Dynamic traffic flow prediction based on GPS Data
22
Author: PhD. Emilian Necula Faculty of Computer Science, “Al. I. Cuza” University, Iasi PhD Fellow, SOP HRD/159/1.5/133675 Project, Romanian Academy Iasi Branch
Transcript of Dynamic traffic flow prediction based on GPS Data

Author: PhD. Emilian Necula Faculty of Computer Science, “Al. I. Cuza” University, Iasi
PhD Fellow, SOP HRD/159/1.5/133675 Project, Romanian Academy Iasi Branch
Introduction
Motivation
Related Work
Data Collection & Description
Solution: Data Processing
Solution: Prediction Model
Solution: TraffiX Simulator
Solution: Performance Evaluation
Conclusions & Future Work
12.11.2014 ICTAI 2014 2

The objective of this research is to establish a traffic flow model
On this model future traffic situation would be predictable
Predictions will be available to the drivers using navigation systems.
We need to have a large GPS
trace database
12.11.2014 ICTAI 2014 3
GPS Data
Dynamic
Traffic
Prediction
Future
Traffic
Prediction
Fig.1- Smartphone enabled traffic predictions
Some key aspects…
12.11.2014 ICTAI 2014 4
GPS
sampling GPS data
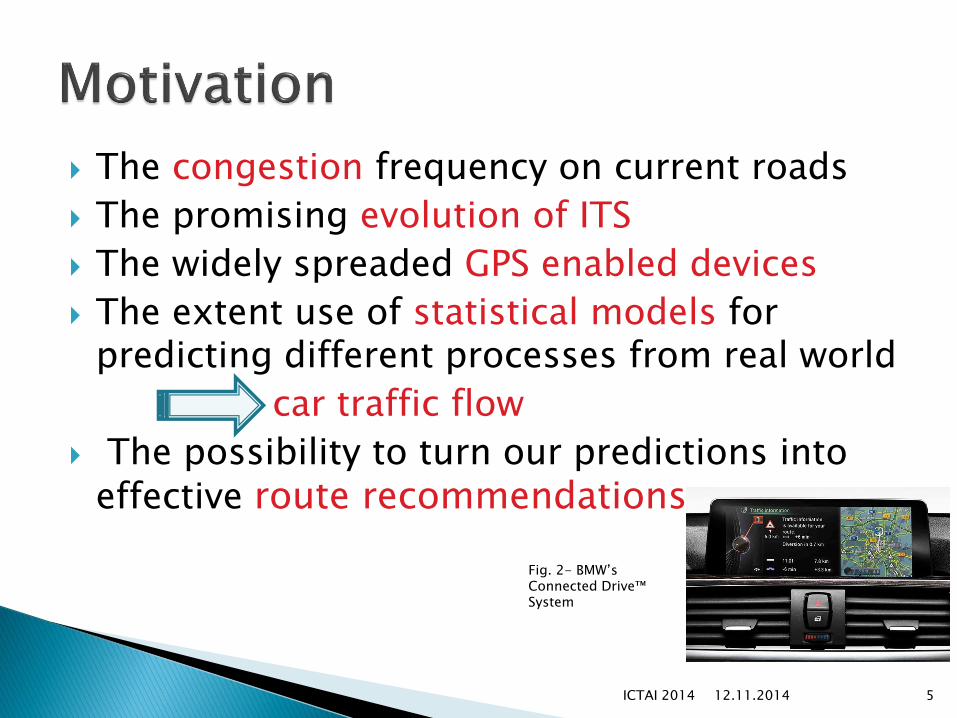
The congestion frequency on current roads
The promising evolution of ITS
The widely spreaded GPS enabled devices
The extent use of statistical models for predicting different processes from real world
car traffic flow
The possibility to turn our predictions into effective route recommendations
12.11.2014 ICTAI 2014 5
Fig. 2- BMW’s Connected Drive™ System

Easy
implementation
Cheap
computations
Weak
dependency on
historical traffic
data
Adaptive to
traffic dynamics
12.11.2014 ICTAI 2014 6

