
DESARROLLO DE UNA METODOLOGÍA PARA EL ...
130
DESARROLLO DE UNA METODOLOGÍA PARA EL CONTROL DE LA SEÑALIZACIÓN DEL TRÁFICO Y EL SISTEMA DE SEMAFORIZACIÓN UTILIZANDO LAS LÍNEAS DE POTENCIA ELÉCTRICA – PLT (PLC) ING. AUGUSTO VELÁSQUEZ MÉNDEZ UNIVERSIDAD NACIONAL DE COLOMBIA FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERÍA DE SISTEMAS E INDUSTRIAL MAESTRÍA EN INGENIERÍA DE TELECOMUNICACIONES BOGOTÁ D.C. 2009
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of DESARROLLO DE UNA METODOLOGÍA PARA EL ...

1
DESARROLLO DE UNA METODOLOGÍA PARA EL CONTROL DE LA
SEÑALIZACIÓN DEL TRÁFICO Y EL SISTEMA DE SEMAFORIZACIÓN
UTILIZANDO LAS LÍNEAS DE POTENCIA ELÉCTRICA – PLT (PLC)
ING. AUGUSTO VELÁSQUEZ MÉNDEZ
UNIVERSIDAD NACIONAL DE COLOMBIA
FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERÍA DE SISTEMAS E INDUSTRIAL
MAESTRÍA EN INGENIERÍA DE TELECOMUNICACIONES BOGOTÁ D.C.
2009

2
DESARROLLO DE UNA METODOLOGÍA PARA EL CONTROL DE LA
SEÑALIZACIÓN DEL TRÁFICO Y EL SISTEMA DE SEMAFORIZACIÓN
UTILIZANDO LAS LÍNEAS DE POTENCIA ELÉCTRICA – PLT (PLC)
ING. AUGUSTO VELÁSQUEZ MÉNDEZ
TESIS
DIRECTORA
ING. ZOILA INÉS RAMOS RODRÍGUEZ, Ph.D. (c)
UNIVERSIDAD NACIONAL DE COLOMBIA
FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERÍA DE SISTEMAS E INDUSTRIAL
MAESTRÍA EN INGENIERÍA DE TELECOMUNICACIONES BOGOTÁ D.C.
2009
3
NOTA DE ACEPTACION
------------------------------------------------- ------------------------------------------------- -------------------------------------------------
------------------------------------------------- FIRMA DIRECTORA DE LA TESIS
------------------------------------------------- FIRMA DEL JURADO
------------------------------------------------- FIRMA DEL JURADO
BOGOTA, D.C.,__ DE _____ DE 2009
------------------------------------------------- FIRMA DEL JURADO
4
INDICE
INTRODUCCIÓN……………………………………………………………………….. ..9
1.1 GENERALIDADES DE SISTEMAS DE CONTROL Y MANEJO DE TRÁFICO……………………………………………………………..…………………………12 1.2 MODOS DE OPERACIÓN DE CONTROL DEL TRÁFICO .................................. 13 1.3 SISTEMAS INTELIGENTES DE TRANSPORTE – ITS ....................................... 14
1.3.1 Sistemas ITS en Bogotá D.C. ........................................................................ 16 1.4 SISTEMA DE SEMAFORIZACIÓN DE BOGOTÁ D.C. ........................................ 17
1.4.1 Funcionamiento de la Actual Red de Telecomunicaciones del sistema de control semafórico de Bogotá D.C. .......................................................................... 19
1.5 DEFINICIÓN DE LA ESTRUCTURA DE UN EQUIPO DE CONTROL LOCAL DE TRÁFICO .......................................................................................................................... 20
1.5.1 Operación local .............................................................................................. 21 1.5.2 Operación centralizada .................................................................................. 21 1.5.3 Estructura de parámetros de un controlador local de tráfico ........................ 22
1.6 REVISIÓN DEL PROTOCOLO DE TELECOMUNICACIONES DEL SISTEMA DE CONTROL SEMAFÓRICO DE LA CIUDAD DE BOGOTÁ D.C. Y DOCUMENTACIÓN DE SUS ESPECIFICACIONES GENERALES ................................................................ 25
1.6.1 Protocolos de telecomunicación en sistemas inteligentes de transporte (ITS) ……………………………………………………………………………………...26
1.6.1.1. Protocolo NTCIP ............................................................................................ 26 1.6.1.2. Protocolo OCIT .............................................................................................. 27 1.6.1.3. Protocolo UTMC ............................................................................................. 28 1.6.2 Protocolo de telecomunicaciones del sistema de control semafórico de
Bogotá D.C. ……………………………………………………………………………….29
2.1. TOPOLOGÍAS DE REDES DE TELECOMUNICACIÓN PARA SISTEMAS DE GESTIÓN DE TRÁFICO .................................................................................... 32
3.1. FACTORES DE CONSIDERACIÓN DEL MEDIO DE TRANSMISIÓN ............... 36 3.2. MEDIOS ALÁMBRICOS ........................................................................................ 37
3.2.1. Alambre de cobre ........................................................................................... 37 3.2.2. Fibra Óptica .................................................................................................... 39 3.2.3. Red Eléctrica .................................................................................................. 39
1 SISTEMAS DE CONTROL Y MANEJO DE TRÁFICO, CONTROLADORES DE TRÁFICO Y PROTOCOLOS DE TELECOMUNICACIÓN .................... 12
2 PLANTEAMIENTO DEL MODELO DE SISTEMA DE TELECOMUNICACIÓN PARA GESTIÓN DE TRÁFICO EMPLEANDO LÍNEAS DE POTENCIA ELÉCTRICA (PLT) .................................................................................................................... ……………………………………………..31
3. ANÁLISIS COMPARATIVO DE LA IMPLEMENTACIÓN DE SISTEMAS DE TELECOMUNICACIÓN BASADOS EN PLT EN SISTEMAS DE TELECOMUNICACIÓN SEMAFÓRICA RESPECTO A OTRO TIPO DE TECNOLOGÍAS .................................................................................................................... ……………………………………………..36

5
3.3. MEDIOS INALÁMBRICOS .................................................................................... 40 3.3.1. Sistemas celulares ......................................................................................... 40 3.3.2. Radio Punto a Punto ...................................................................................... 40 3.3.3. Radio doble vía .............................................................................................. 41 3.3.4. Wi – Fi ............................................................................................................ 42 3.3.5. WLAN (Wireless LAN) ................................................................................... 42 3.3.6. Wi – Max ........................................................................................................ 42
3.4. COMPARACIÓN DE TECNOLOGÍAS .................................................................. 43 3.4.1. Matriz DOFA para PLT/PLC/BPL .................................................................. 44
3.5. PROSPECTIVA TECNOLÓGICA ......................................................................... 44
4.1. DESARROLLO Y VALIDACIÓN DEL MODELO .................................................. 48 4.1.1. Condiciones De La Señal Para Ser Transmitida En Media Y Baja Tensión 48 4.1.2. Modulación Y Acceso A La Red .................................................................... 49 4.1.3. MODEM para Líneas de Potencia Eléctrica (Power Line MODEM –PLM) .. 52 4.1.4. Topología De La Red Eléctrica ...................................................................... 55 4.1.5. Transformadores De Energía Eléctrica ......................................................... 58 4.1.6. Redes Eléctricas ............................................................................................ 60 4.1.7. Cargas Conectadas ....................................................................................... 63 4.1.8. Equipo De Control .......................................................................................... 66 4.1.9. Ruido .............................................................................................................. 67 4.1.10. Parámetros de Acople de la Señal del Modelo ............................................. 68 4.1.11. Modelo Del Canal .......................................................................................... 69
4.2. DETERMINACIÓN DE CONDICIONES DE LA RED ......................................... 109 4.3. DISEÑO DE LA RED ........................................................................................... 110 4.4. PARÁMETROS DE IMPLEMENTACIÓN ........................................................... 116 4.5. MODELOS DE NEGOCIO .................................................................................. 117 4.6. MODELO DE PROCESOS ................................................................................. 118
4.6.1. Proveedores ................................................................................................. 119 4.6.2. Empresa distribuidora de energía y telecomunicaciones PLT/PLC/BPL .... 119 4.6.3. Sistema de Gestión de tráfico ...................................................................... 120 4.6.4. Proceso de Gerencia ................................................................................... 120 4.6.5. Proceso de Desarrollo ................................................................................. 120 4.6.6. Proceso de Gestión Tecnológica ................................................................. 120 4.6.7. Proceso de Gestión Talento Humano ......................................................... 120 4.6.8. Proceso de Suministros ............................................................................... 121
4. DESARROLLO DE UNA METODOLOGÍA DE IMPLEMENTACIÓN DE SISTEMAS DE TELECOMUNICACIÓN BASADOS EN TECNOLOGÍA PLT PARA EL CONTROL DE LA SEÑALIZACIÓN DEL TRÁFICO Y EN SISTEMAS DE SEMAFORIZACIÓN .......................................................... 47
CONCLUSIONES ............................................................................................... 122RECOMENDACIONES ....................................................................................... 125BIBLIOGRAFIA .................................................................................................. 126

6
LISTA DE FIGURAS
FIGURA 1.1. CONFIGURACIÓN TÍPICA DE GESTIÓN DEL TRÁFICO. CONEXIÓN DEL CENTRO DE
CONTROL CON UNA INTERSECCIÓN SEMAFORIZADA PARA BOGOTÁ D.C. ......................... 13 FIGURA 1.3. VISUALIZACIÓN DE PROGRAMACIÓN DE PLANES DE SEÑALES DE TRÁFICO CON EL
SOFTWARE LISA+ VERSIÓN 3.3. .................................................................................... 18 FIGURA 1.4. ESTADÍSTICA PROMEDIO DE AÑOS 2006 -2009, DE FALLAS DEL SISTEMA DE
SEMAFORIZACIÓN DE BOGOTÁ D.C. ............................................................................... 20 FIGURA 1.5. ESTRUCTURA DE CONTROLADOR DE TRÁFICO ..................................................... 25
FIGURA 1.6. TIEMPOS Y MODOS DE OPERACIÓN DEL PROTOCOLO DE TELECOMUNICACIONES
BEFA 15. ...................................................................................................................... 30 FIGURA 2.1. MODELO DE SISTEMA DE TELECOMUNICACIÓN PLT/PLC/BPL PLANTEADO PARA
GESTIÓN DE TRÁFICO. .................................................................................................... 31 FIGURA 2.2. ESQUEMA GENERAL DE SISTEMA DE POTENCIA INCLUYENDO UBICACIÓN DE SISTEMA
DE DISTRIBUCIÓN ........................................................................................................... 32 FIGURA 2.3. CONFIGURACIÓN CONEXIÓN EN ANILLO CERRADO ............................................... 33 FIGURA 2.4. CONFIGURACIÓN DE CONEXIÓN PUNTO ............................................................... 33 FIGURA 2.5. CONFIGURACIÓN CONEXIÓN ESTRELLA ............................................................... 34 FIGURA 2.6. CONFIGURACIÓN CONEXIÓN EN CADENA ............................................................. 34 FIGURA 2.7. CONFIGURACIÓN CONEXIÓN EN ÁRBOL ............................................................... 35 FIGURA 3.1. EMPRESAS DISTRIBUIDORAS DE ENERGÍA QUE HAN IMPLEMENTADO PLT/PLC/BPL
A NIVEL MUNDIAL ............................................................................................................ 45 FIGURA 3.2. CURVA COMPARATIVA DE APRENDIZAJE TECNOLOGÍAS PLT, CABLE Y XDSL ....... 46 FIGURA 4.1. SEÑAL DE PULSOS DIGITALIZADA PRESENTE EN EL MARCO SIEL EN LA CENTRAL DE
SEMAFORIZACIÓN ........................................................................................................... 49 FIGURA 4.2. VALORES DE FRECUENCIA PARA NIVELES LÓGICOS ALTO (FH) Y BAJO (FL). .......... 51 FIGURA 4.3. SEÑALES TRANSMITIDA, RUIDO Y RECIBIDA CON LOS PLM. .................................. 51
FIGURA 4.4. PROBABILIDAD DE ERROR DE BIT P(E) RESPECTO A LA FRECUENCIA, PARA
IMPEDANCIAS DE 0.1Ω Y 1Ω Y DISTANCIA DE 1000M. ...................................................... 52 FIGURA 4.5. CONEXIÓN DE PLM ST7538 A RED ELÉCTRICA. .................................................. 53 FIGURA 4.6. MODELO DEL PLM.............................................................................................. 54 FIGURA 4.7. COMPORTAMIENTO DE RS EN TRANSMISIÓN DEPENDIENDO DE LA FRECUENCIA DE
OPERACIÓN DEL PLM ..................................................................................................... 54 FIGURA 4.8. COMPORTAMIENTO DE RS EN RECEPCIÓN DEPENDIENDO DE LA FRECUENCIA DE
OPERACIÓN DEL PLM ..................................................................................................... 54 FIGURA 4.10. COMPORTAMIENTO DE LA IMPEDANCIA VS. FRECUENCIA EN UN SISTEMA DE
DISTRIBUCIÓN. ............................................................................................................... 57 FIGURA 4.11. MODELO DEL TRANSFORMADOR ....................................................................... 58 FIGURA 4.12. MONTAJE DE PRUEBA DE LABORATORIO TRANSFORMADOR DE DISTRIBUCIÓN. ... 59 FIGURA 4.13. MODELO ELÉCTRICO DE RED ELÉCTRICA EN BAJA TENSIÓN ............................... 62 FIGURA 4.14. MODELO ELÉCTRICO DE RED ELÉCTRICA EN MEDIA TENSIÓN ............................. 62 FIGURA 4.15. CABLES ELÉCTRICOS UTILIZADOS EN DISTRIBUCIÓN .......................................... 63 FIGURA 4.16. MODELO DE CARGA CONCENTRADA EQUIVALENTE EN LA MITAD DE LA LÍNEA. .... 66 FIGURA 4.17. ESPECTRO DE VOLTAJE DE EQUIPOS ELÉCTRICOS A 220VAC/60HZ .................. 68 FIGURA 4.18. PROPAGACIÓN DE LA SEÑAL EN UNA RED DE DISTRIBUCIÓN .............................. 70 FIGURA 4.19. MODELO DE LÍNEA EN MEDIA TENSIÓN............................................................... 72
FIGURA 4.20. COMPARACIÓN DE RESPUESTA EN FRECUENCIA (ATENUACIÓN) DE RED DE
DISTRIBUCIÓN VERSUS SIMULACIÓN PARA N=4 CAMINOS ................................................ 73 FIGURA 4.21. ESQUEMA DE CIRCUITO DE BYPASS DEL TRANSFORMADOR ............................... 74

7
FIGURA 4.22. ESQUEMA DE CIRCUITO DE BYPASS DEL TRANSFORMADOR. INCLUYENDO ACOPLES
CAPACITIVOS E INDUCTIVOS ........................................................................................... 74 FIGURA 4.23. TOPOLOGÍA DE RED DE PLT EXPERIMENTAL Y ATENUACIONES DE SEÑALES
TRANSMITIDAS A DIFERENTES FRECUENCIAS ENTRE SUBESTACIONES ............................. 75 FIGURA 4.24. ESQUEMA DEL NIVEL DE LA SEÑAL TRANSMITIDA ENTRE PLM TRANSMISOR Y
RECEPTOR EN UNA RED DE MEDIA TENSIÓN, INCLUYENDO REPOTENCIADORES PLM CADA
600M. ............................................................................................................................ 76 FIGURA 4.25. MONTAJE DE LABORATORIO PARA PRUEBAS DE TRANSMISIÓN DE LA SEÑAL EN
MEDIA TENSIÓN. ............................................................................................................. 77 FIGURA 4.26. SEÑAL RECIBIDA EN BAJA TENSIÓN, DESPUÉS DE PASAR POR MEDIA TENSIÓN. .. 77
FIGURA 4.27. ESQUEMA DE CONEXIÓN DEL CONTROLADOR DE TRÁFICO EN PARALELO CON
OTRAS CARGAS .............................................................................................................. 79 FIGURA 4.28. MODELO DEL CANAL ......................................................................................... 79 FIGURA 4.29. ATENUACIÓN DE LA SEÑAL TRANSMITIDA DESDE EL PLM HASTA EL CONTROLADOR
DE TRÁFICO A UNA DISTANCIA DE 150M .......................................................................... 80 FIGURA 4.30. AMPLITUD DE LA SEÑAL EN EL PLM. SIMULADO CON ATP. ................................ 81
FIGURA 4.31. MONTAJE DE LABORATORIO PARA IMPLEMENTACIÓN DE PRUEBAS DE
LABORATORIO EN BAJA TENSIÓN. ................................................................................... 82 FIGURA 4.32. SEÑAL ENVIADA DESDE EL PLM EN BORNES DE BAJA TENSIÓN. ......................... 83
FIGURA 4.33. SEÑAL RECIBIDA EN EL PLM EN EL EXTREMO DEL CABLE DE ACOMETIDA
(CONTROLADOR DE TRÁFICO). ........................................................................................ 83 FIGURA 4.34. CIRCUITO EQUIVALENTE DEL MODELO EN MODO DE OPERACIÓN 1. .................... 86 FIGURA 4.35. POLOS Y CEROS DE LA FUNCIÓN DE TRANSFERENCIA EN MODO DE TRANSMISIÓN
1. ................................................................................................................................... 91 FIGURA 4.36. CIRCUITO EQUIVALENTE DEL MODELO EN MODO DE OPERACIÓN 1. .................... 92 FIGURA 4.37. SEÑAL MEDIDA EN LA RECEPCIÓN DEL PLM DEL CONTROLADOR DE TRÁFICO. ... 93 FIGURA 4.38. SEÑAL MEDIDA EN LA RECEPCIÓN EN BORNES DEL TRANSFORMADOR. .............. 93 FIGURA 4.39. POLOS Y CEROS DE MODO DE OPERACIÓN 2. .................................................... 97 FIGURA 4.40. GRÁFICA DE BODE PARA MODO DE OPERACIÓN 2. ............................................. 98 FIGURA 4.41. SIMULACIÓN SIN CONSIDERACIÓN DE CAPACIDADES DE LÍNEA. ........................ 100 FIGURA 4.42. SIMULACIÓN CON CONSIDERACIÓN DE CAPACIDADES DE LÍNEA. ...................... 101 FIGURA 4.43. SIMULACIÓN SIN CONSIDERACIÓN DE PLM RECEPTOR. ................................... 102 FIGURA 4.44. SIMULACIÓN SIN CONSIDERACIÓN DE CAPACIDADES DE LÍNEA. ........................ 104 FIGURA 4.45. SIMULACIÓN CONSIDERANDO CAPACIDADES DE LÍNEA. .................................... 105 FIGURA 4.46. SIMULACIÓN SIN CONSIDERACIÓN CAPACIDADES DE LÍNEA. ............................. 106 FIGURA 4.47. SIMULACIÓN CONSIDERANDO CAPACIDADES DE LÍNEA. .................................... 107 FIGURA 4.48. SISTEMA DE DISTRIBUCIÓN DE CODENSA E.S.P. ......................................... 110
FIGURA 4.49. MODELO DE IMPLEMENTACIÓN PLT/PLC/BPL PLANTEADO PARA GESTIÓN DE
TRÁFICO. ..................................................................................................................... 111 FIGURA 4.50. MODELO PLT/PLC/BPL INCLUYENDO ACOPLADORES DE MEDIA A BAJA TENSIÓN
.................................................................................................................................... 114 FIGURA 4.51. MODELO DEL PLM CON EL CONTROLADOR DE TRÁFICO. ................................. 114 FIGURA 4.52. PUNTO DE INTERCONEXIÓN DENTRO DEL CONTROLADOR LOCAL DE TRÁFICO. . 115
FIGURA 4.53. ESTRUCTURA DE NIVELES DE PROTOCOLOS PROPUESTOS PARA UN SISTEMA DE
ITS CON PLT/PLC/BPL ............................................................................................... 115 FIGURA 4.54. MODELO DE PROCESOS PARA SISTEMAS DE TELECOMUNICACIONES
PLT/PLC/BPL EN SISTEMAS DE GESTIÓN DE TRÁFICO. ................................................ 119

8
LISTA DE TABLAS
TABLA 3.1. COMPARACIÓN DE TECNOLOGÍAS DE TELECOMUNICACIÓN PARA GESTIÓN DE
TRÁFICO ........................................................................................................................ 43TABLA 3.2. MATRIZ DOFA PARA PLT/PLC/BPL EN SISTEMAS DE GESTIÓN DE TRÁFICO ...... 44
TABLA 4.1. PARÁMETROS DE L Y R EN TRANSFORMADOR DE DISTRIBUCIÓN MEDIDO A ALTA
FRECUENCIA .................................................................................................................. 59TABLA 4.2. VALORES DE R, XL Y XC PARA CABLES DE MEDIA TENSIÓN A 60 HZ Y A 132.5 KHZ.
...................................................................................................................................... 62TABLA 4.3 VALORES DE R Y L PARA CABLES DE DISTRIBUCIÓN EN BAJA TENSIÓN ................ 63TABLA 4.4. VALORES DE R Y L PARA CABLES DE ACOMETIDA A USUARIOS RESIDENCIALES . 63TABLA 4.5. CONSUMOS (KWH) USUARIOS CODENSA DEL SEGUNDO SEMESTRE DE 2006 ... 64TABLA 4.6. CONSUMOS (KWH) USUARIOS EMPRESAS SECTOR ELÉCTRICO SEGUNDO SEMESTRE
DE 2006 ........................................................................................................................ 64TABLA 4.7. CARGAS RESIDENCIALES Y TIPO DE CALIBRE ...................................................... 65TABLA 4.8. IMPEDANCIAS DE CARGAS RESIDENCIALES A DIFERENTES FRECUENCIAS ............ 65TABLA 4.9. NÚMERO DE USUARIOS CONECTADOS A TRANSFORMADORES DE CODENSA ..... 66TABLA 4.10. PROPAGACIÓN DE LA SEÑAL EN DIFERENTES CAMINOS ..................................... 71TABLA 4.11. PARÁMETROS DEL MODELO DE LA FIGURA ANTERIOR ....................................... 73TABLA 4.12. VALORES DE LÍNEA DE ACOMETIDA A DIFERENTES DISTANCIAS ........................ 99TABLA 4.13. COMPARACIÓN DE SIMULACIONES Y PRUEBA DE LABORATORIO SIN CAPACIDADES
DE LÍNEA ..................................................................................................................... 100TABLA 4.14. COMPARACIÓN DE SIMULACIONES Y PRUEBA DE LABORATORIO CON CAPACIDADES
DE LÍNEA ..................................................................................................................... 102TABLA 4.15. COMPARACIÓN DE SIMULACIONES Y PRUEBA DE LABORATORIO SIN PLM
RECEPTOR ................................................................................................................... 103TABLA 4.16. COMPARACIÓN DE SIMULACIONES Y PRUEBA DE LABORATORIO SIN CAPACIDADES
DE LÍNEA ..................................................................................................................... 104TABLA 4.17. COMPARACIÓN DE SIMULACIONES Y PRUEBA DE LABORATORIO CONSIDERANDO
CAPACIDADES DE LÍNEA .............................................................................................. 105TABLA 4.18. COMPARACIÓN DE SIMULACIONES Y PRUEBA DE LABORATORIO SIN CONSIDERAR
CAPACIDADES DE LÍNEA .............................................................................................. 106TABLA 4.19. COMPARACIÓN DE SIMULACIONES Y PRUEBA DE LABORATORIO CONSIDERANDO
CAPACIDADES DE LÍNEA .............................................................................................. 108TABLA 4.20. COMPARACIÓN DE SIMULACIONES Y PRUEBA DE LABORATORIO (RESUMEN) ... 108
TABLA 4.21. PROPUESTA DE INTERCONEXIÓN DE SUBESTACIONES DE MEDIA TENSIÓN, TENIENDO EN CUENTA DISTANCIA ENTRE SUBESTACIONES (DIAGONAL INFERIOR) Y
CANTIDAD DE PLM (DIAGONAL SUPERIOR). ................................................................. 112

9
INTRODUCCIÓN
La presente Tesis de Maestría en Ingeniería de Telecomunicaciones, contiene un desarrollo de metodología para la implementación de una alternativa en telecomunicaciones, para los sistemas de gestión del tráfico de vehículos y peatones en las ciudades. La propuesta se hace motivada por la necesidad de solución al sistema de telecomunicaciones de la semaforización de Bogotá D.C., el cual, en los últimos años y por diversos factores, ha afectado en gran parte el aumento de fallas sobre la movilidad de la ciudad. Sin lugar a dudas gestionar esta movilidad es uno de los retos más importantes de las administraciones públicas actuales, que va relacionada con el planeamiento y la administración del tráfico, así como con el control a la observación de las normas de tránsito por parte de los conductores. En efecto, el importante auge de las ciudades se ha visto acompañado de un crecimiento igualmente notable en el parque automotor sin que la malla vial, bien sea por limitaciones de recursos, o por carencias de espacio, pueda crecer al mismo ritmo de los dos elementos anteriores. Como consecuencia del incremento en el uso de medios motorizados para el desplazamiento de personas y mercancías, la ciudad de Bogotá D.C., ha venido enfrentando la necesidad de implementar mecanismos que regulen el tráfico vehicular en concordancia con la necesidad de prevenir la ocurrencia de accidentes, minimizar los efectos de aquellos accidentes que se produzcan, aumentar la movilidad de los ciudadanos y lo más importante, garantizar condiciones de seguridad para el desplazamiento de sus habitantes. En el punto donde confluyen, tanto los sistemas de telecomunicaciones, como los sistemas de gestión de tráfico, es necesario contar con las herramientas tecnológicas que permitan llevar la información desde la calle hasta los centros de gestión de tráfico, bien sea empleando líneas de cable de cobre (caso actual en Bogotá D.C., suministrada por la Empresa de Telecomunicaciones de Bogotá - ETB), otras conexiones alámbricas (como la fibra óptica) ó inalámbricas (radio, wi-fi y wi-max). La gestión tecnológica prestada actualmente sobre el sistema de telecomunicaciones del sistema semafórico de Bogotá D.C., si bien ha sido limitada debido a la compatibilidad de los equipos usados para el control del tráfico con el sistema de comunicación, no se han presentado desarrollos novedosos. Esta Tesis de Maestría estudia una posible alternativa tecnológica, utilizando las líneas de potencia eléctrica, que si bien está enfocada a dar una solución puntual sobre el sistema semafórico de la ciudad de Bogotá, también pretende avanzar en

10
la investigación sobre éste tipo de sistemas de telecomunicación a nivel general que puede ser aplicado en cualquier parte del mundo donde se encuentren sistemas inteligentes de transporte, sistemas de control de tráfico y su subsistema de control semafórico. Cabe aclarar que la conectividad actual del sistema semafórico de Bogotá D.C., mediante cableado de cobre es propiedad de la Secretaría Distrital de Movilidad (SDM), pero los ductos de canalización que soportan dicho cableado son propiedad de la Empresa de Telecomunicaciones de Bogotá D.C. (ETB), obligando a la SDM a mantener un contrato continuo tanto por el alquiler de la infraestructura como por su mantenimiento que anualmente ronda en los seis mil millones de pesos (pesos colombianos del año 2009), sin incluir los materiales como cable telefónico o de empalmería, que anualmente son adquiridos para cubrir las necesidades de expansión del sistema ó reposición por vida útil o por vandalismo. Por otro lado, es pertinente decir que los desarrollos en estos sistemas de telecomunicación han estado ligados a los adelantos por parte de los fabricantes y el mercado, ó como en esta ocasión, gracias a las propuestas de investigación por parte de la universidad. La propuesta presentada, se basa en la utilización de la tecnología Power Line Telecommunications (ó Communications – ó BPL – Broadband Power Line)– Telecomunicaciones a través de Líneas de Potencia Eléctrica (por sus siglas: PLT / PLC / BPL), incluye un desarrollo metodológico para su implementación como sistema de telecomunicaciones para la gestión del tráfico (la señalización del tráfico y la semaforización) de las ciudades. En el capítulo 1, se da una descripción de los sistemas de control y manejo del tráfico de las ciudades a nivel local y mundial, incluyendo las tecnologías conocidas como Intelligent Transportation System (ITS) – Sistemas Inteligentes de Transporte, lo que permite ubicar al lector en el contexto del manejo de la movilidad, para así definir la estructura de un equipo de control local de tráfico, y la revisión del protocolo de telecomunicaciones del sistema de control semafórico de la ciudad de Bogotá D.C., este último, planteado como uno de los objetivos de la Tesis. En el capítulo 2, se presenta el modelo propuesto de sistema de telecomunicación para realizar la gestión de tráfico empleando las líneas de potencia eléctrica PLT. Otro objetivo propuesto en la tesis se desarrolla en el capítulo 3, donde se realiza un análisis comparativo de la implementación de sistemas de telecomunicación basados en PLT/PLC/BPL, respecto a otras tecnologías tanto alámbricas como inalámbricas utilizadas en sistemas de gestión de tráfico.

11
Finalmente, en el capítulo 4, y como objetivo principal, se desarrolla la metodología de implementación de sistemas de telecomunicación basados en tecnología PLT/PLC/BPL para el control de la señalización del tráfico y en sistemas de semaforización, de manera general, gestión de tráfico. En este capítulo se presenta cómo implementar esta tecnología y los parámetros tanto técnicos, como de modelos de negocio y de procesos. Las conclusiones y recomendaciones, son tratadas al final de la Tesis, como resumen de este desarrollo, sirven de punto de partida a una investigación entre la Universidad Nacional de Colombia y la empresa privada, con lo que se pretende dar soluciones a los sistemas de gestión de tráfico y generar repercusiones, tanto en lo técnico, social como en lo económico.

12
1 SISTEMAS DE CONTROL Y MANEJO DE TRÁFICO, CONTROLADORES DE TRÁFICO Y PROTOCOLOS DE TELECOMUNICACIÓN
1.1 GENERALIDADES DE SISTEMAS DE CONTROL Y MANEJO DE TRÁFICO
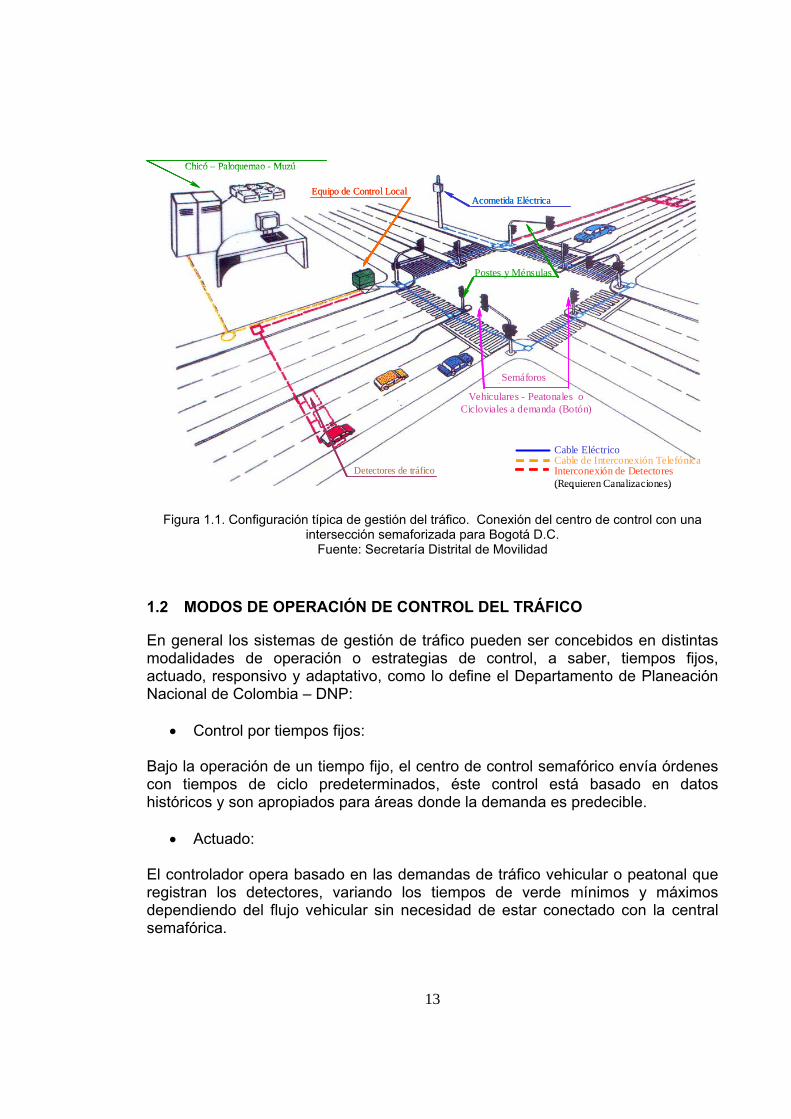
Los sistemas de control de tráfico, y más recientemente, los denominados sistemas inteligentes de transporte (ITS – por sus siglas en inglés – Intelligent Transportation Systems), incluyen el sistema de señalización del tráfico y el de semaforización electrónica, que se caracteriza por ser un sistema flexible a todas las condiciones de tráfico. El concepto de sistemas de control de tráfico, involucra un conjunto de equipamiento computacional de central de tráfico1, que por medio de un sistema de telecomunicaciones2 con los equipos de control local del tráfico3 (comúnmente denominados controladores), permite monitorear en línea el funcionamiento del tráfico y aplicar distintos planes de regulación (tiempos de los semáforos) para las intersecciones viales que conforman redes o ejes. En la figura 1.1 se puede observar la configuración típica de una intersección semaforizada con la conexión al centro de control semafórico para Bogotá D.C., aquí existe una conexión de las centrales de tráfico mediante cableado de cobre a los controladores de tráfico, con el fin de supervisar y controlar dichos equipos. De la figura 1.1, también es posible observar otros elementos que hacen parte del control semafórico, como son los semáforos, sus conexiones de cableado eléctrico hasta el equipo de control que van por canalizaciones, los postes que soportan los semáforos, los detectores de tráfico vehicular y la acometida eléctrica a la red de suministro de energía de la ciudad.
1 El computador central de tráfico es un equipo (hardware) que contiene información relacionada con los tiempos de viaje para el manejo de tráfico de toda una ciudad. 2 El sub-sistema de telecomunicaciones es el encargado de llevar la información desde un computador central de tráfico hasta el equipo de control local de tráfico y viceversa. 3 Equipo de control local de tráfico: es el conjunto de hardware que permite controlar una intersección vial mediante una señalización lógica y actúa de manera local en dicha intersección. En este caso, este equipo está asociado al controlador cuya salida de señalización lógica son los semáforos, los cuales cuentan con una programación desde el controlador, con los tiempos de funcionamiento.
13
Postes y Ménsulas
Semáforos
Vehiculares - Peatonales o Cicloviales a demanda (Botón)
Cable Eléctrico
Interconexión de Detectores(Requieren Canalizaciones)
Cable de Interconexión Telefónica
Equipo de Control Local
Chicó – Paloquemao - Muzú
Detectores de tráfico
Acometida Eléctrica
Postes y Ménsulas
Semáforos
Vehiculares - Peatonales o Cicloviales a demanda (Botón)
Cable Eléctrico
Interconexión de Detectores(Requieren Canalizaciones)
Cable de Interconexión Telefónica
Equipo de Control LocalEquipo de Control Local
Chicó – Paloquemao - Muzú
Detectores de tráfico
Acometida EléctricaAcometida Eléctrica
Figura 1.1. Configuración típica de gestión del tráfico. Conexión del centro de control con una intersección semaforizada para Bogotá D.C.
Fuente: Secretaría Distrital de Movilidad
1.2 MODOS DE OPERACIÓN DE CONTROL DEL TRÁFICO
En general los sistemas de gestión de tráfico pueden ser concebidos en distintas modalidades de operación o estrategias de control, a saber, tiempos fijos, actuado, responsivo y adaptativo, como lo define el Departamento de Planeación Nacional de Colombia – DNP:
Control por tiempos fijos: Bajo la operación de un tiempo fijo, el centro de control semafórico envía órdenes con tiempos de ciclo predeterminados, éste control está basado en datos históricos y son apropiados para áreas donde la demanda es predecible.
Actuado: El controlador opera basado en las demandas de tráfico vehicular o peatonal que registran los detectores, variando los tiempos de verde mínimos y máximos dependiendo del flujo vehicular sin necesidad de estar conectado con la central semafórica.

