
Etude et conception d'un sabre laser
35
Projet Sabre Laser Projet ENUM-ENPU GE4 Rapport final Priscille Cadart Camilo Andrés Martinez Quijano 02/06/2014
-
Upload
insa-strasbourg -
Category
Documents
-
view
0 -
download
0
Transcript of Etude et conception d'un sabre laser

Projet Sabre Laser Projet ENUM-ENPU GE4
Rapport final
Priscille Cadart
Camilo Andrés Martinez Quijano 02/06/2014
2
Table des matières
Introduction ....................................................................................................................................................... 3
I. Analyse du système ............................................................................................................................... 4
A. Analyse fonctionnelle ....................................................................................................................... 4
B. Contraintes ............................................................................................................................................ 4
II. Comparaison des solutions possibles ............................................................................................ 5
A. Système abaisseur de tension 11,1 → 3,3V .............................................................................. 5
B. Convertisseur alimentant les LEDs ............................................................................................. 6
III. Dimensionnement des composants principaux ......................................................................... 8
A. Hacheur abaisseur (Buck) et régulateur ................................................................................... 8
B. Amplificateur de classe D ................................................................................................................ 9
C. LEDs de puissance .............................................................................................................................. 9
D. Hacheur élévateur-abaisseur (Cùk) ..................................................................................... 10
E. Asservissement ................................................................................................................................ 19
IV. Routage et essais ................................................................................................................................. 20
A. Routage des cartes de test ........................................................................................................... 20
B. Premiers tests sur le hacheur Cùk ............................................................................................ 22
C. Régulation de courant ................................................................................................................... 23
V. Problèmes rencontrés et solutions apportées ......................................................................... 25
A. Hacheur Buck .................................................................................................................................... 25
B. Régulation .......................................................................................................................................... 26
C. Ampli de classe D ............................................................................................................................. 26
VI. Fonctionnement final ........................................................................................................................ 28
A. Routages finaux ................................................................................................................................ 28
B. Fonctionnement de l’alimentation 3V ..................................................................................... 29
C. Régulation de courant et hacheur Cùk .................................................................................... 30
Conclusion ................................................................................ Fout! Bladwijzer niet gedefinieerd.

3
Introduction
Dans le cadre du projet d’électronique de puissance et d’électronique
numérique pour la spécialité génie électrique, il nous est demandé de réaliser un
sabre laser. Celui-ci devra respecter un cahier des charges imposé, qui consiste en
l’émission de 5 sons, associés à 5 intensités lumineuses, différents. Ceux-ci
correspondront à 5 phases de fonctionnement du sabre : l’allumage, l’arrêt, le
repos, le mouvement et le choc.
Ce projet se décompose en 3 parties : partie mécanique, partie puissance et
partie commande. La conception mécanique a déjà été réalisée : le manche et la
lame sont déjà faits, nous devrons juste travailler cette dernière pour qu’elle
garde la lumière. Notre travail se concentre alors sur la partie puissance et la
partie commande. Le synopsis général du projet est donné par la figure 1.
Figure 1 - Synopsis général
Ce rapport concernera uniquement le travail lié à la partie puissance. Nous
commencerons par faire un rappel sur la phase de pré-étude et les raisons des
choix des solutions mises en œuvres. Puis nous expliquerons en détail notre
démarche pour dimensionner les composants principaux et nous présenterons
les résultats des premiers essais pratiques. Enfin, nous présenterons les résultats
des tests de mise au point de l’objet final.

4
I. Analyse du système
A. Analyse fonctionnelle
Sur la partie puissance, les fonctions à réaliser seront concentrées sur la
partie du synopsis représenté en rouge sur la figure 2.
Figure 2 - Synopsis puissance
La conception consistera donc à choisir et mettre en œuvre : un
convertisseur continu-continu pour alimenter la carte de commande, un autre
convertisseur continu-continu pour alimenter les LEDs de puissance, ainsi qu’un
amplificateur pour alimenter le haut-parleur.
B. Contraintes
Ce sont les contraintes qui nous permettrons de fixer les critères de choix
pour les solutions technologiques.
Tout d’abord, certains composants sont imposés. C’est le cas de
l’accumulateur LiPo, de tension 11.4V. On impose également le modèle des LEDs :
LUXEON REBEL. Les composants d’électronique numérique, c’est-à-dire de
commande, ainsi que l’accéléromètre sont également imposés. Ils doivent être
alimentés par une tension de 3,3V. Par ailleurs, le volume sonore nécessaire pour
un tel objet implique la mise en œuvre d’un haut-parleur d’une puissance
d’environ 3W.
Ces critères nous indiquent que nous devrons choisir des convertisseurs
particuliers : un élévateur ou un élévateur-abaisseur de tension pour
l’alimentation des LEDs (suivant la couleur de LED choisie), qui nous permette
déréguler le courant, et un système abaisseur de tension pour l’alimentation de la
partie commande. Celui-ci doit être particulièrement précis, car l’accéléromètre
est très sensible aux surtensions.
De plus, dans la documentation technique de l’accumulateur LiPo, il est
indiqué que pour optimiser la durée de vie de celui-ci, il faut le décharger avec un

5
courant le plus lisse possible. Cela pourra être un critère de choix des
convertisseurs.
Une autre contrainte sera l’espace : celui-ci est très limité, car les
dimensions du sabre laser sont imposées et réduites. Il faudra ainsi privilégier un
système qui demande le moins de composants possible.
II. Comparaison des solutions possibles
A. Système abaisseur de tension 11,1 → 3,3V
A partir des contraintes en tension de l’accéléromètre dont nous avons
parlé précédemment, nous avons décidé d’utiliser un système de régulation de
tension composé d’une part, d’un hacheur abaisseur et d’autre part, d’un
régulateur de tension, afin de supprimer toutes les possibles ondulations
produites par l’utilisation d’une alimentation à découpage.
1. Hacheur
On veut obtenir une tension constante de 3,3 V à l’entrée de l’accéléromètre
et pour y arriver on doit considérer toutes les alimentations à découpage
possibles, capables de réaliser cette fonction en prenant en compte leur
rendement et la quantité de composants nécessaires pour sa réalisation. On
pourrait penser à l’utilisation du régulateur linéaire, mais au niveau de
rendement on aurait des problèmes pour le fonctionnement avec l’accumulateur.
Hacheur Buck
L’alimentation à découpage la plus simple correspond au hacheur série qui
permet de limiter le volume des composants utilisés et d’obtenir un rendement
élevé. Ce hacheur est toujours de type abaisseur de tension. L’inconvénient de ce
type de montage par rapport à l’application envisagée est la discontinuité du
courant d’entrée puisqu’on voudrait décharger l’accumulateur à courant constant
pour augmenter sa durée de vie.
Hacheur Sepic
Ce montage a une caractéristique similaire à celle du hacheur Cùk, mais
sans être inverseur de tension, permettant le fonctionnement soit en abaisseur
soit en élévateur selon le rapport cyclique utilisé dans la commande du transistor.
La différence de ce montage par rapport au hacheur Buck est que le courant
d’entrée est complètement lisse, mais d’autre part, sa construction et ses calculs
deviennent beaucoup plus difficiles.
Le choix du type de hacheur dépendra des caractéristiques de la charge. Si
on alimente l’amplificateur classe D avec la sortie du hacheur, on pourrait avoir
besoin d’un courant de sortie qui soit suffisamment grand et qui ne présente pas
des grandes variations. S’il va être utilisé juste pour le PIC et l’accéléromètre, la
tension de sortie sera le facteur le plus important. Enfin, si tous les hacheurs
présentent un comportement similaire, le Buck sera le meilleur choix puisqu’il a

