Multiplication et illisibilité des niveaux politiques : quelles ressources philosophiques ?
Upload
independentCategory
view
1download
0
Centre de Ressources
de Mécanique & Ingénieries
TP de Mécanique
Fluides / Solides
Ecole ENSEIRB-MATMECA, Dpt. MATMECA (MMK2)


SOMMAIRE
TP Fluides / Solides
1. Réaction d’un jet
2. Perte de charge dans une conduite de petit
diamètre
3. Cylindre circulaire en soufflerie
4. Etude d’un réservoir sous pression
5. Etude de la flexion d’une poutre viscoélastique
6. Houle sinusoïdale
Annexes
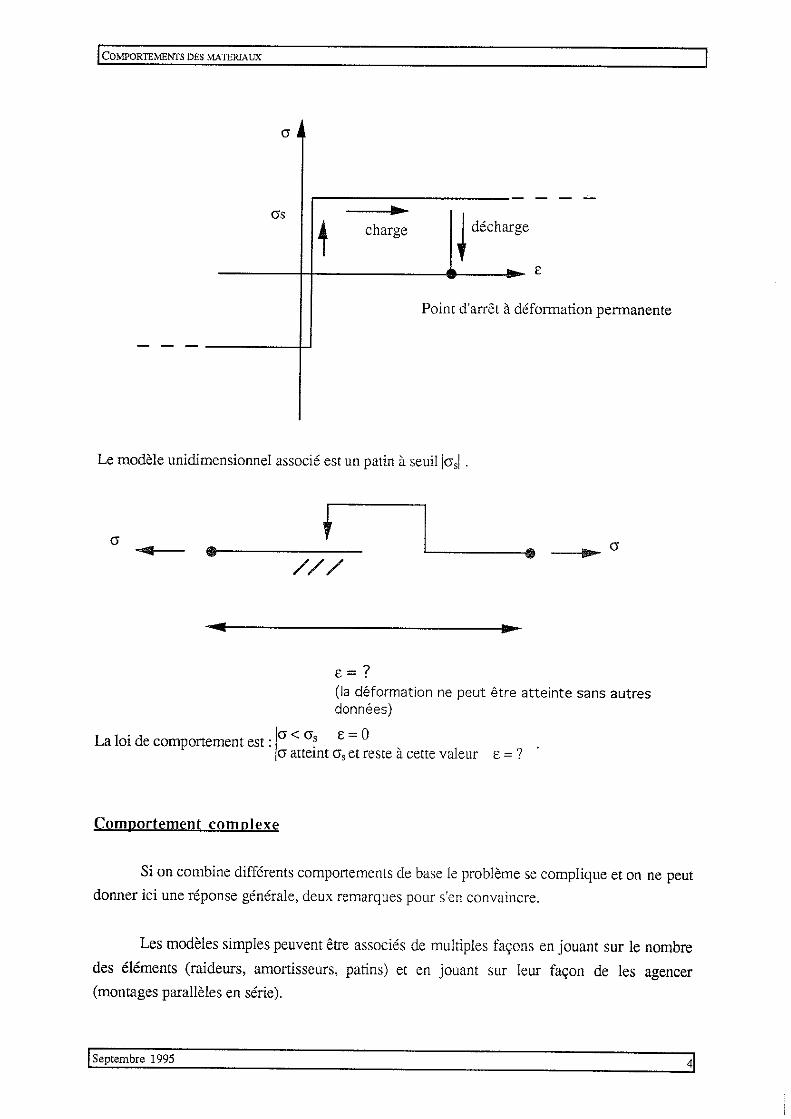
1. Comportement des matériaux
2. Photoélasticimétrie
3. Extensomètrie par jauges
4. Calculs d’erreur


TP de Mécanique
Note Générale à l’usage des étudiants
Déroulement des séances de travaux pratiques
• Présence obligatoire et contrôlée. Toute absence non justifiée (par un certificat médical
daté et signé, un courrier de convocation à un entretien, etc.) entraînera la note de 0/20
qui sera prise en compte dans le calcul de la moyenne du module concerné. Une copie du
justificatif d’absence doit être remise à l’enseignant à la séance suivante, l’original
étant donné à la scolarité.
• Manipulations effectuées en binôme ou trinôme, selon le cycle des permutations défini en
début d’année par les enseignants.
• A la fin de chaque séance, une fiche de synthèse doit être remise en mains propres à
l’enseignant ayant encadré le groupe.
• IL EST STRICTEMENT INTERDIT DE DEPLACER DU MATERIEL D’UN POSTE A
UN AUTRE - EN CAS DE PANNE, FAIRE APPEL A L’ENSEIGNANT OU AU
TECHNICIEN.
Evaluation
Les travaux pratiques seront évalués en cours d’année. Pour cette évaluation seront pris en
compte l’assiduité (retards, pauses exagérément prolongées, départs avant la fin de la séance sans
accord de l’enseignant, etc…), la prestation des étudiants le jour du TP (au sein d’un binôme, si
l’un des deux élèves effectue 75% du travail, il est évident que la note attribuée à chaque élève
sera différente), la rédaction des comptes-rendus (qualité de la présentation, clarté de la
rédaction, calculs d’erreurs, clarté des courbes et des résultats, pertinence des discussions et des
conclusions, etc…). La note globale sera donc basée pour 50 % sur la note de la fiche de
synthèse et pour 50 % sur la note du compte-rendu.
Compte-rendu
Il sera remis à la fin de la séance ou, au plus tard, à la séance suivante, à l’enseignant
présent en TP. Tout retard non justifié entraînera une note de 0 au compte-rendu.
Rédigé sur feuilles A4, il sera restreint à 3 ou 4 pages, les graphiques étant inclus (voir directives
détaillées page suivante). Il comportera en évidence :
• Le titre de la manipulation,
• La date de la séance du TP,
• Le certificat préparé (MASTER MI, MATMECA, …) et le groupe d’appartenance (Gr. 1, 2 …)
• Les noms de tous les participants au TP, le rédacteur étant mentionné en premier.
• Le nom de l’enseignant.
Ne pas oublier à la fin des manipulations :
• D’éteindre les appareils (oscilloscopes, ordinateurs, amplificateurs, …).
• De laisser la paillasse propre et en bon ordre.
• De couper les arrivées d’eau.
• De remettre les capuchons des feutres de tables traçantes.


Compte-Rendu de TP Mécanique (environ 4-5 pages)
Titre de la manipulation
Nom et prénom du rédacteur principal Date de la séance du TP
Nom et prénom des autres participants
Certificat préparé (MM1, MM2, Licence MI, Master MI, …) + n° groupe
Nom de l’enseignant
Introduction *
Décrire brièvement et clairement le contexte expérimental ainsi que tous les objectifs du TP,
sans recopier le fascicule. Ce doit être une introduction personnelle.
Préparation des mesures
Dans la mesure du possible, indiquer les réglages et essais préliminaires qui ont été
nécessaires avant de passer aux mesures principales (montage, étalonnage, équilibrage, etc …).
Théorie
Sans recopier intégralement toute la partie théorique fournie dans le fascicule, rappeler les
hypothèses et les équations principales utilisées dans le cadre du TP. Présenter brièvement la
procédure de calcul utilisée pour vos applications numériques (Maple, Matlab, Excel, autre, …).
Manipulation *
Présenter le schéma de votre montage et expliquer la méthodologie suivie pour effectuer les
mesures demandées.
Résultats et exploitation / discussion des résultats *
Dans la mesure du possible, présenter les résultats de calculs ou de mesures sous forme de
graphes plutôt que sous forme de tableaux, généralement longs et fastidieux à écrire et à lire. Ne
pas oublier de préciser les noms et les unités des grandeurs représentées sur les axes, ainsi que les
échelles. Lorsque plusieurs courbes sont tracées sur une même figure, légender clairement
chacune d’elles (par des couleurs par exemple). Sous chaque figure (ou tableau si vous devez
impérativement présenter un tableau), indiquer explicitement sa légende complète ainsi que son
numéro par ordre d’apparition dans le compte-rendu.
Exemple de tableau :
Fréquence (MHz) Temps écho 1 (s) Temps écho 2 (s) Vitesse onde 1 (mm/µs) Vitesse onde 2 (mm/µs)
0.8 150.3 322.6 3.2 6.3
1.0 151.2 326.4 3.3 6.4
1.2 158.4 354.2 3.4 6.2
1.4 157.1 324.6 3.2 6.5
1.6 155.2 336.4 3.6 6.1
1.8 159.4 344.1 3.4 6.3
Tableau 1 – Mesures de la position temporelle des échos et calculs correspondant aux vitesses de deux ondes.
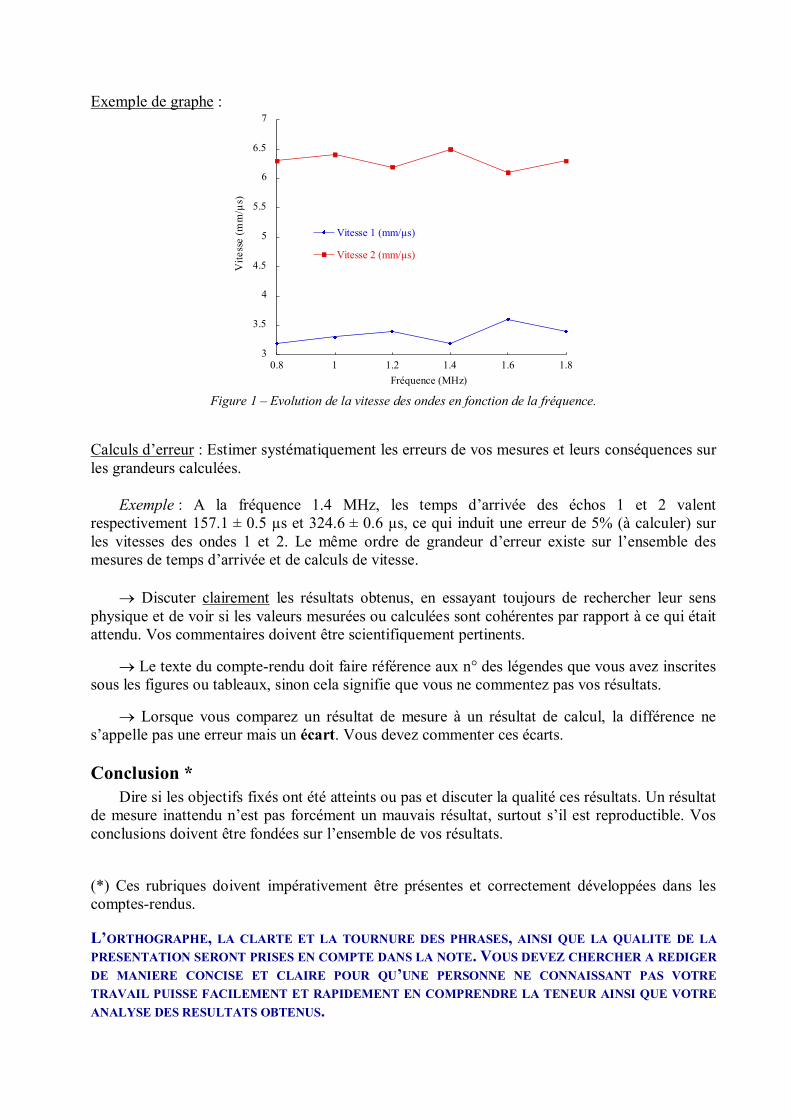
Exemple de graphe :
3
3.5
4
4.5
5
5.5
6
6.5
7
0.8 1 1.2 1.4 1.6 1.8
Vitesse 1 (mm/µs)
Vitesse 2 (mm/µs)
Vit
ess
e (
mm
/µs)
Fréquence (MHz) Figure 1 – Evolution de la vitesse des ondes en fonction de la fréquence.
Calculs d’erreur : Estimer systématiquement les erreurs de vos mesures et leurs conséquences sur
les grandeurs calculées.
Exemple : A la fréquence 1.4 MHz, les temps d’arrivée des échos 1 et 2 valent
respectivement 157.1 ± 0.5 µs et 324.6 ± 0.6 µs, ce qui induit une erreur de 5% (à calculer) sur
les vitesses des ondes 1 et 2. Le même ordre de grandeur d’erreur existe sur l’ensemble des
mesures de temps d’arrivée et de calculs de vitesse.
Discuter clairement les résultats obtenus, en essayant toujours de rechercher leur sens
physique et de voir si les valeurs mesurées ou calculées sont cohérentes par rapport à ce qui était
attendu. Vos commentaires doivent être scientifiquement pertinents.
Le texte du compte-rendu doit faire référence aux n° des légendes que vous avez inscrites
sous les figures ou tableaux, sinon cela signifie que vous ne commentez pas vos résultats.
Lorsque vous comparez un résultat de mesure à un résultat de calcul, la différence ne
s’appelle pas une erreur mais un écart. Vous devez commenter ces écarts.
Conclusion *
Dire si les objectifs fixés ont été atteints ou pas et discuter la qualité ces résultats. Un résultat
de mesure inattendu n’est pas forcément un mauvais résultat, surtout s’il est reproductible. Vos
conclusions doivent être fondées sur l’ensemble de vos résultats.
(*) Ces rubriques doivent impérativement être présentes et correctement développées dans les
comptes-rendus.
L’ORTHOGRAPHE, LA CLARTE ET LA TOURNURE DES PHRASES, AINSI QUE LA QUALITE DE LA
PRESENTATION SERONT PRISES EN COMPTE DANS LA NOTE. VOUS DEVEZ CHERCHER A REDIGER
DE MANIERE CONCISE ET CLAIRE POUR QU’UNE PERSONNE NE CONNAISSANT PAS VOTRE
TRAVAIL PUISSE FACILEMENT ET RAPIDEMENT EN COMPRENDRE LA TENEUR AINSI QUE VOTRE
ANALYSE DES RESULTATS OBTENUS.

