OMAE2014-23686 Reduction of Pitch Motion of FPSO Vessels by Innovative OWC Passive Control
10
1 Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering OMAE2014 June 8-13, 2014, San Francisco, California, USA OMAE2014-23686 Reduction of Pitch Motion of FPSO Vessels by Innovative OWC Passive Control João Seixas de Medeiros COPPE, UFRJ Rio de Janeiro, RJ, Brazil Helio Bailly Guimarães 1) COPPE, UFRJ Rio de Janeiro, RJ, Brazil Antonio Carlos Fernandes COPPE, UFRJ Rio de Janeiro, RJ, Brazil ABSTRACT The improvement of the seakeeping capabilities of Floating, Production, Storage and Offloading (FPSO) vessels increases safety and allows its operation on severe weather conditions. It also increases the fatigue life of the risers. Hence, any improvement on the FPSO motion is mostly welcome. Guimarães [1], following similar efforts by Silva [2], studied the reduction of pitch motions of FPSO vessels with the use of the OWCs (Oscillating Water Columns) passive system. However, both experimental and numerical results were inconclusive due to green water effects during experiments and panel issues with the panel code WAMIT [3], respectively. The objective of the present work is to report a series of new tests that prove the feasibility of an “L-shaped” moon pool concept and estimates and tests the ideal length of such concept that maximizes the restoring moment and minimizes pitch the most. The tests were conducted in the Laboratório de Ondas e Correntes (Laboratory of Waves and Currents) of the Federal University of Rio de Janeiro (COPPE/UFRJ). INTRODUCTION An Oscillating Water Column (OWC) consists of a hollow structure that encloses air and water inside with a free- surface while a submerged opening connects the interior with an external wave field. The main application of OWCs is the conversion of mechanical energy to electrical energy. This is done by forcing the air inside the column through a turbine using the water oscillation caused by wave field. The earliest use of OWCs was in 1947 by Yoshio Masuda, who developed an OWC powered navigation buoy. The Pico Power Plant [4] is also a great example of a practical application of the OWC capabilities. One of the earliest studies of the OWCs was done in 1979 by Lighthill [5]. It was theorized that an additional pressure field raises the pressure inside the moonpool, and the inner pressure inside the device is greater than the outer pressure. It was also characterized that the pressure varies with the moonpool width. Unfortunately, Lighthill was unable to develop an equation to predict the natural frequency of the OWC. Evans [6] continued the studies on OWCs by changing the boundary condition of the internal free-surface of the moonpool, considering a harmonic distributed pressure acting over the surface. According to Evans, the resonance condition for the moonpool happens when: (1) Where is the wave number and is the submerged length of the moonpool. The wave number can be represented as: (2) Where is the natural period of the moonpool. Substituting equation 2 into equation 1: √ (3) Lee, Newman and Nielsen [7], based on Evans’ approach developed the piston mode for WAMIT. It consists of placing a boundary on the interior free-surface of the OWC and indicating the direction of the fluid velocity through the boundary, which considered only constant vertical ______________________________________________________ 1) Guimarães is currently affiliated with the EMSHIP Consortium. He was affiliated with COPPE during his contributions to the research.
Transcript of OMAE2014-23686 Reduction of Pitch Motion of FPSO Vessels by Innovative OWC Passive Control

1
Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering
OMAE2014
June 8-13, 2014, San Francisco, California, USA
OMAE2014-23686
Reduction of Pitch Motion of FPSO Vessels by Innovative OWC Passive Control
João Seixas de Medeiros
COPPE, UFRJ Rio de Janeiro, RJ, Brazil
Helio Bailly Guimarães1)
COPPE, UFRJ Rio de Janeiro, RJ, Brazil
Antonio Carlos Fernandes COPPE, UFRJ
Rio de Janeiro, RJ, Brazil
ABSTRACT The improvement of the seakeeping capabilities of
Floating, Production, Storage and Offloading (FPSO) vessels
increases safety and allows its operation on severe weather
conditions. It also increases the fatigue life of the risers.
Hence, any improvement on the FPSO motion is mostly
welcome. Guimarães [1], following similar efforts by Silva
[2], studied the reduction of pitch motions of FPSO vessels
with the use of the OWCs (Oscillating Water Columns)
passive system. However, both experimental and numerical
results were inconclusive due to green water effects during
experiments and panel issues with the panel code WAMIT [3],
respectively. The objective of the present work is to report a
series of new tests that prove the feasibility of an “L-shaped”
moon pool concept and estimates and tests the ideal length of
such concept that maximizes the restoring moment and
minimizes pitch the most. The tests were conducted in the
Laboratório de Ondas e Correntes (Laboratory of Waves and
Currents) of the Federal University of Rio de Janeiro
(COPPE/UFRJ).
INTRODUCTION An Oscillating Water Column (OWC) consists of a
hollow structure that encloses air and water inside with a free-
surface while a submerged opening connects the interior with
an external wave field. The main application of OWCs is the
conversion of mechanical energy to electrical energy. This is
done by forcing the air inside the column through a turbine
using the water oscillation caused by wave field. The earliest
use of OWCs was in 1947 by Yoshio Masuda, who developed
an OWC powered navigation buoy. The Pico Power Plant [4]
is also a great example of a practical application of the OWC
capabilities.
One of the earliest studies of the OWCs was done in 1979
by Lighthill [5]. It was theorized that an additional pressure
field raises the pressure inside the moonpool, and the inner
pressure inside the device is greater than the outer pressure. It
was also characterized that the pressure varies with the
moonpool width. Unfortunately, Lighthill was unable to
develop an equation to predict the natural frequency of the
OWC.
Evans [6] continued the studies on OWCs by changing
the boundary condition of the internal free-surface of the
moonpool, considering a harmonic distributed pressure acting
over the surface. According to Evans, the resonance condition
for the moonpool happens when:
(1)
Where is the wave number and is the submerged
length of the moonpool. The wave number can be represented
as:
(2)
Where is the natural period of the moonpool.
Substituting equation 2 into equation 1:
√
(3)
Lee, Newman and Nielsen [7], based on Evans’ approach
developed the piston mode for WAMIT. It consists of placing
a boundary on the interior free-surface of the OWC and
indicating the direction of the fluid velocity through the
boundary, which considered only constant vertical
______________________________________________________
1) Guimarães is currently affiliated with the EMSHIP Consortium. He was
affiliated with COPPE during his contributions to the research.
