![[Anais do 14º Simpósio Brasileiro de Automação Inteligente] Modelo ...](https://static.fdokumen.com/doc/165x107/631ec12e5c567f54b404333f/anais-do-14o-simposio-brasileiro-de-automacao-inteligente-modelo-.jpg)
[Anais do 14º Simpósio Brasileiro de Automação Inteligente] Modelo ...
Upload
khangminh22Category
view
1download
0
UNIVERSIDADE DO RIO GRANDE DO NORTEFEDERAL
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA E
DE COMPUTAÇÃO
Automação de uma Planta Piloto ParaEstimação de Vazão em Poços Injetores
Multizonas a Partir de Perfis de Temperatura
Werbet Luiz Almeida da Silva
Orientador: Prof. Dr. Andrés Ortiz Salazar
Dissertação de Mestrado apresentada aoPrograma de Pós-Graduação em EngenhariaElétrica e de Computação da UFRN (área deconcentração: Automação e Sistemas) comoparte dos requisitos para obtenção do títulode Mestre em Ciências.
Número de ordem PPgEEC: M527Natal, RN, Junho de 2018

Divisão de Serviços Técnicos
Catalogação da publicação na fonte. UFRN / Biblioteca Central Zila Mamede
Silva, Werbet Luiz Almeida da.Automação de uma Planta Piloto Para Estimação de Vazão em Poços Injetores
Multizonas a Partir de Perfis de Temperatura / Werbet Luiz Almeida da Silva. -2018.
123f.: il.
Orientador: Andrés Ortiz Salazar
Dissertação (Mestrado) - Universidade Federal do Rio Grande do Norte, Cen-tro de Tecnologia, Programa de Pós-graduação em Engenharia Elétrica e deComputação, Natal, 2018.
1. Perfil de temperatura - Dissertação. 2. Medição de vazão - Dissertação.3. Poços multizonas - Dissertação. 4. Instrumentação - Dissertação. I. Salazar,Andrés Ortiz. II. Título.
RN/UF/BCZM CDU 621.3.017


Aos meus pais, meu irmão, todaminha família e amigos.
Agradecimentos
Ao meu orientador, Prof. Dr. Andrés Ortiz Salazar pela oportunidade de desenvolver estetrabalho e pelos ensinamentos.
Aos companheiros de trabalho (e também amigos): Daniel Coxinha, Verivan, DiegoMoura, Raul, Alexandre, Léo, Yasmin, Kássio, Dayse, José Geraldo, Fernando e Mar-cela pelas contribuições e troca de experiências durante o desenvolvimento do trabalho eresolução de problemas.
Aos amigos e companheiros do LAMP: Glauco Pescocito, Carlos quexada, Rafael, Gus-tavo, Felipe Magoo, Alan Carequinha, Ronaldo, Fabrissom, Victor Fura Olho, Renan,Xiankleber Leão Lobo, Gabriel Apito, Heitor, Elvis, Neto, Thomaz, João Paulo Cavani ePillon, pelas contribuições e momentos de descontração.
Aos funcionários da universidade Maria Prefeita e Seu Raimundo, pelos momentos dedescontração e pelo apoio na manutenção do nosso ambiente de trabalho.
Aos demais colegas de pós-graduação, pelas críticas e sugestões.
Aos meus amigos, pela compreensão nos momentos de ausência.
À minha mãe Luzineide, Meu pai William Luiz, meu irmão Wilde Luiz e à toda minhafamília pelo apoio incondicional e confiança durante esta jornada e toda a minha vida.
À CAPES, pelo apoio financeiro.


Resumo
Uma planta piloto foi construída no Laboratório de Avaliação de Medição em Petróleo(LAMP) para avaliar métodos de estimação da distribuição de vazão em poços injetoresmultizonas através de modelos de transmissão de calor. Este trabalho desenvolveu umsistema de automação constituído de uma estrutura de sensores, elementos de aciona-mento e um software de monitoramento, visando controlar as variáveis necessárias para aexecução dos processos operacionais na planta construída. Foram utilizados sensores devazão, nível e temperatura, além de atuadores como válvulas e bombas, conectados a umcontrolador lógico programável da WEG R©, modelo: TPW03 60HT-A, que é responsá-vel pela concentração dos dados e comunicação com um supervisório implementado emElipse R©SCADA. Essa estrutura permitiu a aquisição dos dados necessários para a ava-liação do método de estimação de vazão a partir de medições de temperaturas ao longoda coluna de injeção do poço protótipo. Os sensores de vazão permitiram a comparaçãodos valores medidos e estimados com o modelo matemático. Foram realizadas adequa-ções à estrutura inicialmente projetada e repetidas as experiências visando melhorar ascondições de operação com o objetivo diminuir as incertezas de medições anteriores.
Palavras-chave: Perfil de temperatura, Medição de Vazão, Poços Multizonas, Instru-mentação.


Abstract
A pilot system was built at the Laboratório de Avaliação de Medição em Petróleo(LAMP) to evaluate estimation methods of flow distribution in multizone injection wellsby heat transmission models. In this work an automation system was developed witha sensor structure, actuators and a monitoring software, to control the variables neededto the process simulation of water injection in the plant built. The follow equipementwere used: flow, level and temperature sensors, and actuators like valves and pumps, allconnected to a programmable logic controller by WEG R©, model: TPW03 60HT-A, thatis able to concentrate the data and communicate with a monitoring system implementedin Elipse R©SCADA software. This structure acquired data to evaluate the flow estima-tion method from temperature measurements throughout the simulated injection tubing.The flow sensors allowed the comparison of the measured and estimated values with themathematical model. Adjustments were made in the original designed structure and theexperiments were repeated in order to reduce the measurement uncertainty obtained inprevious tests.
Keywords: Temperature Profile, Flow Measurements, Multizoned Wells, Instrumen-tation.

Sumário
Sumário i
Lista de Figuras iii
Lista de Tabelas vii
Lista de Símbolos e Abreviaturas ix
1 Introdução 11.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Contribuições . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Organização do Texto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Aspectos Teóricos 52.1 Métodos de Recuperação . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Injeção de Água . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3 Poços Multizonas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4 Perfil de Injetividade . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.5 Sensores de Temperatura Distribuídos (DTS) . . . . . . . . . . . . . . . 122.6 Solução de Ramey . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.7 Projeto Conceitual do Protótipo . . . . . . . . . . . . . . . . . . . . . . . 162.8 Metodologia de Medição . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3 Descrição da Planta 233.1 Instalações Físicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2 Operação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.3 Instrumentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.1 Controlador Lógico-Programável . . . . . . . . . . . . . . . . . 303.3.2 Sensores de Temperatura . . . . . . . . . . . . . . . . . . . . . . 353.3.3 Sensores de Vazão . . . . . . . . . . . . . . . . . . . . . . . . . 393.3.4 Sensores de Nível . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4 Sistema de Aquecimento 454.1 Estrutura Mecânica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464.2 Estrutura Elétrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.3 Estrutura de Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3.1 Modelagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
i

4.3.2 Controlador de Processos Novus N2000 . . . . . . . . . . . . . . 554.3.3 Controle por Ciclos Inteiros . . . . . . . . . . . . . . . . . . . . 55
5 Sistema Supervisório 59
6 Resultados 656.1 Ajuste de offset - Temperatura do Aquecedor . . . . . . . . . . . . . . . 656.2 Comportamento da Temperatura no Poço Injetor . . . . . . . . . . . . . . 686.3 Perfis de Temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7 Conclusão 79
Referências bibliográficas 81
A Manual de Operação da Planta 85A.1 Sistema de Aquecimento . . . . . . . . . . . . . . . . . . . . . . . . . . 85A.2 Protótipo de Monitoramento de Injeção . . . . . . . . . . . . . . . . . . 86
B Layouts 89B.1 Layout - Cabeamento do CLP WEG TPW03 . . . . . . . . . . . . . . . . 89B.2 Esquema Elétrico - Quadro CLP WEG TPW03 . . . . . . . . . . . . . . 89B.3 Esquema Elétrico - Inversores de Tensão . . . . . . . . . . . . . . . . . . 89B.4 Esquema Elétrico - Quadro do Aquecedor . . . . . . . . . . . . . . . . . 89

Lista de Figuras
2.1 Esquemas de injeção. (a) Injeção periférica. (b) Injeção em malhas.Fonte: Rosa et al. (2006). . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Poço injetor multizonas e equipamentos de superfície típicos. Fonte: Re-ges (2016). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3 Tecnologia DTS. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . 122.4 Camadas da estrutura de um poço injetor real. Fonte: Adaptada de Lima
(2017). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.5 Modelo de poço injetor multizonas adotado como referência. Fonte: Adap-
tada de Lima (2017). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.6 Perfis de temperatura de acordo com a vazão injetada. Fonte: Lima
(2017). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.7 Zona de transporte idealizada. Fonte: Lima (2017). . . . . . . . . . . . . 182.8 Dimensões físicas do protótipo do poço injetor. Fonte: Lima (2017). . . . 192.9 Vista do topo - ilustração do projeto do protótipo. Fonte: Lima (2017). . . 202.10 Poço protótipo construído no LAMP. Fonte: Autoria própria (2018). . . . 202.11 Camadas da estrutura de um poço injetor real. Fonte: Lima (2017). . . . . 21
3.1 Imagem aérea - estrutura física de engenharia do Laboratório de Avalia-ção de Medição em Petróleo da UFRN. Fonte: Autoria própria (2018). . . 24
3.2 Diagrama do processo. Fonte: Autoria própria (2018). . . . . . . . . . . 263.3 Arquitetura do sistema. Fonte: Autoria própria (2018). . . . . . . . . . . 283.4 Controlador lógico-programável WEG R©TPW03 - unidade básica. Fonte:
Autoria própria (2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.5 Tela princial - software TPW03-PCLINK. Fonte: Autoria própria (2018). 313.6 Circuito esquemático da placa de condicionamento. Fonte: Autoria pró-
pria (2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.7 Componentes típicos de uma malha de transmissão de sinal de corrente
de 4 à 20 mA. Fonte: Freitas (2016). . . . . . . . . . . . . . . . . . . . . 323.8 Módulo de expansão TPW03-8AD para aquisição de sinais analógicos do
CLP. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . . . . 333.9 Quadro de instalação construído para abrigar o CLP e componentes auxi-
liares. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . . . . 343.10 Sensor de temperatura PT100. Fonte: Autoria própria (2018). . . . . . . . 353.11 Esquemas elétricos de medição de temperatura a partir de sensores RTD.
Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . . . . . . . 37
iii
3.12 Sensores de temperatura instalados no poço protótipo. Fonte: Autoriaprópria (2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.13 Estrutura típica de sensores eletromagnéticos de vazão. Fonte: Autoriaprópria (2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.14 Componentes internos de tubos medidores eletromagnéticos de vazão.Fonte: Adaptada de Crabtree (2009). . . . . . . . . . . . . . . . . . . . . 40
3.15 Tamanho de tubos medidores. Fonte: Webster (1998). . . . . . . . . . . . 413.16 Sensores de vazão instalados na planta. Fonte: Autoria própria (2018). . . 423.17 Medição de nível com sensores ultrassom. Fonte: Autoria própria (2018). 43
4.1 Malha de controle de temperatura. Fonte: Autoria própria (2018). . . . . 454.2 Sistema de aquecimento do Laboratório de Avaliação de Medição em Pe-
tróleo. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . . . 474.3 Estrutura elétrica. Fonte: Autoria própria (2018). . . . . . . . . . . . . . 474.4 Resistor de imersão. Fonte: Autoria própria (2018). . . . . . . . . . . . . 484.5 Conexão elétrica dos resistores de imersão. Fonte: Autoria própria (2018). 484.6 Relé de Estado sólido: (a) Desenho da vista do topo do dispositivo; (b)
Relé real. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . . 494.7 Diagrama de blocos dos componentes da malha de controle. Fonte: Au-
toria própria (2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.8 Resposta a um degrau de potência de 18 kW para o sistema real. Fonte:
Autoria própria (2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.9 Atraso de transporte do sistema. Fonte: Autoria própria (2018). . . . . . . 534.10 Resposta ao degrau dos sistemas simulado e real. Fonte: Autoria própria
(2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.11 Diagrama do Processo. Fonte: Autoria própria (2018). . . . . . . . . . . 574.12 Diagrama do processo e sinais envolvidos. Fonte: Autoria própria (2018). 58
5.1 Tela principal do supervisório implementado. Fonte: Autoria própria(2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2 Animação do estado de operação das válvulas. Fonte: Autoria própria(2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.3 Indicação de velocidade atual e mudança de velocidade de rotação dasbombas. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . . 62
5.4 Janela com os perfis de temperatura da planta. Fonte: Autoria própria(2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.5 Modelo de relatório gerado pelo supervisório. Fonte: Autoria própria(2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.6 Janela de gerenciamento do sistema de aquecimento. Fonte: Autoria pró-pria (2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.1 Variação da temperatura dos sensores e offset observado. Fonte: Autoriaprópria (2018). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.2 Variação da temperatura dos sensores após a subtração do valor de offsetvia software. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . 67
6.3 Variação da temperatura dos sensores após a subtração do valor de offsetdireto no controlador N2000. Fonte: Autoria própria (2018). . . . . . . . 68
6.4 Evolução da temperatura nos sensores TT00, TT04 e TT09 - Etapa detestes de 2017. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . 69
6.5 Variação da temperatura nos sensores TT00, TT04 e TT09 - Etapa detestes de 2017. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . 70
6.6 Evolução da temperatura nos sensores TT10, TT12 e TT15 para os testesdo dia 26 de janeiro de 2017. Fonte: Autoria própria (2018). . . . . . . . 71
6.7 Variação da temperatura nos sensores TT12, TT12 e TT15 para os testesdo dia 26 de janeiro de 2017. Fonte: Autoria própria (2018). . . . . . . . 71
6.8 Temperatura nos sensores TT00, TT04 e TT09 para os testes de 2018.Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . . . . . . . 72
6.9 Variação da temperatura nos Sensores TT00, TT04 e TT09 para os testesde 2018. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . . 73
6.10 Temperatura nos sensores TT10, TT12 e TT15 para os testes de 2018.Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . . . . . . . 74
6.11 Variação da temperatura nos sensores TT10, TT12 e TT15 para os testesde 2018. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . . 74
6.12 Regiões de análise dos perfis de temperatura. Fonte: Autoria própria (2018). 756.13 Perfil de Temperatura - Vazão zona 1 = 18 litros/min. - Vazão zona 2 =
18 litros/min. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . 766.14 Perfil de Temperatura - Vazão zona 1 = 15 litros/min. - Vazão zona 2 =
15 litros/min. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . 776.15 Perfil de Temperatura - Vazão zona 1 = 15 litros/min - Vazão zona 2 = 5,1
litros/min. Fonte: Autoria própria (2018). . . . . . . . . . . . . . . . . . 78
A.1 Disjuntores Dx dos resistores de imersão. . . . . . . . . . . . . . . . . . 85
B.1 Encaminhamento de cabos dos sensores da planta. . . . . . . . . . . . . . 90B.2 Esquema elétrico - Quadro do CLP WEG TPW03 - Parte 1. . . . . . . . . 91B.3 Esquema elétrico - quadro do CLP WEG TPW03 - Parte 2. . . . . . . . . 92B.4 Esquema Elétrico - Inversores de Tensão. . . . . . . . . . . . . . . . . . 93B.5 Esquema Elétrico - Quadro do aquecedor. . . . . . . . . . . . . . . . . . 94B.6 Esquema Elétrico - Quadro do aquecedor. . . . . . . . . . . . . . . . . . 95B.7 Esquema Elétrico - Quadro do aquecedor. . . . . . . . . . . . . . . . . . 96B.8 Esquema Elétrico - Quadro do aquecedor. . . . . . . . . . . . . . . . . . 97B.9 Esquema Elétrico - Quadro do aquecedor. . . . . . . . . . . . . . . . . . 98B.10 Esquema Elétrico - Quadro do aquecedor. . . . . . . . . . . . . . . . . . 99

Lista de Tabelas
3.1 Relação dos instrumentos instalados na planta. . . . . . . . . . . . . . . . 253.2 Relação de endereço de comunicação em rede dos equipamentos. . . . . . 29
4.1 Parâmetros da simulação . . . . . . . . . . . . . . . . . . . . . . . . . . 544.2 Lógica de Modulação das chaves de estado sólido a partir do sinal de
controle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.1 Matriz de causas e efeitos: intertravamentos do supervisório. . . . . . . . 61
6.1 Relação das médias de temperatura para os perfis. . . . . . . . . . . . . . 78
vii

Lista de Símbolos e Abreviaturas
A coeficiente de Relaxação
Aa coeficiente da equação de resposta do sensor
Ar área da seção da tubulação
B coeficiente da equação de resposta do sensor
Bc campo magnético
C coeficiente da equação de resposta do sensor
Eentra energia aplicada
Esai energia dissipada
Esistema Energia do sistema
L f luido nível de enchimento
Lv nível total do tanque
Q vazão
Qentra quantidade de energia térmica aplicada
Qsai quantidade de energia térmica dissipada
R0 resistência do sensor em 0 C
R100 resistência do sensor em 100 C
R1 resistência térmica
RT resistência do material do sensor
RT resistência do material do sensor
T temperatura
Tf temperatura do fluido
Tg temperatura Geotérmica
ix

Tre f temperatura de referencia
U coeficiente global de transferência de calor
∆Esistema variação da energia interna
α coeficiente resistência da platina
m1 vazão na primeira zona de transporte
m2 vazão na segunda zona de transporte
m vazão na entrada do poço
A coeficiente de relaxação médio
π constante matemática
θ1 temperatura do corpo
cp capacidade térmica do fluido de injeção
d diâmetro
dTf diferencial da temperatura do fluido
ds distancia entre o sensor de nível e o nível de líquido
dz diferencial da profundidade do poço
e função exponencial
f (t) função transiente de transferência de calor
ft função transiente de transferência de calor
h coeficiente de transferência de calor por convecção
ha coeficiente de convecção natural e radiação no anular
hconv coeficiente de convecção entre o fluido e a tubulação
h f luido coeficiente de transferência de calor por convecção
kc coeficiente de condução na cimentação
ke condutividade equivalente
k f coeficiente de condução na formação
kr coeficiente de condução no revestimento
kt coeficiente de condução na parede da tubulação
ku fator de proporcionalidade
l comprimento
qo fluxo de calor dissipado
qs fluxo de calor
r raio interno da tubulação
r1 raio mais interno do poço
r5 raio mais externo do poço
t tempo
ts tempo entre envio e o recebimento dos impulsos
v velocidade do condutor
z profundidade do poço
ANSI American National Standards Institute
BS&W Basic Sediment and Water
CLP controlador lógico-programável
DTS Distributed Temperature Sensing
EIA Electronic Industry Alliance
EOR Enhnaced Oil Recovery
GND barramento de referencia
IEC International Electrotechnical Commission
IHM interface homem-máquina
ISA International Society of Automation
LAMP Laboratório de Avaliação de Medição em Petróleo
mA unidade de corrente elétrica
N2000 modelo de controlador de temperatura
NBR Normas Brasileiras
PT100 sensor de temperatura
RS-485 padrão de camada física de comunicação

RTD Resistence Temperature Detector
SCADA Supervisory Control and Data Aqcquisition
TIA Telecommunications Industry Alliance
TPW-03 modelo de controlador lógico-programável
UFRN Universidade Federal do Rio Grande do Norte
Capítulo 1
Introdução
Métodos de recuperação de petróleo baseados em injeção de água tem sido largamenteutilizados na industria de exploração desde que seu potencial para o acréscimo do fatorde recuperação foi reconhecido. Pode até ser considerada como a mais bem sucedidatécnica de exploração já utilizada, de acordo com Yousef et al. (2012). Mogollón et al.(2017) destaca em seu trabalho que mais da metade do petróleo produzido no mundohoje é obtido através da injeção de água. Segundo Cobb & Smith (2001) as principaisvantagens da sua utilização incluem o baixo custo, boa capacidade de deslocamento deóleo e facilidade de penetração na formação. Dentro da classificação dos métodos derecuperação disponíveis, a injeção de água é definida como um método convencionalsecundário, pois essa classe de métodos atua com o objetivo de promover o deslocamentodo óleo para fora dos poros da rocha através de interações mecânicas com o fluido aser produzido. Além disso, é geralmente empregada após a redução da eficiência daexploração através de métodos primários.
O monitoramento em tempo real das variáveis em poços injetores de água é impor-tante para a otimização das operações de produção e diagnóstico de problemas (Jaimeset al. 2014). Quando um único poço injetor é utilizado para produção em diferentes zonas,conhecer a distribuição do volume total injetado ao longo da coluna é fundamental paraa eficiência do método. Distributed Temperature Sensing (DTS) é uma tecnologia em-pregada na industria do petróleo que permite o monitoramento permanente e contínuo davariação de temperatura ao longo da coluna de injeção. Trabalhos como Nowak (1953),Bird (1954), Ramey (1962), Alves et al. (1992) e Hasan & Kabir (1994) estudaram me-todologias de obtenção da alocação da vazão injetada em zonas a partir dos dados detemperatura, possibilitando o monitoramento da distribuição de vazão através de sistemascomo o DTS durante a operação de um poço injetor. Em comparação com métodos comotraçadores radioativos e sensores de vazão rotativos, o DTS pode prover informações so-bre a distribuição de vazões de forma mais frequente, com custo mais baixo, e com menosriscos para o meio ambiente e para os operadores (Mehtiyev et al. 2012).
O trabalho de Lima (2017) definiu uma estrutura simplificada capaz de reproduzir ascondições encontradas em um poço injetor real e provou a sua representatividade a partirda análise dos coeficientes de transferência de calor aplicados a uma estrutura típica decompletação de um poço injetor real. O protótipo obtido simula um poço injetor comduas zonas de injeção e duas zonas de transporte. Ramey (1962) definiu uma solução

2 CAPÍTULO 1. INTRODUÇÃO
capaz de estimar o perfil de temperatura em poços injetores de água quente ou fria comouma função da profundidade e do tempo. Essa solução foi obtida a partir da análise datransferência de calor que ocorre predominantemente de forma radial na coluna de injeçãodevido ao diferencial de temperatura entre os fluidos de injeção e a formação geotérmica.A partir disso, a estrutura projetada por Lima (2017) foi construído no Laboratório deAvaliação de Medição em Petróleo (LAMP) da Universidade Federal do Rio Grande doNorte (UFRN) com a finalidade de avaliar a relação da solução matemática para o perfilde temperatura desenvolvido por Ramey (1962) com a distribuição de vazão para o poçoinjetor multizonas construído.
1.1 MotivaçãoA construção do protótipo foi realizada baseada nas considerações e especificações
dos materiais estabelecidos no projeto. Para o início das experiências seria necessáriaa adequação da estrutura construída com os componentes de automação que já faziamparte da estrutura do LAMP. Além disso, novos equipamentos deveriam ser instaladospara atender à demandas específicas da planta de medição de vazão. Esses equipamentosdeveriam ser projetados em acordo com as exigências técnicas dos experimentos para oqual o protótipo é destinado. Para isso seria necessário o estudo do método proposto e arealização física da instalação dos equipamentos, testes de campo, experiências de valida-ção das medições e eventuais adequações. Essas demandas levaram a ideia de realizaçãodeste trabalho, que tem como produto esperado a planta de medição de vazão a partir deperfis de temperatura.
1.2 ContribuiçõesEste trabalho agregou ao protótipo previamente construído no LAMP uma estrutura
de automação e instrumentação com o objetivo de viabilizar a realização de experimentosde medição a partir de temperatura. Para isso, foi necessário:
• Programar um sistema supervisório.• Projetar, especificar a instalar dispositivos de campo.• Validar a operação dos dispositivos instalados.• Configurar a rede de comunicação de dados entre os componentes.• Instalar circuitos eletrônicos de acionamento e controle.• Avaliar a operação total do processo.• Realizar experimentos de teste e calibração das etapas do processo.
Essas atividades foram necessárias para contribuir com a análise em tempo real da va-riação do perfil de temperatura no poço protótipo e permitir o acompanhamento de todosos dados do processo. Foi realizada a aquisição da distribuição do volume de água inje-tado no sistema através de sensores de vazão eletromagnéticos. A distribuição de vazõesestimadas a partir dos perfis de temperatura puderam então ser comparadas com os va-lores reais, possibilitando a aplicação de análises sobre a incerteza dos dados obtidos. A

1.3. ORGANIZAÇÃO DO TEXTO 3
inclusão de um sistema automatizado ao laboratório também agregou ao sistema a capa-cidade de repetibilidade das experiências, economia de energia e flexibilidade na variaçãodos parâmetros e condições de testes. Por fim, especificações dos instrumentos utilizadosgarantiram a confiança dos resultados e permitirão aos pesquisadores, em trabalhos futu-ros, um maior conforto para obtenção e analise dos mesmos, contribuindo a consolidaçãodo sistema como ferramenta de análise de metodologias de medição de vazão aplicadas àindustria do petróleo.
1.3 Organização do TextoAlém deste texto introdutório como Capítulo 1, este documento apresenta, no Capí-
tulo 2, os conceitos fundamentais para o entendimento do problema e sua aplicação noatual cenário da indústria do petróleo, além de fazer um resumo teórico sobre os estudosenvolvidos na obtenção do protótipo de medição de vazão. No Capítulo 3, a descriçãodas instalações físicas do laboratório é realizada, seguida dos processos envolvidos paraa execução dos experimentos. Ainda na Capítulo 3 é apresentada a arquitetura de instru-mentação proposta para o sistema e visão geral dos componentes instalados, com o devidoembasamento teórico acerca da operação dos mesmo, que culminaram nas tecnologiasempregadas nestes trabalho. O Capitulo 4 faz a descrição das instalações mecânicas, elé-tricas e de controle de um dos principais componentes da planta em estudo: o sistema deaquecimento. O Capítulo 5 apresenta o sistema supervisório programado para a opera-ção da planta. Já o Capítulo 6 abrange os testes de operação realizados para a validaçãodeste trabalho. Por fim, o Capítulo 7 discute sobre as conclusões e considerações finais,detalhando os avanços obtidos a partir deste trabalho e as recomendações para estudosfuturos.

