Mission Planning Systems for Commercial Small-Sat Earth Observation Constellations
8
Mission Planning Systems for Commercial Small-Sat Earth Observation Constellations C. Iacopino * and S. Harrison † and A. Brewer ‡ Surrey Satellite Technology Ltd., Guildford, GU2 7YE, United Kingdom Abstract The miniaturization of satellites and corresponding reduction in cost has opened the opportunities for many end users to have access to Earth Observation (EO) satellite data. This rapidly growing demand is matched by the increasing number of EO imaging companies aiming at offering services and applications for EO data. Surrey Satellite Technology Ltd (SSTL), the world’s premier provider of small satellite missions for EO applications, is today being called to satisfy a growing demand of agile heterogeneous constellation missions. This trend is opening new challenges for the Mission Planning Systems (MPS) which are required to offer adaptability, efficiency and responsiveness to the customers. Automated Planning & Scheduling technologies are key aspects to match these requirements but they need to be carefully integrated within the overall system to show their benefits. This paper presents the Mission Planning System developed at SSTL and the efforts that are taking place to meet these new challenges. We present our current capabilities and the areas under development, from the system architecture to the user interface. Finally we summarize our open questions. The Earth Observation field is predicted to grow at a rate of 16% per year over the next decade, as described in the research report by Market Intel Group (S. Hollister 2011). The main predicted driver for this is the miniaturization of satellites and corresponding reduction in cost that has opened the opportunity for many end users to use satellite data. The Global Monitoring for Environment and Security (GMES) is a prime example of the global nature of Earth imaging data for international response. In this case, five ESA spacecraft need to cooperate with other existing and/or planned missions provided by ESA, EUMETSAT, other national agencies or private companies such as Surrey Satellite Technology Ltd (SSTL) with the Disaster Monitoring Constellation. An even more evident example of this new trend is coming from the increasing number of EO imaging Start-ups that are aiming at launching large constellations of small satellites offering target revisits up * [email protected] † [email protected] ‡ [email protected]. Copyright c 2015, Association for the Advancement of Artificial Intelligence (www.aaai.org). All rights reserved. to several times a day and at a much cheaper price than traditional operators (Kumagai 2014). This context is offering new challenges to the Mission Planning & Scheduling (MPS) systems developed to support the activity of EO imaging tasking as it presents critical requirements such as coordination among the spacecraft, efficiency at constellation level and responsiveness in case of disaster management. Technologies developed in the field of Automated Planning & Scheduling have been demonstrated to be extremely successful. A complete survey can be found in (Chien et al. 2012). However most of these solutions are developed for single platforms and therefore are not necessarily transplantable in a distributed context. On the commercial side a number of companies are developing mission planning systems as generic products that can be customized according to the missions and to the customer requirements. GMV for example has developed a system called flexplan, a rule-based planning system. This software is the core of the Sentinel-1 Mission Planning (S1MP) in charge of generating the long term payload plan for both satellites(Tejo, Garrigues, and Arregui 2014). Deimos as part of its gs4EO software suite has developed the Capacity Analysis and Mission Planning Tool. This system comprises a greedy scheduler and an optimizer based on genetic algorithms(Tonetti, Cornara, and Pirondini 2014). SaVoir Swath Planner, developed by Taitus software is a stand-alone application for analyzing the coverage of multiple EO satellites. It is able to compute the coverage analysis for multiple satellites in near real time, thanks to a GRASP heuristic. However the target of this application is mainly coverage analysis, it does not take into account satellite-specific constraints. (Galan-Vioque et al. 2011) Orbit Logic’s Collection Planning & Analysis Workstation (CPAW) software comprises a spacecraft simulator coupled with scheduling algorithms in order to generate high fidelity imagery collection plans for use in operations, analysis, or imagery ordering (Herz 2014). CPAW offers a wide range of settings in the satellite model definition and presents different degrees of automation in the imaging planning based on a set of graph-search heuristic. Surrey Satellite Technology Ltd. (SSTL) is renowned for pushing the boundary of low cost small satellite applications. In the 1980s SSTL pioneered COTS satellite technology, being able to successfully launch over 40
Transcript of Mission Planning Systems for Commercial Small-Sat Earth Observation Constellations

Mission Planning Systems forCommercial Small-Sat Earth Observation Constellations
C. Iacopino ∗ and S. Harrison † and A. Brewer ‡Surrey Satellite Technology Ltd.,
Guildford, GU2 7YE, United Kingdom
Abstract
The miniaturization of satellites and corresponding reductionin cost has opened the opportunities for many end usersto have access to Earth Observation (EO) satellite data.This rapidly growing demand is matched by the increasingnumber of EO imaging companies aiming at offeringservices and applications for EO data. Surrey SatelliteTechnology Ltd (SSTL), the world’s premier provider ofsmall satellite missions for EO applications, is today beingcalled to satisfy a growing demand of agile heterogeneousconstellation missions. This trend is opening new challengesfor the Mission Planning Systems (MPS) which are requiredto offer adaptability, efficiency and responsiveness to thecustomers. Automated Planning & Scheduling technologiesare key aspects to match these requirements but theyneed to be carefully integrated within the overall systemto show their benefits. This paper presents the MissionPlanning System developed at SSTL and the efforts thatare taking place to meet these new challenges. We presentour current capabilities and the areas under development,from the system architecture to the user interface. Finally wesummarize our open questions.
