
LỜI NÓI ĐẦU Tài liệu học tập hệ thống điều khiển số được ...
107
1 LỜI NÓI ĐẦU Tài liệu học tập hệ thống điều khiển số được biên soạn theo kế hoạch đào tạo và chương trình môn học hệ thống điều khiển số của khối các ngành kỹ thuật chuyên điện, trường Đại học Kinh tế - Kỹ thuật công nghiệp. Nội dung tài liệu gồm 4 chương chính: Chương 1: Những khái niệm cơ bản về điều khiển số, phần này cung cấp khái niệm, cấu trúc cơ bản của hệ điều khiển số, các dạng tín hiệu, phép biến đổi Z và giới thiệu một số hệ điều khiển số. Chương 2: Mô tả toán học hệ điều khiển số, cung cấp các phương pháp mô tả toán học hệ điều khiển số Chương 3 : Khảo sát sự ổn định và phân tích hệ điều khiển số Chương 4: Thiết kế và mô phỏng hệ thống điều khiển số. Nhóm tác giả chân thành cảm ơn Ban Giám hiệu trường Đại học Kinh tế - Kỹ thuật công nghiêp, Khoa Điện, Bộ môn điều khiển và tự động hóa đã động viên và tạo mọi điều kiện thuận lợi để nhóm tác giả viết tài liệu học tập. Trong quá trình biên soạn không tránh khỏi còn nhiều sai sót, tác giả mong nhận được ý kiến đóng góp của các bạn đồng nghiệp và đọc giả để cuốn sách được hoàn thiện hơn. Địa chỉ: Khoa Điện, Trường Đại học Kinh tế Kỹ thuật Công nghiệp, 456 Minh Khai, Hai Bà Trưng, Hà nội. Website: khoadien.uneti.edu.vn. Email: [email protected]. Ngày 15 tháng 4 năm 2019
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of LỜI NÓI ĐẦU Tài liệu học tập hệ thống điều khiển số được ...

1
LỜI NÓI ĐẦU
Tài liệu học tập hệ thống điều khiển số được biên soạn theo kế hoạch đào tạo và
chương trình môn học hệ thống điều khiển số của khối các ngành kỹ thuật chuyên điện,
trường Đại học Kinh tế - Kỹ thuật công nghiệp. Nội dung tài liệu gồm 4 chương chính:
Chương 1: Những khái niệm cơ bản về điều khiển số, phần này cung cấp khái niệm,
cấu trúc cơ bản của hệ điều khiển số, các dạng tín hiệu, phép biến đổi Z và giới thiệu một
số hệ điều khiển số.
Chương 2: Mô tả toán học hệ điều khiển số, cung cấp các phương pháp mô tả toán
học hệ điều khiển số
Chương 3 : Khảo sát sự ổn định và phân tích hệ điều khiển số
Chương 4: Thiết kế và mô phỏng hệ thống điều khiển số.
Nhóm tác giả chân thành cảm ơn Ban Giám hiệu trường Đại học Kinh tế - Kỹ thuật
công nghiêp, Khoa Điện, Bộ môn điều khiển và tự động hóa đã động viên và tạo mọi
điều kiện thuận lợi để nhóm tác giả viết tài liệu học tập. Trong quá trình biên soạn không
tránh khỏi còn nhiều sai sót, tác giả mong nhận được ý kiến đóng góp của các bạn đồng
nghiệp và đọc giả để cuốn sách được hoàn thiện hơn.
Địa chỉ: Khoa Điện, Trường Đại học Kinh tế Kỹ thuật Công nghiệp, 456 Minh
Khai, Hai Bà Trưng, Hà nội.
Website: khoadien.uneti.edu.vn.
Email: [email protected].
Ngày 15 tháng 4 năm 2019

2
MỤC LỤC
LỜI NÓI ĐẦU ...................................................................................................... 1
CHƯƠNG 1: NHỮNG KHÁI NIỆM CƠ BẢN VỀ ĐIỀU KHIỂN SỐ .......... 4
1.1. KHÁI NIỆM. ..................................................................................................................... 4
1.1.1. Khái niệm chung về hệ điều khiển số. ................................................................... 4
1.1.2. Ưu điểm và nhược điểm của điều khiển tương tự và điều khiển số ................... 4
1.1.3. Phân loại hệ điều khiển số. ..................................................................................... 7
1.2. CẤU TRÚC CỦA HỆ THỐNG ĐIỀU KHIỂN SỐ .......................................................... 8
1.3. TÍN HIỆU VÀ XỬ LÝ TÍN HIỆU SỐ .............................................................................. 9
1.3.1. Phân loại tín hiệu .................................................................................................... 9
1.3.2. Xử lý tín hiệu ......................................................................................................... 10
1.4. PHÉP BIẾN ĐỔI Z .......................................................................................................... 15
1.4.1. Định nghĩa ............................................................................................................. 15
1.4.2 Tính chất của phép biến đổi Z .............................................................................. 16
1.4.3. Biến đổi Z của các hàm cơ bản ............................................................................ 17
1.4.4 Các phương pháp tìm biến đổi Z ngược .............................................................. 19
CHƯƠNG II : MÔ TẢ TOÁN HỌC HỆ ĐIỀU KHIỂN SỐ ......................... 22
2.1. MÔ TẢ TOÁN HỌC HỆ ĐIỀU KHIỂN SỐ BẰNG PHƯƠNG TRÌNH SAI PHÂN .... 22
2.2. MÔ TẢ TOÁN HỌC HỆ ĐIỀU KHIỂN SỐ BẰNG HÀM TRUYỀN ĐẠT .................. 23
2.2.1. Hàm truyền đạt của hệ rời rạc ............................................................................. 23
2.2.2. Tính hàm truyền hệ rời rạc từ sơ đồ khối ........................................................... 24
2.3. MÔ TẢ TOÁN HỌC HỆ ĐIỀU KHIỂN SỐ BẰNG PHƯƠNG TRÌNH TRẠNG THÁI ................................................................................................................................................ 28
2.3.1. Thành lập phương trình trạng thái từ phương trình sai phân ......................... 28
2.3.2. Thành lập phương trình trạng thái từ hàm tryền hệ rời rạc ........................... 32
2.3.3 Thành lập phương trình trạng thái hệ rời rạc từ phương trình trạng thái hệ liên tục ....................................................................................................................... 36
2.3.4. Tính hàm truyền hệ rời rạc từ hệ phương trình trạng thái. ............................ 42
2.4. Mô tả toán học hệ điều khiển số bằng Matlab Simulink ...................................... 43
CHƯƠNG 3 :KHẢO SÁT ỔN ĐỊNH VÀ PHÂN TÍCH HỆ ĐIỂU KHIỀN SỐ .............................................................................................................................. 52
3.1 KHÁI NIỆM ..................................................................................................................... 52
3.2. TIÊU CHUẨN ỔN ĐỊNH ĐẠI SỐ ................................................................................. 54
3.2.1. Tiêu chuẩn Routh – Hurwitz mở rộng ................................................................ 54
3.2.2. Tiêu chuẩn JURY .................................................................................................. 56
3.2.3. Quỹ đạo nghiệm số ................................................................................................ 57
3.3. CHẤT LƯỢNG HỆ THỐNG RỜI RẠC ......................................................................... 62

3
3.3.1 Đáp ứng quá độ ...................................................................................................... 62
3.3.2. Độ quá điều chỉnh ................................................................................................. 62
3.4.TÍNH ĐIỀU KHIỂN ĐƯỢC VÀ QUAN SÁT ĐƯỢC CỦA HỆ ĐIỀU KHIỂN SỐ ...... 68
3.4.1 Tính điều khiển được và quan sát được của hệ thống tuyến tính liên tục ........ 68
3.4.2 Tính điều khiển được và quan sát được của hệ thống điều khiển số ................. 68
3.5. KHẢO SÁT TÍNH ỔN ĐỊNH CỦA HỆ THỐNG ĐIỀU KHIỂN SỐ TRÊN MATLAB – SIMULINK. ............................................................................................................................ 70
CHƯƠNG 4 : THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN SỐ ........................... 76
4.1. KHÁI NIỆM .................................................................................................................... 76
4.2. HÀM TRUYỀN ĐẠT CỦA CÁC KHÂU HIỆU CHỈNH RỜI RẠC ............................. 77
4.2.1. Khâu tỉ lệ ................................................................................................................ 77
4.2.2. Khâu vi phân ......................................................................................................... 77
4.2.3.Khâu tích phân ................................................................................................ 78
4.2.4. Bộ điều khiển PI, PD, PID rời rạc ....................................................................... 80
4.2.5. Bộ điều khiển bù pha (sớm pha ,trễ pha ) ........................................................... 80
4.3. THIẾT KẾ HỆ RỜI RẠC DÙNG PHƯƠNG PHÁP QUỸ ĐẠO NGHIỆM SỐ ............ 81
4.3.1. Thiết kế bộ điều khiển sớm pha ........................................................................... 81
4.3.2. Thiết kế bộ diều khiển trễ pha ............................................................................. 86
4.4. THIẾT KẾ BỘ ĐIỀU KHIỂN HỒI TIẾP TRẠNG THÁI. ............................................. 90
4.5. THIẾT KẾ BỘ ĐIỀU KHIỂN PID .............................................................................. 92
4.6. THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN SỐ ĐỘNG CƠ MỘT CHIỀU ....................... 94
4.6.1. Phân tích hệ thống điều khiển số động cơ một chiều ......................................... 94
4.6.2. Tổng hợp hệ thống dùng bộ điều khiển PID ..................................................... 100

4
CHƯƠNG 1
NHỮNG KHÁI NIỆM CƠ BẢN VỀ ĐIỀU KHIỂN SỐ
MỤC TIÊU CỦA CHƯƠNG
Cung cấp cho sinh viên kiến thức cơ bản về hệ thống điều khiển số : khái niệm, ưu
nhược điểm của điều khiển tương tự với điều khiển số, chuyển đổi tín hiệu giữa tương tự
và số, phép biến đổi Z
1.1. KHÁI NIỆM.
1.1.1. Khái niệm chung về hệ điều khiển số.
Hệ điều khiển số là hệ điều khiển mà trong hệ chỉ cần có một tín hiệu là tín hiệu
xung, số hoặc chỉ cần một thiết bị làm việc theo nguyên tắc số.
Sơ đồ khối của một hệ điều khiển số như hình vẽ sau:
Hình 1.1 : Sơ đồ khối của hệ điều khiển số
Trong thực tế không tồn tại hệ điều khiển số mà trong đó bao gồm toàn bộ các tín
hiệu là tín hiệu số hoặc bao gồm toàn bộ thiết bị số. Nguyên nhân là do các đối tượng
điều khiển trong thực tế là các thiết bị với đại lượng điều khiển là các đại lượng vật lý
biến đổi liên tục theo thời gian, do vậy để điều khiển được các đại lượng này thì tín hiệu
điều khiển phải là tín hiệu tương tự, mang năng lượng.
1.1.2. Ưu điểm và nhược điểm của điều khiển tương tự và điều khiển số
a. Hạn chế của điều khiển tương tự và ưu điểm của điều khiển số:
Nhược điểm quan trọng của kỹ thuật tương tự liên quan đến sự trôi thông số do
các nguyên nhân có nguồn gốc khác nhau (do nhiệt, hóa-lý, cơ học,…). Hiện tượng này
làm thay đổi thông số của các linh kiện điện tử, điện dung của tụ điện, điện trở của các
chiết áp. Để khử sự trôi thông số thường sử dụng các mạch bù làm tăng độ phức tạp của
mạch và giá thành. Các linh kiện số chỉ có hai mức năng lượng cao và thấp (0 và 1) nên
không bị ảnh hưởng bởi sự trôi thông số.
Thiết bị tương tự thường nhạy với nhiễu. Nhiễu có thể phát sinh do bản thân linh
kiện (nhiệt, sự già hóa,…) hoặc nhiễu từ các yếu tố bên ngoài do ảnh hưởng của môi

5
trường. Các cấu trúc số có thể được bảo vệ bằng các kỹ thuật áp dụng cho kỹ thuật tương
tự (màn chắn, bọc kim,…), ngoài ra còn dùng các kỹ thuật lọc số.
Việc truyền dẫn tín hiệu tương tự cũng gặp khó khăn do sự suy giảm tín hiệu. Việc
truyền dẫn tín hiệu số ít bị ảnh hưởng bởi sự suy giảm.
Các linh kiện tương tự có tính chất khác nhau về thông số khi sản xuất hàng loạt
làm cho các linh kiện tương tự kém ổn định.
Việc thực hiện một số chức năng như nhớ hoặc trễ bằng kỹ thuật tương tự gặp
nhiều trở ngại. Việc thực hiện các chức năng này bằng kỹ thuật số khá đơn giản.
Do hệ điều khiển số luôn sử dụng thiết bị tính toán có khả năng tính toán mạnh
như vi xử lý hoặc máy tính, cho phép gia công các quy luật điều khiển phức tạp, do vậy
có thể thực hiện điều khiển bám sát đối tượng thực. Trong trường hợp đối tượng thực
biến động, ta có thể chủ động thay đổi cả quy luật điều khiển, do vậy điều khiển số có độ
chính xác cao. Nói cách khác đối với điều khiển số với thiết bị tính toán có khả năng tính
toán mạnh, ta có thể áp dụng nhiều thuật toán điều khiển hiện đại mà trước đây không thể
thực hiện được.
Việc thực hiện mạch và hiệu chỉnh mạch tương tự gặp nhiều khó khăn, phức tạp
nên tốn nhiều thời gian và công sức.
b. Ưu điểm của thiết bị tương tự và nhược điểm của thiết bị số.
Tác động nhanh: Các thiết bị tương tự tác động gần như tức thời trong khi các
thiết bị số tác động chậm do cần thời gian biến đổi và xử lý. Thiết bị số phải thực hiện
theo các bước:
Lấy mẫu, ghi dữ liệu.
Tính toán, xử lý theo chương trình các dữ liệu ghi được ở trên
Muốn ra kết quả thì hệ điều khiển số phải trải qua hai công đoạn trên, do vậy hệ
điều khiển số có độ nhạy kém hơn hệ điều khiển tương tự (thời gian quá độ dài hơn). Để
khắc phục nhược điểm này ta phải tìm cách rút ngắn thời gian ghi dữ liệu bằng cách sử
dụng truyền thông song song mà không sử dụng truyền thông nối tiếp đồng thời loại bỏ
những dữ liệu không cần thiết, chỉ xử lý những dữ liệu cần thiết. Ngoài ra cần phải rút
ngắn thời gian tính toán bằng cách sử dụng vi xử lý có tốc độ tính toán cao đồng thời phải
tối ưu hóa chương trình điều khiển.
Tác động liên tục: cho phép sử dụng để khống chế các thông số (đại lượng) (như
dòng điện, điên áp) có sự biến thiên rất nhanh.
Đơn giản về thiết kế của điều khiển tương tự: Điều khiển tương tự trở nên nặng nề
đối với các điều khiển phức tạp, tuy nhiên ở mức độ cơ cấu hợp lý thì điều khiển tương tự
lại rất đơn giản về phương diện cấu trúc.
c. Các ưu điểm có tính chất quyết định của điều khiển số

6
Điều khiển số cho phép tăng tỷ số giữa tính năng và giá thành. Các ưu điểm của kỹ
thuật số thể hiện ở hai mặt:
- Điều khiển thông minh: các chương trình phần mềm cho phép tối ưu hóa điều
khiển và thay đổi tính năng mong muốn.
- Đơn giản hóa thiết bị, tiêu chuẩn hóa và tích hợp hóa: Vì chức năng điều khiển
chủ yếu được thực hiện bằng phần mềm nên với cùng một thiết bị phần cứng (một bộ vi
xử lý và các giao diện) được sử dụng cho mọi ứng dụng. Điều này dẫn đến giảm các chi
tiết dự phòng, do đó làm giảm giá thành.
d. Một số lưu ý đối với hệ điều khiển số.
- Thiết bị số được chế tạo chuẩn hóa mà các đại lượng vật lý thực tế đo được lại
biến đổi trong dải rộng. Do vậy, bắt buộc phải sử dụng thiết bị khuếch đại chuẩn hóa
A/A. Đây là thiết bị tương tự nên nhiễu rất dễ xâm nhập:
Hình 1.2: Chuẩn hóa tín hiệu tương tự - số
- Trong hệ điều khiển số, tín hiệu đưa vào vi xử lý phải là tín hiệu số mà đại lượng
vật lý thực tế cần điều khiển là tín hiệu tương tự. Vì vậy, bắt buộc phải sử dụng các bộ
chuyển đổi ADC, DAC gây ra sai số về quy luật tín hiệu và giá trị thông tin.
VD: giả thiết mức mã hóa là = 0,1 V
Hình 1.3.
Các mức 4,2; 8,6 khi chuyển về cơ số 2 với 4 bít:
0100 4 x 0,1 = 0,4 V
Rời rạc hóa theo thời Tín hiệu sau khi khôi
phục bằng chuyển đổi DAC

7
1000 8 x 0,1 = 0,8 V
Như vậy xuất hiện sai số khi so sánh với 4,2 và 8,6
Muốn giảm sai số quy luật của tín hiệu thì phải giảm chu kỳ lấy mẫu T. Muốn
giảm sai số về giá trị thông tin cần phải giảm mức độ mã hóa thông tin. Điều này dẫn đến
số lượng mã hóa lớn nên phải tăng số bit.
Để khắc phục, phải dùng chuyển đổi ADC, DAC có số bit mã hóa cao. Khi đó
phải sử dụng vi xử lý có tốc độ tính toán cao.
Hệ điều khiển số có đặc điểm phần cứng không quy định quy luật điều khiển mà
được quy định bởi phần mềm. Do vậy để sử dụng được thì người vận hành và sửa chữa
cần phải nắm vững cả phần cứng và phần mềm.
Do quy luật điều khiển được quy định bởi phần mềm nên có thể dễ dàng thay đổi,
vì vậy gây khó khăn cho người quản lý. Do vậy, trong thực tế các chương trình phần
mềm điều khiển không để trên máy tính mà được ghi trên các bộ nhớ cứng như: ROM,
EPROM, EEPROM.
Xu hướng sử dụng hệ điều khiển kết hợp hệ điều khiển tương tự và hệ điều khiển
số: do các đặc điểm đã nêu ở trên, trong lĩnh vực điều khiển truyền động điện người ta
thường sử dụng kết hợp điều khiển số và điều khiển tương tự.
- Các chức năng đòi hỏi điều khiển tác động nhanh được thực hiện bằng điều
khiển tương tự.
- Các chức năng ở mức cao, điều khiển thông minh nhưng thực hiện chậm hơn
sẽ được thực hiện bằng kỹ thuật số.
1.1.3. Phân loại hệ điều khiển số.
Hệ điều khiển số thường được phân loại theo khả năng xử lý tín hiệu
Hệ điều khiển số đơn kênh: là hệ chỉ điều khiển một đại lượng vật lý. Hệ này có
ưu điểm là đơn giản dễ tính toán nhưng nhược điểm là việc thực hiện dây chuyền tự động
rất khó khăn, cần sử dụng nhiều người vận hành.
Hệ điều khiển số đa kênh: là hệ sử dụng một hệ điều khiển số để điều khiển nhiều
đại lượng vật lý khác nhau, các đại lượng vật lý này hoàn toàn độc lập với nhau. Hệ điều
khiển số đa kênh phải sử dụng các mạch dồn kênh Mux và phân kênh Demux do vậy hệ
có đặc điểm là quá trình điều khiển bị sai số do thời gian điều khiển lặp lại dài khi số đại
lượng vật lý nhiều.
Hệ điều khiển số nhiều chiều: là hệ điều khiển nhiều đại lượng vật lý khác nhau và
giữa các đại lượng vật lý có môi liên hệ với nhau. Do vậy phải thực hiện điều khiển đồng
thời và thông tin, dữ liệu của các đại lượng vật lý phải được trao đổi với nhau. Vì vậy,
đối với hệ điều khiển số nhiều chiều, cần phải sử dụng thuật toán ma trận. Đây là hệ điều
khiển hiện đại có độ chính xác cao và được sử dụng rộng rãi trong thực tế.

8
1.2. CẤU TRÚC CỦA HỆ THỐNG ĐIỀU KHIỂN SỐ
Hình 1.4: Cấu trúc của hệ điều khiển số
Trong đó:
- ĐT: đối tượng cần điều khiển, có nhiệm vụ tạo ra các đại lượng vật lý mà công
nghệ yêu cầu, chẳng hạn muốn có nhiệt độ ta phải có lò gia nhiệt, muốn có tốc độ ta phải
sử dụng động cơ,… Đây là các thiết bị tương tự.
- SS: khối thiết bị đo, có nhiệm vụ đo các đại lượng vật lý tương tự thực tế (không
điện) và biến đổi về đại lượng điện (thường là điện áp hoặc dòng điện). Đây là các thiết
bị tương tự.
- A/A: khối khuếch đại chuẩn hóa, có nhiệm vụ biến tín hiệu tương tự chưa chuẩn
ở đầu vào thành tín hiệu tương tự chuẩn hóa ở đầu ra. Đây là thiết bị tương tự. Hiện nay
thường dùng các chuẩn:
Chuẩn áp: 0 ÷ 5 V (0 ÷ 5 V)
0 ÷ 10 V (0 ÷ 10 V)
0 ÷ 15 V (0 ÷ 15 V)
Chuẩn dòng: 0 ÷ 20 mA (0 ÷ 20 mA)
4 ÷ 20 mA (4 ÷ 20 mA)
- Mux, Demux: thiết bị dồn kênh, tách kênh. Đây là thiết bị số, có nhiệm vụ
chuyển thông tin song song thành nối tiếp và ngược lại. Quá trình chuyển đổi được quét
đồng bộ và được điều khiển bởi vi xử lý thông qua phần mềm điều khiển công nghệ.
- A/D, D/A: khối chuyển đổi tín hiệu tương tự - số, số - tương tự. Đây là thiết bị
số.

