Cours de régulation
22
1 La Régulation Le but de la régulation est de maintenir à une VALEUR DESIREE (GRANDEUR DE REFERENCE), une GRANDEUR PHYSIQUE (GRANDEUR REGLEE) comme la température, l'humidité relative, la pression... soumise à des PERTURBATIONS en mesurant sa valeur. Après COMPARAISON entre grandeur réglée et grandeur de référence, il en résulte un ECART DE REGLAGE. En fonction de cet écart, le régulateur forme un SIGNAL DE COMMANDE (GRANDEUR DE REGLAGE) qui va faire varier la PUISSANCE DE REGLAGE par l'intermédiaire d'un ACTIONNEUR (ORGANE DE REGLAGE). ☞ CES TERMES SERONT A RETENIR Les objectifs principaux à atteindre sont : - Rapidité - Précision - Stabilité Les régulateurs peuvent être de conception : - Analogique : * Electrique * Electronique * Pneumatique * Action directe à fluide auxiliaire L'affichage des valeurs et réglages peuvent être analogiques ou numériques 1. REGULATION NUMERIQUE INTEGREE - RNI Dans ces régulations, il n'apparaît pas de BLOC PHYSIQUE. L’U.T.L. (Unité de Traitement Local), sorte d'ordinateur avec un langage particulier, comporte les BLOCS FONCTION REGULATION. Toutes les GRANDEURS nécessaires à la régulation entrent sous formes numériques au bloc qui forme la grandeur de sortie toujours en numérique. 1.1. ENTREE Les grandeurs d'entrées analogiques sont transformées en valeurs numériques pour avoir accès au bloc régulation. 1.2. SORTIE Les grandeurs de sorties numériques venant du bloc régulation sont transformées en valeurs analogiques pour commander les organes de réglage.
Transcript of Cours de régulation

1
La Régulation
Le but de la régulation est de maintenir à une VALEUR DESIREE (GRANDEUR DE REFERENCE), une
GRANDEUR PHYSIQUE (GRANDEUR REGLEE) comme la température, l'humidité relative, la pression...
soumise à des PERTURBATIONS en mesurant sa valeur. Après COMPARAISON entre grandeur réglée et
grandeur de référence, il en résulte un ECART DE REGLAGE. En fonction de cet écart, le régulateur forme un
SIGNAL DE COMMANDE (GRANDEUR DE REGLAGE) qui va faire varier la PUISSANCE DE REGLAGE par
l'intermédiaire d'un ACTIONNEUR (ORGANE DE REGLAGE).
☞ CES TERMES SERONT A RETENIR
� Les objectifs principaux à atteindre sont :
− Rapidité
− Précision
− Stabilité
� Les régulateurs peuvent être de conception :
− Analogique :
∗ Electrique
∗ Electronique
∗ Pneumatique
∗ Action directe à fluide auxiliaire
���� L'affichage des valeurs et réglages peuvent être analogiques ou numériques
1. REGULATION NUMERIQUE INTEGREE - RNI
Dans ces régulations, il n'apparaît pas de BLOC PHYSIQUE. L’U.T.L. (Unité de Traitement Local), sorte
d'ordinateur avec un langage particulier, comporte les BLOCS FONCTION REGULATION.
Toutes les GRANDEURS nécessaires à la régulation entrent sous formes numériques au bloc qui forme la
grandeur de sortie toujours en numérique.
1.1. ENTREE
Les grandeurs d'entrées analogiques sont transformées en valeurs numériques pour avoir accès au bloc
régulation.
1.2. SORTIE
Les grandeurs de sorties numériques venant du bloc régulation sont transformées en valeurs analogiques pour
commander les organes de réglage.

