificación RS(15,9)
Para el ejemplo de la decodificación se insertan errores a la palabra codificada.
(35)
|0101|1111|0101|0010|1100|0100|1111|0000|0000|1100|0000|0000|0000|0110|1000 (36)
E. Cálculo de los Síndromes
Al realizar la revisión de la paridad en la palabra codificada con o sin errores recibida por el decodificador se tiene como resultado el valor del síndrome. Es decir que se evaluará el polinomio con los símbolos de los cuales está conformado el síndrome, en el caso a estudiarse tenemos un RS(15,9) con 6 símbolos en el vector. Por lo tanto se tiene que el síndrome puede ser definido como:
(37)
Si al evaluar el vector síndrome de la palabra recibida, el resultado es igual a cero, dicha palabra será una palabra código válida, de otro modo al ser el resultado diferente de cero, se tendrá una palabra de código con errores. Primero se evaluará la palabra código con los seis símbolos pertenecientes al síndrome, es decir:
, , ,…,
Se tendrá el vector síndrome de la siguiente manera:
(38)
El vector síndrome resultante es diferente de cero, por lo tanto la palabra código que llegó al receptor posee errores.
Aguirre et al. / Método de Detección y Corrección de Errores Reed-Solomon, Norma ISDB-TB

122
F. Cálculo del Polinomio Detector de Error
El algoritmo más eficiente para la decodificación de códigos bloque cíclicos binarios es el algoritmo de Berlekamp-Masey, cuya complejidad crece linealmente con la distancia mínima del código. Permitirá encontrar el polinomio localizador de errores, siempre y cuando el número de errores producidos no supere la capacidad correctora t del código. Caso contrario el algoritmo producirá un polinomio que no cumpla con las propiedades del polinomio localizador o un polinomio que cumpla con estas propiedades pero incorrecto, en ambos casos la decodificación será equivocada, siendo esta una limitante de Berlekamp-Masey. El polinomio localizador de errores permitirá el cálculo de la ubicación exacta dentro de la palabra que llega al receptor y tendrá la siguiente forma [8]:
de grado menor o igual que t.
Berlekamp-Massey es un algoritmo iterativo que analizará los valores de los síndromes de forma como se muestra en los siguientes pasos:
a) Calcular los síndromes
b) Inicializar
(39)
c) Calcular
d) Modificar
e) Si , ir al paso f) caso contrario ir al paso g)
f) Igualar y , ir al paso h)
g) Igualar
h) Igualar
i) Si entonces e ir al Paso c)
Dónde:
Polinomio localizador de error
Polinomio:
: Polinomio auxiliar, permite calcular
: Síndrome
: Discrepancia entre síndromes
: Iteraciones en curso
: Complejidad lineal
Para el ejemplo se calculará el polinomio localizador de error, con los resultados de las iteraciones calculadas (ver Tabla 4).
Tabla 4: Algoritmo Berlekamp - Massey
Donde se tiene como resultado al polinomio localizador de error a:
(40)
Ya encontrado este polinomio es necesario factorizarlo para así determinar las ubicaciones del error, para esto procedemos a evaluarlo verificando uno a uno si cada elemento sobre el cual se evalúa, es raíz del polinomio Λ(x).
, , …, (41)
Con estos resultados se puede concluir que las raíces de Λ(x) son:
La ubicación de los errores serán los correspondientes a los recíprocos de las raíces calculadas. Por lo tanto las posiciones de los errores son:
Para determinar los valores de los errores se definirá el polinomio evaluador de errores , en la forma
(42)
El polinomio z(x) relaciona la ubicación y magnitud del error
Edición No. 13, Enero 2017

123
Se emplea el algoritmo de Forney, dada las posiciones de los errores, para el cálculo de la magnitud de estos (diferencia entre símbolo correcto y recibido) por medio de la siguiente expresión:
(43)
Donde:
(44)
Una vez calculada la magnitud del error se calcula el polinomio
(45)
(46)
Como paso final de la decodificación y para obtener la palabra código transmitida se realizará la diferencia entre la palabra recibida y el error .
(47)
(48)
(49)
La palabra de información serán los últimos nueve símbolos de la palabra codificada retirando los seis símbolos del inicio pertenecientes a la paridad y desplazándolos las seis ubicaciones hacia atrás que se aumentaron al iniciar el proceso.
(50)
4. REED-SOLOMON (204,188)
La codificación abreviada se debe generar agregando 51 bytes en el comienzo de la entrada de los datos obteniendo un código RS(255,239). Para este codificador se debe utilizar el campo de Galios:
Polinomio primitivo :
(51)
Polinomio generador :
(52)
Al final de la decodificación se deberá remover los 51 bytes agregados al inicio del codificador.
5. SIMULACIÓN REED-SOLOMON (204,188)
A continuación se presenta la simulación del método de detección y corrección de errores Reed-Solomon (204,188) desarrollado en Matlab y con la herramienta Simulink. También se incluye un bloque de transmisión de señal OFDM con esquema de modulación de las portadoras QPSK, con el fin de poder ingresar el flujo de bits provenientes del codificador RS al canal de prueba. El programa permite emular diferentes niveles de ruido en el canal, desvanecimientos rápidos y también los intervalos de guarda 1/4, 1/8, 1/16, 1/32 de la duración del símbolo activo para el modo 1 de la transmisión de una señal de TV digital ISDBT-b [2] [9].
La palabra de información es editable y obtenida aleatoriamente por medio del botón GENERAR. En la Fig. 1 se aprecia el ejemplo que se genera una palabra aleatoria. No se puede apreciar todo la palabra debido a su longitud de 188 bytes.
Figura 1: Simulación RS (204,188)
Después de que la palabra de información es ingresada en el programa se emula un canal por el cual se transmite la señal codificada. Dentro del canal se inserta ruido el cual producirá errores en la palabra. Para que la transmisión se acerque a realidad se implementa un modulador OFDM+QPSK [10].
Figura 2: Señal modulada a transmitirse
Aguirre et al. / Método de Detección y Corrección de Errores Reed-Solomon, Norma ISDB-TB

124
En la Fig. 3 se aprecian los valores recuperados después del mapeo QPSK. Se presenta la palabra codificada con errores en forma discreta.
Figura 3: Señal recuperada con errores en el receptor
En la Fig. 4 se presenta la interfaz gráfica con el proceso completo de la decodificación RS (204,188).
Figura 4: Interfaz gráfica con los valores completos de la decodificación.
6. IMPLEMENTACIÓN DE RS EN TARJETA FPGA SPARTAN 3E
Inicialmente se presentará algunas definiciones necesarias para el entendimiento de esta sección:
FPGA (Field Programmable Gate Array) es un dispositivo programable que contiene bloques de lógica que puede ser configurada mediante un lenguaje de descripción especializado.
VHDL, lenguaje definido por el IEEE usado para describir circuitos digitales o modelar fenómenos científicos respectivamente. VHDL es el acrónimo de VHSIC y HDL, donde VHSIC (Very High Speed Integrated Circuit) y HDL (Hardware Description Language).
Para la elaboración del código VHDL se ha partido del entorno de Matlab, que consiste en una
herramienta técnica de altas prestaciones para el cálculo numérico. Se ha transformado los algoritmos que estaban en lenguaje de Matlab a lenguaje VHDL siendo usada la herramienta Math Works, el generador HDL Code. La función del generador HDL coder es generar automáticamente un código HDL desde MATLAB, es decir que permite diseños sobre FPGAs. Ya que el objetivo de la creación del lenguaje fue principalmente lograr el diseño, modelado y documentación del Método de Detección y Corrección de errores Reed-Solomon se ha procedido a realizar la transformación de los algoritmos desde Matlab, facilitando la realización de scripts de los circuitos complejos desarrollados.
Para la implementación física se utiliza la tarjeta FPGA SPARTAN 3E, donde se cargará la configuración del algoritmo en VHDL. Para realizar las pruebas de funcionamiento se han configurado la entrada y salida de los datos a través del puerto serial. De esta manera el computador generará los datos, los cuales a través del puerto serial se envían hacia la tarjeta, en donde se aplicará el algoritmo de codificación cuando el usuario procede a ejecutarlo a través del botón EJECUTAR presente en la interfaz gráfica como se explicará posteriormente. La palabra codificada saldrá de la tarjeta por el mismo puerto serial hacia el computador donde se presentará por medio de un display en SIMULINK. De la misma manera se procederá la decodificación [11].
Figura 5: Sistema de comunicación entre PC y tarjeta FPGA
En la Fig. 6 se observa la prueba del codificador y decodificador RS en la tarjeta FPGA
Figura 6: Conexión física entre la tarjeta y el computador
Edición No. 13, Enero 2017

