
L'intégration graphique des équations différentielles ordinaires
37
Historia Mathematica 30 (2003) 457–493 www.elsevier.com/locate/hm L’intégration graphique des équations différentielles ordinaires Dominique Tournès a,b a IUFM de la Réunion, allée des Aigues Marines, Bellepierre, F-97487 Saint-Denis cedex, France b CNRS, équipe REHSEIS, UMR 7596, Université Paris 7, 2 place Jussieu, F-75251 Paris cedex 05, France Résumé Dans la période qui précède l’apparition des ordinateurs, les besoins en calcul des scientifiques et des ingénieurs ont conduit à un développement important des méthodes graphiques d’intégration. Pour contribuer à l’étude de ce phénomène peu connu, l’article présente les techniques et les instruments utilisés pour l’intégration graphique des équations différentielles ordinaires, et recherche leurs origines historiques en remontant aux débuts du calcul infinitésimal : procédés de calcul par le trait reposant sur la méthode polygonale ou la méthode des rayons de courbure, emploi du mouvement tractionnel pour la conception d’intégraphes, réduction à des quadratures graphiques en nombre fini ou infini. 2003 Elsevier Inc. All rights reserved. Abstract In the period which precedes the appearance of computers, needs in calculation of the scientists and engineers led to an important development of graphic methods of integration. To contribute to the study of this little known phenomenon, the article presents techniques and instruments used for the graphic integration of ordinary differential equations, and looks for their historic origins by going back to the beginning of calculus: processes of geometric calculation by the polygonal method or the method of radius of curvature, use of tractional motion for the conception of integraphs, reduction to graphic quadratures in finite or infinite number. 2003 Elsevier Inc. All rights reserved. MSC : 01A45 ; 01A50 ; 01A55 ; 01A60 ; 34-03 ; 65-03 ; 65S05 Keywords: Differential equations; Graphical integration; Integraphs Introduction Dans l’Encyklopädie der mathematischen Wissenschaften mit Einschluss ihrer Anwendungen, les ma- thématiciens appliqués Carl Runge et Friedrich A. Willers publient en 1915 un article intitulé « Nume- Adresse e-mail : [email protected]. 0315-0860/$ – see front matter 2003 Elsevier Inc. All rights reserved. doi:10.1016/S0315-0860(03)00033-8
-
Upload
univ-reunion -
Category
Documents
-
view
0 -
download
0
Transcript of L'intégration graphique des équations différentielles ordinaires

es
ngénieursétude deraphiquedu calculrayons
dratures
engineerss littleordinary
sses oftion for
ume-
Historia Mathematica 30 (2003) 457–493www.elsevier.com/locate/hm
L’intégration graphique des équations différentielles ordinair
Dominique Tournèsa,b
a IUFM de la Réunion, allée des Aigues Marines, Bellepierre, F-97487 Saint-Denis cedex, Franceb CNRS, équipe REHSEIS, UMR 7596, Université Paris 7, 2 place Jussieu, F-75251 Paris cedex 05, France
Résumé
Dans la période qui précède l’apparition des ordinateurs, les besoins en calcul des scientifiques et des iont conduit à un développement important des méthodes graphiques d’intégration. Pour contribuer à l’ce phénomène peu connu, l’article présente les techniques et les instruments utilisés pour l’intégration gdes équations différentielles ordinaires, et recherche leurs origines historiques en remontant aux débutsinfinitésimal : procédés de calcul par le trait reposant sur la méthode polygonale ou la méthode desde courbure, emploi du mouvement tractionnel pour la conception d’intégraphes, réduction à des quagraphiques en nombre fini ou infini. 2003 Elsevier Inc. All rights reserved.
Abstract
In the period which precedes the appearance of computers, needs in calculation of the scientists andled to an important development of graphic methods of integration. To contribute to the study of thiknown phenomenon, the article presents techniques and instruments used for the graphic integration ofdifferential equations, and looks for their historic origins by going back to the beginning of calculus: procegeometric calculation by the polygonal method or the method of radius of curvature, use of tractional mothe conception of integraphs, reduction to graphic quadratures in finite or infinite number. 2003 Elsevier Inc. All rights reserved.
MSC :01A45 ; 01A50 ; 01A55 ; 01A60 ; 34-03 ; 65-03 ; 65S05
Keywords:Differential equations; Graphical integration; Integraphs
Introduction
Dans l’Encyklopädie der mathematischen Wissenschaften mit Einschluss ihrer Anwendungen, les ma-thématiciens appliqués Carl Runge et Friedrich A. Willers publient en 1915 un article intitulé « N
Adresse e-mail :[email protected].
0315-0860/$ – see front matter 2003 Elsevier Inc. All rights reserved.doi:10.1016/S0315-0860(03)00033-8

458 D. Tournès / Historia Mathematica 30 (2003) 457–493
ngen »ut jugeress notreu’au
érique.bles deoins tantphique
équationsamp àent de la
incipaleslèvent dunaturelde petitsection 2).
ent, lesde faire
ndantesl, qui aEnfin, jeechniquess à desraphique
lle
d
rische und graphische Quadratur und Integration gewöhnlicher und partieller Differentialgleichu[Runge et Willers, 1915]. La deuxième partie de ce texte commence par une phrase que l’on peaujourd’hui surprenante : « Pour l’intégration des équations différentielles ordinaires, ce sont lmé-thodes graphiquesqui sont les plus rapides et les plus claires ; c’est pourquoi nous commenceronétude par elles ».1 Pour saisir pleinement la portée d’une telle affirmation, il faut avoir à l’esprit qdébut du vingtième siècle, le calcul graphique était une composante importante de l’analyse numEn effet, avant l’apparition des calculatrices électroniques, le calcul numérique à la main et aux talogarithmes était si coûteux en temps et en énergie que les scientifiques et les ingénieurs, du mqu’ils n’avaient pas besoin d’une grande précision, avaient tendance à lui préférer le calcul gra[Tournès, 2000].
Je me propose ici de dégager les grandes idées qui sous-tendent l’intégration graphique desdifférentielles ordinaires et de rechercher leurs origines. Il y a là, pour l’historien, un vaste chexplorer car, depuis la synthèse de Runge et Willers, c’est un thème qui est resté quasiment abslittérature secondaire.
En laissant de côté ce qui relève de l’anecdote, il me semble que se dégagent quatre lignes prde recherches à parcourir successivement. Je distingue, tout d’abord, deux approches qui recalcul par le trait : lorsqu’on pratique des constructions à la règle et au compas, il est assezde discrétiser le phénomène étudié et de remplacer la courbe intégrale inconnue par une suitesegments de tangentes (cf. Section 1) ou par une suite de petits arcs de cercles osculateurs (cf. SEnsuite, il y a une idée qui vient de Leibniz : puisque la règle, le compas et, plus généralemsystèmes articulés ne permettent d’atteindre que des courbes algébriques, il est indispensableintervenir un élément physique dans la construction si l’on veut accéder aux courbes transcedéfinies par des équations différentielles. Cet élément physique, c’est le mouvement tractionnedonné lieu à une longue lignée de travaux conduisant aux intégraphes modernes (cf. Section 3).regroupe dans une dernière catégorie les méthodes qui, sans chercher à mettre au point des tparticulières pour les équations différentielles, visent à ramener l’intégration de ces dernièrequadratures, en nombre fini ou infini, et à exploiter des procédés déjà connus de quadrature g(cf. Section 4).
1. Les lignes polygonales
1.1. La méthode d’Euler
Considérons un problème différentiel de conditions initiales mis sous la forme la plus générale
y′ = f (x, y), y(x0) = y0
(dans cette écriture, la lettrey peut représenter une fonction vectorielle en dimensionp, ce qui permet deramener à la même forme un système différentiel dep équations d’ordre 1 ou une équation différentiescalaire d’ordrep).
1 « Bei der Integration gewöhnlicher Differentialgleichungen führen diegraphische Methodenam schnellsten zum Ziel unsind am übersichtlichsten; sie mögen daher hier zuerst besprochen werden » [Runge et Willers, 1915, 141].

D. Tournès / Historia Mathematica 30 (2003) 457–493 459
commen proche,finies.ne
petitente au
ièremétriqueu calculinfinité
gentes àlui-même
l’un des517]. En
ar points
iourst estreuuer la
artir dur cela,ximationsavoir
quand Fent, les
n obtientpartageité d’une
La technique connue aujourd’hui sous le nom de « méthode d’Euler » consiste à prendrecourbe intégrale approchée une ligne polygonale dont les sommets sont déterminés de proche eà partir du point initial, en remplaçant l’équation différentielle par une équation aux différencesChaque point(x, y) est joint au point suivant(x + �x,y + �y) par un segment de droite, avec udifférence�y déterminée explicitement par la formule�y = f (x, y)�x ou implicitement par l’équation�y = f (x + �x,y + �y)�x. Autrement dit, la méthode d’Euler revient à remplacer, sur chaqueintervalle, la courbe intégrale par sa tangente au point initial (méthode explicite) ou par sa tangpoint final (méthode implicite).
Dans sesInstitutiones calculi integralisde 1768 et 1769, Leonhard Euler a exposé pour la premfois la méthode polygonale sous une forme purement numérique, mais, dans sa version géoet graphique, cette méthode est beaucoup plus ancienne. Elle vient tout droit des débuts dinfinitésimal, intimement associée à la conception d’une courbe en tant que ligne polygonale à unede côtés formés de segments de tangentes infiniment petits.
1.2. Les premières méthodes polygonales
En 1638, Florimond Debeaune soumet quelques exemples de problèmes inverses des tanla sagacité des mathématiciens français, mais Fermat, Roberval, Beaugrand et Debeauneéchouent dans leurs tentatives pour les résoudre. Seul René Descartes donne une solution àproblèmes (le deuxième) dans sa lettre à Debeaune du 16 février 1639 [Descartes, 1639, 514–termes modernes, il s’agit de construire la courbe AX définie par
dy
dx= x − y
bet y(0) = 0,
où AY = y, YX = x et où AB= b est une longueur donnée (cf. Fig. 1).Faute de trouver une construction exacte, Descartes propose une méthode de construction p
qui, d’après lui, est très générale :
Il y a bien vne autre façon qui est plus generale, & à priori, à sçauoir par l’intersection de deux tangentes, laquelle se doit tousfaire entre les deux points où elles touchent la courbe, tant proches qu’on les puisse imaginer. Car en considerant quelle doicette courbe, afin que cette intersection se fasse tousiours entre ces deux points, & non au deça ny au delà, on en peut troconstruction. [Descartes, 1639, 514]
Explicitons la démarche : il s’agit de construire des points de la courbe, de proche en proche, à ppoint initial A. Supposant le point V déjà construit, on cherche à construire le point suivant X. PouDescartes considère les tangentes à la courbe en V et en X, qui se coupent en D, et son approrepose sur le fait que la projection F de D sur l’asymptote se trouve entre celles de V et de X, àP et R. Or, quand F est en R, cela revient à remplacer la courbe par sa tangente au point V, et,est en P, cela revient à remplacer la courbe par sa tangente au point X. On reconnaît, finalemméthodes d’Euler explicite et implicite.
Si l’on reconstitue scrupuleusement les constructions géométriques suggérées dans le texte, odeux lignes polygonales qui encadrent la vraie courbe intégrale. Sur la Fig. 2, je suis parti d’unde AB en huit. Dans sa lettre, Descartes évoque également un partage en seize et la possibilapproximation aussi précise que l’on veut :

460 D. Tournès / Historia Mathematica 30 (2003) 457–493
tes.
Newton,ntensitéethinggit
initiale
ichsondans lanstisant.parties :
. 4). Sips, lau cas de
ée partous les
à une
Fig. 1. Le deuxième problème de Debeaune [Descartes,1639, 515].
Fig. 2. Reconstitution des constructions de Descar
De façon que, diuisant AB en plus de parties, on peut approcher de plus en plus, à l’infiny, de la iuste longueur des lignes Aα, Aβ, &semblables, & par ce moyen construire Mechaniquement la ligne proposée. [Descartes, 1639, 516]
Un autre texte remarquable est la lettre d’Isaac Newton à Robert Hooke du 13 décembre 1679 [1679, 307–308]. Newton y parle de la courbe décrite par un mobile soumis à une force centrale d’iconstante, et fournit une figure sans explication (cf. Fig. 3). Il écrit simplement : « I might add somabout its description by pointsquam proximè» [Newton, 1679, 308]. En termes modernes, il s’ad’intégrer l’équation différentielle
d2M
dt2= −k
−−−→CM
CM,
où k est une constante, et où le mobile M, attiré par le centre C, part du point A avec une vitessedonnée dans la direction de la tangente Am.
Comment Newton a-t-il pu construire cette courbe par points ? Ainsi que l’a montré Herman Erlde manière convaincante [Erlichson, 1991, 1992], la réponse se trouve vraisemblablementméthode des impulsions instantanées qui est exposée dans lesPrincipia de 1687 et, auparavant, dale petit traitéDe Motude 1684. De façon générale, Newton analyse le mouvement en le discréPendant chaque petit intervalle de temps, il considère que le mouvement est composé de deuxun mouvement inertiel sur la tangente et une impulsion dirigée vers le centre d’attraction (cf. Figl’on regarde bien, il s’agit d’une méthode d’Euler implicite puisque, sur chaque intervalle de temcourbe est remplacée par sa tangente au point final. Sur la Fig. 5, j’ai appliqué cette technique ala gravité constante : on retrouve bien une courbe analogue à celle de la lettre de 1679.
Une confirmation que c’est effectivement cette méthode d’intégration graphique qui était utilisNewton et Hooke se trouve dans un manuscrit de Hooke de 1685, sur une figure où subsistenttraits de construction (cf. Fig. 6). Cette fois, il s’agit d’étudier la trajectoire d’un corps soumis

