
Non-convex Global Optimization on Convex Domains
23
Saebamirahmadi.blogspot.com 2014© 1 Non-convex Global Optimization on Box-constrained Domains Saeb AmirAhmadi Chomachar Ph. D. Student Department of Mechanical Engineering Faculty of Engineering and Technology The University of Guilan, Rasht, Iran P. O. BOX 3756 Tel: +98-939-469-7639 Email: [email protected].
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Non-convex Global Optimization on Convex Domains

Saebamirahmadi.blogspot.com 2014©
1
Non-convex Global Optimization on Box-constrained Domains
Saeb AmirAhmadi Chomachar
Ph. D. Student
Department of Mechanical Engineering
Faculty of Engineering and Technology
The University of Guilan, Rasht, Iran
P. O. BOX 3756
Tel: +98-939-469-7639
Email: [email protected].
Saebamirahmadi.blogspot.com 2014©
2
Abstract:
Presented here is a global optimization algorithm to solve n-dimensional box-constrained non-convex
global optimization problems. The algorithm is referred to as Multi-Point Moving Grid (MPMG)
method. It is of derivative-free type and does not require an initial guess or initialization procedure.
The method is always convergent to the global solution as long as the objective function is Lipschitz
continuous along with the first order and second order optimality conditions are satisfied. With
increase in dimension size the computational cost of the method linearly grows which shows the
method is efficient. The method is as well accurate to the largest extent. Global optimization is often
NP-hard when the dimension of problem is high. Deterministic global optimization methods yield
accurate results but are quite expensive in cost when problem is high-dimensional. On the other hand,
stochastic methods are efficient and fast but they do not guarantee the accuracy of the solution found.
However, MPMG search method developed in this study is simultaneously efficient and accurate. The
efficiency and accuracy of the method is shown through numerical exercise and by a concise
mathematical proof. The method is successfully capable to accurately and efficiently spot on the global
optimizer for an exponential function with 3000 dimensions. Also a purportedly NP-hard quadratic
programming problem is easily solved by the MPMG method. Several other high-dimensional multi-
modal bench-mark functions available in the existing literature are successfully examined and treated
by the method. For low dimensional problems and on an ordinary PC the solution is a fraction of a
second away from a click and also for high dimensional problems the solution is not far away. The
convergence rate is linear with a 0.5 asymptotic error constant. It is noteworthy that the method was
confirmed to solve ‘non-convex global optimization on convex domains' and a future paper is
supposed to be developed on this title.
1. Introduction
Mathematical analysis is a blessing ability of all living objects, in whose brains the analyses are
performed to enable them to lead a better life. Any living creature knows how to solve mathematical
problems for their particular issues. For example, one knows how to play card game to heighten the
chance of win and spider knows how to weave its web for the best probability of catching its prey.
There are many other examples that clarify the performance of mathematical analyses by living
creatures as a fish that evades in perpendicular direction to line of sight of a sea hunter.
Optimization problems, as a class of these mathematical problems that occur in our daily life, are
routinely solved in our mind. For example any living object knows that the straight line connecting
two points A and B is the path of minimum distance passing through those points and this is confirmed
by congenital logic in one’s healthy mind. So the concepts of optimization problems are not bizarre
for the mind of ordinary people who have had no exposure to formal mathematics and this is what
makes this field of research more tangible from a theoretical aspect and also conceptually less abstract.
Solving optimization problems are an unavoidable part of our daily life, and at its highest level,
the most optimum strategies are planned that lead to achieve the most valued goals. Optimization
theory is utilized to solve a wide range of problems, from Econometrics to applied sciences.
Studying optimization problems dates back to antiquity whilst Euclid in 300 B.C. studied minimal
distance from a point to a line and proved that in rectangles with constant perimeter, the maximum
area is inscribed by the squares.

Saebamirahmadi.blogspot.com 2014©
3
Global optimization is a very important research subject in optimization field. It is in fact the
methodology of finding the decision or design variables that extremize a multi-variable function on a
certain domain of solution.
Global optimization belongs to the class of NP-complete problems and are typically quite difficult
to be solved exactly. Deterministic methods provide accurate solutions to GO problems as long as the
dimension size is low. On the other hand, stochastic methods provide the solution for high-dimensional
GO problems but they do not guarantee the accuracy of the solution found. Although there is a great
enthusiasm and thirst for a method that is simultaneously efficient and accurate in solving GO
problems, but such a method has not been developed in the existing literature yet. Fortunately, the
author of this paper believes the global optimization algorithm named; Multi-Point Moving Grid
(MPMG) method developed in this study, satiates the thirst of researchers for such universal method.
Many real-world applications can be formulated as global optimization problems. Although
finding the optimum solution of such problems is a daunting job, it is very worthwhile to be
challenged.
In a text-book by Floudas [1], he presented the application of global optimization to problems in
chemical engineering. Needless to say that global optimization is not only restricted to solve problems
in chemical engineering and it has also widespread applications in all branches of engineering,
sciences and applied sciences. Hence it is understood why global optimization has attracted lots of
attention from researches in the field. In another paper, Floudas [2] reviewed the advances in the
application of global optimization to design and control of chemical process systems. Numerous
bench-mark functions in local and global optimization with engineering interest were presented in a
handbook published in 1999 (Floudas & Pardalos [3]).
The fastest optimization algorithms are useful to locate only local optimizers. Global optimization
usually refers to non-convex global optimization, however, global convex optimization has attracted
an interest from scientists recently and is a field of research. Convex and non-convex global
optimization are the terms originated from the mathematical character of the objective function whose
optimum solutions are sought. Convex optimization corresponds to the global optimization of
objective functions which are convex. Meanwhile, convexity is a mathematical character attributed to
functions or regions which satisfy convexity definition that is a mathematical inequality. The convex
optimization methods that have recently attracted many researchers are not actually very robust. These
methods are applicable to find the global minimum for a class of functions that are convex, where the
global minimizer (or maximizer) is the only minimum (or maximum) that exists. This is what makes
the convex optimization methods to be hardly viewed as robust. Global optimization theories are not
in an advanced level of development if not calling it rudimentary.
Optimization methods are basically divided into derivative methods and derivative-free
methods. In derivative-free methods the domain of solution is directly investigated to locate the global
optimizer or local optimizers. This is sometimes very costly and time-consuming. In these methods, it
is not necessary to know the derivative values and the direction of the gradient vector of the functions
whose optimum values are sought. Examples of derivative-free methods in optimization are multilevel
coordinate search, genetic algorithms, bee colony, ant colony, particle swarm and simulated annealing.
The derivative-methods such as steepest descent utilize the direction of the gradient vector of the
functions to approach an optimizer, usually a local one.
In this paper a global optimization method is developed that has none of the negative characters
of the methods developed in the existing literature such as high computational cost or low accuracy.
In fact the method developed in this paper, is of low computational cost as stochastic methods and is
accurate as deterministic methods.
It should be noticed that a mature and healthy human mind develops very perfect optimum
strategies in the most intricate conditions. To the belief of the author of this paper, approaching

