Beyond the Trudinger-Moser supremum
40
Beyond the Trudinger-Moser Supremum Manuel del Pino, Monica Musso and Bernhard Ruf May 7, 2010 Abstract Let Ω be a bounded, smooth domain in R 2 . We consider the functional I (u)= Z Ω e u 2 dx in the supercritical Trudinger-Moser regime, i.e. for R Ω |∇u| 2 dx > 4π. More precisely, we are looking for critical points of I (u) in the class of functions u ∈ H 1 0 (Ω) such that R Ω |∇u| 2 dx =4 πk (1+α), for small α> 0. In particular, we prove the existence of 1-peak critical points of I (u) with R Ω |∇u| 2 dx =4π(1 + α) for any bounded domain Ω, 2-peak critical points with R Ω |∇u| 2 dx =8π(1 + α) for non-simply connected domains Ω, and k-peak critical points with R Ω |∇u| 2 dx =4kπ(1 + α) if Ω is an annulus. 1 Introduction The Trudinger-Moser inequality concerns the limiting case p = N of the Sobolev embeddings W 1,p (Ω) ⊂ L Np N-p (Ω), where Ω ⊂ R N is an open domain. If p = N , the Sobolev space W 1,N (Ω) embeds into any L q (Ω), but easy examples show that W 1,N (Ω) 6⊂ L ∞ (Ω). The maximal growth of integrability for functions u ∈ W 1,N (Ω) has been determined by S. Pohozaev [27] and N. Trudinger [32]: it is of exponential type, more precisely, for a bounded domain in Ω ⊂ R N one has u ∈ W 1,N 0 (Ω) ⇒ Z Ω e u 2 dx < ∞ This inequality was sharpened by J. Moser [26] as follows: sup k∇uk N ≤1 Z Ω e μ|u| N 0 dx ( ≤ C |Ω| , if μ ≤ μ N =+∞ if μ>μ N (1.1) where N 0 = N N-1 and μ N = Nω 1/(N-1) N-1 with ω N-1 the measure of the unit sphere in R N . We recall that in the Sobolev case there is a loss of compactness at the limiting Sobolev exponent p * , and the supremum sup k∇uk p ≤1 Z Ω |u| p * dx 1
Transcript of Beyond the Trudinger-Moser supremum

Beyond the Trudinger-Moser Supremum
Manuel del Pino, Monica Musso and Bernhard Ruf
May 7, 2010
Abstract
Let Ω be a bounded, smooth domain in R2. We consider the functional
I(u) =
∫
Ω
eu2dx
in the supercritical Trudinger-Moser regime, i.e. for∫Ω|∇u|2dx > 4π.
More precisely, we are looking for critical points of I(u) in the class offunctions u ∈ H1
0 (Ω) such that∫Ω|∇u|2 dx = 4 π k (1+α), for small α > 0.
In particular, we prove the existence of 1-peak critical points of I(u) with∫Ω|∇u|2dx = 4π(1+α) for any bounded domain Ω, 2-peak critical points
with∫Ω|∇u|2dx = 8π(1 + α) for non-simply connected domains Ω, and
k-peak critical points with∫Ω|∇u|2dx = 4kπ(1 + α) if Ω is an annulus.
1 Introduction
The Trudinger-Moser inequality concerns the limiting case p = N of the Sobolevembeddings W 1,p(Ω) ⊂ L
NpN−p (Ω), where Ω ⊂ RN is an open domain. If p = N ,
the Sobolev space W 1,N (Ω) embeds into any Lq(Ω), but easy examples showthat W 1,N (Ω) 6⊂ L∞(Ω). The maximal growth of integrability for functionsu ∈ W 1,N (Ω) has been determined by S. Pohozaev [27] and N. Trudinger [32]:it is of exponential type, more precisely, for a bounded domain in Ω ⊂ RN onehas
u ∈ W 1,N0 (Ω) ⇒
∫
Ω
eu2dx < ∞
This inequality was sharpened by J. Moser [26] as follows:
sup‖∇u‖N≤1
∫
Ω
eµ|u|N′dx
≤ C |Ω| , if µ ≤ µN
= +∞ if µ > µN
(1.1)
where N ′ = NN−1 and µN = Nω
1/(N−1)N−1 with ωN−1 the measure of the unit
sphere in RN .We recall that in the Sobolev case there is a loss of compactness at the
limiting Sobolev exponent p∗, and the supremum
sup‖∇u‖p≤1
∫
Ω
|u|p∗dx
1

is not attained for any Ω 6= RN . P.L. Lions [24] showed that also for (1.1) thereis a loss of compactness at the limiting exponent µ = µN . But, despite the lossof compactness and in contrast to the Sobolev case, L. Carleson – A. Changproved in [10] that the supremum
sup‖∇u‖N≤1
∫
Ω
eµN |u|N′dx
is attained for the ball Ω = B1(0). In [12] an alternative proof of this resultwas given, showing that there is a close parallel to the famous result of Brezis-Nirenberg [9] on perturbations of the Sobolev embedding. Struwe showed in [29]that the Carleson-Chang result continues to hold if Ω is a small perturbationof the ball; Flucher [20] then proved that the result is true on general boundeddomains Ω ⊂ R2, and Lin [23] extended the result to general bounded domainsin RN .
Numerical evidence given by Monahan [25] suggested that in the case N = 2(for Ω being the ball) the Trudinger-Moser functional
I(u) =∫
Ω
e|u|2dx , ‖∇u‖2 = µ (1.2)
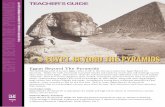
admits a local maximum and a mountain-pass critical value in the supercriticalregime, i.e. for µ > µ2 = 4π and near 4π. In the cited paper, Struwe wasable to prove that this is indeed the case for almost every µ in some interval(4π, µ0). The situation may be visualized as follows, where u(p) and u(µ) denoterespective critical points.
‖u(p)‖∞
pp∗1
‖u(µ)‖∞
µ4π
Fig.1. Approaching criticality in the Sobolev and the Moser case
Recently, Lamm-Robert-Struwe [22] have studied the heat-flow associated tothe Trudinger-Moser functional, and they proved that for t →∞ the solutions ei-ther converge strongly to a solution of the associated stationary Trudinger-Moser
2

equation, or there is the formation of ”standard bubbles”. This quantizationis in correspondence to the results of Adimurthi-Struwe [5], Adimurthi-Druet[4] and Druet [18] concerning the blow-up behavior of sequences of solutions ofthe associated elliptic equations. Using this characterization of the solutions ofthe heat-flow, Lamm-Robert-Struwe prove the existence of local maxima andsaddle point solutions in the supercritical regime for the functional (1.2), thuscompleting the result of Struwe in [29].
In recent years a very successful method has been developed for studyingelliptic equations in critical or supercritical regimes, see e.g. the survey [16].The main idea is to try to guess the form of the solution (using the shape ofthe ”standard bubble”), then linearize the equation in this solution and usea Lyapunov-Schmidt reduction to arrive at a reduced finite dimensional varia-tional problem, whose critical points yield actual solutions of the equation. Inthis paper we use this method to study the functional (1.2) in the supercriti-cal regime. To state the results, we define the Green’s function G(x, y) of theproblem L
−∆xG = 4πδy(x), x ∈ Ω,
G(x, y) = 0, x ∈ ∂Ω,
and H its regular part defined as
H(x, y) = 4 log1
|x− y| −G(x, y). (1.3)
Then from [4], it follows that Robin’s function x 7→ H(x, x) has a strict minimumξ0 ∈ Ω.
We prove the following results.
Theorem 1.1. Let Ω ⊂ R2 be a bounded domain.There exists µ1 > 4π such that for µ ∈ (4π, µ1) the functional I(u) restrictedto the sphere Sµ = u ∈ H1
0 (Ω) :∫Ω|∇u|2dx = µ has a critical value with
corresponding positive solution uµ.Furthermore, for µ → 4π the solution uµ blows up around a point ξµ with
ξµ → ξ0, the minimum of Robin’s function, and there exists a positive numbermµ such that
uµ(x) = (µ− 4π)1/4 [mµG(x, ξµ) + o(1)] ,
where o(1) → 0 as µ → 4π uniformly on compact sets of Ω \ ξ0. Moreover
mµ →√
e
4e−
H(ξ0,ξ0)4 as µ → 4π.
In the next theorem we give a result near and above the critical energy level8π; again, there exist critical levels with corresponding positive solutions withtwo blow-up points, provided the domain has non-trivial topology:
3

Theorem 1.2. Assume that Ω ⊂ R2 is bounded and not simply connected. Thenthere exists µ2 > 8π such that for µ ∈ (8π, µ2) the functional I(u) restricted toSµ has a critical value with a corresponding positive solution uµ which blows uparound two points ξ1, ξ2 ∈ Ω, as µ → 8π. More precisely, there exist mi,µ > 0and ξiµ ∈ Ω, for i = 1, 2, such that
ξiµ → ξi as µ → 8 π, with ξ1 6= ξ2,
anduµ = (µ− 8π)
14 [m1µG(x, ξ1µ) + m2µG(x, ξ2µ) + o(1)]
where o(1) → 0 uniformly on compact sets of Ω \ ξ1, ξ2, as µ → 8 π.
If Ω is an annulus we can looks for solutions with symmetry, with severalpoints of blow-up.
Theorem 1.3. Let 0 < a < b and Ω = B(0, b) \ B(0, a). Fix a positive integerk. Then there exists µk > 4 π k such that for µ ∈ (4π k, µk) the functionalI(u) restricted to Sµ has a critical value with corresponding positive solutionuµ which is invariant under rotations of angle 2π
k and which blows-up around kpoints arranged on the vertices of a regular polygon as µ → 4 π k. More precisely,there exist points ξjµ, for j = 1, . . . , k, such that
ξjµ = rµξj for all j = 1, . . . , k, with rµ → r0 as µ → 4 π k
whereξj = e
2π(j−1)k i for all j = 1, . . . , k,
and r0 is the minimum of the function
r ∈ (a, b) → H(rξ1, rξ1)−∑
i>1
G(rξ1, rξi).
There exists a positive parameter mµ, with
mµ →√
e
4e
H(r0 ξ1,r0 ξ1)−∑i>1 G(r0 ξ1,r0 ξi)4 as µ → 4 π k
such that the solution uµ satisfies
uµ(x) = (µ− 4 π k)14
mµ
k∑
j=1
G(x, ξjµ) + o(1)
where o(1) → 0 uniformly on compact sets of Ω\⋃kj=1r0e
2π(j−1)k i, as µ → 4 π k.
The critical points uµ found in Theorems 1.1 – 1.3 correspond to solutionsof the equation
−∆u = µueu2
∫Ω
u2eu2 in Ω , u = 0 on ∂Ω (1.4)
4

