Design and Development of the Powertrain Elements in a ...
9
EEA Conference & Exhibition 2019, 25 - 27 June in Auckland Design and Development of the Powertrain Elements in a Formula SAE Electric Race Car Thomas Galbraith University of Canterbury Motorsport University of Canterbury Christchurch, New Zealand [email protected] Abstract— Formula SAE is an international uni- versity engineering competition that over 600 teams enter to design, build and race a formula style single seat race car. Since 2016 the University of Canterbury has been developing electric vehicles to race in the Formula SAE Australasia (FSAE-A) competition, held in Australia at the end of each year. The Uni- versity of Canterbury Motorsport (UCM) team has gained considerable prestige amongst the Formula SAE community for its bold engineering initiatives and highly professional build quality. On top of its record breaking appearances at the annual Australa- sia competition, UCM is ranked one of the top 25 teams in the world, as well as being the highest ranked team in New Zealand. The UCM electric vehicles feature four independent in-wheel permanent magnet 3-phase synchronous motors, coupled to the wheel by a custom designed planetary gearbox. The 120kW quadruple motor and inverter package is powered by an entirely student designed and built lithium- ion battery pack, optimised to provide the vehicle with enough capacity to last the 22km Endurance event at full race power. The vehicle's torque vectoring and traction control algorithms are implemented on a control unit which is also student designed, allowing the car to accelerate from 0-100km/h in under three seconds. The demanding power requirements of the four-wheel-drive topology can put a lot of stress on the batteries if not properly managed. As a result, residing with the vehicle's battery pack is almost the same number of electrical circuits and communication networks as the entire rest of the car. This provides the appropriate monitoring and protection systems needed for safe operation. This paper provides a summary of the technology and design processes im- plemented in a high performance, student developed electric race car powertrain. I. I NTRODUCTION Formula SAE is an international engineer- ing competition that invites university teams to design, build and race formula style sin- gle seat race cars. The competition hosts both static and dynamic events where teams compete against each other; from presenting designs to expert judges and developing business mod- els for their projects, to testing performance out on the track. The University of Canter- bury Motorsport (UCM) team is New Zealand's highest ranked Formula SAE team and has been entering four wheel drive (4WD) electric cars in the Australasian competition (FSAE- A) since 2016. With exception of aesthetics, the most defining factor about any Formula SAE car is undoubtedly the powertrain and how it is implemented. Outright performance is achieved by simultaneously optimising designs for a range of criterion, including size, weight, simplicity, manufacturability, safety, efficiency and of course, power output. The powertrain is defined as part of the 'tractive system' which is the high current path (for an EV). The aim of this paper is to give a summary of the design and development process for the electrical pow- ertrain components in UCM's electric vehicles. Since a large proportion of the low voltage (LV) electronics are for monitoring and protection of the tractive system components, aspects of the LV system are also discussed. A simplified block diagram showing the key elements cov-
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Design and Development of the Powertrain Elements in a ...

EEA Conference & Exhibition 2019, 25 - 27 June in Auckland
Design and Development of the PowertrainElements in a Formula SAE Electric Race Car
Thomas GalbraithUniversity of Canterbury Motorsport
University of CanterburyChristchurch, New Zealand
Abstract— Formula SAE is an international uni-versity engineering competition that over 600 teamsenter to design, build and race a formula style singleseat race car. Since 2016 the University of Canterburyhas been developing electric vehicles to race in theFormula SAE Australasia (FSAE-A) competition, heldin Australia at the end of each year. The Uni-versity of Canterbury Motorsport (UCM) team hasgained considerable prestige amongst the FormulaSAE community for its bold engineering initiativesand highly professional build quality. On top of itsrecord breaking appearances at the annual Australa-sia competition, UCM is ranked one of the top 25teams in the world, as well as being the highest rankedteam in New Zealand. The UCM electric vehiclesfeature four independent in-wheel permanent magnet3-phase synchronous motors, coupled to the wheel bya custom designed planetary gearbox. The 120kWquadruple motor and inverter package is poweredby an entirely student designed and built lithium-ion battery pack, optimised to provide the vehiclewith enough capacity to last the 22km Enduranceevent at full race power. The vehicle's torque vectoringand traction control algorithms are implemented on acontrol unit which is also student designed, allowingthe car to accelerate from 0-100km/h in under threeseconds. The demanding power requirements of thefour-wheel-drive topology can put a lot of stress onthe batteries if not properly managed. As a result,residing with the vehicle's battery pack is almost thesame number of electrical circuits and communicationnetworks as the entire rest of the car. This providesthe appropriate monitoring and protection systemsneeded for safe operation. This paper provides asummary of the technology and design processes im-plemented in a high performance, student developedelectric race car powertrain.