6
besoin de moins d’éléments pour son fonctionnement et en plus si le courant
d’entrée n’est pas trop grand, on pourrait dire que la discontinuité ne sera pas
trop grave pour la décharge de l’accumulateur. Avec l’utilisation du régulateur
linéaire, les variations du courant de sortie ne seront pas un problème si grave
puisque ce dispositif sera chargé de le maintenir constante.
2. Régulateur linéaire
Il existe plusieurs types de régulateurs linéaires. Son utilisation dans ce
projet, même si on utilise un convertisseur du type hacheur est dû au
comportement de la tension de sortie, puisqu’elle présente moins de variations
pour un point de fonctionnement fixe que les alimentations à découpage.
Les plus communs sont les régulateurs de la famille 7833 puisqu’ils sont les
plus simples, mais ils ne présentent pas un très grand rendement. On trouve des
régulateurs de ce type avec une capacité de courant jusqu’à trois ampères. Il y en
a aussi du type ld1117 ou lm3940, qui ont une capacité pour des courants
maximums de 0.8 et 1 ampère respectivement. L’avantage de ces régulateurs est
qu’ils présentent une tension de sortie plus précise que celle de la famille 7833 et
une consommation plus petite.
B. Convertisseur alimentant les LEDs
1. Solutions possibles
Pour choisir une structure de hacheur, il faut d’abord considérer les types
de source que l’on veut mettre en relation. Ici, nous avons en entrée un
accumulateur, donc une source de tension. En sortie, on souhaite réguler le
courant circulant dans les LEDs, c’est donc une source de courant que nous
aurons.
De plus, la tension d’entrée sera de 11.4V. Or, nous avons choisi une
couleur de LED rouge, ce qui implique une plage d’alimentation valeurs
supérieurs et inférieurs de 11.4V, d’après la documentation technique des LEDS
Luxeon Rebel.
Notre choix de structure sera donc limité aux hacheurs élévateurs-
abaisseurs et à ceux mettant en relation une source de tension (ou
éventuellement de courant grâce à une inductance dans la maille d’entrée) et une
source de courant. C’est le cas des structures : Cùk, Zeta et Cùk-non inverseur. Le
nombre d’interrupteurs du Cùk-non inverseur étant deux fois plus grand qu’un
Cùk normal ne sera pas envisagée puisqu’il faudrait commander deux
interrupteurs au même temps et, de cette façon, utiliser deux PICs au lieu d’un
seul et utiliser plus de place pour le fonctionnement du système.
De plus, on utilisera forcément des inductances couplées sur le même
circuit magnétique, car cela réduit l’encombrement des composants et permet de
supprimer l’ondulation du courant de sortie avec des valeurs d’inductances
relativement petites.

7
A partir de ces contraintes, on retrouve deux types de convertisseurs
répondant aux caractéristiques cherchées : Cùk et Zeta. Le premier permet de
faire une liaison entre deux sources de courant, ce qui permet d’avoir une sortie
de courant et un courant lisse en l’entrée du circuit. Son inconvénient est
l’inversion de la tension et courant de sortie par rapport à l’entrée. Le second
permet de faire une connexion entre une source de tension et une source de
courant. Son avantage est que les deux tensions et courant ont le même signe et
cela facilite l’asservissement de courant. L’inconvénient est la commande du
transistor puisqu’il n’est pas référencié à la masse et il faut faire un driver du type
« highside » qui peut devenir plus difficile à réaliser que le circuit lui-même.
2. Solution choisie
Pour pouvoir choisir correctement le hacheur à utiliser, on a réalisé des
simulations simples permettant de comparer le fonctionnement des deux
structures. Pour avoir des points clairs dans le comportement des deux hacheurs,
on a pris des conditions de simulations identiques.
Figure 3 : Comportement hacheur Cùk
Figure 4 : Comportement hacheur Zeta
On peut noter que le comportement des deux structures reste similaire
dans les mêmes conditions de travail, mais le Zeta présente une ondulation plus
petite que celle du Cùk dans le régime transitoire. Dans régime permanent, le
comportement est exactement le même.

8
Au moment de faire des simulations avec des LEDs en sortie du hacheur, on
retrouve des comportements similaires mais avec une ondulation un peu plus
grande dans le cas du Zeta.
A partir de ces résultats on a choisi la structure Cùk puisque la seule
difficulté qu’elle présente est la mesure de courant pour la commande du rapport
cyclique qui sera réalisé avec le PIC. Ce problème peut être traité avec l’utilisation
d’un amplificateur différentiel qui sera utilisé sur une résistance de valeur trop
petite afin de minimiser les pertes et l’effet sur l’efficience du système. De plus, la
recherche bibliographique a permis de trouver un amplificateur opérationnel
avec alimentation unipolaire qui permettra de faire l’asservissement à partir de la
seule alimentation du hacheur abaisseur et avec une bande passante suffisante
pour le système.
Or, l’utilisation d’un hacheur Zeta aurait aussi besoin d’un amplificateur
pour l’asservissement du courant et la quantité de composants resterait pareille
avec les deux structures. Cependant, la commande du transistor au niveau de
Driver sera beaucoup plus difficile avec ce type de hacheur et on aurait plus de
problèmes pour le driver du transistor que pour le fonctionnement du système
de façon précise.
III. Dimensionnement des composants principaux
A. Hacheur abaisseur (Buck) et régulateur
Comme dit précédemment, notre choix s’est porté sur un hacheur Buck.
Pour dimensionner, il nous a ensuite fallu caractériser la charge. Celle-ci consiste
en deux PICs consommant chacun au maximum 150 mA, un accéléromètre
consommant environ 10 mA et une mémoire 10 mA grand maximum. Nous avons
considéré que ces derniers consommaient au maximum 200 mA. Ainsi, il nous
faut un hacheur débitant au minimum 400 mA. On peut surdimensionner celui-ci,
au cas où on voudrait alimenter également l’amplificateur de classe D par du 5 V.
Il nous faut également un hacheur fonctionnant à une fréquence la plus élevée
possible, pour avoir les inductances et condensateurs les plus petits possibles.
1. Hacheur Buck : AP5100
Ces informations nous ont conduit à choisir un composant particulier, le
AP5100 fonctionnant à 1,4MHz et débitant jusqu’à 1,2A. Nous avons ensuite
dimensionné les inductances et condensateurs à utiliser en fonction des
ondulations de tension et de courant voulues, ainsi que de la valeur du rapport
cyclique. Ici le rapport cyclique doit être égal à = =
, = 0,44. On veut par
ailleurs limiter l’ondulation du courant à 0,1 A et l’ondulation de tension à 0,5 V.
En faisant l’étude du hacheur, on obtient :
∆ = .. d’où = .1−
∆. = 20. On prend la valeur
normalisée 22μH. De même pour le condensateur de sortie :

9
∆ = . ²." d’où #$ = .
∆%. ². = 17,9 (. On prend la valeur
normalisée 22 nF. Pour un fonctionnement correct, nous avons choisi un
condensateur de type XR7, fonctionnant avec des tensions jusqu’à 50V, et gardant
ainsi pleinement son comportement capacitif pour la tension de fonctionnement
utilisée ici (Vs=5V).
Nous avons dû par ailleurs calculer les résistances fixant la tension de
sortie sur le composant AP5100. Celles-ci sont calculées par les formules
suivantes venant de la documentation technique :
)1 = R2 × ,-./0,81 − 11
2. Régulateur
Pour ce qui est du régulateur, avec notre utilisation, il faut un régulateur
qui fonctionne pour une tension d’entrée d’environ 5V et une tension de sortie de
3V. Cela implique une différence entrée-sortie inférieur à 3V, il faut donc choisir
notre régulateur parmi les familles de LDO : low drop-out. Avec une plage de
tension d’entrée correspondante et un courant de sortie de minimum 400 mA,
puisqu’il alimentera les composants de contrôle. La tension de sortie ne sera
jamais modifiée, on n’a donc pas besoin d’un régulateur ajustable. On a choisi le
TC1262, qui débite 500 mA et sort une tension fixée à 3V.
Nous avons dû mettre en œuvre des condensateurs de filtrage à l’entrée et
à la sortie du régulateur. Pour filtrer les deux types de bruits, nous avons choisi
deux condensateurs : un de 1uF et un de 10uF.
B. Amplificateur de classe D
Le son produit par notre sabre laser proviendra du microcontrôleur qui
lui-même le lira dans une mémoire. L’amplificateur de classe D était donc un
choix naturel car il permet de facilement amplifier des signaux de type
numérique. Il est en effet commandé par un signal MLI (Modulation de Largeur
d’Impulsion). On peut complètement se passer d’un convertisseur numérique
analogique tout en obtenant une bonne qualité de son.
Nos critères de choix de l’amplificateur de classe D ont été : la gamme de
tensions d’alimentations et la taille du composant. Cela nous a amené à choisir un
driver de pont en H BD6221 qui peut être alimenté entre 3 et 18V.
C. LEDs de puissance
Avant de pouvoir réaliser le dimensionnement du hacheur on doit fixer les
caractéristiques principales de la charge. On sait que celle-ci sera composée de
quatre LEDs en série, mais on aura en plus une autre diode qui sera utilisé comme
protection dans le cas où la tension en sortie ait de valeurs négatives qui ne sont
pas supportées par les LEDs. Le modèle de LED est imposé : ce sera des LEDs
LUXEON Rebel. Nous avons choisi le modèle rouge.
On peut alors déterminer la plage de tension de fonctionnement du hacheur
en prenant les valeurs de courant minimal et maximal de travail pour les LEDs
selon les courbes caractéristiques trouvées dans la documentation technique.

