Gaze motion clustering in scan-path estimation
14
RESEARCH REPORT Gaze motion clustering in scan-path estimation Anna Belardinelli Fiora Pirri Andrea Carbone Received: 25 April 2007 / Accepted: 8 February 2008 / Published online: 20 March 2008 Ó Marta Olivetti Belardinelli and Springer-Verlag 2008 Abstract Visual attention is considered nowadays a paramount ability both in Cognitive Sciences and in Cog- nitive Vision to bridge the gap between perception and higher level reasoning functions, such as scene interpreta- tion and decision making. Bottom-up gaze shifting is the main mechanism used by humans when exploring a scene without a specific task. In this paper we investigated which criteria allow for the generation of plausible fixation clus- ters by analysing experimental data of human subjects. We suggest that fixations should be grouped in cliques whose saliency can be assessed through an innovation factor encompassing bottom-up cues, proximity, direction and memory components. Introduction Research on human attention has widely spread in the last century, providing understanding of cognitive processes related to vision (Kramer et al. 2007) and leading to the formulation of several computational models accounting for oculomotor behaviour and fixations distribution. Ear- liest models rely on Posner’s one (1980) and Treisman’s Feature Integration Theory (Treisman and Gelade 1980), according to which several separable basic features, such as intensity, color, shape, edge orientations, and conjunctions of them, that pop out in the field of view, drive eyes to those locations displaying them. In this sense attention has been categorized into bottom- up, i.e. exogenous, stimulus-driven, and top-down, i.e. endogenous, biased by the subject’s knowledge and intentions. Most of computational models so far rely on bottom-up cues, since they are more general and detectable via image-processing techniques and image statistics (see Itti and Koch 2001; Tsotsos et al. 1995; and derived models by Frintrop et al. 2006; Shokoufandeh et al. 2006). These approaches compute feature maps of the whole image at different scales with Gabor filters and Gaussian pyramids, and then conspicuity maps are obtained by means of the center-surround mechanism, which returns locations that contrast with local context. A single saliency map is derived combining the conspicuity maps and a WTA net selects the point to fixate. These models are concerned with defining a relation between fixation deployment and image properties in the viewed scene. Saliency is mostly determined by processing selected features known to have correspondent receptors in biological visual systems. Established architectures so far have usually not encompassed motor data of the perceiving subject. Nevertheless, when freely moving in an open environment the head, eye and body behaviour is condi- tioned to serve the visual system, which, being foveated, calls for the production of a meaningful scanpath to gain high resolution on informative zones. To this end humans have developed precise scanning strategies in everyday routines as well as in specific tasks, like search, surveil- lance or driving. A deeper understanding of these strategies would lead to the design of effective sensorimotor behav- iours in artificial vision systems. In this sense some work A. Belardinelli (&) F. Pirri A. Carbone Dipartimento di Informatica e Sistemistica, ALCOR, Sapienza University, via Ariosto 25, 00185 Rome, Italy e-mail: [email protected] F. Pirri e-mail: [email protected] A. Carbone e-mail: [email protected] 123 Cogn Process (2008) 9:269–282 DOI 10.1007/s10339-008-0206-2
-
Upload
univ-paris8 -
Category
Documents
-
view
0 -
download
0
Transcript of Gaze motion clustering in scan-path estimation

RESEARCH REPORT
Gaze motion clustering in scan-path estimation
Anna Belardinelli Æ Fiora Pirri Æ Andrea Carbone
Received: 25 April 2007 / Accepted: 8 February 2008 / Published online: 20 March 2008
� Marta Olivetti Belardinelli and Springer-Verlag 2008
Abstract Visual attention is considered nowadays a
paramount ability both in Cognitive Sciences and in Cog-
nitive Vision to bridge the gap between perception and
higher level reasoning functions, such as scene interpreta-
tion and decision making. Bottom-up gaze shifting is the
main mechanism used by humans when exploring a scene
without a specific task. In this paper we investigated which
criteria allow for the generation of plausible fixation clus-
ters by analysing experimental data of human subjects. We
suggest that fixations should be grouped in cliques whose
saliency can be assessed through an innovation factor
encompassing bottom-up cues, proximity, direction and
memory components.
Introduction
Research on human attention has widely spread in the last
century, providing understanding of cognitive processes
related to vision (Kramer et al. 2007) and leading to the
formulation of several computational models accounting
for oculomotor behaviour and fixations distribution. Ear-
liest models rely on Posner’s one (1980) and Treisman’s
Feature Integration Theory (Treisman and Gelade 1980),
according to which several separable basic features, such as
intensity, color, shape, edge orientations, and conjunctions
of them, that pop out in the field of view, drive eyes to
those locations displaying them.
In this sense attention has been categorized into bottom-
up, i.e. exogenous, stimulus-driven, and top-down, i.e.
endogenous, biased by the subject’s knowledge and
intentions. Most of computational models so far rely on
bottom-up cues, since they are more general and detectable
via image-processing techniques and image statistics (see
Itti and Koch 2001; Tsotsos et al. 1995; and derived
models by Frintrop et al. 2006; Shokoufandeh et al. 2006).
These approaches compute feature maps of the whole
image at different scales with Gabor filters and Gaussian
pyramids, and then conspicuity maps are obtained by
means of the center-surround mechanism, which returns
locations that contrast with local context. A single saliency
map is derived combining the conspicuity maps and a
WTA net selects the point to fixate.
These models are concerned with defining a relation
between fixation deployment and image properties in the
viewed scene. Saliency is mostly determined by processing
selected features known to have correspondent receptors in
biological visual systems. Established architectures so far
have usually not encompassed motor data of the perceiving
subject. Nevertheless, when freely moving in an open
environment the head, eye and body behaviour is condi-
tioned to serve the visual system, which, being foveated,
calls for the production of a meaningful scanpath to gain
high resolution on informative zones. To this end humans
have developed precise scanning strategies in everyday
routines as well as in specific tasks, like search, surveil-
lance or driving. A deeper understanding of these strategies
would lead to the design of effective sensorimotor behav-
iours in artificial vision systems. In this sense some work
A. Belardinelli (&) � F. Pirri � A. Carbone
Dipartimento di Informatica e Sistemistica, ALCOR, Sapienza
University, via Ariosto 25, 00185 Rome, Italy
e-mail: [email protected]
F. Pirri
e-mail: [email protected]
A. Carbone
e-mail: [email protected]
123
Cogn Process (2008) 9:269–282
DOI 10.1007/s10339-008-0206-2

relating fovea eccentricity to image statistics in contrast
perception during scanpath and visual search tasks has
been presented in Raj et al. (2005), and Najemnik and
Geisler (2005). Highlighting scanpath primary function and
allowing for decreasing resolution as eccentricity from the
fovea increases, Renninger et al. (2005) defined an eye
movement strategy maximizing sequential information in
silouhette observing. Bruce and Tsotsos (2006) propose a
bottom-up strategy relying on a definition of saliency
aimed at maximizing Shannon’s information measure after
ICA decomposition. Anyway, again saliency is given by
objective properties of the observed scene, not taking into
account data of the attentional behaviour adopted by the
subject. In this paper we present a model to analyse
scanpaths during motion basing on the extraction of salient
features, both objective and subjective (in the sense of the
subject’s motion). We carried out some experiments aimed
at eliciting scanpath mechanisms driven by bottom-up
factors when a walking subject lets her gaze glide over a
scene. Of course top-down factors are present as well in the
form of influence of the subject’s knowledge or experience
but since they cannot emerge directly from sensorymotor
data, we focused on bottom-up and oculomotor features as
data for learning a saliency estimation that could be
implemented on a robotic platform in a straightforward
way. To interpret correlation among several features we
apply factor analysis to the training set of fixations, gath-
ered from the subject by means of a gaze tracker device.
