
chương 5. ứng dụng và ví dụ minh họa
41
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa Trang 101 CHƯƠNG 5. ỨNG DỤNG VÀ VÍ DỤ MINH HỌA I. KẾT NỐI PHẦN CỨNG 1. Nguồn cung cấp . Để cấp nguồn cho vi điều khiển cần phải có nguồn đơn +5V, tuy nhiên trong một số ứng dụng có thể cần nguồn đôi (+12V và -12V). Sơ đồ mạch điện sau giới thiệu một mạch nguồn đơn giản, tuy nhiên nếu cần sử dụng cho các ứng dụng đòi hỏi công suất lớn, hãy tham khảo thêm các mạch điện nguồn khác. Hình 5.1: Sơ đồ mạch nguồn Các tụ điện C1, C2, C5, C6, C7 là các t ụ điện giá trị lớn có tác dụng lọc nhiễu tần số thấp. Các tụ điện C3, C4, C8, C9, C10 là các tụ điện giá trị nhỏ lọc nhiễu tần số cao. Các vi mạch LM7805, LM7812, LM7912 có khả năng chịu dòng tải tối đa 1A vì vậy nên chọn biến áp 3A cho các ứng dụng không đòi hỏi công suất lớn. 2. Mạch reset. Mạch reset bao gồm 1 phím nhấn cho phép người sử dụng khởi động lại chương trình vi điều khiển. Ngòai chức năng trên còn bao gồm chức năng tự Reset khi cấp nguồn cho mạch. Hình 5.2: Mạch Reset Khảo sát mạch điện trên ta thấy điện áp tại chân reset se có dạng t reset e R R R u . 2 1 2 với = C(R 1 + R 2 ). Tín hiệu điện e reset sẽ giảm khi cấp điện áp nguồn và sẽ gần bằng không sau thời gian từ 3 đến 5. Để tín hiệu điện áp tồn tại ở mức logic [1] CuuDuongThanCong.com https://fb.com/tailieudientucntt
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of chương 5. ứng dụng và ví dụ minh họa

Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 101
CHƯƠNG 5. ỨNG DỤNG VÀ VÍ DỤ MINH HỌA
I. KẾT NỐI PHẦN CỨNG
1. Nguồn cung cấp.
Để cấp nguồn cho vi điều khiển cần phải có nguồn đơn +5V, tuy nhiên trong một
số ứng dụng có thể cần nguồn đôi (+12V và -12V). Sơ đồ mạch điện sau giới thiệu một
mạch nguồn đơn giản, tuy nhiên nếu cần sử dụng cho các ứng dụng đòi hỏi công suất lớn,
hãy tham khảo thêm các mạch điện nguồn khác.
Hình 5.1: Sơ đồ mạch nguồn
Các tụ điện C1, C2, C5, C6, C7 là các tụ điện giá trị lớn có tác dụng lọc nhiễu tần
số thấp. Các tụ điện C3, C4, C8, C9, C10 là các tụ điện giá trị nhỏ lọc nhiễu tần số cao.
Các vi mạch LM7805, LM7812, LM7912 có khả năng chịu dòng tải tối đa 1A vì
vậy nên chọn biến áp 3A cho các ứng dụng không đòi hỏi công suất lớn.
2. Mạch reset.
Mạch reset bao gồm 1 phím nhấn cho phép người sử dụng khởi động lại chương
trình vi điều khiển. Ngòai chức năng trên còn bao gồm chức năng tự Reset khi cấp nguồn
cho mạch.
Hình 5.2: Mạch Reset
Khảo sát mạch điện trên ta thấy điện áp tại chân reset se có dạng
t
resete
RR
Ru
.
21
2
với = C(R1 + R2). Tín hiệu điện ereset sẽ giảm khi cấp điện áp nguồn
và sẽ gần bằng không sau thời gian từ 3 đến 5. Để tín hiệu điện áp tồn tại ở mức logic [1]
CuuDuongThanCong.com https://fb.com/tailieudientucntt

Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 102
trong ít nhất 1s ta có giải phương trình sau để tìm ra thời gian: VeRR
R t5,3
.
21
2
và
sau đó cho điều kiện t = 1s sẽ tìm được các giá trị R1, R2 và C thích hợp
Điện áp tại chân reset với các giá trị R1, R2 và C đã chọn sẽ có dạng như sau khi
cấp điện áp nguồn 5 V
3. Mạch tạo dao động.
Mạch tạo dao động sẽ sử dụng 2 tụ điện giá trị 22pF kết hợp với thạch anh và tín
hiệu được kết nối với 2 ngõ vào dao động của vi điều khiển là XTAL1 và XTAL2.
Hình 5.3: Mạch cấp dao động cho vi điều khiển
Về cơ bản, để một vi điều khiển có thể hoạt động được chỉ cần kết nối phần cứng
với 3 mục đã trình bày ở trên. Tuy nhiên nếu muốn sử dụng vi điều khiển để ứng dụng vào
các yêu cầu điều khiển khác nhau thì sẽ phải kết nối phần cứng thêm nữa và đồng thời
phải xây dựng một chương trình điều khiển cho vi điều khiển. Các phần tiếp theo sẽ giới
thiệu một số ứng dụng cụ thể.
II. ĐIỀU KHIỂN CƠ CẤU CHẤP HÀNH ĐƠN GIẢN
1. Điều khiển động cơ DC
Trong tài liệu này sẽ chỉ giới thiệu nguyên tắc điều khiển động cơ DC công suất
nhỏ, việc điều khiển các động cơ khác công suất lớn cũng sẽ tương tự về phần mềm và chỉ
thêm phần công suất. Đối với điều khiển động cơ, phần công suất chủ yếu sẽ là các
contactor hoặc các thyristor. Những kiến thức trong thực tập điện cơ bản và trong môn
học Thiết bị chuyển đổi điện tử công suất sẽ giúp các bạn trong công việc này.
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 103
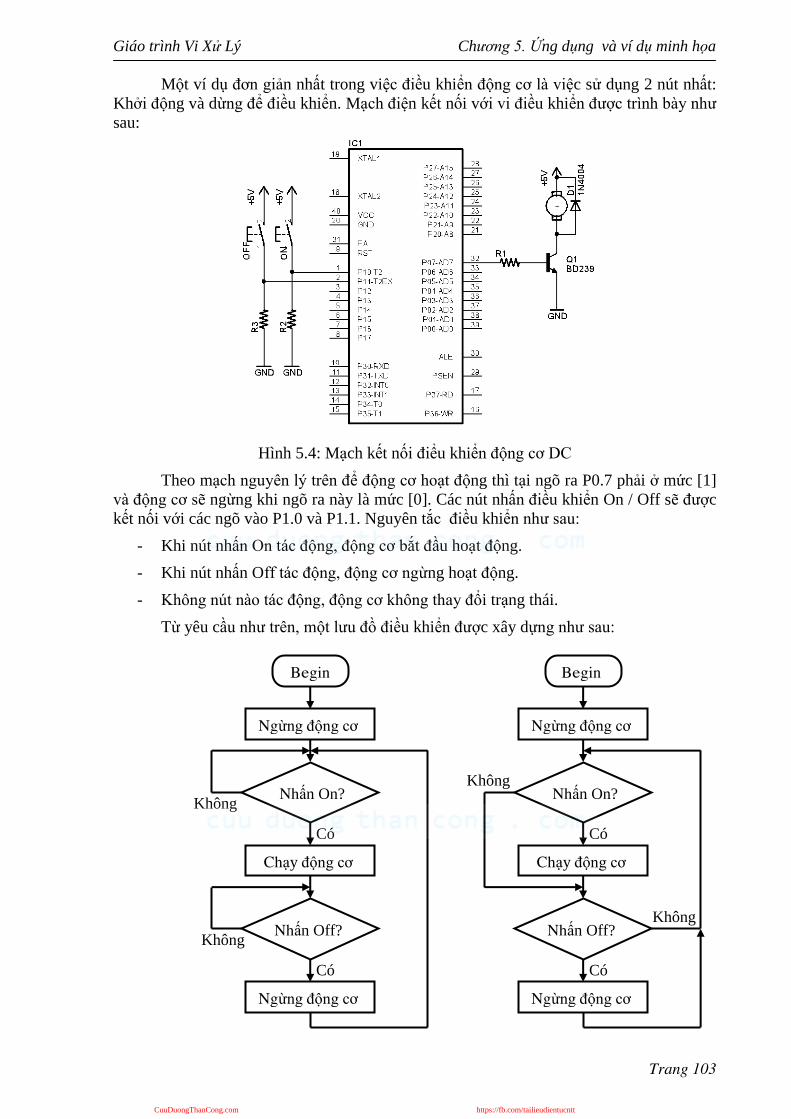
Một ví dụ đơn giản nhất trong việc điều khiển động cơ là việc sử dụng 2 nút nhất:
Khởi động và dừng để điều khiển. Mạch điện kết nối với vi điều khiển được trình bày như
sau:
Hình 5.4: Mạch kết nối điểu khiển động cơ DC
Theo mạch nguyên lý trên để động cơ hoạt động thì tại ngõ ra P0.7 phải ở mức [1]
và động cơ sẽ ngừng khi ngõ ra này là mức [0]. Các nút nhấn điều khiển On / Off sẽ được
kết nối với các ngõ vào P1.0 và P1.1. Nguyên tắc điều khiển như sau:
- Khi nút nhấn On tác động, động cơ bắt đầu hoạt động.
- Khi nút nhấn Off tác động, động cơ ngừng hoạt động.
- Không nút nào tác động, động cơ không thay đổi trạng thái.
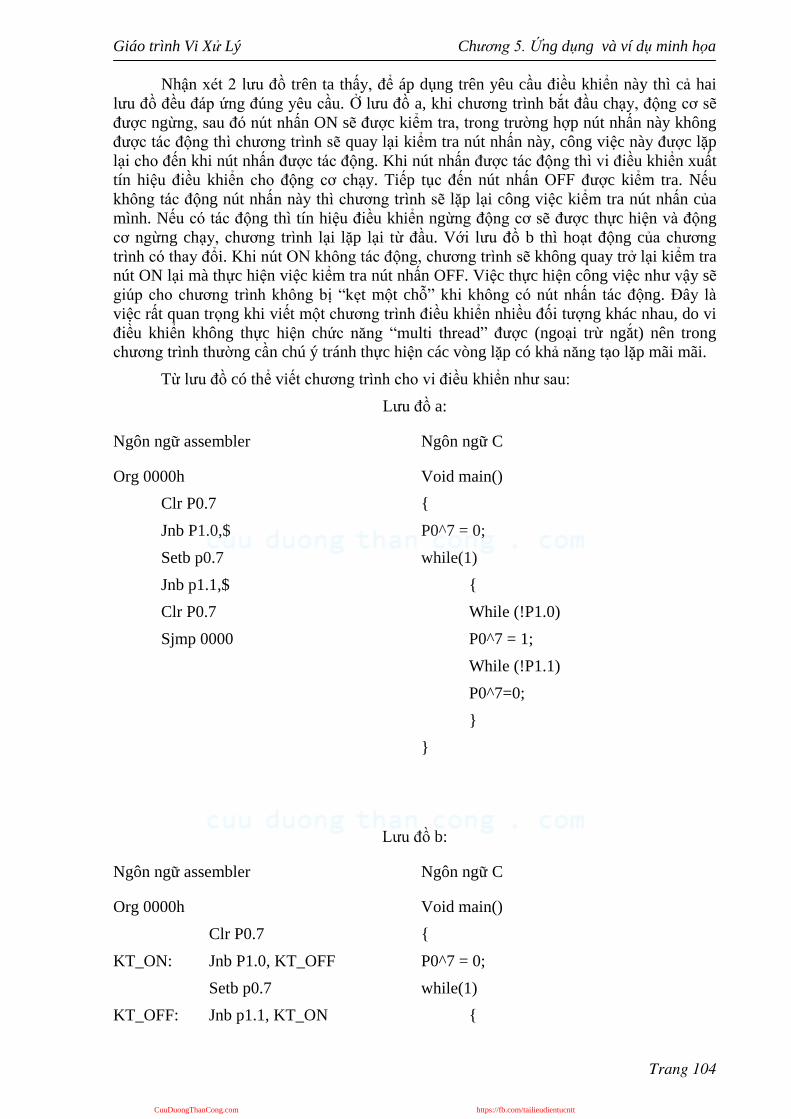
Từ yêu cầu như trên, một lưu đồ điều khiển được xây dựng như sau:
Nhấn On?
Begin
Ngừng động cơ
Chạy động cơ
Ngừng động cơ
Nhấn Off?
Không
Có
Có
Không
Nhấn On?
Ngừng động cơ
Chạy động cơ
Ngừng động cơ
Nhấn Off?
Không
Có
Có
Không
Begin
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 104
Nhận xét 2 lưu đồ trên ta thấy, để áp dụng trên yêu cầu điều khiển này thì cả hai
lưu đồ đều đáp ứng đúng yêu cầu. Ở lưu đồ a, khi chương trình bắt đầu chạy, động cơ sẽ
được ngừng, sau đó nút nhấn ON sẽ được kiểm tra, trong trường hợp nút nhấn này không
được tác động thì chương trình sẽ quay lại kiểm tra nút nhấn này, công việc này được lặp
lại cho đến khi nút nhấn được tác động. Khi nút nhấn được tác động thì vi điều khiển xuất
tín hiệu điều khiển cho động cơ chạy. Tiếp tục đến nút nhấn OFF được kiểm tra. Nếu
không tác động nút nhấn này thì chương trình sẽ lặp lại công việc kiểm tra nút nhấn của
mình. Nếu có tác động thì tín hiệu điều khiển ngừng động cơ sẽ được thực hiện và động
cơ ngừng chạy, chương trình lại lặp lại từ đầu. Với lưu đồ b thì hoạt động của chương
trình có thay đổi. Khi nút ON không tác động, chương trình sẽ không quay trở lại kiểm tra
nút ON lại mà thực hiện việc kiểm tra nút nhấn OFF. Việc thực hiện công việc như vậy sẽ
giúp cho chương trình không bị “kẹt một chỗ” khi không có nút nhấn tác động. Đây là
việc rất quan trọng khi viết một chương trình điều khiển nhiều đối tượng khác nhau, do vi
điều khiển không thực hiện chức năng “multi thread” được (ngoại trừ ngắt) nên trong
chương trình thường cần chú ý tránh thực hiện các vòng lặp có khả năng tạo lặp mãi mãi.
Từ lưu đồ có thể viết chương trình cho vi điều khiển như sau:
Lưu đồ a:
Ngôn ngữ assembler Ngôn ngữ C
Org 0000h
Clr P0.7
Jnb P1.0,$
Setb p0.7
Jnb p1.1,$
Clr P0.7
Sjmp 0000
Void main()
{
P0^7 = 0;
while(1)
{
While (!P1.0)
P0^7 = 1;
While (!P1.1)
P0^7=0;
}
}
Lưu đồ b:
Ngôn ngữ assembler Ngôn ngữ C
Org 0000h
Clr P0.7
KT_ON: Jnb P1.0, KT_OFF
Setb p0.7
KT_OFF: Jnb p1.1, KT_ON
Void main()
{
P0^7 = 0;
while(1)
{
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 105
Clr P0.7
Sjmp KT_ON
if (P1.0)
P0^7 = 1;
if (P1.1)
P0^7=0;
}
}
Lưu ý khi viết chương trình, việc để những địa chỉ là các thanh ghi sẽ gây khó
khăn cho người đọc chương trình nên các địa chỉ này thường được khai báo thành các
biến có tên có ý nghĩa. Việc đặt tên biến trong ngôn ngữ assembly được thực hiện thông
qua việc thực hiện khai báo:
Tên_biến equ địa_chỉ_biến.
Ví dụ với chương trình trên ta có thể viết lại như sau
On_Key equ P1.0
Off_Key equ P1.1
DC_Motor equ P0.7
Org 0000h
Clr DC_Motor
KT_ON: Jnb On_Key, KT_OFF
Setb DC_Motor
KT_OFF: Jnb Off_Key, KT_ON
Clr DC_Motor
Sjmp KT_ON
Lúc này chương trình sẽ trở nên rõ rang hơn và thuận tiện hơn khi chúng ta sử
dụng các địa chỉ khác cho các nút nhấn hoặc ngõ ra điều khiển động cơ. Sẽ không còn
phải dò theo chương trình để chỉnh sửa nữa mà việc thay đổi địa chỉ khai báo sẽ giúp cho
chương trình hoạt động đúng.
Trong ngôn ngữ C, việc khai báo một biến dạng bit như sau:
sbit Tên_biến = địa_chỉ_biến;
Và chương trình được viết lại:
void main()
{
sbit DC_Motor = P0^7;
sbit On_Key = P1^0;
sbit Off_Key = P1^1;
bit Motor_On = 1;
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 106
DC_Motor = !Motor_On;
while(1)
{
if (On_Key)
DC_Motor = Motor_On;
if (Off_Key)
DC_Motor = !Motor_On;
}
}
Bài tập cho phần này, các bạn có thể ứng dụng vi điều khiển để điều khiển động cơ
DC quay thuận nghịch thông qua việc điều khiển bằng các nút nhấn hoặc điiều khiển động
cơ AC 3 pha quay thuận nghịch, khởi động sao – tam giác hoặc khởi động nhiều cấp tốc
độ.
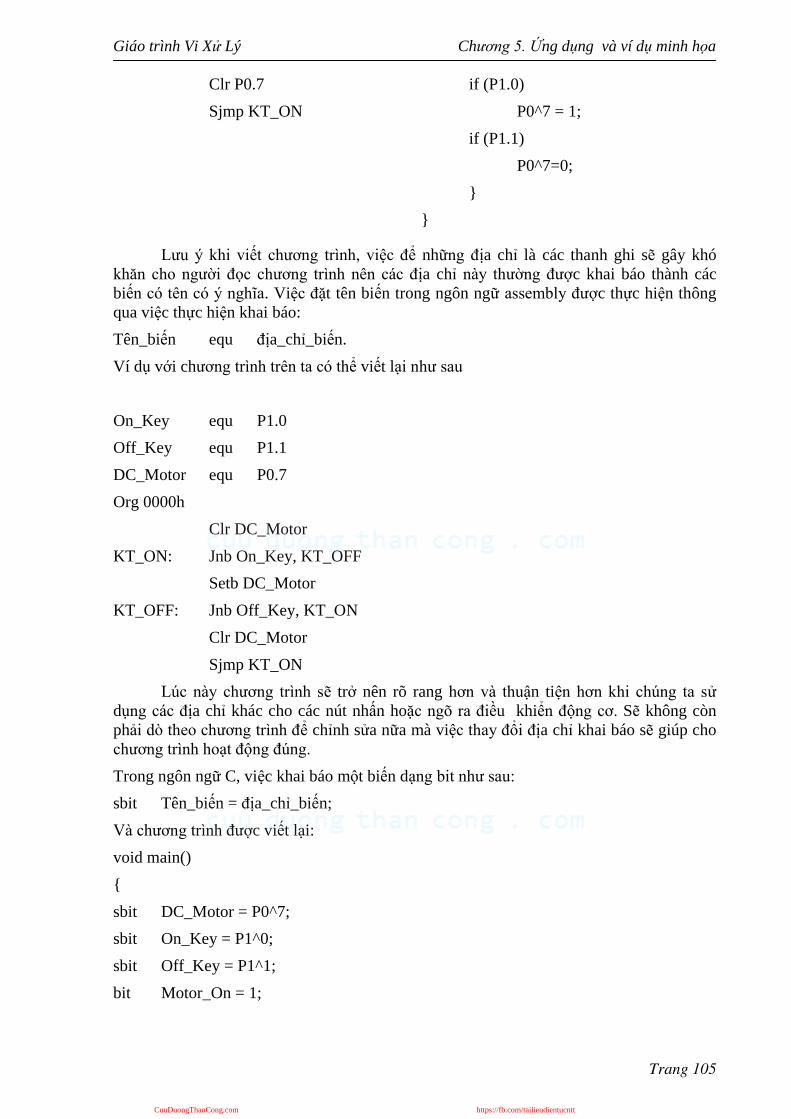
2. Điều khiển động cơ bước
Động cơ bước có chức năng điều khiển các thiết bị di chuyển với khoảng cách ngắn
ví dụ như điều khiển di chuyển đầu đọc đĩa. Tuỳ thuộc vào công suất của động cơ mà sử
dụng các mạch giao tiếp cho phù hợp. Thường thì các động cơ bước luôn đi kèm với mạch
điều khiển và chỉ nhận lệnh từ vi xử lý hay vi điều khiển.
