ENISo Cours Transfère thermique
38
Cours de Transferts Thermiques ENISo R. Heyd 2013-2014
Transcript of ENISo Cours Transfère thermique
Cours de Transferts Thermiques
ENISo
R. Heyd
2013-2014

Table des matieres
1 La thermique – Presentation 3
1 Qu’est-ce que la thermique ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Les differents mode de transferts thermiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3 La conduction thermique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.1 La loi de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.2 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.3 Principales unites d’energie utilisees en thermique . . . . . . . . . . . . . . . . . . . . . . 5
3.4 Proprietes de la conductivite thermique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.5 Lois de melanges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Champ des temperatures d’un solide 9
1 Equation de la chaleur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1 Presentation/Hypotheses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2 Bilan d’energie – Equation de la chaleur . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Conditions aux limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1 Conditions aux limites radiatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Conditions aux limites convectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.1 Mise en equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.2 Notion de couche limite thermique . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Resolution en regime stationnaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2 Resolution dans le cas de la symetrie plane . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2.1 Mur plan de tres grandes dimensions . . . . . . . . . . . . . . . . . . . . . . . . 16
1
TABLE DES MATIERES 2
3.2.2 Analogie electro-thermique – Resistance thermique . . . . . . . . . . . . . . . . . 17
3.2.3 Retour sur le mur baigne par des fluides – Resistance thermique convective . . . 18
3.2.4 Nombre de Biot – Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2.5 Notion de resistance thermique de contact . . . . . . . . . . . . . . . . . . . . . 20
3.3 Equation de la chaleur pour un solide en coordonnees cylindriques . . . . . . . . . . . . . 23
3.3.1 Bilan d’energie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3.2 Resolution en symetrie cylindrique et regime stationnaire . . . . . . . . . . . . . 25
3 Premier principe des systemes ouverts 27
1 Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2 Introduction – Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.1 Grandeurs extensives – Grandeurs intensives . . . . . . . . . . . . . . . . . . . . 28
2.2.2 Densites massiques et volumiques . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.3 Systeme ouvert – Volume de controle – Systeme materiel . . . . . . . . . . . . . 29
2.2.4 Notion de derivee particulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.5 Grandeurs conservatives et non conservatives . . . . . . . . . . . . . . . . . . . . 30
2.2.6 Debit massique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.7 Densite surfacique de flux convectif−→j cvA . . . . . . . . . . . . . . . . . . . . . . . 31
3 Bilan macroscopique d’une grandeur extensive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.1 Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2 Bilan macroscopique en regime stationnaire . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2.1 Bilan d’une grandeur extensive A en suivant un systeme materiel . . . . . . . . . 32
3.2.2 Application : bilan de matiere . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3 Bilan d’energie – Premier principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.1 Premier principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.2 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35

Chapitre 1
La thermique – Presentation
1 Qu’est-ce que la thermique ?
La thermique couvre les domaines de :— la production, le transport et l’utilisation de l’energie thermique (aussi bien en source de chaleur qu’en
refroidissement) ;— l’etude des transferts thermiques au sein ou entre divers systemes.
On peut par exemple chercher a refroidir des systemes qui produisent de l’energie thermique de maniere derivee,parasite :
Fonctionnement : – conversion d’energie chimique enenergie mecanique par combustion d’un hydrocarbure avecdegagement d’energie thermique ;– necessite d’un refroidissement pour un fonctionnementoptimal ;– type de refroidissement : en general par mise en circula-tion (convection) d’un fluide (air, eau+additifs eventuels)a l’aide d’une pompe et d’un echangeur thermique (radia-teur) avec ventilation d’appoint.
Figure 1.1: Refroidissement d’un moteur thermique.
2 Les differents mode de transferts thermiques
Important : Il y a transfert thermique au sein d’un corps ou entre differents milieux, des lors qu’il existe ungradient de temperature ~∇T au sein du systeme considere.
On distingue trois modes de transferts thermiques :
— La conduction thermique : echange d’energie thermique par diffusion, de proche en proche, au sein de
3

CHAPITRE 1. LA THERMIQUE – PRESENTATION 4
Fonctionnement : – abaissement HT vers MT. Les pertes(pertes a vide ou pertes fer et les pertes en charge oupertes cuivre) engendrent une generation d’energie ther-mique qu’il faut evacuer ;– necessite d’un refroidissement pour un fonctionnementoptimal ;– type de refroidissement : en general par conduc-tion/convection a l’aide d’un fluide electriquement isolant(air, huiles minerales+additifs eventuels) avec ventilationd’appoint.
Figure 1.2: Refroidissement d’un transformateur de puissance.
la matiere, sans necessite d’un mouvement d’ensemble du milieu materiel.Exemples : cuillere dans une tasse de cafe, mur d’habitation, culasse d’un moteur, huile de transforma-teur, . . .
— La convection : echange d’energie thermique associe a un deplacement d’ensemble de la matiere, engeneral un fluide en ecoulement.Exemples : seche-cheuveux, convecteur chauffant, courants marins (gulf stream, El-Nino) et atmospheriques(thermiques ascendantes en navigation aerienne), centrale geothermique, . . .Remarque : certains changements d’etat peuvent aussi contribuer au transfert thermique convectifcomme l’ebullition et la liquefaction (condensation liquide).
— Le rayonnement : echange d’energie associe a la propagation d’un rayonnement electromagnetique, sansnecessite d’un support materiel.Exemples : rayonnement thermique du Soleil, du corps humain, LASER de puissance, chauffage parmicro-ondes, . . .Remarque : ne pas confondre l’origine (thermique ou autre) du rayonnement et sa nature qui esttoujours electromagnetique, ici un champ ( ~E, ~B) qui se propage. C’est l’interaction du rayonnementelectromagnetique avec la matiere qui engendre ou non un transfert d’energie thermique !
3 La conduction thermique
3.1 La loi de Fourier
— Le transfert conductif d’energie thermique s’effectue a l’echelle microscopique, par des porteurs d’energiethermique qui peuvent etre :— les electrons dans le cas des metaux 1 ;— les phonons dans le cas des solides isolants (verre, matieres plastiques, . . .) ;— les electrons et les phonons pour les semiconducteurs ;— les atomes et les molecules dans le cas des fluides.
— Le transfert thermique conductif peut etre present aussi bien dans les fluides que dans les solides.— La loi de Fourier 2 est la loi de base de la conduction thermique :
1. Les metaux, qui sont de tres bons conducteurs du courant electrique, sont par la meme occasion de tres bons conducteursde l’energie thermique. Comme ce sont les electrons qui assurent la conduction dans les deux situations, il existe une correlationentre la conductivite electrique γ et la conductivite thermique k, donnee par la loi de Wiedemann et Franz : k/γ = LT , avecL = 2, 44 × 10−8 W.Ω.K−2 le nombre de Lorenz et T la temperature.
2. Joseph Fourier, Theorie analytique de la chaleur, 1822.

CHAPITRE 1. LA THERMIQUE – PRESENTATION 5
k −→jq
−→jq
−→jq
isothermeT = cste
~jq = −k~∇T (1.1)
avec :• k le tenseur de conductivite thermique (u : W.m−1.K−1) quidepend en general du point M (milieux heterogenes : composites),de la temperature, eventuellement de la pression et du temps :k = k(M,T, p, t, . . . ) ;
• ~jq le vecteur densite de flux thermique (u : W/m2), qui est normalen tout point a une isotherme, et ϕq = ~jq · ~n la densite de flux ther-mique ;• la loi de Fourier est une loi phenomenologique analogue aux loisd’Ohm et de Fick.
Figure 1.3: Loi de Fourier.
3.2 Definitions
On definit le flux thermique Φq (u : W), qui traverse une surface quelconque ∂Ω, par la relation :
Φq =
∫∂Ω
~jq · ~ndΣ (1.2)
Proprietes :
• Φq est defini positif pour une normale ~n exterieure a l’element de surface dΣ.
• D’un point de vue thermodynamique on a :
Φq = −Q (1.3)
avec Q la puissance thermique echangee par le systeme considere avec son environnement exterieur.
systeme
−→n−→jq−→n
−→jq
Φq < 0
Q > 0
Φq > 0
Q < 0
Ω
∂Ω
Figure 1.4: Definitions usuelles en thermique.
3.3 Principales unites d’energie utilisees en thermique
Les unites suivantes sont couramment utilisees en thermique.
Joule calorie Kilocalorie thermie kilowattheure British Thermal Unit
J cal kcal th kWh BTU1 J = 1 kg.m2.s−2 1 cal = 4,185 J 1 kcal = 103 cal 1 th = 103 kcal 1 kWh = 3,6 106 J 1 BTU = 1050 J
CHAPITRE 1. LA THERMIQUE – PRESENTATION 6
3.4 Proprietes de la conductivite thermique
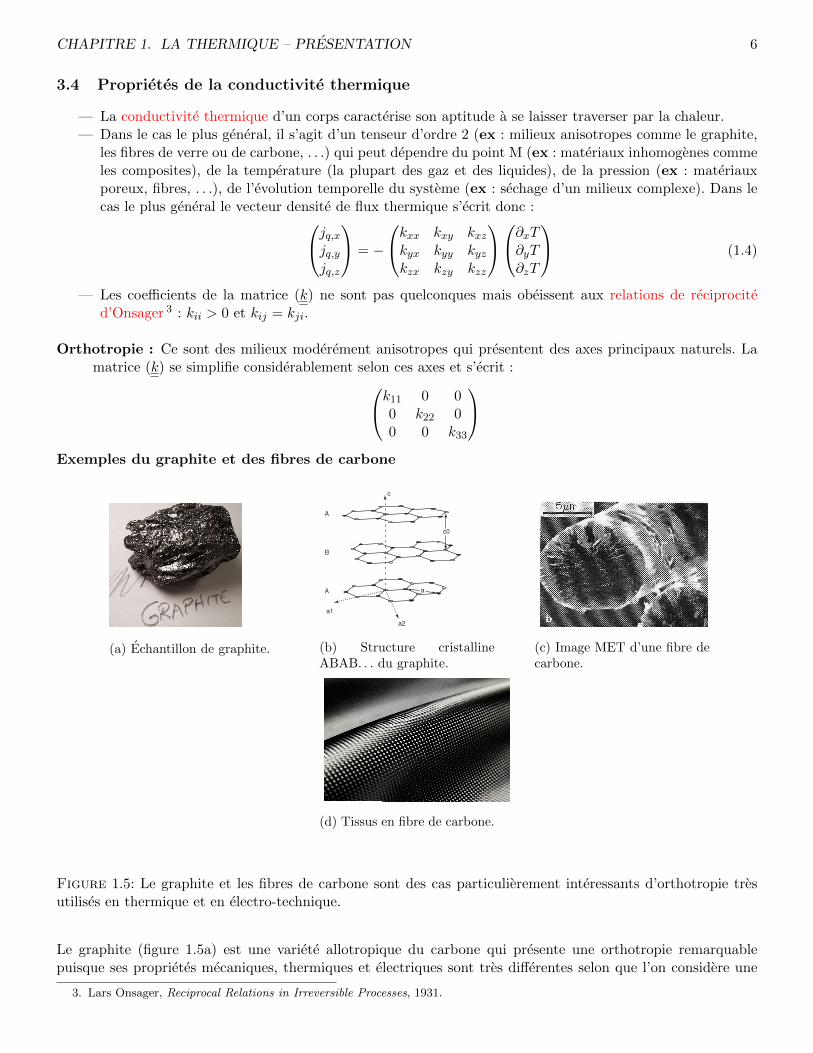
— La conductivite thermique d’un corps caracterise son aptitude a se laisser traverser par la chaleur.— Dans le cas le plus general, il s’agit d’un tenseur d’ordre 2 (ex : milieux anisotropes comme le graphite,
les fibres de verre ou de carbone, . . .) qui peut dependre du point M (ex : materiaux inhomogenes commeles composites), de la temperature (la plupart des gaz et des liquides), de la pression (ex : materiauxporeux, fibres, . . .), de l’evolution temporelle du systeme (ex : sechage d’un milieux complexe). Dans lecas le plus general le vecteur densite de flux thermique s’ecrit donc :jq,xjq,y
jq,z
= −
kxx kxy kxzkyx kyy kyzkzx kzy kzz
∂xT∂yT∂zT
(1.4)
— Les coefficients de la matrice (k) ne sont pas quelconques mais obeissent aux relations de reciprocited’Onsager 3 : kii > 0 et kij = kji.
Orthotropie : Ce sont des milieux moderement anisotropes qui presentent des axes principaux naturels. Lamatrice (k) se simplifie considerablement selon ces axes et s’ecrit :k11 0 0
0 k22 00 0 k33
Exemples du graphite et des fibres de carbone
(a) Echantillon de graphite.
c
c0
A
B
A
a
a1
a2
(b) Structure cristallineABAB. . . du graphite.
(c) Image MET d’une fibre decarbone.
(d) Tissus en fibre de carbone.
Figure 1.5: Le graphite et les fibres de carbone sont des cas particulierement interessants d’orthotropie tresutilises en thermique et en electro-technique.
Le graphite (figure 1.5a) est une variete allotropique du carbone qui presente une orthotropie remarquablepuisque ses proprietes mecaniques, thermiques et electriques sont tres differentes selon que l’on considere une
3. Lars Onsager, Reciprocal Relations in Irreversible Processes, 1931.

