Experimental Investigation of a Double Magnet EMVA at Key-On Engine: A Mechanical Resonance Based...
21
ABSTRACT Nowadays, developing of effective camless engine systems, allowing Variable Valve Actuation (VVA), is one of the fundamental automotive challenge to increase engine power, reduce fuel consumption and pollutant emissions, as well as improve the engine efficiency significantly. Electromechanical devices based on double electromagnets have shown to be a promising solution to actuate engine valves during normal engine cycle due to their efficient working principle. Conversely, this solution requires special care at the key-on engine for the first valve lift, when the valve must be shifted from the middle equilibrium position to the closing one with limited coil currents and power requirements as well. Despite the central role of the first catching problem, few attempts have been done into the existing literature to tackle it systematically. This paper presents an experimental validation of a control strategy for the first lift of a double magnet Electro Mechanical Valve Actuator (EMVA) system. The key idea is to induce valve oscillations exploiting the resonant behavior of the mechanical part. Since the actuator produces a magnetic force as a nonlinear function of the coil currents and valve position, a proper force-to-current inversion algorithm, previously presented by the authors, has been here adopted to transform control magnetic force into reference coil currents actuated via a multi-hysteresis control logic. Results of a wide experimental investigation show that performance strongly depend on the control parameters, i.e. the amplitude and the frequency of the exciting periodic force, with respect to different performance indexes. The performance of the proposed control strategy have been compared experimentally with those provided by an empirical solution involving pulsing coil currents with constant amplitude. INTRODUCTION Currently better and better performance are demanded to vehicles equipped with gasoline engine, both in terms of engine efficiency (fuel economy, torque production and pumping losses reduction) and emission reduction in order to meet the more and more restrictive emission legislation [ 13]. A promising solution to improve engines of the next generation is provided by VVA [ 23, 28, 43, 44]. Indeed, the current engine technology is still based on mechanical cams to actuate the intake and exhaust valves and on the throttle body to regulate the amount of air fed to the cylinders. Despite of the simplicity of this approach, throttling strongly increases pumping work that turns into a worsening of the combustion process due to the lower levels of turbulence inside the combustion chamber and consequently engine efficiency decreases. To overcome such a limitation novel camless engine systems have been studied for the last two decades as a viable solution to achieve VVA allowing throttle free operations [ 12, 13, 42]. In automotive literature different kind of solutions, ranging from mechanical [ 5, 50], electro-hydraulic [ 2, 3, 8, 42], pneumatic [ 30, 33, 41, 53], motor-driven [ 24, 34, 40] to electromechanical [ 6, 7, 38, 39, 46], have been proposed to achieve Variable Valve Timing (VVT) and Variable Valve Lift (VVL). Among them, EMVA systems have shown to provide valuable improvements in terms of full load torque curve, fuel economy (particularly at low loads), emission Experimental Investigation of a Double Magnet EMVA at Key-On Engine: A Mechanical Resonance Based Control Strategy 2010-01-2223 Published 10/25/2010 Alessandro di Gaeta, Umberto Montanaro and Silvio Massimino Istituto Motori CNR Carlos Ildefonso Hoyos Velasco University of Naples Federico II Copyright © 2010 SAE International
Transcript of Experimental Investigation of a Double Magnet EMVA at Key-On Engine: A Mechanical Resonance Based...

ABSTRACTNowadays, developing of effective camless engine systems,allowing Variable Valve Actuation (VVA), is one of thefundamental automotive challenge to increase engine power,reduce fuel consumption and pollutant emissions, as well asimprove the engine efficiency significantly.Electromechanical devices based on double electromagnetshave shown to be a promising solution to actuate enginevalves during normal engine cycle due to their efficientworking principle. Conversely, this solution requires specialcare at the key-on engine for the first valve lift, when thevalve must be shifted from the middle equilibrium position tothe closing one with limited coil currents and powerrequirements as well. Despite the central role of the firstcatching problem, few attempts have been done into theexisting literature to tackle it systematically.
This paper presents an experimental validation of a controlstrategy for the first lift of a double magnet ElectroMechanical Valve Actuator (EMVA) system. The key idea isto induce valve oscillations exploiting the resonant behaviorof the mechanical part. Since the actuator produces amagnetic force as a nonlinear function of the coil currents andvalve position, a proper force-to-current inversion algorithm,previously presented by the authors, has been here adopted totransform control magnetic force into reference coil currentsactuated via a multi-hysteresis control logic. Results of awide experimental investigation show that performancestrongly depend on the control parameters, i.e. the amplitudeand the frequency of the exciting periodic force, with respectto different performance indexes. The performance of the
proposed control strategy have been comparedexperimentally with those provided by an empirical solutioninvolving pulsing coil currents with constant amplitude.
INTRODUCTIONCurrently better and better performance are demanded tovehicles equipped with gasoline engine, both in terms ofengine efficiency (fuel economy, torque production andpumping losses reduction) and emission reduction in order tomeet the more and more restrictive emission legislation [13].A promising solution to improve engines of the nextgeneration is provided by VVA [23, 28, 43, 44]. Indeed, thecurrent engine technology is still based on mechanical camsto actuate the intake and exhaust valves and on the throttlebody to regulate the amount of air fed to the cylinders.Despite of the simplicity of this approach, throttling stronglyincreases pumping work that turns into a worsening of thecombustion process due to the lower levels of turbulenceinside the combustion chamber and consequently engineefficiency decreases. To overcome such a limitation novelcamless engine systems have been studied for the last twodecades as a viable solution to achieve VVA allowing throttlefree operations [12, 13, 42].
In automotive literature different kind of solutions, rangingfrom mechanical [5, 50], electro-hydraulic [2, 3, 8, 42],pneumatic [30, 33, 41, 53], motor-driven [24, 34, 40] toelectromechanical [6, 7, 38, 39, 46], have been proposed toachieve Variable Valve Timing (VVT) and Variable ValveLift (VVL). Among them, EMVA systems have shown toprovide valuable improvements in terms of full load torquecurve, fuel economy (particularly at low loads), emission
Experimental Investigation of a Double MagnetEMVA at Key-On Engine: A Mechanical ResonanceBased Control Strategy
2010-01-2223Published
10/25/2010
Alessandro di Gaeta, Umberto Montanaro and Silvio MassiminoIstituto Motori CNR
Carlos Ildefonso Hoyos VelascoUniversity of Naples Federico II
Copyright © 2010 SAE International