4 CAPÍTULO 1. INTRODUÇÃO
Capítulo 2
Aspectos Teóricos
2.1 Métodos de Recuperação
A produtividade de um reservatório depende de uma análise detalhada dos meios eco-nomicamente viáveis para a exploração em um dado período em uma determinada região.A aplicação dos métodos de recuperação disponíveis tem como ponto fundamental o le-vantamento das características e do comportamento do reservatório a ser explorado, vistoque a viabilidade da exploração é determinada pela relação do custo da aplicação do mé-todo com a capacidade de produção do mesmo. Os métodos de recuperação disponíveispodem ser divididos em métodos primários, em que o óleo é produzido a partir da energiainterna do reservatório, e secundários, quando intervenções de natureza física/química sãorealizadas em uma jazida visando aumentar a eficiência da extração de hidrocarbonetos.
Nos métodos primários, “os fluidos contidos em uma rocha-reservatório devem disporde uma certa quantidade de energia para que possam ser produzidos” (Rosa et al. 2006).A maior parcela dessa energia se manifesta em um reservatório na forma de pressão, e éresultado das etapas de geração e migração do petróleo entre as rochas, bem como dosesforços físicos gerados sobre as jazidas a partir da movimentação e compactação dosolo. Os métodos primários se aplicam através de efeitos de: descompressão, em que osfluidos armazenados se expandem e o volume poroso diminui; e de deslocamento, quando,por exemplo, um aquífero invade uma jazida e “empurra” o óleo em direção aos poçosprodutores. Esses efeitos ocorrem devido à ação característica de mecanismos intrínsecosà formação de cada reservatório, e os mais comuns são: capa de gás, gás em solução einfluxo de água. Geralmente, é realizado o acompanhamento da produção com o objetivode determinar o mecanismo atuante a partir da comparação com as características de cadamecanismo.
“No processo de produção há uma dissipação da energia primária, causada pela des-compressão dos fluidos do reservatório e pelas resistências encontradas pelos mesmos aofluírem em direção aos poços de produção.” (Rosa et al. 2006). De acordo com Abbaset al. (2015), como consequência da dissipação de energia, a quantidade de óleo produzidacomeça a reduzir de forma significativa e a continuidade das operação no reservatório ficaprejudicada. Considerando o volume total recuperável, os métodos primários possuemum rendimento relativamente baixo, mostrando-se serem economicamente ineficientesquando aplicados de forma exclusiva em um campo de exploração. Desse modo, outras
6 CAPÍTULO 2. ASPECTOS TEÓRICOS
metodologias de recuperação precisam ser aplicadas pois a recuperação primária deixauma quantidade significativa de hidrocarbonetos no reservatório.
Ainda de acordo com Rosa et al. (2006), as duas abordagens utilizadas para amenizaros efeitos negativos da dissipação de energia primária dos reservatórios são: aplicaçãode energia secundária de forma artificial através da injeção de fluidos em regiões do re-servatório, e redução das resistências viscosas por meios de métodos especiais, como oaquecimento da jazida. Define-se então como métodos de recuperação secundária aque-les que promovem um acréscimo do volume recuperado após a aplicação da recuperaçãoprimária. Além de aumentar a eficiência da recuperação, os métodos secundários tambémsão importantes para promover a aceleração da produção, por vezes com o objetivo deatender a demandas de mercado.
Os métodos secundários podem ser classificados como convencionais e avançados.Os chamados convencionais são assim denominados pois foram os primeiros métodosempregados com o objetivo de se obter uma produção maior do que a se obteria apenas apartir da energia natural do reservatório. Sua aplicação foi iniciada tão logo a exploraçãode petróleo começou a ganhar força ao redor do mundo, logo, hoje em dia os processosenvolvidos nesses métodos estão bem desenvolvidos e possuem um bom grau de confi-ança. A forma como atua no reservatório para incrementar o fator de recuperação de óleotambém é uma característica dos métodos secundários convencionais. Processos dessetipo são realizados através da injeção de fluidos (água ou gás) com o objetivo único dedeslocar o óleo presente nos poros da rocha. Ou seja, busca um comportamento mecânico,sem interações de natureza química ou termodinâmica, ou que resultem em alterações narocha-reservatório. O uso de gás para o deslocamento de óleo em direção aos poços pro-dutores não é tão eficiente quanto o de água e não é utilizado com frequência atualmente(era mais comum no início do uso de métodos secundários), logo, a injeção de água équase um sinônimo de método secundário de exploração (Green et al. 1998).
De acordo com Bai (2008), as tecnologias de recuperação primárias e secundáriasdisponíveis deixam “presos” nos reservatórios cerca de dois terços do petróleo disponí-vel. “A fração de óleo recuperada com a injeção de água é uma função dos seguintesfatores: eficiência de varrido horizontal, fator de contato e eficiência de deslocamento.”(Rosa et al. 2006). A análise desses parâmetros indica se há necessidade da aplicaçãode métodos secundários especiais para a manutenção das operações em determinada ja-zida. Também chamados de métodos Enhnaced Oil Recovery (EOR) ou de recuperaçãoavançada, esse processos surgiram a partir da segunda guerra mundial quando as empre-sas donas de reservatórios cuja produção estava em declínio perceberam que uma grandequantidade de óleo permanecia armazenada após a aplicação dos métodos primários esecundários convencionais (Green et al. 1998).
Os métodos de EOR podem ser classificados como:
• Métodos Miscíveis: dois ou mais fluidos são miscíveis se, quando misturados,produzem um sistema com uma única fase. Logo, esses processos reduzem asforças interfaciais que causariam a retenção de óleo no reservatório. Esses métodospodem ser a partir da:
– Injeção de hidrocarbonetos.
2.2. INJEÇÃO DE ÁGUA 7
∗ Injeção de banco miscível de GLP.∗ Injeção de gás enriquecido.∗ Injeção de gás pode a alta pressão.
– Injeção de CO2.
• Métodos Térmicos: o aquecimento da jazida reduz a viscosidade e dilata o óleopresente na formação. Como efeitos principais, tem-se, respectivamente: aumentona eficiência de varrido e de deslocamento entre os poros da rocha. Os principaismeios de aplicação são:
– Injeção de fluidos quentes.∗ Injeção de água quente.∗ Injeção de vapor de água.
– Combustão “in-situ”.
• Métodos químicos: nesta classe de métodos, elementos são adicionados à água deinjeção com o objetivo de alterar a razão de mobilidades dentro do reservatório. Oefeito dessa mistura consiste no aumento da viscosidade do fluido injetado, aumen-tando a sua capacidade de deslocamento de óleo. Os componentes mais utilizadossão:
– Injeção de polímero.– Injeção de solução micelar.– Injeção de solução ASP. (Álcali-Surfactante-Polímero).
Diferente dos convencionais, os métodos especiais de recuperação promovem altera-ções nas propriedades dos fluidos e nas interações entre eles e a rocha do reservatório.Entre outros efeitos, causam a diminuição da resistência ao fluxo de óleo no meio poroso,facilitando o fluxo da mistura em direção aos poços produtores.
Cada método de EOR é indicado para uma situação específica. Cabe aos engenheirose geólogos responsáveis pela produção determinar o processo mais adequado. Na maioriadas vezes, a decisão é baseada nos parâmetros de eficiência do método de injeção deágua, porém, pode haver casos em que EOR seja aplicado antes mesmo da produção pormétodos primários e secundários convencionais.
2.2 Injeção de ÁguaA injeção de água é o mais antigo método de recuperação utilizado na industria do
petróleo (Singh et al. 1982). Segundo Mogollón et al. (2017), o primeiro processo deinjeção de água ocorreu na cidade de Pithole, na Pennsylvania, no ano de 1865. Contudo,só passou a ser utilizado em larga escala nos campos de exploração em meados dos anos1950, quando já existia um domínio maior da técnica. No Brasil, o primeiro campo a usaresse processo foi o de Bom João, na Bahia, em 1953 (Rosa et al. 2006).
Ao ser injetada em um reservatório, a água (também chamada de “fluido deslocante”)empurra o óleo (fluido deslocado), que estava armazenado nos poros da rocha, em direçãoos poços produtores. Além de forçar o deslocamento, a água ocupa os espaços deixados
8 CAPÍTULO 2. ASPECTOS TEÓRICOS
nos reservatórios pelos fluidos deslocados. O processo é empregado com os objetivosde aumentar a pressão em um reservatório em um determinado estágio de produção pormétodos primários ou manter a pressão inicial de uma determinada jazida. No segundocaso, a injeção de água é aplicada em conjunto com algum método primário, retardandoo declínio da pressão natural do reservatório. A principal diferença entre as operaçõesde recuperação e manutenção de pressão é o valor da pressão do reservatório quando asoperações são iniciadas (Singh et al. 1982).
Abbas et al. (2015) destaca que a água é o fluido de injeção mais utilizado no mundohoje. Segundo Mogollón et al. (2017), mais da metade do petróleo produzido no mundoutiliza o processo de injeção de água. As principais razões para o sucesso do método são:
• Disponibilidade da água.• Baixo custo, se comparado a outros fluidos de injeção.• Facilidade para injetar na formação.• Alta eficiência no deslocamento do óleo.
A água utilizada para injeção em poços pode ter origem subterrânea, obtida por meiode mananciais através de poços de captação. Outras fontes possíveis de fornecimento sãoos rios, lados e até mesmo o mar. É comum também que a água associada a produção depetróleo seja reutilizada em projetos de injeção.
Cada projeto é exclusivo para cada reservatório. Entretanto, existem aspectos quesão comuns a todos os projetos, independente do reservatório ou até mesmo do fluidoinjetado, como é o caso da existência de poços injetores e produtores. Em projetos deinjeção de água é muito importante a definição de como os poços injetores e produtoresserão distribuídos no campo de petróleo. Além de levar em conta as características físicasdo meio poroso e dos fluido envolvidos, o modelo escolhido deve:
• Proporcionar a maior produção possível de óleo durante um intervalo de tempoeconômico e com o menor volume de fluido injetado possível.
• Oferecer boas condições de injetividade para se obter boa produtividade resultandoem vazões de produção economicamente atrativas.
• Escolher um esquema de injeção em que a quantidade de poços novos a seremperfurados seja a menor possível, principalmente no caso da aplicação do processoem um campo já desenvolvido.
Os projetos devem especificar aspectos como quantidades e distribuição dos poços deinjeção e de produção, pressões e vazões de injeção, estimativas das vazões de produçãoe volumes de fluidos a serem injetados e produzidos. Esses dados, além de serem neces-sários para o dimensionamento dos equipamentos, são fundamentais para a viabilidadeeconômica do projeto.
Os diversos esquemas de injeção possíveis podem ser classificados em dois grupos:
• Injeção periférica: ocorre quando há a concentração de poços do mesmo tipo emdeterminadas áreas de um reservatório. Geralmente, a injeção é realizada em poçoslocalizados na base da estrutura. O óleo então é empurrado em direção aos poçosprodutores.
2.3. POÇOS MULTIZONAS 9
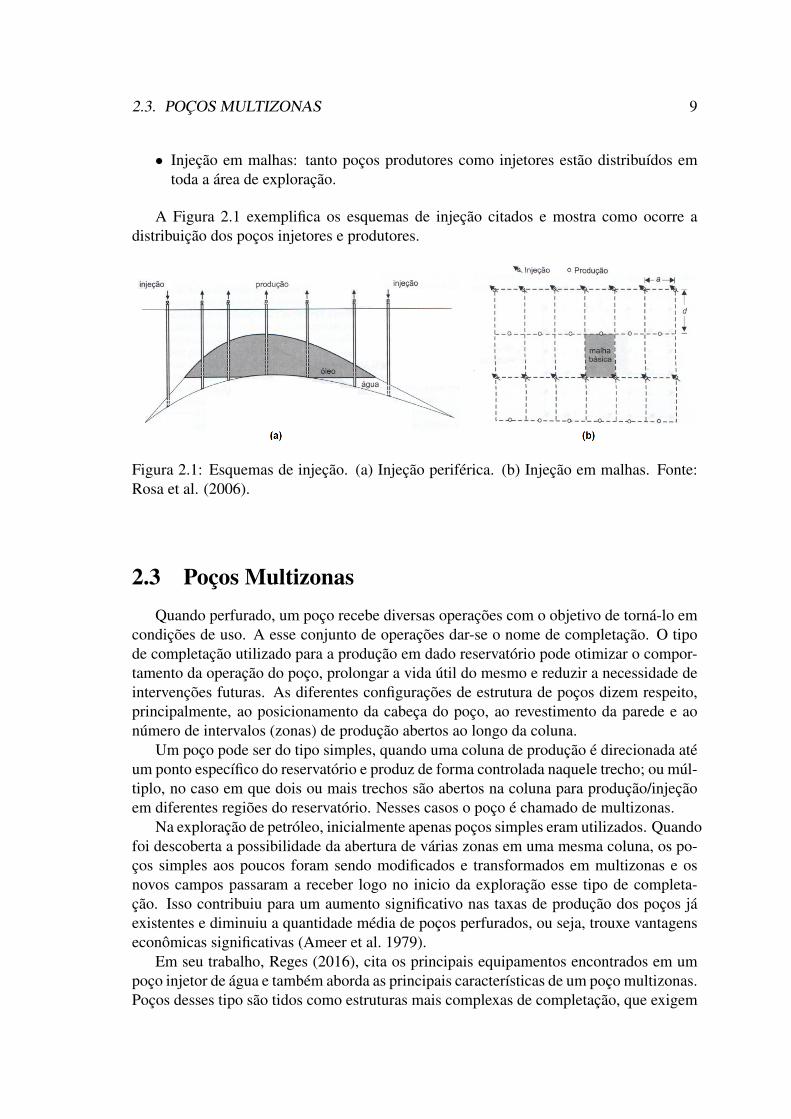
• Injeção em malhas: tanto poços produtores como injetores estão distribuídos emtoda a área de exploração.
A Figura 2.1 exemplifica os esquemas de injeção citados e mostra como ocorre adistribuição dos poços injetores e produtores.
Figura 2.1: Esquemas de injeção. (a) Injeção periférica. (b) Injeção em malhas. Fonte:Rosa et al. (2006).
2.3 Poços MultizonasQuando perfurado, um poço recebe diversas operações com o objetivo de torná-lo em
condições de uso. A esse conjunto de operações dar-se o nome de completação. O tipode completação utilizado para a produção em dado reservatório pode otimizar o compor-tamento da operação do poço, prolongar a vida útil do mesmo e reduzir a necessidade deintervenções futuras. As diferentes configurações de estrutura de poços dizem respeito,principalmente, ao posicionamento da cabeça do poço, ao revestimento da parede e aonúmero de intervalos (zonas) de produção abertos ao longo da coluna.
Um poço pode ser do tipo simples, quando uma coluna de produção é direcionada atéum ponto específico do reservatório e produz de forma controlada naquele trecho; ou múl-tiplo, no caso em que dois ou mais trechos são abertos na coluna para produção/injeçãoem diferentes regiões do reservatório. Nesses casos o poço é chamado de multizonas.
Na exploração de petróleo, inicialmente apenas poços simples eram utilizados. Quandofoi descoberta a possibilidade da abertura de várias zonas em uma mesma coluna, os po-ços simples aos poucos foram sendo modificados e transformados em multizonas e osnovos campos passaram a receber logo no inicio da exploração esse tipo de completa-ção. Isso contribuiu para um aumento significativo nas taxas de produção dos poços jáexistentes e diminuiu a quantidade média de poços perfurados, ou seja, trouxe vantagenseconômicas significativas (Ameer et al. 1979).
Em seu trabalho, Reges (2016), cita os principais equipamentos encontrados em umpoço injetor de água e também aborda as principais características de um poço multizonas.Poços desses tipo são tidos como estruturas mais complexas de completação, que exigem
10 CAPÍTULO 2. ASPECTOS TEÓRICOS
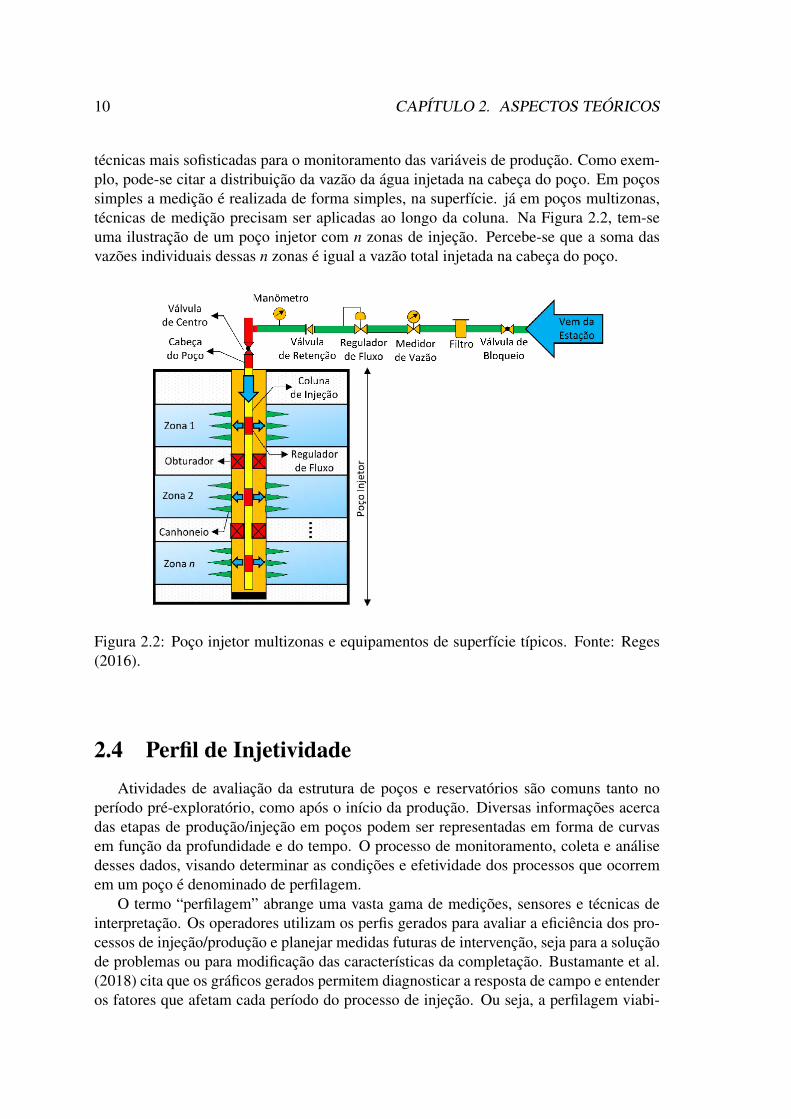
técnicas mais sofisticadas para o monitoramento das variáveis de produção. Como exem-plo, pode-se citar a distribuição da vazão da água injetada na cabeça do poço. Em poçossimples a medição é realizada de forma simples, na superfície. já em poços multizonas,técnicas de medição precisam ser aplicadas ao longo da coluna. Na Figura 2.2, tem-seuma ilustração de um poço injetor com n zonas de injeção. Percebe-se que a soma dasvazões individuais dessas n zonas é igual a vazão total injetada na cabeça do poço.
Figura 2.2: Poço injetor multizonas e equipamentos de superfície típicos. Fonte: Reges(2016).
2.4 Perfil de InjetividadeAtividades de avaliação da estrutura de poços e reservatórios são comuns tanto no
período pré-exploratório, como após o início da produção. Diversas informações acercadas etapas de produção/injeção em poços podem ser representadas em forma de curvasem função da profundidade e do tempo. O processo de monitoramento, coleta e análisedesses dados, visando determinar as condições e efetividade dos processos que ocorremem um poço é denominado de perfilagem.
O termo “perfilagem” abrange uma vasta gama de medições, sensores e técnicas deinterpretação. Os operadores utilizam os perfis gerados para avaliar a eficiência dos pro-cessos de injeção/produção e planejar medidas futuras de intervenção, seja para a soluçãode problemas ou para modificação das características da completação. Bustamante et al.(2018) cita que os gráficos gerados permitem diagnosticar a resposta de campo e entenderos fatores que afetam cada período do processo de injeção. Ou seja, a perfilagem viabi-
2.4. PERFIL DE INJETIVIDADE 11
liza e otimiza a administração e performance do reservatório. Em se tratando da aplicaçãoem campos produzindo por meio da injeção de água, “quanto mais complexo for o reser-vatório, melhor será a gestão necessária para obter a máxima recuperação a partir destatécnica” (Bustamante et al. 2018). De forma mais específica, Fryer et al. (2005) enfatizaem seu trabalho que, quando um poço é construído com a previsão de produção em multi-zonas, o entendimento sobre a contribuição de cada zona na vazão total é importante paraa administração da operação.
O monitoramento da distribuição das vazões em poços injetores de água permite: oti-mizar as vazões injetadas, detectar e controlar vazamentos, detectar fluxo cruzado, iden-tificar os pontos de injeção ao longo da coluna e determinar a contribuição de cada zona ena vazão total injetada (Jaimes et al. 2014). “As presenças de fraturas naturais ou induzi-das, zonas de alta permeabilidade devidas a heterogeneidade do reservatório, etc., podemprovocar uma erupção precoce de água de injeção nos poços produtores, prejudicandoa eficiência de varrido e a própria produção.” (Rosa et al. 2006). É importante, então,traçar perfis de injetividade em frente aos intervalos canhoneados dos poços de injeçãoa fim de que se possa investigar a distribuição de água através da formação e corrigireventuais anomalias. “Este perfil é essencial para aumentar a produção de óleo, diminuira produção de água e caracterizar/gerir o reservatório” (Jiang et al. 2000). Logo, comoresultado do acompanhamento do processo de injeção de água por meio do perfil de in-jetividade, tem-se o aumento na produção de óleo e diminuição na produção de água e,consequentemente, um aumento da eficiência econômica do projeto de exploração.
O método tradicional de registro do perfil de injetividade é realizado através do posi-cionamento de uma ferramenta em cada ponto de interesse em toda a extensão da coluna.Na ferramenta é acoplado um equipamento chamado de medidor de fluxo contínuo, queconsiste em uma hélice giratória que entra em movimento devido ao contato da ferramentacom o fluido. A ferramenta possui um mecanismo para aquisição de pulsos gerados pelomovimento da hélice. A quantidade de rotações por minutos da hélice em determinadotrecho é enviada para a superfície através do cabo que insere a ferramenta no poço (conhe-cido como wireline) e então é calculada a vazão. Em seu trabalho, Carlson et al. (1990)avalia a qualidade das medidas realizadas pelo dispositivo e suas formas de aplicação emum poço.
O levantamento do perfil de injetividade através do medidor de fluxo contínuo pos-sui um custo tipicamente alto. Além disso, considerando que o processo de aquisiçãoenvolve o posicionamento da ferramenta nos pontos do poço, a frequência de mediçãoé relativamente baixa. Batocchio et al. (2010) destaca que esse método não oferece omonitoramento contínuo e ainda interfere na operação do poço.
Ao longo dos anos, diversos modelos térmicos de transmissão de calor em poços depetróleo tem sido estudados. Como destacado no trabalho de Ouyang et al. (2004), essesmodelos podem ser aplicados tanto para a descrição do perfil de temperatura do poço(modelos diretos), como também, para a descrição do perfil de injetividade a partir deperfis de temperaturas reais, medidos na extensão da coluna do poço (problema inverso).Deste modo, o levantamento do perfil de injetividade através de dados de temperaturaapresenta-se como uma ferramenta alternativa ao uso do medido de fluxo contínuo, e suautilização tem se mostrado eficaz principalmente após o desenvolvimento da tecnologia
12 CAPÍTULO 2. ASPECTOS TEÓRICOS
de traçamento de perfis de temperatura em poços a partir de sensores de temperaturadistribuídos (DTS - Distributed temperature system).
2.5 Sensores de Temperatura Distribuídos (DTS)O levantamento de perfis de temperatura em poços injetores e produtores atualmente
pode ser realizado sem interferências na produção graças a tecnologia de sensores de tem-peratura baseados na utilização de fibras óticas. Os sensores de temperatura distribuídos,como são conhecidos, são capazes de medir temperatura ao longo do comprimento de umfilamento de fibra ótica e, como consequência, medem a quantidade de energia em formade calor na extensão do meio em que a fibra está inserida.
Na tecnologia DTS, pulsos de luz com duração de aproximadamente 5 nanosegundossão emitidos por meio da fibra a partir de um gerador de laser. A medida que os pulsospercorrem a fibra, são refletidos em direção a origem e detectados por um processadorde sinais. O espectro do sinal refletido é dividido em três regiões, baseadas no compri-mento de onda: Rayleigh, Briollouin e Raman. A intensidade de energia nas componentesespectrais de Raman é função da temperatura no ponto em que ocorreu a reflexão, e a lo-calização deste ponto é determinada a partir do tempo com que o sinal retorna à fonte(Jaimes et al. 2014). Segundo Güemes et al. (2010), por meio de sensores baseados emfibra ótica, a temperatura pode ser medida com uma resolução de 0.1 C em uma distânciade até 50 Km.
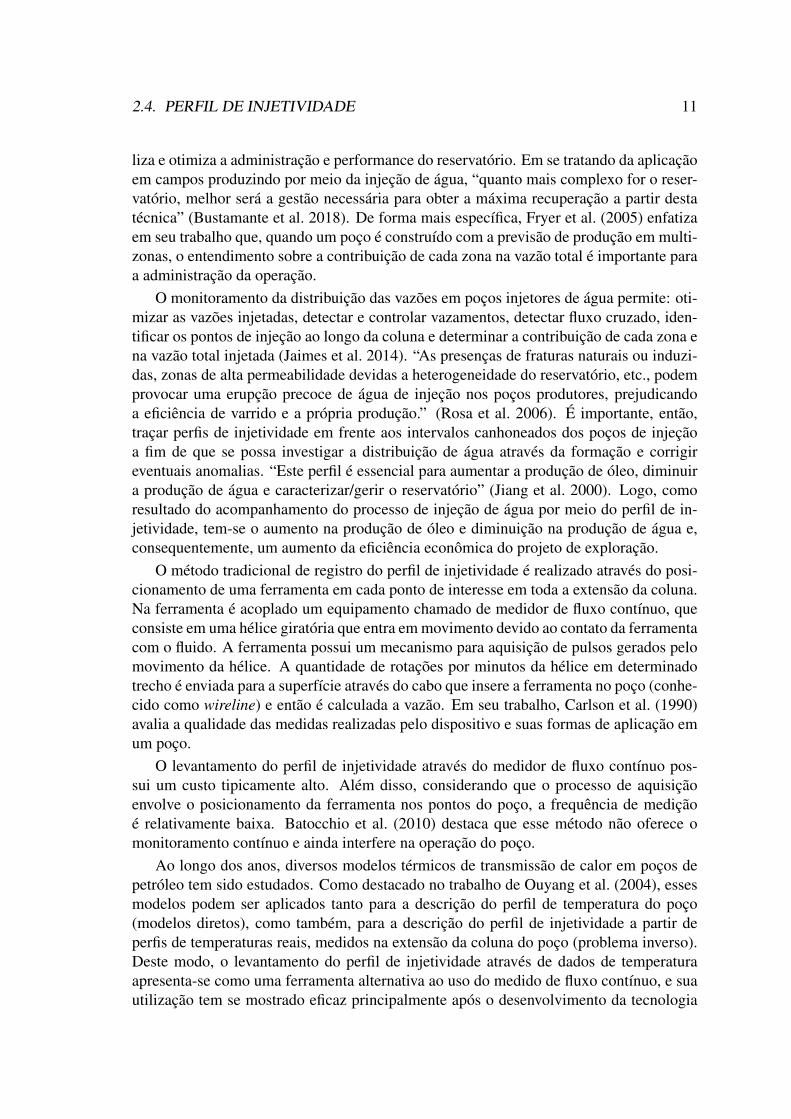
O sistema é constituído por filamento de fibra ótica, uma fonte de laser, um divisorótico e um processador de sinais (Na Figura 2.3 é denominado de “unidade”). “A fibrapode ser instalada dentro da coluna de produção para medir diretamente as propriedadesdo fluido ou por fora do revestimento para fazer aquisições da temperatura da formação.A posição correta depende da aplicação” (Abukhamsin 2016).
Laser
Unidade
Divisor Fibra ótica
injeção
refletidaLuz
Perfil de temperatura
Fluido de
Geotérmica
Figura 2.3: Tecnologia DTS. Fonte: Autoria própria (2018).

