
Grandeurs non invasives pour le diagnostic des machines ...
188
MINISTERE DE L'ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE UNIVERSITE FERHAT ABBAS - SETIF- UFAS (ALGERIE) MEMOIRE Présenté à la faculté des sciences de l’ingénieur Département d’Electrotechnique Pour l’obtention du Diplôme de Magister En Electrotechnique Option : Machines Electriques et leurs commandes Thème Grandeurs non invasives pour le diagnostic des machines asynchrones Soutenu publiquement le 05 / 05 / 2010 devant le jury composé de : Dr. Mostefai Mohamed Président Prof.Université de Sétif Dr.Hemsas Kamel Eddine Rapporteur M.C. Université de Sétif Dr. Radjeai Hammoud Examinateur M.C. Université de Sétif Dr. Khemliche Mabrouk Examinateur M.C.Université de Sétif Dr. Sait Belkacem Examinateur M.C. Université de Sétif Dr. Hachemi Mabrouk Invité M.C. Université de Sétif Sétif 2010 Par Allal Abderrahim
-
Upload
khangminh22 -
Category
Documents
-
view
4 -
download
0
Transcript of Grandeurs non invasives pour le diagnostic des machines ...

MINISTERE DE L'ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE
UNIVERSITE FERHAT ABBAS - SETIF-
UFAS (ALGERIE)
MEMOIRE
Présenté à la faculté des sciences de l’ingénieur Département d’Electrotechnique
Pour l’obtention du Diplôme de
Magister En Electrotechnique
Option : Machines Electriques et leurs commandes
Thème
Grandeurs non invasives pour le diagnostic des machines asynchrones
Soutenu publiquement le 05 / 05 / 2010 devant le jury composé de :
Dr. Mostefai Mohamed Président Prof.Université de Sétif Dr.Hemsas Kamel Eddine Rapporteur M.C. Université de Sétif Dr. Radjeai Hammoud Examinateur M.C. Université de Sétif Dr. Khemliche Mabrouk Examinateur M.C.Université de Sétif Dr. Sait Belkacem Examinateur M.C. Université de Sétif Dr. Hachemi Mabrouk Invité M.C. Université de Sétif
Sétif 2010
Par Allal Abderrahim

Remerciements.
i
Remerciements
Avant tout et particulièrement, je tiens à vouer mon infinie reconnaissance au
tout puissant ALLAH qui m’a crée du néant, m’a guidé au droit chemin, m’a
donné la santé,… .Et notamment, la patience, le courage, et la volonté pour bien
terminer ce modeste travail. Mes remerciements exclusifs et éternels vont
également au messager MOHAMMED que la prière et la paix d'Allah soient sur lui
ainsi que sur sa famille et ses compagnons. Ce prophète, qui enseigne toutes les
valeurs morales et exhorte à la recherche du savoir, m’a encouragé à bien
parachever mon mémoire.
J'exprime vivement ma gratitude et ma profonde reconnaissance à Monsieur le Dr
HEMSAS Kamel-Eddine, (maître de conférence à l'université de Sétif), mon encadreur,
qui n’a épargné aucun effort, et qui n’a jamais cessé de m’apporter un soutien
scientifique et moral. Ses idées pertinentes et le temps qu’il m a ’accordé ont favorisé
de mettre ce thème sur pied et ce mémoire a pu voir enfin le jour.
Je tiens à exprimer également mes respects et mes remerciements à Monsieur le
Pr : MOSTFAI Mohamed (Professeur à l’Université de Sétif) pour avoir accepté de
présider ce jury, et mes remerciements sont aussi accordés à tous les membres de
ce jury qui sera composé des Drs. RADJEAI Hammoud , KHEMLICHE Mabrouk ,
SAIT Belkacem , HACHEMI Mabrouk (maîtres de conférence à l'université de Sétif)
qui vont nous honorer avec leurs remarques et leurs recommandations objectives
qui seront très utiles par la suite.
Je tiens à remercier très vivement ABDESSEMED Rachid et KADJOUDJ
Mohamed (Professeurs à l’université de Batna) pour leurs conseils très bénéfiques et
fructueux qui m’ont guidé pour bien préparer et améliorer le contenu de ce travail.
Je remercie très sincèrement Monsieur : ZOUZOU Salah-Eddine (Professeur à
l’université de Biskra), qui m’a ouvert son laboratoire et m’a offert des
documentations précieuses et des résultats expérimentaux relatifs aux défauts

Remerciements.
ii
rotoriques, et mes remerciements aussi, vont également à SAHRAOUI Mohamed,
(maître de conférence aussi à l'université de Biskra), à ses explications et
orientations qui m’ont facilité une partie très importante de ce travail.
Finalement, je tiens à remercier généreusement l’université de Sétif représentée
par le département d’électrotechnique : tous les enseignants, le personnel
administratif, agents ainsi que tous les ouvriers, de m’avoir offert une chance pour
réaliser mon souhait de poursuivre mes études supérieures.

Dédicaces.
iii
Dédicaces Je dédie ce mémoire à toutes les personnes qui m’ont aidé et particulièrement à : Mes chers parents et à toute ma grande famille
Ma petite famille
Ma chère fille : NOUR ESSOUDJOUD
Tous les bienfaiteurs

Acronymes.
iv
Acronymes
Abréviation Dénomination ASS EPVA ETA FFT IEEE IPA MAS Matlab MCSA ME MI MSA PIPA TIPA SD
Analyse spectrale des signaux Extended Park’s Vector Approach Electromagnetic Torque Approach Fast Fourier transformation Institution of electrical & electronic engineers Instantaneous Power Approach Machine asynchrone Matrix Laboratory Motor Current Signature Analysis Machines électriques Moteur à induction Mechanical Speed Approach Partial Instantaneous Power Approach Total Instantaneous Power Approach Science Direct

Liste des symboles.
v
Liste des symboles
Symboles
Dénomination
fs
p
R
l e
Nr
Ns
rs
Lsf
Rb
Re
Lb
Le
J
K0
Ce Cr
Bs
Brd
Bri
Bk ibk
Fréquence d’alimentation de la machine.
Nombre de pairs de pôles.
Rayon de la machine.
Longueur de la machine.
Epaisseur d’entrefer.
Nombre de barres rotoriques.
Nombre de spire par phase statorique.
Résistance d'une phase statorique.
Inductance de fuite statorique.
Résistance d'une barre rotorique.
Résistance d'un anneau de court circuit.
Inductance de fuite d'une barre rotorique.
Inductance de fuite d'anneau de court circuit.
Moment d'inertie.
Coefficient de frottement.
Couple électromagnétique.
Couple résistant.
Induction magnétique de l'entrefer créée par le courant statorique.
Induction magnétique créée dans l'entrefer par le courant du
système direct équivalent au rotor.
Induction magnétique créée dans l'entrefer par le courant du
système inverse équivalent au rotor.
induction magnétique dans l'entrefer produit par une maille
rotorique k
Courant dans la barre k.

Liste des symboles.
vi
irk ie
iek
isa, isb, isc
vsa, vsb, vsc
ids , iqs
if
il
ir
βl
βr
φBs
φBrd
φBri
Фs
Фrk
saT
ds, qs
Fm
[R], [L]
[Vs]
[Vr]
Courant dans la maille k. Courant dans l'anneau de court circuit .
Courant dans une portion d'anneau.
Courants statoriques.
Tensions statoriques.
Composantes biphasées du courant statorique.
Valeur maximale de la composante fondamentale du courant
d'alimentation.
Valeur maximale de la composant inférieure (1-2g)fs du courant
d'alimentation .
Valeur maximale de la composant supérieure (1+2g)fs du courant
d'alimentation .
L'angle de phase de la composante fondamentale du courant
d'alimentation.
L'angle de phase de la composante (1-2g)fs .
L'angle de phase de la composante (1+2g)fs .
Phase du champ tournant statorique.
Phase du champ tournant rotorique direct .
Phase du champ tournant rotorique inverse.
Flux magnétique par pôle créé par le courant statorique.
Flux principal créé par une maille rotorique.
Flux magnétique total créé par isa et traversant l'enroulement de la
phase "a". Composantes biphasées du flux statorique.
La force magnétomotrice de la phase "a".
Matrices globales des résistances et des inductances avant la
transformation du Park.
Matrice des tensions statoriques.
Matrice des tensions rotoriques.

Liste des symboles.
vii
[Is]
[Ir]
scontactR
sdR
scontactV
scontacti
sdi
sdV
s
d
)(Zs
g
s
r
P
eg 0
g
Fe
f
s
µ0
r
s
r
a
Psat(t)
Psap(t)
Matrice des courants statoriques.
Matrice des courants rotoriques.
Résistance de la branche de court-circuit.
Résistance effective de la branche court-circuitée.
Tension de la branche de court-circuit.
Courant dans la branche de court-circuit
Courant dans la branche court-circuitée.
Tension de la branche court-circuitée.
ouverture angulaire du rotor.
degré d’excentricité statique.
degré d’excentricité dynamique
degré d’excentricité mixte.
excentricité statique axiale.
Glissement .
Pulsation statorique.
Position mécanique du rotor.
Permeance de l’entrefer.
Epaisseur de l’entrefer de la machine.
Epaisseur de l’entrefer ou fonction d’entrefer.
Fréquence d’échantillonnage.
Résolution fréquentielle.
Position des grandeurs statoriques .
Perméabilité magnétique du vide (de l'air).
Position du rotor.
Pulsation statorique.
Vitesse électrique de rotation.
Angle électrique entre deux barres rotoriques.
Puissance instantanée totale d'une phase statorique.
Puissance instantanée partielle d'une phase statorique.

Liste des symboles.
viii
m
LLV
LI
f
Indice de modulation.
Valeur RMS de la tension entre phase .
Courant de ligne.
Pulsation d'oscillation (pulsation de défaut) exprimée en radians.

Table des figures.
ix
Table des figures
1.1 Eléments de constitution d'une MAS à cage d'écureuil 6
1.2 Enroulements statoriques d’une phase d’une machine à 4 pôles 7
1.3 Anneaux de court-circuit et quelques barres pour un rotor à cage
d’écureuil
8
1.4 Rotor à cage d’écureuil 8
1.5 Roulement à bille 9
1.6 Causes internes de défauts de la machine asynchrone triphasée à
cage
10
1.7 Causes externes de défauts de la machine asynchrone 10
1.8 Répartition des pannes des machines de faibles et moyennes
puissances
10
1.9 Répartition des pannes des machines de fortes puissances 11
1.10 Type de défauts des MAS 12
1.11 Mesures vibratoire de la MAS 16
1.12 Mesure du flux axial 16
1.13 Mesure du flux radial 17
1.14 Dimension du roulement à bille 23
2.1 Structure du rotor 28
2.2 Structure électrique du rotor 29
2.3 Schéma électrique équivalent d'une maille rotorique 31
2.4 Schéma électrique équivalent simplifié d'une maille rotorique 32
2.5 Transformation de PARK (a, b, c) à (d, q) 35
2.6 Induction magnétique produit par une maille rotorique 44
2.7 Position de la maille (k) par rapport à la bobine statorique de la
phase "a"
45
2.8 Description de l’excentricité statique et dynamique 48
2.9 Description schématique de l’excentricité statique 49
2.10 Représentation de l’excentricité axiale 51
2.11 Représentation élémentaire d’un court-circuit entre spires 52
2.13 Schéma électrique équivalent simplifié d'une maille rotorique M-sain 53
2.14 Schéma électrique équivalent simplifié d'une maille rotorique
(rupture d’une barre rotorique)
55

Table des figures.
x
3.1 Organigramme général de la simulation de la MAS 59
3.2 Evolution des grandeurs électromécaniques pour un moteur à l'état
sain
60
3.3 Evolution des grandeurs électriques pour un moteur à l'état sain 61
3.4 Courant rotorique dans la barre 1 63
3.5 Influence de la rupture de la barre 1 sur les barres adjacentes 64
3.6 Influence de la rupture de la barre 1 sur les barres adjacente
(2 et 16) Déclenchement direct du défaut
65
3.7 Valeur efficace des courants dans les barres rotoriques, pour
un moteur à l'état sain
66
3.8 Valeur efficace des courants dans les barres rotoriques, pour un
moteur avec des barres cassées
67
3.9.a Ondulation de la vitesse de rotation lors de la rupture d'une barre
puis de deux barres
68
3.9.b Ondulation de la vitesse de rotation lors de la rupture d'une barre
puis de deux barres (Agrandissement)
69
3.10.a Ondulation du couple électromagnétique pendant la rupture
d'une barre puis de deux barres
70
3.10.b Agrandissement de l'ondulation du couple de deux barres
(Agrandissement)
70
3.11.a Courant statorique pendant la rupture d'une barre puis de deux
barres
71
3.11.b Modulation du courant statorique pendant la rupture d'une barre puis 71
3.12 Vitesse pendant un démarrage en charge 72
3.13 Comparaison entre l'ondulation du couple à vide et en charge 73
3.14.a Courant statorique du moteur en charge, avec deux barres cassées 73
3.14.b Courant statorique du moteur à vide avec deux barres cassées 74
3.15 Caractéristique mécanique du moteur 74
3.16 Valeurs efficaces des courants dans les barres rotoriques,pour un
moteur avec deux barres cassées(8 et 9)
75
3.17 Valeurs efficaces des courants dans les barres rotoriques, pour un
moteur avec quatre barres cassées (1, 5, 9 et 13) espacées de /2
76
3.18 Couple électromagnétique pour un moteur en charge avec quatre
barres cassées (1, 5, 9 et 13)
76
3.19 Courant de phase statorique 77

Table des figures.
xi
3.20 Valeurs efficaces des courants dans les barres rotoriques cassure
d’une portion d’anneau de court- circuit
77
3.21 Valeurs efficaces des courants dans les barres rotoriques cassure
de deux portions d’anneaux de court- circuit
78
3.22 Caractéristique mécanique 78
3.23 Schéma de fonctionnement pour un rotor sain 79
3.24 Schéma de fonctionnement pour un rotor défaillant 80
4.1 Principe de la surveillance par analyse spectrale 85
4.2 Courant statorique en régime permanent pour un moteur sain 88
4.3 Courant statorique en régime permanent pour un moteur avec
une barre cassée
88
4.4 Spectre linéaire du courant statorique avec une résolution de 0.1Hz
et pour une barre cassée
89
4.5 Spectre logarithmique du courant statorique pour une barre cassée,
et avec une résolution de 0.1Hz
90
4.6 Spectre logarithmique du courant statorique obtenu pour 1 barre
cassée avec une résolution de 0.1Hz (Zoom autour du fondamental)
90
4.7 Spectre du courant statorique pour un moteur sain en charge 91
4.8 Spectre du courant statorique pour un moteur en charge avec
une barre cassée
92
4.9.a Spectre du courant statorique pour un moteur en charge avec
deux barres adjacentes cassées
92
4.9.b Spectre du courant statorique pour un moteur en charge avec
deux barres adjacentes cassées (Zoom autour du fondamental)
93
4.10 Spectre du courant statorique pour un moteur en charge avec
trois barres adjacentes cassées
93
4.11 Spectre du courant statorique pour quatre barres cassées.
La quatrième barre se trouve à p/2 de la troisième
94
4.12 Spectre du courant statorique pour un moteur en charge avec
deux barres cassées espacées entre eux de /2 (les barres 1 et 5).
94
4.13
Spectre du courant statorique pour un moteur en charge avec
deux barres cassées espacées entre eux de (les barres 1 et 9).
95
4.14 Spectre du courant statorique pour un moteur en charge avec
trois barres cassées espacées entre eux de /2 (les barres 1, 5 et 9)
95

Table des figures.
xii
4.15 Spectre du courant statorique pour un moteur en charge avec
quatre barres cassées espacées entre eux de /2
(les barres 1, 5, 9 et 13).
96
4.16 Variation de l'amplitude de l'harmonique (1-2g) fs en fonction du
nombre de barres cassées
97
4.17.a Spectre du courant statorique lors des défauts dans les portions
d'annaux de court circuit. (Une portion cassée)
98
4.17.b Spectre du courant statorique lors des défauts dans les portions
d'annaux de court circuit. (Deux portions cassées)
98
4.18 Spectre du courant statorique pour un moteur avec
deux barres cassées
99
4.19 Spectre du courant statorique pour un moteur avec une barre
cassée pour différentes valeurs de glissement
100
4.20 Spectre du courant statorique pour un moteur avec deux barres
cassées et différentes valeurs de glissement
101
4.21 Banc d’essai des différentes étapes de détection des défauts 102
4.22 Organigramme des différentes étapes de détection des défauts 103
5.1 Spectre du couple électromagnétique (g=3.5 %) 106
5.2 Spectre de la vitesse (g=3.5 %) 107
5.3 Spectre de la composante oscillatoire (ac) pour un moteur
en charge nominale. Pour différentes cassures de barres
112
113
5.4 Variation de l'amplitude de l'harmonique 2gfs en fonction
de nombre de barres cassées pour la EPVA
114
5.5
Spectre de la puissance instantanée partielle pour :
a.0 : Moteur sain. a.1 : Moteur avec une barre cassée.a.2 : Moteur
avec deux barres cassées. a.3 : Moteur trois barres cassées
117
118
5.6 Spectre de la puissance instantanée totale pour :
b.0 Moteur sain. b.1 Moteur avec une barre cassée.
b.2 Moteur avec deux barres cassées.b.3 Moteur avec trois barres
cassées
119
120
5.7 Variation de l'amplitude de l'harmonique (1-g) 2fs en fonction
de nombre de barres cassées pour la PIPA
121
5.8 Variation de l'amplitude des harmoniques (1-2g)fs , 2gfs et (1-g)2fs
en fonction du nombre de barres rompues pour un moteur en pleine
charge
123

Table des figures.
xiii
6.1 Caractéristique mécanique 126
6.2 Spectre du courant de la première phase statorique 126
6.3 Spectre du module du vecteur de Park étendu 127
6.4 Spectre de la puissance instantanée partielle 127
6.5 Spectre de la puissance instantanée totale 127
6.6 Spectre du courant statorique avec un défaut combiné (court-circuit
entre les spires statoriques+ cassure d’une barre)
129
6.7 Spectre de la puissance instantanée partielle avec un défaut
combiné (court-circuit entre les spires statoriques+ cassure d’une
barre)
130
6.8 Spectres de la puissance instantanée partielle d’un seul défaut et
d’un défaut combiné
131
6.9 Spectre du courant statorique avec cassure d’une barre et un défaut
d’excentricité %50s et %50d
132
6.10 Contour de Park avec cassure d’une barre et un défaut
d’excentricité %50s et %50d
133
6.11 Contour de Park avec cassure d’une barre et d’un anneau de
court-circuit avec un défaut d’excentricité %50s et %50d
133
6.12 Contour de Park avec cassure de deux barres et un défaut
d’excentricité %50s et %50d
134
6.13 Contour de Park avec cassure de trois barres et un défaut
d’excentricité %50s et %50d
134
7.1 Vitesse de rotation. a)- Le présent travail
b)- La publication [MEN 04]
137
7.2 Couple électromagnétique
a)- Le présent travail
b)- La publication [MEN 04]
138
7.3
Courant d'une phase statorique
a)- Le présent travail
b)- La publication [MEN 04]
139
7.4 Courant dans la barre rotorique 2 (BLEU)
a)- Le présent travail
b)- La publication [MEN 04]
140

Table des figures.
xiv
7.5 Spectre du courant statorique
a)- Le présent travail
b)- La publication [MEN 04]
141
7.6 Banc d’essai [RAZ 03] 142
7.7 Spectres du courant statorique du moteur sain (g=0.08)
a)- la simulation.
b)- l'expérimentale.
143
7.8.a Spectres du courant statorique pour un moteur avec une barre
cassée. (g=0.08) (l'expérimentale.)
144
7.9.a Spectre de la puissance instantanée partielle absorbée par un
moteur avec une barre cassée (g=0.08) (l'expérimentale.)
144
7.8.b Spectres du courant statorique pour un moteur avec une barre
cassée. (g=0.08) (ZOOM)
a)- la simulation.
b)- l'expérimentale.
145
7.9.b Spectre de la puissance instantanée partielle absorbée par un
moteuravec une barre cassée (g=0.08) (ZOOM)
a)- la simulation.
b)- l'expérimentale.
146
7.10 Spectre du module du vecteur de Park pour un moteur avec une
barre cassée (g=0.08) (ZOOM)
a)- la simulation.
b)- l'expérimentale.
147
7.11 Spectres de la puissance instantanée partielle moteur un défaut au
rotor a)- Le présent travail avec fs=50 Hz
b)- La publication [DUL 09] avec fs=60 ici (s=g)
149
7.12 Spectres du courant statorique du moteur avec un court-circuit
au stator (100 % de la charge)
a)- Le présent travail
b)- Le mémoire [GHO 05]
150
7.13 Contour de Park (moteur avec défaut d’excentricité)
a)- Le présent travail
b)- La publication [SHA 06]
151

Liste des tableaux.
xv
Liste des tableaux
47 Tableau récapitulatif de toutes les inductances de la machine
asynchrone à cage 2.1
58LES PARAMETRES DU MOTEUR UTILISE EN SIMULATION 3.1
96 Amplitude des composantes (1±2g)fs et (1±4g)fs (en dB) pour
différents nombre de barres cassée 4.1
99 Amplitude des composantes (1±2g)fs et (1±4g)fs (en dB) pour
différents nombre de portions d'anneaux de court-circuit cassées 4.2
122 Comparaison entre les méthodes de détection des défauts
rotoriques. 5.1
123Résultat du classement final5.2

Table des matières.
xvi
Table des matières
Introduction générale 1
1 Surveillance de la MAS à cage : Etat de l’art 5
1.1 INTRODUCTION 5
1.2 CONSTITUTION DE LA MAS 5
1.2.1 Le stator 6
1.2.2 Le rotor 7
1.2.3 Paliers 8
1.3 TYPES DE DEFAUTS DES MAS 9
1.4 TYPES DE DIAGNOSTIC 12
1.4.1 Diagnostic inductif 13
1.4.2 Diagnostic déductif 13
1.4.3 Diagnostic invasif 13
1.4.4 Diagnostic non invasif 14
1.5 METHODES DE DIAGNOSTIC DES DEFAUTS BASEES SUR L'ASS 15
1.5.1 Diagnostic par mesure des vibrations mécaniques 15
1.5.2 Diagnostic par mesure du Flux magnétique axial de fuite 16
1.5.3 Diagnostic par mesure du Flux magnétique radial de fuite 17
1.5.4 Diagnostic par l'analyse des tensions statoriques induites 17
1.5.5 Diagnostic par mesure du couple électromagnétique et de
la vitesse rotorique 17
1.5.6 Analyse fréquentielle de la tension de neutre 18
1.5.7 Diagnostic par mesure de la puissance instantanée 18
1.5.8 Diagnostic par mesure du courant statorique 18
1.5.9 Diagnostic des défauts par analyse du vecteur de Park 19
1.5.10 Diagnostic des défauts par l’estimation paramétrique 19
1.6 SIGNATURES SPECTRALES DES DEFAUTS DANS LE SPECTRE
DU COURANT STATORIQUE 20

Table des matières.
xvii
1.6.1 Défauts statoriques 20
1.6.2 Défauts rotoriques 21
1.6.2.1 Cassure de barres rotoriques 21
1.6.2.2 Excentricité d'entrefer 21
1.6.3 Défauts au niveau des roulements 22
1.7 METHODES DE MODELISATION DU MOTEUR ASYNCHRONE 24
1.7.1 Approche Numérique 24
1.7.1.1 La méthode des réseaux de perméances 24
1.7.1.2 La méthode des éléments finis 25
1.7.2 Approche analytique 25
1.8 CONCLUSION 26
2 Modélisation de la machine asynchrone 27
2.1 INTRODUCTION 27
2.2 LE MODELE MULTI ENROULEMENT DE LA MAS 28
2.2.1 Hypothèses simplificatrices 28
2.2.2 Equations différentielles associées 29
2.2.2.1 Equations différentielles du stator 29
2.2.2.2 Equations différentielles du rotor 31
2.2.2.3 Equation globale des tensions 33
2.2.3 Transformation de PARK 34
2.2.4 Expression du couple électromagnétique 39
2.2.5 Système d’équation global 40
2.2.6 Calcul des inductances 42
2.2.6.1 Inductances statoriques 42
2.2.6.2 Inductances rotoriques 43
2.2.6.3 Inductances mutuelles entre enroulements
statoriques et rotoriques 45
2.2.6.4 Calcul des inductances en cas d’excentricité 47
2.2.6.5 Calcul des inductances en cas de court-circuit
entre spires statorique 52
2.3 PRISE EN COMPTE DES DEFAUT ROTORIQUES DANS LE MODELE 54
2.4 CONCLUSION 56

Table des matières.
xviii
3 Simulation de la machine asynchrone 57
3.1 INTRODUCTION 57
3.2 PROGRAMME DE SIMULATION DE LA MAS
(modèle multi enroulement) 58
3.3 SIMULATION DU DEMARRAGE A VIDE ET VARIATION
DU COUPLE RESISTANT 59
3.4 SIMULATION DU RUPTURE DE BARRES AU ROTOR 62
3.5 EFFET DE GLISSEMENT 72
3.6 EFFET DE POSITION DE BARRES CASSEES 75
3.7 CASSURE DE PORTIONS D’ANNEAUX DE COURT-CIRCUIT 77
3.8 INTRERPRETATION ET ANALYSE DU DEFAUT 79
3.8.1 Expression des champs magnétiques statoriques
et rotoriques 79
3.8.2 Le couple électromagnétique 80
3.8.3 La vitesse de rotation 81
3.8.4 La force électromotrice 81
3.9 CONCLUSION 83
4 Détection des défauts rotoriques par MCSA 84
4.1 INTRODUCTION 84
4.2 TECHNIQUES D’ANALYSES DES DEFAUTS 84
4.2.1 Analyse spectrale 85
4.2.1.1 Méthodes non-paramétriques 86
4.2.1.2 Méthodes paramétriques 86
4.2.2 Analyse cepstrale 86
4.2.3 Méthodes de détections de fréquence connues 87
4.2.4 Méthodes temps-fréquence et temps–échelle 87
4.2.4.1 Temps-fréquence 87
4.2.4.2 Temps- échelle 87
4.2.5 Application de l'analyse spectrale 87
4.3 MCSA PAR LA FFT 88

Table des matières.
xix
4.4 EFFET DU NOMBRE DE BARRES CASSEES SUR
LES HARMONIQUES (1±2kg) fs 91
4.5 DEFAUT DES RUPTURES DES PORTIONS D'ANNEAUX
DE COURT CIRCUIT 97
4.6 L'EFFET DE LA CHARGE SUR LES RAIES (1±2kg)fs
(VARIATION DU GLISSEMENT) 99
4.7 BANC D’ESSAI POUR LA DETECTION DES DEFAUTS ROTORIQUES 102
4.8 CONCLUSION 104
5 Autres approches dédiées à la détection des défauts rotoriques 105
5.1 INTRODUCTION 105
5.2 UTILISATION DU COUPLE ET DE LA VITESSE 106
5.3 L'APPROCHE DE VECTEUR DE PARK ETENDU (EPVA) 108
5.4 UTILISATION DE LA (TIPA) ET DE LA (PIPA) 114
5.5 COMPARAISON ENTRE LES DIFFERENTES GRANDEURS
NON INVASIVES DE DETECTION DES DEFAUTS ROTORIQUES 121
5.6 CONCLUSION 124
6 Simulation des défauts statoriques et des défauts combinés 125
6.1 INTRODUCTION 125
6.1.1 Court-circuit entre spires statoriques 125
6.1.2 Défauts combinés 125
6.2 DEFAUT STATORIQUE EN CAS DE COURT-CIRCUIT
ENTRE SPIRES 126
6.3 FONCTIONNEMENT AVEC DEFAUTS COMBINES 129
6.4 CONCLUSION 135
7 Validations, vérifications et comparaisons 136
7.1 INTRODUCTION 136
7.2 VALIDATIONS PAR LA PUBLICATION [MEN 04] 136
7.3 COMPARAISONS ET VERIFICATIONS AVEC ET
AU MOYEN DES RESULTATS PRATIQUES 142

Table des matières.
xx
7.3.1 Moteur sain 142 7.3.2 Moteur avec un défaut 144
7.4 COMPARAISONS ET VERIFICATIONS AVEC ET AU MOYEN DES PUPLICATIONS ET DES ARTICLES INTERNATIONAUX CONNUS 149 7.5 CONCLUSION 152
8 Conclusions générales et perspectives 153
8.1 Conclusions générales 153
8.2 Perspectives 155
Annexes
Bibliographie 158-164

Table des matières.
xxi

Introduction générale.
1
Introduction générale
Le diagnostic des machines électriques s'est fortement développé dans le monde
industriel car la volonté d'obtenir une chaîne de production de plus en plus sûre
devient, pour certaines applications, indispensable. Les chaînes de production
doivent être dotées de systèmes de protection fiables car une quelconque
défaillance, même la plus anodine, peut mener à un dommage matériel ou corporel
inévitable. C'est pour éviter ces problèmes que la recherche, sur le plan mondial,
s'emploie depuis plusieurs dizaines d'années à élaborer des méthodes de diagnostic.
Celles-ci ont pour premier objectif de prévenir les utilisateurs d'un risque possible
pouvant apparaître en un point particulier du système [DID 04] [ZEB 05].
Le travail présenté dans ce mémoire s'inscrit dans le cadre du diagnostic des
défauts dans les machines asynchrones. Nous avons focalisé l’étude sur ce type de
machines en raison de: sa simplicité de construction, son faible coût d'achat et de
fabrication, sa robustesse mécanique ou encore sa quasi-absence d'entretien et son
fonctionnement à vitesse variable du fait que l’avancée de l’électronique de
puissance qui a fait que nous le trouvons maintenant dans tous les domaines
industriels.
L’outil de la surveillance a pour objectif le diagnostic du défaut avant qu'il ne
conduise à une défaillance totale dans la chaîne de production industrielle. Les deux
rôles du diagnostic sont : la détection et l'identification des défauts. La première se
consacre à la signalisation de l'existence du défaut, alors que la deuxième a pour
but de trouver le type de défaut. L’arrêt ou le fonctionnement anormal de l’outil de
production, et le non-respect des délais qui s’en suivent, engendrent en effet des
surcoûts que les entreprises ne sont plus en état de supporter. Grâce à l’évolution
des technologies de diagnostic et de contrôle, en particulier les instruments de
traitement numérique des signaux issus des capteurs. Cette nouvelle maintenance
se développe aujourd’hui. On est ainsi passé d’une « maintenance préventive », qui

Introduction générale.
2
se traduit par la définition de plans d’actions et d’interventions sur l’équipement, par
le remplacement de certaines pièces en voie de dégradation. Elles permettaient
effectivement d’anticiper les pannes, mais au prix d’un alourdissement important des
coûts de maintenance.
Cette technologie nous a permis d’utiliser des techniques de prévision des pannes
comme, par exemple, l’analyse des vibrations, des courants moteurs et des huiles.
Ce stade de la maintenance, dite « prédictive », permet de remplacer des pièces
juste avant leur rupture. Il s'ensuit que la maintenance ne peut plus se limiter à être
corrective ou préventive, mais se doit d’être « proactive » et « prédictive ». Pour les
électrotechniciens, la surveillance des courants et des vibrations des moteurs est un
art en soi, qui permet de diagnostiquer les défauts potentiels, d’en évaluer la gravité
et de prendre les mesures correctrices nécessaires. L'analyse fonctionnelle avancée
offerte actuellement dans le cadre du traitement de signal et notamment la FFT (fast
Fourier transformation), est amplement exploitée au service de l’analyse des
courants et des vibrations [GHO 05].
Dans ce mémoire, notre objectif est de discerner des différentes approches pour
prédire les défauts dans les MAS. Nous nous sommes penchés sur l'étude des
grandeurs non invasives puisqu’ elles nous permettent facilement la détection
précoce de toutes les anomalies qui peuvent affecter nos MAS. Ce diagnostic qui
nécessite l’analyse juste en régime dynamique de la MAS à cage exige, en
particulier, des informations électriques précises pour connaître l’évolution de
grandeurs telles que les courants rotoriques. Cependant, une caractéristique du
moteur asynchrone à cage est de ne fournir aucun renseignement direct sur les
courants développés au rotor vu l’inaccessibilité à la cage. Plus que tout autre
moteur, il nécessite, donc, l’élaboration d’estimateurs qui rendent compte de l’état
magnétique et électrique du rotor.
Et afin de répondre à cette problématique, nous pouvons envisager l’utilisation de
la méthode de résolution de l’ensemble des équations des circuits d’alimentation de
la machine, avec la cage sous forme d’enroulements particuliers. Le but de notre
travail est de déployer un modèle de ce type, connu sous le nom de multi
enroulement.