D. Tournès / Historia Mathematica 30 (2003) 457–493 461
s les
on,
nt pour
Leibniznt quis les
es
Fig. 3. La solution de Newton au problème de la gravitéconstante [Erlichson, 1992, 57].
Fig. 4. La méthode des impulsions instantanées danPrincipia [Newton, 1687 (Trad. fr. 1759), planche 1].
Fig. 5. Reconstitution de la construction de Newton.Fig. 6. Une construction de Hooke en 1685 [Erlichs1997, 173].
gravité proportionnelle à la distance. Hooke démontre graphiquement que c’est une ellipse ayacentre le point attracteur [Erlichson, 1997].
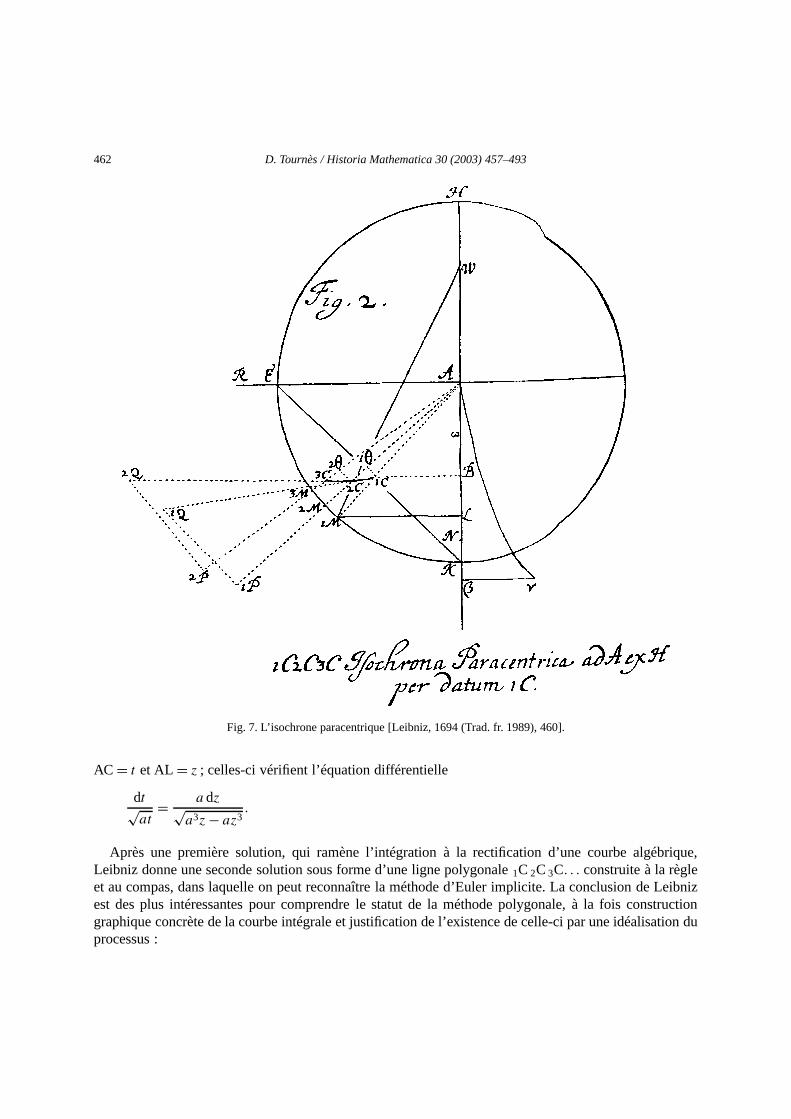
On rencontre encore une utilisation de la méthode polygonale dans un article de Gottfried W.de 1694 sur le problème de l’isochrone paracentrique : trouver la trajectoire d’un point pesas’éloigne uniformément d’un point donné [Leibniz, 1694 (Trad. fr. 1989), 299–304]. Gardonnotations de Leibniz (cf. Fig. 7) : on donne un cercle de centre A et de rayon AH= a ; le point C,qui s’éloigne uniformément du point fixe A à partir d’un point initial1C, est repéré par les coordonné
462 D. Tournès / Historia Mathematica 30 (2003) 457–493
rique,
Leibnizstructionation du
Fig. 7. L’isochrone paracentrique [Leibniz, 1694 (Trad. fr. 1989), 460].
AC = t et AL = z ; celles-ci vérifient l’équation différentielle
dt√at
= a dz√a3z − az3
.
Après une première solution, qui ramène l’intégration à la rectification d’une courbe algébLeibniz donne une seconde solution sous forme d’une ligne polygonale1C2C3C. . . construite à la règleet au compas, dans laquelle on peut reconnaître la méthode d’Euler implicite. La conclusion deest des plus intéressantes pour comprendre le statut de la méthode polygonale, à la fois congraphique concrète de la courbe intégrale et justification de l’existence de celle-ci par une idéalisprocessus :

D. Tournès / Historia Mathematica 30 (2003) 457–493 463
oint
rad. fr.
1868,amental
rs chezrocédéel on estrale enngentes,ielle.verselleoù les
au (cf.
courbese d’elles ;essives
ndances5, 178].lications
ans unen
rtée de
sagene deationsrandeion ou
Nous obtiendrons de la sorte un polygone1C2C3C etc. remplaçant la courbe inconnue, c’est-à-dire unecourbe Mécanique tenantlieu de courbe Géométrique, du même coup nous voyons bien qu’il est possible de faire passer la courbe géométrique par un pdonné1C puisqu’une telle courbe est lalimite où en définitives’effacent progressivement les polygones convergents. Nous disposonsen même temps d’une série de grandeurs ordinaires convergeant vers la grandeur transcendante cherchée. [Leibniz, 1694 (T1989), 304]
Il y a là, très clairement, l’idée qui sera approfondie par Cauchy, en 1824, et par Lipschitz, enpour établir, avec les nouveaux critères de rigueur du dix-neuvième siècle, le théorème fondd’existence dit « de Cauchy–Lipschitz ».
1.3. Les directrices de Bernoulli
La difficulté de la méthode polygonale initiale, telle que nous en avons rencontré des avataDescartes, Newton ou Leibniz, est qu’il faut, pour chaque nouvelle équation, imaginer un pspécifique permettant, à chaque étape, de construire la pente de la tangente au point en lequparvenu. Le procédé serait plus performant si l’on pouvait tracer directement toute courbe intégévitant ces constructions auxiliaires. Pour cela, il serait bon de disposer à l’avance de toutes les tac’est-à-dire de connaître graphiquement le champ de vecteurs déterminé par l’équation différent
C’est Jean Bernoulli, en 1694, qui développe pour la première fois ce point de vue de portée uni[Jean Bernoulli, 1694a]. À cet effet, il introduit la notion de « lignes directrices », lieux des pointscourbes intégrales ont une pente donnée. Pour l’équation différentielley′ = f (x, y), il s’agit des courbesd’équationf (x, y) = k, oùk est une constante (aujourd’hui, à la suite des travaux de Junius MassSection 1.4), ces courbes sont appelées « isoclines »).
Par le moyen des directrices, Bernoulli dégage un procédé général de construction desintégrales : on construit préalablement un faisceau de directrices et la pente associée à chacunpour obtenir ensuite la courbe intégrale issue d’un point A, il suffit de connecter les directrices succpar des segments ayant pour pentes les pentes associées à ces directrices.
Le procédé a suscité l’intérêt des contemporains, ainsi qu’il apparaît à l’examen des correspodes années 1694–1695. Leibniz, nullement surpris, déclare y avoir songé aussi [Leibniz, 169Pierre Varignon tente de comprendre la méthode (cf. Fig. 8), mais, insatisfait, demande des expcomplémentaires ainsi qu’un exemple [Varigon, 1695, 81].
Je ne sais pas si Varignon a obtenu ce qu’il souhaitait. Par contre, on trouve un tel exemple dlettre de Bernoulli au marquis de l’Hospital [Jean Bernoulli, 1694b, 247–249]. Il s’agit de l’équatio
xx dx + yy dx = aa dy
dont les directrices sont des cercles (cf. Fig. 9). Bernoulli en profite pour préciser l’intérêt et la poson idée :
Voilà donc ma methode que j’ay trouvée pour la construction generale des équations differentielles ; elle pourra etre d’un grand udans la pratique, lorsqu’on se contente d’une construction mechanique, car plus on fait de courbes directrices approchantes l’ul’autre, et plus on approchera de la veritable courbe cherchée ; Outre cela on construit par là avec une egale facilité toutes les equdifferentielles, sans employer aucune rectification ni quadrature, au lieu que la methode ordinaire aprés avoir surmonté la plus gdifficulté, qui est de separer les indeterminées (ce qui est pourtant le plus souvent impossible) demande encore une rectificatquadrature, ce qui rend la pratique pour ainsi dire impratiquable. [Jean Bernoulli, 1694b, 249]

464 D. Tournès / Historia Mathematica 30 (2003) 457–493
70. À ceéthodes
en placee globaldie par
Fig. 8. Les directrices de Bernoulli illustrées par Varigon [1695, 81].
Fig. 9. Un exemple de Bernoulli [1694b, 248].
1.4. Renouveau de la méthode polygonale à la fin du dix-neuvième siècle
La méthode polygonale, dans sa version graphique, n’évolue plus jusque vers les années 18moment, les besoins de calcul des ingénieurs font que l’on assiste à un essor fulgurant des mgraphiques et à la constitution du calcul graphique en tant que discipline autonome, avec la mised’enseignements spécialisés et la publication de nombreux traités [Tournès, 2000]. Ce phénomènprofite, en particulier, aux méthodes d’intégration graphique, dont l’étude est reprise et approfon

D. Tournès / Historia Mathematica 30 (2003) 457–493 465
].
e tous lesique des8–1887,
oints oùmièreprendres à égale
ntégraleà égaleode des
Massauprochées
essayantson que
anique deilla durant
es pontsécole, oùappliquée,adémie
Fig. 10. Étude graphique d’une équation différentielle à partir de ses isoclines [Massau, 1878–1887, planche 13
l’ingénieur tchèque Josef Solín2 [1872], puis, surtout, par le Belge Junius Massau,3 professeur à l’écoled’ingénieurs de Gand. Dans une série de travaux élaborés entre 1873 et 1904, Massau développaspects de l’intégration graphique, depuis les quadratures graphiques jusqu’à l’intégration graphéquations différentielles ordinaires et même des équations aux dérivées partielles [Massau, 1871887, 1889, 1900–1904].
Massau introduit le terme de « courbe isocline » à partir de la remarque que c’est le lieu des pl’intégrale a une même inclinaison [Massau, 1878–1887, livre VI, 501] (il semble que ce soit la preoccurrence du mot « isocline » dans ce contexte). Le principal apport de Solín et Massau est deles sommets de la ligne polygonale, non pas sur les isoclines, mais entre les isoclines, à peu prèdistance de deux isoclines consécutives (sur la Fig. 10, on peut voir un exemple de courbe iABCD construite de cette manière). Suivant la façon dont on interprète l’expression « à peu prèsdistance », on obtient des équivalents graphiques de la méthode du point milieu et de la méthtrapèzes, qui s’écrivent respectivement
�y = f
(x + 1
2�x,y
(x + 1
2�x
))�x, �y = f (x, y) + f (x + �x,y + �y)
2�x.
On abandonne ainsi la méthode d’Euler, d’ordre 1, pour des méthodes plus efficaces d’ordre 2.proposera plus tard des traductions graphiques d’autres formules usuelles de quadratures ap[Massau, 1878–1887, livre VI, 502 ; 1889, 427]. Rappelons à ce propos que c’est également end’adapter aux équations différentielles les méthodes du point milieu, des trapèzes et de Simp
2 Josef Marcell Solín (1841–1912), ingénieur et mathématicien tchèque, fut, à partir de 1876, professeur de mécconstruction à l’École polytechnique tchèque de Prague. Il appartient à la fameuse école géométrique tchèque qui brla seconde moitié du dix-neuvième siècle et le début du vingtième.
3 Junius Massau (1852–1909) est né dans le Hainaut, en Belgique wallonne. Il reçut son diplôme d’ingénieur det chaussées en 1874, à l’École du génie civil de l’université de Gand. Dès 1878, il devint professeur dans cetteil enseigna la mécanique analytique, la théorie des machines et la graphostatique. Ses travaux sur la mécaniquel’intégration graphique et la nomographie lui valurent une solide réputation en Belgique et à l’étranger. En 1906, l’Acdes sciences de Paris lui décerna le prix Wilde.

466 D. Tournès / Historia Mathematica 30 (2003) 457–493
ttre auéthodess car lesediate, et; Ocagne,xistenceeut-êtreinspiré
e au points forme
versionsrme deséauté,ans lesodes plustif à une
pratiqueiverses, courbe
Poincarées. Cettegularités,
e
ns
mbre deande des
Prague. Ilechnique. En 1894,qui écrivit
les mathématiciens appliqués allemands Carl Runge, Karl Heun, et Wilhelm Kutta vont mepoint, entre 1895 et 1901, les algorithmes numériques connus aujourd’hui sous le nom de « mde Runge–Kutta ». Sous forme numérique, cette adaptation soulève de grandes complicationéquations aux différences déterminant l’accroissement�y sont implicites. Par contre, sous formgraphique, la combinaison des pentes fournies par plusieurs isoclines consécutives est imméa été abondamment exposée et commentée à la suite de Solín et Massau [Nehls, 1877, chap. 101908, 155–157], parfois en lien avec des réflexions sur les preuves du théorème fondamental d’e[Picciati, 1893; Cotton, 1905, 496 ; 1908, 122]. Il n’est donc pas absurde de penser que c’est ple savoir-faire accumulé préalablement par les calculateurs graphiques à partir de 1870 qui aRunge et ses successeurs lors du passage à une approche numérique. En retour, après la misrigoureuse de la formule classique de Runge–Kutta d’ordre 4, on assiste à sa traduction sougraphique [Runge, 1912, 132–135].
Dès la fin du dix-neuvième siècle, on rencontre des applications concrètes d’envergure desaméliorées de la méthode des isoclines. Massau, tout d’abord, s’en sert pour déterminer la foaxes hydrauliques des cours d’eau non prismatiques [Massau, 1878–1887, livre VI]. Henry L4
après avoir utilisé l’ancienne méthode d’Euler pour l’étude des oscillations à longue période dmachines actionnées par des moteurs hydrauliques [Léauté, 1885, 122–124], passe aux méthprécises du point milieu et des trapèzes pour l’étude du mouvement troublé des moteurs consécuperturbation brusque [Léauté, 1891, 22–23].
Par ailleurs, pour Massau, les courbes isoclines ne servent pas seulement à la constructiond’une courbe intégrale particulière. À partir de l’étude des isoclines, il s’intéresse aussi à dpropriétés géométriques du champ de vecteurs de l’équation différentielle : courbe des inflexionsdes rebroussements, points singuliers, etc. Il entreprend ainsi, à peu près à la même époque queet probablement de façon indépendante, une véritable étude qualitative des équations différentiellétude est utile au calculateur graphique pour préciser le tracé des intégrales au voisinage des sinlà où les méthodes générales peuvent tomber en défaut.
1.5. Variantes et améliorations de la méthode polygonale
Václav Láska5 étudie les équations de la formef (x + y dy/dx, y) = 0, qui se prêtent à unconstruction simple et rapide des petits segments de tangente à partir de la courbef (ξ, η) = 0 [Láska,1890]. Dans la même veine, Emanuel Czuber6 [1899] simplifie la méthode d’Euler pour les équatiolinéaires du premier ordre
y′ + P(x)y = Q(x)
4 Henry Léauté (1847–1916), ingénieur français, fut professeur de mécanique à l’École Polytechnique et mel’Académie des sciences. Il est connu pour ses travaux à caractère mathématique sur la régulation et la télécommmachines.
5 Václav Láska (1862–1943) était un géophysicien, astronome et mathématicien tchèque.6 Emanuel Czuber (1851–1925), mathématicien tchèque, fit ses études à l’École polytechnique allemande de
soutint son doctorat en 1876 dans le domaine de la géométrie pratique. En 1891, il devint professeur à l’École polytde Vienne. Il travailla sur la théorie des probabilités, le calcul des observations et les mathématiques des assurancesil créa un cours technique sur les assurances, dans lequel il introduisait l’usage des probabilités. C’est également luil’article sur le calcul des probabilités dans l’Encyklopädie der mathematischen Wissenschaften.