9
- P: khối vi xử lý tín hiệu, có nhiệm vụ ghi chương trình điều khiển, chương trình
bảo vệ, đọc chương trình điều khiển, đọc giá trị tín hiệu số của đại lượng vật lý tương
ứng trong chương trình; so sánh, quyết định tín hiệu điều khiển. Muốn vậy, vi xử lý phải
điều khiển trạng thái tổng trở của các cửa Mux Demux.
Ngoài ra vi xử lý đọc chương trình bảo vệ, đọc giá trị đại lượng vật lý cần bảo vệ,
so sánh với ngưỡng bảo vệ trong chương trình. Khi giá trị của đại lượng vật lý vượt quá
ngưỡng, P phát lệnh bảo vệ dừng hệ thống đồng thời phát tín hiệu thông báo cho người
vận hành, sửa chữa. Mặt khác, vi xử lý kiểm soát hệ thống và thông báo chế độ làm việc
trong hệ thống thông qua mã lệnh, mã lỗi.
- CCĐC: cơ cấu điều chỉnh có nhiệm vụ nhận tín hiệu điều khiển và chấp hành
quy luật để điều tiết đối tượng sao cho đại lượng vật lý đầu ra biến đổi theo chương trình
công nghệ. Đây là thiết bị tương tự, ví dụ: các van điện tử, các van tiết lưu, động cơ
servo, các bộ biến đổi, biến trở,…
Lưu ý:
- Trong thực tế các khối có thể được chế tạo hợp bộ (trọn bộ), chẳng hạn khối
CCĐC được chế tạo hợp bộ với đối tượng ĐT, khối SS được chế tạo hợp bộ với khối
chuẩn hóa tín hiệu.
- Nếu hệ điều khiển số chỉ điều khiển một đại lượng vật lý (điều khiển số đơn
kênh) thì không có các khối Mux và Demux. 1.3. TÍN HIỆU VÀ XỬ LÝ TÍN HIỆU SỐ
1.3.1. Phân loại tín hiệu
a. Tín hiệu tương tự (tín hiệu liên tục)
Tín hiệu tương tự là tín hiệu mà thông tin có ở bất kỳ thời điểm nào, giá trị thông
tin được mang theo qua thông số đặc trưng của đại lượng vật lý mang tin như: biên độ,
tần số, góc pha đầu (thực tế thường sử dụng biên độ). Để tính toán, thường sử dụng các
hàm toán học liên tục. Giá trị thông tin theo hệ thập phân
Hình 1.5: Tín hiệu liên tục

10
b. Tín hiệu lấy mẫu (tín hiệu rời rạc)
Tín hiệu lấy mẫu là tín hiệu mà thông tin chỉ có ở các thời điểm cố định, ngoài các
điểm lấy mẫu không có thông tin. Giá trị thông tin mang theo biên độ. Giá trị thông tin
theo hệ thập phân.
Hình 1.6: Tín hiệu rời rạc
c. Tín hiệu số
Tín hiệu số x*(t) là tín hiệu mà thông tin chỉ có tại các thời điểm cố định, ngoài các
thời điểm đó ra thì không có thông tin. Giá trị thông tin được mang theo mã số, được tính
toán theo hệ nhị phân.
Ví dụ: rời rạc hóa tín hiệu theo mức sau đó chuyển về cơ số 2
x*(t): t=0 00101101
t=1T 01011100
d. Tín hiệu logic
Tín hiệu logic là tín hiệu mà thông tin có tại bất kỳ thời điểm nào, giá trị thông tin
biểu diễn qua biên độ và chỉ có hai giá trị “0” hoặc “1”. Giá trị trung gian giữa hai giá trị
này bị cấm (không được phép có).
Hình 1.7: Tín hiệu logic
K mở: Điện áp U = 220 V: Đèn tắt xLG= 0
K đóng: Điện áp U = 0 V: Đèn sáng xLG= 1
1.3.2. Xử lý tín hiệu
Như ta đã biết trong hệ điều khiển số luôn tồn tại cả tín hiệu tương tự và tín hiệu
số. Do vậy, phải xảy ra quá trình chuyển đổi tín hiệu từ tín hiệu tương tự thành tín hiệu số
và ngược lại.
2
2
x’

11
Để chuyển đổi tín hiệu từ tín hiệu tương tự sang tín hiệu số, phải trải qua quá trình
lấy mẫu (lượng tử hóa hay rời rạc hóa) tín hiệu. Có ba phương pháp lượng tử hóa tín
hiệu:
- Lượng tử hóa theo thời gian: thực hiện lấy mẫu tín hiệu tại những thời điểm định
trước, cách đều nhau một khoảng thời gian T, T được gọi là chu kỳ lấy mẫu (sample
time). Giá trị thu được là những giá trị (biên độ) của tín hiệu tại những thời điểm lấy
mẫu.
Hình 1.8: Lượng tử hóa theo thời gian
- Lượng tử hóa theo mức: Lượng tử hóa tín hiệu khi tín hiệu đạt những giá trị định
trước.
Hình 1.9: Lượng tử hóa theo mức
- Lượng tử hóa hỗn hợp: Lấy mẫu tín hiệu vào những thời điểm định trước, cách
đều nhau một chu kỳ lấy mẫu T. Chia giá trị tín hiệu ra những mức cách đều nhau.
Khoảng cách giữa các mức lân cận được gọi là một bước lượng tử. Giá trị thu được bằng
mức định trước, có sai số bé nhất so với giá trị thực của tín hiệu tại thời điểm lấy mẫu.
Hình 1.10: Lượng tử hóa hỗn hợp
x
x(t
x

12
Để thực hiện quá trình chuyển đổi tín hiệu ta sử dụng các bộ chuyển đổi tương tự -
số ADC và số - tương tự DAC.
a. Chuyển đổi tương tự - số
Để chuyển đổi từ tín hiệu tương tự thành tín hiệu số ta phải thực hiện qua hai
bước:
- Chuyển đổi tín hiệu tương tự thành tín hiệu lấy mẫu thông qua quá trình lấy mẫu
tín hiệu: x(t) x’(t)
- Chuyển từ tín hiệu lấy mẫu thành tín hiệu số thông qua quá trình lượng tử hóa
theo mức: x’(t) x*(t)
Lấy mẫu là biến đổi tín hiệu liên tục theo thời gian thành tín hiệu rời rạc theo
thời gian .
Hình 1.11: Quá trình lấy mẫu tín hiệu
Xét bộ lấy mẫu có đầu vào là tín hiệu liên tục x(t) và đầu ra là tín hiệu rời rạc *x (t) (Hình 1.9). Quá trình lấy mẫu có thể mô tả bởi biểu thức toán học sau:
*x t x t .s t (1.1)
Trong đó s(t) là chuỗi xung dirac:

13
k
s t t kT
(1.2)
Thay (1.2) vào (1.1) , đồng thời giả sử rằng x(t)=0 khi t<0, ta được:
*
k 0
*
k 0
x t x t t kT
x t x kT t kT
(1.3)
Biến đổi Laplace hai vế phương trình (7.3) ta được :
* kTs
k 0
X s x kT e
(1.4)
Biểu thức (1.4) chính là biểu thức toán học mô tả quá trình lấy mẫu .
Định lý Shanon : Để có thể phục hồi dữ liệu sau khi lấy mẫu mà không bị méo
dạng thì tần số lấy mẫu phải thỏa mãn điều kiện:
c1
f 2fT
(1.5)
Trong đó cf là tần số cắt của tín hiệu cần lấy mẫu .
Trong các hệ thống điều khiển thực tế , nếu có thể bỏ qua được sai số lượng tử
hóa thì các khâu chuyển đổi A/D chính là các khâu lấy mẫu.
Chu kỳ lấy mẫu T ảnh hưởng đến độ chính xác của quy luật tín hiệu theo hướng T
càng nhỏ thì độ chính xác của tín hiệu càng cao, thiết bị chế tạo càng khó khăn. Vì vậy,
theo quan điểm về tín hiệu thì T càng nhỏ thì càng tốt nhưng theo quan điểm về thiết bị
thì T càng lớn càng tốt. Do vậy, trong thực tế T thường được chọn theo điều kiện T <
Tth/2 với Tth là chu kỳ của tín hiệu cần điều khiển, Tth được xác định thông qua máy phổ
tần.
b. Chuyển đổi số - tương tự
Khâu giữ dữ liệu là khâu chuyển tín hiệu rời rạc theo thời gian thành tín hiệu
liên tục theo thời gian.
Khâu giữ dữ liệu có nhiều dangj khác nhau ,đơn giản nhất và được sử dụng
nhiều nhất trong các hệ thống điều khiển rời rạc là khâu giữ bậc 0 ( Zero- Order
Hold- ZOH) (Hình 1.12)
14
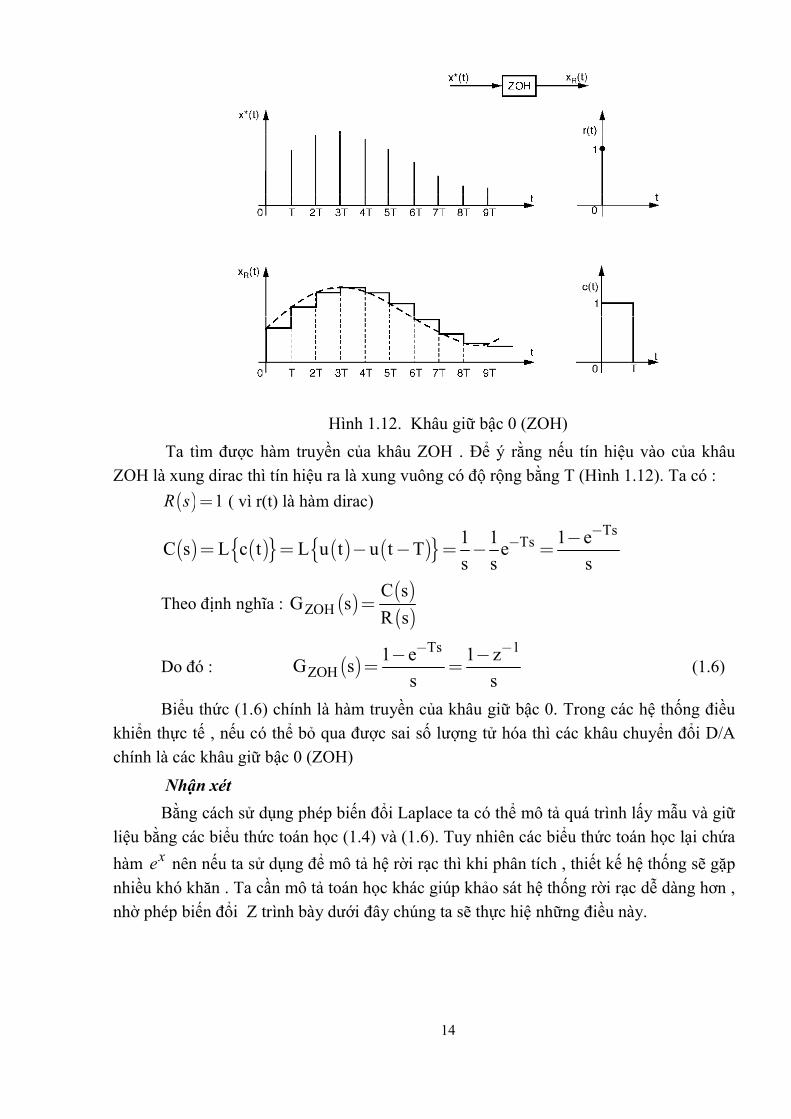
Hình 1.12. Khâu giữ bậc 0 (ZOH)
Ta tìm được hàm truyền của khâu ZOH . Để ý rằng nếu tín hiệu vào của khâu
ZOH là xung dirac thì tín hiệu ra là xung vuông có độ rộng bằng T (Hình 1.12). Ta có :
1R s ( vì r(t) là hàm dirac)
Ts
Ts1 1 1 eC s L c t L u t u t T e
s s s
Theo định nghĩa : ZOH
C sG s
R s
Do đó : Ts 1
ZOH1 e 1 z
G ss s
(1.6)
Biểu thức (1.6) chính là hàm truyền của khâu giữ bậc 0. Trong các hệ thống điều
khiển thực tế , nếu có thể bỏ qua được sai số lượng tử hóa thì các khâu chuyển đổi D/A
chính là các khâu giữ bậc 0 (ZOH)
Nhận xét
Bằng cách sử dụng phép biến đổi Laplace ta có thể mô tả quá trình lấy mẫu và giữ
liệu bằng các biểu thức toán học (1.4) và (1.6). Tuy nhiên các biểu thức toán học lại chứa
hàm xe nên nếu ta sử dụng để mô tả hệ rời rạc thì khi phân tích , thiết kế hệ thống sẽ gặp
nhiều khó khăn . Ta cần mô tả toán học khác giúp khảo sát hệ thống rời rạc dễ dàng hơn ,
nhờ phép biến đổi Z trình bày dưới đây chúng ta sẽ thực hiệ những điều này.

15
1.4. PHÉP BIẾN ĐỔI Z
1.4.1. Định nghĩa
Khi giải phương trình sai phân bậc cao người ta thường gặp nhiều khó khăn, vì
vậy người ta thường dùng biến đổi Z để biến phương trình sai phân tuyến tính của hệ
gián đoạn thành phương trình đại số. Điều này hoàn toàn tương tự như trong trường hợp
hệ liên tục dùng biến đổi Laplace để biến phương trình vi tích phân thành phương trình
đại số.
Cho x(k) là chuỗi tín hiệu rời rạc .Biến đổi Z là x(k) là :
k
k
X z Z x k x k z
(1.7)
Trong đó : Tsz e ( s là biến laplace)
Ký hiệu : Zx k X z
Nếu x(k)=0, k 0 thì biểu thức định nghĩa trở thành :
k
k 0
X z Z x k x k z
(1.8)
Miền hội tụ ( Region of Convergence – ROC) : tập hợp tất cả các giá trị z sao
cho X(z) hữu hạn.
Ý nghĩa của phép biến đổi Z
Giả sử x(t) là tín hiệu liên tục trong miền thời gian , lấy mẫu x(t) với chu kì lấy
mẫu T ta được chuỗi rời rạc x(k)=x(kT).
Biểu thức lấy mẫu x(t):
* kTs
k 0
X s x kT e
(1.9)
Biểu thức biến đổi Z :
k
k 0
X z x k z
(1.10)
Vì Tsz e nên vế phải của hai biểu thức (1.9) và (1.10) là như nhau, do đó
bản chất của việc biến đổi Z một tín hiệu chính là rời rạc hóa tín hiệu đó .
Phép biến đổi Z ngược
Cho X(z) là hàm theo biến phức z . Biến đổi Z ngược của X(z) là :
k 1
C
1x(k) X(z)z dz
2j
(1.11)

16
Với C là đường cong kín bất kỳ nằm trong miền hội tụ ROC của X(z) và bao
gốc tọa độ .
1.4.2 Tính chất của phép biến đổi Z
a. Tính tuyến tính
Nếu Z1 1x k X z
Z2 2x k X z
Thì Z1 1 2 2 1 1 2 2a x k a x k a X z a X z (1.12)
b. Dời trong miền thời gian
Hình 1.13. Làm trễ tín hiệu 0k mẫu
Nếu Zx k X z
Thì oZ kox k k z X z (1.13)
Nhận xét:
Nếu trong miền Z ta nhân X(z) với okz thì tương đương với trong miền thời gian là trễ tín hiệu x(k) ok chu kì lấy mẫu .
Vì Z 1x k 1 z X z nên 1z được gọi là toán tử làm trễ 1 chu kì lấy
mẫu.
c. Tỉ lệ trong miền Z
Nếu : Zx k X z
Thì : Zk 1a x k X a z (1.14)
d. Đạo hàm trong miền Z
Nếu : Zx k X z

17
Thì : Z dX zkx k z
dz (1.15)
e. Định lí giá trị đầu
Nếu : Zx k X z
Thì : z
x 0 lim X z
(1.16)
f. Định lý giá trị cuối
Nếu : Zx k X z
Thì : 1
z 1x lim 1 z X z
(1.17)
1.4.3. Biến đổi Z của các hàm cơ bản
a. Hàm dirac
1 k 0k
0 k 0
Theo định nghĩa :
k 0
k
Z k k z 0 z 1
Vậy : Zk 1 (ROC toàn bộ mặt phẳng Z)
b. Hàm nấc đơn vị
Hàm nấc đơn vị ( liên tục trong miền thời gian ) :
1 0
0 0
tu t
t
Lấy mẫu u(t) với chu kì lấy mẫu là T ta được :
1 0
0 0
ku k
k
Theo định nghĩa :
1 2
0
1 ...
k k
k k
Z u k u k z u k z z z z
Nếu 1z <1 thì biểu thức trên là tổng của cấp số nhân lùi vô hạn. Áp dụng công
thức tính tổng của cấp số nhân lùi vô hạn , ta dễ dàng suy ra :

18
11
11 z
Z u kzz
Vậy : 11
11
Z zu k
zz
c. Hàm dốc đơn vị
Hàm dốc đơn vị liên tục trong miền thời gian:
1 0
0 0
tr t
t
Lấy mẫu r(t) với chu kì lấy mẫu là T , ta được :
0
0 0
kT kr k
k
r k kTu k
Ta tìm biến đổi Z của r(k) bằng cách áp dụng tính chất
Tỉ lệ trong miền Z:
Ta có :
11
1
Zu kz
1
1 21
1
1 1
Z d zku k z
dz z z
1
2 21 11
Z Tz TzkTu k
zz
Vậy
1
2 21 11
Z Tz Tzr k kTu k
zz
d. Hàm mũ
Hàm mũ liên tục trong miền thời gian :
0
0 0
ate tx t
t
Lấy mẫu r(t) với chu kì lấy mẫu là T, ta được
0
0 0
kaTe ke k
k
kaTx k e u k

19
Theo định nghĩa :
2
01 2
1 ...
1 ...
k k aT
k k
aT aT
Z x k x k z x k z e z
e z e z
Nếu 1| ( ) | 1aTe z thì biểu thức trên là tổng của cấp số nhân lùi vô hạn . Áp
dụng công thức tính tổng của cấp số nhân lùi vô hạn , ta suy ra :
1
1
1
aTaT
zZ x k
z ee z
Vậy : 1
1
ZkaT
aTaT
ze u k
z ee z
Kết quả trên ta dễ dàng suy ra :
11
1
Zk za u k
z aaz
1.4.4 Các phương pháp tìm biến đổi Z ngược
Cho các hàm X(z) , bài toán đặt ra là tìm x(k).Theo công thức Z ngược ta có:
Với C là đường cong kín bất kì nằm trong ROC của X(Z) và bao gốc tọa độ .
Tìm x(k) bằng công thức trên rất phức tạp ,thực tế ta thực hiện bằng công thức
sau:
Cách 1 :Phân tích X(z) thành tổng các hàm cơ bản , sau đó tra bảng biến đổi Z
Ví dụ 1.1 . Cho 2 3
zX z
z z
. Tìm x(k)
Giải. Phân tích X(Z), Ta được :
2 3
z zX z
z z
Tra bảng biến đổi Z ta được :
Zk za u k
z a
Suy ra : 2 3k kx k u k
11
2k
c
x k X z z dzj

20
Cách 2. Phân tích X(z) thành chuỗi lũy thừa
Theo định nghĩa biến đổi Z:
0 1 2 3
0
0 1 2 3 ...k
k
X z x k z x z x z x z x z
Do đó nếu phân tích X(z) thành tổng của chuỗi lũy thừa ta sẽ được giá trị x(k)
chính là hệ số của thành phần kz
Ví dụ 1.2 .Cho 2 3
zX z
z z
. Tìm x(k)
Giải . 22 3 5 6
z zX z
z z z z
Chia đa thức , ta được
1 2 3 35 19 65 ...X z z z z z
Suy ra : x(0)=0 ; x(1)=1 ; x(2)=5 ; x(3)=19 ; x(4)= 65,…
Cách 3 : Tính x(k) bằng công thức đệ qui
Ví dụ 1.3 . Cho 2 3
zX z
z z
.Tìm x(k)
Giải . Ta có : 1
2 1 22 3 5 6 1 5 6
z z zX z
z z z z z z
1 2 1
1 2 1
1 5 6
5 6
z z X z z
X z z X z z X z z
Biến đổi Z ngược hai vế phương trình trên (để ý tính chất dời trong miền thời gian
), ta được : ( ) 5 ( 1) 6 ( 2) ( 1)
( ) 5 ( 1) 6 ( 2) ( 1)
x k x k x k k
x k x k x k k
Với điều kiện đầu : ( 1) 0; ( 2) 0x k x k
Thay vào công thức trên ta tìm được :
(0) 0; (1) 1; (2) 5; (3) 19; (4) 65,...x x x x x
Cách 4: Áp dụng công thức thặng dư
1( ) kx k res z X z tại các cực của 1kz X z
Nếu Zo là cực bậc 1 thì :
Res 0
0
1 10
k kz z
z zz X z z z z X z

21
Nếu Zo là cực bậc p thì :
Res 0 0
11 1
011
1 !
ppk k
pz z z z
dz X z z z z X z
p dz
Ví dụ 1.4 . Cho 2 3
zX z
z z
.Tìm x(k)
Giải . Áp dụng công thức thặng dư, ta được :
(k)x =Res 1
2
k
zz X z
+Res 1
3
k
zz X z
Mà
Res 1 12
22 |k k
zz
z X z z z X z
1
2 22 | | 22 3 3
kk k
z zz z
z zz z z
Res 1 13
33 |k k
zz
z X z z z X z
1
3 33 | | 32 3 2
kk k
z zz z
z zz z z
Do đó : ( ) 2 3k kx k
CÂU HỎI HƯỚNG DẪN ÔN TẬP, THẢO LUẬN
1. Trình bày những ưu nhược điểm của tín hiệu tương tự và tín hiệu số
2. Trình bày các phương pháp chuyển đổi tín hiệu từ tương tự sang số và số sang tương
tự
3. Tìm hàm truyền G(z) của từ các hàm truyền liên tục sau:
a, ( )
5
( 1)( 3)s
sG
s s
b, ( ) 2
10
( 1)sGs s
4. Tìm hàm truyền G(z) của từ các hàm truyền liên tục sau:
a, ( )
5
1s
sG
s
b, ( )
5
( 1)sGs s

22
CHƯƠNG II MÔ TẢ TOÁN HỌC HỆ ĐIỀU KHIỂN SỐ
MỤC TIÊU CỦA CHƯƠNG
Cung cấp cho sinh viên kiến thức cơ bản về các phương pháp mô tả toán học hệ
điều khiển số : phương trình sai phân, hàm truyền đạt, phương trình trạng thái và ứng
dụng các phương pháp trong phần mềm Matlab.
2.1. MÔ TẢ TOÁN HỌC HỆ ĐIỀU KHIỂN SỐ BẰNG PHƯƠNG TRÌNH SAI PHÂN
Các bộ điều khiển số cần được dùng trong hệ thống, do đó cần phải thành lập quan
hệ giữa tín hiệu ra và tín hiệu vào. Để mô tả hệ liên tục, ta sử dụng phương trình vi phân.
Để mô tả hệ rời rạc, ta sử dụng phương trình sai phân. Phương trình sai phân là xét xấp xỉ
gần đúng phương trình vi phân được viết ở dạng thuận lợi cho việc lập trình trên máy
tính.
Phương trình sai phân tuyến tính hệ số hằng bậc n được viết dưới dạng tổng
quát như sau với r(k) là tín hiệu vào, c(k) là tín hiệu ra:
0 1 2 n
0 1 m
a c(k n) a c(k n 1) a c(k n 2) ... a c(k)
b r(k m) b r(k m 1) ... b r(k)
(2.1)
với + n m với n gọi là bậc của hệ thống rời rạc
+ c(j), r(j) (với j = k, k+1,...k+n) là các giá trị rời rạc của biến c(k) và r(k) tại
thời điểm lấy mẫu thứ j.
Để giải phương trình sai phân tuyến tính ta có thể lập trình trên máy tính hoặc
dùng biến đổi Z
Ví dụ 2.1 : Xét phương trình sai phân bậc nhất: y(k+ 1) + y(k) = 0
Áp dụng tính chất dịch gốc của biến đổi Z :
m 1
m m k
k 0
Z f (k ) F(Z)
Z f (k m ) Z .F(Z) f (k ).Z
Ta có :
)
Z.Y Z – Zy 0 Y Z 0
ZY (Z) y(0
Z 1

23
2.2. MÔ TẢ TOÁN HỌC HỆ ĐIỀU KHIỂN SỐ BẰNG HÀM TRUYỀN ĐẠT
2.2.1. Hàm truyền đạt của hệ rời rạc
Hình 2.1 : Sơ đồ cấu trúc hệ rời rạc
Hàm truyền đạt của một phần tử hoặc của hệ thống điều khiển là tỷ số giữa ảnh
lượng ra và ảnh lượng vào của phần tử hoặc hệ thống đó theo toán tử Z với điều kiện đầu
bằng không.
Quan hệ giữa tín hiệu vào và tín hiệu ra của hệ thống rời rạc được mô tả bằng
phương trình sai phân :
0 1 2 n
0 1 m
a c(k n) a c(k n 1) a c(k n 2) ... a c(k)
b r(k m) b r(k m 1) ... b r(k)
(2.2)
Trong đó + n m , n được gọi là bậc của hệ thống rời rạc
+ c(j), r(j) (với j = k, k+1,...k+n) là các giá trị rời rạc của biến c(k) và
r(k) tại thời điểm lấy mẫu thứ j.
Biến đổi z hai vế của phương trình ( 2.1) ta được :
n n 1o z 1 z n 1 z n
m m 1o (z) 1 z m 1 z (z)
n n 10 1 n 1 n
m m 10 1 m 1 m (z)
m m 10 1 m 1 m
n n 10 1 n 1 n
a z C a Z C ....a zC a C(z)
b z R b Z R ... b zR R
a Z a Z ...a Z a C(z)
b z b z ...b z ... b R
b z b z ... b z bC(z)
R(z) a z a z ... a a
(2.3)
Đặtm m 1
0 1 m 1 m(z) n n 1
0 1 n 1 n
b z b z ... b z bC(z)G
R(z) a z a z ... a a
(2.4)
G(z) được gọi là hàm truyền của hệ thống rời rạc.
Hàm truyền (2.4) có thể biến đổi tương đương về dạng: (n m) 1 m 1 m
0 1 m 1 m(z) z 1 n 1 z 1
0 1 n 1 n
z b b z ... b z b zC(z)G
R(z) a a z ... a z a z
(2.5)