This equation is related, but not equivalent, to the equation
−∆u = λueu2in Ω , u = 0 on ∂Ω (1.5)
Critical growth equations of form (1.5) (and generalizations) have been exten-sively studied in recent years. The free functional associated with (1.5) is
Jλ(u) =∫
Ω
|∇u|2dx− λ
∫
Ω
e|u|2dx .
In [1], [13] existence results for equation (1.5) were given using variational meth-ods (in the spirit of Brezis-Nirenberg), working with the functional Jλ(u). Onthe other hand, in [4], [5] and [18] the asymptotic behavior of (certain) sequencesof solutions uλ of (1.5) was studied, and it was found that Jλ(uλ) → 4kπ asλ → 0, for some k ≥ 0, while the question whether such families of solutions existfor k ≥ 1 was left open. A positive answer was given in [17] in the case k = 1, 2,showing that there exists a family of solutions uλ to problem (1.5) which blowsup near a minimizer of the Robin’s function H(ξ, ξ) in the case k = 1, and withtwo bubbles in the case k = 2 provided Ω is not simply connected.
The proofs of Theorems 1.1–1.3 are related to the proofs in [17], and forsome details we will refer to that paper.
Acknowledgments. This research has been partly supported by FondecytGrants 1070389, 1080099, Fondecyt Grant-International Cooperation 7070150,Fondo Basal CMM and CAPDE-Anillo ACT-125.
2 A first approximation and outline of the ar-gument
Let us fix an integer k ≥ 1. For a small number α > 0 we consider the set
Mα = u ∈ H10 (Ω) :
∫
Ω
|∇u|2 = 4π k (1 + α) . (2.1)
Our problem is to find critical points of the functional
G(u) =∫
Ω
eu2dx (2.2)
constrained to the manifold Mα. This is equivalent to finding a solution u ∈H1
0 (Ω) to the nonlocal problem
∆ u +4π k (1 + α)∫
Ωu2eu2 dx
u eu2= 0 in Ω, u = 0 on ∂Ω. (2.3)
Or equivalently, this reduces to solve at the same time problem
∆ u + λu eu2= 0 in Ω, u = 0 on ∂Ω. (2.4)
5

and problem
λ =4π k (1 + α)∫
Ωu2eu2 dx
. (2.5)
Let us consider k distinct points ξ1, ξ2, . . . , ξk in Ω and k positive numbersm1, m2, . . . ,mk, such that, for a certain given δ > 0 small, we have
dist(ξj , ∂Ω) > δ, |ξi − ξj | > δ, δ < mj < δ−1. (2.6)
For λ > 0, points ξj and parameters mj satisfying (2.6), we define newparameters µj and εj as follows
log 8µ2j = −2 log 2m2
j −H(ξj , ξj) +∑
i 6=j
mim−1j G(ξi, ξj), (2.7)
where G denotes the Green’s function for the Laplace operator with zero Dirich-let boundary conditions in Ω, and H its regular part (1.3). Let us mention thatrelation (2.7) defines a diffeomorphism between µj and mj . Furthermore, wedefine εj by
log ε−4j =
12m2
jλ− 2 log 2m2
j . (2.8)
With these definitions, we introduce the function
U(x) =√
λ
k∑
j=1
mj
[log
1(µ2
jε2j + |x− ξj |2)2 − Hj(x)
]. (2.9)
In (2.9) the function Hj is defined as follows
∆Hj = 0, in Ω,
Hj(x) = log 1(µ2
jε2j+|x−ξj |2)2 , for x ∈ ∂Ω.
Let us observe that from elliptic estimates,
Hj(x) = H(x, ξj) + O(ε2jµ
2j ),
uniformly in Ω, where H is defined in (1.3). Hence, far from the points ξj ,
log1
(µ2jε
2j + |x− ξj |2)2 − Hj(x) = G(x, ξj) + O(ε2
jµ2j ). (2.10)
Thus in particular we have that, far from the points ξj ,
U(x) =√
λ
k∑
j=1
mj G(x, ξj) + o(1) as λ → 0, (2.11)
6

where o(1) → 0 as λ → 0. On the other hand, in a small neighborhood of agiven ξj , say in |x−ξj | < δ, as a consequence of the definition of the parametersµj and εj in (2.7) and (2.8), we see that
U(x) = mj
√λ
[wj(x) + log ε−4
j + 2 log 2m2j + θ(x)
], (2.12)
where θ is a smooth function such that
θ(x) = O(|x− ξj |) +∑
j
O(ε2j )
and
wj(x) := wµj
(x− ξj
εj
)(2.13)
with
wµ(y) := log8µ2
(µ2 + |y|2)2 . (2.14)
The functions wµ, µ > 0, are the radially symmetric solutions of the Liouvilleequation
∆w + ew = 0 in R2. (2.15)
The aim of this paper is to construct a solution to Problem (3.1), or equiv-alently to Problem (2.4)-(2.5), of the form
u = U + φ,
where φ is a lower order correction. We will do this when k = 1 (see Theorem1.1), when k = 2 and Ω is not simply connected (see Theorem 1.2), and any kwith Ω an annulus (Theorem 1.3).
The first part of our argument is the construction of the function φ. For anyλ > 0 small, points ξj and parameters mj satisfying (2.6) we find φ as solutionto the non linear problem (2.4) when projected on a proper subspace of H1
0 (Ω).Let us be more precise.
The linearized equation at wj (2.13) of the Liouville equation (2.15)
∆ω + eω = 0 in R2
is given by∆ψ + ewj ψ = 0 in R2. (2.16)
It is well known (see [8]) that all finite-energy solutions to (2.16) are given by
z0j(y) = ∂µwµj (y), zlj(y) = ∂ylwµj (y), l = 1, 2.
Hence, expanding variables, the functions
Zij(x) := zij
(x− ξj
εj
), i = 0, 1, 2 (2.17)
7

are all the solutions to
Lj(φ) = ∆φ + ε−2j ewj φ = 0.
Let us further introduce a large but fixed number R0 > 0 and a non-negativefunction ζ(ρ) with ζ(ρ) = 1 if ρ < R0 and χ(ρ) = 0 if ρ > R0 + 1. We denote
ζj(x) = ε−2j ζ
(|x− ξj
εj|)
. (2.18)
The function φ will be a solution to problem (2.4) projected on the subspaceof the functions in H1
0 (Ω) which are L2−orthogonal to all ζjZij , for j = 1, . . . , k,i = 0, 1, 2.
Using the notations: m := (m1, . . . , mk) and ξ := (ξ1, . . . , ξk), we have thevalidity of the following
Propostion 2.1. Let δ > 0 be fixed. There exist λ0 > 0 and C > 0 such that,for any 0 < λ < λ0, for any points ξ1, . . . , ξk, for any parameters m1, . . . , mk
satisfying (2.6), for parameters µj and εj defined by (2.7) and (2.8), there existsa solution φ = φ(λ, ξ, m) to the nonlinear projected problem
∆(U + φ) + λ(U + φ)e(U+φ)2 =√
λ
2∑
i=0
k∑
j=1
cijZijζj , in Ω, (2.19)
φ = 0, on ∂Ω, (2.20)∫
Ω
Zijζjφ = 0, for all i, j.(2.21)
for certain constants cij = cij(λ, ξ, m). Furthermore, the function which to each(λ, ξ,m) associates φ ∈ C(Ω) solution to (2.19)-(2.20)-(2.21) is of class C1, andthe following estimates hold true
‖φ‖∞ ≤ Cλ32 (2.22)
and‖Dξφ‖∞ ≤ Cλ
32 , ‖Dmφ‖∞ ≤ Cλ
32 . (2.23)
Observe that by construction U = 0 on ∂Ω, thus φ = 0 on ∂Ω.
Proposition 2.1 is contained as part of the proof of the result in our previouswork [17], where we construct solutions uλ to
∆u + λueu2= 0 in Ω, u > 0 in Ω, u = 0 on ∂Ω, (2.24)
for any λ > 0 small. Given a certain configuration of points ξ1, . . . , ξk in Ω anda certain choice of the parameters m1, . . . , mk, these solutions uλ behave as
uλ(x) =√
λ
k∑
j=1
mjG(x, ξj) + o(1)
8

where o(1) → 0 on each compact subset of Ω \ ξ1, . . . , ξk.For completeness, we will sketch the principal steps of the proof of Proposi-
tion 2.1 in Section 3.
Given the result in Proposition 2.1 we thus observe that the function U +φ,where U is given by (2.9) and φ is given by Proposition 2.1, is a solution to ourproblem (3.1), or equivalently to (2.4)-(2.5), if there exists a proper choice of λ,points ξj and parameters mj , j = 1, . . . , k, such that
λ =4πk(1 + α)∫
Ω(U + φ)2e(U+φ)2
and cij = 0 for all i, j, (2.25)
or equivalently∫
Ω
|∇(U + φ)|2 dx = 4πk(1 + α) and cij = 0 for all i, j. (2.26)
In Section 4 we will show
Propostion 2.2. Let R be the set of points and parameters (ξ, m) satisfying(2.6). Under the same assumptions of Proposition 2.1, there exists α0 > 0 anda subregion R′ of R such that, for all 0 < α < α0, and for all (ξ, m) ∈ R′ thereexists a function λ = λ(α, ξ,m) such that
∫
Ω
|∇(U + φ)|2 dx = 4πk(1 + α) for all α > 0, α → 0 (2.27)
Furthermore, λ is a smooth function of the free parameter α, of the pointsξ1, . . . , ξk, and the parameters m1, . . . , mk. Moreover λ → 0 as α → 0 forpoints ξ1, . . . , ξk and parameters m1, . . . ,mk belonging to R′.
With this definition of λ, we have that
Dξ,mG(U + φ) = 0 =⇒ cij = 0 for all i, j. (2.28)
In (2.27)-(2.28) the function U is defined in (2.9) and φ is given by Proposition2.1.
Given the choice of λ to have (2.27), for all α > 0 small, Proposition 2.2means that U + φ is a solution to our problem if we can find (ξ, m) to be acritical point of the function
g(ξ, m) = G(U + φ). (2.29)
This will be done in Section 5 in the case k = 1 for any domain Ω, in Section 6in the case k = 2 and Ω a domain not simply connected domain, and in Section7 in the case of arbitrary k ≥ 1 and Ω an annulus.
9

3 Proof of Proposition 2.1
This section will be devoted to prove Proposition 2.1. It is convenient for ourpurpose to rewrite Problem (2.19)–(2.21) by replacing U + φ =
√λ(U + φ), so
that we get
L(φ) = −E −N(φ) +2∑
i=0
k∑
j=1
cijZijζj , in Ω, (3.1)
φ = 0, on ∂Ω, (3.2)∫
Ω
Zijζj φ = 0, for all i, j. (3.3)
In the above expression, L is the linear operator defined as
L(φ) = ∆φ +
k∑
j=1
ε−2j ewj(x)
φ, (3.4)
where εj are defined in (2.8) and wj are defined in (2.13). The function E isgiven by
E(x) = ∆U + f(U), (3.5)
withf(U) = λUeλU2
. (3.6)
and N(φ) is given by
N(φ) = [f(U + φ)− f(U)− f ′(U)φ] + [f ′(U)−k∑
j=1
ε−2j eωj(x)]φ (3.7)
We want to find a small solution φ to the non linear problem (3.1)–(3.3). Todo so two key steps are needed: to establish an invertibility theory for the linearoperator L in suitable spaces of functions and to determine the size of the errorterm E in the corresponding norm.
We start by analyzing the error term E. To estimate the size of the righthand side of equation (3.1), and in particular of the error term E, we introducethe following L∞-weighted norm for bounded functions defined in Ω. Let us set
ρ(x) :=k∑
j=1
ρiχBδ(ξj)(x) + 1
where χ denotes the characteristic function and
ρj(x) = cγj
(1 +
1γj
(wj + 1)) (
1 +1γj
(1 + |wj |))
ew2
j2γj − 1
ε−2
j ewj ,
(3.8)
10

where γj = log ε−4j . Define
‖h‖∗ = supx∈Ω
ρ(x)−1|h(x)|, (3.9)
We claim that‖E‖∗ ≤ Cλ. (3.10)
Indeed, using (2.7), (2.8) and (2.12), for |x− ξj | < δ we have
E(x) = mjε−2j ewj
1− (1 + 2m2
jλwj + O(λ))em2jλw2
j (1 + O (λwj)))
+∑
i
O(ε2i ).
Observe that for |x − ξj | = O(ε) we have that E(x) ∼ λε−2j ewj . On the other
hand, for |x − ξj | > δ for all j we clearly have that |E(x)| ≤ Cλ, as a directconsequence of (2.11). These facts give (3.10).
Next we will establish an invertibility theory for the linear operator L. Givenh ∈ L∞(Ω), we consider the linear problem of finding a function φ such that forcertain scalars cij , i = 0, 1, 2, j = 1, . . . , k, it satisfies
L(φ) = h +2∑
i=0
k∑
j=1
cijZijζj , in Ω, (3.11)
φ = 0, on ∂Ω, (3.12)∫
Ω
Zijζjφ = 0, for all i, j. (3.13)
Consider the norm‖φ‖∞ = sup
x∈Ω|φ(x)|
Proposition 3.1. Let δ > 0 be fixed. Under the same assumptions of Proposi-tion 2.1, for any h ∈ L∞(Ω), there is a unique solution φ := Tλ(h) to problem(3.11)–(3.13) for all λ positive and sufficiently small. Moreover
‖φ‖∞ ≤ C‖h‖∗. (3.14)
We will prove here Proposition 3.1.To do so we need the following estimate for the Laplacian. Let us consider
fixed positive numbers R and M and for ε > 0 the annular region Aε = x / R <|y| < M
ε , the function
ρε(|y|) = γew(ew22γ (1 +
w + 1γ
)(1 +|w|γ
)− 1))
where
w(|y|) = log8µ2
(µ2 + |y|2)2 , γ = log ε−4.
11