D. Tournès / Historia Mathematica 30 (2003) 457–493 467
e
sonstruireoclines.aphiquendant leà l’axe
que courbee].nd’uneun pointectement, oùes petits
].courbe àondanteserchée,mme sur
ensuitede calculvrages ont
lin où ilechnique894. Avecvingtième
s, mais ilétriques,
atiquesuées de
amment à
r.
en remarquant que les tangentes passant par les points de même abscissex concourent au point dcoordonnées
ξ = x + 1
P(x), η = Q(x)
P (x).
Il suffit donc de construire préalablement par points la courbe(ξ, η) et de la graduer avec les abscissex
pour pouvoir ensuite tracer la tangente passant par un point donné quelconque. On peut ainsi cles courbes intégrales à l’aide d’une seule courbe auxiliaire en lieu et place de tout un faisceau d’is
Tetsuzô Kojima approfondit la remarque de Czuber, d’une part en traduisant sous une forme grfacile à mettre en œuvre les méthodes numériques de Runge et de Kutta, d’autre part en éteprocédé à certaines équations non linéaires [Kojima, 1914]. Pour cela, il remplace les parallèlesdes ordonnées par un système de courbes telles que les tangentes passant par les points de chaconcourent en un même point. De manière indépendante, Richard Neuendorff7 développe la même idépour construire les équations différentielles données en coordonnées polaires [Neuendorff, 1922
En généralisant autrement la remarque de Czuber, Rudolf Mehmke8 propose, pour une équatiodifférentielle généraley′ = f (x, y), de construire l’enveloppe des tangentes passant par les pointsparallèle à l’axe des ordonnées [Mehmke, 1917, 119 ; 1930]. Ainsi, avec une règle passant pardonné et placée de manière à être tangente à l’enveloppe correspondante, on peut tracer dirun petit élément de tangente. Willers9 étudie des cas, en particulier celui de l’équation de Riccatil’enveloppe est une conique, ce qui permet d’obtenir des constructions simples et exactes de céléments de tangente [Willers, 1918a, 1918b].
Plutôt que les isoclinesk = f (x, y), où k est une constante, Theodore R. Running10 construitpréalablement les courbesy′ = f (x, k), en portant les valeurs dey′ en ordonnée [Running, 1913À partir du point représentant les conditions initiales, on trace des segments connectant chaquela suivante, de sorte que l’aire sous chaque segment soit égale à la différence des valeurs correspde y. La ligne polygonale ainsi construite approche la courbe dérivée de la courbe intégrale chet les coordonnées des points de cette dernière peuvent se lire directement sur la figure, co
7 Richard Neuendorff (1877–1935) a soutenu sa thèse en 1908 à l’université Christian-Albrechts de Kiel et futprofesseur de mathématiques à l’université de Francfort. Il a écrit plusieurs livres de mathématiques pratiques,graphique et de calcul mécanique à destination des élèves des écoles techniques et des ingénieurs. Ces ouapparemment eu du succès puisqu’ils ont fait l’objet de plusieurs rééditions entre 1911 et 1923.
8 Rudolf Mehmke (1857–1944) s’initia aux mathématiques et à l’architecture à Stuttgart. Il se rendit ensuite à Berétudia sous la direction de Weierstrass, Kronecker et Kummer. Il devint professeur de mathématiques à l’École polytde Darmstadt en 1884, puis professeur de géométrie descriptive et projective à l’École polytechnique de Stuttgart en 1Carl Runge, Mehmke est considéré comme l’une des grandes figures des mathématiques appliquées du début dusiècle. Il s’est surtout occupé de géométrie descriptive, de méthodes graphiques et d’instruments mathématiques’intéressait aussi aux mathématiques pures (calcul vectoriel de Grassmann, fonctions elliptiques, séries trigonomthéorie du potentiel, etc.).
9 Friedrich Adolf Willers (1883–1959) fut un élève de Carl Runge. En 1928, il obtint un poste à l’Institut de mathémappliquées de l’université technique de Freiberg. En 1949, il devint directeur de l’Institut de mathématiques appliql’université technique de Dresde. Il se consacra à l’application des mathématiques aux sciences de l’ingénieur, notl’intégration graphique, à l’analyse pratique et aux instruments de mathématiques.
10 Theodore Rudolph Running (1866–1952) fut professeur de mathématiques à l’université du Michigan, à Ann Arbo

468 D. Tournès / Historia Mathematica 30 (2003) 457–493
ans un
lines etgradués
s classes
d’unonctions
onc lacourbe
ces et lae l’air,
rg à partirit un outilme pour neendu lors
ne. Sesodéliser’intéresser
du papier
xford, il
ersité deleterre.
un nomogramme. De son côté, Gustav Doetsch11 exploite les courbesy′ = f (k, y), qu’il trace sur untransparent tournant et dont il déduit une approximation polygonale de la courbe intégrale dsystème de coordonnées tangentielles, en représentant chaque couple(x, y) par la droite d’équationξ cosx + η sinx − y = 0 [Doetsch, 1921].
Paul Schreiber12 examine l’avantage que présente dans certains cas, pour le tracé des isocdes courbes intégrales, l’utilisation des papiers logarithmiques et autres papiers spécialementqui commencent à être commercialisés à cette époque [Schreiber, 1922]. Enfin, pour de larged’équations d’ordren couramment rencontrées dans les applications, Victor A. Bailey13 et Jack M.Somerville14 simplifient considérablement la construction des lignes polygonales par l’emploitransparent que l’on fait glisser sur la feuille de dessin et sur lequel on a tracé préalablement des fauxiliaires liées aux coefficients de l’équation [Bailey and Somerville, 1938].
2. Les rayons de courbure
2.1. La méthode des rayons de courbure
Considérons une équation différentielle du second ordre, de la forme
d2y
dx2= f
(x, y,
dy
dx
),
et posons dy/dx = tanα. On sait que le rayon de courbure d’une courbe solution est donné par
1
ρ= cos3α
d2y
dx2= cos3 α × f (x, y, tanα).
Sous cette nouvelle forme, l’équation différentielle fournit le rayon de courbure en fonction dex, y etα,c’est-à-dire en fonction de la position du mobile et de la direction du mouvement. On conçoit dpossibilité, à partir d’un point initial en lequel on connaît la pente de la tangente, d’obtenir uneapprochée en construisant une suite d’arcs de cercles osculateurs.
11 Gustav Heinrich Adolf Doetsch (1892–1977) étudia les mathématiques, la physique, la science des assuranphilosophie à Göttingen, Berlin et Munich. Après avoir participé à la Première Guerre mondiale en tant qu’officier dil passa son Habilitation à Hanovre, puis enseigna les mathématiques appliquées à Halle, Stuttgart, et enfin Friboude 1931. Ses travaux portent sur la transformation de Laplace : il a donné une structure solide à la théorie et en a facentral des techniques de l’ingénieur. Pacifiste dans les années 1920, il dut faire des concessions au national-socialispas perdre son poste. En 1939, il fut mobilisé au service de la recherche de guerre. Après la guerre, il fut d’abord suspde la dénazification avant d’être réinstallé dans son poste de professeur à Fribourg en 1951.
12 Carl Adolf Paul Schreiber (1848–1924) fut directeur de la station météorologique de Chemnitz, en Allemagnombreux travaux portent sur la météorologie, l’hydrographie, la géodésie et l’astronomie. C’est en cherchant à mdes observations météorologiques à partir de théories hydrodynamiques et thermodynamiques qu’il a été amené à sà des moyens pratiques d’intégration des équations différentielles. Il a publié plusieurs autres articles sur l’usagelogarithmique, en l’appliquant notamment à la trigonométrie sphérique et à l’étude du mouvement d’un ballon libre.
13 Victor Albert Bailey (1895–1964) est né à Alexandrie, en Égypte. Après des études au Queen’s College, à Oenseigna la physique à l’université de Sydney à partir de 1926.
14 Jack Murielle Somerville (1912–1964) est né à Sydney où il commença ses études avant de rejoindre l’univCambridge. Il enseigna ensuite les mathématiques et la physique à l’université de Sydney et à celle de Nouvelle-Ang

D. Tournès / Historia Mathematica 30 (2003) 457–493 469
n
emière
ntre dementionntielle àisse dansr penser
s, encore
ncontrelicationctile de
umis àrcentreu
,vue de la
’officier’Écoleillerie.
Fig. 11. Méthode des rayons de courbure [Poncelet, 1827–1830, 2e partie, 46].
Sylvestre-François Lacroix décrit clairement cette construction dans la seconde édition de soTraitédu calcul différentiel et du calcul intégral:
Ayant pris arbitrairement le premier point M et la première tangente MT, ce qui donne les premières valeurs des quantitésx, y, dy/dx,on tire de l’équation proposée la valeur correspondante de d2y/dx2, avec laquelle on calcule le rayon du premier cercle osculateur ;on porte ce rayon sur la normale MF, et décrivant un cercle MN′, on prend sur ce cercle un second point N′, duquel résultent denouvelles valeurs dex, y et dy/dx, qui conduisent à une seconde valeur de d2y/dx2, puis à un second cercle osculateur, et la courbecherchée se construit par une suite d’arcs de cercle. On pourrait appliquer ce procédé aux équations du premier ordre, mais la prtangente ne serait plus arbitraire, et il faudrait différentier l’équation proposée pour en tirer l’expression de d2y/dx2. [Lacroix, 1814,451]
Dès les premiers temps du calcul infinitésimal, on s’était intéressé à la détermination du cecourbure et du cercle osculateur en un point d’une courbe donnée. Je n’ai pourtant pas trouvédu problème inverse, c’est-à-dire de la construction d’une courbe définie par une équation différepartir de ses centres de courbure, avant ce texte de Lacroix. Le fait que cette construction apparala seconde édition de 1814 alors qu’elle est absente de la première édition de 1798 peut laisseque la méthode des rayons de courbure était très récente à l’époque de Lacroix ou, tout au moinpeu connue.
2.2. Poncelet et la balistique
La première application concrète des rayons de courbure aux équations différentielles se rechez Jean-Victor Poncelet, dans le cours de mécanique industrielle qu’il professait à l’École d’appde Metz [Poncelet, 1827–1830, 2e partie, 46–49]. Poncelet s’intéresse à la trajectoire d’un projemasse M, lancé d’un point A avec une vitesse initiale V dirigée suivant la tangente AT, et soune force motrice AP (cf. Fig. 11). La composante Ap perpendiculaire à la tangente équilibre la focentrifuge F= M × V2/AC, ce qui permet de construire le rayon de courbure AC. À partir du cede courbure C, on trace un petit arc de cercle AA′. La nouvelle vitesse V′ est alors calculée grâce athéorème des forces vives1
2M × (V2 − V ′2) = Aq × AA ′, et tout est prêt pour recommencer.Les idées de Poncelet ont été approfondies par un de ses élèves, le général Isidore Didion15 qui a
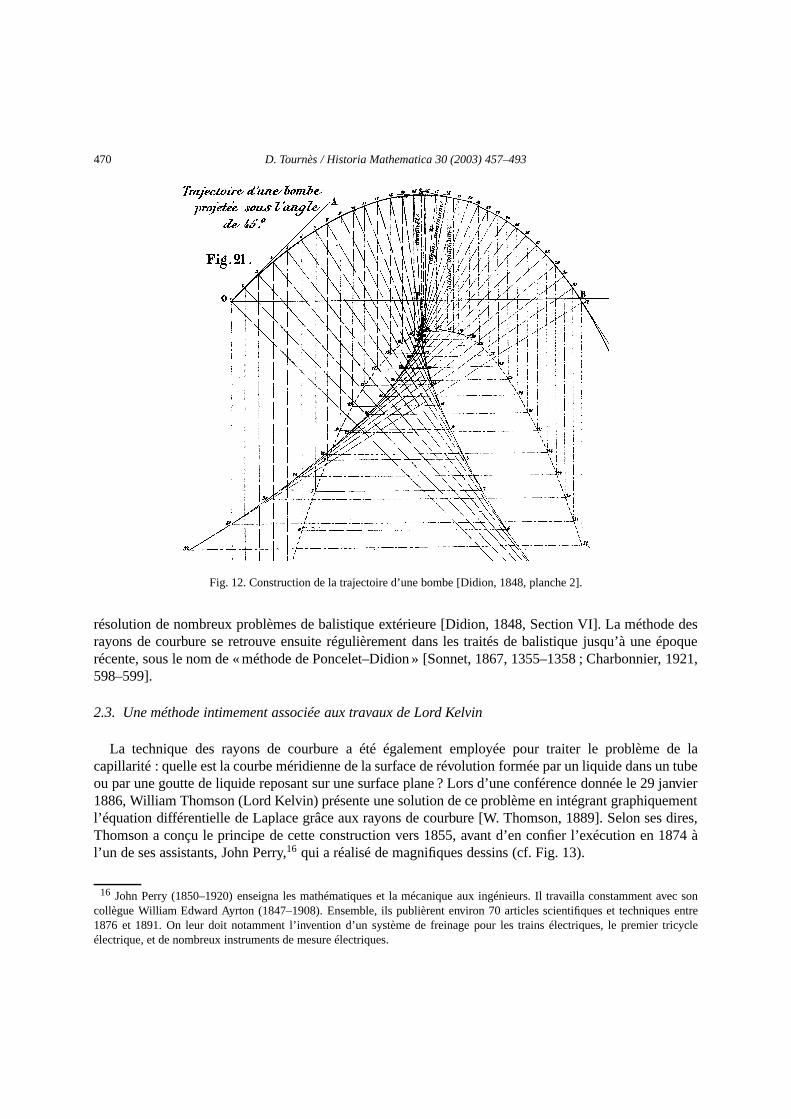
développé plusieurs variantes graphiques de la méthode des rayons de courbure (cf. Fig. 12) en
15 Isidore Didion (1798–1878) entra à l’École Polytechnique de Paris en 1817 et choisit ensuite une carrière dd’artillerie. Il devint professeur d’artillerie à l’École d’application de Metz en 1837, puis examinateur d’admission à lPolytechnique. Il fut promu général en 1858. De 1848 à 1875, il a publié divers travaux relatifs à la balistique et à l’art
470 D. Tournès / Historia Mathematica 30 (2003) 457–493
de dese époqueer, 1921,
e de laun tube9 janvierements dires,1874 à
t avec sones entretricycle
Fig. 12. Construction de la trajectoire d’une bombe [Didion, 1848, planche 2].
résolution de nombreux problèmes de balistique extérieure [Didion, 1848, Section VI]. La méthorayons de courbure se retrouve ensuite régulièrement dans les traités de balistique jusqu’à unrécente, sous le nom de « méthode de Poncelet–Didion » [Sonnet, 1867, 1355–1358 ; Charbonni598–599].
2.3. Une méthode intimement associée aux travaux de Lord Kelvin
La technique des rayons de courbure a été également employée pour traiter le problèmcapillarité : quelle est la courbe méridienne de la surface de révolution formée par un liquide dansou par une goutte de liquide reposant sur une surface plane ? Lors d’une conférence donnée le 21886, William Thomson (Lord Kelvin) présente une solution de ce problème en intégrant graphiqul’équation différentielle de Laplace grâce aux rayons de courbure [W. Thomson, 1889]. Selon seThomson a conçu le principe de cette construction vers 1855, avant d’en confier l’exécution enl’un de ses assistants, John Perry,16 qui a réalisé de magnifiques dessins (cf. Fig. 13).
16 John Perry (1850–1920) enseigna les mathématiques et la mécanique aux ingénieurs. Il travailla constammencollègue William Edward Ayrton (1847–1908). Ensemble, ils publièrent environ 70 articles scientifiques et techniqu1876 et 1891. On leur doit notamment l’invention d’un système de freinage pour les trains électriques, le premierélectrique, et de nombreux instruments de mesure électriques.