Hình 5.5. Hình động cơ bước loại nhỏ.
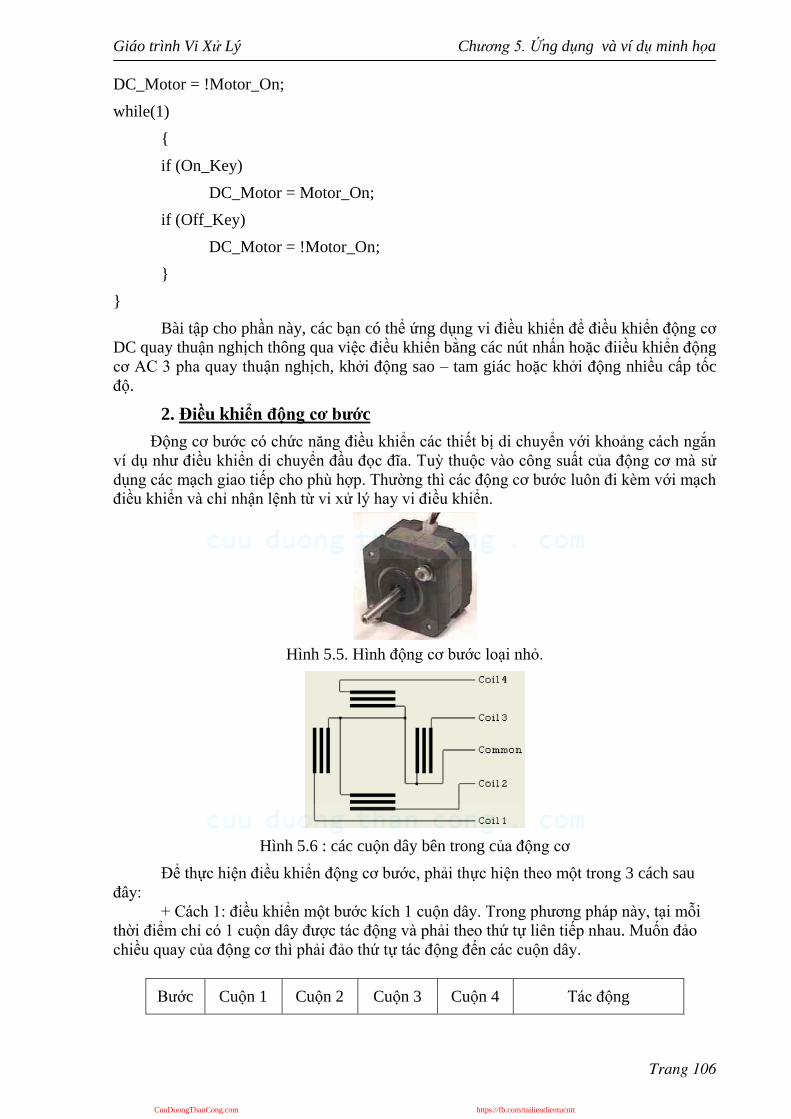
Hình 5.6 : các cuộn dây bên trong của động cơ
Để thực hiện điều khiển động cơ bước, phải thực hiện theo một trong 3 cách sau
đây:
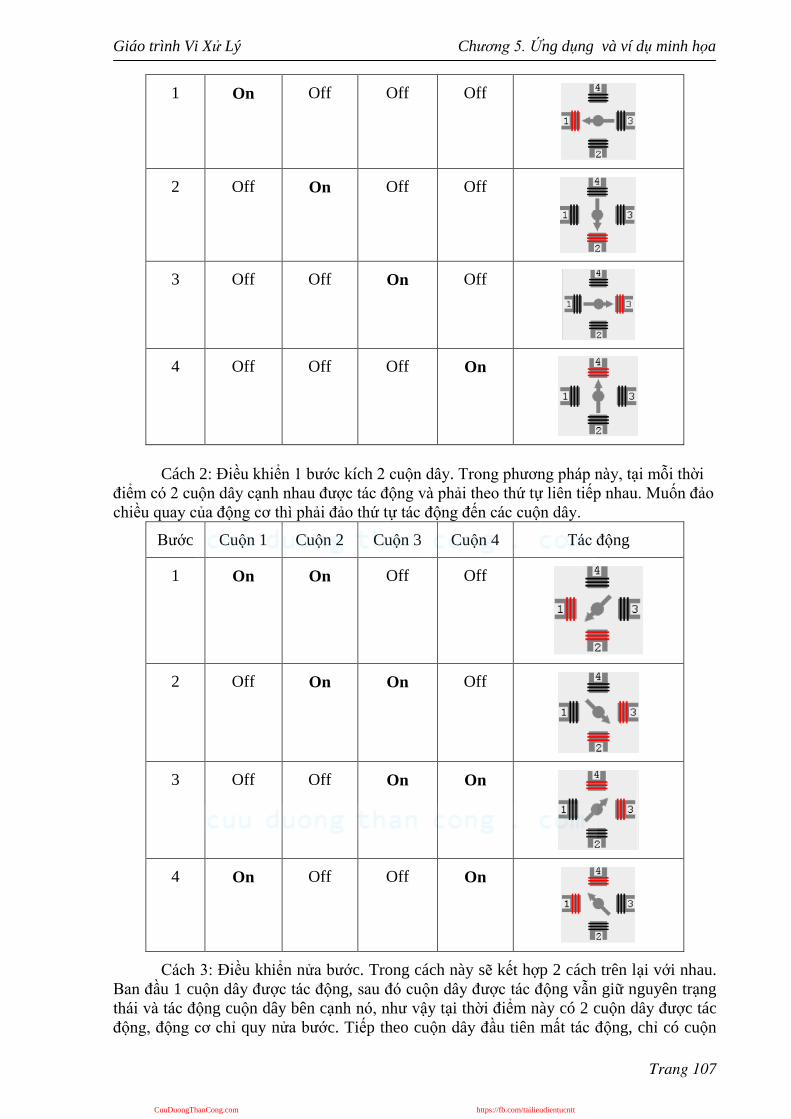
+ Cách 1: điều khiển một bước kích 1 cuộn dây. Trong phương pháp này, tại mỗi
thời điểm chỉ có 1 cuộn dây được tác động và phải theo thứ tự liên tiếp nhau. Muốn đảo
chiều quay của động cơ thì phải đảo thứ tự tác động đến các cuộn dây.
Bước Cuộn 1 Cuộn 2 Cuộn 3 Cuộn 4 Tác động
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 107
1 On Off Off Off
2 Off On Off Off
3 Off Off On Off
4 Off Off Off On
Cách 2: Điều khiển 1 bước kích 2 cuộn dây. Trong phương pháp này, tại mỗi thời
điểm có 2 cuộn dây cạnh nhau được tác động và phải theo thứ tự liên tiếp nhau. Muốn đảo
chiều quay của động cơ thì phải đảo thứ tự tác động đến các cuộn dây.
Bước Cuộn 1 Cuộn 2 Cuộn 3 Cuộn 4 Tác động
1 On On Off Off
2 Off On On Off
3 Off Off On On
4 On Off Off On
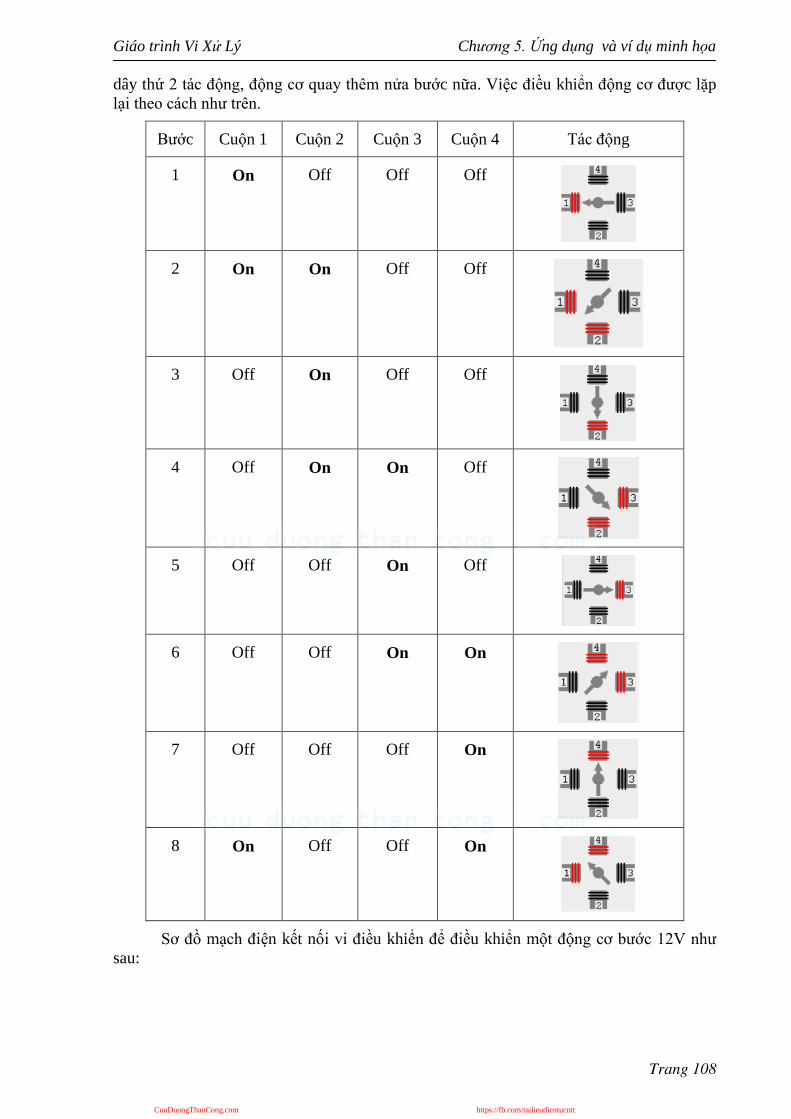
Cách 3: Điều khiển nửa bước. Trong cách này sẽ kết hợp 2 cách trên lại với nhau.
Ban đầu 1 cuộn dây được tác động, sau đó cuộn dây được tác động vẫn giữ nguyên trạng
thái và tác động cuộn dây bên cạnh nó, như vậy tại thời điểm này có 2 cuộn dây được tác
động, động cơ chỉ quy nửa bước. Tiếp theo cuộn dây đầu tiên mất tác động, chỉ có cuộn
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 108
dây thứ 2 tác động, động cơ quay thêm nửa bước nữa. Việc điều khiển động cơ được lặp
lại theo cách như trên.
Bước Cuộn 1 Cuộn 2 Cuộn 3 Cuộn 4 Tác động
1 On Off Off Off
2 On On Off Off
3 Off On Off Off
4 Off On On Off
5 Off Off On Off
6 Off Off On On
7 Off Off Off On
8 On Off Off On
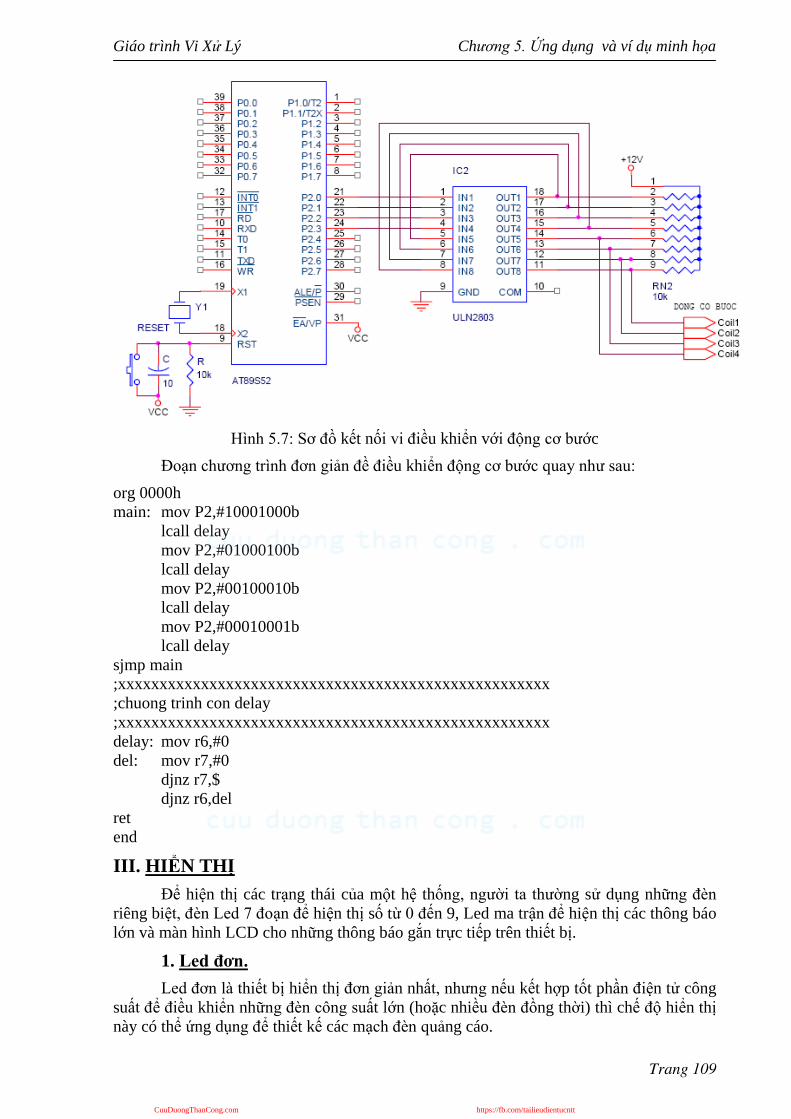
Sơ đồ mạch điện kết nối vi điều khiển để điều khiển một động cơ bước 12V như
sau:
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 109
Hình 5.7: Sơ đồ kết nối vi điều khiển với động cơ bước
Đoạn chương trình đơn giản đề điều khiển động cơ bước quay như sau:
org 0000h
main: mov P2,#10001000b
lcall delay
mov P2,#01000100b
lcall delay
mov P2,#00100010b
lcall delay
mov P2,#00010001b
lcall delay
sjmp main
;xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
;chuong trinh con delay
;xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
delay: mov r6,#0
del: mov r7,#0
djnz r7,$
djnz r6,del
ret
end
III. HIỂN THỊ
Để hiện thị các trạng thái của một hệ thống, người ta thường sử dụng những đèn
riêng biệt, đèn Led 7 đoạn để hiện thị số từ 0 đến 9, Led ma trận để hiện thị các thông báo
lớn và màn hình LCD cho những thông báo gắn trực tiếp trên thiết bị.
1. Led đơn.
Led đơn là thiết bị hiển thị đơn giản nhất, nhưng nếu kết hợp tốt phần điện tử công
suất để điều khiển những đèn công suất lớn (hoặc nhiều đèn đồng thời) thì chế độ hiển thị
này có thể ứng dụng để thiết kế các mạch đèn quảng cáo.
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 110
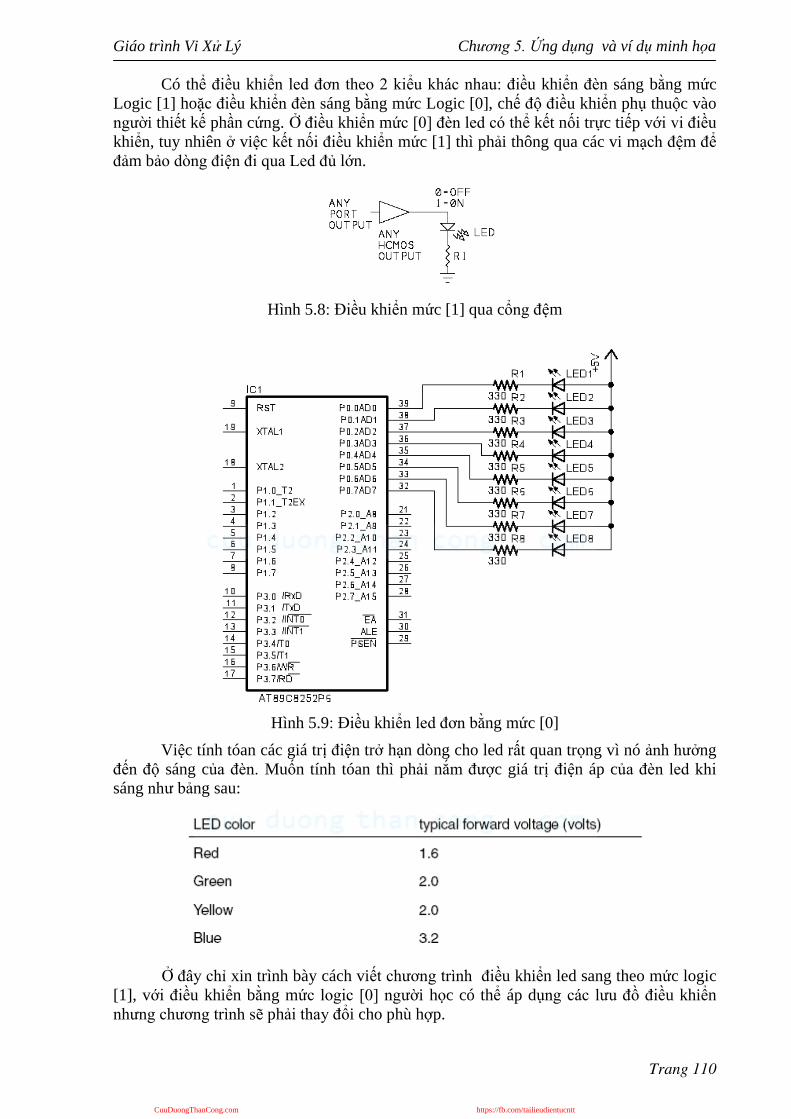
Có thể điều khiển led đơn theo 2 kiểu khác nhau: điều khiển đèn sáng bằng mức
Logic [1] hoặc điều khiển đèn sáng bằng mức Logic [0], chế độ điều khiển phụ thuộc vào
người thiết kế phần cứng. Ở điều khiển mức [0] đèn led có thể kết nối trực tiếp với vi điều
khiển, tuy nhiên ở việc kết nối điều khiển mức [1] thì phải thông qua các vi mạch đệm để
đảm bảo dòng điện đi qua Led đủ lớn.
Hình 5.8: Điều khiển mức [1] qua cổng đệm
Hình 5.9: Điều khiển led đơn bằng mức [0]
Việc tính tóan các giá trị điện trở hạn dòng cho led rất quan trọng vì nó ảnh hưởng
đến độ sáng của đèn. Muốn tính tóan thì phải nắm được giá trị điện áp của đèn led khi
sáng như bảng sau:
Ở đây chỉ xin trình bày cách viết chương trình điều khiển led sang theo mức logic
[1], với điều khiển bằng mức logic [0] người học có thể áp dụng các lưu đồ điều khiển
nhưng chương trình sẽ phải thay đổi cho phù hợp.