REACTION D'UN JET CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG – PL mise à jour le 13/09/2011 1/8
R E A C T I O N D ' U N J E T
* * * * *
I - INTRODUCTION
On se propose de déterminer la résultante des actions de pression exercées par un
jet sur deux obstacles différents, une plaque plane circulaire et une plaque hémisphérique, en
utilisant le théorème des quantités de mouvement encore appelé théorème d'Euler.
II - RAPPELS THEORIQUES
II - 1 . THEOREME DES QUANTITES DE MOUVEMENT. EXPRESSION GENERALE.
En mécanique, on connaît la relation classique entre le torseur des forces
extérieures Fe et le torseur des quantités de mouvement Q , à savoir:
Fd Q
dte
En représentation dite Lagrangienne la dynamique du fluide est décrite par la
dynamique des particules déduite de leur trajectoire respective (approche comparable à la
mécanique du point classique). On travaille couramment, en mécanique des fluides, en
représentation d'Euler c'est-à-dire que l'on étudie l'évolution du champ de vitesse dans l'espace
en fonction du temps comme on peut étudier l'évolution d'un champ de pression ou de
température.
De ce fait, en représentation Eulérienne, une grandeur physique étant fonction
des variables d'espace (x,y,z) et du temps t, la différentielle totale d'une telle fonction est
définie par:
dt
dtx
dxy
dyz
dz
soit
d
dt t x
dx
dt y
dy
dt z
dz
dt
d/dt s'appelle "dérivée particulaire" et s'écrit vectoriellement sous la forme:
d
dt tV grad
.
Le théorème des quantités de mouvement ou théorème d'Euler traduit plus
spécifiquement la relation qui existe entre les résultantes des torseurs des forces extérieures et
des quantité de mouvement sur un volume de contrôle noté V, soit:
dQ
dtFe
avec Q V M d ( ) V
Voù
V M d( ) V est la quantité de mouvement élémentaire attachée
à l'élément de volume dV.

REACTION D'UN JET CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG – PL mise à jour le 13/09/2011 2/8
D'après la définition de la dérivée particulaire, dQ dt
/ s'exprime par:
dQ
dt
d
dtVd
d
dtV d
tV d V grad V d
V V V V
V V V V( ) ( ) . ( )
En utilisant la propriété vectorielle: div V V V grad V V divV( ) . ( ) ( ).
,
et l'équation de conservation de la masse pour un fluide incompressible (équation de
continuité):
divV 0
la seconde intégrale de la dérivée particulaire s'écrit encore sous la forme:
V grad V d div V V d V V n dS
d aprèsOstrograsdkyS
. ( ) ( ) ( ) .'
V V
V V
La résultante des forces extérieures agissant sur le système comprend:
- les forces de surface FS :
F dSS
S
- les forces de volume FV :
F g dv
VV
Le théorème d'Euler sous sa forme générale s'exprime donc par:
F F
tV d V V n dSS
S V
VV
( ) ( ) .
II - 2 . APPLICATION A UN TUBE DE COURANT EN ECOULEMENT PERMANENT
Par hypothèse, le fluide est incompressible et l'écoulement est permanent. Isolons
un tube courant suffisamment étroit pour que dans chaque section perpendiculaire à
l'écoulement les vitesses, les pressions et les masses volumiques puissent être considérées
comme constantes.
V
V
1
2
1
2
z
z
S
S
1
2
L'écriture du théorème d'Euler dans ce cas particulier se traduit par:
F P V V n S V V n S V V ndSS
SL ( ) . ( ) . ( ) . 1 1 1 1 2 2 2 2

REACTION D'UN JET CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG – PL mise à jour le 13/09/2011 3/8
Dans cette relation, SL, S1, S2 désignent respectivement la surface latérale, la
section d'entrée, et la section de sortie. F et Ps représentent les forces de surface et le poids du
fluide contenu dans le tube de courant. Les vecteurs unitaires n1 ,
n2 et
n , normaux
respectivement aux surfaces d'entrée, de sortie et aux surfaces latérales, sont orientés vers
l'extérieur du domaine (d'après le théorème d'Ostrogradsky), d'où: V n V V n V V n1 1 1 2 2 2 0. ; . ; .
ce qui conduit à: F P V S V V S VS 1 1 1 2 2 2
Le fluide étant incompressible, on a conservation du débit massique soit: q V S V Sm 1 1 2 2
Le théorème d'Euler appliqué à un tube de courant se traduit donc par:
F P q V VS m ( )2 1
III . APPLICATION A LA DETERMINATION DE LA FORCE EXERCEE PAR UN JET FRAPPANT UN
OBSTACLE
III.1 CAS DU FLUIDE PARFAIT
Considérons un jet circulaire frappant une plaque de révolution. Le jet se réfléchit
sur la plaque et sa trajectoire est déviée d'un angle par rapport à sa direction initiale.
Plaque de
révolution
Volume de contrôleA
BC
D
V
V
1
2
x
y
n1
2n
CD
AB
n
n
Schéma d'impact du jet sur une plaque
Nous nous proposons en appliquant le théorème d'Euler de déterminerFj SAB ,
résultante des actions de contact du jet sur la plaque.
Isolons un volume de contrôle ABCD du domaine fluide tel qu'il est représenté sur
la figure ci-dessus. Compte-tenu des hypothèses, dans la section d'entrée S1=SAD les lignes de
courant sont rectilignes et parallèles. Par conséquent la répartition des pressions est
hydrostatique sur S1 et la vitesse du fluide sera notée V1 . De même, dans la section de sortie
S2=SBC les lignes de courant sont encore rectilignes et parallèles, la répartition des pressions

REACTION D'UN JET CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG – PL mise à jour le 13/09/2011 4/8
est donc hydrostatique sur S2 et la vitesse, notéeV2 , fait l'angle avec la direction initiale du
jet. Appliquons le théorème d'Euler.
F P P S n P S n p M dSn q V Vj SAB CD
CDm1 1 1 2 2 2 2 1( ) ( )
Le volume de contrôle étant petit, les forces de volume, c'est à dire le poids du
fluide peut être négligé devant l'action des forces de pression. Par ailleurs P1=P2=Pat et
P(M)=Pat avec Pat pression atmosphérique, d'où:
F P S n P S n P dS n q V Vj SAB at at at CD
CDm 1 1 2 2 2 1( )
En fait, seule la force totale F appliquée sur la plaque est mesurable et cette force
résulte de la superposition de l'effet du jet sur la plaque et de l'effet de la pression
atmosphérique sur la surface libre de la plaque. Par conséquent: F F P dS n P S n P S n P dSn P dSn q V Vj S at ABAB at at at CD at ABABCD mAB 1 1 2 2 2 1( )
La résultante des forces de pression sur un contour fermé est nulle si la pression
est uniforme, par conséquent:
P S n P S n P dS n P dS nat at at CD at ABABCD1 1 2 2 0
et F q V Vm ( )2 1
ce qui donne en projection sur les axes 0x et 0y: F q V V
F q V
x m
y m
( cos )
sin
2 1
2
Compte-tenu des hypothèses, entre 2 points situés l'un sur (S1), l'autre sur (S2),
d'une même ligne de courant, le théorème de Bernoulli peut être appliqué:
1
2
1
21
2
1 1 2
2
2 2 V gz P V gz P
Si on néglige, comme on l'a fait précédemment les forces de volume c'est-à-dire les
termes en gz, on en déduit V1 =V2. De ce fait:
F q V
F q V
x m
y m
1
1
1(cos )
sin
III.2 . CAS D'UN FLUIDE REEL
Si l'écoulement dans le jet est permanent "en moyenne" pour le fluide réel, si les
forces de volume peuvent être effectivement négligées dans le cas étudié, l'hypothèse de fluide
non visqueux est peu réaliste. Ainsi la vitesse V2 n'est pas égale à V1 et par conséquent la
résultante réelle en module F' est inférieure à la résultante théorique F.
Pour tenir compte des pertes de charge liées à la viscosité du fluide, on introduit
un coefficient de correction C (C<1), souvent appelé coefficient de rendement, tel que:
F'=CF

REACTION D'UN JET CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG – PL mise à jour le 13/09/2011 5/8
IV - DISPOSITIF EXPERIMENTAL
sortie
tuyère
cylindre transparent
ressort de rappel
du levier
masse mobile
évacuation
de l'eau
réservoir de la
balance hydraulique
règle graduée
obstacle
alimentation en eau
axe de rotation
de la règle
d y
A OP M
I
jet
Z
Schéma d'ensemble du dispositif
Un tuyau vertical alimenté par un banc hydraulique est terminé par une tuyère
conique qui produit un jet d'eau vertical à grande vitesse. Ce jet vient frapper un obstacle sur
lequel il se réfléchit. On dispose ici de deux types d'obstacle, une plaque plane circulaire ou une
plaque hémisphérique. La résultante des forces d'action sur l'obstacle peut être déterminée par
équilibrage d'un bras de levier muni d'un ressort de rappel et dont l'axe de rotation est A.
La tuyère et l'obstacle sont enfermés dans un cylindre transparent dont la base
possède un orifice d'évacuation de l'eau vers une balance hydraulique destinée à la mesure du
débit.
On donne: - le diamètre de sortie de la tuyère: D=0.953 cm
- la distance de la tuyère à l'obstacle: Z=3,85cm 0,5 cm.
- la distance de l'axe du jet à l'axe de rotation: d=15,25 cm

REACTION D'UN JET CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG – PL mise à jour le 13/09/2011 6/8
V MODE OPERATOIRE
Mise en place de l'obstacle:
On dispose de deux obstacles qui peuvent être interchangés en ôtant la vis située
au-dessus du bras de levier et en soulevant l'obstacle pour le dégager du montage. Dans les
deux cas, les obstacles sont positionnés de telle sorte que la trajectoire du jet est confondue
avec l'axe de symétrie de l'obstacle comme le montrent les schémas ci-dessous:
V1
V2V
2
x
ydisque plan
volume de
contrôle
sortie tuyère
Plaque plane circulaire
V1
volume de
contrôle
sortie tuyère
V2
x
y
V2
plaque
hémisphérique
Plaque hémisphérique
Montrer que, dans ces deux cas de figure, la composante suivant y de la résultante
des forces d'action sur la plaque est nulle. En déduire que les expressions de F et F' se réduisent
alors à:
. plaque plane: F q V et F C q Vm m 1 1'
. plaque hémisphérique: F q V et F C q Vm m 2 21 1' ( )
Réglage du bras de levier pour la mesure de F':
En l'absence du jet, placer la charge d'équilibrage de l'obstacle, m, sur le zéro de la
règle et régler l'horizontalité du levier en agissant si nécessaire sur le ressort de rappel (cf
schéma d'ensemble du dispositif). Dans cet état d'équilibre au repos, le moment résultant des
forces appliquées au système par rapport à l'axe de rotation de la règle s'annule.
M A mg
moment dela ch e dé quilibrage
AG m g
moment dupoids de la
règle
AP R
moment dela force exercé epar le ressort
A r
0 0
arg '
Noter que les charges diffèrent suivant l'obstacle étudié:
.m=600g 1g pour la plaque hémisphérique
.m=300g 1g pour la plaque plane circulaire
Lorsque le jet frappe l'obstacle, le levier subit un déséquilibre dû à l'action de la
force du jet, déséquilibre qu'il faut rétablir en déplaçant la charge de sorte que soit rétablie
l'horizontalité du bras de levier. Dans ce nouvel état d'équilibre, le moment résultant des forces

REACTION D'UN JET CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG – PL mise à jour le 13/09/2011 7/8
appliquées au système par rapport à l'axe de rotation de la règle s'annule, ce qui conduit à la
relation:
M A OM mg
moment dela ch e dé quilibrage
AG m g
moment dupoids de la
règle
AP R
moment dela force exercé epar le ressort
AI F
moment dela force exercé e
par le jet
r
( )
arg '
'0 0
Montrer que l'expression de la force F' peut être déduite de la relation précédente sous la
forme:
Fmgy
d'
Mesure du débit par la balance hydraulique
Evacuation de l'eau
Alimentation en eau
Bouchon de vidange
du réservoir de la balance
Axe de rotation
Plateau de chargement
L L1 2
Schéma de principe de la balance hydraulique
La balance hydraulique est constituée par un bras de levier dont le rapport des
longueurs L1/L2 est conçu de telle manière qu'une surcharge de 1,650kg (masse unitaire dont
on dispose en TP) disposée sur le plateau de chargement est équilibrée par la masse de 5 litres
d'eau écoulés dans le réservoir de la balance.
La mesure du débit se déroule donc de la manière suivante. A l'instant initial c'est-
à-dire sans charge sur le plateau et sans eau dans le réservoir, le levier est en déséquilibre et le
plateau de chargement est alors en position basse. On alimente le dispositif en eau et le poids
de l'eau écoulée dans le réservoir va conduire à un basculement du plateau vers le haut. A cet
instant, on charge le plateau avec une masse correspondant à n fois 1,650 kg suivant l'intensité
du débit à mesurer. Le plateau ainsi chargée bascule vers le bas. On déclenche le chronomètre
et l'on mesure le temps mis pour que l'accroissement d'eau écoulée dans le réservoir de la
balance compense la charge du plateau. Ce temps t correspondra à n fois 5 litres d'eau
écoulés et le débit pourra être déduit de la relation:
Qv=5n/t (l/s)
NB: il faut vidanger le réservoir de la balance entre chaque mesure. Pour de forts débits
on pourra être amené à soulever manuellement la bonde de vidange pour vider
totalement la balance avant la mesure du débit.

REACTION D'UN JET CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG – PL mise à jour le 13/09/2011 8/8
La vitesse V0 en sortie de tuyère peut être déterminée à partir du débit mesuré. En
appliquant le théorème de Bernoulli, donner l'expression de la vitesse V1 dans la section S1 en
fonction de cette vitesse V0.
VI MESURES EXPERIMENTALES ET EXPLOITATION DES RESULTATS
Pour différentes valeurs du débit et pour chacun des deux obstacles:
-Relever la valeur du déplacement de la charge, y, en fonction du débit qui sera
mesuré à l'aide de la balance hydraulique. On notera à ce propos que la charge de la balance
hydraulique doit être suffisante pour que le temps de mesure soit supérieur à 30s afin de limiter
les incertitudes surtout pour les forts débits.
- Déterminer F'.
- Calculer V1 et F.
- Déduire la valeur du coefficient de rendement C.
Effectuer un calcul d'incertitude pour estimer la précision avec laquelle sont
déterminés les forces F et F' ainsi que le coefficient de rendement C.
Représenter l'évolution de F et F' sur un même graphique en fonction du nombre de
Reynolds, Re, dont on rappelle qu'il peut être défini ici par:
Re=V0D/
Les valeurs de sont données dans la table suivante:
T(°C) 0 1 2 3 4 5 6 7 8 9
10 1,310 1,273 1,239 1,206 1,175 1,145 1,116 1,087 1,060 1,034
20 1,009 0,984 0,961 0,938 0,916 0,895 0,875 0,855 0,836 0,818
30 0,800 0,783 0,767 0,751 0,736 0,721 0,706 0,692 0,697 0,666
Viscosité dynamique de l'eau liquide (10-3
kg m-1
s-1
), en fonction de la température.
(d'après International Critical Tables, 1929)
Représenter l'évolution de C en fonction du nombre de Reynolds.
Commenter les courbes obtenues par rapport aux évolutions théoriques attendues.
Que pouvez-vous en déduire sur la validité des hypothèses initiales.
_____________________________

PERTES DE CHARGES DANS UNE CONDUITE DE PETIT DIAMETRE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG- PL mise à jour le 13/09/2011 1/6
P E R T E S D E C H A R G E D A N S
U N E C O N D U I T E D E P E T I T D I A M E T R E
* * *
I - INTRODUCTION
I.1 . DIFFERENTS REGIMES D’ECOULEMENT EN FONCTION DU NOMBRE DE
REYNOLDS
Il existe plusieurs régimes d'écoulement qui présentent des différences essentielles.
L'expérience de Reynolds, qui consiste à introduire un colorant au sein d'un fluide en
écoulement dans un tube de section constante et à observer la forme des lignes de courant
permet de mettre en évidence ces différents régimes.
Tant que la vitesse est suffisamment faible, on observe un filet coloré parfaitement
net. Les filets liquides restent juxtaposés, parallèles entre eux, sans le moindre enchevêtrement.
C'est le régime laminaire.
Si la vitesse d'écoulement s'accroît dans le tube, le filet coloré oscille et devient
sinueux. Une augmentation encore plus importante entraîne une rupture du filet et les
particules fluides décrivent des trajectoires désordonnées. Il s'agit du régime turbulent.
Le régime d'écoulement est fortement lié au nombre de Reynolds, nombre sans
dimensions, défini dans le cas d'un écoulement dans une conduite par:
Re=Vdh/µ
où dh est le diamètre hydraulique défini par: dh=4rh=4S/p, S section de la conduite et p
périmètre mouillé. Dans le cas d’une section circulaire, dh est égal au diamètre de la conduite.
Re représente le rapport entre les forces d'inertie et les forces de viscosité.
Dans cette configuration géométrique, si Re < 2000 soit si les forces de viscosité
sont prépondérantes par rapport aux forces d'inertie, le régime est laminaire et si Re>2000, le
régime est turbulent, les forces d'inertie devenant alors prépondérantes par rapport aux forces
de viscosité. En fait la valeur de transition n'est pas aussi précise mais elle définit la valeur au
voisinage de laquelle on peut s'attendre à une transition de régime d'écoulement.
I.2 . PERTES DE CHARGE ET REGIMES D'ECOULEMENT
Les différents régimes d'écoulement peuvent aussi être mis en évidence par l'étude
des pertes de charge en fonction du débit. Lorsqu’un fluide s’écoule dans une conduite, il doit
vaincre des forces liées aux frottements sur les parois, aux frottements intermoléculaires du
fluide lui-même. Ces forces se manifestent par une dissipation d'énergie volumique (ou perte
de charge).
Les pertes de charge peuvent en fait avoir deux origines. Elles peuvent provenir,
comme nous venons de le mentionner, de la dissipation d'énergie liée à la viscosité du fluide en
contact avec les parois. On dira alors qu'il s'agit de pertes de charge linéaires, régulières ou
réparties. Les pertes de charge peuvent être dues aussi à des "accidents hydrauliques" à savoir
la présence d'un coude, d'un rétrécissement, d'un embranchement, etc., dans le circuit

PERTES DE CHARGES DANS UNE CONDUITE DE PETIT DIAMETRE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG- PL mise à jour le 13/09/2011 2/6
hydraulique étudié. Dans ce cas, on dira qu'il s'agit de pertes de charge singulières car elles
sont liées à une singularité localisée contrairement aux pertes de charge régulières.
On se propose, ici, de déterminer les pertes de charge linéaires se produisant dans
une conduite cylindrique de faible diamètre et ce, en fonction de la vitesse moyenne
d’écoulement du fluide c'est-à-dire en fonction du type d'écoulement.
II - RAPPELS THEORIQUES
Le théorème de Bernoulli, relatif à un écoulement de fluide parfait, traduit la
conservation de l'énergie le long d'une ligne de courant et définit ainsi la charge (énergie
ramenée à l'unité de poids) dans toute section perpendiculaire à l'écoulement par:
HP
gz
V
g
2
2
Cette charge reste constante le long d'une ligne de courant pour un fluide parfait
(pas de dissipation visqueuse), elle diminue pour un fluide réel visqueux. La variation de
charge, c'est à dire les pertes de charge liées aux forces de viscosité lors d’un écoulement, de
vitesse moyenne V, dans un tube cylindrique de diamètre D et de longueur L s’exprime par:
HL
D
V
g
2
2
est appelé coefficient de pertes de charge linéaires. est sans dimensions. est
une fonction de deux nombres sans dimensions, à savoir le nombre de Reynolds et le rapport
entre rugosité et diamètre des canalisations D, soit:
fD
(Re, )
En effet, une surface rugueuse comporte des aspérités qui ont une action directe
sur les forces de contact et donc sur l'intensité de la turbulence. La rugosité influence donc le
régime d'écoulement et par conséquent l'importance de l'énergie dissipée au contact de la
paroi. est définie comme une longueur qui correspond à l'ordre de grandeur de la hauteur des
aspérités de la paroi considérée.
Les différentes expressions de sont regroupées dans le tableau ci-dessous en
fonction du type d'écoulement:
Ecoulement laminaire Re<2000
Formule de Poiseuille
64
Re
Ecoulement turbulent lisse
2000<Re<105
Formule de Blasius
0 316
14
.
Re
(conduites lisses) Re>105
Formule de Karman-Prandtl
12
2 51
Log
Re
.
Ecoulement turbulent rugueux
(conduites rugueuses) Formule de Karman-Prandtl
12
3 71
Log
D(
.)

PERTES DE CHARGES DANS UNE CONDUITE DE PETIT DIAMETRE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG- PL mise à jour le 13/09/2011 3/6
On remarque qu'en régime turbulent rugueux, ne dépend plus du nombre de
Reynolds mais du seul paramètre /D.
III - DISPOSITIF EXPERIMENTAL
air
BA
manomètre à eau
manomètre
à mercure
prise de
pression
prise de
pression
pointeau de
réglage du débit
connecteur
eau/mercure
bécher
alimentation
en eau
Schéma général de l'installation
château
d'eau
trop plein
château d'eau
alimentation
château d'eau
vanne 1
vanne 2
robinet 1robinet 2
pompe
trop plein
réservoir
Evier
alimentation réservoir
Schéma de l'alimentation en eau

PERTES DE CHARGES DANS UNE CONDUITE DE PETIT DIAMETRE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG- PL mise à jour le 13/09/2011 4/6
L’appareil est composé d’une conduite cylindrique de faible section (de diamètre
intérieur D=3 mm et de longueur de L=524 mm entre les deux prises de pression A et B).
Montrer que, dans ce cas particulier où la conduite est horizontale et de diamètre
constant, la perte de charge qui se produit sur la longueur L, séparant les points A et B,
s'exprime par:
HL
D
V
g
P P
g
A B
2
2
La variation de pression entre les points A et B peut être mesurée à l'aide soit d'un
manomètre à mercure soit d'un manomètre à eau. La sélection du mode de fonctionnement se
fait par l’intermédiaire d’un connecteur comme le montre la figure ci-dessous.
circulation de l'eau
manomètre
à eaumanomètre à mercure
circulation de l'eau
manomètre à eau
manomètre à mercure
Position mercure Position eau
Le circuit est alimenté en eau avec un débit qui peut être réglé grâce au pointeau
situé à l'extrémité droite de la conduite. La valeur du débit peut être déterminée en mesurant le
volume d'eau récupéré dans le bécher pendant un temps donné. Pour les mesures à faible débit,
l'alimentation en eau du circuit est effectuée par le château d'eau et la mesure de pression est
effectuée par le manomètre à eau. Pour les mesures à forts débits, on puise dans un réservoir
par l'intermédiaire d'une pompe et la mesure de pression est effectuée par le manomètre à
mercure.
IV - MANIPULATION
Les mesures seront effectuées du débit le plus faible au débit le plus important.
Justifier pourquoi cet ordre. Justifier la nécessité de disposer de deux dispositifs de mesure
distincts suivant qu'on travaille à fort ou faible débit.
IV.1 . MESURES A FAIBLES DEBITS
Vérifier que la pompe est arrêtée, que le robinet 2 et la vanne 2 soient fermés.
Sélectionner le manomètre à eau à l'aide du connecteur prévu à cet effet. Pour alimenter le
circuit en eau, ouvrir la vanne 1 et le robinet 1 compensant la perte d'eau dans le château d'eau.
Régler le débit à l'aide du pointeau. La valeur du débit peut être déterminée en
mesurant le volume d'eau récupéré dans le bécher pendant un temps donné.

PERTES DE CHARGES DANS UNE CONDUITE DE PETIT DIAMETRE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG- PL mise à jour le 13/09/2011 5/6
Pour chaque débit, relever la valeur des hauteurs de prises de pression en A et B,
et la température de l’eau donnée par un thermomètre plongeant dans le réservoir.
Il est conseillé de faire un nombre de lectures suffisant (environ 15 pour chaque
système d’alimentation). A justifier.
IV.2 . MESURES A FORTS DEBITS
Refermer le robinet 1 et la vanne 1. Sélectionner maintenant le manomètre à
mercure. Pour alimenter le circuit en eau, ouvrir le robinet 2 compensant la perte d'eau dans le
réservoir, puis la vanne 2 et mettre la pompe en marche.
Effectuer une série de mesures comme précédemment.
AVANT TOUTE MANIPULATION, S’ASSURER QUE LES VANNES ET
ROBINETS SOIENT TOUS FERMES.
LA POSITION DE LA SORTIE D’EAU AU NIVEAU DU BECHER DOIT
ETRE MAINTENUE IDENTIQUE PENDANT TOUTE LA DUREE DES
MESURES.
PENSEZ A VERIFIER QUE LES RESERVOIRS SONT PLEINS, QU’ILS
SONT ALIMENTES EN CONTINU PENDANT VOS MESURES, TOUT EN
S’ASSURANT QU’ILS NE DEBORDENT PAS !
NE LAISSEZ PAS COULER DE L’EAU SI VOUS N’EFFECTUEZ PAS DE
MESURES…
V - RESULTATS ET CALCULS
1 - Calculer le coefficient de pertes de charge linéaires pour chacun des essais
réalisés et présenter les résultats dans un tableau en précisant bien tous les relevés effectués.
On rappelle la masse volumique du mercure: =13600 kg m-3
.
2 - Tracer la courbe log = f (log Re).
3 - Mettre en évidence les différents régimes d'écoulement et les comparer avec les
courbes de Nikuradse. Donner les valeurs des nombres de Reynolds de transition entre les
zones I et II (laminaire / transition), et II et III (transition/ turbulent). Commentaires.

PERTES DE CHARGES DANS UNE CONDUITE DE PETIT DIAMETRE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB, CG- PL mise à jour le 13/09/2011 6/6
T(°C) 0 1 2 3 4 5 6 7 8 9
0 1,794 1,732 1,674 1,619 1,568 1,519 1,473 1,429 1,387 1,348
10 1,310 1,273 1,239 1,206 1,175 1,145 1,116 1,087 1,060 1,034
20 1,009 0,984 0,961 0,938 0,916 0,895 0,875 0,855 0,836 0,818
30 0,800 0,783 0,767 0,751 0,736 0,721 0,706 0,692 0,697 0,666
40 0,654 0,641 0,630 0,618 0,607 0,597 0,587 0,577 0,567 0,558
50 0,549 0,540 0,532 0,524 0,515 0,507 0,499 0,592 0,484 0,477
60 0,467 0,463 0,456 0,449 0,443 0,437 0,431 0,424 0,419 0,422
70 0,407 0,402 0,396 0,391 0,386 0,381 0,376 0,371 0,366 0,361
80 0,357 0,353 0,348 0,344 0,340 0,336 0,332 0,328 0,324 0,320
90 0,317 0,313 0,309 0,306 0,303 0,299 0,296 0,293 0,290 0,287
100 0,284 0,282 0,279 0,276 0,273 0,270 0,267 0,264 0,262 0,259
Viscosité dynamique de l'eau liquide (10-3
kg m-1
s-1
), en fonction de la température.
(d'après International Critical Tables, 1929)
Re=2000
laminaireLog Re
Log
hydrauliquement lisse hydrauliquement rugueux
turbulent
Courbes de Nikuradse
CYLINDRE CIRCULAIRE EN SOUFFLERIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB,CG – PL mise à jour le 13/09/2011 1/7
C Y L I N D R E C I R C U L A I R E E N S O U F F L E R I E
* * *
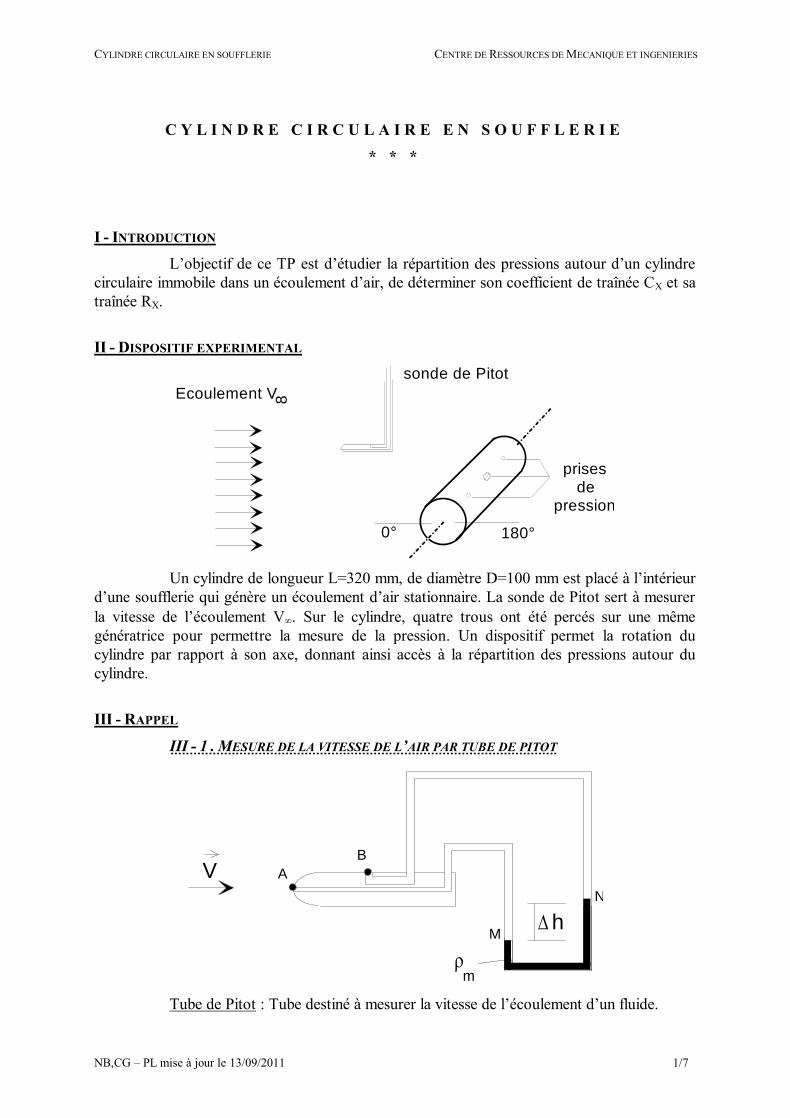
I - INTRODUCTION
L’objectif de ce TP est d’étudier la répartition des pressions autour d’un cylindre
circulaire immobile dans un écoulement d’air, de déterminer son coefficient de traînée CX et sa
traînée RX.
II - DISPOSITIF EXPERIMENTAL
Ecoulement V 8
0° 180°
sonde de Pitot
prises depression
Un cylindre de longueur L=320 mm, de diamètre D=100 mm est placé à l’intérieur
d’une soufflerie qui génère un écoulement d’air stationnaire. La sonde de Pitot sert à mesurer
la vitesse de l’écoulement V. Sur le cylindre, quatre trous ont été percés sur une même
génératrice pour permettre la mesure de la pression. Un dispositif permet la rotation du
cylindre par rapport à son axe, donnant ainsi accès à la répartition des pressions autour du
cylindre.
III - RAPPEL
III - 1 . MESURE DE LA VITESSE DE L’AIR PAR TUBE DE PITOT
m
h
A
B
V
M
N
Tube de Pitot : Tube destiné à mesurer la vitesse de l’écoulement d’un fluide.

CYLINDRE CIRCULAIRE EN SOUFFLERIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB,CG – PL mise à jour le 13/09/2011 2/7
A VA
= O
P au point d'arrê t B
V
P dans le fluide
A
B
B
Principe : Soit l’écoulement stationnaire d’un fluide incompressible dont on
suppose que la vitesse V et la pression P sont uniformes. Le tube de Pitot est la combinaison
de deux prises de pression, l’une statique au point d’arrêt A, l’autre totale en B donnée par
une prise latérale. La différence des deux pressions est mesurée à l’aide d’un tube en U et
permet de déduire la vitesse de l'écoulement.
Le tube de Pitot, très allongé et de petit diamètre, est introduit parallèlement aux
lignes de courant. On peut alors supposer qu'au point B, V VB , et qu'au point A la vitesse
est nulle.
Le théorème de Bernoulli relatif aux fluides parfaits, à savoir:
PA + V
2+ gz = P +
V
2gz
A
2
A B
2
B
s'écrit le long de la ligne de courant passant par les points A et B:
PA + gz = P + V
2gzA B
2
B
d'où
V PA
= - P B
*2
*
avec P*=P+gz, pression étoilée
La différence PA* - PB
* peut être déduite de la dénivellation h du manomètre
différentiel en U. En effet, en se référant au schéma de la page précédente:
P P
P P
P P gz
P P gz
P P P P g z zA M
B N
A M M
B N N
A B M N
m g h
N M
* *
* *
*
*
* *( )
Par conséquent : P P g hA B m* *
( )
où m est la masse volumique du liquide manométrique et la masse volumique du fluide en
écoulement. Ici, il s'agit d'un écoulement d'air dont la masse volumique est négligeable par
rapport à celle du liquide manométrique (ici de l'eau), par conséquent:
P P g h g hA B m m* *
( )
On en déduit l’expression de la vitesse de l’écoulement :
V = 2
g hm
avec m : masse volumique de l’eau (m = 1001 kg/m3)
: masse volumique de l’air ( = 1.225 kg/m3)

CYLINDRE CIRCULAIRE EN SOUFFLERIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB,CG – PL mise à jour le 13/09/2011 3/7
III - 2 . DIFFERENTS REGIMES D’ECOULEMENT EN FONCTION DU NOMBRE DE
REYNOLDS
Le nombre de Reynolds basé sur le diamètre du cylindre Re = V D
est le
paramètre caractéristique du régime d’écoulement autour d’un cylindre.
Pour des faibles valeurs du nombre de Reynolds, les forces de viscosité sont
prépondérantes. L'écoulement est alors symétrique sans oscillations (écoulement visqueux non
décollé).
Deux tourbillons symétriques se forment derrière le cylindre lorsque le nombre de
Reynolds est compris entre 5 et 40. Pour une valeur du nombre de Reynolds supérieure à 40
mais inférieure à 160, les tourbillons se détachent l’un après l’autre formant ce que l’on appelle
une allée de Von Karmann. Dans ces conditions, l'écoulement n'est plus symétrique et, à la
traînée (composante parallèle à la vitesse de la résultante des forces de pression) s'ajoute une
portance (composante perpendiculaire à la vitesse de la résultante des forces de pression). Au
delà de Re=300, l’écoulement devient turbulent et comprend plusieurs phases comme
l'illustrent les schémas ci-dessous. Entre Re=160 et Re=300, le régime est transitoire.
Re<5 5<Re<40
40<Re<150 à 300 300<Re<2 à 3 105
2 à 3 10 <Re<2 à 3 1065
Re>3 106
Une visualisation expérimentale de ces différents régimes se développant dans le sillage
d'un cylindre peut être réalisée à l'aide de traceur comme l'illustrent les photos suivantes:

CYLINDRE CIRCULAIRE EN SOUFFLERIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB,CG – PL mise à jour le 13/09/2011 4/7
Re=32
Re=55
Re=73
Re=102
Re=161Re=65
Re 160 Régime laminaire
160 < Re < 300 Régime Transitoire

CYLINDRE CIRCULAIRE EN SOUFFLERIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB,CG – PL mise à jour le 13/09/2011 5/7
Re > 300 Régime Turbulent
IV - ETUDE DE LA REPARTITION DES PRESSIONS AUTOUR D’UN CYLINDRE
Le coefficient de traînée CX est défini par la relation :
CX = R
1
2 V S
X
2
S étant la surface projetée du cylindre sur un plan perpendiculaire à
l'écoulement
la masse volumique du fluide à l’infini amont
V la vitesse du fluide à l’infini amont
RX est la traînée, projection de la résultante aérodynamique sur un axe
parallèle à V et de même sens.
On définit aussi le coefficient de pression locale Kp tel que :
Kp = P - P
1
2 V
2
où P est la pression statique en un point de la paroi du cylindre
P la pression statique à l’infini amont de l'écoulement.
L’application du théorème de Bernoulli, entre un point situé à l’infini et un point
situé à la frontière de la couche limite, nous donne après avoir comme précédemment négligé
les termes en gz:
P + 1
2 V = P +
1
2 V
2 2 d’où Kp = 1 -
V
V
2

CYLINDRE CIRCULAIRE EN SOUFFLERIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB,CG – PL mise à jour le 13/09/2011 6/7
Remarque : au point d’arrêt, V = 0, Kp = 1.
A partir de ces définitions, et en considérant un élément de surface dS sur lequel
s’exerce une force de pression dF = (P - P) dS, on démontrera la formule :
dS
dF
V 8
CX = Kp cos d
0
V - MODE OPERATOIRE
Vérifier à l’aide du tube de Pitot que l’écoulement est uniforme et calculer le
nombre de Reynolds. La vitesse V sera préalablement mesurée à l’aide du tube de Pitot.
Comparer la mesure de vitesse avec celle obtenue avec le vélocimétre digital.
Pour déterminer le CX du cylindre, on mesurera pour diverses valeurs de (de 0 à
180° et tous les 5°) la valeur de (P - P) au manomètre différentiel.
Préalablement, on vérifiera qualitativement la symétrie de répartition des pressions
par rapport à l'axe du cylindre. Cette phase d'observation doit permettre de repérer la position
du cylindre telle que les prises de pression soient effectivement dans l'alignement de
l'écoulement c'est-à-dire telle que =0. On notera, s'il en existe un, le décalage avec la position
0 du disque gradué et l'on corrigera par la suite les valeurs de lues en tenant compte de ce
décalage de l'origine.
PENSEZ A REMETTRE L’APPAREIL EN CHARGE APRES VOS
MESURES !
UNE FOIS VOS MESURES TERMINEES, DEMANDEZ A L’ENCADRANT
D’ETEINDRE LA SOUFFLERIE AVANT D’ENTAMER L’ANALYSE DE
VOS MESURES…
Ceci étant, pour chaque valeur de , on effectuera la moyenne des valeurs des
quatre prises de pressions.
Ainsi P eau- P = P = g
h
4- h ( )
ii=1
4
stat

CYLINDRE CIRCULAIRE EN SOUFFLERIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
NB,CG – PL mise à jour le 13/09/2011 7/7
On tracera le diagramme Kp()
comme ci-contre, puis la courbe (Kp cos )
en fonction de et on déterminera la valeur
du CX par intégration graphique. Il est alors
possible de calculer RX connaissant les
caractéristiques géométriques du cylindre (L
et D).
1
V 8
Kp( 1)
Kp( 2)
2
Enfin, on vérifiera que le CX expérimental est en accord avec la formule de
Lamb dont la représentation graphique est donnée ci-dessous. Il s'agit d'une formule donnant
les variations du coefficient de traînée en fonction du nombre de Reynolds pour un cylindre
d'allongement infini:
Re
Représentation graphique de la formule de Lamb
Température
(°C)
Masse volumique
(kg m-3
)
Viscosité dynamique
(kg m-1
s-1
)
0 1.293 1.71 10-5
10 1.247 1.76 10-5
15 1.225 1.78 10-5
20 1.205 1.81 10-5
30 1.165 1.86 10-5
Propriétés de l'air sec en fonction de la température (Batchelor)


PHOTOELASTICIMETRIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
FG - YG, OC mise à jour le 16/09/2011 1 / 6
P H O T O E L A S T I C I M E T R I E
* * *
I - INTRODUCTION
I - 1 . RAPPEL
Dans le cas de structures aux géométries simples (ex : une éprouvette
rectangulaire, un cylindre…) et soumises à des sollicitations simples (ex : traction simple,
flexion pure…), un modèle analytique suffit à prédire l’état de contrainte/déformation de la
structure. Cependant, dans des domaines industriels tels que l’aéronautique, la géométrie des
structures à concevoir ainsi que la nature des sollicitations auxquelles ces structures sont
soumises peuvent devenir extrêmement complexes.
Pour contourner ces difficultés, une approche numérique basée sur des calculs de
type éléments finis est possible. De façon complémentaire, il existe des approches
expérimentales couramment utilisées dans l’industrie qui permettent aussi de visualiser l’état
de contrainte/déformation du matériau. Parmi ces techniques expérimentales, les principales
reposent soit sur l’analyse d’image (méthode de la grille, corrélation d’images) soit sur les lois
optiques (photoélasticimétrie).
I - 2 . PHOTOELASTICIMETRIE
Dans un matériau qualifié de photoélastique, il existe un couplage entre la lumière
incidente et ses propriétés élastiques : quand ce matériau est soumis à des efforts, ses
propriétés optiques varient proportionnellement aux déformations induites. La
photoélasticimétrie permet donc de visualiser par voie optique l’état de contrainte du
matériau. C’est par exemple un moyen extrêmement efficace pour repérer les zones de
concentration de contrainte.
Les matériaux photoélastiques les plus courants sont le plexiglas, la résine époxy,
le polyester et le polyuréthane. Ces matériaux sont caractérisés par une constante
photoélastique qui quantifie l’importance du couplage photoélastique. Le polyuréthane
présente par exemple un couplage 800 fois élevé que le plexiglas.

PHOTOELASTICIMETRIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
FG - YG, OC mise à jour le 16/09/2011 2 / 6
I - 3 . OBJECTIF
L’objectif de ce TP est de se familiariser avec les concepts sous-jacents à la
photoélasticimétrie afin de déterminer le vecteur contrainte agissant en différents points d’une
poutre à inertie variable.
Dans un premier temps, la constante photoélastique du matériau constitutif de la
poutre sera déterminée indépendamment au travers de deux sollicitations simples pour
lesquelles l’état de contrainte est connu théoriquement : une traction uniaxiale et une flexion 4
points.
Dans un deuxième temps, les vecteurs contraintes en différents points de la poutre
à inertie variable seront déterminées grâce à une combinaison de mesures expérimentales, de
considérations théoriques et d’utilisation du cercle de Mohr.
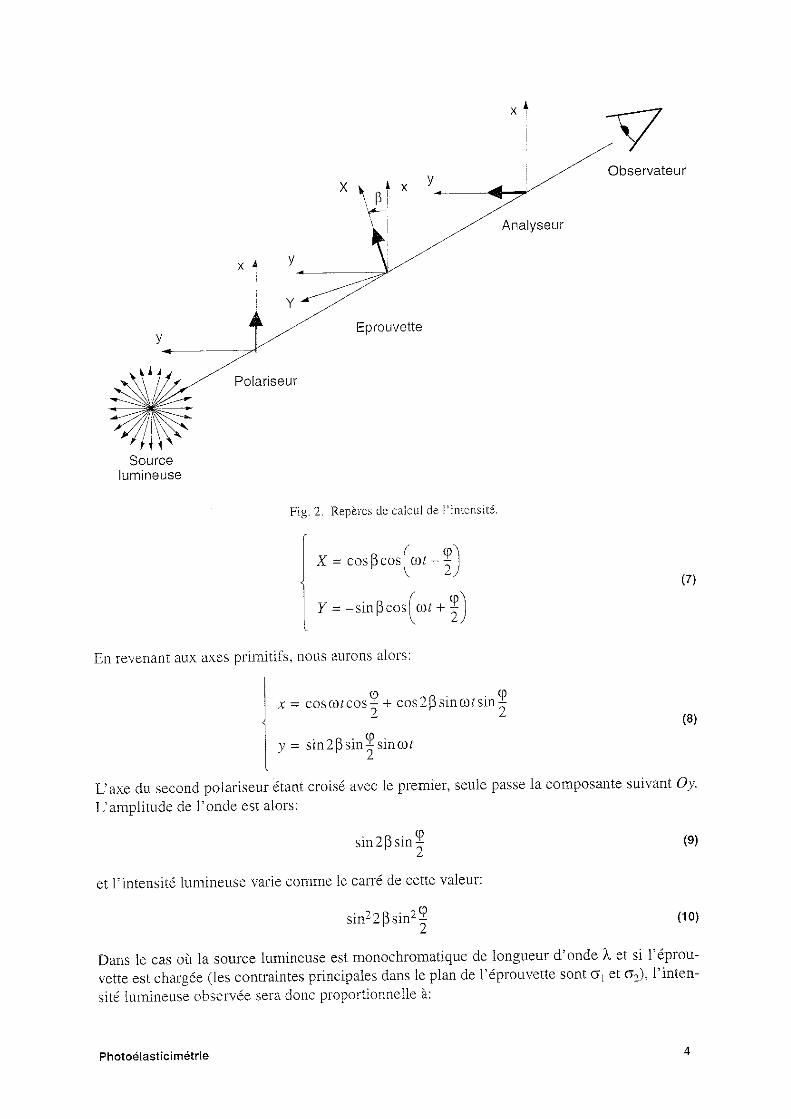
I - 4 . PRINCIPE ET DISPOSITIF EXPERIMENTAL
Le principe et les lois de la photoélasticité sont étroitement liés à des phénomènes
optiques (polarisation de la lumière, biréfringence, trajet optique) et mécaniques (état de
contrainte, déformation du matériau).
L’éprouvette d’essai est soumise à une charge par l’intermédiaire d’un cadre placé
entre un polariseur et un analyseur.
Les bases d’optique indispensable à la compréhension de ce TP sont détaillées
dans l’annexe intitulée « Principe de la photoélasticimétrie ».
2. TRAVAIL PREPARATOIRE
II - 1 . TRACTION UNIAXIALE
Le schéma ci-contre présente une éprouvette soumise à une traction
pure.
Q1- Soit la différence des contraintes principales. Déterminer
en fonction de F et de S0 (section de l’éprouvette soumise à la traction).

PHOTOELASTICIMETRIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
FG - YG, OC mise à jour le 16/09/2011 3 / 6
II - 2 . FLEXION 4 POINTS
L’éprouvette est maintenant soumise à une flexion 4 points.
Q2- Déterminer le torseur de cohésion en tout point de l’éprouvette.
Q3- En utilisant l’expression du moment fléchissant, établir l’expression de , différence des
contraintes principales, en tout point de l’éprouvette.
3. ETUDE EXPERIMENTALE
III - 1 . DETERMINATION DE LA CONSTANTE PHOTOELASTIQUE C
Dans la suite, la constante photoélastique
C est définie telle que k C, avec k l’ordre de la
frange isochromatique et la différence des
contraintes principales (cf la formule encadrée en
rouge en dernière page de l’annexe).
III – 1.1 . TRACTION UNIAXIALE
Mettre en place l’éprouvette destinée à
l’expérience de traction uniaxiale comme sur le
schéma ci-contre. La force appliquée est mesurée à
l’aide d’un dynamomètre.
ATTENTION : pour cette expérience, ne pas dépasser l’ordre k=3. Au-delà,
l’éprouvette risque d’être endommagée !
Q4- A chaque valeur de k correspond une force appliquée F. Lors de la
détermination de cette force, quelles sont les principales causes d’incertitude ? Au regard de
ces incertitudes, proposer une démarche expérimentale pertinente pour déterminer cette force
et l’erreur de mesure de cette force.

PHOTOELASTICIMETRIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
FG - YG, OC mise à jour le 16/09/2011 4 / 6
Q5- En s’appuyant sur le travail préparatoire et en suivant la démarche proposée à
la question précédente, déterminer la différence des contraintes principales pour k=1 et
k=2.
Q6- Au moyen d’un graphique approprié, en déduire la valeur de la constante
photoélastique C caractéristique de l’éprouvette.
Q7- Existe-t-il des zones de l’éprouvette sujettes à des concentrations de
contraintes ?
Q8- Pour que cette méthode soit applicable, quelle hypothèse doit être faite sur la
valeur de la contrainte dans l’épaisseur de l’éprouvette ?
III – 1.2 . FLEXION 4 POINTS
Mettre en place l’éprouvette destinée à
l’expérience de flexion 4 points comme sur la photo
ci-contre.
ATTENTION : pour cette expérience,
ne pas dépasser l’ordre k=3, au risque
d’endommager l’éprouvette !
Q9- Lors de la mise en place de
l’éprouvette, à quoi faut-il veiller pour se trouver
dans une situation comparable à celle modélisée aux
questions Q2 et Q3.
Q10- En s’appuyant sur les résultats des questions Q2 et Q3, justifier le choix du
point de l’éprouvette où les mesures seront effectuées.
Q11- En suivant la démarche proposée à la question Q4 et en s’appuyant sur le
travail préparatoire, déterminer la différence des contraintes principales pour k=1, k=2 et
k=3.
Q12- Au moyen d’un graphique approprié, en déduire la valeur de la constante
photoélastique C caractéristique de l’éprouvette.

PHOTOELASTICIMETRIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
FG - YG, OC mise à jour le 16/09/2011 5 / 6
III – 1.3 . COMPARAISON
Q13- Comparer les valeurs de la constante photoélastique C déduites aux
questions Q6 et Q12. Commenter en analysant, en particulier, les sources d’erreurs des deux
méthodes de mesure de C.
II - 2 . POUTRE A INERTIE VARIABLE
L’objectif est de déterminer le vecteur contrainte en un point quelconque d’une
poutre à inertie variable sollicitée à son extrémité O par une force verticale. L’amplitude de
la force est mesurée avec un dynamomètre. Pour les mesures, choisir = 25 daN.
Dans le cadre de ce TP, les vecteurs contraintes seront déterminés pour une facette
de normale : les deux composantes à déterminer sont donc xx et xy. De plus, pour illustrer
le principe, deux mesures seront effectuées : l’une en un point M(x,y) d’abscisse x = 7 cm et
l’autre en un point M(x,y) d’abscisse x = 12 cm.
III – 2.1 . MESURE EN X = 7 CM
Q14- Le point M doit être situé sur une frange isochromatique d’ordre k connu.
Préciser l’ordre k retenu et mesurer l’ordonnée du point M correspondant.
Q15- Mesurer l’angle .
Q16- En utilisant la valeur de la constante photoélastique déterminée à la partie
3.1, déterminer la différence des contraintes principales pour l’ordre k retenu. Quelle
caractéristique géométrique du cercle de Mohr correspond à ?
Q17- En tournant le polariseur et l’analyseur de façon judicieuse, montrer
expérimentalement que la direction OM est une isocline.

PHOTOELASTICIMETRIE CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
FG - YG, OC mise à jour le 16/09/2011 6 / 6
Q18- La photoélasticimétrie ne donnant que la différence des contraintes, on
utilisera l’expression théorique de xx obtenue par un calcul de RdM : 3
3
2xx
Fxy
bh . Dans cette
dernière expression, b correspond à l’épaisseur de la poutre. En se rappelant qu’une ligne
isocline indique la direction d’une des contraintes principales et en s’appuyant sur les
questions Q15, Q16 et Q17, construire le cercle de Mohr au point M.
Q19- Au regard de considérations géométriques simples, quelle valeur particulière
devrait prendre l’une des deux contraintes principales ? Comparer à la valeur relevée sur le
cercle de Mohr.
Q20- Expliquer en quoi la photélasticimétrie permet d’avoir directement accès
aux contraintes de cisaillement maximales.
III – 2.1 . MESURE EN X = 12 CM
Q21- Reprendre les questions Q14 à Q17 en x = 12 cm.

RESERVOIR CYLINDRIQUE SOUS PRESSION CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
YG, OC mise à jour le 26/09/2011 1 / 5
R E S E R V O I R C Y L I N D R I Q U E S O U S P R E S S I O N
* * *
I - INTRODUCTION
Comme le suggère l’observation des bulles de savon, la forme géométrique
naturellement appropriée pour une structure devant résister à une pression interne serait une
sphère. Cependant, pour des raisons pratiques, l’utilisation d’une géométrie cylindrique est
souvent privilégiée dans le cadre du transport (pipeline, canalisation) ou du stockage
(extincteur, chaudière, citerne, silo) de matière. De telles structures cylindriques sous pression
se retrouvent aussi dans le domaine du transport de passagers (fuselage d’avion, coque d’un
sous-marin).
Tandis qu’un grand nombre d’applications industrielles ont vu le jour, la
recherche dans ce domaine est toujours active, comme le montre l’existence de deux revues
scientifiques spécialisées dans ce domaine : Journal of Pressure Vessel Technology and
International Journal of Pressure Vessels and Piping.
Dans ce TP, vous êtes mis en situation d’expert arrivant après un accident sur une
bombonne sous pression (bombonne jaune). Pour comprendre les événements ayant menés à
cette rupture une maquette instrumentée a été reconstituée. Les mesures menées permettront
d’aider à la compréhension de l’accident.
II - TRAVAIL PREPARATOIRE
L’objectif de ce travail préparatoire est d’établir l’équation dite des chaudières
donnant le rapport entre la contrainte circonférentielle et la contrainte longitudinale dans le
cas d’une bonbonne sous pression. Ce travail préliminaire est à réaliser avant la séance.
II - 1 . RAPPEL
Les contraintes sont reliées aux déformations selon la loi de Lamé :
Tr I 2 ,
où et sont les coefficients de Lamé et I est le tenseur identité.
Connaissant le module d’Young E et le coefficient de Poisson du matériau :
1 2 1
E
et
2 1
E
.

RESERVOIR CYLINDRIQUE SOUS PRESSION CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
YG, OC mise à jour le 26/09/2011 2 / 5
II - 2 . HYPOTHESE
L’objet de l’étude est un réservoir cylindrique fermé aux deux extrémités (Fig. 1).
Les différentes quantités physiques utiles dans la suite sont :
- la pression interne P,
- la pression atmosphérique P0,
- le rayon extérieur r,
- l’épaisseur t de la coque.
Figure 1 : géométrie du réservoir
Caractéristiques élastiques de l’acier constituant l’enveloppe :
- module d’Young : E = 210 GPa
- Coefficient de Poisson : = 0.30
Q1- Montrer qu’en un point de la surface extérieure du réservoir, la normale à
cette surface est une des directions principales de contrainte. On note r,e la contrainte
principale radiale associée à cette direction.
Q2- Les pressions internes appliquées dans la suite varieront de 1 MPa à 18 MPa.
Justifier que l’influence de la pression atmosphérique peut être négligée. En déduire la valeur
de r,e.
Q3- De même, montrer qu’en un point de la surface intérieure du réservoir, la
normale à cette surface est une des directions principales de contrainte et donner la valeur de
la contrainte principale associée (appelée contrainte radiale r,i).

RESERVOIR CYLINDRIQUE SOUS PRESSION CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
YG, OC mise à jour le 26/09/2011 3 / 5
II - 3 . EXPRESSION DES CONTRAINTES LONGITUDINALES ET CIRCONFERENTIELLES
Les deux autres contraintes principales en un point de la surface du réservoir
sont la contrainte circonférentielle ϴ (i.e. associée à la direction tangentielle à la surface et
perpendiculaire à l’axe du cylindre) et la contrainte longitudinale z (i.e. associée à la
direction tangentielle à la surface et colinéaire à l’axe du cylindre).
Q4- Dans le cas d’une coque à paroi mince (i.e. ), l’hypothèse d’une
contrainte circonférentielle ϴ uniforme dans l’épaisseur de la coque est autorisée. Calculer
ϴ en réalisant une coupure par un plan contenant puis en écrivant l’équilibre local.
Q5- Calculer la contrainte longitudinale z en réalisant une coupure centrale par
un plan de normale et en écrivant l’équilibre local. Que vaudrait z dans le cas d’un
cylindre ouvert (ex : un pipeline) ?
Q6- En utilisant écrire le lien entre ϴ et z. Y aurait-il un intérêt à utiliser
pour l’enveloppe des matériaux élastiquement anisotropes ?
Q7- Faire une représentation des contraintes sur un cercle de Mohr. Déterminer la
contrainte de cisaillement maximale et la direction associée.
III - ETUDE EXPERIMENTALE
III - 1 . JAUGES DE DEFORMATION
On utilise des jauges de déformation à fils résistants collées sur la surface du
réservoir. Les jauges de déformation permettent de mesurer des extensions (cf. annexes).
Dans un plan, la mesure de trois extensions selon trois directions différentes (l’ensemble des
trois jauges constituant une rosette) permet de caractériser l’état de déformation dans ce plan
en un point de la structure.
Dans ce TP, on utilise en chaque point trois jauges disposées à 120° les unes par
rapport aux autres. Les extensions sont mesurées relativement à une direction contenue dans
le plan tangent à la surface au point considéré.

RESERVOIR CYLINDRIQUE SOUS PRESSION CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
YG, OC mise à jour le 26/09/2011 4 / 5
III - 2 . GEOMETRIE DU RESERVOIR
Q7- Mesurer r et t en supposant que la bonbonne endommagée et la bonbonne de
la maquette ont les même dimensions. On parle de coque à paroi mince (resp. épaisse) lorsque
r/t > 10 (resp. r/t < 10). Vérifier que le réservoir étudié possède une paroi mince.
Q8- L’analyse menée dans le travail préparatoire est valable en tout point de la
surface du réservoir, excepté au voisinage des zones présentant des concentrations de
contraintes. Existe-t-il de telles zones sur le réservoir étudié ?
Q9- De plus, cette analyse suppose implicitement que le poids du réservoir peut-
être négligé devant la force exercée par la pression. Est-ce le cas ? (pour l’application
numérique, supposer une masse volumique de 8000 kg.m-3
pour le matériau constituant la
coque).
III - 3 . MESURES
ATTENTION : La valeur maximum de la pression interne à ne pas dépasser est de
18 MPa pour ne pas endommager le matériel (bonbonne, système de mesure et de mise sous
pression).
Q10- Pour une dizaine de valeurs de pression croissantes puis décroissantes,
relever successivement les indications fournies par les jauges.
III - 4 . DEFORMATION ELASTIQUE / PLASTIQUE
Q11- Au moyen d’un graphique approprié, mettre en évidence le comportement
élastique du matériau constitutif de la coque dans l’intervalle de pression interne considéré.
III - 5 . LINEARITE DE LA REPONSE
Q12-a Tracer sur un même graphique l’évolution de la déformation mesurée par
les jauges en fonction de la pression interne. Comparer la déformation de chacune des jauges
pour une pression interne donnée. Commenter.
Q12-b Observez la bonbonne endommagée et décrire le mode de rupture.
Interprétez la morphologie de la rupture en utilisant vos résultats.