This step helps reducing feature space dimensionality and
combining both temporal and spatial aspects. We propose a
method to cluster fixations related to single saccadic cycles
(see Fig. 1) by introducing a suitable distance measure to
apply to data transformed into the factor space. The use-
fulness of clustering is twofold: on the one hand spatially
and temporally close fixations are usually related to distinct
objects or salient zones inspected, that is, they can denote
higher level functions such as recognition and inference.
On the other hand, clustering can help relating or com-
paring different scanpaths, simplifying data analysis and
discarding outliers (Turano et al. 2003). In Santella and
Decarlo (2003) meanshift clustering with a Gaussian kernel
is proposed to cluster fixations, considering only spatial
location and time.
Finally we introduce an innovation factor modulated by
an Inhibition of Return component, in order to describe the
increase of saliency between consecutive cycles.
Experimental tools
The device used to acquire eye and head displacement data
is an improved version of the one presented in Belardinelli
et al. (2006, 2007). The gaze-machine is made of a helmet
upon which sensors are embedded. A stereo rig and an
inertial platform are aligned along a stripe mounted on the
helmet (see Fig. 2, on the left). Two more cameras, that is,
two microcameras C-mos are mounted on a stiff prop and
point at the pupils. Each eye-camera provides two infrared
LEDs, disposed along X and Y axes near the camera centre.
Fig. 1 Example of some fixations groupings
Fig. 2 On the left, both the gaze machine and the calibration are shown. On the right the detected pupil center, bottom the pupil is detected while
blinking
270 Cogn Process (2008) 9:269–282
123

All cameras were pre-calibrated using the well-known
Zhang camera calibration algorithm (Zhang 1999) for
intrinsic parameter determination and lens distortion cor-
rection. Extrinsic and rectification parameters for stereo
camera were computed too, and standard stereo correlation
and triangulation algorithms used for scene depth estima-
tion. An inertial sensor is attached to the system to correct
errors due to involuntary movements that occur during the
calibration stage. The scene camera frames are suitably
paired with the eye-camera frames for pupil tracking. The
data stream acquired from these instruments is collected at
a frame rate of 15 Hz and it includes the right and left
images of the scene, the cumulative time, the right and left
images of the eyes, and the head angles, in degrees,
accounting for the three rotations: the pitch (the chin up
and down), the roll (the head inclined towards the shoul-
ders) and the yaw (the head rotation left and right),
obtained by the inertial system (see Fig. 3).
In order to correctly locate the Point of Regard of the
user, an eye-camera calibration phase, relative to the two
pairs of cameras and the eyes, is required before using the
system. Calibration is, indeed, necessary to correctly pro-
ject the line of sight on the scene taking into account
several factors such as:
1. Light changes, because light is specularly reflected at
the four major refracting surfaces of the eye (anterior
and posterior cornea and anterior and posterior lens),
and the specularly reflected light is image forming.
2. Head movements, displacing the line of sight also
according to the three rotations pitch, yaw and roll.
3. The unknown position of the eye w.r.t. the stereo rig and
the two C-mos, as they depend on the user head and height.
4. The three reference frames constituted by the three
pairs of vision systems: the stereo rig, i.e. the scene
cameras, the C-mos, i.e. the eye-cameras, and the eyes.
We shall not describe here the eye-camera calibration
process nor the preliminary camera calibrations. A phase of
the eye-camera calibration, using a chess board of 81
squares, projected on the wall plane, is illustrated in Fig. 2,
while the results of pupil tracking are shown in the same
figure on the right. The output of the calibration process is
a transformation matrix mapping the current pupil center,
at time t, on the world point the user is looking at. To
correctly project the world point with respect to a reference
frame common to the whole scanpath, we need to
determine the current position of the user. Indeed, by
calibration, the position of the fixations, at each time step t,
is only known with respect to the subject and not with
respect to a reference frame common to all the fixations.
Since the subject is moving in open space, and, in the
system described, her position cannot be determined if the
environment is completely unknown, we have to put some
restrictions on the environment. Therefore for the experi-
ments described in the paper we have been considering a
relatively small lane whose map is depicted in Fig. 3 and it
is known in advance. Different landmarks have been cho-
sen in order to localize the subject on the map and to
determine fixation point coordinates in the inertial refer-
ence frame, as described below.
According to the eye-camera calibration and the data
from the inertial sensor at each time step t the orientation R
of the head–eye system is known. Hence, following the
notation illustrated in Fig. 3 (left), we are given the current
head–eye orientation R, at time step t, by the three rotations
Fig. 3 On the left a scheme of
the exploration path using
known landmarks, showing the
computation of the subject
position at time t. On the right
the map of the lane in which the
experiments were conducted.
Blue landmarks indicate gates
edges, red landmarks lamps,
green landmarks trees. These
are the landmarks used to
localize the subject
Cogn Process (2008) 9:269–282 271
123

pitch, yaw and roll of the head and the two eye-rotations hand u, indicating the pitch and yaw of the eye. Note that
the head rotations are given with respect to the initial
orientation in t0, which is taken as reference frame for all
the successive rotations, while eye rotations are given with
respect to the observation axis (i.e. the pupillary axis). Yet
the current position of the subject is unknown. We assume
that at each time step t three landmarks are visible in the
image. Thus, given the landmarks Li ¼ ðxi; yi; ziÞ>; Lj ¼ðxj; yj; zjÞ> and Lk ¼ ðxk; yk; zkÞ>; their coordinates
ðxq; yq; zqÞ>; q 2 fi; j; kg; with respect to the reference
frame W0, are known. Furthermore, by stereo triangulation,
the three relative distances di, dj and dk from Vt to Li, Lj and
Lk are determined. In the hypothesis that the landmarks are
correctly localized, but for an error e, the position of the
subject at time t, is obtained resolving the following system
of equations with constraints, for ðx0; y0; z0Þ>; the coordi-
nates of the position of V at time t.
d2i ¼ ðxi � x0Þ2 þ ðyi � y0Þ2 þ ðzi � z0Þ2:
d2j ¼ ðxj � x0Þ2 þ ðyj � y0Þ2 þ ðzj � z0Þ2:
d2k ¼ ðxk � x0Þ2 þ ðyk � y0Þ2 þ ðzk � z0Þ2:
ðx0; y0; z0Þ> ¼ arg minVtdðVt ;Vt�1Þ; with ðx0 [ 0; y0 [ 0; z0 [ 0Þ:
8>>><
>>>:
ð1Þ
Indeed, we can always choose a fixed reference frame such
that the coordinates ðxq; yq; zqÞ> 2 R3 are always positive.
Once the Vt coordinates of the subject, w.r.t. the fixed
reference frame W0 are known, then also the distance dV
from Vt to W0 is determined.
Hence to localize the point of fixation in world coordi-
nates with respect to the reference frame W0 we have
FVtt ¼ RtðFW0
t � VtÞ; and thus FW0t ¼ R>t FVt
t þ Vt: Here
FW0t are the coordinates of the fixation, at time t, with
respect to W0, while FVtt are the local coordinates, at time t,
with respect to Vt.
