
Conception d'une stratégie de commande vectorielle ...
205
MARC PERRON CONCEPTION D'UNE STRATÉGIE DE COMMANDE VECTORIELLE ÉNERGÉTIQUEMENT OPTIMALE DE LA MACHINE ASYNCHRONE BASÉE SUR UN MODÈLE DES PERTES NEURONAL SUR FPGA Thèse présentée à la Faculté des études supérieures de l'Université Laval dans le cadre du programme de doctorat en Génie Électrique pour l'obtention du grade de Docteur en philosophie (Ph.D.) DÉPARTEMENT DE GÉNIE ÉLECTRIQUE ET DE GÉNIE INFORMATIQUE FACUL TÉ DES SCIENCES ET DE GÉNIE UNIVERSITÉ LAVAL QUÉBEC 2009 ©Marc Perron, 2009
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of Conception d'une stratégie de commande vectorielle ...

MARC PERRON
CONCEPTION D'UNE STRATÉGIE DE
COMMANDE VECTORIELLE
ÉNERGÉTIQUEMENT OPTIMALE DE LA
MACHINE ASYNCHRONE BASÉE SUR UN
MODÈLE DES PERTES NEURONAL SUR FPGA
Thèse présentée
à la Faculté des études supérieures de l'Université Laval
dans le cadre du programme de doctorat en Génie Électrique
pour l'obtention du grade de Docteur en philosophie (Ph.D.)
DÉPARTEMENT DE GÉNIE ÉLECTRIQUE ET DE GÉNIE INFORMATIQUE
F ACUL TÉ DES SCIENCES ET DE GÉNIE
UNIVERSITÉ LAVAL
QUÉBEC
2009
©Marc Perron, 2009

Résumé
Les innovations technologiques des dernières décennies en matière d'électronique
tant au niveau du traitement numérique de l'information que de la gestion de l' énergie ont
contribué à une révolution majeure dans la conversion d 'énergie électromécanique: celle
des entraînements à vitesse variable (EVV).
L'amélioration des plateformes de calculs et des techniques de commande ont
grandement amélioré la performance dynamique des moteurs électriques à courant
alternatif notamment grâce à la commande vectorielle. Cependant, la littérature contient
relativement peu d'études sur l'utilisation de la commande vectorielle comme un moyen
d'améliorer la performance énergétique des EVV de machines asynchrones: c ' est à
l'étude et à l'avancement de ce domaine de connaissances que cette thèse est consacrée.
L'état de l'art contient plusieurs avancées sur la modélisation des pertes dans la
machine et la plupart des stratégies de commande énergétiquement optimales (SCEO)
reposent sur l'ajustement optimal du flux dans la machine basé sur un modèle des pertes.
La proposition d'avancement de cette thèse ne repose pas sur l'amélioration de la qualité
d'un modèle de pertes de la machine, mais plutôt sur les moyens d'intégrer efficacement
ce modèle des pertes dans le système de commande.
Dans cette perspective, nous démontrons une propriété intéressante des réseaux de
neurones artificiels (RNA) de type perceptron multicouche qui ouvre de nouvelles
possibilités en matière d'intégration de fonctionnalités au système de commande et ce,
sans coût supplémentaire. Deux nouvelles fonctionnalités sont ainsi proposées:
l'amélioration de l'efficacité énergétique du système sur toute la plage de charge par
l'utilisation judicieuse d'une technique de modulation discontinue et l'amélioration de la
stabilité du système par l'intégration d'un nouveau détecteur de régime permanent.
Ces propositions d'avancement sont validées en simulation et sur un banc d'essai
expérimental composé d'un système de commande à base de FPGA. Ce type de circuit
logique reprogrammable permet la mise en oeuvre d'architectures de systèmes parallèles
qui conviennent tout à fait aux systèmes à base de RNA et aux architectures avancées de
systèmes d'EVV.

Abstract
Technological innovations of the last decades in the field of electronics, including
both digital signal processing and energy management, have opened the way to a major
revolution in the process of energy conversion: the advancement of variable speed motor
drive systems (VSD).
Improvements of computing platforms and control techniques su ch as vector
control have contributed to improve dynamic performance of alternating-cuITent (AC)
electric motors systems. However, technical litterature shows a relatively small amount
of papers related with the use of vector control as a way ta improve the energy of
asynchronous machines variable-speed drives: it is to this field of knowledge that this
thesis is committed ta study and to bring forward.
The CUITent state of the art contains many advances on the machine loss
modelization and most of energy-efficiency control schemes involve the optimal
adjustment of the machine flux based on a machine loss model. This thesis' advancement
proposaI is not based on the improvement of the motor' s loss model, but rather on the
means to effectively integrate this loss model into the system controUer.
In this perspective, we demonstrate an interesting property of multilayer
perceptron artificial neural networks (ANN) that opens new possibilities in integrating
controUer system components at no additional cost. Based on this property, two new
functionalities are proposed: fuU-Ioad range energy efficiency improvement by the use of
a discontinuous pulse width modulation (PWM) unit and the improvement of system's
stability by the design of a novel steady-state detector.
Those advancement proposaIs are validated with digital simulations and with an
experimental testbench designed with a FPGA-based controUer. This type of
programmable logic device (PLD) opens up the possibility of paraUelism in embedded
systems design which is convenient for ANN-based systems and for the next generation
of VSD controUers architectures.

Avant-propos
Je tiens d'abord à remercier mon directeur de thèse, Dr. Hoang Le-Huy, pour son support,
sa générosité et sa confiance tout au long de mes années passées au LEEPCI.
Cette thèse aurait sans doute été plus difficile à réaliser sans le support financier fourni en
partie par Dr. Le-Huy, la bourse au doctorat du Canadien National et la bourse en
recherche industrielle du Conseil de Recheche en Science Naturelles et en Genie du
Canada (CRSNG) que j'ai pu obtenir grâce à mon partenaire industriel TecHydro inc .. Je
tiens à remercier tout spécialement M. Marcel Labbé, président de TecHydro inc., pour
son ouverture d'esprit, sa très grande éthique de travail et pour m'avoir donné la chance
de toucher au monde de la génération d'énergie hydroélectrique.
Merci à tout le personnel de l'Université Laval avec qui j'ai travaillé de près ou de loin
au cours de ces années notamment les techniciens François Lemay, Martin Gagnon, Luc
Bouffard et Marco Béland et tout le personnel de secrétariat.
Les années au LEEPCI n'auraient sans doute pas été aussi géniales s'il n'y avait pas eu
tous les copains de lab et stagiaires qui sont passés depuis mon arrivée en 2004. Je garde
de merveilleux souvenirs des discussions passées à la cafétéria, dans le lab et dans les
soirées organisées à parler ouvertement de tous les sujets: sérieux et moins sérieux. Le
LEEPCI est une grande famille à laquelle je garderai un grand sentiment d'appartenance.
Cette thèse n'aurait sans doute pas pu se réaliser sans le soutien inconditionnel de mes
parents Marcel et Hélène ainsi que de toute ma famille. Je pense notamment à ma grand
mère maternelle, Laurette, qui est un modèle de résilience et à qui je dédie cette thèse.
Je remercie finalement l'amour de ma vie, Élise, pour son amour et son esprit libre qui
m'inspirent à avancer et à toujours continuer de rêver ...

« Ce qui est simple est toujours faux, ce qui ne l'est pas est inutilisable. »
Paul Valery (1871 -1 945)
écrivain, poète, philosophe et épistémologue français
« L'ordre et la connexion des idées est le même que l'ordre et la connexion des choses.»
Baruch Spinoza (1632- 1677)
philosophe hollandais

v
Table des matières
RÉSUMÉ ........................................................................................................................................................ 1
ABSTRACT ................................................................................................................................................. II
AVANT-PROPOS ...................................................................................................................................... 111
LISTE DES TABLEAUX ....................................................................................................................... VIII
LISTE DES FIGURES ............................................................................................................................... IX
LISTE DES SYMBOLES ....................................................................................................................... XIV
INTRODUCTION GÉNÉRALE ................................................................................................................. 1
1. CHAPITRE 1 : LES ENTRAÎNEMENTS À VITESSE VARIABLE DE MACHINES
ASYNCHRONES ......................................................................................................................................... 6
1.1
1.2
1.3
lA
LA MACHINE ASYNCHRONE
L'ONDULEUR DE TENSION
LE SYSTÈME DE COMMANDE
CONCLUSION
2. CHAPITRE II : ÉTUDE DE LA PROBLÉMATIQUE DES PERTES DANS LES
7
19
21
25
MACHINES ASYNCHRONES ET LES ONDULEURS DE TENSION .............................................. 28
2.1 LES MÉCANISMES DE PERTES 28
28 2.1.1 LES PERTES DANS LA MACHINE ASYNCHRONE
Les pertes électromagnétiques ...... ........... ..................... .................. ............... ................................... .. 29
Les pertes mécaniques ....... ..... ...... .... .. ................. ...................................... ......... ...... ........... .. .... ........ . 38
Synthèse des mécanismes de production de pertes dans la MA .......................... ......................... ....... 38
2.1.2 L ES PERTES DANS L'ONDULEUR 40
2.2 REVUE DE LA LITTÉRATURE SUR LA COMMANDE ÉNERGÉTIQUEMENT OPTIMALE DES MACHINES
2.2.1
2.2.2
2.3
ASYNCHRONES 43
Optimisation des pertes dans le moteur ... ................... ................... .. ........................... .......... 43
Minimisation des pertes dans l' onduleur ............................................................................. . 52
CONCLUSION 55
3. CHAPITRE III : CONCEPTION AVANCÉE DE LA COMMANDE DE FLUX À BASE
DE RÉSEAU DE NEURONES ARTIFiCiELS ....................................................................................... 58
3.1 INTRODUCTION AUX RÉSEAUX DE NEURONES ARTIFICIELS 58
VI
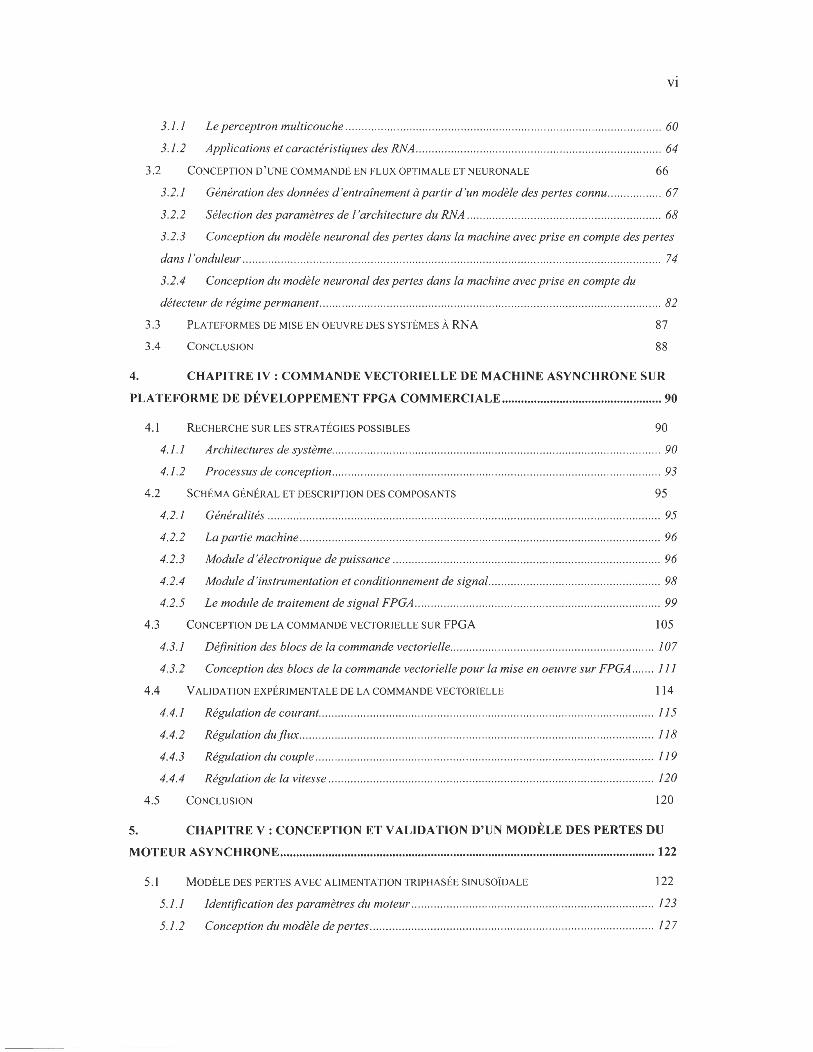
3.1.1 Le perceptron multicouche ........... ........................................................................................ 60
3.1.2 Applications et caractéristiques des RNA ........................ .. .... ..... .................................. ....... . 64
3.2 CONCEPTION D'UNE COMMANDE EN FLUX OPTIMALE ET NEURONALE 66
3.2.1 Génération des données d 'entraînement à partir d'un modèle des pertes connu .......... ... .. .. 67
3.2.2 Sélection des paramètres de l 'architecture du RNA .......... .................... .. ..................... ....... . 68
3.2.3 Conception du modèle neuronal des pertes dans la machine avec prise en compte des pertes
dans l 'onduleur ................ ......... ................. .......................... ............. .. ................. .......... ........... ......... . 74
3.2.4 Conception du modèle neuronal des pertes dans la machine avec prise en compte du
détecteur de régime permanent .................. .............. ...................... ..................... .............................. .. 82
3.3
3.4
PLATEFORMES DE MISE EN OEUVRE DES SYSTÈMES À RNA
CONCLUSION
87
88
4. CHAPITRE IV : COMMANDE VECTORIELLE DE MACHINE ASYNCHRONE SUR
PLATEFORME DE DÉVELOPPEMENT FPGA COMMERCIALE .................................................. 90
4.1 RECHERCHE SUR LES STRATÉGIES POSSIBLES 90
4.1.1 Architectures de système ........... .......... .................................................................. .... .... .... .... 90
4.1.2 Processus de conception ............................................ .......................................... ........... ...... 93
4.2 SCHÉMA GÉNÉRAL ET DESCRIPTION DES COMPOSANTS 95
4.2.1 Généralités ......... ..................................... .......................................................................... .... 95
4.2.2 La partie machine ........................................................................... ...................................... 96
4.2.3 Module d'électronique de puissance .................................................................................... 96
4.2.4 Module d'instrumentation et conditionnement de signal ................................................ ...... 98
4.2.5 Le module de traitement de signal FPGA .................................................. ........................... 99
4.3 CONCEPTION DE LA COMMANDE VECTORIELLE SUR FPGA 105
4.3.1 Définition des blocs de la commande vectorielle ............................................ ............ ........ 107
4.3.2 Conception des blocs de la commande vectorielle pour la mise en oeuvre sur FPGA ....... 111
4.4 VALIDATION EXPÉRIMENTALE DE LA COMMANDE VECTORIELLE 114
4.4.1 Régulation de courant ......................................................................................................... 115
4.4.2 Régulation du flux ....................................................................................... ........................ 118
4.4.3 Régulation du couple .......................................................................................... ................ 119
4.4.4 Régulation de la vitesse ... ................................................................................................... 120
4.5 CONCLUSION 120
5. CHAPITRE V : CONCEPTION ET VALIDATION D'UN MODÈLE DES PERTES DU
MOTEUR ASyNCHRONE ..................................................................................................................... 122
5.1 MODÈLE DES PERTES AVEC ALIMENTATION TRIPHASÉE SINUSOÏDALE 122
5.1.1 Identification des paramètres du moteur ............................................................ ................ 123
5.1.2 Conception du modèle de pertes ......................................................................................... 127

VIl
5.1.3 Validation du modèle de pertes à vide ......... .... ..... .. ... ...... ... ...... ...... ...... .. ........... .... ...... .. ..... 129
5.2 MODÈLE DES PERTES AVEC CONVERTISSEUR STATIQUE 130
5.3 CONCLUSION 132
6. CHAPITRE VI : CONCEPTION ET VALIDATION EXPÉRIMENTALE DE LA
COMMANDE DE FLUX OPTIMALE ET NEURONALE SUR FPGA ............................................. 133
6.1
6.2
6.1 .1
6.1.2
C ONCEPTION DE RNA SUR FPGA 133
Résolution associée aux gains .. ... ..... .. .. .. ..... .. ... ... .. .... ... ... ....... .... ..... .......... .. ..... .. .. .. .......... .. 134
Stratégie de mise en œuvre de lafonction d'activation .... ..... ... .. ........ .. .. .... ......... .... .... .... ... 134
RÉALISATION DES FONCTIONS DE COMMANDE DE FLUX NEU RONAUX SUR FPGA 136
6.2.1 Commande de flux neuronal ....... ........... ........ .. .... .. ............ ... .. ...... .. .. ..... ................. .... .. .. .... 136
6.3 V ALIDATION EXPÉRIMENTALE DE LA COMMANDE DE FLUX AVEC DÉTECTEUR DE RÉGIME
6.4
PERMANENT 139
6.3.1 Essai initial ... .. .... .. .... ... .. .... ..... ....... .... ... .. ...... .. .. ... ... ....... .... ... ... ...... ....... ... .. ... ..... .. ..... .... ..... . 139
6.3. 2
6.3.3
Amélioration des données d 'entraÎnement.. ... .. ........... ............. .. ........ .... .. .. .... .... ..... ........ ... . 140
Validation finale .... ..... ..... ..... .. .. ... .... .... ...... ... ........ .... ....... .. .. .. .... ......... ...... ... .... .. ....... ... ..... .. 142
CONCLUSION 150
CONCLUSION GÉNÉRALE .................................................................................................................. 151
RÉFÉRENCES ......................................................................................................................................... 155
ANNEXE 1- IDENTIFICATION DES PARAMÈTRES DU MOTEUR ASyNCHRONE .............. 165
ANNEXE 2 - DONNÉES EXPÉRIMENTALES DE LA COMMANDE VECTORIELLE
INTELLIGENTE ET ÉNERGÉTIQUEMENT OPTIMALE .............................................................. 173
ANNEXE 3 - RÉSULTATS DES SIMULATIONS DU TABLEAU 3-4 ............................................. 179
ANNEXE 4 - DONNÉES TECHNIQUES PRINCIPALES DU KIT DE DÉVELOPPEMENT FPGA
STRA TIX D' ALTERA ............................................................................................................................ 183
VI11
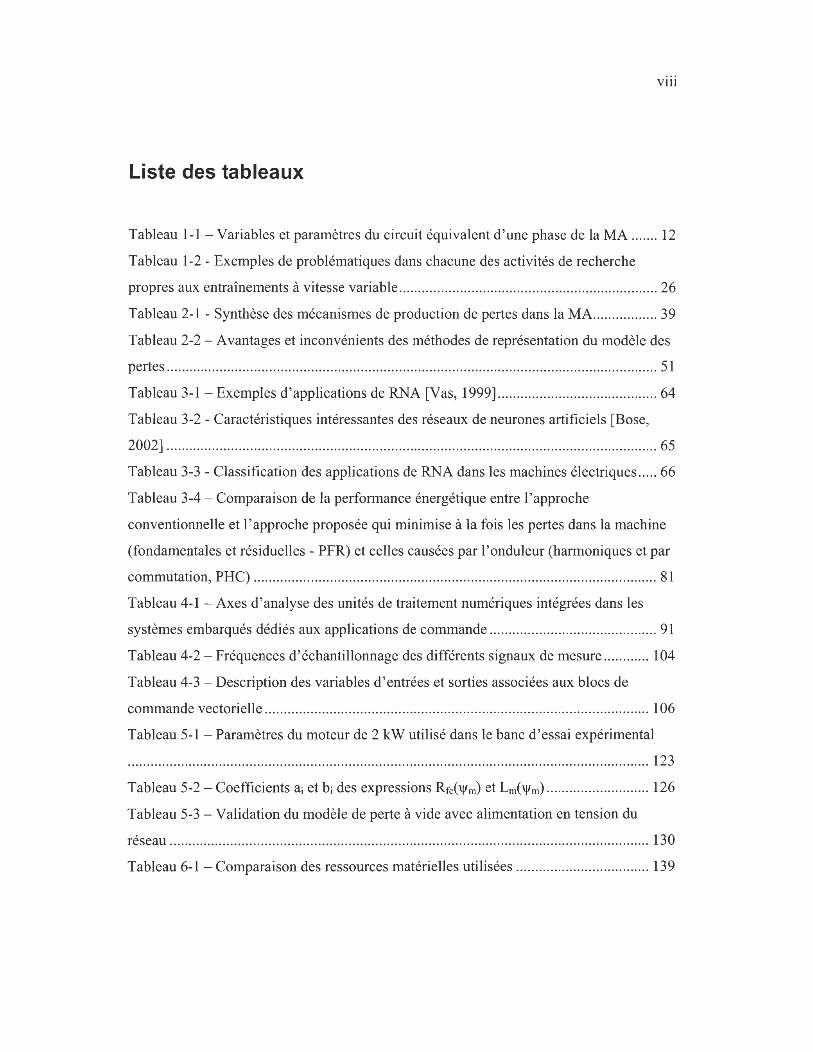
Liste des tableaux
Tableau 1-1 - Variables et paramètres du circuit équivalent d'une phase de la MA ....... 12
Tableau 1-2 - Exemples de problématiques dans chacune des activités de recherche
propres aux entraînements à vitesse variable ............................................ ........................ 26
Tableau 2-1 - Synthèse des mécanismes de production de pertes dans la MA ................. 39
Tableau 2-2 - Avantages et inconvénients des méthodes de représentation du modèle des
pertes ................................................................................................................................. 51
Tableau 3-1 - Exemples d'applications de RNA [Vas, 1999] .......................................... 64
Tableau 3-2 - Caractéristiques intéressantes des réseaux de neurones artificiels [Bose,
2002] ................................................................. ..................... ........................................... 65
Tableau 3-3 - Classification des applications de RNA dans les machines électriques ..... 66
Tableau 3-4 - Comparaison de la performance énergétique entre l'approche
conventionnelle et l'approche proposée qui minimise à la fois les pertes dans la machine
(fondamentales et résiduelles - PFR) et celles causées par l'onduleur (harmoniques et par
commutation, PRC) .......................................................................................................... 81
Tableau 4-1 - Axes d'analyse des unités de traitement numériques intégrées dans les
systèmes embarqués dédiés aux applications de commande ............................................ 91
Tableau 4-2 - Fréquences d'échantillonnage des différents signaux de mesure ............ 104
Tableau 4-3 - Description des variables d'entrées et sorties associées aux blocs de
commande vectorielle ..................................................................................................... 106
Tableau 5-1 - Paramètres du moteur de 2 kW utilisé dans le banc d'essai expérimental
..................................................... .. .................................................................................. 123
Tableau 5-2 - Coefficients ai et b i des expressions Rfe('Vrn) et Lrn('Vrn) ........................... 126
Tableau 5-3 - Validation du modèle de perte à vide avec alimentation en tension du
réseau .............................................................................................................................. 130
Tableau 6-1 - Comparaison des ressources matérielles utilisées ................................... 139

IX
Liste des figures
Fig. 1-0-1 - Schéma général du positionnement de la thèse (en rose) dans l'univers du
génie électrique actuel .............. ........................................................................................... 4
Fig. 1-1 - Schéma de la structure d'une machine asynchrone [Maxicours, 2009] ............. 7
Fig. 1-2 - Circuit équivalent d'une phase de la MA ramené au stator [Bose, 2002] ........ Il
Fig. 1-3 - Diagramme vectoriel d'une phase [Bose, 2002] ......................... ..................... . 13
Fig. 1-4 - Couple en fonction du glissement [Bose, 2002] ............................................... 15
Fig. 1-5 - Transformation du repère VSas,bs,cs au repère VSds,qs [Bose, 2002] ....................... 16
Fig. 1-6 - Transformation du repère fixe VSds,qs au repère tournant Veds, qs [Bose, 2002] .... 17
Fig. 1-7 - Circuit équivalent compact du modèle d'une phase dans le repère tournant
[Bose, 2002] ................................................................................................... ...... ............. 18
Fig. 1-8 - Onduleur triphasé à deux niveaux alimenté par un redresseur à diodes [Bose,
2002] ..................................................... .......... .................................................................. 20
Fig. 1-9 - Classification des stratégies de commande de MA ........................................... 22
Fig. 1-10 - Schéma représentant la configuration d'un entraînement à vitesse variable
basé sur la commande scalaire [Bose, 2002] .................................................................... 23
Fig. 1-11 - Commande vectorielle basée sur l'orientation du champ (méthode indirecte )24
Fig. 1-12 - Comparaison de différents mode d'exploitation sur les axes de performance
dynamique et énergétique en charge (1- alimentation secteur, 2 - alimentation
convertisseur en boucle ouverte, 3 - commande scalaire, 4 - commande vectorielle, 5 -
commande vectorielle adaptative, 6 - commande vectorielle avec ajustement du flux
rotorique) ........................................................................................................................... 25
Fig. 2-1 - Projection des signaux de tension, de flux et de courant magnétisant afin de
créer la boucle d'hystérésis [Fitzgerald et al., 1990]. ....................................................... 30
Fig. 2-2 - Effet des laminations sur les courants de Foucault [Wildi, 2001] .................... 31
Fig. 2-3 - Circuit équivalent à haute fréquence [Boldea et al., 2002] ............................... 36
Fig. 2-4 - Variation de la résistance et de l'inductance de fuite en fonction de la fréquence
[Boldea et al., 2002] ......................................................................................................... . 37
x
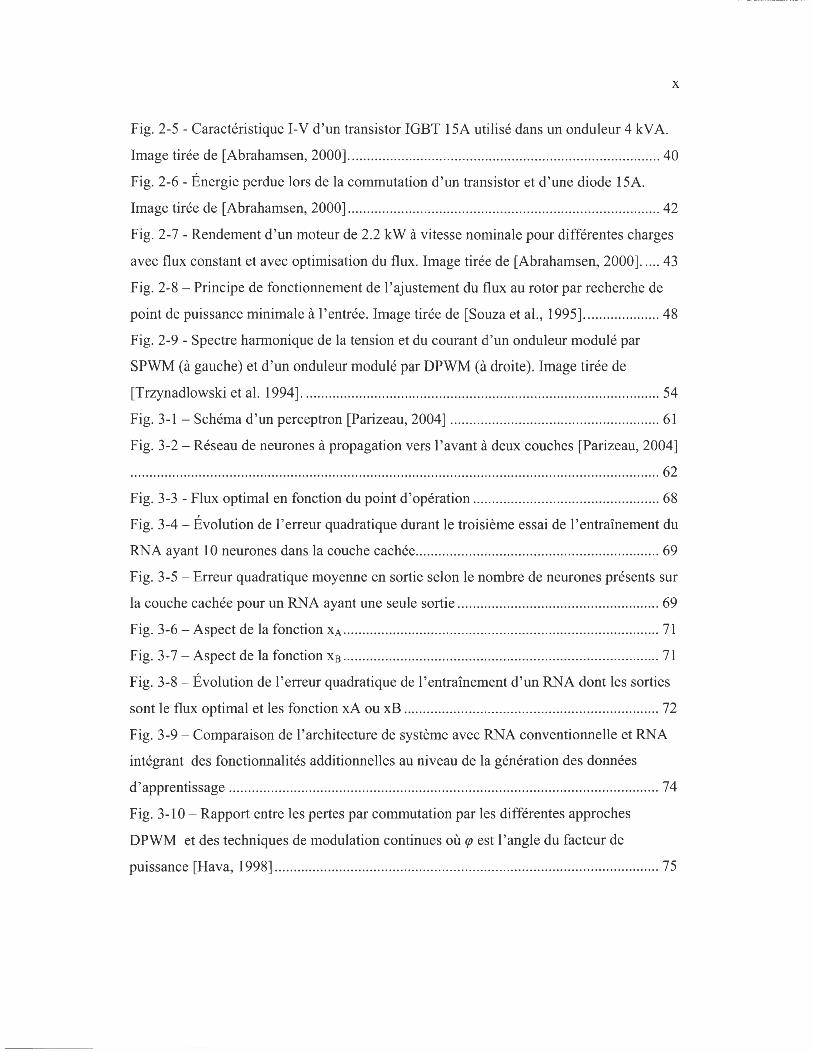
Fig. 2-5 - Caractéristique I-V d'un transistor IGBT 15A utilisé dans un onduleur 4 kVA.
Image tirée de [Abrahams en, 2000] .................................................................................. 40
Fig. 2-6 - Énergie perdue lors de la commutation d'un transistor et d'une diode 15A.
Image tirée de [Abrahams en, 2000] .................................................................................. 42
Fig. 2-7 - Rendement d'un moteur de 2.2 kW à vitesse nominale pour différentes charges
avec flux constant et avec optimisation du flux. Image tirée de [Abrahamsen, 2000] ..... 43
Fig. 2-8 - Principe de fonctionnement de l'ajustement du flux au rotor par recherche de
point de puissance minimale à l'entrée. Image tirée de [Souza et al., 1995] .................... 48
Fig. 2-9 - Spectre harmonique de la tension et du courant d'un onduleur modulé par
SPWM (à gauche) et d'un onduleur modulé par DPWM (à droite). Image tirée de
[Trzynadlowski et al. 1994] .............................................................................................. 54
Fig. 3-1 - Schéma d'un perceptron [Parizeau, 2004] ....................................................... 61
Fig. 3-2 - Réseau de neurones à propagation vers l'avant à deux couches [Parizeau, 2004]
........................................................................................................................................... 62
Fig. 3-3 - Flux optimal en fonction du point d'opération ................................................. 68
Fig. 3-4 - Évolution de l'erreur quadratique durant le troisième essai de l'entraînement du
RNA ayant 10 neurones dans la couche cachée ................................................................ 69
Fig. 3-5 - Erreur quadratique moyenne en sortie selon le nombre de neurones présents sur
la couche cachée pour un RNA ayant une seule sortie ..................................................... 69
Fig. 3-6 - Aspect de la fonction XA ...•••..••...........••••.•.•.............•..............•......•.............•.... 71
Fig. 3-7 - Aspect de la fonction XB ................................................................................... 71
Fig. 3-8 - Évolution de l'erreur quadratique de l'entraînement d'un RNA dont les sorties
sont le flux optimal et les fonction xA ou xB ................................................................... 72
Fig. 3-9 - Comparaison de l'architecture de système avec RNA conventionnelle et RNA
intégrant des fonctionnalités additionnelles au niveau de la génération des données
d'apprentissage ................................................................................................................. 74
Fig. 3-10- Rapport entre les pertes par commutation par les différentes approches
DPWM et des techniques de modulation continues où cp est l'angle du facteur de
puissance [Hava, 1998] ..................................................................................................... 75

Xl
Fig. 3-11 - Rapport entre pertes par commutation de la DPWM optimale et les pertes par
commutation avec modulation continue en fonction de l'angle du facteur de puissance rp
et de l'angle de blocage de la commutation l.f1 [Hava, 1998] ............................................ 76
Fig. 3-12 - Facteur de puissance en fonction de id pour différentes valeurs de charge en
utilisant les équations (3-13) à (3-17) ............................................................................... 77
Fig. 3-13 - Architecture avec intégration conventionnelle du modèle des pertes par
commutation ..................................................................................................................... 78
Fig. 3-14 - Facteur de puissance en fonction du point d'opération .................................. 78
Fig. 3-15 - Angle de blocage optimall.f1opt en fonction du point d'opération ................... 79
Fig. 3-16 - Architecture avec intégration du modèle de pertes par commutation au niveau
de la génération des données d'apprentissage .................................................................. 79
Fig. 3-17 - Évolution de l'erreur quadratique de l'entraînement d'un RNA dont les sorties
sont le flux optimal et l'angle de blocage optimal 't'opt ..................................................... 80
Fig. 3-18 - Intégration conventionnelle du détecteur de régime permanent à la commande
........................................................................................................................................... 83
Fig. 3-19 - Fonction r}(l1wp, I1Te) pour e inf = 0.25, e sup = 0.75 et l.f1opt(p.u.) = 0.5 ........ 85
Fig. 3-20 - Architecture avec intégration du détecteur de régime permanent au niveau de
la génération des données d'apprentissage ....................................................................... 86
Fig. 3-21 - Évolution de l'erreur quadratique de l'entraînement d'un RNA avec D2 qui
intègre le détecteur de régime permanent ......................................................................... 86
Fig. 4-1 - Évolution vers les systèmes sur une puce à technologie matérielle
programmable ................................................................................................................... 91
Fig. 4-2 - Schéma illustrant les deux grandes approches de conception de systèmes et
leur application dans la conception de système embarqués à base de FPGA ................... 94
Fig. 4-3 - Schéma fonctionnel des composantes du banc d'essai expérimental .............. 95
Fig. 4-4 - Onduleur à trois niveaux à neutre fixé (dit Neutral Point Clamped), [Pham,
2005] ................................................................................................................................. 97
Fig. 4-5 - Schéma de l'onduleur vu du circuit de commande .......................................... 97
Fig. 4-6 - Schéma de l'interfaçage de l'onduleur avec la carte FPGA ............................. 98
Fig. 4-7 - Schéma représentant la démodulation d'un signal modulé en amplitude par la
méthode de suppression de la porteuse [Stremler, 1994] ............................................... 101

Xll
Fig. 4-8 - Démodulation du signal de mesure à l'aide du SignalTap Analyzer™ d'Altera
......................................................................................................................................... 102
Fig. 4-9 - Schéma du mécanisme de démodulation des signaux de mesure ................... 104
Fig. 4-10 - Validation de la démodulation des signaux de mesure ................................. 105
Fig. 4-11 - Schéma de la commande vectorielle développée sur le banc d'essai
expérimental .................................................................................................................... 106
Fig. 4-12 - Schéma de la régulation de courant synchrone ............................................. 109
Fig. 4-13 - Version DSP Builder du bloc de régulation de couple ................................. 113
Fig. 4-14 - Validation du bloc de régulation PI de vitesse en version DSP Builder ....... 113
Fig. 4-15 - Validation du bloc PI vitesse en simulation avec matériel dans la boucle
(MDB) ............................................................................................................................. 114
Fig. 4-16 - Courant des phases A et B à vide (OJp = 37 radis) ........................................ 115
Fig. 4-17 - Réponse à l'échelon de la composante de courant id ................................... 116
Fig. 4-18 - Réponse à l'échelon de la composante de courant iq ................................... 117
Fig. 4-19 - Réponse à l'échelon du flux rotorique ......................................................... 118
Fig. 4-20 - Réponse du couple suite à changement de vitesse à vide (OJpref = 18.5 radis à
3 7 radis) .......................................................................................................................... 119
Fig. 4-21 - Réponse à l'échelon en vitesse pour différentes consignes (wpref = 18.5,37,
55.5 radis) ....................................................................................................................... 120
Fig. 5-1 - Comparaison des coefficients KRfe et KLm obtenus à partir de l'essai à vide avec
ceux montrés dans l'article de [Novotny et al., 1984] .................................................... 125
Fig. 5-2 - Courbes de régression polynomiales pour approximer la valeur des coefficients
K~re et KLm pour différentes valeurs de flux .................................................................... 126
Fig. 5-3 - Pertes dans la MA à vide pour différents niveaux de flux à une vitesse de 0.1
......................................................................................................................................... 131
Fig. 5-4 - Pertes dans la MA en charge pour différents niveaux de flux à une vitesse de
0.1 .................................................................................................................................... 132
Fig. 6-1 - Fonction sigmoïde coupée en 4 morceaux à partir du point de symétrie (x = 0)
......................................................................................................................................... 135
Xlli
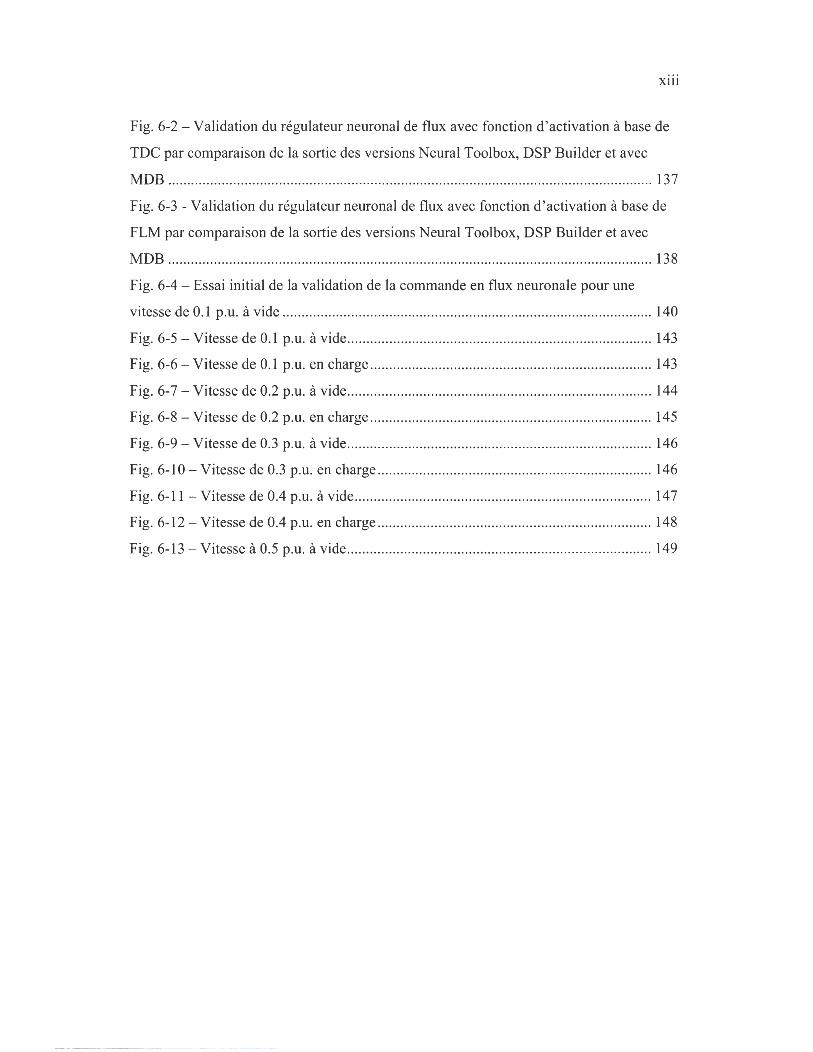
Fig. 6-2 - Validation du régulateur neuronal de flux avec fonction d'activation à base de
TDC par comparaison de la sortie des versions Neural Toolbox, DSP Builder et avec
MDB ............................................................................................................................... 137
Fig. 6-3 - Validation du régulateur neuronal de flux avec fonction d'activation à base de
FLM par comparaison de la sortie des versions Neural Toolbox, DSP Builder et avec
MDB ............................................................................................................................... 138
Fig. 6-4 - Essai initial de la validation de la commande en flux neuronale pour une
vitesse de 0.1 p.u. à vide ........................................................ ......................................... 140
Fig. 6-5 - Vitesse de 0.1 p.u. à vide ................................................................................ 143
Fig. 6-6 - Vitesse de 0.1 p.u. en charge .......................................................................... 143
Fig. 6-7 - Vitesse de 0.2 p.u. à vide ................................................................................ 144
Fig. 6-8 - Vitesse de 0.2 p.u. en charge .......................................................................... 145
Fig. 6-9 - Vitesse de 0.3 p.u. à vide ................................................................................ 146
Fig. 6-10 - Vitesse de 0.3 p.u. en charge ........................................................................ 146
Fig. 6-11 - Vitesse de 0.4 p.u. à vide .............................................................................. 147
Fig. 6-12 - Vitesse de 0.4 p.u. en charge ........................................................................ 148
Fig. 6-13 - Vitesse à 0.5 p.u. à vide ................................................................................ 149

Liste des symboles
Indices et exposants
a,b,c
a,~
d,q,Û
e (exposant)
e (indice)
f
g
h
m
n
p
r
s ( exposant)
s (indice)
t
Symboles et unités
A
B
C
D
F
H
L
l
P
phases de la machine
axes de référence dans le repère stationnaire au stator
axe direct, en quadrature et composante homopolaire
repère tournant
électrique / électromagnétique
fuite
glissement
hystérésis
branche magnétisante
relatif au bus à courant continu
mécanique
rotor
repère stationnaire
stator
couple
surface (m2)
densité de flux (Weber 1 m2 ou Tesla)
coefficient
longueur (m)
force (Newton)
champ magnétique (A/m)
inductance (Henry)
courant (Ampère)
nombre de pôles de la machine
XIV

R
S
T
V
co
Abréviations
ASIC
CA
CAO
CC
CEO
CFO
DSP
EQM
ETANN
EVV
FLM
FOC
FPGA
FMM
IGBT
LEEPCI
MA
MCC
MDB
MLI
MOSFET
PHS
résistance (Ohm)
glissement (sans dimension)
couple (Nm)
tension (Volt)
vitesse angulaire (radis)
flux magnétique (Weber)
application specific integrated circuit
courant alternatif
conception assistée par ordinateur
courant continu
contrôleur énergétique optimal
commande à flux orienté
digital signal processing (ou processor, selon le contexte)
erreur quadratique moyenne
electrically trainable artificial neural network
entraînement à vitesse variable
fonction linéaire par morceau
field oriented control
field programmable gate array
force magnétomotrice
insulated gate bipolar transistor
laboratoire d'électrotechnique, d'électronique de puissance et de
commande industrielle
machine asynchrone
machine à courant continu
matériel dans la boucle
modulation de largeur d'impulsions
metal oxide semiconductor field effect transistor
pertes harmoniques spatiales
xv

PI
PWM
RNA
RTL
SCEO
TDC
TDH
TPM
VHDL
VHSIC
proportionnel intégral
pulse width modulation
réseau de neurones artificiels
register transfer level
stratégie de commande énergétiquement optimale
table de conversion (lookup table)
taux de distorsion hannonique
tours par minute
VHSIC hardware description language
very high speed integrated circuit
XVI

1
Introduction générale
Positionnement de la thèse dans l 'univers du génie électrique actuel
La science du génie électrique est le patrimoine de connaissances que possède
l'humanité afin d'utiliser l' énergie de nature électrique à des fins utiles. La connaissance
scientifique et la maîtrise de ce type d ' énergie sont relativement récentes (les premières
applications sont apparues au XIXe siècle) si on la compare à l' énergie mécanique dont
les premières applications sont apparues environ 3000 avant J-C (cales, roues, leviers,
etc.). L'énergie électrique possède de nombreuses utilités qui ont profondément contribué
à améliorer la qualité de vie générale depuis plus d'un siècle. L'intérêt pour l 'utilisation
de ce type d'énergie provient d'une application et d'une propriété fondamentales : (1) le
transport économique de grandes quantités d'énergie sur de grandes distances et (2) une
très grande vitesse de propagation dans des matériaux conducteurs.
La première de ces propriétés permet de séparer géographiquement un point de
production d'énergie à un point de consommation en les reliant à l'aide d'un réseau
électrique qui joue alors un rôle d'interface. Un point de production d'énergie transforme
de l'énergie provenant de différentes formes (hydraulique, nucléaire, éolienne, charbon,
etc.) en énergie mécanique grâce à une turbine. Le transfert de cette énergie mécanique
vers le réseau électrique est effectué à l'aide d'une machine électrique (alternateur) qui
est reliée à la turbine par un arbre. Cette énergie électrique est distribuée aux points de
consommation par le réseau électrique et peut être reconvertie en énergie mécanique par
une autre machine électrique (moteur), transformée en chaleur (chauffage) ou utilisée
pour alimenter des appareils électroniques (ordinateur). La conversion électromécanique
effectuée à l'aide de machines électriques est fondamentale dans ces processus de
génération et de transformation de l'énergie et provient de la compréhension des
phénomènes électriques et magnétiques dont les fondements sont issus des travaux de
l'écossais James Clerk Maxwell (1831-1879).