2
displacements. This allowed the simulation of OWCs with
variable cross-section using WAMIT’s panel method.
For the past few years the team of the Laboratory of
Waves and Currents (LOC) from the Federal University of Rio
de Janeiro (UFRJ) has been tackling the Floating, Production,
Storage and Offloading (FPSO) vessel seakeeping problems,
specially the longitudinal rotation, or pitch. A new approach to
attenuate this motion consists of an innovative Oscillating
Water Column system proposed and studied by Guimarães [1]
and Silva [2]. Both authors study shows a high potential for
the pitch motion reduction using these devices. However,
further tests with FPSO models were needed to assess the
feasibility of the new system. Such tests were done and are
presented in this paper.
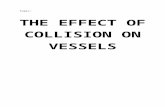
PROPOSED OWC SYSTEM
The idealized OWC system to control the pitch motion
consists of an “L-shaped” tube with one of its ends directly
connected to the sea and the other opened. This way the water
inside the duct can freely move up and down as the wave
group passes by the ship. These tubes are located on the bow
and stern to maximize the Restoring Moment generated by the
moving water.
Figure 1 - OWC System Schematic
Helder, Schmittner and Buchner [8] presented a very
interesting technical discussion on the 31st International
Conference on Ocean, Offshore and Arctic Engineering. The
so called “inverse concept”, a vehicle with a design very
similar to the one proposed here, with OWCs on the bow and
stern as well. The purpose of such vehicle is to use the motion
peaks created by the moonpools to generate electrical energy.
THEORETICAL BACKGROUND
The first approach was to analyze the water flow through
the Reynolds Transport Theorem [9]. The control volume is
represented in Fig. 1 and, considering that the cross-section
remains constant:
(4)
The Transport Theorem states that:
∑ ∬ ( )
(5)
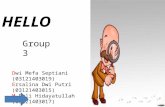
Figure 2 - (a) Control Volume, (b) Reference System
The horizontal and vertical forces are, respectively:
( ) (6)
(7)
It is then clear that the force , which is responsible for
the Restoring Moment desired, is maximized if .
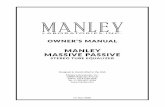
According to Belvins [10], the formula to estimate the
natural frequency of two tanks connected on the same level is:
Figure 3 - Natural frequency of 2 connected tanks [10]
( )
[
( )
( )
]
(8)
Considering that and that the ocean is a tank
with infinite area then:
(9)
Equation 8 is reduced to a simple formula:
√
(7)
Where .
Thus, by setting the natural frequency of the OWC with
the FPSO’s peak pitch response frequency, it’s possible to
seek a minimum pitch response motion.
3
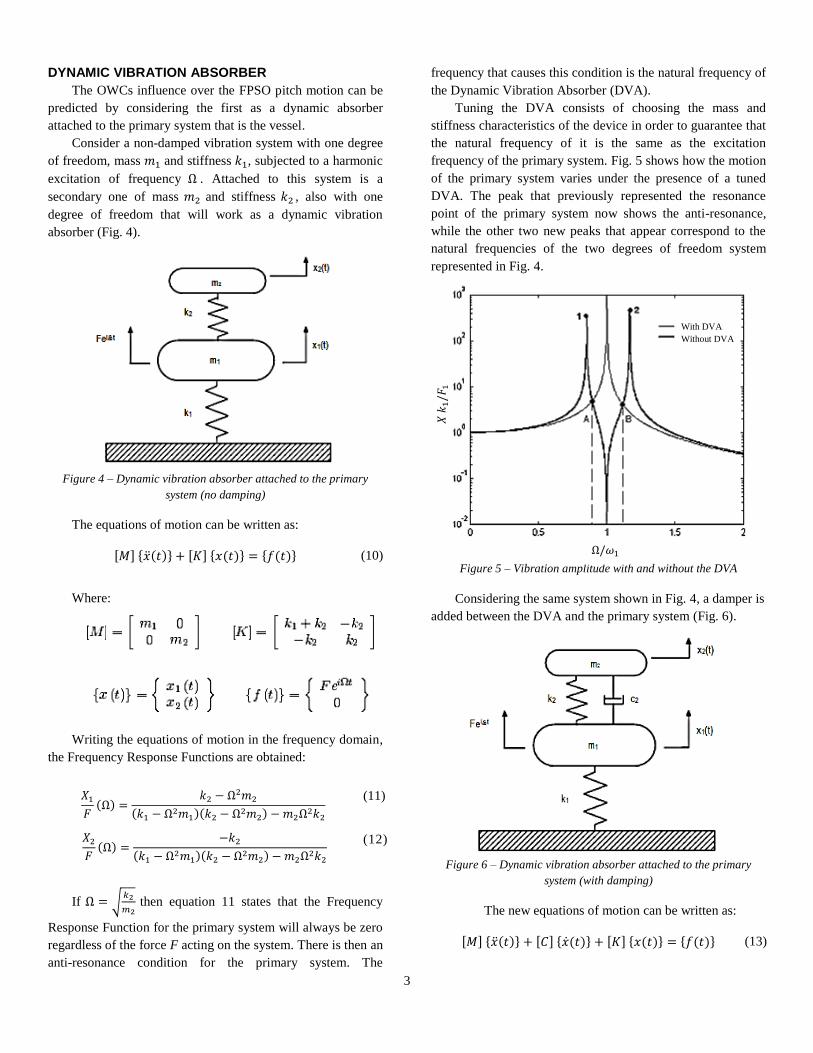
DYNAMIC VIBRATION ABSORBER
The OWCs influence over the FPSO pitch motion can be
predicted by considering the first as a dynamic absorber
attached to the primary system that is the vessel.
Consider a non-damped vibration system with one degree
of freedom, mass and stiffness , subjected to a harmonic
excitation of frequency . Attached to this system is a
secondary one of mass and stiffness , also with one
degree of freedom that will work as a dynamic vibration
absorber (Fig. 4).