Now, when t = t0 there are two possibilities: (1) the
subject orientation is parallel to the fixed reference frame,
possibly translated; (2) the subject has an unknown initial
orientation. In any case the eye rotations are h = u = 0,
because in t0 being the eyes aligned with the C-mos, the
rotation angles w.r.t. the pupillary axis are zero. In the first
case, R is RW0; at time t0, and the translation is obtained as
above.
In the second case we note the following useful facts: (1)
the distance between Vt0 and the real world point PC,
projection of the image center C, whose coordinates are
given in the subject reference frame, is known. (2) PC is on
the Z-axis of the subject reference frame. (3) The distance
between PC and the three landmarks is known. (4) The W0
coordinates of the position Vt0 of the subject can be esti-
mated as in (Eq. 1), likewise those of the three landmarks,
for the above remarks. Now, using these facts and the tri-
angles with vertices PC, Lk, Lj and PC, Lk, V0 and PC, V0,
W0 it is possible to estimate the coordinates of PC in W0
coordinates, by constrained optimization, hence the initial
orientation R of the subject in relation to the fixed reference
frame W0. In fact, once the W0 coordinates of PC are
determined the direction cosines of PC, w.r.t. W0 return the
orientation of the Zt0 axis of the head–eye reference frame.
On the other hand the Xt0 axis passes through Vt0 and it is
orthogonal to Zt0 and the Yt0 axis is the cross product of the
first two. Finally, we note that a dynamic estimation of the
rotations, for times steps t = 1, 2, ..., N, given the above-
stated measurements, can be used to correct the head–eye
system of the subject orientation, as the movements are
slow and smooth. We shall not discuss further these aspects
here.
We have, thus, obtained the fixation point Ft, for each
time step, given both the transformation matrices, from the
calibration phases, for projecting the line of sight in real
world coordinates, and the position of the subject in space.
Therefore we have the following data structure F which is
made available for further processing at each time step t:
F :
I ¼ RGB image of the scene;M ¼ depth image of the scene;eL ¼ intensity image of the left eye;eR ¼ intensity image of the right eye;T ¼ time elapsed from the beginning of the experiment;
H ¼ ða; b; cÞ ¼ head rotations; where alpha is the pitch rotation of the head
b is the yaw rotation of the head and
c is the roll rotation of the head;ER ¼ ðu; hÞ ¼ eye rotations, where u is the pitch rotation of the eye and
h is the yaw rotation of the eye. Both rotations are determined w.r.t. the pupillary axis coinciding with the observation axis of the C-mos;pC ¼ pupil center;F ¼ fixation point, obtained by the projection of the line of sight with respect to a fixed reference frame W0;V ¼ current position of the subject, with respect to a fixed reference frame W0;R ¼ rotation matrix giving the orientation of the head�eye system, with respect to a fixed reference frame W0;
8>>>>>>>>>>>>>>>>>>>>>><
>>>>>>>>>>>>>>>>>>>>>>:
ð2Þ
272 Cogn Process (2008) 9:269–282
123
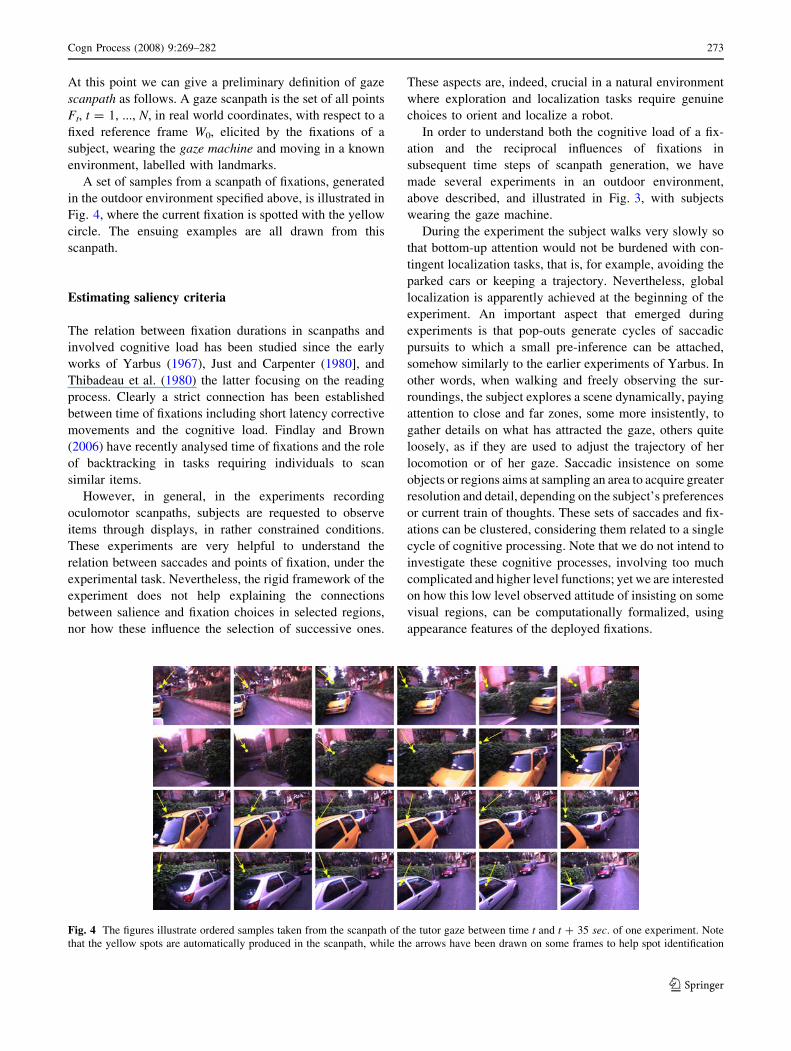
At this point we can give a preliminary definition of gaze
scanpath as follows. A gaze scanpath is the set of all points
Ft, t = 1, ..., N, in real world coordinates, with respect to a
fixed reference frame W0, elicited by the fixations of a
subject, wearing the gaze machine and moving in a known
environment, labelled with landmarks.
A set of samples from a scanpath of fixations, generated
in the outdoor environment specified above, is illustrated in
Fig. 4, where the current fixation is spotted with the yellow
circle. The ensuing examples are all drawn from this
scanpath.
Estimating saliency criteria
The relation between fixation durations in scanpaths and
involved cognitive load has been studied since the early
works of Yarbus (1967), Just and Carpenter (1980], and
Thibadeau et al. (1980) the latter focusing on the reading
process. Clearly a strict connection has been established
between time of fixations including short latency corrective
movements and the cognitive load. Findlay and Brown
(2006) have recently analysed time of fixations and the role
of backtracking in tasks requiring individuals to scan
similar items.
However, in general, in the experiments recording
oculomotor scanpaths, subjects are requested to observe
items through displays, in rather constrained conditions.
These experiments are very helpful to understand the
relation between saccades and points of fixation, under the
experimental task. Nevertheless, the rigid framework of the
experiment does not help explaining the connections
between salience and fixation choices in selected regions,
nor how these influence the selection of successive ones.
These aspects are, indeed, crucial in a natural environment
where exploration and localization tasks require genuine
choices to orient and localize a robot.
In order to understand both the cognitive load of a fix-
ation and the reciprocal influences of fixations in
subsequent time steps of scanpath generation, we have
made several experiments in an outdoor environment,
above described, and illustrated in Fig. 3, with subjects
wearing the gaze machine.