10
On note que le courant maximal est de 700 mA pour la couleur rouge et on a
fixé une valeur maximale de courant de 600 mA dans le fonctionnement de notre
système afin de protéger ces éléments pendant son fonctionnement. Comme la
luminosité doit changer avec les chocs, on place le mode « normal » du sabre à
500 mA. Ce qui permet d’avoir 600 mA pour augmenter la luminosité lors de la
rencontre avec un obstacle. De plus, on détermine une valeur minimale de 100
mA pour l’allumage de la LED et pour le principe et la fin de la rampe lumineuse.
Pour les trois valeurs mentionnées on cherche la tension correspondante
pour une seule LED et on multiplie cette valeur par quatre en supposant que
toutes les LEDs sont identiques. Puis, on augmente la valeur de la tension en
sortie en 0.7V à cause de la diode de protection et avec la relation liant l’entrée et
la sortie du système on trouve les différentes valeurs du rapport cyclique de la
partie commande.
234 = 9.99.9 + 11.4 = 0.465
289 = 14.514.5 + 11.4 = 0.56
4:2 = 13.713.7 + 11.4 = 0.545
De ces trois valeurs on voit que la plus importante est celle correspondante
au rapport cyclique maximal puisque si on la dépasse on ne peut pas assurer que
les LEDs puissent fonctionner après et qu’elles ne seront pas grillées. De plus, la
valeur minimale est nommée de cette façon parce que correspond théoriquement
à la plus petite valeur de courant de la rampe de luminosité, mais dans le cas réel
on peut trouver des rapports cycliques plus petits avec l’asservissement à
réaliser.
D. Hacheur élévateur-abaisseur (Cùk)
1. Dimensionnement simple : Sans couplage des inductances
A partir de ces résultats, on cherche à déterminer les valeurs des
composants du montage complet. Pour le faire, on suppose que les éléments sont
parfaits, que les courants d’entrée et sortie son constants, que le hacheur reste en
conduction continu et on ne fait pas encore le couplage des inductances.
A partir de cette analyse, on retrouve les équations caractérisant le
comportement du circuit par rapport aux valeurs d’ondulation de tension et
courant.
D’abord, on détermine la valeur de la capacité de stockage, pour le faire on
analyse le comportement de la tension dans cet élément en prenant compte la
nullité en valeur moyenne de son courant. Ainsi, on détermine l’expression de
l’ondulation de la tension dans l’élément en faisant l’analyse pendant une période
de fonctionnement :

11
∆< = = ∗ # ∗
On fixe la fréquence d’opération du hacheur à 250 kHz et on se place dans le
cas le plus critique, c’est-à-dire, pour le courant de sortie maximale puisque cela
donnera l’ondulation dans cette tension la plus grande de tous les cas. On fixe,
ensuite, une ondulation maximale de 1 V pour déterminer la valeur de capacité à
prendre.
# = 0.6 ∗ 0.561 ∗ 250? = 1.3.
En suivant la même démarche, on peut déterminer la valeur des
inductances du hacheur qu’on suppose égales puisqu’elles présentent les mêmes
équations et le même comportement en régime permanant. On trouve d’abord les
conditions sur l’ondulation du courant des inductances, puisque on veut régler la
valeur du courant de sortie :
∆= = ∗ ∗
Avec la valeur de fréquence déjà choisie, on se place encore une fois dans le
cas le plus critique (rapport cyclique maximal) et on fixe une ondulation
maximale de courant de 150 mA permettant de trouver la valeur des inductances
du circuit.
= 11.4 ∗ 0.560.15 ∗ 250000 = 170.4.
Finalement, il est possible de déterminer la capacité de sortie pour limiter
l’ondulation de la tension. Pour le faire on suppose que le courant de sortie est
constant et que toute l’ondulation de courant traverse la capacité. Dans ces
conditions, on trouve :
∆" = ∗ 8 ∗ #$ ∗ ∗ @
Pour protéger les LEDs, on limite cette ondulation à 10 mV, encore dans le
cas le plus critique.
#$ = 11.4 ∗ 0.568 ∗ 0.01 ∗ 170.4 ∗ 10A ∗ 250000@ = 7.5.
Avec ces valeurs on réalise une simulation pour voir que le système répond
dans les limites posées et on trouve le résultat montré dans la figure suivante.

12
Figure 5 : Caractéristiques initiales hacheur Cùk
On note qu’en régime permanent le résultat est celui attendu, mais le
comportement dans le régime transitoire n’est pas correct pour cette application
puisque on trouve un dépassement du courant en sortie assez grande qui ne sera
pas supporté par les LEDs et on pourrait les griller dans le démarrage du
système.
Pour améliorer le comportement du système on modifie les contraintes de
tension sur les capacités, ce qui permet de trouver finalement des valeurs de
capacités donnés au-dessous :
#$ = 150(
# 820(
Avec ces valeurs on améliore de façon importante le comportement du
système en sortie, avec des ondulations de 10 mA et 100 mV, mais en détériorant
fortement le comportement de la tension de la capacité de stockage et du courant
d’entrée. Néanmoins, les variables les plus importantes pour ce système sont
celles de la sortie puisqu’elles vont contrôler le comportement des LEDs et de
cette façon de la luminosité du sabre. Les résultats avec ces valeurs sont montrés
ci-dessous :
Figure 6 : Amélioration comportement hacheur Cùk

13
2. Dimensionnement complet : Couplage des inductances
Pour réaliser le couplage on doit analyser l’effet que cela aura dans le
comportement du système et des variables qu’on veut réguler. Pour le faire on
part des équations de fonctionnement du circuit, en faisant spéciale attention à la
tension des inductances. On remarque que dans le cas du couplage, on cherche à
avoir une ondulation du courant de sortie égal à zéro.
B/ 1 ⋅ D3/D/ − E ⋅ D3@/
D/ =
Comme l’ondulation dans le courant de sortie est nulle, on peut supprimer
le deuxième terme de la soustraction et retrouver la même expression para L1
que dans le cas des bobines découplées.
=
FG
Mais, comme il est possible de limiter l’ondulation du courant de sortie
même si l’ondulation en entrée est relativement grande, on fixe une ondulation à
l’entrée de 200 mA.
= 11.4 ∗ 0.560.2 ∗ 250000 = 127.68.
A partir de la recherche des inductances de valeur commerciale, il n’est pas
possible de trouver des inductances couplées avec deux valeurs différentes pour
les inductances propres, donc comme dans le cas des bobines non couplées on
prend les deux inductances du hacheur de la même valeur.
Finalement, avec la même recherche bibliographique on a trouvé que le
coefficient de couplage de ces éléments est toujours entre 95 et 99%, ce qui
signifie que la valeur de l’inductance mutuelle est presque la même que celle des
inductances propres.
A partir des valeurs trouvées, on réalise des simulations du système pour
vérifier que les contraintes et limites posées soient respectées et le système
puisse fonctionner correctement. On a noté à partir des résultats que le
comportement n’était plus celui attendu parce qu’il fallait dimensionner encore la
capacité de stockage puisque dans le nouveau montage une ondulation trop
grande de la tension produit en effet négatif sur l’ondulation des courants.
En augmentant la valeur de la capacité de stockage à 270 nF, avec des
inductances propres de 150 uH et une mutuelle de 145 uH, on trouve le résultat
montré à continuation.

