Electricidad y electronicada Unidades 1 4
129
1 Tecnológico Nacional de México Instituto Tecnológico de Tuxtla Gutiérrez Ingeniería Industrial Materia: Electricidad y Electrónica 2°C Presenta: Robles Domínguez Cesar Enrique Docente: Ing. Martínez Castellanos Jorge Eli Tuxtla Gutiérrez, Chiapas, México; Semestre Enero- Junio de 2015
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Electricidad y electronicada Unidades 1 4

1
Tecnológico Nacional de México
Instituto Tecnológico de Tuxtla Gutiérrez
Ingeniería Industrial
Materia: Electricidad y Electrónica
2°C
Presenta:
Robles Domínguez Cesar Enrique
Docente:
Ing. Martínez Castellanos Jorge Eli
Tuxtla Gutiérrez, Chiapas, México; Semestre Enero-Junio de 2015

2
ÍndiceUnidad 1:1.1 Introducción a la electricidad………..
1.2 Conceptos de magnitudes eléctricas……..
1.3 Circuito Eléctrico……
1.4 Medición de magnitudes eléctricas……
1.5 Conceptos básicos de las leyes Ohm, Kirchhoff, Lenz,Faraday y Watts….
1.6 Aplicaciones de electricidad básica
Resistencia…………
Efectos de Temperatura…………
Ley de OHM ¨Potencia y energía¨………….
Potencia………………..
Eficiencia……………..
Energía……………..
Unidad 2: Motores, transformadores y aplicaciones2.1- Motores de corriente directa y corriente alterna y que tipos de motores hay y como operan

3
2.2 Transformadores monofásicos y trifásicos y cómo funcionan
2.3 Reglamento de obras e instalaciones eléctricas (para que sirve y donde se aplica el reglamento)
https://col128.mail.live.com/mail/ViewOfficePreview.aspx?messageid=mgVzx3fibp5BGvUAAhWtfbkA2&folderid=flinbox&attindex=0&cp=-1&attdepth=0&n=13938048
2.4 Elementos de control industrial
2.5 Aplicaciones de los motores y de los transformadores
Unidad 3:
Unidad 4:

4
1.1 Introducción a la electricidadLa electricidad es una forma de energía que, a pesar desu conocimiento y su dominio son relativamente recientes, seencuentra en todas las facetas y actividades decualquier sociedad desarrollada. La utilización de laelectricidad represento una importante evolución enlas soluciones tecnológicas que dan respuestas a lesnecesidades de la humanidad.Un ejemplo los constituyen los sistemas de iluminación. Paradar satisfacción a la necesidad de alargar las horas hábiles,se desarrollaron distintos sistemas de iluminación desde losinicios de la humanidad hasta mediados del siglo XIX. Todoslos sistemas desarrollados durante este tiempo, basadosprincipalmente en la combustión, no aportaron grandesdiferencias o avances entre ellos pues los resultadosobtenidos entre la combustión de una antorcha de madera y lade una lámpara de petróleo, por poner un ejemplo, eran muylimitados y similares.Por el contrario, a partir del desarrollo de la lámpara deincandescencia durante la tercera parte del siglo XIX, sedispone de sistemas prácticos limpios y seguros que permitendesarrollar cualquier actividad con independencia de lascondiciones naturales de iluminación.¿Qué es la electricidad?La electricidad es una forma de energía. Energía es poder...el poder de hacer, de hacer por ejemplo que las cosas semuevan y de hacer que las cosas funcionen. Para entender quées la electricidad debemos comenzar con los átomos. Losátomos son pequeñas partículas que son muy difíciles de ver,y son los elementos con los que está hecho todo a nuestroalrededor. Un átomo está compuesto por protones, electrones yneutrones. El centro de un átomo, al cual se llama "núcleo",tiene al menos un protón.Alrededor del núcleo viajan loselectrones (en igual cantidad que los protones) agran velocidad.Los protones y electrones tienenuna propiedad llamada carga, la de los protones es de signopositivo y la de los electrones es de signo negativo. Los

5
neutrones no tienen carga. Los protones y electrones seatraen entre sí porque tienen cargas de distinto signo.En cambio las partículas que tienen cargas del mismo signo serepelen.Tipos de electricidad
Existe la electricidad estática donde las cargas eléctricasestán en reposo un ejemplo podría ser la electricidad en lasnubes de una tormenta. No siempre esta electricidad espeligrosa ya que muchos fenómenos inofensivos se producen pormedio de ella; los cuerpos que tienen esta electricidadatraen objetos ligeros, se atraen o repelen entre si,despiden chispas..
Corriente eléctrica
¿Por qué se encienden las bombillas? ¿Por qué se calientanlas estufas eléctricas? ¿Por qué giran los ventiladores?Porqué a través de ellos pasa la corriente eléctrica.Los fenómenos eléctricos dependen de la composición internade la materia. Cualquier clase de materia está formada por unconjunto de partículas llamadas átomos. A su vez al átomoestá formado por partículas aun más pequeñas:Electrones (partículas con cargas negativas, de masa muypequeña).

6
Protones (partículas cargadas positivamente).Neutrones (partículas neutras)La corriente eléctrica es el desplazamiento de electrones através de un conductor metálico.
Ley de Coulomb
Fue Franklin quien denomino carga positiva a la que adquiríael vidrio por frotación, y carga negativa a la adquirida porla ebonita, y de este modo se ha mantenido a través deltiempo. Por otra parte, se creía que la carga eléctricaestaba distribuida de forma continua en la materia pero se ademostrado que toda carga es múltiplo entero de cierta cargaeléctrica básica y nunca fraccionario. A esta carga unidad sele denomina carga elemental y es la del electrón.En el Sistema Internacional se utiliza como unidad de cargael coulomb, que equivale a la carga de 6, 242X10?8electrones.Coulomb en 1785, fue el primero que midió usandouna balanza de torsión como la de cavendish, lasfuerzas atractivas y repulsivas entre cargas eléctricas ydedujo la ley que las determina:La fuerza de atracción o repulsión entre dos cargas puntualeses directamente proporcional a su producto e inversamenteproporcional al cuadrado de la distancia que las separa
1.2 Conceptos de magnitudes eléctricas
Carga eléctricaLa carga eléctrica mide el exceso o defecto de electronessobre el número de protones en un cuerpo. Todos los cuerposen condiciones normales son eléctricamente neutros, peroestos pueden ganar o perder electrones por diferentescircunstancias, teniendo en este momento carga eléctrica.Launidad con la cual se mide la carga eléctrica es el culombio(C) que equivale a 6´3 x 1018 electrones, o lo que es lo

7
mismo, un electrón tiene una carga eléctrica de 1.6 X 10-19culombios.IntensidadUn cuerpo cargado eléctricamente genera a su alrededor uncampo eléctrico. La cantidad de flujo electrónico a través deun cuerpo con material conductor es una medida de lacorriente presente en el conductor.Las cargas en movimiento son los electrones relativamentelibres encontrados en conductores como cobre, aluminio u oro.El término “libres” indica que se pueden mover fuera delátomo en una dirección determinada mediante la aplicación deuna fuente de energía externa.Lo anteriormente descrito se representa mediante la siguienteecuación:
I – Intensidad (amperios) C- Carga en Culombios t -Tiempo (segundos)
La unidad con la cual se mide la intensidad es el Amperio(A). Por lo tanto, la intensidad eléctrica que atraviesa unconductor representa la cantidad de carga eléctrica que loatraviesa en la unidad de tiempo.
Una analogía bastante utilizada paraexplicar el modo de medir la corriente esel flujo de agua a través de un tubo, elcual habrá que partir e insertar unmedidor, en otras palabras, primero se debe"romper" el trayecto del flujo de la carga(corriente) e insertar el medidor entre lasdos terminales (expuestas) creadas en elcircuito. A este proceso se le denominamedir en serie.El medidor que se utiliza para medir laintensidad se le denomina amperímetro opolímetro (es un instrumento que puedemedir más cosas además de la intensidad,

8
tales como la resistencia, tensión, etc.).
Tensión:La tensión, o voltaje, es una variable que necesita 2puntos para ser definida. Si se quiere que una corrientecircule por un circuito, debe existir una diferencia depotencial que propicie el desplazamiento. Esa diferencia depotencial es lo que se puede identificar con la tensión.La unidad de medida de la tensión es el voltio (V).Tal vez la forma más fácil de entender el significado detensión es haciendo una analogía con un fenómeno de lanaturaleza. Si comparamos el flujo de la corriente eléctricacon el flujo de la corriente de agua de un río, la tensiónequivaldría a la altura, diferencia de nivel -de potencial-,de una catarata (caída de agua). Es justamente ese desnivelel que hace posible el desplazamiento del fluido.
El medidor que se utiliza para medir latensión es el voltímetro o polímetro (porsi queremos medir más magnitudes que latensión). La tensión se mide en paralelo,es decir, no hace falta interrumpir elcircuito para poder medir el voltaje entre2 puntos.
Resistencia:La resistencia es la oposición, por parte de un materialconductor, o semiconductor, a la circulación de la corrienteeléctrica. La resistencia del sistema controla el nivel de lacorriente resultante, mientras mayor es la resistencia, menores la corriente y viceversa.La unidad de resistencia es el Ohmio. El instrumento paramedir una resistencia es el óhmetro que, como en los casosanteriores, suele venir incluido en los polímetros. Elprocedimiento es situar en paralelo, como cuando se mide latensión, el instrumento con la resistencia, o los puntosentre los que se quiera medir, pero con la obligación dedesconectar toda tensión en el circuito y aislar el elemento cuya R se quiere medir

9
para no obtener el valor del paralelo de tal resistencia con el circuito al que seconecta.
1.3 Circuito EléctricoEl circuito eléctrico es el recorrido preestablecido por elque se desplazanlas cargas eléctricas.
Circuito elemental
Las cargas eléctricas que constituyen una corriente eléctricapasan de un punto que tiene mayor potencial eléctrico a otroque tiene un potencial inferior. Para mantenerpermanentemente esa diferencia de potencial, llamada tambiénvoltaje o tensión entre los extremos de un conductor, senecesita un dispositivo llamado generador (pilas, baterías,dinamos, alternadores...) que tome las cargas que llegan a un

10
extremo y las impulse hasta el otro. El flujo de cargaseléctricas por un conductor constituye una corrienteeléctrica.
Se distinguen dos tipos de corrientes:
Corriente continúa:
Es aquella corriente en donde los electrones circulan en lamisma cantidad y sentido, es decir, que fluye en una mismadirección. Su polaridad es invariable y hace que fluya unacorriente de amplitud relativamente constante a través de unacarga. A este tipo de corriente se le conoce como corriente
continua(cc) o corrientedirecta (cd), y es
generadapor una pila o
batería.
Este tipo de corriente es muy utilizada en los aparatoselectrónicos portátiles que requieren de un voltajerelativamente pequeño. Generalmente estos aparatos no puedentener cambios de polaridad, ya que puede acarrear dañosirreversibles en el equipo.
Corriente alterna:

11
La corriente alterna es aquella que circula durante un tiempoen un sentido y después en sentido opuesto, volviéndose arepetir el mismo proceso en forma constante. Su polaridad seinvierte periódicamente, haciendo que la corriente fluyaalternativamente en una dirección y luego en la otra. Seconoce en castellano por la abreviación CA y en inglés por lade AC.
Este tipo de corriente es la que nos llega a nuestras casas ysin ella no podríamos utilizar nuestros artefactos eléctricosy no tendríamos iluminación en nuestros hogares. Este tipo decorriente puede ser generada por un alternador o dinamo, lacual convierten energía mecánica en eléctrica.
El mecanismo que lo constituye es un elemento giratoriollamado rotor, accionado por una turbina el cual al girar enel interior de un campo magnético (masa), induce en susterminales de salida un determinado voltaje. A este tipo decorriente se le conoce como corriente alterna (a).
Pilas y baterías:
Las pilas y las baterías son un tipo de generadores que seutilizan como fuentes de electricidad.

12
Las baterías, por medio de una reacción química producen, ensu terminal negativo, una gran cantidad de electrones (quetienen carga negativa) y en su terminal positivo se produceuna gran ausencia de electrones (lo que causa que esteterminal sea de carga positiva).
Ahora si esta batería alimenta un circuito cualquiera, haráque por éste circule una corriente de electrones que saldrándel terminal negativo de la batería, (debido a que éstos serepelen entre si y repelen también a los electrones libresque hay en el conductor de cobre), y se dirijan al terminalpositivo donde hay un carencia de electrones, pasando através del circuito al que está conectado. De esta manera seproduce la corriente eléctrica.
Fuerza electromotriz de un generador:
Se denomina fuerza electromotriz (FEM) a la energíaproveniente de cualquier fuente, medio o dispositivo quesuministre corriente eléctrica. Para ello se necesita laexistencia de una diferencia de potencial entre dos puntos opolos (uno negativo y el otro positivo) de dicha fuente, quesea capaz de bombear o impulsar las cargas eléctricas através de un circuito cerrado.

13
A. Circuito eléctrico abierto (sin carga o resistencia). Portanto, no se establece la circulación de la corrienteeléctrica desde la fuente de FEM (la batería en este caso).B. Circuito eléctrico cerrado, con una carga o resistenciaacoplada, a través de la cual se establece la circulación deun flujo de corriente eléctrica desde el polo negativo haciael polo positivo de la fuente de FEM o batería.
Resumiendo, un generador se caracteriza por su fuerzaelectromotriz, fem, que es la energía que proporciona a launidad de carga que circula por el conductor.
Fuerza electromotriz = energía/Carga fem=E/Q
La unidad de fuerza electromotriz en el SI es el voltio (V):1 voltio = 1 julio / 1 culombio
Voltímetro:
La ddp y la fem se pueden medir conectando un voltímetroentre dos puntos de un circuito o entre los terminales de ungenerador. El voltímetro siempre se conecta en paralelo. Laescala de un voltímetro viene expresada en voltios.

14
Para efectuar la medida de la diferencia de potencial elvoltímetro ha de colocarse en paralelo, esto es, enderivación sobre los puntos entre los que tratamos deefectuar la medida. Esto nos lleva a que el voltímetro debeposeer una resistencia interna lo más alta posible, a fin deque no produzca un consumo apreciable, lo que daría lugar auna medida errónea de la tensión. Para ello, en el caso deinstrumentos basados en los efectos electromagnéticos de lacorriente eléctrica, estarán dotados de bobinas de hilo muyfino y con muchas espiras, con lo que con poca intensidad decorriente a través del aparato se consigue la fuerzanecesaria para el desplazamiento de la aguja indicadora.
En la actualidad existen dispositivos digitales que realizanla función del voltímetro presentando unas características deaislamiento bastante elevadas empleando complejos circuitosde aislamiento.
En la Figura se puede observar la conexión de un voltímetro(V) entre los puntos de a y b de un circuito, entre los quequeremos medir su diferencia de potencial.
En algunos casos, para permitir la medida de tensionessuperiores a las que soportarían los devanados y órganosmecánicos del aparato o los circuitos electrónicos en el casode los digitales, se les dota de una resistencia de elevado

15
valor colocada en serie con el voltímetro, de forma que solole someta a una fracción de la tensión total.
1.4 Medición de magnitudes eléctricas.
Voltaje, tensión o diferencia de potencial (V)En un circuito eléctrico, la diferencia de potencial (elvoltaje o la tensión) existente entre los polos del generadoro entre los puntos cualesquiera del circuito, es la causa deque los electrones circulen por el circuito si este seencuentra cerrado.Su unidad es el voltio (v). Se suelen emplear dos múltiplosde esta unidad que son el kilovoltio (kV) yel megavoltio (mV) y también dos submúltiplos como sonel milivoltio (mV) y el microvoltio (µV).1kV= 1.000 V 1MV= 1.000.000 V1V= 1000MV 1 V= 1.000.000 µV

16
Para medir el voltaje se utiliza un aparatollamado voltímetro. Se conecta en paralelo al elemento cuyovoltaje queremos medir.Intensidad de la corriente eléctrica (I).La intensidad de la corriente se define como la cantidad decarga eléctrica que circula por un circuito en la unidadde tiempo.Se mide en Amperio (a). Normalmente se emplean de unossubmúltiplos de esta unidad que son miliamperio (mA) y elmicroamperio (µA)1 A= 1.000 mA 1 A= 1.000.000 µALa intensidad es una característica equivalente al caudal enel circuito hidráulico, esto es, a la cantidad de agua quepasa en la unidad de tiempo por un punto de la tubería.Para medir la intensidad de corriente que circulan por uncircuito se utilizan unos aparatos llamados amperímetros, seconecta en serie para efectuar la medida.Resistencia Eléctrica (R)Es la propiedad que tienen los cuerpos de dificultar más omenos el paso de la corriente eléctrica. Las sustanciasconductoras ofrecen poca resistencia al paso de la corriente,sin embargo las sustancias aislantes ofrecen una altaresistencia al paso de la corriente eléctrica.La resistencia de un conductor depende del tipo de materialde el que esta compuesto de su longitud y de su sección. Amayor longitud mayor resistencia y por el contrario a mayorsección de conductor menor resistencia de la misma formaque el agua circula por la tubería tiene pocos cambiosde dirección y son mas anchas.La unidad de resistencia es el ohmio (O). Normalmente seemplean de esta unidad como son kiloohmios (K O) y elmegohmio (M O).1 k O= 1.000 O 1 M O = 1.000.000 O