During the experiment the subject walks very slowly so
that bottom-up attention would not be burdened with con-
tingent localization tasks, that is, for example, avoiding the
parked cars or keeping a trajectory. Nevertheless, global
localization is apparently achieved at the beginning of the
experiment. An important aspect that emerged during
experiments is that pop-outs generate cycles of saccadic
pursuits to which a small pre-inference can be attached,
somehow similarly to the earlier experiments of Yarbus. In
other words, when walking and freely observing the sur-
roundings, the subject explores a scene dynamically, paying
attention to close and far zones, some more insistently, to
gather details on what has attracted the gaze, others quite
loosely, as if they are used to adjust the trajectory of her
locomotion or of her gaze. Saccadic insistence on some
objects or regions aims at sampling an area to acquire greater
resolution and detail, depending on the subject’s preferences
or current train of thoughts. These sets of saccades and fix-
ations can be clustered, considering them related to a single
cycle of cognitive processing. Note that we do not intend to
investigate these cognitive processes, involving too much
complicated and higher level functions; yet we are interested
on how this low level observed attitude of insisting on some
visual regions, can be computationally formalized, using
appearance features of the deployed fixations.
Fig. 4 The figures illustrate ordered samples taken from the scanpath of the tutor gaze between time t and t + 35 sec. of one experiment. Note
that the yellow spots are automatically produced in the scanpath, while the arrows have been drawn on some frames to help spot identification
Cogn Process (2008) 9:269–282 273
123

Several factors, actually, concur to produce a scanpath
and some of them are difficult to discriminate. More pre-
cisely, it is difficult to discriminate which factor is
prevailing in each time step, directing the gaze toward a
location rather than another. In the described experiments
we wanted to verify whether the general criteria reported
below could make sense of the elicited fixations grouping
and help giving an insight into the mechanisms underlying
the scanpath strategy.
More specifically, we wanted to show that the saliency
of a saccadic cycle, related to a spatial area, is delineated
by two main components, that is, inhibition of return and
innovation at the current time step. Indeed, innovation
accounts for the strength of unexpected, outstanding and
unattended stimuli (see Itti and Baldi 2006; for discussion
on the surprise effect).
The structure of scanpaths experiments
The purpose of an experiment is to model the structure of
the dynamic features emerging from a scanpath and to
understand the nature of the paths followed by the gaze. At
the same time we are interested in characterizing both a
gaze scanpath and the experiment supporting it. Our goal is
to learn a model that could allow us to automatically
generate a scanpath, although we shall not face the issue of
automatic scanpath generation here.
An experiment EP is defined to be the collection of data
F t¼1;...;N ; as described in (Eq. 2), including a scanpath, that
is, the collection of fixations Ft, plus the data obtained by
suitably transforming the original data to obtain more
precise and detailed information on the gaze path, as
described below.
In particular, the depth map M is the set of coordi-
nates of points in space of each pixel in I : Let us
consider these coordinates aligned as (XV, YV, ZV), with
XV ¼ ðx1; x2; . . .; xnÞ>; YV ¼ ðy1; y2; . . .; ynÞ> and ZV ¼ðz1; z2; . . .; znÞ>; we note that these coordinates are relative
to the viewer V at time t, i.e. in position Vt. Given the
rotation matrix Rt these components can be rotated with
respect to the fixed reference frame W0, hence the rotated
coordinates are:
ðXW0; YW0
; ZW0Þ ¼ R>ðXV YV ZVÞ>
h i>þ1nV>t
� �
ð3Þ
Furthermore from the elapsed time T we want to infer the
time spent on each fixation. It is, thus, necessary to com-
pute the velocity of the gaze around each fixation, given
that each frame is acquired at 15 Hz.
For example, suppose that at time 25, the subject is
looking at point ð70; 80; 270Þ>; given in cm and W0
coordinates, and at time 25.067 she is looking at point
ð69; 81; 271Þ>: The time elapsed is 1/15 s. during which
the eye could have moved quite far from the first fixation.
Instead the distance between the two fixations isffiffiffi3p
cm.
Now, if we consider 0.03 s. before the first fixation and
0.03 s. after the second, then we could estimate the
velocity of the gaze for this fixation to be 0.1 m/s and the
time of fixation, that is d t, to be 2/15. Therefore the time of
fixation is given by either defining a threshold on the
velocity of the gaze or by introducing a threshold on the
distance between k C 2 fixations.
For the combined rotation of head and eyes we assume
that the eyes anticipate the head positions, but their
movements are never contrasting. Therefore, we can con-
sider an algebraic sum of the angles of rotation.
On these bases we can specify two new concepts, that is,
proximity and following-a-direction.
Proximity accounts for surround inhibition, that is, the
decrease of visual acuity when eccentricity from the fovea
increases. Stimuli that are salient but peripheral with
respect to the current fixation point are less likely to be
noticed and attended. Let Bt be the disk centred in Ft,
with some radius r, and Y its projection on the image
plane. We need two data to assess proximity. First the
distance of point b in Bt from the fixation Ft, in world
coordinates. Further, we need the luminance of the point,
projected on the image, compared to the luminance of the
whole foveated region. The proximity value of a point b
is a function of the luminance contrast of its projection on
the image and its distance from the fixation. Let b be a
point in Bt and y the luminance of its projection on the
image plane. Let l be the mean luminance value of Y, rits standard deviation, and let d be the distance of b from
Ft. We have:
PðbÞ ¼ ððy� lÞ=ðrðd þ 1ÞÞÞ2: ð4Þ
Observe that this coordinate evaluates the scanpath opti-
mization, that is, the restraint to jumping between distant
fixations overlooking what is in the middle.
Following-a-direction is an optimization aspect stem-
ming from the consideration that when a subject explores a
scene she follows a scanning strategy which, possibly, goes
from one side to the other, moving her head, in a cyclic way.
The subject, namely, tries to stay on her scanning route as
long as other factors do not prevail. A biological justification
can be found in the attentional momentum, an effect
described in Spalek and Hammad (2004) which, more spe-
cifically than the IOR (Inhibition Of Return) mechanism,
shows that attention tends to explore new locations. In par-
ticular, attention does not only disregard just attended
locations in favour of unvisited ones, but in doing so it shifts
along the same direction. To allow for this effect we designed
a factor considering the shift between three consecutive
fixations Ft - 1, Ft, Ft + 1. Given the vectors vt�1:t ¼ Ft�1Ft���!
and vt:tþ1 ¼ FtFtþ1���!