14
Figure 7 : Comportement hacheur couplage des inductances
Ce résultat semble à être celui désiré mais on a pris une valeur d’inductance
mutuelle relativement petite, qui correspond à un coefficient de couplage de
96%. Commercialement, les valeurs de ce coefficient sont toujours au-dessus de
98%. Au moment de modifier la simulation avec ces valeur il devient difficile de
maintenir un courant de sortie avec une petite ondulation et au même temps
contrôler le dépassement du régime transitoire de ce courant pour que ne supère
pas les maximums des LEDs.
De plus, il est possible de noter quelques pulses de courant négatifs, avec
une durée de 4 us chacun, en entrée qui peuvent poser de problèmes pour le
fonctionnement du hacheur.
Finalement, on a noté qu’on peut contrôler l’ondulation du courant de sortie
avec la valeur de la capacité de stockage, mais les valeurs trop grandes vont
produire un dépassement du courant maximal des LEDs qui n’est pas possible
dans notre application et aussi augmente l’amplitude des pulses négatifs de
courant produits.
Le meilleur résultat possible jusqu’au moment est présenté ci-dessous, on
peut noter que l’ondulation des courants d’entrée et sortie n’est pas trop grande
et de plus, on limite le dépassement du régime transitoire. Les pulses négatifs ne
peuvent pas être supprimés mais, comme le système ne va pas démarrer à la
valeur maximale, l’amplitude sera plus limité et cela posera moins de problèmes.
On a fait cette simulation avec un coefficient de couplage de 98%.

15
Figure 8 : Courants d'entrée et sortie avec différent coefficient de couplage
A partir des valeurs calculées, on a modifié chaque élément pour pouvoir
diminuer les ondulations de courant et améliorer le comportement du circuit,
spécialement au niveau de LEDs es sachant qu’il est possible de supprimer
l’ondulation de courant en sortie avec des petites valeurs d’inductance quand
elles sont couplées.
Pour le faire, on est parti des valeurs calculées et on a modifié chacune en
faisant attention au comportement du circuit et aux effets de chaque composant.
De plus, on a pris la résistance parasite de la batterie pour pouvoir noter les
caractéristiques du montage concernant la capacité d’entrée.
Par rapport à ce dernier paramètre, on note que son utilisation change
juste la valeur de l’ondulation du courant d’entrée, mais qu’avec les valeurs
petites de capacitance d’entrée et de sortie n’a pas vraiment un effet significatif
dans le fonctionnement du circuit.
Après, on a essayé de diminuer la valeur des inductances propres pour
diminuer le plus possible la taille du montage, tout en gardant le bon
fonctionnement. Sans modifier les autres composants, on retrouve un
fonctionnement qui n’a pas beaucoup changé, sauf pour une augmentation du
dépassement à l’allumage et une petite augmentation de l’ondulation (10% de
plus).
Pour revenir à la petite ondulation qu’on avait avant des modifications, on
agit sur les valeurs des capacités de stockage et d’entrée. Pour garder la priorité
des composants, on modifie d’abord la capacité de stockage puisqu’elle est celle
qui sert à contrôler les effets des inductances dans le comportement du circuit.
Comme on a pris une valeur plus petite d’inductance, on décide d’augmenter la
capacité de stockage afin de garder un rapport entre les deux valeurs et du
montage en général. Néanmoins, les variations de capacité n’ont pas un effet
linéaire dans le comportement du circuit et pour avoir une bonne réponse, il a été
nécessaire d’augmenter vingt fois la capacité pour avoir la moitié de l’ondulation

16
dans le courant de sortie. De la même façon que l’inductance, on augmente encore
plus le dépassement du courant de sortie.
Ensuite, on a modifié la valeur de la capacité de sortie pour pouvoir
diminuer encore plus l’ondulation du courant de sortie. En augmentant cette
valeur quatre fois, on diminue encore l’ondulation et on peut arriver à la
vingtaine de milliampères au courant de sortie maximal.
Finalement, on a essayé d’améliorer encore plus le fonctionnement du
circuit par rapport au courant à travers les LEDs en modifiant encore les valeurs
déjà modifiées. On a fait spéciale attention à la valeur de la capacité d’entrée
puisque sa valeur n’était pas si grande en comparaison avec les autres capacités,
mais on n’a pas trouvé d’améliorations dans le comportement du circuit même en
courant d’entrée.
Les modifications réalisées au circuit donnent comme résultat le courant
de sortie qu’on peut observer dans la figure suivante. On note un pic de courant
de presque 2.5 ampères en sortie et de presque 20 ampères en entrée, mais
comme la simulation ne prends pas en compte la boucle fermée qu’on va réaliser,
on s’intéresse uniquement aux valeurs moyennes. Le dépassement et le temps de
réaction seront contrôlés avec le PIC d’asservissement de courant.
Figure 9 : Comportement Cùk après modifications
3. Prise en compte des imperfections des composants
A partir des améliorations du montage réalisées à partir des résultats des
simulations (avec une ondulation de 20 mA au courant maximal dans les LEDs et
un pic de courant de deux ampères en boucle ouverte) on a décidé de prendre en
compte les imperfections des composants. Pour le faire, on a dû trouver les bons
interrupteurs et aussi les bobines et capacités adaptés aux besoins du montage. A
partir des simulations, on a déterminé les contraintes de chaque élément afin de
pouvoir trouver les bons composants.
La recherche des composants permet de trouver les possibles éléments à
prendre pour la réalisation du montage avec les valeurs de ses imperfections
(résistances, chutes de tension, etc.). On essaie de regarder à partir des

17
simulations les effets sur le fonctionnement du circuit de toutes les imperfections
possibles. Les résultats sont montrés à continuation :
Figure 10 : Comportement Cùk avec imperfections
Avec l’apparition des imperfections dans le circuit, on peut trouver une
amélioration dans le comportement du circuit au niveau du courant en entrée et
en sortie. D’une part, on est capable de reconnaître le pic de courant en entrée à
l’instant zéro servant à charger la capacité d’entrée du circuit. D’autre part, la
prise en compte des résistances parasites des composants réels, spécialement au
niveau des bobines, limite le courant traversant le circuit et de la même façon son
ondulation, ce qui permet d’avoir dans ces conditions, une ondulation de 10
milliampères en sortie.
Même si le résultat semble correct, on doit prendre en compte que les
simulations réalisées jusqu’au moment ne prennent pas en compte l’absence de
signal de contrôle sur le MOSFET et qui est un cas possible dans la vie réelle
puisque les PICS ne démarrent pas instantanément et ont un temps d’allumage
beaucoup plus grande que celui du hacheur. Pour faire face à cet inconvénient, on
décide de vérifier la réponse du circuit dans ces conditions, c’est-à-dire avec un
démarrage retardé du signal de contrôle sur le transistor.
Figure 11 : Comportement du hacheur avec une commande retardée