17
1.5 Conceptos básicos de las leyes Ohm,Kirchhoff, Lenz, Faraday y Watts.La corriente continua es un movimiento de electrones. Cuandolos electrones circulan por un conductor, encuentran unacierta dificultad al moverse. A esta "dificultad" la llamamosResistencia eléctrica.
La resistencia eléctrica de un conductor depende de tresfactores relacionados bajo la siguiente ecuación:

18
La resistividad depende de las características del materialdel que está hecho el conductor.
La ley de Ohm relaciona el valor de la resistencia de unconductor con la intensidad de corriente que lo atraviesa ycon la diferencia de potencial entre sus extremos. En elgráfico vemos un circuito con una resistencia y una pila.Observamos un amperímetro que nos medirá la intensidad decorriente, I. El voltaje que proporciona la pila V, expresadoen voltios, la intensidad de corriente, medido en amperios,y el valor de la resistencia en ohmios, se relacionan por laley de Ohm, que aparece en el centro del circuito.
Con la Ley de Ohm, podemos apreciar las siguientesmagnitudes:
* "La intensidad de la corriente es directamenteproporcional al voltaje e inversamente proporcional a laresistencia en todos los circuitos o elementos eléctricos".
* “La caída de tensión o diferencia de potencial, esdirectamente proporcional al producto de la corrienteeléctrica a través del circuito por el valor de laresistencia eléctrica del mismo.
* “La resistencia eléctrica, es directamente proporcional ala caída de tensión en un circuito o un elemento einversamente proporcional a la corriente eléctrica a travésde él.
Leyes de KirchhoffEsta ley también es llamada ley de nodos o primera ley deKirchhoff y es común que se use la sigla LCK para referirse aesta ley. La ley de corrientes de Kirchhoff nos dice que:

19
En cualquier nodo, la suma de las corrientes que entran enese nodo es igual a la suma de las corrientes que salen. Deforma equivalente, la suma de todas las corrientes que pasanpor el nodo es igual a cero
Esta fórmula es válida también para circuitos complejos:
La ley se basa en el principio de la conservación de lacarga donde la carga en couloumbs es el producto de lacorriente en amperios y el tiempo en segundos
Esta ley es llamada también Segunda ley de Kirchhoff, ley delazos de Kirchhoff o ley de mallas de Kirchhoff y es comúnque se use la sigla LVK para referirse a esta ley.
En un lazo cerrado, la suma de todas las caídas de tensión esigual a la tensión total suministrada. De forma equivalente,la suma algebraica de las diferencias de potencial eléctricoen un lazo es igual a cero.
De igual manera que con la corriente, los voltajes tambiénpueden ser complejos, así:
Esta ley se basa en la conservación de un campo potencial deenergía. Dado una diferencia de potencial, una carga que hacompletado un lazo cerrado no gana o pierde energía alregresar al potencial inicial.Esta ley es cierta incluso cuando hay resistencia en elcircuito. La validez de esta ley puede explicarse alconsiderar que una carga no regresa a su punto de partida,debido a la disipación de energía. Una carga simplementeterminará en el terminal negativo, en vez de en el positiva.Esto significa que toda la energía dada por la diferencia de

20
potencial ha sido completamente consumida por la resistencia,la cual la transformaraá en calor.
En resumen, la ley de tensión de Kirchhoff no tiene nada quever con la ganancia o pérdida de energía de los componenteselectrónicos (Resistores, capacitores, etc. ). Es una ley queestá relacionada con el campo potencial generado por fuentesde tensión. En este campo potencial, sin importar quecomponentes electrónicos estén presentes, la ganancia opérdida de la energía dada por el campo potencial debe sercero cuando una carga completa un lazo.
Campo eléctrico y potencial eléctrico
La ley de tensión de Kirchhoff puede verse como unaconsecuencia del principio de la conservación de la energía.Considerando ese potencial eléctrico se define como unaintegral de línea, sobre un campo eléctrico, la ley detensión de Kirchhoff puede expresarse como:Que dice que la integral de línea del campo eléctricoalrededor de un lazo cerrado es cero.Para regresar a una forma más especial, esta integral puede"partirse" para conseguir el voltaje de un componente enespecífico.Ley de Lenz
Ley: "El sentido de la corriente inducida sería tal que suflujo se opone a la causa que la produce".La Ley de Lenz plantea que las tensiones inducidas serán deun sentido tal que se opongan a la variación del flujomagnético que las produjo; no obstante esta ley es unaconsecuencia del principio de conservación de la energía.La polaridad de una tensión inducida es tal, que tiende aproducir una corriente, cuyo campo magnético se opone siempre

21
a las variaciones del campo existente producido por lacorriente original.El flujo de un campo magnético uniforme a través de uncircuito plano viene dado por:Dónde:
§ = Flujo magnético. La unidad en el SI es el weber (Wb).
§ = Inducción magnética. La unidad en el SI es el tesla (T).
§ = Superficie del conductor.
§ = Ángulo que forman el conductor y la dirección del campo.
Si el conductor está en movimiento el valor del flujo será:
En este caso la Ley de Faraday afirma que la Vε inducido encada instante tiene por valor:§ Vε Donde Vε es el voltaje inducido y dΦ/dt es la tasa devariación temporal del flujo magnético Φ. La direcciónvoltaje inducido(el signo negativo en la fórmula) se debe ala ley de Lenz.Esta ley se llama así en honor del físico germano-báltico Heinrich Lenz, quien la formuló en el año 1834.
Ley de Faraday

22
La Ley de inducción electromagnética de Faraday (osimplemente Ley de Faraday) se basa en los experimentosque Michael Faraday realizó en 1831 y establece queel voltaje inducidoen un circuito cerrado es directamenteproporcional a la rapidez con que cambia enel tiempo el flujo magnético que atraviesauna superficie cualquiera con el circuito como borde:1
En resumen: "La cantidad de sustancia que se oxida o sereduce en los electrodos de una cuba electrolítica esproporcional a la cantidad de electricidad depositada"Donde es el campo eléctrico, es el elemento infinitesimaldel contorno C, es la densidad de campo magnético y S esuna superficie arbitraria, cuyo borde es C. Las direccionesdel contorno C y de están dadas por la regla de la manoderecha.La permutación de la integral de superficie y la derivadatemporal se puede hacer siempre y cuando la superficie deintegración no cambie con el tiempo.Por medio del teorema de Stokes puede obtenerse una formadiferencial de esta ley:Ésta es una de las ecuaciones de Maxwell, las cualesconforman las ecuaciones fundamentales del electromagnetismo.La ley de Faraday, junto con las otras leyesdel electromagnetismo, fue incorporada en las ecuaciones deMaxwell, unificando así al electromagnetismo.En el caso de un inductor con N vueltas de alambre, lafórmula anterior se transforma en:Donde Vε es el voltaje inducido y dΦ/dt es la tasa devariación temporal del flujo magnético Φ. La direcciónvoltaje inducido(el signo negativo en la fórmula) se debe ala ley de Lenz.
Ley de watts
Enunciado:

23
“La potencia eléctrica suministrada por un receptor esdirectamente proporcional a la tensión dela alimentación (v) del circuito y a la intensidad ( I ) quecircule por él”Ecuación:P = V . IEn donde:
P = potencia en VatiosV = Tensión en voltiosI = Intensidad
Vatio:
El vatio o watt es la unidad de potencia del Sistema Internacional de Unidades.Su símbolo es W.Es el equivalente a 1 julio por segundo (1 J/s) y es una de lasunidades derivadas.
Expresado en unidades utilizadas en electricidad, el vatio esla potencia producida por una diferencia de potencial de 1voltio y una corriente eléctrica de 1 amperio (1 VA).
La potencia eléctrica de los aparatos eléctricos se expresa en vatios, si son de poca potencia, pero si son de mediana o gran potencia se expresa en kilovatios (kW) que equivale a 1000 vatios. Un kW equivale a 1,35984 CV (caballos de vapor).
1.6 Aplicaciones de electricidad basica
- Circuito basico

24
- Materiales conductores
-Materiales Aisladores
ResistenciaR= P*L/A R= Ohms P= resistividad= CM L= longitud enpies
A=el area de seccion transversal= CM
Metal ConductoresPlata 105Cobre 100Oro 70.5Aluminio 61Tugsteno 31.8Niquel 28.1Hierro 14Constantano 3.57
Metalesaisladores
Rigidez dielectrica
Aire 30Porcelana 70Aceites 140Vaquelita 150Caucho 270Papeln parafin
300
Teflon 600Vidrio 900Mica 2000
25
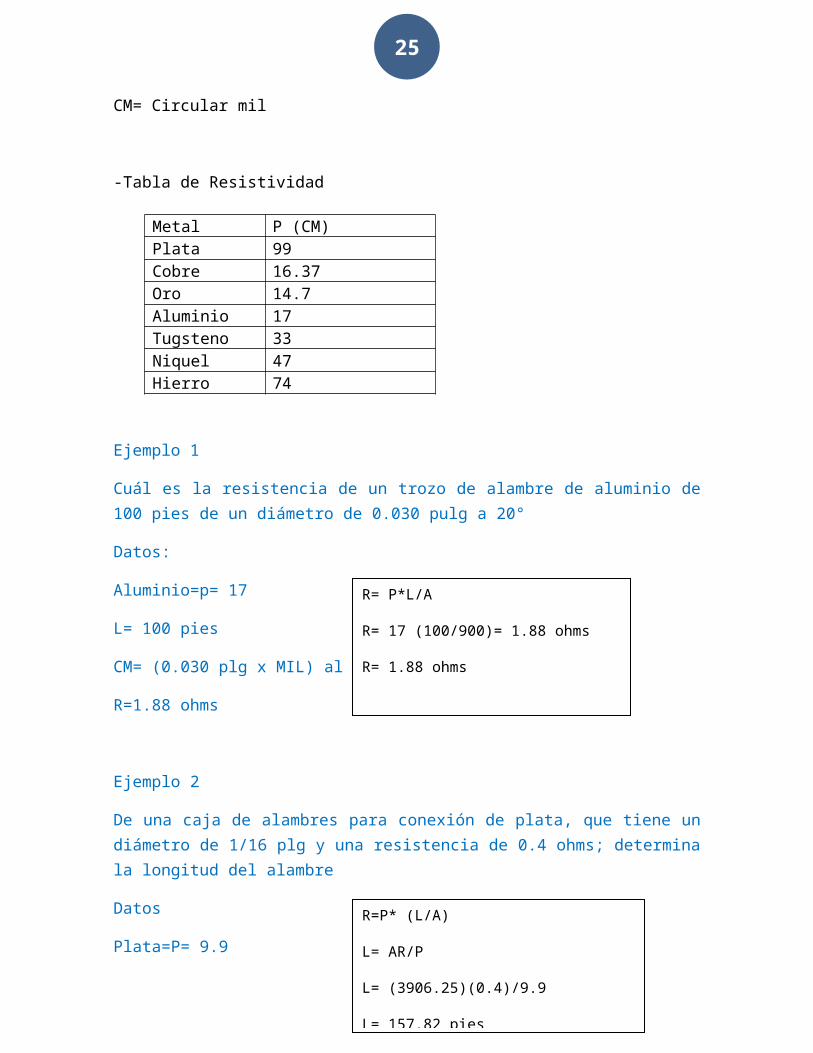
CM= Circular mil
-Tabla de Resistividad
Ejemplo 1
Cuál es la resistencia de un trozo de alambre de aluminio de100 pies de un diámetro de 0.030 pulg a 20°
Datos:
Aluminio=p= 17
L= 100 pies
CM= (0.030 plg x MIL) al 2
R=1.88 ohms
Ejemplo 2
De una caja de alambres para conexión de plata, que tiene undiámetro de 1/16 plg y una resistencia de 0.4 ohms; determinala longitud del alambre
Datos
Plata=P= 9.9
R= P*L/A
R= 17 (100/900)= 1.88 ohms
R= 1.88 ohms
R=P* (L/A)
L= AR/P
L= (3906.25)(0.4)/9.9
L= 157.82 pies
Metal P (CM)Plata 99Cobre 16.37Oro 14.7Aluminio 17Tugsteno 33Niquel 47Hierro 74

26
A=(1/16*MIL) al 2
R= 0.4 ohms
L= 157.82 pies
-Ejercicios
1.- Cual es la resistencia de una barra de oro con unalongitud de 150 pies y de un diametro de 0.10 pulgadas
Datos
Oro=P= 14.7
L= 100 pies
A= (0.10 plg x MIL) al 2
R= 0.19411 Ohms
2.-Cual es el area de una espada de hierro con unaresistencia de 0.7 ohms, una longitud de 75 pies
Datos:
Hierro=P= 74
R= 0.7 ohms
L= 75 pies
A=1.4428 plg
3.- Calcular resistencia de un cubo de niquel con unalongitud de 15 pies y una área de 35 cm
Datos:
Niquel=P= 47
L= 15 pies
R= P*L/A
R= 14.7 * 150/10000
R= 0.1911
A= L/PR
A= 75/(0.7)(74)
A= 1.4428 plg
R= P*L A
R= 47*15 (14xmil) al 2
R=0.000002397 ohms

27
A= 35 cm*0.4 plg= 14
R= 0.000002397 ohms
4.- Cual es la longitud de una barra de tugsteno con unaresistencia de 0.57 ohms y 0.75 plg de área
Datos:
Tusgteno=P= 33
R= 0.57
A=0.74 plg= 304,900
L= 5266.45 pies
Efectos de Temperatura
Mayor temperatura= Mayor resistencia
En el caso de los conductores aumenta la resistencia alaumentrar la temperatura debido a mayor movimiento molecular.
T= temperatura absoluta inferida al material
t1 y t2 = temperaturas
r1 y r2 = resistencias
-Temperaturas absolutas
R= P* P/L
L= A*R/P
L= 304,900(o.57) / 33
L= 5266.45 pies
T+t1= T+t2R1 R2
Metal °CPlata 243Cobre 234.5Oro 274Aluminio 236Tugsteno 204Niquel 147Hierro 162

28
Ejemplo:
Si la resistencia de un alambre de plata es de 80 ohms a 30°C cual sera la resistencia a 120 °C
Datos:
Plata= T= 243
t1= 30°
r1= 80 ohms
t2= 120°
r2= 106.37 ohms
Ejemplo 2
Si la resistencia de un alambre de cobre a 0 °C es de 40 Ohms¿Cual seria la resistencia a – 50 °C
Datos:
Cobre=T= 234.5
t1= 0 °C
r1= 40 ohms
t2= -50 °C
r2= 31.40 Ohms
-Ejercicios
r2= (T+t2)r1/ T+t1
r2= (243+120°)(80)/234+30°
r2= 106.37 Ohms
r2= (T+t2)r1/T+t1
r2= (234.5°-50°)/243°+0* 40
r2=31.47 Ohma

29
1.-La resistencia de una Cable de plata es de 75 ohms a 45 °C¿Cual seria su resistencia a 75 °C?
Datos:
Plata= T= 243 °C
r1= 70 ohms
t1= 45 °C
t2= 75 °C
r2= 77.29 ohms
2.- La temperatura de una pistola electrica de Oro con unaresistencia de 15 Ohms y despues de aumetar su temperatura a37 °C.Tiene una resistencia de 40 Ohms
Datos:
Oro= T= 236 °C
r1= 15 Ohms
t1= 14.46 °C
t2= 37 °C
r2= 40 ohms
3.- La resistencia de un gancho de hierro de cuanto podra sersi a -40 °C es de 35 ohms ¿ y si el gancho esta a 5 °C?
Datos:
Hierro= T= 162 °C
t2= 5 °C
T+t1= T+ t2 r1 r2
r2= (T+t2)r1= (243+75)*70= T+t1 243+45
T+t1= T+ t2 r1 r2
t1= (T+t2)r1= (236°+37°)15 r2+T 236°+40
T+t1= T+ t2 r1 r2
r1=(T+t1)r2= (162-40)*35= T+t2 162+5
r1= 25.56 ohms