Simmons [1] and Krumm [2] used Hidden Markov models to obtain short-term prediction (but static)
Wang [3] achieved a dynamic traffic prediction
Pang [4] prediction model is based on subtractive clustering for fuzzy neural network (simulated data)
12.11.2014 ICTAI 2014 7
Fig.3- Wang’s flow diagram of dynamic traffic prediction model
Dougherty [5] reported a congestion prediction method using neural network
Huisken and Coffa [6] performed time series analysis for traffic congestion prediction
Chen [7] proposed a congestion prediction algorithm based on auto regressive fuzzy logic
Parametric vs. Nonparametric…
12.11.2014 ICTAI 2014 8
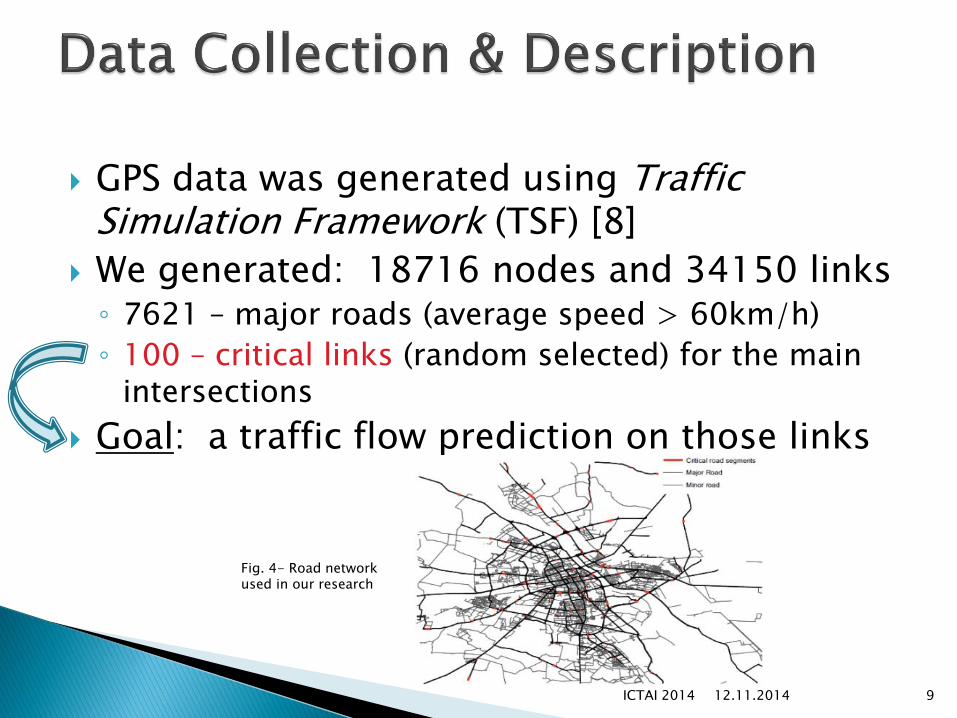
GPS data was generated using Traffic Simulation Framework (TSF) [8]
We generated: 18716 nodes and 34150 links ◦ 7621 – major roads (average speed > 60km/h)
◦ 100 – critical links (random selected) for the main intersections