CuuDuongThanCong.com https://fb.com/tailieudientucntt

Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 111
Đầu tiên xin giới thiệu đọan chương trình nhấp nháy cả 8 đèn led. Với yêu cầu này
chúng ta thấy rằng các ngõ ra tại cổng P0 sẽ phải thay đổi trạng thái từ FFH thành 00H và
ngược lại. Có thể xây dựng lưu đồ như sau:
Tuy nhiên nếu không chú ý ở đây và viết chương trình đúng theo lưu đồ, khi thực
hiện chạy chương trình chúng ta sẽ không thấy đèn sáng. Lý do đơn giản là do thời gian
thực hiện lệnh của vi điều khiển. Với thạch anh 12MHz, việc thực hiện các lệnh sáng và
tắt đèn led sẽ chỉ tốn thời gian 1s và với thời gian như vậy không đủ đáp ứng cho đèn led
sáng và đồng thời cũng không đủ để mắt người có thể nhận biết những trạng thái khác
nhau của đèn. Chính vì vậy lưu đồ chương trình đúng sẽ phải là:
Trong đó chương trình Delay1s là đoạn chương trình “không thực hiện” một công
việc có ý nghĩa nào mà chỉ đơn thuần là sẽ thực hiện trong thời gian 1s. Những chương
trình này thường được viết thành những chương trình con và cất trong các thư viện để có
thể gọi sử dụng một cách nhanh nhất.
2. Led 7 đoạn
Để giao tiếp giữa vi điều khiển và led 7 đoạn thông thường người ta sử dụng một
trong hai cách sau:
- Giao tiếp trực tiếp: kiểu này sẽ dùng 1 port loại Anode chung và sử dụng 8 đường
IO.
Begin
Sáng đèn
Tắt đèn
Begin
Sáng đèn
Delay 1s
Delay 1s
Tắt đèn
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 112
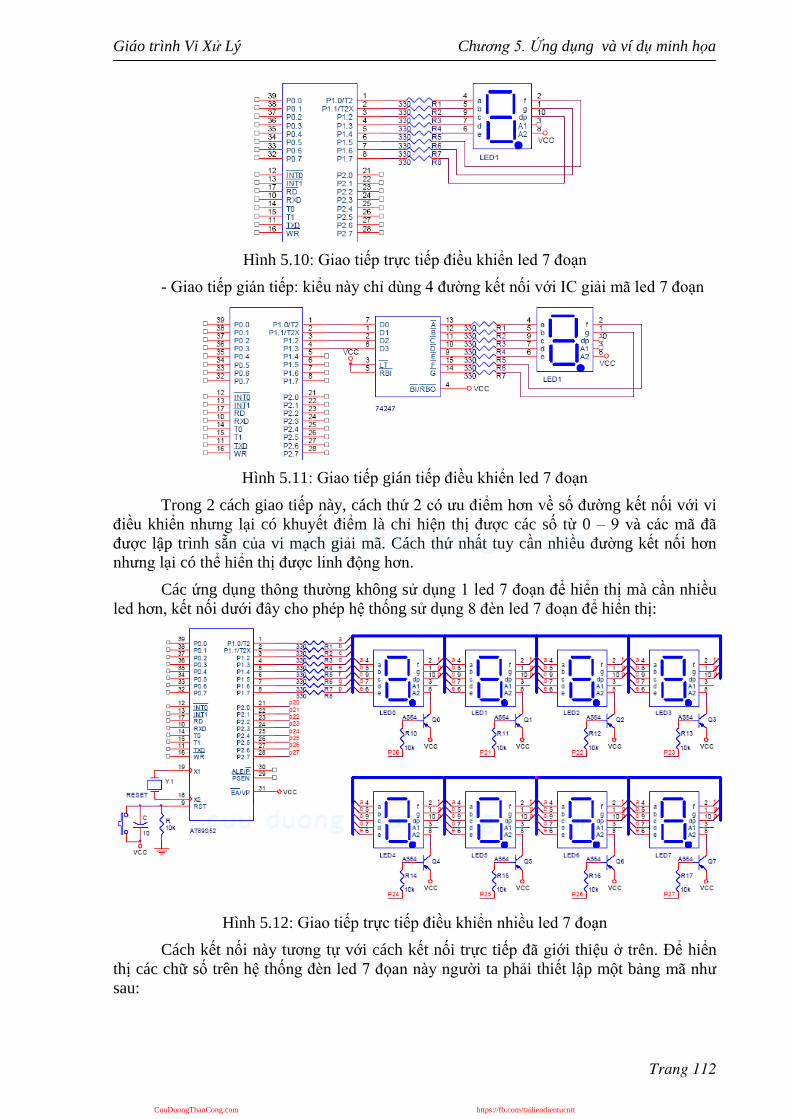
Hình 5.10: Giao tiếp trực tiếp điều khiển led 7 đoạn
- Giao tiếp gián tiếp: kiểu này chỉ dùng 4 đường kết nối với IC giải mã led 7 đoạn
Hình 5.11: Giao tiếp gián tiếp điều khiển led 7 đoạn
Trong 2 cách giao tiếp này, cách thứ 2 có ưu điểm hơn về số đường kết nối với vi
điều khiển nhưng lại có khuyết điểm là chỉ hiện thị được các số từ 0 – 9 và các mã đã
được lập trình sẵn của vi mạch giải mã. Cách thứ nhất tuy cần nhiều đường kết nối hơn
nhưng lại có thể hiển thị được linh động hơn.
Các ứng dụng thông thường không sử dụng 1 led 7 đoạn để hiển thị mà cần nhiều
led hơn, kết nối dưới đây cho phép hệ thống sử dụng 8 đèn led 7 đoạn để hiển thị:
Hình 5.12: Giao tiếp trực tiếp điều khiển nhiều led 7 đoạn
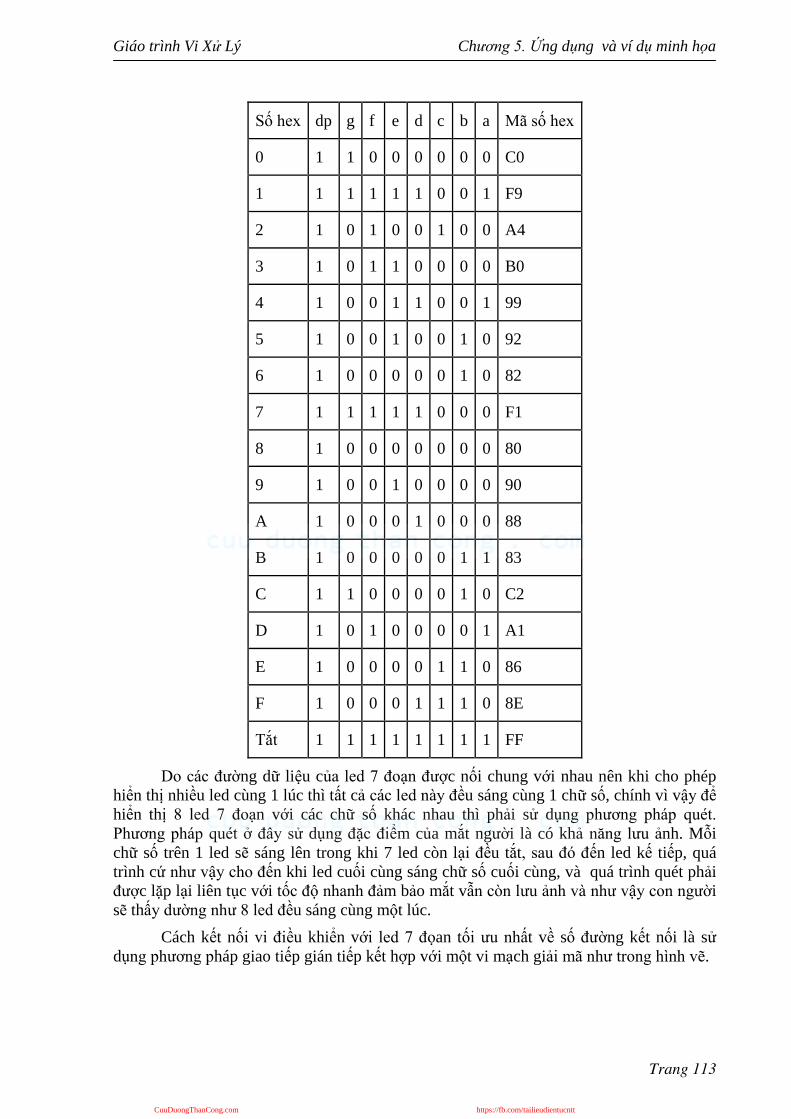
Cách kết nối này tương tự với cách kết nối trực tiếp đã giới thiệu ở trên. Để hiển
thị các chữ số trên hệ thống đèn led 7 đọan này người ta phải thiết lập một bảng mã như
sau:
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 113
Số hex dp g f e d c b a Mã số hex
0 1 1 0 0 0 0 0 0 C0
1 1 1 1 1 1 0 0 1 F9
2 1 0 1 0 0 1 0 0 A4
3 1 0 1 1 0 0 0 0 B0
4 1 0 0 1 1 0 0 1 99
5 1 0 0 1 0 0 1 0 92
6 1 0 0 0 0 0 1 0 82
7 1 1 1 1 1 0 0 0 F1
8 1 0 0 0 0 0 0 0 80
9 1 0 0 1 0 0 0 0 90
A 1 0 0 0 1 0 0 0 88
B 1 0 0 0 0 0 1 1 83
C 1 1 0 0 0 0 1 0 C2
D 1 0 1 0 0 0 0 1 A1
E 1 0 0 0 0 1 1 0 86
F 1 0 0 0 1 1 1 0 8E
Tắt 1 1 1 1 1 1 1 1 FF
Do các đường dữ liệu của led 7 đoạn được nối chung với nhau nên khi cho phép
hiển thị nhiều led cùng 1 lúc thì tất cả các led này đều sáng cùng 1 chữ số, chính vì vậy để
hiển thị 8 led 7 đoạn với các chữ số khác nhau thì phải sử dụng phương pháp quét.
Phương pháp quét ở đây sử dụng đặc điểm của mắt người là có khả năng lưu ảnh. Mỗi
chữ số trên 1 led sẽ sáng lên trong khi 7 led còn lại đều tắt, sau đó đến led kế tiếp, quá
trình cứ như vậy cho đến khi led cuối cùng sáng chữ số cuối cùng, và quá trình quét phải
được lặp lại liên tục với tốc độ nhanh đảm bảo mắt vẫn còn lưu ảnh và như vậy con người
sẽ thấy dường như 8 led đều sáng cùng một lúc.
Cách kết nối vi điều khiển với led 7 đọan tối ưu nhất về số đường kết nối là sử
dụng phương pháp giao tiếp gián tiếp kết hợp với một vi mạch giải mã như trong hình vẽ.
CuuDuongThanCong.com https://fb.com/tailieudientucntt

Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 114
Hình 5.13: Giao tiếp gián tiếp điều khiển nhiều led 7 đoạn
Để hiển thị một số nào đó trên led, chỉ cần thực hiện lệnh
Mov P1, #XYh
Trong đó Y chính là chữ số muốn hiển thị lên đèn và X điều khiển vị trí led. Đoạn
chương trình sau là một ví dụ để hiển thị mã số sinh viên : 06118093 lên 8 đèn led:
Org 0000h
Mov P1,#00h ; hiển thị số 0 lên led đầu tiên bên phải
lcall Delay
Mov P1,#16h ; hiển thị số 6 lên led thứ nhì
lcall Delay
Mov P1,#21h ; hiển thị số 1 lên led thứ ba
lcall Delay
Mov P1,#31h ; hiển thị số 1 lên led thứ tư
lcall Delay
Mov P1,#48h ; hiển thị số 8 lên led thứ năm
lcall Delay
Mov P1,#50h ; hiển thị số 0 lên led thứ sáu
lcall Delay
Mov P1,#69h ; hiển thị số 9 lên led thứ bảy
lcall Delay
Mov P1,#73h ; hiển thị số 3 lên led thứ tám
lcall Delay
Sjmp 0000h
Đọan chương trình trên chỉ là 1 ví dụ để bạn hiển thị một số bất kỳ nào đó lên 8 led
7 đoạn, trong thực tế thường thì những chữ số trong quá trình hiển thị phải thay đổi được
nên thường người ta xây dựng chương trình hiển thị số với các chữ số được lưu trong 1
vùng bộ nhớ RAM nào đó. Lưu đồ chương trình như sau:
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 115
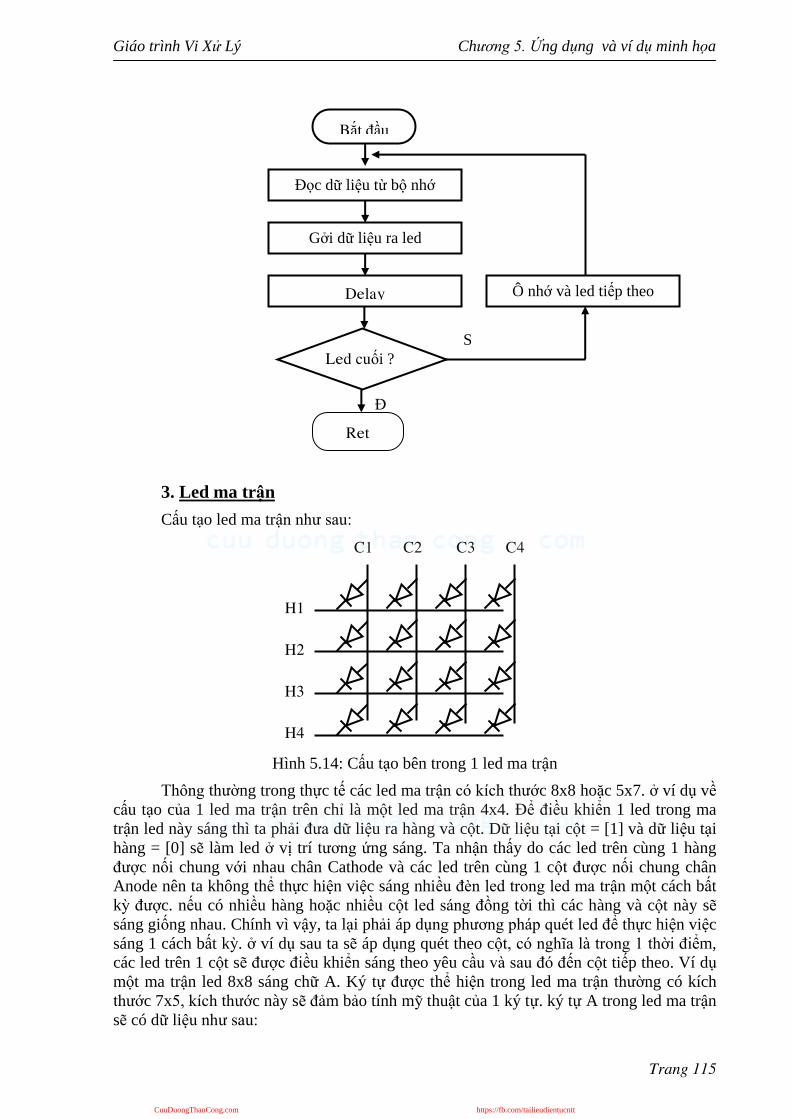
3. Led ma trận
Cấu tạo led ma trận như sau:
Hình 5.14: Cấu tạo bên trong 1 led ma trận
Thông thường trong thực tế các led ma trận có kích thước 8x8 hoặc 5x7. ở ví dụ về
cấu tạo của 1 led ma trận trên chỉ là một led ma trận 4x4. Để điều khiển 1 led trong ma
trận led này sáng thì ta phải đưa dữ liệu ra hàng và cột. Dữ liệu tại cột = [1] và dữ liệu tại
hàng = [0] sẽ làm led ở vị trí tương ứng sáng. Ta nhận thấy do các led trên cùng 1 hàng
được nối chung với nhau chân Cathode và các led trên cùng 1 cột được nối chung chân
Anode nên ta không thể thực hiện việc sáng nhiều đèn led trong led ma trận một cách bất
kỳ được. nếu có nhiều hàng hoặc nhiều cột led sáng đồng tời thì các hàng và cột này sẽ
sáng giống nhau. Chính vì vậy, ta lại phải áp dụng phương pháp quét led để thực hiện việc
sáng 1 cách bất kỳ. ở ví dụ sau ta sẽ áp dụng quét theo cột, có nghĩa là trong 1 thời điểm,
các led trên 1 cột sẽ được điều khiển sáng theo yêu cầu và sau đó đến cột tiếp theo. Ví dụ
một ma trận led 8x8 sáng chữ A. Ký tự được thể hiện trong led ma trận thường có kích
thước 7x5, kích thước này sẽ đảm bảo tính mỹ thuật của 1 ký tự. ký tự A trong led ma trận
sẽ có dữ liệu như sau:
C1 C2 C3 C4
H1
H2
H3
H4
Bắt đầu
Đọc dữ liệu từ bộ nhớ
Gởi dữ liệu ra led
Delay Ô nhớ và led tiếp theo
Led cuối ?
Đ
S
Ret
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 116
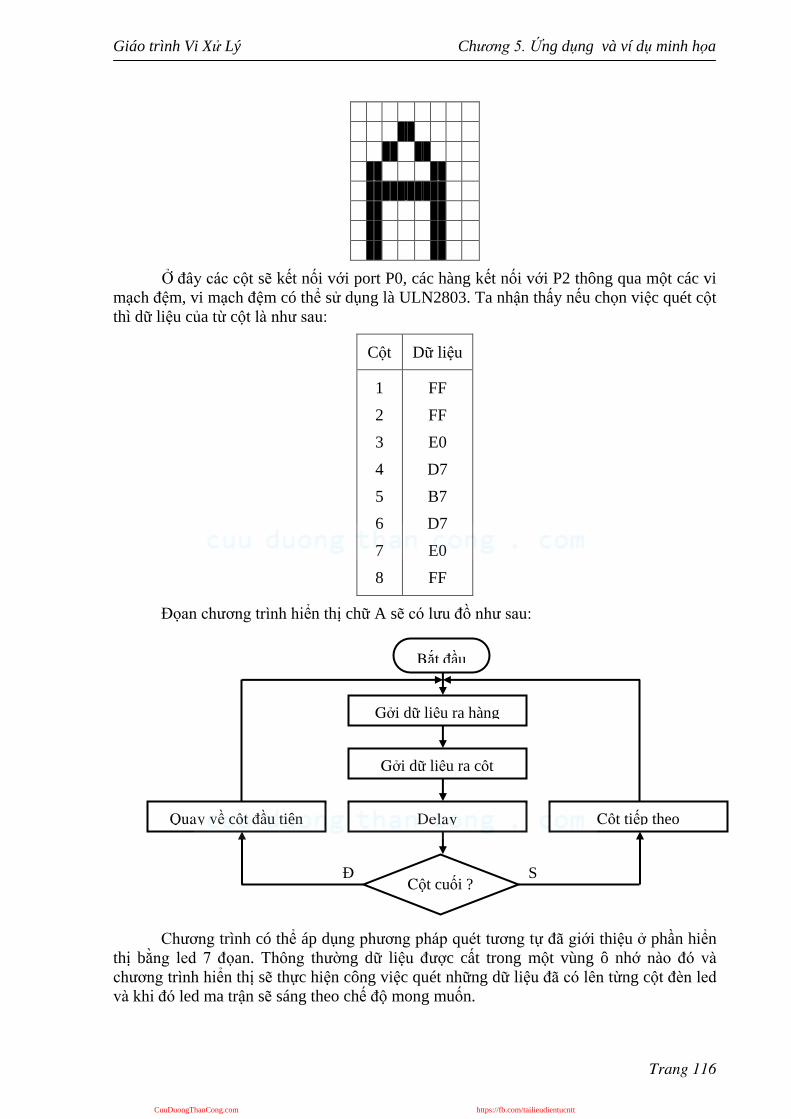
Ở đây các cột sẽ kết nối với port P0, các hàng kết nối với P2 thông qua một các vi
mạch đệm, vi mạch đệm có thể sử dụng là ULN2803. Ta nhận thấy nếu chọn việc quét cột
thì dữ liệu của từ cột là như sau:
Cột Dữ liệu
1
2
3
4
5
6
7
8
FF
FF
E0
D7
B7
D7
E0
FF
Đọan chương trình hiển thị chữ A sẽ có lưu đồ như sau:
Chương trình có thể áp dụng phương pháp quét tương tự đã giới thiệu ở phần hiển
thị bằng led 7 đọan. Thông thường dữ liệu được cất trong một vùng ô nhớ nào đó và
chương trình hiển thị sẽ thực hiện công việc quét những dữ liệu đã có lên từng cột đèn led
và khi đó led ma trận sẽ sáng theo chế độ mong muốn.