30
r1= 25.56 ohms
t1= -40 °C
r2= 35 ohms
4.- Si la resistencia de una barra de aluminio es de 35 ohmsa 15 °C cual sera su temperatura con 80 Ohms de resistencia?
Datos:
Aluminio= T= 274 °C
t1= 15 °C
r1= 35 ohms
t2=74.82 °C
r2= 80 ohms
Ley de OHM ¨Potencia y energía¨Efecto= Causa Oposición
Corriente= Diferencia de potencial Resistencia
I= E R
I= Amperes R= Ohms E= Volts (ley de ohm)
Caida de potencial= V
E= IR I=V R
T+t1= T+ t2 r1 r2
t2=(T+t1)r2= (274+15)*80= r1+T 35+274
t2= 74.82 °C
31
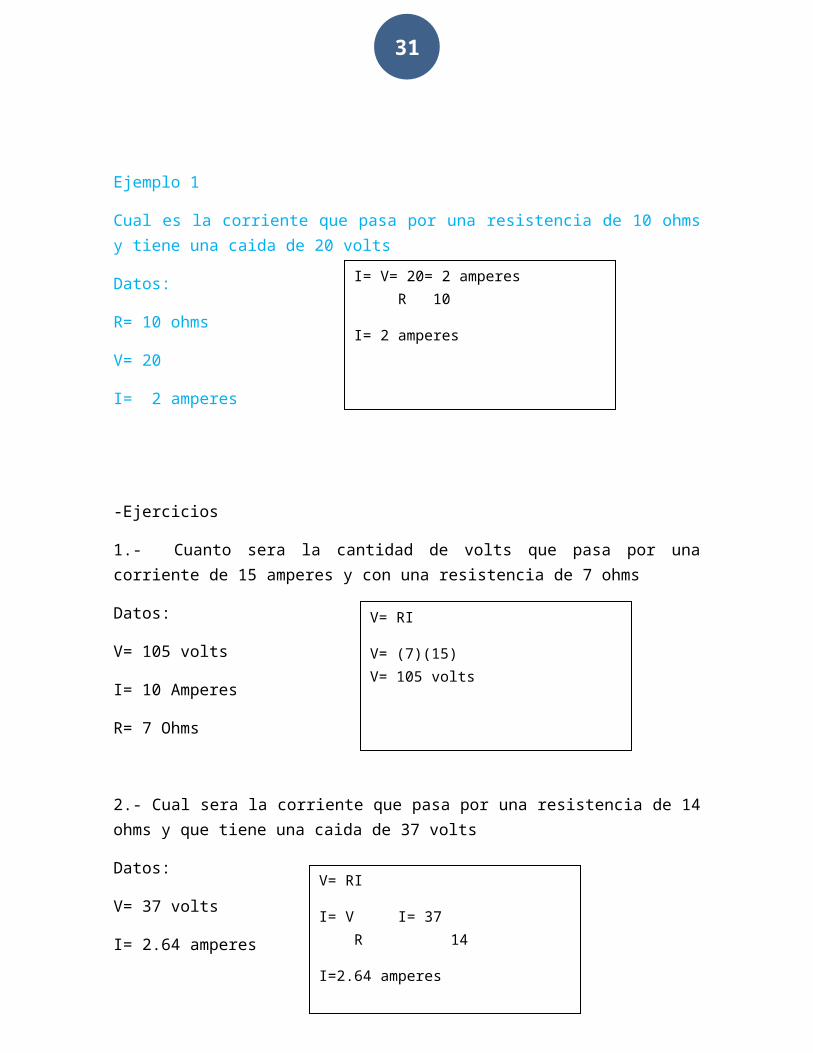
Ejemplo 1
Cual es la corriente que pasa por una resistencia de 10 ohmsy tiene una caida de 20 volts
Datos:
R= 10 ohms
V= 20
I= 2 amperes
-Ejercicios
1.- Cuanto sera la cantidad de volts que pasa por unacorriente de 15 amperes y con una resistencia de 7 ohms
Datos:
V= 105 volts
I= 10 Amperes
R= 7 Ohms
2.- Cual sera la corriente que pasa por una resistencia de 14ohms y que tiene una caida de 37 volts
Datos:
V= 37 volts
I= 2.64 amperes
I= V= 20= 2 amperes R 10
I= 2 amperes
V= RI
I= V I= 37 R 14
I=2.64 amperes
V= RI
V= (7)(15)V= 105 volts

32
R= 14 ohms
PotenciaEs una indicacion de trabajo que se puede hacer en unacantidad especifica de tiempo, un indice de realisacion detrabajo.
P= W P= IV en Watts (Caida de voltaje) P= EI (Subida devoltaje) t
P= QV I= Q V= IR I= V t t R
1 Hp= horse power
1 Hp= 746 watts
W= QV Q= Carga V= Voltaje
Ejemplo 1
Determie la potencia suministrada a un motor que se le aplica120 volts y tiene una correitne de 5 amperes
Datos:
V= 120 Volts
I= 5 Amperes
P= 600 volts
Ejemplo 2
Cual es la potencia que disipa una resistencia de 50 ohms yque pasa por ella 8 amperes
Datos:
P= VI
P= (120)(5)
P= 600 Volts
P= I*I (R)
P= 8*8 (50)
P= 3,200 watts

33
R= 50 Ohms
I= 8 Amperes
P= 3,200 volts
-Ejercicios
1.- Determinar la potencia del Go-Kart con motor pequeño sise le aplica 150 volts y una corriente de 7 amperios
Datos:
P= 1050 watts
V= 150 volts
I= 7 amperes
2.- Cual es la potencia que elimina una resistencia de 37ohms y que pasa una corriente de 4 amperes
Datos:
P= 592 watts
R= 37ohms
I= 4 Amperes
3.- Cual sera la corriente e un cochesito electrico si tieneuna potencia de 37 watts y 3.7 volts
Datos:
P= 37 watts
V= 3.7
P= I*I (R)
P= 8*8 (50)
P= 3,200 watts
P= VI
P= ( 150)(7)
P= 1050 watts
P= I*I(R)
P= 4*4 (37)
P= 592 watts
P=VI
I=P= 37 V 3.7I=amperes

34
I= amperes
4.- Cual sera la resistencia de un motor de 2 ampers y unapotencia de 85 watts
Datos:
R= 21.25 ohms
I= 2 Amperes
P= 85 watts
EficienciaEntrada Salida
Energíaenergía
Conservación de energía
Estable:
Entrada= Salida + energía perdida Energía energía o almacenada
W entrada= W salida + W perdida t t t
P= w Pi= Po + perdida t
P= I*I(R)
R= P = 85= 21.25 ohms I*I 2*2
(Fuente Interna)
Caja negra

35
Eficiencia (η) Eficiencia= Salida potencia Entrada potencia
η= Po x 100 % = el resultado es en porcentaje Pi
η= Wo x 100 Wi
Ejemplo 1
Un motor de 3 Hp que funciona a una eficiencia del 80% ¿Cuales la entrada de potencia en watts si la corriente de entradaes de 10 amperes?
Datos:
Po= 3 Hp = 2,238 watts
η= 80 x 100= 0.80
Pi= 2,792.5 watts
E= 279.75 volts
-Ejercicio
1.- Un robot de 7 Hp que trabaja a una productividad del 37%¿ Cuál es la entrada de potencia y si la corriente de entradaes la entrada de 7 amperes?
Datos:
Po= 7 Hp x 746= 5222
η= 37% x 100= 0.37
η= Po x 100 Pi
Pi= Po= 2238= 2797.5 watts η 0.80
P=EI E=P= 2795.5= 279.75 volts I 10
Pi=Po= 5222= 14113.5135 η 0.37
P=EI E=P= 14114.5135= 2016.21 I 7

36
Pi= 14,113.5135
E=2016.21 volts
I= 7 amperes
2.- Cual es la productividad de un ecomotor que trabaja a3757 watts y que tiene una entrada de potencia de 4,000 watts
Datos:
Po= 3,757 watts
Pi= 4,000
η= 93.925%
3.-Una planta nuclear con una eficiencia del 47% con unasalida de potencia de 13 Hp ¿Cuánto es su corriente deentrada si la entrada de potencia es de 578 volts?
Datos:
Pi=
η = 47% x 100= 0.47
Po= 13Hp x 746= 9698 watts
E= 578 volts
I= 7.88 amperes
energía Perdida o ganada por cualquier sistema se determina por:
η= Po x 100= Pi
η= 3757= 93.925 % 4000
η= Po x 1000= Pi
Pi= Po= (9698)(0.47)= 4558.06 η
I= P= 4558.06 watts=7.88 amperes E 578volts

37
W= P*t
W= energía= watts/ seg= Jules
P= potencia= watts
t= tiempo= segundos
Watts/seg energía= (potencia)[tiempo(hr)]= kw/hr
Energía= [ Potencia(watts)][tiempo(hr)] 1000
Ejemplo 1
Cuanta energía en kw/hr se requiere para encender un foco de60 watts continuamente durante un año
Datos:
W= 525.6 kw/hr
P= 60 watts
t= 365 días x 24 horas= 8760 hr
Ejemplo 2
Cuanto tiempo puede estar encendida la television de 205watts antes de utilizar mas de 4 kw/hr
Datos:
t= 19.5 hr
P= 205 watts
W= 4 kw/ hr
W= P*t 1000
W= (60)(8760) 1000
W= 525.6 kw/hr
W==P*t 1000
t= W x 1000= 4 x 1000 P 205
t= 19.5 hr

38
Ejemplo 3
Cuál es el costo de utilización de un motor de 5 Hp durante3 horas si el precio de 2.10 pesos por kw/ hr
Datos:
P= 5 Hp x 746= 3730
t= 3 hr
costo= $2.10 x 11.19= 23.50 pesos
W= 11.19 kw/ hr
Ejercicios Energía
1.- cuanta energia en kw/ hr se necesitan para encender unxbox de 137 watts durante 3 dias
Datos:
W= 9.864 kw/ hr
P= 137 watts
t= 3 días x 24 horas=
2.- Cuantos watts se requieren para una turbina ecologica quetiene de 17 kw/hr y funciona por 100 hr
Datos:
P= 170 watts
W= 17 kw/hr
W= P*t 1000
W= (3730)(3) 1000
W= 11.19 kw/hr
W= P*t 1000
W= (137)(72)= 9.864 kw/hr 1000
W= P*t
P= W= (17)(1000)= 170 watts t 100

39
t= 100 hr
3.- Que tiempo puede estar encendida la ecoestufa si tieneuna potencia de 13 watts y una energía de 3 kw/hr
Datos:
t= 230.76 hr
W= 3 kw/hr
P= 13 watts
4.-cuánto vale tener encendido un árbol de navidad por 7 díascon un motor de 2.5 Hp si el precio por kw/hr es de 3.75pesos
Datos:
W=313.32 kw/hr
P= 2.5 Hp x 746 watts=
t= 7 dias x 24 horas=
Costo= $3.75 x = $1174.95
5.- Cual es la potencia en Hp de un robot con una energía de1735 kw/hr y una duración de 15 días
Datos:
P= 4819.4 watts
W= 1735 kw/hr
t= 15 dias x 24 hr= 360 hr
W=P*t
P= W= 1735 x 1000= 4819.4 watts t 360
W= P*t 1000
W= (1865)(168)= 313.32 kw/ hr 1000
Costo= 3.75* 313.32= $1174.95
W= P*t
t=W= 3*1000= 230.76 hr P 13

40

41
Circuitos
Se dispone de dos tipos de corriente
a) Corriente continua (c.c): en la que la corriente no cambia en magnitud y direccion
b) Corriente alterna (c.a): Es en la que la corriente cambia constantemente de magnitud y direccion
Circuitos en serie (C.e.s)
Consiste en cierto numero de elemntos unidos en puntos terminantes proporcionando por lo menos una trayectoria cerrada
+
0
+
-

42
RT= R1+R2+R3+........Rn
Ejemplos:
Determinar la resistencia total de los siguientes circutos enserie
a) b)
c) d)
a) RT= R1+R2 RT= 4 ohm + 5 ohm= 9 ohm
b) RT= R1+R2+R3 RT= 2ohm+4ohm+6ohm= 12ohm
c) RT= R1+R2+R3+R4 RT= 2 ohm+3 ohm+ 4 ohm+ 5 ohm= 14 ohm

43
d) RT= R1+R2+R3+R4 RT= 2 ohm+2 ohm+2 ohm+2 ohm= 8 ohm
Ejercicios:
a) b) c)
Ley de tensiones de Kirchoff
-La suma algebraica de las subidas de tension (+) y las caidade sension (-) es igual a cero
E0V= 0La suma en un circuito cerrado
Ejemplo
Aplicando la ley de tensiones de kirchoff para las 3 trayectorias marcadas en el siguiente circuito
Polaridad- += +
+E-V1-V2=0E=V1+V2
Trayectoria 1+E-V1-V2=0E=V1+V2
Trayectoria 2+V2-V3-V4=0V2= V3+V4
RT= R1+R2RT= 3ohm+4ohmRT= 7 ohms
RT= R1+R2+R3+R4RT= 5+7+2+3RT= 17 ohms
RT= R1+R2+R3RT= 3+7+10RT= 20 ohms

44
Ejemplo 1
Determinar V1,V2 para el siguiente circuito
Ejemplo 2
Determinar V1+V2 parael siguiente ciruito
Ejemplo 3
Trayectoria 1+E-V1-V2=0E=V1+V2
Trayectoria 2+V2-V3-V4=0V2= V3+V4
-10V-V2=0V2= 10 volts
V1-6V-V14V-V1=0V1= 4 volts
25V-V1+15=0V1= 25V+15VV1=40 V
20V+V2=0 V2= -20 V

45
Para el circuito siguiente calcular RT,I,V1,V2,P4 ohm,P6 ohmDeterminar la potencia de salida de la bateria y compare con la disipada por la resistencia y verificar por la ley de tensiones de kirchoff
Datos:
RT= 10ohmI= 2 ampV1= 8 voltsV2= 12 voltsE= 20 VP4=P6=
Ejercicios:
Determinar V1, V2 para el siguiente circuito
Determinar V1, V2 para el siguiente circuito
a) RT= R1+R2 c) P4= V1*I P4= 8*2= 16 watts RT= 4+6= 10 ohm P6= V2*I P6= 12*2=24 watts
b) I=E= 20= 2 amperes d) P=EI R 10
EoV=0E-V1-V2=0E= V1+V2
V1-10v=0V1=10v
V2-17v-3v=0V2=17v+3v=20v

46
Aplicada la ley de tensiones de kirchoff para las 3 trayecorias marcadas en el siguiente ciruito
Ejemplo
Para el siguiente circuito calcular RT,I,V1,V2,V3 y verificarpor la ley de tensiones de kirchoff
Datos:
E= 54VR1=6 ohmR2= 7 ohmR3= 5 ohmV1= 18vV2= 21vV3= 15vI= 3 AmperesRT= 18 ohm
E= V1+V2
V2=v1+V2
V4= V2+V3
E=V5-V1-V2E= V1+V2+V3+V4+V5V3=V4
RT= R1+R2+R3RT= 6+7+5=18
I=E= 54= 3 amp RT 18
V=IRV1= (3)(6)= 18vV2=(3)(7)= 21vV3= (3)(5)= 15v
E=V1+V2V2= V1+V4V4=V2+V3
EOV=0E-V1-V2-V3=0E= V1+V2+V354V=18v+21v+15v
a) Resistencia= RT= R1+R2+R3....+Rn
b) Corriente= I=V c) la tension atraves de la resistencia Rx RT X=1,2,3....n Vx= I*Rx
d) la tension atraves de 2 o mas resistencia enserie que una resistencia RT RV= I*RT
e)si se sustituye I del inciso b) en las ecuaciones de los inicios c) y d)

47
Ejercicios
1.- Para el siguiente circuito calcular Rt,I,V1,V2,P5,P12, determinar la potencia de salida de la bateria y compare con la disipada pór las resistencias y verificar por la ley de tensiones de kirchoff
Datos:
RT= 17ohmI= 2.17 ampV1= 10.85V2= 26.04E= 37 vP5= 22.785 wattsP12= 56.5068 watts
2.- calcular del siguiente circuito Rt,V1,V2,V3 y verificar por la ley de tensiones de kirfchoff
a) Rt b)corriente c) la tension atraves de resistencia Rx
d) la tension atraves de 2 o mas resistencia
Datos:
Rt= 18 ohmV1=28.35
RT= R1+R2 RT= 5+12= 17 ohm I= E= 37= 2.17 amp V= IR RT 17 V1=(2.17)(5)=10.85 V2=(2.17)(12)=26.04

48
V2=32.4E=73 VP7=114.8174P3=49.2075P8=131.22I= 4.05
3.- Calcular el siguiente circuito
Datos:
RT= 29 ohmI=2.89V1=28.9V2=11.36V3=43.35E=84 vP10= 83.521P4= 33.4084P15= 43.35
4.- Calcular el siguiente circuito
Datos:
RT= 36 ohmI= 0.41 ampV1= 4.51
RT= R1+R2+R3= 7+3+8= 18 ohmI=E = 73 = 4.05 amp V=IR RT 18 V1=(4.05)(7)= 28.35 V2=(4.05)(3)=12.15 V3=(4.05)(8)= 32.4
RT= R1+R2+R3= 10+4+15= 29 ohm
I= E = 84= 2.89 amp RT 29
V=IRV1=(2.89)(10)=28.9 P10=(2.89)(28.9)= 83.521 EoV=V2=(2.89)(4)=11.56 P4=(2.89)(11.56)=33.4084 E=V1+V2+V3
RT=R1+R2+R3= 11+12+13= 36 ohm
I= E = 15= 0.41 V=IR RT 36 V1=(0.41)(11)=4.51 EoV=0 V2=(0.41)(12)=4.92 E=V1+V2+V3