The Earth Observation field is predicted to grow at a rateof 16% per year over the next decade, as described in theresearch report by Market Intel Group (S. Hollister 2011).The main predicted driver for this is the miniaturizationof satellites and corresponding reduction in cost that hasopened the opportunity for many end users to use satellitedata. The Global Monitoring for Environment and Security(GMES) is a prime example of the global nature of Earthimaging data for international response. In this case, fiveESA spacecraft need to cooperate with other existingand/or planned missions provided by ESA, EUMETSAT,other national agencies or private companies such asSurrey Satellite Technology Ltd (SSTL) with the DisasterMonitoring Constellation. An even more evident exampleof this new trend is coming from the increasing numberof EO imaging Start-ups that are aiming at launching largeconstellations of small satellites offering target revisits up
∗[email protected]†[email protected]‡[email protected].
Copyright c© 2015, Association for the Advancement of ArtificialIntelligence (www.aaai.org). All rights reserved.
to several times a day and at a much cheaper price thantraditional operators (Kumagai 2014).
This context is offering new challenges to the MissionPlanning & Scheduling (MPS) systems developed to supportthe activity of EO imaging tasking as it presents criticalrequirements such as coordination among the spacecraft,efficiency at constellation level and responsiveness in case ofdisaster management. Technologies developed in the field ofAutomated Planning & Scheduling have been demonstratedto be extremely successful. A complete survey can be foundin (Chien et al. 2012). However most of these solutionsare developed for single platforms and therefore are notnecessarily transplantable in a distributed context.
On the commercial side a number of companies aredeveloping mission planning systems as generic productsthat can be customized according to the missions and to thecustomer requirements. GMV for example has developed asystem called flexplan, a rule-based planning system. Thissoftware is the core of the Sentinel-1 Mission Planning(S1MP) in charge of generating the long term payloadplan for both satellites(Tejo, Garrigues, and Arregui 2014).Deimos as part of its gs4EO software suite has developedthe Capacity Analysis and Mission Planning Tool. Thissystem comprises a greedy scheduler and an optimizerbased on genetic algorithms(Tonetti, Cornara, and Pirondini2014). SaVoir Swath Planner, developed by Taitus softwareis a stand-alone application for analyzing the coverage ofmultiple EO satellites. It is able to compute the coverageanalysis for multiple satellites in near real time, thanks toa GRASP heuristic. However the target of this applicationis mainly coverage analysis, it does not take into accountsatellite-specific constraints. (Galan-Vioque et al. 2011)Orbit Logic’s Collection Planning & Analysis Workstation(CPAW) software comprises a spacecraft simulator coupledwith scheduling algorithms in order to generate high fidelityimagery collection plans for use in operations, analysis, orimagery ordering (Herz 2014). CPAW offers a wide rangeof settings in the satellite model definition and presentsdifferent degrees of automation in the imaging planningbased on a set of graph-search heuristic.
Surrey Satellite Technology Ltd. (SSTL) is renownedfor pushing the boundary of low cost small satelliteapplications. In the 1980s SSTL pioneered COTS satellitetechnology, being able to successfully launch over 40

satellites in 34 years. Today SSTL is the world’spremier provider of small satellite EO missions, andoperates the Disaster Monitoring Constellation (DMC),the first Earth observation constellation of low cost smallsatellites providing daily high resolution images for severalapplications including global disaster monitoring. Pushingthe boundary of low cost satellites means also pushing theboundary of the mission planning systems which form partof the SSTL portfolio.
In this paper, we present the experience, challenges andaims behind the development of mission planning systemsin the EO commercial sector, identifying the differenceswith academic and institution world research. The rest ofthe paper is organized as follows: Section 1 focuses on therequirements given by the commercial sectors; Section 2presents the high level architecture of the mission planningsystem currently developed in SSTL; and the remainingsections describe the main components of the system, theircapabilities and their roadmaps. Finally, Sect. 6 discussesthe main limitations of and the possible alternatives to ourapproach.
1 Requirements for commercial MissionPlanning Systems
Mission Planning Systems developed for commercialmissions are often driven by requirements similar to theones of the academic and institution world. However twomain factors specific to commercial applications play a keyrole: the customer and the economic return. In the followingparagraphs we discuss the implications of these factors.