14
Responsivo:
Es similar al actuado, pero en este caso el controlador registra los vehículos, los cuenta y le envía esta información a la central semafórica, quien selecciona unos planes de señales predeterminados y le indica al controlador cual utilizar.
Adaptativo: Tiene en cuenta los volúmenes instantáneos del tránsito, la densidad y el tiempo de espera consumido en cada sentido de circulación, pero en lugar de seleccionar un plan predeterminado, el sistema lo crea a través de la central semafórica. Los sistemas adaptativos más utilizados a nivel mundial son:
SCOOT SCATS SITRAFFIC ITACA ADIMOT OPAC
Los sistemas de control de tráfico pueden incluir opciones complementarias que optimicen su operación, tales como:
Estaciones de Conteos Vehiculares Estaciones de mediciones de condiciones ambientales Supervisión mediante cámaras de video (CCTV) Señalización variable (información a conductores y peatones)
Las opciones mencionadas constituyen una interesante herramienta de apoyo a la gestión de tráfico, ya que permite a los operadores del sistema disponer de información actualizada de la situación de la red, entregar indicaciones de las condiciones del tránsito a los usuarios y adoptar acciones ante eventos no programables.
1.3 SISTEMAS INTELIGENTES DE TRANSPORTE – ITS
Existen muchas tecnologías que se están aplicando en el área del transporte4 para combatir problemas como la congestión de tránsito, mejorar la seguridad vial, proveer información al viajero y proteger al medio ambiente. La aplicación de estas tecnologías para mejorar el transporte se conoce como sistemas inteligentes de transporte ó ITS por su sigla en inglés de Intelligent Transportation Systems.
4 Plan Maestro de Movilidad para Bogotá Distrito Capital. http://www.movilidadbogota.gov.co

15
Los sistemas inteligentes de transporte pueden ser definidos como “el matrimonio entre los avances en tecnologías de información y sistemas de comunicación con los vehículos y redes de caminos que forman parte del sistema de transporte” (Planzer, 2001). También pueden definirse como "la optimización de las funciones propias de los elementos básicos del Tránsito – Infraestructura Vial (calles y caminos) y Vehículos – mediante la aplicación de tecnologías avanzadas que interrelacionan tales elementos" (Álvarez Huerta, 2000). Existen dos elementos fundamentales en los Sistemas Inteligentes de Transporte, el primero es la capa lógica compuesto por las funciones y los procesos y el segundo es la capa física compuesto por los sistemas y las tecnologías. En ambos casos existe una coherencia con la definición de los servicios o aplicaciones ITS que se asocia a un marco normativo de referencia. En la figura 1.2, se ve reflejada una visión de conjunto de esta estructura básica de los ITS.
Arquitectura Lógica
Arquitectura Física
Normatividad
Funciones y procesos de los ITS
Sistemas y tecnologías en la infraestructura de los ITS
Normatividad técnica y estándares aplicables a los ITS
Figura 1.2. Estructura básica de los ITS Fuente: Original modificado. Secretaría Distrital de Movilidad de Bogotá D.C.
www.movilidadbogota.gov.co La arquitectura lógica, establece las funciones y procesos para desarrollar los ITS que incluyen las aplicaciones informáticas que se ejecuta el hardware de todos los equipamientos tanto fijos como móviles que hay en las vías. La arquitectura Física incluye los esquemas y especificaciones para los componentes físicos y el conjunto de dispositivos electrónicos y de telecomunicaciones, así como a las instalaciones necesarias para dar soporte a

16
los diferentes servicios. Esta arquitectura utiliza diferentes esquemas de canales de telecomunicaciones para dar soporte a los servicios. La normatividad, es el conjunto de normas y estándares nacionales o internacionales que se homologan para dar soporte a la arquitectura física. Hoy día, los sistemas inteligentes de transporte, básicamente, ayudan a los conductores a circular evitando lugares congestionados y la presencia de accidentes con lo que estos sistemas pueden acabar siendo considerados como la optimización de las funciones de los elementos básicos del tránsito5.
1.3.1 Sistemas ITS en Bogotá D.C.
Enmarcado dentro del Plan Maestro de Movilidad -PMM-6 de la Alcaldía Mayor de Bogotá D.C. y de acuerdo con las definiciones expuestas en el Plan de Ordenamiento Territorial -POT-7, el subsistema de regulación y control lo conforman, los centros de control de tráfico, la red de semaforización y los sistemas tecnológicos de vigilancia y control de la operación del tráfico. Sus objetivos refuerzan la conformación del sistema de movilidad para lograr un transporte urbano-regional integrado, eficiente y competitivo, en operación sobre una red vial jerarquizada y a regular el tráfico en función de los modos de transporte que la utilicen. En el marco del Decreto 319 de 2006, se define como una de las políticas8 del PMM la movilidad inteligente planteando la necesidad de incorporar las tecnologías informáticas para lograr una eficiente gestión del sistema de movilidad y como uno de sus principales objetivos, “articular en forma eficiente y competitiva los subsistema vial, de transporte y de regulación y control del tráfico con tecnologías apropiadas” 9. En el plan de desarrollo Distrital 2008 – 2012, La Secretaría Distrital de Movilidad10 (SDM), en su calidad de autoridad en el tema, considera la implementación del Sistema Inteligente de Administración del Tráfico que incluye la primera etapa de los Sistemas Inteligentes de Transporte para la ciudad de Bogotá D.C., con miras a desarrollar los mecanismos de regulación de tráfico vehicular, incluyendo la modernización del sistema semafórico de la ciudad y la renovación de su plataforma de telecomunicaciones.
5 CEPAL. “Nuevas tecnologías de información y telecomunicaciones en el sector transporte”. Edición nº 177. Mayo 2001. http://www.eclac.cl/Transporte/noticias/bolfall/2/6562/FAL177.htm 6 Bogotá (Colombia). Alcaldía Mayor. Decreto 319 de 2006. Por el cual se adopta el Plan Maestro de Movilidad para Bogotá Distrito Capital, que incluye Ordenamiento de Estacionamientos y se dictan otras disposiciones. Agosto 15 de 2005. 7 Bogotá (Colombia). Alcaldía Mayor. Decreto 190 de 2004. "Por medio del cual se compilan las disposiciones contenidas en los Decretos Distritales 619 de 2000 y 469 de 2003" Bogotá, D.C., Junio 22 de 2004. 8 Bogotá (Colombia). Alcaldía Mayor. Decreto 319 de 2006. Op cit. Título II, Capítulo I, Artículo 7. p. 6 9 Ibid. Título II, Capítulo II, Artículo 8. p. 7 10 http://www.movilidadbogota.gov.co

17
1.4 SISTEMA DE SEMAFORIZACIÓN DE BOGOTÁ D.C.
El sistema de semaforización de Bogotá11, que hace parte de los sistemas ITS, es un componente básico del conjunto de herramientas para el ordenamiento y la regulación del tránsito de la ciudad y como tal ha sido objeto desde su instalación en 1978, de continuos procesos de actualización tecnológica que han estado acompañados de un crecimiento proporcional de las instalaciones que lo conforman. El sistema de semaforización de Bogotá es de manejo centralizado configurado como se mostró en la Figura 1.1, y está conformado por 3 centros de control de tráfico ubicados geográficamente en el Chico (Norte), Paloquemao (Centro) y Muzú (Sur), interconectados mediante una red LAN (red de área local). Esta red enlaza todos los procesos y permite el control y operación de las computadoras de tráfico dispuestas en los centros de control. La transmisión de la información para el manejo del sistema se realiza vía MODEM a través de una red de cableado de cobre dedicado, punto a punto, por canalizaciones de la ETB. La base de control de operación está en Paloquemao (centro principal) y desde allí se ejerce un control permanente a través de un terminal (TERM) cuyo software permite el acceso a los tres centros de control y a cada una de sus computadoras en forma independiente. La red cuenta con una base de tiempo común, localizada en Paloquemao, que permite sincronizar con exactitud la activación y el desarrollo de los tiempos de los semáforos en los tres centros de control. Dispone, además, de interfases de comunicación con los equipos de control local de tráfico instalados en la calle (algunos de ellos dotados de UPS para mantener constantes sus voltajes) y la transmisión, centralizada, se efectúa a través de una red de cableado de cobre, diseñada en función del número de intersecciones a conectar. En el ANEXO 1, se encuentra información gráfica relacionada con el sistema de semaforización de la ciudad de Bogotá D.C., incluyendo un mapa de la ciudad con la ubicación de las intersecciones semaforizadas. Por otro lado para gestionar la planeación del tránsito se hace necesario distribuir la ciudad en zonas de trabajo definidas con base en condiciones de tráfico homogéneas para lograr un manejo semafórico bajo el concepto de red, con priorización de corredores y sentidos viales, con programación del control semafórico en función del tráfico, la hora y del día de la semana (no existen tiempos únicos). Una herramienta útil actualmente empleada en esta gestión del tránsito para la ciudad es el software de planeación LISA+, la figura 1.3 ilustra una simulación, que
11 http://www.movilidadbogota.gov.co
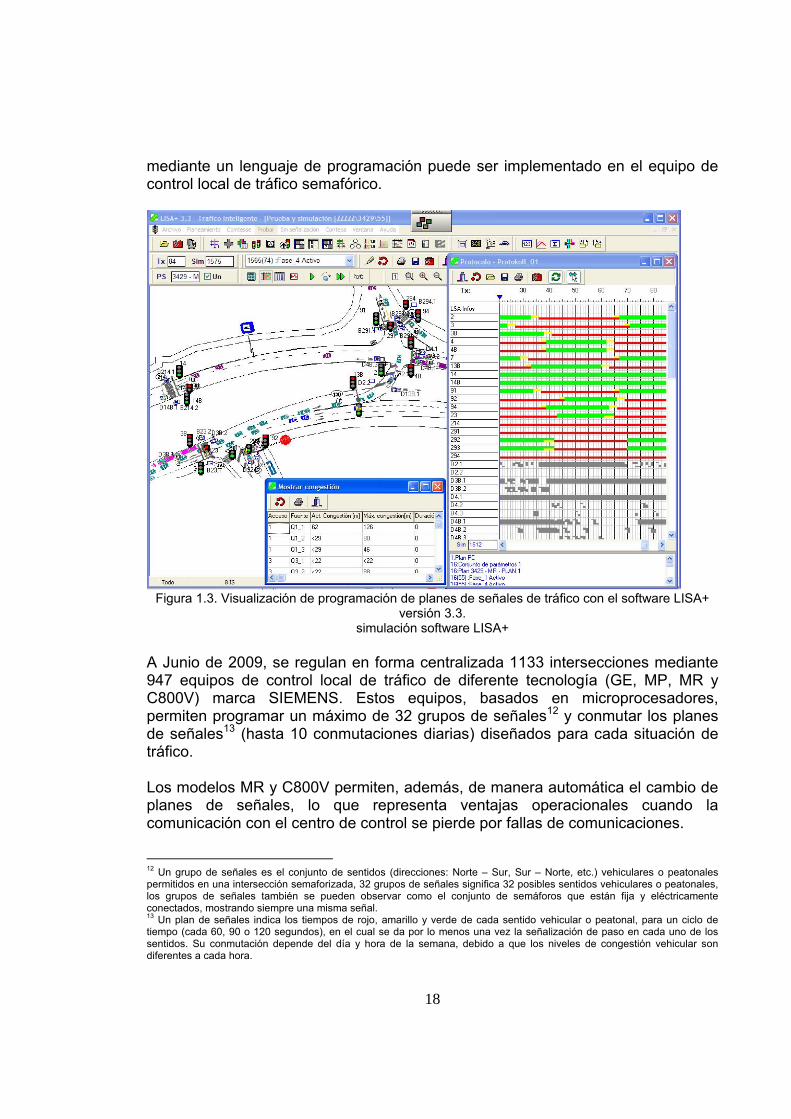
18
mediante un lenguaje de programación puede ser implementado en el equipo de control local de tráfico semafórico.
Figura 1.3. Visualización de programación de planes de señales de tráfico con el software LISA+
versión 3.3. simulación software LISA+
A Junio de 2009, se regulan en forma centralizada 1133 intersecciones mediante 947 equipos de control local de tráfico de diferente tecnología (GE, MP, MR y C800V) marca SIEMENS. Estos equipos, basados en microprocesadores, permiten programar un máximo de 32 grupos de señales12 y conmutar los planes de señales13 (hasta 10 conmutaciones diarias) diseñados para cada situación de tráfico. Los modelos MR y C800V permiten, además, de manera automática el cambio de planes de señales, lo que representa ventajas operacionales cuando la comunicación con el centro de control se pierde por fallas de comunicaciones.
12 Un grupo de señales es el conjunto de sentidos (direcciones: Norte – Sur, Sur – Norte, etc.) vehiculares o peatonales permitidos en una intersección semaforizada, 32 grupos de señales significa 32 posibles sentidos vehiculares o peatonales, los grupos de señales también se pueden observar como el conjunto de semáforos que están fija y eléctricamente conectados, mostrando siempre una misma señal. 13 Un plan de señales indica los tiempos de rojo, amarillo y verde de cada sentido vehicular o peatonal, para un ciclo de tiempo (cada 60, 90 o 120 segundos), en el cual se da por lo menos una vez la señalización de paso en cada uno de los sentidos. Su conmutación depende del día y hora de la semana, debido a que los niveles de congestión vehicular son diferentes a cada hora.

19
El sistema dispone de estaciones de conteo, constituidas por 680 detectores14, que registran el volumen y la ocupación vial por puesto de medida, en intervalos de 1 minuto. La información de estos detectores es transmitida a Ios centros de control a través de unidades de comunicación y líneas telefónicas. En el caso de Ios equipos de control modelo MR y C800V se utilizan las mismas líneas y unidades de comunicación tanto para el telecomando de semáforos como para la captura de datos de volúmenes vehiculares.
Desde la implementación del sistema semafórico en Bogotá D.C., se buscó un sistema de control centralizado con el fin de optimizar el control semafórico de la ciudad, dicha labor se realizó bajo la administración inicial de la Empresa de Telecomunicaciones de Bogotá (ETB) quién era la encargada desde 1976 hasta el 2001 de administrar el sistema semafórico de la ciudad, después de este año y hasta el año 2006, la Secretaría de Tránsito y Transporte de Bogotá (STT) se encargó de dicha labor, desde Enero de 2007, debido a la reestructuración distrital en materia de entidades del sector, es la Secretaría Distrital de Movilidad (SDM) quien administra el sistema actualmente.
1.4.1 Funcionamiento de la Actual Red de Telecomunicaciones del sistema de control semafórico de Bogotá D.C.
Bajo la administración de la ETB se estructuró el sistema de telecomunicaciones del sistema semafórico, basándose en un diseño tipo estrella utilizando canales para telefonía, donde existe una conexión punto a punto mediante pares trenzados de cable telefónico desde cada centro de control semafórico (Chicó, Paloquemao y Muzú) hacia cada equipo de control local de tráfico ubicado en cada intersección semafórica de la ciudad. Esta decisión se tomó teniendo en cuenta las políticas de la ETB en su administración, donde lo óptimo se presentó con el aprovechamiento de las canalizaciones de tendido telefónico existentes en la ciudad y su capacidad técnica de gestión de mantenimiento, además de no contar con otras opciones tecnológicas compatibles con el proveedor de los equipos de control semafórico en su momento. En el caso del vandalismo sobre el sistema de telecomunicaciones semafóricas de la ciudad, este representa el mayor porcentaje de ocurrencia de fallas del sistema, en promedio con un 39%, según los reportes estadísticos (promedio años 2006 - 2009), como se puede observar en la Figura 1.4. 14 Un detector con sensor de bucle y en general un detector de flujo vehicular, es un elemento mecánico que actúa como sensor del paso vehicular por una vía con el fin de tomar una acción sobre el comportamiento del tráfico.

20
FALLAS DEL SISTEMA DE SEMAFORIZACION
POSTERIA Y SEMAFOROS0,38%
ENERGIA32,76%
CENTRO DE COMPUTO0,00%
CABLE DE INTERCONEXION39,26%
EQUIPO BLOQUEADO14,98%
FALLA DE EQUIPO9,43%
BOMBILLERIA1,15%
CABLE ELECTRICO2,05%
Figura 1.4. Estadística promedio de años 2006 -2009, de fallas del sistema de semaforización de
Bogotá D.C. Fuente: Secretaría Distrital de Movilidad. http://www.movilidadbogota.gov.co
1.5 DEFINICIÓN DE LA ESTRUCTURA DE UN EQUIPO DE CONTROL LOCAL DE TRÁFICO
Los equipos de control local de tráfico son elementos de hardware, que basan su funcionamiento en microprocesadores, con los cuales se permite controlar los flujos de tráfico vehicular y/o peatonal, en una intersección, por medio de un programa local, de acuerdo con las características del cruce. En funcionamiento coordinado y sincronizado, permiten desarrollar cualquiera de los programas establecidos en el computador central de tráfico. En la ciudad de Bogotá D.C., los equipos de control local de tráfico utilizados son de marca SIEMENS, con las siguientes tecnologías y protocolos de telecomunicación:
Equipo GE – Protocolo Befa 8 Equipo MP – Protocolo Befa 8 Equipo MR – Protocolo Befa 15 Equipo C800 V – Protocolo Befa 15
En el ANEXO 1, se pueden observar imágenes de los equipos de control local de tráfico. Para definir la estructura de parámetros que controla un equipo de control local de tráfico, es necesario entender que la operación de estos equipos puede ser de manera aislada (operación local) o por operación centralizada (coordinada con un centro de control).

21
1.5.1 Operación local
El funcionamiento de los controladores se puede presentar de la siguiente manera: Funcionamiento por tiempos fijos: el controlador es programado para operar
mediante programas de planes de señales de tiempos fijos ejecutados en la unidad central del equipo, donde se seleccionan dependiendo del día y la hora.
Funcionamiento actuado por demanda vehicular ó peatonal: empleando algún tipo de sensor de vehículos15 y botones de demanda peatonal16, se seleccionan programas con los cuales se atienden los movimientos dependiendo de la demanda.
1.5.2 Operación centralizada
Los controladores que se comunican con centrales de semaforización permiten coordinar la movilidad de la ciudad de una forma más eficiente, debido a que gracias a su supervisión, es posible realizar modificaciones de la programación de los planes de señales teniendo en cuenta la ubicación geográfica de todas las intersecciones semaforizadas. Los sistemas centralizados tradicionales permiten entre otros:
la coordinación de corredores viales y mallas en olas verdes17 los reportes de falla y estado de funcionamiento de los controladores la reacción sobre cambios de la demanda de vehículos a nivel
macroscópico la generación de datos de demanda del tráfico para su planificación.
Los sistemas más modernos, permiten además de lo anterior:
la alimentación remota de los controladores de tráfico la interacción con sistemas de operación y recaudo de transporte masivo la priorización del transporte público la interacción con dispositivos de ITS
En el ANEXO 1, se pueden encontrar imágenes de las centrales de semaforización de la ciudad de Bogotá D.C. Existen dos tipos de control centralizado, que son los sistemas SF, que trabajan con puntos de cambio y los sistemas SV, los cuales alimentan programas completos en los equipos.
15 Existen diversos tipos de sensores vehiculares, como por ejemplo, bucles electromagnéticos, sensores infrarrojos, sensores LASER y detectores por video. 16 Los botones de demanda peatonal son equipos que permiten sensar la presencia peatonal, constan de un pulsador que al ser oprimido, emite un pulso al controlador con lo que origina una solicitud (o demanda) de luz verde al peatón. 17 Ola verde es la coordinación de señalización del verde sobre el mismo flujo vehicular en varias intersecciones semaforizadas cercanas, con el fin de despejar ese flujo vehicular.
22
1.5.2.1 Sistema SF (puntos de cambio) En este sistema, los programas de señalización se elaboran en la memoria del computador de tráfico, el cual selecciona las estructuras18 y envía pulsos de sincronismo hacia los controladores cada segundo, a su vez, los controladores de tráfico tienen programadas varias estructuras que después de recibir el pulso de sincronismo, van siendo seleccionadas para su ejecución. En el caso de la obtención de datos de detectores de tráfico, el computador de tráfico selecciona diferentes programas según la situación del tráfico. En Bogotá, los controladores de tipo GE y MP, funcionan bajo la modalidad de sistemas SF con puntos de cambio.
1.5.2.2 Sistema SV (programas completos)
En este sistema, según la necesidad del tráfico, el computador central calcula un programa de señales que es enviado al controlador, donde se ejecuta teniendo en cuenta una base de tiempo común con la central, a su vez, el controlador ejecuta siempre el último programa enviado por la central de manera independiente de ella. En el caso de la obtención de datos de detectores de tráfico, el computador de tráfico calcula diferentes programas según la necesidad. En Bogotá, los controladores de tipo MR y C800V, funcionan bajo la modalidad de sistemas SV con programas completos.
1.5.3 Estructura de parámetros de un controlador local de tráfico
La estructura de parámetros de un equipo de control local de tráfico, depende de los parámetros básicos establecidos por la normatividad internacional para el control de tráfico. En este caso, se tienen tres grandes tendencias usadas a nivel mundial, como son la normatividad norteamericana, la europea y la asiática. Para el caso de la ciudad de Bogotá, se emplea la normatividad Europea, especialmente la norma Alemana RILSA19 (en alemán: Richtlinien für Lichtsignalanlagen), que contempla todas las consideraciones y recomendaciones que se deben tener en cuenta para la localización y puesta en servicio de semáforos en las intersecciones de la malla vial, así como los aspectos más importantes que el Ingeniero de Tránsito debe tener en cuenta para el cálculo de los programas de señales para intersecciones individuales y redes coordinadas, además, la norma aplica para el diseño tanto a nivel micro como a nivel macro. Es necesario señalar que el amoblamiento de los semáforos y la puesta en servicio
18 Una estructura es un conjunto de estado de señales que presentan los semáforos en una intersección, dando vía simultáneamente a uno o varios flujos vehiculares y/o peatonales no conflictivos entre sí, cubriendo todos los movimientos de la intersección. 19 Manual de Planeación y Diseño para la Administración del Tránsito y Transporte. Tomo I v5. http://transitobogota.gov.co

23
de las intersecciones controladas por semáforo se rigen bajo la Norma Alemana DIN VDE 083220 o su equivalente internacional. Adicionalmente, de manera general, los criterios de señalización vial de semaforización, requeridos por los controladores son los establecidos por el Ministerio de Transporte en el manual de señalización vial21 “Dispositivos para la regulación del tránsito en calles, carreteras y ciclo rutas de Colombia”, expedido en mayo de 2004. Teniendo en cuenta la norma RILSA y la DIN VDE, la estructura básica de controladores de tráfico se puede establecer con las características mínimas presentadas en el ANEXO 2. La función básica de un controlador de tráfico es la de ordenar los cambios de luces en los semáforos, y según el manual de señalización vial del ministerio de transporte, la interpretación de los colores de los semáforos es: “a) Verde: Los conductores de los vehículos, y el tránsito vehicular que observe esta luz podrá seguir de frente o girar a la derecha, a menos que alguna señal (reflectorizada o preferentemente iluminada) prohíba dichos giros, siempre y cuando se tenga la vía despejada de peatones o de otros vehículos. b) Amarillo: Advierte a los conductores de los vehículos que el período de verde asignado a un flujo vehicular ha terminado y está a punto de iniciar el período de rojo y, por lo tanto, debe asumir una conducta de prevención c) Rojo: Los vehículos y el tránsito vehicular deben detenerse antes de la línea de PARE y si no la hay a una distancia de dos metros antes del semáforo, deben permanecer parados hasta que aparezca el verde correspondiente. Es recomendable que en los tiempos de seguridad de las intersecciones siempre se incluya un período de todo rojo como parte de éste.” El controlador de tráfico almacena los planes de señales que incluyen las secuencias de Rojo-Verde-Amarillo-Rojo y de Rojo-Rojo y Amarillo-Verde-Amarillo-Rojo. El controlador local debe operar por lo menos en las siguientes formas22:
Como regulador de una intersección aislada mediante planes de señales de tiempos fijos conmutados según un automático de día programable.
Como regulador de una intersección aislada mediante dependencia de tráfico, cuya prioridad está establecida en función de datos de tráfico adquiridos a nivel local.
20 Comisión Electrotécnica Alemana, Norma DIN y la Asociación Electrotécnica Alemana (Verband Deutscher Elektrotechniker - VDE). 0832 para sistemas de señalización del tráfico. Marzo de 1990. 21 http://www.mintransporte.gov.co/Servicios/Biblioteca/documentos/Manual_senalizacion/Capitulo7_SEMAFOROS.pdf 22 Banse. Sistemas de control y manejo de tráfico. Andinatraffic. 2007.

24
Como regulador de una intersección que se integre a una red de intersecciones coordinadas, con control centralizado en tiempo real, sin necesidad de colocar módulos adicionales.
En general el controlador debe registrar:
Conmutación de planes y programas Fallas de telecomunicación Estado de los bombillos de los semáforos Estado del suministro de energía Fallas en la coordinación Encendido y apagado del controlador Corto circuitos
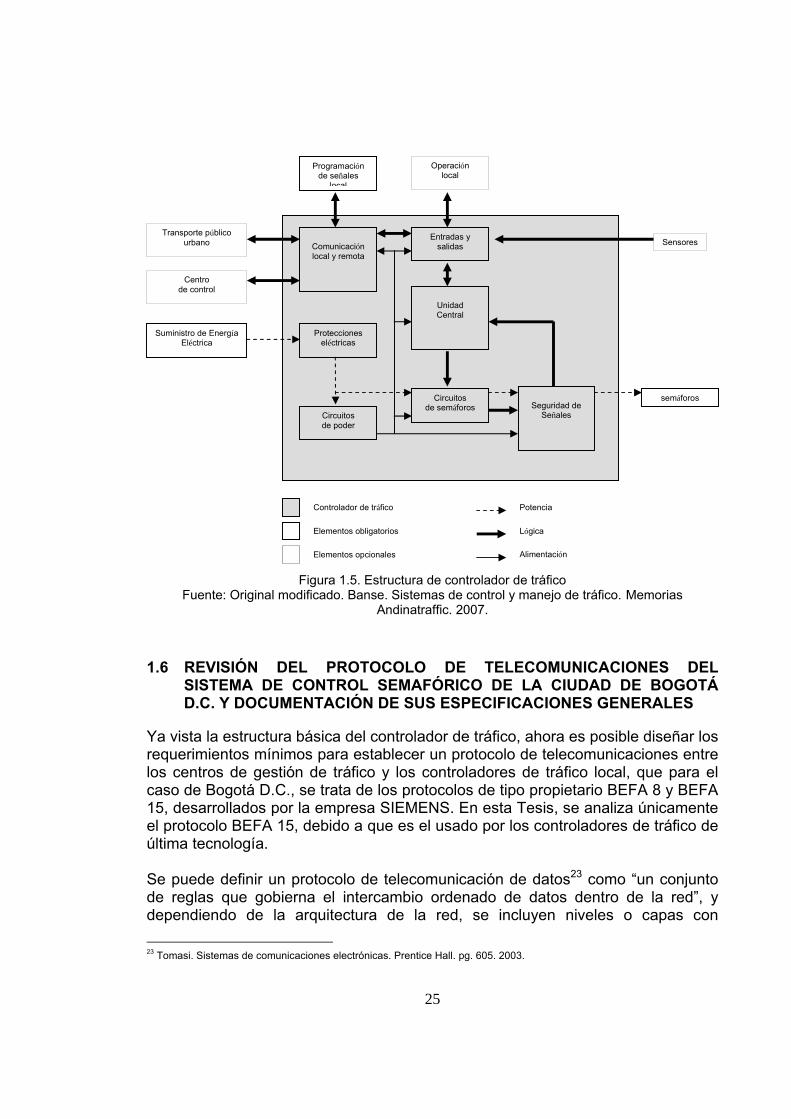
En la figura 1.5 se puede observar la estructura del controlador de tráfico, donde es posible determinar una unidad central, encargada de gestionar las funciones principales del controlador, las entradas y salidas, encargadas de la comunicación para recibir y enviar la información del centro de control y los sensores de tráfico. También, la programación de señales local que incluye toda la información que depende de las condiciones de movilidad de la intersección, esto es los tiempos de viaje. Adicionalmente, la parte de potencia, protecciones y salidas hacia los semáforos, incluyendo la supervisión realizada de seguridad de señales que es activada en caso de fallo de las lámparas de los semáforos. Finalmente, elementos opcionales como los sensores de tráfico y la comunicación con el transporte público urbano, en caso de requerir una priorización de acceso a la intersección por parte de este usuario.
25
Figura 1.5. Estructura de controlador de tráfico Fuente: Original modificado. Banse. Sistemas de control y manejo de tráfico. Memorias
Andinatraffic. 2007.
1.6 REVISIÓN DEL PROTOCOLO DE TELECOMUNICACIONES DEL SISTEMA DE CONTROL SEMAFÓRICO DE LA CIUDAD DE BOGOTÁ D.C. Y DOCUMENTACIÓN DE SUS ESPECIFICACIONES GENERALES
Ya vista la estructura básica del controlador de tráfico, ahora es posible diseñar los requerimientos mínimos para establecer un protocolo de telecomunicaciones entre los centros de gestión de tráfico y los controladores de tráfico local, que para el caso de Bogotá D.C., se trata de los protocolos de tipo propietario BEFA 8 y BEFA 15, desarrollados por la empresa SIEMENS. En esta Tesis, se analiza únicamente el protocolo BEFA 15, debido a que es el usado por los controladores de tráfico de última tecnología. Se puede definir un protocolo de telecomunicación de datos23 como “un conjunto de reglas que gobierna el intercambio ordenado de datos dentro de la red”, y dependiendo de la arquitectura de la red, se incluyen niveles o capas con
23 Tomasi. Sistemas de comunicaciones electrónicas. Prentice Hall. pg. 605. 2003.
Comunicación local y remota
Protecciones eléctricas
Entradas y salidas
Unidad Central
Circuitos de poder
Circuitos de semáforos
Seguridad de
Señales
Transporte público urbano
Centro de control
Operación local
Sensores
Programación de señales
local
Suministro de Energía Eléctrica
semáforos
Controlador de tráfico
Elementos obligatorios
Elementos opcionales
Potencia
Lógica
Alimentación
26
protocolos específicos. En el caso de la interconexión de sistemas abiertos (OSI – Open System Interconnection) se da una jerarquía de siete capas, donde el nivel más alto cuenta con un conjunto completo de servicios para hacer funcionar una aplicación de datos. “De manera general, las capas son:
1. Capa física: especifica las normas físicas, eléctricas, funcionales y de procedimiento para entrar a la red de comunicación de datos.
2. Capa de enlace de datos: responsable de las comunicaciones entre nodos primarios y secundarios de la red
3. Capa de red: determina cuál configuración de red es más adecuada para la función que proporciona la red.
4. Capa de transporte: controla la integridad del mensaje, de principio a fin, y en eso se incluye la ruta, la segmentación y la recuperación de errores para el mensaje.
5. Capa de sesión: responsable de la disponibilidad de la red, esto es, de capacidad de almacenamiento y del procesador.
6. Capa de presentación: maneja toda conversión de código o de sintaxis necesaria para presentar los datos a la red, en formato común para las comunicaciones.
7. Capa de aplicación: controla la secuencia de actividades dentro de una aplicación.”
1.6.1 Protocolos de telecomunicación en sistemas inteligentes de transporte (ITS).
Desde el punto de vista de los países desarrollados, donde se han podido estructurar y diseñar soluciones para atender la problemática de la movilidad, se ha visto una gran tendencia a la normalización y estandarización de los diferentes niveles de los sistemas de gestión de tráfico, no quedándose solamente en el concepto de sistemas semafóricos, sino avanzando hacia la integración de los diferentes subsistemas de la movilidad, apoyados en la utilización de protocolos de telecomunicación de tipo abierto, es decir que no son propietarios de un único fabricante. A continuación se presentan las iniciativas de protocolos de telecomunicaciones abiertos para sistemas ITS más comunes a nivel mundial.
1.6.1.1. Protocolo NTCIP
NTCIP24 (National Transportation Communications for ITS Protocol) es un proyecto de estandarización conjunto de entidades oficiales de los Estados
24 www.ntcip.org

27
Unidos, lo que lo hace público e independiente de los lineamientos propios de los fabricantes, dichas entidades iniciaron este protocolo en 1996 y son: AASHTO: American Association of State Highway and Transportation Officials NEMA: National Electrical Manufacturer Association ITE: Institute of Transportation Engineer El protocolo NTCIP se basa en varios estándares de telecomunicaciones que permite determinar la forma y el lenguaje de comunicación entre una central y equipos en vía ó entre centrales, basado en el principio de interoperabilidad de los equipos y la intercambiabilidad de los mismos dentro de un sistema único de gestión del tráfico. El desarrollo de NTCIP se ha realizado teniendo en cuenta una arquitectura técnica nacional de los sistemas ITS en Estados Unidos, la cual se caracteriza por su modularidad y escalabilidad pensada en el desarrollo de futuros sistemas y la conexión con otras centrales, además de contar con la adecuación de equipos normatizados por la Entidad Oficial para fabricaciones eléctricas – NEMA. NTCIP permite la definición de diferentes opciones de protocolos de telecomunicaciones dentro de su estructura de cinco (5) niveles de la siguiente manera:
a) Nivel de Información: Define los tipos de datos en un lenguaje común. b) Nivel de Aplicación: Define la gestión de redes. c) Nivel de Transporte: Define el enrutamiento de las comunicaciones. d) Nivel de Subred: Define la interfase física con el medio de comunicación. e) Nivel de Planta: Define el tipo del canal de comunicación.
El protocolo NTCIP gracias a su diseño permite el uso de diferentes estándares en cada uno de los niveles mencionados, lo que lo hace mucho más flexible que otros protocolos para ITS en el momento de su diseño y de su planeación.
1.6.1.2. Protocolo OCIT
El protocolo OCIT25 (Open Communicaction Interface for Road Traffic Control Systems) inicia su desarrollo en 1999 a partir de una iniciativa entre diversas ciudades de Alemania y varios fabricantes de sistemas y equipos semafóricos, con el objetivo de estandarizar interfaces, sin entrar en el detalle de la construcción de equipos de cada fabricante.
25 www.ocit.org

28
El grupo de desarrollo de este protocolo se denomina ODG – OCIT Developper Group, el cual es fundado por las empresas Dambach, Siemens, Signalbau Huber, STOYE y Stührenberg, quienes constantemente realizan los ajustes a las descripciones del protocolo de manera detallada. La jerarquía de ODG divide diferentes acciones a otros grupos de desarrollo, como son el OCIT-Outstations quién define las interfaces y protocolos entre la central y los equipos en vía. OCIT establece su estructura mediante seis (6) niveles, incluyendo un protocolo propio denominado BTPPL (Basis Transport Paket Protokoll Layer), de manera similar como se dividen los niveles en otros protocolos. Este protocolo permite una flexibilidad especial para los sistemas de control semafórico, aunque cuenta con limitaciones en el desarrollo para otros módulos de los sistemas inteligentes de transporte, pues aún se encuentra en desarrollo en dichos sistemas.
1.6.1.3. Protocolo UTMC
El Protocolo UTMC26 (Urban Traffic Management and Control) empieza en 1997, como una iniciativa del Departamento de Transporte del Reino Unido (Department for Transport - DfT) para el desarrollo de elementos abiertos para los sistemas inteligentes de transporte para áreas urbanas. A partir del 2001, se inicio su implementación en 4 ciudades del Reino Unido. El grupo de desarrollo de este protocolo es el UTC Development Group – UDG, del cual hacen parte tanto Entidades oficiales como empresas particulares, quienes establecen mediante el UTC Suppliers Forum (USF), las políticas y estrategias del UTMC. El protocolo UTMC es similar al NTCIP, en cuanto a la estructuración de sus niveles así:
a) Nivel de Información: Define los tipos de datos en un lenguaje común. b) Nivel de Aplicación: Define la gestión de redes. c) Nivel de Transporte: Define el enrutamiento de las comunicaciones. d) Nivel de Subred: Define la interfase física con el medio de comunicación. e) Nivel de Planta: Define el tipo del canal de comunicación.
Una de las diferencias leves entre el NTCIP y el UTMC, se encuentra en el nivel de Aplicación, en donde el NTCIP cuenta con más opciones, además de definir otros objetos y diccionarios diferentes en el nivel de información, sin descuidar su arquitectura.
26 http://utmc.uk.com

29
1.6.2 Protocolo de telecomunicaciones del sistema de control semafórico de Bogotá D.C.
En esta Tesis, se analizó el protocolo de telecomunicaciones propietario BEFA 15 empleado en el 50% de los equipos de control de tráfico utilizados en el sistema semafórico de la ciudad de Bogotá D.C., mediante el desarrollado de pruebas de campo en funcionamiento, de la siguiente manera:
Se comprobó la interconexión con un equipo de control local de tráfico ubicado en el centro de la ciudad.
Desde el centro de control de semaforización de Paloquemao, se comprobó el estado de funcionamiento y reporte de información de fallas gracias a una interfase de usuario y a reportes del computador de tráfico de la ciudad.
Se corroboraron los estados de señalización mostrados por la interfase de usuario gráfica y se comprobaron los valores de voltaje asociados al protocolo de comunicaciones.
Se probaron los estados de funcionamiento y falla del equipo de control local de tráfico y se comprobaron los reportes presentados por la interfase de usuario y los reportes impresos por el computador de tráfico de la ciudad.
Las pruebas realizadas permitieron determinar las siguientes características técnicas:
1) El sistema de telecomunicación está conformado por dos sistemas básicos de transmisión, medio físico a través de pares telefónicos, enlace por bucles de corriente continua (análogo) y enlace vía MODEM digital. El protocolo de telecomunicaciones tiene las siguientes funciones: Debe recibir bloques de comando y bloques de texto desde el
computador de control de tráfico. Debe enviar los comandos de control y texto, incluyendo las direcciones
del MODEM del equipo de control y el byte de control, al MODEM en la central, con máximo 16 líneas.
Debe recibir mensajes de estado y textos desde el MODEM del equipo de control y generar los mensajes de falla.
Debe permitir evaluar los mensajes de estado del equipo de control para activar y controlar un panel indicador.
2) El Protocolo de telecomunicaciones tiene los siguientes modos de
operación: Seis (6) bytes de comandos cada uno con 8 bits Cuatro (4) bytes de mensajes cada uno con 8 bits
3) La interfase de transmisión de datos es de tipo asíncrona, serial de 2400
baud, código ASCII y 7 bits + bit de paridad par.
30
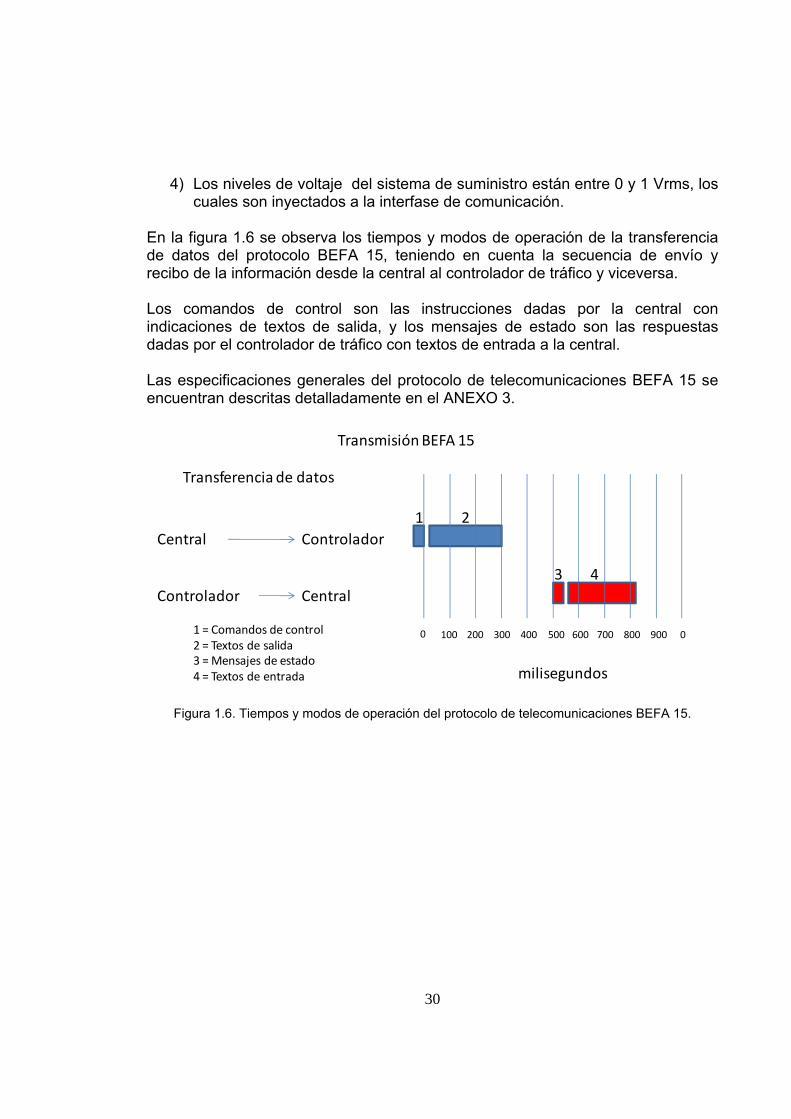
4) Los niveles de voltaje del sistema de suministro están entre 0 y 1 Vrms, los
cuales son inyectados a la interfase de comunicación. En la figura 1.6 se observa los tiempos y modos de operación de la transferencia de datos del protocolo BEFA 15, teniendo en cuenta la secuencia de envío y recibo de la información desde la central al controlador de tráfico y viceversa. Los comandos de control son las instrucciones dadas por la central con indicaciones de textos de salida, y los mensajes de estado son las respuestas dadas por el controlador de tráfico con textos de entrada a la central. Las especificaciones generales del protocolo de telecomunicaciones BEFA 15 se encuentran descritas detalladamente en el ANEXO 3.
Transmisión BEFA 15
Transferencia de datos
Central Controlador
Controlador Central
1 2
3 4
0 100 200 300 400 500 600 700 800 900 0
milisegundos
1 = Comandos de control2 = Textos de salida3 = Mensajes de estado4 = Textos de entrada
Figura 1.6. Tiempos y modos de operación del protocolo de telecomunicaciones BEFA 15.
31
2 PLANTEAMIENTO DEL MODELO DE SISTEMA DE TELECOMUNICACIÓN PARA GESTIÓN DE TRÁFICO EMPLEANDO LÍNEAS DE POTENCIA
ELÉCTRICA (PLT)
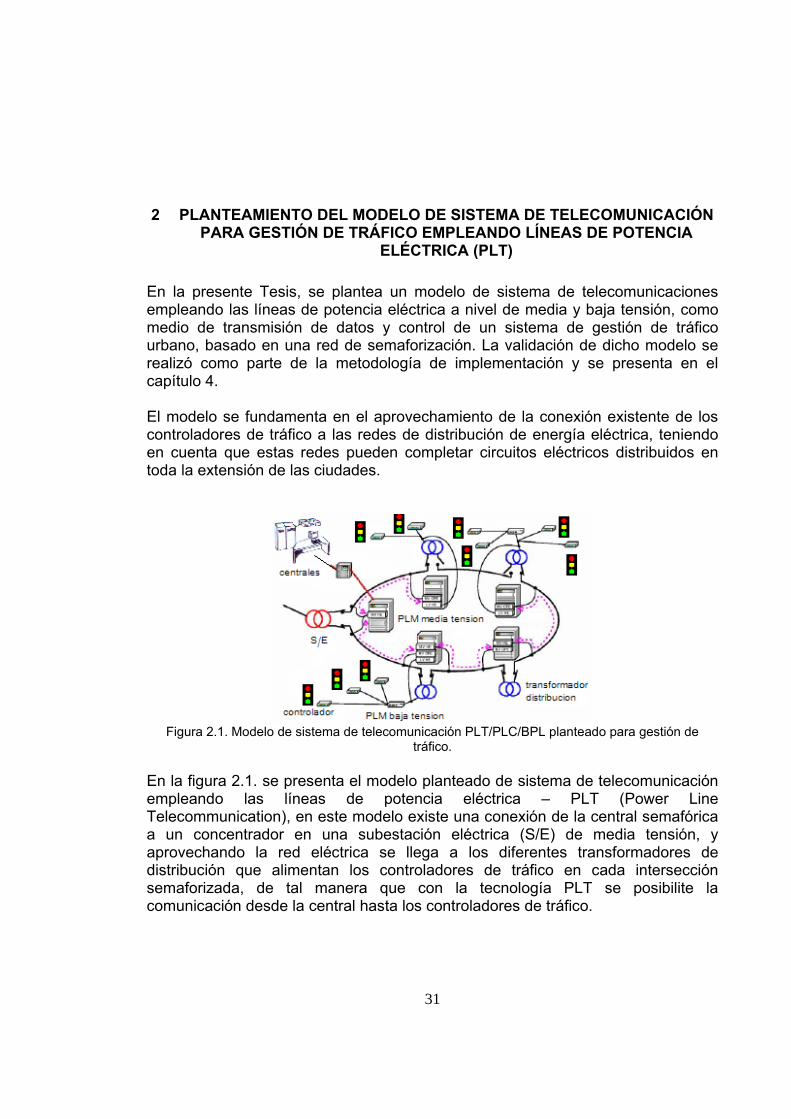
En la presente Tesis, se plantea un modelo de sistema de telecomunicaciones empleando las líneas de potencia eléctrica a nivel de media y baja tensión, como medio de transmisión de datos y control de un sistema de gestión de tráfico urbano, basado en una red de semaforización. La validación de dicho modelo se realizó como parte de la metodología de implementación y se presenta en el capítulo 4. El modelo se fundamenta en el aprovechamiento de la conexión existente de los controladores de tráfico a las redes de distribución de energía eléctrica, teniendo en cuenta que estas redes pueden completar circuitos eléctricos distribuidos en toda la extensión de las ciudades.
Figura 2.1. Modelo de sistema de telecomunicación PLT/PLC/BPL planteado para gestión de
tráfico. En la figura 2.1. se presenta el modelo planteado de sistema de telecomunicación empleando las líneas de potencia eléctrica – PLT (Power Line Telecommunication), en este modelo existe una conexión de la central semafórica a un concentrador en una subestación eléctrica (S/E) de media tensión, y aprovechando la red eléctrica se llega a los diferentes transformadores de distribución que alimentan los controladores de tráfico en cada intersección semaforizada, de tal manera que con la tecnología PLT se posibilite la comunicación desde la central hasta los controladores de tráfico.
32
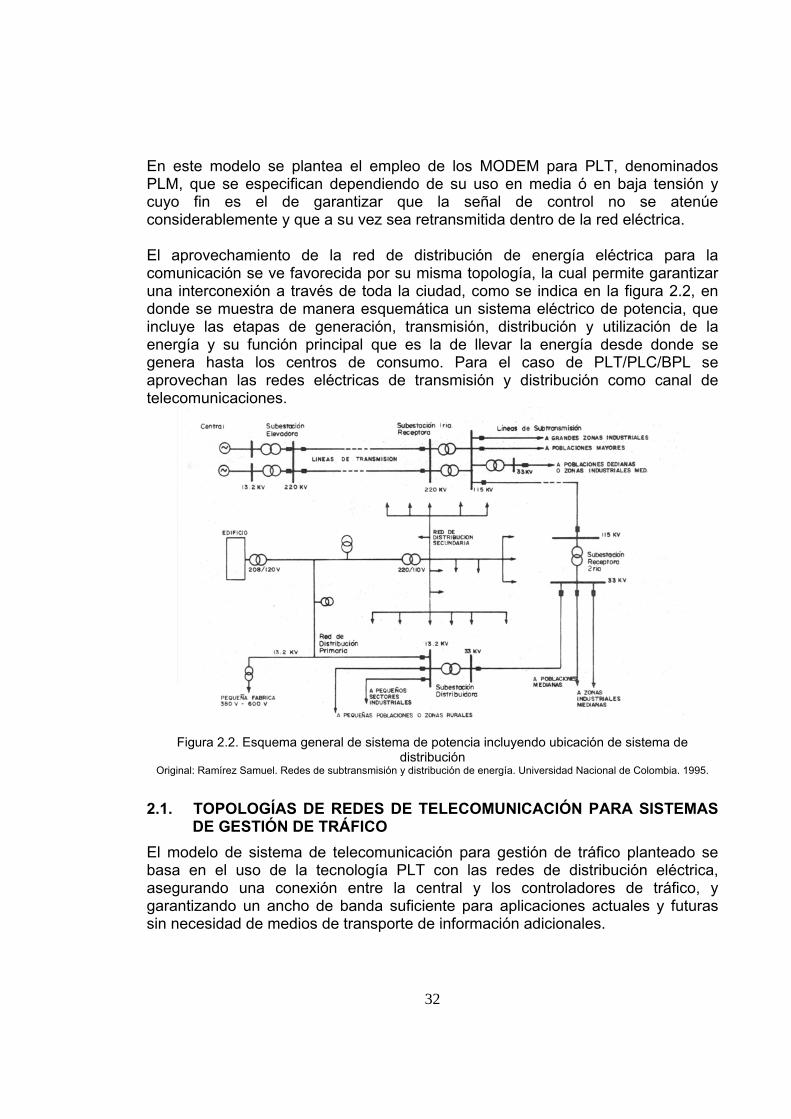
En este modelo se plantea el empleo de los MODEM para PLT, denominados PLM, que se especifican dependiendo de su uso en media ó en baja tensión y cuyo fin es el de garantizar que la señal de control no se atenúe considerablemente y que a su vez sea retransmitida dentro de la red eléctrica. El aprovechamiento de la red de distribución de energía eléctrica para la comunicación se ve favorecida por su misma topología, la cual permite garantizar una interconexión a través de toda la ciudad, como se indica en la figura 2.2, en donde se muestra de manera esquemática un sistema eléctrico de potencia, que incluye las etapas de generación, transmisión, distribución y utilización de la energía y su función principal que es la de llevar la energía desde donde se genera hasta los centros de consumo. Para el caso de PLT/PLC/BPL se aprovechan las redes eléctricas de transmisión y distribución como canal de telecomunicaciones.
Figura 2.2. Esquema general de sistema de potencia incluyendo ubicación de sistema de
distribución Original: Ramírez Samuel. Redes de subtransmisión y distribución de energía. Universidad Nacional de Colombia. 1995.
2.1. TOPOLOGÍAS DE REDES DE TELECOMUNICACIÓN PARA SISTEMAS DE GESTIÓN DE TRÁFICO
El modelo de sistema de telecomunicación para gestión de tráfico planteado se basa en el uso de la tecnología PLT con las redes de distribución eléctrica, asegurando una conexión entre la central y los controladores de tráfico, y garantizando un ancho de banda suficiente para aplicaciones actuales y futuras sin necesidad de medios de transporte de información adicionales.