Saebamirahmadi.blogspot.com 2014©
4
deterministic problems through stochastic means, as refers to several optimization techniques, does
not seem a good idea. The author believes that, a perfect deterministic solution always exist for an
associated deterministic problem. The human beings are intellectually much stronger than to yield to
the tenacity and difficulty of the so-called NP-hard optimization problems and this study would
optimistically prove this. There are numerous text books for mathematical optimization [4-31]. Several
global optimization algorithms are applicable to find the global optimum of the objective function
provided its analytical properties such as the Lipschitz constant is known. This information is often
unavailable, hence, these methods are not robust and reliable for many of the problems.
This paper presents a method to solve n-dimensional non-convex global optimization on box-
constrained domains. These problems are visited in many real-world applications. The method is
named Multi-Point Moving Grid (MPMG) search method. It is of multi-level coordinate search type
and provides the solution to a general class of GO problems. The method is convergent to the optimal
solution as long as the objective function is Lipschitz continuous and also first order together with
second order optimality conditions are satisfied.
In the present work, the optimizer is efficiently found with probability one and with high
accuracy. MPMG search method is either capable to solve ‘non-convex global optimization on convex
domains’ and the mathematical proof is left for a future paper that is supposed to be developed on this
title.
In the remaining, first preliminaries are presented and then Multi-Point Moving Grid (MPMG)
search is described. After that the analysis and simulation results are presented.
2. Preliminaries
Box constrained global optimization has a wide range of applications in engineering design [32-
48]. Global optimization methods provide the global optimum of multi-modal functions which have
numerous local optima. Many methods and techniques are developed in the existing literature related
to global optimization, however, how to solve such problems efficiently is still a problem with great
challenges. In the last decades, some deterministic methods (such as the filled function method [49-
58]) has attracted much interest in the field of global optimization.
In many optimization problems, the existence of several local optimizers poses a challenge for
classical optimization methods to find the global optimizer. In better words, the classical methods are
inclined to get entrapped in local optimizers before reaching out for the global optimizer.
Multi-point Moving Grid (MPMG) method developed in this study has in one place all the
positive characters of all other methods and has none of the negative characters of them. The MPMG
method developed here has a potential to simultaneously replace both stochastic and deterministic
approaches in global optimization.
A general constrained optimization problem is formulized as:
(2.1)
.
n n
'min' F(x) x Ix
F : R R; I R
F(x) is said to be globally optimized at the point *
x if the followings hold true:
(2.2) *F(x ) F(x) : x I ,
And:

Saebamirahmadi.blogspot.com 2014©
5
(2.3) *F(x ) F(x) : x I ,
The former for global minimization problem and the latter for global maximization problem. *
x is the
optimum solution.
In this study, the domain of solution is assumed to be a set product of closed intervals in Rn or in other
words a hypercube, mathematically given as:
(2.4) . L U n n L UI = [x x ] = x R x x x
Figure 1 The area; I, in 2-d Cartesian frame.
An important analytical property of a function F (x), defined already, is the Lipschitz continuity. Given
two metric spaces X(X,d ) and
Y(Y,d ) , where Xd denotes the metric on the set X and Yd is
the metric on the set Y (for example Yd (x,y) = x - y ), then the function F(x) is called Lipschitz
continuous if a real constant L 0 exists, such that for all 1 2x ,x in the domain of solution, the
following holds true:
(2.5) Y 1 2 X 1 2
d (F(x ),F(x )) Ld (x ,x ) ,
A minimum of L is referred to as the Lipschitz constant for the function F(x). The inequality is trivially
satisfied if x1=x2.
Convexity is another fundamental concept in optimization. Convex optimization methods are utilized
to find the global optimum values for convex functions. A convex function F (x) is such that for any
couple of points, 1 2x ,x in the domain of solution, the following holds true in the space1nR
(2.6) , [ ] . n
1 2 1 2F(αx +(1-α)x ) αF(x )+(1-α)F(x ) α 0 1
For a concave function the inequality sign in (2.6) should be inverted.

