Average synaptic activity and neural networks topology: a global inverse problem

Neural Networks 54 (2014) 85–94
Contents lists available at ScienceDirect
Neural Networks
journal homepage: www.elsevier.com/locate/neunet
Impulsive synchronization schemes of stochastic complex networkswith switching topology: Average time approachChaojie Li a, Wenwu Yu b, Tingwen Huang c,∗
a Platform Technologies Research Institute, RMIT University, Melbourne, VIC 3001, Australiab Department of Mathematics, Southeast University, Nanjing 210096, PR Chinac Texas A&M University at Qatar, Doha, P.O. Box 23874, Qatar
a r t i c l e i n f o
Article history:Received 1 November 2013Received in revised form 29 January 2014Accepted 27 February 2014Available online 12 March 2014
Keywords:Impulsive synchronizationStochastic complex networksSwitching topologyAverage dwell timeAverage impulsive interval
a b s t r a c t
In this paper, a novel impulsive control law is proposed for synchronization of stochastic discrete complexnetworks with time delays and switching topologies, where average dwell time and average impulsiveinterval are taken into account. The side effect of time delays is estimated by Lyapunov–Razumikhintechnique, which quantitatively gives the upper bound to increase the rate of Lyapunov function. Byconsidering the compensation of decreasing interval, a better impulsive control law is recast in terms ofaverage dwell time and average impulsive interval. Detailed results from a numerical illustrative exampleare presented and discussed. Finally, some relevant conclusions are drawn.
© 2014 Elsevier Ltd. All rights reserved.
1. Introduction
Consensus has received increasing attention since the collec-tive dynamical behaviors of complex networks have been a sub-ject of intensive research with potential applications in physical,social, biological, and technological fields. In general, complex net-works aremodeled by a graphwith non-trivial topological featureswhere every node is an individual element of the whole systemwith certain pattern of connections, which are neither entirely reg-ular nor entirely random (Barabási & Albert, 1999; Strogatz, 2001;Watts & Strogatz, 1998). These features do not occur in the math-ematical models of the networks that have been studied in thepast, such as lattices or random graphs, but they do truly existin nature. However, the phenomenon of synchronization of largepopulations is a challenging problem and requires different hy-pothesis to be solved. Synchronization processes in populationsof locally interacting elements are in the focus of intensive re-search. The analysis of synchronizability has benefited not onlyfrom the advance in the understanding of complex networks, butalso has it contributed to the understanding of general emergentproperties of networked systems, such as the Internet, Human andRobot interaction networks, human collaboration networks, etc. As
∗ Corresponding author. Tel.: +974 44230174.E-mail address: [email protected] (T. Huang).
http://dx.doi.org/10.1016/j.neunet.2014.02.0130893-6080/© 2014 Elsevier Ltd. All rights reserved.
a consequence, many results for synchronization of different com-plex networks have been extensively studied in the physics andmathematics literature; e.g. Wang and Chen (2002a), Wu (2003),Olfati-Saber, Fax, andMurray (2007), Yu et al. (2009), Yu, Chen, andLü (2009), Yu, Chen, Lü, and Kurths (2013), Wang, Wang, and Liu(2010), Wang, Ho, Dong, and Gao (2010), Liang, Wang, Liu, and Liu(2008), Liang, Wang, and Liu (2009), Zhang, Tang, Fang, and Wu(2012), Lu and Ho (2010), Lu, Ho, and Cao (2010), Mahdavi, Men-haj, Kurths, and Lu (2013), Shen,Wang, and Liu (2011), Shen,Wang,and Liu (2012), Gan (2012), Lü and Chen (2005), Wen, Bao, Zeng,and Huang (2013), Huang, Li, Yu, and Chen (2009), Wang and Chen(2002b), Chen, Liu, and Lu (2007), Liu, Lu, and Chen (2011), Guan,Wu, and Feng (2012), Yang, Cao, and Lu (2012), Liu, Lu, and Chen(2013), Hu, Yu, Jiang, and Teng (2012), Zhao, Hill, and Liu (2011)and references therein.
Theoretically, synchronization of a network is mainly con-tributed by the nodes’ dynamical behaviors connections among thenodes. Many results have been devoted to the structural charac-terization and evolution of complex networks. In Wang and Chen(2002a), the authors studied robustness and fragility of synchro-nization of scale-free networks through the spectral propertiesof the underlying structure. In terms of graph based theoreticalbounds to synchronizability, Wu (2003) mainly focused on thebounds of its extreme eigenvalues with graph. Global and localsynchronization of coupled networks were discussed in Wen et al.(2013) and Yu et al. (2009) where different techniques were em-ployed to address time delays in the system level. The authors

86 C. Li et al. / Neural Networks 54 (2014) 85–94
of Wang, Ho et al. (2010) and Wang, Wang et al. (2010) studiedsynchronization of discrete complex networks when the case in-volves randomly occurred nonlinearities and mixed time-delays.The bounded H∞ state estimation problem was studied in Shenet al. (2011) via RLMI method. In addition, synchronizability forgeneral dynamical networks and fuzzy complex dynamical net-works were discussed in Lu and Ho (2010) and Mahdavi et al.(2013).
Meanwhile, to design a control law for synchronization ofcomplex network, many efforts have been made for this purpose.In the sense of continuous control law, Lü and Chen (2005)described a remarkable idea of a time-varying complex dynamicalnetwork model and designed its controlled synchronizationcriteria. Stability schemes of delayedneural networkswere studiedby Zhang et al. (2012) in which time-varying impulses havebeen modeled. A set of sampled-data synchronization controllersis designed by utilizing both the Gronwall’s inequality and theJenson integral inequality in Shen et al. (2012). Taking accountinto the consideration of discontinuous control approach, periodicintermittent controller (Gan, 2012) and intermittent controller (Huet al., 2012) for synchronization of networks with time delayswere investigated through different methods. Lu et al. (2010)first established a novel concept, namely average impulsiveinterval, for the synchronizability analysis of complex networks. Byintroducing intermittent linear state feedback, Huang et al. (2009)studied problems of cluster synchronization of linearly coupledcomplex networks and synchronization of delayed chaotic systemswith parameter mismatches, respectively. Hybrid adaptive andimpulsive control (Yang et al., 2012) was exploited for stochasticsynchronization of complex networks. In addition, as known,certain complex networks display a scale-free feature, of whichthe connectivity distributions have the power-law form. Thepinning scheme of the most highly connected nodes induced thata significant reduction in required controllers as compared to thetraditional control scheme, see Wang and Chen (2002b). Moregeneral cases of pining control can be found in Yu et al. (2009),Yu et al. (2013). A single controller of pinning synchronization wasdesigned, for example, without assuming symmetry, irreducibility,or linearity of the couplings, the authors (Chen et al., 2007)proved that a single controller can pin a coupled complexnetwork to a homogeneous solution. By considering the averageimpulsive interval, some generic mean square stability criteria ofsynchronization controlwere derived in Lu et al. (2010). Obviously,these methods are effective for the synchronization control ofdifferent complex networks.
