Formation Flying and Relative Dynamics under the CR3BP Formulation
20
185 AAS 14-214 FORMATION FLYING AND RELATIVE DYNAMICS UNDER THE CIRCULAR RESTRICTED THREE-BODY PROBLEM FORMULATION Fabio Ferrari * and Michèle Lavagna † Formation Flying can greatly answer some very complex mission goals at the cost of a quite challenging trajectory design and station keeping problem solv- ing. For this reason formation flying is now one of the most frequently em- ployed architecture for space missions and relative position and velocity re- quirements are becoming very important in the design process. The dynamical properties of a low-acceleration environment such as the vicinity of libration points associated to the Circular Restricted Three-Body Problem (CR3BP), can be effectively exploited to design spacecraft configurations able of satisfy rela- tive position and velocity requirements. This work analyzes the effects of the three-body dynamics on a free uncontrolled formation of spacecraft. The three-body dynamical environment is then analyzed when some constraints are imposed to the relative dynamics of two co-operating spacecraft with the per- spective of providing a useful and powerful tool to support refined mission analysis for future challenging missions to be designed. INTRODUCTION The problem of Formation Flying has been extensively studied within the case of the Two-Body Problem, while only recently formation flying has been studied within the Three-Body Problem environment. The majority of studies which consider formations of spacecraft in the Three-Body Problem, analyses suitable control strategies, but very few of them treats the topic of free uncon- trolled formations. Barden and Howell 1 exploited the natural motion on the center manifold near periodic orbits to reproduce tori of quasi-periodic trajectories which can be useful for the design of naturally bounded formations of satellites. Few years later, G´ omez et al. 2 derived regions around periodic orbits with zero relative velocity and radial acceleration, which ideally keep unchanged the relative distances between the spacecraft in the formation. Finally, H´ eritier and Howell 3 extended the analysis done by G´ omez et al. and derived low drift regions (low relative velocity and accel- eration) around periodic orbits, as quadric surfaces. Both studies performed by Gomez et al. and H´ eritier and Howell, focus on the linearized dynamics and consider small formations of satellites. The aim of the present work is to deepen the understanding of the relative dynamics related to a highly unstable and non-linear environment such as the one provoked by multiple gravitational sources. The research can be divided into two main parts. The free dynamics of a formation fly- ing under CR3BP modeling is firstly discussed: a three spacecraft triangularly-shaped formation is assumed as a representative geometry to be investigated. As a further step, constraints on the ∗ Ph.D. Candidate, Department of Aerospace Science and Technology, Politecnico di Milano, Milan, Italy, 20156. † Associate Professor, Department of Aerospace Science and Technology, Politecnico di Milano, Milan, Italy, 20156.
Transcript of Formation Flying and Relative Dynamics under the CR3BP Formulation

185
AAS 14-214
FORMATION FLYING AND RELATIVE DYNAMICS UNDER THE
CIRCULAR RESTRICTED THREE-BODY PROBLEM
FORMULATION
Fabio Ferrari* and Michèle Lavagna†
Formation Flying can greatly answer some very complex mission goals at thecost of a quite challenging trajectory design and station keeping problem solv-ing. For this reason formation flying is now one of the most frequently em-ployed architecture for space missions and relative position and velocity re-quirements are becoming very important in the design process. The dynamicalproperties of a low-acceleration environment such as the vicinity of librationpoints associated to the Circular Restricted Three-Body Problem (CR3BP), canbe effectively exploited to design spacecraft configurations able of satisfy rela-tive position and velocity requirements. This work analyzes the effects of thethree-body dynamics on a free uncontrolled formation of spacecraft. Thethree-body dynamical environment is then analyzed when some constraints areimposed to the relative dynamics of two co-operating spacecraft with the per-spective of providing a useful and powerful tool to support refined missionanalysis for future challenging missions to be designed.
INTRODUCTION
The problem of Formation Flying has been extensively studied within the case of the Two-Body
Problem, while only recently formation flying has been studied within the Three-Body Problem
environment. The majority of studies which consider formations of spacecraft in the Three-Body
Problem, analyses suitable control strategies, but very few of them treats the topic of free uncon-
trolled formations. Barden and Howell1 exploited the natural motion on the center manifold near
periodic orbits to reproduce tori of quasi-periodic trajectories which can be useful for the design of
naturally bounded formations of satellites. Few years later, Gomez et al.2 derived regions around
periodic orbits with zero relative velocity and radial acceleration, which ideally keep unchanged the
relative distances between the spacecraft in the formation. Finally, Heritier and Howell3 extended
the analysis done by Gomez et al. and derived low drift regions (low relative velocity and accel-
eration) around periodic orbits, as quadric surfaces. Both studies performed by Gomez et al. and
Heritier and Howell, focus on the linearized dynamics and consider small formations of satellites.
The aim of the present work is to deepen the understanding of the relative dynamics related to
a highly unstable and non-linear environment such as the one provoked by multiple gravitational
sources. The research can be divided into two main parts. The free dynamics of a formation fly-
ing under CR3BP modeling is firstly discussed: a three spacecraft triangularly-shaped formation
is assumed as a representative geometry to be investigated. As a further step, constraints on the
∗Ph.D. Candidate, Department of Aerospace Science and Technology, Politecnico di Milano, Milan, Italy, 20156.†Associate Professor, Department of Aerospace Science and Technology, Politecnico di Milano, Milan, Italy, 20156.
186
formation dynamics have been imposed and regions which satisfy the constraining set, still under a
CR3BP formulation have been identified.
As far as the first study branch is concerned, it is here clarified that initial configurations and
their performance in terms of formation keeping, have been investigated and key parameters, which
mainly control the formation dynamics under a CR3BP formulation, have been identified. The ana-
lysis has been performed under four degrees of freedom to define the geometry and the orientation
of the equilateral triangle in the CR3BP rotating frame: one parameter defines the size of the tri-
angle and three angles describe the orientation with respect to the rotating frame. In general the
triangle can be representative not only of a formation of spacecraft but also of a single spacecraft,
shaped as a planar triangle. From this point of view, the change in shape and size of the triangle can
be seen as stresses in the structure of the single spacecraft and then, as deformations, considering a
real deformable body: the more the triangle is able of maintaining its initial shape and size, the less
the structure is subject to stresses and deformations.
The second part of the present research considers a two spacecraft formation flying as a case of
reference and regions compliant with specific dynamical constraints (i.e. zero relative acceleration
and velocity) are identified. Similar analyses have been recently performed2, 3 but since they both
consider the linearized CR3BP dynamical system, they are valid within the linear approximation,
i.e. when the deputy is located very close to the chief spacecraft (close enough to let linear ap-
proximation be valid). The present work analyzes the problem without the assumption of linearity,
considering the full non-linear problem. Therefore solutions from current literature are extended to
non-linear scenarios. Both planar and three-dimensional problems have been studied, and the results
are here proposed. The results obtained in this section represent new and powerful tools to support
refined mission analysis for future missions to be designed, when two co-operating spacecraft are
considered.
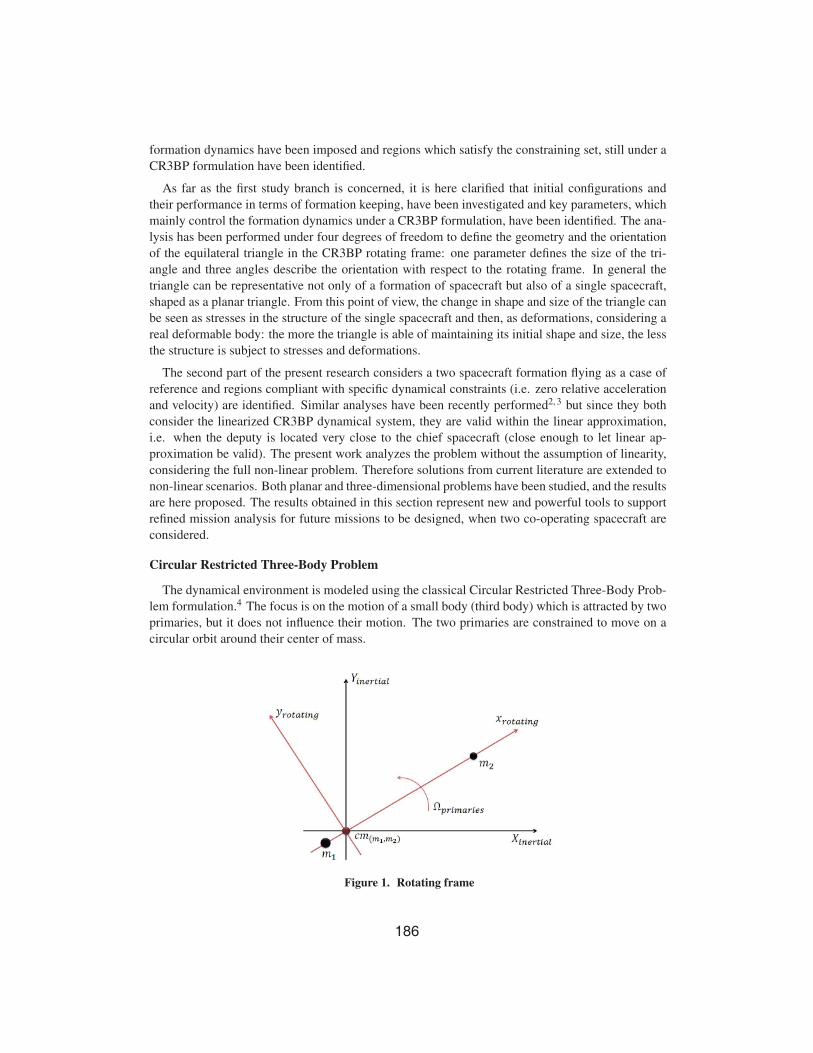
Circular Restricted Three-Body Problem
The dynamical environment is modeled using the classical Circular Restricted Three-Body Prob-
lem formulation.4 The focus is on the motion of a small body (third body) which is attracted by two
primaries, but it does not influence their motion. The two primaries are constrained to move on a
circular orbit around their center of mass.