Figure 4 – Dynamic vibration absorber attached to the primary
system (no damping)
The equations of motion can be written as:
[ ] { ( )} [ ] { ( )} { ( )} (10)
Where:
Writing the equations of motion in the frequency domain,
the Frequency Response Functions are obtained:
( )
( )(
)
(11)
( )
(
)( )
(12)
If √
then equation 11 states that the Frequency
Response Function for the primary system will always be zero
regardless of the force F acting on the system. There is then an
anti-resonance condition for the primary system. The
frequency that causes this condition is the natural frequency of
the Dynamic Vibration Absorber (DVA).
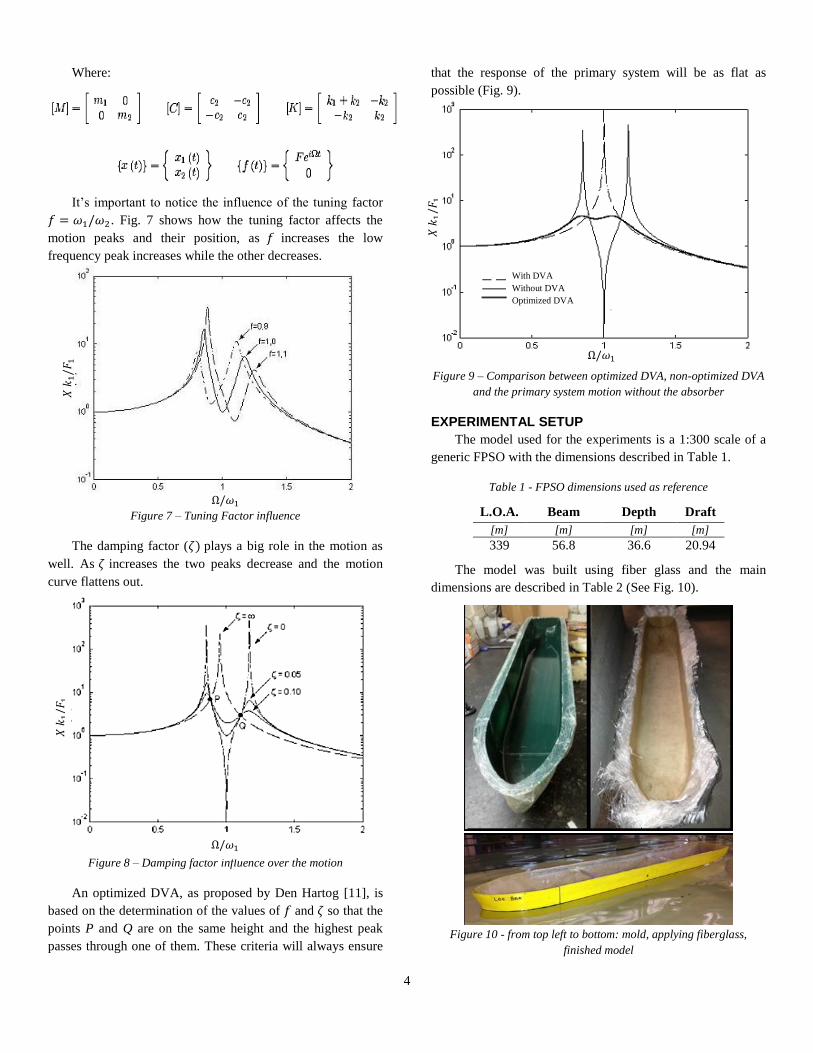
Tuning the DVA consists of choosing the mass and
stiffness characteristics of the device in order to guarantee that
the natural frequency of it is the same as the excitation
frequency of the primary system. Fig. 5 shows how the motion
of the primary system varies under the presence of a tuned
DVA. The peak that previously represented the resonance
point of the primary system now shows the anti-resonance,
while the other two new peaks that appear correspond to the
natural frequencies of the two degrees of freedom system
represented in Fig. 4.
Figure 5 – Vibration amplitude with and without the DVA
Considering the same system shown in Fig. 4, a damper is
added between the DVA and the primary system (Fig. 6).
Figure 6 – Dynamic vibration absorber attached to the primary
system (with damping)
The new equations of motion can be written as:
[ ] { ( )} [ ] { ( )} [ ] { ( )} { ( )} (13)
𝑋 𝑘 𝐹
With DVA
Without DVA
4
Where:
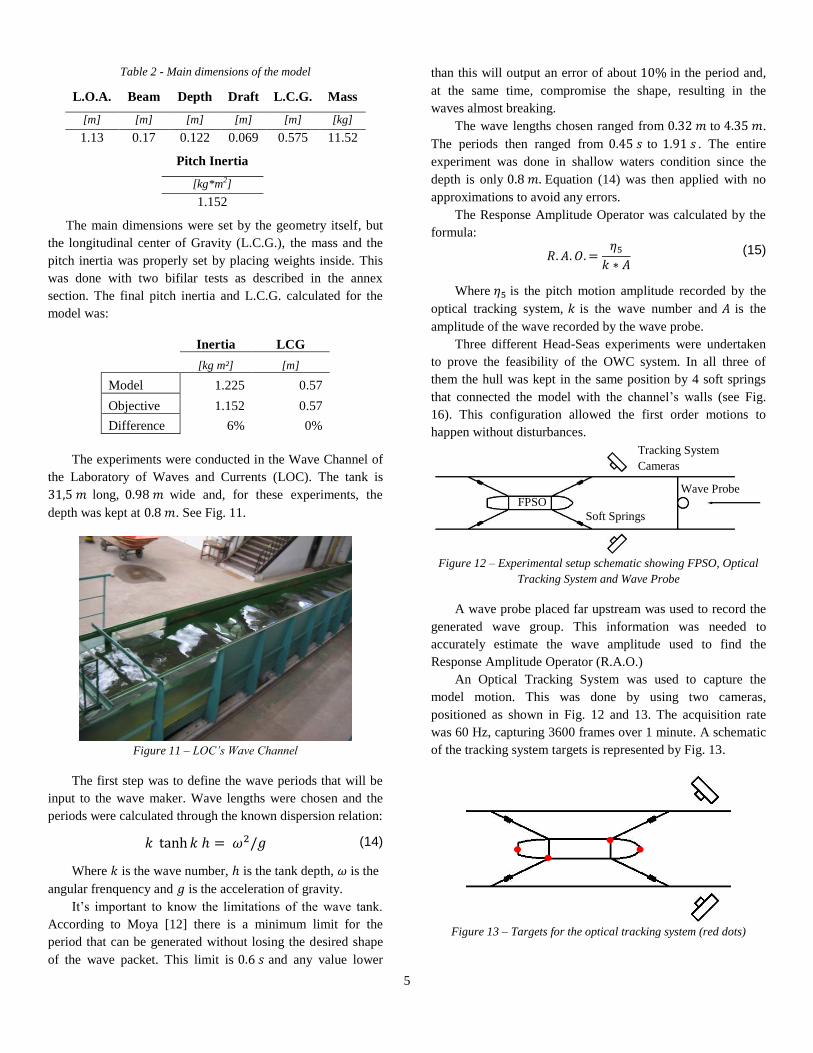
It’s important to notice the influence of the tuning factor
. Fig. 7 shows how the tuning factor affects the
motion peaks and their position, as increases the low
frequency peak increases while the other decreases.
