Fast orthogonal search (FOS) versus fast Fourier transform (FFT) as spectral model estimations...
11
Struct Multidisc Optim (2012) 45:503–513 DOI 10.1007/s00158-011-0695-y RESEARCH PAPER Fast orthogonal search (FOS) versus fast Fourier transform (FFT) as spectral model estimations techniques applied for structural health monitoring (SHM) Ahmed El-Shafie · Aboelmagd Noureldin · Don McGaughey · Aini Hussain Received: 8 February 2011 / Revised: 17 May 2011 / Accepted: 18 July 2011 / Published online: 9 September 2011 c Springer-Verlag 2011 Abstract In the last decade, structural health monitoring (SHM) systems became essential to accurately monitor structural response due to real-time loading conditions, detect damage in the structure, and report the location and nature of this damage. Spectral analysis using Fourier transform has been widely used in SHM. In this research, a novel approach for the characterization of in structure damage in civil structure is introduced. The target is to develop vibration-based damage detection algorithms that can relate structural dynamics changes to damage occur- rence in a structure. This article presents a new method utilizing high resolution spectral analysis based on Fast Orthogonal Search (FOS) techniques. FOS is a signal pro- cessing tool developed to provide high-resolution spectral estimation. In addition, it is a general-purpose non-linear modeling technique that finds functional expansions using an arbitrary set of non-orthogonal candidate functions. In order to examine the proposed method, the IASC-ASCE structural health monitoring benchmark structure is used in this study to illustrate the merits and limitation of the proposed approach. We also discuss the merits and the limitations of FOS as applied to SHM. A. El-Shafie (B ) Civil & Structural Engineering Department, University Kebangsaan Malaysia, Bangi, Malaysia e-mail: [email protected] A. Noureldin · D. McGaughey Department of Electrical and Computer Engineering, Royal Military College of Canada, Kingston, Canada A. Hussain Electric, Electronics Systems Engineering Department, University Kebangsaan Malaysia, Bangi, Malaysia Keywords SHM · Spectral analysis · Fast orthogonal search (FOS) · Fourier transform · Damage detection 1 Introduction Structural health monitoring (SHM) aims at the charac- terization of structural performance to enhance structural safety and to significantly reduce lifetime operating costs by early detection for maintenance. Thus, the basis for implementing SHM systems in critical structures (airplanes, rotorcraft, vehicles and bridges) is to detect damage occur- rence and inform the responsible stakeholders about the location, nature and severity of this damage (Rytter 1993; Staszewski 1998). Repeated incidents in the Airline industry have resulted in growing uncertainty regarding the reliabil- ity of routine maintenance methods and inspection tech- niques (Schmidt et al. 2004). The difficulty of thorough visual inspection of structures has increased the need for complex SHM systems that can provide early and reli- able damage detection in critical and historical structures (Frangopol et al. 2004; Del Grosso et al. 2004). 1.1 Structural health monitoring The data collected by structural monitoring systems can be used to characterize properties of the structural system and to potentially identify the onset of structural damage. Since manual inspection of structural response data for signs of damage might not represent a desirable nor scalable solu- tion, automated damage detection algorithms are needed. When these damage detection algorithms are embedded and autonomously executed by the structural monitoring system, the system is transformed into a structural health monitoring
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of Fast orthogonal search (FOS) versus fast Fourier transform (FFT) as spectral model estimations...

Struct Multidisc Optim (2012) 45:503–513DOI 10.1007/s00158-011-0695-y
RESEARCH PAPER
Fast orthogonal search (FOS) versus fast Fourier transform(FFT) as spectral model estimations techniques appliedfor structural health monitoring (SHM)
Ahmed El-Shafie · Aboelmagd Noureldin ·Don McGaughey · Aini Hussain
Received: 8 February 2011 / Revised: 17 May 2011 / Accepted: 18 July 2011 / Published online: 9 September 2011c© Springer-Verlag 2011
Abstract In the last decade, structural health monitoring(SHM) systems became essential to accurately monitorstructural response due to real-time loading conditions,detect damage in the structure, and report the locationand nature of this damage. Spectral analysis using Fouriertransform has been widely used in SHM. In this research,a novel approach for the characterization of in structuredamage in civil structure is introduced. The target is todevelop vibration-based damage detection algorithms thatcan relate structural dynamics changes to damage occur-rence in a structure. This article presents a new methodutilizing high resolution spectral analysis based on FastOrthogonal Search (FOS) techniques. FOS is a signal pro-cessing tool developed to provide high-resolution spectralestimation. In addition, it is a general-purpose non-linearmodeling technique that finds functional expansions usingan arbitrary set of non-orthogonal candidate functions. Inorder to examine the proposed method, the IASC-ASCEstructural health monitoring benchmark structure is usedin this study to illustrate the merits and limitation of theproposed approach. We also discuss the merits and thelimitations of FOS as applied to SHM.