Figure 1. Rotating frame

187
Equations of motion. It is useful to express the equations of motion of the third body in a refer-
ence frame which is centered in the center of mass of the two primaries and rotates together with
them, with the same angular velocity (Figure 1). The equations of motion can be conveniently
written in a nondimensional form, using the potential function associated to the problem
U =1
2(x2 + y2) +
1− μ
r1+
μ
r2(1)
with
r1 =√
(x+ μ)2 + y2 + z2 (2a)
r2 =√
(x− (1− μ))2 + y2 + z2 (2b)
the parameter μ is called mass ratio and it is defined as follows
μ =m2
m1 +m2(3)
The equations of motion are then ⎧⎨⎩x− 2y = Ux
y + 2x = Uy
z = Uz
(4)
where the notation U(·) means partial derivative of the potential with respect to the variable (·).
FREE TRIANGULAR FORMATION
It is useful to study and understand how a formation of satellites interacts with the surrounding
environment: this analysis is aimed to explore the CR3BP dynamical environment and its effects on
a simple unconstrained formation. In particular, the analysis deals with a triangular formation and
explores initial configuration which provide good performance in terms of formation keeping. Only
free motion is analyzed and no control is considered for formation keeping.
Statement of the problem
An equilateral triangular formation is considered and three identical spacecraft are located at the
vertexes of the triangle.
Figure 2. Reference configuration of the formation in the rotating frame

188
Figure 2 shows the reference configuration of the formation and its four degrees of freedom,
which define the geometry and the orientation of the triangle in the rotating frame: γ, β, θ describe
the orientation in the space with respect to the CR3BP rotating frame, being respectively the rotation
angle around x, y and z rotating frame axes, while d defines the size of the formation, being it the
distance between each spacecraft and the barycenter of the triangle. Angles are considered to be
zero as the formation is in its reference configuration: in this case the triangle lies on the (x, y)plane (Figure 2). The barycenter of the triangular formation is placed on a reference periodic orbit
in the CR3BP. The equations of motion are integrated for each of the three spacecraft as they evolve
near the reference trajectory and the evolution of the formation is analyzed. The aim of the analysis
is to find good initial configurations in terms of its four degrees of freedom (γ, β, θ, d), looking at
different reference orbits (size and type of orbit).
The analysis has been performed for the case of Earth-Moon system, hence the results are shown
for this particular system. Even so, a brief analysis shows that the meaning of the results is not
changing if other systems are considered, therefore the following analysis and its results can be
considered valid for any generic μ value.
Definition of performance factors
The ideal formation keeping condition can be synthesized as no change in shape and size of the
initial triangular configuration. This condition is of course impossible to obtain if the formation
is free and uncontrolled, in an extremely chaotic and non-linear environment such as the CR3BP,
but it is possible to seek preferred initial configurations which lead to small changes in shape and
size of the formation during its evolution on the orbit, and then to cheaper formation keeping needs.
In order to evaluate how characteristics of the formation are maintained, it is important to analyze
how the shape and the size of the triangular formation change during the evolution of the three
spacecraft along the orbit. In particular it is useful to define a way to measure formation keeping
performance, trying to quantify both shape and size changes, in order then to be able of seeking
good initial configurations which allow good formation keeping maintenance. To this purpose, two
performance factors have been built: the Shape Factor (SF), which takes into account for the change
in the shape of the triangle, and the Size or Dimension Factor (DF), which takes into account for the
change in size of the triangular formation.
Shape Factor
To evaluate and quantify the change in shape of the triangular formation during its evolution on
the reference orbit, the Shape Factor has been defined and a convenient mathematical expression
has been found to express it. The mathematical expression shall fulfill some needs that shall be
accomplished by the Shape Factor function. First of all, a nondimensional factor should be consid-
ered, in order to allow comparisons between different systems and different analyses and to keep
the expression as general as possible. Also, the variables of the function, shall be meaningfully
allowing the monitoring of the shape changes. A good choice is to select the ratios of the sides of
the triangle, referring to Figure 2:
ε1 =a
bε2 =
a
cε3 =
b
c(5)
These three parameters, provide a good choice in terms of monitoring of the shape changes: it can
be easily seen that the shape is unchanged if and only if
ε1 = ε2 = ε3 = 1 (6)

189
and therefore they can provide a good way of determine where the shape is unchanged. Note that
only two of these parameters are independent: it is possible to choose then, for example, ε1 and ε2as variables for the Shape Factor
SF = f(ε1, ε2) (7)
Then, once the variables have been selected, the mathematical expression of the Shape Factor
function shall be built. To proceed, it is convenient to introduce some constraints in order to shape
the mathematical function in a convenient way. For example, it can be convenient to consider a
mathematical expression which is equal to one if and only if the shape of the triangle is unchanged.
It can be also useful to set this mathematical function such as it can range from 0 to 1 in a mono-
tonic way, so that the lower is its value, the worse is the condition in terms of shape maintenance.
Considering then the selected variables, both ε1 and ε2 are always greater than zero, being the ratios
of two positive numbers. For this reason, it is better to consider a function whose variables’ domain
is always greater than zero. Moreover, as the choice of the ratios (5) is arbitrary, it is convenient to
have a function which is symmetric with respect to ε and 1ε , having this way an expression which is
not dependent on the definition of the ratios. For example, considering two sides of the triangle:
a = 1 unit
b = 5 units
the Shape Factor shall give the same result if the ratio has been defined both
ε =a
b=
1
5or ε =
b
a= 5
For this reasons, the following expression has been selected for the Shape Factor function
SF = e−√
(ln ε1)2+(ln ε2)
2
(8)
Figure 3. Shape Factor (logarithmic scale)
Figure 3 shows the 3D plot of Equation (8), which is the definition of the Shape Factor. The
Shape Factor provides a good way to estimate the shape changes of the triangular formation during
its evolution on the orbit. Note that the value of the Shape Factor depends on the choice of the ratio

190
to use: for example, the choice (ε1, ε2) will provide different numerical results form the choice
(ε1, ε3) or (ε2, ε3). It is possible to make the Shape Factor independent also from that choice by
computing SF for all three possible choices and then taking the average value. However, without
any loss of generality, the analysis performed in this work relates to Equation (8), and not to the
averaged SF.
Dimension Factor
To evaluate formation keeping performance, the other important aspect to be monitored during
the evolution of the formation on its orbit is the size of the triangle formed by the spacecraft. It
can happen that the distance between the spacecraft grows very fast without changes (or with little
changes) in the shape of the formation: this situation is not detectable with the Shape Factor moni-
toring, hence another factor (Size or Dimension Factor) is required. Similarly to what done for the
Shape Factor, a nondimensional factor is considered. Also in this case side ratios are considered as
variables, but this time the ratio is computed with respect to the initial length of the side. Referring
to Figure 2
η1 =a
a0η2 =
b
b0η3 =
c
c0(9)
where the subscript 0 denotes the initial length of the sides (initial configuration). To find the
mathematical expression, the only condition to be verified is that the Dimension Factor equals one
at the initial condition and if the average size of the formation is maintained. Then, it shall be also
considered that, once again, the variables represent ratios of positive numbers. A very simple form
for the Dimension Factor can be adopted, averaging the three ratios η1, η2 and η3
DF =η1 + η2 + η3
3(10)
Equation (10) let then understand if the three spacecraft are getting farther or closer to each other.