In the practical network environment, information exchangeof each node through communication channels often experienceslink failures and transmission delay, which can bemodeled by a se-quence of switching interconnections with time delays as shownin Liu et al. (2011) and Olfati-Saber et al. (2007). Synchroniza-tion problems with respect to switched systems were studied bytypical techniques, for instance, the multiple v-Lyapunov functionmethod (Zhao et al., 2011). As aforementioned in Lu et al. (2010)and Yang et al. (2012), by average impulsive interval, it can be de-rived that a unified synchronization criterion of complex networksis less conservative no matter desynchronizing or synchronizingimpulses. Likewise, by average dwell time (Vu &Morgansen, 2010;Zhang & Shi, 2009), the stability criterion of switched system isless conservative. If we can obtain the result by virtue of the re-lationship between average impulsive interval and average dwelltime, it would bemuch less conservative than the previous results.The research undertaken so far in order to understand how syn-chronization phenomena are affected by impulsive control law andthe topological substrate of interactions, especially, when complexnetworks are involving noisy disturbances. The main goal of thispaper is to examine the effect of time delays in switching topolo-gies exerting on synchronization through Lyapunov–Razumikhin
technique. Correspondingly, the major contributions in this paperare twofold. First, the relationship between average impulsive in-terval(AII) of control law and average dwell time(ADT) of switchedtopologies is established. Second, the average time approach pre-sented in this paper offers attractive features that are potentiallyuseful for controlling different categories of complex networks.
The paper is organized as follows. We first introduce the basicmathematical descriptions of discrete complex networks that willbe used henceforth. Next, we focus on the synchronization analysisof discrete complex networks through impulsive control in thesense of average dwell time. The effect of time delays is tackledby Lyapunov–Razumikhin technique. Section 4 is devoted to theanalysis of the conditions for the synchronization of complexnetworks in the sense of average interval time. The relationshipis established by means of the results in Section 3. In Section 5, wepresent a numerical example and the discussion on the tradeoffbetween AII and ADT is given. Finally, the last section rounds offthe paper by giving our conclusions.
2. Preliminary
Let Rd denote the d-dimensional Euclidean space and ∥ • ∥
be the Euclidean norm in Rd. Denote Z+ = 1, 2, . . ., Zτ =
−τ ,−τ+1,−τ+2, . . . ,−1, 0, the finite setH = 1, 2, . . . ,H
with finite positive integer H , N = 0, 1, 2, . . ., I be the identitymatrix, and matrix X > 0 (<,≥,≤)means that X is a symmetricpositive definite matrix (negative definite, positive semi-definite,negative semi-definite, respectively). Denote themaximum eigen-value and minimum of the matrix by λmax(•) and λmin(•). The su-perscript T stands for matrix transposition. The Kronecker productof matrices Q ∈ Rm×nand P ∈ Rp×q is a matrix in Rmp×nq denotedas Q ⊗ P . Matrices, if not explicitly stated, are assumed to havecompatible dimensions. The notation ⌈x⌉ stands for the minimalinteger not less than x.A .
= BmeansA is denoted byB. As the defini-tion in Liang et al. (2009, 2008), let (Ω,F ,P ) be a complete prob-ability space with a natural filtration Ftt≥0 satisfying the usualconditions (i.e., the filtration contains all -null sets and is right con-tinuous) and by Brownian motionω(s) : 0 ≤ s ≤ t, where weassociate Ω with the canonical space generated by ω(t), and de-note F the associated σ -algebra generated by ω(t) with all theprobability measure P . L2F0
([−τ , 0],Rd) is the family of all F0-measurable C([−τ , 0],Rd)-valued random variable. E• standsfor the mathematical mean expectation operator with respect tothe given probability measure P .
Consider the following stochastic discrete time-varying com-plex networks with N identical nodes involving time delays andswitching topology:
xi(k + 1) = f (k, xi(k))+
Nj=1
lij.σ (k)Γ xj(k − τ(k))
+ gi(k, xi(k))ω(k), (1)
where xi(k) = (xi,1(k), xi,2(k), . . . , xi,d(k))T ∈ RNd represents thestate vector of the ith node at each instant of time k and d denotesthe number of nodes affiliated to each sub-networks. f : Z+ ×
Rd→ Rd is a nonlinear vector function which stands for different
dynamical behavior of each node. Γ = diagγ1, γ2, . . . , γd > 0is the inner coupling matrix between two connected nodes. τ(k)is a nonnegative constant which represents the time-delay of thesignal transmitted from the network to the ith node, where thecoupling time-delay τ(k) satisfies 0 ≤ τ(k) ≤ τ for a constantτ > 0. gi : Z×Rd
→ Rd is the noise intensity function vector.ω(k)is a scaleWiener process (Brownianmotion) defined on (Ω,F ,P )with
Eω(k) = 0, Eω(k)2 = 1,Eω(i)ω(j) = 0, (i = j). (2)

C. Li et al. / Neural Networks 54 (2014) 85–94 87
Let G = (1, 2, . . . ,N, E) be an undirected graph with N vertices,describing the topology of the network. The Graph Laplacianmatrix LG associatedwithG is defined as LG = ∆G−AG, where∆G isthe degree matrix and AG is the adjacency matrix of the graph. TheLaplacian matrix is symmetric, positive semi-definite and has 0 asan eigenvaluewith eigenvector 1. More specifically,G is connectedif and only if rank(LG) = N − 1 and λ2(LG) serves the functionas the determinant contributor to the algebraic connectivity of G.For networks with switching connected topologies, let G be thefinite set corresponding to the connected undirected graphs withvertices 1, 2, . . . ,N, such that
G = Gh = (1, 2, . . . ,N, Eh)|h ∈ H.
EachGh ∈ G is connected, undirectedwith different connections ofedge. Let IG ⊂ N be an index set associatedwith the elements ofG.A switching signal σ is a map σ : Z+ → IG. For each time k ∈ Z+,the switching signal σ establishes the network graph Gσ(k) ∈ Gutilized by the network agents. The logical rules that generate theswitching signals constitute the switching logic, and the indexσ(k)is called the active mode at the time instant k. Meanwhile, letkm,x(m ∈ N ) be the switching instants to label each switchingphenomenon, i.e., when σ(km,x − 1) = 1, the active mode is Mode1; when σ(km,x) = 2, the active mode is replaced by Mode 2. Letk0,x = 0 be the starting mode. Note that there is no-chattering re-quirement in the discrete-time switched system due to the finitestate changes in each impulsive interval, see Zhang and Shi (2009).