18
On note d’abord le pic de courant nécessaire pour la charge de la capacité
d’entrée d’environ 18 ampères qui est suivi d’un régime transitoire dû à la nature
RLC intrinsèque du circuit à l’entrée. La seule difficulté de ce comportement est la
partie négative de ce courant puisqu’il est possible que le hacheur ne soit pas
capable de le supporter. Ensuite, on note une diminution notable dans le pic de
courant de sortie due au retard du signal de commande du transistor par rapport
au moment de la charge du condensateur d’entrée. Ainsi, quand tout le système
démarre au même temps, le transitoire de charge de la capacité se traduit dans
une augmentation du courant de sortie.
De cette façon-là, on admet que le comportement du courant du circuit est
correct par rapport au fonctionnement final du sabre. Cependant, on n’a pas
encore parlé de l’autre variable électrique à contrôler au niveau des LEDs. Même
si la tension n’est pas le paramètre le plus important pour l’application du
montage, on doit faire attention à ne pas dépasser les valeurs limites de tension
afin de les protéger. On révise maintenant, la tension à la sortie du circuit, dans
les mêmes conditions de simulation que dans le cas précédent.
Cette simulation permet de voir que la tension de sortie est positive
pendant la phase de charge des capacités d’entrée et de sortie, ce qui représente
un problème pour les LEDs puisqu’elles ne supportent pas du tout les tensions
inverses et dans le circuit tel qu’il est conçu chacune d’elles devrait supporter 2
volts. Ainsi, on est obligé de trouver un moyen de limiter cette tension ou de la
supprimer pour assurer le bon fonctionnement du circuit et la protection des
LEDs.
Figure 12 : Tension en sortie commande retardée
Pour supprimer ces pics de tension inverse on a alors décidé de faire un
hacheur irréversible en courant, afin d’éviter les pics négatifs de courant d’entrée
nécessaires pour la charge anticipée de la capacité de sortie. Ainsi, la capacité de
sortie ne sera chargée qu’au moment de l’arrivée du signal de commande du
transistor, ce qui permettra à la fin de supprimer les tensions inverses dans les
LEDs quand le PIC n’a pas encore démarré.
L’irréversibilité en courant du circuit est possible grâce à l’utilisation
d’une nouvelle diode qui sera placée en série avec la bobine de sortie du circuit
magnétique permettant d’avoir une seule direction de courant de sortie. Comme
19
le courant a un sens unique, la tension de sortie aura aussi une seule direction et
les LEDs seront protégées contre les tensions inverses.
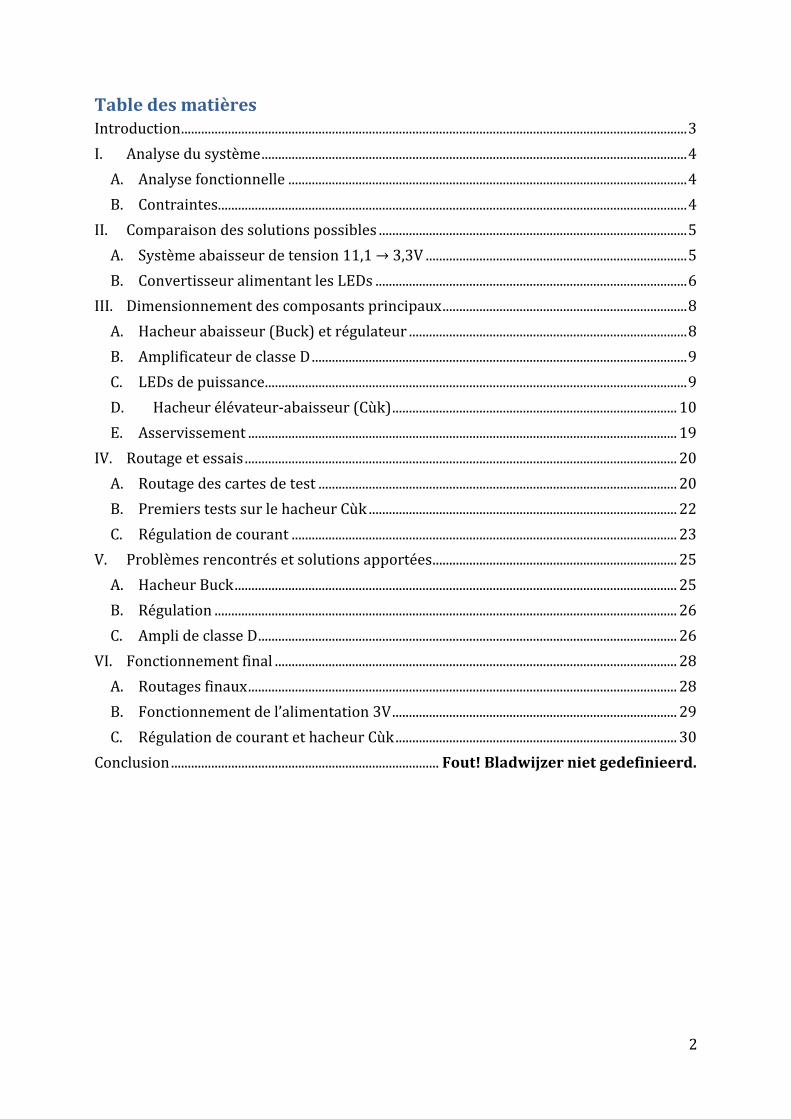
Il est important de remarquer que l’insertion de la nouvelle diode va
produire une grande quantité de pertes dans le circuit parce qu’elle sera toujours
traversée par un courant, mais il est nécessaire de protéger les LEDs ou sinon on
pourrait les détruire avant de pouvoir tester le comportement du circuit. De plus,
comme il s’agit d’une diode en série il y a une chute de tension intrinsèque à son
utilisation et les valeurs de rapport cyclique devront être plus grandes pour
assurer le bon fonctionnement du circuit. Finalement, les résultats du circuit
définitif sont présentés ci-dessous.
Figure 13 : Comportement final hacheur après modifications et protections des LEDs
Ces derniers résultats correspondent à un bon fonctionnement du circuit
par rapport à tous les paramètres importants et pour cette raison on a décidé de
commencer les étapes de production de plaquette d’essais et la réalisation des
épreuves de fonctionnement qui seront montrés plus tard dans ce document.
E. Asservissement
Pour avoir un meilleur contrôle sur l’intensité lumineuse, il est intéressant
de réaliser un asservissement du courant. Pour cela, il faut mettre en œuvre une
boucle nécessitant un capteur de courant. Il faut également modéliser le
comportement du hacheur pour ensuite dimensionner le correcteur associé.
1. Capteur de courant
Pour la mesure du courant, nous avons dû prendre en compte le fait que la
structure du Cùk implique que la référence de tension n’est pas la même entre
l’entrée et la sortie. Deux types de capteurs de courant étaient possibles : le shunt
de mesure et la sonde à effet Hall. Dans les deux cas, il est nécessaire de mettre en
œuvre un amplificateur car le signal de mesure est trop faible pour être traité.
Nous avons choisi de mettre en œuvre une résistance shunt car nous
avons trouvé que c’était plus simple qu’une sonde à effet Hall. Nous devons alors
utiliser un montage amplificateur soustracteur pour prendre en compte la
différence de masse. Le composant choisit est un amplificateur d’instrumentation
fonctionnant en unipolaire pour pouvoir être alimenté entre 0 et 3V.
Puisque le shunt mis en œuvre a une valeur de 0,1Ω, il a donc une
sensibilité de 100mV/A. On choisit le gain correspondant et on peut calculer les

20
résistances associées. Nous devrons faire attention au bruit, à cause du niveau de
tension faible.
2. Correcteur
L’asservissement du hacheur se fera selon la boucle de la figure 3.
Figure 14 - Asservissement
Les tests de simulations nous permettent d’approcher le fonctionnement
du Cùk par une fonction de transfert du 2ème ordre pour commencer. Il nous
faudra faire des essais avec les composants réels pour pouvoir estimer les
constantes de temps et les gains associés. Nous devrons ensuite nous fixer un
cahier des charges pour le système (dépassements et temps de réponse) pour
pouvoir calculer les éléments du correcteur choisi. Une fois ces éléments calculés,
nous devront calculer la fonction de transfert en numérique correspondante, et
programmer ensuite l’algorithme du correcteur dans le PIC.
IV. Routage et essais
A. Routage des cartes de test
1. Alimentation 3V
Sur la figure 4 est représenté le schéma mettant en œuvre le convertisseur
11,4 – 3V.
Figure 15 - Schéma alimentation 3V
A ce schéma est associé le routage de la carte de test correspondante,
figure 5. Ce routage a été fait en prenant en compte le fait que certains
B230AB230A
Vin1 Vout 3
GND
2
TC126212
BATT
CONN-SIL2 L1
22uH
C10U10uF
C1U1uF
12
ALIM
CONN-SIL2
INK1
GND
A2
ENCOM1
BST COM2
SW K2
FB A1
AP5100
C1
22nF
R147k
R210k
C2100pF
R100K100kC10U1
10u

