
Erratum - Correction to :Ultrasound Imaging Using Variations of the Iterative Born Technique
10
574 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 46, no. 3, may 1999 Ultrasound Imaging Using Variations of the Iterative Born Technique Lujiang Liu, Xiaodong Zhang, and Shira L. Broschat, Senior Member, IEEE Abstract—The iterative Born method is an inverse tech- nique that has been used successfully in ultrasound imag- ing. However, the calculation cost of the standard iterative Born method is high, and parallel computation is limited to the forward problem. In this work, two methods are in- troduced to increase the rate of convergence of the iter- ative Born algorithm. These methods are tested on three different objects. The results are promising, with both algo- rithms giving accurate results at lower computational cost. The first method, referred to as the coarse resolution initial value (CRIV) method, uses the iterative Born algorithm for a coarse grid to quickly estimate the initial value of the object to be reconstructed. From this initial value, the final image is obtained for a finer grid with additional iter- ations. The cost of this method is 40% less than that of the iterative Born technique. The second method, the quadri- phase source (QS) method, simultaneously uses four single sources, and object reconstruction for each is performed in parallel; the reconstruction results for all four sources then are averaged to obtain the final image. The cost of this method is 20% less than that of the standard iterative Born method. When the object to be reconstructed is of low contrast and/or has a small phase shift, the QS method is very promising because parallel computation can be used to solve both the forward and inverse problems. However, the QS method fails for high contrast objects. I. Introduction E arly detection of breast cancer greatly improves the chance of survival, perhaps by as much as 25% [1]. Thus, imaging a tumor when it is small (i.e., a minimal tumor less than 5 mm in diameter) is critical. X-ray mam- mography is widely used to detect breast cancer in post- menopausal women. However, for women under the age of 50, X-ray mammography is limited in use because breast tissue in younger women is dense; dense tissue does not provide the contrast needed to readily image small tumors. This is not the case for ultrasound imaging, which may prove to be a viable alternative to X-ray mammography for breast cancer diagnosis [2]. Current ultrasound imag- ing technology is based on a pulse-echo approach that uses only the time-of-flight of energy reflected by tissue bound- aries to obtain an image. However, this works poorly when strong scattering occurs in the insonified object as it does Manuscript received January 9, 1998; accepted September 28, 1998. This work was supported by the National Science Foundation un- der grants ECS-9253547, IRI-9506414, and by the Carl M. Hansen Foundation. The authors are with the School of Electrical Engineering and Computer Science, Washington State University, Pullman, WA 99164-2752 (e-mail: [email protected]). in young female breasts [3], [4]. Full wave inversion tech- niques are required to account for this strong scattering. Unlike pulse-echo methods, inverse scattering techniques use energy transmitted and received at many different an- gles around the object to reconstruct its image. Recently, the Gauss-Newton method combined with conjugate gradient descent has been applied to solve the inverse problem [5]. However, this approach has been found to be sensitive to noise [6]. The iterative Born (IB) method [7] has been shown to be quite robust to noise, but it is computationally expensive. In this paper we present two variations of the standard IB method called the coarse resolution initial value (CRIV) method and the quadri- phase source (QS) method. These algorithms are tested on three 16 × 16 pixel objects modeling a breast tumor surrounded by glandular tissue. For low-contrast objects, both algorithms yield accurate reconstructions at lower computational cost. However, for high-contrast objects the QS method fails. The IB method makes use of the Born approximation, which is a reasonable assumption when only weak scatter- ing occurs in the insonified object. Unfortunately, the Born approximation gives a poor initial value when strong scat- tering occurs that makes the overall computational cost of the IB method high. The CRIV method introduces a new approach for obtaining the initial value. The CRIV method involves two steps. In the first step, the problem is solved using coarse resolution; and, in the second step, the result from the first step is used as the initial value for recon- struction of the object with normal resolution. Unlike the method proposed in [8], which uses multiple frequencies and a different grid size for each frequency, in the CRIV method the initial value is chosen by reconstructing the average value of the object profile at a single frequency. One drawback of the IB method is that parallel compu- tation can be performed only on the forward problem. In this work, we present a new method, the QS method; with the QS method parallel computation can be performed on both the forward and inverse problems. The QS method exploits the relationship between the angle of the incident wave and the reconstructed object profile, as discussed in Section II. Four single sources are evenly spaced around the object, and reconstruction of the image for each of the sources is performed simultaneously using the IB al- gorithm. The results from the four separate sources then are averaged to obtain the final image. The computational cost is 20% less than that of the IB method. 0885–3010/99$10.00 c 1999 IEEE
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Erratum - Correction to :Ultrasound Imaging Using Variations of the Iterative Born Technique

574 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 46, no. 3, may 1999
Ultrasound Imaging Using Variations of theIterative Born Technique
Lujiang Liu, Xiaodong Zhang, and Shira L. Broschat, Senior Member, IEEE
Abstract—The iterative Born method is an inverse tech-nique that has been used successfully in ultrasound imag-ing. However, the calculation cost of the standard iterativeBorn method is high, and parallel computation is limitedto the forward problem. In this work, two methods are in-troduced to increase the rate of convergence of the iter-ative Born algorithm. These methods are tested on threedifferent objects. The results are promising, with both algo-rithms giving accurate results at lower computational cost.The first method, referred to as the coarse resolution initialvalue (CRIV) method, uses the iterative Born algorithmfor a coarse grid to quickly estimate the initial value ofthe object to be reconstructed. From this initial value, thefinal image is obtained for a finer grid with additional iter-ations. The cost of this method is 40% less than that of theiterative Born technique. The second method, the quadri-phase source (QS) method, simultaneously uses four singlesources, and object reconstruction for each is performedin parallel; the reconstruction results for all four sourcesthen are averaged to obtain the final image. The cost ofthis method is 20% less than that of the standard iterativeBorn method. When the object to be reconstructed is oflow contrast and/or has a small phase shift, the QS methodis very promising because parallel computation can be usedto solve both the forward and inverse problems. However,the QS method fails for high contrast objects.
