Câu 1. Hãy giải thích tại sao PLC lại được sử dụng rộng rãi ...
73
Câu 1. Hãy giải thích tại sao PLC lại được sử dụng rộng rãi trong các hệ thống điểu khiên quá trình (Điều khiển công nghiệp)? 3 điểm Đáp án: Vì PLC có những Ưu điểm như sau: -Tính linh hoạt: có thể sử dụng một bộ điều khiển cho nhiều đối tượng khác nhau với các thuât toán điều khiển khác nhau. 0.4 - Dễ dàng thiết kê và thay đổi logic điều khiển: với các hệ thống điểu khiển sử dụng rơle, khi thay đổi logic điều khiển cần có nhiều thời gian để nối lại dây cho các thiết bị và panel điều khiển, và đó là một công việc phức tạp. với hệ thống điều khiển sử dụng PLC, thay đổi logic điều khiển bằng cách thay đổi chương trình thông qua thiết bị lập trình và ngôn ngữ lập Ưình chuyên dùng. Điều đó làm giảm đáng kể thời gian thiết kế hệ thông. 0.5 - Tôi Ưu logic điều khiển: được sự hỗ trỢ của các công cụ mô phỏng và gỡ rối trực tuyến và Ưực quan làm cho hệ thống được thiết kê có tính tôi Ưu hơn. 0.4 - Tốc đô thưc hiên nhanh. 0.4 - Nhỏ, gọn và giá thành thấp. 0.4 - Khả năng bảo mật hệ thống khi sử dụng mã khóa. 0.4 - Khả năng mở rộng và nâng cấp hệ thống: do được chê tạo dưói dạng các modul được chuẩn hóa cho phép ghép nối các thành phần không chỉ của một nhà sản xuất. Đây là một yêu cầu không thể thiếu trong các hệ thống điều khiển hiên đai. 0.5 Câu 2. Hãy trình bày cấu trúc và nguyên lý hoạt động cơ bản của PLC? 3 điểm Đáp án: PLC là thiết bi điều khiển dưa trên bô vi xử lv. các thành phần cơ bản của nó gồm (vẽ hình): - Khối xử lý trung tâm (Central Processing Unit - CPU): Đây là bộ não của hệ thông, có chức năng điều khiển và giám sát toàn bộ hoạt động của hệ thống bằng cách thực hiện tuần tự các lệnh trong bộ nhớ. Bên trong CPU gồm các mạch điều khiển, khối thuật toán và logic, các thanh ghi chuyên dụng và thanh ghi dữ liệu tạm thời. Hoạt động cơ bản của CPU là: đọc lẳn lượt tùhg 0.7
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Câu 1. Hãy giải thích tại sao PLC lại được sử dụng rộng rãi ...

Câu 1. Hãy giải thích tạ i sao PLC lạ i được sử dụng rộng rãi trong các h ệ
thống đ iểu kh iên quá trình (Điều khiển công nghiệp)?
3
điểmĐáp án: Vì PLC có những Ưu điểm như sau:
-Tính linh hoạt: có thể sử dụng một bộ điều khiển cho nhiều đối tượng khác
nhau với các thuât toán điều khiển khác nhau.
0.4
- Dễ dàng thiết kê và thay đổi logic điều khiển: với các hệ thống điểu khiển
sử dụng rơle, khi thay đổi logic điều khiển cần có nhiều thời gian để nối lại
dây cho các thiết bị và panel điều khiển, và đó là một công việc phức tạp. v ớ i
hệ thống điều khiển sử dụng PLC, thay đổi logic điều khiển bằng cách thay
đổi chương trình thông qua thiết bị lập trình và ngôn ngữ lập Ưình chuyên
dùng. Điều đó làm giảm đáng kể thời gian thiết kế hệ thông.
0.5
- Tôi Ưu logic điều khiển: được sự hỗ trỢ của các công cụ mô phỏng và gỡ
rối trực tuyến và Ưực quan làm cho hệ thống được thiết kê có tính tôi Ưu hơn.
0.4
- Tốc đô thưc hiên nhanh. 0.4- Nhỏ, gọn và giá thành thấp. 0.4- Khả năng bảo mật hệ thống khi sử dụng mã khóa. 0.4- Khả năng mở rộng và nâng cấp hệ thống: do được chê tạo dưói dạng các
modul được chuẩn hóa cho phép ghép nối các thành phần không chỉ của một
nhà sản xuất. Đây là một yêu cầu không thể thiếu trong các hệ thống điều
khiển hiên đai.
0.5
Câu 2. Hãy trình bày cấu trúc và nguyên lý hoạt động cơ bản của PLC? 3
điểmĐáp án: PLC là thiết bi điều khiển dưa trên bô vi xử lv. các thành phần cơ
bản của nó gồm (vẽ hình):
- Khối xử lý trung tâm (Central Processing Unit - CPU): Đây là bộ não của
hệ thông, có chức năng điều khiển và giám sát toàn bộ hoạt động của hệ
thống bằng cách thực hiện tuần tự các lệnh trong bộ nhớ. Bên trong CPU gồm
các mạch điều khiển, khối thuật toán và logic, các thanh ghi chuyên dụng và
thanh ghi dữ liệu tạm thời. Hoạt động cơ bản của CPU là: đọc lẳn lượt tùhg
0.7

lệnh từ bộ nhớ, giải mã lệnh, phát tín hiệu điều khiển các thành phần khác và
xử lý dữ liệu.
Khôi nguồn
CPU / -\ -
Bộ nhớ trong--------- 7X---------
X //V Bus hệ thống
Khôi ghép nối vàoV
Khối ghép nối ra
-BỘ nhớ trong (Internal Memory): Bộ nhớ trong là loại bộ nhớ bán dẫn, có 0.7
ưu điểm là tương thích về kích thước và mức logic với các thành phần khác
của hệ thống; tốc độ truy nhập cao; năng lượng tiêu thụ thấp. PLC sử dụng
các loại bộ nhớ sau đây:
-ROM hệ thống: chứa chương trình hệ thống (hệ điều hành) và dữ liệu
cô định được CPU sử dụng. Dữ liệu trong ROM được nhà sản xuất nạp vào
và không thay đổi trong suốt quá trình sử dụng sau này.
-RAM chứa chương trình và dữ liệu của người sử dụng
-RAM làm bộ đệm cho các tín hiệu vào/ra và cho các đối tượng khác
(bộ đếm, định thời...)
-EEPROM để lưu cố định chương tình của người sử dụng cũng như
những dữ liệu cần thiết mà người dùng lựa chọn.
Một phần hoặc toàn bộ RAM có thể được nuôi bằng tụ điện hoặc
nguồn pin bên ngoài. Chương trình của người sử dụng được nạp vào RAM,
sau đó tư động nạp vào EPPROM đề cổ thề lưu trữ vĩnh cửu._______________-Bus hệ thống (System Bus): Bus hệ thống phục vụ cho việc truyền thông 0.7
tin giữa các thành phần trong hệ thống. Thông tin được truyền trong hệ thống
dưới dạng tín hiệu nhị phân. Bus hệ thống gồm có các bus sau:______________

-Bus dữ liệu: bus dữ liệu là bus hai chiều, dùng để truyền tải dữ liệu
giữa các thành phần trong hệ thống.
-Bus địa chỉ: bus địa chỉ là bus một chiều, khi CPU muốn truy cập đến
một thành phần nào đó thì nó cung cấp địa chỉ của thành phần đó lên bus này,
tín hiệu địa chỉ qua bộ giải mã địa chỉ kích hoạt thành phần tương ứng.
-Bus điều khiển: CPU sử dụng bus điều khiển để cung cấp các tín hiệu
điều khiển và nhận các tín hiệu thông báo từ các thành phần.Khối ghép nối vào/ra (Input/Output Interface):
- Khối ghép nối vào có các chức năng sau: nhận tín hiệu vào từ các thiết bị
nhập (ví dụ các cảm biến, chuyển mạch...); biến đổi các tín hiệu vào thành
mức điện áp một chiều; thực hiện cách ly tĩnh điện bằng bộ ghép nối quang;
tạo tín hiệu logic chuẩn đưa đến các mạch trong PLC.
- Khối ghép nối ra hoạt động tương tự khối ghép nối vào: tín hiệu một chiều
chuẩn từ trong PLC qua các mạch biến đổi đến các đầu ra vật lý, cho phép
điều khiển trực tiếp các tải một chiều và xoay chiều công suất nhỏ với các
mức điện áp khác nhau. BỘ ghép nối quang cũng được sử dụng để tránh cho
các mạch bên trong PLC khỏi ảnh hưởng của các thiết bị bên ngoài.
0.7
-Khối nguổn (Power Supply): Khối nguồn có chức năng biến đổi nguồn
điện áp bên ngoài thành các mức điện áp phù hỢp cung cấp cho các thành phần
củaPLC.
0.2
Câu 3. Trình bày cáu trúc và sơ đồ nguyên lý mạch cơ bản của các cổng
vào của PLC?
3
điểmĐáp án: Khối ghép nối vào có các chức năng sau: nhận tín hiệu vào từ các
thiết bị nhập (ví dụ các cảm biến, chuyển mạch...); biến đổi các tín hiệu vào
thành mức điện áp một chiều; thực hiện cách ly tính điện bằng bộ ghép nối
quang; tạo tín hiệu logic chuẩn đưa đến các mạch ttong PLC.
Do đó mạch ghép nối vào có các khối sau:
1.5

-Bộ biến đổi
-Mạch cách ly tĩnh điện
-Mạch logic
Sơ đồ mạch ghép nối vào:
Khối đầu tiên nhận tín hiệu từ các cảm biến, chuyển mạch...Nêu tín
hiệu vào là điện áp xoay chiều thì bộ biến đổi chỉnh lưu thành điện áp một
chiều có giá trị nhỏ. Đầu ra của bộ biến đổi không được đưa ưực tiếp đến
các mạch trong PLC nhằm tránh cho nó khỏi ảnh hưởng của mạch ngoài. Ví
dụ trong trường hỢp bộ biến đổi làm việc không chính xác, thì điện áp xoay
chiều lớn được đưa đến PLC và làm hỏng hệ thống, bởi vì hầu hết các mạch
xử lý chỉ làm việc với điện áp 5V một chiều. Do vậy phải có mạch cách ly để
bảo vệ các mạch Ưong PLC. Mạch cách ly thường sử dụng bộ ghép nối
quang, Tín hiệu được chuẩn hóa về mức logic để đưa vào hệ thống, sơ đồ
nguyên lý của mạch ghép nối vào:
1.5

Câu 4. T h ê nào là vòng quét? Hãy trình bày chi t iế t các giai đoạn làm việc
của PLC thông qua vòng quét?
3
điểmĐáp án: Chức năng của CPU là thực hiện lặp đi lặp lại một chuỗi công
việc. Sự thực hiện các công việc có tính tuần hoàn này gọi là vòng quét (Scan
cycle). Trong mỗi vòng quét, CPU thực hiện hầu hết hoặc toàn bộ các công
việc sau:
- Đọc các đầu vào
- Thực hiện chương trình
- x ử lý các yêu cầu truyền thông
- Thực hiện tự chẩn đoán
- Viết các đầu ra
Có thể biểu diễn vòng quét của CPU như sau:
Viết các đầu z " ' ' s . DOC các đáu vào ra / ^
í JTư chẩn Y J Thực hiện chương trình đoán _____ /
x ử lý các yêu cầu truyền thông
1.5
Đ ọc các đầu vào số. Mỗi vòng quét bắt đầu bằng việc đọc giá trị hiện
thời của các đầu vào số và lưu các giá trị này ở bộ đệm vào. CPU quản lý bộ
đệm dành cho các đẩu vào sô theo từng byte. Nêu CPU hoặc module mở rộng
không có đủ một đầu vào vật lý cho mỗi bit của byte nào đó, thì không thể gán
lại các bit này cho các module tiếp theo cũng như không thể sử dụng chúng
trong chương trình. Tại thời điểm bắt đắu mỗi vòng quét, CPU gán các bit
không sử dụng này bằng 0. Trong trường hỢp các module mở rộng không
được lắp đặt, thì có thể sử dụng các bit đầu vào mở rộng này trong chương
0.5

tình như các bit nhớ thông thường.Thực h iện chương trình. Trong giai đoạn thực hiện chương trình, các
lệnh được thực hiện lần lượt từ lệnh đầu tiên đến lệnh cuối cùng. Các lệnh
vào/ra trực tiếp cho phép truy nhập trực tiếp đến các đầu vào/ra vật lý trong
khi thực hiện chương trình hoặc trình xử lý ngắt. Nêu chương trình có sử
dụng ngắt, thì tình xử lý ngắt chỉ đƯỢc thực hiện khi sự kiện ngắt tương ứng
xuất hiện (sự kiện ngắt có thể xuất hiện tại bất kỳ thời điểm nào trong vòng
quét).
0.4
xử ỉý các yêu cầu truyền thông. Trong giai đoạn này, CPU sẽ xử lý bất kỳ
yêu cẩu nào nhận được từ cổng truyền thông.
0.2
Thực h iện tự chẩn đoán. Trong giai đoạn này, CPU thực hiện kiểm tra phần
lõi của nó (chương trình hệ thống), các module vào/ra, bộ nhớ chương trình
người dùng (chỉ ở chê độ RUN).
0.2
Ghi các đẩu ra số. Tại thời điểm kết thúc mỗi vòng quét, CPU ghi dữ liệu
lưu trong bộ đệm tới các đầu ra vật lý.
0.2
Câu 5. Trình bày cấu trúc và sơ đồ nguyên lý mạch cơ bản của các cổng
ra cùa PLC?________________________________________________________Đáp án: Khối ghép nối ra hoạt động tương tự khối ghép nổi vào: tín hiệu một
chiều chuẩn từ trong PLC qua các mạch biến đổi đến các đầu ra vật lý, cho
phép điều khiển trực tiếp các tải một chiều và xoay chiều công suất nhỏ với
các mức điện áp khác nhau. Bộ ghép nối quang cũng được sử dụng để tránh
cho các mạch bên trong PLC khỏi ảnh hưởng của các thiết bị bên ngoài.
3 điểm
1.5
Từ bộ đệmMạch logic Mạch cách
ly ứnh điện
Đầu ra
Mạch giao tiếp sử dụng rơle, tranzitor, triac cho phép nối trực tiếp PLC với
tải công suất nhỏ. Khi nổi đầu ra với tải công suất lớn cắn cổ mạch cống suất

bẽn ngoài.___________________________________________________________Mạch giao tiếp kiểu rơle: tín hiệu từ PLC được sử dụng để điều khiển
rơle, có khả năng chuyển mạch dòng điện lớn trong mạch tải. Ngoài ra rơle
còn có chức năng cách ly PLC với mạch ngoài. Rơle có khả năng chịu quá tải
trong thời gian ngắn. Tuy nhiên, nhược điểm của rơle là tốc độ chuyển mạch
chậm. Mạch rơle được sử dụng cho cả tải một chiều và xoay chiều.
Từ mạch_ logic
II
PLÓI-wv-
Đầu ra
1.5
Mạch giao tiếp kiểu tranzitor: tín hiệu từ PLC điều khiển tranzitor làm
việc ở chế độ khóa. Ưu điểm của tranzitor là tốc độ chuyển mạch nhanh.
Nhưng dễ bị hư hỏng do quá tải hoặc khi chuyển từ trạng thái thông sang
khóa. Do đó phải sử dụng các mạch bảo vệ. Mạch tranzitor chỉ dùng cho điện
áp một chiều.
Từ mạch logic
LED 1I
Ỷ c1
1
1
A A A 1
p l c !
Đầu ra
Mạch giao tiếp kiểu triac: chuyên dùng với mạch điện xoay chiều, có
tốc độ chuyển mạch nhanh. Nhưng dễ bị hư hỏng do quá tải, nên phải có
mạch bảo vệ.
Như vậy, mặc dù các mạch bẽn trong PLC làm việc với tín hiệu chuẩn 5V

một chiểu, nhưng nhờ có mạch ghép nối ra nên có thể nối trực tiếp PLC với
phụ tải một chiều hoặc xoay chiều có các mức điện áp khác nhau.__________
Câu 6. Hãy trình bày các vùng nhớ cơ bản của PLC S7-200? 3
điểmĐáp án: Các vùng nhớ cơ bản của PLC S7 như sau:
-Vùng nhớ đệm vào I: CPU lấy mẫu các đẩu vào vật lý tại thời điểm bắt
đầu của mỗi vòng quét và ghi các giá trị này ở vùng đệm vào. Chương trình có
thể truy nhập vùng đệm vào theo bit, byte, từ, hoặc từ kép.
0.3
-Vùng nhớ đệm ra Q: Tại thời điểm kết thúc mỗi vòng quét, CPU sao chép
các giá trị được lưu trong vùng đệm ra đến các đầu ra vật lý. Chương trình có
thể truy nhập vùng đệm ra theo bit, byte, từ, hoặc từ kép.
0.3
-Vùng nhớ V: Có thể sử dụng vùng nhớ V để lưu các kết quả trung gian của
các thao tác đang được thực hiện ữong chương trình. Cũng có thể sử dụng
vùng nhớ V để lưu các dữ liệu khác có liên quan đến quá trình điều khiển. Có
thể truy nhập vùng nhớ V theo bit, byte, từ, hoặc từ kép.
0.3
-Vùng nhớ bit M: Có thể sử dụng vùng nhớ bit M như các rơle điều khiển
bên trong. Mặc dù có tên là vùng nhớ bit nhưng có thể truy nhập theo bit, byte,
từ, hoặc từ kép.
0.2
-Vùng nhớ s (Sequence Control Relay - SCR): Các bit thuộc vùng nhớ s được
sử dụng để tổ chức các hoạt động theo một trình tự nào đó của máy móc thành
các đoạn chương tìn h tương đương. Các bit nhớ s được gọi là các rơle điều
khiển trình tự. Nó cho phép phân đoạn chương trình về mặt logic. Có thể truy
nhập vùng nhớ s theo bit, byte, từ, hoặc từ kép.
0.3
-Vùng nhớ đặc b iệt SM: Các bit nhớ đặc biệt SM được sử dụng để giao tiếp
giữa CPU và chương trình của người sử dụng. Chương trình có thể sử dụng
các bit này để lựa chọn và điều khiển một sô chức năng đặc biệt của CPU S7-
200. Có thể truy nhập dữ liệu trong vùng nhớ này theo bit, byte, từ, hoặc từ
kép.
0.3
-Vùng nhớ của các bộ định thòi T: Trong CPU S7-200, các bộ định thời có 0.2

chức năng đếm thời gian. Các bộ định thời S7-200 có các độ phân giải lms,
10ms, lOOms.-Vùng nhớ của các b ộ đếm C: Trong CPU S7-200, các bộ đếm có chức năng
đếm theo sườn dương của xung ở các đầu vào đếm. CPU cung cấp ba loại bộ
đếm: đếm tiến, đếm lùi, đếm cả tiến và lùi.
0.2
-Địa chỉ các đầu vào tương tự AI: PLC S7 biến đổi một giá trị tương tự
(như nhiệt độ hoặc điện áp) thành một giá trị sô có độ dài 16 bit. Việc đọc các
giá trị này bằng cách sử dụng địa chỉ gồm nhận dạng vùng nhớ (AI), kích
thước dữ liệu (W), địa chỉ byte đẩu tiên. Bởi vì các đắu vào tương tự là các từ
và luôn bắt đầu bằng các byte sô chẵn, nên địa chỉ byte là các số chẵn. Các giá
trị đầu vào tương tự là các giá trị chỉ đọc được (read-only).
0.3
-Địa chỉ các đầu ra tương tự AQ: S7-200 biến đổi một giá trị sô 16 bit thành
tín hiệu điện tỷ lệ với giá trị số. Việc ghi các giá trị này bằng cách sử dụng
địa chỉ gồm nhận dạng vùng nhớ (AQ), kích thước dữ liệu (W), địa chỉ byte
đầu tiên. Bởi vì các đầu ra tương tự là các từ và luôn bắt đắu bằng các byte sô
chẵn, nên địa chỉ byte là các sô chẵn. Các giá trị đắu ra tương tự là các giá trị
chỉ ghi được (write-only).
0.3
- Địa chỉ các b ộ đếm tốc độ cao HC: Các bộ đếm tốc độ cao được thiết kê
để đêm các sự kiện có tốc độ rất cao không phụ thuộc vào vòng quét của
CPU. Bộ đếm tốc độ cao có một giá trị hiện thời là sô nguyên không dấu 32
bit. Truy nhập giá trị này bằng cách sử dụng địa chỉ như sau:
0.3
Câu 7. Hãy trình bày việc xác định các đầu vào/ra môdun CPU và mô đun
m ở rộng của PLC S7-200?
3
điểmCác đầu vào/ra tích hỢp trên module CPU có các địa chỉ cô định. Có thể thêm
các đầu vào/ra bằng cách kết nối các module mở rộng về bên phải của CPU
để tạo thành một dãy các đẳu vào/ra. Địa chỉ của các vị trí trên module được
1.5

xác định bằng kiểu vào/ra và vị trí của module ưong dãy, và có liên hệ với địa
chỉ các module cùng kiểu trước đó. Các module mở rộng sô sử dụng bộ đệm
vào/ra theo từng byte. Điều này có nghĩa là nếu một module không có đủ 8 đắu
vào hoặc ra cho một byte trong bộ đệm, thì các bit chưa sử dụng trong byte đó
không thể gán cho các module tiếp theo trong dãy, cũng như không thể dùng
chúng trong chương trình. Đối với module vào, các bit chưa dùng này được xóa
về 0 khi CPU cập nhật đắu vào.
CPU 22410.0QO.O10.1Q0.110.2Q0.210.3 Q0.310.4 Q0.410.5 Q0.510.6 00.6
-10:7--
41/4Q12.0Q2.012.1Q2.112.2Q2.212.3Q2.3
8113.0
13.1
13.2
13.3
13.4
13.5
13.6
-Br?-
4AI/1AQAIWO AQW0 AIW2 AIW4 AIW6
8Q03.0
03.1
Q3.2
03.3
03.4
03.5
Q3.6
-Q3*-
4AI/ 1AQAIW8 AQW4 AIW10 AIW12 AIW14
1.5
Q0.711.0Ql.o11.1
8. Hãy trình bày các phương pháp lập trình và nêu uti nhược điểm'ì-3C1M từng phương pháp trên?11*5 — , , , A X , ----------- ̂ T
3
điểmCách lập trình cho S7 dựa trên ba phương pháp chính: 0.5
- Phương pháp liệt kê lệnh (Statement List - viết tắt là STL),
- Phương pháp hình thang (Ladder Logic - viết tắt là LAD),
- Phương pháp biểu đồ khối chức năng (Function Block Diagram - viết tắt là
FBD).____________________________________________________________-Phương pháp liệt kê lệnh: 1.0
Phương pháp liệt kê lệnh cho phép tạo ra các chương trình điểu khiển
bằng cách nhập mã gợi nhớ của lệnh. Nhìn chung, phương pháp liệt kê lệnh
phù hỢp cho những nhà lập trình chuyên nghiệp. Phương pháp STL cho phép
tạo ra các chương trình mà đỗi khi không thề viết được bằng các phương pháp

LAD hoặc FBD, bởi vì đó là các phương pháp đồ họa nên phải có một sô quy
tắc để vẽ và nối các phần tử cho đúng. Đ ể lập trình bằng phương pháp STL
cần phải hiểu rõ phương thức s ử dụng ngăn x ế p logic, bởi vì các lệnh này can
thiệp vào các bit của ngăn xếp. Các thao tác can thiệp vào ngăn xếp tác động
đến bit đầu tiên hoặc bit đầu tiên và bit thứ hai của ngăn xếp. Giá trị mới có
thể ghi đè hoặc chèn vào bit đầu tiên của ngăn x ếp . Khi giá trị mới chèn vào vị
trí bit đầu tiên thì các bit bị đẩy xuống một vị trí và bit cuối cùng sẽ bị mất.
Thao tác với hai bit đầu tiên s ẽ kéo các bit tiếp theo lên một vị trí.
Ngăn xếp logic là một vùng nhớ gồm có 9 bit liền nhau. Các lệnh chỉ
can thiệp đến bit đầu tiên và bit thứ hai của ngăn xếp.
so Bit đầu tiên của ngăn xếpSI Bit thứ hai của ngăn xếpS2 Bit thứ ba của ngăn xếpS3 Bit thứ tư của ngăn xếpS4 Bit thứ năm của ngăn xếpS5 Bit thứ sáu của ngăn xếpS6 Bit thứ bảy của ngăn xếpS7 Bit thứ tám của ngăn xếpS8 Bit thứ chín của ngăn xếp
-Phương pháp hình thang: 1.0
Phương pháp hình thang được s ử dụng rộng rãi vì có tính trực quan, đơn giản.
Các phần tử trong LAD tương ứng với các phần tử của hệ thống điều khiển
rơle, đó là tiếp điểm, cuộn dây, hộp chức năng và mạng LAD.
Tiếp điểm “ 1 |~: tượng trưng cho tiếp điểm của rơle. Các tiếp điểm có
thể là thường mở hoặc thường đóng
Cuộn dây —( tượng trưng cho cuộn dây của rơle
Hộp (box): tượng trưng cho các hàm, làm việc khi có dòng điện chạy
đến hộp.
Mạng LAD: là đường nối các phần tử thành mạch hoàn thiện từ đường nguồn
bên trái, qua các tiếp điểm đến cuộn dây hoặc các hộp và về đường nguồn
bên phải.

-Phương pháp biểu đồ khối chức năng: 0.5
Phương pháp này sử dụng các khối hộp để biểu diễn các cổng logic (AND,
OR, NOT) và các hàm thực hiện các chức năng (định thời, đếm, toán học...).
Có các đường nối giữa các hộp để tạo thành mạch logic theo yêu cầu. Vì vậy,
phương pháp này tương tự như việc thiết kẽ mạch sổ.
Câu 9. Hãy trình bày ưng dụng PLC xây dựng h ệ thống điều khiển tự
động? trình bày kỹ h ệ thống điểu khiển trình tự?
3
điểmKhi bắt đầu xây dựng một hẹ thống điều khiển trên cơ sở ứng dụng PLC,
một câu hỏi đặt ra là phải thực hiện những công việc theo một quv trình như
thế nào?. Có thể đó không phải là một vấn đề lớn khi xây dụhg một hệ thống
đơn giản. Nhưng đối với những hệ thống phức tạp thì cần phải có một quy
trình thiết kế phù hỢp. Nó giúp cho người thiết kê kiểm soát được quá trình
thực hiện công việc của mình, từ sự mô tả chức năng và yêu cầu của hệ
thống cho đến việc lập chương trình điều khiển cho PLC. Trong chương này
sẽ đưa ra mô hình hệ thống điều khiển trình tự, đề cập đến phương pháp mô
tả chức năng hệ thống điều khiển trình tự và kỹ thuật lập trình điều khiển
trình tự ứng dụng PLC.
1.0
Một hệ thống điều khiển tự động bao gồm các thành phần chính sau:
- Phần điều khiển: phần điều khiển có chức năng tạo ra các lệnh điều
khiển cắn thiết tùy thuộc vào thông tin mà nó nhận được. Các thông tín này có
thể nhận được từ người điều khiển hoặc thông tin phản hồi từ phần chấp
hành thông qua các cảm biến.
- Phần chấp hành: đôi khi còn gọi là phần công suất, nhận lệnh từ phần
điều khiển để thực hiện điều khiển đổi tượng. Phần chấp hành có thể là các
động cơ điện, cuộn dây điện từ, rơle...Mô hình tổng quát của hệ thống điều khiển tự động như sau:
1.0

Hiệu chỉnh bằng tay1
Tác động Báo hiệu
Phần điều khằển
Lệnh điều khiển
Phản hồi
Phần chấp hành
Thông báo trạng thái
Hệ thống điều khiển logic là hệ thống điều khiển thực hiện các chức
năng logic chuyển mạch. Ta có thể mô tả hệ thống điều khiển logic dưới
dạng một mạch logic gồm các đắu vào và đầu ra như sau:
Các đầu vào Hệ thống điều Các đầu ra
Dựa theo mô hình này, có thể chia hệ thống điều khiển thành hai loại: 1.0
-Hệ thông điều khiển tổhỢp: là hệ thống điều khiển mà trạng thái của
các đầu ra chỉ phụ thuộc vào trạng thái của các đầu vào tại thời điểm đang
xét. Có thể biểu diễn hệ thống dưới dạng hàm logic:
Đầu ra = f(đầu vào)
-Hệ thống điều khiển trình tự: là hệ thống điều khiển mà trạng thái của
các đẩu ra không chỉ phụ thuộc vào trạng thái của các đầu vào tại thời điểm
đang xát mà còn phụ thuộc vào trạng thái trước đó của hệ thống. Biểu diễn
hệ thống bằng hàm logic:
Đẩu ra = f(đầu vào, trạng thái hệ thống)
Hệ điều khiển tổ hợp là trường hỢp riêng của hệ điều khiển trình tự,
khi sô trạng thái của hệ thống bằng 1. Hệ thống điều khiển trình tự là hệ
thống phổ biển trong thực tể. Đặc ương của hệ thống điều khiển trình tự là

sự thực hiện lặp đi lặp lại một chuôi các thao tác, tương ứng với một ưạng
thái hoạt động của hệ thống.__________________________________________
Câu 10. Hãy trình bày kỹ qui trình th iế t k ế h ệ thống đ iều khiển tu ần
tư?
3
điểmThiết kế hệ thống điều khiển trình tự ứng dụng PLC gồm có hai nhiệm vụ là
thiết kế phần cứng và thiết kê chương trình điều khiển. Thiết kế chương
trình điều khiển chỉ là một phần trong toàn bộ quá trình thiết kế, nhưng là yếu
tô quan trọng vì nó tạo ra các tài liệu cần thiết giúp cho việc lập trình và gỡ
rối cũng như lập tài liệu hệ thống để lưu trữ sau này. Điều này đặc biệt có ý
nghĩa khi bảo trì và nâng cấp hệ thống.
1.0
Hình dưới đây biểu diễn quy trình tổng quát khi thiết k ế hệ thống điều khiển
trình tự ứng dụng PLC. Phương pháp này cho phép triển khai, lắp đặt phần
cứng và thiết kế chương tình điều khiển được tiến hành độc lập và song
song. Nó cũng cho phép trao đổi thông tin bổ xung giữa các quá trình thiết kê
nhằm hoàn thiện hệ thống theo hướng tôi Ưu nhất. Đối với hệ thống điều
khiển đơn giản thì ít khi đòi hỏi sự hoạch định và thiết kế chương trình, bởi vì
không có nhiều sự liên kết logic giữa các phần trong chương trình. Đối với các
hệ thống phức tạp, cắn thiết kê chương trình có cấu trúc và theo một quy
trình xác định, điều đó làm cho quá trình được kiểm soát, ưánh nhẩm lẫn và
thiếu sót khi thiết kế chương trình, chương trình dễ đọc, hiệu chỉnh, bổ xung,
và lập tài liệu thiết kế.Trong quy trình thiết kế hệ thống điều khiển, một vấn
đề quan trọng là phải mô tả hệ thông điều khiển một cách chính xác, khoa
học, và được chuẩn hóa. Ngoài ra, cách mô tả hệ thống phải tạo điều kiện
thuận lợi cho việc thiết kê chương ưình điều khiển.
1.0

Xác định yêu cắu và chức năng rủa hệ thông----
1.0
Thiết kế phần cứng
Xác định yêu cầu về bộ xử lý, bộ nhớ, vào/ra và các chức năng chuyên dùng ỉ —
Thiết kế chương trình
Lựa chọn và lắp đặt phần cứng
1rLập tài 1 thuât—
iệu kỹ
Yêu cầu đối với quá trình điều khiển
Chia quá trình điều khiển thành các khối
-chát-năng
Mô tả chức năng các khối
Lập trình cho các khối chức năng
Liên kết chương trình, mô phỏng và hiệu chỉnh
ĩLập tài liệu
Chạy thử trên thiết bị, hiệu chỉnh và hoàn thiện hệ thống-----------------------------------------------------------
Câu 11. Hãy trình bảy các phương pháp mô tả h ệ thống điều khiển? ___3

Trình bày chi t iế t phương pháp lưu đồ? điểmSự mô tả hệ thống điều khiển một cách chi tiết bằng lời thường dài, khó theo
dõi, không trong sáng và không chính xác. Nó chỉ được sử dụng để mô tả một
cách khái quát nhất các chức năng và yêu cầu của hệ thống. Đ ể mô tả hệ
thống điều khiển đáp ứng được các yêu cầu đã nêu thì trước hết cần phải chia
quá trình điều khiển thành các khối chức năng nhỏ, mỗi khối này ngoài các
đầu vào/ra vật lý còn có các đầu vào/ra logic để liên kết các khối lại với nhau.
Mỗi khối chức năng là những hệ thống điều khiển dạng tổ hỢp hay trình tự.
Như vậy, ta đã làm đơn giản hóa hệ thống bởi vì hệ thống điều khiển Ưình tự
ban đắu đã được chia thành các hệ thống điều khiển Ưình tự nhỏ và cả hệ
thống tổ hỢp - là hệ thống đơn giản hơn trong việc thiết kế.
Các phương pháp mô tả hệ thống điểu khiển gồm:
- Phương pháp logic rơle và cổng logic
- Phương pháp lưu đò
- Phương pháp sơ đò chức năng
1.5
-Phương pháp lưu đồ:
Phương pháp này thường dùng khi thiết kê chương trình cho máy tính, cũng
là phương pháp phổ biến để mô tả trình tự hoạt động của một hệ thống
điều khiển. LƯU đồ có quan hệ trực tiếp đến sự mô tả bằng lời hệ thống
điều khiển, chỉ ra điều kiện cắn kiểm ưa ở từng bước và các thao tác xử lý
trong bước đó. Phương pháp này có nhược điểm là chiếm nhiều không gian
khi mô tả hệ thống lớn.
1.5

Câu 12. Hãy trình bày các phương pháp mô tả h ệ thống điều khiển?
Trình bày chi t iế t phương pháp sơ đồ chức năng?
3
điểmSự mô tả hệ thống điều khiển một cách chi tiết bằng lời thường dài, khó theo
dõi, không trong sáng và không chính xác. Nó chỉ được sử dụng để mô tả một
cách khái quát nhất các chức năng và yêu cầu của hệ thống. Đ ể mô tả hệ
thống điều khiển đáp ứng được các yêu cầu đã nêu thì ưước hết cần phải chia
quá trình điều khiển thành các khối chức năng nhỏ, mỗi khối này ngoài các
đầu vào/ra vật lý còn có các đầu vào/ra logic để liên kết các khối lại với nhau.
Mỗi khối chức năng là những hệ thống điều khiển dạng tổ hỢp hay trình tự.
Như vậy, ta đã làm đơn giản hóa hệ thống bởi vì hệ thống điều khiển trình tự
ban đầu đã được chia thành các hệ thống điều khiển tình tự nhỏ và cả hệ
thống tổ hỢp - là hệ thống đơn giản hơn trong việc thiết kế.
Các phương pháp mô tả hệ thống điều khiển gồm:
- Phương pháp logic rơle và cổng logic
- Phương pháp lưu đò
Phươnq pháp sơ đò chức nănq
1.5

-Phương pháp sơ đò chức năng:
Phương pháp này ngày càng trở nên phổ biến để mô tả các hoạt động
trình tự, cho pháp thể hiện một cách chi tiết các thao tác xử lý ở một trạng thái
(hay bước) cũng như ưình tự hoạt động của quá trình điều khiển.với cách
dùng các ký hiệu gọn và cô đọng cho phép mô tả hệ thống mạch lạc và rõ
ràng, mô tả được các chức năng chuyên dùng của các máy móc và quá trình,
không những gần gũi với các hoạt động của các cơ cấu máy hay quá trình mà
còn là công cụ hỗ trỢ đắc lực khi kiểm tra và chạy thử hệ thống.
1.5
1
4 ------
r
Điều kiên khởi đông
Bước1
--------►x ử lý 1
'
4------
r
Điều kiên chuyển bước
BướcT
--------►Xử lý 2
'
< * -----r
Điều kiên chuyển bước
Câu 13. Hãy trình bày các cách truy cập của PLC S7-200? 3
điểmCPU S7-200 lưu trữ dữ liệu ở các vị trí khác nhau trong bộ nhớ, mỗi vị
trí nhớ có một địa chỉ duy nhất. Chương trình có thể sử dụng địa chỉ của vị trí
nhớ để truy nhập dữ liệu trong bộ nhớ. Cách truy nhập này gọi là định địa chỉ
trực tiếp.
Đ ể truy nhập đến một bit trong một vùng nhớ nào đó, chương trình phải
chỉ rõ địa chỉ gồm tên vùng nhớ, địa chỉ byte, và địa chỉ bit. Địa chỉ byte và địa
chỉ bit ngăn cách nhau bởi dấu (.). Chê độ địa chỉ này gọi là chê độ định địa
2.0

chỉ bit.
Định dạng địa chỉ:
[Tên vùng nhớ][Địa chỉ byte].[Địa chỉ bit]
Ví dụ: 13.4
Trong đó:
I: tên vùng nhớ (vùng nhớ đệm vào)
3: địa chỉ byte
4: địa chỉ bit
7 6 5 4 3 2 1 0I 0 I 1 I 2 I 3 I 4 I 5 I 6 I 7 I 8 I 9 I 10 I 11 I 12
Chương trình có thể truy nhập dữ liệu trong các vùng nhớ theo byte, từ (word),
hoặc từ kép (double word) bằng cách chỉ rõ địa chỉ gồm tên vùng nhớ, kích
thước dữ liệu (byte - B, từ - w, hoặc từ kép - DW), và địa chỉ byte đầu tiên.
Chế độ địa chỉ này gọi là chế độ định địa chỉ byte.
Định dạng địa chỉ: [Tên vùng nhớ][Kích thước][Địa chỉ byte đầu tiên]
Ví dụ: VB100, VW100, VD100
7 0V B 1 0 0 V B 1 0 0
15 £7 0VW 100 V B 1 0 0 V B 10 1
31 24Ỉ3 16L5 87V D 1 0 0 V B 1 0 0 V B 1 0 1 V B 1 0 2 V B 1 0 3
1.0

Câu 1: Hãy phân tích và viết chương trình PLC thực hiện trạm rót nhiên liệu. Nguyên lý làm việc của hệ ứiông như sau:- Băng tải A được quay bởi động cơ MA thực hiện cấp các lon, các lon này được chuyển sang băng tải B sử dụng xilanh C3 khi cảm biến S6 báo có lon trên băng tải Xinh lanh trở về vị trí ban đầu khi cảm biến SI báo.- cảm biến S2 phát hiện có lon trên băng tải B, đây là điều khiển cho phép băng tải B chuyển. Băng tải B chuyển động khoảng khoảng 0.5m sử dụng cảm biến S3 (Sử dụng động cơ bang tải MB và phanh điện từ DTB).- Đổng thời với băng tải B chuyển động, thực hiện mở xilanh C1 để chất lỏng chảy tù thùng chứa TA vào thùng định lượng TB, quá trình này sẽ báo hết nhiên liệu trong thùng A bằng còi và bằng đèn khi S5 chuyển trạng thái xuống 0. Quá trình này dừng lại khi cảm biến S4 báo.- Khi S3 báo, thực hiện mở xilanh C2 để rót chất lỏng vào chai (Thời gian rót được đặt 10 giây).- Khi quá trình rót được thực hiện xong (thời gian 10 giây hết), quá trình trên lại được lặp lại.
Tran rót nhiên liêu vào chai
Chú ý: Khi thực hiện phải làm những bước sau:- Phân tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nếu sô đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)_______ - Xây dựng lưu đò thuật toán_________________________________________________
í5điểm)

- Viết chương trìnhTrả lời: Điểm1. Phân tích bài toán đê xác định số đầu và kiêu loại vào/raBài toán gồm các đẩu vào/ra như sau:
1
Stt Ký hiệu Đia chỉ Kiểu tín hiêu Giải thích1 Start 10.0 Đắu vào Núm ấn để hệ thống bắt đầu2 Stop 10.1 Đầu vào Núm ấn dừng hệ thống3 SI 10.2 Đẩu vào cảm biến báo hết hành trình của
xilanh4 S2 10.3 Đắu vào Báo có chai trên trên băng tải B
ở vị trí từ băng tải A sang.5 S3 10.4 Đắu vào Báo chai ở vị trí cho phép rót
nhiên liêu6 S4 10.5 Đắu vào Báo nhiên liệu trong thùng
định lượng đã đầy7 S5 10.6 Đẩu vào Báo hế t nhiên liệu thùng chứa
A8 S6 10.7 Đắu vào Báo có chai ở băng tải A9 C1 QO.O Đẩu ra Điều khiển xilanh C110 C2 Q0.1 Đầu ra Điều khiển xilanh C211 C3 Q0.2 Đầu ra Điều khiển xilanh C312 MA Q0.3 Đầu ra Động cơ băng tải A13 MB Q0.4 Đẩu ra Động cơ băng tải B14 DTB Q0.5 Đầu ra Phanh điên từ15 Fault Q0.6 Đầu ra Đèn báo hết nhiên liêu16 Buzz Q0.7 Đầu ra Còi báo hết nhiên liêu
2. Chon PLC:với đầu vào ra như trên 8 vào và 8 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra núm Start. nếu ấn. cho phép hê thông vào chê đô làm viêc. bât đông cơ quay băng tải A (MA).Kiểm tra núm Stop. Nêu Stop = 1 then dừng hệ thống, ngƯỢc lại chuyển sang bước 2 Bước 2: Kiểm tra đầu vào cảm biến S6 và S2. Nêu S6 = 1 và S2 = 0 thì cấp điên cho xilanh C1 để đẩy lon sang băng tải B, ngƯỢc lại chuyển sang bước 1.Bước 3: Kiểm tra đầu vào cảm biến Sl. Nêu SI = 1 thì ngắt điên cho xilanh C1 để xilanh trở về trạng thái ban đầu, ngược lại chuyển sang bước 3.Bước 4: Kiểm tra đầu vào cảm biến S3 và S2. Nêu S2 = 1 và S3 = 0 thì thưc hiên những thao tác sau:
- Ngắt điện phanh điện từ DTB và cấp điện cho động cơ quay băng tải B (MB)
- Cấp điện cho xilanh C1- Kiểm tra đầu vào cảm biến S3. Nêu S3 = 1 đù dừng động cơ MB và cấp
1.0

điện cho phanh từ DTB- Kiểm tra cảm biến S4, nếu S4 = 1 thì ngắt điện xilanh C1- Kiểm tra cảm biẽn S5, nếu S4 = 0 thì bật đèn và báo còi để thông báo hết
nhiên liệu trong thùng chứa TA (đèn Fault và còi Buzz).- Nêu S3 = 1 và S4 = 1 thì chuyển sang bước 5. NgƯỢc lại trở lại bước 4.
Bước 5: Kiểm tra đắu vào cảm biến S3 và và cờ báo chưa rót nhiên liêu. Nêu S3 = 1 và cờ báo chưa rót nhiên liệu báo FALSE thì:
- Cấp điện cho xilanh C2- Bật timer để trễ 10 giây
Bước 6: Kiểm tra cờ trang thái đổng hồ thời gian rót. Nêu cờ có logic 1 thì chuvên sang bước 1. NgƯỢc lại trở về bước 64. Viết chương trình: Theo thuật toán và cách sử dụng lệnh của học viên 2.5

Câu 2: Hãy phân tích và viết chương trình PLC thực hiện quá trình điều khiển đóng náp chai.Nguyên lý làm việc của hệ ứiông như sau :
Cấp điện cho băng tải A cho đến khi cảm biến SI báo có chai ở vị trí đóngnắp.
Cấp điện cho xilanh C2 cho đến khi cảm biến S7 bật lên,MỞ xilanh C1 một phần đến khi cảm biến S3 bật lên và cùng thời điểm này
cấp điện cho van VI để hút khí tạo chân không để giữ nắp.Thu xilanh C2 vào cho đến khi cảm biến S6 bật lênMỞ xi lanh C1 cho đến khi cảm biến S2 bật lên và đồng thời ngắt điện cho
van VI để thả nắp.Thu xilanh C1 vào cho đến khi cảm biến S8 bật lêncảm biến S5 sử dụng để kiểm tra nắp đã được đóng chưa và đếm sản phẩm Lặp lại chu tình như trên
T rạn đóng nấỊ) chai
(5điểm)
Băng tải Động cơ băng tải
Chú ý : Khi thực hiện phải làm những hước sau:- Phân tích bài toán đ ể xác định số đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nếu sô đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng lưu đò thuật toán- Viết chương ữình

Trả lòi: Điểm1. Phân tích bài toán đ ể xác định số đầu và kiểu loại vào/raBài toán gổm các đâu vào/ra như sau:
1
Stt Ký hiệu Đia chỉ Kiểu tín hiêu Giải thích1 Start 10.0 Đắu vào Núm ấn để hệ thông bắt đầu2 Stop 10.1 Đầu vào Núm ấn dừng hệ thống3 SI 10.2 Đầu vào cảm biến báo có chai ở vị trí
đóng nắp4 S2 10.3 Đắu vào cảm biến báo hết hành trình của
xilanh C1 (vị trí mà đủ lực ép nắp vào chai).
5 S3 10.4 Đẩu vào c ả m biến báo vị trí xilanh C1 ở vị trí giữa
6 S4 10.5 Đắu vào Báo hành trình trở về hết của xilanh C1
7 S5 10.6 Đầu vào c ả m biến báo nắp đã được đóng và cũng sử dụng để đếm sản phẩm.
8 S6 10.7 Đẩu vào Báo hành trình trở về hết của xilanh C2
9 S7 11.0 Đầu vào Báo hành trình ra hết của xilanh C2
10 C1 QO.O Đầu ra Điều khiển xilanh C111 C2 Q0.1 Đầu ra Điều khiển xilanh C212 MB Q0.3 Đầu ra Động cơ băng tải B13 VI Q0.4 Đầu ra Van hút chân không
2. Chon PLC:với đầu vào ra như trên 9 vào và 4 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra núm Start. nếu ấn. cho phép hê thống vào chê đô làm viêc. bât đông cơ quay băng tải B (MB).Kiểm tra núm Stop. Nêu Stop = 1 then dừng hệ thống, ngƯỢc lại chuyển sang bước 2 Bước 2: Kiểm tra đẩu vào cảm biến S6 và S2. Nêu S6 = 1 và S2 = 0 thì cấp điên cho xilanh C1 để đẩy lon sang băng tải B, ngƯỢc lại chuyển sang bước 1.Bước 3: Kiểm ưa đầu vào cảm biến Sl. Nêu SI = 1 thì ngắt điên cho xilanh C1 để xilanh trở về trạng thái ban đẩu, ngƯỢc lại chuyển sang bước 3.Bước 4: Kiểm tra đầu vào cảm biến S3 và S2. Nêu S2 = 1 và S3 = 0 thì thưc hiên những thao tác sau:
- Ngắt điện phanh điện từ DTB và cấp điện cho động cơ quay băng tải B (MB)
- Cấp điện cho xilanh C1- Kiểm tra đầu vào cảm biên S3. Nêu S3 = 1 thì dùhg động cơ MB và cấp
1.0

điện cho phanh từ DTB- Kiểm tra cảm biến S4, nếu S4 = 1 thì ngắt điện xilanh C1- Kiểm tra cảm biến S5, nếu S4 = 0 thì bật đèn và báo còi để thông báo hết
nhiên liệu trong thùng chứa TA (đèn Fault và còi Buzz).- Nêu S3 = 1 và S4 = 1 thì chuyển sang bước 5. NgƯỢc lại trở lại bước 4.
Bước 5: Kiểm tra đầu vào cảm biến S3 và và cờ báo chưa rót nhiên liêu. Nêu S3 = 1 và cờ báo chưa rót nhiên liệu báo FALSE thì:
- Cấp điện cho xilanh C2- Bật timer để trễ 10 giây
Bước 6: Kiểm tra cờ trang thái đồng hổ thời gian rót. Nêu cờ có logic 1 thì chuvên sang bước 1. NgƯỢc lại trở về bước 64. Viết chương trình: Theo thuật toán và cách sử dụng lệnh của học viền 2.5

Câu 3: Hãy phân tích và viết chương trình PLC thực hiện quá trình điều khiển (5 điểm)đưa nhiên liêu vào chai.
(^Ã )̂ Thùng chúà A
\ Thùng định luọhg B
C1
Thùnq đinh lươnq B - Rỗnq
S6 O SD
Thùnq đinh lươnq B - Đầy
S6 c s » ,
Nguyên lý làm việc của hệ ứiông như sau:- Khi có chai ở vị trí rót (được xác định bởi cảm biến S3).- Để chất lỏng chảy từ thùng A sang thùng B được điều khiển bởi xilanh Cl. Khi đóng xilanh C1 để ngăn chất lỏng từ thùng A sang thùng B, dừng cấp cấp điện khi cảm biến S7 = l.- Hệ thông ra lệnh mở xilanh C2 để cho chất lỏng trong thùng B vào chai (vị trí hết hành ứình mở van thùng chứa B được xác định bởi cảm biến S4 và vị trí đóng kín được xác định bởi cảm biến S5).- Mức chất lỏng trong chai được xác định bởi cảm biến S8, S9.Chú ỷ : Khi thực hiện phải làm những bước sau:
- Phân tích bài toán đ ể xác định số đầu và kiểu loại vào/ra

- Chọn PLC và mô đun mở rộng (nếu cần - Nêu số đầu vào/ra quá nhiều thì cần phải chọn thêm mô đun mở rộng)
- Xây dựng lữu đò thuật toán- Viết chương trình
T rả lời: Điểm1. Phân tích bàỉ toán đ ể xác định số đầu và kiểu loại vào/raBài toán gồm các đầu vào/ra như sau:
1
Stt Ký hiệu Đia chỉ Kiểu tín hiêu Giải thích1 Start 10.0 Đầu vào Núm ấn để hệ thống bắt đầu2 Stop 10.1 Đắu vào Núm ấn dừng hệ thống3 S2 10.2 Đẩu vào cảm biến báo hết hành trình của
xilanh4 S3 10.3 Đẳu vào Báo có chai trên trên băng tải B
ở vị trí từ băng tải A sang.5 S4 10.4 Đầu vào Báo chai ở vị trí cho phép rót
nhiên liêu6 S5 10.5 Đắu vào Báo nhiên liệu trong thùng
định lượng đã đắy7 S6 10.6 Đầu vào Báo hế t nhiên liệu thùng chứa
A8 S7 10.7 Đắu vào Báo có chai ở băng tải A9 S8 11.0 Đầu vào10 S9 11.1 Đầu vào11 C1 QO.O Đầu ra Điều khiển xilanh C112 C2 Q0.1 Đầu ra Điều khiển xilanh C213 C3 Q0.2 Đầu ra Điều khiển xilanh C314 MA Q0.3 Đầu ra Động cơ băng tải A
2. Chon PLC:với đẩu vào ra như trên 10 vào và 4 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra núm Start. nếu ấn. cho phép hê thống vào chê đô làm viêc. Kiểm tra núm Stop. Nêu Stop = 1 then dừng hệ thống, ngược lại chuyển sang bước 2 Bước 2: Kiểm tra cảm biến S3. nêu S3 = 1 thĩ:
- MỞ xilanh 1 cho đến khi S5 = 1- Kiểm tra nếu S8 = 1 và S9 = 1 thì đóng xilanh C1- Xilanh C1 được cấp điện đến khi cảm biến S4 = 1.
Bước 3: Bât đông cơ băng tải MA nêu S2 = 1 để quav băng tải cho đến khi cảm biến S3=l. NgƯỢc lại lặp lại bước 3 Bước 4: Chuyển về bước 1.
1.0
4. Viết chương trình: Theo thuật toán và cách sử dụng lệnh của học viên 2.5

Top view
Câu 4: Hãỵ phân tích và viết chương trình PLC thực hiện quá trình điếu khiểnvận chuyển hàng tự động như trên hình vè sau:
(5 điểm)
S6
C3
□
□
S4
S5
S I □
MR
□ S1C1
S2□
C2
S3
_EL
TT u
Nguyên lý làm việc như sau:sản phẩm đầu vào được đưa vào bởi băng tải quay bởi động cơ MR.Khi cảm biến S3 = 1 thì cấp điện cho C2 và trễ 1 thời gian sao cho xilanh
đi hết hành trình đẩy sản phẩm đến đúng vị trí. Đồng thời lúc này cấp điện cho C1 cho đen khi S2 = l!
SI là cảm biến sử dụng để đếm sô sản phẩm đã được đẩy sang vị trí xếphàng.
Khi S6 = 1 và bộ đếm báo đã có 3 sản phẩm được xilanh C2 đẩy đi, thì cấp điện cho C3 đẩy sản phẩm từ A sang B. Ngắn điện được xác định bởi các cảm biềnS4vàS5.
Khi S9 = 1 và S4 = 1 thì cấp điện cho xilanh C4 để đẩy sản phẩm lên xe, cho đến khi S7 = 1 thì cấp điện để xilanh về vị t í ban đầu (xác định bởi S8 = 1)
Hành trình trên được lặp đi lặp lại.
Chú v: Khi thực hiện phải làm những bước sau:

- Phân tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nêu sô đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng lữu đò thuật toán- Viet chươnq ữình
Trả lời: Điểm1. Phân tích bài toán đ ể xác định số đầu và kiểu loại vào/raBài toán gồm các đầu vào/ra như sau:
1
Stt Ký hiệu Đia chỉ Kiểu tín hiêu Giải thích1 Start 10.0 Đầu vào Núm ấn để hệ thống bắt đầu2 Stop 10.1 Đẩu vào Núm ấn dừng hệ thống3 SI 10.2 Đầu vào cảm biến đếm sản phẩm4 S2 10.3 Đầu vào cảm biến báo xilanh vể vị trí
ban đầu5 S3 10.4 Đẩu vào Báo sản phẩm đã sẵn sàng
cho đẩy sang vị trí A6 S4 10.5 Đầu vào cảm biến báo xilanh về vị trí
ban đầu7 S5 10.6 Đẩu vào cảm biến báo xilanh ở vị trí mở
hết cỡ8 S6 10.7 Đầu vào cảm biến báo đã đủ số sản
phẩm ở vị t í A9 S7 11.0 Đầu vào cảm biến báo xilanh ở vị trí mở
hết cỡ10 S8 11.1 Đẩu vào cảm biến báo xilanh về vị trí
ban đầu11 S9 11.2 Đầu vào cảm biến báo sản phẩm đã ở vị
trí để đẩy sang xe.12 Cl QO.O Đầu ra Điều khiển xilanh C113 C2 Q0.1 Đầu ra Điều khiển xilanh C214 C3 Q0.2 Đầu ra Điều khiển xilanh C315 C4 Q0.3 Đầu ra Điều khiển xilanh C416 MR Q0.3 Đầu ra Động cơ băng tải A
2. Chon PLC:với đắu vào ra như trên 11 vào và 5 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra núm Start, nếu ấn. cho phép hê thống vào chế đô làm viêc. Kiểm tra núm Stop. Nêu Stop = 1 then dừng hệ thông, ngược lại chuyển sang bước 2 Bước 2: Cap điên chó đông cơ quav băng tải MR Bước 3: Đêm sô sản phẩm mỗi khi SI = 1.Bước 4: Nêu SI chuvển trane thái từ 1 xuốne 0, thưc hiên trễ 2 giâv rồi cấp điên cho xilanh Cl. Nêu cảm biến S3, nếu S3 = 1 thì:
- MỞ xilanh C2
1.0

- Trễ khoảng 10 giây Bước 5:
- Sau khi hêt thời gian trễ cắt điện cho xilanh C2- Khi S2 = 1 và sô sản phẩm nhỏ hơn 3 thì cắt điện để xilanh C1 tự trả về
Bước 6: Khi bô đếm báo đã có 3 sản phẩm và cảm biến S6 = 1. cấp điên cho xilanh C3 cho đến khi S5 = 1 thì cắt điện. Xóa bộ đếm đếm sản phẩm.Bước 7: Khi cảm biến S9 = 1 và S4 = 1 thì cấp điên chò xilanh C4. Khi S7 = 1 thì cắt điện xilanh C4.Bước 8: Chuvển về bước 1.4. Viết chương trình: Theo thuật toán và cách sử dụng lệnh của học viên 2.5

Câu 5: Hãy phân tích và viết chương trình PLC thực hiện quá trình điều khiển rót nhiên liệu tự động như trên hình vẽ sau. Chát lỏng được bơm vào 2 thùng chứa bởi động cơ bơm và van VI và V2. Việc xác định hai thùng đầy và cạn thông qua các cảm viến UL1, LL1 và UL2, LL2. Các van V3, V4 cho phép chất lỏng chảy vào thùng xe.
(5 điểm)
V I V 2
lULl— 1
A LL1 B=>
UL2
LL2
Motor
Nguyên lý làm việc như sau:Khi xe vào vị trí, người vận hành ấn núm Start để bắt đầu thực hiện quá trình bơm.- Khởi động cơ bơm. Các van V3, V4 đóng- MỞ van VI và V2 để nhiên liệu bơm vào hai thùng định lượng A và B- Khi các cảm biến UL1 = 1 và UL2 = 1 thì đóng van VI và V2 và ngắt điện cho bơm- MỞ các van V3 và V4 cho đến khi LL1 = 0 và LL2 = 0 thì đóng các van này lại- Lặp lại cho đến khi đủ định lượng là mỗi thùng được bơm 3 lần thùng đính lượng
Chú ý : Khi thực hiện phải làm những bước sau:- Phân tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nêu cần - Nêu sô đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng lữu đô thuật toán- Viết chương ữình

Trả lòi: Điểm1. Phân tích bài toán đ ể xác định số đầu và kiểu loại vào/raBài toán gổm các đâu vào/ra như sau:
1
Stt Ký hiệu Đia chỉ Kiểu tín hỉêu Giải thích1 Start 10.0 Đầu vào Núm ấn để hệ thống bắt đầu2 Stop 10.1 Đẩu vào Núm ấn dừng hệ thống3 SI 10.2 Đẩu vào cảm biến đếm sản phẩm4 UL1 10.3 Đầu vào cảm biến báo mức cao thùng
định lượng A5 LL1 10.4 Đẩu vào cảm biến báo mức thấp thùng
định lượng A6 UL2 10.5 Đẩu vào cảm biến báo mức cao thùng
định lượng B7 LL2 10.6 Đẩu vào cảm biến báo mức thấp thùng
định lương B8 VI QO.O Đầu ra Điều khiển van 19 V2 Q0.1 Đầu ra Điều khiển van 210 V3 Q0.2 Đầu ra Điều khiển van 311 V4 Q0.3 Đầu ra Điều khiển van 412 PUMP Q0.3 Đầu ra Động cơ băng tải A
2. Chon PLC:với đầu vào ra như trên 11 vào và 5 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra núm Start. nếu ấn. cho phép hê thống vào chê đô làm viêc. Kiểm tra núm Stop. Nêu Stop = 1 then dừng hệ thống, ngược lại chuyển sang bước 2 hoặc SÔ lẩn thùng địng lượng nhỏ hơn 3.Bước 2: Cap điễn cho đông cơ bơm nhiên liêu PUMP Bước 3: MỞ van VI và V2. đóng van V3 và V4.Bước 4: Kiểm tra van UL1 và ƯL2. Nêu ƯL1 = 1 thì cắt điên van VI và cắt V2 khi UL2 = 1. NgưỢc lại chuyển lại bước 4.Bước 5: Nêu UL1 = 1 và UL2 = 1. thì ngắt điên đông cơ bơm nhiên liêu PUMP. MỞ van V3 và V4 để nhiên liệu chảy vào thùng xe.Bước 6: Đóng các van V3 và V4 tương ứng khi các cảm biến LL1 và LL2 chuvển trạng thái từ 1 xuống 0.Bươc 7: Chuyển về bước 1.
1.0
4. Viết chương trình: Theo thuật toán và cách sử dụng lệnh của học viên 2.5

Câu 6: Hãy phân tích và viết chương trình PLC đảo chiều tự động động cơ. Khi ấn nút START, vật M chuyển động vế bên ữái cho đến khi SI đóng lại. Khi SI đóng lại, chương trình thực hiện đảo chiều động cơ. Khi vật M chuyển động đóng công tắc S2, chương trình thực hiện đảo chiều động cơ. Quá trình trên được thực hịên tự động và chỉ khi dừng khi ấn nut STOP
Chú ý : Khi thực hiện phải làm những bước sau:- Phân tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nếu sô đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng lưu đò thuật toán- Viết chương ữình
A 5điểm)
Trá lời: Điểm1. Phân tích bài toán đ ể xác định số đẩu và kiểu loại vào/ra
Stt Ký hiệu Đia chỉ Kiểu tín hiêu Giải thích1 Start 10.0 Đắu vào Núm ấn để hệ thống bắt đầu2 Stop 10.1 Đẩu vào Núm ấn dừng hệ thống3 SI 10.2 Đầu vào Đầu vào giới hạn từ cảm biến
SI4 S2 10.3 Đắu vào Đầu vào giới hạn từ cảm biến
SI5 Thuận QO.O Đầu ra Rơle cấp nguồn cho động cơ
quay thuận6 Thuận Q0.1 Đầu ra Rơle cấp nguồn cho động cơ
quay ngược2. Chon PLC:với đẩu vào ra như trên 4 vào và 2 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra núm Start, nếu ấn, cho phép động cơ sẽ chạy theo một chiều hoặc thuận, hoặc ngƯỢc (tùy theo cách lập trình)_____________________________________
1.0

Bước 2: Kiểm ữa cảm biến SI- Nêu SI = 1 thì thực hiện đảo chiều động cơ,- Bêu SI = 0 thi khồng thay đổi gì.- Chuyển sang bước 4
Bước 3: Kiểm tra cảm biến S2- Nêu S2 = 1 thì thực hiện đảo chiều động cơ,- Bêu S2 = 0 thi không thay đổi gì.- Chuyển sang bước 4
Bước 4: Đông cơ chav theo chiều đang đươc lưa chonBước 5: Kiểm tra núm Stop. Nêu Stop = 1 then dừng hê thống, ngươc lai chuvển sang bước 24. Viết chương trình: Tùy theo thuật toán và cách sử đụng lệnh của học viên 2.5
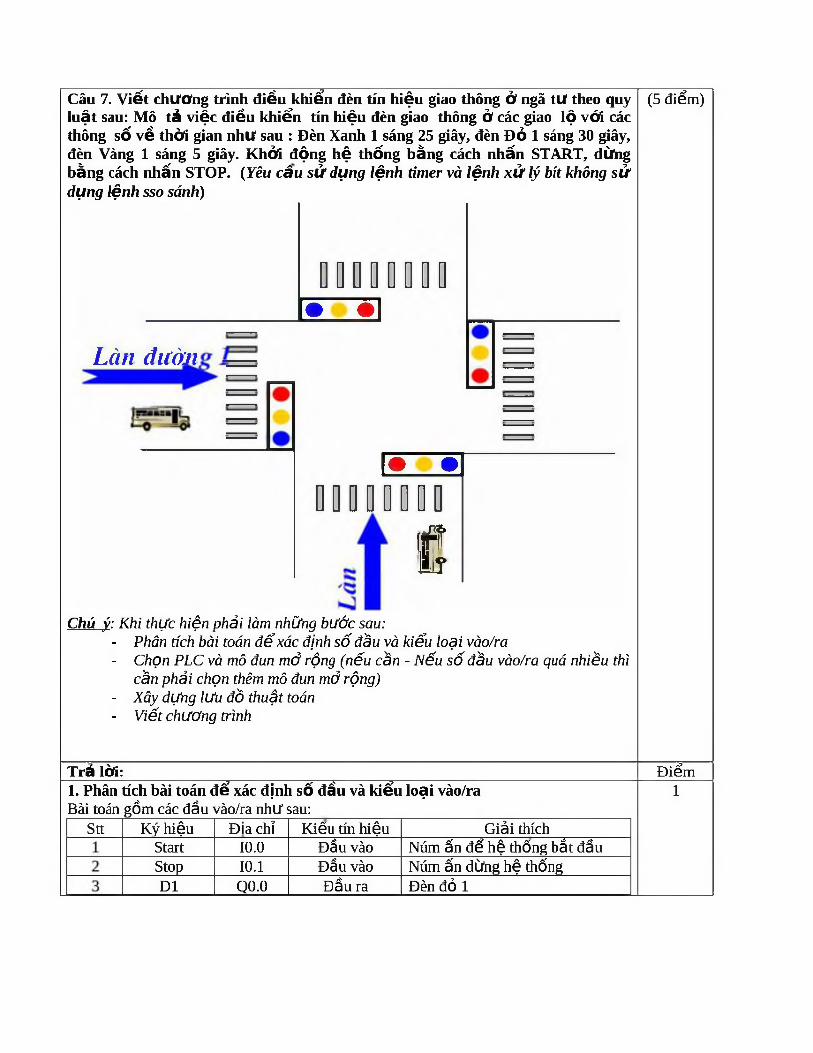
Câu 7. Viết chương trình điếu khiển đèn tín hiệu giao thông Ở ngã tư theo quy luật sau: Mô tả việc điểu khiển tín hiệu đèn giao thông ở các giao lộ với các thông số về thời gian như sau : Đèn Xanh 1 sáng 25 giây, đèn ĐỎ 1 sáng 30 giây, đèn Vàng 1 sáng 5 giây. Khởi động hệ thống bằng cách nhấn START, dừng bằng cách nhấn STOP. (Yêu câu sử dụng lệnh tìmer và lệnh xử lý bít không sử dụng lệnh sso sánh)
D D D D D Ũ D Do
(5 điểm)
Làn đườn
ĩ * — »
Q D Q Q Q Ũ Q D
é
Chú ý : Khi thực hiện phải làm những bước sau:- Phân tích bài toán đ ể xác định số đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nếu số đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng lưu đò thuật toán- Viết chương ữình
Trả lời:1. Phân tích bài toán để xác định số đầu và kiểu loại vào/raBài toán gồm các đầu vào/ra như sau:_________
Điểm1
Stt Ký hiệuStartStopDI
Đia chỉ10.010.1QO.O
Kiêu tín hiệuĐầu vàoĐắu vào Đầu ra
_________ Giải thích_______Núm ẩn để hệ thông bắt đẩuNúm ấn dừng hệ thống Đèn đỏ 1

4 D2 Q0.1 Đầu ra Đèn đỏ 25 XI Q0.2 Đẩu ra Đèn xanh 16 X2 Q0.3 Đẩu ra Đèn xanh 27 VI Q0.4 Đầu ra Đèn vàng 18 V2 Q0.5 Đẩu ra Đèn vang 2
2. Chon PLC:với đẩu vào ra như trên 4 vào và 2 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra núm Start, nếu ấn, cho phép hê thống vào chê đô làm viêc.Kiểm ưa núm Stop. Nêu Stop = 1 then dừng hệ thống, ngƯỢc lại chuyển sang bước 2 Bước 2: Khởi tao các thao tac sau:
- Khởi động Timer cho đèn đỏ 1 với thời gian là 30 giây- Khởi động Timer cho đèn xanh 2 với thời gian là 25 giây- Bật đầu ra lên 1 cho đèn đỏ 1 và xanh 2
Bước 2: Kiểm tra bít trang thái của Timer cho đèn xanh 2- Nêu bít trạng thái bằng 1 thì tắt đèn xanh 2- Khởi động timer cho đèn vàng 2 với thời gian là 5 giây- Bật đèn vàng 2 và chuyển sang bước 3 Ngữợc lại: quay lại bước 2
Bước 3: Kiểm tra bít trang thái của Timer cho đèn đỏ 1 hoăc vàng 2- Nêu bít trạng thái bằng 1 thì tắt đỏ 1 và vàng 2- Khởi động timer cho đèn xanh 1 và đỏ 2 tương úhg với thời gian là 25 và 30
giây- Bật đèn đỏ 2, xanh 1 và chuyển sang bước 4 NgƯỢc lại: quay lại bước 3
Bước 4:: Kiểm tra bít trana thái của Timer cho đèn xanh 1- Nêu bít trạng thái bằng 1 thì tắt đèn xanh 1- Khởi động timer cho đèn vàng 1 với thời gian là 5 giây- Bật đèn vàng 1 và chuyển sang bước 5 Ngữợc lại: quay lại bước 4
Bước 5: Kiểm tra bít trang thái của Timer cho đèn đỏ 2 hoăc vàng 1- Nêu bít trạng thái bằng 1 thì tắt đỏ 2 và vàng 1- Chuyển sang bước 2 NgƯỢc lại: quay lại bước 5
1.0
4. Viết chương trình: Tùy theo thuật toán và cách sử đụng lệnh của học viên 2.5

Câu 8. Xác định mức ưu tiên trong các cuộc thi (minh họa trên hình dưới đây) Các yêu cău cúa bài toán:
• Sau khi host đã đọc xong câu hỏi• Các người chơi ấn núm trước mặt đ ể xác định người nào ấn đầu and
tiên• Chuông sẽ kêu trong 10 giây khi bất kỳ một trong những ngưòí choi ấn
núm• Đèn chỉ thị phía trước mỗi người chơi sẽ sáng và chỉ được xóa khỉ host
(5 điểm)
ãn núm chuyến mạch.Ilost Player 1
Buzzer
4Chú ý : Khi thực hiện phải làm những bước sau:
- Phân tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nêu số đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng lừu đò thuật toán
_______ - Viết chương trình_________________________________________________________Trả lời: Điểm1. Phân tích bài toán đê xác định số đầu và kiêu loại vào/raBài toán gồm các đáu vào/ra như sau:
Stt Ký hiệu
PB1PB2PB3
RESET
Địa chỉ
10.010.110.2
10.3
Kiểu tín hiệu
Đầu vàoĐầu vàoĐầu vào
Đầu vào
Giải thích
Núm ẩn để hệ thống bắt đầuNúm ẩn dừng hệ thốngĐầu vào giới hạn từ cảm biến SIĐầu vào giới hạn từ cảm biến SI
1

5 DI QO.O Đầu ra Rơle cấp nguồn cho động cơ quay thuận
6 D2 Q0.1 Đẩu ra Rơle cẩp nguổn cho động cơ quay ngƯỢc
7 D3 Q0.2 Đẩu ra8 CHUONG Q0.3 Đầu ra
2. Chon PLC:với đầu vào ra như trên 4 vào và 2 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm ưa núm ấn lần lươt của từng người chơi, nếu núm ấn của hai người chơi còn lại vẫn chưa ấn thì cho phép chuông kêu, bật đèn của người chơi tương ứng sáng và khởi tạo đồng hồ thời gian cho chuôngBước 2: Kiểm tra đồng hồ thời gian đã chav hết chưa để ngắt chuông, hoăc MC hủv quyền trả lời của người chơi.Bước 3: Nêu trả lời xong. MC xóa trang thái Ưu tiên về trang thái ban đắu. chương trình trở về bước 1.
1.0
4. Viết chương trình: Tùy theo thuật toán và cách sử đụng lệnh của học viên 2.5

Câu 9: Điếu khiển dây chuyền đóng gói.hoa quả. Nội dung bài toán như sau: Khi ấn núm START được ấn, băng tải vận chuyển hộp quay. Khi có hộp vào vị trí, băng tải hộp dừng lại vả băng tải vận chuyển hoa quả (táo) bắt đầu quay, cảm biến đếm đến 10 quả táo. Băng tải hoa quả sê dừng và băng tải hộp được khởi động lại. BỘ đếm được xóa và hoạt động sẽ được lặp lại cho đến khi núm STOP đươc ấn.
(5 điểm)
START(00000)
PG1
P62
(1001)BOXCONVEYOR
Chủ ý: Khi thực hiện phải làm những bước sau:- Phân tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nêu số đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng lưu đò thuật toán- Viết chương ữình
Trả lời: Điểm1. Phân tích bài toán đ ể xác định số đầu và kiểu loại vao/raBài toán gồm các đầu vào/ra như sau:_________
1
Stt Ký hiệu
Start
Địa chỉ
10.0
Kiêu tín hiệu
Đẩu vào
Giải thích
Khởi động hệ thông

2 Stop 10.1 Đầu vào Núm ấn dừng hệ thống3 SI 10.2 Đầu vào cảm biến hộp4 S2 10.3 Đẩu vào cảm biến quả5 BoxPro QO.O Đắu ra TÚI hiệu điều khiển băng tải
quả6 BoxCon Q0.1 Đầu ra Tín hiệu điều khiển băng tải
hộp2. Chon PLC:với đầu vào ra như trên 4 vào và 2 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. Lưu đồ thuật toán:Bước 1: Kiểm ữa điều khiển bắt đầu. Nêu núm Start ấn. cho phép hê thống chav Bước 2: Kiểm tra hôp có ở vi trí không, nếu có thì thưc hiên bước 4. còn không thưc hiện bước 3Bước 3: Khởi đông băng tải hôp cho đến khi cảm biến hôp báo có hôp ở vi trí đóng sản phẩmBước 4: Khởi đông băng tải quả cho đến khi cảm biến đếm sản phẩm báo đã đủ sô sản phẩm cần đóngBươc 5: Khởi đông băng tải hôp. chuvển sang bước 2Bước 6: Kiểm ữa tín hiêu Stop. nếu có logic bằng 1 thì dừng hê thống
1.0
4. Viết chương trình: Tùy theo thuật toán và cách sử đụng lệnh của học viên 2.5

Câu 10: H ệ thống điều khiển xe ra vào bãi xe vói nội dung như sau: Hệ thống điều khiển bãi đậu xe chứa tối đa lả 12 chiếc. Mỗi lẩn xe vào, PLC tự động tăng thêm 1 bởi cảm biến phát hiện xe Sl. Bất kỳ một chiếc xe nào đi ra khỏi bãi, PLC sẽ tự động giảm đi 1 bởi cảm biến phát hiện S2. Khi 12 chiếc xe được đăng ký, bảng hiệu đầy xe sê được sáng lên thông báo đến các xe không được vào nữa.
(5 điểm)
Chú ý : Khi thực hiện phải làm những bước sau:- Phân tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nếu số đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng lữu đô thuật toán- Viết chương ữình
Trả lời: Điểm1. Phân tích bài toán đê xác định số đầu và kiêu loại vào/ra 1
Stt Ký hiệu
StartSt°pSIS2DID2
BRVMBRVDBRRM
Địa chỉ
10.010.110.210.3QO.OQ0.1Q0.2Q0.3Q0.4
Kiêu tín hiệu
Đầu vàoĐầu vàoĐầu vàoĐầu vàoĐầu raĐầu raĐầu raĐầu raĐầu ra
Giải thích
Khởi động hệ thôngNúm ấn dừng hệ thống— 2 _? X , ,cảm biến cửa vào báo xe vàocảm biến cửa đẩu ra báo xe raĐèn tín hiêu báo vẫn còn chỗ_ N 1 /- 1 a' , "XĐèn báo hết chỗ để xeMỞ barrier cửa vàoĐỏng barrier cửa vàoMỞ barrier cửa ra

10 BRRD Q0.5 Đầu ra Đóng barrier cửa ra2. Chon PLC:với đắu vào ra như trên 4 vào và 6 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra điều khiển bắt đâu. Nêu núm Start ấn. cho phép hê thống chav Bước 2: Kiểm tra bô đếm. nếu sô xe bằng 12 thì báo đèn đỏ báo đầv và ra lênh không cho phép mở barrier cửa vào. NgƯỢc lại báo đèn còn chỗ.Bước 3: Khi có xe đến phát hiên bởi cảm biến cửa vào Sl. cấp điên cho đông cơ mở barrier cửa vào (BRVM) đồng thời đếm sô xe vào. Trễ 30 giây sau khi SI chuyển trạng thái từ 1 xuống 0 thì đóng barrier lại (BRVD)Bước 4: Khi 1 xe ra phát hiên bởi cảm biến S2. thì:
- Cấp điện mở barrier cửa ra (BRRM)- Trừ đi một sô xe có trong bãi
Bước 5: Khi cảm biến S2 chuyển trang thái từ 1 xuống 0 thì trễ 30s sau đó ra lênh đóng barrier lại (BRRD)Bước 6: Kiểm tra tín hiêu Stop, nếu núm này ấn thì dừng hê thống, nếu không chuyển sang bước 1.
1.0
4. Viết chương trình: Tùy theo thuật toán và cách sử đụng lệnh của học viên 2.5

Câu 11: Viết chương trình PLC điều khiển đóng/mở cửa tự động vói những yêu cắu sau: Khi có người (vật) vào hoặc ra được phát hiện bỏi cảm biến, bộ điều khiển cấp nguồn cho động cơ theo chiều mở cửa. Động cơ chạy cho đến khi công tắc hành trình cuối đóng lại. Khi không có ngưòl và cửa đã mở hết thì trễ 10 giây sau đó đóng cửa lại cho đến khỉ cảm biến hành trình đóng bật lên. Nêu đang đóng mà cảm biến phát hiện có người ra/vào thì lại điều khiển cửa mở ra.
(5 điểm)
Chú ý : Khi thực hiện phải làm những bước sau:- Phăn tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nếu số đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng lữu đò thuật toán- Viết chương trình
Trả lời: Điểm1. Phân tích bài toán đê xác định số đẩu và kiêu loại vào/ra
Stt Ký hiệu
StartStopSIS2
Địa chỉ
10.010.110.210.3
Kiêu tín hiệu
Đầu vàoĐầu vàoĐầu vàoĐẩu vào
Giải thích
Khởi động hệ thốngNúm ấn dừng hệ thòngcảm biến báo cửa đã mở hếtcảm biển báo cửa đã đóng

5 S3 10.4 Đầu vào cảm biến báo có người hoặc vât ra vào
6 Open QO.O Đẩu ra MỞ cửa7 Close 00.1 Đẩu ra Đóng cửa
2. Chon PLC:với đẩu vào ra như trên 5 vào và 2 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra điều khiển bắt đầu. Nêu núm Start ấn. cho phép hê thống chav Bước 2: Kiểm tra xem có người vào hoăc ra không (cảm biến S3V Nêu S3 = 1 thì cấp điện cho động cơ để mở cửa, cho đến khí SI = 1.Bước 3: Nêu Sl = 1 và S3 = 0 (nghĩa là không có ngườiì thì thưc hiên trễ 10 giâv Bước 4: Khi thời gian trễ hết. cấp điên cho đông cơ đóng cửa. Ngươc lai. nếu trong quá trình trê, có bất kỳ sự xuất hiện của người hoặc vật (S3 = 1) thì thời gian trễ lại bị xóa và thực hiện lại nếu đủ điều kiện.Bươc 5: Khi đang đóng cửa. nếu S3 = 1 thì iâp tức dùhg đông cơ và cấp điên mở cửaBước 6: Kiểm tra tín hiêu Stop, nếu có logic bằng 1 thì dừng hê thống, ngươc lai chuyển sang bước 1.
1.0
4. Viết chương trình: Tùy theo thuật toán và cách sử đụng lệnh của học viên 2.5

Câu 12: Bài toán bơm, trộn và xả vói những yêu cẩu sau:Khi ấn núm START, van MV1 mở, nước chảy vào thùng, và đổng thòi
động cơ M chạyKhi nước đạt đến TLB1 thì MV1 đóng, M dừng MV2 mở, xấ nước ra đến khi nước dưới mức TLB2.Quá trình này lặp di lặp lại 4 lần thì báo đèn dừng và chuông kêu 10s, lúc
này bấm núm START cũng không có ý nghĩa.Muốn hệ thống làm việc lại, chúng ta bấm núm RESET đ ể thực hiện lại
từ đẩu
(5 điểm)
MV I Control Panel
TLBI(5)
TLB2<6)
PBI(0)
p b :(1)
r e 3(2)
Pt.(1004)
BZílOOit
START
ISTOP
§ >RESET
fEND
BfZZER
Chú ý : Khi thực hiện phải ỉàm những bước sau:- Phân tích bài toán đ ể xác định số đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nếu sô đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng ỉừu đò thuật toán- Viết chương trình
Trả lời: Điểm1. Phân tích bài toán đ ể xác định số đầu và kiểu loại vào/ra
Stt Ký hiệu
StartStopResetTLB1
Địa chỉ
10.010.110.210.3
Kiểu tín hiệu
Đầu vàoĐầu vàoĐầu vàoĐầu vào
Giải thích
Khỏi động hệ thôngNứm ẩn dừng hệ thống— 1 A 1 A7Reset hệ thốngcảm biển báo thùng chứa đầy

5 TLB2 10.4 Đầu vào cảm biến báo thùng chứa cạn6 MV1 QO.O Đầu ra MỞ van cho nhiên liệu chảy vào7 MV2 Q0.1 Đầu ra MỞ van cho nhiên liệu chảy ra8 End 00.2 Đầu ra Đèn báo kết thúc 1 chu trình9 BUZZ Q0.3 Đầu ra Còi báo kết thúc 1 chu trình10 MOTOR Q0.4 Đầu ra Động cơ trộn
2. Chon PLC:với đầu vào ra như trên 5 vào và 5 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra điều khiển bắt đẩu. Nêu núm Start ấn. cho phép hê thổng chav Bước 2: Cấp điên cho van MV1 và đông cơ trôn ÍMOTORÌ nếu sô lần thưc hiên nhỏ hơn 4Bước 3: Kiểm tra cảm biến mức cao TLB1. nếu TLB1 = 1 thì:
- Dừng động cơ trộn- Đóng van MV1- MỞ van MV2 NgưỢc lại, lặp lại bước 3
Bước 4: Kiểm tra cảm biến mức thấp TLB2. Nêu TLB2 = 0 thì:- Đóng van MV2- Tăng sô lần thực hiện lên Ngược lại lặp lại bước 4.
Bước 5: Kiếm tra so lằn thưc hiên. Nêu sô lần thưc hiên đươc 4 lẩn thì bât đèn báo kết thúc và chuông kêu trong thời gian 10s. Bật điều kiện để hệ thống không thể chạy được khi không bấm num RESET.Bước 6: Kiểm tra tin hiêu Stop, nếu có logic bằng 1 thì dừhg hê thống, ngươc lai chuyển sang bước 1.
1.0
4. Viết chương trình: Tùy theo thuật toán và cách sử đụng lệnh của học viên 2.5

Câu 13: Phân tích và viết chương trình bài toán in mã sản phẩm tự động vóicác yêu cầu sau:- Có hai chê độ tự động và bằng tay được lựa chọn bằng chuyển mạch SI- sản phẩm được đưa đến vị trí in bỏl xilanh 1A và giữ đúng vị trí đó bỏi xiỉanh 3A và in mã bởi xilanh 2A.- Đê đưa sản phẩm đã được in mã được kéo bỏi động cơ MI và đếm sản phẩm bằng cảm biến LI
S-1 <§ồ c«ng n g h ồ h ồ th è n g in tem s i n phÈm
2S1 —
2A
Magazin 2S2_—
_ 2Y1§ Q jín nh- n
AUS EIN
è S1
1Y1KJE
Chú ý: Khi thực hiện phải làm những bước sau:- Phân tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nếu số đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng ỉữu đô thuật [oán- Viết chương ữình
W ả lòi:
(5 điểm)
1. Phân tích bài toán đ ể xác định sổ đâu và kiểu loại vào/raĐiểm
Stt Ký hiệu
StartStopAuto
RESETLI
Địa chỉ
10.010.110.2
10.310.4
Kiểu tín hiệu
Đầu vàoĐầu vàoĐầu vào
Đầu vàoĐầu vào
Giải thích
Khởi động hệ thốngNúm ấn dừng hệ thống— I I A7 1 A 1 AChuyển chê độ tự động hoặc bằng tayKhởi tạo lại hệ thốngcảm biển dùng để đềm sản
1

phẩm6 1S1 10.5 Đầu vào cảm biến báo xilanh 1A đã thu
hết vào7 1S2 10.6 Đầu vào cảm biến báo xilanh 1A đã mở
hết ra8 2S1 10.7 Đầu vào cảm biến báo xilanh 2A đã thu
hết vào9 2S2 11.0 Đẩu vào cảm biến báo xilanh 2A đã mở
hết ra10 3S1 11.1 Đầu vào cảm biến báo xilanh 3A đã thu
hết vào11 3S2 11.2 Đầu vào cảm biến báo xilanh 3A đã mở
hết ra12 BI 11.3 Đầu vào cảm biến báo có sản phẩm13 1Y1 QO.O Đầu ra Điều khiển van để mở xilanh
1A14 2Y1 Q0.1 Đầu ra Điều khiển van để mở xilanh
2A15 3Y1 Q0.2 Đầu ra Điều khiển van để mở xilanh
3A16 M Q0.3 Đầu ra Còi báo kết thúc 1 chu trình
2. Chon PLC:với đẩu vào ra như trên 12 vào và 4 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra điều khiển bắt đầu. Nêu núm Start ấn. cho phép hê thống chav Bước 2: Nêu cảm biến BI = 1 thì:
- Cấp điện cho van 3Y1- Khi cảm biến 3S2 = 1, cấp điên cho van 1Y1 để đẩy sản phẩm vào vị trí in
nhãn- Khi cảm biến 1S1 = 1, cấp điện cho xilanh 2A thông qua van 2Y1, chuyển
sang bước 3NgƯỢc lại chuyển sang bước 6
Bước 3: cho đển khi cảm bien 2S2 = 1 thì trễ ls sau đó cắt điên cho van 1Y1. 2Y1. 3Y1 để xilanh trở vể vị trí ban đầu.
Khi các cảm biến 1S1, 2S1, 3S1 đểu có logic bằng 1 thì khởi động động cơ M để kéo sản phẩm ra.Bước 4: Khi cảm biến LI cảm nhân đươc sản phẩm đi qua thì thưc hiên đếm sản phẩm và đồng thời dừng động cơ M.Bước 5:Nêu bấm núm RESET, sô đếm sản phẩm của hê thống đươc xóa về không Bước 6: Kiểm tra tín hiêu Stop, nếu có logic bằng 1 thì dùhg hê thống, ngươc lai chuyển sang bước 1.
1.0
4. Viết chương trình: Tùy theo thuật toán và cách sử đụng lệnh của học viên 2.5

Câu 14: Viết chương trình điểu khiển đèn tín hiệu giao thông Ở ngã tư theo quy luật sau: Mô tả việc điểu khiển tín hiệu đèn giao thông ở các giao lộ vói các thông số vế thời gian như sau : Đèn Xanh 1 sáng 25 giây, đèn ĐỎ 1 sáng 30 giây, đèn Vàng 1 sáng 5 giây. Khỏi động hệ thống bằng cách nhấn START, dừng bằng cách nhấn STOP. (Yêu cầu sử dụng lệnh tìmer và lệnh xử lý bít và lệnh sso sánh)
D D D D D Ũ D Do
(5 điểm)
Làn đườn
ĩ * — »
QDQQQŨQD é
Chú ỷ : Khi thực hiện phải làm những bước sau:- Phân tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nếu số đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng ỉừu đồ thuật toán- Viết chương trình
Trả lời:1. Phân tích bài toán đ ể xác định số đầu và kiểu loại vảo/raBài toán gồm các đầu vào/ra như sau:
Điểm1.0
Stt Ký hiệuStartSt°pDID2
Địa chỉ10.010.1 QO.O Q0.1
Kiểu tín hiệuĐắu vàoĐắu vào Đầu ra Đẩu ra
Giải thíchNúm ẩn để hệ thông bắt đầuNúm ẩn dừng hệ thống Đèn đỏ 1 Đèn đỏ 2

5 XI Q0.2 Đầu ra Đèn xanh 16 X2 Q0.3 Đầu ra Đèn xanh 27 VI Q0.4 Đẩu ra Đèn vàng 18 V2 Q0.5 Đẩu ra Đèn vang 2
2. Chon PLC:với đầu vào ra như trên 4 vào và 2 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. LƯU đồ thuật toán:Bước 1: Kiểm tra núm Start, nếu ấn. cho phép hê thống vào chê đô làm viêc.Kiểm tra núm Stop. Nêu Stop = 1 then dừng hệ thống, ngược lại chuyển sang bước 2 Bước 2: Khởi tao các thao tac sau:
- Khởi động Timer với thời gian là 60 giây- Bật đầu ra lên 1 cho đèn đỏ 1 và xanh 2
Bước 2: Kiểm tra giá tri đổng hồ timer- Nếu giá trị timer >25s thì tắt đèn xanh- Khởi bật đèn vàng 2.NgƯỢc lại: quay lại bước 2
Bước 3: Kiểm tra giá tri đổng hồ timer- Nêu giá trị timer >30s thì tắt đèn đỏ 1, tắt đèn vàng 2- Bật đèn xanh 1 và đèn đỏ 2 Ngữợc lại: quay lại bước 3
1.0
Bước 4: Kiểm tra giá tri đổng hồ timer- Nêu giá trị timer >55s thì tắt đèn xanh 1- Bật đèn vàng 1
NgƯỢr lại: quay lại bưór 4Bước 5: Kiểm tra giá tri đổng hổ timer
- Nêu giá trị timer >60s thì khởi động lại timer chuyển sang bước 2 NgƯỢc lại: quay lại bước 5
4. Viết chương trình: Tùy theo thuật toán và cách sử đụng lệnh của học viên 2.5

Câu 15: Phân tích và viết chương trình khoan tự động dưới đây vóí những yêu cẩu sau:- Khi ấn núm START hệ thống bát đầu làm việc. Động cơ M l có chức năng quay mũi khoan, động cơ M2 có chức năng nâng, hạ mũi khoan.- Van Y1 điều khiển nước làm mát- cảm biến LI xác định khoan đã đạt độ sâu yêu cầu- Xilanh 1A có chức năng giữ vật khi khoan, các cảm biến 1B1 và 1B2 là điểm đầu và điểm cuối của hành trình xỉlanh- S4, S5 xác định vị trí đầu và cuối đê điều khiển động cơ nâng mũi khoan- S2 xác định có vật cẩn khoan
Chú ý : Khi thực hiện phải làm những bước sau:- Phân tích bài toán đ ể xác định số đầu và kiểu loại vào/ra- Chọn PLC và mô đun mở rộng (nếu cần - Nếu sô đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)- Xây dựng ỈUÌI đồ thuật toán
Viết chương ữình_________________________________________________
(5 điểm)
Trả lời:1. Phân tích bàỉ toán đ ể xác định số đầu và kiểu loại vào/ra
Điểm
Stt Ký hiệu Đia chỉ Kiểu tín hiêu Giải thích1 Start 10.0 Đầu vào Núm ấn để hệ thống bắt đầu
1.0

2 Reset 10.1 Đầu vào Núm ấn dừng hệ thống3 LI 10.2 Đắu vào Báo đô sâu của khoan4 S2 10.3 Đẩu vào Báo có vât đê khoan5 S4 10.4 Đầu vào Cho biết khoan ở vi trí bắt đẩu6 S5 10.5 Đầu vào Báo đô sâu của khoan7 1B1 10.6 Đắu vào Báo xilanh ở vi trí ban đầu8 1B2 10.6 Đẩu vào Báo xilanh ở vi trí đã mở hết cỡ9 Q1 QO.O Đầu ra MỞ động cơ quay mũi khoan MI10 Q2v Q0.1 Đầu ra Động cơ 2 quay theo chiều để
nâng mũi khoan11 Q2r Q0.2 Đầu ra Động cơ 2 quay theo chiều để
ha mũi khoan12 Y1 Q0.3 Đầu ra MỞ van cho nước làm mát13 1Y1 Q0.4 Đầu ra Van điều khiển mở xilanh 1A14 1Y2 Q0.5 Đầu ra Van điều khiển đóng xilanh 1A
2. Chon PLC:với đầu vào ra như trên 8 vào và 6 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU 224)
0.5
3. Lưu đồ thuật toán:Bước 1: Kiểm ữa núm Start, nếu ấn. cho phép hê thống vào chê đô làm viêc.Bước 2: Khi có sản phẩm cần khoan đươc xác đinh bởi cảm biến S2. thưc hiên các thao tác sau:
- Khởi động động cơ MI để quay mũi khoan- Cấp điện cho van điện từ 1Y1 để xilanh 1A đẩy ra giữ sản phẩm khoan- Khi 1B2 = 1 thì cấp điện cho Q2r để hạ mũi khoan- Cấp điện mở van Y1 để cho nước làm mát chảy làm mát mũi khoan
Bước 2: Kiểm tra cảm biến LI và S5. Nêu LI = 1 và S5 = 1 thì- Cấp điện cho Q2v để nâng mũi khoan
Bước 3: Kiểm tra cảm biến S4. nếu S4 = 1 thì:- Dừng động cơ M2- Tắt động cơ MI- Cấp điện cho van điện từ 1Y2 để thu xilanh 1A vào cho đến khi 1B1 = 1
Bước 4: Kiểm tra núm Reset. Nêu Reset = 1 then dừng hê thống, ngươc lai chuvển sang bước 1
1.0
4. Viết chương trình: Tùy theo thuật toán và cách sử đụng lệnh của học viên 2.5

Câu 1. Khái n iệm và phân loại của h ệ thống SCADA? 2
điểmSCADA - Supervisory Control And Data Acquisition là một hệ thống điều
khiển giám sát và thu thập dữ liệu, nói một cách khác là một hệ thống hỗ trỢ
con người trong việc giám sát và điều khiển từ xa, ở cấp cao hơn hệ điều
khiển tự động thông thường. Đ ể có thể điều khiển và giám sát từ xa thì hệ
SCADA phải có hệ thống truy cập, truyền tải dữ liệu cũng như hệ giao diện
người - máy (HMI - Human Machine Interface).
Trong hệ thống điều khiển giám sát thì HMI là một thành phắn quan
trọng không chỉ ở cấp điều khiển giám sát mà ở các cấp thấp hơn người ta
cũng cần giao diện người - máy để phục vụ cho việc quan sát và thao tác vận
hành ở cấp điều khiển cực bộ. Vì lý do giá thành, đặc điểm kỹ thuật nên các
màn hình vận hành (OP - Operator Panel), màn hình cảm ứng (TP - Touch
Panel), Multi Panel ... chuyên dụng được sử dụng nhiều và chiếm vai trò quan
ƯỌng hơn.
Nêu nhìn nhận SCADA theo quan điểm truyền thống đù nó là một hệ
thống mạng và thiết bị có nhiệm vụ thuần tuý là thu thập dữ liệu từ các trạm
ở xa và truyền tải về khu trung tâm để xử lý. Trong các hệ thống như vậy thì
hệ truyền thông và phần cứng được đặt lên hàng đầu và cắn sự quan tâm
nhiều hơn. Trong những năm gần đây sự tiến bộ vượt bậc của công nghệ
truyền thông công nghiệp và công nghệ phần mềm trong công nghiệp đã đem
lại nhiều khả năng và giải pháp mới nên trọng tâm của công việc thiết kê xây
dựng hệ thống SCADA là lựa chọn công cụ phần mềm thiết kế giao diện và
các giải pháp tích hỢp hệ thống.
1.0
Các hệ thống SCADA được phân làm bốn nhóm chính với các chức năng:
- SCADA độc lập / SCADA nối mạng
- SCADA không có khả năng đồ hoạ / SCADA có khả năng xử lý đổ hoạ
1.0

thông tin thời gian thực.
Bôn nhóm chính của hệ thống SCADA:
H ệ thống SCADA mờ (Blind): Đây là hệ thống đơn giản, nó không có bộ
phận giám sát. Nhiệm vụ chủ yếu của hệ thống này thu thập và xử lý dữ liệu
bằng đồ thị. Do tính đơn giản nên giá thành thấp.
H ệ thống SCADA xử lý đò hoạ thông tin thời gian thực : Đây là hệ thống
SCADA có khả năng giám sát và thu thập dữ liệu. Nhờ tập tin cấu hình của
máy khai báo trước đấy mà hệ có khả năng mô phỏng tiến trình hoạt động
của hệ thống sản xuất. Tập tin cấu hình ghi lại ưạng thái hoạt động của hệ
thống. Khi xảy ra sự cô thì hệ thống có thể báo cho người vận hành đ ể xử lý
kịp thời. Cũng có thể hệ sẽ phát ra tín hiệu điều khiển dừng hoạt động của
tất cả máy móc.
H ệ thống SCADA độc lập : Đây là hệ có khả năng giám sát và thu thập
dữ liệu với một bộ vi xử lý. Hệ này chỉ có thể điều khiển được một hoặc hai
máy móc. Vì vậy hệ này chỉ phù hỢp với những sản xuất nhỏ, sản xuất chi
tiết.
H ệ thông SCADA mạng: Đây là hệ có khả năng giám sát và thu thập dữ
liệu với nhiều bộ vi xử lý. Các máy tính giám sát được nối mạng với nhau. Hệ
này có khả năng điều khiển được nhiều nhóm máy móc tạo nên dây chuyền
sản xuất. Qua mạng truyền thông, hệ thống được kết nối với phòng quản lý,
phòng điều khiển, có thể nhận quyết định điều khiển trực tiếp từ phòng quản
lý hoặc từ phòng thiết kế. Từ phòng điều khiển có thể điều khiển hoạt động
của các thiết bị ở xa.


Câu 2. Hãy trình bày cấu trúc và các thành phần cơ bản của 2
mạng SCADA? điêm

cấu trúc chung của hệ SCADA:Cấu trúc chung của hệ SCADA được minh hoạ trong hình vẽ sau:
H ồ th èn g <SIÒU kh ió i gi, m S 1 1
Thiõt bM IQi khiQi tù ®§ ng
NI FO N
I
FONI
CIỊm b iõ i vụ chÊp hpnh
NI
NI
NI
- oNèi trùc tìỘD
•o
Nèi qua m1 ng
NI: (Network lnterface) Giao dicn nr̂ ng
1/0: (InpuưOutput) Vpo/Ra
Qóa kủ ứiuÊt
Trong hệ ứiống điều khiển giám sát, các cảm biến và cơ cấu chấp hành đóng
vai trò là giao diện giữa thiết bị điều khiển với quá trình kỹ thuật. Còn hệ
thống điều khiển giám sát đóng vai trò là giao diện giữa người và máy. Các
thiết bị và các bộ phận của hệ thống được ghép nối với nhau theo kiểu điểm-
điểm (Point to Point) hoặc qua mạng truyền thông. Tín hiệu thu đƯỢc từ cảm
biến có thể là tín hiệu nhị phân, tín hiệu sô hoặc tương tự. Khi xử lý trong
máy tính, chúng phải được chuyển đổi cho phù hỢp với các chuẩn giao diện
vào/ra của máy tính.

Câu 3. Trình bày ưu và nhược của hệ điểu khiển tập trung và phân tán? 2
điểmNgày nay cấu trúc điều khiển tập trung thường chỉ được áp dụng cho
những hệ thống nhỏ với các máy móc vận hành đơn giản bởi giá thành thấp.
Tuy nhiên cấu trúc này còn có những hạn chê như:
- Công việc nối dây phức tạp, sô lượng cáp lớn, giá thành cao.
- Việc mở rộng hệ thống gặp nhiều khó khăn, độ linh hoạt không cao.
- ĐỘ tin cậy kém do sự phụ thuộc vào một thiết bị điều khiển duy nhất,
có thể dùng giải pháp lắp thêm thiết bị điều khiển dự phòng nhưng sẽ
dẫn đến chi phí cao.
- Phương pháp truyền dẫn tín hiệu giữa các thiết bị trường và thiết bị
điều khiển dễ chịu ảnh hưởng của nhiễu gây ra sai sô lớn.
- Phạm vi ứng dụng hạn hẹp.
1.0
M ột h ệ điểu khiển phân tán thường bao gồm:
- Trung tâm điều hành quá trình.
- Trung tâm điều khiển là các máy tính điều khiển, máy tính công nghiệp,
máy tính phối hỢp được nối với nhau và nối với trung tâm điểu hành
qua các bus.
- Các bộ điều khiển tại chỗ như thiết bị vào/ra, cơ cấu chấp hành, cảm
biến được nối với trung tâm điều khiển qua bus trường (Field bus).
Ưu điểm của điều kh iển phân tán:
- Thay đổi cách nối điểm - điểm bằng mạng truyền thông, thời gian lắp
đặt nhanh chóng.
- Độ tin cậy, tính linh hoạt và năng suất được nâng cao nhờ xử lý phân
1.0

tán.
- Cấu trúc đơn giản dễ dàng chẩn đoán, báo trì, bảo dưỡng hệ thống.
- Việc sử dụng các giao diện chuẩn quốc tế nâng cao khả năng tương tác
giữa các thành phần.
- Có thể tích hỢp các hệ thống mới và cũ, dễ dàng mở rộng hệ thống và
kết nối với hệ thống thông tin ở cấp trên.
Câu 4. Trình bày mô hình phân cáp của mạng SCADA và chức năng cơ
bản của từng cấp?
2
điểm
Câu 5. HÕ thèng ®iÒu khión tr^n c -1 sẽ hõ SIMATIC? 3
điểmMô hình phân cấp: Toàn bộ hệ thống điều khiển giám sát được phân
chia thành các cấp chức năng như hình vẽ minh hoạ dưới đây:

QuHn lý c«ng<y
§ iò i hịinh s Un xuÊt
2
l r
§ ïQi khiQigi4 m s 41
ồoẵo
õanncoca
Iuuu OQG u ooo ooo 20C a a o a 0 0 0 1 = 3 0 ooo *
Ĩ Ĩ
§ iQi khiQi
rChÊp hpnh Ị̂ i i i ị ^
Qóa twtih kü thuËt
Đ ể sắp xếp, phân loại các chức năng tự động hoá của một hệ thống
điều khiển và giám sát người ta thường sử dụng mô hình như trên, v ớ i loại
mô hình này các chức năng được phân thành nhiều cấp khác nhau, từ dưới lên
trên. Càng ở những cấp dưới thì các chức năng càng mang tính chất cơ bản
hơn, đòi hỏi yêu cáu cao hơn về độ nhanh nhạy, thời gian phản ứng. Một

chức năng ở cấp trên được thực hiện dựa trên các chức năng ở cấp dưới
nhưng ngƯỢc lại lượng thông tin cần trao đổi và xử lý lại lớn hơn nhiều.
Việc phân cấp chức năng sẽ tiện lợi cho việc thiết kê hệ thống và lựa
chọn thiết bị. Tuỳ thuộc vào mức độ tự động hoá và cấu trúc hệ thống cụ thể
mà ta có mô hình phân cấp chức năng.
Cấp chấp hành: Các chức năng chính của cấp chấp hành là đo lường,
dẫn động và chuyển đổi tín hiệu trong trường hỢp cần thiết. Thực tế, đa sô
các thiết bị cảm biến hay chấp hành cũng có phần điều khiển riêng cho việc
thực hiện đo lường/truyền động được chính xác và nhanh nhạy. Các thiết bị
thông minh (có bộ vi xử lý riêng) cũng có thể đảm nhận việc xử lý và chuẩn
bị thông tin trước khi đưa lên cấp trên điều khiển.
Cấp điều khiển: Nhiệm vụ chính của cấp điều khiển là nhận thông tin
từ các bộ cảm biến, xử lý các thông tin đó theo một thuật toán nhất định và
truyền đạt lạ i kết quả xuống các bộ chấp hành. Máy tính đảm nhận việc theo
dõi các công cụ đo lường, tự thực hiện các thao tác như ấn nút mở/đóng van,
điều chỉnh cần gạt, núm xoay,... Đặc tính nổi bật của cấp điều khiển là xử lý
thông tin. Cấp điều khiển và cấp chấp hành hay được gọi chung là cấp trường
(Field level) chính vì các bộ điều khiển, cảm biến và chấp hành được cài đặt
trực tiếp tại hiện trường gần kề với hệ thống kỹ thuật.
Cấp điều khiển giám sát: có chức năng giám sát và vận hành một quá
trình kỹ thuật, có nhiệm vụ hỗ trỢ người sử dụng trong việc cài đặt ứng
dụng, thao tác theo dõi, giám sát vận hành và xử lý những tình huống bất
thường._____________________________________________________________
Câu 6. Trình bày mạng truyền thông công nghiệp SIMATIC NET và
chuẩn giao thức PPI
2
điểmSIMATIC NET là mạng truyền thông cho phép kết nối với các bộ điều khiển
của SIEMENS, các máy tính chủ, các trạm làm việc. SIMATIC NET bao gồm

các mạng truyền thông, các thiết bị truyền dữ liệu, các phương pháp truyền
thông dữ liệu, các giao thức và dịch vụ truyền dữ liệu giữa các thiết bị, các
module cho phép kết nối mạng LAN (CP - Communication Processor hoặc IM
- Interface Module).
Với hệ thống SIMATIC NET, SIEMENS cung cấp hệ thống truyền
thông mở cho nhiều cấp khác nhau của các quá trình tự động hoá trong môi
trường công nghiệp. Hệ truyền thông SIMATIC NET dựa trên nhiều tiêu
chuẩn quốc tế ISO/OSI (International Standardization Organisation / Open
System Interconnection). Cơ SỞ của các hệ thông truyền thông này là các mạng
cục bộ (LANs), có thể thực hiện theo nhiều cách khác nhau: điện học, quang
học, không dây hoặc kết hỢp cả ba cách trên.
Theo các yêu cầu về chức năng các lớp trong tổ chức điều hành, quản lý
sản xuất thì mạng công nghiệp được chia thành nhiều cấp bao gồm: cấp điều
hành quản lý, cấp phân xưởng, cấp trường và cấp cơ cấu chấp hành - cảm
biến - đối tượng. Theo phương pháp tổ chức hệ thống như trên SIMATIC
cung cấp các loại sub-net như:
- Mạng PPI.
- Mạng MPI.
- Mạng AS-i.
- Mạng PROFIBUS.
- Mạng ETHERNET công nghiệp.

Mạng PPI:
pic S7-200
PPI
pc/pg
PPI (Point to Point Interface) thực hiện truyền thông nối tiếp điểm tới
điểm. Ghép nôi điểm tới điểm có thể là ghép nối giữa hai thiết bị tự động hoá
với nhau, hay ghép nối giữa thiết bị với máy tính hoặc với thiết bị truyền
thông khác.
PPI có những tính chất đặc ừ ưng sau đây:
- Ghép nối giữa hai thiết bị truyền thông một cách trực tiếp hay thông qua
driver đặc biệt.
- Có thể sử dụng các thủ tục riêng được định nghĩa truyền kiểu ASCII.
Câu 7. Trình bày mạng truyền thông công nghiệp SIMATIC NET và
chuẩn giao thức MPI
2
điểmSIMATIC NET là mạng truyền thông cho phép kết nối với các bộ điều khiển
của SIEMENS, các máy tính chủ, các trạm làm việc. SIMATIC NET bao gồm
các mạng truyền thông, các thiết bị truyền dữ liệu, các phương pháp truyền
thông dữ liệu, các giao thức và dịch vụ truyền dữ liệu giữa các thiết bị, các
module cho phép kết nối mạng LAN (CP - Communication Processor hoặc IM
1

- Interface Module).
Với hệ thống SIMATIC NET, SIEMENS cung cấp hệ thống truyền
thông mở cho nhiều cấp khác nhau của các quá trình tự động hoá trong môi
trường công nghiệp. Hệ truyền thông SIMATIC NET dựa trên nhiều tiêu
chuẩn quốc tê ISO/OSI (International Standardization Organisation / Open
System Interconnection). c ơ sở của các hệ thông truyền thông này là các mạng
cục bộ (LANs), có thể thực hiện theo nhiều cách khác nhau: điện học, quang
học, không dây hoặc kết hỢp cả ba cách trên.
Theo các yêu cầu về chức năng các lớp trong tổ chức điều hành, quản lý
sản xuất thì mạng công nghiệp được chia thành nhiều cấp bao gồm: cấp điều
hành quản lý, cấp phân xưởng, cấp trường và cấp cơ cấu chấp hành - cảm
biến - đối tượng. Theo phương pháp tổ chức hệ thống như trên SIMATIC
cung cấp các loại sub-net như:
- Mạng PPI.
- Mạng MPI.
- Mạng AS-i.
- Mạng PROFIBUS.
- Mạng ETHERNET công nghiệp.
Mạng MPI:
MPI (Multi Point Interface) là một subnet của SIMATIC. Mạng MPI
được sử dụng cho cấp trường hay cấp phân xưởng với yêu cầu về khoảng
cách giữa các trạm không lớn. Mạng chỉ cho phép liên kết với một sô thiết bị
của SIMATIC như S7/M7 và C7. Thiết lập mạng MPI phục vụ cho mục đích
ghép nối một sô lượng hạn chế các ưạm (không quá 32 trạm) và dung lượng
truyền thông nhỏ với tốc độ truyền tối đa là 187,5 Kbps. Phương pháp thâm

nhập đường dẫn được chọn cho mạng MPI là Token Passing.
pc/pgN. ----71
1/ M
S7-300 OP S7-400
Mạng MPI có những đặc điểm cơ bản sau:
- Các thiết bị trong mạng thuộc SIMATIC S7/M7 và C7 vì vậy cho phép
thiết lập mạng đơn giản.
- Mạng được thiết lập với sô lượng hạn chế các thành viên và chỉ có khả
năng trao đổi một dung lượng thông tin nhỏ.
- Truyền thông thông qua bảng dữ liệu toàn cục gọi tắ t là GD (Global
Data). Bằng phương pháp này cho phép thiết lập bảng truyền thông
giữa các trạm trong mạng trước khi thực hiện truyền thông.
Có khả năng liên kết nhiều CPU và PG/OP với nhau.
Câu 8. Trình bày mạng truyền thông công nghiệp SIMATIC NET và
chuẩn giao thức AS-i
2
điểmSIMATIC NET là mạng truyền thông cho phép kết nối với các bộ điều khiển

của SIEMENS, các máy tính chủ, các trạm làm việc. SIMATIC NET bao gồm
các mạng truyền thông, các thiết bị truyền dữ liệu, các phương pháp truyền
thông dữ liệu, các giao thức và dịch vụ truyền dữ liệu giữa các thiết bị, các
module cho phép kết nối mạng LAN (CP - Communication Processor hoặc IM
- Interface Module).
Với hệ thống SIMATIC NET, SIEMENS cung cấp hệ thống truyền
thông mở cho nhiều cấp khác nhau của các quá trình tự động hoá trong môi
trường công nghiệp. Hệ truyền thông SIMATIC NET dựa trên nhiều tiêu
chuẩn quốc tế ISO/OSI (International Standardization Organisation / Open
System Interconnection). c ơ sở của các hệ thống truyền thông này là các mạng
cục bộ (LANs), có thể thực hiện theo nhiều cách khác nhau: điện học, quang
học, không dây hoặc kết hỢp cả ba cách trên.
Theo các yêu cầu về chức năng các lớp trong tổ chức điều hành, quản lý
sản xuất thì mạng công nghiệp được chia thành nhiều cấp bao gồm: cấp điều
hành quản lý, cấp phân xưởng, cấp trường và cấp cơ cấu chấp hành - cảm
biến - đối tượng. Theo phương pháp tổ chức hệ thông như trên SIMATIC
cung cấp các loại sub-net như:
- Mạng PPI.
- Mạng MPI.
- Mạng AS-i.
- Mạng PROFIBUS.
- Mạng ETHERNET công nghiệp.
Mạng MPI:
Mạng AS-Í:

C7
AS-i bus
□<*> 1=1CD o
□□ o
S7-200
-4a ►□ I B S T
HH□ □ □ □ 1_1 LJ
□1 I I t I tZD Ũ
n -o ;
Logo!
A>
V
V
AS-i (Actuator Sensor Interface) giao diện cảm biến cơ cấu chấp hành,
mạng chỉ có một chủ duy nhất. Phương pháp thâm nhập đường dẫn là
phương pháp Master - Slave, một phương pháp hoàn toàn tối Ưu cho những
mạng chỉ có duy nhất một thiết bị là chủ. AS-i sẽ có cấu trúc thật là đơn giản
nếu như các cơ cấu chấp hành và các cảm biến đều là các thiết bị kiểu sô
(Digital InpuưDigital Output - DI/DO), khi thiết bị kiểu analog phải sử dụng
các bộ chuyển đổi tín hiệu chuẩn của SIEMENS. Trong mạng chỉ có ưạm chủ
có quyền điều khiển quá trình trao đổi thông tin. Trạm chủ (Master) gọi tuần
tự từng trạm tớ (Slave) tới một và đòi hỏi các trạm này gửi dữ liệu lên trên
trạm chủ hoặc nhận dữ liệu từ ưạm chủ.
Những tính chât đặc trưng của AS-i:
- AS-i là mạng tối ưu cho các thiết bị chấp hành và cảm biến số. Quá
trình trao đổi dữ liệu được thực hiện thông qua đường dẫn từ cơ cấu
chấp hành/cảm biến với trạm chủ, đường dẫn này đồng thời là đường
cung cấp nguồn cho các cảm biến.

- AS-i có thể ghép nối với các cơ cấu chấp hành có kích thước 1 bit đến 8
bit theo tiêu chuẩn IP 65 và liên kết trực tiếp với quá trình.
- Hoạt động của AS-i không cần thiết lập cấu hình trước.
Câu 9. Trình bày m ạng truyền thông công nghiệp SIMATIC NET và
chuẩn giao thức PROFIBUS
2
điểmSIMATIC NET là mạng truyền thông cho phép kết nối với các bộ điều khiển
của SIEMENS, các máy tính chủ, các trạm làm việc. SIMATIC NET bao gồm
các mạng truyền thông, các thiết bị truyền dữ liệu, các phương pháp truyền
thông dữ liệu, các giao thức và dịch vụ truyền dữ liệu giữa các thiết bị, các
module cho phép kết nối mạng LAN (CP - Communication Processor hoặc IM
- Interface Module).
Với hệ thống SIMATIC NET, SIEMENS cung cấp hệ thống truyền
thông mở cho nhiều cấp khác nhau của các quá trình tự động hoá trong môi
trường công nghiệp. Hệ truyền thông SIMATIC NET dựa trẽn nhiều tiêu
chuẩn quốc tế ISO/OSI (International Standardization Organisation / Open
System Interconnection), c ơ sở của các hệ thống truyền thông này là các mạng
cục bộ (LANs), có thể thực hiện theo nhiều cách khác nhau: điện học, quang
học, không dây hoặc kết hỢp cả ba cách trên.
Theo các yêu cầu về chức năng các lớp trong tổ chức điều hành, quản lý
sản xuất thì mạng công nghiệp được chia thành nhiều cấp bao gồm: cấp điều
hành quản lý, cấp phân xưởng, cấp trường và cấp cơ cấu chấp hành - cảm
biến - đối tượng. Theo phương pháp tổ chức hệ thống như trên SIMATIC
cung cấp các loại sub-net như:
- Mạng PPI.
- Mạng MPI.
- Mạng AS-i.
2

- Mạng PROFIBUS.
- Mạng ETHERNET công nghiệp.
Mạng PROFIBUS:
PROFIBUS - Process Field Bus. Đây là một chuẩn truyền thông được
SIEMENS phát triển từ năm 1987 Ưong DIN 19245. PROFIBUS được thiết lập
theo phương pháp hệ truyền thông mở, không phụ thuộc vào nhà chê tạo
(Open Communication Network) phục vụ cho các cấp phân xưởng và cấp
trường. Mạng PROFIBUS tuân theo chuẩn EN 50170 cho phép kết nối các bộ
điều khiển PLC, các thiết bị vào/ra phân tán, các bộ lập trình PC/PG, các cơ
cấu chấp hành, các thiết bị hãng khác.
Các loại PROFIBUS:
Mạng PROFIBUS được cung cấp theo ba chủng loại tương thích
nhau:

PROFIBUS - DP (Distributed Peripheral) phục vụ cho việc trao đổi
thông tin nhỏ nhưng đòi hỏi tốc độ truyền nhanh. PROFIBUS - DP được xây
dựng tối Ưu cho việc kết nối các thiết bị trường với máy tính điều khiển.
PROFIBUS - DP phát triển nhằm đáp ứng yêu cầu cao về tính năng thời gian
trong trao đổi dữ liệu, giữa cấp điểu khiển cũng như các bộ PLC hoặc các
máy tính công nghiệp với các ngoại vi phân tán ở cấp trường như các thiết bị
đo, truyền động và van. Việc trao đổi chủ yếu được thực hiện tuần hoàn theo
cơ chế Master/Slave, v ớ i sô trạm tối đa trong một mạng là 126, PROFIBUS -
DP cho phép sử dụng cấu hình một trạm chủ (Mono Master) hoặc nhiều ưạm
chủ {Multi Master). Một đặc trưng nữa của PROFIBUS - DP là tốc độ truyền
cao, có thể lên tới 12 Mbit/s.
PROFIBUS - FMS (Fieldbus Message Specification) trao đổi lượng
thông tin trung bình giữa các thành viên bình đẳng với nhau trong mạng.
PROFIBUS - FMS được dùng chủ yếu cho việc nối mạng các máy tính
điều khiển và giám sát. Mạng này chỉ thực hiện ở các lớp 1, 2, 7 theo mô hình
quy chiếu OSI. Do đặc điểm của các ứng dụng trên cấp điều khiển và điều
khiển giám sát, dữ liệu chủ yếu được trao đổi với tính chất không định kỳ.
PROFIBUS - PA (Process Automation) được thiết kê riêng cho những
khu vực nguy hiểm. PROFIBUS - PA là sự mở rộng của PROFIBUS - DP về
phương pháp truyền dẫn an toàn trong môi trường dễ cháy nổ theo chuẩn IEC
61158-2. PROFIBUS - PA là loại bus trường thích hỢp cho các hệ thống điều
khiển phân tán trong các ngành công nghiệp hoá chất và hoá dầu. Thiết bị
chuyển đổi (DP/PA-Link) được sử dụng để tích hợp đường mạng PA với
mạng PROFIBUS DP. Điều này đảm bảo cho toàn bộ thông tin có thể được
truyền liên tục trên hệ thống mạng PROFIBUS bao gồm cả DP và PA.
Câu 10. Trình bày các chuẩn giao thức PROFIBUS? 2

điểmCác loại PROFIBUS:
Mạng PROFIBUS được cung cấp theo ba chủng loại tương thớch
nhau:
PROFIBƯS - DP (Distributed Peripheral) phục vụ cho việc trao đổi
thụng tin nhỏ nhưng đũi hỏi tốc độ truyền nhanh. PROFIBUS - DP được xõy
dựng tối Ưu cho việc kết nối cỏc thiết bị trường với mỏy tớnh điều khiển.
PROFIBUS - DP phỏt triển nhằm đỏp ứng yờu cầu cao về tớnh năng thời
gian trong trao đổi dữ liệu, giữa cấp điều khiển cũng như cỏc bộ PLC hoặc
cỏc mỏy tớnh cụng nghiệp với cỏc ngoại vi phõn tỏn ở cấp trường như cỏc
thiết bị đo, truyền động và van. Việc trao đổi chủ yếu được thực hiện tuần
hoàn theo cơ chê Master/Slave. v ớ i sô trạm tối đa trong một mạng là 126,
PROFIBUS - DP cho phộp sử dụng cấu hỡnh một trạm chủ (Mono Master)
hoặc nhiều trạm chủ (Multi Master). Một đặc trưng nữa của PROFIBUS - DP
là tốc độ truyền cao, cú thể lờn tới 12 MbiƯs.

S7-300 MasterClasslPC with CP
Master Classl
PROFIBUS DP
Mas te r Lilas s I ||—=—I —
. T
□ nS7-200
ET-200
Slave
PROFIBUS - FMS (Fieldbus Message Specification) trao đổi lượng
thụng tin trung bỡnh giữa cỏc thành viờn bỡnh đẳng với nhau trong mạng.
PROFIBUS - FMS được dựng chủ yếu cho việc nối mạng cỏc mỏy
tớnh điều khiển và giỏm sỏt. Mạng này chì thực hiện Ở cỏc lớp 1, 2, 7 theo
mụ hỡnh quy chiếu OSI. Do đặc điểm của cỏc ứng dụng trờn cấp điều khiển
và điều khiển giỏm sỏt, dữ liệu chủ yếu được trao đổi với tớnh chất khụng
định kỳ.

FMS client ™ s serverS7-400 station S7-400 station
PG/PC \vith STEP 7 and NCM S7 for PROFIBUS
PROFIBUS - PA (Process Automation) được thiết kê riờng cho những
khu vực nguy hiểm. PROFIBUS - PA là sự mở rộng của PROFIBUS - DP về
phương phỏp truyền dẫn an toàn trong mụi ưường dễ chỏy nổ theo chuẩn
IEC 61158-2. PROFIBUS - PA là loại bus trường thớch hỢp cho cỏc hệ thống
điều khiển phõn tỏn trong cỏc ngành cụng nghiệp hoỏ chất và hoỏ dầu. Thiết
bị chuyển đổi (DP/PA-Link) được sử dụng để tớch hỢp đường mạng PA với
mạng PROFIBUS DP. Điều này đảm bảo cho toàn bộ thụng tin cú thể được
truyền liờn tục ườn hệ thống mạng PROFIBUS bao gồm cả DP và PA.