• Flexibility to customers’ preferences. Customers playa key role in the projects from the system requirementsdefinition to the acceptance tests. Each mission is highlycustomized to their needs and interests and a significanteffort is devoted to align these preferences to what isactually feasible or useful given the resources available.SSTL deals with a great variety of customers acrossgovernments and imaging companies. This variability inthe customers’ preferences motivates the development ofan MPS with a wide variety of functionalities, able tosatisfy different ways of working and that can be easilycustomized.
• System model fidelity. The MPS needs a veryaccurate system model in order to plan efficiently thespacecraft resources. Each mission developed in SSTLis comprised of heritage components, which have beenalready flight proven in previous missions, as well asnew developments. This helps reducing costs withoutcompromising reliability. The MPS system model hasto reflect a similar modular architecture, where thealgorithms defining the new components can seamlesslyintegrate into the overall system.
• Responsiveness & Reliability. The system requirementsdescribing the performance expected by the customersare a serious aspect for the overall mission. Some of ourcustomers deal with critical scenarios such as disastermanagement. This means that the MPS has to assure a
high-level reliability as well as responsiveness. Equallyimportant is the system efficiency that in case of privatecustomers is directly connected to the economic return forthat customer.
• Scalability. The current trend for EO missions sees theuse of larger constellations of up to dozens of satellites. Abigger number of satellites allows lower revisit times aswell as quicker coverage. However from a planning pointof view this results in a more complex system to manageand to optimize. The MPS needs to offer scalability insystem performance as well as in system usability.
• Interoperability & heterogeneity. Some constellationsinclude heterogeneous satellites, for example opticaltogether with SAR. Some of these satellites might beowned by different entities and controlled by independentground segments. In some cases different customersmight buy quotas of the constellation capacity. Theseare further levels of complexity for the system that hasto handle different system models, has to interface todifferent ground segments and has to guarantee the quotasamong the users.
• Adaptability. The MPS operates in a dynamicenvironment where asynchronous user requests, satelliteavailability windows, emergency situations and goalredefinitions constantly change. The rate of change islikely to increase with the size of the constellation andthe volume of business of the customer. Being able toadapt to this dynamic is surely a desirable feature for anMPS.
• ‘Man in the loop’. The importance of autonomousapplications and optimization techniques is growing withthe increase of complexity of the systems. Howevercustomers do want to feel in control of their missionand understand how the system works. This meansthat the system needs to carefully integrate autonomousapplications without removing the manual workflow butenrich it with more information and support.
• Customer perception. A new autonomous feature couldbe technologically fascinating but its value has to beperceived and acknowledged by the customers. Thisis an important consideration when developing a newfunctionality and it justifies the importance given to thegraphical component associated to that feature and itsusability.
• Limited budget & time. In commercial projects thebudget is often the strongest constraint that affects most ofthe decisions. Delivering a project in time and in budgetis one of the biggest challenges. SSTL aims at deliveringmissions in less than 2-3 years and only a small portion ofthis time is dedicated to the MPS. Such a tight scheduleforces us to focus on the real needs of the customers andwhat would make the difference for them.
2 SSTL MPS ArchitectureThe SSTL Mission Planning System is responsible forPlanning and Scheduling the payload operations of a

Satellite Planner 1
Mission Broker
Satellite Planner 2
Catalogue OGC CSW
3rd party GS OGC SPS
Satellite Operator
Atlas MI
MPS
Mission Operator
Figure 1: SSTL Mission Planning System Architecture.
satellite constellation. It provides interfaces to allowUsers to place requests and for Spacecraft Operators tomanage the Payload operations. The current version ofthe MPS is being developed to efficiently handle multiplesatellites and ground stations. It comprises of a seriesof distributed components connected using the ServiceOriented Architecture (SOA) web service paradigm. Figure1 shows the high-level view of the system architecture.
The main components are:
• Atlas Mission Interface (MI). This represents themain front-end of the system. Its core functionality isthe imaging tasking but it also offers a number ofrelated functionalities such as campaign management,plan analysis, plan management, catalogue client andreporting.
• Mission Broker. This is the ”broker” of the system.It interfaces Atlas MI with all the Satellite Plannercomponents required by the mission. It does notimplement any user interface as its core functionalitiesis allowing the Atlas components to communicate withthe Satellite Planner components and the Cataloguecomponents.
• Satellite Planner. This is the satellite-specificcomponent. It implements the system model specific ofthe satellite associated to it. In a constellation scenarioone Satellite Planner component is required for eachsatellite of the constellation. It manages the low-levelplanning of the satellite as well as the life cycle of theacquisitions requested.