I. Introduction
Early detection of breast cancer greatly improvesthe chance of survival, perhaps by as much as 25% [1].
Thus, imaging a tumor when it is small (i.e., a minimaltumor less than 5 mm in diameter) is critical. X-ray mam-mography is widely used to detect breast cancer in post-menopausal women. However, for women under the age of50, X-ray mammography is limited in use because breasttissue in younger women is dense; dense tissue does notprovide the contrast needed to readily image small tumors.This is not the case for ultrasound imaging, which mayprove to be a viable alternative to X-ray mammographyfor breast cancer diagnosis [2]. Current ultrasound imag-ing technology is based on a pulse-echo approach that usesonly the time-of-flight of energy reflected by tissue bound-aries to obtain an image. However, this works poorly whenstrong scattering occurs in the insonified object as it does
Manuscript received January 9, 1998; accepted September 28, 1998.This work was supported by the National Science Foundation un-der grants ECS-9253547, IRI-9506414, and by the Carl M. HansenFoundation.
The authors are with the School of Electrical Engineering andComputer Science, Washington State University, Pullman, WA99164-2752 (e-mail: [email protected]).
in young female breasts [3], [4]. Full wave inversion tech-niques are required to account for this strong scattering.Unlike pulse-echo methods, inverse scattering techniquesuse energy transmitted and received at many di!erent an-gles around the object to reconstruct its image.
Recently, the Gauss-Newton method combined withconjugate gradient descent has been applied to solve theinverse problem [5]. However, this approach has been foundto be sensitive to noise [6]. The iterative Born (IB) method[7] has been shown to be quite robust to noise, but it iscomputationally expensive. In this paper we present twovariations of the standard IB method called the coarseresolution initial value (CRIV) method and the quadri-phase source (QS) method. These algorithms are testedon three 16 ! 16 pixel objects modeling a breast tumorsurrounded by glandular tissue. For low-contrast objects,both algorithms yield accurate reconstructions at lowercomputational cost. However, for high-contrast objects theQS method fails.
The IB method makes use of the Born approximation,which is a reasonable assumption when only weak scatter-ing occurs in the insonified object. Unfortunately, the Bornapproximation gives a poor initial value when strong scat-tering occurs that makes the overall computational cost ofthe IB method high. The CRIV method introduces a newapproach for obtaining the initial value. The CRIV methodinvolves two steps. In the first step, the problem is solvedusing coarse resolution; and, in the second step, the resultfrom the first step is used as the initial value for recon-struction of the object with normal resolution. Unlike themethod proposed in [8], which uses multiple frequenciesand a di!erent grid size for each frequency, in the CRIVmethod the initial value is chosen by reconstructing theaverage value of the object profile at a single frequency.
One drawback of the IB method is that parallel compu-tation can be performed only on the forward problem. Inthis work, we present a new method, the QS method; withthe QS method parallel computation can be performed onboth the forward and inverse problems. The QS methodexploits the relationship between the angle of the incidentwave and the reconstructed object profile, as discussed inSection II. Four single sources are evenly spaced aroundthe object, and reconstruction of the image for each ofthe sources is performed simultaneously using the IB al-gorithm. The results from the four separate sources thenare averaged to obtain the final image. The computationalcost is 20% less than that of the IB method.
0885–3010/99$10.00 c! 1999 IEEE

liu et al.: iterative born technique and ultrasound 575
Fig. 1. Scattering geometry.
II. Formulations
A. Iterative Born Method
The scattering geometry for the imaging problem isshown in Fig. 1. The scattered data is measured aroundthe object at discrete points indicated by R. The acous-tic wave equation in two dimensions can be expressed inintegral form as [9]:
u(ρ) = uinc(ρ) +!!
S
g(ρ " ρ!)o(ρ!)u(ρ!) dρ! (1)
where S is the surface of the object to be imaged, ρ =(x, y) and ρ! = (x!, y!) are the coordinates of the obser-vation point and source point, respectively, u(ρ) is thetotal acoustic pressure field at ρ, uinc(ρ) is the incidentfield at ρ, o(ρ) is the object function to be reconstructed,and g(ρ " ρ!) is the Green’s function in two dimensionsgiven by:
g(ρ " ρ!) ="j
4H(2)
0 (k0|ρ " ρ!|), (2)
where H(2)0 is the Hankel function of the second kind, k0 =
!c0
is the acoustic wave number in the background medium,c0 is the sound speed of the background medium, and !is the angular frequency. The scattered field at a receiverlocated at ρ is given by:
us(ρ) =!!