RESERVOIR CYLINDRIQUE SOUS PRESSION CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
YG, OC mise à jour le 26/09/2011 5 / 5
III - 6 . DETERMINATION DES DIRECTIONS PRINCIPALES
Q13- Pour deux valeurs de la pression interne, par exemple 9 MPa et 18 MPa,
tracer le tricercle de Mohr des déformations de la rosette centrale. L’utilisation des mesures de
déformations sur une rosette à 120° pour tracer un cercle de Mohr est détaillée en annexe.
Q14- En déduire la direction des axes principaux, la valeur des déformations
principales associées ainsi que celle des contraintes principales associées. Comparer aux
résultats de la partie 2.3.
Q15- Selon quelles directions le module de la contrainte de cisaillement est-il
maximum ?
Q16- Observez plus finement le réservoir endommagé. En déduire le mode de
rupture du matériau utilisé pour la fabrication de cette bonbonne et élaborer un scénario
d’accident.
NB : l’étudiant curieux pourra se documenter sur quelques accidents de
« bonbonne sous pression » dans divers domaines (canalisations, aéronautique, sous
marins…).







































CALCULS D’ERREUR CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
PL mise à jour le 13/09/2011 1/6
C a l c u l s d ’ e r r e u r
* * *
I - INTRODUCTION
Le calcul d'erreur, ou calcul d'incertitudes est un ensemble de techniques
permettant d'estimer l'erreur faite sur un résultat numérique, à partir des incertitudes ou des
erreurs faites sur les mesures qui ont conduit à ce résultat. Ceci permet donc d'estimer la
propagation des erreurs.
Il faut considérer trois sources d'erreur (uncertainty en anglais) :
la précision de la mesure 1, ou l'incertitude (resolution en anglais) ;
la dispersion statistique 2 (precision en anglais) ;
l'erreur systématique 3 (accuracy en anglais).
L’erreur totale étant = 1 + 2 + 3.
I.1 . PRECISION DE MESURE
Sur un appareil analogique, la première limitation est la distance séparant les
graduations ; on peut améliorer ceci avec un vernier, comme sur un pied à coulisse ou certains
goniomètres, ou bien avec une vis micrométrique comme sur un Palmer. Sur un appareil
numérique, cette précision est donnée par le nombre de chiffres de l'affichage.
1 est l'espacement entre les graduations, ou bien la valeur d'une unité du dernier
chiffre de l'affichage.
Mais il se peut que le phénomène soit instable ou bien perturbé par un phénomène
extérieur aléatoire. Alors, on verra l'aiguille osciller ou bien les derniers chiffres de l'affichage
numérique changer. Ceci réduit la précision de mesure, on ne peut considérer que la partie
stable du nombre obtenu.
Lorsque l'on utilise des publications très anciennes pour évaluer un événement non
reproductible (l'objet a disparu ou s'est altéré, ou bien il s'agit d'un événement unique), on doit
parfois avoir recours à une échelle empirique, comme par exemple l'échelle de Mercalli ou de
Rossi-Forel pour les séismes ou l'échelle de Mohs pour la dureté d'un matériau, l'évaluation de
1 devient alors difficile ; cela n'est possible que si l'on peut établir une correspondance avec
une échelle « moderne » basée sur une mesure physique. Par exemple, on essaie d'établir une
correspondance entre les dégâts d'un séisme décrits dans des écrits antiques et l'énergie des
ondes sismiques.

CALCULS D’ERREUR CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
PL mise à jour le 13/09/2011 2/6
De même, lorsque la mesure consiste à classifier un phénomène dans une catégorie
(cas par exemple d'un sondage d'opinion ou du recensement des pathologies), il n'est pas
possible de définir 1.
I.2 . DISPERSION STATISTIQUE
Si l'on mesure plusieurs fois le même phénomène avec un appareil suffisamment
précis, on obtiendra chaque fois un résultat différent xi. Ceci est dû à des phénomènes
perturbateurs ou, pour les mesures extrêmement précises, à la nature aléatoire du phénomène
(chaos, incertitude quantique).
Parmi les phénomènes perturbateurs, on peut dénombrer :
l'erreur d'échantillonnage : c'est lorsque l'on prélève un échantillon qui n'est pas
représentatif de ce que l'on veut mesurer ; le résultat dépend alors de la manière
dont on choisit l'échantillon ;
l'erreur de préparation : c'est lorsque la préparation de l'échantillon introduit un
biais ; l'échantillon s'altère pendant le transport, le stockage ou la manipulation
(pollution, dégradation, transformation physique ou chimique) ;
la stabilité de l'appareil : celui-ci peut être sensible aux variations de température,
de tension d'alimentation électrique, aux vibrations, aux perturbations
électromagnétiques des appareils environnants… ou bien présenter un défaut de
conception ou une usure (bruit de fond électronique, pièce instable…)
Sur un grand nombre de mesures, on peut considérer que l'on a une probabilité
dont la distribution est gaussienne. Le résultat de la mesure sera alors la moyenne empirique
des résultats :
n
i
i 1
1E X x
n
le carré de l'écart type 2 de la gaussienne peut s'évaluer avec la variance empirique
corrigée 2 :
n2 2
i
i 1
1ˆ (x X)
n 1
L'erreur due à la dispersion statistique est alors estimée par :
2ˆk.
k étant une constante dépendant du niveau de confiance, c'est-à-dire de l'erreur admissible.
En physique, on prend souvent k = 3, ce qui correspond à un intervalle de confiance de
99,73%, c'est-à-dire que 99,73% des valeurs xi sont comprises entre ˆ ˆE x et E x et 0,27%
seront hors de cet intervalle ; sur 1 000 mesures, seules trois seront en dehors de l'intervalle.

CALCULS D’ERREUR CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
PL mise à jour le 13/09/2011 3/6
Dans de nombreux cas, on se contente de prendre k = 2, soit un niveau de confiance de 95%
(5 mesures hors intervalle pour cent mesures).
I.3 . ERREUR SYSTEMATIQUE
L'erreur systématique comprend des phénomènes comme l'erreur
d'échantillonnage, l'erreur de préparation ; ces problèmes peuvent introduire une dispersion
statistique ou bien un décalage des résultats si l'erreur commise est toujours la même. Les
appareils dérivent avec le temps, ce qui rend nécessaire leur réétalonnage régulier. On peut
avoir une très faible dispersion statistique, et avoir toutefois un résultat faux... On peut aussi
tout simplement mesurer un paramètre qui ne représente pas de manière pertinente ce que l'on
veut évaluer.
II – CRITERES DE DISPERSION
En mesure physique (métrologie), la dispersion est estimée par l'écart type, qui sert
à calculer l'erreur de mesure. De manière plus générale, il est important de savoir si les valeurs
sont groupées ou au contraire dispersées, ce qui indique si la population est uniforme ou pas
vis-à-vis du critère testé.
L'étendue est la différence entre la valeur maximale et la valeur minimale du
caractère statistique.
Etendue = xmax – xmin
Après avoir calculé la moyenne X , on peut chercher à savoir de quelle façon les
valeurs s'éloignent de cette moyenne. On crée alors une nouvelle série statistique: la série des
écarts.
i ie x X
Le premier réflexe serait de calculer la moyenne de ces écarts. Mais les propriétés
de la moyenne nous assurent que la moyenne des écarts est nulle. En effet, certains de ces
écarts sont négatifs et d'autres sont positifs, la somme des écarts positifs compensant
exactement la somme des écarts négatifs. Il faut donc s'abstraire du signe et calculer alors la
moyenne de la valeur absolue des écarts. C’est ce que l'on appelle l'écart moyen.
n
i
i 1
1x X
n
, dans le cas d'une série discrète non triée.
n
i i n
i 1
i in
i 1
i
i 1
n x X
f (x X)
n
, dans le cas d'une série discrète regroupée.
n
i i n
i 1
i in
i 1
i
i 1
n m X
f (m X)
n
, dans le cas d'une série continue.

CALCULS D’ERREUR CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
PL mise à jour le 13/09/2011 4/6
III – Variance
L'utilisation des valeurs absolues est souvent une impasse en mathématique (parce
que la fonction valeur absolue n'est pas dérivable). Pour rendre positifs les écarts, un autre
outil est à notre disposition: la mise au carré. On ne va donc pas calculer la moyenne des écarts
mais la moyenne des écarts au carré. C'est ce qu'on appelle la variance :
n
2
i
i 1
1(x X)
n
, dans le cas d'une série discrète non triée.
n
2
i i n2i 1
i in
i 1
i
i 1
n x X
f (x X)
n
, dans le cas d'une série discrète regroupée.
n
2
i i n2i 1
i in
i 1
i
i 1
n m X
f (m X)
n
, dans le cas d'une série continue.
En statistique et probabilité, la variance est une mesure arbitraire servant à
caractériser la dispersion d'un échantillon ou d'une population. On la définit comme le carré de
l'écart type. La variance représente la moyenne des carrés des écarts à la moyenne : elle permet
de caractériser, tout comme l'écart type, la dispersion des valeurs xi par rapport à la moyenne.
Dans le cas général, si X est une variable aléatoire :
2 2 2E(x ) E(x)
(moyenne des carrés – carrés des moyennes)
IV - Ecart-type
En mathématiques, l'écart type est une quantité réelle positive, éventuellement
infinie, utilisée dans le domaine des probabilités pour caractériser la répartition d'une variable
aléatoire autour de sa moyenne. En particulier, la moyenne et l'écart type caractérisent
entièrement les lois gaussiennes à un paramètre réel, de sorte qu'ils sont utilisés pour les
paramétrer. Plus généralement, l'écart type, à travers son carré appelé variance, permet de
caractériser des lois gaussiennes en dimension supérieure. Ces considérations ne sont pas sans
importance, notamment dans l'application du théorème central limite.
En statistiques, l'écart type ou déviation standard est défini au contraire pour un
ensemble fini de données numériques interprétées comme la réalisation d'une variable aléatoire.
Il est alors utilisé pour mettre en place des tests, autrement dit, il permet de décider si une
probabilité est plausible compte tenu des valeurs disposées avec une certaine marge d'erreur.
L'écart type est aussi utilisé dans les problèmes de régression linéaire.
Les écarts types connaissent de nombreuses applications, tant dans les sondages,
qu'en physique, ou en biologie. Ils permettent en pratique de rendre compte des résultats
numériques d'une expérience répétée.

CALCULS D’ERREUR CENTRE DE RESSOURCES DE MECANIQUE ET INGENIERIES
PL mise à jour le 13/09/2011 5/6
De par la mise au carré des écarts, l'unité de la variance est le carré de celle du
caractère (si le caractère est en kg, sa moyenne est en kg mais sa variance est en kg2) d'ou
l'impossibilité d'additionner la moyenne et la variance. On a donc défini l'écart type noté .
L’écart type est la racine carrée de la variance (et donc son unité est la même que celle de la
moyenne. Cela a l'air anecdotique mais la possibilité d'additionner moyenne et écart type est
fondamentale, en particulier pour le calcul d'intervalle de confiance.
L'écart type n'est pas modifié si on ajoute ou retranche une constante à la série
statistique. L'écart type est toujours positif et est nul si la série statistique est constante.
Comme la moyenne, l'écart type est sensible aux valeurs extrêmes ou aberrantes et il est
parfois nécessaire d'éliminer ces valeurs avant de faire le calcul de l'écart type.
Lorsque le caractère statistique a une distribution normale gaussienne,
grossièrement en forme de cloche, l'écart type prend tout son sens.
Dans l'intervalle X ;X , on trouve 68% de la population.
Dans l'intervalle X 2 ;X 2 , on trouve 95% de la population.
Dans l'intervalle X 3 ;X 3 , on trouve 99,7% de la population.
On appelle ces intervalles les plages de normalité à niveau de confiance de 68%,
95%, 99,7%.
Copyright © 2022 FDOKUMEN