24
Hai cách biểu diễn trên hoàn toàn tương đương nhau, trong thực tế hàm
truyền dạng thứ hai được sử dụng nhiều hơn.
Ví dụ 2.2. Cho hệ thống rời rạc mô tả phương trình sai phân :
c(k+3) +2c(k+2) – 5c(k+1) + 3c(k) = 2r(k+2) + r(k)
Tìm hàm truyền của hệ thống
Giải. Biến đổi Z hai vế phương trình sai phân mô tả hệ thống ,ta được :
3 2 2z C z 2z C z – 5z C z 3 C z 2 z R z R z
2
(z) 3 2
1 2
(z) 1 2 3
C(z) 2z 1G
R(z) z 2z 5z 3
C(z) z (2 z )G
R(z) 1 2z 5z 3z
2.2.2. Tính hàm truyền hệ rời rạc từ sơ đồ khối
Khi thêm vào hệ thống liên tục các khâu lấy mẫu, khâu dữ liệu ( và bộ điều
khiển số ) ta được hệ thống điều kiển rời rạc. bài toán đặt ra là tìm hàm truyền hệ rời rạc
theo biến từ sơ đồ khối có các khâu lấy mẫu. Xét một số sơ đồ thường gặp sau đây :
a. Hai khâu nối tiếp cách nhau bởi khâu lấy mẫu
Hình 2.2 : Hai khâu nối tiếp cách nhau bởi khâu lấy mẫu
1 2C(z)
G(z) G (z)G (z)R(z)
(2.6)
Trong đó: 11 2 2G (s) ;G (z) ZG G(z) s)Z (
Ví dụ 2.3: Cho 11
G (s)s a
và 21
G (s)s a
Tìm hàm truyền tương
đương của hai hệ thống có sơ đồ khối ở hình 2.2.
Giải. Tra bảng biến đổi Z, ta có:
T1 1 aGe
(zs
)1 z
£ G (s) £a z
T2 2 bGe
(zs
)1 z
£ G (s) £b z
Do đó dễ dàng suy ra:

25
2
1 2 aT bT
zG(z) G (z)G (z)
(z e )(z e )
b.Hai khâu nối tiếp không cách nhau bởi khâu lấy mẫu
Hình 2.3: Hai khâu nối tiếp không cách nhau bới khâu lấy mẫu
1 2C(z)
G(z) G G (z)R(z)
(2.7)
Trong đó : 1 2 1 2G G (z) Z G (s)G (s)
Cần chú ý là :
1 2 1 21 2 1 2G (z)G (z) Z G (s) .Z G (s £ G (s)G (s)) G G (z)
Ví dụ 2.3 sẽ minh họa điều này.
Ví dụ 2.4. Cho 11
G (s)s a
và 11
G (s)s b
Tìm hàm truyền tương
đương của hai hệ thống có sơ đồ khối ở hình 2.3.
Giải. Tra bảng biến đổi z, ta có :
11 12 )G1
G (z) £ G (s)£ G (s £(s a)(s b)
=1 1 1
£(b a)(s a) a b s b
1 1 1£ £
(b a)(s a) a b s b
= aT bT
1 z 1 z
(b a) a bz e z e
<=> bT aT
aT bT
z(e e )
(b a)(z e )(z e )

26
c.Hệ thống hồi tiếp có khâu lấy mẫu trong kênh sai số
Hình 2.4: Hệ thống hồi tiếp có khâu lấy mẫu trong kênh sai số
kC(z) G(z)
G (z)R(z) 1 GH(z)
(2.8)
Trong đó: ( ) ; ( )( ( ) ( )) G s GH zZ Z G s sG Hz
Trường hợp H(s) = 1 ( hệ thống hồi tiếp âm đơn vị ) ta có :
kC(z) G(z)
G (z)R(z) 1 HG(z)
(2.9)
Ví dụ 2.5. Cho 1
G(s)s a
và 1
G(s)s b
Tìm hàm truyền tương đương
của hai hệ thống có sơ đồ khối ở hình 2.4
Giải. thực hiện phép biến đổi z tương tự như đã làm ở ví dụ 2.3 và 2.4, ta dễ
dàng tính được. aT
1 zG(s) Z
s a zG(z)
eZ
bT aT
aT aT
1 z(e e )G(s)H(s) Z
(s a)(s b) (b a)(z e )(z e )GH(z) Z
Thay vào công thức (2.8) ta được : bT
k aT bT bT aT
b a)(z e )G
(b a)(z e )(z e )z(e e )
d.Hệ thống hồi tiếp có khâu lấy mẫu trong vòng hồi tiếp
Hình 2.5: Hệ thống hồi tiếp có khâu lấy mẫu trong vòng hồi tiếp

27
Trường hợp này không tìm được biểu thức hàm truyền , quan hệ giữa tín hiệu vào
và tín hệu ra như sau :
RG(z)
C(z)1 HG(z)
(2.10)
Trong đó : R(s)H(s) ;GH(z) £ GR (G(z s) s) Z H( )
e. Hệ thống hồi tiếp có các khâu lấy mẫu đồng bộ trong nhánh thuận
Hình 2.6: Hệ thống hồi tiếp có khâu lấy mẫu đồng bộ trong nhánh thuận
kC(z) G(z)
G (z)R(z) 1 H(z)G(z)
(2.11)
Trong đó : G(s) ;H(z)G(z )Z s) Z H(
f. Hệ thống hồi tiếp có các khâu lấy mẫu đồng bộ và các khâu nối tiếp ở nhánh
thuận
Hình 2.7: Hệ thống hồi tiếp có các khâu lấy mẫu đồng bộ và các khâu nối
tiếp ở nhánh thuận
1 2k
1 2
C(z) G (z)G (z)G (z)
R(z) 1 G (z)G H(z)
(2.12)
Trong đó :

28
1 1 2 2( ) ( ) ; ( ) ( )G z Z G s G z Z G s
2 2G H(z) Z G (s)H(s)
2.3. MÔ TẢ TOÁN HỌC HỆ ĐIỀU KHIỂN SỐ BẰNG PHƯƠNG TRÌNH TRẠNG THÁI
2.3.1. Thành lập phương trình trạng thái từ phương trình sai phân
a. Vế phải của phương trình sai phân không chứa sai phân của tín hiệu vào
Xét hệ thống rời rạc có quan hệ giữa tín hiệu vào và tín hiệu ra mô tả phương
trình sai phân :
1 n 1 n 0c(k n) a c(k n 1)b ... a c(k 1) a c(k) b r(k) (2.13)
Chú ý : Ở phương trình trên hệ số 0a 1 . Nếu 0a 1 ta chia hai vế cho 0a để
được phương trình sai phân có dạng ( 2.13).
Tương tự như đã làm đối với hệ liên tục, ta đặt các biến trạng thái để biến đổi
tương đương phương trình sai phân bậc n ở trên thành hệ n phương trình sai phân bậc
một.
Đặt các biến trạng thái như sau:
1
2 1 2
3 2 3
n n 1 n n
x (k) c(k)
x (k) x (k 1) x (k) c(k 1)
x (k) x (k 1) x (k) c(k 2)
...
x (k 1) x (k 1) x (k n 1) x (k 1) e(k n)
Thay vào phương trình (2.13) ta được :
1n n n n 1 2 n 0
n n n n 1 2 n 1 0
x (k 1) a x (k) ... a x (k) a x (k) b r(k)
x (k 1) a x (k) ... a x (k) a x (k) b r(k)
Kết hợp với phương trình trên với các biểu thức đặt biến trạng thái ta được hệ
phương trình sau :
1
1 2
2 3
n 1 n
n n n 1 2 n 1 0
x (k 1) x (k)
x (k 1) x (k)
.........
x (k 1) x (k)
x (k 1) a x (k) ... a x (k) a x (k) b r(k)
Viết lại dưới dạng ma trận:

29
1 1
2 2
n 1 n 1
n n 1 n 2 2 1 0n n
x (k 1) x (k)0 1 0 0 0 0
x (k 1) x (k)0 0 1 0 0 0
r(k)
x (k 1) 0 0 0 0 1 x (k) 0
a a a a a bx (k 1) x (k)
Đáp ứng của hệ thống :
1
2
1
n 1
n
x (k)
x (k)
c(k) x (k) 1 0 0 0
x (k)
x (k)
Đặt:
1
2
n 1
n
x (k)
x (k)
x(k)
x (k)
x (k)
d
n n 1 n 2 2 1
0 1 0 0 0
0 0 1 0 0
A
0 0 0 0 1
a a a a a
d
0
0
0
B
0
b
dC 1 0 0 0
Ta được hệ phương trình biến thái:
d d
d
x(k 1) A x(k) B r(k)
c(k) C x(k)
(2.14)
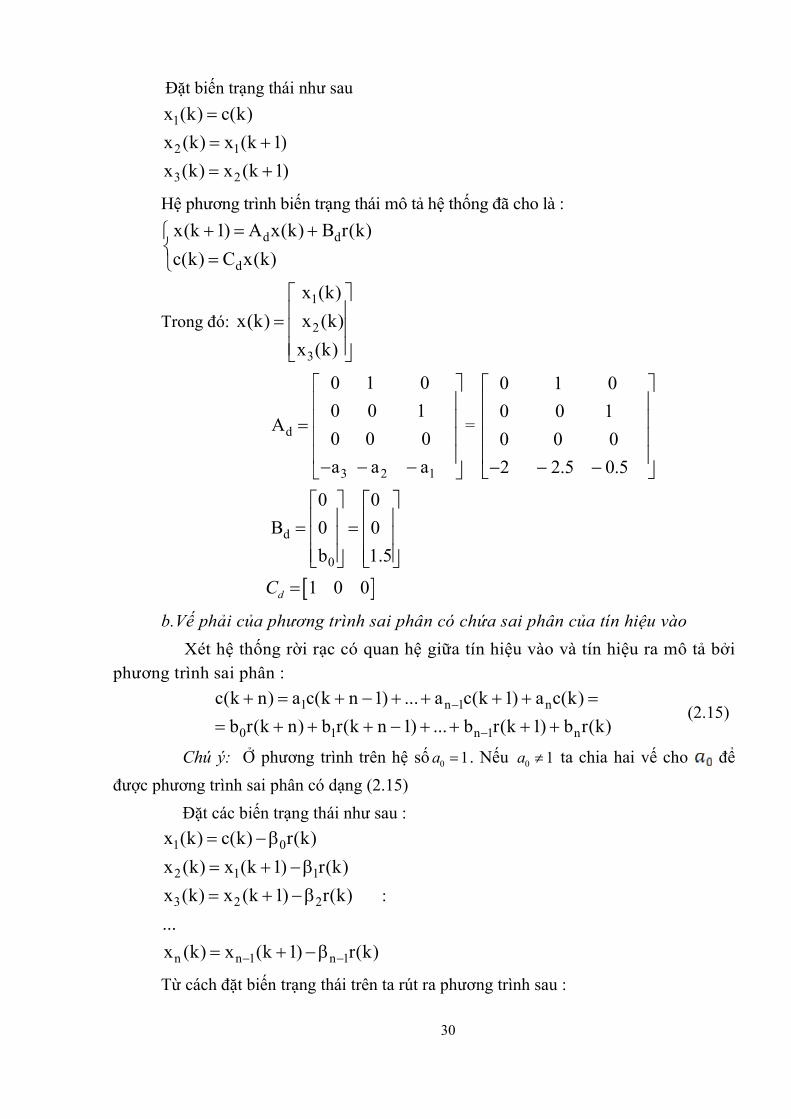
Ví dụ 2.6. Cho hệ thống điều khiển rời rạc mô tả bới phương trình sai phân :
2c(k+3) = c(k+2) + 5c(k+1) +4c(k) = 3r(k)
Hãy viết hệ phương trình biến trạng thái mô tả hệ thống.
Giải. Ta có : 2c(k+3) =c(k+2) +5c(k+1)+4c(k) = 3r(k)
<=>c( k+3)+0.5c(k+2) + 2.5c(k+1) +2c(k0=1.5r(k)
30
Đặt biến trạng thái như sau
1
2 1
3 2
x (k) c(k)
x (k) x (k 1)
x (k) x (k 1)
Hệ phương trình biến trạng thái mô tả hệ thống đã cho là :
d d
d
x(k 1) A x(k) B r(k)
c(k) C x(k)
Trong đó:
1
2
3
x (k)
x(k) x (k)
x (k)
d
3 2 1
0 1 0
0 0 1A
0 0 0
a a a
=
0 1 0
0 0 1
0 0 0
2 2.5 0.5
d
0
0 0
B 0 0
b 1.5
1 0 0dC
b.Vế phải của phương trình sai phân có chứa sai phân của tín hiệu vào
Xét hệ thống rời rạc có quan hệ giữa tín hiệu vào và tín hiệu ra mô tả bởi
phương trình sai phân :
1 n 1 n
0 1 n 1 n
c(k n) a c(k n 1) ... a c(k 1) a c(k)
b r(k n) b r(k n 1) ... b r(k 1) b r(k)
(2.15)
Chú ý: Ở phương trình trên hệ số 0 1a . Nếu 0 1a ta chia hai vế cho để
được phương trình sai phân có dạng (2.15)
Đặt các biến trạng thái như sau :
1 0
2 1 1
3 2 2
n n 1 n 1
x (k) c(k) r(k)
x (k) x (k 1) r(k)
x (k) x (k 1) r(k)
...
x (k) x (k 1) r(k)
:
Từ cách đặt biến trạng thái trên ta rút ra phương trình sau :

31
n n 1 n 1 2 1 n nx (k 1) a x (k) a x (k) a x (k) r(k)
Trong đó :
0 0
1 1 1 0
2 2 1 1 2 0
3 3 1 2 2 1 3 0
4 4 1 1 2 2 3 1 4 0
n n 1 n 1 2 n 2 3 n 3 4 n 4 n 1 1 0 0
b
b a
b a a
b a a a
b a a a a
...
b a a a a ... a a
Do đó hệ phương trình biến trạng thái mô tả hệ thống có dạng:
d d
d d
x(k 1) A x(k) B r(k)
c(k) C x(k) D r(k)
(2.16)
Trong đó :
1
2
n 1
n
x (k)
x (k)
x(k)
x (k)
x (k)
d
n n 1 n 2 2 1
0 1 0 0 0
0 0 1 0 0
A
0 0 0 0 1
a a a a a
d
0
0
0
B
0
b
dC 1 0 0 0
Ví dụ 2.7. Cho hệ thống rời rạc mô tả bởi phương trình sai phân :
2c(k+3) + c(k+2)+5c(k+1)+4c(k)=r(k+2)+3r(k)
<=> c(k+3) +0.5c(k+2) +2.5c(k+1)+2c(k)=0.5r(k+2)+1.5r(k)
Đặt các biến trạng thái :

32
1 o
2 1 1
3 2 2
3 3 1 2 2 1 3 3
x (k) c(k) r(k)
x (k) x (k 1) r(k)
x (k) x (k 1) r(k)
x (k 1) a x (k) a x (k) a x (k) r(k)
Trong đó :
0 0
1 1 1 0
2 2 1 1 2 0
3 3 1 2 2 1 3 0
b 0
b a 0,5 5 0
b a a 0 0,5 0,5 2,5 0 0,25
b a a a 1,5 0,5 ( 0,25) 2,5 0,5 0,375
Hệ phương trình biến trạng thai có dạng:
d d
d d
x(k 1) A x(k) B r(k)
c(k) C x(k) D r(k)
Trong đó :
1
2
3
x (k)
x(k) x (k)
x (k)
=
0 1 0
0 0 1
0 0 0
2 2.5 0.5
d
0
0 0
B 0 0
b 1.5
dC 1 0 0
2.3.2. Thành lập phương trình trạng thái từ hàm tryền hệ rời rạc
Cho hệ thống mô tả bởi hàm truyền m m 1
0 1 m 1 m(z) n n 1
1 n 1 n
b z b z ... b z bC(z)G
R(z) z a z ... a a
(2.17)
Chú ý : Ở phương trình trên hệ số 0 1a Nếu 0 1a ta chia hai vế cho để
được phương trình sai phân có dạng (2.17)
Cách 1 : Biến đổi tương đương hàm truyền về dạng phương trình sai phân : n n 1
1 n 1 n
m m 10 1 m 1 m
1 n 1 n
0 1 m 1 m
(2.17) (z a z ... a a )C(z)
(b z b z ... b z b )R(z)
c(k n) a c(k n 1) ... a c(k 1) a c(k)
b r(k m) b r(k m 1) ... b r(k 1) b r(k)

33
Áp dụng phương pháp đã trình bày ở mục 2.3.1.b ta rút ra được hệ phương trình
biến trạng thái.
Ví dụ 2.8. Hãy thành lập hệ phương trình trạng thái mô tả hệ thống có hàm truyền
là : 2
3 2
C(z) z 3G(z)
G(z) 2z z 5z 4
Giải. Cách 1: Hàm truyền đã cho tương đương với : 2
3 2
C(z) 0.5z 1.5G(z)
G(z) z 0.5z 2.5z 2
<=> 3 2 2z 0,5z 2,5c 2 C(z) (0,5z 1,5)R(z)
<=>c(k+3) + 0.5c(k+2) + 2.5c(k+1) +2c(k)=0.5r(k+2)+1.5r(k)
Xem tiếp lời giải này đã trình bày ở ví dụ 2.7
Cách 2:
Do
m m 10 1 m 1 m
n n 11 n 1 n
b z b z ... b z bC(z)G(z)
R(z) z a z ... a z a
Nên ta có thể đặt biến phụ E(z) sao cho :
m m 10 1 m 1 m z(b z b z ... b z b )E
(2.18)
n n 11 n 1 n (z)R(z) (Z a Z ... a z a )E
(2.19)
(2.19) <=> 1 n 1 ne(k n) a e(k n 1) ... a e(k 1) a e(k) r(k)
Áp dụng công thức đã trình bày ở mục 2.3.1.a, đặt các biến trạng thái
1
2 1 2
3 2 3
n n 1 n n
x (k) e(k)
x (k) x (k 1) x (k) e(k 1)
x (k) x (k 1) x (k) e(k 2)
...
x (k) x (k 1) x (k n 1) x (k 1) e(k n)
Ta được phương trình:
1 1
2 2
n 1 n 1
n n n 2 2 1 0n n
x (k 1) x (k)0 1 0 0 0 0
x (k 1) x (k)0 0 1 0 0 0
r(k)
x (k 1) 0 0 0 0 1 x (k) 0
a a a a a bx (k 1) x (k)
(2.20)

34
Từ (2.19) ta có
0 1 1 m 1 m
0 m 1 1 m m 1 2 m 1
1
2
m m 1
n 1
n
c(k) b e(k m) b e(k m) b e(k m 1) ... b e(k 1) b e(k)
c(k) b x (k) b b (k) ... b x (k) b x (k)
x (k)
x (k)
c(k) b b 0 0
x (k)
x (k)
Tóm lại ta được hệ phương trình trạng thái:
d d
d
x(k 1) A (k) B (k)
c(k) C x(k)
Ví dụ 2.9. Cho hệ thống mô tả bởi hàm truyền :
2
3 2
C(z) z 3G(z)
R(z) 2z z 5z 4
Hãy thành lập hệ phương trình trạng thái :
Giải: Hàm truyền đã cho tương đương với : 2
3 2
C(z) 0,5z 1,5G(z)
R(z) z 0,5z 2,5z 2
Đặt biến phụ ( )E z sao cho :
2
3 2
C(z) (0,5z 1,5)E(z)
R(z) (z 0,5z 2,5z 2)E(z)
=> c(k) (0,5c(k 2) 1,5c(k)
r(k) e(k 3) 0,5e(k 2) 2,5e(k 1) 2e(k)
Đặt biến trạng thái :
1
2 1
3 2
x (k) e(k)
x (k) x (k 1)
x (k) x (k 1)
Ta được hệ phương trình :

35
d d
d
x(k 1) A x(k) B r(k)
c(k) D x(k)
=
3 2 1
0 1 0 0 1 0
0 0 1 0 0 1
a a a 2 2,5 0,5
x(k)= 1
2
3
x (k)
x (k)
x (k)
; d
0
B 0
1
; d 2 1 0D b b b 1,5 0 0,5
Ví dụ 2.10. Hãy thành lập hệ phương trình trạng thái mô tả hệ thống có hàm
truyền là :
4 3 2
C(z) 2z 3G(z)
R(z) z 2z z 5z 3
Giải. Đặt biến phụ ( )E z sao cho :
4 3 2(z)
C(z) (2z 1)E(z)
R(z) (z 2z z 5z 3)E
=> c(k) (2e(k 1) e(k)
r(k) e(k 4) 2e(k 3) e(k 2) 5e(k 1) 3e(k)
Đặt biến trạng thái :
1
2 1
3 2
4 3
x (k) e(k)
x (k) x (k 1)
x (k) x (k 1)
x (k) x (k 1)
Ta được hệ phương trình :
d d
d
x(k 1) A x(k) B r(k)
c(k) C x(k)
Trong đó :

36
1
2
3
4
d
4 3 2 1
d
d 1 0
x (k)
x (k)x(k)
x (k)
x (k)
0 1 0 0
0 0 1 0A
0 0 0 1
a a a a
0 1 0 0
0 0 1 0
0 0 1 1
3 5 2 2
0
0B
0
1
C b b 0 0 1 2 0 0
2.3.3 Thành lập phương trình trạng thái hệ rời rạc từ phương trình trạng thái hệ liên tục
Phương pháp này chỉ áp dụng được cho hệ thống có sơ đồ khối như sau:
Trình tự thành lập phương trình trạng thái
Bước 1: Thành lập hệ phương trình biến trạng thái liên tục:
Rx(t) Ax(t) Be (t)
c(t) Cx(t)
Bước 2: Tính ma trận quá độ của hệ liên tục:

37
1(t) L (s)
Với 1(s) (sI A)
Bước 3: Rời rạc hóa phương trình trạng thái ở bước 1, ta được :
d d r
d
x (k 1)T A x(kT) B e (kT)
c(k) C x(kT)
Trong đó :
d
T
d d0
d
A (T)
B ( )B
C C
Bước 4 : Hệ phương trình biến trạng thái của hệ rời rạc cầm tìm với tín hiệu
Vào ( )r kT là : d d r
d
x k 1 T A x(kT) B e (kT)
c(k) C x(kT)
Chứng minh :Bước 1 và 2 thành lập phương trình trạng thái và tính ma trận
quá độ của hệ liên tục không có gì phải chứng minh . Ta chứng minh từ bước 3
ở bước này ta suy ra phương trình trạng thái của hệ rời rạc từ phương trình trạng
trạng thái cuả hệ liên tục.
Bước 3 : ở học phần LTĐKTĐ, ta đã biết nghiệm của phương trình trạng thái hệ
liên tục cho bởi công thức trên với
: t
R0
x(t) (t)x 0 ( )Be ( )d
Tổng quát:
R
o
t
o o o et
x(t) (t t )x(t ) ( t )B ( )d
Áp dụng công thức trên với : 0t kT
t (k 1)T
Ta được :
(k 1)T
Rkt
x [(k 1)T]= (T)x(kt)+ ( kT) e ( )d

38
Ta lại có : Re ( ) e(kT), : kT (k 1)T
Do e (kT) không phụ thuộc vào biến lấy tích phân nên :
(k 1)T
kT
x[(k+1)T] (T)x(kt) ( ( kT)Bd )e(kT)
Đổi biến phép tính lấy tích phân, ta được :
k 1 T
kT
x k 1 T T x kT kT Bd e kT
(*)
Rời rạc hoá phương trình ngõ ra của hệ liên tục , ta được:
dc kT c x kT
Bước 4: Theo sơ đồ khối của hệ thống, ta thấy :
de kT r kT c kT r kT c x kT
Thay vào (*) ta được kết quả cần chứng minh .
Ví dụ 2.11. Cho hệ thống rời có sơ đồ như hình vẽ.Hãy thành lập hệ phương trình
Biến trạng thái mô tả hệ thống với các biến trạng thái được xác định trên hình vẽ.
Giải
Bước 1: Thành lập hệ phương trình biến trạng thái mô tả hệ liên tục :
Theo hình vẽ ta có :
21 1 2
X sX s sX s X s
s
1 2x t x t
R2 2 R
E sX s s a X s E s
s a