Saebamirahmadi.blogspot.com 2014©
6
Multilevel coordinate search is a derivative-free method that performs the search directly on
candidate points in domain of solution and evaluates function values at these points to reach the global
optimizer while there is no need for any information on the function’s gradient. The paper developed
by H. Waultraud and N. Arnold [59], elaborates a type of this method that has many restrictions such
as good initialization procedure. The MPMG method developed in this paper is typically viewed as a
critically modified multi-level coordinate search method.
The MPMG method is robust, efficient and accurate and is based on a simple mathematical
logic. It is in fact a multilevel coordinate search method, at every level of which, the best
approximation is updated and the error bound is continually decreased. There is no restricting
assumption on the convexity of the functions that are to be optimized (the function may be convex or
non-convex and the only restriction is for the objective function to be Lipschitz continuous). At every
level of the method, the problem is transformed into finding the optimizer in only a number of (2n+1)
engaged candidate points, where n is the dimensionality of the problem. The method is authenticated
by a precise mathematical proof and also by numerical simulations. The algorithm proceeds iteratively
searching the optimal point among 2n+1 equally-spaced points which belong to the neighborhood of
the best solution found in the previous iteration. The time needed to perform the function evaluation
in 2n+1 points grows linearly in n (with O(n)) when n goes to infinity, therefore the algorithm is fairly
computationally economical.
3. Analysis
Weierstrass theorem states that a function; F (x), that is continuous on a nonempty feasible set
S (a closed and bounded set), has a global minimum in S.
In the current study it is assumed that F (x) is continuous and regular on domain of solution,
therefore a minimizer as *x exists in I that satisfies (2.2). At every level ‘s’ the set of optimum design
variables is given by the n-vector notified by s,optx that is the center of equally spaced points which
are the candidates for the next level of search.
The process of finding the global optimizer is formulized as a multilevel process. At the first level the
optimizer is the mid-point of domain of solution:
(3.1) 1, opt midpointx = x .
midpointx is the center-point (mid-point) of the domain of solution I, that is a hypercube formed
as the Cartesian product of closed intervals.
At every level; s, the optimization problem is tantamount to finding the optimizer in only a
number of (2n+1) points where n is the dimension of I. For a 2-D domain of solution, the engaged
points and the graphical illustration of the MPMG method is given by Fig. 2.

Saebamirahmadi.blogspot.com 2014©
7
Figure 2 the critical grid-points engaged at level s and the geometry of the problem for a typical 2-D
domain of solution.
3.1. Necessary and Sufficient condition for the convergence of the MPMG method
The distance between the candidate points engaged at every level s, is given as:
(3.2) ,i i nsi sis
u - vd = ;i = 1,2,...,n;d R ,n
2
Where is the set of natural numbers. n is the dimensionality of the problem and *x is the global
minimizer hence satisfies the following inequality:
(3.3) , [ ] ,L U L U
A
* n * n n nF(x ) F(αx + (1- α)x ) α 0 1 ,x R ,x R ,x R
where:
(3.4)
(3.5)
,Lx = inf(I)
.Ux = sup(I)

Saebamirahmadi.blogspot.com 2014©
8
s,optx is the minimizer spotted on at level ‘s’ and it is the center of a number of 2n+1 next level
candidate grid-points which are generated at equal spaces of ds.
In this study, the functions whose optimum values are sought are Lipschitz continuous with
respect to the 2-norm, however the Lipschitz constant; L, is not to be necessarily known. Based on the
knowledge from (2.5) it should hold true that:
(3.6)
If Xd demonstrate the Euclidean norm then based on the assumptions of the problem the
following holds true:
(3.7)
d(x,y)=x-y and 2
. notifies the Euclidean norm briefly shown by . .
Based on the problem assumptions the followings hold true
(3.8) ,B *s,optF(x ) - F(x ) 0 A
(3.9) ,B *s,optF(x ) - F(x ) 0 A
where B= s,optF(x ) and A is notified in (3.3).
Any Lipschitz continuous function is certainly convex on a class of sub-domains; Iconvex, and
is as well certainly concave on another class of sub-domains; the complement set; Iconcave. Notice
that the members of Iconvex and Iconcave might be a mixture of points and sub-intervals in I, also
might include the null set. Therefore the following inequality holds true over the whole domain of
solution; I, with a mild hypotheses. Based on the definition of convexity and concavity the right-hand-
side of the inequality (3.3) is decomposed, hence the following holds true:
(3.10)
Tconvex is the set of points in [0 1]n which is associated to a class of sub-intevals in I on which the
function is convex and Tconcave is the set of points (or class of sub-intervals) in [0 1]n associated
with the set of points in I on which the function is concave. When α spans [0 1]n the whole domain
of solution is spanned. Without any disregard of mathematical logic, it holds true to cross-over the
place of L
x and U
x in (3.3), hence (3.9) becomes:
(3.11) ,
H
* U Ls,opt s,optF(x ) - F(x ) F(x ) -αF(x ) - (1-α)F(x )
inequalities (3.10) and (3.11) are added to yield:
.* *Y s,opt X s,optd (F(x ),F(x )) Ld (x ,x )
.* *s,opt 2 s, opt s 2
d(F(x ),F(x )) Ld (x ,x ) = L d
, .U
G
n* Ls,opt s,opt concave convexF(x ) - F(x ) F(x ) αF(x ) (1-α)F(x ) α T T T = 0 1

Saebamirahmadi.blogspot.com 2014©
9
(3.12) 2 ( ) .
W= G+H
* U Ls,opt s,opt
1F(x ) - F(x ) 0 ( F(x ) - (2α -1) F(x ) F(x ) )
2
The right hand side of the inequality 3.12; the expression W, is placed between the two expressions of
the inequality (3.7) to enforce both (3.12) and (3.7) to hold true (this is the imposition of Lipschiz
continuity of the objective function and simultaneously guarantee of convergence to the optimal
solution), mathematically expressed as:
(3.13) 0.5 , * U Ls,opt s,opt sF(x ) -F(x ) 0 F(x ) α - F(x ) F(x ) L d
(3.14) 0.5 , * * U Ls,opt sF(x ) -F(x ) 0 ΔF+F(x ) α - F(x ) F(x ) L d
(3.15) 4 5 .*s,opt 1 2 3 sF(x ) - F(x ) 0 E E E E E L d
4 5, , , and1 2 3E E E E E are given in Appendix. It is assumed that the objective function is a cost
function which is positive on domain of solution, whereas, this is a mild assumption and might be
loosen through an alternative mathematical formulation for the proof. The function is Lipschitz
continuous and this yields:
(3.16) .U LF(x ) F(x ) = L u - v
Mathematical expansion of F at *x gives:
(3.17) ,* T *1ΔF = J(x )(±d) + d H(x )d +H.O.T
2
H.O.T notifies the higher order terms in the expansion given in (3.17). J is the Jacobian and is given
simply by:
(3.18) .* *J(x ) = F(x )
H is the Hessian matrix, and downward del is the gradient symbol. Therefore it is true to write:
(3.19) , * T *1ΔF = F(x )d + d H(x )d + H.O.T
2
Where:
(3.20) 2T * *
max sd H(x )d λ (H(x )) d
Based on the first order optimality condition which is also the MPMG’s assumption, it is known that:
(3.21) 0. *F(x )d
Because the objective function is assumed to be continuous and regular on the domain of solution the
following limit exists and based on (3.15) and (3.19-21), we have:

Saebamirahmadi.blogspot.com 2014©
10
(3.22)
11 2
.
s
s s
s*max
d 0(s ) d 0(s )s s
u - vL( α - 0.5 )
d L( α - 0.5 )λ (H(x )) lim lim
d d
This yields:
(3.23) . *maxλ (H(x ))
Based on second order optimality condition H (x*) is positive definite, therefore its eigenvalues are
positive. It means that:
(3.24) 0 .*maxλ (H(x ))
Hence the convergence criteria is broken to (3.25) as long as the objective function is Lipschitz
continuous:
(3.25) 0 .*maxλ (H(x ))
Which is the case ever happens for a Lipschitz continuous function. Based on the preceding analysis
the MPMG method is convergent to the global solution for any Lipschitz continuous function as long
as first order and second order optimality conditions are met and the function is regular.
To study the convergence we have:
(3.26)
For a sufficiently large value of ‘h’ not the infinity:
(3.27)
es is the error value at level s. If h→∞ then:
(3.28) .
*s, opt
sLim x - x = 0
And this is considered as the uniform convergence of discrete optimizer sequence; s, optx , to the
continuous global optimizer;*
x . Another convergence study is presented through the following
formulation and based on (3.2):
(3. 29) .
*s
s+1 s+1
s+1*sss
x - x e 2 1Lim = = =
2e 2x - x
This shows unity order of convergence to zero and a 0.5 asymptotic error constant. It means the method
is linearly convergent to zero with a 0.5 convergence rate.
.
*s, opt s
s sLim x - x Lim d
.
s hss h s h
u - vLim d = Lim ε
2

Saebamirahmadi.blogspot.com 2014©
11
3.2. Numerical Simulations and Applications of the MPMG method
A computer code was developed in the MATLABTM software environment to investigate the
performance of the global optimization method (named MPMG) developed in this study. Based on PC
simulations, the MPMG proved to be robust, efficient and accurate. In contrast to several other
methods that are vulnerable to get stuck to local optimizers, the MPMG developed in this study is
robustly capable to locate the global optimizer for any Lipschitz continuous function as long as the
first order and second order optimality conditions are met. The global optimizers for the test functions
are simply a click away for low-dimensional problems, while MATLABTM genetic algorithms (GA
subroutine) failed (it hanged up!!!). There is no requirement for an initial guess or an initialization
procedure. By MPMG the domain of solution is continually split and the error bound is continually
decreased. Based on this idea, the method is not sensitive to the hugeness of domain of solution and it
is available for the largest box-constrained domains corresponding to certain optimization problems.
In case of multiple global optimizers (weak global optimum) such as in sine waves, one of the global
optimizers in the considered domain is spotted on by the MPMG strategy. In the follow, the 3-D
functions whose optimum values were sought are given in correspondence to their computer
illustrations. The estimates of the optimum variables are marked by white points converged to the
exact values. Through the numerical illustrations, there would be no doubt even for a cynical observer
that the MPMG is robust, accurate and efficient. In addition to box-constrained domains, MPMG
search method is available for problems with convex domain of solution, and the proof will be
presented in a future paper. Numerical simulations are presented for global optimization of high-
dimensional multimodal functions including quadratic programming and linear programming as well
as several other cases. The CPU of the PC on which the simulations were performed was a Core 2
Duo, 3.40 GHz with 2.00 GB of RAM. It should be added that for numerical simulation of the MPMG
method for functions with over 3000 variables the PC warned the lack of memory. Hence, for these
cases simulations were performed on a superior computer whose CPU characteristics were informed
in the relevant sections in the following. In the upcoming sections Ni is the number of iterations and
N is the dimension of the GO problem. The method was successfully capable to accurately and
efficiently spot on the global optimizers for an exponential function and quadratic programming with
3000 dimensions. Also it efficiently yielded accurate solutions to high-dimensional multi-modal test
functions available in the existing literature. For low dimensional problems the solution is a fraction
of a second away from a click and also for high dimensional problems the solution is not far away.
‘x*’ is the known solution and ‘x*predicted’ is the solution revealed by the MPMG method. For 2-D
functions, x and y are the coordinates whose range of variation is given correspondingly. Convergence
plots are given in the following section.
#1- Goldstein–Price function:
2 2 2
2 2 2
( , ) (1 ( 1) (19 14 3 14 6 3 ))
(30 (2 3 ) (18 32 12 48 36 27 )); 2 , 5
F x y x y x x y xy y
x y x x y xy y x y
(0, 1) 3 minF F

Saebamirahmadi.blogspot.com 2014©
12
Figure 3 Goldstein-Price function and the estimated minimizers converged to the exact value of (x=0,
y= -1)
#2- a highly oscillatory function
2 2
2 2
sin( )( , ) ; 2 , 5.5
x yF x y x y
x y
Figure 4 the weak global maximum estimated by MPMG in an strongly edgy and volatile environment
#3- Ackley’s function

Saebamirahmadi.blogspot.com 2014©
13
1 2 1
1 1
0.02 cos 2
20 20
N N
i i
i i
N x N x
F e e e
Ni=10
N=1000
1000
qx [0 25]
x*=[0 0 0 0…0]
x*predicted=[0 0 0 0…0]
F(x*predicted)=-8.8818×10-16
runtime=1200seconds
#4- Rastrigin’s function
2
1
10cos(2 ) 10N
i
i
ixxF
Ni=5
N=1000
1000
qx [0 1]
x*= x*predicted =[0 0 0 0…0]
F(x*predicted)=0
Runtime=1010 seconds
#5- Shekel Function
42 1 4
1 1
( ( ) ) ; 5; [0 10]m
q qp p q
p q
F x C m x
1(1, 2, 2, 4, 4,6,3,7,5,5)
10
4.0 1.0 8.0 6.0 3.0 2.0 5.0 8.0 6.0 7.0
4.0 1.0 8.0 6.0 7.0 9.0 3.0 1.0 2.0 3.0
4.0 1.0 8.0 6.0 3.0 2.0 5.0 8.0 6.0 7.0
4.0 1.0 8.0 6.0 7.0 9.0 3.0 1.0 2.0 3.0
C
x*=[4, 4, 4, 4] F(x*)=-10.1532
x*predicted=[3.9990, 3.9990, 3.9990, 3.9990] F(x*predicted)=-10.5314
runtime=0.064340 (a fraction of a second)

