Modelos-VAR-e-VCE.pdf - UFJF
25
Econometria III ANE059 Notas de Aula MODELOS VETORIAIS AUTORREGRESSIVOS E DE CORREÇÃO DE ERROS Última Atualização: Julho 2018 Prof. Rogério Silva de Mattos Departamento de Economia Faculdade de Economia Universidade Federal de Juiz de Fora [email protected] http://www.ufjf.edu.br/rogerio_mattos
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Modelos-VAR-e-VCE.pdf - UFJF

Econometria III ANE059
Notas de Aula
MODELOS VETORIAIS AUTORREGRESSIVOS E DE CORREÇÃO DE ERROS
Última Atualização: Julho 2018
Prof. Rogério Silva de Mattos Departamento de Economia
Faculdade de Economia Universidade Federal de Juiz de Fora
[email protected] http://www.ufjf.edu.br/rogerio_mattos

2
1. INTRODUÇÃO
Cowles Comission (décadas de 1930 e 1940) – Modelos econométricos estruturais
(equações simultâneas)
o Exemplos:
2 endógenas (yt e zt) e 1 exógena (xt):
10 11 11 1
20 21 21 2
t t t t
t t t t
y b b z c x
z b b y c x
2 endógenas (yt e zt), e 3 pré-determinadas (yt–1 e zt–1 e xt)
tttttt
tttttt
zcycxcybbz
zcycxczbby
2123122212120
1113112111110
o Forma Estrutural (FE): endógenas em função endógenas e de pré–
determinadas (ex. os 2 sistemas acima)
o Forma Reduzida (FR): endógenas em função só de pré–determinadas (ex.
para 2º sistema acima)
ttttt
ttttt
wzyxz
wzyxy
21231222120
11131121110
o Problema da Identificação: uma equação de um sistema/modelo estrutural é
identificada se é possível obter os parâmetros da forma estrutural (b’s e c’s) a
partir do conhecimento dos parâmetros da forma reduzida ( ’s).
1ª. equação identificada:
tttt
ttt
xcybbz
zbby
2212120
11110
2 equações identificadas:
ttttt
ttttt
zcxcybbz
ycxczbby
2123212120
1112111110
o Uso de Restrições: solução do problema da identificação.
Restrições nos parâmetros estruturais (mais comum)
Restrições nas variâncias/covariâncias dos erros estruturais
Sistemas com milhares de variáveis e equações (décadas de 1950, 1960 e 1970)
Crítica de Sims (1980)
o “Restrições de identificação inacreditáveis”
o Variáveis devem ser tratadas simetricamente no âmbito de um modelo VAR