Bắt đầu
Gởi dữ liệu ra hàng
Gởi dữ liệu ra cột
Delay Cột tiếp theo
Cột cuối ?
Quay về cột đầu tiên
Đ S
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 117
Trường hợp thiết kế một dòng chữ hiển thị bằng led ma trận lúc này ta thấy số
hàng sẽ thường là 8 hoặc 16, nhưng số cột lên đến hàng trăm, khi đó ta không thể kết nối
tất cả các chân hàng và cột của bảng led trực tiếp với vi điều khiển được. Nếu số cột quá
nhiều, việc quét theo cột sẽ không đảm bảo cho màn hình chữ của chúng ta sáng đều nên
người ta chuyển sang quét hàng. Dữ liệu cột sẽ được giao tiếp thông qua các vi mạch dịch
74HC595.
4. Hiển thị bằng LCD
LCD có rất nhiều dạng phân biệt theo kích thước từ vài kí tự đến hàng chục kí tự, từ 1
hàng đến vài chục hàng. Ví dụ LCD 16×2 có nghĩa là có 2 hàng, mỗi hàng có 16 kí tự. LCD
20×4 có nghĩa là có 4 hàng, mỗi hàng có 20 kí tự.
LCD có nhiều loại và số chân của chúng cũng khác nhau, với LCD 16x2 có 2 loại phổ
biến là loại 14 chân và loại 16 chân, sự khác nhau là các chân nguồn cung cấp, còn các chân
điều khiển thì không thay đổi, khi sử dụng loại LCD nào thì phải tra datasheet của chúng để
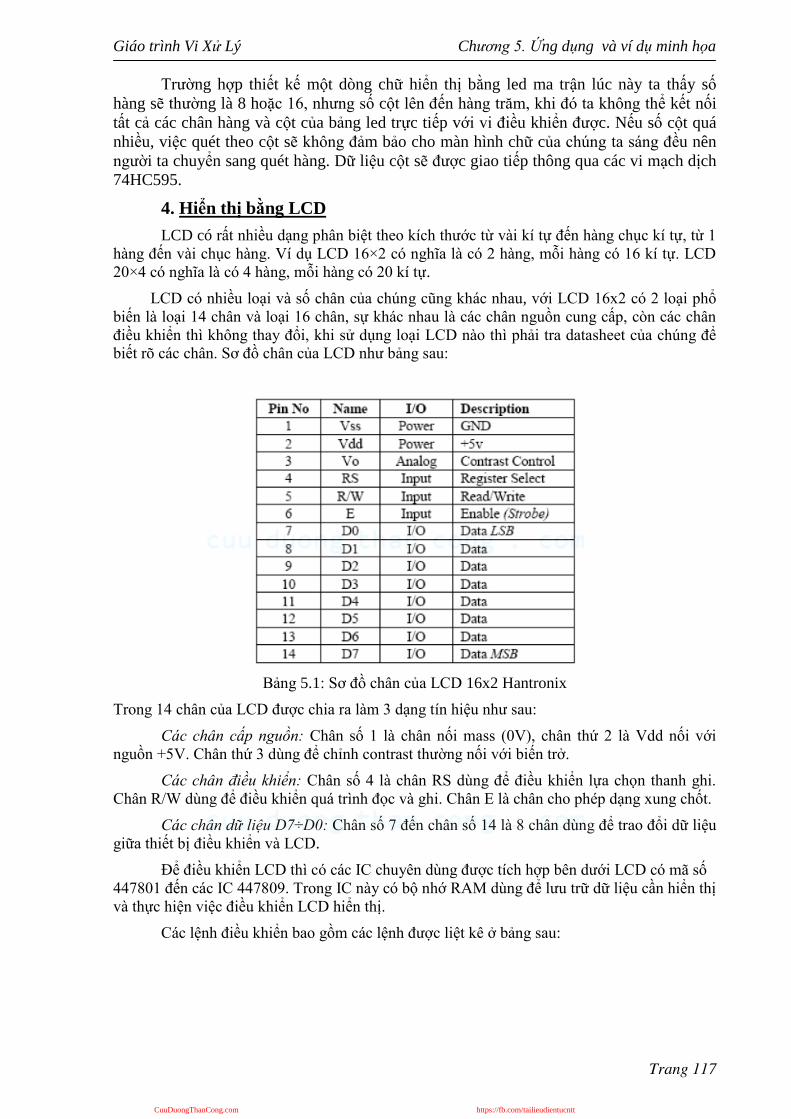
biết rõ các chân. Sơ đồ chân của LCD như bảng sau:
Bảng 5.1: Sơ đồ chân của LCD 16x2 Hantronix
Trong 14 chân của LCD được chia ra làm 3 dạng tín hiệu như sau:
Các chân cấp nguồn: Chân số 1 là chân nối mass (0V), chân thứ 2 là Vdd nối với
nguồn +5V. Chân thứ 3 dùng để chỉnh contrast thường nối với biến trở.
Các chân điều khiển: Chân số 4 là chân RS dùng để điều khiển lựa chọn thanh ghi.
Chân R/W dùng để điều khiển quá trình đọc và ghi. Chân E là chân cho phép dạng xung chốt.
Các chân dữ liệu D7÷D0: Chân số 7 đến chân số 14 là 8 chân dùng để trao đổi dữ liệu
giữa thiết bị điều khiển và LCD.
Để điều khiển LCD thì có các IC chuyên dùng được tích hợp bên dưới LCD có mã số
447801 đến các IC 447809. Trong IC này có bộ nhớ RAM dùng để lưu trữ dữ liệu cần hiển thị
và thực hiện việc điều khiển LCD hiển thị.
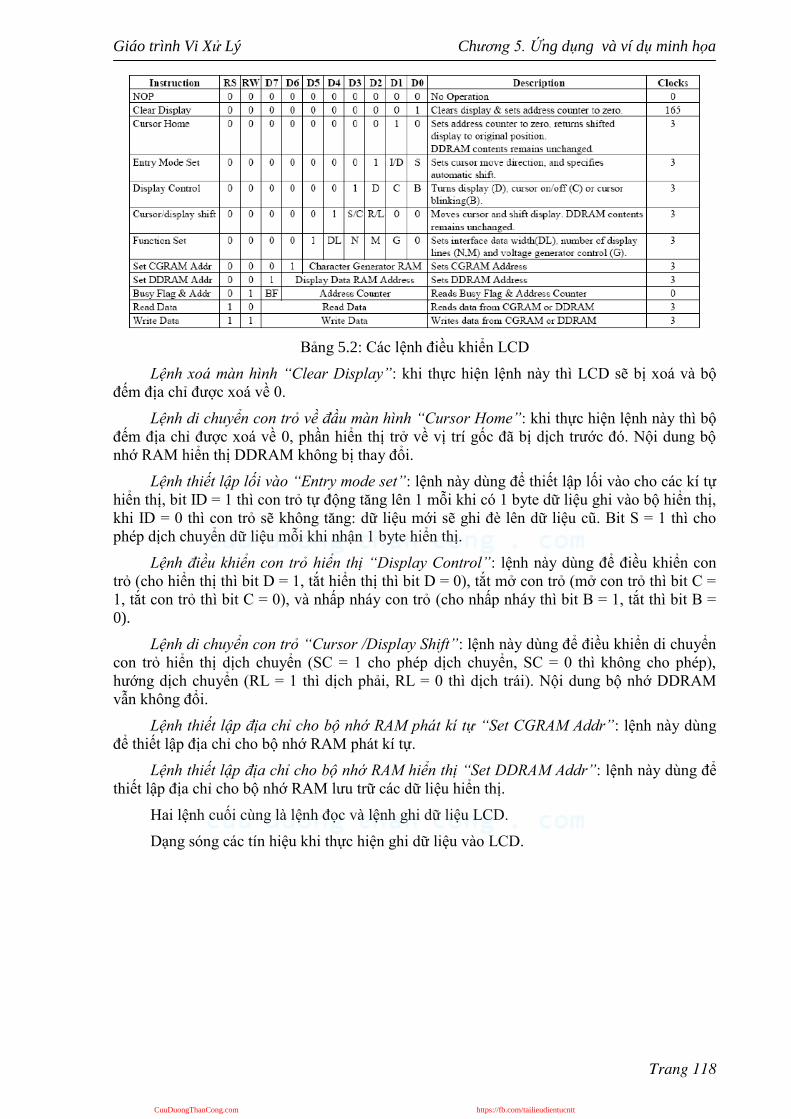
Các lệnh điều khiển bao gồm các lệnh được liệt kê ở bảng sau:
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 118
Bảng 5.2: Các lệnh điều khiển LCD
Lệnh xoá màn hình “Clear Display”: khi thực hiện lệnh này thì LCD sẽ bị xoá và bộ
đếm địa chỉ được xoá về 0.
Lệnh di chuyển con trỏ về đầu màn hình “Cursor Home”: khi thực hiện lệnh này thì bộ
đếm địa chỉ được xoá về 0, phần hiển thị trở về vị trí gốc đã bị dịch trước đó. Nội dung bộ
nhớ RAM hiển thị DDRAM không bị thay đổi.
Lệnh thiết lập lối vào “Entry mode set”: lệnh này dùng để thiết lập lối vào cho các kí tự
hiển thị, bit ID = 1 thì con trỏ tự động tăng lên 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị,
khi ID = 0 thì con trỏ sẽ không tăng: dữ liệu mới sẽ ghi đè lên dữ liệu cũ. Bit S = 1 thì cho
phép dịch chuyển dữ liệu mỗi khi nhận 1 byte hiển thị.
Lệnh điều khiển con trỏ hiển thị “Display Control”: lệnh này dùng để điều khiển con
trỏ (cho hiển thị thì bit D = 1, tắt hiển thị thì bit D = 0), tắt mở con trỏ (mở con trỏ thì bit C =
1, tắt con trỏ thì bit C = 0), và nhấp nháy con trỏ (cho nhấp nháy thì bit B = 1, tắt thì bit B =
0).
Lệnh di chuyển con trỏ “Cursor /Display Shift”: lệnh này dùng để điều khiển di chuyển
con trỏ hiển thị dịch chuyển (SC = 1 cho phép dịch chuyển, SC = 0 thì không cho phép),
hướng dịch chuyển (RL = 1 thì dịch phải, RL = 0 thì dịch trái). Nội dung bộ nhớ DDRAM
vẫn không đổi.
Lệnh thiết lập địa chỉ cho bộ nhớ RAM phát kí tự “Set CGRAM Addr”: lệnh này dùng
để thiết lập địa chỉ cho bộ nhớ RAM phát kí tự.
Lệnh thiết lập địa chỉ cho bộ nhớ RAM hiển thị “Set DDRAM Addr”: lệnh này dùng để
thiết lập địa chỉ cho bộ nhớ RAM lưu trữ các dữ liệu hiển thị.
Hai lệnh cuối cùng là lệnh đọc và lệnh ghi dữ liệu LCD.
Dạng sóng các tín hiệu khi thực hiện ghi dữ liệu vào LCD.
CuuDuongThanCong.com https://fb.com/tailieudientucntt

Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 119
Hình 5.15 : Dạng sóng tín hiệu ghi dữ liệu vào LCD
Nhìn vào dạng sóng ta có thể thấy được trình tự điều khiển như sau:
- Điều khiển tín hiệu RS.
- Điều khiển tín hiệu R/W xuống mức thấp.
- Điều khiển tín hiệu E lên mức cao để cho phép.
- Xuất dữ liệu D7÷D0.
- Điều khiển tín hiệu E về mức thấp.
- Điều khiển tín hiệu R/W lên mức cao trở lại.
Việc xây dựng lưu đồ chương trình và viết chương trình hiển thị lên LCD dựa hoàn
tòan vào dạng sóng trên và các yêu cầu hiển thị trên màn hình của bạn. Khi lập trình cho LCD
bằng ngôn ngữ C, các thư viện LCD.h thường được xây dựng sẵn và bạn chỉ việc sử dụng
chúng.
IV. MA TRẬN PHÍM
Việc nhập dữ liệu bên ngòai tác động vào vi điều khiển trong quá trình đang xử lý
một chương trình thông thường được thông qua các phím nhấn. Các phím nhấn đơn đã
được mô tả trong các ví dụ minh họa về điều khiển động cơ, trong phần này sẽ trình bày
ứng dụng sử dụng ma trận phím. Ma trận phím được sử dụng để “tiết kiệm” các đường
giao tiếp IO của vi điều khiển. với 16 phím nhấn đơn, ta cần dùng 16 đường giao tiếp
nhưng qua sử dụng ma trận phím, số đường sử dụng chỉ còn lại 8. Sẽ càng tiết kiệm được
nhiều nếu ta sử dụng nhiều phím nhấn hơn.
Hình 5.16: Sơ đồ kết nối Ma trận phím
Một số nhận xét về ma trận phím như sau:
C1 C2 C3 C4
H1
H2
H3
H4
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 120
Nếu ta coi dữ liệu ở các hàng là dữ liệu ngõ ra và dữ liệu các cột là dữ liệu ngõ vào,
ta có:
- Tất cả dữ liệu ngõ vào luôn bằng mức [1] khi không có phím nào bị nhấn
- Nếu cho dữ liệu ngõ ra bằng [0] thì dữ liệu ngõ vào ở cột tương ứng với
phím bị nhấn sẽ bằng [0], các dữ liệu ngõ vào còn lại sẽ bằng [1]. Tuy nhiên sẽ
không phân biệt được trường hợp các phím cùng 1 cột nhưng khác hàng được
nhấn vì ngõ vào tương ứng luôn bằng [0].
- Nếu cho duy nhất một hàng bằng [0], các hàng còn lại bằng [1]. Ngõ vào
cột sẽ bằng [0] khi và chỉ khi phím nằm ở vị trí hàng và cột tương ứng bị nhấn, vì
vậy ta nhận biết chính xác được phím nào đang bị nhấn.
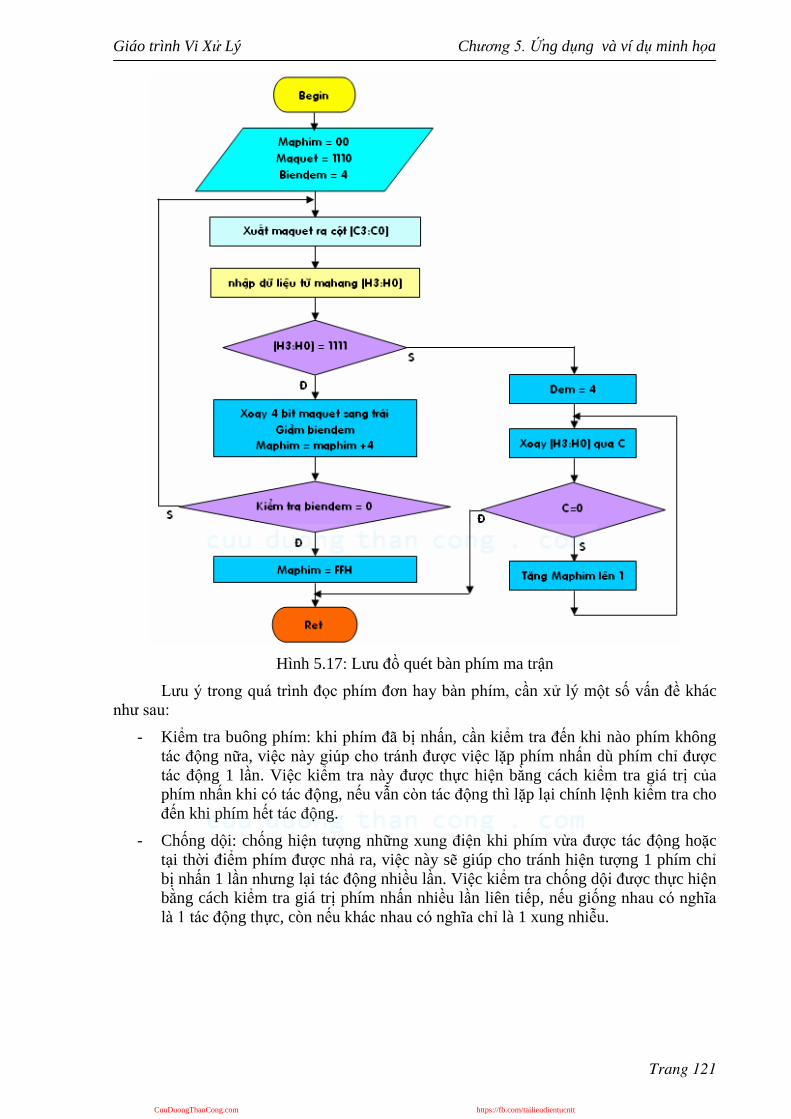
Từ đó ta xây dựng nên quy tắc quét bàn phím như sau:
+ Xuất dữ liệu quét cột 1
+ Kiểm tra dữ liệu các hàng, nếu có hàng nào tác động, lưu lại giá trị mã
phím
+ Kiểm tra lần lượt các cột tiếp theo
+ Đánh dấu giá trị của mã phím khi không có phím bị nhấn.
Và lưu đồ được trình bày dưới đây:
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 121
Hình 5.17: Lưu đồ quét bàn phím ma trận
Lưu ý trong quá trình đọc phím đơn hay bàn phím, cần xử lý một số vấn đề khác
như sau:
- Kiểm tra buông phím: khi phím đã bị nhấn, cần kiểm tra đến khi nào phím không
tác động nữa, việc này giúp cho tránh được việc lặp phím nhấn dù phím chỉ được
tác động 1 lần. Việc kiểm tra này được thực hiện bằng cách kiểm tra giá trị của
phím nhấn khi có tác động, nếu vẫn còn tác động thì lặp lại chính lệnh kiểm tra cho
đến khi phím hết tác động.
- Chống dội: chống hiện tượng những xung điện khi phím vừa được tác động hoặc
tại thời điểm phím được nhả ra, việc này sẽ giúp cho tránh hiện tượng 1 phím chỉ
bị nhấn 1 lần nhưng lại tác động nhiều lần. Việc kiểm tra chống dội được thực hiện
bằng cách kiểm tra giá trị phím nhấn nhiều lần liên tiếp, nếu giống nhau có nghĩa
là 1 tác động thực, còn nếu khác nhau có nghĩa chỉ là 1 xung nhiễu.
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 122
V. ADC VÀ DAC
1. Chuyển đổi ADC.
Chuyển đổi ADC cho phép vi điều khiển đo được những tín hiệu tương tự, từ đó sử
dụng kết quả đo này cho các ứng dụng điều khiển như điều khiển khống chế nhiệt độ, cân
và hiển thị điện tử, đo tốc độ động cơ sử dụng máy phát tốc v.v… Các vi mạch chuyển đổi
ADC được phân thành 2 lọai: truyền dữ liệu nối tiếp và truyền dữ liệu song song. Sử dụng
truyền dữ liệu song song có ưu điểm là tốc độ truyền nhanh nhưng lại cần phải sử dụng
nhiều đường giao tiếp, truyền dữ liệu nối tiếp tuy chậm nhưng lại sử dụng ít đường giao
tiếp, như vậy tùy theo từng ứng dụng cu thể mà nên chọn kiểu giao tiếp cho phù hợp.
Trong phần này chỉ giới thiệu một vi mạch chuyển đổi ADC thông dụng trên thị
trường hiện nay là ADC 0809, ưu điểm của vi mạch này là dễ sử dụng và có khả năng đo
được 8 kênh ngõ vào, khuyết điểm lại là tốc độ chậm, độ phân giải thấp (độ chính xác
không cao).