2.6. SOLUÇÃO DE RAMEY 13
A Figura 2.3 representa um poço injetor com o sistema DTS instalado, também estãorepresentados os perfis de temperatura da formação geológica e do fluido. É possívelperceber que o único componente em contato com o poço é a própria fibra, que por sermuito fina, interfere de forma insignificante na entrada/saída de fluido da coluna.
Como consequência da mínima intervenção na estrutura do poço, o uso do DTS para oauxílio no acompanhamento da produção em reservatórios não oferece riscos para os ope-radores, para o meio ambiente e para a estrutura do meio em que está operando. “Coma técnica DTS, a fibra ótica é inserida na coluna para fornecer informações completassobre a temperatura do poço a cada leitura, permitindo o monitoramento permanente econtínuo sem interrupção da produção” (Batocchio et al. 2010). Como não há a necessi-dade de manobras ou posicionamento de equipamentos, a temperatura da coluna pode serlida de foma rápida e contínua. Portanto, variações na dinâmica de operação do poço queresultem em variações de temperatura podem ser monitoradas em tempo real.
As contribuições do sistema DTS como ferramenta de monitoramento de gerencia-mento de poços também foi destacado no trabalho de Ouyang et al. (2004), que tam-bém cita como suas maiores vantagens o monitoramento contínuo e em tempo real sema necessidade de movimentação do sensor na coluna do poço e ausência de impacto naoperação. Porém, como citado anteriormente, para ser aplicado no traçamento de perfisde injetividade, os dados de temperatura gerados pelo sistema DTS devem ser tratadoscom modelos matemáticos de transmissão de calor em poços que relacionem as variá-veis de vazão e temperatura. A eficácia desse método depende da qualidade do modelodesenvolvido e das aproximações realizadas dos parâmetros envolvidos.
2.6 Solução de Ramey
Em todo processo de injeção e produção envolvidos nas etapas de recuperação depetróleo ocorre a transmissão de calor entre os fluidos do processo e a formação geoló-gica em que o poço está instalado. Em seu trabalho, Ramey (1962) propôs uma soluçãoaproximada para o problema de transmissão de calor em poços em que ocorre a injeçãode fluidos quentes ou frios. Essa solução permite a estimação da temperatura do fluidocomo uma função da profundidade e do tempo em que o processo está ocorrendo. Con-siderando que um fluido incompressível é injetado em um poço com vazão e temperaturaconhecida, a relação aproximada obtida a partir do balanço de energia aplicado ao escoa-mento do fluido em um poço injetor é dada pela seguinte equação diferencial:
dTf (z, m, t)dz
+Tf (z, m, t)−Tg(z)
A(z, m, t)= 0 (2.1)
em que t é o tempo, z a profundidade, Tf (z, m, t) a temperatura média do fluido, que de-pende da profundidade (z) do tempo e da vazão de entrada; Tg(z) a temperatura geotérmicae A é o coeficiente de relaxação, igual a:
A =mcp[k f +U(z, m)r f (t)]
2πrk fU(z, m)(2.2)
14 CAPÍTULO 2. ASPECTOS TEÓRICOS
cuja variável m corresponde à vazão injetada, cp à capacidade térmica do fluido de injeção,k f à condutividade da formação e r ao raio interno da tubulação. Os termos U(z, m) e f (t)são o coeficiente global e a função transiente de transferência de calor, respectivamente.
O desenvolvimento das Equações (2.1) e (2.2) considerou que as propriedades físicase térmicas dos fluidos e da formação geológica não variam com a temperatura. Foi es-tabelecido também que o calor é transferido de forma radial na formação e a o processode transmissão pode ser representado a partir de soluções em regime permanente. Para asolução da Equação 2.1, deve-se aplicar uma relação correspondente ao comportamentodo perfil de temperatura em função da profundidade da formação geotérmica do poço. Di-ferentes perfis podem ser utilizados. Para este trabalho, como será explicado nas seçõesseguintes, o perfil constante, Tg(z) = Tg(0), em que Tg(0) é a temperatura da formação nacabeça do poço, é o mais adequado pois descreve melhor o comportamento do protótipoconstruído. A temperatura do líquido em função da profundidade e do tempo é dada paraum poço instalado em um reservatório cuja a temperatura da rocha não varia é descritapor:
Tf (z, m, t) = Tg(0)+ [Tf (0, m, t)−Tg(0)]e− Z
A(m,t) . (2.3)
A aplicação da Equação (2.3) depende da correta definição f (t) e U(z, m). “Discus-sões completas sobre o coeficiente global podem ser encontradas em muitas referênciassobre transmissão de calor” (Ramey 1962). A função f (t) pode ser estimada a partirde soluções para a condução radial de calor em um cilindro infinitamente longo. “Taissoluções são apresentadas em diversos textos sobre transmissão de calor e são análogasà soluções para o fluxo transiente de fluidos utilizadas em engenharia de reservatórios”(Ramey 1962). Uma das representações para função f (t) provém da definição da taxa detransferência de calor da coluna do poço para a formação, equivalente à:
dqdZ
=2πk(Tf −Tg(0))
f (t). (2.4)
Na Equação 2.4, a variável k corresponde à condutividade térmica da formação. Se-gundo Ramey (1962), devem ser consideradas soluções que, quando comparadas comvalores experimentais obtidos em campo, forneçam a precisam desejada. Uma soluçãorazoável considera que o fluxo de calor no espaço anular da parede do poço é controladopela convecção em regime permanente.
Já o valor U(z, m) considera todos os mecanismos de transferência de calor nas ca-madas da estrutura de um poço. De acordo com as leis que regem esses mecanismos, ataxa de fluxo de calor através das camadas de um poço injetor é proporcional à diferençade temperatura média do fluido de injeção e a temperatura geotérmica, e também, à áreaperpendicular à direção de propagação do fluxo.
2.6. SOLUÇÃO DE RAMEY 15
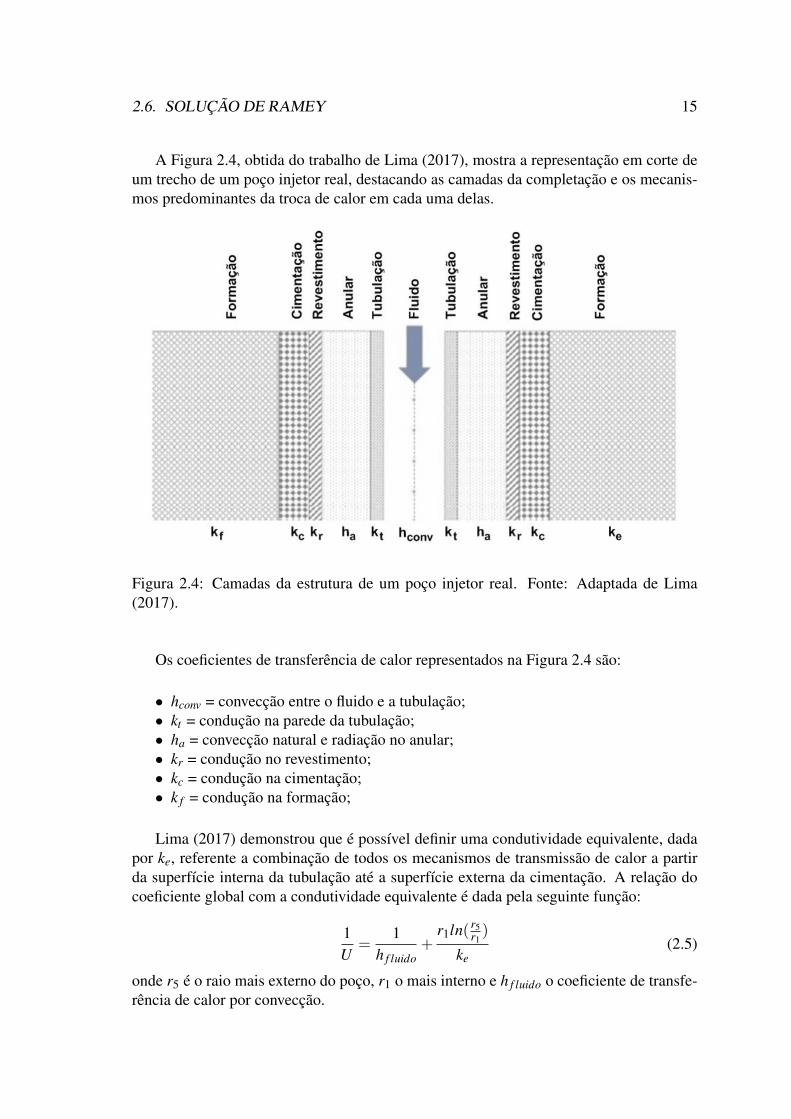
A Figura 2.4, obtida do trabalho de Lima (2017), mostra a representação em corte deum trecho de um poço injetor real, destacando as camadas da completação e os mecanis-mos predominantes da troca de calor em cada uma delas.
Figura 2.4: Camadas da estrutura de um poço injetor real. Fonte: Adaptada de Lima(2017).
Os coeficientes de transferência de calor representados na Figura 2.4 são:
• hconv = convecção entre o fluido e a tubulação;• kt = condução na parede da tubulação;• ha = convecção natural e radiação no anular;• kr = condução no revestimento;• kc = condução na cimentação;• k f = condução na formação;
Lima (2017) demonstrou que é possível definir uma condutividade equivalente, dadapor ke, referente a combinação de todos os mecanismos de transmissão de calor a partirda superfície interna da tubulação até a superfície externa da cimentação. A relação docoeficiente global com a condutividade equivalente é dada pela seguinte função:
1U
=1
h f luido+
r1ln( r5r1)
ke(2.5)
onde r5 é o raio mais externo do poço, r1 o mais interno e h f luido o coeficiente de transfe-rência de calor por convecção.
16 CAPÍTULO 2. ASPECTOS TEÓRICOS
Definidos os coeficientes, a solução de Ramey (1962) fornece uma solução geral paraobtenção do perfil de temperatura em poços sob influência térmica da temperatura geotér-mica. Quando mais precisa for a caracterização dos parâmetros envolvidos, mais próximodo real será o perfil de temperatura obtido.
2.7 Projeto Conceitual do ProtótipoEsta seção aborda as considerações e análises desenvolvidas em trabalhos anterio-
res que fundamentaram o projeto do protótipo simulador capaz de representar as condi-ções encontradas em poços injetores multizonas reais. Serão apresentados os objetivos daconstrução do protótipo, o modelo de poço tomado como referência, o comportamento doperfil de temperatura esperado para esse poço, as análises que culminaram definição daestrutura e dimensões do simulador e a estrutura final construção no LAMP.
Partindo do problema do levantamento do perfil de injetividade em poços multizonas,um grupo de pesquisas foi formado no LAMP com o objetivo de estudar metodologias deobtenção da distribuição de vazão em poços a partir do perfil de temperatura que se formano fluido devido a troca de calor com a formação geológica. As pesquisas iniciaram comdesenvolvimento da modelagem matemática, baseado no trabalho de Ramey (1962), queresultaram em trabalhos como o de Reges et al. (2016) e Britto (2016). Paralelamente, foidesenvolvida a ideia de um protótipo físico de poço injetor multizonas. A estrutura deveriasimular o comportamento de um poço injetor de água e permitir o monitoramento dasvariáveis importantes para análise do método em questão. Para isso, a estrutura deveriacontar com medição in loco das variáveis através de sensores instalados nos pontos deinteresse. Como ponto de partida e restrições iniciais:
• Acesso às zonas de injeção para o posicionamento de medidores de vazão.• Possibilidade de modificação da distribuição de vazão nas zonas com o objetivo de
testar diferentes pontos de operação.• Devido ao custo elevado do sistema DTS, outro meio de aquisição das temperaturas
deveria ser aplicado.
Essas considerações resultaram na conclusão de que a construção de uma estrutura nahorizontal seria operacional e economicamente viável. Desse modo, seria possível insta-lação de equipamentos de medição e controle já difundidos na industria, que geralmentenecessitam de acesso ao ponto de medição tanto para instalação como para manutençãoe operação. Lima (2017) provou em seu trabalho, a partir da análise do balanço de ener-gia em um volume de controle, a validade da metodologia de Ramey (1962) para umaestrutura de poço injetor construído na posição horizontal.
2.7. PROJETO CONCEITUAL DO PROTÓTIPO 17
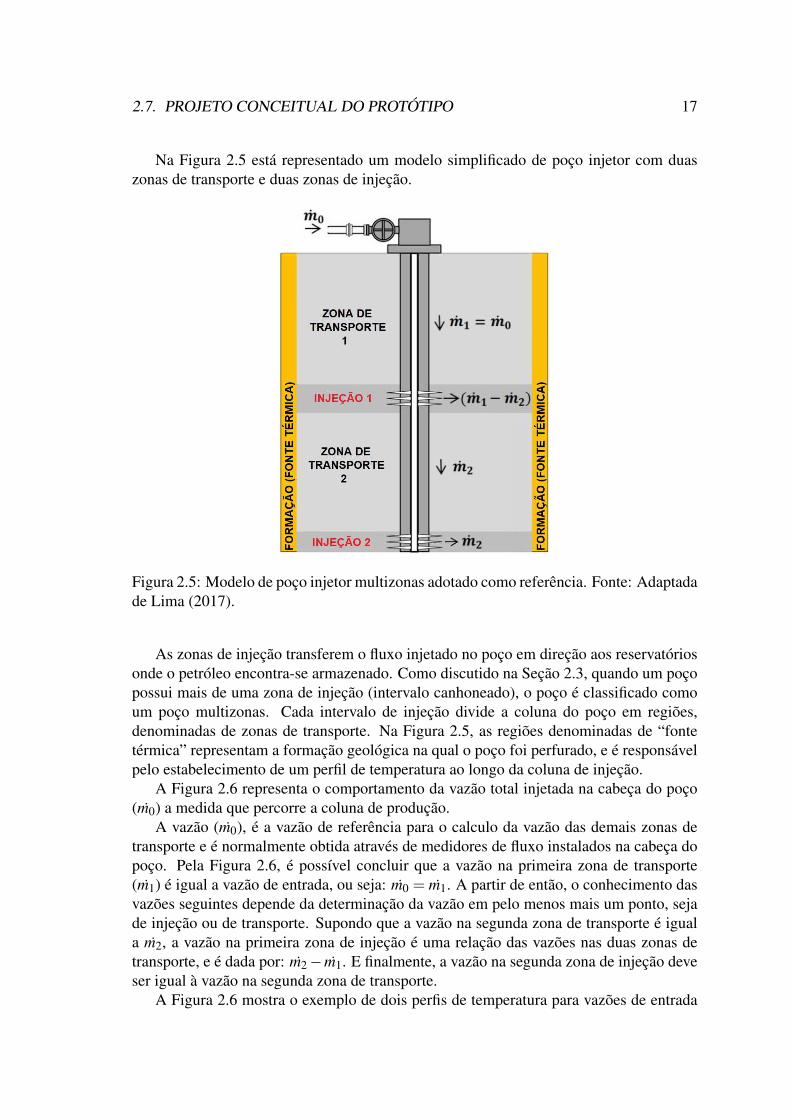
Na Figura 2.5 está representado um modelo simplificado de poço injetor com duaszonas de transporte e duas zonas de injeção.
Figura 2.5: Modelo de poço injetor multizonas adotado como referência. Fonte: Adaptadade Lima (2017).
As zonas de injeção transferem o fluxo injetado no poço em direção aos reservatóriosonde o petróleo encontra-se armazenado. Como discutido na Seção 2.3, quando um poçopossui mais de uma zona de injeção (intervalo canhoneado), o poço é classificado comoum poço multizonas. Cada intervalo de injeção divide a coluna do poço em regiões,denominadas de zonas de transporte. Na Figura 2.5, as regiões denominadas de “fontetérmica” representam a formação geológica na qual o poço foi perfurado, e é responsávelpelo estabelecimento de um perfil de temperatura ao longo da coluna de injeção.
A Figura 2.6 representa o comportamento da vazão total injetada na cabeça do poço(m0) a medida que percorre a coluna de produção.
A vazão (m0), é a vazão de referência para o calculo da vazão das demais zonas detransporte e é normalmente obtida através de medidores de fluxo instalados na cabeça dopoço. Pela Figura 2.6, é possível concluir que a vazão na primeira zona de transporte(m1) é igual a vazão de entrada, ou seja: m0 = m1. A partir de então, o conhecimento dasvazões seguintes depende da determinação da vazão em pelo menos mais um ponto, sejade injeção ou de transporte. Supondo que a vazão na segunda zona de transporte é iguala m2, a vazão na primeira zona de injeção é uma relação das vazões nas duas zonas detransporte, e é dada por: m2 − m1. E finalmente, a vazão na segunda zona de injeção deveser igual à vazão na segunda zona de transporte.
A Figura 2.6 mostra o exemplo de dois perfis de temperatura para vazões de entrada
18 CAPÍTULO 2. ASPECTOS TEÓRICOS
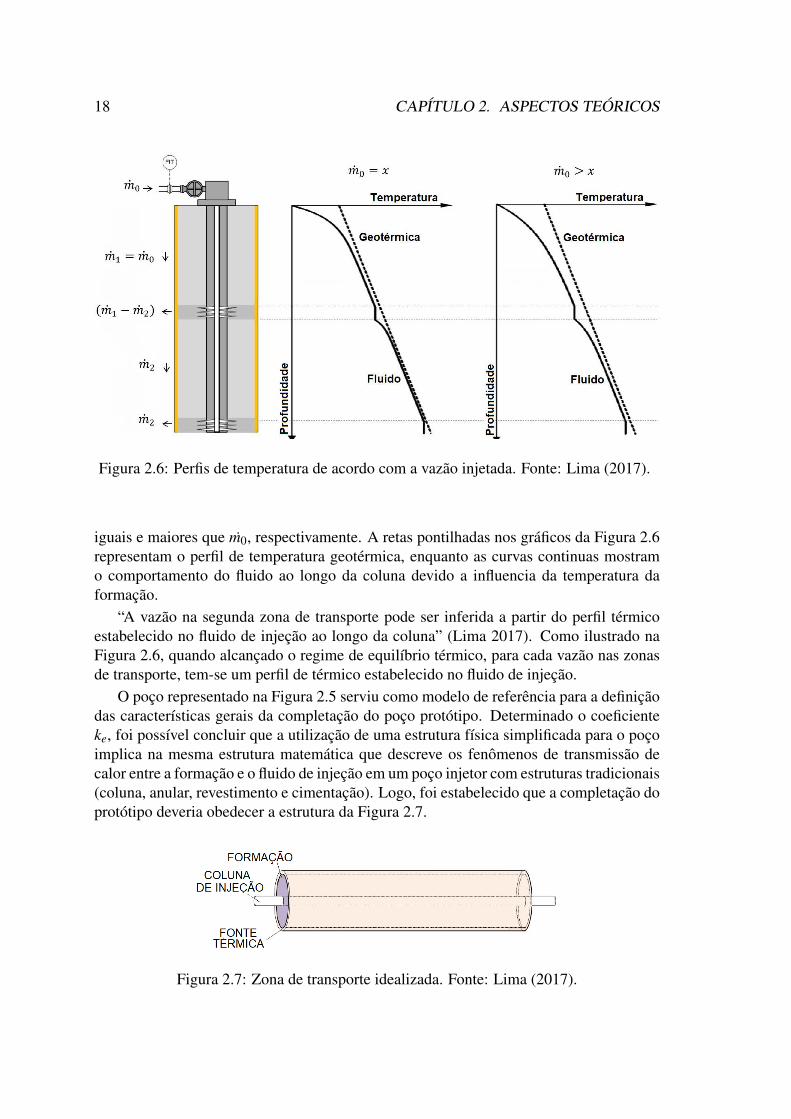
Figura 2.6: Perfis de temperatura de acordo com a vazão injetada. Fonte: Lima (2017).
iguais e maiores que m0, respectivamente. A retas pontilhadas nos gráficos da Figura 2.6representam o perfil de temperatura geotérmica, enquanto as curvas continuas mostramo comportamento do fluido ao longo da coluna devido a influencia da temperatura daformação.
“A vazão na segunda zona de transporte pode ser inferida a partir do perfil térmicoestabelecido no fluido de injeção ao longo da coluna” (Lima 2017). Como ilustrado naFigura 2.6, quando alcançado o regime de equilíbrio térmico, para cada vazão nas zonasde transporte, tem-se um perfil de térmico estabelecido no fluido de injeção.
O poço representado na Figura 2.5 serviu como modelo de referência para a definiçãodas características gerais da completação do poço protótipo. Determinado o coeficienteke, foi possível concluir que a utilização de uma estrutura física simplificada para o poçoimplica na mesma estrutura matemática que descreve os fenômenos de transmissão decalor entre a formação e o fluido de injeção em um poço injetor com estruturas tradicionais(coluna, anular, revestimento e cimentação). Logo, foi estabelecido que a completação doprotótipo deveria obedecer a estrutura da Figura 2.7.
Figura 2.7: Zona de transporte idealizada. Fonte: Lima (2017).
2.7. PROJETO CONCEITUAL DO PROTÓTIPO 19
Essa estrutura é composta por:
• Coluna de injeção: duto onde percorre o fluido injetado no poço.• Formação: a coluna de injeção é enterrada em um material com condutividade
térmica próxima de um reservatório real.• Fonte térmica: mecanismo de transferência de calor que mantenha o perfil de tem-
peratura desejado na formação que circunda a coluna de injeção.
O perfil geotérmico exemplificado na Figura 2.6 apresenta um comportamento apro-ximadamente linear, em que a temperatura aumenta proporcionalmente à profundidade.Essa curva é similar ao perfil de temperatura geotérmica observado em poços reais e éconsequência, segundo Nowak (1953), do contínuo fluxo de calor em direção à superfí-cie a partir do interior da terra. Naturalmente, em um poço construído na horizontal nãoocorre o acréscimo natural da temperatura da formação com a profundidade. Portanto, aestrutura tende a permanecer a uma temperatura constante, sob influência da temperaturaambiente. A possibilidade de promover o aquecimento forçado da estrutura para manterum perfil linear se mostrou inviável, pois demandaria uma grande quantidade de energia.Concluiu-se então que seria mais simples trabalhar com o perfil geotérmico do protótipodado por uma mesma temperatura ao longo da extensão do poço. A aplicabilidade da me-todologia de Ramey (1962) à diferentes perfis de temperatura embasou e viabilizou essadecisão de projeto.
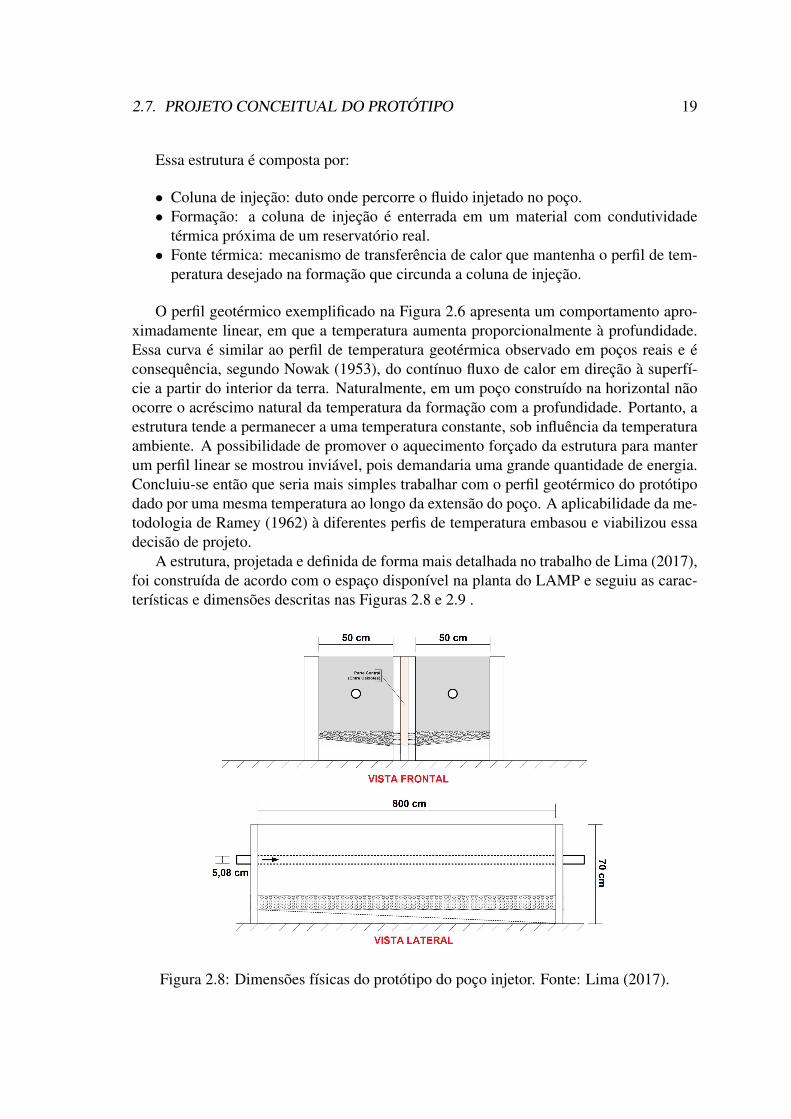
A estrutura, projetada e definida de forma mais detalhada no trabalho de Lima (2017),foi construída de acordo com o espaço disponível na planta do LAMP e seguiu as carac-terísticas e dimensões descritas nas Figuras 2.8 e 2.9 .
Figura 2.8: Dimensões físicas do protótipo do poço injetor. Fonte: Lima (2017).
20 CAPÍTULO 2. ASPECTOS TEÓRICOS
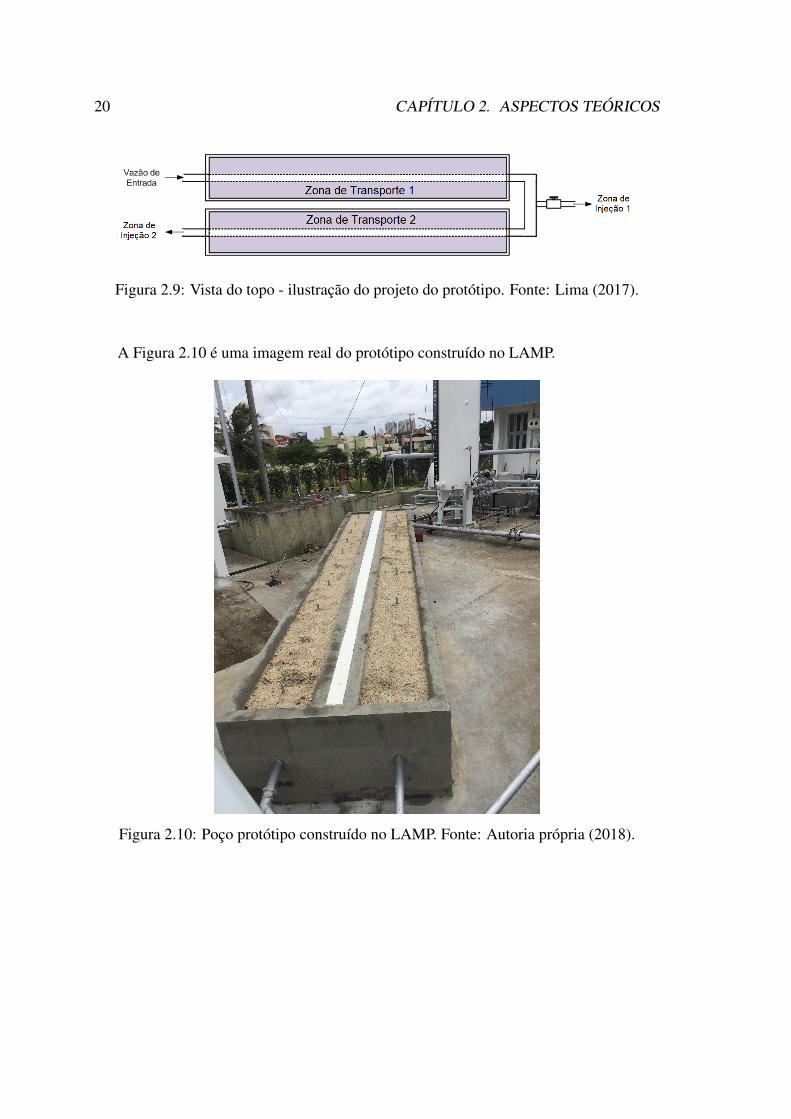
Figura 2.9: Vista do topo - ilustração do projeto do protótipo. Fonte: Lima (2017).
A Figura 2.10 é uma imagem real do protótipo construído no LAMP.
Figura 2.10: Poço protótipo construído no LAMP. Fonte: Autoria própria (2018).

2.8. METODOLOGIA DE MEDIÇÃO 21
2.8 Metodologia de MediçãoO coeficiente de relaxação é o parâmetro que permite a aplicação da metodologia
de Ramey (1962) ao cálculo da distribuição de vazão em poços. Essa relação fica maisevidente se a Equação (2.2) for representada na forma:
m =2πrk fU(z, m)
cp[k f +U(z, m)r f (t)]A. (2.6)
A Equação (2.3) fornece a relação entre o perfil de temperatura e o coeficiente derelaxação. Dessa forma, independente do regime de escoamento, é possível determinar asvazões de injeção mi a partir dos valores dos coeficientes de relaxação Aire f para todos ospontos ao longo da coluna do poço. De modo que, conhecida a vazão na cabeça do poço,as vazões em cada zona de transporte são dadas por:
m ∼=A
Are fmre f . (2.7)
A manipulação da Expressão (2.3) fornece:
ln[
Tf luido(0)−Tg(0)Tf luido(z)−Tg(0)
]=
zA. (2.8)
A expressão do lado esquerdo da Equação (2.8) dá origem a uma nova variável, defi-nida no trabalho de Lima (2017) como Temperatura Adimensional (T ∗
f luido(z)). Logo:
T ∗f luido(z) = ln
[Tf luido(0)−Tg(0)Tf luido(z)−Tg(0)
]. (2.9)
Nessa abordagem, o perfil de temperatura do poço, representado pela Equação (2.3)dá origem a uma curva linear, como a da Figura (2.11), em que o coeficiente de relaxaçãomédio (A) é calculado a partir do inverso do coeficiente angular dessa curva.
Figura 2.11: Camadas da estrutura de um poço injetor real. Fonte: Lima (2017).

22 CAPÍTULO 2. ASPECTOS TEÓRICOS
Logo, a aplicação da metodologia de Ramey (1962) para o cálculo do perfil de inje-tividade, obedecidas as devidas condições para o escoamento do fluido, consiste em, apartir do perfil de temperatura medido com instrumentos instalados no poço, aplicar asEquações (2.3) ou (2.9) para determinar os coeficientes de relaxação para cada amostrade temperatura, e em seguida, aferir o valor da vazão em cada intervalo de injeção com aEquação (3.9).