Let us consider the problem
−∆Ψ = ρε , in Aε
Ψ = 0 , on ∂Aε.(3.15)
Lemma 3.1. There exists constants C, ε0 depending only on uniform upperand away from zero lower bounds for R, M , such that for all ε < ε0 the solutionΨε to Problem (3.15) satisfies ‖Ψε‖∞ ≤ C.
Proof. The solution Ψ is radial, say Ψ = Ψ(r), r = |y|. Let us consider thechange of variables ψ(t) = Ψ(et). Then it is straightforward to check that ψsatisfies
−ψ′′(t) = e2tρε(et), t ∈ [R, γ + M ], ψ(R) = ψ(γ + M) = 0.
Since w(r) = −4 log r + O(1) in all the considered range, we find that we canestimate
e2tρε(et) ≤ Ce−2t
(1 +
t
γ+
M
γ)(1 +
t
γ)e
2t2γ − 1
=: g(t)
Thus, in order to prove the desired result it suffices to show that the solutionof the problem
−ψ′′(t) = g(t), t ∈ [log R, γ + M ], ψ(R) = ψ(γ + M) = 0
is uniformly bounded. Here and in the rest of the proof, C denotes a genericconstant independent of large γ.
Since ψ is concave and positive, it suffices to show that the quantity ψ(γ2 ) is
uniformly bounded. Let G(t, s) be the Green’s function of −ψ′′ with Dirichletboundary conditions in the interval. Then
G(t,γ
2) ≤ C mint− log R, γ + M − t.
Hence, since
ψ(γ
2
)=
∫ γ+M
log R
G(t,γ
2) g(t) dt
we get|ψ (
γ2
) | ≤ C∫ γ
2log R
(t− log R)|g(t)| dt
+C∫ log M ′+γ
γ2
(log M + γ − t)|g(t)| dt.
(3.16)
The first integral in (3.16) can be estimated as follows
∫ γ2
log R
(t− log R)|g(t)| dt ≤ C
∫ γ2
log R
e−2te2t2γ (1 + t4) dt
12

≤ C
∫ γ2
log R
e−t(1 + t4) dt ≤ C,
since in this region 2t2
γ ≤ t. Concerning the second integral in (3.16), we observe
that in that region |g(t)| ∼ γe−2te2t2γ (1− t
γ ), so we get
∫ log M ′+γ
γ2
(log M ′ + γ − t)|g(t)| dt ≤ C
∫ γ+O(1)
γ2
e−2t+ 2t2γ (γ − t + O(1))2
≤ C
∫ γ2 +O(1)
O(1)
e−s(s + O(1))2 ds ≤ C,
where we have used the change of variable s = γ − t.
We have thus established the existence of a positive constant C independentof ε such that
|Ψ(y)| ≤ C, for R < |y| < M
ε,
and the proof of the lemma is concluded.
An immediate consequence of the above estimate is the following.
Corollary 1. Let us consider the weight ρj(x) defined in (3.8), and the solutionΨj to the problem
−∆Ψj(x) = ρj , in Rεj < |x− ξj | < M
Ψj = 0 , on ∂Aε.(3.17)
Then there exists a C > 0, independent of all small εj such that
|Ψj(x)| ≤ C, for all Rεj < |x− ξj | < M.
Proof of Proposition 3.1. We will first establish the following a priori esti-mate: there exist positive numbers λ0 and C, such that for any solution φ to(3.11)-(3.13), one has
‖φ‖∞ ≤ C‖h‖∗, (3.18)
for all λ < λ0.We will carry out the proof of the a priori estimate (3.18) by contradiction.
We assume then the existence of sequences λn → 0, points ξnj ∈ Ω and numbers
mnj , µn
j , functions hn with ‖hn‖∗ → 0, φn with ‖φn‖∞ = 1, constants cijn,
L(φn) = hn +2∑
i=0
k∑
j=1
cijnZijζj , in Ω, (3.19)
φn = 0, on ∂Ω, (3.20)∫
Ω
Zijζjφn = 0, for all i, j. (3.21)
13

Passing to a subsequence we may assume that the points ξnj approach limit-
ing, distinct points ξ∗j in Ω. We claim that φn → 0 in C1 local sense on compactsof Ω \ ξ∗1 , . . . , ξ∗k. Indeed, let us observe that hn → 0 locally uniformly, awayfrom the points ξj . Away from the ξj ’s we have then ∆φn → 0 uniformly oncompact subsets on Ω \ ξ∗1 , . . . , ξ∗k. Since φn is bounded it follows also thatpassing to a further subsequence, φn approaches in C1 local sense on compactsof Ω \ ξ∗1 , . . . , ξ∗k a limit φ∗ which is bounded and harmonic in Ω \ ξ1, . . . , ξkand φ∗ = 0 on ∂Ω. Hence φ∗ extends smoothly to a harmonic function in Ω, sothat φ∗ = 0, and the claim follows.
Multiplying equation (3.11) against Zij and integrating by parts, one getsthat cijn → 0, as n →∞, for all i = 0, 1, 2 and j = 1, . . . , k.
Our next claim is that
sup|x−ξj |<Rεj
|φn(x)| → 0 for all R > 0. (3.22)
By contradiction, assume there exists an index j and R > 0 such that, for all n,
sup|x−ξn
j |<Rεj
|φn(x)| ≥ κ > 0.
Let us set φn(z) = φn(ξnj + εjz). Elliptic estimates imply that φn converges
uniformly over compacts to a bounded solution φ 6= 0 of the problem in R2
∆φ +8µ2
j
(µ2j + |z|2)2 φ = 0.
According to the nondegeneracy result in [8], φ is therefore a linear combinationof the functions zij , i = 0, 1, 2. However, our assumed orthogonality conditionson φn pass to the limit and yield
∫ζ(|z|)zij φ = 0, for i = 0, 1, 2, thus a contra-
diction from which claim (3.22) follows.
Let us fix such a number R > 0 which we may take larger whenever it isneeded and consider the quantity
‖φ‖i = sup∪k
j=1B(ξj ,Rεj)
|φ|.
The desired result, ‖φn‖∞ → 0 is a consequence of the following fact: there isa uniform constant C > 0 such that
‖φ‖∞ ≤ C[‖φ‖i + ‖h‖∗]. (3.23)
We will establish this with the use of barriers. Indeed, a crucial fact is that theoperator L satisfies the maximum principle in Ω outside balls centered at thepoints ξj of radius Rεj , for some fixed R > 0. Let us check this. Given a > 0,consider the function
Z(x) =k∑
j=1
z0(aε−1j |x− ξj |), x ∈ Ω (3.24)
14

where z0(r) = r2−11+r2 is the radial solution in R2 of ∆z0 + 8
(1+r2)2 z0 = 0. Adirect computation shows that if a is taken small and fixed, and R > 0 ischosen sufficiently large depending on this a, then we have that L(Z) < 0 inΩ := Ω \ ∪m
j=1B(ξj , Rεj) and Z > 0 in Ω. Thus in this region L satisfies themaximum principle, namely if L(ψ) ≤ 0 in Ω and ψ ≥ 0 on ∂Ω then ψ ≥ 0 inΩ.
Let us consider the function Ψj in Corollary 1. Since Ψj is uniformlybounded, it is easy to see that if R is chosen sufficiently large then the uniformlybounded function ψj(x) := Ψj(4x) satisfies −L(ψj) > ρj for Rεj < |x−ξj | < M ,where we fix M > 0 such that Ω ⊂ B(ξj ,M).
Let us set
φ(y) = 2‖φ‖iZ(x) + ‖h‖∗k∑
j=1
ψj(x).
where Z is the function defined above in (3.24). Then, it is easily checkedthat, choosing R larger if necessary, −L(φ) ≤ h, φ ≥ φ on ∂Ω, where Ω =Ω\∪m
j=1B(ξj , Rεj). Hence |φ| ≤ φ on Ω, and estimate (3.23) follows. This givesthe proof of (3.18).
It only remains to prove the solvability assertion. To this purpose we considerthe space
H =
φ ∈ H10 (Ω) :
∫
Ω
ζjZij φ = 0 for i = 0, 1, 2, j = 1, . . . , k
,
endowed with the usual inner product [φ, ψ] =∫Ω∇φ∇ψ. Problem (3.11)-(3.13)
expressed in weak form is equivalent to that of finding a φ ∈ H, such that
[φ, ψ] =∫
Ω
[−Wφ + h] ψ dx, for all ψ ∈ H.
With the aid of Riesz’s representation theorem, this equation gets rewrittenin H in the operator form φ = K(φ) + h, for certain h ∈ H, where K is acompact operator in H. Fredholm’s alternative guarantees unique solvability ofthis problem for any h provided that the homogeneous equation φ = K(φ) hasonly the zero solution in H. This last equation is equivalent to (3.11)-(3.13)with h ≡ 0. Thus the existence of a unique solution follows from the a prioriestimate (3.18). This finishes the proof.
We have now the elements to prove Proposition 2.1.
Proof of Proposition 2.1. To solve problem (3.1)–(3.3) in L∞(Ω), we recastit in fixed point form
φ = Tλ(−E −N(φ)) := A(φ) (3.25)
15