Figure 7 – Tuning Factor influence
The damping factor ( ) plays a big role in the motion as
well. As increases the two peaks decrease and the motion
curve flattens out.
Figure 8 – Damping factor influence over the motion
An optimized DVA, as proposed by Den Hartog [11], is
based on the determination of the values of and so that the
points P and Q are on the same height and the highest peak
passes through one of them. These criteria will always ensure
that the response of the primary system will be as flat as
possible (Fig. 9).
Figure 9 – Comparison between optimized DVA, non-optimized DVA
and the primary system motion without the absorber
EXPERIMENTAL SETUP
The model used for the experiments is a 1:300 scale of a
generic FPSO with the dimensions described in Table 1.
Table 1 - FPSO dimensions used as reference
L.O.A. Beam Depth Draft
[m] [m] [m] [m]
339 56.8 36.6 20.94
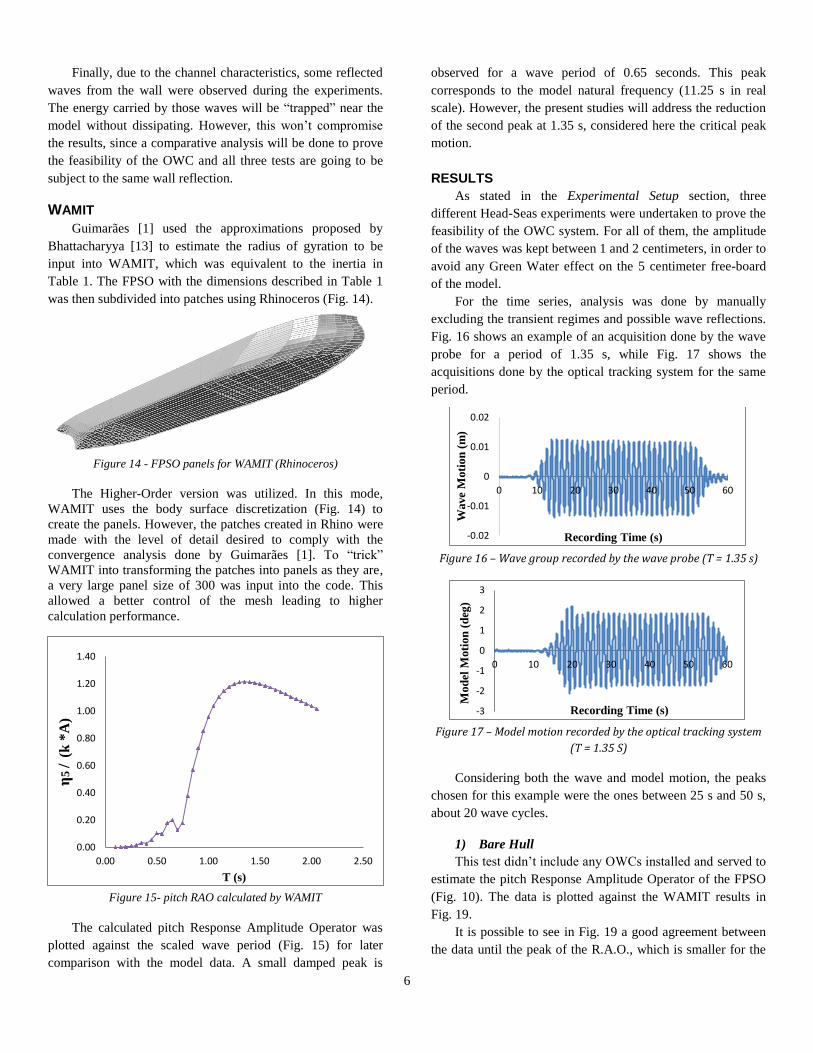
The model was built using fiber glass and the main
dimensions are described in Table 2 (See Fig. 10).
Figure 10 - from top left to bottom: mold, applying fiberglass,
finished model
𝑋 𝑘 𝐹
𝑋 𝑘 𝐹
𝑋 𝑘 𝐹
With DVA
Without DVA
Optimized DVA
5
Table 2 - Main dimensions of the model
L.O.A. Beam Depth Draft L.C.G. Mass
[m] [m] [m] [m] [m] [kg]
1.13 0.17 0.122 0.069 0.575 11.52
Pitch Inertia
[kg*m2]
1.152
The main dimensions were set by the geometry itself, but
the longitudinal center of Gravity (L.C.G.), the mass and the
pitch inertia was properly set by placing weights inside. This
was done with two bifilar tests as described in the annex
section. The final pitch inertia and L.C.G. calculated for the
model was:
Inertia LCG
[kg m²] [m]
Model 1.225 0.57
Objective 1.152 0.57
Difference 6% 0%
The experiments were conducted in the Wave Channel of
the Laboratory of Waves and Currents (LOC). The tank is
long, wide and, for these experiments, the
depth was kept at . See Fig. 11.
Figure 11 – LOC’s Wave Channel
The first step was to define the wave periods that will be
input to the wave maker. Wave lengths were chosen and the
periods were calculated through the known dispersion relation:
(14)
Where is the wave number, is the tank depth, is the
angular frenquency and is the acceleration of gravity.
It’s important to know the limitations of the wave tank.
According to Moya [12] there is a minimum limit for the
period that can be generated without losing the desired shape
of the wave packet. This limit is and any value lower
than this will output an error of about in the period and,
at the same time, compromise the shape, resulting in the
waves almost breaking.