Lσ(k) = (lij,σ (k))N×N is the coupling configuration matrix rep-resenting the coupling topology of the dynamical network at theactive mode σ(k). The element lij,σ (k) is defined as the connec-tivity of the whole complex network, in which if there is a con-nection between subnetwork i and subnetwork j (j = i) thenlij,σ (k) = lji,σ (k) = 1; otherwise, lij,σ (k) = lji,σ (k) = 0 (j = i). Letthe diagonal element lii,σ (k) be defined as
lii,σ (k) = −
Nj=1,j=i
lij,σ (k) = −
Ni=1,i=j
lji,σ (k), (3)
where 1 ≤ i, j ≤ N . The initial conditions associated with model(1) are given by
xi(θ) = φi(θ), θ ∈ Zτ , (4)
where φ(θ) ∈ L2F0([−τ , 0],Rd) and the norm of φ(θ) is defined by
∥φ(θ)∥τ = supθ∈Zτ ∥φ(θ)∥.In order to design an impulsive control scheme to synchronize
system (1), we consider the evolutionary state abruptly jumps atevery impulsive instant of time kn,u from its open-loop state, whichcan be formularized by
xi(kn,u) = Jnxi(kn,u − 1), n ∈ N (5)
where xi(kn,u − 1) stands for the primal state at time instant kn,uwithout impulsive jump (see Zhang, Sun, & Feng, 2009). As usual,every impulsive instant of time kn,u satisfies 0 = k0,u < k1,u <k2,u < · · · < kn,u < kn+1,u < · · · and limn→∞ kn,u = ∞; Jn ∈ Rd×d
represents the impulsive jump strength at time instant kn,u. There-fore, at each impulsive instant of time kn,u, the coupled states xi(k)and xj(k) can be described by
xi(kn,u)− xj(kn,u) = Jn[xi(kn,u − 1)− xj(kn,u − 1)]. (6)
Intuitively, a family of impulsive controller can be designed as
Ui(k, xi(k)) =
∞n=1
δ(k − kn,u)Jn(xi(kn,u − 1)), n ∈ N , (7)
whereUi(k, xi(k)) represents a class of impulsive controller at eachinstant of time kn,u; δ(•) denotes the Dirac discrete-time function.
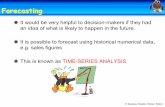
Fig. 1. The trend in the evolution of controlled system with switching signals.
As shown in Fig. 1, the top picture represents the state evolutionof discrete system and the bottom one denotes the switching sig-nals among three different modes. In addition, the state switchingoccurs at each time instant ki,x (i = 1, 2, 3, . . . , 19) while impul-sive control is deployed at time instant kj,u (j = 1, 2, 3, . . . , 8).Eventually, bymeans of impulsive control, systemwill converge toits equilibrium point.
Remark 1. It is worthwhile mentioning here that every time in-stant of impulsive control is unnecessarily equal to the time instantof switching signal, i.e., kn,u = km,x. Due to the existence of timedelays in the dynamical system, it is difficult to design feedbackcontroller for the switched systems in the presence of both statedelays and switching delays (see Vu&Morgansen, 2010).When theinformation available to the controller is a delayed version of thedesired one in a network environment, the closed loop will featureboth switching signals and delayed states. However, the impulsivecontrol law is asynchronous to switching signals, which is consum-mate even the existence of large time delays. Therefore, impulsivecontrol is a better choice for this circumstance, in which informa-tion exchange experiences both link failures and time delays.
The equivalent matrix form of impulsive controlled system isgiven byx(k + 1) = F(k, x(k))+ (Lσ(k) ⊗ Γ )x(k − τ(k))
+G(k, x(k))ω(k); k = kn,u, k ∈ Z+;
x(kn,u) = [IN ⊗ Jn]x(kn,u − 1),(8)
where Lσ(k) is a configuration matrix defining the topology of eachsub-state. The compact forms of each element are
x(k) = [xT1(k) xT2(k) . . . xTN(k)]T ,
F(k, x(k)) = [f T (k, x1(k)) . . . f T (k, xN(k))]T ,x(k − τ(k)) = [xT1(k − τ(k)) . . . xTN(k − τ(k))]T ,
G(k, x(k)) = [gT1 (k, x1(k)) . . . gT
N(k, xN(k))]T .
Assumption 1. For each nonlinear function f (·, ·), suppose thatthere exist constant f satisfies
[f (k, x1)− f (k, x2)]T [f (k, x1)− f (k, x2)]≤ f [x1(k)− x2(k)]T [x1(k)− x2(k)],
where any x1, x2 ∈ Rd.
Assumption 2. For each noisy intensity function g(·, ·), supposethat there exists a matrix G ∈ Rd×d such that
gT (k, xi(k))g(k, xi(k)) ≤ ∥Gxi(k)∥2, i = 1, 2, . . . ,N,
for any xi ∈ Rd.

88 C. Li et al. / Neural Networks 54 (2014) 85–94
Assumption 3. Without loss of generality, let Mn be the subset ofH(Mn ⊆ H) and represent sub-states appearing on impulsiveinterval k ∈ [kn,u, kn+1,u −1] (n ∈ N ). Different impulsive intervalhas its own subset Mn.
For the simplicity of calculation, we denote F = diagf , f , . . . ,f and G = diagg, g, . . . , g. Let
xij(k) = xi(k)− xj(k),xij(k − τ) = xi(k − τ)− xj(k − τ),
Fij(k, x(k)) = Fi(k, x(k))− Fj(k, x(k)),
Lσ(k)WLσ(k) = Nl(2)ij,σ (k), WLσ(k) = Nlij,σ (k).
Now, we recall some useful related definitions as follow.
Definition 1 (see Hespanha & Morse, 1999). For switching signal σand any K > k > k0, let Nσ (K , k) be the switching numbers of σover the interval [k, K). If for any given K and k (K > k > k0), wehave
Nσ (K , k) ≤K − k
Ta+ N0
σ ,
then Ta and N0σ are called average dwell time and the chatter
bound, respectively.
Definition 2 (see Lu et al., 2010). The average impulsive interval ofthe impulsive sequence ζ = t1, t2, ··· is less than Ta, if there exista positive integer N0
ζ and a positive number Nζ (K , k) associatedwith the number of impulsive times of impulsive sequence ζ overthe interval [k, K), such that
Nζ (K , k) ≤K − kTa
+ N0ζ ,
where Ta is called average impulsive interval.
Definition 3. The impulsive controlled discrete complex networks(8) are said to be globally exponentially synchronized in the meansquare, if for any initial condition φ(θ) ∈ L2F0
([−τ , 0],Rd), thereexist two positive constants λ andM0 ≥ 1 such that
E∥xi(k)− xj(k)∥2
≤ M0e−γ (k−k0), 1 ≤ i ≤ j ≤ N
holds for all k > k0.
Lemma 1. Let W = (wij)N×N , P ∈ Rd×d, x = (xT1, xT2, . . . , x
TN)
T
and y = (yT1, yT2, . . . , y
TN)
T with xk, yk ∈ Rd (k = 1, 2, . . . ,N). IfW = W T and each row sum of W is zero, then
xT (W ⊗ P)y = −
N−1i=1
Nj=i+1
wij(xi − xj)TP(yi − yj).
3. Main results
3.1. Global exponential synchronizability
In this section, we consider the global exponential synchroniza-tion problem of discrete delayed systems with switching topol-ogy by employing Lyapunov–Razumikhin Technique. Specifically,by considering Lyapunov-like functions allowed to increase withthe bounded increase rate on each impulsive interval, the criteriaof global exponential synchronization are developed in terms ofaverage dwell time (ADT) which has been widely used for the sta-bility analysis of the switched system.
