Diseño Acelerometro
11
Instituto Politécnico Nacional Unidad Profesional Interdisciplinaria en Ingeniería y Tecnologías Avanzadas Tópicos avanzados de sensores Practica 1: Diseño y simulación de un acelerómetro de un eje. Profesora: Abarca Jiménez Griselda Stephany Integrantes: -Blanco Corona Eduardo -Evia Urban Erick Alfredo -Galindo Fuentes Alejandro
Transcript of Diseño Acelerometro

Instituto Politécnico Nacional
Unidad Profesional Interdisciplinaria enIngeniería y Tecnologías Avanzadas
Tópicos avanzados de sensores
Practica 1: Diseño y simulación de unacelerómetro de un eje.
Profesora: Abarca Jiménez GriseldaStephany
Integrantes:-Blanco Corona Eduardo-Evia Urban Erick Alfredo-Galindo Fuentes Alejandro

Grupo: 3MM4
Introducción
El acelerómetro es un dispositivo capaz de medir aceleraciones,
existen diferentes tipos de acelerómetros en función del tipo de
tecnología que utilicen para medir esa magnitud: mecánicos,
piezoeléctricos, de condensador, etc.
Para esta práctica se diseñara un acelerómetro mecánico, en este tipo
de acelerómetros se sitúa una masa dentro de un armazón, la cual está
suspendida mediante resortes de manera que pueden tener variaciones de
posición al aplicarle una fuerza, así que en el sistema se tendrán
presentes tanto la ley de Hooke como la segunda ley de Newton.
La ley de Hooke nos dice que el alargamiento que se presenta en un
resorte es directamente proporcional a la fuerza que se aplica. Esto
se expresa mediante la siguiente formula:
F=kx
En donde F es la fuerza aplicada, k es la constante de elasticidad del
resorte y x es el desplazamiento resultante al aplicar la fuerza.
La segunda ley de Newton dice que “la aceleración de un cuerpo es
directamente proporcional a la fuerza neta que actúa sobre él e
inversamente proporcional a su masa”. Su ecuación es:
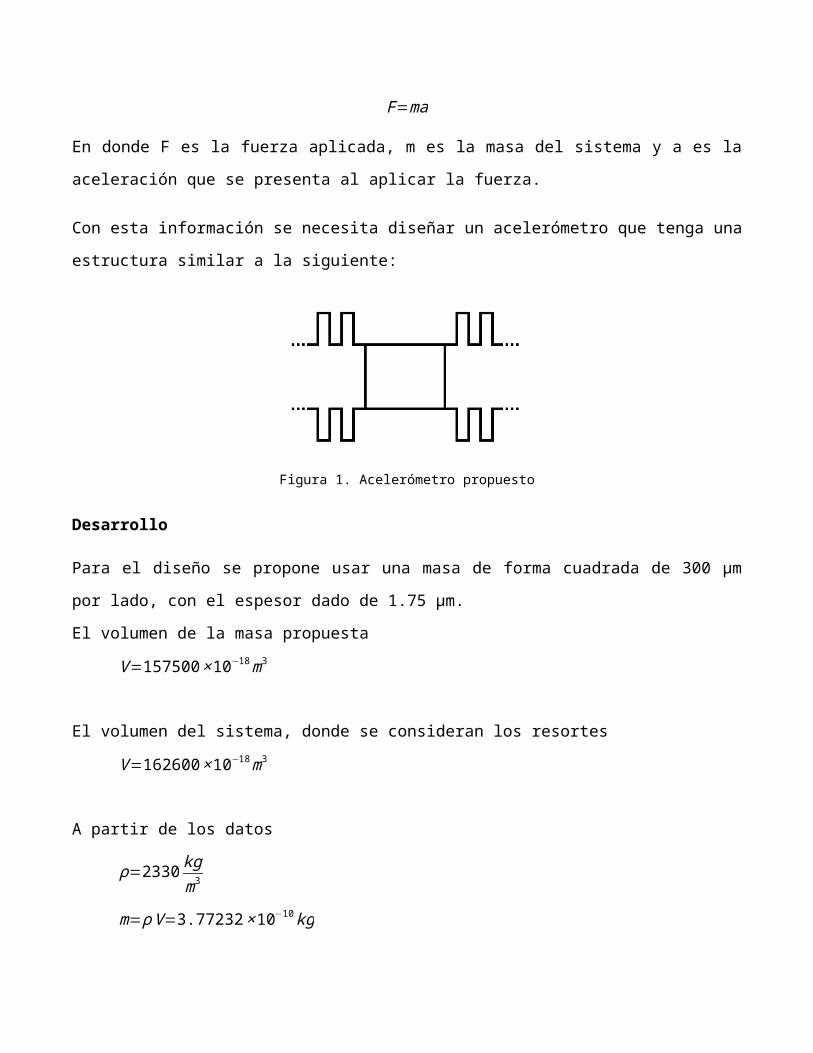
F=ma
En donde F es la fuerza aplicada, m es la masa del sistema y a es la
aceleración que se presenta al aplicar la fuerza.
Con esta información se necesita diseñar un acelerómetro que tenga una
estructura similar a la siguiente:
Figura 1. Acelerómetro propuesto
Desarrollo
Para el diseño se propone usar una masa de forma cuadrada de 300 µm
por lado, con el espesor dado de 1.75 µm.
El volumen de la masa propuesta
V=157500×10−18m3
El volumen del sistema, donde se consideran los resortes
V=162600×10−18m3
A partir de los datos
ρ=2330kgm3
m=ρV=3.77232×10−10kg
a=4g=39.24 ms2
F=ma
F=kxma=kxk=max
x=1μm
keq=0.014802Nm
El sistema conforma un arreglo de cuatro resortes en paralelo, los
cuatro con la misma kkeq=k1+k2+k3+k4=4kres
kres=keq
4
kres=0.003705Nm
Se calcula la kx de una estructura Crab Leg, para determinar la
cantidad de estructuras conectadas en serie para encontrar el
equivalente de la kres. Los datos de las longitudes propuestas se
obtienen después de una serie de iteraciones, buscando que el número
de estructuras sea un número entero.
E=160×109 Nm Módulo de Young del material (Poli-Si)
t=1.75μm Espesor de los brazos del resorte