Introduction générale.
3
Le modèle multi enroulement représente la machine par des enroulements au
stator et au rotor. Le nombre d’enroulements utilisé pour représenter le rotor est égal
au nombre de barres de la cage. Au niveau du stator, il est représenté par trois
enroulements. Le développement de ce modèle peut donner une vision plus claire sur
les grandeurs de la cage du moteur d’une façon générale et en particulier sur
l’évolution des courants rotoriques en régime dynamique [BOU 06].
Ce mémoire est subdivisé en huit chapitres.
Dans le premier chapitre, nous présentons, d’abord, les éléments de constitution
de ce type de machine en précisant les principaux défauts de la machine
asynchrone, leurs origines ainsi que leurs signatures spectrales qui seront exposés
par la suite. Les différentes techniques de diagnostic sont aussi présentées. Le tout
constitue un aperçu sur l’état de l’art et la problématique du sujet.
Le deuxième chapitre est consacré à la présentation du modèle de simulation.
Nous utilisons un modèle basé sur le couplage magnétique des circuits électriques
pour analyser le comportement de la machine en l'absence et en présence de
défaillances. Ce type d'approche offre un modèle de machine flexible, un temps de
calcul raisonnable et ne nécessite aucun recours au calcul de champ. Les
inductances se calculent avec précision dans le but d'obtenir des résultats encore
plus proche de la réalité. Nous analysons ensuite le modèle de simulation affecté par
différents défauts.
Dans le troisième chapitre, nous présentons, dans un premier temps, les résultats
de simulation du moteur asynchrone, dans les différentes conditions de
fonctionnement, pour des différents défauts, ainsi que leurs conséquences sur les
grandeurs électromécaniques de la machine. Dans un second temps, et afin
d'interpréter les phénomènes observés, tels que les oscillations du couple, de la
vitesse et la modulation du courant statorique, nous montrons une étude analytique
du défaut rotorique.
Dans le quatrième chapitre, nous présentons les différents types de l’analyse
spectrale. Puis nous prenons comme exemple l'analyse spectrale du courant
statorique (FFT).

Introduction générale.
4
Pour mettre en évidence l’existence des harmoniques caractéristiques du défaut
de barres ou d'anneaux de court-circuit. Nous mettons aussi l’accent sur le nombre
de barres cassées ou de portions de court-circuit rompues, d’un coté, et leurs
positions mutuelles ou la valeur du glissement, d’un autre coté, sur les fréquences
caractéristiques du défaut.
Dans le cinquième chapitre, nous abordons d'autres approches destinées à la
détection des défauts de barres rotoriques .Ces approches sont basées sur la
détection des raies liées au défaut issu des harmoniques engendrées par la vitesse,
le couple, le module du vecteur de Park étendu et la puissance instantanée. A la fin,
on a fait une récapitulation : nous présentons par la suite une comparaison entre
toutes ces techniques d’après leur sensibilité et leur efficacité.
Dans le sixième chapitre, nous le consacrons à révéler les signatures des :
défauts statoriques, défauts d’excentricité et défauts combinés.
Nous achevons notre travail par un septième chapitre dans lequel nous
comparons nos simulations et nos constatations avec des résultats expérimentaux et
les vérifions au moyen des articles internationaux connus.
Enfin, on va parachever ce mémoire par un huitième chapitre, consacré aux
conclusions générales qui mettent l’accent sur les points d’appuis de ce mémoire de
même que nous mettons en valeur les perspectives pour nos prochains travaux.

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
5
Chapitre 1
Surveillance de la MAS à cage : Etat de l’art
1.1 INTRODUCTION
La machine asynchrone (MAS), à cause de sa robustesse, est très répandue dans
le milieu industriel. Son utilisation classique est avant tout l’entraînement des
systèmes à vitesse fixe ou constante. Aujourd’hui, avec le contrôle électronique du
moteur lui ouvre un large champ d’utilisation. La MAS n’est plus limitée à des
applications à vitesse constante.
Malgré ces qualités, il est bien possible que ce type de machines présente des
défaillances causées par un vieillissement prématuré dû à des contraintes de
différentes origines. Si celles-ci ne sont pas décelées en amont de la panne totale, il
sera difficile de prévoir les conséquences sur le rendement de l’installation. C’est
pour cette raison que les méthodes et les stratégies de diagnostic et de détection
des défauts ont connu un développement spectaculaire au même titre que l’industrie
exploitante elle-même. Il n’est donc pas question de s’affranchir à une réflexion
permettant d’agir de telle sorte que la disponibilité des installations opérantes
demeure maximale, car les arrêts non programmés peuvent étendre les temps de
réparation et d’intervention; par conséquent, une augmentation des pertes
financières serait inévitable.
Dans ce premier chapitre, on va essayer de mettre l’accent sur les différentes
questions qui se posent vis-à-vis les défauts de la MAS, les différents types du
diagnostic qui constituent en globalité l’importante problématique du sujet.
1.2 CONSTITUTION DE LA MAS
La MAS, souvent appelée MI comprend un stator et un rotor, constitué de tôles
d'acier au silicium et comportant des encoches dans lesquelles on place les

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
6
enroulements. Le stator est fixe ; on y trouve les enroulements reliés à la source. Le
rotor est monté sur un axe de rotation. Selon que les enroulements du rotor sont
accessibles de l'extérieur ou sont fermés sur eux mêmes en permanence, on définit
deux types de rotor : bobiné ou à cage d'écureuil [ZEB 05]:
Fig . 1.1 : Eléments de constitution d'une MAS à cage d'écureuil
1.2.1 Le stator
Le circuit magnétique statorique est un empilement de tôles fines d'acier
découpées, faisant apparaître les différentes encoches statoriques. On utilise des
tôles minces dont l'épaisseur varie entre 0:35 et 0:50 mm pour minimiser les pertes
dans le circuit magnétique. De plus, afin de limiter l'effet des courants de Foucault,
on isole habituellement les tôles d'une mince couche de vernis ou de silicate de
Tôles +cage rotorique Barre inclinée Boite à Bornes
Tôles statoriques
Tête de bobine statorique
Roulement à billes
Arbre
Anneaux de court- circuit
Carter de fonte avec ailettes de refroidissement
Ventilateur de refroidissement

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
7
soude. Le bobinage statorique est constitué de deux parties (Fig. 1.1): les
conducteurs d'encoches et les têtes de bobines. Les conducteurs d'encoches
permettent de créer dans l'entrefer le champ magnétique à l'origine de la conversion
électromagnétique. Les têtes de bobines permettent, quant à elles, la fermeture des
courants en organisant leur circulation, l'objectif étant d'obtenir une répartition des
forces magnétomotrices et du flux la plus sinusoïdale possible dans l'entrefer, pour
limiter les oscillations du couple électromagnétique [SMA 02].
Fig .1.2 : Enroulements statoriques d’une phase d’une machine à 4 pôles [SMA 02].
Physiquement, on peut effectuer les bobinages statoriques de plusieurs façons, mais
on utilise habituellement trois types d'enroulements : l'enroulement imbriqué,
l'enroulement concentrique et l'enroulement ondulé. Chaque type présente des
avantages dans certaines applications. Pour les petits moteurs, et particulièrement
lorsque la réalisation du bobinage est mécanisée, on utilise généralement
l'enroulement concentrique.
1.2.2 Le rotor
Le rotor est constitué comme le stator de tôles empilées et habituellement du
même matériau. Dans les petits moteurs, les tôles sont découpées dans une seule
pièce et assemblées sur un arbre. Dans de plus gros moteurs, chaque lamination est
constituée de plusieurs sections montées sur un moyeu. Dans le cas des rotors à
cage d'écureuil, les encoches peuvent être semi-ouvertes ou fermées. Les
enroulements sont constitués de barres court-circuitées par un anneau terminal

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
8
placé à chaque extrémité du rotor. Les conducteurs sont généralement réalisés par
Coulage d'un alliage d'aluminium, ou par des barres massives de cuivre ou, à
l'occasion, en laiton préformées et frettées dans les tôles du rotor. Il n'y a
généralement pas, ou très peu, d'isolation entre les barres rotoriques et les tôles
magnétiques. Leur résistance est suffisamment faible pour que les courants ne
circulent pas dans les tôles, sauf lorsqu'il y a une rupture de barre [SMA 02].
Fig .1.4 : Rotor à cage d’écureuil [SMA 02].
1.2.3 Paliers
Les paliers, qui permettent de supporter et de mettre en rotation l'arbre
rotorique, sont constitués de flasques et de roulements à billes insérés à chaud sur
Fig .1.3 : Anneaux de court-circuit et quelques barres pour un rotor à cage d’écureuil

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
9
l'arbre. Les flasques, moulés en fonte, sont fixés sur le carter statorique grâce à des
boulons ou des tiges de serrage comme nous pouvons le visualiser sur la (Fig. 1.1).
L'ensemble ainsi établi constitue alors la MAS à cage d'écureuil [DID 04].
Fig .1.5 : Roulement à bille
1.3 TYPES DE DEFAUTS DES MAS
Bien que la MAS à cage d'écureuil soit réputée robuste, elle peut parfois présenter
différents types de défauts. La diversité de Leurs origines peut entraîner des erreurs
sur Leurs nature et localisation. De ce fait, la bonne connaissance des mécanismes
des défauts à surveiller et de leurs conséquences sur les signaux relevés un parfait
diagnostic.
Les défauts peuvent être dus à diverses causes naturelles ou artificielles, prévisibles
ou intempestives, internes, externes ou mixtes; qui sont très souvent reliés entre
eux [RAZ 02] :
Thermiques (surcharge, température ambiantes élevée, . . .).
Électriques (diélectrique, phénomène transitoire, . . .).
Mécaniques (bobinage, vibrations. . .).
Environnementales (agression, humidité . . .).

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
10
Fig 1.6 : Causes internes de défauts de la machine asynchrone triphasée à cage [KHA 08]
Fig 1.7 : Causes externes de défauts de la machine asynchrone triphasée à cage [KHA 08].
Une étude statistique, effectuée en 1988 par une compagnie allemande de
systèmes industriels sur les pannes des machines asynchrones de faible et moyenne
puissance (50KW à 200KW), a donné les résultats suivants (Fig. 1.8) :
Fig. 1.8 : Répartition des pannes des machines de faibles et moyennes puissances [KHA 08].

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
11
Les défauts statoriques sont les plus rencontrés dans ces types de machines.
Une autre étude statistique faite sur des machines de grande puissance (100KW à
1MW) a donné les résultats suivants (Fig. 1.9) :
Fig. 1.9 : Répartition des pannes des machines de fortes puissances [KHA 08].
Les contraintes mécaniques sont plus grandes pour ces types de machines, ce qui
explique le taux élevé des pannes dues aux roulements. Celles-ci exigent une
maintenance mécanique accrue [KHA 08].
Ces études montrent que certains défauts sont plus fréquents que d’autres, parmi
ces défauts :
Si l'on néglige les pannes dues à une mauvaise conception (mauvais choix des
matériaux), d'une mauvaise fabrication (défauts de moulage ou d'usinage) ou d'un
mauvais montage du moteur, les défaillances les plus souvent rencontrées d'une
MAS peuvent être schématisées par la (fig. 1.10).
Les conséquences de ces défauts conduisent à de multiples problèmes qui
affectent la rentabilité de l’installation globale, et qui peuvent aller jusqu’à l’arrêt
total. Parmi les conséquences des défauts On cite:
Fluctuations du couple et de la vitesse.
Appel supplémentaire de courant.
Déséquilibre au niveau de la tension et du courant de ligne.
Augmentations des arrêts non programmés, des pertes de production, et par
conséquent, du rendement global.

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
12
Fig. 1.10 : Type de défauts des MAS
1.4 TYPES DE DIAGNOSTIC
Le type de diagnostic le plus approprié à un système industriel donné ne peut se
faire qu’après un recensement raffiné des besoins et des connaissances disponibles.
Pour effectuer le diagnostic des machines d’une installation industrielle, les
opérations de maintenance analysent un certain nombre de signaux issus de la
machine. En effet, l’évolution temporelle et le contenu spectral de ces signaux
peuvent être exploités pour détecter et localiser les anomalies qui affectent leurs
bons fonctionnements. [BEL 05].
De ce fait, le diagnostic peut être classé en deux grandes familles:
Diagnostic inductif et déductif.
Diagnostic invasif (interne) et non invasif (externe).

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
13
1.4.1 Diagnostic inductif
Ce type de diagnostic correspond à une approche de recherche montante (en
amont). Il s’agit de trouver le défaut à partir de ses effets sur le système. Ce type
utilise un mécanisme de raisonnement en avant qui a pour objectif d’interpréter les
symptômes ainsi que leurs combinaisons afin de trouver le défaut [BEL 05].
1.4.2 Diagnostic déductif
Le raisonnement en arrière (en aval) est la principale caractéristique de ce type.
Le diagnostic déductif doit trouver quels sont les effets dans les systèmes. Une
vérification des “effets trouvés” par rapport aux “effets possibles” permet de
confirmer et ou d’informer l’existence du défaut.
Le diagnostic peut utiliser soit une seule méthode de raisonnement (avant ou
arrière) soit une combinaison mixte. La connaissance “à priori” de la cause “ défaut ”
implique la connaissance de certains effets [BEL 05].
1.4.3 Diagnostic invasif
Le diagnostic invasif dépendant de la connaissance obtenue à partir des modèles
mathématiques du système.
Ce type de diagnostic est principalement dérivé des techniques utilisées
primitivement par les automaticiens. A partir des techniques d’identification des
paramètres, il devient possible de mettre en œuvre la méthode du problème inverse.
Le diagnostic de défaillance est possible en suivant en temps réel l’évolution des
paramètres physiques ou bien en utilisant l’inversion des modèles de type « boite
noire ». Il implique une connaissance approfondie du fonctionnement sous la forme
de modèles mathématiques qui devront être obligatoirement validés
expérimentalement avant toute utilisation industrielle [BEL 05].
Les différents types de diagnostic invasif se regroupent en 04 grandes familles :
Méthode à base de modèle.
Méthodes d’identification des paramètres.
Méthodes d’estimation du vecteur d’état.
Méthodes analytiques.

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
14
1.4.4 Diagnostic non invasif
Le diagnostic non invasif utilise la connaissance issue de l’expertise humaine. Ce
diagnostic se base sur l’analyse spectrale des signaux (ASS) que fournit la machine
lors de son fonctionnement [BEL 05].
Les signaux les plus utilisés sont :
Électriques : analyse des grandeurs électriques aux bornes de la machine :
(Tensions, courants, puissance instantanée partielle, puissance instantanée
totale, analyse temporelle du module du vecteur de Park…).
Mécaniques : analyse des vibrations acoustiques (accéléromètre…).
Thermiques : analyse de la température de la machine :(sonde de
température, mesure infrarouge…).
Électromagnétiques : analyse des flux dans l’entrefer, (spire de mesure de
flux), des flux de dispersion radial ou axial (bobines externes).
Chimiques : analyse des huiles ou des gaz.
Dans les suivantes sections, nous présentons les méthodes basées sur l’approche
ASS des grandeurs “mesurables ” ce qui permet par la suite, à détecter et localiser
les défauts des ME [BUI 07].
Notons que ce type de diagnostic, objet du présent travail, a attiré notre attention
vu ces avantages :
Facile à mettre en œuvre technico-économiquement.
Pas besoin de modèle (grandeurs issues directement des bancs d’essais).
Signaux issus directement des installations.
Connaissances sur le système sain (par mesure ou modèle).
En plus nous avons mis l’accent particulièrement sur les 03 premières méthodes
qui seront décrites dans les chapitres qui suivent. Les autres sont à titres
informatifs, vu leurs larges utilisations et qui peuvent être pour de futures
investigations.

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
15
1.5 METHODES DE DIAGNOSTIC DES DEFAUTS BASEES SUR L'ASS
Comme nous l’avons déjà évoqué, la première étape est basée sur la
connaissance du système sain (par mesures ou par modèles numériques).La
deuxième étape consiste en une création « artificielle » de défauts (à nouveau sur
maquettes physiques ou par modèles numériques).La signature du défaut, c’est-à-
dire sa répercussion sur certaines grandeurs, est alors identifiée. Une observation
est ensuite réalisée sur un convertisseur réel .Une analyse est portée sur les
grandeurs de défauts déjà connues. Et pour commencer, nous pouvons donner
d’après cette littérature les principales techniques du diagnostic utilisées pour
obtenir des informations sur l'état de santé de la machine sont les suivantes[BUI 07]
1.5.1 Diagnostic par mesure des vibrations mécaniques
L’analyse spectrale des vibrations a été utilisée dans les machines tournantes
pour le diagnostic pendant des décennies. Il est affirmé que la surveillance des
vibrations est la méthode la plus fiable d'évaluer la santé globale d'un système
rotor. Les forces radiales, créées par le champ d'entrefer, provoquent des vibrations
dans la MAS. Ces forces sont proportionnelles au carré de l'induction magnétique.
0
2
2
),(),(
tB
tF sradial (1.1)
La distribution de l'induction magnétique dans l'entrefer, est le produit de la
F.m.m (Fm) et de la perméance (P) [SAH 08].
.
P.FmB (1.2)
La perméance dépend de la variation de l'entrefer (à cause des ouvertures des
encoches statoriques et rotoriques, l'excentricité), ce qui influe sur La force
magnétomotrice. Au même titre que les courants, l'ASS de vibrations fournit des
informations pratiquement sur tous les défauts mécaniques fréquemment
rencontrés, elle permet aussi la détection des défauts électriques. Les spectres des
signaux de vibrations, relevés du moteur actuel et en exploitation, sont comparés
avec ceux enregistrés lorsque le moteur est sain. Une simple lecture comparative
nous fait découvrir l’état et le type de défaut de notre moteur s’il y a lieu.

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
16
.
Fig. 1.11 : Mesures vibratoire de la MAS [CAS 03].
1.5.2 Diagnostic par mesure du Flux magnétique axial de fuite
Dans le cas idéal de fonctionnement, les courants et les tensions statoriques de la
machine sont équilibrés. Mais lors d’un défaut quelconque, il entraîne un
déséquilibre électrique et magnétique dans la partie statorique, ce qui provoque
l’apparition des flux de fuite axial de valeurs liées au degré de sévérité du défaut.
Pour analyser ce flux axial, on place à l’extrémité de la machine ou autour de l’arbre
une bobine .elle sera le siége d'une force électromotrice induite. Le flux de mesure
peut être utilisé dans l’analyse spectrale pour le suivi de l'état électrique et détecter
le type de défauts d'un MI à cage [SAH 03] [VOI 03].
Fig. 1.12 : Mesure du flux axial [VOI 03].

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
17
1.5.3 Diagnostic par mesure du Flux magnétique radial de fuite
La mesure du flux magnétique extérieur s’effectue à l’aide d’un capteur bobiné.
Celui-ci est placé sur le côté de la machine, à égale distance des extrémités de la
culasse et à une distance x de l’axe, comme indiqué sur la (fig 1.13).Le contenu
spectral du flux axial, concernant les fréquences de ses composantes, sera similaire
à celui du flux radial. En fait il sera moins riche, car il existe plusieurs conditions
pour qu’un harmonique d’induction génère une composante de courant associée.
D’autre part, le fait de placer le capteur à mi-distance des extrémités de la culasse
minimise l’influence de la composante axiale. C’est pourquoi la caractérisation du
flux mesuré résultera uniquement de l’induction d’entrefer, qui nous offre une image
plus réelle sur l’état de santé de notre machine. [RAP 06].
Fig. 1.13 : Mesure du flux radial.
1.5.4 Diagnostic par l'analyse des tensions statoriques induites
La rupture d'une barre va affecter directement la tension induite dans les
enroulements statoriques. En utilisant cette technique pour exploiter le contenu
fréquentiel de la tension induite, par le flux rotorique, directement dans les
enroulements statoriques pendant la déconnexion du moteur de réseau, en éliminant
ainsi toutes les asymétries de la source d’alimentation (déséquilibres, harmoniques)
ou la non linéarité des caractéristiques magnétiques de la machine [SAH 03].
1.5.5 Diagnostic par mesure du couple électromagnétique et de la vitesse
rotorique
Lorsqu’une rupture de barre apparaît, les spectres fréquentiels de la vitesse
rotorique et du couple électromagnétique laissent paraître des composantes

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
18
supplémentaires situées aux fréquences 2kgfs. Cependant, il s’est avéré que
l’analyse de ses composantes ne nous renseigne pas aussi bien sur le défaut
rotorique que celles présentes dans le spectre du courant statorique (augmentation
des amplitudes moins significatives).De plus, l’acquisition de ces deux signaux
nécessite un équipement assez coûteux par rapport à un simple capteur de courant,
ce qui limite leur utilisation pour le diagnostic de défauts des machines asynchrones.
Certains systèmes reconstruisent une image du couple électromagnétique à partir
des tensions et des courants mesurés sur la machine, mais cette approche reste
moins efficace que les méthodes précédemment citées [DID 04].
1.5.6 Analyse fréquentielle de la tension de neutre
En 1998, Cash a utilisé la tension présente entre le neutre de la source
d'alimentation et le neutre de la MAS pour détecter des courts-circuits entre spires
dans le bobinage statorique. Une analyse similaire a été effectuée dans le but de
détecter un défaut rotorique dans les machines asynchrones.
On montre que l'information donnée par la tension présente entre les deux neutres
était pertinente pour le diagnostic des défauts rotoriques. Cette technique a tout
d'abord été testée sur différents essais de simulation .L'information la plus
significative pour permettre un diagnostic fiable de la cage rotorique se situe au
niveau des composantes harmoniques de fréquence [DID 04].
ggfsfbt )1(3
1.5.7 Diagnostic par mesure de la puissance instantanée
La quantité d'information donnée par la puissance instantanée d'une phase, qui
n'est autre que le produit de la tension d'alimentation et du courant absorbé par le
moteur, est plus importante que l'analyse du courant seul. En effet, en plus de la
composante fondamentale et des deux composantes latérales, le spectre de la
puissance instantanée contient une composante additionnelle située à la fréquence
de défaut.Ceci présente l'avantage de cette méthode par rapport aux autres[DID 04]
1.5.8 Diagnostic par mesure du courant statorique
L'analyse des courants statoriques dans le domaine fréquentiel reste la méthode
la plus couramment utilisée car le spectre résultant contient une source de
renseignement sur la majorité des défauts électriques et magnétiques pouvant
apparaître au sein d'une MAS.

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
19
Nous savons que le suivi de l'amplitude des composantes caractéristiques de
fréquence gkfs 21( dans le spectre du courant permet de se renseigner sur l'état
de la cage rotorique[DID 04].
Cette technique est dénommée dans la littérature "Motor Current Signature
Analysis" (MCSA). Les défauts de la MAS se traduisent dans le spectre du courant
statorique soit par :
Les raies spectrales qui apparaissent avec des fréquences qui sont
directement liées à la vitesse de rotation de la machine, aux vitesses des
champs tournants et aux paramètres physiques de la machine.
Les raies spectrales ont une modification de leurs amplitudes, dans le spectre
du courant.
Le technicien de la surveillance doit avoir une bonne connaissance des défauts et
leurs signatures à partir du courant statorique.
1.5.9 Diagnostic des défauts par analyse du vecteur de Park
Une représentation en deux dimensions peut être utilisée pour décrire le
phénomène des moteurs asynchrones triphasés. Une des plus connues et des plus
appropriées repose sur le calcul des courants dits de Park. En fonction des courants
de phase isa(t), isb(t) et isc(t), les courants de Park id(t) et iq(t) peuvent être
calculés pour l'obtention de la courbe de lissajou : iqs=f(ids). Le changement de
l'épaisseur et de la forme de cette courbe donne une information sur le défaut
[DID 04] :
1.5.10 Diagnostic des défauts par l’estimation paramétrique
Cette méthode de diagnostic utilise les paramètres structuraux d'un modèle de
connaissance et extrait par la suite les paramètres du système à partir des lois de
connaissance pour détecter et localiser les défaillances. Le point essentiel dans
l'efficacité de cette méthode est le choix du modèle de connaissance. En effet, le
type de défaut que l'on voudra détecter sera en fonction du modèle utilisé. Les
premiers travaux relatant de l'estimation de paramètres ont débuté avec des
modèles relativement simples (modèle de Park par exemple) utilisés depuis plusieurs
années pour la commande des machines électriques (ME). Ces modèles n'ont besoin
que de quatre paramètres pour effectuer le diagnostic de défaut ce qui, dans
certains cas, ne permet pas de localiser avec précision la défaillance. L'étape

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
20
suivante est donc nécessairement le passage à un modèle de connaissance plus fin
de la machine, tout en gardant la possibilité d'identifier les paramètres souhaités.
Ces modèles peuvent être des modèles triphasés, qui s'affranchissent de l'hypothèse
d'une machine magnétiquement équilibrée, ou encore des modèles à n phases,
capables de refléter le fonctionnement de la machine sur une large bande de
fréquences. Des algorithmes spécifiques ont été élaborés pour l'estimation
séquentielle de paramètres. Le filtre de Kalman apparaît comme le plus adéquat de
tous mais aussi le plus délicat à mettre en oeuvre. Tout d'abord, en tant
qu'algorithme d'identification en temps réel, le filtre de Kalman étendu délivre un
modèle adaptatif, capable de prendre en compte les évolutions normales des
paramètres de la machine telles que la variation des résistances (en fonction de la
température) ou encore la variation des inductances (en fonction du niveau de
saturation).Par ailleurs, les paramètres estimés, eux-mêmes, permettent une
première analyse des conditions de fonctionnement de la machine. Par exemple, une
augmentation anormale de la valeur des résistances statoriques peut signifier un
échauffement excessif et donc une dégradation progressive des enroulements
[DID 04].
1.6 SIGNATURES SPECTRALES DES DEFAUTS DANS LE SPECTRE DU
COURANT STATORIQUE
1.6.1 Défauts statoriques
Les défauts statoriques regroupent principalement les défauts de court-circuit
d’une phase à la terre, court-circuit entre phases, ou court-circuit entre spires. Ils
commencent généralement par un court-circuit entre spires, avant d’évoluer vers
des défauts plus graves.
Une des principales causes de ces défauts est la dégradation de l’isolation qui peut
être une dégradation fonctionnelle (liée à la durée de vie de l’enroulement) ou bien
due aux conditions d’exploitation et aux contraintes mécaniques, thermiques,
électriques et environnementales. Ce type de défauts entraîne l’apparition d’une
série d’harmoniques dans le spectre du flux axial donnée par [GHO 05] :
k)g1(p
nff scs (1.3)
Avec : n=1, 2, 3, … et k=1, 3, 5, …

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
21
1.6.2 Défauts rotoriques
Le courant statorique en régime permanent donne des indications sur les
défaillances rotoriques telles que les ruptures de barres, d'anneaux de court-circuit
ou l'excentricité d’entrefer, rupture d’une phase, court-circuit entre spires du
stator…
1.6.2.1 Cassure de barres rotoriques
La présence d’une barre rotorique cassée provoque une asymétrie rotorique qui a
son tour produit des raies spectrales autour de la fréquence fondamentale fs, telles
que :
)kg21(ff sbrc (1.4)
La sévérité du défaut dépend directement de l'amplitude de ces composantes
spectrales.
1.6.2.2 Excentricité d'entrefer
Il existe deux types d'excentricité : l’excentricité statique se distingue par le fait
que le centre du rotor n’est pas confondu avec celui du stator, tel que des rotors ou
noyaux statoriques ovales. Et l’excentricité dynamique fait que le centre du rotor
tourne autour du centre du stator, dans ce type d’excentricité, l’épaisseur minimale
de l’entrefer est en fonction de la position du rotor.
Les excentricités d'entrefer peuvent être détectées, en surveillant les raies latérales
fondamentales de la fréquence d'alimentation [BEN 00]:
p
)g1(k1ff sexc (1.5)
Avec : k = 1, 2, 3, …
La détection des excentricités est aussi possible en surveillant les harmoniques
principales d'encoches du courant et certaines de leurs composantes spectrales
latérales. Cette méthode nécessite la connaissance du nombre d'encoches rotoriques
Ne. Les fréquences des composantes spectrales d'encoches et de celles associées aux
excentricités d'entrefer dynamiques sont les suivantes :

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
22
wdesexcenc n
p
)g1()nNk(ff (1.6)
nd = 0, dans le cas d'une excentricité statique et nd = 1, dans le cas d'une
excentricité dynamique.
Ne est le nombre d'encoches rotoriques.
k=1, 2, 3, … et nw=1, 3, 5, 7, … (l'ordre de l'harmonique de la F.m.m du stator)
La présence d'une excentricité statique, modifie l'amplitude des harmoniques
principales d'encoches du courant statorique, tandis que celle d'une excentricité
dynamique fait apparaître de nouvelles raies spectrales [SAH 03][RAZ 03] [BEN 00].
1.6.3 Défauts au niveau des roulements
Comme les éléments roulants du roulement supportent le rotor, quelque soient
les défauts dans les roulements, ils vont produire des mouvements radiales entre le
rotor et le stator dans la machine. Par conséquent, des variations d'entrefer
génèrent dans le courant statorique des raies spectrales de fréquence :
froul = | fs ± kfv | (1.7)
D'où : k = 1, 2, …,
fv est l'une des fréquences caractéristiques des vibrations (fb, fb. int ou fb. ext)
Les fréquences caractéristiques des vibrations dépendent de l'élément du roulement
affecté par un défaut et sont liées sur les paramètres physiques du roulement.
Selon, les fréquences de vibration qui caractérisent les défauts des roulements à
bille sont [BON 00] [THA 06]:
Défaut au niveau d'une bille :
2
rotb )cosPD
BD(1f
BD
PDf (1.8)
Défaut sur la bague intérieure :
cos
PD
BD1f
2
nf rot
bint.b (1.9)
Défaut sur la bague extérieure :