where Tλ is the operator in Proposition 3.1. Using a Taylor expansion and thefact that ‖f ′′(U)‖∗ ≤ C we find that
‖N(φ)‖∗ ≤ C‖φ‖2∞ + Cλ‖φ‖∞.
This estimate, Proposition 3.1, and estimate (3.10) imply that A(B) ⊂ B whereB = φ / ‖φ‖∞ ≤ Mλ for a sufficiently large and fixed M and all small λ.Besides, it is directly checked that the operator A has a small Lipschitz constantin B for all small λ. Thus, the contraction mapping principle leads to a solutionφ of (3.1)–(3.3) with ‖φ‖∞ ≤ Cλ. This gives (2.22). The C1-dependence ofthe function φ on the points ξ and the parameter m and the correspondingestimates (2.23) can be obtained as in [17] Section 4.
4 Proof of Proposition 2.2
We start with the following
Propostion 4.1. Let δ > 0 be a fixed small number, let U be the function definedin (2.9) and φ the function given by Proposition 2.1. Assume the parameters µj
and εj are defined as in (2.7) and (2.8), and assume that λ is a free parameter.Then, as λ → 0, the following expansions hold true
∫
Ω
|∇(U + φ)|2 dx = 4πk1 + λfk(ξ,m) + λ3Θλ(ξ, m)
(4.1)
where
fk(ξ, m) = 2
k∑
j=1
m2j (b + 2 log 2m2
j + H(ξj , ξj))−∑
i 6=j
mimjG(ξi, ξj)
(4.2)
with b = (2 log 8− 2) > 0. Furthermore, as λ → 0,∫
Ω
e(U+φ)2 dx = |Ω|+16π
k∑
j=1
m2j +λ
k∑
j=1
m2j
∫
Ω
G2(x, ξj) dx+λ2Θ(ξ, m). (4.3)
In (4.1) and (4.3), Θλ(ξ, m) denotes a smooth function, uniformly boundedtogether with its derivatives, as λ → 0, for (ξ, m) satisfying constraint (2.6).
Proof.We write ∫
Ω
|∇(U + φ)|2 dx =∫
Ω
|∇U |2 + 2∫
Ω
∇U∇φdx +∫
Ω
|∇φ|2
In [17] Lemma 6.5, we showed that
∫
Ω
|∇U |2 = 4πk
1 + λfk(ξ, m) +
k∑
j=1
ε2j log
1εj
θ(ξ,m)
(4.4)
16

where fk is the function defined in (4.2) and θ is a smooth function, uni-formly bounded together with its derivatives, as λ → 0, in the region for(ξ, m) satisfying (2.6). In order to get (4.1), we are left with the estimateof 2
∫Ω∇U∇φdx +
∫Ω|∇φ|2.
If we multiply equation (2.19) against φ, and we then integrate on Ω, we getthrough an integration by parts
∫
Ω
∇U∇φdx +∫
Ω
|∇φ|2 = λ
∫
Ω
(U + φ)e(U+φ)2φ (4.5)
since we recall that φ = 0 on ∂Ω and the orthogonality conditions (2.21) hold.Since ‖φ‖∞ ≤ Cλ
32 , for some fixed constant C, we have
∣∣∣∣∫
Ω
(U + φ)e(U+φ)2φ
∣∣∣∣ ≤ Cλ32
∣∣∣∣∫
Ω
(U + φ)e(U+φ)2∣∣∣∣ .
Now, a Taylor expansion on the last integral also gives,∣∣∣∣∫
Ω
(U + φ)e(U+φ)2φ
∣∣∣∣ ≤ Cλ32
∣∣∣∣∫
Ω
UeU2∣∣∣∣ .
We now write, for some δ > 0 small,∫
Ω
UeU2dx =
∫
Ω\∪jB(ξj ,δ√
εj)
+k∑
j=1
∫
B(ξj ,δ√
εj)
UeU2.
Since in the region Ω\∪jB(ξj , δ√
εj) the function U(x) =√
λ(∑
j mjG(x, ξj)+o(1)), with o(1) → 0 as λ → 0, a Taylor expansion gives∫
Ω\∪jB(ξj ,δ√
εj)
UeU2=√
λ
k∑
j=1
mj
∫
Ω
G(x, ξj)[1 + λ
k∑
j=1
mjG(x, ξj)](1 + o(1))
=√
λ
k∑
j=1
mj
∫
Ω
G(x, ξj) dx(1 + o(1)).
Let us now fix j. We write∫
B(ξj ,δ√
εj)
=∫
B(ξj ,δεj | log εj |)+
∫
B(ξj ,δ√
εj)\B(ξj ,δ√
εj)
[UeU2] = I1 + I2.
We estimate first I1. Performing the change of variables y = x−ξj
εjand using
the notations Vj(y) = 2γjU(εjy + ξj)− 2γ2j and γj = log ε−4
j , we have
I1 = ε2j
γjeγ2
j∫
B(0,δ| log εj |)(Vj(y) + 2γ2j )e
Vj(y)+V 2
j (y)
4γ2j dy
= 2ε2je
γ2j
√λmj
∫B(0,δ| log εj |) ωj(y)eωj(y)(1 + o(1))
= 2m3j
√λ
∫R2 ω(y) 8
(1+|y|2)2 dy(1 + o(1)).
17

On the other hand
|I2| ≤ C√
λ∫ δε
− 12
j
δ| log εj |1r4 e
log2 r
γ2j r dr
(t = log r)
= C√
λ∫ R2+
γ2j4
R1+log γ2je−2t+ 4t2
γ2j dt ≤ C
√λ
∫ R2+γ2
j4
R1+log γ2je−t dt ≤ Cλ
32 .
(4.6)
We thus conclude that∫
Ω
UeU2dx =
√λΘλ(ξ, m)(1 + o(1)) (4.7)
where Θλ(ξ, m) is bounded together with its derivatives in the considered region.This fact, together with (4.5), gives
∫
Ω
∇U∇φdx +∫
Ω
|∇φ|2 = λ3Θλ(ξ, m).
We can thus conclude that estimate (4.1) holds true in C0-sense. The C1-closeness is a direct consequence of the fact that Θλ(ξ,m) is bounded togetherwith its derivatives in the considered region.
Let us now evaluate∫Ω
e(U+φ)2 . We write∫
Ω
e(U+φ)2 =∫
Ω
eU2e2Uφ+φ2
.
A Taylor expansion, together with estimate (4.7), gives that∫
Ω
e(U+φ)2 =∫
Ω
eU2+ λ2Θ(ξ, m). (4.8)
Now we write
∫
Ω
eU2dx =
k∑
j=1
∫
B(ξj ,δ√
εj)
eU2dx
+ Aλ. (4.9)
Since in the region Ω \ ∪jB(ξj , δ√
εj) we have
U(x) =√
λ(∑
j
mjG(x, ξj) + o(1)),
with o(1) → 0 as λ → 0, a Taylor expansion gives
Aλ =∫
Ω\∪jB(ξj ,δ√
εj)
[1 + λ
k∑
j=1
m2jG
2(x, ξj)](1 + o(1))
18

= |Ω|+ λ
k∑
j=1
m2j
∫
Ω
G2(x, ξj) dx + λ2Θλ(ξ, m).
Now, we write∫
B(ξj ,δ√
εj)eU2
dx =∫
B(ξj ,δεj | log εj |) eU2dx +
∫B(ξj ,δ
√εj)\B(ξj ,δεj | log εj |) eU2
dx
= I1 + I2.
We will show next that
I1 = 16πm2j + λΘλ(ξ, m), I2 = λΘλ(ξ,m) (4.10)
for some function Θλ, uniformly bounded together with its derivatives, as λ → 0.Indeed, performing the change of variables y = x−ξj
εjand using the notations
Vj(y) = 2γjU(εjy + ξj)− 2γ2j and γj = log ε−4
j , we have
I1 = ε2je
γ2j∫
B(0,δ| log εj |) eVj(y)+
V 2j (y)
4γ2j dy
= 2m2j
∫R2
8(1+|y|2)2 dy + λΘλ(ξ,m) = 16πm2
j [1 + λΘλ(ξ,m)] .
On the other hand
|I2| ≤ C
∫ δε− 1
2j
δ| log εj |
1r4
elog2 r
γ2j r dr = O(λ) ,
by the calculations in (4.6).We can thus conclude that estimate (4.3) holds true in C0-sense. The C1-
closeness is a direct consequence of the fact that Θλ(ξ,m) is bounded togetherwith its derivatives in the considered region.
We are now ready to give the proof of Proposition 2.2.
Proof of Proposition 2.2. Let R′ be the subset of R defined as follows
R′ = (ξ, m) ∈ R : fk(ξ,m) 6= 0.
Replacing expansion (4.1) into (2.27), we see that (2.27) gives
λfk(ξ, m) + λ3Θλ(ξ, λ) = α (4.11)
In R′, relation (4.11) defines λ as a function of α, ξ and m, which is smooth in(ξ, m) in the region R′. Furthermore, as α → 0, we have
λ =α
fk(ξ,m)+
α3
f4k (ξ, m)
Θα(ξ, m),
19

where Θα is a smooth function of (ξ, m), which is uniformly bounded togetherwith its derivatives, in the region R′.
Assume now (2.27). We shall prove (2.28). Let us define the functional
J(u) =12
∫
Ω
|∇u|2 − λ
2
∫
Ω
eu2
for functions u ∈ H10 (Ω). We claim that
J ′(U + φ)[∂(U + φ)] = 0, (4.12)
where with ∂ we either denote the partial derivative with respect to mj forany j = 1, . . . , k, or the partial derivative with respect to ξji for j = 1, . . . , k,i = 1, 2.
Indeed, a direct computation gives
J ′(U + φ)[∂(U + φ)] =∫
Ω
∇(U + φ)∇(∂(U + φ))− λ
∫
Ω
(U + φ)e(U+φ)2∂(U + φ)
=12∂
(∫
Ω
|∇(U + φ)|2)− λ∂
(∫
Ω
e(U+φ)2)
= 0
where we use the fact that ∂(∫
Ω|∇(U + φ)|2) = 0 since (2.27) holds, and the
assumption that ∂(∫
Ωe(U+φ)2
)= 0.
Let us now consider the following change of variables
1√λ
(U + φ)(x) = mlvl(x− ξl
εl) +
12mlλ
for some l = 1, . . . , k. A direct consequence of (2.12) gives
vl(y) = wµl(y) +
∑
j
(O(|εly + ξl − ξj |) + O(ε2j )) for |y| ≤ δ
εl. (4.13)
A straightforward computation gives that
J(U + φ) = Il(vl)
where
Il(vl) =m2
l
2
∫
Ωl
|∇vl|2 dx−m2l
∫
Ωl
evleλm2l v2
with Ωl = Ω−ξl
εl. Furthermore,
J ′(U + φ)[∂(U + φ)] = I ′l(vl)[∂vl]. (4.14)
Now, since (U + φ) solves (2.19) in Ω, we see that vl(y) solves in Ωl
mlε−2l
[∆vl + evl(1 + 2λm2
l vl)eλm2l v2
l
]=
∑
ij
cijζ(εly + ξl − ξj
εj)ε−2
j zij(εly + ξl − ξj
εj).
20

Thus from (4.12) and (4.14) we get
0 = I ′l(vl)[∂vl]
=∑
ij
(∫
Ωl
ζ(εly + ξl − ξj
εj)ε−2
j zij(εly + ξl − ξj
εj)∂vldy
)cij
Now assume that ∂ = ∂m1 . Fix i and j. To compute the coefficient in front ofcij in the above expression, we choose l = j and obtain∫
Ωl
ζ(εly + ξl − ξj
εj
)ε−2j zij
(εly + ξl − ξj
εj
)Dm1vldy =
∂µj
∂m1
∫
R2z20j(y) dy (1 + o(1)) .
Thus we conclude that, for any h = 1, . . . , k,
0 =∑
j
( ∂µj
∂mh
∫
R2z20j(y) dy
)c0j (1 + o(1))
If we now assume that ∂ = ∂ξabfor a = 1, 2, b = 1, . . . , k, a direct argument
show on the other hand that
0 =∑
j
( ∂µj
∂ξab
∫
R2z20j(y) dy
)c0j +
( ∫
R2z21j(y) dy
)cab (1 + o(1))
We can conclude that Dξ,mIλ(ξ, m) = 0 implies the validity of a system ofequations of the form
[∑
j
∂µj
∂mhc0j
](1 + o(1)) = 0, j = 1, . . . , k, (4.15)
[A
∑
j
∂µj
∂ξabc0j + cab
](1 + o(1)) = 0, a = 1, 2, b = 1, . . . , k, (4.16)
for some fixed constant A, with o(1) small in the sense of the L∞ norm as λ → 0.The conclusion of the Lemma follows if we show that the matrix (Dmµj)j ofdimension k×k is invertible in the range for the points ξj and parameters mj weare considering. Indeed, this fact implies unique solvability of (4.15). Insertingthis in (4.16) we get unique solvability of (4.16).
Consider the definition of the µj ’s, in terms of mj ’s and points ξj given in(2.7). These relations correspond to the gradient DmF (m, ξ) of the function Fdefined as follows
F (m, ξ) =12
k∑
j=1
m2j
[log 2m2
j − log 8µ2j − 1−H(ξj , ξj)
]+
∑
i6=j
G(ξi, ξj)mimj .
It is natural to perform the change of variable sj = m2j . With abuse of notation,
the above function now reads as follows
F (s, ξ) =12
k∑
j=1
sj
[log 2sj − log 8µ2
j − 1−H(ξj , ξj)]+
∑
i6=j
G(ξi, ξj)√
sisj .
21