A. El-Shafie (B)Civil & Structural Engineering Department,University Kebangsaan Malaysia, Bangi,Malaysiae-mail: [email protected]
A. Noureldin · D. McGaugheyDepartment of Electrical and Computer Engineering,Royal Military College of Canada, Kingston, Canada
A. HussainElectric, Electronics Systems Engineering Department,University Kebangsaan Malaysia, Bangi, Malaysia
Keywords SHM · Spectral analysis ·Fast orthogonal search (FOS) · Fourier transform ·Damage detection
1 Introduction
Structural health monitoring (SHM) aims at the charac-terization of structural performance to enhance structuralsafety and to significantly reduce lifetime operating costsby early detection for maintenance. Thus, the basis forimplementing SHM systems in critical structures (airplanes,rotorcraft, vehicles and bridges) is to detect damage occur-rence and inform the responsible stakeholders about thelocation, nature and severity of this damage (Rytter 1993;Staszewski 1998). Repeated incidents in the Airline industryhave resulted in growing uncertainty regarding the reliabil-ity of routine maintenance methods and inspection tech-niques (Schmidt et al. 2004). The difficulty of thoroughvisual inspection of structures has increased the need forcomplex SHM systems that can provide early and reli-able damage detection in critical and historical structures(Frangopol et al. 2004; Del Grosso et al. 2004).
1.1 Structural health monitoring
The data collected by structural monitoring systems can beused to characterize properties of the structural system andto potentially identify the onset of structural damage. Sincemanual inspection of structural response data for signs ofdamage might not represent a desirable nor scalable solu-tion, automated damage detection algorithms are needed.When these damage detection algorithms are embedded andautonomously executed by the structural monitoring system,the system is transformed into a structural health monitoring

504 A. El-Shafie et al.
system. An immediate benefit of structural health monitor-ing systems is that they offer facility managers the opportu-nity to adopt condition-based maintenance strategies in lieuof today’s schedule-based approaches.
Different damage detection algorithms have been pro-posed for a variety of structural systems including thosefor mechanical, aeronautical and civil structures (Doeblinget al. 1998). The vast majority of these damage detectionmethods have originated under the assumption that onlya small number of sensors are available for recording thedynamic response of the system. As such, the methodsare primarily global-based damage detection methods thatseek to correlate measurable changes in modal propertiesto structural damage. Particularly for civil structures, theseapproaches have been hampered by their sensitivity to astructure’s environmental factors (e.g. temperature); thus,the onset of structural damage can be difficult to detect.However, in recent years, there has been a renewed inter-est in formulating new approaches to damage detection thatare more robust in the face of environmental factors. Inparticular, new damage detection methods receiving recentattention all include the use of new analytical tools suchas pattern recognition (Sohn and Farrar 2001), Bayesiansystem identification (Yuen et al. 2004) and active sensingimpedance spectroscopy (Park et al. 1998).
Currently, most SHM systems depend on measuringstructural dynamics characteristics and analyzing these datain the frequency domain by performing modal analysis(Doebling et al. 1998; Yong 2002; Ren and De Roeck 2002;Manson et al. 2003; Pothisiri and Hjelmstad 2003). Dam-age detection algorithms from modal analysis depend onobserving signals from sensors distributed over the struc-ture and developing accurate structural models (e.g. finiteelement (FE) models) to identify observable mode shapes.Problems associated with FE modelling such as discretiza-tion, configuration errors and modelling errors, as discussedby Yang et al. (2003), proved that modal testing might not besufficiently practical. Moreover, experimental verificationof damage detection algorithms using modal data fromrelatively large structures showed that modal characteris-tics might be insensitive to localized damage (Friswell andPenny 1997; Gentile 2003). Kim et al. (2003) suggestedusing modal strain energy to estimate the severity of damageand pointed out that changes in the natural frequencies aredifficult to measure due to the limited change in frequen-cies due to the uneven mass distribution in large structures.It has also been proven that changes in the mode shapes dueto damage might not be identifiable due to signal corrup-tion by noise and/or to the limited number of identifiablemode shapes (because of the low frequency of vibration ofrelatively large structures, Kinawi et al. 2002). Ren and DeRoeck (2002) examined the effect of noise on the reliabilityof damage identification from modal analysis and reported
that the effect of noise is highly dependent on damage sever-ity such that limited damage states will be more challengingto detect at high levels of noise than severe ones.
1.2 Problem statement
As modal analysis is performed in the frequency domain,most current SHM systems implement Fast Fourier Trans-form (FFT; Doebling et al. 1998; Ren and De Roeck 2002;Park et al. 1998). FFT is used to decompose a time–domainsequence in terms of a set of basic functions. The set of com-plex sinusoids
{eiωn, −∞ < f < ∞}
forms the set of thesebasis functions where i is the complex number
(i = √−1
),
(ω = 2π f ), f is the frequency and n is the discrete timevariable (Mitra 2001). A major problem in using the FFTresults from the fact that the transform is the result of asummation (or integration in the continuous time domain)over the entire signal length. This means that the signaldecomposition cannot indicate the time of occurrence fora transient signal. Therefore, the DFT can provide goodfrequency resolution, but no time resolution.