3
o Num VAR, todas as variáveis são endógenas e, logo, sua representação já é a
FR do sistema
2. VAR(1) COM 2 VARIÁVEIS
Sejam dois processsos estocásticos yt e zt representados como:
tttt
tttt
zayaaz
zayaay
212212120
111211110
(a’s são parâmetros)
Onde 1t, ~ I(0), 2t ~ I(0) e E(1t) = E(2t)=0. Diz-se que yt e zt seguem um processo
VAR(1)
Representação matricial extensa:
t
t
t
t
t
t
z
y
aa
aa
a
a
z
y
2
1
1
1
2221
1211
20
10
Representação matricial compacta:
ttt xAAx 110
Onde:
t
t
tz
yx
20
10
0a
aA
2221
1211
1aa
aaA
t
t
t
2
1
Exemplo: consumo e investimento
o
ttItCt
ttItCt
ICI
ICC
211
111
(α’s e β’s são parâmetros)
Exemplo: equilíbrio dinâmico de mercado (preço e quantidade)
o l (α’s e β’s são parâmetros)
3. VAR(p) COM 2 VARIÁVEIS
tptpptpttttt
tptpptpttttt
zayazayazayaaz
zayazayazayaay
222,21,222,2221,2122,1121,120
112,11,212,2211,2112,1111,110
...
...
Onde 1t, ~ I(0), 2t ~ I(0) e E(1t) = E(2t) = 0
Representação matricial extensa:
t
t
pt
pt
pp
pp
t
t
t
t
t
t
z
y
aa
aa
z
y
aa
aa
z
y
aa
aa
a
a
z
y
2
1
22,21,
12,11,
2
2
22,221,2
12,211,2
1
1
22,121,1
12,111,1
20
10...
4
Representação matricial compacta:
tptpttt xAxAxAAx 22110
Onde:
t
t
tz
yx
20
10
0a
aA
22,21,
12,11,
ii
ii
iaa
aaA i = 1,...,p
t
t
t
2
1
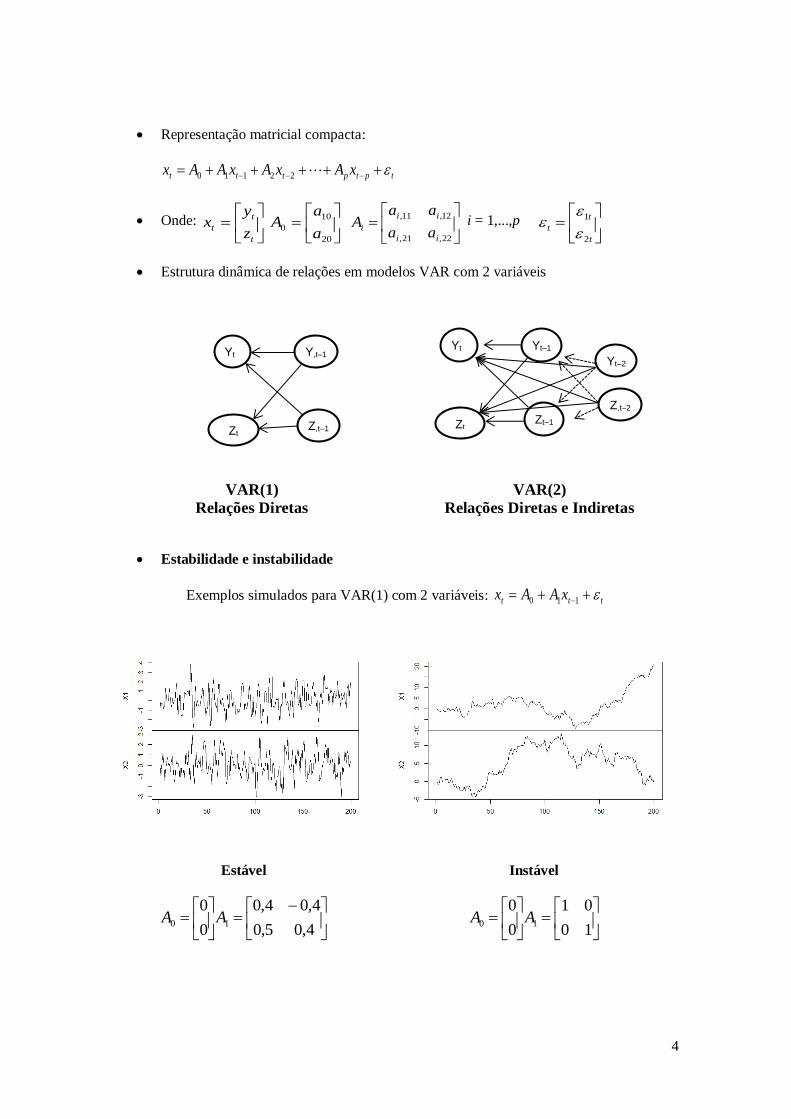
Estrutura dinâmica de relações em modelos VAR com 2 variáveis
VAR(1)
Relações Diretas
VAR(2)
Relações Diretas e Indiretas
Estabilidade e instabilidade
Exemplos simulados para VAR(1) com 2 variáveis: ttt xAAx 110
Estável
4,05,0
4,04,0
0
010 AA
Instável
10
01
0
010 AA
Yty Y,t–1
Zt Z,t–1
Yty Yt–1
Zt Zt–1
Yt–2
Z,t–2

5
Instável só numa variável
6,00
01
1,0
1,010 AA
Instável Co–integrado
5,05,0
5,05,0
2,0
2,010 AA
Representação usando operador de defasagem:
ttt xAAx 110 tt AxBAI 01
Condição de estabilidade: 0|)(|
ticoCaracterís Polinômio
1 BAI p/ 1|| B (ou seja, todas as raízes do
determinante polinomial em B têm de estar fora do círculo unitário)
4. MODELO VAR(p) GERAL COM m VARIÁVEIS
Sejam m processos estocásticos x1t , x2t, . . . xmt
Representação matricial compacta:
tptpttt xAxAxAAx ...22110
Onde:
mt
t
t
x
x
x :
1
0
10
0 :
ma
a
A
mmimi
mii
i
aa
aa
A
,1,
1,11,
i = 1,...,p
mt
t
t
1
E também it, ~ I(0) e E(it) = 0 para i = 1,...,n. Diz-se que xt segue um Var(p)
Representação usando operador de defasagem:
tt
p
p AxBABABAI 0
2
21 ...