33
Las topologías de red de telecomunicaciones más comunes en sistemas de gestión de tráfico, se pueden asociar a diversas redes de energía eléctrica, y en el caso del modelo planteado se asemeja a la conexión en anillo cerrado, que permite redundancia en la transmisión de la información. A continuación se presentan diversas topologías de redes de telecomunicaciones para sistemas de gestión de tráfico.
2.1.1. Conexión en anillo cerrado
En la figura 2.3, se puede observar la conexión tipo anillo cerrado desde la central hasta los controladores de tráfico, en este caso existe una redundancia para la transmisión de la información, lo que permite contar con un sistema más seguro.
Figura 2.3. Configuración conexión en anillo cerrado
Fuente: Original. Banse. Sistemas de control y manejo de tráfico. Memorias Andinatraffic 2007.
2.1.2. Conexión punto a punto
En la figura 2.4, se puede observar la conexión punto a punto desde la central hasta el controlador de tráfico.
Figura 2.4. Configuración de conexión punto
Fuente: Original. Banse. Sistemas de control y manejo de tráfico. Memorias Andinatraffic 2007.

34
2.1.3. Conexión estrella
En la figura 2.5, se puede observar la conexión tipo estrella desde la central hasta los controladores de tráfico.
Figura 2.5. Configuración conexión estrella
Fuente: Original. Banse. Sistemas de control y manejo de tráfico. Memorias Andinatraffic 2007.
2.1.4. Conexión en cadena
En la figura 2.6, se puede observar la conexión tipo cadena desde la central hasta los controladores de tráfico, en este caso el primer controlador puede funcionar como maestro y los siguientes como esclavos.
Figura 2.6. Configuración conexión en cadena
Fuente: Original. Banse. Sistemas de control y manejo de tráfico. Memorias Andinatraffic 2007.
2.1.5. Conexión en árbol
En la figura 2.7, se puede observar la conexión tipo árbol desde la central hasta los controladores de tráfico, este caso se puede presentar en caso de tener sistemas con problemas de comunicación por distancias largas, que requieran del uso de repetidores de la señal.

35
Figura 2.7. Configuración conexión en árbol
Fuente: Original. Banse. Sistemas de control y manejo de tráfico. Memorias Andinatraffic 2007.
36
3. ANÁLISIS COMPARATIVO DE LA IMPLEMENTACIÓN DE SISTEMAS DE TELECOMUNICACIÓN BASADOS EN PLT EN SISTEMAS DE
TELECOMUNICACIÓN SEMAFÓRICA RESPECTO A OTRO TIPO DE TECNOLOGÍAS
Con el fin de determinar las posibles ventajas o desventajas del modelo planteado se analiza comparativamente la implementación de sistemas de telecomunicación basados en PLT en sistemas de gestión de tráfico respecto a otro tipo de tecnologías.
3.1. FACTORES DE CONSIDERACIÓN DEL MEDIO DE TRANSMISIÓN
Cada medio de transmisión tiene su pro y su contra en el diseño de cualquier sistema de telecomunicaciones, para el caso de los sistemas de gestión de tráfico, depende de las condiciones de cada ciudad, de sus recursos, de su planeación, de su modelo de negocio y de su geografía27. El factor de planeación del sistema de telecomunicaciones tiene su alcance ligado a los recursos disponibles, pues por lo general los sistemas de gestión de tráfico son entidades relacionadas con un servicio público y por lo general con limitaciones de presupuesto. Por otro lado, el mantenimiento y los costos operacionales son otros dos factores a tener en cuenta cuando se comparan los medios de transmisión para una aplicación dada. En el caso de la fibra óptica, se requieren de canalizaciones que la soporten, lo que implica construcciones o alquiler, pero su mantenimiento es mínimo. En otro caso, para la red eléctrica (modelo GITUN) ya existe la red instalada cuyo mantenimiento va ligado a las condiciones de calidad del servicio ofrecido por la empresa prestadora del servicio. Los sistemas de microondas pueden ser instalados en menos tiempo y a menor costo que la fibra en canalizaciones, pero las torres requieren de costos de arrendamiento o compra de terreno, de mayor mantenimiento y una revisión anual por deterioro del material. En resumen, se deben tomar todos los atributos de los medios potenciales que pueden ser usados para una aplicación específica y determinar cual presenta el mejor costo-beneficio. Esto no siempre significa más ancho de banda, mayores velocidades de transmisión, instalación más fácil o menor costo, pero todos los
27 U.S. Department of Transportation Federal Highway Administration. Telecommunications Handbook for Transportation. Final Report. 2004.

37
factores influyen en la decisión. Una solución adecuada puede ser aquella que soporte la mayor cantidad de requerimientos del sistema de gestión de tráfico. Hay muchos sistemas de gestión de tráfico que combinan el alambre de cobre con enlaces inalámbricos y la decisión para crear este tipo de sistemas normalmente es de tipo económico, pero esta es solo una de las razones para seleccionar un medio sobre otro, o para combinar el uso de varios medios.
3.2. MEDIOS ALÁMBRICOS
Se pueden catalogar los medios alámbricos, en los tradicionales y en las nuevas alternativas como es el caso de la propuesta con telecomunicaciones a través de redes eléctricas. Los medios son:
Alambre de cobre Fibra óptica Red eléctrica (modelo GITUN)
3.2.1. Alambre de cobre
Las propiedades eléctricas del alambre de cobre crean resistencia e interferencia. Mientras más señales de telecomunicación viajen, más atenuación se tiene debido a las propiedades eléctricas asociadas al alambre de cobre, como es el caso de la resistencia eléctrica del cobre que limita las velocidades de transmisión y la distancia. Sin embargo, teniendo en cuenta estas propiedades, el costo, los fáciles procesos de fabricación y su facilidad para ubicarlo en canalizaciones, lo hacen un medio de decisión lógica en el momento de su selección como medio de transmisión en sistemas de gestión de tráfico. El Aluminio y el Oro también son usados para propósitos de telecomunicaciones, pero el Oro (el más eficiente) es demasiado caro para usarlo en estos propósitos y el aluminio no es un conductor eficiente para estos casos. En el caso de la red de telecomunicaciones semafóricas en Bogotá, se emplea actualmente el cobre, pero cabe destacar que debido a factores como el incremento en el costo del cobre a nivel internacional, se ha generado un incremento considerable en los costos por suministros del cable de telecomunicaciones, lo que ha llevado a un aumento en el vandalismo sobre este tipo de redes y por ende en el incremento de fallas del sistema de telecomunicaciones semafóricas. Hay dos tipos primarios de cables que contienen alambre de cobre usado para telecomunicaciones:
38
Par trenzado Coaxial
3.2.1.1. Par trenzado
Las señales de telecomunicación enviadas por alambre de cobre son principalmente corriente eléctrica directa (CD) la cual es modulada para representar una frecuencia. Cualquier otra corriente eléctrica cerca al cable de telecomunicaciones (incluyendo otras señales de telecomunicaciones) puede introducir interferencia y ruido. Los grupos de cables pueden inducir interferencias de corrientes electromagnéticas, esto sucede cuando una señal dentro del cable es tan fuerte que introduce un campo magnético dentro de un cable adyacente o un par de telecomunicaciones. Las fuentes de energía como las líneas de transmisión de energía o las lámparas fluorescentes pueden causar interferencia electromagnética. Esta interferencia puede ser minimizada trenzando un par de alambres alrededor de un eje común o con el uso de pantallas metálicas. El trenzado crea una pantalla magnética que ayuda a minimizar el “crosstalk”28. El par trenzado es usado en los sistemas de telecomunicaciones para servicio telefónico y está compuesto por dos alambres de cobre trenzados alrededor uno del otro, para evitar la interferencia entre ellos. Las empresas de telecomunicaciones que prestan el servicio de telefonía local, tienen gran cantidad de canalizaciones y cableado de cobre del tipo par trenzado tendido en todas las ciudades, lo que posibilita el uso de este medio de telecomunicaciones para los sistemas de gestión de tráfico, pero con las limitaciones de ancho de banda propias del mismo. En el caso del sistema de control semafórico de Bogotá, actualmente se usa este par trenzado, que para el caso de controladores de tráfico local con protocolo de telecomunicaciones BEFA 15 emplea un (1) par trenzado y para controladores con protocolo de telecomunicaciones BEFA 8 emplea cuatro (4) pares trenzados para la comunicación hasta los centros de control semafórico. La comunicación se realiza en topología radial y se conectan los pares trenzados desde cada central semafórica a cada equipo de control local de tráfico.
3.2.1.2. Cable Coaxial
El cable coaxial consta de un núcleo en cobre que lleva la señal respecto a una pantalla metálica y con una cubierta exterior. Además tiene la posibilidad de llevar la información en grandes distancias. Este cable fue usado por algunas secretarías de tránsito para llevar la información entre los controladores de tráfico y los centros de control, debido a que permitía transmitir video, pero fue desplazado por la fibra óptica. A pesar de esto, aún es 28 Crosstalk: señal de interferencia entre conductores cercanos.

39
usado para la transmisión de video desde cámaras en la calle, aunque la caída de costos de la fibra óptica ha llevado a algunas ciudades a descartar el uso del cable coaxial. Debido a que en la mayoría de ciudades hay operadores de televisión por cable que cuentan con redes de cable coaxial tendido, es posible usar estas redes para la transmisión de datos de control del tráfico.
3.2.2. Fibra Óptica
La fibra óptica se refiere al medio y tecnología asociada a transmitir información como impulsos de luz análogos a través de hilos de vidrio. Un hilo de fibra óptica puede llevar mucha más información que el alambre de cobre convencional, además de estar inmune a la interferencia electromagnética (EMI). La fibra es considerada como la de mejor característica por eficiencia de transmisión, esto es, pérdida efectiva de la señal sobre distancia (dB/km). La fibra mono modo puede tener un factor de atenuación de la señal entre 0.25 dB/km y 0.5 dB/km y en teoría se pueden enviar señales adicionales para la gestión de tráfico respecto a otros medios de transmisión En los sistemas de gestión de tráfico que requieren de gran capacidad de transmisión de información se utiliza fibra óptica, especialmente la mono modo, teniendo en cuenta las distancias en las ciudades, desde los equipos que están en la calle hasta los centros de gestión de tráfico o control semafórico. En la mayoría de las grandes ciudades, existen empresas de telecomunicaciones que cuentan con diferentes topologías de tendidos de fibra óptica, y por lo general cuentan con la topología en anillo, la cual se puede utilizar para la transmisión de datos para control de tráfico, conectando los controladores de tráfico a dicha red y en algún punto realizar la interconexión con la central de gestión de tráfico.
3.2.3. Red Eléctrica
La red de distribución de energía es estudiada en esta tesis, como un modelo original, propuesto por GITUN para la transmisión de datos para el control de tráfico y control semafórico, gracias a las propiedades eléctricas del cable de transmisión de energía. Es de destacar que este tipo de redes se encuentra en todas las ciudades, grandes o pequeñas y es la que permite la alimentación eléctrica de los controladores de tráfico local, por tanto no son necesarios tendidos de red adicionales. Las características y el modelo propuesto permiten determinar la posibilidad de utilizar esta red para transmisiones de gestión de tráfico y gracias a la existencia de anillos de redes entre subestaciones de energía, es posible contar con
40
diferentes puntos de interconexión con la red de gestión de tráfico y en el caso de los equipos de control local de tráfico ya existe una conexión instalada.
3.3. MEDIOS INALÁMBRICOS
Los medios de comunicación inalámbrica comparados con los alámbricos pueden resultar menos costosos y menos complejos, ya que no hay necesidad de implementar ciertos tipos de canalizaciones o el tendido de redes, sino que aprovechan las antenas de transmisión que se ubican estratégicamente en cada ciudad, bien sea de algún operador de telecomunicaciones o antenas propias. Como ejemplo, se pueden mencionar las siguientes:
Sistemas celulares Radio Punto a punto Radio doble vía Wi-Fi / Wi-Max
Los tres primeros han sido usados en sistemas de gestión de tráfico y recientemente se ha visto la posibilidad de usar Wi-Fi / Wi-Max en algunas ciudades, gracias a que se ha venido instalando esta tecnología.
3.3.1. Sistemas celulares
Los desarrollos en sistemas celulares cuentan con amplia difusión tanto de tecnologías como de proveedores de servicios de telecomunicaciones, lo que lo hace una solución viable que garantiza un cubrimiento amplio en cualquier ciudad. Las velocidades de transmisión se pueden establecer en varios Kbps dependiendo de la infraestructura montada por los operadores.
3.3.2. Radio Punto a Punto
Estos sistemas pueden comunicar entre localizaciones fijas y por lo general son usados como reemplazo de sistemas alámbricos. El sistema punto a punto puede ser establecido utilizando casi cualquier frecuencia de radio, pero por lo general usan el espectro de microondas de 800MHz a 30GHz.
3.3.2.1. Microondas
El sistema de microondas es un servicio punto a punto, que provee conectividad entre nodos de telecomunicaciones. Las compañías de telefonía la usan para proveer un respaldo de la infraestructura y alcanzar grandes distancias.

41
En Colombia, el Ministerio de Tecnologías de la Información y las Comunicaciones29 ha designado las frecuencias permitidas y las licencias de utilización de frecuencias para garantizar que no haya interferencia.
3.3.2.2. Spread Spectrum Radio
Es una tecnología que “Ensancha” (Spread) la transmisión sobre un grupo de radio frecuencias. Se usan dos técnicas, la más común es la llamada “frecuencia esperada”, donde el radio usa una frecuencia en un tiempo, pero a intervalos pre-determinados salta a otra frecuencia para ayudar a proveer una transmisión segura. El segundo sistema ensancha la transmisión sobre varias frecuencias a la vez. Estos sistemas por lo general son usados para transmisiones en distancias hasta los 3 km y sobre una banda de 20 a 30 MHz. Las técnicas de modulación de Spread Spectrum tienen varias ventajas sobre otras técnicas de radio, como el hecho que la señal es distribuida sobre un gran ancho de banda, lo cual minimiza la cantidad de potencia presente en cualquier frecuencia de transmisión. El resultado es una señal que se encuentra por debajo del ruido de receptores de banda estrecha convencionales, pero está dentro de lo mínimo requerido por un receptor spread spectrum. Los receptores son capaces de detectar potencias de señales muy bajas y rechazar portadoras indeseadas. Cada transmisor y receptor está programado con una secuencia única de ensanchado, la cual es usada para des-ensanchar la señal deseada efectivamente, cancelando el ruido. Recientemente, en la ciudad de Colorado Springs – Estados Unidos, se implementó un sistema de telecomunicaciones basado en esta tecnología para el sistema de gestión de tráfico30.
3.3.3. Radio doble vía
Los sistemas de radio de doble vía han sido usados desde la década de los años 30, originalmente por entidades militares, pero su uso se ha expandido a casi todos los ámbitos sociales, incluidos la ciudadanía con los sistemas “handy”. Las frecuencias más comunes son 30, 150, 450, 512 y 800 MHz y por ejemplo en la banda de frecuencia de 150MHz, se pueden alcanzar distancias de comunicación con radios de 30 a 50 km. Actualmente en los Estados Unidos, algunas entidades estatales de control de tráfico están uniendo esfuerzos con entidades de seguridad para crear un sistema de telecomunicaciones de radio de manera común, lo cual permite una coordinación más fácil de los recursos para solucionar los incidentes de tráfico.
29 www.mincomunicaciones.gov.co 30 El fabricante de esta tecnología para esa aplicación es: http://www.freewave.com

42
En Bogotá, se usa el sistema de radio de doble vía para telecomunicaciones de coordinación del personal de mantenimiento del sistema de control semafórico y adicionalmente se tiene una frecuencia común con la policía de tránsito para coordinar labores sobre la regulación del tráfico.
3.3.4. Wi – Fi
El sistema Wi – Fi es aplicado a un servicio de telecomunicaciones punto a punto con radio de espectro de 900MHz, 2GHz y 5GHz y no son requeridas licencias para su uso, con la única restricción que los sistemas no excedan los requerimientos de potencia o altura de la antena. Con esto se buscan equipos para cualquier aplicación que cumplan con los límites de emisión específicos. Actualmente, algunos sistemas de gestión de tráfico emplean telecomunicaciones Wi – Fi, especialmente para comunicar la programación de un equipo de control de tráfico de manera inalámbrica y cerca al mismo equipo.
3.3.5. WLAN (Wireless LAN)
Las redes LAN inalámbricas permiten la comunicación a la red LAN sin utilizar cables, su estándar es el IEEE 802.11. Con estas redes se puede alcanzar un radio de 150 m dentro de instalaciones y de 300 m en exteriores. Para sistemas de tráfico, las redes WLAN requieren de un punto de acceso cableado que conecte todos los equipos inalámbricos a la red cableada. La mayor desventaja de las redes WLAN es la falta de seguridad, ya que la transmisión puede ser interceptada fácilmente por hackers que interfieren en las comunicaciones. Otra desventaja es la sobrepoblación del ancho de banda, ya que mucha gente usa WLAN en una misma área, lo que también puede crear problemas por interferencia.
3.3.6. Wi – Max
Es un sistema inalámbrico de área amplia, basada en el estándar IEEE 802.1631. Tiene una cobertura en el rango de los km y ha sido diseñada para contar con una cobertura de punto – multipunto fijo y gran ancho de banda. Actualmente en varias ciudades Colombianas, existen operadores de telecomunicaciones con disponibilidad de ofrecer el servicio Wi – Max, el cual puede ser utilizado en las telecomunicaciones de sistemas de gestión de tráfico. 31 Ver: http://grouper.ieee.org/groups/802/16/index.html
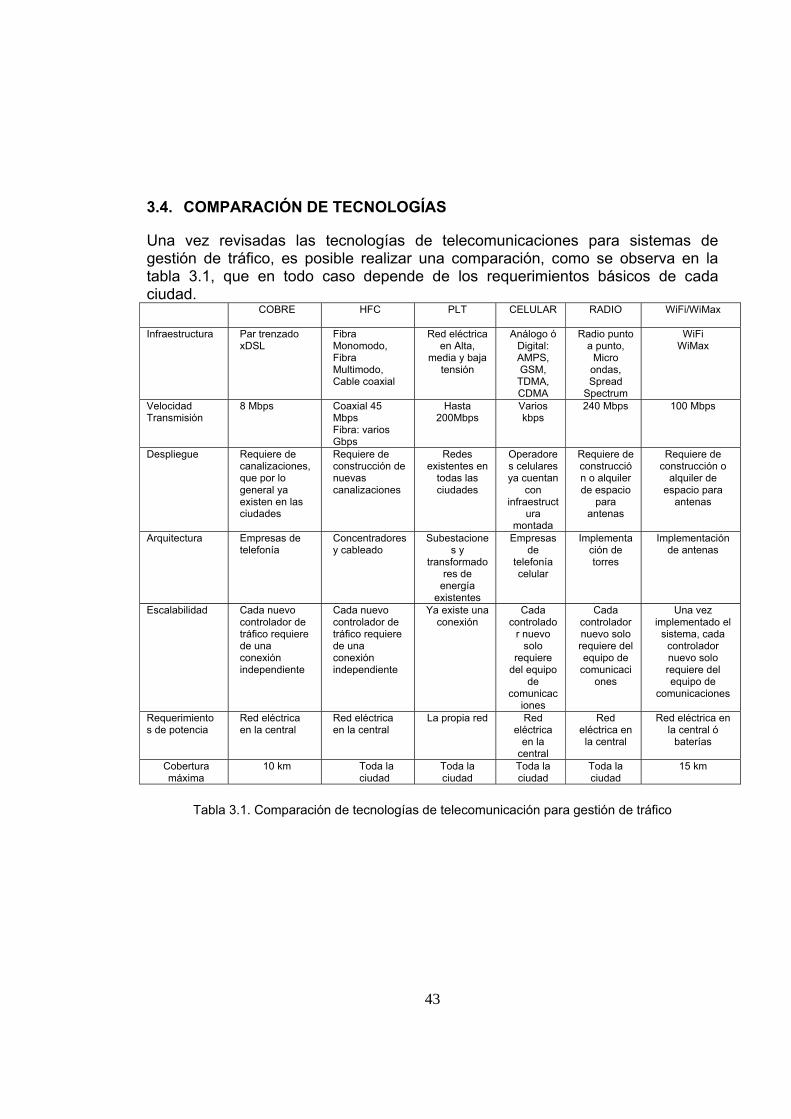
43
3.4. COMPARACIÓN DE TECNOLOGÍAS
Una vez revisadas las tecnologías de telecomunicaciones para sistemas de gestión de tráfico, es posible realizar una comparación, como se observa en la tabla 3.1, que en todo caso depende de los requerimientos básicos de cada ciudad.
COBRE
HFC PLT CELULAR RADIO WiFi/WiMax
Infraestructura Par trenzado xDSL
Fibra Monomodo, Fibra Multimodo, Cable coaxial
Red eléctrica en Alta,
media y baja tensión
Análogo ó Digital: AMPS, GSM,
TDMA, CDMA
Radio punto a punto,
Micro ondas, Spread
Spectrum
WiFi WiMax
Velocidad Transmisión
8 Mbps Coaxial 45 Mbps Fibra: varios Gbps
Hasta 200Mbps
Varios kbps
240 Mbps 100 Mbps
Despliegue Requiere de canalizaciones, que por lo general ya existen en las ciudades
Requiere de construcción de nuevas canalizaciones
Redes existentes en
todas las ciudades
Operadores celulares ya cuentan
con infraestruct
ura montada
Requiere de construcción o alquiler de espacio
para antenas
Requiere de construcción o
alquiler de espacio para
antenas
Arquitectura Empresas de telefonía
Concentradores y cableado
Subestaciones y
transformadores de
energía existentes
Empresas de
telefonía celular
Implementación de torres
Implementación de antenas
Escalabilidad Cada nuevo controlador de tráfico requiere de una conexión independiente
Cada nuevo controlador de tráfico requiere de una conexión independiente
Ya existe una conexión
Cada controlado
r nuevo solo
requiere del equipo
de comunicac
iones
Cada controlador nuevo solo requiere del equipo de
comunicaciones
Una vez implementado el
sistema, cada controlador nuevo solo requiere del equipo de
comunicaciones
Requerimientos de potencia
Red eléctrica en la central
Red eléctrica en la central
La propia red Red eléctrica
en la central
Red eléctrica en la central
Red eléctrica en la central ó
baterías
Cobertura máxima
10 km Toda la ciudad
Toda la ciudad
Toda la ciudad
Toda la ciudad
15 km
Tabla 3.1. Comparación de tecnologías de telecomunicación para gestión de tráfico

44
3.4.1. Matriz DOFA para PLT/PLC/BPL
La tecnología PLT/PLC/BPL, es una buena alternativa en sistemas de gestión de tráfico, debido entre otros factores a que los controladores de tráfico local ya cuentan con la conexión a la red de distribución de energía eléctrica, pero en todo caso la viabilidad de la utilización de dicha red para telecomunicaciones en estos sistemas, se ve determinada por un análisis comparativo respecto a otras tecnologías. En la tabla 3.2, se puede observar una matriz DOFA (Debilidades, Oportunidades, Fortalezas y Amenazas), desarrollada para sistemas PLT/PLC/BPL utilizados en gestión de tráfico.
FORTALEZAS OPORTUNIDADES - Medio físico ya desplegado - Ubicuidad de la red eléctrica - Posibilidad de crecimiento modular - Sin requerimientos de nueva conexión, en caso de implementar nuevos controladores de tráfico - Utilización óptima del ancho de banda
- Requerimientos futuros de ancho de banda cubiertos - Escasa competencia en la infraestructura de acceso - Combinación con otras tecnologías
- Gestión de calidad de servicio en caso de requerir gran ancho de banda
- Escasa competencia tecnológica - Producción de equipos limitada
- Aún no se ha desarrollado para gestión de tráfico
- En Colombia no se han definido las bandas de frecuencia y regulación para PLT/PLC/BPL - Ausencia de estándares internacionales para interoperabilidad de equipos
DEBILIDADES AMENAZAS
Tabla 3.2. Matriz DOFA para PLT/PLC/BPL en sistemas de gestión de tráfico
3.5. PROSPECTIVA TECNOLÓGICA
En la actualidad, los desarrollos en PLT/PLC/BPL, se proliferan a nivel mundial, y las empresas distribuidoras de energía han encontrado un nicho de mercado como se puede ver en el mapa de la figura 3.1.

45
Figura 3.1. Empresas distribuidoras de energía que han implementado PLT/PLC/BPL a nivel
mundial Fuente: Original modificado http://www.plcforum.org
Dentro de la prospectiva para PLT/PLC/BPL en sistemas de gestión de tráfico, se crea una gran oportunidad de aprovechamiento por parte de las empresas de distribución de energía, en el caso de Bogotá D.C., se trata de CODENSA, y gracias a la compra de energía por parte de usuarios no regulados, la posibilidad se amplía a todas las empresas involucradas en distribución de energía. La prospectiva tecnológica, está orientada a atender las necesidades de los sistemas de gestión de tráfico y sistemas ITS, entre otras, en las siguientes aplicaciones:
Sistemas de supervisión mediante cámaras de video Detección virtual de vehículos Señalización variable, tanto para conductores como para usuarios de
transporte público Sistemas de seguridad Sistemas de control de infracciones de tráfico
PLT/PLC/BPL, permite atender estas necesidades con costos competitivos, gracias a que su ancho de banda ha sido probado hasta 200Mbps, por parte de fabricantes como DS2, ASCOM y SIEMENS. Hoy el costo por línea para las tecnologías alámbricas de telecomunicaciones en sistemas de gestión de tráfico son comparables, se encuentra una leve ventaja

46
con PLT/PLC/BPL. Esto se debe a que las otras tecnologías ocupan diferentes posiciones en la escala de ciclo de vida de producto, ellas ya alcanzaron estados diferentes en la curva de aprendizaje y en economías de escala, como se muestra en la figura 3.2.
Figura 3.2. Curva comparativa de aprendizaje tecnologías PLT, Cable y xDSL
Fuente: Original modificado. http://www.plcforum.org Tanto xDSL como Cable ya han conseguido pasos significativos en el ciclo de vida. Para xDSL aún se logra alguna reducción potencial de costos, pero es más limitada que con Cable o PLT/PLC/BPL. Como PLT/PLC/BPL representa la última generación de tecnologías alámbricas para gestión de tráfico, la mayor reducción potencial de costos permanece con PLT/PLC/BPL.
47
4. DESARROLLO DE UNA METODOLOGÍA DE IMPLEMENTACIÓN DE SISTEMAS DE TELECOMUNICACIÓN BASADOS EN TECNOLOGÍA PLT
PARA EL CONTROL DE LA SEÑALIZACIÓN DEL TRÁFICO Y EN SISTEMAS DE SEMAFORIZACIÓN
Debido a que las líneas eléctricas se pueden considerar como un medio hostil para la transmisión de datos, entre otros por la variación de la impedancia (cargas eléctricas) con respecto al tiempo, al ruido y a la atenuación de la señal. A continuación para el caso de los sistemas de telecomunicaciones de gestión de tráfico se desarrolla una metodología de implementación de sistemas basados en PLT/PLC/BPL, la cual se presenta de la siguiente manera:
1. Desarrollo y validación del modelo que permite simular el comportamiento de la señal a transmitir en diferentes puntos hasta llegar al receptor en la calle.
2. Determinación de condiciones de la red que permite tener en cuenta la capacidad disponible y sus limitaciones.
3. Diseño de la red de acuerdo con las condiciones actuales de transmisión de datos para gestión de tráfico y respecto al crecimiento tanto de las necesidades como de la tecnología presente en el mercado.
4. Parámetros finales de implementación, que abarca un modelo de topología de red propuesto, los parámetros de implementación de dicho modelo, la extensión de la red, los tiempos de respuesta, las implicaciones en el evento de pérdida de enlace, pérdida de nodo y las implicaciones de seguridad de datos.
5. Establecimiento de modelos de negocio, teniendo en cuenta los modelos de funcionamiento de la gestión de tráfico de las ciudades.
6. Establecimiento de procesos, con el fin de ver los factores de interrelación de los sistemas que afectan la prestación del servicio de telecomunicaciones empleando PLT.
El modelo debe tener en cuenta que se trata de un medio utilizado para la transmisión de energía eléctrica, empleado también para la transmisión de datos [8]. El tratamiento de señales, en ambos casos se maneja de la misma forma, es decir, las características del canal pueden ser tanto dependientes del tiempo como de la frecuencia. Esto hace, que por una parte debido a la combinación de variaciones de cargas eléctricas, el canal se comporte de forma variable en el tiempo y aleatorio y, por otro lado debido a las frecuencias utilizadas en la transmisión sea dependiente de la frecuencia y de la relación señal a ruido (S/N). A partir de la definición del modelo eléctrico se puede determinar una función de transferencia que permite simular la respuesta en amplitud y frecuencia.

48
La metodología de implementación de sistemas PLT/PLC/BPL para gestión de tráfico, comprende también el conjunto de varios factores, entre otros, los aspectos técnicos de PLT/PLC/BPL, la comparación y prospectiva tecnológica, los modelos de implementación tecnológica, de negocios y de procesos.
4.1. DESARROLLO Y VALIDACIÓN DEL MODELO
Se requiere un modelamiento detallado del sistema PLT/PLC/BPL, específicamente para las condiciones de gestión de tráfico, teniendo en cuenta el modelo planteado en el capítulo 2 de acuerdo con lo siguiente:
1. Las condiciones de la señal (datos semafóricos) 2. El tipo de modulación y el acceso a la red 3. El MODEM para PLT (Power Line MODEM – PLM) y los registros de control 4. La topología de la red eléctrica y el comportamiento de la señal en redes
eléctricas en media y baja tensión 5. Los transformadores de energía eléctrica 6. Los modelos para redes eléctricas 7. Las cargas conectadas 8. El equipo de control de tráfico, 9. El ruido, 10. Los parámetros de acople de la señal. 11. El modelo del canal y su validación.
4.1.1. Condiciones De La Señal Para Ser Transmitida En Media Y Baja Tensión
El detalle de los datos a ser transmitidos entre la central y los controladores en la calle, se especificó en el numeral 1.6.2, relacionado con el protocolo de telecomunicaciones BEFA15. Una vez conocidos los datos se determina la adecuación de esta señal digital a análoga mediante el establecimiento del tipo de modulación y la tecnología del MODEM para PLT (PLM) que depende de dicha modulación. En la figura 4.1, se puede observar la señal digitalizada presente en el marco SIEL (Interfase de comunicación de la central de semaforización), cuyos valores son ampliamente descritos en el protocolo BEFA 15 del Anexo 3.