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
23
cos
PD
BD1f
2
nf rot
bext.b (1.10)
Fig. 1.14 : Dimension du roulement à bille
où nb est le nombre d'éléments roulants, BD le diamètre d'un élément roulant, PD la
distance entre les centres des billes diamétralement opposées, β l'angle du contact
des billes avec les bagues du roulement et frot est la fréquence de rotation du rotor.
Pour des dimensions courantes, c'est-à-dire que le nombre de billes est de 6 à 12,
les fréquences de vibrations peuvent être approximés par [GHO 05 ] [RAZ 03]. :
fb.int = 0.6 nbfrot (1.11)
fb.ext = 0.4 nbfrot (1.12)

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
24
1.7 METHODES DE MODELISATION DU MOTEUR ASYNCHRONE
A ce jour, les modèles qui décrivent le fonctionnement de la MAS à cage
d'écureuil peuvent être constitués l’étape primordiale en matière du diagnostic. Ils
permettent la compréhension du fonctionnement défectueux, la vérification sur
prototype virtuel de l’efficacité des algorithmes de détection de défaut et elles
apportent également la possibilité de construire des bases de données sur les
manifestations électriques et magnétiques de ces défauts. Il est nécessaire donc,
de créer un modèle adapté au problème à traiter, offrant une image claire sur les
phénomènes qui se déroulent à l’intérieur de notre machine décrivant le
comportement de la machine non pas d’une façon approximative, comme pour la
commande, mais d'une façon la plus réelle possible [BEL 05].
Les modèles qui décrivent le fonctionnement de la MAS à cage peuvent être
décomposés en deux parties bien distinctes :
les modèles dits "physiques".
les modèles dits "comportementaux".
En ce qui nous concerne, les modèles physiques, ce sont les lois régissant
l'électromagnétisme qui sont utilisées pour décrire le fonctionnement de la MAS.
[CAS 03].Nous ne les citerons pas tous mais nous pouvons énoncer les deux
approches les plus populaires [DID 04] :
1.7.1 Approche Numérique
On cite deux méthodes :
1.7.1.1 La méthode des réseaux de perméances
Pour respecter un bon compromis précision-temps de calcul, on utilise cette
méthode de modélisation électromagnétique basée sur l'introduction de perméances
variables en fonction du flux, formant ainsi, un circuit magnétique équivalent,
débaptisé, réseau de perméances. Le circuit magnétique de la machine est discrétisé
et présenté par un ensemble de perméances. Les perméances peuvent être
constantes ou dépendent de la géométrie ou encore du flux magnétique. Le circuit
magnétique est couplé avec le circuit électrique de la machine. Entre autres, ces

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
25
méthodes permettent la modélisation des défauts de la machine. Cette méthode est
moins complexe que celle des éléments finis. [HEM 06].
1.7.1.2 La méthode des éléments finis
La méthode des éléments finis est une méthode de simulation des dispositifs
électromagnétiques qui permet de résoudre numériquement les équations de
Maxwell. Pour appliquer cette méthode, il faut décrire, convenablement, toute la
géométrie du dispositif. Il est possible de prendre en compte les propriétés
physiques des différents matériaux. Parfois, il est possible de réduire le domaine
d'études grâce à la symétrie du champ électromagnétique. Cette méthode est très
précise, mais elle présente deux inconvénients majeurs : le temps de calcul est
grand et on est obligé de faire rentrer toute la géométrie de la machine. Le modèle
obtenu, devient très complexe rendant, ainsi, difficile son utilisation pour la
surveillance (le diagnostic) ou la commande [HEM 06].
1.7.2 Approche analytique
Elle est basée sur la modélisation du moteur sous forme de circuits électriques
équivalents. Elle repose sur le concept d'inductance, notion qui caractérise une
relation flux–courant linéaire. Cette approche permet d'établir un schéma électrique
équivalent de la machine et par conséquent de trouver les équations différentielles
caractérisant le fonctionnement de la machine. Cette approche offre un bon
compromis en termes de précision du modèle et de temps de calcul. De plus, ce type
de modélisation permet de prendre en compte un certain nombre de défauts
d'origine électromagnétique tels que les défauts de court-circuit entre spires
statoriques, les défauts de type rupture de barre rotorique et/ou de portion d'anneau
de court-circuit. Nous pouvons aussi intégrer à ce type de modèle les défauts
d'excentricité statique et dynamique [DID 04].
Ces modèles mathématiques de degrés de complexités différentes, depuis le
modèle triphasé au stator et rotor jusqu'aux modèles triphasés au stator et multi-
phasés au rotor (modèle multi enroulement), ont été l’objet de nombreuses
recherches et plusieurs publications surtout en IEEE. En ce qui nous concerne, notre
travail va se baser sur le modèle multi enroulement dans le chapitre suivant (2).

Chapitre 1 Surveillance de la MAS à cage : Etat de l’art.
26
1.8 CONCLUSION
Dans ce chapitre, nous avons mis l’accent sur : les défauts qui affectent
fréquemment la MAS, leurs causes et leurs signatures, ainsi que les différentes
méthodes du diagnostic. Notre travail sera consacré à l'étude et la détection, des
cassures de barres et d'anneaux de court-circuit dans la cage rotorique, le court-
circuit dans les enroulements statoriques et les défauts d’excentricité d'un moteur
asynchrone. L’objectif de notre mémoire est de trouver un moyen performant
susceptible de prévoir un défaut majeur, et contribuant ainsi à promouvoir la
maintenance prédictive’ ou ‘proactive’ dont l’objet est la détection des défauts
parfois avant même qu’ils ne se manifestent visiblement, et ayant pour fin, moins
d’arrêts non programmés, plus de disponibilité et par conséquent, un rendement
meilleur. Pour cela, il faut disposer des bons modèles mathématiques, décrivant le
comportement de la machine dans l'état sain et avec défaut. Ceci fait l'objet du
chapitre suivant.

Chapitre 2 Modélisation de la machine asynchrone.
27
Chapitre 2
Modélisation de la machine asynchrone
2.1 INTRODUCTION
Le modèle multi enroulement, défini dans le but de mieux se rapprocher de la
structure réelle du rotor à cage, suppose que celui-ci regroupe un nombre de mailles
formant un enroulement polyphasé, chaque maille est constituée de deux barres
adjacentes et les deux portions d’anneau de court-circuit qui les relient .Une telle
structure a été utilisée avec profit dans le diagnostic de la machine asynchrone.
Plusieurs démarches ont été menées dans cet axe, et ont permis de dévoiler
quelques phénomènes découlant d’un défaut, tel que l’apparition des raies de
fréquences supérieures ou inférieures à la fréquence statorique dans l’analyse
spectrale des courants, couple, vitesse et puissance[GHO 05].
Les modèles simples (dq), utilisés dans les méthodes classiques, négligent un
certain nombre de phénomènes. Ces modèles sont fréquemment affectés par les
transformations et le changement d'axe. Donc, il a fallu s'orienter vers le modèle
multi enroulement pour une description adaptée aux défauts [KHA 08].
Dans notre étude, nous utiliserons la méthode des circuits électriques
magnétiquement couplés pour simuler le fonctionnement de la machine asynchrone.
Les facilités apportées par cette approche pour étudier les défauts magnétiques,
nous ont semblé être les plus adéquates pour analyser l'influence d'une rupture de
barre ou d’anneau de court-circuit sur le fonctionnement de la machine asynchrone
à cage. Nous avons privilégié l'approche analytique afin de disposer d'un modèle
mathématique ne nécessitant pas d'outils de calculs complexe [DID 04].

Chapitre 2 Modélisation de la machine asynchrone.
28
2.2 LE MODELE MULTI ENROULEMENT DE LA MAS
2.2.1 Hypothèses simplificatrices
La cage rotorique peut se décomposer en (Nr + 1) circuits électriques rotoriques
indépendants. En effet, si nous considérons deux barres rotoriques adjacentes ainsi
que les segments d'anneau de court-circuit les reliant, nous obtenons une boucle
rotorique fermée qui peut être étudiée sous forme de circuit électrique. Un des
anneaux de court-circuit crée par conséquent une boucle supplémentaire ce qui
porte le nombre de boucle totale à (Nr+1). Nous associons à chacune de ces boucles
un courant, ce qui nous amène à calculer (Nr+1) courants rotoriques
(Fig.2).Chaque barre rotorique est modélisée par une inductance en série avec une
résistance, tout comme chaque segment d'anneau de court-circuit (Fig 2.2)[DID 04].
Pour notre modélisation, nous avons été amenés à faire quelques hypothèses
simplificatrices dont les plus importantes sont :
La machine est symétrique à entrefer constant.
La répartition dans l’entrefer de la force magnétomotrice et du flux est
sinusoïdale.
Le circuit magnétique n’est pas saturé et a une perméabilité constante.
Les pertes fer par hystérésis et courants de Foucault, l’effet de peau
et les effets de dentures sont négligés.
L’effet des encoches est négligé.
La réduction de spires qui intervient dans une phase à la suite d’un court-
circuit est négligeable.
Fig. 2.1 : Structure du rotor [SCH 99]

Chapitre 2 Modélisation de la machine asynchrone.
29
Fig. 2.2 : Structure électrique du rotor [BAG 99]
Avec ces hypothèses, on calcule les différents paramètres du modèle
[MAG 06] [BAG 99] [BOU 06].
2.2.2 Equations différentielles associées
Pour faire une simulation numérique réelle de notre machine, il nous faut mettre
toutes les équations de notre système global. L'ensemble des équations
différentielles indépendantes définissant le modèle de la machine doit être mis en
valeur.
Cherchons donc ses équations :
2.2.2.1 Equations différentielles du stator
Ces équations différentielles vont nous permettre d'associer le vecteur tension, le
vecteur courant ainsi que le vecteur flux pour les trois phases statoriques Sa, Sb et
Sc. En appliquant la loi d'Ohm sur les trois phases statoriques, nous obtenons :
][dt
d]i][R[]v[ sabcsabcssabc (2.1)
Avec :
Tscsbsasabc ]vvv[]v[ , le vecteur de tensions statoriques.

Chapitre 2 Modélisation de la machine asynchrone.
30
Tscsbsasabc ]iii[]i[ , le vecteur de courants statoriques.
[Rs] : matrice des résistances statoriques.
rs00
0rs0
00rs
]R[ s (2.2)
Les trois phases statoriques sont non seulement magnétiquement couplées entre
elles mais également avec les circuits électriques rotoriques. Par conséquent, les
courants de boucles rotoriques notés ici ][ rki interviennent dans les équations des
trois flux statoriques comme le montre l'équation ci-dessous :
]][[]][[][ rksrsabcssabc iMiL (2.3)
T)1N(rrk1r0rrk ]iiii[]i[
r , le vecteur de courants dans les mailles rotoriques.
Tscsbsasabc ][][ , le vecteur de flux statoriques.
Tscsbsasabc ]iii[]i[ , le vecteur de courants statoriques.
[Ls] : la matrice des inductances statoriques se compose des inductances propres,
de magnétisation, de fuites et mutuelles des trois phases statoriques. Elle peut se
mettre sous la forme.
LcsMsMs
MsLbsMs
MsMsLas
]L[ s (2.4)
[Msr] : matrice des inductances mutuelles entre phases statoriques et mailles
rotoriques.

Chapitre 2 Modélisation de la machine asynchrone.
31
...)3
4akcos(L...
...)3
2akcos(L...
...)akcos(L...
]M[
rsr
rsr
rsr
sr (2.5)
où : k=0, 1, 2, …, Nr-1
Les équations des trois phases statoriques de la machine étant maintenant décrites,
les équations associées aux circuits électriques de la cage rotorique sont maintenant
abordées.
2.2.2.2 Equations différentielles du rotor
La (fig 2.3) représente le schéma équivalent d'une maille de la cage rotorique :
Fig. 2.3 : Schéma électrique équivalent d'une maille rotorique [SCH 99]

Chapitre 2 Modélisation de la machine asynchrone.
32
Fig. 2.4 : Schéma électrique équivalent simplifié d'une maille
rotorique
Tout comme pour les équations du stator de la machine asynchrone, les équations
natives des circuits électriques rotoriques peuvent se mettre sous une forme
matricielle. Nous relions les tensions de chacune des boucles rotoriques avec les
courants et les flux grâce aux équations [DID 04] [BAG 99]:
Sachant que :
)1k(rrkbk
erkek
iii
iii
L'équation de tension pour une maille ' k ' de la cage rotorique est donnée par :
0dt
di
N
RiRiRR
N
R2iR rke
r
e)1k(rbkrkbk)1k(b
r
e)1k(rbk
(2.6)
avec :
]i[)3
4akcos()
3
2akcos()akcos(L
iN
L)ii(LiMrri
N
L2L2Lrp
sabcrrrsr
er
e)1k(r)1k(rb
1Nr
kj0j
rjrkr
ebrk
(2.7)

Chapitre 2 Modélisation de la machine asynchrone.
33
Il faut compléter le système d'équations des circuits du rotor par celle de l'anneau
de court-circuit [MAG 06].
On a alors :
0idt
dLiRi
dt
d
N
Li
N
Reeee
1N
0krk
r
e1N
0krk
r
err
(2.8)
2.2.2.3 Equation globale des tensions
L'équation globale des tensions est :
Idt
Ld
dt
IdLIRV (2.9)
Avec :
Tscsbsa ]0000vvv[]V[ , le vecteur global des tensions (Nr+41),
il contient les trois tensions statoriques et les Nr tensions des mailles rotoriques,
ainsi que la tension de l'anneau de court-circuit.
T
e)1N(rrk1r0rscsbsa ]iiiiiiii[]I[r
, le vecteur global des courants (Nr+41),
il contient les trois courants statoriques et les Nr courants des mailles rotoriques,
ainsi que le courant de l'anneau de court-circuit.
Rr0
0Rs
R
, la matrice globale des résistances.
Avec :
[Rr] : la matrice des résistances rotoriques [MAG 06].

Chapitre 2 Modélisation de la machine asynchrone.
34
[Rr] =
eR
rN
eR
rN
eR
rN
eR
Nr
eR2)2Nr(bR)1Nr(bR)2Nr(bR0)1rN(bR
0bkRNr
eR2)1k(bRbkR)1k(bR0
rN
eR)1rN(bR00bR
Nr
eR2)1Nr(bR0bR
(2.10)
rT
sr
srs
LM
ML
L
, la matrice globale des inductances.
Avec :
[Lr] : matrice des inductances rotoriques [MAG 06].
[Lr] =
er
e
r
e
r
e
r
ebbb
br
ebb
r
ebb
r
eb
LN
L
N
L
N
L
N
L2L2LrpLMrrMrrLMrr
MrrLMrrN
L2L2LrpLMrr
N
LLMrrMrrLMrr
N
L2L2Lrp
(2.11)
0dt
Md
dt
Md0
dt
Ld
Tsr
sr
, la dérivée de la matrice globale des inductances.
2.2.3 Transformation de PARK [BEL 05]
Pour obtenir un système des équations à coefficients constants, il est usuel de
faire appel à une transformation de PARK qui permet le passage du repère réel
triphasé (a, b, c) au repère d’axe (h, d, q).
Le système des grandeurs triphasées est tel que la somme instantanée des
grandeurs est nulle. Ceci permet d’annuler la composante homopolaire par
conséquent, le repère (h, d, q) peut être réduit à un repère biphasé (d, q) [BEL 05].

Chapitre 2 Modélisation de la machine asynchrone.
35
Fig. 2.5 : Transformation de PARK (a, b, c) à (d, q) [SCH 99]
On remarque que la matrice [Msr] dépend du temps, ce que nécessite l'inversion
de la matrice inductance [L], de dimension Nr+4, à chaque pas de calcul. Pour
rendre cette matrice constante, on applique la transformation de Park sur les
équations de tensions globales. Le repère de Park doit être lié au rotor.
La matrice de Park modifiée est définie par [BEL 05][ZEB 05] :
)3
4sin()
3
4cos(
2
1
)3
2sin()
3
2cos(
2
1
sincos2
1
3
2)(
P (2.12)
La dérivée de la matrice de Park est :
)3
4cos()
3
4sin(0
)3
2cos()
3
2sin(0
cossin0
3
2
dt
)(Pd (2.13)
La matrice globale de Park de dimension (Nr+4)( Nr+4) est définie par :

Chapitre 2 Modélisation de la machine asynchrone.
36
10
0)(P
TT
(2.14)
10
0)(P
TT
1
1
(2.15)
[1] : est la matrice identité de dimension (Nr+1)(Nr+1).
Sachant que :
[V] = [T] [Vtr], avec : Tqsdsostr ]0000vvv[]V[
[I] = [T] [Itr], avec : Te)1N(rrk1r0rqsdsostr ]iiiiiiii[]I[
r
Avec :
t)sin(v2
3v
t)cos(v2
3v
rsmqs
rsmds
(2.16)
L'équation (2.9) devient :
trtr
trtr ITdt
Ld
dt
ITdLITRVT (2.17)
dt
IdTLTIT
dt
LdT
dt
TdLTTRTV tr
D
1tr
C
1
B
1
A
1tr
(2.18)
Les termes A, B, C et D sont données par :
r
s1
1
R0
0)(PR)(P
TRTA
(2.19)

Chapitre 2 Modélisation de la machine asynchrone.
37
0dt
)(PdM
0dt
)(PdL)(P
dt
TdLTB
Tsr
s1
1
(2.20)
0)(Pdt
Md
dt
Md)(P0
Tdt
LdTC
Tsr
sr1
1
(2.21)
rT
sr
sr1
s1
1
L)(PM
M)(P)(PL)(P
TLTD
(2.22)
La mise en équation du modèle de la machine, conduit à un système complet de
dimension Nr+4 [BEL 05]:
e
)1N(r
rk
0r
qs
ds
os
tr
e
)1N(r
rk
0r
qs
ds
os
tr
qs
ds
os
i
i
i
i
i
i
i
]R[
i
i
i
i
i
i
i
dt
d]L[
0
0
0
0
v
v
v
rr
(2.23)
[Ltr] et [Rtr] sont les matrices globales des résistances et des inductances après la
transformation de Park [BAG 99] [MOH 06] [BEL 05]:
La matrice [Ltr] est donnée par : (2.24)

Chapitre 2 Modélisation de la machine asynchrone.
38
2 0 0 0 0 0 0
3 3 30 0 cos( ) cos(( 1) ) 0
2 2 2
3 30 0 0 sin( ) sin(( 1) ) 0
2 2............ .......... ............ ........ .................. ............. .......... ..............
sr sr sr
sr sr
Ls Ms
Ls Ms L L a L Nr a
Ls Ms L a L Nr a
............ ...
3 e0 0 2 2
2
3 30 cos( ) sin( ) 2 2
2 2
3 30 cos(( 1) ) sin(( 1) ) 2 2
2 2
sr
sr sr
sr sr
Le LL Lrp Lb Mrr Lb Mrr Mrr Lb
Nr Nr
LeL a L a Mrr Lb Lrp Lb Mrr Lb Mrr
Nr
LeL Nr a L Nr a Mrr Lb Mrr Mrr Lb Lrp Lb
N
e
............ ................... ...................... ............. ...................... .............. .............. ...........................
e0 0 0
L
r Nr
L LeLe
Nr Nr
La matrice [Rtr] est donnée par : (2.25)
Re000
2)2()1()2(0)1(000
02)1()1(0
)1(002)1(0000
0))1cos((
2
3)cos(
2
3
2
300
0))1sin((
2
3)sin(
2
3000
000000
Nr
eR
Nr
eR
Nr
eR
Nr
eR
NrbRNrbRNrbRNrbR
bkR
Nr
eR
kbRbkRkbR
Nr
eR
NrbRbR
Nr
eR
NrbRbR
aNrsr
rLasr
rLsr
rLrs
aNrsr
rLasr
Lrrs
rs
A ces équations, on ajoute les équations électromécaniques afin d'avoir la vitesse
électrique de rotation et la position r du rotor [MOH 06] [ZEB 05]:
m0m kCrCeJ
1
dt
d (2.26)
rrdt
d (2.27)

Chapitre 2 Modélisation de la machine asynchrone.
39
2.2.4 Expression du couple électromagnétique [MAG 06] [KHA 08] [ZEB 05]
Il faut d'abord, trouver les expressions des composantes biphasées ds et qs du
flux statorique.
On a:
kr
odqs1
rT
sr
srs1
kr
odqs
i
i
10
0)(P
LM
ML
10
0)(P (2.28)
kr
odq
rT
sr
sr1
s1
kr
odqs
i
i
L)(PM
M)(P(PL)(P (2.29)
On aura :
krsr1
odqss1
odqs iM)(Pi)(PL)(P (2.30)
Après le calcul on obtient :
1
0
1
0
)sin(2
3)(
)cos(2
3)(
Nr
krksrqsqs
Nr
krksrdsds
akiLiMsLs
akiLiMsLs
(2.31)
Or, pour un moteur alimenté par une source triphasée, la puissance instantanée
s'écrit :
dqs
Tdqs
dqsT
dqs
sabcT
sabssa
iv
iPvP
ivtP
)()(
)(
(2.32)
Les équations de tensions dans un repère lié au rotor sont données par :
dsrqs
qsqs
qsrds
dsds
dt
dirsv
dt
dirsv
(2.33)

Chapitre 2 Modélisation de la machine asynchrone.
40
En remplaçant les tensions vds et vqs dans l'expression (2.32), on obtient :
dsqsqsdsrqs
qsds
ds2qs
2dssa ii
dt
di
dt
diiirs)t(P
(2.34)
Le troisième terme, représente la puissance électromagnétique transmise au rotor
à travers l'entrefer par l'intermédiaire du champ tournant. Donc le couple
électromagnétique est :
dsqsqsds iiPCe (2.35)
En remplaçant ds et qs par ses expressions, on obtient :
1
0
1
0
)sin()cos(2
3 Nr
krkds
Nr
krkqssr akiiakiiLPCe (2.36)
2.2.5 Système d’équation global
Nous pouvons regrouper ces équations dans une représentation matricielle unique
pour aboutir à [RAZ 03] : (2.37)
r
r
I
=
1
00
00
TJ
L
.
0
Cr
V
1
00
00
TJ
L
-
.
010
02
1
00
Vr
T
r
fd
LdI
d
LdrR
r
r
I
forme condensée :
,.'.'
XAXBU (2.38-a)
où le vecteur
X. peut être écrit comme suit :

Chapitre 2 Modélisation de la machine asynchrone.
41
XBAUAX .'.'.' 11
, (2.38-b)
Nous pouvons la mettre sur la forme suivante :
].'.[.
'
].'.[.'
1
1
XBUY
AVEC
YAX
XBUAX
Nous faisons, ainsi, apparaître le vecteur d’état [X] et le vecteur [U]contenant les
grandeurs externes à la machine tel que :
[X]=
r
r
I
, [
X ]=
r
r
I
. , [U]=
0
Cr
V,
Avec la définition des matrices B et A donnée par:
[B’]=
00
00
TJ
L
, [A’ ]=
.
010
02
1
00
Vr
T
r
fd
LdI
d
LdrR
,
Les termes dus à la rotation de la machine sont donnés par :

Chapitre 2 Modélisation de la machine asynchrone.
42
Gmt = rd
Ldr
, (2.39)
On se retrouve ainsi face à un système d’équations différentielles régissant le
fonctionnement de la machine. Pour parvenir à la solution, une méthode numérique
doit être mise en oeuvre, la méthode explicite de Runge Kutta s’avère la plus utilisée
dans ces cas. Bien avant ça, nous devons définir les matrices A’ et B' de manière à
traduire l’état interne de la machine, à savoir, état sain ou état de défaut [BOU 06].
2.2.6 Calcul des inductances
2.2.6.1 Inductances statoriques
En premier temps, on suppose que les enroulements statoriques sont idéalement
distribués autour du périphérique de l’entrefer de sorte que l’induction résultante
puisse être supposée sinusoïdale. Dans ce cas, l’expression de la F.m.m de la
première phase statorique "a" sera [GHO 05] [HAM 08] [TOL 91] [JON 07]:
)cos(p
iN2)(Fm sas
(2.40)
Ns est le nombre total des tours de chaque phase, p le nombre de paires de pôles,
un angle décrivant une position particulière dans l’espace ; cet angle est mesuré par
rapport à une référence fixe par rapport au stator, et le courant traversant la phase
"a" .La densité du flux radial créée dans l’entrefer tiendra l’expression:
)cos(pe
iN2)(B sas0
s
(2.41)
Où μ0 désigne la perméabilité magnétique de l’air, et e l’épaisseur de l’entrefer de la
machine symétrique .Le flux magnétique dans l'entrefer, par pôles, est obtenu par
intégration de l'expression (2.41) autour d'un intervalle polaire le long de la machine
:
p2
p2
s
l
0S
ss dRBdzdSB (2.42)

Chapitre 2 Modélisation de la machine asynchrone.
43
Etant donné que l’entrefer de la machine est supposé uniforme, et qu’on néglige
toute asymétrie axiale, l’expression (2.42) se réduit à:
sa2s0
s ipe
lRN4
(2.43)
Où R désigne le rayon moyen de l’entrefer de la machine symétrique, et l la
longueur effective de la machine.
Le flux magnétique total traversant l'enroulement de la phase "a" dû au courant isa :
sa
p2
p2
2s0
sassssaT iLspd)cos(pe
lRN2iNN
(2.44)
L'inductance principale (magnétisante) de la phase "a" statorique est donnée donc
par :
2
2s0
pe
lRN4LmsLsp
(2.45)
L'inductance totale (propre) de la phase "a", est égale à la somme de l'inductance
de magnétisation et l'inductance de fuite :
LsfLspLas (2.46)
Puisque les enroulements statoriques sont symétriques, les inductances propres
des trois phases sont égales (Las = Lbs = Lcs = Ls).
Les enroulements statoriques étant identiques et symétriques et du fait qu’ils sont
décalés de 2π/3, les inductances mutuelles entre enroulements statoriques auront
pour valeurs :
2
LspMs (2.47)
2.2.6.2 Inductances rotoriques
En définissant les flux rotoriques qui entrent en jeux, et en faisant référence à la
représentation équivalente du rotor, il sera possible de donner l’expression des
différentes inductances. La (fig. 2.6) représente, en fonction de l’ouverture angulaire
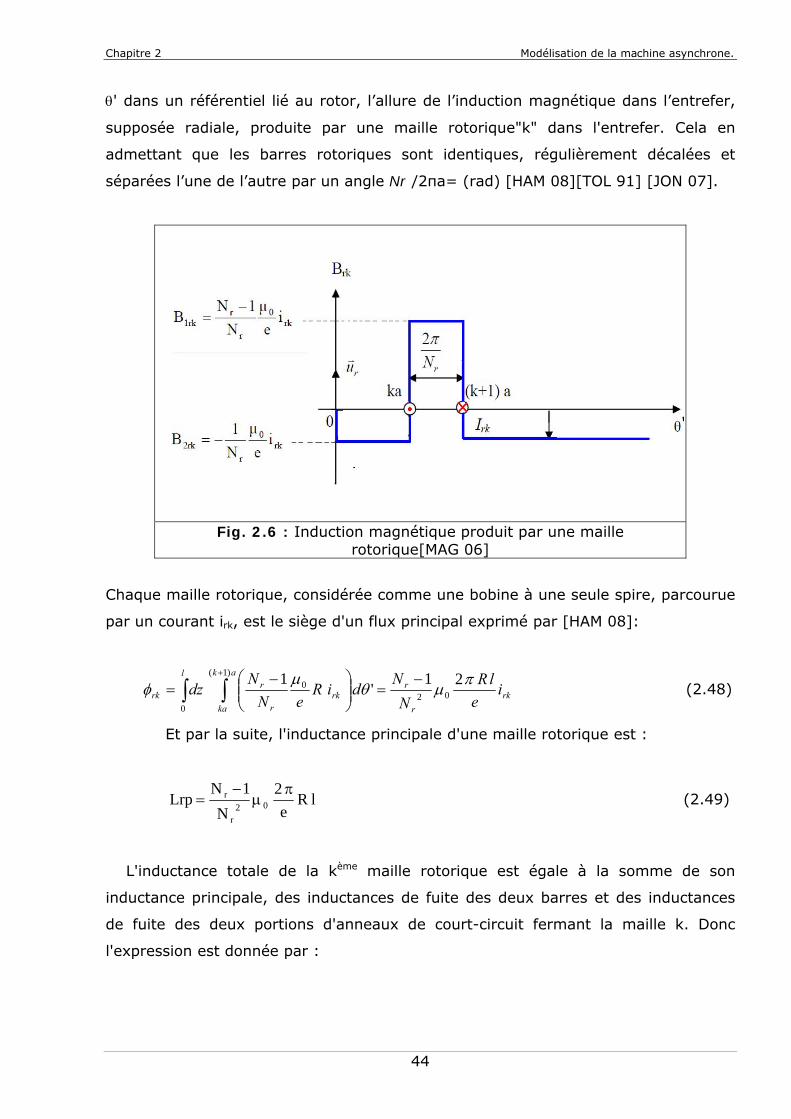
Chapitre 2 Modélisation de la machine asynchrone.
44
' dans un référentiel lié au rotor, l’allure de l’induction magnétique dans l’entrefer,
supposée radiale, produite par une maille rotorique"k" dans l'entrefer. Cela en
admettant que les barres rotoriques sont identiques, régulièrement décalées et
séparées l’une de l’autre par un angle Nr /2πa= (rad) [HAM 08][TOL 91] [JON 07].
Fig. 2.6 : Induction magnétique produit par une maille rotorique[MAG 06]
Chaque maille rotorique, considérée comme une bobine à une seule spire, parcourue
par un courant irk, est le siège d'un flux principal exprimé par [HAM 08]:
rk
r
rak
ka
rkr
rl
rk ie
lR
N
NdiR
eN
Ndz
21'
102
)1(0
0
(2.48)
Et par la suite, l'inductance principale d'une maille rotorique est :
lRe
2
N
1NLrp 02
r
r
(2.49)
L'inductance totale de la kème maille rotorique est égale à la somme de son
inductance principale, des inductances de fuite des deux barres et des inductances
de fuite des deux portions d'anneaux de court-circuit fermant la maille k. Donc
l'expression est donnée par :

Chapitre 2 Modélisation de la machine asynchrone.
45
eb L2L2LrpLrr (2.50)
Les mailles rotoriques sont magnétiquement couplées par l'intermédiaire du flux
rotorique d'entrefer. Le flux traversant la jème maille, produit par le courant irk
circulant dans la maille k est donné par :
a)1j(
ja
rk0
r
l
0
rkrj 'diReN
1dz (2.51)
Donc, l'inductance mutuelle entre mailles rotoriques non adjacentes, est exprimée
par la relation suivante :
lRe
2
N
1Mrr 0
2r
(2.52)
L'inductance mutuelle entre la kème maille et les mailles adjacentes est donnée par :
b)1k(k)1k(k LMrrMrMr (2.53)
2.2.6.3 Inductances mutuelles entre enroulements statoriques et rotoriques
Sachant que : t' r
Le champ magnétique dans l’entrefer dû au courant isa s’écrit en fonction de lié au
rotor de l'équation (2.42), donne [BAG 99] [HAM 08] [JON 91]:
Fig. 2.7 : Position de la maille (k) par rapport à la bobine statorique de la phase "a" [BAG 99]

Chapitre 2 Modélisation de la machine asynchrone.
46
])t'cos[(pe
iN2)'(B r
sas0s
(2.54)
D'où le flux traversant la maille k, produit par le courant isa, est donné par :
a)1k(
ka
s
l
0
sark 'dR)'(Bdz (2.55)
L'intégrale de l'équation ci-dessus conduit à [SAH 03] [TOL 91] [JON 07] :
]aktcos[iL rsasrsark (2.56)
L'inductance mutuelle entre la maille k et la phase "a" est donnée donc par la
relation suivante :
aktcosLM rsrsark (2.57)
Avec : )2
asin(
pe
lRN4L
2
s0sr
(2.58)
Et rN
2pa
est l'angle électrique entre deux maille rotorique.
De même, les inductances mutuelles entre la kème maille et les phases "b" et "c",
sont exprimées par :
3
2aktcosLM rsrsbrk (2.59)
3
4aktcosLM rsrscrk (2.60)
Le tableau suivant, résume les expressions de toutes les inductances de la
machine asynchrone à cage.