6
Condição de estabilidade: 0|)(|
ticoCaracterís Polinômio
1
p
pBABAI p/ 1|| B (ou seja, todas as
raízes do determinante polinomial em B têm de estar fora do círculo unitário)
Ordem de integração de um vetor: Diz-se vetor )(~ dIxt quando a ordem máxima
de integração de um de seus componentes é d. Ou seja, basta que um elemento
)(~ dIx jt.
5. COINTEGRAÇÃO NO CONTEXTO MULTIVARIADO
Definição Geral: Sejam m processos estocásticos com mesma ordem de integração
x1t ~ I(d), x2t ~ I(d), ..., xmt ~ I(d). Se existir (pelo menos uma) combinação linear
)(~2211 bdIxaxaxa mtmtt , onde a1, ... , am são constantes reais e b d, então x1t,
x2t, ..., xmt são co-integrados de ordem CI(d,b).
Definição no caso CI(1,1): Sejam m processos estocásticos todos integrados de 1ª
ordem x1t ~ I(1), x2t ~ I(1), ..., xmt ~ I(1). Se existir (pelo menos uma) combinação linear
)0(~2211 Ixaxaxa mtmtt , onde a1, ... , am são constantes reais, então x1t, x2t, ..., xmt
são co-integrados de ordem CI(1, 1).
Como sei se há ou não co-integração?
Se há, quantas relações de co-integração existem?
6. MODELO VCE(p–1) GERAL COM m VARIÁVEIS
VCE = Modelo Vetorial de Correção de Erros
Sejam )1(~:
1
I
x
x
x
mt
t
t
Transformação VAR VCE:
o Seja o VAR(p) em nível:
tptpttt xAxAxAAx ...22110
o Mediante operações algébricas, é possível re–escrever como (ver anexo):
o VCE(p–1) em primeiras diferenças:

7
tptptttt xxxxx )1(1221110 ...
Onde:
o
mt
t
t
x
x
x :
1
mt
t
t
1
0
0
10
0 : A
m
o )( 1
,1,
1,11,
pi
mmimi
mii
i AA
i = 1,...,p–1
o )( 1
1
111
)(p
mmm
m
mmAAI
xt–1 representa o termo de correção de erros (CE)
Cada elemento do vetor xt representa uma relação de co-integração
o )0(~...2211 Ixxx mtimtiti p/i = 1,...,m
o Pode haver no mínimo uma e no máximo m-1 relações de co-integração
linearmente independentes
Cada linha de é um vetor de co-integração
o Pode haver no mínimo um e no máximo m-1 vetores de co-integração
linearmente independentes
o Se houver r vetores de co–integração independentes em , os m–r restantes
serão linearmente dependentes dos demais.
O posto de é que indica o número de relações/vetores de co-integração linearmente
independentes
O teste de co-integração de Johansen envolve determinar estatisticamente o posto de
Esta matriz é
fundamental para
a análise de
cointegração ! ! !

8
7. REFRESCANDO A MEMÓRIA (MATRIZES)
Seja:
mkm
k
aa
aa
A
1
111
onde aij são números reais
o Posto(A) = número de linhas ou colunas linearmente independentes
o o valor máximo de Posto(A) é o menor dentre m e k
Seja a matriz quadrada:
mmm
m
aa
aa
A
1
111
onde aij são números reais
o Posto(A) = 0 implica que A = 0 (matriz nula)
o 1 r=Posto(A) m-1 significa que:
det(A) = |A| = 0
As m linhas/colunas são linearmente dependentes entre si
Há, porém, r = Posto(A) linhas/colunas linearmente independentes
A possui r autovalores não–nulos
A possui m–r autovalores nulos
o Posto(A) = m significa que:
A tem posto cheio
Há m linhas/colunas linearmente independentes
det(A) = |A| 0
A possui inversa, isto é, A-1
de ordem mm tal que A-1
A = AA-1= Im
A possui todos os m autovalores não nulos
o Traço de A =
m
i
iia1
(= soma dos elementos da diagonal principal de A)
Autovalores e Autovetores
o Seja: Az = z, onde A é m×m, z é m×1 e é um escalar
o Problema: Sabendo A, quais valores de constituem solução?