125
En la Fig. 7 se observa la interfaz FPGA con la palabra decodificada.
Figura 7: Interfaz gráfica con los valores completos de la decodificación.
7. RECURSOS UTILIZADOS EN LA TARJETA FPGA SPARTAN 3E
La Fig. 8 presenta el resumen detallado en porcentaje del nivel de uso de la tarjeta FPGA. En el campo “Number of Slices” se indica que se ha utilizado el 101% de la tarjeta, esto se debe a que la Spartan 3E tiene un 5 % de reserva del cual se ha utilizado el 5%.
Figura 8: Recursos utilizados en la tarjeta FPGA Spartan 3E para el codificador y decodificador RS (15,9)
La tarjeta FPGA Spartan 3E posee una memoria limitada lo que permite un número limitado de comandos. Por esta razón se podrá realizar la implementación del código Reed-Solomon (15,9) con un nivel de procesamiento del 100% y su funcionamiento es el correcto. Para el código Reed-Solomon (204,188) se requiere una tarjeta con una memoria más extensa, debido a que la tarjeta utilizada en el actual estudio no se logra procesar todo el algoritmo.
8. CONCLUSIONES
La complejidad de un algoritmo se define por medio del número de operaciones elementales necesarias en la resolución de un problema y a su vez las operaciones dependen del número de datos de entrada y de salida. De esta manera la complejidad
aumenta linealmente según sea el tamaño de la información de entrada. Por esta razón se partió de un algoritmo pequeño con 15 bytes de entrada, Reed-Solomon (15,9), y posteriormente se replicó el algoritmo para el desarrollo del Reed-Solomon (204,188) con 255 bytes de entrada. El estudio, comprensión y visualización del código Reed-Solomon es más fácil con un código de dimensiones pequeñas.
La decodificación Reed-Solomon utiliza varios algoritmos para su resolución, entre los cuales se encuentra Berlekamp-Massey, estos algoritmos limitan al decodificador la corrección de errores cuando la palabra de información que ingresa al receptor sobrepasa el número de errores permitidos por el algoritmo. Al intentar decodificar una palabra que sobrepase el número máximo de errores no se logra decodificar, llegando la información con errores.
El algoritmo Reed-Solomon (204,188) puede corregir 8 bytes de los 255 bytes que ingresan, cada byte posee 8 bits, por lo tanto tiene la capacidad de corregir 64 bits siempre y cuando sean dentro de los mismos 8 bytes.
La herramienta de programación Matlab permite realizar funciones y algoritmos que dependen de entradas variables o constantes según sea la necesidad del usuario, por tal razón el algoritmo realizado es un genérico para cualquier Reed-Solomon a implementarse. El lenguaje de Matlab es flexible para realizar cálculos avanzados como los utilizados en el codificador y decodificador Reed-Solomon.
La tarjeta utilizada es la Spartan 3E, ya que es una tarjeta con múltiples aplicaciones, fácil de conseguir en el mercado y su valor es accesible para estudiantes. Tarjetas de mayor capacidad tienen costo elevado.
La tarjeta FPGA Spartan 3E es compatible con Matlab, por lo cual es factible realizar la transformación de funciones generadas en Matlab a programas en lenguaje VHDL.
Para el código Reed-Solomon (204,188) se satura la memoria de la tarjeta Spartan 3E, por lo cual no es posible realizar la implementación en dicha tarjeta, es necesario utilizar una tarjeta de mayor capacidad para poder implementarlo físicamente. La comprobación del correcto funcionamiento se logra a través de la simulación presentada. El costo de la tarjeta óptima para la implementación es alto y se debe solicitar su importación directa del fabricante. Se recomienda la tarjeta FPGA Virtex 6.
Aguirre et al. / Método de Detección y Corrección de Errores Reed-Solomon, Norma ISDB-TB

126
Dentro de las redes de transporte se poseen tecnología como SDH y OTN, las cuales trabajan con un sistema de detección y corrección de errores RS (255,239) el cual su algoritmo se ha elaborado en el presente proyecto. Por lo tanto el estudio se lo puede implementar sobre las redes de transporte de datos.
REFERENCIAS BIBLIOGRÁFICAS
[1] ARCOTEL, Adopción del estándar para Televisión Digital Terrestre, http://www.arcotel.gob.ec/wp-content/uploads/2015/07/Proyecto-resoluci%C3%B3n-norma-tecnica-tdt.pdf
[2] Asociación Brasilera de Normas Técnicas, “ABNT NBR 15601:2007 Televisión digital terrestre – Sistema de transmisión ISDB-Tb”, 2007.
[3] Abramson Norman, “Teoría de la Información y Codificación”, Editorial Paraninfo, quinta edición, Madrid, 1981.
[4] Haykin Simon, “Sistemas de Comunicación”, Editorial Limusa Wiley, cuarta edición, New York, 2001.
[5] Artés Antonio, Pérez Fernando, “Comunicaciones Digitales”, Editorial Limusa, primera edición, México, 2001.
[6] Herstein I. N., “Álgebra moderna”, Editorial F. Trillas, S. A., primera edición, México, 1970.
[7] Espitia Jesus, Codificador Reed-Solomon en Software. http://tesis.ipn.mx/bitstream/handle/123456789/11486/44.pdf?sequence=1
[8] Casey Erin, Berlekamp-Massey Algorithm. http://www.math.umn.edu/~garrett/students/reu/MB_algorithm.pdf
[9] Rao Farhat Masood, Adaptive Modulation (QPSK, QAM). https://arxiv.org/ftp/arxiv/papers/1302/1302.7145.pdf
[10] D. Matie, “OFDM as possible modulation technique for multimedia applications in the range of mm waves”, Introduction to OFDM, II edition, TUD-TVS. October 1998.
[11] Simpsons P, “FPGA Design: Best Practices for Teambased Design”, Editorial Springer, New York, 2010.
Lenín A. Aguirre.- nació en Quito-Ecuador, el 11 de septiembre de 1990. Graduado en el Colegio Experimental “Sebastián de Benalcázar”, donde obtuvo el título de Bachiller en Ciencias especialización Físico Matemáticas. En el
año 2008 ingresó a la Escuela Politécnica Nacional donde obtuvo el título de Ingeniero Electrónica y Telecomunicaciones. Actualmente es Asistente Técnico en CELEC EP Unidad de Negocio Transelectric en la Subgerencia de Servicios del S.N.I.
Esteban P. Gordon.- nació en Quito-Ecuador, el 10 de noviembre de 1990. Graduado en el Colegio Experimental “Sebastián de Benalcázar”, donde obtuvo el título de Bachiller en Ciencias especialización Físico Matemáticas. En el
año 2008 ingresó a la Escuela Politécnica Nacional donde obtuvo el título de Ingeniero Electrónica y Telecomunicaciones. Actualmente es Asistente Técnico en CELEC EP Unidad de Negocio Transelectric en la Subgerencia de Servicios del S.N.I.
Edición No. 13, Enero 2017

127
Resumen
En el presente trabajo se establece una metodología para determinar la ubicación idónea de Unidades de Medición Fasorial (PMUs, por sus siglas en inglés), sobre la base de potenciar su uso para monitorear diferentes fenómenos eléctricos. Con este objetivo, se especifican los estudios eléctricos que deben realizarse en un Sistema Eléctrico de Potencia (SEP) para definir los límites de seguridad que permitan mantener una operación confiable y estable del sistema, considerando criterios de observabilidad estática y dinámica, los cuales facilitan la identificación de elementos de alta relevancia operativa para el sistema, tanto en condiciones normales de operación como ante posibles condiciones de estrés potencialmente peligrosas para el SEP, los cuales deberían ser monitoreados en tiempo real. De esta forma, se especifican aquellas barras del sistema idóneas para ubicar PMUs que permitan monitorear los siguientes fenómenos eléctricos: i) observabilidad estática (estimación de estado), ii) estabilidad estática de ángulo (diferencia angular), iii) estabilidad de voltaje de corredores de transmisión; y, iv) estabilidad oscilatoria (observabilidad dinámica). La metodología es aplicada al sistema de prueba IEEE New England de 39 barras, y los resultados muestran las bondades de la propuesta.
Palabras clave— Ubicación Óptima de PMUs, Observabilidad estática, Observabilidad dinámica, PMUs, SEP, Estabilidad de Voltaje, Estabilidad Estática de Ángulo, Estabilidad Oscilatoria.
Abstract
A methodology for the suitable placement of Phasor Measurement Units (PMUs) is presented in this paper with the aim of exploiting their usage for monitoring different electric phenomena. With this purpose, the methodology defines the studies that should be performed in an Electric Power System (SEP by its acronym in Spanish) in order to define security limits to allow a reliable and stable operation of the power system, taking into account static and dynamic observability criteria, which allow identifying elements with a high operative relevance to the system during a normal operation stage and also in the face of potentially hazardous stress conditions for the SEP, which should be monitored in real time. Thus, the suitable system buses for installing PMUs are identified in order to monitor the following phenomena: i) steady-state observability, ii) steady-state angle stability (angle difference), iii) voltage stability of transmission corridors; and, iv) oscillatory stability (dynamic observability). The proposal is applied to the IEEE 39-bus test system and the results show the benefits of the proposal.
Index terms— PMU Optimal Placement, Static Observability, Dynamic Observability, PMUs, SEP, Voltage Stability, Steady-state Angle Stability, Oscillatory Stability.
Artículo Académico / Academic Paper
Definición de Estudios Eléctricos para Determinar la Ubicación de Unidades de Medición Sincrofasorial en Sistemas Eléctricos de Potencia
J. Báez1 S. Ordóñez1 J. Cepeda2 P. Verdugo2 F. Quilumba1
1Escuela Politécnica Nacional, EPNE-mail: [email protected]; [email protected]; [email protected]
2Operador Nacional de Electricidad - CENACEE-mail: [email protected]; [email protected]
Recibido: 08-09-2016, Aprobado tras revisión: 09-12-2016 Forma sugerida de citación: Báez J.; Ordóñez S.; Cepeda, J.; Verdugo, P.; Quilumba, F. (2017). “Definición de Estudios Eléctricos para Determinar la Ubicación de Unidades de Medición Sincrofasorial en Sistemas Eléctricos de Potencia”. Revista Técnica “energía”. No. 13, Pp. 127-138 ISSN 1390-5074.