reduction (especially during engine cranking) and enginewarm up (see [16, 20, 21] and references therein) by allowingtiming variations, valve event, late closure of the intake valveand cylinder or port deactivation. By exploiting EMVAsystems the low-end torque improves by 10% - 20% and thefuel economy increases by 16% - 19% with a substantialreduction of pollutant emissions [13].
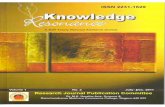
An EMVA system is mainly formed by two opposed magnetsand two balanced springs working in parallel (see also Fig.1). Each magnet consists of a coil and a core where themagnetic field flows. A ferromagnetic armature, connected tothe engine valve by a non-ferromagnetic stem, is placedbetween the two magnets. The armature initially is in themiddle equilibrium position between the two magnets. Atengine startup the armature is pulled up near to the upper/lower magnet and hold there, storing in the springs themechanical energy spent for their deformations. When theupper magnet is deactivated, the elastic energy is released andthe EMVA system approximately behaves as an “harmonicoscillator” in free evolution. The moving part, at a distance ofless than about one millimeter, is captured and held by thelower electromagnet. A similar series of events occur whenthe moving part is released and the upper magnet catches it.Since electromagnets can produce high forces at lowdistances, power requirements of the system are quite low.
Figure 1. A schematic view of the EMVA.
To achieve the potential benefits promised by EMVAsystems in replacing the traditional camshaft, two crucialcontrol problems have to be tackled and solved efficiently bycar manufactures, i.e. the control of the valve seating velocity(Soft Landing Control problem, SLC) and the first liftmanoeuvre (First Catching Control problem, FCC). (Noticethat, the high nonlinear coupling between the mechanical and
magnetic parts embedded into the valve actuator and thecoupling with the engine make these control taskscumbersome obstacles to overcome for a low-cost massproduction of this camless technology.) More in detail, thecontrol objective in the case of the SLC problem is thereduction of the impact velocity during valve opening andclosing in order to increase the lifespan of the valve actuatorand at the same time to reduce acoustical noise. In fact, anacceptable landing velocity should be less than 0.03 [m/s] at600 [rpm] engine speed and less than 0.3 [m/s] at 6000 [rpm]engine speed [1], although in camshaft design the seatingvelocity is limited below 0.05 [m/s] [45]. This specificationbecomes more arduous to accomplish since a valve stroke hasto occur in a very short time (about 3 [ms]) to guarantee aproper load variation ability of the valvetrain [21].
To solve this control problem, different control strategies canbe found in the technical literature. For example in [20, 21,45, 52] EMVA system is controlled in open loop via series ofproperly tuned current patterns. Since open loop control issensitive to disturbances and suffers poor repeatability, closedloop strategies have been also extensively used on the basisof different EMVA modeling. For instance in [35] the softlanding is addressed using a nonlinear feedback strategy,where control parameters were tuned by means of anextremum seeking method. In [46] a Linear-QuadraticRegulator feedback controller was developed for soft seatingwhile Flatness-Based tracking method is adopted in [10]. In[15], based on nonlinear force model reproduced via properpolynomials, a sensorless sliding mode control strategy wasused to track a reference trajectory designed for the soft-landing. In [49] the quiet seating control is designed based ona linearized model of EMVA and in [27] a simplifiednonlinear model was used to design an exact linearizationbased control law. A physics-based model for a single magnetdeveloped in [52] was used to set up valve positioncontrollers [26, 51], observer based [36] and adaptivestrategies [25, 37]. Moreover, a linear grey-box modelingincluding a valve lash was used to design a third order linearcontroller coupled to cycle-to-cycle repetitive learningcontrol action [45, 47,48,49] and in [22] a sensorlessapproach is proposed.
The second control problem, here referred to as FCC, consistsof moving the valve from its resting position (middleequilibrium position) close to an end-stroke position (closed/opened valve position) at the engine start-up. Taking intoaccount that the magnetic force decreases rapidly andnonlinearly with the air-gap (between the armature and cores)and no potential elastic energy is initially stored in thesystem, the control authority on the armature is low. Hence,the first lift manoeuvre turns to be a complex and arduoustask to be accomplished with feasible coil currents providedby automotive electrical power circuits and then the challengeof the FCC problem arises [55]. Despite the central role, fewattention has been made by the existing automotive literature

to solve the problem of the first lift as far as we are aware. In[54, 56] special designs of EMVA based on PermanentMagnetics (PM) have been proposed to attain the first liftmanoeuvre with admissible coil currents. We highlight that,even though this approach simplifies the FCC task, thedemagnetization of the PM have to be efficiently addressed toavoid system faults.
Some solutions to prevent the PMs from demagnetization canbe found in [29, 57]. When conventional EMVAs are adopteda simple and viable solution to catch the valve at enginestartup is instead presented in [4]. Here, in the case thetemperature is within a predetermined normal range, armatureoscillations are induced by alternatively supplying current toelectromagnets at the mechanical resonant frequency of thesystem. The currents levels are regulated as function of theapproach of the armature toward a pole face. Instead, if thetemperature is below that range, a high current pulse issupplied to an electromagnet. We point out that to implementeffective managements of the entire system of valves, powerrequirements to accomplish the first catching play a crucialrole. In [11], in order to provide effective approaches for theinitialization of the engine valves, the maximum number ofvalve that can leave the equilibrium position is computed onthe basis of the actual power supply capability, whichdepends on the battery charge state, battery life, as well asambient and engine temperatures. It is then apparent that sucha number increases if the energy to complete the first lift pervalve decreases. Again, in order to reduce the instantaneouspower requirements, inventors propose in [11] to initializeengine valves sequentially. As a consequence the time neededto complete the first lift of each valve becomes crucial tomeet customer satisfaction in terms of waiting time at thekey-on.
In [18] authors have solved both the control tasks via model-based decoupling control strategies. The key point of theentire control approach is a detailed and predictive FEM-based dynamic model of the EMVA system presented in [19].This model describes accurately self and mutual magneticeffects and has been used in [18] to design a Force-To-Current (FTC) inverse algorithm allowing to determine theequivalent coil currents generating a given magnetic forcewhen the armature position is known. The resultingdecentralized control architecture consists of two nestedcontrollers. The inner feedback controller regulates the upperand lower coil currents to demanded values. Instead, the outercontroller is chosen among a given set of subcontrollers by ascheduler on the basis of the control task to be performed, i.e.the first lift manoeuvre or the tracking of a soft landingtrajectory. The magnetic force is then used as control variableby each subcontroller and converted by means of the FTCinverse algorithm into feasible reference coil currents fed tothe inner control loop. In so doing, the outer controllers canbe designed neglecting the magnetic and electrical dynamicsof the actuator which results decoupled from the mechanical
part. Relating to the FCC problem, in [18] authors haveshown the infeasibility of solving it as a tracking controlproblem due to current constraints on the power actuator andthey proposed a mechanical resonance frequency strategy asviable energy solution for the first lift manoeuvre.
In this paper we propose for the first time experimentalresults of an EMVA system controlled via the decoupledapproach in [18]. In particular the first catching problem isaddressed by exploiting the resonant frequency of themechanical part. Hence, the control input generated by theouter controller for the first lift manoeuvre takes a sinusoidalshape. Since the resonant frequency as well as the resonantpeak are sensitive to system parameter variations, asensitivity analysis is also carried out. Experimental resultsare then analyzed with respect to different performanceindexes based on energetic consideration, maximum coilcurrents as well as first catching time with the aim tocharacterize experimentally the system behaviors during firstlift using its frequency response. Finally, performance of theproposed control strategy have been comparedexperimentally with those provided by an empirical solutioninvolving pulsing coil currents with constant amplitude.
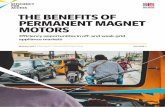
EXPERIMENTAL SETUPThis work is based on the electromechanical valve prototypedesigned in [17, 19,20,21] and developed by the IstitutoMotori of National Research Council of Italy in cooperationwith “Dell'Orto S.p.A.” company. EMVA prototype is shownin Fig. 2. The setup consists of four main components: i) theEMVA system; ii) the interface with a Rapid ControlPrototyping (RCP) module; iii) a sensor position; iv) a poweractuator.
The valve is one of intake of a four valves spark ignition 2liter engine (see Fig. 2c). It is worth noting that the valveactuator has been designed with particular attention to thechoice of technologically advanced materials (sinteredmaterials), such as those based on iron powders with highelectrical resistivity and good magnetic performances. In sodoing, undesirable eddy currents are strongly limited and themagnetic response of the valve actuator improvesconsequently.