S
g(ρ " ρ!)o(ρ!)u(ρ!) dρ!. (3)
The object function satisfies the relationship o(ρ) =k2(ρ)" k2
0; k(ρ) is the wave number at ρ and is related to
the frequency f , attenuation ", and sound speed c by [10]:
k(ρ) =2#f
c(ρ)" j"(ρ). (4)
The method of moments [11], with pulse-basis functionsand point matching, is used to solve (1) and (3). Introduc-ing matrix notation, one obtains:
$uinc = "($o) · $u, (5)
and
$us = K($u) · $o, (6)
where " is an N !N matrix and is a function of the objectvector $o; K($u) is an M !N matrix and is a function of thetotal field vector $u; $uinc, $u, and $o are vectors of length N ;$us is a vector of length M ; N is the total number of cellsinto which the object is discretized; and M is the totalnumber of receivers. The expression for the ijth elementof " is:
"ij = oj ·!!
Sj
g(ρi " ρ!) dρ! (7)
and for the ijth element of K it is:
Kij = uj ·!!
Sj
g(ρi " ρ!) dρ! (8)
where Sj is the area of the jth cell.When the object vector $o is given, the total field vector
$u can be uniquely determined from (5); this is the forwardproblem. However, when both the scattered field vector $us
and the total field vector $u are given, the object vector $oin (6) cannot be uniquely determined; this is the inverseproblem. To circumvent the instability of the problem, aregularization procedure is used in the IB method. As usedin [7], the object vector $o is estimated by:
$̂o = (K† · K + % · I)"1K† · $̂u (9)
where † denotes the conjugate transpose, I is the N ! Nidentity matrix, % is the regularization parameter that isa small positive number, and $̂u is the estimated total fieldinside the object.
The basic idea of the IB method is to fix alternately oneof the two unknowns, $̂u or $̂o, and then solve for the other.The steps of the algorithm are:
• Set iteration number i = 0, and initialize $̂u0 to be $uinc.This is the Born approximation.
• Set i = 1 and solve for $̂oi using (9).• Solve for $̂ui using (5).• Using the current $̂oi and $̂ui, calculate the scattered
field $̂uis using (6).
• Compute the relative residue error between $̂uis and the
measured scattered field $us using:
RRE =
"##$%L
l=1 #$̂uis(l) " $us(l)#2
%Ll=1 #$us(l)#2
(10)

576 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 46, no. 3, may 1999
Fig. 2. Incident angle dependence.
where the summation is over the sources, L is the num-ber of sources used to illuminate the object, and # · #denotes the Euclidean norm.
• If a predetermined termination criterion is met, exit;otherwise, i = i + 1, and repeat from the second step.
The goal of our inverse technique is to reconstruct theobject function as accurately as possible. This requiresthat we minimize the di!erence between the calculatedand measured data and that the solution converges to aglobal minimum rather than to a local minimum. In theIB method, the rate of convergence and obtainment of aglobal minimum depend on the choice of the regulariza-tion parameter %. For a good choice of %, the algorithmwill converge faster and will converge to a global minimum.However, choosing an optimum regularization parameter isdi#cult and time-consuming. (Wang and Chew [7] choosethe parameter empirically.) Convergence also depends onthe initial value used. If the initial value $̂u0 is better thanthe zero initial contrast assumed in the Born approxima-tion, the reconstructed object will be closer to a globalminimum, and convergence will occur more quickly. It wasshown in [12] that reconstruction is nearly perfect whenthe initial value is close to the solution. The new CRIValgorithm discussed in Section III.B yields both a goodregularization parameter and a good initial value.
B. The Coarse Resolution Initial Value Method
As mentioned previously, there are two steps in theCRIV method. In the first step the IB method for a singlesource is used to solve the inverse problem for a coarse reso-lution of the object. If the desired resolution is an n1 ! n1grid, the coarse grid is n2 ! n2 where n2 < n1. The IBcoarse resolution result essentially gives the average back-
Fig. 3. (a) True object for Case 1. (b) True object for Case 2. (c) Trueobject for Case 3.
ground value of the object. The forward problem is solvedfor the desired n1 ! n1 resolution. The regularization pa-rameter % is found empirically. First an estimate of theupper bound of the major eigenvalue of the matrix K†Kis found by taking the maximum of the absolute sum ofeach column of the matrix [13]; % is then chosen to be theproduct of this upper bound and 5.0!10"4. In the secondstep, the coarse resolution result of the first step is inter-polated for the n1 ! n1 grid and is then used as the initialvalue for the desired resolution. The choice of % is based onthe value of % in the first step. Di!erent resolutions for theCRIV method were tried, and n2 = 2 was found to be themost e#cient for n1 = 16. With n1 = 16 and n2 = 2, fouror five iterations are required to reconstruct the averagevalue of the object profile for the coarse resolution.
C. The Quadri-Phase Source Method
When an object is reconstructed using one source, thereconstructed profile depends on the incident angle of the

liu et al.: iterative born technique and ultrasound 577
Fig. 4. Results for the IB method with noiseless data (Case 1).
source, as shown in Fig. 2. This angle dependence re-sults in a random distribution of the reconstructed valuesaround the true value. The idea of the QS method is totake advantage of this relationship by using a number ofsources simultaneously at di!erent angles and then aver-aging the results to eliminate the randomness and obtainthe true value. Di!erent source configurations were exam-ined, and it was found empirically that an arrangementof four sources evenly spaced around the object gives thebest results. Accordingly, we call this technique the QSmethod.