; the following-a-direction factor for the
274 Cogn Process (2008) 9:269–282
123

fixation at time t + 1 is given by the cosine of the angle kbetween the two vectors:
DðFtþ1Þ ¼ � cosðkt�1:tþ1Þ
¼ � jvt�1:tj2 þ jvt:tþ1j2 þ jvt�1:t � vt:tþ1j2
2jvt�1:tjjvt:tþ1jð5Þ
It is easy to see that the function takes a maximal value of 1
when the vectors are parallel and with same direction and a
minimal value of -1 when parallel and with opposite
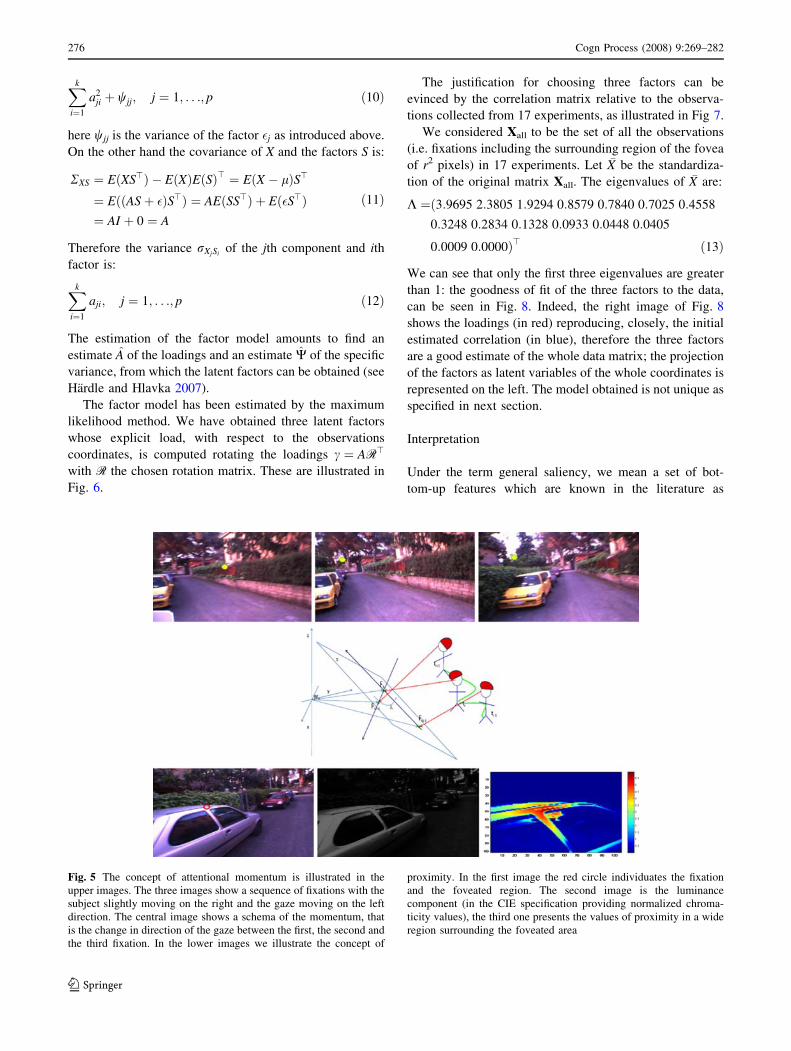
direction. Proximity and following-a-direction factors are
exemplified in Fig. 5.
We consider the set of meaningful features defined
above relative to a region surrounding the projection of the
fixation point Ft, at time t, on both the RGB image I and
the rotated depth image M (see Eq. 3).
For each fixation Ft a square of r2 pixels, whose centre is
the fixation, is sampled (in most experiments we have used
r = 5).
An experiment is gathered into a matrix X, where each
column denotes an observation and each row denotes one
of the physical properties mentioned above, processed at
each time t, during the experiment. Therefore for each
fixation there are r2 observations
n observations ¼ r2 �#fixations
15 features ¼
Obs1 Obs2 � � � Obsn
R
G
B
depth
� � � � � � � � � � � � � � �elapsed
8>>>>>>><
>>>>>>>:
ð6Þ
Specifically, the coordinates of the matrix X of observations
data are the following 15 features: colours (R,G,B), depth (Z),
positions gradient (dX,dY,dZ), where the coordinates
ðXW0; YW0
; ZW0Þ are with respect to W0, proximity, eye rota-
tions (yaw,pitch), combined with the analogous head rotations,
and head roll rotation, velocity, distance between two suc-
cessive fixation points, cumulative time at fixation, estimated
time at fixation. The whole set is formed by 15 features.
To model the generation of the subject scanpath we shall
take the following steps on the data gathered by the
experiments:
1. Use factor analysis, earlier developed in psychometrics
(see Mardia et al. 1979) to decorrelate the data
deducing the latent factors which interpret the main
components of saliency.
2. Infer the structure of cycles of fixations from a suitable
metric on the latent factors.
3. Specify the two core behaviours, that is, inhibition of
return and innovation, this last as a function of
inhibition of return, given the cycles.
In the next section we shall illustrate how to obtain the
latent factors defining saliency.
Latent factors
As shown in the previous section all the features gathered
are obtained by measurements of the subject head–eye
movements and of the colour and space variations obtained
from the three pairs of frames (eyes and scene) of the video
sequences at time t = 1, ..., N. These data can be viewed as
indirect measurements of the real source of attention.
Therefore the meaning of the measurements lies in the
correlation structure that accounts for most of the variation
of the features and explains saliency.
The idea behind the use of factor analysis is to find the
common patterns accounting for the specific roots of
saliency.
Let X be a matrix (p 9 n) of n observations and p
features, we first want to infer the latent factors that
influence saliency and discuss them.
Given an observation X ¼ ðX1; . . .;XpÞ> (i.e. a (p 9 1)
array), taking into account all of the above-mentioned
coordinates, by factor analysis we can reduce the coordi-
nates into common factors, such that
X ¼ ASþ �þ l ð7Þ
where A is a (p 9 k) matrix of the loadings of the factors
S(k 9 1), representing the common latent elements among
the observation coordinates, � is a (p 9 1) matrix of the
specific factors, that is, it is a vector of random variables
interpreting the noise relative to each coordinate, and l is the
mean of the variables. In factor reduction it is assumed that
E(S) = 0 and its variance is the identity, furthermore
Eð�Þ ¼ 0, while the variance of � is W ¼ diagðw11; . . .;wppÞ;also called the specific variance. Finally the covariance of S
and � is also 0.
The component Xj of the observation X can be specified,
in terms of common factors as:
Xk
i¼1
ajiSi þ �j þ lj; j ¼ 1; . . .; p ð8Þ
The variance of the observation can be specified as follows:
RXX ¼ EðXX>Þ � EðXÞEðXÞ> ¼ EðX � lÞðX � lÞ>
¼ EðASþ �ÞðASþ �Þ>
¼ EðASS>A> þ �S>A> þ AS�> þ ��>Þ¼ AEðSS>ÞA> þ Eð�S>ÞA> þ AEðS�>Þ þ Eð��>Þ¼ AA> þW
ð9Þ
Since Eð�S>Þ ¼ EðS�>Þ ¼ 0; EðSS>Þ ¼ varðSÞ ¼ I and
Eð��>Þ ¼ W; as noted above. Therefore the variance rXjXj
of the jth component is:
Cogn Process (2008) 9:269–282 275
123
Xk
i¼1
a2ji þ wjj; j ¼ 1; . . .; p ð10Þ
here wjj is the variance of the factor �j as introduced above.
On the other hand the covariance of X and the factors S is:
RXS ¼ EðXS>Þ � EðXÞEðSÞ> ¼ EðX � lÞS>
¼ EððASþ �ÞS>Þ ¼ AEðSS>Þ þ Eð�S>Þ¼ AI þ 0 ¼ A
ð11Þ
Therefore the variance rXjSiof the jth component and ith
factor is:
Xk
i¼1
aji; j ¼ 1; . . .; p ð12Þ
The estimation of the factor model amounts to find an
estimate A of the loadings and an estimate W of the specific
variance, from which the latent factors can be obtained (see
Hardle and Hlavka 2007).
The factor model has been estimated by the maximum
likelihood method. We have obtained three latent factors
whose explicit load, with respect to the observations
coordinates, is computed rotating the loadings c ¼ AR>
with R the chosen rotation matrix. These are illustrated in
Fig. 6.
The justification for choosing three factors can be
evinced by the correlation matrix relative to the observa-
tions collected from 17 experiments, as illustrated in Fig 7.