Figure 2. (a)-(b) Experimental setup for double magnetEMVA system. (c) Prototype of EMVA system.
Power circuit has the important task to track (by means of aproperly multi-hysteresis control logic [18]) the currents inthe coils at the reference values yielded by the outercontrollers. It follows that the performance of these laststrongly depend on those of power circuit. Control of thesystem is done via a RCP dSPACE based station shown inFig. 2a, composed by a processor board (DS1005), includinga PowerPC RISC µP running at 1GHz, equipped with adigital (DS1004) and an analog I/O (DS2201) boards. Thecontrol station is programmed in Matlab/Simulink(MathWorks) environment and the experiments are managedand instrumented by ControlDesk application (dSPACE). Alaser position sensor LD1627 (Micro-Epsilon) [32] depictedin Fig. 2b, that works in the range 0-10 [mm] with cut-offfrequency of 37 [kHz], is used for the on-line measurement ofthe valve position. Sampling time is set to 70 [µs], givenenough interval time to make digital I/O signal processingand computed control actions, as well as all others auxiliaryservices and monitoring tasks of the EMVA plant.
MATHEMATICAL MODELAmong many models proposed in technical literature [9, 14,21, 45, 52] in this work we exploit the lumped parameterdynamic model derived from a hybrid analytical-FEMapproach in [19] for its high predictive capabilities shown inreproducing the strongly nonlinear dynamics characterizingsuch a magnetic valve actuator. The model reproducesprecisely all electrical and magnetic nonlinearities, as self andmutual inductances, back-ElectroMotive Forces (back-EMFs)and magnetomotive force for a wide range of magnetization(linear and saturation) and for all armature positions.
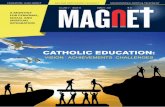
According to [19] and as schematized in Fig. 3b, EMVAdynamics are the result of an high nonlinear interactionbetween the electrical, the magnetic and the mechanical
subsystems. More in detail the electrical subsystem describesthe coil currents dynamics, while the mechanical one takesinto account armature dynamics. The interaction between theelectrical and mechanical parts is due to the magnetic forcegenerated by the magnetic field (magnetic block in Fig. 3b)which is applied on the armature.
Figure 3. (a) EMVA system full scheme. (b) Blockscheme of the EMVA model.
From the previous discussion and assuming the pairarmature-valve as a rigid body, plant dynamics are describedas:
(1)
(2)
(3)
where: I = (iu il)T is the vector of the upper, iu [A], and lower,il [A], coil currents, respectively; V = (Vu Vl)T[V] is thevector of the voltages applied to upper and lower coils inVolt; R = diag(ru rl) [Ω] is the diagonal matrix of the coilelectrical resistances; h [m] and v [m/s] are the position and

the velocity of the armature, respectively; heq [m] is theposition of the valve at equilibrium in the absence of externalforces; k(h - heq) [N] is the sum of the upper and lower springforces, with k [N/m] being the equivalent spring stiffness; σv[N] is a linear viscous friction with σ [Ns/m] being theviscous coefficient; m [kg] is the equivalent mass of allmoving parts, included the effect of non negligible springmasses; the matrix Λ(I, h) [H] models the self and mutual coilinductances, whereas the vector Z(I, h) [V·s/m] collects selfand mutual back-EMFs caused by the motion of the armaturein a magnetic field.
Exploiting the symmetry of the system, the magnetomotiveforce, say FM [N] in model (1), (2), (3), can be written as:
(4)
where , and are the magnetic force due to theupper coil, the lower coil and the interaction between them,respectively, F(i, g) is the force given by a single magnet fora given current i [A] and air-gap g [m], and gmax [m] is themaximum air-gap value. The mathematical expressions of the
terms Λ(I, g), Z(I, h), F(i, h) and are complex,hence, for the sake of brevity we report here only that ofmagnetic force F(i, g):
(5)
The reader is referred to [19] for further details. We point outthat eddy currents have not been taken into account in thederivation of the magnetic force model (4). The eddy currenteffects can be neglected since sintered materials were adoptedfor most of the volume (two cores) of the actuator.Nevertheless in [19] has been shown that the lumpedparameter model (1), (2), (3) reproduces accurately dynamicsobtained via a FEM-based magnetic analysis including alsoeddy currents effects. In the next section we show that theproposed magnetic force model allows to reproduce valvedynamics with a great accuracy. Hence it is here validatedexperimentally for the first time.
We note that, since some residual air-gaps could beconsidered between the armature and cores at closing andopening valve positions (i.e. to ensure an adequate airtight ofthe valve on its seat), we suppose that valve position h can
vary in the interval [hmin, hmax] with 0 ≤ hmin < hmax ≤ gmax,with hmin and hmax being the end-stroke positions. Thisimplies, under the assumption that the two springs are equallypreloaded, the nominal equilibrium position is heq = (hmax +hmin) / 2 and actually valve stroke is hstr = hmax − hmin.According to this notation, the residual air-gaps between thearmature and upper magnet/lower magnet (at closed/opened
valve) can be expressed as and
, respectively. Notice that these parametersstrongly affect the magnetic force since it rapidly decreaseswith air-gap for a constant current [19]. One can deduce thatsmall residual air-gaps become a prerequisite to limit currentrequirements in closed/opened position, whereas the highestspring force (k·hstr/2) could easily trigger instabilityconditions.
MODEL VALIDATIONIn this section we validate on the basis of experimental datathe model introduced previously. In particular, to control thevalve motion according to the decoupling control approachpresented in [18] and briefly summarized in the next section,it is enough to validate the mechanical part of the model andthe magnetomotive force, i.e. equations (2),(3) and (4). Theidentification and model validation activities are organized inthree steps: 1) estimation of the mechanical parametersduring free response; 2) tuning of the residual air-gaps; 3)validation of the whole model in forced response.
1stStep - To tune the mechanical parameters in (2), i.e. k, mand σ, we have considered different time series of the valveposition acquired during free oscillations, i.e. when the coilcurrents are set to zero (absence of external forces), withinitial valve position, h0 := h(t0), equal to the first peakoscillation, occurring at the instant t0 after switch off of thelower magnet where valve was initially hold, and whereinitial velocity, v0 := v(t0), is zero. An optimization techniquebased on a least-square algorithm [31] has been then used toestimate the mechanical parameter. A priori information onparameters value set were exploited to initialize the algorithmfor finding the minimum of cost index (sum of squared errorsbetween model data and experimental ones). Theidentification routine returns as optimal values m = 0.153[kg], k = 96993 [N/m] and σ = 11.5 [N·s/m]. Fig. 4 shows thehigh matching between experimental data and modelpredictions and confirms the effectiveness of the mechanicalvalve modeling as well as the identification method.

Figure 4. Model validation during free oscillation.Engine valve position: model predictions (blue dashed
line) and experimental data (black solid line).
2nd Step - The residual air-gap parameters and aretuned as those values such that the magnetic force (5) equalsthat elastic in closed and opened position, respectively.Speaking in math terms, the subsequent nonlinear equationshave to be solved:
(6)
(7)
where and are the minimum current values(experimentally observed) able to hold magnetically thearmature against the upper and lower cores respectively, and
the and are the effective valve displacements(experimentally measured) from equilibrium position.
Equations (6),(7) give as solutions [µm] and
[µm], here expressed in micrometers.
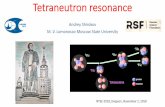
3ndStep - To validate the model when it is excited by amagnetic force different from zero, we have considereddifferent experimental time histories of the coil currents fedto magnetomotive force model (4) when the valve position his computed by means of (2)-(3) and the mechanicalparameters are those identified previously. Fig. 5a shows theprecise matching between experimental valve position dataand model predictions when the measured coil currents takethe shape in Figs. 6a and 6b, and the magnetomotive forcepredicted by the model (4) is traced in Fig. 5b.
We remark that the magnetic force model (4) here adopted isthe one derived using FEM data [19] and no furtherexperimental parameter tuning has been required. Hence theeffectiveness of the FEM based modeling approach proposedin [19] is also proven indirectly.
Figure 5. Model validation for a nonzero magnetic force.(a) Simulated valve position (blue dashed line) and
experimental data (black points). (b) Forces: magneticforce (red solid line), elastic force (blue dashed line) and
friction force (black dotted line).