Saebamirahmadi.blogspot.com 2014©
14
#6- Griewank function
2 1000
1 1
1cos( ) 1; [0 600] ;N 1000
4000
NNq
q q
q q
xF x x
q
; Ni=20
x*=[0 0 0 0 0 … 0] F(x*)=0
x*predicted=[0 0 0 0 0… 0] F(x*predicted)=0
runtime= 200 seconds
# 7- Evtushenko function (ref. [13])
62
1
1[ sin(2 ( )]
6 5q
q
qF x
6[0 1]x
x*=[0.55 0.35 0.15 0.95 0.75 0.55] F(x*)= -1
x*predicted=[0.5498 0.3496 1.1504 0.9502 0.7500 0.5498] F(x*predicted)=-1.0000
runtime= 1.27 seconds
Figure 5 Convergence plot for the Evtushenko function in 6 dimensions
# 8- Csendes’ function
206
1
1(2 sin( ))q
q q
F xx
Ni=10
1 2 3 4 5 6 7 8 9 10-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
Number of iterations
Function o
ptim
um
valu
es a
t each level
convergence study for the Evtushenko function in 6 variables

Saebamirahmadi.blogspot.com 2014©
15
N=20
20x [0 2]
x*=[0 0 0 0 … 0] F(x*)=0
x*predicted=[0.0054 0.0054 0 .0054 … 0.0054] F(x*predicted)=6.0643*10-13
runtime= 33.80 seconds
# 9- Michaelwicz’s function
2
22
1
qsin( ) sin( )
m
q
q
q
xF x
2[0 ]x
m=10
N=2
Ni=10
x*=[2.20319 1.57049] F (x*)= -1.8013
x*predicted=[2.2028 1.5708]
F(x*predicted)= -1.8013
runtime=0.015368 second
# 10-a- Exponential function
3000
1F
2q
q
-0.5 x
-e
3000x [0 1]
Ni=10;
x*=[0 0 0 0 0 0 0 0 ... 0] F(x*)= -1
x*predicted=[0 0 0 0 0 … 0] F(x*predicted)= -1
CPU characteristics: Intel Core i 5, 4 GB RAM
runtime= 2324.05 seconds

Saebamirahmadi.blogspot.com 2014©
16
Figure 6 Convergence study for the exponential function based on various dimensionality.
# 10-b- Exponential function
21500
1
( )
; 11500
q qx c
q
qcF
q
-0.5
-e
15 00x [0 1]
Ni=12;
xq*= qc F(x*)= -1
x*predicted=[0.9993 0.9988 0.9988 0.9973 0.9966 0.9961 0.9954 0.9946 0.9939 0.9934
……………… 0.0112 0.0107 0.0010 0.0093 0.0085 0.0081 0.0073 0.0066….. 0.0061
0.0049 0.0039 0.0034 0.0027 0.0020 0.0012 0.0007 0]
F(x*predicted)= -1.0000
CPU#1
runtime= 7561.660604 seconds
1 2 3 4 5 6 7 8 9 10-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
Number of iterations
Function o
ptim
um
valu
es a
t each level
Convergence study for the exponential function based on various dimension size
100 dimensions
50 dimensions
30 dimensions
20 dimensions
10 dimensions