49
Figura 4.1. Señal de pulsos digitalizada presente en el marco SIEL en la central de semaforización La adecuación de esta señal, empleando el PLM permite transmitir una señal modulada empleando las líneas de potencia eléctrica desde un punto de interconexión en una de las centrales de semaforización hasta los equipos en vía conectados a la red eléctrica.
4.1.2. Modulación Y Acceso A La Red
Teniendo en cuenta, las tecnologías desarrolladas para PLM en el mercado y la normatividad para las frecuencias de transmisión y sus aplicaciones, como se puede observar en el estándar CENELEC 50065, el cual provee las características para transmisión y recepción sobre líneas de distribución en bajo voltaje, en la banda de frecuencia de 3kHz a 148.5kHz, adicionalmente el estándar incluye características de la línea de potencia, variación de impedancia, ruido, sistemas de modulación y protocolos. En el área de tecnología de PLT/PLC/BPL, se pueden utilizar diferentes tipos de modulación dependiendo de la aplicación, en este caso se considera el control de equipos para el manejo de tráfico. Malaver - Ramos [14], relaciona un análisis de técnicas de modulación para PLT/PLC/BPL, dentro de las que se encuentran las de modulación por desplazamiento de amplitud (ASK), por desplazamiento de frecuencia (FSK y MSK), por desplazamiento de fase (PSK / BPSK), por desplazamiento de fase M-ARIA (MPSK) y por amplitud en cuadratura (QAM), todas ellas orientadas a la prestación del servicio de Internet usando PLT/PLC/BPL. Adicionalmente, se deben tener en cuenta técnicas de multicanalización útiles para la transmisión de datos en redes de distribución eléctrica, como es el caso de la división lógica del canal de telecomunicaciones en el tiempo (TDM), aquí cada señal utiliza el canal en un tiempo determinado, la división en frecuencias (FDM),
50
donde cada señal puede utilizar el canal en un solo rango de frecuencias y la división por códigos (CDM) donde cada señal utiliza un código único para utilizar determinados espacios de tiempo-frecuencia sin necesidad de ser continuos. Generalmente, estas técnicas de modulación relacionadas, tales como FSK (Frecuency shift keying), CDMA (Code-division multiple access) o el caso de OFDM (Orthogonal frequency-division multiplexing) son reconocidas como las más apropiadas para PLT/PLC/BPL32 y dependiendo de la aplicación específica, cada técnica de modulación tiene ciertas ventajas. Por ejemplo, en caso de un sistema de PLT/PLC/BPL de bajo costo y baja velocidad de datos una buena solución es FSK. Para velocidades de datos mayores, hasta 1Mbps, CDMA ofrece la ventaja de usar la ganancia de procesamiento inherente al sistema para llegar a los límites de radiación permitidas. Además, para FSK una parte significativa del espectro es atenuada a más de 40dB (en el rango de 3 – 6 MHz). Y para velocidades de transmisión hasta de 10Mbps se pueden lograr con una técnica de modulación más eficiente como OFDM. Finalmente, teniendo en cuenta por un lado las limitaciones de frecuencia de operación planteadas por normatividades como la CENELEC y su banda de frecuencia de 3kHz a 148.5kHz, y cómo los fabricantes de tecnología para PLT/PLC/BPL han respondido a esta normativa desarrollando MODEM para PLT/PLC/BPL (PLM) con frecuencias de operación alrededor de 132.5 kHz. Y por otro lado, el protocolo de acceso que permite la distribución de la banda, tanto para otros sistemas del mismo tipo como para diferentes sistemas que utilizan diferentes tipos de modulación o protocolos, ya que la red eléctrica se comporta como la red de comunicaciones disponible para todos los usuarios. Por tanto, se determina utilizar elementos de modulación FSK para PLT/PLC/BPL que respondan a la frecuencia de 132.5kHz, ejemplo de ello son los PLM de fabricantes como SGS-Thomson, que utiliza una modulación FSK de banda estrecha centrada a 132.45kHz, Philips que emplea modulación ASK centrada a 132.5kHz, National Semiconductor también con FSK y Echelon con BPSK. La selección de FSK, también está relacionada con una solución de bajo costo que es usada en este caso para velocidades de datos bajos, como el del equipo de control local de tráfico con 2400 bps, descrito en el numeral 1.6.1.
4.1.2.1. Modulación FSK
La función de un PLM es recibir y transmitir a través de las líneas eléctricas, conectadas con un circuito de acoplamiento adecuado. Cuando se utiliza el PLM con modulación FSK, las señales eléctricas se codifican de acuerdo con una
32 Pavlidou. Power line communications: state of the art and future trends. IEEE Communications magazine. April 2003.
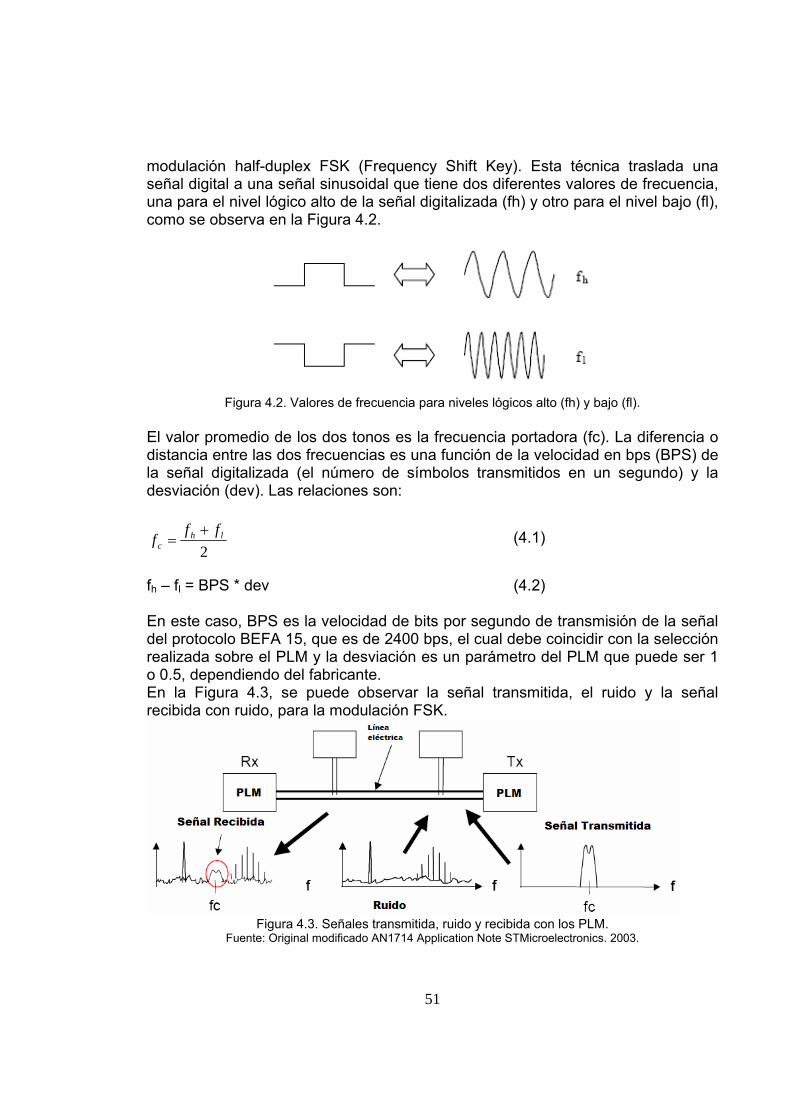
51
modulación half-duplex FSK (Frequency Shift Key). Esta técnica traslada una señal digital a una señal sinusoidal que tiene dos diferentes valores de frecuencia, una para el nivel lógico alto de la señal digitalizada (fh) y otro para el nivel bajo (fl), como se observa en la Figura 4.2.
Figura 4.2. Valores de frecuencia para niveles lógicos alto (fh) y bajo (fl).
El valor promedio de los dos tonos es la frecuencia portadora (fc). La diferencia o distancia entre las dos frecuencias es una función de la velocidad en bps (BPS) de la señal digitalizada (el número de símbolos transmitidos en un segundo) y la desviación (dev). Las relaciones son:
2lh
c
fff
(4.1)
fh – fl = BPS * dev (4.2) En este caso, BPS es la velocidad de bits por segundo de transmisión de la señal del protocolo BEFA 15, que es de 2400 bps, el cual debe coincidir con la selección realizada sobre el PLM y la desviación es un parámetro del PLM que puede ser 1 o 0.5, dependiendo del fabricante. En la Figura 4.3, se puede observar la señal transmitida, el ruido y la señal recibida con ruido, para la modulación FSK.
Figura 4.3. Señales transmitida, ruido y recibida con los PLM.
Fuente: Original modificado AN1714 Application Note STMicroelectronics. 2003.

52
4.1.2.2. Probabilidad de error de bit P(e) Debido a que en este sistema se presenta mucho ruido, por las condiciones del medio, se debe tener en cuenta la probabilidad de error P(e)33, que está dada por:
0
)(N
EerfceP b (4.3)
Donde: P(e), es la probabilidad de error erfc, es la función de error coherente Eb, es la energía por bit N0, es la densidad de ruido. Según [10], se puede presentar la siguiente probabilidad de error para la transmisión a cargas de 0.1Ω y 1Ω en distancias de 1000m, como se muestra en la figura 4.4.
Figura 4.4. Probabilidad de error de bit P(e) respecto a la frecuencia, para impedancias de 0.1Ω y
1Ω y distancia de 1000m. Fuente: Cavdar [10]
4.1.3. MODEM para Líneas de Potencia Eléctrica (Power Line MODEM –PLM)
Para el modelo del sistema PLT, se ha utilizado el MODEM para PLT (Power Line MODEM – PLM) del fabricante STMicroelectronics, referencia ST7538, el cual es un PLM que es utilizado para realizar pruebas de comunicación. El ST7538 es un transceptor34 diseñado para comunicaciones sobre líneas de potencia eléctrica en bajo y medio voltaje, su función es realizar la interfase desde 33 Probabilidad de error. P(e): es la expectativa teórica, o matemática, de que determinado sistema tenga una tasa de errores. La tasa de errores de bits es un registro histórico del funcionamiento real del sistema en cuanto a errores. Tomasi. Sistemas de comunicaciones electrónicas. Pág. 509. Prentice Hall. 2003. 34 Transceptor – Transceiver : (Transmitter / Receiver) es un aparato que transmite y recibe señales sobre un medio. Cole. Telecommunications. Pág 154. Prentice Hall. 1999.

53
la red eléctrica al sistema (usualmente un microprocesador con algunos sensores), el cual gestiona la aplicación y las capas superiores del protocolo de telecomunicaciones. La tecnología utilizada es CMOS-LDMOS-BIPOLAR Este PLM es un equipo independiente del protocolo y puede ser usado para implementar protocolos propietarios o estandarizados, como es el caso del protocolo de comunicaciones semafóricas BEFA 15. Adicionalmente, el PLM tiene a la salida una interfase con regulación de voltaje y pocos componentes pasivos, de tal forma que tiene un circuito de acople capaz de transmitir una señal válida en condiciones críticas de impedancia de carga. En la figura 4.5 se observa la conexión del PLM, incluyendo un transformador de salida que se comporta como interfase entre el PLM y la red eléctrica.
Figura 4.5. Conexión de PLM ST7538 a red eléctrica.
Fuente: ST7538 FSK POWER-LINE TRANSCEIVER DEMO-KIT DESCRIPTION. STMicroelectronics. 2003
El modelo del PLM se puede representar como una fuente en serie con una resistencia y un condensador de acople, como se observa en la Figura 4.6.

54
Figura 4.6. Modelo del PLM
En este caso, la fuente (U) es la señal enviada por el PLM de 1V, Rs es la resistencia de la fuente de 3Ω, presente cuando transmite la señal, y de 35 Ω cuando recibe la señal y C es un condensador de 1μF, de acople a la red eléctrica. El comportamiento de Rs en transmisión se puede observar en la Figura 4.7. y en recepción en la Figura 4.8
Figura 4.7. Comportamiento de Rs en transmisión dependiendo de la frecuencia de operación del
PLM Fuente: ST7538 FSK POWER-LINE TRANSCEIVER DEMO-KIT DESCRIPTION. STMicroelectronics. 2003
Figura 4.8. Comportamiento de Rs en recepción dependiendo de la frecuencia de operación del
PLM Fuente: ST7538 FSK POWER-LINE TRANSCEIVER DEMO-KIT DESCRIPTION. STMicroelectronics. 2003
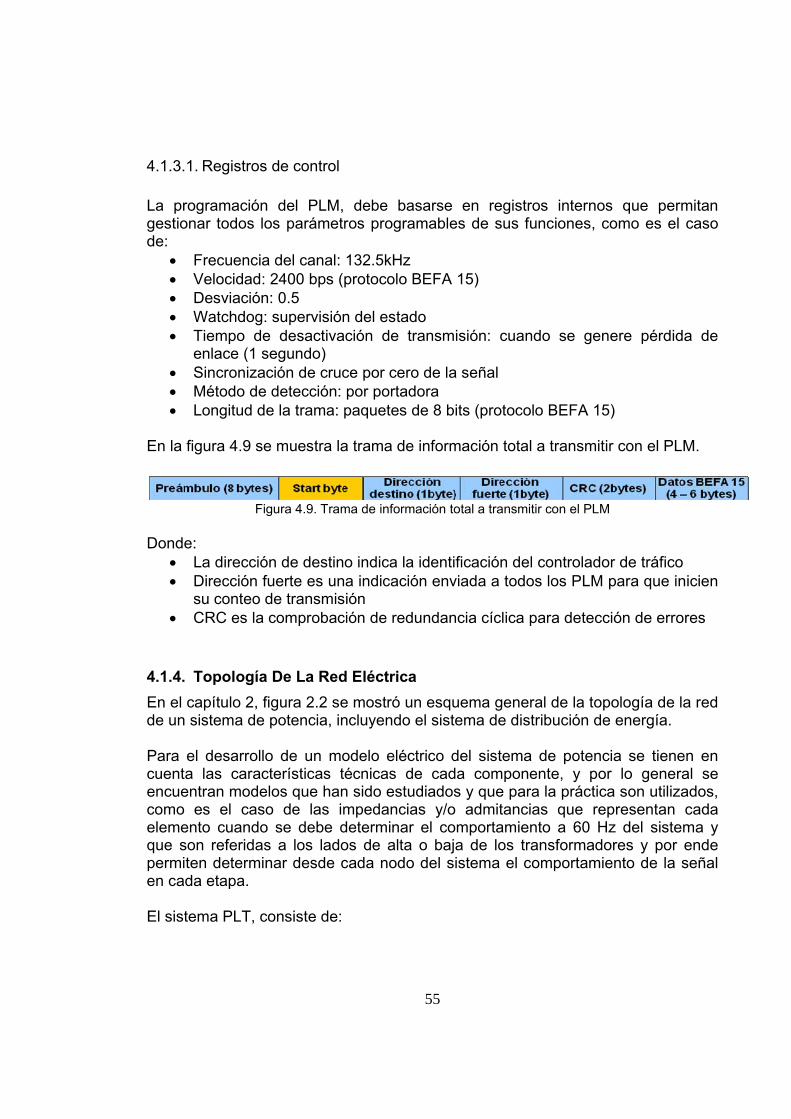
55
4.1.3.1. Registros de control La programación del PLM, debe basarse en registros internos que permitan gestionar todos los parámetros programables de sus funciones, como es el caso de:
Frecuencia del canal: 132.5kHz Velocidad: 2400 bps (protocolo BEFA 15) Desviación: 0.5 Watchdog: supervisión del estado Tiempo de desactivación de transmisión: cuando se genere pérdida de
enlace (1 segundo) Sincronización de cruce por cero de la señal Método de detección: por portadora Longitud de la trama: paquetes de 8 bits (protocolo BEFA 15)
En la figura 4.9 se muestra la trama de información total a transmitir con el PLM.
Figura 4.9. Trama de información total a transmitir con el PLM
Donde:
La dirección de destino indica la identificación del controlador de tráfico Dirección fuerte es una indicación enviada a todos los PLM para que inicien
su conteo de transmisión CRC es la comprobación de redundancia cíclica para detección de errores
4.1.4. Topología De La Red Eléctrica
En el capítulo 2, figura 2.2 se mostró un esquema general de la topología de la red de un sistema de potencia, incluyendo el sistema de distribución de energía. Para el desarrollo de un modelo eléctrico del sistema de potencia se tienen en cuenta las características técnicas de cada componente, y por lo general se encuentran modelos que han sido estudiados y que para la práctica son utilizados, como es el caso de las impedancias y/o admitancias que representan cada elemento cuando se debe determinar el comportamiento a 60 Hz del sistema y que son referidas a los lados de alta o baja de los transformadores y por ende permiten determinar desde cada nodo del sistema el comportamiento de la señal en cada etapa. El sistema PLT, consiste de:

56
Cada punto disponible para conexión de los MODEM PLT (PLM), Incluye el cableado hacia edificaciones El cableado a los equipos eléctricos Los equipos eléctricos en sí Las redes eléctricas que conectan los tableros de distribución al
transformador de distribución El propio transformador. Ya que cada transformador de distribución sirve a mas de una residencia o
edificación, se deben considerar las cargas y cableado de las edificaciones conectadas al mismo transformador.
Para el caso del sistema de potencia colombiano, se pueden definir diferentes topologías35 y niveles de voltaje36:
Transmisión: 500kV, 230kV y 115kV Subtransmisión: 66kV, 57.5kV y 34.5kV Distribución: 13.2kV y 11.4kV Suministro: Monofásicos bifilar, trifilar o trifásico a 110V/120V/208V/440V
4.1.4.1. Comportamiento de la red eléctrica en baja y media tensión en frecuencia de red (60Hz)
La impedancia del sistema eléctrico al trabajar en la frecuencia de 60Hz, se ve determinada por las cargas conectadas y por tanto no es constante en el tiempo y por lo general mientras menor sea la impedancia mayor es la potencia a suministrar, lo cual también va asociado al caso de usar el sistema para transmisión de información, es decir mientras mas cargas conectadas haya mas potencia se requiere para transmitir información.
4.1.4.2. Comportamiento de la red eléctrica en baja y media tensión en altas frecuencias
El aspecto mas importante a tener en cuenta en el comportamiento del sistema a altas frecuencias está relacionado con la atenuación de la señal debida a reflexiones causadas por los acoples eléctricos entre líneas y cargas, ya que las líneas se comportan como guías de onda37 y por tanto la señal a transmitir se ve enfrentada a sucesivas etapas de acoples que hacen que se vaya atenuando. El sistema eléctrico tiene una impedancia variable dependiendo de diversos factores como por ejemplo su configuración (conexión estrella o anillo) o el número de nodos. Un estudio realizado por Malack [12], muestra el comportamiento de la
35 Se define topología eléctrica como el estado de conexión momentánea de los elementos físicos (líneas de transmisión, transformadores, etc.) del sistema que integran su configuración o estructura física. 36 Florez Lucio. Introducción al análisis de sistemas de potencia. Vol. 1. Universidad Nacional de Colombia. 1995. 37 Dostert. Power Line communications. Prentice Hall. 2001
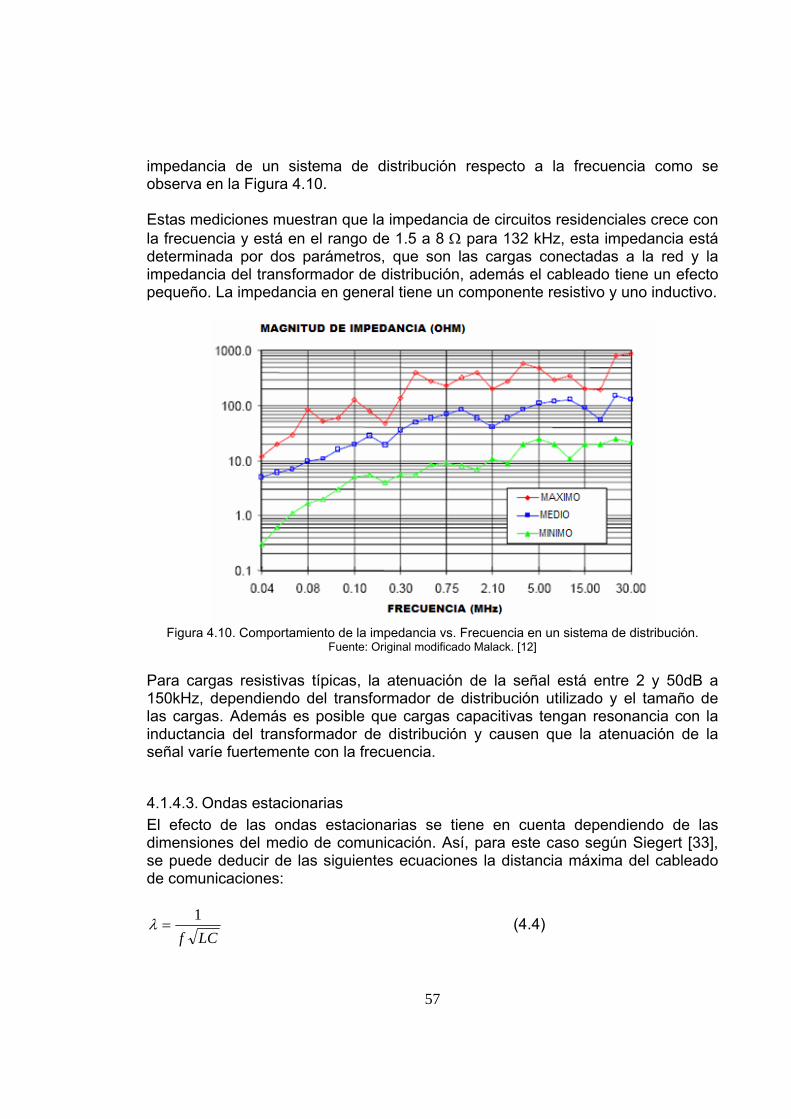
57
impedancia de un sistema de distribución respecto a la frecuencia como se observa en la Figura 4.10. Estas mediciones muestran que la impedancia de circuitos residenciales crece con la frecuencia y está en el rango de 1.5 a 8 para 132 kHz, esta impedancia está determinada por dos parámetros, que son las cargas conectadas a la red y la impedancia del transformador de distribución, además el cableado tiene un efecto pequeño. La impedancia en general tiene un componente resistivo y uno inductivo.
Figura 4.10. Comportamiento de la impedancia vs. Frecuencia en un sistema de distribución.
Fuente: Original modificado Malack. [12]
Para cargas resistivas típicas, la atenuación de la señal está entre 2 y 50dB a 150kHz, dependiendo del transformador de distribución utilizado y el tamaño de las cargas. Además es posible que cargas capacitivas tengan resonancia con la inductancia del transformador de distribución y causen que la atenuación de la señal varíe fuertemente con la frecuencia.
4.1.4.3. Ondas estacionarias
El efecto de las ondas estacionarias se tiene en cuenta dependiendo de las dimensiones del medio de comunicación. Así, para este caso según Siegert [33], se puede deducir de las siguientes ecuaciones la distancia máxima del cableado de comunicaciones:
LCf
1 (4.4)

58
Donde: λ, es la longitud de onda f, es la frecuencia de la señal a transmitir, y
LC
1, es la velocidad de propagación, en este caso de 150.000 km/s para cable
de distribución con aislamiento. Definiendo l, como la longitud de la línea de transmisión, se tiene que para λ =
4*l, la longitud de la línea es casualmente ¼ de la longitud de onda38, por tanto, de la ecuación anterior:
LC4f
1 (4.5)
Reemplazando, para la frecuencia de 100 kHz se tiene una longitud de 375m y para 150 kHz, se tiene una longitud de 250m. La longitud del cableado que conecta el controlador de tráfico con el transformador de distribución determina la longitud del camino de comunicación en el secundario del transformador. Además por lo general la distancia entre el controlador y el transformador en baja tensión no supera los 150 metros. Por tanto, el efecto de las ondas estacionarias no es común a frecuencias por debajo de los 150kHz.
4.1.5. Transformadores De Energía Eléctrica
El modelo eléctrico del transformador de distribución se representa como se observa en la figura 4.11, en este caso como una resistencia equivalente (Req) y una inductancia equivalente (Leq) en serie referidos al lado de bajo voltaje. A altas frecuencias los valores de R y L son diferentes que a 60 Hz, por tanto para el desarrollo del modelo planteado, se realizaron pruebas de laboratorio para conocer dichos valores, aplicando un voltaje de 1V (amplitud de la señal de transmisión del PLM) a diferentes frecuencias, incluyendo la frecuencia de operación del MODEM PLM.
Figura 4.11. Modelo del transformador
38 Siegert. Alta Tensión y sistemas de transmisión. Pág. 229. LIMUSA. 1993.

59
Se desarrollaron pruebas en el Laboratorio de Ensayos Industriales de la Universidad Nacional de Colombia sobre un transformador de distribución con las siguientes características: Marca: ABB. Potencia Nominal: 75 KVA Fases: 3 Vprimario: 11.4KV Vsecundario: 214/123.5 V Conexión: Dyn5 La figura 4.12, muestra la prueba realizada, donde las resistencias de 400 Ω simulan la red en media tensión y las resistencias de 2 Ω en baja tensión.
Figura 4.12. Montaje de prueba de laboratorio transformador de distribución.
Los resultados a las frecuencias de interés fueron los siguientes:
Frecuencia (Hz)
L(mH) C(nF) R( Ω)
60 0.87 1.5
132K 0.01229 1
150K 0.01124 1
Tabla 4.1. Parámetros de L y R en transformador de distribución medido a alta frecuencia
En las pruebas realizadas, con la frecuencia del PLM se pudo observar que con la aplicación de un bajo voltaje, no se presentaron corrientes de excitación en el núcleo del transformador y por ende no existen pérdidas en el mismo, por lo tanto se puede deducir que la implementación de dispositivos como los PLM no afectan el funcionamiento del transformador de distribución.
60
4.1.6. Redes Eléctricas
Las redes eléctricas usadas en Colombia para los diferentes niveles de voltaje tienen características de resistencia, inductancia y capacidad dependiendo de si se tratan de redes aéreas o subterráneas. Para el caso de estudio se revisan las redes de media y baja tensión en donde se pueden encontrar cables eléctricos para baja tensión aquellos cuyo voltaje de operación es como máximo, de 2000V entre fases. De forma básica, un cable para media y baja tensión39 está compuesto por uno o varios conductores de cobre y materiales que componen el aislamiento o la chaqueta, que generalmente son plásticos. Opcionalmente se construyen con pantalla electrostática y en algunas aplicaciones específicas con armaduras para protección mecánica. Los materiales de aislamiento más ampliamente usados son el Policloruro de vinilo (PVC), el Polietileno termoplástico (PE) y el Polietileno reticulado (XLPE). Los cables pueden ser monopolares, de potencia, para acometida y tipo múltiplex de aluminio. Los calibres usados en baja tensión están entre número 12 a 6 AWG, dependiendo de si se trata de un cable para acometida o para distribución en baja tensión y para media tensión se usan por lo general cables desde calibre número 2 hasta 4/0. En la tesis de Maestría de Bastidas - Ramos40 y en el libro de Dostert [9], se presentan los estudios realizados sobre las características técnicas de las redes de potencia eléctrica para la transmisión de señales (información) a altas frecuencias, incluyendo las características de las redes colombianas, aquí se pueden sacar varias conclusiones importantes como son:
En el análisis de líneas de alto voltaje, los valores de atenuación son bajos a frecuencias altas y grandes longitudes.
En el empalme de líneas aéreas con líneas subterráneas se presentan atenuaciones adicionales que se incrementan con la cantidad de empalmes, debido al efecto de reflexiones en las señales.
Los modelos eléctricos para líneas subterráneas se pueden asimilar a los modelos de cable coaxial, debido a que se trata de cables de conductores y neutro concéntrico externo
Para los modelos eléctricos de líneas aéreas se pueden utilizar fórmulas correspondientes a líneas de placas paralelas para el cálculo de impedancia característica y resistencia en función de la frecuencia
El siguiente es un resumen de fórmulas para el cálculo de los parámetros necesarios para el desarrollo del modelo de las redes eléctricas a altas frecuencias, planteadas por Dostert [9].
39 CENTELSA. Catalogo de cables eléctricos para media y baja tensión 2006. 40 Bastidas - Ramos. Análisis técnico de una red de distribución de potencia eléctrica para la transmisión de señales que llevan información del servicio de valor agregado Internet. Tesis de Maestría en Ingeniería de Telecomunicaciones. Universidad Nacional de Colombia. 2005
61
La capacidad por longitud y la inductancia por longitud, pueden ser calculadas como:
i
a
r
r
rC
ln
2 0 (4.6)
i
a
r
rL ln
20
(4.7)
Donde ar es el radio interno del conductor externo y ir es el radio del conductor.
0 es la constante dieléctrica, 0 es la permeabilidad del espacio, y r la
constante dieléctrica relativa. A altas frecuencias, la resistencia por longitud, R, está determinada por el efecto piel. Así, la corriente fluye sobre una capa delgada en la superficie externa, la profundidad a , depende de la frecuencia, f , la conductividad específica, , del cable, y puede ser calculada como:
0
1
fa (4.8)
La resistencia, R, por unidad de longitud:
ia rr
fR
11
2
1 0
(4.9)
La conductancia por longitud, G, puede ser calculada por medio del factor de pérdida tan del dieléctrico y de la capacidad por longitud C:
tan*2 fCG (4.10) La ecuación de la impedancia característica compleja Z es:
CjG
LjRZ
(4.11)
Para altas frecuencias, R<<ωL y G<<ωC, esto significa que la impedancia característica puede ser modelada como:
)(realC
LZ (4.12)
Adicionalmente, la atenuación D(f,l) puede ser calculada por el factor de atenuación α(f), dependiendo de la longitud l en dB:
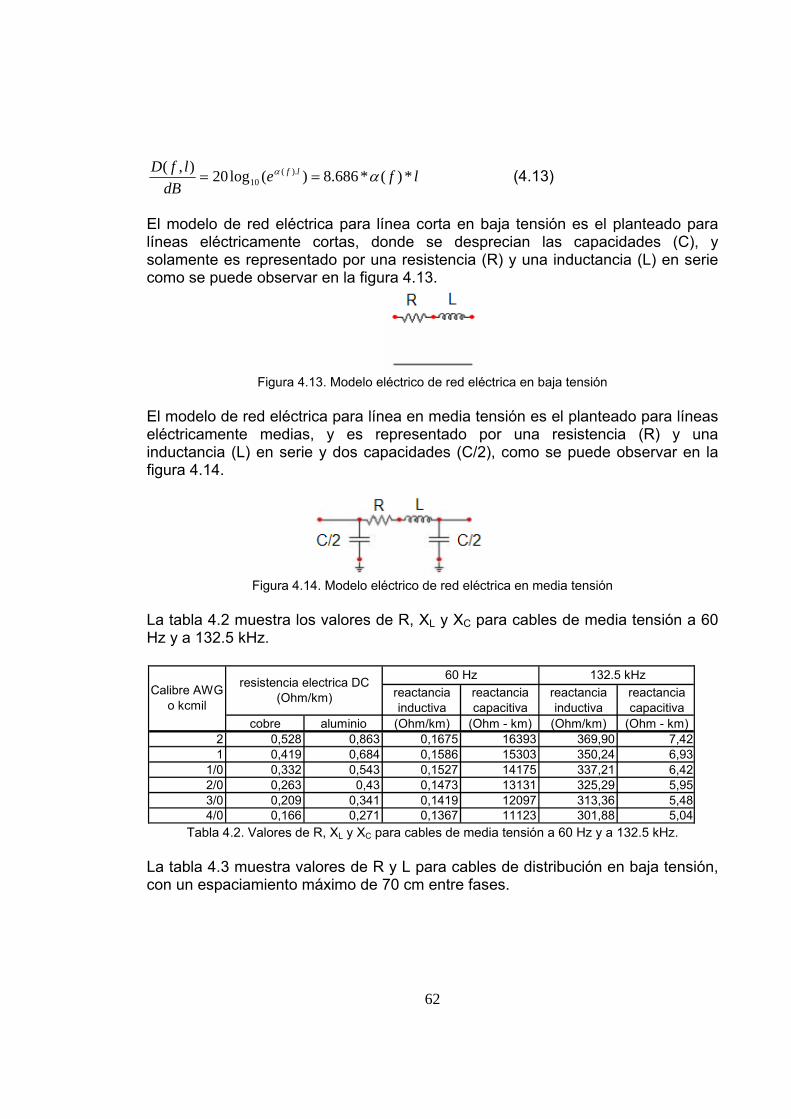
62
lfedB
lfD lf *)(*686.8)(log20),( ).(
10 (4.13)
El modelo de red eléctrica para línea corta en baja tensión es el planteado para líneas eléctricamente cortas, donde se desprecian las capacidades (C), y solamente es representado por una resistencia (R) y una inductancia (L) en serie como se puede observar en la figura 4.13.
Figura 4.13. Modelo eléctrico de red eléctrica en baja tensión
El modelo de red eléctrica para línea en media tensión es el planteado para líneas eléctricamente medias, y es representado por una resistencia (R) y una inductancia (L) en serie y dos capacidades (C/2), como se puede observar en la figura 4.14.
Figura 4.14. Modelo eléctrico de red eléctrica en media tensión
La tabla 4.2 muestra los valores de R, XL y XC para cables de media tensión a 60 Hz y a 132.5 kHz.
reactancia inductiva
reactanciacapacitiva
reactancia inductiva
reactancia capacitiva
cobre aluminio (Ohm/km) (Ohm - km) (Ohm/km) (Ohm - km)2 0,528 0,863 0,1675 16393 369,90 7,421 0,419 0,684 0,1586 15303 350,24 6,93
1/0 0,332 0,543 0,1527 14175 337,21 6,422/0 0,263 0,43 0,1473 13131 325,29 5,953/0 0,209 0,341 0,1419 12097 313,36 5,484/0 0,166 0,271 0,1367 11123 301,88 5,04
60 Hz 132.5 kHzresistencia electrica DC
(Ohm/km)Calibre AWG
o kcmil
Tabla 4.2. Valores de R, XL y XC para cables de media tensión a 60 Hz y a 132.5 kHz.
La tabla 4.3 muestra valores de R y L para cables de distribución en baja tensión, con un espaciamiento máximo de 70 cm entre fases.

63
CALIBRE LH/m ROhm/m6 1,31972E-06 0,002164 1,29901E-06 0,00136
Tabla 4.3 Valores de R y L para cables de distribución en baja tensión
La tabla 4.4 muestra valores de R y L para cables de acometida a usuarios residenciales.
Configuración 2x8+8 2x6+6 2x4+4 2x2+2 2x8+10 2x6+8 2x4+6 2x2+4L H/m 2,979E-07 2,815E-07 2,677E-07 2,563E-07 3,632E-07 3,276E-07 3,144E-07 3,027E-07R Ohm/m 2,100E-03 1,320E-03 8,310E-04 5,230E-04 2,100E-03 1,320E-03 8,310E-04 5,230E-04
CABLES DE ACOMETIDA CONFIGURACIÓN 2F + 1N
Tabla 4.4. Valores de R y L para cables de acometida a usuarios residenciales
La Figura 4.15 muestra algunos tipos de cable eléctrico utilizados en niveles de distribución.
Figura 4.15. Cables eléctricos utilizados en distribución Original: catálogo cables de distribución CENTELSA. 2006
4.1.7. Cargas Conectadas
Las cargas conectadas al sistema eléctrico, donde también se encuentra conectado el controlador de tráfico, pueden ser por lo general del tipo industrial, comercial, residencial o alumbrado público, las cuales consumen kWh dependiendo de su naturaleza como se puede observar en la Tabla 4.5, y para el caso de estudio se deben analizar los consumos del tipo de usuario presente en la
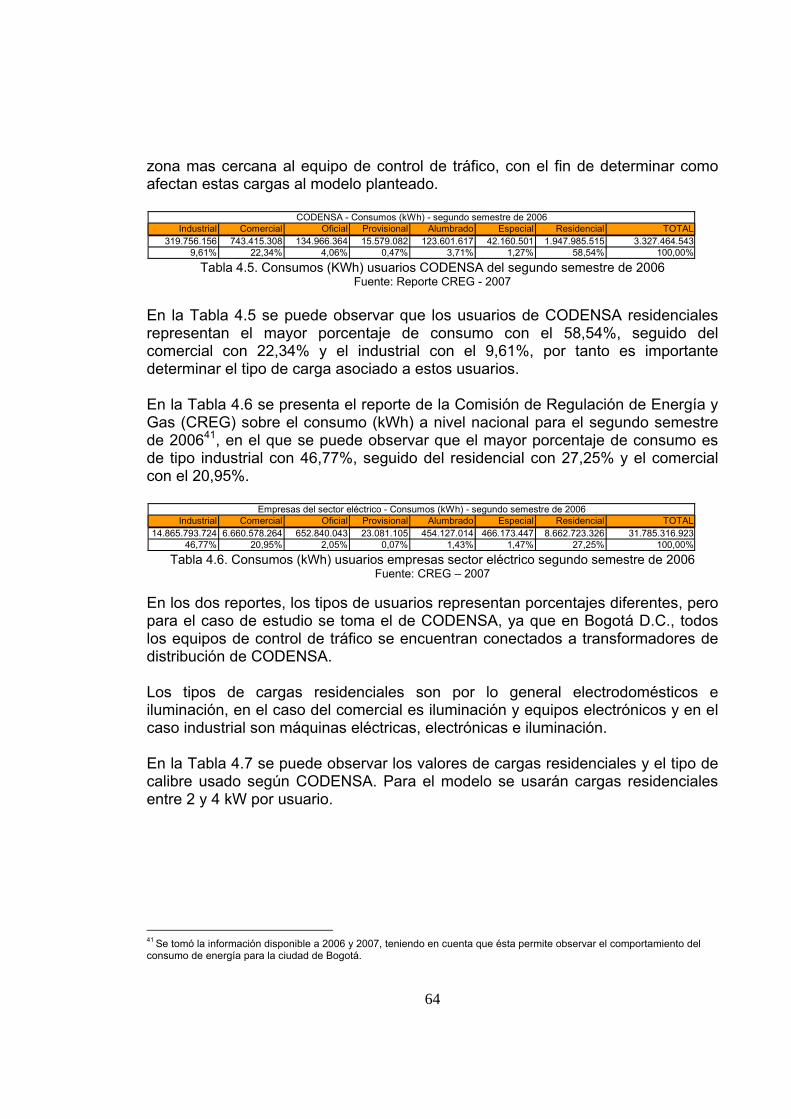
64
zona mas cercana al equipo de control de tráfico, con el fin de determinar como afectan estas cargas al modelo planteado.
Industrial Comercial Oficial Provisional Alumbrado Especial Residencial TOTAL319.756.156 743.415.308 134.966.364 15.579.082 123.601.617 42.160.501 1.947.985.515 3.327.464.543
9,61% 22,34% 4,06% 0,47% 3,71% 1,27% 58,54% 100,00%
CODENSA - Consumos (kWh) - segundo semestre de 2006
Tabla 4.5. Consumos (KWh) usuarios CODENSA del segundo semestre de 2006
Fuente: Reporte CREG - 2007
En la Tabla 4.5 se puede observar que los usuarios de CODENSA residenciales representan el mayor porcentaje de consumo con el 58,54%, seguido del comercial con 22,34% y el industrial con el 9,61%, por tanto es importante determinar el tipo de carga asociado a estos usuarios. En la Tabla 4.6 se presenta el reporte de la Comisión de Regulación de Energía y Gas (CREG) sobre el consumo (kWh) a nivel nacional para el segundo semestre de 200641, en el que se puede observar que el mayor porcentaje de consumo es de tipo industrial con 46,77%, seguido del residencial con 27,25% y el comercial con el 20,95%.
Industrial Comercial Oficial Provisional Alumbrado Especial Residencial TOTAL14.865.793.724 6.660.578.264 652.840.043 23.081.105 454.127.014 466.173.447 8.662.723.326 31.785.316.923
46,77% 20,95% 2,05% 0,07% 1,43% 1,47% 27,25% 100,00%
Empresas del sector eléctrico - Consumos (kWh) - segundo semestre de 2006
Tabla 4.6. Consumos (kWh) usuarios empresas sector eléctrico segundo semestre de 2006
Fuente: CREG – 2007
En los dos reportes, los tipos de usuarios representan porcentajes diferentes, pero para el caso de estudio se toma el de CODENSA, ya que en Bogotá D.C., todos los equipos de control de tráfico se encuentran conectados a transformadores de distribución de CODENSA. Los tipos de cargas residenciales son por lo general electrodomésticos e iluminación, en el caso del comercial es iluminación y equipos electrónicos y en el caso industrial son máquinas eléctricas, electrónicas e iluminación. En la Tabla 4.7 se puede observar los valores de cargas residenciales y el tipo de calibre usado según CODENSA. Para el modelo se usarán cargas residenciales entre 2 y 4 kW por usuario.
41 Se tomó la información disponible a 2006 y 2007, teniendo en cuenta que ésta permite observar el comportamiento del consumo de energía para la ciudad de Bogotá.
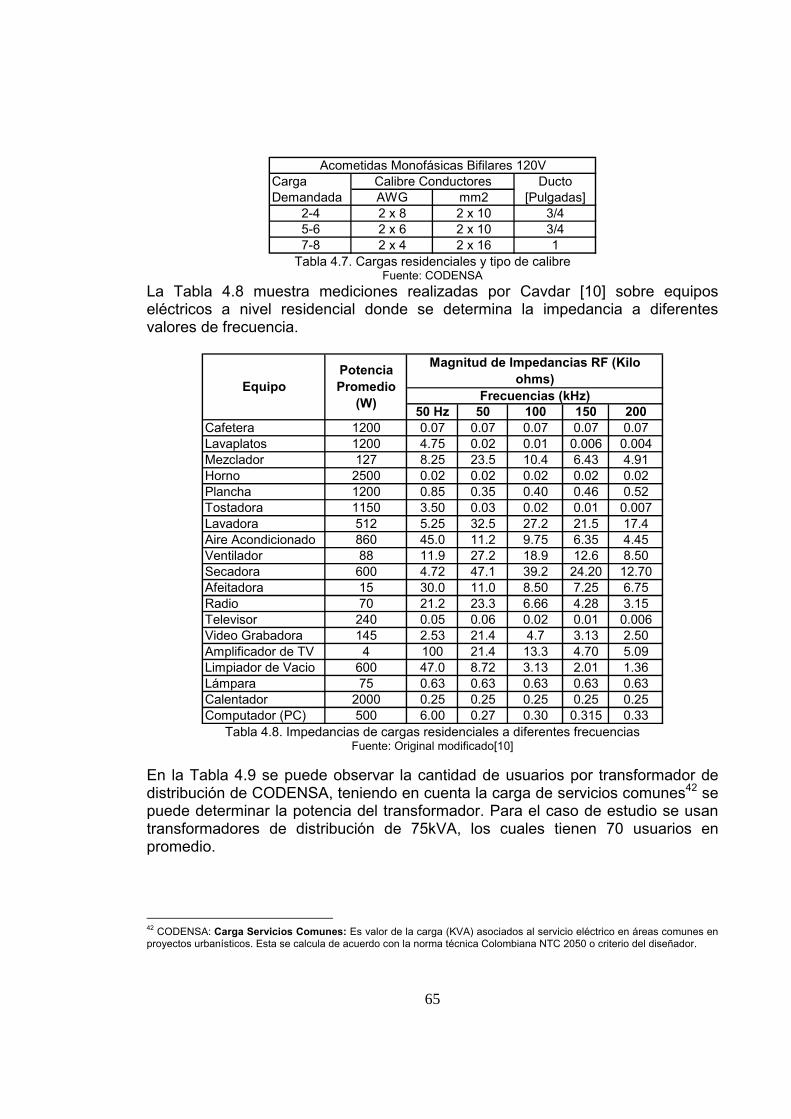
65
AWG mm22-4 2 x 8 2 x 10 3/45-6 2 x 6 2 x 10 3/47-8 2 x 4 2 x 16 1
Acometidas Monofásicas Bifilares 120VCarga Demandada
Calibre Conductores Ducto [Pulgadas]
Tabla 4.7. Cargas residenciales y tipo de calibre
Fuente: CODENSA
La Tabla 4.8 muestra mediciones realizadas por Cavdar [10] sobre equipos eléctricos a nivel residencial donde se determina la impedancia a diferentes valores de frecuencia.
50 Hz 50 100 150 200Cafetera 1200 0.07 0.07 0.07 0.07 0.07Lavaplatos 1200 4.75 0.02 0.01 0.006 0.004Mezclador 127 8.25 23.5 10.4 6.43 4.91Horno 2500 0.02 0.02 0.02 0.02 0.02Plancha 1200 0.85 0.35 0.40 0.46 0.52Tostadora 1150 3.50 0.03 0.02 0.01 0.007Lavadora 512 5.25 32.5 27.2 21.5 17.4Aire Acondicionado 860 45.0 11.2 9.75 6.35 4.45Ventilador 88 11.9 27.2 18.9 12.6 8.50Secadora 600 4.72 47.1 39.2 24.20 12.70Afeitadora 15 30.0 11.0 8.50 7.25 6.75Radio 70 21.2 23.3 6.66 4.28 3.15Televisor 240 0.05 0.06 0.02 0.01 0.006Video Grabadora 145 2.53 21.4 4.7 3.13 2.50Amplificador de TV 4 100 21.4 13.3 4.70 5.09Limpiador de Vacio 600 47.0 8.72 3.13 2.01 1.36Lámpara 75 0.63 0.63 0.63 0.63 0.63Calentador 2000 0.25 0.25 0.25 0.25 0.25Computador (PC) 500 6.00 0.27 0.30 0.315 0.33
EquipoPotencia Promedio
(W)Frecuencias (kHz)
Magnitud de Impedancias RF (Kilo ohms)
Tabla 4.8. Impedancias de cargas residenciales a diferentes frecuencias
Fuente: Original modificado[10]
En la Tabla 4.9 se puede observar la cantidad de usuarios por transformador de distribución de CODENSA, teniendo en cuenta la carga de servicios comunes42 se puede determinar la potencia del transformador. Para el caso de estudio se usan transformadores de distribución de 75kVA, los cuales tienen 70 usuarios en promedio.
42 CODENSA: Carga Servicios Comunes: Es valor de la carga (KVA) asociados al servicio eléctrico en áreas comunes en proyectos urbanísticos. Esta se calcula de acuerdo con la norma técnica Colombiana NTC 2050 o criterio del diseñador.
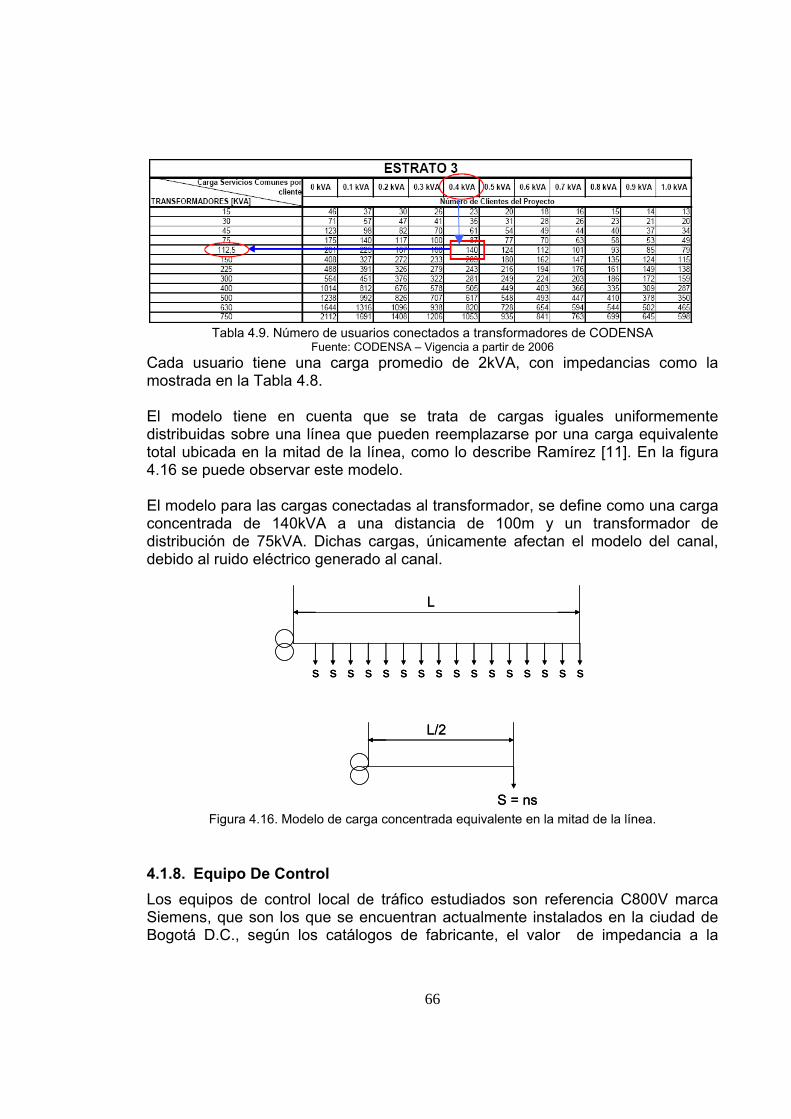
66
Tabla 4.9. Número de usuarios conectados a transformadores de CODENSA
Fuente: CODENSA – Vigencia a partir de 2006
Cada usuario tiene una carga promedio de 2kVA, con impedancias como la mostrada en la Tabla 4.8. El modelo tiene en cuenta que se trata de cargas iguales uniformemente distribuidas sobre una línea que pueden reemplazarse por una carga equivalente total ubicada en la mitad de la línea, como lo describe Ramírez [11]. En la figura 4.16 se puede observar este modelo. El modelo para las cargas conectadas al transformador, se define como una carga concentrada de 140kVA a una distancia de 100m y un transformador de distribución de 75kVA. Dichas cargas, únicamente afectan el modelo del canal, debido al ruido eléctrico generado al canal.
L
s s s s s s s s s s s s s s s s
S = ns
L/2
L
s s s s s s s s s s s s s s s s
S = ns
L/2
Figura 4.16. Modelo de carga concentrada equivalente en la mitad de la línea.
4.1.8. Equipo De Control
Los equipos de control local de tráfico estudiados son referencia C800V marca Siemens, que son los que se encuentran actualmente instalados en la ciudad de Bogotá D.C., según los catálogos de fabricante, el valor de impedancia a la