Vi mạch ADC 0809 là một thiết bị CMOS tích hợp với một bộ chuyển đổi từ
tương tự sang số 8 bit, bộ chọn 8 kênh và một bô logic điều khiển tương thích. Bộ chuyển
đổi AD 8 bit này dùng phương pháp chuyển đổi xấp xỉ liên tục. Bộ chọn kênh có thể truy
xuất bất kỳ kênh nào trong các ngõ vào tương tự một cánh độc lập.
Thiết bị này loại trừ khả năng cần thiết điều chỉnh điểm 0 bên ngoài và khả năng
điều chỉnh tỷ số làm tròn ADC 0809 dễ dàng giao tiếp với các bộ vi xử lý.
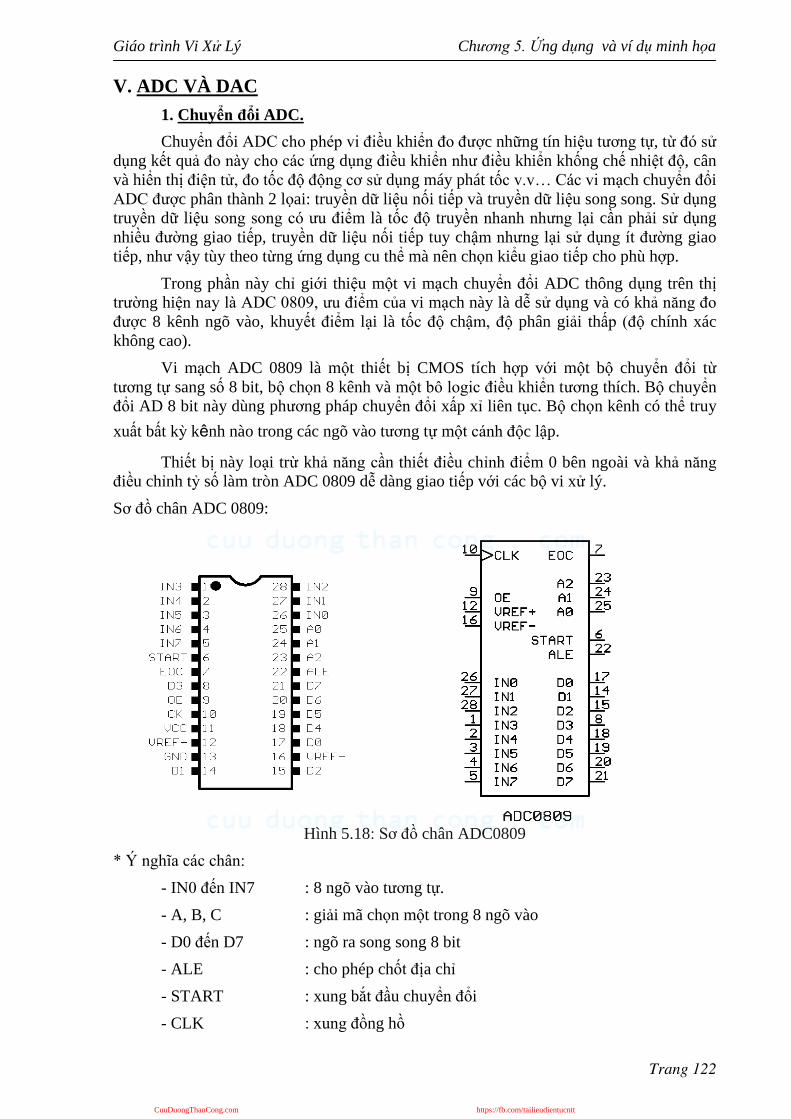
Sơ đồ chân ADC 0809:
Hình 5.18: Sơ đồ chân ADC0809
* Ý nghĩa các chân:
- IN0 đến IN7 : 8 ngõ vào tương tự.
- A, B, C : giải mã chọn một trong 8 ngõ vào
- D0 đến D7 : ngõ ra song song 8 bit
- ALE : cho phép chốt địa chỉ
- START : xung bắt đầu chuyển đổi
- CLK : xung đồng hồ
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 123
- REF (+) : điện thế tham chiếu (+)
- REF (-) : điện thế tham chiếu (-)
- VCC : nguồn cung cấp
* Các đặc điểm củaADC 0809:
- Độ phân giải 8 bit
- Tổng sai số chưa chỉnh định ± ½ LSB; ± 1 LSB
- Thời gian chuyển đổi: 100us ở tần số 640 kHz
- Nguồn cung cấp + 5V
- Điện áp ngõ vào 0 – 5V
- Tần số xung clock 10kHz – 1280 kHz
- Nhiệt độ hoạt động - 40oC đến 85oC
- Dễ dàng giao tiếp với vi xử lý hoặc dùng riêng
- Không cần điều chỉnh zero hoặc đầy thang
* Nguyên lý hoạt động:
ADC 0809 có 8 ngõ vào tương tự, 8 ngõ ra 8 bit có thể chọn 1 trong 8 ngõ vào
tương tự để chuyển đổi sang số 8 bit.
Các ngõ vào được chọn bằng cách giải mã. Chọn 1 trong 8 ngõ vào tương tự được
thực hiện nhờ 3 chân ADDA, ADDB, ADDC như bảng trạng thái sau:
Bảng 5.3 : Bảng trạng thái ADC 0809
auk hi kích xung start thì bộ chuyển đổi bắt đầu hoạt động ở cạnh xuống của
xung start, ngõ ra EOC sẽ xuống mức thấp sau khoảng 8 xung clock (tính từ cạnh xuống
của xung start). Lúc này bit cơ trọng số lớn nhất (MSB) được đặt lên mức 1, tất cả các bit
còn lại ở mức 0, đồng thời tạo ra điện thế có giá trị Vref/2, điện thế này được so sánh với
điện thế vào in.
+ Nếu Vin > Vref/2 thì bit MSB vẫn ở mức 1.
+ Nếu Vin < Vref/2 thì bit MSB vẫn ở mức 0.
Tương tự như vậy bit kế tiếp MSB được đặt lên 1 và tạo ra điện thế có giá trị
Vref/4 và cũng so sánh với điện áp ngõ vào Vin. Quá trình cứ tiếp tục như vậy cho đến
khi xác định được bit cuối cùng. Khi đó chân EOC lên mức 1 báo cho biết đã kết thúc
chuyển đổi.
A2 A1 A0 Ngõ vào tương tự
0 0 0 IN0
0 0 1 IN1
0 1 0 IN2
0 1 1 IN3
1 0 0 IN4
1 0 1 IN5
1 1 0 IN6
1 1 1 IN7
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 124
Trong suốt quá trình chuyển đổi chân OE được đặt ở mức 1, muốn đọc dữ liệu ra
chân OE xuống mức 0.
Trong suốt quá trình chuyển đổi nếu có 1 xung start tác động thì ADC sẽ ngưng
chuyển đổi.
Mã ra N cho một ngõ vào tùy ý là một số nguyên.
Trong đó Vin : điện áp ngõ vào hệ so sánh.
Vref(+): điện áp tại chân REF(+).
Vref(-): điện áp tại chân REF(-).
- Giá trị bước nhỏ nhất
1 LSB = 8
2
5 = 0,0196 V/byte
Vậy với 256 bước Vin = 5V.
Áp vào lớn nhất của ADC 0809 là 5V.
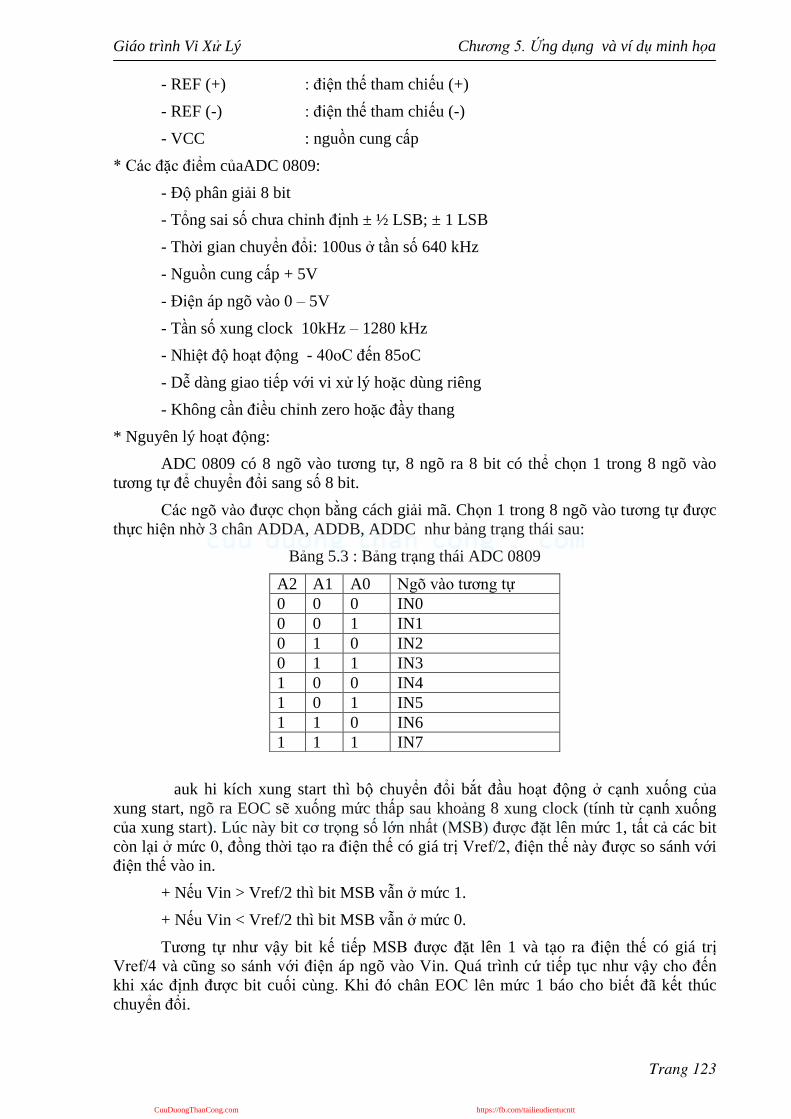
• Biểu đồ thời gian của ADC 0809.
Hình 5.19: Lưu đồ thời gian quá trình chuyển đổi ADC
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 125
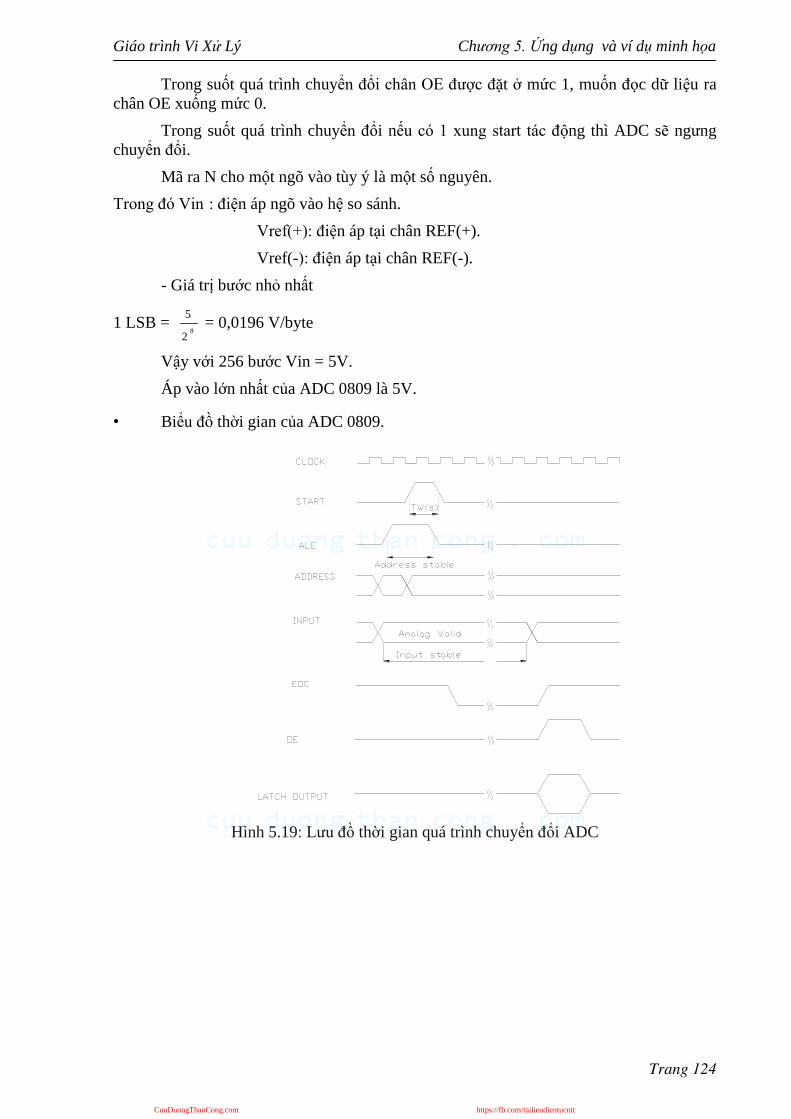
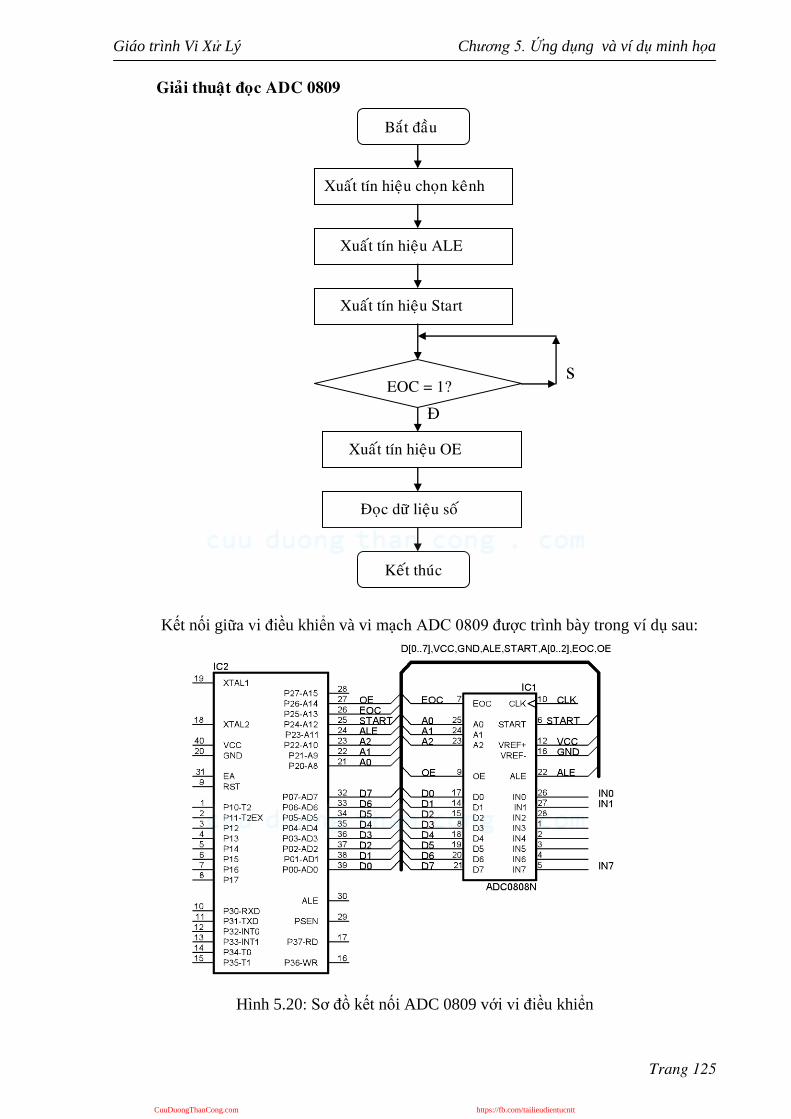
Giaûi thuaät ñoïc ADC 0809
Kết nối giữa vi điều khiển và vi mạch ADC 0809 được trình bày trong ví dụ sau:
Hình 5.20: Sơ đồ kết nối ADC 0809 với vi điều khiển
Baét ñaàu
Xuaát tín hieäu choïn keânh
Xuaát tín hieäu ALE
Xuaát tín hieäu Start
EOC = 1?
Xuaát tín hieäu OE
Ñoïc döõ lieäu soá
Keát thuùc
s
Ñ
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 126
Trong đó Port 0 được kết nối với các chân dữ liệu D0 – D7 và Port 2 kết nối với
các chân điều khiển của ADC0809. Đọan chương trình đọc dữ liệu từ ngõ vào IN0 của
ADC và cất vào thanh ghi A như sau:
Read_ADC:
Anl P2,#0f8h
Setb P2.3
Setb P2.4
Nop
Nop
Clr P2.3
Clr P2.4
Jnb P2.5,$
Setb P2.6
Mov A,P0
ret
Maïch dao ñoäng schmitt cho ADC 0809.
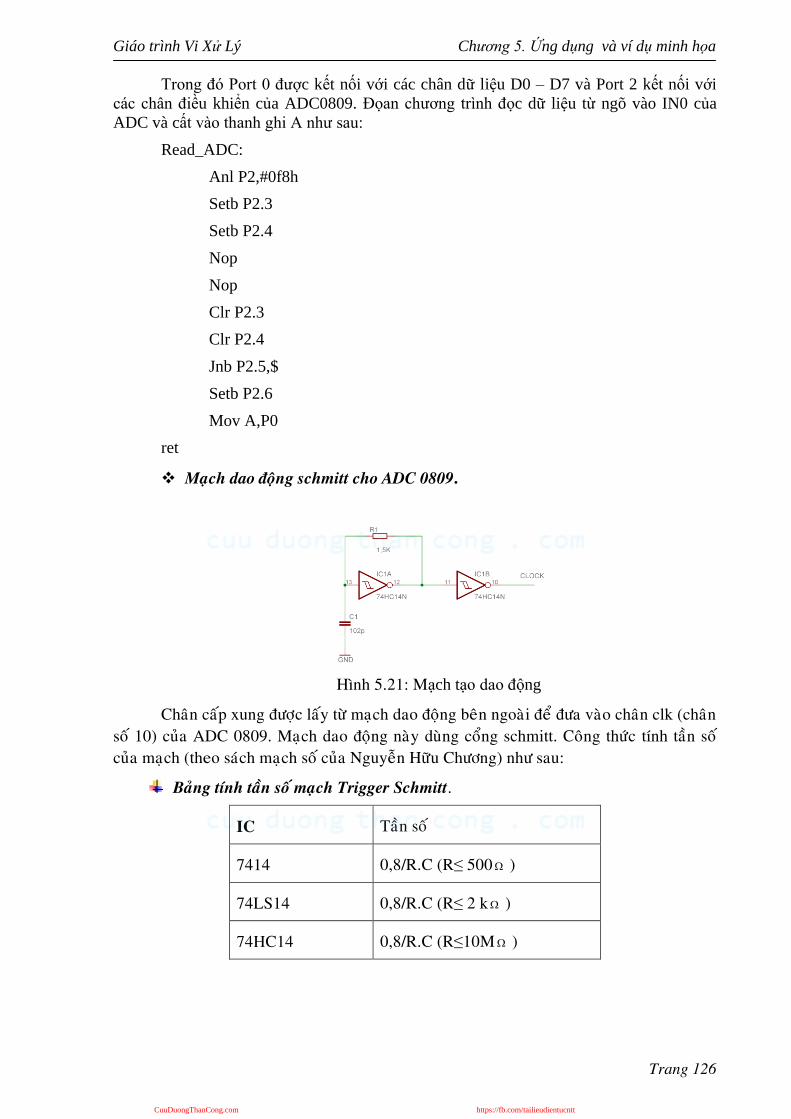
Hình 5.21: Mạch tạo dao động
Chaân caáp xung ñöôïc laáy töø maïch dao ñoäng beân ngoaøi ñeå ñöa vaøo chaân clk (chaân
soá 10) cuûa ADC 0809. Maïch dao ñoäng naøy duøng coång schmitt. Coâng thöùc tính taàn soá
cuûa maïch (theo saùch maïch soá cuûa Nguyeãn Höõu Chöông) nhö sau:
Baûng tính taàn soá maïch Trigger Schmitt.