The wave lengths chosen ranged from to .
The periods then ranged from to . The entire
experiment was done in shallow waters condition since the
depth is only Equation (14) was then applied with no
approximations to avoid any errors.
The Response Amplitude Operator was calculated by the
formula:
(15)
Where is the pitch motion amplitude recorded by the
optical tracking system, is the wave number and is the
amplitude of the wave recorded by the wave probe.
Three different Head-Seas experiments were undertaken
to prove the feasibility of the OWC system. In all three of
them the hull was kept in the same position by 4 soft springs
that connected the model with the channel’s walls (see Fig.
16). This configuration allowed the first order motions to
happen without disturbances.
Figure 12 – Experimental setup schematic showing FPSO, Optical
Tracking System and Wave Probe
A wave probe placed far upstream was used to record the
generated wave group. This information was needed to
accurately estimate the wave amplitude used to find the
Response Amplitude Operator (R.A.O.)
An Optical Tracking System was used to capture the
model motion. This was done by using two cameras,
positioned as shown in Fig. 12 and 13. The acquisition rate
was 60 Hz, capturing 3600 frames over 1 minute. A schematic
of the tracking system targets is represented by Fig. 13.
Figure 13 – Targets for the optical tracking system (red dots)
FPSO
Tracking System
Cameras
Wave Probe
Soft Springs
6
Finally, due to the channel characteristics, some reflected
waves from the wall were observed during the experiments.
The energy carried by those waves will be “trapped” near the
model without dissipating. However, this won’t compromise
the results, since a comparative analysis will be done to prove
the feasibility of the OWC and all three tests are going to be
subject to the same wall reflection.
WAMIT
Guimarães [1] used the approximations proposed by
Bhattacharyya [13] to estimate the radius of gyration to be
input into WAMIT, which was equivalent to the inertia in
Table 1. The FPSO with the dimensions described in Table 1
was then subdivided into patches using Rhinoceros (Fig. 14).
Figure 14 - FPSO panels for WAMIT (Rhinoceros)
The Higher-Order version was utilized. In this mode,
WAMIT uses the body surface discretization (Fig. 14) to
create the panels. However, the patches created in Rhino were
made with the level of detail desired to comply with the
convergence analysis done by Guimarães [1]. To “trick”
WAMIT into transforming the patches into panels as they are,
a very large panel size of 300 was input into the code. This
allowed a better control of the mesh leading to higher
calculation performance.
Figure 15- pitch RAO calculated by WAMIT
The calculated pitch Response Amplitude Operator was
plotted against the scaled wave period (Fig. 15) for later
comparison with the model data. A small damped peak is
observed for a wave period of 0.65 seconds. This peak
corresponds to the model natural frequency (11.25 s in real
scale). However, the present studies will address the reduction
of the second peak at 1.35 s, considered here the critical peak
motion.
RESULTS
As stated in the Experimental Setup section, three
different Head-Seas experiments were undertaken to prove the
feasibility of the OWC system. For all of them, the amplitude
of the waves was kept between 1 and 2 centimeters, in order to
avoid any Green Water effect on the 5 centimeter free-board
of the model.
For the time series, analysis was done by manually
excluding the transient regimes and possible wave reflections.
Fig. 16 shows an example of an acquisition done by the wave
probe for a period of 1.35 s, while Fig. 17 shows the
acquisitions done by the optical tracking system for the same
period.
Figure 16 – Wave group recorded by the wave probe (T = 1.35 s)
Figure 17 – Model motion recorded by the optical tracking system
(T = 1.35 S)
Considering both the wave and model motion, the peaks
chosen for this example were the ones between 25 s and 50 s,
about 20 wave cycles.
1) Bare Hull
This test didn’t include any OWCs installed and served to
estimate the pitch Response Amplitude Operator of the FPSO
(Fig. 10). The data is plotted against the WAMIT results in
Fig. 19.
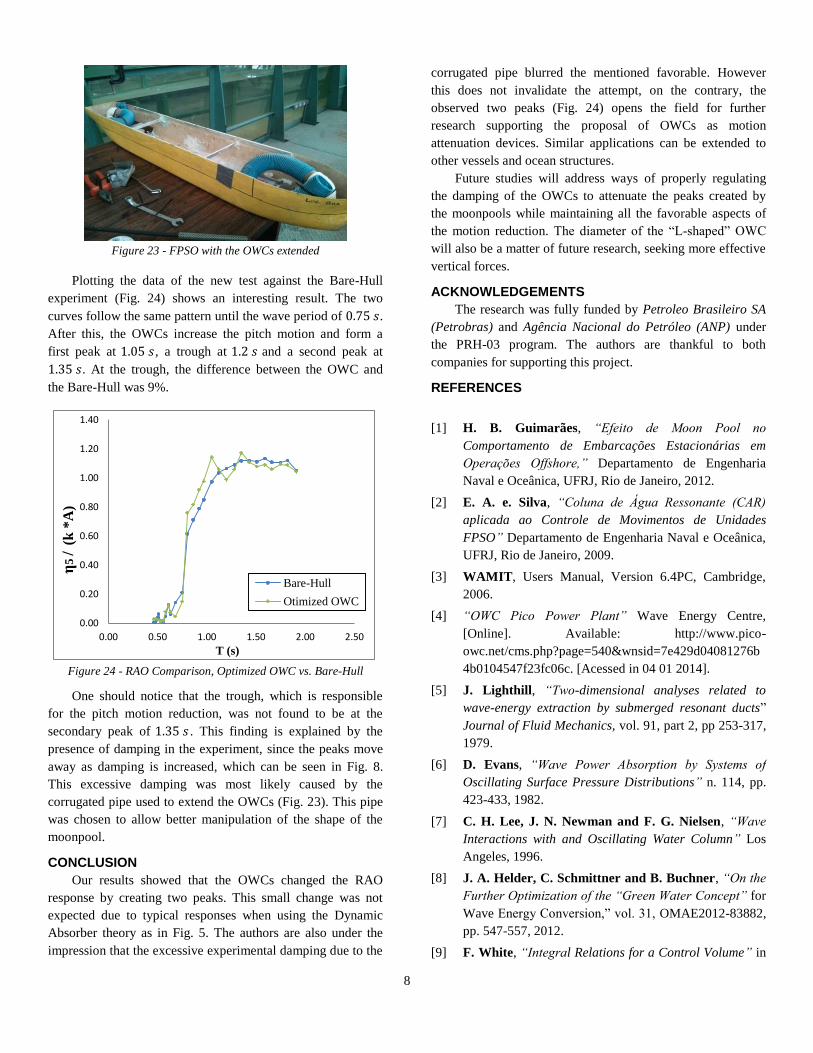
It is possible to see in Fig. 19 a good agreement between
the data until the peak of the R.A.O., which is smaller for the
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
0.00 0.50 1.00 1.50 2.00 2.50
η5
/ (k
*A
)
T (s)
-0.02
-0.01
0
0.01
0.02
0 10 20 30 40 50 60
Wave
Moti
on
(m
)
Recording Time (s)
-3
-2
-1
0
1
2
3
0 10 20 30 40 50 60
Mod
el M
oti
on
(d
eg)
Recording Time (s)
7
experimental tests. This discrepancy was not expected, as it
happens in the area where inertial effects predominate.