CHAPITRE 1. LA THERMIQUE – PRESENTATION 7
direction ~c perpendiculaire aux plans de noyaux benzeniques (ou encore plan de graphene) ou une directionparallele a ce plan de graphene (figure 1.5c). Par exemple le graphite est facilement clivable selon toute directionparallele aux plans de graphene. C’est d’ailleurs le detachement aise de ces plans de graphene qui permet d’ecrireavec une mine de graphite sur une feuille de papier. De meme le graphite conduit l’energie thermique et le courantelectrique beaucoup mieux parallelement aux plans de graphene que perpendiculairement.
Les proprietes thermiques du graphite et des fibres de carbone dependent fortement des traitements physico-chimiques mis en œuvre lors de la preparation ou de la purification (CCVD, pyrolyse, . . .). Certaines formesallotropiques du carbone comme les fibres de carbones CCVD, HT et les nanotubes de carbone (CNT) presententles valeurs de conductivites thermiques les plus elevees connues actuellement : de 2000 a 3500 W.m−1.K−1.Dans le cas du graphite, le tenseur de conductivite thermique peut s’ecrire :
(k)
=
k‖ 0 0
0 k‖ 0
0 0 k⊥
avec k⊥ selon l’axe ~c et k‖ dans le plan de graphene. On a ici k‖ = 200k⊥, ce qui est exceptionnel ! Aveck⊥ = 10 W.m−1K−1, on obtient k‖ = 2000 W.m−1K−1 contre 420 pour l’argent !Dans le cas des fibres de carbone, le tenseur de conductivite thermique peut s’ecrire :
(k)
=
k‖ 0 0
0 k⊥ 00 0 k⊥
ici k‖ selon l’axe de la fibre et k⊥ dans le plan perpendiculaire a l’axe de la fibre. On a encore k‖ = 200k⊥ aveck⊥ = 10 W.m−1K−1.
Isotropie : il n’y a plus dans ce cas de direction privilegiee de l’espace vis a vis des proprietes physiques dumateriau. Le tenseur de conductivite thermique se reduit a un simple scalaire : k = k(M,T, p, t)1.C’est le cas des liquides et des gaz, des milieux poly-cristallins (la plupart des metaux et alliages), desmilieux amorphes (verres, matiere plastiques, sable, beton, . . .).Ordres de grandeur des conductivites thermiques de quelques gaz usuels (conditions standards) :
Gaz H2 O2 N2 air H2Ov CO2 vide
k (W.m−1.K−1) 0,16 0,023 0,022 0,022 0,016 0,015 0
Ordres de grandeur des conductivites thermiques de quelques liquides usuels (conditions standards saufNa) :
Liquide eau glycerine ethylene glycol (EG) huiles moteur Hg Na
k (W.m−1.K−1) 0,59 0,29 0,26 0,14 8,35 80
Ordres de grandeur des conductivites thermiques de quelques solides amorphes usuels (conditions stan-dards) :
Solide Fe Si Al Cu Ag Cu2O AlO2 CuO SiO2 graphites, CNT
k (W.m−1.K−1) 80 150 237 400 420 80 40 33 1,3 de ≈2000 a 3500
Pour finir nous avons rassemble figure 1.6 les six ordres de grandeur couverts par la conductivite thermique.
3.5 Lois de melanges
Bon nombre de materiaux utilises en thermique sont constitues de suspensions/inclusions de micro-particulessolides (ou de liquides/gaz) dans un milieu continu hote (milieux poreux, composites, fluides complexes, nano-fluides, . . .). On peut utiliser des lois dites de melange pour predire les proprietes physiques de ces compositesen fonction de leur composition. En ce qui concerne la conductivite thermique, les lois suivantes sont utilisables

CHAPITRE 1. LA THERMIQUE – PRESENTATION 8
Figure 1.6: Domaines de conductivites thermiques dans les conditions standards.
10−2 10−1 1 10 102 103 104
H2gaz
CO2, H2O
Hghuiles
liquides
H2O
fibres de verremousses boisisolants cplx.
solides non metalliquesplastiques oxydes
metaux
AgZn
formes all. de CCNTFibres graphite
(avec φ = Vp/Vtot la fraction volumique en inclusions, Q la puissance thermique et k la conductivite thermiquedu melange) :
Modele Loi Commentaires
Q
kp , φ kmh , 1 − φ
1
k=
φ
kp+
1− φkmh
Modele serie. Aucune hypothese sur la taille des parti-cules/inclusions et leur forme, repartition geometrique sansrealite physique, donc une portee tres limitee. L’assembleedes inclusions est consideree comme un continuum. Lemodele est cependant peu physique vue la separation ar-tificielle des deux phases.
Qp
Qmh
kp , φ
kmh , 1 − φ
k = φkp + (1− φ)kmh Modele parallele. Memes remarques que precedemment.
Qk
kmh= 1 +
3(α− 1)φ
α+ 2− (α− 1)φ
Regle des melanges de Maxwell-Garnett avec α = kp/kmh.Les inclusions sont supposees spheriques, de taille micro-scopique et sans interaction. Elles sont dispersees dans unmilieu hote continu. Les fractions volumiques considereesdoivent rester faibles (φ 6 0,1). Modele beaucoup plusrealiste que les deux precedents.
idem φ
(kp − kkp + 2k
)+ (1− φ)
(khf − kkhf + 2k
)= 0
Modele implicite de Bruggeman : melange binaire de par-ticules spheriques homogenes. Aucune limitation sur laconcentration en inclusions qui sont reparties au hasard.
Table 1.1: Diverses lois de melange.

Chapitre 2
Champ des temperatures d’un solide
1 Equation de la chaleur
1.1 Presentation/Hypotheses
On considere le cas tres important et tres frequent ou un solide echange de l’energie thermique avec un autresolide, un fluide ou eventuellement les deux. Le solide considere n’etant pas a priori a l’equilibre thermique maisplutot siege d’un phenomene de transport thermique en son sein et avec son environnement, sa temperature n’estpas uniforme et ne peut en aucun cas etre definie de maniere unique pour l’ensemble du solide : T = T (M, t).Il est par consequent impossible d’appliquer les lois de la physique (premier et second principes par exemple)au solide dans son ensemble. Il est donc indispensable d’effectuer des bilans locaux de grandeurs extensives(masse, quantite de mouvement, energie, entropie, . . .) afin d’obtenir les equations qui permettent de decrire,entre autres, le champ des temperatures T (M, t) a chaque instant t et en tout point M du solide.
Dans ce chapitre nous nous placons dans la situation du solide indeformable (∂tρ = 0), isotrope (k = k 1)mais pas necessairement homogene ou lineaire : k = k(M,T, . . . ). Au sein de ce solide solide, le seul transfertthermique envisageable est de nature conductive et satisfait donc a la loi de Fourier.Notons que la demarche que nous allons expliciter dans ce chapitre est egalement applicable a un fluide si ilpeut etre suppose incompressible (faibles nombres de Mach) et siege d’aucun phenomene de convection.Nous etablissons maintenant l’equation de la chaleur, satisfaite par le champ des temperatures T (M, t) du solide,a partir d’un bilan local d’energie, c’est a dire par application du premier principe de la thermodynamique a unelement de volume infinitesimal dτ du solide. Cet element infinitesimal de matiere presente une masse dm = ρdτ .L’element de volume est suppose suffisamment petit pour que le champ des temperatures puisse y etre considerecomme uniforme. Dans ces conditions, les lois de la thermodynamique de l’equilibre peuvent y etre appliqueesde maniere locale.
1.2 Bilan d’energie – Equation de la chaleur
On considere l’element de volume dτ represente figure 2.1.
Le premier principe de la thermodynamique des systemes fermes s’ecrit simplement pour l’element de volumedτ :
dUdτ
dt= Qedτ + W e
dτ (2.1)
avec :
9

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 10
∂Ω
Ω
~jq
x
z
dτ
dx
Figure 2.1: Bilan d’energie d’un volume infinitesimal dτ .
• Udτ = [ρcT (M, t) + cste] dτ , l’energie interne de l’element de volume dτ du solide, ρ la masse volumiqueet c la capacite calorifique massique ou chaleur specifique (u : J.K−1.kg−1). Le solide etant indeformable,on peut ecrire ρdτ = cste. De meme on a en tres bonne approximation c = cste pour un solide (d’apres laloi de Dulong et Petit). On en deduit que :
dUdτ
dt= ρc
∂T
∂tdτ (2.2)
• La puissance W edτ echangee par l’element de volume dτ autrement que par les forces pressantes (comme
l’effet Joule, absorption lumiere, induction, . . .) que l’on peut toujours ecrire sous la forme :
W edτ = wedτ (2.3)
avec we la puissance volumique (u : W.m−3, appelee aussi densite volumique de puissance) echangee parl’element de volume dτ .Dans le cas de l’effet Joule : we = u(t)i(t)/dτ = dRi2(t)/dτ , avec dR la resistance electrique infinitesimalede l’element de volume dτ .
• La puissance thermique Qedτ echangee par l’element de volume dτ par contact avec la matiere qui l’envi-ronne, donc par conduction, que l’on peut ecrire, en absence de symetrie particuliere :
Qedτ = Qedτ,x + Qedτ,y + Qedτ,z
Il reste a expliciter chacun des trois termes precedents.En supposant que le vecteur densite de flux thermique ~jq,x est oriente dans le sens des x croissants, dτrecoit de l’energie thermique en x et en perd en x+ dx, d’ou le bilan de chaleur dans la direction x :
Qedτ,x = −k(x)
(∂T
∂x
)x
dydz + k(x+dx)
(∂T
∂x
)x+dx
dydz
=∂
∂x
(k∂T
∂x
)dxdydz
=∂
∂x
(k∂T
∂x
)dτ
De meme on trouve Qedτ,y = ∂∂y
(k ∂T∂y
)dτ et Qedτ,z = ∂
∂z
(k ∂T∂z
)dτ .