The general imaging tasking workflow is the following:the user defines a set of imaging opportunities using AtlasMI and submits them to the Mission Broker that forwardsthem to the respective Satellite Planner components. EachSatellite Planner validates the new imaging opportunitiesagainst the spacecraft low-level plan and if possible it addsthem into the current plan. When required each SatellitePlanner generates the spacecraft command sequences toacquire the images. These sequences are then uploaded to
each spacecraft during the next contact with the groundstation. Most of this workflow is fully automated but thereare still challenges regarding the plan definition. This isdescribed in Sect. 5.
In order to maintain low developing costs and ahigh flexibility each of these components has a modulararchitecture with a wide number of reusable elements acrossdifferent missions and customers. Ideally they would onlyneed to be configured appropriately for individual missionrequirements rather than require software changes, but inreality this never happens because each mission has specificrequirements and new software functionalities that need tobe added to the system. Moreover a various number ofmissions with different CONOPS and features are normallydeveloped at the same time. This means that multiple MPSare in development at any one time. Maintaining a high levelof generality is a continuous challenge.
3 Satellite PlannerThe Satellite Planner is responsible for the low-levelplanning and scheduling of activities on an individualsatellite. The new image acquisition requests are deliveredby the Mission Broker component to the Satellite Plannerthat validates them against its current plan. Moreover thesatellite operator can manage operations on the individualsatellite via the Satellite Operator interface, a GUI designedto offer various functionalities from plan management tospacecraft/system configuration.
The core of the Satellite Planner is a timeline-basedplanning engine which is in charge of generating thetimelines associated to the resources while preserving theirconsistency. This engine always maintains a conflict-freeachievable plan without needing intervention from usersor satellite operators. The calculation of the timelines isbased on different types of events/activity that are scheduledfollowing a specific order. The imaging acquisitions arethe first to be scheduled as they have immovable startand end times and must be placed at these allocatedtimes on the timelines. The second to be allocated are theactivities directly connected with the imaging acquisitionssuch as the AOCS manoeuvres. These events define theimaging windows. Finally the planning engine allocatesthe remaining activities such as data transfer, power anddownlink events.
When conflicts are found and there is no possibility ofmoving the events around, a deterministic priority-basedconflict resolution scheme is employed. This will dischargethe lowest priority fixed event and all the events relatedto it. A concept we are working is an intelligent conflictresolution scheme which is able to offer alternative solutionsto the users when acquisition requests are refused dueto a conflict. Such an algorithm shall behave as a localsearch optimizer, offering the closest optimum valid solutionavailable. Anything with a broader scope would result in awider change to the plan that the user would probably refuse.
Once consistent timelines are generated the planningengine also performs optimization based on rules specificto its satellite model. As such it is optional and may infact involve more than one distinct optimization algorithm.

Example of optimizations could be detecting and preventingunnecessary attitude manoeuvres between image captures,flow of data between storage units, windowing rules formultiple imager banks, etc.
The events presented above and the rules among themare generated in accordance to the specific satellite modelmanaged by the Satellite Planner. A high fidelity model isessential to guarantee high reliability and high efficiencyin the use of the satellite resources. Moreover it requiresa modular architecture with a wide number of reusableelements across different missions and straightforwardconfiguration of the satellite-specific requirements. Notethat in the reality the high-fidelity model used on ground hasto maintain a certain level of margin due to the uncertaintyon the resources utilisation, such as data compression anddownlink rate. These aspects are outside the scope of thispaper. A detailed discussion can be found in (Maillard et al.2015). The rest of this section focuses on the capabilities andversatility of the MPS system model.
Imager modelThe MPS models various imaging modes defined for eachmission as well as the imager parameters required to achievehigh quality images.
• Imaging modes can be single or compound. Singlemodes are typical pushbroom acquisitions where thesatellite is kept a constant attitude during the capture.Compound modes imply combinations of two or moresingle mode acquisition with attitude manoeuvres inbetween. A typical example is an along-track stereoacquisition achieved by capturing two acquisitions ofthe same target during a single pass thanks to a pitchmanoeuvre in between.
• Typical imager parameters regard the gains and exposuressettings. The correct tuning of these parameters isessential in order to avoid saturation of the sensor. Theuser is called to classify the type of target terrain heis interested in imaging, and the MPS determines gainand exposure settings automatically. Depending on thesensor the MPS is also called to determine the numberof TDI (Time Delay and Integration) stages to use. Thisdepends on the SNR (Signal Noise Ratio) estimated forthe acquisition.
• The MPS also takes care of safety constraints for theimager such as overheating during long strip acquisitionsor close sequential acquisitions and dangerous attitudeconditions when direct sun light could hit the sensor.