I. INTRODUCTION
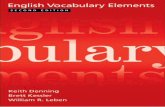
Formula SAE is an international engineer-ing competition that invites university teamsto design, build and race formula style sin-gle seat race cars. The competition hosts bothstatic and dynamic events where teams competeagainst each other; from presenting designs toexpert judges and developing business mod-els for their projects, to testing performanceout on the track. The University of Canter-bury Motorsport (UCM) team is New Zealand'shighest ranked Formula SAE team and hasbeen entering four wheel drive (4WD) electriccars in the Australasian competition (FSAE-A) since 2016. With exception of aesthetics,the most defining factor about any FormulaSAE car is undoubtedly the powertrain andhow it is implemented. Outright performance isachieved by simultaneously optimising designsfor a range of criterion, including size, weight,simplicity, manufacturability, safety, efficiencyand of course, power output. The powertrain isdefined as part of the 'tractive system' which isthe high current path (for an EV). The aim ofthis paper is to give a summary of the designand development process for the electrical pow-ertrain components in UCM's electric vehicles.Since a large proportion of the low voltage (LV)electronics are for monitoring and protectionof the tractive system components, aspects ofthe LV system are also discussed. A simplifiedblock diagram showing the key elements cov-

PMSM
1
PMSM
2
PMSM
3
PMSM
4
MOTOR
CONTROLLER(S)
QUADRUPLE
INVERTER
PACKAGE
ACCUMULATOR
LITHIUM ION
BATTERY PACK
GEAR-
BOX
GEAR-
BOX
GEAR-
BOX
GEAR-
BOX
VEHICLE
CONTROL
UNIT (VCU)
DRIVER AND
VEHICLE
SENSORS
ANALOG
PROTECTION
SYSTEMS
Fig. 1. Simplified block diagram of UCM's electric vehiclepowertrain.
ered in this paper is shown in Fig. 1. The designand development of the planetary gearboxes isalso a very significant part of the powertrain,however, this will not be presented.
II. HISTORY OF ELECTRIC RACING AT UCFollowing the success of UCM's 2015 com-
bustion car, ultimately placing them 3rd in theinternal combustion (IC) engine world rankings,the team was motivated to work on an entirelynew challenge: the development of electric ve-hicles. At the 2016 Australasian competition itbecame the first EV in the history of FSAE-A tooutright win a dynamic racing event, beating allcontenders in both electric and internal combus-tion engine vehicle categories. Unfortunately,UCM16's cooling system struggled with theAustralian heat and a mechanical failure inthe rear wheel assembly rendered it unable tofinish the 22km Endurance event, placing thecar (Fig. 2) 12th overall.
The 2017 team set out with ambitious plansto optimise the electric car with a focus onweight and performance. The team designed avery complex car, including mechanical featuresthat had never been seen before in FormulaSAE. Unfortunately, a minor mistake during amajor manufacturing stage forced the team to berequired to build a second, entirely new chassis.This setback, coupled with typical unexpecteddelays, crippled the project and it soon becameclear that the car was not going to be readybefore the December competition.
Fig. 2. UCM16 on track during Autocross at FSAE-A 2016.
In 2018 UCM took the learning's from 2017and almost entirely re-built the electric carwhilst also building a new IC engine car, en-tering them both at the Australasian competi-tion in December. UCM18-E's performance putthe teams EV development program back inthe spotlight after it took home three podiumfinishes: 1st in Business Presentation, 2nd inEndurance and 3rd in Autocross. Unfortunately,an unexpected electrical bug during the Acceler-ation event denied the team from starting. How-ever, the team's performance across all other ar-eas secured a 4th place overall, narrowly missinganother podium finish. UCM18-E (Fig. 3) wasalso the first Australasian built 4WD EV (andNew Zealand's first EV) to finish the Endurancerace in the event's 18 year history.