Capítulo 3
Descrição da Planta
O protótipo construído no LAMP visa reproduzir em condições controladas o pro-cesso de injeção de água em um poço injetor com múltiplas zonas de produção. Essesistema permite a modificação da estrutura do poço, a reprodutibilidade das experiênciase a aquisição dos dados do processo. Essas características dependem da utilização de com-ponentes industriais que proporcionem aos operadores uma operação confiável e segurada planta. A partir disso, este trabalho especificou e agregou ao protótipo um conjuntode componentes de campo como: atuadores, instrumentos de medição e controladores,acompanhados de uma arquitetura de rede de comunicação e software supervisório, queviabilizaram a realização do processo de injeção e a análise dos resultados de forma con-trolada e automatizada, a partir de uma estação de trabalho.
Este capítulo apresenta as características construtivas e operacionais do protótipo ins-trumentado. Serão abordados também os detalhes da estrutura de instrumentação insta-lada para a automatização das experiências, as modificações elétricas e mecânicas reali-zadas no aquecedor do protótipo, bem como os resultados dos primeiros testes de aqueci-mento e de controle de temperatura. Por fim, será apresentado o supervisório programadoe a sua importância para o acompanhamento das experiências de medição de vazão a partirde temperatura.
3.1 Instalações FísicasInicialmente utilizado para projetos de medição de BS&W (Basic Sediment and Wa-
ter), o LAMP recebeu no ano de 2004 toda a sua estrutura de tanques, tubulação e ins-trumentação. Quando construído, a ideia foi conceber um laboratório com equipamentosindustriais com operação automatizada, de modo que todas as experiências pudessem seracompanhadas de uma sala de controle. Para isso, foi agregada à estrutura física umaestrutura lógica para controle e automação de processos.
A execução do projeto de medição de vazão a partir de temperatura foi planejada como intuito de utilizar o maior número possível de dispositivos já disponíveis no LAMP.Desde modo, a modificação mais aparente, no que se refere à estrutura física original, sedeu pela construção da estrutura responsável por simular a operação de um poço injetorde água para produção de petróleo com múltiplas zonas de produção.
24 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
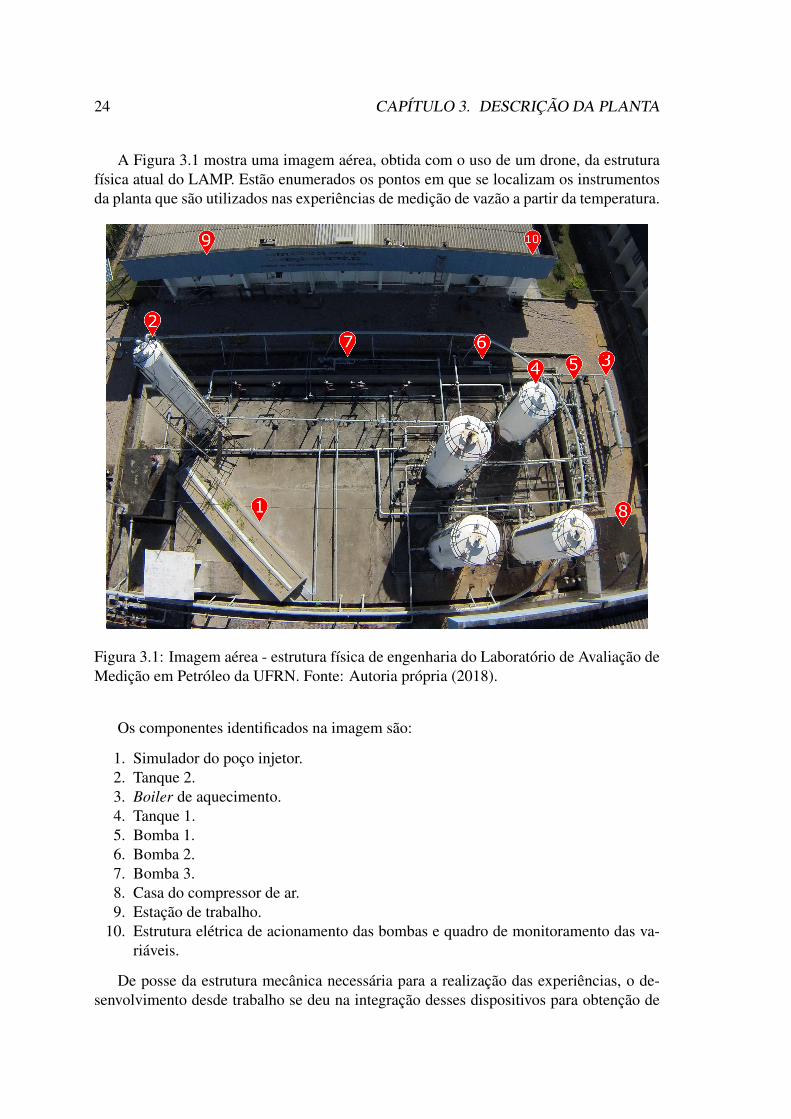
A Figura 3.1 mostra uma imagem aérea, obtida com o uso de um drone, da estruturafísica atual do LAMP. Estão enumerados os pontos em que se localizam os instrumentosda planta que são utilizados nas experiências de medição de vazão a partir da temperatura.
Figura 3.1: Imagem aérea - estrutura física de engenharia do Laboratório de Avaliação deMedição em Petróleo da UFRN. Fonte: Autoria própria (2018).
Os componentes identificados na imagem são:
1. Simulador do poço injetor.2. Tanque 2.3. Boiler de aquecimento.4. Tanque 1.5. Bomba 1.6. Bomba 2.7. Bomba 3.8. Casa do compressor de ar.9. Estação de trabalho.
10. Estrutura elétrica de acionamento das bombas e quadro de monitoramento das va-riáveis.
De posse da estrutura mecânica necessária para a realização das experiências, o de-senvolvimento desde trabalho se deu na integração desses dispositivos para obtenção de
3.2. OPERAÇÃO 25
um protótipo de testes totalmente automatizado. Com exceção das bombas, das válvulaspneumáticas e do compressor de ar, todos os demais componentes eletrônicos do sistemaprecisaram ser especificados, adquiridos e instalados. Para o início dos testes, foi necessá-ria uma avaliação dos procedimentos a serem seguidos e o comportamento das principaisvariáveis foi estimado. Nas seções seguintes o processo de medição de vazão no protótipoautomatizado será detalhado, destacando a importância de cada dispositivo e os resultadosda integração do sistema.
3.2 OperaçãoAs experiências no protótipo de medição de vazão a partir de perfis de temperatura
consistem em aferir a distribuição de vazão em um poço injetor com duas zonas de pro-dução a partir do perfil de temperatura formado ao longo da coluna de injeção. A variaçãode temperatura é obtida devido a troca de calor entre a água (previamente aquecida) e aformação geotérmica em que o poço está instalado. O método de medição é avaliado apartir da comparação dos resultados obtidos com as vazões medidas no protótipo a partirde sensores de fluxo instalados no poço.
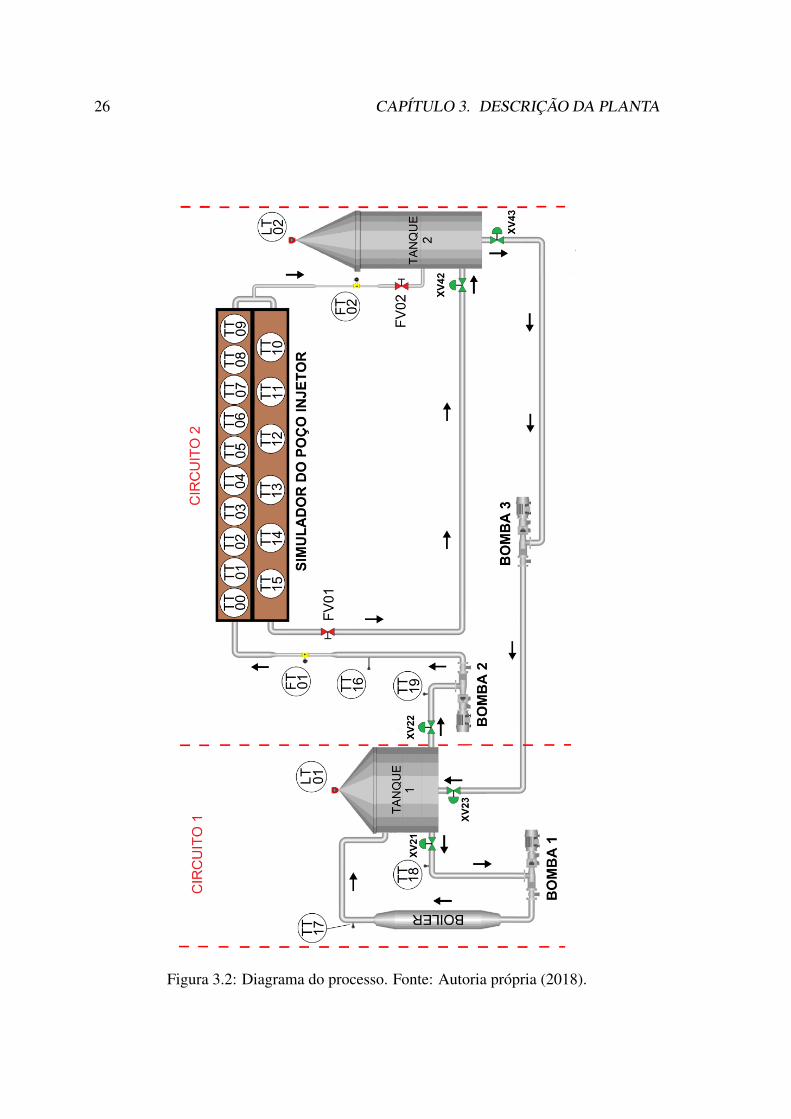
A Figura 3.2 apresenta o diagrama de processo do protótipo. A nomenclatura adotadapara a identificação dos dispositivos segue as recomendações da norma ANSI/ISA-5.1-2009 Instrumentation Symbols and Identification. A figura fornece uma visão geral dosinstrumentos instalados em campo que possuem papel ativo na realização das experiên-cias, e serve de guia para o entendimento da operação da planta. Os componentes estãolistados na Tabela 3.1. Desses, apenas as válvulas pneumáticas e as bombas foram reuti-lizados dos projetos anteriores do LAMP.
Instrumento Identificação Funcional QuantidadeMedidor de Vazão FT 2Medidor de Nível LT 2Medidor de Temperatura TT 21Válvulas Pneumáticas XV 5Válvulas Manuais FV 2Bombas BOMBA 2
Tabela 3.1: Relação dos instrumentos instalados na planta.
26 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
Figura 3.2: Diagrama do processo. Fonte: Autoria própria (2018).

3.2. OPERAÇÃO 27
A primeira condição para o início das experiências é que toda a água a ser utilizadaesteja armazenada no tanque 1. Para isso, a quantidade deve estar definida e de acordocom o horizonte de tempo esperado para os testes. Além disso, toda a tubulação deve estarpreviamente preenchida. A operação geral do sistema pode ser dividida em dois circuitos(como indica a Figura 3.2): circuito 1, responsável por aquecer a água armazenada notanque 1; e o circuito 2, em que a água aquecida é transferida para os caixotes que simulamo poço injetor do protótipo. As setas que acompanham a tubulação na Figura 3.2 indicamo sentido do fluxo de água que ocorre na planta.
• Operação do Circuito 1:
Iniciada a operação, a válvula pneumática XV21, de saída do tanque 1, deve ser aberta, abomba 1 é acionada e faz a água circular através do aquecedor e então, retornar ao tanque1 a uma temperatura mais elevada, estabelecendo o ciclo fechado de trabalho do circuito1. Uma vez atingido o valor de temperatura adequado no tanque 1, a bomba 2 é acionadae a água aquecida é enviada ao outro ramo de operação.
• Operação do Circuito 2:
No circuito 2 ocorrem os experimentos de medição de vazão propriamente ditos. A águaaquecida no circuito 1 é enviada, através da abertura da válvula XV22 e do acionamentoda bomba 2, para o simulador do poço injetor. Aferições de temperatura e vazão sãorealizadas imediatamente antes da entrada do poço através dos sensores TT16 e FT01,respectivamente. A tubulação que simula a coluna de injeção do poço encontra-se enter-rada dentro de dois caixotes de areia responsáveis por simular a formação geológica emque o poço está instalado. Ao longo dessa tubulação foram distribuídos 16 sensores detemperatura (TT00 até TT15), com o objetivo de identificar a variação térmica ao longodas zonas de transporte, provocada pela troca de calor entre o fluido injetado e o solo. Nafigura, a primeira zona de injeção divide o poço injetor duas zonas de transporte. Nesseponto foi instalado um sensor de vazão (FT02) e uma válvula proporcional de controle(FV02). A alteração da abertura da válvula FV02 modifica a distribuição da vazão inje-tada ao longo do poço injetor, e assim é possível obter um novo perfil de temperaturasantes e depois da zona de injeção, de acordo com a modelagem matemática do sistema.O fechamento total da válvula FV02 configura a estrutura como um poço injetor comuma única zona de produção. A válvula FV01 é útil para promover ajustes mais precisosda distribuição da vazão entre as zonas. Logo, a variação forçada da vazão possibilita aanálise de diferentes situações de operação. A mudança na rotação da bomba 2 tambémresulta em modificações na vazão de trabalho. Ao passar pelo simulador do poço injetor, ofluido de trabalho é transferido para o Tanque 2, onde fica temporariamente armazenado.Quando o nível no tanque 2 começa a subir, a bomba 3 é acionada para devolver o fluidopara o tanque 1, completando assim o ciclo do circuito 2.
A intervenção humana na planta só é necessária quando a abertura das válvulas FV01e FV02 precisa ser alterada. Comandos para as válvulas pneumáticas, acionamento doaquecedor e acionamento de bombas, assim como o monitoramento e aquisição de todasas variáveis do processo, são realizados a partir da estação de trabalho.

28 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
3.3 InstrumentaçãoA operação automatizada dos processos descritos na seção anterior é baseada no em-
prego de dispositivos eletrônicos desenvolvidos para aplicações em sistemas industriais.São equipamentos fabricados de acordo com as normas e padrões nacionais e interna-cionais, que visam a execução da aplicação a qual foram destinados de forma flexível,segura, confiável e eficiente. Além disso, os instrumentos de medição utilizados são cali-brados em laboratórios acreditados de acordo com a norma NBR/IEC 17025, garantindoa confiabilidade e a repetibilidade das medidas realizadas nas experiências.
O protótipo instrumentado de medição de vazão adota o modelo hierárquico de qua-tro camadas definido por Zhang (2010) e encontrado na maioria dos sistemas industriaisautomatizados, são elas: produção, sistema, aplicação e interface homem-máquina. Osinstrumentos de campo descritos na Tabela 3.1 representam a camada de produção que, deacordo com a definição e o que foi visto nas seções anteriores, são equipamentos que in-teragem fisicamente com as variáveis do processo, controlando e medindo todas as etapasde execução.
Estão representados na arquitetura do sistema (Figura 3.3), além dos dispositivos dacamada de produção, os equipamentos da camada de sistema: controladores dos compo-nentes de campo e a topologia da rede de comunicação. O protótipo utiliza um Controla-dor Lógico-Programável (CLP) WEG R©TPW-03, três inversores de tensão e um contro-lador NOVUS R©N2000. Esses equipamentos possuem a interface de controle necessáriapara o acionamento dos atuadores e para aquisição das informações enviadas pelos sen-sores. Além disso, possuem uma estrutura de hardware e software para o processamentode informações e comunicação em rede. Os detalhes desses equipamentos e suas confi-gurações para a operação do protótipo serão exploradas nos subtópicos seguintes.
SENSORES SENSORES SENSORES DEDE VAZÃODE NÍVEL TEMPERATURA
ESTAÇÃO DE TRABALHO
DE IMERSÃOBOMBAS DE
DESLOCAMENTO
CLP WEG
VÁLVULASPNEUMÁTICAS
CONTROLADORNOVUS N2000DE TENSÃO
INVERSORES
MODBUS/RS-485
POSITIVO
SENSORES DETEMPERATURA
RESISTORES
TPW-03
Figura 3.3: Arquitetura do sistema. Fonte: Autoria própria (2018).
As especificações de meio físico em que a conexão em rede é estabelecida seguem opadrão RS-485. Nessa interface os dados são enviados e recebidos de forma sequencialatravés de um barramento (canal) de comunicação formado por uma conexão de três fios
3.3. INSTRUMENTAÇÃO 29
(positivo, negativo e GND). Definido pela Electronic Industry Alliance (EIA) e Telecom-munications Industry Alliance (TIA), o RS-485 é muito utilizado na industria por permitira interligação de diferentes dispositivos através de uma configuração de rede simples econfiável. Nas configurações dos dispositivos conectados à rede devem ser especificadosos endereços que os mesmos utilizam para envio e recepção de mensagens.
A Tabela 3.2 relaciona cada equipamento ao endereço correspondente configuradopara arquitetura da Figura 3.3.
Dispositivo EndereçoEstação de Trabalho 0CLP 1Novus 2Inversor 1 3Inversor 2 4Inversor 3 5
Tabela 3.2: Relação de endereço de comunicação em rede dos equipamentos.
Na camada de aplicação encontra-se o sistema SCADA (Supervisory Control andData Acquisition) instalado na estação de trabalho. Trata-se de um software de moni-toramento, controle e aquisição de dados que é conectado aos equipamentos da camadade sistema com o objetivo de concentrar todas as informações da operação da planta efornecer uma interface de alto nível ao operador, avisando-o sobre todos os eventos im-portantes para a operação da planta. No que diz respeito a camada de interface homem-máquina (IHM), pode-se tê-la distribuída em diversos equipamentos do sistema, semprecom o objetivo de otimizar a cooperação entre os dispositivos e os operadores do sistemae apresenta-se na forma de softwares, displays e botões.
A seguir, serão detalhados os itens da Figura 3.3.

30 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
3.3.1 Controlador Lógico-ProgramávelO CLP TPW-03 é um controlador de uso geral semi-modular, segundo a definição de
Kuphaldt (2017), cuja unidade básica (Figura 3.4) permite a conexão de módulos comfunções adicionais, que são instalados de acordo com a necessidade de cada sistema emque o CLP é utilizado.
Figura 3.4: Controlador lógico-programável WEG R©TPW03 - unidade básica. Fonte:Autoria própria (2018).
O módulo básico já incorpora fonte de alimentação e realiza as funções de proces-samento, memória, comunicação e entrada/saída de dados, logo, pode ser utilizado (sema necessidade de módulos extra) em uma vasta gama de aplicações. Entre as principaiscaracterísticas pode-se citar:
• Alta capacidade de processamento.• Memória EEPROM interna com capacidade para o armazenamento de até 16 mil
instruções.• Portas digitais: 36 de entrada e 24 de saída.• Interface para conexão com um barramento de rede RS-485.• Compatível com o protocolo MODBUS.
Estão disponíveis módulos para expansão do número de portas de entradas e saídasdigitais, interface homem-máquina, entradas e saídas analógicas, fonte de alimentação ecomunicação Profibus e Ethernet TCP/IP.
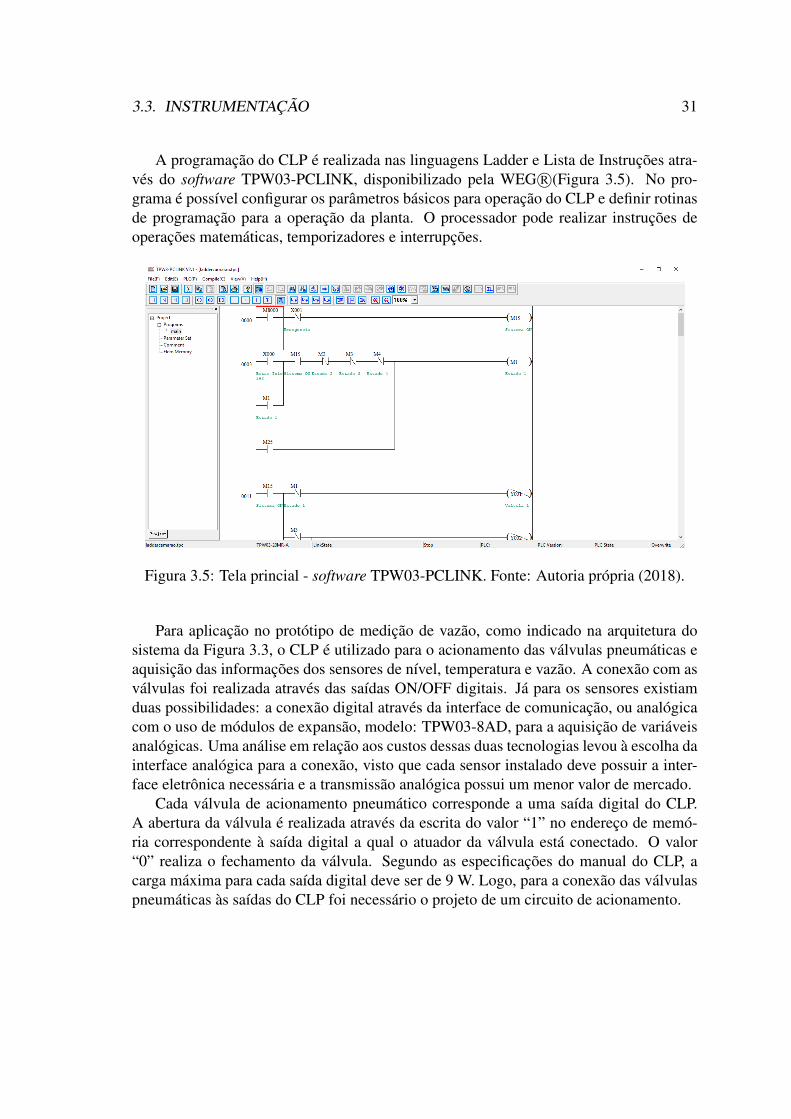
3.3. INSTRUMENTAÇÃO 31
A programação do CLP é realizada nas linguagens Ladder e Lista de Instruções atra-vés do software TPW03-PCLINK, disponibilizado pela WEG R©(Figura 3.5). No pro-grama é possível configurar os parâmetros básicos para operação do CLP e definir rotinasde programação para a operação da planta. O processador pode realizar instruções deoperações matemáticas, temporizadores e interrupções.
Figura 3.5: Tela princial - software TPW03-PCLINK. Fonte: Autoria própria (2018).
Para aplicação no protótipo de medição de vazão, como indicado na arquitetura dosistema da Figura 3.3, o CLP é utilizado para o acionamento das válvulas pneumáticas eaquisição das informações dos sensores de nível, temperatura e vazão. A conexão com asválvulas foi realizada através das saídas ON/OFF digitais. Já para os sensores existiamduas possibilidades: a conexão digital através da interface de comunicação, ou analógicacom o uso de módulos de expansão, modelo: TPW03-8AD, para a aquisição de variáveisanalógicas. Uma análise em relação aos custos dessas duas tecnologias levou à escolha dainterface analógica para a conexão, visto que cada sensor instalado deve possuir a inter-face eletrônica necessária e a transmissão analógica possui um menor valor de mercado.
Cada válvula de acionamento pneumático corresponde a uma saída digital do CLP.A abertura da válvula é realizada através da escrita do valor “1” no endereço de memó-ria correspondente à saída digital a qual o atuador da válvula está conectado. O valor“0” realiza o fechamento da válvula. Segundo as especificações do manual do CLP, acarga máxima para cada saída digital deve ser de 9 W. Logo, para a conexão das válvulaspneumáticas às saídas do CLP foi necessário o projeto de um circuito de acionamento.
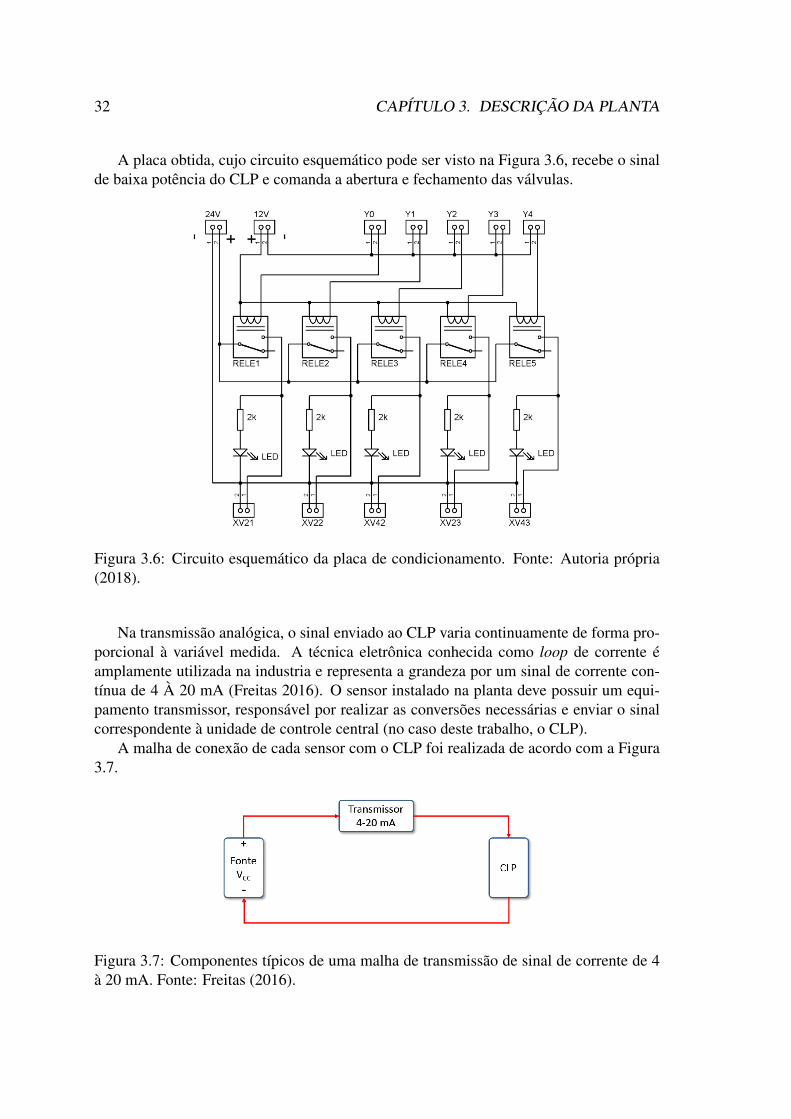
32 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
A placa obtida, cujo circuito esquemático pode ser visto na Figura 3.6, recebe o sinalde baixa potência do CLP e comanda a abertura e fechamento das válvulas.
Figura 3.6: Circuito esquemático da placa de condicionamento. Fonte: Autoria própria(2018).
Na transmissão analógica, o sinal enviado ao CLP varia continuamente de forma pro-porcional à variável medida. A técnica eletrônica conhecida como loop de corrente éamplamente utilizada na industria e representa a grandeza por um sinal de corrente con-tínua de 4 À 20 mA (Freitas 2016). O sensor instalado na planta deve possuir um equi-pamento transmissor, responsável por realizar as conversões necessárias e enviar o sinalcorrespondente à unidade de controle central (no caso deste trabalho, o CLP).
A malha de conexão de cada sensor com o CLP foi realizada de acordo com a Figura3.7.
Figura 3.7: Componentes típicos de uma malha de transmissão de sinal de corrente de 4à 20 mA. Fonte: Freitas (2016).
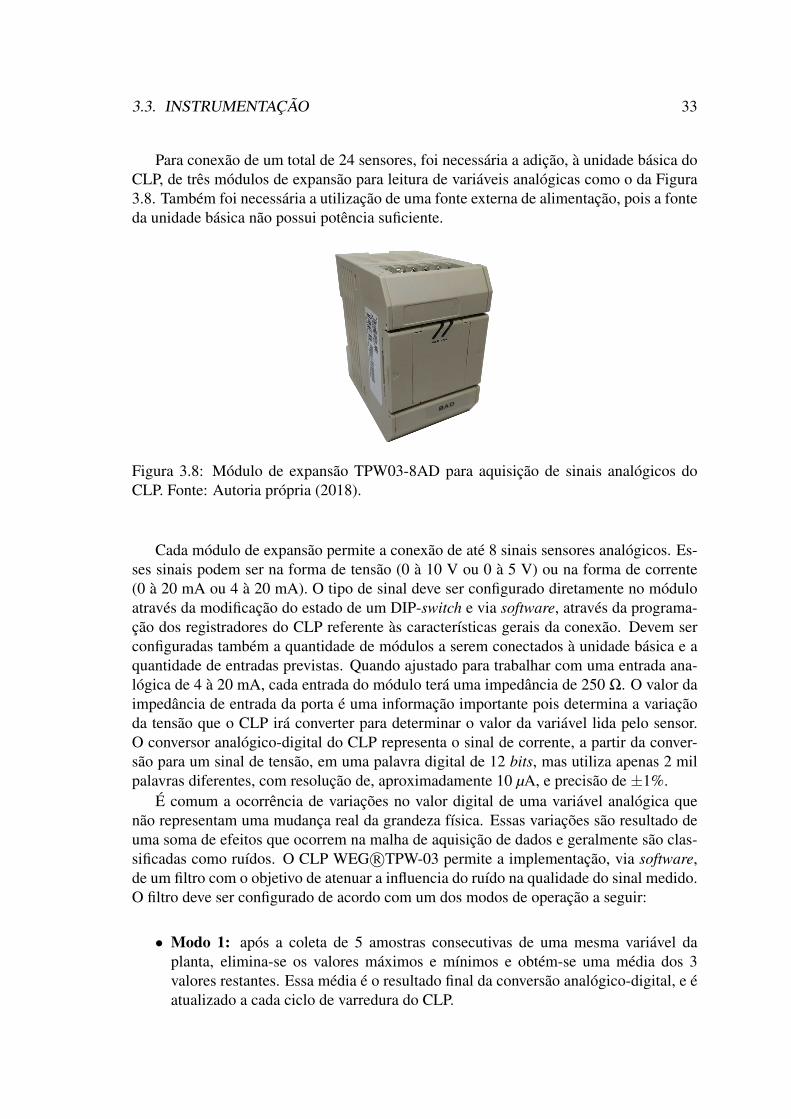
3.3. INSTRUMENTAÇÃO 33
Para conexão de um total de 24 sensores, foi necessária a adição, à unidade básica doCLP, de três módulos de expansão para leitura de variáveis analógicas como o da Figura3.8. Também foi necessária a utilização de uma fonte externa de alimentação, pois a fonteda unidade básica não possui potência suficiente.
Figura 3.8: Módulo de expansão TPW03-8AD para aquisição de sinais analógicos doCLP. Fonte: Autoria própria (2018).
Cada módulo de expansão permite a conexão de até 8 sinais sensores analógicos. Es-ses sinais podem ser na forma de tensão (0 à 10 V ou 0 à 5 V) ou na forma de corrente(0 à 20 mA ou 4 à 20 mA). O tipo de sinal deve ser configurado diretamente no móduloatravés da modificação do estado de um DIP-switch e via software, através da programa-ção dos registradores do CLP referente às características gerais da conexão. Devem serconfiguradas também a quantidade de módulos a serem conectados à unidade básica e aquantidade de entradas previstas. Quando ajustado para trabalhar com uma entrada ana-lógica de 4 à 20 mA, cada entrada do módulo terá uma impedância de 250 Ω. O valor daimpedância de entrada da porta é uma informação importante pois determina a variaçãoda tensão que o CLP irá converter para determinar o valor da variável lida pelo sensor.O conversor analógico-digital do CLP representa o sinal de corrente, a partir da conver-são para um sinal de tensão, em uma palavra digital de 12 bits, mas utiliza apenas 2 milpalavras diferentes, com resolução de, aproximadamente 10 µA, e precisão de ±1%.
É comum a ocorrência de variações no valor digital de uma variável analógica quenão representam uma mudança real da grandeza física. Essas variações são resultado deuma soma de efeitos que ocorrem na malha de aquisição de dados e geralmente são clas-sificadas como ruídos. O CLP WEG R©TPW-03 permite a implementação, via software,de um filtro com o objetivo de atenuar a influencia do ruído na qualidade do sinal medido.O filtro deve ser configurado de acordo com um dos modos de operação a seguir:
• Modo 1: após a coleta de 5 amostras consecutivas de uma mesma variável daplanta, elimina-se os valores máximos e mínimos e obtém-se uma média dos 3valores restantes. Essa média é o resultado final da conversão analógico-digital, e éatualizado a cada ciclo de varredura do CLP.
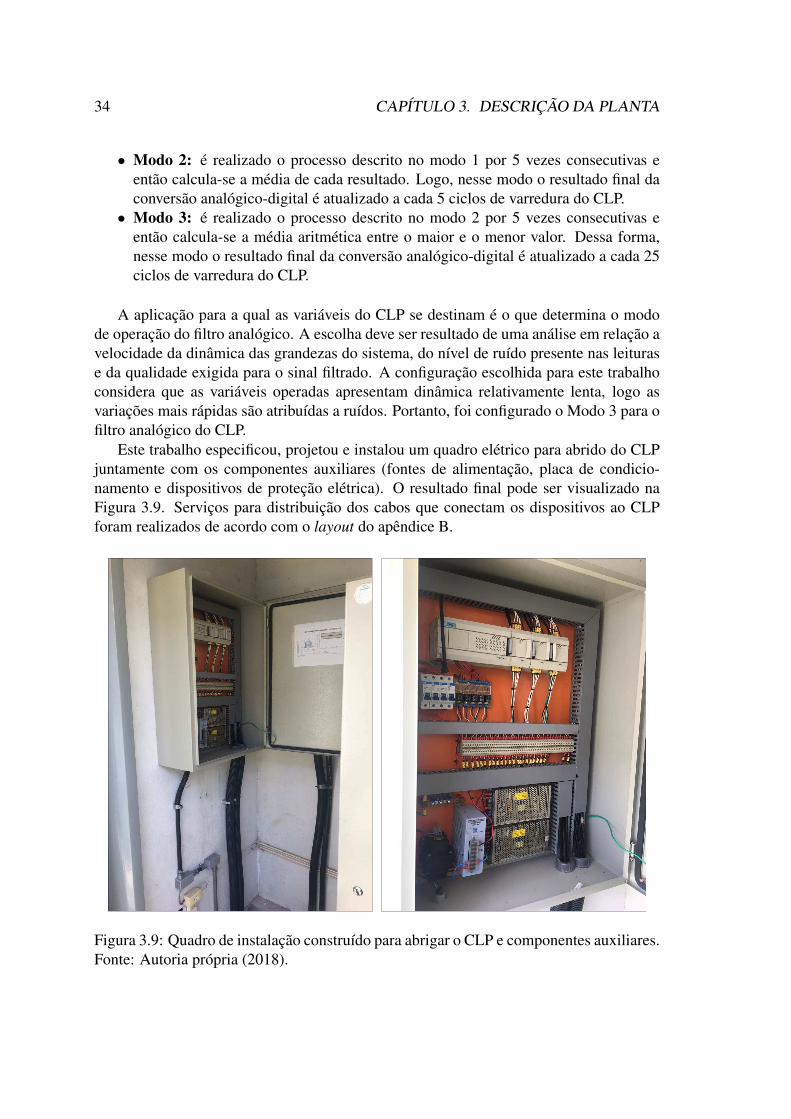
34 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
• Modo 2: é realizado o processo descrito no modo 1 por 5 vezes consecutivas eentão calcula-se a média de cada resultado. Logo, nesse modo o resultado final daconversão analógico-digital é atualizado a cada 5 ciclos de varredura do CLP.
• Modo 3: é realizado o processo descrito no modo 2 por 5 vezes consecutivas eentão calcula-se a média aritmética entre o maior e o menor valor. Dessa forma,nesse modo o resultado final da conversão analógico-digital é atualizado a cada 25ciclos de varredura do CLP.
A aplicação para a qual as variáveis do CLP se destinam é o que determina o modode operação do filtro analógico. A escolha deve ser resultado de uma análise em relação avelocidade da dinâmica das grandezas do sistema, do nível de ruído presente nas leiturase da qualidade exigida para o sinal filtrado. A configuração escolhida para este trabalhoconsidera que as variáveis operadas apresentam dinâmica relativamente lenta, logo asvariações mais rápidas são atribuídas a ruídos. Portanto, foi configurado o Modo 3 para ofiltro analógico do CLP.
Este trabalho especificou, projetou e instalou um quadro elétrico para abrido do CLPjuntamente com os componentes auxiliares (fontes de alimentação, placa de condicio-namento e dispositivos de proteção elétrica). O resultado final pode ser visualizado naFigura 3.9. Serviços para distribuição dos cabos que conectam os dispositivos ao CLPforam realizados de acordo com o layout do apêndice B.
Figura 3.9: Quadro de instalação construído para abrigar o CLP e componentes auxiliares.Fonte: Autoria própria (2018).