Differently from the Shape Factor, it needs information on the initial state of the formation and
provides a measure of the size of the formation at a certain time after initial time. Roughly speaking,
DF=10 at t = t1 (with t1 > t0) means that the triangle is, on average, 10 times bigger than its initial
size at t = t0.
Results
As specified in the previous section, the goal of the analysis is to seek initial configurations which
provide good performance in terms of formation keeping. To this aim, several initial configurations
have been considered, for different choice of initial orientation angles γ, β, θ, different choice of
initial distance between the spacecraft and the barycenter of the triangular formation d and consid-
ering different types and size of orbits in the CR3BP. In particular, the following initial conditions
have been explored:
γ, β, θ ranging from 0 to 2π
d 1, 10, 100 km
191
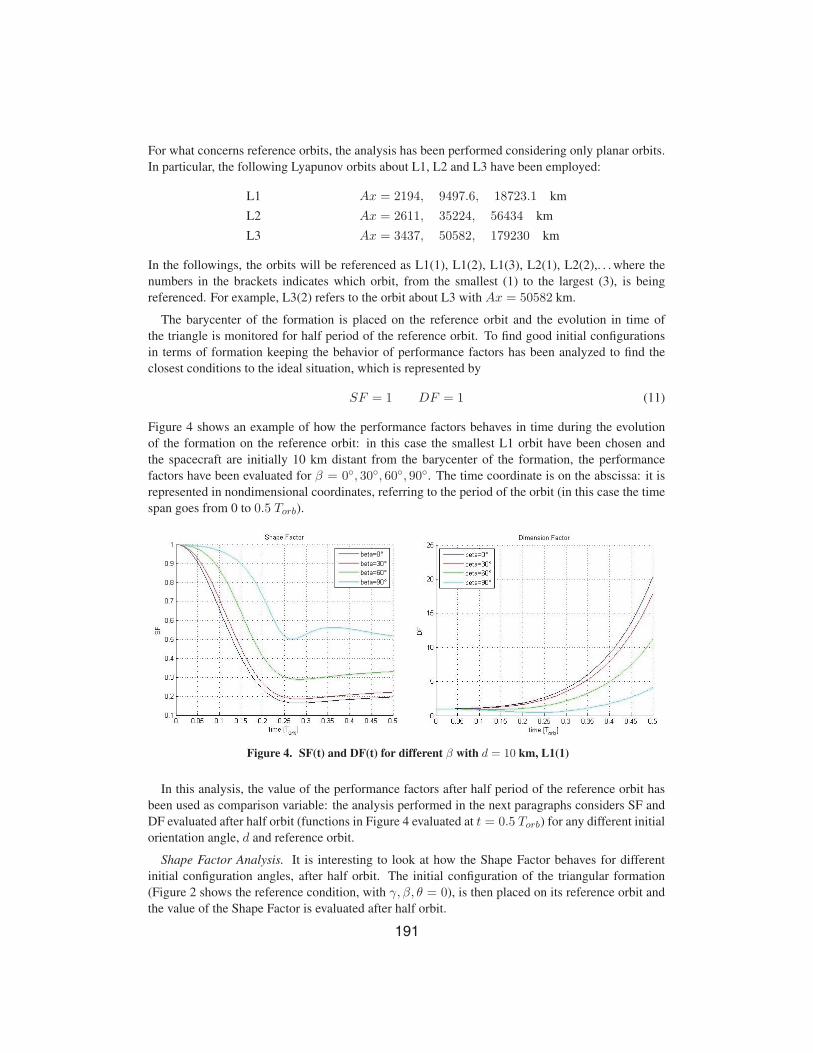
Figure 4. SF(t) and DF(t) for different β with d = 10 km, L1(1)
In this analysis, the value of the performance factors after half period of the reference orbit has
been used as comparison variable: the analysis performed in the next paragraphs considers SF and
DF evaluated after half orbit (functions in Figure 4 evaluated at t = 0.5 Torb) for any different initial
orientation angle, d and reference orbit.
Shape Factor Analysis. It is interesting to look at how the Shape Factor behaves for different
initial configuration angles, after half orbit. The initial configuration of the triangular formation
(Figure 2 shows the reference condition, with γ, β, θ = 0), is then placed on its reference orbit and
the value of the Shape Factor is evaluated after half orbit.
For what concerns reference orbits, the analysis has been performed considering only planar orbits.
In particular, the following Lyapunov orbits about L1, L2 and L3 have been employed:
L1 Ax = 2194, 9497.6, 18723.1 km
L2 Ax = 2611, 35224, 56434 km
L3 Ax = 3437, 50582, 179230 km
In the followings, the orbits will be referenced as L1(1), L1(2), L1(3), L2(1), L2(2),. . . where the
numbers in the brackets indicates which orbit, from the smallest (1) to the largest (3), is being
referenced. For example, L3(2) refers to the orbit about L3 with Ax = 50582 km.
The barycenter of the formation is placed on the reference orbit and the evolution in time of
the triangle is monitored for half period of the reference orbit. To find good initial configurations
in terms of formation keeping the behavior of performance factors has been analyzed to find the
closest conditions to the ideal situation, which is represented by
SF = 1 DF = 1 (11)
Figure 4 shows an example of how the performance factors behaves in time during the evolution
of the formation on the reference orbit: in this case the smallest L1 orbit have been chosen and
the spacecraft are initially 10 km distant from the barycenter of the formation, the performance
factors have been evaluated for β = 0◦, 30◦, 60◦, 90◦. The time coordinate is on the abscissa: it is
represented in nondimensional coordinates, referring to the period of the orbit (in this case the time
span goes from 0 to 0.5 Torb).

192
For example, looking at the evolution of the formation for γ ranging from 0 to 2π and β, θ = 0 for
a given choice of d and reference orbit, the SF after one orbit can be plotted as function of γ. Figure 5
shows the values of SF after half orbit with respect to its initial orientation (for γ ranging from 0 to
2π and considering always β, θ = 0), for a formation placed on the small reference orbit about L1,
with initial distance between each spacecraft and the barycenter of the formation d = 1. Looking
at this plot, it is easy to find the best condition and the corresponding initial orientation (γ) with all
the other conditions fixed: the ideal formation keeping case is SF = 1 and so the best condition (the
one that gets closer to the ideal formation keeping case) is the maximum of the function SF(γ). In
this case the maximum is achieved for an initial γ of 180◦. However, the maximum value of the
Shape Factor is quite low (SF = 0.244), hence it is not a good initial condition in terms of formation
keeping. To look for better conditions, the other parameters (angles, d and reference orbit) shall be
changed.
Figure 5. SF vs γ with d = 1 km, L1(1)
The behavior of the Shape Factor is analyzed separately with respect to γ, β and θ, looking, for
each case, at how the parameter d and the choice of the reference orbit affect the results. Properties
of functions SF(γ) (with β, θ = 0), SF(β) (with γ, θ = 0) and SF(θ) (with γ, β = 0) are then
investigated.
The analysis shows that the major influence on the Shape Factor is due to the initial orientation
of the formation and to the choice of the reference orbit, while the parameter d plays a minor role.
The functions SF(γ), SF(β) and SF(θ) show an oscillating behavior and a periodicity of period πor 2π. In any case, the shape of the function is little dependent on the choice of the orbit and on the
parameter d. Performance is always quite good in the case of SF(θ) (SF � 0.534), while the results
are bad if a rotation about the x axis is considered (SFmax = 0.390). The best case is obtained for
the function SF(β), considering the orbit L3(1) with β = 90◦ (SF = 0.911). The choice of the
reference orbit is also important and in general, with few exceptions, the best results are obtained
for small orbits about L3.
Dimension Factor Analysis. Similarly to what done for the Shape Factor, the behavior of the
Dimension Factor has been characterized with respect to initial orientation angle, d and reference
orbit, to find the best initial configuration, trying to be as close as possible to the ideal formation
keeping condition (DF = 1).

193
of period π/3, 23π or π. This time the performance is quite poor for any case (DF � 10) except
for the DF(β): the best condition is again achievable for L3(1) with β = 90◦ (DF = 1.054). As
for the Shape Factor, the parameter d shows no influence on the results and the best performance is
achieved for small orbits about L3.