One advantage of the QS method is that both forwardand inverse calculations are realizable on a parallel com-puter, whereas for the IB method, parallel computation islimited to the forward problem. The computational costbenefit for the small test image used in this study is in-significant; but for real objects, parallel implementation ofboth the forward and inverse calculations would result ina significant increase in the e#ciency of the computations.
III. Test Cases
To test the two algorithms, reconstructions were per-formed for three cases. For Case 1, we reconstructed asection of tissue modeling a breast tumor 2.7 mm in diam-eter surrounded by glandular tissue. The phase shift forthe entire object was about 0.2#. The true object for Case1 is given in Fig. 3(a). For Case 2, we reconstructed an-other section of tissue but this time with a larger breasttumor 6.3 mm in diameter surrounded by glandular tis-sue. The total phase shift was about 0.3#. The true ob-
ject for Case 2 is given in Fig. 3(b). The sound speed inthe glandular tissue was c = 1,520 m/s and the atten-uation was " = 0.80 dB/cm/MHz. The sound speed inthe tumor was c = 1,564 m/s, and the attenuation was" = 1.18 dB/cm/MHz [2]. For the background medium,we used the sound speed of water, c0 = 1,490 m/s, andthe source frequency was f = 400 kHz. A set of foursingle-frequency plane wave sources was used with thesources spaced evenly around the object. The grid sizewas h = c/(4f), or four points per wavelength &, approxi-mately 0.9 mm for our examples. The measured data weresimulated using the approach of [7], that is, by solvingthe forward problem for the known object profile to ob-tain the field within the scatterer and then solving (6)to find the scattered field. The accuracy of these sim-ulations was verified using an alternate approach as de-scribed in [12]. To test the algorithms for an object withhigher contrast and/or larger phase shift, Case 3 was used.The sound speed in the glandular tissue was increasedto c = 1,650 m/s and in the tumor to c = 1,700 m/s;the diameter of the tumor used is 4.5 mm, giving a totalphase shift of 0.8#. The true object for Case 3 is givenin Fig. 3(c). For all examples, the forward problem wassolved using Gaussian elimination. Finally, the number ofreceivers per source was 256.
IV. Simulation Results
Computer simulations were performed for the three testcases, both with and without noise. By noise, we mean thatGaussian white noise was added to the real and imagi-
578 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 46, no. 3, may 1999
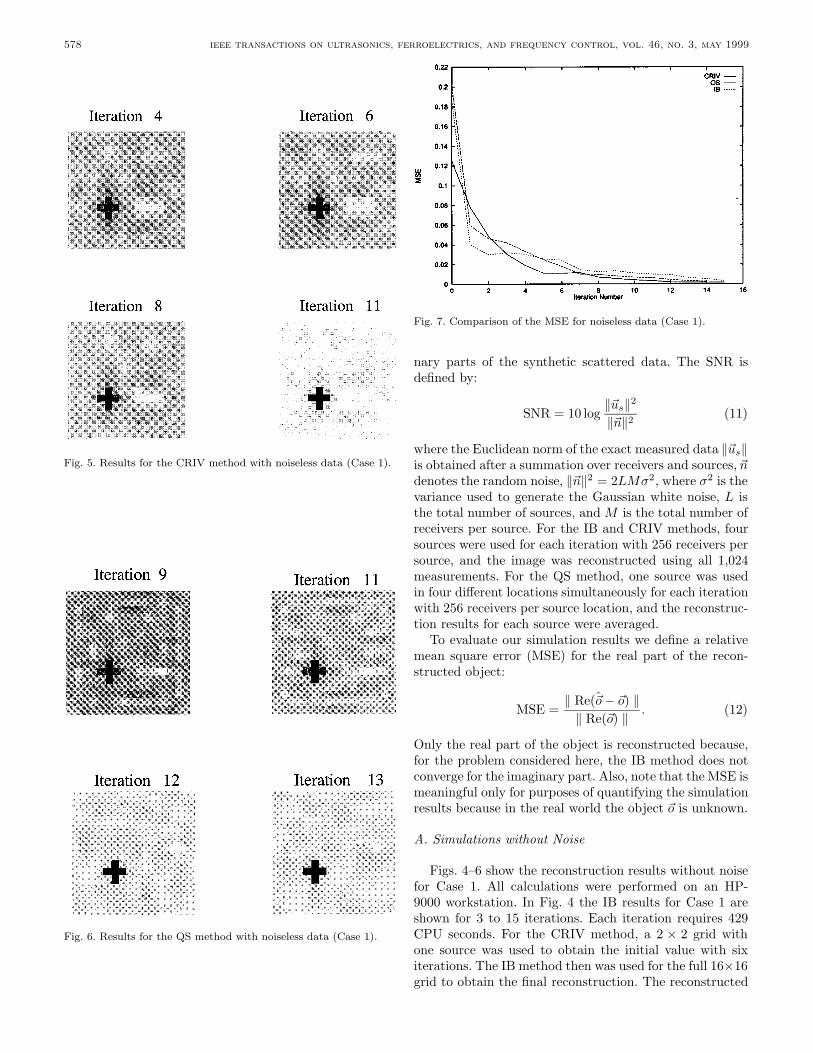
Fig. 5. Results for the CRIV method with noiseless data (Case 1).
Fig. 6. Results for the QS method with noiseless data (Case 1).