However, since the analysis of the OWC effects will be done
over the experimental results, these were considered
acceptable results.
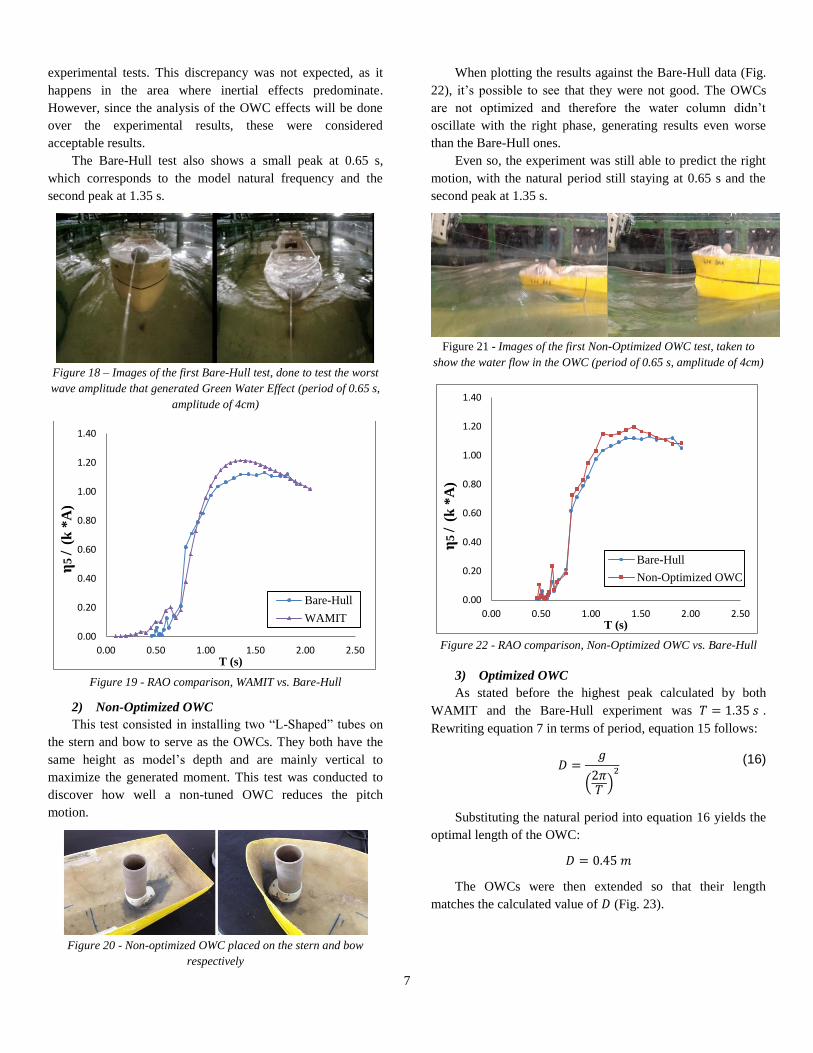
The Bare-Hull test also shows a small peak at 0.65 s,
which corresponds to the model natural frequency and the
second peak at 1.35 s.
Figure 18 – Images of the first Bare-Hull test, done to test the worst
wave amplitude that generated Green Water Effect (period of 0.65 s,
amplitude of 4cm)
Figure 19 - RAO comparison, WAMIT vs. Bare-Hull
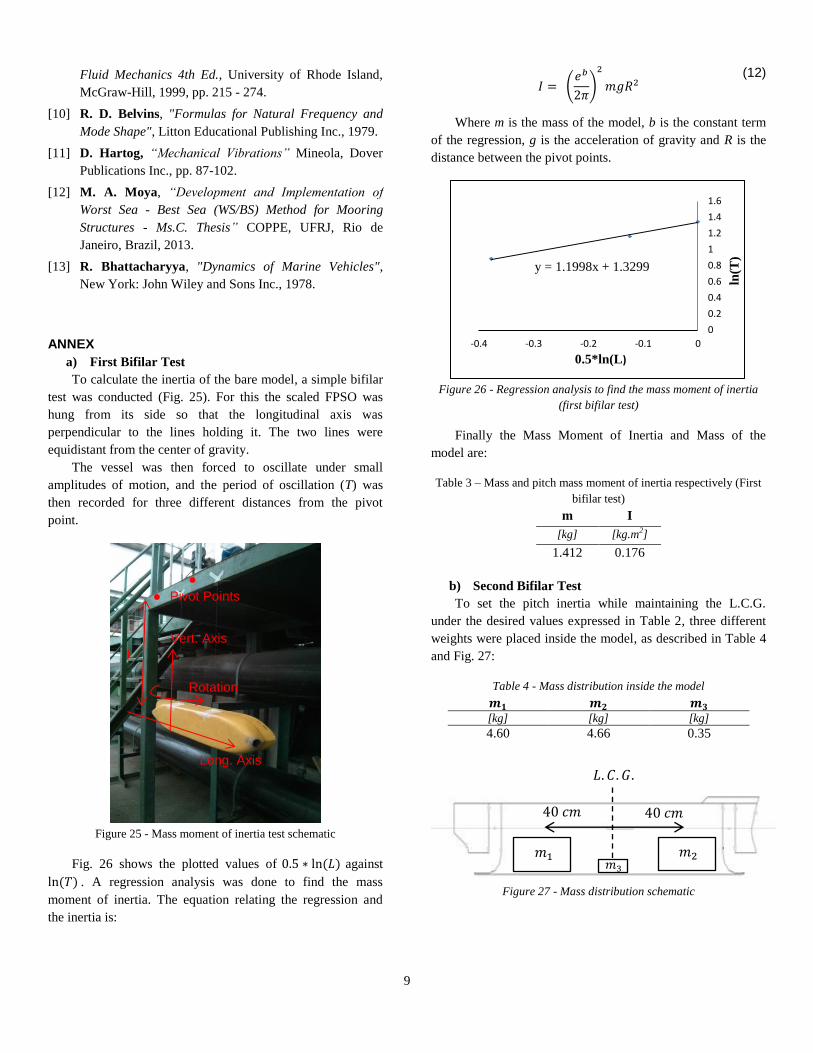
2) Non-Optimized OWC
This test consisted in installing two “L-Shaped” tubes on
the stern and bow to serve as the OWCs. They both have the
same height as model’s depth and are mainly vertical to
maximize the generated moment. This test was conducted to
discover how well a non-tuned OWC reduces the pitch
motion.