128
1. INTRODUCCIÓN
El ingreso de nuevas instalaciones de generación, transmisión y distribución, y el crecimiento continuo en el consumo de energía eléctrica están ocasionando que los Sistemas Eléctricos de Potencia (SEPs) sean operados cada vez más cerca de sus límites de seguridad, por lo cual resulta una necesidad garantizar una operación segura y confiable, independientemente del estado operativo en el que se encuentre el sistema. Esto ha motivado el uso y desarrollo de nuevas tecnologías para mejorar el monitoreo de la operación de los SEPs [1].
En la actualidad, uno de los dispositivos que han adquirido importancia estratégica para el monitoreo y control de los SEPs son las Unidades de Medición Fasorial (PMUs, por sus siglas en inglés). Estos dispositivos calculan (o estiman) fasores de corriente y voltaje de la red eléctrica, a partir de los registros analógicos de las señales de corriente y voltaje ac, garantizando la sincronización de estas mediciones y una adquisición de datos con una tasa de muestreo que permite visualizar, en tiempo real, el comportamiento dinámico del sistema (tasas de actualización de un ciclo de la frecuencia industrial). De esta forma, las PMUs permiten evaluar la estabilidad de los SEPs en estado estacionario y dinámico, siendo esto parte integral de un Sistema de Monitoreo de Área Extendida (WAMS, por sus siglas en inglés) [1]. Los Sistemas de Monitoreo de Área Extendida son redes informáticas que se encuentran ubicadas sobre un área geográfica amplia y permiten gestionar las mediciones de un SEP. Su función está orientada a la interconexión de redes o equipos terminales que se encuentran ubicados a grandes distancias entre sí. Para ello los WAMS cuentan con una infraestructura basada en nodos de conmutación que llevan a cabo la interconexión de dichos elementos, por los cuales fluye, de manera apreciable, información continuamente [1].
Un aspecto fundamental en los sistemas WAMS es enfocar el monitoreo en los puntos críticos del SEP, con el propósito de viabilizar análisis estáticos y dinámicos adecuados. En este sentido, una adecuada selección de los sitios de monitoreo donde las PMUs deberán ser instaladas (o en donde las variables eléctricas deberán ser monitoreadas) es necesaria para eficazmente realizar el procesamiento en tiempo real de enormes cantidades de datos. A este respecto, varias propuestas metodológicas han sido plasmadas con el propósito de ubicar PMUs en los SEP [2]. Así, la minimización del número de PMUs que aseguren una adecuada observabilidad estática (para aplicaciones del estimador de estado y que fue llamada “ubicación óptima de PMUs” OPP, por sus siglas en inglés) fue
posiblemente la primer propuesta [1]. Sin embargo, este enfoque pierde de vista el propósito principal de las PMUs y los sistemas WAMS que es viabilizar el monitoreo de fenómenos dinámicos. En tal sentido, otras propuestas han enfrentado el problema con el objetivo de asegurar un monitoreo dinámico. En [3] el problema es resuelto a través de un análisis de coherencia basado en perturbaciones en combinación con agrupamiento difuso (fuzzy). Por otro lado, un enfoque dinámico similar es enfrentado mediante teoría de grafos en [4] o y filtro de Kalman en [5]. Asimismo, un enfoque híbrido para determinar las ubicaciones adecuadas de las PMUs con el objetivo de garantizar la apropiada observabilidad de los fenómenos dinámicos rápidos y lentos que se proponen evaluar en tiempo real es presentada en [2]. Este método está basado en un análisis probabilístico que permite garantizar la observabilidad de los fenómenos dinámicos rápidos y lentos, con el fin de llevar a cabo una adecuada evaluación de la vulnerabilidad, en tiempo real.
A pesar que varios métodos de hecho analizan aspectos dinámicos, los actualmente propuestos se enfocan en ciertas premisas basadas sobre el interés particular de monitorear un determinado fenómeno y no contemplan las aplicaciones de monitoreo disponibles de un determinado software de análisis comercial (por ejemplo WAProtector que se usa en CENACE), por lo que se pierde de vista la aplicabilidad práctica. Con esta perspectiva, el NASPI (North American SynchroPhasor Initiative) presentó una guía para ubicar PMUs considerando su aplicación para monitorear diferentes fenómenos dinámicos [6]. Esta guía presenta una serie de recomendaciones para seleccionar los puntos críticos del sistema que sean de interés para su monitoreo.
Sobre la base de las recomendaciones realizadas por el NASPI, el presente trabajo propone una metodología práctica para determinar la ubicación idónea de PMUs en SEPs que considera diferentes fenómenos eléctricos y que potencia las aplicaciones de monitoreo provistas por WAProtector.
Para esto, en primera instancia, es necesario analizar el costo/beneficio de la instalación de cada PMU (aspecto que se pretende minimizar en el OPP), pues el costo del comisionamiento puede oscilar entre 10.000 y 20.000 dólares [1] dependiendo de las características de cada unidad, mientras que los beneficios al incrementar considerablemente la seguridad de un sistema de potencia, a través de la supervisión del comportamiento estático y dinámico del mismo, puede resultar más representativo (por lo que justamente el OPP no es la alternativa más adecuada). Por tal razón, se considera conveniente
Edición No. 13, Enero 2017

129
contar con una mayor cantidad de PMUs con el fin de lograr una observabilidad completa del sistema; sin embargo, es necesario también tomar en cuenta la cantidad de información que se obtiene de cada PMU, siendo la capacidad de almacenamiento uno de los principales inconvenientes en el OPP.
En este sentido, para determinar la ubicación de las PMUs en un SEP, se propone identificar no solo los lugares de aseguren observabilidad estática (OPP) sino los lugares considerados como más relevantes dentro de la operación del sistema, utilizando criterios operativos, siguiendo las sugerencias del NASPI y potenciando el uso de las aplicaciones provistas por WAProtector Para ello, este trabajo define cuatro estudios con los cuales es factible identificar sectores de mayor vulnerabilidad en un sistema de potencia en condiciones normales de operación y ante la posible ocurrencia de contingencias, minimizando de esta forma el número de PMUs necesarias para garantizar la observabilidad estática y dinámica del SEP.
El resto del artículo está organizado de la siguiente forma: la sección 2 describe el marco teórico, la sección 3 presenta la metodología propuesta, la sección 4 muestra los resultados de las simulaciones, la sección 5 resume el procedimiento definido para ubicar PMUs y la sección 6 presenta las conclusiones del estudio.
2. MARCO TEÓRICO
2.1. Observabilidad Estática (OPP Tradicional)
Dentro de la observabilidad estática se incluye el problema de OPP, cuya base radica en la determinación tanto del número mínimo necesario de PMUs como de su ubicación óptima, teniendo siempre en consideración la observabilidad de todo el SEP como una sola isla observable. Se han considerado para este fin criterios de programación lineal entera y criterios eléctricos estáticos de conectividad y observabilidad [1].
2.1.1. Programación Lineal Entera
• Número mínimo de PMUs: El objetivo principal del problema de OPP es determinar un número mínimo necesario de PMUs y su ubicación óptima para asegurar la observabilidad completa del SEP. La función objetivo se describe a continuación, a través de la expresión notada en [7]:
(1)
(2)
(3)
(4)
Donde:
FO : Función Objetivo
( )S k : Vector cuyo k-ésimo elemento representa la instalación de una PMU en la k-ésima barra
( , )A i j : Matriz de conectividad de barras
• Mediciones redundantes: El número de medidas redundantes de cada barra o el número de veces que es observada cada barra de manera directa o indirecta se define como mediciones redundantes; entonces, para asegurar la observabilidad completa del sistema de potencia, el número de mediciones redundantes para cada barra deber ser por lo menos uno (1), por lo tanto se puede definir una función objetivo como el máximo de mediciones redundantes en la red eléctrica [7].
• Efecto de barras de inyección cero:
1) Cuando existen barras que son incidentes a una barra de inyección cero observable, todas son observables excepto una. La barra inobservable puede ser observable al aplicar las Leyes de Corrientes de Kirchhoff (KCL, por sus siglas en inglés) a la barra de inyección cero.
2) Cuando las barras incidentes a una barra de inyección cero inobservable son observables, la barra de inyección cero puede ser observable al aplicar KCL a la barra de inyección cero.
Estas dos condiciones se pueden combinar para demostrar que tanto las barras de inyección cero como las barras incidentes o una barra simple pueden ser observables, haciendo las otras barras observables [7].
• Restricción de contingencias: Dentro de un sistema de potencia pueden ocurrir diferentes clases de contingencias, que podrían ocasionar problemas de inestabilidad en el sistema; entonces, es fundamental analizar la observabilidad del sistema bajo estas condiciones entre las cuales se incluye la pérdida de una línea de transmisión y falla de PMUs, para determinar el número mínimo necesario de PMUs y su ubicación [7].
Báez et al. / Estudios Eléctricos para Ubicación de PMUs en Sistemas Eléctricos de Potencia