IC Taàn soá
7414 0,8/R.C (R≤ 500 )
74LS14 0,8/R.C (R≤ 2 k )
74HC14 0,8/R.C (R≤10M )
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 127
Taàn soá toái ña cuûa xung clock caáp cho ADC laø 640Khz. Ngöôøi thöïc hieän chæ
duøng ôû taàn soá 500Khz vaø duøng IC 74LS14. Giaù trò linh kieän ñöôïc xaùc ñònh nhö
sau:
CRf
8,0
Vôùi taàn soá 500Khz vaø choïn giaù trò ñieän trôû laø 1K thì ta coù :
33
10.5,110.500
8,0
C =
910.06,1
(F) 1060 (pF)
Choïn tuï C = 102 (pF).
Tuy nhiên đây chỉ là một đọan chương trình con giới thiệu cách sử dụng ADC
0809, bạn hãy viết lại chương trình con một cách đầy đủ hơn bằng cách cho phép đọc bất
kỳ kênh ngõ vào tương tự nào.
2. Chuyển đổi DAC.
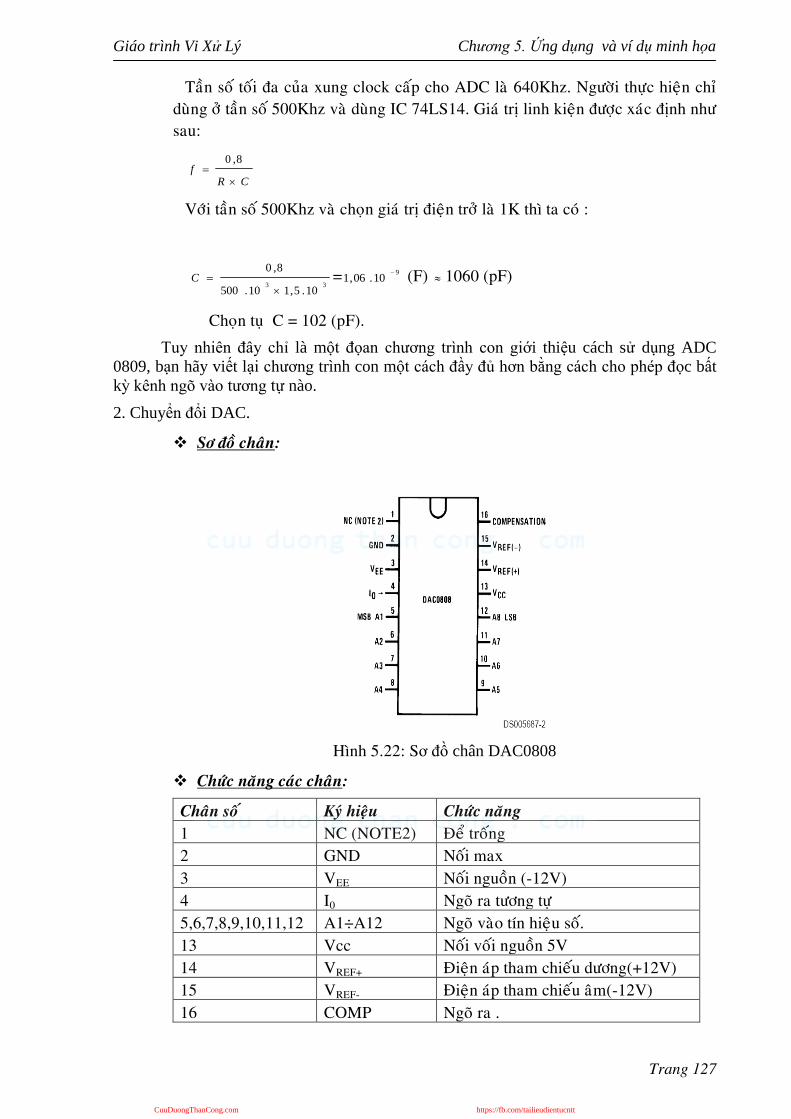
Sô ñoà chaân:
Hình 5.22: Sơ đồ chân DAC0808
Chöùc naêng caùc chaân:
Chaân soá Kyù hieäu Chöùc naêng
1 NC (NOTE2) Ñeå troáng
2 GND Noái max
3 VEE Noái nguoàn (-12V)
4 I0 Ngoõ ra töông töï
5,6,7,8,9,10,11,12 A1÷A12 Ngoõ vaøo tín hieäu soá.
13 Vcc Noái voái nguoàn 5V
14 VREF+ Ñieän aùp tham chieáu döông(+12V)
15 VREF- Ñieän aùp tham chieáu aâm(-12V)
16 COMP Ngoõ ra .
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 128
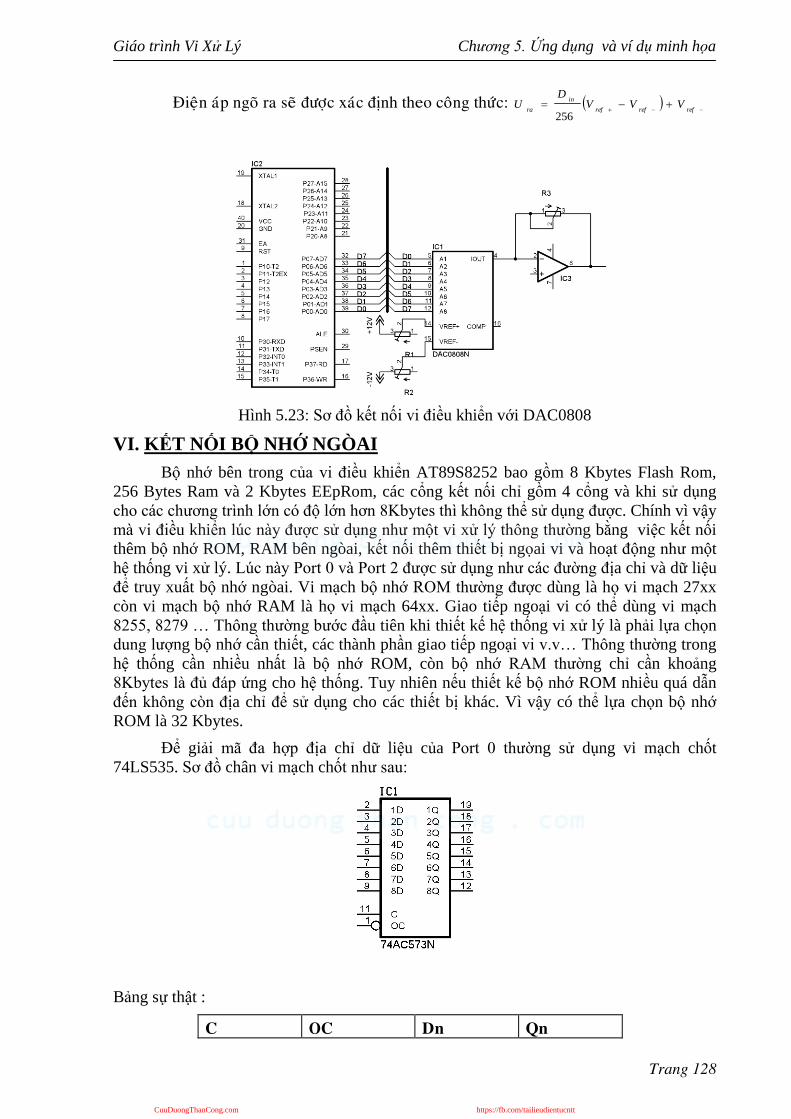
Ñieän aùp ngoõ ra seõ ñöôïc xaùc ñònh theo coâng thöùc:
refrefref
in
raVVV
DU
256
Hình 5.23: Sơ đồ kết nối vi điều khiển với DAC0808
VI. KẾT NỐI BỘ NHỚ NGÒAI
Bộ nhớ bên trong của vi điều khiển AT89S8252 bao gồm 8 Kbytes Flash Rom,
256 Bytes Ram và 2 Kbytes EEpRom, các cổng kết nối chỉ gồm 4 cổng và khi sử dụng
cho các chương trình lớn có độ lớn hơn 8Kbytes thì không thể sử dụng được. Chính vì vậy
mà vi điều khiển lúc này được sử dụng như một vi xử lý thông thường bằng việc kết nối
thêm bộ nhớ ROM, RAM bên ngòai, kết nối thêm thiết bị ngọai vi và hoạt động như một
hệ thống vi xử lý. Lúc này Port 0 và Port 2 được sử dụng như các đường địa chỉ và dữ liệu
để truy xuất bộ nhớ ngòai. Vi mạch bộ nhớ ROM thường được dùng là họ vi mạch 27xx
còn vi mạch bộ nhớ RAM là họ vi mạch 64xx. Giao tiếp ngoại vi có thể dùng vi mạch
8255, 8279 … Thông thường bước đầu tiên khi thiết kế hệ thống vi xử lý là phải lựa chọn
dung lượng bộ nhớ cần thiết, các thành phần giao tiếp ngoại vi v.v… Thông thường trong
hệ thống cần nhiều nhất là bộ nhớ ROM, còn bộ nhớ RAM thường chỉ cần khoảng
8Kbytes là đủ đáp ứng cho hệ thống. Tuy nhiên nếu thiết kế bộ nhớ ROM nhiều quá dẫn
đến không còn địa chỉ để sử dụng cho các thiết bị khác. Vì vậy có thể lựa chọn bộ nhớ
ROM là 32 Kbytes.
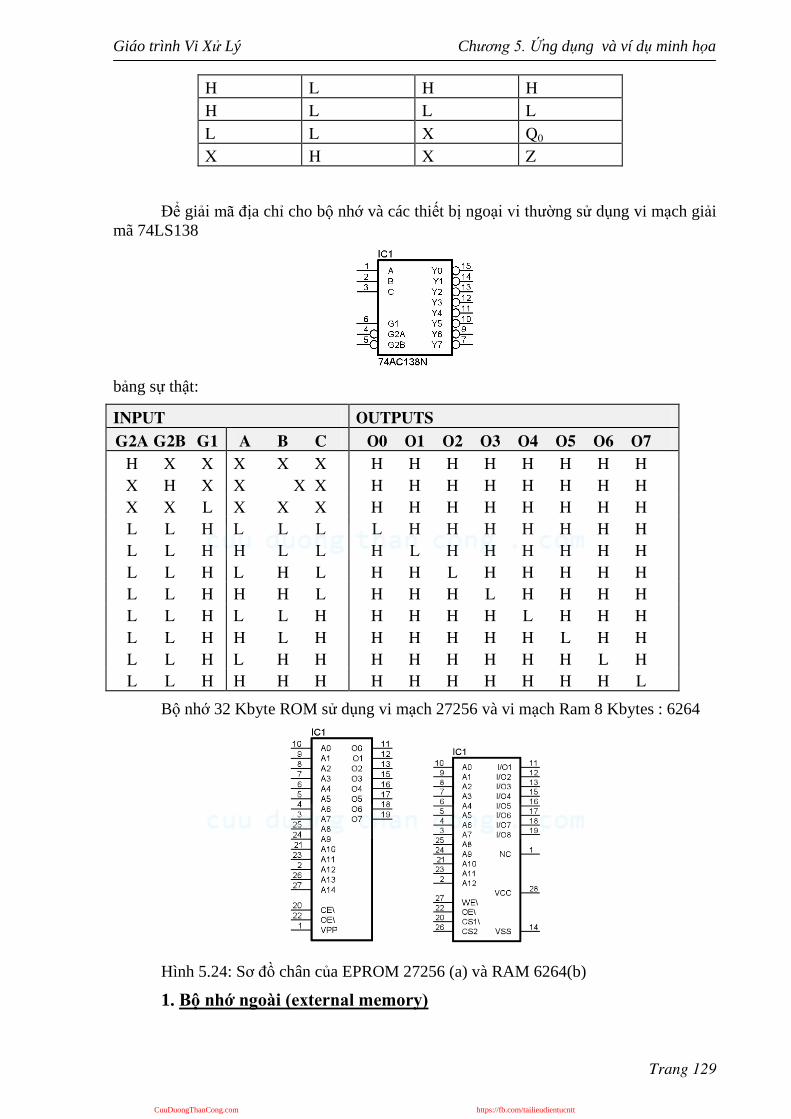
Để giải mã đa hợp địa chỉ dữ liệu của Port 0 thường sử dụng vi mạch chốt
74LS535. Sơ đồ chân vi mạch chốt như sau:
Bảng sự thật :
C OC Dn Qn
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 129
H L H H
H L L L
L L X Q0
X H X Z
Để giải mã địa chỉ cho bộ nhớ và các thiết bị ngoại vi thường sử dụng vi mạch giải
mã 74LS138
bảng sự thật:
INPUT OUTPUTS
G2A G2B G1 A B C O0 O1 O2 O3 O4 O5 O6 O7
H X X X X X H H H H H H H H
X H X X X X H H H H H H H H
X X L X X X H H H H H H H H
L L H L L L L H H H H H H H
L L H H L L H L H H H H H H
L L H L H L H H L H H H H H
L L H H H L H H H L H H H H
L L H L L H H H H H L H H H
L L H H L H H H H H H L H H
L L H L H H H H H H H H L H
L L H H H H H H H H H H H L
Bộ nhớ 32 Kbyte ROM sử dụng vi mạch 27256 và vi mạch Ram 8 Kbytes : 6264
Hình 5.24: Sơ đồ chân của EPROM 27256 (a) và RAM 6264(b)
1. Bộ nhớ ngoài (external memory)
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 130
Bộ nhớ ngoài của vi điều khiển rất quan trọng để mở rộng tầm hoạt động lớn hơn
Resources trên Chip để tránh sự thiếu hụt của thiết bị được nhà sản xuất quy định. Họ
MSC-51 cho phép mở rộng vùng nhớ mã ngoài 64K và vùng nhớ dữ liệu ngoài 64K.
Những ngoại vi cũng được thêm vào để mở rộng thêm khả năng xuất nhập I/O và chúng
trở thành vùng nhớ dữ liệu ngoài sử dụng như bản đồ nhớ I/O. Khi dùng bộ nhớ ngoài thì
Port 0 trở thành địa chỉ đa kênh (A0A7) và bus dữ liệu (D0D7) mà tín hiệu ALE sẽ
chốt byte của địa chỉ ở sự bắt đầu của mỗi chu kỳ nhớ ngoài. Port 2 thường được dùng
làm byte cao của bus địa chỉ. Port 0 được ghép chung để tiết kiệm chân ra.
Phương pháp chungđược sắp đặt để làm việc là : Trong suốt nữa đầu của chu kỳ
nhớ, byte thấp của địa chỉ được cung cấp bởi Port 0 và được chốt bởi việc dùng tín hiệu
ALE. Một con chốt 74HC373 (hoặc con khác tương đương) sẽ giữ byte thấp của địa chỉ
chỉ chốt lại trong khoảng thời gian của chu kỳ nhớ. Trong nữa chu kỳ nhớ thứ hai, Port 0
được sử dụng như bus dữ liệu và dữ liệu được đọc hoặc ghi tùy thuộc hoạt động đọc hay
ghi.
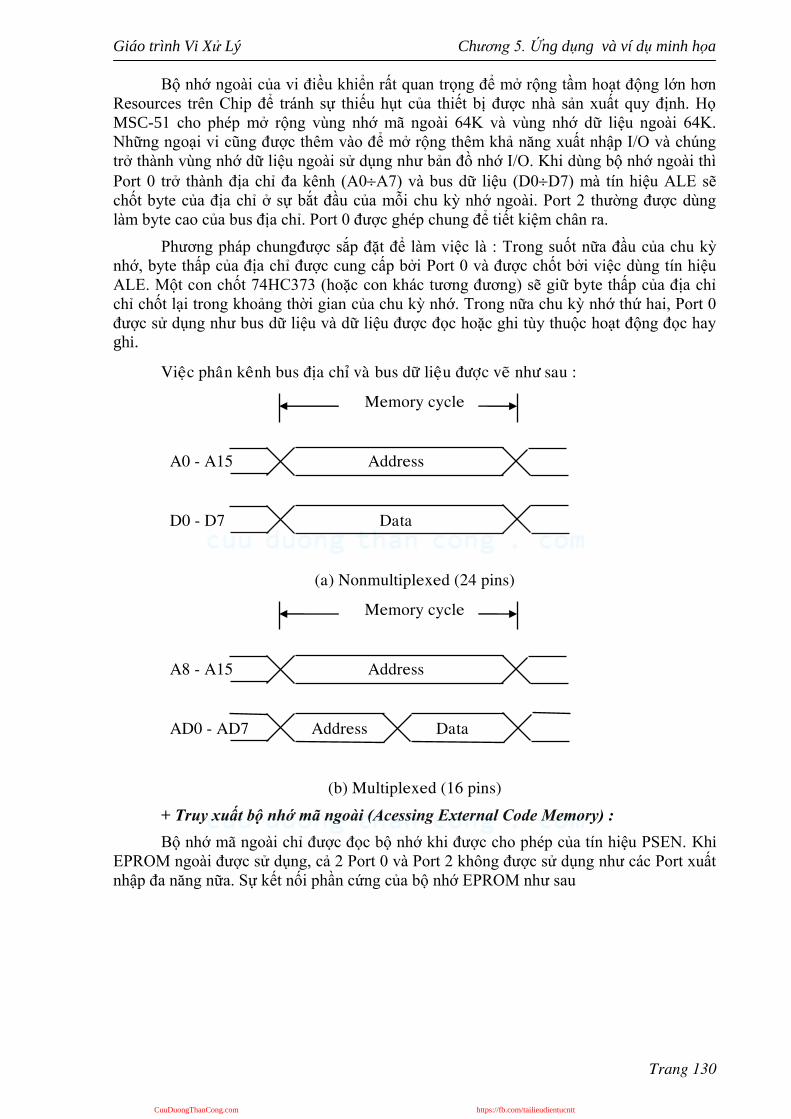
Vieäc phaân keânh bus ñòa chæ vaø bus döõ lieäu ñöôïc veõ nhö sau :
Memory cycle
A0 - A15 Address
D0 - D7 Data
(a) Nonmultiplexed (24 pins)
Memory cycle
A8 - A15 Address
AD0 - AD7 Address Data
(b) Multiplexed (16 pins)
+ Truy xuất bộ nhớ mã ngoài (Acessing External Code Memory) :
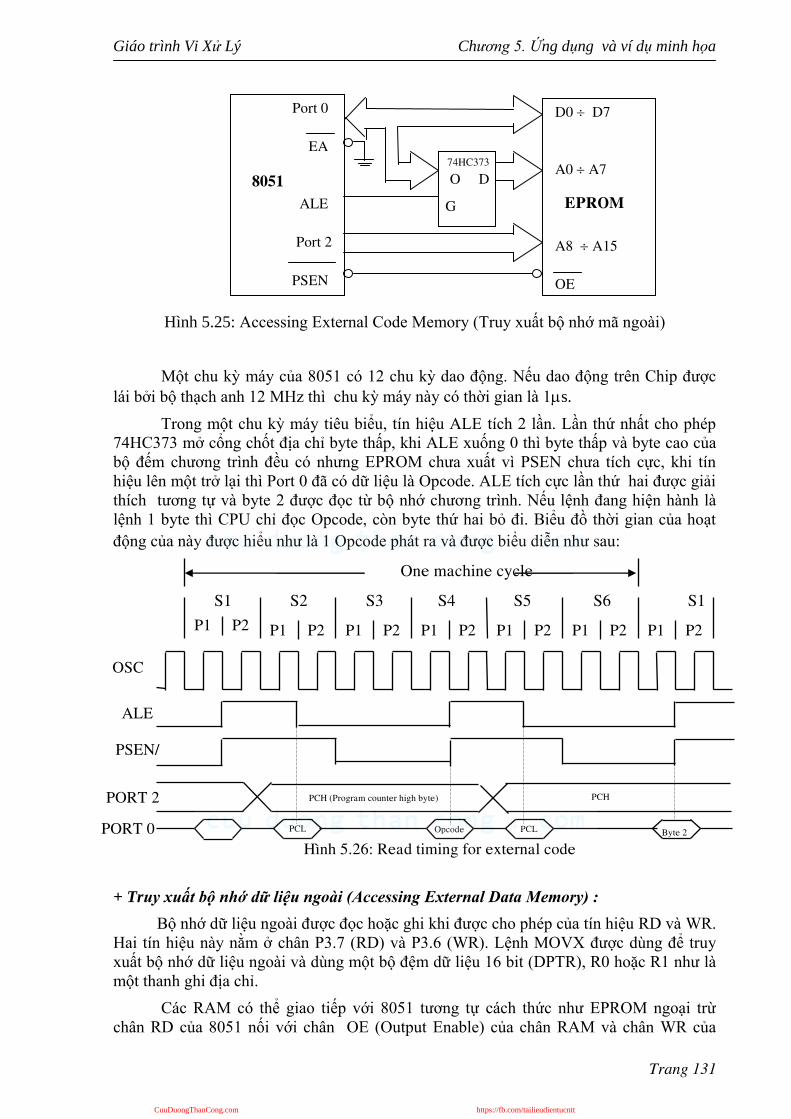
Bộ nhớ mã ngoài chỉ được đọc bộ nhớ khi được cho phép của tín hiệu PSEN. Khi
EPROM ngoài được sử dụng, cả 2 Port 0 và Port 2 không được sử dụng như các Port xuất
nhập đa năng nữa. Sự kết nối phần cứng của bộ nhớ EPROM như sau
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 131
Hình 5.25: Accessing External Code Memory (Truy xuất bộ nhớ mã ngoài)
Một chu kỳ máy của 8051 có 12 chu kỳ dao động. Nếu dao động trên Chip được
lái bởi bộ thạch anh 12 MHz thì chu kỳ máy này có thời gian là 1s.