67
entrada es de 5 Ohm. El equipo de control está compuesto por módulos electrónicos para su funcionamiento y las salidas de potencia hacia los semáforos están controladas por TRIACS, lo que puede generar ruido al PLM dependiendo de la ubicación de este dispositivo dentro del controlador de tráfico.
4.1.9. Ruido
Los equipos conectados al mismo secundario del transformador al cual se conecta el PLM, son la principal fuente de ruido. Dentro de estas fuentes, las más importantes son los TRIACS usados para regular iluminación, motores universales, interruptores usados en equipos y lámparas fluorescentes. Los TRIACS generan ruido síncrono con la señal de potencia de 60Hz y este ruido aparece como armónicos de 60Hz43. Los motores universales de las licuadoras también crean ruido, pero no es tan fuerte como el de los variadores para iluminación que generalmente no es síncrono con los 60Hz. Adicionalmente, los variadores de iluminación están encendidos más tiempo que los motores universales. En los últimos años se han introducido otras dos fuentes de ruido, como es el caso de las lámparas fluorescentes y las fuentes de alimentación de batería recargable (como las usadas en los computadores portátiles) o equipos pequeños. En muchos casos, ellos tienen una frecuencia de trabajo o armónicos en el rango de la frecuencia de comunicaciones para PLT, que es de 10kHz a 150kHz. Por tanto, la presencia de esta frecuencia exactamente a la misma frecuencia de comunicación puede afectar la seguridad de la comunicación. La figura 4.17 muestra algunas fuentes de ruido, las medidas se realizaron con un transformador de aislamiento con un VARIAC, un analizador de espectros HP4395A acoplado con un condensador de alto voltaje (1μF) y un autotransformador (1:1) con 2mH.
43 Cantone. ST7538 FSK POWER-LINE TRANSCEIVER DEMO-KIT DESCRIPTION. STMicroelectronics. 2003
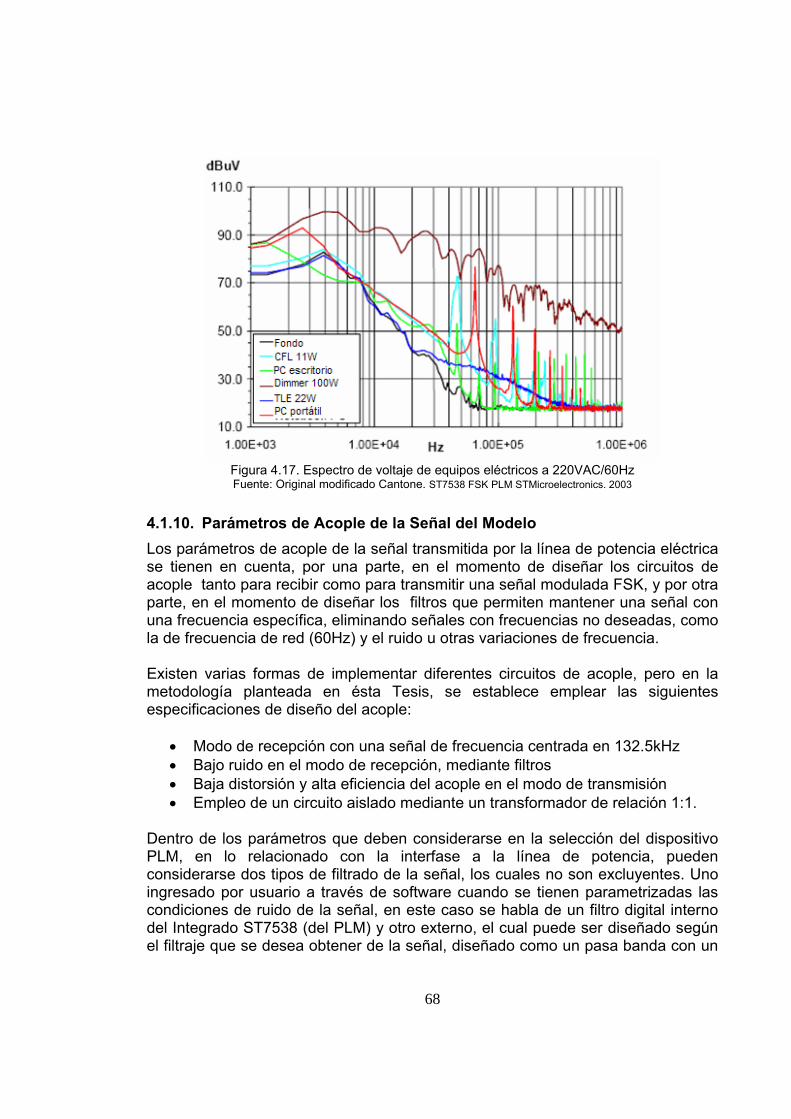
68
Figura 4.17. Espectro de voltaje de equipos eléctricos a 220VAC/60Hz Fuente: Original modificado Cantone. ST7538 FSK PLM STMicroelectronics. 2003
4.1.10. Parámetros de Acople de la Señal del Modelo
Los parámetros de acople de la señal transmitida por la línea de potencia eléctrica se tienen en cuenta, por una parte, en el momento de diseñar los circuitos de acople tanto para recibir como para transmitir una señal modulada FSK, y por otra parte, en el momento de diseñar los filtros que permiten mantener una señal con una frecuencia específica, eliminando señales con frecuencias no deseadas, como la de frecuencia de red (60Hz) y el ruido u otras variaciones de frecuencia. Existen varias formas de implementar diferentes circuitos de acople, pero en la metodología planteada en ésta Tesis, se establece emplear las siguientes especificaciones de diseño del acople:
Modo de recepción con una señal de frecuencia centrada en 132.5kHz Bajo ruido en el modo de recepción, mediante filtros Baja distorsión y alta eficiencia del acople en el modo de transmisión Empleo de un circuito aislado mediante un transformador de relación 1:1.
Dentro de los parámetros que deben considerarse en la selección del dispositivo PLM, en lo relacionado con la interfase a la línea de potencia, pueden considerarse dos tipos de filtrado de la señal, los cuales no son excluyentes. Uno ingresado por usuario a través de software cuando se tienen parametrizadas las condiciones de ruido de la señal, en este caso se habla de un filtro digital interno del Integrado ST7538 (del PLM) y otro externo, el cual puede ser diseñado según el filtraje que se desea obtener de la señal, diseñado como un pasa banda con un

69
ancho de banda de alrededor de 40 kHz, ya que por debajo de 100kHz, existe mayor probabilidad de ruido asíncrono, lo que generaría mayor cantidad de errores en la transmisión y por tanto pérdida de información.
4.1.11. Modelo Del Canal
Una vez revisados los componentes que hacen parte del modelo, se determinan dos componentes principales, un modelo en media tensión que permita asegurar una señal análoga de 1V en los bornes del transformador de distribución al que este conectado el controlador de tráfico y un modelo en baja tensión, en el que se puede observar que los principales elementos son el PLM, el propio transformador de distribución, la red eléctrica y el equipo de control local de tráfico. En el caso de las cargas del sistema de distribución, bien sea residenciales, industriales o comerciales, son cargas que se encuentran en constante variación, pero que en todo caso se encuentran en paralelo con el equipo de control de tráfico. Por tanto dichas cargas, pueden afectar el modelo del canal y desde el punto de vista del controlador de tráfico, únicamente se ve afectado por el ruido inducido al canal.
4.1.11.1. Modelo Propuesto Del Canal En Media Tensión
Se debe asegurar la conexión de un concentrador de datos en la central semafórica a un concentrador de datos en una subestación eléctrica (S/E). El transporte de datos entre ambos puede ser realizado por diferentes medios tanto alámbricos como inalámbricos. Para el caso de Bogotá, se proponen tres posibles conexiones, teniendo en cuenta que ya existe una interconexión entre las tres centrales:
S/E Castellana, aproximadamente a 1km de la central de semaforización de Chicó.
S/E Centro, aproximadamente a 1.5 km de la central de semaforización de Paloquemao.
S/E Muzú, aproximadamente a 1 km de la central de semaforización de Muzú.
Como conclusión de esta conexión, se puede observar que gracias a esta topología que requiere una sola conexión a la S/E eléctrica, es posible reubicar los componentes de las centrales de semaforización, en una sola central, lo que generaría una disminución en los costos asociados al suministro, operación y mantenimiento de centrales semafóricas. Dependiendo del camino, de la cantidad de nodos y de cambios de impedancias por el tipo de la línea y cargas conectadas a la red, se deben considerar los factores de reflexión y transmisión en cada nodo donde llega la señal, dada por la teoría de líneas de transmisión de forma generalizada así:
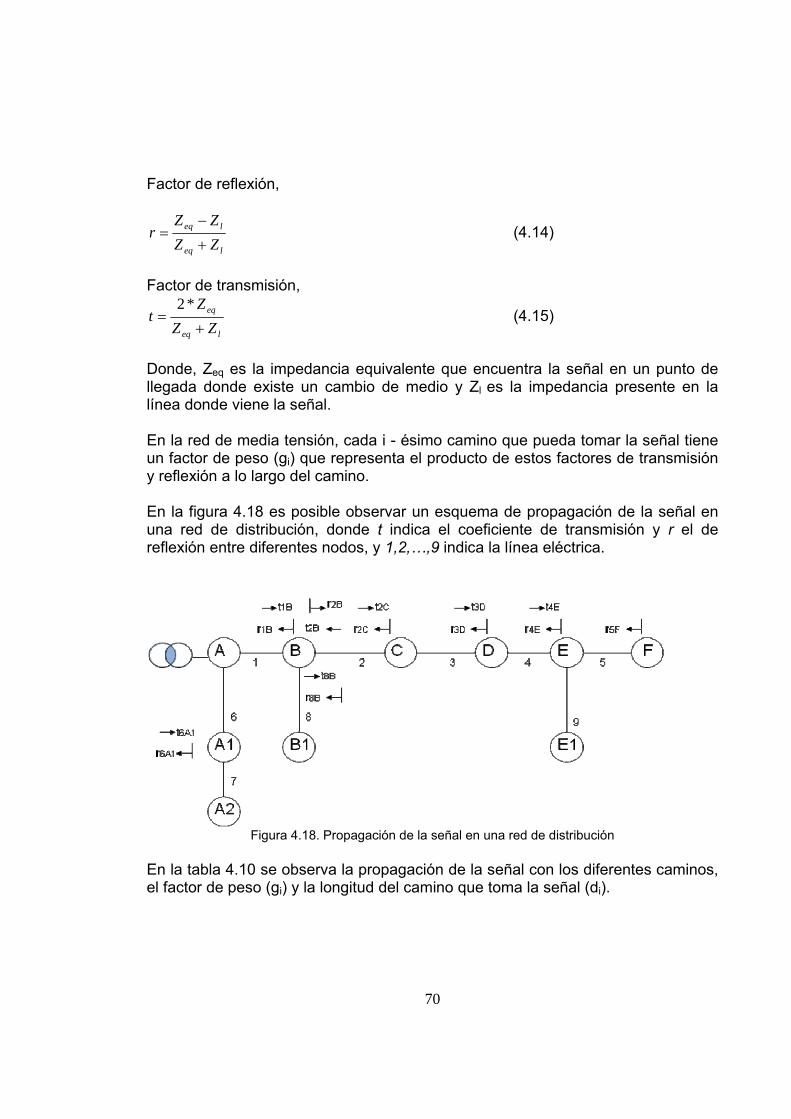
70
Factor de reflexión,
leq
leq
ZZ
ZZr
(4.14)
Factor de transmisión,
leq
eq
ZZ
Zt
*2 (4.15)
Donde, Zeq es la impedancia equivalente que encuentra la señal en un punto de llegada donde existe un cambio de medio y Zl es la impedancia presente en la línea donde viene la señal. En la red de media tensión, cada i - ésimo camino que pueda tomar la señal tiene un factor de peso (gi) que representa el producto de estos factores de transmisión y reflexión a lo largo del camino. En la figura 4.18 es posible observar un esquema de propagación de la señal en una red de distribución, donde t indica el coeficiente de transmisión y r el de reflexión entre diferentes nodos, y 1,2,…,9 indica la línea eléctrica.
Figura 4.18. Propagación de la señal en una red de distribución
En la tabla 4.10 se observa la propagación de la señal con los diferentes caminos, el factor de peso (gi) y la longitud del camino que toma la señal (di).
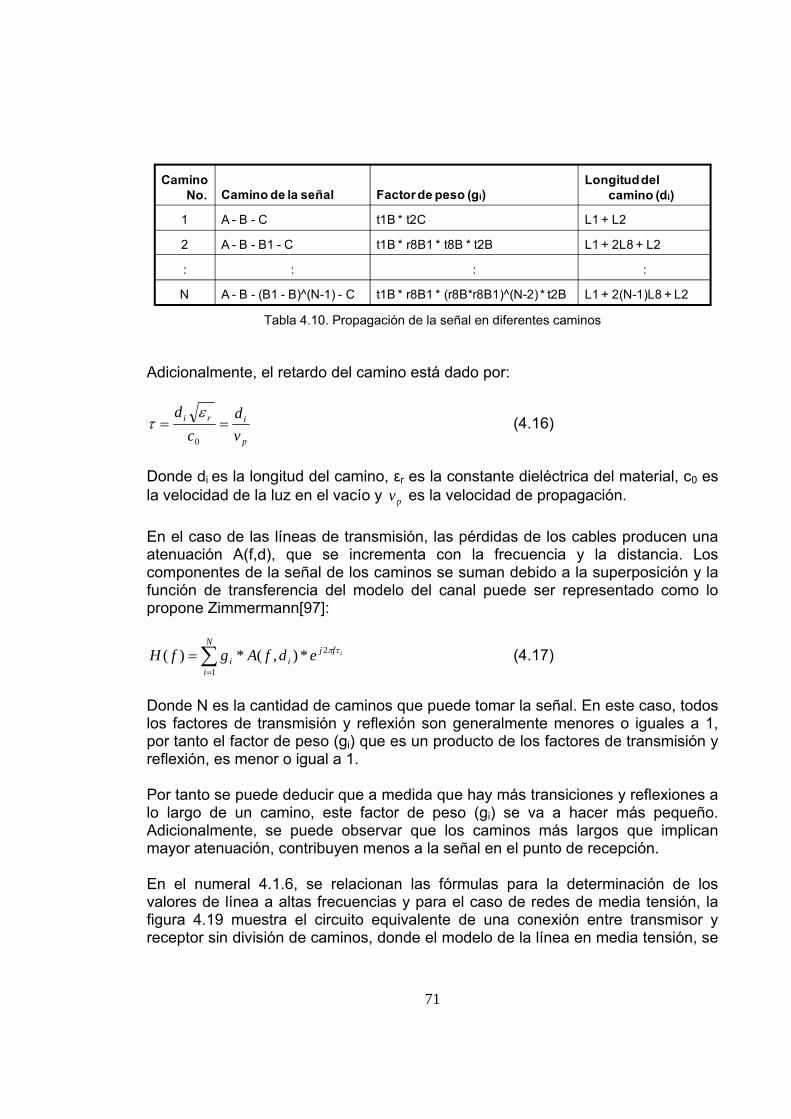
71
Camino No. Camino de la señal Factor de peso (gi)
Longitud del camino (di)
1 A - B - C t1B * t2C L1 + L2
2 A - B - B1 - C t1B * r8B1 * t8B * t2B L1 + 2L8 + L2
: : : :
N A - B - (B1 - B)^(N-1) - C t1B * r8B1 * (r8B*r8B1)^(N-2) * t2B L1 + 2(N-1)L8 + L2
Tabla 4.10. Propagación de la señal en diferentes caminos Adicionalmente, el retardo del camino está dado por:
p
iri
v
d
c
d
0
(4.16)
Donde di es la longitud del camino, εr es la constante dieléctrica del material, c0 es la velocidad de la luz en el vacío y pv es la velocidad de propagación.
En el caso de las líneas de transmisión, las pérdidas de los cables producen una atenuación A(f,d), que se incrementa con la frecuencia y la distancia. Los componentes de la señal de los caminos se suman debido a la superposición y la función de transferencia del modelo del canal puede ser representado como lo propone Zimmermann[97]:
ifji
N
ii edfAgfH 2
1
*),(*)(
(4.17)
Donde N es la cantidad de caminos que puede tomar la señal. En este caso, todos los factores de transmisión y reflexión son generalmente menores o iguales a 1, por tanto el factor de peso (gi) que es un producto de los factores de transmisión y reflexión, es menor o igual a 1. Por tanto se puede deducir que a medida que hay más transiciones y reflexiones a lo largo de un camino, este factor de peso (gi) se va a hacer más pequeño. Adicionalmente, se puede observar que los caminos más largos que implican mayor atenuación, contribuyen menos a la señal en el punto de recepción. En el numeral 4.1.6, se relacionan las fórmulas para la determinación de los valores de línea a altas frecuencias y para el caso de redes de media tensión, la figura 4.19 muestra el circuito equivalente de una conexión entre transmisor y receptor sin división de caminos, donde el modelo de la línea en media tensión, se
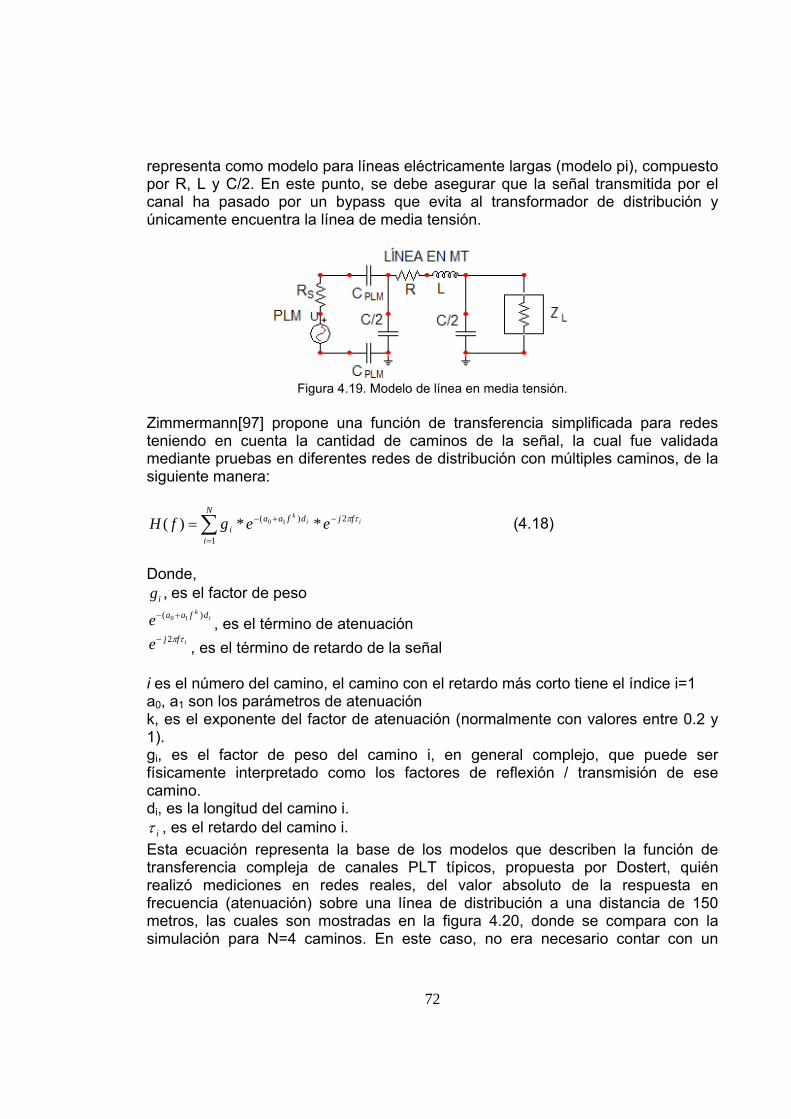
72
representa como modelo para líneas eléctricamente largas (modelo pi), compuesto por R, L y C/2. En este punto, se debe asegurar que la señal transmitida por el canal ha pasado por un bypass que evita al transformador de distribución y únicamente encuentra la línea de media tensión.
Figura 4.19. Modelo de línea en media tensión.
Zimmermann[97] propone una función de transferencia simplificada para redes teniendo en cuenta la cantidad de caminos de la señal, la cual fue validada mediante pruebas en diferentes redes de distribución con múltiples caminos, de la siguiente manera:
iik fjdfaa
N
ii eegfH 2)(
1
**)( 10
(4.18)
Donde,
ig , es el factor de peso
ik dfaae )( 10
, es el término de atenuación ifje 2, es el término de retardo de la señal
i es el número del camino, el camino con el retardo más corto tiene el índice i=1 a0, a1 son los parámetros de atenuación k, es el exponente del factor de atenuación (normalmente con valores entre 0.2 y 1). gi, es el factor de peso del camino i, en general complejo, que puede ser físicamente interpretado como los factores de reflexión / transmisión de ese camino. di, es la longitud del camino i.
i , es el retardo del camino i.
Esta ecuación representa la base de los modelos que describen la función de transferencia compleja de canales PLT típicos, propuesta por Dostert, quién realizó mediciones en redes reales, del valor absoluto de la respuesta en frecuencia (atenuación) sobre una línea de distribución a una distancia de 150 metros, las cuales son mostradas en la figura 4.20, donde se compara con la simulación para N=4 caminos. En este caso, no era necesario contar con un

73
conocimiento detallado de la topología de la red, pero se determinaron los factores requeridos en la ecuación 3.18. Analizando esta figura, se puede concluir que para frecuencias menores a 1 MHz, se presenta una baja atenuación de la señal y dicha atenuación se va incrementando conforme se aumenta la frecuencia de la señal. Para el caso del modelo propuesto, con frecuencias de transmisión de 132.5kHz, se esperan bajas atenuaciones (menores a -20dB) de la señal en distancias cortas, teniendo en cuenta cuatro posibles caminos que pueda tomar la señal dentro de la red.
Figura 4.20. Comparación de respuesta en frecuencia (atenuación) de red de distribución versus
simulación para N=4 caminos Fuente: Original modificado . Zimmermann, Dostert. A Multi-Path Signal Propagation Model for the
Power Line Channel in the High Frequency Range. Proceedings IEEE ISPLC. 1999 En la Tabla 4.11, se muestran los parámetros del modelo.
Camino No. 1 2 3 4 Retardo en μs 1.0 1.25 1.76 2.64Longitud equivalente en metros 150 188 264 397 Factor de peso (gi) K=0.5, a0= 0, a1=8x10-6, εr=4
0.4 -0.4 -0.8 -1.5
Tabla 4.11. Parámetros del modelo de la figura anterior Fuente: Ídem.
En el caso del transformador de distribución, visto como una discontinuidad en la red de media tensión, se puede observar que este elemento afecta la señal transmitida en ese punto, mediante el factor de transmisión provocado por un cambio de medio, repercutiendo así en una atenuación en la señal. Por esta razón se propone una solución ampliamente desarrollada en la tecnología PLT, como es el caso de un bypass sobre el transformador mediante acopladores de línea, como se puede observar de manera esquemática en la figura 4.21. Adicionalmente, en la figura 4.22 se muestran los acoples tanto capacitivos como inductivos que componen el bypass.

74
De esta manera, la señal recibida sufre una baja atenuación gracias a los componentes de filtrado y acople [99].
Figura 4.21. Esquema de circuito de bypass del transformador
Figura 4.22. Esquema de circuito de bypass del transformador. Incluyendo acoples capacitivos e
inductivos

75
El Bypass está compuesto por dos PLM, un Procesador de Señal Digital (DSP) y los acoples (capacitivo e inductivo). En este caso, el primer PLM convierte la señal análoga a digital, la cual actúa como entrada al DSP, este último acondiciona la señal evitando los componentes de baja frecuencia mientras que regenera y amplifica la señal. La salida del DSP actúa como entrada del segundo PLM, el cual convierte esta señal regenerada a una forma análoga antes del acople y de las líneas eléctricas. Los elementos de acople entre media tensión y baja tensión sirven para optimizar el acople de impedancias entre media tensión y el PLM. Poseen un alto aislamiento que asegura y protege a los equipos de telecomunicaciones y a los usuarios de dichos equipos. Según implementaciones realizadas en varias redes de media tensión, como por ejemplo las desarrolladas por Issa [98], como se puede observar en la figura 4.23, donde se conectaron cinco subestaciones directamente, sin tener en cuenta los ramales, se emplearon PLM con acopladores inductivos y capacitivos, y se realizaron varias pruebas de transmisión PLT entre las subestaciones, a varias frecuencias, se observaron atenuaciones entre -70 dBm y -75dBm, para frecuencias de transmisión entre 100kHz y 1 MHz.
Figura 4.23. Topología de red de PLT experimental y atenuaciones de señales transmitidas a
diferentes frecuencias entre subestaciones Fuente: Original modificado. Issa. Goldberg. Research and Development Department, Electricité de
France. 2005.

76
Por otro lado, teniendo en cuenta que la señal se va a ver atenuada a lo largo del camino en media tensión, se propone la implementación de varios PLM sobre la misma red, con el fin de repotenciar la señal y mantenerla en cerca de 1V (120dBμV = 13dBm) hasta llegar al transformador de distribución en donde se alimenta el controlador de tráfico, como se observa en la figura 4.24. Como ha sido probado en múltiples ocasiones en redes de media tensión, se implementan repotenciadores PLM cada 600 metros, como es el caso operado en una red PLM propuesta por Chaffanjon [99].
Figura 4.24. Esquema del nivel de la señal transmitida entre PLM transmisor y receptor en una red
de media tensión, incluyendo repotenciadores PLM cada 600m. Fuente: Original modificado. Chaffanjon. A Real Knowledge of Propagation: the Way of efficiency
and Reliability Making PLC Generalization Feasible. Proceedings ISPLC 1998.
4.1.11.2. Validación Del Modelo Propuesto Del Canal En Media Tensión
La consideración del transformador de distribución que alimenta el controlador de tráfico, su implicación en la atenuación de la señal y la consideración del requerimiento de la necesidad de utilizar filtros de acople para la señal, cuando esta pasa de baja tensión a media tensión y nuevamente a baja tensión, fueron validadas mediante pruebas de laboratorio, teniendo en cuenta el esquema del montaje de la figura 4.25, donde se empleó un transformador trifásico de 75kVA, 120/240//11400 VAC conectado por media tensión a una distancia de 3 metros con un transformador bifásico de 25kVA, 13800//240/120 VAC.
77
Figura 4.25. Montaje de laboratorio para pruebas de transmisión de la señal en media tensión.
Laboratorio de Ensayos Industriales (LABE). Universidad Nacional de Colombia. Se realizó la prueba de comunicación de envío de tramas de información de tipo hexadecimal, simulando las condiciones de la trama de información de datos de planes de señales semafóricos, mediante reenvíos continuos de dicha trama a 2400bps y una señal con amplitud de 1V, modulada en FSK con una frecuencia central de 132.5kHz. Se emplearon dos PLM conectados en cada lado de baja tensión de cada transformador, cada uno realizando tanto transmisión como recepción (uno a la vez). La señal enviada de 13dBm (1V) es medida en la recepción y se muestra en la figura 4.26, con una amplitud de -70dBm.
Figura 4.26. Señal recibida en baja tensión, después de pasar por media tensión.

78
Como se puede observar de esta figura, una atenuación de -70dBm, si bien permite la lectura correcta de los datos enviados en una distancia corta (3 metros entre transformadores), hace ineficiente la transmisión por media tensión, con lo que se concluye la necesidad de utilizar un bypass utilizando un filtro acoplador en cada uno de los transformadores, con el fin de disminuir dicha atenuación. En esta prueba de laboratorio, no es posible simular la atenuación debida a la longitud de la red de media tensión, ni tampoco el efecto de los ramales, pero si es posible probar mediante validación experimental, como una señal de alta frecuencia (132.5kHz) y 13dBm (1V), es transmitida y recibida en una red pasando por baja – media – baja tensión, traspasando los transformadores de distribución.
4.1.11.3. Modelo Propuesto Del Canal En Baja Tensión
Una vez se encuentre la señal proveniente del lado de media tensión en los bornes de alta del transformador de distribución, mediante los filtros – acopladores propuestos, se debe asegurar repotenciar la señal en un nivel de 1V, en el lado de baja tensión del transformador al que se encuentre conectada la acometida del controlador de tráfico. Adicionalmente, mediante la conexión de la línea de acometida al controlador de tráfico es posible conectar un PLM en bornes de baja tensión del transformador con un PLM en el extremo final del cable de acometida en el controlador de tráfico. En la Figura 4.27, se puede observar el esquema de la conexión del controlador de tráfico mediante el cable de acometida eléctrica a los bornes de baja tensión del transformador de distribución. En la figura 4.28, se puede observar la conexión el modelo eléctrico del canal de telecomunicaciones, compuesto por el modelo del PLM en estado de transmisión, el transformador de distribución visto desde bornes de baja tensión, la línea de transmisión (acometida eléctrica del controlador de tráfico) y la carga conectada (controlador de tráfico en paralelo con PLM en estado de recepción). Todo el modelo propuesto, con valores evaluados a la frecuencia de modulación de la señal (132.5kHz).

79
Figura 4.27. Esquema de conexión del controlador de tráfico en paralelo con otras cargas
Figura 4.28. Modelo del canal
En el modelo del canal, se tiene lo siguiente: V plm: Amplitud de señal del PLM, 1.25V a frecuencia 132.5kHz R plm: Resistencia interna del PLM, 3Ω C1,C2: Condensadores de acople del PLM, 1μF R trafo: Resistencia del transformador de distribución medida a 132kHz,
0.11Ω, vista desde el lado de baja tensión. L trafo: Inductancia del transformador de distribución medida a 132 kHz,
0.257μH, vista desde el lado de baja tensión.

80
R línea. Resistencia del cable de acometida #6 AWG, 2.16m Ω/m, longitud 150m
L línea: Inductancia del cable de acometida #6 AWG, 1.31 μH/m, longitud 150m
R cont: Resistencia del controlador de tráfico local, 5Ω Se realizaron diferentes simulaciones del modelo, en el software MATLAB, para determinar el comportamiento en frecuencia y en el software ATP, para determinar el comportamiento en amplitud y tiempo de la señal (figura 4.30). En la figura 4.29, se puede observar la simulación en MATLAB del modelo, donde para una transmisión de la señal a 150 m desde el PLM al controlador, esto es la distancia que hay desde el transformador de distribución hasta el controlador, se tiene una atenuación cercana a -52dB
0 50 100 1500
10
20
30
40
50
60Atenuación de la señal
Distacia(m)
L(dB
)=20
log1
0(M
ag)
5 ohm - 132.5kHz
Figura 4.29. Atenuación de la señal transmitida desde el PLM hasta el controlador de tráfico a una
distancia de 150m

81
(f ile canalPLM.pl4; x-v ar t) v :XX0001 v :XX0004 0,00 0,02 0,04 0,06 0,08 0,10[ms]
-1,00
-0,75
-0,50
-0,25
0,00
0,25
0,50
0,75
1,00[V]
Figura 4.30. Amplitud de la señal en el PLM. Simulado con ATP.
Utilizando el modelo planteado por Cavdar [10] para la función de transferencia, de la siguiente manera:
012
23
3
012
20
)(
)()(
bsbsbsb
asasa
sV
sVsA
SV
(4.19)
Se pueden reemplazar los valores medidos del modelo, de forma tal que la función de transferencia final es:
5.4350004-2.3190e009-1.2353e016-1.0169e
006-1.1100e012-2.5700e
)(
)()(
23
20
sss
ss
sV
sVsA
SV (4.20)
4.1.11.4. Validación Del Modelo Propuesto Del Canal En Baja Tensión
Para la validación del modelo, se desarrollaron tanto pruebas de laboratorio, como desarrollo matemático, con el fin de comprobar datos obtenidos mediante simulaciones de la función de transferencia y del circuito equivalente, respecto a dichas pruebas de laboratorio. La caracterización del modelo en baja tensión se desarrolla para dos modos de operación: en el primer modo de operación la transmisión se realiza transmitiendo en bornes del transformador de baja tensión y la recepción se realiza en el controlador de tráfico ubicado igualmente en baja tensión, en el segundo modo de operación, la transmisión se realiza desde el controlador de tráfico y la recepción se realiza en bornes del transformador de potencia.