We considered Xall to be the set of all the observations
(i.e. fixations including the surrounding region of the fovea
of r2 pixels) in 17 experiments. Let �X be the standardiza-
tion of the original matrix Xall. The eigenvalues of �X are:
K ¼ð3:9695 2:3805 1:9294 0:8579 0:7840 0:7025 0:4558
0:3248 0:2834 0:1328 0:0933 0:0448 0:0405
0:0009 0:0000Þ> ð13Þ
We can see that only the first three eigenvalues are greater
than 1: the goodness of fit of the three factors to the data,
can be seen in Fig. 8. Indeed, the right image of Fig. 8
shows the loadings (in red) reproducing, closely, the initial
estimated correlation (in blue), therefore the three factors
are a good estimate of the whole data matrix; the projection
of the factors as latent variables of the whole coordinates is
represented on the left. The model obtained is not unique as
specified in next section.
Interpretation
Under the term general saliency, we mean a set of bot-
tom-up features which are known in the literature as
Fig. 5 The concept of attentional momentum is illustrated in the
upper images. The three images show a sequence of fixations with the
subject slightly moving on the right and the gaze moving on the left
direction. The central image shows a schema of the momentum, that
is the change in direction of the gaze between the first, the second and
the third fixation. In the lower images we illustrate the concept of
proximity. In the first image the red circle individuates the fixation
and the foveated region. The second image is the luminance
component (in the CIE specification providing normalized chroma-
ticity values), the third one presents the values of proximity in a wide
region surrounding the foveated area
276 Cogn Process (2008) 9:269–282
123

causing a pop-out effect, such as colour, luminance and
depth (see. e.g. Itti and Koch 2001). Wherever these
features are highly contrasted with respect to the sur-
rounding area, the correspondent location stands out. This
is the most basic mechanism of visual attention and,
although most of time top-down attention is affecting the
selective tuning of attention, bottom-up attention is nev-
ertheless always ‘on’, particularly when exploring a scene
without a specific task.
The extracted latent factors shed a new light on the
structuring components of general saliency, especially with
respect to motion.
The loadings for the first factor highlight a strong
influence of depth and variation in the Y and Z directions,
while velocity, following-a-direction and the roll move-
ment of the head seem to be less significant. This is
coherent with those studies stressing the role of cortical
mechanisms in detecting focal orientation.
Fig. 6 The figure on the left
illustrates the load of each
extracted factor (rotated) with
respect to the coordinates, the
figure on the right the
contribution of each factor on
160 fixations of a scanpath
of 27 s, interpolants and the
polynomial degree is used to
indicate the behaviour
Fig. 7 The figure illustrates the
correlation matrix of Xall,
colours highlight meaningful
correlations
Fig. 8 The figure on the left
illustrates the weights of each
extracted factor (rotated) with
respect to the coordinates. The
plot on the right shows the
correspondence between the
estimated correlation of the data
gathered during the experiments
and those obtained by AA> þW
Cogn Process (2008) 9:269–282 277
123

On the other hand, it is interesting to note that the three
colour channels are collected in the second component,
whose behaviour (see Fig. 6) is in antiphase with respect to
the first component, this means that luminance and colour
not only are stand alone components of saliency, not
influenced by orientation and motion, but their behaviour
contrasts orientation, like if while orientation pop out is
active colour pop out is inhibited.
The last component can be identified with motion. The
loadings select first head–eye movements having, indeed,
highest weight, then elapsed time and finally proximity.
Note that the third component behaviour (see Fig. 6) is in
between the other two components.
The self-motion component, in attention modelling, is a
novelty and it is faced in our approach thanks to the sac-
cades collection, while the subject is walking, so that the
head is naturally in movement and the body coordination,
during slow steps on the road, contributes significantly in
the pop out.
The correlation-decorrelation of the fifteen chosen fea-
tures introduces, thus, a new insight in the general notion of
saliency. We suggest that it is exactly a bottom-up stimulus
that arouses pre-attentive vision and consequent redirection
of attention determining, as we shall discuss further, a
cyclic structure of attention.
We shall call the three latent factors, composing the
saliency, orientation saliency, luminance-colour saliency
and motion saliency.
Given the observations Xall obtained from the subject
scanpaths in a set of experiments EP, the saliency model,
estimated from the experiments, is given by the following
parameters:
ðA; S;WÞ ð14Þ
Here A are the loadings, S the latent factors, W is the
variance of the random noise �. The model, as noted above,
is not unique and the degrees of freedom are d = (1/2)(p-
k)2-(1/2)(p + k) = 63. However, choosing a rotation that
best fits the correlation of the common factors, the matrix A
of the loadings can be fixed. Hence we shall refer to the
model that best interprets the parameters given the rotation
R: We note that the rotation is chosen so as to maximize
the sum of the variances of the squared loadings within
each column of A. The model, given the rotation is thus:
M ¼ ðA; S;W;RÞ ð15Þ
Now, considering the model estimated by the set of
experiments, we have the following numbers:
1. The set of fixations F ¼ fFtjt ¼ 1; . . .;Ng; and the
regions Xt surrounding the fixations, each of size r2.
Therefore the matrix of all the data has size r2N 9 p,
with p = 15.
2. The array of factors S. As we have chosen 3 factors,
then S has size r2N 9 3.
3. The matrix A of the loadings, having size p 9 3.
4. The diagonal matrix W of the specific variance, having
size p 9 p.
5. The rotation matrix R which has size 3 9 3.
In the next section we shall discuss how to use the
correlation structure induced by the common factors to
define a metric on the space of fixations, and introduce the
concept of cycle.
Metric on latent factors: cycles of fixations
In this section we analyse how cycles of saccades can be
inferred from a scanpath and how, given two observations
Yi, Yj from the visual array we can induce that they belong
to the same cycle.
A cycle of local saccades is a set of fixations that must
be close in time and space (first and third factors) but not
necessarily similar in colour, unless we think only of
luminance. Nevertheless, there must be also some mean-
ingful aspect related to colour that we have not yet
observed in the experiments, and that we shall face in
future research. In this paper we shall consider colour only
through the latent factors (in our case the second factor).
Given two specific regions Yi and Yj, their relative dis-
tance can be specified with respect to the model
ðA; S;W;RÞ: In other words, we assume that the model
correctly specifies the correlation amongst the parameters,
through the latent factors explaining the saliency, hence the
similarity of two regions can be interpreted, in terms of
saliency, as the relative distance of their predicted factors
from the model.
Now, let Yi and Yj be two foveated regions of the
visual array at some specified time steps t and t0, that is,
two (r 9 r) squares of pixels centred in two fixation
points, then the factors predicted by the regions should
approximate those predicted by the model. If we consider
the vector ½Yq S�>; q 2 fi; jg as normally distributed, then
according to the model (see Eqs. 9, 11) its parameters
are:
NlY
lS
� �
;AA> þW A
A> I3
� �� �
ð16Þ
Here, note that the variance of the factors is the identity,
that is, in our case I3(3 9 3), the mean of the
factors lS = 03, and the other values are as given in
(Eqs. 9, 11). The expectation of the latent factor S; given
the specific observation Y, and being the distribution of S,
conditional on the observation Y(p 9 1), the above-defined
k-variate Gaussian (by hypothesis), is:
278 Cogn Process (2008) 9:269–282
123

EðSjY ¼ YqÞ ¼ A>ðAA> þWÞ�1ðY � lYÞ ð17Þ
This is the estimated individual factor score for the
observation Y = Yq. On the other hand, the variance of
the latent factor array, given the observation Y is, for k = 3
(in our case):
varðSjY ¼ YqÞ ¼ Ik � A>ðAA> þWÞ�1A ð18Þ
Therefore the conditional distribution is:
f ðSjY ¼ YiÞ�NðA>ðAA> þWÞ�1ðY � lYÞ; Ik �A>ðAA> þWÞ�1AÞ
ð19Þ
Despite the underlying correlation structure, the influence
of an observation on a group of factors differs from the
influence of another observation. Therefore, the affinity of
two observations can be drawn considering the impact of
each observation on the latent factors.