This is a strictly convex function of the parameters sj , for parameters sj
uniformly bounded and uniformly bounded away from 0 and for points ξj in Ωuniformly far away from each other and from the boundary. For this reason,the matrix ( ∂2F
∂si∂sj) is invertible in the range of parameters and points we are
considering. Thus, by the implicit function theorem, relation (2.7) defines adiffeomorphism between µj and mj . This fact gives the invertibility of ( ∂µj
∂ml)
we were aiming at.This concludes the proof of Proposition 2.2.
5 Proof of Theorem 1.1
In this section we assume that Ω is a bounded domain with smooth boundaryand k = 1. Thus in this case the point ξ ∈ Ω and the parameter m ∈ R+ satisfythe constraints
dist(ξ, ∂Ω) > δ, δ < m < δ−1. (5.1)
Condition (2.27) reduces to
λf1(ξ,m) + λ3Θλ(ξ, m) = α (5.2)
wheref1(ξ, m) = 2m2(b + 2 log 2m2 + H(ξ, ξ)). (5.3)
For simplicity we introduce the change of variables s = m2. Observe that, forany ξ ∈ Ω, the function s → b+2 log 2s+H(ξ, ξ) is strictly monotone in (0,∞),it has a unique zero s = s(ξ) = 1
2e−b+H(ξ,ξ)
2 , it is negative for 0 < s < s andstrictly positive for s > s. We thus conclude that in the region
(ξ, s) ∈ R′ = (ξ, s) : ξ ∈ Ω, s > s(ξ),where f1(ξ, s) is strictly positive, relation (5.2) defines λ as a smooth functionof α and (ξ, s). More precisely,
λ =α
f1(ξ, s)+
α3
f1(ξ, s)4Θα(ξ, s)
where Θα is a smooth function of (ξ, s) uniformly bounded, together with itsderivatives, as α → 0.
Replacing (5.3) and (5.2) in (4.3) for k = 1, we get that
g(ξ, s) :=∫
Ω
e(U+φ)2 dx = |Ω|+ 16πs +α
∫Ω
G2(x, ξ) dx
2(b + 2 log 2s + H(ξ, ξ))
+(
α
2s(b + 2 log 2s + H(ξ, ξ))
)2
Θα(ξ, s), (5.4)
where Θα is a smooth function which is uniformly bounded together with itsderivatives in the region R′.
22

As a consequence of (5.2) and of Proposition 2.2, we have that the functionu = U + φ, where U is defined in (2.9) and φ is given by Proposition 2.1, isa solution to our problem (3.1) if we establish the existence of a critical point(ξ, s) for the function g given by (5.4).
We claim that, given δ > 0, for all α > 0 small enough, the function
ϕα(ξ, s) := |Ω|+ 16πs +α
∫Ω
G2(x, ξ) dx
2(b + 2 log 2s + H(ξ, ξ))(5.5)
has a critical point in the region dist(ξ, ∂Ω) > δ and s(ξ) + δ√
α < s <s(ξ) + δ−1
√α and that this critical point situation is stable under small C1
perturbation of ϕα, in the sense that any function which is C1 close to ϕα inthe region considered also has a critical point. This fact will conclude the proofof Theorem 1.1 since, in the above region, the function g(ξ, s) given by (5.4) isa small C1 perturbation of ϕα as α → 0.
Thus what is left of this section is devoted to prove the existence of a C1-stable critical point situation for ϕα (see Proposition 4.1).
Consider the new change of variable t = s − s, so that t > 0 in the regionwe are considering. In this new variable, the function ϕα takes the form
ϕα(ξ, t) = |Ω|+ 16π(s + t) +α
∫Ω
G2(x, ξ) dx
2 log(1 + ts )
. (5.6)
Let H0 > 0 be the minimum value of the function H inside Ω. Let δ > 0 besuch that the set Ωδ := ξ ∈ Ω : H(ξ, ξ) < H0 +10δ is strictly contained in Ω.
LetD = Ωδ × R+
and let B = Ω δ2× [δ
√α, δ−1
√α] and B0 = Ω δ
2× δ√α, δ−1
√α. Consider the
set Γ of all functions φ ∈ C(B, D) such that there exists ψ ∈ C([0, 1] × B; D)with
ψ(0, ·) = IdB , ψ(1, ·) = φ, ψ(t, ·)|B0= IdB0 .
Definesupφ∈Γ
inf(ξ,t)∈B
ϕα(ξ, t) = c.
Observe that the value c is strictly positive, as a direct consequence of thedefinition of ϕα in the region considered. We will show that, given δ > 0 small,for all α > 0 small enough,
a)inf
(ξ,t)∈B0
ϕα(ξ, t) > c
b) there exists K > 0 independent of δ > 0 such that
c < K
23

c) if δ > 0 is small enough, then for any (ξ, t) ∈ ∂D such that ϕα(ξ, t) = cthere exists a tangent vector τ to ∂D such that
∇ϕα(ξ, t) · τ 6= 0.
Under the conditions a), b), c), a critical point (ξ, t) for ϕα with ϕα(ξ, t) = cexists, as a standard deformation argument involving the negative gradient flowof ϕα shows. This structure is clearly preserved for small C1(D)-perturbationsof ϕα and hence a stable critical point situation for the functional g, which isC1-close to ϕα, is established.
Proof of a). We start with the following observations. For any given ξ,since α > 0 the function t → ϕα(ξ, t) is strictly convex and positive in (0,∞),thus it has a unique minimum that we denote by t = t(ξ). This minimum isnon degenerate, namely ∂2
∂2tϕα(ξ, t) 6= 0, as a direct computation shows. From∂tϕα(ξ, t) = 0 we get that
log2(1 +t
s)(1 +
t
s) =
α∫Ω
G2(x, ξ) dx
64πs. (5.7)
The function h(r) := log2(1 + r)(1 + r) is strictly monotone in (0,∞) and, aTaylor expansion gives
h(r) = r2 + o(r2) as r → 0.
In particular, as α → 0, from (6.19) we obtain
t =
√αs
√∫Ω
G2(x, ξ) dx
8√
π+ o(
√αs). (5.8)
Choosing, if necessary, a smaller δ, we may assume that, for any ξ ∈ Ωδ, wehave that
δ
2√
α ≤ t(ξ) ≤ δ−1
2√
α.
In particular, this fact gives the validity of a).
Proof of b). Inserting (5.8) in (6.10), we get
ϕα(ξ, t) = |Ω|+ 16πs(ξ) + ϕα(ξ) (5.9)
where
ϕα(ξ) =√
αs
8
√π
∫
Ω
G2(x, ξ) +√
α∫Ω
G2(x, ξ)
2√
s log(1 +√
α∫Ω G2(x,ξ)
8√
πs)
+ o(
√αs).
(5.10)¿From (5.9) we thus get the following estimates for ϕα(ξ, t(ξ))
ϕα(ξ, t(ξ)) := |Ω|+ 16πe−b+H(ξ,ξ)
2 + O(√
α) (5.11)
24

¿From this we conclude that there exists a constant M independent of δ suchthat
c ≤ supξ∈Ω
(|Ω|+ 16πe−
b+H(ξ,ξ)2 + M
).
Thus b) is proven.
Proof of c). We argue by contradiction: assume that for a sequence δ → 0,points (ξ, t) with ϕα(ξ, t) = c and (ξ, t) ∈ ∂D we have that ∇ϕα(ξ, t) · τ = 0for any tangent vector τ to ∂D. Since c is uniformly bounded above and belowaway from zero, we have that t is uniformly bounded above and away from 0.Thus we assume that ∂tϕα(ξ, t) = 0 (otherwise we would get a contradictionright away). But if this is the case, our function ϕα(ξ, t) is given by (5.9), orequivalently (5.11). Now, since ξ → e−
b+H(ξ,ξ)2 has a maximum in the region Ωδ,
we have the existence of a tangent vector τ to ∂Ωδ such that ∇ϕα(ξ, t) · τ 6= 0.This concludes our argument, and also the proof of Theorem 1.1.
6 Proof of Theorem 1.2
In this section we assume that Ω is not simply connected and k = 2. In thiscase ξ = (ξ1, ξ2) ∈ Ω2 and m = (m1, m2) ∈ R2
+ satisfy
dist(ξi, ∂Ω) > δ, |ξ1 − ξ2| > δ, δ < mi < δ−1 (6.1)
for some given δ > 0 small, but independent of α.Condition (2.27) reduces to
λf2(ξ,m) + λ3Θ(ξ, m) = α (6.2)
where
f2(ξ, m) = 2
2∑
j=1
m2j (b + 2 log 2m2
j + H(ξj , ξj))−m1m2G(ξ1, ξ2)
. (6.3)
¿From now on, we will use the change of variables m2j = sj , j = 1, 2.
We next will describe the set
Z = (ξ, s) ∈ Ω2 × R2+ : s1s2 6= 0, f2(ξ, s) = 0. (6.4)
For any fixed ξ ∈ Ω2, there exists a unique intersection in R2+ between the set
Zξ = s ∈ R2+ : s1s2 6= 0, f2(ξ, s) = 0 (6.5)
and the lines s2 = ts1, for any 0 < t < ∞. This gives a parametrization of thecurve described by Zξ. Namely
Zξ = s = (s1, s2) ∈ R2+ : s1 =
12eφ(ξ,t), s2 =
t
2eφ(ξ,t), 0 < t < ∞
25

where
φ(ξ, t) =√
tG(ξ1, ξ2)− (1 + t)b−H(ξ1, ξ1)− tH(ξ2, ξ2)− 2t log t
2(1 + t). (6.6)
In particular, the set Zξ is a smooth curve in R2+, which is diffeomorphic to
s21 + s2
2 = 1 ∩ R2+, and it divides R2
+ into two connected components, onebounded and the other unbounded. In particular, in the unbounded componentf2 is positive. We call this region Z+
ξ and we denote by Z+ the region given by
Z+ = (ξ, s) ∈ Ω2 × R2+ : s1s2 6= 0, f2(ξ, s) > 0.
In Z+ relation (6.2) defines λ as a smooth function of the free parameter α andof the points (ξ, s).
Replacing (6.3) and (6.2) in (4.3) for k = 2, we get that
g(ξ, s) :=∫
Ω
e(U+φ)2 dx = |Ω|+ 16π(s1 + s2) +αh(ξ, s)f2(ξ, s)
+(
α
f2(ξ, s)
)2
Θα(ξ, s), (6.7)
whereh(ξ, s) = s1
∫
Ω
G2(x, ξ1) dx + s2
∫
Ω
G2(x, ξ2) dx, (6.8)
f2 is defined in (6.3) and Θα is a smooth function which is uniformly boundedtogether with its derivatives in Z+.
As a consequence of (5.2) and of Proposition 2.2, we have that the functionu = U + φ, where U is defined in (2.9) and φ is given by Proposition 2.1, isa solution to our problem (3.1) if we establish the existence of a critical point(ξ, s) for the function g given by (6.7). We will devote the rest of this Sectionto prove the above assertion.
We first introduce a further change of variables. For any fixed ξ ∈ Ω2,we consider the connected region Z+
ξ in R2+ where f2(ξ, s) > 0. We perform
the following change of variable: for any ξ ∈ Ω2 and t ∈ (0,∞), we defines = (1 + r)s, where
s = (s1(ξ, t), s2(ξ, t)) = (eφ(ξ,t)
2,t eφ(ξ,t)
2)
with φ given by (6.6), and r ∈ R. In particular, s ∈ Zξ and if r > 0 then(1 + r)s ∈ Z+
ξ .In the new variables (ξ, t, r) the function g takes the form
g(ξ, t, r) = |Ω|+ 16π(1 + r)(s1 + s2)
+αh(ξ, (1 + r)s)f2(ξ, (1 + r)s)
+( α
f2(ξ, (1 + r)s)
)2
Θα(ξ, (1 + r)s) .(6.9)
26