9
o Solução: Há sempre m valores de , ou raízes, que satisfazem a equação.
o Essas m raízes são chamadas autovalores de A e denotadas 1,2,...m.
o Associados aos m autovalores, há m autovetores, que são valores do vetor z
que satisfazem à equação e que são denotados z1,z2,...,zm.
Propriedades dos Autovalores
o Posto(A) = número de autovalores não nulos de A
o
m
i
iA1
, isto é, o determinante de A é o produto dos autovalores de A
o iii a se A é diagonal ou triangular
o Traço(A) =
m
i
i
1
8. TESTE DE CO-INTEGRAÇÃO DE JOHANSEN
Seja
1
:
t
t
mt
x
x
x
VAR(p): tptpttt xAxAxAAx ...22110
VCE(p–1): tptptttt xxxxx )1(1221110 ...
)( 1 pAAI
Seja r = Posto() número de vetores de cointegração linearmente independentes (ou
de relações de cointegração linearmente independentes)
r = 0 = 0 (matriz nula) e NÃO HÁ co-integração, mas todas as séries apresentam raiz unitária, isto é, são I(1)
r = m
Neste caso, o VAR(p) para xt seria um sistema estável e logo todos
os processos estocásticos em xt seriam I(0), contrariando nossa
hipótese de que todos são I(1).
1 r m-1 HÁ r vetores de co-integração linearmente independentes. Ou seja,
HÁ r relações de co-integração linearmente independentes.
Esta matriz é fundamental para
a análise de cointegração! ! !
10
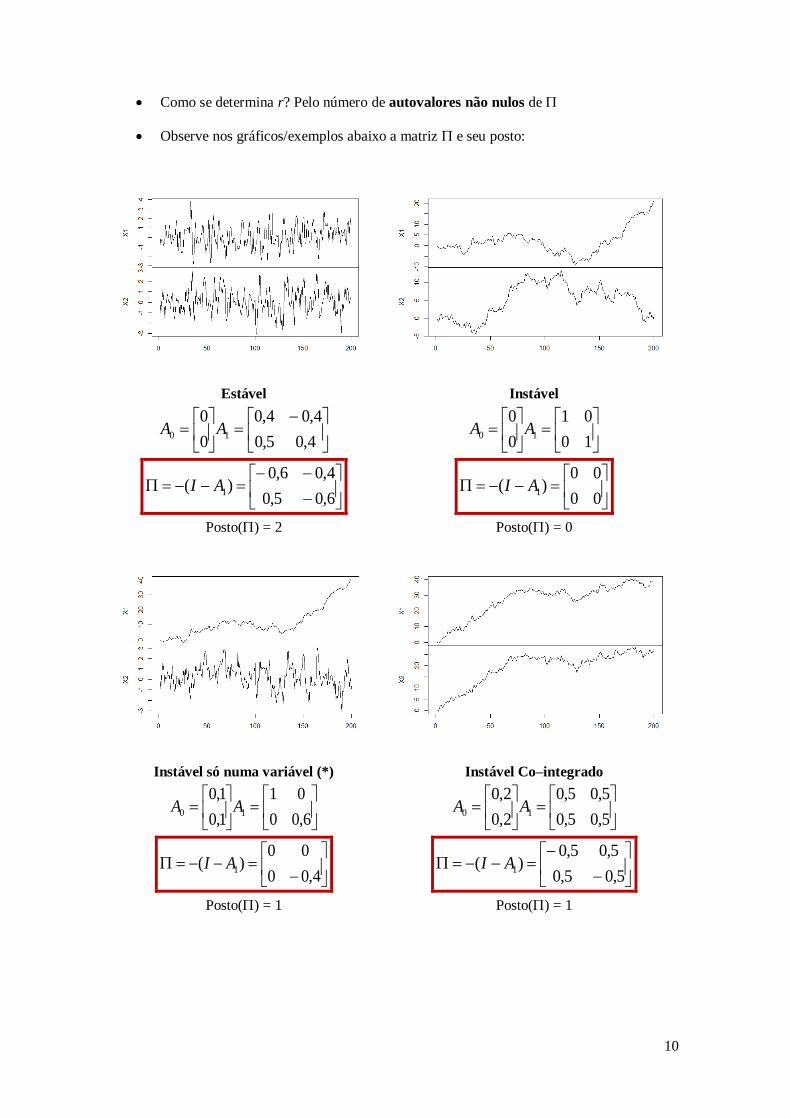
Como se determina r? Pelo número de autovalores não nulos de
Observe nos gráficos/exemplos abaixo a matriz e seu posto:
Estável
4,05,0
4,04,0
0
010 AA
6,05,0
4,06,0)( 1AI
Posto() = 2
Instável
10
01
0
010 AA
00
00)( 1AI
Posto() = 0
Instável só numa variável (*)
6,00
01
1,0
1,010 AA
4,00
00)( 1AI
Posto() = 1
Instável Co–integrado
5,05,0
5,05,0
2,0
2,010 AA
5,05,0
5,05,0)( 1AI
Posto() = 1

11
Teste do Traço
1. Enunciado:
rPostoH
rPostoH
)(:
)(:
1
0
2. Estatística do traço:
n
ri
itraço Tr1
)ˆ1ln()(
a. n ˆ...ˆˆ
21 são autovalores estimados de (normalizados e ordenados)
3. Regra de Decisão: Ctraço r )( Rejeito H0; Ctraço r )( Não rejeito H0
a. C é o valor crítico obtido de uma tabela da distribuição de traço
4. Obs: Aplica-se o teste sequencialmente para r = 0, r = 1, ...
Teste do Máximo Autovalor
1. Enunciado:
1)(:
)(:
1
0
rPostoH
rPostoH
2. Estatística do máximo autovalor: )ˆ1ln()( 1 rmáx Tr
a. n ˆ...ˆˆ21 são autovalores estimados de (normalizados e ordenados)
3. Regra de Decisão: Cmáx Rejeito H0; Cmáx Não rejeito H0
a. C é o valor crítico obtido de uma tabela da distribuição de máx
4. Obs: Aplica-se o teste sequencialmente para r = 0, r = 1, ...
Determinação do Lag–Máximo do VAR de teste
Assim como o teste ADF, o teste de Johansen estima um VCE de teste para tx para o
qual precisa-se determinar um lag máximo (p) a priori
Estima–se um VAR irrestrito em primeiras diferenças para várias hipóteses de lag–
máximo
A cada estimação, avalia–se os critério de informação AIC e SC computados para o
VAR como um todo