2
La seconde de ces propriétés permet l'utilisation de l'énergie électrique comme un
moyen de représenter et de transmettre de l'information. En faisant varier l'état de la
tension ou du courant dans un matériau conducteur, il est possible d'associer à un
paramètre de cette variation d'état une quantité d'information utile pouvant être propagée
d'un émetteur vers un récepteur à une vitesse proche de celle de la lumière. Cette
propriété a été exploitée pour mener à l'invention du téléphone et à d'autres moyens de
télécommunications dérivés (radio, télévision, etc.). Ces inventions ont contribué
fondamentalement au développement du traitement de signal et de l'électronique. La
théorie fondamentale de l'ingénierie des communications a été développée en 1948 par
l'américain Claude Shannon (1916-2001) et le transistor bipolaire, à la base de toute
l'électronique moderne, par les chercheurs William Shockley (1910-1989), John Bardeen
(1908-1991) et Walter Brattain (1902-1987) chez Bell Labs aux États-Unis en 1947.
Ainsi, on peut dire de manière générale que le génie électrique se divise en deux
grands champs d'applications: les applications reliées à l'énergie électrique comme
capacité de produire un travail et les applications reliées à l'énergie électrique comme
capacité de représenter et de transmettre de l'information. La synthèse de ces deux
grands champs d'applications a mené à l'invention d'un nouveau champ d'application
qui s'étend à tous les systèmes dynamiques: l'ingénierie de la commande.
Le principe à la base de l'ingénierie de la commande est d'utiliser un système de
basse énergie pour réguler un système de haute énergie en vue d'obtenir un effet désiré.
La première application connue de ce type de système est le célèbre régulateur à boule de
James Watt (1736-1819) appliqué à la régulation de la vitesse d'une machine à vapeur.
C'est le même James Clerk Maxwell cité plus haut qui a travaillé sur la formalisation de
la théorie du fonctionnement de ce type de régulateur vers la fin du 1ge siècle et a ouvert
le champ de la théorie de la commande. Vinrent ensuite des noms comme Edward Routh
(1831-1907), Harold Black (1898-1983), Alexandre Lyapunov (1857-1918) et Harry
Nyquist (1889-1976) qui ont construit les bases de la théorie de la commande en étudiant
les critères de stabilité et le mécanisme de rétroaction pour plusieurs classes de systèmes.
Norbert Wiener (1894-1964) a synthétisé ces travaux en généralisant la théorie de la
commande et de la communication et en proposant leur application à la compréhension
de l'homme et de la société « comme machine». Les travaux de Wiener ont alors ouvert

3
la voie vers les théories d'intelligence artificielle et de techniques de modélisation basées
sur la connaissance plutôt que sur des équations analytiques.
Les progrès dans le développement de l'électronique dans les années 1950-1960 ont
fondamentalement révolutionné le génie électrique autant dans les applications reliées à
la conversion d'énergie qu'aux applications reliées au traitement de l'information:
• les applications reliées à la conversion d'énergie ont été transformées par
l'électronique de puissance qui permet de convertir l'énergie électrique d'une
forme à une autre;
• les applications reliées au traitement du signal ont été transformées par
l'intégration à large échelle de transistors permettant la construction de circuits
électroniques offrant une puissance de calcul de plus en plus élevée. Dans les
systèmes de commande, l'impact des progrès en électronique a permis
d'améliorer le découplage entre système commandé et le système de commande à
l'aide de capteurs et de circuits électroniques analogiques ou numériques
augmentant ainsi la complexité et la performance de ces systèmes (par rapport aux
systèmes de commandes mécaniques conventionnels).
La synthèse de ces progrès a donné lieu à la montée d'un nouveau type de système
combinant à la fois un système de conversion d'énergie électrique à base d'électronique
de puissance et un système de commande à base d'électronique en vue de réguler la
forme du courant électrique injecté dans une machine électrique. Ce type de système est
appelée «entraînement» et ouvre la voie à de nouvelles utilisations des machines
électriques. Auparavant utilisées comme convertisseurs d'énergie électro-mécanique,
elles jouent désormais le rôle d'actionneur mécanique dont il est possible de commander
précisément la dynamique.
Il existe deux aspects fondamentaux à considérer dans l'évaluation de la performance
des entraînements: celui de la performance dynamique et celui de la performance
énergétique. L'amélioration de l'un ou l'autre de ces aspects de performance (dynamique
et/ou énergétique) peut se faire selon trois perspectives: par l'amélioration de la machine,
par l'amélioration du convertisseur et par amélioration du système de commande (Fig.
1-0-1).

~ M
electnques
Gènie ï ctnqu
!
,ransmissior1 ~n r J ~ 1
El ron u d Clrcull ' puissance él ctroniq 8S
Entraînements â 'Ii ess variable 14------1
Systemes 00 mane-
4
t
~rn~ nfo
Trart rr 1 d signal
Fig. 1-0-1 - Schéma général du positionnement de la thèse (en rose) dans l'univers du génie électrique
actuel
Le sujet de cette thèse repose sur l'étude de l'amélioration du système de commande
en vue d'améliorer la performance énergétique d'un système d'entraînement à vitesse
variable composé d'une n1achine asynchrone (MA) alimentée par un onduleur de tension
triphasé à deux niveaux. Les contributions de cette thèse se situent à la fois au niveau de
l'utilisation nouvelle d ' algorithmes d ' intelligence artificielle (réseaux de neurones
artificiels, RNA) et à la fois sur l'utilisation d'un nouveau type de circuit électronique
programmable (appelé Field Programmable Gate Array , FPGA).
Organisation de l 'ouvrage
Au chapitre l, les généralités entourant les pnnCIpes de fonctionnement des
entraînements à vitesse variable de MA sont montrées avec une ouverture sur les
possibilités d'augmenter leur efficacité énergétique.
Au chapitre 2, les principaux mécanismes de pertes présents dans les MA et dans les
convertisseurs statiques sont présentés dans la première partie. La seconde partie montre
les différentes stratégies possibles de lninitnisation des pertes dans ce type de système et
dans quelle direction ont été menés les plus récents travaux en la matière. On termine le
chapitre en ouvrant sur deux perspectives importantes dans l'intégration d'un modèle de

5
pertes dans un contrôleur: sa performance et son coût (en terme de ressources mémoires,
unités logiques ou temps de calculs). Les RNA s 'avèrent une avenue intéressante pour
diminuer le coût d'intégration du modèle des pertes dans le contrôleur.
Au chapitre 3, on présente une introduction au domaine des RNA et de leur utilisation
dans les systèmes d'électronique de puissance. Ensuite, on présente la conception d'une
fonction de commande optimale de flux neuronal à partir d 'un modèle de pertes
générique. On examinera l'utilisation de RNA dans la conception de la fonction de
commande de flux en vue de diminuer la complexité globale du système de commande et
étendre l'optimisation énergétique sur toute la plage de charge sans coût supplémentaire.
Au chapitre 4, on présente la conception d'un banc d' essai expérimental permettant
de faire la validation des régulateurs conçus au chapitre 3. On y montre la réalisation d 'un
système de commande vectorielle sur plateforme de développement commerciale FPGA
en proposant une approche logicielle plutôt qu'une approche matérielle
conventionnellement proposée.
Au chapitre 5, on conçoit et valide expérimentalement un modèle des pertes de la MA
à partir des résultats obtenus à l'identification des paramètres du standard IEEE-112.
Au chapitre 6, une introduction sur la conception de RNA sur FPGA est présentée
avant de montrer les résultats expérimentaux issus de la validation du régulateur de flux
optimal et neuronal avec intégration du détecteur de régime permanent et basé sur le
modèle des pertes construit et validé au chapitre 4.
~ f"..<mœption et réaltsation d'un
bene:; d;essaJ expênmenlai
~ C~néralité5 et probiémaHque
~ Etlme d;e la probMmatique e1 propos.iti()f)s d'ijvQj'i(jrm'1ants
~ Cooception de commande
vectorielle améliorée
ChaoitreVI
~ Conœpl.km et validajJoo d'uf)
modèle des pertes
1 • 'v,."' ..... w •... '", ••...•• w ............. w.w"' .... ,w,w, .. ,.w., f'i Validation expérimentale de la •• 'v"' .... "'w.'" ~ " ~,w"'vW>v,)
commandé Véèto.tiéllé amèliQréé
Figure 1-1.1-1 - Organisation de l'ouvrage

6
Chapitre 1: Les entraÎnements à vitesse variable de
machines asynchrones
Les machines asynchrones (aussi appelées machines à induction) sont des machines
électriques inventées à la fin du XIX siècle et qui permettent la conversion efficace de
l'énergie électrique en énergie mécanique sur une plage de puissances d 'utilisation de
l'ordre de la centaine de Watt à plusieurs milliers de kiloWatt.
Leur simplicité de construction, d'utilisation et d'entretien ont vite popularisé leur
utilisation industrielle en mode moteur comme source d ' énergie mécanique primaire pour
entraîner des pompes, des ventilateurs, etc. Dans ce type d'application, la MA est
alimentée directement à partir du réseau de distribution électrique (de tension électrique
et de fréquence fixes) limitant ainsi sa plage d'opération près de la vitesse nominale de la
machine. Cette limite a longtemps confiné les MA au simple rôle de convertisseur
d'énergie laissant le rôle d'actionneur aux machines à courant continu.
Un moyen pour repousser cette limite est d'alimenter la MA à l'aide d'une source de
tension d'amplitude et de fréquence réglables adaptés aux besoins de l'application. Ce
système de modulation alimenté par une source de tension continue et appelé
« onduleur » est basé sur l'utilisation de convertisseurs statiques composés
d'interrupteurs électroniques de puissance. La tension d'alimentation continue de
l' onduleur peut provenir soit d 'une batteri~ ou soit d 'un autre type de convertisseur
statique appelé « redresseur» et dont la fonction est de transformer une onde de tension
alternative en tension continue.
La modulation de l'onde tension de sortie de l' onduleur s'effectue par la génération
de signaux d'ouverture et de fermeture des transistors de puissance. Ces signaux sont
générés à l'aide d'un circuit de commande électronique et déterminent directement la
performance de l'entraînement de la MA.
Ce chapitre a pour objectif de faire un survol de l'information essentielle à connaître
sur les éléments qui composent un système d'entraînement à vitesse variable d'une MA.
Ainsi, les sections suivantes traiteront spécifiquement de la machine asynchrone, de
l' onduleur de tension et du système de commande.

7
1.1 La machine asynchrone
Description générale
La MA est un système électromécanique permettant la conversion de l ' énergie
mécanique en énergie électrique (mode générateur) et la conversion de l'énergie
électrique en énergie mécanique (mode moteur). Elle est composée d'une partie fixe
appelé stator et d 'une partie tournante appelée rotor (Fig. 1-1).
Stator
Bâti
racrordement
Fig. 1-1 - Schéma de la structure d'une machine asynchrone [Maxicours, 2009]
Le stator d'une MA polyphasée est composé de plusieurs bobines de fil de cuivre
disposées dans des encoches. La fonction de ces bobines est de créer une force
magnétomotrice (FMM) tournante (sinusoïdale) à l'intérieur du stator lorsqu'elles sont
mises sous tension. Un nombre égal d'encoches est attribué pour chaque phase de la

8
machine et sont regroupées en pôles positionnés symétriquement dans le stator. Le
nombre de pôle d'une machine dépend de la fréquence de son alimentation et de sa
vitesse nominale. Il existe deux types de rotor pour les MA : (1) les rotors bobinés et (2)
les rotors à cage d'écureuil.
Les rotors bobinés sont composés de bobines de fil de cuivre disposées dans des
encoches comme dans le cas du stator. Ces bobines sont alors connectées en parallèle
pour former les phases qui sont à leur tour connectées entre elles en configuration étoile
(Y) et reliées à l'extérieur de la MA par des balais. On utilise cet arrangement afin de
contrôler la vitesse en contrôlant le courant dans le rotor à l'aide de résistances variables.
Les rotors à cage à écureuil sont construits à l'aide de barres métalliques placées
dans les encoches et reliées entre elles à l'aide de bagues de terminaison (end rings). Ce
type de rotor est moins coûteux, plus robuste et plus fiable que le rotor bobiné mais le
courant qui y circule n'est pas directement contrôlable, ni mesurable.
Principe de fonctionnement
La compréhension du fonctionnement de la MA repose essentiellement sur deux
lois physiques fondamentales: la loi d'Ampère (loi des forces électromagnétiques) et la
loi de Faraday (loi de l'induction électromagnétique). Ces deux lois physiques sont
synthétisées en une seule loi électromagnétique que sont les équations de Maxwell.
Essentiellement, la loi d'Ampère énonce que lorsqu'un conducteur de courant est
placé dans un champ d'induction magnétique, une force électromagnétique est générée
dont la grandeur et la direction sont données par:
(1-1) F=(BxD)!
où ft est la force mécanique (N), Ë est la densité de flux magnétique (Wb/m2), jj
est la longueur du conducteur qui croise le champ magnétique (m) et ! le courant qui
circule dans le conducteur (A).
La loi d'Ampère est le principe de base de toutes les machines électriques: à
l'aide d'un courant électrique et d'un flux magnétique il est possible de créer un couple
mécanique et vice-versa. Ce qui différencie les divers types de machines électriques entre
elles (machines synchrones, machines asynchrone et machines à courant continu) se

9
résume à la manière dont on s 'y prendra pour générer un flux magnétique et le coupler
avec un courant électrique pour créer un couple mécanique (dans le cas d'une utilisation
en mode moteur). Dans le cas particulier de la MA, le flux magnétique produit par le
courant rotorique provient de l'induction de la tension au rotor causé par une différence
de vitesse électrique entre le rotor et le stator. Cette induction de la tension est décrite par
la loi de Faraday.
La loi de Faraday énonce qu 'une tension électrique est induite dans un conducteur
lorsque celui-ci croise un flux magnétique variable dans le temps ou dans l'espace. Ainsi,
une tension électrique sera induite dans un conducteur mobile croisant un flux
magnétique constant (variation du flux dans l ' espace - principe utilisé par les machines
électriques) ou dans un conducteur fixe traversé par un flux magnétique dont la grandeur
etlou la direction sont variables (variation du flux dans le temps - principe utilisé par les
transformateurs de tension). La grandeur de la tension induite dans un tel conducteur est
donnée par:
(1-2) d
e = --lf/ dt
où e est la tension électrique induite (V) et If/ est le flux magnétique (Wb) donné par:
(1-3) lf/ = fsB. dS
où S est la surface de la densité de flux croisée par le conducteur (m2).
Ainsi, en appliquant une tension de forme sinusoïdale d'amplitude Vs et de
fréquence W s (radis) aux bornes des trois phases du stator, on crée ainsi un champ
tournant de même fréquence dans l'entrefer et qui coupe les enroulements du rotor. La
fréquence à laquelle sont coupés les enroulements du rotor dépend de la vitesse
mécanique du rotor wp (radis) du rotor et la vitesse électrique au stator W s et se nomme
fréquence de glissement wg (radis) :

10
où P est le nombre de pôles de la machine. Il est utile de représenter le glissement S
relatif à la vitesse électrique de la tension au stator W s (notation par unité) :
(1-5)
Selon la loi de Faraday, lorsque la fréquence de glissement est non nulle, une
tension induite apparaît aux bornes des enroulements du rotor. Cette tension crée à son
tour un courant rotorique dont la grandeur ramenée au stator est égale à :
(1-6)
où Rr est la résistance du bobinage d'une phase du rotor (n) et Lfr est l'inductance de
fuite au rotor (H). Le courant au rotor est en retard sur la tension du rotor par un angle Br déterminé par le facteur de puissance du rotor.
Selon la loi d'Ampère, le courant rotorique qui croise le flux magnétique pour
chacune des phases produit alors un couple mécanique sur le rotor:
où lÎ' m et Ir sont respectivement les valeurs crêtes du flux magnétique et du courant
rotorique. L'angle Bt est l'angle de couple correspondant à la phase entre la force
magnétomotrice du stator et celle du rotor :
(1-8)

Il
Circuit équivalent des phases réelles
La modélisation de la MA est nécessaire pour déterminer avec précision son
fonctionnement et son comportement dynamique, utile pour la conception de machines et
d ' entraînements de machines à haute performance. Il existe plusieurs modèles de MA qui
se différencient par le système de coordonnées avec lequel ils sont construits: (1) repère
des phases (a, b, c) , (2) repère stationnaire au stator (a, fJ) et (3) repère tournant basé sur
la vitesse électrique du rotor (d, q). La validité d 'un modèle peut également être limitée
au régime permanent ou également inclure les régimes transitoires.
Le modèle de la MA basé sur le repère des phases est le plus intuitif puisqu ' il est
basé sur le développement d'un modèle unique et identique pour chacune des phases qui
composent la MA. La première approximation d'un tel modèle est de le construire en
faisant l'hypothèse d'un couplage électromagnétique entre le stator et le rotor semblable à
celui que l'on trouve dans un transformateur. Le stator et le rotor peuvent donc être
modélisés par les mêmes éléments: (1) résistance du bobinage, (2) inductance de fuite et
(3) inductance mutuelle. Sachant que le rapport de transformation de la tension entre le
stator et le rotor est égal à (1-9), il est possible de ramener les éléments du circuit
rotorique au stator et ainsi se retrouver avec un circuit équivalent d'une phase tel que
montré à la Fig. 1-2. La définition de chacun des paramètres et des variables présentés à
la Fig. 1-2 est montrée au Tableau 1-1.
(1-9)
Lfr
Î Vs
l Fig. 1-2 - Circuit équivalent d'une phase de la MA ramené au stator [Bose, 2002]

12
Tableau 1-1 - Variables et paramètres du circuit équivalent d ' une phase de la MA
Variable 1 paramètre Description Unités
Vs Tension de phase au stator V
Vm F oree contre-électromotrice (FCEM) V
is Courant au stator A
im Courant magnétisant A
ipfe Courant dû aux pertes fer A
io Courant total dans la branche magnétisante A
ir Courant au rotor A
Rs Résistance au stator n Rr Résistance au rotor n Rm Résistance équivalente des pertes dans le fer n Lfs Inductance de fuite au stator H
Lm Inductance mutuelle H
Lfr Inductance de fuite au rotor H
S Glissement p.u.
Rapport entre le nombre de tour du bobinage n -
au rotor par rapport à celui au stator
La résistance équivalente Rm a pour but de modéliser les pertes engendrées dans le noyau
magnétique qui sont également appelées «pertes fer» (iron losses). L'inductance
magnétisante Lm a pour but de modéliser l'imperfection au niveau de la perméabilité du
noyau magnétique (idéalement infiniment grande). Le modèle présenté à la Fig. 1-2 est
valide en régime permanent et basé sur les hypothèses suivantes:
• le noyau magnétique n'est pas saturable, c'est-à-dire que le flux est toujours
directement proportionnel au courant magnétisant;
• les pertes fer représentées par la résistance équivalente Rm ne considèrent que les
pertes fondamentales et non les pertes causées par les harmoniques spatiales du
flux magnétique causées par les discontinuités/asymétries géométriques de la
construction de la machine;

13
• les résistances au rotor et au stator ne varient pas en fonction de la température;
• on ne considère que l'onde fondamentale de la tension Vs: ce qui est valable
lorsque la tension Vs est parfaitement sinusoïdale (alimentée directement par le
réseau) mais ce qui n'est pas le cas lorsque la MA est alimentée par un onduleur
de tension.
Le diagramme vectoriel du circuit équivalent d'une phase présenté à la Fig. 1-3.
Ct'}ti stator
Fig. 1-3 - Diagramme vectoriel d'une phase [Bose, 2002]
Le couple électromagnétique est égal au rapport de la puissance de sortie de la MA
(Psortie) et de sa vitesse mécanique (wp ) :
(1-10) T == ~ortie == ~ortie (PJ e ûJ p ûJs (1- S) 2
Or, la puissance de sortie de la MA est égale à la puissance qui traverse l'entrefer
(Pentrejer) moins les pertes cuivres dans le bobinage du rotor (Pcuivre,rotor) :

14
2 R r 2 2 (1- S) (1-11) ~orlie == P entre/ er - P cuivre,rolor == 31 r S - 31 r R r == 31 r R r S
En négligeant les pertes fer [Bose, 2002], on peut estimer le courant rotorique comme
étant à peu près égal à :
( 1-12 ) Ir ~ -;:===============Vs=============-
(Rs +~)2 +(j);(Lfs +Lf }
À l'aide de (1-10), (1-11) et (1-12), on peut alors exprimer le couple électromagnétique
Te par la relation suivante:
Le couple électromagnétique Te est donc fonction de la tension d'alimentation Vs, de la
fréquence d'alimentation W s et du glissement S. La courbe du couple en fonction du
glissement est montrée à la Fig. 1-4.

fl't'inage moteur
Tam ~.+--+---- couple maximal
'vUesst~ synchrone
...-- glissement, (S) 2~ ________ ~ __ ~ __ ~ ________________ ~ ________________ ~
t.ouple de démarrage
o
Fig. 1-4 - Couple en fonction du glissement [Bose, 2002]
Circuit équivalent des phases fictives d-q
15
Le principal problème avec la modélisation basée sur les phases est que l'équation
du couple (1-13) n'est pas découplée en variable de flux et de courant, ce qui ne permet
pas une commande linéaire du flux et du courant et par conséquent une commande
linéaire du couple. Ce modèle n'est également valable qu'en régime permanent, ce qui
constitue un problème pour les applications où la performance dynamique est très
importante.
Une manière d'arriver à une équation découplée du couple est de ramener les
composantes du diagramme vectoriel de la Fig. 1-3 de chacune des phases à un système
de coordonnées à deux dimensions (d, q) basé au stator (fixe) ou basé au rotor (tournant).
La composante d est alignée sur le flux et la composante q est placée à 90° de la
composante d (alignée sur le courant de couple). La machine à N phases peut donc être
ramenée à une machine à 2 phases fictives.
La transformation des variables de tension dans un repère des phases fixe (aS, bS,
CS) à un repère à deux dimensions fixe et référé au stator (cf, qS) est montré à la Fig. 1-5.

16
La transformation pour les variables de courant et de flux au stator et au rotor est
exactement la même.
bs
cs
s IIxe d
s an q
Fig. 1-5 - Transformation du repère VSas,bs,cs au repère VSds,qs [Bose, 2002]
Par de simples relations géométriques, on peut donc transformer les tensions
d'alimentation au stator dans le repère des phases VS o, b,c en tensions VS ds, qs, Os référées au
stator (transformation de Park) :
où VS Os est la composante de séquence zéro qui est normalement toujours égale à zéro (en
raison de l 'hypothèse de symétrie parfaite entre les phases au stator et en raison de
l'impossibilité de connecter un neutre dans le cas d'un rotor à cage) et es est l'angle entre
la composante qS et la composante v s . Il est commun de négliger VS Os et de travailler
seulement avec les composantes d et q.
Les tensions au stator VS ds, qs ont l'avantage de représenter les tensions au stator
VSo,b,c dans un repère à deux dimensions mais leur grandeur varie toujours

17
sinusoïdalement dans le temps. Cet inconvénient peut être contourné en représentant les
tensions VS ds,qs dans un repère tournant à la vitesse électrique W e et dont la position est Be (Fig. 1-6).
e q
s d
Fig. 1-6 - Transformation du repère fixe" ds,qs au repère tournant ve ds,qs [Bose, 2002]
La transformation des tensions au stator VS ds,qs dans un repère fixe au stator à un repère
tournant ve ds,qs se fait à l'aide de relations géométriques simples:
La représentation des tensions au stator dans un repère tournant ve ds, qs possède l'avantage
que, pour des tensions d'alimentation au stator VS a,b,c d'amplitude constante, la grandeur
des composantes est également constante. Le repère tournant peut être soit aligné avec (1)
le flux au rotor lfJr, (2) le flux dans l'entrefer lfJrn ou (3) le flux au stator I{fs.
Ainsi, la représentation électrique des circuits au stator et au rotor d'une MA (à
cage ou à rotor bobiné) dans le repère tournant est exprimée par:

18
(1-16)
(1-17) e R·e d e ( \.., e R.e d e ( \." vqr == rlqr + -lf/ qr + OJe - OJr H dr' V dl' == r l dr + -lf/ ds - OJe - OJr H qr dt dt
où les expressions des flux magnétiques couplés sont égales à :
(1 18) e L· e L (. e . e ) e L· e L ( . e . e ) e L (. e . e ) - lf/ qs == fs lqs + m l qs + lqr ,lf/ qr == jr l qr + m lqs + lqr ,lf/ qm == m lqs + lqr
(1 19) e L·e L (. e ·e ) e L·e L (. e ·e ) e L (. e ·e ) - lf/ ds == fs l ds + m l ds + l dr ,lf/ dr == fr l dr + m l ds + l dr ,lf/ dm == m l ds + l dr
Il est possible d'exprimer les équations (1-16) à (1-17) de manière plus compacte en
multipliant les équations Vd par j et en les additionnant à vq. Ainsi, on trouve:
(1 20) e . e R (. e .. e ) d ( e . e ) . ( e . e ) e - V qs - JV ds == s l qs - J l ds + dt \lf/ qs - J lf/ ds + J OJ e \lf/ qs - J lf/ ds == V qds
Le circuit équivalent représentant les équations (1-20) à (1-21) est montré à la Fig. 1-7.
v.qds
o--------------------------------------------------------------~
Fig. 1-7 - Circuit équivalent compact du modèle d'une phase dans le repère tournant [Bose, 2002]

L'expression du couple électromagnétique Te à l'aide des variables issues du modèle de
la machine dans le repère tournant est égal à :
19
L'équation du couple électromagnétique (1-22) est maintenant découplée en variable de
flux et de courant. Cela implique que le modèle de la MA dans le repère tournant nous
permet de commander linéairement le couple électromagnétique Te à l'aide des variables
de flux et de courant. Ainsi, une même valeur de couple peut être produite par des
niveaux de flux et de courant différents. La recherche de la configuration flux -courant
optimale dépendra d'un compromis entre les performances dynamiques et les
performances énergétiques de la MA.
1.2 L'onduleur de tension
Un onduleur de tension est convertisseur statique permettant la génération d'ondes de
tension sinusoïdales d'amplitude et de fréquence variables à partir d'une source de
tension continue (provenant d'une batterie ou d'un circuit redresseur).
Il est possible de convertir une tension continue à une tension pratiquement
sinusoïdale à l'aide d'un onduleur à une ou plusieurs phases. Un onduleur est composé
d'un nombre de «bras» égal au nombre de phases. Chaque bras contient un nombre de
transistors déterminé par le nombre de niveaux de tensions de sortie de chaque bras. Dans

20
le cas d'une alimentation triphasée à deux niveaux (+/- Vn), chaque bras contient deux
transistors (Fig. 1-8).
v" c
cbau'g~
Fig. 1-8 - Onduleur triphasé à deux niveaux alimenté par un redresseur à diodes [Bose, 2002]
Il est possible de créer une tension de sortie qui se rapproche d'une onde sinusoïdale
en faisant commuter adéquatement les transistors de l' onduleur. La technique de
commutation la plus utilisée pour moduler une tension sinusoïdale à l'aide d'un onduleur
est celle de la modulation par largeur d'impulsion (MLI). La tension de sortie de
l'onduleur n'est pas parfaitement sinusoïdale et par conséquent, plusieurs harmoniques
sont produites par l' onduleur et se traduisent par des pertes harmoniques dans la charge et
en oscillations dans le courant (qui provoque par conséquent des oscillations dans le
couple dans le cas où la charge est un moteur).
Les pertes harmoniques et les oscillations de courant dans la charge peuvent être
réduites en modulant une tension de sortie plus fidèle à une onde sinusoïdale parfaite en
ajoutant des niveaux de tensions à l'onduleur. Ces onduleurs sont appelés onduleurs multi
niveaux.
21
1.3 Le système de commande
Le système de commande est un circuit électronique dont la fonction est de piloter
l ' onduleur de tension afin d'obtenir un effet désiré sur le MA. Ce pilotage peut se faire en
boucle ouverte ou en boucle fermée à l'aide de capteurs de courant, de tension ou de
vitesse, suivant la stratégie utilisée. Un circuit électronique et une stratégie de commande
sont donc les composantes principales d'un système de commande d'un entraînement à
vitesse variable de MA.
Le circuit électronique
Le circuit électronique est composé de ports d'entrées et de sortie connectés à un
circuit de traitement de l ' information. Ce type de système fait partie de la grande famille
des « systèmes embarqués». Les premiers systèmes de commande pour entraînements à
vitesse variable étaient entièrement analogiques mais depuis le début des années 1980, le
traitement de l'information se fait à l'aide d'un circuit numérique en faisant la conversion
analogique/numérique des entrées et la conversion numérique/analogique des sorties.
Ce circuit numérique peut prendre différentes formes qui varient entre le circuit
logique sur mesure (tout matériel) et le circuit logique générique interfacé à une mémoire
dans laquelle on emmagasine du code (tout logiciel). Typiquement, les circuits tout
matériel sont réalisés à l'aide de technologie ASIC (Application Specific Integrated
Circuit) alors que les circuits génériques sont des ASIC spécialisés connus sous le nom
de microcontrôleurs ou de DSP (digital signal processor). Les circuits matériels offrent
plus de performance et de flexibilité de conception que les circuits génériques mais leur
coût de développement est beaucoup plus grand. Pour cette raison, la plupart des
systèmes de commande développés au cours des 20 dernières années l'ont été à l'aide de
circuits génériques de type DSP.
Depuis seulement quelques années], un nouveau type de technologie réunissant les
avantages des circuits matériels (performance, flexibilité de conception) et des circuits
1 La technologie FPGA existe depuis le début des années 1980 mais n'est devenue une alternative aux
autres plateformes de calculs (micro-contrôleurs et DSP) que seulement depuis le début des années 2000.
22
génériques (reprogrammabilité et faible coût de développement) a fait son entrée dans le
monde de systèmes embarqués: ce sont les FPGA (Field Programmable Gate Array ).
Les FPGA sont essentiellement des ASIC contenant des matrices de portes logiques et de
mémoire reconfigurables. Cette technologie possède l'avantage de pouvoir intégrer à la
fois des circuits matériels sur mesure et des circuits génériques permettant au concepteur
un judicieux arrangement entre matériel et logiciel.
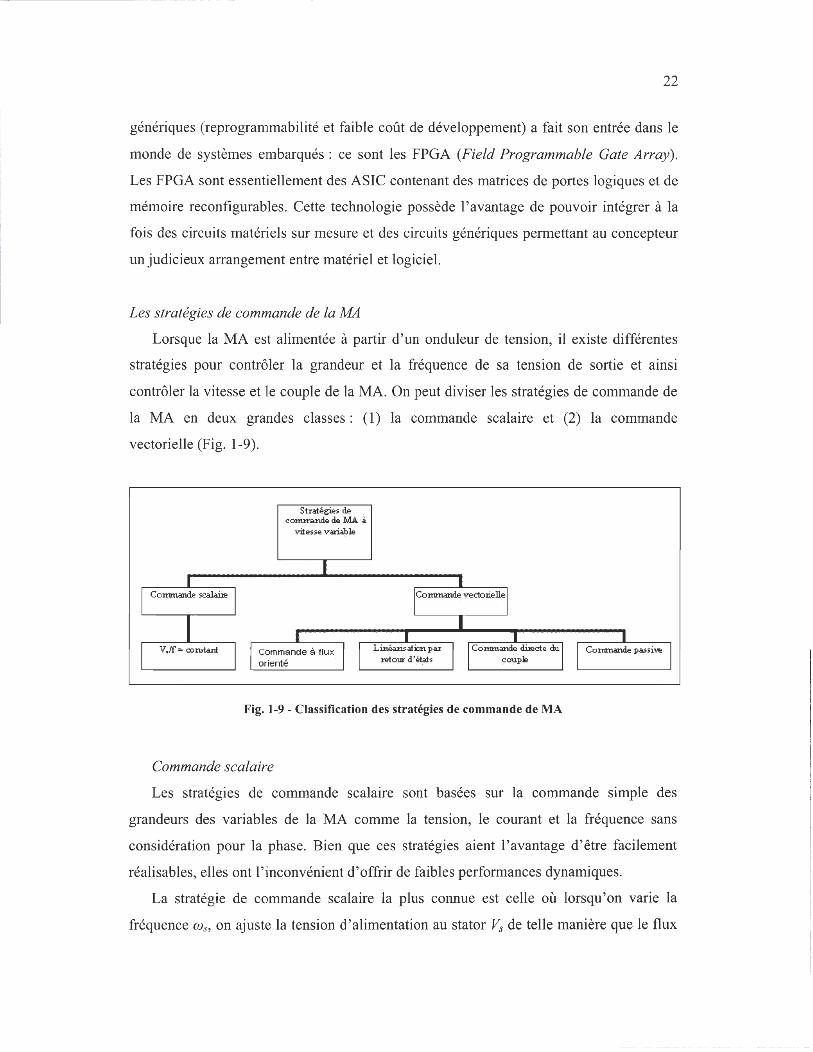
Les stratégies de commande de la MA
Lorsque la MA est alimentée à partir d 'un onduleur de tension, il existe différentes
stratégies pour contrôler la grandeur et la fréquence de sa tension de sortie et ainsi
contrôler la vitesse et le couple de la MA. On peut diviser les stratégies de commande de
la MA en deux grandes classes: (1) la commande scalaire et (2) la commande
vectorielle (Fig. 1-9).
Stratégies de commande de MA ·.à
vitesse variable
Fig. 1-9 - Classification des stratégies de commande de MA
Commande scalaire
Les stratégies de commande scalaire sont basées sur la commande simple des
grandeurs des variables de hi MA comme la tension, le courant et la fréquence sans
considération pour la phase. Bien que ces stratégies aient l'avantage d'être facilement
réalisables, elles ont l'inconvénient d'offrir de faibles performances dynamiques.
La stratégie de commande scalaire la plus connue est celle où lorsqu'on varie la
fréquence (jJs, on ajuste la tension d'alimentation au stator Vs de telle manière que le flux

23
ou le ratio entre la tension et la fréquence reste constant (car lfls = Vsfwe). Cette stratégie
de commande peut être appliquée en boucle ouverte ou en boucle fermée avec régulation
de la fréquence de glissement. Cette dernière approche a comme avantage d'éviter
l'instabilité en limitant le glissement à une valeur tenant compte du couple maximal de la
machine. La référence en tension Vs * et en fréquence W e * sont fournies en entrée à un bloc
de MLI qui a comme fonction d'actualiser cette commande.
(O~-y-i:~f"' l- ~~ç O>pl 0>,
L_~,,~~_~ ___ , __ ~ ... _. ~. -_-_. ~---'--~~-l
m; ---._.-._--...
Onduhtür de tension
etMLI "'---_.....-_....:1
; Moteur
capteur de vitesse
Fig. 1-10 - Schéma représentant la configuration d'un entraînement à vitesse variable basé sur la
commande scalaire [Bose, 2002]
Commande vectorielle
Les stratégies de commande vectorielle se distinguent des stratégies de commande
scalaire en prenant non seulement en compte la grandeur des variables de contrôle mais
également leur phase. La grandeur et la position des vecteurs de courant et de flux sont
donc toujours connues ce qui assure un découplage parfait des composantes du couple et
permet ainsi d'obtenir des performances dynamiques très élevées.
La stratégie de commande vectorielle la plus connue est celle de la commande à flux
orienté (CFO, ou Field Oriented Control FOC). Elle est basée sur l'utilisation d'un
modèle de machine à deux phases fictives dans un repère tournant tel que présenté à la
Fig. 1-7. Ce modèle permet un découplage des composantes du courant de flux et de
24
couple qui permet d'avoir un contrôle linéaire sur le couple comme dans le cas d 'une
machine à courant continu (MCC). Ainsi, en connaissant la valeur du courant dans les
trois phases de la machine (ce qui peut être fait en prenant une mesure seulement sur
deux phases) et en appliquant la transformée de Park (équation (1-14)), on connaît la
valeur des composantes ide et i q e du courant que l 'on peut alors réguler selon la valeur du
flux et du couple souhaitées.
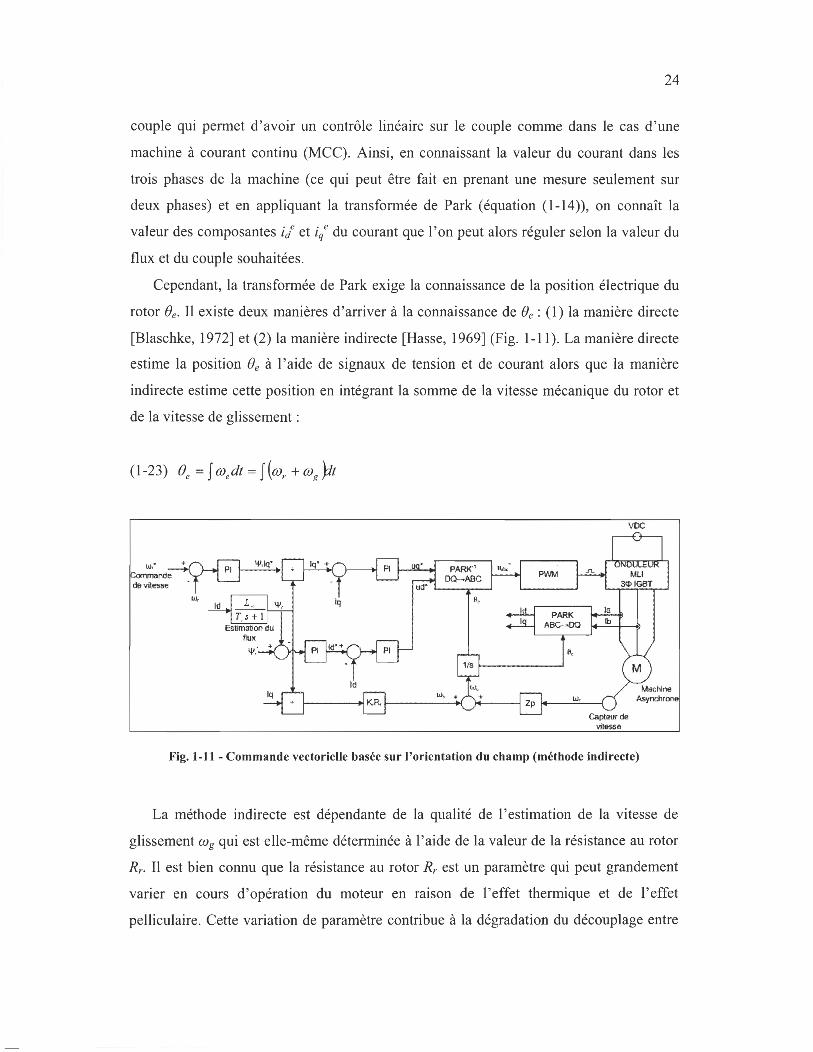
Cependant, la transformée de Park exige la connaissance de la position électrique du
rotor Be. Il existe deux manières d'arriver à la connaissance de Be : (1) la manière directe
[Blaschke, 1972] et (2) la manière indirecte [Hasse, 1969] (Fig. 1-11). La manière directe
estime la position Be à l'aide de signaux de tension et de courant alors que la manière
indirecte estime cette position en intégrant la somme de la vitesse mécanique du rotor et
de la vitesse de glissement:
\fOC
Fig. 1-11 - Commande vectorielle basée sur l'orientation du champ (méthode indirecte)
La méthode indirecte est dépendante de la qualité de l'estimation de la vitesse de
glissement wg qui est elle-même déterminée à l'aide de la valeur de la résistance au rotor
Rr. Il est bien connu que la résistance au rotor Rr est un paramètre qui peut grandement
varier en cours d'opération du moteur en raison de l'effet thermique et de l'effet
pelliculaire. Cette variation de paramètre contribue à la dégradation du découplage entre

25
les composantes de flux et de courant ainsi qu'à la stabilité de la commande. Pour ces
raisons, les stratégies de commande vectorielle pour des applications de haute
performance incluent souvent un estimateur de résistance au rotor.
1.4 Conclusion
Ce premier chapitre permet de donner une perspective générale sur l ' étude des
systèmes d'entraînement à vitesse variable de MA qui se décomposent en trois parties
formant chacun leur propre champ d ' études en. ingénierie: les machines électriques,
l'électronique de puissance et la commande.
La finalité de ce type de système étant l' exploitation de la MA selon des
spécifications de performances données, les problématiques appartenant à ce type de
systèmes sont donc orientées vers les problématiques associées aux performances
attendues de la MA. Ainsi, la performance du convertisseur statique et du système de
commande seront toujours orientées vers un mode d'exploitation désiré de la MA.
C··· idéal · •.• )
cette thèse
\ o 88 8 8 .... ..... .. .
Performance dynamique
Fig. 1-12 - Comparaison de différents mode d'exploitation sur les axes de performance dynamique et
énergétique en charge (1- alimentation secteur, 2 - alimentation convertisseur en boucle ouverte, 3 -
commande scalaire, 4 - commande vectorielle, 5 - commande vectorielle adaptative, 6 - commande
vectorielle avec ajustement du flux rotorique)

26
Les modes d'exploitation de la MA se situent entre deux grands axes: le mode basé
sur la performance dynamique et le mode basé sur la performance énergétique. Le choix
du mode d'exploitation se fera en fonction des besoins de l'application dans laquelle la
MA sera utilisée. Ce choix est le résultat d 'un compromis entre performances dynamique
et énergétique propres à l' appiication en question (Fig. 1-12).
L'objet de la recherche dans le domaine des entraînements à vitesse variable est soit
d'agrandir l'un ou l'autre des axes principaux (améliorer la performance, améliorer
l ' efficacité énergétique) soit de minimiser les compromis (meilleure performance
énergétique pour une même performance dynamique ou vice-versa). Cette recherche
mène à des activités tout à fait différentes dans les trois champs de connaissances qui
composent celui des entraînements à vitesse variable (Tableau 1-2).
Tableau 1-2 - Exemples de problématiques dans chacune des activités de recherche propres aux
entraînements à vitesse variable
Activités de recherche Performance dynamique Performance énergétique
Conception de machines
électriques
Conception de
convertisseurs statiques
Conception de systèmes de
commande
optimisation du rotor
fréquence de commutation,
onduleurs multi niveaux
modèle de la machine
structure, matériaux
« snubber », commutation
douce
modèle des pertes
Le présent ouvrage de recherche porte sur les activités de recherche reliées à la
conception de systèmes de commande d'entraînement à vitesse variable de MA. La revue
de la littérature montre que dans ce domaine, il existe beaucoup plus d'articles reliés à
l'augmentation de la performance dynamique que celle de la performance énergétique.
Considérant également que notre société est présentement à l'heure de l'efficacité
énergétique, il existe donc une opportunité claire en termes académiques et en termes de
besoins au niveau des applications d'orienter le contenu du présent ouvrage vers la

27
recherche de solutions afin d'améliorer la performance énergétique des MA. Selon [Bose,
2000], plus de 600/0 de l'énergie électrique produite dans les pays industrialisés sert à
alimenter des moteurs électriques. Dans le même article, l'auteur affirme que les
applications en électronique de puissance ont un potentiel de réduction de 150/0 à 20% de
l'énergie électrique consommée dans le monde.
Nous avons également montré précédemment que la stratégie de commande
vectorielle permettait le découplage de la régulation du flux et du courant. Considérant la
performance dynamique reconnue à la stratégie de commande vectorielle, le découplage
des composantes du couple ouvre l'opportunité d ' améliorer la performance énergétique
de la commande vectorielle en faisant l ' ajustement du flux en fonction du point
d'opération (point 6 sur la Fig. 1-12). Une application type pour ce genre d'amélioration
sont les MA utilisées dans les nouvelles voitures électriques ou hybrides [Chan et al. ,
2001].
Cette orientation implique l'étude des mécanismes de pertes à l'intérieur de la MA
ainsi que dans le convertisseur statique. C'est l'objet du prochain chapitre.