Figure 6. Model validation for a nonzero magnetic force.Measured currents: (a) lower coil current and (b) upper
coil current.
THE DECOUPLING ARCHITECTURETO CONTROL EMVA SYSTEMSThe decoupled control architecture for EMVA systemspresented by authors in [18] mainly consists of two nestedcontrol loops and can be schematized as in Fig. 7.
Figure 7. Block scheme of the EMVA control unit.
The inner feedback controller (CCC, Coil Current Controller)regulates to demanded values, Id, the upper and lower coilcurrents, I, by varying the coil voltages, V. Instead, the outercontroller is chosen by the supervisor (SCHEDULER) on thebasis of the control task to be performed and EMVAoperating conditions. In particular the first catching controller(FCC) is scheduled at the engine startup to transfer the enginevalve from the initial middle position to that closing/opening.Instead, the soft landing controller (SLC) is activated tocontrol the valve motion during the last part of the valvestroke to perform soft catching operations. We note that, theoutput of both these subcontrollers is the demanded magneticforce to apply on the armature. To link the outer and the innercontrol loop a proper force to current inverse algorithm isimplemented into the FTC block in order to transform thedemanded magnetic force into a pair of feasible reference coilcurrents to be tracked by the CCC. Finally, the Open-loopCurrent Pulses (OCP) block provides directly referencesetpoint coil currents to the inner current control loop toperform other valve operation modes.
In what follows some details about the CCC strategy and theFTC inverse algorithm will be given. The reader can be foundfurther details on the supervisor policy, OCP block and onSLC block in [18].
COIL CURRENT CONTROL BASED ONA MULTI-HYSTERESIS STRATEGYThe Coil Current Controller block in Fig. 7 has the importanttask to regulate the currents for both coils to a desired current
vector . To achieve this control taskwith an implementable low cost circuitry, the multi-hysteresiscontrol strategy proposed in [18] has been implemented inhardware (see also Fig. 8a).

Figure 8. Coil currents controller: (a) Multi-Hysteresiscontrol scheme; (b) Hysteresis control function.
This sliding mode control approach is mainly based on a pairof hysteresis controllers to reduce chattering phenomena. Thefirst hysteresis, termed Fast, controls rapid transients whilethe second one, termed Slow, controls steady currents.Denoting H(e;Vmin, Vmax, ethr) as the hysteresis function inFig. 8b, where the error e is the argument, ±ethr are thesymmetric switching thresholds, and Vmin and Vmax are theminimum and maximum control voltages respectively, themulti-hysteresis controller for each coil is described as:
(8)
where Vc is the applied coil voltage, e = i − id is the trackingcurrent error, id is the reference coil current to be tracked, and
and
are the fast and slow hysteresis
functions respectively, with VF, VS, and beingcontrol parameters to be properly tuned, with VF > VS and
. In particular, the HF controller uses a highbipolar control action, V = ±VF, to regulate the current, whileHS drives the coil with lower control actions, V = VS with VS≪ VF, and V = 0 (free evolution). Moreover, the fast controlHF is applied if the error is greater than a given threshold,
and till the error is not less than slow threshold
, where the slower action HS is then switched on.The slow control HS is applied till the error is smaller than the
fast threshold, . We remark that to avoid abnormalswitching between two hysteresis controllers a certaindistance has to be guaranteed between the thresholds, that is
the difference is properly tuned as a tradeoffbetween tracking performance and switching frequency.
Notice that, by means of this multi-hysteresis strategy, thechattering frequency of the control action, unavoidable withswitching based control strategies, decreases with respect to asingle hysteresis control approach. Hence, the heat producedin the power electronic circuit and in the materials (eddy-currents) reduce with the benefit for the efficiency of themagnetic flux.
FORCE-TO-CURRENT INVERSEALGORITHMThe Force-To-Current block in Fig. 7 has the important task
to transform the output of the outer controllers (SLCand FCC) in the desired current vector
fed to the CCC.
Figure 9. Overview of the FTC block scheme generatingthe two desired coil currents.

Figure 10. Desired coil current vs. air-gap for differentdesired magnetic force.
From the mathematical viewpoint, this problem consist ofcalculating the inverse of the magnetic force functionFM(iu,il,h) with respect to iu and il for each h position.
By assuming that the effect due to the mutual interaction
between coils is negligible ( in (4)) because onemagnet at time is enabled (as it is in normal workingconditions) and taking into account the symmetry of theactuator (see (4)), the problem to invert the magnetic force isreduced to get the current from the two variable function F(i,g) in equation (5) for a given desired force Fd and rearrangingthe desired coil currents according to the scheme in Fig. 9.More in detail, when the armature has to be attracted by the
upper magnet (that is ) then the upper channel
yields and the lower one gives .Dually, when the armature has to be attracted by the lowermagnet (Fd > 0) then the lower channel gives
and the upper is set to .The reader is referred to [18] for details on the algorithm toinverse the function F(i, g). Here we remind that for thebenefit of the computational cost, results provided by the thisclosed loop inverse algorithm can be stored into a lookup-table for different air gap and demanded magnetic force. Fig.10 shows iso-force curves as a function of the air-gap andparameterized in terms of the demanded force.
FIRST CATCHING CONTROLPROBLEM STATEMENT ANDSPECIFICATIONSAt engine startup the valve is in the middle equilibriumposition, say heq in (2), and it needs to be taken in closed
position in a fast and controlled way. This manoeuvre, namedFirst Catching, is quite arduous since the magnet has a lowcontrol authority when the armature is at high distance from itand no stored initial energy is present in the system. From thecontrol viewpoint, to control the valve close enough to theend-stroke position with feasible coil currents is just one ofthe control objective to be satisfied. Other controlspecifications involve the time needed to accomplish the firstcatching task as well as power losses.
Let's denote as S := {h ∈ [hmin; hmax]| h - hmin < ΔSLC} theset of valve positions close “enough” to the closed valveposition, with ΔSLC being a threshold to be properly tuned,TFCC the time interval needed to complete the first catchingtask, i.e. the time interval needed by the valve to enterdefinitively into S, say Pc the mean electrical power required
by the coils, i.e, , and
is the maximumdesired current value outputted by the FTC-block whencontrol force is yielded by the FCC-block, the first catchingcontrol problem can be stated as follows:
to find a control strategy to lead the valve position into theset S definitively with
where T̄FCC, Pc̄ and are the maximum acceptablevalues. In the rest of the paper we assume T̄FCC = 125 [ms],
P̄c = 40 [W] and . We point out that we havechosen such a T̄FCC having in mind to accomplish the entirekey-on task driving in sequence the 16 engine valves in amaximum time of 2 [s].
FORCE CONTROLLER DESIGNIn this section we design a mechanical resonance frequencybased control strategy to address the first catching problemwhen the decoupling control architecture in Fig. 7 is adopted.
Taking advantage of the inner current control loop and theforce-to-current inverse algorithm, i.e. the CCC and the FTCblocks in Fig. 7 respectively, system dynamics to beconsidered for the design of the FCC-block (or equivalentlyfor the design of SLC-block) are those of the mechanicalsubsystem (see also Fig. 3b) excited by a dynamical saturatedmagnetic force (see also Fig. 11b for a schematicrepresentation), i.e.:

(9)
with
where u is the desired magnetic force conceived for the firstcatching task, and Γ(u, h) is a dynamic saturation functionwhose boundaries depend on the actual valve position, h, anda maximum admissible current imax fixed for this task as wellas by the electrical power circuit, i.e. umax (h) := F(imax, gmax− h) and umin (h) := − F(imax, h) for each h. The Γ(u, h) is theforce sent to the FTC-block to be transformed into the desired
coils and whose values are guaranteed do not exceedthe maximum feasible current imax for each given valveposition h.
Figure 11. (a) Block scheme for EMVA System controlusing a dynamic saturation. (b) Frequency response for
mechanical subsystem of EMVA. Coordinates ofresonant peak are fr = 126.4 [Hz] and Mr = −79.22 [dB].
Now, under the assumption that system (9) works in thelinear range, its dynamics are governed by
(10)
and in particular for the case of first catching, the initialcondition are h(0) = heq and ḣ(0) = 0.
The first valve lift control problem can be solved exploitingthe mechanical resonance characterizing the mechanicaldynamics of the system (10). The idea is to initiate aswinging of the moving masses applying on them asinusoidal force of the form
(11)
where, fd [Hz] should be chosen in principle as the resonantfrequency of the harmonic oscillator (10), say fr and Ad =0.5hstr/Ar [N], with Ar [m/N] being the resonant peak ofsystem (10). In so doing the natural amplification of thesystem leads the valve close to its seat with feasible coilcurrents without impacts (in the ideal case, the closed/openedvalve position is reached by the valve with zero velocity).
Notice from the control prospective the control law (11) is afeedforward control action that exploits the frequencyresponse of the system, which can be strongly affected bysystem parameter variations. As consequence, in thefollowing subsection a sensitivity analysis of the controlparameters is carried out.
SENSITIVITY ANALYSISTaking into account that the mechanical dynamics are thoseof a classical second order oscillator having as resonant
frequency and resonant
peak , the control parameters in(11) have to be chosen as:
(12)
As it is apparent from (12) control parameters dependsnonlinearly on the systems parameters {m, k, σ}. In order toanalyze the variability of the control parameters when ageneric system parameter γ changes of a small quantity δγwith respect to its nominal value, say γN, i.e. γ = γN + δγ, weintroduce the following sensitivity functions obtainedderiving the functions (12) with respect to one of system

parameter when the other ones are fixed at their nominalvalues and then we normalize them, i.e:
(13)
with γ being a generic system parameter belonging to {m, k,σ} set. After simple algebraic manipulations the sensitivityfunctions are those reported in Tab. 1.
Table 1. Sensitivity functions.
Figs. 12a and 12b show the resonant frequency fd and thecontrol parameter Ad respectively as function of normalizedsystem parameters.
These figures highlight that within a range of ±20% centeredon the nominal values, parameters variation is almost linearand in particular the resonant frequency is not affected by theviscous coefficient variation. These observations areconfirmed by analyzing the parameter variation rates in Tab.1. More in detail, the sensitivity analysis for parameter fdshows that such a parameter depends weakly on σ (the
sensitivity function takes values around zero in therange of frequencies of the interest), while it depends strongly
with respect to m and k, with and takingvalues −0.25 and 0.5 respectively. Instead, the parameter Ad
is quite sensitive to all parameters variations mainly for σ
being .
Figure 12. Control parameter as function of thenormalized system parameters γ/γN (a) frequency fd offorce control signal u; (b) amplitude Ad of the force
control signal.
EXPERIMENTAL RESULTSIn this section, to confirm the effectiveness of the controlarchitecture in Fig. 7, different sinusoidal force controlactions are adopted and compared in terms of the controlspecifications previously given. More in detail, theexperimental campaign is carried out by fixing one controlparameter and varying the other one in a preassigned range.Indeed, Ad ∈ A = [20; 32] [N] and fd ∈ F = [122;130] [Hz].

Figure 13. Experimental results controlling the EMVAby means of a feedforward sinusoidal magnetic force
varying the frequency fd for different amplitude Ad: (a)first catching time TFCC; (b) mean power in the coils Pc;
(c) maximum values of desired currents .
Performance in terms of control specifications provided bydifferent possible pair of control parameters are summarizedin Fig. 13. Notice that in such figures the absence of the
performance index for any pair (Ad, fd) means that for such apair it is not possible to accomplish the first catching taskbecause self-oscillations (limit cycle) with amplitudeinsufficient to reach the S region are induced. For instance,three representative cases are reported in Fig. 14. Further, forforce amplitude Ad less than 20 [N] we observed that thevalve remains stuck at its equilibrium probably due to thepresence of dry friction.
Figure 14. Experimental results of mechanicalresonance based first catching missing obtained for: (a)
fd = 122 [Hz] and Ad = 22 [N]; (b) fd = 128 [Hz] and Ad =24 [N]; (c) fd = 130 [Hz] and Ad = 32 [N].

We remark that transitions from satisfactory solutions to pooror infeasible ones occur for relative small system parametervariations. For example, assume that the resonant frequencyis fixed at the nominal values (fd = 126.5 [Hz]), when thecontrol parameter Ad decreases by 26.5% (i.e. Ad = 24 [N] inFig. 13a) with respect to the nominal one (Ad = 30 [N]) thefirst catching time increases by 70% approximately (that isfrom 87.5 [ms] to 150 [ms], which does not fit the TFCCcontrol specification), and for a percentage reduction of 33%the valve catching is missed. As suggested by the sensitivityanalysis, such a control parameter variation Ad can be due tothe system lubrication determining the σ parameter. Indeed,the worsening of the first catching time and the fail of thecontrol task are induced for a viscous coefficient variation of20% and 45% respectively. Such a range of variation isrealistic if we consider that engine oil characteristics stronglyvary with temperature and wear. Again, by combining Fig.12a and Fig. 13a, if the spring stiffness (moving masses)increases (decreases) by 5%, for example due tomanufacturing tolerances, then the resonant frequencybecomes 129 [Hz] and for any force amplitude in F the firstcatching is failed.
As it was expected, experiments show that the first catchingtime TFCC reduces when Ad increases. This trend, confirmedby Fig. 13a, is indeed consistent with the fact that byincreasing the force amplitude Ad, the energy provided to thesystem increases as well, allowing the valve to reach theclosed end-stroke position faster. Additionally, Fig. 13ashows that the valve can reach the boundary even for forceswith magnitude less than the nominal, Ad ≈ 30 [N], but inthose cases the range of frequencies guaranteeing toaccomplish the first lift manoeuvre is a small subset of A. Inparticular when Ad = 20 [N], the range of effectivefrequencies reduces to [124;126] [Hz] with a first catchingtime about 400 [ms] that is unacceptable at key-on whichduration would result too long to open in sequence all intakeand exhaust valves (e.g. for a 16 valves engine the key-onwould last 6.4 [s]). Instead, when the amplitude of themagnetic force exceeds 28 [N], the first catching task isattained for all frequencies in A in a satisfactory time interval.Nevertheless, higher magnetic forces imply higher powerrequirements and coil currents during the first valve lift asresults reported in Figs. 13b and 13c confirm.
From the previous discussion it is apparent that the controlparameters have to be chosen to satisfy the tradeoff betweenfirst catching time, power requirements and maximum coilcurrents. Taking into account the control specifications givenpreviously, i.e. TFCC ≤ 125 [ms], Pc ≤ 40 [W] and
, we have found four control parameterpairs able to satisfy those constraints. This set of possiblesolutions is reported in Tab. 2 with the performance indexesand rounded in Figs. 15a, 15b and 15c. In particular these
figures show the location of the solution set with respect tothose which verify just one control specification (pointsbelow the dashed red line). As experimental data show, whencontrol specifications comprising energetic performanceindexes, the set of possible solution is not a neighbor of thenominal solution (fd, Ad) = (126.5,30). Instead frequencieslower than the nominal resonant frequency better fit thecontrol objective as stated into this paper. This mismatchprobably is mainly due to dry friction effects that shift therange of frequency where the plant amplifies sinusoidalforces and uncertainties on the mass due to non exactknolewdge of spring mass effects on it.
Table 2. Comparative table between experimental results