Theorem 1. Under Assumptions (A1) and (A2), the dynamicalsystem (8) is globally exponentially synchronized in the mean squareif there exist positive scalars εn > 0, αn > 0, βn > 1 and µ ≥ 1 oneach time interval k ∈ [kn,u, kn+1,u − 1] satisfying:
I. for each sub-state k ∈ [km,x, km+1,x − 1] and certain positiveinteger nτ = ⌈
τinfm∈N km+1,x−km,x
⌉, there exist positive definite
matrices Pi ∈ Rd×d and Qi ∈ Rd×d, such that
Pi ≤ µPj, Qi ≤ µQj, i, j ∈ H,
lnαn ≤ εn, n ∈ N ,
where
αn = maxσ(k)∈Mn
λmax(Πσ(k))+ µβnλmax(Ωσ(k))
λmin(Pσ(k))
,
Πσ(k) = F TPσ(k)F + GTPσ(k)G − Nlij,σ (k)F TQ−1σ(k)F ,
Ωσ(k) = −Nl(2)ij,σ (k)ΓTPσ(k)Γ − Nlij,σ (k)Γ TPT
σ(k)Qσ(k)Pσ(k)Γ ;
II. it is given that each impulsive controller requires
λ2max(Jn) ≤ e−(ε+lnµTa )(kn+1,u−kn,u)
with the average dwell time
Ta ≥ T ∗
a =lnµγ ∗ − ε
,
where γ ∗= maxn∈N
−
2 ln λmax(Jn)kn+1,u−kn,u
.
III. βn ≥ e(ε+lnµTa )(2kn+1,u−kn,u−kn−nτ+1,u), where ε = maxn∈N εn.
Proof. Consider the following Lyapunov function:
V (k) = xT (k)(W ⊗ Pσ(k))x(k), (9)
for any k ∈ [kn,u, kn,u − 1], n ∈ N , where
W =
N − 1 −1 . . . −1−1 N − 1 . . . −1. . . . . . . . . . . .−1 −1 . . . N − 1
. It is given that, for θ ∈ [−τ ,−1], we
have
V (θ) = xT (θ)(W ⊗ Pσ(θ))x(θ)
= −
N−1i=1
Nj=i+1
wij(φi(θ)− φj(θ))T
Pσ(θ)(φi(θ)− φj(θ))
≤ λmax(Pσ(θ))N−1i=1
Nj=i+1
(−wij)∥φi(θ)− φj(θ)∥2.
Let ϕ(∥φi(θ)− φj(θ)∥2) = λmax(Pσ(θ))∥φi(θ)− φj(θ)∥
2, thus
V (θ) ≤
N−1i=1
Nj=i+1
ϕ(∥φi(θ)− φj(θ)∥2)
.= ϕ(∥φ∥
2τ ). (10)
Choose M ≥ 1 and γ > 0, such that
1 ≤ Me−γ (k1,u−k0,u)e−ε0(k1,u−k0,u)−Nσ (k1,u,k0,u) lnµ.
We claim that
EV (k) ≤ Mϕ(∥φ∥2τ )e
−γ (kn,u−k0,u),
k ∈ [kn,u, kn+1,u − 1], n ∈ N . (11)
Mathematical induction will be utilized to prove the result in twosteps. In the first step, the given statement (11) is to prove for thefirst intervalwhich is on k ∈ [k0,u, k1,u−1] for n = 1. The inductivestep is to prove that (11) for any interval k ∈ [kn−1,u, kn,u − 1]

C. Li et al. / Neural Networks 54 (2014) 85–94 89
implies the given statement for the next interval.Meanwhile, proofby contradiction is also applied in each step where we assume thatthe given statement of each step is not a truly proposition and showthat there is a contradiction to this assumption.
We first show that
EV (k) ≤ Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u), k ∈ [k0,u, k1,u − 1]. (12)
Obviously, for k ∈ [k0,u − τ , k1,u − 1],
EV (k) ≤ ϕ(∥φ∥2τ )
≤ Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u)e−ε0(k1,u−k0,u)e−Nσ (k1,u−k0,u) lnµ
< Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u)e−ε0(k1,u−k0,u)
< Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u). (13)
If (12) is not true, consider the case that no switching appears onthis interval, then there exists an instant of time k ∈ [k0,u, k1,u−1],
k = mink ∈ [k0,x, k1,u − 1]|EV (k) > Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u).
Or the case that certain state-switchings occur, then there exists aninstant of time k ∈ [km,x, km+1,x −1] belonging to the time interval[k0,u, k1,u − 1] satisfying
k = mink ∈ [km,x, km+1,x − 1]|EV (k)
> Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u)
such that
EV (k) > Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u)
> Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u)e−ε0(k1,u−k0,u)
> Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u)e−ε0(k1,u−k0,u)e−Nσ (k1,u,k0,u) lnµ
> ϕ(∥φ∥2τ ) (14)
and
EV (k) ≤ Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u), k ∈ [k0,u − τ , k − 1]. (15)
Consider
k∗= maxk ∈ [k0,u, k]|EV (k) ≤ Mϕ(∥φ∥
2τ )
× e−γ (k1,u−k0,u)e−ε0(k1,u−k0,u)e−Nσ (k1,u,k0,u) lnµ, (16)
from which we have
EV (k) > Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u)e−ε0(k1,u−k0,u)
× e−Nσ (k1,u,k0,u) lnµ, k ∈ [k∗+ 1, k − 1]. (17)
Therefore, we can conclude that, for k ∈ [k∗, k], one gives
EV (k∗) ≤ EV (k) ≤ EV (k), (18)
and, taking time delay s ∈ Zτ into account, one has,
EV (k + s) ≤ Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u)
≤ eε0(k1,u−k0,u)eNσ (k1,u,k0,u) lnµEV (k∗)
≤ e(ε+lnµTa )(k1,u−k0,u)EV (k∗)
≤ β1EV (k). (19)
Consider the increment of V (k) along the solution of discretecomplex networks (1) in the interval k ∈ [k∗, k−1]. For each activeinstant of sub-system k ∈ [k∗
m,x, k∗
m+1,x − 1],
E∆V (k) = EV (k + 1) − EV (k)= E[F(k, x(k))+ (Lσ(k) ⊗ Γ )x(k − τ)
+G(k, x(k))ω(k)]T (W ⊗ Pσ(k+1))
× [F(k, x(k))(Lσ(k) ⊗ Γ )x(k − τ)
+G(k, x(k))ω(k)] − xT (k)(W ⊗ Pσ(k))x(k)
= EF T (k, x(k))(W ⊗ Pσ(k+1))F(k, x(k))+ xT (k − τ)(LTσ(k) ⊗ Γ T )(W ⊗ Pσ(k+1))
× (Lσ(k) ⊗ Γ )x(k − τ)+ 2F T (k, x(k))× (W ⊗ Pσ(k+1))(Lσ(k) ⊗ Γ )x(k − τ)
×GT (k, x(k))(W ⊗ Pσ(k+1))G(k, x(k))
− xT (k)(W ⊗ Pσ(k))x(k). (20)
By further computation, (20) is given by
EV (k + 1) ≤ µNσ (k+1,k)E
N−1i=1
Nj=i+1
xTij(k)FT
× Pσ(k)Fxij(k)+
N−1i=1
Nj=i+1
xTij(k)GTPσ(k)Gxij(k)
−
N−1i=1
Nj=i+1
xTij(k − τ)Nl(2)ij,σ (k)ΓTPσ(k)Γ
× xij(k − τ)−
N−1i=1
Nj=i+1
xTij(k)Nlij,σ (k)FT
×Q−1σ(k)Fxij(k)−
N−1i=1
Nj=i+1
xTij(k − τ)N
× lij,σ (k)Γ TPTσ(k)Qσ(k)Pσ(k)Γ xij(k − τ)
≤ µNσ (k+1,k)E
N−1i=1
Nj=i+1
xTij(k)[F
TPσ(k)F
+GTPσ(k)G − Nlij,σ (k)F TQ−1σ(k)F ]
× xij(k)+ xTij(k − τ)[−Nl(2)ij,σ (k)ΓTPσ(k)Γ
−Nlij,σ (k)Γ TPTσ(k)Qσ(k)Pσ(k)Γ ]xij(k − τ)
≤ µNσ (k+1,k)λmax(Πσ(k))
λmin(Pσ(k))EV (k)
+λmax(Ωσ(k))
λmin(Pσ(k−τ(k)))EV (k − τ)
.