28
Chapitre Il : Étude de la problématique des pertes dans
les machines asynchrones et les onduleurs de tension
Ce chapitre a pour objectif d'identifier et de décrire les principaux mécanismes de
pertes dans un système composé d'une MA et d'un onduleur de tension ainsi que de faire
une revue de la littérature sur la problématique de l'optimisation énergétique dans la
conception de systèmes de commande pour entraînements à vitesse variable de MA.
2. 1 Les mécanismes de pertes
2.1.1 Les pertes dans la machine asynchrone
Selon le premier principe de la thermodynamique (principe de conservation de
l'énergie), il n'y a jamais création ou destruction de l'énergie mais seulement sa
transformation d'une nature à une autre (électrique, mécanique, thermique, etc.).
Dans un système dont on peut clairement identifier les frontières (entrée et sortie du
système), on peut analyser la transformation de l'énergie en faisant la différence entre la
puissance à l'entrée et à la sortie du système. Cette différence correspond à la somme de
la variation d'énergie accumulée et de la puissance dissipée en chaleur. Dans un système
idéal, la différence entre la puissance à l'entrée et à la sortie est nulle de telle manière
qu'il n'y a pas d'énergie accumulée (facteur de puissance unitaire), ni de pertes dans le
système (rendement unitaire).
La MA est un système dont les frontières sont clairement identifiables. Utilisée en
mode moteur, sa puissance à l'entrée est de nature électrique et correspond à un produit
de la tension et du courant. Sa puissance de sortie est de nature mécanique et correspond
au produit du couple et de la vitesse. Le passage de l'énergie électrique à l'énergie
mécanique n'est pas directe: il doit passer par une énergie de couplage qui est l'énergie
magnétique. La MA n'est pas un système idéal: il y a accumulation d'énergie dans le
champ magnétique et perte de puissance en chaleur dans tout le système.

29
On peut ainsi diviser les mécanismes de production de pertes dans la MA en deux
grandes classes: (1) les pertes électromagnétiques et (2) les pertes mécaniques.
Les pertes électromagnétiques
Les pertes électromagnétiques dans la MA sont celles qui ont lieu dans les
conducteurs électriques (pertes cuivre ou pertes par conduction) et dans le noyau
magnétique (pertes fer) du rotor et du stator. On peut, à leur tour, les diviser en trois
grandes catégories : (1) les pertes fondamentales , (2) les pertes harmoniques spatiales
(pertes résiduelles) et (3) les pertes harmoniques temporelles.
Les pertes harmoniques temporelles n'existent que lorsque la MA est alimentée par
une source imparfaite (qui génère des harmoniques) comme un réseau de distribution
pollué ou un onduleur en tension.
Pertes fondamentales
Les pertes fondamentales sont les pertes fer et les pertes cuivre occasionnées par
l'onde fondamentale de la tension, du courant et du flux.
Les pertes fondamentales dans le fer sont : (1) les pertes par hystérésis et (2) les
pertes par courant de Foucault. Ces pertes fer sont causées par la variation du flux
magnétique et ne sont présentes que dans le noyau magnétique du stator et dans ses
encoches dans lesquelles est inséré le bobinage lorsque le glissement est à peu près nul.
Les pertes par hystérésis sont dues à une réorientation des domaines magnétiques
dans le matériau. Cela a pour effet que, lorsque la densité de flux magnétique B varie
sinusoïdalement dans le matériau (ce qui est le cas en raison de la forme sinusoïdale de la
tension), la forme de la variation de l'intensité du champ magnétique H (causé par le
courant magnétisant) ne change pas de la même manière (voir Fig. 2-1).

30
Fig. 2-1 - Projection des signaux de tension, de flux et de courant magnétisant afin de créer la boucle
d'hystérésis [Fitzgerald et al., 1990].
Cette non linéarité donne lieu à ce qu 'on appelle une boucle d'hystérésis. On peut
mesurer la quantité d'énergie absorbée W à chaque cycle à l'aide de l'équation suivante:
(2-1) W = AlfHdB
où A= l'aire de la section du noyau magnétique, 1 = longueur parcourue par le flux dans le
noyau magnétique.
Les pertes par hystérésis sont donc fonction de la fréquence d'opération f, de l'aire de
la boucle d 'hystérésis et du volume du noyau magnétique. La valeur des pertes par
hystérésis est évaluée empiriquement par le manufacturier du matériau utilisé et est donné
par le coefficient Ch (W/kg). Ainsi, on peut approximer ces pertes dans le stator et dans le
rotor à l'aide de ces équations:
(2-2) P jer,hystérésis,stator ~ Chf(BenGe,s + BnnGn,s )
(2-3) Pjer,hystérés;s,mtor "" ~n,s chsf{;1: Ce,r + B:Cn,r ) n,r

31
où B[e,nj est la densité de flux dans les encoches et dans le noyau (T), G[e,nj,[r,sj est la
masse des encoches et du noyau (Kg) dans le stator et le rotor, s est le glissement et n =
(1.7 - 2.0) est un coefficient dépendant de la forme de la boucle d'hystérésis (appelé
« exposant de Steinmetz »).
On voit bien dans l'équation (2-3) qu'à la vitesse synchrone (s ~ 0), les pertes par
hystérésis dans le rotor sont à peu près nulles.
Les pertes par courant de Foucault sont causées par la création d'un champ électrique
à l'intérieur du noyau afin de s'opposer à la variation de flux. Il s'agit en fait d'une
conséquence directe de la loi de Faraday. Ce champ électrique donne lieu à la création
d'un courant (de Foucault) qui engendre alors des pertes Joule. Pour les minimiser, on
construit le noyau magnétique à l'aide de petites feuilles laminées isolées les unes des
autres à l'aide d'une couche d'oxyde ou de vernis. Les courants de Foucault ne sont alors
confinés qu'aux laminations, ce qui réduit de beaucoup les pertes (voir Fig. 2-2).
noya.Lf de fer lame!fê
~ ............. ~. trux altemaJÎf
If
Sans lamination Avec laminations
Fig. 2-2 - Effet des laminations sur les courants de Foucault [Wildi, 2001]
Les pertes par courant de Foucault varient avec le carré de la fréquence f, le carré de
la densité de flux B et de l'épaisseur des laminations:

32
Les pertes fondamentales dans le cuivre sont causées par le passage du courant dans
le bobinage du stator et du rotor. Il en résulte un effet Joule correspondant au produit de
la résistance par le carré du courant pour chacune des phases:
(2-5)
Les pertes cuivres seront influencées par: (1) la température et (2) l'effet pelliculaire
(aussi appelé effet de peau). En effet, la résistance R d'un conducteur varie en fonction de
la température T de la manière suivante:
(2-6) R = Ra (1 + a(T - Ta))
où R et Ra sont respectivement la résistance aux températures T et Ta et a est le
coefficient de variation thermique du matériau du conducteur.
L'effet pelliculaire se produit en présence de courant alternatif dans le conducteur.
Lorsque le courant varie, le champ magnétique correspondant varie également mais avec
un certain retard causant un déséquilibre temporaire qui a pour effet de pousser les
charges vers la surface du conducteur et ainsi augmenter la résistance R du conducteur.
L'importance de l'effet pelliculaire augmente avec la fréquence du courant. L'effet
pelliculaire est non négligeable si la profondeur de pénétration du champ magnétique est
supérieure au rayon du conducteur:
(2-7) 8(/,0) = r=r= > r ~~
où f est la fréquence du courant, (j est la conductivité électrique du matériau et r le rayon
du conducteur.
A la fréquence de glissement nominale, l'effet de peau est négligeable dans le rotor d'une
MA.

33
Dans le cas où le rotor à cage a des barres en biais (skew) et non isolées, on pourra
observer un courant entre les barres du rotor, ce qui augmentera les pertes cuivre dans le
rotor. Cependant, on fera l 'hypothèse ici que les barres sont droites et que ce courant
entre les barres est nul. Ainsi, la résistance du bobinage du stator Rs et du rotor Rr varient
en fonction de la température, de la fréquence du courant et du glissement: Rs(T,j) et
Pertes harmoniques spatiales
Les pertes harmoniques spatiales (PHS) sont causées par la géométrie de l ' espace
dans lequel circule le flux magnétique dans la MA. Par exemple, une encoche est une
discontinuité spatiale qui a pour effet perturber le passage de l'onde fondamentale de flux
et de provoquer la dispersion d'harmoniques de flux dans le moteur. Les pertes d ' énergie
ainsi causées sont appelées pertes résiduelles (stray losses) et varient selon la charge:
pertes résiduelles sans charge ou avec charge (stray no-Ioad/load losses) .
Il existe deux types de PHS : (1) à la surface du noyau magnétique et (2) par pulsation
du flux causé par les encoches. On déterminera les PHS en charge à l'aide d'un facteur de
correction appliqué aux PHS sans charge.
Les PHS à la surface du noyau magnétique du rotor sont causées par une déformation
du flux et sont estimées à (dans une lamination d ' épaisseur d et pour une harmonique v) :
(2-8) 1 d 12 y =-oo 21rR 2
P,am' V = - f f f Jr ,v dxdydz 0" -d / 2 y =O x=O
où (j est la conductivité électrique du matériau utilisé pour fabriquer les laminations et J r , v
est égale à la densité de courant dans la lamination ( au rotor) :
~
(2-9) J r = aSvmBve R Z où Sv est le glissement de l'harmonique v.
On trouve les pertes par PHS à la surface du noyau magnétique en calculant (2-8) pour
chacune des harmoniques v pour chaque lamination:

34
(J 2 2 2 R (2-10) PHS surface rotor sch == -Bv (SvaJ) d -21rRI OÙ 1 est la longueur axiale du rotor (m).
, J ' " 24 v
Pour trouver ces pertes dans le cas où il y a une charge, on doit appliquer le facteur de
correction suivant:
(2-11) PHS ,surjace,rotor,ch == PHS ,surjace ,rotor ,schCch où
(2-12) C ch == (lch J2 où l ch et l sch représentent le courant statorique avec et sans charge, l sch
La solution de ces équations montre que les PHS à la surface du noyau magnétique en
charge peuvent être plus grandes de 9% que celles sans charge. Les PHS à la surface du
noyau magnétique du stator sont négligeables puisque la largeur des encoches du rotor est
généralement beaucoup plus petite que celle du stator.
Les PHS par pulsation du flux causées par les encoches ont lieu à deux endroits: (1)
dans le noyau magnétique du stator et du rotor et (2) dans la cage du rotor. Le principe de
calcul de ces pertes est semblable à celui montré pour les PHS en surface du noyau
magnétique du rotor. On peut montrer que ces pulsations de flux donnent lieu à des pertes
par courant de Foucault et l'expression de ces pertes est donnée par:
(2-13) PHS ,pulsation ,nstator,sch = C ep (B pj (;~ J G e,s
(2-14) PHS,pu/sation ,nrotor ,sch = C ep (Bpr)t ~~ J G e"
où Cep sont les pertes fer à 1 T et 60 Hz, Bp[s,rJ la pulsation de densité de flux dans le stator
et dans le rotor,h[s,rJ est la fréquence de pulsation de flux dans le stator et le rotor.
Les pertes par pulsation de flux dans la cage du rotor (avec des barres droites ou sans
biais) donnent lieu à des pertes cuivre occasionnées par une augmentation de l'effet de
peau dans les barres du rotor. Les pertes pour toutes les harmoniques k sont estimées à :

35
(2-15) PHS,pulsation,cagerotor == Ï NrRb (Ns fJ( i~2' )2
k=1 PI -V L
OÙ Rb est la résistance entre les barres de la cage du rotor (n), N[r,s) le nombre d'encoches
au rotor et au stator,fla fréquence d'alimentation (Hz),plle nombre de paires de pôles et
ibk le courant au rotor (A).
La solution de ces équations montre que les PHS par pulsation de flux dans la
cage du rotor causées par les encoches en charge peuvent être plus grandes d'e 430/0 de
celles sans charge. L'idée de construire une cage de rotor avec des barres en biais
(skewed) est dans le but de réduire ces pertes par pulsation de flux dans la cage.
Un modèle pour estimer les pertes de charges résiduelles basée sur la vitesse
mécanique et le courant au rotor a été proposé par [Kioskeridis, 1996] :
où Cres est un coefficient de pertes de charges résiduelles égal à 0.0150 pour un
moteur à induction de 1 HP.
Pertes harmoniques temporelles
Les pertes harmoniques temporelles causées par les imperfections des ondes de
tension, de courant et de flux surviennent lorsque la MA est alimentée par une source non
idéale (générant des harmoniques) comme un réseau pollué ou un onduleur de tension.
Ces harmoniques augmentent les pertes dans le cuivre et dans le fer du stator et du rotor
et contribuent à augmenter l'effet pelliculaire qui devient non-négligeable à haute
fréquence.
Dans un onduleur de tension, le paramètre qui aura le plus d'impact sur la quantité
d 'harmoniques générées par la source est le ratio k (également appelé facteur de
modulation) entre la fréquence de la porteuse h et la fréquence de l'onde fondamentale f:
(2-17) k = f p
f

36
Plus le ratio k est élevé, moins il y aura d 'harmoniques générées par la source de
tension. Cependant, un ratio k élevé aura pour conséquence d ' augmenter les pertes par
commutation dans l' onduleur. Le choix optimal du ratio k sera celui du meilleur
compromIs entre pertes harmoniques dans la MA et pertes par commutation dans
l ' onduleur.
Les pertes par conduction causées par les harmoniques temporelles se calculent
sensiblement de la même manière que celles causées par l'onde fondamentale.
Cependant, en raison de l ' effet pelliculaire, on observe une variation de la valeur des
résistances et des inductances de fuite au rotor et au stator. Également, à haute fréquence,
l'impédance de l'inductance mutuelle devient tellement grande qu 'on peut maintenant la
négliger dans le circuit équivalent (voir Fig. 2-3).
Fig. 2-3 - Circuit équivalent à haute fréquence [Boldea et al., 2002]
Ainsi, les pertes par conduction causées par les harmoniques temporelles sont égales à :
où le courant Iv est déterminé par les inductances L sl et Lrl :
La variation de la valeur des résistances et des inductances de fuites (au stator et au rotor)
en fonction de la fréquence est montrée par la Fig. 2-4.

37
f
Fig. 2-4 - Variation de la résistance et de l'inductance de fuite en fonction de la fréquence [Boldea et
al., 2002]
Les pertes fer par hystérésis et par courants de Foucault occasionnées par les
harmoniques temporelles dans le noyau magnétique de la MA se situent à la fois dans le
rotor et le stator. Il devient cependant difficile de les évaluer car la pénétration du flux
magnétique dans le matériau à haute fréquence devient à peu près égale à l'épaisseur des
laminations. Ainsi, en fonction de la pénétration du flux, on distinguera deux situations:
(1) absence d'effet pelliculaire et (2) présence d'effet pelliculaire.
Il n'y aura pas d' effet pelliculaire pour les harmoniques qui ont une fréquence
relativement basse. Dans ce cas, les pertes fer seront composées de pertes par hystérésis
et pertes par courants de Foucault et seront égales à :
(2-20) P/er,h-temp,pep = {Kh,Vvf vl -n + K e,Vv )AI
On voit bien dans l'équation (2-20) que plus la fréquence est élevée, plus les pertes
par hystérésis deviendront négligeables alors que les pertes par courants de Foucault
resteront constantes. Ainsi, à haute fréquence les pertes fer causées par les harmoniques
temporelles seront égales à :
(2-21) P/er,h-temp ,ep = K eV} f v1/2

38
Les pertes mécaniques
Les pertes mécaniques dans la MA sont dues à : (1) la friction de l'arbre du rotor sur
les billes de roulement et (2) à la friction de l'air sur le rotor.
La friction de l'arbre du rotor se divise en deux parties: (1) friction statique et (2)
friction dynamique. La friction statique est constante alors que la friction dynamique est
fonction de la vitesse mécanique du rotor wp et d'une constante d'amortissement B.
Ainsi, sachant que la friction est un couple, on n'a qu'à multiplier par la vitesse pour
obtenir les pertes par friction de l'arbre du rotor:
(2-22) P jriction,rotor = OJp Cr friction,stat + BOJp )
La friction de l'air sur le rotor est fonction d'une constante kvent et du carré de la
vitesse mécanique wp . Ainsi, les pertes par friction de l'air peuvent être exprimées
comme:
Les pertes mécaniques totales sont donc égales à :
Synthèse des mécanismes de production de pertes dans la MA
Voici un tableau qui synthétise chacune des pertes décrites dans les paragraphes
précédents et ce, dans chacune des parties de la MA qui entraîne une charge à couple
constant et à vitesse et température constantes. On fait également les hypothèses
suivantes:

• les barres du rotor sont droites (nonskewed) et isolées; • la fréquence d'alimentation est de 60 Hz; • la machine est triphasée.
Tableau 2-1 - Synthèse des mécanismes de production de pertes dans la MA
Cuivre
Hystérésis
Courants de Foucault
Surface du noyau
magnétique
Pulsation de flux dans le
noyau (pertes fer)
Pulsation de flux dans la
cage (pertes cuivre)
Pertes fer (bf)
Pertes fer (hf)
Friction du rotor
Friction due à la ventilation
K V 2j,1 / 2 e v v
Pertes mécaniques
OJ p (r friction ,sIal + B OJ p )
39

40
2.1.2 Les pertes dans l'onduleur
Il existe trois états possibles d'un transistor dans l' onduleur: (1) fenné (en
conduction), (2) ouvert (bloqué) et (3) en commutation (passage de l'état ouvert à fermé
ou vice-versa). Lorsqu'un transistor est ouvert, il n'y a pas de courant qui le traverse (à
l'exception d'un courant de fuite très faible) et ainsi il n'y a pas de perte de puissance.
Les pertes de puissance dans l' onduleur se divisent donc en : (1) pertes par conduction et
(2) pertes par commutation.
Pertes par conduction
Lorsqu'un transistor de l' onduleur conduit un courant 1 c, la tension V CE à ses bornes est
faible mais non nulle. Il s'en suit une perte par conduction qui est directement détenninée
par l'intensité du courant lc et la caractéristique VCE-SAT du type de transistor utilisé (voir
exemple, Fig. 2-5).
Toshiba MG 15Q6ES40, diode and IGBT on-state voltage 15 - - - - -- - -:- - - - _. - . :- - -r -----:-.. ----. -:---_ ... -;- -- - ---:
: djOfe 1 IG8T: , , , , , , , , , ,
~ 10 - - .. - - - - ~ - - - - - ... :. - - - - - - - -:- .. - - - - - -:- - - - . .. - ~ - - - - - - - - ~ l "l ' 1 1 1 1 1
" , , , ,
i i / i i : ... y .. j ........ j : / : : : 1 1 l ,
. .
. . , ,
0.5 1 1.5 2 2.5 3 forward voltage fVJ
Fig. 2-5 - Caractéristique I-V d'un transistor IGBT 15A utilisé dans un onduleur 4 kVA. Image tirée
de [Abrahamsen, 2000].
Ainsi, on peut évaluer les pertes dans le transistor et dans la diode de roue libre de la
manière suivante [Abrahams en, 2000] :

41
(2 26) P (T7 • P eon D )' - ON,D = y O,D + rO ,DID ' ID
où VO[T,D} est la tension en polarisation directe (du transistor et de la diode), rO[T,D} la
résistance interne, i[T,D} le courant et fJcond[T,D] est une constante qui caractérise le courant
i[T,D} en fonction de V[T,D}.
En pratique, on peut réduire ces courbes à une expression linéaire (fJcond[T,D) = 1).
La stratégie de modulation n'a pas d'influence sur les pertes par conduction dans
l' onduleur [Kolar et al., 1991]. Ainsi, du point de vue de la commande, il n'existe pas de
moyen de réduire les pertes par conduction dans l' onduleur (pour une grandeur de
courant donnée).
Pertes par commutation
Les pertes par commutation dans un transistor ou une diode sont difficilement
estimables analytiquement car elles sont reliées à plusieurs facteurs au niveau de la
construction des composants et du circuit. Pour cette raison, ces pertes sont déterminées
de manière empirique et sont indiquées dans les caractéristiques techniques fournies par
le manufacturier. Cependant, les données fournies par le manufacturier ont des tolérances
très grandes et l'identification précise de ces pertes doit se faire par une procédure
d'identification telle que montrée dans [Blaabjerg, 1994].
Une telle identification a été faite dans [Abrahamsen, 2000] et les pertes par
commutation pour le transistor (on-off) et la diode (off) sont présentées à la Fig. 2-6.

42
measured switcll energy, 15 A module
: . transistor 0 1 2_5 - - - - - - - - . - - - - - - - -~ - - - - - - - - - - - - - - - - ~ - - - - - - - - - -J_ - --
, , · . · . , ,
!:i' 2 ... - .. . .. _ . . _ . . _. ~ .. _ . . _ ... . _ . . _ .. ~.# iransISto-"-oit -S. : f f 1.5 ···_··_··_··_· ·_z:·· ···· ···r .. ; ........ .... _ .. . ca ~ /' __ ~~tr
, · ·· ·· · ·· · · · · · ··~··· · ·T ······· · ······· · .
0_5 '·'7 , ,
5 10 15 current [A]
Fig. 2-6 - Énergie p erdue lors de la commutation d ' un transistor et d ' une diode 15A. Image tirée de
[Abrahamsen, 2000]
Les pertes par commutation peuvent alors s'approximer par les relations suivantes:
(2 27) P {'A • BOil T - sw,on,T = J f1on,T 1T '
où f est la fréquence de commutation, i [T,D} le courant dans le transistor et la diode,
A [on,offJ,[T,D} et B [on,offJ,[T,D} sont des constantes qui caractérisent les pertes.
Pour minimiser les pertes par commutation pour un courant i[T, DJ, on peut minimiser
la fréquence de commutation f Mais une fréquence de commutation trop faible entraînera
une augmentation du taux de distorsion harmonique (TDH) (voir l'équation (2-17)). Dans
[Abrahams en, 2000] , le compromis idéal entre harmoniques et pertes par commutation
dans un moteur de 2 kW a été trouvé entre 3-4 kHz.

43
2.2 Revue de la littérature sur la commande
énergétiquement optimale des machines asynchrones
2.2.1 Optimisation des pertes dans le moteur
Deux excellents articles [Hori et al., 2003], [Levi et al., 2003] ainsi que la thèse de
[Abrahamsen, 2000] permettent de faire une revue efficace des développements de la
commande en vue d'optimiser le rendement énergétique de la MA.
Les premiers travaux qui ont porté sur l'intérêt d'économiser de l'énergie lorsque la
charge est inférieure à la charge nominale sont ceux de [N ola, 1977] qui a proposé un
contrôleur de facteur de puissance (aussi appelé contrôleur de Nola). Une analyse
quantitative de l'espérance des économies engendrées par l'idée de Nola est présentée
pour une application de commande de MA à partir d'un redresseur construit au moyen de
thyristors [Lipo et al., 1983]. Cette analyse présente les défauts du contrôleur de Nola et
conclue que les marges d'économie d'énergie à l'aide de cette technique sont limitées (la
charge doit être inférieure à 0.45 p.u. pour une longue période de temps). C'est bien ce
qui est observé dans la thèse de [Abrahams en, 2000] (Fig. 2-7).
1~------------------------------~ 1
1 1
optJmJs~d efffc/en'r;y 0.8 . -- -- - - - -- 1 - -- -- - - - -- -r - - - - r- -- - - - -- -- - .., - -- -- - - - -- --
..... 1 1 1 1
::i 1 1 :
à 1 const~nt .ir~Q.~ flux : ~O.6 - ------ ---~------------~----------~-----------~-----------c: 1 1 1 1
.~ 1: • 0.4-.... oS a E
0.2
1 1 1 1
-------~--------~--------~-------~--------1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1
-------~--------~--------~-------~--------1 1 1 1 1 1 1 1 1 1
1
o~----------~------~----------~ o 0.2 0.4 0.6 0.8 1
Joad torque [p.u.]
Fig. 2-7 - Rendement d'un moteur de 2.2 kW à vitesse nominale pour différentes charges avec flux
constant et avec optimisation du flux. Image tirée de [Abrahamsen, 2000].

44
La même année, [Kusko et al., 1983] ont proposé la première stratégie de
commande énergétiquement optimale (SCEO) basé sur un modèle analytique des pertes
pour une application de commande scalaire de MA et de machines à CC. Une analyse des
pertes en mode moteur est présentée et il est montré que pour une vitesse et un couple de
charge donnés, on peut minimiser les pertes en ajustant la tension d'entrée Vs et la
fréquence d'entrée Is. L'idée d'une SCEO basée sur la recherche de la puissance
minimale à l'entrée est également mentionnée.
C'est justement ce qui a été présenté par [Novotny et al., 1985] : une SCEO dont
le principe de fonctionnement est basé sur la recherche du point minimal de la puissance
d'entrée. Ainsi, en mesurant la puissance à l ' entrée directement sur le bus à CC et en
utilisant la commande vectorielle, ils proposent d'ajuster graduellement les composantes
du flux et du couple du courant statorique is jusqu'à ce que la puissance d'entrée atteigne
un minimum pour une même puissance de sortie (produit de la vitesse et du couple). Les
avantages de cette stratégie sont évidents: (1) on minimise non seulement les pertes dans
le moteur mais dans tout le système et (2) il n'est pas nécessaire de connaître le modèle
du système et la valeur de ses paramètres a priori pour que cette SCEO fonctionne.
Cependant, cette stratégie de SCEO prend beaucoup de temps à converger (plus de 7 s.
dans ce cas-ci) et est dépendante de la qualité de la mesure de la puissance à l'entrée. Un
autre inconvénient est que les variations de flux engendrent des oscillations dans le
couple.
Les travaux de [Kusko et al., 1983] et de [Novotny et al., 1985] sont la base de tous
les développements subséquents dans le domaine des SCEO de MA. Les innovations
subséquentes sont au niveau de la minimisation des faiblesses de chacune de ces SCEO :
• la robustesse aux variations de paramètres dans le cas de la stratégie basée sur le
modèle des pertes;
• l'augmentation du temps de convergence et la réduction des oscillations du couple
dans le cas de la stratégie par recherche de la puissance à l'entrée minimale.

45
Développements des SCEO basés sur un modèle des pertes
L'ouvrage de [Novotny et al., 1984] propose, dans le cadre de la conception d'une
commande scalaire, un modèle des pertes beaucoup plus élaboré en utilisant une version
du paramètre des pertes dans le fer Rm tenant compte des pertes par hystérésis et des
courants de Foucault. Ils incluent également dans leur circuit équivalent de la MA des
composantes modélisant les pertes de charges résiduelles. Leur article montre
l'importance de la saturation magnétique dans le modèle des pertes, rendant ainsi la
fréquence de glissement optimale dépendante de la grandeur du couple de charge T,.
Le problème avec la commande scalaire est que sa réponse dynamique est lente et
ne peut qu'être utilisée que dans un système où il n'est pas nécessaire d'avoir une grande
plage dynamique de commande. Une alternative est l'utilisation de la commande
vectorielle: dans [Garcia et al., 1994] les auteurs proposent une nouvelle version des
travaux de [Novotny et al., 1984] mais basée sur la commande vectorielle. La SCEO
proposée par ces auteurs comprend un modèle des pertes élémentaire qui ne tient pas
compte des effets de saturation et de la température. Les auteurs ont cependant fait une
analyse de sensibilité et le paramètre qui a la plus grande influence sur l'efficacité
énergétique du système est la résistance au rotor Rr. Une variation de Rr de 100% se
traduit par une perte d'efficacité du système de 2%.
Un modèle des pertes incluant la saturation magnétique pour les machines à CA et
à CC a été présenté par [BernaI et. al., 2000]. Les auteurs montrent une méthode générale
pour calculer les pertes dans les moteurs électriques. Les résultats en simulation pour un
moteur asynchrone montrent que la loi de commande pour id incluant la saturation
magnétique, les pertes par hystérésis et les pertes par courant de Foucault est à peu près
identique à la commande optimale. D'autres analyses des pertes ont notamment été faites
par [Boldea et al., 1987] mais elles n'étaient pas adaptées à être utilisées avec la
commande vectorielle.
La complexité du modèle des pertes utilisé dans un montage expérimental est
limitée par la capacité de calculs des microcontrôleurs utilisés pour commander la MA.
La montée de la capacité de calculs des microcontrôleurs va de pair avec la rapidité de
commutation des nouveaux transistors qui est de l'ordre de 50 kHz. Pour augmenter la

46
rapidité des calculs du modèle de pertes et d'augmenter la précision de celui-ci, il devient
avantageux de remplacer ces calculs complexes par un réseau de neurones artificiels
(RNA).
Les travaux de [Hasan et al, 1997] sont les premiers à présenter l'utilisation d'un
RNA pour intégrer le modèle des pertes dans la SCEO et pour commander le courant de
flux id. Pour entraîner le RNA, ils ont simulé 16 points d'opérations du système et ajusté
manuellement le courant de flux optimal pour finalement créer des données
d'entraînement autour de ces 16 points d'opération. Le contrôleur a été validé en
simulation et montre une efficacité constante peu importe le point d'opération.
Les travaux de [Peracaula et al., 2002] sont beaucoup plus intéressants car ils
intègrent un vrai modèle de pertes, incluant la saturation magnétique, dans un RNA.
L'architecture du RNA est à propagation par l'avant de type 2-5-7-1 (2 neurones sur la
première couche, 5 sur la deuxième, etc.) avec une fonction d'activation linéaire sur les
couches d'entrée et de sortie et une fonction d'activation non linéaire (tangente sigmoïde)
sur les couches cachées. L'entraînement du RNA a été fait selon l'algorithme de
Levenberg-Marquardt. Le temps de réponse de cette SCEO obtenu en simulation est de
l'ordre de 100-120 ms.
Les mêmes auteurs ont présenté une suite de ces travaux [Peracaula et al., 2005]
dans laquelle les entrées du RNA sont non seulement la vitesse du rotor COr et le couple
électromagnétique Te mais aussi une estimation de la résistance au rotor Rr.
L'architecture du RNA a également été changée pour une 3-3-1 (une seule couche
cachée). La validation de ce modèle amélioré est également présentée en simulation et le
temps de réponse est semblable aux travaux précédents.
Un autre groupe de chercheurs ont présenté une SCEO basée sur un modèle des
pertes et implanté à l'aide d'un RNA [Abdin et al, 2003] qui est semblable à celui
présenté par [Peracaula et al., 2002]. Les entrées du RNA sont la vitesse du rotor et le
couple de charge et la sortie est la commande en flux. La différence est au niveau du
modèle des pertes utilisé où les effets du flux et de la fréquence de la fondamentale sont
modélisés par une variation de la résistance magnétisante Rm. La structure du RNA utilisé
est 2-9-1 et la méthode d'entraînement utilisée est la rétro propagation des erreurs à partir
de données d'entraînement construites à partir de 25 points d'opération. Les résultats

47
obtenus en simulation seulement ne se contentent que de montrer que l'efficacité du
système ne change pas en fonction de la charge.
Il est intéressant de noter qu'aucun chercheur n'a encore poussé le processus de
conception jusqu'à la validation expérimentale d'une SCEO à base de RNA. La nécessité
de la validation expérimentale dans l'étude de l 'augmentation de la performance
énergétique des EVV est très importante puisque, comme il a été vu dans les sections
précédentes, il est particulièrement difficile de concevoir un modèle des pertes précis du
système machine-onduleur.
Développement des SCEO basées sur la recherche de la puissance d'entrée minimale
L'ouvrage de [Bose et al. , 1995] propose l'utilisation d'une commande à logique
floue pour déterminer plus efficacement la grandeur des incréments pour l'ajustement du
flux (voir Fig. 2-8). Cette innovation, validée en simulation et sur un banc d' essai
expérimental, accélère le temps de convergence de cette SCEO. Cependant, les
ondulations du couple doivent être compensées à l'aide d'une technique de propagation
vers l'avant (jeedforward) très complexe. Cette SCEO n'est toutefois active qu'en régime
permanent; lorsqu'un changement du couple de charge survient ou une nouvelle vitesse
de référence est commandée, la commande revient à une configuration normale avec flux
nominal: ce qui a pour conséquence de complexifier l'architecture du système de
commande. Une verSIon neuro-floue de ce contrôleur, validée en simulation, est
présentée par le même auteur dans [Bose et al., 1997].
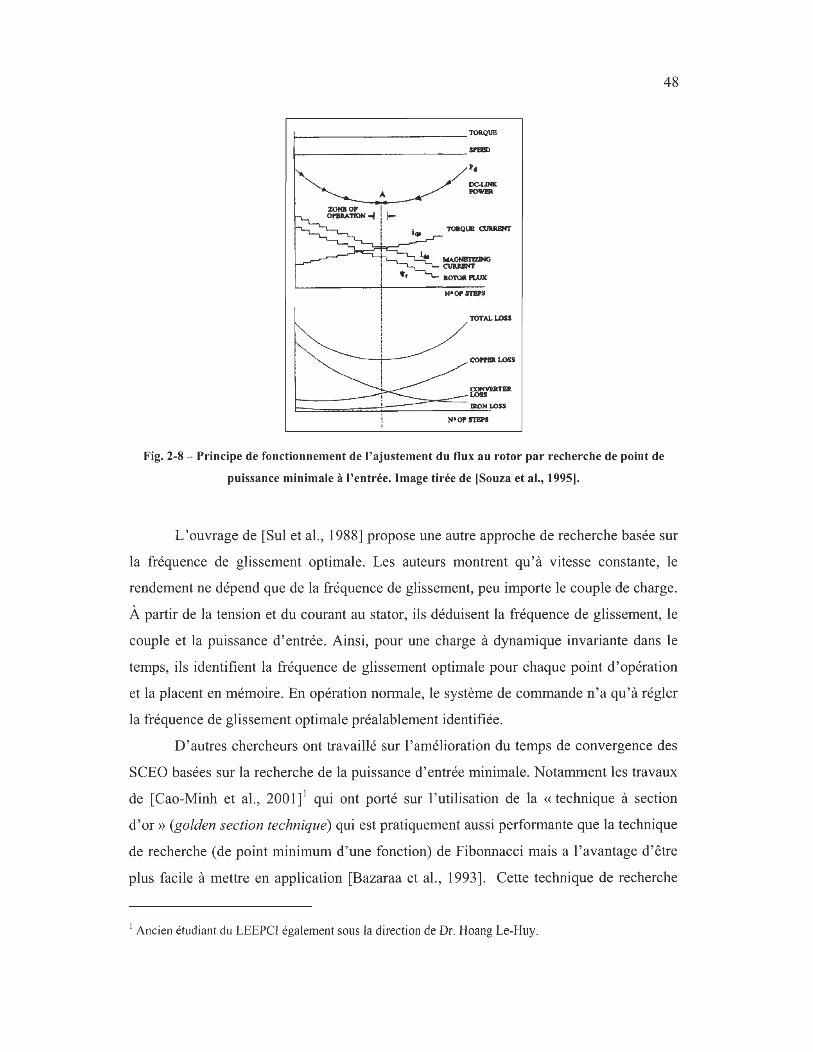
48
~ ________________ ~ __ ~Qœ
~ 1
1
t
N'~STIfS
OONVERTlDl LOSS
--:::::--::::::::::...~~ IRON LOIS
H'OPnEP!
Fig. 2-8 - Principe de fonctionnement de l'ajustement du flux au rotor par recherche de point de
puissance minimale à l'entrée. Image tirée de [Souza et al., 1995].
L'ouvrage de [Sul et al., 1988] propose une autre approche de recherche basée sur
la fréquence de glissement optimale. Les auteurs montrent qu'à vitesse constante, le
rendement ne dépend que de la fréquence de glissement, peu importe le couple de charge.
À partir de la tension et du courant au stator, ils déduisent la fréquence de glissement, le
couple et la puissance d'entrée. Ainsi, pour une charge à dynamique invariante dans le
temps, ils identifient la fréquence de glissement optimale pour chaque point d'opération
et la placent en mémoire. En opération normale, le système de commande n'a qu'à régler
la fréquence de glissement optimale préalablement identifiée.
D'autres chercheurs ont travaillé sur l'amélioration du temps de convergence des
SCEO basées sur la recherche de la puissance d'entrée minimale. Notamment les travaux
de [Cao-Minh et al., 2001]1 qui ont porté sur l'utilisation de la « technique à section
d'or» (golden section technique) qui est pratiquement aussi performante que la technique
de recherche (de point minimum d'une fonction) de Fibonnacci mais a l'avantage d'être
plus facile à mettre en application [Bazaraa et al., 1993]. Cette technique de recherche
1 Ancien étudiant du LEEPCI également sous la direction de Dr. Hoang Le-Huy.

49
n'a pas besoin de connaître la valeur de la vitesse du moteur ni du couple
électromagnétique. Le problème de l'oscillation de couple causé par le changement de
flux (à toutes les 0.20 s) est résolu par les auteurs à l'aide d'un filtre passe-bas de
deuxième ordre dont le temps de montée de 0.15 s. Leur SCEO est testée en simulation et
sur un banc d'essai expérimental et le temps de convergence à une tolérance de 1.5% du
flux nominal est de 1.8 s pour les deux types de tests, ce qui est plus performant que celle
de [Novotny et al, 1985]. L 'économie d'énergie par rapport à une stratégie
conventionnelle de commande vectorielle se situe entre 220/0 (charge 0.25 p.u. et vitesse
0.75 p.u.) et 30% (sans charge et vitesse 0.5 p.u.).
Stratégie hybride: modèle des pertes et recherche de la puissance d'entrée minimale
D'autres chercheurs ont combiné les avantages des deux techniques en proposant
une SCEO hybride qui allie à la fois rapidité de convergence et robustesse [Hori et al. ,
2003]. Le principe proposé par les auteurs est d'utiliser un modèle des pertes pour
l'ajustement grossier de la commande de flux et un engin de recherche de puissance
d'entrée minimale pour l'ajustement fin de cette commande. En régime transitoire, lors
d'un changement de la consigne de vitesse ou d'une variation de charge, le flux nominal
est rétabli et la SCEO est activée aussitôt que le régime transitoire est atteint. Les auteurs
ont comparé expérimentalement la performance de cette SCEO hybride à une SCEO
basée uniquement sur la recherche de la puissance d'entrée minimale: la SCEO hybride
converge en 0.9 s alors que la seconde SCEO (recherche seulement) converge en 2.2 s.
Un avantage de cette SCEO hybride est qu'elle ne nécessite pas de modèle très précis du
système et des pertes car l'ajustement fin est fait par recherche.
L'amélioration de la robustesse de la SCEO basée sur un modèle de pertes peut
être accomplie par l'identification en ligne des paramètres du moteur d'après l'ouvrage
de [Levi et al., 2003]. Les auteurs proposent un modèle générique du modèle des pertes et
la mesure de la puissance d'entrée du bus CC pour estimer les paramètres de ce modèle.
Leur modèle générique tient compte de toutes les pertes et non-linéarités dans la MA, y
compris la saturation magnétique. Cette stratégie a été vérifiée expérimentalement sur des
entraînements à vitesse variable à commande vectorielle avec ou sans capteur. Les
auteurs observent une diminution de la consommation de puissance de l'ordre de 13% à

50
26% comparé à une SCEO basée uniquement sur la recherche de la puissance d'entrée
minimale. Il s'agit d'un excellent compromis entre les deux types d'approches.
La question de la robustesse
L'ajustement du flux magnétique dans l'intention de diminuer les pertes cuivre et
les pertes fer implique un compromis sur la robustesse du contrôleur aux perturbations de
charge et de variation de commande en vitesse. La diminution du flux implique une
diminution du temps de réponse à la commande en couple (réduction de la largeur de
bande de contrôle) et par conséquent rend le système plus vulnérable à l'instabilité. Le
design idéal est celui où on augmente le rendement du système sans compromis sur sa
dynamique.
Pour solutionner ce problème, les auteurs [Levi et al., 2003], [Hori et al., 2003],
[Cao-Minh et al., 2001] (et plusieurs autres) proposent de rétablir la commande en flux
nominal lorsqu'une perturbation de charge ou une variation de la commande en vitesse
survient à l'aide d'un détecteur de régime permanent. L'optimisation du rendement
énergétique ne se fait alors qu'en régime permanent. Cette approche comporte cependant
certains inconvénients:
• l'ajout d'un détecteur de régime permanent augmente la complexité de la SCEO;
• la transition rapide entre une valeur de flux optimale et nominale peut entraîner des
oscillations de couple qui peuvent mener à l'instabilité;
• la nécessité de définir une frontière entre le régime permanent et le régime transitoire.
La littérature ne contient actuellement aucune proposition de solution permettant
d'éliminer ou de réduire un de ces inconvénients.
Mise en œuvre de la commande de flux dans la SCEO
La valeur de la commande de flux ne tient pas uniquement à la précision de son
modèle des pertes mais également aux ressources (temps, mémoire, unités logiques)
qu'elle devra prendre pour être intégrée au reste de la commande vectorielle. Idéalement,
on voudra un modèle précis de pertes sans trop prendre de ressources matérielles ou de
calcul sur l'unité de traitement.

51
Typiquement, les méthodes utilisées pour intégrer un modèle des pertes dans un
contrôleur consiste à faire le calcul en temps réel du flux optimal à l'aide du modèle
analytique ou de construire une table de conversion contenant la valeur du flux optimal
pour différents points d'opération. Les avantages et inconvénients de chacune de ces
méthodes sont montrés au Tableau 2-2.
Tableau 2-2 - Avantages et inconvénients des méthodes de représentation du modèle des pertes
Méthode Avantages Inconvénients
calcul en temps réel à partir précis, nécessite peu long temps de calcul,
du modèle analytique d'espace mémoire complexe
nécessite beaucoup
table de conversion rapide, simple d'espace mémoire,
nécessite un calcul
d'interpolation
La méthode basée sur le calcul en temps réel du flux optimal basé sur un modèle
analytique peut être intéressante pour un modèle simple. Cependant, cette méthode ne
sera plus envisageable à partir d'un certain niveau de complexité car le temps de calcul
associé à cette méthode augmentera en fonction de ce niveau de complexité.
La méthode basée sur table de conversion n'a pas le problème de l'augmentation
du temps de calcul en fonction de la complexité mais a plutôt le problème de
l'augmentation de l'espace mémoire en fonction de celle-ci. En effet, pour un modèle à
dimension donnée, plus on voudra un grand degré de précision, plus la table de
conversion prendra de l'espace mémoire. De plus, si on ajoute une dimension au modèle
(celui-ci étant seulement fonction de la vitesse et du couple mais également de la
résistance rotorique par exemple [Peracaula, 2005]), l'espace mémoire allouée à la mise
en place du modèle augmentera significativement.
Une méthode située à mi-chemin entre le calcul en temps réel et la table de
conversion est celle discutée au chapitre précédent et basée sur l'utilisation de réseaux de
neurones artificiels (RNA). Le modèle des pertes, aussi complexe soit-il, peut être utilisé
pour générer des données d'entraînement afin d'entraîner un RNA dont la précision sera

52
fonction du nombre de neurones qu'il contient [Cybenko, 1989]. Cette approche ne
nécessite pas beaucoup d'espace mémoire et sa flexibilité permet de l'envisager pour des
modèles de pertes à multiples entrées multiples sorties fortement non linéaires. Sa
performance pourra être accrue si elle est mise en place sur une plateforme de calcul
permettant le parallélisme comme les ASIC ou les FPGA. Dans le cas où elle est mise en
place sur une plateforme de calcul série de type von Neumann (DSP), le temps de calcul
associé au calcul des sorties du RNA sera fonction du nombre de neurones qu'il contient.
Ainsi, l'utilisation de RNA pour représenter le modèle des pertes à l'intérieur du
contrôleur est une approche performante et qui permet d'uniformiser le processus de mise
en place en proposant une seule méthode pour différents niveaux de complexité de
modèles de pertes. Cette approche ouvre également la voie à l'utilisation de méthodes
d'identification du modèle des pertes en temps réel à base de RNA qui auraient comme
avantage d'être adaptatives et permettant ainsi une augmentation de la performance du
contrôleur. Ce type de solutions pourrait être réalisée par un RNA fonctionnant comme
modèle des pertes (neuro-commande) [Narendra, 1990] ou comme identificateur de
paramètres d'un modèle de référence (model-based reference adaptive system) [Elbuluk
et al., 2002].
2.2.2 Minimisation des pertes dans l'onduleur
L'étude de l'influence des techniques de MLI sur la performance dynamique et
énergétique des entraînements à vitesse variable est l'objet de la thèse de [Hava, 1998],
du livre de [Lipo et al., 2003] et l'article de [Holtz, 1994]. Ces trois travaux permettent de
faire une revue efficace de l'état de l'art au niveau des stratégies de MLI afin de réduire
les pertes dans l' onduleur.
Les pertes causées par l' onduleur de tension dans un système d'entraînement à vitesse
variable sont: (1) les pertes par commutation dans l'onduleur et (2) les pertes
harmoniques dans le moteur. Les premières sont reliées à la fréquence de commutation
des éléments d'électronique de puissance de l' onduleur alors que les secondes sont

53
causées par les harmoniques générées par le mode de fonctionnement intrinsèquement
discontinu d'un convertisseur statique (transitions rapides d'un état à un autre).
C' est [King, 1974] qui a formulé en premier l'idée d'ajouter un signal (appelé de
séquence zéro) au signal de référence de l' onduleur afin d'en augmenter la capacité
d'utilisation en tension. Jusque là, les onduleurs avaient une sortie linéaire jusqu'à 78%
de la tension maximale. L'injection du signal de séquence zéro a permis d'augmenter
cette limite à 90.7% et a donné lieu à l' invention de la modulation par vecteur spatial
(space vector pwm, SVPWM).
D 'autres techniques de modulation populaires ont par la suite vu le jour dont celle
incluant l ' injection d 'une composante troisième harmonique (third harmonie injection
PWM, THIPWM) dans le signal de référence par [Buja et al., 1975] permettant ainsi
d'augmenter l'indice de modulation possible d'un onduleur de 15% sans entrer dans la
région d'hypermodulation. Par la suite, l'injection d 'un signal de séquence zéro
discontinu a été proposée par [Depenbrock, 1977] et c'est ce que l'on appelle désormais
la MLI discontinue (DPWM). Les avantages reconnus à cette technique de modulation,
outre sa grande plage linéaire, sont la réduction des pertes par commutation et
l'augmentation de la qualité de l'onde fondamentale à indice de modulation élevée (par
rapport à celle générée par la SVPWM).
L'ouvrage de [Trzynadlowski et al., 1994] propose une stratégie de modulation basée
sur les travaux de Depenbrock et qui fait un compromis entre les pertes par commutation
et la qualité de l' onde (quantité d'harmoniques) produite par l' onduleur. Leurs résultats
montrent bien la supériorité de la qualité de l'onde d'un onduleur modulé par DPWM
comparativement à un autre modulé par SPWM (voir Fig. 2-9).