130
2.2. Estabilidad de Voltaje
La estabilidad de voltaje es la capacidad de un sistema eléctrico de potencia para mantener voltajes aceptables en todas las barras del sistema a partir de una condición inicial de operación dada. La inestabilidad de voltaje está relacionada con un déficit de recursos de potencia reactiva en la red [8], [9]. La inestabilidad de voltaje puede ser ocasionada con la ocurrencia de perturbaciones, incrementos de carga o cambios en las condiciones operativas del sistema que provoquen un incremento o disminución de voltaje en algunas barras de manera progresiva, lo cual ocasionaría la actuación de las protecciones del sistema provocando desconexiones en cascada y pérdida de sincronismo en algunos generadores. En términos matemáticos, un sistema es estable en voltaje, si la sensibilidad V-Q es positiva para cada barra; es decir, si incrementos o decrementos de Q ocasionan también incrementos y decrementos de V, respectivamente, y es inestable si la sensibilidad V-Q es negativa al menos en una barra del sistema [10], [11].
Cuando el sistema no es capaz de mantener un equilibrio en los voltajes de las diferentes barras del SEP luego de una perturbación, se produce una fuerte depresión de voltaje en gran parte del sistema o, en el peor de los casos, un apagón general. La inestabilidad puede venir asociada también a sobrevoltajes producidos por las características capacitivas de la red o por la utilización de limitadores de corriente de excitación de los generadores sincrónicos. Dentro de los posibles resultados de la inestabilidad de voltaje se incluyen la salida de servicio de líneas de transmisión y de elementos de los sistemas de protección, y la pérdida de carga en un área [10], [11].
Las herramientas más utilizadas para analizar la estabilidad de voltaje en los sistemas eléctricos de potencia son las curvas de Potencia-Voltaje (P-V). Como se muestra en la Figura 1 el método del equivalente de Thévenin permite estimar, en tiempo real, la curva P-V de líneas de transmisión en cuyas barras de envío y recepción se encuentran instaladas PMUs [10], [11], [9].
PMU A PMU B
! "#
10,008,006,004,002,000,00
1,20
0,90
0,60
0,30
0,00
-0,30
x-Axis: Est_Voltaje: Power in puEst_Voltaje: Voltage stable side in puEst_Voltaje: Voltage unstable side in pu
Y = 0,920 pu 3.930 pu
Y = 1,070 pu
DIgSILENT 39 Bus New England System Est_Voltaje Date: 8/5/2016
DIg
SIL
EN
T
Figura 1: Curva P-V de una línea de transmisión
2.3. Estabilidad Estática de Ángulo
La estabilidad de ángulo es la capacidad del sistema para mantener el sincronismo de las máquinas sincrónicas del sistema de potencia luego de haber sido sometido a una perturbación. La estabilidad de ángulo depende de la capacidad de restaurar el equilibrio entre el torque mecánico y el torque electromagnético en cada uno de los generadores del sistema de potencia [8], [12].
La diferencia angular entre dos barras del sistema de potencia es una medida directa de la capacidad de transmisión entre estos nodos. La Figura 2 ilustra dos áreas (A y B) de un sistema de potencia interconectadas por un conjunto de vínculos eléctricos. La expresión notada en (4) define la transferencia de potencia entre el área A y el área B considerando que en un SEP a nivel alto de voltaje x≫r, donde x es la impedancia del vínculo entre las barras A y B y r es la resistencia del vínculo entre las barras A y B [12].
Como se muestra en la Figura 3, idealmente el límite máximo de transferencia de potencia, se presenta en el punto máximo de la curva cuando se cumple que ; es decir, cuando
; sin embargo, debido a la complejidad del sistema de potencia, que puede causar congestión de la red de transmisión, existen otros factores que no permiten alcanzar este límite ideal.
(5)
Edición No. 13, Enero 2017

131
Figura 2: Transferencia de potencia entre dos barras del sistema
Figura 3: Curva Potencia – Ángulo
2.4. Observabilidad Dinámica
2.4.1. Estabilidad Oscilatoria
La estabilidad oscilatoria es la habilidad del sistema de potencia para mantener sincronismo relacionado con la existencia de suficiente torque de amortiguamiento [8], [13].
Al producirse variaciones de carga o generación en sistemas de potencia, los generadores tratan de encontrar nuevos estados de operación estable, produciéndose oscilaciones de potencia y frecuencia ocasionadas por los intercambios de energía eléctrica entre dichas unidades. Las oscilaciones son caracterizadas mediante los denominados modos de oscilación que pueden clasificarse, en forma general, en los siguientes [13].
Los modos locales se asocian con oscilaciones de un generador o un grupo de generadores contra el resto de máquinas del sistema. Estas oscilaciones presentan frecuencias en el rango de 0,7 a 2,0 Hz. Los modos inter-área, por su parte, son causados por interacciones entre grandes grupos de generadores oscilando entre ellos. Estos modos presentan rangos de frecuencia entre 0,1 a 0,7 Hz. Existen dos tipos de modos oscilatorios adicionales, causados por controladores de diferentes tipos de componentes (llamados modos de control), o por oscilaciones que ocurren en los sistemas rotacionales de los sistemas turbina-generador de las unidades generadoras (denominados modos torsionales). Este tipo de oscilaciones presentan un rango de frecuencias asociadas bastante amplio [13]. Dentro de los modos de control existen unos de muy baja frecuencia (0,01 Hz – 0,1 Hz) que aparecen en sistemas con
alta penetración hidráulica y que están asociados a la inadecuada sintonización de los controladores de velocidad de las unidades de generación hidráulicas [13].
El análisis modal es la herramienta más utilizada para analizar las oscilaciones en un SEP. Consiste en la determinación de los modos de oscilación y el análisis de sus correspondientes frecuencias modales complejas. La estabilidad oscilatoria se cumple cuando todos los modos presentan un amortiguamiento positivo [13]. Si se considera que el fenómeno oscilatorio es causado por pequeñas perturbaciones, la estabilidad oscilatoria toma el nombre de estabilidad de pequeña señal. En este caso, y considerando que las perturbaciones son lo suficientemente pequeñas, lo que permite la linealización del sistema de ecuaciones, el análisis se lo realiza mediante el Análisis Modal. Esto se consigue a través de la representación del sistema en el espacio de estado, y el posterior análisis de la matriz de estado [8]. La inestabilidad en pequeña señal está asociada a la insuficiencia de torque de amortiguamiento en el sistema, lo que puede provocar oscilaciones crecientes del ángulo del rotor [8].
2.4.2. Índices de Observabilidad Dinámica
En [2] se propone el uso de una serie de índices probabilísticos de observabilidad para determinar aquellas barras del sistema de potencia cuyas variables eléctricas permiten observar los modos oscilatorios. Estos índices se basan en el método conocido como medida geométrica de observabilidad (gmoi) y son: medida promedio de observabilidad (MPOgm) y medida de observabilidad ortogonal (ORTgm). Usando la base conceptual de los índices de observabilidad presentada en [2], este artículo determina la ubicación idónea de PMUs para estabilidad oscilatoria y la combina con los otros fenómenos estáticos y dinámicos mostrados en esta sección para definir un conjunto completo de barras candidatas para ubicar PMUs que permita observar varios fenómenos eléctricos, siguiendo las sugerencias del NASPI y procurando potenciar el uso de las aplicaciones de monitoreo de WAProtector.
3. METODOLOGÍA PROPUESTA
En la metodología propuesta se describen los pasos a seguir para determinar la ubicación idónea de PMUs a través de un “OPP Modificado” que considere características estáticas y dinámicas del SEP, como se muestra en la Figura 4.
La metodología propuesta en la Figura 4 se puede describir de la siguiente manera:
Báez et al. / Estudios Eléctricos para Ubicación de PMUs en Sistemas Eléctricos de Potencia

132
Figura 4: Diagrama de Flujo de la Metodología propuesta
• Validación del caso de estudio: Se ejecutan varias simulaciones del sistema que se desea analizar, para verificar que se pueden realizar los estudios propuestos y consecuentemente determinar la ubicación de PMUs, en diferentes condiciones de operación. Para esto se utiliza el software de simulación PowerFactory de DIgSILENT.
• Observabilidad estática: Se ubican las PMUs para observabilidad estática (OPP Tradicional), teniendo en mente minimizar la instalación de PMUs considerando como aplicación la estimación de estado mediante programación lineal entera y estudios eléctricos.
• Programación Lineal Entera: Usando el método de programación lineal entera, el cual considera los criterios de medición redundante, efecto de barras de inyección cero y restricción de contingencias, se obtiene un número mínimo de PMUs que vuelve totalmente observable al sistema eléctrico.
• Estudios Eléctricos: Se definen dos estudios eléctricos de importancia para un SEP: estabilidad de voltaje en corredores de transmisión y estabilidad estática de ángulo, en función del interés de monitoreo de estos fenómenos en el SEP.
• Estabilidad de Voltaje: Mediante el estudio de estabilidad de voltaje de corredores de transmisión se determinan aquellos vínculos que son de importancia crítica para el sistema considerando el ingreso de nuevas centrales de generación al sistema eléctrico. Una vez identificados dichos corredores se ubican las PMUs garantizando el monitoreo de posibles congestiones de estos corredores críticos a través de la supervisión de su condición de estabilidad de voltaje. Con el fin de obtener condiciones más ajustadas a la realidad se utiliza el objeto “control secundario de frecuencia” de PowerFactory para repartir la potencia activa de regulación entre las unidades seleccionadas [9].
• Estabilidad Estática de Ángulo: En el estudio de estabilidad estática de ángulo se determinan las diferencias angulares que representan un estado de vulnerabilidad estática a causa de una probable pérdida de sincronismo al ser el sistema sometido a una perturbación N-1. Con el fin de obtener condiciones más ajustadas a la realidad se utiliza el objeto “control secundario de frecuencia” de PowerFactory para repartir la potencia activa de regulación entre las unidades seleccionadas. En este sentido las PMUs se ubican en barras y subestaciones para garantizar una adecuada supervisión para estabilidad estática de ángulo [12].
• Observabilidad dinámica: Dentro de la observabilidad dinámica se incluye el análisis de estabilidad oscilatoria como medio de ubicación de PMUs.
• Estabilidad Oscilatoria: El análisis de estabilidad oscilatoria se realiza mediante el módulo de análisis modal de PowerFactory, identificando los modos de oscilación que presentan bajo amortiguamiento y las frecuencias de oscilación de los mismos (entre 0,1 Hz y 0,7 Hz para modos inter-área y de 0,7 Hz a 2 Hz para modos locales). La ubicación de PMUs se realiza utilizando los índices de observabilidad geométricos aplicados a los modos de interés garantizando la observabilidad dinámica para estabilidad oscilatoria.
• Ubicación de PMUs: Finalmente, las PMUs son ubicadas realizando una superposición de los resultados determinados en cada estudio, esto, con el fin de ubicar un número mínimo de PMUs, pero garantizando que las unidades instaladas proporcionen información necesaria para que el sistema sea totalmente observable frente a cualquier fenómeno eléctrico que se pueda presentar.
4. RESULTADOS
Para verificar la viabilidad de la metodología propuesta se analiza el sistema IEEE 39 barras (New England System), el cual consta de: 10 generadores, siendo uno de ellos un generador equivalente que representa al sistema de New York, 28 barras de 345 kV, 1 barra de 230 kV, 1 barra de 138 kV, 9 barras de 16,5 kV, 19 cargas y 34 líneas de transmisión, tal como se muestra en la Figura 5. El primer paso consiste en validar el caso de estudio. Después de ello se realizan los estudios definidos en la metodología.
Edición No. 13, Enero 2017