39
2 2 Rx (t) ax t e t
2 2 Rx t ax t e t
Kết hợp hai phương trình trên ta được hệ phương trình :
.
1 2
.
2 2 R
.11
R22
.
R
x t x t
x t ax t e t
x t0 0x t e t0 1x tx t
x t Ax t Be t 7.3.4
Đáp ứng của hệ thống :
1 t
12
xc t kx t K 0 cx t
x t
Do đó: 0 1 0A B c k 0
0 a 1
Bước 2: Tính ma trận quá độ :
1 11
1 1
1 1
1
1 0 0 1 s 1s sI A s
0 1 0 a 0 s a
1 1s a 1 s s s a1
0 ss s a 10
s a
1 11 1L L
s s s as s s at L s l
1 10 o Ls a s a
at
at
11 1 e
at
0 e

40
Bước 3 : Rời rạc hoá các phương trình trạng thái của hệ liên tục, ta được:
d d R
d
x k 1 T A kT B e kT
c kT c x kT
Trong đó:
at aT
dat aT
t T
aT aTT T T
daT aT0 0, 0
TaT
2
aT
0
1 11 1 e 1 1 e
a aA T
0 e 0 e
1 11 1 e 1 e0
a aB d d d1
0 e e
e T e
a aa
e
a
B
aT
22
aT
d
1
aa
e 1
a a
C C k 0
Bước 4: Hệ phương trình biến trạng thái mô tả hệ thống rời rạc với tín hiệu vào
r(kT) là :
d d d d
d
x k 1 T A B C x kT B r kT
c kT c x kT
Trong đó:
41
aT
aT 2 2
d d daTaT
aT
2 2aT
aTaT
aTaT
2 2
d d d aT
T e 11
1 1 e a a aaA B C K 0
e 10 ea a
T e 1k1 a a a1 1 e
ae 10 e K 0
a a
T e 1 11 K 1 e
a aa aA B C
eK
a
aT1e
a
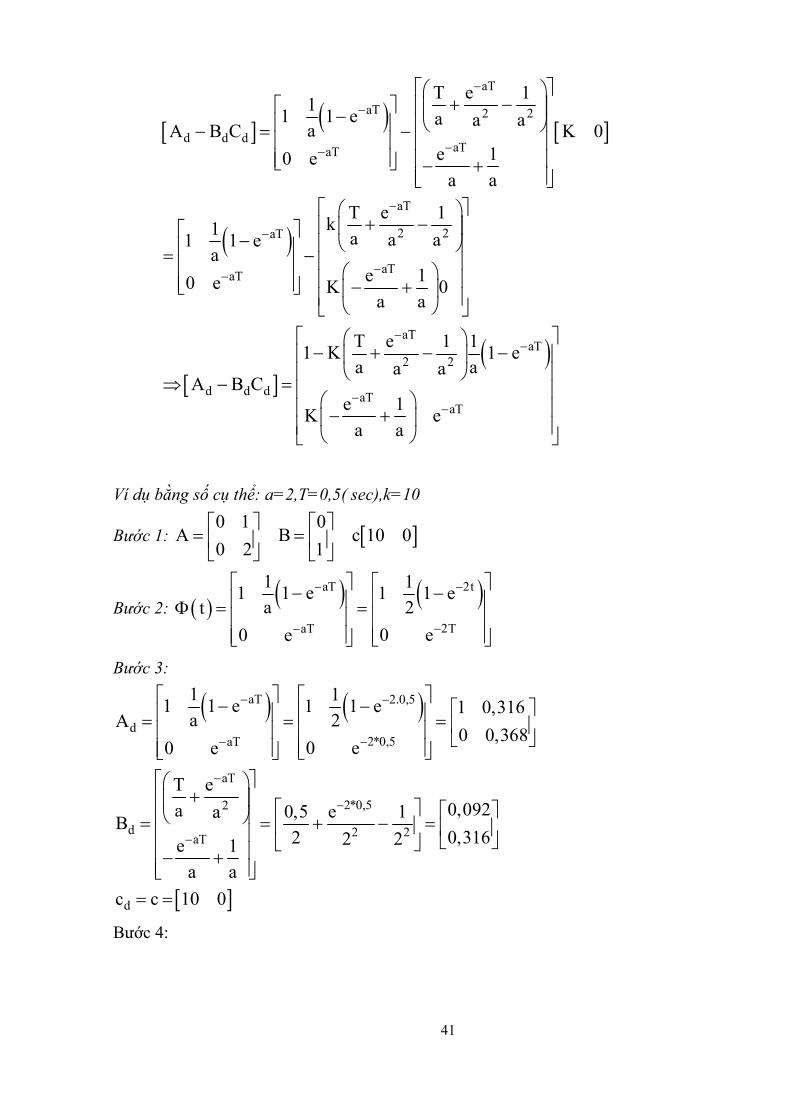
Ví dụ bằng số cụ thể: a=2,T=0,5( sec),k=10
Bước 1: 0 1 0A B c 10 0
0 2 1
Bước 2: aT 2t
2TaT
1 11 1 e 1 1 e
a 2t
0 e0 e
Bước 3:
aT 2.0,5
d2*0,5aT
aT
2*0,52
d 2 2aT
d
1 11 1 e 1 1 e 1 0,316
a 2A0 0,368
0 e0 e
T e0,092a 0,5 e 1a
B0,3162 2 2e 1
a a
c c 10 0
Bước 4:

42
d d d
1 0,316 0,092A B C 10 0
0 0,368 0,316
1 0,316 0,92 0 0,08 0,316
0 0,368 3,68 0 3,16 0,368
Kết luận :hệ phương trình biến trạng thái cần tìm là:
1 1
2 2
1
2
x k 1 x k0,08 0,316 0.092r k
3,16 0,368 0,316x k 1 x k
x kc k 10 0
x k
2.3.4. Tính hàm truyền hệ rời rạc từ hệ phương trình trạng thái.
Cho hệ thống rời rạc mô tả bởi hệ phương trình biến trạng thái :
d d
d
x(k 1) A (k) B r(k)
c(k) C x(k)
Bài toán đặt ra là tìm hàm truyền : (z)C(z)
GR(z)
Biến đổi Z hệ phương trình trạng thái ta được :
<=> d d
d
zX(z) A X(z) B R(z)
C(z) C X(z)
<=>( ) ( ) ( )
( ) ( )d d
d
zI A X z B R z
C z C X z
<=>1
d d
d
X(z) (zI A ) B R(z)
C(z) C X(z)
1d d dC(z) C (zI A ) B R(z)
Lập tỉ số ta được : 1d d d
C(z)G(z) C (zI A ) B
R(z)
(2.21)
Ví dụ 2.12. Cho hệ thống mô tả bởi phương trình trạng thái
Trong đó : d
0 1A
0,7 0,1
; d
0B
2
; dC 1 0

43
Hãy viết hàm truyền của hệ thống trên
Giải . Áp dụng công thức 2.21 hàm truyền của hệ thống là :
1d d d
C(z)G(z) C (zI A ) B
R(z)
Ta có :
21
d
1d d
1d d d
z 0 0 1(zI A )
0 z 0,7 0,1
z 0,1 11
0,7 0,1z(z 0,1) 0,7
z 0,1 1 0 21 1(zI A ) B
0,7 0,1 2 2zz(z 0,1) 0,7 z(z 0,1)
21 2C (zI A ) B 1 0
2zz(z 0,1) 0,7 z(z 0,1) 0,
7
Vậy (z)
2G
z(z 0,1) 0,7
2.4. Mô tả toán học hệ điều khiển số bằng Matlab Simulink
Các lệnh mô tả toán học hệ rời rạc tương tự như các lệnh mô tả toán học hệ liên
tục, chỉ khác là khi tạo ra hệ thống ta không chỉ nhập các thông số hệ thống ( tử số, mẫu
số hàm truyền và các ma trận trạng thái ) mà còn nhập vào chu kỳ lấy mẫu.
Tạo ra hệ thống mô tả bởi hàm truyền : lệnh tf ( transfer function)
Cú pháp : G=tf(TS,MS,T) tạo ra hệ thống rời rạc mô tả bởi hàm truyền G có tử số
là đa thức TS, mẫu số là đa thức MS và chu kỳ lấy mẫu là T. Nếu không xác định T thì
đặt T = 1
Ví dụ 1: chu kỳ lấy mẫu là 0.2 s
>> TS=1;MS=[2 1];
>> G1=tf(TS,MS,0.2)
G1 =
1
-------
2 z + 1
Sample time: 0.2 seconds

44
Discrete-time transfer function.
Ví dụ 2 : chu kỳ lấy mẫu không xác định
>> TS=1;MS=[2 1];
>> G1=tf(TS,MS,-1)
G1 =
1
-------
2 z + 1
Sample time: unspecified
Discrete-time transfer function.
Ví dụ 3 :
G2=tf([4 1],conv([2 1],[3 1]),-1)%G2=(4z+1)/((2z+1)(3z+1))
G2 =
4 z + 1
---------------
6 z^2 + 5 z + 1
Sample time: unspecified
Discrete-time transfer function.
Đơn giản hàm truyền : lệnh mineral
Cú pháp ; G-minreal(G) triệt tiêu các thành phần giống nhau ở tử số và mẫu số để
được dạng hàm truyền tối giản
Ví dụ 4:
>> TS=[2 1];MS=conv([2 1],[3 1]);
>> G=tf(TS,MS,-1)
G =

45
2 z + 1
---------------
6 z^2 + 5 z + 1
Sample time: unspecified
Discrete-time transfer function.
>> G=minreal(G)
G =
0.3333
----------
z + 0.3333
Sample time: unspecified
Discrete-time transfer function.
-Các lệnh ghép nối hệ rời rạc hoàn toàn giống như các lệnh ghép nối hệ liên tục,
cụ thể :
+ Tính hàm truyền của hệ thống nối tiếp : lệnh series hoặc toán tử “*”
Cú pháp : G=series(G1,G2) tính hàm truyền G=G1*G2
+Tính hàm truyền hệ thống song song : lênh parallel hoặc toán tử “+”
Cú pháp : G=series(G1,G2) tính hàm truyền G=G1+G2
+ Tính hàm truyền của hệ thống hồi tiếp : lệnh feedback
Cú pháp : Gk=feedback(G1,G2) tính hàm truyền hệ hồi tiếp âm 1k
1 2
GG
1 G *G
Ví dụ 5:
G1=tf(1,[2 1],-1);%G1=1/(2Z+1)
>> G2=tf([4 1],conv([1 0],[3 1]),-1);%G2=(4z+1)/z(3z+1)
>> G=series(G1,G2)
G =

46
4 z + 1
-----------------
6 z^3 + 5 z^2 + z
Sample time: unspecified
Discrete-time transfer function.
>> G=parallel(G1,G2)
G =
11 z^2 + 7 z + 1
-----------------
6 z^3 + 5 z^2 + z
Sample time: unspecified
Discrete-time transfer function.
>> G=feedback(G2,G1)
G =
8 z^2 + 6 z + 1
-----------------------
6 z^3 + 5 z^2 + 5 z + 1
Sample time: unspecified
Discrete-time transfer function.
>> Gk=feedback(G2,G1)
Gk =
8 z^2 + 6 z + 1
-----------------------

47
6 z^3 + 5 z^2 + 5 z + 1
Sample time: unspecified
Discrete-time transfer function.
>> Gk=minreal(Gk)
Gk =
1.333 z^2 + z + 0.1667
------------------------------------
z^3 + 0.8333 z^2 + 0.8333 z + 0.1667
Sample time: unspecified
Discrete-time transfer function.
-Tạo ra hệ thống mô tả bởi phương trình trạng thái : lệnh ss ( state space)
Cú pháp : PTTT = ss( A,B,C,D,T) tạo ra hệ thống rời rạc mô tả bởi phương trình
trạng thái PTTT có các ma trận trạng thái là A, B, C, D và chu kỳ T. Nếu không xác định
T thì đặt T = -1.
Ví dụ 6 :
>> A=[0 1;-0.7 -0.1]
A =
0 1.0000
-0.7000 -0.1000
>> B=[0; 2]
B =
0
2

48
>> C=[1 0]
C =
1 0
>> D=0
D =
0
>> PTTT=ss(A,B,C,D,-1)
PTTT =
a =
x1 x2
x1 0 1
x2 -0.7 -0.1
b =
u1
x1 0
x2 2
c =
x1 x2
y1 1 0
d =
u1

49
y1 0
Sample time: unspecified
Discrete-time state-space model.
-Các lệnh biến đổi giữa hàm truyền và phương trình trạng thái của hệ rời rạc hoàn
toàn giống hệ liên tục :
+ Biến đổi phương trình trạng thái về hàm truyền : lệnh tf
Cú pháp : G=tf(PTTT)
+ Biến đổi hàm truyền về dạng phương trình trạng thái : lệnh ss
Cú pháp : PTTT=tf(G)
Ví dụ 7:
>> A=[0 1;-0.7 -0.1];B=[0;2];C=[1 0];D=0;
>> PTTT=ss(A,B,C,D,-1)
PTTT =
a =
x1 x2
x1 0 1
x2 -0.7 -0.1
b =
u1
x1 0
x2 2
c =
x1 x2
y1 1 0
d =
u1
y1 0

50
Sample time: unspecified
Discrete-time state-space model.
>> G=tf(PTTT)
G =
2
-----------------
z^2 + 0.1 z + 0.7
Sample time: unspecified
Discrete-time transfer function.
>> PTTT=ss(G)
PTTT =
a =
x1 x2
x1 -0.1 -0.7
x2 1 0
b =
u1
x1 2
x2 0
c =
x1 x2
y1 0 1

51
d =
u1
y1 0
Sample time: unspecified
Discrete-time state-space model.
Để ý rằng sau khi biến đổi ngươc từ hàm truyền về dạng phương trình trạng thái ta
được các ma trận trạng thái hoàn toàn khác với ma trận trạng thái đã nhập ban đầu, điều
này không có gì vô lý vì đối với một hệ thống tùy theo cách đặt biến trạng thái khác nhau
ta sẽ có các phương trình trạng thái khác nhau.
CÂU HỎI HƯỚNG DẪN ÔN TẬP, THẢO LUẬN
1. Cho hệ thống rời rạc có sơ đồ cấu trúc như sau:
Trong đó: T= 0,05 , 2
10( )
( 1)G s
s
a, Tìm hàm truyền hệ hở của hệ thống .
b, Tìm hàm truyền hệ kín của hệ thống
2. Cho hàm truyền 2
2( )
0.1 0.7G z
z z
a, Tìm hệ phương trình trạng thái mô tả hệ thống .
b, Tìm phương trình sai phân của hệ thống.

52
CHƯƠNG 3 KHẢO SÁT ỔN ĐỊNH VÀ PHÂN TÍCH HỆ ĐIỂU KHIỀN SỐ
MỤC TIÊU CỦA CHƯƠNG
Cung cấp cho sinh viên kiến thức về phân tích và đánh giá độ ổn định của hệ
thống điều khiển số
Cung cấp cho sinh viên kiến thức về các phương pháp đánh giá chất lượng hệ
thống điều khiển số
3.1 KHÁI NIỆM
Ta đã biết, hệ điều khiển số tuyến tính được mô tả bởi phương trình sai phân tuyến
tính có dạng tổng quát:
0 1 2 n
0 1 m
a c(k n) a c(k n 1) a c(k n 2) ... a c(k)
b r(k m) b r(k m 1) ... b r(k)
(3.1)
Về cơ bản, kỹ thuật phân tích và đánh giá độ ổn định của hệ thống tuyến
tính liên tục có thể áp dụng cho hệ thống ĐKS tuyến tính. Để xét hệ thống số ổn định hay
không, ta phải giải phương trình sai phân. Nghiệm tổng quát của phương trình sai phân
mô tả hệ thống điều khiển số có dạng:
0 qdc(nT) c (nT) c (nT) (3.2)
trong đó:
+ 0c (nT) là nghiệm riêng của phương trình sai phân. Nghiệm riêng
0c (nT) biểu diễn trạng thái xác lập của hệ thống, nó không ảnh hưởng đến tính ổn định
của hệ thống.
+ qdc (nT) là nghiệm tổng quát của phương trình sai phân thuần nhất (phương
trình sai phân có vế phải bằng 0). Nghiệm qdc (nT) mô tả đặc tính của quá trình quá độ,
nó ảnh hưởng tới tính ổn định của hệ. Vì vậy, để xét tính ổn định của hệ thống điều khiển
số ta cần giải phương trình sai phân thuần nhất:
0 1 2 na c(k n ) a c(k n 1) a c(k n 2) ... a c(k ) 0
(3.3)
Tính chất của nghiệm của phương trình (3.3) được xác định dựa vào nghiệm của
phương trình đặc tính:
n n 1 n 2
0 1 2 na Z a Z a Z ... a 0 (3.4)
Giả thiết phương trình đặc tính có n nghiệm riêng biệt, nghiệm của phương trình
sai phân thuần nhất có dạng: n n n
0 1 1 2 2 n nc (nT) C z C z ... C z

53
iC là các hằng số được xác định từ sơ kiện bài toán. Hệ thống điều khiển số sẽ ổn
định khi
0nlim c (nT) 0
(3.5)
Điều kiện trên được xác định thông qua các đặc tính nghiệm số của phương
trình đặc tính
Từ những phân tích trên ta rút ra kết luận đối với hệ thống điều khiển số tuyến tính
+ Hệ ổn định nếu phương trình đặc tính của hệ có các nghiệm thực hoặc nghiệm
phức có mô đun < 1.
+ Hệ không ổn định nếu phương trình đặc tính của hệ có các nghiệm thực hoặc
nghiệm phức có mô đun > 1.
+ Hệ ở biên giới ổn định nếu phương trình đặc tính của hệ có nghiệm thuần ảo và
các nghiệm khác là nghiệm thực hay phức có môđun <1.
* Mỗi liên hệ giữa mặt phẳng Z và mặt phẳng S
Mặt phẳng Z liên hệ với mặt phẳng S theo công thức: sTz e
Hai mặt phẳng này đều là các lượng phức được biểu diễn trên trục thực và
ảo chi khác ở chỗ mặt phẳng S có thứ nguyên của tần số còn mặt phẳng Z thì không có
thứ nguyên.
Trục ảo trong mặt phẳng Z giống như trong mặt phẳng S chúng đóng một
vai trò quan trọng trong việc nghiên cứu tính ổn định của hệ gián đoạn.
Trục số ảo của mặt phẳng S biểu thị của giá trị (jω) đi từ -∞ → zero → ∞
Đặt s j ta có sT j Tz e e cos( T)+jsin( T)
Hình 3.1. Quan hệ giữa mặt phẳng Z và mặt phẳng S
+ Khi ω tăng từ 0 đến π/T, đường thẳng từ gốc đến điểm Z quay ngược chiều kim
đồng hồ và nó vẽ lên một vòng tròn có bán kính là :
2 2R cos ( t) sin ( t) 1

54
+ Khi ω tăng từ -π/T đến 0, đường thẳng từ gốc đến điểm Z quay cùng chiều kim
đồng hồ và nó vê lên một vòng tròn có bán kính là 1.
+ Khi s = 0 suy ra 0z e 1 . Khi đó gốc của mặt phẳng S trùng với điểm +l trên
mặt phẳng Z.
+ Khi s = - ∞ suy ra z e 0 .Khi đó gốc của hệ Z trùng với điểm - ∞ của
mặt phẳng S
Nhận thấy nửa trái của mặt phẳng S (nửa ổn định) được thể hiện bằng phần trong
đường tròn đơn vị trong mặt phẳng Z.
Trên mặt phẳng S, do tính chất chu kỳ của các đặc tính tần số của hệ thống số nên
chi cần khảo sát sự phân bố nghiệm số trong dài tần từ 0 0
2 2
như hình 3.2a.
Hình 3.2. Quan hệ giữa mặt phẳng Z và mặt phẳng S
Trong các dải tần tiếp theo, với độ rộng 0 sự phân bố nghiệm số hoàn toàn lặp
lại. Hệ thống ổn định khi tất cả các nghiệm số của phương trình đặc tính phân bố bên trái
trục ảo. Khi có nghiệm nằm bên phải trực ảo, hệ thống sẽ không ổn định. Trục ảo là
đường biên giới phân vùng ổn định trên mặt phẳng S ( hệ thống điều khiển tuyến tính liên
tục)
Trên mặt phẳng Z, hệ thống sẽ ổn định khi tất cả các nghiệm số của phương trình
đặc tính phân bố bên trong vòng tròn đơn vị.
Hệ thống sẽ không ổn định nếu có một nghiệm nào đó nằm ngoài vòng tròn đơn
vị.
Vậy, vòng tròn đơn vị là biên giới ổn định trên mặt phẳng Z (hình 3.2b). 3.2. TIÊU CHUẨN ỔN ĐỊNH ĐẠI SỐ
3.2.1. Tiêu chuẩn Routh – Hurwitz mở rộng
Tiêu chuẩn Routh- Hurwitz cho phép đánh giá phương trình đại số n n 1
o 1 n 1 na x a x ... a x a 0 có nghiệm nằm bên phải mặt phẳng phức hay không .
Ta đã sử dụng kết quả này để đánh giá nghiệm của phương trình đặc tính của hệ
55
liên tục n n 1o 1 n 1 na s a s .... a s a 0
.
Nếu phương trình trên có nghiệm nằm bên phải mặt phẳng phức thì hệ liên tục
không ổn định.
Không thể sử dụng trực tiếp tiêu chuẩn Routh-Hurwitz để đánh giá tính ổn định
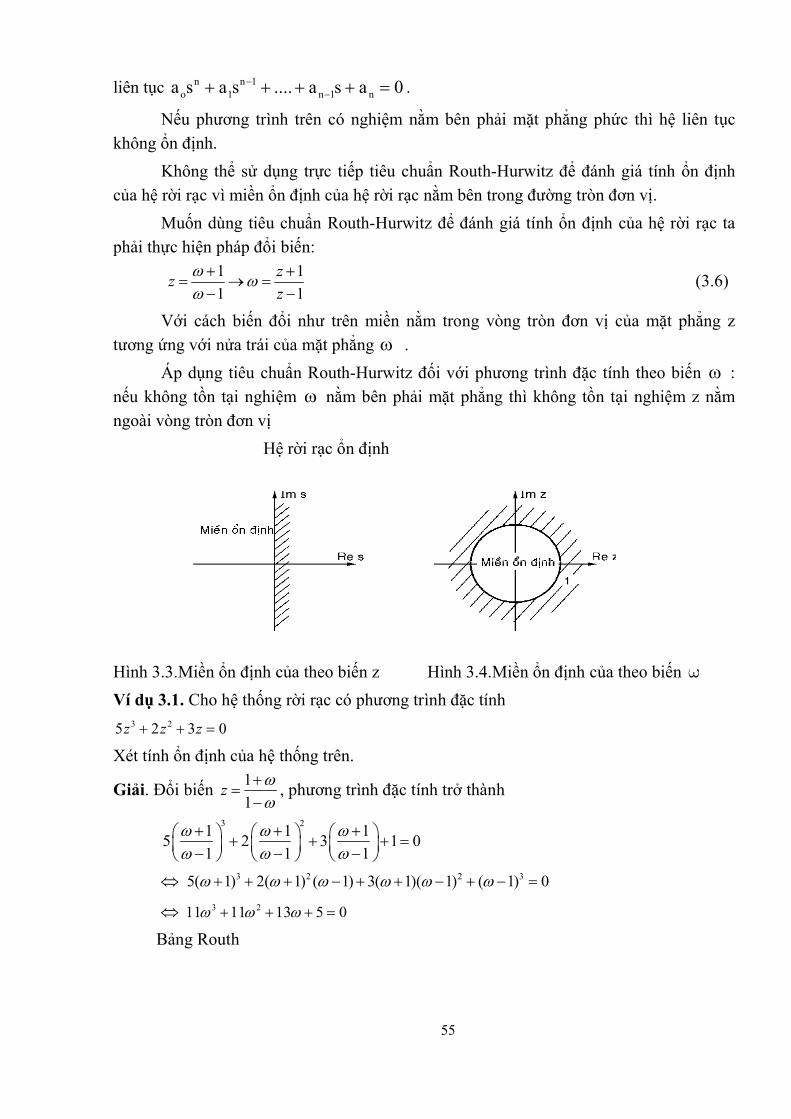
của hệ rời rạc vì miền ổn định của hệ rời rạc nằm bên trong đường tròn đơn vị.
Muốn dùng tiêu chuẩn Routh-Hurwitz để đánh giá tính ổn định của hệ rời rạc ta
phải thực hiện pháp đổi biến:
1 1
1 1
z
zz
(3.6)
Với cách biến đổi như trên miền nằm trong vòng tròn đơn vị của mặt phẳng z
tương ứng với nửa trái của mặt phẳng .
Áp dụng tiêu chuẩn Routh-Hurwitz đối với phương trình đặc tính theo biến :
nếu không tồn tại nghiệm nằm bên phải mặt phẳng thì không tồn tại nghiệm z nằm
ngoài vòng tròn đơn vị
Hệ rời rạc ổn định
Hình 3.3.Miền ổn định của theo biến z Hình 3.4.Miền ổn định của theo biến
Ví dụ 3.1. Cho hệ thống rời rạc có phương trình đặc tính 3 25 2 3 0z z z
Xét tính ổn định của hệ thống trên.
Giải. Đổi biến 1
1
z
, phương trình đặc tính trở thành
3 2
1 1 15 2 3 1 0
1 1 1
3 2 2 35( 1) 2( 1) ( 1) 3( 1)( 1) ( 1) 0
3 211 11 13 5 0
Bảng Routh