D. Tournès / Historia Mathematica 30 (2003) 457–493 471
’orbitesW. Hill
ités delvin, quie si les
ehors du
blementgrationdams »
’époquelème des
Fig. 13. Une courbe de capillarité dessinée par John Perry [W. Thomson, 1889, 34].
En 1892, Thomson emploie aussi la méthode des rayons de courbure pour la recherche dpériodiques du problème des trois corps, à la suite des travaux de l’astronome américain Georgesur la théorie de la Lune [W. Thomson, 1892]. À partir de là, pour les auteurs ultérieurs de tracalcul graphique, la méthode des rayons de courbure va être définitivement associée à Lord Keen est considéré comme le créateur [Willers, 1928 (Trad. angl. 1948), 394]. Tout se passe commrecherches antérieures faites en balistique depuis Poncelet n’avaient jamais été diffusées en dmilieu restreint des ingénieurs militaires.
Par ailleurs, il est intéressant de constater que la méthode graphique de Lord Kelvin a probainspiré les astronomes britanniques qui ont mis au point les méthodes multipas pour l’inténumérique des équations différentielles, celles qui sont appelées aujourd’hui « méthodes d’A[Tournès, 1998, 43]. En effet, John C. Adams s’intéresse au problème de la capillarité en 1855, à ldes premiers travaux de Thomson, George H. Darwin recherche des orbites périodiques du prob

472 D. Tournès / Historia Mathematica 30 (2003) 457–493
uationsDe plus,
erical
des devolontéphiques.
: ilcalculsle, encourbe.
utres sura règle.et ainsi
pointe du
laire au
ouplend
s’en sertque, etingeronstants
ure à lauendorff,
le tracéne, en
ines den peutortante1895 lesdonna salucrative
urg.
trois corps juste après l’article de Thomson de 1892, et tant Adams que Darwin mettent les éqdu second ordre qu’ils ont à intégrer sous une forme faisant apparaître le rayon de courbure.à propos de son algorithme numérique, Darwin écrit explicitement : « This method is the numcounterpart of the graphical process described by Lord Kelvin in hisPopular Lectures, but it is verymuch more accurate » [Darwin, 1897, 125]. Comme nous l’avons vu plus haut pour les méthoRunge–Kutta (cf. Section 1.4), il semble que les méthodes d’Adams proviennent en partie de lad’approfondir sous forme numérique des idées exploitées en premier lieu par les calculateurs gra
2.4. Variantes et amélioration de la méthode des rayons de courbure
En 1893, Charles V. Boys17 apporte une simplification pratique à la méthode de Thomsonconçoit un dispositif assez simple, formé d’une règle spécialement graduée (afin d’éviter certainsauxiliaires) et d’un tripode dont chaque pied se termine par une aiguille [Boys, 1893]. La règcelluloïd transparent, comporte un petit trou dans lequel on fait passer le crayon servant à tracer laUn pied du tripode est planté sur la règle au niveau du premier centre de courbure et les deux ala feuille de papier, de sorte qu’on puisse tracer un petit arc par un mouvement de rotation de lEn maintenant la règle fixe, on déplace ensuite le tripode jusqu’au deuxième centre de courburede suite. L’avantage de ce dispositif est que l’on trace les arcs de cercle successifs sans que lacrayon quitte la feuille de papier, d’où une courbe parfaitement lisse. En 1916, Rudolf Rothe18 améliorel’instrument de Boys en ajoutant, sur une version élargie de la règle, un second axe perpendicupremier, ce qui permet, lorsqu’on travaille sur du papier quadrillé, de lire directementy′ en plus dex ety[Rothe, 1916].
En 1913, Ernst Meissner19 utilise le système de coordonnées tangentielles où l’on représente le c(x, y) par la droite d’équationξ cosx + η sinx − y = 0 (cf. Section 1.5) : pour l’équation du secoordrey′′ = f (x, y, y′), le rayon de courbure vaut tout simplementρ = y + y′′, d’où une constructionparticulièrement aisée dans ce mode inhabituel de représentation [Meissner, 1913]. Meissneravec brio (cf. Fig. 14) pour intégrer les équations du pendule simple et du pendule sphéripour étudier les oscillations amorties ou forcées d’un système mécanique. Plus tard, Rudolf Inz20
généralisera la méthode de Meissner aux équations linéaires d’ordre quelconque à coefficients c[Inzinger, 1947]. Entre-temps, Neuendorff fournit l’adaptation de la méthode des rayons de courbconstruction des équations données en coordonnées polaires, en 1922 pour le second ordre [Ne1922, 135] et l’année suivante pour un ordre quelconque [Neuendorff, 1923].
En ce qui concerne l’amélioration de la précision, on a proposé très tôt de prendre, pourd’un petit arc de courbe, non pas le rayon de courbure au point initial de l’arc, mais une moyen
17 Sir Charles Vernon Boys (1855–1944) étudia la physique, les mines et la métallurgie à la Royal School of MLondres. Il travailla au Royal College of Science à partir de 1881 et fut élu Fellow of the Royal Society en 1888. Osignaler qu’il inventa un intégraphe indépendamment d’Abdank-Abakanowicz. Toutefois, sa contribution la plus impconcerne la gravitation : en se servant de fibres de quartz pour mesurer les petites forces, il reprit entre 1890 etexpériences de Cavendish (1798) afin d’améliorer la valeur de la constante gravitationnelle. Après 1897, Boys abansituation de professeur pour occuper le poste de Metropolitan Gas Referee. En parallèle, il développa une carrièred’expert en instruments de mesure. Il présida la Physical Society of London (1917–1918) et fut anobli en 1935.
18 Rudolf Ernst Rothe (1873–1942) fut professeur de mathématiques à l’École polytechnique de Berlin–Charlottenb19 Ernst Franz Samuel Meissner (1883–1939) fut professeur de mécanique à l’École polytechnique de Zurich.20 Rudolf Inzinger, né en 1907, fut professeur à l’université technique de Vienne.

D.To
urn
ès
/Histo
riaM
ath
em
atica
30
(2003)
457–493
473
s [Meissner, 1913, 222].
Fig. 14. Méthode des rayons de courbures en coordonnées tangentielle
474 D. Tournès / Historia Mathematica 30 (2003) 457–493
]. Si cesrgence.
té derdre plusle mêmentielles
uivant :u bordure où elletraceres enau point
M. Bos,
e sortesistement,par uneloppant,
génieurt, il occupanationaleement de
Fig. 15. La tractrice, courbe de tangente constante MT= a et d’équationx = a ln a+√a2−y2
y −√
a2 − y2.
divers sens, des rayons de courbure aux extrémités [Didion, 1848, 200 ; W. Thomson, 1892, 444variantes diminuent effectivement l’erreur, elles n’entraînent pas un changement d’ordre de conveUn ingénieur argentin, José Babini,21 a étudié cette question d’un point de vue théorique et a tenmettre au point, de façon analogue aux méthodes de Runge–Kutta, des méthodes graphiques d’oélevé par des combinaisons savantes de rayons de courbure successifs [Babini, 1926]. Dansesprit, Ernst Völlm22 a réussi à accélérer la convergence de la construction en coordonnées tangede Meissner [Völlm, 1939].
3. Le mouvement tractionnel
3.1. De la tractrice aux premiers intégraphes
En 1672, Leibniz rencontre à Paris le médecin Claude Perrault, qui lui soumet le problème squelle est la courbe décrite par une montre lorsque l’on tire l’extrémité de la chaîne le long drectiligne de la table ? Cette courbe, la tractrice, a beaucoup intéressé les géomètres dans la mesest liée algébriquement à la courbe logarithmique (cf. Fig. 15). On voyait là un moyen indirect dela courbe logarithmique d’un mouvement continu et, par suite, de légitimer l’emploi des logarithmgéométrie. Dans ce but, de nombreux savants, Christiaan Huygens en tête, tentèrent de mettreun instrument pour tracer concrètement la tractrice. Tout cela a été étudié finement par Henk J.auquel je renvoie pour davantage de détails [Bos, 1988].
Généralisant cette idée de mouvement tractionnel, Leibniz expose, en 1693, le principe d’und’intégraphe universel [Leibniz, 1693 (Trad. fr. 1989), 263–267]. L’appareil (cf. Fig. 16) conessentiellement en un fil dont on tire une extrémité T le long d’une droite AT ou, plus généraled’une courbe donnée (T) dans un plan horizontal et dont la longueur variable TC est déterminéeautre courbe donnée (E) dans un plan vertical. La seconde extrémité C du fil trace alors, en l’enve
21 José Babini (1897–1984), fils d’immigrants italiens, est né à Buenos Aires, en Argentine. Après une carrière d’incivil puis de professeur de mathématiques, il se tourna vers l’histoire des sciences dans les années 1940. Parallèlemendes fonctions administratives dans plusieurs universités argentines avant d’accéder, en 1958, à la tête de la Directionde la culture. Entre 1920 et 1940, il fut le premier dans son pays à utiliser des machines à calculer pour son enseignmathématiques appliquées.
22 Ernst Völlm soutint en 1933 une thèse sur la théorie de la nomographie à l’École polytechnique de Zurich.

D. Tournès / Historia Mathematica 30 (2003) 457–493 475
Leibniz,rte quelllons voir
siècle.aut, il nerie, sous
ivementcertains
li en 1693u point
e vers la1693].roites pouliesesoite EFuations
Fig. 16. L’intégraphe de Leibniz [1693 (Trad. fr. 1989), 458].
une courbe (C). En choisissant convenablement les courbes (T) et (E), on devrait pouvoir, selontracer une courbe (C) dont les pentes obéissent à une loi donnée, c’est-à-dire résoudre n’impoproblème inverse des tangentes. Bien que ce programme puisse sembler assez vague, nous aqu’il a guidé la conception de nombreux instruments d’intégration jusqu’au début du vingtièmeContrairement aux méthodes des lignes polygonales et des rayons de courbure vues plus hs’agit plus ici de constructions approchées, mais bien de constructions exactes, du moins en théoréserve d’ignorer l’imperfection matérielle des appareils.
Dès la fin du dix-septième siècle, plusieurs géomètres imaginent et, parfois, construisent effectdes instruments tractionnels formés de fils guidés par des règles ou des poulies pour résoudreproblèmes inverses des tangentes. Un premier exemple est un problème posé par Jean Bernoul[Jean Bernoulli, 1693] : trouver une courbe dont la tangente PQ est proportionnelle à l’abscisse dQ (cf. Fig. 17). La condition PQ/OQ= p = EO/OF se traduit par l’équation
y
√1+
(dx
dy
)2
= p
(x − y
dx
dy
).
La même année, son frère Jacques obtient une solution à l’aide d’une équerre que l’on déplacgauche et d’un fil GQP dont l’extrémité G est maintenue sur la droite EF [Jacques Bernoulli,On reconnaît, dans le dispositif de Bernoulli, l’équivalent de la courbe (E) de Leibniz (ici la dEF). Huygens, de son côté, aborde le même problème en imaginant divers systèmes avec depour guider le fil, en fonction de la valeur du paramètrep [Huygens, 1693, 550–552]. Dans décrits ultérieurs, Jacques Bernoulli suggère que, pour guider le fil, on pourrait remplacer la drde la Fig. 17 par une courbe algébrique quelconque, ce qui permettrait d’intégrer d’autres éqdifférentielles [Jacques Bernoulli, 1694 ; 1696].
476 D. Tournès / Historia Mathematica 30 (2003) 457–493
r uneen, 1963,
est fixe
atistaourbe
.graphie liésnstruments
e carrièreématiquesphysiqueavigation,ments
Poleni à
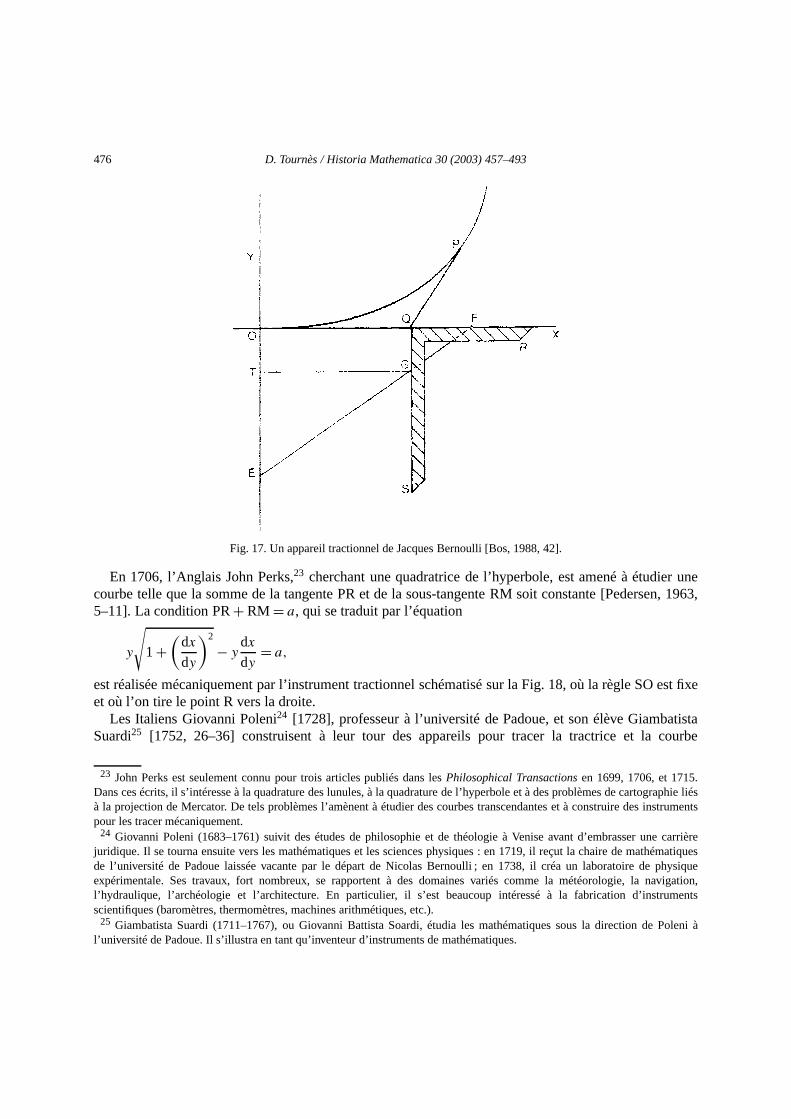
Fig. 17. Un appareil tractionnel de Jacques Bernoulli [Bos, 1988, 42].
En 1706, l’Anglais John Perks,23 cherchant une quadratrice de l’hyperbole, est amené à étudiecourbe telle que la somme de la tangente PR et de la sous-tangente RM soit constante [Peders5–11]. La condition PR+ RM = a, qui se traduit par l’équation
y
√1+
(dx
dy
)2
− ydx
dy= a,
est réalisée mécaniquement par l’instrument tractionnel schématisé sur la Fig. 18, où la règle SOet où l’on tire le point R vers la droite.
Les Italiens Giovanni Poleni24 [1728], professeur à l’université de Padoue, et son élève GiambSuardi25 [1752, 26–36] construisent à leur tour des appareils pour tracer la tractrice et la c
23 John Perks est seulement connu pour trois articles publiés dans lesPhilosophical Transactionsen 1699, 1706, et 1715Dans ces écrits, il s’intéresse à la quadrature des lunules, à la quadrature de l’hyperbole et à des problèmes de cartoà la projection de Mercator. De tels problèmes l’amènent à étudier des courbes transcendantes et à construire des ipour les tracer mécaniquement.
24 Giovanni Poleni (1683–1761) suivit des études de philosophie et de théologie à Venise avant d’embrasser unjuridique. Il se tourna ensuite vers les mathématiques et les sciences physiques : en 1719, il reçut la chaire de mathde l’université de Padoue laissée vacante par le départ de Nicolas Bernoulli ; en 1738, il créa un laboratoire deexpérimentale. Ses travaux, fort nombreux, se rapportent à des domaines variés comme la météorologie, la nl’hydraulique, l’archéologie et l’architecture. En particulier, il s’est beaucoup intéressé à la fabrication d’instruscientifiques (baromètres, thermomètres, machines arithmétiques, etc.).
25 Giambatista Suardi (1711–1767), ou Giovanni Battista Soardi, étudia les mathématiques sous la direction del’université de Padoue. Il s’illustra en tant qu’inventeur d’instruments de mathématiques.