Fig. 7. Comparison of the MSE for noiseless data (Case 1).
nary parts of the synthetic scattered data. The SNR isdefined by:
SNR = 10 log#$us#2
#$n#2 (11)
where the Euclidean norm of the exact measured data #$us#is obtained after a summation over receivers and sources, $ndenotes the random noise, #$n#2 = 2LM'2, where '2 is thevariance used to generate the Gaussian white noise, L isthe total number of sources, and M is the total number ofreceivers per source. For the IB and CRIV methods, foursources were used for each iteration with 256 receivers persource, and the image was reconstructed using all 1,024measurements. For the QS method, one source was usedin four di!erent locations simultaneously for each iterationwith 256 receivers per source location, and the reconstruc-tion results for each source were averaged.
To evaluate our simulation results we define a relativemean square error (MSE) for the real part of the recon-structed object:
MSE =# Re($̂o " $o) #
# Re($o) # . (12)
Only the real part of the object is reconstructed because,for the problem considered here, the IB method does notconverge for the imaginary part. Also, note that the MSE ismeaningful only for purposes of quantifying the simulationresults because in the real world the object $o is unknown.
A. Simulations without Noise
Figs. 4–6 show the reconstruction results without noisefor Case 1. All calculations were performed on an HP-9000 workstation. In Fig. 4 the IB results for Case 1 areshown for 3 to 15 iterations. Each iteration requires 429CPU seconds. For the CRIV method, a 2 ! 2 grid withone source was used to obtain the initial value with sixiterations. The IB method then was used for the full 16!16grid to obtain the final reconstruction. The reconstructed
liu et al.: iterative born technique and ultrasound 579
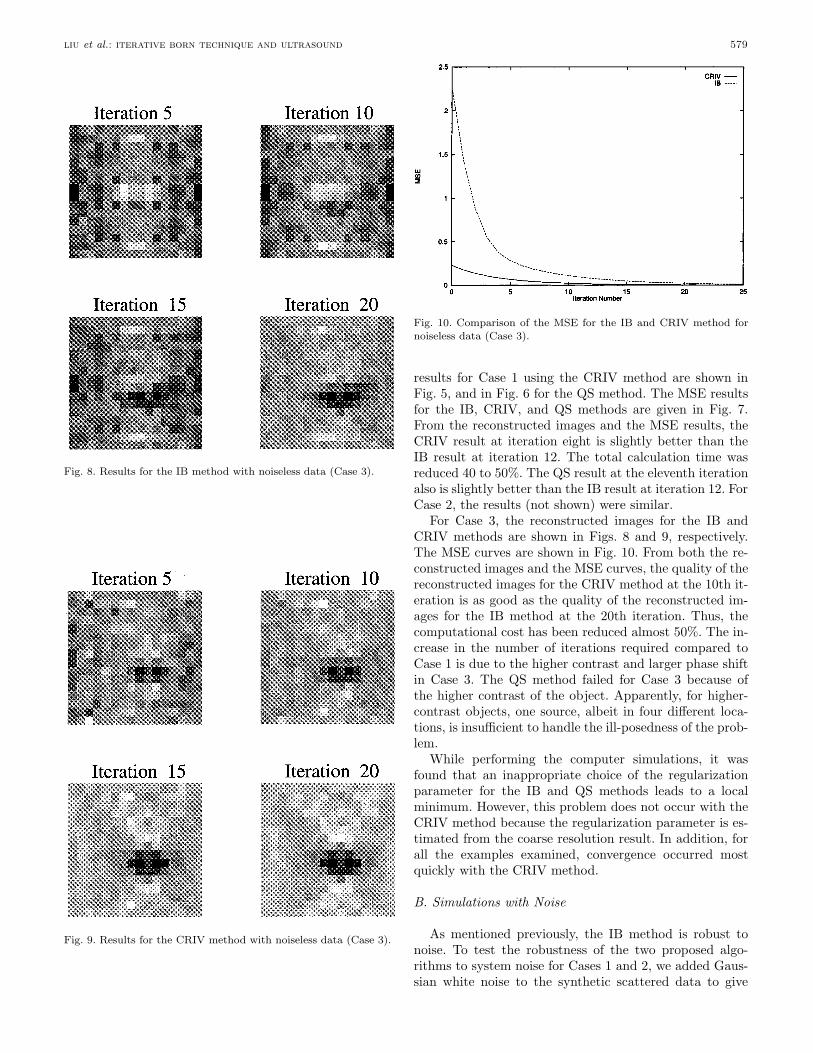
Fig. 8. Results for the IB method with noiseless data (Case 3).
Fig. 9. Results for the CRIV method with noiseless data (Case 3).
Fig. 10. Comparison of the MSE for the IB and CRIV method fornoiseless data (Case 3).
results for Case 1 using the CRIV method are shown inFig. 5, and in Fig. 6 for the QS method. The MSE resultsfor the IB, CRIV, and QS methods are given in Fig. 7.From the reconstructed images and the MSE results, theCRIV result at iteration eight is slightly better than theIB result at iteration 12. The total calculation time wasreduced 40 to 50%. The QS result at the eleventh iterationalso is slightly better than the IB result at iteration 12. ForCase 2, the results (not shown) were similar.