133
4.1. Observabilidad Estática - Programación Lineal Entera (OPP Tradicional)
En la Figura 6 se muestran los pasos a seguir para encontrar el número mínimo de PMUs (OPP Tradicional) y determinar su ubicación óptima en el sistema. De esta forma se determina la ubicación de 8 PMUs en diferentes barras del sistema, como se indica en la Tabla 1.
Tabla 1: Barras del sistema en las que se deben ubicar PMUs según OPP Tradicional
Barras del sistema
BUS 01 BUS 08 BUS 18 BUS 16
BUS 14 BUS 26 BUS 23 BUS 11
Figura 5: IEEE 39 barras (New England System)
Enumeración de barras
Número de conexiones
Ingreso de datos en MATLAB
Ingreso del documento de Excel
Obtención de la matriz de
conectividad
Número total de PMUs
Ubicación de PMUs en el
sistema
Figura 6: Ubicación de PMUs mediante observabilidad estática
4.2. Estabilidad de Voltaje
Para obtener las curvas P-V se deben identificar los corredores de transmisión que presenten altas cargabilidades y sobrepasen los límites mínimos
y máximos de voltaje (mínimo 0,92 en p.u. y máximo 1,07 en p.u., que corresponden a límites de calidad de energía y servicio [14]) suponiendo además análisis de contingencias. Considerando la cargabilidad de las líneas de transmisión y el voltaje de las barras asociadas en condiciones normales y frente a contingencias, se presentan como potenciales candidatas las líneas: 5-6, 6-7, 6-11, 10-11, 14-4, 15-16, 16-19, 21-22, en las cuales se realiza el análisis de estabilidad de voltaje para ubicar las PMUs. De este análisis se desprenden 12 ubicaciones para la ubicación de PMUs, como se muestra en la Tabla 2.
Tabla 2: Barras del sistema en las que se debe ubicar PMUs para Estabilidad de Voltaje
Barras del sistema
BUS 04 BUS 05 BUS 06 BUS 07 BUS 10 BUS 11
BUS 14 BUS 15 BUS 16 BUS 19 BUS 21 BUS 22
4.3. Estabilidad Estática de Ángulo
Para el análisis de Estabilidad Estática de Ángulo se identifican las barras, líneas y cargas de interés, de acuerdo al siguiente detalle:
• Barras: Se utilizan las barras resultantes del estudio de observabilidad estática.
• Cargas: Para realizar incrementos paulatinos de potencia se consideran todas las cargas del sistema.
• Líneas: Para realizar contingencias, se consideran las líneas de 345 kV.
La ubicación de PMUs se realiza considerando las diferencias angulares respecto a una barra de referencia (en este caso se considera la barra 11 como referencia ya que presenta el mayor ángulo de voltaje). El análisis determina la necesidad de instalar 5 PMUs en diferentes barras del sistema, como se muestra en la Tabla 3.
Tabla 3: Barras del sistema en las que se debe ubicar PMUs para Estabilidad Estática de Ángulo
Barras de sistema
BUS 01 BUS 16 BUS 18 BUS 23 BUS 26
4.4. Observabilidad Dinámica - Estabilidad oscilatoria
Para realizar el análisis oscilatorio se deben identificar los modos de oscilación de baja frecuencia que presentan bajo amortiguamiento. Para lo cual se realiza el análisis modal para el sistema IEEE 39 barras en PowerFactory de DIgSILENT. Del
Báez et al. / Estudios Eléctricos para Ubicación de PMUs en Sistemas Eléctricos de Potencia

134
análisis se obtienen 6 modos de oscilación con estas características; 2 modos inter-área (frecuencia entre 0,1 y 0,7 Hz) y 4 modos locales (frecuencia alrededor de un 1 Hz) los cuales presentan bajo porcentaje de amortiguamiento. Cada modo proporciona información del comportamiento de los elementos del sistema.
Para determinar la ubicación de PMUs para estabilidad oscilatoria se utilizan índices de observabilidad [2] para estos 6 modos, de acuerdo a las expresiones notadas en (6), (7) y (8).
(6)
(7)
(8)
Donde oigm es el índice de observabilidad geométrica, jc es la j-ésima fila de la matriz de sensibilidad C, correspondiente a la barra j, es el i-ésimo vector propio derecho, gmMPO es el promedio de la j-ésima fila del índice de observabilidad geométrica,
gmORT es el índice de observabilidad ortogonal.
La matriz C (matriz de salida) y los vectores propios derechos se obtienen del análisis modal ejecutado en PowerFactory de DIgSILENT, del cual se identifican las variables de estado (velocidad o ángulo) y las variables algebraicas (voltaje y corriente), esto con el propósito de reducir la matriz C y los vectores propios derechos dejando solamente las variables de mayor importancia para el sistema.
De esta manera se pueden calcular los índices de observabilidad para ubicar PMUs en base al ángulo o a la velocidad considerando la observabilidad en voltajes y corrientes de las barras del sistema. Mediante un análisis de dispersión que relacione
gmMPO y gmORT se realiza la agrupación de individuos (barras) cercanos, y considerando los valores mayores de la relación / gmgm OP RTM O de cada agrupación se determina la ubicación de las PMUs, como se observa en la Tabla 4.
Tabla 4: Barras del sistema en las que se deben ubicar PMUs para Estabilidad Oscilatoria
AGRUP. BARRAS
0,3899 1 1 0,3899 BUS 02
0,4134 0,3460 2 1,1950 BUS 09
0,2332 0,9563 3 0,2439 BUS 26
0,0711 0,7856 4 0,0904 BUS 10
0,2267 0,3663 5 0,6189 BUS 29
0,2892 0,4426 6 0,6534 BUS 19
5. UBICACIÓN FINAL DE PMUs
Para determinar la ubicación final de las PMUs en el sistema eléctrico se propone identificar los lugares que son de importancia para los diferentes parámetros definidos en cada estudio, con el fin de reducir la cantidad de información a ser almacenada y analizada. En este sentido:
• Para asegurar la observabilidad estática minimizando el número de PMUs: Se requiere de 8 PMUs ubicadas en las barras 1, 8, 11, 14, 16, 18, 23 y 26.
• Para monitorear la Estabilidad de Voltaje de los corredores críticos: Se requiere de 12 PMUs ubicadas en las barras 4, 5, 6, 7, 10, 11, 14, 15, 16, 19, 21 y 22.
• Para supervisar la Estabilidad Estática de Ángulo: Se requiere de 5 PMUs ubicadas en las barras 1, 16, 18, 23 y 26.
• Para evaluar la Estabilidad Oscilatoria: Se requiere de 6 PMUs ubicadas en las barras 2, 9, 10, 19, 26 y 29.
• Ubicación Final (OPP final modificada): En base a los resultados de los estudios realizados se determina un requerimiento de un total de 20 PMUs, sin embargo, con el fin de reducir el número de PMUs y de esta manera reducir la cantidad de información a ser almacenada y analizada, se consideran solo los casos de mayor criticidad presentes en cada estudio realizado, con lo cual se requiere de un total de 12 PMUs, garantizando de esta manera la observabilidad completa del sistema frente a cualquier fenómeno eléctrico que se pueda presentar.
De acuerdo a los resultados obtenidos, la ubicación final de las PMUs en el sistema IEEE 39 barras se presenta en la Tabla 5 y en la Figura 7.
Edición No. 13, Enero 2017