D. Tournès / Historia Mathematica 30 (2003) 457–493 477
la sous-faisants, sontistingueent cesentielles
e lesux typesqu’en
ction des6, dansrésistaitAlexis-
ensuiteprès leielle peutibniz, par
lus d’unen 1836omètresremiers
Fig. 18. Un appareil tractionnel de John Perks [Pedersen, 1963, 6].
logarithmique, en traduisant mécaniquement la propriété de la tangente constante et celle detangente constante. Pour la première fois, il s’agit d’instruments véritablement professionnelsappel à de la mécanique de précision et où les fils, peu fiables car difficiles à garder tenduremplacés par des tiges rigides dont la longueur peut varier grâce à des glissières. Ce qui dplus particulièrement les recherches de Poleni, c’est que, non content d’obtenir mécaniquemcourbes transcendantes usuelles, il engage une réflexion sur la construction d’équations différplus générales. C’est ainsi qu’il modifie son traceur de logarithmes pour intégrer l’équation
a dx + bdy = aa dy : you qu’il construit une équation dont la solution est un cercle, ce qui lui permet d’affirmer quinstruments tractionnels sont tout aussi légitimes en géométrie que le compas puisque les ded’instruments permettent de tracer la même courbe ! D’autre part, il relance l’idée de Leibnizguidant convenablement le fil, on devrait pouvoir intégrer toute équation différentielle.
Parallèlement à ces tentatives quelque peu disparates, une théorie générale de la construéquations différentielles par l’emploi du mouvement tractionnel est commencée par Euler, en 173le but d’intégrer par ce procédé la fameuse équation du comte Jacopo Riccati, équation quijusque-là à toutes les tentatives [Euler, 1741]. La théorie d’Euler, utilisée ponctuellement parClaude Clairaut pour résoudre un problème de dynamique [Clairaut, 1745, 9] a été développéepar Vincenzo Riccati, le fils de Jacopo. Dans un mémoire de 1752, Vincenzo Riccati fait à peutour de la question et montre que, sous des hypothèses très générales, toute équation différentêtre intégrée de manière exacte grâce à un mouvement tractionnel déterminé, comme chez Ledeux courbes convenablement choisies [Riccati, 1752 ; Riccati et Saladini, 1767, chaps. 14–16].
3.2. Les intégraphes composés de la fin du dix-neuvième siècle
La construction mécanique des équations différentielles passe ensuite de mode pendant psiècle. En dehors de quelques tentatives peu convaincantes de Gustave-Gaspard Coriolis[Coriolis, 1836], il faut attendre les années 1870 pour voir réapparaître les idées fécondes des gédu dix-huitième siècle. Tout se passe comme s’il s’agissait d’une redécouverte. Dans un des p

478 D. Tournès / Historia Mathematica 30 (2003) 457–493
k-long de
quationret
du dix-ertainesgraphesui sontêlées du
munauténne et de
Fig. 19. L’intégraphe d’Abdank-Abakanowicz[Willers, 1928 (Trad. angl. 1948), 153].
Fig. 20. L’intégraphe de Pascal [Willers, 1911, 37].
intégraphes, celui de Bruno Abdank-Abakanowicz,26 on retrouve un mouvement tractionnel [AbdanAbakanowicz, 1886]. L’appareil est monté sur un cadre rigide qui se déplace sur des roulettes lel’axe des abscisses (cf. Fig. 19). L’extrémité d’une tige est tirée le long d’une courbe donnée d’éy = f (x), de sorte que la pente de la tige soit précisémentf (x). La roulette coupante située à l’autextrémité de la tige enveloppe ainsi une courbe dont la pente est constamment égale àf (x), ce qui permed’obtenir la primitive cherchée.
D’autres instruments tractionnels fabriqués peu après, beaucoup plus précis que ceuxhuitième siècle en raison des progrès de la mécanique industrielle, permettent d’intégrer cclasses d’équations différentielles. Dans le vocabulaire de l’époque, on les appelle des « intécomposés », par opposition aux « intégraphes simples », comme celui d’Abdank-Abakanowicz, qseulement destinés aux quadratures, c’est-à-dire aux équations différentielles sans variables mtypey′ = f (x).
26 Le Polonais Bruno Abdank-Abakanowicz (1852–1900) s’est installé à partir de 1881 à Paris, au sein de la comscientifique polonaise en exil. C’était un élève de Wawrzyniec Zmurko, professeur aux Écoles polytechniques de VieLvov, qui s’était lui aussi intéressé à l’intégration mécanique.

D. Tournès / Historia Mathematica 30 (2003) 457–493 479
un
ojectionne
mieration de[Pascal,
Czuberes dumatiqueéquationsue, etc.14, dans
eest unrite pare la
droite).cobPour lesit deux
à l’appuin 1907, ilrmi sonintégrales
s écolesomique deil a publiéde l’école
sur lesvolumes).chimiques00]. Ces
ur dues et le
Dans l’intégraphe d’Ernesto Pascal27 (cf. Fig. 20), inspiré de celui d’Abdank-Abakanowicz,pointeur C permet de suivre une courbe donnée, d’équationy = Q(x), tandis qu’un marqueur C′ tracela courbe enveloppée par la roulette coupante D. La longueur GD est contrainte à garder une prconstante sur l’axe des abscisses, égale àa (a = 1 sur la Fig. 20). La roulette D va donc envelopper ucourbe d’équation
y′ = Q(x) − y
a,
ou encoreay′ + y = Q(x). L’intégraphe de Pascal permet ainsi d’intégrer toute équation du preordre à coefficients constants [Pascal, 1910]. Pascal donne de nombreux exemples d’applicson instrument à divers problèmes se ramenant à une ou plusieurs équations de ce type1911]. Aussitôt, en s’inspirant à la fois de l’intégraphe de Pascal et de la construction de(cf. Section 1.5), Willers conçoit un instrument voisin pour l’intégration des équations linéairpremier ordre à coefficients variables [Willers, 1911]. Pascal se lance alors dans l’étude systéde diverses variantes de son intégraphe et en tire de multiples applications à certaines classes d’différentielles, aux équations intégrales du type de Volterra, aux intégrales elliptiques, à la balistiqEn quelques années, il publie sur ces sujets une dizaine d’articles dont le contenu est repris, en 19un mémoire de synthèse [Pascal, 1914]. On peut signaler également que Mario Merola28 a eu recours àl’appareil de Pascal pour d’autres applications d’envergure en balistique [Merola, 1920].
Par ailleurs, dès 1899, l’ingénieur serbe Michel Petrovitch29 a imaginé d’utiliser un tractoriographpour l’intégration de certaines équations différentielles [Petrovitch, 1899]. Un tractoriographeappareil qui permet de tracer la tractoire d’une courbe donnée, c’est-à-dire la courbe décl’extrémité libre d’un fil posé sur un plan horizontal lorsque l’on tire l’autre extrémité le long dcourbe donnée (l’ancienne tractrice de Perrault et Leibniz n’était autre que la tractoire d’uneSi la démarche de Petrovitch est restée spéculative, l’ingénieur de la marine Louis-Frédéric Ja30 adéveloppé concrètement cette idée au début du vingtième siècle [Jacob, 1907, 1908, 1909].besoins des problèmes de balistique qu’il rencontrait dans l’artillerie de marine, Jacob a constru
27 Ernesto Pascal (1865–1940) fit ses études à Naples, Pise et Göttingen, où il gagna l’estime de Felix Klein. Grâcede ce dernier, Pascal obtint en 1890, à 25 ans seulement, la chaire de calcul infinitésimal de l’université de Pavie. Echangea pour l’université de Naples, où il resta jusqu’à sa mort. Il fut membre de l’Accademia Nazionale dei Lincei. Paimposante production mathématique (près de 250 publications), on peut noter de nombreux travaux concernant lesd’équations différentielles particulières.
28 Mario Merola, qui a fait l’essentiel de sa carrière comme professeur de mathématiques et physique dans lesecondaires, a été pendant une courte période, au milieu des années 1920, assistant à l’observatoire astronCapodimonte, à Naples. En dehors de quelques travaux d’astronomie, il s’est surtout intéressé à l’enseignement :un manuel de trigonométrie plane pour les lycées et divers articles de réflexion sur les programmes de sciencesélémentaire.
29 Michel Petrovitch (1868–1943), professeur à l’université de Belgrade (Serbie), a publié de nombreux travauxéquations différentielles, la théorie des fonctions, le calcul et l’algèbre (ses œuvres complètes représentent quinzeOutre les instruments mécaniques dont il est question ici, Petrovitch a aussi construit des appareils hydrauliques etpour intégrer graphiquement certains types d’équations différentielles [Petrovitch, 1897, 1898, 1900 ; Price, 19appareils, à la fois ingénieux et marginaux, sont inclassables dans le cadre de mon étude.
30 Louis-Frédéric Jacob, né en 1857, fut ingénieur de l’artillerie navale, colonel d’artillerie coloniale et directeLaboratoire central de la Marine à Paris. Il a publié plusieurs ouvrages sur la balistique, l’artillerie, les mécanismcalcul mécanique.

480 D. Tournès / Historia Mathematica 30 (2003) 457–493
mouvoire, avec
ongueurinée parouvelleontrôlerinverseur
ique et dede 41 ans,ue qui lel. En 1900,une sérieillième, ounça dans larance. En
Fig. 21. L’intégraphe de Jacob pour l’équation de Riccati [Jacob, 1909, 22].
Fig. 22. L’intégraphe de Jacob pour l’équation d’Abel [Jacob, 1909, 97].
appareils, l’un pour intégrer l’équation de Riccatiy′ = Ay2+By+C (cf. Fig. 21), l’autre pour l’équationd’Abel yy′ = Ay2 + By + C (cf. Fig. 22).
Dans les deux cas, un transporteur formé de deux parallélogrammes articulés permet del’appareil parallèlement à lui-même sur la table à dessin. Cet appareil est en fait un tractoriographune pointe que l’on déplace le long d’une courbe donnée. Dans le cas de l’équation de Riccati, la lde la tige est constante ; dans le cas de l’équation d’Abel, cette longueur est variable et détermun guide ayant la forme d’une seconde courbe donnée. Il est frappant de retrouver ici, une nfois, le principe inépuisable de Leibniz, à savoir deux courbes choisies convenablement pour cà tout instant la pente de la courbe que l’on veut tracer et résoudre ainsi le difficile problèmedes tangentes. L’ingénieur espagnol Leonardo Torres Quevedo31 a également écrit sur ce principe po
31 Leonardo Torres Quevedo (1852–1936) est considéré comme un précurseur de la cybernétique, du calcul analogl’informatique. Il débuta en 1876 une carrière d’ingénieur des ponts et chaussées, mais ce n’est qu’en 1893, à l’âgequ’il publia son premier travail scientifique. Il déploya ensuite, pendant une trentaine d’années, une activité frénétiqconduisit à s’occuper de dirigeables, de téléphériques, de télégraphie sans fil ou de machines analogiques de calcuil présenta à l’Académie des sciences de Paris un « Mémoire sur les machines à calculer ». Il construisit lui-mêmede machines de type mécanique pour résoudre, par exemple, une équation du huitième degré à la précision du mune équation du second degré à coefficients complexes. Il conçut également un automate joueur d’échecs et se lathéorie de l’automatique. Tout ceci lui valut un énorme prestige au niveau international, surtout en Espagne et en F

D. Tournès / Historia Mathematica 30 (2003) 457–493 481
es, bien
it aussisi qu’elle
ée de laie, ellesplace.
imative-sformait», en unhant larmer undes équa-tes par
éaliserquation
tla
ssocié de
concevoir des machines permettant de résoudre toute équation différentielle, mais ces machinplus ambitieuses que celles de Jacob, sont restées purement théoriques [Torres, 1901].
4. Les quadratures
4.1. L’intégration par quadratures en tant que méthode graphique
À l’origine, la méthode qui consistait à ramener une équation différentielle aux quadratures étaune technique graphique permettant de construire concrètement les courbes intégrales. C’est ainest présentée par Jean Bernoulli (cf. Section 1.3) ou dans leTraité de Lacroix :
Dans les premiers tems on chercha à déterminer par les aires ou même par les arcs de quelques courbes connues, l’ordonncourbe demandée ; depuis on a laissé ces constructions de côté, parce que, quelqu’élégantes qu’elles fussent dans la théorétoient toujours moins commodes et sur-tout moins exactes dans la pratique, que les formules approximatives qui ont pris leur[Lacroix, 1798, 196]
Dans la pratique ancienne, on effectuait la quadrature d’une courbe en décomposant approxment l’aire sous la courbe en une réunion de petits triangles, rectangles ou trapèzes, que l’on tranpar des opérations graphiques en un seul rectangle ou un seul carré (d’où le mot « quadraturesens classique depuis l’Antiquité). De même, la rectification d’une courbe s’opérait en approccourbe par une ligne polygonale formée de petits segments que l’on mettait bout à bout pour fosegment unique à mesurer. Ce sont ces opérations qui, dans le cas des courbes définies partions différentielles, sont jugées impraticables par Bernoulli, insuffisamment commodes et exacLacroix.
De fait, la résolution par quadratures des équations différentielles n’est pas si facile à rgraphiquement. On s’en rend compte en lisant la description du procédé, pour le cas d’une éà variables séparables, dans les ouvrages de référence que sont l’Encyclopédiede Diderot et d’Alember[1754, 389], leTraitéde Lacroix [1798, 297] ou l’Histoire des mathématiquesde Jean-Étienne Montuc[1802, 174–175]. Une fois qu’on a réussi à mettre l’équation sous la forme
Y (y)dy = X(x)dx,
il reste à construire successivement cinq courbes par points (cf. Fig. 23) :
f : y = X(x), h : y =x∫
0
X(t)dt, m : x = Y (y), n : x =y∫
0
Y (t)dt,
s :y∫
0
Y (t)dt =x∫
0
X(t)dt.
1901, il devint directeur du nouveau Laboratoire de mécanique appliquée de Madrid et, en 1927, il fut élu membre al’Académie des sciences de Paris.