Saebamirahmadi.blogspot.com 2014©
17
Figure 7 Convergence plot for the exponential function in 1500 dimensions
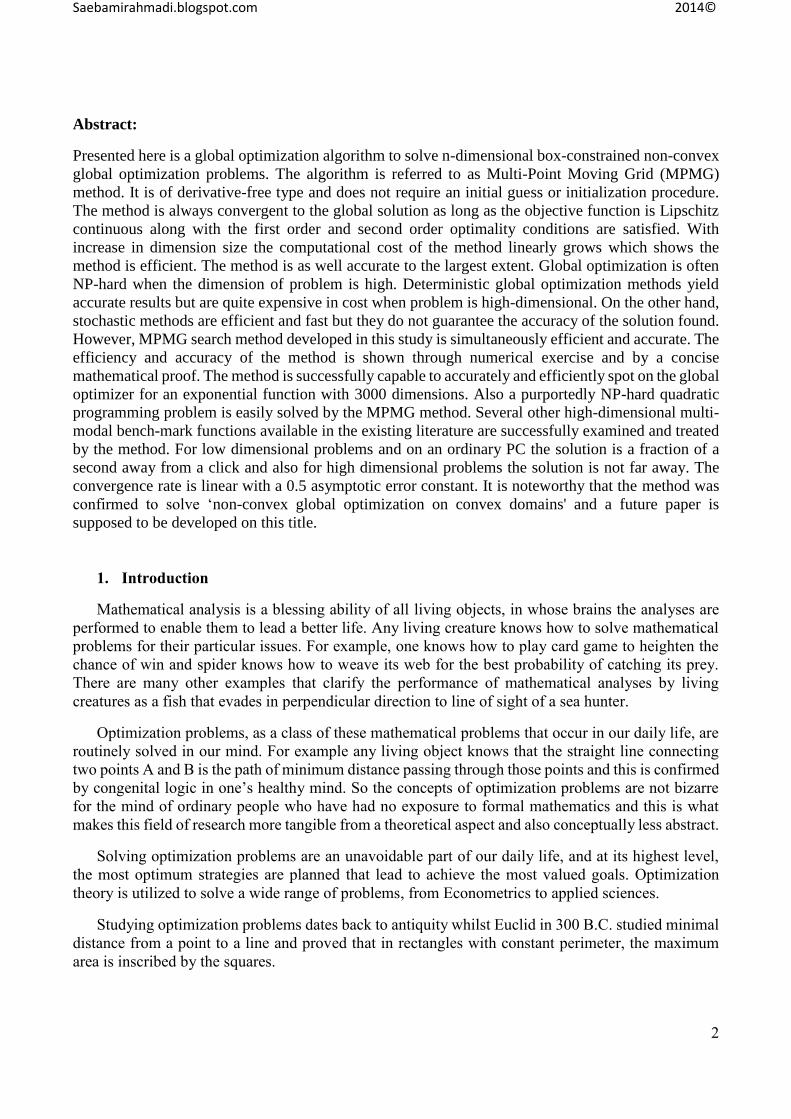
# 11- Quadratic Function (Quadratic programming)
CPU characteristics: Intel Core i5, 4 GB RAM
30002
1
( )q q
q
F x c
3000x [0 1]
N=3000
Ni=10
runtime = 27364 seconds
min=2.3842*10-4
* 13000
... 0.5049 0.5049 0.5049 0.5039 0.5039 0.5039
* 1.0000 0.9990 0.99
...............0.500
90 0.9990 0.9980 0.9980 0.9980 0
0 0.5000 0.5000 ... 0.003
.
9
9971 ..
0.0029 0.0029 ...
0.0020 0.0020 0.0
.
020 0.
q q
x predict
c
d
qx
e
0010 0.0010 0.0010 0 0
0 2 4 6 8 10 12-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0Convergence plot for exponential function with 1500 decision variables
Number of iterations Ni
Obje
ctive f
unction's
optim
um
valu
es a
t each ite
ration
Saebamirahmadi.blogspot.com 2014©
18
Figure 8 convergence plot for quadrating programming with various dimension size
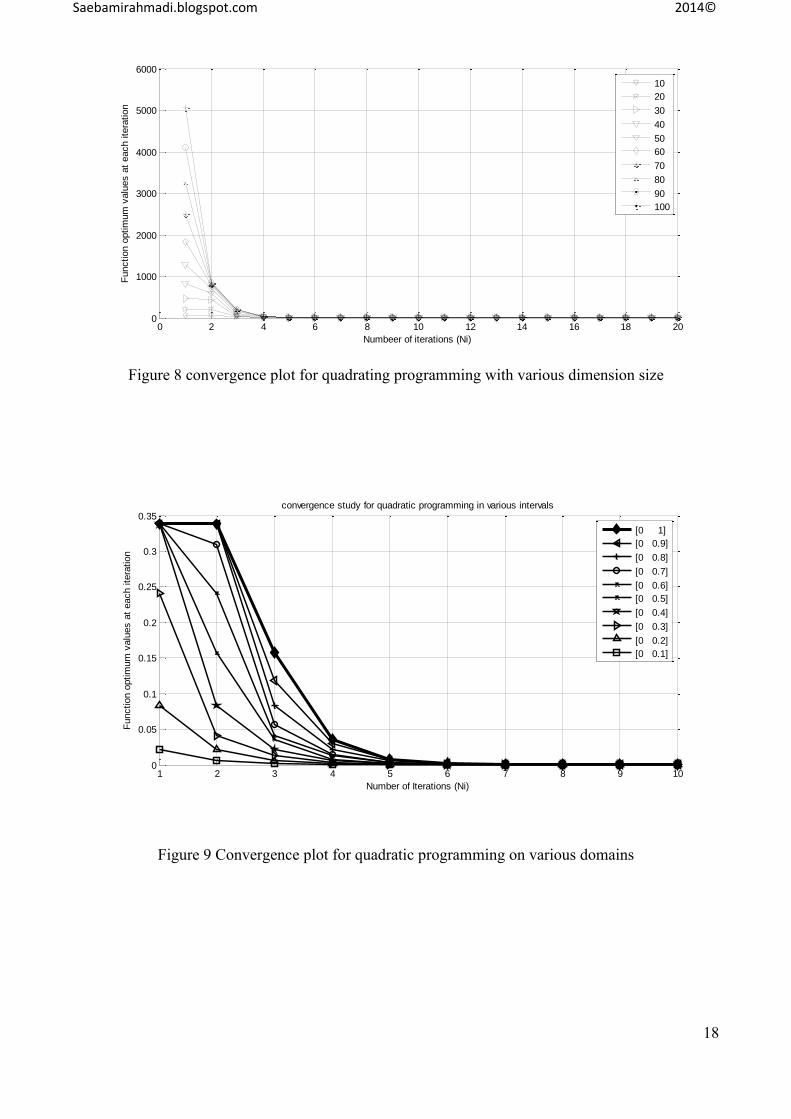
Figure 9 Convergence plot for quadratic programming on various domains
0 2 4 6 8 10 12 14 16 18 200
1000
2000
3000
4000
5000
6000
Numbeer of iterations (Ni)
Function o
ptim
um
valu
es a
t each ite
ration
10
20
30
40
50
60
70
80
90
100
1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35convergence study for quadratic programming in various intervals
Number of Iterations (Ni)
Function o
ptim
um
valu
es a
t each ite
ration
[0 1]
[0 0.9]
[0 0.8]
[0 0.7]
[0 0.6]
[0 0.5]
[0 0.4]
[0 0.3]
[0 0.2]
[0 0.1]

Saebamirahmadi.blogspot.com 2014©
19
Figure 10 convergence plot for quadratic programming in 3000 dimensions
#-12- Linear programming
Min {b x , * * 1000[x 40 40]i ix x }
*
ix known
N=1000
Ni=10
x*(Known)= x*predicted = 2.9322, 2.9322,…
F(x*predicted)= -1.4600e+08
b= -1.2738e+02, 1.0898e+02, -2.2530e+03 …
Runtime=3054.09 seconds
1 2 3 4 5 6 7 8 9 100
10
20
30
40
50
60
70
Number of iterations (Ni)
Function o
ptim
um
valu
es a
t each ite
ration
Convergence study for quadratic programming in 3000 dimensions