Finding a critical point for g(ξ, s), for ξ ∈ Ω2 and s ∈ R2+, is equivalent to
finding a critical point for g(ξ, t, r) for ξ ∈ Ω2 and (t, r) ∈ R2+.
We claim that, given δ > 0, for all α > 0 small enough, the function
ϕα(ξ, t, r) := |Ω|+ 16π(1 + r)(s1 + s2) +αh(ξ, (1 + r)s)f2(ξ, (1 + r)s)
(6.10)
has a critical point in the region dist (ξi, ∂Ω) > δ, |ξ1− ξ2| < δ, δ < t < δ−1 andδ√
α < r < δ−1√
α and that this critical point situation is stable under smallC1 perturbation of ϕα, in the sense that any function which is C1 close to ϕα
in the region considered also has a critical point. Since g is C1-close to ϕα (seeProposition 4.1) this fact will conclude the proof of Theorem 1.2.
Let us fix a small number δ > 0 to be chosen later. We define D to be
D = Ω2δ × R2
+, where Ω2δ = y ∈ Ω2 / dist (y, ∂Ω2) > δ. (6.11)
Denote by Ω1 a bounded nonempty component of R2\Ω and assume that 0 ∈ Ω1.Consider a closed, smooth Jordan curve γ contained in Ω which encloses Ω1. Welet S be the image of γ and B = S × S × [δ, δ−1]× [δ
√α, δ−1
√α]. Thus B is a
closed and connected subset of D. Define B0 = S × S×[δ, δ−1]×δ√α, δ−1√
α.B0 is a closed subset of B.
Let Γ be the class of all maps Φ ∈ C(B,D) with the property that thereexists a function Ψ ∈ C([0, 1]×B,D) such that
Ψ(0, ·) = IdB , Ψ(1, ·) = Φ, Ψ(t, ·)|B0= Id|B0
(6.12)
Then we defineC = sup
Φ∈Γinfz∈B
ϕα(Φ(z)). (6.13)
We will show that, given δ > 0 small, for all α > 0 small enough,
a)infB0
ϕα(ξ, t, r) > C
b) there exists K > 0 independent of δ > 0 such that
C < K
c) if δ > 0 is small enough, then for any (ξ, t, r) ∈ ∂D such that ϕα(ξ, t, r) = Cthere exists a tangent vector τ to ∂D such that
∇ϕα(ξ, t, r) · τ 6= 0.
Under conditions a), b), c), a critical point (ξ, t) for ϕα with ϕα(ξ, t) = Cexists, as a standard deformation argument involving the negative gradient flowof ϕα shows. This structure is clearly preserved for small C1(D)-perturbations
27

of ϕα and hence a stable critical point situation for the functional g, which isC1-close to ϕα, is established.
Proof of a). We claim that, given δ > 0 small, for any ξ ∈ Ω2, withdist(ξi, ∂Ω) > δ, |ξ1 − ξ2| > δ, and t ∈ R+ the function r → g(ξ, t, r) has a nondegenerate minimum in [δ
√α, δ−1
√α]. Indeed, observe that in this region, the
function g takes the form
ϕα(ξ, t, r) = ϕα(ξ, t, r) + αΘα(ξ, t, r) (6.14)
where
ϕα(ξ, t, r) = |Ω|+ 16π(1 + r)(s1 + s2) +αh(ξ, s)
[∂s1f2(ξ, s)s1 + ∂s2f2(ξ, s)s2]r
and Θα(ξ, t, r) is a smooth function, uniformly bounded together with its deriva-tives, as α → 0. A direct computation gives
∂s1f2(ξ, s) = b + 2 log 2s1 + 2 + H(ξ1, ξ1)−√
s2
2√
s1G(ξ1, ξ2),
∂s2f2(ξ, s) = b + 2 log 2s2 + 2 + H(ξ2, ξ2)−√
s1
2√
s2G(ξ1, ξ2)
and, since f2(ξ, s) = 0, we get that
∂s1f2(ξ, s)s1 + ∂s2f2(ξ, s)s2 = 2(s1 + s2).
Observe that, in the region we are considering, we have that m < s1+ s2 < m−1,for a certain positive constant m depending on δ, but independent of α. Insertingthe above computation in ϕα, we get
ϕα(ξ, t, r) = |Ω|+ 16π(1 + r)(s1 + s2) +αh(ξ, s)
2(s1 + s2)r.
Since α > 0 and h > 0, the function r → g(ξ, t, r) has a critical point r given by
r =
√h(ξ, s)
4√
2π(s1 + s2)
√α,
which is a non degenerate minimum, since
∂2r ϕα(ξ, t, r) =
αh(ξ, s)(s1 + s2)r3
> 0.
Choosing, if necessary, a smaller δ, we may assume that, for any ξ ∈ Ωδ andδ ≤ t ≤ δ−1, we have that
δ
2√
α ≤ r(ξ, t) ≤ δ−1
2√
α.
28

In particular, this fact gives the validity of a).
Proof of b). Replacing the value of r in g, we get
ϕα(ξ, t, r) = |Ω|+ 16π(s1 + s2) +√
α8√
π√2
√h(ξ, t),
thus, from (6.14),
ϕα(ξ, t, r) = |Ω|+ 16π(s1 + s2) + O(√
α)
= |Ω|+ 8π(1 + t)eφ(ξ,t) + O(√
α) (6.15)
To prove b), we need to show the existence of K > 0 independent of small δsuch that if Φ ∈ Γ, then there exists a point z ∈ B for which
ϕα(Φ(z)) ≤ K. (6.16)
We write
z = (z1, z2, z3, z4), Φ(z) = (Φ1(z), Φ2(z), Φ3(z), Φ4(z)),
with(z1, z2), (Φ1(z),Φ2(z)) ∈ Ω2, z3, z4, Φ3(z), Φ4(z) ∈ R+.
Since from definition (6.12) the map Ψ keeps B0 fixed, we have that for any(z1, z2) ∈ S1 × S1 and z3 ∈ [δ, δ−1], there exists z4 ∈ [δ
√α, δ−1
√α] so that
ϕα(Φ(z)) ≤ |Ω|+ 8π(1 + Φ3(z))eφ(Φ1(z),Φ2(z),Φ3(z)) + O(√
α)
We claim that for any z3 ∈ R2+ there exists a z ∈ S×S such that Φ1(z, z3, z4)
and Φ2(z, z3, z4) have antipodal directions, more precisely
Φ1(z, z3, z4)|Φ1(z, z3, z4)| = Rπ
Φ2(z, z3, z4)|Φ2(z, z3, z4)| , (6.17)
where Rπ denotes a rotation in the plane of an angle π. This fact clearlyimplies the existence of a number M > 0 depending only on Ω such thatG(Φ1(z, z3), Φ2(z, z3)) ≤ M . Thus
ψ(Φ(z, z3, z4)) ≤ 8πeb2 (1 + t)e−
t log t1+t ≤ K
for some explicit number K, which depends on M , but is independent of δ. Thisgives the validity of estimate (6.16).
We will prove (6.17) by means of a degree argument. Fix z3. Let us consideran orientation-preserving homeomorphism h : S1 → S1 and the map f : S1 ×S1 → S1 × S1 defined as f(ζ) = (f1(ζ), f2(ζ)) with
f1(ζ1, ζ2) =Φ1(h(ζ1), h(ζ2), z3, z4)|Φ1(h(ζ1), h(ζ2), z3, z4)| , f2(ζ1, ζ2) =
Φ2(h(ζ1), h(ζ2), z3, z4)|Φ2(h(ζ1), h(ζ2), z3, z4)|
29

If we show that f is onto, we get in particular the validity of (6.17).
By definition, there exists a Ψ ∈ Γ such that Ψ(1, ·) = Φ. If we denote byΨi(t, ·) the components of the map Ψ and Ψi(t, ξ1, ξ2) = Ψi(t, ξ2, ξ2, z3, z4), itfollows that, for i = 1, 2, Ψi ∈ C([0, 1] × S1 × S1, Ω2
δ), Ψi(0, ·) = IdS1×S1 andΨi(1, ·) = Φi. Define a homotopy F : [0, 1]× S1 × S1 → S1 × S1 by
F1(t, ζ) =Ψ1(t, h(ζ1), h(ζ2))|Ψ1(t, h(ζ1), h(ζ2))|
and F2(t, ζ) =Ψ2(t, h(ζ1), h(ζ2))|Ψ2(t, h(ζ1), h(ζ2))|
.
Let us notice that F (1, ζ) = f(ζ) and
F (0, ζ) = (h(ζ1)|h(ζ1)| ,
h(ζ2)|h(ζ2)| ).
This function defines a homeomorphism of S1×S1, which we regard as embeddedin R3, parametrized as follows:
ζ : (θ1, θ2) ∈ [0, 2π)2 7→ (ρ1 cos θ1, ρ1 sin θ1, 0) + (0, ρ2 cos θ2, ρ2 sin θ2),
for 0 < ρ2 < ρ1. The map f defined above can be read in the introducedvariables as
f(ζ) = (ρ1f1(ζ), 0) + (0, ρ2f2(ζ)).
The function f can be extended to a continuous map f : T → T , where T is thesolid torus described by
(θ1, θ2, ρ) ∈ [0, 2π)m × [0, ρ2] 7→ (ρ1 cos θ1, ρ1 sin θ1, 0) + (0, ρ cos θ2, ρ sin θ2)
andf(ζ, ρ) = (ρ1f1(ζ), 0) + (0, ρf2(ζ)).
The function f is homotopic to a homeomorphism of T , along a deformationwhich applies ∂T = S1 × S1 into itself. Thus deg(f , T, P ) 6= 0 for all P in theinterior of T . We see next how this fact implies that f is onto. Take (θ∗1 , θ∗2) ∈[0, 2π)2 and ρ∗ ∈ (0, ρ2) then there exist ζ∗∗ ∈ S1 × S1 and ρ∗∗ ∈ (0, ρ2) suchthat
(ρ1f1(ζ∗∗), 0) + (0, ρ∗∗f2(ζ∗∗)) = (ρ1 cos θ∗1 , ρ1 sin θ∗1 , 0) + (0, ρ∗ cos θ∗2 , ρ∗ sin θ∗2)
Thus we get f1(ζ∗∗) = (cos θ∗1 , sin θ∗1), f2(ζ∗∗) = (cos θ∗2 , sin θ∗2) and ρ∗ = ρ∗∗. Itthen follows that f is onto. This concludes the proof of (6.17).
Proof of c). To show the validity of c), we argue by contradiction: assumethat for a sequence δ → 0, points (ξ, t, r) with ϕα(ξ, tr) = C and (ξ, t) ∈ ∂D wehave that∇ϕα(ξ, t, r)·τ = 0 for any tangent vector τ to ∂D. Since C is uniformlybounded above and below away from zero, we have that r is uniformly boundedabove and away from 0. Thus we assume that ∂rϕα(ξ, t, r) = 0 (otherwise we
30