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 11
Finalement la puissance thermique totale Qedτ echangee par l’element de volume dτ peut se mettre sousla forme :
Qedτ =
[∂
∂x
(k∂T
∂x
)+
∂
∂y
(k∂T
∂y
)+
∂
∂z
(k∂T
∂z
)]dτ = ~∇ ·
(k~∇T
)dτ (2.4)
• En rassemblant tous les termes du bilan et en simplifiant par dτ , on obtient l’equation de la chaleur pourun solide isotrope indeformable avec terme de source :
ρc∂T
∂t= ~∇·
(k~∇T
)+ we (2.5)
• Remarques :— Il s’agit d’une equation locale, applicable uniquement dans le domaine Ω interieur au solide.— Cette equation est accompagnee d’une condition initiale pour T , qui donne la valeur de T (M, 0) en
tout point M du solide.— Cette equation est accompagnee de deux conditions aux limites, definies sur la frontiere ∂Ω qui delimite
le solide et qui peuvent etre des conditions :
. sur la temperature T (de type Dirichlet) ;
. sur le flux conductif, c’est a dire sur ~∇T (de type Neuman) ;
. mixtes, reliant ~∇T et T (de type Robin).
— Tres important : on ne peut appliquer l’equation de la chaleur sous sa forme (2.5) qu’a conditionde ne faire aucune approximation sur le champ des temperatures. Des que l’on fait une approximationsur T (en particulier sur la dependance de T avec les coordonnees d’espace), il faut refaire un biland’energie adapte.
— On peut generaliser la demonstration precedente au cas d’un solide anisotrope :
ρc∂T
∂t= ~∇·
(k~∇T
)+ we (2.6)

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 12
2 Conditions aux limites
2.1 Conditions aux limites radiatives
Tout corps de temperature absolue non nulle emet un rayonnement electromagnetique d’origine ther-mique et en recoit eventuellement. Il y a lieu de prendre en compte ces echanges radiatifs dans le biland’energie d’un systeme physique. Differentes situations sont envisageables selon la nature physique du systeme.Nous considerons ici un solide opaque, de temperature T , qui echange de l’energie uniquement avec un fluidenon participatif (parfaitement transparent) de temperature T∞ loin de la surface solide (il n’y a pas pour lemoment d’echanges avec d’autres solides, donc pas de facteur de forme a considerer ici).
couche d’absorption
solide opaque
ϕa
ϕi ϕr ϕPϕe
fluide transparent, T∞
Figure 2.2: Solide opaque en interaction radiative avec un fluide transparent de temperature T∞ loin du solide.
Lorsque le solide etudie (modelise comme un corps gris 1 de densite surfacique de flux hemispherique integralemis 2 ϕe = σεT 4, avec ε l’emissivite hemispherique totale) est opaque, la densite surfacique de flux net radiatifhemispherique ϕR du solide est donnee par :
ϕR = ϕP − ϕi = ϕe − ϕa (2.7)
avec (figure 2.2) ϕP = ϕe + ϕr la densite surfacique de flux hemispherique partant et ϕi la densite surfaciquede flux hemispherique incident, de l’environnement fluide vers le solide. La conservation de l’energie lumineuseincidente permet d’ecrire : ϕi = ϕr + ϕa + ϕt et puisque le solide est considere opaque ici, on a de plus ϕt = 0,d’ou le resultat (2.7). D’autre part on a ϕa = aϕi, on peut donc ecrire
ϕR = ϕe − aϕi = εσT 4 − aϕi (2.8)
avec a l’absorption totale hemispherique. Dans le cas du corps radiateur gris (ε independant de λ) et diffus (εindependant de la direction) a l’equilibre thermodynamique, on a la propriete importante suivante : a(T ) = ε(T )(loi de Kirchhoff). En general cette propriete reste valable hors d’equilibre d’ou :
ϕR = εσT 4 − εϕi (2.9)
Pour finir, le fluide environnant peut en general etre modelise comme un corps noir, dont la densite surfaciquede flux hemispherique emis est donnee par : ϕfe = σT 4
∞. La densite surfacique de flux net radiatif du solideprend une expression assez simple que nous rappelons ici :
ϕR = σε(T 4 − T 4
∞)
(2.10)
1. Un corps gris a une emisivite hemispherique independante de la frequence de la radiation emise. Certains corps ne verifientpas cette propriete (l’atmosphere par exemple), dans ce cas ε depend de la frequence emise et donc de la temperature d’emission.
2. Les densites surfacique de flux radiatif hemispherique ϕ ont pour unite le W/m2.

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 13
Le flux radiatif elementaire echange par l’element de surface dΣ du solide a donc pour expression :
dΦR = σε(T 4 − T 4
∞)
dΣ (2.11)
il est defini positif exterieur (donc compte positivement en quittant le solide). Pour finir, la puissance thermiqueradiative dQrad echangee par un element de surface dΣ de la surface solide s’ecrira d’apres ce qui precede :
dQrad = −ϕRdΣ = −σε(T 4 − T 4
∞)
dΣ (2.12)
avec :
. σ ≈ 5,67× 10−8 W.K−4.m−2 la constante de Stefan-Boltzmann ;
. les temperatures utilisees dans les equations (2.10) a (2.12) sont obligatoirement les temperatures absoluesexprimees en Kelvin ;
. ε est l’emissivite hemispherique totale de la surface solide consideree (0 < ε 6 1), elle depend de la natureet de l’etat de surface du materiau, ainsi que de sa temperature ;
. si ∆T = |T − T∞| T, T∞, alors on a la possibilite de lineariser (2.12) sous la forme :
dQrad ≈ −4σεT 3∞ (T − T∞) dΣ (2.13)
2.2 Conditions aux limites convectives
2.2.1 Mise en equation
Dans la plupart des situations industrielles, le solide considere echange de l’energie thermique avec des fluidesqui l’entourent ou le traversent (air, liquides de refroidissement, . . .). Considerons par exemple le cas d’un fluideincompressible newtonien qui s’ecoule au voisinage d’une surface solide indeformable et immobile (figure 2.3).
solide immobile (ks, ρs, cs)
ρscs∂tT = ~∇·(ks~∇T
)+ wes (ECS)
~u∞, T∞
fluide en ecoulement (k, ρ, c)
∣∣∣∣∣∣∣∣∂tρ+ ~∇·(ρ~u) = 0 (CM)
ρ∂t~u+ ρ(~u·~∇)~u = −~∇p+ ~∇(η~∇·~u) + ~f (NS)
ρc∂tT + ρc(~u·~∇)T = ~∇·(k~∇T
)+ we (ECF)
Figure 2.3: Ecoulement externe au voisinage d’un solide immobile et indeformable. Le fluide est supposeincompressible et newtonien. Le terme volumique de dissipation visqueuse wd sera neglige par la suite dans lebilan d’energie interne du fluide.
Le probleme complet est alors decrit par les equations bilans suivantes :— pour le solide : l’equation de la chaleur (ECS) ;— pour le fluide : l’equation de conservation de la matiere (CM), l’equation de Navier-Stokes (NS) et
l’equation de la chaleur dans le fluide (ECF). On notera, dans le cas du fluide, que la densite volumiquede puissance we la plus generale contient trois termes :
we = wep + weap + wed
CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 14
avec : wep = −p~∇·~u la puissance volumique des forces pressantes ; weap la puissance volumique des forcesautres que les forces pressantes (Joule, micro-ondes, . . .) et wed la puissance volumique de dissipationvisqueuse. On peut montrer que ce dernier terme s’ecrit, dans le cas d’un fluide newtonien, sous laforme :
wed =∑ij
σvij∂ui∂xj
(2.14)
avec σvij = 2η(eij − 1
3δij~∇·~u
)le tenseur des contraintes visqueuses ; eij = 1
2
(∂ui∂xj
+∂uj∂xi
)et δij le symbole
de Kronecker.Dans le cas du fluide incompressible que nous considerons ici, on a ~∇·~u = 0 d’ou wep = 0. D’autre part lacontribution de la dissipation visqueuse est en general negligeable devant le terme de conductivite ther-mique. Il reste en general uniquement le terme de puissance volumique des forces autres que pneumatiqueweap que nous ecrivons simplement we.
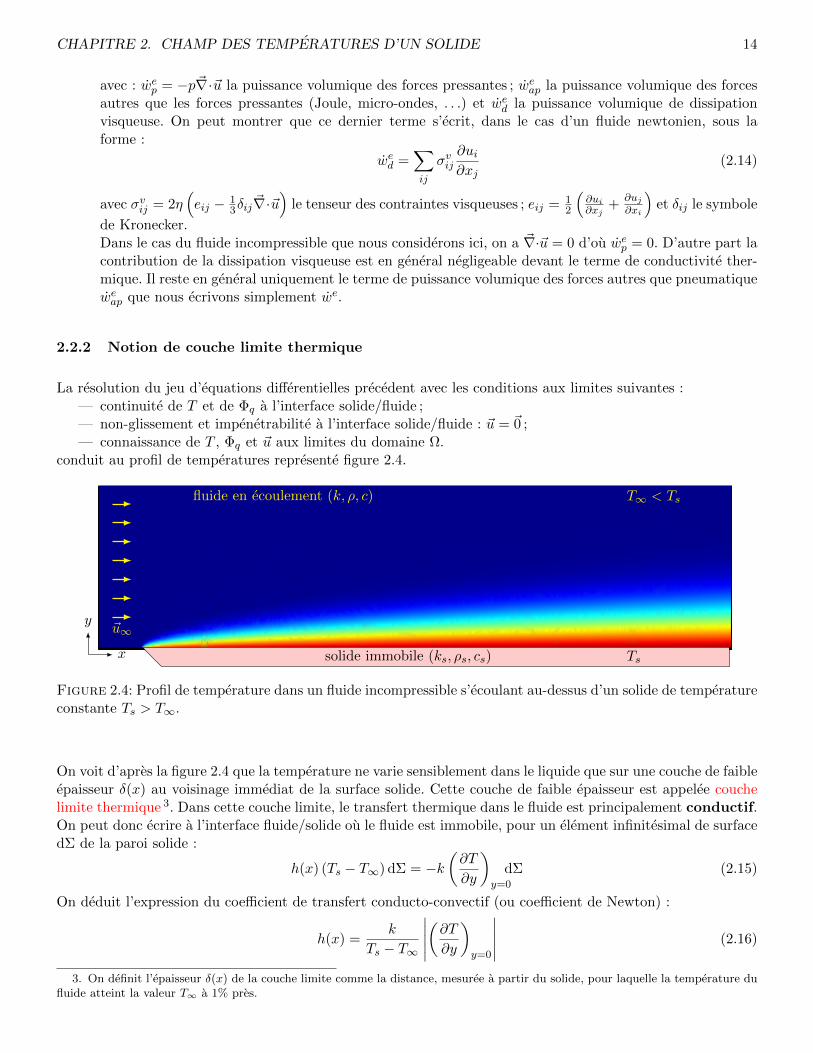
2.2.2 Notion de couche limite thermique
La resolution du jeu d’equations differentielles precedent avec les conditions aux limites suivantes :— continuite de T et de Φq a l’interface solide/fluide ;— non-glissement et impenetrabilite a l’interface solide/fluide : ~u = ~0 ;— connaissance de T , Φq et ~u aux limites du domaine Ω.
conduit au profil de temperatures represente figure 2.4.
~u∞
x
y
fluide en ecoulement (k, ρ, c) T∞ < Ts
Tssolide immobile (ks, ρs, cs)
Figure 2.4: Profil de temperature dans un fluide incompressible s’ecoulant au-dessus d’un solide de temperatureconstante Ts > T∞.
On voit d’apres la figure 2.4 que la temperature ne varie sensiblement dans le liquide que sur une couche de faibleepaisseur δ(x) au voisinage immediat de la surface solide. Cette couche de faible epaisseur est appelee couchelimite thermique 3. Dans cette couche limite, le transfert thermique dans le fluide est principalement conductif.On peut donc ecrire a l’interface fluide/solide ou le fluide est immobile, pour un element infinitesimal de surfacedΣ de la paroi solide :
h(x) (Ts − T∞) dΣ = −k(∂T
∂y
)y=0
dΣ (2.15)
On deduit l’expression du coefficient de transfert conducto-convectif (ou coefficient de Newton) :
h(x) =k
Ts − T∞
∣∣∣∣∣(∂T
∂y
)y=0
∣∣∣∣∣ (2.16)
3. On definit l’epaisseur δ(x) de la couche limite comme la distance, mesuree a partir du solide, pour laquelle la temperature dufluide atteint la valeur T∞ a 1% pres.

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 15
Si d’une part les temperatures Ts et T∞ sont constantes, en revanche la pente ∆T/∆y depend elle de x. En effet,|∆T/∆y| diminue lorsque l’on s’eloigne du bord d’attaque du solide. Dans ces conditions on comprend bien quele coefficient d’echange h(x) est une fonction de la distance x au bord d’attaque du solide. On a representefigure 2.5 l’allure de l’epaisseur δ(x) de la couche limite thermique et du coefficient d’echange h(x).
x0
δ(x), h(x)
Figure 2.5: Evolution de la couche limite thermique et du coefficient d’echange pour un ecoulement externe ala surface d’un solide de temperature constante Ts.
On deduit des resultats precedents que le flux thermique elementaire conducto-convectif echange par un elementde surface elementaire dΣ du solide s’ecrit sous la forme :
dΦq,cv = h(x)(Ts − T∞)dΣ (2.17)
Le flux thermique echange par tout le solide avec le fluide s’ecrit maintenant :
Φq,cv =x
Σ
h(x)(Ts − T∞)dΣ
= (Ts − T∞)x
Σ
h(x)dΣ
= h(Ts − T∞)Σ
avec h = 1Σ
sh(x)dΣ le coefficient d’echange moyen (et a condition que Ts soit uniforme, ce qui n’est pas
toujours le cas). C’est en general h que l’on donne dans les applications.
Remarques :— La relation (2.17) est appelee loi de Newton du transfert thermique conducto-convectif.— La relation (2.16) montre que le coefficient de transfert h est une fonction de la nature du fluide (via
k) et donc de la temperature mais egalement de l’etat de surface du solide. Par ailleurs h depend tresetroitement de la vitesse d’ecoulement u∞ (convection) du fluide loin de la couche limite thermique. Enparticulier h augmente quand u∞ augmente (et inversement l’epaisseur de la couche limite thermique δdiminue quand u∞ augmente). Lorsque le fluide est immobile, on a le cas limite δ →∞ et h→ 0.
— Les developpements proposes dans cette etude supposent un ecoulement laminaire au niveau du solide.Cependant l’ecoulement peut devenir turbulent pour des longueurs d’ecoulement suffisamment impor-tantes. En regime turbulent, l’epaisseur de la couche limite augmente mais h(x) aussi (contrairementa la situation laminaire). La turbulence favorise donc le transfert thermique conducto-convectif dans lacouche limite.
— Loin de la couche limite thermique, la temperature du fluide peut etre supposee uniforme et egale aT∞.
— On voit ici l’importance du transfert thermique conductif dans la couche limite thermique. D’ailleursune facon d’ameliorer l’extraction de chaleur par utilisation d’une circulation de liquides est d’augmenterleur conductivite thermique en y inserant par exemple des particules metalliques microscopiques ounanoscopiques en suspension.

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 16
3 Resolution en regime stationnaire
3.1 Presentation
On considere la situation assez frequente ou le systeme a atteint un regime de fonctionnement stationnaire(qui n’est cependant pas un etat d’equilibre thermodynamique car la temperature n’est pas a priori uniforme),d’ou :
∂T
∂t= 0
L’equation de la chaleur devient dans ce cas :
~∇·(k ~∇T
)+ w = 0 (2.18)
. Remarque importante : en regime stationnaire et en absence de terme de source (w = 0), l’equation
de la chaleur se reduit a ~∇·(k ~∇T
)= 0, soit ~∇·~jq = 0 : le vecteur densite de flux thermique ~jq est a flux
conservatif ou encore le flux thermique Φq est conserve. Dans ce cas, l’energie thermique qui entre dansle systeme est egale, en valeur absolue, a l’energie thermique qui quitte le systeme.
. Hypothese : nous supposons dans la suite de ce cours que le solide est isotrope, homogene et qu’unedescription lineaire convient. Dans ces conditions l’equation de la chaleur prend la forme d’une equationde Poisson :
∆T +w
k= 0 (2.19)
3.2 Resolution dans le cas de la symetrie plane
Nous nous interessons a la resolution de l’equation de la chaleur (2.19) dans le cas de la symetrie plane, pourlaquelle en regime stationnaire le champ des temperature ne depend que d’une seule variable d’espace que nousnoterons x.
3.2.1 Mur plan de tres grandes dimensions
On considere tout d’abord le cas frequent d’un mur plan de tres grandes dimensions laterales (figure 2.6a, paroisd’un four, ecran thermique, murs d’une maison d’habitation, . . .), sans terme de source : w = 0. L’equation dela chaleur dans le mur plan se reduit a une equation de Laplace :
∆T = 0 (2.20)
La solution de l’equation de Laplace (2.20) prend, en symetrie plane 1D, la forme generale simple suivante :
T (x) = T1 +T2 − T1
Lx (2.21)
avec T1 = T (0) et T2 = TL. Le profil de temperature est donc lineaire dans le mur et en supposant que T1 > T2,il a l’allure representee figure 2.6a.
Dans bon nombre de situations pratiques, le mur est baigne par des fluides de temperatures respectives T∞1 etT∞2 loin du mur, avec des coefficients d’echange convectif moyens respectifs h1 et h2. Le profil de temperatureau voisinage du mur prend alors l’allure representee figure 2.6b. En general on a acces (par mesure par exemple)aux temperatures T∞1 et T∞2 plutot qu’aux temperatures T1 et T2. Il est donc souvent necessaire d’exprimerle profil de temperature T (x) du mur en fonction des temperatures extremes T∞1 et T∞2 , ce que nous allonschercher a faire un peu plus loin dans ce cours.

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 17
k Σ
murT
x x = L
~jq
T1
T2
(a) Profil de temperature dans un mur de grandesdimensions laterales.
k Σ
murT
x x = L
~jq
T1
T2
T∞2
T∞1
h1 h2
fluidefluide
(b) Profil de temperature en presence de fluidesbeignant les parois laterales du mur.
Figure 2.6
3.2.2 Analogie electro-thermique – Resistance thermique
Nous avons deja indique precedemment que les lois de Fourier et d’Ohm etait tres analogues et presentent lameme structure cause/effet, particulierement dans le cas du regime stationnaire que nous considerons ici. Nousavons rassemble les principales analogies entre ces deux lois dans la table 2.1.
loi locale loi integrale cause effet resistance
Electrique/Ohm ~j = −σ~∇V I =s
Σ~j · d~Σ = ∆V/R U = ∆V I R = L
σΣ
Thermique/Fourier ~jq = −k~∇T Φq =s
Σ~jq · d~Σ = ∆T/Rt ∆T Φq Rt = L
kΣ
Table 2.1: Analogies electro-thermiques en regime stationnaire et symetrie plane.
Au niveau des grandeurs physiques, on a les analogies suivantes : σ ↔ k (W/m/K) ; V ↔ T (K) ; U ↔ ∆T(K) ; I ↔ Φq (W) ; R↔ Rt (K/W).On peut encore symboliser cette analogie par les representations graphiques de la figure 2.7.
VA VBI R
U = VA − VB
(a) Resistance electrique.
TA TBΦq Rt
∆T = TA − TB
(b) Resistance thermique.
Figure 2.7: Analogie electro-thermique.
On retiendra qu’en symetrie plane, la resistance thermique conductive est donnee par :
Rt =L
kΣ> 0 (2.22)

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 18
3.2.3 Retour sur le mur baigne par des fluides – Resistance thermique convective
1. En regime stationnaire et en absence de terme de source, le flux thermique conductif Φcdq est conserve
a la traversee du mur. On a par consequent :
Φcdq (0) = Φcd
q (L) =kΣ
L(T1 − T2)
2. La continuite du flux thermique en x = 0 et en x = L impose egalement :
Φcvq (0) = Φcd
q (0) et Φcdq (L) = Φcv
q (L)
avec : Φcvq (0) = h1(T∞1 − T1)Σ et Φcv
q (L) = h2(T2 − T∞2 )Σ
En notant Φq > 0 le flux thermique qui traverse le systeme, on deduit des relations precedentes que :
Φq =kΣ
L(T1 − T2) = h1Σ(T∞1 − T1) = h2Σ(T2 − T∞2 ) (2.23)
Par analogie avec la resistance thermique conductive definie precedemment, on introduit une resistance ther-mique convective de la couche limite thermique consideree, definie par :
Rcvt =
1
hΣ> 0 (2.24)
On peut alors reecrire (2.23) sous la forme suivante :
Φq =T1 − T2
Rcdt
=T∞1 − T1
Rcvt,1
=T2 − T∞2Rcvt,2
(2.25)
Cette relation est caracteristique d’une association serie de trois resistances thermiques Rcvt,1, Rcd
t et Rcvt,2, tra-
versees par un meme flux thermique Φq, avec T∞1 > T∞2 . Le probleme du mur baigne par des fluides peut etrerepresente graphiquement par l’association electrique serie analogue suivante :
T∞1 T1ΦqRcvt,1 T2
Rcdt T∞2
Rcvt,2
En utilisant les lois classiques de l’electricite pour un circuit serie, on trouve facilement T∞1 − T∞2 = Rtott Φq,
avec Rtott = Rcv
t,1 +Rcdt +Rcv
t,2. De meme les lois de l’electricite permettent d’ecrire T1 − T2 sous la forme :
T1 − T2 =Rcdt
Rtott
(T∞1 − T∞2 ) (2.26)
En guise de conclusion provisoire, l’ecart (T1−T2) n’est pas quelconque, il est fixe par les temperatures extremesdes fluides qui bordent le mur et bien sur par la composition du mur et de ces memes fluides (via les resistancesthermiques).
Par ailleurs on peut encore ecrire les relations suivantes deduites de (2.25) :
T∞1 − T1 = Rcvt,1Φq = Rcv
t,1
T∞1 − T∞2Rtott
T1 − T2 = Rcdt Φq = Rcd
t
T∞1 − T∞2Rtott
T2 − T∞2 = Rcvt,2Φq = Rcv
t,2
T∞1 − T∞2Rtott

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 19
On en deduit sans peine les expressions de T1 et T2 :
T1 = T∞1 −Rcvt,1
T∞1 − T∞2Rtott
T2 = T∞2 +Rcvt,2
T∞1 − T∞2Rtott
Et pour finir celle de T (x) en fonction cette fois des temperatures T∞1 et T∞2 :
T (x) = T∞1 − (T∞1 − T∞2 )
(Rcvt,1
Rtott
+Rcdt
Rtott
x
L
)(2.27)
ou de maniere equivalente (a montrer a titre d’exercice) :
T (x) = T∞2 + (T∞1 − T∞2 )
[Rcvt,2
Rtott
+Rcdt
Rtott
(1− x
L
)](2.28)
3.2.4 Nombre de Biot – Applications
Nombre de Biot On peut maintenant se poser une question simple : a quelle(s) condition(s) le champ detemperature T (x), d’un mur baigne par des fluides, est-il quasi-uniforme et quelle est alors la valeur de T dansce mur ?
Puisque 0 6 x/L 6 1, on voit d’apres (2.27) que T (x) ne depend plus de x, des lors que :
Rcdt Rcv
t,1, soit encore :Rcdt
Rcvt,1
1
Ce quotient de resistances thermiques est un nombre sans dimension appele nombre de Biot, note Bi et definipar :
Bi =Rcdt
Rcvt
=L/kΣ
1/hΣ=hL
k(2.29)
avec k la conductivite thermique du mur, h le coefficient de transfert convectif mur/fluide et L la longueurcaracteristique associee a la conduction thermique a travers le mur (ici son epaisseur).
Proprietes/Utilite :
. Le nombre de Biot permet de comparer l’efficacite du transfert thermique conductif dans le mur a l’effi-cacite du transfert thermique convectif dans le fluide qui baigne ce mur.
. Si Bi 1 alors k hL et le transfert thermique conductif dans le mur est beaucoup plus efficace que letransfert thermique convectif dans le fluide.
. Bi 1 se traduit encore par Rcdt Rcv
t : pour un meme flux thermique, la chute de temperature dansle mur est negligeable devant la chute de temperature dans le fluide, donc la temperature dans le mur estquasi uniforme !
. Lorsqu’un solide est baigne par un fluide, on utilise systematiquement le nombre de Biot pourdecider si la temperature dans le mur est uniforme dans la direction de la longueur L caracteristique dela conduction thermique dans le mur.
. Exemple : soit une ailette de refroidissement en cuivre de conductivite k = 400 W.m−1.K−1, cylindriquede diametre D = 1 cm et de longueur L = 1 m, baignee par un fluide en mouvement transversal avec uncoefficient de transfert h = 100 W.m−2.K−1. On trouve dans la direction radiale de l’ailette : Bi = hD/k =100× 10−2/400 1. On peut en deduire en bonne approximation que ∂T/∂r = 0.

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 20
. Si on a des difficultes a identifier la dimension L a utiliser dans l’expression de Bi, on peut aussi la definircomme le quotient du volume V du solide sur l’aire Σ de la surface qui est baignee par le fluide :
L =V
Σ
Soit dans le cas de l’ailette cylindrique de refroidissement precedente : L = πLD2/4πDL = D/4, ce qui est du
meme ordre de grandeur que D.Dans le cas du mur precedent : L = Σ× L/Σ = L avec L l’epaisseur du mur.
Applications En introduisant les deux nombres de Biot : Bi1 = h1L/k = Rcdt /R
cvt,1 et Bi2 = h2L/k =
Rcdt /R
cvt,2, on peut reecrire la temperature T (x) du mur plan baigne par des fluides sous la forme suivante :
T (x) = T∞1 − (T∞1 − T∞2 )
(1
1 + Bi1 + Bi1/Bi2+
Bi11 + Bi1 + Bi1/Bi2
x
L
)(2.30)
ou de maniere equivalente :
T (x) = T∞2 + (T∞1 − T∞2 )
[1
1 + Bi2 + Bi2/Bi1+
Bi21 + Bi2 + Bi2/Bi1
(1− x
L
)](2.31)
On obtient alors les comportements suivants en fonction des valeurs des nombres de Biot Bi1 et Bi2 :
T2T1T∞2
T∞1
Bi1 1 (et Bi2 > Bi1)T (x) ≈ T∞2 = cste
T2T1
T∞1
T∞2
Bi1 = Bi2 1T (x) ≈ T∞1 +T∞2
2 = cste
T2T1
T∞2
T∞1
Bi2 1 (et Bi1 > Bi2)T (x) ≈ T∞1 = cste
Figure 2.8: Comportement du champ des temperatures a l’interieur d’un mur baigne par des fluides.
3.2.5 Notion de resistance thermique de contact
Presentation Le contact entre deux solides est rarement ideal (placement d’un capteur de temperaturesur une surface solide, radiateur thermique pour composants electroniques de puissance, . . .) car a l’echellemicroscopique les surfaces de contact ne sont pas parfaitement lisses. Des asperites/cavites existent et un fluideintersticiel (FI) peut etre present (air, liquide, vide, . . .) qui joue le role d’un isolant thermique de faible epaisseurε. Cette couche isolante entraıne une chute de temperature ∆T entre les deux solides : il n’y a plus continuitea l’echelle macroscopique entre les temperatures en x = 0 : T1(0) 6= T2(0).
En revanche on peut encore considerer que le flux thermique est lui continu a l’interface : Φq,1 = Φq,2 = Φq.
On peut modeliser macroscopiquement ce comportement a l’aide d’une resistance thermique de contact Rct (u :m2.K.W−1) definie par :
d2Φq =T1 − T2
Rctd2Σ (2.32)

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 21
k1 k2
x0
T1
T2
Φq,1 Φq,2
FI
(a) Solides en contact thermique imparfait. L’interfacemoyenne est localisee en x = 0.
T1 T2d2ΦqRct
T1 = T2 +Rctd2Φq/d
2Σ
(b) Modele electrique de la resistance thermique decontact entre deux solides.
Figure 2.9: Resistance thermique de contact entre deux solides.
On notera que les temperatures T1 et T2 ne sont pas a priori uniformes et dependent du point considere al’interface, de meme pour Rct
4. En introduisant les temperatures moyennes T c1 et T c2 de part et d’autre ducontact, on peut ecrire, avec Σ l’aire totale de l’interface :
Φq =
∫Σ
T1 − T2
Rctd2Σ =
T c1 − T c2Rct
Σ
Soit encore :
Φq =T c1 − T c2rct
(2.33)
avec rct = Rct/Σ (u : K.W−1).
Modelisation thermique du contact imparfait D’un point de vue thermique, on peut desormais modeliserles deux solides en contact de la maniere suivante :
0 0
T c1 T c2Φq
rct
4. C’est la raison pour laquelle on definit la resistance de contact a partir de d2Φq plutot qu’a partir de Φq.

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 22
Ordres de grandeur La resistance thermique de contact moyenne Rct depend principalement : de la rugosite
de surface, de la nature du fluide intersticiel et de la pression entre les surfaces en contact.
pression (bar) fluide intersticiel acier cuivre magnesium aluminium
1 vide 6 a 25 1 a 10 1,5 a 3,5 1,5 a 5,0100 vide 0,7 a 4 0,1 a 0,5 0,2 a 0,4 0,2 a 0,4
1 air 2,751 helium 1,051 huile 0,5251 glycerol 0,265
Table 2.2: Resistance thermique de contact moyenne Rct (en 10−4 m2.K.W−1) pour differentes pressions de
contact, differents milieux intersiticiels et pour differentes interfaces metal/metal de meme nature.

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 23
3.3 Equation de la chaleur pour un solide en coordonnees cylindriques
3.3.1 Bilan d’energie
Nous considerons une situation telle que le champ des temperatures dans le solide presente la symetrie cylin-drique : T = T (r, θ, z, t) (champ de temperatures dans un cable, un tuyau, . . .). Pour faire le bilan d’energie,nous choisissons un volume infinitesimal dτ = rdrdθdz du solide, presentant lui aussi la symetrie cylindrique(figure 2.10). D’apres le premier principe de la thermodynamique, le bilan d’energie pour cet element de solide
z
r
r + dr
θθ + dθ
Figure 2.10: Secteur angulaire de hauteur dz.
infinitesimal s’ecrit :∂t(Udτ ) = ρc∂tTdτ = Qdτ + Wdτ (2.34)
avec :
. Wdτ la puissance autre que mecanique, echangee par l’element de volume dτ avec l’exterieur (effet Joule,absorption lumiere, induction, . . .). On peut toujours ecrire ce terme sous la forme Wdτ = wdτ .
. Qdτ la puissance thermique infinitesimale echangee par l’element de volume dτ avec le reste du solide. Onpeut ecrire ce terme sous la forme :
Qdτ = Qrdτ + Qθdτ + Qzdτ
Il reste a calculer chaque terme de la puissance thermique echangee.Terme Qrdτ (figure 2.11a) :
Qrdτ = Qrdτ (r) + Qrdτ (r + dr)
= −krdθdz ∂rT + k(r + dr)dθdz ∂r+drT
= dθdz [k(r + dr)∂r+drT − kr∂rT ]
= rdθdz1
r∂r (k r∂rT ) dr
Soit finalement :
Qrdτ =1
r∂r (k r∂rT ) dτ
On calcule de la meme maniere le terme Qθdτ (figure 2.11b) :
Qθdτ = Qθdτ (θ) + Qθdτ(θ+dθ)
= −kdrdz1
r∂θT + kdrdz
1
r∂θ+dθT
= drdz1
r[k∂θ+dθT − k∂θT ]
= drdz1
r∂θ (k ∂θT ) dθ

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 24
Soit finalement :
Qθdτ =1
r2∂θ (k ∂θT ) dτ
De la meme, on obtient pour le terme Qzdτ :
Qzdτ = Qzdτ (z) + Qzdτ(z+dz)
= −krdrdθ ∂zT + krdrdθ ∂z+dzT
= rdrdθ∂z (k ∂zT ) dz
Soit finalement :Qzdτ = ∂z (k ∂zT ) dτ
z
r
r + dr
θθ + dθ
Qrdτ(r)
Qrdτ(r+dr)
(a) Contribution radiale a la puis-sance thermique.
z
r
r + dr
θθ + dθ
Qθdτ(θ)Qθdτ(θ+dθ)
(b) Contribution orthoradiale a lapuissance thermique.
Figure 2.11: Bilan d’energie interne en symetrie cylindrique.
En rassemblant les resultats precedents, on obtient le bilan de puissance thermique de l’element de volumeinfinitesimal dτ en coordonnees cylindriques :
Qdτ =
[1
r∂r (k r∂rT ) +
1
r2∂θ (k ∂θT ) + ∂z (k ∂zT )
]dτ
Le bilan d’energie (2.34) peut finalement s’ecrire :
ρc∂tTdτ =
[1
r∂r (k r∂rT ) +
1
r2∂θ (k ∂θT ) + ∂z (k ∂zT )
]dτ + wedτ
En simplifiant par dτ , on obtient l’equation de la chaleur en coordonnees cylindriques, pour un solide isotropenon lineaire ou (et) non homogene avec terme de source interne :
ρc∂tT =1
r∂r (k r∂rT ) +
1
r2∂θ (k ∂θT ) + ∂z (k ∂zT ) + we (2.35)
Si on peut supposer que k est une constante (ce qui est tres souvent le cas), on obtient plus simplement :
ρc∂tT = k
[1
r∂r (r∂rT ) +
1
r2∂θ2T + ∂z2T
]+ we (2.36)
On reconnaıt dans (2.36) l’expression du laplacien en coordonnees cylindriques, d’ou :
ρc∂tT = k∆T + we (2.37)
On retrouve bien l’equation de la chaleur deja etablie en coordonnees cartesiennes. Ce qu’il faut retenir ici, c’estla methodologie du bilan local en symetrie cylindrique.

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 25
3.3.2 Resolution en symetrie cylindrique et regime stationnaire
Nous considerons a nouveau le cas important du regime stationnaire dans un milieu presentant une symetriede revolution. Dans ces conditions le champ des temperatures ne depend que de r : T = T (r). La conductionde la chaleur est donc stationnaire et radiale (donc 1D). C’est souvent le cas par exemple pour les conduiteset les tuyaux de section circulaire.L’equation de la chaleur se simplifie considerablement et s’ecrit maintenant :
1
r∂r (r∂rT ) = − w
e
k(2.38)
Resolution Nous cherchons tout d’abord la solution de (2.38) avec un terme de source we et une conductivitethermique constants. En integrant deux fois par rapport a r, on obtient :
T (r) = −1
4
we
kr2 +Aln r +B (2.39)
Si le domaine Ω inclut l’origine r = 0 (figure 2.12a), alors on est en presence d’une divergence logarithmiquequi impose que A = 0. En revanche si l’origine n’est pas incluse dans le domaine Ω (figure 2.12b), la singulariten’existe plus et A 6= 0.
k
Ω ∂Ω
(a) 0 ∈ Ω ⇒ divergence logarith-mique en r = 0⇒ A = 0.
k
Ω ∂Ω
(b) 0 6∈ Ω⇒ pas de divergence loga-rithmique en r = 0⇒ A 6= 0.
Figure 2.12: Probleme de la divergence logarithmique en symetrie axiale.
Resistance thermique en symetrie cylindrique On suppose maintenant qu’il n’y a plus de terme desource, il suffit d’ecrire : we = 0 dans (2.39), d’ou :
T (r) = Aln r +B (2.40)
Les remarques precedentes sur la divergence logarithmique restent valables ici. On considere plus particulierementle cas d’une conduite ou d’un tuyau constitue d’un solide cylindrique creux de longueur Lz, sans terme de source(figure 2.13).
a1
a2
kLz
Figure 2.13: Tuyau ou conduite constituee d’un solide cylindrique creux.

CHAPITRE 2. CHAMP DES TEMPERATURES D’UN SOLIDE 26
En notant T (a1) = T1 et T (a2) = T2, avec par exemple T1 > T2, on obtient la temperature T (r) dans la paroisde la conduite cylindrique (∀r ∈ [a1, a2]) sous la forme :
T (r) =T2 − T1
ln a2/a1ln
r
a2+ T2 (2.41)
Le flux thermique Φrq a travers la parois s’obtient a partir de (2.41) :
Φrq = −k∂rT × Σr
= −k T2 − T1
ln a2/a1
1
r× 2πrLz
Soit finalement :
Φrq =
2πkLzln a2/a1
(T1 − T2) (2.42)
On peut remarquer que :— l’expression du flux thermique Φr
q ne depend pas de r : en RS et en absence de terme de source, le fluxthermique est conserve a travers la parois de la conduite.
— le flux thermique Φrq peut encore s’ecrire sous la forme Φr
q = (T2 − T1) /Rcdt avec Rcd
t la resistancethermique de la parois donnee en symetrie cylindrique par :
Rcdt =
ln a2/a1
2πkLz> 0 (2.43)
T1 T2Φrq
Rcdt
ln a2/a1
2πkLz
Figure 2.14: Resistance thermique d’une paroi en symetrie cylindrique.

Chapitre 3
Premier principe des systemes ouverts
1 Presentation
Nous considerons dans ce chapitre le cas d’un systeme physique eventuellement en ecoulement (fluide) ou enmouvement (solide) par rapport a un referentiel d’etude. C’est le cas par exemple de bon nombre de machinesutilisant des fluides en ecoulement :
— les compresseurs qui permettent de comprimer un gaz : la pression de sortie p2 est superieure a la pressiond’entree p1 ;
— les pompes qui permettent de faire transiter un fluide d’un recipient vers un autre ou vers l’atmospherelibre ;
— les helices de bateau ou d’avion (qui sont motrices) ou les helices d’eolienne (qui sont receptrices) ;— les turbines ou les moteurs a reaction, . . .
Σ1
~v1
p1
T1
Σ2
~v2
p2
T2
helice
Figure 3.1: Systeme physique homogene en ecoulement dans une machine.
Nous supposerons seulement ici que le systeme est homogene et qu’il n’est le siege d’aucune reaction chi-mique (figure 3.1). Ce systeme n’est pas a l’equilibre thermodynamique global (ETG), mais nous supposons que
27
CHAPITRE 3. PREMIER PRINCIPE DES SYSTEMES OUVERTS 28
l’evolution du systeme est suffisamment lente pour pouvoir faire l’hypothese de l’equilibre thermodynamiquelocal (ETL) et continuer a utiliser les resultats de la thermodynamique de lequilibre mais sous une forme locale,avec des champs intensifs : T , p, ρ, u, . . .
2 Introduction – Definitions
2.1 Introduction
La notion de bilan est fondamentale en physique. Ainsi le premier principe de la thermodynamique est unprincipe de conservation de l’energie E = Ec,ma + U du systeme physique considere, avec Ec,ma l’energiecinetique macroscopique du systeme et U son energie interne.Pour appliquer correctement le premier principe, il convient par consequent de faire un bilan convenable del’energie totale du systeme entre l’etat initial A (dans le temps et dans l’espace) et l’etat final B (dans le tempset dans l’espace) au cours de la transformation qu’il subit.
Pour effectuer ce bilan d’energie, on peut proceder de deux manieres selon la situation rencontree :
— le systeme est homogene 1 et a l’equilibre thermodynamique global aux etats A et B. Dans ce casun bilan global pour le systeme dans son ensemble suffit parfaitement et prend la forme habituelle dupremier principe : ∆E = Wext +Qext ;
— le systeme n’est pas a l’equilibre thermodynamique global et certaines de ses variables thermodynamiquesintensives ne sont pas uniformes Dans ce cas un bilan global pour tout le systeme doit passer tout d’abordpar un examen local des grandeurs thermodynamiques du systeme puis une integration sur tout le systemephysique. C’est cette approche que nous allons developper dans ce chapitre ou les systemes consideresne sont pas a l’equilibre thermodynamique global.
2.2 Definitions
Avant d’etablir les principaux resultats de ce cours, rappelons quelques definitions importantes.
2.2.1 Grandeurs extensives – Grandeurs intensives
Grandeurs extensives
Definition 1 (Grandeur extensive). Une grandeur physique X est extensive si elle est proportionnelle a laquantite de matiere du systeme physique (Ω) sur lequel elle est definie. Notons que si le systeme est homogene,la grandeur physique X est definie pour le systeme dans son ensemble (sens global) : X = X(Ω).
Citons quelques exemples de grandeurs physiques extensives : la masse m, la quantite de mouvement m−→v , lemoment cinetique −→σ , les energies mecanique Em, cinetique Ec, potentielle Ep, interne U , libre F , l’entropie S,les enthalpies H et G, . . .
Mathematiquement, a une grandeur physique X extensive correspond une fonction X homogene d’ordre 1. C’esta dire si X est definie sur R, on a :
∀λ ∈ R, X (λΩ) = λ1X (Ω) = λX (Ω)
1. Homogene est a considerer au sens ou toutes les grandeurs physiques sont uniformes sur le systeme.

CHAPITRE 3. PREMIER PRINCIPE DES SYSTEMES OUVERTS 29
Grandeur intensive Dans le cas contraire a la definition de l’extensivite, on definit une grandeur Y intensivecomme n’etant pas liee a la quantite de matiere du systeme.
Citons quelques exemples de grandeurs physiques intensives : la temperature T , la pression p, le vecteur vitesse−→v , et toutes les grandeurs massiques ou volumiques qui peuvent etre definies comme un rapport de deuxgrandeurs extensives : la masse volumique ρ, la densite particulaire n, la fraction volumique φ, . . .
Mathematiquement, une grandeur physique Y est intensive si et seulement si :
∀λ ∈ R, Y (λΩ) = λ0Y (Ω) = Y (Ω)
2.2.2 Densites massiques et volumiques
A toute grandeur physique scalaire extensive A (Ω) definie sur le systeme physique (Ω) on peut associer unedensite massique a ou volumique av, qui sont des champs scalaires du point geometrique M et du temps t,definies par :
A =y
V (Ω)
a (M, t) dm =y
V (Ω)
a (M, t) ρ (M, t) dτ =y
V (Ω)
av (M, t) dτ
2.2.3 Systeme ouvert – Volume de controle – Systeme materiel
Systeme ouvert Un systeme est dit ouvert lorsqu’il peut etre traverse par la matiere, du fait d’un ecoulementpar exemple. Le systeme ouvert peut avoir une existence physique, c’est le cas de bon nombre de machines(compresseur, tuyere, turbine, . . . ) ou etre simplement une surface mathematique sans existence physique.
On ne peut pas appliquer les lois de la physique directement a un systeme ouvert (en particulier quand il s’agitd’une surface mathematique sans existence physique !). Nous verrons que la derivee particulaire, notee D
Dt , estl’outil qui permet d’appliquer (indirectement) les lois de la physique en considerant un systeme ouvert,appele aussi volume de controle, que nous definirons plus loin.
Systeme materiel
Definition 2 (systeme materiel). On appelle systeme materiel (Ω) un systeme de volume Vm ou V (Ω), ayantune existence physique, donc compose de matiere. Le systeme materiel est delimite par une surface materielle∂(Ω) a priori mobile et deformable, fermee au sens mathematique et au sens physique.
La masse d’un systeme materielle est constante. On peut encore dire que la masse d’un systeme materiel estconservee. C’est uniquement au systeme materiel qui a une existence physique que l’on peut appliquer les loisde la physique.
Volume de controle
Definition 3 (systeme materiel). On appelle volume de controle Vc un volume fictif, sans realite physique,donc qui n’est pas compose de matiere. Ce volume de controle est delimite par une surface mathematique Sc apriori mobile et deformable, fermee au sens mathematique uniquement.
Le volume de controle Vc est donc libre d’etre traverse par la matiere lorsqu’il y a ecoulement.

CHAPITRE 3. PREMIER PRINCIPE DES SYSTEMES OUVERTS 30
2.2.4 Notion de derivee particulaire
La derivee particulaire, notee DDt , est un operateur fondamental de l’ecoulement qui permet de passer de la
representation eulerienne du champ des vitesses a la representation lagrangienne des lois de la physique. Laderivee particulaire de toute grandeur a peut s’ecrire sous la forme :
DX
Dt=∂X
∂t+(−→v ·−→∇)X
La derivee particulaire s’applique donc de preference a un champ eulerien de l’ecoulement.
2.2.5 Grandeurs conservatives et non conservatives
Grandeur conservative
Definition 4 (Grandeur conservee). Une grandeur physique X (Ω) definie sur un systeme materiel (Ω) estconservative ou conservee si et seulement si cette grandeur est constante au cours de l’evolution du systememateriel (Ω).
Dans le cas le plus general ou le systeme materiel (Ω) est fluide et s’ecoule, la grandeur physique X (Ω) estconservative ou conservee si et seulement si :
d
dtX (Ω) = 0 (3.1)
Citons quelques exemples fondamentaux de grandeurs conservatives :
– la masse m et la charge q sont conservees en toute circonstance : dmdt = 0 et dq
dt = 0 ;
– pour un systeme physique isole 2 la quantite de mouvement est conservee : ddt~p = ~0 ;
– pour un systeme physique isole, la somme de l’energie interne et de l’energie cinetique macroscopique estconservee : d
dt (U + Ec,ma) = 0 ;
– pour un systeme physique isole qui n’est le siege d’aucun phenomene irreversible, l’entropie S est conservee :dSdt = 0.
Grandeur non conservee
Definition 5 (Grandeur non conservee). Une grandeur physique X (Ω) definie sur un systeme materiel (Ω) estnon conservative ou non conservee si est seulement si :
d
dtX (Ω) 6= 0 (3.2)
En general on peut introduire un taux volumique de production σX de la grandeur physique X qui est definiepar :
d
dtX(Ω) =
y
V (Ω)
σX(M, t) dτ (3.3)
La grandeur physiqueX(Ω) est donc non conservative si et seulement si σX(M, t) 6= 0. Les exemples de grandeursnon conservees ne manquent pas en physique : quantite de mouvement, energie interne d’un systeme non isole,entropie d’un systeme isole evoluant de maniere irreversible, . . .
2. Isole au sens thermodynamique du terme, c’est a dire sans aucun echange d’aucune forme avec l’exterieur.

CHAPITRE 3. PREMIER PRINCIPE DES SYSTEMES OUVERTS 31
Les lois de la physique permettent par ailleurs de donner une expression a σX . Dans le cas par exemple de
la quantite de mouvement, ce sont les forces exterieures−→F appliquees au systeme qui sont a l’origine de la
variation de la quantite de mouvement −→p . On peut dans ce cas ecrire en projection sur l’axe Ox par exemple :
Fx =y
V (Ω)
σpxdτ
2.2.6 Debit massique
Definition 6 (Debit massique). On appelle debit massique d’un ecoulement la quantite qm ou m definie par :
qm =x
Σ
ρ−→v · d−→Σ
avec ρ la masse volumique du fluide et d−→Σ l’element de surface infinitesimale traverse par l’ecoulement. Le
debit massique s’exprime en kg.s−1 dans le SI et represente la quantite de matiere qui traverse une sectionfinie Σ par unite de temps, du fait de l’ecoulement. On peut aussi introduire un debit massique elementaire :
d2qm = ρ−→v · d−→Σ .
2.2.7 Densite surfacique de flux convectif−→j cvA
Un transport convectif apparaıt chaque fois qu’une grandeur physique A caracteristique d’un fluide (masse,energie, un constituant d’un melange) est transportee avec le fluide en mouvement.
Definition 7 (Densite surfacique de flux convectif). On appelle densite surfacique de flux convectif (ou encore
courant volumique convectif) de la grandeur A, le vecteur−→j cvA defini par :
−→j cvA = ρa−→v
avec a la densite massique associee a la grandeur physique A, ρ la masse volumique du fluide et −→v le champdes vitesses d’ecoulement du fluide.
3 Bilan macroscopique d’une grandeur extensive
3.1 Presentation
Nous etablissons tout d’abord un bilan macroscopique d’une grandeur physique extensive scalaire A attacheea un ecoulement stationnaire d’un fluide. On entend par grandeur extensive attachee au fluide, toutes lesgrandeurs physiques intervenant dans les lois de la physique comme : la masse m, la quantite de mouvement−→p = m−→v , l’energie (cinetique, interne, . . . ), l’entropie, . . .
Le bilan a pour role essentiel de permettre de predire la facon dont la grandeur extensive varie avec l’ecoulement,dans le temps (partie temporelle) et dans l’espace (partie convective) puisque le fluide s’ecoule a travers unemachine, une conduite ou tout autre systeme ouvert.
Dans la plupart des situations pratiques, la phase de fonctionnement stationnaire d’une machine est la pluscouramment utilisee.

CHAPITRE 3. PREMIER PRINCIPE DES SYSTEMES OUVERTS 32
On rappelle que l’on associe a la grandeur physique extensive A la densite massique a definie par :
A =y
Vm≡V (Ω,t)
a (M, t) dm =y
Vm≡V (Ω,t)
ρ (M, t) a (M, t) dτ
On peut proposer deux approches distinctes 3 pour etablir un bilan macroscopique :
1. une approche en terme de systeme ferme, ou le bilan s’effectue en suivant un systeme materiel ferme demasse constante m ou dm et en comptabilisant les variations de A(t) sur ce systeme materiel, entre deuxinstants tres proches t et t+ dt ;
2. une approche en terme de systeme ouvert, ou le bilan s’effectue sur un volume de controle reel ou fictifmais fixe dans l’espace. Dans ce cas on ne suit pas le systeme materiel.
Nous presentons la premiere approche dans les paragraphes suivants. Il s’agit de l’approche lagrangienne deslois de la physique, donc celle qui nous paraıt la plus naturelle .
3.2 Bilan macroscopique en regime stationnaire
On s’interesse au bilan d’une grandeur extensive A, de densite massique a, attachee a un ecoulement stationnaireou au mouvement stationnaire d’un solide.
Puisque le regime de fonctionnement est suppose stationnaire, a ne depend pas explicitement du temps maisuniquement de l’espace : a = a (M). En revanche cela ne veut pas dire que A ne varie pas dans le temps car ily a ecoulement ou deplacement de matiere !
3.2.1 Bilan d’une grandeur extensive A en suivant un systeme materiel
Presentation Le bilan s’effectue en comptabilisant la grandeur extensive A sur le systeme materiel (Ω)entre deux instants tres proches t et t+dt. On en deduit ensuite la difference dA = A(t+dt)−A(t). Consideronspar exemple la portion de conduite representee figure 3.2. On a represente en gris le systeme materiel Ω(t) al’instant t et en tirets le meme systeme materiel 4 mais a l’instant ulterieur t+ dt.
A l’instant t, la grandeur extensive A(t) s’ecrit :
A(t) =y
Ω(t)
ρadτ (3.4)
Le regime etant stationnaire, les champs a et ρ ne dependent pas explicitement du temps. Un instant dt (petit)plus tard, le systeme materiel s’est deplace et occupe alors le volume Ω(t + dt) materialise par les tirets. Onpeut ecrire la grandeur extensive A(t+ dt) sous la forme :
A(t+ dt) =y
Ω(t+dt)
ρadτ (3.5)
Dans la mesure ou les champs sont consideres stationnaires ici, on peut encore ecrire (3.5) sous la forme :
A(t+ dt) =y
Ω(t)
ρadτ +y
(II)
ρadτ −y
(I)
ρadτ (3.6)
3. Les deux approches donnent bien evidemment les memes relations generales.4. Lorsque le systeme materiel considere est fluide, il peut eventuellement se deformer au cours de l’evolution temporelle.

CHAPITRE 3. PREMIER PRINCIPE DES SYSTEMES OUVERTS 33
Σ1
(1)
(2)
Σ2
~v1
p1 (I)
T1
~v2
p2 (II)
T2
helice
Σ′1
(1′)
(2′)
Σ′2
p1
T1
Figure 3.2: Bilan d’une grandeur extensive A en suivant un systeme materiel de masse m constante, qui traversepar exemple une machine.
ou on a decompose le volume Ω(t+ dt) du systeme materiel a l’instant t+ dt en Ω(t+ dt) = Ω(t) + (II)− (I).Dans la mesure ou dt est tres petit, on peut encore ecrire, en (1) et en (2) : dτ = dΣd` avec d` = vdt. L’integrale(3.6) devient :
A(t+ dt) = A(t) +x
Σ2
ρav dΣ dt−x
Σ1
ρav dΣdt (3.7)
Si on peut faire l’hypothese que le champ a est uniforme sur les sections Σ1 et Σ2, alors (3.7) se simplifieconsiderablement et peut s’ecrire alors :
A(t+ dt) = A(t) + m (a2 − a1) dt (3.8)
avec m le debit massique qui est, on le rappelle, conserve en regime stationnaire : m =s
Σ1ρvdΣ =
sΣ2ρvdΣ.
On deduit des developpements precedents le bilan de la grandeur extensive A en regime stationnaire, pourune situation ou sa densite massique a est uniforme sur les sections Σ1 et Σ2 :
dA
dt= m (a2 − a1) (3.9)
C’est un resultat important qu’il faut savoir etablir selon la procedure de bilan developpee dans ce paragraphe.
Remarques Notons pour finir quelques remarques et generalisations :
1. Si la densite massique a n’est pas uniforme sur les sections Σ1 et Σ2, on ecrira (3.9) sous la forme plusgenerale :
dA
dt=
∂Ω
ρa~v · ~ndΣ (3.10)
avec ~n la normale exterieure a la surface fermee ∂Ω qui delimite le systeme materiel (Ω).

CHAPITRE 3. PREMIER PRINCIPE DES SYSTEMES OUVERTS 34
2. Si d’une part le regime n’est pas stationnaire (alors le debit massique n’est plus a priori conserve) etsi d’autre part la densite massique a n’est pas uniforme sur les sections Σ1 et Σ2, on est alors dans lasituation la plus generale. Le bilan integral de la grandeur extensive A s’ecrit maintenant :
dA
dt=
y
Ω(t)
∂t(ρa)dτ +
∂Ω(t)
ρa~v · ~ndΣ (3.11)
C’est un resultat important, valable pour tout regime de fonctionnement, applicable a un systeme materielde masse constante.
3. Si les champs a, ρ et ~v ne presentent aucune discontinuite sur ∂Ω, alors on peut appliquer le theoreme deGauss au dernier terme du membre de droite de (3.11), et obtenir ainsi :
dA
dt=
y
Ω(t)
[∂t(ρa) + ~∇·(ρa~v)
]dτ (3.12)
3.2.2 Application : bilan de matiere
Dans le cas de la grandeur extensive masse A = m, la densite massique correspondante a vaut simplementa = 1. La masse d’un systeme materiel etant conservee, on a obligatoirement dm/dt = 0. On deduit alors de(3.12) la relation locale de conservation de la matiere :
dm
dt= 0⇒ ∂tρ+ ~∇·(ρ~v) = 0 (3.13)
3.3 Bilan d’energie – Premier principe
3.3.1 Premier principe
On rappelle que le premier principe de la thermodynamique est un principe de conservation de l’energie au sensle plus large. Il s’ecrit, pour un systeme materiel (Ω) de masse constante, sous la forme suivante :
dEΩ
dt= W e
Ω + QeΩ (3.14)
avec :
. EΩ = Ec,ma +U , la somme de l’energie cinetique macroscopique (due au mouvement macroscopiquedu fluide ou du solide) du systeme materiel et de son energie interne U (due au mouvement internemicroscopique d’agitation thermique des constituants elementaires du systeme). Si le systeme n’est pasa l’equilibre thermodynamique (ce qui est le plus souvent le cas), les grandeurs Ec,ma et U ne sont engeneral pas uniformes et sont calculees de la maniere la plus generale a partir de leurs densites massiquesrespectives ec,ma = 1
2v2 et u, a l’aide des integrales :
Ec,ma =y
Ω(t)
ρec,madτ =y
Ω(t)
ρ1
2v2dτ et U =
y
Ω(t)
ρudτ
L’expression de la densite massique d’energie interne u depend de la nature du systeme materiel considere.Dans le cas d’un solide, d’un liquide ou d’un gaz en ecoulement pour lequel le nombre de Mach est trespetit devant 1 (M 1), on peut prendre en tres bonne approximation u = cT + cste, avec c la chaleurspecifique ou capacite calorifique massique.

CHAPITRE 3. PREMIER PRINCIPE DES SYSTEMES OUVERTS 35
. W eΩ represente le terme de puissance des actions qui s’exercent sur le systeme.
. QeΩ represente le terme de puissance thermique echangee entre le systeme et son environnement (parconduction, convection et rayonnement).
En utilisant le resultat (3.12) applique a l’energie EΩ =t
Ω(t) ρedτ , avec e = 12v
2 + u, on obtient la forme laplus generale du premier principe pour un systeme ferme en mouvement ou en ecoulement :
y
Ω(t)
[∂t
(1
2ρv2 + ρu
)+ ~∇·
((1
2ρv2 + ρu)~v
)]dτ = W e
Ω + QeΩ (3.15)
Il reste a expliciter les termes W eΩ et Qe
Ω dans diverses situations courantes.
Puissances des actions exterieures W eΩ On entend par actions exterieures toutes les actions qui peuvent
s’exercer sur le systeme materiel (Ω). On peut distinguer dans ce cas les actions qui s’exercent a distance surle systeme (champs de pesanteur, electromagnetiques, . . .) des actions de contact (forces pressantes, forces defrottement visqueux).
Cas du regime stationnaire Dans le cas important et frequent du regime stationnaire, les champs physiquesdu systeme ne dependent pas explicitement du temps et l’equation bilan (3.15) s’ecrit simplement sous la forme :
y
Ω(t)
~∇·(
(1
2ρv2 + ρu)~v
)dτ = W e
Ω + QeΩ (3.16)
En appliquant le theoreme de la divergence a l’integrale triple sur le volume Ω(t), on peut encore ecrire (3.16)sous la forme suivante :
Σ(t)
(1
2v2 + u
)ρ~v · d~Σ = W e
Ω + QeΩ (3.17)
3.3.2 Exemple
On considere le dispositif de la figure 3.3 qui schematise le procede de laminage d’une plaque metallique en unetole destinee par exemple a l’industrie automobile. La plaque d’epaisseur e et de largeur ` passe tout d’aborddans un four de longueur active L qui est charge d’elever la temperature de la plaque en lui appliquant un fluxthermique surfacique ϕq. On suppose que la plaque evolue dans le four en regime stationnaire et a la vitesse~v = v~ex, avec v = cste.
Mise en equation Vue la faible epaisseur e de la plaque, nous supposons que sa temperature est uniformeselon y et ne depend donc que de x : T = T (x). En rappelant que la masse volumique ρ d’un solide peut etresupposee en bonne approximation constante et que la densite massique d’energie interne d’un solide obeit a laloi de Dulong et Petit : u = cmT + u0 avec u0 = cste, le membre de gauche du bilan (3.17) s’ecrit, pour unelement de volume dτ = e`dx de la plaque en mouvement (figure 3.4) :
Σ(t)
(1
2v2 + u
)ρ~v · d~Σ =
[1
2v2 + cmT + u0
]x+dx
× ρ(x+dx)vx+dxe`−[
1
2v2 + cmT + u0
]x
× ρ(x)vxe` (3.18)

CHAPITRE 3. PREMIER PRINCIPE DES SYSTEMES OUVERTS 36
0 L
four
four
ϕq ϕq
ϕq ϕqgalet d’en-traınement
x
y
plaque ~v tole
laminoire
Figure 3.3: Schema de principe du laminage d’une tole, l’ensemble est represente dans le plan de coupetransversal ou la plaque a une epaisseur e.
x
y
plaque
x
~nx
x+dx
~nx+dx
ϕq
ϕq
~ve
Figure 3.4: Bilan d’energie pour un element infinitesimal dτ = e`dx de la plaque en mouvement de translationrectiligne uniforme.
Soit en rappelant que le debit massique de matiere m associe au mouvement de la plaque est donne ici parm = ρve`, on deduit de l’equation precedente, des proprietes du solide et de la translation uniforme, que :
Σ(t)
(1
2v2 + u
)ρ~v · d~Σ = mcm [T (x+dx)− T (x)] = mcm
∂T
∂xdx (3.19)
Par ailleurs nous supposons que l’element de volume infinitesimal de la plaque n’echange aucun travail d’aucuneforme avec son voisinage : W e
dτ = 0 W. En revanche il y a des echanges thermiques entre la plaque et le fourd’une part (via les parois parietales) et au sein de la plaque d’autre part. On peut donc ecrire Qedτ sous la formesuivante :
Qedτ = 2ϕq(x)`dx+ Qecd,dτ (x) + Qecd,dτ (x+dx) (3.20)
avec Qecd,dτ la puissance thermique echangee de maniere conductive (donc au sein de la plaque) entre l’elementde volume infinitesimal dτ et le reste de la plaque (donc en x et en x+dx). En remarquant que T (x+dx) > T (x)et donc que ∂xT > 0, on a : Qecd,dτ (x) = −k(x)∂xT (x)e` < 0 et Qecd,dτ (x+dx) = k(x+dx)∂x+dxT (x+dx)e` > 0,avec k la conductivite thermique de la plaque. On en deduit au final que :
Qedτ = 2ϕq(x)`dx+∂
∂x
[k∂T
∂x
]e`dx (3.21)
Au final, en rassemblant les resultats (3.20) et (3.21) et en supposant que la plaque metallique est homogene, onobtient l’equation differentielle satisfaite par la temperature T (x) de la plaque a l’interieur du four, en regimestationnaire :
ρvcme∂T
∂x= 2ϕq(x) + ke
∂2T
∂x2(3.22)
La solution de l’equation (3.22) depend tout d’abord de la forme de ϕq(x) mais egalement des conditions auxlimites.

CHAPITRE 3. PREMIER PRINCIPE DES SYSTEMES OUVERTS 37
Exemple de resolution On considere une plaque d’acier d’epaisseur e = 1 cm, de masse volumique ρ =7850 kg.m−3, de chaleur specifique cm = 490 J.kg−1.K−1, de conductivite thermique k = 40 W.K−1.m−1, sedeplacant dans un four de longueur L = 10 m a la vitesse constante v = 1 cm.s−1. La temperature de laplaque etant Ta = 293 K a l’entree dans le four en x = 0, on cherche a determiner l’evolution de T (x)dans la plaque et en particulier la temperature de la plaque a la sortie x = L du four. On donne pour celaϕq(x) = ϕ0 = cste = 10 kW.m−2. On pose δT (x) = T (x)− Ta. La variation de temperature δT (x) satisfait a lameme equation differentielle (3.22) que T (x) :
ρvcme∂δT
∂x= 2ϕ0 + ke
∂2δT
∂x2(3.23)
Une solution analytique est possible pour (3.23) et peut se mettre sous la forme generale suivante :
δT (x) =2ϕ0
ecmvρx+
k
cmvρC2 exp
cmvρx
k+ C1 (3.24)
On peut introduire une longueur caracteristique Lc definie par Lc = k/cmvρ et re-ecrire (3.24) sous la forme :
δT (x) =2ϕ0Lcek
x+ C2Lc expx
Lc+ C1 (3.25)
Avec les donnees du probleme, on trouve Lc ≈ 1 cm. On constate donc que pour x Lc, le terme exponentieldiverge, ce qui impose une valeur nulle a la constante C2. On en deduit la forme de δT (x) :
δT (x) =2ϕ0Lcek
x+ C1 (3.26)
Les conditions aux limites en x = 0 permettent de determiner C1. Il suffit de supposer ici la continuite de latemperature en x = 0 : T (0) = Ta ⇒ δT (0) = 0. On en deduit que C1=0 :
δT (x) =2ϕ0Lcek
x =2ϕ0
ecmvρx (3.27)
Le profil de temperature dans la plaque est donc lineaire. Par ailleurs on voit egalement d’apres (3.27) que latemperature atteinte a la sortie du four (en x = L) est donnee par
T (L) = Ta +2ϕ0L
ecmvρ(3.28)
La temperature atteinte en x = L depend logiquement des parametres suivants :— de ϕ0 : la temperature atteinte a la sortie du four est d’autant plus elevee que le flux thermique surfacique
de chauffage ϕ0 est important ;— de L : de la meme maniere la temperature atteinte est d’autant plus elevee que le four est long ;— de e : la temperature atteinte est d’autant plus elevee que la plaque est mince ;— de v : la temperature atteinte est d’autant plus elevee que la plaque se deplace lentement dans le four ;— de ρcm (capacite calorifique volumique) : la temperature atteinte est d’autant plus elevee que la capacite
calorifique volumique du materiau est faible.Avec les donnees du probleme, on trouve une elevation de la temperature de la plaque δT (L) a la sortie du four,qui vaut : δT (L) = 520 K.