56
3 11 13 2 11 5 1 8 0 0 5
Bàng 3.1. Thành lập bảng Routh
Do tất cả hệ số ở cột 1 bảng Routh đều dương nên hệ số ổn định.
Hoặc
Ma trận Hurwitz
1 3
0 2
1 3
0 11 5 0
0 11 13 0
0 0 11 5
a a
a a
a a
1
2
3 2
11 0
11 13 5 11 0
5 0
Do các định thức con đều dương nên hệ số ổn định.
3.2.2. Tiêu chuẩn JURY
Về nguyên tắc, tiêu chuẩn ổn định Rao-Hurvit mở rộng có thể áp dụng cho
mọi hệ thống điều khiển số. Song đối với hệ bậc cao, việc tính toán khó. Khi đó người ta
thường dùng tiêu chuẩn Schur-cohn và tiêu chuẩn ổn định Jury.
Tiêu chuẩn này cho rằng một hệ thống dữ liệu đã được lấy mẫu là ổn định (có tất
cả các nghiệm nằm bên trong vòng tròn đơn vị của mặt phẳng Z) nêu tất cả các số hạng
trong các hàng lẻ ở cột bên trái của bảng Jury là dương.
Bảng Jury được thiết lập từ phương trình đặc tính:
n n 10 1 n 1 na Z a Z ... a Z a 0
(3.7)
Cách thành lập bảng Jury như sau :
- Hàng 1 là các hệ số của phương trình đặc tính theo thứ tự tăng dần
- Hàng chẵn ( bất kỳ) gồm các hệ số của hàng lẻ trước đó viết theo thứ tự ngược
lại
- Giá trị hàng thứ 3 được tính bằng cách lấy định thức bậc 2 mà sử dụng cột đầu
tiên của hàng đầu tiên với mỗi cột khác của các hàng này bắt đầu từ phải qua trái chia cho
hệ số ai). Như vậy các số hạng được tính như sau:
n n n0 0 n 1 1 n 1 j j n j
0 0 0
a a ab a a ;b a a ,b a a
a a a (3.8)
57
Hàng nZ n 1Z n 2Z … n jZ … 1Z 0Z
1 0a 1a 2a n ja n 1a na
2 na n 1a n 2a ja 1a 0a
3 0b 1b 2b n jb n 1b nb
4 nb n 1b n 2b jb 1b 0b
5
6
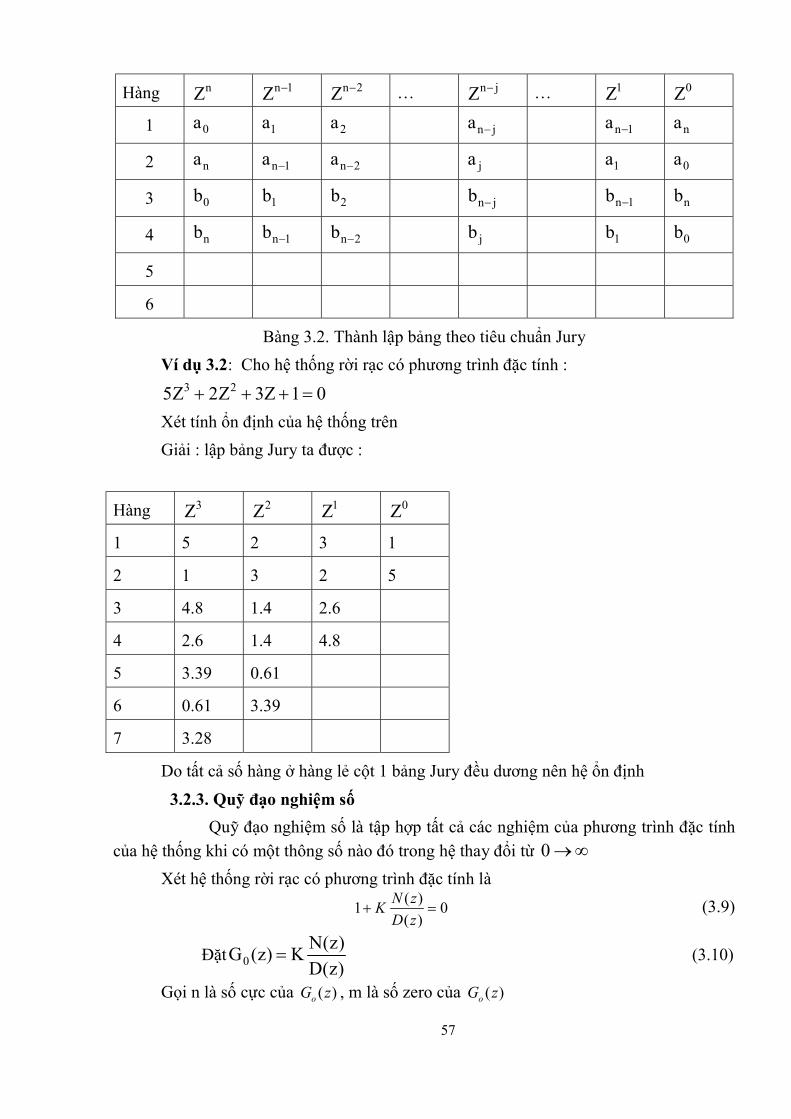
Bàng 3.2. Thành lập bảng theo tiêu chuẩn Jury
Ví dụ 3.2: Cho hệ thống rời rạc có phương trình đặc tính : 3 25Z 2Z 3Z 1 0
Xét tính ổn định của hệ thống trên
Giải : lập bảng Jury ta được :
Hàng 3Z 2Z 1Z 0Z
1 5 2 3 1
2 1 3 2 5
3 4.8 1.4 2.6
4 2.6 1.4 4.8
5 3.39 0.61
6 0.61 3.39
7 3.28
Do tất cả số hàng ở hàng lẻ cột 1 bảng Jury đều dương nên hệ ổn định
3.2.3. Quỹ đạo nghiệm số
Quỹ đạo nghiệm số là tập hợp tất cả các nghiệm của phương trình đặc tính
của hệ thống khi có một thông số nào đó trong hệ thay đổi từ 0
Xét hệ thống rời rạc có phương trình đặc tính là
( )1 0
( )
N zK
D z (3.9)
Đặt 0N(z)
G (z) KD(z)
(3.10)
Gọi n là số cực của ( )oG z , m là số zero của ( )oG z

58
Từ phương trình (3.10) ta có 1 ( ) 0oG z (3.11)
0
( ) 1
( ) (2 1)
oG z
G z l (3.12)
Biểu thức (3.12) là điều kiện biên độ và điều kiện pha của (3.11)
Chú ý : Nếu phương trình đặc tính của hệ thống có dạng trên thì ta phải biến đổi
tương đương về dạng trên trước khi áp dụng các qui tắc vẽ QĐNS
Vì dạng phương trình đặc tính của hệ liên tục đã học ở học phần lý thuyết điều
khiển tự động và phương trình đặc tính trên là như nhau ( chỉ thay s bằng biến z) nên quy
tắc vẽ QĐNS là như nhau , chỉ khác ở qui tắc 8 , thay vì đối với hệ liên tục ta tìm giao
điểm của QĐNS với trục ảo thì đối với hệ rời rạc ta tìm giao điểm của QĐNS với đường
tròn đơn vị .
Sau đây là 11 qui tắc vẽ quỹ đạo nghiệm số của hệ thống rời rạc có phương trình
đặc tính có dạng 3.9
Qui tắc 1: Số nhánh của quỹ đạo nghiệm số = bậc của phương trình đặc tính = số
cực của Go(z)=n.
Qui tắc 2: Khi K=0 các nhánh của quỹ đạo nghiệm số xuât phát từ các cực của
Go(z). Khi K tiến đến : m nhánh của quỹ đạo nghiệm số tiến đến m zero của Go(z), n-
m nhánh còn lại tiến đến theo cá tiệm cận xác định bởi qui tắc 5 và 6
Qui tắc 3: Quỹ đạo nhiệm số đối xứng qua trục thực
Qui tắc 4: Một điểm trên trục thực thuộc về quỹ đạo nghiệm số nếu tổng số cực
và zero của Go(z) bên phải nó là một số lẻ.
Qui tắc 5: Góc tạo bởi các đường tiệm cận của quỹ đạo nghiệm với trục thực xác
định bở công thức: (2 1)l
n m
(l 0, 1, 2) (3.13)
Qui tắc 6: Giao điểm giữa các tiệm cận với trục thực là điểm A có tọa độ xác định
bởi n m
i ii 1 i 1
p zpole zero
OAn m n m
(3.14)
Qui tắc 7: Điểm tách nhập của quỹ đạo nghiệm số nằm trên trục thực và là
nghiệm của phương trình :
dK
0dz
(3.15)
Qui tắc 8: Giao điểm của quỹ đạo nghiệm số đường tròn đơn vị có thể xác định
bằng 1 trong hai cách sau đây :

59
- Áp dụng tiêu chuẩn Routh- Hurwitz mở rộng hoặc tiêu chuẩn July.
- Thay z a jb ( điều kiện : 2 2a b 1 ) vào phương trình đặc tính (3.9)
, cân bằng phần thực và phần ảo sẽ tìm được giao điểm với đường tròn đơn vị và giá trị
ghK
Qui tắc 9: Góc xuất phát của quỹ đạo nghiệm số tại cực phức jp được xác
định bởi công thức : m n
j i j ii 1 i 1
j i
180 arg(p z ) arg(p p )
(3.16)
Qui tắc 10: Tổng các nghiệm là hằng số khi K thay đổi từ 0
Qui tắc 11: Hệ số khuếch đại dọc theo quỹ đạo nghiệm số có thể xác định từ điều
kiện biên độ
N(z)
K 1D(z)
(3.17)
Ví dụ 3.3. Cho hệ thống điều khiển rời rạc có sơ đồ khối như hình vẽ trong đó
+ Hàm truyền khâu liên tục 5K
G(s)s(s 5)
+ Chu kì lấy mẫu T=0,1sec
Hãy vẽ QĐNS của hệ thống trên khi K thay đổi từ 0 . Tính ghK .
GIẢI. Phương trình đặc tính của hệ có sơ đồ khối như trên là :
1 G(z) 0
Trong đó
Ts
ZOH
12
0,5 0,5 0,5
2 0,5
1 e 5KG(z) G (s).G(s)
s s(s 5
5K(1 z )
s (s 5)
z (0,5 1 e )z (1 e 0,5e )z 1K
z 5(z 1) (z e )
=

60
0,021z 0,018G(z) K
(z 1)(z 0,607)
Phương trình đặc tính là
0,021z 0,0181 K 0
(z 1)(z 0,607)
+Các cực : 1 2p 1,p 0.0607(n 2)
+Các zero: 1z 0.857(m 1)
+ Góc tạo bởi tiệm cận và trực thực:
(2l 1) (2l 1)(l 0)
n m 2 1
+Giao điểm giữa tiệm cận với trục thực :
cuc zero (1 0,607) ( 0,857)OA 2,464
n m 2 1
+ Điểm tách nhập là nghiệm của phương trình dK
0dz
Ta có 2(z 1)(z 0,607) z 1.607z 0.607
K0,021z 0,018 0.021z 0.018
suy ra
2
2
dK 0,021z 0,036z 0,042
dz (0,021z 0,018)
1
2
2,506dK0
0,79d
z
2zz
Cả hai nghiệm trên đều thuộc QĐNS →có hai điểm tách nhập.
Giao điểm của QĐNS với đường tròn đơn vị :
2
(z 1)(z 0.607) K(0.021z 0.018) 0
z (0.021K 1.607)z (0.018K 0.607) 0
Cách 1: dùng tiêu chuẩn Routh-Hurwitz mở rộng
Đổi biến 1
z1
, ta được

61
2
2
1 1(0.021K 1.607) (0.018K 0.607) 0
1 1
0.039K (0.786 0.036K) (3.214 0.003K) 0
Điều kiện để hệ thống ổn định là
K 0
0.786 0.036K 0
3.214 0.003K 0
K 0
K 21.83
K 1071
ghK 21.83
Thay ghK 21.83 vào phương trình đặc tính, ta được
2z 1.1485z 1 0
z 0.5742 j0.8187
Vậy giao điểm của QĐNS với vòng tròn đơn vị là
z 0.5742 j0.8187
Cách 2: thay z a jbvào phương trình trên, ta được
2
2 2
2 2
(a jb) (0.021K 1.607)(a jb) (0,018K 0,067) 0
a j2ab b (0,021K 1,607)a j(0,021K 1,607)b (0,018K 0,067) 0
a b (0,021K 1,607)a (0,018K 0,607) 0
j2ab j(0,021K 1,607)b 0
Kết hợp với điều kiện 2 2a b 1 ta được hệ phương trình 2 2
2 2
a b (0,021K 1,607)a (0,018K 0,607) 0
j2ab j(0,021K 1,607)b 0
a b 1
Giải hệ phương trình trên, ta được bốn giao điểmlà
z =1, tương ứng với K =0
z = - 1, tương ứng với K =1071
Vậy Kgh = 21, 83
Hình 3.5 . Qũy đạo nghiệm số của
ví dụ 3.3

62
3.3. CHẤT LƯỢNG HỆ THỐNG RỜI RẠC
Tương tự hệ điều khiển tương tự, hệ điều khiển số sau khi kết luận đã ổn định ta
phải đánh giá chất lượng của hệ. Việc đánh giá chất lượng của hệ được thực hiện thông
qua các chỉ tiêu chất lượng:
3.3.1 Đáp ứng quá độ
Chất lượng của hệ thống điều khiển được đánh giá trực tiếp từ đồ thị đáp ứng đầu
ra của hệ thống với tín hiệu đầu vào là xác định.
Đáp ứng quá độ của hệ thống là đáp ứng đầu ra của hệ khi đầu vào là hàm bước
nhảy đơn vị 1(t).
Dựa vào đáp ứng quá độ, ta có thể tính được các thông số về chỉ tiêu chất lượng
như:
- Sai số xác lập
- Độ quá điều chỉnh,
- Thời gian quá độ
- Số lần dao động v.v...
Đối với hệ thống liên tục, việc xây dựng đáp ứng quá độ là tìm nghiệm của
phương trình vi phân (phương pháp Runge Kuta) hoặc phương trình sai phân (Phương
pháp Tustin) hoặc dùng các phương pháp gián tiếp (phương pháp hình thang), phương
pháp đại số (toán tử Laplace), phương pháp mô phỏng,...
Thực tế cho thấy, tất cả các phương pháp phân tích đáp ứng quá độ và xác lập cho
hệ liên tục đều có thể áp dụng cho hệ rời rạc.
Với phép biến đổi Z, đáp ứng thời gian trong hệ thống số là tín hiệu được lấy mẫu
ở từng thời điểm T (s). Chất lượng động của hệ điều khiển số được đánh giá thông qua
các nghiệm cực và nghiệm Zero của hàm số truyền trong mặt phẳng Z
Có thể xác định được đáp ứng của hệ thống rời rạc bằng một trong hai cách sau
đây:
- Cách 1 : tính C(z) sau đó dùng phép biến đổi Z ngược để tìm c(k)
- Cách 2 : tính nghiệm x(k) của phương trình trạng thái của hệ rời rạc, từ đó suy ra c(k)
Cặp cực quyết định : hệ bậc cao có thể xấp xỉ gần đúng về hệ bậc hai với hai cực
là hai cặp cực quyết định
Đổi với hệ liên tục, cặp cực quyết định là cặp cực nằm gần trục ảo nhất. Do Tsz e nên đối với hệ rời rạc, cặp cực quyết định là cặp cực nằm gần vòng tròn đơn vị
nhất.
3.3.2. Độ quá điều chỉnh
Đối với hệ rời rạc, các thường sử dụng để tính độ quá điều chỉnh là dùng biểu thức
định nghĩa :
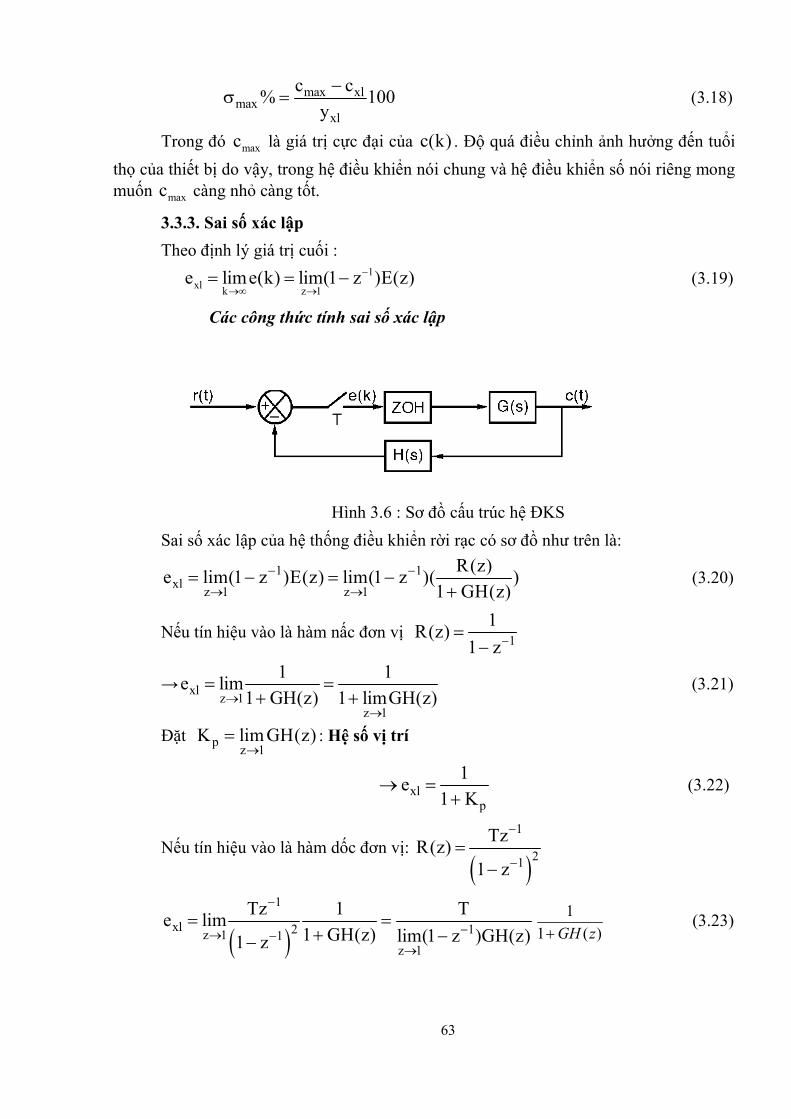
63
max xlmax
xl
c c% 100
y
(3.18)
Trong đó maxc là giá trị cực đại của c(k) . Độ quá điều chỉnh ảnh hưởng đến tuổi
thọ của thiết bị do vậy, trong hệ điều khiển nói chung và hệ điều khiển số nói riêng mong muốn maxc càng nhỏ càng tốt.
3.3.3. Sai số xác lập
Theo định lý giá trị cuối :
1xl
k z 1e lime(k) lim(1 z )E(z)
(3.19)
Các công thức tính sai số xác lập
Hình 3.6 : Sơ đồ cấu trúc hệ ĐKS
Sai số xác lập của hệ thống điều khiển rời rạc có sơ đồ như trên là:
1 1xl
z 1 z 1
R(z)e lim(1 z )E(z) lim(1 z )( )
1 GH(z)
(3.20)
Nếu tín hiệu vào là hàm nấc đơn vị 1
1R(z
z)
1
→ xlz 1
z 1
1 1e lim
1 GH(z) 1 limGH(z)
(3.21)
Đặt pz 1
K lim GH(z)
: Hệ số vị trí
p
xl1
Ke
1
(3.22)
Nếu tín hiệu vào là hàm dốc đơn vị:
1
21
TR(
z
1z)
z
1
1
l 11x
zz 1
2
T 1 Te lim
1 GH(z) lim(1 z )GH(z)
z
1 z
1
1 ( )GH z (3.23)