82
En la figura 4.31, se puede observar el montaje de laboratorio implementado para las pruebas en baja tensión.
Figura 4.31. Montaje de laboratorio para implementación de pruebas de laboratorio en baja tensión.
Laboratorio de Ensayos Industriales (LABE). Universidad Nacional de Colombia.
Se realizó la prueba de comunicación de envío de tramas de información de tipo hexadecimal, simulando las condiciones de la trama de información de datos de planes de señales semafóricos, mediante reenvíos continuos de dicha trama a 2400bps y una señal con amplitud de 1V, modulada en FSK con una frecuencia central de 132.5kHz. Se emplearon dos computadores portátiles para la indicación de las condiciones de programación de los PLM tanto en transmisión como en recepción. La figura 4.32. Muestra la señal enviada desde el PLM conectado a los bornes de baja tensión, simulando la señal que debe llegar después del trayecto de media tensión. En la figura 4.33, se puede observar la señal recibida en el PLM conectado en el extremo final del cable de acometida, simulando la condición del PLM en el controlador de tráfico, este último, es simulado mediante la carga de dos computadores portátiles conectados en ese mismo extremo. Se desarrollaron pruebas para cada PLM manteniendo su ubicación, en condiciones de transmisión y recepción, con resultados similares.
PLM conectado a bornes de BT del transformador
PLM conectado a extremo final del cable de acometida
Cable de acometida semafórica (130m)
Transformador de distribución
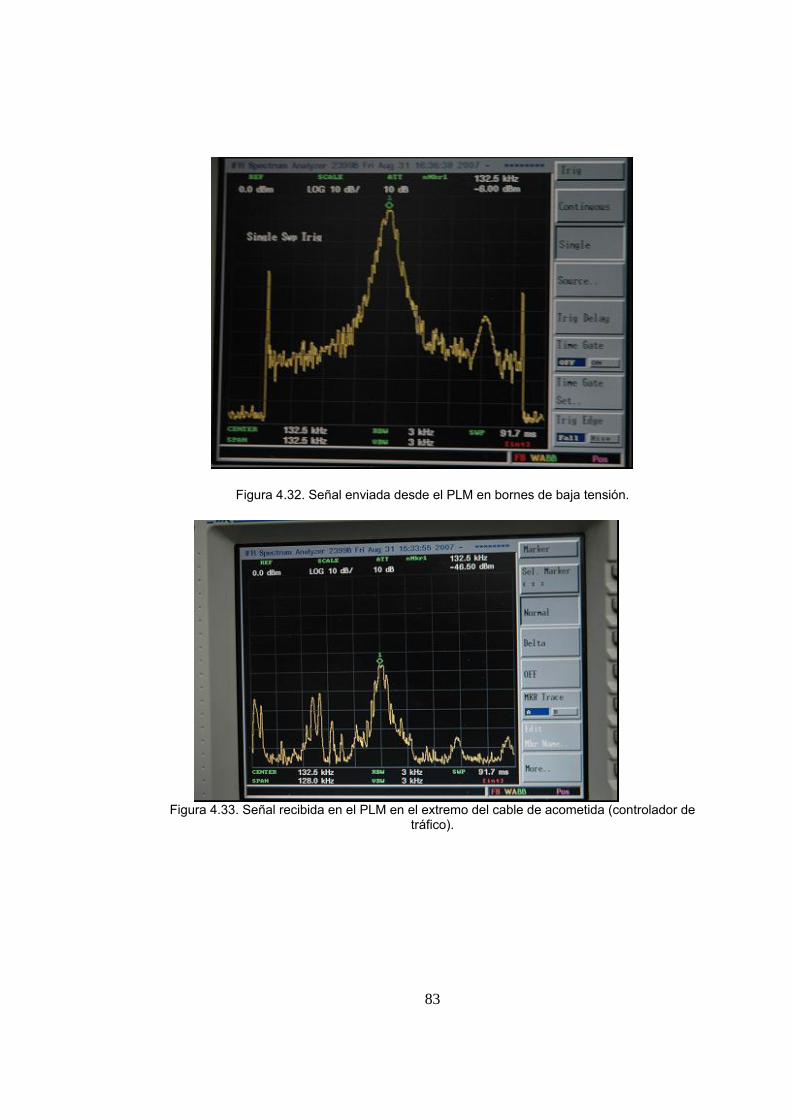
83
Figura 4.32. Señal enviada desde el PLM en bornes de baja tensión.
Figura 4.33. Señal recibida en el PLM en el extremo del cable de acometida (controlador de
tráfico).

84
4.1.11.5. Validación Del Modelo Propuesto Del Canal En Baja Tensión Mediante La Función De Transferencia
La caracterización del modelo en baja tensión se desarrolla para dos modos de operación: en el modo 1 de operación la transmisión se realiza transmitiendo en bornes del transformador de baja tensión y la recepción se realiza en el controlador de tráfico ubicado igualmente en baja tensión, en el modo 2 de operación la transmisión se realiza desde el controlador de tráfico y la recepción se realiza en bornes del transformador de potencia. El circuito del modelo propuesto es resuelto mediante cuadripolos o circuito de dos puertos con el fin de encontrar la función de transferencia del modelo, hallando los parámetros A, B, C y D, así:
2
2
1
1
I
V
DC
BA
I
V
(4.21)
a. Cuando -I2=0, 2
1
V
VA
b. Cuando V2=0, 2
1
I
VB
c. Cuando -I2=0, 2
1
V
IC
d. Cuando V2=0, 2
1
I
ID
A continuación se describen las consideraciones propuestas, que se deben tener presentes en el momento de realizar una transmisión o recepción de datos sobre la línea de potencia eléctrica en baja tensión, como es el caso de la influencia de la frecuencia de operación seleccionada sobre el comportamiento eléctrico de los componentes del modelo, lo que direcciona su caracterización y respuesta. Los valores de las resistencias, capacidades e inductancias del modelo fueron halladas mediante pruebas de laboratorio y análisis matemático detallado como es el caso de la caracterización del transformador de potencia, de la línea eléctrica, del dispositivo PLM y del controlador de tráfico, dicho proceso se ha descrito en capítulos anteriores.

85
Transformador: R1= 0.11Ω L1= 0.257uH (a 132KHz) En la línea de acometida AWG THHN No.6 R2= 2.16mΩ/m L2= 1.31 uH/m Clinea/2= 0.15nF/m Valores de línea de acometida a 130 metros R2= 0.2808Ω L2= 0.1714mH Clinea/2= 0.15nF El controlador de tráfico: ZL= 5Ω El dispositivo PLM En modo de transmisión (caracterización Normatividad CENELEC)
Rs= 3Ω En modo de recepción(caracterización Normatividad CENELEC)
Rs= 35Ω Capacidades de Acople:
C1=C2= 1uF Distancia de la acometida de prueba de laboratorio: 130 metros Debido a que las pruebas ejecutadas en el laboratorio se efectuaron con cable de 130 metros (característica y distancia real entre el transformador y el controlador de tráfico), las condiciones de los parámetros de las simulaciones y desarrollos presentados a continuación serán específicamente a esta distancia; si se quiere conocer el comportamiento a otra distancia refiérase a la curva de atenuación Vs distancia para el modelo desarrollado en el capítulo anterior.
4.1.11.5.1. Modo De Operación 1: Transmitiendo En Bornes Del Transformador
A) SIN CONSIDERAR EL PLM RECEPTOR
A.1) Sin considerar las capacidades de la línea corta de baja tensión
En la figura 4.34, se puede observar el circuito del modelo en modo de operación, transmitiendo en bornes del transformador. En este caso se desprecia el efecto
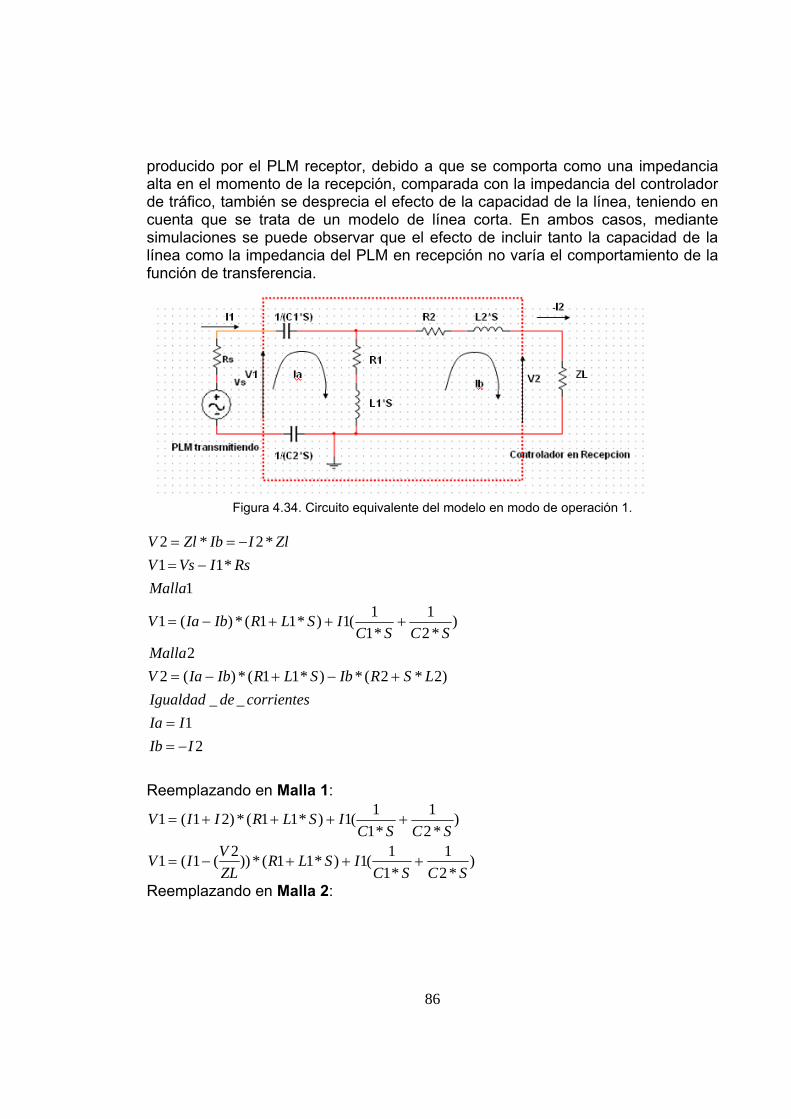
86
producido por el PLM receptor, debido a que se comporta como una impedancia alta en el momento de la recepción, comparada con la impedancia del controlador de tráfico, también se desprecia el efecto de la capacidad de la línea, teniendo en cuenta que se trata de un modelo de línea corta. En ambos casos, mediante simulaciones se puede observar que el efecto de incluir tanto la capacidad de la línea como la impedancia del PLM en recepción no varía el comportamiento de la función de transferencia.
Figura 4.34. Circuito equivalente del modelo en modo de operación 1.
2
1
__
)2*2(*)*11(*)(2
2
)*2
1
*1
1(1)*11(*)(1
1
*11
*2*2
IIb
IIa
corrientesdeIgualdad
LSRIbSLRIbIaV
MallaSCSC
ISLRIbIaV
Malla
RsIVsV
ZlIIbZlV
Reemplazando en Malla 1:
)*2
1
*1
1(1)*11(*))
2(1(1
)*2
1
*1
1(1)*11(*)21(1
SCSCISLR
ZL
VIV
SCSCISLRIIV
Reemplazando en Malla 2:

87
)2*2(2)*11(*)21(2 LSRISLRIIV
Aplicando igualdad de cuadripolos:
Con I2=0, 2
1
V
VA
, Reemplazando en Malla 1 y Malla 2 y despejando:
)*11((*)1(2
))*2
1
*1
1()*11((*)1(1
SLRIVSCSC
SLRIV
SCCRSCCLA
*)21(*1*)21(*1
1S*R1*C2)(C1S2*L1*C2)(C12
, con el fin de reducir la ecuación, se define a (C1+C2 = Ceq), entonces, :
SCeqRSCeqLA
*)(*1*)(*1
1S*R1*(Ceq)S2*L1*(Ceq)2
Con V2=0, 2
1
I
VB
, Reemplazando en Malla 1 y Malla 2 :
))*2
1
*1
1(1)*11((*)1(1
SCSCISLRIV
y )2*2(2)*11(*)21(0 LSRISLRII
Despejando a I1 de de la segunda ecuación y reemplazando en la primera ecuación:
)*2
1
*1
1(*
)*11(
))21(*)21((*2
)*11(*)*11(
))21(*)21((*21
)*11(
))21(*)21((*21
SCSCSLR
LLSRRI
SLRSLR
LLSRRIV
SLR
LLSRRII
1*)21(*1*)21(*
)21*)21()21(*1*2(*2*1*)21(*2
23
RCCSLCCS
LRCCCCLRSLLCCSB
1*)21(*1*)21(*
)21()2*12*1*)21((*2 RCCSLCCS
RRLLRRCCS
88
Con -I2=0, 2
1
V
IC
, Reemplazando en Malla 2:
)*11(*)1(2 SLRIV
)*11(
1
SLRC
Con V2=0, 2
1
I
ID
, Reemplazando en Malla 2:
)2*2(2)*11(*)21(0 LSRISLRII
)*11(
)*22()*11(
SLR
SLRSLRD
Despejando I1
)2*2(2)*11(*)21(1 LSRISLRIII
Por lo tanto la función de transferencia se despeja:
DRSBCRSZLAZL
ZL
IDVCRSIBVA
ZLI
IRSVI
ZLI
SVs
SVAv
****
)2*2*(*)2*2*(
*2
1*
*2
))((
)(2
Reemplazando los parámetros A, B, C y D se obtiene:
)))*11(
)*22()*11((*
1*)21(*1*)21(*
)21()2*12*1*)21((*
)1*)21(*1*)21(*
)21*)21()21(*1*2(*2*1*)21(*(
))*11(
1(**)
*)(*1*)(*1
1S*R1*(Ceq)S2*L1*(Ceq)(*(
2
2
23
2
SLR
SLRSLRRS
RCCSLCCS
RRLLRRCCS
RCCSLCCS
LRCCCCLRSLLCCS
SLRRSZL
SCeqRSCeqLZL
ZLAv
89
21)*)*2*1*
1*2*1(*)21(21(
)*)2*11*22*1*(*)21(
)1*)21(*(*)2*1*21((
*)1*)2(*(*)1*)21(*(
2
3
2
RRZLSZLRSRRSRRS
RZLRRCCLL
SLRLRLRSLRSCC
LCCZLSLLCC
SRCCIZLSLCCZLAv
Por facilidad en el manejo de la ecuación se hace la siguiente equivalencia: Ceq= C1+C2 En el numerador de la función de transferencia:
a1= ZL*Ceq*R1 a2=ZL*Ceq*L1 En el denominador de la función de transferencia:
b1= L1+L2+Ceq*(R1*R2+ZL*R1+RS*R1+RS*R2+RS*ZL) b2= ZL*Ceq*L1+Ceq*(RS*L1+RS*L2+R2*L1+R1*L2) b3= Ceq*L1*L2 bo= ZL+R2+R1
A.1.1) Gráfica de polos y ceros con MATLAB
Reemplazando los valores de los datos del modelo, aplicándolos a la función de transferencia e ingresando dichos datos a MATLAB se obtiene: a2f = 2.5700e-012 b2f = 1.0711e-009 b3f = 8.8136e-016 a1f = 1.1100e-006 b1f = 2.0525e-004 b0f = 5.3918 z = 1.0e+005 *

90
0 -4.31906614785992 p = 1.0e+005 * -9.85283020966786 -1.98759274381011 -0.31238634124836 k = 2.915948080239630e+003 Zero/pole/gain: 2915.9481 s (s+4.319e005) ----------------------------------------- (s+9.853e005) (s+1.988e005) (s+3.124e004 A.1.2) Análisis Polos Y Ceros: Av= Función de orden 2/ Función de orden 3 El numerador de la función de transferencia define los CEROS y el denominador define a los POLOS de la función de transferencia que describe al sistema. Se observa claramente en el mapa de polos y ceros generados por software MATLAB:
2 CEROS y 3 POLOS (x) en el eje real en el cuadrante izquierdo.
La figura 4.35, muestra los polos y ceros, representa un sistema estable de tiempo-continuo, por encontrarse sus 3 polos en la mitad izquierdo del plano S.
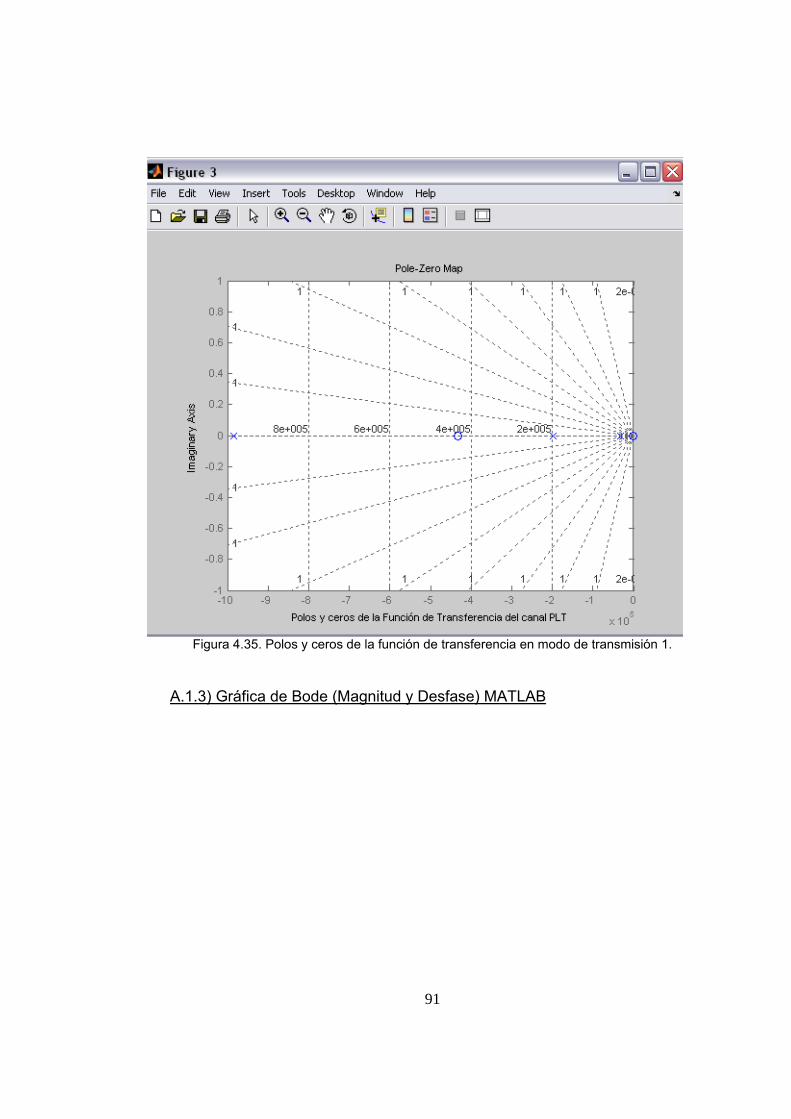
91
Figura 4.35. Polos y ceros de la función de transferencia en modo de transmisión 1.
A.1.3) Gráfica de Bode (Magnitud y Desfase) MATLAB
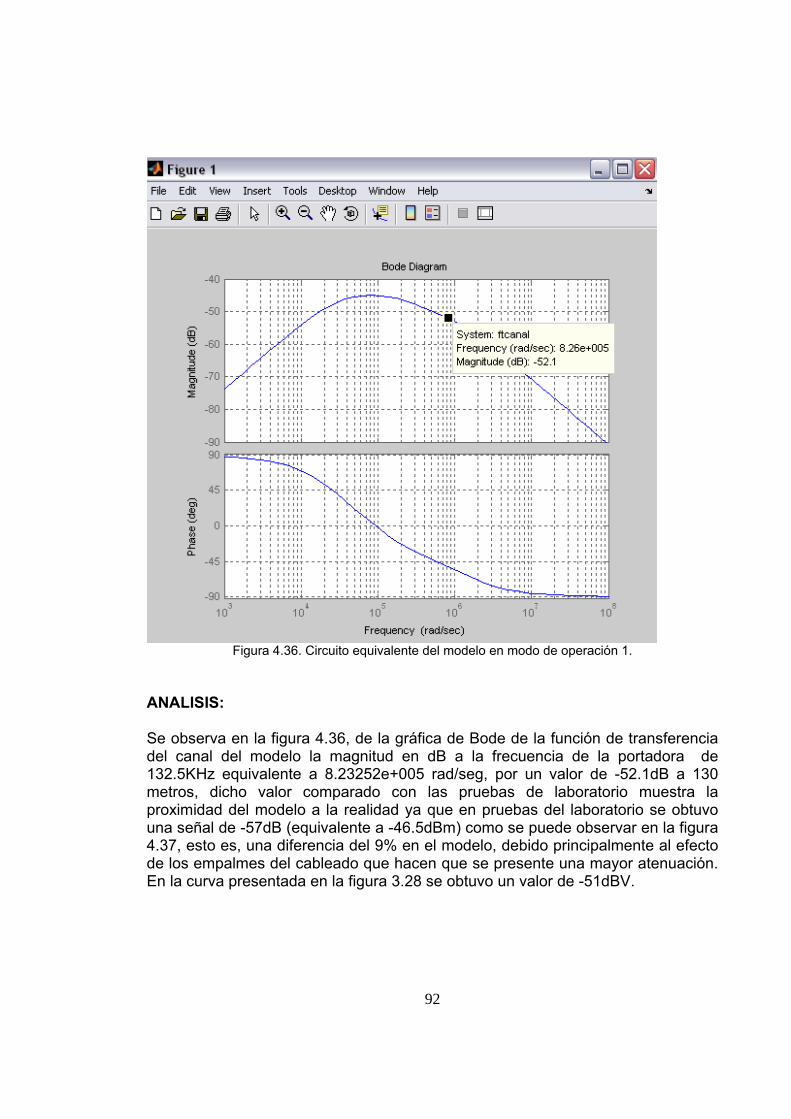
92
Figura 4.36. Circuito equivalente del modelo en modo de operación 1.
ANALISIS: Se observa en la figura 4.36, de la gráfica de Bode de la función de transferencia del canal del modelo la magnitud en dB a la frecuencia de la portadora de 132.5KHz equivalente a 8.23252e+005 rad/seg, por un valor de -52.1dB a 130 metros, dicho valor comparado con las pruebas de laboratorio muestra la proximidad del modelo a la realidad ya que en pruebas del laboratorio se obtuvo una señal de -57dB (equivalente a -46.5dBm) como se puede observar en la figura 4.37, esto es, una diferencia del 9% en el modelo, debido principalmente al efecto de los empalmes del cableado que hacen que se presente una mayor atenuación. En la curva presentada en la figura 3.28 se obtuvo un valor de -51dBV.
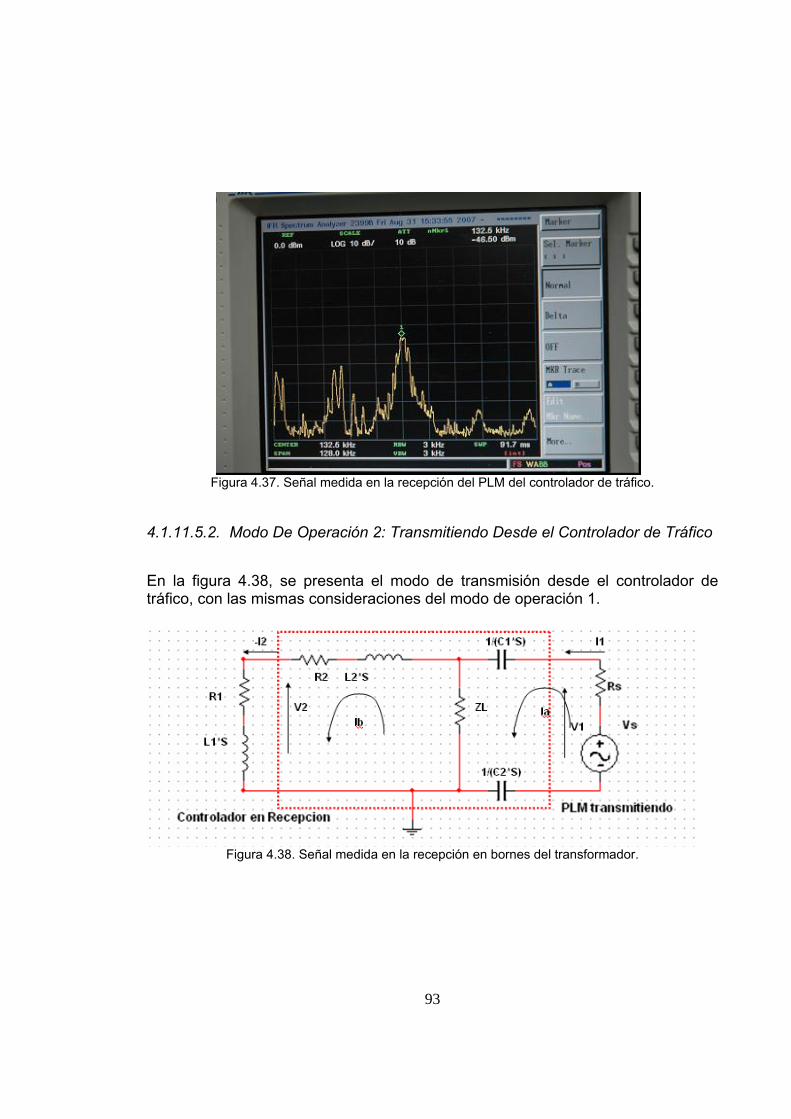
93
Figura 4.37. Señal medida en la recepción del PLM del controlador de tráfico.
4.1.11.5.2. Modo De Operación 2: Transmitiendo Desde el Controlador de Tráfico
En la figura 4.38, se presenta el modo de transmisión desde el controlador de tráfico, con las mismas consideraciones del modo de operación 1.
Figura 4.38. Señal medida en la recepción en bornes del transformador.
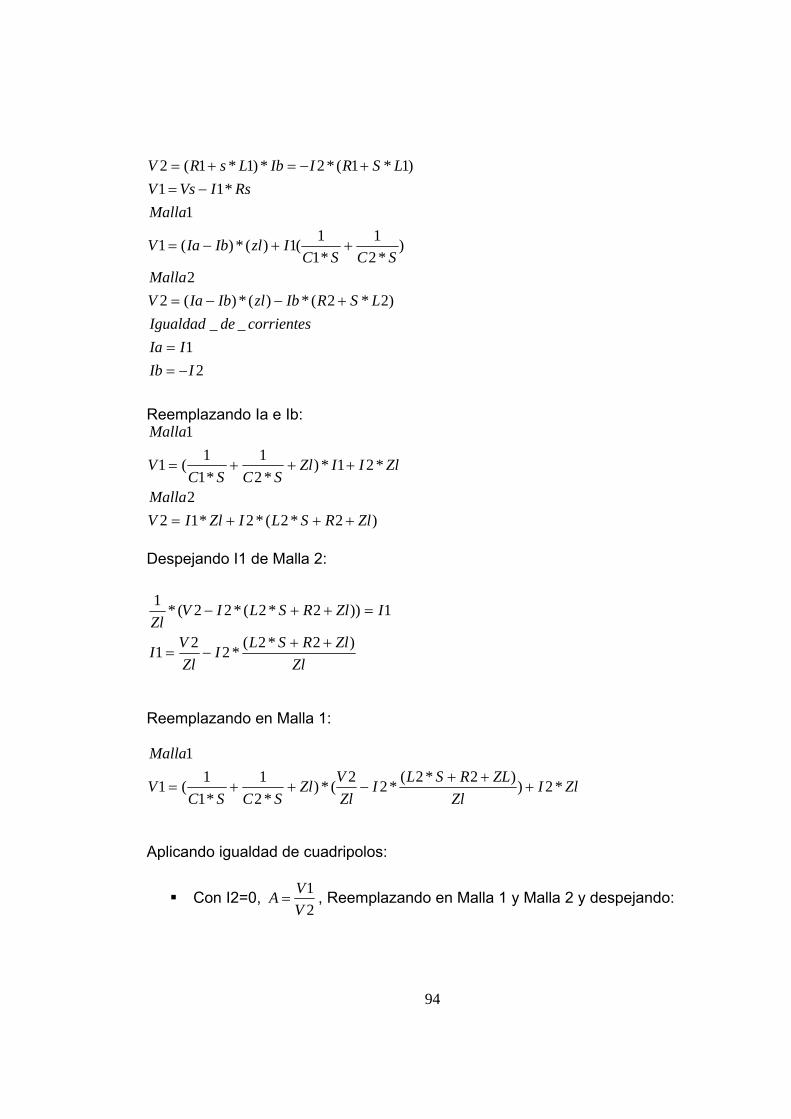
94
2
1
__
)2*2(*)(*)(2
2
)*2
1
*1
1(1)(*)(1
1
*11
)1*1(*2*)1*1(2
IIb
IIa
corrientesdeIgualdad
LSRIbzlIbIaV
MallaSCSC
IzlIbIaV
Malla
RsIVsV
LSRIIbLsRV
Reemplazando Ia e Ib:
)2*2(*2*12
2
*21*)*2
1
*1
1(1
1
ZlRSLIZlIV
Malla
ZlIIZlSCSC
V
Malla
Despejando I1 de Malla 2:
Zl
ZlRSLI
Zl
VI
IZlRSLIVZl
)2*2(*2
21
1))2*2(*22(*1
Reemplazando en Malla 1:
ZlIZl
ZLRSLI
Zl
VZl
SCSCV
Malla
*2))2*2(
*22
(*)*2
1
*1
1(1
1
Aplicando igualdad de cuadripolos:
Con I2=0, 2
1
V
VA , Reemplazando en Malla 1 y Malla 2 y despejando:

95
)1
(*)*2
1
*1
1(
2
1
1
ZlZl
SCSCV
VA
Malla
)**2*1
2**1*21(
2
1
)1
(*)**2*1
*2**1**2*1(
2
1
SZlCC
CSCZlCC
V
VA
ZlSSCC
SCSCZlSCSC
V
VA
Con V2=0, 2
1
I
VB
, Reemplazando en Malla 1 y Malla 2 :
ZlSCCZlCCSZlCC
zlRSl
I
V
)*2*1*21(*)
**2*1
2*2(
2
1
Con -I2=0, 2
1
V
IC , Reemplazando en Malla 2:
ZlC
IVZl
1
1)2(*1
Con V2=0, 2
1
I
ID
, Reemplazando en Malla 2:
Zl
ZlRSLD
ZlRSLIZlI
)2*2(
)2*2(*2*10
Despejando I1
)2*2(2)*11(*)21(1 LSRISLRIII
Por lo tanto la función de transferencia se despeja:
)***1*1()**1*1(
*11
)2*2*(*)2*2*(
)*11(*2
1*
)*11(*2
))((
)(2
DRsBCRsRARCRsLALS
SLR
IDVCRSIBVA
SLRI
IRSVI
SLRI
SVs
SVAv
Reemplazando en los parámetros A, B, C y D los valores del modelo en MATLAB
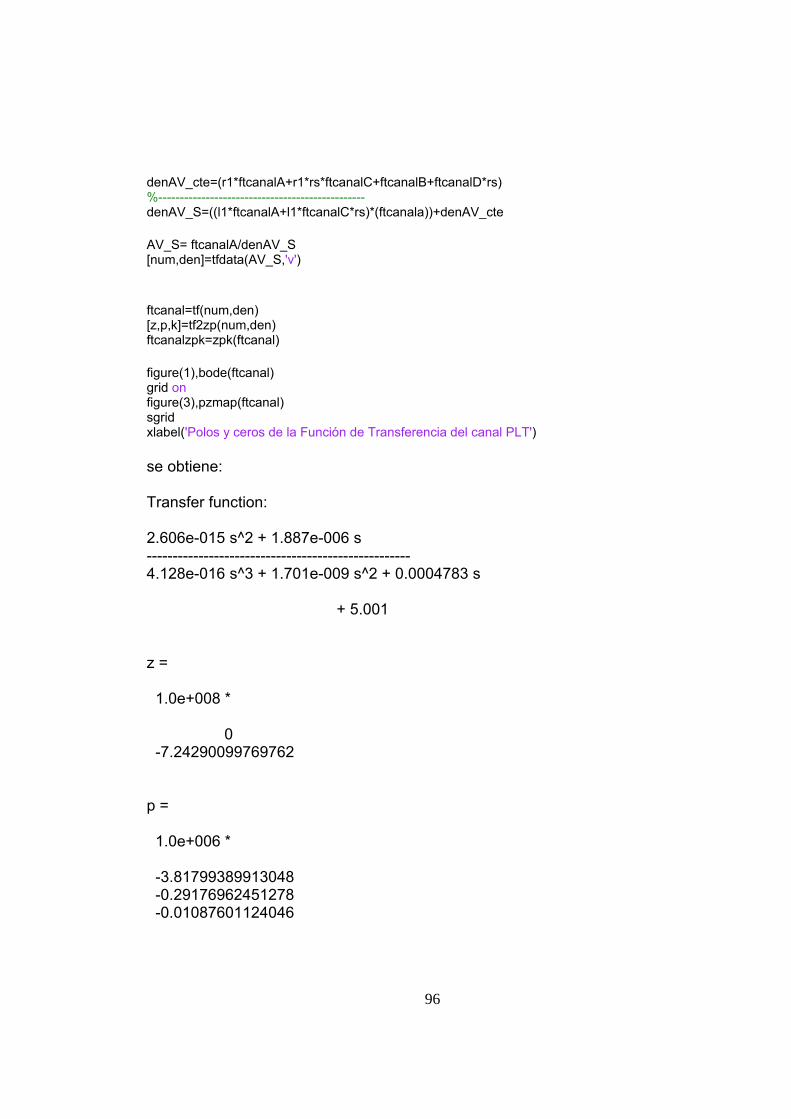
96
denAV_cte=(r1*ftcanalA+r1*rs*ftcanalC+ftcanalB+ftcanalD*rs) %------------------------------------------------ denAV_S=((l1*ftcanalA+l1*ftcanalC*rs)*(ftcanala))+denAV_cte AV_S= ftcanalA/denAV_S [num,den]=tfdata(AV_S,'v') ftcanal=tf(num,den) [z,p,k]=tf2zp(num,den) ftcanalzpk=zpk(ftcanal) figure(1),bode(ftcanal) grid on figure(3),pzmap(ftcanal) sgrid xlabel('Polos y ceros de la Función de Transferencia del canal PLT') se obtiene: Transfer function: 2.606e-015 s^2 + 1.887e-006 s --------------------------------------------------- 4.128e-016 s^3 + 1.701e-009 s^2 + 0.0004783 s + 5.001 z = 1.0e+008 * 0 -7.24290099769762 p = 1.0e+006 * -3.81799389913048 -0.29176962451278 -0.01087601124046