AOCS modelSatellite attitude and orbital estimation is an essential aspectfor the MPS and its precision is critical in order to acquirethe exact targets requested by the user. This is not a trivialtask if we are trying to achieve a responsive system andwe consider high resolution agile constellations. The MPSimplements two main functionalities:
• Finding imaging opportunities. The MPS calculates whenthe satellite will pass over a specific target. This task
can be done with different levels of precision andperformance. The first condition for accuracy is givenby the knowledge on the satellite orbit. The groundsegment using the GPS measurements of the satelliteupdates the orbit definition of the satellite every 24 hours.This is represented in a TLE (Two Line Element) thatis disseminated across various ground segment software,including the MPS. Given this information the MPS runsa fast approximated prediction algorithm which exploitsan estimator based on the epicycle model (Palmer P.2000). Finally in order to achieve the accuracy requiredthe results of this algorithm are refined using a gradientmethod.
• Calculating attitude maneuvers. The MPS dynamicallytracks and records the attitude of the satellite at anygiven time. When a new acquisition is submitted theMPS is called to define the events regarding the attitudemaneuvers. This involves the knowledge of the satelliteAOCS capability in terms of ranges of roll and pitchavailable, the speed of the actuators and the accuracyrequired by the imaging mode.
Communication model
The MPS is responsible for determining the downlinkbudget available to the satellite. This implies calculatingthe duration of each ground station pass as well as thebudget available for each pass. This depends on the antennacapability of the satellite. Antennas have very differentpatterns and those with high power and a narrow coneof radiation are provided with a mechanical pointingmechanism. Such a mechanism moves the antenna to trackthe groundstation during a pass and is very useful for agilesatellites when a downlink is performed at the same time asan off-pointing image capture. In this case the MPS has tocheck that no pointing limit constraints are violated. If thisis predicted to occur then the MPS varies the duration ofthe pass. Lastly the MPS implements different policies withregards to which ground station to download. The user canindicate a specific ground station or a group where the imagehas to be downloaded to all of the ground stations or only tosome of them.
Data storage model
The MPS can model the data storage capability of thesatellite and the policy in place for using it. This implies avarious number of devices often used in combination. Somedevices have a high capacity but very basic reading/writingpolicy (do not support file deletion) or vice versa smallcapacity but full access control. Different downlink policescan be associated to the different devices that in turn givesdifferent downlink priorities to the acquisitions saved onthese devices. The MPS dynamically tracks and records theutilization of the data storage devices as well as definingthe event associated with the data flows to and from thesedevices.

Power modelPart of the validation that the MPS performs for everynew acquisition involves checking that capturing anddownloading the proposed images will not deterioratethe battery. This could be done with hard-coded safetyconstraints, however this would be quite inaccurate and thelack of any dynamic checking could result in constraintstoo restrictive for a given schedule. The current SSTL MPSdynamically tracks and records power usage in order tomaximize the use of a satellite. The MPS models andpredicts the power being generated by the solar panels andthe power being used by its onboard components. Morespecifically this model takes into account the following:
• The effect of solar panel temperature on the powergeneration per unit time
• The power generated per unit time, which is directlydependent on the angle of incidence of solar radiationon the solar panels when the spacecraft is not in eclipse.This depends on the spacecraft’s planned attitude over thecourse of the plan.
• Power expected to be used by the new acquisition requestand by all the events associated to it.
From this data the MPS can detect where the patternof battery usage may be detrimental to its long-termperformance. This is achieved checking the under voltageprotection threshold, the capacity available in a 24-hourperiod in order to prevent a slow but steady decline in batterycapacity and the number of discharge cycles in a 24-hourperiod in order to preserve the lifetime of the battery.
The smallest time step (and therefore accuracy of theprofile) per iteration is configurable to allow adjustment ofaccuracy versus algorithm performance.
4 Mission BrokerThe Mission Broker component aims at implementing thedistributed nature of the MPS. We envisage scenarioswhere a number of heterogeneous satellite-specific groundsegments are interconnected through the Mission Broker.This allows front ends like Atlas MI to see the entire systemas one constellation. This is a concept of increasing interestfor private customers as well as institutions where differentspace assets need to be put under the same planning system.Moreover this distributed nature enables the concept ofcapacity sharing among different customers. Customers maybe interested in a certain percentage share of payload timeper day or in a quota of the overall throughput.
In order to improve the operability with non SSTL groundsegments we are working on extending these interfacestowards the OGC web service standards. The MissionBroker is able to connect to external components throughOGC standards such as CSW (Catalog Service for the Web),WPS (Web Processing Service) and SPS (Sensor PlanningService). The OGC EO SPS service specification (Robin andMrigot 2011) seems flexible enough to handle the validation(feasibility check) and submission of acquisitions to asatellite-specific planning system such as the SSTL SatellitePlanner. Moreover, it provides a status notification update
service. These are functions currently provided by theproprietary interfaces between the SSTL Satellite Plannerand the Mission Broker.