482 D. Tournès / Historia Mathematica 30 (2003) 457–493
er,
ure està des
apides et
, devientgir desnel, ou
nur H qui
angle
appareil)
e l’angle
invention
Fig. 23. Intégration graphique par quadratures d’une équationdifférentielle [Montucla, 1802, planche 5].
Fig. 24. Schéma d’un planimètre d’Hermann [Maur1998, 220].
Si l’on souhaite construire la courbe intégrale avec précision, la lourdeur d’une telle procédévidente. Voilà pourquoi, vers la fin du dix-huitième siècle, ramener les équations différentiellesquadratures semblait une impasse du point de vue pratique, faute de disposer de moyens rperformants de quadrature graphique.
4.2. Progrès du dix-neuvième siècle pour les quadratures graphiques
La technique précédente, fastidieuse à réaliser par les seuls procédés du calcul par le traitplus praticable si l’on dispose d’instruments spéciaux pour effectuer les quadratures. Il peut s’aintégraphes du type d’Abdank-Abakanowicz (cf. Section 3.2), fondés sur le mouvement tractiond’autres appareils mécaniques exploitant un principe différent : celui de la roulette intégrante.
Le premier à avoir construit un tel appareil semble être l’ingénieur bavarois Johann M. Herman32 en1814. Le mécanisme (cf. Fig. 24) est déplacé parallèlement à l’axe des abscisses, avec un pointesuit une courbey = f (x). Une roulette liée à H tourne par friction sur un cône C, de sorte que sonde rotation soit proportionnel à l’ordonnée du point H. Ainsi, pour un déplacement élémentaire dx le longde l’axe des abscisses, la roulette tourne (à un coefficient près dépendant des dimensions de l’d’un anglef (x)dx et, pour un déplacement le long du segment[x0, x], elle tourne d’un angle total
F(x) =x∫
x0
f (t)dt.
On peut par là mesurer l’aire sous une courbe et, plus généralement, en enregistrant les valeurs dpour diverses valeurs dex, tracer par points une primitive.
32 Johann Martin Hermann (1785–1841) était un arpenteur bavarois qui travaillait pour le service du cadastre. Sonn’attira guère l’attention de ses supérieurs et ne fut pas publiée.

D. Tournès / Historia Mathematica 30 (2003) 457–493 483
sommeavec leante, on
disque,fameux
entsd succèsmplaires.gration.insi qu’à; Jacob,
41].draturesules dessièrementPoncelet
ssau (cf.lacer, surale deanière à
ant quela voiegrationpolygoneunge et
tion parevenait,a restelles ne
vers lesnasiumla chaleur,
précision.appareil,largement
fabriquela qualitéfut élu en
Grâce à la roulette intégrante, on matérialise la vision leibnizienne de l’intégrale en tant queinfinie de rectangles infinitésimaux. On s’appuie donc sur le second aspect de l’intégrale :mouvement tractionnel, on résolvait le problème inverse des tangentes ; avec la roulette intégrrésout celui de la quadrature des courbes.
Après Hermann, d’autres ingénieurs imaginèrent de faire tourner la roulette intégrante sur unpuis directement sur le plan de la feuille de papier pour aboutir notamment, en 1854, auplanimètre polaire de Jakob Amsler33 où la roulette se déplace par une combinaison de mouvemde rotation et de glissement. Ce planimètre, simple et relativement peu coûteux connut un grancommercial : on estime que, sous ses différentes variantes, il a été fabriqué à plus de 500 000 exeMais ce n’est pas ici le lieu de refaire une histoire détaillée des instruments mécaniques d’intéJe renvoie pour cela aux études récentes et très complètes de Joachim Fischer [1995, 2002], aquelques livres classiques sur les instruments de mathématiques [Dyck, 1892 ; Ocagne, 18931911 ; Galle, 1912 ; Morin, 1913 ; Horsburgh, 1914 ; Willers, 1926, 1951 ; Meyer zur Capellen, 19
Parallèlement au développement des instruments mécaniques d’intégration, le calcul des quapar le trait fait également de grands progrès. Par la traduction sous forme graphique des formquadratures numériques, on dépasse les méthodes anciennes qui consistaient à décomposer grol’aire sous une courbe en petits rectangles ou petits trapèzes. Dès 1835, on rencontre chezune version graphique de la méthode de Simpson [Poncelet, 1835, 162], mais c’est surtout MaSection 1.4) qui donne une impulsion décisive à ce processus. Massau montre comment rempchaque subdivision de l’intervalle d’intégration, la courbe à intégrer par une courbe polynomidegré quelconque, et comment construire exactement l’aire sous cette courbe polynomiale, de matteindre une grande précision. Par ailleurs, en s’attachant à la construction d’une primitive en tcourbe, plutôt qu’à la simple évaluation graphique d’une intégrale définie en tant qu’aire, il ouvreà la réalisation d’intégrations graphiques itérées. Enfin, il fait le lien avec certains procédés d’intédéveloppés par les ingénieurs pour les besoins de la statique graphique, notamment l’usage dufuniculaire [Massau, 1878–1887 ; Saviotti, 1883 ; Favaro, 1885 ; Ocagne, 1908 ; Runge, 1912 ; RWillers, 1915 ; Willers, 1920 ; Maurer, 1998].
4.3. Approximations successives et quadratures répétées
Grâce aux instruments mécaniques d’intégration, grâce aux nouvelles techniques d’intégrale trait popularisées par Massau, l’intégration par quadratures des équations différentielles dsous forme graphique, beaucoup plus facile à réaliser qu’au dix-huitième siècle. Tout celnéanmoins d’un intérêt pratique limité, car on sait bien que la plupart des équations différentie
33 Né en Suisse, Jakob Amsler (1823–1912) étudia d’abord la théologie en Allemagne avant de s’orientermathématiques et la physique. De retour en Suisse, il obtint son Habilitation à Zurich et devint professeur au Gymde Schaffhausen. Il s’intéressa pendant quelques années à la physique mathématique (magnétisme, conduction deattraction des ellipsoïdes), puis se consacra, à partir de 1854, à la construction d’instruments mathématiques deIl inventa le planimètre polaire, premier instrument mécanique d’intégration utilisant les coordonnées polaires. Cetbien adapté à la détermination des moments statiques, des moments d’inertie et des coefficients de Fourier, futemployé par les ingénieurs de la construction navale et des chemins de fer. À Schauffhausen, Amsler monta unespécialement destinée à la production de son planimètre, d’où sortirent environ 50 000 appareils. Pour l’originalité etde ses instruments, Amsler obtint des prix aux expositions universelles de Vienne (1873) et de Paris (1881, 1889), et1892 à l’Académie des sciences de Paris.

484 D. Tournès / Historia Mathematica 30 (2003) 457–493
imationspour les
rentielles
e
er uneral, unecourbes
t et avecéquation
tionsion, parindreent les
homson,uation
, JamesColleget l’effet
se laissent pas ramener à un nombre fini de quadratures. En fait, c’est la méthode des approxsuccessives, étudiée d’un point de vue théorique par Cauchy et Liouville, dans les années 1830,équations différentielles linéaires, puis par Picard, dans les années 1890, pour les équations difféquelconques, qui va donner un nouvel élan à cette direction de recherche.
Le problème de Cauchy
y′ = f (x, y), y(x0) = y0
peut se mettre sous la forme intégrale équivalente
y = y0 +x∫
x0
f(t, y(t)
)dt.
Dans la méthode des approximations successives, on part d’une première solution approchéy1(x),obtenue par n’importe quel procédé, et on calcule les suivantes par les relations
yn+1(x) = y0 +x∫
x0
f(t, yn(t)
)dt.
Du point de vue graphique, la construction de l’équation reviendrait, en théorie, à effectuinfinité de quadratures. En pratique, après un nombre réduit d’étapes, on obtiendra, en génébonne approximation de la courbe intégrale cherchée (vu l’épaisseur des traits de crayon, deuxsuccessives seront rapidement indiscernables). À partir du moment où l’on sait réaliser facilemenprécision les quadratures graphiques, il semble donc possible d’intégrer graphiquement toutedifférentielle.
4.4. Mise en œuvre de l’idée des quadratures répétées
C’est William Thomson qui a eu, le premier, l’idée d’exploiter la méthode des approximasuccessives autrement que sous forme numérique. L’occasion lui en a été fournie par l’inventson frère James,34 d’un nouveau type d’intégraphe formé d’un disque, d’une sphère et d’un cyl[J. Thomson, 1876]. William Thomson se sert de deux de ces appareils pour intégrer pratiqueméquations linéaires du second ordre à coefficients variables, omniprésentes en physique [W. T1876a]. Pour cela, dans la lignée des travaux de Sturm et Liouville, il part du fait qu’une telle éqpeut être réduite à la forme
d
dx
(1
P
du
dx
)= u,
34 James Thomson (1822–1892) est beaucoup moins connu que son frère William (Lord Kelvin). À partir de 1840poursuivit une carrière d’ingénieur à Dublin, Glasgow et Belfast. En 1857, il devint professeur de génie civil au Queen’sde Belfast, puis, en 1873, à l’université de Glasgow. En 1877, il fut élu Fellow of the Royal Society. Il étudia notammende la pression sur l’abaissement du point de congélation de l’eau et fit diverses recherches en hydraulique.

D. Tournès / Historia Mathematica 30 (2003) 457–493 485
,itée par
e sortemier, onnnaire
quationonque,formésmplexes.mettre à
essivestravauxlle trèsmieuxsrationur laTout cela[Runge,
imaginéent pas
uite cettee part,mmentintégrerde deux
s comme
migré auxtronomique
où P est une fonction donnée dex, et qu’une solution qui s’annule enx = 0 est la limite de la suite
un+1 =x∫
0
P
(C +
x∫0
un dx
)dx,
avec une constante arbitraire C et une fonctionu1 quelconque, par exempleu1 = x. Les deux intégraphesutilisés conjointement, permettent de réaliser d’un seul coup la quadrature double nécessl’itération : on suit avec le pointeur du premier intégraphe la courbe représentative de la fonctionun et lesecond intégraphe fournit, sur son cylindre d’enregistrement, le tracé de la fonctionun+1 ; on recommencejusqu’à ce qu’il n’y ait plus de différence sensible entre deux courbes successives.
Thomson eut même une illumination : si l’on couplait mécaniquement les deux intégraphes dque la fonction sortant du second coïncide automatiquement avec celle qui entre dans le preobtiendrait directement la solution exacte de l’équation ! Dans un autre article encore plus visio[W. Thomson, 1876b], Thomson donne le principe théorique d’appareils pouvant intégrer une élinéaire à coefficients variables de n’importe quel ordre, et même une équation différentielle quelcavec l’idée qu’on pourrait s’en servir pour le problème des trois corps. Ces appareils sont tousd’un grand nombre d’intégraphes simples connectés entre eux par des dispositifs mécaniques coMalheureusement, les moyens technologiques de son époque étaient insuffisants pour perThomson de réaliser valablement de tels instruments.
Cependant, l’idée initiale de Thomson, à savoir que l’on peut réaliser les quadratures succl’une après l’autre sur une feuille de papier, fait son chemin. Peu après la publication desde Picard, qui prouvent la convergence de la méthode itérative pour une équation différentiegénéraley′ = f (x, y), Runge propose une traduction graphique du procédé en synthétisant aules techniques disponibles [Runge, 1907]. La première intégrale approchéey1 est construite à partir deisoclines, avec la méthode du point milieu (cf. Fig. 25). La deuxième intégrale vient de l’intéggraphique de la fonctionf (x, y1(x)), réalisée soit avec un intégraphe, soit par le trait, comme sFig. 25, avec les méthodes de Massau. On recommence ensuite autant de fois que nécessaire.se généralise aux systèmes d’équations du premier ordre ou aux équations d’ordre supérieur1912, 138–141], en construisant simultanément plusieurs courbes (cf. Fig. 26).
Après Runge, de nombreux auteurs, que nous avons déjà rencontrés plus haut et qui ontune méthode originale pour le tracé d’une première courbe intégrale approchée, ne manqude souligner que la méthode des approximations successives peut permettre d’améliorer ensconstruction [Rothe, 1916, 94 ; Doetsch, 1921, 465 ; Neuendorff, 1922, 135 ; 1933, 450]. D’autrEugène A. Kholodovsky,35 en adaptant les idées de Massau et de Runge, explique en détail coréaliser les quadratures graphiques en coordonnées polaires [Kholodovsky, 1929] et commentgraphiquement, par des quadratures répétées, les équations du premier ordre, les systèmeséquations du premier ordre et les équations du second ordre lorsque les variables sont considéréedes coordonnées polaires [Kholodovsky, 1930].
35 Eugène A. Kholodovsky, né en 1876, a été professeur de mathématiques à l’Institut polytechnique de Petrograd. ÉÉtats-Unis après la Révolution russe, on le retrouve au début des années 1920 comme assistant à l’observatoire asLick de l’université de Californie, à Santa Cruz.

486 D. Tournès / Historia Mathematica 30 (2003) 457–493
le dansr
ersité dument deasion dede l’efforts dans lese Boeing
Fig. 25. Intégration par approximations successives d’une équation du premier ordre [Runge, 1912, 121].
Fig. 26. Cas d’un système [Runge, 1912, 139].
Le procédé itératif a été utilisé de façon systématique pour des travaux d’électricité industriella première moitié du vingtième siècle. Par exemple, Thornton C. Fry36 s’en est servi pour intégre
36 Thornton Carl Fry (1892–1991) reçut son Ph.D. en mathématiques, physique et astronomie en 1920 à l’univWisconsin. Il fut l’un des premiers mathématiciens à travailler pour l’industrie. Il occupa le poste de chef du départemathématiques à la Western Electric Company (1916–1924), puis aux Bell Telephone Laboratories, où il eut l’occcollaborer avec Claude Shannon. Pendant la Seconde Guerre mondiale, l’équipe de Fry fut réquisitionnée au servicede guerre et se consacra à la défense anti-aérienne. Fry a joué un rôle pionnier pour introduire le calcul des probabilitésciences de l’ingénieur. Une fois à la retraite, il est resté actif en devenant consultant pour diverses entreprises commou le National Center for Atmospheric Research.