97
k = 6.31298449612403 Zero/pole/gain: 6.313 s (s+7.243e008) ----------------------------------------- (s+3.818e006) (s+2.918e005) (s+1.088e004) ANALISIS POLOS Y CEROS: La figura 4.39, muestra los polos y ceros, representa un sistema estable de tiempo-continuo, por encontrarse sus 3 polos en la mitad izquierdo del plano S.
Figura 4.39. Polos y ceros de modo de operación 2.
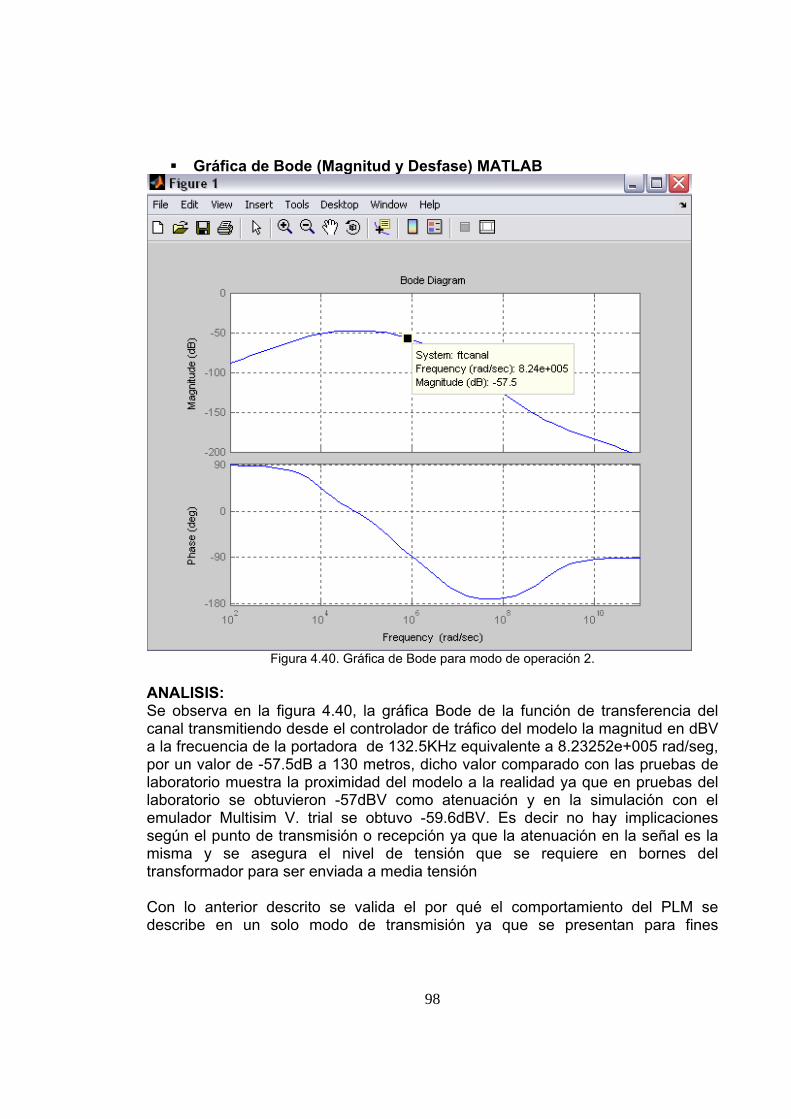
98
Gráfica de Bode (Magnitud y Desfase) MATLAB
Figura 4.40. Gráfica de Bode para modo de operación 2.
ANALISIS: Se observa en la figura 4.40, la gráfica Bode de la función de transferencia del canal transmitiendo desde el controlador de tráfico del modelo la magnitud en dBV a la frecuencia de la portadora de 132.5KHz equivalente a 8.23252e+005 rad/seg, por un valor de -57.5dB a 130 metros, dicho valor comparado con las pruebas de laboratorio muestra la proximidad del modelo a la realidad ya que en pruebas del laboratorio se obtuvieron -57dBV como atenuación y en la simulación con el emulador Multisim V. trial se obtuvo -59.6dBV. Es decir no hay implicaciones según el punto de transmisión o recepción ya que la atenuación en la señal es la misma y se asegura el nivel de tensión que se requiere en bornes del transformador para ser enviada a media tensión Con lo anterior descrito se valida el por qué el comportamiento del PLM se describe en un solo modo de transmisión ya que se presentan para fines
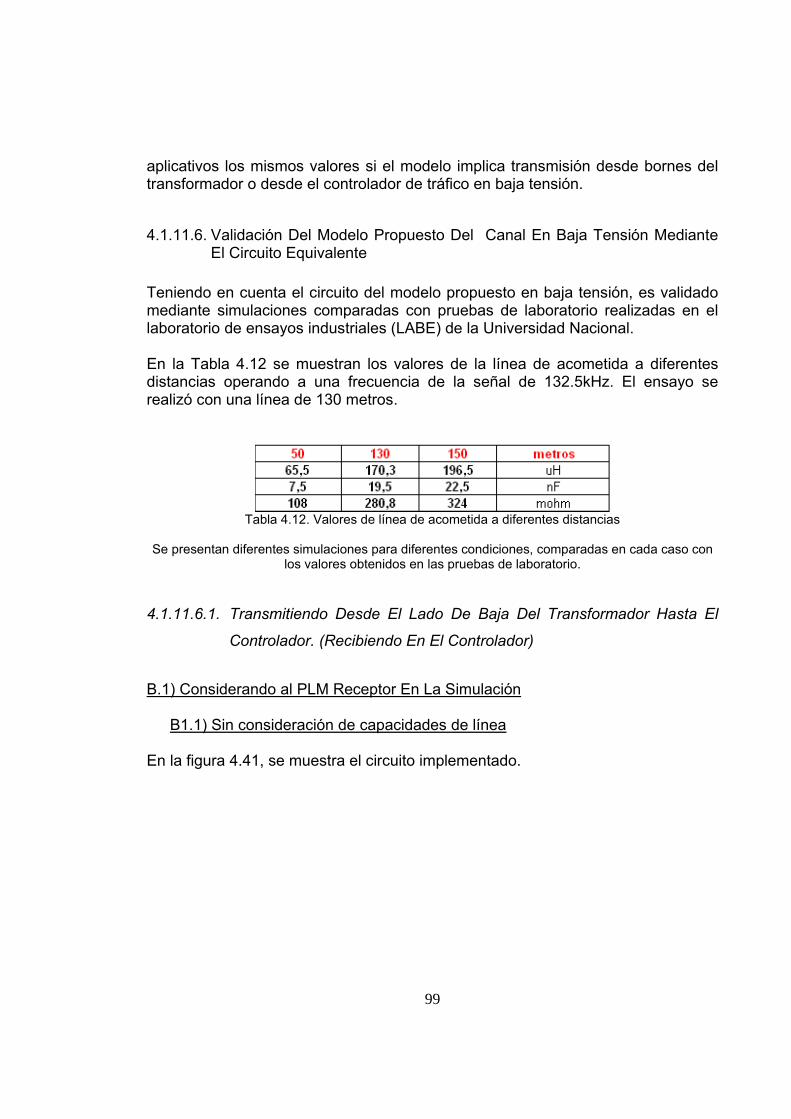
99
aplicativos los mismos valores si el modelo implica transmisión desde bornes del transformador o desde el controlador de tráfico en baja tensión.
4.1.11.6. Validación Del Modelo Propuesto Del Canal En Baja Tensión Mediante El Circuito Equivalente
Teniendo en cuenta el circuito del modelo propuesto en baja tensión, es validado mediante simulaciones comparadas con pruebas de laboratorio realizadas en el laboratorio de ensayos industriales (LABE) de la Universidad Nacional. En la Tabla 4.12 se muestran los valores de la línea de acometida a diferentes distancias operando a una frecuencia de la señal de 132.5kHz. El ensayo se realizó con una línea de 130 metros.
Tabla 4.12. Valores de línea de acometida a diferentes distancias
Se presentan diferentes simulaciones para diferentes condiciones, comparadas en cada caso con
los valores obtenidos en las pruebas de laboratorio.
4.1.11.6.1. Transmitiendo Desde El Lado De Baja Del Transformador Hasta El
Controlador. (Recibiendo En El Controlador)
B.1) Considerando al PLM Receptor En La Simulación
B1.1) Sin consideración de capacidades de línea En la figura 4.41, se muestra el circuito implementado.
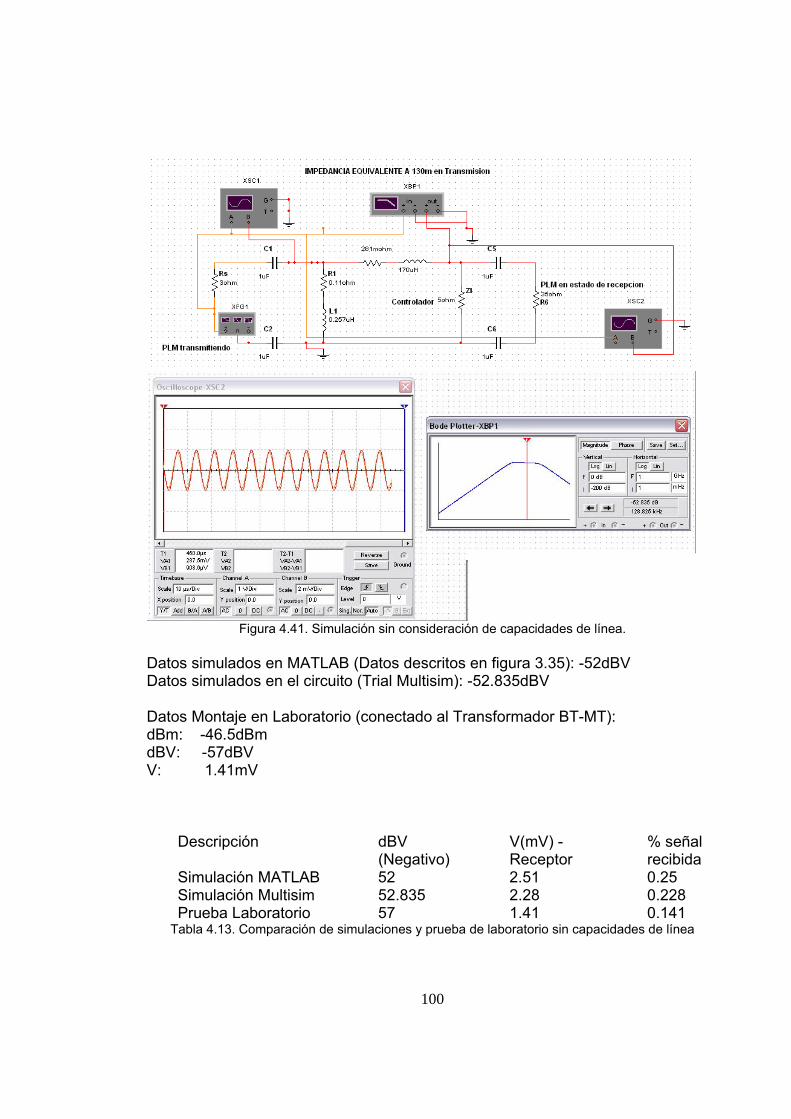
100
Figura 4.41. Simulación sin consideración de capacidades de línea.
Datos simulados en MATLAB (Datos descritos en figura 3.35): -52dBV Datos simulados en el circuito (Trial Multisim): -52.835dBV Datos Montaje en Laboratorio (conectado al Transformador BT-MT): dBm: -46.5dBm dBV: -57dBV V: 1.41mV
Descripción dBV (Negativo)
V(mV) - Receptor
% señal recibida
Simulación MATLAB 52 2.51 0.25 Simulación Multisim 52.835 2.28 0.228 Prueba Laboratorio 57 1.41 0.141
Tabla 4.13. Comparación de simulaciones y prueba de laboratorio sin capacidades de línea
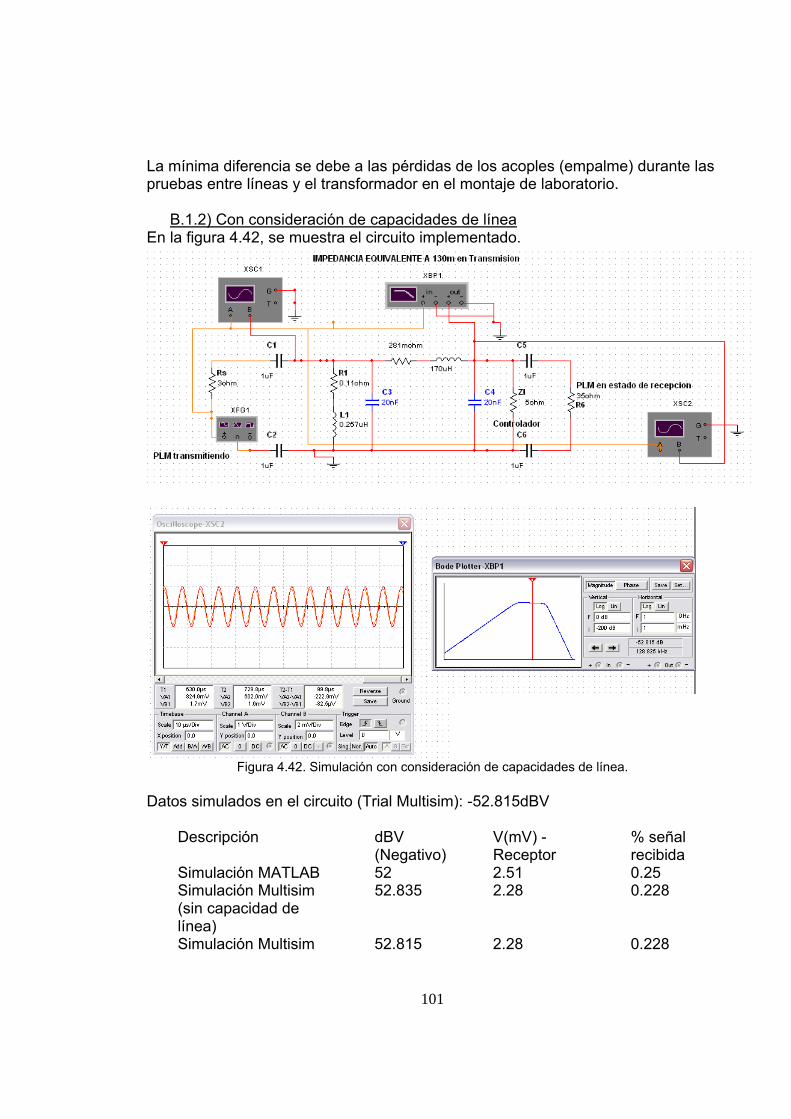
101
La mínima diferencia se debe a las pérdidas de los acoples (empalme) durante las pruebas entre líneas y el transformador en el montaje de laboratorio.
B.1.2) Con consideración de capacidades de línea En la figura 4.42, se muestra el circuito implementado.
Figura 4.42. Simulación con consideración de capacidades de línea. Datos simulados en el circuito (Trial Multisim): -52.815dBV
Descripción dBV (Negativo)
V(mV) - Receptor
% señal recibida
Simulación MATLAB 52 2.51 0.25Simulación Multisim (sin capacidad de línea)
52.835 2.28 0.228
Simulación Multisim 52.815 2.28 0.228
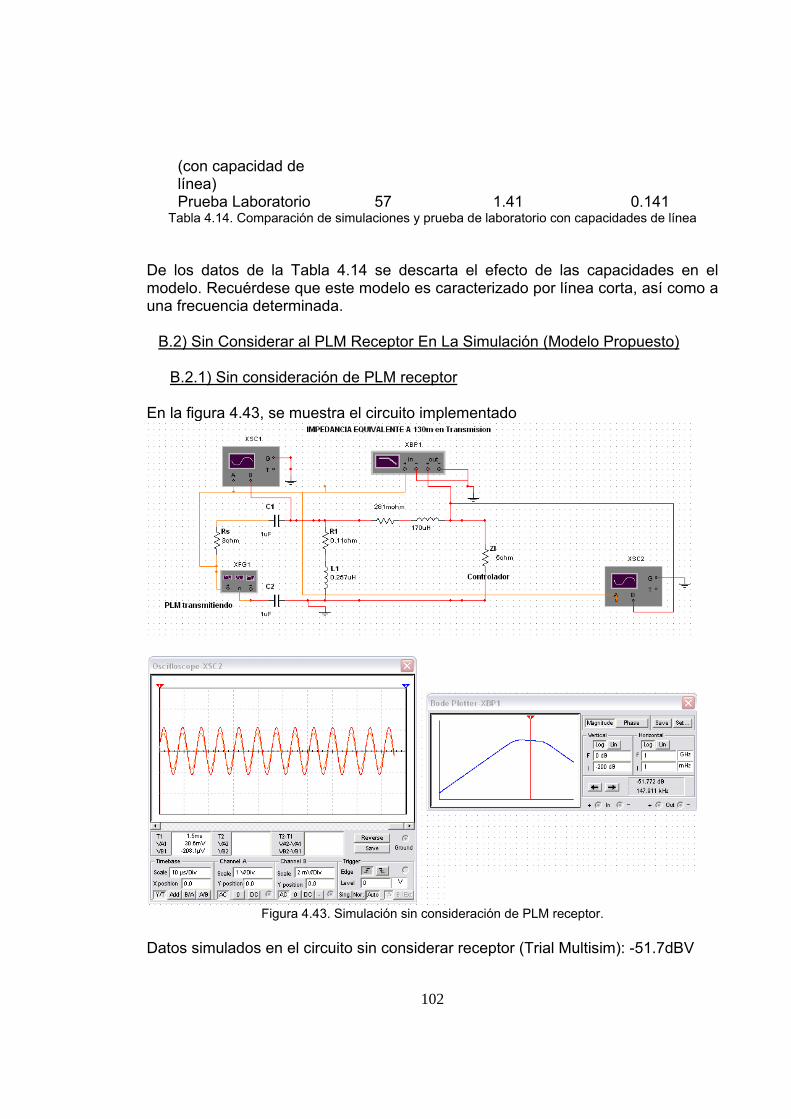
102
(con capacidad de línea) Prueba Laboratorio 57 1.41 0.141
Tabla 4.14. Comparación de simulaciones y prueba de laboratorio con capacidades de línea De los datos de la Tabla 4.14 se descarta el efecto de las capacidades en el modelo. Recuérdese que este modelo es caracterizado por línea corta, así como a una frecuencia determinada.
B.2) Sin Considerar al PLM Receptor En La Simulación (Modelo Propuesto)
B.2.1) Sin consideración de PLM receptor En la figura 4.43, se muestra el circuito implementado
Figura 4.43. Simulación sin consideración de PLM receptor.
Datos simulados en el circuito sin considerar receptor (Trial Multisim): -51.7dBV

103
Datos simulados en el circuito considerando receptor (Trial Multisim): -52.835dBv Datos simulados en MATLAB: -52dBV
Descripción dBV (Negativo)
V(mV) - Receptor
% señal recibida
Simulación MATLAB 52 2.51 0.25 Simulación Multisim (sin capacidad de línea y sin PLM receptor)
51.7 2.6 0.26
Simulación Multisim (sin capacidad de línea y con PLM receptor )
52.835 2.28 0.228
Prueba Laboratorio 57 1.41 0.141 Tabla 4.15. Comparación de simulaciones y prueba de laboratorio sin PLM receptor
Analizando los datos anteriores de la Tabla 4.15, es posible concluir que se puede despreciar en el modelo el PLM receptor, ya que en recepción la impedancia del PLM receptor es muy alta, debido esto a la programación el dispositivo ST7538 para la condición de frecuencia específica. Finalmente, se concluye teniendo en cuenta las razones expuestas en este numeral sobre las razones por las cuales se despreciaron las capacidades de línea y el PLM receptor en el modelo y que no afectan fuertemente el comportamiento tanto en frecuencia como en amplitud.
4.1.11.6.2. Transmitiendo Desde El Controlador y Recibiendo en el Lado De Baja
Del Transformador (En Bornes)
C.1 Considerando al PLM Receptor En La Simulación
C.1.1 Sin consideración de capacidades de línea En la figura 4.44, se muestra el circuito implementado

104
Figura 4.44. Simulación sin consideración de capacidades de línea.
Descripción dBV (Negativo)
V(mV) – Receptor
% señal recibida
Simulación Multisim 59.532 1.05 0.105 Prueba Laboratorio 62 0.8 0.08
Tabla 4.16. Comparación de simulaciones y prueba de laboratorio sin capacidades de línea
C.1.2 Con consideración de capacidades de línea En la figura 4.45, se muestra el circuito implementado
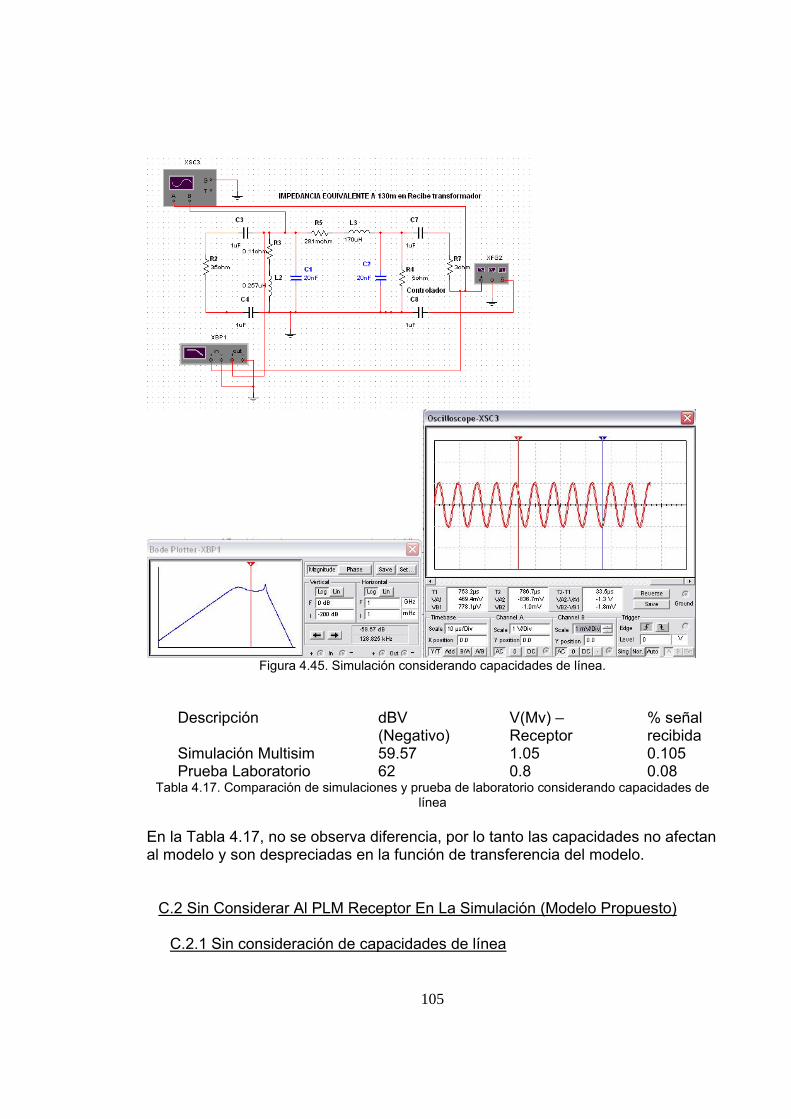
105
Figura 4.45. Simulación considerando capacidades de línea.
Descripción dBV (Negativo)
V(Mv) – Receptor
% señal recibida
Simulación Multisim 59.57 1.05 0.105 Prueba Laboratorio 62 0.8 0.08
Tabla 4.17. Comparación de simulaciones y prueba de laboratorio considerando capacidades de línea
En la Tabla 4.17, no se observa diferencia, por lo tanto las capacidades no afectan al modelo y son despreciadas en la función de transferencia del modelo.
C.2 Sin Considerar Al PLM Receptor En La Simulación (Modelo Propuesto)
C.2.1 Sin consideración de capacidades de línea
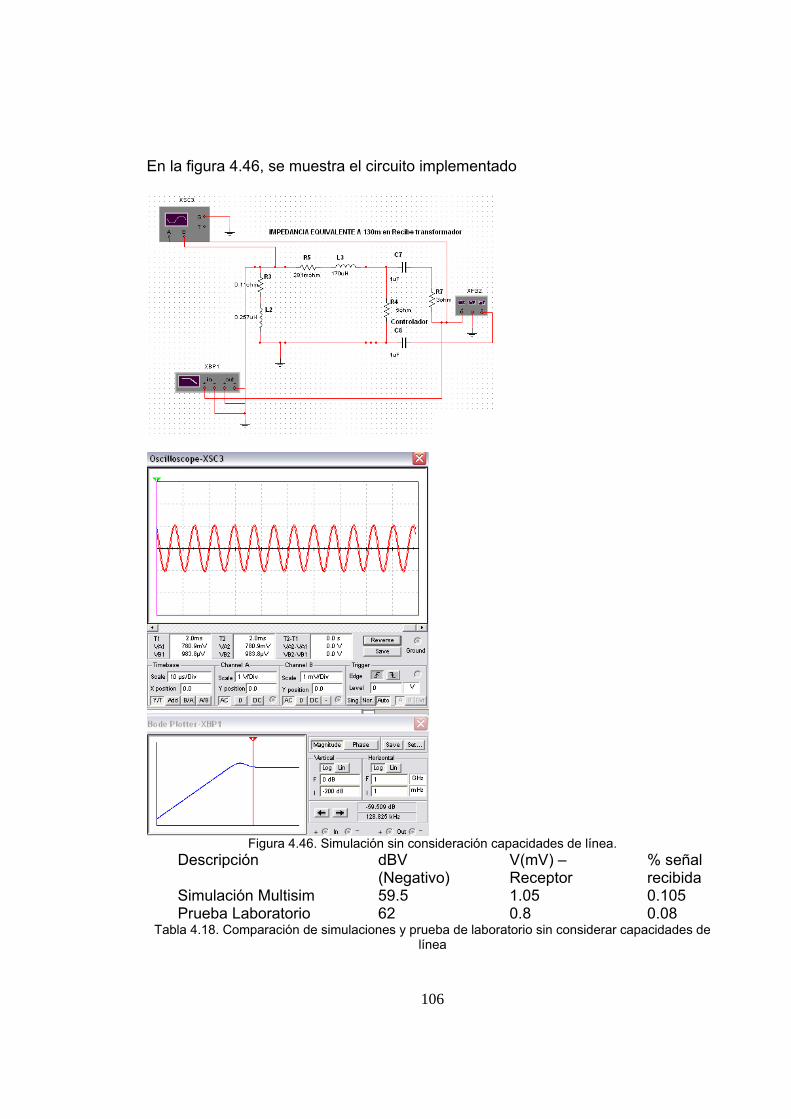
106
En la figura 4.46, se muestra el circuito implementado
Figura 4.46. Simulación sin consideración capacidades de línea.
Descripción dBV (Negativo)
V(mV) – Receptor
% señal recibida
Simulación Multisim 59.5 1.05 0.105 Prueba Laboratorio 62 0.8 0.08
Tabla 4.18. Comparación de simulaciones y prueba de laboratorio sin considerar capacidades de línea
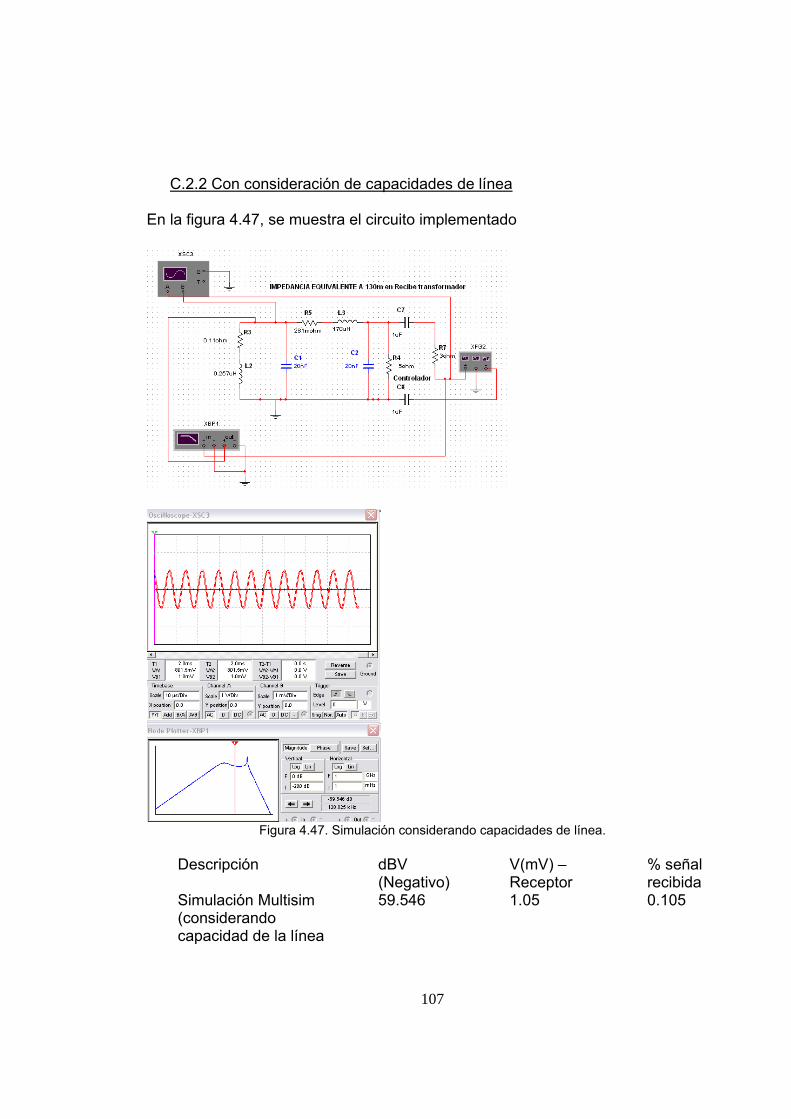
107
C.2.2 Con consideración de capacidades de línea
En la figura 4.47, se muestra el circuito implementado
Figura 4.47. Simulación considerando capacidades de línea.
Descripción dBV
(Negativo) V(mV) – Receptor
% señal recibida
Simulación Multisim (considerando capacidad de la línea
59.546 1.05 0.105

108
y sin receptor PLM) Simulación Multisim (sin considerar la capacidad de la línea y sin receptor PLM)
59.5 1.05 0.105
Prueba Laboratorio
62 0.8 0.08
Tabla 4.19. Comparación de simulaciones y prueba de laboratorio considerando capacidades de línea
SE DESPRECIA LA CAPACIDAD DE LA LINE DEBIDO A QUE NO TIENE EFECTOS CONSIDERABLES EN LA TRANSMISION. RESUMEN DEL ANALISIS
Descripción dBV (Negativo)
V(mV) – Receptor
% señal recibida
SIN PLM RECEPTOR Simulación Multisim (considerando capacidad de la línea)
59.546 1.05 0.105
Simulación Multisim (sin considerar la capacidad de la línea)
59.5 1.05 0.105
CON PLM RECEPTOR
Simulación Multisim (considerando capacidad de la línea)
59.57 1.05 0.105
Simulación Multisim (sin considerar la capacidad de la línea)
59.532 1.05 0.105
Tabla 4.20. Comparación de simulaciones y prueba de laboratorio (resumen) SE DESPRECIAN EL PLM RECEPTOR Y LA CAPACIDAD DE LINEA, AUNQUE LA ATENUACIÓN ES LEVEMENTE MAYOR RECIBIENDO EN BORNES DEL TRANSFORMADOR, LO CUAL SE CORRIGE CON LA REPOTENCIACIÓN DE LA SEÑAL EN ESTE PUNTO.
109
4.2. DETERMINACIÓN DE CONDICIONES DE LA RED
Para el caso de Bogotá D.C., cuando se analiza la red eléctrica disponible, es importante indicar que no existen estudios detallados sobre el estado actual de dicha red y de sus condiciones de disponibilidad para ser utilizada como red de comunicaciones, por tanto solo es posible basarse en el desarrollo de modelos como el propuesto en esta Tesis que permiten simular el comportamiento en diferentes tramos con resultados óptimos. En diferentes partes del mundo, cuando se han empleado redes de distribución de energía para transmitir datos, por lo general se han hecho pruebas piloto, iniciando en circuitos eléctricos de manzanas hasta llegar a varias cuadras o incluso barrios enteros, esto con el fin de ir analizando el comportamiento de la red de manera sectorizada, teniendo en cuenta:
El estado físico de dicha red La cantidad de empalmes La cantidad de transformadores de distribución La cantidad de circuitos aéreos ó subterráneos La cantidad de cargas eléctricas presentes y los horarios de consumo El tipo de usuario de la red (comercial, industrial ó residencial)
Hasta el momento, no existen estudios que permitan concluir de manera contundente los límites de la capacidad de la red eléctrica como canal de telecomunicaciones, sino más bien el límite lo han impuesto los equipos y tecnologías disponibles en el mercado especialmente en el desarrollo de velocidades máximas de transmisión. A efectos técnicos el PLT/PLC/BPL presenta algunas ventajas sobre otras tecnologías alámbricas como el cobre, debido a que no necesita una instalación adicional y es posible transmitir mucha más información, con velocidades que rondan los 200 Mbps. Lo único especial es el MODEM, que en el caso de sistemas de gestión de tráfico debe ser adaptado al equipo de control. También es posible combinar la tecnología PLT/PLC/BPL con otras tecnologías, tanto alámbricas como inalámbricas. Algunas ventajas comparativas de PLT/PLC/BPL para los sistemas de gestión de tráfico son las siguientes44:
Economía de instalación: sin obra civil, cada transformador de distribución es un posible punto de interconexión.
Modelo económico: costo de equipos relativamente bajos
44 Velásquez. PLC Modelos de negocios en banda ancha. Trabajo final. Gestión de tecnología. Maestría en Ingeniería de Telecomunicaciones. Universidad Nacional de Colombia. 2005.
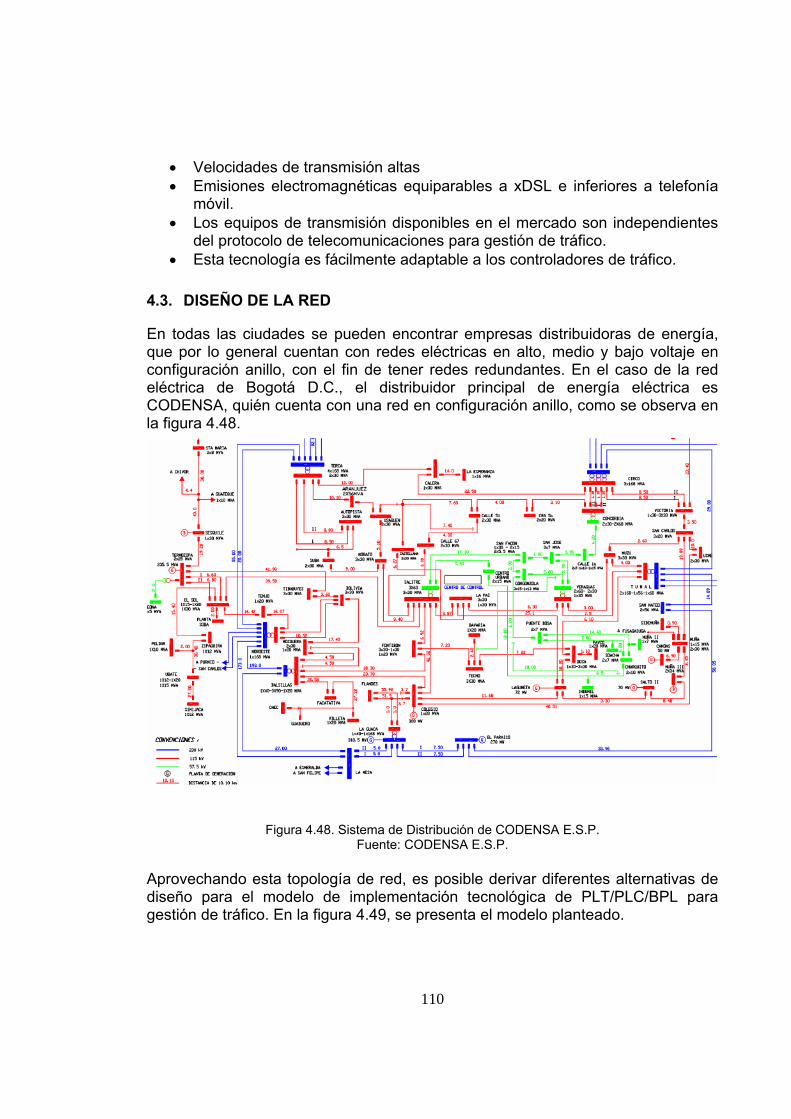
110
Velocidades de transmisión altas Emisiones electromagnéticas equiparables a xDSL e inferiores a telefonía
móvil. Los equipos de transmisión disponibles en el mercado son independientes
del protocolo de telecomunicaciones para gestión de tráfico. Esta tecnología es fácilmente adaptable a los controladores de tráfico.
4.3. DISEÑO DE LA RED
En todas las ciudades se pueden encontrar empresas distribuidoras de energía, que por lo general cuentan con redes eléctricas en alto, medio y bajo voltaje en configuración anillo, con el fin de tener redes redundantes. En el caso de la red eléctrica de Bogotá D.C., el distribuidor principal de energía eléctrica es CODENSA, quién cuenta con una red en configuración anillo, como se observa en la figura 4.48.
Figura 4.48. Sistema de Distribución de CODENSA E.S.P. Fuente: CODENSA E.S.P.
Aprovechando esta topología de red, es posible derivar diferentes alternativas de diseño para el modelo de implementación tecnológica de PLT/PLC/BPL para gestión de tráfico. En la figura 4.49, se presenta el modelo planteado.
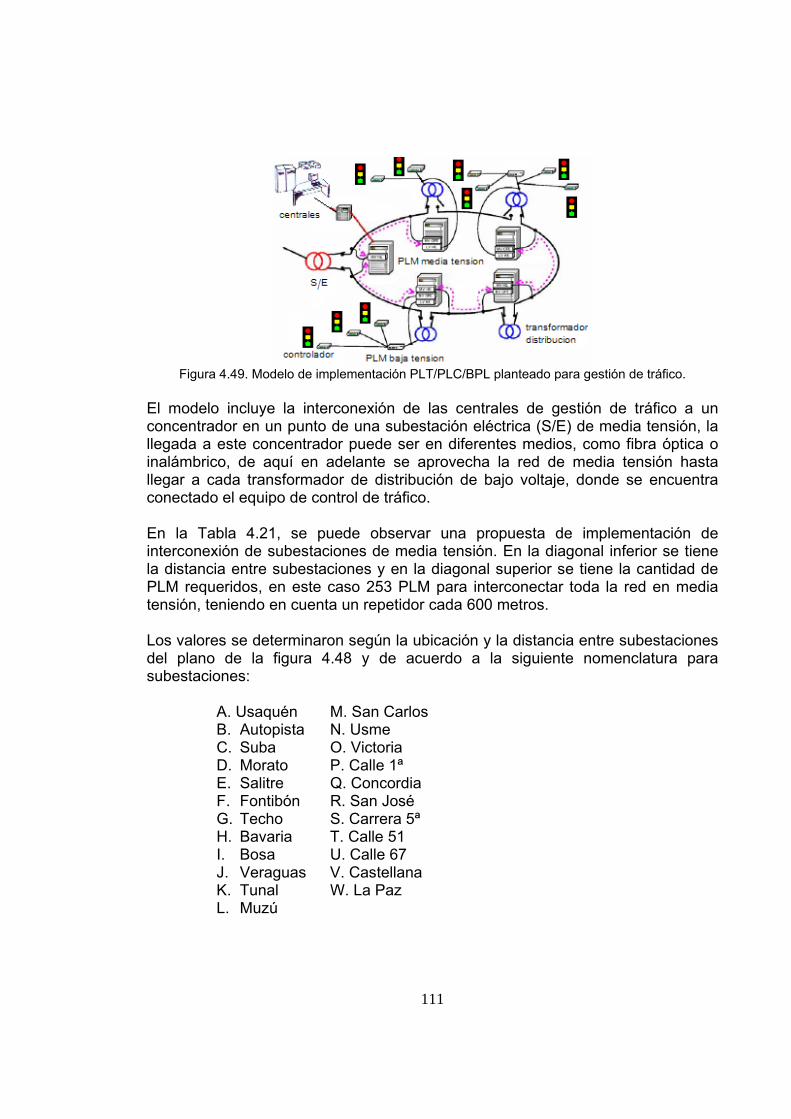
111
Figura 4.49. Modelo de implementación PLT/PLC/BPL planteado para gestión de tráfico.
El modelo incluye la interconexión de las centrales de gestión de tráfico a un concentrador en un punto de una subestación eléctrica (S/E) de media tensión, la llegada a este concentrador puede ser en diferentes medios, como fibra óptica o inalámbrico, de aquí en adelante se aprovecha la red de media tensión hasta llegar a cada transformador de distribución de bajo voltaje, donde se encuentra conectado el equipo de control de tráfico. En la Tabla 4.21, se puede observar una propuesta de implementación de interconexión de subestaciones de media tensión. En la diagonal inferior se tiene la distancia entre subestaciones y en la diagonal superior se tiene la cantidad de PLM requeridos, en este caso 253 PLM para interconectar toda la red en media tensión, teniendo en cuenta un repetidor cada 600 metros. Los valores se determinaron según la ubicación y la distancia entre subestaciones del plano de la figura 4.48 y de acuerdo a la siguiente nomenclatura para subestaciones:
A. Usaquén M. San Carlos B. Autopista N. Usme C. Suba O. Victoria D. Morato P. Calle 1ª E. Salitre Q. Concordia F. Fontibón R. San José G. Techo S. Carrera 5ª H. Bavaria T. Calle 51 I. Bosa U. Calle 67 J. Veraguas V. Castellana K. Tunal W. La Paz L. Muzú
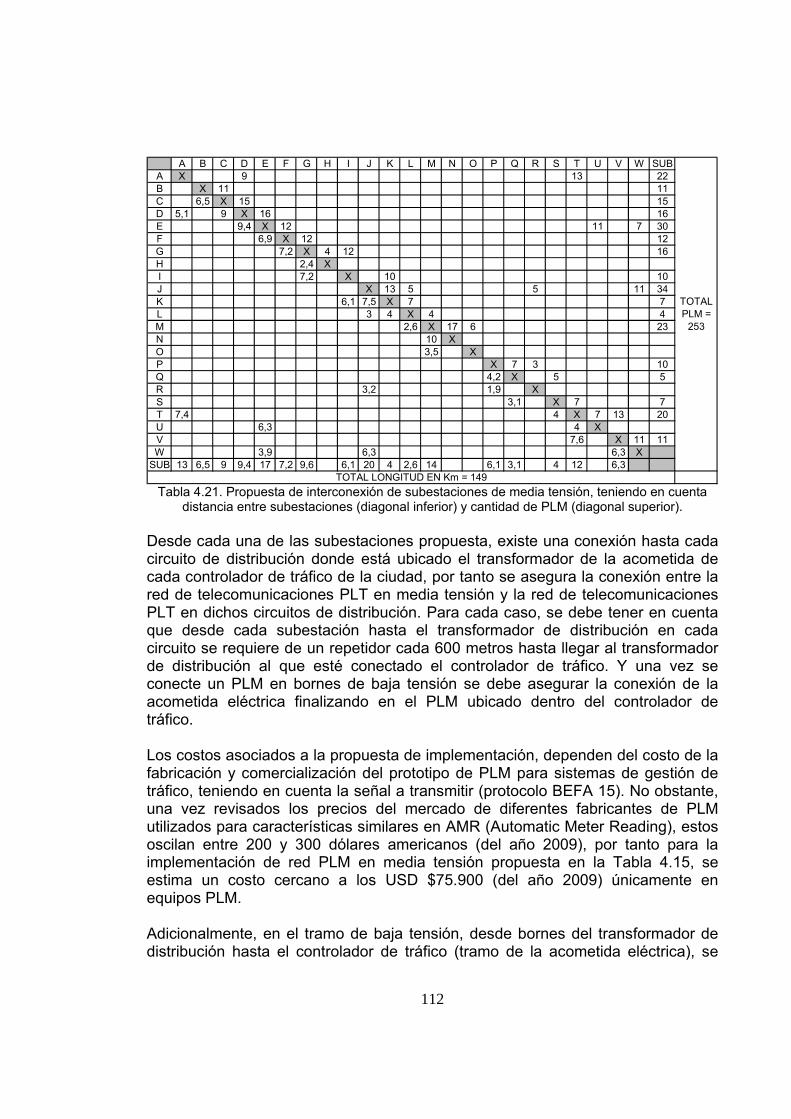
112
A B C D E F G H I J K L M N O P Q R S T U V W SUBA X 9 13 22B X 11 11C 6,5 X 15 15D 5,1 9 X 16 16E 9,4 X 12 11 7 30F 6,9 X 12 12G 7,2 X 4 12 16H 2,4 XI 7,2 X 10 10J X 13 5 5 11 34K 6,1 7,5 X 7 7L 3 4 X 4 4M 2,6 X 17 6 23N 10 XO 3,5 XP X 7 3 10Q 4,2 X 5 5R 3,2 1,9 XS 3,1 X 7 7T 7,4 4 X 7 13 20U 6,3 4 XV 7,6 X 11 11W 3,9 6,3 6,3 X
SUB 13 6,5 9 9,4 17 7,2 9,6 6,1 20 4 2,6 14 6,1 3,1 4 12 6,3
TOTAL PLM =
253
TOTAL LONGITUD EN Km = 149 Tabla 4.21. Propuesta de interconexión de subestaciones de media tensión, teniendo en cuenta
distancia entre subestaciones (diagonal inferior) y cantidad de PLM (diagonal superior). Desde cada una de las subestaciones propuesta, existe una conexión hasta cada circuito de distribución donde está ubicado el transformador de la acometida de cada controlador de tráfico de la ciudad, por tanto se asegura la conexión entre la red de telecomunicaciones PLT en media tensión y la red de telecomunicaciones PLT en dichos circuitos de distribución. Para cada caso, se debe tener en cuenta que desde cada subestación hasta el transformador de distribución en cada circuito se requiere de un repetidor cada 600 metros hasta llegar al transformador de distribución al que esté conectado el controlador de tráfico. Y una vez se conecte un PLM en bornes de baja tensión se debe asegurar la conexión de la acometida eléctrica finalizando en el PLM ubicado dentro del controlador de tráfico. Los costos asociados a la propuesta de implementación, dependen del costo de la fabricación y comercialización del prototipo de PLM para sistemas de gestión de tráfico, teniendo en cuenta la señal a transmitir (protocolo BEFA 15). No obstante, una vez revisados los precios del mercado de diferentes fabricantes de PLM utilizados para características similares en AMR (Automatic Meter Reading), estos oscilan entre 200 y 300 dólares americanos (del año 2009), por tanto para la implementación de red PLM en media tensión propuesta en la Tabla 4.15, se estima un costo cercano a los USD $75.900 (del año 2009) únicamente en equipos PLM. Adicionalmente, en el tramo de baja tensión, desde bornes del transformador de distribución hasta el controlador de tráfico (tramo de la acometida eléctrica), se

113
debe emplear un PLM con bypass en bornes del transformador cuyo costo está cercano a los 300 dólares, y un PLM dentro del controlador de tráfico, cuyo costo está cercano a los 50 dólares (del año 2009). Por tanto para los 897 controladores de tráfico se estima un costo de USD $313.950, para un total de USD $389.950, sin incluir costos de nacionalización. Con estos valores, se estima que la implementación del sistema PLT para gestión de tráfico en la ciudad de Bogotá este cercano a los USD $2`000.000 (del año 2009), incluyendo los equipos, los PLM empleados en cada circuito de distribución hasta el transformador de distribución del controlador de tráfico, los costos de nacionalización (35%), ingeniería y puesta en funcionamiento. Los costos asociados al mantenimiento en media tensión de este sistema pueden acordarse (para el caso de Bogotá D.C.) mediante convenios interadministrativos de arrendamiento de infraestructura con CODENSA, que en la actualidad para el sistema semafórico es de COL $40´000.000 mensuales45 (del año 2009), esto es, COL $480´000.000 anuales, cifra muy inferior a los cerca de COL $5.000´000.000 anuales, que cuesta el mantenimiento de la actual red de telecomunicaciones semafóricas, que emplea cableado de cobre, por tanto, para esta aplicación, el tiempo de retorno de la inversión es de un año, teniendo en cuenta los costos actuales del sistema en funcionamiento. En la figura 4.50, se puede observar el modelo con los acopladores de media a baja tensión. En la figura 4.51, se puede observar el modelo en el controlador local de tráfico, incluyendo un PLM, conectado a un puerto de comunicaciones RS-232, también se puede observar en esta figura, el plan de señales del controlador en funcionamiento, gracias a una conexión con un computador portátil. En más detalle, en la figura 4.52, se tiene un posible punto de interconexión a la llegada de la alimentación eléctrica, la cual está adyacente al actual punto de llegada del MODEM de telecomunicaciones.
45 Fuente: Secretaría Distrital de Movilidad. Dirección de control y vigilancia del tránsito.