Therefore, DFT-based SHM systems might recognizedamage occurrence if they are used to observe frequencyspikes (Park et al. 1998) but this damage recognition wouldbe based on frequency information only while all possibletime information will be lost. Unless a time resolution anal-ysis is used, the value of such time information in structuralvibration signals cannot be assessed. It has been shown thatgood time localization can be accomplished by applying theshort time Fourier Transform (STFT), which utilizes a win-dow function that is multiplied by the input signal beforecomputing the FFT (Mitra 2001).
Although STFT provides a time–frequency representa-tion of a signal, there is a major drawback with respect toutilizing STFT in SHM applications; namely that the widthof the window is fixed. As the width of the window functionincreases, more accurate information about the differentfrequencies within the window is obtained; but the abilityto determine when those frequencies occur is lost (Mitra2001).
Using the fast orthogonal search (FOS) algorithm as analternative solution to the aforementioned approaches fordamage detection is introduced in this paper. It is a sig-nal processing tool developed to provide high-resolutionspectral estimation. FOS, introduced by Korenberg (Yong2002), is a general-purpose non-linear modeling techniquethat finds functional expansions using an arbitrary set ofnon-orthogonal candidate functions.
1.3 Objective
This paper describes the application of FOS in damagedetection at different level. The primary objective of this

FOS versus FFT as spectral model estimations applied for SHM 505
research is to develop a novel high resolution spectral anal-ysis technique that can extract the fundamental frequencycomponents of the each damage level. In addition, the pro-posed FOS method will be examined at different operationalefficiently in terms of accelerometer measurement process.Finally, a comparison analysis versus the traditional FFTwill be carried out for all window sizes.
To validate and compare the performance of current andfuture damage detection methodologies, a powerful struc-tural health monitoring benchmark study has been devisedthat offers an extensive data set collected from a full-scalelaboratory structure tested under ambient and forced vibra-tions. Since the public release of the IASC-ASCE TaskGroup on Structural Health Monitoring’s benchmark study.
2 Structural health monitoring procedure
The process of implementing a damage-detection strategyis referred to as SHM. This process involves the observa-tion of a structure over a period of time using periodicallyspaced measurements, the extraction of features from thesemeasurements, and the analysis of these features to deter-mine the current state of health of the system. The output ofthis process is periodically updated information regardingthe ability of the structure to continue to perform its desiredfunction in light of the inevitable ageing and degradationresulting from the operational environments.
Figure 1 shows a chart summarizing the structural health-monitoring process. The topics summarized in this figureare discussed below.
2.1 Operational evaluation
Operational evaluation answers two questions in the imple-mentation of a structural health-monitoring system. (1)What are the conditions, both operational and environmen-tal, under which the system to be monitored functions? (2)What are the limitations on acquiring data in the operationalenvironment?
DataAcquisition
DataProcessing
DataCommunication
DiagnosticsData
RetrievalProcessed
Data Storage
Fig. 1 Architecture of classical SHM system
Operational evaluation begins to set the limitations onwhat will be monitored and how the monitoring will beaccomplished. This evaluation starts to tailor the damage-detection process to features that are unique to the systembeing monitored and tries to take advantage of uniquefeatures of the postulated damage that is to be detected.
2.2 Data acquisition and cleansing
The data-acquisition portion of the structural health-monitoring process involves selecting the types of sen-sors to be used, the location where the sensors should beplaced, the number of sensors to be used, and the data-acquisition/storage/transmittal hardware. This process willbe application specific. Economic considerations will playa major role in making these decisions. Another consider-ation is how often the data should be collected. In somecases, it may be adequate to collect data immediately beforeand at periodic intervals after a severe event. However, iffatigue crack growth is the failure mode of concern, it maybe necessary to collect data almost continuously at rela-tively short time intervals. Because data can be measuredunder varying conditions, the ability to normalize the databecomes very important to the damage-detection process.One of the most common procedures is to normalize themeasured responses by the measured inputs. When envi-ronmental or operating condition variability is an issue, theneed can arise to normalize the data in some temporal fash-ion to facilitate the comparison of data measured at similartimes of an environmental or operational cycle. Sources ofvariability in the data-acquisition process and with the sys-tem being monitored need to be identified and minimizedto the extent possible. In general, all sources of variabil-ity cannot be eliminated. Therefore, it is necessary to makethe appropriate measurements such that these sources canbe statistically quantified. Data cleansing is the processof selectively choosing data to accept for, or reject from,the feature selection process. The data-cleansing process isusually based on knowledge gained by individuals directlyinvolved with the data acquisition. Finally, it should benoted that the data-acquisition and cleansing portion of astructural health-monitoring process should not be static.Insight gained from the feature selection process and thestatistical model development process will provide informa-tion regarding changes that can improve the data-acquisitionprocess.