Moving forward, the Atlas MI component may be ableto automatically configure itself to use different EO assets.Currently this is a manual and time consuming procedure.The EO SPS specification may be extended with a modelspecific for the mission planning purposes. This model mayincorporate the AOCS, power, data storage, imaging andcommunication models. The constraints could be definedusing a standard language such as the NDDL (New DomainDefinition Language)(Frank and Jonsson 2007) or similar.These concepts are still at definition stage and require furtherinvestigation.
5 Atlas Mission InterfaceAtlas MI encompasses most of the MPS functionalitiesavailable to the users. It is a multi-user web applicationdeveloped using AJAX technologies, such as the RAP(Remote Application Platform) framework. This frameworkenables us to write a modern web application using mostlyclassic Java programming. This offers a number of benefitssuch as code sharing among the ground segment softwareand the development of tools given by the Java IDE.Moreover Atlas MI allows multiple users concurrently. Thistogether with the portability given by the web applicationallows a great flexibility in the system deployment.
The RAP framework offers the reuse of a numberof GUI components that are common in the EclipseRCP framework, such as views and perspectives. Thesecomponents allow a higher level of usability and flexibilityin shaping the GUI layout. A view implements aspecific functionality while a perspective provides a set offunctionalities aimed at accomplishing a specific task. Aperspective defines the initial set and layout of the views.Moreover perspectives can share the same views if needed.
The rest of this section is going to describe a number ofperspectives that represent specific use cases. Some of theirfunctionalities are under development or are still at conceptlevel but it is important to present them in order to show ouroverall aim. These perspectives can be seen as steps of theimaging tasking workflow as represented in Fig. 2. The userstarts defining the areas of interests, in the Campaign Editor;this is the main input to generate the imaging opportunitiesand create suitable plans in the Plan Builder perspective.This perspective allows manual and automated planning aswell advanced tools to evaluate different plans. The PlanExecution perspective is used for the monitoring and controlof the current plan while the Catalogue displays the imagesacquired. Finally the Reporting perspective helps the user todocument the work performed.
Campaign EditorThis perspective allows the user to manage all the aspectsrelated to the concept of campaign. In Atlas MI this is akey concept for the imaging planning. A campaign is anextension of the classic concept of Area of Interest (AOI);it groups a wider set of imaging requirements defined by theusers and by the system such as:

Plan Execution
Reporting
Campaign Editor
Campaign
Catalogue
CSW
Plan Builder
Manual Planning
Automated Planning
Multi-Dim.Evaluation
Figure 2: Imaging tasking workflow and perspectives inAtlas MI.
• Sets of AOis. They can represent imaging targets, imagesacquired or targets non available. An AOI can be drawnby the user using an Earth map view or can be loadedfrom a KML file or from a gazetteer. An AOI can be atarget point, such a city, a rectangle, a polygon or a set ofpolygons.
• List of satellites that can be used for this campaign. Thismight depend on the type of imaging products neededor on the agreements in place with the customers of thatcampaign.
• Image quality requirements such as maximum cloudcoverage, sun elevation and so on.
• Customer or priority level. This is important for theconflict resolution policy applied during the planningprocedure. A priority system can be associated atcustomer level or at AOI level.
• Utilization quota of the constellation capacity expectedfor this campaign. The automated planner takes thispreference in account.Once a set of campaigns is defined, the user can switch
to the Plan Builder perspective where these campaigns areconverted to a set of imaging opportunities and evaluatedfor the submission into the plan.
Plan BuilderBuilding a plan for a constellation is a critical processwhere many factors need to be taken in account: thecampaigns requested, the images acquired in the catalogueand the resources available in the constellation. Theuser needs therefore to be assisted with different levelof autonomy. Here the integration and the usability ofautomated technologies becomes a crucial design element.The key concept in this perspective is the plan. A plan is a setof imaging opportunities that have been either just generatedin Atlas MI or already submitted to the Satellite Planners.We envisage three tools to be used in combination:
Figure 3: Atlas screen-shoot of the manual planningfunctionality.
• Manual planning. The user can create draft plans basedon the current plan and on new imaging opportunitiesgenerated by the system. Once a campaign is selected theuser can search for the imaging opportunities that satisfyall the requirements of that campaign. Moreover the usercan then edit any parameter associated to each imagingopportunity such as imager settings, AOCS, priority,ground station, etc. Figure 3 shows a screen-shoot of thistool.
• Multi-dimensional plan evaluation. We are working ongiving the user the ability to create multiple plans andedit them separately. This is a desirable functionalityparticularly when the user can compare these plansagainst each other as different dimensions of analysis.The user will be able to select the dimensions of analysisamong: system throughput (number of images), imagequality (minimum roll, best sun elevation), coverage,quickest time or user preferences compliance. The systemshall display the results of the comparison using aPareto front representation. The benefits of such amulti-objective analysis have been widely shown bythe MUSE system in applications such as the sciencescheduling for the James Webb Space Telescope or forthe Cluster II mission (Johnston and Giuliano 2010).