Results Summary. The results of the study highlight the importance of the initial orientation of
the triangular formation for formation keeping. Analyzing the effect of the other parameters in-
volved (size of the triangular formation and reference orbit), it is clear that the size of the formation
has practically no influence on its formation keeping performance, while the orbit can have relevant
effects. For these reasons, when considering the design of a mission which employs a triangular
formation placed on a periodic orbit in the CR3BP, to lower formation keeping needs in terms of
Δv to be provided to the three spacecraft, the initial (or reference) orientation and the reference
orbit must be chosen carefully.
Both Shape and Dimension Factor analyses show that a formation initially rotated around the xaxis (γ �= 0) with respect to its reference configuration (Figure 2) produces bad performance in
terms of formation keeping: indeed, the three spacecraft triangular formation loses its shape and
grows in size very quickly. Overall, the best performance is achieved when the formation is initially
rotated around y axis (β �= 0), while the rotation around z axis (θ �= 0) gives good results only
for what concerns the shape maintenance but not in terms of size keeping. For what concerns the
reference orbits, the best place to locate the formation is near L3. It can be also useful to notice that
SF functions are periodic of period 2π (SF(γ), SF(β)) or π (SF(θ)), while DF functions are periodic
of period π (DF(γ), DF(β)) and π/3 or 2/3π in the case of DF(θ), meaning that more than one best
condition can be present in the [0− 2π] domain.
Tables 1 and 2, summarizes the qualitative behavior of, respectively the shape and the Dimension
Factor, with respect to the reference orbit indicating where the performance is good (SF > 0.5,
0.3 < DF < 3) and where it is bad.
Table 1. Results summary (SF)
L γ β θ[deg] [deg] [deg]
L1 bad good goodL2 bad good goodL3 bad very good good
Table 2. Results summary (DF)
L γ β θ[deg] [deg] [deg]
L1 bad bad badL2 bad bad badL3 bad good bad
Finally, Table 3 summarizes the best values obtained in the former analysis, specifying the orien-
tation angle which maximize the performance.
Best Initial Configuration. Looking at Tables 1, 2 and 3, it is easy to find the initial condition
which guarantees the best performance in terms of both shape and size maintenance: the analysis
show that the best performance can be achieved if the formation is rotated of 90◦ around the y axis
(γ = 0◦, β = 90◦, θ = 0◦) and placed on the small reference orbit about L3, no matter what
the initial size of the formation (d) is. This means to have the triangle lying on the (y, z) plane,
with normal towards x axis. Note that considering these conditions as initial configuration for the
formation, the Shape and Dimension Factor after half period of the reference orbit are very close to
the ideal formation keeping condition
SF = 0.911 DF = 1.054
Functions DF(γ), DF(β) and DF(θ) result to be oscillating and, depending on the case, periodic
194
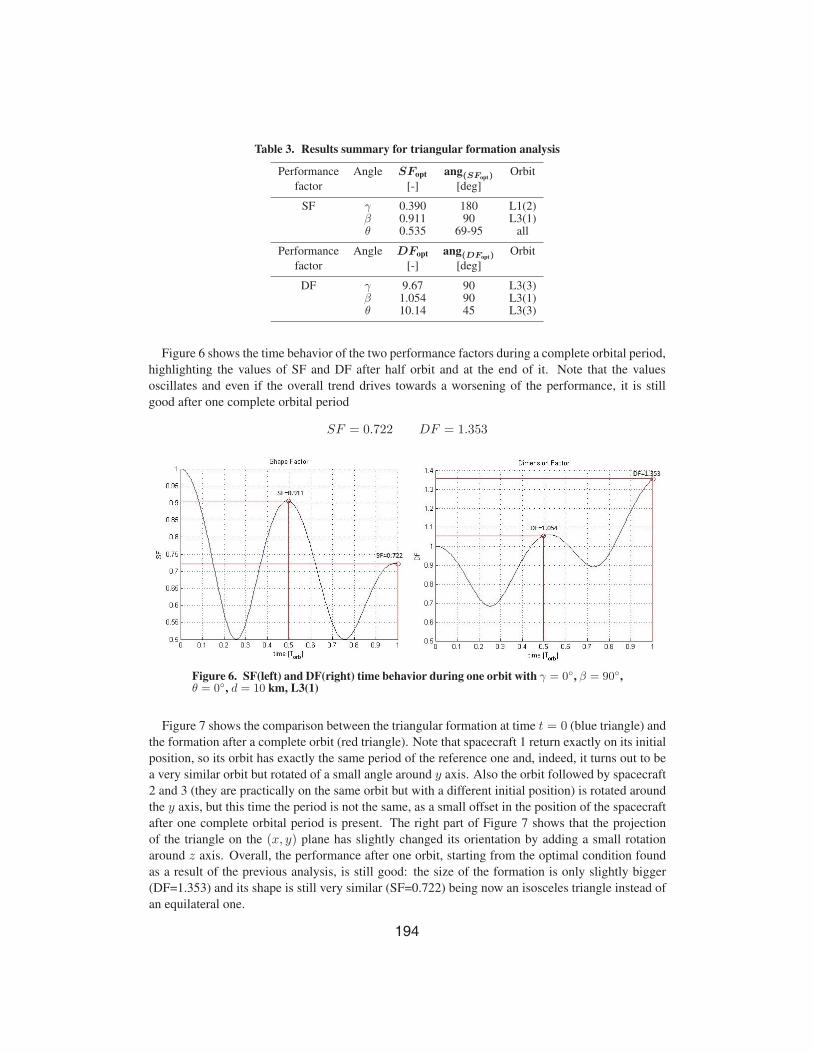
Figure 6. SF(left) and DF(right) time behavior during one orbit with γ = 0◦, β = 90◦,θ = 0◦, d = 10 km, L3(1)
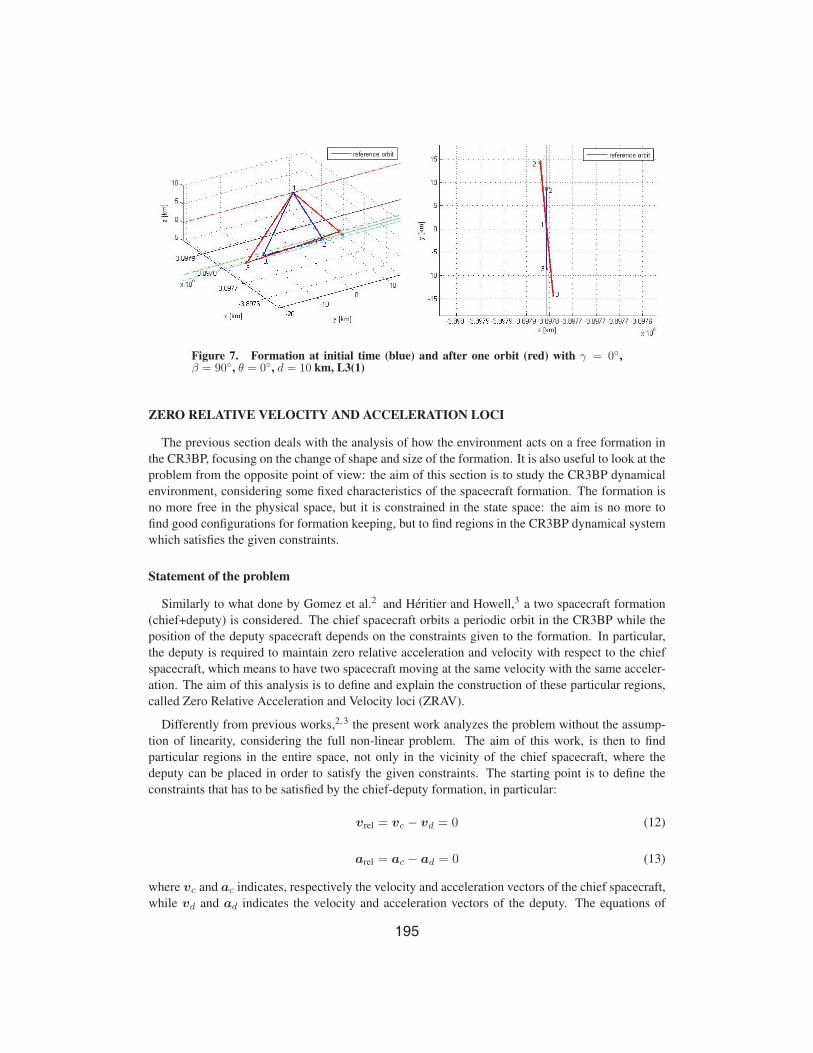
Figure 7 shows the comparison between the triangular formation at time t = 0 (blue triangle) and
the formation after a complete orbit (red triangle). Note that spacecraft 1 return exactly on its initial
position, so its orbit has exactly the same period of the reference one and, indeed, it turns out to be
a very similar orbit but rotated of a small angle around y axis. Also the orbit followed by spacecraft
2 and 3 (they are practically on the same orbit but with a different initial position) is rotated around
the y axis, but this time the period is not the same, as a small offset in the position of the spacecraft
after one complete orbital period is present. The right part of Figure 7 shows that the projection
of the triangle on the (x, y) plane has slightly changed its orientation by adding a small rotation
around z axis. Overall, the performance after one orbit, starting from the optimal condition found
as a result of the previous analysis, is still good: the size of the formation is only slightly bigger
(DF=1.353) and its shape is still very similar (SF=0.722) being now an isosceles triangle instead of
an equilateral one.