2.3 Feature selection
The area of the structural damage-detection process thatreceives the most attention in the technical literature is theidentification of data features that allow one to distinguishbetween the undamaged and damaged structure. Inherent

506 A. El-Shafie et al.
in this feature selection process is the condensation of thedata. The operational implementation and diagnostic mea-surement technologies needed to perform structural healthmonitoring typically produce a large amount of data. Acondensation of the data is advantageous and necessary, par-ticularly if comparisons of many datasets over the lifetimeof the structure are envisioned. Also, because data may beacquired from a structure over an extended period of timeand in an operational environment, robust data-reductiontechniques must retain sensitivity of the chosen features tothe structural changes of interest in the presence of envi-ronmental noise. The best features for damage detection aretypically application specific. Numerous features are oftenidentified for a structure and assembled into a feature vector.
In general, it is desirable to develop feature vectors thatare of low dimension. It is also desirable to obtain manysamples of the feature vectors. There are no restrictionson the types or combinations of data contained in the fea-ture vector. As an example, a feature vector may containthe first three resonant frequencies of the system, a timewhen the measurements were made, and a temperature read-ing from the system. A variety of methods are employedto identify features for damage detection. Past experiencewith measured data from a system, particularly if damag-ing events have been previously observed for that system,is often the basis for feature selection. Numerical simula-tion of the damaged system’s response to simulated inputsis another means of identifying features for damage detec-tion. The application of engineered flaws, similar to onesexpected in actual operating conditions, to specimens canidentify parameters that are sensitive to the expected dam-age. Damage accumulation testing, during which significantstructural components of the system under study are sub-jected to a realistic accumulation of damage, can also beused to identify appropriate features. Fitting linear or non-linear, physical-based or non-physical-based models of thestructural response to measured data can also help iden-tify damage-sensitive features. Common features used invibration-based damage-detection studies are briefly sum-marized below. A more detailed summary can be found inDoebling et al. (1998).
3 Methodology
3.1 High resolution spectral density
The fast orthogonal search (FOS) algorithm (Korenberg1989; Korenberg and Paarmann 1989; Ali 2003; McGaugheyet al. 2003; Chon 2001) is a general purpose modelingtechnique which can be applied to spectral estimation andtime-frequency analysis. The algorithm uses an arbitrary setof non-orthogonal candidate functions pm(n) and finds a
functional expansion of an input y(n) in order to minimizethe mean squared error (MSE) between the input and thefunctional expansion.
The functional expansion of the input y(n) in terms ofthe arbitrary candidate functions pm(n) is given by:
y(n) =M∑
m=0
am pm(n) + ε(n) (1)
where am is the weights of the functional expansion, andε(n) is the modeling error.
By choosing non-orthogonal candidate functions, thereis no unique solution for (1). However, FOS may model theinput with fewer model terms than an orthogonal functionalexpansion. For example, the fast Fourier transform (FFT)uses a basis set of complex sinusoidal functions that havean integral number of periods in the record length (Chon2001). For the FFT to model a frequency that does not havean integral number of periods in the record length, energyis spread into all the other frequencies, which is a phenom-ena known as spectral leakage. By using candidate functionsthat are non-orthogonal, FOS may be able to model this fre-quency between two FFT bins with a single term resultingin a many fewer weighting terms in the model (Chon 2001).
FOS begins by creating a functional expansion usingorthogonal basis functions such that
y(n) =M∑
m=0
gm wm(n) + e(n) (2)
where wm(n) is a set of orthogonal function derived fromthe candidate functions pm(n), gm is the weight, and e(n) isan error term. The orthogonal functions wm(n) are derivedfrom the candidate functions pm(n) using the Gram Schmidt(GS) orthogonalization algorithm. The orthogonal func-tions wm(n) are implicitly defined by the Gram–Schmidtcoefficients αmr and do not need to be computed point-by-point. The Gram–Schmidt coefficients αmr and the orthogo-nal weights gm can be found recursively using the equations(Korenberg 1989):
w0 (n) = p0 (n) (3)
D (m, 0) = pm (n) p0 (n) (4)
D (m, r) = pm (n) pr (n) −r−1∑
i=0
αri D(m, i) (5)
αmr = pm (n) wr (n)
w2r (n)
= D (m, r)
D (r, r)(6)

FOS versus FFT as spectral model estimations applied for SHM 507
C (0) = y (n) p0 (n) (7)
C (m) = y (n) pm (n) −m−1∑
r=0
αmr C(r) (8)
gm = C (m)
D (m, m)(9)
In its last stage, FOS calculates the weights of the originalfunctional expansion am, from the weights of the orthog-onal series expansion, gm . The value of am can be foundrecursively using
am =M∑
i=m
gi vi , vm = 1 (10)
where,
vi = −i−1∑
r=m
αir vr , i = m + 1, m + 1, . . . , M (11)
From (4), (5), (7) and (8) it can be noted that FOS requiresthe calculation of the correlation between the candidatefunctions and the calculation of the correlation between theinput and the candidate functions. The correlation betweenthe input and the candidate function y (n) pm (n) are typ-ically calculated point-by-point once at the start of thealgorithm and then stored for later quick retrieval.