Figure 15. Experimental results controlling the EMVAby means of a feedforward sinusoidal magnetic force
varying the frequency fd for different amplitude Ad: (a)first catching time TFCC (b) mean power losses in the
coils Pc (c) maximum values of desired currents max Id.
FIRST LIFT MANOEUVRESIn what follows some experimental results related to the firstlift manoeuvre when the control parameters take values intothe solution set are reported to show the effectiveness of theentire decoupling control approach in Fig. 7 to solve the FCCtask. Notice that the efficiency of the force based controlstrongly relies on the model of the magnetic force (4). Hence,the experimental results here proposed confirm furthermorethe effectiveness of the FEM-based modeling approachproposed in [19].
Figs. 16 show the control performance when fd = 123 [Hz]and Ad = 28 [N]. As shown in Fig. 16a, the controlled EMVAresponse mimic transient harmonic one of a classical secondorder linear system despite strongly nonlinear coupledelectrical and mechanical dynamics. Fig. 16b shows also theupper (red dashed line) and lower (red dotted line) dynamicboundaries for the control signal u, i.e. umax and uminrespectively (see the term Γ(u, h) in equation (9)). Instead, thereference coil currents produced by the inverse force-to-current algorithm (FTC-block in Fig. 7) to be tracked by theinner current control loop are reported in Figs. 17a and 17bwith the actual coil currents. More in detail, Fig. 17a showsthe comparison between the reference lower coil current andthe actual one. Instead the precise tracking of the upper coilcurrent is shown in Fig. 17b. We note that, the step currentsdemanded at the end of the manoeuvre is the OCP-blockoutput (see Fig. 7) enabled by the Scheduler just before thevalve position enters into the S - region in order to completevalve closing (see also [18] for further details).
To prove the effectiveness of the inner current controller(CCC-block in Fig. 7) based on the multi-hysteresis controlstrategy (8), Figs. 18 show a zoom of the current trackingperformance during this valve lift manoeuvre. Moreprecisely, Fig. 18a shows the electrical variables for lowermagnet, where the coil voltage Vl reported in the top of figureis almost a piecewise constant signal due to the levels of thehysteresis. Analogously, Fig. 18b shows the electricalvariables for the upper coil, whereas Fig. 18c shows thelevels of current applied to the upper coil and the currentreference when the OCP-block is activated to closecompletely the valve. Indeed, the catching of the valve isdone by the OCP-block by using a first level of current iu =15 [A] and the a second one equal to iu = 20 [A] to completethe catch of the valve. Notice that in the last part of thecatching the soft landing controller is not used, hence smallimpact phenomena occurs as shown in Fig. 16a.

Figure 16. Experimental results of mechanicalresonance based first catching strategy obtained for fd
=123 [Hz] and Ad = 28 [N]. (a) valve position, (b) controlaction.
Figure 17. Experimental results of mechanicalresonance based first catching strategy obtained for fd =
123 [Hz] and Ad = 28 [N]. (a) lower coil current, (b)upper coil current.

Figure 18. Experimental results of coil currentcontrollers based on multi-hysteresis control strategy
during a first catching manoeuvre obtained for fd =123[Hz] and Ad = 28 [N].
EXPERIMENTAL COMPARISONBETWEEN FORCE BASED CONTROLSTRATEGY AND EMPIRICALIn this section we compare the performance provided by theproposed control strategy with respect to a simple empiricalapproach to move the valve toward the closed position. Thissolution consists of supplying pulsing coil currents (squarewave coil currents) with a frequency around the resonant oneof the mechanical part. In so doing the first catchingcontroller directly demands to the CCC-block (see Fig. 7)currents of the form:
(14)
where and are the upper and lower referencecoil currents respectively, ∏ (fdt) is the square functionoscillating between 0 and 1 with frequency fd [Hz] and Bd [A]is the level of the pulsing currents.
As in the case of sinusoidal exciting force and for the sake ofa fair comparison, the experimental campaign is carried outby fixing one control parameter and varying the other one ina preassigned range. Indeed, Bd ∈ B = [10;17] [A] and fd ∈F= [122;130] [Hz].
Performance in terms of control specifications provided bythis empirical solution are summarized in Fig. 19. It is easy toverify that there is not any control parameter pair which isable to verify all the control specification at the same time. Infact the control objective on the electrical power required bythe coils (Pc < 40 [W]) is satisfied just when the current levelis Bd = 10 [A], but unfortunately for this current and for allthe range of frequencies the first catching time exceeds 125[ms] as required, hence the set of solutions is empty. Again,when the first catching time becomes satisfactory (TFCC <125 [ms]) the power exceeds 46 [W] hence the controlspecification is violated more than 16%.

Figure - 19. Experimental results controlling the EMVAby means of feed-forward pulsing square wave coilcurrents varying the frequency fd and for different
current levels Bd: (a) first catching time TFCC; (b) meanpower in the coils Pc; (c) maximum values of desired
currents .
By neglecting the control objectives a further comparisonbetween the presented control strategies can be carried out.As shown in Fig. 13 when the force based control strategy is
exploited, the smallest first catching time is about 73 [ms](case fd = 122 [Hz] and Ad = 32 [N]) with a power losses inthe coils and maximum desired current equal to 43 [W] and16.5 [A], respectively. A similar first catching time can beobtained with the current based control strategy by using acurrent level Bd = 12 [A] at the same frequency fd = 122 [Hz],but in this case the power losses in the coils and maximumdesired current become 57 [W] and 12 [A], respectively.Hence, when oscillating currents are adopted to solve the firstlift problem, the power requirement increases by more then32.5% without provide any improvement of performance. Itis worth noticing that despite a greater maximum coil current(see also Fig. 13), less energy is spent into coils when theforce based control design is used because when the armatureis close to electromagnets the current needed to produce agiven force reduces drastically (see also the shape of themagnetic force as function of the air gap in Fig. 10). We notethat although the desired current peak is higher in the case offorce based control (16.5 [A]) with respect to the empiricalcontrol solution (12 [A]) the effective mean current flowingthrough coils is reduced of about 1 [A], that is 11.2 [A] and12 [A] for the former and latter control strategiesrespectively.
Considering now the solutions of the current based approachproviding a power losses of about 40 [W]. By Fig. 19 it isapparent that the best first catching time is about 145.5 [ms]attained with fd = 124 [Hz] and Bd = 10 [A]. By using theforce based method and requiring the same power losses ispossible to attain a first catching time equal to 80 [ms] (seesolution with fd = 123 [Hz] and Ad = 30 [N] in Fig. 13).Hence, by exploiting the strategy proposed in this paper thetime interval to complete the first lift manoeuvre reducesmore than 45% with respect to the empirical approach.
Briefly, the previous experimental analysis shows that theforce based control design is energetic advantageous withrespect to an empirical approach here exploited as test bed,guaranteeing less power requirements to achieve a demandedfirst catching time, or equivalently a less first catching timefor a given energy losses into coils. This feature is probablydue to the fact that the current control strategy introducesharmonic force components with frequencies higher than theresonant one whose are attenuated by the mechanical partwithout proving a substantial contribution to the valvemotion. Although these harmonics are not strictly necessarythey have a cost in terms of electrical energy losses. Instead,the design of the exciting control action in terms of forceallows to exploit at best the advantages provided by aresonant system. Moreover, since the more the armature isclose to a pole face the more the coil current to provide thedemanded force decreases, the intensity of the coil currentsreduces automatically on the basis of the armature positionwithout any further empirical adjustment when the forcebased approach is adopted. In so doing electrical power