Fig. 3. UCM18-E battles the rain during Endurance at FSAE-A2018.
2

III. DRIVETRAIN
There many drivetrain topologies to choosefrom when building an EV. The most commondrivetrains seen in Formula SAE electric are:
• RWD with a single motor and inverter(using a chain and sprocket)
• RWD with two motors (using either a chainand sprocket or planetary gearbox)
• 4WD with hub mounted planetary gear-boxes in each wheel
The following considerations were madewhen choosing to build a RWD or 4WD car[1]:
• Performance analysis of RWD vs 4WDusing the tyre model
• Implementation of torque vectoring, trac-tion control and regenerative braking
• Compatibility of available motors with var-ious inverters
Given that a vehicle propels forward due tothe reaction force between the tyre and theroad, a 4WD powertrain is inherently capableof exerting more propulsive force than a RWDcar of the same weight. Similarly to producinga forward movement, a car's ability to cornerfaster is based on the amount of lateral forcethe tires can exert on the ground. The abilityto control all four wheels independently allowsthe yaw rate of a race car to be changeddynamically by control algorithms, allowing thelateral and longitudinal force on the wheels tobe maximised at all times [1]. The load transferduring braking also enables a 4WD EV toregenerate more energy than would be possiblewith a RWD car.
When UCM decided to transition to electric,four out of the five highest ranked EV teamsin the world had 4WD cars [1]. Given the clearperformance advantages, the characteristics of a4WD car aligned best with the team's goals. Theequally evident added complexity of building avehicle that featured independently controlledhub motors only complemented UCM's ambi-tious engineering design mentality.
The three most popular 4WD electric drive-train options in 2016 were:
• Self-developed inverters and motors• Self-developed inverter with off-the-shelf
motor• Formula SAE specific inverter and motor
kit from AMK (Germany)The AMK package was chosen by UCM as it
allowed the team to avoid compatibility issuesbetween a motor and an inverter, which wasnot tolerable given the tight project timeline[1]. The kit comprises of four silicon IGBTinverters packaged together and four perma-nent magnet synchronous motors (PMSM), asshown in Fig. 4 and Fig. 5 respectively. Thekit can provide a continuous power output of49.2kW and peak of 120kW. The inverters areconfigured using an AMK software packagethat allows over 500 parameters to be modi-fied. Most of these are for setting limits forthe protection of hardware, but also includeperformance altering variables. The most usefulof these being control gains for the internaltorque and velocity PID controller, to adjust theresponse of the motors to a given control signalsent by the vehicle control unit (VCU).
Fig. 4. AMK KW26 inverter package [1].
IV. ACCUMULATOR
An accumulator is defined by Formula SAEas an energy storage container that may includebatteries or super capacitors. For UCM, it ispurely battery storage. The following sectionaims to give an overview of the design decisionsmade over the past three years and how themain accumulator sub-systems work together
3

Fig. 5. AMK DD5 30kW PMSM [1].
to form an FSAE-A rules compliant, lithiumbattery pack.
A. Energy Source
Since UCM16 was the team's first EV, therewas no energy consumption data to base theaccumulator capacity requirements off. To en-sure the car was going to finish the 22kmendurance race, a race car lap simulation toolwas used. A model of UCM16 was made in thesoftware based on the calculated performanceparameters of the car. The vehicle model wasthen simulated on a FSAE-A competition trackfrom a previous year which generated an esti-mate for the amount of energy consumed forthe endurance event [1]. The FSAE-A compe-tition allows for time between events to chargeor swap accumulators, hence it was designedto only last the duration of the most energyintensive event. By taking into account ap-proximate regenerative currents, feedback fromestablished overseas teams and including somefactor of safety, UCM16's accumulator was re-quired to be approximately 8.5kWh [1]. Exten-sive research into available and popular batterytechnologies was carried out, and the requirednumber of series and parallel cells determinedfor each common EV battery type availableon the market. The chosen cell chemistry wasselected based on the calculated overall weightand a documented reputation of the cell beingsuccessfully used in EV's previously. Despitebeing designed for seven cells in parallel and141 in series (7p141s), insufficient tolerances in
the mechanical design of the accumulator con-tainer led to the UCM16 accumulator needingto reduce the number of cells. It was finallyconstructed of Samsung 18650 Li-ion cells, spotwelded in a 7p108s configuration. The complex-ity of the spot welding process (for a pack thislarge) and difficulty physically interfacing withthe chosen BMS motivated the move to a pre-packaged, Samsung 18650 brick for UCM18-E,as shown in Fig. 6.