2
1.3. MODULES ENTREE / SORTIE
Les transformations analogique/numérique et numérique/analogique se font par les modules entrée/sortie (voir
chapitre « Les modules Entrée / Sortie « ).
1.4. LIAISON CONTROLEUR / MODULES
Elle est réalisée par le P.BUS
12
6
3
6
45
1 = Sonde (Grandeur réglée)
2 = Module d'entrée
3 = Contrôleur avec BLOC REGULATION
4 = Module de sortie
5 = Actionneur (Grandeur de réglage)
6 = P. Bus
2. CONSTITUTION D'UNE BOUCLE DE REGULATION
T
w x
21
43
T
y
5
6
1w
y
A
B
Z
7
Figure a Figure b
1 = Régulateur
2 = Sonde
3 = Actionneur
W = Grandeur de référence (consigne)
X = Grandeur à régler (mesure)
A = Dispositif de réglage
B = Boucle à régler
Y = Grandeur de réglage (signal de sortie)

3
2.1. BUT
Maintenir une température constante dans un local. La température de l'eau dans les radiateurs varie suivant
la position de la vanne (figure a).
L'ensemble constitue une boucle de régulation qui peut être représentée suivant la figure b.
2.1.1. Dispositif de réglage
Il est constitué de :
− Régulateur � 1
− Grandeur de référence � W
− Grandeur à régler � X
− Grandeur de réglage � Y
− Actionneur � 3
2.1.2. Boucle à régler
Elle est constituée de :
− Surface de chauffe et vanne de réglage
− Le local à chauffer
− Perturbation Z (déperdition, apports, émission du corps de chauffe)
3. CONCEPTION DU REGULATEUR
Comparateur
W
X
w
x
Grandeur à régler
Grandeurde référence
Amplification
P. PI. PID
Organede réglage
O R
Y
Grandeur de réglage

4
3.1. ACTION DES REGULATEURS
Afin de pouvoir adopter l'action du régulateur à la réponse de la boucle à régler, il faudra régler son
COMPORTEMENT DANS LE TEMPS (comportement dynamique). Ceci se fait à l'aide des actions :
P : Proportionnelle
PI : Proportionnelle Intégrale
PID : Proportionnelle Intégrale Dérivée
Nota : Pour de plus amples renseignements, se reporter au principe de base de la régulation.
Nous allons étudier dans ce chapitre la base des réglages des blocs fonction régulation.
3.2. BLOC DE FONCTION REGULATION
Lors de l'affichage du journal de l'application n°1 climatisation à la ligne 11, nous voyons :
RGB3 REGULATEUR CHAUD PRV/SPV= 20.2 / 22
RGB3 Bloc régulateur RGB numéro 3
REGULATEUR CHAUD Texte en clair désignant ce bloc régulateur
PRV = 20.2 PRV (Process value) : Grandeur mesurée 20.2 : Valeur de la grandeur mesurée
SPV = 22 SPV (Set Point Value) : Grandeur de référence 22 : Valeur de consigne
4. COMPARAISON DES REGULATEURS ANALOGIQUES ET RNI
Nous trouvons dans le bloc de fonction régulation les mêmes grandeurs et les mêmes actions que dans la
régulation analogique.
ANALOGIQUE RNI
Grandeur de référence W RGB3.SPV
Grandeur à régler X RGB3.PRV
Grandeur de réglage Y RGB3.COU
Action Proportionnelle P RGB3.KREG
Action Intégrale I RGB3.KINT
Action Dérivée D RGB3.KDIF
Exemple : RGB 3 . SPV
Paramètre
Séparateur
Numéro atrribué au bloc fonction régulation
Bloc fonction régulation
Ces seuls paramètres nous suffisent pour accéder à nos manipulations.
Nous voyons sur la figure Rn1, l'organigramme global du régulateur numérique.