64
Đặt v1
1
zz
1K zlim 1 H
TG
: Hệ số vận tốc
lV
x K
1e (3.24)
Ví dụ 3.4: cho hệ thống điều khiển rời rạc có sơ đồ khối như hình vẽ, trong đó
- Hàm truyền khâu liên tục K
G(s)(s a)(s b)
( với K=10, a=2, b=3)
- Chu kỳ lấy mẫu: T = 0.1 (sec)
+ Tìm hàm truyền hệ kín kG (z)
+ Tính đáp ứng của hệ đối với tín hiệu vào là hàm nấc đơn vị, độ vọt lố, sai số xác
lập.
Giải.
+ Hàm truyền của hệ rời rạc :
Gk(z)= G(z)
1 G(z)
Trong đó : G(z) = ZOHZ G s G s =Ts K
Zs (s a)(s b
e
)
1
=K(1-z-1)Z1
s(s a)(s b)
= Kz 1
z
aT bT
z(Az B)
z 1 z e z e
Với A= aT bT
)
b 1 e a z e
ab(b a
B= aT bT bT aTa
)b
e 1 e
a (b
e – be 1
a
Thay K=10, a=2, b=3, T=0,1 ta được
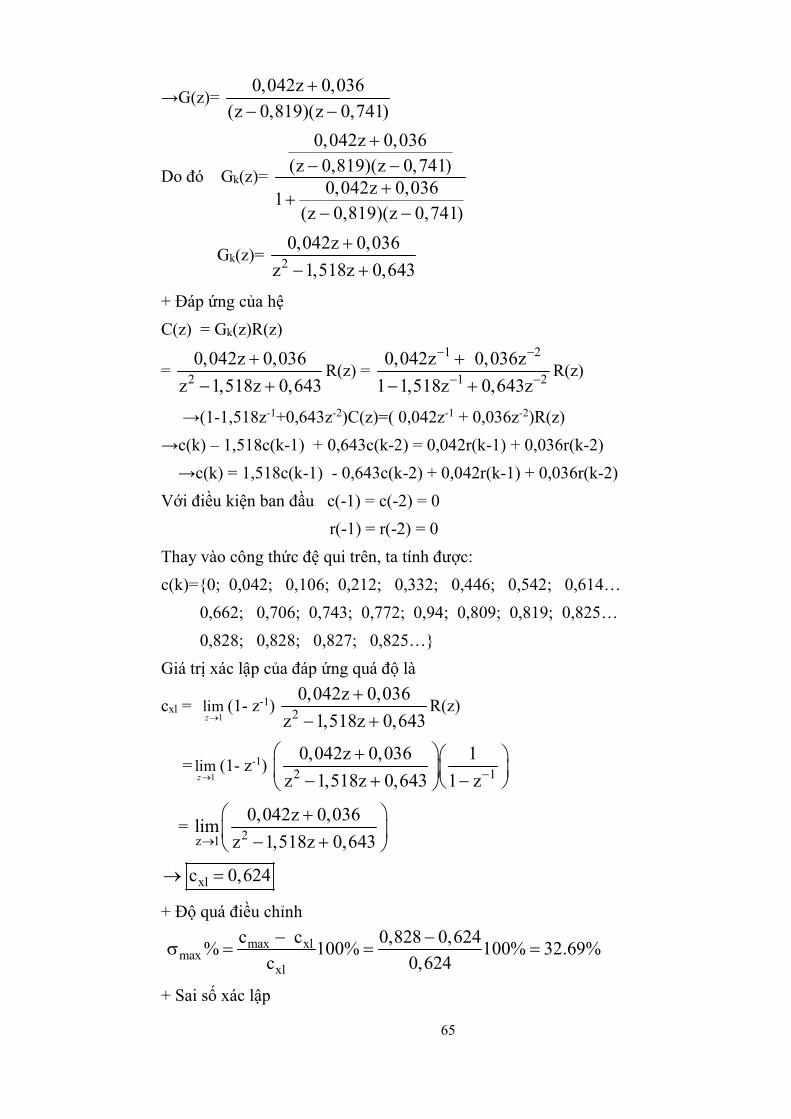
65
→G(z)= 0,042z 0,036
(z 0,819)(z 0,741)
Do đó Gk(z)=
0,042z 0,036(z 0,819)(z 0,741)
0,042z 0,0361
(z 0,819)(z 0,741)
Gk(z)= 2
0,042z 0,036
1,518z 0,643z
+ Đáp ứng của hệ
C(z) = Gk(z)R(z)
= 2
0,042z 0,036
1,518z 0,643z
R(z) = 1 2
1 2
0,042z 0,036z
1 1,518z 0,643z
R(z)
→(1-1,518z-1+0,643z-2)C(z)=( 0,042z-1 + 0,036z-2)R(z)
→c(k) – 1,518c(k-1) + 0,643c(k-2) = 0,042r(k-1) + 0,036r(k-2)
→c(k) = 1,518c(k-1) - 0,643c(k-2) + 0,042r(k-1) + 0,036r(k-2)
Với điều kiện ban đầu c(-1) = c(-2) = 0
r(-1) = r(-2) = 0
Thay vào công thức đệ qui trên, ta tính được:
c(k)={0; 0,042; 0,106; 0,212; 0,332; 0,446; 0,542; 0,614…
0,662; 0,706; 0,743; 0,772; 0,94; 0,809; 0,819; 0,825…
0,828; 0,828; 0,827; 0,825…}
Giá trị xác lập của đáp ứng quá độ là
cxl = 1
limz
(1- z-1) 2
0,042z 0,036
1,518z 0,643z
R(z)
=1
limz
(1- z-1) 2 1
0,042z 0,036 1
1,518z 0z z,643 1
= 2z 1
0,042z 0,036lim
1,518z 0,643z
xl 0,624c
+ Độ quá điều chỉnh
max xl
xlmax
0,828 0,624% 100% 100% 32.69%
c 0,
c
624
c
+ Sai số xác lập
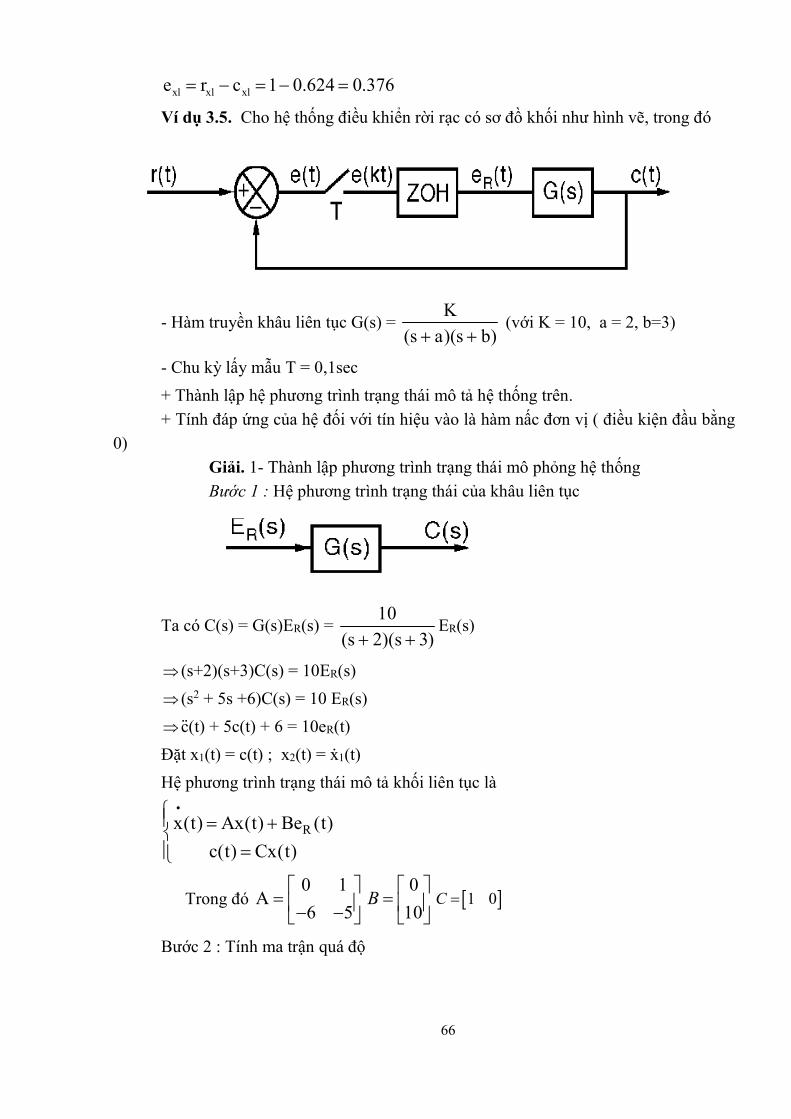
66
xl xl xle r c 1 0.624 0.376
Ví dụ 3.5. Cho hệ thống điều khiển rời rạc có sơ đồ khối như hình vẽ, trong đó
- Hàm truyền khâu liên tục G(s) = K
(s a)(s b) (với K = 10, a = 2, b=3)
- Chu kỳ lấy mẫu T = 0,1sec
+ Thành lập hệ phương trình trạng thái mô tả hệ thống trên.
+ Tính đáp ứng của hệ đối với tín hiệu vào là hàm nấc đơn vị ( điều kiện đầu bằng
0)
Giải. 1- Thành lập phương trình trạng thái mô phỏng hệ thống
Bước 1 : Hệ phương trình trạng thái của khâu liên tục
Ta có C(s) = G(s)ER(s) = 10
(s 2)(s 3) ER(s)
(s+2)(s+3)C(s) = 10ER(s)
(s2 + 5s +6)C(s) = 10 ER(s)
c̈(t) + 5c(t) + 6 = 10eR(t)
Đặt x1(t) = c(t) ; x2(t) = ẋ1(t)
Hệ phương trình trạng thái mô tả khối liên tục là
Rx(t) Ax(t) Be (t)
c(t) Cx(t)
Trong đó 0 1
A6 5
0
10B
1 0C
Bước 2 : Tính ma trận quá độ

67
Φ(s) =
1 11 1 0 0 1 s 1
(sI A) s1 0 6 5 6 s 5
s 5 1
s 5 1 (s 2)(s 3) (s 2)(s 3)1
6 s 6 ss(s 5) 6
(s 2)(s 3_ (s 2)(s 3)
Φ(t)= 1 1
s 5 1
(s 2)(s 3) (s 2)(s 3)L (s) L
6 s
(s 2)(s 3) (s 2)(s 3)
=> Φ(t)=
2t 3t 2t 3t
2t 3t 2t 3t
3e 2e e e
6e 6e 2e 3e
Bước 3 :Rời rạc hóa các phương trình trạng thái của hệ liên tục, ta được :
d d R
d
x[(k 1)T] A x(kT) B e (kT)
c(kT) C x(kT)
trong đó
2t 3t 2t 3t
d 2t 3t 2t 3t
t T 0.1
3e 2e e eA (T)
6e 6e 2e 3e
=> d
0.975 0.078A
0.468 0.585
2 3 2 3T T
d 2 3 2 30 0
(3e 2e ) (e e ) 0B ( )Bd d
10( 6e 6e ( 2e 3e
0.12 32 3T
2 32 30
0
e e10(e e ) 10(
d 2 310( 2e 3e )
10(e e )

68
3.4.TÍNH ĐIỀU KHIỂN ĐƯỢC VÀ QUAN SÁT ĐƯỢC CỦA HỆ ĐIỀU KHIỂN SỐ
3.4.1 Tính điều khiển được và quan sát được của hệ thống tuyến tính liên tục
Hệ thống được gọi là điều khiển được nếu với một tác động vào ta có thể chuyển trạng thái của hệ thống từ trạng thái ban đầu 0t đến trạng thái cuối 1t trong một thời gian
hữu hạn. Hệ thống được gọi là quan sát được nếu với các toạ độ đo được ở biến ra iy
của hệ, ta có thể khôi phục lại trạng thái ix trong khoảng thời gian hữu hạn.
a) Tính điều khiển được
Định lý: Một hệ thống tuyến tính hệ số hằng mô tá bới phương trình trạng thái cấp
n:
x(t) Ax(t) Bu(t)
được gọi là điều khiển được hoàn toàn, khi và chỉ khi ma
trận sau có hạng bằng n. 2 n 1P B,AB,A B,...,A B (3.25)
Rank(P) = n
b) Tính quan sát được
Định lý: Một hệ thống tuyến tính hệ sô hằng mô tả bởi phương trình trạng thái cấp
n:
X AX(t) BU(t)
Y(t) CX(t)
(3.26)
được gọi là quan sát được hoàn toàn khi và chỉ khi ma trận sau có hạng bằng n. n 1L C',A 'C',(A')C',...(A') C' Rank(L) N (3.27)
3.4.2 Tính điều khiển được và quan sát được của hệ thống điều khiển số
Giả thiết hệ điều khiển số được mô tả bởi hệ phương trình trạng thái:
d d
d
x(k 1) A x(k) B (k)
Y(k) C x(k)
(3.28)
trong đó: x(k 1),x(k) là các vectơ n chiều.
dA là ma trận n x n
a) Tính điều khiển được
Hệ thống số được gọi là điều khiển được nếu ta tìm được vectơ điều khiển u(k) để
chuyển hệ thống từ trạng thái ban đầu bất kỳ đến trạng thái cuối bất kỳ trong một khoảng
thời gian giới hạn.
Vậy ta cần tìm điều kiện để xác định được tác động điều khiển nhằm chuyển hệ
thống từ trạng thái x(0) đến trạng thái cuối x(n) đã cho.

69
Viết lại hệ phương trình trạng thái:
d d
2d d d d d d
n n 1d d d d d d
x(1) A x(0) B (0)
x(2) A x(1) B u(1) A x(0) A B u(0) B u(1)
.....
x(n) A x(n 1) B u(n 1) A x(0) A B u(0) .....B u(n 1)
(3.29)
vì dA ,x(0),x(n) đã biết nên vế trái của phương trình là xác định, suy ra nghiệm
duy nhất u(i) chỉ tồn tại khi ma trận sau đây có hạng bằng n. n 1 n 2d d d d d d dM A B A B . .. A B B (3.30)
Rank(M)=n
b) Tính quan sát được
Hệ thống số được gọi là quan sát được nếu theo các số liệu đã đo được ở đầu ra
y(k) ta có thể xác định được trạng thái x(k) của nó.
Thật vậy, từ phương trình ra: dy(k) C x(k) ta viết lại:
d
d d d
n 1d d
y(0) C x(0)
y(1) C x(1) C A x(0)
...
y(n 1) C A x(0)
(3.31)
Viết cách khác:
Vì y(k) đã biết nên nghiệm duy nhất x(0) tồn tại khi ma trận sau có hạng bằng n ' ' ' ' n 1 'd d d d dN C A C . .. (A ) C (3.32)
Ví dụ 3.6: Cho hệ thống điều khiển số được mô tả bởi phương trình trạng thái:
1 1
2 2
1
2
( 1) ( )1 0.485 0.0142( )
( 1) ( )2 0.85 0.0245
( )( ) 1 0
( )
x k x ku k
x k x k
x ky k
x k
a, Khảo sát tính điều khiển được của hệ thống?
- Ma trận điều khiển được của hệ thống:
d d dM A B B

70
Trong đó: 1 0.485 0.0142 0.0260
2 0.85 0.0245 0.0075d dA B
0.0142
0.0245dB
0.0260 0.0142
0.0075 0.0245M
Nên Rank (M)= 2. Hệ thống điều khiển được hoàn
toàn.
b, Khảo sát tính quan sát được của hệ thống?
- Ma trận điều khiển được của hệ thống:
' ' 'd d dN C A C
Trong đó: 11 0 '
0d dC C
1 0.485 1 2'
2 0.85 0.485 0.85d dA A
1 2 1 1' '
0.485 0.85 0 0.485d dA C
1 1
0 0.485N
det 0.485 0N
Nên Rank (N)= 2. Hệ thống quan sát được hoàn toàn.
3.5. KHẢO SÁT TÍNH ỔN ĐỊNH CỦA HỆ THỐNG ĐIỀU KHIỂN SỐ TRÊN MATLAB – SIMULINK.
Cho hệ điều khiển có sơ đồ cấu trúc:

71
1 2
20(z 0,1)W (z)
(2z 0,6)
; 3
0,1W (s)
s 1
; 2
10(s 3)W (s)
s 1
; 4
0,1(s 0,1)W (s)
s 2
Yêu cầu :
- Tìm hàm truyền đạt của hệ thống
- Xét sự ổn định của hệ thống.
a. Tìm hàm truyền đạt của hệ thống.
>> W1=tf([20 2],[2 2.4 0.36],0.1)
W1 =
20 z + 2
--------------------
2 z^2 + 2.4 z + 0.36
Sample time: 0.1 seconds
Discrete-time transfer function.
>> W2=tf([10 30],[1 1])
W2 =
10 s + 30
---------
s + 1
Continuous-time transfer function.
>> W21=c2d(W2,0.1)
W21 =
10 z - 7.145
------------
z - 0.9048
Sample time: 0.1 seconds
Discrete-time transfer function.

72
>> W3=tf([0 0.1],[1 1])
W3 =
0.1
-----
s + 1
Continuous-time transfer function.
>> W31=c2d(W3,0.1)
W31 =
0.009516
----------
z - 0.9048
Sample time: 0.1 seconds
Discrete-time transfer function.
>> W4=tf([0.1 0.01],[1 2])
W4 =
0.1 s + 0.01
------------
s + 2
Continuous-time transfer function.
>> W41=c2d(W4,0.1)
W41 =
0.1 z - 0.09909
---------------
z - 0.8187
73
Sample time: 0.1 seconds
Discrete-time transfer function.
>> W12=series(W1,W21)
W12 =
200 z^2 - 122.9 z - 14.29
-------------------------------------
2 z^3 + 0.5903 z^2 - 1.812 z - 0.3257
Sample time: 0.1 seconds
Discrete-time transfer function.
>> Wtd1=feedback(W12,W41,-1)
Wtd1 =
200 z^3 - 286.6 z^2 + 86.33 z + 11.7
----------------------------------------------
2 z^4 + 18.95 z^3 - 34.4 z^2 + 11.91 z + 1.683
Sample time: 0.1 seconds
Discrete-time transfer function.
>> Whe=series(Wtd1,W31)
Whe =
1.903 z^3 - 2.728 z^2 + 0.8216 z + 0.1113
-----------------------------------------------------------
2 z^5 + 17.14 z^4 - 51.55 z^3 + 43.04 z^2 - 9.091 z - 1.523
Sample time: 0.1 seconds
Discrete-time transfer function.

74
Vậy hàm truyền đạt của hệ thống là : 3 2
he 5 4 3 2
1.903z 2.728z 0.8216z 0.1113W
2z 17.14z 51.55z 43.04z 9.091z 1.523
b. Xét sự ổn định của hệ thống
Từ hàm truyền đạt xét ra phương trình đặc tính: 5 4 3 22z 17.14z 51.55z 43.04z 9.091z 1.523 0
>> MS=[2 17.14 -51.55 43.04 -9.091 -1.523]
MS =
2.0000 17.1400 -51.5500 43.0400 -9.0910 -1.5230
>> x=roots(MS)
x =
-11.0759
0.9751
0.9129
0.7245
-0.1066
Bằng Matlab ta tìm được nghiệm của phương trình như sau :
1
2
3
4
5
z 11.0759
z 0.9751
z 0.9129
z 0.7245
z 0.1066
Ta thấy rằng 1z 1 nên hệ không ổn định.

75
CÂU HỎI HƯỚNG DẪN ÔN TẬP, THẢO LUẬN
1. Cho hệ thống rời rạc có sơ đồ cấu trúc như sau:
Trong đó: T= 0,1 ; 2
( 2)( )
( 1)
sG s
s
a, Tìm hàm truyền hệ hở của hệ thống .
b, Tìm hàm truyền hệ kín của hệ thống .
c, Xét tính ổn định của hệ thống theo tiêu chuẩn đại số.
2. Cho hệ thống rời rạc có sơ đồ cấu trúc như sau:
Trong đó: T= 0,1 ; 2
( 2)( )
( 1)
sG s
s
Tìm đáp ứng rời rạc y(kT)
3. Cho hệ thống điều khiển số được mô tả bởi phương trình trạng thái:
1 1
2 2
1
2
( 1) ( )1 0.624 0.1608( )
( 1) ( )1 0.385 0.1821
( )( ) 1 1
( )
x k x ku k
x k x k
x ky k
x k
a, Khảo sát tính điều khiển được của hệ thống?
b, Khảo sát tính quan sát được của hệ thống?

76
CHƯƠNG 4 THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN SỐ
MỤC TIÊU CỦA CHƯƠNG
Cung cấp cho sinh viên kiến thức về hàm truyền đạt của các khâu hiệu chỉnh rời
rạc, các phương pháp thiết kế hệ thống điều khiển số, áp dụng cụ thể với động cơ một
chiều.
4.1. KHÁI NIỆM
Có nhiều sơ đồ điều khiển khác nhau có thể áp dụng cho hệ rời rạc , trong đó sơ
đồ điều khiển thông dụng nhất là hiệu chỉnh nối tiếp với bộ điều khiển Gc(z) là bộ điều
khiển sớm pha, trễ pha số, PID số,.....
Hình 4.1 : Sơ đồ điều khiển hiệu chỉnh nối tiếp bộ điều khiển cG (z)
Một sơ đồ điều khiển khác cũng được sử dụng rất phổ biến là điều khiển hồi tiếp
trạng thái
Hình 4.2 : Sơ đồ điều khiển hồi tiếp trạng thái
Thiết kế bộ điều khiển số là xác định hàm truyền Gc(z) hoặc giá trị hồi tiếp trạng
thái K để hệ thống thõa mãn yêu cầu về độ ổn định ,chất lượng quá độ,sai số xác lập.
Thực tế trong đa số trường hợp bộ điều khiển số là các thuật toán phần mềm chạy
trên máy tính PC hoặc vi xử lý . Từ hàm truyền Gc(z) hoặc giá trị độ lợi K ta suy ra được
phương trình sai phân mô tả quan hệ giữa ngõ vào và ngõ ra của bộ điều khiển quan hệ
này được sử dụng để lập trình phần mềm điều khiển chạy trên máy tính hoặc vi xử lý.
Có nhiều phương pháp được sử dụng để thiết kế bộ điều khiển số trong nội dung
chương này chỉ đề cập đến phương pháp thiết kế dùng quỹ đạo nghiệm số, phương pháp
thiết kế bộ điều khiển PID, phương pháp thiết kế bộ điều khiển hồi tiếp trạng thái
(phương pháp phân bố cực )và phương pháp giải tích

77
4.2. HÀM TRUYỀN ĐẠT CỦA CÁC KHÂU HIỆU CHỈNH RỜI RẠC
4.2.1. Khâu tỉ lệ
P PG (z) K (4.1)
4.2.2. Khâu vi phân
Hình 4.3 : Khâu vi phân liên tục
Khâu vi phân liên tục Dde(t)
u(t) Kdt
(4.2)
Khâu vi phân rời rạc được tính bằng các công thức sai phân, có ba cách
tính :
- Sai phân tới :
D
e(k 1) e(k)u(k)
TK
(4.3)
D
DD
zE(z) E(z)U(z)
TU(z) K
(z) (z 1)E(z) T
K
G
(4.4)
- Sai phân lùi
D
e(k) e(k 1)u(k)
TK
(4.5)
1
D
1 1D D DD
E(z) z E(z)U(z)
TU(z) K K K z 1
(z) (1 z ) (1 z )E(z) T T T z
K
G
(4.6)
- Sai phân giữa
De(k 1) e(k 1)
u(k) K2T
(4.7)
1
D
21D D
D
zE(z) z E(z)U(z) K
2T
U(z) K K z 1G (z) (z z )
E(z) 2T 2T z
(4.9)

78
Công thức sai phân tới và sai phân giữa cần tín hiệu e(k+1) là tín hiệu sai số
trong tương lai , mà trong các bài toán điều khiển thời gian thực ta không thể có
được tín hiệu trong tương lai (trừ khi sử dụng bộ dự báo ) nên thực tế chỉ có
công thức sai phân lùi được sử dụng phổ biến nhất, do đó
1D DD
K K z 1G (z) (1 z )
T T z
(4.10)
4.2.3.Khâu tích phân
Hình 4.4 : Khâu tích phân liên tục
Khâu tích phân liên tục
0
( ) ( ) t
Iu t K e t dt (4.11)
Khâu tích phân rời rạc
(k 1)TkT kT
I I I0 0 (k 1)T
kT
I(k 1)T
u(kT) K e(t)dt K e(t)dt K e(t)dt
u(kT) u[(k 1)T] K e(t)dt
(4.12)
Xét tích phân kT
I(k 1)T
K e(t)dt : có ba cách tính
- Tích phân hình chữ nhật tới
Hình 4.5: Tích phân hình chữ nhật tới

79
kT
(k 1)T
I
1I
e(t)dt Te(kT)
u(kT) u[(k 1)T]+K Te(kT)
U(z) z U(z) K TE(z)
(4.13)
I I 1
U(z) 1G (z) K T
E(z) 1 z
(4.14)
+ Tích phân hình chữ nhật lùi
Hình 4.6: Tích phân hình chữ nhật lùi
kT
(k 1)T
I
1I
e(t)dt Te[(k 1)T]
u(kT) u[(k 1)T]+K Te[(k 1)T]
U(z) z U(z) K Te[(k 1)T]
(4.15) 1
I I 1
U(z) zG (z) K T
E(z) 1 z
(4.16)
- Tích phân hình thang
Hình 4.7: Tích phân hình chữ nhật lùi

80
kT
(k 1)T
I
1 1I
Te[(k 1)T]+e(kT)e(t)dt
2
K Tu(kT) u[(k 1)T]+ (e[(k 1)T]+e(kT))
2K T
U(z) z U(z) (z E(z)+E(z))2
(4.17) 1
I II 1
U(z) K T z 1 K T z 1G (z)
E(z) 2 1 z 2 z 1
(4.18)
Trong ba cách tính tích phân trình bày ở trên, tích phân hình thang cho kết quả
chính xác nhất ,do đo thực tế người ta thường sử dụng công thức
I(I)
K T z 1G
2 z 1
(4.19)
4.2.4. Bộ điều khiển PI, PD, PID rời rạc
Từ các hàm truyền rời rạc cơ bản vừ phân tích ở trên ,ta rút ra được hàm truyền
của bộ điều khiển PI, PD, PID số như sau
IPI P
K T z 1G (z) K
2 z 1
(4.20)
DPD P
K z 1G (z) K
T z
(4.21)
I DPID P
K T z 1 K z 1G (z) K
2 z 1 T z
(4.22)
4.2.5. Bộ điều khiển bù pha (sớm pha ,trễ pha )
Hình 4.8 : Sơ đồ khối bộ bù pha
Hàm truyền của bộ điều khiển bù pha liên tục có dạng:

81
C
s aG (s) K
s b
(4.23)
(Trong đó : a>b: bộ bù trễ pha ; a<b : bộ bù sớm pha)
Rời rạc hóa quan hệ giữa ngõ vào và ngõ ra các bộ bù pha liên tục,sử dụng công
thức tích phân hình thang, suy ra ta được hàm truyền của bộ bù pha có dạng
C
(aT 2)z (aT 2)G (s) K
(bT 2)z (bT 2)
(4.24)
Hàm truyền có thể viết dưới dạng
CC
C
z zG (z) Kc
z p
(4.25)
Trong đó Cz là zero và Cp là là cực của khâu hiệu chỉnh
CC
C
(aT 2) 2(1 z )z aT
(aT 2) (1 z )
(4.26)
CC
C
(bT 2) 2(1 p )p bT
(bT 2) (1 p )
(4.27)
Do aT, bT dương nên cực và zero của khâu hiệu chỉnh phai thỏa mãn điều kiện
C
C
[z ] 1
[p ] 1
(4.28)
Các quan hệ ở trên ta cũng dễ dàng suy ra
- Khâu sớm pha C Cz p
- Khâu trễ pha C Cz p
4.3. THIẾT KẾ HỆ RỜI RẠC DÙNG PHƯƠNG PHÁP QUỸ ĐẠO NGHIỆM SỐ
4.3.1. Thiết kế bộ điều khiển sớm pha
Hình 4.9 : Sơ đồ cấu trúc bộ điều khiển sớm pha
Phương trình đặc tính của hệ thống trước khi hiệu chỉnh là