Saebamirahmadi.blogspot.com 2014©
20
Figure 11 Convergence plot for linear programming in 500 dimensions
4. Conclusions
A global optimization algorithm, named MPMG (Multi-Point Moving Grid) method was developed
which by simulation and a concise mathematical proof was shown to be simultaneously efficient and
accurate. The method is valid as long as the objective function is Lipschitz continuous and first order
as well as second order optimality conditions are met. The computational cost associated with the
method linearly grows with increase in dimension size. This is much economical than any other
deterministic GO algorithms that their computational cost usually exponentially grows with increase
in dimension size. Several highly multi-modal bench-mark functions were efficiently and accurately
treated by the method. Quadratic programming and also exponential bench-mark function with 3000
decision variables were also examined by the method and an accurate solution were efficiently found
for the corresponding problems. It is noteworthy that the method was confirmed to solve ‘non-convex
global optimization on convex domains’ and a future paper is supposed to be developed on this title.
The MPMG algorithm, synchronized the good characters of stochastic and deterministic methods in
one place. The algorithm fills the vacant place of a most wanted global optimization method which is
desired to be simultaneously efficient and accurate.
Biography
Saeb AmirAhmadi Chomachar was born on July 1984, in Rasht, Iran. He is currently a PhD candidate
in Mechanical Engineering (Dynamics, Vibrations, and Controls) at the University of Guilan, Rasht,
Iran. He received an M.Sc. in Aerospace Engineering (Flight Mechanics) from the Center of
Excellence in Flight Dynamics and Controls at the Aerospace Engineering Department of the
AmirKabir University of Technology (AUT), Tehran, Iran, 2011. As well he holds a B.Sc. in
Mechanical Engineering (Mechanics of Solids) from the University of Guilan, Rasht, Iran, 2007. He
is serving as a reviewer for the IEEE (Aerospace and Electronic Systems, Transactions on), and the
AIAA (Journal of Guidance, Control and Dynamics). As well he served as a reviewer for ASME-
IMECE-2012. His research interest lies in the area of development of novel mathematical theories. As
well he is interested in research fields of flight dynamics and controls in general and particularly the
Aeroservoelasticity. He is the author of several popular online publications.
1 2 3 4 5 6 7 8 9 10-1.5
-1.4
-1.3
-1.2
-1.1
-1
-0.9
-0.8
-0.7x 10
8
Number of iterations
Function o
ptim
um
valu
es a
t each level
Convergence study for linear programming in 500 dimensions

Saebamirahmadi.blogspot.com 2014©
21
REFERENCES
[1] Floudas, C. A. Deterministic global optimization: Theory, methods and applications. Nonconvex
optimization and its applications. Kluwer Academic Publishers, (2000).
[2] Floudas, C. A. Global optimization in design and control of chemical process systems. Journal of
Process Control, 10, 125, (2000).
[3] Floudas, C. A., Pardalos, P. M., Adjiman, C. S., Esposito,W. R., Gumus¸, Z. H., Harding, S. T.,
Klepeis, J. L., Meyer, C., & Schweiger, C. A. Handbook of test problems in local and global
optimization. Kluwer Academic Publishers, (1999).
[4] Bard, J. F. Practical bilevel optimization. Nonconvex optimization and its applications. Kluwer
Academic Publishers, (1998).
[5] Horst, R., Pardalos, P. M., & Thoai, N. V. Introduction to global optimization. Nonconvex
optimization and its applications. Kluwer Academic Publishers, (2000).
[6] Sherali, H. D., & Adams, W. P. A reformulation–linearization technique for solving discrete and
continuous nonconvex problems. Nonconvex optimization and its applications. Kluwer Academic
Publishers, (1999).
[7] Tawarmalani, M.,&Sahinidis, N.V. Semidefinite relaxations of fractional programs via novel
convexification techniques. Journal of Global Optimization, (2001), 20, 137–158.
[8] Tuy, H. Convex analysis and global optimization. Nonconvex optimization and its applications.
Kluwer Academic Publishers.) (1998).
[9] Zabinsky, Z. B. Stochastic adaptive search for global optimization. Nonconvex optimization and
its applications. Kluwer Academic Publishers.). (2003).
[10] Neumaier, A. Complete search in continuous global optimization and constraint satisfaction. In
A. Iserles (Ed.), Acta Numerica (Vol. 13, pp. 271–369). Cambridge University Press, (2004).
[11] J. Jahn, Introduction to the Theory of Nonlinear Optimization, 3rd Edition, Springer-Verlag
Berlin Heidelberg, (2007).
[12] Z. Michalewicz, Genetic algorithms + data structures = evolution programs, 3rd ed., Springer,
Berlin (1996).
[13] J. S. Arora, Introduction to Optimum Design, Second Edition, Elsevier Academic Press (2004).
[14] A. Ben-Tal, L. El Ghaoui, A. Nemirovski, Robust Optimization, Princeton University Press
(2009).
[15] D. Bertsekas, Convex Analysis and Optimization, Athena Scientific (2003).
[16] I. M Bomze, T. Csendes, R. Horst, and P. M. Pardalos, Developments in Global optimization.
Dordrecht, Netherlands: Kluwer, (1997).
[17] J. Borwein AND A. Lewis, Convex Analysis and Nonlinear Optimization, Springer (2000)
[18] S. P. Boyd AND L. Andenberghe, Convex Optimization. Cambridge University, (2004)
[19] E. K. P. Chong, S. H. Zak, An Introduction to Optimization, Wiley (2011).
[20] N. Christofides, Combinatorial optimization, Wiley (1979)
[21] M Clerc, Particle Swarm Optimization, John Wiley & Sons, Jan (2010).
[22] K. Deb, Optimization for Engineering Design: Algorithms and Examples, PHI Learning Pvt. Ltd.
(2004).
[23] P. E. Gill, W. Murray, M. H. Wright, Practical optimization, Academic Press (1981).
[24] O. Güler, Foundations of Optimization in Finite Dimensions, Springer (2010).
[25] E. R. Hansen, Global optimization using interval analysis, Dekker, New York (1992).
[26] R. Horst, H. Tuy, Global optimization, deterministic approaches, 3rd ed. (2010), Springer, Berlin.
[27] B. Korte, J. Vygen, Combinatorial Optimization: Theory and Algorithms, Springer (2005).
[28] Y. Nesterov, Yurii. Introductory Lectures on Convex Optimization, Kluwer Academic Publishers
(2004).
[29] J. Nocedal AND S. Wright, Numerical Optimization (Springer Series in Operations Research and
Financial Engineering) 2nd edition (2006).
[30] G. C. Onwubolu, B. V. Babu, New Optimization Techniques in Engineering, Springer, (2004).
[31] A. Ruszczyński. Nonlinear Optimization. Princeton University Press (2006).