Obviously, state-switching would occur more than one time oneach of impulsive intervals. Due to the fact that σ(k) ∈ M0 on theinterval [k0,u, k1,u − 1] and Pσ(k) ≤ µPσ(k−τ), it is obtained that
EV (k + 1) ≤ µNσ (k+1,k)λmax(Πσ(k))
λmin(Pσ(k))
+ β0λmax(Ωσ(k))
µ−1λmin(Pσ(k))
EV (k)
≤ µNσ (k+1,k)α0EV (k). (21)
Therefore, we have
EV (k) ≤ µNσ (k,k∗)α(k−k∗)0 EV (k∗)
< µNσ (k1,u,k0,u)α(k1,u−k0,u)0 EV (k∗)
≤ µNσ (k1,u,k0,u)α(k1,u−k0,u)0 Mϕ(∥φ∥
2τ )
× e−γ (k1,u−k0,u)e−ε0(k1,u−k0,u)e−Nσ (k1,u,k0,u) lnµ

90 C. Li et al. / Neural Networks 54 (2014) 85–94
= Mϕ(∥φ∥2τ )e
−γ (k1,u−k0,u)
< EV (k), (22)
which is a contradiction. Thus, (12) is true.Next, we claim (11) is true for n = 0, 1, 2, . . . , n, such that
EV (k) ≤ Mϕ(∥φ∥2τ )e
−γ (kn,u−k0,u), k ∈ [kn−1,u, kn,u − 1]. (23)
Correspondingly, we should prove (23) holds for n = n + 1,
EV (k) ≤ Mϕ(∥φ∥2τ )e
−γ (kn,u−k0,u), k ∈ [kn,u, kn+1,u − 1]. (24)
Note that from Condition II, we have
EV (kn,u) = E
N−1i=1
Nj=i+1
xTij(kn,u − 1)JTn
× Pσ(kn,u−1)Jnxij(kn,u − 1)
≤ λ2max(Jn)E
N−1i=1
Nj=i+1
xTij(kn,u − 1)
× Pσ(kn,u−1)xij(kn,u − 1)
= λ2max(Jn)EV (kn,u − 1)
≤ λ2max(Jn)Mϕ(∥φ∥2τ )e
−γ (kn,u−k0,u)
≤ Mϕ(∥φ∥2τ )e
−γ (kn+1,u−k0,u)e−εn(kn+1,u−kn,u)
× e−Nσ (kn+1,u,kn,u) lnµ. (25)
If (24) is not true, then there exists an integer m > n such thatk ∈ [km,x, km+1,x − 1] on interval k ∈ [kn,u, kn+1,u − 1] satisfying
k = mink ∈ [km,x, km+1,x − 1]|EV (k) ≤ Mϕ(∥φ∥2τ )
× e−γ (kn+1,u−k0,u). (26)
Consequently, we have k > km,x and V (k) > V (kn,u). Also thereexists another integerm∗∗ such thatm∗∗
≤ m.Denote
k∗∗= maxk ∈ [km∗∗,x, km∗∗+1,x]|EV (k) ≤ Mϕ(∥φ∥
2τ )
× e−γ (kn+1,u−k0,u)e−εn(kn+1,u−kn,u)e−Nσ (kn+1,u,kn,u) lnµ. (27)
For any k ∈ [k∗∗+ 1, k], we have
EV (k) > Mϕ(∥φ∥2τ )e
−γ (kn+1,u−k0,u)e−εn(kn+1,u−kn,u)
× e−Nσ (kn+1,u,kn,u) lnµ. (28)
In addition, for any k ∈ [k∗∗, k], we have
EV (k∗∗)
≤ EV (k) ≤ EV (k). (29)
Then, for any k ∈ [km,x, km+1,x − 1],
E V (k + 1) ≤ µNσ (k+1,k)E V (k)
×
λmax(Πσ(km,x))+ µβnλmax(Ωσ(km,x))
λmin(Pσ(km,x))
≤ µNσ (k+1,k)αnE V (k) . (30)
In light of Condition (III), it observes that for any s ∈ Zτ , one hask + s ∈ [kn−nτ ,u, k − 1]. Then, for any k ∈ [k∗∗, k − 1], we have
EV (k + s) ≤ Mϕ(∥φ∥2τ )e
−γ (kn−nτ+1,u−k0,u)
≤ Mϕ(∥φ∥2τ )e
−γ (kn+1,u−k0,u)
× enτ−1
i=0 [εn−i(kn+1−i,u−kn−i,u)]
× enτ−1
i=0 [Nσ (kn+1−i,u,kn−i,u) lnµ]
= e−εn(kn+1,u−kn,u)e−Nσ (kn+1,u,kn,u) lnµ
×Mϕ(∥φ∥2τ )e
−γ (kn+1,u−k0,u)
× eεn(kn+1,u−kn,u)eNσ (kn+1,u,kn,u) lnµ
× enτ−1
i=0 [εn−i(kn+1−i,u−kn−i,u)]
× enτ−1
i=0 [Nσ (kn+1−i,u,kn−i,u) lnµ]
< e(ε+lnµTa )(2kn+1,u−kn,u−kn−nτ+1,u)EV (k∗∗
+ 1)< βnEV (k). (31)
Consider that k = k, we have
EV (k) ≤ µNσ (k,k∗∗)p(k−k∗∗)
n,u EV (k∗∗)
< µNσ (kn+1,u−kn,u) lnµα(kn+1,u−kn,u)n
× e−ε(kn+1,u−kn,u)e−Nσ (kn+1,u,kn,u) lnµ
×Mϕ(∥φ∥2τ )e
−γ (kn+1,u−k0,u)
< Mϕ(∥φ∥2τ )e
−γ (kn+1,u−k0,u)
< EV (k), (32)
which is a contradiction. Hence, (24) holds for k = k + 1. And byvirtue of mathematical inductionmethod, the claim (11) is true foreach k ∈ Z+.