82
1 G(z).H(z) 0 (4.29)
Phương trinh đặc tính của hệ thống sau khi hiệu chỉnh là
C1 G (z)G(z).H(z) 0 (4.30)
Khâu hiệu chỉnh sớm pha có dạng
CC
C
z zGc(z) K
z p
(4.31)
Bài toán đặt ra là chọn giá trị C C CK ,z ,p để đáp ứng của hệ thống thỏa mãn yêu
cầu về chất lượng quá độ (chất lượng quá độ thể hiện qua vị trí của cặp cực quyết định).
Trình tự thiết kế
Bước 1: Xác định cặp cực quyết định từ yêu cầu thiết kế về chất lượng của hệ
thống trong quá trình quá độ
=
r = = ∠ =T (4.32)
Bước 2: Xác định góc pha cần bù để cặp cực quyết định nằm trên QDNS của
hệ thống sau khi hiệu chỉnh bằng công thức
* 0 *
1 1
180 arg( * ) arg( )
n m
i ii i
z p z z (4.33)
Dạng hình học của công thức trên là
(4.34)
Bước 3: Xác định vị trí cực và zero của khâu hiệu chỉnh
Vẽ hai đường thẳng bất kỳ xuất phát từ cực quyết định *z sao cho hai
đường thẳng này ạo với nhau một bằng .Giao điểm của hai nửa đường thẳng này với
trục thực là vị trí cực zero của khâu hiệu chỉnh.
Đối với hệ rời rạc, người ta thường áp dụng phương pháp triệt tiêu nghiệm
cực của hệ thống để chọn cực và zero của khâu hiệu chỉnh.
Bước 4: Tính bằng cách áp dụng công thức
*c z zG (z)GH(z) 1
(4.35)
Ví dụ 4.1. Cho hệ thống điều khiển rời rạc có sơ đồ khối như hinh vẽ,trong đó :

83
-Hàm truyền khâu liên tục 10G s
s(s 5)
Chu kỳ lấy mẫu T=0.1sec
Hãy thiết kế khâu hiệu chỉnh sớm sao cho hệ thống sau khi hiệu chỉnh có cặp cực
quyết định ξ = 0 707 , (rad/sec)
Giải: Phương trình đặc tính của hệ trước khi hiệu chỉnh
1 G(z) 0
Trong đó
Ts
ZOH1 e 10
G(z) Z G (s)G (s) Zs s(s 5
2
1 110.(1 z )Z
s s 5
0.5 0,5 0,5
0,5
z 0,5 1 e )z (1 e 0,5e )z 110
z 5(z 1)(z e )
0,21 0,18
( )( 1)( 0,607)
z
G zz z
Cặp cực quyết định mong muốn: * j1,2z re
Trong đó nT 0,1*0,707*10r e e 0,493
2 2nT 1 0.1.10 1 0.0707 0.707
* 0,7071,2 0,493 0,493 cos(0,707) sin(0,707) jz e j
* 0,7071,2 0,493 0,375 0,320 jz e j
Góc pha cần bù : *
1 2 3180 ( )
Dễ dàng tính được

84
* 0 0 0 0180 (152,9 125.9 ) 14,6 84
Chọn cực và zero của khâu hiệu chỉnh bằng phương pháp triệt tiêu nghiệm :
c cz 0,607 z 0,607
Tính cực của khâu hiệu chỉnh
Ta có *sin
AB PBsin PAB
Mà 2 2
* 0 0 02
C
C
c c
PB (0,607 0,375) 0,320 0,388
PAB 125,9 84 41,9
sin84AB 0,388 0,578
sin 41,9
p OA OB AB 0.607 0.578 0.029
p 0,029
z 0,607G (z) K
z 0,029
Tính cK từ điều kiện
*c z zG (z)GH(z) 1
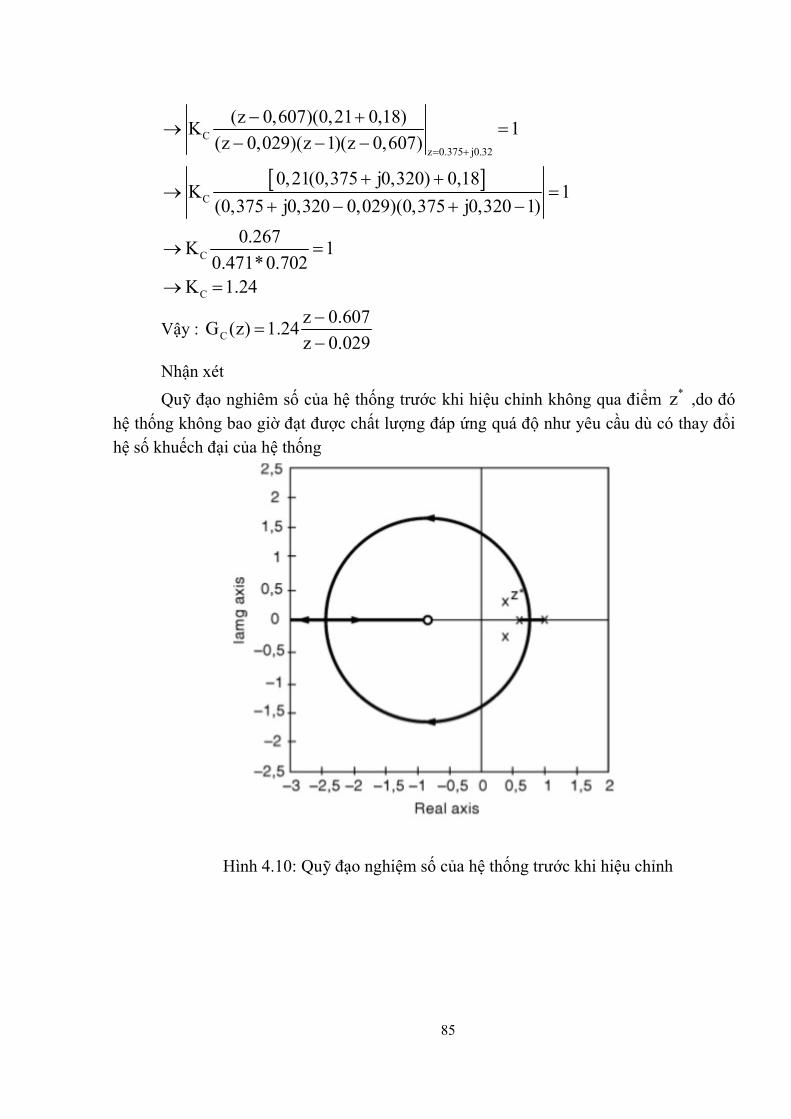
85
C
z 0.375 j0.32
C
C
C
(z 0,607)(0,21 0,18)K 1
(z 0,029)(z 1)(z 0,607)
0,21(0,375 j0,320) 0,18K 1
(0,375 j0,320 0,029)(0,375 j0,320 1)
0.267K 1
0.471*0.702K 1.24
Vậy : C
z 0.607G (z) 1.24
z 0.029
Nhận xét
Quỹ đạo nghiêm số của hệ thống trước khi hiệu chỉnh không qua điểm *z ,do đó
hệ thống không bao giờ đạt được chất lượng đáp ứng quá độ như yêu cầu dù có thay đổi
hệ số khuếch đại của hệ thống
Hình 4.10: Quỹ đạo nghiệm số của hệ thống trước khi hiệu chỉnh
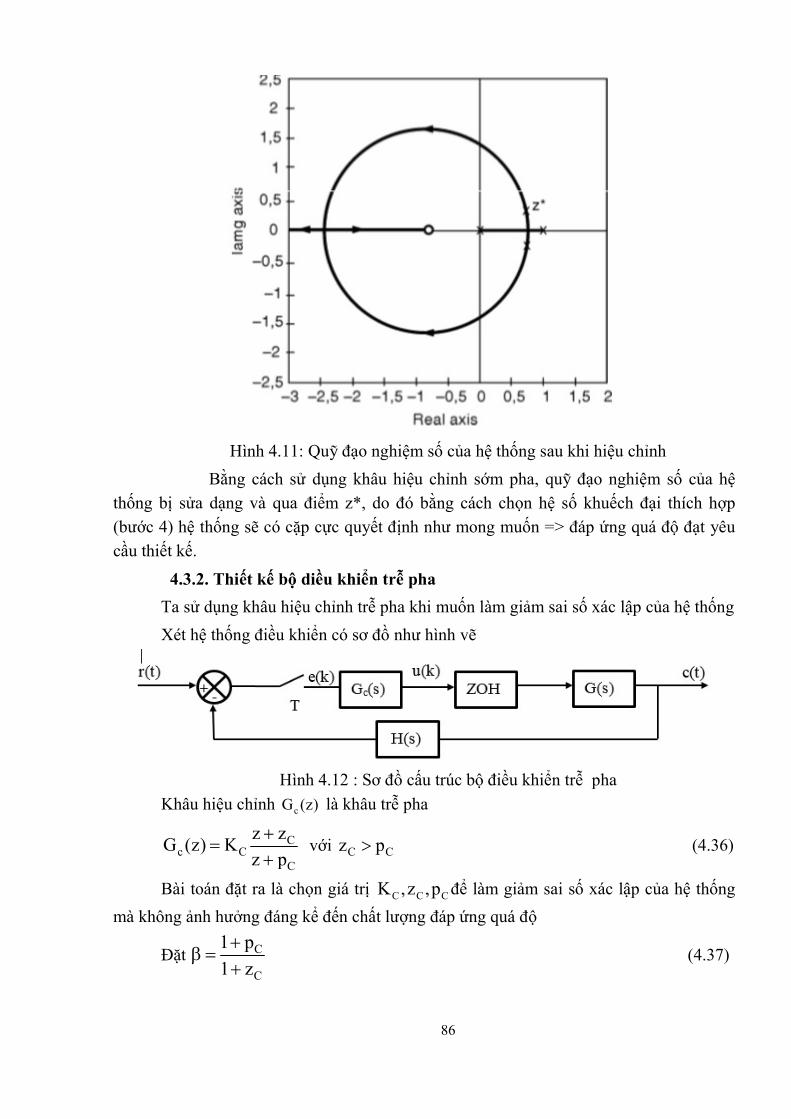
86
Hình 4.11: Quỹ đạo nghiệm số của hệ thống sau khi hiệu chỉnh
Bằng cách sử dụng khâu hiệu chỉnh sớm pha, quỹ đạo nghiệm số của hệ
thống bị sửa dạng và qua điểm z*, do đó bằng cách chọn hệ số khuếch đại thích hợp
(bước 4) hệ thống sẽ có cặp cực quyết định như mong muốn => đáp ứng quá độ đạt yêu
cầu thiết kế.
4.3.2. Thiết kế bộ diều khiển trễ pha
Ta sử dụng khâu hiệu chỉnh trễ pha khi muốn làm giảm sai số xác lập của hệ thống
Xét hệ thống điều khiển có sơ đồ như hình vẽ
Hình 4.12 : Sơ đồ cấu trúc bộ điều khiển trễ pha
Khâu hiệu chỉnh cG (z) là khâu trễ pha
Cc C
C
z zG (z) K
z p
với C Cz p (4.36)
Bài toán đặt ra là chọn giá trị C C CK ,z ,p để làm giảm sai số xác lập của hệ thống
mà không ảnh hưởng đáng kể đến chất lượng đáp ứng quá độ
Đặt C
C
1 p
1 z
(4.37)

87
Trình tự thiết kế
Bước 1:Xác đinh từ yêu cầu sai số xác lâp
Nếu yêu cầu về sai số xác lập cho dưới dJng hệ số vị trị *PK thì
P*P
K
K (4.38)
Trong đó PK hệ số vị trí của hệ trước khi hiệu chỉnh
*PK hệ số vị trí mong muốn
Nếu yêu cầu về sai số xác lập cho dưới dạng hệ số vận tốc *vK thì
V*V
K
K (4.39)
Trong đó VK -hệ số vận tốc của hệ trước khi hiệu chỉnh
*VK -hệ số vận tốc mong muốn
Bước 2: Chọn zero của khâu hiệu chỉnh rất gần điểm +1 để không làm ảnh hưởng
đáng kể đến dạng QĐNS, suy ra
1 1c cz z (chú ý điều kiện 1cz ) (4.40)
Bước 3: Tính cực của khâu hiệu chỉnh
C Cp 1 (1 z ) (4.41)
Bước 4: Tính CK bằng cách áp dụng công thức
c z z*G (z)GH(z) 1 (4.42)
Trong đó *1,2z là cặp cực quyết định của hệ thống sau khi hiệu chỉnh. Do yêu cầu
cần thiết không làm ảnh hưởng đáng kể đến đáp ứng quá độ nên có thế gần đúng *1,2 1,2z z (4.43)
Với *1,2z là cặp cực quyết định cuả hệ thống trước khi hiệu chỉnh
Ví dụ 4.2: Cho hệ thống điều chỉnh rời rạc có sơ đồ khồi như hình vẽ trong đó :
Hàm truyền khâu liên tục 50
G(s)s(s 5)
,chu kỳ lấy mẫu của hệ thống sau khi
hiệu chỉnh có hệ số vận tốc là *VK 100 . Hãy thiết kế khâu hiệu chỉnh trễ pha

88
Giải: Phương trình đặc tính của hệ trước khi hiệu chinh
1 G(z) 0
0,5
Ts
ZOH
12
0,5 0,5
2 0,5
1 e 50G(z) Z G (s)G(s) Z
s s s 5
150(1 z ).Z
s (s 5)
z 0,5 1 e z (1 e 0,5ez 150
z 5(z 1) (z e )
0,21z 0,18G(z)
(z 1)(z 0,607)
Cặp cực quyết định của hệ thống trước khi hiệu chỉnh là nghiệm của chương trình
1,2
0,21 0,181 0 0,699 0,547
( 1)( 0,607)
z
z jz z
Hệ số vận tốc của hệ thống trước khi hiệu chỉnh là
1V
z 1
1V
z 1
V
1K lim(1 z )GH(z)
T1 0,21z 0,18
K lim(1 z )0,1 (z 1)(z 0,607)
K 9,9
Do đó v*v
K 9,90,099
100K
Chọn zero của khâu hiệu chỉnh rất gần điểm +1
c cz 0,99 z 0,99
Suy ra cực của khâu hiệu chỉnh
C Cp 1 (1 z ) 1 0,099(1 0,99)
C c C
z 0,99p 0,999 G (z) K
z 0,999
Tính CK từ điều kiên
C(z 0.99) (0.21z 0.18)
K .z 0.999 (z 1)(z 0.607)
C(0,699 j0,547 0,99
K 10,699 j0,547 0,999)
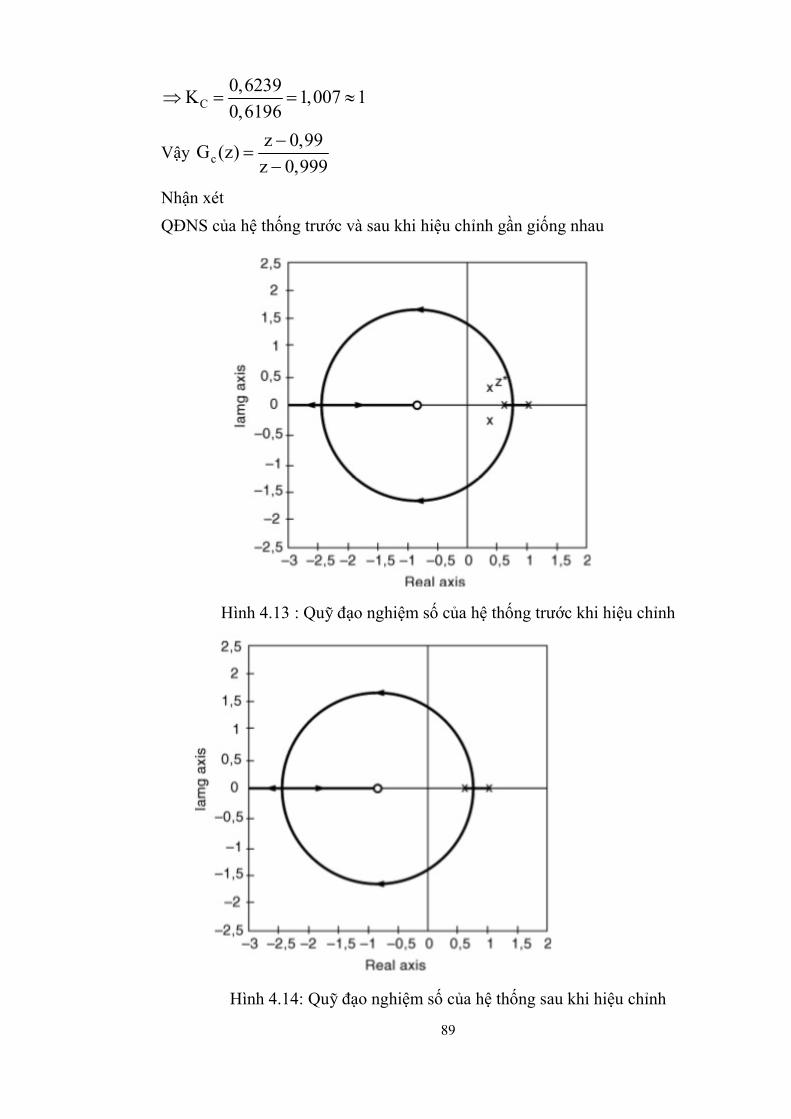
89
C0,6239
K 1,007 10,6196
Vậy cz 0,99
G (z)z 0,999
Nhận xét
QĐNS của hệ thống trước và sau khi hiệu chỉnh gần giống nhau
Hình 4.13 : Quỹ đạo nghiệm số của hệ thống trước khi hiệu chỉnh
Hình 4.14: Quỹ đạo nghiệm số của hệ thống sau khi hiệu chỉnh

90
4.4. THIẾT KẾ BỘ ĐIỀU KHIỂN HỒI TIẾP TRẠNG THÁI.
Hình 4.15 : Sơ đồ khối của hệ dùng bộ điều khiển hồi tiếp trạng thái
Cho đối tượng điều khiển được mô tả bởi hệ phương trình biến trang thái
d d
d
x(k 1) A (k) Bu(k)c(k) C x(k)
(4.44)
Tín hiệu điều khiển trong hệ hồi tiếp trang thái là
u(k) r(k) Kx(k) (4.45)
Hệ phương trình biến trạng thái mô tả hệ hồi tiếp trang thái
d d
d
d d d
d
x(k 1) A x(k) B [r k Kx(k)c(k) C x(k)
x(k 1) A B K x(k) B r(k)c(k) C x(k)
(4.46)
Phương trình đặc tính của hệ hồi tiếp trang thái
d ddet zI A B K 0
(4.47)
Lý thuyết điều khiển chứng minh được rằng: nếu rank(P) = n,với n là bậc của hệ
thống và ] thì hệ thống trên điều khiển
được, thì đó có thể tìm được vecto K để phương trình đặc tính (4.46) có nghiệm bất kỳ
Trình tự thiết kế
Bước 1: Viết phương trình đặc tính của hệ thống sau khi hiệu chỉnh
d ddet zI A B K 0 (4.48)
Bước 2 : Viết phương trình đặc tính mong muốn
n
iz 1
(z p ) 0
(4.49)
Trong đó ip (i 1...n) là các cực mong muốn
Bước 3: Cân bằng các hệ số của hai phương trình đặc tính (4.47) và (4.48) tìm
được vectơ hồi tiếp K
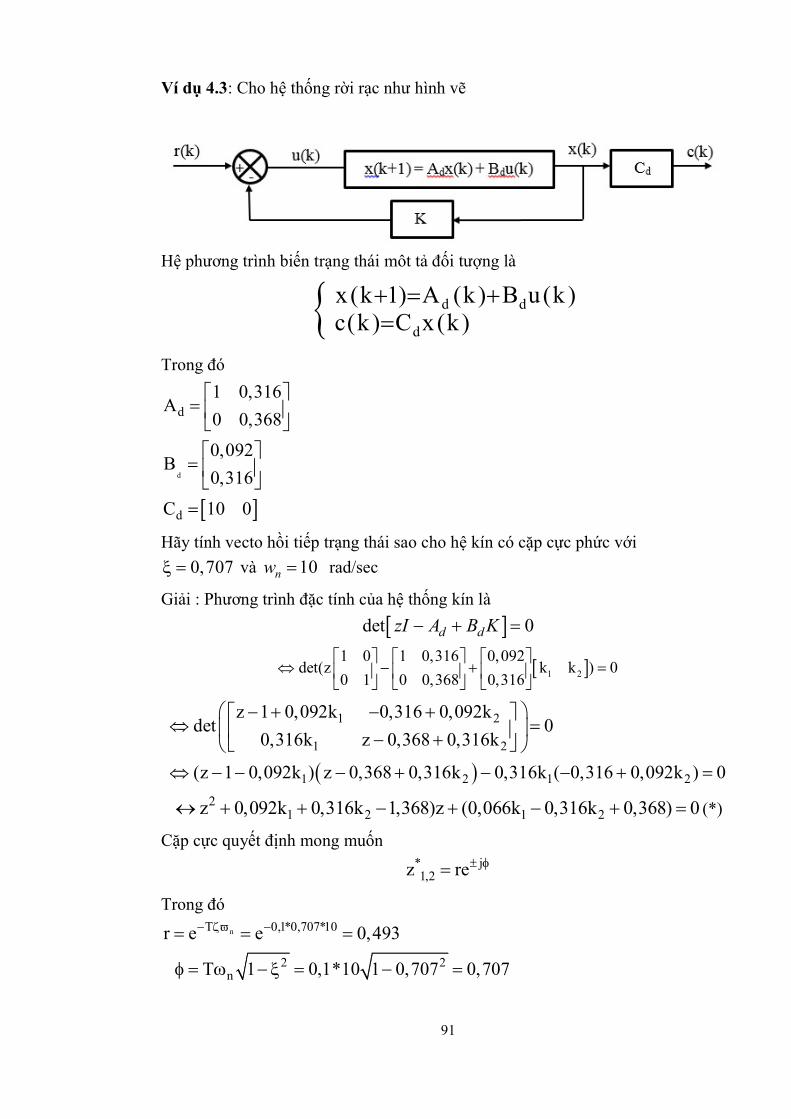
91
Ví dụ 4.3: Cho hệ thống rời rạc như hình vẽ
Hệ phương trình biến trạng thái môt tả đối tượng là
d d
d
x(k 1) A (k) B u(k )c(k) C x(k)
Trong đó
d
d
d
1 0,316A
0 0,368
0,092B
0,316
C 10 0
Hãy tính vecto hồi tiếp trạng thái sao cho hệ kín có cặp cực phức với
0,707 và 10nw rad/sec
Giải : Phương trình đặc tính của hệ thống kín là
det 0 d dzI A B K
1 2
1 0 1 0,316 0,092det(z k k ) 0
0 1 0 0,368 0,316
1 2
1 2
1 2 1 2
z 1 0,092k 0,316 0,092kdet 0
0,316k z 0,368 0,316k
(z 1 0,092k ) z 0,368 0,316k 0,316k ( 0,316 0,092k ) 0
21 2 1 2z 0,092k 0,316k 1,368)z (0,066k 0,316k 0,368) 0 (*)
Cặp cực quyết định mong muốn * j1,2z re
Trong đó
nT 0,1*0,707*10r e e 0,493
2 2nT 1 0,1*10 1 0,707 0,707