requirements are expected to be reduced as confirmed byexperiments.
SUMMARY/CONCLUSIONSWe have presented for the first time the experimentalvalidation of an electromechanical valve actuator controlledvia the decoupling approach previously presented by authors[18]. The control architecture is mainly composed by twocontrol loops. The inner consists of a coil current controllerwhile the outer one is scheduled among a set of controllers toaccomplish fundamental control tasks like the first valve liftor the soft landing. The reference to the inner control loop isgenerated by means of a proper force-to-current inversealgorithm relies on a FEM-based model of the actuator.
In particular, in this paper the decoupling control architecturehas been used to solve the problem related to the first valvelift. The control strategy here proposed exploits the resonantfrequency of the mechanical part. Indeed, a proper sinusoidalforce can induce valve oscillations whose allow to lead thevalve near the closed/opened position with feasible coilcurrents and limited electrical power consumption.
The authors are aware that the valve lift control strategy hereproposed is an open-loop control action, and so it can mostlysuffer parameter uncertainty, a sensitivity analysis of thecontrol law on mechanical plant parameters has beenfurthermore developed to support the first catching controllerFCC results of a wide experimental campaign obtainedvarying frequency and the amplitude of control magneticforce. Nevertheless, this does not affect the novelty and theeffectiveness of the general control architecture enabling thedesign of control laws for EMVA valve operations onlyfocusing the attention on the mechanical dynamics neglectingthe coupling with cumbersome current dynamics.
A solution set in which the control parameters can rangeguaranteeing a first catching time less than 125 [ms] withoutviolate the constraints on the mean powers in the coils, 40[W], and the current peaks, 16 [A], has been provided.Experiments have also confirmed that sinusoidal force baseddesign method is much more convenient in terms of electricalpower requirement than an empirical solution based on apulsing coil currents with constant amplitude.
Moreover current research is focused in developing closed-loop control strategies to tackle the first valve lift at key-on toinsert into the experimental control framework here proposed.
REFERENCES1. Ahmad, T. and Theobald, M.A., “A Survey of Variable-Valve-Actuation Technology,” SAE Technical Paper 891674,1989, doi:10.4271/891674.2. Battistoni, M., Foschini, L., Postrioti, L., and Cristiani,M., “Development of an Electro-Hydraulic Camless VVA
System,” SAE Technical Paper 2007-24-0088, 2007, doi:10.4271/2007-24-0088.
3. Bernard, L., Ferrari, A., Vattaneo, F., Valfidis, C.,“Developments in Fiat's Electro-Hydraulic Variable ValveActuation System”, presented at International Congress onVariable Valve Timing - Benefits of Variable Valve Timingto Reduce Fuel Consumption and Emission, Essen, Germany,2000.
4. Boie, C., Kather, L., Schmitz, G., Van der Staay, F.,Feyerl, G. R., “Method of starting an electromagneticactuator operating a cylinder valve of a piston-type internal-combustion engine”, U.S. Patent 6333843, Dec. 25, 2001.
5. Brüstle, C. and Schwarzenthal, D., “VarioCam Plus-AHighlight of the Porsche 911 Turbo Engine,” SAE TechnicalPaper 2001-01-0245, 2001, doi:10.4271/2001-01-0245.
6. Butzmann, S., Melbert, J., and Koch, A., “SensorlessControl of Electromagnetic Actuators for Variable ValveTrain,” SAE Technical Paper 2000-01-1225, 2000, doi:10.4271/2000-01-1225.
7. Chang, W. S., Parlikar, T. A., Seeman, M. D., Perreault,D. J., Kassakian, J. G., Keim, T. A., “A New ElectromagneticValve Actuator”, presented at IEEE Workshop on PowerElectronics in Transportation, 2003.
8. Chiavazzo, E., Dell'Orto, P., di Gaeta, A., Manganiello,G., Marchetti, M., Police, G., “Electro-Hydraulic VariableValve Actuator and Method to Control Valves of InternalCombustion Engines”, E.U. Patent 1770247, Sep. 25, 2006.
9. Chladny, R., Koch, C., “A magnetic flux-based positionsensor for control of an electromechanical VVT actuator”,presented at American Control Conference, 2006.
10. Chladny, R. R., Koch, C. R., “Flatness-Based Trackingof an Electromechanical Variable Valve Timing ActuatorWith Disturbance Observer Feedforward Compensation”,IEEE Transactions on Control Systems Technology, 16(4):652-663, 2008, doi:10.1109/TCST.2007.912121.
11. Degner, M., Grabowski, J., “Initialization ofelectromechanical valve actuator in an internal combustionengine”, U.S. Patent 7540264, June 2, 2009.
12. Dresner, T. and Barkan, P., “A Review of Variable ValveTiming Benefits and Modes of Operation,” SAE TechnicalPaper 891676, 1989, doi:10.4271/891676.
13. Picron, V., Postel, Y., Nicot, E., and Durrieu, D.,“Electro-Magnetic Valve Actuation System: First StepsToward Mass Production,” SAE Technical Paper2008-01-1360, 2008, doi:10.4271/2008-01-1360.
14. Eyabi, P.B. and Washington, G., “Nonlinear Modeling ofan Electromagnetic Valve Actuator,” SAE Technical Paper2006-01-0043, 2006, doi:10.4271/2006-01-0043.

15. Eyabi, P., Washington, B., “Modeling and sensorlesscontrol of an electromechanical valve actuator”,Mechatronics, 16(6):159-175, 2006.
16. Flierl, R. and Klüting, M., “The Third Generation ofValvetrains-New Fully Variable Valvetrains for Throttle-FreeLoad Control,” SAE Technical Paper 2000-01-1227, 2000,doi:10.4271/2000-01-1227.
17. diGaeta, A., “Modelling and Control of anElectromechanical Valve Actuator for Camless Engine”, Ph.D. thesis, Department of Systems and Computer Engineering,University of Naples “Federico II”, Italy, 2003.
18. di Gaeta, A., Giglio, V., and Police, G., “Model-BasedDecoupling Control of a Double Magnet Engine ValveActuator,” SAE Int. J. Engines 2(2):254-271, 2009, doi:10.4271/2009-01-2751.
19. diGaeta, A., Glielmo, L., Giglio, V., Police, G.,“Modeling of an Electromechanical Engine Valve ActuatorBased on a Hybrid Analytical-FEM Approach”, IEEE/ASMETransactions on Mechatronics, 13(6):625-637, 2008, doi:10.1109/TMECH.2008.2003469.
20. Giglio, V., Iorio, B., Police, G., and di Gaeta, A.,“Analysis of Advantages and of Problems ofElectromechanical Valve Actuators,” SAE Technical Paper2002-01-1105, 2002, doi:10.4271/2002-01-1105.
21. Giglio, V., Iorio, B., Police, G., and di Gaeta, A.,“Preliminary Experiences in the Design of anElectromechanical Valve Actuator,” SAE Technical Paper2001-24-0016, 2001, doi:10.4271/2001-24-0016.
22. Gunselmann, C., Melbert, J., “Soft-Landing Control ForSensorless Electromagnetical Spring-Mass Actuators”,presented at “2nd IEE International Conference on PowerElectronics, Machines and Drives”, 2004.
23. Guzzella, L., “Automobiles of the future and the role ofautomatic control in those systems”, Annual Reviews inControl, 33:1-10, 2009, doi:10.1016/j.arcontrol.2009.01.001.
24. Qiu,Y. H., Parlikar,T. A., Chang, W. S., Seeman, M. D.,Keim,T. A., Perreault,D. J., Kassakian,J. G., “Design andExperimental Evaluation of An Electromechanical EngineValve Drive”, presented at 35th Annual IEEE PowerElectronics Specialists Conference, Germany, 2004.
25. Hoffmann, W., Peterson, K. S., Stefanopoulou, A. G.,“Iterative Learning Control for Soft Landing ofElectromechanical Valve Actuator in Camless Engines”,IEEE Transactions on Control Systems Technology, 11(2):174-184, 2003, doi:10.1109/TCST.2003.809242.
26. Hoffmann, W., Stefanopoulou, A. G., “Valve PositionTracking for Soft Landing of Electromechanical CamlessValvetrain”, presented at “3rd IFAC Workshop onAutomotive Control”, Germany, 2001.
27. Huang, R. and Zhao, Y., “A Control Strategy Based onExact Linearization for Electromagnetic Valve Actuation,”
SAE Technical Paper 2007-01-1596, 2007, doi:10.4271/2007-01-1596.
28. Järvi, I., “VAVACT-Variable Valve ActuationMechanism,” SAE Technical Paper 2003-01-0025, 2003, doi:10.4271/2003-01-0025.
29. Liu, J. J., Yang, Y. P., Xu, J. H., “ElectromechanicalValve Actuator with Hybrid MMF for Camless Engine”,presented at “17th World Congress The InternationalFederation of Automatic Control, 10698-10703, 2008.
30. Ma, J., Schock, H., Carlson, U., Hoglund, A. et al.,“Analysis and Modeling of an Electronically PneumaticHydraulic Valve for an Automotive Engine,” SAE TechnicalPaper 2006-01-0042, 2006, doi:10.4271/2006-01-0042.
31. Madsen, K., Nielsen, H.B., Tingleff, O., “Methods forNon-Linear Least Squares Problems. Informatics andMathematical Modelling, 2nd Edition”, printed by“Department of Informatics and Mathematical Modelling”,Technical University of Denmark, 2004.
32. MICRO-EPSILON, “Instruction Manual optoNCDT1670/1627”, http://www.micro-epsilon.com/download/manuals/man--optoNCDT-1607--en.pdf, Mar. 2010.
33. Nguyen, T., Leavitt, J., Jabbari, F., Bobrow, J. E.,“Accurate Sliding-Mode Control of Pneumatic System UsingLow-Cost Solenoid Valves”, IEEE/ASME Transactions onMechatronics, 12(2):216-219, 2007.
34. Parlikar,T. A., Chang, W. S., Qiu,Y. H., Seeman,M. D.,Perreault, D. J., Kassakian, J. G., Keim, T. A., “Design andExperimental Implementation of an Electromagnetic EngineValve Drive”, IEEE/ASME Transactions On Mechatronics,10(5):482-494, 2005: doi:10.1109/TMECH.2005.856221.
35. Peterson, K. S., Stefanopoulou, A. G., “Extremumseeking control for soft landing of an electromechanical valveactuator”, Automatica, 40(6):1063-1069, 2004.
36. Peterson, K., Stefanopoulou, A. G., Megli, T.,Haghgooie, M., “Output Observer Based Feedback for SoftLanding of Electromechanical Camless Valvetrain Actuator”,presented at American Control Conference, 2002.
37. Peterson, K., Stefanopoulou, A. G., Wang, Y., Megli, T.,“Virtual Lash Adjuster for an Electromechanical ValveActuator Through Iterative Learning Control”; presented atASME International Mechanical Engineering Congress,USA, 2003
38. Pischinger, M., Kreuter, P., “Electromagneticallyoperated actuators”, U.S. Patent 4455543, June 19, 1984.
39. Pischinger, M., Salber, W., van der Staay, F.,Baumgarten, H. et al., “Benefits of the ElectromechanicalValve Train in Vehicle Operation,” SAE Technical Paper2000-01-1223, 2000, doi:10.4271/2000-01-1223.