• Automated planning. This tool is an alternative workflowrespect to the manual planning functionality. In thiscase the system calculate the imaging opportunities andautomatically select the subsets that optimize the goalcriteria selected by the user. Each of these subsets ispresented as a new plan to the user. The goals availableto the user are the same of the dimensions of analysispresented above. Finally the stopping criteria determinesthe modality of use of this functionality. In single-runmode the user has to wait that the algorithms convergeinto an optimum or that a maximum amount of time haspassed. In continuous mode the optimization process runsin the background updating the plan list whenever a betterplan is found and whenever the campaigns are changed.This way of using the system does not require highresponsiveness but it does require a different workflow in

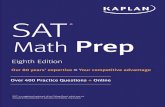
Figure 4: Example of coverage planning problem overChina.
the imaging tasking operations.The Automated planning functionality is still at
prototyping stage and is object of our research. Inthe last few years we have been researching a systembased on Ant Colony Optimization that was ableto solve the constellation planning problem in avery scalable and adaptable manner when runningin a continuous mode (Iacopino and Palmer 2012;Iacopino et al. 2014). This is therefore our favouriteapproach in solving this problem. However there arelimitations and open questions. The main questionregards the definition of approximated satellite models forevaluating the different plans proposed by the optimizationprocess. Using high fidelity models such as the ones in theSatellite Planner described in previous sections is not afeasible approach due to the computation time required fortheir evaluation.
Moreover we are working to extend this research alongtwo directions: multi-objective optimization and coverageplanning. A multi-objective optimization system can offer acomprehensive set of plans, spread along conflicting goals.This is a clear benefit for the multi-dimensional analysis.
The coverage planning is particularly important whentrying to image large AOI, such as continents with highresolutions agile satellites. In this case the planning problemexplodes dimensionally because there is also a problem ofAOI segmentation. For each pass the system has to chooseamong tens of imaging opportunities and has to try to avoidoverlapping with the opportunities of other passes. Figure4 shows an example result of a coverage planning problemover China. A few studies to this problem can be found in(Mclaren et al. 2011; Knight, McLaren, and Hu 2012).
Plan ExecutionThe Satellite Planner interface offers a number offunctionalities to manage the plan at satellite level. InAtlas MI the user can access management functionalitiesat constellation level. This perspective gives a constantlyupdating picture of the current plan. The user can access thefollowing basic functions:• Notification board. The system notifies any event that
affects the plan, such as the change of status of someacquisitions (new images performed) or that affects theuser-defined campaigns (new cloud information).
• Plan Manager. Here the user can visualize any portionof the plan or filter it. The user can access to anyspecific details of an acquisition and perform a number ofactions on them, such as removing from the plan, editingdownlink schedule and so on.
• Timeline Viewer. The user can visualize with a timelinerepresentation any resource or event profile related to aspecific spacecraft or ground station in a defined timeframe.
CatalogueA catalogue client is essential to close the circle that goesfrom ordering an image opportunity to display the imageacquired. Atlas MI implements a client that is able toquery OGC CSW catalogue servers. The use of standardweb service interfaces helps the interoperability with thecustomers’ ground segments. The catalogue client allowsthe user to perform complex searches customized to thedifferent imaging products metadata. These searches arecampaign based; the user can select the same campaignsdefined in the Campaign Manager perspective and use theseas time window and geographical input.
ReportingSemi-automated reports can be created using thisperspective. The user can define templates using avery simple scripting language that are then filled with realtime data from the MPS. This is a quite handy functionality,very flexible in creating a number of different reports. Thisis a desirable functionality when operating in a constellationcontext with high throughput and high number of customers.
6 ConclusionsEarth Observation Small-Sat constellations offer newchallenges for the commercial Mission Planning Systemssolutions. We need systems which are highly responsive tocustomer inputs, adaptable to dynamic environments andhighly scalable but at same time cost effective and customeroriented. Today a number of autonomy solutions areavailable for meeting these requirements such as advancedPlanning & Scheduling technologies and self-organizingagent architectures.
In this paper, we presented years of operationalexperience matured in SSTL in developing MPS systems.The concepts presented show an innovative system thatoffers reliability and fidelity as well as reusability andconfigurability to satellite-specific requirements. Howeverthere are still a number of questions which do not have easyanswers. To summarize these challenges:
• Generic vs Satellite-specific. As seen in this paper thereis a constant pressure to design the MPS with componentsthat can be reused across different missions. This is not atrivial task and affects any new functionality developed,including the design of the satellite models. Purelysatellite-specific solutions can offer fast development,simple design but poor reusability while purely genericsolutions can be highly reusable but requiring longer

development and more complex design. The mainchallenge is therefore in finding a good cost-effectivetrade-off.