SPWM
'û. _. 01 .. ;;, ~ ~ - - _ ... t - ... ~ ... ~ ... - - JI:' ~,Jo,. ;;C J9 IV 1" ... _ ... - "t - - - -;- ~,. '" ~: ... <10' .. 91.:- .. _ ... _ ! ( : : , ; ,. I.C
~; • -:::t::::r::: :i: :::::: : :t:::t -::t:::.._., ..• i~ :: ::~ :: :: l:: ::c :~::::; :: : : : :. ::::: :: t::: :~ : : ::: ::uT"!~(--l: -I--iul--l"l
FREOiJENCY (Hz)
DPWM
54
Fig. 2-9 - Spectre harmonique de la tension et du courant d'un onduleur modulé par SPWM (à
gauche) et d'un onduleur modulé par DPWM (à droite). Image tirée de [Trzynadlowski et al. 1994].
Les travaux de [Hava, 1998] sont certainement les plus concrets qui ont été faits
dans ce sens jusqu'à maintenant. Il a notamment développé une technique de DPWM
adaptative [Hava et al., 1998] qui permet d'ajuster les pertes par commutation dans
l' onduleur et la qualité de l'onde en sortie. Puisqu'aucune technique de modulation
n'offre une performance supérieure sur toute la plage de modulation, les auteurs ont
proposé l'utilisation du SVPWM pour un indice de modulation mi faible et du DPWM
pour un indice de modulation mi élevé (mi> 0.81). La combinaison de deux types de MLI
dépend aussi de ce que l'on veut minimiser: les pertes par commutation ou celles dues
aux harmoniques. Il est démontré que le DPWM peut réduire jusqu'à 50% les pertes par
commutation par rapport au SPWM et que ces pertes sont fonction du facteur de
puissance et d'une variable de commande. Les essais expérimentaux effectués sur une
MA de 5 HP avec commande scalaire montre que l' échauffement (en OC) du dissipateur
de chaleur avec DPWM et une charge de 1.0 p.u. est pratiquement égal à celui avec
SVPWM mais avec une charge deux fois plus petite (0.5 p.u.).
Dans sa thèse, Hava a également montré le bon fonctionnement expérimental de
la DPWM dans le cadre de la commande vectorielle d'une MA. Il a surtout étudié le

55
comportement du DPWM en hyper-modulation en régime transitoire et en régime
permanent. Il conclut que la limite du DPWM pour le régime permanent est de mi = 0.95.
Les travaux de [Blasko, 1997] illustrent le même concept que [Hava, 1998] avec des
résultats semblables mais exprimés d'une manière différente.
2.3 Conclusion
Les méthodes existantes
Il existe deux méthodes de commande optimale de flux dans une MA : (1) la méthode
basée sur un modèle des pertes et (2) la méthode basée sur la recherche de la puissance
minimale à l'entrée. La première méthode a un temps de convergence rapide mais est
sensible aux variations de paramètre du modèle alors que la deuxième méthode minimise
les pertes totales dans tout le système mais possède un temps de convergence plus lent
que la première. Il est possible de profiter des avantages de ces deux méthodes en
utilisant une méthode hybride.
Dans la pratique, la méthode par modèle de pertes suscite un plus grand intérêt que la
méthode par recherche du point de puissance minimal à l'entrée car elle est non
seulement moins coûteuse à mettre en oeuvre (elle ne nécessite pas de capteurs
supplémentaires) mais sa performance n'est pas dépendante de la qualité de la mesure de
la puissance à l'entrée. De plus, la présence d'oscillations de couple engendrées par la
méthode par recherche du point de puissance minimal à l' entrée (en raison de
l'ajustement graduel du flux) exige un mécanisme de compensation complexe. Ainsi, le
seul intérêt évident pour cette méthode est son utilisation dans une SCEO hybride.
Nouvelles avancées et problèmes non-résolus
L'évolution des SCEO avec modèle de pertes pour la commande vectorielle est
passée d'un modèle ne contenant que les pertes fondamentales à un modèle qui tient
compte de la saturation magnétique et de l'estimation en ligne de la résistance rotorique
Rr. Les plus récents développements résident dans la conception d'une telle SCEO basée
sur l'utilisation de RNA qui permet les avantages en flexibilité et en performance des
TDC (temps de réponse court comparé à la stratégie de calculer en temps réel le flux

56
optimal à partir d'un modèle des pertes analytique) mais sans l'inconvénient de nécessiter
beaucoup de ressources en mémoire.
Le rendement énergétique d'un système composé d'un onduleur de tension et
d'une MA peut être grandement amélioré à faible charge par l'utilisation d'une SCEO
mais à pleine charge, le rendement du système est le même qu'un système sans SCEO. Il
est cependant possible de minimiser les pertes dans le système en pleine charge en
s'attaquant à une autre source de pertes: les pertes par commutation dans l' onduleur et
les pertes harmoniques dans le moteur engendrées par l' onduleur. Ces pertes peuvent être
minimisées par l'utilisation d'une technique de modulation discontinue de l' onduleur.
L'état de l'art au niveau de la théorie de la modulation discontinue est très abondant et il
fait presque l'unanimité qu'il s'agit d'une technique de modulation intéressante pour
minimiser les pertes par commutation et/ou harmonique. Cependant, les travaux qui
traitent de son utilisation expérimentale dans l'application de commande de MA sont peu
nombreux et plusieurs questions ne sont pas encore bien résolues (comme par exemple la
détermination du point mi seuil pour le passage d'une modulation SVPWM à modulation
DPWM).
Un second problème associé aux SCEO basé sur un modèle des pertes est celui
d'obtenir non seulement de bonnes performances énergétiques du système en régime
permanent mais également de bonnes performances dynamiques en régime transitoire. Ce
problème est généralement solutionné en ramenant le flux au niveau nominal lorsque le
système est identifié comme étant en régime transitoire par un détecteur de régime
permanent. Cette solution comporte des problèmes de conception qui ont des
répercussions sur la stabilité et la complexité du système de commande.
Un autre problème, plus méthodologique, est que la littérature ne présente que des
SCEO impliquant des modèles de MA impliquant des paramètres difficilement
identifiables au moyen de techniques simples (notamment les coefficients associées aux
pertes par hystérésis, par courant de Foucault et par les harmoniques spatiales) : ce qui en
réduit certainement l'application. Une SCEO basée sur un modèle des pertes facile à
construire au moyen d'une technique simple et offrant des performances acceptables
augmenterait certainement l'accessibilité de l'implantation de telles solutions.

57
Proposition d'avancement
Considérant les problématiques actuelles en conception de SCEO et telles
qu'illustrées plus haut, cette thèse propose de contribuer à leur solution en proposant de
nouvelles méthodes de conception de SCEO à base de RNA. Ces nouvelles méthodes
permettront notamment:
• d'augmenter l'efficacité du système à toute la plage de charge par l'intégration de
la DPWM à la commande;
• de réduire la complexité et le risque d'instabilité en intégrant le détecteur de
régime permanent à même la commande neuronale;
• de simplifier le processus de conception du modèle des pertes par la construction
d'un modèle à l'aide du standard bien connu IEEE-112.
Considérant l'importance de la validation expérimentale dans l'étude de
l'optimisation énergétique des systèmes à MA, un banc d'essai expérimental a été
développé. La validation expérimentale de la SCEO à base de RNA proposée constitue
une première pour ce type de contrôleur.
58
Chapitre III : Conception avancée de la commande de
flux à base de réseau de neurones artificiels
Il a été montré au chapitre précédent que les SCEO de MA basées sur un modèle des
pertes sont très prometteuses mais ouvrent sur deux problématiques: la conception d 'un
modèle des pertes représentatif de la MA et l'intégration efficace de ce modèle dans la
stratégie de commande.
Sur ce sujet, l ' approche basée sur l 'utilisation des qualités d ' approximateurs
universels des RNA en vue de l'intégration du modèle des pertes dans la stratégie de
commande ouvre des perspectives intéressantes en termes de coûts et de performance.
Une certaine maturité a récemment été atteinte dans l'étude de cette approche avec les
travaux de [Peracaula et al., 2005]. Cependant, ces travaux n'ont été présentés qu ' en
simulation et une version expérimentale d'une telle SCEO n'a toujours pas été réalisée.
Ce chapitre a pour objectif de décrire la méthode de conception du modèle des pertes
de la machine basée sur un réseau de neurones artificiels et de proposer deux nouvelles
approches de conception qui permettent respectivement:
• d'augmenter l'efficacité du système à toute la plage de charge par l'intégration de
la DPWM à la commande;
• de réduire la complexité et le risque d'instabilité en intégrant le détecteur de
régime permanent à la commande neuronale.
Mais tout d'abord, une introduction aux systèmes à RNA sera présentée ainsi qu 'un
survol de leurs applications dans la commande de machines électriques.
3. 1 Introduction aux réseaux de neurones artificiels
Les réseaux de neurones artificiels (RNA) sont une des approches issues du domaine
de l ' « intelligence artificielle» (lA) qui comprend également d'autres approches tels la

59
logique floue, les algorithmes génétiques (aussi appelés algorithmes évolutionnaires) ou
les systèmes experts. Le domaine de recherche de l'lA a vu le jour durant les années 1940
et a évolué en un domaine très multidisciplinaire réunissant autant de chercheurs en
psychologie, en linguistique, en informatique, en mathématiques, en robotique, etc. dont
l' obj ectif est de trouver des mécanismes permettant l'augmentation de l'autonomie des
machines. Le concept porteur de cet accroissement d'autonomie est celui de l'évolution
du « comportement» de la machine par des mécanismes d'adaptation ou d'apprentissage
dans un environnement d'exploitation difficilement modélisable et/ou variant dans le
temps. Avec le temps, ce domaine de recherche est devenue une spécialité appelée
« intelligence computationnelle » qui est un sous-ensemble du domaine de l'lA.
Les RNA sont des structures mathématiques dont le fonctionnement est inspiré de
celui des réseaux de neurones biologiques déjà présents dans la nature. La stratégie
fondamentale de ce type de structure est de concevoir des cellules de traitement
d'information élémentaires et de les connecter entre elles pour former un réseau. Ce
réseau, combiné à un algorithme d'apprentissage et stimulé par des données
d'entraînement, peut être entraîné à modéliser le monde extérieur et ensuite être utilisé à
remplir des fonctions bien spécifiques. Les deux grandes classes de RNA existantes se
distinguent en fonction de leur mode d'apprentissage qui peut être supervisé ou non
supervisé.
Les RNA basés sur un mode d'apprentissage supervisé sont ceux où le RNA est
entraîné à faire des associations entre un jeu de données d'« entrée» et un jeu de données
de « sortie ». Par exemple, dans une application de contrôle de qualité, on peut entraîner
un RNA à associer des images de pièces fabriquées à un état de qualité qui pourrait être
« défectueux» ou « normal ». L'apprentissage de ces associations par le RNA se fait en
lui présentant des données d'entrée et en corrigeant les paramètres du RNA en fonction
de la différence entre la sortie du RNA et celle attendue pour ce type de données.
Les RNA basés sur un mode d'apprentissage non-supervisés sont ceux où le RNA est
entraîné à classifier automatiquement les données d'entraînement sans référence
extérieure. Pour reprendre l'exemple précédent, en présentant successivement des images
de pièces défectueuses ou normales à un RNA à apprentissage non-supervisé, celui-ci en
vient à se représenter le monde extérieur en deux classes d'événements possibles.

60
L 'apprentissage se fait par une construction et un positionnement successif des images
d ' entraînement qui finissent par converger dans des sous-espaces distincts de l 'espace
d ' entrée.
3.1.1 Le perceptron multicouche
Le perceptron multicouche (multilayer perceptron ou feedforward neural network)
appartient à la classe des RNA à apprentissage supervisé et est le type de RNA le plus
connu et le plus utilisé. En effet, selon [Meireles et al. , 2003] , le perceptron multicouche
est utilisé dans 81 % des applications industrielles qui incluent des systèmes à RNA. Les
éléments fondateurs de ce type de réseau de neurones ont été proposés vers la fin des
années 1950 par [Rosenblatt, 1957], inventeur du perceptron qui est le nom donné au
neurone artificiel étant à la base de ce type de RNA. Son véritable essor a cependant été
pris au cours des années 1980 suite à l'invention d'un algorithme d ' apprentissage
performant pour ce type de RNA et basé sur la rétropropagation des erreurs l.
Anatomie et principe defonctionnement d'un perceptron
Un perceptron se divise en trois parties fondamentales: (1) les entrées, (2) l'unité de
traitement et (3) la sortie. L'unité de traitement se divise à son tour en deux parties: (1) le
sommateur et (2) la fonction d'activation. Tous ces éléments qui composent un
perceptron sont montrés à la Fig. 3-1.
1 En fait, l ' invention de ce type d'apprentissage a été proposé d'abord par [Bryson et al., 1969] mais a été
oublié suite à l'ouvrage de [Minksy et al. , 1969] qui révélait - à tort - les limites des réseaux de neurones
artificiels de type perceptron, ce qui a jeté un froid sur le financement de ce type de recherche dans les
années 1970. C'est suite aux travaux de [Rumelhart et al., 1986] et à ceux d'autres chercheurs que les
conclusions préalablement faites par Minksy et al. ont été réfutées.

61
Rentrées Modèle du neurone
1\ 1 \
'--J \~ ____ -1 ______ ~1
Fig. 3-1 - Schéma d'un perceptron [Parizeau, 2004]
Le principe de fonctionnement d'un perceptron est simple. Chacune des Rentrées
est multipliée par un gain W i dont les sorties sont additionnées ensemble dans le
sommateur. Le niveau du sommateur peut être ajustée à l'aide d'un biais b. Le résultat est
ensuite passé dans une fonction f appelée «fonction d'activation». La sortie a de la
fonction d'activation est égale à :
où wT = [WI, W2, ... , WR}T est le vecteur des gains qui multiplie le vecteur d 'entrée
P = [Pl, P2, ... , PR}T et b est la valeur du biais.
Il existe plusieurs types de fonction d'activation: (1) fonction seuil, (2) fonction
sigmoïde, (3) fonction tangente hyperbolique, (4) fonction linéaire, etc. Le choix de la
fonction d'activation dépend de l 'application pour lequel il sera utilisé (caractéristiques
de l'espace de sortie) et constitue une étape fondamentale dans le processus de
conception d'un RNA.
Ainsi, pour un vecteur d'entrée p, la sortie du perceptron sera déterminée par la valeur
des gains W et du biais b. La connaissance présente dans un perceptron est donc
emmagasinée dans la valeur des gains W et b qui sont ajustés à l'aide d'un algorithme
d'apprentissage.

62
Pour des fins de simplifications pour le reste de l'ouvrage, nous utiliserons
l'expression «neurone artificiel» pour désigner le perceptron, à moins d'indication
contraire.
Organisation des neurones artificiels en couche et en réseaux
En disposant de S neurones artificiels en parallèle, on peut aInSI créer une
organisation appelée « couche». Chaque entrée p est connectée à chacun des neurones
artificiels de la couche et sa sortie est ainsi constituée de R valeurs. On peut alors former
un réseau de couches en les connectant en série: les sorties des couches placées en amont
deviennent ainsi les entrées de celles placées en aval.
Le nombre de neurones artificiels et le type de fonction d'activation de chaque
couche peuvent varier d'une couche à l'autre mais le nombre de neurones artificiels dans
la couche de sortie doit être égal au nombre de sorties du réseau.
\ / \ s2x 1
'---.1 \'--____ ....11 \ .... : ____ ....,1
Fig. 3-2 - Réseau de neurones à propagation vers l'avant à deux couches [Parizeau, 2004]
Le RNA présenté à la Fig. 3-2 correspond à un perceptron multicouche à Rentrées
ayant Si neurones sur la première couche avec fonction d'activation sigmoïde, S neurones sur la deuxième couche (appelée « couche cachée») avec fonction d'activation
linéaire et une seule sortie. Cette architecture de perceptron multicouche ayant une seule
couche cachée a une importance particulière dans le domaine de l'approximation de
fonctions. En effet, il a été récemment montré que ce type de perceptron multicouche

63
peut être utilisé pour approximer n ' importe quelle fonction continue à une précision
donnée [Cybenko, 1989]. La précision de l' approximation est dépendante du nombre de
neurones utilisés dans la couche cachée (plus il y a de neurones, plus l'approximation est
précise).
Pour des fins de simplification pour le reste de l 'ouvrage, nous utiliserons
l'expression «réseau de neurones artificiels» (RNA) pour désigner le perceptron
multicouche, à moins d'indication contraire.
L'algorithme d 'apprentissage basé sur la rétropropagation des erreurs
Le principe de base de cet algorithme est d'arriver à une configuration des poids W e et
des biais he de chacun des neurones du RNA à entraîner qui minimise l' erreur
quadratique moyenne entre la sortie de la dernière couche ae du RNA et la sortie désirée
d en fonction des entrées p. On peut d'ailleurs définir les données d'entraînement D d'un
RNA comme étant égal à :
nombre de données d'entraînement.
Rappelons que la sortie de chaque couche c (d'un réseau ayant C couches) est égale à :
(3-3) a G = J C (W c ac-1 - hC) où C = 1 ... C et aD = p (vecteur d'entrée)
Il s'agit d'un processus itératif qui revient à calculer la variation des poids et des biais
(respectivement W et b) à attribuer aux valeurs présentes à chaque itération k :
où
(3-5) (ÔWc)k = -1] ; k
avec 1] le taux d'apprentissage,
(3-6) F(x) = E(eT (k)e(k)) ~ eT (k)e(k) = F(x) représente l'indice de performance et
(3-7) e(k) = d(k) - a e (k) représente l'erreur en sortie du réseau.

64
On remarque que cet algorithme implique le calcul de la dérivée partielle de
l'approximation de l'erreur quadratique moyenne pour chacun des neurones sur chacune
des couches. On comprend qu'une des conditions d'utilisation de cet algorithme
d'apprentissage est d'avoir des fonctions d'activation dérivables pour chacun des
neurones du RNA.
3.1.2 Applications et caractéristiques des RNA
Les applications des RNA se divisent en deux grandes classes d'applications: celles
basées sur l'approximation de fonction et celles basées sur la reconnaissance de fonne
(pattern recognition). Des exemples d'applications appartenant à chacune de ces classes
sont montrés au Tableau 3-1.
Tableau 3-1- Exemples d'applications de RNA [Vas, 1999]
Applications Exemple
Approximation de fonction
Reconnaissance de fonne
Prédiction
Commande
Vision artificielle
Classification
Dynamique de la charge
Régulateur PI
Détection de pièces
défectueuses
Identification du type de
défaut
En plus de la capacité d'apprentissage des RNA, ces structures de calcul comportent
plusieurs autres caractéristiques qui les rendent intéressants à utiliser pour des
applications pratiques (Tableau 3-2).

-_. _. --~-_. ----
65
Tableau 3-2 - Caractéristiques i ntéressantes des réseaux de neurones artificiels [Bose, 2002]
Caractéristique
capacité d'extrapolation
tolérance au bruit
parallélisme
robustesse aux fautes
Justification
l
1
1 n 'est pas obligatoire d'entraîner le RNA sur tout l' espace
d ' entrée: une judicieuse sélection des points critiques de
' espace d ' entrée fournira assez d ' information au RNA pour le
modéliser et le généraliser.
Ce qui rend leur utilisation intéressante dans les applications
de reconnaissance de formes où la caractéristique à identifier
st souvent bruitée. e
La structure intrinsèquement parallèle des RNA en fait une
puissante unité de calcul dans le cas où le RNA est réalisé sur
une plateforme matérielle.
La distribution de la connaissance sur les gains et les biais
dans tout le réseau le rend tolérant à un éventuel changement
de valeur accidentel d'un gain ou d'un biais.
Applications des RNA dans la commande de machines électriques et en électronique de
puissance
Les machines électrique s et les convertisseurs statiques sont des procédés ayant une
et dont les paramètres varient dans le temps. Nous avons vu
les RNA sont des structures particulièrement performantes
sus non-linéaires et dont la capacité d'apprentissage leur
mps. Par conséquent, cette complémentarité entre les besoins
caractéristiques des RNA fait en sorte qu'il s'agit d'une
ésoudre des problèmes dans ces applications.
dynamique très non-linéaire
à la section précédente que
pour modéliser des proces
permet d'évoluer dans le te
des ces applications et les
approche intéressante pour r
Il existe de nombreux 0
RNA dans les application
uvrages et articles scientifiques qui traitent de l'utilisation des
s de machines électriques et d'électronique de puissance
2002], [Kazmierkowski et al., 2002], [Cirstea et al. , 2002].
sur la question est certainement celui de [Vas, 1999]. Le
plications en 5 catégories:
notamment ceux de [Bose,
L'ouvrage le plus complet
Tableau 3-3 classifie ces ap

66
Tableau 3-3 - Classification des applications de RNA dans les machines électriques
Application Exemple
estimateur de variables d'état
estimation de paramètres
modulation par largeur d'impulsion
régulation de courant
détection de défaut
estimation du flux ou de la vitesse d'un
moteur asynchrone
résistance au rotor ou inductance de fuite
d'un moteur asynchrone
modulation par vecteur d'espace
commande vectorielle ou directe
défaut de roulement ou d'isolation du
bobinage
3.2 Conception d'une commande en flux optimale et neuronale
Tel qu'illustré au chapitre 2, le RNA est une alternative intéressante aux méthodes
de représentation traditionnelles du modèle des pertes à l'intérieur du contrôleur qui sont
basées sur le calcul en temps réel à l'aide d'un modèle analytique ou l'utilisation d'une
table de conversion. Il s'agit là d'un bel exemple d'application d'approximation de
fonction qui convient parfaitement à l'architecture du RNA perceptron multicouche.
La conception d'une version neuronale du modèle des pertes de la MA se divise
en trois étapes: (1) la génération des données d'entraînement, (2) la sélection de
l'architecture du RNA et (3) l'entraînement du RNA à l'aide des données d'entraînement.
Ces étapes peuvent être réaliséees à l'aide du logiciel de calcul scientifique MatlabMC
ainsi que la boîte à outil spécialisée dans la conception de RNA Neural N etwork
ToolboxMc.

3.2.1 Génération des données d'entraÎnement à partir d'un modèle
des pertes connu
67
La génération de données d'entraînement qui caractérisent tout l'espace d'entrée est
fondamentale dans la conception d'un RNA performant [Norgaard et al., 2000]. Un
nombre trop faible de données augmentera l'erreur en sortie du RNA alors qu'un nombre
trop élevé de données augmentera le temps de calculs et risque également de faire entrer
le RNA dans un mode de « sur-apprentissage ». La procédure à suivre est de commencer
avec un nombre faible de données et d'augmenter jusqu'à ce que le critère de l 'erreur
quadratique en sortie soit rencontré.
Ainsi, les données d'entraînement DO pour le contrôleur optimal de flux à deux
entrées sont composées des valeurs de vitesse électrique au stator OJs , du couple
électromagnétique T e et de la valeur du flux optimal au rotor lfir associé à la valeur de ces
entrées:
ms l T el lf/ rI
(3-8) DO = [po dO]oùpo = ms2 T e2 etdO = lf/r2
msQ T eQ lf/rQ
Ces données d'entraînement sont construites à l'aide du modèle des pertes que l'on
désire représenter. On divise alors l'espace d'entrée en Q points uniformément répartis
entre 0 et 1 p.u. pour chacune des dimensions du modèle (associées à la variable p)
auxquels correspondent Q valeurs de flux optimales (associées à la variable d).
La génération des données d'entraînement pour la conception d'un modèle neuronal
des pertes dans la machine se fait à l'aide du modèle présenté par [Peracaula, 2002].
L'espace d'entrée est alors divisé en Q = 525 points (25x25) d'opérations pour lesquels le
flux qui minimise les pertes dans la MA a été préalablement trouvé à l'aide de la fonction
de recherche de minimumfminbnd disponible dans Matlab™.
Il a été préalablement déterminé que la structure de RNA de choix pour l'application
d'approximation de fonction est celle du perceptron multicouche avec une couche cachée.

68
Ce type de RNA peut approximer n'importe quelle fonction à une précision donnée qui
est fonction du nombre de neurones présents dans la couche cachée. Une étape
importante de la conception est de trouver le nombre optimal de neurones à placer ur la
couche cachée pour avoir une approximation sati faisante du modèle (une erreur
quadratique minimale) et un RNA le plus parcimonieux possible afin de minin1iser les
re ource en temps et en matériel néce saire à a mi e en place dan le contrôleur. Dan
leur plus récent travail, [Peracaula et al. 2005] ont utilisé un RNA ayant 3 entrées et 3
neurones sur la couche cachée (la 3e entrée étant l ' approximation de la résistance
rotorique) avec 385 données d'entraînement et une erreur quadratique de 1.57xlO-s (Fig.
3-3).
1 [ ~ ~I 1 _
~ - ~ m ' ~ ,j ~ ri 8- ." -j
~ .:l l
.. -i
: -~
Flux optimal pour différents points d'opéra Ion
... . . . .. . • ...of il t ••
• • • • .. • ' •• + .t ..... ' .... . ' ....... ' •• ' .. : ........ .,. ~ ~ ~ .. ' .. "' .. ' .. " ,: '. >~.'. > . .. ... . • • .. •• '+ •
• .... ........... .. • • ... • ........ 4 . ....... .. .. . .. . . ... . . . . . .. . .... - .4o ... . .... , ..... . , ... ........ . . . .. . . .. ... ... .. . .......
-4 ....... .,. •
• .. • .. • .• • .... of '"
. . . . ... ... . .... ,. ......... ......... .
.. , .. .......... ......... • + •
.... ..... ,...; . . . .1'
,. ...... . . . . ...... . ...
... f ..
l~
1 .j-~-
.... '!,..-
.. . . .. . ...... '1
Couple (p u) Vitesse (p .U )
--~-
Fig. 3-3 - Flux optimal en fonction du point d 'opération
3.2.2 Sélection des paramètres de l'architecture du RNA
À l'aide de la boite à outil de Matlab ™ Neural Network Toolbox, des RNA ayant un
nombre différent de neurones sur la couche cachée ont été conçus (de 3 à 20 neurones) et
entraînés avec le jeu de données d'entraînenlent (voir l'évolution de l 'entraînement à la
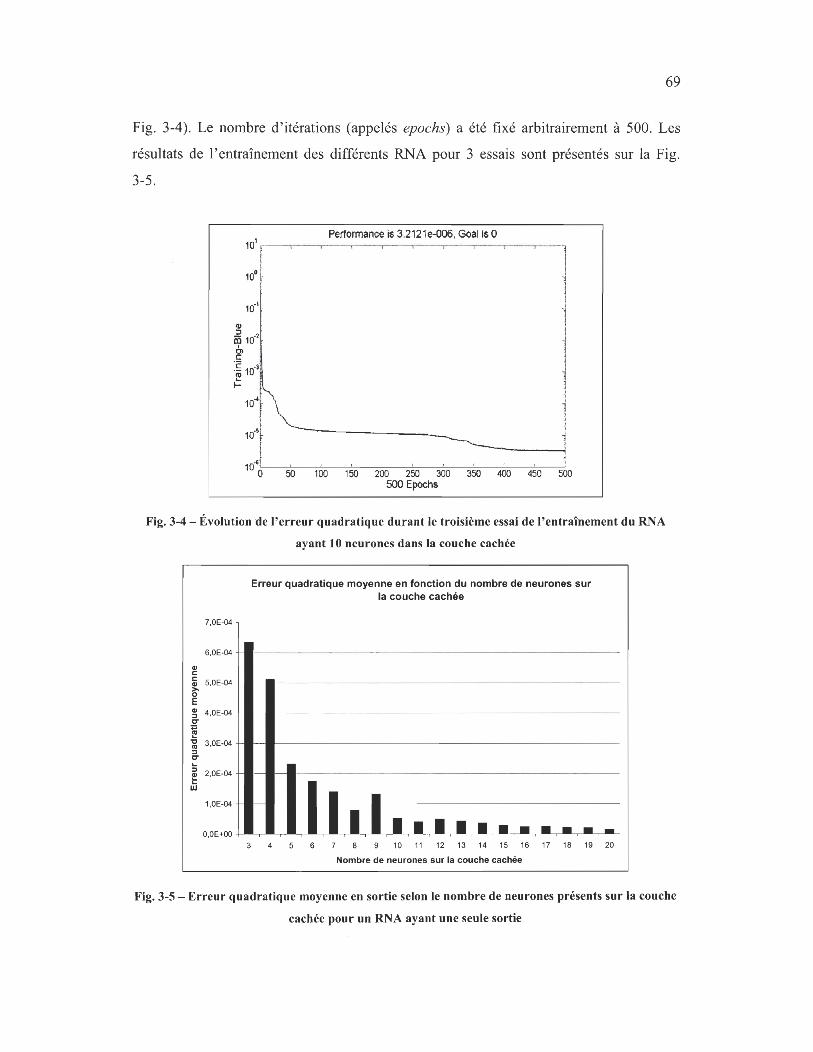
69
Fig. 3-4). Le nombre d'itérations (appelés epochs) a été fixé arbitrairement à 500. Les
résultats de l'entraînement des différents RNA pour 3 essais sont présentés sur la Fig.
3-5.
Performance is 3 .. 2121e-006, Goal is 0 10' ~~"~~~~-~-~-~~-~~~~~~----~--~--~---~,~-, ___ ~~~ __ ~
4l) :J
a;s 10'1 , 0)
c: . '.ë .:j :' 'ro 10 j
.= 10~~
1 10·5}
f lO·'i<------'-1 -_,-1 _---'-1 __ -'-1 _---' __ -'--_-'-_---'-__ -'--_-'
o 50 100 150 200 250 300 350 400 450 500 500 Epochs
Fig. 3-4 - Évolution de l'erreur quadratique durant le troisième essai de l'entraînement du RNA
ayant 10 neurones dans la couche cachée
CI) c:
7,OE-04
Erreur quadratique moyenne en fonction du nombre de neurones sur la couche cachée
6,OE-04 -1-11.------ ----------------------
~ 5,OE-04 , __ - __ -------------------------->-o E ~ 4,OE-04 - . --11.-------------------------
.2" ni ~ 3,OE-04 ~-----------------------------~ C" :; ~ 2,OE-04
W 1,OE-04-1--11.- __ ---I _____ I- __ --__ -------------- ----
10 11 12 13 14 15 16 17 18 19 20
Nombre de neurones sur la couche cachée
Fig. 3-5 - Erreur quadratique moyenne en sortie selon le nombre de neurones présents sur la couche
cachée pour un RNA ayant une seule sortie

70
On voit sur la Fig. 3-5 que l'erreur quadratique moyenne (EQM) en sortie du
RNA entraîné à l'aide des données d'entraînement provenant du modèle de pertes de la
machine diminue en fonction du nombre de neurones présents sur la couche cachée, ce
qui confirme bien ce qui a été démontré par [Cybenko, 1989]. Cette erreur est
relativement faible même avec un petit nombre de neurones (3 neurones, EQM =
6.20xl0-4) puis diminue par environ 3 en ajoutant 2 neurones supplémentaires. Passé un
certain nombre de neurones sur la couche cachée (plus de 8 neurones), on observe que
l'EQM ne diminue pratiquement plus.
L'impact de l'ajout d'une sortie supplémentaire sur la taille du RNA
La question de l'impact de l'ajout d'une sortie supplémentaire au RNA sur le
nombre de neurones nécessaires pour obtenir une EQM du même ordre est intéressante.
Cet ajout implique une modification à la structure des données d'entraînement de telle
sorte que le vecteur d contient une nouvelle composante x et que Dl est par conséquent
égal à :
(Osl T el lf/ rI Xl
(3-9) D! =[i i]oùi = (Os 2 T e2 etd l =
lf/ r2 X 2
(OsQ T eQ lf/rQ X Q
Est-ce que l'ajout de connaissance amenée par la sortie supplémentaire X au RNA aura un
impact significatif sur sa taille? On peut déjà penser que cet impact sera fonction de la
forme du nouvel espace de sortie: plus sa corrélation avec les connaissances déjà
apprises par le RNA est grande, moins l'impact sur sa taille sera grand. À l'opposé, un
nouvel espace d'entrée totalement non-correlé avec l'espace déjà en place nécessitera
beaucoup plus de ressources neuronales nécessaires.
On peut valider cette hypothèse en examinant l'impact sur la taille du RNA suite à
l'ajout des espaces de sorties XA et XB suivants (voir Fig. 3-6 et Fig. 3-7) pour créer les
J. eux de données d'entraînements Dxl et Dl: A XE

(3 -1 0) X A (p) = X A ( [ù s , Te) = Te
(3-11) X B (p) = X B (0)" Te) = Te + Sin( S 211"2·:" ) = Te + sin(SO)J
r. ~ _
• + .....
.,+ . ~ .... ' .... .. ' ....... . ..... ..... . .. .. - ...... of·· ..... -,.. ....... . ~ .. . ... ..- ...... ...... . .... .. .. •••••. .+" ......... . .. - ........ -. .-
•••••••••• .+' .+ .... " ........... ...... ....... . ... . • ••• ~ ..... "'t .. ...... • ...... • ...
• + t ... . .... ••• ........ . " ••• •
• 11' · ' ........ , + •• , • • , •• ' •••• >.. ,'_ ,.t .... • ••
•.• .... •••. . t., "".~ ••••• •••••• • ••• , ..... _--~~ee
• •• .-....... - ' n ~ ••• ' .' ":ti J
~- - - -:c>- -.,-- _ +.~~.:~. G4 n:o .. -- - G~
Vitesse (p ,u,) COLJnl~ (0 LI )
Fig. 3-6 - Aspect de la fonction XA
Vitesse (p U l ' _
Couple (p U,) j--
Fig. 3-7 - Aspect de la fonction XB
71
On observe que les fonctions X A et Xs sont complètement différentes. Les résultats de
l'entraînement d'un RNA ayant pour sortie supplémentaire l'une de ces fonctions sont
montrés sur la Fig. 3-8 pour différent nombre de neurones sur la couche cachée.

Q,) c c Q,) >. 0 E Q,) ::l C"
~ ~
"'C ~ ::l 0'" ~
::l cu ~ ~
W
2,5E-04
2,OE-04
1,5E-04
1,OE-04
5,OE-05
Erreur quadratique moyenne en fonction du nombre de neurones sur la couche cachée
D xA . xB
0,0 E +00 1-....L-----'------'-----r-'----r-'----L----~------'------'------'----_,__J_---_,___'_-------L-----'-----'---
6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Nombre de neurones sur la couche cachée
72
Fig. 3-8 - Évolution de l'erreur qu adratiq ue de l'entraînement d 'un RNA dont les sorties sont le flux
optimal et les fo nction xA ou xB
On observe sur ce graphique que l'EQM pour XA et X s est respectivement de 3. 7E -S et
7 .SE -S pour 10 neurones sur la couche cachée: ce qui est du même ordre de grandeur que
les résultats pour le RNA à une seule sortie (S.3 E-S) présenté à la Fig. 3-S. On observe
également que l'EQM de Xs est supérieur à XA, résultat attendu en raison de la moins
grande homogénéité de son espace de données par rapport à XA (comparer Fig. 3-6 et Fig.
3-7), mais que cette différence devient de plus en plus petite en fonction du nombre de
neurones présents sur la couche cachée du RNA.
Ces observations originales permettent de penser qu'il est possible d 'ajouter de la
connaissance utile à un RN A avec un impact n1ineur sur sa topologie. Cela a pour
conséquence qu'il est possible d ' ajouter des fonctionnalités à un système à base de
RNA sans coût suppplémentaire dans la mise en œuvre du système de commande
(lnême RNA avec plus de fonctionnalités).

73
Nouvelle utilité des RNA dans la conception de systèmes de commande: l'intégration
fonctionnelle au niveau de la génération des données d'apprentissage
L'examen de la question de l'influence de l'ajout d'une dimension à l'espace de sortie du
RNA à la section précédente ouvre la porte à une utilisation originale de RNA dans la
conception de systèmes de commandes: en plus d'être utilisé pour établir des relations
complexes entre entrées et sortie, ils peuvent également être utilisés pour intégrer des
fonctionnalités (nouvelles ou déjà existantes) à même le RNA en modifiant le jeu de
données d'apprentissage. Il s'agit d'une utilité très intéressante puisqu'elle permet:
• d'ajouter de nouvelles fonctionnalités au système de commande à très faible coût;
• de réduire la complexité de l'architecture du système de commande en procédant
à l'intégration de composants au niveau des données d'apprentissage;
• de modifier l'architecture fonctionnelle du système de commande sans
nécessairement en modifier la topologie (i.e. l'intégration des composants au
niveau des données d'apprentissage ne vient pas changer l'intégration d'un RNA
déjà présent dans le système de commande).

81 . JI .. RmctÎO!1 B _Cl lL.._F_oo_ct_· ion_. _A_...JIbL-.-_(_R_NA_}_~~
82 ·
:1
ArWitecture Çvec RNA intégrant des f2nc1~noal i té$ supr!érnentaires au ni· eau de la génération œs dor nées d'apprentissage.
Fonotion$ A6,C
,"--_<_R_N_Al_-"" ... ,,~§J
~ ----
74
Fig. 3-9 - Comparaison de l'architecture de système avec RNA conventionnelle et RNA intégrant des
fonctionnalités additionnelles au niveau de la génération des données d ' apprentissage
Les sections suivantes montreront deux exemples concrets d 'amélioration de SCEO qui
profitent de cette amélioration de design de système à RNA.
3.2.3 Conception du modèle neuronal des pertes dans la machine
avec prise en compte des pertes dans l'onduleur
Nous avons vu au chapitre 2 les principales approches mentionnées dans la
littérature permettant de réduire les pertes dans la MA par ajustement optimal du flux
(basées sur un modèle des pertes, la recherche du point minimal de puissance à l ' entrée,
approches hybrides, etc.) . Les pertes par commutation et par conduction dans l ' onduleur
ont également été étudiées et il a été observé qu ' il était possible d ' en minimiser les pertes

75
par commutation en utilisant des stratégies de MLI avancées telle que la DPWM optimale
par [Hava, 1998].
Le pnncIpe utilisé par la D PWM optimale pour réduire les pertes par
commutation est d'empêcher la commutation des transistors IGBT lorsque le courant est
maximal. La DPWM optimale est en fait la combinaison de plusieurs techniques de
DPWM (DPWMO, DPWM1, DPWM2, DPWM3 voir [Lipo et al., 2003] pour une
description détaillée) qui sont utilisées dans leur zone optimale. On voit sur la Fig. 3-10
que la DPWM optimale peut réduire les pertes par commutation jusqu'à 500/0 par rapport
aux techniques de modulation continues.
O.45L--...L..-----L...--"--_....J....._---L. __ ...L...-_--'-__ "--_-I---..J
-80 -60 -40 -20 20 40 60 80
[deg]
Fig. 3-10 - Rapport entre les pertes par commutation par les différentes approches DPWM et des
techniques de modulation continues où ({J est l'angle du facteur de puissance [Hava, 1998]
Afin de déterminer l'angle lJf requis pour bloquer la commutation, la DPWM
généralisée nécessite de connaître le facteur de puissance de la charge qui est alimentée
par l' onduleur de tension qu'elle commande. La relation entre l'angle de blocage de la
commutation et le facteur de puissance est donnée par (voir Fig. 3-11) :

76
1r (3-12) lj/=CP + -
6
L'angle du facteur de puissance en régime permanent peut être calculé en fonction de la
vite se électrique au stator ws, du couple électromagnétique Te et de la campo ante id du
courant [Bose, 2002] :
(3-13 ) cp (ùs' Te' id = arc tan , b . ' . 1/1 ou ( ) [ in1Q0(i . + i ) J ' reel(l ,. + ' 1/1)
... .. ;
.. ... -:.
'. "'~- .
0.7 .. .. '
0.6 , 1 •• ~ ••
0.5 ~ 1. ( "
60
o ,. [d o·]
Fig. 3-11 - Rapport entre pertes par commutation de la DPWM optimale et les pertes par
commutation avec modulation continue en fonction de l'angle du facteur de puissance qJ et de l'angle
de blocage de la commutation '11 [Hava, 1998J
(3-14) i l' ~ lj/ m~ ------------------------~ et
( R J2 ') ( R J2 ') R, + -: + (jws (LI' + L f; ))- R, + -: + (jm, (Lf' + L f; ))-
(3-15) . V , lj/ m {Ù.I· T/}/ = . ' ~----
} {ù'I· L III j {ùs L IJI

77
Le facteur de puissance pour un moteur ayant les n1êmes caractéristiques que celui utilisé
au laboratoire du LEEPCI (voir caractétistique au chapitre 4) en fonction de id, à vitesse
électrique nominale W sO et à couple nominal Te() a été calculé avec les équations montrée
plus haut (Fig. 3-12).
0,9
0,8 • •
Facteur de Puissance en fonction de Id pour différentes valeurs de charge
0,7 -t------III-------c ... ----;;;-------------'1~.-,---------------l
• • • • 0,6 • • •
• • • • ••• 0,5
• 04 •
0,3 ·I----·---------· __ ---,---;===~====~==,~--·----------,,-------------,---,,-----,,--------.. ----------------- -- - , ... ------,,-------.--------- ··---------------1 ...
0,2
0,1 -1-----------------------------1
0 ,15 0 ,25 0,35 0,45 0,55 0,65 0,75 0,85 0,95 1,05
Id (p.u.)
Fig. 3-12 - Facteur de puissance en fo nction de id pour différentes valeurs de charge en utilisant les
équations (3-13) à (3-17)
Ces valeurs de facteur de pUIssance peuvent alors être utilisées facilement pour
commander optimalement la modulation DPWM en fonction du point d'opération. Ainsi ,
préalablement à l'intégration à la SCEO développée auparavant, l'architecture du
nouveau système qui minimise les pertes dans l'onduleur ressemble à la Fig. 3-13.