3.3. INSTRUMENTAÇÃO 35
3.3.2 Sensores de Temperatura
Considerando o total de sensores distribuídos para aferição da temperatura da colunado poço protótipo (16), os sensores de monitoramento da temperatura do tanque 1 (4) eo sensor de aquisição da temperatura do fluido imediatamente antes da injeção no poço,um total de 21 instrumentos de medição de temperatura foram instalados na planta. Sãoos sensores mais importantes do sistema pois são utilizados para o levantamento do perfilde temperatura na coluna do poço injetor. Outra função significativa é a de monitorar atemperatura do tanque 1, que serve como parâmetro para o acionamento do aquecedor.
São sensores resistivos do tipo PT100, cujo principio de medição é baseado em umacaracterística comum aos metais: a variação da resistência elétrica a partir da influenciada temperatura. Por este motivo, são classificados como sensores do tipo RTD (do inglês:Resistence Temperature Detector) e pertencem à família dos instrumentos eletrônicos detemperatura. Os materiais mais utilizados em sensores RTD são: platina, níquel e cobre.A difusão desses componentes como sensores é atribuída:
• A característica aproximadamente linear que os mesmos apresentam quando sub-metidos a determinadas variações de temperatura.
• Disponibilidade comercial.• Baixo custo.
Outra característica importante é a ductilidade, pois para serem utilizados nos instru-mentos esses materiais primeiro são transformados em fios extremamente finos, enroladosem forma de resistência e depositados em pequenos bulbos de cerâmica ou vidro, comomostra a Figura 3.10.
ELEMENTO SENSOR
TRANSMISSOR
BULDO DE VIDRO
TERMOMÉTRICOPOÇO
CABEÇOTE
Figura 3.10: Sensor de temperatura PT100. Fonte: Autoria própria (2018).

36 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
Os termorresistores industriais são geralmente encontrados em invólucros como o daFigura 3.10, em que o instrumento é dividido em cabeçote e poço termométrico. O cabe-çote armazena a eletrônica de condicionamento e transmissão de sinal. Na extremidadedo poço termométrico encontra-se o elemento sensor. O comprimento do poço varia deacordo com a aplicação em que o sensor é instalado.
O PT100 utiliza a platina como elemento de medição. De acordo com Ribeiro (1999)é o transdutor de temperatura mais utilizado da industria e se sobressai perante aos outrosmetais devido a sua alta precisão e estabilidade em sua faixa de medição. É denominadoPT100 pois possui uma resistência de 100 ohm a uma temperatura de 0 C. O coeficientede resistência (α) é definido como uma quantidade de variação de resistência por graude temperatura em um range de 0 à 100 C (Webster 1998). Esse parâmetro quantifica asensibilidade do elemento à variação de temperatura e é obtido através da relação:
α =R100 −R0
100R0(3.1)
onde R0 = resistência do sensor em 0 C e R100 = resistência do sensor em C. O valordo coeficiente da platina definido pela IEC 60751:2008 é α = 0,000385. A forma maisgeral equação 3.1 determina a resistência do material para qualquer valor de temperaturae é dada por:
RT = Rre f [1+α(T −Tre f )] (3.2)
em que T é a temperatura na qual se deseja determinar a resistência, Tre f é um valor detemperatura em que a resistência do material já é conhecida (geralmente 0 C), RT é aresistência do material a ser determinada e Rre f é a resistência no valor de temperatura dereferencia (100 Ω para Tre f = 0 C).
Relações mais aproximadas, conhecidas por equações de Callendar-van Dusen, sãodadas por funções polinomiais para duas faixas diferentes de temperatura. Para a faixaque varia entre 0 e 850 C:
RT = R0 +(1+AaT +BT 2) (3.3)
e para o range de -200 à 0 C:
RT = R0 +(1+AaT +BT 2 −100CT 3 +CT 4) (3.4)
A norma IEC 60751:2008 também define os valores dos coeficientes das equações 3.3e 3.4: Aa = 3,9083x10−3 C−1, B =−5,775x10−7 C−2 e C =−4,183x10−12 C−4.
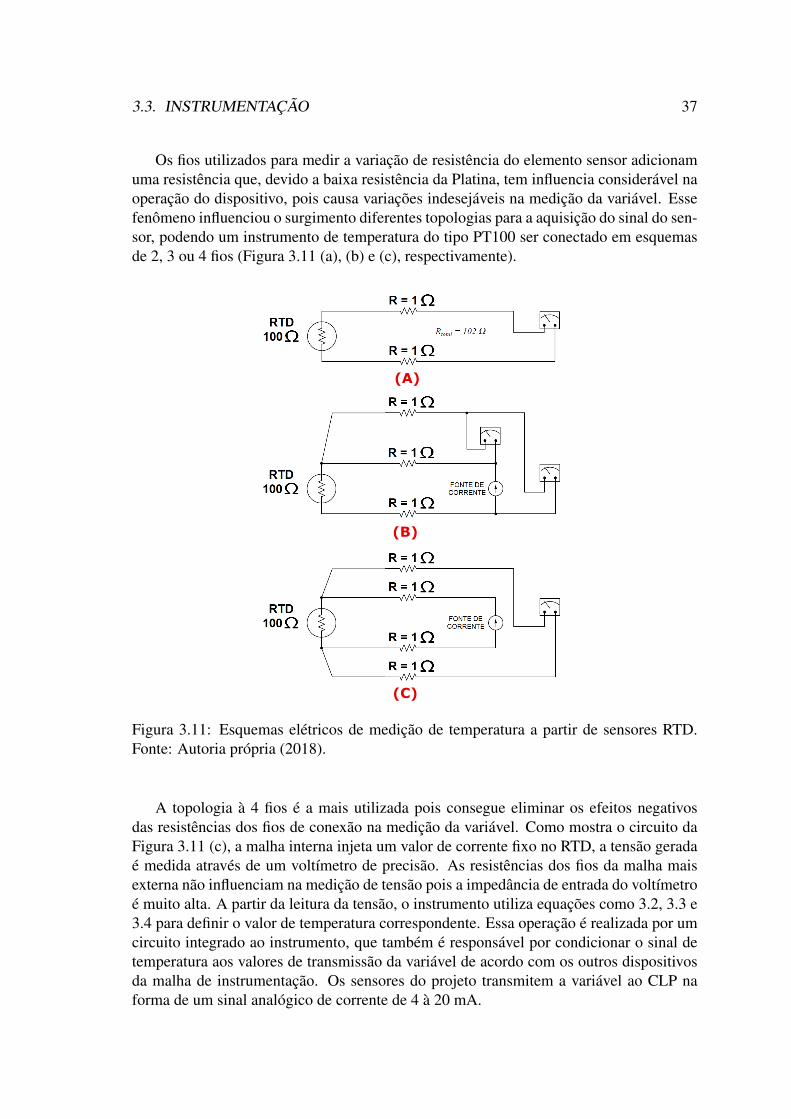
3.3. INSTRUMENTAÇÃO 37
Os fios utilizados para medir a variação de resistência do elemento sensor adicionamuma resistência que, devido a baixa resistência da Platina, tem influencia considerável naoperação do dispositivo, pois causa variações indesejáveis na medição da variável. Essefenômeno influenciou o surgimento diferentes topologias para a aquisição do sinal do sen-sor, podendo um instrumento de temperatura do tipo PT100 ser conectado em esquemasde 2, 3 ou 4 fios (Figura 3.11 (a), (b) e (c), respectivamente).
(A)
(B)
(C)
Figura 3.11: Esquemas elétricos de medição de temperatura a partir de sensores RTD.Fonte: Autoria própria (2018).
A topologia à 4 fios é a mais utilizada pois consegue eliminar os efeitos negativosdas resistências dos fios de conexão na medição da variável. Como mostra o circuito daFigura 3.11 (c), a malha interna injeta um valor de corrente fixo no RTD, a tensão geradaé medida através de um voltímetro de precisão. As resistências dos fios da malha maisexterna não influenciam na medição de tensão pois a impedância de entrada do voltímetroé muito alta. A partir da leitura da tensão, o instrumento utiliza equações como 3.2, 3.3 e3.4 para definir o valor de temperatura correspondente. Essa operação é realizada por umcircuito integrado ao instrumento, que também é responsável por condicionar o sinal detemperatura aos valores de transmissão da variável de acordo com os outros dispositivosda malha de instrumentação. Os sensores do projeto transmitem a variável ao CLP naforma de um sinal analógico de corrente de 4 à 20 mA.

38 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
A Figura 3.12 mostra os sensores de temperatura instalados no protótipo. São instru-mentos da marca Salcas, cujo poço termométrico mede 410 milímetros. Foram calibradospara faixa de operação de 0 C à 70 C e apresentam uma incerteza de medição de ±0,25C.
Figura 3.12: Sensores de temperatura instalados no poço protótipo. Fonte: Autoria pró-pria (2018).
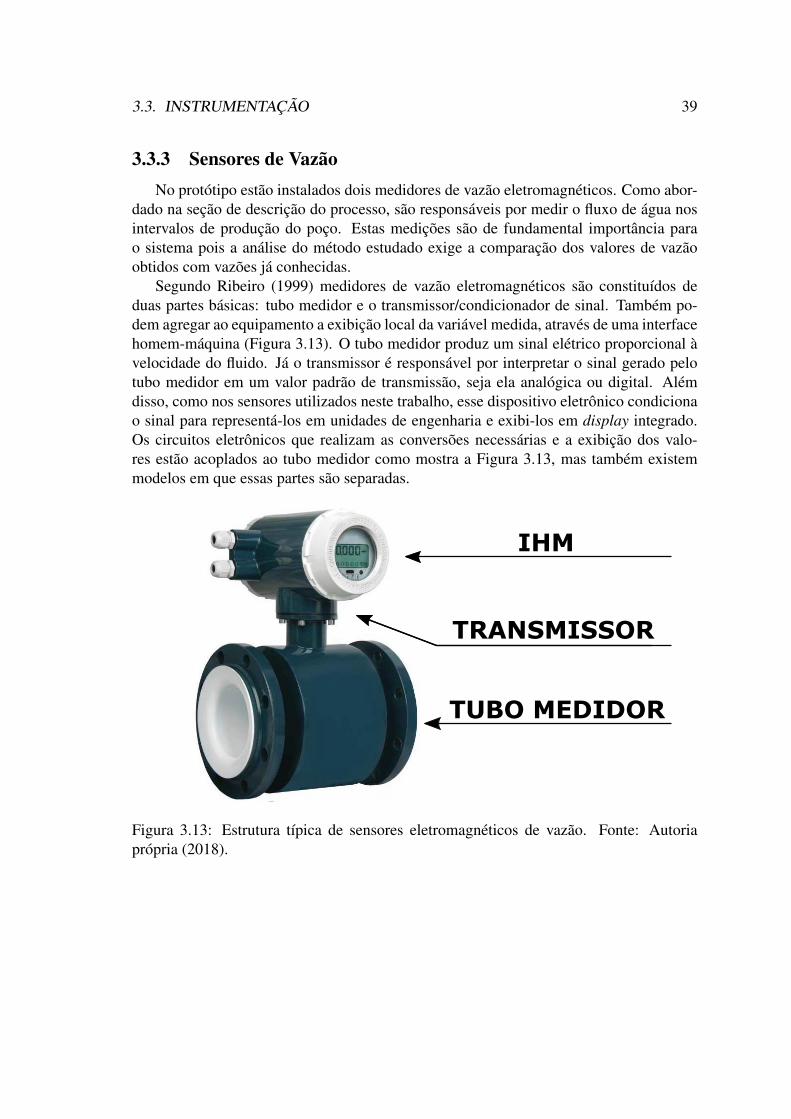
3.3. INSTRUMENTAÇÃO 39
3.3.3 Sensores de VazãoNo protótipo estão instalados dois medidores de vazão eletromagnéticos. Como abor-
dado na seção de descrição do processo, são responsáveis por medir o fluxo de água nosintervalos de produção do poço. Estas medições são de fundamental importância parao sistema pois a análise do método estudado exige a comparação dos valores de vazãoobtidos com vazões já conhecidas.
Segundo Ribeiro (1999) medidores de vazão eletromagnéticos são constituídos deduas partes básicas: tubo medidor e o transmissor/condicionador de sinal. Também po-dem agregar ao equipamento a exibição local da variável medida, através de uma interfacehomem-máquina (Figura 3.13). O tubo medidor produz um sinal elétrico proporcional àvelocidade do fluido. Já o transmissor é responsável por interpretar o sinal gerado pelotubo medidor em um valor padrão de transmissão, seja ela analógica ou digital. Alémdisso, como nos sensores utilizados neste trabalho, esse dispositivo eletrônico condicionao sinal para representá-los em unidades de engenharia e exibi-los em display integrado.Os circuitos eletrônicos que realizam as conversões necessárias e a exibição dos valo-res estão acoplados ao tubo medidor como mostra a Figura 3.13, mas também existemmodelos em que essas partes são separadas.
TUBO MEDIDOR
TRANSMISSOR
IHM
Figura 3.13: Estrutura típica de sensores eletromagnéticos de vazão. Fonte: Autoriaprópria (2018).

40 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
O processo de medição de vazão em sensores desse tipo tem como princípio a lei deFaraday da indução. Como mostra a Figura 3.14, dentro do tubo medidor é gerado umcampo magnético constante, perpendicular ao sentido do fluxo. Quando o fluido atravessao campo, tensões elétricas são induzidas nas paredes do tubo. Os eletrodos detectam atensão gerada e enviam para o circuito de condicionamento do sensor.
CAMPOMAGNÉTICO
TUBO
CIRCUITO DE CONDICIONAMENTO
ELETRODO
ELETRODO
FLUIDOCONDUTOR
Figura 3.14: Componentes internos de tubos medidores eletromagnéticos de vazão.Fonte: Adaptada de Crabtree (2009).
Segundo a Lei de Faraday, a tensão induzida a partir do movimento de um condutoratravés de um campo magnético é dada por:
ε = Bclv (3.5)
onde ε é a tensão induzida no condutor, Bc é o campo magnético, l é o comprimento e v,a velocidade com que o condutor atravessa o campo. Nos casos dos medidores de vazão,o condutor é o fluido que atravessa o tubo medidor e o comprimento do condutor é igualao diâmetro do duto (l = d). A vazão (Q) no duto cuja área da seção reta é igual a Ar estárelacionado a velocidade média do fluido de acordo com:
Q = Arv (3.6)
substituindo a relação 3.6 em 3.5, tem-se que:
ε =BdQ
A(3.7)
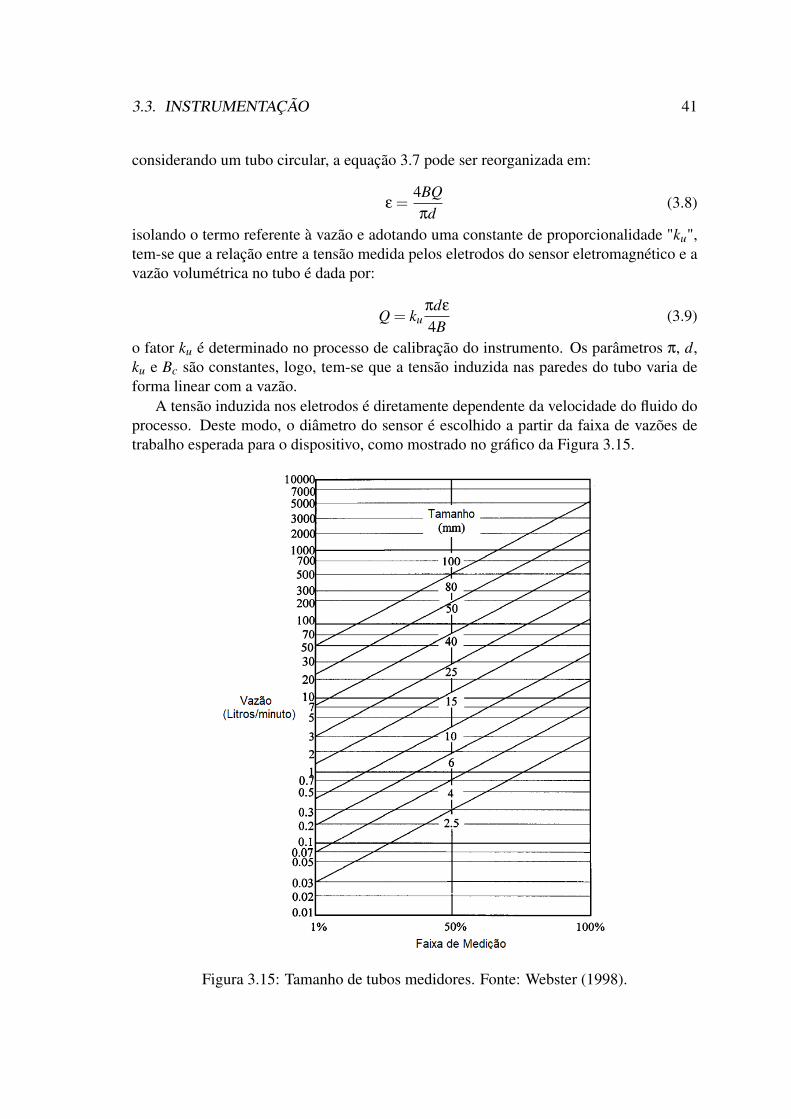
3.3. INSTRUMENTAÇÃO 41
considerando um tubo circular, a equação 3.7 pode ser reorganizada em:
ε =4BQπd
(3.8)
isolando o termo referente à vazão e adotando uma constante de proporcionalidade "ku",tem-se que a relação entre a tensão medida pelos eletrodos do sensor eletromagnético e avazão volumétrica no tubo é dada por:
Q = kuπdε
4B(3.9)
o fator ku é determinado no processo de calibração do instrumento. Os parâmetros π, d,ku e Bc são constantes, logo, tem-se que a tensão induzida nas paredes do tubo varia deforma linear com a vazão.
A tensão induzida nos eletrodos é diretamente dependente da velocidade do fluido doprocesso. Deste modo, o diâmetro do sensor é escolhido a partir da faixa de vazões detrabalho esperada para o dispositivo, como mostrado no gráfico da Figura 3.15.
Figura 3.15: Tamanho de tubos medidores. Fonte: Webster (1998).
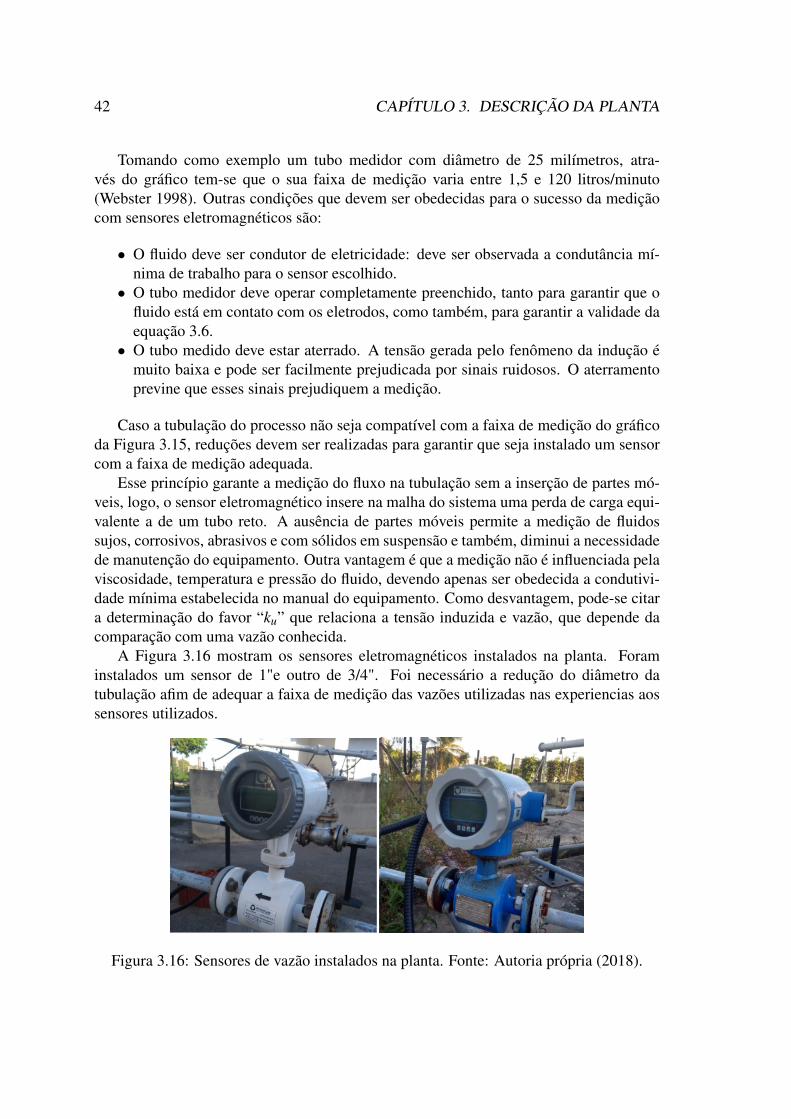
42 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
Tomando como exemplo um tubo medidor com diâmetro de 25 milímetros, atra-vés do gráfico tem-se que o sua faixa de medição varia entre 1,5 e 120 litros/minuto(Webster 1998). Outras condições que devem ser obedecidas para o sucesso da mediçãocom sensores eletromagnéticos são:
• O fluido deve ser condutor de eletricidade: deve ser observada a condutância mí-nima de trabalho para o sensor escolhido.
• O tubo medidor deve operar completamente preenchido, tanto para garantir que ofluido está em contato com os eletrodos, como também, para garantir a validade daequação 3.6.
• O tubo medido deve estar aterrado. A tensão gerada pelo fenômeno da indução émuito baixa e pode ser facilmente prejudicada por sinais ruidosos. O aterramentoprevine que esses sinais prejudiquem a medição.
Caso a tubulação do processo não seja compatível com a faixa de medição do gráficoda Figura 3.15, reduções devem ser realizadas para garantir que seja instalado um sensorcom a faixa de medição adequada.
Esse princípio garante a medição do fluxo na tubulação sem a inserção de partes mó-veis, logo, o sensor eletromagnético insere na malha do sistema uma perda de carga equi-valente a de um tubo reto. A ausência de partes móveis permite a medição de fluidossujos, corrosivos, abrasivos e com sólidos em suspensão e também, diminui a necessidadede manutenção do equipamento. Outra vantagem é que a medição não é influenciada pelaviscosidade, temperatura e pressão do fluido, devendo apenas ser obedecida a condutivi-dade mínima estabelecida no manual do equipamento. Como desvantagem, pode-se citara determinação do favor “ku” que relaciona a tensão induzida e vazão, que depende dacomparação com uma vazão conhecida.
A Figura 3.16 mostram os sensores eletromagnéticos instalados na planta. Foraminstalados um sensor de 1"e outro de 3/4". Foi necessário a redução do diâmetro datubulação afim de adequar a faixa de medição das vazões utilizadas nas experiencias aossensores utilizados.
Figura 3.16: Sensores de vazão instalados na planta. Fonte: Autoria própria (2018).

3.3. INSTRUMENTAÇÃO 43
3.3.4 Sensores de Nível
Os sensores de nível do protótipo monitoram em tempo real os níveis dos tanques 1e 2. Essa função é importante pois existe uma dependência entre o nível dos tanques e otempo total de duração de um ciclo de operações do protótipo. O nível de água presenteno tanque 1 deve ser suficiente para atender a uma intervalo de testes predefinido. Esseintervalo deve considerar o tempo em que a água aquecida percorre todo o protótipo e édepositada no tanque 2. Em caso de falha dos sensores de vazão instalados na planta, omonitoramento do nível dos tanques também pode ser útil para aferição indireta do fluxode fluido injetado na coluna de injeção. Com o monitoramento dessa variável tambémé possível definir ações de segurança que evitem que as bombas da planta operem emvazio e que os tanques transbordem. Por fim, o nível também pode ser considerado paraa modificação da estratégia de controle do sistema de aquecimento.
Atualmente, tem-se disponíveis uma variedade de tecnologias para medição de nívelem tanques e reservatórios. Basicamente, o princípio físico explorado em determinadométodo de medição diferencia o mesmo dos demais. A medição de nível baseada no cal-culo de tempo de uma onda de ultrassom enviada até superfície do liquido se destaca pe-rante a outras metodologias devido a sua imunidade à variações na composição químicado produto a ser medido, baixo preço dos transdutores e simplicidade para o processa-mento das informações (Ilijanic et al. 2006). A variável de interesse é mensurada a partirda aquisição do tempo de propagação de um sinal de ultrassom dentro do reservatório,logo, é classificado como um princípio de medição indireta.
Os sensores de ultrassom para a medição contínua de nível de enchimento são apro-priados para produtos líquidos e sólidos em quase todas as áreas industriais. O sensor denível é composto por dois componentes: o transdutor e um condicionador eletrônico desinal. Posicionado no topo do tanque (Figura 3.17), o transdutor acústico do sensor emitesinais de ultrassom em direção ao produto a ser medido.
d
Lv
s
SINAL SINALTRANSMITIDO REFLETIDO
Figura 3.17: Medição de nível com sensores ultrassom. Fonte: Autoria própria (2018).