In view of Lemma 1, it can be obtained that, for any k ∈ Z+,
minσ(k)∈H
λmin(Pσ(k))E
N−1i=1
Nj=i+1
∥xi(k)− xj(k)∥22
≤ E
N−1i=1
Nj=i+1
(xi(k)− xj(k))TPσ(k)(xi(k)− xj(k))
≤ Mϕ(∥φ∥
2τ )e
−γ (k−k0,u). (33)
Therefore, for any k ∈ Z+, we have
E
N−1i=1
Nj=i+1
∥xi(k)− xj(k)∥22
≤M
minσ(k)∈H
λmin(Pσ(k))
ϕ(∥φ∥2τ )e
−γ (k−k0,u) (34)
which implies that
E∥xi(k)− xj(k)∥2
≤ M0e−γ (k−k0,u), 1 ≤ i < j ≤ N. (35)
Finally, according to Definition 3, we conclude that the discretecomplex networks (8) are globally exponentially synchronized inthemean square under the impulsive control, and the proof is thencompleted.
Remark 2. Lyapunov function (9) is a kind of estimator whichindicates the error distances from each pair of nodes in each step.When time k increases to infinity, the error converges to zero inthe mean square sense under the feasible control law.
Remark 3. Note that, there may exist multiple state-switchingson each impulsive interval. In Condition (I) of Theorem 1, αn isemployed to estimate the boundary of divergence rate to impulse-free system (1), which corresponds to themaximal divergence rateof sub-states on the interval [kn,u, kn+1,u − 1].

C. Li et al. / Neural Networks 54 (2014) 85–94 91
Remark 4. In Theorem 1, Condition (II) formulates the trade-offbetween the impulsive control gain Jn and average dwell time Ta.Generally, if we consider ADT as a property of system (1), thesmaller Ta is, the larger impulsive gain is required. It means thatimpulsive gain should be large enough to stabilize amore frequentswitched subsystem. Ta is employed to compute the number ofstate-switching Nσ (kn+1,u, kn,u) where N0
σ can be adjusted intoM . In addition, the convergent rate of dynamical system (8) isestimated by γ ∗
− ε −lnµTa
where γ ∗= maxn∈N
−
2 ln λmax(Jn)kn+1,u−kn,u
contributed by impulsive control is ubiquitous in impulsive controltheory, please see Lu et al. (2010), Guan et al. (2012).
Remark 5. In Condition (III), Razumikhin technique is adoptedto estimate the effect of time delays in the impulsive controlledsystem (8). The Lyapunov–Razumikhin function introduced in thispaper is not required to decrease in the entire time space. In fact,the increasing trend of Lyapunov–Razumikhin function is allowedin the entire time space except at each impulsive time instant.
3.2. Exploring impulsive control by average impulsive interval
In this section, we further consider that, on time interval k ∈
[km,x, km+1,x − 1], the error distances among the nodes of trajec-tories in the coupled networks are divided into two categories.The first ones are increasing while the others are decreasing,which implies that the incremental ratios of Lyapunov-like func-tion are greater than 1 or less than 1(or equal to). For concisenotation, denotes T+(km+1,x, km,x) as the number of incremen-tal ratios of Lyapunov-like function which are greater than 1 andT−(km+1,x, km,x) as the number of incremental ratios of Lyapunov-like function which are less than 1(or equal to), respectively.
We now apply average impulsive interval (AII) technique toanalyze the dynamical system (8) for a more flexible impulsivecontrol law.
Theorem 2. Under Assumptions (A1) and (A2), the dynamicalsystem (8) is globally exponentially synchronized in the mean squareif there exist some scalars ε+ > 0, ε− < 0, αn > 0, βn > 1 andµ ≥ 1 on each time interval k ∈ [kn,u, kn+1,u − 1] satisfying
I. For each sub-state k ∈ [km,x, km+1,x − 1] and certain positiveinteger nτ = ⌈
τinfm∈N km+1,x−km,x
⌉, there exist matrices Pi ∈ Rd×d,
and Qi ∈ Rd×d, such that
Pi ≤ µPj, Qi ≤ µQj, i, j ∈ H,
ε+ = maxn∈N
lnαn if αn > 1,
ε− = minn∈N
lnαn if αn ≤ 1,
where
αn = maxσ(k)∈Mn
λmax(Πσ(k))+ µβnλmax(Ωσ(k))
λmin(Pσ(k))
,
Πσ(k) = F TPσ(k)F + GTPσ(k)G − Nlij,σ (k)F TQ−1σ(k)F ,
Ωσ(k) = −Nl(2)ij,σ (k)ΓTPσ(k)Γ − Nlij,σ (k)Γ TPT
σ(k)Qσ(k)Pσ(k)Γ .
II. The relationship between average impulsive interval and averagedwell time requires
ln ηTa
+ ε− +lnµ+ (ε+ − ε−)Tmax
Ta< 0
where η ≥ λ2max(Jn) and Tmax = maxm∈N T+(km+1,x, km,x).III. lnβ ≥ (ε− +
lnµ+(ε+−ε−)TmaxTa
)(nτ + 1)Tmax, where Tmax =
supn∈N (kn+1,u − kn,u) and β = maxn∈N βn.
Proof. Consider that on eachof impulsive time interval [kn,u, kn+1,u−1], there are couples of state switchings, i.e., kn,u < k1,x < k2,x <· · · < km,x < · · · < kn+1,u.
Let k0,x = k0,u, for k ∈ [−τ ,−1], we have
V (θ) = xT (θ)(W ⊗ Pσ(θ))x(θ)
≤ ϕ(∥φ∥2τ ). (36)
For each time interval [km,x, km+1,x − 1] associated with impul-sive time interval [k0,u, k1,u − 1], the increment of Lyapunov func-tion is given by where β is determined by Condition (III) and Tmaxdenotes the maximal impulsive interval under average impulsiveinterval constraint.
By virtue of Condition (I), we have
E V (k + 1) ≤ eε−T−(k,km,x)+ε+T+(k,km,x)EV (km,x)
= eε−T−(k,km,x)+ε−T+(k,km,x)
× e−ε−T+(k,km,x)+ε+T+(k,km,x)EV (km,x)
≤ e(ε+−ε−)Tmaxeε−(k−km,x)E
V (km,x)
, (37)
where Tmax represents the maximal number of the incrementsamong all of switched states.
Thus, for any k ∈ [k0,u, k1,u − 1], one observes
E V (k + 1) ≤ µNσ (k,k0,u)e(ε+−ε−)TmaxNσ (k,k0,u)
× eε−(k−k0,u)EV (k0,u)
= e[lnµ+(ε+−ε−)Tmax]Nσ (k,k0,u)+ε−(k−k0,u)
×EV (k0,u)
. (38)
Note that if k = k1,u, and denote ηn = λ2max(Jn). It is given that
EV (k1,u)
≤ λ2max(J1)E
V (k1,u − 1)
= η1E
V (k1,u − 1)
≤ η1e[lnµ+(ε+−ε−)Tmax]Nσ (k1,u,k0,u)
× eε−(k1,u−k0,u)EV (k0,u)
. (39)
Therefore, for any k ∈ [kn,u, kn+1,u − 1], we have
E V (k) ≤ ηk−1ηk−2 · · · η1e[lnµ+(ε+−ε−)Tmax]Nσ (k,k0,u)
+ eε−(k−k0,u)EV (k0,u)
. (40)
In terms of the average impulsive interval, the impulsive se-quence ζ = k1,u, k2,u, . . . is less than Ta. Let η = maxn∈N ηn.It follows from Definition 2 that for k ∈ Z+
E V (k) ≤ ηNζ (k,k0,u)e[lnµ+(ε+−ε−)Tmax]Nσ (k,k0,u)
× e+ε−(k−k0,u)EV (k0,u)
= Me(
ln ηTa
+ε−+lnµ+(ε+−ε−)Tmax
Ta )(k−k0,u)EV (k0,u)
, (41)
where M = e[lnµ+(ε+−ε−)Tmax]N0σ−ln ηN0
ζ .According to the Condition (II) and the fact that k0,x = k0,u,
when k approaches infinity, E V (k) exponentially converges to0. It implies that the dynamical network (8) can be exponentiallysynchronized in themean-square sense by impulsive control. Thus,Theorem 2 is proved.