49
V2= 4.92V3= 5.33E= 15
6.-Para el siguiente circuito determine V2,V4
Datos:
R1= 1ohmR2= 2 ohmR3= 4ohmE= 21v
VT= 18v
6.-
Determinar V1,V4,V5
R1= 2ohmR2= 4 ohmR3= 1ohmR4= 3ohmI= 4 AmpRT= 10 ohm
RT= R1+R2+R3RT= 1+2+4= 7 ohm
a) Vx=RxV RT
V2=R2V V2= 2(21)=6v RT 7
V1=R1V V1= 1(21)=3v
b) Determinar V4
VT= RTV VT=(R1+R2)V RT RT
VT=(2+4)21= 18v
Vx= RxV= R1V= 2(40)= 8v RT RT 10
V5=(R1+R2)V= (2+4)(40)= 24v RT 10
RT= R1+R2+R3+R4= 2+4+1+3=
V1=2(4)= 8 vV2= 4(4)= 16vV3= 1(4)= 4vV4= 3(4)= 12v

50
Circuitos en paralelo
2 elementos están paralelos cuando tiene 2 puntos en común
A B C[A II B]II C
[A II B]+ C
C
B
A
[A II B]II E
1 resistencia1 = 1 + 1 + ... + 1RT R1 R2
2 Resistencias
3 Resistencias
RT= R1*R2*R3 R1R2+R1R3+R2R3

51
Ejemplo:
Calcular Rt,I,I1,I2,I3,V1,V2,V3,P1,P2,P3 para el siguiente cirucito y comprobar si la resistencia disipada es igua a lasPR1, PR2, PR3
Datos:
E= 20vR1= 2 ohm
R2= 4 ohm
R3= 6 ohm
I1= 10 amp
I2= 5 amp
I3= 3.33 amp
Ejercicios en paralelo
1.- Calcular el siguiente circuito en paralelo
Datos:
E=15VR1= 7 ohm
a) RT= R1xR2xR3 = 2x4x6 = 1.09 ohms R1R2+R1R3+R2R3 2*4+2*6+4*6
b) IT= V = 20 = 18.34 amperes RT 1.09
c) I1= V= 20= 10 amp I2= V = 20= 5 amp I3=V=20=3.33 R1 2 R2 4 R3 6
d) P=V*IT
PE= 20(18.34)= 366.8 wattsP1=VI1=(20)(10)=200 watts
EIE=EIS
18.34= 10+5+3.33
18.34amp=18.33 amp
PE=200+100+66.6
366.6 watts=366.6
a) RT= R1xR2xR3 = 7x4x3 = 84= 1.37 ohm R1R2+R1R3+R2R3 7*4+7*3+4*3 61
b) IT= V = 15v = 10.94 amp c) I1= V= 15= 2.14 I2=V=

52
R2= 4 ohmR3= 3 ohm!1= 2.14 amp!2= 3.75 amp!3= 5 ampPR1= 32.1 wattsPR2= 56.25 wattsPR3= 75 watts
2.- Calcular el siguiente circuito que está en paralelo
Datos:
E= 27 vR1= 15ohmR2= 7 ohmR3= 16IT= 7.35 amp
I1= 1.8 ampI2= 3.85 amp!3= 1.6875 ampPR1= 48.6 wattsPR2= 103.95 wattsPR3= 45.5626 wattsRT= 3.67
Regla de divisor de corrienteLa corriene de entrada I= V RT
Pero X=1,2,3,...n V=IxRx (I=V = IxRx) es la forma general de divisor de corriente
a) RT= R1xR2xR3 = 15x7x16 = 3.67 ohms R1R2+R1R3+R2R3 105+240+112
b) IT= V= 27v = 7.35 amp I1= V = 27v= 1.8 I2=V=27 = 3.85 I3= V= 27= 1.6874 RT 3.67 R1 15 R2 7 R3 16
c) P=VI
a) RT= R1xR2xR3 = 7x4x3 = 84= 1.37 ohm R1R2+R1R3+R2R3 7*4+7*3+4*3 61
b) IT= V = 15v = 10.94 amp c) I1= V= 15= 2.14 I2=V=
Ix= RTI Rx
RT= R1R2 R1+R2

53
RT RT
Ejemplo: Determinar las magnitudes de corriente de I1,I2 parala siguiente figura
Ejercicios:
1.- Para el siguiente circuito determine I1,I2
Ix= RTI Rx
RT= R1R2 R1+R2
I1= R2I = 4(12)= 48 = 8 amp R1+R2 2+4 6
I2= R1I = 2(12)= 24= 4 amp R1+R2 2+4 6
I1= R2I = 9(8) = 72= 5.33 amp R1+R2 45+9 13.5
54
2.- Calcular I1,I2
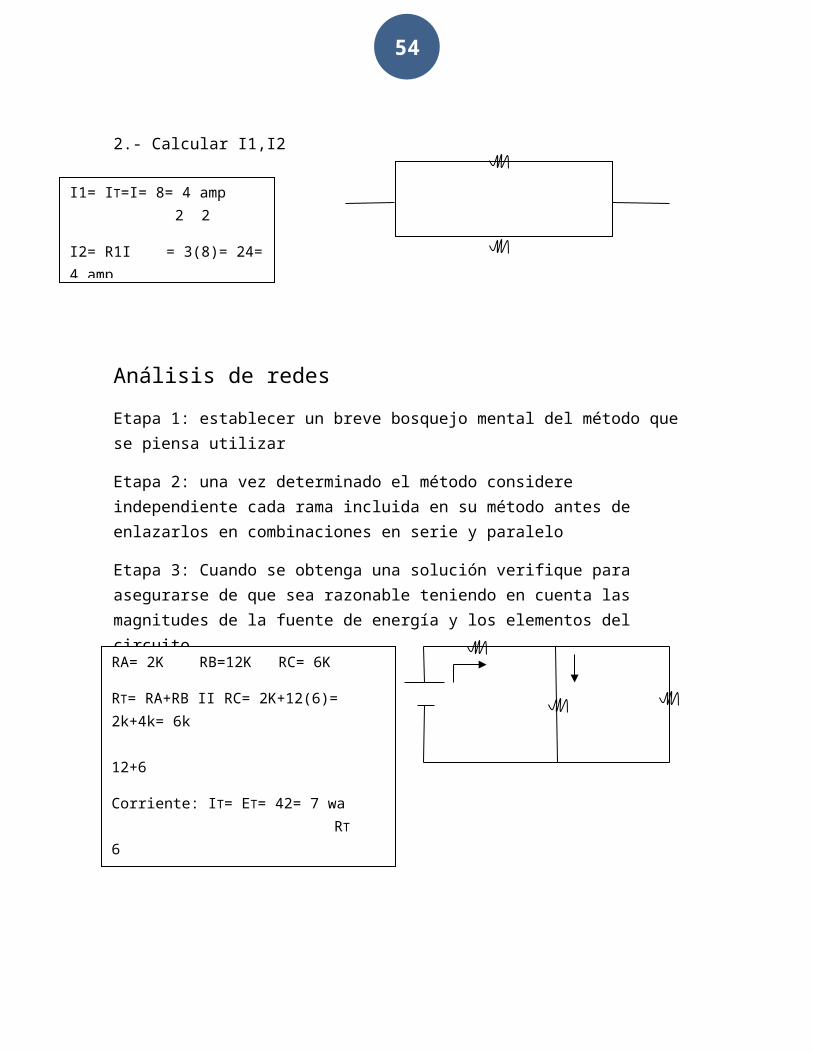
Análisis de redesEtapa 1: establecer un breve bosquejo mental del método que se piensa utilizar
Etapa 2: una vez determinado el método considere independiente cada rama incluida en su método antes de enlazarlos en combinaciones en serie y paralelo
Etapa 3: Cuando se obtenga una solución verifique para asegurarse de que sea razonable teniendo en cuenta las magnitudes de la fuente de energía y los elementos del circuito
I1= IT=I= 8= 4 amp 2 2
I2= R1I = 3(8)= 24=4 amp
RA= 2K RB=12K RC= 6K
RT= RA+RB II RC= 2K+12(6)= 2k+4k= 6k 12+6
Corriente: IT= ET= 42= 7 wa RT 6

55
Ejercicios:
1.- Para el siguiente circuito determinar Rt,I,IA,IB,IC,I1,I2
Datos:
R1= 9 ohmR2= 6 ohmR3= 4 ohmR4= 6 ohmR5= 3 ohmR6= 3 ohmRT= 5.6 ohmIT= 3 ampIB= 1 ampIC= 2 ampI1= 1.2I2= 1.8
Método de la corriente derivada (En este metodo no se usa la resistencia total Rt y son dos fuentes)
Etapas:
1.- Se asigna una distinta corriente de direccion arbitraria a cada ramo de la red
RA= R1R2= 9x6= 3.6 ohm RB= R3+R4 II R5= 4+(6x3)= 6 ohm RC= 3 ohm R1+R2 9+6 6+3
RT= 1 + R3 + 1 + R6 RT= 1 + 4 + 1+ 3 = 5.6 ohm 1+1 1 + 1 1 + 11 + 1 R1 R2 R4 R5 9 6 6 3

56
2.- indican polaridades a cada resistencia determinadas por la direccion tomada por el fluje de la corriente
3.- Se aplica la ley de tensiones de kirfchoff entorno a cadatrayectoria cerrada y la ley de corrientes de kirchoff en cada nodo
4.- Se resuelven las ecuaciones lineales simultaneas restantes
Datos:
E1= 2vE2= 6vI1= -1 ampI2= 2 ampI3= 1ampR1= 2 ohmR2= 1 ohmR3= 4 ohm
2v-2I1-4I3=0 6v-1I2-4I3=0 2I1 + 0I2 + 4I3 = 2-2I1-4I3=-2v (-1) -1I2-4I3=-6v(-1) 0I1 + 1I2 + 4I3 = 62I1+4I3= 2v 1I2+4I3= 6v I1 + I2 - I3 = 0
Calcular I1: 2 0 4I1= 6 1 4 I1= 2(-1-4)-0(-6)+4(6-0)= 14 = -1 amp 0 1 -1 D -14 D
2 2 4I2= 0 6 4 I2= 2(-6)-2(-4)+4(-6)= -28 = 2 amp 1 0 -1 D -14 D
2da forma para calcular las 2 corrientes
1: 2:
2v-2I1-4(I1+I2)=0 6v-1I2-4(I2+I1)=02v-6I1-4I2=0 6v-4I1-5I2=06I1+4I2=2v (-) 4I1+5I2= 6v (-1)
D= 6I1 + 4I2 = 2v D= 6 4 D= 30-16=14 4I1 + 5I2 = 6v 4 5
I1= 2 4 I1= 10-24= -1 amp

57
Ejercicios: Resolver por ambos metodos
1.-
Datos:
E1= 7vE2= 3vR1=9 ohmR2= 3 ohmR3= 8 ohmI1= 0.4308I2= -0.0406I3= 0.3902
Circuito A
1: 2:
7v-9I1-8I3=0 3v-3I2-8I3=0 9I1+ 0I2 + 8I3 = 7v-9I1-8I3=-7v(-1) -3I2-8I3=-3v(-1) D= 0I1+ 3I2 + 8I3 = 3v9I1+8I3=7v 3I2+8I3= 3v I1 + I2 – I3 = 0v
9 0 8D= 0 3 8 D= 9(-3-8)-0(-1-8)+8(-3)= -123 1 1 -1
Calcular I1: Calcular I2:
I1= 7 0 8 I1= 7(-3-8)-0(-3)+8(3) = 0.4308 I2= 9 7 8 I2=9(-3)-7(-1-8)+8(-3)=0.0406 3 3 8 -123

58
2.-
Datos:
E1= 8vE2= 5vR1= 5 ohmR2= 2 ohmR3= 9 ohmI1= 0.5890 ampI2= 0.0273 ampI3= 0.53 amp
Circuito B:
1: 2:
8v-5I1-9I3=0 (-1) 5v-2I2-9I3=0 (-1) D= 5I1 + 0I2 + 9I3 = 8v D= 5 0 9 = 5(2-9)-0(-9)+9(-2)= 175I1+9I3=8v 2I2+9I3=5v 0I1 + 2I2 + 9I3 = 5v 0 2 9 I1 + I2 + I3 = 0v 1 1 1
Calcular I1: Calcular I2: Calcular I3:
I1= 8 0 9 = 8(2-9)-0(-5)+9(5)= 0.64 I2= 5 8 9 = 5(5-9)-8(-9)+9(-5)
2da forma
1: 2:
8v-5I1-9(I1+I2=0 (-1) 5V-2I2-9(I2+I1)=0 (-1) D= 14I + 9I2 = 8v D= 14 9 = 154-81= 7314I1+9I2= 8v 9I1+11I2= 5v 9I1 + 11I2 = 5v 9 11
I1: 8 9 = 88-45= 0.5890 I2: 14 8 = 70 -72 = -0.0273 I3= I1+I2

59
Bibliografía Unidad 1

60
Unidad 2: Motores, transformadores yaplicaciones
2.1- Motores de corriente directa y corriente alterna y que tipos de motores hay y como operan
Motor de corriente continua (C.C)El motor de corriente continua (denominado también motor de corriente directa, motor CC o motor DC) es una máquina que convierte la energía eléctrica en mecánica, provocando un movimiento rotatorio, gracias a la acción del campo magnético.Una máquina de corriente continua (generador o motor) se compone principalmente de dos partes. El estator da soporte mecánico al aparato y contiene los devanados principales de la máquina, conocidos también con el nombre de polos, que pueden ser de imanes permanentes o devanados con hilo de cobre sobre núcleo de hierro. El rotor es generalmente de forma cilíndrica, también devanado y con núcleo, alimentado con corriente directa mediante escobillas fijas (conocidas también como carbones).El principal inconveniente de estas máquinas es el mantenimiento, muy caro y laborioso, debido principalmente aldesgaste que sufren las escobillas al entrar en contacto con las delgas.Algunas aplicaciones especiales de estos motores son los motores lineales, cuando ejercen tracción sobre un riel, o bien los motores de imanes permanentes. Los motores de corriente continua (CC) también se utilizan en la construcción de servomotores y motores paso a paso. Además existen motores de CD sin escobillas.

61
Tipos de Motores C.CMotor Lineal:Un motor lineal es un motor eléctrico que posee su estator y su rotor "distribuidos" de forma tal que en vez de producir un torque (rotación) produce una fuerza lineal en el sentido de su longitud. El modo más común de funcionamiento es como un actuador tipo Lorentz, en el cual la fuerza aplicada es linealmente proporcional a la corriente eléctrica y
al campo magnético .
Motor de imanes permanentes:

62
Los motores de imanes permanentes son motores eléctricos cuyofuncionamiento se basa en imanes permanentes (motores de IP).Existen diversos tipos, siendo los más conocidos:
Motores de corriente continua de IP Motores de corriente alterna de IP Motores paso a paso de IPUno de los de mayor aplicación es el motor sincrónico de imánpermanente (en inglés Permanent Magnet Synchronous Motor, PMSM).
Servomotores:Un servomotor (también llamado servo) es un dispositivo similar a un motor de corriente continua que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición.1
Un servomotor es un motor eléctrico que puede ser controlado tanto en velocidad como en posición.Es posible modificar un servomotor para obtener un motor de corriente continua que, si bien ya no tiene la capacidad de control del servo, conserva la fuerza, velocidad y baja inercia que caracteriza a estos dispositivos.
63
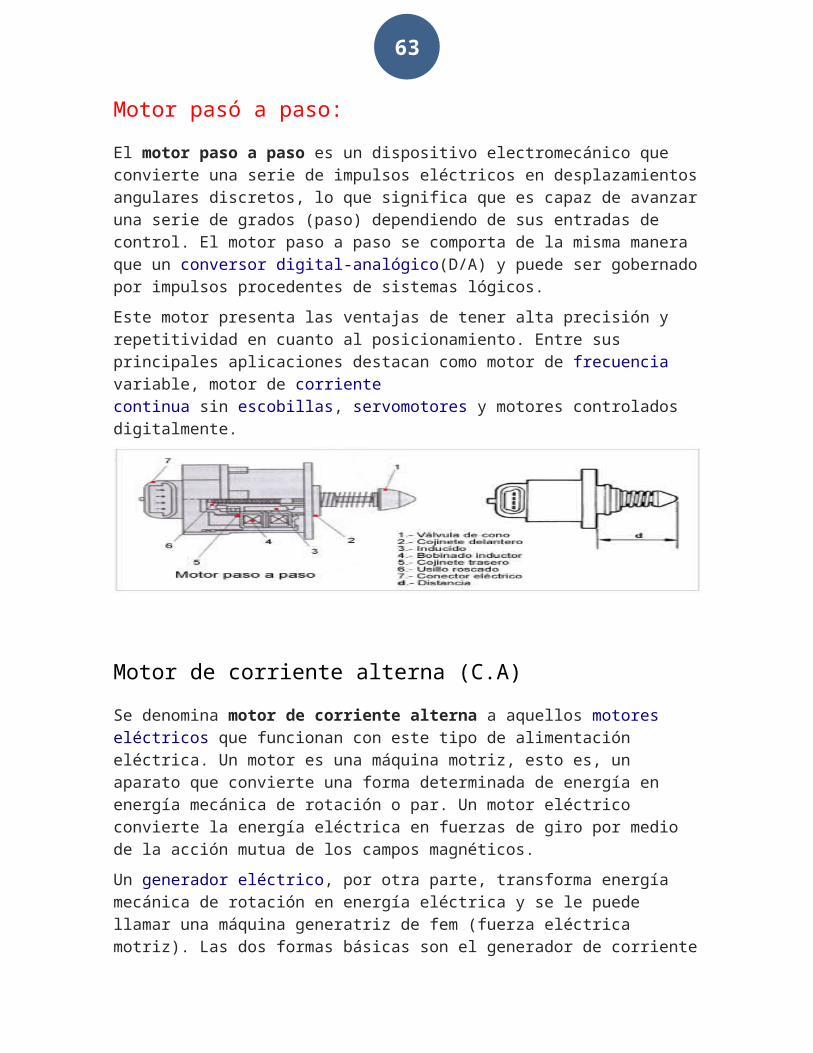
Motor pasó a paso:El motor paso a paso es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientosangulares discretos, lo que significa que es capaz de avanzaruna serie de grados (paso) dependiendo de sus entradas de control. El motor paso a paso se comporta de la misma manera que un conversor digital-analógico(D/A) y puede ser gobernadopor impulsos procedentes de sistemas lógicos.Este motor presenta las ventajas de tener alta precisión y repetitividad en cuanto al posicionamiento. Entre sus principales aplicaciones destacan como motor de frecuencia variable, motor de corriente continua sin escobillas, servomotores y motores controlados digitalmente.
Motor de corriente alterna (C.A)Se denomina motor de corriente alterna a aquellos motores eléctricos que funcionan con este tipo de alimentación eléctrica. Un motor es una máquina motriz, esto es, un aparato que convierte una forma determinada de energía en energía mecánica de rotación o par. Un motor eléctrico convierte la energía eléctrica en fuerzas de giro por medio de la acción mutua de los campos magnéticos.Un generador eléctrico, por otra parte, transforma energía mecánica de rotación en energía eléctrica y se le puede llamar una máquina generatriz de fem (fuerza eléctrica motriz). Las dos formas básicas son el generador de corriente