wb=0.9μm Ancho de los brazos del resorte
wa=0.9μm
La=261.3μm Largo de los brazos del resorte
Lb=10.2μm
kx=Et4 (wb
Lb )3
(4Lb+αLa
Lb+αLa )ky=
Et4 (wa
La )3
(4Laα+Lb
Laα+Lb )
α=(wb
wa )3
Figura 2. Crab Leg
kx=0.0111187Nmky=53.50642
Nm
Mayor rigidez en el eje ‘y’ provoca menor deformación en este,
haciendo que el desplazamiento principal sea en el eje ‘x’.

Las estructuras Crab Leg conectadas en serie forman el resorte, la kres
es igual a la inversa de la suma de las inversas, y considerando quekx es igual en cada uno de los elementos
kres=kx
NestructurasNestructuras=
kres
kx
Nestructuras=3.004≈3
Resultados
En base a los datos obtenidos se procedió a diseñar el modelo en el
software COMSOL para poder aplicar las pruebas necesarias y saber si
cumple con los parámetros esperados.
El resultado final al realizar el modelo en COMSOL fue el siguiente:
Figura 3. Modelo realizado en COMSOL

Desplazamiento en x
Para el desplazamiento en x se obtuvo la siguiente gráfica:
Figura 4. Desplazamiento en x al aplicar fuerzas de -4G a 4G
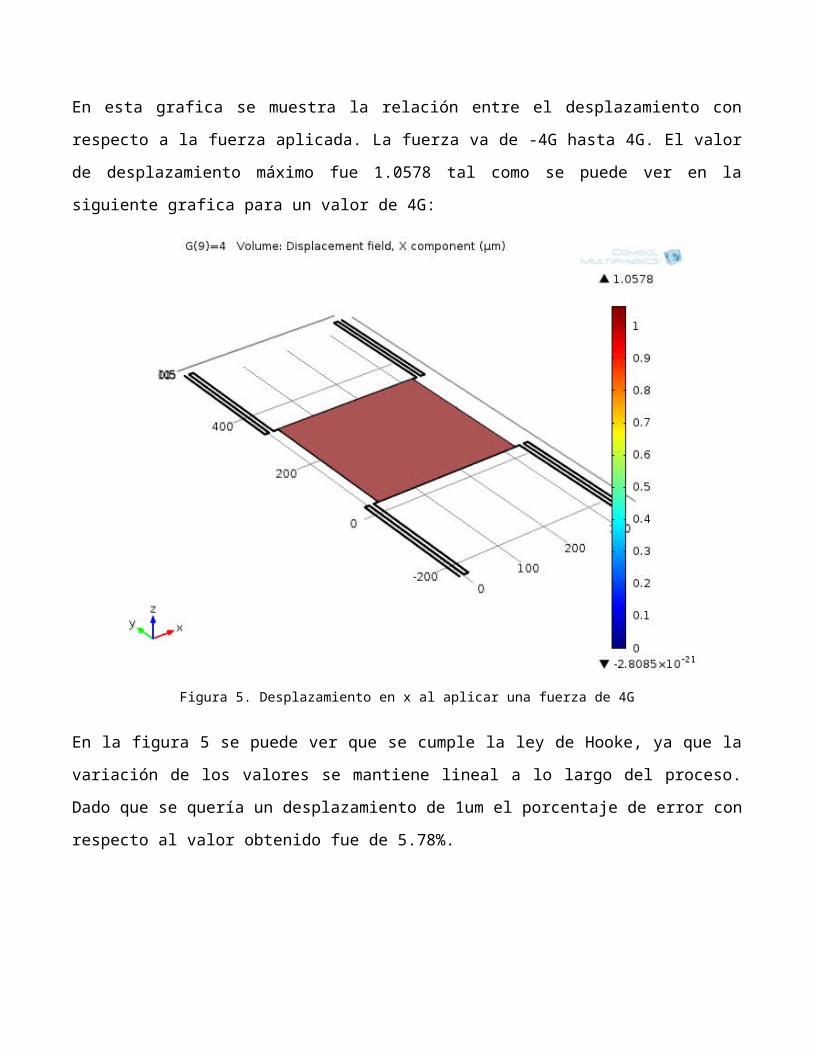
En esta grafica se muestra la relación entre el desplazamiento con
respecto a la fuerza aplicada. La fuerza va de -4G hasta 4G. El valor
de desplazamiento máximo fue 1.0578 tal como se puede ver en la
siguiente grafica para un valor de 4G:
Figura 5. Desplazamiento en x al aplicar una fuerza de 4G
En la figura 5 se puede ver que se cumple la ley de Hooke, ya que la
variación de los valores se mantiene lineal a lo largo del proceso.
Dado que se quería un desplazamiento de 1um el porcentaje de error con
respecto al valor obtenido fue de 5.78%.

Deflexión en z
Se obtuvo la siguiente gráfica:
Figura 6. Desplazamiento en z al aplicar fuerzas de -4G a 4G
En este caso también se muestra la relación entre el desplazamiento
con respecto a la fuerza aplicada, como se ve el cambio en el

desplazamiento es muy pequeño, alcanzando un valor máximo de 0.0833
um. Esto es debido a que la única fuerza que afecta a este