It is indispensable to develop the impulsive control law whichis readily carried out for the uncontrolled system (1). Theorem 2shows better performance on this purpose in the sense of averageimpulsive interval (AII), see Lu and Ho (2010), Yang et al. (2012).Note that average impulsive interval must be greater than 2 indiscrete dynamical system otherwise the impulsive control lawdegenerates as the feedback control.

92 C. Li et al. / Neural Networks 54 (2014) 85–94
Remark 6. In Theorem 2, Condition (II) shows the proportional re-lationships among average dwell time (ADT) of state switching,average impulsive interval (AII), and the impulsive strength. Thelarger the average dwell time Ta is, the longer the impulsive inter-val Ta can be. Indeed, the larger the average dwell time Ta is, thesmaller the impulsive strength η is needed to guarantee the syn-chronizability of dynamical system (8). If there is no state switch-ing in dynamical system (8), i.e. η = 1, Condition (II) degeneratesinto ln η
Ta+ ε < 0 without taking into consideration the decreasing
interval, which similarly corresponds to the results in the litera-ture (Yang et al., 2012).
4. Numerical example
In this section, a numerical example is shown to illustrate theresults obtained in the previous section. Consider the standardHenon map as the individual node in the dynamical networks:
x1(k + 1) = 1 + x2(k)− ax21(k),x2(k + 1) = bx1(k),
where a = 1.2 and b = 0.4. Thus, F(k, x(k)) = Ax(k) + ψ(x(k)),where A =
0 1b 0
, and ψ(x(k)) =
1 − ax21(k)
0
.
Meanwhile, we have ∥F(xi) − F(xj)∥ ≤ f ∥xi − xj∥, where
F =
a∥xi,1 + xj,1∥ 0
0 a∥xi,1 + xj,1∥
.
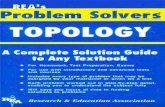
Create a small-world network with the aforementioned indi-vidual node, in which there are three different topologies switch-ing from one to another. More specifically, the parameters for thefirst subsystem are configured by N = 100, k = 4, and edge-adding probability p = 0.2. The parameters for the second one areN = 100, k = 4, p = 0.4. For the third one, N = 100, k = 6, andp = 0.2. The initial values x1, x2 of each node are randomly chosenfrom [−1.25, 1.25] and [−0.3, 0.3], respectively, please see detailsin Fig. 2.
Let τ(k) be equal to the integer part of |2 sin( kπ4 )|, Γ =
diag(0.13, 0.13) and g(k, x(k)) =
0.0085 ∗ cos(k) 0
0 0.0085 ∗ sin(k)
.
For the given switching signal σ1 in Fig. 3, we obtain nτ = 2. TakingJn = 0.15 andµ = 1.05, according to Condition (I) of Theorem 1, itis given that P1 =
0.5898 −0.0337
−0.0337 0.5898
, Q1 =
0.0247 −0.0048
−0.0048 0.0247
,
P2 =
0.6199 −0.0258
−0.0258 0.6199
, Q2 =
0.0202 −0.0100
−0.0100 0.0202
, P3 =
0.6453 −0.0028−0.0028 0.6453
, and Q3 =
0.0210 −0.0091
−0.0091 0.0210
. Then, α1 =
0.9359, α2 = 1.2634, α3 = 1.4022, β1 = 12.9125, β2 = 12.5424,and β3 = 12.4297. Consequently, ε = 0.3385. Denote ∆T =
kn+1,u −kn,u. If∆T = 3, γ ∗= 1.2647 and T ∗
a ≥ 1.1801. Therefore,the dynamical system with Ta = 1.3637 can be synchronized inthe sense of Theorem 1 by the designed parameters, and the de-tails can be in Fig. 3.
To verify Theorem 2, let us consider a different switching signalσ2 in Fig. 4. Obviously, nτ = 2 and Tmax = 7. Likewise, Jn = 0.15and µ = 1.05, according to Condition (I) of Theorem 2, it is givenε+ = 0.3380 and ε− = −0.0662. By the switching signal σ2,average dwell time Ta = 2.4391.
According to Condition (II) of Theorem 2, average impulsiveinterval is required by Ta ≤ 3.6922. Due to the availability of β ,we can only choose Tmax = 3. Thus, the dynamical network withswitching signal σ2 can be synchronized by the impulsive controllaw with AII = 2.6315 shown in Fig. 4. Meanwhile, in Fig. 5, theblue and the red impulsive sequences represent that the differencebetween the previous impulsive effect and the current one are 2and 3, respectively.
a
b
c
d
Fig. 2. (a) N = 100, k = 4, p = 0.2; (b) N = 100, k = 4, p = 0.4; (c)N = 100, k = 6, p = 0.2; (d) Chaotic trajectory of each single node corruptedby noisy.

C. Li et al. / Neural Networks 54 (2014) 85–94 93
Fig. 3. State response and ADT = 1.3637 under impulsive control law∆k = 3.
Fig. 4. State response and ADT = 2.4391 under AII control law Ta = 2.6315.
Fig. 5. Average impulsive interval sequences.
It is worthy noting that, Theorem 2 shows a better performancethan Theorem 1 does. In Condition (II) of Theorem 2, if we let aver-age impulsive interval Ta constantly be equal to 3 with the switch-ing signal σ1, the tolerance of this control law to theminima of ADTis given by Ta ≥ 0.9478. Interestingly, it implies that the dynami-cal system (1) with arbitrary switching signal can be synchronizedby this control law since the minimal interval of any discrete sys-tem is 1. Besides, the trade-off between average impulsive intervaland average dwell time can be qualitatively obtained, which showsthat every average impulsive interval corresponds a minima of av-erage dwell time. Please see details in Fig. 6.
5. Conclusion
This paper has analyzed the impulsive synchronization prob-lems of stochastic discrete complex networks with time delaysand switching topologies. In terms of Lyapunov–Razumikhin Tech-nique, two criteria for global exponential synchronizability havebeen established with average time approach, namely averagedwell time, and average impulsive interval. More specifically, theproposed impulsive control law takes the compensation of de-creasing interval into account and formulates the relationship
Fig. 6. Average impulsive interval vs average dwell time.
among impulsive strength, impulsive interval and average dwelltime. In addition, the trade-off between average dwell time andaverage impulsive interval has been discussed in a small-worldnetwork. In further work, the pinning control law associated withaverage dwell time and average impulsive interval for certainswitched complex networks will be considered.