The MSE of the orthogonal function expansion has beenshown to be (Yang et al. 2003):
ε2 (n) = y2 (n) −M∑
m=0
g2mw2
m (n) (12)
It then follows that the MSE reduction given by the mth
candidate function is given by:
Qm = g2mw2
m (n) = g2m D (m, m) (13)
FOS can fit a model with a small number of model terms byfitting terms which reduce the mean squared error (MSE)in order of their significance. The FOS search algorithm isstopped in one of three cases. The first is when certain max-imum number of terms is fitted. The second case is whenthe ratio of MSE to the mean squared value of the input sig-nal is below a pre-defined threshold. The third case is whenadding another term to the model reduces the MSE less thanadding white Gaussian noise.
Spectral analysis with FOS is accomplished by selectingcandidates pm(n) that are pairs of sine and cosine terms ateach of the frequencies of interest. The candidate functionspm(n) are given by
p2m (n) = cos(ωmn)
p2m+1 (n) = sin(ωmn) (14)
where m = 1,..., P , ωm is the digital frequency of the candi-date pair and P is the number of candidate pairs. By fitting asine and cosine pair at each candidate frequency, the magni-tude and phase at the candidate frequency can be determined(Ali 2003; McGaughey et al. 2003).
There are two significant differences between FOS and con-ventional Fourier Transform techniques (i.e. Discrete Fou-rier Transform (DFT) or FFT) (Korenberg and Paarmann1989; Chon 2001): (1) FOS yields a parsimonious sinu-soidal series representation by selecting the most significantsinusoidal components first; and (2) the frequencies of thesinusoids selected need not be commensurate nor integralmultiples of the fundamental frequency corresponding tothe record length (Korenberg 1989). This translates to betterfrequency resolution in the spectral model.
As FOS is generally known to be a data dependent algo-rithm (Korenberg 1989; Korenberg and Paarmann 1989; Ali2003; McGaughey et al. 2003; Chon 2001); the accuracyof the model produced by FOS depends on the data recordbeing modelled, the candidate functions used to computecorrelations, and the stopping conditions (thresholds) in thealgorithm.
Sinusoidal candidate functions were selected in this re-search because they had been successfully applied to de-noising and in non-stationary signal analysis (Korenbergand Paarmann 1989). Furthermore, the closed-form expres-sions for computing the cross-correlations between sinu-soids make the execution time of FOS with sinusoidal basisfunctions considerably faster than it would be with mostother types of basic functions (Korenberg 1989).
The FOS candidate frequencies are chosen to have ahigher resolution than the fast Fourier transform (FFT) toachieve better de-noising. The frequency resolution a FFTcan be given by
F FT resolution = fs/
N (15)
where fs is the sampling frequency and N is the number ofpoints in the record. Subject to the SNR, it has been shownthat FOS can achieve frequency resolutions up to 5, 8 or 10times the frequency resolution of the FFT.
From (14) it can be seen that a long record length givesgood spectral resolution, which is needed to accuratelymodel a time-series. However, as the data is time-varying,

508 A. El-Shafie et al.
Fig. 2 Illustration of theIASC-ASCE benchmark teststructure with accelerometer andshaker locations labeled(adapted from Johnson et al.(2004))
a short record length is desired for good time resolution onthe time varying parameters. For this research, the candidatefunction spacing was typically set in the order of 1/10 theFFT resolution for each segment. Candidate frequencies canbe selected so that the candidate functions focus on a partic-ular frequency range of interest. For example, the candidatescan be spaced with a high resolution on a range of inter-est and outside the range of interest the candidates can bespaced by FFT resolution intervals. In general, it is desirableto have the minimum number of candidate frequencies. Toofew terms results in a model that does not accurately modelthe motion dynamics. Too many terms will add noise termsas well as increase the computation time. In this research,MaxFTA is typically set between 6 and 15, not including aDC model term.
FOS stops modeling when adding a new frequency pairdoes not reduce the MSE more than fitting white Gaussiannoise (WGN). It is know that INS data includes WGN andcolored noise, which may not be rejected by this thresh-old. Thus, a candidate acceptance threshold, requiring afrequency pair to fit a minimum percentage of the overallenergy in the signal, is set. These thresholds allow FOS tomodel the motion dynamics and reject frequency terms thatmodel the noise.
As discussed above, FOS is a robust spectral estimationtechnique. The surveyed literature indicated that FOS con-sistently outperforms other conventional signal processingtechniques in spectral analysis applications. FOS is goodat detecting the frequencies of interest buried in colouredand white noise even at poor signal to noise ratios (SNR)(0 dB and in some cases as low as −25 dB). The computa-tion time required for FOS is considerably higher than thatof the FFT techniques, but with sufficient computing power(i.e. current day personal computers) the time is still withinthe limits required for real-time application. Additionally, itis the authors’ belief that the superior frequency resolution
and ability to cope with corrupted data provided by FOSoutweighs the setback imposed by the computation load.