78
Fig. 3-13 - Architecture avec intégration conventionnelle du modèle des pertes par commutation
Nous avons vu que le module de commande optimale du DPWM néces ite de connaître
le courant id afin d ' en déduire le facteur de puissance. Or, cette fonction est déjà remplie
par le module de conlmande optimale de flux qui associe un flux optimal préalablement
calculé en fonction d'un modèle des pertes de la machine pour chacun des points
d ' opération.
Couple (p.u.) Vitesse (p.u.)
Fig. 3-14 - Facteur de puissance en fonction du point d'opération
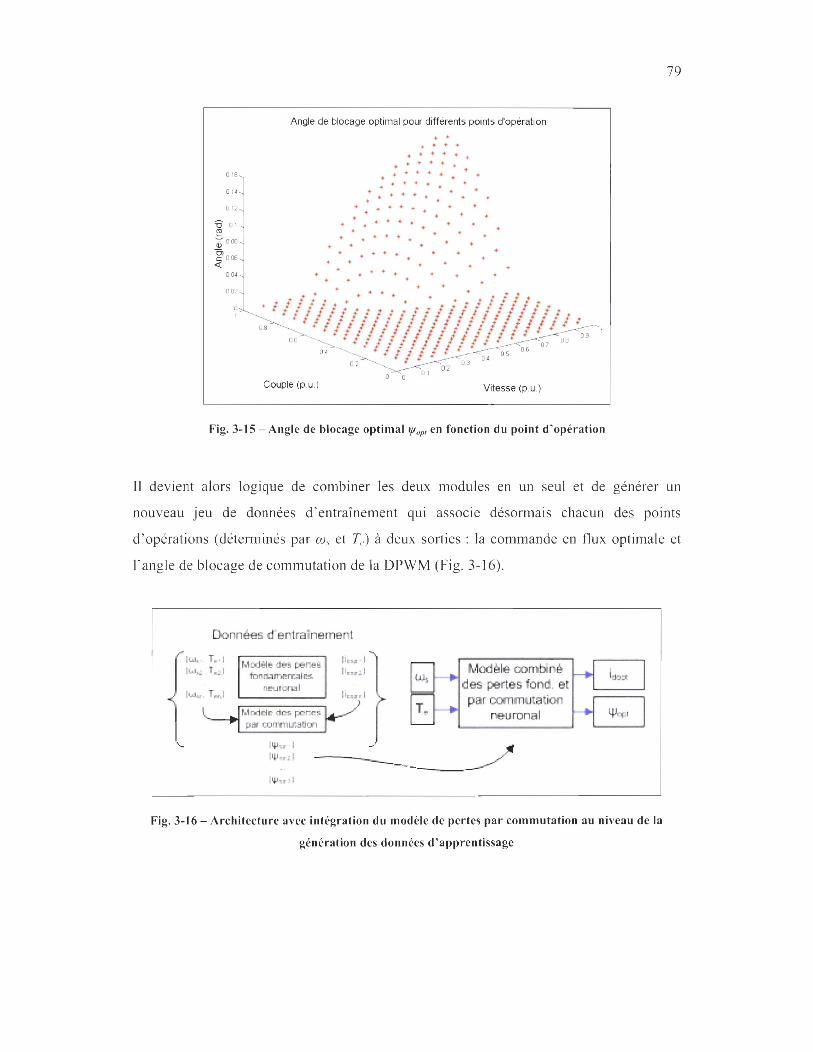
016
01 4
012
13' 01 -,
~ ~ 008 0> e OOS <{
004 ,
002 ,
Angle de blocage optimal pour différents points d'opération
... ... -t-... ..-
... ... ... ..- ... ..- lf ..-
... ... .. ...
... .. ... ... ..-... .. ..-
... + ... ..
.;- ... ...
* ... .op-...
0.8
Couple (p.U.) Vitesse (p.U.)
Fig. 3-15 - Angle de blocage optimal f!1opt en fonction du point d ' opération
79
Il devient alors logique de combiner les deux modules en un seul et de générer un
nouveau jeu de données d ' entraînement qui associe désormais chacun des points
d ' opérations (déterminés par OJs et Te) à deux sorties: la commande en flux optimale et
l'angle de blocage de commutation de la DPWM (Fig. 3-16).
r L
Iw III: :r .....
l ' , 11:-:r " J
Iw Iln:rr l )
Fig. 3-16 - Architecture avec intégration du modèle de pertes par commutation au niveau de la
génération des données d'apprenti ssage

80
Tel qu'attendu, l'impact de l'ajout du modèle de pertes par commutation sur la taille du
RNA est minime. Lorsqu 'on remplace les fonctions XA ou XB par l'angle de blocage
optimal lj1 opt pour créer un nouveau j eu de données D ~ Opl qui associe chacun de points
d 'opération à un niveau de flux optimal et un angle de blocage de modulation de
l ' onduleur optimal, le niveau d'erreur quadratique moyenne est semblable à celui obtenu
pour le jeu de données d'entraînement DO (Fig. 3-17).
Cette nouvelle SCEO basée sur la minimisation des pertes dans la machine et
dans l'onduleur permet d ' augmenter l'efficacité du système sur toute la plage de charge
au lieu de seulement pour la région de faible charge pour les SCEO basées seulement sur
l'ajustement du flux. Une étude sur la performance énergétique de cette approche a été
effectuée [Perron et al., 2006] afin de la comparer à l ' approche conventionnelle sans
ajustement de flux et dont la modulation est continue (modulation par vecteur espace)
pour un système entraînant une MA de 2 HP (à 4 pôles et vitesse nominale de 1800
RPM). La synthèse des résultats de cette étude est présentée au Tableau 3-4.
1,6E-04
1,4E-04 1-
Ci)
ê 1,2E-04 tCi) >-o E 1,OE-04 I-
Ci) ::l cr
Erreur quadratique moyenne en fonction du nombre de neurones sur la couche cachée avec angle de blocage optimal en 2e sortie
~ B,OE-05 1- r--... "C ca 6- 6,OE-05 -; ___ - _1-
... ::l
W 4,OE-05
e :1 o~::+:: -it--------,-__ ---,----I.----1--.Jj __ , ---1 , --1 , ---1 . ---1 , ---=--=--I ,-I-,--Ll- ~-I =1 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Nombre de neurones sur la couche cachée
Fig. 3-17 - Évolution de l'erreur quadratique de l'entraînement d'un RNA dont les sorties sont le flux
optimal et l'angle de blocage optimal 'l'opt

81
Tableau 3-4 - Comparaison de la performance énergétique entre l'approche conventionnelle et
l'approche proposée qui minimise à la fois les pertes dans la machine (fondamentales et résiduelles -
PFR) et celles causées par l'onduleur (harmoniques et par commutation, PHC)
Vitesse Charge SVPWM DPWM (p.u.) (p.u.) PFR-PUC(W) Rend. (0/0) PFR- PUC (W) Rend. (%)
Commande avec flux constant (nominal) 0,2 0,2 23,6 4,0 74,3 23,6 2,1 75,7 0,2 1,0 169,6 Il,2 68,9 169,6 6,1 69,5 0,5 0,2 123,1 4,3 61,1 123,1 2,2 61,5 0,5 1,0 276,1 Il 8 77,6 276,1 6,2 78,0 1,0 0,2 310,1 4,7 56,0 310,1 2,4 56,1 1,0 1,0 471,0 12,3 80,5 471,0 6,5 80,7
Commande avec ajustement du flux base sur un modèle neuronal 0,2 0,2 23,1 4,1 74,6 23,0 2,1 76,1 0,2 1,0 171,2 13,0 68,5 171,2 7,0 69,2 0,5 0,2 95,1 4,2 66,8 94,7 2,2 67,4 0,5 1,0 275,4 Il,8 77,7 275,4 6,2 78,0 1,0 0,2 216,5 5,3 64,3 214,9 2,7 64,8 1,0 1,0 471,4 12,9 80,5 471,2 7,1 80,7
En analysant les résultats montrés au Tableau 3-4, on observe que:
• les pertes fondamentales dans la machine à charge nominale sont similiaires pour les
deux approches mais celles à faible charge sont en moyenne 27% inférieures avec
l'approche basée sur un ajustement du flux basé sur un modèle des pertes neuronal;
• peu importe l'approche, on observe que les pertes par commutation sont coupées
environ de moitié (47%) lorsque l' onduleur est modulé à partir d'une approche
DPWM au lieu d'une approche SVPWM;
• si on compare les pertes totales, on observe que l'approche proposée permet une
réduction des pertes de 31 % par rapport à l'approche conventionnelle à faible charge
(217,6 W vs 314,8 W) et de 1 % à charge nominale (478,3 W vs 483,3 W).
Ainsi, l'idée d'intégrer les pertes par commutation dans la SCEO permet d'étendre
l'augmentation de l'efficacité énergétique du système sur toute la plage de charge.
L'approche neuronale de cette SCEO vient en faciliter la réalisation en n'ajoutant ni coût
ni complexité supplémentaires au système: ce qui en augmente la probabilité
d'utilisation.

3.2.4 Conception du modèle neuronal des pertes dans la machine
avec prise en compte du détecteur de régime permanent
82
Une limite du modèle de pertes de la MA présentée au chapitre 2 est de n 'être
valide que dans le régime permanent et ne peut être utilisé pour minimiser les pertes en
régime transitoire. Également, afin d 'assurer une excellente réponse dynamique du
système suite à un changement du point d ' opération (variation de la vitesse commandée
et/ou de la charge), on voudra rétablir le flux à sa valeur nominale.
C 'est la stratégie généralement présentée dans la littérature sur la conception de
régulateur de flux en vue de minimiser les pertes dans la MA [Levi et al., 2003], [Hori et
al., 2003], [Cao-Minh et al., 2001] mais qui comporte un inconvénient important qui est
de concevoir un détecteur de régime permanent. Le rôle de ce détecteur est d'ajuster la
commande en flux à la valeur énergétiquement optimale ou à la valeur nominale selon le
régime dynamique du système (transitoire ou permanent).
L'ajout de ce détecteur de régime permanent augmente la complexité de
l'architecture du contrôleur et s'intègre mal au reste des composants. Il s'agit là d'un
inconvénient des contrôleurs typiquement présentés dans la littérature et qui aurait
avantage à être éliminé, sinon réduit.
Une manière d'éliminer ce détecteur de régime permanent est de l'intégrer
complètement au régulateur de flux au niveau de la génération des données
d'apprentissage. Une façon de mettre en œuvre cette intégration est de rendre la consigne
en flux non seulement fonction du point d'opération de la MA mais également fonction
de son régime (permanent ou transitoire). Cela peut être rendu possible en ajoutant deux
entrées à la commande de flux: l'erreur en vitesse mécanique (I1Wp ) et l'erreur en couple
électromagnétique (I1Te) (voir Fig. 3-18).

lDétectetJr de réginle
rl~~~ I~' ~~~~~~.~._; ___ p_. e_T_'ma_ .. _c m_; ._e_n_t __ ~
Fig. 3-18 - Intégration conventionnelle du détecteur de régime permanent à la commande
83
Ainsi, la valeur de sortie du régulateur de flux est située entre le flux nominal
l/fr-nom et le flux énergétiquement optimal l/fr-opt en fonction de la « grandeur» du régime
transitoire qui serait fonction de l'erreur en vitesse et l'erreur en couple r(L1CVp , L1Te) :
La fonction r( L1CVp , L1Te) doit être conçue de manière à ce que fJf/ej = fJf/pt en régime
permanent (L1CVp = L1Te ~ 0) et fJf/ej = [fJf/pt ,fJfrnom
] en régime transitoire (L1CVp t- 0 et/ou
L1Te t- 0). Cette fonction vient donc jouer le rôle de «délimiteur» entre le régime
transitoire et le régime permanent et peut être conçue de plusieurs façons. Il y a donc une
contrainte de conception qui est celle de créer une zone de transition entre fJf/pt et fJf/om
qui est:
• assez large pour éviter les fluctuations rapides de la commande de flux et ainsi
diminuer le risque d'instabilité du système;
• assez étroite pour assurer une bonne réponse dynamique du système.
La conception de la fonction r( L1CVp , L1Te) est donc un compromis entre performance et
stabilité du système qui doit être déterminé par le concepteur en fonction du cahier des

84
charges et des caractéristiques de l'application. Il existe donc une infinité de façons
possibles de concevoir r(l1wp , 11 Te).
Proposition de conception de r(l1wp , I1Te)
Dans un premier temps, la fonction r(l1wp , I1Te) peut être divisée en trois parties (avec
transition linéaire) sur la base du critère e = I1wm (p.u.) + I1Te (p.u.) pour former:
o (3 -19) rI (e ) = 1 - 'If opt (p.u.) (e - e inf )
8 sup - 8 inf
1
si 0 ~ 8 inf
si e inf < e ~ e sup
si8 <8 sup
Ainsi, selon les équations (3-18) et (3-19), lorsque la somme des erreurs en vitesse
mécanique et en couple électromagnétique est inférieure à une certaine limite e inf, la
référence en flux lflref est égale à la valeur optimale provenant du modèle de pertes lflop t.
Un cas particulier de l'équation (3-19) est montré à la Fig. 3-19. On peut maintenant
former un nouveau jeu de données D 2 qui intégre le détecteur de régime permanent:

0.9
..-.0.8 ID ~ 0.7
~ 0.6
8 <1 0.5
~ 0.4
0.3
. . .. :. : ~ ..... .. •. : •. ::.: .. :.+:: .. . .. . .. .. . ..... '.. . ..... . . ~ .. : ... : . : . : : .. : ... ~ .. ~. : .: . : . : . : . . .: : . : .~ : : : ~ .. ' : . : .: : : . : .': ':.: : : : ... : .... ~ .... .
: ....... ......... ..... .... '+ • ... .... .... .. ' • • ~ •• : : : : • : • : : : . : • . ~ ... : : •• . : : +: • .• ~. : : ~. : : • : ~. : .: .: • .. . : .... .... : ..................... .... : .. . ............ :' .. : .: .. : ~.: : ......... .
•.
.' ..
.'. : ..... -. : .... . . '. : ... . 0.8
0.8
0.4 0 .. 6 0.4 0.2 0..2
o 0 L\ Te (p.u.) ilrop (p.u.)
Fig. 3-19 - Fonction l](Awp, ATe) pour e;nf= 0.25, e sup = 0.75 et f/lopt(p.u.) = 0.5
d2 ], 2 oup
Tel !1m pl !1Tel Te2 !1m p2 !1Te2
lf/rQ
85
L'architecture de la commande en flux optimale neuronale qui intègre le détecteur de
régime permanent directement à partir de son jeu de données d'entraînement est montré à
la Fig. 3-20. L'erreur quadratique moyenne obtenue lors de l'entraînement de RNA avec
D2 et un nombre différent de neurones sur la couche cachée est montrée à la Fig. 3-21. La
grandeur de l'erreur obtenue est du même ordre que celle obtenue avec DO : ce qui montre
bien la propriété intéressante de l'approche de l'intégration de fonctionnalité directement
dans le j eu de données d'entraînement qui permet d'améliorer la performance de la
commande sans coût supplémentaire.

Données d'en'traJneme.nt
~ lIJ~'; Tl.~l t>!I~~~1 4.T.'f'I) \I.!..\l. T-i.z. &W.~l , àTll~)
rAodè.~ des Jlerte~ ftntJ:a w;efltà H!S-
ooi.n~·..a l e:1. d~«C~ lr de
r~ im;a t.t9hftlanent
j:~Ji i' i·J ( iœ-I~}:
fJ,tode1e 'Combiné--_. de-$. pettes fOt1d, et.
déteoteur de
Fig. 3-20 - Architecture avec intégration du détecteur de régime permanent au niveau de la
génération des données d ' apprentissage
2,5E-04
Erreur quadratique moyenne en fonction du nombre de neurones sur la couche cachée avec détecteur de régime permanent intégré
CI) 2,OE-04 i-----c: c: CI) >o ; 1,5E-04 :J g ~ '0 ~ :J C" ... :J
1,OE-04 --- ----
~ W 5,OE-05 - - _ -----1_ ---1. --- ---- - ---------------
O,OE+OO 6 8 9 1 0 11 12 1 3 14 15 16 17 18 19 20
Nombre de neurones sur la couche cachée
Fig. 3-21 - Évolution de l'erreur quadratique de l'entraînement d'un RNA avec D 2 qui intègre le
détecteur de régime permanent
86
Il est évident que plusieurs autres approches pourraient être envisagées dans la
conception de la fonction r(I1OJp , I1Te): nouvelle définition du critère 8 , étude
approfondie du choix de einf et esup, évolution non-linéaire de la « zone de transition »,
etc. La proposition ci-dessus est toutefois amplement suffisante dans le cadre de cet
ouvrage et sa validation expérimentale sera démontrée au chapitre 6.

87
3.3 Plateformes de mise en oeuvre des systèmes à RNA
Les RNA sont une classe de systèmes d'inspiration biologique dont la topologie et le
fonctionnement ont des similitudes avec les cellules neuronales du système nerveux
présent chez les animaux (incluant l'humain). Ce type de système possède une
architecture de plusieurs cellules élémentaires connectées en parallèle et entraînées à
devenir performantes dans l'exécution d'une tâche spécifique.
Ainsi, afin d'exploiter l'architecture parallèle de ce type de système, les premières
réalisations et applications de perceptrons multicouche ont été faites de manière
matérielle: soit sur montages avec composantes discrètes ou soit sur ASIC [Sundararajan
et al., 1998]. Plusieurs modèles de neurones artificiels analogiques composés notamment
d'amplificateurs opérationnels (communément appelés ampli-op) et de résistances
électriques ont été construits au début des années 1990. Certains modèles de RNA ont
même été lancés commercialement sous forme de circuits intégrés (notamment le
80 170X ETANN - Electrically Trainable Analogue Neural Network - fabriqué par Intel).
Ces RNA réalisés sous forme matérielle offrent d'intéressantes performances (le 80170X
peut faire 2 milliards d'opération de multiplication et de sauvegarde - MAC - par
seconde) [Cirstea et al., 2002] mais leur complexité d'utilisation et leur coût de
développement a freiné leur utilisation pratique dans les applications d'ingénierie.
La solution la plus pratique pour l'utilisation de RNA dans les applications de
commande était de les émuler de manière série sur une plateforme de type DSP. Cette
solution n'est pas idéale car on sait que la performance d'un RNA augmente avec son
nombre de neurones mais que son temps de calcul augmente également de la même façon
(lorsqu'il est implanté sur DSP). Il y a donc un juste compromis à faire entre nombre de
neurones et performance du RNA. Certains chercheurs ont alors proposé des stratégies de
mise en place efficaces sur DSP pour réduire le temps de calcul et augmenter la
performance en sortie du RNA [Mohamadian et al., 2003], [Harley et al., 1998]. Les
travaux de [Moussa et al., 2006] ont montré que la réalisation de RNA de type perceptron
multicouche sur FPGA est plus de 40 fois plus performante (en termes de réajustement

88
des poids par seconde avec la technique de rétroproapagation des erreurs) que la
réalisation sur un microprocesseur de type Intel Pentium III.
L ' arrivée récente de la technologie FPGA dans le monde des systèmes embarqués
(depuis 2002 environ) vient cependant changer les façons de faire. Inventée dans les
années 1980 et utilisée pendant une vingtaine d'années à remplir des fonctions bien
précises (surtout des les applications du secteur des télécommunications), la technologie
FPGA atteint maintenant une densité de transistors assez grande (conséquence de la Loi
de Moore) pour être utilisée à des applications de traitement de signal plus génériques.
Cette technologie permet de concevoir des circuits de commande qui marient à la fois la
flexibilité des circuits DSP et la performance des circuits matériels sur mesure ASIC à un
prix compétitif avec la technologie DSP. Cette plateforme permettant le parallélisme à
bas prix est donc une avenue intéressante pour l'intégration de RNA dans les systèmes
embarqués [Omondi et al., 2006], notamment dans les applications d'électronique de
puissance [Bose, 2007], [Kjosavik, 2005].
3.4 Conclusion
Considérant les problématiques et l' état de l'art au niveau des SCEO étudiées au chapitre
précédent, deux nouvelles avancées intéressantes dans la conception de SCEO ont été
proposées dans ce chapitre:
• l'augmentation de l'efficacité énergétique sur toute la plage de charge en tenant
compte des pertes par commutation dans l' onduleur et en les commandant à partir
d'une modulation discontinue optimale (DPWM);
• la conception d'un détecteur de régime permanent permettant de trouver le meilleur
compromis entre stabilité et performances dynamiques.
L'étude sur l'impact de l'ajout d'un espace de sortie supplémentaire à la taille d'un RNA
a permis de développer une nouvelle approche d'intégration de fonctionnalités dans la
commande. Cette approche suggère une intégration au niveau des données

89
d ' entraînement permettant ainsi d'augmenter la performance de la commande sans
augmenter sa complexité et son coût de mise en œuvre. Cette approche a été appliquée
avec succès à l'intégration des deux avancées mentionnées plus haut dans une SCEO.
L'étape suivante est la validation expérimentale de cette approche. C'est la raison pour
laquelle les différentes voies possibles de mise en œuvre de stratégies de commande à
RNA ont été examinées: DSP, FPGA, ASIC. La plateforme la mieux adaptée en termes
de performance et de flexibilité pour la mise en place de stratégies de commande à RNA
est certainement celle des FPGA.

90
Chapitre IV: Commande vectorielle de machine
asynchrone sur plateforme de développement FPGA
commerciale
Ce chapitre a pour objectif de décrire la construction et la validation du banc d'essai
expérimental qui a été mis en place dans le laboratoire du LEEPCI afin de valider
expérimentalement la stratégie de commande optimale proposée au chapitre 3. La
validation du bon fonctionnement ainsi que la méthode de développement logiciel dans
un environnement de conception assistée par ordinateur (CAO) sont également
présentées.
Dans un premier temps, nous nous pencherons sur l'étude des avenues possibles en
termes d'architectures et de conception de système. Cette étude permettra de faire un
choix éclairé sur la meilleure stratégie à prendre pour le développement du banc d'essai.
4.1 Recherche sur les stratégies possibles
4.1.1 Arch itectures de système
Les connaissances nécessaires pour établir une stratégie de mise en œuvre d'un
système de commande appartiennent au domaine des systèmes embarqués. L'expression
la plus simple d'un système embarqué est celle d'un système avec des entrées (capteurs),
une unité de traitement (numérique ou analogique) et des sorties qui permettent d'agir sur
le monde extérieur. Les systèmes embarqués numériques sont appliqués depuis plusieurs
années dans le monde de l'électronique de puissance et leur utilité n'est plus à démontrer.
Cependant, compte tenu de l'évolution des technologies d'électronique, il existe
désormais plusieurs façon de concevoir l'architecture de ces systèmes en tenant compte

91
des besoins spécifiques de l'application. L'analyse de ces possibilités peut se faire en
deux axes: l'axe technologique et l'axe méthodologique (voir le Tableau 4-1).
Tableau 4-1 - Axes d'analyse des unités de traitement numériques intégrées dans les systèmes
embarqués dédiés aux applications de commande
flexible
moins performants
FPGAIDSP
faible coût de développement
ne permet pas le parallélisme
que
flexible
un peu moins performant que ASIC
faible coût de développement
parallélisme possible
permet l'intégration de IlCIDSP
très performant
peu flexible
coût de développement très élevé
parralélisme possible
permet l'intégration de IlCIDSP
Jusqu'à récemment, les approches possibles consistaient à utiliser soit des circuits
électroniques génériques programmables (micro-contrôleurs et DSP), soit des circuits
électroniques taillés sur mesure et non programmables (ASIe) ou soit de mixer les deux
approches en faisant du co-traitement.
t OSP~I 1 FPGA~II
r-~Co-lraitement-4>L-I __ F_PG_·. A_··· · ___ l i~/ ~ ~,7;)
/ ~ .. I oSP
I@/.
~ ~ OSP+FPGA
Système sur une puce
Fig. 4-1 - Évolution vers les systèmes sur une puce à technologie matérielle programmable

92
L 'augmentation de la densité de transistors présents dans les technologies FPGA a donné
lieu à de nouvelles possibilités mariant la flexibilité de la méthodologie logicielle et la
performance des plateformes matérielles: celle des « systèmes sur une puce» (system-
on-chip). Ce qui était auparavant sous forme de puce électronique devient désormais du
logiciel permettant de configurer une partie de FPGA: processeurs de traitement de
signal, fonctions logiques spécialisées, etc.
Dans le cadre de cet ouvrage, l'architecture de système qui a été favorisée est celle à
1000/0 matérielle FPGA (sans processeur embarqué) pour les raisons suivantes:
• l'approche en co-traitement avec un DSP externe a été envisagée mais finalement
écartée pour des raisons pratiques: deux environnements de développements (DSP et
FPGA) auraient dû être utilisés augmentant ainsi le temps de mise en œuvre et la
complexité du banc d'essai expérimental;
• la technologie FPGA permet d'obtenir à la fois la pleine performance des approches
RNA (ce qui n'est pas le cas des DSP) et un faible coût de développement par rapport
aux solutions matérielles conventionnelles (ASIC);
• la technologie FPGA permet le parallélisme dans l'architecture de système
embarqués et ouvre ainsi la voie à une identification temps-réel du modèle des pertes
de la machine à l ' aide d'un RNA à apprentissage supervisé en ligne, roulant en
parallèle à l'application de commande de moteur l;
• le but de l'ouvrage n ' étant pas de développer une application mais de valider une
approche de conception de commande vectorielle, l'ajout d'un processeur embarqué
n'aurait pas significativement augmenté la performance ou réduit la complexité du
système développé;
• les outils de développement permettant de mixer logiciel et matériel n'étaient pas
disponibles en début de projet;
1 Conformément à l'idée largement répandue dans l'industrie et initialement formulée par Dr. Chris Rowen,
président de Tensilica, selon laquelle l'architecture des systèmes embarqués évolue vers une «mer de
microprocesseurs» très spécialisés (traduction libre de l'expression « sea ofprocessors »).

93
4.1.2 Processus de conception
Les approches de conception de systèmes sont nombreuses et varient selon le type
d'application. Néanmoins, toutes celles qui existent peuvent être classées en deux
grandes catégories: les approches ascendantes (bottom-up) et les approches descendantes
(top-down).
Les approches ascendantes débutent par la conception de composants élémentaires
qui sont par la suite intégrés ensemble pour construire des composants de plus grande
complexité. Ces approches conviennent bien à des applications où les ressources sont
limitées et peu flexibles: elle sont notamment utilisées dans le design de systèmes
matériels (hardware) à l'aide de langage de description matérielle (hardware description
language, HDL).
Les approches descendantes débutent par une description formelle des spécifications
que doit atteindre le système et évoluent vers une partition de ces spécifications en des
fonctions élémentaires. Ces approches conviennent bien à des applications complexes où
les ressources sont pratiquemment illimitées et très flexibles: elles sont notamment
utilisées dans le design de systèmes logiciels à l'aide de langages universels et
indépendants de la plateforme sur lequel ils seront implantés (par exemple le language
C++ ou le langage de spécification formelle 'z' basé sur la théorie des ensembles de
Zermelo-Frankel).
Les systèmes FPGA étant d'abord des systèmes à base matérielle, le processus de
conception utilisé a été à l'origine basé sur l'approche ascendante et utilisaient des
langages de description matérielle. Cette approche convient très bien pour des
applications de logique ou de traitement de signal. Cependant, l'utilisation récente des
FPGA dans des applications de plus haut niveau (systèmes embarqués) a nécessité le
développement d'outils de conception adaptés à cette technologie mais basés sur
l'approche descendantes et ce, pour les raisons suivantes :
• la conception de systèmes complexes par l'approche ascendante est trop coûteuse en
raison de son manque de flexibilité;

•
94
les concepteurs des nouveaux systèmes embarqués sur FPGA sont d'abord des
ingénieurs logiciels (approche descendante) étant donné que ce type de système a
jusqu'à maintenant été développé à l'aide de technologies logicielles (micro
contrôleurs, DSP).
Approche ascendante (matériell)
Approche descendante (logiciel)
~~,
EJB8 Intégration en 'sous" Définition da $OU$-
ËÎ~~è~(~ Mise en œuvre des sot/&-systèmes
Composants élémentaires sur une plateforme
Processus de conception sur FPGA
Fig. 4-2 - Schéma illustrant les deux grandes approches de conception de systèmes et leur application
dans la conception de système embarqués à base de FPGA
Plus concrètement, l'approche descendante appliquée à la conception de systèmes
embarqués sur FPGA consiste à décrire les spécifications du système souhaité dans un
langage de haut niveau (C++ ou dans Simulink) qui est indépendant de la plateforme
finale et d'utiliser un générateur automatique de VHDL qui traduit cette spécification de
haut niveau en description matérielle. C'est cette approche qui a été privilégiée dans le
développement du banc d'essai expérimental et ce, à l'aide des outils logiciels
commerciaux fournis par le manufacturier Altera [Perron et al., 2008].

95
4.2 Schéma général et description des composants
4.2.1 Généralités
Le banc d ' essai expérimental est schématisé à la Fig. 4-3 et montre le conneXIons
présentes entre chacune des composantes principales du montage (les con1posants avec
fond bleu pâle sont des composantes qui ont été construites au LEEPCI) . On peut diviser
le montage en quatre parties : (1 ) la partie machine, (2) la partie électronique de
puissance, (3 ) la partie instrumentation et conditionnement de signal et (4) la partie
traiten1ent de signal FPGA.
Comrnandt! VSC10fIsi
1 ~iI:~ 1
Fig. 4-3 - Schéma fonctionnel des composantes du banc d 'essai expérimental

96
4.2.2 La partie machine
La partie machine est composée de machines, de boîtiers d'alimentation et de banc de
charges provenant de la ligne de produits de Lab Volt. Il s ' agit d'un moteur asynchrone de
2.2 kW qui entraîne une génératrice à courant continu (CC) 1.5 kW qui alimente un banc
de charges résistives. La génératrice à CC est excitée à l'aide d'une source de tension
continue réglable à 120 V. Le couple de charge produit par la génératrice à CC peut être
ajusté à l ' aide du banc de charges résistives. Une description technique détaillée de ces
composantes est fournie en Annexe.
4.2.3 Module d'électronique de puissance
La partie électronique de puissance est composée de l ' onduleur triphasé à trois
niveaux à neutre fixé (Neutral Point Clamped) construit au LEEPCI par Hung Phi Pham
en 2005 [Pham, 2005] ainsi que des modules de commande rapprochée reliés à l'étage de
commande par fibre optique. L' onduleur est construit à l'aide de transistors IGBT de
marque Powerex (modèle CM100DU-12F) dont la tension nominale entre le collecteur et
l'émetteur (V CE) est de 600 V et le courant nominal est de 100 A. Chacun des transistors
est connecté en parallèle à une diode de roue libre de marque IXYS (modèle DSEI
2x101) d 'une tension nominale de 600 V et d'un courant nominal de 96 A. Les circuits de
commande rapprochée ainsi que les émetteurs optiques sont ceux conçus et réalisés à
l'interne au département de génie électrique de l'Université Laval par le technicien
Martin Gagnon.

h) 'i vi
Fig. 4-4 - Onduleur à trois niveaux à neutre fixé (dit Neutral Point Clampetl), [Pham, 2005]
97
Cependant, l'onduleur présenté à la Fig. 4-4 n'est pas utilisé comme un onduleur à
trois niveaux mais plutôt comme onduleur à deux niveaux. Cela revient à dire que pour
chacun des bras de l' onduleur, les transistors T1-T2 (niveau haut) sont toujours
commandés par le même niveau logique (ouvert ou fermé). Il en va logiquement de
même pour les transistors T3-T4 qui sont commandés identiquement et selon le niveau
logique opposé aux transistors T 1-T2. Ainsi, vu du circuit de commande, l' onduleur
présenté à la Fig. 4-5 est un onduleur à deux niveaux classique dont le schéma est le
suivant:
c
Fig. 4-5 - Schéma de l'onduleur vu du circuit de commande
Le schéma de l'interfaçage de la partie électronique de puissance avec l'unité de
traitement signal FPGA est montré à la Fig. 4-6.
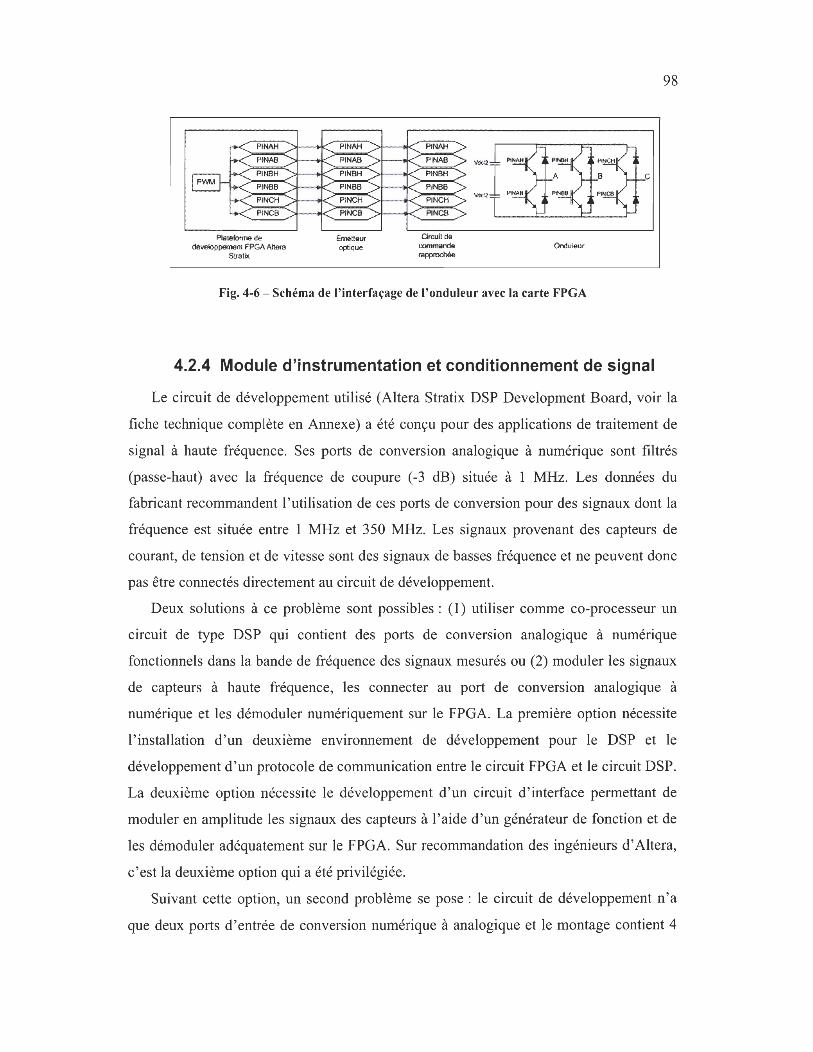
pl.ueforrrt@ de dëvtOOp~nt FPGA Mara
Stfatix:
Émetteur optique
Circuit de COIllrlléUlde
rapproêhée Ondulaur
Fig. 4-6 - Schéma de l'interfaçage de l'onduleur avec la carte FPGA
c
4.2.4 Module d'instrumentation et conditionnement de signal
98
Le circuit de développement utilisé (Altera Stratix DSP Development Board, voir la
fiche technique complète en Annexe) a été conçu pour des applications de traitement de
signal à haute fréquence. Ses ports de conversion analogique à numérique sont filtrés
(passe-haut) avec la fréquence de coupure (-3 dB) située à 1 MHz. Les données du
fabricant recommandent l'utilisation de ces ports de conversion pour des signaux dont la
fréquence est située entre 1 MHz et 350 MHz. Les signaux provenant des capteurs de
courant, de tension et de vitesse sont des signaux de basses fréquence et ne peuvent donc
pas être connectés directement au circuit de développement.
Deux solutions à ce problème sont possibles: (1) utiliser comme co-processeur un
circuit de type DSP qui contient des ports de conversion analogique à numérique
fonctionnels dans la bande de fréquence des signaux mesurés ou (2) moduler les signaux
de capteurs à haute fréquence, les connecter au port de conversion analogique à
numérique et les démoduler numériquement sur le FPGA. La première option nécessite
l'installation d'un deuxième environnement de développement pour le DSP et le
développement d'un protocole de communication entre le circuit FPGA et le circuit DSP.
La deuxième option nécessite le développement d'un circuit d'interface permettant de
moduler en amplitude les signaux des capteurs à l'aide d'un générateur de fonction et de
les démoduler adéquatement sur le FPGA. Sur recommandation des ingénieurs d'Altera,
c'est la deuxième option qui a été privilégiée.
Suivant cette option, un second problème se pose: le circuit de développement n'a
que deux ports d'entrée de conversion numérique à analogique et le montage contient 4

99
instruments de mesures (2 mesures de courant, 1 mesure de vitesse et 1 mesure de
tension). Cependant, les filtres passe-haut des ports analogiques à numériques imposent
que la fréquence des signaux d'entrée doit être supérieure à 1 MHz. Une telle fréquence
d'échantillonnage laisse amplement d'espace pour multiplexer dans le temps les 4
mesures dont les bandes de fréquence sont relativement faibles.
La partie instrumentation et conditionnement de signal est composée (1) du circuit
électronique avec les capteurs de courant et de tension de Hung Phi Pham, (2) du circuit
électronique avec capteur de vitesse et multiplexeur et (3) du générateur de signaux
HP8116A.
Le circuit électronique avec capteurs de courant permet de mesurer la valeur du
courant instantané des phases A et B du moteur et la tension du bus DC. Ces mesures de
courants et de tension sont converties en un signal de tension continue qui varie
linéairement en fonction de l'amplitude du signal d'entrée et dont la valeur est de 1.5V
lorsque le signal d'entrée est nul.
Le circuit avec capteur de vitesse et multiplexeur permet d'interfacer la mesure de la
vitesse instantanée du moteur et de multiplexer dans le temps les signaux de mesures de
courant et de vitesse. La mesure de vitesse instantanée est un signal de tension continu
qui varie linéairement en fonction de la vitesse du moteur et dont la valeur est de av lorsque la vitesse est nulle (+/- 1.75 V à vitesse nominale). Cette mesure est conditionnée
par le circuit électronique afin de la convertir dans le même format que les mesures de
courant (centrées à 1.5V).
4.2.5 Le module de traitement de signal FPGA
Le module de traitement de signal FPGA contient la configuration logique
programmée sur le FPGA et qui découle de la conception du contrôleur. Elle se
décompose en deux principales parties: (1) le bloc de traitement des signaux d'entrée et
(2) le bloc de commande vectorielle. Le premier bloc sera décrit dans cette section alors
que le deuxième, étant donnée son importance, sera décrit à la section 4.3.

100
Le bloc de traitement des signaux d 'entrée
La fonction de ce bloc est de démultiplexer les signaux de mesures provenant du port
de conversion analogique à numérique lui-même connecté à l'extérieur au générateur de
signal HP 8116A afin de rendre ces signaux utilisables par le bloc de commande
vectorielle. Deux principaux problèmes sont rattachés à cette fonction: (1) la
démodulation du signal de mesure et (2) la réduction du bruit dans ce signal.
Démodulation
Tel que décrit précédemment, les quatre signaux de mesures impliqués dans ce
montage sont multiplexés dans le temps et modulés en amplitude sur une porteuse de 5
MHz à l'aide d'un générateur de fonction. C'est ce signal de 5 MHz variable en
amplitude qui est doit être démodulé puis démultiplexé pour reconstituer les quatre
signaux de départ. Plus formellement, nous avons le signal provenant du générateur de
fonction:
(4-1) rp(t) = jet) cos(COc/)
où W c = 2n(5x1 06) radis et correspond à la fréquence de la porteuse
Une méthode classique pour démoduler le signal est de le multiplier avec sa porteuse
puis de le filtrer passe-bas tel que montré sur la Fig. 4-7.

101
(b) {e) (d)
Fig. 4-7 - Schéma représentant la démodulation d'un signal modulé en amplitude par la méthode de
suppression de la porteuse [Stremler, 1994]
(4-2)
L'équation précédente montre bien qu'on retrouve le signal modulé I(t) avec une
amplitude réduite de moitié à la sortie du filtre passe bas. Le principe de cette technique
est plutôt simple mais assez complexe à mettre en application. Premièrement, il yale
problème de génération de la porteuse qui doit absolument se faire à l'intérieur du FPGA
car le générateur de fonction n'a pas de sortie supplémentaire à cet effet. Cette contrainte
implique donc la mise en place d'un mécanisme de synchronisation avec le générateur de
fonction. Deuxièmement, il y a l'ajout d'un bloc de filtre passe bas qui vient augmenter la
complexité de la conception: un tel bloc prend beaucoup de ressources matérielles et
engendre un délai dans le signal.
Considérant ces problèmes pratiques reliés à la mise en place de la stratégie de
démodulation par suppression de la porteuse (suppressed carrier demodulation), une
nouvelle stratégie de démodulation basée sur l'échantillonnage synchronisé du signal de
mesure avec le signal de déclenchement provenant du générateur de fonction est
proposée.

102
Le principe de cette stratégie de démodulation est d ' échantillonner le signal de
mesure précisément lorsque ce signal est à son amplitude maximale, c 'est-à-dire à () = n/2
ou () = 3n/2. Ainsi, en choisissant d'échantillonner le signal de mesure une fois par cycle
à () = n/2, on se retrouve avec un signal représentant l 'évolution de l'amplitude de la
porteuse dans le temps ce qui revient à retrouver le signal modulé au départ I(t). Pour que
cette stratégie fonctionne bien, il est important de connaître le moment où l'angle du
signal de mesure est à () = n/2. À cet effet, il est possible d'utiliser le signal de
déclenchement du générateur de fonction qui passe de 0 à 1 à chaque passage à zéro de la
porteuse (avec un déphasage de 25 ns pour tenir compte d'une porteuse à 5 MHz dans
notre cas). La valeur du signal échantillonné est ensuite emmagasinée jusqu'au prochain
échantillonnage dans un registre.
Fig. 4-8 - Démodulation du signal de mesure à l'aide du SignalTap Analyzer™ d'Altera
Réduction du bruit dans le signal
Les signaux de mesure provenant des capteurs de vitesse, courant et tension subissent de
nombreuses transformations entre les capteurs et le circuit FPGA : circuit électronique
des capteurs, circuit multiplexeur, générateur de fonction, port d'entrée analogique à

103
numérique et démodulation. Chacun des ces systèmes ou opérations introduit du bruit
dans le signal et contribue à sa dégradation:
où S eO sont les valeurs des mesures à la sortie des c capteurs, Se ces valeurs après la
démodulation et e(t) l ' erreur introduite dans le signal.
Dans l 'hypothèse que l'erreur e(k) introduite dans le signal est blanc et gaUSSIen,
l ' espérance de l ' erreur e(k) est nulle:
(4-4) E[e(k)] = 0
Ainsi, il est possible de réduire le niveau de bruit dans les signaux S(k) en faisant la
moyenne des signaux avec plusieurs échantillons:
( 4-5) E[ S c (k )] = E[ S cO (k ) + e( k )] = E[ S cO (k )] + E[ e( k )] = E[ S cO (k ) ]
La très grande fréquence d'échantillonnage disponible ( 5 MHz) permet de réaliser
facilement cette méthode de filtrage sur le circuit FPGA du montage expérimental.
Chacun des 4 signaux de mesure est ainsi tour à tour échantillonné à 128 reprises avec
des pauses de 32 cycles entre chaque mesure pour laisser le temps au signal à la sortie du
multiplexeur de s'établir.
Étant donné les dynamiques différentes entre les signaux de mesure, il est inutile
d'échantillonner tous les canaux de mesure à la même vitesse d'échantillonnage. Le
tableau Tableau 4-2 montre que les signaux de courant sont échantillonnés 100 fois plus
rapidement que les signaux de vitesse et de tension. Le mécanisme général de
démodulation du signal est montré à la Fig. 4-9.

104
Tableau 4-2 - Fréquences d 'échantillonnage des différents signaux de mesure
Signaux Dynamique Fréquence d'échantillonnage
Courants A et B 60 Hz 15 kHz
Vitesse lente 150 Hz
Ten ion Bus CC lente 150 Hz
Fig. 4-9 - Schéma du mécanisme de démodulation des signaux de mesure
Les signaux démodulés sont ainsi disponibles pour le module de commande vectorielle et
peuvent être envoyés vers un port de conversion numérique à analogique pour
visualisation sur un oscilloscope. La validation du bon fonctionnement du bloc de
démodulation est montrée à la Fig. 4-10 avec trois signaux: (1) la mesure du courant A
démodulé, (2) la mesure du courant A prise directement avec un capteur de courant
branché sur l'oscilloscope et (3) la mesure du courant B démodulé.