Goal: a traffic flow prediction on those links
12.11.2014 ICTAI 2014 9
Fig. 4- Road network used in our research
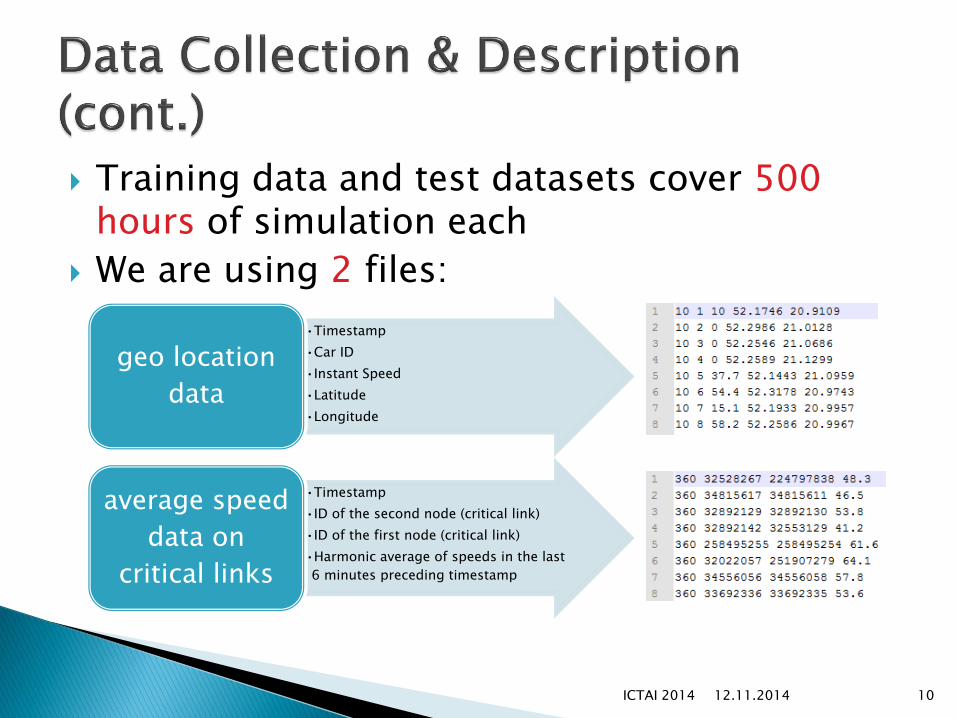
Training data and test datasets cover 500 hours of simulation each
We are using 2 files:
12.11.2014 ICTAI 2014 10
•Timestamp
•Car ID
•Instant Speed
•Latitude
•Longitude
geo location
data
•Timestamp
•ID of the second node (critical link)
•ID of the first node (critical link)
•Harmonic average of speeds in the last
6 minutes preceding timestamp
average speed
data on
critical links
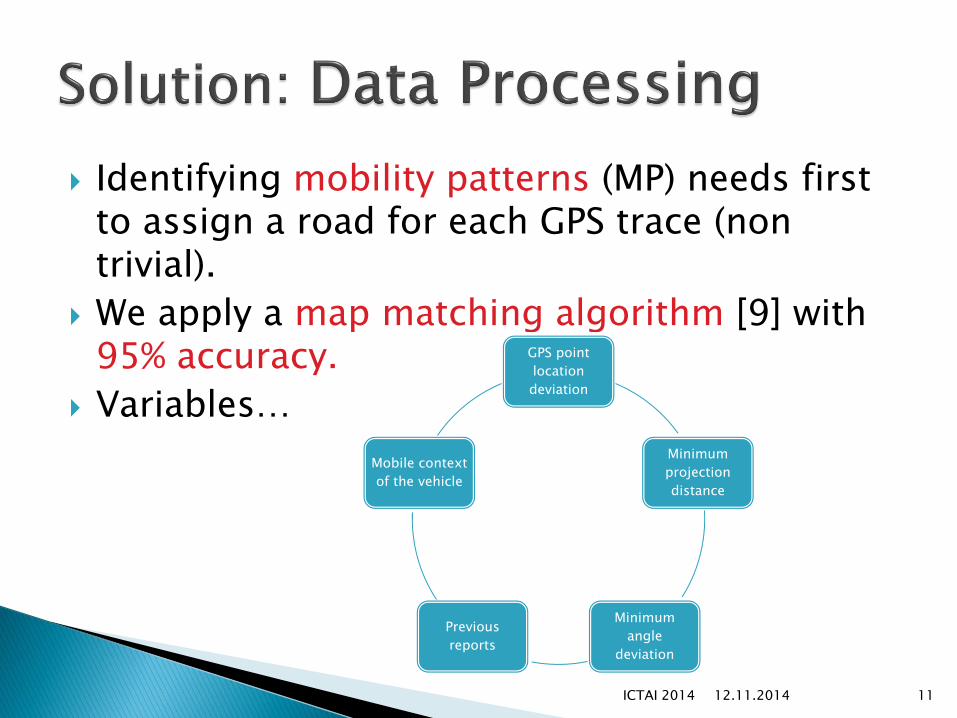
Identifying mobility patterns (MP) needs first to assign a road for each GPS trace (non trivial).
We apply a map matching algorithm [9] with 95% accuracy.
Variables…
12.11.2014 ICTAI 2014 11
GPS point
location
deviation
Minimum
projection
distance
Minimum
angle
deviation
Previous
reports
Mobile context
of the vehicle