For Case 3, the reconstructed images for the IB andCRIV methods are shown in Figs. 8 and 9, respectively.The MSE curves are shown in Fig. 10. From both the re-constructed images and the MSE curves, the quality of thereconstructed images for the CRIV method at the 10th it-eration is as good as the quality of the reconstructed im-ages for the IB method at the 20th iteration. Thus, thecomputational cost has been reduced almost 50%. The in-crease in the number of iterations required compared toCase 1 is due to the higher contrast and larger phase shiftin Case 3. The QS method failed for Case 3 because ofthe higher contrast of the object. Apparently, for higher-contrast objects, one source, albeit in four di!erent loca-tions, is insu#cient to handle the ill-posedness of the prob-lem.
While performing the computer simulations, it wasfound that an inappropriate choice of the regularizationparameter for the IB and QS methods leads to a localminimum. However, this problem does not occur with theCRIV method because the regularization parameter is es-timated from the coarse resolution result. In addition, forall the examples examined, convergence occurred mostquickly with the CRIV method.
B. Simulations with Noise
As mentioned previously, the IB method is robust tonoise. To test the robustness of the two proposed algo-rithms to system noise for Cases 1 and 2, we added Gaus-sian white noise to the synthetic scattered data to give
580 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 46, no. 3, may 1999
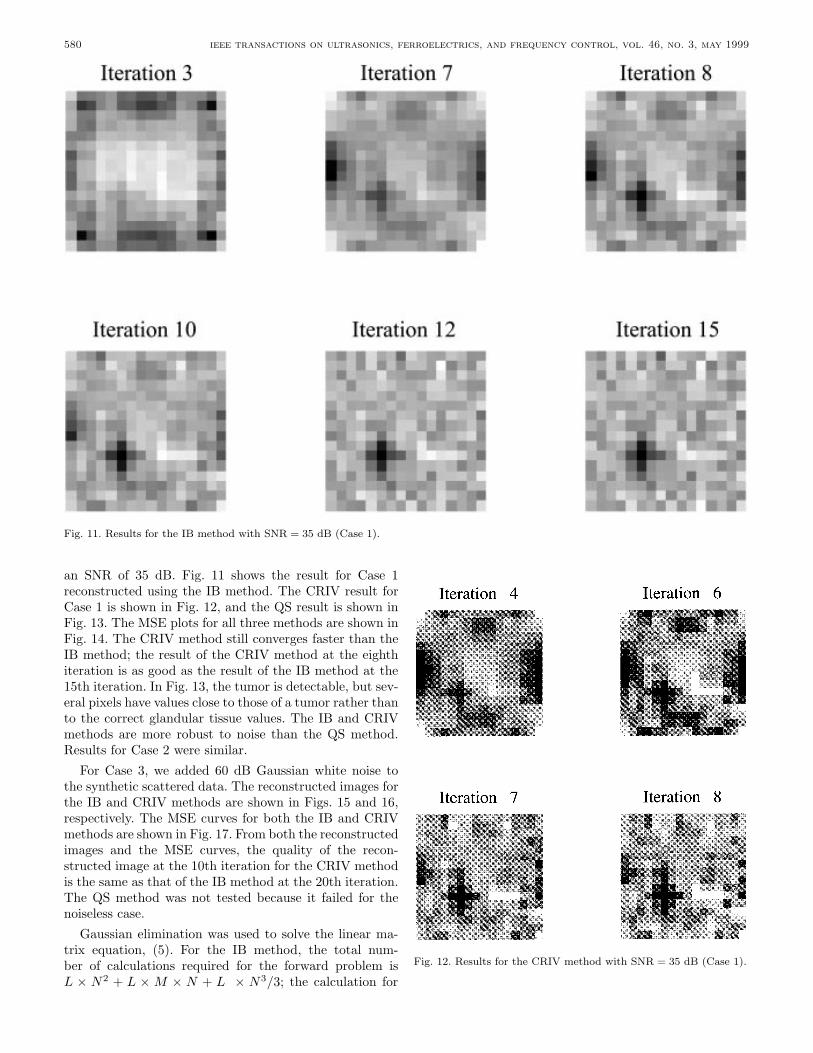
Fig. 11. Results for the IB method with SNR = 35 dB (Case 1).