BRICK TERMINALS (M8 NUT)
TEMPERATURE SENSOR CONNECTOR
Fig. 6. Lithium-ion building block used in the UCM18-Eaccumulator [2].
The pre-packaged 18650 bricks were onlyavailable in an eight-parallel configuration in2017, so the pack's capacity was increased.The number of series cells was also increasedto 120. After the 2018 season, the team wasable to record sufficient data on the stress puton the cells during racing. It was discoveredthat the nominal pack voltage of 432V forcedthe motors to operate in a lower efficiencyregion compared to if the pack was closer tothe FSAE-A competition limit of 600V, causingan increase in heat dissipation in the statorwindings. As expected, the decrease in voltagealso caused a proportionally larger amount ofcurrent to be drawn for the same power output,increasing i2R losses in the cells.
An important factor that had not been con-sidered in the battery pack design previouslywas the large temperature rise Li-ion has whendischarging above, or even close to its' contin-uous current rating. This was discovered aftertesting with the 2018 accumulator. There is astrict 60C temperature limit for accumulators
4

at the competition, with disqualification beingthe consequence if violated. Testing in NewZealand did not reveal any thermal issues in theaccumulator, however, the ambient temperatureat the 2018 Australasia competition was around30C. With insufficient data to calculate theexpected rise over the 2018 Endurance track,the maximum torque limit sent to the inverterby the VCU was decreased significantly in anact to reduce the tractive current draw. Despiteplacing 2nd and 3rd in Endurance and Autocrossrespectively, the car was actually performancelimited to about two thirds of its capability.
High current discharge experiments and sim-ulations using actual vehicle data, carried outby the 2019 team, aimed to allow optimisa-tion of the number of series and parallel cellsneeded for UCM19. The thermal characteristicsof Li-ion is inherently difficult to model, espe-cially when regenerative currents are included.Nonetheless, as a result of the analysis, theUCM19 pack will revert back to a seven parallelcell configuration whilst having a peak voltageof 580V (7p138s).
B. Accumulator Management System
The accumulator management system (AMS)has the primary responsibility of monitoringthe voltage and temperature of all the cells inthe pack. An off-the-shelf battery managementsystem (BMS) is used to balance the cell'svoltages, whilst a student designed temperaturemonitoring system (TMS) supervises all of thecell temperatures [3]. The BMS and TMS to-gether form the AMS, as shown in Fig. 7.
The BMS implemented is made-to-orderfrom a specialist in Colorado, USA. The systemfeatures a 'distributed' topology, where eachof the cell balancing circuits is individuallymounted on the 18650 bricks (Fig. 8). Alter-native to a 'centralised' BMS, the distributedsystem allows the heat generated from thebalance currents to be spread throughout theaccumulator container, instead of being con-centrated at a single location. There is also noneed to have 'flying' balance wires connectingto each cell terminal throughout the container.
With this system, only two pairs of galvanicallyisolated communication wires connect the BMSof an accumulator segment (12-15 bricks) to thecentral BMS controller (Fig. 9); improving thesafety and modularity of the system. The maindisadvantage of a distributed system is that thereare more components to be packaged at the cell,rather than all at a single location elsewhere inthe container. Which can make the mechanicaldesign and layout more difficult.
Whilst the TMS has seen one revision toimprove the packaging and functionality, theBMS has not been changed significantly sinceits original installation in 2016. An alternativewas trialled in 2018 but was soon abandoneddue to lack of engineering support from thesupplier. The next improvement to the AMSwill be the implementation of a self-developedBMS that incorporates the TMS as well.
C. High Voltage Front End
The HV front end primarily consists of theaccumulator isolation relays (AIR's), fuse, cur-rent sensor, precharge and discharge systems,as well as the contactor controller (AMS). Theprecharge circuit is required to limit the inrushcurrent caused due to the large intermediate ca-pacitor on the DC input of the inverter when themain contactors (AIR+ and AIR-) are closed.The discharge circuit works in a similar man-ner, but discharges the intermediate capacitorwhen the contactors open. The location of theprecharge and discharge systems are shown inFig. 10. Since the discharge system operates onthe inverter side of the contactors, it is mountedoutside of the accumulator container.