Table 3. Results summary for triangular formation analysis
Performance Angle SFopt ang(SFopt)Orbit
factor [-] [deg]
SF γ 0.390 180 L1(2)β 0.911 90 L3(1)θ 0.535 69-95 all
Performance Angle DFopt ang(DFopt)Orbit
factor [-] [deg]
DF γ 9.67 90 L3(3)β 1.054 90 L3(1)θ 10.14 45 L3(3)
Figure 6 shows the time behavior of the two performance factors during a complete orbital period,
highlighting the values of SF and DF after half orbit and at the end of it. Note that the values
oscillates and even if the overall trend drives towards a worsening of the performance, it is still
good after one complete orbital period
SF = 0.722 DF = 1.353
195
Figure 7. Formation at initial time (blue) and after one orbit (red) with γ = 0◦,β = 90◦, θ = 0◦, d = 10 km, L3(1)
ZERO RELATIVE VELOCITY AND ACCELERATION LOCI
The previous section deals with the analysis of how the environment acts on a free formation in
the CR3BP, focusing on the change of shape and size of the formation. It is also useful to look at the
problem from the opposite point of view: the aim of this section is to study the CR3BP dynamical
environment, considering some fixed characteristics of the spacecraft formation. The formation is
no more free in the physical space, but it is constrained in the state space: the aim is no more to
find good configurations for formation keeping, but to find regions in the CR3BP dynamical system
which satisfies the given constraints.
Statement of the problem
Similarly to what done by Gomez et al.2 and Heritier and Howell,3 a two spacecraft formation
(chief+deputy) is considered. The chief spacecraft orbits a periodic orbit in the CR3BP while the
position of the deputy spacecraft depends on the constraints given to the formation. In particular,
the deputy is required to maintain zero relative acceleration and velocity with respect to the chief
spacecraft, which means to have two spacecraft moving at the same velocity with the same acceler-
ation. The aim of this analysis is to define and explain the construction of these particular regions,
called Zero Relative Acceleration and Velocity loci (ZRAV).
Differently from previous works,2, 3 the present work analyzes the problem without the assump-
tion of linearity, considering the full non-linear problem. The aim of this work, is then to find
particular regions in the entire space, not only in the vicinity of the chief spacecraft, where the
deputy can be placed in order to satisfy the given constraints. The starting point is to define the
constraints that has to be satisfied by the chief-deputy formation, in particular:
vrel = vc − vd = 0 (12)
arel = ac − ad = 0 (13)
where vc and ac indicates, respectively the velocity and acceleration vectors of the chief spacecraft,
while vd and ad indicates the velocity and acceleration vectors of the deputy. The equations of

196
motion for the chief read as follows⎧⎪⎪⎪⎨⎪⎪⎪⎩
xc = xc + 2yc − 1−μr31c
(xc + μ)− μr32c
(xc − (1− μ))
yc = yc − 2xc − yc
(1−μr31c
+ μr32c
)
zc = −zc(1−μr31c
+ μr32c
) (14)
with
r1c =√
(xc + μ)2 + y2c + z2c
r2c =√
(xc − (1− μ))2 + y2c + z2c
the same set of equations (Eq. (14)) is of course valid also for the deputy (with subscript d instead
of c). The first step is then to evaluate the relative acceleration (Eq. (13)) and to equate it to zero
⎧⎨⎩xc − xd = 0yc − yd = 0zc − zd = 0
(16)
which is equivalent to
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
xc + 2yc − 1−μr31c
(xc + μ)− μr32c
(xc − (1− μ)) =
= xd + 2yd − 1−μr31d
(xd + μ)− μr32d
(xd − (1− μ))
yc − 2xc − yc
(1−μr31c
+ μr32c
)= yd − 2xd − yd
(1−μr31d
+ μr32d
)
−zc(1−μr31c
+ μr32c
)= −zd
(1−μr31d
+ μr32d
)(17)
then, the other constraint (Eq. (12)) can be written as
⎧⎨⎩xc − xd = 0yc − yd = 0zc − zd = 0
(18)
substituting it into (17), the system becomes
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
xc − 1−μr31c
(xc + μ)− μr32c
(xc − (1− μ)) =
= xd − 1−μr31d
(xd + μ)− μr32d
(xd − (1− μ))
yc − yc
(1−μr31c
+ μr32c
)= yd − yd
(1−μr31d
+ μr32d
)
−zc(1−μr31c
+ μr32c
)= −zd
(1−μr31d
+ μr32d
)(19)
Note that the resulting system is not a system of differential equations any more, but it is a non-linear
algebraic system.
The whole problem can be better handled exploiting the state representation of the dynamics of
the spacecraft. Equations (14) for the chief and the deputy can be written, in an extremely compact
form, as
Xc = f(Xc) (20)
Xd = f(Xd) (21)

197
where X represents the six dimensional state of the spacecraft
Xc =
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
xcyczcxcyczc
⎫⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎭
Xd =
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
xdydzdxdydzd
⎫⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎭
Then, the constraint (Equations (12) and (13)), can be written as
Xc − Xd = 0 (22)
Finally, applying the constraints, the results is equivalent to the one obtained before
f(rc) = f(rd) (23)
which represent the non-linear algebraic system (19).
As specified at the beginning of this section, the chief spacecraft is considered to be orbiting a
periodic orbit in the CR3BP, hence, its position vector rc is known. The system (19) (or equiva-
lently (23)) is then composed by three non-linear algebraic equations and it has three unknowns
represented by the three components of the position vector of the deputy rd. The problem is then
reduced to the solution of the non-linear algebraic system (19), whose solutions represent the points
in the space where the deputy has the same acceleration and velocity of the chief spacecraft.
Results
The analysis has been performed considering the Earth-Moon system and the results for this
particular system are shown here. However, as for the free triangular formation, a brief analysis
showed that the qualitative results are the same, if the system is changing. For that reason, the results
and the main analysis can be considered valid for any general μ value. The following reference
orbits for the chief spacecraft have been considered:
2D case (Lyapunov) L1: Ax = 14879 km T = 14.4 days
L2: Ax = 35223 km T = 16.1 days
L3: Ax = 272296 km T = 27.1 days
3D case (Halo) L1: Ay = 48494 km, Az = 53308 km T = 12 days
L2: Ay = 48861 km, Az = 27616 km T = 14.1 days
L3: Ay = 466575 km, Az = 186281 km T = 27.1 days
Planar case
Before considering the general three-dimensional system, to have a better understanding of the
problem it can be useful to simplify it: to this aim, the planar case (x, y plane) is initially considered.