135
Tabla 5: Ubicación Final de las PMUs
Barras del sistema
BUS 02 BUS 04 BUS 06 BUS 09 BUS 11 BUS 14
BUS 16 BUS 18 BUS 19 BUS 21 BUS 22 BUS 26
Figura 7: Ubicación final de PMUs
6. PROCEDIMIENTO PARA LA UBICACIÓN DE PMUs
En base a los estudios realizados y resultados obtenidos en el análisis para el sistema IEEE 39 barras, es factible definir un procedimiento mediante el cual se puede determinar la ubicación de PMUs. Este procedimiento se aplicará con la finalidad de ubicar las PMUs considerando qué parámetro eléctrico es más relevante para diferentes puntos del sistema. El procedimiento se describe a continuación:
1. Revisar que las bases de datos del programa PowerFactory de DIgSILENT se encuentren actualizadas para el período de análisis.
2. Preparar los casos de estudio que incluyan las condiciones operativas que se requieren analizar mediante la adecuación de los casos y la verificación de convergencia a través de simulaciones estáticas (flujos de potencia) y dinámicas (estabilidad transitoria -simulación en el dominio del tiempo- y análisis modal).
3. Determinar la ubicación de PMUs mediante el algoritmo de programación lineal entera tomando en cuenta las barras de mayor nivel de voltaje.
4. Realizar el estudio de estabilidad de voltaje en corredores de transmisión utilizando el método del equivalente Thévenin, empleando el objeto “control secundario de frecuencia” de PowerFactory para repartir la potencia activa de regulación entre las unidades de generación seleccionadas, con el fin de crear una condición
más ajustada a la realidad. A continuación se debe identificar la peor contingencia, en lo que respecta a la estabilidad de voltaje, para los corredores de transmisión a ser analizados. Para esto se debe realizar un análisis de contingencias N – 1 dentro de cada una de las condiciones operativas a ser consideradas. Finalmente se obtienen las curvas P-V en condiciones normales y ante la ocurrencia de la peor contingencia con el uso del script DPL de estabilidad de voltaje [9], las mismas que se intersecan con los límites de voltaje establecidos para condiciones de operación normales y de emergencia.
5. Realizar el estudio de estabilidad estática de ángulo creando condiciones de alto estrés en el SEP, a través de un análisis de contingencias N – 1, de diferentes elementos de transmisión, asociado a incrementos paulatinos de carga en zonas específicas, llevado a cabo mediante la ejecución del script DPL de estabilidad estática de ángulo [12], considerando una barra como barra de referencia, utilizando también el objeto “control secundario de frecuencia”. Finalmente se deben identificar las barras que presenten mayores diferencias angulares mediante un análisis estadístico.
6. Realizar el análisis de estabilidad oscilatoria utilizando el método de análisis modal en PowerFactory de DIgSILENT. Del análisis se obtienen los valores propios y se determina la frecuencia y la razón de amortiguamiento de cada modo; a continuación se aplican los índices de observabilidad dinámica para determinar la ubicación de PMUs.
7. Realizar una superposición de los resultados de cada estudio para determinar las barras en las cuales es necesario ubicar PMUs y para qué parámetro eléctrico resulta más conveniente cada ubicación.
7. CONCLUSIONES Y RECOMENDACIONES
• En el presente trabajo, a través de un conjunto de estudios eléctricos se realizó un análisis en el SEP, con el fin de determinar los puntos críticos para la ubicación de las unidades de medición fasorial que permitan realizar el monitoreo estático y dinámico de diferentes elementos del sistema, contribuyendo de esta forma a identificar condiciones de estrés potencialmente peligrosas
Báez et al. / Estudios Eléctricos para Ubicación de PMUs en Sistemas Eléctricos de Potencia

136
para la operación del SEP y garantizando una operación segura y confiable del mismo.
• Las PMUs son dispositivos ampliamente utilizados en el monitoreo de SEPs debido a las características que presentan; sin embargo, existen varios aspectos que deben ser considerados para su comisionamiento, por ejemplo: el costo de instalación, los medios de comunicación, su ubicación optima, la cantidad de información obtenida para monitoreo, entre otros, por lo cual es necesario determinar un número mínimo de PMUs y los lugares donde éstas deben ser instaladas, considerando criterios técnicos y los estudios realizados, reduciendo la cantidad de información y manteniendo completamente observable al sistema.
• La ubicación de PMUs ha sido determinada, en el presente trabajo, a través del uso de cuatro estudios, con los cuales es factible lograr un pleno aprovechamiento de las bondades de las unidades de medición fasorial permitiendo analizar de una forma adecuada la información disponible.
• Con la ayuda de la Programación Lineal Entera se determina un número mínimo de PMUs que hacen completamente observable el sistema, sin considerar variables eléctricas, por lo cual, este método, se complementa con la realización de estudios eléctricos, lo que permite definir la ubicación final optima modificada.
• A través del Análisis de Estabilidad de Voltaje se identifican los corredores de transmisión del sistema IEEE 39 barras afectados por dos condiciones: altas cargabilidades y voltajes bajos en sus barras de recepción en condiciones normales de operación y ante contingencias, determinando, así, las barras en las cuales es necesario ubicar PMUs.
• Empleando el Análisis de Estabilidad Estática de Ángulo se determinan las diferencias angulares más representativas con respecto a la barra 11 (barra de referencia), bajo la premisa de que una diferencia angular alta entre dos barras se encuentra asociada a una elevada cargabilidad en las líneas de transmisión que conectan a estas barras. De esta forma es posible definir las subestaciones en las cuales es necesario ubicar PMUs.
• Mediante el Análisis de Estabilidad Oscilatoria, se logra determinar los modos de oscilación críticos existentes en el sistema IEEE 39 barras, a través del análisis modal, los cuales son posteriormente asociados a los índices de observabilidad con el propósito de determinar la ubicación de las PMUs.
• La metodología desarrollada en este proyecto permite analizar SEPs de diferentes tamaños teniendo en cuenta diferentes condiciones de operación y definiendo previamente los elementos a ser considerados en el análisis, debido a que la cantidad de información a ser analizada, los tiempos de simulación y los resultados de cada estudio guardan una estrecha relación con el número de elementos y el tamaño de los sistemas.
• A través de la metodología propuesta ha sido factible determinar la ubicación de PMUs con la realización de diferentes estudios eléctricos; sin embargo, cabe considerar que esta no constituye una metodología única para ubicar PMUs, pues como se observa en los resultados, cada análisis arroja conclusiones diferentes; es decir, en cada fenómeno analizado las barras en las que se deben ubicar PMUs no son las mismas, con lo que se infiere que la ubicación de las PMUs depende de la satisfacción de requerimientos puntualmente definidos.
REFERENCIAS BIBLIOGRÁFICAS
[1] D. J. Jiménez Analuiza, “Ubicación Óptima de Unidades de Medición Sincrofasoriales PMU’s para Mejorar la Observabilidad de un Sistema Eléctrico de Potencia,” Thesis, 2015.
[2] J. C. Cepeda Campaña, “Evaluación de la vulnerabilidad del sistema eléctrico de potencia en tiempo real usando tecnología de medición sincrofasorial,” Universidad Nacional de San Juan, 2013.
[3] I. Kamwa, A. K. Pradham, G. Joos, and S. R. Samantaray, “Fuzzy Partitioning of a Real Power System for Dynamic Vulnerability Assessment,” IEEE Trans. Power Syst., vol. 24, no. 3, pp. 1356 – 1365, 2009.
[4] M. A. Rios and O. Gómez, “Identification of Coherent Groups and PMU placement for Inter-Area monitoring Based on Graph Theory,” in 2011 IEEE PES Conference on Innovative Smart Grid Technologies - Latin America, 2011, pp. 1 – 7.
Edición No. 13, Enero 2017

137
[5] Y. Sun, P. Du, Z. Huang, K. Kalsi, R. Diao, K. K. Anderson, Y. Li, and B. Lee, “PMU placement for dynamic state tracking of power systems,” in 2011 North American Power Symposium, 2011.
[6] North American SynchroPhasor Initiative NASPI, “Guidelines for Siting Phasor Measurement Units,” Res. Initiat. Task Team Rep., pp. 1–24, 2011.
[7] M. Nazari-Heris and B. Mohammadi-Ivatloo, “Application of heuristic algorithms to optimal PMU placement in electric power systems: An updated review,” Renew. Sustain. Energy Rev., vol. 50, pp. 214–228, Oct. 2015.
[8] P. Kundur, J. Paserba, V. Ajjarapu, G. Andersson, A. Bose, C. Canizares, N. Hatziargyriou, D. Hill, A. Stankovic, C. Taylor, T. Van Cutsem, and V. Vittal, “Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions,” IEEE Trans. Power Syst., vol. 19, no. 3, pp. 1387–1401, 2004.
[9] J. C. Cepeda, P. X. Verdugo, and G. A. Argüello, “Monitoreo de la Estabilidad de Voltaje de Corredores de Transmisión en Tiempo Real a partir de Mediciones Sincrofasoriales,” Rev. Politécnica, vol. 33, no. 1, Feb. 2014.
[10] L. D. Andagoya Alba, “Máxima capacidad de generación eólica a ser instalada en el Sistema Eléctrico Ecuatoriano,” Thesis, QUITO/EPN/2014, 2014.
[11] E. M. Samaniego Rojas, “Detección de áreas débiles respecto a la estabilidad de ténsion en tiempo real utilizando lógica difusa,” Cuenca, 2013.
[12] J. Cepeda and P. Verdugo, “Determinación de los Límites de Estabilidad Estática de Ángulo del Sistema Nacional Interconectado,” Rev. Técnica “energía,” vol. 10, 2014.
[13] J. C. Cepeda and A. B. De La Torre, “Monitoreo de las oscilaciones de baja frecuencia del Sistema Nacional Interconectado a partir de los registros en tiempo real,” Rev. Técnica “energía,” pp. 181–190, May 2014.
[14] CENACE, “Determinación de los límites de estabilidad de voltaje de corredores de transmisión.” Jun-2015.
Juan Báez Córdova.- Nació en Quito, Ecuador en 1989. Egresado de la Carrera de Ingeniería Eléctrica de la Escuela Politécnica Nacional. Sus áreas de interés son la Distribución y Operación de Sistemas Eléctricos de Potencia.
Santiago Ordóñez Carrillo.- Nació en Quito, Ecuador en 1987. Egresado de la Carrera de Ingeniería Eléctrica de la Escuela Politécnica Nacional. Sus áreas de interés son la Distribución y Operación de Sistemas Eléctricos de Potencia.
Jaime Cepeda Campaña.- Nació en Latacunga, Ecuador en 1981. Recibió el título de Ingeniero Eléctrico en la Escuela Politécnica Nacional en 2005, y el de Doctor en Ingeniería Eléctrica en la Universidad Nacional de San Juan en 2013. Entre 2005 y
2009 trabajó en Schlumberder y en el CONELEC. Colaboró como investigador en el Instituto de Energía Eléctrica, Universidad Nacional de San Juan, Argentina y en el Instituto de Sistemas Eléctricos de Potencia, Universidad Duisburg-Essen, Alemania entre 2009 y 2013. Actualmente se desempeña como Subgerente Nacional de Investigación y Desarrollo del CENACE y como Profesor a Tiempo Parcial en la Escuela Politécnica Nacional. Sus áreas de interés incluyen la evaluación de vulnerabilidad en tiempo real y el desarrollo de Smart Grids.
Pablo Verdugo Rivadeneira.- Nació en la ciudad de Quito en 1987. Realizó sus estudios secundarios en el Colegio Nacional Experimental Juan Pío Montufar y sus estudios superiores en la Escuela Politécnica Nacional, donde se gradúo
de Ingeniero Eléctrico en el año 2012. Entre el 2011 y el 2015 desempeñó sus funciones en la Dirección
Báez et al. / Estudios Eléctricos para Ubicación de PMUs en Sistemas Eléctricos de Potencia