The HV front end (Fig. 11) was initiallydesigned in 2016 to carry a continuous currentof 100A. However, power data gathered duringtesting in 2018 revealed that the vehicle wasoperating very close to this limit when drivenat a fast pace. The 2019 system has thereforebeen upgraded to operate at 150A continuous.In addition, the new system will feature HVcontactors with auxiliary windings so that thestate of the relay armature can be monitoredby LV electronics; creating an additional level
5

ISOLATION PCB
HV CONNECTOR
LV CONNECTOR
CONTACTOR
CONTROL
VEHICLE SIDEISOLATED HV SIDE
AMS
TEMPERATURE
MONITORING
SYSTEM (TMS)
BATTERY
MANAGEMENT
SYSTEM (BMS)
TO EACH 18650 BRICK TERMINAL
TO EACH 18650 BRICK
TEMPERATURE SENSOR TERMINAL
BATTERY:
120 SERIES BRICKS
SEPARATED INTO 10
SEGMENTS OF 12
(UCM18-E)
ISOLATED 12V
DCDC
CONVERTER
SIGNAL
GALVANIC
ISOLATION
AIR+
PRECHARGE
RELAY
AIR-
Fig. 7. Block diagram showing the main accumulator sub-systems.
of redundancy for the indication of the maincontactor's state. This would be useful in thevery unlikely situation the relays are openedunder load and the relay armature is welded tothe yoke.
V. ISOLATION AND PROTECTION SYSTEMS
FSAE-A EV rules specify that the entiretractive and grounded low voltage (GLV) sys-tems be completely galvanically separated. Forsystems that monitor the tractive system andcommunicate with GLV electronics (such asbetween the AMS, HV front end and the VCU),isolation barriers must be present. The 12V (LV)supply, CAN Bus communication and discretefault signals between the accumulator and carare implemented with isolated DC-DC convert-ers, optical transceivers and optical transistorsrespectively.
The integrity of the isolation is actively mon-itored in the vehicle using an insulation mon-itoring device (IMD). The IMD is a devicespecifically designed for unearthed DC drive
systems in EV's and monitors the insulationbetween the HV tractive system and the GLVground [4]. The device (shown in Fig. 12) isset to trip when the insulation resistance fallsbelow the FSAE-A requirement of 500Ω/V pk.The 2018 IMD would be triggered if the HVinsulation resistance fell below 252kΩ (for the504V accumulator).
The IMD is one of four analogue (no pro-grammable logic) protection systems that iscapable of directly breaking the supply to themain contactors if tripped. The other three are;the precharge/discharge over temperature cir-cuit (PDOC), which monitors the temperatureof the precharge and discharge components;brake system plausibility device (BSPD), whichcompares the brake signal against the trac-tive system current draw; the AMS, which istriggered if cell voltage or temperature limitsare exceeded in the accumulator. These fouranalogue fault circuits are 'latched' if triggered,meaning they will stay active even if the LV
6

Fig. 8. BMS cell monitoring PCBs mounted on the 18650bricks.
power is cycled. They can only be reset via abutton that is outside the cockpit.
The AMK inverter is also equipped withprotective monitoring functions includingshort-circuit/ground fault, intermediatecircuit overvoltage, excess temperature atthe motor/inverter and over current protection.The team has also configured the inverter tode-rate the torque delivered to each motorbased on how close the drivetrain is getting tothe current and temperature limits.
VI. VEHICLE CONTROL UNIT
The VCU is a student designed PCB thatis responsible for enabling all of the drivefunctions. A block diagram of the PCB is shownin Fig. 13. The VCU ensures that the car is onlyenabled to drive after a strict set of FormulaSAE rule requirements are met, this includesvalidating all sensor readings and checking thestate of the tractive system. Once the tractive
Fig. 9. Cell board communication wires connecting to the BMSmaster controller.