D. Tournès / Historia Mathematica 30 (2003) 457–493 487
928]. Fryier ordre
adraturesables sur
ont étén 1931,8)ermettantervenir
; Bush,iquement
cients dete.ouglasdizaine
achussetsentiel et’électricités machinese, Bush fut
conseiller
esseur der Professorur intégrer
Fig. 27. Intégration par approximations successives d’une équation du second ordre [Fry, 1928, 408].
des équations du second ordre apparaissant dans des problèmes de circuits électriques [Fry, 1ramène classiquement une équation du second ordre à un système de deux équations du prempuis, partant de solutions approchées constantes égales aux valeurs initiales, il effectue les qusuccessives à l’aide d’un intégraphe jusqu’à ce que deux courbes consécutives soient indiscernle papier (cf. Fig. 27).
C’est pour ces mêmes problèmes d’électricité industrielle que des analyseurs différentielsconstruits dans les années 1930–1950, réalisant enfin le programme visionnaire de Lord Kelvin. Eau Massachussets Institute of Technology, Vannevar Bush37 réussit à construire un appareil (cf. Fig. 2formé de six intégraphes pouvant être connectés entre eux par des liaisons mécaniques et pde résoudre toute équation différentielle jusqu’à l’ordre six (car les problèmes usuels font intjusqu’à trois équations simultanées du second ordre) [Bush et al., 1927 ; Bush and Hazen, 19271931]. Les entrées et les sorties se font de manière graphique : des pointeurs sont guidés, mécanou manuellement suivant les cas, le long des courbes construites pour représenter les coeffil’équation, tandis qu’à la sortie, les solutions sont tracées automatiquement sur une table traçan
Un autre analyseur différentiel fut construit en 1935, à l’université de Manchester, par DR. Hartree38 [1935, 1938, 1940, 1949, chap. 2]. Pendant la Seconde Guerre mondiale, une
37 Vannevar Bush (1890–1974) fut, entre les deux guerres mondiales, professeur d’ingénierie électrique au MassInstitute of Technology. C’est là qu’à partir de 1931, il développa avec ses étudiants un premier analyseur différd’autres machines analogiques destinées à surmonter les calculs difficiles qui freinaient l’essor de domaines comme lindustrielle, la géophysique, l’étude des rayons cosmiques ou la mécanique quantique. En quelques années, decomparables à celles de Bush se répandirent aux États-Unis et à l’étranger. Pendant la Seconde Guerre mondialappelé à Washington pour diriger un réseau de laboratoires voués à la recherche de guerre. Après 1945, il continua àle gouvernement en matière de science et de défense, et rejoignit les directions de Merck et de AT&T.
38 Douglas Rayner Hartree (1897–1958) a fait ses études à Cambridge. Il obtint son doctorat en 1926 et devint profmathématiques appliquées puis de physique théorique à Manchester. En 1946, il revint à Cambridge comme Plummeof Mathematical Physics. Tout au long de sa carrière, il développa des méthodes puissantes d’analyse numérique po

488 D. Tournès / Historia Mathematica 30 (2003) 457–493
À partirs liaisonsérentielses et lese cartesalyseursphique
étriqueoit leuron, c’étaitprocheAprèssolutionsmétrique
ique et lene visiteartree fut
Fig. 28. Schéma de l’analyseur différentiel de Vannevar Bush [1931, 452].
d’appareils de ce type étaient en service et certains furent mobilisés pour des calculs balistiques.de 1942, de nouvelles versions apparurent, avec des intégraphes couplés entre eux par deélectriques et non plus mécaniques [Bush and Caldwell, 1945]. Cependant, les analyseurs diffdisparurent rapidement face à l’essor des calculateurs électroniques, dans lesquels les entrésorties ne se font plus sous forme graphique, mais sous forme numérique par l’intermédiaire dperforées [Goldstine, 1972, 1re partie, chap. 10]. D’une certaine manière, on peut voir dans les andifférentiels des sortes de « dinosaures » marquant à la fois l’apogée et la fin de l’intégration grades équations différentielles.
5. Conclusion
L’intégration graphique des équations différentielles est à situer dans une longue tradition géomqui remonte à l’antiquité grecque. Dans cette tradition, de nombreux problèmes, quelle que sorigine, étaient abordés avec une pensée et un langage géométriques : résoudre une équaticonstruire sa solution par le tracé et l’intersection de courbes. Sur le plan théorique, l’apgéométrique s’efface vers le milieu du dix-huitième siècle au profit d’une approche algébrique.Euler, on ne construit plus des courbes, on calcule des fonctions. On représente désormais lesdes équations par des algorithmes algébriques, éventuellement infinis. Pourtant, la pensée géo
les équations différentielles, notamment en lien avec la défense anti-aérienne, la physique atomique, l’hydrodynamcontrôle automatisé des usines chimiques. C’est après avoir étudié l’analyseur différentiel de Vannevar Bush lors d’uaux États-Unis qu’Hartree projeta d’en construire un à son tour. Par ailleurs, pendant la Seconde Guerre mondiale, Himpliqué dans le projet de l’ENIAC, l’un des premiers calculateurs numériques électroniques.

D. Tournès / Historia Mathematica 30 (2003) 457–493 489
er entrest ainsipendantt variées
cessusométriqueérique ».uationsôtés des
à écrire
.d científica
.
um (nov.
häuser,
), 255–
, Basel/
ctionem. 284–
rithmicæ.
88.
ne disparaît pas complètement après 1750. Elle continue notamment à vivre et à se développles mains des utilisateurs des mathématiques : physiciens, ingénieurs civils et militaires. C’equ’au sein de la science du calcul, les méthodes graphiques ont conservé une place importantedeux siècles, jusqu’à l’apparition des calculateurs électroniques. Les recherches nombreuses eévoquées dans cet article sont là pour en témoigner.
L’étude de l’intégration graphique est, tout d’abord, un moyen de mieux comprendre ce prohistorique général qui fait passer, dans une grande partie des mathématiques, d’une pensée géancienne à la pensée algébrique moderne, jusqu’à la situation actuelle où l’on parle de « tout numPlus spécifiquement, c’est un moyen d’aborder autrement l’histoire de l’analyse numérique des éqdifférentielles, en redonnant aux méthodes graphiques la juste place qu’elles occupèrent aux calgorithmes purement numériques.
Remerciements
Je remercie chaleureusement Christian Gilain et Ivor Grattan-Guinness, qui m’ont encouragécet article et qui ont accepté d’en relire attentivement la première version.
Références
Abdank-Abakanowicz, B., 1886. Les intégraphes. La courbe intégrale et ses applications. Gauthier–Villars, Paris;Trad. allemande par Bitterli, E. Die Integraphen. Die Integralcurve und ihre Anwendungen. Teubner, Leipzig, 1889
Babini, J., 1926. Sobre la integración gráfica de las ecuaciones diferenciales de secundo orden. Anales de la SociedaArgentina 102, 170–178.
Bailey, V.A., Somerville, J.M., 1938. The graphical solution of ordinary differential equations. Philos. Mag. 26 (7), 1–31Bernoulli, Jean, 1693. Solutio problematis Cartesio propositi a Dn de Beaune. Acta Eruditorum (mai 1693), 234–235;
Ou Johannis Bernoulli Opera omnia, Vol. 1. Bousquet, Lausanne et Genève, 1742, pp. 65–66.Bernoulli, Jean, 1694a. Modus generalis construendi omnes æquationes differentiales primi gradus. Acta Eruditor
1694), 435–437;Ou Johannis Bernoulli Opera omnia, Vol. 1. Bousquet, Lausanne et Genève, 1742, pp. 123–125.
Bernoulli, Jean, 1694b. Lettre à l’Hôpital de fin décembre 1694. In: Der Briefwechsel von Johann Bernoulli, Vol. 1. BirkBasel, 1955, pp. 246–250.
Bernoulli, Jacques, 1693. Solutio problematis fraterni ante octiduum Lipsiam transmissi. Acta Eruditorum (juin 1693256;Ou Speiser, D. (Ed.), Die Streitschriften von Jacob und Johann Bernoulli. Variationsrechnung. BirkhäuserBoston/Berlin, 1991, pp. 160–162.
Bernoulli, Jacques, 1694. Constructio mechanicarum curvarum omnium ope logarithmicæ et alterius facile per tradescribendæ. In: Weil, A., Mattmüller, M. (Eds.), Die Werke von Jakob Bernoulli, Vol. 5. Birkhäuser, Basel, 1999, pp287.
Bernoulli, Jacques, 1696. Constructio generalis omnium curvarum transcendentium ope simplicioris tractoriæ et logaIn: Weil, A., Mattmüller, M. (Eds.), Die Werke von Jakob Bernoulli, Vol. 5. Birkhäuser, Basel, 1999, pp. 148–150.
Bos, H.J.M., 1988. Tractional motion and the legitimation of transcendental curves. Centaurus 31, 9–62.Boys, C.V., 1893. On the drawing of curves by their curvature. Philos. Mag. 36 (5), 75–82.Bush, V., Gage, F.D., Stewart, H.R., 1927. A continous integraph. J. Franklin Inst. 203, 63–84.Bush, V., Hazen, H.L., 1927. Integraph solution of differential equations. J. Franklin Inst. 204, 575–615.Bush, V., 1931. The differential analyser. A new machine for solving differential equations. J. Franklin Inst. 212, 447–4Bush, V., Caldwell, S.H., 1945. A new type of differential analyser. J. Franklin Inst. 240, 255–326.

490 D. Tournès / Historia Mathematica 30 (2003) 457–493
rs, Paris.émoires
pl. 1, 5–9.’Académie
hys. 44,
escartes.
rs, Vol. 4.
ech. 1,
& Sohn,
struction.
inentibus
e l’italien
. (Eds.),chnischen
, Weiss,erlag für
ccessive, Vol. 2.
ntenary
Haye,
chisches
4, 898–900,
.
Charbonnier, P., 1921. Traité de balistique extérieure. Tome I: Balistique extérieure rationnelle. Doin et Gauthier–VillaClairaut, A.-C., 1745. Sur quelques principes qui donnent la solution d’un grand nombre de problèmes de dynamique. M
de l’Académie royale des sciences. Année 1742, 1–52.Coriolis, G.G., 1836. Sur un moyen de tracer des courbes données par des équations différentielles. J. Math. Pures ApCotton, É., 1905. Sur l’intégration approchée des équations différentielles. C. R. Hebdomadaires des Séances de l
des Sciences 140, 494–496.Cotton, É., 1908. Sur l’intégration approchée des équations différentielles. Acta Math. 31, 107–126.Czuber, E., 1899. Beitrag zur graphischen Integration der linearen Differentialgleichungen erster Ordnung. Z. Math. P
41–49.Darwin, G.H., 1897. Periodic orbits. Acta Math. 21, 99–242.Descartes, R., 1639. Lettre à Debeaune du 20 février 1639. In: Adam, C., Tannery, P. (Eds.), Œuvres de D
Correspondance, Vol. 2. Vrin, Paris, 1975, pp. 510–523.Diderot, D., d’Alembert, J. (Eds.), 1754. Encyclopédie ou Dictionnaire raisonné des sciences, des arts et des métie
Briasson, David l’aîné, Le Breton & Durand, Paris.Didion, I., 1848. Traité de balistique. Leneuveu, Paris. 2e Édition, Dumaine, Paris, 1860.Doetsch, G., 1921. Über die graphische Integration von Differentialgleichungen erster Ordnung. Z. Angew. Math. M
464–466.Dyck, W., 1892. Katalog mathematischer und mathematisch-physikalischer Modelle, Apparate und Instrumente. Wolf
München.Erlichson, H., 1991. Newton’s 1679/80 solution of the constant gravity problem. Amer. J. Phys. 59, 728–733.Erlichson, H., 1992. Newton and Hooke on centripetal force motion. Centaurus 35, 46–63.Erlichson, H., 1997. Hooke’s september 1685 ellipse vertices construction and Newton’s instantaneous impulse con
Historia Math. 24, 167–184.Euler, L., 1741. De constructione æquationum ope motus tractorii aliisque ad methodum tangentium inversam pert
(1736). Comment. Acad. Sci. Petropolitanae 8, 66–85;Ou Dulac, H. (Ed.), Leonhardi Euleri Opera omnia, Ser. 1, Vol. 22. Teubner, Leipzig/Berlin, 1936, pp. 83–107.
Favaro, A., 1885. Leçons de statique graphique. Deuxième partie. Calcul graphique. Gauthier–Villars, Paris. [Trad. dpar Paul Terrier, avec appendice et notes du traducteur.]
Fischer, J., 1995. Instrumente zur Mechanischen Integration. Ein Zwischenbericht. In: Schütt, H.-W., Weiss, BBrückenschläge. 25 Jahre Lehrstuhl für Geschichte der exakten Wissenschaften und der Technik an der TeUniversität Berlin. Verlag für Wissenschafts- und Regionalgeschichte Dr. Michael Engel, Berlin, pp. 111–156.
Fischer, J., 2002. Instrumente zur Mechanischen Integration II. Ein (weiterer) Zwischenbericht. In: Schürmann, A.B. (Eds.), Chemie-Kultur-Geschichte. Festschrift für Hans-Werner Schütt anlässlich seines 65. Geburtstages. VGeschichte der Naturwissenschaften und der Technik, Berlin/Diepholz, pp. 143–155.
Fry, T.C., 1928. The use of the integraph in the practical solution of differential equations by Picard’s method of suapproximations. In: Fields, J.C. (Ed.), Proc. Internat. Mathematical Congress held in Toronto, August 11–16, 1924Univ. of Toronto Press, Toronto, pp. 407–428. [Réimpression Kraus, Nendeln/Liechtenstein, 1967.]
Galle, A., 1912. Mathematische Instrumente. Teubner, Leipzig/Berlin.Goldstine, H.H., 1972. The Computer from Pascal to von Neumann. Princeton Univ. Press, Princeton, NJ.Hartree, D.R., 1935. The differential analyser. Nature 135, 940–943.Hartree, D.R., 1938. The mechanical integration of differential equations. Math. Gaz. 22, 342–364.Hartree, D.R., 1940. The Bush differential analyser and its applications. Nature 146, 319–323.Hartree, D.R., 1949. Calculating Instruments and Machines. Univ. of Illinois Press, Urbana, IL.Horsburgh, E.M. (Ed.), 1914. Modern Instruments and Methods of Calculation. A Handbook of the Napier Terce
Exhibition. Bell/The Royal Society of Edinburgh, London/Edinburgh.Huygens, C., 1693. Lettre au Marquis de l’Hospital du 5 novembre 1693. In: Œuvres complètes, Vol. 10. Nijhoff, La
1905, pp. 549–554. [Réimpression Swets & Zeitlinger, Amsterdam, 1973.]Inzinger, R., 1947. Zur graphischen Integration linearer Differentialgleichungen mit konstanten Koeffizienten. Österrei
Ingenieur Archiv 1, 410–420.Jacob, L.-F., 1907. Intégromètre à lame coupante. C. R. Hebdomadaires des Séances de l’Académie des Sciences 14
1254.Jacob, L.-F., 1908. Nouvel intégromètre. C. R. Hebdomadaires des Séances de l’Académie des Sciences 147, 33–34