105
Fig. 4-1 0 - Validation de la démodulation des signaux de mesure
Cette figure montre bien la conformité du signal de mesure A démodulé avec sa forme
originale ainsi que le découplage adéquat entre les signaux de mesure A et B.
4.3 Conception de la commande vectorielle sur FPGA
Le principe de base dans la commande vectorielle d'un moteur à courant alternatif est
de procéder au découplage des cOlnposantes du couple électromagnétique (flux et
courant) à l'aide d'un changement de repère des variables électriques du dOlnaine de
phases (a, b, c) vers le domaine en quadrature (d, q). Ce découplage des variables de flux
et de courant pem1et de linéariser la régulation du couple et par conséquent de la vitesse.
Il a été présenté au premier chapitre qu'il existe plusieurs variantes de la comn1ande
vectorielle (Fig. 1-9) qui se différencient par le niveau de complexité et de performance.
L 'objectif de cet ouvrage est d'arriver à découpler les composantes du couple
électromagnétique le plus simplen1ent possible afin de valider une stratégie de
minimisation des pertes d ' énergie dans le moteur. Ainsi , ce qui est recherché n ' est pas la

106
performance dynamique du moteur mais bien un moyen de commander la variable du
flux magnétique indépendamment de la variable de courant.
La stratégie la plus simple permettant d'atteindre cet objectif est d'utiliser la
commande vectorielle indirecte basée sur le flux au rotor avec un onduleur de tension
régulé en courant. Pour simplifier davantage le développement de la commande, la plage
d'opération de cette dernière a été restreinte au premier cadran (vitesse et couple positifs).
Ce type de commande se divise en huit blocs importants (Tableau 4-3 et Fig. 4-11) :
Tableau 4-3 - Description des variables d'entrées et sorties associées aux blocs de commande
vectorielle
Description
transformation de Park
estimation du flux rotorique
estimation de la position électrique
régulation de vitesse
régulation du couple
régulation de courant
transformation de Park inverse
modulation par largeur d'impulsion
Entrées Sorties
i a, ib, iCI Be id, iq
id ljfr
ljfr, iq, OJp Be
il OJp T/ej
yrej e ,lf/r
. rej lq
ilid, iliq rej rej
Vd ,Vq
rej rej Vd , Vq
rej . rej rej Va , Vb , Vc '
rej rej rej Va " Vb ,Vc SAH, 13, SBH, 13, SCH ,13
va",r . Park inverse vb,~r MU Fig, 4,6
(d.q}"'''., .··. , (a,o;c)"'f. sinusoïdale
Parkdir~ (d.qle ~ (a.h,c).
vc""
C3pteurs de courant
Fig. 4-11 - Schéma de la commande vectorielle développée sur le banc d'essai expérimental

107
4.3.1 Définition des blocs de la commande vectorielle
Bloc de transformation de Park
La transformation de Park se fait en deux étapes qui ont déjà été décrites par les équations
(1-14) et (1-15). En alignant la phase A avec l'axe q ((Je), la transformation des
composantes de courant du repère des phases au stator (ias, hS, i/ ) au repère stationnaire
(id/, iq/ ) se fait de la manière suivante:
On peut alors faire le passage des composantes du courant du repère stationnaire (id/ , iq/ )
au repère tournant (id/ , iq/) à l'aide de la position électrique (Je:
(4-7)
Bloc d'estimation du flux rotorique
L'estimation du flux au rotor se fait de manière simple en multipliant la composante du
courant ide par la valeur de l'inductance mutuelle Lm. La dynamique de l'établissement du
flux selon la constante de temps Tr est respectée à l'aide d'une fonction de transfert du
premier degré. Ainsi, le flux rotorique est estimé de la manière suivante:
(4-8)
où Tr = Lr/Rr et s est l'opérateur de Laplace

108
Bloc d'estimation de la position électrique
L'estimation de la position électrique Be s'effectue en faisant l'intégrale dans le temps de
la vitesse électrique W e, elle-même fonction de la vitesse mécanique wp et du glissement
Wg. Ainsi:
où P = le nombre de paires de pôles = 2
Bloc de régulation de vitesse
La régulation de vitesse est faite à l'aide d'un bloc proportionnel intégral (PI) dont le gain
P est ajusté en fonction du temps de réponse désiré et de la grandeur maximale du couple
(ou du courant) alors que la grandeur du gain 1 est ajusté pour corriger plus ou moins
rapidement l'erreur en régime permanent. La sortie de ce bloc est la commande en
couple saturée au couple maximum Tmax :
où I1wp = l'erreur en vitesse = wpref_wp
Bloc de régulation de couple
La régulation du couple consiste à ajuster la consigne de courant {q/ef en fonction de la
consigne de couple électromagnétique T/ef et du flux magnétique au rotor lJfr. La sortie de
ce bloc est saturée au courant iq max.
(4 Il) .e, ref - . (2 P Lr T;ef
. max J - 1 - mIn - --- 1 qs 3 L ' q
m lf/ r

109
Bloc de régulation du courant
La littérature contient un vaste éventail de techniques utilisables pour faire la régulation
de courant [Kazmierkowski et al., 1998]. On y distingue deux grandes classes: (1) les
techniques à état ouvert ou fermé (<< on-off controllers ») dont la plus populaire est la
commande par hystérésis et (2) les techniques basées sur la ML!. Les différences en ces
deux classes se situent au niveau de la complexité de la mise en œuvre et de la
performance: la commande par hystérésis est simple mais offre des performances
inférieures à celle de la commande basée sur la MLI quant à la qualité du contenu
spectral et de la pleine utilisation de la tension du bus à CC.
La technique de commande de courant proposée ici est connue sous le nom de
« régulation de courant synchrone» [Kazmierkowski et al., 2002] et son principe de
fonctionnement est illustré à la Fig. 4-12. L'expression des tensions de référence (Vd/,
vq/ ) s'expriment alors comme suit:
(4 13) ref - A . e K f (A . e KA' e K ) - V qs - D.lqs 1 + D.lqs 2 - D.l ds l OJg
vd
wg
vq ~------~~ >---------~
K2'
Fig. 4-12 - Schéma de la régulation de courant synchrone

110
Bloc de transformation de Park inverse
Ce bloc réalise la fonction inverse du bloc de transformation de Park en appliquant un
double changement de repère aux composantes de tension de référence (Vdsre~ vq/ef
). Le
passage du repère tournant au repère des phases s' effectue par ces deux opérations:
( 4-14 ) ds == e e ds [vS,ref ] [cos(e) - sin(g )][ve,ref ] v;;ref sin(ee) cos(ee) v;;ref
[vref
1 0 1
(4-15) vt = J3 1 [v~;rif ] 2 2 vs,rel ref
J3 qs vcs 1
--2 2
Bloc de modulation par largeur d'impulsion
Le bloc de modulation par largeur d'impulsion est composé d'une table de conversion
(look-up table) qui permet la génération d'une porteuse triangulaire Vp à 3906.25 Hz ainsi
que de comparateurs permettant de comparer la porteuse avec les trois tensions de
références Va/e~ Vb/ej et Vc/ e! Le choix de cette fréquence précise repose sur une raison
de design et une raison pratique. Il est montré dans les résultats expérimentaux de la thèse
de [Abrahamsen, 2000] que la fréquence de commutation idéale afin de minimiser les
pertes par commutation dans l' onduleur et les pertes harmoniques dans un moteur de 2
kW se situe entre 3-4 kHz. La carte FPGA utilisée dans le banc d'essai possède une
horloge dont la fréquence est située à 80 MHz et le signal de la porteuse est généré à
partir d'une table de conversion de 10 bits soit 210 = 1024 échantillons par cycle. En
multipliant le nombre d'échantillons par la fréquence désirée (1024x4 kHz) on trouve le
nombre de cycle nécessaires par seconde pour la génération de la porteuse soit 4,096
MHz. En utilisant de la logique combinatoire pour diviser la fréquence de l 'horloge
interne par un facteur 20, on se retrouve avec une deuxième horloge à 4 MHz. En activant

111
en boucle le signal de la porteuse contenant 210 échantillons, on arrive finalement à une
fréquence de porteuse égale à 4 MHz / 210 = 3906.25 Hz.
La modulation du signal est de type sinusoïdal et linéaire jusqu'à un indice de modulation
de 0.78 (au delà de cet indice de modulation, la modulation est non-linéaire et appelée
« surmodulation ») . Les signaux de commutation sont générés de la manière suivante:
(4-16)
( 4-17)
( 4-18)
r si yref > y V - as - p
VT- AB = VT- AH T-AH - 0 siyref <y as p
r si y~;f ~ yp V - VT- BB = VT- BH T-BH - 0 si yref < y bs p
r siyref >y V - cs - P
VT- CB = VT- CH T-CH - 0 siyref <y cs p
4.3.2 Conception des blocs de la commande vectorielle pour la
mise en oeuvre sur FPGA
La validation dans Simulink des blocs de commande vectorielle montre que du
côté fonctionnel, ces blocs remplissent bien la fonction souhaitée. Il ne reste maintenant
qu'à mettre en oeuvre ces mêmes fonctionnalités à l'intérieur de l'unité de traitement de
signal.
Dans le cas des solutions traditionnelles sur micro-contrôleurs ou DSPs, il s'agit de
convertir ces blocs en code de haut niveau tel C++, de traduire ce code en langage
machine et de placer le code final en mémoire. Dans le cas des FPGAs, tel que discuté
précédemment à la section 4.1.2, il ne s'agit pas de créer du code mais bien de concevoir
des circuits logiques à partir des blocs élémentaires présents sur le type de technologie
FPGA · utilisée pour remplir chacune de ces fonctions. De nouvelles contraintes propres à
ce type de circuit s'ajoutent au processus de développement:

112
1. contraintes au niveau de la représentation des données (formats et résolution
de l'information);
2. contraintes au niveau des ressources matérielles disponibles;
3. contraintes au niveau de la synchronisation des signaux;
Dans la cadre de cette thèse, l'outil de conception FPGA de haut niveau qui a été
utilisé est celui fournit par Altera, le manufacturier de la carte de développement utilisée,
est dont le nom commercial est DSP Builder. Ce logiciel est une boîte à outil (toolbox)
qui doit être utilisé directement dans Simulink et dont les blocs sont interfaçables avec
d'autres blocs Simulink.
Ainsi, la mise en place sur FPGA de la commande vectorielle décrite à la section
précédente revient à convertir la version Simulink du design en version DSP Builder. La
librairie de blocs fournie dans le logiciel DSP Builder est composée de blocs pouvant être
directement convertis en format VHDL puis synthétisés pour la mise en place sur FPGA.
Ces blocs remplissent seulement des fonctions élémentaires comme des additions, des
multiplications ou des opérations logiques ET, OU, NON, etc. La conversion de la
plupart des blocs du design Simulink est plutôt directe, mais le fonctionnement de
certains blocs doit être complètement revus pour être bien adaptés à leur version FPGA.
Le bloc de régulation de couple est montré en exemple à la Fig. 4-13. On y voit bien
le mécanisme de calcul de la commande de couple PI en fonction de l'erreur en vitesse
ainsi que le mécanisme de saturation à T/ e/ = ION m.

------~rst
~-----1)01
1 - q(31 0) -z+1
Fig. 4-1 3 - Version DSP Builder du bloc de régulation de couple
113
~---+CD Couple_Rei
Chacun des blocs de la commande vectorielle a ainsi été conçu et validé en
comparant sa sortie avec celle du bloc Simulink correspondant pour une même série de
données en entrée (Fig. 4-14).
~.
Fig. 4-14 - Validation du bloc de régulation PI de vitesse en version DSP Builder
La validation du bon fonctionnelnent du bloc DSP Builder avec la verSlon
Simulink n ' est cependant pas suffisante pour procéder à la phase d'intégration. Il arrive
fréquemn1ent que le comportement d'un bloc DSP Builder en simulation ne soit pas le
même que lorsqu ' elle est ll1ise en place sur le FPGA (en raisons de bogues présents dans

114
le logiciel). L 'ultime étape consiste donc à faire la validation de chacun des blocs dans
leur version sur une simulation avec matériel dans la boucle (MDB) ou hardware-in-the-
loop. La version MDB du bloc est une version matérielle implantée dans le FPGA et qui
fonctionne en nlême temps que le reste de la simulation de test dans Simulink grâce à une
communication établie par un câble parallèle entre la plateforme FPGA et l'ordinateur
utilisé pour la conception (Fig. 4-15).
alCo
dus 31·1 fi
Plateforme de développement
FPGA
Fig. 4-15 - Validation du bloc PI vitesse en simulation avec matériel dans la boucle (MDB)
4.4 Validation expérimentale de la commande vectorielle
Cette section a pour objectif de montrer le bon fonctionnement du banc d'essai
expérimental conçu et développé selon ce qui a été présenté dans les sections 4.1 à
4.3. Il s'agit d'une condition primordiale à rencontrer afin d'utiliser le banc d'essai
expérimental pour valider l'approche de commande optimale présentée au chapitre
précédent.

115
4.4.1 Régulation de courant
La premier item à valider dans la régulation de courant est la qualité de la
forme d'onde: on recherche une forme purement sinusoïdale avec le moins de bruit
(harmoniques) que possible. Avant même de faire une mesure des pha es du courant,
il est possible de savoir si la régulation de courant est bonne ou mauvai e seulement
en écoutant et en regardant le moteur tourner: une bonne régulation de courant
engendre un mouvement silencieux du moteur et une vitesse table.
4 00
1.00 +--I~-----I---fl----I'-l------I------I--~+---I---r----#--"1l----I----Jr------lJ--l---<
g ~ o OO ~~--+-~-~~--~~-+-~-~~-----ll--~-~~-~~~ o
U
-3 00~---------~------------~~----~
-4 00 0.00
- Phase A - Phase 8 1
2000 40 00 60 00 80 00 100.00
Temps (ms)
120.00 14000 160 00
Fig. 4-1 6 - Courant des phases A et B à vide (wp = 37 radis)
18000
La Fig. 4-16 montre les mesures des phases A (en bleu) et B ( en rose) du courant
(prises avec deux capteurs de courant directement branchés sur l'oscilloscope) lorsque le
moteur tourne à vide et avec une commande en vitesse de 0.2 p.u. (37 radis) . On
remarque que la qualité du courant est bonne: forme sinusoïdale qui contient peu de
bruit (surtout la phase B).

116
- Id-ref 1
- Id
0.0 0 1 02 0.3 04 0.5 0.6 0.7 0.8 0 9 1 0 1 1 1 2 1 3 1 4 1 5 1 6 1 7 1 8 1.9 20
Tellll}S ts)
Fig. 4-17 - Réponse à l'échelon de la composante de courant id
La Fig. 4-17 montre les signaux de commande du courant ij-e!' ainsi que sa valeur
observée id à la sortie du bloc de transforn1ation de Park lorsque la vitesse du moteur et la
vitesse commandée sont nulles (et par conséquent un couple commandé nul). On
remarque que le courant id se stabilise bien à la valeur de courant commandée mais après
de longues oscillations d'amplitudes assez Ï1nportantes. II existe plusieurs causes
possibles pour expliquer cette mauvaise performance en régime transitoire notamment
celle d'une estimation imparfaite de la vitesse de glissement (voir le schéma du
régulateur de courant synchrone, Fig. 4-12), elle même causée par l'erreur d'estimation
des paramètres de la machine et des erreurs de mesures (notamment la mesure de la
vitesse mécanique).

10
-2 01 0.2 03 0 4 05
Teml>s (s)
06
1 Iq-ref 1
- Iq
07 08 0.9
Fig. 4-18 - Réponse à l'échelon de la composante de courant iq
117
La Fig. 4-18 montre les signaux de commande du courant iqrel ainsi que sa valeur
observée iq à la sortie du bloc de transforn1ation de Park lorsque la vitesse du moteur et la
vitesse commandée sont nulles (et par conséquent un couple commandé nul). On
remarque que le courant iq suit bien le signal de commande et présente un régime
transitoire beaucoup plus acceptable que celui du courant id montré à la figure précédente.
Une petite erreur en régime permanent est observable mais s'explique par un décalage au
niveau du réglage de l'affichage des signaux. S'il y avait une réelle erreur en régime
permanent, le système ne serait pas capable de stabiliser à la vitesse commandée, c ' est-à
dire que lorsque la commande en couple serait nulle, le couple électromagnétique produit
serait non-nul et il serait alors possible d'observer une accélération du moteur.
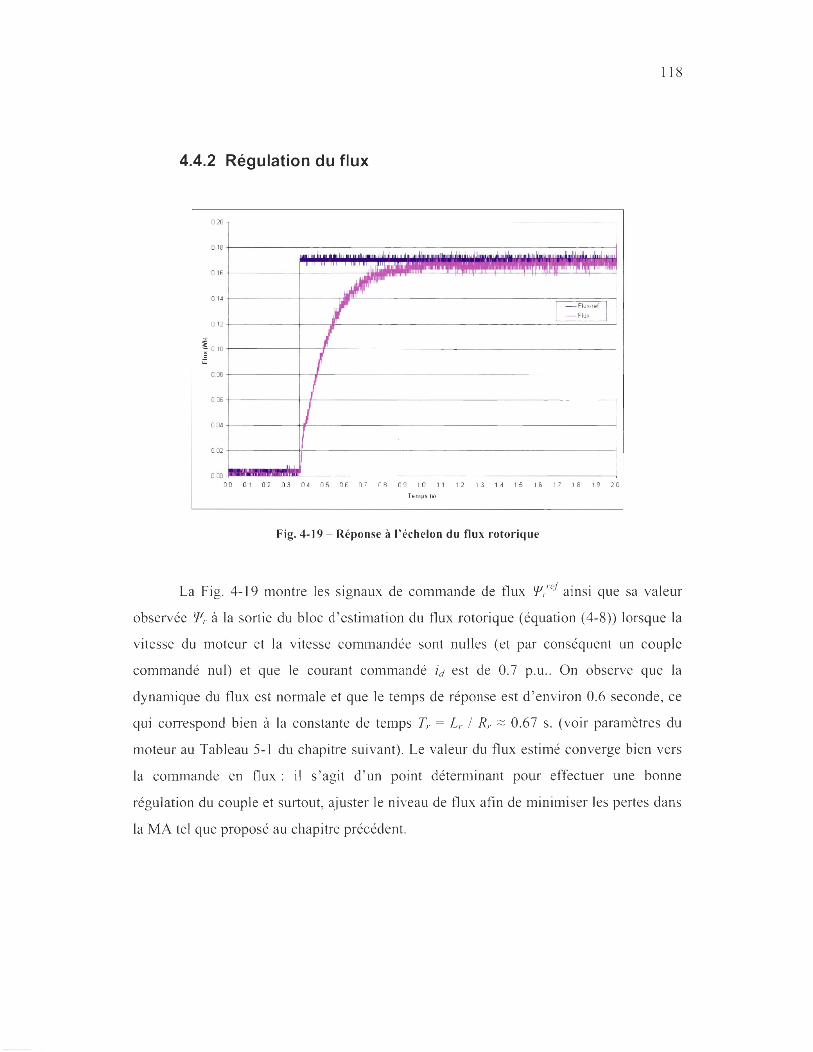
11 8
4.4.2 Régulation du flux
020
0 18~------------------------------------------------~
014r-------~----~~------------------------~====~-
012 ~------_+--~~--------------------------~======-
01O r--------+--~-------------------------------------
0.08 r--------+~L---------------------------------------
006~------~~---------------------------------------
004~------~~---------------------------------------
002~------~~---------------------------------------
0.00 .. MHIIIII_MR! ________________________________________ ---, 00 01 0.2 0 3 0 4 05 0 6 0 7 0.8 0.9 1.0 1.1 1.2 1 3 1 4 1 5 1 6 1.7 1.8 1.9 20
Temps (sI
Fig. 4-19 - Réponse à l'échelon du flux rotorique
La Fig. 4-19 montre les signaux de comlnande de flux 'F,.ref ainsi que sa valeur
observée 'Pr à la sortie du bloc d ' estimation du flux rotorique (équation (4-8)) lorsque la
vitesse du moteur et la vitesse commandée sont nulles (et par conséquent un couple
commandé nul) et que le courant comlnandé id est de 0.7 p.u .. On observe que la
dynamique du flux est normale et que le tenlps de réponse est d'environ 0.6 seconde, ce
qui correspond bien à ]a constante de temps Tr = Lr / Rr ~ 0.67 s. (voir paramètres du
moteur au Tableau 5-1 du chapitre suivant). Le valeur du flux estimé converge bien vers
la commande en flux: il s ' agit d 'un point déterminant pour effectuer une bonne
régulation du couple et surtout, ajuster le niveau de flux afin de IninÎLniser les pertes dans
la MA tel que proposé au chapitre précédent.

119
4.4.3 Régulation du couple
3.0,------
25+-----
2.0 +-------l!-
15 +--------li--
1.0 +------+---______'T
0.5
00 -I--------------------------------i 00 0 1 02 03 04 05 06 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1 5 1 6 1 7 1 8 1.9 20
Temps Isl
Fig. 4-20 - Réponse du couple suite à changement de vitesse à vide (w/ef = ] 8.5 radIs à 37 radIs)
La Fig. 4-19 montre les signaux de commande de couple électromagnétique T/e.l
ainsi que sa valeur observée Te lors d'un changement de la consigne de vitesse mpre.l de
0.1 à 0.2 p.u. lorsque la MA est à vide. Cette figure montre bien que le couple Te suit bien
le signal de commande qui finit par converger vers une valeur proche de zéro (qui
équivaut au couple de frottement à cette vitesse).

120
4.4.4 Régulation de la vitesse
70
~ ~~-------------------+#-----------------------
10~----~~------------------------------------
00 05 1 0 1 5 2 CI 25 3 CI 3.5 4.0 4 t 5 (1 55 60 65 1.0 75 80 85 9.0 95 10 CI T elllps(s)
Fig. 4-21 - Réponse à l'échelon en vitesse pour différentes consignes (w/ef = 18.5, 37, 55.5 radis)
La Fig. 4-21 montre les signaux de commande en vitesse w pret' ainsi que la vitesse
mesurée wp à l ' aide du capteur de vitesse installé sur la MA pour les consignes de vitesse
de 0.1 , 0.2 et 0.3 p.u. lorsque la MA est à vide. On observe que la dynamique de vitesse
de la MA est normale et qu 'elle converge bien à la vitesse commandée: ce qui montre le
bon foncti onnelnent général du système d 'EVV qui pourra alors être utilisé pour mesurer
les pertes dans la Inachine à différents points d 'opération en vitesse et couple de charge.
4.5 Conclusion
Dans ce chapitre, nous avons décrit le proce sus de conception et de mise en œuvre
du banc d ' essai expérimental qui sera utili sé pour valider le système de commande
proposé au chapitre 3. Ce banc d ' essai a été construit autour d 'une puce électronique
121
reprogrammable de type FPGA intégrée à une plateforme de développement commerciale
fournie par le manufacturier Altera.
Ce type de technologie a été choisi en raIson de ses affinités évidentes avec la
réalisation de systèmes de commande à base de RNA (possibilité de parallélisme fin ou
fine-grained parallelism) et d'architectures avancées de systèmes embarqués (possibilité
de parallélisme grossier ou coarse-grain parallelism). Ce choix nous a permis
d'expérimenter un nouveau processus de conception de systèmes matériels basé sur le
paradigme de l'approche descendante, traditonnellement utilisée dans les systèmes
logiciels.
Chaque sous-système du système de commande a été validé avec succès dans un
premier temps par une approche avec matériel-dans-Ia-boucle et l'environnement de
simulation de systèmes électriques SimPowerSystemsMC et puis dans un deuxième temps
à l'aide d'un moteur et d'un onduleur de tension bien réels.
La validation expérimentale du système d'EVV présentée dans ce chapitre montre
que le banc d'essai est prêt à être utilisé pour valider la nouvelle proposition de
commande présentée au chapitre 3.
122
Chapitre V: Conception et validation d'un modèle des
pertes du moteur asynchrone
Ce chapitre a pour but de faire la conception et la validation d'un modèle des pertes dans
la MA du banc d'essai expérimental en vue de faire la validation de la SCEO avancée
développée au chapitre 3. Il avait été identifié au chapitre 2 que les modèles typiquement
mentionnés dans la littérature comprenaient des paramètres difficiles à estimer (comme le
coefficient de pertes par hystérésis ou par courant de Foucault) à l'aide de techniques
simples.
Puisqu'il n 'est pas dans l'objectif du présent ouvrage de développer un modèle précis des
pertes, nous proposons de valider la SCEO à l'aide d'un modèle des pertes construit à
l'aide du standard IEEE-112 qui est couramment utilisé dans l'industrie. Le modèle
résultant possède l'avantage d'être facile d'utilisation et par conséquent augmente la
probabilité d'acceptation industrielle de la SCEO proposée.
5. 1 Modèle des pertes avec alimentation triphasée sinusoïdale
L'alimentation d'une MA par une source triphasée sinusoïdale permet de simplifier
l'analyse des pertes dans la machine. En faisant l'hypothèse que la tension de sortie de la
source est purement sinusoïdale, de fréquence constante et dont les valeurs d'amplitude et
de fréquence sont connues, le calcul des pertes dans la machine se simplifie au calcul des
pertes engendrées par l'onde de tension fondamentale.

123
5.1.1 Identification des paramètres du moteur
Il existe plusieurs méthodes et techniques d'identification hors ligne et en ligne des
paramètres d'une MA [Toliyat et al., 2003J. Les méthodes hors lignes généralement
utilisées sont décrites dans le standard IEEE-112 [IEEE-112, 2004]. La prédiction de la
performance dynamique/énergétique est directement reliée à la précision avec laquelle les
paramètres identifiés de la machine se rapprochent des paramètres réels.
La méthode qui a été utilisée pour identifier les paramètres de la MA du banc d ' essai
expérimental est celle basée sur un schéma équivalent des phases du moteur tel que
présenté au chapitre 1 et décrite comme la méthode F dans le standard IEEE-112. Cette
méthode se divise en trois parties: (1) essai à vide, (2) essai en rotor bloqué et (3) essai à
glissement nominal et tension d'entrée réduite.
La MA utilisée dans le banc d'essai est un moteur LabVolt de 2 kW. Les valeurs des
paramètres de la MA alimentée à tension nominale (208 V) et à fréquence nominale (60
Hz) sont présentés au tableau 5-1. Les détails et les résultats de l'identification de la MA
sont présentés à l'Annexe 1.
Tableau 5-1 - Paramètres du moteur de 2 kW utilisé dans le banc d'essai expérimental
Paramètre Description Valeur Unité
Rs Résistance statorique 0.655 Q
~fs Inductance de fuite au stator 16.61 mH
Rfe Résistance équivalente aux pertes fer 253.5 Q
Lm Inductance mutuelle 51.73 mH
Lfr Inductance de fuite rotorique réfléchie au stator 16.61 mH
Rr Résistance rotorique réfléchie au stator 0.102 Q
À partir des paramètres de la MA présentés au tableau 5-1, il est possible de calculer
précisément les pertes totales dans la machine à vide à tension et à fréquence nominale.

124
Cependant, pour être en mesure de prédire les pertes totales dans la MA à vide pour
différents niveaux de tension d'alimentation (et par conséquent de flux lflm), les
paramètres Rfe et Lm doivent être ajustés à l'aide de coefficients K~re et KLm déterminés à
partir des mesures de l'essai à vide [Novotny et al., 1984] de telle sorte que:
(5-1) Rfe(lflm} = Rfeo*KMe(lfl"J où Rfeo est la valeur nominale de Rfe
(5-2) Lm(lfl"J =Lmo*KLm(lflm) où Lmo est la valeur nominale de Lm
Les coefficients KRfe et KLm sont déterminés à partir de valeurs Rfei et Lmi équivalentes
calculées pour chacun des i points d'opération vérifiés lors de l'essai à vide. L'ajustement
de Rfe est fait en fonction de la puissance d'entrée et celui de Lmi est fait en fonction du
courant total de la manière suivante:
(5-3) Rf.;('1/ m,) = 3('1/ ;OJeY = 3V;; où i = 1, 1, 2, ... ,18, représente j'indice de l'essai à hi Phi
vide et où
(5-5)
La valeur des coefficients KRfei et KLmi est le rapport entre les différentes valeurs de
paramètres Rfei et Lmi trouvés par rapport à la valeur au point d'opération nominal:
(5-6)
(5-7)
RJei K RJei == R O
Je
K Lmi Lmi == LO .
ml
La Fig. 5-1 compare les valeurs trouvées des coefficients KRfei et KLmi (représentés en
blanc) avec les valeurs présentées dans l'article de [Novotny et al., 1984] à partir d'essais
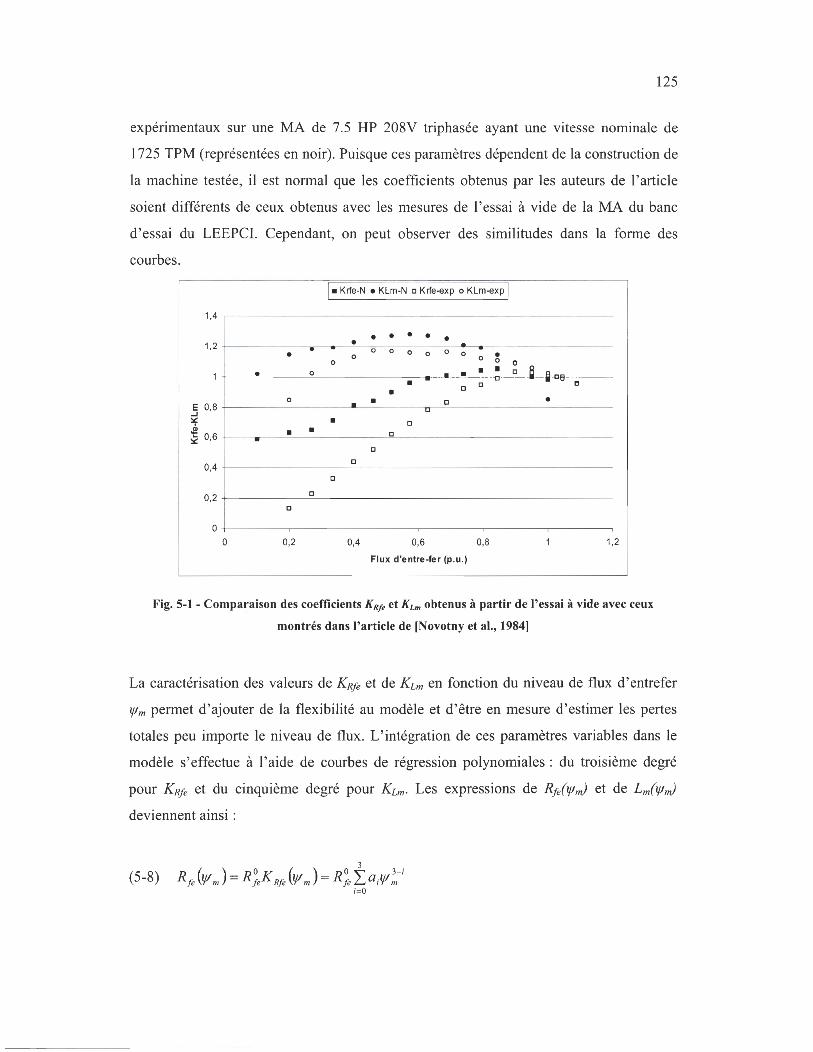
125
expérimentaux sur une MA de 7.5 HP 208V triphasée ayant une vitesse nominale de
1725 TPM (représentées en noir). Puisque ces paramètres dépendent de la construction de
la machine testée, il est normal que les coefficients obtenus par les auteurs de l' article
soient différents de ceux obtenus avec les mesures de l ' essai à vide de la MA du banc
d'essai du LEEPCI. Cependant, on peut observer des similitudes dans la forme des
courbes.
1. Krfe-N • KLm-N 0 Krfe-exp 0 KLm-exp 1
1,4
• • • • • 1,2 • • 0 a 0 0 0 0 • 0 0 0 0 0
• 0 • • • 0 1 • 0 c • 0
0 • 0 • E 0,8 ...J ~ • 0
~ • • 0 ~ 0,6 0
0,4 0
0
0,2 0
0
° ° 0,2 0,4 0,6 0,8 1,2
Flux d'entre-fer (p.u.)
Fig. 5-1 - Comparaison des coefficients KRfe et KLm obtenus à partir de l'essai à vide avec ceux
montrés dans l'article de [Novotny et al., 1984]
La caractérisation des valeurs de KRfe et de K Lm en fonction du niveau de flux d ' entrefer
'lfm permet d 'ajouter de la flexibilité au modèle et d'être en mesure d' estimer les pertes
totales peu importe le niveau de flux. L'intégration de ces paramètres variables dans le
modèle s'effectue à l'aide de courbes de régression polynomiales: du troisième degré
pour KR.re et du cinquième degré pour KLm. Les expressions de R.re('lfm) et de Lm(lflm}
deviennent ainsi:

126
5
(5 9) L ( ) = LO K ( ) = L 0 " b 5-;
- 11/ lj/ J17 m Lili lj/ m 111 ~ ; lj/ fI1
;=0
où la valeur des coefficients Qi et h i (obtenus par régression linéaire à l'aide du logiciel
Excel) est lllontrée au Tableau 5-2.
o 2 3 4 5
-169.7 57.41 -0.08723 0.03031
9901 -8855 3031 -507 41,52 -0.1897
La Fig. 5-2 montre les courbes qui approximent les valeurs de K~fe et de K Lm sur le
domaine utile du flux d ' entre-fer VJm :
1,4 _._---- --
1 ,2 -------.-.------"-,----------. -.---.-.. --.. ---- ---- -_._., ------.----.---.. ------------.------.-.-.----------"------.------------------.. ---. -------.
~ 0,6 ..e: ~ ~ 0,4
0,2
° °
...... ....
.. .... ,. ...... iA·····a.····
.'
.' •...
0,05
•• .' .'
....
0,1
.••••.... ;l •.•.•••••• • •••• A ••••
..•.. .'
. ' ....• ....
0,15
.. ' .' .'
t ····f ··· .. '
0,2
Flux d'entrefer 4Jm (Wb)
. ... . :::::: .•..
0,25
• Krfe-calc 1
. Krfe-reg 1
À KLm-caIC ! . KLm-reg 1
0,3
Fig. 5-2 - Courbes de régression polynomiales pour approximer la valeur des coefficients KR./e et KLIII
pour différentes valeurs de flux

127
5.1.2 Conception du modèle de pertes
Tel que présenté au chapitre 2, il existe de nombreux mécanismes de pertes à l'intérieur
de la MA lors de son fonctionnement (voir Tableau 2-1). La modélisation de ces
mécanismes de pertes est simple pour certains (pertes cuivre fondamentales) et très
complexe pour d'autres (pertes harmoniques spatiales). Bien qu'une estimation juste des
pertes totales dans la MA dépend de la qualité avec laquelle on modélise et on découple
chacun des mécanismes de pertes, il est tout de même possible de concevoir un modèle
des pertes performant en simplifiant la modélisation de certains mécanismes de pertes. Il
s'agit de faire un compromis acceptable entre la précision et la complexité du modèle des
pertes.
Pertes fondamentales
Les pertes fondamentales se réduisent aux pertes cuivre au stator et au rotor ainsi
qu'aux pertes fer totales (qui englobent les pertes hystérésis et les pertes par courant de
Foucault au stator et au rotor). En commençant par les pertes cuivres, on les exprime
comme étant égales à :
(5-10) ~u = Pcu-s + Pcu-r = 3(RsI: + RrI?) où
(5-11) 1: =Id +Iq
(5-12) 1 = Lm (lf/m) 1 r L q
r

128
En faisant l 'hypothèse que l'inductance de fuite au rotor est négligeable [Bose, 2002] , le
flux au rotor devient à peu près égal au flux mutuel:
(5-16) lf/ r ~ lf/ m
Les pertes cuivre à un couple électromagnétique Te donné, deviennent donc fonction du
flux au rotor lJfr :
Les pertes fer totales dans le MA sont composées de celles au stator et de celles au rotor.
Cependant, nous avons vu au chapitre 2 que les pertes fer au rotor sont négligeables.
Ainsi:
( 5 -18) P jer = P jer-s + P j er- r ~ P jer-s
Pertes de charge résiduelles
Les pertes de charge résiduelles Pres correpondent aux pertes harmoniques spatiales et
sont ramenées à l'équation suivante [Kioskeridis, 1996] :

129
Pertes mécaniques
Les pertes mécaniques correspondent aux pertes par frottement des roulements et aux
pertes par frottement de la ventilation. Ces pertes sont ramenées à une seule équation
dépendante de la vitesse :
Pertes totales
Les pertes totales PTot dans la MA est la somme des pertes fondamentales (cuivre et fer),
résiduelles et mécaniques:
5.1.3 Validation du modèle de pertes à vide
Une première validation à vide permet d'avoir un aperçu sur les pertes totales
dans la machine sans les pertes Joule au rotor et les pertes de charges résiduelles qui sont
difficile à estimer. Les pertes Joule au rotor dépendent de la valeur de la résistance
rotorique qui varie en fonction de la température et qui n'est pas directement mesurable
dans une MA à cage (on doit alors l'estimer à l'aide de l'essai à rotor bloqué ou par des
méthodes d'estimation en ligne).
Ainsi, en opérant la MA à vide sous différentes valeurs de tension de phase Vi (et
à fréquence constante de 60 Hz), on peut mesurer la grandeur du courant dans une phase
de la machine et les pertes totales à l'aide d'un analyseur de puissance (AV PA4400). Ces
mesures sont alors comparées à celles calculées à l'aide du modèle des pertes en fonction
de la tension de phase et de la vitesse du moteur (pour l'ajustement du glissement).

130
Tableau 5-3 - Validation du modèle de perte à vide avec alimentation en tension du réseau
Il Il Pertes Pertes VI (1-1) Vitesse erreur erreur
mesuré modèle mesurées modèle
219,5 1799 5,118 5,08 0,70/0 199,02 205,99 3,50/0
210,6 1798 4,806 4,79 0,3% 186,55 189,3 1,5%
197,21 1799 4,361 4,34 0,5% 165,38 168,4 1,8%
186,93 1799 4,064 4,03 0,8% 153,02 155,2 1,4%
167,74 1799 3,542 3,52 0,60/0 133,8 135,4 1,2%
146,56 1798 3,043 3,04 0,1% 116,55 118,6 1,8%
124,94 1797 2,562 2,58 0,70/0 102,1 105,03 2,9%
102,85 1795 2,122 2,14 0,8% 91,76 94 2,4%
80,37 1794 1,7198 1,72 0,0% 82,08 85,29 3,9%
57,84 1787 1,4328 1,46 1,9% 75,15 78,8 4,9%
42,55 1775 1,4235 1,46 2,6% 72,3 76,64 6,0%
Les données du tableau 5-3 montrent bien que le modèle conçu permet de prédire avec
une précision acceptable (moins de 5%) la grandeur du courant de phase dans la machine
et les pertes totales. On remarque que l'erreur de prédiction des pertes totales augmente
avec le glissement en raison de la variation de la valeur de la résistance rotorique en
fonction du glissement qui n'est pas pris en compte dans le modèle.
5.2 Modèle des pertes avec convertisseur statique
Le modèle des pertes conçu à la section précédente doit être validé dans le cas où
la MA est alimentée par un convertisseur statique. Nous savons déjà que ce type
d'alimentation augmente les pertes cuivre et les pertes fer dans la machine et par
conséquent, nous devrions ainsi observer une différence entre les pertes estimées à partir
du modèle et celles mesurées sur le banc d'essai expérimental.
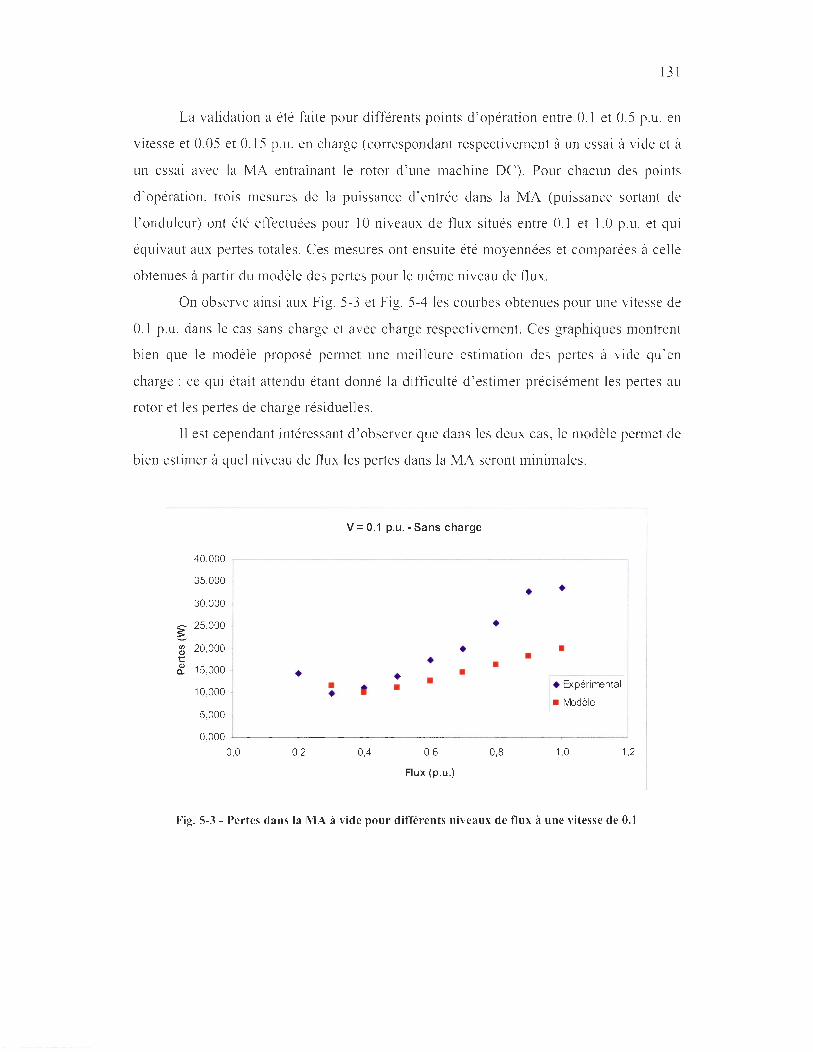
131
La validation a été faite pour différents points d 'opération entre 0.1 et 0.5 p.u. en
vitesse et 0.05 et 0.15 p.u. en charge (correspondant respectivement à un essai à vide et à
un essai avec la MA entraînant le rotor d'une machine DC). Pour chacun des points
d ' opération, trois mesures de la puissance d' entrée dans la MA (puissance sortant de
l' onduleur) ont été effectuées pour 10 niveaux de flux itués entre 0.1 et l.0 p.u. et qui
équivaut aux pertes totales. Ces mesures ont ensuite été moyennées et comparée à celle
obtenues à partir du modèle des pertes pour le même niveau de flux.
On observe ainsi aux Fig. 5-3 et Fig. 5-4 les courbe obtenues pour une vitesse de
0.1 p.u. dans le ca sans charge et avec charge respectivement. Ce graphique montrent
bien que le n10dèle proposé pern1et une meilleure estimation des pertes à vide qu 'en
charge : ce qui était attendu étant donné la difficulté d ' estin1er précisément les pertes au
rotor et les pertes de charge résiduelles .
Il est cependant intéressant d'observer que dans les deux cas, le modèle permet de
bien estimer à quel niveau de flux les pertes dans la MA seront minin1ales.
40,000
35,000
30,000
~ 25,000
fi) 20,000 Q) 1:: Q) 15,000 -a..
10,000
5,000
0,000 0,0
•
0,2
• •
v = 0.1 p.u. - Sans charge
0,4
• • • •
0,6
Flux (p.u.)
• •
• •
• -
0,8
•
-• Expérirrental
1- rvbdèle
1,0 1,2
Fig. 5-3 - Pertes dans la MA à vide pour différents niveaux de flux à une vitesse de 0.1

132
v = 0.1 p.u. - Avec charge
60,000
50,000 • • • 40,000 •
§"' • • ~ 30,000 ~ • • t Q)
20,000 ~ a..
• • ExpérirT"Bntal • • • • 10,000 -1 • • • rvbdèle
0,000 ' 0,0 0,2 0,4 0,6 0,8 1,0 1,2
Flux (p .u.)
Fig. 5-4 - Pertes dans la MA en charge pour différents niveaux de flux à une vitesse de 0.1
Les résultats obtenus pour les autres points d 'opérations sont similaires à ceux présentés
plus haut et par souci de concision, ils ne seront pas lTIontrés ici. Le lecteur est invité à les
consulter en Annexe ou au chapitre 6 dans lesquels ils seront comparés avec la réponse
obtenue à l ' aide du système de commande proposé au chapitre 3.
Bien que restreint, le dOlnaine de validation étudié est suffisant pour montrer la validité
du modèle des pertes conçu à la section précédente et son utilisation dans la commande
avancée du chapitre 3.
5.3 Conclusion
Ce chapitre a permis de faire la validation d 'un modèle des pertes construit à l ' aide du
standard lEEE-112 en vue de faire l ' entraînement de la SCEO dévelopée au chapitre 3.
Les résultats obtenus n10ntrent qu ' il s ' agit d 'un modèle acceptable pour la conception de
cette SCEO.