64
continua y el generador de corriente alterna, este último máscorrectamente llamado alternador.Todos los generadores necesitan una máquina motriz (motor) dealgún tipo para producir la fuerza de rotación, por medio de la cual un conductor puede cortar las líneas de fuerza magnéticas y producir una fem. La máquina más simple de los motores y generadores es el alternador.
Tipos de motores C.AEn algunos casos, tales como barcos, donde la fuenteprincipal de energía es de corriente continua, o donde sedesea un gran margen de velocidades de giro, pueden emplearsemotores de c-c. Sin embargo, la mayoría de los motoresmodernos trabajan con fuentes de corriente alterna. Existeuna gran variedad de motores de c-a, entre ellos tres tiposbásicos: el universal, el síncrono y el de jaula de ardilla.
Motores universalesLos motores universales trabajan con voltajes de corriente continua o corriente alterna. Tal motor, llamado universal, se utiliza en sierras eléctricas, taladros, utensilios de cocina, ventiladores, sopladores, batidoras y otras aplicaciones donde se requiere gran velocidad de giro con cargas débiles o fuerzas resistentes pequeñas. Estos motores

65
para corriente alterna y directa, incluyendo los universales,se distinguen por su conmutador devanado y las escobillas.
Motores asíncronosEl motor asíncrono trifásico está formado por un rotor, que puede ser de dos tipos: de jaula de ardilla o bobinado; y un estátor, en el que se encuentran las bobinas inductoras. Estas bobinas son trifásicas y están desfasadas entre sí 120ºen el espacio. Según el Teorema de Ferraris, cuando por estasbobinas circula un sistema de corrientes trifásicas equilibradas, cuyo desfase en el tiempo es también de 120º, se induce un campo magnético giratorio que envuelve al rotor.Este campo magnético variable va a inducir una tensión en el rotor según la Ley de inducción de Faraday:
Motores síncronos

66
De acuerdo con estos principios, se puede utilizar un alternador como motor en determinadas circunstancias, aunque si se excita el campo con c-c y se alimenta por los anillos colectores a la bobina del rotor con c-a, la máquina no arrancará. El campo alrededor de la bobina del rotor es alterno en polaridad magnética pero durante un semiperiodo del ciclo completo, intentará moverse en una dirección y durante el siguiente semiperiodo en la dirección opuesta. El resultado es que la máquina permanece parada. La máquina solamente se calentará y posiblemente se quemará.Para generar el campo magnético del rotor, se suministra una CC al devanado del campo; esto se realiza frecuentemente por medio de una excitatriz, la cual consta de un pequeño generador de CC impulsado por el motor, conectado mecánicamente a él. Se mencionó anteriormente que para obtener un par constante en un motor eléctrico, es necesario mantener los campos magnéticos del rotor y del estator constante el uno con relación al otro. Esto significa que el campo que rota electromagnéticamente en el estator y el campoque rota mecánicamente en el rotor se deben alinear todo el tiempo.
Motores de jaula de ardillaLa mayor parte de los motores que funcionan con c-a de una sola fase tienen el rotor de tipo jaula de ardilla. Los rotores de jaula de ardilla reales son mucho más compactos y tienen un núcleo de hierro laminado.Los conductores longitudinales de la jaula de ardilla son de cobre y van soldados a las piezas terminales de metal. Cada conductor forma una espira con el conductor opuesto conectado

67
por las dos piezas circulares de los extremos. Cuando este rotor está entre dos polos de campos electromagnéticos que han sido magnetizados por una corriente alterna, se induce una fem en las espiras de la jaula de ardilla, una corriente muy grande las recorre y se produce un fuerte campo que contrarresta al que ha producido la corriente (ley de Lenz). Aunque el rotor pueda contrarrestar el campo de los polos estacionarios, no hay razón para que se mueva en una dirección u otra y así permanece parado. Es similar al motor síncrono el cual tampoco se arranca solo. Lo que se necesita es un campo rotatorio en lugar de un campo alterno.
2.2 Transformadores monofásicos y trifásicos ycomo funcionanLos transformadores son máquinas estáticas que se utilizanpara variar los valores de tensión (V) e intensidad (I) enC.A.
Son utilizados en las líneas de transporte y distribuciónpara elevar o reducir los valores de tensión eléctrica.
Transformadores monofásicos
Los transformadores, como la mayoría de las máquinas eléctricas, disponen de un circuito magnético y dos circuitoseléctricos. Sobre el núcleo magnético, formado por chapas

68
apiladas, van arrollados dos bobinados que se denominan primarios y secundarios.
Al conectar el bobinado primario de N1 espiras a una tensión alterna, se crea un flujo magnético alterno. Este flujo magnético, que se establece en todo el circuito magnético, recorre el bobinado secundario de N2 espiras induciendo en éluna fuerza electromotriz produciendo la tensión en bornes V2.
A la relación de tensiones entre el primario y secundario se le llama relación de transformación, para un transformador ideal se cumple:
dónde:
m = relación de transformación V1 = tensión del primario (V) V2 = tensión del secundario (V) N1 = número de espiras del primario N2 = número de espiras del secundario
La transferencia de energía eléctrica entre el primario y secundario se hace a través del campo magnético variable que aparece en el núcleo, no hay conexión eléctrica entre los dosbobinados.

69
Transformadores trifásicos
Los transformadores trifásicos han venido siendo útiles para la generación de corriente en grandes redes eléctricas son lo más usual en lo que tiene que ver al número de usuarios de tipo comercial e industrial que hacen uso del sistema, y es necesario considerar la importancia que tienen el mismo.
Para la energía de un sistema trifásico se puede transformar por medio de tres transformadores monofásico en otro caso solo con el uso de un transformador trifásico, por facilidad en las instalaciones eléctrica o ya sea por razones de tipo económico, es preferible el uso del transformador trifásico.
Normalmente los transformadores trifásicos están constituidos de un núcleo que tiene 3 columnas y sobre cada una se encuentran los devanados primarios y secundarios. Estos devanados pueden conectarse en estrella, delta o zig-zag de las cuales se las puede hacer nueve combinaciones.

70
Tipos de transformadores trifásicos
Los transformadores se manejan en un amplio campo sirven paracompensar las necesidades de los usuarios, los transformadores de distribución, acoplados sobre los postes, facilitan a los consumidores domésticos, cantidades de potencia relativamente pequeñas. Los transformadores de potencia se utilizan en las plantas generadoras para elevar el valor de tensión generada a más altos niveles para el transporte. La tensión de transporte se reduce mediante transformadores en las subestaciones de distribución local. En estos transformadores de potencia se produce fuertes calentamientos debido al efecto Joule en las bobinas y por lahistéresis, también debido a las corrientes de Foucault del núcleo. Es por lo cual se requiere de refrigeración que puedeser, por enfriamiento natural o forzado, o también por sistemas de circulación de agua o aceite.
En la práctica se utiliza el aceite debido a su durabilidad ycapacidad para disipar del calor. Existen hoy en día transformadores de medida: de tensión, para medir voltajes, yde intensidad para medir corrientes, pero estos son en gran

71
parte transformadores monofásicos. Los transformadores de corriente polifásicos requieren tantos pares de arrollamientos o carretes elementales como fases, también se hallan otros tipos de transformadores: de audio y video, que funcionan a una amplia gama de frecuencias.
2.3 Reglamento de obras e instalacioneseléctricas (para que sirve y donde se aplicael reglamento)
La junta directiva de CFE estable las medidas de seguridadpara evitar accidentes tanto humanos que como la maquinariapues las instalaciones eléctricas manejan grandes cantidadesde energía y una falla podría ser tan solo un corto circuitoo toda una explosión causando muertes y daños materiales delas cuales la CFE es responsable y por eso es vital que seaprendan las reglas básicas del reglamento.
Todos los trabajadores deben ser capacitados para que rindanel máximo desempeño en la instalación de cableado de altovoltaje como el perfecto mantenimiento de las instalaciones.Una falla, que podría ser un corto o la explosión de untransformador puede a dejar a miles o ciento de miles depersonas sin luz lo que equivale a un gran riesgo deaccidentes o perdidas económicas, el reglamento estable comoproceder ante estas circunstancias y las acciones a tomar,también el reglamento especifica el uso de ropa y equiponecesario para trabajar en las corrientes eléctricas.

72
El reglamento es universal en todo México con pequeñoscambios en el equipo debido el tipo de clima de cada entidad.El reglamento en su mayoría se aplica dentro de la plantapero al ser un cableado el equipo dedico a supervisar lastomas de corriente cuentan con una capacitación especial yellos deben actuar al pie de la letra el reglamento puesellos trabajan con cables de alto voltaje y una falla podríacausarles la muerte.
La importancia del reglamente es mucha pues en ella se confíaque se eviten accidentes y no haya fallas en el sistema deoperación de la planta. Cual quier empleado que falle ciertasreglas se le castiga con un día de sueldo y si llega aacumular 5 faltas es despedido, todo eso es una técnica deaprendizaje para que los mismos empleados estén atentos a susdescuidos y se maximice el rendimiento de su planta de luz.
2.4 Elementos de control industrial
(Relevadores)El relé (en francés: relais "relevo") o relevador es undispositivo electromecánico. Funciona como un interruptorcontrolado por un circuito eléctrico en el que, por medio deuna bobina y un electroimán, se acciona un juego de uno ovarios contactos que permiten abrir o cerrar otros circuitoseléctricos independientes. Fue inventado por Joseph Henry en1835.

73
Dado que el relé es capaz de controlar un circuito de salidade mayor potencia que el de entrada, puede considerarse, enun amplio sentido, como un amplificador eléctrico. Como talse emplearon en telegrafía, haciendo la funciónde repetidores que generaban una nueva señal con corrienteprocedente de pilas locales a partir de la señal débilrecibida por la línea. Se les llamaba "relevadores" Existen multitud de tipos distintos de relés, dependiendo delnúmero de contactos, de su intensidad admisible, del tipo decorriente de accionamiento, del tiempo de activación ydesactivación, entre otros. Cuando controlangrandes potencias se llaman contactores en lugar de relés.Relés electromecánicos
Relés de tipo armadura: pese a ser los más antiguos siguensiendo lo más utilizados en multitud de aplicaciones. Unelectroimán provoca la basculación de una armadura al serexcitado, cerrando o abriendo los contactos dependiendo desi es NA (normalmente abierto) o NC (normalmente cerrado).
Relés de núcleo móvil: a diferencia del anterior modeloestos están formados por un émbolo en lugar de unaarmadura. Debido a su mayor fuerza de atracción, seutiliza unsolenoide para cerrar sus contactos. Es muyutilizado cuando hay que controlar altas corrientes
Relé tipo reed o de lengüeta: están constituidos por unaampolla de vidrio, con contactos en su interior, montadossobre delgadas láminas de metal. Estos contactos conmutan

74
por la excitación de una bobina, que se encuentraalrededor de la mencionada ampolla.
Relés polarizados o biestables: se componen de una pequeñaarmadura, solidaria a un imán permanente. El extremoinferior gira dentro de los polos de un electroimán,mientras que el otro lleva una cabeza de contacto. Alexcitar el electroimán, se mueve la armadura y provoca elcierre de los contactos. Si se polariza al revés, el giroserá en sentido contrario, abriendo los contactos ócerrando otro circuito.
Relés multitensión: son la última generación de reles quepermiten por medio de un avance tecnológico en el sistemaelectromagnético del rele desarrollado y patentado porRelaygo, a un rele funcionar en cualquier tensión yfrecuencia desde 0 a 300 AC/DC reduciendo a un solo modelolas distintas tensiones y voltajes que se fabricaban hastaahora.
Relé de estado sólidoSe llama relé de estado sólido a un circuito híbrido,normalmente compuesto por un optoacoplador que aísla laentrada, un circuito de disparo, que detecta el paso por cerode la corriente de línea y un triac o dispositivo similar queactúa de interruptor de potencia. Su nombre se debe a lasimilitud que presenta con un relé electromecánico; estedispositivo es usado generalmente para aplicaciones donde sepresenta un uso continuo de los contactos del relé que encomparación con un relé convencional generaría un seriodesgaste mecánico, además de poder conmutar altos amperajesque en el caso del relé electromecánico destruirian en pocotiempo los contactos. Estos relés permiten una velocidad deconmutación muy superior a la de los relés electromecánicos.

75
Relé de corriente alternaCuando se excita la bobina de un relé con corriente alterna,el flujo magnético en el circuito magnético, también esalterno, produciendo una fuerza pulsante, con frecuenciadoble, sobre los contactos. Es decir, los contactos de unrelé conectado a la red, en algunos lugares, como variospaíses de Europa y latinoamérica oscilarán a 2 x 50 Hz y enotros, como en Estados Unidos lo harán a 2 x 60 Hz. Estehecho se aprovecha en algunos timbres y zumbadores, como unactivador a distancia. En un relé de corriente alterna semodifica la resonancia de los contactos para que no oscilen.
Relé de láminasEste tipo de relé se utilizaba para discriminardistintas frecuencias. Consiste en un electroimán excitadocon la corriente alterna de entrada que atrae varias varillassintonizadas para resonar a sendas frecuencias de interés. Lavarilla que resuena acciona su contacto, las demás no. Losrelés de láminas se utilizaron en aeromodelismo y otrossistemas de telecontrol.

76
Relés de acción retardadaSon relés que ya sea por particularidad de diseño o bien porel sistema de alimentación de la bobina, permiten disponer deretardos en su conexión y/o desconexión.
Relés con retardo a la conexión: El retardo a la conexiónde relés puede obtenerse mecánicamente aumentando la masade la armadura a fin de obtener mayor inercia del sistemamóvil; o bien, aumentando la presión de los resortes quedebe vencer la fuerza de atracción del relé. También seobtiene un efecto similar de retardo utilizando C.C. paraalimentar al relé en una de los dos siguientes formas:
Relé con resistor previo y capacitor en paralelo con labobina: Cuando se alimenta con C.C. al relé, elcapacitor, hasta entonces descargado, origina unaintensa corriente de carga inicial la cual al atravesar

77
al resistor origina una apreciablecaída en la tensiónaplicada a la bobina, verificándose así un retraso a laconexión. Cabe aclarar que siempre que se interrumpa laalimentación del relé el capacitor, descargándose sobrela bobina, establecerá también un cierto retraso en ladesconexión.
Relé de dos devanados con corriente en oposición: Ladisposición de uno de estos relés se basa en laexistencia de dos devanados conectados en oposición;usualmente designados como principal y auxiliar, y queposeen mayor y menor número de espiras respectivamente.Al aplicarse rensión de C.C. la corriente se establecerápidamente en el devanado auxiliar a la vez que conmucha mayor lentitud en el principal debido a la marcadadiferencia en la reactancia inductiva de cada uno(Debido al diferente número de espiras que tiene cadauno) De esa manera y debido a que el campo magnético queoriginan ambos devanados es opuesto, la actuación delrelé se producirá cuando la fuerza magnetomotriz -engradual aumento- del devanado principal sea superior ala del devanado auxiliar y la presión de los resortesdel relé, con lo que se obtiene el buscado retardo en laconexión.