114
Figura 4.50. Modelo PLT/PLC/BPL incluyendo acopladores de media a baja tensión
Figura 4.51. Modelo del PLM con el controlador de tráfico.

115
Figura 4.52. Punto de interconexión dentro del controlador local de tráfico.
En la figura 4.53, se presenta la estructura de niveles de protocolos propuestos para un sistema de gestión de tráfico (ITS) y sistema de control semafórico, teniendo en cuenta la telecomunicación con PLT/PLC/BPL.
Figura 4.53. Estructura de niveles de protocolos propuestos para un sistema de ITS con PLT/PLC/BPL
ITS
Central a central
Planes de señales
Central a controlador
Especificación de plataforma (CORBA,
FTP, SNMP)
TCP / IP
PLM (FSK)
Red eléctrica
Nivel de aplicación
Nivel de transporte
Nivel de red
Nivel de enlace de datos
Nivel de información
BEFA 15
ITS
Central a central
Planes de señales
Central a controlador
Especificación de plataforma (CORBA,
FTP, SNMP)
TCP / IP
PLM (FSK)
Red eléctrica
Nivel de aplicación
Nivel de transporte
Nivel de red
Nivel de enlace de datos
Nivel de información
BEFA 15
116
Por otro lado, dentro de la metodología, se debe incluir, los parámetros de implementación del modelo, la extensión de la red, los tiempos de respuesta, las implicaciones en el evento de pérdida de enlace, pérdida de nodo y las implicaciones de seguridad de datos.
4.4. PARÁMETROS DE IMPLEMENTACIÓN
Para planear la implementación del sistema PLT/PLC/BPL para gestión de tráfico, se deben considerar algunos parámetros46, que se convierten en requisitos básicos, estos son:
4.4.1. Extensión:
Indicación del área física a ser cubierta por la red de comunicaciones, En este caso la ciudad de Bogotá, que aprovecha una red instalada de distribución de energía de propiedad de la empresa CODENSA.
4.4.2. Tiempo de respuesta:
Cuán rápido puede enviarse una transmisión desde cada nodo de la red. De esto dependerán factores como velocidad de transmisión, número de nodos en servicio y el protocolo relacionado, además de los requerimientos de respuesta de la aplicación. Para este desarrollo, se deben asegurar tiempos de respuesta de máximo 400ms, teniendo en cuenta la longitud de la trama de información del protocolo BEFA 15, como se indica en el Anexo 3.
4.4.3. Tiempo de respuesta en el peor caso:
El máximo retardo, abajo y arriba del tiempo de respuesta típico, que puede ser tolerado en una aplicación en particular (causado por retransmisión debida al ruido de la línea). En este caso este valor es de 100ms, teniendo en cuenta la longitud de la trama de información del protocolo BEFA 15, como se indica en el Anexo 3.
4.4.4. Implicaciones en el evento de pérdida de enlace:
Cómo debería la red funcionar si hay un rompimiento de la comunicación. Para este sistema, la pérdida de enlace es bastante seria, debido a que si se pierde el enlace con el equipo de control de tráfico, este empieza a operar de manera local y no permite un manejo coordinado con equipos cercanos lo que produce una descoordinación de la movilidad de la zona. La atención sobre este tipo de pérdida de enlace debe ser lo más pronto posible, pero en el peor de los casos no debe superar un lapso de una hora, teniendo en cuenta que para los equipos controlados mediante protocolo BEFA 15, su funcionamiento normal debe ser bajo operación centralizada, como se describe en el capítulo I, numeral 1.6.2, mediante puntos de cambio (SF), como se describe en el numeral 1.6.2.1, por tanto ante la
46 Newbury. Power line carrier systems for industrial control applications. IEEE Transactions on power delivery. Vol 14. No. 4 October 1999.

117
pérdida de enlace, su funcionamiento es como el descrito en el numeral 1.6.1 (operación local), generando descoordinación con los equipos adyacentes.
4.4.5. Implicación de pérdida de nodo:
Cómo debe funcionar la red si un nodo se pierde. En este caso, se debe asegurar una redundancia en el camino de la señal, implicando que se debe conocer el estado de los nodos a través de la misma red, teniendo en cuenta que el nodo crítico es el más cercano al equipo de control de tráfico.
4.4.6. Implicaciones de seguridad de datos:
Es necesario para que el enlace sea seguro y como se evita la corrupción de datos por interferencia intencional o por ruido. Para este requerimiento, se puede asegurar la información gracias al protocolo utilizado para el entendimiento entre el centro de control de tráfico y los controladores de tráfico en la calle, ya que dicho protocolo únicamente obedece a ciertas órdenes y reportes desde la central de tráfico y solamente permite dar indicaciones de control o supervisión de planes de manejo de tráfico y estado del equipo de control que solo pueden ser aplicados a equipos de control local de tráfico. Analizando los enunciados anteriores, se puede ver que el control y supervisión del tráfico tiene requerimientos básicos de comunicación en tiempo real y de manera segura, además de tiempos de desconexión intermedios que permiten tener un rango de opciones tecnológicas en PLT/PLC/BPL disponibles en el mercado para atender esta necesidad. Hay que tener en cuenta que para este sistema se deben relacionar tanto las técnicas de transmisión como de protocolo y adicionalmente, en aspectos del protocolo relacionados con la integridad y enrutamiento de los datos.
4.5. MODELOS DE NEGOCIO
Se plantean dos modelos de negocios, pero pueden existir múltiples, todo depende del modelo de funcionamiento de los sistemas de gestión de tráfico de cada ciudad. Esto, debido a que en algunas ciudades, como es el caso de Cartagena (Colombia), la gestión de tráfico semafórica hace parte de la red de iluminación pública, y en otras ciudades, como Bogotá (Colombia) hace parte de la Secretaría Distrital de Movilidad.
4.5.1. Caso 1. Sistema de gestión de tráfico como parte del sistema de iluminación pública.
En este caso los costos asociados a la implementación, operación y mantenimiento del sistema de telecomunicaciones utilizando PLT/PLC/BPL, hacen parte de los mismos costos de operación y mantenimiento de la red de media y baja tensión. Únicamente se tiene un incremento en personal calificado en
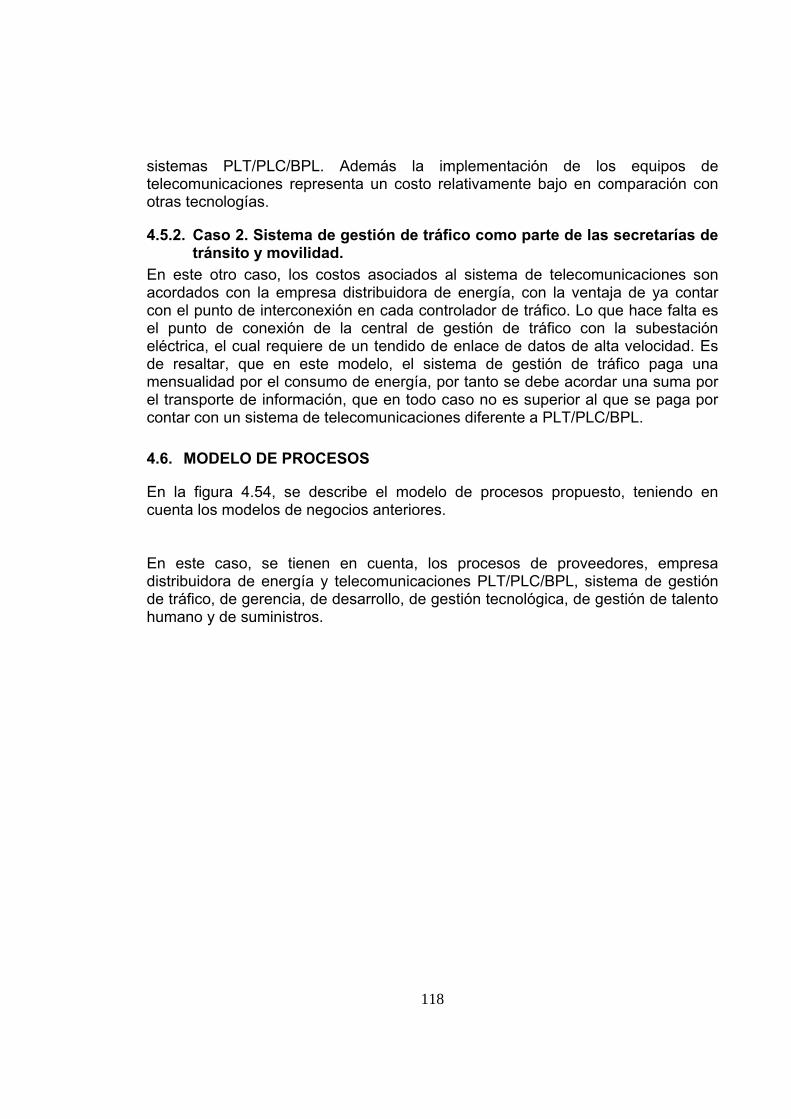
118
sistemas PLT/PLC/BPL. Además la implementación de los equipos de telecomunicaciones representa un costo relativamente bajo en comparación con otras tecnologías.
4.5.2. Caso 2. Sistema de gestión de tráfico como parte de las secretarías de tránsito y movilidad.
En este otro caso, los costos asociados al sistema de telecomunicaciones son acordados con la empresa distribuidora de energía, con la ventaja de ya contar con el punto de interconexión en cada controlador de tráfico. Lo que hace falta es el punto de conexión de la central de gestión de tráfico con la subestación eléctrica, el cual requiere de un tendido de enlace de datos de alta velocidad. Es de resaltar, que en este modelo, el sistema de gestión de tráfico paga una mensualidad por el consumo de energía, por tanto se debe acordar una suma por el transporte de información, que en todo caso no es superior al que se paga por contar con un sistema de telecomunicaciones diferente a PLT/PLC/BPL.
4.6. MODELO DE PROCESOS
En la figura 4.54, se describe el modelo de procesos propuesto, teniendo en cuenta los modelos de negocios anteriores. En este caso, se tienen en cuenta, los procesos de proveedores, empresa distribuidora de energía y telecomunicaciones PLT/PLC/BPL, sistema de gestión de tráfico, de gerencia, de desarrollo, de gestión tecnológica, de gestión de talento humano y de suministros.
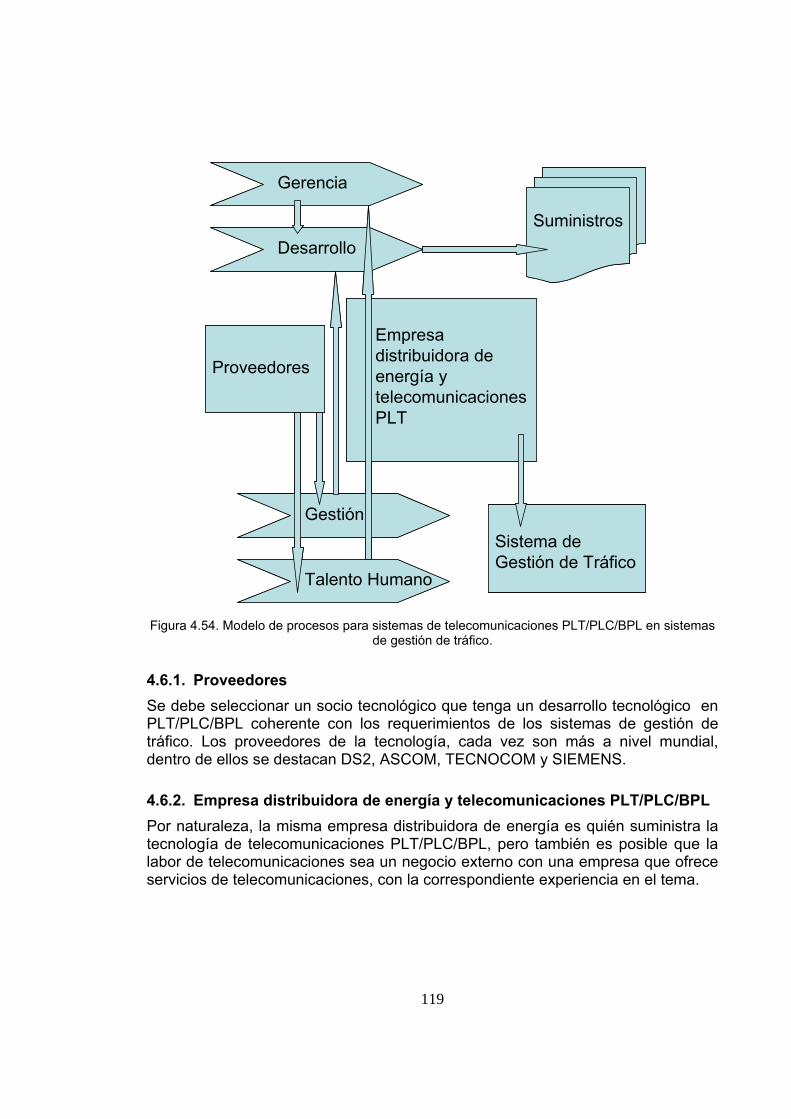
119
Figura 4.54. Modelo de procesos para sistemas de telecomunicaciones PLT/PLC/BPL en sistemas de gestión de tráfico.
4.6.1. Proveedores
Se debe seleccionar un socio tecnológico que tenga un desarrollo tecnológico en PLT/PLC/BPL coherente con los requerimientos de los sistemas de gestión de tráfico. Los proveedores de la tecnología, cada vez son más a nivel mundial, dentro de ellos se destacan DS2, ASCOM, TECNOCOM y SIEMENS.
4.6.2. Empresa distribuidora de energía y telecomunicaciones PLT/PLC/BPL
Por naturaleza, la misma empresa distribuidora de energía es quién suministra la tecnología de telecomunicaciones PLT/PLC/BPL, pero también es posible que la labor de telecomunicaciones sea un negocio externo con una empresa que ofrece servicios de telecomunicaciones, con la correspondiente experiencia en el tema.
Empresa distribuidora de energía y telecomunicaciones PLT
Proveedores
Suministros
Sistema de Gestión de Tráfico
Gerencia
Desarrollo
Gestión
Talento Humano
Empresa distribuidora de energía y telecomunicaciones PLT
Proveedores
Suministros
Sistema de Gestión de Tráfico
Gerencia
Desarrollo
Gestión
Talento Humano

120
4.6.3. Sistema de Gestión de tráfico
En este caso, el sistema de gestión de tráfico es el cliente de PLT/PLC/BPL, ya que a menos que la gestión del tráfico sea parte de la red de iluminación pública, el enfoque está en la regulación de la movilidad de la ciudad y no en los sistemas de telecomunicaciones.
4.6.4. Proceso de Gerencia
La directiva del sistema de telecomunicaciones PLT/PLC/BPL debe establecer las políticas de los procesos de desarrollo del sistema. Orientando y tomando decisiones de carácter tecnológico al momento de cambiar la tecnología o de acoplarla a otras tecnologías existentes o presentadas en prospectiva.
4.6.5. Proceso de Desarrollo
Teniendo en cuenta la expansión del sistema de gestión de tráfico y las limitaciones tecnológicas se plantea conseguir el mejor precio y rendimiento de productos PLT/PLC/BPL y de su reemplazo total o parcial, en caso que los requerimientos de manejo de información del sistema de gestión de tráfico cambien. En el caso de Bogotá D.C., se debe asegurar en la actualidad el manejo de la información del sistema de semaforización (tramas de información de 2400bps), pero dicho sistema se debe planear hacia el manejo de información relacionada con video.
4.6.6. Proceso de Gestión Tecnológica
Se deben seguir procesos de vigilancia, inteligencia y perspectiva tecnológica, para establecer las tecnologías emergentes que puedan representar peligro u oportunidad para el sistema PLT/PLC/BPL. Una opción, es la de complementar el sistema de telecomunicaciones con otras tecnologías nuevas, o simplemente, como en el caso del sistema de Bogotá D.C., la complementación con el sistema de telecomunicaciones actual.
4.6.7. Proceso de Gestión Talento Humano
La base de todo sistema de gestión de tráfico es el personal, el cual debe ser idóneo para cada labor asignada, por tanto se presenta como un factor clave en los sistemas de telecomunicaciones, es así como se ha planteado contar con un grupo interdisciplinario de profesionales, teniendo en cuenta su experiencia en gestión de tráfico, donde se sugiere que sean incluidos entre otros, ingenieros de telecomunicaciones, electricistas, electrónicos y de sistemas.

121
4.6.8. Proceso de Suministros
Para el sistema de gestión de tráfico debe ser una ventaja contar con un servicio de telecomunicaciones con gran ancho de banda ancha, como es PLT/PLC/BPL, pues la convergencia de los servicios en telecomunicaciones es grande, así la conexión de suministro de energía eléctrica ahora se convierte en una conexión de banda ancha adicional.
122
CONCLUSIONES
1. La estructura general planteada para la operación de los controladores de tráfico local, teniendo en cuenta las tecnologías presentes a nivel mundial y la proyección de fabricación, con una vida útil de 15 años, tiempo en el cual los fabricantes no garantizan la provisión de repuestos, permite determinar las condiciones técnicas de los pliegos de condiciones para la compra de estos elementos, sin importar el protocolo de telecomunicaciones para su conexión con la central semafórica.
2. Teniendo en cuenta las condiciones de operación de los controladores de
tráfico, y el protocolo de telecomunicaciones, se evidenció la necesidad de La operación de la gestión de tráfico en las ciudades de manera centralizada, con el fin de garantizar la supervisión de los equipos en la calle, la supervisión de la movilidad de la ciudad y la coordinación del planeamiento de tráfico (tiempos de viaje).
3. Los modos de operación del protocolo de telecomunicaciones BEFA 15,
antes conocido únicamente por el fabricante, son los siguientes:
Seis (6) bytes de comandos cada uno con 8 bits Cuatro (4) bytes de mensajes cada uno con 8 bits
La interfase de transmisión de datos es de tipo asíncrona, serial de 2400 bps, código ASCII y 7 bits + bit de paridad par. Los niveles de voltaje del sistema de suministro están entre 0 y 1Vrms, los cuales son inyectados a la interfase de comunicación.
4. Del análisis comparativo de las telecomunicaciones por líneas de potencia
eléctrica (PLT/PLC/BPL) para sistemas de gestión de tráfico, con medios alámbricos e inalámbricos, se observa un comportamiento equivalente con estos sistemas de banda ancha y se encuentran ventajas sobre el par telefónico, especialmente por el cubrimiento, el despliegue de infraestructura, mantenimiento, operación y velocidad de transmisión (en caso de aplicaciones futuras que así lo requieran).
5. Con la implementación de sistemas de telecomunicaciones para gestión de
tráfico, basados en PLT/PLC/BPL, es posible para el caso de Bogotá D.C., reducir de tres a una sola central semafórica, gracias a que con esta tecnología se puede cubrir toda la ciudad, con un solo punto de interconexión, como se indica en el modelo de implementación propuesto.

123
6. La metodología de implementación de sistemas PLT/PLC/BPL planteada para gestión de tráfico permite tener en cuenta las condiciones de las redes eléctricas colombianas.
7. En la revisión del comportamiento de la señal en la red eléctrica, se puede
deducir que a medida que hay más transiciones y reflexiones a lo largo de un camino, el factor de peso (gi) se va a hacer más pequeño. Adicionalmente, se puede observar que los caminos más largos que implican mayor atenuación, contribuyen menos a la señal en el punto de recepción.
8. El efecto de las ondas estacionarias no es común a frecuencias por debajo
de los 150kHz, cuando se emplean longitudes de cables inferiores a 150 metros, como en el caso de la conexión a partir del secundario del transformador de distribución hasta el controlador de tráfico.
9. La implementación de dispositivos como los PLM no afectan el
funcionamiento de los transformadores de distribución, debido a que los voltajes de operación empleados en la transmisión y recepción de señales, así como sus frecuencias, no generan corrientes de excitación en el núcleo del transformador y por ende no existen pérdidas en el mismo.
10. Se comprobó que FSK ofrece grandes ventajas sobre otros tipos de
modulación, debido principalmente a la cantidad de datos a ser transmitidos y al bajo costo para la implementación.
11. Se comprobó, para el modelo planteado, la independecia del protocolo de
telecomunicaciones BEFA 15, del MODEM para PLT/PLC/BPL (PLM), lo que permitió establecer una estructura de niveles de protocolos, en el caso del PLM en el nivel de red, y en el caso del BEFA 15 en el nivel de aplicación.
12. Se planteó un modelo del canal de telecomunicaciones para PLT/PLC/BPL,
determinando una función de transferencia que sirve para la simulación en frecuencia y un modelo eléctrico para la simulación en el tiempo. En ambos casos, se validó su funcionalidad, mediante pruebas de laboratorio que permiten demostrar que los niveles obtenidos corresponden a los mismos niveles de atenuación de señales transmitidas empleando PLT/PLC/BPL.
13. Considerando que la atenuación medida en la señal recibida de 132.5kHz, después de media tensión es de -70dBm, se concluye que es necesario el empleo de un bypass sobre el transformador de distribución, con el fin de disminuir dicha atenuación. Esta solución de bypass sobre el transformador se puede realizar mediante acopladores de línea, bien sea de tipo inductivo o capacitivo.
124
14. Gracias a la topología de la red eléctrica, a las condiciones técnicas de los controladores de tráfico y a las condiciones tecnológicas de los proveedores de PLT/PLC/BPL, es viable desarrollar un prototipo de PLM para telecomunicaciones en sistemas de gestión de tráfico, teniendo en cuenta la metodología propuesta y el hecho que respecto a la tecnología presente actualmente en la ciudad de Bogotá (cableado de cobre), PLT/PLC/BPL, resulta ser más económica, con mejor cobertura y con capacidades de ancho de banda superiores, lo que redunda en una mejor planificación de la ampliación de la red semafórica actual.
125
RECOMENDACIONES 1. La investigación en el tema PLT/PLC/BPL, en Colombia, debe ser desarrollado con mayor cubrimiento, tanto desde el punto de vista Universidad, como desde el punto de vista de mercado, debido a que gracias a las propiedades de la red eléctrica, es posible alcanzar un nivel aplicativo bastante alto, comparado con otras tecnologías. 2. Una vez determinado el protocolo de telecomunicaciones BEFA 15 y la estructura general de los controladores de tráfico, es posible recomendar que se cuente con un solo protocolo de telecomunicaciones entre los centros de control de tráfico y los equipos en la calle, ya que en caso de presentarse “islas” descentralizadas ó equipos que funcionen de manera local, es posible que ocurra una descoordinación por el planeamiento del tráfico en las fronteras de estas “islas”, lo que ocasionaría problemas de congestión en esa área de la ciudad. 3. Este trabajo de Tesis, es un punto de partida a una investigación entre la Universidad Nacional de Colombia y la Empresa privada, que pretende dar soluciones a los sistemas de gestión de tráfico desde el punto de vista tecnológico, pero genera una repercusión, tanto en lo social como en lo económico, para los sistemas de gestión de tráfico, para la movilidad de las ciudades y por ende para sus habitantes. 4. Se recomienda continuar con el desarrollo de trabajos de investigación por parte de la Universidad Nacional, en otros temas relacionados con PLT/PLC/BPL de gran interés, como es el caso de:
El ruido Estudio de la red de distribución eléctrica en Bogotá D.C. Estudio de la capacidad de transmisión de información de dicha red.

126
BIBLIOGRAFIA [1] Plan de desarrollo. Presidencia de la República de Colombia. www.presidencia.gov.co/planacio/cap2/cap3.htm [2] Plan Maestro de Movilidad para Bogotá Distrito Capital. http://www.movilidadbogota.gov.co [3] CEPAL. “Nuevas tecnologías de información y telecomunicaciones en el sector transporte”. Edición nº 177. Mayo 2001. http://www.eclac.cl/Transporte/noticias/bolfall/2/6562/FAL177.htm [4] Manual de Planeación y Diseño para la Administración del Tránsito y Transporte. Tomo I v5. http://transitobogota.gov.co [5] Comisión Electrotécnica Alemana, Norma DIN y la Asociación Electrotécnica Alemana (Verband Deutscher Elektrotechniker - VDE). 0832 para sistemas de señalización del tráfico. Marzo de 1990. [6] Manual de Señalización. Ministerio de transporte. Colombia. http://www.mintransporte.gov.co/Servicios/Biblioteca/documentos/Manual_senalizacion/Capitulo7_SEMAFOROS.pdf [7] Banse. Sistemas de control y manejo de tráfico. Andinatraffic. 2007. [8] N. Pavlidou. Power Line Communications: State of the art and future Trends. IEEE Communications Magazine. April 2003. [9] Dostert. Power Line communications. Prentice Hall. 2001 [10] Cavdar. Performance Analysis of FSK Power Line Communications Systems Over the Time-Varying Channels: Measurements and Modelling. IEEE TRANSACTIONS ON POWER DELIVERY, VOL. 19, NO. 1, JANUARY 2004. [11] Ramírez. Redes de subtransmisión y distribución de energía. Universidad Nacional de Colombia. 1995. [12] Malack. Engstrom., Measurements of the RF impedance of 86 commercial AC power distribution systems in six European countries. IBM (Electromagnetic Compatibility Laboratory). 2001. [13] Cantone. ST7538 FSK POWER-LINE TRANSCEIVER DEMO-KIT DESCRIPTION. STMicroelectronics. 2003 [14] Malaver H. Ramos Z. Análisis y estudio de las técnicas de tratamiento de señales para la prestación del servicio de Internet sobre redes de distribución de potencia eléctrica. Tesis de Maestría en Ingeniería de Telecomunicaciones. Universidad Nacional de Colombia. 2005 [15] Hoojien. A channel model for the residential power circuit used as a digital communications medium. IEEE Trans. Electromagn, Compat. Vol. 40. pp. 331-336.Nov. 1998. [16] Malack. RF impedance of United States and European power lines. IEEE Trans. Electromagn, Compat. Vol. 18 pp. 36-38. Feb. 1976. [17] Brown. Some Practical Measurements of Far Field Radiated Emissions from a PLT Cell and an Estimation of the Cumulative Ground-Wave Effects of PLT Deployment on a Sensitive HF Surveillance Site protected by a Non- Deployment Area of Radius 1500m. Proc. ISPLC. 2002.

127
[18] Jingbo. Characteristics of Low Voltage Distribution Networks in the European and FCC united Band and its Channel Capacity. Proc. ISPLC. 2002. [19] Philips. Modelling of Powerline Communication Channels. Proc. ISPLC. 1999. [20] Hensen. Characterisation, Measurement and Modelling of Medium Voltage Power-Line Cables for High Data Rate Communication. Proc. ISPLC. 2000. [21] Vines. Noise on residential power distribution circuits. IEEE Trans. Electromagnetic compatibility. Vol. EMC-26, pp. 161-168. Nov. 1998 [22] Tanaka. High frecuency noise power spectrum, impedance and transmission loss of powerline in Japan in intrabuilding power line communications. IEEE Trans. Consumer Electro. 34. pp. 321-326. 1998. [23] Kohno. An Adaptive canceller of cochannel for spread spectrum multiple access communication networks in a power line. IEEE. JSAC. Mayo 1999 [24] Honary. Yazdani. Application of space time diversity / coding to power line communication systems. Intl. Patent. 0130043.3. Diciembre 2001. [25] Celis Gómez, Leonardo Fabio. Tecnologías de acceso al medio en ATM inalámbrico. http://neutron.ing.ucv.ve/revista-e/No6/ [26] Tanembaum. Redes de Computadoras. Pearson. 1997. [27] Clayton. Diccionario ilustrado de telecomunicaciones. McGraw-Hill 2001. [28] Tomasi. Sistemas de comunicaciones electrónicas. Prentice Hall. 2003. [29] Onunga. Personal Computer Communications on lntrabuilding powerline LAN using CSMA with Priority Acknowlegment. IEEE JSAC. vol. 7. pp. 180-91. 1989. [30] Vuong. An Iow-cost and Portable Local Area Network for Interconnecting PC's using Electric Power Lines. IEEE JSAC. Vol. 7. No. 2. p.p. 192-201. Feb. 1989. [31] Gershon. A Token passing Network for Powerlines Communications. Trans. On Consumer Elec. p.p. 129--34. May 1999. [32] Chan. Performance Enhancement using Forward Error Correction on Powerline Communication Channels. IEEE Trans. Power Delivery. Vol. 9. No. 2. pp. 645-53. Apr. 1991. [33] Siegert. Alta Tensión y sistemas de transmisión. LIMUSA. 1993. [34] Anatory. Broadband Power Line Communications: The Factors Influencing Wave Propagations in the Medium Voltage Lines Justinian. Proc. IEEE ISPLC. 2007. [35] Abad, Velásquez, Ramos. Model To Apply AMR Systems In Energy Electromechanical Meter Using Low Voltage Distribution Lines (117 VAC - 60 Hz.) In Colombia. Proceedings IEEE ISPLC 2007 [36] Hui-Myoung Oh. A Systematic Technique for Estimating Multipath Parameters of Power-Line Communication Channel. Proc. IEEE ISPLC. 2007. [37] Papadopoulos. A Multipath Channel Model for PLC Systems based on Nodal Method and Modal Analysis. Proc. IEEE ISPLC. 2007. [38] Tucci. A Fuzzy-Logic model for impulsive noise in PLC. Proc. IEEE ISPLC. 2007. [39] Mengi. Coded Frequency Modulation with RLL Sequences for CENELEC Band Applications. Proc. IEEE ISPLC. 2007. [40] Guerrieri. Performance of the turbo coded Home Plug AV system over power-line networks. Proc. IEEE ISPLC. 2007.

128
[41] Swart. Convolutional code search for good permutation trellis codes using M-ary FSK. Proc. IEEE ISPLC. 2007. [42] Aquilu´e. A Low Complexity Multicarrier Proposal for Medium Rate Demanding Automatic Meter Reading Systems. IEEE ISPLC. 2007. [43] Lasciandare. Experimental field trials of a utility AMR power line communication system analyzing channel effects and error correction methods. Proc. IEEE ISPLC. 2007. [44] Selga. Lessons Learned from Wireless Sensor Networks with Application to AMR and PLC. Proc. IEEE ISPLC. 2007. [45] Li. Broadband Impedance Matching Circuit Design Using Numerical Optimization Techniques and Field Measurements. Proc. IEEE ISPLC. 2007. [46] Janse. Classifying Typical Residential Rooms for Narrow-Band Impedance Adaptation. Proc. IEEE ISPLC. 2007. [47] Pang. Common-mode Current Propagation in Power Line Communication Networks Using Multi-Conductor Transmission Line Theory. Proc. IEEE ISPLC. 2007. [48] Newbury. The assessment and Measurement of the signal Regression of Broadband Power Signals in the frequency range 1.6MHz to 30MHz over the low voltage distribution Network. Proc. IEEE ISPLC. 2007. [49] Capetta. Digital PLC technology to support the MV and HV grid remote control: practical experience and standardisation open issues. Proc. IEEE ISPLC. 2007. [50] Castellani. HV-DPLC SELTA experience and standard needs vision. Proc. IEEE ISPLC. 2007. [51] Miravalles. Opera 2: standardization of broadband PLC. Proc. IEEE ISPLC. 2007. [52] Benninger. Standardization issues of Digital Power Line Communication over high voltage lines. Proc. IEEE ISPLC. 2007. [53] Cañete. Power line channels: frequency and time selective Part 1.- Response of indoor PLC channels. Proc. IEEE ISPLC. 2007. [54] Katayama. Power line channels: frequency and time selective Part 2.- Noise statistics of indoor PLC channels. Proc. IEEE ISPLC. 2007. [55] Belov. Mathematical modelling of conducted EMI in an independent power supply system including power line communication technology. Proc. IEEE ISPLC. 2007. [56] Koch. Derivation of the extrapolation factor for PLC radiation measurements. Proc. IEEE ISPLC. 2007. [57] Favre. Common mode Current and radiations mechanisms in PLC networks. Proc. IEEE ISPLC. 2007. [58] Rubinstein. On the Impact of Mitigating Radiated Emissions on the Capacity of PLC Systems. Proc. IEEE ISPLC. 2007. [59] Tonello. Synchronization for Multiuser Wide Band Impulse Modulation Systems in Power Line Channels with Unstationary Noise. Proc. IEEE ISPLC. 2007. [60] Tucci. Blind Channel Estimation for Power-line Communications by a Kohonen Neural Network. Proc. IEEE ISPLC. 2007.
129
[61] Arrabal. Comparative Analysis of Pilot-Based Channel Estimators for DMT Systems Over Indoor Power-Line Channels. Proc. IEEE ISPLC. 2007. [62] Haidine. Analysis of the Channel Allocation Problem in Broadband Power Line Communications Access Networks. Proc. IEEE ISPLC. 2007. [63] Do. CATP: Collective Acknowledgement Transmission Protocol for Group Commands in PLC Networks based on the SFN Technique. Proc. IEEE ISPLC. 2007. [64] Zaballos. Simulation and modelling of the coexistence of polling and contention in PLC based AMR systems. Proc. IEEE ISPLC. 2007. [65] Do. Performance Evaluation of the PLC-MAC Protocol in Accordance with the OPERA Specification. Proc. IEEE ISPLC. 2007. [66] Garaluz. Mitigation of cyclic short-time noise in indoor power-line channels. Proc. IEEE ISPLC. 2007. [67] Fertonani. A Simplified Metric for Soft-Output Detection in the Presence of Impulse Noise. Proc. IEEE ISPLC. 2007. [68] Maniati. Robust Detection in Power Line Communication for OFDM and non-Rayleigh fading Channels. Proc. IEEE ISPLC. 2007. [69] Jensen. Benchmarking and QoS of In-House Powerline Equipment under Noisy Conditions. Proc. IEEE ISPLC. 2007. [70] Latchman. HomePlug Standards for Worldwide Multimedia In-Home Networking and Broadband Powerline Access. Proc. IEEE ISPLC. 2007. [71] Hansen. Standardised Characteristics Measurements and Modelling of the Transmission Channel. Proc. IEEE ISPLC. 2007. [72] Neto. PLC Systems Performance Analysis Regarding Power Quality Disturbances. Proc. IEEE ISPLC. 2007. [73] Benato. Application of plc for control and protection of future distribution networks. Proc. IEEE ISPLC. 2007. [74] Lee. Characteristic Parameter Analysis on Medium Voltage Power Distribution Line for BPLC. Proc. IEEE ISPLC. 2007. [75] Grassi. Data-Transmission Characteristics of Power Cables With Star-Quad Cross-Section. Proc. IEEE ISPLC. 2007. [76] Mujcic. High-voltage PLC roles in packet-switching networks of power utilities. Proc. IEEE ISPLC. 2007. [77] Thirugnanam. Channel Modelling for Impulse-Based Communications over a Microprocessors Power Distribution Network. Proc. IEEE ISPLC. 2007. [78] Seo. An Iterative Technique of Time- and Frequency-Domain Clipping for Reducing PAPR of OFDM Signals. Proc. IEEE ISPLC. 2007. [79] Antonini. Systematic analysis of electromagnetic emissions and susceptibility in BPL system. Proc. IEEE ISPLC. 2007. [80] Haumont´e. Scattering Division Multiple Access. Proc. IEEE ISPLC. 2007. [81] Kang. Design and Implementation of Network Management System for Power Line Communication Network. Proc. IEEE ISPLC. 2007. [82] Meng. A Comparison Study of Three Power-Line Communication Techniques in Low Signal-to-Noise Conditions. Proc. IEEE ISPLC. 2007.
130
[83] Corlay. Improving channel estimation in Power line communications by using linear interpolation revitalized. Proc. IEEE ISPLC. 2007. [84] Mekuria. UWB Pulse Transmission over Powerline Channel. Proc. IEEE ISPLC. 2007. [85] Lele. A comparison of preamble-based channel estimation techniques for OFDM/OQAM transmission over the power line. Proc. IEEE ISPLC. 2007. [86] Pavel. Design, Installation and Operation of a Power Line Communications Network in Morelia, Mexico. Proc. IEEE ISPLC. 2007. [87] Ribeiro. Regulation Issues Relating to Broadband PLC: A Brazilian Experience and Perspective. Proc. IEEE ISPLC. 2007. [88] Theall. The Ingredients for Global Standards and Ubiquity. Proc. IEEE ISPLC. 2007. [89] Kuriyama. Evaluation of Home Appliance Translator for remote control of conventional home appliances. Proc. IEEE ISPLC. 2007. [90] Bumiller. Automated Channel and Performance Measurements for Narrowband MV- and LV-Power-Lines. Proc. IEEE ISPLC. 2007. [91] Tsuzuki. Characteristics of Power-Line Channels in Cargo Ships. Proc. IEEE ISPLC. 2007. [92] Heo Design and Implementation of Monitoring Software for Heterogeneous Control Network. Proc. IEEE ISPLC. 2007. [93] Newman. HomePlug AV Security Mechanisms. Proc. IEEE ISPLC. 2007. [94] Lin. Bandwidth Estimation of in-Home Power Line Networks. Proc. IEEE ISPLC. 2007. [95] Andreou. Performance of Commercially Available Residential PLC Modems. Proc. IEEE ISPLC. 2007. [96] Avril. Characterization of Time Variation of the Powerline Channel Frequency Response Simultaneously with Impulsive Noise. Proceedings IEEE ISPLC. 2007. [97] Zimmermann. Dostert. A Multi-Path Signal Propagation Model for the Line Channel in High Frequency Range. Proceedings IEEE ISPLC. 1999. [98] Issa. Goldberg. Power Line Communications Using Low and Medium Voltage Networks. Research and Development Department, Electricité de France. 2005. [99] Chaffanjon. A Real Knowledge of Propagation: the Way of efficiency and Reliability Making PLC Generalization Feasible. Proceedings ISPLC 1998.




