44 CAPÍTULO 3. DESCRIÇÃO DA PLANTA
Os impulsos emitidos são refletidos pela superfície do produto e recebidos novamentepelo transdutor acústico como ecos.
O tempo entre envio e o recebimento dos impulsos (ts) é proporcional à distância (ds)entre o nível de líquido e o topo do tanque:
d =vts2
(3.10)
em que v é a velocidade aproximada de propagação do som dentro do tanque. O nívelde enchimento (L f luido) é calculado a partir da diferença entre o tamanho total do tanque(Lv) e a distância ds:
L f luido = Lv −ds (3.11)
O circuito condicionador e transmissor é acoplado ao equipamento e realiza as con-versões necessárias para o envio da informação para o CLP como um sinal analógico de4 à 20 mA.
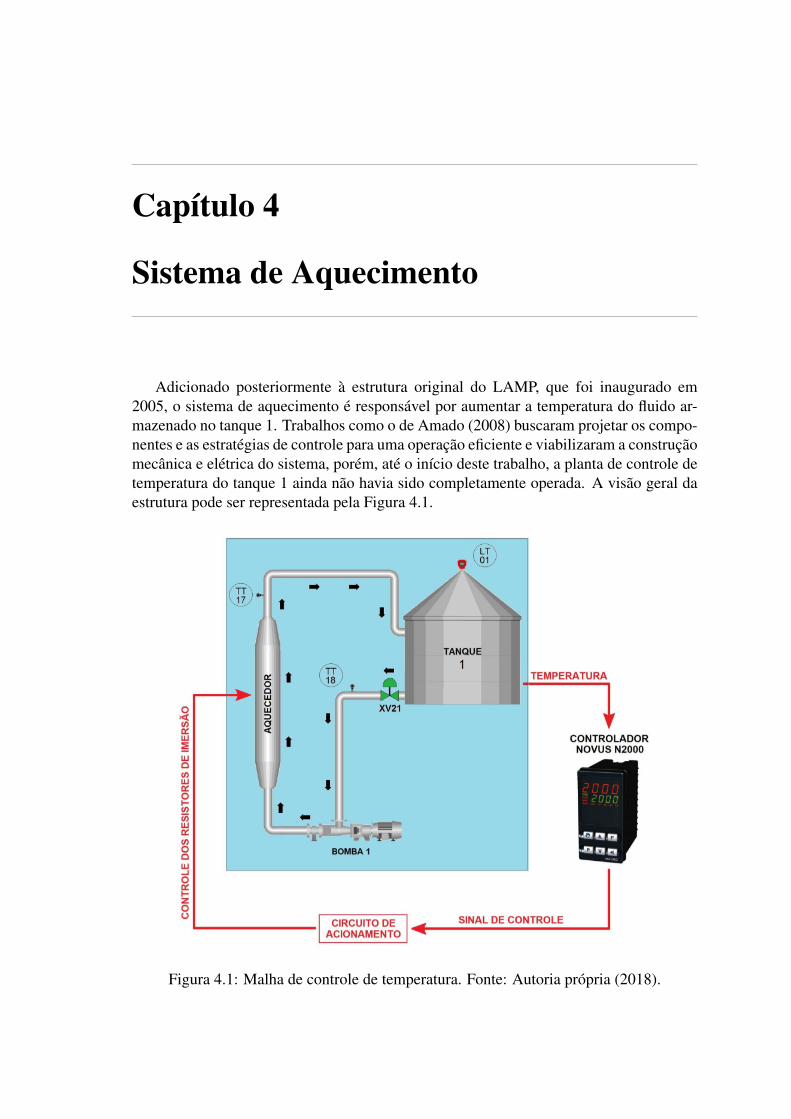
Capítulo 4
Sistema de Aquecimento
Adicionado posteriormente à estrutura original do LAMP, que foi inaugurado em2005, o sistema de aquecimento é responsável por aumentar a temperatura do fluido ar-mazenado no tanque 1. Trabalhos como o de Amado (2008) buscaram projetar os compo-nentes e as estratégias de controle para uma operação eficiente e viabilizaram a construçãomecânica e elétrica do sistema, porém, até o início deste trabalho, a planta de controle detemperatura do tanque 1 ainda não havia sido completamente operada. A visão geral daestrutura pode ser representada pela Figura 4.1.
Figura 4.1: Malha de controle de temperatura. Fonte: Autoria própria (2018).
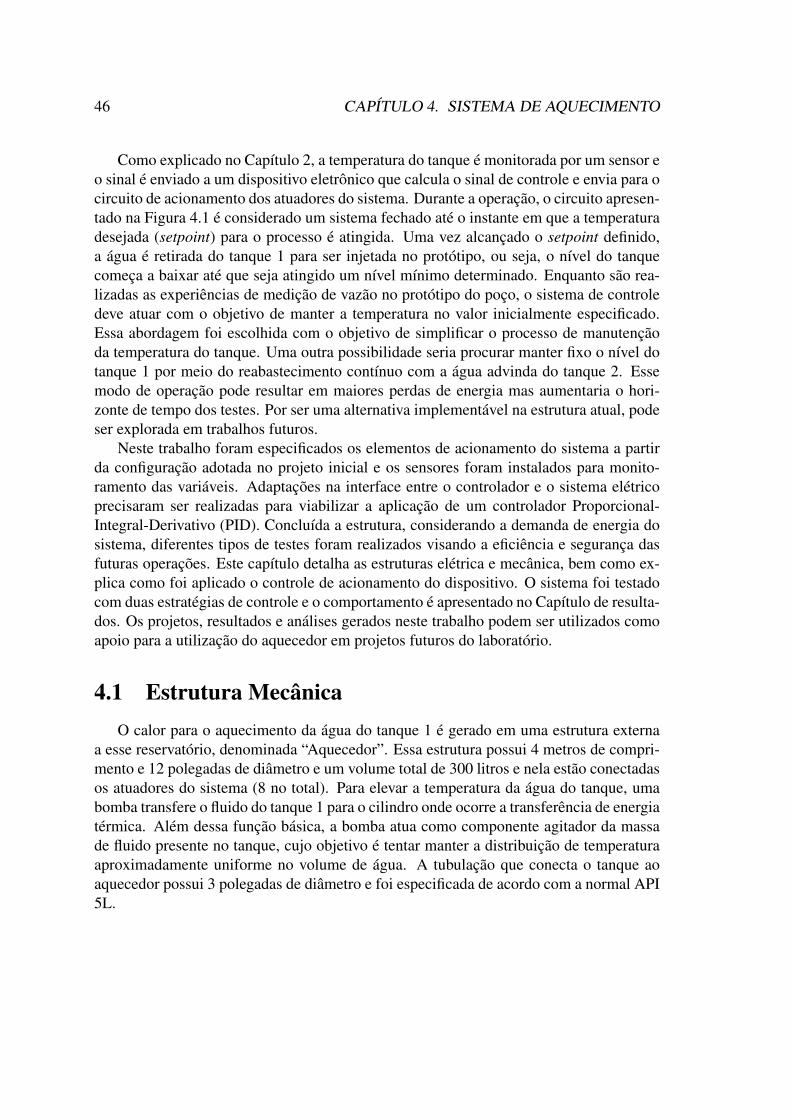
46 CAPÍTULO 4. SISTEMA DE AQUECIMENTO
Como explicado no Capítulo 2, a temperatura do tanque é monitorada por um sensor eo sinal é enviado a um dispositivo eletrônico que calcula o sinal de controle e envia para ocircuito de acionamento dos atuadores do sistema. Durante a operação, o circuito apresen-tado na Figura 4.1 é considerado um sistema fechado até o instante em que a temperaturadesejada (setpoint) para o processo é atingida. Uma vez alcançado o setpoint definido,a água é retirada do tanque 1 para ser injetada no protótipo, ou seja, o nível do tanquecomeça a baixar até que seja atingido um nível mínimo determinado. Enquanto são rea-lizadas as experiências de medição de vazão no protótipo do poço, o sistema de controledeve atuar com o objetivo de manter a temperatura no valor inicialmente especificado.Essa abordagem foi escolhida com o objetivo de simplificar o processo de manutençãoda temperatura do tanque. Uma outra possibilidade seria procurar manter fixo o nível dotanque 1 por meio do reabastecimento contínuo com a água advinda do tanque 2. Essemodo de operação pode resultar em maiores perdas de energia mas aumentaria o hori-zonte de tempo dos testes. Por ser uma alternativa implementável na estrutura atual, podeser explorada em trabalhos futuros.
Neste trabalho foram especificados os elementos de acionamento do sistema a partirda configuração adotada no projeto inicial e os sensores foram instalados para monito-ramento das variáveis. Adaptações na interface entre o controlador e o sistema elétricoprecisaram ser realizadas para viabilizar a aplicação de um controlador Proporcional-Integral-Derivativo (PID). Concluída a estrutura, considerando a demanda de energia dosistema, diferentes tipos de testes foram realizados visando a eficiência e segurança dasfuturas operações. Este capítulo detalha as estruturas elétrica e mecânica, bem como ex-plica como foi aplicado o controle de acionamento do dispositivo. O sistema foi testadocom duas estratégias de controle e o comportamento é apresentado no Capítulo de resulta-dos. Os projetos, resultados e análises gerados neste trabalho podem ser utilizados comoapoio para a utilização do aquecedor em projetos futuros do laboratório.
4.1 Estrutura MecânicaO calor para o aquecimento da água do tanque 1 é gerado em uma estrutura externa
a esse reservatório, denominada “Aquecedor”. Essa estrutura possui 4 metros de compri-mento e 12 polegadas de diâmetro e um volume total de 300 litros e nela estão conectadasos atuadores do sistema (8 no total). Para elevar a temperatura da água do tanque, umabomba transfere o fluido do tanque 1 para o cilindro onde ocorre a transferência de energiatérmica. Além dessa função básica, a bomba atua como componente agitador da massade fluido presente no tanque, cujo objetivo é tentar manter a distribuição de temperaturaaproximadamente uniforme no volume de água. A tubulação que conecta o tanque aoaquecedor possui 3 polegadas de diâmetro e foi especificada de acordo com a normal API5L.
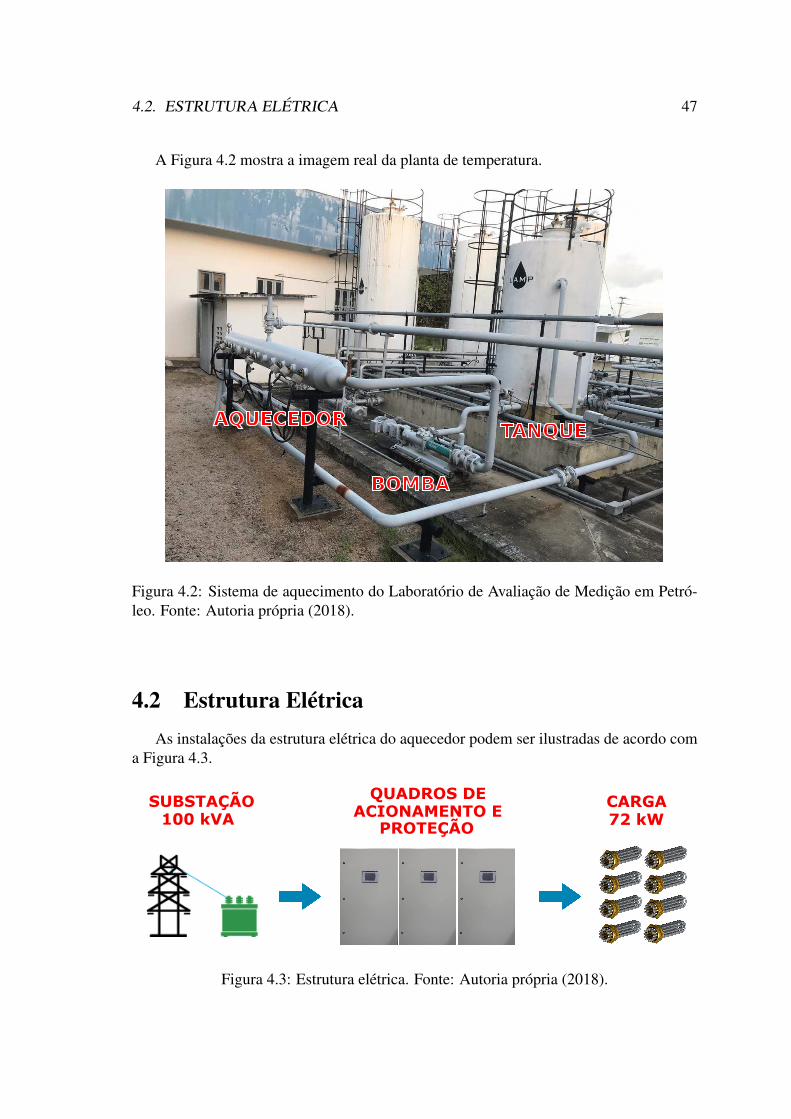
4.2. ESTRUTURA ELÉTRICA 47
A Figura 4.2 mostra a imagem real da planta de temperatura.
TANQUE
BOMBA
AQUECEDOR
Figura 4.2: Sistema de aquecimento do Laboratório de Avaliação de Medição em Petró-leo. Fonte: Autoria própria (2018).
4.2 Estrutura ElétricaAs instalações da estrutura elétrica do aquecedor podem ser ilustradas de acordo com
a Figura 4.3.
QUADROS DEACIONAMENTO E
PROTEÇÃO
SUBSTAÇÃO100 kVA
CARGA72 kW
Figura 4.3: Estrutura elétrica. Fonte: Autoria própria (2018).
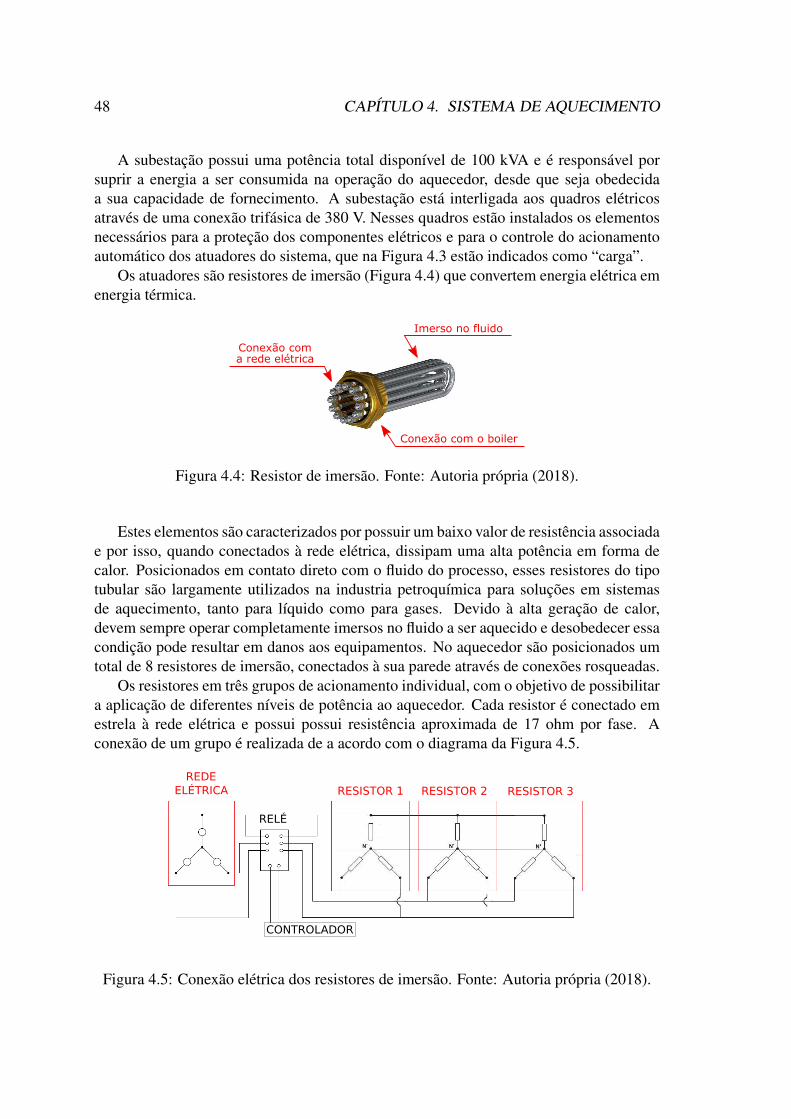
48 CAPÍTULO 4. SISTEMA DE AQUECIMENTO
A subestação possui uma potência total disponível de 100 kVA e é responsável porsuprir a energia a ser consumida na operação do aquecedor, desde que seja obedecidaa sua capacidade de fornecimento. A subestação está interligada aos quadros elétricosatravés de uma conexão trifásica de 380 V. Nesses quadros estão instalados os elementosnecessários para a proteção dos componentes elétricos e para o controle do acionamentoautomático dos atuadores do sistema, que na Figura 4.3 estão indicados como “carga”.
Os atuadores são resistores de imersão (Figura 4.4) que convertem energia elétrica emenergia térmica.
Imerso no fluido
Conexão com o boiler
Conexão coma rede elétrica
Figura 4.4: Resistor de imersão. Fonte: Autoria própria (2018).
Estes elementos são caracterizados por possuir um baixo valor de resistência associadae por isso, quando conectados à rede elétrica, dissipam uma alta potência em forma decalor. Posicionados em contato direto com o fluido do processo, esses resistores do tipotubular são largamente utilizados na industria petroquímica para soluções em sistemasde aquecimento, tanto para líquido como para gases. Devido à alta geração de calor,devem sempre operar completamente imersos no fluido a ser aquecido e desobedecer essacondição pode resultar em danos aos equipamentos. No aquecedor são posicionados umtotal de 8 resistores de imersão, conectados à sua parede através de conexões rosqueadas.
Os resistores em três grupos de acionamento individual, com o objetivo de possibilitara aplicação de diferentes níveis de potência ao aquecedor. Cada resistor é conectado emestrela à rede elétrica e possui possui resistência aproximada de 17 ohm por fase. Aconexão de um grupo é realizada de a acordo com o diagrama da Figura 4.5.
REDEELÉTRICA RESISTOR 1 RESISTOR 2 RESISTOR 3
RELÉ
CONTROLADOR
Figura 4.5: Conexão elétrica dos resistores de imersão. Fonte: Autoria própria (2018).

4.2. ESTRUTURA ELÉTRICA 49
Considerando que os três grupos estão conectados em paralelo à rede de alimentação,a demanda total corrente de fase é de aproximadamente 107 A. Os equipamentos utiliza-dos para a montagem dos quadros de acionamento foram especificados de acordo com ascaracterísticas previstas para a carga e para a operação do aquecedor. O esquema elétricoda instalação dos quadros está disponível no Apêndice B.
Na Figura 4.5, o elemento “relé” faz a interface entre o sinal de controle e o sinal depotência dos atuadores. Estes componentes foram especificados neste trabalho levandoem consideração a demanda de potência da carga e o projeto inicial de operação da estru-tura elétrica descrito no trabalho de Amado (2008). Tratam-se de chaves eletrônicas depotência baseadas em semicondutores, também são conhecidas por: relés de estado sólido(Figura 4.6).
A B
Figura 4.6: Relé de Estado sólido: (a) Desenho da vista do topo do dispositivo; (b) Reléreal. Fonte: Autoria própria (2018).
Relés de estado sólido funcionam como um interruptor, ou seja, fazem a conexão en-tre a rede de alimentação e a carga a partir de um sinal de comando. São ditos de estadosólido pois utilizam tiristores, que são chaves eletrônicas baseadas em elementos semi-condutores que não possuem contato mecânico. A principal vantagem destes dispositivosperante os relés eletromecânicos ou interruptores é que estes podem ser utilizados em am-bientes com atmosferas explosivas, pois a comutação do estado de operação da carga nãogera faiscamento. Além disso, podem operar em frequências elevadas e possuem maiordurabilidade. A conexão da carga à rede elétrica depende apenas do sinal enviado pelocontrolador ao relé de estado sólido. O relé escolhido para a instalação do aquecedorpossui as seguintes características:
- Tensão de carga: 480 Vac.- Corrente nominal: 50 A.
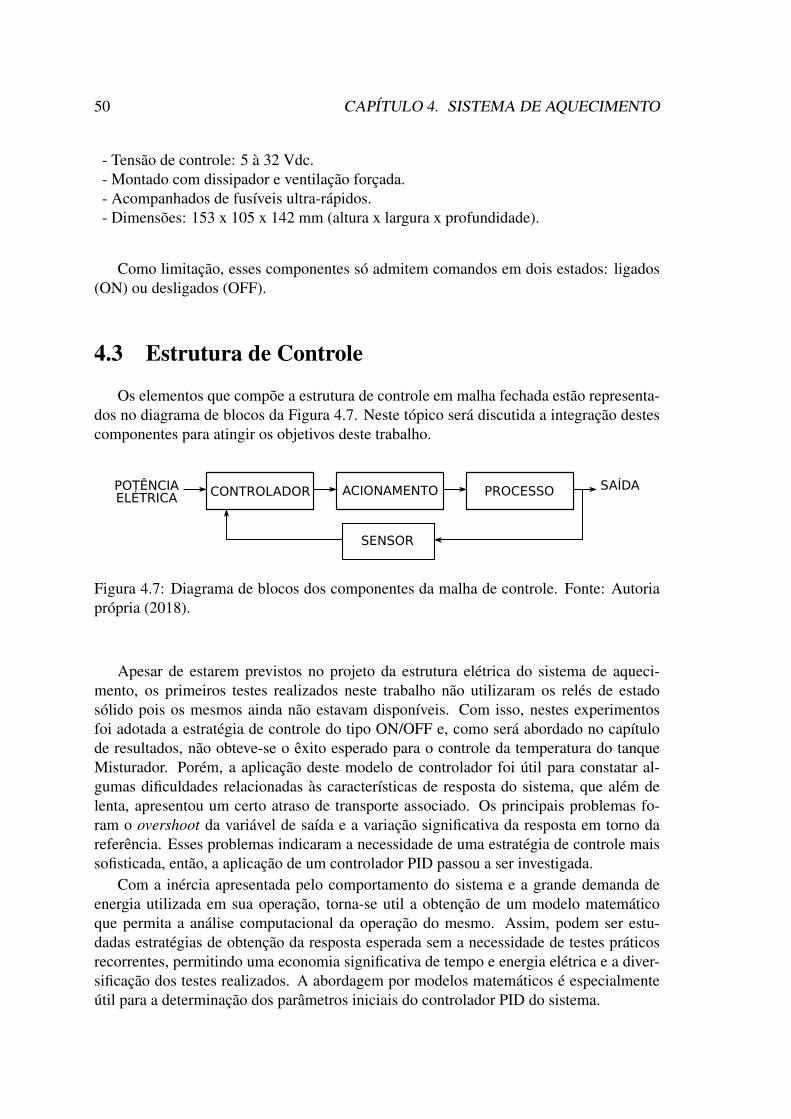
50 CAPÍTULO 4. SISTEMA DE AQUECIMENTO
- Tensão de controle: 5 à 32 Vdc.- Montado com dissipador e ventilação forçada.- Acompanhados de fusíveis ultra-rápidos.- Dimensões: 153 x 105 x 142 mm (altura x largura x profundidade).
Como limitação, esses componentes só admitem comandos em dois estados: ligados(ON) ou desligados (OFF).
4.3 Estrutura de Controle
Os elementos que compõe a estrutura de controle em malha fechada estão representa-dos no diagrama de blocos da Figura 4.7. Neste tópico será discutida a integração destescomponentes para atingir os objetivos deste trabalho.
CONTROLADOR
SENSOR
ACIONAMENTO PROCESSOPOTÊNCIAELÉTRICA
SAÍDA
Figura 4.7: Diagrama de blocos dos componentes da malha de controle. Fonte: Autoriaprópria (2018).
Apesar de estarem previstos no projeto da estrutura elétrica do sistema de aqueci-mento, os primeiros testes realizados neste trabalho não utilizaram os relés de estadosólido pois os mesmos ainda não estavam disponíveis. Com isso, nestes experimentosfoi adotada a estratégia de controle do tipo ON/OFF e, como será abordado no capítulode resultados, não obteve-se o êxito esperado para o controle da temperatura do tanqueMisturador. Porém, a aplicação deste modelo de controlador foi útil para constatar al-gumas dificuldades relacionadas às características de resposta do sistema, que além delenta, apresentou um certo atraso de transporte associado. Os principais problemas fo-ram o overshoot da variável de saída e a variação significativa da resposta em torno dareferência. Esses problemas indicaram a necessidade de uma estratégia de controle maissofisticada, então, a aplicação de um controlador PID passou a ser investigada.
Com a inércia apresentada pelo comportamento do sistema e a grande demanda deenergia utilizada em sua operação, torna-se util a obtenção de um modelo matemáticoque permita a análise computacional da operação do mesmo. Assim, podem ser estu-dadas estratégias de obtenção da resposta esperada sem a necessidade de testes práticosrecorrentes, permitindo uma economia significativa de tempo e energia elétrica e a diver-sificação dos testes realizados. A abordagem por modelos matemáticos é especialmenteútil para a determinação dos parâmetros iniciais do controlador PID do sistema.