Trong một chu kỳ máy tiêu biểu, tín hiệu ALE tích 2 lần. Lần thứ nhất cho phép
74HC373 mở cổng chốt địa chỉ byte thấp, khi ALE xuống 0 thì byte thấp và byte cao của
bộ đếm chương trình đều có nhưng EPROM chưa xuất vì PSEN chưa tích cực, khi tín
hiệu lên một trở lại thì Port 0 đã có dữ liệu là Opcode. ALE tích cực lần thứ hai được giải
thích tương tự và byte 2 được đọc từ bộ nhớ chương trình. Nếu lệnh đang hiện hành là
lệnh 1 byte thì CPU chỉ đọc Opcode, còn byte thứ hai bỏ đi. Biểu đồ thời gian của hoạt
động của này được hiểu như là 1 Opcode phát ra và được biểu diễn như sau:
One machine cycle
S1 S2 S3 S4 S5 S6 S1
+ Truy xuất bộ nhớ dữ liệu ngoài (Accessing External Data Memory) :
Bộ nhớ dữ liệu ngoài được đọc hoặc ghi khi được cho phép của tín hiệu RD và WR.
Hai tín hiệu này nằm ở chân P3.7 (RD) và P3.6 (WR). Lệnh MOVX được dùng để truy
xuất bộ nhớ dữ liệu ngoài và dùng một bộ đệm dữ liệu 16 bit (DPTR), R0 hoặc R1 như là
một thanh ghi địa chỉ.
Các RAM có thể giao tiếp với 8051 tương tự cách thức như EPROM ngoại trừ
chân RD của 8051 nối với chân OE (Output Enable) của chân RAM và chân WR của
Port 0
EA
ALE
Port 2
PSEN
8051
D0 D7
A0 A7
A8 A15
OE
74HC373
O D
G EPROM
P1 P2 P1 P2 P1 P2 P1 P2 P1 P2 P1 P2 P1 P2
OSC
ALE
PSEN/
PORT 2
PORT 0 PCL Opcode PCL Byte 2
PCH PCH (Program counter high byte)
Hình 5.26: Read timing for external code
memory
CuuDuongThanCong.com https://fb.com/tailieudientucntt

Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 132
8051 nối với chânWE của RAM. Sự nối các bus địa chỉ và dữ liệu tương tự như cách nối
của EPROM. Biểu đồ thời gian của hoạt động đọc bộ nhớ dữ liệu ngoài bởi MOVX A, @
DPTR như sau :
One machine cycle One machine cycle
Hình 5.27: Timing for MOVX instruction
Trong biểu đồ thời gian của bộ đọc dữ liệu ngoài, cứ hai chu kỳ máy thì ALE tích
cực 3 lần. ALE tích cực lần thứ nhất để chốt byte thấp bộ đếm chương trình vào IC chốt
373để khi PSEN tích cực lái Opcode vào Port 0. ALE tích cực lần thứ hai để chốt địa chỉ
của byte thấp bộ đếm dữ liệu vào IC chốt 373 và chờ khi RD tích cực để lấy dữ liệu ngoài,
tín hiệu được WR đưa lên cao trong suốt thời gian thực hiện lệnh đọc.
Hình 5.28: Accessing External Data Memory (Truy xuaát boä nhôù döõ lieäu
ngoaøi)
Port 0
EA
ALE
Port 2
RD
WR
8051
D0 D7
A0 A7
A8 A15
OE
WE
74HC373
O D
G
RAM
S1 S2 S3 S4 S5 S6 S3 S4 S1 S2 S5 S6
ALE
PORT 2
PORT 0 DPL Opcode PCL
PCH DPH (Data pointer high byte)
PSEN
RD
External
data in
CuuDuongThanCong.com https://fb.com/tailieudientucntt

Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 133
CS
CS
D0 - D7
OE
EPROM
A0 A12
8K Bytes
CS
C
B
A
G1
G2
G3
0
1
2
3
4
5
6
7
CS
CS
OE D0 - D7
W
RAM
A0 A12
8K Bytes
CS
6264 2764
PSEN RD
WR
Address Bus (A0 A15)
Data Bus (D0 D7)
Select other
EPROM/RAM
Biểu đồ thời gian ghi lên bộ nhớ của dữ liệu ngoài bởi lệnh MOVX @ DPTR, A
cũng giống như hoạt động đọc, ngoại trừ chân WR hạ thấp thay vào chổ của RD (RD
được đưa lên cao) và dữ liệu được xuất trên Port 0.
+ Sự giải mã địa chỉ (Address Decoding) :
Sự giải mã địa chỉ là một yêu cầu tất yếu để chọn EPROM, RAM, ADCO809, . . .
Sự giải mã địa chỉ đối với 8051 để chọn các vùng nhớ ngoài như các vi xử lý. Nếu các con
EPROM hoặc RAM 8K được dùng thì các bus địa chỉ phải được giải mã để chọn các IC
nhớ nằm trong phạm vi giới hạn 8K : 0000H1FFFH, 2000H3FFFH, . . .
Một cách cụ thể, IC giải mã 74HC138 được dùng với những đầu của nó được nối
với những đầu vào chọn Chip CS (Chip Select) trên những IC nhớ EPROM, RAM, . . .
Hình sau đây cho phép kết nối nhiều EPROM và RAM.
74HC138
Hình 5.29: Address Decoding (Giaûi maõ ñòa chæ)
CuuDuongThanCong.com https://fb.com/tailieudientucntt

Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 134
+ Söï ñeø leân nhau cuûa caùc vuøng nhôù döõ lieäu ngoaøi :
Moät nhöôïc ñieåm chung cuûa 8051 laø caùc vuøng nhôù döõ lieäu ngoaøi naèm ñeø leân
nhau, vì tín hieäu PSEN ñöôïc duøng ñeå ñoïc boä nhôù maõ ngoaøi vaø tín hieäu RD ñöôïc duøng
ñeå ñoïc boä nhôù döõ lieäu, neân moät con RAM coù theå chieám giöõ vuøng nhôù döõ lieäu baèng
caùch noái ñöôøng OE cuûa noù ñeán coång AND logic (phuû ñònh ñaàu vaøo cuûa NOR) cuûa
PSEN vaø RD.
W
RD
PSEN
Hình 5.30: Overlapping the External code and data space
Hình naøy cho pheùp IC RAM ñöôïc ghi nhö boä nhôù döõ lieäu, ñöôïc ñoïc nhö boä nhôù
döõ lieäu hay boä nhôù maõ. Vì vaây moät chöông trình coù theå ñöôïc LOAD vaøo trong RAM
(baèng vieäc ghi leân RAM nhö boä nhôù Data) vaø ñöôïc truy xuaát (baèng vieäc truy xuaát noù
nhö boä nhôù maõ).
2. Thiết bị ngọai vi
IC giao tiếp ngọai vi thường được sử dụng để mở rộng khả năng giao tiếp là IC
8255A. Vi mạch 8255A thường được gọi là mạch giao tiếp ngoại vi lập trình được
(Programmable Peripheral Interface – PPI). Do khả năng đa năng trong các ứng dụng thực tế
nên 8255A là vi mạch giao tiếp được dùng rất phổ biến cho các hệ vi xử lý 8 bit – 16 bit.
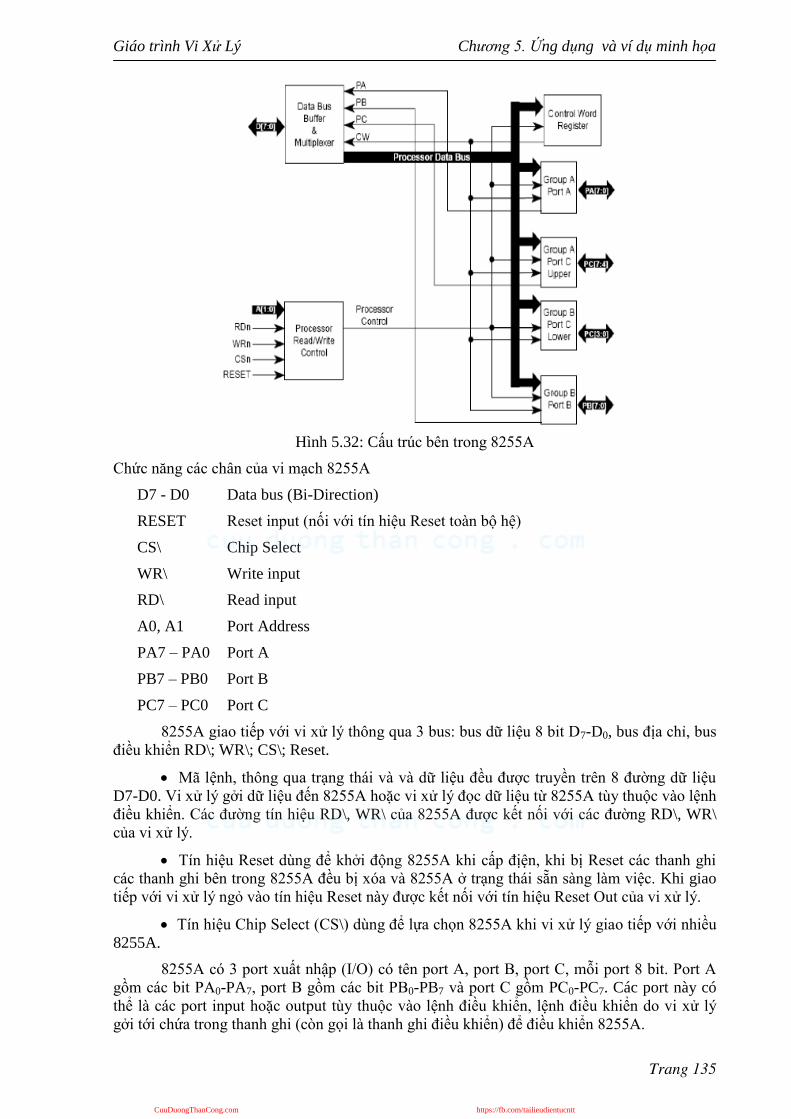
IC 8255A có 40 chân như hình 5.31 và sơ đồ cấu trúc bên trong như hình 5.32:
Hình 5.31: Sơ đồ chân 8255A
RAM
W
OE
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 135
Hình 5.32: Cấu trúc bên trong 8255A
Chức năng các chân của vi mạch 8255A
D7 - D0 Data bus (Bi-Direction)
RESET Reset input (nối với tín hiệu Reset toàn bộ hệ)
CS\ Chip Select
WR\ Write input
RD\ Read input
A0, A1 Port Address
PA7 – PA0 Port A
PB7 – PB0 Port B
PC7 – PC0 Port C
8255A giao tiếp với vi xử lý thông qua 3 bus: bus dữ liệu 8 bit D7-D0, bus địa chỉ, bus
điều khiển RD\; WR\; CS\; Reset.
Mã lệnh, thông qua trạng thái và và dữ liệu đều được truyền trên 8 đường dữ liệu
D7-D0. Vi xử lý gởi dữ liệu đến 8255A hoặc vi xử lý đọc dữ liệu từ 8255A tùy thuộc vào lệnh
điều khiển. Các đường tín hiệu RD\, WR\ của 8255A được kết nối với các đường RD\, WR\
của vi xử lý.
Tín hiệu Reset dùng để khởi động 8255A khi cấp địện, khi bị Reset các thanh ghi
các thanh ghi bên trong 8255A đều bị xóa và 8255A ở trạng thái sẵn sàng làm việc. Khi giao
tiếp với vi xử lý ngỏ vào tín hiệu Reset này được kết nối với tín hiệu Reset Out của vi xử lý.
Tín hiệu Chip Select (CS\) dùng để lựa chọn 8255A khi vi xử lý giao tiếp với nhiều
8255A.
8255A có 3 port xuất nhập (I/O) có tên port A, port B, port C, mỗi port 8 bit. Port A
gồm các bit PA0-PA7, port B gồm các bit PB0-PB7 và port C gồm PC0-PC7. Các port này có
thể là các port input hoặc output tùy thuộc vào lệnh điều khiển, lệnh điều khiển do vi xử lý
gởi tới chứa trong thanh ghi (còn gọi là thanh ghi điều khiển) để điều khiển 8255A.
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 136
Các địa chỉ A1-A0 của 8255A dùng để lựa chọn các port và thanh ghi, A1A0=002 dùng
để chọn Port A, A1A0 = 012 dùng để chọn Port B, A1A0 = 102 dùng để chọn Port C, A1A0 =
112 dùng để chọn thanh ghi điều khiển. Trong sơ đồ khối 8255A, các port I/O chia làm hai
nhóm: nhóm A gồm port A và 4 bit cao của port C, nhóm B gồm port B và 4 bit thấp của port
C. Để sử dụng các port của 8255A người lập trình phải gởi từ điều khiển ra thanh ghi điều
khiển để 8255A định cấu hình cho các port đúng theo yêu cầu mà người lập trình mong muốn.
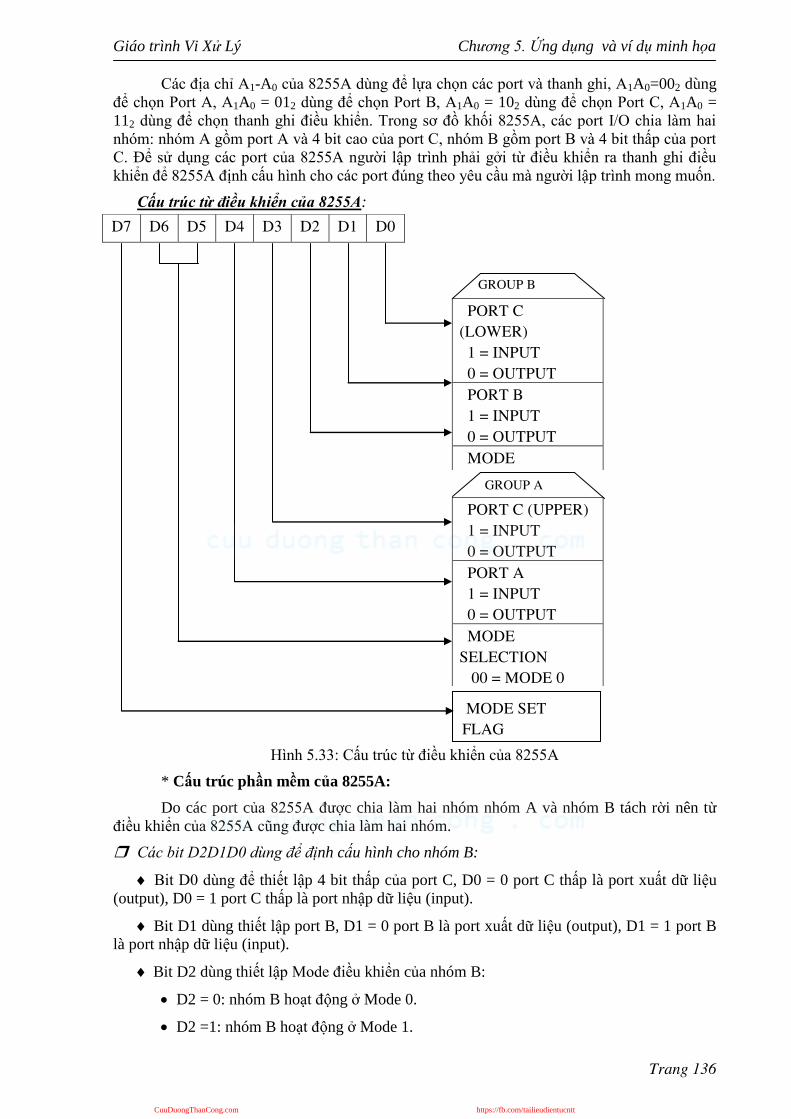
Cấu trúc từ điều khiển của 8255A:
Hình 5.33: Cấu trúc từ điều khiển của 8255A
* Cấu trúc phần mềm của 8255A:
Do các port của 8255A được chia làm hai nhóm nhóm A và nhóm B tách rời nên từ
điều khiển của 8255A cũng được chia làm hai nhóm.
Các bit D2D1D0 dùng để định cấu hình cho nhóm B:
Bit D0 dùng để thiết lập 4 bit thấp của port C, D0 = 0 port C thấp là port xuất dữ liệu
(output), D0 = 1 port C thấp là port nhập dữ liệu (input).
Bit D1 dùng thiết lập port B, D1 = 0 port B là port xuất dữ liệu (output), D1 = 1 port B
là port nhập dữ liệu (input).
Bit D2 dùng thiết lập Mode điều khiển của nhóm B:
D2 = 0: nhóm B hoạt động ở Mode 0.
D2 =1: nhóm B hoạt động ở Mode 1.
D7 D6 D5 D4 D3 D2 D1 D0
PORT C
(LOWER)
1 = INPUT
0 = OUTPUT
PORT B
1 = INPUT
0 = OUTPUT
MODE
SELECTION
0 = MODE 0
1 = MODE 1
GROUP B
PORT C (UPPER)
1 = INPUT
0 = OUTPUT
PORT A
1 = INPUT
0 = OUTPUT
MODE
SELECTION
00 = MODE 0
01 = MODE 1
1X = MODE 2
GROUP A
MODE SET
FLAG
1 = ACTIVE
CuuDuongThanCong.com https://fb.com/tailieudientucntt

Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 137
Các bit D6, D5, D4, D3 dùng để định cấu hình cho nhóm A:
Bit D3 dùng để thiết lập 4 bit cao của port C, D3 = 0 port C là port xuất dữ liệu (output),
D3 = 1 port C là port nhập dữ liệu (input).
Bit D4 dùng để thiết lập port A, D4 = 0 port A là port xuất dữ liệu (output), D4 = 1 port
A là port nhập dữ liệu (input).
Bit D6D5 dùng thiết lập Mode điều khiển của nhóm A:
D6D5 = 00: nhóm A hoạt động ở Mode 0.
D6D5 = 01: nhóm A hoạt động ở Mode 1.
D6D5 = 1X: nhóm A hoạt động ở Mode 2.