One way to deal with the distance between regions, in
terms of the predicted latent factors, is to compute the
Mahalanobis distance between observations, that is DM ¼ðH varðSjXÞ�1 H>Þ1=2; with H the mean of the region
centred in Ft, hence DM is a distance matrix of dimension
N 9 N and the distance between region i and j is readily
observed in row i and column j.
Another method consists in computing the correlation
matrix of all the factors and observations, that is, HCH>;with C the correlation, and then considering the distance
DC ¼ IN � HCH>: Also in this case DC is a distance
matrix of dimension N 9 N.
However, if we consider the space of parameters X,
associated with the space of fixations, that is, the space
including the factor model M ¼ ðA; S;WÞ 2 X; but also the
factors predicted by one, two or n regions, then the distance
could be defined in this space. Let us define Hi the
parameters estimated by the observations in region Yi and
fi ¼ f ðSjY ¼ Yi;HiÞ the conditional distribution given the
local parameters and fM the conditional distribution given
the model M: Then we have:
D2ðfi; fjÞ ¼1
2
Z
X
ðf 1=2i � f
1=2M Þ
2dx
0
@
1
A
þZ
X
ðf 1=2j � f
1=2M Þ
2dx
0
@
1
A ð20Þ
This is the mean Hellinger distance between the estimated
model and the local models, which is a real distance
measure (see Bishop 2006).
Now, given the above-defined distance we have to
delimit a cycle CY according to a neighbourhood of
fixations. Consider the lattice generated by D where,
instead of all the observations in the experiment, i.e. (r2 N),
we have N values obtained by estimating the mean of each
(r 9 r) square, surrounding the fixations.
It is interesting to note that, because of both time and
space, this is a block matrix, except when return to a pre-
viously visited cycle happens after a certain amount of
time. At this point we can define the neighbourhood sys-
tem, based on the above-defined distance between
fixations, as follows. Let qi = (x,y) be the pixel position of
the observation Yi, in the current frame (fixation):
Ni ¼ qjjDðfi; fjÞ\q; i 6¼ j� �
ð21Þ
Here, given a weight w [ 0, e.g w = 1/5, and given that
the number of fixations is M, q is defined as:
q ¼ w
ðwþ 1Þminj2M
Dðfi; fjÞ� �
þ 1
Mðwþ 1Þ
� �
�XM
j¼1
Dðfi; fjÞ �minj2M
Dðfi; fjÞ
Note that q is defined for each neighbourhood, as it
depends from the chosen observation Yi. Then a cycle Ci is
defined to be the set of neighbours for which D satisfies:
ðqi; qjÞ 2 Ci iff ðqi; qjÞ 2 Ni^8qrðqj; qrÞ 2 Ci ! Dðfi; frÞ� q
ð22Þ
It is easy to see that all points in a sequence of fixations
satisfying the above conditions form a clique.
We have verified that the above-defined distance is suf-
ficient to capture the cycles performed by the subjects in the
experiments. Results of the definition can be observed in
Fig. 9 which are relative to the scanpath illustrated in Fig. 4.
The above-defined distance has been suitably verified in
all the experiments, leading to natural cycles that are
approximately correct (in empirical terms, by comparison
with the subjects resolution effort). That is, the obtained
cycles, as illustrated in Fig. 9, capture what the subject
marked as an attempt to augment the resolution of an inter-
esting region, and are consistent with time and distance.
Now, if we were given two random observations Yi and
Yj in the visual array, and a model M ¼ ðA;F;W;RÞ;which has been learned from the matrix X of data gathered
by the subject’s experiments, then Yi and Yj would be in the
same cycle if the distance Dðfi; fjÞ of their obtained factors,
from (17), satisfies the above conditions.
Furthermore it is possible to show, although we will not
do it here that, apart from later returns and random exits
from the cycle, a cycle is consistent in time and space, as
there is a continuity of back and forth gaze steps inside the
cycle, among fixations.
Cogn Process (2008) 9:269–282 279
123

Inhibition of return and Innovation
Given the model M ¼ ðA;F;W;RÞ; the factor estimate and
an observation Yi we shall introduce the concept of inhibition
of return and innovation for a random observation, that will
allow predicting whether an observation is promising or not.
Let us assume that a cycle C; initiated by a random
observation Y, has been given. Since, as observed above,
a cycle is consistent in time and space, we say that the
time spent inside the cycle is TC:
We can now introduce the concept of inhibition of
return to a cycle, which accounts for the interest shown for
a region and the way elements of the visual array pop out
far or near a specific cycle.
Inhibition of return ðIORCÞ
The inhibition of return accounts for the time delay in
returning to a visited region. This mnemonic component
tells that we will pay no further attention to a zone recently
sampled through fixations and saccadic movements, at least
for a certain amount of time (see, e.g. Klein 2000).
Someone who is walking observes closer objects already
glanced at a distance. In this sense there is a return which,
though, is not immediate.
Now, let C ¼ ðY1; . . .YmÞ be a cycle of foveated regions,
we expect that inside the cycle there is backtracking,
i.e. the gaze goes back and forth between the fixations, and
the time spent in the cycle is TC: However, once the gaze
has abandoned the cycle it will not return to it in a lapse of
time which depends on TC: Therefore, a recently visited
region (included in the convex hull of a cycle) will receive
a higher value of inhibition. Now, if tC is the exit time of
the cycle C, t is the time step of a current fixation Ft, with
Yt 62 C; and TC the time spent in the cycle C, then tC B t
and TC � tC: Hence we define the inhibition of return as:
IORCðtÞ ¼ a expT2
Cðt � tcÞðt þ 1Þ2
!
ð23Þ
Here a is a normalization factor to ensure that IORC � 1. It
is easy to see that the inhibition of return IORC to a cycle
C first increases and then, as the time passes, it decreases
again leaving attention free to go back to an already visited
region (see Fig. 10).
At this point we are ready to introduce the concept of
innovation.
Innovation ðGÞ
Consider the current cycle C, at time t, and suppose that the
time spent in C, so far, is TC: Let Y be a random obser-
vation, now Y could be in C or not, depending on whether
the predicted factor, from the local region estimate (see Eq.
20), is more or less distant from the factor predicted in the
Fig. 9 The figures illustrate the cycles, including returns after a while, obtained by computing the cliques as in Eq. (22), using the distance
measure defined in Eq. (20). Note that the red circles have been added to emphasise the groups of yellow stars indicating observations
280 Cogn Process (2008) 9:269–282
123

current cycle. However, if the distance is less than the
threshold q it might be the case that the cycle is inhibited
by the IORC. Therefore, these two facts have to be taken
into account in the definition of innovation.
In other words, we consider innovation as a function of
the current observed region Y, such that, given a cycle C at
time step t
GðC; Y ; tÞ � 0 if Y 62 Ct
\0 otherwise
ð24Þ
If innovation is positive then the attention is stimulated to
jump out of the cycle and to remain in it otherwise.