92
* j0,7071,2z 0,493e 0,493 cos(0,707) jsin(0,707)
* j0,7071,2z 0, 493e 0,375 j0,320
Phương trình đặc tính mong muốn :
2
(z 0.375 j0.320)(z 0.375 j0.320) 0
z 0.75z 0.243 0(**)
Cân bằng các hệ số ở hai phương trình (*) và (**),ta được
1 2
1 2
(0,092k 0,316k 1,368 0,75
(0,066k 0,316k 0,368 0,243
Giải hệ phương trình trên ta được
1
2
k 3,12
k 1,047
Vậy K 3,12 1,047
4.5. THIẾT KẾ BỘ ĐIỀU KHIỂN PID
Từ yêu cầu thiết kế về đáp ứng quá độ (vị trí nghiệm của phương trình đặc tính )
và sai số xác lập, có thể tính toán giải tích ) và sai số xác lập,có thể tính toán giải tính để
chọn thông số bộ điều khiển PID số .Sau đấy là một vi dụ
Ví dụ 4.4: Cho hệ thống điều khiển có sơ đồ như hình vẽ
10
( )10 1
G ss
; ( ) 0,05H s ; 2secT
Thiết kế khâu hiệu ( )cG z để hệ thống có cặp cực phức với
0,707, 2 / secnw rad và sai số xác lập đối xá đôi với với tín hiệu vào là hàm nấc đơn
vị bằng 0
Giải. Do yêu cầu sai số xác lập đối với tín hiệu vào là hàm nấc bằng 0 nên ta sử dụng hiệu chỉnh ( )cG z là khâu PI
c
1p
K T z 1G (z) K
2 z 1
Phường trìnhđặc tính cảu hệ thống sau khi hiệu chỉnh là
1 ( ) ( )cG z GH z

93
Trong đó Ts
ZOH1 e 10 *0,05
G(H) G (s)G(s)H(s)s (10s 1)
0,091GH(z)
(z 0,819)
Do đó
Ip
K T z 1 0,0911 K 0
2 z 1 z 0,819
IK T z 1 0,0911 Kp 0
2 z 1 z 0,819
Thay T=2 ta suy ra 2
p I p Iz (0,091K 0,091K 1,819)z ( 0,091K 0,091K 0,819) 0
Cặp cực quyết đinh mong muốn là
n
* j1,2
T 2*0,707*2
2 2n
* j2,8281,2
*1,2
z re
r e e 0,059
T 1 2* 2 1 0,707 2,282
z 0,059e 0,059 cos(2,282) jsin(2,828)
z 0,056 j0,018
Phương trình đặc tính mong muốn là
2
2
z 0,056 j0,018 (z 0,056 j0,018) 0
z 0,112z 0,0035 0
So sánh (1) và (2) suy ra
P I
p I
0,091K 0,091K 1,819 0,112
0,091K 0,091K 0,819 0,0035
Giải phương trình trên ta được
p
I
K 15,09
K 6,13
Vậy cz 1
G (z) 15,09 6,13z 1

94
4.6. THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN SỐ ĐỘNG CƠ MỘT CHIỀU
4.6.1. Phân tích hệ thống điều khiển số động cơ một chiều
Sơ đồ khối hệ thống điều khiển động cơ một chiều, điều chỉnh tốc độ bằng cách
thay đổi điện áp phần ứng :
Hình 4.16: Sơ đồ khối hệ thống điều khiển động cơ một chiều
Trong phương pháp này, để thay đổi điện áp phần ứng ta sử dụng bộ chỉnh lưu nửa
chu kỳ bán điều khiển thyristor, Chức năng cơ bản của các khối như sau:
+ Giao diện ra là mạch có chứa bộ biến đổi DAC giúp máy tính giao tiếp và đưa
tín hiệu điều khiển ra bên ngoài.
+ Bộ khuếch đại ra là bộ phát và khuếch đại xung điều khiển mở 2 thyristor.
+ 1 2 1 2T ,T ,D ,D là bộ chỉnh lưu bán điều khiển 2 nửa chu kỳ
+ FT là máy phát tốc có nhiệm vụ biến tín hiệu tốc độ thành tín hiệu điện áp phản
hồi về máy tính.
+ Giao diện vào là mạch có chứa bộ ADC dùng để biến tín hiệu phản hồi điện áp
dạng tương tự thành dạng số cung cấp cho quá trình điều khiển bên trong máy tính
Với phương pháp này điện áp phần ứng đặt lên động cơ đươc tính theo
công thức :
u 0U U cos2
(4.50)
Với mô hình trên ta có sơ đồ của hệ thống khi chưa có bộ điều khiển mềm :
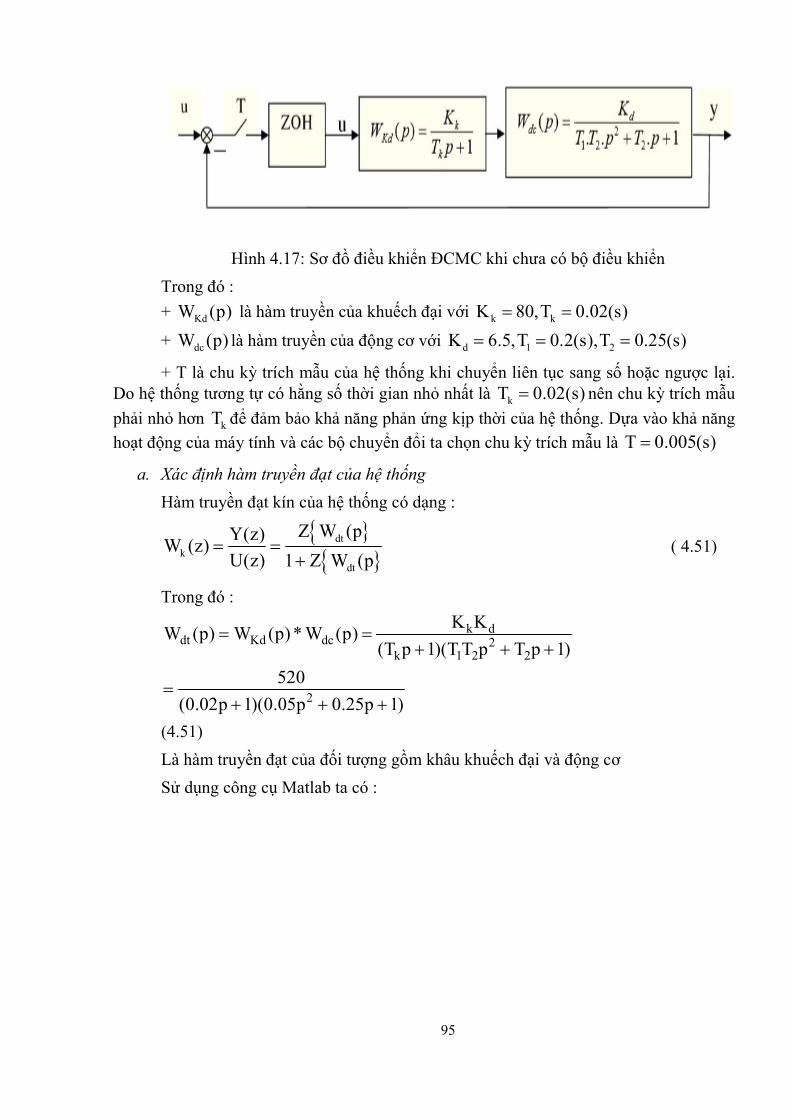
95
Hình 4.17: Sơ đồ điều khiển ĐCMC khi chưa có bộ điều khiển
Trong đó :
+ KdW (p) là hàm truyền của khuếch đại với k kK 80,T 0.02(s)
+ dcW (p) là hàm truyền của động cơ với d 1 2K 6.5,T 0.2(s),T 0.25(s)
+ T là chu kỳ trích mẫu của hệ thống khi chuyển liên tục sang số hoặc ngược lại. Do hệ thống tương tự có hằng số thời gian nhỏ nhất là kT 0.02(s) nên chu kỳ trích mẫu
phải nhỏ hơn kT để đảm bảo khả năng phản ứng kịp thời của hệ thống. Dựa vào khả năng
hoạt động của máy tính và các bộ chuyển đổi ta chọn chu kỳ trích mẫu là T 0.005(s)
a. Xác định hàm truyền đạt của hệ thống
Hàm truyền đạt kín của hệ thống có dạng :
dtk
dt
Z W (pY(z)W (z)
U(z) 1 Z W (p
( 4.51)
Trong đó :
k ddt Kd dc 2
k 1 2 2
2
K KW (p) W (p) * W (p)
(T p 1)(T T p T p 1)
520
(0.02p 1)(0.05p 0.25p 1)
(4.51)
Là hàm truyền đạt của đối tượng gồm khâu khuếch đại và động cơ
Sử dụng công cụ Matlab ta có :
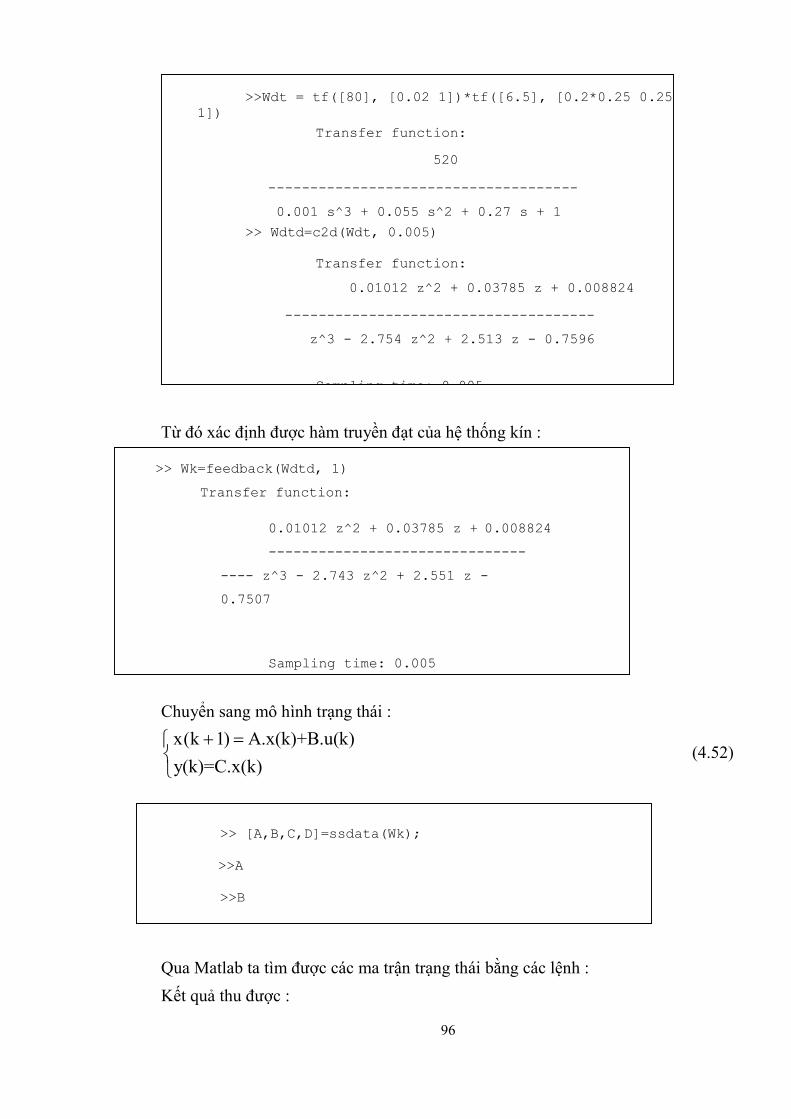
96
Từ đó xác định được hàm truyền đạt của hệ thống kín :
Chuyển sang mô hình trạng thái :
x(k 1) A.x(k)+B.u(k)
y(k)=C.x(k)
(4.52)
Qua Matlab ta tìm được các ma trận trạng thái bằng các lệnh :
Kết quả thu được :
>>Wdt = tf([80], [0.02 1])*tf([6.5], [0.2*0.25 0.25 1])
Transfer function:
520
-------------------------------------
0.001 s^3 + 0.055 s^2 + 0.27 s + 1
>> Wdtd=c2d(Wdt, 0.005)
Transfer function:
0.01012 z^2 + 0.03785 z + 0.008824
-------------------------------------
z^3 - 2.754 z^2 + 2.513 z - 0.7596
Sampling time: 0.005
>> Wk=feedback(Wdtd, 1)
Transfer function:
0.01012 z^2 + 0.03785 z + 0.008824
-------------------------------
---- z^3 - 2.743 z^2 + 2.551 z -
0.7507
Sampling time: 0.005
>> [A,B,C,D]=ssdata(Wk);
>>A
>>B
>>C

97
>> [A,B,C,D]=ssdata(Wk)
A =
2.7435 -1.2756 0.7507
2.0000 0 0
0 0.5000 0
B =
0.2500
0
0
C =
0.0405 0.0757 0.0353
D =
0
Kết quả thu được :
2.7435 1.2756 0.7507
A 2 0 0 ,
0 0.5 0
0.25
B 0 ,C 0.0405 0.0757 0.0353
0
(4.53)
b. Kiểm tra tính điều khiển được và quan sát được của hệ thống
- Tính điều khiển được : Ta lập ma trận 2P A .B A.B B
(4.54)
Xét tính điều khiển được thông qua hạng của ma trận này
>> P=[A^2*B A*B B]
P =
1.2439 0.6859 0.2500
1.3717 0.5000 0
0.2500 0 0
>> det(P)
ans =

98
-0.0313
>> rank(P)
ans =
3
1.2439 0.6859 0.25
P 1.3717 0.5 0
0.25 0 0
(4.53)
det(P) 0.0313 0 do đó hệ thống là điều khiển được
+ Tính quan sát được : Ta lập ma trận ' ' ' ' 2 'N C A .C (A ) .C
(4.55)
>> C'
ans =
0.0405
0.0757
0.0353
>> A'
ans =
2.7435 2.0000 0
-1.2756 0 0.5000
0.7507 0 0
>> N=[C' A'*C' A'^2*C']
N =
0.0405 0.2625 0.6521
0.0757 -0.0340 -0.3196
0.0353 0.0304 0.1971
>> det(N)
ans =
-0.0045
>> rank(N)
ans =
3

99
0.0405 0.2625 0.6521
N 0.0757 0.034 0.3196
0.0353 0.0304 0.1971
(4.56)
det(N) 0.0045 0 do đó hệ quan sát được.
c. Kiểm tra tính ổn định của hệ thống
Từ hàm truyền đạt ra xét phương trình đặc tính mẫu : 3 2z 2.743z 2.551z 0.7507 0
(4.57)
>> HS=[1 -2.743 2.551 -0.7571];
>> x=roots(HS)
x =
1.0744 + 0.3462i
1.0744 - 0.3462i
0.5941 + 0.0000i
Bằng Matlab ta tìm được nghiệm của phương trình như sau :
1 1
2 2
3
z 1.0744 j0.3462 z 1.1128
z 1.0744 j0.3462 z 1.1128
z 0.5941
(4.58)
Ta thấy rằng 1 2z z 1 nên hệ không ổn định.
d. Quá trình quá độ của hệ thống
Khảo sát bằng Matlab :
>> step(Wk,0.185)

100
Hình 4.18: Đặc tính quá độ của hệ khi chưa có bộ ĐK
Nhận xét : đặc tính quá độ ngày càng mở rộng nên đặc tính khi chưa có bộ điều
khiển là không ổn định.
4.6.2. Tổng hợp hệ thống dùng bộ điều khiển PID
a. Bộ điều khiển PID
Hiện nay để tổng hợp một hệ thống điều khiển có rất nhiều phương pháp
như sử dụng bộ PID nối tiếp, PID bù song song hay bộ hồi tiếp trạng thái. Trong đó sử
dụng bộ PID bù nối tiếp là phương pháp kinh điển những vẫn được sử dụng rất nhiều. Bộ
điều khiển PID gồm 3 thành phần : thành phần tỉ lệ - thành phần tích phân – thành phần
vi phân. Mỗi thành phần có những ảnh hưởng nhất định đến chất lượng của hệ thống và
việc lựa chọn một bộ tham số phù hợp cho ba thành phần đó sẽ đem lại cho hệ thống chất
lượng mong muốn. Bộ PID có 2 loại : PID tương tự là bộ điều khiển bằng phần cứng,
PID số là bộ điều khiển bằng phần mềm do người lập trình viết ra. Trong bài này ta sẽ sử
dụng bộ điều khiển PID số.
Hàm truyền liên tục của bộ điều khiển PID số có thể được viết dưới dạng
sau :

101
IPID P d
KW (s) K K s
s (4.59)
Để chuyển từ bộ PID tương tự sang bộ PID số ta sử dụng phương pháp gần
đúng Tustin bằng cách chuyển từng phần của bộ PID tương tự thành dạng rời rạc theo
công thức :
+ Thành phần tỉ lệ được giữ nguyên
+ Thành phần tích phân được lấy gần đúng theo Tustin :
I IK K T(z 1)
s 2(z 1)
(4.60)
+ Thành phần vi phân được lấy gần đúng theo Tustin:
DD
K (z 1)K s
Tz
(4.61)
Trong đó T là chu kỳ trích mẫu của hệ thống
Như vậy hàm truyền đạt rời rạc của bộ PID số là :
I DPID P
2 2P I D
2D D DP I P I
K T(z 1) K (z 1)W (z) K
2(z 1) Tz
2TK z(z 1) K T z(z 1) 2K (z 1)
2TZ(z 1)
K K K(K 0.5K T )z (K 0.5K T 2 )z
T T Tz(z 1)
( 4.62)
b. Thông số bộ điều khiển PID
Sử dụng phương pháp tổng hợp bộ điều khiển PID nối tiếp ta có sơ đồ hệ thống
Hình 4.19 : Sơ đồ hệ thống sử dụng bộ điều khiển PID
- Nhiệm vụ của quá trình tổng hợp là tìm các thông số Kp,Ki,Kd của bộ điều kiển PID
sao cho hệ thống đạt chất lượng như mong muốn. Nhưng đến nay, chưa có phương
pháp chuẩn nào để tìm một cách chính xác các thông số này của bộ điều khiển mà
hoàn toàn phải “mò” dựa vào các thông số này của bộ điều PID lên chất lượng hệ
thống thông qua kết quả mô phỏng trên Simulink

102
Mức độ ảnh hưởng các thông số của bộ PID đến chất lượng của hệ thống là phụ
thuộc vào cấu trúc của hệ thông số bộ PID đến chất lượng cảu hệ thống là phụ thuộc vào
cấu trúc của hệ tuy nhiên nó cũng tuân theo nguyên tắc cơ bản :
Thời gian ổn định Độ quá điều chỉnh Độ sai lệch tĩnh
Kp Ít ảnh hưởng Tăng Giảm
Ki Tăng Tăng Triệt tiêu
kd Giảm Giảm Ít ảnh hưởng
Các bước để xác định thông số của bộ điều chỉnh PID
+ Xây dựng mô hình hệ thống trên phần mềm mô phỏng Simulink
+Đặt các thông số cho bộ |PID tùy ý.
+Chạy thử mô hình và kiểm tra kết quả đặc tính quá độ trên |Scope
+Quan sát đường đặc tính quá độ của hệ thống,kiểm tra xem tính chất nào chưa
đạt yêu cầu thì thay đổi thông số tương ứng của bộ PID theo mức độ ảnh hưởng cho trong
bảng trên.
+ Chạy lại mô hình với thông số mới và tiếp tục kiểm tra,sửa đổi cho đến khi hệ
đạt chất lượng như mong muốn
Tuy nhiên để thuận tiện và nhanh chóng khi tổng hợp hệ thống,trong
Matlab đã tích hợp sẵn một công cụ chuyên dụng giúp ta xác định tương đối chính xác
thông số của bộ điều khiển PID đó là Rltool. Với công cụ này ta có thể xác định một cách
sơ bộ thông số của bộ PID qua gán các điểm cực mong muốn cho hệ thống.Như ta đã biết
các điểm cực là thông số quyết định đến chất lượng của hệ thống,với một hệ điều khiển
số để ổn định thì các điểm cực phải năm bên trong vòng tròn đơn vị.
Như vậy ta sẽ tìm các thông số của bộ PID để làm cho hệ thống ổn định
bằng công cụ Rltool,sau đó chạy thử hệ thống trên Simulink và tiếp tục chỉnh sửa các
thông số của bộ PID để đạt chất lượng mong muốn.

103
*Các bước thực hiện tìm thông số bộ PID nối tiếp
Trong từng Command Windows đánh lệnh:
Cửa sổ Rltool xuất hiện, ta nhập mô hình của đối tượng bằng cách vào
:File\Import Model ta sẽ có sơ đồ mô hình hệ thống và của sổ để nhập thông số.Ta nhập
Wdtz tượng,trong đó k là bộ có các thông số cần tìm.
Hình 4.20: Hộp hội thoại để nhập các khâu trong hệ thống
Để nhập thông số cho bộ PID ta vào Tool\Edit Compensator,hộp hội thoại
cho phép ta nhập các điểm cực và điểm không của bộ PID xuất hiện.Từ hàm truyền rời
rạc của bộ PID ta được hai điểm cực là :z1=1 và z2=0; còn hai điểm không ta có thể chọn
tùy ý.

104
Hình 4.21: Hộp hội thoại nhập các điểm cực,điểm không cho bộ PID
-Quan sát đồ thị quỹ đạo nghiệm,và thay đổi thông số PID bằng cách kéo các điểm
cực,điểm không của bộ PID trên đồ thị sao cho hệ thống có chất lượng đạt yêu cầu.Từ đó
ra rút ra được các thông số cơ bản của bộ PID là:
Kp=0,0085;
Ki=0,0024;
Kd=0,000004;
*Kiểm tra và thay đổi thông số bộ PID trên Simulink
Xây dựng mô hình trên hệ thống trên Simulink với các thống số vừa tìm được
Hình 4.22:Sơ đồ mô phỏng hệ thống trên Simulink
-Chạy sơ đồ với thông số chưa hiệu chỉnh ta được đường đặc tính quá độ:

105
Hình 4.23:Đặc tính quá độ của hệ thống khi chưa có hiệu chỉnh
Chỉnh định lại các thông số bộ PID cho đến khi hệ đạt chất lượng tốt:
Hình 4.24: Sơ đồ mô phỏng hệ thống trên Simulink sau khi điều chỉnh TS
Với các thông số tìm được :
Kp=0,00274
Ki=0,000054/0,005=0,0108
Kd=0,098.0,005=0,0005;
Đặc tính quá độ của hệ:

106
Hình 4.25: Đặc tính quá độ của hệ khi đã có hiệu chỉnh
Qua đường đặc tính quá độ ta thấy chất lượng của hệ thống đã tốt hơn rất nhiều so
vói trước khi điều chỉnh :
+Thời gian quá độ :1,4s
+Độ quá điều chỉnh :0,8%
Như vậy thông số của bộ điều khiển PID số cần tìm là
Kp=0,00274;
Ki=0,0108;
Kp=0,0005;
Và có hàm truyền đạt
2
0,000054( 1) 0,0989( 1)W ( ) 0,0274
2( 1)
0,002767. 0,09526. 0,098
( 1)
PID
z zz
z z
z z
z z

107
CÂU HỎI HƯỚNG DẪN ÔN TẬP, THẢO LUẬN
1.Cho hệ thống điều khiển rời rạc có sơ đồ khối như hinh vẽ,trong đó :
Hàm truyền khâu liên tục s 1G s
s(s 5)
Chu kỳ lấy mẫu T=0.2(sec)
Hãy thiết kế khâu hiệu chỉnh sớm sao cho hệ thống sau khi hiệu chỉnh có cặp cực
quyết định ξ = 0 707 , (rad/sec)
Trình bày các phương pháp chuyển đổi tín hiệu từ tương tự sang số và số sang
tương tự
2.Cho hệ thống rời rạc như hình vẽ
H
Hệ phương trình biến trạng thái môt tả đối tượng là
d d
d
x(k 1) A (k) B u(k )c(k) C x(k)
Trong đó
d
d
d
1 0,32A
0 0,37
0,09B
0,34
C 10 0
Hãy tính vecto hồi tiếp trạng thái sao cho hệ kín có cặp cực phức với
0,707 và 10nw rad/sec





![[LÝ DO] Dự Án MT Eastmark City Quận 9 [ĐƯỢC](https://static.fdokumen.com/doc/165x107/63291ff5c9a3e76c80004295/ly-do-du-an-mt-eastmark-city-quan-9-duoc.jpg)