Các nhóm A, B được cấu hình ở Mode 0:
Từ điều khiển nhóm A & B hoạt động ở Mode 0:
1 0 0 D4 D3 0 D1 D0
Ở Mode 0 các port A, port B, port C thấp và port C cao là các port xuất hoặc nhập dữ
liệu độc lập. Do có 4 bit để lựa chọn nên có 16 từ điều khiển khác nhau cho 16 trạng thái xuất
nhập của 4 port.
Các nhóm A & B được cấu thình ở Mode 1:
Từ điều khiển nhóm A B hoạt động ở Mode 1:
1 0 1 D4 D3 1 D1 D0
Ở Mode 1 các port A & B làm việc xuất nhập có chốt (Strobe I/O). Ở Mode này hai
port A & B hoạt động độc lập với nhau và mỗi port có 1 port 4 bit điều khiển/dữ liệu. Các
port 4 bit điều khiển/dữ liệu được hình thành từ 4 bit thấp và 4 bit cao của port C.
Khi 8255A được cấu hình ở Mode 1, thiết bị giao tiếo muốn 8255A nhận dữ liệu, thiết
bị đó phải tạo ra tín hiệu yêu cầu 8255A nhận dữ liệu, ngược lại 8255A muốn gởi tín hiệu đến
thiết bị khác, 8255A phải tạo ra tín hiệu yêu cầu thiết bị đó nhận dữ liệu, tín hiệu yêu cầu đó
gọi là tín hiệu Strobe.
Nhóm A làm việc ở cấu hình Mode 1:
Port A được cấu hình là port nhập dữ liệu.
Chức năng của các đường tín hiệu được trình bày ở hình vẽ sau đây:
Từ điều khiển :
1 0 1 1 D3 X X X
Hình 5.34: Mode 1 Port A
INT
E
A
PA7-
PA0
STBA
IBFA
PC4
PC5
PC3
PC6,7
RD
INTR
A
I/O
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 138
Các đường tín hiệu của port C trở thành các đường điều khiển/dữ liệu của port A.
Bit PC4 trở thành bit STBA (Strobe Input, tác động mức thấp), được dùng để chốt dữ
liệu ở các ngỏ vào PA7 – PA0 vào mạch chốt bên trong 8255A.
Bit PC5 trở thành bit IBTA (Input Bufer Full, tác động mức cao), dùng để báo cho
thiết bị bên ngoài biết dữ liệu đã được chốt bên trong.
Bit PC3 trở thành bit INTRA (Interrupt Request, tác động ở mức cao), bit này có mức
Logic 1 khi hai bit STBa = 1, IBF = 1 và bit INTEa (Interrupt Enable) ở bên trong 8255A
bằng 1. Bit INTEa được thiết lập mức Logic 1 hay 0 dưới sự điều khiển của phần mềm dùng
cấu trúc Set/Reset của 8255A. Ở hình vẽ trên, bit INTEa = 1 dùng để cho phép tín hiệu IBF
xuất hiện tại ngõ ra INTRA của cổng AND. Tín hiệu INTA tác động đến ngõ vào của ngắt vi
xử lý để bao cho vi xử lý biết: dữ liệu mới đã xuất hiện ở port A chương trình phục vụ ngắt sẽ
đọc dữ liệu vào xóa yêu cầu ngắt.
Các bit còn lại của port C: PC6, PC7 là các bit xuất/nhập bình thường tùy thuộc vào
bit D3 trong từ điều khiển hình trên. Các bit XXX được dùng để thiết lập cho nhóm B.
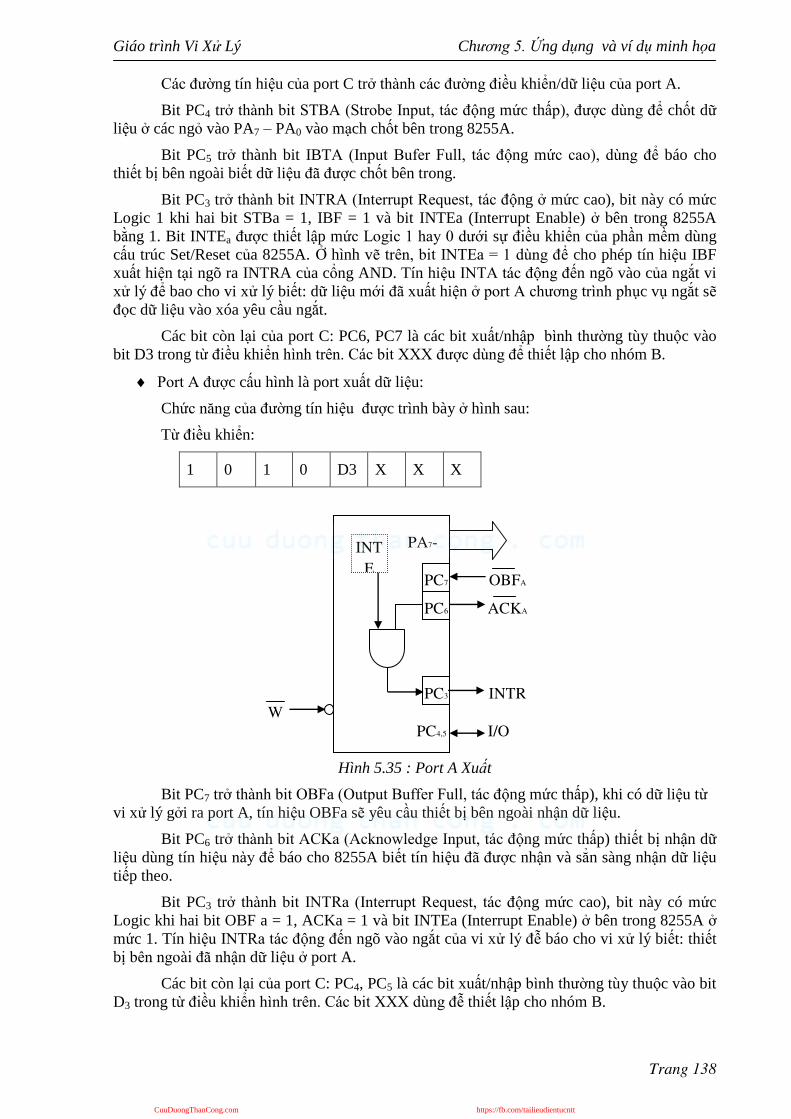
Port A được cấu hình là port xuất dữ liệu:
Chức năng của đường tín hiệu được trình bày ở hình sau:
Từ điều khiển:
1 0 1 0 D3 X X X
Hình 5.35 : Port A Xuất
Bit PC7 trở thành bit OBFa (Output Buffer Full, tác động mức thấp), khi có dữ liệu từ
vi xử lý gởi ra port A, tín hiệu OBFa sẽ yêu cầu thiết bị bên ngoài nhận dữ liệu.
Bit PC6 trở thành bit ACKa (Acknowledge Input, tác động mức thấp) thiết bị nhận dữ
liệu dùng tín hiệu này để báo cho 8255A biết tín hiệu đã được nhận và sẳn sàng nhận dữ liệu
tiếp theo.
Bit PC3 trở thành bit INTRa (Interrupt Request, tác động mức cao), bit này có mức
Logic khi hai bit OBF a = 1, ACKa = 1 và bit INTEa (Interrupt Enable) ở bên trong 8255A ở
mức 1. Tín hiệu INTRa tác động đến ngõ vào ngắt của vi xử lý đễ báo cho vi xử lý biết: thiết
bị bên ngoài đã nhận dữ liệu ở port A.
Các bit còn lại của port C: PC4, PC5 là các bit xuất/nhập bình thường tùy thuộc vào bit
D3 trong từ điều khiển hình trên. Các bit XXX dùng đễ thiết lập cho nhóm B.
INT
E
A
PA7-
PA0
OBFA
ACKA
PC7
PC6
PC3
PC4,5
W
R
INTR
A
I/O
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 139
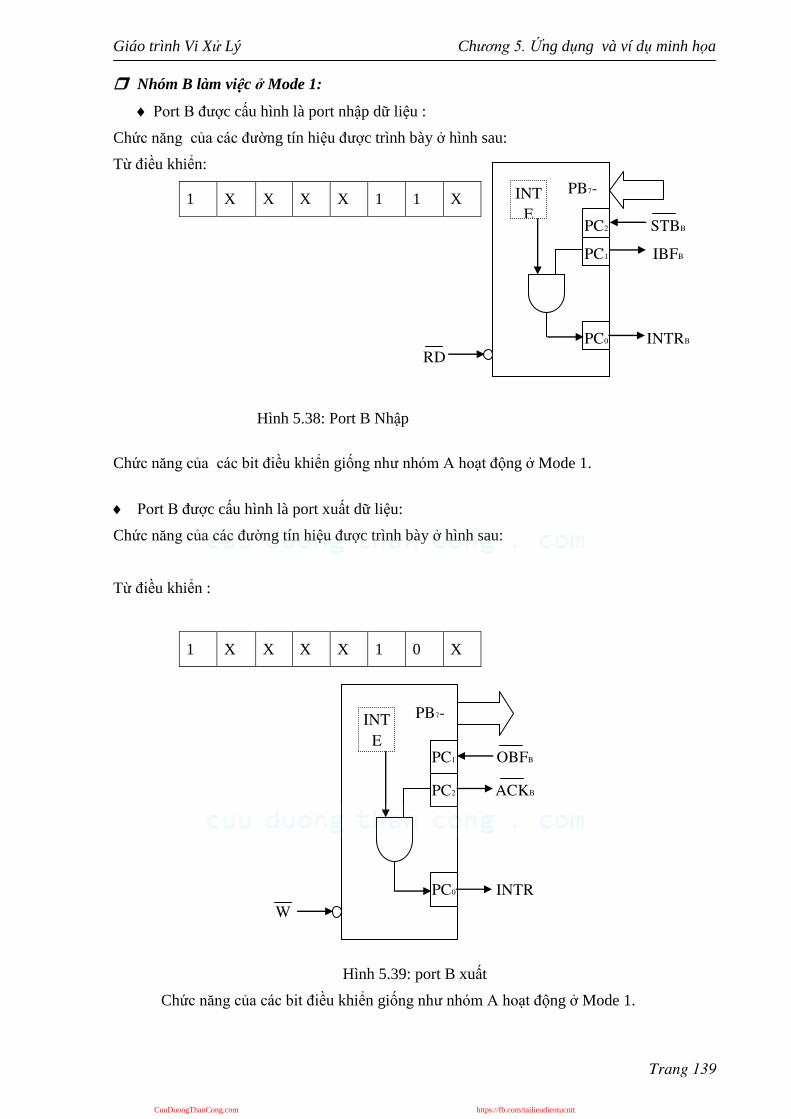
Nhóm B làm việc ở Mode 1:
Port B được cấu hình là port nhập dữ liệu :
Chức năng của các đường tín hiệu được trình bày ở hình sau:
Từ điều khiển:
1 X X X X 1 1 X
Hình 5.38: Port B Nhập
Chức năng của các bit điều khiển giống như nhóm A hoạt động ở Mode 1.
Port B được cấu hình là port xuất dữ liệu:
Chức năng của các đường tín hiệu được trình bày ở hình sau:
Từ điều khiển :
1 X X X X 1 0 X
Hình 5.39: port B xuất
Chức năng của các bit điều khiển giống như nhóm A hoạt động ở Mode 1.
INT
E
B
PB7-
PB0
STBB
IBFB
PC2
PC1
PC0
RD
INTRB
INT
E
B
PB7-
PB0
OBFB
ACKB
PC1
PC2
PC0
W
R
INTR
B
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 140
Các bit XXX được dùng thiết lập cho nhóm A, bit D0 không có tác dụng trong trường
hợp cả hai nhóm cùng làm việc ở Mode 1.
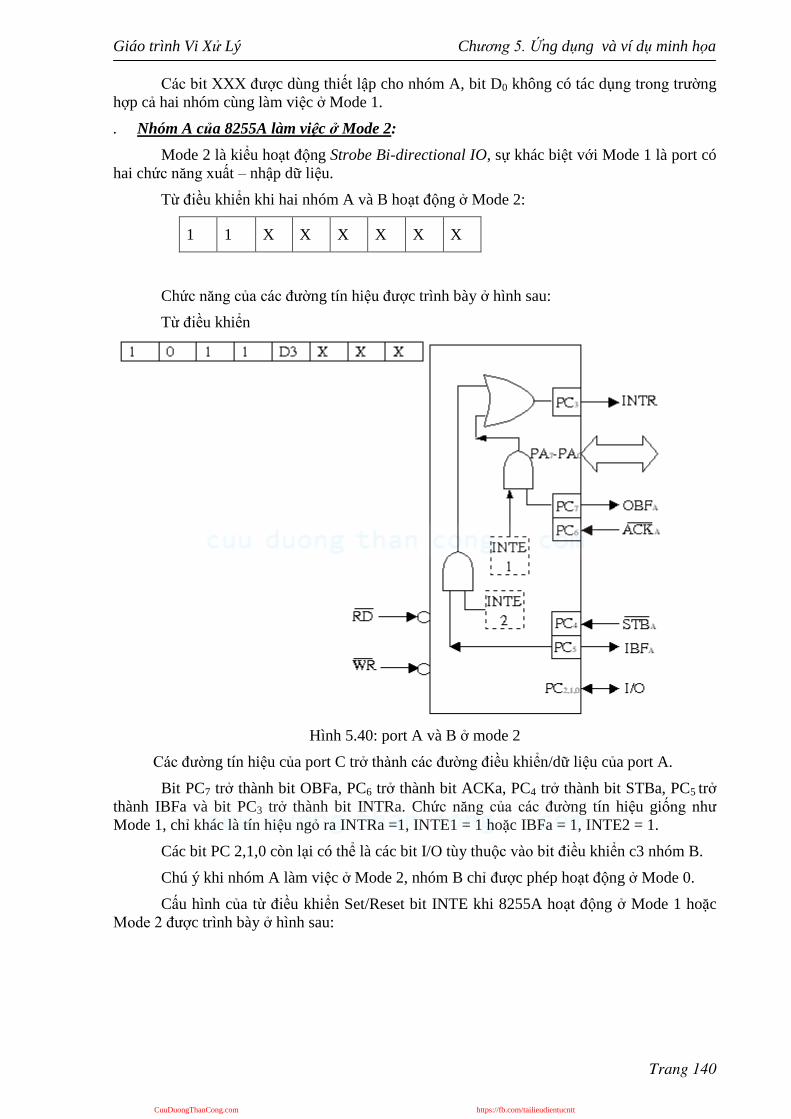
. Nhóm A của 8255A làm việc ở Mode 2:
Mode 2 là kiểu hoạt động Strobe Bi-directional IO, sự khác biệt với Mode 1 là port có
hai chức năng xuất – nhập dữ liệu.
Từ điều khiển khi hai nhóm A và B hoạt động ở Mode 2:
1 1 X X X X X X
Chức năng của các đường tín hiệu được trình bày ở hình sau:
Từ điều khiển
Hình 5.40: port A và B ở mode 2
Các đường tín hiệu của port C trở thành các đường điều khiển/dữ liệu của port A.
Bit PC7 trở thành bit OBFa, PC6 trở thành bit ACKa, PC4 trở thành bit STBa, PC5 trở
thành IBFa và bit PC3 trở thành bit INTRa. Chức năng của các đường tín hiệu giống như
Mode 1, chỉ khác là tín hiệu ngỏ ra INTRa =1, INTE1 = 1 hoặc IBFa = 1, INTE2 = 1.
Các bit PC 2,1,0 còn lại có thể là các bit I/O tùy thuộc vào bit điều khiển c3 nhóm B.
Chú ý khi nhóm A làm việc ở Mode 2, nhóm B chỉ được phép hoạt động ở Mode 0.
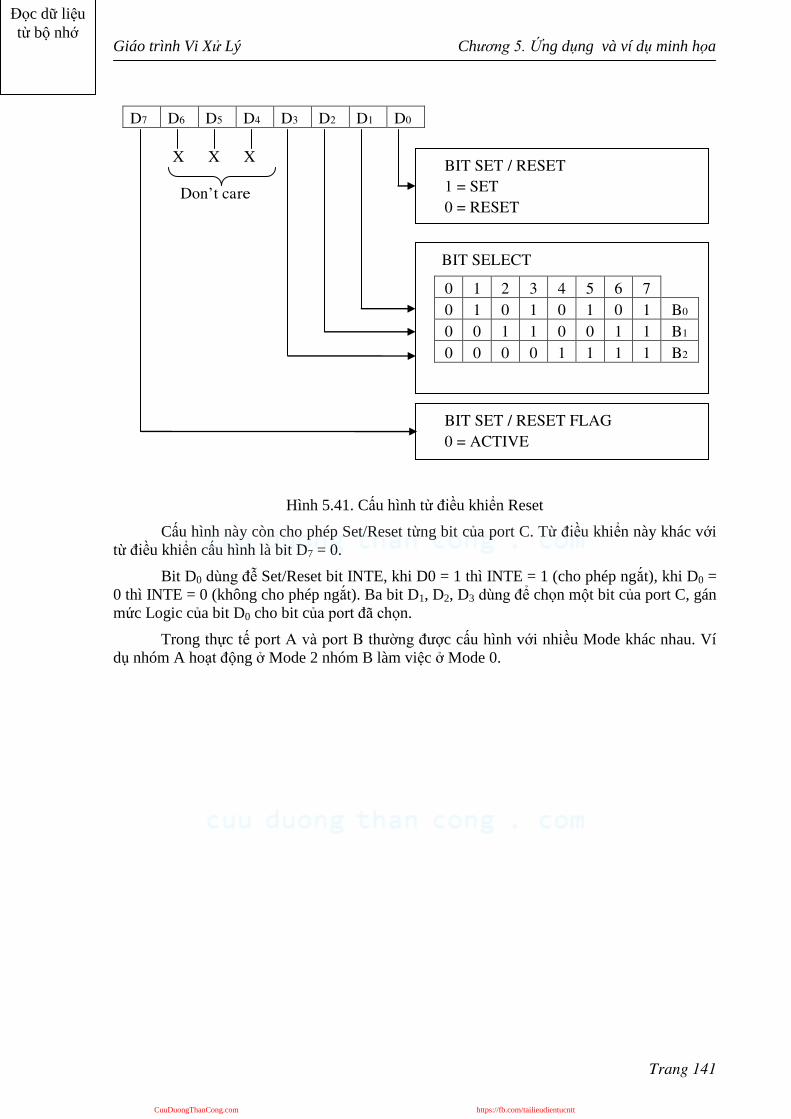
Cấu hình của từ điều khiển Set/Reset bit INTE khi 8255A hoạt động ở Mode 1 hoặc
Mode 2 được trình bày ở hình sau:
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Giáo trình Vi Xử Lý Chương 5. Ứng dụng và ví dụ minh họa
Trang 141
Hình 5.41. Cấu hình từ điều khiển Reset
Cấu hình này còn cho phép Set/Reset từng bit của port C. Từ điều khiển này khác với
từ điều khiển cấu hình là bit D7 = 0.
Bit D0 dùng đễ Set/Reset bit INTE, khi D0 = 1 thì INTE = 1 (cho phép ngắt), khi D0 =
0 thì INTE = 0 (không cho phép ngắt). Ba bit D1, D2, D3 dùng để chọn một bit của port C, gán
mức Logic của bit D0 cho bit của port đã chọn.
Trong thực tế port A và port B thường được cấu hình với nhiều Mode khác nhau. Ví
dụ nhóm A hoạt động ở Mode 2 nhóm B làm việc ở Mode 0.
0 1 2 3 4 5 6 7
0 1 0 1 0 1 0 1 B0
0 0 1 1 0 0 1 1 B1
0 0 0 0 1 1 1 1 B2
BIT SELECT
BIT SET / RESET
1 = SET
0 = RESET
BIT SET / RESET FLAG
0 = ACTIVE
D7 D6 D5 D4 D3 D2 D1 D0
X X X
Don’t care
Đọc dữ liệu
từ bộ nhớ
CuuDuongThanCong.com https://fb.com/tailieudientucntt




