3.2 Experimental setup
3.2.1 IASC-ASCE benchmark study structure
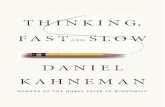
Phase 2 of the IASC-ASCE structural health monitoringbenchmark study consists of experimental testing of a large-scale laboratory steel structure in which damage is inten-tionally introduced. The steel structure is constructed usingthree steel sections for the columns (B100 × 9), beams(S75×11) and bracing elements (L25 × 25 × 3). As shownin Fig. 2, the 4-bay structure consists of four floors, each2.5 m by 2.5 m in area, and stands 3.6 m tall. A varietyof accelerometers are installed throughout the structure torecord its response in the structure’s weak (y, southward)and strong (x, westward) directions. Using the mountedaccelerometers (1 to 4) see Fig. 2, the structure is moni-tored under ambient conditions as well as when vibrations
Table 1 Damaged configurations of the IASC-ASCE benchmarkstructure
Configuration Description # of brace
removed
1 Undamaged—all braces –
installed (healthy)
2 Eastside braces removed 8
3 Southeast bay braces removed 8
4 Only one southeast brace 2
removed on 1st and 4th floors
5 All of the 1st floor southeast 2
bay braces removed

FOS versus FFT as spectral model estimations applied for SHM 509
are introduced using an electro-dynamic shaker and modalhammer blows. In this study, only structural accelerationresponse data corresponding to random excitations gener-ated using the electro-dynamic shaker will be considered.For excitation of the benchmark structure, a Ling DynamicSystems V450 shaker is mounted to the top story of the teststructure. With a total mass of 81.6 kg, the shaker is alignedsuch that the excitation direction is 45◦ relative to the boththe strong and weak structural directions.
An accelerometer is mounted to the shaker to recordsits acceleration during random white noise excitation ofthe structure. To record the response of the structure,
accelerometers are mounted to the eastern face of the struc-ture at each floor. With sensitivities of 5 V/g, the forcebalanced accelerometers are sufficiently accurate in record-ing the response of the structure during random excitationsdelivered by the shaker.
The structure is initially excited for 120 s using a ran-dom excitation record generated and applied by the shaker.This response of the structure corresponds to the structure inits undamaged state and is denoted as Configuration 1. Assummarized in Table 1, an additional four configurationsthat represent the test structure in a damaged state (bracingmembers removed) are tested.
a) Healthy Configuration b) Partially Damage Configuration (2)
c) Partially Damage Configuration (3) d) Partially Damage Configuration (4)
e) Damage Configuration
Fig. 3 Acquired measurements at accelerometer A for the duration of 120 s. a Healthy configuration. b Partially damage configuration (2). cPartially damage configuration (3). d Partially damage configuration (4). e Damage configuration

510 A. El-Shafie et al.
0 5 10 15 20 250
0.1
0.2
0.3
0.4
0.5
0.6
0.7Accelerometer A FFT - 10sec window
Frequency (Hz)
Mag
nit
ud
e
HEAPD2
PD3
PD6
DAM
0 5 10 15 20 250
1
2
3
4
5
6x 10
-3 Accelerometer A FOS -10sec window
Frequency (Hz)
Mag
nit
ud
e
DAMHEAPD3
PD6
PD2
DAM
PD6
HEA PD3 PD2
(a) FFT analysis over 10 sec window (b) FOS analysis over 10 sec window
Fig. 4 FFT and FOS analysis over 10 s window for accelerometer A. a FFT analysis over 10 s window b FOS analysis over 10 s window
4 Results and discussions
In this section, we consider the data from the ASCE bench-mark structure as the case study to develop and test theFOS-based spectral analysis module. The ASCE Bench-mark Group generated structural response data from a 2 ×2 bay, 4 story, rectangular steel test structure. A series ofaccelerometers measurements was collected from the teststructure at nine different levels of damage (ASCE Bench-mark Group). Configuration 1 was classified as “healthy”,configurations 2–6 were classified as “partially damaged”and configurations 7–9 were classified as “fully damaged”.The measurements from two of the accelerometers A (AccelF1 as shown in Fig. 2) and B (Accel F4 as shown in Fig. 2)analyzed and discussed in this study. The measurementswere acquired at 50 Hz data rate for 120 s. Figure 3 shows
a waterfall illustration for the acquired measurements ataccelerometer A for the duration of 120 s.