The acceleration constraint (13) can be written then in the two dimensional case as
arel = ac − ad =
{acx − adxacy − ady
}=
{arelx
arely
}= 0 (24)
198
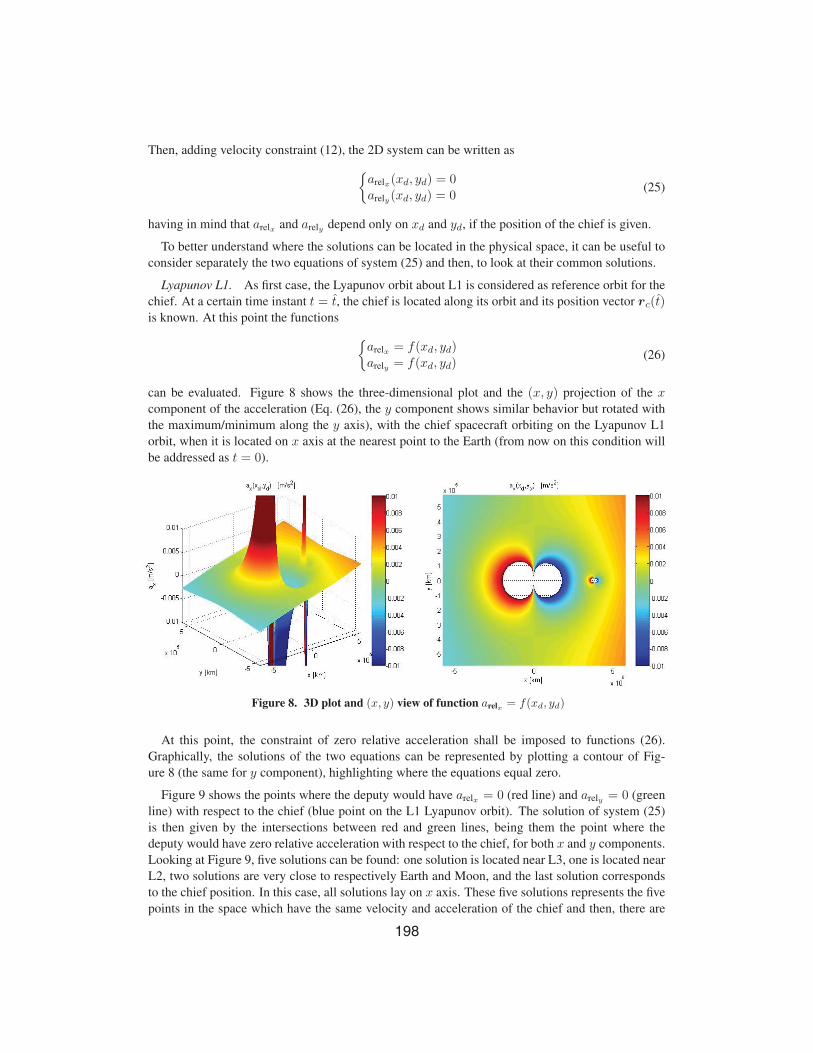
Figure 8. 3D plot and (x, y) view of function arelx = f(xd, yd)
At this point, the constraint of zero relative acceleration shall be imposed to functions (26).
Graphically, the solutions of the two equations can be represented by plotting a contour of Fig-
ure 8 (the same for y component), highlighting where the equations equal zero.
Figure 9 shows the points where the deputy would have arelx = 0 (red line) and arely = 0 (green
line) with respect to the chief (blue point on the L1 Lyapunov orbit). The solution of system (25)
is then given by the intersections between red and green lines, being them the point where the
deputy would have zero relative acceleration with respect to the chief, for both x and y components.
Looking at Figure 9, five solutions can be found: one solution is located near L3, one is located near
L2, two solutions are very close to respectively Earth and Moon, and the last solution corresponds
to the chief position. In this case, all solutions lay on x axis. These five solutions represents the five
points in the space which have the same velocity and acceleration of the chief and then, there are
Then, adding velocity constraint (12), the 2D system can be written as
{arelx(xd, yd) = 0arely(xd, yd) = 0
(25)
having in mind that arelx and arely depend only on xd and yd, if the position of the chief is given.
To better understand where the solutions can be located in the physical space, it can be useful to
consider separately the two equations of system (25) and then, to look at their common solutions.
Lyapunov L1. As first case, the Lyapunov orbit about L1 is considered as reference orbit for the
chief. At a certain time instant t = t, the chief is located along its orbit and its position vector rc(t)is known. At this point the functions
{arelx = f(xd, yd)arely = f(xd, yd)
(26)
can be evaluated. Figure 8 shows the three-dimensional plot and the (x, y) projection of the xcomponent of the acceleration (Eq. (26), the y component shows similar behavior but rotated with
the maximum/minimum along the y axis), with the chief spacecraft orbiting on the Lyapunov L1
orbit, when it is located on x axis at the nearest point to the Earth (from now on this condition will
be addressed as t = 0).

199
Figure 9. arelx(xd, yd) = 0 and arely (xd, yd) = 0 (Lyapunov L1)
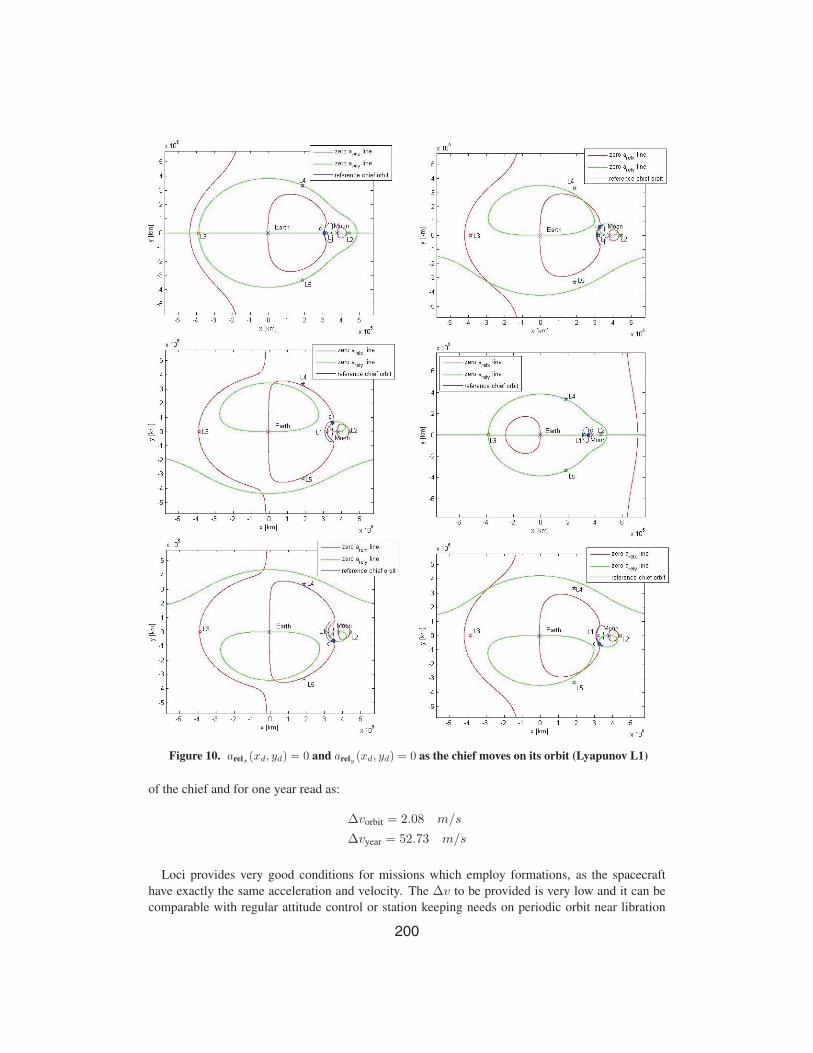
It is possible then to follow the evolution of the solutions as the chief moves along its orbit.
Figure 10 shows how the solutions of the planar non-linear system change as the chief moves along
its orbit. The symmetry of Figure 9 is maintained only when the chief lays on the x axis, while,
when yc �= 0, the solutions moves away from the x axis. Note that the evolution of the solutions is
symmetric with respect to the x axis, for yc > 0 and yc < 0. Figure 10, allows to identify some
properties of these solution maps, but a deeper analysis is needed. Analyzing carefully the evolution
of the solutions, different kind of solution arrangements are present and in particular, nine different
solution maps can be identified. Also, the number of solutions ranges from five to seven.
Once the general location of the solution is known, the problem can be solved numerically pro-
viding a good initial guess which is close to the actual solution. For example, a first guess can
be provided to find the position of the solution which is initially near L3. Then, the system can
be solved for any time instant as the chief moves on its orbit, in order to better follow the actual
solution (the one chosen with the initial guess).