Now, given a cycle C and the current observation Yi, an
estimate of the latent factor S is (17), that is, the conditional
expectation extended to C = Ct, E(S| C = Ct). This is the
regression function of S on C = Ct and E(S0| Y = Yi) is the
regression function of S0 on Y = Yi. Therefore, the distance
according to (20), is DðC;YÞ: If DðC; YÞ � q\0 it follows
that we expect Y to belong to C, having thus low innovation
value, unless C is already inhibited by the IORC: Hence
innovation should be like IORCðtÞ; but weighted by the
distance between the current observation and the consid-
ered cycle:
GðC; Y ; tÞ ¼ IORCðtÞlogDðC; YÞqþ 1
� �� �
ð25Þ
Consider the following cases: if DðC; YÞ\q then innova-
tion rapidly decreases because it expects that the current
fixation is within a cycle further, because of the influence
of the inhibition of return, it will increase again, still
remaining negative. On the other hand, if DðC; YÞ� q then
innovation rapidly increases, to drive the gaze towards new
regions, but then according to inhibition of return it will
decrease and, unless other factors will not contribute it,
approximates IORCðtÞ (see Fig. 10).
Conclusions
Attention is a fundamental component in modelling cog-
nitive architectures as it fosters learning and development
of complex behaviours. Features accounting for selection
of fixation points are not only related to appearance but
should also allow for head and eye movement underlying
strategies. In our research endeavour to investigate and
model psycho-physiological mechanisms of attention
deployment during scene perception, we conducted
experiments in outdoor environments, letting the subject
perform a natural task which would not overwhelm visual
and cognitive resources but just help basic factors emerg-
ing. We designed a framework to extract features from
fixations performed by a subject: some features were taken
as raw measures, others, such as following-a-direction and
proximity, were obtained by processing specific data to
make sense of oculomotor behaviour. We provided a
methodology to group data according to correlated features
so to make them more easily interpretable and comparable.
This made possible to cluster fixations close in appearance,
space and time, according to a distance measure defining
neighbourhoods on observations. We devised a model of
saliency of a cluster, defined as innovation, relying on the
obtained factors and similarity with the current cycle of
fixations. Results showed that a tendency to prefer new
regions anytime a cycle has been going on for a certain
amount of time. This effect was modelled in the innovation
measure by the IOR factor.
The proposed framework was tested on collected
sequences, validating the procedure. Although preliminary
this work will be further expanded in order to make
acquisition and interpretation of data as easy and reliable as
possible, for example by removing the constraints on
known environments and localization through landmarks.
0 200 400 600 800 1000 1200 1400 1600 1800 2000−2
−1
0
1
2
3
4
t
Inno
vatio
nInnovation for different distances D(Y,C)
D=0.5<ρD=7<ρD=12>ρD=18>ρ
0 500 1000 1500 2000 25000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t
IOR
C
IOR of a cycle C taken at different time steps, with TC varying from 0 to 0.5sec.
TC=0
TC=0.1
TC=0.3
TC=0.5
y max
y mean
Fig. 10 The figures illustrate on the left the IORC ; taken with different times of permanence and on the right the innovation taken for different
distances
Cogn Process (2008) 9:269–282 281
123

Further, we are currently working on the definition of a
priming factor, aimed at assessing influence or causality of
a selected region on next selection. Moreover interpretation
and classification of gaze cycles will be used as a tool for
defining and modelling visual strategies and, lastly, object
recognition in a way that can be learnt by robots or artifi-
cial vision systems. Development of this architecture will
hence lead to production of autonomous and meaningful
scanpaths.
Acknowledgments The authors would like to thank the reviewers
for their worthwhile suggestions. This research has been supported by
the European Union 6th Framework Programme Project Viewfinder.
References
Belardinelli A, Pirri F, Carbone A (2006) Spatial discrimination in
task-driven attention. In: Proceedings of IEEE RO-MAN’06.
Hatfield, UK, pp 321–327
Belardinelli A, Pirri F, Carbone A (2007) Bottom-up gaze shifts and
fixations learning by imitation. IEEE Trans Syst Man Cybern B
37:256–271
Bishop CM (2006) Pattern recognition and machine learning.
Springer, Heidelberg
Bruce NDB, Tsotsos JK (2006) Saliency based on information
maximization. Adv Neural Inf Process Syst 18:155–162
Findlay JM, Brown V (2006) Eye scanning of multi-element displays:
I scanpath planning. Vis Res 46:179–195
Frintrop S, Jensfelt P, Christensen H (2006) Attentional landmark
selection for visual slam. In: Proceedings of the IEEE/RSJ
international conference on intelligent robots and systems
(IROS’06)
Hardle W, Hlavka Z (2007) Multivariate statistics: exercises and
solutions. Springer, Heidelberg
Itti L, Baldi P (2006) Bayesian surprise attracts human attention. In:
Advances in neural information processing systems, vol 19
(NIPS*2005). MIT Press, Cambridge, pp 1–8
Itti L, Koch C (2001) Computational modeling of visual attention. Nat
Rev Neurosci 2(3):194–203
Just M, Carpenter P (1980) A theory of reading. Psychol Rev 87:329–
354
Klein RM (2000) Inhibition of return. Trends Cogn Sci 4:138–147
Kramer AF, Wiegmann DA, Kirlik A (2007) Attention. From theory
to practice. Oxford University Press, Oxford
Mardia K, Kent J, Bibby J (1979) Multivariate analysis. Academic
Press, London
Najemnik J, Geisler WS (2005) Optimal eye movement strategies in
visual search. Nature 434:387–391
Posner MI (1980) Orienting of attention. Q J Exp Psychol 32-A:3–25
Raj R, Geisler WS, Frazor RA, Bovik AC (2005) Contrast statistics
for foveated visual systems: fixation selection by minimizing
contrast entropy. J Opt Soc Am 22(10):2039–2049
Renninger LW, Coughlan J, Verghese P, Malik J (2005) An
information maximization model of eye movements. Adv Neural
Inf Process Syst 17:1121–1128
Santella A, Decarlo D (2003) Robust clustering of eye movement
recordings for quantification of visual interest. In ETRA 2004.
New York, pp 23–34
Shokoufandeh A, Sala PL, Sim R, Dickinson SJ (2006) Landmark
selection for vision-based navigation. IEEE Trans Rob
22(2):334–349
Spalek TM, Hammad S (2004) Supporting the attentional momentum
view of ior: Is attention biased to go right? Percept Psychophys
66(2):219–233
Thibadeau R, Just M, Carpenter P (1980) Real reading behaviour. In:
Proceedings of the 18th annual meeting on association for
computational linguistics, Morristown, NJ, USA. Association for
Computational Linguistics, pp 159–162
Treisman A, Gelade G (1980) A feature-integration theory of
attention. Cogn Psychol 12:97–136
Tsotsos JK, Culhane S, Wai W, Lai Y, Davis N, Nuflo F (1995)
Modeling visual attention via selective tuning. Artif Intell
78:507–547
Turano KA, Geruschat DR, Baker FH (2003) Oculomotor strategies
for the direction of gaze tested with a real-world activity. Vis
Res 43:333–346
Yarbus AL (1967) Eye movements and vision. Plenum Press, New
York
Zhang Z (1999) Flexible camera calibration by viewing a plane from
unknown orientations. In: The Proceedings of the seventh IEEE
international conference on Computer vision, 1999, vol 1, pp
666–673
282 Cogn Process (2008) 9:269–282
123