D. Tournès / Historia Mathematica 30 (2003) 457–493 491
. Math.
thly 37,
iversity.
chungen.chaftliche
auliques et
hique pour
r motum:
. fr. par
. fr. par
atische
urs sortis
es de Gand
ngénieurs
sociation
Technik,
.erential-
199–203,
n, 1944;
raphes et
Jacob, L.-F., 1909. Intégromètre à lame coupante. Imprimerie nationale, Paris.Jacob, L.-F., 1911. Le calcul mécanique. Appareils arithmétiques et algébriques. Intégrateurs. Doin, Paris.Kholodovsky, E.A., 1929. Graphical integration and differentiation of functions in a polar coördinate system. Amer
Monthly 36, 3–21.Kholodovsky, E.A., 1930. Graphical integration of differential equations in a polar coördinate system. Amer. Math. Mon
231–240.Kojima, T., 1914. On graphical solutions of some differential equations of the first order. Sci. Rep. Tohoku Imperial Un
First series: Mathematics, Physics and Chemistry, 289–302.Lacroix, S.-F., 1798. Traité du calcul différentiel et du calcul intégral, Vol. 2. Duprat, Paris.Lacroix, S.-F., 1814. Traité du calcul différentiel et du calcul intégral, 2e Édition. Courcier, Paris.Láska, V., 1890. Ueber gewisse Curvensysteme und ihre Anwendung zur graphischen Integration der Differentialglei
Sitzungberichte der königliches böhmischen Gesellschaft der Wissenschaften (Mathematisch-NaturwissensClasse) 1, 222–225.
Léauté, H., 1885. Mémoire sur les oscillations à longue période dans les machines actionnées par des moteurs hydrsur les moyens de prévenir ces oscillations. J. de l’École Polytechnique 55, 1–126.
Léauté, H., 1891. Du mouvement troublé des moteurs consécutif à une perturbation brusque. Nouvelle méthode grapl’étude complète de ce mouvement. J. de l’École Polytechnique 61, 1–33.
Leibniz, G.W., 1693. Supplementum geometriæ dimensoriæ seu generalissima omnium tetragonismorum effectio pesimiliterque multiplex constructio lineæ ex data tangentium conditione. Acta Eruditorum (sept. 1693);Ou Gerhardt, C.I. (Ed.), Leibnizens mathematische Schriften, Vol. 5, 2e Édition. Olms, 1962, pp. 294–301. [TradM. Parmentier in: Naissance du calcul différentiel, Vrin, Paris, 1989, pp. 247–267.]
Leibniz, G.W., 1694. Constructio propria problematis de curva isochrona paracentrica. Acta Eruditorum (août 1694);Ou Gerhardt, C.I. (Ed.), Leibnizens mathematische Schriften, Vol. 5, 2e Édition. Olms, 1962, pp. 309–318. [TradM. Parmentier in: Naissance du calcul différentiel, Vrin, Paris, 1989, pp. 282–305.]
Leibniz, G.W., 1695. Lettre de Leibniz à Jean Bernoulli du 6/16 mai 1695. In: Gerhardt, C.I. (Ed.), Leibnizens mathemSchriften, Vol. 3.1, 2e Édition. Olms, 1962, pp. 174–179.
Massau, J., 1878–1887. Mémoire sur l’intégration graphique et ses applications. Annales de l’Association des ingéniedes écoles spéciales de Gand 2, 13–55, 203–281;Annales de l’Association des ingénieurs sortis des écoles spéciales de Gand 7 (1884), 53–132;Annales de l’Association des ingénieurs sortis des écoles spéciales de Gand 10 (1887), 1–535.
Massau, J., 1887. Note sur les intégraphes. Bulletin mensuel de l’Association des ingénieurs sortis des écoles spécial(mars 1887), 30–60.
Massau, J., 1889. Appendice au mémoire sur l’intégration graphique et ses applications. Annales de l’Association des isortis des écoles spéciales de Gand 12, 185–443.
Massau, J., 1900–1904. Mémoire sur l’intégration graphique des équations aux dérivées partielles. Annales de l’Asdes ingénieurs sortis des écoles spéciales de Gand 23, 95–214;Annales de l’Association des ingénieurs sortis des écoles spéciales de Gand 1 (3) (1902), 135–226, 393–434;Annales de l’Association des ingénieurs sortis des écoles spéciales de Gand 2 (1903), 383–436;Annales de l’Association des ingénieurs sortis des écoles spéciales de Gand 3 (1904), 65–147.
Maurer, B., 1998. Karl Culmann und die graphische Statik. Verlag für Geschichte der Naturwissenschaft und derStuttgart.
Mehmke, R., 1917. Leitfaden zum graphischen Rechnen. Teubner, Leipzig. 2e Édition (augmentée et corrigée), 1924Mehmke, R., 1930. Neue Konstruktionen für graphisches Differentiieren und graphische Integration gewöhnlicher Diff
gleichungen. Z. Angew. Math. Mech. 10, 602–605.Meissner, E., 1913. Ueber graphische Integration von totalen Differentialgleichungen. Schweizerische Bauzeitung 62,
221–224.Merola, M., 1920. Il problema balistico col metodo Pascal. Giornale di matematiche di Battaglini 68 (3), 161–174.Meyer zur Capellen, W., 1941. Mathematische Instrumente. Akademische Verlagsgesellschaft, Leipzig. 2e Éditio
3e Édition, 1949.Montucla, J.-É., 1802. Histoire des mathématiques, Vol. 3. Agasse, Paris. [Réimpression Blanchard, Paris, 1960.]Morin, H. (de), 1913. Les appareils d’intégration, intégrateurs simples et composés, planimètres, intégromètres, intég
courbes intégrales, analyse harmonique et analyseurs. Gauthier–Villars, Paris.

492 D. Tournès / Historia Mathematica 30 (2003) 457–493
Édition.
dinaten.
oordina-
ilungen.
n, Vol. 2.
tiques de
Éditionvelée et de
, 1924.]li.
tiche di
s Séances
c. Math.
mer. J.
3, 537–
eminarii,
raphie de
énie 12,
90.Lælii a
.erein. 16,
erential-e partie.
81.
Nehls, C., 1877. Über graphische Integration und ihre Anwendung in der graphischen Statik. Rümpler, Hannover. [2eLeipzig, 1882; 3e Édition, 1885.]
Neuendorff, R., 1922. Zeichnerische Lösung von gewöhnlichen Differentialgleichungen erster Ordnung in PolarkoorZ. Angew. Math. Mech. 2, 131–136.
Neuendorff, R., 1923. Zeichnerische Lösung von gewöhnlichen Differentialgleichungen beliebiger Ordnung in Polarkten. Z. Angew. Math. Mech. 3, 34–36.
Neuendorff, R., 1933. Zeichnerische Lösung gewöhnlicher Differentialgleichungen 1. Ordnung mittels FunktionsteZ. Angew. Math. Mech. 13, 450–451.
Newton, I., 1679. Lettre à Hooke du 13 décembre 1679. In: Turnbull, H.W. (Ed.), The Correspondence of Isaac NewtoCambridge Univ. Press, Cambridge, UK, 1960, pp. 307–308.
Newton, I., 1687. Philosophiæ naturalis principia mathematica. Trad. fr. par Mme du Châtelet. In: Principes mathémala philosophie naturelle. Desaint & Saillant, Paris, 1759. [Réimpression Gabay, Paris, 1990.]
Ocagne, M. (d’), 1893. Le calcul simplifié par les procédés mécaniques et graphiques. Gauthier–Villars, Paris. [2e(entièrement refondue et considérablement augmentée), 1905; 3e Édition (avec une rédaction entièrement renounombreuses additions), 1928.]
Ocagne, M. (d’), 1908. Calcul graphique et nomographie. Doin, Paris. [2e Édition (revue et corrigée), 1914; 3e ÉditionPascal, E., 1910. L’integratore meccanico per le equazioni differenziali lineari di 1◦ ordine e per altre equazioni differenzia
Giornale di matematiche di Battaglini 48, 16–26.Pascal, E., 1911. L’uso e le applicazioni dell’integratore meccanico per le equazioni differenziali. Giornale di matema
Battaglini 49, 155–170.Pascal, E., 1914. I miei integrafi per equazioni differenziali. Pellerano, Naples.Pedersen, O., 1963. Master John Perks and his mechanical curves. Centaurus 8, 1–18.Petrovitch, M., 1897. Sur un procédé d’intégration graphique des équations différentielles. C. R. Hebdomadaires de
de l’Académie des Sciences 124, 1081–1084.Petrovitch, M., 1898. Sur l’intégration hydraulique des équations différentielles. Amer. J. Math. 20, 293–300.Petrovitch, M., 1899. Intégration graphique de certains types d’équations différentielles du premier ordre. Bull. So
France 27, 200–205.Petrovitch, M., 1900. Appareil à liquide pour l’intégration graphique de certains types d’équations différentielles. A
Math. 22, 1–12.Picciati, G., 1893. Sull’integrazione grafica delle equazioni differenziali e sue applicazioni. Il Politecnico 41, 493–50
545.Poleni, G., 1728. Lettre à Jacob Hermann de septembre 1728. In: Epistolarum mathematicarum fasciculus. Typis S
Patavii, 1729.Poncelet, J.-V., 1827–1830. Cours de mécanique industrielle. rédigé par Mr le capitaine du Génie Gosselin. Lithog
Clouet, Paris, 1re partie, 1827–1828; 2e partie, 1828–1829; 3e partie, 1830.Poncelet, J.-V., 1835. Solution graphique des principales questions sur la stabilité des voûtes. Mémorial de l’officier du G
151–213.Price, W.A., 1900. Petrovitch’s apparatus for integrating differential equations of the first order. Philos. Mag. 49, 487–4Riccati, V., 1752. De usu motus tractorii in constructione æquationum differentialium commentarius. Ex typographia
Vulpe, Bononiæ.Riccati, V., Saladini, G., 1767. Institutiones analyticæ, Vol. 2. Ex typographia Sancti Thomæ Aquinatis, Bononiæ.Rothe, R., 1916. Zur graphischen Integration von Differentialgleichungen zweiter Ordnung. Z. Math. Phys. 64, 90–100Runge, C., 1907. Über graphische Lösungen von Differentialgleichungen erster Ordnung. Jahresber. Deutsch. Math.-V
270–272.Runge, C., 1912. Graphical Methods. Columbia Univ. Press, New York;
Éd. allemande, Graphische Methoden. Teubner, Leipzig–Berlin, 1915. 2e Édition, 1919.Runge, C., Willers, F.A., 1915. Numerische und graphische Quadratur und Integration gewöhnlicher und partieller Diff
gleichungen. In: Encyklopädie der mathematischen Wissenschaften mit Einschluss ihrer Anwendungen, Vol. 2, 3Teubner, Leipzig, pp. 47–176 (article II C 2).
Running, T.R., 1913. A graphical solution of the differential equation of the first order. Amer. Math. Monthly 20, 279–2Saviotti, C., 1883. Note sur les méthodes graphiques d’intégration. Rev. Universelle des Mines 13 (2), 483–511.

D. Tournès / Historia Mathematica 30 (2003) 457–493 493
en
ellschaft
e Édition,
homson
ariable
ficients.
1–55;Villars,
.
res. Rev.
ohann I
lkurven.
lkurven
nbourg,
dition,
Schreiber, P., 1922. Über die Verwendbarkeit der Logarithmenpapiere bei der Integration der Differentialgleichungy′ =f (x, y). Z. Angew. Math. Mech. 2, 201–207.
Solín, J.M., 1872. Ueber graphische Integration. Ein Beitrag zur Arithmographie. Verlag der königlich böhmischen Gesder Wissenschaften, Prague.
Sonnet, H., 1867. Dictionnaire des mathématiques appliquées. Hachette, Paris. [2e Édition, 1874; 3e Édition, 1879; 41884.]
Suardi, G., 1752. Nuovi istromenti per la descrizione di diverse curve antiche e moderne. Rizzardi, Brescia.Thomson, J., 1876. An integrating machine having a new kinematic principle. Proc. Roy. Soc. 24, 262–265; Ou in: T
and Tait [1879, pp. 488–492].Thomson, W., (Lord Kelvin), 1876a. Mechanical integration of linear differential equations of the second order with v
coefficients. Proc. Roy. Soc. 24, 269–271; Ou in: Thomson and Tait [1879, pp. 497–499].Thomson, W., 1876b. Mechanical integration of the general linear differential equation of any order with variable coef
Proc. Roy. Soc. 24, 271–275; Ou in: Thomson and Tait [1879, pp. 500–504].Thomson, W., 1889. Capillary attraction. In: Popular Lectures and Adresses, Vol. 1. Macmillan, London/New York, pp.
2e Édition, 1891. Trad. fr. par P. Lugol, L’attraction capillaire. In: Conférences scientifiques et allocutions. Gauthier–Paris, 1893, pp. 1–37.
Thomson, W., 1892. On graphic solution of dynamical problems. Philos. Mag. 34 (5), 443–448.Thomson, W., Tait, P.G., 1879. Treatise on Natural Philosophy, Vol. 1, Part 1. Cambridge Univ. Press, Cambridge, UKTorres, L., 1901. Machines à calculer. Imprimerie nationale, Paris.Tournès, D., 1998. L’origine des méthodes multipas pour l’intégration numérique des équations différentielles ordinai
Histoire Math. 4, 5–72.Tournès, D., 2000. Pour une histoire du calcul graphique. Rev. Histoire Math. 6, 127–161.Varigon, P., 1695. Lettre à Jean Bernoulli du 23 avril 1695. In: Costabel, P., Peiffer, J. (Eds.), Der Briefwechsel von J
Bernoulli, Vol. 2. Birkhäuser, Basel/Boston/Berlin, 1988, pp. 80–83.Völlm, E., 1939. Interpolationsverfahren zur Integrationsmethode von Meissner. Comment. Math. Helv. 11, 362–368.Willers, F.A., 1911. Zum Integrator von E. Pascal. Z. Math. Phys. 59, 36–42.Willers, F.A., 1918a. Graphische Integration einiger gewöhnlichen Differentialgleichungen erster Ordnung mittels Strah
Arch. Math. Phys. 26 (3), 96–102.Willers, F.A., 1918b. Graphische Integration gewöhnlicher Differentialgleichungen erster Ordnung, deren Strah
Kegelschnitte sind. Arch. Math. Phys. 27 (3), 51–58.Willers, F.A., 1920. Graphische Integration. Vereinigung wissenschaftlicher Verleger, Berlin.Willers, F.A., 1926. Mathematische Instrumente. Vereinigung wissenschaftlicher Verleger, Berlin. [2e Édition. Olde
Munich/Berlin, 1943.]Willers, F.A., 1928. Methoden der praktischen Analysis. de Gruyter, Berlin. [2e Édition, 1950; 3e Édition, 1957; 4e É
1971.];Trad. angl. par Beyer, Robert T. Practical Analysis. Graphical and Numerical Methods. Dover, New York, 1948.
Willers, F.A., 1951. Mathematische Maschinen und Instrumente. Akademie-Verlag, Berlin.