21
composants seront amenés à dissiper de la puissance, et qu’il leur faut donc une
surface suffisante : c’est le cas du régulateur linéaire mais aussi des composants
commutant du hacheur. Des zones ont été utilisées plutôt que des pistes, pour
permettre le passage de plus de courant sans trop chauffer, mais également pour
faciliter le soudage.
Il est à noter que, si c’est peu important pour la carte de test, il faudra
réduire au maximum les distances pour la carte définitive.
Figure 16 - Routage carte d'alimentation
2. Hacheur Cùk
Pour la production de la carte du hacheur, on est parti du circuit
déterminé précédemment et montré figure 6, avec chacun des composants
choisis et en sachant que la partie de droite du circuit correspond à la carte des
LEDs et non au hacheur directement à l’exception de la résistance shunt qui sera
utilisée pour la mesure et l’asservissement du courant de sortie.
Figure 17 - Schéma du hacheur
A partir de ce montage, on a cherché une façon de faire le routage le mieux
possible pour le fonctionnement du circuit. D’abord, il fallait chercher une façon
de placer tous les composants qui sont branchés à la masse le plus proche
possible afin de laisser une zone de masse unique de taille suffisante par rapport
au courant qui la traversera. Ensuite, on a cherché une façon de placer les autres
composants de puissance (diodes, bobines, etc.) le plus proche possible pour
diminuer la longueur des chemins. De plus on a fait des zones dans chaque cas
pour supprimer l’effet des résistances et inductances parasites liées à l’utilisation
de la carte et aussi pour faciliter la dissipation de la chaleur des composants
travaillant à hauts courants.
22
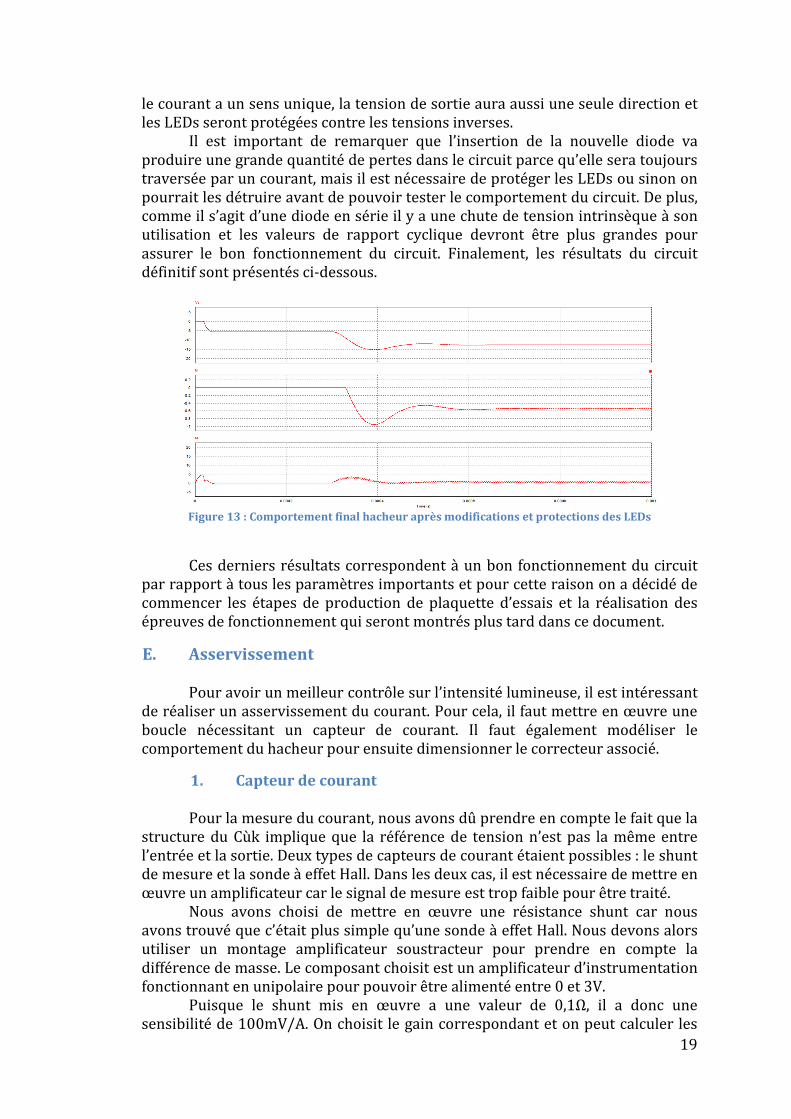
Le routage final est présenté dans la figure 7. Pour pouvoir avoir une carte
répondant aux contraintes du fonctionnement, il a fallu faire plusieurs cartes et
améliorations de design.
Figure 18 - Routage Cùk
B. Premiers tests sur le hacheur Cùk
A partir de la conception du hacheur, on a réalisé le montage et les
premiers essais de fonctionnement avec une source de tension du laboratoire et
un GBF pour le signal de commande du transistor, c’est-à-dire, sans
l’asservissement de courant, uniquement pour relever les principales
caractéristiques et vérifier le fonctionnement en valeurs nominales. Pour le faire,
on est parti d’un rapport cyclique de 0.2 à tension nulle et on l’a augmentée
jusqu’à sa valeur nominale. Puis on a mesuré avec une sonde de courant et
l’oscilloscope la forme d’onde du courant, sa valeur moyenne et son ondulation
en fonction du rapport cyclique variant jusqu’à 0.42. On n’est pas allé plus loin
pour éviter de dépasser le courant maximal des LEDs et pour éviter aussi le
chauffage extrême de ces composants. On a pu noter pendant les mesures que le
courant traversant les LEDs change brusquement avec la température. Cela
signifie que la dissipation de la chaleur et l’asservissement de courant deviennent
critiques pour le bon fonctionnement du système.
La figure 8 montre le courant (en vert) et la tension (en jaune) de sortie
pour un rapport cyclique de 0.42. Cette image fut prise dans un instant fixe, mais
on a pu observer que le courant augmentait avec le temps de fonctionnement des
LEDs.
Figure 19 - Mesure de courant et tension

23
A partir des mesures, il est possible de tracer la caractéristique de courant
moyen et de l’ondulation de courant en fonction du rapport cyclique du signal de
commande du transistor. Celles-ci sont montrées figures 9 et 10.
Figure 20 - Courant en fonction du rapport cyclique
Figure 21 - Ondulation en fonction du rapport cyclique
L’analyse des résultats permet vérifier que le comportement du circuit
n’est pas linéaire, mais aussi que la température est un élément très important
puisque le dernier point de mesure du courant moyen est vraiment loin de ce
qu’on pouvait attendre par rapport au comportement du circuit jusqu’au point de
mesure précédent. On peut dire aussi que la mesure a été faite dans un
environnement avec beaucoup de bruit et pour cette raison l’ondulation n’a pas
une tendance stable. Enfin, on note qu’il existe des points pour lesquels les
variations du rapport cyclique deviennent plus critiques à cause de la relation
non linéaire entre l’entrée et la sortie du circuit.
C. Régulation de courant
Partant du principe de mesure de courant utilisé dans le hacheur, on a
décidé de faire une commande (consigne) analogique afin d’avoir les deux
signaux à comparer du même type. Pour faire ce système, on aura besoin du
convertisseur analogique-numérique du PIC de régulation deux fois : une pour la
consigne et l’autre pour la mesure. Sachant que la consigne est juste un signal
analogique entre 300mV et 3V, le système n’a pas besoin du PIC générale du
sabre pour fonctionner et on obtient à la fin un complètement indépendant qui
peut être utilisé pour d’autres applications et pas uniquement dans le sabre laser.