The residual MSE threshold and Maximum Terms to Addare the FOS parameters that have the major impact on theperformance. These parameters are related to the stoppingcriteria in FOS algorithm. Several trials have been per-formed to reach balanced model that can identify the realfeatures of the signals at certain case of damage. A resid-ual MSE threshold of 0.8% was selected for both sensors.While, the Maximum Terms to Add was set to be 11, whichenabled FOS to fit 5 frequencies and the bias zero-frequencyterm. The FOS module processed the accelerometer mea-surements using a non-overlapping window. Two windowsizes (10 and 60 s) were examined. To validate the perfor-mances of utilizing FOS, comparative analysis with FFTwas performed. The figures below demonstrate the results
0 5 10 15 20 250
0.1
0.2
0.3
0.4
0.5
0.6
0.7Accelerometer B FFT - 10 sec window
Frequency (Hz)
Mag
nitu
de
HEAPD2
PD3
PD6
DAM
0 5 10 15 20 250
0.5
1
1.5
2
2.5
3x 10
-3 Accelerometer B FOS - 10sec window
Frequency (Hz)
Mag
nitu
de
PD2
DAMHEAPD6
PD3
DAM
PD3
HEA
PD6
PD2
(a) FFT analysis over 10 sec window (b) FOS analysis over 10 sec window
Fig. 5 FFT and FOS analysis over 10 s window for accelerometer B. a FFT analysis over 10 s window b FOS analysis over 10 s window

FOS versus FFT as spectral model estimations applied for SHM 511
0 5 10 15 20 250
0.5
1
1.5
2
2.5
3
3.5
4Accelerometer A FFT- 60 sec window
Frequency (Hz)
Mag
nitu
de
HEAPD2
PD3
PD6
DAM
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4x 10
-3 Accelerometer A FOS - 60 sec window
Frequency (Hz)
Mag
nitu
de
PD3
PD2
HEAPD6
DAM
(a) FFT analysis over 60 sec window (b) FOS analysis over 60 sec window
Fig. 6 FFT and FOS analysis over 60 s window for accelerometer A. a FFT analysis over 60 s window b FOS analysis over 60 s window
for both accelerometers utilizing FOS and FFT at windowsizes 10 and 60 s respectively. In these figures, we onlyshow three cases of partial damage (2, 3 and 4 labeled asPD2, PD3 and PD6 respectively) in addition to the health(HEA) and fully damaged (DAM) cases. Figures 4 and 5compare the performances of FOS and FFT for the case of10 s window for both accelerometers A and B, respectively.It can be depicted from the spectral analysis of accelerom-eter A that the FOS was able to identify the two casesof healthy (HEA) and damage (DAM) structure with allfrequency components computed at 14.5 and 12 Hz, respec-tively. The three cases of partial damage showed distributionof the components over a wider range of the spectrum.Such frequency components estimated by FOS can be usedby an intelligent clustering module (using neural networks
or fuzzy logic) to identify the case of partial damage thatcorresponds to these frequency components. The spectralanalysis showed by FOS over 10 s window and shown inFig. 4b cannot be depicted from the corresponding FFTanalysis shown in Fig. 4a, where the frequency componentsfor all 5 cases are spread over the entire frequency range (0–25 Hz) and are contaminated by the background noise. Thesame performance was obtained after processing accelerom-eter B. It can be depicted from Fig. 5b that FOS was able toidentify the frequency components for each of the 5 caseswith almost all these components exiting in one frequencyor at least narrow frequency range for the HEA and DAMcases. In Fig. 5a, it is obvious that FFT, for such a smallwindow size, cannot provide similar robust analysis to thatof FOS.
0 5 10 15 20 250
0.5
1
1.5
2
2.5
3
3.5
4
4.5Accelerometer B FFT- 60 sec window
Frequency (Hz)
Mag
nitu
de
HEAPD2
PD3
PD6
DAM
0 5 10 15 20 250
0.5
1
1.5x 10
-3 Accelerometer B FOS - 60 sec window
Frequency (Hz)
Mag
nitu
de
DAMHEAPD3
PD6
PD2
(a) FFT analysis over 60 sec window (b) FOS analysis over 60 sec window
Fig. 7 FFT and FOS analysis over 60 s window for accelerometer B. a FFT analysis over 60 s window b FOS analysis over 60 s window

512 A. El-Shafie et al.
For 60 s window, FFT started to have comparable perfor-mance to FOS as can be observed in Fig. 6 for the case ofaccelerometer A and in Fig. 7 for the case of accelerometerB. However, FOS continued to show consistent performanceand more robust spectral analysis than FFT. This demon-strates that FOS is independent of the window size usedin the computation of the spectral analysis. For small win-dow sizes (which is always desirable in case of real-timeapplications), FOS provided better performance in detectingand separating all cases of the structural status. For windowsizes 10 and 20 s FFT could not recognize the case of totaldamage.
5 Conclusions
This study offered a new spectral analysis method for Struc-tural Health Monitoring (SHM). The scheme is based onusing fast orthogonal search (FOS) algorithm as a sig-nal processing algorithm to provide high-resolution spectralestimation for each case of structure damage. Using FOStechniques proved to efficiently search for the frequencycomponents corresponding to five different damage cases.The FOS algorithm proves to be of superior performancethan the presently utilized techniques because, especially ifCompared to the conventional FFT algorithm: (1) it is oper-ational efficiently for all window sizes and its performancedid not change with changing the window size, which isthe case with FFT; (2) it will be easier for any damageidentification/decision making to be accurately performedusing the features extracted from the FOS outputs where allbackground noises are removed.
Acknowledgments This research is supported by the first authorresearch grant from Smart Engineering Group, University KebangsaanMalaysia the research grant UKM-DLP-2011-002 and UKM-KK-02-FRGS0125-2009 and eScienceFund 01-01-02-SF0581, ministry ofTechnology, Science and Innovation (MOSTI). The authors acknowl-edge the financial support of NSERC and the experimental data pro-vided by Dr. Mahmoud Reda-Taha, Department of Civil Engineering,University of New Mexico. We also wish to thank Molly McCuskey(Department of Civil Engineering, University of New Mexico) forproviding the experimental data used in this study.