Saebamirahmadi.blogspot.com 2014©
22
[32] J. J. Mor´e and G. Toraldo, On the solution of large quadratic programming problems with bound
constraints, SIAM J. Optim., 1 (1991), pp. 93–113. New York, 1984.
[33] R. Glowinski, Numerical Methods for Nonlinear Variational Problems, Springer-Verlag, Berlin,
New York, (1984).
[34] E. G. Birgin, I. Chambouleyron, and J. M. Mart´ınez, Estimation of the optical constants and the
thickness of thin films using unconstrained optimization, J. Comput. Phys., 151 (1999), pp. 862–880.
[35] P. G. Ciarlet, The Finite Element Method for Elliptic Problems, North–Holland, Amsterdam,
(1978).
[36] E. G. Birgin, R. Biloti, M. Tygel, and L. T. Santos, Restricted optimization: A clue to a fast and
accurate implementation of the common reflection surface stack method, J. Appl. Geophys., 42 (1999),
pp. 143–155.
[37] W. Glunt, T. L. Hayden, and M. Raydan, Molecular conformations from distance matrices, J.
Comput. Chem., 14 (1993), pp. 114–120.
[38] A. R. Conn, N. I. M. Gould, and Ph. L. Toint, Global convergence of a class of trust region
algorithms for optimization with simple bounds, SIAM J. Numer. Anal., 25 (1988), pp. 433–460.
[39] Z. Dost´al, A. Friedlander, and S. A. Santos, Solution of coercive and semicoercive contact
problems by FETI domain decomposition, Contemp. Math., 218 (1998), pp. 82–93.
[40] Z. Dost´al, A. Friedlander, and S. A. Santos, Augmented Lagrangians with adaptive precision
control for quadratic programming with simple bounds and equality constraints, SIAM J. Optim., 13
(2003), pp. 1120–1140.
[41] F. Facchinei and S. Lucidi, A class of penalty functions for optimization problems with bound
constraints, Optimization, 26 (1992), pp. 239–259.
[42] A. Friedlander, J. M. Mart´ınez, and S. A. Santos, A new trust region algorithm for bound
constrained minimization, Appl. Math. Optim., 30 (1994), pp. 235–266.
[43] W. W. Hager, Dual techniques for constrained optimization, J. Optim. Theory Appl., 55 (1987),
pp. 37–71.
[44] W. W. Hager, Analysis and implementation of a dual algorithm for constrained optimization, J.
Optim. Theory Appl., 79 (1993), pp. 427–462.
[45] J. M. Mart´ınez, BOX-QUACAN and the implementation of augmented Lagrangian algorithms
for minimization with inequality constraints, J. Comput. Appl. Math., 19 (2000), pp. 31–56.
[46] W. W. Hager, Dual techniques for constrained optimization, J. Optim. Theory Appl., 55 (1987),
pp. 37–71.
[47] W. W. Hager, Analysis and implementation of a dual algorithm for constrained optimization, J.
Optim. Theory Appl., 79 (1993), pp. 427–462.
[48] J. M. Mart´ınez, BOX-QUACAN and the implementation of augmented Lagrangian algorithms
for minimization with inequality constraints, J. Comput. Appl. Math., 19 (2000), pp. 31–56.
[49] R.P. Ge, A filled function method for finding a global minimizer of a function of several variables,
Math. Program. 46 (1990) pp.191–204.
[50] R.P. Ge, C.B. Huang, A continuous approach to nonlinear integer programming, Appl. Math.
Comput. Vol 34 (1989) pp.39–60
[51] R.P. Ge, Y.F. Qin, A class of filled functions for finding a global minimizer of a function of
several variables, J. Optim. Theory Appl. 54 (2) (1987) pp.241–252.
[52] X. Liu, A computable filled function used for global optimization, Appl. Math. Comput. 126
(2002) pp. 271–278.
[53] X. Liu, Finding global minima with a computable filled function, J. Global Optim. 19 (2001)
pp.151–161.
[54] X. Liu, W. Xu, A new filled function applied to global optimization, Comput. Operat. Res. 31
(2004) pp.61–80.
[55] S. Lucid, V. Piccialli, New classes of globally convexized filled functions for global optimization,
J. Global Optim. 24 (2002) pp.219–236.
[56] Y.L. Shang, L.S. Zhang, A filled function method for finding a global minimizer on global integer
optimization, J. Comput. Appl.
Math. 181 (2005) pp.200–210.

Saebamirahmadi.blogspot.com 2014©
23
[57] Z. Xu, H. Huang, P. Pardalos, C. Xu, Filled functions for unstrained global optimization, J. Global
Optim. 20 (2001) pp.49–65.
[58] W.X. Zhu, A class of filled functions for box constrained continuous global optimization, Appl.
Math. Comput. 169 (2006) pp.129–145.
[59] H. Waultraud AND N. Arnold, Global optimization by multilevel coordinate search, Kluwer
Academic Publishers, Netherlands, (1998).
Appendix.
0.5 * U L1E ΔF F(x ) α - F(x ) F(x )
0.5 * U L2E = ΔF+F(x ) α - F(x ) F(x )
0.5 0.5 * U L * U L3E = ΔF + F(x ) α - F(x ) F(x ) ΔF + F(x ) α - F(x ) F(x )
4 3 , 0.5s opt U LE E = ΔF + ΔF F(x ) α - F(x ) F(x )
5 2 0.5 U LE = ΔF α - F(x ) F(x )




