24
En principe, de la régulation étais celui expliqué précédemment et pour le
réaliser on est parti de la réalisation des comparaisons des signaux analogiques
nécessaires pour la commande de LEDs. Quand la comparaison réalisée a
commencé à donner les bons résultats (vérification du comportement du PIC et
de la vitesse de calculs, à cause du temps de la conversion analogique numérique)
on a fait varier le rapport cyclique en fonction de la comparaison réalisée. Si la
consigne est plus grande que la mesure de courant (et donc, le courant) on
augmentera le rapport cyclique, si la mesure de courant est plus grande on le
diminuera et si les deux signaux sont égaux, on conservera le même rapport
cyclique pour les maintenir égaux. Ce processus a été réalisé dans une boucle
infinie pour assurer l’égalité des deux signaux tout le temps.
Cette forme de fonctionnement du circuit ne correspond pas à la forme
générale d’un asservissement qui, à partir de l’écart entre les deux signaux,
génère une réponse du circuit avec un temps de réponse et un dépassement
égaux dans tous les cas et pour toutes les variations de consigne. Néanmoins,
avec les essais réalisés du circuit avec différentes consignes et avec différentes
variations a permis de vérifier le bon comportement du système avec cette façon
de réaliser le contrôle bien qu’elle ne soit pas la plus optimale. La différence
principale entre le contrôle réalisé avec l’asservissement général est que le
premier ne produit pas la même réponse pour différentes variations de consigne,
le temps de réponse et le dépassement du signal est différent en chaque cas. Le
temps de réponse est proportionnel à l’écart entre les signaux, plus loin est la
mesure de la consigne, plus de temps va le prendre arriver au bon résultat.
Dans le cas, général on veut que le comportement du circuit soit toujours
le même pour éviter des situations hors de ce qui était attendu. Néanmoins, on
s’est rendu compte que la différence des temps de réponse pour différentes
variations de la consigne n’était pas si différente à cause de la vitesse de calcul du
PIC travaillant à 32MHz. De plus, pour l’application envisagée (la lumière du
sabre) le temps de réponse n’est pas une contrainte vraiment puisque la
résolution des yeux n’est pas si grande et ces différents temps de réponse ne
feront pas une différence par rapport aux effets observés.
A partir de ces conclusions on a remarqué que le point important était le
contrôle d’un possible dépassement, dû au transitoire du hacheur. En pratique au
moment de faire les tests, on a noté que les dépassements du courant en sortie
étaient évités par cette façon de régulation parce que quand le courant était plus
grand que la consigne, le rapport cyclique commençait à diminuer sa valeur en
limitant les pics de courant en sortie.
Finalement, on a pu remarquer que l’erreur statique du courant était nulle
parce que le rapport cyclique varie jusqu’à ce que le courant en sortie soit égal à
la consigne reçue. Enfin, pour éviter les courants en sortie trop grandes et
supérieurs à ces supportés pour les LEDs, dans le PIC de régulation on a mis une
limite à la valeur de la consigne et une autre à la valeur du rapport cyclique qui ne
seront jamais dépassés même si la consigne est plus grande.

25
B330BB330B
100N
100nF
Vin1 Vout 3
GND
2
TC1262VIN2
EN3
BST 1
SW 8
FB5
PGOOD4
GN
D7
BUCK
12
BATT
CONN-SIL2L1
B82432C1153K000
C22U22u
C10U10uF
C1U1uF
C10U11uF
R100K
10k
22U1
22u
1
5VCONN-SIL1
12
ALIM
CONN-SIL2
V. Problèmes rencontrés et solutions apportées
A. Hacheur Buck
Lors des premiers essais sur l’alimentation 3V, un court-circuit était
présent sur la carte. Nous avons réalisé qu’il venait d’une erreur de package au
niveau du routage. Nous avons donc fait un nouveau routage.
Figure 22 - Nouveau routage de l'alimentation 3V
L’essai sur le nouveau routage (figure 11) nous a montré qu’il y avait une
très grande ondulation de tension à la sortie du hacheur. Cela était probablement
dû à la très grande fréquence de fonctionnement (1,4MHz), combiné à des
condensateurs mal dimensionnés pour une utilisation à ces fréquences.
Nous avons donc décidé de changer le composant utilisé, et avons à la
place utilisé un ADP2302-ARDZ. Celui-ci fonctionne à 700kHz et débite jusqu’à
2A. La version 5V nous a par ailleurs permis d’utiliser moins de composants
extérieurs. Pour le dimensionnement, nous avons modifié les contraintes en
ondulation de tension en mettant un peu plus d’exigence sur la tension et moins
sur les ondulations de courant. Ainsi pour ΔVS=0.2V, nous avons obtenu pour C
une valeur de 44uF. Pour ΔiL=0,5A on obtient une inductance L=8,0uH. Nous
avons donc pris, avec les valeurs normalisées, deux condensateurs 22uF et une
inductance de 6,8uH.
Le montage a quelque peu changé (figure 12), même si nous avons gardé
le même régulateur, et nous avons dû refaire un routage (figure 13).
Figure 23 - Montage de l'alimentation 3V avec ADP2302-ARDZ5.0

26
Figure 24 - Routage correspondant
B. Régulation
En général, les problèmes rencontrés dans cette partie du système sont
liés au fonctionnement du PIC et au signal de commande de la lumière. D’une
part, le signal de commande du PIC16F (pic général du système) n’étais jamais
zéro et, en principe, les LEDs ne seraient jamais éteintes avec ce système. Ainsi,
avant de pouvoir faire la comparaison des signaux pour la régulation de courant
on a du faire une correction d’offset pour s’adapter aux contraintes des
composants (raison pour laquelle le signal doit être supérieur à 300mV). D’autre
part, la programmation des effets lumineux résulte plus difficile, puisqu’il n’est
pas possible de les programmer dans le PIC de régulation et ils doivent être
programmé dans la consigne venant du PIC central et ils doivent être synchrones
avec le son. Ce dernier point n’appartient pas à la partie puissance directement,
mais on a pu le solutionner en modifiant la consigne du code principale dans la
partie de lecture de son.
Finalement, le dernier problème et plus important aussi, correspond au
bruit des signaux de commande et de mesure. Comme l’asservissement de
courant est réalisé en analogique, le contrôle du bruit résulte important, puisque
un bruit trop grand dans le signal de commande ou de mesure va éloigner le
comportement du système de ce qui était attendu. Ainsi, pour conserver
uniquement la composante continue des signaux (qui est ce qui est important) on
a utilisé des petits filtres passe-bas de premier ordre (pour éviter l’utilisation de
beaucoup plus de composants). Comme l’atténuation maximale de ce filtre n’est
pas trop importante, on aura toujours du bruit dans le signal. Néanmoins, comme
l’amplitude du bruit sera limitée, on pourra éviter les signaux qui puissent gêner
le comportement du système.
C. Amplificateur de classe D
Pour tester l’amplificateur, nous avons commencé par faire une carte
d’adaptation avec l’amplificateur pour seul composant. Nous avons d’abord eu
des difficultés à trouver un mode de fonctionnement pour lequel l’amplificateur
fonctionnait. Nous avons fini par utiliser le mode PWM control, mode B en

27
Reverse. Cela signifiait qu’il fallait connecter l’entrée Forward à la sortie PWM du
PIC, et on retrouverai le signal PWM inversé en sortie.
Nous avons ensuite remarqué de pics de courant très importants à la mise
sous tension (figure 14). Nous nous sommes rendu compte que nous avions
oublié de découpler, ce que nous avons ensuite fait avec un condensateur 47uF.
Le pic de courant à la mise sous tension a alors diminué (figure 15), cependant se
rajoutait à celui-ci un pic de courant négatif. Cela nous a posé des problèmes lors
d’un essai avec le PIC, la broche de sortie PWM a en effet été grillée.
Figure 25 - Pic de courant à la mise sous tension de l'amplificateur
Figure 26 - Pic de courant après découplage
Nous effectuions d’abord nos essais avec un haut-parleur 50Ω, nous avons
remarqué que malgré une résistance élevée, celui-ci chauffait beaucoup. Nous
avons donc mesuré le signal en sortie de l’amplificateur et observé la présence
d’une importante composante continue. Nous l’avons donc filtrée avec un
condensateur 100nF.
Ces essais nous ont permis d’obtenir un fonctionnement correct de
l’amplificateur, selon le montage figure 16. Cependant, nous n’avions pas eu le
temps de les faire avant le routage final de la carte de commande sur laquelle
nous voulions le mettre. C’est pourquoi nous n’avons pas pu la faire fonctionner.