• Responsiveness vs Efficiency. Responsive systemsimprove the usability of the user interfaces, the customersatisfaction and facilitate late breaking urgent imagerequests such in case of disaster monitoring. Howeverdelivering reliable and efficient solutions is equallyimportant. This is a trade-off that needs to be constantlybalanced with any functionality, in particular in case ofautonomous functionalities. The biggest challenge is indefining the border between the approximated satellitemodels used during the optimization process performedin Atlas MI and the high fidelity models defined in theSatellite Planner. A model too approximated providesplans very quickly but they are less efficient and morelikely to be refused at later stages of the submissionprocess. This could get to a point where the efficiencyis so low that it defies the benefits of the optimizationprocess itself. On the other side with a model too precisethe optimization process could be simply unfeasible interms of performance.
• Customer driven deployment vs Long-term vision. Inthe commercial sector most of the new developmentsfor a product are driven by customer requirements.This is a powerful mechanism that assures incrementaldevelopment. However this approach has limitationsbecause often the customers have limited knowledge ofwhat the current capabilities available in the market areor what could be further developed. This motivates theeffort in maintaining a long-term roadmap and devotinga reasonable effort to align customers’ preferences to ourfuture direction.
ReferencesChien, S.; Johnston, M.; Frank, J.; Giuliano, M.; Kavelaars,A.; Lenzen, C.; and Policella, N. 2012. Ageneralized timeline representation, services, and interfacefor automating space mission operations. In Proceedingsof the 12th International Conference on Space Operations,SpaceOps AIAA.Frank, J., and Jonsson, A. 2007. Developingdomain-independent search control for europa2.In Proceedings of the Workshop on Heuristics forDomain-independent Planning: Progress, Ideas,Limitations, Challenges. 17th International Conference onAutomated Planning and Scheduling ICAPS-2007.Galan-Vioque, J.; Vazquez, R.; Carrizosa, E.; Flores, C.;Perea, F.; and Crespo, F. M. 2011. Towards a visual toolfor swath acquisition planning in multiple-mission eoss. In7th International Workshop on Planning and Scheduling forSpace, IWPSS-11.Herz, E. 2014. Eo and sar constellation imagerycollection planning. In Proceedings of the 13th InternationalConference on Space Operations, SpaceOps. AIAA.Iacopino, C., and Palmer, P. 2012. The dynamics of ant
colony optimization algorithms applied to binary chains.Swarm Intelligence 6(4):343–377.Iacopino, C.; Palmer, P.; Policella, N.; Donati, A.; andBrewer, A. 2014. How ants can manage your satellites.Acta Futura (9):59–72.Johnston, M., and Giuliano, M. 2010. Multi-objectivemulti-user scheduling for space science missions. InProceedings of the 11th International Conference on SpaceOperations, SpaceOps. AIAA.Knight, R.; McLaren, D.; and Hu, S. 2012. Planningcoverage campaigns for mission design and analysis:Clasp for the proposed desdyni mission. In ProceedingsInternational Symposium on Artificial Intelligence,Robotics, and Automation for Space.Kumagai, J. 2014. 9 earth-imaging start-ups towatch. http://spectrum.ieee.org/aerospace/satellites/9-earthimaging-startups-to-watch.Maillard, A.; Pralet, C.; Jaubert, J.; Sebbag, I.; Fontanari,F.; and LHermitte, J. 2015. Ground and boarddecision-making on data downloads. In Proceedings of25th International Conference on Automated Planning andScheduling ICAPS-2015.Mclaren, D.; Rabideau, G.; Chien, S.; Knight, R.; Anwar,S.; Mehall, G.; and Christensen, P. 2011. Schedulingresults for the themis observation scheduling tool. In 7thInternational Workshop on Planning and Scheduling forSpace, IWPSS-11.Palmer P., M. Y. 2000. A fast prediction algorithm ofsatellite passes. In Small Satellite Conference.Robin, A., and Mrigot, P. 2011. Ogc sensor planning serviceinterface standard 2.0 earth observation satellite taskingextension. http://www.opengeospatial.org/standards/sps.S. Hollister, G. 2011. Military space requirements marketsand technologies forecast - 2012-2017. Technical report.Tejo, J.; Garrigues, A.; and Arregui, J. 2014. Planningthe operations for sentinel-1 satellite: how to fit a complexpuzzle. In Proceedings of the 13th International Conferenceon Space Operations, SpaceOps. AIAA.Tonetti, S.; Cornara, S.; and Pirondini, F. 2014. Fullyautomated mission planning and capacity analysis tool forthe deimos-2 agile satellite. In Proceedings of the 13thInternational Conference on Space Operations, SpaceOps.AIAA.