78
Relés con retardo a la desconexión: También es posibleobtener retardo a la desconexión por medios mecánicos -disminución de la presión de los resortes del relé- aunqueen la mayoría de los casos se recurre a alguno de lossistemas que se indican a continuación:
Relé con capacitor en paralelo: Como su nombre loindica, posee un capacitor que por su condición enparalelo toda vez que se interrumpa la alimentación deC.C. al relé considerado, la desconexión resultaráretardada por la descarga de dicho capacitor sobre labobina, sistema con el que se obtienen tiempos muyexactos y que en función de los valores de R y C enconsideración puede superar largamente un segundo.
Relé con devanado adicional en cortocircuito: Estosdisponen de dos devanados: uno de ellos llamadoprincipal o de accionamiento y otro adicional que seencuentra cortocircuitado. Ya sea que el devanadoprincipal sea conectado o desconectado de la tensión dealimentación, la variación de flujo consiguienteinducirá en el devanado adicional una corriente queoponiéndose a la causa que la produce retarda a dichavariación, con lo que se produce así un retardo tanto ala conexión como a la desconexión del relé.

79
Relé con devanado adicional controlado por contactoauxiliar: Estos relés son absolutamente similares a losanteriores, con el único agregado de un contactoauxiliar del propio relé encargado de conectar odesconectar al devanado auxiliar. Así el relé presentaráun retardo a la desconexión o a la conexión según seutilice un contacto auxiliar Normal Abierto o NormalCerrado, respectivamente.
Relés con retención de posiciónEn este caso los relés poseen un diseño en el cual tienenremaches de elevada remanencia colocados dentro de orificiospracticados en el núcleo y la armadura de los mismos, y enexacta coincidencia. Por estar perfectamente rectificadas lascaras polares en contacto al cerrar el circuito magnético delrelé quedará en esa posición -por remanencia magnética-aunque la bobina se desconecte, retornando a la posición dereposo inicial sólo cuando una corriente de sentido contrariovuelva a abrirlo.

80
VÁLVULAS DE CONTROL.En el control automático de los procesos industriales laválvula de control juega un papel muy importante en el buclede la regulación. Realiza la función de variar el caudal delfluido de control que modifica a su vez el caudal de lavariable medida comportándose como un orificio de áreacontinuamente variable. Dentro del bucle de control tienetanta importancia como el elemento primario, el transmisor yel controlador.
El cuerpo de la válvula contiene en su interior el obturadory los asientos y esta provisto de de rosca o de bridas paraconectar la válvula a la tubería. El obturador es quienrealiza la función de paso del fluido y puede actuar en ladirección de su propio eje o bien tener un movimientorotativo. Esta unido a un vástago que pasa a través de latapa del cuerpo y que es accionado por el servomotor.
TIPOS DE VÁLVULAS.
Las válvulas pueden ser de varios tipos según sea el diseñodel cuerpo y el movimiento del obturador.
Las válvulas de movimiento lineal en las que el obturador semueve en la dirección de su propio eje se clasifican como seespecifica a continuación.

81
2.5 Aplicaciones de los motores y de lostransformadoresAunque el precio de un motor de corriente continua es considerablemente mayor que el de un motor de inducción de igual potencia, existe una tendencia creciente a emplear motores de corriente continua en aplicaciones especiales.La gran variedad de la velocidad, junto con su fácil control y la gran flexibilidad de las características par-velocidad del motor de corriente continua, han hecho que en los últimos años se emplee éste cada vez más con maquinas de velocidad variable en las que se necesite amplio margen develocidad y control fino de las mismas.
Existe un creciente número de procesos industriales que requieren una exactitud en su control o una gama de velocidades que no se puede conseguir con motores de corriente alterna. El motor de corriente continua mantiene unrendimiento alto en un amplio margen de velocidades, lo que junto con su alta capacidad de sobrecarga lo hace más apropiado que el de corriente alterna para muchas aplicaciones.
82
Los motores de corriente continua empleados en juguetes, suelen ser del tipo de imán permanente, proporcionan potencias desde algunos vatios a cientos de vatios. Los empleados en giradiscos, unidades lectoras de CD, y muchos discos de almacenamiento magnético son motores en los que el rotor es de imán fijo y sin escobillas. En estos casos el inductor, esta formado por un juego de bobinas fijas, y un circuito electrónico que cambia el sentido de la corriente a cada una de las bobinas para adecuarse al giro del rotor. Este tipo de motores proporciona un buen par de arranque y uneficiente control de la velocidad.
Una última ventaja es la facilidad de inversión de marcha de los motores grandes con cargas de gran inercia, al mismo tiempo que devuelven energía a la línea actuando como generador, lo que ocasiona el frenado y la reducción de velocidad.
Las principales aplicaciones del motor de corriente continua son:
• Trenes de laminación reversibles. Los motores deben de soportar una alta carga. Normalmente se utilizan varios motores que se acoplan en grupos de dos o tres.
• Trenes Konti. Son trenes de laminación en caliente con varios bastidores. En cada uno se va reduciendo más la sección y la velocidad es cada vez mayor.
• Cizallas en trenes de laminación en caliente. Se utilizan motores en derivación.
• Industria del papel. Además de una multitud de máquinas quetrabajan a velocidad constante y por lo tanto se equipan con motores de corriente continua, existen accionamientos que exigen par constante en un amplio margen de velocidades.• Otras aplicaciones son las máquinas herramientas, máquinas extractoras, elevadores, ferrocarriles.

83
• Los motores desmontables para papeleras, trefiladoras, control de tensión en máquinas bobinadoras, velocidad constante de corte en tornos grandes
MOTORES DE CORRIENTE ALTERNA
Se diseñan dos tipos básicos de motores para funcionar concorriente alterna:
*los motores síncronos
*los motores de inducción.
El motor síncrono es en esencia un alternador trifásico quefunciona a la inversa. Los imanes del campo se montan sobreun rotor y se excitan mediante corriente continua, y lasbobinas de la armadura están divididas en tres partes yalimentadas con corriente alterna trifásica.
La variación de las tres ondas de corriente en la armaduraprovoca una reacción magnética variable con los polos de losimanes del campo, y hace que el campo gire a una velocidadconstante, que se determina por la frecuencia de la corrienteen la línea de potencia de corriente alterna.
La velocidad constante de un motor síncrono es ventajosa enciertos aparatos. Sin embargo, no puede utilizarse este tipode motores en aplicaciones en las que la carga mecánica sobreel motor llega a ser muy grande, ya que si el motor reduce suvelocidad cuando está bajo carga puede quedar fuera de fasecon la frecuencia de la corriente y llegar a pararse. Losmotores síncronos pueden funcionar con una fuente de potenciamonofásica mediante la inclusión de los elementos de circuitoadecuados para conseguir un campo magnético rotatorio.

84
El más simple de todos los tipos de motores eléctricos es elmotor de inducción de caja de ardilla que se usa conalimentación trifásica.
Los motores con rotores del tipo jaula de ardilla se puedenusar con corriente alterna monofásica utilizando variosdispositivos de inductancia y capacitancia, que alteren lascaracterísticas del voltaje monofásico y lo hagan parecido albifásico. Estos motores se denominan motores multifásicos omotores de condensador (o de capacidad), según losdispositivos que usen. Los motores de jaula de ardillamonofásicos no tienen un par de arranque grande, y seutilizan motores de repulsión-inducción para las aplicacionesen las que se requiere el par. Este tipo de motores puedenser multifásicos o de condensador, pero disponen de uninterruptor manual o automático que permite que fluya lacorriente entre las escobillas del conmutador cuando searranca el motor, y los circuitos cortos de todos lossegmentos del conmutador, después de que el motor alcance unavelocidad crítica.
TRANSFORMADOR DE POTENCIA
Descripción:Se utilizan para substransmisión y transmisión de energía eléctrica en alta y media tensión. Son de aplicación en subestaciones transformadoras, centrales de generación y en grandes usuarios.
Características Generales:Se construyen en potencias normalizadas desde 1.25 hasta 20 MVA, en tensiones de 13.2, 33, 66y 132 kV. y frecuencias de 50 y

85
60 Hz.
TRANSFORMADOR DE DISTRIBUCIÓN
Se denomina transformadores de distribución, generalmente lostransformadores de potencias iguales o inferiores a 500 kVA yde tensiones iguales o inferiores a 67 000 V, tanto monofásicos como trifásicos. Aunque la mayoría de tales unidades están proyectadas para montaje sobre postes, algunosde los tamaños de potencia superiores, por encima de las clases de 18 kV, se construyen para montaje en estaciones o en plataformas. Las aplicaciones típicas son para alimentar agranjas, residencias, edificios o almacenes públicos, talleres y centros comerciales.
Descripción:Se utilizan en interior para distribución de energía eléctrica en media tensión, enlugares donde los espacios reducidos y los requerimientosde seguridad en caso de incendio imposibilitan la utilización de transformadoresrefrigerados en aceite. Son deaplicación en grandes edificios, hospitales, industrias, minería, grandes centros comerciales y toda actividad que requiera la utilización intensiva de energía eléctrica.
Características Generales:Su principal característica esque son refrigerados en aire con aislación clase F, utilizándose resina epoxi comomedio de protección de los arrollamientos, siendo

86
innecesario cualquier mantenimiento posterior a la instalación. Se fabrican en potencias normalizadas desde 100 hasta 2500 kVA,tensiones primarias de 13.2, 15, 25, 33 y 35 kV y frecuencias de 50 y 60 Hz.
Transformadores Herméticos de Llenado Integral
Descripción:Se utilizan en intemperie o interior para distribución de energía eléctrica en media tensión, siendo muy útiles en lugares donde los espacios sonreducidos. Son de aplicación en zonas urbanas, industrias, minería, explotaciones petroleras, grandes centros comerciales y toda actividad que requiera la utilización intensiva de energía eléctrica.
Características Generales:Su principal característica esque al no llevar tanque de expansión de aceite no necesita mantenimiento, siendoesta construcción más compactaque la tradicional. Se fabrican en potencias normalizadas desde 100 hasta

87
1000 kVA, tensiones primarias de 13.2, 15, 25, 33 y 35 kV yfrecuencias de 50 y 60 Hz.
Transformadores Rurales
Descripción:Están diseñados para instalación monoposte en redes de electrificación suburbanas monofilares, bifilares y trifilares, de 7.6, 13.2 y 15 kV.En redes trifilares se pueden utilizar transformadores trifásicos o como alternativa 3monofásicos.
Aplicaciones
Transformador de construcción adecuada para ser instalado en cámaras, en cualquier nivel, pudiendo ser utilizado donde haya posibilidad de inmersión decualquier naturaleza.
Características
Potencia: 150 a 2000KVA
Alta Tensión: 15 o 24,2KV
Baja Tensión: 216,5/125;220/127;380/220;400/231V

88
Bibliografía 2 unidad:

89
Unidad 3 ELECTRÓNICA INDUSTRIALBÁSICA
3.1 Introducción a la electrónicaindustrial (analógica y digital)La electrónica digital es la rama de la electrónica másmoderna y que evoluciona más rápidamente. Se encarga desistemas electrónicos en los que la información estácodificada en estados discretos, a diferencia de los sistemasanalógicos donde la información toma un rango continuo devalores.En la mayoría de sistemas digitales, el número de estadosdiscretos es tan solo dos y se les denomina niveles lógicos.Estos niveles se representan por un par de valores devoltaje, uno cercano al valor de referencia del circuito(normalmente 0 voltios, tierra o "GND"), y otro cercano alvalor dado por la fuente de alimentación del circuito. Estosdos estados discretos reciben muchas parejas de nombres enlibros de electrónica y otros textos especializados, siendolos más comunes "0" y "1", "false" y "true", "off" y "on" o"bajo" y "alto" entre otros. Tener solo estos dos valores nospermite usar el Álgebra Booleana y códigos binarios, los quenos proporciona herramientas muy potentes para realizarcálculo sobre las señales de entrada.Al hablar de electrónica digital estamos en presencia delmayor avance en cuanto a ciencia electrónica se refiere. Alprincipio los mecanismos interactuaban entre si pormovimientos y secuencia preconcebidas para obtener un mismoresultado, la invención de las válvulas, luego lostransistores, los chips y por último los microprocesadoresasí como los micro-controladores han llevado a esta ciencia a

90
posicionarse como una de las más precisas en lo que aprocesamiento de datos, imagen y vídeo podamos hablar.Los más complejos sistemas digitales, aplicados y útiles hoyen día son posibles gracias a la integración de loscomponentes, herramientas, equipos y subsistemaselectrónicos, informáticos y mecánicos. En tiempos modernoses tan fácil tocar una pantalla con nuestras manos (pantallatáctil), ejecutar un comando de voz y cambiar un canal oabrir una ventana, apagar y encender una bombilla; todogracias a la electrónica digital. Como su nombre lo indicaella se sustenta en su propio lenguaje, el lenguaje de códigobinario "1" y "0", se crean ciclos de palabras, password,secuencias de bit y byte y se hace realidad lo que nunca sepensó poder monitorear en tiempo real un proceso a miles dekilómetros de distancia de la tierra. Todas las demásciencias hoy en día se deben a la invención de los sistemasdigitales, es difícil pensar en cocinar algo, llamar a unpariente lejano o ir al cine sin dejar a un lado laelectrónica digital.Por eso podemos decir que ella misma contempla los mejoresavances y conducen la vida al futuro, claro complementada porlas telecomunicaciones y por las ciencias exactas, lainformática, la mecatronica, la ciencia médica conaplicaciones de prótesis, chips cerebrales, los mismos juegosde realidad virtual y videojuegos infantiles y los no taninfantiles. En conclusión los desarrollos tecnológicosgestados en laboratorios, instalaciones militares, losavances y ayudas humanitarias a países y personas en sitiosaun hoy en día remotos e inhóspitos, no fueran posible sinesta rama de la ingeniería la electrónica pero principalmentela digital, la cual es hoy en día una de las más importantes,versátil y sigue en avance y crecimiento en tiemposglobalizados.La electrónica digital ha alcanzado una gran importanciadebido a que es utilizada para realizar autómatas y por serla piedra angular de los sistemas micro programados como sonlos ordenadores o computadoras.

91
La electrónica analógica considera y trabajacon valores continuos pudiendo tomar valores infinitos,podemos acotar que trata con señales que cambian enel tiempo de forma continua porque estudia los estados deconducción y no conducción de los diodos ylos transistores que sirven para diseñar cómputos en elálgebra con las cuales se fabrican los circuitos integrados.La Electrónica Analógica abarca muchos campos como porejemplo, la electrónica analógica dinámica que trata de uncircuito que traslada hondas o vibraciones aun sistema eléctrico, la analógica hidráulica la cual esexistente entre una corriente del agua de superficie plana oun flujo bidimensional como ejemplo un reloj, el cual tiendea tene4r engranaje de diferentes tipos los cuales son movidospor un conductor el mueve los engranajes que son diferentestamaños pero cada uno para una función especifica como la delos segundos, minutos y horas.También podemos decir que la electrónica analógica definecampos más específicos tales como:
Conducción de semiconductores. Diodos Circuitos con diodos. Transistor bipolar Etapas transistoradas. Transistores de efecto de campo. Amplificación y retroalimentación. Amplificador operacional (I). Amplificador operacional (II). Otros sistemas amplificadores Otros sistemas analógicos Filtros activos.
DIODOSEs un componente discreto que permite la circulación decorriente entre sus terminales en un determinado sentido,mientras que la bloquea el sentido contrario,Funcionamiento del diodo ideal: El funcionamiento del diodo ideales un componente que presenta resistencia nula al paso de la

92
corriente en un determinado sentido y resistencia infinita enotro sentido.V = 10V, R = 1K, D = diodo, i = 10 mA.a. Conducción del diodo en sentido directo (diodo cerrado)
V = 10V, R = 1K, D = diodo, I = 0mA.b) Conducción del diodo en sentido inverso (diodo abierto)Diodo de unión:El diodo es un elemento semiconductor debido a la función delas uniones, de características opuestas, es decir, uno detipo N y otro de tipo P. las uniones de ambas forman deldiodo de unión (construido con materiales Germano y Silicio)Tenemos que en el momento que son unidos los dos materiales,los electrones y huecos en la región de la unión se combinan,dando por resultado una falta de portadores en la regióncercana a la unión.Disposición de huecos – electrones en la región de unión:Existe la curva característica de operación del diodo deUnión. Existen tres regiones de conducción; a) regióndirecta, región inversa y región de ruptura.El diodo de unión opera en dos regiones tales:a. región directab. región inversa.
Curva característica del diodo:a. Condición de polarización directa. Donde Ri = [V(máx) –
Vz] / [Iz (máx) + Il (min)], sustituyendo valores Ri =[(24) – 10] / [(140) + (20)] = 87,5 Q
Al considerar diversas combinaciones de V y Ri podemosdeterminar que la corriente del diodo permanece dentro delintervalo 14 < Iz > 140 mA, como se estableció en la teoría.
3.2 elementos básicos de electrónica analógico(diodo, diodo emisor, SCR Y TRIAC.)
-Diodo

93
Es el dispositivo semiconductor más sencillo y se puedeencontrar prácticamente en cualquier circuito electrónico. Sefabrican en versiones de silicio (la más utilizada) y degermanio. Consta de 2 terminales, denominados ánodo y cátodo(-). El origen de estos nombres se remite a las antiguasválvulas de vacío que hacían la función rectificadora en loscircuitos. En esta ocasión el cátodo está dopado consustancias que exceden los 4 electrones de última capa del Geo el Si, por lo que sería el cristal N, negativo, y el ánodoel cristal P, ya que se dopa con elementos químicos quetienen menos de 4 electrones. Entre ambos se genera una"barrera de potencial" que es la que coadyuva a lacirculación en un sentido, mas no en el otro, de las cargas.
El Diodo puede funcionar de 2 maneras diferentes:
Polarización directa: se da cuando la unión PN sepolariza en sentido directo, es decir, el polo positivose conecta al ánodo al polo negativo al cátodo. En estecaso la corriente atraviesa con mucha facilidad el diodocomportándose éste prácticamente como un cortocircuito.
Polarización inversa: en esta ocasión el polo negativose conecta al ánodo y el positivo al cátodo.
Los diodos tienen multitud de funciones, pero una de las másimportantes es formando parte de circuitos de rectificación,de conversión de ca a cc.