Chapitre 2 Modélisation de la machine asynchrone.
47
INDUCTANCES EXPRESSIONS
L'inductance principale d'une phase statorique. 2
2s0
pe
lRN4LmsLsp
L'inductance mutuelle entre phases statoriques
2
LspMs
L'inductance totale d'une phase statorique LsfLspLsLcsLbsLas
L'inductance principale d'une maille rotorique lR
e
2
Nr
1NrLrp 02
L'inductance mutuelle entre mailles rotoriques
non adjacentes lR
e
2
NrMrr
20
L'inductance mutuelle entre mailles rotoriques
adjacentes b)1k(k)1k(k LMrrMrMr
L'inductance mutuelle entre une maille rotorique
et une phase statorique "a".
aktpcosLM rsrsark
avec : )2
asin(
pe
lRN4L
2
s0sr
Tab. 2.1 : Tableau récapitulatif de toutes les inductances de la machine asynchrone à cage [KHA 08]
2.2.6.4 Calcul des inductances en cas d’excentricité Evoquer la non uniformité de l’entrefer ; c’est parler principalement du problème
d’excentricité du rotor. Cette dernière se divise en deux groupes. La non uniformité
de l’entrefer peut être radiale ou bien axiale. On peut dire aussi que la première se
nomme: l’excentricité statique, mais la deuxième s’appelle l’excentricité dynamique.
L’excentricité statique se remarque dans le cas ou le centre du rotor ne coïncide pas
avec celui du stator, tel que des rotors ou noyaux statoriques ovales. L’excentricité
dynamique fait que le centre du rotor tourne autour du centre du stator, dans ce
type d’excentricité, l’épaisseur minimale de l’entrefer est en fonction de la position
du rotor (fig 2.8). L’apparition des deux excentricités en même temps produit ce que
l’on nomme l’excentricité mixte. Afin que nous calculions les inductances d’une
machine qui est affectée par ce type de défaut, donc nous devons modéliser la
variation de l’épaisseur d’entrefer avant de faire intervenir la fonction d’enroulement
[GHO 05].

Chapitre 2 Modélisation de la machine asynchrone.
48
Fig. 2.8 : Description de l’excentricité statique et dynamique
2.2.6.4.1 Excentricité radiale
L’excentricité est purement radiale si l’épaisseur de l’entrefer pour une ouverture
angulaire donnée, et une position r du rotor, est la même le long de l’axe Z de la
machine. Autrement dit, la fonction de l’entrefer peut être fonction seulement de
et r .
La (fig 2.9) met en évidence une vue de face d’un rotor statiquement excentrique
par rapport à l’axe de la machine, où O et O désignent les centres du stator et du
rotor respectivement. La distance OO est le décalage entre les deux centres, et
reflète le degré de déplacement du rotor. Elle est égale à la variation maximale qui
peut survenir sur l’épaisseur de l’entrefer en faisant varier l’ouverture angulaire
de 0 jusqu’à 2π (angle mécanique).
Dans le cas de l’excentricité statique, et comme le présente la (fig 2.9), la
fonction d’entrefer aura pour expression [GHO 05]:
))cos(.1.()( 0 sgg (2.61)

Chapitre 2 Modélisation de la machine asynchrone.
49
Fig. 2.9 : Description schématique de l’excentricité statique
tel que s est le degré d’excentricité statique. Si l’excentricité est dynamique, elle
sera exprimée en fonction du degré d’excentricité dynamique d comme suit
[SAH08]:
))cos(.1.(),( 0 rdr gg (2.62)
L’excentricité mixte est la manifestation des deux excentricités, statique et
dynamique en même temps. Soit dans ce cas:
))cos(.)cos(1.(),( 0 rdsr gg (2.63)
Et si on tient compte de la représentation linéaire, il est possible de remplacer et
r par les longueurs des arcs correspondants rx et rr rx . Il est tout de même
possible de rassembler s et d dans une nouvelle grandeur caractérisant
l’excentricité mixte. Dans ce cas, l’inverse de la fonction d’entrefer s’écrit :
))/cos(1(
1),(
0
1
rxgxxg r (2.64)
Avec :

Chapitre 2 Modélisation de la machine asynchrone.
50
),cos(.222 ds (2.65)
Et
)/cos(
)/sin(arctan.
rx
rxr
rds
rd
(2.66-a)
De plus en plus compliquée, les valeurs des inductances peuvent être trouvées en
adoptant une intégration numérique faisant intervenir la fonction d’enroulement
modifiée donnée par l’expression suivante si on prend en considération les
harmoniques d’espace : (2.66-b)
Cependant, une résolution analytique doit impérativement faire appel à une
expression approximative en effectuant un développement en série de Fourier de
(2.64). Nous avons constaté qu’un parfait résultat sera obtenu en s’arrêtant au
troisième terme, tel que [GHO 05] [MAR 05]:
)),/(2cos()/cos(),( 2101
0 rxPrxPPxxgP r (2.67)
Avec :
,1
12
0
0
g
P (2.68)
2
01
11.2PP , (2.69)
,11
.2
22
02
PP (2.70)
2.2.6.4.2 Excentricité axiale
Dans ce type d’excentricité, la fonction d’entrefer, ou également, la fonction
inverse de l’entrefer est fonction aussi de Z . Par conséquent, la fonction inverse de
l’entrefer tiendra l’expression suivante :
d),θ()g,θ()N,θ(nrLμi
ψL
π
rrArBA
BABA
2
0
10

Chapitre 2 Modélisation de la machine asynchrone.
51
,)/)cos(()()/cos()(1(
1),,(
0 rxxzrxzgxzxP
rdsr
(2.71)
Ou bien une forme approximée;
),/(2cos(()()/cos()()(),,( 210 rxzPrxzPzPxzxP r (2.72)
Afin d’examiner le cas de l’excentricité statique axiale à titre d’exemple,
l’expression de )(zs doit être définie. En se référant à la (fig 2.10) exposant le
diamètre extérieur du rotor et le diamètre intérieur du stator avec exagération dans
la représentation de l’entrefer )(zs peut être écrite comme suit [GHO 05]:
),1.()( 0 L
zz ss
(2.73)
Comme présenté dans la (fig 2.10), l’entrefer minimal pour Z =0 est supposé à =0
le long de l’axe verticale. L’entrefer minimal a une position angulaire fixe pour les
valeurs de Z inférieur à L , mais sa valeur dépend de Z .
D’un autre coté, si la section du rotor parfaitement concentrique correspond à
LZ dans ce cas L doit être sélectionnée supérieure à une certaine valeur
garantissant l’existence d’un entrefer non nul le long de l’axe Z . Pour L , )(zs va
tendre vers 0, et l’étude convergera vers le cas de l’excentricité purement radiale.
Fig. 2.10 : Représentation de l’excentricité axiale

Chapitre 2 Modélisation de la machine asynchrone.
52
Il est à noter que dans un cas pareil, il est difficile de parvenir à une solution
analytique permettant de trouver les intégrales doubles. La non uniformité axiale
est, d’un coté présente à cause de l’inclinaison des barres, et de l’autre coté par
l’excentricité axiale. La solution analytique est précise et prend moins de temps de
simulation par rapport à une intégration numérique. Néanmoins, il est parfois
préférable d’adopter une intégration numérique à cause de la facilité de son
implantation [GHO 05].
2.2.6.5 Calcul des inductances en cas de court-circuit entre spires statorique
2.2.6.5.1 Exemple élémentaire
Soit le simple exemple élémentaire d’une bobine A′−X′ à cinq spires occupant
deux encoches tel que représente la (fig 2.11) Lorsqu’un court-circuit apparaît entre
les points de contact et a1 et a2 on obtient quelques spires en série et une spire
additionnelle court-circuitée. Il en résulte moins de spires effectives dans le circuit
de la phase; donc un affaissement de la FMM résultante, et la création d’une
nouvelle maille court-circuitée et couplée magnétiquement avec les autres circuits de
la machine [GHO 05][SCH 99].
Fig. 2.11 : Représentation élémentaire d’un court-circuit entre spires [GHO 05].
2.2.6.5.2 Système d’équations correspondant
La (fig 2.12) représente le circuit statorique équivalent du nouveau système avec
deux branches additionnelles, relatives aux spires court-circuitées et scontact
relative à la branche de court-circuit.

Chapitre 2 Modélisation de la machine asynchrone.
53
sdR représente la résistance effective de la branche court-circuitée, et est
généralement petite, tandis que scontactR est la résistance de la branche de court-
circuit qui doit être très grande dans l‘état sain. La simulation du court-circuit
brusque consiste à faire annuler en un instant cct la résistance scontactR . Il est à
rappeler que la maille court-circuitée résultante est couplée magnétiquement avec
les autres circuits de la machine, ce qui impose le calcul des nouvelles inductances
toujours selon les notions préétablies. Aucun couplage ne sera envisagé avec la
branche scontact en raison de son caractère non inductif.
Quant au model mathématique, la formulation de base relative au système
d’équations différentielles données par les équations (2.37) et (2.38-b) ne subit pas
de grands changements, à part l’extension des vecteurs tension et courant en leurs
nouvelles expressions données par
TscontactsdsCsBsAS VVVVVV ........... .... , (2.74)
TscontactsdsCsBsAs iiiiiI ....... .. , (2.75)
Fig. 2.12 : Représentation d’un circuit statorique contenant un court-circuit entre spires.
Et par conséquent, la réinitialisation des matrices inductances et résistances en
tenant compte des branches nouvellement introduites [GHO 05] [SCH 99].

Chapitre 2 Modélisation de la machine asynchrone.
54
2.2.6.5.3 Application à la machine étudiée
Considérant le cas d’un court-circuit qui touche 50% des tours de la première
bobine de la phase A. La résistance de la maille court-circuitée sera, dans ce cas
pour la nouvelle résistance de la phase A, d'une valeur réduite qui dépend du
nombre de spires court-circuitées.
2.3 PRISE EN COMPTE DES DEFAUT ROTORIQUES DANS LE MODELE
Le type de défaut que nous étudions est la rupture d’une ou plusieurs barres
rotoriques ou de portions d’anneaux de court-circuit. Le circuit électrique rotorique
donné à la (fig 2.13) doit être reconsidéré pour permettre la prise en compte du
défaut rotorique dans le modèle de la machine.
La (fig 2.14) représente un schéma de deux mailles adjacentes en état sain et à la
présence de la rupture d’une barre.
Fig. 2.13 : Schéma électrique équivalent simplifié d'une maille rotorique (moteur sain)

Chapitre 2 Modélisation de la machine asynchrone.
55
Fig. 2.14 : Schéma électrique équivalent simplifié d'une maille rotorique (rupture) d’une barre rotorique)
La simulation de ce type de défaillance peut être faite en utilisant deux méthodes
différentes, le but étant d’annuler le courant qui traverse la barre incriminée.
La première méthode de modélisation consiste à reconstituer totalement le circuit
électrique rotorique. Dans ce type d’approche, la barre rotorique défaillante est
enlevée du circuit électrique, ce qui oblige à recalculer les matrices des résistances
[Rr] et des inductances [Lr] de la machine asynchrone.
En effet, la suppression d’une barre de la cage nous donne des matrices [Rr] et [Lr]
de rang inférieur à celle développée pour la machine saine.
La seconde approche envisageable consiste à augmenter artificiellement la valeur
de la résistance de la barre ou de la portion d’anneaux incriminée d’un facteur
suffisant pour que le courant qui la traverse soit le plus proche possible de zéro en
régime permanent.
En comparaison avec la première méthode, la structure du circuit électrique
rotorique n’est pas modifiée car nous considérons, dans ce type de modélisation,
qu’une rupture de barre n’altère pas les inductances propres et mutuelles de la cage
rotorique.
Par conséquent, le programme de simulation s’adaptera à cette nouvelle
contrainte et nous donnera l’évolution temporelle des différents signaux pour un
fonctionnement de la machine avec ce type de défaut.

Chapitre 2 Modélisation de la machine asynchrone.
56
De plus, la simulation d’une barre partiellement cassée (barre fissurée de moitié
par exemple) ne peut pas être envisagée, si nous utilisons la première méthode de
modélisation alors qu’elle est tout à fait faisable avec la seconde [DID 04].
2.4 CONCLUSION
Nous avons bien illustré, dans ce chapitre, le modèle multi enroulement qui tient
compte de la structure complète du rotor. Le choix d’un tel modèle est imposé par
l’objectif de pouvoir simuler une rupture de barre ou de portion d’anneaux de court-
circuit au rotor. Pour cela, nous avons représenté toutes les équations de divers
types de barres et de portions d’anneaux du rotor. Avec tous les changements qui
s’ajoutent aux paramètres du moteur dans le cas d'un défaut de court-circuit
statorique ou d'excentricité pour que notre modèle reflète le plus possible notre ME
étudié.
Dans le chapitre suivant, nous attendrons impatiemment les résultats de
simulation et le défit de ce modèle envers différents essais (sain et défaillant) qui
seront étudiés puis analysés.

Chapitre 3 Simulation de la machine asynchrone.
57
Chapitre 3
Simulation de la machine asynchrone
3.1 INTRODUCTION
Dans ce chapitre, on considère la simulation du modèle multi enro ulement,
permettant de représenter l'évolution temporelle des grandeurs de la MAS des
différentes courbes du courant statorique, du courant dans les barres rotorique, le
couple et la vitesse de rotation ainsi que les valeurs efficaces des courants des
barres et les courants des barres cassées. La modulation est effectuée dans
différentes conditions de fonctionnement : la machine à l’état sain et avec défaut. En
suite, en présente une analyse détaillée des différents défauts rotoriques. Cette
analyse a pour objectif d’analyser les phénomènes observés sur les performances du
moteur .La valeur de la résistance doit être bien déterminé ; d’après les expériences,
on prend souvent la valeur de la résistance de la barre cassée comme suit
(Rbc=16*Rb) pour ce type de moteur ; (cette valeur a été choisie de sorte que le
courant qui traverse la barre défaillante soit le plus proche possible de zéro).
Après avoir défini le modèle de la MAS, nous avons utilisé le logiciel MATLAB pour
résoudre les équations différentielles obtenues et pour l'exploitation des résultats.
Le système (2.37) est alors implanté au sein du logiciel. La résolution des équations
différentielles est réalisée par la méthode de Runge Kutta d'ordre 4.
Dans ce chapitre, nous présentons sur les figures qui suivent l'évolution
temporelle des grandeurs de la MAS lorsque nous passons d'un fonctionnement sain
à un fonctionnement défaillant. Pour analyser l'effet de la rupture de barre sur ces
grandeurs, nous avons choisi de rendre la barre Rb1 de la cage rotorique défaillante
à l'instant t = 2 secondes en imposant une résistance de barre 16 fois supérieure à
celle donnée pour un fonctionnement sain (cette valeur a été choisie de sorte que le
courant qui traverse la barre défaillante soit le plus proche possible de zéro). Cette
étude à pour objectif, d'analyser et d'interpréter les phénomènes observés dans ce

Chapitre 3 Simulation de la machine asynchrone.
58
chapitre, tels que les oscillations du couple et de la vitesse, ainsi que la modulation
du courant statorique.
Remarque très importante :
Nous rappelons ici que tous nos résultats de simulation sont validés par des
références citées dans notre bibliographie dont les (pdf)s se trouvent, dans le
dossier complet de mon mémoire , chez mon encadreur. Pour ne pas rendre le
mémoire assez volumineux et ne pas alourdir le lecteur, on a pris seulement
quelques exemples.
On ajoute que les paramètres du moteur, utilisé pour la suite de toutes les
simulations, sont donnés dans le tableau suivant [MEN 04] :
Tab. 3.1 : LES PARAMETRES DU MOTEUR UTILISE EN SIMULATION 1.1 Kw P puissance nominale 200 v v tension nominale de ligne50 H fs fréquence d'alimentation1 p nombre de paire de pole35.76mm D diamètre moyen 65 mml longueur 0.2 mm e épaisseur d'entrefer 16 Nr nombre de barre 160 Ns nombre de spire par phase7.58 Ωrs résistance d'une phase statorique26.5 mHLsf inductance de fuite statorique 150 μΩRb résistance d'une barre rotorique150 μΩRe résistance d'un anneau de court-circuit0.1 μHLb inductance de fuite d'une barre rotorique0.1 μHLe inductance de fuite d'anneau de court-circuit5.4 10-3Kgm²J moment d'inertie 0 Nms2k0 coefficient de frottement
3.2 PROGRAMME DE SIMULATION DE LA MAS (modèle multi enroulement)
Le programme général est constitué d’une partie principale faisant appel à trois
soubroutines :
Inverser la matrice des inductances.
Dériver de ces matrices (Derivs).
Résolution du système d’équations différentielles non linéaire par
la méthode de (Runge–Kutta.).

Chapitre 3 Simulation de la machine asynchrone.
59
Le programme de la (fig 3.1) dévoile les différentes étapes qui nous permettent la
résolution du modèle afin d’obtenir les grandeurs souhaitées (courant dans les
barres de la cage, ainsi que la vitesse angulaire et le couple électromagnétique).
Fig. 3.1 : Organigramme général de la simulation de la MAS
3.3 SIMULATION DU DEMARRAGE A VIDE ET VARIATION DU COUPLE
RESISTANT
Les résultats issus de la simulation du fonctionnent sain (sans défaut), les (fig 3.2
a et b) et (fig 3.3 a et b) montrent, respectivement, l'évolution de la vitesse de
rotation et du couple électromagnétique ainsi que le courant statorique et le courant
dans la barre 1, lors d'un démarrage à vide sous une tension nominale avec une
alimentation sinusoïdale équilibrée. A l'instant t=1 s, nous procédons à un échelon
de couple résistant nominal de 2.5 Nm. On note que tous nos programmes sont
écrits sous Matlab.
La vitesse diminue à la vitesse nominale (fig 3.2 a) et le courant augmente à la
valeur nominale (fig. 3.3 a). Le couple électromagnétique vient équilibrer le couple
résistant ce qui nous remarquons dans la (fig. 3.2 b).

Chapitre 3 Simulation de la machine asynchrone.
60
0 0.5 1 1.5 2 2.5 3 3.5 4-500
0
500
1000
1500
2000
2500
3000
3500
temps en (sec)
La v
itess
e e
n (t
r/m
n)
La mise en charge
a)-Vitesse de rotation.
0 0.5 1 1.5 2 2.5 3 3.5 4-2
0
2
4
6
8
10
12
14
16
18
temps en (sec)
Cou
ple(
N/m
)
La mise en charge
b)-Couple électromagnétique
Fig. 3.2 : Evolution des grandeurs électromécaniques pour un moteur à l'état sain.

Chapitre 3 Simulation de la machine asynchrone.
61
0 0.5 1 1.5 2 2.5 3 3.5 4-20
-15
-10
-5
0
5
10
15
20
temps en (sec)
Le c
oura
nt s
tato
rique
en
(A)
a)- Courant d'une phase statorique.
0 0.5 1 1.5 2 2.5 3 3.5 4-1500
-1000
-500
0
500
1000
1500
temps en (sec)
Le c
oura
nt r
otor
ique
en
(A)
La mise en charge
b)- Courant rotorique dans la barre1.
Fig. 3.3 : Evolution des grandeurs électriques pour un moteur à l'état sain

Chapitre 3 Simulation de la machine asynchrone.
62
Comme nous avons dit que ses résultats sont semblables à ceux de la référence
[MEN 04]
3.4 SIMULATION DE LA RUPTURE DE BARRES AU ROTOR
Nous présentons sur les (fig 3.4 à 3.21) l'évolution temporelle des grandeurs de
la MAS lorsque nous passons d'un fonctionnement sain à un fonctionnement
défaillant. Pour analyser l'effet de la rupture de barre sur ces grandeurs, nous avons
choisi de rendre la barre rb1 de la cage rotorique défaillante à l'instant t = 2
secondes en imposant une résistance de barre 16 fois supérieure à celle donnée
pour un fonctionnement sain (cette valeur a été choisie de sorte que le courant qui
traverse la barre défaillante soit le plus proche possible de zéro). Par la suite, nous
avons créé un second défaut en augmentant la résistance de la barre rb2 à l'instant
t = 3 secondes.
Pour valider les phénomènes physiques prévus par la théorie dans le cas d'une
cassure de barres au rotor, nous avons exécuté des simulations avec le modèle
élaboré.
Généralement, la simulation d’une cassure de barre par l’annulation tout
simplement par le courant qui la traverse .Donc ; d’après cette théorie, on va
modifier les matrices des inductances et des résistances de tel sorte que : dans le
cas où la barre k est cassée, le courant ibk devrait être nul. Ainsi, le courant dans la
maille (k-1) devient égal au courant dans la maille (k), c'est-à-dire, (ir(k-1) =
irk).Cette théorie nous permet d’additionner deux colonnes et des deux lignes liées
aux courants ir(k-1) et irk dans les matrices des inductances et des résistances. Et
finalement, on arrive à la suppression du vecteur des courants irn, par conséquent
l’ordre du système va diminuer.
Pourtant, d'après des chercheurs dans le modèle multi enroulement, on a trouvé
que le courant dans une barre rompue n'est jamais nul. En comparant entre les
résultats de simulation, lorsqu'on modélise la cassure d'une barre par la méthode
décrite ci-dessus, et les résultats expérimentaux. On a trouvé que cette méthode a
des limites. Puisque avec les hypothèses simplificatrices au début, le modèle
mathématique a négligé les courants de fuite à travers les tôles. A vrai dire, il y a

Chapitre 3 Simulation de la machine asynchrone.
63
toujours un courant qui circule à travers les tôles du rotor tangentiellement vers les
barres adjacentes. Il est nécessaire donc de modéliser ce phénomène par l’ajout
d’une grande résistance additionnelle (relative) à la résistance de la barre rotorique
pour laisser un faible courant de fuite imitant le fait réel dans le rotor.
La valeur exacte de la résistance à ajouter pour simuler la cassure d'une barre
dépend des paramètres de la machine et particulièrement du pas de simulation.
Pour notre cas, si on prend un pas de simulation de 10-3 sec, une augmentation de
16 fois de la résistance initiale de la barre nous a offert des résultats qui sont en
concordance avec la théorie décrite dans les chapitres précédents. On signale aussi
que l'augmentation de la résistance plus de 16 fois amène à l’instabilité du système
numérique, ce problème sera relevé par la diminution du pas de calcul.
Notre simulation est faite d’abord d’après les indications suivantes :
À l'instant t=2 s, nous avons simulé la rupture de la première barre. Le courant dans
cette barre va diminuer fortement (fig 3.4), entraînant une augmentation importante
du courant dans les barres voisines (le courant presque annulé dans la barre 1 va
se distribuer dans les autres barres d’après leur emplacement de celle rompue)
(fig 3.5).
0 0.5 1 1.5 2 2.5 3 3.5 4-1500
-1000
-500
0
500
1000
1500
temps en (sec)
Co
ura
nt r
oto
riqu
e (
A)
La mise en charge La rupture de la barre 1
Fig. 3.4 : Courant rotorique dans la barre 1.

Chapitre 3 Simulation de la machine asynchrone.
64
0.5 1 1.5 2 2.5 3 3.5 4-1500
-1000
-500
0
500
1000
1500
temps en (sec)
Le c
oura
nt r
otor
ique
(A
)
Courant dans la barre 1Courant dans la barre 2Courant dans la barre 16
La mise en charge
La rupture de la barre 1
2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 4-150
-100
-50
0
50
100
150
temps en (A)
Le c
oura
nt r
otor
ique
(A
)
ZOOM rupture barre 1
Fig. 3.5 : Influence de la rupture de la barre 1 sur les barres
adjacentes.

Chapitre 3 Simulation de la machine asynchrone.
65
0 0.5 1 1.5 2 2.5 3-1500
-1000
-500
0
500
1000
1500
temps en(sec)
Co
ura
nt d
an
s le
s b
arr
es
roto
riq
ue
s (A
)
2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3-200
-150
-100
-50
0
50
100
150
200
temps en (sec)
Co
ura
nt d
an
s le
s b
arr
es
roto
riq
ue
s (A
)
VUE GLOBALE
barre1barre2barre3barre4barre5barre6barre7barre8barre9barre10barre11barre12barre13barre14barre15barre16
barre 16 barre 2
barre 1 (défaillant)
ZOOM
Fig. 3.6 : Influence de la rupture de la barre 1 sur les barres adjacentes (2 et 16) Déclenchement direct du défaut
Les (fig 3.5 et 3.6) représentent l'évolution du courant dans la barre rb3. Nous
pouvons noter que la rupture de la première barre induit une très faible

Chapitre 3 Simulation de la machine asynchrone.
66
augmentation du courant qui la traverse. Au moment du premier défaut, le courant
qui circulait dans la barre défaillante (barre rb1) se partage dans les barres
rotoriques adjacentes. Lorsque la seconde barre est cassée (barre rb2), nous
remarquons que le courant de la barre n°3 augmente significativement. En effet,
c'est le courant qui circulait dans la barre n°2 qui est partagé, en majorité, dans les
barres n°3 et n°16. Nous reportons sur les (fig 3.7 et 3.8), la répartition des
courants traversant les barres rotoriques à un instant t pour les trois modes de
fonctionnement étudiés (rotor sain, une barre cassée et deux barres cassées). Nous
pouvons remarquer que lorsque le défaut atteint deux barres cassées (nous
rappelons que la cage rotorique de la machine étudiée comporte 16 barres), le
courant maximum traversant les barres adjacentes à celles défaillantes est
quasiment deux fois (1.7 fois) supérieur au courant rotorique obtenu avec une cage
d'écureuil saine. Une augmentation anormale du courant dans les barres peut
provoquer un échauffement local et conduire à une nouvelle rupture.
0 2 4 6 8 10 12 14 16 180
10
20
30
40
50
60
70
80
Numéro de barres
Cou
rant
rot
oriq
ue (
A)
Fig. 3.7 : Valeur efficace des courants dans les barres rotoriques, pour un moteur à l'état sain.

Chapitre 3 Simulation de la machine asynchrone.
67
0 2 4 6 8 10 12 14 16 180
10
20
30
40
50
60
70
80
90
100
Numéro de barres
Cou
rant
rot
oriq
ue (
A)
a)- Une barre cassée (la barre 1).
0 2 4 6 8 10 12 14 16 180
20
40
60
80
100
120
Numèro de barres
Co
ura
nt r
oto
riq
ue
(A
)
b)- Deux barres cassées (la barre 1 et 2)
Fig. 3.8 : Valeur efficace des courants dans les barres rotoriques, pour un moteur avec des barres cassées.