References
Ali EFA (2003) Application of the fast orthogonal search in automatictarget detection. Ph.D. Thesis, Department of Electrical and Com-puter Engineering, Royal Military College of Canada, Kingston,Ontario
Chon KH (2001) Accurate identification of periodic oscillations buriedin white or colored noise using fast orthogonal search. IEEE TransBiomed Eng 48(6):622–629
Del Grosso A, Torre A, Rosa M, Lattuada BG (2004) Applicationof SHM techniques in the restoration of historical buildings:
the Royal Villa of Monza. In: Boller C, Staszewski WJ (eds)Proceedings of the 2nd European workshop on structural healthmonitoring, Munich, Germany, pp 205–212
Doebling SW, Farrar CR, Prime MB (1998) A summary review ofvibration-based damage identification methods. Shock Vib Digest30(2):91–105
Frangopol DM, Neves LC, Petcherdchoo A (2004) Health and safetyof civil infrastructures: a unified approach. In: Mufti A, AnsariF (eds) Proceedings of the 2nd international workshop on struc-tural health monitoring of innovative civil structures, Winnipeg,Canada, pp 253–264
Friswell MI, Penny JET (1997) Is damage location using vibrationmeasurements practical? In: Proceedings of the internationalworkshop: DAMAS 97, structural damage assessment usingadvanced signal processing procedures, Sheffield, UK
Gentile C (2003) Dynamic performance of A P.C. Bridge: computationand tests. In: El-Dieb et al (eds) Proceedings of the internationalconference on performance of construction materials, ICPCM,Cairo, Egypt, vol 1, pp 449–458
Johnson EA, Lam HF, Katafygiotis LS, Beck JL (2004) The phaseI IASC-ASCE structural health monitoring benchmark problemusing simulated data. J Eng Mech ASCE 130(1):3–15
Kim J-T, Ryu Y-S, Choi H-M, Stubbs N (2003) Damage iden-tification in beam-type structures: frequency-based method vs.mode-shape-based method. Eng Struct 25:57–67
Kinawi H, Reda Taha MM, El-Sheimy N (2002) Structural health mon-itoring using the semantic wireless web: a novel application forwireless networking. In: Proceedings of the 27th IEEE confer-ence on local computer networks (LCN), FL, USA, Ed. pp 770–780
Korenberg MJ (1989) A robust orthogonal algorithm for systemidentification and time-series analysis. Biol Cybern 60:267–276
Korenberg MJ, Paarmann LD (1989) Applications of fast orthogonalsearch: time-series analysis and resolution of signals in noise. AnnBiomed Eng 17:219–231
Manson G, Worden K, Allman D (2003) Experimental validation of astructural health monitoring technology: part II. Novelty detectionon a gnat aircraft. J Sound Vib 259(2):345–363
McGaughey DR, Korenberg MJ, Adeney KM, Collins SD, Aitken GJ(2003) Using the fast orthogonal search with first term reselectionto find subharmonic terms in spectral analysis. Ann Biomed Eng31:741–751
Mitra SK (2001) Digital signal processing: a computer-basedapproach, 2nd edn. McGraw Hill, NY
Park S, Stubbs N, Bolton RW (1998) Damage detection on a steelframe using simulated modal data. In: Proceedings of the16th international modal analysis conference, Santa Barbara,CA, USA, SPIE-International Society for Optical Engineering,pp 612–622
Pothisiri T, Hjelmstad KD (2003) Structural damage detection andassessment from modal response. ASCE J Eng Mech 129(2):135–145
Ren W-X, De Roeck G (2002) Structural damage identificationusing modal data. I: simulation verification. ASCE J Struct Eng128(1):87–95
Rytter A (1993) Vibration based inspection of civil engineering struc-tures. PhD. Dissertation, Aalborg University, Aalborg, Denmark
Schmidt H, Telgkamp J, Schmidt-Bramdecker B (2004) Applicationof structural health monitoring to improve efficiency of aircraftstructure. In: Boller C, Staszewski WJ (eds) Proceedings of the2nd European workshop on structural health monitoring, Munich,Germany, pp 11–18
Sohn H, Farrar C (2001) Damage diagnosis using time-series analysisof vibrating signals. Journal of Smart Materials and Structures,IOP 10(3):446–451

FOS versus FFT as spectral model estimations applied for SHM 513
Staszewski WJ (1998) Structural and mechanical damage detectionusing wavelets. Shock Vib Digest 30(6):557–472
Yang D-M, Stronach AF, MacConnell P (2003) The applica-tion of advanced signal processing techniques to induc-tion motor bearing condition diagnosis. Meccanica 38(2):297–308
Yong X (2002) Condition assessment of structures using dynamicdata. Ph.D. Dissertation, School of Civil and EnvironmentalEngineering, Nanyang Technological University, Singapore
Yuen K-V, Au SK, Beck JL (2004) Two-stage structural health mon-itoring approach for phase 1 benchmark studies. J Eng MechASCE 130(1):16–33