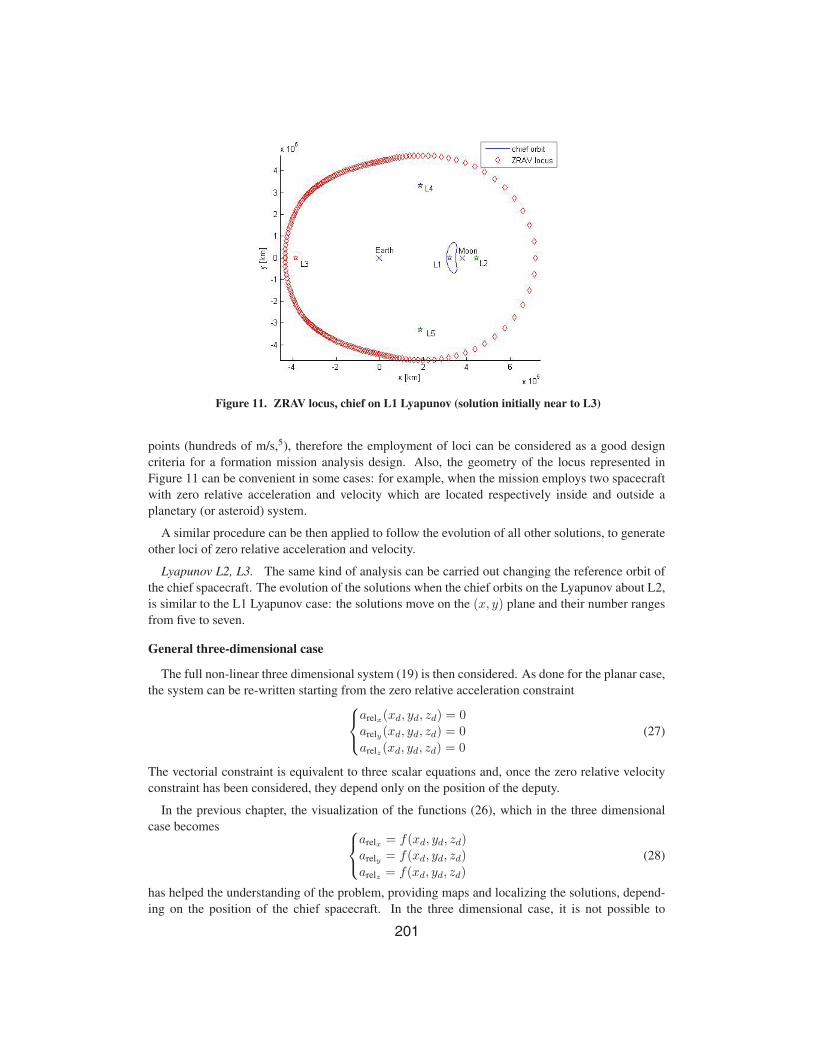
Figure 11 shows the evolution of the solution which is initially near L3 during one period of
Lyapunov chief’s orbits about L1. For each time instant (in this case the time discretization is Δt =1/200 Tref , where Tref is the orbital period of the chief’s orbit) the non linear two-dimensional
system has been solved and the solution found at t − 1 is provided as new initial guess for time t.Note that the solution path represented in Figure 11 is not an actual trajectory for the deputy, but it
is only a locus of points where it would have the same acceleration and velocity the chief has while
moving on its orbit. In order to make the locus an actual trajectory, an acceleration profile shall be
provided to the deputy. The Δv to keep the deputy on the locus, respectively, for one orbital period
ideally four points (except for the chief position itself), where the deputy can be placed in order to
have the same velocity and acceleration of the chief spacecraft. It is important to notice that these
five solutions are valid for t = t (t = 0 in this case), when the chief is located as Figure 9.
200
of the chief and for one year read as:
Δvorbit = 2.08 m/s
Δvyear = 52.73 m/s
Loci provides very good conditions for missions which employ formations, as the spacecraft
have exactly the same acceleration and velocity. The Δv to be provided is very low and it can be
comparable with regular attitude control or station keeping needs on periodic orbit near libration
Figure 10. arelx(xd, yd) = 0 and arely (xd, yd) = 0 as the chief moves on its orbit (Lyapunov L1)
201
Figure 11. ZRAV locus, chief on L1 Lyapunov (solution initially near to L3)
points (hundreds of m/s,5), therefore the employment of loci can be considered as a good design
criteria for a formation mission analysis design. Also, the geometry of the locus represented in
Figure 11 can be convenient in some cases: for example, when the mission employs two spacecraft
with zero relative acceleration and velocity which are located respectively inside and outside a
planetary (or asteroid) system.
A similar procedure can be then applied to follow the evolution of all other solutions, to generate
other loci of zero relative acceleration and velocity.
Lyapunov L2, L3. The same kind of analysis can be carried out changing the reference orbit of
the chief spacecraft. The evolution of the solutions when the chief orbits on the Lyapunov about L2,
is similar to the L1 Lyapunov case: the solutions move on the (x, y) plane and their number ranges
from five to seven.
General three-dimensional case
The full non-linear three dimensional system (19) is then considered. As done for the planar case,
the system can be re-written starting from the zero relative acceleration constraint⎧⎨⎩arelx(xd, yd, zd) = 0arely(xd, yd, zd) = 0
arelz(xd, yd, zd) = 0
(27)
The vectorial constraint is equivalent to three scalar equations and, once the zero relative velocity
constraint has been considered, they depend only on the position of the deputy.
In the previous chapter, the visualization of the functions (26), which in the three dimensional
case becomes ⎧⎨⎩arelx = f(xd, yd, zd)arely = f(xd, yd, zd)
arelz = f(xd, yd, zd)
(28)
has helped the understanding of the problem, providing maps and localizing the solutions, depend-
ing on the position of the chief spacecraft. In the three dimensional case, it is not possible to
202
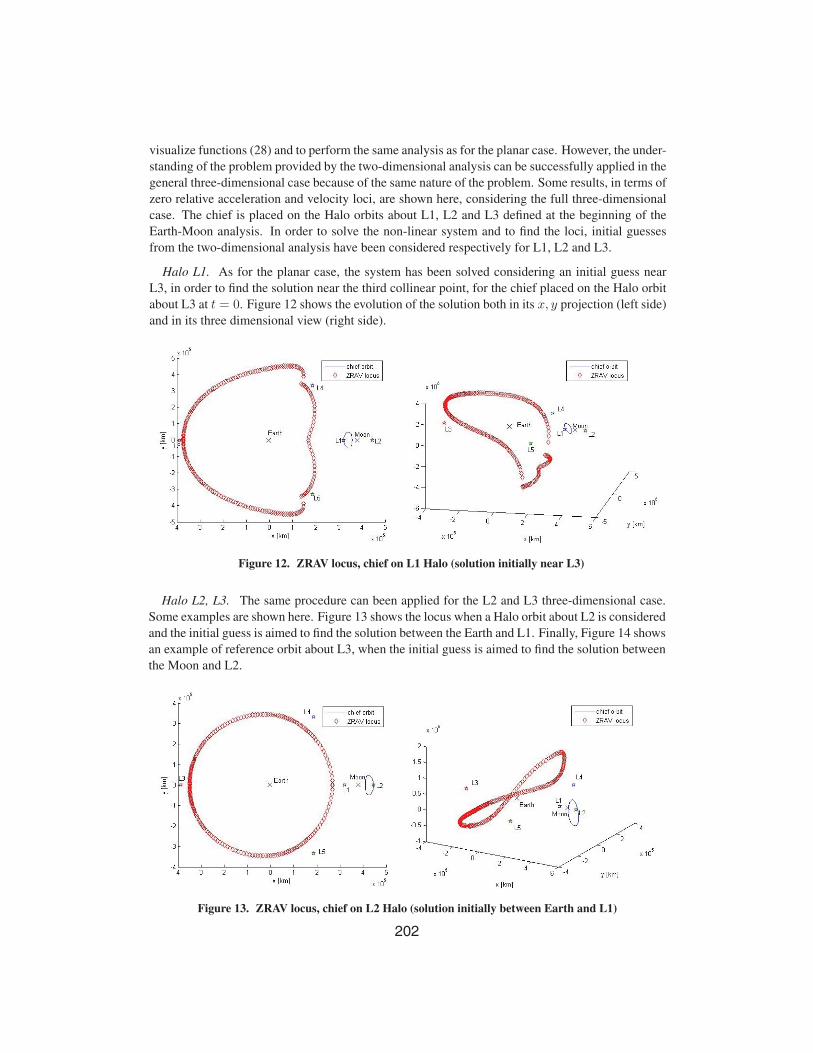
visualize functions (28) and to perform the same analysis as for the planar case. However, the under-
standing of the problem provided by the two-dimensional analysis can be successfully applied in the
general three-dimensional case because of the same nature of the problem. Some results, in terms of
zero relative acceleration and velocity loci, are shown here, considering the full three-dimensional
case. The chief is placed on the Halo orbits about L1, L2 and L3 defined at the beginning of the
Earth-Moon analysis. In order to solve the non-linear system and to find the loci, initial guesses
from the two-dimensional analysis have been considered respectively for L1, L2 and L3.
Halo L1. As for the planar case, the system has been solved considering an initial guess near
L3, in order to find the solution near the third collinear point, for the chief placed on the Halo orbit
about L3 at t = 0. Figure 12 shows the evolution of the solution both in its x, y projection (left side)
and in its three dimensional view (right side).