94
El diodo en un esquema electrónico se representa por elsiguiente símbolo.
4. a) Diodo LED
Se caracteriza principalmente por su capacidad de emitir luz,siempre que esté polarizado directamente, de lo contrario nola emitirá. Al igual que el diodo rectificador, losterminales suelen estar identificados, bien por una bandajunto al cátodo, en el caso anterior, o por patillas dediferente longitud, siendo la más larga la del ánodo. Paraasegurarse de qué patilla corresponde al ánodo y cuál alcátodo se puede usar el polímetro. En aquella combinación queofrezca menos resistencia, la punta de prueba conectada alcomún estará tocando el cátodo.
La conexión se realizará siempre en serie con una resistenciaque limite la corriente y evite que se dañe el diodo. Parasaber el valor de la resistencia que se ha de poner se aplicala siguiente fórmula:
Los LEDs se fabrican en diferentes colores: rojo, verde,naranja, etc, con el fin de señalizar distintos eventos, ellono está influido por su constitución electrónica, que es lamisma al margen del color.

95
Estos diodos toleran tensiones de funcionamiento de alrededorde 1´2 V e intensidades máximas en torno a 80 mA.
El diodo LED en un esquema electrónico se representa por elsiguiente símbolo.
1. b) Puente rectificador
Este dispositivo se utiliza para transformar la corrientealterna en corriente continua, de un sólo sentido. El puenterectificador está formado por cuatro diodos interconectadosde la siguiente manera.
La forma de actuar del puente rectificador es la siguiente:se introduce la corriente alterna por los 2 terminales deentrada convirtiéndose ésta en corriente pulsante a lasalida, es corriente continua de muy baja calidad que debeser tratada con filtros y otros componentes hasta aproximarlaa la corriente continua.
6. Transistor
Los transistores están formados por 2 uniones PN en el mismodispositivo. Hay 2 tipos de transistores: los PNP y los NPN.
Un transistor PNP está formado por un cristalsemiconductor que tiene una zona dopada con impurezastipo N, situada entre 2 zonas dopadas con impureza tipoP, formándose así 2 uniones PN.

96
Un transistor NPN está formado por un semiconductor conuna zona dopada con impurezas tipo P, situada entre 2zonas dopadas con impureza tipo N, formándose así 2uniones PN.
El transistor es un componente electrónico que tiene 3patillas o electrodos que se denominan: emisor E, colector C,y base B. El emisor y el colector son las zonas dopadas conel mismo tipo de impurezas, ya sean de tipo P o N, mientrasque la base se encuentra dopada con un tipo de impurezadiferente.
El método que tiene el dispositivo de amplificar la corrientees el siguiente: la corriente entra por una de sus patillas(base) poniendo en macha un proceso dentro del transistor quefacilita la corriente entre emisor y colector, siendo ésta deun valor superior al de la base - emisor, esto supone dehecho una amplificación.
Todos los transistores vienen de fábrica con un valorconstante (hFE) que nos indica la capacidad de amplificaciónde éste. Gracias a este valor podremos sacar de un transistorlos siguientes datos:
IC = hFE* IB. IE es aproximadamente IC
Donde:

97
IC - corriente que pasa por la patilla colectorhFE -factor de amplificación del transistor (Ic/Ib)IB - corriente que pasa por la patilla baseIE - corriente que pasa por la patilla emisor
En el esquema adjunto se puede apreciar la importancia de laganancia del transistor, hFE. Si entendemos que la tensión B-E, Vbe, es la habitual de las uniones PN, unos 0,7V, lacorriente por la base, ib será: (20 - 0,7) / 400k = 48,25 µA
Aplicando el factor de amplificación del transistor, ic =48,25µA * 100 = 4,825 mA
La caída de tensión entre el colector y el emisor, Vce = 20 -(4,825mA * 2K) = 20 - 9,65 = 10,35V.
Las aplicaciones de los transistores son muy numerosas, perobásicamente realiza funciones o de amplificación, como seacaba de ver en el ejemplo anterior, o de conmutación, muyextendida en el campo digital. Uno u otro comportamientodepende del estado en el que se encuentre el transistor:activo, en corte o en saturación. Activa es la situacióndescrita con anterioridad. El transistor está en corte cuandono conduce, lo cual se suele deber a una falta de intensidadpor la base (para esta configuración). Cuando entre emisor ycolector circula lo máximo de corriente que el transistoradmite se dice que está en saturación
Un transistor puede presentarse en gran variedad de formasexternas según los encapsulados como, por ejemplo, lassiguientes:

98
6. Circuito Integrado
Hoy en día los circuitos integrados son la base fundamentalde la electrónica. El circuito integrado es una cápsula o unchip de silicio, u otro material semiconductor, queutilizando sus capacidades de semiconductor hace funcionar atodos los componentes (transistores, resistencias, diodos,condensadores, etc.) que cobija en su interior.
El chip va recubierto por una funda de plástico. La conexióncon otros dispositivos electrónicos se realiza a través delas patillas o pins. Estos están codificados numéricamente,teniendo cada pin una función determinada que varíadependiendo de los diferentes tipos de circuitos integrados.
La integración de los circuitos electrónicos presenta unaserie de ventajas e inconvenientes.
Ventajas:

99
Reducción de costes. Aumento considerable de la fiabilidad. Capacidad de procesamiento mucho mayor. Reducción de tiempo en la localización de averías. Menor espacio en el almacenaje de los componentes. Consumo de energía más bajo.
Inconvenientes:
La potencia máxima que pueden disipar es muy reducida. No es conveniente integrar componentes como bobinas y
condensadores de altos valores, así como transistoresPNP y NPN.
Los valores de las resistencias y condensadores nopueden superar ciertos máximos.
La manipulación de éstos exige el instrumental adecuado.
Los circuitos integrados se pueden clasificar segúndiferentes criterios, como grado de integración, tecnologíade fabricación y otros.
La clasificación más importante se hace a través de latecnología utilizada, distinguiéndose así 2 tipos decircuitos integrados: analógicos y digitales.
Los analógicos: son aquellos circuitos que trabajan conseñales eléctricas que pueden tomar un número infinitode valores.
Los digitales: son aquellos circuitos que trabajan conseñales eléctricas que solo pueden tomar un determinadonúmero de valores, generalmente sólo toman 2 valorescuando se trata del código binario.
Los circuitos más utilizados actualmente en el mundo de laelectrónica son los digitales. Estos se clasificanprincipalmente en:
Según la tecnología de fabricación:

100
DTL: circuitos fabricados utilizando la combinación delos efectos de los diodos y transistores. Se encuentranampliamente superados tecnológicamente.
TTL: circuitos fabricados a base de transistoresbipolares.
CMOS: circuitos fabricados utilizando transistores deefectos de campo, los cuales son sensibles a cargasestáticas. Presentan un consumo muy bajo.
ECL: circuitos fabricados empleando transistoresbipolares que funcionan en la zona activa. Son los másrápidos.
Según el grado de complejidad:
SSI (Small Scale of Integration): Entre 1 y 30 puertaslógicas
MSI (Medium Scale of Integration): Entre 30 y 300puertas lógicas
LSI (Large ...): Entre 300 y 10000 puertas lógicas VLSI (Very Large ...): entre 10000 y 1000000 puertas
lógicas ULSI (Ultra Large ...): más de 1.000.000 puertas lógicas
A continuación se muestra el aspecto físico de un circuitointegrado.
6. a) Zócalo para Circuito Integrado
El zócalo se puede definir como la base del circuitointegrado. Se trata de un componente fácil de reponer,pudiendo evitar así los diferentes tipos de problemas quepueden surgir al trabajar sobre el circuito integrado,

101
especialmente debidos a la sensibilidad al calor quecaracteriza los circuitos integrados.
Las patillas del zócalo se sueldan sobre el circuito impreso,no afectando así la soldadura al circuito integrado.Realizado este proceso se pincha el circuito integrado sobreel zócalo.
El aspecto de un zócalo es el siguiente:
-El Triac
En esencia, el TRIAC es un DIAC controlado por medio de untercer terminal denominado puerta.
Las curvas características son semejantes con la salvedad deque, en este caso, posee una entrada suplementaria para elcontrol del disparo. Esta característica queda claramentedenotada en su símbolo eléctrico.
El TRIAC se emplea fundamentalmente en la regulación de lapotencia eléctrica en C.A. Interviene en circuitos degobierno de motores, hornos, etc.

102
También se usa en aplicaciones de activación controlada decircuitos eléctricos y electrónicos.
Es común la utilización del TRIAC en circuitos de alarmaexcitados por luz, por contacto, o por cualquier otrotransductor.
La señal de control se aplica entre la puerta G y uno de losterminales activos. El disparo requiere una excitación depuerta de las siguientes características:
vg-a1 entre 1,5 y 3 Voltios.
ig entre 30 y 200 mA.
3.3 elementos básicos de la electrónicadigital (compuertas lógicas, tablas de verdad,temporizadores, contadores, sumadores.)
Operaciones lógicas (álgebra de boole): son las operacionesmatemáticas que se usan en el sistema binario , sistema denumeración que solo usa el 0 y el 1. Si no sabes lo que es terecomendamos este enlace:Sistema Binario

103
Bien pues aquí tienes todas las operaciones lógicas quenos interesan:
Como ves son muy sencillas, pero es fundamental que lasconozcas bien cuando tengas que calcular el resultado de lasfunciones lógicas.
LAS PUERTAS LÓGICAS
Son componentes electrónicos representados por un símbolocon una o dos entradas (pueden ser de mas) y una sola salidaque realizan una función (ecuación con variables binarias), yque toman unos valores de salida en función de los que tengaen los de entrada.
Las puertas lógicas también representan un circuitoeléctrico y tienen cada una su propia tabla de la verdad, enla que vienen representados todos los posibles valores deentrada que puede tener y los que les corresponden de salidasegún su función.
Veamos la primera puerta lógica.
Puerta Lógica Igualdad (función igualdad)

104
Como vemos la función que representa esta puerta es que elvalor de la salida (motor o lámpara) es siempre igual al delestado del de entrada (pulsador o interruptor). En el esquemavemos que se cumple. El pulsador en estado 0 (sin pulsar) lalámpara está apagada, o lo que es lo mismo en estado también0. Si ahora pulsamos el pulsador, estado 1, la lámpara seenciende y pasará también al estado 1. La tabla de la verdadnos da los estado de la salida para los posibles estados deentrada, que este caso solo son dos 0 o 1. ¿Fácil no?. Buenopues ahora vamos a ver las demás puertas lógicas.
Puerta NO O NOT (negación)
Es una puerta que la entrada siempre es contraria al valorde la salida. En las funciones una barra sobre una variablesignifica que tomará el valor contrario (valor invertido). Veamos su función, el símbolo, el circuito eléctrico y sutabla de la verdad.
La función nos dice que el estado de la salida S, es el de

105
la entrada a pero invertida, es decir la salida es locontrario de la entrada. si a es 0, a invertida será 1. Si aes 1 a invertida será 0. Como vemos el pulsador está enestado 0 cerrado (sin pulsar) y la lámpara en estado 0 delpulsador estará encendida, estado 1. Cuando pulsamos elpulsador (estado 1) la lámpara se apaga y estará en estado 0.
Todas las puertas lógicas que se invierten a la salida susímbolo lleva un circulito en el extremo.
Puerta O o OR (función suma)
En este caso hay dos elementos de entrada (dospulsadores). Para que la lámpara esté encendida (estado1)debe de estar un pulsador cualquiera pulsado (estado 1) o losdos. Fíjate que al sumar las entradas en la tabla de laverdad 0 + 0 es igual a 0 y 0+1 es 1.
Puerta AND (función multiplicación)
En este caso para que la lámpara este encendida esnecesario que estén pulsador (estado 1) los dos pulsadores a

106
la vez. Ojo 0x1 es 0 y 1x1 es 1.
Con estas 4 puertas podríamos hacer casi todos loscircuitos electrónicos, pero también es recomendable conocerotras dos puertas lógicas más para simplificar circuitos.
PUERTA NOR (función suma invertida)
Aquí vemos que la función viene representada en el propiosímbolo. Además a la salida le llamamos Y, se pude llamar concualquier letra en mayúsculas. Las entradas son A y B peroinvertidas. Fíjate que solo hay posibilidad de salida 1cuando los dos pulsadores, cerrados en reposo, están sinaccionar (estado 1). Si cualquiera de los dos pulsadores loaccionamos lo abriríamos y la lámpara estaría apagada.
Fíjate que es como la puerto OR pero con el circulito enel extremo del símbolo. Ya sabes que es por que se invierte.
PUERTA NAND (función producto invertido)

107
Como están en paralelo los dos pulsadores sin accionar(estado 0) la lámpara estará encendida (estado 1) y aunquepulsemos y abramos un pulsador la lámpara seguirá encendida.Solo en el caso de que pulsemos los dos pulsadores (los dosabiertos) y estén en estado 1 la lámpara se apagará (estado0).
Hasta ahora hemos visto las puertas lógicas aisladas, peroestas puertas sirven para realizar circuitos mas complicadoscombinándolas unas con otras, obteniendo así un circuitológico combinacional.
A partir de que nos planteen un problema lo primero quedeberemos saber es el número de variables (sensores,pulsadores, interruptores, etc) que vamos a utilizar y a cadauno de ellos le asignamos una letra de una variable lógica(a, b, c, etc). Al elemento de salida le llamamos S, y acontinuación sacamos la tabla de la verdad poniendo losposibles valores de las variables (0 o 1) y el valor quetomará la salida para esos valores (tabla de la verdad delproblema o circuito). Ejemplo: queremos que una caja fuertese abra cuando se pulsen dos pulsadores a la vez.
Tenemos dos pulsadores a y b y una salida que será elmotor de la caja fuerte. Este motor funcionará (estado 1)para abrir la caja. Ya sabemos como debe funcionar. ahorasacamos la tabla de la verdad. Una tabla con dos variables deentrada a y b y con una salida. Tendremos una tabla con 4casos posibles. Para esta tabla vamos pensando para cada casocomo será el valor de la salida.

108
A continuación sacamos la función lógica del problema.Para sacar la función usamos la tabla de la verdad. Cogemossolo las filas que den como salida el valor 1 (solo hay una yes la última), y multiplicamos las variables de entrada decada fila que tenían valor 1 (recuerda solo hay una) poniendoinvertidas las que tengan valor 0 y en estado normal las quetengan valor 1. En este caso las dos tienen valor 1 luego nohabrá ninguna invertida. La función lógica sería:
S = a x b
Así de sencillo. si tuviéramos dos fila con salida 1tendríamos dos productos y estos productos se sumarían parasacar la función (no es el caso).
Una vez que tenemos la función lógica y la tabla de laverdad sacamos el circuito lógico combinacional poniendotantas líneas verticales como variables tengamos (dos en estecaso).
Sacamos líneas horizontales para cada variable delproducto de la función, colocando para las variablesinvertidas la puerta NO (no hay en este caso). Unimos lasvariables de cada producto con la función AND (producto) y alfinal unimos los productos mediante la puerta O (funciónsuma). En el ejemplo sería muy sencillo el circuito ya quecorresponde con la puerta AND, ya que solo hay una fila conS=1.

109
Y ya esta.
Imaginemos que el problema nos propone que la caja fuertese abra cuando alguno de los pulsadores esté activado (cuandoestán los dos a la vez no). Ahora tendremos dos filas consalida 1, por eso hay que sumar los dos productos queobtenemos. Como también tenemos variables de entradasinvertidas habrá que poner en ellas la puerta inversora antesde hacer el producto y al final para unir los dos productosse usa la puerta O. En este caso tendríamos la siguientetabla de la verdad, función lógica y circuito 1.
Las puertas lógicas no se venden por separado, sino quevienen incorporadas en los llamados circuitos integrados oCI. Veamos dos CI de los más usados.

110
Este es el 7432 y como vemos tiene 4 puertas lógicas OR.Las patillas 14 y 7 es donde se conecta el positivo y elnegativo de la pila.
ahora vamos a ver el CI 7402 con 4 puertas NOR
En la realidad para hacer los circuitos tendremos quecomprar los CI adecuados, que incluyan las puertas lógicasque necesitaremos, y utilizar sus puertas lógicas para hacerlos circuitos lógicos combinacionales.
Bueno ya tienes los conocimientos básicos de electrónicadigital. Ahora solo queda practicar haciendo circuitos.¿teatreves?