Chapitre 3 Simulation de la machine asynchrone.
68
En analysant la (fig 3.9 a et b) où nous présentons l'évolution de la vitesse
rotorique, nous visualisons l'apparition d'une légère ondulation lorsque la rupture de
la première barre rotorique apparaît. Cette ondulation, qui augmente lorsque le
deuxième défaut est créé, oscille à une fréquence de 2gfs par rapport au rotor un
champ rotorique inverse qui tourne à –gs. L'interaction de ces champs avec celui
issu du bobinage statorique donne naissance à un couple électromagnétique, qui est
la somme d'une composante directe constante et d'une composante inverse
sinusoïdale de pulsation 2gs. Cette composante provoque des fluctuations dans
la vitesse qui peuvent contribuer à une fatigue supplémentaire de l'arbre. Cette
ondulation s’accentue plus fort encore quand une deuxième barre sera cassée à
l'instant t=3 s en suivant les amplitudes du courant dans les barres voisines qui
deviennent plus importantes (fig 3.8 a et b) et (fig 3.9 a et b).
0 0.5 1 1.5 2 2.5 3 3.5 4-500
0
500
1000
1500
2000
2500
3000
3500
temps en (sec)
vite
sse
de r
otat
ion
(tr/
min
)
La mise en charge Une barre cassée
deux barres cassées
Fig. 3.9.a : Ondulation de la vitesse de rotation lors de la
rupture d'une barre puis de deux barres.
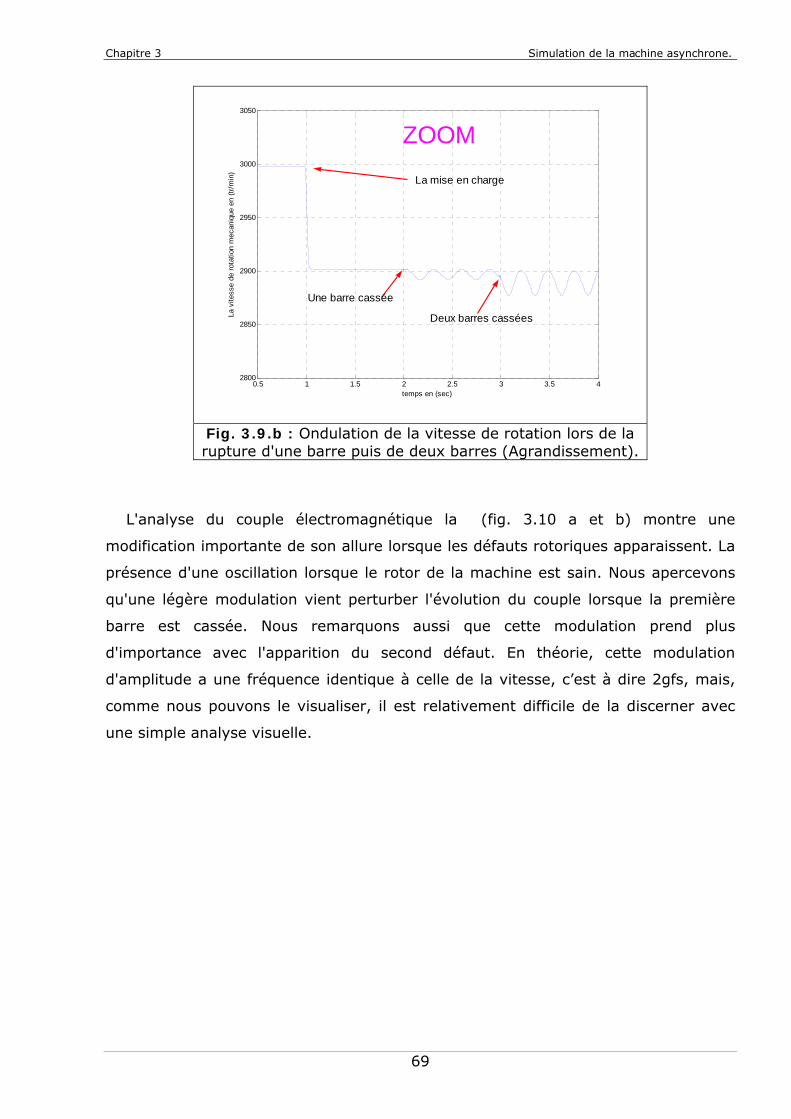
Chapitre 3 Simulation de la machine asynchrone.
69
0.5 1 1.5 2 2.5 3 3.5 42800
2850
2900
2950
3000
3050
temps en (sec)
La v
itess
e de
rot
atio
n m
ecan
ique
en
(tr/
min
)
ZOOM
La mise en charge
Une barre cassée
Deux barres cassées
Fig. 3.9.b : Ondulation de la vitesse de rotation lors de la rupture d'une barre puis de deux barres (Agrandissement).
L'analyse du couple électromagnétique la (fig. 3.10 a et b) montre une
modification importante de son allure lorsque les défauts rotoriques apparaissent. La
présence d'une oscillation lorsque le rotor de la machine est sain. Nous apercevons
qu'une légère modulation vient perturber l'évolution du couple lorsque la première
barre est cassée. Nous remarquons aussi que cette modulation prend plus
d'importance avec l'apparition du second défaut. En théorie, cette modulation
d'amplitude a une fréquence identique à celle de la vitesse, c’est à dire 2gfs, mais,
comme nous pouvons le visualiser, il est relativement difficile de la discerner avec
une simple analyse visuelle.

Chapitre 3 Simulation de la machine asynchrone.
70
0 0.5 1 1.5 2 2.5 3 3.5 4-2
0
2
4
6
8
10
12
14
16
18
temps en (sec)
Cou
ple
(N/m
)
La mise en charge
une barre casséedeux barres cassées
Fig. 3.10.a : Ondulation du couple électromagnétique pendant la rupture d'une barre puis de deux barres.
1 1.5 2 2.5 3 3.5 40.5
1
1.5
2
2.5
3
3.5
4
temps en (sec)
Cou
ple
(N/m
)
La mise en charge
une barre cassée
deux barres cassées
ZOOM
Fig. 3.10.b : Agrandissement de l'ondulation du couple.
Les (fig 3.11 a et b), représente l'évolution du courant absorbé par une phase
statorique. Comme pour les deux grandeurs précédentes, le défaut rotorique induit
une très légère modulation d'amplitude. Il faut attendre le second défaut (deux
barres cassées) pour permettre de la visualiser clairement.

Chapitre 3 Simulation de la machine asynchrone.
71
Nous avons représenté l'enveloppe de ce courant sur la (fig 3.11 b) Comme nous
pouvons le voir, cette modulation reste très faible, trop faible pour permettre
d'effectuer un diagnostic précis de l'état de la cage rotorique.
0 0.5 1 1.5 2 2.5 3 3.5 4-20
-15
-10
-5
0
5
10
15
20
temps en (sec)
Cou
rant
sta
toriq
ue (
A)
La mise en charge Une barre cassée Deux barres cassées
Fig. 3.11.a : Courant statorique pendant la rupture d'une barre puis de deux barres.
1.5 2 2.5 3 3.5 41.5
1.6
1.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
temps en (sec)
Cou
rant
sta
toriq
ue (
A)
Une barre cassée Deux barres cassées ZOOM
Fig. 3.11.b : Modulation du courant statorique pendant la rupture d'une barre puis de deux barres (Agrandissement).

Chapitre 3 Simulation de la machine asynchrone.
72
La (fig 3.12) montre l'influence du nombre des barres cassées sur la durée du
régime transitoire au démarrage. On remarque nettement que la durée pour
atteindre la vitesse nominale augmente avec le nombre des barres cassées.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-500
0
500
1000
1500
2000
2500
3000
temps en (sec)
vite
sse
de r
otat
ion
(tr/
min
)
L'etat sain 1 barre cassée2 barres cassées3 barres cassées
Fig. 3.12 : Vitesse pendant un démarrage en charge
3.5 EFFET DE GLISSEMENT
Afin de vérifier l'effet du glissement sur l'amplitude de la composante oscillatoire,
nous avons également effectué la même simulation pour la machine à vide. D'après
les (fig 3.13 et 14 a et b), on peut remarquer qu'il est difficile de détecter le défaut
en régime permanent, quand la machine n'est pas chargée. Cependant, on a trouvé
que la caractéristique mécanique en régime transitoire, donne des informations sur
l'état du moteur, même à vide (fig 3.15).

Chapitre 3 Simulation de la machine asynchrone.
73
0 0.5 1 1.5 2 2.5 3 3.5 4-2
0
2
4
6
8
10
12
14
16
18
temps en (sec)
Cou
ple
(N/m
)
moteur en charge
La mise en charge Une barre cassée
Deux barres cassées
moteur à vide
Fig. 3.13 : Comparaison entre l'ondulation du couple à vide et en charge.
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
temps en (sec)
Cou
rant
sta
toriq
ue (
A)
Fig. 3.14.a : Courant statorique du moteur en charge,
avec deux barres cassées.

Chapitre 3 Simulation de la machine asynchrone.
74
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
temps en (sec)
Cou
rant
sta
toriq
ue (
A)
Fig. 3.14.b : Courant statorique du moteur à vide avec
deux barres cassées.
-500 0 500 1000 1500 2000 2500 3000 3500-5
0
5
10
15
20
25
vitesse en (tr/min)
Cou
ple
(N/m
)
moteur à vide sans défaut moteur à vide avec deux barres cassées
Fig. 3.15 : Caractéristique mécanique du moteur.

Chapitre 3 Simulation de la machine asynchrone.
75
3.6 EFFET DE POSITION DE BARRES CASSEES
Maintenant, on va voir l'influence du défaut sur les performances du moteur parce
qu’il ne dépend pas seulement du nombre de barres cassées, mais leur mutuelle
position joue un rôle important aussi .Le cas le plus médiocre, est lorsque les barres
cassées sont adjacentes et c'est le cas le plus fréquent en pratique (fig 3.16). Mais si
les barres sont espacées d’un angle électrique de /2 (rad) (Fig 3.17 et 3.18).on
n'observe pas une grande influence sur les performances du moteur .Ceci amène à
des confusions dans l'interprétation de l'état de la machine. Principalement sur les
défauts équilibrés qui amènent à une symétrie des grandeurs électriques.
0 2 4 6 8 10 12 14 16 180
20
40
60
80
100
120
numéro de barres
Cou
rant
rot
oriq
ue (
A)
Fig. 3.16 : Valeurs efficaces des courants dans les barres
rotoriques,pour un moteur avec deux barres cassées(8 et 9).

Chapitre 3 Simulation de la machine asynchrone.
76
0 2 4 6 8 10 12 14 16 180
20
40
60
80
100
120
numéro de barres
Cou
rant
sta
toriq
ue (
A)
Fig. 3.17 : Valeurs efficaces des courants dans les barres
rotoriques, pour un moteur avec quatre barres cassées (1, 5, 9 et 13) espacées de /2.
0 0.5 1 1.5 2 2.5 3-2
0
2
4
6
8
10
12
14
16
18
temps en (sec)
Cou
ple
(N/m
)
Fig. 3.18 : Couple électromagnétique pour un moteur en
charge avec quatre barres cassées (1, 5, 9 et 13)

Chapitre 3 Simulation de la machine asynchrone.
77
3.7 CASSURE DE PORTIONS D’ANNEAUX DE COURT-CIRCUIT
La cassure d’une portion d’anneau de court-circuit est un défaut qui apparaît aussi
fréquemment que la cassure de barres. L’effet de la cassure d’une portion d’anneau
de court-circuit sur les différentes grandeurs de la machine est représenté sur les
figures suivantes :
5 5.5 6 6.5 7 7.5 81.5
2
2.5
3
temps en (sec)
Cou
rant
sta
toriq
ue (
A)
Cassure de la 1ère portion d'anneau
Cassure de la 2 ème portion d'anneau
Fig. 3.19 : Courant de phase statorique
0 2 4 6 8 10 12 14 16 180
10
20
30
40
50
60
70
80
90
numéro de barres
cour
ant
roto
rique
(A
)
Fig. 3.20 : Valeurs efficaces des courants dans les barres
rotoriques cassure d’une portion d’anneau de court- circuit

Chapitre 3 Simulation de la machine asynchrone.
78
0 2 4 6 8 10 12 14 16 180
10
20
30
40
50
60
70
80
90
numéro de barres
cour
ant
roto
rique
(A
)
Fig. 3.21 Valeurs efficaces des courants dans les barres
rotoriques cassure de deux portions d’anneaux de court- circuit
-500 0 500 1000 1500 2000 2500 3000-2
0
2
4
6
8
10
12
14
16
18
vitesse en (tr/min)
Cou
ple
en (
N/m
)
rotor avec deux portions d'anneaux casséesrotor avec une portion d'anneau casséerotor sain
Fig. 3.22 : Caractéristique mécanique

Chapitre 3 Simulation de la machine asynchrone.
79
3.8 INTRERPRETATION ET ANALYSE DU DEFAUT
Le défaut, lors d'une rupture de barres, provoque une asymétrie dans le système
et par conséquent dans tous les paramètres à étudier : le couple, la vitesse, le
courant statorique…
Comme, nous sommes des scientifiques qui ne se contentent pas seulement de
remarquer ces phénomènes, il faut les interpréter et les analyser aussi.
3.8.1 Expression des champs magnétiques statoriques et rotoriques
Le champ magnétique dans l'entrefer, dans le cas idéal et sans défaut, est
purement sinusoïdal. L’induction magnétique, dans un repère lié au stator, dans un
point M qui se localise dans l'entrefer est :
)tcos(ik)t(BsBMsasss (3.1)
M : position du point M.
Dans le cas où il y aurait une rupture de barre, ce défaut entraîne une asymétrie
dans notre système qui rend son étude analytique très compliquée à faire.
Pour simplifier ce problème, nous avons décomposé chaque paramètre asymétrie en
un direct et l’autre inverse.
Fig. 3.23: Schéma de fonctionnement pour un rotor sain
Le champ direct tourne à une vitesse : m + r :
Avec m =(1-g) s, r = gs
Donc: m + r = (1-g) s + gs = s
)tcos(ik)t(BrdBMsrdrdrd (3.2)

Chapitre 3 Simulation de la machine asynchrone.
80
Fig. 3.24 : Schéma de fonctionnement pour un rotor
défaillant
Le champ inverse tourne à une vitesse : m - r = (1-g) s - gs = (1-2g)s, donc :
)t)g21cos((ik)t(BriBMsririri (3.3)
3.8.2 Le couple électromagnétique
Le couple électromagnétique est donné par :
sri
sri
srd
srdtot d
dW
d
dWCe
(3.4)
Wsrd : est l'énergie magnétique emmagasinée direct dans l'entrefer
Wsrd : est l'énergie magnétique emmagasinée inverse dans l'entrefer
avec :
)sin(
22
0
2
00
rds BBrdrdass
rdssrd
ikikelR
dBBelR
W
(3.5)
)2sin(
22
0
2
00
ris BBsririass
rissri
tgikikelR
dBBelR
W
(3.6)

Chapitre 3 Simulation de la machine asynchrone.
81
ris
rds
BBsri
BBsrd (3.7)
L'expression (3.4), du couple électromagnétique, devient :
)2cos()cos(00
risrds BBsririassBBrdrdasstot tgikikelR
ikikelR
Ce
(3.8)
Finalement, on peut dire que le couple électromagnétique se compose d’une
composante constante et une composante oscillatoire. Le courant direct au rotor, est
à la source de la composante constante. Le défaut provoque le courant inverse au
rotor qui donne naissance à la composante oscillatoire de pulsation 2gs[SAH 03]
[THA 06].
3.8.3 La vitesse de rotation
L’équation la vitesse en fonction du couple nous donne :
m0m kCrCe
dt
dJ
(3.9)
Si on néglige le frottement k0 et avec Cr = Cesr .On obtient :
srisrisrdm CeCrCeCe
dt
dJ
(3.10)
Si on intègre, on aura :
)tg2(cosiikkelR
Jg2
1)g1()t(
ris BBsriasris0s
sm
(3.11)
On remarque que dans (3.11), l’oscillatoire du couple provoque une pulsation 2gs
dans la vitesse.
3.8.4 La force électromotrice
Si un conducteur de longueur l, passant par le point M, situé dans l'entrefer, la
f.e.m induite dans ce conducteur est donnée par (loi de Lenz) :

Chapitre 3 Simulation de la machine asynchrone.
82
dt
d
dt
d
dt
dte rirds
)(
(3.12)
)g)t((lR)t(B)g)t((lR)t(BlR)t(B)t(e smrismrdssa (3.13)
Avec
Bs(t)= sasik )cos(sBMst (3.14)
Brd(t)= rdrdik )cos(rdBMst
Bri(t)= ririikriBMstg )21cos(( )
En remplaçant m(t) par son expression, on obtient :
)cos(
)2)41cos((
))21cos(()21(
))21cos((
))21cos((
)cos()cos()(
ss
ris
ri
rirds
rirds
rds
BBMsriri
BBMsriri
BMssriri
BBBMsrdrd
BBBMsrdrd
BMssrdrdBMsssas
tKlRik
tgKlRik
tgglRik
tgKlRik
tgKlRik
tlRiktlRikte
(3.15)
Avec : risris0s
IIkkelR
Jg4
1K
A ces résultats, nous pouvons dire :
Un défaut, dans la ME, engendre un champ magnétique inverse de fréquence –gfs,
ce qui fait naître des courants à la fréquences (1-2g)fs dans les circuits statoriques.
En parallèle, dans le couple électromagnétique va s’accompagner d’une composante
oscillatoire de fréquence 2gfs, vu qu’il est proportionnel au courant .A son tour le
couple produit une oscillation dans la vitesse qui induit aussi des nouvelles
composantes de courant (1±2g)fs dans les circuits statoriques . Les composantes
oscillatoires de la même fréquence (1-2g)fs s'ajoutent pour donner une seule
harmonique résultante. Alors que les courant de fréquence (1+2g)fs, circulent dans
les enroulements statoriques , et en présence de défaut, induisent des courants de
±3gfs au rotor. Les courants de fréquence (1±4g)fs ont un processus identique à
celui des courants de fréquence (1±2g)fs [SAH 03] [THA 06].

Chapitre 3 Simulation de la machine asynchrone.
83
3.9 CONCLUSION
Dans ce chapitre, nous avons présenté un modèle permettant la simulation d'une
MAS à cage d'écureuil. Les conséquences d'une rupture de barre (ou d'un segment
d'anneaux) de la cage d'écureuil s'obtiennent très simplement, il suffit d'augmenter
la résistance de la barre incriminée (ou la résistance de la portion d'anneaux
considérée). Ce modèle de machine a permis de comprendre les phénomènes
physiques mis en jeu lors de l'apparition d'un tel défaut. Nous avons découvert que
la rupture d’une barre entraîne des oscillations dans le couple et dans la vitesse,
ainsi qu'une modulation du courant statorique. L'amplitude de ces oscillations
augmente avec le nombre de barres cassées. Nous avons observé aussi que la durée
du régime transitoire augmente avec la sévérité du défaut de barres. Nous avons
remarqué de plus que les effets de cassures de barres peuvent être inobservables,
en cas où la machine ne serait pas chargée ou affectée par un défaut équilibré.
On peut constater facilement que les allures des courants statoriques, la vitesse
et le couple électromagnétique ne fournissent pas d’informations fines sur l’état du
moteur. Par conséquent, il est plus judicieux de traiter le signal afin d’en ressortir
avec des données plus représentatives. Ceci fait l'objet du chapitre suivant.

Chapitre 4 Détection des défauts rotoriques par MCSA.
84
Chapitre 4
Détection des défauts rotoriques par MCSA
4.1 INTRODUCTION
Le diagnostic se réalise dans les installations électriques en analysant certaines
grandeurs telles que la température, le bruit, les vibrations...etc.
La variation de ses grandeurs n’est que les conséquences directes et les
manifestations claires dues à la modification des grandeurs tempo fréquentielles
mesurables.
Et lorsqu’une machine passe vers un nouveau mode de fonctionnement, la
détection précoce de l’évolution vers ce mode non désiré permet d’anticiper le
diagnostic et d’éviter les risques.
A cet effet, on s’intéresse obligatoirement au diagnostic qui permet de détecter
de façon précoce les anomalies, qui représentent un des moyens sûrs pour
contribuer à améliorer la productivité des différents secteurs.
Nous présenterons dans ce chapitre, l'analyse spectrale du signal du courant
statorique en utilisant la transformée de Fourier rapide (FFT), qui est utilisée depuis
de nombreuses années pour détecter des défaillances dans les ME, en particulier les
ruptures de barres au rotor, la dégradation des roulements, les excentricités, les
court-circuits dans les bobinages. Les méthodes d'analyse spectrale sont
principalement utilisées dans les machines directement alimentées par le réseau et
fonctionnant en régime permanent [MAG 06].
4.2 TECHNIQUES D’ANALYSES DES DEFAUTS Avant d’aborder la question de l'analyse spectrale du signal, nous commençons à

Chapitre 4 Détection des défauts rotoriques par MCSA.
85
mettre en évidence toutes les autres méthodes de traitement de signal disponibles
pour le diagnostic des machines tournantes, qui peuvent être classées dans quatre
groupes différents : l'analyse spectrale, l'analyse cepstrale, l'analyse temporelle,
l'analyse temps-fréquence ou temps-échelle. Dans ce qui suit, on présente quelques
méthodes qui sont utilisées dans le diagnostic des ruptures de barres.
4.2.1 Analyse spectrale
L'analyse spectrale est utilisée pour détecter des défaillances dans les ME,
essentiellement les ruptures de barres au rotor des MAS, la dégradation des
roulements, les excentricités et les courts-circuits dans les bobinages. Ces cas se
prêtent bien à cette approche dans la mesure où de nombreux phénomènes se
traduisent par l'apparition de fréquences directement liées à la vitesse de rotation ou
à des multiples de la fréquence d'alimentation. La surveillance par analyse spectrale
de la MAS consiste donc à effectuer une simple transformée de Fourier des
grandeurs affectées par le défaut, et à visualiser les fréquences parasites constituant
la signature d'un défaut dans la machine (Fig. 4.1). Les grandeurs choisies sont soit
les grandeurs électriques (plus particulièrement les courants de ligne), soit les
grandeurs mécaniques (vibration, couple électromagnétique) [SMA 02].
Fig. 4.1 : Principe de la surveillance par analyse spectrale [SMA 02]

Chapitre 4 Détection des défauts rotoriques par MCSA.
86
L'analyse spectrale est certainement la méthode la plus naturelle pour le
diagnostic des défauts. Cette technique permet une surveillance rapide et peu
onéreuse car elle exige un simple capteur de courant ou de vibration. Cependant,
elle nécessite une analyse manuelle par un expert en surveillance des ME.
Pour obtenir le spectre en fréquence, il existe plusieurs méthodes. On distingue
principalement deux approches [BEL 05]:
les méthodes non paramétriques.
les méthodes paramétriques.
4.2.1.1 Méthodes non paramétriques
Pour ces méthodes, on trouve tous les estimateurs à base d'analyse de Fourier.
Les spectres basés sur l'utilisation de la transformation de Fourier sont obtenus :
soit par le calcul direct sur des segments d'échantillons temporels, puis au
moyen de la transformée de Fourier, des segments pondérés par une fenêtre
d'apodisation.
soit par le calcul du spectre sur la fonction d'auto corrélation [BEL 05].
4.2.1.2 Méthodes paramétriques
Les méthodes d'analyse fréquentielles paramétriques sont basées sur la
détermination d'un modèle représentant le signal à analyser et pour lequel les
paramètres sont utilisés pour estimer le spectre de puissance. L'estimation du
spectre nécessite trois étapes. La première consiste à sélectionner un type de
modèle. Ensuite, on estime les paramètres du modèle retenu en utilisant les
échantillons du signal. La dernière étape enfin, concerne l'estimation spectrale à
partir des paramètres du modèle estimé [BEL 05].
4.2.2 Analyse cepstrale
Cette méthode est utilisée en analyse vibratoire et dans le cas du diagnostic de
réducteurs. Il a été prouvé qu'en calculant le cepstrale, on identifie clairement la
présence des raies.

Chapitre 4 Détection des défauts rotoriques par MCSA.
87
4.2.3 Méthodes de détections des fréquences connues
Ces méthodes reposent sur le principe que les défauts se caractérisent par
l'apparition ou le renforcement d'une raie à une fréquence fixe ou proportionnelle à
la vitesse de rotation de la machine.
4.2.4 Méthodes temps-fréquence et temps–échelle
4.2.4.1 Temps-fréquence
Les méthodes d'analyse temps–fréquence ont été développées pour l'étude des
signaux non stationnaires [BEL 05]. Plus généralement, elles s'appliquent à des
signaux dont le contenu fréquentiel ou les propriétés statistiques évoluent au cours
du temps. Pour décrire cette évolution temporelle, il faut réaliser une analyse
spectrale évolutive, d’où les méthodes temps-fréquence. Parmi les techniques de
l'analyse temps-fréquence, la transformation de Wigner–Ville permet des diagnostics
précis. Cette transformation est une fonction réelle qui définit une distribution
d'énergie dans le plan temps-fréquence. Elle peut être interprétée comme une
densité spectrale instantanée [BOU 01].Cependant, cette analogie est tempérée par
l'existence de valeurs négatives qui en rendent l'interprétation délicate. Des
procédures de lissage (fréquentiel et temporel) par fenêtrage permettent de réduire
les interférences entre les différentes composantes fréquentielles du signal. La
représentation temps-fréquence a permis ainsi de mettre en évidence la modulation
de fréquence linéaire en fonction du temps. Le temps de calcul d'une représentation
temps-fréquence peut être prohibitif. De plus l'inter présentation d’une image est
souvent difficile [DID 04].
4.2.4.2 Temps- échelle
Ce mode de représentation est utilisé pour détecter des phénomènes qui se
déroulent sur des échelles de fréquence différentes rencontrés dans un signal. La
transformation en ondelette a été formalisée par Grossman et Morle [BEL 05].
4.2.5 Application de l'analyse spectrale
Il existe de nombreux types de fenêtres qui privilégient des aspects particuliers
par rapport aux autres. Il convient donc de choisir la fenêtre adéquate pour le signal
en fonction du problème particulier que l’on doit résoudre.
Cette caractéristique porte essentiellement sur trois points :
la largeur et la hauteur du lobe principal,

Chapitre 4 Détection des défauts rotoriques par MCSA.
88
la hauteur du premier lobe secondaire,
l’atténuation des lobes secondaires,
On utilise la fenêtre de hanning [BEL 05].
4.3 MCSA PAR LA FFT
Chaque défaut dans la MAS va donner naissance à une influence remarquable
surtout sur le courant statorique par la modulation de son amplitude à la
fréquence 2gfs.Nous avons mis en évidence ce phénomène en visualisant le courant
statorique en régime permanent (Fig 4.2) et (fig 4.3).Ces simulations sont obtenues
à l'aide du modèle élaboré dans le deuxième chapitre.
Le signal temporel (Fig 4.3) confirme la modulation de l’amplitude du courant par
une fréquence de 2gfs.
0 0.5 1 1.5 2 2.5 3 3.5 4-20
-15
-10
-5
0
5
10
15
20
temps en (sec)
cou
ran
t sta
tori
qu
e e
n (
A)
2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 4-3
-2
-1
0
1
2
3
temps en (sec)
cou
ran
t sta
tori
que
en
(A)
ZOOM
Fig. 4.2 : Courant statorique en régime permanent pour un moteur sain.
0 0.5 1 1.5 2 2.5 3 3.5 4-20
-15
-10
-5
0
5
10
15
20
temps en (sec)
cou
ran
t sta
tori
qu
e e
n (
A)
2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 4-3
-2
-1
0
1
2
3
temps en (sec)
cou
ran
t sta
tori
qu
e e
n (
A)
ZOOM
Fig. 4.3 : Courant statorique en régime permanent pour un moteur avec une
barre cassée

Chapitre 4 Détection des défauts rotoriques par MCSA.
89
Les (fig. 4.2 et 4.3) nous montrent clairement que l’analyse directe du courant
statorique, il s’avère très difficile puisque, comme nous voyons ,la modulation de
l’amplitude est très faible pour l’observer clairement et par conséquent donner un
diagnostic parfait (de quel type de l’anomalie précis s’agit-il ?).La pauvreté du
signal temporel du courant, en renseignements nécessaires pour détecter les
défauts en questions, nous amène au signal fréquentiel qui offre des informations
précieuses sur sa composition. Nous avons montré précédemment qu’un défaut de
barres rotoriques, se manifeste dans le spectre du courant statorique par l'apparition
des raies autour du fondamental. Dans notre cas, nous avons utilisé la transformée
de Fourier rapide. (FFT) qui s’avère plus commode.
On va prendre une résolution satisfaisante pour discerner clairement les bandes
latérales et on peut l’analyser facilement pour diagnostiquer notre machine.
Puisque premièrement, il faut séparer les raies du fondamental, nous avons choisi
avec soin les paramètres de notre signal :
Nous avons fait une simulation avec une barre cassée en pleine charge, soit
un glissement de 3.5 % équivaut à un couple résistant de (2.5 N /m).
Les fréquences qu'on cherche dépendent du glissement, ce dernier dépend de
la variation de la vitesse. Ceci implique que la résolution du spectre doit
séparer les fréquences (1±2g)fs pour des valeurs faibles de glissement.
Nous avons choisi pour cela (10000 points) une durée d'acquisition de 10
secondes, ce qui implique que : f = Fe/N = 0.1 Hz, ce qui est nettement
suffisant pour séparer les raies qui sont à une distance de ±2gfs = 3.5 Hz
(fig 4.4, 4.5 et 4.6) [SAH 03].
0 50 100 150 200 250 300 350 400 450 5000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1spectre linéaire du courant avec 1 barre cassée
fréquence en (Hz)
cour
ant no
rmalisé
en (A)
Fig. 4.4 : Spectre linéaire du courant statorique avec une résolution de 0.1Hz et pour une barre cassée.

Chapitre 4 Détection des défauts rotoriques par MCSA.
90
20 30 40 50 60 70 80
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique du courant avec 1 barre cassée
Fréquence (Hz)
Am
plitu
de (
dB)
Fig. 4.6 : Spectre logarithmique du courant statorique obtenu pour 1 barre cassée avec une résolution de 0.1Hz.
(Zoom autour du fondamental)
La comparaison des deux (fig 4.4 et 4.5), nous permet de remarquer que le
spectre logarithmique fait apparaître des renseignements, qui ne sont pas
détectables sur le spectre linéaire. Mais on peut lire aisément sur la (fig 4.6) les
harmoniques caractéristiques du défaut de barres rotoriques, à la fréquence 46.5 Hz
et 53.5Hz.
0 50 100 150 200 250 300 350 400 450 500-120
-100
-80
-60
-40
-20
0spectre logarithmique du courant avec 1 barre cassée
Fréquence (Hz)
Am
plitu
de (dB
)
Fig. 4.5 : Spectre logarithmique du courant statorique pour une barre cassée,et avec une résolution de 0.1Hz.

Chapitre 4 Détection des défauts rotoriques par MCSA.
91
4.4 EFFET DU NOMBRE DE BARRES CASSEES SUR LES HARMONIQUES
(1±2kg)fs
Nous présentons sur la (fig 4.7) , le spectre du courant statorique d'un moteur
sain en charge nominale (g = 3.5 %). C'est évident qu'on n'observe aucune raie
latérale. Mais en réalité on observe même un dégrée d’asymétrie naturelle (de
construction) qui donne naissance normalement à l'apparition des raies mais avec
amplitudes faibles [SAH 03] [ARO 07] [MEN 04].
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plitu
de (
dB)
Fig. 4.7 : Spectre du courant statorique pour un moteur sain en charge.
La visualisation des raies dans le courant statorique permet d’expliquer le défaut
lorsque une barre est rompue et d’obtenir plus d’information sur le défaut à partir
des raies latérales aux fréquences [46.5 Hz et 53.5Hz] et avec amplitudes [-32.37 et
-36.96] (Fig 4.8).

Chapitre 4 Détection des défauts rotoriques par MCSA.
92
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique du courant statorique 2 barres cassées
Fréquence (Hz)
Am
plit
ud
e (
dB)
(1+2g)fs
(1+4g)fs
(1-2g)fs
(1-4g)fs
Fig. 4.8 : Spectre du courant statorique pour un moteur en charge avec une barre cassée.
Quand une deuxième barre adjacente est cassée, on remarque une
augmentation de 05.81 dB sur la raie (1-2g)fs, et une augmentation de 07.17 dB
sur la raie (1+2g)fs.On observe aussi, l'apparition des raies aux fréquences[42.6 Hz
et 57.4 Hz] qui correspondent à (1±4g)fs,et avec des amplitudes faibles[-41.55 dB
et -52.88 dB] (fig. 4.9 a et b).
0 50 100 150 200 250 300 350 400 450 500-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plit
ude (dB)
Fig. 4.9.a : Spectre du courant statorique pour un moteur en charge avec deux barres adjacentes cassées

Chapitre 4 Détection des défauts rotoriques par MCSA.
93
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique du courant statorique 2 barres cassées
Fréquence (Hz)
Am
plit
ud
e (d
B)
(1+2g)fs
(1+4g)fs
(1+6g)fs)
(1-2g)fs
(1-4g)fs
(1-6g)fs)
fs
Fig. 4.9.b : Spectre du courant statorique pour un moteur en charge avec deux barres adjacentes cassées
(Zoom autour du fondamental).
Quand la troisième barre est cassée, on constate une augmentation sur les
amplitudes des harmoniques (1±2kg)fs. On signale que les amplitudes des
composantes (1±2kg)fs, diminuent à chaque fois quand on s'éloigne du
fondamentale. (fig. 4.10).
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plit
ude (dB
)
(1+2g)fs
(1+4g)fs
(1+6g)fs
(1+8g)fs
(1-2g)fs
(1-4g)fs
(1-6g)fs
(1-8g)fs
fs
Fig. 4.10 : Spectre du courant statorique pour un moteur en charge avec trois barres adjacentes cassées
La visualisation des (fig 4.7, 4.8, 4.9 et 4.10), nous attire l’attention que les
amplitudes des raies (1±2kg) fs ont évolué encore après la rupture des barres
adjacentes. Mais maintenant lors de la rupture de la quatrième barre, qui se situe à

Chapitre 4 Détection des défauts rotoriques par MCSA.
94
p/2 de la troisième barre. On constate une diminution de l’amplitude de la raie de
l’ordre 3.5 dB sur les amplitudes des raies plutôt qu'une augmentation (fig. 4.11).
Ce qui a été confirmé par plusieurs publications et par [BEN 00] [MAG 06] [GHO 05]
dans le cas de la rupture des barres non contiguës.
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Amplitud
e (d
B)
(1+2g)fs
(1+4g)fs
(1-2g)fs
(1-4g)fs
Fig. 4.11 : Spectre du courant statorique pour quatre barres cassées. La quatrième barre se trouve à p/2 de la troisième.
D’autre part, si on mettre en évidence la visualisation du spectre du courant dans le
cas où deux barres espacées électriquement de /2 sont rompues (les barres 1 et
5).La remarque du signal issu de la simulation la (fig 4.12) montre ici que les raies
(1±2kg)fs ont des faibles amplitudes [-55.62 dB et -57.34 dB] par rapport à celles
des barres adjacentes cassées. Mais c’est un cas échéant parce que le plus souvent
la rupture de la première barre induit dans les barres adjacentes une augmentation
aigue du courant qui provoque leurs ruptures [RAN 05].
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Amplitude (dB)
(1+2g)fs (1-2g)fs
Fig. 4.12 : Spectre du courant statorique pour un moteur en charge avec deux barres cassées espacées entre eux de /2
(les barres 1 et 5).

Chapitre 4 Détection des défauts rotoriques par MCSA.
95
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Amplitu
de (dB
)
Fig. 4.13 : Spectre du courant statorique pour un moteur en charge avec deux barres cassées espacées entre eux de
(les barres 1 et 9).
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0s
Fréquence (Hz)
Amplitu
de (dB
)
Fig. 4.14 : Spectre du courant statorique pour un moteur en charge avec trois barres cassées espacées entre eux de /2
(les barres 1, 5 et 9)
L’interprétation logique de la (Fig. 4.15) qui donne un signal sans raies de défaut
malgré qu’il y ait quatre barres cassées espacées entre eux de /2.Cela revient à
l’asymétrie de défaut qui empêche l’apparition des raies qui est une conséquence
principale de l’asymétrie.

Chapitre 4 Détection des défauts rotoriques par MCSA.
96
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Amplitude
(dB
)
Fig. 4.15 : Spectre du courant statorique pour un moteur en charge avec quatre barres cassées espacées entre eux de /2 (les barres 1, 5, 9 et 13).
Pour récapituler tout ce qu’on a mentionné précédemment sur la conséquence du
nombre de barres cassées et leurs positions mutuelles sur les amplitudes des
composantes (1±2kg)fs.
D’après le (tab. 4.1) et la (fig 4.12), on peut affirmer que l’existence des raies
(1±2kg)fs est un signe flagrant du défaut et son amplitude marque le degré de
sévérité [GHO 05].
L'état du moteur L'amplitude des composantes en dB (1-2g)fs (1+2g)fs (1-4g)fs (1+4g)fs
Sain - - - - 1 barre cassée -34.31 -36.97
-57.84 -64.44
2 barres cassées -26.56 -29.97
-41.55 -51.88
3 barres cassées -21.78 -25.87 -33.04 -44.11
4 barres cassées
-17.99 -23.93
-26.54 -39.22
Tab. 4.1 : Amplitude des composantes (1±2g)fs et (1±4g)fs (en dB) pour différent nombre de barres cassées

Chapitre 4 Détection des défauts rotoriques par MCSA.
97
0 1 2 3 4 5 6 7 8-40
-35
-30
-25
-20
-15
-10
Nombre de barres adjacentes cassées
L'a
mp
litu
de
de
l'h
arm
on
iqu
e (
1-2
g)f
s (d
B)
Fig. 4.16 : Variation de l'amplitude de l'harmonique (1-2g) fs en fonction du nombre de barres cassées.
4.5 DEFAUT DES RUPTURES DES PORTIONS D'ANNEAUX DE COURT-CIRCUIT
Les (fig. 17 a et b), illustre l’effet de la cassure de portions d’anneaux sur les
performances sur la machine. Des oscillations apparaissent sur le couple et la vitesse
de rotation et nous remarquons que le comportement est globalement analogue à
celui qui apparaît dans les cas de la cassure de barre qui engendrent l'apparition des
composantes à (1±2kg)fs. Donc, ce type de défaut se manifeste de la même façon
que les défauts dans les barres rotoriques.
On remarque sur la (fig. 17 b), qui représente le courant d’une phase statorique
pour la rupture de deux portions d’anneaux, la modulation d’amplitude qui
s’accentue selon la position de portion. La rupture de la portion influe sur les
courants efficaces des barres du rotor c'est-à-dire une déséquilibre, on remarque
que le courant dans la barre 1 atteint une valeur importante (environ de 120 A) ce
qui traduit par des pertes Joule plus importantes [SAH 03] ][TOL 02].

Chapitre 4 Détection des défauts rotoriques par MCSA.
98
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plit
ud
e (
dB)
(1+2g)fs
(1+4g)fs
(1+6g)fs (1-6g)fs
(1-4g)fs
(1-2g)fs
Fig. 4.17.a : Spectre du courant statorique lors des défauts dans les portions d'annaux de court-circuit.
(Une portion cassée).
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plitu
de
(dB
)
Fig. 4.17. b : Spectre du courant statorique lors des défauts dans les portions d'annaux de court-circuit.
(Deux portions cassées)
D’après le (tab 4.2), On remarque que les amplitudes des harmoniques dues aux
cassures des portions d'anneaux sont plus grandes que celles causées par les
cassures de barres cela revient essentiellement à chaque portion d’anneau influe
directement sur deux barres qu’il court-circuite.

Chapitre 4 Détection des défauts rotoriques par MCSA.
99
L'état du moteur L'amplitude des composantes en dB (1-2g)fs (1+2g)fs (1-4g)fs (1+4g)fs
1 portion cassée -29.35 -32.00 -49.24 -55.71
2 portions cassées
-26.38 -30.00 -42.07 -52.46
Tab. 4.2 : Amplitude des composantes (1±2g)fs et (1±4g)fs (en dB) pour différent nombre de portions d'anneaux de court-circuit cassées
4.6 L'EFFET DE LA CHARGE SUR LES RAIES (1±2kg)fs
(VARIATION DU GLISSEMENT)
La charge (le glissement g) a un grand effet sur le contenu spectral étudié.
Nous remarquons, d’après les (fig. 4.19 et 4.20), l’évolution spectrale du courant
statorique pour différentes valeurs du glissement.
Pour un glissement très faible (à vide), on ne peut pas détecter aucunes raies
pour les harmoniques (1±2g)fs. En revanche, on remarque nettement
l’accroissement des raies pour les glissements de g = 0.016 % (mi – charge) et
g = 0.035 % (charge nominale) [RAN 06].
Si on superpose les deux signaux dans la même visualisation (fig 4.18) pour
différents glissements, nous remarquons quand la charge s’affaiblit c’est à dire le
glissement g chaque fois va tendre vers zéro l'analyse des signaux est alors plus
difficile encore à remarquer les raies spectrales adjacentes avec un espacement
faible qui va diminuer inversement proportionnel au glissement jusqu’à la
disparition complète [SZA 04][TOL 02] [AHM 06].
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique du courant
Fréquence (Hz)
Amplitu
de (dB
)
mi-charge (g~0.016) pleine charge (g~0.035)
Fig. 4.18 : Spectre du courant statorique pour un moteur avec deux barres cassées

Chapitre 4 Détection des défauts rotoriques par MCSA.
100
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Amplitu
de (dB
)
a)- à vide
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plitu
de (dB
)
c)- charge nominale (g=0.035)
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plitu
de (dB
)
b)- mi-charge (g= 0.016)
Fig. 4.19 : Spectre du courant statorique pour un moteur avec une barre cassée pour différentes valeurs de glissement.

Chapitre 4 Détection des défauts rotoriques par MCSA.
101
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique du courant
Fréquence (Hz)
Am
plitu
de (dB
)
a)- à vide
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique du courant
Fréquence (Hz)
Am
plitu
de (dB
)
b)- mi-charge (g= 0.016)
20 30 40 50 60 70 80-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique du courant
Fréquence (Hz)
Am
plitu
de (dB
)
c)- charge nominale (g=0.035)
Fig. 4.20 : Spectre du courant statorique pour un moteur avec deux barres cassées et différentes valeurs de glissement.

Chapitre 4 Détection des défauts rotoriques par MCSA.
102
4.7 BANC D’ESSAI POUR LA DETECTION DES DEFAUTS ROTORIQUES
Les défauts rotoriques de la MAS sont basés essentiellement sur l’emplacement
des harmoniques qui reflètent la nature des anomalies en question. Nous proposons
un banc d’essai pour l’étude de ce type de défaut représenté dans la (fig 4.21) et
complété par l’organigramme de la (fig 4.22) que nous souhaitons le réaliser très
prochainement pour de futures investigations.
En premier lieu, nous procédons à l'acquisition et l’analyse du signal du courant
consommé par la machine électrique, puis nous procédons à une estimation du
glissement qui nous permet de prévoir les fréquences (1±2kg)fs qui spécifient
chaque défaut .
En deuxième lieu, nous appliquons un balayage du spectre pour que nous
puissions confirmer l’existence ou l’absence de défaut. Dans le cas où notre machine
électrique serait affectée par un type de défaut, nous procédons à comparer
l’amplitude de ces harmoniques caractéristiques du défaut recueillies par celles qui
se trouve dans notre banque de données qui contient l'intervalle de variation des
amplitudes pour apprécier son degré de sévérité.
Fig. 4.21 : Banc d’essai des différentes étapes de détection des défauts
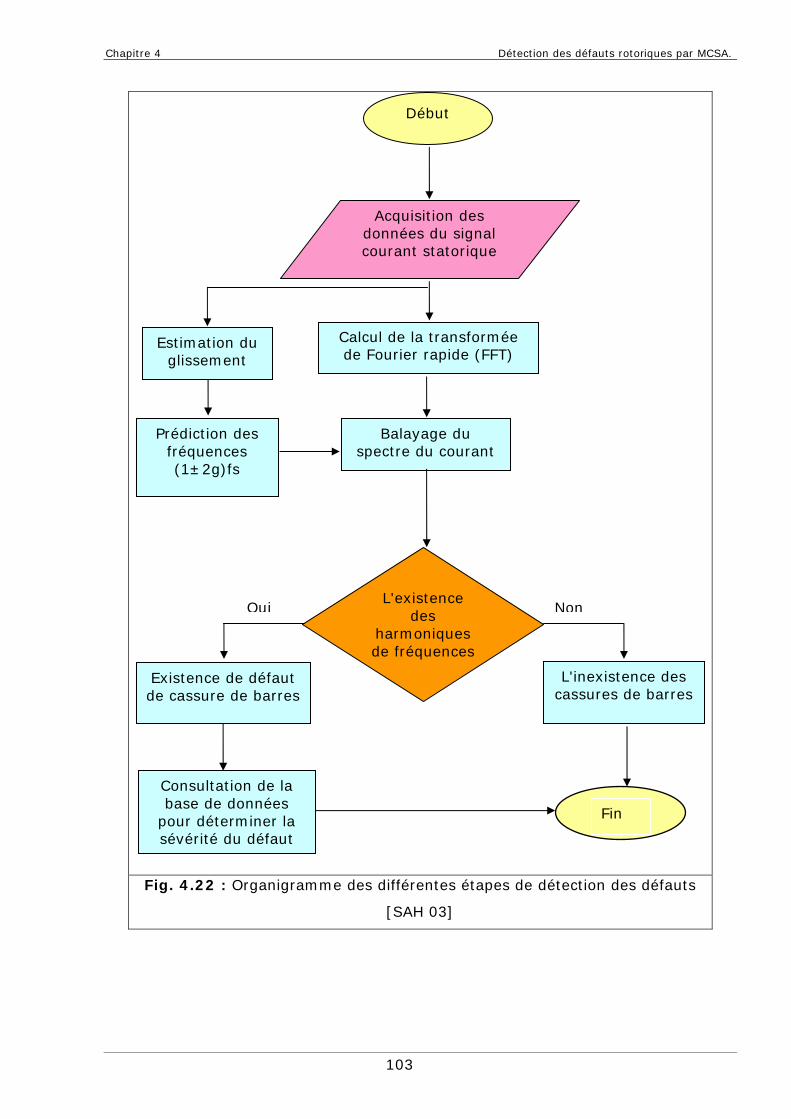
Chapitre 4 Détection des défauts rotoriques par MCSA.
103
Fig. 4.22 : Organigramme des différentes étapes de détection des défauts
[SAH 03]
Début
Acquisition des données du signal courant statorique
Calcul de la transformée de Fourier rapide (FFT)
Estimation du glissement
Prédiction des fréquences (1±2g)fs
Balayage du spectre du courant
Consultation de la base de données
pour déterminer la sévérité du défaut
L'existence des
harmoniques de fréquences
Existence de défaut de cassure de barres
L'inexistence des cassures de barres
Oui Non
Fin

Chapitre 4 Détection des défauts rotoriques par MCSA.
104
4.8 CONCLUSION
La MCSA, par la transformée de Fourier rapide (FFT), nous a permis de
déterminer la composition fréquentielle de ce signal et donc de retrouver les raies
associées au défaut de barres et d'anneaux de court-circuit. Nous avons montré que
le bon choix de la résolution fréquentielle, permet de séparer les composantes les
plus proches du fondamental. Les résultats de la simulation nous ont permis
d'arriver aux conclusions suivantes :
Les amplitudes des harmoniques (1±2g)fs, associées au défaut, augmentent
avec le nombre de barres cassées.
Les amplitudes des harmoniques (1±2g)fs dépendent aussi de la position
mutuelle de barres cassées.
La charge est un paramètre important à prendre en considération. En effet, le
diagnostic des défauts devient plus délicat lorsque le glissement est proche de
zéro.
Cependant, il nous semble intéressant de faire une comparaison entre la méthode
basée sur la MCSA, et celles basées sur l'analyse spectrale des autres signaux issus
de la MAS. Ceci, fait l'objet du chapitre suivant.

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
105
Chapitre 5 Autres approches dédiées à la détection
des défauts rotoriques 5.1 INTRODUCTION
Dans ce chapitre, quatre approches sont introduites :
La première et la deuxième approche sont successivement l’approche du couple
électromagnétique (Electromagnetic Torque approach) ETA et de la vitesse
mécanique (Mechanical Speed Approach) MSA qui peuvent fournir des informations
précieuses sur le type de défaut, vu qu’elles sont deux grandeurs périodiques de
pulsation 2gs.
La troisième méthode: c’est l’Approche du module du Vecteur du Parc Étendu
(Extended Park’s Vector Approach) EPVA. Cette technique se base sur les trois
courants des phases (a, b et c), qui sont transformés dans le repère biphasé du Park
(d et q), et offre une possibilité de détecter les anomalies dans la cage rotorique,
puisque elle ne contient que des composantes liées directement au défaut.
La quatrième technique: c’est l’Approche de la Puissance Instantanée électrique
(Instantaneous Power Approach) IPA.L'avantage de la IPA est que les harmoniques
peuvent être séparées plus facilement de la composante fondamentale. De plus, la
puissance instantanée électrique contient aussi plus d'information que MCSA parce
que la puissance instantanée électrique est un produit de multiplication entre le
voltage et le courant. Dans ce chapitre, on va étudier l’Approche de la Puissance
Instantanée Partielle (Partial Instantaneous Power Approach) PIPA et l’Approche de
la Puissance Instantanée Totale (Total Instantaneous Power Approach) TIPA.
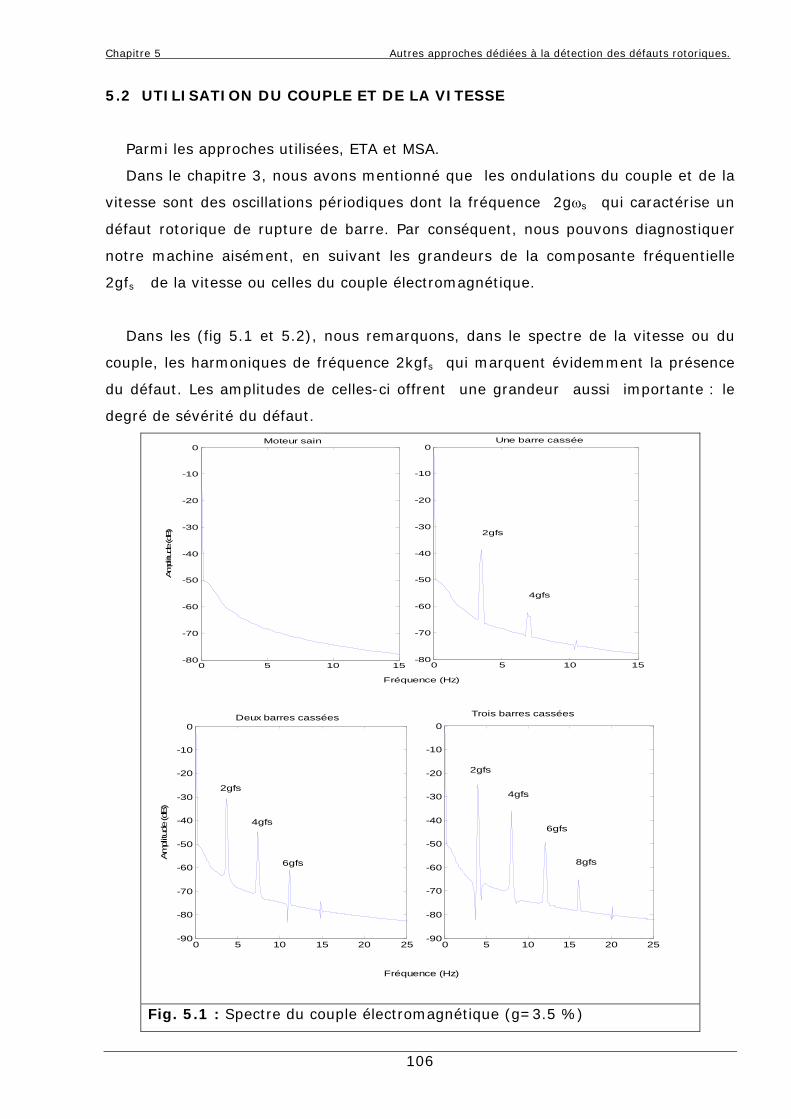
Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
106
5.2 UTILISATION DU COUPLE ET DE LA VITESSE
Parmi les approches utilisées, ETA et MSA.
Dans le chapitre 3, nous avons mentionné que les ondulations du couple et de la
vitesse sont des oscillations périodiques dont la fréquence 2gs qui caractérise un
défaut rotorique de rupture de barre. Par conséquent, nous pouvons diagnostiquer
notre machine aisément, en suivant les grandeurs de la composante fréquentielle
2gfs de la vitesse ou celles du couple électromagnétique.
Dans les (fig 5.1 et 5.2), nous remarquons, dans le spectre de la vitesse ou du
couple, les harmoniques de fréquence 2kgfs qui marquent évidemment la présence
du défaut. Les amplitudes de celles-ci offrent une grandeur aussi importante : le
degré de sévérité du défaut.
0 5 10 15-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
0 5 10 15-80
-70
-60
-50
-40
-30
-20
-10
0
Amplitude (dB) 2gfs
4gfs
Moteur sain Une barre cassée
0 5 10 15 20 25-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Am
plitude (dB)
0 5 10 15 20 25-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Deux barres cassées Trois barres cassées
2gfs
4gfs
6gfs
6gfs
4gfs
2gfs
8gfs
Fig. 5.1 : Spectre du couple électromagnétique (g=3.5 %)

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
107
0 5 10 15-140
-130
-120
-110
-100
-90
-80
-70
-60
Am
plit
ude (dB
)
Moteur sain
0 5 10 15-140
-130
-120
-110
-100
-90
-80
-70
-60
Fréquence (Hz)
Une barre cassée
2gfs
4gfs
0 5 10 15-140
-130
-120
-110
-100
-90
-80
-70
-60
Am
plit
ude (dB
)
Deux barres cassées
0 5 10 15 20 25-140
-130
-120
-110
-100
-90
-80
-70
-60
Fréquence (Hz)
Trois barres cassées
2gfs
4gfs
2gfs
4gfs
6gfs
8gfs 6gfs
Fig. 5.2 : Spectre de la vitesse (g=3.5 %)
L’analyse de ses signaux nous amène à confirmer que le spectre du couple offre
des renseignements plus clairs que ceux de la vitesse, à cause de ses faibles
ondulations par rapport à celle du couple.
Pourtant, n’oublions pas que l’ondulation de la vitesse ou du couple dépend
essentiellement du mécanisme du système entraîné. Donc ses deux grandeurs ont
une liaison aussi purement mécanique qui peut influer sur les résultats des
harmoniques finales par d’autres harmoniques d’origine purement mécanique. A ce
qui s’ajoute les capteurs de la vitesse ne sont pas idéaux pour relever leurs

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
108
oscillations fines parce que généralement les tachymètres ont des grandeurs très
faibles par rapport de la vitesse de la machine, ce qui ne reflète pas exactement la
réalité de la signature étudiée. Conséquence : un diagnostic médiocre.
Vu les remarques citées ci-dessus et en plus le facteur économique, l’utilisation
de ses approches est très limitée, exceptée dans des installations spéciales avec des
capteurs sophistiqués ; si non, on a recours à d’autres approches.
5.3 L'APPROCHE DE VECTEUR DE PARK ETENDU (EPVA)
Cette technique est souvent très connue par sa large utilisation, vu sa grande
sensibilité pour la détection des défauts, nombreuses recherches, qui ont été faites
pour améliorer cette méthode, montrent sa grande fiabilité.
Cette approche est basée essentiellement sur l’analyse spectrale du module du
vecteur de Park issu d’une transformation faite du repère triphasé en allant vers un
repère biphasé Pour rendre cette matrice constante, on applique la transformation
de Park sur les équations de tensions globales .Le repère de Park doit être lié au
rotor [THA 06].
Les courants statoriques triphasés isa, isb et isc sont des signaux purement
sinusoïdaux, s’il n’y a pas un défaut, sont donnés par les formules suivantes:
)3
4tcos(i)t(i
)3
2tcos(i)t(i
)tcos(i)t(i
smsc
smsb
smsa
(5.1)
Dans le cas d’une anomalie dans le système (machines+installation,…), nous
aurons une asymétrie dans nos grandeurs électriques surtout les courants
statoriques. Pour écrire son expression analytique; on a recours, afin de les
décomposer, à la série de Fourier; vu l’existence des harmoniques de fréquences
(1±2g)fs, l’expression du courant statorique est exprimée par [SAH 03]:
Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
109
21 sasasafsa iiii
21 sbsbsbfsb iiii (5.2)
21 scscscfsc iiii
Avec
le fondamental est donné par :
)3
4cos(
)3
2cos(
)cos(
tii
tii
tii
fscf
fsbf
fsaf
(5.3)
la première harmonique :
]3
4)21cos[(
]3
2)21cos[(
])21cos[(
111
111
111
tgii
tgii
tgii
sc
sb
sa
(5.4)
La deuxième harmonique :
]3
4)21cos[(
]3
2)21cos[(
])21cos[(
222
222
222
tgii
tgii
tgii
sc
sb
sa
(5.5)
la matrice de Park modifiée est définie par :
)3
4sin()
3
4cos(
2
1
)3
2sin()
3
2cos(
2
1
sincos2
1
3
2)(P (5.6)

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
110
La méthode analytique pour passer du triphasé au biphasé est illustrée dans le
chapitre 2.
Les courants du Park (ids et iqs), dans un repère lié au rotor, sont donnés dans le
cas où il n’y aurait pas de défaut par les expressions suivantes [JAF 08] [THA 06] :
)]3
4sin()
3
2sin(sin[
3
2
)]3
4cos()
3
2cos(cos[
3
2
scsbsaqs
scsbsads
iiii
iiii
(5.7)
Avec (=rt)
Dans le cas où il y aurait un défaut, la transformation de Park et celle de Fourier
et en remplaçant les courants isa , isb et isc par ses expressions dans la relation (5.7),
on obtient :
2
22
1
11
2
22
1
11
)3sin()sin(]sin[2
3
)3cos()cos(]cos[(2
3
tgitgitgii
tgitgitgii
sdsdsfqs
sdsdsfds
(5.8)
Le carré du module du vecteur de Park est donné par :
22qsds ii
Avec :
)4cos(3)2cos(3
)2cos(3)(2
3
211222
1122
21
22
tgiitgii
tgiiiiiiji
ssf
sffqsds
(5.9)
Le module du vecteur de Park se compose de deux parties :

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
111
La première partie (dc): composante continue engendrée surtout par le
fondamental.
La deuxième partie (ac) : deux composantes aux fréquences 2gfs et 4gfs.
La partie (ac), permet facilement de détecter les défauts qui affectent le rotor, car
ses composantes ont seulement des fréquences des défauts.
L’avantage de cette méthode, puisque dans le spectre il n’y a pas du
fondamental, on peut séparer facilement les composantes 2gfs et 4gfs. De plus, vu
que cette méthode se base sur les signaux recueillis des trois phases à la fois, nous
aboutissons à un niveau d’information très supérieur à celui apporté par une seule
phase.
Les courbes de la (fig 5.3) montrent clairement la présence des composantes
2gfs et 4gfs, dans le spectre de la composante oscillatoire (ac), caractéristiques du
défaut pour l'état sain, et pour une barre cassée, puis deux barres cassées et enfin
pour trois barres cassées, avec une charge nominale (2.5 Nm) [SAH 03] [AND 00].

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
112
0 50 100 150 200 250 300 350 400 450 500-80
-70
-60
-50
-40
-30
-20
-10
0
10
20
Fréquence (Hz)
Am
plitu
de (
dB)
0 2 4 6 8 10 12-50
-40
-30
-20
-10
0
10
20
ZO
OM
moteur sain
0 10 20 30 40 50 60 70 80 90 100-65
-60
-55
-50
-45
-40
-35
-30
-25
-20
-15
-10
Fréquence (Hz)
Am
plitu
de (
dB)
0 2 4 6 8 10 12-45
-40
-35
-30
-25
-20
-15
-10
ZO
OM
b.1 barre cassée

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
113
10 20 30 40 50 60 70 80 90 100-65
-60
-55
-50
-45
-40
-35
-30
-25
-20
-15
Fréquence (Hz)
Am
plitu
de (
dB)
5 10 15 20 25
-50
-45
-40
-35
-30
-25
-20
-15
ZO
OM
c.2 barres cassées
2gfs
4gfs
6gfs
8gfs
0 10 20 30 40 50 60 70 80 90 100-65
-60
-55
-50
-45
-40
-35
-30
-25
-20
-15
Fréquence (Hz)
Am
plitu
de (
dB)
0 5 10 15 20 25
-50
-40
-30
-20
ZO
OM
d.3 barres cassées
2gfs 4gfs
6gfs
8gfs
Fig. 5.3 : Spectre de la composante oscillatoire (ac) pour un moteur en charge nominale. Pour différentes cassures de barres.

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
114
0 1 2 3 4 5 6 7 8-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
Nombre de barres cassées
Am
plit
ud
e d
e la
co
mp
osa
nte
2g
fs e
n d
B
Module du Vecteur de Park
Fig. 5.4 : Variation de l'amplitude de l'harmonique 2gfs en fonction de nombre de barres cassées pour la EPVA.
Si, nous observons le tableau ci-dessus, on doit noter que la EPVA, qui a un
facteur de sévérité (2gfs) augmente très remarquablement avec le nombre de
barres cassées, lui donne la possibilité d’être parmi les meilleurs indicateurs de l’état
de la ME [THA 06] [SAH 03].
5.4 UTILISATION DE LA (TIPA) ET DE LA (PIPA)
Si vsa, vsb et vsc sont les tensions d'alimentation du moteur, et (isa, isb et isc) sont
les courants d'alimentation du moteur, la puissance instantanée totale est donc
donnée par [TER 04] [AND 00] [MAR 02]:
][][)( sabcT
sabcscscsbsbsasatsa ivivivivtP
(5.10)
Mais la la puissance instantanée partielle est donc donnée par :
][][)( sabT
sabsbsbsasasap ivivivtP (5.11)
En utilisant la transformation de Park, dont le repère est lié au rotor [THA 06]:

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
115
)3
4sin()
3
4cos(
2
1
)3
2sin()
3
2cos(
2
1
sincos2
1
3
2)(P (5.12)
[isabc] = [P()][iodqs]
[vsabc] = [P()][vodqs],
On obtient :
qsqsdsdssat ivivtP )( (5.13)
Les courants ids et iqs sont donnés par l'expression (5.8).
Les composantes vds et vqs, dans un repère lié au rotor, sont données par
[DUL 09][SAH 03]:
)tgsin(v3v
)tgcos(v3v
sqs
sds (5.14)
En remplaçant les expressions de ids, iqs, vds, et vqs dans l'équation (5.13), on
obtient la puissance instantanée totale :
acdc
rsrmrsrmfmsat tgivtgivivtP )2cos(2
3)2cos(
2
3)cos(
2
3)( (5.15)
On remarque bien que la puissance instantanée totale Psat(t), est constituée
d’une composante continue (dc),qui correspond à la valeur moyenne de la puissance
active, plus une composante oscillatoire (ac) à la fréquence de modulation 2gfs.
D’une manière générale, la cassure des barres rotoriques engendre dans le
spectre de la puissance instantanée une série des harmoniques aux fréquences 2kgfs
(avec k=1, 2, …).

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
116
Mais, la puissance instantanée partielle a une expression plus complexe pour un
défaut d’asymétrie. On observe que la puissance instantanée partielle Psap(t), est
constituée d’une composante continue (dc), plus une composante oscillatoire (ac) à
deux fréquences de modulation :
La première : 2kgfs.
La deuxième : (1-kg) 2fs et (1+kg) 2fs.
D’une manière générale, la cassure des barres rotoriques engendre dans le
spectre de la puissance instantanée partielle deux séries des harmoniques aux
fréquences 2kgfs et (1±kg) 2fs (avec k=1, 2, …).
)cos()
6cos(2)2cos(()
6)2cos((
2)(Psap(t) 10 1
tttImV
tp ffsfsLLL
s
Avec
)6
cos()6
2cos()( 10 1
tIVtp sLLLs
Dans cette expression,
Psp(t) : représente la puissance instantanée partielle d'une phase statorique,
m :l'indice de modulation,
LLV : la valeur RMS de la tension entre phase,
LI :le courant de ligne ,
f :la pulsation d'oscillation (pulsation de défaut) exprimée en radians,
s et 1
représentent respectivement la pulsation des courants d'alimentation
exprimée en radians et l'angle de déphasage entre le courant absorbé par le
moteur et la tension [DID 04].
Il faut noter que les grandeurs utilisées dans cette technique (les tensions
et les courants) sont facilement accessibles. En plus, la prise en compte des
courants et les tensions dans les trois phases donne un sens plus fort au spectre de
la puissance, ce qui présente un avantage par rapport aux autres méthodes.

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
117
Le moteur est testé initialement pour l'état sain, par la PIPA (fig 5.5.a). On
constate que l'état sain du moteur est caractérisé par l'absence des harmoniques
liées au défaut. Suite à des ruptures de barres, les (fig 5.5.b, c et d), mettent en
évidence l'apparition des raies aux fréquences 2kgfs et aux fréquences (1-kg)2fs et
(1+kg)2fs [AND 00].
0 50 100 150 200 250 300 350 400 450 500-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plit
ud
e (
dB
)
spectre logaritmique de la puissance instantanée partielle pab
0 5 10 15-80
-60
-40
-20
0
ZO
OM
90 95 100 105 110-100
-80
-60
-40
-20
0
ZO
OM
moteur sain
0 50 100 150 200 250 300 350 400 450 500-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique de la puissance partielle pab
Fréquence (Hz)
Am
plitu
de (
dB)
0 5 10 15-80
-60
-40
-20
0
ZO
OM
85 90 95 100 105 110-100
-80
-60
-40
-20
0
ZO
OM
a.1 une barre cassée
2gfs
4gfs
2fs+2gfs
2fs+4gfs
2fs-2gfs
2fs-4gfs
2fs

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
118
0 50 100 150 200 250 300 350 400 450 500-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique de la puissance partielle pab
Fréquence (Hz)
Am
plitu
de (
dB)
0 5 10 15 20 25-100
-80
-60
-40
-20
0
ZO
OM
80 90 100 110 120-100
-80
-60
-40
-20
0
ZO
OM
a.2 barres cassées
2gfs 4gfs
6gfs
2fs+2gfs
2fs+4gfs
2fs+6gfs
2fs-2gfs
2fs-4gfs
2fs-6gfs
2fs
0 50 100 150 200 250 300 350 400 450 500-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique de la puissance partielle pab
Fréquence (Hz)
Am
plitu
de (
dB)
0 5 10 15 20 25-100
-80
-60
-40
-20
0
ZO
OM
70 80 90 100 110 120-100
-80
-60
-40
-20
0
ZO
OM
a.3 barres cassées
2gfs
4gfs
6gfs
8gfs
2fs+2gfs
2fs+4gfs
2fs+6gfs
2fs 2fs-2gfs
2fs-4gfs
2fs-6gfs
2fs-8gfs
Fig. 5.5 : Spectre de la puissance instantanée partielle pour : a.0 : Moteur sain. a.1 : Moteur avec une barre cassée.
a.2 : Moteur avec deux barres cassées. a.3 : Moteur trois barres cassées.
Le moteur est testé initialement aussi pour l'état sain, la TIPA (fig 5.6.a). On
constate que l'état sain du moteur est caractérisé par l'absence des harmoniques
liées au défaut. Suite à des ruptures de barres, les (fig 5.6.b, c et d), mettent en

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
119
évidence l'apparition des raies aux fréquences 2kgfs. L'amplitude de ces raies indique
le degré de sévérité du défaut (Fig 5.7) [AND 00][THA 06].
0 50 100 150 200 250 300 350 400 450 500-120
-100
-80
-60
-40
-20
0spectre logarithmique de la puissance totale pabc
Fréquence (Hz)
Am
plit
ud
e (
dB
)
0 5 10 15-80
-70
-60
-50
-40
-30
-20
-10
0
ZO
OM
moteur sain
0 10 20 30 40 50 60 70 80 90 100-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique de la puissance totale pabc
Fréquence (Hz)
Am
plitu
de (
dB
)
0 5 10 15-80
-70
-60
-50
-40
-30
-20
-10
0
ZO
OM
b.1 barre cassée
2gfs
4gfs

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
120
0 10 20 30 40 50 60 70 80 90 100-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique de la puissance totale pabc
Fréquence (Hz)
Am
plit
ud
e (
dB
)
0 2 4 6 8 10 12 14 16 18 20-90
-80
-70
-60
-50
-40
-30
-20
-10
0
ZO
OM
2gfs 4gfs
6gfs
b.2 barres cassées
0 10 20 30 40 50 60 70 80 90 100-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique de la puissance totale pabc
Fréquence (Hz)
Am
plit
ude
(dB
)
0 5 10 15 20-90
-80
-70
-60
-50
-40
-30
-20
-10
0
ZO
OM
b.3 barres cassées
2gfs 4gfs
6gfs
8gfs
Fig. 5.6 : Spectre de la puissance instantanée totale pour : b.0 Moteur sain. b.1 Moteur avec une barre cassée.
b.2 Moteur avec deux barres cassées. b.3 Moteur avec trois barres cassées

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
121
Si nous analysons le tableau ci-dessous, on doit noter que la PIPA, qui a un
facteur de sévérité (1-g) 2fs, augmente assez remarquablement avec le nombre de
barres cassées de 1 à 4 qui va donner une sensibilité aux défauts de cassure barres
très satisfaisante mais plus de 4 barres devient mois sensible [THA 06] [SAH 03].
0 1 2 3 4 5 6 7 8-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0Puissance partielle
Nombre de barres cassées
Am
plit
ud
e d
e la
co
mp
osa
nte
(1
- g
)2
fs e
n d
B
Fig. 5.7 : Variation de l'amplitude de l'harmonique (1- g) 2fs en fonction de nombre de barres cassées pour la PIPA
5.5 COMPARAISON ENTRE LES DIFFERENTES GRANDEURS
NON INVASIVES DE DETECTION DES DEFAUTS ROTORIQUES
Le tableau suivant donne, pour différent degré de sévérité du défaut, les
amplitudes des composantes associées aux cassures de barres. On remarque que
l'amplitude de la composante (1-2g)fs (du courant statorique) est toujours
supérieure à celle de la composante 2gfs (du couple, du vecteur du Park ou de la
puissance) quelque soit le nombre de barres cassées. En d'autre terme,
l'harmonique (1-2g)fs est plus sensible au sévérité du défaut que l'harmonique 2gfs
[DUL 09][SAH 03].

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
122
Glissement Amplitude de la composante (1-2g)fs en dB Fo=50 Hz
MCSA
1br 2br 3br 4br 5br g=gn
-34.31 -26.56 -21.78 -17.99 -14.74
g=gn/2 -40.06 -33.33 -27.42 -25.00 -21.83
Glissement Amplitude de la composante 2gfs en dB
Fo=0 Hz
ETA
1br 2br 3br 4br 5br g=gn -38.59 -30.68 -24.96 -20.79 -17.17
g=gn/2 -46.08 -38.29 -32.54 -28.04 -23.42
Glissement Amplitude de la composante 2gfs en dB Fo=0 Hz
EPVA
1br 2br 3br 4br 5br g=gn -34.59 -26.44 -21.72 -15.46 -9.87
g=gn/2 -31.25 -24.65 -19.48 -18.19 -16.31
Glissement Amplitude de la composante 2gfs en dB Fo=0 Hz
PIPA
1br 2br 3br 4br 5br g=gn -39.29
-31.29 -25.45 -21.13 -17.39
g=gn/2 -48.23 -40.43 -34.61 -29.65 -24.75
Glissement Amplitude de la composante (1 - g )2fs en dB
Fo=100Hz
PIPA
1br 2br 3br 4br 5br g=gn -38.32 -30.49 -25.61 -21.69 -18.31
g=gn/2 -41.12 -34.33 -28.37 -25.90 -22.65
Glissement Amplitude de la composante 2gfs en dB Fo=0 Hz
TIPA
1br 2br 3br 4br 5br g=gn -51.80
-42.60 -35.24 -28.73 -23.46
g=gn/2 -47.59 -42.24 -38.24 -39.14 -39.52
Tab. 5.1 : Comparaison entre les méthodes de détection des défauts rotoriques

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
123
0 1 2 3 4 5 6 7-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
Am
plit
ud
e (
dB
)
Nombre de barres cassées
Amplitude de l'harmonique (1-g)2fs de la PIPA
Amplitude de l'harmonique 2gfs de la EPVA
Amplitude de l'harmonique (1-2g)fs de la MCSA
Fig. 5.8 : Variation de l'amplitude des harmoniques (1-2g)fs , 2gfs et (1-g)2fs en fonction du nombre de barres rompues pour un moteur
en pleine charge Bien que les avantages soient apportés par la (PIPA), (TIPA) et celle de la (ETA),
le (tab 5.1) et la (fig 5.8) montrent que les meilleures méthodes pour détecter les
cassures de barres est celles basées sur la (MCSA) et la (EPVA) parce qu’elles ont
presque la même sensibilité aux charges nominales mais la (EPVA) est plus
sensible aux faibles charges .On peut classer ces méthodes de diagnostic en
commençant par la plus sensible à la défaillance.
1. L'analyse spectrale du courant statorique (MCSA) et le module du vecteur de
Park étendu (EPVA).
2. L'analyse spectrale de la puissance instantanée partielle (PIPA) autour du
fondamental Fo=100Hz
3. L'analyse spectrale du couple électromagnétique (ETA)
4. L'analyse spectrale de la puissance instantanée partielle (PIPA) autour du
fondamental Fo=0 Hz
5. L'analyse spectrale de la puissance instantanée totale (TIPA) autour du
fondamental Fo=0 Hz
6. L'analyse spectrale de la vitesse mécanique (MSA) Fo=0 Hz
Tab. 5.2 : Résultat du classement final

Chapitre 5 Autres approches dédiées à la détection des défauts rotoriques.
124
Important :
Ce classement a été validé par [FIL 94], [SAH 03] et [AHM 06].
5.6 CONCLUSION
Les résultats issus du tableau nous ont permis de classer les approches d’après
leur degré de sensibilité et d’efficacité de diagnostic. La MCSA et la EPVA occupent
la première position, vu qu’elles se basent toutes les deux sur des paramètres
initiaux d’alimentation et liées directement aux fréquences des harmoniques. Aussi,
nous signalons ici que la EPVA peut dominer la MCSA surtout lors du fonctionnement
à faible charge puisqu’ elle recueille son signal à partir des trois phases statoriques.
Par contre la MCSA est alimentée par une seule phase; ce qui nous montre
clairement ses résultats ci-dessus .Toutefois, la MCSA, à la charge nominale, offre le
meilleur résultat lors de la rupture de la première barre. Et nous, nous intéressons
ici à la signalisation du premier défaut, alors nous avons mis la MCSA avec la EPVA
dans la première position.
La PIPA se classe, d’après les résultats recueillis, dans la deuxième position. Cela
montre qu’elle est d’une importance considérable dans le diagnostic puisqu’ elle tire
ses signaux à partir de deux paramètres différents (le courant + la tension).C’est
vrai que, la première signalisation de défaut est détectée par la MCSA et la EPVA
mais cette caractéristique permet à la PIPA d’être l’approche le plus révélateur de la
nature du défaut.
En définitive, on peut dire que la MCSA et la EPVA se sont avérées les meilleures
pour la détection des défauts que sur la MSA ou sur la ETA. En effet, la mesure du
courant puis son traitement est plus simple et moins onéreux qu'une analyse de la
vitesse ou du couple.

Chapitre 6 Simulation des Défauts Statoriques et des Défauts Combinés.
125
Chapitre 6 Simulation des défauts statoriques et des
défauts combinés 6.1 INTRODUCTION
Le début de ce chapitre sera marqué par le traitement du fonctionnement du
moteur asynchrone à cage dans son état sain, et cela par la simulation d’un
démarrage à vide et l’introduction de la charge après l’établissement du régime
permanant, puis d’un enclenchement direct sur une charge. Les programmes se
baseront sur le modèle de multi enroulement [GHO 05].
6.1.1 Court-circuit entre spires statoriques
Un court-circuit entre spires peut causer un déséquilibre d’impédance entre les
trois phases statoriques, se traduisant par une inégalité des résistances et/ou des
inductances des enroulements statoriques. Mais ce qui ne doit pas être négligé, et
que le court-circuit isole un certain nombre de tours, tout en formant une maille
indépendante couplée magnétiquement avec les autres mailles de tout le circuit. Le
courant dans cette maille doit être estimé afin de pouvoir mesurer les conséquences
[GHO 05] [SMA 02] [SCH 99].
6.1.2 Défauts combinés
Il se peut qu’un défaut commence sa manifestation par des signes poussant le
technicien à soupçonner d’un défaut et non pas d’un autre. Mais en inspectant les
relevés spectraux du moteur, on se trouve face à des signaux très riches en
harmoniques, liés à la structure et à la construction de la machine, liés à des défauts
qui n’ont pas encore atteint un stade préoccupant, ou bien liés à des phénomènes
qu’on ignore encore. Ce qui fait que dans les meilleurs cas, un défaut peut cacher un
autre, ou il est souvent combiné avec un défaut différent, donc le technicien doit
absolument savoir aussi les relevées spectrales issues des défauts combinés pour
assurer une bonne surveillance du système en exploitation [GHO 05].

Chapitre 6 Simulation des Défauts Statoriques et des Défauts Combinés.
126
6.2 DEFAUT STATORIQUE EN CAS DE COURT-CIRCUIT ENTRE SPIRES
Un court-circuit entre spires peut entrainer une asymétrie statoriques, se
traduisant par une inégalité des résistances et/ou des inductances des enroulements
statoriques. Mais ce qui doit être pris en considération, et que le court-circuit isole
un certain nombre de tours, tout en formant une maille indépendante couplée
magnétiquement avec les autres mailles de tout le circuit. Le courant dans cette
maille doit être estimé afin de pouvoir mesurer les conséquences.
Considérant le cas d’un court-circuit entre 50% des tours de la première bobine de
la phase A [GHO 05] [SMA 02] [SCH 99] [GOJ 00].
-500 0 500 1000 1500 2000 2500 3000-40
-20
0
20
40
60
80
100
Vitesse de rotation mécanique en (tr/mn)
Coup
le e
n (N
/m)
Fig. 6.1 : Caractéristique mécanique.
0 20 40 60 80 100 120 140 160 180 200-120
-100
-80
-60
-40
-20
0
Fréquence (Hz)
Am
plit
ude (dB)
100 Hz
0 Hz
Fig. 6.2 : Spectre du courant de la première phase statorique.

Chapitre 6 Simulation des Défauts Statoriques et des Défauts Combinés.
127
0 50 100 150 200 250 300 350 400 450 500-100
-80
-60
-40
-20
0
20
Fréquence (Hz)
Am
plitude (dB)
Fig. 6.3 : Spectre du module du vecteur de Park étendu.
0 50 100 150 200 250 300 350 400 450 500-120
-100
-80
-60
-40
-20
0
Fréquence (Hz)
Am
plit
ude e
n (dB)
Fig. 6.4 : Spectre de la puissance instantanée partielle.
0 50 100 150 200 250 300 350 400 450 500-120
-100
-80
-60
-40
-20
0
Fréquence (Hz)
Am
plit
ude (dB)
Fig. 6.5 : Spectre de la puissance instantanée totale.

Chapitre 6 Simulation des Défauts Statoriques et des Défauts Combinés.
128
La (fig. 6.2) représente le spectre du courant de la première phase statorique
après l’introduction du défaut. La seule nouvelle composante fréquentielle visible
constatée est à 0 et 100 Hz, mais en plus de ça, le court-circuit provoque
généralement une modulation de la première harmonique d’encoches
rotoriques[THO 06].
k)g1(p
nff scs
Avec : n=1, 2, 3, … et k=1, 3, 5, …
La (fig. 6.3) représente le spectre du module du vecteur de Park étendu, les
nouvelles composantes fréquentielles visibles constatées sont [THO 06]: ~ 50, 100,
150,250,…
D’une manière générale et d’après les équations étudiées précédemment, nous
avons les signatures suivantes :
rcs mff
Avec m=1, 2, 3,4,
La (fig 6.4) représente le spectre de la puissance instantanée partielle les nouvelles
composantes fréquentielles visibles constatées sont [THO 06]: ~ 50, 100,…
Il existe deux signatures :
Autour du fondamental “0”
rcs mff .
Autour du fondamental 2fs “100”
rscs mfff 2 .
Avec
m=1, 2,3,…
sr fgf )1( la fréquence rotorique
La (fig 6.5) représente le spectre de la puissance instantanée totale les nouvelles
composantes fréquentielles visibles constatées sont [THO 06]: ~50,…

Chapitre 6 Simulation des défauts statoriques et des défauts combinés.
129
Autour du fondamental “0”
rcs mff
Avec
m=1, 2,3,…
6.3 FONCTIONNEMENT AVEC DEFAUTS COMBINES Dans ce chapitre, on expose la première fois un cas, de cassure d’une barre
rotorique, accompagné d’un court–circuit statorique ; le deuxième cas, d’une
cassure de barres rotoriques, accompagné aussi d’une excentricité mixte. Ce sont
des cas pratiques issus de l’acquisition des signaux réels d’un moteur avec un rotor
sain, un moteur avec un rotor présentant une rupture partielle d’une barre ou des
barres et d’un moteur présentant un court-circuit statorique artificiel d’une part
d’autre part un défaut de roulement. Les résultats trouvés vont être examinés à la
base des produits de la simulation.
Dans le spectre de la (fig 6.6) et de la (fig 6.7), on peut distinguer les raies
caractérisant les cassures de barres, des raies indiquant le court-circuit entre les
spires statoriques. Il en résulte qu’un défaut de barres ne peut pas voiler un défaut
court-circuit entre les spires statoriques, et inversement, à moins que ces raies ne
soient superposées, du fait qu’elles se manifestent aux mêmes fréquences [GHO 05]
[THO 06].
0 20 40 60 80 100 120-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plitu
de (dB
)
0.5 Hz 96.6 Hz
99.4 Hz
Fig. 6.6 : Spectre du courant statorique avec un défaut combiné (court-circuit entre les spires statoriques+ cassure d’une barre).

Chapitre 6 Simulation des Défauts Statoriques et des Défauts Combinés.
130
0 20 40 60 80 100 120 140 160 180 200-120
-100
-80
-60
-40
-20
0
Fréquence (Hz)
Am
plit
ud
e (d
B)
146.6 Hz 149.4 Hz
49.4 Hz 46.6 Hz
Fig. 6.7 : Spectre de la puissance instantanée partielle avec un défaut combiné
(court-circuit entre les spires statoriques+ cassure d’une barre).
D’après les figures ci-dessous, il est à noter aussi, que les amplitudes des raies
sont plus importantes que si le défaut était seul. De même en ce qui concerne les
harmoniques supérieures et les harmoniques d’encoches rotoriques comme le montre
la (fig 6.8).

Chapitre 6 Simulation des Défauts Statoriques et des Défauts Combinés.
131
Dans le spectre de la (fig 6.9), on peut distinguer les raies caractérisant les
cassures de barres, des raies indiquant l’excentricité du rotor .Il en résulte qu’un
défaut de barres ne peut pas voiler un défaut d’excentricité.
La courbe de lissajou (contour de Park) offre aussi la possibilité de visualiser un
seul défaut ou un défaut combiné. Sa forme, son épaisseur et son inclinaison
0 20 40 60 80 100 120 140 160 180 200-120
-100
-80
-60
-40
-20
0
Fréquence (Hz)
Am
plit
ude
(dB
)
défaut combinéun seul défaut
145 146 147 148 149 150 151 152 153
-105
-100
-95
-90
-85
-80
-75
Fréquence (Hz)
Am
plit
ud
e (d
B)
défaut combiné:court-circuit statorique+1 barre casséeun seul défaut :court-circuit statorique
ZOOM
Fig. 6.8 : Spectres de la puissance instantanée partielle d’un seul défaut et d’un défaut combiné

Chapitre 6 Simulation des Défauts Statoriques et des Défauts Combinés.
132
permettent de détecter les défauts et leurs origines surtout d’excentricité ou de
cassure de barre.
Nous avons présenté, dans les figures suivantes, quelques exemples qui illustrent
certains défauts combinés d’excentricité %50s et %50d accompagnés de
différente cassure de barres rotoriques .Nous remarquons clairement la différence
entre les défauts d’après leurs formes, leurs épaisseurs et leurs
inclinaisons :comme le montre les ( Fig 6.10 , 6.11 , 6.12 et 6.13).
0 10 20 30 40 50 60 70 80 90 100
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plit
ud
e (
dB
)
(1+2g)fs (1-2g)fs
(1+4g)fs (1-4g)fs
fs
Fig. 6.9 : Spectre du courant statorique avec cassure d’une barre et un défaut d’excentricité %50s et %50d

Chapitre 6 Simulation des Défauts Statoriques et des Défauts Combinés.
133
-30 -20 -10 0 10 20 30-30
-20
-10
0
10
20
30contour de park "la courbe de Lissajou Isq = f (Isd )
défaut simple : d'excentricité mixtedéfauts combinés: excentricité mixte+1 barre cassèe
Iq (A)
Id (A)
Fig. 6.10 : Contour de Park avec cassure d’une barre et un défaut d’excentricité %50s et %50d
-30 -20 -10 0 10 20 30-30
-20
-10
0
10
20
30contour de park "la courbe de Lissajou Isq = f (Isd )
défaut simple : d'excentricité mixtedéfauts combinés: excentricité mixte+1 barre cassèe+1anneau de court-circuit
Iq (A)
Id (A)
Fig. 6.11 : Contour de Park avec cassure d’une barre et d’un anneau de court-circuit avec un défaut d’excentricité %50s et %50d

Chapitre 6 Simulation des Défauts Statoriques et des Défauts Combinés.
134
-30 -20 -10 0 10 20 30-30
-20
-10
0
10
20
30contour de park "la courbe de Lissajou Isq = f (Isd )
défaut simple : d'excentricité mixtedéfauts combinés: excentricité mixte+2 barres cassèes
Iq (A)
Id (A)
Fig. 6.12 : Contour de Park avec cassure de deux barres et un défaut d’excentricité %50s et %50d
-30 -20 -10 0 10 20 30-30
-20
-10
0
10
20
30contour de park "la courbe de Lissajou Isq = f (Isd )
défaut simple : d'excentricité mixtedéfauts combinés: excentricité mixte+3 barres cassèes
Iq (A)
Id (A)
Fig. 6.13 : Contour de Park avec cassure de trois barres et un défaut d’excentricité %50s et %50d

Chapitre 6 Simulation des Défauts Statoriques et des Défauts Combinés.
135
6.4 CONCLUSION D’après cette partie du mémoire, nous pouvons dire en conclusion que la
détection du court-circuit front entre les spires statoriques par le relevé direct du
courant statorique ou suite au déclenchement par la protection contre les surcharges
au niveau des deux phases restantes, mais la détection d’un court-circuit partiel ne
l’est pas aussi simplement. De ce fait, on doit impérativement s’orienter vers
d’autres approches plus efficaces. L’analyse spectrale du courant statorique en est
une. L’apparition des fréquences obéissant à l’expression (1.3) est en fonction de la
sévérité du défaut, le modèle établi peut les révéler aisément, la fréquence 100 Hz
sera toujours présente indiquant un certain déséquilibre d’impédance; elle est
sensible à l’apparition du défaut statorique.
En outre, il est à noter qu’il se peut, dans les défauts combinés que les
fréquences données par (1.3) coïncident avec les fréquences, des défauts de barres,
ou bien même par les défauts d’excentricité, données par l’expression (1.7), et c’est
ce qui limite leur fiabilité vis-à-vis du diagnostic des défauts statoriques. Néanmoins,
une procédure de résolution par élimination, l’analyse d’autres variantes en relation
avec les autres défauts suspects, l’expérience acquise et le suivi continu peuvent se
compléter pour aboutir à une bonne prédiction de la nature du problème.
En définitive, on a vu que les défauts sont généralement combinés. Les relevés
spectraux sont toujours riches en harmoniques indiquant la multitude de
phénomènes ou éventuellement, de problèmes définissant l’état de la machine.

Chapitre 7 Validations, comparaisons et vérifications.
136
Chapitre 7
Validations, comparaisons et vérifications
7.1 INTRODUCTION
Afin de valider notre étude et vérifier l'efficacité des techniques de diagnostic
décrites dans notre mémoire, nous allons présenter quelques résultats
expérimentaux et les comparaisons nécessaires.
7.2 VALIDATIONS PAR LA PUBLICATION [MEN 04]
La publication [MEN 04] a pris les mêmes paramètres du moteur utilisé dans la
simulation dans notre mémoire. Pour cela, cette publication de base est considérée
comme un outil indispensable pour la validation, la valorisation et l’appréciation de
notre travail ainsi nous pouvons convaincre le lecteur.
Nous connaissons que toutes les équations mathématiques citées dans ce
mémoire sont utilisées dans le modèle utilisé dans les simulations. Pour cela ,nous
pouvons dire que notre modèle a une approche acceptable parce que tous nos
simulations coïncides avec celles de la publication [MEN 04] comme le montrent les
(fig. 7.1 , 7.2 , 7.3 , 7.4 , 7.5 ) .Seulement il ya une différence entre les moments
de cassures de barres et de l’application de la charge et de sa valeur.

Chapitre 7 Validations, comparaisons et vérifications.
137
0 0.5 1 1.5 2 2.5 3 3.5 4-500
0
500
1000
1500
2000
2500
3000
3500
temps en (sec)
vite
sse
de r
otat
ion
(tr/
min
)
La mise en charge Une barre cassée
deux barres cassées
a)
b)Fig. 7.1 : Vitesse de rotation.
a)- Le présent travail
b)- La publication [MEN 04]

Chapitre 7 Validations, comparaisons et vérifications.
138
0 0.5 1 1.5 2 2.5 3 3.5 4-2
0
2
4
6
8
10
12
14
16
18
temps en (sec)
Cou
ple
(N/m
)
La mise en charge
une barre casséedeux barres cassées
a)
b)
Fig. 7.2 : Couple électromagnétique
a)- Le présent travail b)- La publication [MEN 04]

Chapitre 7 Validations, comparaisons et vérifications.
139
0 0.5 1 1.5 2 2.5 3 3.5 4-20
-15
-10
-5
0
5
10
15
20
temps en (sec)
Cou
rant
sta
toriq
ue (
A)
La mise en charge Une barre cassée Deux barres cassées
a)
b)
Fig. 7.3 : Courant d'une phase statorique
a)- Le présent travail b)- La publication [MEN 04]

Chapitre 7 Validations, comparaisons et vérifications.
140
0 1 2 3 4 5 6-1500
-1000
-500
0
500
1000
1500
temps en (sec)
cou
ran
t ro
tori
qu
e (
A)
barre rotorique 2 sainbarre rotorique 1 casséebarre rotorique 3 cassée
a)
b)
Fig. 7.4 : Courant dans la barre rotorique 2 (BLEU)
a)- Le présent travail b)- La publication [MEN 04]

Chapitre 7 Validations, comparaisons et vérifications.
141
20 30 40 50 60 70 80
-80
-70
-60
-50
-40
-30
-20
-10
0spectre logarithmique du courant avec 1 barre cassée
Fréquence (Hz)
Am
plitu
de (
dB)
a)
b)Fig. 7.5 : Spectre du courant statorique
a)- Le présent travail
b)- La publication [MEN 04]

Chapitre 7 Validations, comparaisons et vérifications.
142
7.3 COMPARAISONS ET VERIFICATIONS AVEC ET AU MOYEN
DES RESULTATS PRATIQUES
Les tests expérimentaux sont effectués sur un banc expérimental au sein du
laboratoire du GREEN-UHP à Nancy. Le moteur utilisé est de : 3Kw, 2p=2,
230/400v, 2800tr/mn et une fréquence de 50Hz, fabriqué par Sew-Uscome . Le
moteur est couplé avec une génératrice à courant continu chargée par des
résistances variables, c’est le moyen qui permet de changer le couple de la charge.
Le contenu spectral des courants et des tensions est enregistré et exploité en
utilisant un programme implanté sous l'environnement MATLAB [RAZ 03].
Nous avons reçu quelques résultats expérimentaux de ce banc à l'aide d’un
professeur pour faire la comparaison et la vérification nécessaires de notre travail.
Fig. 7.6 : Banc d’essai [RAZ 03]
Sur cette image, nous distinguons
un moteur asynchrone.
un onduleur de tension.
un moteur à courant continu avec sa charge résistive.
des appareils de mesures et capteurs.
un ordinateur dédié à l’acquisition et de traitements des données.
un onduleur de tension.
7.3.1 Moteur sain Le spectre du courant statorique de la (fig 7.7) montre bien la composante
fondamentale à 50 Hz. Le moteur étant à l’état sain, fonctionnant avec un

Chapitre 7 Validations, comparaisons et vérifications.
143
glissement (g=0.08). Malgré cela, la composante (1-2g)fs apparaît clairement
indiquant la présence d’une certaine asymétrie naturelle du rotor due à
l’inadéquation des méthodes et conditions de fabrication.
10 20 30 40 50 60 70 80 90-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plitu
de
(dB
)
a)
10 20 30 40 50 60 70 80 90-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence en Hz
Am
plitu
de
en d
B
(1-2g)fs
(1+2g)fs
b)
Fig. 7.7 : Spectres du courant statorique du moteur sain (g=0.08)
a)- la simulation.
b)- l'expérimentale.

Chapitre 7 Validations, comparaisons et vérifications.
144
7.3.2 Moteur avec un défaut
Dans cet essai, le défaut rotorique a été provoqué par la confection, avec une
perceuse, d’un trou suffisant pour assurer la fracture complète de la barre au niveau
du rotor. Comme il est indiqué dans le premier chapitre.
La (fig 7.8.a et b) et la (fig 7.9.a et b) représentent le spectre du courant
statorique et le spectre de la de la puissance instantanée partielle du moteur
opérant avec un glissement (g=0.08). Le spectre résultant est très riche en
harmoniques, mais cela n’empêche pas la distinction des raies caractérisant les
défauts d’asymétrie naturelle et du défaut rotorique, donc on peut les remarquer
facilement.
0 100 200 300 400 500-120
-100
-80
-60
-40
-20
0
Fréquence en Hz
Am
plitude e
n d
B
Fig. 7.8.a Spectres du courant statorique pour un moteur avec une barre cassée. (g=0.08) (l'expérimentale.)
0 100 200 300 400 500-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence en Hz
Am
plitude e
n d
B
Fig. 7.9.a : Spectre de la puissance instantanée partielle absorbée par un moteur avec une barre cassée (g=0.08) (l'expérimentale.)