desplazamiento es la de la gravedad sobre la masa del propio cuerpo.
Con el valor de 0.0833 sabemos que se tiene un 8.33% de deflexión.
Conclusiones
Blanco Corona Eduardo
Evia Urban Erick Alfredo
En la práctica pude darme cuenta de cómo es que se construyen los
acelerómetros dentro de los sensores digitales. Comenzando con las
restricciones propias del proceso de fabricación, como lo fue el
material, o las dimensiones mínimas que se pueden fabricar. Otro punto
importante que se consideró durante el diseño fue la deformación sobre
el eje X y la deflexión existente en el eje Z, ya que esta es la que
va a influir directamente en el posterior proceso de los capacitores.
Finalmente cabe mencionar que si se desea que este acelerómetro
funcione sobre sólo un eje, hay que considerar durante el proceso de
diseño que la rigidez sobre el eje Y sea mucho mayor. Para todo el
proceso de diseño resulto muy útil la herramienta de software COMSOL
Multiphysics, ya que con ella se puede hacer fácilmente un análisis
considerando los diferentes elementos.
Galindo Fuentes David Alejandro
Al finalizar la practica puedo afirmar que los parámetros más
importantes en el diseño de acelerómetros a escala de MEMS, son la
rigidez de los elementos de soporte para la masa móvil que se asocia a
ciertos parámetros restrictivos de diseño como el espesor del
material, dimensiones minimas e incrementos y, a su vez el largo y
ancho de los soportes que dieron la pauta para calcular el coeficiente
de restitución en base al tipo de material empleado.
También concluyó que es necesario un diseño con gran exactitud en el
desplazamiento sobre el eje deseado donde no influya la sensitividad
cruzada de otro eje y minimizar el error de medición, logrando esto
mediante el cálculo de los soportes y empleando una masa acorde al
modelo. El software de análisis y diseño COMSOL fue eficiente en la
simulación de comportamiento del modelo logrando tener una tolerancia
en el diseño bastante aceptable