Figure 12. ZRAV locus, chief on L1 Halo (solution initially near L3)
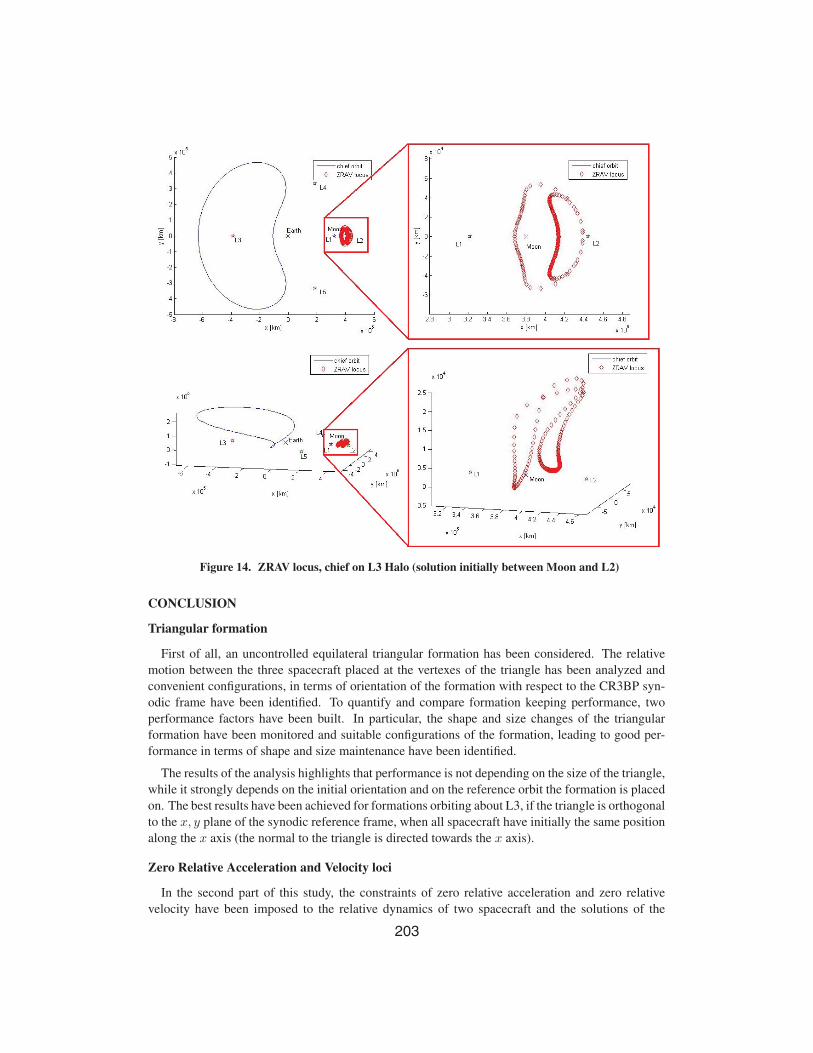
Halo L2, L3. The same procedure can been applied for the L2 and L3 three-dimensional case.
Some examples are shown here. Figure 13 shows the locus when a Halo orbit about L2 is considered
and the initial guess is aimed to find the solution between the Earth and L1. Finally, Figure 14 shows
an example of reference orbit about L3, when the initial guess is aimed to find the solution between
the Moon and L2.
Figure 13. ZRAV locus, chief on L2 Halo (solution initially between Earth and L1)
203
CONCLUSION
Triangular formation
First of all, an uncontrolled equilateral triangular formation has been considered. The relative
motion between the three spacecraft placed at the vertexes of the triangle has been analyzed and
convenient configurations, in terms of orientation of the formation with respect to the CR3BP syn-
odic frame have been identified. To quantify and compare formation keeping performance, two
performance factors have been built. In particular, the shape and size changes of the triangular
formation have been monitored and suitable configurations of the formation, leading to good per-
formance in terms of shape and size maintenance have been identified.
The results of the analysis highlights that performance is not depending on the size of the triangle,
while it strongly depends on the initial orientation and on the reference orbit the formation is placed
on. The best results have been achieved for formations orbiting about L3, if the triangle is orthogonal
to the x, y plane of the synodic reference frame, when all spacecraft have initially the same position
along the x axis (the normal to the triangle is directed towards the x axis).
Zero Relative Acceleration and Velocity loci
In the second part of this study, the constraints of zero relative acceleration and zero relative
velocity have been imposed to the relative dynamics of two spacecraft and the solutions of the
Figure 14. ZRAV locus, chief on L3 Halo (solution initially between Moon and L2)

204
constrained problem have been investigated. The study of the planar case has been useful for the
understanding of the problem through the possibility of visualizing the solutions of the resulting
nonlinear algebraic system. The full three-dimensional problem has been investigated and three-
dimensional solutions have been identified.
The results obtained in this section represent new and convenient tools for mission and trajectory
design, when two co-operating spacecraft are considered. In particular, considering a chief and a
deputy spacecraft, trajectories which allow the deputy to have zero relative acceleration and velocity
with respect to the chief have been identified in the CR3BP dynamical environment. These particular
trajectories have been called Zero Relative Acceleration and Velocity loci (ZRAV). As the spacecraft
are located in a low-acceleration environment such as the one provided by CR3BP dynamics, the
amount of acceleration to be provided to the spacecraft in order to maintain its position on the ZRAV
locus turns out to be very low: in terms of Δv, the cost is of the same order of magnitude of station
keeping cost to maintain the spacecraft on a periodic orbit within the CR3BP.
REFERENCES[1] B. T. Barden and H. K. C, “Formation Flying in the Vicinity of Libration Point Orbits,” 1998.
[2] G. Gomez, M. Marcote, J. J. Masdemont, and J. M. Mondelo, “Natural Configurations and ControlledMotions Suitable for Formation Flying,” AAS 05-347, 2005.
[3] A. Heritier and K. C. Howell, “Regions Near the Libration Points Suitable to Maintain Multiple Space-craft,” 2012.
[4] V. Szebehely, Theory of Orbits: The Restricted Problem of Three Bodies. New York and London:Academic Press, 1967.
[5] W. S. Koon, M. W. Lo, J. E. Marsden, and S. D. Ross, Dynamical Systems, the Three Body Problemand Space Mission Design. 2006.
[6] H. Schaub and J. L. Junkins, Analytical Mechanics of Aerospace Systems. American Institute Of Aero-nautics Astronautics, 2002.
[7] K. C. Howell, “Families of Orbits in the Vicinity of the Collinear Libration Points,” The Journal of theAstronautical Sciences, Vol. 49, 2001, pp. 107–125.
[8] A. Jorba and J. Masdemont, “Dynamics in the Centre Manifold of the Collinear Points of the RestrictedThree Body Problem,” 1997.
[9] K. C. Howell, “Three-Dimensional Periodic ’Halo’ Orbits,” 1983.
[10] K. C. Howell and J. V. Breakwell, “Almost Rectilinear Halo Orbits,” Celestial Mechanics, Vol. 32,1984, pp. 29–52.
[11] J. J. C. M. Bik, P. N. A. M. Visser, and O. Jenrich, “Stabilization of the triangular LISA satelliteformation,”
[12] A. Heritier, “Exploration of the Region Near the Sun-Earth Collinear Libration Points for the Controlof Large Formations,” PhD Thesis, Purdue University, 2012.
[13] B. T. Barden and K. C. Howell, “Dynamical Issues Associated with Relative Configurations of MultipleSpacecraft Near the Sun-Earth/Moon L1 Point,” AAS/AIAA Astrodynamics Specialist Conference, 1999.
[14] B. G. Marchand, “Spacecraft Formation Keeping Near the Libration Points of the Sun-Earth/MoonSystem,” PhD Thesis, Purdue University, 2004.
[15] K. C. Howell and B. T. Barden, “Trajectory Design and Stationkeeping for Multiple Spacecraft inFormation Near the Sub-earth L1 Point,” IAF, 1999.
[16] K. C. Howell and B. G. Marchand, “Design and Control of Formations Near Libration Points of theSun-Earth/Moon Ephemeris System,”
[17] M. Bando and A. Ichikawa, “Periodic Orbits and Formation Flying Near the Libration Points,”
[18] S. Gong, J. Li, H. Baoyin, and Y. Gao, “Formation Reconfiguration in Restricted Three-Body Problem,”Acta Mech Sin, No. 23, 2007, pp. 321–328.
[19] P. Gurfil, M. Idan, and N. J. Kasdin, “Adaptive Neural Control of Deep-Space Formation Flying,”Journal of Guidance, Control and Dynamics, Vol. 26, No. 3, 2003.
[20] P. Gurfil and N. J. Kasdin, “Stability and Control of Spacecraft Formation Flying in Trajectories of theRestricted Three-Body Problem,” Acta Astronautica, No. 54, 2004, pp. 433–453.