28
Figure 27 - Schéma de montage de l'ampli
VI. Fonctionnement final
A. Routages finaux
1. Carte de commande
Celle-ci contient l’alimentation 3V, le PIC principal ainsi que les
périphériques nécessaires au fonctionnement du sabre (mémoire, accéléromètre,
amplificateur).
Cette version a été établie après les corrections qu’ont amenées les divers
tests, mais nous n’avons pas eu le temps de la faire graver.
Figure 28 - Routage final de la carte de commande
2. Carte Cùk
On est parti de la carte de puissance réalisée précédemment puisque son
fonctionnement correspondait à celui attendu du hacheur et on a ajouté juste
quelques composants correspondants au filtrage du signal de mesure de courant
pour assurer un bon fonctionnement et le PIC de régulation pour avoir une carte
VSS
OUT11
VCC2
VCC3
FIN4
GND 8OUT2 7VREF 6
RIN 5
AMPLID
C4
47uF
C5
100n
1HP1
1
GND
1
11V
signal PWM

29
de puissance complète et indépendante des autres parties du système. Les seules
fils nécessaires correspondent aux alimentations : 11V et 3V et à la consigne
venant du PIC général. Toute la partie de puissance a des zones à cause des
niveaux de courant nécessaires alors que la partie de régulation a besoin juste
des niveaux de tension et pour cette raison n’a pas de zones.
Figure 29 : Routage final de la carte de puissance
B. Fonctionnement de l’alimentation 3V
Lors des essais finaux, nous avons pu faire les mesures suivantes.
Figure 30 : Régime transitoire alimentation 3V
L’allumage se fait donc très rapidement lorsque la charge est constante
(essai avec résistance de charge), avec aucun dépassement. L’ondulation est très
faible. Le maximum est quelque peu en dessous des 3V réglés, mais cela permet
d’avoir de la marge pour protéger l’accéléromètre.
Nous avons également pu mesurer les variations de tension lorsque plus
de courant est demandé sur le circuit (allumage des LEDs et détection de

30
différents évènements par le PIC). Ainsi nous avons remarqué que les tensions
pouvaient devenir dangereuses pour l’accéléromètre lors du fonctionnement
normal du circuit. Cependant les pics sont assez courts.
Figure 31 - Tension de l'alimentation 3V lors de l'allumage des LEDs
Figure 32 - Tension de l'alimentation 3V lors de la détection d'évènements par le PIC
C. Régulation de courant et hacheur Cùk
A partir du système de régulation implémenté dans le hacheur, on a vérifié
le fonctionnement de tous les effets de lumière du sabre. Après avoir vérifié le
comportement du système, on a décidé de réaliser des mesures de courant en
tension de la partie contrôle pour analyser le comportement par rapport à celui
de la boucle ouverte et au moment des effets lumineux.

31
1. Cycle d’allumage, repos et extinction du sabre
Figure 33 : Courant de sortie (vert) et consigne reçue pour le PIC (jaune)
On note bien que le signal de consigne à un petit offset de 300mV qui n’est
pas trop grande, mais sachant que le gain du système de mesure est juste de 3.5,
le courant correspondant à cette valeur était suffisante pour allumer les LEDs et
si on n’avait pas mis la correction d’offset dans la régulation, on aurait toujours
les LEDs allumés, même au moment de l’extinction complète.
D’autre part, on peut noter que le signal de consigne est trop bruité et que
ce bruit est amené au courant de sortie à cause de la régulation de courant
réalisé. Si on analyse l’échelle du signal de commande et celle du signal de
courant, on note bien que le bruit du curant est environ la troisième partie du
bruit di signal de consigne, à cause du gain du système de mesure. Il faut
remarquer aussi que le bruit du courant est surement plus grand au bruit de la
consigne divisé en 3.5 puisque les fils des LEDs sont susceptibles d’augmenter le
niveau de bruit et tout le bruit propre du hacheur fait aussi partie du bruit de la
sortie en plus de l’ondulation naturelle du courant à cause des interruptions de
l’alimentation Cùk utilisé.
Pour être surs du bon fonctionnement du hacheur et que l’amplitude
regardée à l’oscilloscope ne soit pas due au circuit, on a filtré le signal avant de la
partie de régulation pour analyser la variation dans le courant de sortie du
circuit. La figure 34 montre la diminution du bruit en sortie avec ce filtrage de la
consigne. On diminue dans un 30-40% le bruit en sortie. En comparaison avec le
comportement du circuit en boucle ouvert, on note une augmentation de cette
ondulation. Nous nous sommes rendu compte que l’augmentation de cette
ondulation est due en grande partie au bruit, mais aussi au principe de la
régulation, puisque le bruit de deux grandeurs à comparer fait que la
comparaison ne soit jamais exact et que le rapport varie tout le temps et cela
produit des variations dans le niveau DC du signal qui à grande échelle
ressemblent au bruit observé (à cause de l’ondulation autour de ce niveau).

32
Figure 34 : Courant de sortie (vert) et signal de consigne filtré (jaune)
Finalement, tout ce qu’il reste à vérifier est le fonctionnement du circuit de
mesure de courant utilisé. La figure 35 montre le comportement de ce système
pour analyser son comportement par rapport au courant de sortie dans la même
image et par rapport à la consigne dans les images précédentes. On peut noter
aussi le bon fonctionnement du système de mesure qui peut capter tout le bruit
du courant.
Figure 35 : Courant de sortie (vert) et mesure de courant (jaune)
Dans cette image est possible de reconnaître l’allure de la consigne
provenant du PIC général après filtrage. Cela est dû au fait que dans la structure
du hacheur on a mis un filtre après la sortie de l’amplificateur pour éviter le bruit

33
dans la mesure. D’autre part, si on compare le signal avec la consigne, on peut
noter que ce signal n’a pas d’offset, mais appart ça, on pourrait confondre les
deux signaux, ce qui permet de conclure par rapport au bon fonctionnement du
système de régulation.
2. Conséquences de la boucle fermée sur la PWM (commande du transistor)
Dans le cas de la boucle ouverte, on parlait d’un signal de commande
constante, dans le cas de la boucle fermée, la figure 36 montre le comportement
du signal de commande envoyé au transistor. La commande varie tout le temps à
cause de la différence entre la consigne et la mesure de courant et le bruit de ces
deux signaux. Même si on note une grande variation du rapport cyclique du signal
de commande, la luminosité apparente (celle qu’on peut voir) des LEDs ne change
pas, à cause de la grande vitesse de ces variations.
Figure 36 : Signal de commande transistor hacheur Cùk
3. Choc et mouvement
Figure 37 : Courant en sortie pour le choc (d'abord) et le mouvement (après)
Cette dernière image permet de voir comme varie le courant de sortie
pour les effets lumineux du choc et du mouvement. Ce comportement est dû aux

34
choix des effets, puisqu’on a choisi une augmentation de la lumière pendant le
choc, alors que le mouvement en produit juste une diminution.
4. Conclusion sur l’asservissement
L’asservissement des grandeurs physiques peut être fait de plusieurs
façons. Le choix du type dépendra toujours des besoins de l’application et des
contraintes du système. Parfois il est possible de choisir de méthodes
d’asservissement plus simples qu’autres, mais c’est possible juste à cause de
l’application et du système qu’on va à asservir.
Bien que l’asservissement du courant de sortie permette d’avoir le même
comportement du circuit pour différentes conditions de l’alimentation, on peut
distinguer différents inconvénients et avantages de son utilisation. D’une part, le
système est plus sensible au bruit puisqu’on a plus de composants. D’autre part,
la consommation de courant de la batterie augmente quand la tension diminue,
c’est-à-dire plus la batterie est déchargée et plus le circuit va lui demander du
courant pour fonctionner (pour maintenir la puissance constante). Enfin, il faut
contrôler les changements de consommations des LEDs avec la température,
puisque plus chaudes elles sont, plus petite dévient sa tension de seuil et plus
grande le courant de sortie. La boucle fermée permettra d’éviter ce
comportement et de les protéger.

35
Conclusion - Bilan
En bilan de ce projet, nous avons pu atteindre les objectifs du projet
d’ENPU, à savoir faire fonctionner l’alimentation 3V et le hacheur alimentant les
LEDs. Nous avons également pu faire fonctionner la commande de ce dernier et
réaliser ainsi les effets lumineux voulus.
Cependant, nous aurions pu mettre en œuvre un asservissement plus
performant mais le temps nous a manqué pour la mise au point. Par ailleurs, la
mise en œuvre de l’amplificateur de classe D nous a causé quelques soucis,
notamment par rapport aux autres composants d’électronique numérique. Cela
nous indique que les problématiques de découplage sur des cartes de ce type sont
importantes à comprendre. C’est en effet la difficile mise en œuvre de la carte de
commande qui nous a empêché de terminer le projet et de rendre un objet
fonctionnel.
Ce projet a été très enrichissant, il nous a notamment permis de mettre en
application les connaissances théoriques que nous avons développées au premier
semestre en électronique de puissance. Nous avons également pu être confrontés
aux nombreuses différences entre théorie et pratique et apprendre à réagir aux
problèmes liés à ces différences.




