133
Chapitre VI : Conception et validation expérimentale de
la commande de flux optimale et neuronale sur FPGA
Ce chapitre a pour obj ectif de faire la validation de la stratégie de commande vectorielle
énergétiquement optimale avec régulateur de flux neuronal conçue au chapitre 3 à l ' aide
du banc d ' essai expérimental décrit au chapitre 4. Le réseau de neurones intégré à cette
stratégie de commande est entraîné par des données d ' entraînements générées à partir du
modèle des pertes proposé et validé au chapitre 5. Mais avant de présenter la validation
de la stratégie de commande, une introduction à la conception de RNA de type
perceptron multicouche sur FPGA sera présentée.
6.1 Conception de RNA sur FPGA
La question de la conception de RNA sur FPGA est devenu, avec la montée de
l'utilisation des FPGA dans les applications de systèmes embarqués (voir section 3.3), un
sujet très actuel. Le seul ouvrage complètement dédié à cette question n'est paru que très
récemment [Omondi et al., 2006]. La problématique fondamentale dans cette activité est
de réaliser un système dont l'architecture est d'inspiration analogique (biologique) sur
une plateforme numérique à résolution finie. Le RNA idéal devrait donc être réalisé avec
des gains et des fonctions d'activation de résolution infinie mais, étant donné les
ressources limitées des FPGA, un compromis doit être effectué entre sa performance et la
quantité de ressource à utiliser pour sa réalisation.
Cette problématique est vraie pour tous les types de RNA mais, par souci de
concision, nous étudierons ici les aspects de cette problématique reliée à la réalisation de
perceptrons multicouche.
Ainsi, selon l'article de [Zhu et al., 2003], les deux principaux problèmes reliés à
la réalisation de RNA sur FPGA sont: (1) la résolution associée aux gains et (2) la
stratégie de mise en œuvre de la fonction d'activation.

134
6.1.1 Résolution associée aux gains
La stratégie d 'optimisation de résolution des gains du RNA qui est la plus simple,
la plus directe et la plus répandue est celle par essai et erreur. Toutefois, certains
chercheurs ont tenté de trouver une méthode formelle permettant de trouver la résolution
optimale à attribuer à ces gains en fonction de l ' application.
Ainsi, les recherches menées par [Holt et al. , 1991] ont montré que la résolution
optimale des gains du RNA devrait être de 16 bits à point fixe (1 bit pour le signe, 3 bits à
gauche de la virgule, 12 bits à droite). Les récents travaux menés par [Muthuramalingam
et al., 2007] dans l'utilisation des RNA sur FPGA dans une application de modulation par
largeur d'impulsion confirment que la performance optimale du RNA est obtenue à une
résolution de 16 bits à point fixe.
6.1.2 Stratégie de mise en œuvre de la fonction d'activation
La fonction d 'activation joue un rôle majeur dans le bon fonctionnement d 'un
RNA et peut exister sous plusieurs formes: linéaire, sigmoide, tangente hyperbolique,
etc. [Haykin, 1998]. Bien que la réalisation de la fonction d'activation linéaire soit
relativement simple (un gain), la réalisation des autres formes mentionnées plus haut
(non-linéaires) est beaucoup plus complexe.
Typiquement, la façon la plus rapide de réaliser ces fonctions d'activation est
d'utiliser des tables de conversion (look up table) [Botros et al., 1994] afin de faire une
correspondance directe entre les entrées et les sorties. Un inconvénient évident de cette
approche est la nécessité d'utiliser beaucoup d'espace mémoire. Un compromis entre
précision des fonctions d'activation et besoin en espace mémoire doit alors être effectué.
D'autres méthodes plus complexes mais nécessitant moins d'espace mémoire sont
discutées dans la littérature, notamment en ce qui concerne la fonction d'activation de
forme sigmoïde [Tommiska, 2003]. L'alternative la plus connue à l'utilisation de tables
de conversion est d 'approximer la fonction sigmoïde à l'aide d'une fonction linéaire par

135
morceaux (FLM, piecewise linear approximation) : l'espace mémoire se réduit alors à
conserver la valeur des coefficients de cette fonction.
1.0
0.9
0 .8
0.7
0 _6
Y 0_5
0.4
0.3
0.2
0.1
0 >-8 -6 -4 -2
Il •
o x
2
./ e-e--
4 6 a
Fig. 6-1 - Fonction sigmoïde coupée en 4 morceaux à partir du point de symétrie (x = 0)
Ainsi, en prenant comme référence la Fig. 6-1, l'approximation de la fonction sigmoïde
s(x) sur un domaine 1 = [B,H] se fait en le divisant en 2k parties (avec B < lI) :
1 = lI0 ,lp ... ,12k J
( 6-1 ) 1 = [(z BO , 1 HO)' (I BI' 1 HI)'" ., (1 B 2k , 1 H 2 k )]
1 = [( B,B + H2~ B J( B + H2~ B ,B + 2(~~ B) } .. .(B + 2k-I(~ - B) ,H )]
Chacune de ces parties est alors approximée par un polynôme d'ordre 1 :
(6-2) s(x) = 1 ~ s(xlx E Il,) = CI ' + C21'X où 1 + e-x ,1 ,
(6-3) 1
s(lBi) = _1 = s(1 B' ) = CI ' + C 2 .lB' 1 + e Bi 1 , 1 ,1 1

136
(6-4) 1
s(lHJ = -1 . = S(/H' ) = Cl ' + C2 ' /H ' 1 + e H I 1 ,1 , 1 1
En solutionnant, on trouve les valeurs de Cl et C2 pour l'intervalle l i = [/Ei, /HJ :
(6-5) C = _____ r_-:--__ :--l ,i / / / 1 Hi / 1 Bi r + Hi - Bi + Hie - Bie
(6-6) el Hi _ el Bi
C = où 2,i / / / 1 Hi / 1 Bi r + Hi - Bi + Hie - Bie
(6-7)
Ainsi, plus on divise le domaine l avec un grand nombre de sections plus on réduit
l' erreur entre l'approximation s (x ) et s(x). Un moyen d'améliorer la précision sans
toutefois augmenter le nombre de sections est d'observer que la fonction sigmoïde s(x)
est symétrique autour de x = 0 et que s(x)l- 00 < x < 0 = -s(lxl).
6.2 Réalisation des fonctions de commande de flux neuronaux
sur FPGA
Cette section présente la réalisation sur FPGA des fonctions de commande conçues au
chapitre 4. Pour fins de comparaison, deux versions seront présentées pour chacun des
régulateurs : une version avec fonction d'activation à base de TDC et une autre à base de
FLM.
6.2.1 Commande de flux neuronal
La commande de flux neuronal est une fonction qui détermine le niveau de flux
optimal en fonction du point d'opération de la MA déterminé par sa vitesse et son couple
de charge. Sa réalisation a été faite à l ' aide d'un perceptron multicouche à 3 couches
ayant respectivement 2-8-1 neurones (2 entrées, 8 neurones sur la couche caché et 1

137
sortie) et dont la tructure e t entièrement parallèle. Un script Matlab a été créé afin de
concevoir un RNA sur FPGA (dans DSP Builder) à partir d'une pécification provenant
du Matlab Neural etwork Toolbox.
Con1n1ande deflux neuronale avec.fonction d 'activation à base de TDC
La validation du fonctionnement de la commande de flux neuronale avec fonction
d'activation à ba e de TDC e t montrée à la Fig. 6-2. Cette validation e fait en faisant la
comparaison de la ortie respective de ver ions idéale (Neural Toolbox) en imulation
(D SP Builder) et en MDB de la commande neuronale pour de ntrée de vite e et de
couple dOlmés. On observe sur la Fig. 6-2 que la réponse en sortie des trois ver ions du
régulateurs sont semblables et que la con1mande en flux suit de près le couple du MA tel
que déduit du modèle de pertes (voir Fig. 3-3).
Signaux d'entrée normalisés (vitesse et couple)
0.8
0.6
0.4
0.2 - Vitesse
- Couple
10 20 30 40 50 60 ïO 80 90 100
Commande en flux normalisée 0.9r--·-,-----,..---,-----r-----,-----,-----,---,----,------,
0.8
0.7
0.6
:: _ """IT"",, i\. fI & DSP Builder
0.2 _ M~ttri91 d~ns la . boucle
10 20 30 40 50 60 70 80 90 100
Fig. 6-2 - Validation du régulateur neuronal de flux avec fonction d ' activation à base de TDC par
comparaison de la sortie des versions Neural Toolbox, DSP Builder et avec MDB

138
Con1mande deflux neuronale avec ,fonction d 'activation à base de FLM
La validation du fonctionnement de la commande de flux neuronale a ec fonction
d 'activa6on à base de FLM est montrée à la Fig. 6-3. Cette validation e fait en fai ant la
cOlnparaison de la sortie respective des ver ions idéale (Neural Network Toolbox), en
siInulation (DSP Builder) et en MDB de la commande neuronale pour de entrée de
vitesse et de couple donnés. On observe que la réponse en ortie des troi versions du
régulateurs sont semblables et que la commande en flux suit de près le couple de la MA
tel que déduit du modèle de pertes (voir Fig. 3-3).
Signaux d'entrée normalisés (vitesse et couple)
10 20 30 40 50 60 70 80 90 100
Commande en flux normalisée 0.9 .------.,--------,,-------,.----------,----,.----------,~-__,--,------,---,
0.8 / -'" ~='9 p-~,
:: ' \ 1 \ / 0.5 \ ri' \, d' :: - """"oolb,, " ~ J o 2 & DSP Suilder ~J
. _ Maferie l dans la
0.10
boucle
10 20 30 40 50 60 1
70 1
80 1
90 100
Fig. 6-3 - Validation du régulateur neuronal de flux avec fonction d ' activation à base de FLM par
comparaison de la sortie des versions Neural Toolbox, OSP Builder et avec MOB

139
Comparaison des ressources matérielles utilisées pour les deux approches
La quantité de ressources matérielles utilisées pour mettre en place cette fonction de
commande sur un FPGA Altera Stratix EPI S80B956C6 selon les deux types de
construction de la fonction d'activation sont montrées au Tableau 6-1.
Tableau 6-1 - Comparaison des ressources matérielles utilisées
Fonction activation Éléments logiques Bits mémoire
TDC 1,514 458,752
FLM 1,349 73,728
On remarque que les deux types de constructions de la fonction d'activation prennent à
peu près la même quantité d'unités logiques mais qu'au niveau de la quantité de bits
mémoire utilisés, la stratégie basée sur l'utilisation de FLM est beaucoup plus
intéressante (la stratégie FLM ne prend que 160/0 de la mémoire nécessaire pour la
stratégie TDC).
6.3 Validation expérimentale de la commande de flux avec
détecteur de régime permanent
6.3.1 Essai initial
La validation initiale de la commande de flux se fait de la même manière que
celle du modèle des pertes au chapitre 5 à l'exception que la commande en flux est
désormais représentée par une commande à RNA sur FPGA (RNA qui est entraîné à
l'aide du modèle des pertes validé au chapitre 5) et selon une configuration de données
d'entraînement tel que spécifiée par D 2 au chapitre 3. Les résultats obtenus pour une
vitesse de 0.1 p.u. à vide sont montrés à la Fig. 6-4.
On observe sur cette figure que le niveau de flux de référence en sortie de la
commande neuronale tel qu'observé sur le banc d'essai expérimental est plus élevé que
celui attendu (i.e. le niveau de flux indiqué par le point minimum du modèle de pertes).

140
40,000
35,000 • • 30,000 décalage par rapport au
_ 25,000 niveau de flux optimal •
~ r-(/) 20,000 • • cv t:: • • cv • Q. 15,000 • •
• • • Expérirrental 10,000 • •
• rvlodèle 5,000
• RNA
0,000 0,0 0,2 0,4 0,6 0,8 1,0
Flux (p .u.)
Fig. 6-4 - Essai initial de la validation de la commande en flu x neu ronale pour une vitesse de 0.1 p.u.
à vide
Ce problème observé est dû à la mauvaise intégration du détecteur de régime
pemlanent dans la structure des données d'entraînement D 2. Il se trouve que dans cette
structure de données, le nombre de données d ' entraînement correspondant au régime
permanent (l1wp = I1Tc = 0) et associés au niveau de flux optimal est inférieur au nombre
de données d ' entraînement correspondant au régime transitoire (l1wp -1 0 et I1Te -1 0) et
associées à un niveau de flux situé entre le niveau optinlal et le niveau nominal. Cela a
donc pour effet de « décaler» vers un niveau de flux supérieur tout le groupe de données
correpondant au cas spécial du régime permanent.
6.3.2 Amélioration des données d'entraÎnement
Le problème identifié à la section précédente est causé par un débalancement de
l' importance relative des données d ' entraînement de D2 où se trouvent quatre fois plus de
données reliées au cas en régime transitoire qu ' en réginle permanent. Ce problème peut
être conlpensé par la création d 'un « renforcement positif » créé par la répétition des

141
données reliées au régime permanent en un nombre suffisant permettant d'atteindre un
équilibre entre données d'entraînement reliées à chacun des régime.
Par exemple, dans les données d' entraînement D 2, pour un point d'opération en
régime permanent (wp = 0.25, Te = 0.25) associé à une certaine valeur de flux (lflopt = 0.5),
on aura plusieurs autres données reliés au régime transitoire (l1wp = {0.25, 0.50, 0.75 ,
1.0} et I1Te = {0.25, 0.50, 0.75, 1.0}) toutes associées à une valeur de flux située entre le
flux optimallflopt et le flux nominallflnom.
Pour compenser cette différence, on créera un jeu de données d'entraînement
ayant la structure suivante (où les données en régime permanent sont répétées n fois) :
(6-8) Dl =~l d l]OÙ pl = [p ~ ] et dl = [ d ~ ] où Prt d rt
Prpl Ws I T el 00 d rpi lf/ rI
(6-9) 3 Prp2 W s2 T e2 00 et d;p =
d rp2 avec drpl.. n = lf/r 2
Prp = avec Prpl..n =
Prpn W sQ T eQ 00 drpn lf/rQ
Prtl Wsx T ex o 0.25 d rtl lf/ r-rt-x l
3 Prt2 W sx T ex o 0.50 et d;t =
d rt2 lf/ r-rt-x2 (6-10) Prt = avec P rtx( x=I .. . Q) = avec d rtx =
P rtQ W sx T ex 1.0 1.0 d r'Q lf/ r-rt-x I6
Un nouveau jeu de données d'entraînement avec quatre répétition des données en
régime permanent (n = 4) a été crée et la validation est montrée à la section suivante.

142
6.3.3 Validation finale
Cette section présente les résultats des essais expérimentaux obtenus avec la
SCEO proposée au chapitre 3. Les tests ont été effectués à des vitesses entre 0.1 et 0.5
p.u. de la vitesse nominale pour l'entraînement d'une MA de 2.2 kW à vide et avec une
charge.
Ces résults sont présentés sur les graphiques suivants sur lesquels on distingue les
informations suivantes: les pertes mesurées expérimentalement avec l'ajustement manuel
du flux de 0.2 à 1.0 p.u. (montrées par un losange bleu), les pertes estimées à partir du
modèle construit au chapitre 6 pour différents niveaux de flux (montrées en rouge) et les
pertes mesurées expérimentalement avec le système de commande intégrant la
proposition du chapitre 3 (un seul point noir).
Ces graphiques permettent de comparer la grandeur estimée par le modèle des
pertes et les pertes mesurées et d'observer que la SCEO commande bien le niveau de flux
optimal (correspondant au minimum de la courbe du modèle des pertes) pour chacun des
points d'opérations testés.

143
Vitesse de 0.1 p. u.
40,000
35,000
• • 30,000
25,000 • ~ (f) 20,000 • • Cl> t • • Cl> • a.. 15,000 • • • • • • • Expérirœntal 10,000 • • rvbdèle
5,000 • RNA
0,000 0,0 0,2 0,4 0,6 0,8 1,0 1,2
Flux (p.u.)
Fig. 6-5 - Vitesse de 0.1 p.u. à vide
60,000
50 ,000 • • • 40,000 •
~ • • • (f) 30,000 • • Cl> t Cl> a..
20,000 - • • • • Ex périrœntal • • • • • 10,000 • rvbdèle • RNA
0,000 0,0 0,2 0,4 0,6 0,8 1,0 1,2
Flux (p.u.)
Fig. 6-6 - Vitesse de 0.1 p.u. en charge

144
On observe sur la Fig. 6-5 et Fig. 6-6 que le niveau de flux commandé par la
SCEO proposée correspond bien au niveau de flux minimum du modèle des pertes utilisé
pour entraîner le RNA et qui se situe près de 0.4 p.u .. Ce niveau de flux correpond bien
au niveau de flux experimental observé pour le test en charge mais diffère d'environ 0.1
p.u. du niveau minimal observé lors du test à vide.
On observe également sur ces figures que le perte e timées par le lTIodèle en
fonction du niveau de flux diffèrent de celles ob ervées expérimentalement, à l'exception
des test effectués à de faibles niveaux de flux (0.2 à 0.6 p.u.). Les test effectués en
charge montrent de lTIanière évidente ces différence . Ces observation ont normale car
le modèle utilisé a été con truit seulenlent à partir de mesure de pertes à vide de la MA.
Il est intéressant de remarquer que bien que l'erreur d'estimation des pertes par le
modèle construit soit grande, ce dernier permet quand même de déterminer avec justesse
le niveau de flux optimal pour réduire les pertes dans la MA. Cet ajustement du flux
pern1et de diminuer les pertes d'environ 650/0 par rapport à celles lTIesurée à flux nominal
pour le test à vide et de 400/0 pour le test en charge.
Vitesse de 0.2 p.u.
60,000
50,000
40 ,000
~ CI) 30 ,000 Cl)
t Cl) a.
20,000
10,000
0,000 0,0
• •
0,2
•
0,4
• • •
0,6
Flux (p .u .)
Fig. 6-7 - Vitesse de 0.2 p.u. à vide
• • • • • •
• Expérirœntal
• rvbdèle
• RNA --------
0,8 1,0 1,2

145
100,000 - - - -
90,000 • 80,000
• 70,000 • 60,000 • • [ • • • • • CI) 50,000
Cl)
-e Cl) 40,000 a.
• • 30,000 • • • • • • 20,000 • Expérirrental
10,000 • rvbdèle
• RNA 0,000 0,0 0,2 0,4 0,6 0,8 1,0 1,2
Flux (p .u.)
Fig. 6-8 - Vitesse de 0.2 p.u . en charge
On peut faire les Inên1es observations sur les Fig. 6-7 et Fig. 6-8 que sur les
figures montrant les pelies à une vitesse de 0.1 p.u.: le modèle des pertes utilisé ne
permet pas de quantifier de n1anière juste les pertes mesurées expérimentalement (sauf
pour la région 0.2-0.6 p.u. pour les tests à vide qui concorde parfaitement) ll1ais
permettent de déterminer avec justesse le niveau de flux optimal pour minimiser les
pertes dans le systèlne.
Cet ajustement de flux permet de réduire les pertes par rapport à celles mesurées
avec un niveau nominal de 60% lors de l ' opération à vide et de 260/0 lors de l'opération
en charge.
On remarque également que le niveau de flux optimal en charge (0.4 p.u.) est
différent de celui observé à vide (0.3 p.u.) : ce qui n'était pas le cas dans le test effectué à
une vitesse de 0.1 p.u ..
La grandeur des pertes est égalelnent signicativement plus grande à une vitesse de
0.2 p.u. que par rapport à celles observées à une vitesse de 0.1 p.u .. L'essai à vide montre
des pertes de près de 20 W à vitesse de 0.2 p.u. comparativement à près de 12.5 W à la
vitesse de 0.1 p.u .. L'essai en charge montre des pertes de près de 55 W à vitesse de 0.2
p.U. comparativement à près de 30 W à la vitesse de 0.1 p.u . .

146
Vitesse de 0.3 p. u.
70,000
60,000 • •
50,000 • [ 40,000 • • • • 1/) • • Cl) • ~ 30,000 Cl) a.
20,000 • Expérirœntal
• MJdèle 10,000
• RNA
0,000 0,0 0,2 0,4 0,6 0,8 1,0 1,2
Flux (p.u .)
Fig. 6-9 - Vitesse de 0.3 p.u. à vide
140,000
120,000 • • 100,000 •
• • • [ 80,000 e. • • 1/) Cl) ~ 60,000 Cl) a.
• 40,000 • • • • • • •
• Expérirœntal 20,000 • MJdèle
• RNA 0,000 :
0,0 0,2 0,4 0,6 0,8 1,0 1,2
Flux (p.u.)
Fig. 6-10 - Vitesse de 0.3 p.u. en charge
Des observations similaires aux précédentes peuvent être faites à partir du test à
0.3. p .u. représenté aux Fig. 6-9 et Fig. 6-10. On remarque que le modèle des pertes en
charge devient de plus en plus plat entre 0.5 et 1.0 p.u. mais ce qui n ' empêche pas d 'avoir

147
un niveau de flux minimum à l'endroit observé par les mesures expérimentales tant dans
le test à vide que dans le test en charge.
L 'ajusteluent optimal du flux permet d'observer une réduction des pertes dans le
système par rapport à celles ob ervés avec un ajustement nominal du flux de l ' ordre de
58% pour le test à vide et de 27% pour le test en charge.
Vitesse de 0.4 p.u.
70,000 -----.------~--
60,000
50,000
~ 40,000 ln Cl>
~ 30,000 -a..
20,000
10,000
•
• • • • • •
• • •
• • • • • •
• Ex périrrent~ • IVbdèle
• RNA 0,000 1---_______________________ _
0,0 0,2 0,4 0,6 0,8 1,0 1,2
Flux (p.u .)
Fig. 6-1 1 - Vitesse de 0.4 p.u. à vide

148
160,000 --~~
140,000 • • 120,000 • • • •
100,000 e . • ~ • fIJ 80,000 Cl)
t::: • Cl) a.. 60,000 • • • • • • •
40,000 • Expérirrental
20,000 ' . rvlodèle • RNA
0,000 0,0 0,2 0,4 0,6 0,8 1,0 1,2
Flux (p.u.)
Fig. 6-12 - Vitesse de 0.4 p.u. en charge
Les résultats montrés sur les Fig. 6-11 et Fig. 6-12 sont semblables à ceux
observés aux niveau de vitesse 0.1-0.3 p.u. à la différence que dans le cas du test à vide,
on observe des différences importantes entre le modèle et les pertes observées même pour
des niveaux de flux faibles 0.1-0.4 p.u. ce qui n'avait pas été le cas dans les autres tests.
Ces écarts n'empêchent pas d'avoir un ajustement de flux efficace pour les tests à
vide et en charge. Cet ajustement de flux permet d'observer une réduction des pertes dans
le système par rapport à l'ajustement au flux nominal de l'ordre de 46% à vide et de 1 7%
en charge.

149
Vitesse = 0.5 p. u.
100,000
90 ,000 • 80,000 • 70,000 • • • • • 60,000 •• •
~ • If) 50,000 • • Q)
t:: • Q) 40,000 • a..
30,000
20,000 - . Expérill'ental
10,000 • rv10dèle
• RNA 0,000
0,0 0,2 0,4 0,6 0,8 1,0 1,2
Flux (p.u.)
Fig. 6-13 - Vitesse à 0.5 p.u. à vide
On observe sur la Fig. 6-13 une dégradation de l'erreur entre les pertes estinlées
par le modèle et celles mesurées sur le banc d'essai. Le début de cette dégradation était
déjà observable sur les résultats des tests à 0.4 p.u ..
Les résultats du test en charge ne peuvent pas être présentés car, en raison de la
nature très expérimentale du banc d'essai sur lequel ces tests sont effectués, le
fonctionnement du système au-delà d'une vitesse de 0.5 p.u. en charge montre des signes
d'instabilités qui peuvent mettre l'intégrité du système en cause. Pour y arriver, il aurait
fallut investir encore plus de temps dans le déverminage de l' onduleur utilisé ainsi que
dans les différents circuits électroniques installés entre la carte FPGA et l' onduleur.
Étant donné les résultats satisfaisants obtenus à basse vitesse et le nombre
d'heures de déverminage qu'il aurait fallut investir pour faire fonctionner le systènle sur
une plage d'opération conlplète (0.1 - 1.0 p.u. en vitesse et en charge), il a été jugé
approprié de limiter la plage de test à un niveau de vitesse de 0.5. p.u ..

150
6.4 Conclusion
Ce chapitre a présenté la mise en œuvre de la commande vectorielle améliorée
proposé au chapitre 3 en commençant par une introduction à la conception de RNA sur
FPGA. La validation de cette SCEO a par la suite été démontré sur le banc d'essai
construit au chapitre 4 et en utilisant le modèle des pertes validé au chapitre 5.
Les premiers essais révélé que le j eu de données d'entraînement tel que conçu au
chapitre 3 comportait une lacune qui biaisait les résultats de la commande en flux optimal
en régime permanent. Une amélioration de la conception du jeu de données
d'entraînement a été proposée et utilisée par valider avec succès la SCEO.

151
Conclusion générale
Les travaux présentés dans cet ouvrage touchent une application de grande
importance qui est celle de l'économie d'énergie dans les MA alimentés par un onduleur
de tension. La croissance de l'application des technologies d'électronique de puissance
ainsi que l ' augmentation de la demande mondiale en énergie rendent cette thèse
pertinente tant au niveau technlogique qu'au niveau des besoins actuels de notre société.
Le sujet d'étude de cette thèse pouvait être abordé du point de vue de la machine,
du convertisseur ou du système de commande. Les récentes avancées en matière de
technologie de traitement de signal avancées (réseaux de neurones artificiels) et de
plateformes de calculs (Field Programmable Gate Array) ouvrent des voies de recherche
très prometteuses et c'est sous l'angle du système de commande que le sujet a donc été
abordé.
Une étude de la littérature sur le sujet a permIs de soulever plusieurs
problématiques non résolues notamment: (1) l'augmentation de l'efficacité énergétique
limitée à faible charge par les méthodes d'ajustement de flux, (2) la question du
compromis de la performance dynamique par la méthode de rétablissement du flux à un
niveau nominal en régime transitoire. Plusieurs chercheurs ont montré que l'utilisation de
RNA dans la conception de stratégies de commandes énergétiquement optimale
permettait de les mettre en œuvre de manière simple, peu importe la complexité du
modèle de pertes utilisé, et constituaient une excellente alternative entre leur mise en
place sur forme de calculs en temps-réel ou sous forme de table de conversion.
Une étude approfondie des RNA de type perceptron multicouche a permis de
mettre en évidence une propriété intéressante qui consiste à pouvoir ajouter de la
connaissance au RNA sans augmenter significativement sa taille ni changer son
architecture. Cette propriété ouvre la voie à une nouvelle méthode d'intégration de
fonctionnalités sans impact sur la complexité du système de commande. Cette nouvelle
approche d ' intégration est mise en valeur par l'ajout de deux nouvelles fonctionnalités au
système de commande qui viennent combler les problématiques préalablement

152
identifiées: (1) la commande de l ' angle optimal du blocage de la commutation un vue de
réduire les pertes par commutation à l ' aide de la modulation discontinue et (2) le
détecteur de régime permanent permettant un rétablissement du flux nominal optimal en
régime transitoire qui permet d ' obtenir le meilleur compromis entre stabilité et
performances dynamiques.
Une validation en simulation de la commande vectorielle énergétiquement
optimale combinant l'ajustement du flux et la modulation discontinue montre que cette
approche permet d ' augmenter l ' efficacité énergétique du système onduleur-MA sur toute
la plage de charge. Cette approche permet notamment de réduire les pertes dans le
système de 1 % à puissance nominale.
La validation de la stratégie de commande améliorée avec détecteur de régime
permanent a été réalisée à l'aide d'un banc d'essai expérimental construit à l'aide d 'une
plateforme de développement FPGA commerciale et d'un onduleur construit au LEEPCI.
La technologie FPGA ouvre de nouvelles possibilités d'architectures de systèmes
embarqués idéales pour les applications d'électronique de puissance et consiste en une
plateforme « naturelle» de mise en œuvre des systèmes à RNA. Lors de la mise en œuvre
de ce banc d'essai expérimental, nous avons utilisé une nouvelle méthodologie de
conception dite « descendante» qui s'apparente à celle utilisée dans le développement de
systèmes logiciels et qui fait opposition à l'approche « ascendante» conventionnellement
utilisée lors de la conception de système à technologie FPGA.
Contrairement aux nombreux ouvrages que l'on retrouve dans la littérature, le
présent ouvrage ne cherche pas à construire et valider un modèle des pertes ultra-précis
nécessitant l'utilisation de paramètres difficiles à identifier. Cet ouvrage propose plutôt la
validation d'un système de commande vectorielle énergétiquement optimal à l'aide d'un
modèle des pertes issu des mesures prises à l'aide d'un standard reconnu qui est celui de
l'IEEE-112. Nous avons vu que ce dernier ne permet pas de quantifier précisément les
pertes dans la MA, mais permet cependant de connaître avec une bonne précision, le
niveau de flux optimal à commander pour chacun des points d'opération du moteur.
La validation expérimentale du système de commande vectorielle
énergétiquement optimale montre que la stratégie proposée fonctionne bien dans les
limites dans lesquelles elle a été validée et rien ne nous empêche de penser que son bon

153
fonctionnement pourrait être vérifié avec succès sur toute la plage d'opération de ce type
de système.
Les contributions originales de cette thèse
Cette thèse contribue à l'avancement des connaissances de plusieurs façons. On compte
parmi les contributions principales:
• la proposition d'une nouvelle méthode d'intégration de fonctionnalités sans coût
supplémentaire dans les systèmes embarqués à partir de l'observation d'une propriété
des RNA de type perceptron multicouche qui n'ajamais été mis de l'avant;
• la proposition et la validation par simulation numérique d'une approche permettant
d'augmenter l'efficacité énergétique des systèmes d'EVV de MA sur toute la plage de
charge à l'aide de la modulation discontinue;
• la proposition et la validation expérimentale d'une stratégie de commande vectorielle
énergétiquement optimale basée sur un modèle des pertes ;
• la proposition et la validation expérimentale d'un détecteur de régime permanent
directement intégré dans le RNA et permettant d'établir le meilleur compromis entre
performances dynamiques et stabilité du système d'EVV.
Nous comptons également les avancées suivantes comme contributions secondaires:
• la conception et la validation d'un banc d'essai expérimental construit à l'aide de
plateforme de développement commerciale normalement utilisée dans les applications
de télécommunications (car aucune disponible pour les application de commande
industrielle) incluant un circuit de multiplexage dans le temps et de modulation de
plusieurs signaux de mesures provenant de capteurs de tension, de courant et de
vitesse;
• la démonstration du bon fonctionnement des outils commercialement disponibles et
l'utilisation d'une méthodologie « descendante» dans le conception d'un système sur
FPGA;

154
• la démonstration de la pertinence de l'utilisation d'un modèle de pertes basée sur les
mesures du standard IEEE-112 dans la conception de la commande de flux optimale.
Lefutur
Le développement logique de cet ouvrage est d'avancer vers des approches adaptatives
du modèle des pertes de la machine afin de rendre robuste la commande optimale en flux
par rapport aux variations de paramètres de la MA. Ceci implique la conception d'un
modèle des pertes de plus grande dimension (de nouveaux jeux de données
d'entraînement) et d'estimateurs de paramètres en-ligne de la MA (qui pourront alors être
intégrés directement dans le jeu de données d'entraînement).
Nous avons vu que la fonction r(l!lwp , I!lTe) qui permet d'établir un compromis entre
performance dynamique et stabilité du système nécessite plus de recherche pour arriver à
une forme optimale en fonction des besoins de l'application (qui tient notamment compte
de la dynamique de la charge).
Une autre VOle d'avancement consiste à faire la validation expérimentale de la
proposition d'augmentation de l'efficacité énergétique sur toute la plage de charge à
l'aide de stratégie de modulation discontinue. Il reste notamment beaucoup de recherche
à faire pour augmenter la prise en compte des pertes de commutation et des pertes
harmoniques dans le modèle des pertes globales du système.
Finalement, dans une plus large perspective, cet ouvrage sur la conception d'une stratégie
de commande énergétiquement optimale pourrait certainement être transférable dans
d'autres applications d'efficacité énergétique où le couple produit est fonction de deux
variables commandables comme c'est le cas avec le ratio air/essence dans les moteurs à
combustion [Guzella et al., 2004].

155
Références
ABDIN, E.S., GHONEM, G.A., DIAB, H.M.M, DERAZ, S.A., Efficiency Optimization
of a Vector Controlled Induction Motor Drive Using an Artificial Neural Network, The
29th Annual Conference of the IEEE Industrial Electronics Society, Vol. 3, p. 2543-2548,
2003.
ABRAHAMSEN, F., Energy Optimal Control of Induction Motor Drives, Thèse de
Doctorat (Ph.D.), Institute of Energy Technology, Université d'Aalborg (Danemark), 216
p., 2000. En ligne (29 décembre 2008):
http://www.aub.aau.dk/phd/department14/text/abrahamsen-flemming.pdf
Voir également article synthèse: [ABRAHAMSEN et al. 2001].
ABRAHAMSEN, F., BLAABJERG, F., PEDERSEN, lK., THOEGERSEN, P.B.,
Efficiency-optimized control of medium-size induction motor drives, IEEE Trans. on
Industry Applications, Vol. 37, No. 6, p. 1761-1777, Novembre-Décembre 2001.
BAZARAA, M.S., SHERALI, H.D., SHETTY, C.M., Nonlinear Programming Theory
and Aigorithms, 2e edition, New York, Wiley, p. 270-271,1993.
BERNAL, F.F., GARCIA-CERRADA, A., FAURE, R., Model-Bass Loss Minimization
for DC and AC Vector-Controlled Motors Including Core Saturation, IEEE Trans. on
Industry Applications, Vol. 36, No. 3, Mai-Juin 2000.
BLAABJERG, F., MUNK-NIELSEN, S., PEDERSEN, lK., An Advanced Measurement
System for Verification of Models and Data-sheets, PELS Workshop on Computers in
Power Electronics, pp. 234-239, 1994.

156
BLASCHKE, F., The principle of field orientation as applied to the new transvector
closed loop control system for rotating field machines, Siemens Review, Vol. 34, mai,
1972.
BLASKO, V., Analysis of a Hybrid PWM Based on Modified Space- Vector and Triangle-
Comparison Methods, IEEE Trans. on Industry Applications, Vol. 33, No. 3, p.756-764,
Mai-Juin 1997.
BOLDEA, L, NASAR, S., Unified Treatment of core lasses and saturation in the
orthogonal-axis model of electric machines, Proc. Jnst. Elect. Eng., pt. B, Vol. 134, No.
6, pp. 355-363, Novembre 1987.
BOLDEA, L, NASAR, S., The Induction Machine Handbook, CRC Press LCC, 800 p.,
2002.
BOSE, B.K., P ATEL, N.R., RAJA SHEKARA, K., A Neuro-Fuzzy Based On-Line
EjJiciency Optimization Control of a Stator Flux-Oriented Direct Vector-Controlled
Induction Motor Drive, IEEE Trans. on Ind. Electronics, Vol. 44, no. 2., p.270-273, Avril
1997.
BOSE, B., Energy, Environment and Advances in Power Electronics, IEEE Trans. On
Power Electronics, Vol. 15, No. 4, p.688-701, Juillet 2000.
BOSE, B.K., Modern Power Electronics and AC Drives, Prentice-Hall, 711 p., 2002.
BOSE, B.K., Neural Network Applications in Power Electronics and Motor Drives - An
introduction and perspective, IEEE Trans. on Industrial Electronics, Vol. 54, No. 1,
p.l4-33, Février 2007.

157
BOTROS, N.M., ABDUL-AZIZ, M., Hardware implementation of an artificial neural
network using field programmable gate arrays (FPGA 's), IEEE Trans. on Industrial
Electronics, Vol. 40, No. 6, p. 665-667, Décembre 1994.
BRYSON, A.E., HO, Y.C., Applied Optimal Control, Blaisdell, New York, 1969.
BUJA, G., INDRI, Improvement of pulse width modulation techniques, Arch.
Electrotech. (Allemagne), Vol. 57, p. 281-289, 1975.
CAO-MINH, T., HORI, Y., Convergence Improvement of Ejjiciency-Optimization
Control of Induction Motor Drives, IEEE Trans. on Industry Applications, Vol. 37, No. 6,
Novembre-Décembre 2001.
CHAN, C.C., CHAU, K.T., Modern Electric Vehicle Technology, Oxford Science
Publications, 300 p., 2001.
CIRSTEA, M.N., DINU, A., KHOR, J.G., McCORMICK, M., Neural and Fuzzy Logic
Control of Drives and Power Systems, Newnes - Elsevier Science, Oxford (Angleterre),
399 pages, 2002.
CYBENKO, G., Approximation by superpositions of a sigmoidal function, Mathematics
of Control, SignaIs and Systems, Vol. 2, No. 4, p. 303-314,1989.
DEPENBROCK, M., Pulse width control of a 3-phase inverter with non sinusoidal phase
voltages, Conf. Rec. IEEE Int. Semiconductor Power Conversion Conf., p. 399-403,
1977.
ELBULUK, M.E., TONG, L., HUSAIN, I., Neural-network-based model reference
adaptive systems for high-performance motor drives and motion contrais, IEEE Trans. on
Industry Applications, Vol. 38, No. 3, Mai-juin 2002.

158
FITZGERALD, A.E., KINGSLEY, C. J., UMANS, S.D., Electric Machinery, 5e edition,
McGraw-Hill, États-Unis, p. 599, 1990.
GARCIA, G.O., STEPHAN, R.M., WATANABE, E.H., Comparing the Indirect Field-
Oriented Control with a Scalar Method, IEEE Trans. on Industrial Electronics, Vol. 41,
No. 2, p. 201-207, Avril 1994.
GUZELLA, L., ONDER, C.H., Introduction to Modeling and Control of Internai
Combustion Engine Systems, Springer, 300 pages, 2004.
HARLEY, R.G., BURTON, B., DIANA, G., RODGERSON, J.R., Reducing the
computational demands of continually online-trained artificial neural networks for
system identification and control offast pro cesses , IEEE Trans. on Industry Applications,
Vol. 34, No. 3, mai-juin 1998.
HASSE, K., Zur dynamic drehzahlgeregelter antriebe mit stromrichtergespeisten
asynchrony-kurzschlublaufermaschinen, Darmstadt, Techn. Hochsch, Diss., 1969.
HASAN, K.M., SINGH, B., Neural Network control ofinduction motor drives for energy
efficiency and high dynamic performance, 23 rd International Conference on Industrial
Electronics, Control and Instrumentation, Vol. 2, Novembre 1997.
HAVA, A .. M., Carrier-Based PWM- VSI Drives in the Overmodulation Region, Thèse de
Doctorat (Ph.D.), Université du Wisonsin - Madison (États-Unis), 360 p., 1998. En ligne
(29 décembre 2008) : http://www.eee.metu.edu.tr/--hava/
HAVA, A.M., KERKMAN, R.J., LIPO, T.A., A High-Performance Generalized
Discontinuous PWM Aigorithm, IEEE Trans. on Industry Applications, Vol. 34, No. 5,
pp. 1059-1071, Septembre-Octobre 1998.

159
HA YKIN, S., Neural Networks - A comprehensive Foundation, 2e edition, Pearson
Education, Upper Saddle River (États-Unis), 842 p., 1998.
HOLT, J.L., BAKER, T.E., Back Propagation simulations using limited precision
calculations, compte-rendu de l'International Joint Conference on Neural Networks, pp.
121-126, Vol. 2, 1991.
HOLTZ, J., Pulsewidth Modulationfor Electronic Power Conversion, Proceedings of the
IEEE, Vol. 82, No. 8, pp. 1194-1214, Août 1994.
HORI, Y, CHAKRABORTY, C., Fast Efficiency Optimization Techniques for the
Indirect Vector-Control/ed Induction Motor Drives, IEEE Trans. on Industry
Applications, Vol. 39, p.1070-1076, No. 4 Juillet/Août 2003.
IEEE-112, IEEE Standard Test Procedure for Polyphase Induction Motors and
Generators, 79 pages, 4 novembre 2004.
KAZMIERKOWSKI, M.P., MALESANI, L, Current control techniques for three-phase
voltage-source PWM converters: a survey, IEEE Trans. on Industrial Electronics, Vol.
45, No. 5, pp. 691-703, Octobre 1998.
KAZMIERKOWSKI, M.P., KRISHNAN, R., BLAABJEG, F., Control in Power
Electronics - Selected Problems, Academie Press - Elsevier Science, États-Unis, 518
pages, 2002.
KING, K.G., A three phase transistor class-B inverter with sine wave output and high
efficiency, Inst. Elect. Eng. Conf. Pub. 123, p. 204-209, 1974.
KIOSKERIDIS, L, MARGARIS, N., Loss Minimization in scalar-control/ed induction
motor drives with search control/ers, IEEE Trans. on Power Electronics, Vol. Il, No. 2,
p. 213-220,1996.

160
KJOSA VIK, G., Take Electronic Motor Drives to the Next Level, Embedded Magazine, 4
pages. Septembre 2005.
KOLAR, J.W., ERTL, H., ZACH, F.C., lnfluence of the Modulation Method on the
Conduction and Switching Losses of a PWM Converter System, IEEE Trans. on Industry
Applications, Vol. 27, No. 6, p. 1063-1075, Novembre-Décembre 1991.
KUSKO, A., GALLER, D., Control Means for Minimization of Losses in AC and DC
Motor Drives, IEEE Trans. on Ind. Appl., vol. IA-19, No. 4, p. 561-570, Juillet-Août
1983.
LEVI, E., VUKOSA VIC, S.N., Robust DSP-Based Efficiency Optimisation of a Variable
Speed Induction Motor Drive, IEEE Trans. on Ind. Electronics, vol. 50, No. 3, Juin 2003.
LIPO, T.A., ROWAN, T.M., A Quantitative Analysis of lnduction Motor Performance
Improvement by SCR Voltage Control, IEEE Trans. on Ind. Applications, vol. 19, p. 545-
553, Juillet-Août 1983.
LIPO, T.A., HOLMES, D.G., Pulse Width Modulation for Power Converters - Principle
and Practice, IEEE Press Series on Power Engineering, États-Unis, 724 p., 2003.
MAXICOURS, Site web, Cours en électrotechnique, http: //\V\v\v.u1axicours.com/soutien
scolaire/electrotechnique/bac-pro/132631.htnll , 17 mai 2009.
MEIRELES, M.R.G., ALMEIDA, P.E.M., SIMOES, M.G., A Comprehensive Review for
industrial applicability of artificial neural networks, IEEE Trans. on Industrial
Electronics, Vol. 50, No. 3, p. 585-601, Juin 2003.
MINKSY, M.L., PAPERT, S., Perceptrons - An introduction to computational geometry,
MIT Press, Cambridge, 1 ère edition, 1969.