40. Rassern, R.R., “Single-Cylinder Engine Tests of aMotor-Driven, Variable Valve Actuator,” SAE TechnicalPaper 2001-01-0241, 2001, doi:10.4271/2001-01-0241.
41. Richeson, W. E., Erickson, F. L., “Pneumatic Actuatorwith solenoid operated control valves”, U.S. Patent 4873948,Oct. 17, 1989.
42. Schechter, M.M. and Levin, M.B., “Camless Engine,”SAE Technical Paper 960581, 1996, doi:10.4271/960581.
43. Stein, R.A., Galietti, K.M., and Leone, T.G., “Dual EqualVCT-A Variable Camshaft Timing Strategy for ImprovedFuel Economy and Emissions,” SAE Technical Paper950975, 1995, doi:10.4271/950975.
44. Stone, R. and Kwan, E., “Variable Valve ActuationMechanisms and the Potential for Their Application,” SAETechnical Paper 890673, 1989, doi:10.4271/890673.
45. Tai, C., Stubbs, A., Tsao, T., “Modeling and ControllerDesign of an Electromagnetic Engine Valve”, presented atAmerican Control Conference, 2001.
46. Tai, C., Stubbs, A., Tsao, T.-C., “Control of anElectromechanical Actuator for Camless Engines”, IEEEProceedings of the American Control Conference,3113-3118, 2003.
47. Tai, C. and Tsao, T., “Control of an ElectromechanicalActuator for Camless Engines”, presented at AmericanControl Conference, 2003.
48. Tai, C. and Tsao, T., “Control of an ElectromechanicalCamless Valve Actuator”, American Control Conference,2002.
49. Tai, C., Tsao, T., “Quiet Seating Control Design of anElectromagetic Engine Valve Actuator”, presented at ASMEInternational Mechanical Engineering Congress andExposition, USA, 2001.
50. Titolo, A., “The Variable Valve Timing System-Application on a V8 Engine,” SAE Technical Paper 910009,1991, doi: 10.4271/910009.
51. Wang, Y., Megli, T., Haghgooie, M., Peterson, K.S. etal., “Modeling and Control of Electromechanical ValveActuator,” SAE Technical Paper 2002-01-1106, 2002, doi:10.4271/2002-01-1106.
52. Wang, Y., Stefanopoulou, A. G., Haghgooie, M.,Kolmanovsky, I., Hammoud, M., “Modeling of anElectromechanical Valve Actuator for a Camless Engine”,presented at 5th International Symposium on AdvancedVehicle Control, 2000.
53. Watson, J.P. and Wakeman, R.J., “Simulation of aPneumatic Valve Actuation System for Internal CombustionEngine,” SAE Technical Paper 2005-01-0771, 2005, doi:10.4271/2005-01-0771.
54. Ahn, H. J., Kwak, S. Y., Chang, J. U., and Han, D. C..“A new EMV system using a PM/EM hybrid actuator”. In
Proceedings of the 2005 IEEE International Conference onMechatronics, pages 816-821, 2005.
55. Clark, R. E., Jewell, G. W, Forrest, S. J., Rens, J., andMaerky, C.. “Design features for enhancing the performanceof electromagnetic valve actuation systems”. IEEETransactions on Magnetics, 41(3):1163-1168, 2005.
56. Kim, J. and Lieu, D. K.. “Designs for a new quick-response latching electromagnetic valve”. In Proceedings ofthe 2005 IEEE International Conference on ElectricMachines and Drives, pages 1773-1779, 2005.
57. Lecrivain, M. and Gabsi, M.. “Electomagnetic actuatorfor controlling a valve of an internal combustion engine andinternal combustion engine equipped with such an actuator”.USPTO, 2007. US 7.156.057B2
CONTACT INFORMATIONDr. Alessandro di Gaeta (corresponding):[email protected]
Dr. Umberto Montanaro:[email protected]
Dr. Silvio Massimino:[email protected]
Dr. Carlos Ildefonso Hoyos Velasco:[email protected]
Web-site of the Istituto Motori of the National ResearchCouncil of Italy: www.im.cnr.it.
ACKNOWLEDGMENTSThe authors would like to thank the engineers of the R&DGroup of the Dell'Orto S.p.A. in Naples for their valuable andprofitable cooperation, as well the Power Electronic Group ofthe “Second University of Naples” in Aversa, in particular L.and G. Rubino, for making the multi-hysteresis electroniccontrol circuit.
DEFINITIONS/ABBREVIATIONSVVA
Variable Valve Actuation
EMVAElectro Mechanical Valve Actuator
VVTVariable Valve Timing

VVLVariable Valve Lift
SLCSoft Landing Control
FCCFirst Catching Control
FTCForce To Current
RCPRapid Control Prototyping
back-EMFsback-ElectroMotive Forces
CCCCoil Current Controller
OCPOpen-loop Current Pulses
The Engineering Meetings Board has approved this paper for publication. It hassuccessfully completed SAE's peer review process under the supervision of the sessionorganizer. This process requires a minimum of three (3) reviews by industry experts.
All rights reserved. No part of this publication may be reproduced, stored in aretrieval system, or transmitted, in any form or by any means, electronic, mechanical,photocopying, recording, or otherwise, without the prior written permission of SAE.
ISSN 0148-7191
doi:10.4271/2010-01-2223
Positions and opinions advanced in this paper are those of the author(s) and notnecessarily those of SAE. The author is solely responsible for the content of the paper.
SAE Customer Service:Tel: 877-606-7323 (inside USA and Canada)Tel: 724-776-4970 (outside USA)Fax: 724-776-0790Email: [email protected] Web Address: http://www.sae.orgPrinted in USA