12
9. OUTRAS REPRESENTAÇÕES DO MECANISMO DE CORREÇÃO DE ERROS
Modelo VAR(2) só com 2 variáveis:
tttttt
tttttt
zayazayaaz
zayazayaay
2222,2221,2122,1121,120
1212,2211,2112,1111,110
tttt xAxAAx 22110
Co–integração entre yt e zt:
o Só pode haver 1 relação de cointegração
o Forma Regressão: ttt Ebzy
o Forma Erro de Desequilíbrio: ttt bzyE
o iSó pode haver 1 erro de desequilíbrio
Modelo com mecanismo de correção de erro VCE(1):
ttttzt
ttttyt
zyEz
zyEy
2122,1121,1120
1112,1111,1110
0 1 1 1t t t tx x x
Se y e z forem endógenas, o erro de desequílibrio Et tem de aparecer como
variável explicativa em ambas as equações do VCE(1)
Se apenas uma for endógena, o erro de desequilíbrio não aparece numa delas (o
valor do α respectivo é 0).
Relação entre matriz e o erro de desequilíbrio Et :
y t
t
z t
Ex
E
Note que o mecanismo de correção de erro é:
t
t
t
z
y
tt
z
y
t
z
y
tz
ty
t
xz
yb
bzyEE
Ex
]1[
)(
z
y
= termos de ajustamentos ao desequilíbrio Et

13
b
1 = vetor de co–integração normalizado
t
t
tz
yx = vetor de endógenas
Ou seja:
21
12
22]1[ b
z
y
Caso Geral: Modelo VAR(p) com m endógenas:
VAR(p): tptpttt xAxAxAAx ...22110
VCE(p–1): tptptttt xxxxx )1(1221110 ...
Onde:
mt
t
t
x
x
x :
1
0
10
0 :
m
mmimi
mii
i
,1,
1,11,
i = 1,...,p
mt
t
t
1
mmm
m
mm
1
111
)(
Resultado de álgebra matricial: Se 1 r = Posto() m 1, então existem matrizes
e ambas mr tais que:
o = ’
= matriz de coeficientes de ajustamento (aos desequilíbrios)
= matriz de coeficientes de co-integração
o
rt
t
t
E
E
x 1
= r erros de desequilíbrio (ou r relações de co-integração)
Nova representação do VCE:
VCE(p–1): tptptttt xxxxx
Prazo-Curto
)1(12211
Prazo)-(LongoMCE
1
CP
0 ...

14
n
Exemplo: r = 2 e m = 4
o
42322212
41312111
4241
3231
2221
1211
)44(
o
t
t
tttt
tttt
tE
E
xxxx
xxxxx
2
1
,442,332,222,111
,441,331,221,111
o
tttt
trtt
tttt
tttt
EEx
EEx
EEx
EEx
41,2421,141404
31,2321,131303
21,2221,121202
11,2121,111101
o Os 2 erros de desequilíbrio E1t e E2t têm de aparecer como variáveis
explicativas nas 4 equações do VCE(p1)
9. PROBLEMA DA IDENTIFICAÇÃO DE α e β
Podemos estimar , mas a decomposição não é única:
o Há infinitas combinações de e que geram a mesma
o Logo, e não são identificadas (não podemos estimá-las a partir de uma
estimativa de )
Mas, dado , é única.
Estratégia de identificação: identificar
Condição de Posto de identificação (Juselius, 2006):
o j–ésima relação de co–integração estará identificada se o número de restrições
lineares impostas a ela for no mínimo igual a r – 1
Exemplo: m = 4 e r = 2
o
42322212
41312111
4241
3231
2221
1211
)44(
e não identificadas

15
o Como r = 2, posso identificar cada linha de impondo pelo menos 1 (= r 1)
restrição linear
o
423212
413121
)42( 1
1
uma restrição linear em cada linha de
o
*
24
*
23
*
14
*
13
)42(
*
10
01
duas restrições lineares em cada linha de
o
*
42
*
32
*
41
*
31
*
42
*
41
*
32
*
31
*
22
*
21
*
12
*
11
10
01