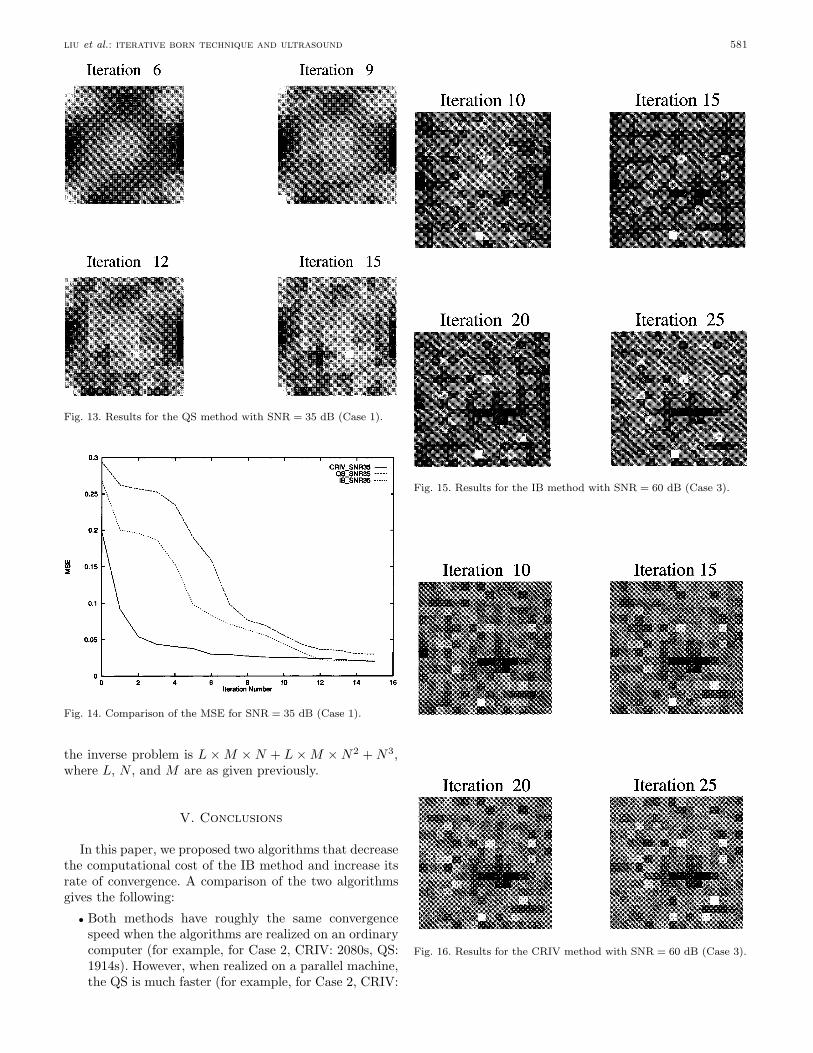
an SNR of 35 dB. Fig. 11 shows the result for Case 1reconstructed using the IB method. The CRIV result forCase 1 is shown in Fig. 12, and the QS result is shown inFig. 13. The MSE plots for all three methods are shown inFig. 14. The CRIV method still converges faster than theIB method; the result of the CRIV method at the eighthiteration is as good as the result of the IB method at the15th iteration. In Fig. 13, the tumor is detectable, but sev-eral pixels have values close to those of a tumor rather thanto the correct glandular tissue values. The IB and CRIVmethods are more robust to noise than the QS method.Results for Case 2 were similar.
For Case 3, we added 60 dB Gaussian white noise tothe synthetic scattered data. The reconstructed images forthe IB and CRIV methods are shown in Figs. 15 and 16,respectively. The MSE curves for both the IB and CRIVmethods are shown in Fig. 17. From both the reconstructedimages and the MSE curves, the quality of the recon-structed image at the 10th iteration for the CRIV methodis the same as that of the IB method at the 20th iteration.The QS method was not tested because it failed for thenoiseless case.
Gaussian elimination was used to solve the linear ma-trix equation, (5). For the IB method, the total num-ber of calculations required for the forward problem isL ! N2 + L ! M ! N + L ! N3/3; the calculation for
Fig. 12. Results for the CRIV method with SNR = 35 dB (Case 1).
liu et al.: iterative born technique and ultrasound 581
Fig. 13. Results for the QS method with SNR = 35 dB (Case 1).
Fig. 14. Comparison of the MSE for SNR = 35 dB (Case 1).
the inverse problem is L ! M ! N + L ! M ! N2 + N3,where L, N , and M are as given previously.
V. Conclusions
In this paper, we proposed two algorithms that decreasethe computational cost of the IB method and increase itsrate of convergence. A comparison of the two algorithmsgives the following:
• Both methods have roughly the same convergencespeed when the algorithms are realized on an ordinarycomputer (for example, for Case 2, CRIV: 2080s, QS:1914s). However, when realized on a parallel machine,the QS is much faster (for example, for Case 2, CRIV:
Fig. 15. Results for the IB method with SNR = 60 dB (Case 3).
Fig. 16. Results for the CRIV method with SNR = 60 dB (Case 3).

582 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 46, no. 3, may 1999
Fig. 17. Comparison of the MSE for the IB and CRIV methods forSNR = 60 dB (Case 3).
1614s, QS: 520s), but the object profile reconstructionusing the CRIV method is more accurate.
• The CRIV method is more robust to noise than theQS method. This was tested using data with an SNRof 35 dB.
• The QS method is well-suited for parallel computa-tion. On a parallel machine, we ran Case 1 for boththe QS method and the IB method. The QS methodrequires only 37% (130s/354s) of the time required bythe IB method for each iteration and only 25% of thetotal time for reconstruction of the final image. Theforward calculation for one source takes 25 seconds foreach iteration; the inverse calculation for one sourcetakes 105 seconds. Thus, it takes the QS method 130seconds per iteration for four sources as both forwardand inverse calculations are done in parallel. For theIB method, the inverse calculations for four sourcesrequire 329 seconds as they are not performed in par-allel. Thus, it takes the IB method 354 seconds periteration for four sources assuming the forward calcu-lation is done in parallel.
• When the object to be reconstructed has low contrastand/or a small phase shift, the QS method is verypromising because of its lower computational cost.
Both methods proposed show promise. However, be-cause the test cases were for small objects with phaseshifts less than #, the usefulness of the two algorithms stillmust be established for large objects. Future work involvesimplementation of a full-sized breast model. In addition,for large objects the optimum value of n2 for the CRIVmethod and the optimum number of sources for the QSmethod must be investigated. If either or both of thesealgorithms is found to work well for large simulations, thenext step is to test them with real measured data.