Chapitre 7 Validations, comparaisons et vérifications.
145
10 20 30 40 50 60 70 80 90-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plit
ude
(dB
)(1+2g)fs
(1+4g)fs
(1-2g)fs
(1-4g)fs
(1-4g)fs
a)
10 20 30 40 50 60 70 80 90-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence en Hz
Am
plit
ud
e e
n d
B
(1-2g)fs
(1-4g)fs
(1-6g)fs
(1+2g)fs
(1+4g)fs
(1+6g)fs
b)
Fig. 7.8.b : Spectres du courant statorique pour un moteur avec une barre cassée. (g=0.08) (ZOOM)
a)- la simulation.
b)- l'expérimentale.

Chapitre 7 Validations, comparaisons et vérifications.
146
0 5 10 15 20 25 30-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plit
ude
(dB
) 2gfs
4gfs
6gfs
80 85 90 95 100 105 110 115 120-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)A
mp
litu
de
(d
B)
2fs + 2gfs
2fs + 4gfs
2fs - 2gfs
2fs -4gfs
a)
5 10 15 20 25 30-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence en Hz
Am
plit
ud
e e
n d
B
2gfs
4gfs
6gfs
80 85 90 95 100 105 110 115 120-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence en Hz
Att
enua
tion
en d
B
2fs+ 2gfs 2fs-4gfs
2fs- 2gfs
2fs-4gfs
b)
Fig. 7.9.b : Spectre de la puissance instantanée partielle absorbée par un moteur avec une barre cassée (g=0.08) (ZOOM)
a)- la simulation. b)- l'expérimentale.

Chapitre 7 Validations, comparaisons et vérifications.
147
0 5 10 15 20 25 30-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fréquence (Hz)
Am
plit
ud
e (
dB
) 2gfs
4gfs
6gfs
a)
b)
Fig. 7.10 : Spectre du module du vecteur de Park pour un moteur avec une barre cassée (g=0.08) [SAH 03]
a)- la simulation.
b)- l'expérimentale. On note que les composantes spectrales du courant statorique sont plus sensibles
au défaut de barres. En effet, l'amplitude de l'harmonique (1-2g)fs [43.5Hz, -32dB]

Chapitre 7 Validations, comparaisons et vérifications.
148
du courant est plus grande que celle 2gfs [8.5Hz, -40.9dB] du module du vecteur de
Park ,d'après la (fig 7.10), et celle 2gfs [6.5Hz, -39.5dB] de la puissance
instantanée, ce qui confirme nos dires dans le chapitre 5.

Chapitre 7 Validations, comparaisons et vérifications.
149
7.4 COMPARAISONS ET VERIFICATIONS AVEC ET AU MOYEN DES PUPLICATIONS ET DES ARTICLES INTERNATIONAUX CONNUS
0 20 40 60 80 100 120 140 160 180 200-150
-100
-50
0
Fréquence (Hz)
Am
plit
ud
e (
dB
)2gfs
4gfs
6gfs
2fs 2fs-2gfs
2fs-4gfs
2fs+4gfs
2fs+2gfs
a)
b)
Fig. 7.11 : Spectres de la puissance instantanée partielle moteur un défaut au rotor
a)- Le présent travail avec fs=50 Hz
b)- La publication [DUL 09] avec f= fs=60 Hz ici (s=g)
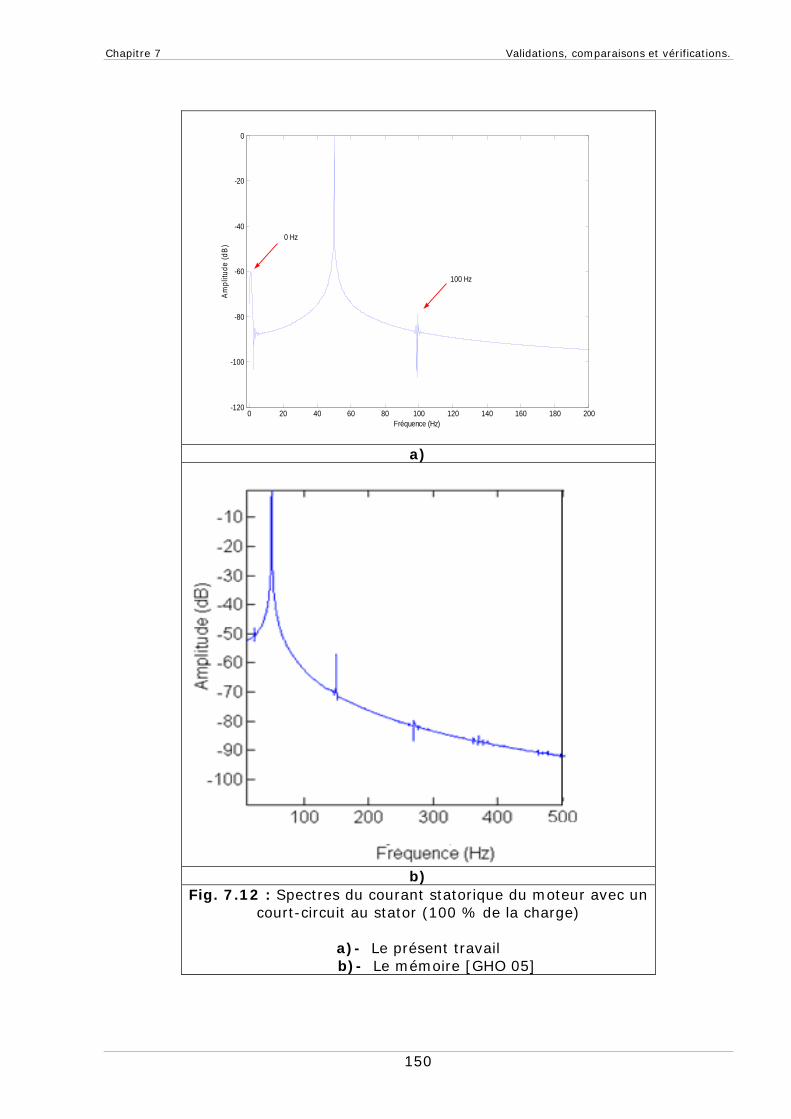
Chapitre 7 Validations, comparaisons et vérifications.
150
0 20 40 60 80 100 120 140 160 180 200-120
-100
-80
-60
-40
-20
0
Fréquence (Hz)
Am
plit
ud
e (
dB
)
100 Hz
0 Hz
a)
b)
Fig. 7.12 : Spectres du courant statorique du moteur avec un court-circuit au stator (100 % de la charge)
a)- Le présent travail
b)- Le mémoire [GHO 05]

Chapitre 7 Validations, comparaisons et vérifications.
151
-30 -20 -10 0 10 20 30-30
-20
-10
0
10
20
30contour de park "la courbe de Lissajou Isq = f (Isd )
défaut simple : d'excentricité mixtedéfauts combinés: excentricité mixte+1 barre cassèe
Iq (A)
Id (A)
a)
b)
Fig. 7.13 : Contour de Park (moteur avec défaut d’excentricité)
a)- Le présent travail b)- La publication [SHA 06]
D'après les (fig 7.11), (fig 7.12) et (fig 7.13), nous pouvons remarquer aussi
facilement cette concordance qui reflète un niveau haut de nos résultats puisque,
comme vous avez vu; ils coïncident d'une manière flagrante, et sans exception,
avec tous les articles internationaux.

Chapitre 7 Validations, comparaisons et vérifications.
152
7.5 CONCLUSION
Pour se rapprocher encore de la réalité, cette partie du mémoire montre la
validation, la comparaison et la vérification de nos travaux représentés par les
techniques dédiées à la détection des défauts sur des signaux réels issus d'un MAS
par, avec et au moyen des résultats pratiques et quelques résultats extraits des
articles publiés dans des sites de recherches très connus IEEE et SD concernant le
diagnostic mis en question dans notre mémoire. Finalement, nous avons trouvé une
validation de notre travail et une concordance acceptable avec ce qui a été prédit
par l’analyse analytique et la simulation.

Conclusions générales et perspectives.
153
Chapitre 8
Conclusions générales et perspectives
8.1 CONCLUSIONS GENERALES
Le travail présenté dans ce mémoire s'inscrit dans le cadre du diagnostic des
défauts dans les MAS triphasées. Nous avons focalisé notre étude sur les MAS à
cage :
d’une part, ce sont les plus utilisées actuellement, à raison de: leur simplicité de
construction, leur faible coût d'achat et de fabrication, leur robustesse mécanique ou
encore leur quasi-absence d'entretien et leur fonctionnement à vitesse variable
grâce à l’avancée de l’électronique de puissance; à tel point que nous les trouvons
maintenant dans tous les domaines industriels.
Pour cela, n’oublions pas que L’arrêt non programmé ou le fonctionnement
anormal de l’outil de production, et le non-respect des délais qui s’en suivent,
engendrent en effet des coûts que les entreprises ne sont plus en état de supporter
et elles peuvent perdre leurs noms dans un marché concurrentiel, ce qui influe
directement sur leurs destins économiques, et déclarer enfin leur faillite.
Mais d’autre part, la MAS à cage est caractérisée par des équations électriques
complexes, où apparaissent des paramètres dont la détermination expérimentale
s’avère imprécise sans accéder aux informations rotoriques, ce qui nous laisse dans
l’impossibilité de voir le comportement et l’évolution des courants rotoriques en
régime dynamique.
Dans ce mémoire, notre objectif a été de trouver des approches efficaces pour
prédire les défauts dans les MAS. Nous nous sommes penchés sur l'étude des
grandeurs non invasives puisque elles nous permettent facilement la détection

Conclusions générales et perspectives.
154
précoce de toutes les anomalies qui peuvent affecter nos MAS. Ce diagnostic, qui
nécessite l’analyse juste en régime dynamique de la MAS à cage, exige en particulier
des informations électriques précises pour connaître l’évolution des paramètres tels
que les courants rotoriques. Cependant, une caractéristique du moteur asynchrone à
cage est de ne fournir aucun renseignement direct sur les courants développés au
rotor, vu l’inaccessibilité à la cage. Plus que tout autre moteur, il nécessite donc
l’élaboration d’estimateurs qui rendent compte de l’état magnétique et électrique du
rotor.
Et pour répondre à cette problématique, nous avons envisagé l’utilisation de la
méthode de résolution de l’ensemble des équations des circuits d’alimentation de la
machine, avec la cage sous forme d’enroulements particuliers. Le but de notre travail
a été de développer un modèle de ce type, connu sous le nom de multi enroulement.
Au début de ce mémoire, nous avons rappelé les éléments de constitution de la
MAS afin de préciser les différents défauts qui peuvent affectés le bon
fonctionnement des MAS à cage, ainsi que leurs causes et leurs signatures
spectrales. Selon la littérature et la brève présentation des diverses méthodes du
diagnostic, nous avons constaté que l’analyse spectrale des signaux est la méthode
la plus utilisée, vu sa simplicité et son efficacité de prévoir un défaut dès lors que
ses premiers signes commencent à apparaître, ce qui nous a incité à adopter cette
technique.
Afin de représenter le comportement de la machine lors d'un fonctionnement
normal (ME saine) et anormal (ME défaillante), nous avons développé un modèle
mathématique : multi enroulement pour la cage rotorique. Ensuite, nous avons
construit un programme de simulation à l'aide du MATLAB. Ceci, nous a permis de
visualiser le courant statorique, le couple, la vitesse et les courants dans les barres
rotoriques…,et parmi toutes ces grandeurs électriques et mécaniques, nous avons
mis l’accent sur les grandeurs non invasives, pendant les différentes conditions de
fonctionnement de la machine (sans ou avec défaut).
Nous avons effectué l’analyse spectrale du courant statorique, par la transformée
de Fourier rapide (FFT) qui nous a offert la possibilité de détecter les composantes
(1±2kg)fs caractéristiques du défaut de barres. Egalement, nous avons montré que

Conclusions générales et perspectives.
155
la variation sur les caractéristiques du défaut et sur les l'amplitudes des
harmoniques (1±2kg)fs suit le nombre de barres cassées, leur mutuelle position
ainsi que de la charge appliquée sur l’arbre du moteur. Nous avons remarqué que
le défaut causé par les cassures des portions d'anneaux de court-circuit est plus aigu
que celui dû aux cassures de barres.
Dans cette étude aussi, nous avons fait, pour détecter les défauts rotoriques, une
simulation des autres signaux issus de la machine (le couple, la vitesse, le module
du vecteur de Park étendu, la puissance instantanée partielle et puissance
instantanée totale). Nous avons dressé un tableau récapitulatif qui compare les
différentes amplitudes issues de ses grandeurs non invasives. Malgré les avantages
de toutes ses approches, il s'est avéré que la détection des défauts est plus simple
et plus efficace avec le courant statorique et avec le module du vecteur de Park
étendu qu’avec les autres signaux.
Enfin, nous n’avons pas oublié de relever les signatures des : défauts
statoriques, défauts d’excentricité et défauts combinés. Nous avons validé nos
résultats obtenus par des résultats expérimentaux et les vérifier au moyen des
articles internationaux connus.
8.2 PERSPECTIVES
En perspective, il nous semble important :
d’une part, de diminuer le nombre des hypothèses simplificatrices
et d’envisager la prise en compte:
o des effets des harmoniques d’espace.
o des effets des encoches.
o de l’inclinaison des barres rotoriques.
o de la saturation dans le modèle mathématique.
dans le calcul de la permeance de l’entrefer.
d’autre part, d’étudier d’autres approches non invasives originales telles que
le diagnostic par le flux de dispersion.
Finalement, de faire une étude de comparaison entre toutes les grandeurs

Conclusions générales et perspectives.
156
non invasives, du point de vue de leur sensibilité aux défauts affectant nos
MAS.
Donc, cette perspective nous offrira la possibilité de faire cette étude de
comparaison de la manière la plus fine possible qui nous permettra de s’approcher
encore plus de la réalité.
En définitive, tout cela va aller dans le sens d’un diagnostic prédictif, qui
permettra d'anticiper les pannes et de remplacer les pièces juste avant leur rupture,
pour assurer la continuité productive de nos entreprises .N'est-ce pas l’économie,
enfin de compte, est le maître mot gouvernant le destin des pays, dans un marché
concurrentiel ?!.

ANNEXES

Bibliographie.
158
Bibliographie
[AHM 05]: I. Ahmed, N. Ertugrul and W.L. Soong “A study on the detection of
fault frequencies for condition monitoring of induction machines” School
of Electrical and Electronics Engineering University of Adelaide, Australia.
[ALF 98]: M.Alfredo,A.Thomas “Complex vector model of the squirrel cage
induction machine including instantaneous rotor bar currents”Department
of Electrical and computer engineering University of Wisconsin-Madison
(USA).
[AND 00]: Andrzej M. Trzynadlowski, Ewen Ritchie, "Comparative Investigation
of Diagnostic Media for Induction Motors: A Case of Rotor Cage Faults,"
IEEE Transactions on Industry Electronics, Vol. 47, No. 5, October2000,
pp. 1092-1099.
[ARO 07]: T. Aroui ,Y. Koubaa ,A. Toumi “Application of feedforward neural
network for induction machine rotor faults diagnostics using stator
current”Research Unity of Industrial Process Control (UCPI), National
Engineering School of Sfax (ENIS),Sfax-Tunisia 2007.
[BAG 99] : L. Baghli, “ Contribution à la commande de la machine asynchrone,
utilisation de la logique floue, des réseaux de neurones et des
algorithmes génétiques ” Thèse de doctorat, Université Henri Poincaré,
Nancy-І, 1999.
[BEL 05] : BELHAMDI Saad “ Prise en Compte D’un Défaut Rotorique Dans
la Commande d’un Moteur Asynchrone ”Thèse de Magister, Université
Mohamed Khider Biskra, Soutenue 2005.

Bibliographie.
159
[BEN 00]: M. H. Benbouzid, “A Review of Induction Motors Signature Analysis as a
Medium For Faults Detection”, IEEE Transactions on Industrial Electronics
Vol 47, N°5, October 2000, pp. 984-993.
[BON 00] : E.L.Bonaldi,L.E.Borges da Silva,G.Lambert-Torres “ Using rough
sets techniques as a fault diagnosis classifier for induction motors ”
Electronic Engineering Department University Itajouba Brasil.
[BOU 01] : T. Boumegora “ Recherche des signatures électromagnétiques des
défauts dans une machine asynchrone et synthèse d’observateurs en
vue du diagnostic ”. Thèse de doctorat, Ecole centrale de Lyon, 2001.
[BOU 06] : Bouharket. Melek , “ Etude de l’évolution des courants rotoriques d’une
machine asynchrone à cage en regime dynamique ”, Thèse de Doctorat
2006,Université de Batna (Algerie).
[BUI 07] : Bui. Viet. Phuong “Diagnostic des machines électriques par l’analyse du
champ magetique de fuite application à l’identification de défauts
rotoriques d’un alternateur à vide”, Thèse de Doctorat 2007, Institut
national polytechnique de Grenoble (France).
[CAS 03] : R. Casimir “ Diagnostic des défauts des machines asynchrones par
reconnaissance des formes ”. Thèse de doctorat, Ecole centrale
de Lyon,2003
.
[DID 04] : G. Didier “ Modélisation et diagnostic de la machine asynchrone en
présence de défaillances ”.Thèse de doctorat, Université Henri Poincaré,
Nancy І, 2004.
[DUL 09] : Dulce F. Pires, V. Fernão. Pires, J.F. Martins , A.J. Pires “ Rotor
cage
fault diagnosis in three-phase induction motors based on a current and
virtual flux approach” Energy Conversion and Management50 (2009)
pp 1026–1032.

Bibliographie.
160
[FIL 94]: F. Filippetti, G. Franceschini, C. Tassoni, P. Vas, “Broken bar
detection in induction machines: Comparaison between current spectrum
approach and parametre estimation approach“,IEEE Industry Application
Conference'94, pp. 95-102, Denver USA, Oct 1994.
[HAM 04]: H.Hamidi ,A.R. Nasiri , F. Taringoo “ Detection and isolation of mixed
eccentricity in three phase induction motor viawavelet packet
decomposition” Islamic Azad University of Boroujerd.
[HEM 06] :M. Kamel eddine Hemssas “ Développement d’un nouveau modèle
de la machine asynchrone pour la commande et la surveillance ” Thése
de doctorat d’état, Université Farhat abbas Sétif, 2006, Algeria.
[HEN 05] : H. Henao “ Détection des défauts de coulage dans les rotors à cage
d’écureuil à l’arrêt ” J3eA, Journal sur l’enseignement des sciences et
technologies de l’information et des systèmes, Volume 4, Hors-Série 4, 6
(2005), Université de Picardie Jules Verne– IUP GEII France.
[JAF 08] : Jafar Zarei , Javad Poshtan “An advanced Park’s vectors approach for
bearing fault detection” Department of Electrical Engineering, Iran
University of Science and Technology, Tribology International42 (2009)
PP 213– 219.
[JON 05]:Jonathan. Sprooten “Finite element and electrical circuit modelling of
faulty induction machines–study of internal effects and fault detection
techniques-A” thesis submitted to the Universite Libre de Bruxelles
(ULB) 2007.
[KHA 07]: A. F. Khatir, K. E. Hemsas , “Diagnostic Des Machines Asynchrones :
Utilisation Du Modèle Multi enroulements” 4th International Conference
on Computer Integrated Manufacturing CIP’2007.

Bibliographie.
161
[KHA 08] : Khatir.Abdelfatah “Etude comparative des modèles des MAS utilisés
en diagnostic des pannes” mémoire de Magistèr , Université Ferhat
Abbas-Sétif UFAS (Algérie),2008.
[GHO 05] :Ghoggal. Adel : “ Diagnostic de la machine asynchrone triphasée : dédié
à la détection des défauts ”Mémoire de Magister, Université de Batna,
Soutenue 2005
[GOJ 00]: Gojko M. Joksimovic, “The detection of inter-turn short circuits in the
stator windings of operating motors” IEEE Transaction on Industrial
Electronics, Vol. 47, N°. 5, October, 2000 pp 1078-1084.
[MAG 06] :A.Maghraoui, A.Deboucha, “Diagnostic des défauts dans les moteurs
asynchrones triphasés à cage”. Université de Biskra (Algerie) 2006.
[MAR 02] :Mario El Tabach “ Détection des défauts mécaniques par analyse des
signaux électriques d’alimentation ” Université de Technologie Compiègne
10 juillet 2002.
[MAR 05]: Marcio Massakiti Kubo, Emesto Ruppert Filho “Three-phase induction
motor dynamic mathematical model considering air-gap irregularities”
International Symposium on Diagnostics for Electric Machines, Power
Electronics and Drives Vienna, Austria, 7-9 September 2005.
[MEN 04]: Arezki Menacer Mohamed-Saïd Naît-Saïd A/Hamid Benakcha Saïd
Drid “Stator current analysis of incipient fault into asynchronous motor
rotor bars using fourier fast transform” Journal of Electrical Engineering,
Vol. 55, N°. 5-6, 2004, 122-130.
[MOH06]: Mohamed Boucherma , Mohamed Yazid Kaikaa Abdelmalek
Khezzar “Park model of squirrel cage induction machine including space
harmonics effects” Journal of Electrical Engineering, Vol. 57, N°. 4, 2006,
193–199.

Bibliographie.
162
[MOH 08]:Mohammed Zeki Khedher , “ Knowledge based diagnosis of faults in
induction motors ”Jordan University, Knowledge Based Industries &
Nanotechnology Conference Doha – Qatar 11th – 12th February 2008.
[RAP 06] :Raphaël Romary, Delphine Thailly , Jean-François Brudny, Amine
Yazidi,Humberto Henao, Gérard-André Capolino, Pierre Suau,
“ Diagnostic de machines électriques par analyse du champ magnétique
de dispersion ” Deux laboratoires ont pris part à ces travaux: le LSEE
de l’Université d’Artois et le CREA de l’Université Picardie Jules Verne.
REE N° 11 Décembre 2006.pp 49-62.
[RAN 05]: Randy Supangat, Nesimi Ertugrul, Wen L. Soong, Douglas A. Gray,
Colin Hansen and Jason Grieger “Broken rotor bar fault detection in
induction motors using starting current analysis” School of Electrical and
Electronic Engineering, University of Adelaide, Australia.
[RAZ 02] :H. Razik “le contenu spectral du courant absorbe par la machine
asynchrone en cas de défaillance ”. p 48-52, 29-juin 2002.
[RAZ 03] :H. Razik, G. Didier “ notes de cours sur le diagnostic de la machine
asynchrone ”.Université Henri Poincaré, Nancy-І, 7-janvier 2003.
[SCH 99]: E. Schaeffer “ Diagnostic des machines asynchrones : modèles et outils
paramétriques dédiés à la simulation et à la détection de défaut ”. Thèse
de doctorat, Université De Nantes 1999.
[SAH 03] :Sahraoui.Mohamed “Contribution aux diagnostics des machines
asynchrones triphasées à cage ”Université Mohamed Khider Biskra,
10/2003.

Bibliographie.
163
[SAH 08]: M. Sahraoui , A. Ghoggal, S.E. Zouzou, M.E. Benbouzid “Dynamic
eccentricity in squirrel cage induction motors – Simulation and analytical
study of its spectral signatures on stator currents” Laboratoire de Génie
Electrique de Biskra (LGEB), University of Biskra, BP 145 Biskra, Algeria.
Journal homepage: www.elsevier.com/ locate/simpat.
[SAM 08]: Samir Hamdani, Omar Touhami, Rachid Ibtiouen, “A Generalized
Two Axes Model of a Squirrel-Cage Induction Motor for Rotor Fault
Diagnosis”Serbian Journal of Electrical May 2008, 155-170.
[SHA 06]: Ali S. Al-Shahrani “Influence of adjustable speed drive on induction
motor fault detection using stator current monitoring” Thesis, Oregon
State University, 2006.
[SMA 02] :S. Bachir “ Contribution au diagnostic de la machine asynchrone par
estimation paramétrique ”. Thèse de doctorat, Université de
Poitiers, 2002.
[SUB 99]: Subhasis Nandi , Hamid A. Toliyat “Condition monitoring and fault
diagnosis of electric machinery- A Review” Advanced Electric Machines
& Power Electronics Laboratory Department of Electrical Engineering,
Texas A&M University (USA) 1999.pp 1-8.
[SZA 05]: SZABÓ Loránd , DOBAI Jenő Barna , BIRÓ Károly Ágoston “Rotor
faults detection in squirrel-cage induction motors by current signature
analysis”2004 IEEE-TTTC - International Conference on Automation,
Quality and Testing, Robotics May 13 – 15, 2004, Cluj-Napoca,
Romania pp1-6.
[TER 04]: G. Didier, E. Ternisien†, O. Caspary, and H. Razik “Fault detection of
broken rotor bars in induction motor using a global fault index ” Groupe
de Recherche en Electrotechnique et Electronique de Nancy, Université
Henri Poincaré-2004.

Bibliographie.
164
[THA 06]: Thanis SribovornmongkolIn “Evalution of motor online diagnosis by
FEM simulations” Master’s Thesis Electrical Machines and Power Electronics
School of Electrical Engineering Royal Institute of Technology
Stockholm,2006
[TOL 91]: Hamid A.Toliyat,Thomas A.Lipo, J.Coleman White “ Analysis of a
concentrated winding machine for adjustable speed drive applications
part 1(motor analysis)” IEEE Transactions on Energy conversion,Vol.6 N°4
,December 1991.pp 679-683.
[TOL 02]: Dr. Hamid A. Toliyat “Condition monitoring and fault diagnosis of electric
machinery” Advanced Electric Machines & Power Electronics Laboratory
Department of Electrical Engineering, Texas a & M University (USA) 2002.
[VOI 03]: Voitto. Kokko, “Condition monitoring of squirrel-cage motors by axial
magnetic flux measurements” Department of Electrical Engineering,
Optoelectronics and Measurement Techniques Laboratory, University of
OULU 2003
[ZEB 05] :Zebri.Fouad,Mehamelle.Houcine “ Detection et localisation des
défauts de la machine asynchrone à double stator application de la
technique l’intelligence artificielle” Université de Biskra (Algerie).
:

Bibliographie.
165

. Résumé/ Abstract / ملخص
تزامنية اال مقتحمة لتشخيص اآلالت أال قاديرامل
و لقد عكفنا علي استكشاف . االتزامنيةف من هذه المذآرة هو العثور على مقاربة فعالة للتنبؤ باألعطال المحتملة في اآللة هدال :ملخصوقت مبكر والتي يمكن أن تؤثر على محرآاتنا أو مواقعها في / أنها تسمح لنا بسهولة الكشف علي األعطال و إذ أال مقتحمة مقاديرال
.االتزامنيةهذا التشخيص يقتضي التحليل الصحيح في الطور الديناميكي للمحرك أال تزامني ذي القفص الذي يتطلب ، بصفة خاصة ، المعلومات
بأنه ال يوفر أي تزامنيةالمحرآات االومع ذلك ، سمة من سمات قفص الكهربائية لتحديد دقيق لتطور الوسائط مثل التيارات الدوارةولمعالجة هذه المشكلة ، يمكننا النظر في . معلومات مباشرة بشأن التيارات المتكونة في الدوار نظرا لعدم إمكانية الوصول إلى القفص
لنا هو تطوير نموذج من والهدف من عم. استخدام أسلوب حل جميع المعادالت من دارات تغذية المحرك ، مع اعتبار القفص آلفات خاصة .هذا النوع، والمعروفة باسم متعدد اللفات
، يمكن التنبؤ بالعيوب في المحرك المذآور ) تحويلة فورييه السريعة(إن استخراج اإلشارات المختلفة من هذا النموذج ، وذلك باستخدام
حاآاة سمحت بتقييم والمقارنة بين هذه التقنيات للتحقق من صحة أخيرا، نتائج الم .وتوقع األعطال لزيادة آفاءة اإلنتاج في سوق تنافسية .التي قدتم نشرها سابقا الدولية بحوثنا واستنتاجاتنا ثم تحققنا من صحتها مقارنة بالنتائج العملية و مع بعض األعمال
أعطال ,في الجزء الساآناألعطال ,مقتحمة أال,يعة تحويلة فورييه السر ,التحليل الطيفي ,اآللة أالمتزامنية , التشخيص الكلمات المفتاحية
أال تمرآزية ,الدوار
Grandeurs non invasives pour le diagnostic des machines asynchrones
Résumé : L’objectif de ce mémoire est de trouver des approches efficaces pour prédire les défauts dans la machine asynchrone. Nous nous sommes penchés sur l’étude des grandeurs non invasives puisque elles nous permettent facilement la détection et/ou la localisation précoce de toutes les anomalies qui peuvent affecter nos MA. Ce diagnostic, qui nécessite l’analyse juste en régime dynamique de la MA à cage, exige en particulier des informations électriques précises pour connaître l’évolution des paramètres tels que les courants rotoriques. Cependant, une caractéristique du moteur asynchrone à cage est de ne fournir aucun renseignement direct sur les courants développés au rotor, vu l’inaccessibilité à la cage. Et afin de répondre à cette problématique, nous pouvons envisager l’utilisation de la méthode de résolution de l’ensemble des équations des circuits d’alimentation de la machine, avec la cage sous forme d’enroulements particuliers. Le but de notre travail est de développer un modèle de ce type, connu sous le nom de multi enroulement. L’extraction des différents signaux issus de ce modèle, en utilisant la (FFT), permet de prédire les défauts dans la machine asynchrone et anticiper les pannes afin d’augmenter le rendement de la production dans un marché concurrentiel. Enfin, des résultats de simulations nous ont permis l'évaluation et la comparaison entre ces techniques et afin de valider notre étude et nos constatations nous les avons vérifiées au moyen de quelques résultats pratiques et autres travaux internationaux publiés. Mots clés : Diagnostic, Machine asynchrone, Analyse spectrale, FFT, non invasives, défauts statorique, défauts
rotorique, l’excentricité.
Non-invasive quantities for diagnosis of asynchronous machines Abstract: The aim of this paper is to find effective approaches to predict faults in the asynchronous machine. We looked to explore non-invasive quantities since they allow us to easily detect and / or locate any early abnormalities which can affect our asynchronous machine. This diagnosis requires the correct analysis in dynamic cage asynchronous machine requires, in particular, accurate electrical information to determine the precise evolution of parameters such as rotor currents. However, a characteristic of induction motor cage is not providing any direct information on the pattern developed in rotor regarding the inaccessibility to the cage. And in order to resolve this problem, we can consider using the method of solving all the equations of supply circuits of the machine, with the cage form considered as special windings. The aim of our work is to develop a model of this type, known as multi-winding. The extraction of various signals issued from this model, using “FFT”, can predict defects in the induction machine and anticipate failures by increasing the production efficiency in a competitive market. Finally, simulation results have permitted the evaluation and comparison between these techniques and to validate our research and our findings we have checked them with some practical results and other international works published. Keywords: Diagnosis, Asynchronous machine, Spectral analysis, FFT, Non-invasive, Stator defects, Rotor faults, Eccentricity.




