5
De
Consigne
Mesure
Ecart
Multiplicateur I
Multiplicateur P
Multiplicateur D
Sommateur
SortieSoustracteur
ORGANIGRAMME GLOBALREGULATEUR NUMERIQUE (RGB)
Rn 1
Nota : Toutes les formules présentéesdans ce chapître sont données à tître indicatif afin de faciliter la compréhension du système
6
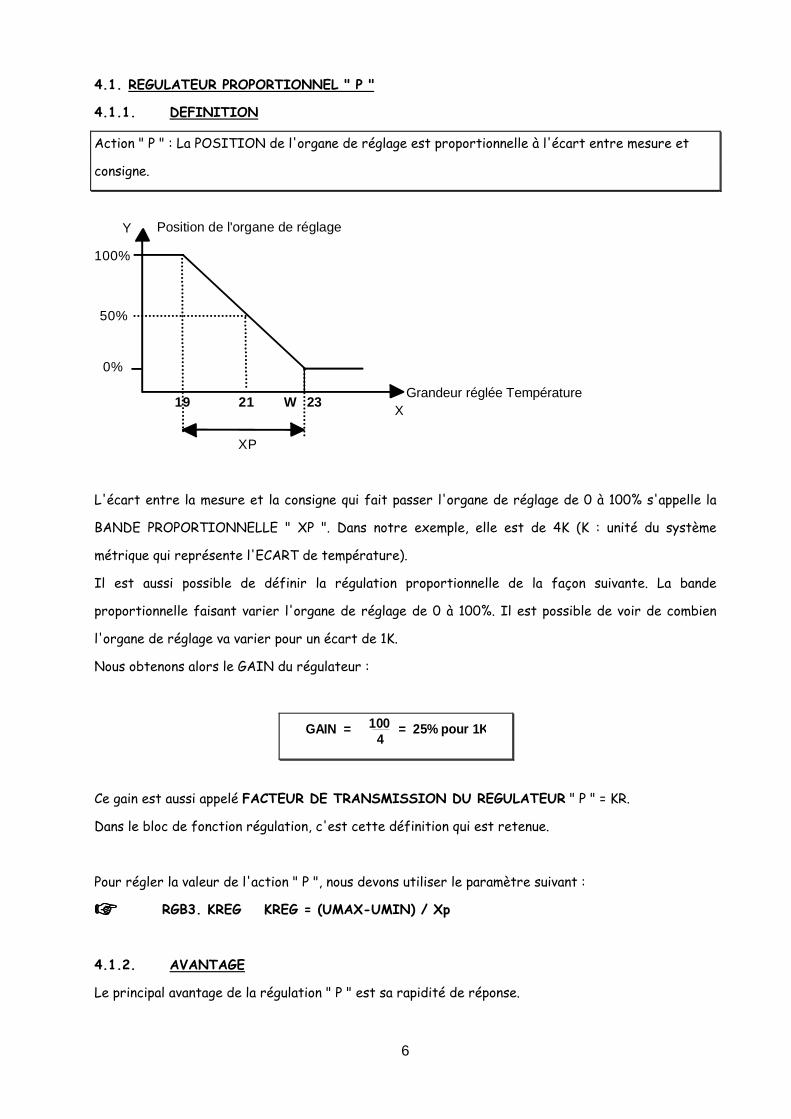
4.1. REGULATEUR PROPORTIONNEL " P "
4.1.1. DEFINITION
Action " P " : La POSITION de l'organe de réglage est proportionnelle à l'écart entre mesure et
consigne.
Y
100%
50%
0%
19 21
XP
X
Position de l'organe de réglage
Grandeur réglée Température W 23
L'écart entre la mesure et la consigne qui fait passer l'organe de réglage de 0 à 100% s'appelle la
BANDE PROPORTIONNELLE " XP ". Dans notre exemple, elle est de 4K (K : unité du système
métrique qui représente l'ECART de température).
Il est aussi possible de définir la régulation proportionnelle de la façon suivante. La bande
proportionnelle faisant varier l'organe de réglage de 0 à 100%. Il est possible de voir de combien
l'organe de réglage va varier pour un écart de 1K.
Nous obtenons alors le GAIN du régulateur :
GAIN = 1004
= 25% pour 1 K
Ce gain est aussi appelé FACTEUR DE TRANSMISSION DU REGULATEUR " P " = KR.
Dans le bloc de fonction régulation, c'est cette définition qui est retenue.
Pour régler la valeur de l'action " P ", nous devons utiliser le paramètre suivant :
☞☞☞☞ RGB3. KREG KREG = (UMAX-UMIN) / Xp
4.1.2. AVANTAGE
Le principal avantage de la régulation " P " est sa rapidité de réponse.

7
4.1.3. INCONVENIENT
Le fait que l'organe de réglage est positionné en fonction de l'écart mesure-consigne, cette
régulation dépend de la " CHARGE ". L'équilibre mesure-consigne n'existe que lorsque la mesure
égale la consigne. Si la charge augmente (l'organe de réglage s'ouvre totalement), la valeur de
mesure est inférieure à la valeur de consigne. Si la charge diminue (l'organe de réglage se ferme
totalement), la valeur de mesure est supérieure à la valeur de consigne. Il est évident que s'il est
demandé une précision totale, il ne faut pas utiliser un régulateur " P ".
� Voir figures Rn2 et Rn3
L'organigramme d'un régulateur P analogique et celui de bloc fonction régulation (RNI)

8
Bp=100
G
Consigne (W)
Mesure (X)
E=W-X
Multiplicateur P Sortie (Y)Soustracteur
Ecart=Consigne-mesure
Y=E*G
Ecart (E)
G=Gain
Paramètres classiques
REGULATEUR P.
Rn 2

9
Consigne (W) = RGBx.SPV
Mesure (X) = RGBx.PRV
Multiplicateur P Sortie (Y)Soustracteur
Paramètres du bloc RGBRGB = Bloc régulateur
Y = RGBx.E1*RGBx.KREG
RGBx . YY
Définit le No du bloc régulateurRGB+X composent l'adresse
Agit comme séparateur entrel'adresse et le paramètre
Définit le paramètre concerné
E 1= RGBx.SPV-RGBx.PRVEcart = Consigne - mesure
Ecart (E) = RGBx.E1
RGBx.KREG=RGBx.UMAX - RGBx.UMIN
Bp
REGULATEUR P.
Rn 3
Considérons que UMAX=100 et UMIN=0donc: RGBx.KREG=Gain
RGBx.KREG=Gain

10
4.2. REGULATEUR PROPORTIONNEL INTEGRAL " PI "
Dans la réalité, il n'existe pas de régulateur Intégral. Cette action est toujours liée à l'action
PROPORTIONNELLE pour former un régulateur PROPORTIONNEL INTEGRAL " PI "
4.2.1. DEFINITION
Action " I " : La vitesse de l'organe de réglage est proportionnelle à l'écart mesure-consigne. Si
l'écart est important, la vitesse est grande. Si l'écart diminue, la vitesse diminue.
Vy Vitesse de l'organe de réglage
V2
V1
K1
K2
Ecart mesure - consigne K
V = VitesseK = Ecart mesure - consigne
4.2.3. FORMATION DU REGULATEUR " PI "
I
100%
50%
X = W----0%
P
Température
Y = Position de l'organe de réglage
X = W - XPZ
X = W - XPX = Ecart de mesure en valeur de XP

11
4.2.3. TEMPS D'INTEGRATION Tn
Nous venons de voir la formation d'un régulateur " PI ". Il est pris en compte une valeur Tn (Temps
d'Intégration).
DEFINITION
Le Temps d'Intégration " Tn " est le temps qu'il faut à l'action I pour procéder pour un même écart
de réglage que celle qui a été amenée immédiatement par l'action P.
Dans notre exemple, l'écart de réglage est égal à : Z
Xp
Dans le bloc de fonction régulation, le réglage de l'action " I ", nous devons utiliser le paramètre
suivant.
RGB3.KINT
AVANTAGE
L'action I du régulateur permet de supprimer complètement l'écart de réglage.
Le régulateur PI cumule les deux avantages P + I :
���� Rapidité
���� Précision
� Voir figures Rn4 - Rn5
Organigramme d'un régulateur PI analogique et celui du bloc fonction régulation (RNI)
Remarque : Sur les lignes Rn4 et Rn5, les actions I et ensuite les sorties des régulateurs ne sont pas
représentées de la même façon. Le bloc de fonction régulation ne travaille pas de façon
continue comme le régulateur analogique mais par CYCLE. Il y'a donc une notion de temps
à prendre en conséquence.
Nous reviendrons sur cette particularité.
Le calculateur possède plusieurs blocs de fonction régulation. Ils travaillent les uns après les autres
en fonction du temps de cycle.
Le rapport entre CYCLE et KINT se trouve dans la formule suivante.
Tn = CYC / KINT

12
Bp=100G
Consigne (W)
Mesure (X)
E=W-X
Sortie (Y)Soustracteur
Ecart=Consigne-mesure
Ecart (E)
Paramètres classiques
Multiplicateur I
Multiplicateur P
P=E*GG=Gain
SI=Somme Intégrale
SI=SI+(E*G*GI)
GI=Gain Intégrale
Sommateur
P=Part proportionnelle
Y=P+SI
REGULATEUR P.I.
Rn 4

13
Consigne (W) = RGBx.SPV
Mesure (X) = RGBx.PRV
E 1= RGBx.SPV-RGBx.PRV
Multiplicateur P
Sortie (Y) = RGBx.COU
Soustracteur
Ecart = Consigne - mesure
Ecart (E) = RGBx.E1
Paramètres du bloc RGBRGB = Bloc régulateur
RGBX . YY
Définit le No du bloc régulateurRGB+X composent l'adresse
Agit comme séparateur entrel'adresse et le paramètre
Définit le paramètre concerné
Multiplicateur I
Multiplicateur PP=E1*KREG
RGBx.KREG=Gain
RGBx.SINT=Somme Intégrale
SINT=SINT+(E1*KREG*KINT)
RGBx.KINT=Gain Intégrale
Part Proportionnelle
Sommateur
COU = P +RGBx.SINT
Nota : La part proportionnelle n'est pasaccessible par les paramètres dubloc régulateur elle peut secalculer par la formule suivanteP = COU - SINT
REGULATEUR P.I.
Rn 5
RGBx.KREG=RGBx.UMAX - RGBx.UMIN
Bp
Considérons que UMAX=100 et UMIN=0donc: RGBx.KREG=Gain

14
4.3. REGULATEUR PROPORTIONNEL INTEGRAL DERIVE " PID "
Dans ce régulateur, il est ajouté une action " DERIVEE ". Cette action vient s'ajouter aux actions
proportionnelle et intégrale pour former un régulateur " PID. "
4.3.1. DEFINITION
Action " D " : Elle mesure la vitesse de variation de l'écart mesure-consigne. Elle produit une
modification de la grandeur de réglage en fonction de la vitesse de l'écart de
réglage.
Il faut donc que l'écart varie pour que l'action dérivée ait un rôle.
4.3.2. FORMATION DU REGULATEUR " PID "
y100%
50%
0%
D
I
P
X = W
X = W - XP
X = W-XP
2
X = Ecart de mesure en valeur de XP
4.3.3. TEMPS DE DERIVATION - TV
Le temps de dérivation Tv définit l'action de la part D du régulateur. Il est indiqué en secondes ou
en minutes. Plus Tv est grand plus le régulateur intervient avec force dès le premier instant.
Dans le bloc fonction régulation, le réglage de l'action " D ", nous devons utiliser le paramètre
suivant :
RGB3.KDIF
AVANTAGE
L'action D du régulateur lui permet de réagir comme s'il avait ressenti plus tôt la variation de la
grandeur réglée. On réduit ainsi les répercussions nuisibles du temps mort.
� Voir figures Rn6 et Rn7
Organigramme d'un régulateur PID analogique et celui du bloc fonction régulation (RNI)
REMARQUE
Comme pour la partie I, il existe aussi une différence de présentation de l'action D. Ceci est dû au
fait que le bloc régulation travaille par CYCLE.

15
Consigne (W)
Mesure (X)
E=W-X
Sortie (Y)Soustracteur
Ecart=Consigne-mesure
Ecart (E)
Paramètres classiques
Multiplicateur I
Multiplicateur P
P=E*GG=Gain
SI=Somme Intégrale
SI=SI+(E*G*GI)
GI=Gain Intégrale
Sommateur
P=Part proportionnelle
Y=P+SI+D
Multiplicateur D
D=Part DérivéeDeDe=Dérivée de l'écart
GD=Gain DérivéeD=De*GD
Bp=100
G
REGULATEUR P.I.D.
Rn 6

16
Consigne (W) = RGBx.SPV
Mesure (X) = RGBx.PRV
E 1= RGBx.SPV-RGBx.PRV
Multiplicateur P
Sortie (Y) = RGBx.COU
Soustracteur
REGULATEUR P.I.D.
Ecart = Consigne - mesure
Ecart (E) = RGBx.E1
Paramètres du bloc RGBRGB = Bloc régulateur
RGBX . YY
Définit le No du bloc régulateurRGB+X composent l'adresse
Agit comme séparateur entrel'adresse et le paramètre
Définit le paramètre concerné
Multiplicateur I
Multiplicateur P
P=E1*KREGKREG=Gain Proport.
RGBx.SINT=Somme Intégrale
SINT=SINT+(E1*KREG*KINT)
RGBx.KINT=Gain Intégrale
Part Proportionnelle
Sommateur
COU = P +RGBx.SINT+D
De
Multiplicateur D
KDIF=Gain Dérivée
D=De*KDIF
De=Dérivée de l'écart
Nota : Seule la part intégrale est accessible par le paramètreSINT ( RGBx.SINT )
Rn 7
RGBx.KREG =RGBx.UMAX - RGBx.UMIN
Bp

17
4.3.4. BOUCLES A REGLER
On peut classer les boucles à régler en deux catégories. Elles déterminent le choix des actions du
régulateur.
LES BOUCLES LENTES
Elles demandent un temps d'équilibrage assez long.
Exemple : Température ambiante d'un local
Régulateur : Actions PI ou PID
LES BOUCLES RAPIDES
Elles demandent un temps d'équilibrage très court
Exemple : Température de l'air soufflé
Température instantanée ECS
Température départ vers radiateurs
Régulateur : Action PI
Nota : Le régulateur action P peut être utilisé dans les boucles lentes à condition qu'il soit accepté
un léger écart de réglage.
CYCLE
Le temps de CYCLE est rentré dans le bloc fonction régulation.
Il est déterminé en fonction de la fréquence de variation de la boucle à régler. Il faut avoir au
minimum 3 échantillonnages de la valeur mesurée par alternance.
On accepte des temps de cycles de 5 à 30 secondes pour les boucles à régler rapides à lentes.
On peut voir sur la figure Rn9 en A et B, les valeurs mesurées pour un temps de CYCLE donné. On
remarque qu'ils se forment 4 points de mesure dans une alternance. A chaque point de mesure
correspond un calcul du bloc de fonction régulation.
Dans la figure C, il ne se fait qu'une seule mesure. Il y a donc imprécision de la valeur réelle et donc
de la correction.
Dans la figure D, nous avons un nombre important de mesure ; ce qui nous permet de suivre
l'évolution du processus le plus justement possible.
TEMPS DE CYCLE ET INTEGRATION
Nous avons vu que le rapport entre temps de cycle et KINT était donné par la formule :
Tn = CYC / KINT
On s'aperçoit sur la figure Rn8 que le temps de cycle influe sur la réponse de l'action intégrale.

18
INFLUENCE DU TEMPS DE CYCLESUR LA MESURE DU PROCESSUS
Rn 9

19
APPRECIATIONS DU REGLAGE DES ,REGULATEURS (Pour régulateurs PI)
Si le processus de régulation est trop fortement apériodique ou oscille trop, il faut régler plus ou
moins le régulateur.
Quel est le paramètre à régler :KREG ou KINT ? les figures ci-dessous essaient d’y répondre à l’aide
du comportement au dérangement.
REGIMES APERIODIQUES :
Si un dérangement provoque un trop grand écart par rapport à la valeur de consigne, KREG est trop
faible :
X
T
Trop grand écart ➞ Augmenter KREG
S’il faut trop de temps pour atteindre la valeur de consigne, c’est qu’en général KINT est trop petit :
X
T
Approche lente de la valeur de consigne ➞ Augmenter KINT
REGIMES OSCILLANTS :
Si des oscillations apparaissent dont la moyenne approche lentement de la valeur de consigne, c’est
que KREG est trop grand et KINT éventuellement trop petit.
X
T
Réduire KREG (augmenter KINT)
S’il se produit des oscillations dont la moyenne correspond à peu prés à la valeur de consigne, c’est
que KINT est trop grand.
X
T
Réduire KINT

20
5 REGLAGE DU SYSTEME DE REGULATION
5.1 METHODE DE REGLAGE
Tout d’abord, on règle une bande proportionnelle Xp aussi grande que possible, un temps
d’intégration Tn aussi grand que possible, et un temps d’intégration Tv aussi petit que possible. Puis
on réduit la bande proportionnelle jusqu’à ce qu’une oscillation permanente s’installe (figure 75). On
appelle Xp.crit la bande proportionnelle pour laquelle l’oscillation permanente apparaît. La durée
d’oscillation correspondante est appelée T.crit. Avec ces deux paramètres on peut d’éterminer les
valeurs de réglage les plus appropriées pour chaque mode de régulation (voir tableau 1) .
Tableau 1
Mode de régulation Xp Tn Tv
P 2 Xp.crit
PI 2.2 Xp.crit 0.85 T.crit
PID 1.7 Xp.crit 0.75 Tcrit 0.12 T.crit
Le réglage des paramètres selon les tableaux 1 et 6 ne donne souvent qu’un comportement de
régulation à peu près bon. Ces paramètres doivent être ajustés dans chaque cas particulier.
A l’aide de différentes figures, on va expliquer l’influence sur le comportement de régulation des
paramètres Xp et Tn sur un régulateur PI.
Dans la figure 76, on voit clairement que l’influence de la perturbation sur la grandeur réglée
diminue à mesure que la Xp diminue. Si on choisit une Xp trop petite (figure 76 c), Il se produit des
oscillations qui entraînent une instabilité.
Dans la figure 77, on peut voir que lorsque Tn diminue l’effet de la perturbation est éliminé
rapidement. Mais un temps d’intégration Tn trop petit entraîne des oscillations (figure 77 c) et donc
une instabilité.

21
Une instabilité du système peu donc provenir d’une Xp trop petite ou d’un Tn trop petit. A titre
d’explication, on compare sur la figure 78 les deux cas suivants :
(a) Xp trop petit mais Tn trop grand,
(b) Xp trop grand mais Tn trop petit.
Dans ces deux réglages, des oscillations apparaissent. Mais, dans le cas (a), il faut du temps avant
que la valeur de consigne ne soit atteinte à nouveau. Dans le cas (b), la valeur de consigne est
atteinte trop rapidement.
Le tableau 6 donne des réglages pour des boucles à régler de climatisation.

22