16
10. OPÇÕES DO TESTE DE JOHANSEN
(implementadas em vários softwares como o Eviews)
Admitem a ausência ou presença de constantes e tendências em xt e nas relações de
cointegração, através da especificação do VCE estimado no procedimento do teste
(Eviews chama de test VAR):
tptptt xxx )1(111 ...) ? (
Terminologia:
o RC = relações de Co–integração
o VAR = parte VAR do modelo VCE
Opção 1: Sem interceptos no VAR (= séries em xt sem tendência determinística) e nas
RC:
tptpttt xxxxH )1(1111
1
0 ...:
Opção 2: Sem interceptos no VAR (= séries em xt sem tendência determinística) mas
com interceptos nas RC:
tptpttt xxxxH )1(11101
2
0 ...)(:
Opção 3: Com intercepto no VAR (= séries em xt com tendência determinística linear)
e com interceptos nas RC:
tptpttt xxxxH )1(111010
3
0 ...)(:
Opção 4: Com intercepto no VAR (= séries em xt com tendência determinística linear)
e com interceptos + tendência determinística linear nas RC:
tptpttt xxtxxH )1(1111010
4
0 ...)(:
Opção 5: Com intercepto e tendência linear no VAR (= séries em xt com tendência
determinística quadrática*) e com interceptos + tendência determinística linear nas
RC:
tptpttt xxtxtxH )1(11110110
5
0 ...)(:
* Nota: itiit zx 0 , com zii ~ I(0) xit possui tendência determinística linear
tiiiit ztbx 0 , com zii ~ I(0) xit possui tendência determinística quadrática
Aninhamento das hipóteses: )()()()()( 5
0
4
0
3
0
2
0
1
0 rHrHrHrHrH

17
Resumo das Opções do Teste de Cointegração de Johansen
Opções Tendências Deterministicas
No. VAR RC xt (nível) RC
1 - -
2 - cte - -
3 cte cte TDL -
4 cte cte + t TDL TDL
5 cte + t cte + t TDQ TDL
Nota: cte = constante; TDL = tendência determinística linear;
TDQ = tendência determinística quadrática.
11. PROCEDIMENTOS DO TESTE DE JOHANSEN
1. Determinação do lag-máximo p do modelo VCE (estima-se VARs irrestritos em primeiras
diferenças e seleciona-se p pelos critérios de Akaike e Schwarz ou pelo teste LB);
2. Escolha da opção de teste (1-5; Eviews permite ainda sumariar todas)
3. Cálculo das estatísticas )(rtraço e )(rmáx , para cada valor de r = 0,1,...,m pelo seguinte
procedimento:
3.1 Estimação irrestrita do modelo VAR e do Modelo para xt-1:
tptptttt xxxdBx ̂ˆ...ˆˆˆˆ)1(122110
*
)1(
*
12
*
21
*
1
**
01ˆˆ...ˆˆˆˆ
tptptttt xxxdBx
3.2 Uso dos resíduos t̂ e *ˆt para construção da função de verossimilhança
condicional (FVC) sob hipótese de normalidade dos erros t̂ e *ˆt :
3.3 Cálculo e ordenação dos autovalores m ˆˆˆ21 (resolvendo um problema
que equivale a maximizar a FVC)
3.4 Cômputo de
)ˆ1ln()( 1 i
m
ritraço Tr
)ˆ1ln()( 1 rmáx Tr
Obs: Os passos acima são apenas um esboço. Mais detalhes em Johansen (1995) “Likelihood–
based inference in cointegrated VAR models”. Capítulo 6.

18
5. Escolha de NS, determinação do valor Crítico e aplicação da regra de decisão
12. CONSTRUÇÃO FINAL DO MODELO ECONOMÉTRICO DE ST (Estimação do
VAR ou VCE)
Seja o VAR(p) para as variáveis em nível:
tptpttt xAxAxAAx ...22110
Assuma que:
o ),0(~ 2
iit N p/i = 1,...,m são processos ruído branco e
o 0),( jsitCov p/i j, t = s e t s. (covariância nula dos erros entre equações
em termos contemporâneos e defasados)
Se )0(~ Ixit p/i = 1,...,m, estima–se cada equação do VAR(p) diretamente por MQO
Se )1(~ Ixit , p/i = 1,...,m, mas não há qualquer relação de co–integração (neste caso
0 ), estima–se um VAR(p–1) para as variáveis em 1as
diferenças usando
MQO :
tptpttt xxxx )1(122110 ...
o Nota: Se só g séries forem I(0) e m-g forem I(1), mas estas não co-
integradas, basta diferenciar apenas as que são I(1). Neste caso, o vetor
tx terá g séries em nível e m–g séries em 1as diferenças.
Se )1(~ Ixit , p/i = 1,...,m, e houverem r < m relações de co–integração, estima–se o
modelo VCE(p–1) por máxima verossimilhança:
tptptttt xxxxx )1(1221110 ...