After processing the raw GPS data we identify the set of all road segments
R = {r1, r2, . . .rn} We present a m segment itinerary as a road
segment sequence containing m consecutive road segments
Sm = r1r2···rm where ri ∈ R, m ≥ 1
k-segment Mobility Pattern (k ≥ 2) is a k-segment itinerary Sk where, given all Sj, 1 ≤ j < k, the probability of a vehicle to select rj+1 as the next route choice is greater than predefined threshold σ.
12.11.2014 ICTAI 2014 12
We use a probabilistic suffix tree (PST) to implement a K-bounded VMM
In a K-bounded VMM a state can be determined by knowing at most K previous states in the Markov chains
The mobilitiy pattern algorithm is divided in:
12.11.2014 ICTAI 2014 13
Parsing
vehicles
traces
Building
the PST MP
*K – the memory length of the model **VMM- Variable-order Markov Model

Example…
12.11.2014 ICTAI 2014 14
Fig. 7- Road map instance and the MP for r0
We developed this simulator to investigate the traffic flow evolution
Includes major traffic characteristics
It is developed as a microscopic traffic simulator based on Intelligent Driver Model [10]
Light and easy user interface
It can simulate 105 cars on a real road network (real time)
12.11.2014 ICTAI 2014 15 TraffiX Simulator
Traffic:
GPS Traces
Language:
C#
Maps:
OpenStreetMap

Main user interface…
12.11.2014 ICTAI 2014 16
Fig. 9 – TraffiX Simulator with part of the road network under traffic flow simulation
We compared our method with Artificial Neural Network method and Shift Model method
The performance was quantified regarding: ◦ MAE – Mean Absolute Error
◦ MAPE – Mean Absolute Percent Error
◦ RMSE – Root Mean Square Error
We will show the error level for each method trying to predict the traffic flow of a critical link.
12.11.2014 ICTAI 2014 17

The prediction errors are proportional with prediction interval
ANN reduces MAE by 52%, MAPE by 36% and RMSE by 47% compared with Shift Model
Our model (VMM) reduces MAE by 30%, MAPE by 24% and RMSE by 10% compared with Shift Model
reg. MAPE: ANN performs best when prediction interval is 10s. Our model outperforms ANN when the prediction interval is >1 min.
12.11.2014 ICTAI 2014 18
Fig.10 – Our method (VMM) vs. ANN and Shift Model using MAE/MAPE/RMSE
We studied the feasibility of identifying mobility patterns in a city
We used GPS traces generated from an external simulator - TSF
We proposed a VMM based method to make short-term traffic flow prediction
Experiments made withTraffiX Simulator found that:
◦ daily drivers have no constraints on route selection
◦ route selection is well behaved (MP)
◦ MP are connected with different traffic conditions
Performance tests showed that our VMM model reduces prediction error up to 52% compared to the Shift Model and up to 22% compared to the ANN model.
FW: fine tuning of the MP generation algorithm (clusterization, information from adjacent links..), extend traffic flow prediction.
12.11.2014 ICTAI 2014 19
[1] R. Simmons, B. Browning, Y. Zhang, and V. Sadekar, “Learning to Predict Driver Route and Destination Intent,” ITS Conference, 2006, pp. 127–132
[2] J. Krumm, “A Markov Model for Driver Turn Prediction,” SAE World Congress, 2008
[3] Y. Wang, Y. Chen, M. Qin, and Y. Zhu, “Dynamic Traffic Prediction Based on Traffic Flow Mining,” 6th World Congress on Intelligent Control and Automation, pp. 6078–6081, June 2006
[4] M. Pang, X. Zhao, “Traffic Flow Prediction of Chaos Time Series by Using Subtractive Clustering for Fuzzy Neural Network Modeling,” in Intelligent Information Technology Applications, 2007, pp. 23–27
[5] M. S. Dougherty, H. R. Kirby, and R. D. Boyle, “The use of neural networks to recognize and predict traffic congestion,” Traffic Engineering and Control, vol. 34, no.6, 1993, pp. 311–314
[6] G. Huisken and A. Coffa, “Short term congestion prediction: comparing time series with neural networks,” IEE conference on road transport information and control, 2000, pp. 66–69
[7] B. Chen, S. Peng, and K. Wang, “Traffic Modeling, Prediction, and Congestion Control for High-Speed Networks: A Fuzzy AR Approach,” IEEE On Fuzzy Systems, 2000, pp. 491–508
[8] P. Gora, “Traffic Simulation Framework - a cellular automaton based tool for simulating and investigating real city traffic,” Recent Advances in Intelligent Information Systems, Warsaw, 2009, pp. 642–653
[9] E. Necula, “Mining GPS Data to learn driver’s route patterns,” (under review for SYNASC 2014).
[10] S. Zhang, W. Deng, Q. Zhao, H. Sun, and B. Litkouhi. “An Intelligent Driver Model with Trajectory Planning,” 2012 IEEE ITS Society Conference Management System,pp. 876–881, Sept. 2012,USA
12.11.2014 ICTAI 2014 20

21

22