111
Aquí te dejamos dos problemas planteados para que intentesresolverlos, pero antes deberías intentar hacer el Test deElectrónica Digital y los Ejercicios Escritos deElectrónica digital que son muy sencillos. También tienes unenlace en la parte de arriba a la derecha en "También tepueden interesar" un enlace a un simulador de electrónicadigital que te puedes descargar gratis y practicar haciendocircuitos.
1º) Realizar el circuito lógico combinacional para uncircuito de seguridad de una máquina taladradora, de talforma que solo pueda encenderse cuando la puerta de seguridadesté cerrada (pulsador a para la puerta y b para el encendidodel motor).
2º) Un motor está accionado por 3 finales de carrera demodo que funciona si se cumple alguna de las siguientescondiciones:- A accionado, B y C en reposo- A en reposo B y C accionados- A y B en reposo y C accionados- A y B accionados, C en reposo
3.4 aplicación de los conceptos básicos de laelectrónica
Vamos a explicar en este curso los principales componentesutilizados en electrónica y sus principales aplicaciones,sobre todo en circuitos. Por ser un curso básico noentraremos en detalles demasiados complicados, solamente enel funcionamiento, forma de conexión y sus usos, suficienteen la mayoría de los casos. De todas formas al final de cadacomponente te encontrarás un enlace para ampliarconocimientos si quieres saber más sobre ese componente

112
electrónico.
Después de ver electrónica básica te recomendamos quehagas el Juego Componentes Electrónicos para comprobar lo quehas aprendido. Comencemos.
LAS RESISTENCIAS FIJAS
Resistencias fijas: Siempre tienen el mismo valor. Suvalor teórico viene determinado por un código de colores. Seusan para limitar o impedir el paso de la corriente por unazona de un circuito. El símbolo utilizado para los circuitos,en este caso, pueden ser 2 diferentes, son los siguientes:
Aquí tienes como son las resistencias en la realidad:
Como ves tienen unas barras de colores (código de colores)que sirven para definir el valor de la resistencia en ohmios(Ω). El código para el valor de cada color y mas sobre lasresistencias lo tienes en este página:
El primer color indica el primer número del valor de laresistencia, el segundo color el segundo número, y el tercero

113
el numero de ceros a añadir. Cada color tiene asignado unnúmero. Este código es el llamado código de colores de lasresistencias. Un ejemplo. Rojo-Rojo-Rojo = 2200Ω (se leañaden dos ceros). Otro Ejemplo el de la siguiente imagen:
El primer color nos dice que tiene un valor de 2, elsegundo de 7, es decir 27, y el tercer valor es por 100.000(o añadirle 5 ceros). La resistencia valdrá 2.700.000 ohmios.¿Fácil no?.
Si quieres saber más sobre la resistencia eléctrica terecomendamos este enlace:
POTENCIOMETRO O RESISTENCIA VARIABLE
Son resistencias variables mecánicamente. Los potenciómetros tienen 3 terminales. La conexión de los terminales exteriores hace que funcione como una resistencia fija con un valor igual al máximo que puede alcanzar el potenciómetro. El terminal del medio con el de un extremo hace que funcione como variable al hacer girar una pequeña ruleta. Aquí vemos 2 tipos diferentes, pero que funcionan de la misma forma:

114
Cualquier símbolo electrónico que tenga una flecha cruzándole significa que es variable. En este caso una resistencia variable o potenciómetro sería:
Para Saber más sobre el potenciómetro te recomendamos esteenlace: Potenciómetro.
LA LDR O RESITENCIA VARIABLE CON LA LUZ
Resistencia que varía al incidir sobre ella el nivel de luz. Normalmente su resistencia disminuye al aumentar la luz sobre ella. Suelen ser utilizados como sensores de luz ambiental o como una fotocélula que activa un determinado proceso en ausencia o presencia de luz.
Cualquier símbolo que tenga flechas hacia el significa quecambia al actuar la luz sobre el. Su símbolo es:

115
EL TERMISTOR
Son resistencias que varían su valor en función de la temperatura que alcanzan. Hay dos tipos: la NTC y la PTC.
NTC : Aumenta el valor de su resistencia al disminuir la temperatura (negativo).
PTC: Aumenta el valor de su resistencia al aumentar la temperatura (positivo).
Los símbolos son:
EL DIODO
Componente electrónico que permite el paso de la corrienteeléctrica en una sola dirección (polarización directa). Cuando se polariza inversamente no pasa la corriente por él.

116
En el diodo real viene indicado con una franja gris la conexión para que el diodo conduzca. De ánodo a cátodo conduce. De cátodo a ánodo no conduce.
El símbolo del diodo es el siguiente:
Veamos como funcionaría en un circuito con un lámpara. Si en la pila la corriente va del polo positivo (Barra larga) alnegativo (barra corta) Tenemos que la lámpara:
En el primer caso se dice que está polarizado directamentey en el caso de que no conduzca se dice que está en polarización inversa.

117
Para Saber más sobre el diodo te recomendamos este enlace: Diodo.
EL DIODO LED
Diodo que emite luz cuando se polariza directamente (patilla larga al +). Estos diodos funcionan con tensiones menores de 2V por lo que es necesario colocar una resistenciaen serie con ellos cuando se conectan directamente a una pilade tensión mayor. La patilla larga nos indica el ánodo. Lucirá cuando la patilla larga este conectada al polo positivo.
Su símbolo para los circuitos es el siguiente:
Para saber más sobre el diodo led te recomendamos este enlace: Diodo Led.
EL CONDENSADOR
Componente que almacena una carga eléctrica, para liberarla posteriormente. La cantidad de carga que almacena se mide en faradios (F). Esta unidad es muy grande por lo quesuele usarse el microfaradio (10 elevado a -6 faradios) o el picofaradio (10 elevado a -12 faradios). OJO los condensadores electrolíticos están compuesto de una disolución química corrosiva, y siempre hay que conectarlos

118
con la polaridad correcta.
Su Símbolo es el siguiente, el primero es un condensador normal y el segundo el símbolo de un condensador electrolítico:
Bibliografía 3 unidad:

119
Unidad 4
4.1 Sensores y transconductores eléctricos.
Trandsductores
Un transductor es un dispositivo que transforma un tipo devariable física (porejemplo, fuerza, presión, temperatura, velocidad, etc.) enotro.Un sensor es un transductor que se utiliza para medir unavariable física de interés. Algunos de los sensores ytransductores utilizados con más frecuencia son loscalibradores de tensión (utilizados para medir la fuerza y lapresión), los termopares (temperaturas), los velocímetros(velocidad).Cualquier sensor o transductor necesita esta calibrado paraser útil como dispositivos de medida. La calibración esel procedimiento mediante el cual se establece la relaciónentre la variable medida y la señal de salida convertida.Los transductores y los sensores pueden clasificarse en dostipos básicos, dependiendo de la forma de la señalconvertida.Los dos tipos son:
Transductores analógicos Transductores digitales
Los transductores analógicos proporcionan una señal analógicacontinua, por ejemplo voltaje o corriente eléctrica. Estaseñal puede ser tomada como el valor de la variable físicaque se mide.Los transductores digitales producen una señal de salidadigital, en la forma de un conjunto de bits de estado enparalelo o formando una serie de pulsaciones que pueden ser

120
contadas. En una u otra forma, las señales digitalesrepresentan el valor de la variable medida. Los transductoresdigitales suelen ofrecer la ventaja de ser más compatiblescon lascomputadoras digitales que los sensores analógicos enla automatización y en el control de procesos.
SENSORES ELECTRICOS
Un sensor es un dispositivo capaz de transformar magnitudesfísicas o químicas, llamadas variablesde instrumentación, enmagnitudes eléctricas. Las variables de instrumentacióndependen del tipode sensor y pueden ser por ejemplotemperatura, intensidad luminosa, distancia,aceleración,inclinación, desplazamiento, presión, fuerza,torsión, humedad, pH, etc. Una magnitud eléctricaobtenidapuede ser una resistencia eléctrica (como en una RTD),una capacidad eléctrica (como enun sensor de humedad), unatension eléctrica (como en un termopar), una corrienteeléctrica(como un fototransistor), etc.Un sensor sediferencia de un transductor en que el sensor está siempre encontacto con lavariable a medir o a controlar. Hay sensoresque no solo sirven para medir la variable, sinotambién paraconvertirla mediante circuitos electrónicos en una señalestándar (4 a 20 mA, o 1 a5VDC) para tener una relaciónlineal con los cambios de la variable sensada dentro de unrango(span), para fines de control de dicha variable en unproceso.[cita requerida]Puede decirse también que es undispositivo que aprovecha una de sus propiedades con el findeadaptar la señal que mide para que la pueda interpretarotro dispositivo. Como por ejemplo eltermómetro de mercurioque aprovecha la propiedad que posee el mercurio de dilatarse

121
ocontraerse por la acción de la temperatura. Un sensortambién puede decirse que es undispositivo que convierte unaforma de energía en otra. Áreas de aplicación de lossensores:Industria automotriz, Industria aeroespacial,Medicina , Industria de manufactura, Robótica , etc.*Selección de los Sensores en la automatizaciónLa selección se basa en la decisión sobre cual es el sensormás adecuado. Esto depende del material del objeto el cualdebe detectarse.Si el objeto es metálico, se requiere un sensor inductivo. Siel objeto es de plástico, papel, o si es líquido (basadoen aceite o agua), granu1ado o en polvo, se requiere unsensor capacitvo. Si el objeto puede llevar un imán, esapropiado un sensor magnético.Para elegir un sensor adecuado se deben seguir estos cuatropasos:
FORMA DE LA CARCASA DISTANCIA OPERATIVA. DATOS ELECTRÓNICOS Y CONEXIONES GENERALIDADES

122
4.2 Dispositivos de control electrico yelectronicoElectrónico UnAparato o dispositivo electrónico consiste en unacombinación de componentes electrónicosorganizados encircuitos, destinados a controlar y aprovechar las señaleseléctricas.Ejemplo de dispositivo electrónico es unamplificador de sonido que controla el flujo de energía deunmicrófono hacia los altavoces.
De acuerdo con el criterio que se elija podemos obtenerdistintas clasificaciones. Seguidamente se detallan lascomúnmente más aceptadas.
Según su estructura física
Discretos: son aquellos que están encapsulados uno a uno,como es el caso de los resistores, condensadores, diodos,transistores, etc.
Integrados: forman conjuntos más complejos, como por ejemploun amplificador operacional o una puerta lógica, que puedencontener desde unos pocos componentes discretos hastamillones de ellos. Son los denominados circuitos integrados.
Según el material base de fabricación.Semiconductores (ver listado).No semiconductores.
Según su funcionamiento.Activos: proporcionan excitación eléctrica, ganancia ocontrol (ver listado).Pasivos: son los encargados de la conexión entre losdiferentes componentes activos, asegurando la transmisión delas señales eléctricas o modificando su nivel según el tipoenergía.

123
Electromagnéticos: aquellos que aprovechan las propiedadeselectromagnéticas de los materiales (fundamentalmentetransformadores e inductores).Electroacústicos: transforman la energía acústica eneléctrica y viceversa (micrófonos, altavoces, bocinas,auriculares, etc.).Optoelectrónicos:transforman la energía lumínica en eléctricay viceversa (diodos LED, células fotoeléctricas, etc.).
ComponentesComponentes semiconductoresUn semiconductor es una sustancia que se comporta comoconductor o como aislante dependiendo de la temperatura delambiente en el que se encuentre. Los elementos químicossemiconductores de la tabla periódica.
Componentes activosLos componentes activos son aquellos que son capaces decontrolar el flujo de corriente de los circuitos o derealizar ganancias . Fundamentalmente son los generadoreseléctricos y ciertos componentes semiconductores. Estosúltimos, en general, tienen un comportamiento no lineal, estoes, la relación entre la tensión aplicada y la corrientedemandada no es lineal.
En la actualidad existe un número elevado de componentesactivos, siendo usual, que un sistema electrónico se diseñe apartir de uno o varios componentes activos cuyascaracterísticas lo condicionará. Esto no sucede con loscomponentes pasivos. En la siguiente tabla se muestran losprincipales componentes activos junto a su función más comúndentro de un circuito.
Eléctrico. Un Aparato o dispositivo eléctricoes un aparato que, para cumplir una tarea, utilizaenergíaeléctrica alterándola, ya sea por transformación,amplificación/reducción o interrupción.Un ejemplo de aparato

124
eléctrico es una lámpara incandescente que transforma laelectricidad en luz.
LOS CONTROLES ELECTRICOS
Los controles eléctricos son usados industrialmente paramáquinas o equipos, los cuales realizan un determinadotrabajo. Un ejemplo es el de un final de carrera (LimitSwitch) el cual desactiva o activa un circuito al accionarsemecánicamente una palanca que es la que provoca la apertura ocierre de los contactos.
Estos pueden ser del tipo:
MANUAL: Este tipo de control se ejecuta manualmente en elmismo lugar en que está colocada la máquina. Este control esel más sencillo y conocido y es generalmente el utilizadopara el arranque de motores pequeños a tensión nominal. Estetipo de control se utilizan frecuentemente con el propósitode la puesta en marcha y parada del motor. El costo de estesistema es aproximadamente la mitad del de un arrancadorelectromagnético equivalente. El arrancador manualproporciona generalmente protección contra sobrecarga ydesenganche de tensión mínima, pero no protección contra bajatensión.
SEMI-AUTOMATICO: Los controladores que pertenecen a estaclasificación utilizan un arrancador electromagnético y uno omás dispositivos pilotos manuales tales como pulsadores,interruptores de maniobra, combinadores de tambor odispositivos análogos. Quizás los mandos más utilizados sonlas combinaciones de pulsadores a causa de que constituyenuna unidad compacta y relativamente económica. El controlsemi-automático se usa principalmente para facilitar lasmaniobras de mano y control en aquellas instalaciones dondeel control manual no es posible.

125
CONTROL AUTOMATICO: Un control automático está formado por unarrancador electromagnético o contactor controlado por uno omás dispositivos pilotos automáticos. La orden inicial demarcha puede ser automática, pero generalmente es unaoperación manual, realizada en un panel de pulsadores einterruptores.
Los contactores son dispositivos electromagnéticos, en elsentido de que en ellos se producen fuerzas magnéticas cuandopasan corrientes eléctricas por las bobinas del hiloconductor que estos poseen y que respondiendo a aquellasfuerzas se cierran o abren determinados contactos por unmovimiento de núcleos de succión o de armaduras móviles
4.3 fundamentos básicos del PLC
Principios BásicosCon la llegada de los autómatas programables, los llamadosPLC, la industria sufrió un impulso importante, que hafacilitado de forma notable que los procesos de producción ocontrol se hayan flexibilizado mucho. Encontramos PLC en laindustria, pero también en nuestras casas, en los centroscomerciales, hospitalarios, etc. También en nuestras escuelasde formación profesional encontramos frecuentemente autómatasprogramables. PLC son las siglas en inglés de ControladorLógico Programable (Programmable Logic Controller). Cuando seinventaron, comenzaron llamándose PC (Controladorprogramable), pero con la llegada de los ordenadorespersonales de IBM, cambió su nombre a PLC (No hay nada queuna buena campaña de marketing no pueda conseguir). En Europales llamamos autómatas programables. Sin embargo, ladefinición más apropiada sería: Sistema Industrial de ControlAutomático que trabaja bajo una secuencia almacenada enmemoria, de instrucciones lógicas.

126
1.1¿Qué es un PLC?El PLC es un dispositivo de estado sólido, diseñado paracontrolar procesos secuenciales (una etapa después de laotra) que se ejecutan en un ambiente industrial. Es decir,que van asociados a la maquinaria que desarrolla procesos deproducción y controlan su trabajo.Como puedes deducir de la definición, el PLC es un sistema,porque contiene todo lo necesario para operar, y esindustrial, por tener todos los registros necesarios paraoperar en los ambientes hostiles que se encuentran en laindustria.1.2 ¿Qué hace un PLC?Un PLC realiza, entre otras, las siguientes funciones:
Recoger datos de las fuentes de entrada a través de lasfuentes digitales y analógicas.
Tomar decisiones en base a criterios preprogramados. Almacenar datos en la memoria. Generar ciclos de tiempo. Realizar cálculos matemáticos. Actuar sobre los dispositivos externos mediante las
salidas analógicas y digitales. Comunicarse con otros sistemas externos.

127
Los PLC se distinguen de otros controladores automáticos, enque pueden ser programados para controlar cualquier tipo demáquina, a diferencia de otros controladores (como porejemplo un programador o control de la llama de una caldera)que, solamente, pueden controlar un tipo específico deaparato.Además de poder ser programados, son automáticos, es decirson aparatos que comparan las señales emitidas por la máquinacontrolada y toman decisiones en base a las instruccionesprogramadas, para mantener estable la operación de dichamáquina.Puedes modificar las instrucciones almacenadas en memoria,además de monitorizarlas.

128

129
Bibliografía 4 unidad: