Column generation algorithm for RSA problems in flexgrid optical networks
12
Photon Netw Commun (2013) 26:53–64 DOI 10.1007/s11107-013-0408-0 Column generation algorithm for RSA problems in flexgrid optical networks Marc Ruiz · Michal Pióro · Mateusz ˙ Zotkiewicz · Miroslaw Klinkowski · Luis Velasco Received: 6 March 2013 / Accepted: 18 July 2013 / Published online: 8 August 2013 © Springer Science+Business Media New York 2013 Abstract Finding optimal routes and spectrum allocation in flexgrid optical networks, known as the RSA problem, is an important design problem in transport communication networks. The problem is NP -hard, and its intractability becomes profound when network instances with several tens of nodes and several hundreds of demands are to be solved to optimum. In order to deal with such instances, large- scale optimization methods need to be considered. In this work, we present a column (more precisely, path) generation- based method for the RSA problem. The method is capa- ble of finding reasonable sets of lightpaths, avoiding large sets of precomputed paths, and leading to high-quality solu- tions. Numerical results illustrating effectiveness of the pro- posed method for obtaining solutions for large RSA problem instances are presented. Keywords Integer programming · Column generation · Routing and spectrum allocation · Flexgrid optical networks M. Ruiz (B ) · L. Velasco Computers Architecture Department, Universitat Politècnica de Catalunya, c/ Jordi Girona, 31, 08034 Barcelona, Spain e-mail: [email protected] M. Pióro · M. ˙ Zotkiewicz Institute of Telecommunications, Warsaw University of Technology, Nowowiejska 15/19, 00-665 Warszawa, Poland M. Klinkowski Department of Transmission and Optical Technologies, National Institute of Telecommunications, Szachowa 1, 04-894 Warszawa, Poland 1 Introduction Recent technologies in flexible optical networking, and in particular the flexible grid (flexgrid) technology specified in the ITU-T G.694.1 Recommendation [1], are considered as the most promising solution to deal with high volumes of data traffic that have to be carried in transport communica- tion networks. In the flexgrid solution, the frequency spec- trum of an optical fiber link is divided into narrow frequency slots. Any sequence of consecutive slots can be used as one channel, and such a channel can be switched in the network nodes to create an optical path (lightpath). The channel cov- ers the frequency range occupied by the optical signal and the guard band required for the roll-off filters. Thus, a lightpath is determined by a routing path and a selected channel that is switched in the intermediate nodes of the route. Figure 1 illustrates with an example the above-mentioned concepts in the considered flexgrid representation. Here, two lightpaths sharing the expanded link use distinct channels in the optical spectrum, and each one of the channels uses a non-overlapped sequence of consecutive frequency slots. Note that in [1], the meaning of term slot is slightly different than in our case. However, since many works in the literature use this term in the same meaning as we do and the standardization of flex- grid technologies is still in progress, in the remainder of this paper, we consider that a slot represents a narrow segment of the frequency spectrum (as illustrated in Fig. 1). For more details on flexible optical network architectures and proof- of-concept experiments, we refer the reader to [4, 7, 10]. In flexgrid optical networks, the problem of establish light- paths for a set of end-to-end demands that compete for spec- trum resources is called the routing and spectrum allocation (RSA) problem. RSA consists of assigning a lightpath to each connection request from a given set. Each such lightpath is routed in the network graph and assigned a contiguous 123
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Column generation algorithm for RSA problems in flexgrid optical networks
Photon Netw Commun (2013) 26:53–64DOI 10.1007/s11107-013-0408-0
Column generation algorithm for RSA problems in flexgridoptical networks
Marc Ruiz · Michał Pióro · Mateusz Zotkiewicz ·Mirosław Klinkowski · Luis Velasco
Received: 6 March 2013 / Accepted: 18 July 2013 / Published online: 8 August 2013© Springer Science+Business Media New York 2013
Abstract Finding optimal routes and spectrum allocationin flexgrid optical networks, known as the RSA problem,is an important design problem in transport communicationnetworks. The problem is NP-hard, and its intractabilitybecomes profound when network instances with several tensof nodes and several hundreds of demands are to be solvedto optimum. In order to deal with such instances, large-scale optimization methods need to be considered. In thiswork, we present a column (more precisely, path) generation-based method for the RSA problem. The method is capa-ble of finding reasonable sets of lightpaths, avoiding largesets of precomputed paths, and leading to high-quality solu-tions. Numerical results illustrating effectiveness of the pro-posed method for obtaining solutions for large RSA probleminstances are presented.
Keywords Integer programming · Column generation ·Routing and spectrum allocation · Flexgrid optical networks
M. Ruiz (B) · L. VelascoComputers Architecture Department,Universitat Politècnica de Catalunya,c/ Jordi Girona, 31, 08034 Barcelona, Spaine-mail: [email protected]
M. Pióro · M. ZotkiewiczInstitute of Telecommunications,Warsaw University of Technology,Nowowiejska 15/19, 00-665 Warszawa, Poland
M. KlinkowskiDepartment of Transmission and Optical Technologies,National Institute of Telecommunications,Szachowa 1, 04-894 Warszawa, Poland
1 Introduction
Recent technologies in flexible optical networking, and inparticular the flexible grid (flexgrid) technology specified inthe ITU-T G.694.1 Recommendation [1], are considered asthe most promising solution to deal with high volumes ofdata traffic that have to be carried in transport communica-tion networks. In the flexgrid solution, the frequency spec-trum of an optical fiber link is divided into narrow frequencyslots. Any sequence of consecutive slots can be used as onechannel, and such a channel can be switched in the networknodes to create an optical path (lightpath). The channel cov-ers the frequency range occupied by the optical signal and theguard band required for the roll-off filters. Thus, a lightpathis determined by a routing path and a selected channel thatis switched in the intermediate nodes of the route. Figure 1illustrates with an example the above-mentioned concepts inthe considered flexgrid representation. Here, two lightpathssharing the expanded link use distinct channels in the opticalspectrum, and each one of the channels uses a non-overlappedsequence of consecutive frequency slots. Note that in [1], themeaning of term slot is slightly different than in our case.However, since many works in the literature use this term inthe same meaning as we do and the standardization of flex-grid technologies is still in progress, in the remainder of thispaper, we consider that a slot represents a narrow segmentof the frequency spectrum (as illustrated in Fig. 1). For moredetails on flexible optical network architectures and proof-of-concept experiments, we refer the reader to [4,7,10].
In flexgrid optical networks, the problem of establish light-paths for a set of end-to-end demands that compete for spec-trum resources is called the routing and spectrum allocation(RSA) problem. RSA consists of assigning a lightpath to eachconnection request from a given set. Each such lightpathis routed in the network graph and assigned a contiguous
123

54 Photon Netw Commun (2013) 26:53–64
Fig. 1 Example of the considered flexgrid representation
fraction of frequency spectrum (this constraint is called spec-trum contiguity) reserved on the route. Clearly, the frequen-cies assigned to the individual lightpaths cannot overlap onthe network links. Moreover, it is commonly assumed that thesame piece of the spectrum is used on all the links traversedby a lightpath (this constraint is called spectrum continuity).
The RSA optimization problem is NP-hard [12]. In prac-tice, the RSA problem is more difficult than the routing andwavelength assignment (RWA) problem related to the fixed-grid wavelength division multiplexing (WDM) networks.Note that ordinary RWA algorithms, for instance such asthe one presented in Liu and Rouskas [14], are not appro-priate for flexible optical networks as the elastic spectrumallocation in flexible optical networks is different from chan-nel assignment in WDM networks. In the former, contrary tothe latter, the channel width is not rigidly defined but can betailored to the actual width of the transmitted signal.
Several alternative mixed-integer programming (MIP)formulations of the RSA problem can be found in the litera-ture [3,12,19,20]. Among them, the formulation proposed inVelasco et al. [19] seems to be the most attractive. In this for-mulation, both the continuity and contiguity constraints areremoved from the MIP by using a set of precomputed light-paths. Although this formulation is superior to others in termsof the computational time and the size of network instanceshandled, realistic instances are still difficult to solve due tothe large set of the involved integer path-flow variables.
To make large instances of RSA tractable by MIP formu-lations, decomposition methods must be applied. Columngeneration (CG) is one of such decomposition techniques. Itallows for reducing the amount of variables (referred to ascolumns) in the LP-based problem formulations [2,13]. In
CG, the problem is initialized with a small list of admissi-ble columns which is then extended. A key element of CGis to formulate and solve a pricing problem, which concernsfinding new columns that, when added to the problem, canimprove the objective function value. Applications of CGfor solving design problems in communication networks canbe found in Pióro et al. [17]. In the context of network flowproblems, CG is referred to as path generation (PG) since thevariables to find and add are admissible path-flows.
In RSA problems, a technique based on CG must providelightpaths containing continuous and contiguous spectrumchannels. In this paper, we present a novel lightpath genera-tion algorithm (referred to as CGA) for the MIP formulationsof RSA. This PG algorithm is adapted to optical paths witha specific and unique piece of assigned spectrum. The pro-posed method is applied for a RSA problem similar to theone described in Klinkowski et al. [11]. The problem aims atminimizing the total amount of unserved bit-rate for a giventraffic matrix. The final total amount of unserved bit-rate(caused by the lack of spectrum resources) results either fromrejecting entire demands or from rejecting only a part of therequested demanded bit-rate maintaining a minimum servedbit-rate. Since network operators usually aim at providingconnectivity service to a wide variety of clients (to increaserevenues), the former case is strongly penalized. Presentedmodels are developed for a network operating with a sin-gle modulation format. Further extensions corresponding toadaptive transponders, i.e., making use of multiple modula-tion formats in accordance with lightpath characteristics, areleft for further study.
To the best of our knowledge, the presented work is amongthe first concerning application of CG to RSA problems in
123

Photon Netw Commun (2013) 26:53–64 55
flexgrid optical networks. Note that CG has been widely stud-ied in the context of RWA, for example, in Jaumard et al. [9].However, the RWA problem formulations proposed in Jau-mard et al. [9] are not applicable to RSA since, as alreadymentioned, the flexible spectrum allocation in EON differswith the fixed-grid channel assignment in WDM.
The rest of the paper is organized as follows. In Sect. 2,we present the RSA problem dealt with in the paper. Then, inSect. 3, a lightpath generation algorithm for the linear relax-ation of the introduced RSA problem is described, followedby Sect. 4 presenting the main solution approach to RSA.Effectiveness of the proposed optimization approach is dis-cussed in Sect. 5 using the results of a numerical study ofsmall-to-large size network instances derived from a well-know realistic optical network. Finally, Sect. 6 concludes thepaper and sketches directions for the future work.
2 Problem statement
2.1 Problem definition and notation
In the paper, a network is represented by a graph G =(V, E,D) where V is the set of nodes, E is the set of links,and D is the set of (traffic) demands. For the problems con-sidered in the paper, links and demands can be undirectedas well as directed. In the sequel, we will assume the undi-rected case. Let V |2| denote the set of all two-element sub-sets of the set of nodes V . Each link e ∈ E is representedby its end nodes s(e) and t (e) with {s(e), t (e)} ∈ V |2|. Itis assumed that the capacity of each link is divided into aset S = {s1, s2, . . . , sS} of slots (see Table 1). The slotsof a link can be used by connections in the form of chan-nels. Channel c of capacity n is a set of contiguous (i.e.,consecutive) slots of the form c = {si , si+1, . . . , si+n−1}for some i between 1 and S − (n − 1). In the sequel, Cwill denote the set of all possible channels and n(c), c ∈ C,the number of slots in channel c. Obviously, the number ofall possible channels (for all n = 1, 2, . . . , S) is equal to|C| = S(S+1)
2 .Each demand d ∈ D is represented by its end nodes s(d)
and t (d) with {s(d), t (d)} ∈ V |2| and is characterized by aminimum demand bit-rate and a maximum demand bit-rate,h(d) and H(d), respectively. The interpretation is that thedemand, if realized at all, must be assigned to a bandwidth(i.e., a portion of the spectrum, in terms of the number ofslots) able to serve the bit-rate between h(d) and H(d). Weuse n(d) and N (d) to denote, respectively, these bandwidthlimits. Consequently, the set C(d)(C(d) ⊆ C) of channelsthat can be used for demand d ∈ D is defined as follows:c ∈ C(d) if and only if n(d) ≤ n(c) ≤ N (d), which meansthat the paths allowable for demand d ∈ D can use onlythose channels whose capacity n(c) is sufficient to carry the
minimum demand bit-rate h(d) and is not too large in termsof the maximum bit-rate H(d). Note that
|C(d)| = (2(S + 1)−N (d)−n(d))(N (d)−n(d)+1)
2.
(1)
Each demand d ∈ D is assigned to a pre-defined set P(d)
of allowable lightpaths (each using a selected channel) con-necting its end nodes. The set of links composing the routeof lightpath p ∈ P(d) (path in graph G connecting s(d) andt (d)) is denoted by E(p), and the channel is assigned to thislightpath by c(p) ∈ C(d),
The RSA problem studied in this paper consists of deter-mining, for each demand d ∈ D, a single route overa given flexgrid optical network, p(d) ∈ P(d), togetherwith its assigned channel (spectrum allocation) c(p(d)) ∈C(d) to minimize the number of rejected demands (primaryobjective) and the amount of unserved bit-rate (secondaryobjective). The served bit-rate of each demand is a valuebetween h(d) and H(d). If h(d) cannot be satisfied, then thedemand is rejected. In other words, we are to find a singlelightpath (i.e., a route and its channel assignment) over a flex-grid optical network for every transported demand minimiz-ing the traffic objective subject to the following constraints:
– Spectrum contiguity: the channel consists of a contiguous(adjacent) subset of slots
– Spectrum continuity: the channel should be the same foreach link on the routing path
– Channel capacity: the channel should serve a bit-ratebetween h(d) and H(d)
– Slot occupancy: each slot in each link can be allocated toat most one lightpath.
2.2 Formulation of the RSA problem
The list of objects, parameters, and problem variablesrequired for the formal statement of the RSA problemdescribed in Sect. 2.1 is given in Table 1. The mixed-integerformulation of the problem can be written down in the fol-lowing way:
P(P) : min F = A∑
d∈Dh(d)Xd +
∑
d∈DYd (2a)
Xd +∑
p∈P(d)
xdp = 1 d ∈ D (2b)
∑
d∈D
∑
p∈Q(d,e,s)
xdp ≤ 1 e ∈ E, s ∈ S (2c)
Yd +∑
p∈P(d)
g(p)xdp = H(d) d ∈ D (2d)
Xd ∈ {0, 1}, Yd ∈ R d ∈ D (2e)
xdp ∈ {0, 1} d ∈ D, p ∈ P(d). (2f)
123

56 Photon Netw Commun (2013) 26:53–64
Table 1 NotationE Set of links, E = |E|S Set of spectrum slots, S = |S|b(n) Bit-rate carried in a channel consisting of n slots
C Set of channels, C = S(S+1)2
n(c) Number of slots used by channel c ∈ CS(c) Set of (contiguous) slots composing channel c ∈ CD Set of demands, D = |D|h(d) Minimum bit-rate of demand d ∈ Dn(d) Number of slots required to carry h(d), d ∈ DH(d) Maximum bit-rate of demand d ∈ DN (d) Number of slots required to carry H(d), d ∈ D
g(d, n) ={
H(d), if n = N (d)
b(n), if n(d) ≤ n < N (d)Bit-rate of demand d ∈ D carried on n slots
C(d) ⊆ C Set of channels allowable for demand d ∈ D,
c ∈ C(d) ⇔ n(d) ≤ n(c) ≤ N (d)
P(d) Set of lightpaths allowable for demand d ∈ DP = ⋃
d∈D P(d) Set of all allowable lightpaths
Q(d, e, s) ⊆ P(d) Set of lightpaths for d ∈ D usingslot s ∈ S on link e ∈ E
E(p) Set of links traversed by lightpath p ∈ Pd(p) Demand d ∈ D realized by lightpath p ∈ Pc(p) Channel occupied by lightpath p ∈ P , c(p) ∈ C(d)
n(p) = n(c(p)) Number of slots occupied by lightpath p ∈ PS(p) = S(c(p)) Set of slots used by lightpath p ∈ Pg(p) = g(d(p), n(p)) Bit-rate carried on lightpath p ∈ PA A weight for objective function (A � 1)
Xd , d ∈ D Binary variables, Xd = 1 when d is not realized at all
xdp, d ∈ D, p ∈ P(d) Binary variables, xdp = 1 when lightpathp carries its demand d
Yd , d ∈ D Continuous variables, unserved bit-ratewith respect to H(d).
Objective function (2a) minimizes the total amount ofunserved bitrate. By using the weight factor A, the unservedbit-rate from all refused demands (i.e., Xd = 1) prevailsover the unserved bitrate from accepted ones (xdp = 1),thus giving priority to the minimization of demand rejection.Constraint (2b) either assigns a lightpath to a demand (i.e.,∑
p∈P(d) xdp = 1 and Xd = 0) or rejects the demand (i.e.,∑p∈P(d) xdp = 0 and Xd = 1). Moreover, in the first case,
it selects exactly one lightpath to be assigned for the demand.Constraint (2c) makes sure that occupancy of the slots is notviolated, ensuring that the number of active lightpaths (i.e.,lightpaths with xdp = 1) sharing a specific slot is at mostequal to 1. Constraint (2d) sets the variable Yd equal to theunserved, with respect to H(d), bit-rate of demand d ∈ D.Finally, constraints (2e) and (2f) define the type of variables(R denotes the set of real numbers).
Observe that formulation (2) is based on path-flows, andtherefore, it assumes a given set of allowable lightpaths P .Clearly, the formulation is non-compact as it requires an
exponential number of variables xdp, d ∈ D, p ∈ P(d),in order to consider all possible lightpaths. The problemP(P) with the set P containing all possible lightpaths willbe referred to simply as P. The set P is defined by thecondition: P = ⋃
d∈D P(d) and for each d ∈ D, p ∈P(d) if, and only if, the E(p) defines an elementary (i.e.,loop-less) path in graph G between s(d) and t (d), andc(p) ∈ C(d). Certainly, in the paper, we are lookingfor solutions of P that can possibly utilize any path in anetwork.
3 Lightpath generation algorithm
Below we consider the linear relaxation L(P) of the mixed-integer programming formulation P(P) given in (2), and itssolution via CG. The linear relaxation of problem P (withthe full list of allowable paths) will be denoted by L. Forthe considered problem, CG actually means generation of
123

Photon Netw Commun (2013) 26:53–64 57
lightpaths that will actually be performed through the con-straint generation for the problem dual to L.
3.1 Linear relaxation of problem P and its dual
Let P be a given list of admissible paths. The linear relax-ation of the mixed-integer formulation P(P), call the primalproblem below, is as follows:
L(P) : min F = A∑
d∈Dh(d)Xd +
∑
d∈DYd (3a)
[λd ] Xd +∑
p∈P(d)
xdp = 1 d ∈ D (3b)
[πes ≥ 0]∑
d∈D
∑
p∈Q(d,e,s)
xdp ≤ 1 e ∈ E, s ∈ S (3c)
[γd ] Yd +∑
p∈P(d)
g(p)xdp = H(d) d ∈ D (3d)
Xd ∈ R+, Yd ∈ R d ∈ D (3e)
xdp ∈ R+ d ∈ D, p ∈ P(d) (3f)
where R+ denotes the set of non-negative real numbers.To derive the problem dual to L(P), we use the dual vari-
ables specified on the left-hand sides of constraints (3b)–(3d).We first formulate the Lagrangian function (see [13] for moredetails):
L(x, X, Y ; λ, π, γ )
=∑
d∈Dγd H(d) +
∑
d∈Dλd −
∑
e∈E
∑
s∈Sπes
+∑
d∈D(Ah(d) − λd)Xd
+∑
d∈D(1 − γd)Yd
+∑
d∈D
∑
p∈P(d)
(−λd − g(p) +∑
e∈E(p)
∑
s∈S(p)
πes)xdp
(above we use the notation: λ = (λd , d ∈ D), π =(πes, e ∈ E, s ∈ S), γ = (γd , d ∈ D)). Then we define thedual function
W (λ, π, γ ) = min{L(x, X, Y ; λ, π, γ ) :x ≥ 0, X ≥ 0, Y unconstrained in sign} (4)
and by specifying the domain of the dual function by appro-priate inequalities, we obtain the dual to L(P):
D(P) : max W =∑
d∈DH(d)
+∑
d∈Dλd −
∑
e∈E
∑
s∈Sπes
(5a)
λd ≤ A · h(d) d ∈ D (5b)
λd + g(p) ≤∑
e∈E(p)
∑
s∈S(p)
πes
d ∈ D, p ∈ P(d)
(5c)
πes ≥ 0 e ∈ E, s ∈ S. (5d)
Note that dual variables γd , d ∈ D have disappeared, asonly γd = 1, d ∈ D are allowed in the domain of the dualfunction (4).
Problem D(P) is a linear programming problem with theset of feasible solutions defined by the (dual) polyhedron(5b)–(5d) in the dual space RD+E ·S . We will denote thispolyhedron by T (P). It is well known (see [13]) that theoptimal objective of the dual problem, W ∗(P), is equal tothe optimal objective, F∗(P), of the primal problem. Eachoptimal vertex solution of T (P) identifies an optimal vertexsolution of the primal problem L(P). Hence, any optimalvertex solution of D would yield an optimal vertex solutionof L.
3.2 Dual pricing
Clearly, problem D can be solved through constraint gen-eration (see for example [17]), namely through generatingconstraints (5c). Let T denote the solution polyhedron forproblem D. Now suppose we are given a set P = ⋃
d∈D P(d)
of allowable lightpaths (we may assume that P(d) = ∅, d ∈D, although even this is not necessary to assure feasibility ofD(P)) and let (λ∗, π∗) be an optimal solution of D(P). If forsome d ∈ D, there existed a lightpath p(d) ∈ P(d)\P(d)
with∑
e∈E(p(d))
∑
s∈S(p(d))
π∗es − g(p(d)) < λ∗
d
then the inequality (5c) corresponding to p(d), i.e.,
λd + g(p(d)) <∑
e∈E(p(d))
∑
s∈S(p(d))
πes (6)
would be a valid inequality for T (which means that all(λ, π) ∈ T satisfy (6)) and would cut off a part of T (P) since(λ∗, π∗) do not satisfy (6). Hence, inequality (6) defines acut for T (P) with respect to T , i.e.,
T ⊆ T (P) ∩ {(λ, π) ∈ RD+E ·S :λd + g(p(d)) <
∑
e∈E(p(d))
∑
s∈S(p(d))
πes} � T (P).
Thus, if we added lightpath p(d) to the set P of allow-able lightpaths, then polyhedron T (P ∪ {p(d)}) would bea proper subset of polyhedron T (P). In consequence, theoptimal objective of problem D(P ∪ {p(d)}) would be lessequal than the optimal objective of problem D(P), possiblysmaller. Since W ∗(P ∪{p(d)}) = F∗(P ∪{p(d)}), the latter
123

58 Photon Netw Commun (2013) 26:53–64
case would lead to an improvement as F∗(P∪{p(d)}) wouldbe smaller than F∗(P).
The above discussion leads to the constraint generationprocedure for solving the dual problem D (i.e., the problemwith all possible lightpath) based on the following dual pric-ing problem defined for a given vector of dual variables π
and for each demand d ∈ D:PP(π, d): Find a lightpath q in P(d) minimizing the
length
|q|π =∑
e∈E(q)
∑
s∈S(q)
πes − g(q). (7)
Note that the above problem can be solved by a shortest pathalgorithm applied |C(d)| times. More specifically, for eachchannel c ∈ C(d), we define the link weights as
w(e) =∑
s∈S(c)
πes (8)
and find a shortest path (route) r in graph G between the endnodes s(d), t (d) of the considered demand, with respect tothe link weights (8). Then, we define a lightpath p(d, c) withE(p(d, c)) = r (note that we treat r as a set of links) andc(p(d, c)) = c. Finally, we select the shortest, with respectto (7), lightpath p(d) out of the so defined set {p(d, c) :c ∈ C(d)}. Clearly, the procedure of solving PP(π, d) ispolynomial since the link weights (8) are nonnegative.
3.3 Solving the dual through constraint generation
To solve problem D, we apply the following algorithm.
Algorithm CGA (Constraint Generation Algorithm)
Step 1: Define an initial list P of allowable paths (seeSect. 3.5).Step 2: Solve D(P) to obtain an optimal solution (λ∗, π∗).Then, separately for each demand d ∈ D, solve the dualpricing problem PP(π∗, d). If for the current d, the value of|p(d)|π∗ is strictly less than λ∗
d then the inequality (6) is acut for T (P), and hence, we add the lightpath p(d) to theproblem: P(d) := P(d) ∪ {p(d)}. Otherwise, if |p(d)|π∗ ≥λ∗
d , we do not extend the current set P(d).Step 3: If it happens that, after considering all d ∈ D, nonew lightpath is added to P then stop: The current solution(λ∗, π∗) and the set of lightpaths P solves the dual problemD. Otherwise, go back to Step 2.
Clearly, in Step 2 of Algorithm CGA, for each d ∈ D, aconstraint of the form (5c) that is most violated by (λ∗, π∗)(if any) is added to the dual problem. Adding a new light-path p(d) to P , i.e., a new constraint to the dual problemD(P), is equivalent to adding a new flow variable xdp(d) tothe primal problem L(P). As already mentioned, the optimaldual variables (λ∗, π∗) can be easily transformed to optimal
primal variables x∗ (and to X∗ and Y ∗) at any stage of theabove algorithm (see [13]), and W ∗(P) = F∗(P). Finally,we observe that although there is no guarantee that the abovealgorithm will converge in a polynomial number of itera-tions; in practice, it does converge polynomially so we mayconsider Algorithm CGA as efficient.
3.4 Enhancements of CGA
Algorithm CGA can be adjusted in several ways. First of all,we can try to decrease the number of shortest path calcula-tions in Step 2. For a given d ∈ D, this is the number |C(d)|of channels with n(c) between n(d) and N (d), given by (1).
Obviously, no lightpath q for a demand d ∈ D using achannel with n slots cannot be shorter (in terms of (7)) thanπ∗ − g(d, n), where π∗ = mine∈E,s∈S π∗
es . Also, since thevalues π∗ − g(d, n) strictly increase with the decreasing n,the following procedure can be applied for solving the dualpricing problem PP(π∗, d) in Step 2 of CGA for each d ∈ D.
Algorithm PPA (Pricing Problem Algorithm)
Step 1: Set z(d) = +∞ and n := N (d).Step 2: If π∗ − g(d, n) ≥ z(d) go to Step 3. Otherwise, foreach channel c ∈ C(n) compute a shortest path r(c) (for theassumed d ∈ D) with respect to the link weights defined by(8) for π∗. Let r(c′) be a shortest path among the so computedshortest paths r(c), c ∈ C(n)). Set
z(d) =∑
e∈r(c′)
∑
s∈S(c′)π∗
es − g(d, n)
and define a lightpath p(d) with E(p(d)) = r(c′) andc(p(d)) = c′. Clearly, p(d) is a shortest lightpath accordingto (7) (for the given π∗) using n slots; its length is equal toz(d). Certainly, if for some channel c the length of the short-est path r(c) is equal to π∗ then we may put c′ = c and stopthe calculations as there are no better paths.Step 3: If n = n(d) stop: p(d) solves PP(π∗, d). Otherwise,n := n − 1 and go back to Step 2.
If for the current channel c it happens that the length ofthe shortest path r(c) computed in Step 2 of PPA is equal toπ∗, then we stop the algorithm: the lightpath defined by r(c)and c solves PP(π∗, d).
We can also speed up the calculations of Step 2 of CGAat the expense of the quality of the cut corresponding to thefinally calculated lightpath p(d). Instead of the most violatedcut by (λ∗, π∗), we can stop PPA when a reasonable cut isfound. We know that the shortest lightpath in P(d) has thelength (7) equal to λ∗
d , and the lower bound on the lightpath
length in P(d) is π∗−g(d, N (d)). Consequently, if in Step 2of PPA we find a lightpath p(d) with the length less or equalto
αλ∗d + (1 − α)(π∗ − g(d, N (d)))
123

Photon Netw Commun (2013) 26:53–64 59
for some fixed given α ∈ [0, 1), then we immediately go toStep 3 and treat p(d) a suboptimal solution of PP(π∗, d).Note that if α = 0, then the introduced modification is notactive.
Another way of enhancing CGA is to consider a num-ber of demands simultaneously. In Step 2 of CGA, the pric-ing problem PP is solved for each demand d ∈ D and thisrequires finding a shortest path for the weights (8) for eachpair (d, c), d ∈ D, c ∈ C(d), i.e.,
∑d∈D |C(d)| paths in total.
Since |C(d)| ≤ |C| = S(S+1)2 , d ∈ D and the value of S is
fixed and does not increase with the size of the problem, thenumber of shortest path computations is O(D). Thus, usingthe Dijkstra shortest path algorithm [5] for each pair (d, c)separately as in the CGA described in the previous section,complexity of Step 2 becomes equal to O(D · (V 2 + E)).Assuming D = O(V 2) (where V = |V|) and E = O(V 2),the considered complexity becomes O(V 4). This complexitycan be decreased by using, for each fixed channel c ∈ C, theFloyd-Warshall algorithm [6] that computes shortest pathssimultaneously for all demands. Then, the complexity ofStep 2 becomes O(V 3). Alternatively, the Floyd-Warshallcan be substituted with the Dijkstra algorithm executed forall nodes independently. Notice that one execution of theDijkstra algorithm provides shortest paths to all other nodes.
3.5 Initial sets of lightpaths
For evaluating the impact of the initial set of lightpaths Pon the CGA performance, we have used three such initial-ization procedures, referred to as MaxLeft, GreedyRSA, andMinAll,
The simplest procedure is MaxLeft. It just generates oneinitial lightpath p(d) for each demand d ∈ D. The lightpathis composed of a shortest route in terms of the number ofhops between s(d) and t (d), and of the channel c composedof the first (i.e., leftmost) N (d) slots. Thus, in fact, MaxLeftgenerates the lightpaths that would be generated by the firstiteration of CGA if it started from the empty set of admissiblepaths P = ∅. This is because the (unique) optimal solutionof D(∅) is λ∗
d = A ·h(d), d ∈ D and π∗es = 0, e ∈ E, s ∈ S.
The lightpaths in P produced by MaxLeft use the leftmostpart of the spectrum, leaving the slots on the right-hand sideof the spectrum unused. For this reason, the value of the pri-mal objective function F∗(P) after the first iteration of CGAwill be poor due to high blocking of demands. In order to alle-viate this effect, the second procedure, called GreedyRSA, isconsidered. As MaxLeft, GreedyRSA produces one lightpathp(d) for each demand d ∈ D, and p(d) is assigned a channelc with n(c) = N (d). Still, the particular channel assigned top(d) is not in general the leftmost one. To generate the paths,we first sort the demands in the decreasing order of H(d) andconsider the demands one by one. The first demand, d1, on
the ordered list D = {d1, d2, ..., dD} assigned its lightpath asin MaxLeft, and the slots used by c(p(d1)), i.e., N (d1) left-most slots, are permanently deleted from the links of p(d1).Next, for d2, we consider all the channels with N (d2) slotsone by one. For each such channel c, we try to find a router(c) between s(d2) and t (d2) such that all the slots in c areavailable on the links of r(c), and r(c) is the shortest route inthe network graph in terms of the number of hops. Supposec is the first channel for which such a route r(c) exists. Then,we define the lightpath p(d2) by putting E(p(d2)) = r(c) andc(p(d2)) = c and permanently delete the slots of c from thelinks of E(p(d2)). If, however, for all channels c with n(c) =N (d2) no such a route r(c) exists, the demand is assigned itslightpath path p(d2) according to the MaxLeft rule. In thiscase, the N (d2) (leftmost) slots assigned to p(d2) are notdeleted form the links of E(p(d2)). The procedure is contin-ued until the last demand, dD , is assigned its lightpath p(dD).
The two above-described procedures assign the maximumnumber of slots to the selected demand lightpaths. Hence,using the lightpaths P produced by MaxLeft or GreedyRSAfor L(P) will result in a solution with two groups of demands:those with maximum bit-rate allocation H(d) and those notrealized at all. As the objective function (3a) strongly penal-izes (through A � 1) the presence of demands of the lattergroup, we consider the third lightpath initialization proce-dure, MinAll, that aims at alleviating this penalization. Toform an initial set P(d), MinAll finds a shortest-hop router between s(d) and t (d) and then produces a set of light-paths P(d) = {p(d, c) : c ∈ C(d), n(c) = n(d)} withthe same route r , i.e., E(p(d, c)) = r for all c ∈ C(d) withn(c) = n(d). All the algorithms and procedures presentedabove are described in detail in [18].
4 Solution method: PBA
Our solution method for the basic RSA problem P formulatedin (2) is called price-and-branch algorithm (PBA), as it isbased on what we may call the price-and-branch approach.Recall that problem P denotes the RSA problem in which allpossible lightpaths can be used, i.e., P = P(P), where P isthe set of all lightpaths.
PBA consists of two main phases. In the first phase,we solve the linear relaxation of problem P, i.e., prob-lem L, using the constraint/path generation algorithm CGAdescribed in Sect. 3.3. The set of lightpaths P resulting fromCGA is then used as an input for the second phase.
The second phase of PBA solves problem P(P) for the setof paths P resulting form CGA. The second phase applies abranch-and-bound solver.
Thus, the name price-and-branch comes from the twophases of PBA—First, we do the pricing (which in this con-text means that we generate lighpaths), and then, for a fixed
123
60 Photon Netw Commun (2013) 26:53–64
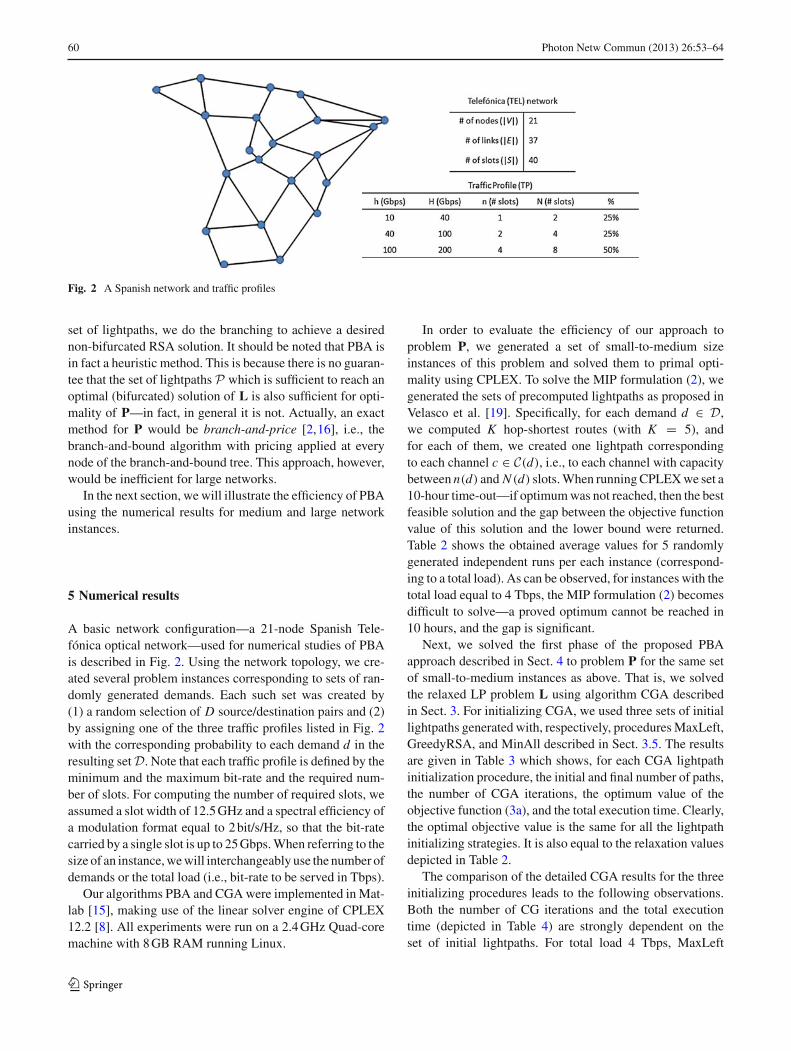
Fig. 2 A Spanish network and traffic profiles
set of lightpaths, we do the branching to achieve a desirednon-bifurcated RSA solution. It should be noted that PBA isin fact a heuristic method. This is because there is no guaran-tee that the set of lightpaths P which is sufficient to reach anoptimal (bifurcated) solution of L is also sufficient for opti-mality of P—in fact, in general it is not. Actually, an exactmethod for P would be branch-and-price [2,16], i.e., thebranch-and-bound algorithm with pricing applied at everynode of the branch-and-bound tree. This approach, however,would be inefficient for large networks.
In the next section, we will illustrate the efficiency of PBAusing the numerical results for medium and large networkinstances.
5 Numerical results
A basic network configuration—a 21-node Spanish Tele-fónica optical network—used for numerical studies of PBAis described in Fig. 2. Using the network topology, we cre-ated several problem instances corresponding to sets of ran-domly generated demands. Each such set was created by(1) a random selection of D source/destination pairs and (2)by assigning one of the three traffic profiles listed in Fig. 2with the corresponding probability to each demand d in theresulting set D. Note that each traffic profile is defined by theminimum and the maximum bit-rate and the required num-ber of slots. For computing the number of required slots, weassumed a slot width of 12.5 GHz and a spectral efficiency ofa modulation format equal to 2 bit/s/Hz, so that the bit-ratecarried by a single slot is up to 25 Gbps. When referring to thesize of an instance, we will interchangeably use the number ofdemands or the total load (i.e., bit-rate to be served in Tbps).
Our algorithms PBA and CGA were implemented in Mat-lab [15], making use of the linear solver engine of CPLEX12.2 [8]. All experiments were run on a 2.4 GHz Quad-coremachine with 8 GB RAM running Linux.
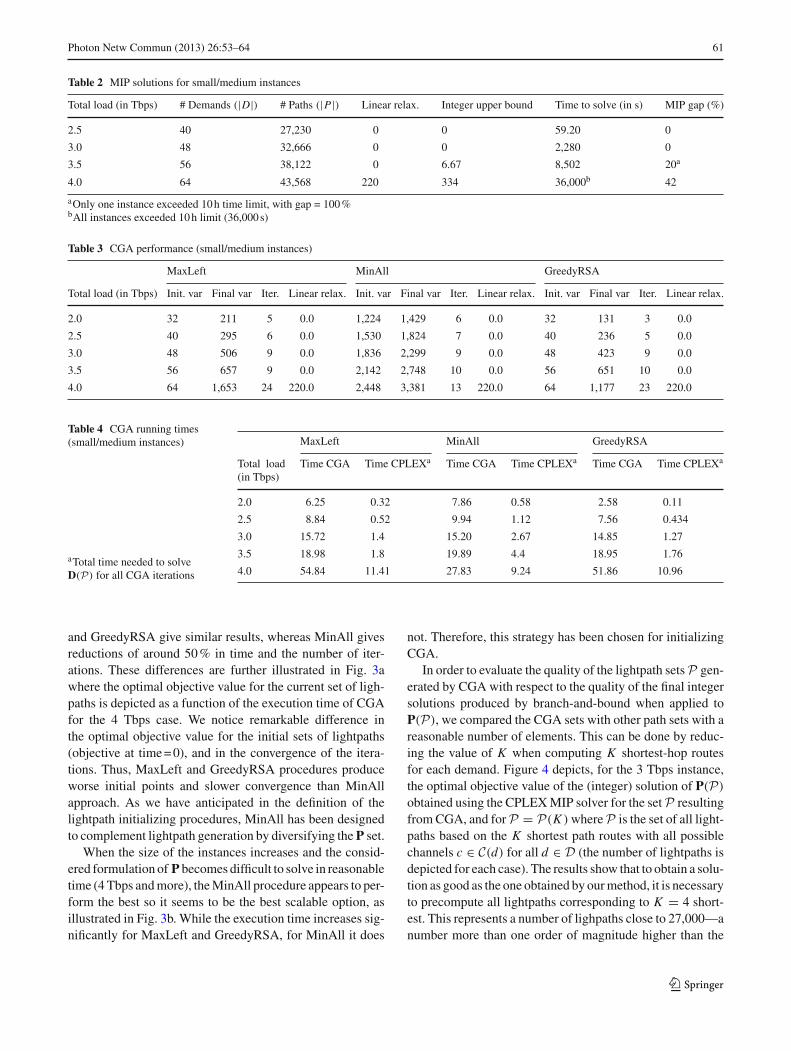
In order to evaluate the efficiency of our approach toproblem P, we generated a set of small-to-medium sizeinstances of this problem and solved them to primal opti-mality using CPLEX. To solve the MIP formulation (2), wegenerated the sets of precomputed lightpaths as proposed inVelasco et al. [19]. Specifically, for each demand d ∈ D,we computed K hop-shortest routes (with K = 5), andfor each of them, we created one lightpath correspondingto each channel c ∈ C(d), i.e., to each channel with capacitybetween n(d) and N (d) slots. When running CPLEX we set a10-hour time-out—if optimum was not reached, then the bestfeasible solution and the gap between the objective functionvalue of this solution and the lower bound were returned.Table 2 shows the obtained average values for 5 randomlygenerated independent runs per each instance (correspond-ing to a total load). As can be observed, for instances with thetotal load equal to 4 Tbps, the MIP formulation (2) becomesdifficult to solve—a proved optimum cannot be reached in10 hours, and the gap is significant.
Next, we solved the first phase of the proposed PBAapproach described in Sect. 4 to problem P for the same setof small-to-medium instances as above. That is, we solvedthe relaxed LP problem L using algorithm CGA describedin Sect. 3. For initializing CGA, we used three sets of initiallightpaths generated with, respectively, procedures MaxLeft,GreedyRSA, and MinAll described in Sect. 3.5. The resultsare given in Table 3 which shows, for each CGA lightpathinitialization procedure, the initial and final number of paths,the number of CGA iterations, the optimum value of theobjective function (3a), and the total execution time. Clearly,the optimal objective value is the same for all the lightpathinitializing strategies. It is also equal to the relaxation valuesdepicted in Table 2.
The comparison of the detailed CGA results for the threeinitializing procedures leads to the following observations.Both the number of CG iterations and the total executiontime (depicted in Table 4) are strongly dependent on theset of initial lightpaths. For total load 4 Tbps, MaxLeft
123
Photon Netw Commun (2013) 26:53–64 61
Table 2 MIP solutions for small/medium instances
Total load (in Tbps) # Demands (|D|) # Paths (|P|) Linear relax. Integer upper bound Time to solve (in s) MIP gap (%)
2.5 40 27,230 0 0 59.20 0
3.0 48 32,666 0 0 2,280 0
3.5 56 38,122 0 6.67 8,502 20a
4.0 64 43,568 220 334 36,000b 42
aOnly one instance exceeded 10 h time limit, with gap = 100 %bAll instances exceeded 10 h limit (36,000 s)
Table 3 CGA performance (small/medium instances)
MaxLeft MinAll GreedyRSA
Total load (in Tbps) Init. var Final var Iter. Linear relax. Init. var Final var Iter. Linear relax. Init. var Final var Iter. Linear relax.
2.0 32 211 5 0.0 1,224 1,429 6 0.0 32 131 3 0.0
2.5 40 295 6 0.0 1,530 1,824 7 0.0 40 236 5 0.0
3.0 48 506 9 0.0 1,836 2,299 9 0.0 48 423 9 0.0
3.5 56 657 9 0.0 2,142 2,748 10 0.0 56 651 10 0.0
4.0 64 1,653 24 220.0 2,448 3,381 13 220.0 64 1,177 23 220.0
Table 4 CGA running times(small/medium instances)
aTotal time needed to solveD(P) for all CGA iterations
MaxLeft MinAll GreedyRSA
Total load(in Tbps)
Time CGA Time CPLEXa Time CGA Time CPLEXa Time CGA Time CPLEXa
2.0 6.25 0.32 7.86 0.58 2.58 0.11
2.5 8.84 0.52 9.94 1.12 7.56 0.434
3.0 15.72 1.4 15.20 2.67 14.85 1.27
3.5 18.98 1.8 19.89 4.4 18.95 1.76
4.0 54.84 11.41 27.83 9.24 51.86 10.96
and GreedyRSA give similar results, whereas MinAll givesreductions of around 50 % in time and the number of iter-ations. These differences are further illustrated in Fig. 3awhere the optimal objective value for the current set of ligh-paths is depicted as a function of the execution time of CGAfor the 4 Tbps case. We notice remarkable difference inthe optimal objective value for the initial sets of lightpaths(objective at time = 0), and in the convergence of the itera-tions. Thus, MaxLeft and GreedyRSA procedures produceworse initial points and slower convergence than MinAllapproach. As we have anticipated in the definition of thelightpath initializing procedures, MinAll has been designedto complement lightpath generation by diversifying the P set.
When the size of the instances increases and the consid-ered formulation of P becomes difficult to solve in reasonabletime (4 Tbps and more), the MinAll procedure appears to per-form the best so it seems to be the best scalable option, asillustrated in Fig. 3b. While the execution time increases sig-nificantly for MaxLeft and GreedyRSA, for MinAll it does
not. Therefore, this strategy has been chosen for initializingCGA.
In order to evaluate the quality of the lightpath sets P gen-erated by CGA with respect to the quality of the final integersolutions produced by branch-and-bound when applied toP(P), we compared the CGA sets with other path sets with areasonable number of elements. This can be done by reduc-ing the value of K when computing K shortest-hop routesfor each demand. Figure 4 depicts, for the 3 Tbps instance,the optimal objective value of the (integer) solution of P(P)
obtained using the CPLEX MIP solver for the set P resultingfrom CGA, and for P = P(K ) where P is the set of all light-paths based on the K shortest path routes with all possiblechannels c ∈ C(d) for all d ∈ D (the number of lightpaths isdepicted for each case). The results show that to obtain a solu-tion as good as the one obtained by our method, it is necessaryto precompute all lightpaths corresponding to K = 4 short-est. This represents a number of lighpaths close to 27,000—anumber more than one order of magnitude higher than the
123

62 Photon Netw Commun (2013) 26:53–64
Fig. 3 Influence of the initial lightpath set on CGA performance
Fig. 4 Evaluation of quality of generated paths for the 3 Tbps case andMinAll
number of lightpaths generated by CGA which is smallerthan 2,000.
The results presented so far suggest that CGA is a reason-able method to generate the sets of lightpaths used to specifythe problem P(P) solved by branch-and-bound. This is espe-cially true for the instances in which the method of precom-
puting sets of lightpaths based on the K shortest-hop routesbecomes unaffordable. To illustrate this point, we generatedlarge problem instances based on the same network topologybut with large number of demands and spectrum slots. Con-sidering a large value of K (equal to 10, to make it likely thatan integer optimum will be found), the number of lightpathsrises to intractable values. Table 5 gives a sample of mean-ingful results for such large instances. In the two consideredcases (PBA solution method described in Sect. 4), the timeoutset to CPLEX to return the best integer solution was 10 h. Ascan be seen, CGA provides, with up to 2 orders of magnitudeless number of lightpaths as well as better integer solutions inthe same running time as compared with applying CPLEX tothe precomputed lightpaths. Moreover, in the cases when thenumber of lightpaths is too large for CPLEX (out-of-memorymessages appear), and the PBA approach provides a reason-able way for obtaining feasible good-quality solutions of theconsidered RSA problem.
Finally, we decided to compare our CGA algorithm with astochastic approach that generates the same number of light-paths. The results can be found in Table 6. The approachconsiders K shortest paths for each demand with respect to anumber of hops, where K ∈ {1, 2, 3, 4}, and adds lightpathsfor demands at random using only the considered K short-est paths as routes. Each of the considered routes and eachof the viable channels (of width between hd and Hd ) havean equal probability of being selected. The results show thatCGA outperforms the stochastic approach by returning a setof lightpaths that provides results 50% better on average thanthe results obtained while using a set of lightpaths returnedby the stochastic approach.
6 Conclusion and further work
In this paper, we have considered a RSA problem for flex-grid optical networks together with a price-and-branch reso-lution method PBA, based on a lightpath generation algo-rithm CGA. PBA is a two-phase method. It first finds areasonable set of lightpaths to be used in a MIP formu-lation solved in the second phase. The method aims atimproving current approaches consisting of using large setsof heuristically precomputed lightpaths that lead to exces-sively many optimization variables in the MIP formulationswhen applied to realistic network instances. Our numeri-cal results for small, medium, and large network instancesshow that PBA remarkably reduces the number of variablesin the MIP formulation of RSA (up to 2 orders of magni-tude) and maintains (or even improves) the solution qualityas compared with other approaches. It is worth mentioningthat although our approach is heuristic, it performs betterthan other reasonable ways of approaching the consideredproblem.
123

Photon Netw Commun (2013) 26:53–64 63
Table 5 PBA performance(large instances) Precomputed lightpaths CGA
Total load(in Tbps)
|D| |S| |P| Linearrelax.
Integerupperbound
|P| Linearrelax.
Integerupperbound
4 64 40 132,400 520 1,895 3,287 520 775
7 112 68 269,640 0 7,420 9,338 0 785
10 180 96 8,675,190 Out-of-memory 17,203 0 857
Table 6 PBA with CGA versus PBA with random algorithm
PBA K = 1 K = 2 K = 3 K = 4
# |P| Linearrelax.
Integerupperbound
Linearrelax.
Integerupperbound
Linearrelax.
Integerupperbound
Linearrelax.
Integerupperbound
Linearrelax.
Integerupperbound
Avg. 9,338 0 785 1,914 2,110 1,186 1,790 1,181 1,850 1,338 2,025
Min 9,300 0 755 1,894 2,100 1,180 1,770 1,151 1,760 1,255 1,920
Max 9,409 0 820 1,949 2,115 1,196 1,820 1,234 1,935 1,416 2,180
In fact, the CGA algorithm developed in Sect. 3 can beused in an exact branch-and-price algorithm where lightpathgeneration is applied not only at the root branch-and-boundnode but also at all other nodes of the branch-and-boundtree. Developing such an algorithm for the considered RSAproblem and its extensions will be the subject of our futureresearch. We shall enhance the branch-and-bound procedurewith problem-specific valid inequalities (cuts) in order tostrengthen the LP relaxations and improve the executiontime. Other direction of our future research is investigationand development of alternative stronger MIP formulationsfor the RSA problem. Eventually, we shall apply the devel-oped optimization procedures in an integrated flexgrid opticalnetworks design tool.
Acknowledgments The presented work was supported by the FP7project IDEALIST (Grant agreement no. 317999). The work wasalso supported by National Science Center (Poland) under Grant2011/01/B/ST7/02967 (M. Pióro and M. Zotkiewicz) and 2011/01/D/ST7/05884 (M. Klinkowski). M. Zotkiewicz was additionally sup-ported by the EC European Social Fund through the Warsaw Uni-versity of Technology Development Programme. Also, M. Ruiz andL. Velasco were supported by the Spanish Ministry of Science throughthe TEC2011-27310 ELASTIC project. The authors wish to thankDavid Rebolo for his valuable collaboration.
References
[1] Spectral grids for WDM applications: DWDM frequency grid.ITU-T G.694.1 (ed. 2.0) (2012)
[2] Barnhart, C., Johnson, E.L., Nemhauser, G.L., Savelsbergh,M.W.P., Vance, P.H.: Branch-and-price: column generation forsolving huge integer programs. Oper. Res. 46, 316–329 (1996)
[3] Christodoulopoulos, K., Tomkos, I., Varvarigos, E.A.: Elasticbandwidth allocation in flexible OFDM-based optical networks.IEEE J. Lightw. Technol. 29(9), 1354–1366 (2011)
[4] Cugini, F., Meloni, G., Paolucci, F., Sambo, N., Secondini, M.,Gerardi, L., Poti, L., Castoldi, P.: Demonstration of flexible opti-cal network based on path computation element. IEEE J. Lightw.Technol. 30(5), 727–733 (2012)
[5] Dijkstra, E.W.: A note on two problems in connexion with graphs.Numer. Math. 1, 269–271 (1959)
[6] Floyd, R.W.: Algorithm 97: shortest path. Commun. ACM 5(6),345 (1962). doi:10.1145/367766.368168
[7] Geisler, D.J., Proietti, R., Yin, Y., Scott, R.P., Cai, X., Fontaine,N.K., Paraschis, L., Gerstel, O., Yoo, S.J.B.: The first testbeddemonstration of a flexible bandwidth network with a real-timeadaptive control plane. In: Proceedings of the ECOC. Geneva,Switzerland (2011)
[8] ILOG: CPLEX 12.2 user’s manual. ILOG (2010). ftp://ftp.software.ibm.com/software/websphere/ilog/docs/optimization/cplex/ps_usrmancplex.pdf
[9] Jaumard, B., Meyer, C., Thiongane, B.: On column generationformulations for the RWA problem. Discret. Appl. Math. 157(6),1291–1308 (2009)
[10] Jinno, M., Takara, H., Kozicki, B., Tsukishima, Y., Sone, Y.,Matsuoka, S.: Spectrum-efficient and scalable elastic optical pathnetwork: architecture, benefits, and enabling technologies. IEEECommun. Mag. 47(11), 66–73 (2009)
[11] Klinkowski, M., Ruiz, M., Velasco, L., Careglio, D., Lopez, V.,Comellas, J.: Elastic spectrum allocation for time-varying trafficin flexgrid optical networks. IEEE J. Sel. Areas Commun. 31(1),26–38 (2013)
[12] Klinkowski, M., Walkowiak, K.: Routing and spectrum assign-ment in spectrum sliced elastic optical path network. IEEE Com-mun. Lett. 15(8), 884–886 (2011)
[13] Lasdon, L.: Optimization Theory for Large Systems. MacMillan,New York (1970)
[14] Liu, Z., Rouskas, G.N.: A fast path-based ILP formulation foroffline RWA in mesh optical networks. In: Proceedings of theIEEE Globecom. Anaheim, California (2012)
123

64 Photon Netw Commun (2013) 26:53–64
[15] MATLAB: version 7.10.0 (R2010a). The MathWorks Inc., Natick,Massachusetts (2010)
[16] Pióro, M.: Mathematical Foundations for Signal Processing, Com-munications, and Networking, Chap. Network Optimization Tech-niques. CRC Press, Boca Raton (2012)
[17] Pióro, M., Medhi, D.: Routing, Flow, and Capacity Design inCommunication and Computer Networks. Morgan Kaufman, LosAltos (2004)
[18] Ruiz, M., Rebolo, D., Pióro, M., Zotkiewicz, M., Klinkowski, M.,Velasco, L.: Detailed description of column generation algorithmsfor RSA problems in flexgrid optical networks. Technical report,UPC-DAC-RR-2013-15, Barcelona, Spain (2013)
[19] Velasco, L., Klinkowski, M., Ruiz, M., Comellas, J.: Modelingthe routing and spectrum allocation problem for flexgrid opticalnetworks. Photonic Netw. Commun. 24, 177–186 (2012)
[20] Wang, Y., Cao, X., Hu, Q., Pan, Y.: Towards elastic and fine-granular bandwidth allocation in spectrum-sliced optical net-works. IEEE J. Opt. Commun. Netw. 4(11), 906–917 (2012)
Author Biographies
Marc Ruiz is a post-doctoral researcher atthe Optical Communications Group (GCO)of Universitat Politècnica de Catalunya(UPC). He received the M.Sc. degree inStatistics and Operational Research and thePh.D. degree in Computer Science from UPCin 2009 and 2012, respectively. His researchinterest includes optimization and perfor-mance of next generation optical networks.
Michał Pióro is a professor and head of theComputer Networks and Switching Divisionat the Institute of Telecommunications, War-saw University of Technology, Poland, anda professor at Lund University, Sweden. Hereceived the Ph.D. degree in telecommunica-tions in 1979 and the D.Sc. degree in 1990,both from the Warsaw University of Tech-nology. In 2002, he received a Polish State
Professorship. His research interests concentrate on modeling, design,and performance evaluation of telecommunication systems. He is anauthor of four books and more than 150 technical papers presented inthe telecommunication journals and conference proceedings. He hasled many research projects for telecom industry in the field of networkmodeling, design, and performance analysis. He is deeply involved ininternational research projects including FP7, Celtic and COST projects.
Mateusz Zotkiewicz is an assistant profes-sor at the Computer Networks and Switch-ing Division at the Institute of Telecommu-nications, Warsaw University of Technol-ogy, Poland. He received the M.Sc. degreein telecommunications in 2007 from War-saw University of Technology, and the Ph.D.degree in 2011 from Warsaw University ofTechnology and Telecom SudParis, France.
His research interests concentrate on modeling and design of telecom-munications networks.
Mirosław Klinkowski is an assistant pro-fessor at the Department of Transmissionand Optical Technologies at the NationalInstitute of Telecommunications in Warsaw,Poland, and he is a collaborating researcherat the Universitat Politècnica de Catalunya(UPC), Barcelona, Spain. He received theM.Sc. degree (1999) from Warsaw Univer-sity of Technology, Poland, and the Ph.D.
degree (2008) from UPC. He has co-authored several book chapters andover 80 papers presented in leading journals and conference proceed-ings. His research interests concentrate on algorithm design, modeling,and optimization in communication networks.
Luis Velasco is an associate professor anda senior researcher at Universitat Politècnicade Catalunya (UPC). He received the M.Sc.degree in physics from Universidad Com-plutense de Madrid (UCM) in 1993, and thePh.D. degree from UPC in 2009. In 1989, hejoined Telefónica of Spain and was involvedin the specifications and first office applica-tion of the Telefónica’s SDH transport net-
work. In 2003, he joined UPC. His interests include architecture designand planning in multilayer networks, and he is currently leading networkplanning tasks within FP-7 IDEALIST project.
123