TRACTIVE
PACK
FUSE
POWER
STAGE
PRECHARGE CIRCUITD
ISC
HA
RG
E C
IRC
UIT
AMK INVERTER
AIR+
AIR-
INT
ER
ME
DIA
T
E C
AP
AC
ITO
R
Fig. 10. Block diagram of the UCM16 and UCM18-E HV frontend.
system is livened and the vehicle is in 'drive'mode, the VCU carries out real-time vehicledynamic algorithms using the driver and vehiclesensors to produce the control messages forthe AMK inverter. These student developedalgorithms include vehicle torque vectoring andtraction control.
The tractive system is precharged when an
7

Fig. 11. HV front end of UCM18-E's accumulator. In the forefront is the main contactors and the tractive fuse.
Fig. 12. Image of the Bender Isometer IMD [1].
enable message is sent from the VCU to theAMS. After precharge, the vehicle can be putin to 'drive' mode; following the successfulcompletion of a start-up sequence that involvesthe simultaneous push of the brake pedal andpress of the dashboard 'start' button. In additionto the CAN Bus control, the VCU also hasdirect control over the HV contactors via the'shutdown' circuit, as shown in Fig. 13. Theshutdown circuit carries the energising currentfor the main contactors and precharge relaycoils. The VCU is able to react to issues andimplausibilities with varying degrees of severity,from slowly de-rating the motors proportionalto temperature, or disabling the tractive system
Fig. 13. Block diagram of the UCM18-E vehicle control unitPCB [5].
entirely.
VII. FUTURE DEVELOPMENTS AT UCM
A future improvement to be made to theUCM electric powertrain is the development ofa lithium polymer (LiPo) pouch cell accumula-tor. Due to the power/energy density ratio of theLiPo battery chemistry more closely matching
8

the requirements of UCM's Formula SAE cars,changing from Li-ion 18650 cells would allowthe physical size and weight of the accumulatorto reduce. Safety and simplicity have been theprincipal reasons for using pre-packaged Li-ionbricks until now, at the expense of additionalweight. To improve the form factor of the ac-cumulator packaging, the team is investigatingthe development of a custom designed BMS thatcan integrate tightly with the cells whilst alsosatisfying all FSAE-A temperature monitoringrules as a single AMS unit (as mentioned inSection IV-B).
The inverter that comes with the AMK pack-age uses silicon IGBTs packaged against analuminium cooling plate with sizeable air gapsbetween components. The University of Can-terbury has begun research in to the design andbuild of a potential replacement inverter pack-age featuring silicon carbide (SiC) MOSFETs.This will not only reduce the physical size ofthe unit, but also reduce the heat generated bythe switches, significantly improving efficiency.
In addition to new planetary gearboxes, afocus for a branch of the 2019 powertrain teamis the advancement of the vehicle dynamicalgorithms in the VCU. This involves the im-plementation of new high fidelity sensors andan improvement on the algorithms themselves.This work will have a direct impact on theperformance of the vehicle.
VIII. CONCLUSION
The powertrain elements of the UCM elec-tric vehicles are developed immensely eachyear, with every car well out performing it'spredecessor. The optimisation of lithium bat-tery packs, protection systems and supervisoryelectronics is a unique and highly rewardingproject for electrical engineering students atthe University of Canterbury. Whilst keepingsafety paramount, the team aims to continuebeing immersed in new technology to enhancelearning and ultimately build faster race cars.
REFERENCES
[1] M. Barham, “Design and Development of the ElectricalSystems in an Electric Formula SAE Race Car,” Universityof Canterbury, Christchurch, 2017.
[2] Energus Power Solutions, ‘Li2x4p25R: Li-ion buildingblock 3.6V/20Ah/18C‘, 2017. [Online]. Available:https://www.energusps.com/shop/product/li2x4p25r-li-ion-building-block-3-6v-20ah-18c-229?category=3. [Accessed:21 April 2019].
[3] T. Galbraith, C. Jaine, C. Lane and J. Smith,“Developmentof Electric Racecar Electronics“ University of Canterbury(unpublished), Christchurch, 2017.
[4] Bender, ‘ISOMETER IR155-3203/IR155-3204‘,2019. [Online]. Available: https://www.bender-uk.com/products/insulation-monitoring/isometer ir155-3203ir155-3204. [Accessed: 29 April 2019].
[5] A. Chen, B. Maurer, H. Mander and S. Kuipers, “FormulaSAE Electric Racecar,“ University of Canterbury (unpub-lished), Christchurch, 2018.
9