Figure 20 - Non-optimized OWC placed on the stern and bow
respectively
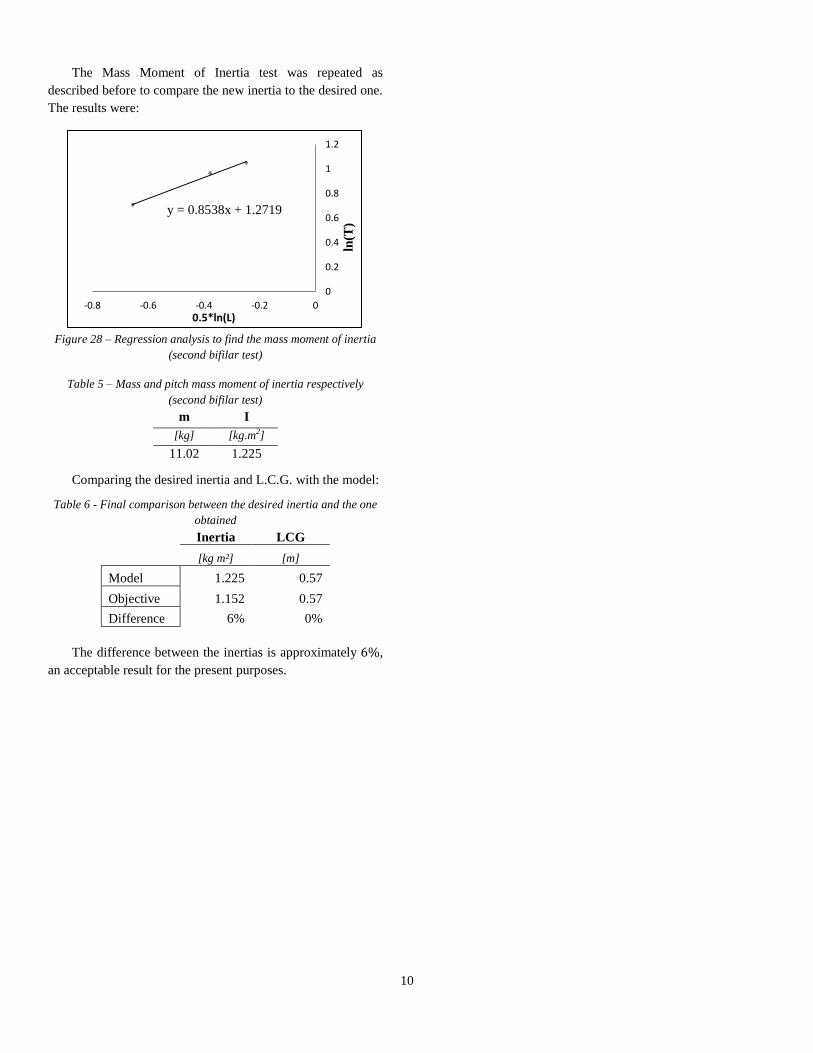
When plotting the results against the Bare-Hull data (Fig.
22), it’s possible to see that they were not good. The OWCs
are not optimized and therefore the water column didn’t
oscillate with the right phase, generating results even worse
than the Bare-Hull ones.
Even so, the experiment was still able to predict the right
motion, with the natural period still staying at 0.65 s and the
second peak at 1.35 s.
Figure 21 - Images of the first Non-Optimized OWC test, taken to
show the water flow in the OWC (period of 0.65 s, amplitude of 4cm)
Figure 22 - RAO comparison, Non-Optimized OWC vs. Bare-Hull
3) Optimized OWC
As stated before the highest peak calculated by both
WAMIT and the Bare-Hull experiment was .
Rewriting equation 7 in terms of period, equation 15 follows:
( )
(16)
Substituting the natural period into equation 16 yields the
optimal length of the OWC:
The OWCs were then extended so that their length
matches the calculated value of (Fig. 23).
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
0.00 0.50 1.00 1.50 2.00 2.50
η5
/ (k
*A
)
T (s)
Bare-Hull
WAMIT
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
0.00 0.50 1.00 1.50 2.00 2.50
η5
/ (k
*A
)
T (s)
Bare-Hull
Non-Optimized OWC
8
Figure 23 - FPSO with the OWCs extended
Plotting the data of the new test against the Bare-Hull
experiment (Fig. 24) shows an interesting result. The two
curves follow the same pattern until the wave period of .
After this, the OWCs increase the pitch motion and form a
first peak at , a trough at and a second peak at
. At the trough, the difference between the OWC and
the Bare-Hull was 9%.
Figure 24 - RAO Comparison, Optimized OWC vs. Bare-Hull
One should notice that the trough, which is responsible
for the pitch motion reduction, was not found to be at the
secondary peak of . This finding is explained by the
presence of damping in the experiment, since the peaks move
away as damping is increased, which can be seen in Fig. 8.