Acknowledgments
The authors wish to thank Drs. Charles W. Manry, Jr.,and Patrick J. Flynn for helpful comments.
References
[1] R. Highnam, M. Brady, and B. Shepstone, “A representation formammographic image processing,” Med. Image Anal., vol. 1, no.1, pp. 1–18, 1996.
[2] E. L. Madsen, J. A. Zagzebski, G. R. Frank, J. F. Greenleaf,and P. L. Carson, “Anthropomorphic breast phantoms for as-sessing ultrasonic imaging system performance and for trainingultrasonographers: Part two,” J. Clin. Ultrasound, vol. 10, pp.91–100, 1982.
[3] R. J. Pauls and B. D. Steinberg, “A refraction-based model andsimulation to explore wavefront distortion in ultrasound mam-mography: Refraction-induced amplitude effect,” in Internal Re-port, Valley Forge Research Center, University of Pennsylvania,Philadelphia, 1992.
[4] C. W. Manry and S. L. Broschat, “The FDTD method for ul-trasound propagation through a two-dimensional model of thehuman breast,” Ultrason. Imaging, vol. 18, pp. 25–34, 1996.
[5] D. T. Borup, S. A. Johnson, W. W. Kim, and M. J. Berggren,“Nonperturbative diffraction tomography via Gauss-Newton it-eration applied to the scattering integral equation,” Ultrason.Imaging, vol. 14, pp. 69–85, 1992.
[6] C. W. Manry, Jr., and S. L. Broschat, “Inverse imaging of thebreast with a material classification technique,” J. Acoust. Soc.Amer., vol. 103, pp. 1538–1546, 1998.
[7] Y. M. Wang and W. C. Chew, “Reconstruction of two-dimensional refractive index distribution using the Born iter-ative and distorted Born iterative method,” Acoust. Imaging,vol. 18, pp. 105–114, 1991.
[8] W. W. Kim, D. T. Borup, and S. A. Johnson, “Acceleratedinverse scattering algorithm for higher contrast object,” Proc.IEEE Ultrason. Symp., 1987, pp. 903–906.
[9] P. N. T Wells, Ultrasonics in Clinical Diagnosis, Edinburgh,New York: Churchill Livingstone, 1977.
[10] E. L. Madsen, H. J. Sathoff, and J. A. Zagzebski, “Ultrasonicshear wave properties of soft tissues and tissue-like materials,”J. Acoust. Soc. Amer., vol. 74, pp. 1346–1355, 1983.
[11] R. F. Harrington, Field Computation by Moment Methods, NewYork: MacMillan, 1968.
[12] T. J. Cavicchi and W. D. O’Brien, Jr., “Numerical study ofhigher-order diffraction tomography via the sinc basis momentmethod,” Ultrason. Imaging, vol. 11, pp. 42–74, 1989.
[13] E. Bodewig, Matrix Calculus, New York: Interscience Publishers,Inc., 1959, p. 74.
Lujiang Liu was born in Heilongjiang, Chinaon August 29, 1964. He received a B.S. degreein electrical engineering from Qinghua Uni-versity, Beijing, China, in 1987, and an M.S.degree in electrical engineering from TianjinUniversity, Tianjin, China, in 1990. He ma-jored in image signal processing.
Mr. Liu worked for the Schindler ElevatorCompany as a computer scientist from 1990to 1995. He received a second M.S. degree inelectrical engineering in 1996 from Washing-ton State University, Pullman, Washington,
where his research area was ultrasound imaging using inverse scat-tering. He currently works as a programmer analyst for J. D. Edwardsand Company, Denver, Colorado.

liu et al.: iterative born technique and ultrasound 583
Xiaodong Zhang received both B.S. andM.S. degrees in electrical engineering from theUniversity of Electronic Science and Technol-ogy of China, Chengdu, China, in 1990 and1993, respectively. From 1993 to 1996, she wasa lecturer at the same university. Since 1996she has been working toward the Ph.D. degreein the School of Electrical Engineering andComputer Science, Washington State Univer-sity, Pullman, Washington.
Her current research interests includequantitative ultrasonic imaging, inverse scat-
tering problems, and signal and image processing.
Shira Lynn Broschat (M’89–SM’95) re-ceived the B.S. degree in August 1982, theM.S. degree in March 1985, and the Ph.D.degree in December 1988, all in electrical en-gineering from the University of Washington,Seattle.
From 1983 to 1985 she was a research as-sociate for the Bioelectromagnetics ResearchLaboratory at the University of Washington,where she did work on microwave hyperther-mia treatment of cancer. From 1985 to 1989she was a research associate at the University
of Washington’s Applied Physics Laboratory, where she was involvedin research on wave scattering from rough surfaces. In 1989 she joinedthe faculty of the School of Electrical Engineering and Computer Sci-ence at Washington State University, Pullman. She currently is anassociate professor and the interim associate director for the school.Her current research interests are in rough surface scattering, ultra-sound mammography, ultrasound imaging using inverse scattering,remote sensing, and engineering education.
Dr. Broschat has been the recipient of a Young InvestigatorAward from the Office of Naval Research, a Presidential Young In-vestigator Award from the National Science Foundation, and a Presi-dential Faculty Fellow Award from the National Science Foundation.




