138
de Planeamiento de CENACE. Actualmente se desempeña en la Subgerencia de Investigación y Desarrollo del Operador Nacional de Electricidad.
Franklin L. Quilumba.- Obtuvo el título de Ingeniero Eléctrico en la Escuela Politécnica Nacional en Quito, Ecuador, en el 2008. Realizó sus estudios de posgrado en la Universidad de Texas Arlington, en Arlington, Estados Unidos
de América, donde obtuvo el grado de Master of Science in Electrical Engineering y el título de Doctor of Philosophy Ph.D. en el 2014. Desde el 2014, el Dr. Quilumba es parte del cuerpo docente de la Escuela Politécnica Nacional, donde es Profesor Agregado. Sus áreas de interés son análisis, operación, estabilidad y control de sistemas eléctricos de potencia, modelación de carga, planeación de generación y transmisión; respuesta de la demanda; y predicción de carga.
Edición No. 13, Enero 2017

139
Resumen
El Operador Nacional de Electricidad – CENACE dispone como parte de las herramientas para el proceso de supervisión de la operación del sistema eléctrico ecuatoriano un sistema de Monitoreo de Área Extendida (WAMS), el cual permite observar en tiempo real información estratégica relacionada con la estabilidad oscilatoria del sistema. Toda esta información proveniente del sistema WAMS maneja un gran volumen de información resultante del muestreo de las variables eléctricas con una resolución 60 muestras por segundo registradas a través de 29 unidades de medición fasorial (PMU) que han sido dispuestas de manera estratégica en ciertas subestaciones del Sistema Nacional Interconectado (SNI). Esta información por una parte permite identificar posibles estados de oscilación en tiempo real y su consecuente aporte a la toma de decisiones a nivel operativo, y por otra parte permite adquirir un conocimiento a través de análisis post mortem mediante un tratamiento estadístico adecuado.
Con este antecedente mediante este trabajo se pretende aplicar ciertos criterios estadísticos utilizados para el análisis de datos bajo un concepto de Big Data; conceptos que permitirán implementar una base para el análisis estadístico con integración de múltiples conjuntos de datos provenientes de otras fuentes como el sistema SCADA, la búsqueda de información considerando al factor tiempo como un parámetro crítico para la toma de decisiones y retroalimentación de la operación, y el uso de grandes volúmenes de información como las obtenidas a través del sistema SCADA y WAMs.
Palabras clave— WAMS, estabilidad oscilatoria, pequeña señal, análisis de datos, cluster, Big Data.
Abstract
The national operator of electricity - CENACE has as part of its tools for the process of monitoring the operation of the Ecuadorian electrical system a Monitoring Wide Area (WAMS), which one allows to observe real-time strategic information related to the oscillatory stability system. All this information from the WAMS system handles a large volume of information resulting from sampling the electrical variables with a resolution 60 samples per second obtained through 29 Phasor Measurement Units (PMUs) that have been placed strategically in certain substations Interconnected National system (SNI). This information identifies some possible states of oscillation in real time and its consequent contribution to decision making at the operational level, and on the other hand can acquire knowledge through post mortem by an appropriate statistical treatment.
With this background through this work is intended to apply certain statistical criteria used for data analysis under a concept of Big Data; concepts that will implement a basis for statistical analysis with integration of multiple data sets from other sources such as the SCADA system, information search considering the time factor as a critical parameter for decision-making and feedback of the operation, and the use of large volumes of information as those obtained through the SCADA system and WAMs.
Index terms— WAMS, oscillatory stability, short term, data analysis, clustering, Big Data.
Aplicación Práctica / Practical Issues
Determinación de Modos Oscilatorios Presentes en el Sistema Eléctrico Ecuatoriano Mediante Técnicas Estadísticas
R.E. Cubillo
Operador Nacional de Electricidad - CENACE E-mail: [email protected]
Recibido: 13-09-2016, Aprobado tras revisión: 09-12-2016 Forma sugerida de citación: Cubillo B. R.; (2017). “Determinación estadística de modos de estabilidad oscilatoria”. Revista Técnica “energía”. No. 13, Pp. 139-145 ISSN 1390-5074.

140
1. INTRODUCCIÓN
El estado del arte de la operación de tiempo real de un sistema eléctrico de potencia, se ve complementada a mediante los análisis de eventos y los análisis posoperativos para los diferentes estados del sistema presentados, así tanto en condiciones de operación normal como de emergencia. Bajo este antecedente un análisis posoperativo permite realizar una inferencia operativa sobre posibles escenarios de la operación mediante una determinación de características similares o patrones obtenidos, los cuales pueden ser obtenidos a través de un análisis exploratorio y estadístico de la información resultante y obtenida de los sistemas tecnológicos de uso del operador y en el caso de CENACE como lo son los sistemas SCADA y WAMS.
En el presente artículo se tratará como una primera etapa el análisis de la información obtenida a través del sistema WAMS y su aplicación gestora de información WAProtector disponible en el CENACE, la cual permite obtener y registrar información de la composición modal de señales de potencia de 29 PMUs distribuidas en el sistema ecuatoriano. La información proveniente de las unidades de medición fasorial disponen de información con una resolución de 60 muestras por segundo, lo que continuamente genera un gran volumen continuo de datos que son procesados y almacenados.
El sistema WAProtector almacena este gran volumen de información en base de datos con la factibilidad de poder acceder a la misma a través de la herramienta, en ese sentido en este particular se pone más atención a la información de la frecuencia, la razón de amortiguamiento y amplitud de los modos presentados en cada instaste de tiempo.
Por otra parte, el manejo de grandes volúmenes de información obedece a que su manipulación y gestión requiere de esfuerzos significativos que hacen muy difícil su proceso mediante el uso de herramientas de análisis tradicionales y bajo la premisa de obtención de resultados con el factor tiempo como parte de ellas.
El concepto de Big Data se identifica con el manejo de información proveniente de diferentes fuentes, análisis de grandes volúmenes de información que puede ser del tipo inclusive no estructurada y en escala la velocidad de tratamiento de la misma, lo que involucra tareas multidisciplinarias con conceptos matemáticos, estadísticos y ciencias de la computación de manera integrada. Y finalmente como aplicación a este entorno se destaca la optimización operacional y mejora en la toma de decisiones encaminando los resultados como parte de un proceso de la ciencia de los datos. Y con el fin de integrar nuevos análisis
relacionados a este tema a partir de este concepto se realiza la prepara ración de la información y el tratamiento estadístico de datos.
Bajos estos antecedente se pretende a través de este articulo establecer diferentes tratamientos de datos con el fin de llegar a caracterizar las variables del sistema presentes en un escenario de estabilidad oscilatoria, es decir de las señales de frecuencia y amortiguamiento que definan al sistema eléctrico ecuatoriano en un común escenario de oscilaciones naturales de pequeña señal obtenidas a través del sistema WAMS, y mediante el tratamiento de esta información utilizando herramientas estadísticas licenciadas como STATA y open source.
2. MARCO TEORICO
2.1. Estabilidad oscilatoria de pequeña señal
Un análisis de estabilidad oscilatoria de pequeña señal consiste de un estudio basado en el comportamiento de un sistema de potencia frente a perturbaciones pequeñas esto con el fin de determinar la capacidad del sistema mantener un estado de sincronismo. Dentro de estas perturbaciones pequeñas se pueden identificar los cambios naturales [1] en condiciones normales de toma y salida de cargas, entrada y salida de generación, o incluso frente a cambio de programaciones entre enlaces de interconexión internacionales.
Una inestabilidad de pequeña señal puede resultar debido a un incremento en el ángulo de un rotor dando origen a un modo de inestabilidad no oscilatorio, mientras que ante la aparición de oscilaciones en el rotor con amplitud creciente originarán modos de inestabilidad oscilatoria.
Las oscilaciones presentes en los sistemas de potencia generalmente no generan un estado de inestabilidad sin embargo es de vital importancia pretender y observar bajo qué condiciones estas oscilaciones hacen que el sistema pierda o mantenga la estabilidad.
2.1.1 Oscilaciones en sistemas de potencia.
La estabilidad de pequeña señal puede ser identificada en función de la siguiente clasificación [2]
a) Modos entre áreas: Son oscilaciones que se encuentran identificadas en los rangos de 0.2 y 0.7 Hz. Estas oscilaciones involucran a grupos de máquinas en un área las cuales oscilan de manera coherente frente a otro grupo de generadores perteneciente a otra área, interconectados a través de un enlace débil.
Edición No. 13, Enero 2017