19
13. PREVISÃO COM VAR
14. MODELOS VAR E VCE COM SAZONALIDADE
Sejam D1, D2, ..., Ds-1 variáveis dummies sazonais, definidas como:
outro
jtD jt
0
1 j = 1,...,s-1
E sejam D*
1, D*
2, ..., D*
s-1 variáveis dummies sazonais centradas e definidas como:
sDD jtjt /1*
Nota: Dummies centradas possuem média amostral nula e, dessa forma, não interferem
nos valores estimados dos interceptos do VAR/VCE, isto é, dos drifts
Modelo VAR(p) com sazonalidade
o t
s
j
jtjptptt eDxAxAAx
1
1
*
110 ...
o
mj
j
m
j
1
1
- vetor dos j-ésimos coeficientes sazonais nas m equações do
VAR
Modelo VCE(p-1) com sazonalidade
o t
s
j
jtjptptttt eDxxxxx
1
1
*
)1(1221110 ...
Opções do teste de Johansen na presença de sazonalidade
o No Eviews, na Janela do “Johansen Cointegration Test”, informa-se as
variáveis dummies centradas },...,1:{ * sjD jt no campo “Exogenous”.

20
15. EXEMPLO: DEMANDA DE MOEDA NA DINAMARCA 1974 1987 (Johansen, S. and Juselius, K. (1990), Maximum Likelihood Estimation and Inference on Cointegration –
with Applications to the Demand for Money, Oxford Bulletin of Economics and Statistics, 52, 2, 169–
210.)
Vamos replicar agora a análise e construção do modelo VCE, feita por Johansen e Juselius no paper acima, seguindo um passo a passo:
PASSO 1: Especificação do Modelo a Estimar
Objetivo: t
b
t
d
ttt IbIbYbbM 4321
Status das variáveis: M, Y, Id, I
b são todas endógenas
M – log do estoque real de moeda M2 (LRM no Eviews)
Y – log renda real (LRY no Eviews) I
d – taxa de juros de depósitos bancários (IDE no Eviews)
Ib – taxa de juros de debêntures (bonds) (IBO no Eviews)
– erro aleatório I(0) t – tempo em trimestres
PASSO 2: Análise Gráfica
Séries
11.5
11.6
11.7
11.8
11.9
12.0
12.1
74 75 76 77 78 79 80 81 82 83 84 85 86 87
LRM
5.7
5.8
5.9
6.0
6.1
6.2
74 75 76 77 78 79 80 81 82 83 84 85 86 87
LRY
.06
.07
.08
.09
.10
.11
.12
.13
74 75 76 77 78 79 80 81 82 83 84 85 86 87
IDE
.08
.10
.12
.14
.16
.18
.20
.22
74 75 76 77 78 79 80 81 82 83 84 85 86 87
IBO

21
PASSO 3: Testes de Raízes Unitárias (ADF) c/Dummies Sazonais
Variável Opção do
Teste
Lag Máx Estatística
V. Crítico
5%*
LRM Constante 1 -0,860188 -2.918778
D(LRM) Constante 0 -4,205064 -2.918778
LRY Constante 0 -0.961002 -2.916566
D(LRY) Constante 0 -5.859790 -2.917650
IDE Constante 1 -2.364133 -2.917650
D(IDE) Constante 0 -5.005109 -2.917650
IBO Constante 1 -1.544769 -2.917650
D(IBO) Constante 0 -5.057297 -2.917650
* Baseados nos valores críticos de McKinnon (1996) que são reportados no módulo de RU do Eviews. Este módulo, porém, não permite incorporar variáveis dummies sazonais. Então, as equações de teste tiveram de ser estimadas e seus lags máximos determinados pela minimização do critério de Schwarz.
PASSO 4: VAR irrestrito (Preparação para o Teste de Johansen)
o Lag máximo: t–1 (determinado pelo Critério de Akaike
1)
o Sem constante
D(LRM) = 0.396717860583*D(LRM(-1)) - 0.136586581432*D(LRY(-1)) - 0.752372317455*D(IBO(-1)) - 0.316882089578*D(IDE(-1)) + 0.00472153704684 -
0.0659809363703*DC1 - 0.0105328633238*DC2 - 0.0422475819052*DC3
D(LRY) = 0.498877861446*D(LRM(-1)) - 0.141727777855*D(LRY(-1)) +
0.0863501734685*D(IBO(-1)) - 0.409065263391*D(IDE(-1)) - 5.20301773931e-05 -
0.0212544606294*DC1 + 0.00413078386082*DC2 - 0.0120219822294*DC3
D(IBO) = 0.0573743771616*D(LRM(-1)) + 0.140954894028*D(LRY(-1)) +
0.391778564658*D(IBO(-1)) + 0.181703045926*D(IDE(-1)) - 0.0016741713191 +
7.81207085012e-06*DC1 + 0.00726950407281*DC2 + 0.00463347476314*DC3
D(IDE) = 0.0399420607041*D(LRM(-1)) + 0.0171647457072*D(LRY(-1)) +
0.362594602198*D(IBO(-1)) + 0.159881049599*D(IDE(-1)) - 0.00042182550606 - 0.00358080163253*DC1 - 0.00202989559212*DC2 - 0.00266422914234*DC3
PASSO 5: Teste de Co–integração de Johansen (Traço e Máximo Autovalor)
1 O procedimento que recomendo é usar o critério de Schwarz, que neste caso minimizaria no lag t1.
Johansen e Juselius (1988) não reportam a estimação do VARirrestrito, mas nossas estimativas do VCE
usando o Eviews 7.1 batem com as deles se usamos o crierio de Akaike, que é minimizado no lag1.