would get a contradiction right away). But if this is the case, our functionϕα(ξ, t, r) is given by (6.15). Let us define
ψ(ξ, t) = |Ω|+ 8π(1 + t)eφ(ξ,t) (6.18)
We argue by contradiction. Let us assume there exist a sequence δ = δn → 0and points (ξn, tn) such that (omitting the subscript n), (ξ, t) → (ξ, t) ∈ Ω2×R+
and ψ(ξ, t) → C > 0. We shall show that there exists a tangent vector τ , tangentto Ω2 × R+, such that ∇ψ(ξ, t) · τ 6= 0.
Observe first that by definition, we can see
C > max8πe−b+H(ξ1,ξ1)
2 , 8πe−b+H(ξ2,ξ2)
2 .
Assume first that ξ ∈ Ω2, if t → (0, 0) then we would get that ψ(ξ, t) →8πe−
b+H(ξ1,ξ1)2 , and this is a contradiction with the above observation. In a very
analogous way, we can exclude that t → ∞; indeed, if t → ∞ then ψ(ξ, t) →8πe−
b+H(ξ2,ξ2)2 , reaching again a contradiction.
Let us consider now the case in which dist(ξ2, ∂Ω) = δ. As δ → 0, this factimplies that H(ξ2, ξ2) → ∞, but then we must also have that |ξ1 − ξ2| → 0to keep the value of ψ bounded. By construction we have dist(ξ1, ∂Ω) ≥ δ.Two cases arise: if ∇tψ(ξ, t) 6= 0, then we can choose τ parallel to ∇tψ(ξ, t).Otherwise, we are in the case in which ∇tψ(ξ, t) = 0. What is left of this proofconcerns the analysis of this case.
Let us consider for the moment ξ = (ξ1, ξ2) fixed. Then t ∈ (0,∞) 7→ ψ(ξ, t)has a unique non degenerate maximum. Indeed, observe that
limt→0+
ψ(ξ, t) = 8πe−b+H(ξ1,ξ1)
2 , limt→+∞
ψ(ξ, t) = 8πe−b+H(ξ2,ξ2)
2 ,
∂tψ(ξ, t) =4πeφ(ξ,t)
(1 + t)[s(ξ, t) + H(ξ1, ξ1)−H(ξ2, ξ2)]
wheres(ξ, t) =
1− t
2√
tG(ξ1, ξ2)− 2 log t.
The function t → s(ξ, t) is monotone decreasing in (0,∞),
limt→0+
s(ξ, t) = +∞, limt→+∞
s(ξ, t) = −∞
and∂ts(ξ, t) = − t + 1
2t√
tG(ξ1, ξ2)− 2
t< 0, for all t > 0.
Let t = t(ξ) be the unique non degenerate maximum point of ψ(ξ, t), definedby the relation
1− t
2√
tG(ξ1, ξ2)− 2 log t = H(ξ2, ξ2)−H(ξ1, ξ1). (6.19)
31

We have that there exists a positive constant c > 0 such that c < t < c−1.This is a direct consequence of the following fact: there exists a positive numberC such that ∣∣∣∣
H(ξ2, ξ2)−H(ξ1, ξ1)2G(ξ1, ξ2)
∣∣∣∣ ≤ C. (6.20)
We postpone the proof of (6.20).
We have now the tools to conclude the proof of our lemma. We recall thatthe case we are discussing is the following: dist(ξ2, ∂Ω) = δ, ξ1 → ξ2, withdist(ξ1, ∂Ω) ≥ δ, ∇tψ(ξ, t) = 0. Inserting the value of t given by (6.19) into theexpression of ψ, we get
ψ(ξ, t(ξ)) = 8πe−b(1 + t)e√
tG(ξ1,ξ2)−2H(ξ1,ξ1)4
We assume by contradiction that
∇ξ2ψ(ξ, t) · τ = 0 (6.21)
for any vector τ tangent to ∂Ωδ at ξ2, where Ωδ = x ∈ Ω : dist(x, ∂Ω) = δ.Taking into account (6.19) we have that
∇ξψ(ξ, t) = ψ(ξt)
√t∂ξG(ξ1, ξ2)− 2∂ξH(ξ1, ξ1)
4.
We denote ρ = |ξ1 − ξ2| → 0. Only two cases may occur, namely δρ → ∞ or
δρ ≤ c0, for some constant c0. We shall show that in both cases relation (6.21)is impossible.
Let us assume first that δρ →∞ and define
xj =ξ2 − ξj
ρfor j = 1, 2
and xj = limδ→0 xj . Let us define
ϕ(x1, x2) = ϕ2(ξ1 + ρx1, ξ2 + ρx2, s).
Since away from the boundary the function H(x, x) is bounded, we get
limδ→0
∇ξ2ϕ2(ξ + ρx) = −C∂xljlog
1|x1 − x2| 6= 0
contradicting (6.21). Thus, we necessarily have that δρ is bounded. The inter-
esting case is when ξ1 ∈ ∂Ωδ. If not, we can reproduce the argument above toreach a contradiction. The case δ = o(ρ) cannot happen because of (6.20). Letus assume then that δ
ρ → c. We consider the scaled domain Ω = δ−1Ω, whoseassociated Green’s function G and regular part H are given by (6.23). In this
32

scaled domain the number t defined by relation (6.19) remains away from 0 and1, since the quantity
H(ξ2, ξ2)− H(ξ1, ξ1)2G(ξ1, ξ2)
remains bounded. Furthermore, after a rotation and translation, we may assumethat ξ2 := ξ2
δ → (0, 1), ξ1 := ξ1δ → (a, 1), for some a > 0, as δ → 0 and the
domain Ω becomes the half-plane x2 > 0. Under this condition, we see that thederivative of ϕ2 in the direction e = (0, 1) is not 0, reaching again a contradictionwith (6.21), and the proof is concluded.
We show the validity of (6.20). We assume by contradiction that
0 ≤ H(ξ2, ξ2)−H(ξ1, ξ1)2G(ξ1, ξ2)
→ +∞. (6.22)
We have δ = dist(ξ2, ∂Ω). Let us denote d1 = dist(ξ1, ∂Ω), and d = |ξ1 − ξ2|.Condition (6.22) implies that d1 and d → 0, with δ = o(d1) and δ = o(d). Letus consider the expanded domain Ω = δ−1Ω and observe that for this domainits associated Green’s function and regular part are given by
H(x1, x2) = 4 log δ + H(δx1, δx2), G(x1, x2) = G(δx1, δx2). (6.23)
Furthermore, dist(ξ2, ∂Ω) = δ implies dist( ξ2δ , ∂Ω) = 1. After a rotation and
translation, we assume that ξ2δ = (0, 1) and as δ → 0 the domain Ω becomes
the half-plane x2 > 0. We denote respectively by G0 and H0 Green’s functionand its regular part, associated to the half plane x2 > 0. The expressions forG0 and H0 are explicit:
H0(x, y) = 4 log1
|x− y| , y = (y1,−y2)
where y = (y1, y2), and
G0(x, y) = 4 log1
|x− y| − 4 log1
|x− y| .
We thus compute the expression in (6.22)
0 ≤ H(ξ2, ξ2)−H(ξ1, ξ1)2G(ξ1, ξ2)
=H( ξ2
δ , ξ2δ )− H( ξ1
δ , ξ1δ )
2G( ξ1δ , ξ2
δ )
=H0((0, 1), (0, 1))− 4 log δ
|ξ1−ξ1| + o(1)
4 log δ|ξ1−δ(0,1)|
= O(1),
but this is in contradiction with (6.22).
33

7 Proof of Theorem 1.3
In this section we assume that Ω = B(0, b) \ B(0, a) with 0 < a < b and we fixan integer k. We look for a solution to Problem (2.4)–(2.5), or equivalently fora critical point of the functional I(u) constrained to Sµ, for µ > 4πk (see (1.2)),in the class of functions that are invariant under rotations of angle 2π
k .To be more precise, we build a solution of the form
u(x) = U(x) + φ(x)
where U(x) is given by (2.9), with the following choice for the points ξj and theparameters mj
ξj = re2π(j−1)
k i, mj = m for all j = 1, . . . , k
with r > 0, m > 0. On the other hand, the function φ is a solution to thenonlinear Problem (2.19)–(2.21).
Since by construction the function U is invariant under rotations of 2πk and
it is even in the x2-direction, a direct consequence of the uniqueness of φ guar-anteed by Proposition 2.1 is that the function φ shares the same symmetries.These facts, together with the uniqueness of φ, imply that the constants cij thatappear in equation (2.19) satisfy the following conditions
cij = ci1 for all j = 2, . . . , k, for all i = 0, 1, 2
andc21 = 0.
We thus conclude that if we work in the class of functions that are invariantunder rotations of 2π
k and even in the x2-direction, the function U + φ is asolution to (2.4)–(2.5) if there exists a proper choice of λ, r > 0 and m > 0 suchthat ∫
Ω
|∇(U + φ)|2 dx = 4 π k(1 + α), and c01 = c11 = 0.
¿From Proposition 4.1 we deduce that the first of the above conditions reducesto
λfk(r,m) + λ3Θλ(r,m) = α (7.1)
where
fk(r,m) = 2 k m2
[b + 2 log(2m2) + H(ξ1, ξ1)−
∑
i>1
g(ξ1, ξi)
]
and Θλ(r,m) is a smooth function of the variables r, m, which is uniformlybounded together with its derivatives, as λ → 0, in the region a+ δ < r < b− δ,δ < m < δ−1 for any given δ > 0.
For simplicity we introduce the change of variables s = m2, and we defineH(r) = H(ξ1, ξ1) and G(r) =
∑i>1 G(ξ1, ξi). The function fk gets rewritten as
fk(r, s) = 2 k s [b + 2 log 2s + H(r)−G(r)] .
34