161
MOHAMADIAN, M., NOWICKI, E., ASHRAFZADEH, F., CHU, A., SACHDEVA, R.,
EVANIK, E., A novel neural network controller and its efficient DSP implementationfor
vector-controlled induction motor drives, IEEE Trans. on Industry Applications, Vol. 39,
No. 6, p. 1622-1629, Novembre-décembre 2003 .
MOUSSA, M., AREIBI, S., NICHOLS, K., On the Arithmetic precision for
Implementing back-propagation networks on FPGA - A case study, chapitre #2 dans
[Omondi et al., 2006].
MUTHURAMALINGAM, A., HIMA VATHI, S., SRINIVASAN, E., Neural Network
Implementation Using FPGA: Issues and Application, International Journal of
Information Technology, p. 86-92, Vol. 4, No. 2, 2007.
NARENDRA, K.S., PARTHASARATHY, K., Identification and control of dynamical
systems using neural networks, Neural Networks, IEEE Transactions on , Vo1.1, No.1, p.
4-27, Mars 1990.
NOLA, F., Power Factor Control System for AC Induction Motor, Brevet américain
#4,052,648, 4 Octobre 1977.
N0RGAARD, M., RA VN, O., POULSEN, N.K., HANSEN, L.K., Neural Networks for
Modelling and Control ofDynamic Systems, Springer-Verlag, Londres, 246 p., 2000.
NOVOTNY, D.W., KIRSCHEN D.S., SUWANWISOOT, W., Minimising Induction
Motor Losses by Excitation Control in Variable Frequency Drives, IEEE Trans. on Ind.
Applications, vol. 20, p. 1244-1250, Septembre/Octobre 1984.

162
NOVOTNY, W.N., LIPO, T.A., KIRSCHEN, D.S., On-Line Efficiency Optimization of a
Variable Frequency Induction Motor Drive, IEEE Trans. on Industry Applications, vol.
IA-21, no. 4, p. 610-616, Mai/Juin 1985.
OMONDI, A.R., RAJAPAKSE, J.C., FPGA Implementation of Neural Networks,
Springer, 360 pages, 2006.
PARIZEAU, M., GEL-21140 - Réseaux de neurones, Notes de cours, Université Laval,
150 p. 2004.
PERACAULA, l, MORENO-EGUILAZ, lM., PRYYMAK, B., Neural Network based
Efficiency Optimization of an Induction Motor Drive with Vector Control, IEEE 2002
28th Annual Conference of the Industrial Electronics Society, Vol. 1, p.146-151, 2002.
PERACAULA, J., MORENO-EGUILAZ, lM., PRYYMAK, B., Neural Network Flux
Optimisation using a Model of Losses in Induction Motor Drives, Proceedings of the
ElectrIMACS'2005, Hammamet, Tunisie, 2005.
PERRON, M., LE-HUY, H., Full Load Range Neural Network Efficiency Optimization of
an Induction Motor with Vector Control using Discontinuous PWM, IEEE International
Symposium on Industrial Electronics, Montréal (Canada), 2006.
PERRON, M., LE-HUY, H., Induction Motor Vector Control FPGA Design and
Implementation using Altera Electronic Design Automation Tools, Conférence
ELECTRIMACS, Québec (Canada), 2008.
PHAM, H. P., Commande directe du couple du moteur asynchrone avec l'onduleur à
trois niveaux à fréquence de commutation constante, Thèse de doctorat, Université Laval,
187 pages, juillet 2005.

163
ROSENBLATT, F., The perceptron : A perceiving and recognizing automaton, Rapport
#85-460-1, Projet PARA, Comell Aeronautical Laboratory, Ithaca, New York, 1957.
RUMELHART, D.E., HINTON, G.E., WILLIAMS, R.J., Learning internai
representations by error propagation, article paru dans RUMELHART, D.E.,
McLELLAND, J.L., ParaUel Distributed Processing, Vol. 1, Chapitre 8, pp. 318-362,
MIT Press, 1986.
SOUSA, G. C. D., BOSE, B.K., CLELAND, J.G., Fuzzy Logic Based On-Line Efficiency
Optimization Control of an Indirect Vector-Controlled Induction Motor Drive, IEEE
Trans. Ind. Electronics, Vol. 42, No. 2, pp. 192-198, Avril 1995.
STREMLER, F.G., Introduction to Communication Systems, 3e edition, Addison
Wesley, 757 pages, 1992.
SUNDARARAJAN, N., SARATCHANDRAN, P., ParaUel Architectures for Artificial
Neural Networks - Paradigm and implementation, IEEE Computer Society, 379 pages,
1998.
SUL, K.S., PARK, M.H., A Novel Technique for Optimal Efficiency Control of a
Current-Source Inverter-Fed Induction Motor, IEEE. Trans. on Power Electronics, vol. 3,
No. 2, p. 192-199, Avril 1988.
TOLIYTAT, H.A., LEVI, E., RAINA, M., A Review of RFO Induction Motor Parameter
Estimation Techniques, IEEE Trans. on Energy Conversion, Vol. 18, No. 2., Juin 2003.
TOMMISKA, M.T., Efficient digital implementation of the sigmoid function for
reprogrammable logic, IEE Computers and Digital techniques, Vol. 150, No. 6, pp. 403-
411,2003.

164
TRZYNADLOWSKI, A., LEGOWSKI, S., Minimum-Loss Vector PWM Strategy for
Three-Phase Inverters, IEEE Trans. On Power Electronics, Vol. 9, No. 1, p.26-34,
Janvier 1994.
VAS, P., Artificial-intelligence based electrical machines and drives, Oxford Science
Publications, 625 pages, 1999.
WILDI, T., SYBILLE, G., Électrotechnique, Presses de l'Université Laval 3e edition,
1161 pages, 2001.
ZHU, J., SUTTON, P., FPGA Implementations of Neural Networks - a Survey of a
Decade of Progress, Proceedings of 13th International Conference on Field
Programmable Logic and Applications, Lisbonne (Portugal), Septembre 2003.

165
Annexe 1 - Identification des paramètres du moteur
asynchrone
La méthode d'identification des paramètres du moteur asynchrone est celle basée sur l'utilisation d'un circuit équivalent des phases de la machines présentée dans le standard 112 de l'IEEE [IEEE-112, 2004] qui est celle identifiée comme étant la méthode F.
Description du circuit équivalent
RI X1
'Io..-Jo-
J --:=r----fl!2 ...... , ---r-I---'~!oo.----"î R
Vl • Z2
l __________ ~~. Fig. A-I - Schéma du circuit équivalent d'une phase (tiré de [IEEE-112, 2004])
Pour un meilleur suivi des opérations avec le standard IEEE-112, la notation utilisée dans cette Annexe sera le même que celle utilisée dans le standard.
Variable Description Unités VI Tension de ~hase au stator V V 2 Tension de ~hase au rotor réfléchie au stator V f Fréquence d'excitation Hz 12 Courant au rotor réfléchi au stator A lm Courant d'excitation A Ife Courant dans les pertes fer A RI Résistance au stator Ohm R2 Résistance au rotor Ohm Rfe Résistance éguivalente aux pertes fer Ohm Xl Réactance de fuite au stator Ohm X2 Réactance de fuite au rotor réfléchie au stator Ohm XM Réactance magnétisante Ohm s Glissement p.u.

166
Procédure
A - Mesure de résistance du bobinage au stator
La mesure a été effectuée à l'aide d'une source de tension ajustable et de deux multimètres pouvant indiquer précisément la tension et le courant appliqués aux bornes des enroulements du stator du moteur branché en étoile. Une série de mesures a été effectuée à température ambiante et une autre a été prise à température normale d 'opération.
En faisant 1 'hypothèse que la résistance de chaque phase est identique, la résistance d 'une phase est égale à la moitié du rapport entre la tension et le courant observé aux bornes de deux phases.
Test effectué à 26.0 Oc Branchement Tension (V) Courant (A) R mesurée (fi) R phase (U)
A-B 3.828 2.912 1.314 0.657 A-C 3.832 2.886 1.328 0.664 B-C 3.822 2.870 1.331 0.666 A-B 3.564 2.766 1.289 0.644 A-C 3.498 2.688 1.301 0.651 B-C 3.501 2.690 1.301 0.651
Mo~enne résistance statorique 0.655
Test effectué à 39.4 Oc Branchement Tension (V) Courant (A) R mesurée (U) R phase (U)
A-B 3.564 2.766 1.289 0.644 A-C 3.498 2.688 1.301 0.651 B-C 3.501 2.690 1.301 0.651
Mo~enne résistance statorique 0.649
On remarque que la résistance statorique des phases du moteur ne varie pas de manière significative entre la température ambiante et la température normale d'opération (variation de près de 13 OC).

167
B - Tests à vide
Le test à vide sert à mesurer les pertes fer pour différentes valeurs de flux au stator.
Les mesures ont été prises après avoir fait tourner le moteur à vide à une tension de 223.5V jusqu'à ce que la puissance d'entrée se soit stabilisée. Il s'agit en fait de réchauffer les roulements du moteur qui offrent une résistance plus grande lorsqu'il ne sont pas réchauffés (une différence de 20W à l'entrée est observée).
# Test Tension (V) Courant (A) Puissance (W) Vitesse Temp. (OC) (RPM)
1 223.5 5.26 209 1799 37.8 2 212.6 4.88 188 1799 37.8 3 208.0 4.72 181 1799 37.8 4 201.6 4.50 172 1799 37.8 5 190.2 4.14 155 1799 37.7 6 178.7 3.82 141 1798 37.4 7 167.4 3.54 131 1798 37.1 8 156.5 3.27 122 1798 36.9 9 145.3 2.98 112 1798 36.5 10 134.7 2.74 107 1798 36.3 Il 123.6 2.54 99 1798 35.9 12 112.5 2.30 94 1798 35.6 13 101.5 2.09 88 1795 35.4 14 90.7 1.88 85 1794 35.0 15 79.5 1.70 79 1794 34.8 16 67.9 1.53 76 1791 34.6 17 56.6 1.41 73 1785 34.4 18 45.4 1.38 71 1778 34.3
C - Pertes par frottement
Les pertes par frottement se déduisent par interpolation des pertes totales observées en fonction du carré de la tension au stator. Les pertes par frottement sont égales à 39.01 W.

168
170
/ ./
/ / y = 0,0025x + 39,01
./ 1
/-.,.
160
150
140
130
120
11 0
100
90
80 20000 25000 30000 35000 40000 45000 50000 55000
Tension au carré (V2)
D - Pertes fer
Les pertes fer en fonction de la tension d'alimentation se déduisent à partir des pertes totales desquelles on soustrait les pertes par frottement et les pertes Joule au stator.
Tension (V) Puissance (W) Frottement (W) P-Stator P-Fer (W) 223 .5 209 39.01 54.49 114.91 212.6 188 39.01 46.83 101.57 208.0 181 39.01 43 .81 97.69 201.6 172 39.01 39.82 92.08 190.2 155 39.01 33.70 81.70 178.7 141 39.01 28.69 72.68 167.4 131 39.01 24.57 66.81 156.5 122 39.01 20.96 61.42 145.3 112 39.01 17.46 54.92 134.7 107 39.01 14.79 52.59 123.6 99 39.01 12.69 46.71 112.5 94 39.01 10.40 43.99 101.5 88 39.01 8.59 39.74 90.7 85 39.01 6.95 37.87 79.5 79 39.01 5.68 33.66 67.9 76 39.01 4.60 31.70 56.6 73 39.01 3.91 29.31 45.4 71 39.01 3.74 27.24

115
95
~ 75
~ III Q)
t:: 55 Q) Q..
35
15 25 75 125
Tension 1-1 (V)
Calcul de Rie
2
Rie =3~= 253.5 n où V2 =120-4.72~O.655 2 +6.262 =90.3V Ph
169
175 225

E - Test à rotor bloqué et calculs
Tension (V) Courant (A) Puissance (W) 39.09 9.45 277.0 37.90 9.09 255.6 35.80 8.45 222.2 32.10 7.37 169.1 34.99 8.23 210.5 36.31 8.62 231 .5 37.30 8.91 247.6 38.52 9.26 268.5 37.20 8.87 246.9 37.31 8.90 248.7 38.04 9.12 26l.5 37.96 9.08 259.9 34.83 8.16 210.2 35.02 8.22 213.3 35.12 8.23 214.5
9,500 +------- ---------x----l
9,000
8,500
~ c: 8,000 ~ 0 (,) 7,500
y = O,2968x - 2,1708 7,000 +------ ------------j
6,500 +------- ------- - - --j
6,000 -/-----r------.--------.------.,------l 30,000 32,000 34,000 36,000 38,000 40,000
Tension (V)
290 ,000 ,..--------------- ---;
270 ,000 +-------------- -.;<-- ----1
250 ,000 -f-------- ------.F-----j
[ 230 ,000 +----------~ .. _--- - __j
fil ~ ~ 210 ,000 -l--------~-------___i c..
190,000 -J------/ ---------- -j
y = 15,599x - 333 ,56
170.000 +-----..,IC-- - ------------j
150,000 +----..-----,-----,----~-----i
30 ,000 32,000 34 ,000 36 ,000 38 ,000 40 ,000
Tension (V)
170

171
F - Test à voltage réduit et à glissement nominal et calculs
Calcul des réactances Xl, X2, XM et de la résistance Rie
La puissance réactive à vide et à tension nominale est égale à :
La puissance réactive à voltage réduit et à glissement nominal est égal à :
Le calcul des valeurs des réactances à 60 Hz se fait par itérations avec les expressions suivantes:
2 X M = 3Vo 2 x 1 2 - 19.50 il
Qo -311O X I ( XI J 1+-X M
XI =X2 = [QL X r[l+ ;1 ] = 6.262 n 31 2 x 2+_1 M
IL X M
Calcul de la tension V2
Avec les valeurs données dans le tableau en haut de page on trouve V 2 = 16.65 V
Calcul de l'angle ()2

Calcul des courants Ife, IM et 12
Calcul de R2
s = 1- 1770 = 1.670/0 1800
172

173
Annexe 2 - Données expérimentales de la commande
vectorielle intelligente et énergétiquement optimale
Voir pages suivantes.

v = 0.1 - SANS CHARGE FLUX NOM 0.2442 CHARGE 0,0666 VDC 150 EXPÉRIMENTAL ET MODELE
FLUX 0.1 0.0244 0,2 0,0488 0,3 0,0733 0,4 0,0977 0,5 0,1221 0,6 0,1465 0.7 0.1709 0,8 0,1954 0,9 0.2198 1,0 0,2442
RNA FLUX
03-déc 0.406
= 0.1 - AVEC CHARGE FLUX NOM CHARGE
0,2442 0.0912
VDC 150 EXPERIMENTAL ET MODELE
FLUX 0.1 0.0244 0,2 0,0488 0,3 0,0733 0,4 0,0977 0,5 0,1221 0,6 0,1465 0,7 0,1709 0,8 0,1954 0.9 0.2198 1,0 0.2442
RNA FLUX
03-déc 0.428
ESSAI #1
0.483 0,320 0,380 0,435 0,599 0,658 0,880 1,042 1,103
ESSAI #1 0,386
40,000
35,000
30,000
[ 25,000
III 20 ,000 CIl
~ 15,000
10,000
5,000
0.000 0.0
ESSAI #1
1,646 1,128 1,002 1,062 1,180 1,350 1,578 1,684
ESSAI #1 0,943
60,000
50.000 ·
40,000 [ III 30 .000 CIl ;;
Q.. 20 ,000
10,000
0,000 0,0
TEMPS MESURE 2 MINUTES
EXPÉRIMENTAL (WATT-H) ESSAI #2
0,449 0,334 0,368 0.478 0,555 0.665 0,842 1,084 1,180
ESSAI #2 0.412
•
0,2
TEMPS MESURE
ESSAI #2
1,640 1,098 1.016 1,110 1.176 1,390 1,528 1,646
ESSAI #2 0,998
•
•
0.2
ESSAI #3
0.496 0,336 0.372 0,455 0,572 0,664 0,842 1,144 1,078
ESSAI #3 0.418
MOY-WATT
14,280 9,900 11 ,200 13,680 17,260 19,870 25,640 32,700 33,610
WATT 12.16
v = 0.1 p .u . - Sans charge
• •
0,4
ESSAI #3
1,680 1,104 1,012 1,084 1,176 1,364 1.568 1,656
ESSAI #3 0.960
• • • •
0,6
Flux (p .u.)
2 MINUTES
MOY-WATT
49,660 33,300 30,300 32,560 35.320 41 ,040 46,740 49,860
WATT 29.01
V = 0.1 p .u. - Avec charge
• • • • •
• • • • 0,4 0,6
Flux (p .u.)
•
•
0,8
•
•
0,8
M M_UlU-
COUPLE 0,0666
•
•
•
•
WATT
29,6203 11 ,5566 10,0964 11 ,0607 12,6841 14,5085 16,351 3 18,1273 19,7976
• Expérimenta l . Modéle . RNA
1,0 1,2
WATT
14,0108 11 ,3404 11 ,8679 13,2705 14,9578 16,7059 18,4126 20.0306
COUPLE 0.0912
• •
'. E,p"imOOI''] • . Modéle . RNA -----
1,0 1,2
174

v = 0.2 - SANS CHARGE FLUX NOM CHARGE
0,2442 0,058
VDC 150 EXPÉRIMENTAL ET MODELE
FLUX 0,1 0,0244 0,2 0,0488 0.3 0,0733 0,4 0,0977 0,5 0,1221 0,6 0,1465 0,7 0,1709 0,8 0,1954 0,9 0,2198 1,0 0,2442
RNA FLUX
03-déc 0,300
V = 0.2 - AVEC CHARGE FLUX NOM 0,2442 CHARGE 0,120 VDC 150 EXPÉRIMENTAL ET MODELE
FLUX 0,1 0,0244 0,2 0,0488 0,3 0,0733 0,4 0,0977 0,5 0,1221 0,6 0,1465 0,7 0,1709 0,8 0,1954 0,9 0,2 198 1,0 0,2442
RNA FLUX
03-déc 0,4 10
TEMPS MESURE 2 MI NUTES
EXPÉRIMENTAL (WATT-H) - M-UlM-ESSAI #1 ESSAI #2
2,369 2,464 0.889 0,854 0,623 0,628 0.631 0,672 0,749 0.702 0,861 0,836 1,074 1,058 1,220 1,285 1,326 1,338 1,577 1,676
ESSAI #1 ESSAI #2 0,655 0,64
60.000
50.000
40.000
~ III 30 .000 CIl
~ Il.
20.000
10.000
0.000 0,0 0,2
TEMPS MESURE
ESSAI #1 ESSAI #2
2,884 2,958 2,064 2,064 1,730 1,764 1,745 1,841 1,942 1,910 2.096 2,111 2,266 2,254 2,462 2,412
ESSAI #1 ESSAI #2 1,860 1,842
100,000
90,000 • 80.000
70,000
~ 60.000 • III 50,000 CIl
~ 40,000 Il.
30 ,000 • 20,000
10,000
0,000 0,0 0,2
ESSAI #3 2,453 0,804 0,626 0,674 0,756 0,892 1,050 1,206 1,480 1,588
ESSAI #3 0.632
MOY-WATT 72 ,860
WATT
25,470 23,0459 18,770 17,9860 19,770 19,7318 22 ,070 22 ,3550 25.890 24,8972 31 ,820 27.1678 37,110 29,1679 41 ,440 30,9467 48,410 32 ,5585
WATT COUPLE 19,27 0,058
v = 0.2 p.u. - Sans charge
• • • • • • • • • • • Expérimental 1 •
. Modéle
. RNA
0,4 0,6 0.8 1,0 1.2
Flux (p.u .)
2 MINUTES
ESSAI #3 MOY-WATT WATT
54 .3353 2,821 86,630 28 ,9629 2,003 61 ,310 25,4471 1,766 52,600 25,8878 1,816 54,020 27,2955 1,914 57,660 28,9000 2,082 62,890 30,4778 2,300 68,200 31 ,9738 2,538 74 ,120 33,3880
ESSAI #3 WATT COUPLE 1,798 55 0,120
V = 0.2 p.u. - Avec charge
• • • • • • • • • • • • • • • • Expérimental
. Modéle
. RNA
0.4 0,6 0,8 10 1,2
Flux (p.u. )
175

v = 0.3 • SANS CHARGE FLUX NOM 0,2442 CHARGE 0,0573 VDC 150 EXPÉRIMENTAL ET MODELE
FLUX 0,1 0,0244 0,2 0,0488 0,3 0,0733 0,4 0,0977 0,5 0,1221 0,6 0,1465 0,7 0,1709 0,8 0,1954 0,9 0,2198 1,0 0,2442
RNA FLUX
03-déc 0,282
~ = 0.3 - AVEC CHARGE FLUX NOM CHARGE
0,2442 0,125
VDC 150 EXPERIMENTAL ET MODELE
FLUX 0.1 0,0244 0,2 0,0488 0,3 0,0733 0,4 0,0977 0,5 0.1221 0,6 0,1465 0.7 0,1709 0,8 0,1954 0.9 0,2198 1,0 0,2442
RNA FLUX
03-déc 0,482
ESSAI #1
1,064 0,862 0,942 1,038 1.198 1,353 1,524 1,812 2,058
ESSAI #1 0,920
70.000
60,000
50,000
[ 40,000 VI Cl
~ 30,000 c..
20,000
10,000
0,000
TEMPS MESURE
EXPÉRIMENTAL (WATT-H) ESSAI #2
1,128 0,868 0,968 1,007 1,236 1,393 1,600 1,822 2,018
ESSAI #2 0.898
ESSAI #3
1,072 0,902 0,942 1.040 1.228 1,348 1,596 1,812 2,038
ESSAI #3 0.872
2 MINUTES
MOY-WATT 0,000 32 ,640 26 ,320 28 ,520 30,850 36,620 40,940 47 ,200 54,460 61 ,140
WATI 26.900
v = 0.3 p.u. - Sans charge
• • , ,
0,0 0,2 0,4 0,6
Flux (p.u.)
TEMPS MESURE 2 MINUTES
NTAL(WATT-H) ESSAI #1 ESSAI #2 ESSAI #3 MOY-WATI
0,000 0,000
3,789 4,086 3,962 118,370 2,826 2,902 2,822 85,500 2,607 2.591 2.552 77,500 2.698 2,778 2,740 82,160 2,730 2.798 2.778 83.060 2,884 3,048 2.847 87,790 3,169 3,368 3.382 99,190 3,438 3,698 3,521 106,570
ESSAI #1 ESSAI #2 ESSAI #3 WATI 2,768 2.778 2.654 82
V = 0.3 p.u. - Avec charge
140 .000
120,000 • 100,000
[ • • e. • • 80,000 Cl
~ 60,000 c.. • 40 ,000
' . Expérimental • • • • 20,000 . Modèle
. RNA 0,000
0,0 0,2 0,4 0,6
Flux (p .u.)
• •
0,8
•
•
0,8
COUPLE 0.0573
• •
•
•
M M.!.I§'M WATI
34,1845 28,4932 29,8082 31.9991 34,1657 36,1954 38 ,1239 40,0067 41 ,8928
• Expérimental . Modéle . RNA
1,0 1,2
WATI
87,1181 48 ,7973 40 ,6218 38 ,7345 38,7757 39.5601 40 .6980 42 .0484 43 ,5593
COUPLE 0,125
• •
• •
1.0 1,2
176

v = 0.4 - SANS CHARGE FLUX NOM 0,2442 TEMPS MESURE 2 MINUTES CHARGE 0,0654 VDC 150 EXPÉRIMENTAL ET MODELE
EXPÉRIMENTAL (WATT-H) FLUX ESSAI #1 ESSAI #2 ESSAI #3 MOY-WATT
0,1 0,0244 0,000 0,2 0,0488 1.462 1,560 1,544 45 ,660 0,3 0,0733 1.174 1.196 1,148 35 ,180 0,4 0,0977 1,232 1,241 1,226 36 ,990 0.5 0,1221 1,372 1,358 1,366 40,960 0,6 0,1465 1,476 1,438 1,438 43,520 0,7 0,1709 1,597 1.591 1,562 47 ,500 0,8 0,1954 1,988 1,950 1,920 58,580 0,9 0,2198 1,982 2,050 2,026 60 ,580 1,0 0,2442 2,198 2,232 2,206 66,360
RNA FLUX ESSAI #1 ESSAI #2 ESSAI #3 WATT
03-dèc 0.349 1,271 1.280 1,312 38,630
v = 0.4 p.u. - Sa ns charge
70.000
60,000 • 50,000 •
[ 40,000 • • • • Vl • • • <Il
ai 30.000 Cl.
20,000
10,000
0,000 " 0,0 0,2 0,4 0,6
Flux (p .u.)
v = 0.4 - AVEC CHARGE FLUX NOM 0,2442 TEMPS MESURE 2 MINUTES CHARGE 0,123 VDC 150 EXP RIMENTAL ET MODELE
FLUX ESSAI #1 ESSAI #2 ESSAI #3 MOY-WATT 0, 1 0,0244 0,000 0,2 0,0488 0,000 0.3 0,0733 4,876 4,764 4,658 142,980 0,4 0,0977 3,726 3,734 3,883 113,430 0,5 0,1221 3,333 3,308 3,273 99,140 0,6 0,1465 3,332 3,312 3,342 99.860 0,7 0,1709 3, 51 9 3,508 3,4 18 104,450 0,8 0,1954 3,685 3,720 3,772 111 ,770 0,9 0,2198 3,855 3,948 3,866 116,690 1,0 0,2442 4,049 4,11 0 4,008 121 ,670
RNA FLUX ESSAI #1 ESSAI #2 ESSAI #3 WATT
03-déc 0,575 3,488 3.424 3,486 103,98
V = 0.4 p.u. - Avec charge
160 ,000
140.000 • • 120.000 • ~ 100.000 • e. • Vl 80,000 · <Il
~ • Cl. 60,000 · • • • • 40,000
1 +E'pe"meo" j 1
20,000 . Modele . RNA
0,000 0,0 0,2 0,4 0,6
Flux (p.u.)
• •
0,8
•
•
0,8
M .',I.I.I34-WATT
57,0467 42,8568 41 ,0818 41 ,8083 43,3072 45,1709 47,2970 49,6684 52 ,2938
COUPLE 0,0654
• • • •
• Expérimenta l . Modèle . RNA
1,0 1,2
WATT
127,1179 71 ,11 31 56,4232 51,4772 49,9835 50 ,0768 51 ,0693 52 ,6714 54 ,7509
COUPLE 0,123
-----~
• •
• •
1,0 1,2
177

v = 0.5· SANS CHARGE FLUX NOM 0,2442 CHARGE 0,109 VDC 150 EXPÉRIMENTAL ET MODELE
FLUX 0,1 0,0244 0,2 0,0488 0,3 0,0733 0,4 0,0977 0,5 0,1221 0,6 0,1465 0,7 0,1709 0,8 0.1954 0,9 0.2198 1,0 0,2442
RNA FLUX
03-déc 0,569
TEMPS MESURE 2 MI NUTES
EXPÉRIMENTAL (WATT-H) ESSAI #1 ESSAI #2
1,640 1.602 1,310 1.388 1,489 1,500 1,715 1,702 1,869 1,802 2,046 2,052 2.392 2,328 2,636 2,686 2,716
ESSAI #1 ESSAI #2 2,034 2.070
100,000 -
90,000
80,000
70,000
[ 60,000 tI) 50,000 • III t III 40,000 a..
30,000 i • Expérimental 1
20,000 I . Modèle i
10,000 l~_~~ _______ J 0,000
0,0 0,2
ESSAI #3
1,666 1,344 1,470 1,736 1.814 2,036 2,295 2,546
ESSAI #3 1,958
MOY-WATT 0,000
49 ,080 40,420 44 ,590 51,528 54 ,850 61 ,340 70 ,150 78 ,680 27 ,160
WATT 60,620
v = 0.5 p .u . - Sans charge
• • • •• • • •
• •
0,4 0,6
Flu x (p.u .)
• •
0,8
COUPLE 0,109
• • •
1,0
87 ,1125 68 ,6696 62 ,0872 60 .0091 60 ,1577 61 ,6613 64 ,1409 67,4203
1,2
178

179
Annexe 3 - Résultats des simulations du Tableau 3-4
Voir pages suivantes.

RAPPORT DE SIMULATION PROJET DE RECHERCHE - MARC PERRON - UNIVERSITÉ LA V AL 24-Apr-2006 19:27:43
DESCRIPTION DU TEST: Test A VEC/SANS ajustement de flux + AVEC/SANS DPWM, V = 0.2 p.U.
--------------------- TEST #1 ---------------------24-Apr-2006 19:27:43 Point d'opération: Vitesse(rad/s) = 37 Couple(Nm) = 2.158
180
Pertes FC (W): FLUX = 23 .6681 HARMONIQUES = 0.075663 COMMUTATION = 3.8977 FP = 0.27524 FREQH = 12.7554 VEN = 37.5069 CFIN = 2.022 Pertes avec RNA (W): FLUX = 23.0073 HARMONIQUES = 0.075276 COMMUTATION = 3.7053 FP = 0.2013 FREQH = 12 .8869 VFIN = 37.508 CFIN = 2.0372 Pertes avec DPWM (W): FLUX = 23.6681 HARMONIQUES = 0.075804 COMMUTATION = 2.9081 FP = 0.64716 FREQH = 12.8208 VFIN = 37.508 CFIN = 2.1405 Pertes RNA+ DPWM (W): FLUX = 23.008 HARMONIQUES = 0.094807 COMMUTATION = 2.7034 FP = -0.73361 FREQH = 13.0893 VFIN = 37.5092 CFIN = 2.1626
--------------------- TEST #2 ---------------------24-Apr-2006 20:02 :38 Point d'opération: Vitesse(radls) = 37 Couple(Nm) = 10.79 Pertes FC (W): FLUX = 170.1481 HARMONIQUES = 0.14139 COMMUTATION = Il.4225 FP = 0.48124 FREQH = 15.7238 VFIN = 37.0616 CFIN = 10.4768 Pertes avec RNA (W): FLUX = 170.8912 HARMONIQUES = 0.12442 COMMUTATION = 11.4758 FP = 0.29156 FREQH = 15.6255 VFIN = 37.062 CFIN = 10.4832 Pertes avec DPWM (W): FLUX = 170.1481 HARMONIQUES = 0.10081 COMMUTATION = 7.1636 FP = 0.7064 FREQH = 15.5284 VFIN = 37.0606 CFIN = ]0.343 Pertes RNA+ DPWM (W): FLUX = 170.8909 HARMONIQUES = 0.11342 COMMUTATION = 7.]872 FP = 0.75119 FREQH = 15.5284 VFIN = 37.0606 CFIN = 10.5888
Temps de simulation: 1 h 18m46s

RAPPORT DE SIMULATION PROJET DE RECHERCHE - MARC PERRON - UNIVERSITÉ LA V AL 24-Apr-200620:47:46
DESCRIPTION DU TEST: Test A VEC/SANS ajustement de flux + AVEC/SANS DPWM, V = 0.5 p.u.
--------------------- TEST #] ---------------------24-Apr-200620:47:46 Point d'opération: Vitesse(rad/s) = ] ] 1 Couple(Nm) = 2.158
181
Pertes FC (W): FLUX = 123.3047 HARMONIQUES = 0.24135 COMMUTATION = 4.0851 FP = 0.23722 FREQH = 36.2345 VFIN = 111 .5261 CFIN = 2.7327 Pertes avec RNA (W): FLUX = 95 .064 HARMONIQUES = 0.17495 COMMUTATION = 3.9876 FP = -0.015265 FREQH = 37.3162 VFJN = 1] 1.5349 CFIN = 2.7465 Pertes avec DPWM (W): FLUX = 123.3047 HARMONIQUES = 0.17355 COMMUTATION = 3.0647 FP = -0.25857 FREQH = 36.7674 VFIN = 111.5256 CFIN = 2.5541 Pertes RNA+ DPWM (W): FLUX = 95.249 HARMONIQUES = 0.14062 COMMUTATION = 3.01 ] 8 FP = 0.63242 FREQH = 36.7674 VFIN = ] 1 ] .5345 CFIN = 2.3602
--------------------- TEST #2 ---------------------24-Apr-2006 2] :56:3] Point d'opération: Vitesse(radJs) = 111 Couple(Nm) = 10.79 Pertes FC (W): FLUX = 280.6768 HARMONIQUES = 0.26712 COMMUTATION = ] 1.5457 FP = 0.40886 FREQH = 39.0656 VFIN = 111.1204 CFIN = 10.5206 Pertes avec RNA (W): FLUX = 28] .288] HARMONIQUES = 0.27109 COMMUTATION = 1 ].5635 FP = 0.31272 FREQH = 39.0656 VFIN = 111.1209 CFIN = 10.5094 Pertes avec DPWM (W): FLUX = 280.6768 HARMONIQUES = 0.20048 COMMUTATION = 7.1102 FP = 0.64288 FREQH = 39.0656 VFIN = ] ] 1.] 198 CFIN = 11.1538 Pertes RNA+ DPWM (W): FLUX = 281.289 HARMONIQUES = 0.]8938 COMMUTATION = 7.1354 FP = 0.63087 FREQH = 39.0656 VFlN = 111.12 CFIN = 10.9474
Temps de simulation: 2h45m36s

RAPPORT DE SIMULATION PROJET DE RECHERCHE - MARC PERRON - UNIVERSITÉ LA V AL 24-Apr-200623:34:54
DESCRIPTION DU TEST: Test AVEC/SANS ajustement de flux + AVEC/SANS DPWM, V = ] .0 p.u.
--------------------- TEST #1 ---------------------24-Apr-200623 :34:54 Point d'opération : Vitesse(rad/s) = ] 85 Couple(Nm) = 2.] 58
182
Pertes FC (W): FLUX = 3]0.6197 HARMONIQUES = 0.37633 COMMUTATION = 4.2877 FP = 0.20114 FREQH = 59.5309 VFIN = 185.4814 CFIN = 3.1977 Pertes avec RNA (W): FLUX = 2] 8.9253 HARMONIQUES = 0.2609] COMMUTATION = 4.49 FP = 0.57269 FREQH = 60.983 VFIN = ] 85.4955 CFIN = 3.0282 Pertes avec DPWM (W): FLUX = 310.6] 97 HARMONIQUES = 0.22787 COMMUTATION = 3.223 FP = 0.25685 FREQH = 59.5309 VFIN = 185.48]5 CFIN = 2.9756 Pertes RNA+ DPWM (W): FLUX = 2]8.56]7 HARMONIQUES = 0.]8364 COMMUTATION = 3.3552 FP = 0.64913 FREQH = 60.983 VFIN = ] 85.495 CFIN = 2.9733
--------------------- TEST #2 ---------------------25-Apr-2006 00: 1 ] :25 Point d'opération: Vitesse(rad/s) = 185 Couple(Nm) = 10.79 Pertes FC (W): FLUX = 483.6624 HARMONIQUES = 0.43799 COMMUTATION = ] 1.7386 FP = 0.4]685 FREQH = 62.5078 VFIN = 185.0348 CFIN = ] 1.7897 Pertes avec RNA (W): FLUX = 483 .778] HARMONIQUES = 0.8]47] COMMUTATION = 11.632 FP = 0.58021 FREQH = 64.11 08 VFIN = 185.0354 CFIN = 11.7428 Pertes avec DPWM (W): FLUX = 483.6624 HARMONIQUES = 0.3] 54 COMMUTATION = 7.1774 FP = 0.73332 FREQH = 62.5078 VFIN = 185.0349 CFIN = ] ] .3474 Pertes RNA+ DPWM (W): FLUX = 483.7903 HARMONIQUES = 0.30254 COMMUTATION = 7.2286 FP = 0.34945 FREQH = 62.5078 VFIN = 185.0359 CFIN = ] 1.548
Temps de simulation: 1 h22m52s

183
Annexe 4 - Données techniques principales du kit de
développement FPGA Stratix d'Altera Voir pages suivantes.
Le document complet est disponible en ligne à l ' adresse:
http://www.altera.comlliterature/ds/ds _ stratix _ dsp _ bd ~ro.pdf

184
Stratix EP1 S80 DSP Development Board
December 2004, ver. 1.3 Data Sheet
Features
Altera Corporation
DS-STXDVBD-l .3
The Stratix® EPIS80 DSP development board is included with the DSP Development Kit, Stratix Professional Edition (ordering code: DSP-BOARD IS80). This board is a powerful development platform for digital signal processing (DSP) designs, and features the Stratix EPIS80 device in the speed grade (-6) 956-pin package.
Components
• Analog 1/0 • Two I2-bit l25-MHz A/D converters • Two I4-bit I65-MHz DI A converters • Single-ended or differential inputs, and single-ended outputs
• Memory subsystem • 2 Mbytes of 7.5-ns synchronous SRAM configured as two
independent 36-bit buses • 64 Mbits of flash memory
• Configuration options • On-board configuration via the 64-Mbits flash memory, plus the
Altera® EPM7064 programmable logic device (PLD) • Download configuration data using ByteBlasterMVTM
download cab les • Dual seven-segment display • One 8-pin dual in-line package (DIP) switch • Three user-definable pushbutton switches • One 9-pin RS-232 connector • Two user-definable LEDs • On-board 80-MHz oscillator • Single 5-V DC power supply (adapter included)
Debugging Interfaces • Two Mictor-type connectors for Agilent Technologies logic analyzers • Several O.l-inch headers
Expansion Interfaces • Two connectors for Analog Devices A/D converter daughter cards • Connector for Texas Instruments Evaluation Module (TI-EVM)
daughter cards • Al tera Expansion Prototype Connector

185 Stratix EP1 S80 DSP Development Board
General Description
2
• Footprint for a front panel data port (FPDP) • Prototyping area
The Stratix EPIS80 DSP development board provides a hardware platform designers can use to start developing DSP systems based on Stratix devices immediately. Combined with DSP inteUectual property (IP) from Altera and Altera Megafunction Partners Program (AMPPSM) partners, users can quickly develop powerful DSP systems. Altera' s unique OpenCore® Plus technology aUows users to try out these IP cores in hardware prior to licensing them. DSP Builder (version 2.2.1) includes a library for the Stratix EPIS80 DSP development board. This library aUows algorithm development, simulation, and verification on the board, aU from within The MathWorks MATLAB/Simulink system-level design tools. AdditionaUy, the Stratix DSP development board has a Texas Instruments' EVM (cross-platform) daughter card connector, which enables development and verification of FPGA co-processors.
Altera Corporation

Components & Interfaces
186 General Description
Figure 1 shows a top view of the board components and interfaces.
Figure 1. Stralix EP1 S80 DSP Development Board Components & Interfaces
JP26
Two External CloC!<
JP25
GO-Pin 110 Connector (JP8)
JP23 JP18
MAX
Inputs (Jc:::P=l ,=J ===:::;;=H=,l
64-Mbit Flash
Memory (U3)
SMA Connector Output !rom
DIA 1 (J2)
JP9 ========:.;=~ 14-brt , 165-MHz DIA ---.!"'""-----
Converters (U21 , U23)
JP10 =======~
SMA Connector = Output !rom
DIA 2 (J3)
12-bit , 125 MHz AlD Converters
(U10, U30)
SMA Connector Input to
AlD 1 (JP6)
9-Pin RS-232 Connector (J8)
Power-on LED (08)
Two User-De!ined LE Os (06, 07)
Altera Expansion Prototype Connector (JP20, JP21, JP24)
Connector (J1 1) (reverse side) Pushbutton Switches (SWO, SW1 , SW2)
Dual Seven-segment Display (04)
Joint Test Action Group (JTAG) Connector (JP30)
5.0-V Power Supply Connector (J1)
T21ble 1 describes the components on the board and the interfaces it supports.
Table 1. Stralix EP1S80 DSP Development Board Components & Interfaces (Part 1 of 3)
Component/ Interface
Components
AlD converters
DIA conve rters
2 Mbytes SRAM
Altera Corporation
Type
1/0
1/0
Memory
Board Designation
U10, U30
U21,U23
U34, U35, U36, U37
Description
The board has two 12-bit 125-MHz AlD converters
The board has two 14-bit 165-MHz DIA converters
The board has 2 MBytes of 7.5-ns synchronous SRAM configured as two independent 36-bit buses.
3

187 Stratix EP1S80 DSP Development Board
Table 1. Stratix EP1S80 DSP Development Board Components & Interfaces (Part 2 of 3)
Component/ Type Board Description Interface Designation 64 Mbits of flash Memory U3 The board has 64 Mbits of flash memory.
SMA external clock Input JP1, JP3 The board has two SMA connector inputs connected to input connectors clocks, and terminated in 50 n. SMA external clock Output JP2, JP4 The board has two SMA connector outputs with a output connectors source impedance of 50 n. Dual seven-segment Display 04 The board has a dual seven-segment display. display
DIPswitch 1/0 SW3 The board has eight DIP switches, which are user-definable as logic inputs.
Pushbutton switches 1/0 SWO, SW1, The board has three pushbutton switches, which are SW2 user-definable as logic inputs.
User-defined LEDs Display 06,07 The board has two user-definable LEDs.
Power-on LED Display 08 The board has an LED that illuminates when power is supplied to the board.
conf_done LED Display 05 The board has an LED that illuminates upon successful configuration of the Stratix device.
RS-232 connector 1/0 J8 The board has a OB9 connector, which is configured as a OTE seriai port. The interface voltages are converted to 3.3-V signais and brought to the Stratix device, which must be configured to generate and accept transmissions.
On-board 80MHz Clock U1 The board has a socked on-board 80-MHz oscillator. oscillator
Single 5.0-V OC Input J1 (adapter) A 5.0-V OC power supply and a board adapter is power supply included.
User 1/0 pins 1/0 JP7, JP8 The board has ninety general-purpose 1/0 pins on the 0.1-inch headers (45 on JP8; 45 on JP7). The Stratix pins that drive the JP8 header also drive headers JP20, JP21, and JP24. Similarly, the Stratix pins that drive the JP7 header also drive headers JP19, and JP22.
Debugging Interfaces
Mictor connectors 1/0 J9,J10 The board has two Mictor headers, each connected to 33 Stratix pins (32 data, 1 clock) for use with an external logic analyzer.
Expansion Interfaces
Analog Deviees Expansion JP19,JP22 The board provides an interface to Analog Device's A/D connector (1) converters via two 40-pin connectors.
TI-EVM connectors Expansion J11,J12 The board provides an interface to the TI-EVM. The connectors can be found on the reverse side of the board, as shown in Figure 1.
4 Altera Corporation

188 Using the Board
Table 1. Stratix EP1SBO DSP Development Board Components & Interfaces (Part 3 of 3)
Component/ Interface
Altera Expansion Prototype Header
FPDP Footprint
Prototyping area
Note to Ta.ble 1:
Type
Expansion
Expansion
Expansion
Board Designation JP20, JP21,
JP24
J4
NIA
Description
The board provides a custom interface to Altera expansion cards via a 74-pin header.
Four rows of pins comprise a footprint for an FPDP, which can be added to the board.
The board provides a grid of plated through-holes on O.1-inch centers. Thirty Stratix 1/0 pins are connected to the grid.
(1) The two debug headers designated in this table can be used ta interface ta Analag Deviees A/D converter evaluatian boards. They are designated as JP19 and JP22, and interface to Analag Deviees AD6645 / 9433/9430 external A/D converters. Note that the JP19 and JP22 headers share Stratix pins with JP7.
Using the Board
Environmental Requirements The Stratix EPlS80 DSP development board must be stored between --40° C and 100° C. The recommended operating tempe rature is between 0° C and 55° C.
n~:&j:~) The Stratix EPlS80 DSP development board can be damaged without proper anti-static handling.
When power is applied to the board, the Power On LED illuminates. At this time, the Stratix device is automatically configured and, upon successful configuration, the con f _ done LED illuminates.
rCi:i::: JP18 allows the user to load one of two Stratix configuration images upon power-up. If the jumper on JP18 is not present, the factory configuration loads. If the jumper is present, the user configuration loads. See "Non-Volatile Configuration" on page 7 for more details.
To configure the board with a new design, the designer should perform the following steps, explained in detail in this section.
1. Apply power to the board.
2. Configure the Stratix device.
Altera Corporation 5




