4.3. ESTRUTURA DE CONTROLE 51
4.3.1 Modelagem
Os parâmetros e considerações adotadas para obtenção de um modelo matemático de-pendem do nível de precisão do modelo exigido para o estudo realizado. Geralmente,quão mais descritivo for o modelo, mais complexas são as análises necessárias. Tratando-se de sistemas que envolvem processos térmicos, a temperatura nos diversos pontos deum corpo varia com a localização. Logo, modelos térmicos são mais fielmente represen-tados através de análises com parâmetros distribuídos. Porém, o nível de dificuldade e onúmero de equações necessárias para descrição em parâmetros distribuídos não justificama adoção nessa metodologia a este trabalho. Assim, a primeira consideração a ser adotadaé que o modelo térmico do aquecedor pode ser representado através de parâmetros con-centrados, em que a temperatura em todos os pontos da massa de fluido é uniforme e nãovaria com a localização.
O segundo ponto a ser considerado é que a malha completa de aquecimento é umsistema fechado, em que a massa envolvida no processo permanece constante. Assim, oprincípio da conservação da energia diz que a variação líquida na energia total do sistemadurante o processo de aquecimento é igual à diferença entre a energia total recebida e aenergia total dissipada. Ou seja:
∆Esistema = Eentra +Esai (4.1)
Em que ∆Esistema é a variação da energia interna, Eentra é a energia aplicada e Esai eenergia dissipada pelo sistema através das suas fronteiras. Como não há fluxo de massaatravés da fronteira do sistema e as variações de energia devido ao trabalho realizado pelabomba são desprezíveis, a variação da energia interna é dada através da quantidade decalor que é armazenada em sua massa em decorrência da diferença entre a quantidade deenergia térmica aplicada (Qentra) e dissipada (Qsai). Logo:
∆Esistema = Qentra +Qsai (4.2)
O resultado da transferência de energia térmica para o fluido é o aumento da suatemperatura. A propriedade que mensura a quantidade de calor que uma massa podearmazenar é a capacitância térmica (C). O acréscimo de temperatura de um corpo (θ1)devido ao fluxo de calor (qs) é igual a:
C1d(θ1)
dt= qs (4.3)
O aquecedor não é termicamente isolado, logo, parte do calor recebido é transferidopara o ambiente através de efeitos de convecção, condução e radiação. O efeito maissignificativo de transferência de calor que o ocorre no sistema é a convecção, logo, osdemais serão tratados como desprezíveis. O fluxo de calor dissipado (qo) em decorrênciada diferença de temperatura (θ1) são relacionados através da resistência térmica (R1):
qo =θ1
R1(4.4)
que por sua vez é relacionada ao coeficiente de transferência de calor por convecção (h),
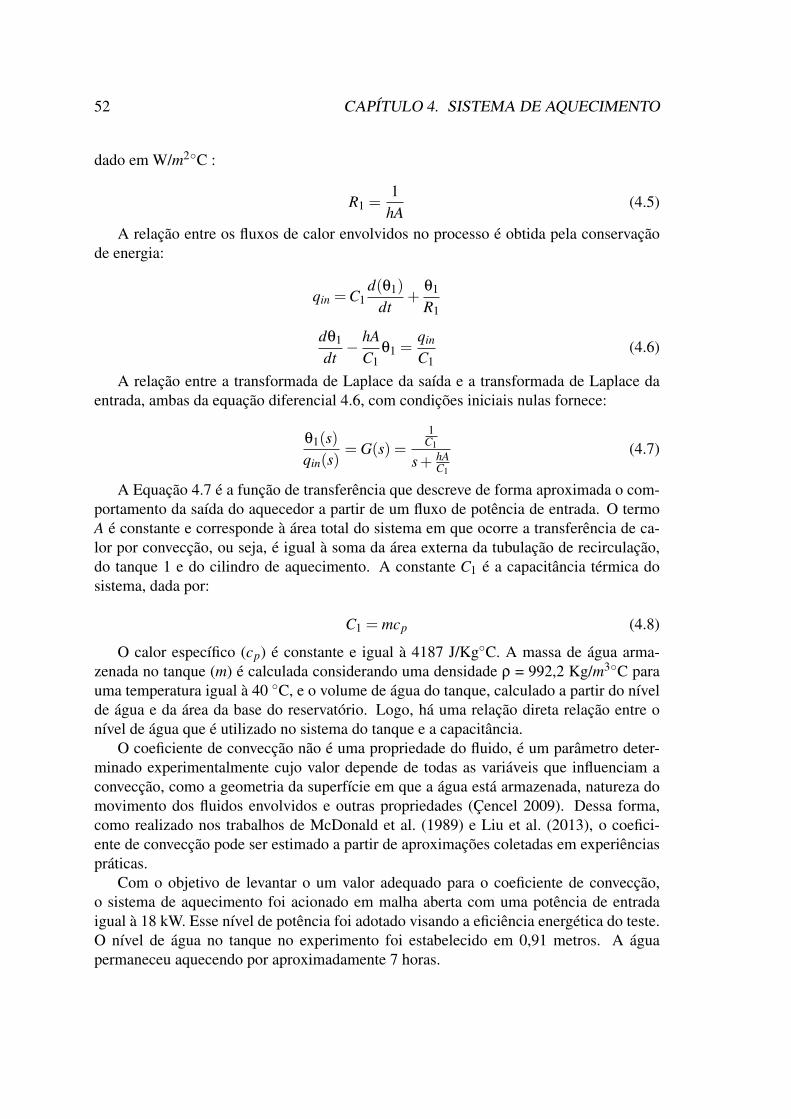
52 CAPÍTULO 4. SISTEMA DE AQUECIMENTO
dado em W/m2C :
R1 =1
hA(4.5)
A relação entre os fluxos de calor envolvidos no processo é obtida pela conservaçãode energia:
qin =C1d(θ1)
dt+
θ1
R1
dθ1
dt− hA
C1θ1 =
qin
C1(4.6)
A relação entre a transformada de Laplace da saída e a transformada de Laplace daentrada, ambas da equação diferencial 4.6, com condições iniciais nulas fornece:
θ1(s)qin(s)
= G(s) =1
C1
s+ hAC1
(4.7)
A Equação 4.7 é a função de transferência que descreve de forma aproximada o com-portamento da saída do aquecedor a partir de um fluxo de potência de entrada. O termoA é constante e corresponde à área total do sistema em que ocorre a transferência de ca-lor por convecção, ou seja, é igual à soma da área externa da tubulação de recirculação,do tanque 1 e do cilindro de aquecimento. A constante C1 é a capacitância térmica dosistema, dada por:
C1 = mcp (4.8)
O calor específico (cp) é constante e igual à 4187 J/KgC. A massa de água arma-zenada no tanque (m) é calculada considerando uma densidade ρ = 992,2 Kg/m3C parauma temperatura igual à 40 C, e o volume de água do tanque, calculado a partir do nívelde água e da área da base do reservatório. Logo, há uma relação direta relação entre onível de água que é utilizado no sistema do tanque e a capacitância.
O coeficiente de convecção não é uma propriedade do fluido, é um parâmetro deter-minado experimentalmente cujo valor depende de todas as variáveis que influenciam aconvecção, como a geometria da superfície em que a água está armazenada, natureza domovimento dos fluidos envolvidos e outras propriedades (Çencel 2009). Dessa forma,como realizado nos trabalhos de McDonald et al. (1989) e Liu et al. (2013), o coefici-ente de convecção pode ser estimado a partir de aproximações coletadas em experiênciaspráticas.
Com o objetivo de levantar o um valor adequado para o coeficiente de convecção,o sistema de aquecimento foi acionado em malha aberta com uma potência de entradaigual à 18 kW. Esse nível de potência foi adotado visando a eficiência energética do teste.O nível de água no tanque no experimento foi estabelecido em 0,91 metros. A águapermaneceu aquecendo por aproximadamente 7 horas.
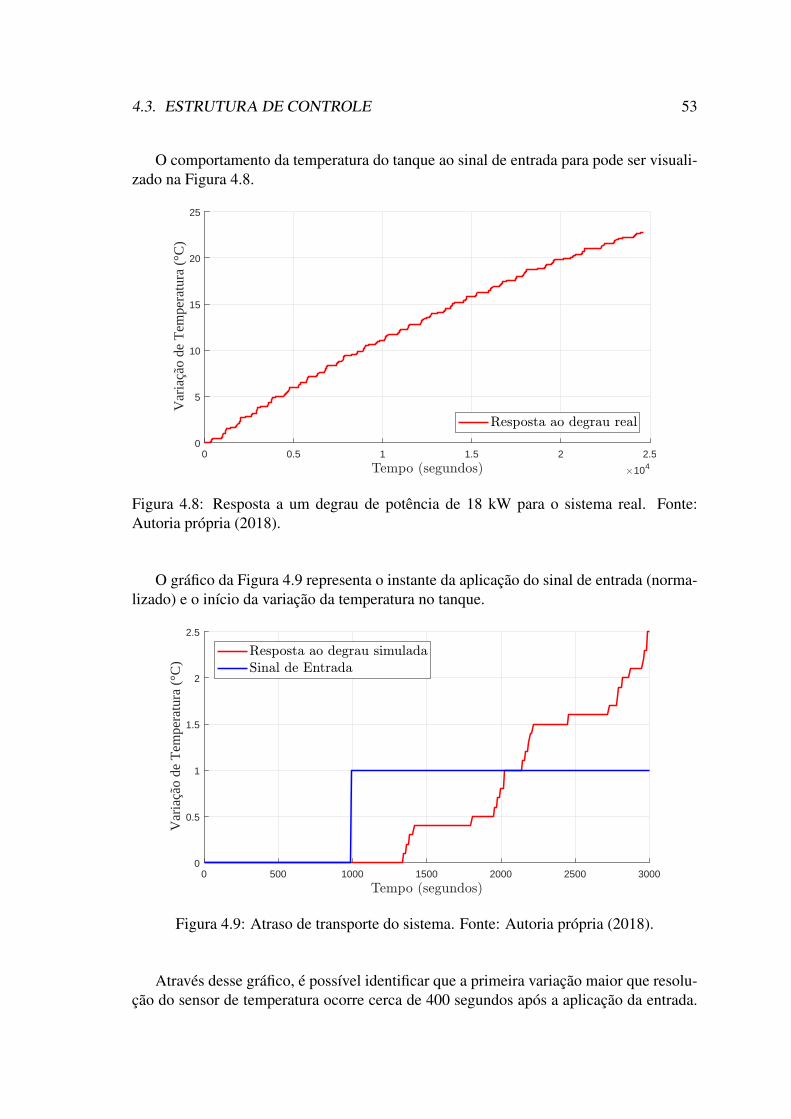
4.3. ESTRUTURA DE CONTROLE 53
O comportamento da temperatura do tanque ao sinal de entrada para pode ser visuali-zado na Figura 4.8.
0 0.5 1 1.5 2 2.5
104
0
5
10
15
20
25
Var
iaçã
o de
Tem
pera
tura
(°C
)
Figura 4.8: Resposta a um degrau de potência de 18 kW para o sistema real. Fonte:Autoria própria (2018).
O gráfico da Figura 4.9 representa o instante da aplicação do sinal de entrada (norma-lizado) e o início da variação da temperatura no tanque.
0 500 1000 1500 2000 2500 30000
0.5
1
1.5
2
2.5
Var
iaçã
o de
Tem
pera
tura
(°C
)
Figura 4.9: Atraso de transporte do sistema. Fonte: Autoria própria (2018).
Através desse gráfico, é possível identificar que a primeira variação maior que resolu-ção do sensor de temperatura ocorre cerca de 400 segundos após a aplicação da entrada.
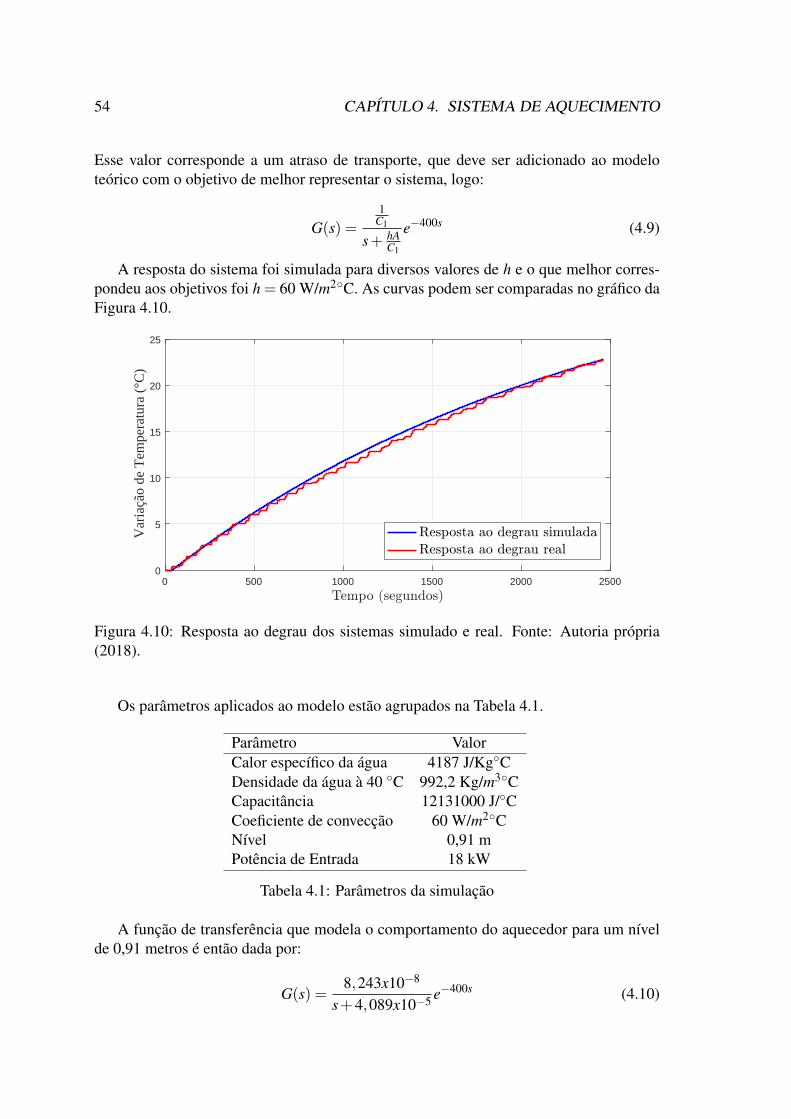
54 CAPÍTULO 4. SISTEMA DE AQUECIMENTO
Esse valor corresponde a um atraso de transporte, que deve ser adicionado ao modeloteórico com o objetivo de melhor representar o sistema, logo:
G(s) =1
C1
s+ hAC1
e−400s (4.9)
A resposta do sistema foi simulada para diversos valores de h e o que melhor corres-pondeu aos objetivos foi h = 60 W/m2C. As curvas podem ser comparadas no gráfico daFigura 4.10.
0 500 1000 1500 2000 25000
5
10
15
20
25
Var
iaçã
o de
Tem
pera
tura
(°C
)
Figura 4.10: Resposta ao degrau dos sistemas simulado e real. Fonte: Autoria própria(2018).
Os parâmetros aplicados ao modelo estão agrupados na Tabela 4.1.
Parâmetro ValorCalor específico da água 4187 J/KgCDensidade da água à 40 C 992,2 Kg/m3CCapacitância 12131000 J/CCoeficiente de convecção 60 W/m2CNível 0,91 mPotência de Entrada 18 kW
Tabela 4.1: Parâmetros da simulação
A função de transferência que modela o comportamento do aquecedor para um nívelde 0,91 metros é então dada por:
G(s) =8,243x10−8
s+4,089x10−5 e−400s (4.10)
4.3. ESTRUTURA DE CONTROLE 55
De posse de modelos como o da Equação 4.10, simulações em malha aberta e malhafechada podem ser realizadas para diversas condições de operação do sistema. Comoexemplo, pode-se citar a influência do volume de água do tanque no tempo total em que atemperatura demora a chegar a valores quaisquer. Outro exemplo é a resposta do sistemapara diferentes valores de potência de entrada. Por último, e mais importante, sistemasde controle em malha fechada para um volume especificado podem ser projetados como objetivo de obter estimações dos parâmetros dos controladores. Diferentes métodos deprojetos podem ser abordados à nível de simulação antes de serem testados na planta real.Tornando então o processo necessário de sintonia de controladores uma atividade menoscustosa energeticamente.
O modelo especificado foi utilizado para o levantamento, através da simulação dosistema em malha fechada, de parâmetros aproximados para um controlador do tipo PID.Esses parâmetros foram obtidos de forma empírica, observando-se o comportamento davariação da resposta à modificações nos ganhos do controlador.
4.3.2 Controlador de Processos Novus N2000O dispositivo eletrônico que correspondendo ao bloco “controlador” da malha do sis-
tema, foi adquirido na época do projeto inicial do sistema. Trata-se de um um controladorde processos da marca NOVUS, modelo N2000, que trabalha com a maioria dos senso-res e sinais utilizados na indústria e dispõe de saídas para conexão com atuadores. Porser fabricado para aplicações nos diversos ambientes industriais, possui uma estruturaeletrônica robusta, essencial para controlar processos que demandam um bom nível desegurança na operação. Entre as principais características, tem-se:
• Interface para comunicação com rede serial através do protocolo MODBUS.• Dispõe de curvas características previamente programadas para a maioria dos sen-
sores de temperatura industriais.• Permite recepção de variáveis via sinal de corrente de 4 à 20 mA.• 1 Saída analógica de 0 à 20 ou 4 à 20 mA.• 6 saídas digitais do tipo ON/OFF.• 1 saída digital com modulação em largura de pulso (PWM).
4.3.3 Controle por Ciclos InteirosComo descrito na seção anterior, o acionamento dos atuadores do aquecedor é reali-
zado através de chaves eletrônicas que controlam o nível de potência entregue ao sistemaatravés de comandos em dois estados: chaves ligadas e desligadas. Esse método limita aspossibilidades de operação de algoritmos de controle, visto que as rotinas mais eficientes(como controladores PID) demandam que o sinal enviado aos atuadores varie de formacontínua dentro da faixa de potência disponível na entrada do processo.
A técnica de controle por ciclos inteiros visa modular o nível de potência aplicada poratuadores de tensão alterada com acionamento em dois níveis através da variação númerode ciclos do sinal senoidal aplicado ao sistema em determinado intervalo de tempo. Arelação entre os intervalos em que o sistema está ligado ou desligado (ciclo de trabalho)

56 CAPÍTULO 4. SISTEMA DE AQUECIMENTO
determina a potência média aplicada para o período considerado. O ciclo de trabalho podevariar entre 0 e 100% do intervalo escolhido, logo, considerando o valor médio, tem-seentão uma variação contínua do nível de potência entregue à carga.
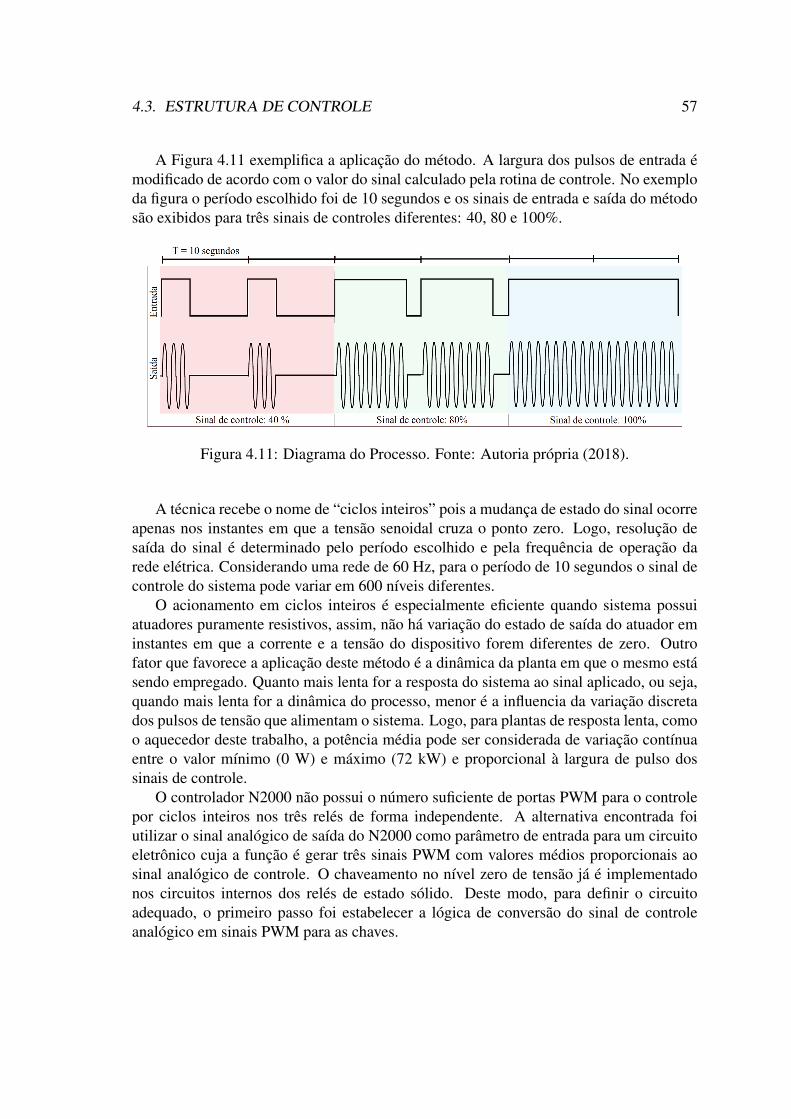
4.3. ESTRUTURA DE CONTROLE 57
A Figura 4.11 exemplifica a aplicação do método. A largura dos pulsos de entrada émodificado de acordo com o valor do sinal calculado pela rotina de controle. No exemploda figura o período escolhido foi de 10 segundos e os sinais de entrada e saída do métodosão exibidos para três sinais de controles diferentes: 40, 80 e 100%.
Figura 4.11: Diagrama do Processo. Fonte: Autoria própria (2018).
A técnica recebe o nome de “ciclos inteiros” pois a mudança de estado do sinal ocorreapenas nos instantes em que a tensão senoidal cruza o ponto zero. Logo, resolução desaída do sinal é determinado pelo período escolhido e pela frequência de operação darede elétrica. Considerando uma rede de 60 Hz, para o período de 10 segundos o sinal decontrole do sistema pode variar em 600 níveis diferentes.
O acionamento em ciclos inteiros é especialmente eficiente quando sistema possuiatuadores puramente resistivos, assim, não há variação do estado de saída do atuador eminstantes em que a corrente e a tensão do dispositivo forem diferentes de zero. Outrofator que favorece a aplicação deste método é a dinâmica da planta em que o mesmo estásendo empregado. Quanto mais lenta for a resposta do sistema ao sinal aplicado, ou seja,quando mais lenta for a dinâmica do processo, menor é a influencia da variação discretados pulsos de tensão que alimentam o sistema. Logo, para plantas de resposta lenta, comoo aquecedor deste trabalho, a potência média pode ser considerada de variação contínuaentre o valor mínimo (0 W) e máximo (72 kW) e proporcional à largura de pulso dossinais de controle.
O controlador N2000 não possui o número suficiente de portas PWM para o controlepor ciclos inteiros nos três relés de forma independente. A alternativa encontrada foiutilizar o sinal analógico de saída do N2000 como parâmetro de entrada para um circuitoeletrônico cuja a função é gerar três sinais PWM com valores médios proporcionais aosinal analógico de controle. O chaveamento no nível zero de tensão já é implementadonos circuitos internos dos relés de estado sólido. Deste modo, para definir o circuitoadequado, o primeiro passo foi estabelecer a lógica de conversão do sinal de controleanalógico em sinais PWM para as chaves.
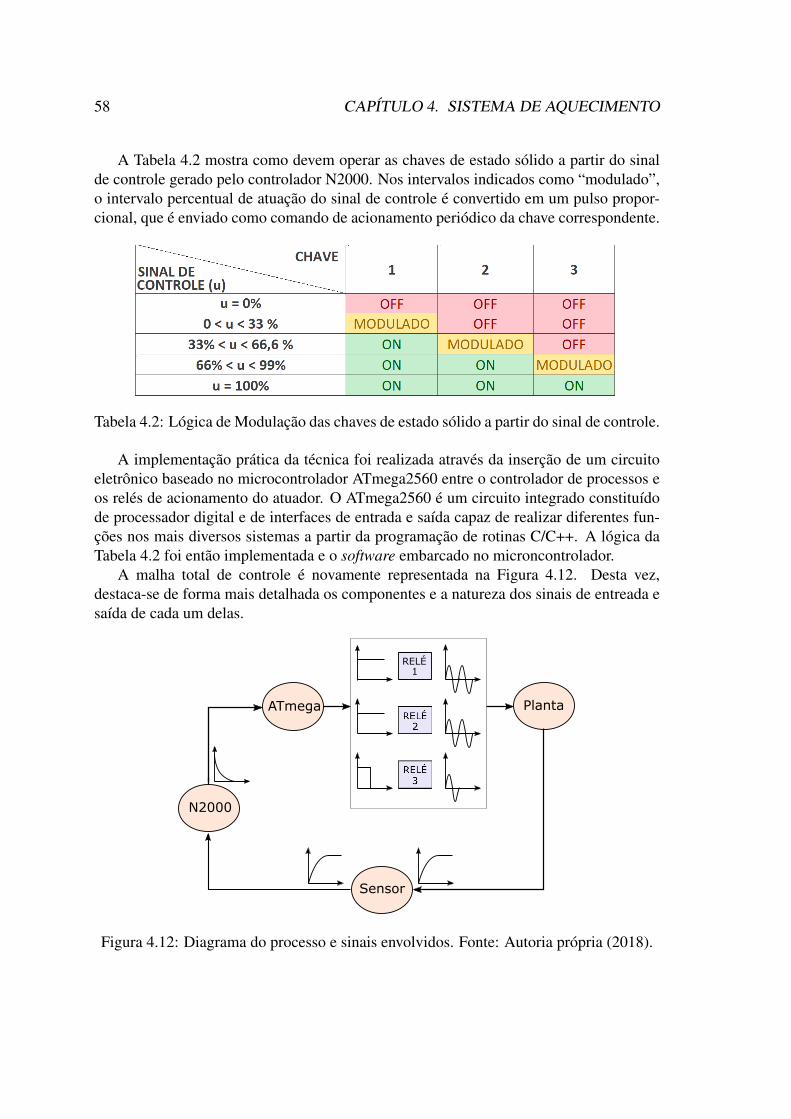
58 CAPÍTULO 4. SISTEMA DE AQUECIMENTO
A Tabela 4.2 mostra como devem operar as chaves de estado sólido a partir do sinalde controle gerado pelo controlador N2000. Nos intervalos indicados como “modulado”,o intervalo percentual de atuação do sinal de controle é convertido em um pulso propor-cional, que é enviado como comando de acionamento periódico da chave correspondente.
Tabela 4.2: Lógica de Modulação das chaves de estado sólido a partir do sinal de controle.
A implementação prática da técnica foi realizada através da inserção de um circuitoeletrônico baseado no microcontrolador ATmega2560 entre o controlador de processos eos relés de acionamento do atuador. O ATmega2560 é um circuito integrado constituídode processador digital e de interfaces de entrada e saída capaz de realizar diferentes fun-ções nos mais diversos sistemas a partir da programação de rotinas C/C++. A lógica daTabela 4.2 foi então implementada e o software embarcado no microncontrolador.
A malha total de controle é novamente representada na Figura 4.12. Desta vez,destaca-se de forma mais detalhada os componentes e a natureza dos sinais de entreada esaída de cada um delas.
N2000
ATmega
Sensor
Planta
RELÉ1
Figura 4.12: Diagrama do processo e sinais envolvidos. Fonte: Autoria própria (2018).
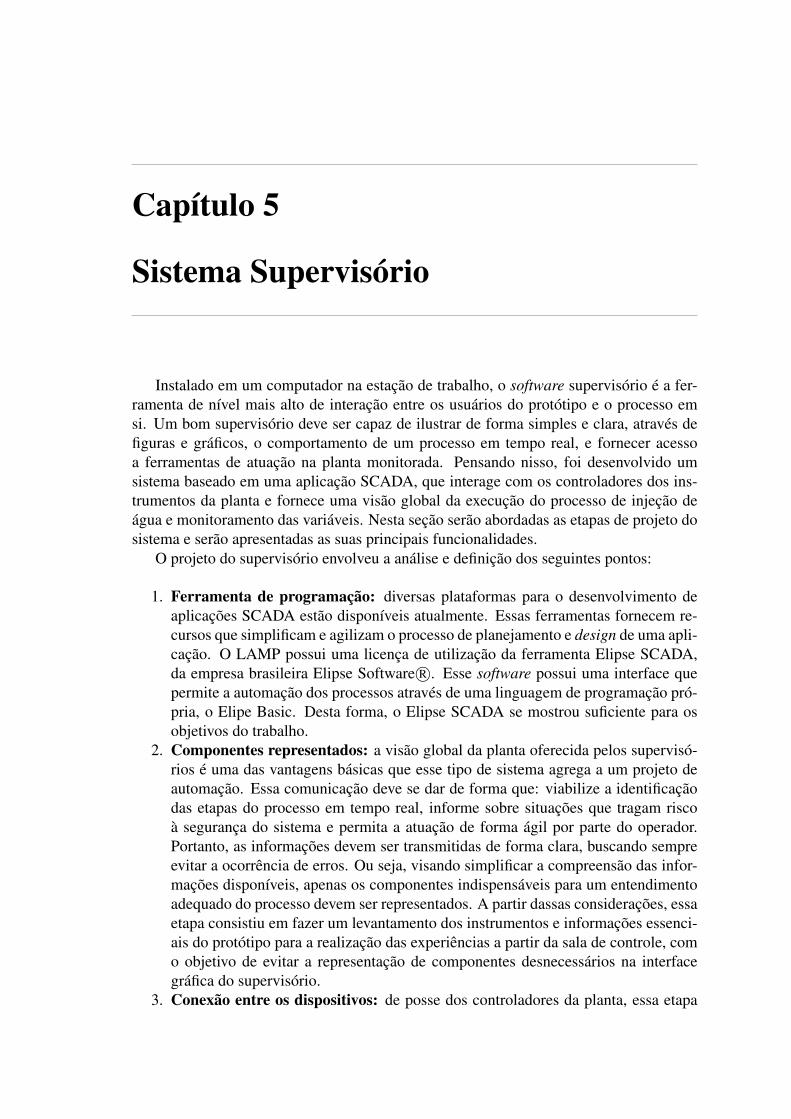
Capítulo 5
Sistema Supervisório
Instalado em um computador na estação de trabalho, o software supervisório é a fer-ramenta de nível mais alto de interação entre os usuários do protótipo e o processo emsi. Um bom supervisório deve ser capaz de ilustrar de forma simples e clara, através defiguras e gráficos, o comportamento de um processo em tempo real, e fornecer acessoa ferramentas de atuação na planta monitorada. Pensando nisso, foi desenvolvido umsistema baseado em uma aplicação SCADA, que interage com os controladores dos ins-trumentos da planta e fornece uma visão global da execução do processo de injeção deágua e monitoramento das variáveis. Nesta seção serão abordadas as etapas de projeto dosistema e serão apresentadas as suas principais funcionalidades.
O projeto do supervisório envolveu a análise e definição dos seguintes pontos:
1. Ferramenta de programação: diversas plataformas para o desenvolvimento deaplicações SCADA estão disponíveis atualmente. Essas ferramentas fornecem re-cursos que simplificam e agilizam o processo de planejamento e design de uma apli-cação. O LAMP possui uma licença de utilização da ferramenta Elipse SCADA,da empresa brasileira Elipse Software R©. Esse software possui uma interface quepermite a automação dos processos através de uma linguagem de programação pró-pria, o Elipe Basic. Desta forma, o Elipse SCADA se mostrou suficiente para osobjetivos do trabalho.
2. Componentes representados: a visão global da planta oferecida pelos supervisó-rios é uma das vantagens básicas que esse tipo de sistema agrega a um projeto deautomação. Essa comunicação deve se dar de forma que: viabilize a identificaçãodas etapas do processo em tempo real, informe sobre situações que tragam riscoà segurança do sistema e permita a atuação de forma ágil por parte do operador.Portanto, as informações devem ser transmitidas de forma clara, buscando sempreevitar a ocorrência de erros. Ou seja, visando simplificar a compreensão das infor-mações disponíveis, apenas os componentes indispensáveis para um entendimentoadequado do processo devem ser representados. A partir dassas considerações, essaetapa consistiu em fazer um levantamento dos instrumentos e informações essenci-ais do protótipo para a realização das experiências a partir da sala de controle, como objetivo de evitar a representação de componentes desnecessários na interfacegráfica do supervisório.
3. Conexão entre os dispositivos: de posse dos controladores da planta, essa etapa
60 CAPÍTULO 5. SISTEMA SUPERVISÓRIO
consistiu em definir a interface de rede para a conexão entre os dispositivos. Oprincipal critério foi baseado na escolha de uma interface que estivesse disponívelem todos os equipamentos, evitando o número de aparelhos conversores de padrõesfísicos de rede necessários. Como citado anteriormente, a interface escolhida foi aRS-485 e a estrutura de comunicação é baseada no protocolo MODBUS.
4. Variáveis e funcionalidades: nesse ponto do planejamento, todas as variáveisde interesse foram representadas como TAGS dentro da interface do supervisório.Também foram definidas as funções que o supervisório deveria executar e com isso,as devidas relações das operações com as variáveis foram configuradas. Foram adi-cionadas animações que representam de forma visual a operação sistema, botõesde liga/desliga para os atuadores, displays de exibição do valor atual das variáveis,ferramentas de geração de gráficos para exibição da evolução temporal de algumasvariáveis e foi configurada a função de geração de relatório.
5. Confecção dos diagramas: criação da interface do supervisório utilizando imagensdisponíveis no pacote do Elipse ou editadas em outros softwares.
6. Intertravamentos: entre as funções básicas do supervisório está a capacidade daaplicação de rotinas de segurança para a operação do processo. A aplicação dessafunção é mais adequada quando as rotinas são implementadas diretamente nos com-ponentes de campo, como CLPs, pois possuem conexão direta com os atuadores epossíveis falhas na rede de comunicação não prejudicariam a operação segura doprocesso. Porém, os supervisórios também são utilizados com esse fim, e atuam demodo a usar as variáveis do sistema como parâmetro indicador de situações extre-mas que podem ocorrer no processo e definir as ações que devem ser executadasde forma automática para evitar danos aos equipamentos e prejuízos a execuçãodo processo. Esta etapa de planejamento do software consiste em prever as situ-ações de risco (causas) possíveis e definir as ações automáticas comandadas pelosupervisório (efeitos). O resultado desse levantamento pode ser agrupado em formade uma matriz de causas e efeitos, que ajuda no entendimento global das funçõesde seguranças implementadas no supervisório. A Tabela 5.1 mostra as relações deintertravamentos programadas através do supervisório.
As etapas descritas resultaram em um software dividido em três telas: a principaloferece uma visão geral dos componentes do protótipo de monitoramento de injeção.Nessa aba as válvulas da planta podem ser abertas e fechadas através de um simplesclique sobre o componente, assim como as bombas podem ser acionadas e as rotaçõessão alteradas por meio do preenchimento de um campo específico. A figura 5.1 mostra dainterface gráfica do supervisório com o objetivo de fornecer uma visão geral do mesmo,sem o detalhamento das informações.
A Figura 5.2 mostra como o simbolo da válvula é exibido no programa de acordocom seu estado de operação. A mesma animação foi relacionada aos ícones das bombas.A cor vermelha indica que a válvula está fechada e que as bombas estão desligadas, e acor verde corresponde às válvulas abertas e às bombas ligadas que indicam se as mesmasestão abertas ou fechadas. O estado de operação também aparece escrito abaixo dosícones correspondentes, como mostra a Figura 5.2.
A Figura 5.3 mostra os campos para indicação e modificação da velocidade de rotação
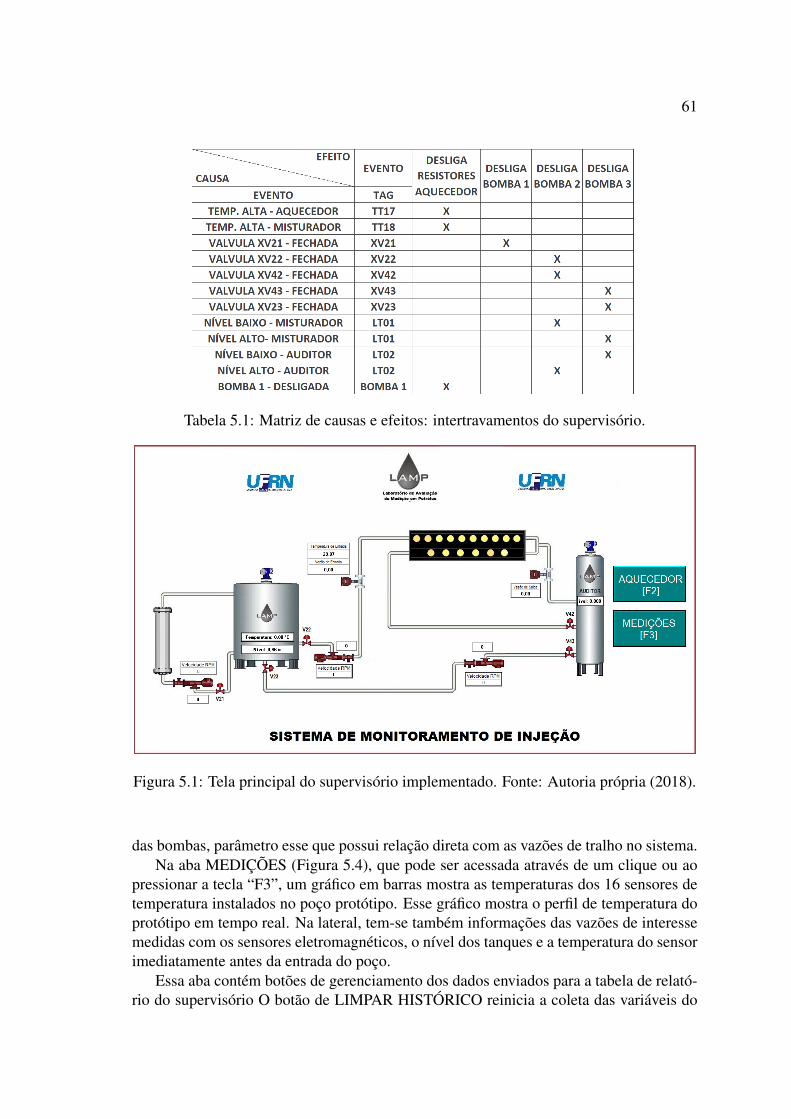
61
Tabela 5.1: Matriz de causas e efeitos: intertravamentos do supervisório.
Figura 5.1: Tela principal do supervisório implementado. Fonte: Autoria própria (2018).
das bombas, parâmetro esse que possui relação direta com as vazões de tralho no sistema.Na aba MEDIÇÕES (Figura 5.4), que pode ser acessada através de um clique ou ao
pressionar a tecla “F3”, um gráfico em barras mostra as temperaturas dos 16 sensores detemperatura instalados no poço protótipo. Esse gráfico mostra o perfil de temperatura doprotótipo em tempo real. Na lateral, tem-se também informações das vazões de interessemedidas com os sensores eletromagnéticos, o nível dos tanques e a temperatura do sensorimediatamente antes da entrada do poço.
Essa aba contém botões de gerenciamento dos dados enviados para a tabela de relató-rio do supervisório O botão de LIMPAR HISTÓRICO reinicia a coleta das variáveis do
62 CAPÍTULO 5. SISTEMA SUPERVISÓRIO
Figura 5.2: Animação do estado de operação das válvulas. Fonte: Autoria própria (2018).
VELOCIDADE ATUAL
VELOCIDADE DESEJADA
Figura 5.3: Indicação de velocidade atual e mudança de velocidade de rotação das bom-bas. Fonte: Autoria própria (2018).
sistema, limpando a tabela do arquivo relatório. O botão ATUALIZAR RELATÓRIO gra-vas as informações para o arquivo. A Figura RELATÓRIO mostra o formato do arquivogerado pelo supervisório. No eixo “Y” é o horário das medições realizadas, atualizadas acada 10 segundos. No eixo “X” são as variáveis de interesse para análise do processo.
Também foi programada uma aba para o gerenciamento do sistema de aquecimento(Figura 5.6).
Nessa aba é possível acompanhar em tempo real a evolução da temperatura do tan-que Misturador e as medições auxiliares. Também é possível configurar os setpoints damalha de controle, optar pelo controle ON/OFF ou PID e configurar os parâmetros doscontroladores.
O processamento dos dados gerados pela execução dos processos para a aplicação dométodo de medição de vazão a partir de temperatura poderia ser realizada diretamenteno supervisório. Porém, essa atividade demandaria um maior esforço computacional,levando ao risco de travamentos da interface e prejuízo no acompanhamento da operaçãoda planta. Dessa forma, os dados gerados pelo supervisório são salvos automaticamente,e analisados de forma “offline”, após a execução dos testes de medição. A viabilidade doprocessamento “online” dos dados pode ser analisada em trabalhos futuros.
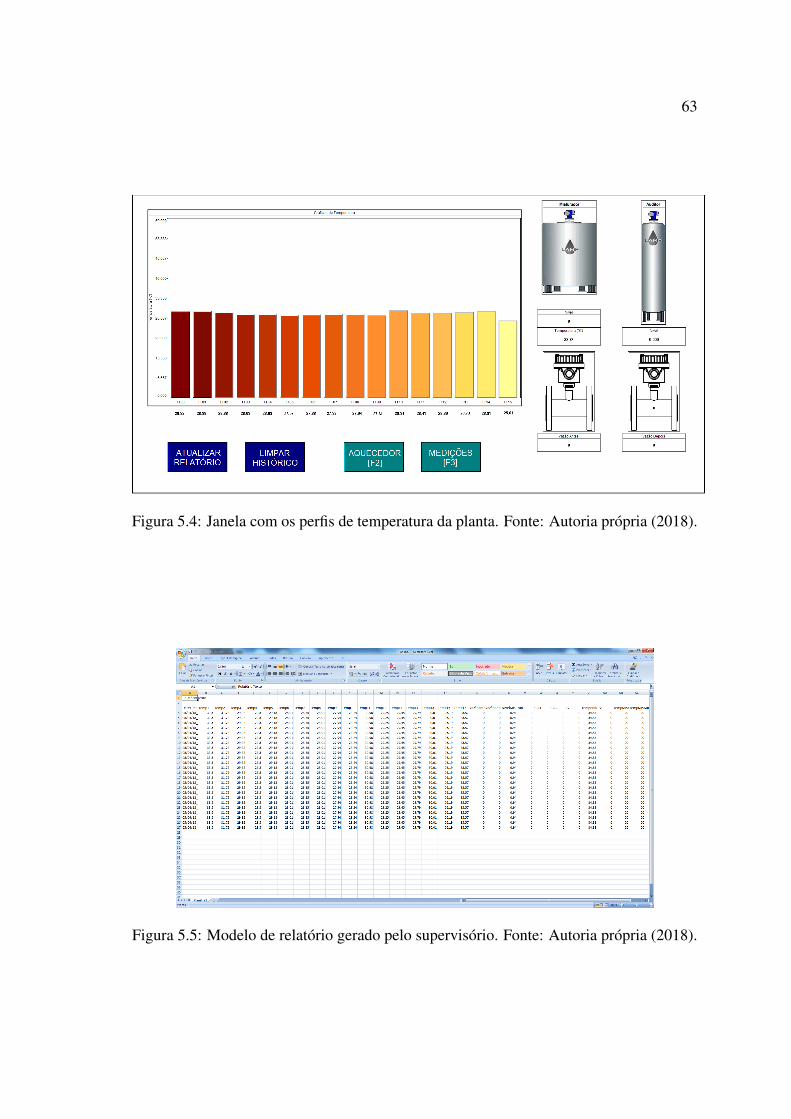
63
Figura 5.4: Janela com os perfis de temperatura da planta. Fonte: Autoria própria (2018).
Figura 5.5: Modelo de relatório gerado pelo supervisório. Fonte: Autoria própria (2018).