22
o Opção 9.2: )(:)( 011
2
0 ttt xBdxrH
o Exógenas:
DC1 (dummy sazonal centrada ref. 1º trimestre) DC2 (dummy sazonal centrada ref. 2º trimestre)
DC3 (dummy sazonal centrada ref. 3º trimestre)
Relação de Co–integração com coeficientes normalizados para variável M
b
t
d
ttt IIYM 21,522,403,106,6ˆ
PASSO 5: Estimação do Modelo VCE: (em azul o termo de correção de erros)
o Sem constante
D(LRM) = - 0.212954922489*( LRM(-1) - 1.03294877961*LRY(-1) -
4.21587960969*IDE(-1) + 5.20691889328*IBO(-1) - 6.05993199157 ) +
0.262770987129*D(LRM(-1)) - 0.144254448212*D(LRY(-1)) - 0.670697860616*D(IDE(-1)) - 0.0401148282042*D(IBO(-1)) - 0.057652734512*DC1
- 0.0163049625209*DC2 - 0.0408585539269*DC3
D(LRY) = 0.115022025021*( LRM(-1) - 1.03294877961*LRY(-1) -
4.21587960969*IDE(-1) + 5.20691889328*IBO(-1) - 6.05993199157 ) +
0.602668489245*D(LRM(-1)) - 0.142827890466*D(LRY(-1)) -

23
0.182560716592*D(IDE(-1)) - 0.290608912734*D(IBO(-1)) - 0.0268261889827*DC1
+ 0.00784215853592*DC2 - 0.0130827262393*DC3
D(IDE) = 0.0294110850903*( LRM(-1) - 1.03294877961*LRY(-1) -
4.21587960969*IDE(-1) + 5.20691889328*IBO(-1) - 6.05993199157 ) +
0.0613395363618*D(LRM(-1)) + 0.0177406101739*D(LRY(-1)) + 0.212009266543*D(IDE(-1)) + 0.264939283406*D(IBO(-1)) -
0.00482994892908*DC1 - 0.00117798909009*DC2 - 0.00288468622481*DC3
D(IBO) = 0.0231772319597*( LRM(-1) - 1.03294877961*LRY(-1) -
4.21587960969*IDE(-1) + 5.20691889328*IBO(-1) - 6.05993199157 ) +
0.0573489000836*D(LRM(-1)) + 0.144223979803*D(LRY(-1)) +
0.203769212148*D(IDE(-1)) + 0.310660402192*D(IBO(-1)) - 0.000400020177692*DC1 + 0.00762195839493*DC2 + 0.00462651019216*DC3

24
Apêndice
Transformando VAR(p) em VCE(p–1)
Exemplificaremos para o caso de um VAR(4) para um VCE(3), ambos sem
termos constantes:
tttttt exAxAxAxAAx 443322110
Condição de estabilidade: 04
4
3
3
2
21 zAzAzAzAI para 1|| z (em
outras palavras, o determinante polinomial só pode ter raízes fora do círculo
unitário).
Subtraindo xt–1 de ambos os lados:
tttttt exAxAxAxIAAx 443322110 )(
Somando e subtraindo 12 txA no lado direito:
tttttttt exAxAxAxAxAxIAAx 4433221212110 ][)(
tttttt exAxAxAxIAAAx 4433121210 )(
Somando e subtraindo )( 213 tt xxA no lado direito:
ttt
ttttttt
exAxA
xAxxAxxAxIAAAx
4433
122132131210 )]()([)(
ttt
ttttttt
exAxA
xAxAxAxAxAxIAAAx
4433
12231323131210 ][)(
tt
ttttttt
exA
xxAxAxxAxIAAAAx
44
3231221313210 )()()(
tttttt exAxAxAAxIAAAAx 442313213210 )()(
Somando e subtraindo )( 3214 ttt xxxA no lado direito:
tttt
tttttttt
exAxAxAA
xxxAxxxAxIAAAAx
4423132
3214321413210
)(
)]()([)(
tttt
tttttttt
exAxAxAA
xAxAxAxAxAxAxIAAAx
4423132
3424143424141321
)(
][)(

25
ttttt
tttttt
exAxAxAxAA
xxAxxAxIAAAAAx
)()(
)()()(
443423132
324214143210
tttt
tttt
exAxAxAA
xAxAxIAAAAAx
3423132
2414143210
)(
)(
tt
tttt
exA
xAAxAAAxIAAAAAx
34
2431432143210 )()()(
Ou seja, temos o seguinte VCE(3)
tttttt exxxxx 33221110
43
432
4321
4321
00
)(
)(
)(
A
AA
AAA
AAAAI
A