141
Figura 1: Oscilaciones entre áreas
b) Modos locales: Son oscilaciones que se encuentran identificadas en los rangos entre 0.8 y 1.8 Hz. Estas oscilaciones involucran a oscilaciones provenientes de un generador o una planta, que se encuentra en oscilación contra el sistema.
Figura 2: Oscilaciones locales
c) Modos entre máquinas: Son oscilaciones que se encuentran identificadas en los rangos entre 1.5 y 3 Hz. Estas oscilaciones son el resultado de las interacciones entre los controladores de las unidades y no están asociadas a los límites de estabilidad debido a la transferencia de potencia. Sin embargo, la presencia de este tipo de oscilaciones también puede presentarse en centrales de generación eléctricamente cercanas.
Figura 3: Oscilaciones entre máquinas
d) Modos de control: Son oscilaciones que se encuentran identificadas con valores de frecuencias mayores a los 4 Hz. Estas oscilaciones son atribuibles a problemas en los propios sistemas de control, reguladores de voltaje, reguladores de velocidad y de control de voltaje.
e) Modos de muy baja frecuencia: Son oscilaciones que se encuentran identificadas en los rangos entre 0.01 y 0.1 Hz. Estas oscilaciones también son consideradas como modos de control y generalmente aparecen en sistemas altamente hidráulicos, debido a problemas en la sintonización en los controladores de velocidad en las unidades de generación hidráulica.
f) Modos de torsión: Su rango de frecuencia está identificada en los rangos de 10 y 46 Hz, y son el resultado de inestabilidad por interacciones de elementos de potencia en la red como compensadores serie, controles de sistemas HVDC (alto voltaje dc)
Los auto valores de una matriz del sistema disponen la información sobre las frecuencias de oscilación en un determinado punto de operación y a través de esta el estudio de pequeña señal.
Un análisis modal [3] permite determinar las oscilaciones de un sistema eléctrico de potencia, obteniéndose como resultado los modos de oscilación y sus correspondientes frecuencias modales definidas mediante la frecuencia y la razón de amortiguamiento de una oscilación a través de las siguientes expresiones.
(1)
(2)
Donde:
2.2. Técnicas de análisis de datos con la conceptualización de Big Data
Conceptualmente Big Data hace referencia al almacenamiento, tratamiento y análisis de grandes cantidades de datos con el fin de extraer conocimiento de esta información y que responde a las siguientes características:
• Volumen: Resolución de adquisición de la información de 60 muestras por segundo proveniente de 29 PMUs ubicadas en el SNI.
• Variedad: Información proveniente de 29 nodos con contenido de información no necesariamente inter – relacionada de tipo no estructurada o metadata.
Cubillo / Determinación de modos oscilatorios presentes en el sistema eléctrico ecuatoriano mediante técnicas estadísticas

142
• Velocidad: Análisis de datos y obtención de resultados donde el parámetro tiempo resulta ser crítico.
Figura 4: 3 Vs de Big Data
2.2.1 Conceptos generales
a) Dataset: Son los conjuntos de datos que mantienen ciertos atributos o propiedades relacionadas y que pueden ser obtenidos de una o varias fuentes de información, siendo esta información previamente o no estructurada.
b) Análisis de datos: Corresponden a las diferentes técnicas estadísticas de amplia variedad que permiten durante un proceso la inspección, limpieza y trasformación de datos con el fin de obtener conocimiento o destacar cierta información encontrada, para la determinación de conclusiones y la toma de decisiones obtenidas a través de estos análisis.
c) Cluster:
Dada una muestra X formada por n individuos sobre los que se mide p variables, en cada objeto n. Siendo el valor de la variable en el i-esimo objeto con i = 1,2,…,p
Este conjunto de valores numéricos puede ser ordenado en la siguiente matriz.
Dado este conjunto de n observaciones caracterizados por la información de p variables se plantea de manera que ciertos individuos son pertenecientes a un grupo identificado como un cluster
2.2.2 Análisis Clúster
El análisis clúster consiste de una metodología de análisis de datos basado en un procedimiento
estadístico que podría ser univariante (sobre observaciones) o multivariante (sobre diferentes variables) bajo un conjunto de datos que corresponden a una muestra con información esperada de tipo:
• Homogénea respecto a las variables utilizadas para su formación.
• De agrupación de información cifrada de manera general desconocida a priori dentro de un conjunto de p variables y n individuos
• De información con grupos lo más distintos posibles unos de otros, a través de un criterio de similaridad con la capacidad de relación de semejanza.
a) Clúster de k-medias
Es un método de clasificación el cual n observaciones se agrupan en k grupos los cuales se asignan mediante la determinación de la distancia a un valor medio más cercano, en este tipo de clúster se utilizan algoritmos expectation - maximization de distribucion gaussianas.
- Métodos de cálculo de las distancias.
• Distancia euclídea.
(3)
• Distancia euclídea al cuadrado.
(4)
• Distancia de Minkowski.
(5)
b) Clúster Visual
Una agrupación visual permite durante en el proceso de creación de categorías basadas en la agrupación de los valores contiguos de las variables y observaciones existentes con el fin de dar lugar a un número limitado de categorías a priori, esta metodología permite utilizar la agrupación visual para:
o Crear variables categóricas a partir de variables de escala continuas.
o Colapsar un número elevado de categorías ordinales en un conjunto menor de categorías.
o Crear un mapeo referencial de la información a través de la información cruda.
Edición No. 13, Enero 2017

143
2.2.3 Tratamiento de la información estadística
Con el fin de dar un adecuado tratamiento de la información debido a un gran volumen de los datos obtenidos a partir de las diferentes fuentes generalmente no contemplan un formato o estructura que permita ser procesada de manera directa, tomando las siguientes consideraciones:
1) Ejecución de tareas para un adecuado tratamiento inicial de la información, mediante análisis y técnicas de detección y de filtrado de datos a típicos o datos perdidos.
2) Almacenamiento y registro de la información en medios o archivos para tratamiento adecuado.
Bajo la conceptualización de Big Data la información de las unidades de medición fasorial se establece una arquitectura de información no estructurada (noSQL); de la siguiente manera.
Figura 5: Esquema de tratamiento de la información
Esta arquitectura permite que la información requerida sea almacenada de tal forma de garantizar tiempos menores en el procesamiento y análisis de la información debido al gran volumen de datos obtenidos del sistema WAMs.
Con la disponibilidad de la información de CouchDB el tratamiento de la misma se realiza mediante la utilización de R y las funciones de este paquete estadístico en la presentación de resultados.
3. RESULTADOS
3.1. Resultados del análisis de clúster
Como primera etapa del análisis de datos con el fin de conocer el comportamiento de las variables de frecuencia y amortiguamiento se realizó en primera instancia un análisis de clúster mediante gráficos sobre la data cruda.
Para ello se consideró una muestra de 432,764 observaciones correspondientes a la información de la semana comprendida entre el 1 de agosto al 7 de agosto del 2016.
Para posteriormente aplicar un clúster de k-medias con la información del parámetro k obtenido a través del análisis visual de esta manera obteniéndose:
3.1.1 Resultado de clúster gráfico
Figura 6: Clúster grafico sobre toda la información de la muestra
Esta primera aproximación permitió identificar la conformación visual de 10 clúster, que corresponde al parámetro k para el análisis de clúster mediante k-medias.
3.1.2 Resultados de clúster k-medias
Figura 7: Grafico de densidad de probabilidad de modos significativos
Mediante el análisis clúster de k-medias, el cual fue desarrollado mediante la técnica de cálculo de distancias euclídeas con un parámetro de k = 9, se obtuvo que los modos más significativos presentes en el periodo de corresponden son acuerdo a la siguiente tabla de resultados, con su correspondiente probabilidad.
Tabla 1: Densidad de distribución normal de modos significativos
Clúster Identificación del modo
1 0.173869 0.176715 interarea (*)
2 1.021607 0.039945 local
3 1.584195 0.401130 entre maquinas
4 1.168694 0.048467 local
5 1.822311 0.133868 entre máquinas(*)
6 0.544967 0.043489 entre área
7 3.352751 0.289291 Control (*)
8 0.384855 0.033961 entre área
9 0.081655 0.061510 control mbf
De los resultados de la gráfica de densidad de probabilidad se determina que los modos de mayor
Cubillo / Determinación de modos oscilatorios presentes en el sistema eléctrico ecuatoriano mediante técnicas estadísticas