94 C. Li et al. / Neural Networks 54 (2014) 85–94
Acknowledgment
This publication was made possible by NPRP grant # NPRP 4-1162-1-181 from the Qatar National Research Fund (a memberof Qatar Foundation). The statements made herein are solely theresponsibility of the authors.
References
Barabási, A., & Albert, R. (1999). Emergence of scaling in random networks. Science,286, 509–512.
Chen, T., Liu, X., & Lu, W. (2007). Pinning complex networks by a single controller.IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications,54(6), 1317–1326.
Gan, Q. (2012). Exponential synchronization of stochastic Cohen–Grossbergneural networks with mixed time-varying delays and reaction–diffusion viaperiodically intermittent control. Neural Networks, 31, 12–21.
Guan, Z., Wu, Y., & Feng, G. (2012). Consensus analysis based on impulsive systemsinmultiagent networks. IEEE Transactions on Circuits and Systems I: FundamentalTheory and Applications, 59(1), 170–178.
Hespanha, J., & Morse, A. (1999). Stability of switched systems with average dwell-time. In Proc. of the 38th Conf. on Decision and Contr..
Huang, T., Li, C., Yu, W., & Chen, G. (2009). Synchronization of delayed chaoticsystems with parameter mismatches by using intermittent linear statefeedback. Nonlinearity, 22, 569–584.
Hu, C., Yu, J., Jiang, H., & Teng, Z. (2012). Exponential synchronization forreaction–diffusion networks with mixed delays in terms of image-norm viaintermittent driving. Neural Networks, 31, 1–11.
Liang, J.,Wang, Z., & Liu, X. (2009). State estimation for coupled uncertain stochasticnetworks with missing measurements and time-varying delays: the discrete-time case. IEEE Transactions on Neural networks, 20(5), 781–793.
Liang, J., Wang, Z., Liu, Y., & Liu, X. (2008). Global synchronization control of generaldelayed discrete–time networks with stochastic coupling and disturbances.IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 38(4),1073–1083.
Liu, B., Lu,W., & Chen, T. (2011). Global almost sure self-synchronization of Hopfieldneural networkswith randomly switching connections.Neural Networks, 24(3),305–310.
Liu, B., Lu, W., & Chen, T. (2013). A new approach to the stability analysisof continuous-time distributed consensus algorithms. Neural Networks, 46,242–248.
Lü, J., & Chen, G. (2005). A time-varying complex dynamical network model andits controlled synchronization criteria. IEEE Transactions on Automatic Control,50(6), 841–846.
Lu, J., & Ho, D. (2010). Globally exponential synchronization and synchronizabilityfor general dynamical networks. IEEE Transactions on Systems, Man, andCybernetics, Part B: Cybernetics, 40(2), 350–361.
Lu, J., Ho, D., & Cao, J. (2010). A unified synchronization criterion for impulsivedynamical networks. Automatica, 46(7), 1215–1221.
Mahdavi, N., Menhaj, M., Kurths, J., & Lu, J. (2013). Fuzzy complex dynamicalnetworks and its synchronization. IEEE Transactions on Cybernetics, 43(2),648–659.
Olfati-Saber, R., Fax, J., & Murray, R. (2007). Consensus and cooperation innetworked multi-agent systems. Proceedings of the IEEE, 95(1), 215–233.
Shen, B., Wang, Z., & Liu, X. (2011). Bounded H∞ synchronization and stateestimation for discrte time-varying stochastic complex networks over a finitehorizeon. IEEE Transactions on Neural networks, 22(1), 145–157.
Shen, B., Wang, Z., & Liu, X. (2012). Sampled-data synchronization control ofdynamical networks with stochastic sampling. IEEE Transactions on AutomaticControl, 57(10), 2644–2650.
Strogatz, S. (2001). Exploring complex networks. Nature, 410, 268–276.Vu, L., & Morgansen, K. (2010). Stability of time–delay feedback switched linear
systems. IEEE Transactions on Automatic Control, 55(10), 2385–2390.Wang, X., & Chen, G. (2002a). Synchronization in scale-free dynamical networks:
robustness and fragility. IEEE Transactions on Circuits and Systems I: FundamentalTheory and Applications, 49(1), 54–62.
Wang, X., & Chen, G. (2002b). Pinning control of scale-free dynamical networks.Physica A. Statistical Mechanics and its Applications, 310, 521–531.
Wang, Z., Ho, D., Dong, H., & Gao, H. (2010). Robust H-infinity finite-horizoncontrol for a class of stochastic nonlinear time-varying systems subject tosensor and actuator saturations. IEEE Transactions on Automatic Control, 55(7),1716–1722.
Wang, Z., Wang, Y., & Liu, Y. (2010). Global synchronization for discrete-timestochastic complex networks with randomly occurred nonlinearities andmixed time-delays. IEEE Transactions on Neural Networks, 21(1), 11–25.
Watts, D., & Strogatz, S. (1998). Collective dynamics of ‘small-world’ networks.Nature, 393, 440–442.
Wen, S., Bao, G., Zeng, Z., & Huang, T. (2013). Global exponential synchronization ofmemristor-based recurrent neural networks with time-varying delays. NeuralNetworks, 48, 195–203.
Wu, C. (2003). Synchronization in coupled arrays of chaotic oscillators withnonreciprocal coupling. IEEE Transactions on Circuits and Systems I: FundamentalTheory and Applications, 50(2), 294–297.
Yang, X., Cao, J., & Lu, J. (2012). Stochastic synchronization of complex networkswith nonidentical nodes via hybrid adaptive and impulsive Control. IEEETransactions on circuits and systems I: Fundamental Theory and Applications,59(2), 371–384.
Yu, W., Cao, J., Chen, G., Lü, J., Han, J., & Wei, W. (2009). Local synchronization ofa complex network model. IEEE Transactions on Systems, Man, and Cybernetics,Part B: Cybernetics, 39(1), 230–241.
Yu, W., Chen, G., & Lü, J. (2009). On pinning synchronization of complex dynamicalnetworks. Automatica, 45(2), 429–435.
Yu, W., Chen, G., Lü, J., & Kurths, J. (2013). Synchronization via pinning controlon general complex networks. SIAM Journal on Control and Optimization, 51(2),1395–1416.
Zhang, L., & Shi, P. (2009). Stability, l2-gain and asynchronous Hinf control ofdiscrete-time switched systems with average dwell time. IEEE Transactions onAutomatic Control, 54(9), 2192–2199.
Zhang, Y., Sun, T., & Feng, G. (2009). Impulsive control of discrete systemswith timedelay. IEEE Transactions on Automatic Control, 54(4), 830–834.
Zhang, W., Tang, Y., Fang, J., & Wu, X. (2012). Stability of delayed neural networkswith time–varying impulses. Neural Networks, 36, 59–63.
Zhao, J., Hill, D., & Liu, T. (2011). Stability of dynamical networks withnon–identical nodes: a multiple V–Lyapunov function method. Automatica,47(12), 2615–2625.
Copyright © 2022 FDOKUMEN