For any r ∈ (a, b), let s = s(r) = 12e−
b+H(r)−G(r)2 . In the region
(r, s) ∈ R′ = (r, s) : r ∈ (a, b), s > s(r),fk(r, s) is strictly positive and relation (7.1) defines λ as a smooth function ofα and (r, s). More precisely,
λ =α
fk(r, s)+
α3
fk(r, s)4Θα(r, s)
where Θα is a smooth function of (r, s) uniformly bounded, together with itsderivatives, as α → 0.
Inserting this information into (4.3) we get that
g(r, s) :=∫
Ω
e(U+φ)2 dx = |Ω|+ 16 π k s +α
∫Ω
G2(x, ξ1) dx
2(b + 2 log 2s + H(r)−G(r))
+(
α
2s(b + 2 log 2s + H(r)−G(r))
)2
Θα(r, s), (7.2)
where Θα is a smooth function which is uniformly bounded together with itsderivatives in the region R′.
As a consequence of Proposition 2.2 and the symmetries of the function U+φ,we have that u = U + φ is a solution to Problem (2.4)-(2.5) if we establish theexistence of a critical point (r, s) for the function g given by (7.2).
Arguing as in Section 5 we will prove that, given δ > 0, for all α > 0 smallenough, the function
ϕα(r, s) := |Ω|+ 16 π k s +α
∫Ω
G2(x, ξ1) dx
2(b + 2 log 2s + H(r)−G(r))(7.3)
has a critical point in the region a + δ < r < b − δ and s(r) + δ√
α < s <s(r) + δ−1
√α, and that this critical point situation is stable under small C1
perturbation of ϕα in the region considered. This fact will conclude the proofof Theorem 1.3.
Thus what is left of this section is devoted to prove the existence of a C1-stable critical point situation for ϕα.
Consider the new change of variable t = s − s, so that t > 0 in the regionwe are considering. In this new variable, the function ϕα takes the form
ϕα(r, t) = |Ω|+ 16 π k (s + t) +α
∫Ω
G2(x, ξ1) dx
2 log(1 + ts )
. (7.4)
Since the points ξj are uniformly separated from each other, the func-tion G(r) is bounded from above in the interval (a, b). Since limr→a H(r) =limr→b H(r) = ∞, the function H(r) − G(r) has a minimum r0 in (a, b). Letδ > 0 and define the set Iδ := r ∈ (a, b) : h(r) < H(r0)−G(r0) + 10δ. Let
D := Iδ × R+,
35

B := I δ2× [δ
√α, δ−1
√α] and B0 := I δ
2× δ√α, δ−1
√α. Consider the set Γ of
all function φ ∈ C(B, D) such that there exists ψ ∈ C([0, 1]×B; D) with
ψ(0, ·) = IdB , ψ(1, ·) = φ, ψ(t, ·)|B0= IdB0 .
Definesupφ∈Γ
inf(r,t)∈B
ϕα(r, t) = c.
Observe that the value c is strictly positive, as a direct consequence of thedefinition of ϕα in the region considered. We will show that for given δ > 0small, for all α > 0 small enough,
a)inf
(r,t)∈B0
ϕα(r, t) > c
b) there exists K > 0 independent of δ > 0 such that
c < K
c) if δ > 0 is small enough, then for any (r, t) ∈ ∂D such that ϕα(r, t) = cthere exists a tangent vector τ to ∂D such that
∇ϕα(r, t) · τ 6= 0.
Under the conditions a), b), c), a critical point (r, t) for ϕα with ϕα(r, t) = cexists, as a standard deformation argument involving the negative gradient flowof ϕα shows. This structure is clearly preserved for small C1(D)-perturbationsof ϕα and hence a stable critical point situation for the functional g, which isC1-close to ϕα, is established.
Proof of a). We start with the following observations. For any given r, sinceα > 0, the function t → ϕα(r, t) has a unique non degenerate minimum that wedenote by t = t(r). From ∂tϕα(r, t) = 0 we get that
log2(1 +t
s)(1 +
t
s) =
α∫Ω
G2(x, ξ1) dx
64πs,
from which we deduce that, as α → 0,
t =
√αs
√∫Ω
G2(x, ξ1) dx
8√
π+ o(
√αs). (7.5)
Choosing, if necessary, a smaller δ, we may assume that, for any r ∈ Iδ, we havethat
δ
2√
α ≤ t(r) ≤ δ−1
2√
α.
In particular, this fact gives the validity of a).
36

Proof of b). Inserting (7.5) into (6.10), we get
ϕα(r, t) = |Ω|+ 16 π k s(r) + ϕα(r) (7.6)
where
ϕα(r) =√
αs
[8
√π
∫
Ω
G2(x, ξ1)+√
α∫Ω
G2(x, ξ)
2√
s log(1 +√
α∫Ω G2(x,ξ)
8√
πs)
]+o(
√αs). (7.7)
¿From (7.6) we thus get the following estimates for ϕα(r, t(r))
ϕα(r, t(ξ)) := |Ω|+ 16 π k e−b+H(r)−G(r)
2 + O(√
α) (7.8)
¿From this we conclude that there exists a constant M independent of δ suchthat
c ≤ supr∈(a,b)
(|Ω|+ 16πe−
b+H(r)−G(r)2 + M
).
Thus b) is proven.
Proof of c). To show the validity of c), we argue by contradiction: assumethat for a sequence δ → 0, points (r, t) with ϕα(r, t) = c and (r, t) ∈ ∂D wehave that ∇ϕα(r, t) · τ = 0 for any tangent vector τ to ∂D. Since c is uniformlybounded above and below away from zero, we have that t is uniformly boundedabove and away from 0. Thus we assume that ∂tϕα(r, t) = 0 (otherwise wewould get a contradiction right away). But if this is the case, our functionϕα(r, t) is given by (7.6), or equivalently (7.8). Now, since r → e−
b+H(r)−G(r)2
has a maximum in the region Iδ, we have the existence of a tangent vector τto ∂Iδ such that ∇ϕα(r, t) · τ 6= 0. This concludes our argument, and also theproof of Theorem 1.3.
References
[1] Adimurthi, Existence of positive solutions of the semilinear Dirichletproblem with critical growth for the n-laplacian. Ann. Sc. Norm. Sup.Pisa, Ser. IV 17 (1990) 393-413.
[2] Adimurthi, S. Prashanth Failure of Palais-Smale condition and blow-upanalysis for the critical exponent problem in R2, Proc. Indian. Acad. Sci.Math. Sci. 107 (1997), 283-317.
[3] Adimurthi, P.N. Srikanth, S.L. Yadava, Phenomena of critical exponentin R2, Proc. Roy. Soc. Edinburgh 199 A (1991) 19-25.
[4] Adimurthi, O. Druet, Blow-up analysis in dimension 2 and a sharp formof Trudinger-Moser inequality, Comm. Partial Differential Equations 29(2004), 295–322.
37

[5] Adimurthi, M. Struwe Global compactness properties of semilinear ellip-tic equations with critical exponential growth, J. Funct. Anal. 175 (2000),125-167.
[6] A. Bahri, J.M. Coron, On a nonlinear elliptic equation involving thecritical Sobolev exponent: the effect of the topology of the domain, Comm.Pure Appl. Math. 41 (1988), 255–294.
[7] A. Bahri, Y.-Y. Li, O. Rey, On a variational problem with lack of com-pactness: the topological effect of the critical points at infinity. Calc. ofVar. 3 (1995), 67–93.
[8] S. Baraket, F. Pacard, Construction of singular limits for a semilinearelliptic equation in dimension 2. Calc. Var. Partial Differential Equations6 (1998), no. 1, 1–38.
[9] H. Brezis, L. Nirenberg, Positive solutions of nonlinear elliptic equationsinvolving critical Sobolev exponents. Comm. Pure Appl. Math. 36 (1983),437–47.
[10] L. Carleson, S.-Y. A. Chang, On the existence of an extremal functionfor an inequality of J. Moser, Bull. Sci. Math. (2), 110 (1986), 113–127.
[11] J.M. Coron, Topologie et cas limite des injections de Sobolev, C.R. Acad.Sc. Paris 299 Series I (1984), 209–212.
[12] D.G. de Figueiredo, J.M. do O, B. Ruf, On an inequality by N. Trudingerand J. Moser and related elliptic equations, Comm. Pure Appl. Math. 55(2002), 135-152.
[13] D.G. de Figueiredo, O. Miyagaki and B. Ruf, Elliptic equations in R2
with nonlinearities in the critical growth range, Calc. Var. Partial Diff.Equs. 3 (1995), 139–153.
[14] D.G. de Figueiredo, B. Ruf, Existence and non-existnce of radial solu-tions for elliptic equations with critical exponent in R2, Comm. PureAppl. Math. 48 (1995) 1–17.
[15] M. del Pino, M. Kowalczyk, M. Musso, Singular limits in Liouville-typeequations, Calc. Var. Partial Differential Equations 24 (2005), 47–81.
[16] M. del Pino, M. Musso, Bubbling in Nonlinear Elliptic Problems NearCriticality, Handbook of Differential Equations, Stationary Partial Dif-ferential Equations, Vol. 3, p. 215-316, ed. M. Chipot, Elsevier, 2006.
[17] M. del Pino, M. Musso, B. Ruf, New solutions for Trudinger-Moser criti-cal equations in R2, Journal of Functional Analysis 258 (2010), 421–457.
[18] O. Druet, Multibump Analysis in dimension 2: quantification of blow-uplevels. Duke Math. Journal 132 (2006), no. 2, 217–269.
38

[19] P. Esposito, M. Grossi, A. Pistoia, On the existence of blowing-up solu-tions for a mean field equation. Ann. Inst. H. Poincare Anal. Non Lineaire22 (2005), no. 2, 227–257.
[20] M. Flucher, Extremal functions for the Trudinger-Moser inequality in 2dimensions, Comment. Math. Helv. 67 (1992), 471–497.
[21] Z.-C. Han, Asymptotic approach to singular solutions for nonlinear ellip-tic equations involving critical Sobolev exponent . Ann. Inst. H. PoincareAnal. Non Lineaire 8 (1991), no. 2, 159–174.
[22] T. Lamm, F. Robert, M. Struwe, the heat flow with a critical exponentialnonlienarity, preprint
[23] K.C. Lin, Extremal functions for Moser’s inequality, Trans. Amer. Math.Soc. 348 (1996), no. 7, 2663–2671.
[24] P.L. Lions, The concentration-compactness principle in the calculus ofvariations. The limit case, part 1, Riv. Mat. Iberoamericana 1 (1985),145–201.
[25] Monahan, J.P., Numerical solutions of a non-linear boundary value prob-lem, thesis, Princetion Univ., 1971
[26] J. Moser, A sharp form of an inequality by N. Trudinger, Indiana Univ.Math. J. 20 (1970/71), 1077–1092.
[27] S.I. Pohozhaev, The Sobolev embedding in the case pl = n, Proc. Tech.Sci. Conf. on Adv. Sci. Research 1964-1965, Mathematics Section, 158-170, Moskov. Energet. Inst. Moscow, 1965.
[28] O. Rey, The role of the Green’s function in a nonlinear elliptic equationinvolving the critical Sobolev exponent, J. Funct. Anal. 89 (1990), no. 1,1–52.
[29] M. Struwe, Critical points of embeddings of H1,n0 into Orlicz spaces, Ann.
Inst. Henri Poincare, 5, 5, (1988), 425–464.
[30] M. Struwe, A global compactness result for elliptic boundary value prob-lems involving limiting nonlinearities, Math. Z. 187 (1984), 511–517.
[31] M. Struwe, Positive solutions of critical semilinear elliptic equations onnon-contractible planar domains, J. Eur. Math. Soc. 2, (2000) 329-388.
[32] N.S. Trudinger, On embedding into Orlicz spaces and some applications,J. Math. Mech. 17 (1967), 473–483.
[33] V. I. Yudovich, Some estimates connected with integral operators andwith solutions of elliptic equations, Dokl. Akad. Nauk SSRR 138 (1961),805–808 (Russian); English transl., Soviet Math. Dokl. 2 (1961), 746–749.
39

Manuel Del PinoDepartamento de Ingenierıa Matematica and CMMUniversidad de ChileCasilla 170 Correo 3, Santiago, Chilee-mail: [email protected]
Monica MussoDepartamento de MatematicaPontificia Universidad Catolica de ChileAvda. Vicuna Mackenna, 4860, Macul, Chilee-mail: [email protected]
Bernhard RufDipartimento di MatematicaUniversita di MilanoVia Saldini 50, 20133 Milan, Italye-mail: [email protected]
40