This excessive damping was most likely caused by the
corrugated pipe used to extend the OWCs (Fig. 23). This pipe
was chosen to allow better manipulation of the shape of the
moonpool.
CONCLUSION
Our results showed that the OWCs changed the RAO
response by creating two peaks. This small change was not
expected due to typical responses when using the Dynamic
Absorber theory as in Fig. 5. The authors are also under the
impression that the excessive experimental damping due to the
corrugated pipe blurred the mentioned favorable. However
this does not invalidate the attempt, on the contrary, the
observed two peaks (Fig. 24) opens the field for further
research supporting the proposal of OWCs as motion
attenuation devices. Similar applications can be extended to
other vessels and ocean structures.
Future studies will address ways of properly regulating
the damping of the OWCs to attenuate the peaks created by
the moonpools while maintaining all the favorable aspects of
the motion reduction. The diameter of the “L-shaped” OWC
will also be a matter of future research, seeking more effective
vertical forces.
ACKNOWLEDGEMENTS
The research was fully funded by Petroleo Brasileiro SA
(Petrobras) and Agência Nacional do Petróleo (ANP) under
the PRH-03 program. The authors are thankful to both
companies for supporting this project.
REFERENCES
[1] H. B. Guimarães, “Efeito de Moon Pool no
Comportamento de Embarcações Estacionárias em
Operações Offshore,” Departamento de Engenharia
Naval e Oceânica, UFRJ, Rio de Janeiro, 2012.
[2] E. A. e. Silva, “Coluna de Água Ressonante (CAR)
aplicada ao Controle de Movimentos de Unidades
FPSO” Departamento de Engenharia Naval e Oceânica,
UFRJ, Rio de Janeiro, 2009.
[3] WAMIT, Users Manual, Version 6.4PC, Cambridge,
2006.
[4] “OWC Pico Power Plant” Wave Energy Centre,
[Online]. Available: http://www.pico-
owc.net/cms.php?page=540&wnsid=7e429d04081276b
4b0104547f23fc06c. [Acessed in 04 01 2014].
[5] J. Lighthill, “Two-dimensional analyses related to
wave-energy extraction by submerged resonant ducts”
Journal of Fluid Mechanics, vol. 91, part 2, pp 253-317,
1979.
[6] D. Evans, “Wave Power Absorption by Systems of
Oscillating Surface Pressure Distributions” n. 114, pp.
423-433, 1982.
[7] C. H. Lee, J. N. Newman and F. G. Nielsen, “Wave
Interactions with and Oscillating Water Column” Los
Angeles, 1996.
[8] J. A. Helder, C. Schmittner and B. Buchner, “On the
Further Optimization of the “Green Water Concept” for
Wave Energy Conversion,” vol. 31, OMAE2012-83882,
pp. 547-557, 2012.
[9] F. White, “Integral Relations for a Control Volume” in
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
0.00 0.50 1.00 1.50 2.00 2.50
η5
/ (k
*A
)
T (s)
Bare-Hull
Otimized OWC
9
Fluid Mechanics 4th Ed., University of Rhode Island,
McGraw-Hill, 1999, pp. 215 - 274.
[10] R. D. Belvins, "Formulas for Natural Frequency and
Mode Shape", Litton Educational Publishing Inc., 1979.
[11] D. Hartog, “Mechanical Vibrations” Mineola, Dover
Publications Inc., pp. 87-102.
[12] M. A. Moya, “Development and Implementation of
Worst Sea - Best Sea (WS/BS) Method for Mooring
Structures - Ms.C. Thesis” COPPE, UFRJ, Rio de
Janeiro, Brazil, 2013.
[13] R. Bhattacharyya, "Dynamics of Marine Vehicles",
New York: John Wiley and Sons Inc., 1978.
ANNEX
a) First Bifilar Test
To calculate the inertia of the bare model, a simple bifilar
test was conducted (Fig. 25). For this the scaled FPSO was
hung from its side so that the longitudinal axis was
perpendicular to the lines holding it. The two lines were
equidistant from the center of gravity.
The vessel was then forced to oscillate under small
amplitudes of motion, and the period of oscillation (T) was
then recorded for three different distances from the pivot
point.
Figure 25 - Mass moment of inertia test schematic
Fig. 26 shows the plotted values of ( ) against
( ) . A regression analysis was done to find the mass
moment of inertia. The equation relating the regression and
the inertia is:
(
)
(12)
Where m is the mass of the model, b is the constant term
of the regression, g is the acceleration of gravity and R is the
distance between the pivot points.
Figure 26 - Regression analysis to find the mass moment of inertia
(first bifilar test)
Finally the Mass Moment of Inertia and Mass of the
model are:
Table 3 – Mass and pitch mass moment of inertia respectively (First
bifilar test)
m I
[kg] [kg.m2]
1.412 0.176
b) Second Bifilar Test
To set the pitch inertia while maintaining the L.C.G.
under the desired values expressed in Table 2, three different
weights were placed inside the model, as described in Table 4
and Fig. 27:
Table 4 - Mass distribution inside the model
[kg] [kg] [kg]
4.60 4.66 0.35
Figure 27 - Mass distribution schematic
y = 1.1998x + 1.3299
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
-0.4 -0.3 -0.2 -0.1 0
ln(T
)
0.5*ln(L)
𝑚 𝑚 𝑚
𝑐𝑚 𝑐𝑚
𝐿 𝐶 𝐺 Long. Axis
Vert. Axis
Rotation
Pivot Points
L
10
The Mass Moment of Inertia test was repeated as
described before to compare the new inertia to the desired one.
The results were:
Figure 28 – Regression analysis to find the mass moment of inertia
(second bifilar test)
Table 5 – Mass and pitch mass moment of inertia respectively
(second bifilar test)
m I
[kg] [kg.m2]
11.02 1.225
Comparing the desired inertia and L.C.G. with the model:
Table 6 - Final comparison between the desired inertia and the one
obtained
Inertia LCG
[kg m²] [m]
Model 1.225 0.57
Objective 1.152 0.57
Difference 6% 0%
The difference between the inertias is approximately ,
an acceptable result for the present purposes.
y = 0.8538x + 1.2719
0
0.2
0.4
0.6
0.8
1
1.2
-0.8 -0.6 -0.4 -0.2 0
ln(T
)
0.5*ln(L)