64 CAPÍTULO 5. SISTEMA SUPERVISÓRIO
Figura 5.6: Janela de gerenciamento do sistema de aquecimento. Fonte: Autoria própria(2018).
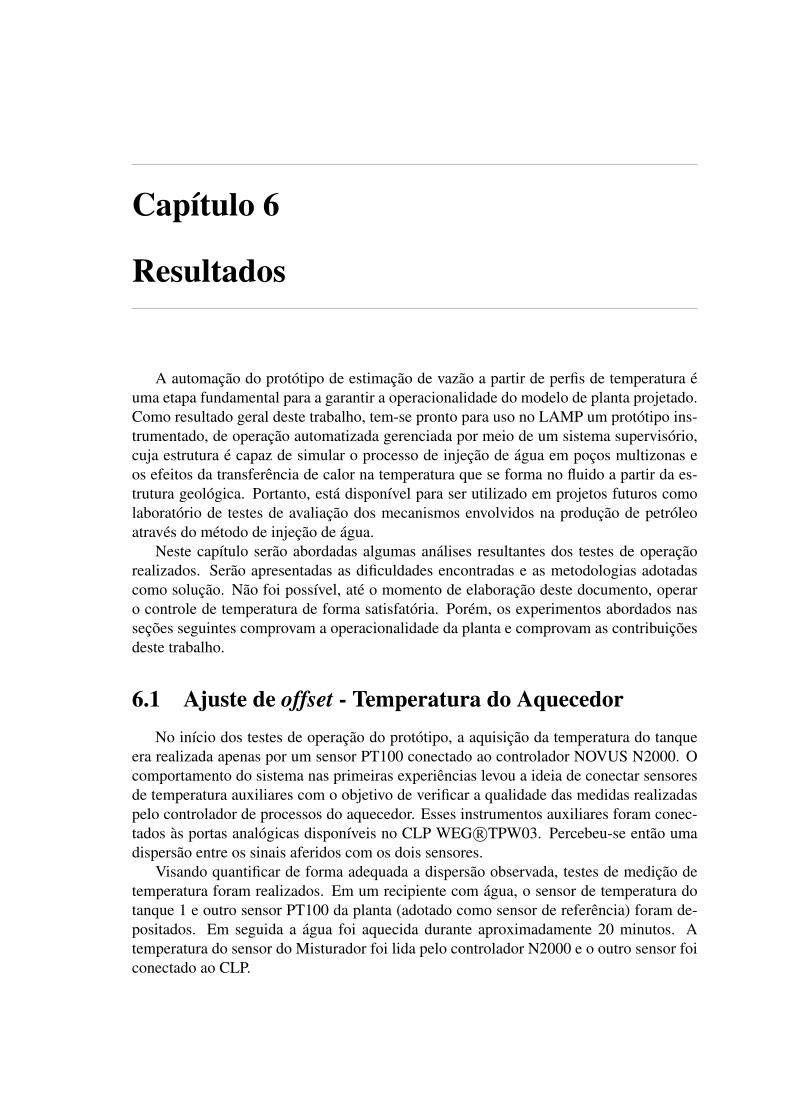
Capítulo 6
Resultados
A automação do protótipo de estimação de vazão a partir de perfis de temperatura éuma etapa fundamental para a garantir a operacionalidade do modelo de planta projetado.Como resultado geral deste trabalho, tem-se pronto para uso no LAMP um protótipo ins-trumentado, de operação automatizada gerenciada por meio de um sistema supervisório,cuja estrutura é capaz de simular o processo de injeção de água em poços multizonas eos efeitos da transferência de calor na temperatura que se forma no fluido a partir da es-trutura geológica. Portanto, está disponível para ser utilizado em projetos futuros comolaboratório de testes de avaliação dos mecanismos envolvidos na produção de petróleoatravés do método de injeção de água.
Neste capítulo serão abordadas algumas análises resultantes dos testes de operaçãorealizados. Serão apresentadas as dificuldades encontradas e as metodologias adotadascomo solução. Não foi possível, até o momento de elaboração deste documento, operaro controle de temperatura de forma satisfatória. Porém, os experimentos abordados nasseções seguintes comprovam a operacionalidade da planta e comprovam as contribuiçõesdeste trabalho.
6.1 Ajuste de offset - Temperatura do AquecedorNo início dos testes de operação do protótipo, a aquisição da temperatura do tanque
era realizada apenas por um sensor PT100 conectado ao controlador NOVUS N2000. Ocomportamento do sistema nas primeiras experiências levou a ideia de conectar sensoresde temperatura auxiliares com o objetivo de verificar a qualidade das medidas realizadaspelo controlador de processos do aquecedor. Esses instrumentos auxiliares foram conec-tados às portas analógicas disponíveis no CLP WEG R©TPW03. Percebeu-se então umadispersão entre os sinais aferidos com os dois sensores.
Visando quantificar de forma adequada a dispersão observada, testes de medição detemperatura foram realizados. Em um recipiente com água, o sensor de temperatura dotanque 1 e outro sensor PT100 da planta (adotado como sensor de referência) foram de-positados. Em seguida a água foi aquecida durante aproximadamente 20 minutos. Atemperatura do sensor do Misturador foi lida pelo controlador N2000 e o outro sensor foiconectado ao CLP.
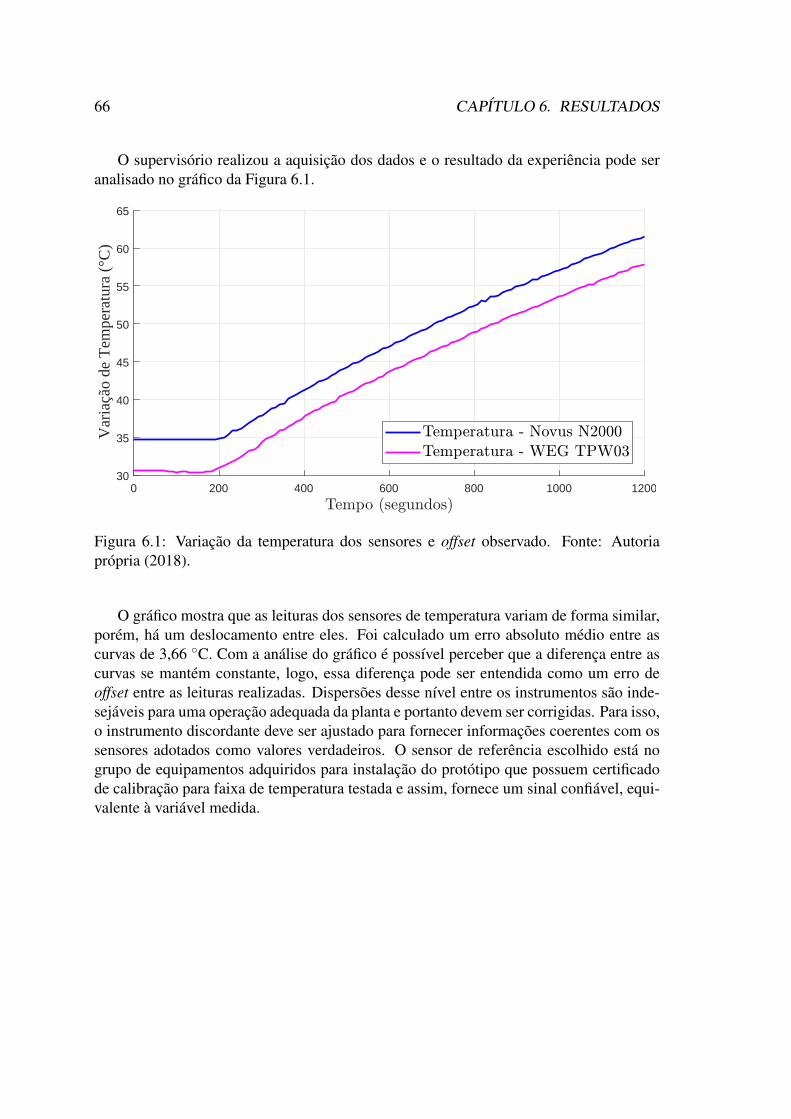
66 CAPÍTULO 6. RESULTADOS
O supervisório realizou a aquisição dos dados e o resultado da experiência pode seranalisado no gráfico da Figura 6.1.
0 200 400 600 800 1000 120030
35
40
45
50
55
60
65
Var
iaçã
o de
Tem
pera
tura
(°C
)
Figura 6.1: Variação da temperatura dos sensores e offset observado. Fonte: Autoriaprópria (2018).
O gráfico mostra que as leituras dos sensores de temperatura variam de forma similar,porém, há um deslocamento entre eles. Foi calculado um erro absoluto médio entre ascurvas de 3,66 C. Com a análise do gráfico é possível perceber que a diferença entre ascurvas se mantém constante, logo, essa diferença pode ser entendida como um erro deoffset entre as leituras realizadas. Dispersões desse nível entre os instrumentos são inde-sejáveis para uma operação adequada da planta e portanto devem ser corrigidas. Para isso,o instrumento discordante deve ser ajustado para fornecer informações coerentes com ossensores adotados como valores verdadeiros. O sensor de referência escolhido está nogrupo de equipamentos adquiridos para instalação do protótipo que possuem certificadode calibração para faixa de temperatura testada e assim, fornece um sinal confiável, equi-valente à variável medida.
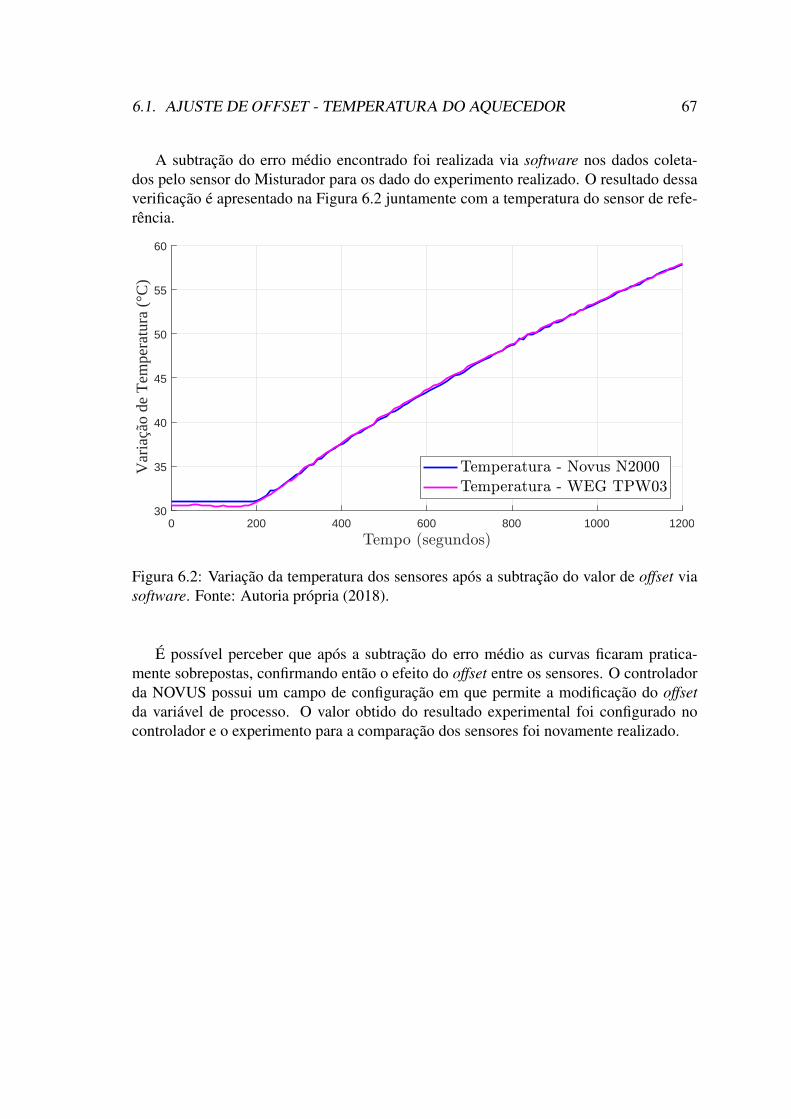
6.1. AJUSTE DE OFFSET - TEMPERATURA DO AQUECEDOR 67
A subtração do erro médio encontrado foi realizada via software nos dados coleta-dos pelo sensor do Misturador para os dado do experimento realizado. O resultado dessaverificação é apresentado na Figura 6.2 juntamente com a temperatura do sensor de refe-rência.
0 200 400 600 800 1000 120030
35
40
45
50
55
60
Var
iaçã
o de
Tem
pera
tura
(°C
)
Figura 6.2: Variação da temperatura dos sensores após a subtração do valor de offset viasoftware. Fonte: Autoria própria (2018).
É possível perceber que após a subtração do erro médio as curvas ficaram pratica-mente sobrepostas, confirmando então o efeito do offset entre os sensores. O controladorda NOVUS possui um campo de configuração em que permite a modificação do offsetda variável de processo. O valor obtido do resultado experimental foi configurado nocontrolador e o experimento para a comparação dos sensores foi novamente realizado.
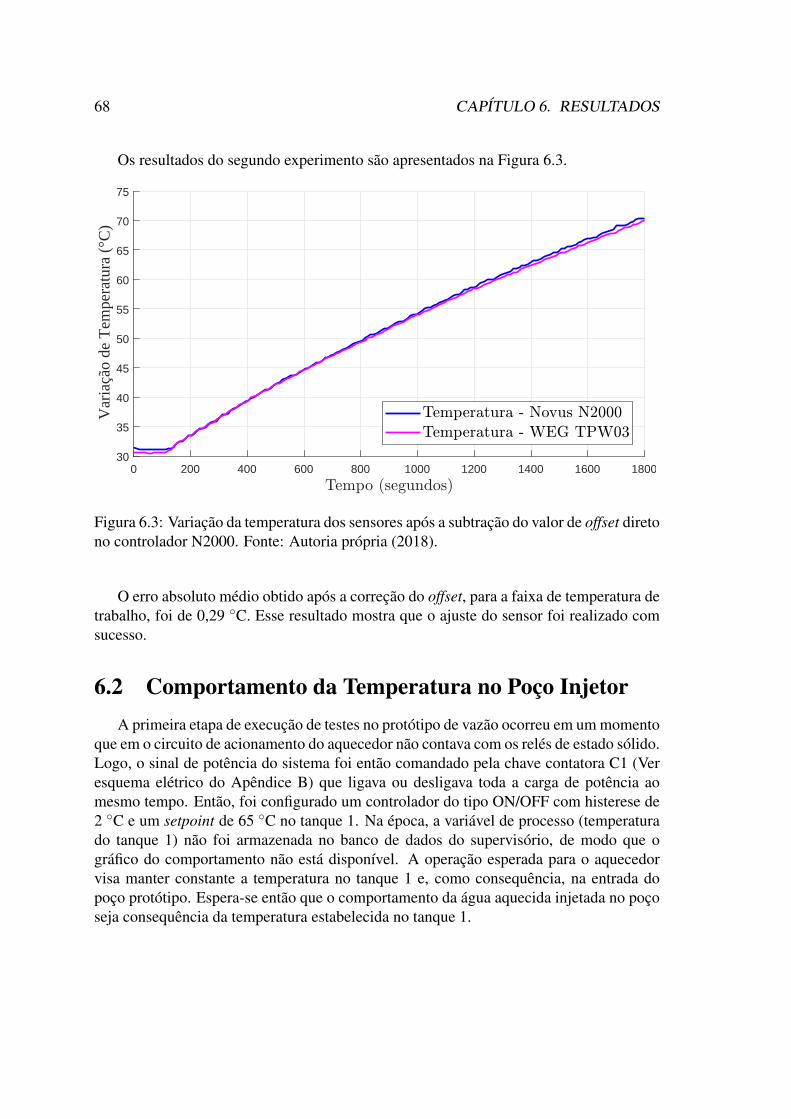
68 CAPÍTULO 6. RESULTADOS
Os resultados do segundo experimento são apresentados na Figura 6.3.
0 200 400 600 800 1000 1200 1400 1600 180030
35
40
45
50
55
60
65
70
75
Var
iaçã
o de
Tem
pera
tura
(°C
)
Figura 6.3: Variação da temperatura dos sensores após a subtração do valor de offset diretono controlador N2000. Fonte: Autoria própria (2018).
O erro absoluto médio obtido após a correção do offset, para a faixa de temperatura detrabalho, foi de 0,29 C. Esse resultado mostra que o ajuste do sensor foi realizado comsucesso.
6.2 Comportamento da Temperatura no Poço InjetorA primeira etapa de execução de testes no protótipo de vazão ocorreu em um momento
que em o circuito de acionamento do aquecedor não contava com os relés de estado sólido.Logo, o sinal de potência do sistema foi então comandado pela chave contatora C1 (Veresquema elétrico do Apêndice B) que ligava ou desligava toda a carga de potência aomesmo tempo. Então, foi configurado um controlador do tipo ON/OFF com histerese de2 C e um setpoint de 65 C no tanque 1. Na época, a variável de processo (temperaturado tanque 1) não foi armazenada no banco de dados do supervisório, de modo que ográfico do comportamento não está disponível. A operação esperada para o aquecedorvisa manter constante a temperatura no tanque 1 e, como consequência, na entrada dopoço protótipo. Espera-se então que o comportamento da água aquecida injetada no poçoseja consequência da temperatura estabelecida no tanque 1.
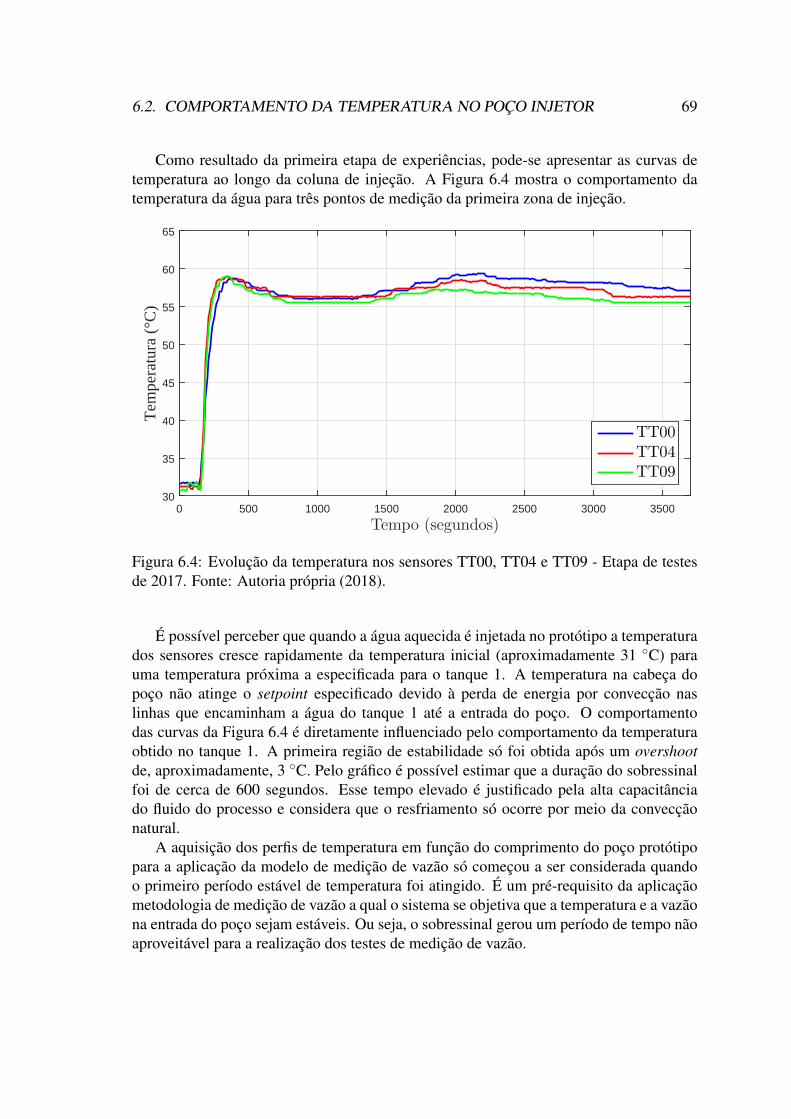
6.2. COMPORTAMENTO DA TEMPERATURA NO POÇO INJETOR 69
Como resultado da primeira etapa de experiências, pode-se apresentar as curvas detemperatura ao longo da coluna de injeção. A Figura 6.4 mostra o comportamento datemperatura da água para três pontos de medição da primeira zona de injeção.
Tempo (segundos)0 500 1000 1500 2000 2500 3000 3500
Tem
pera
tura
(°C
)
30
35
40
45
50
55
60
65
TT00TT04TT09
Figura 6.4: Evolução da temperatura nos sensores TT00, TT04 e TT09 - Etapa de testesde 2017. Fonte: Autoria própria (2018).
É possível perceber que quando a água aquecida é injetada no protótipo a temperaturados sensores cresce rapidamente da temperatura inicial (aproximadamente 31 C) parauma temperatura próxima a especificada para o tanque 1. A temperatura na cabeça dopoço não atinge o setpoint especificado devido à perda de energia por convecção naslinhas que encaminham a água do tanque 1 até a entrada do poço. O comportamentodas curvas da Figura 6.4 é diretamente influenciado pelo comportamento da temperaturaobtido no tanque 1. A primeira região de estabilidade só foi obtida após um overshootde, aproximadamente, 3 C. Pelo gráfico é possível estimar que a duração do sobressinalfoi de cerca de 600 segundos. Esse tempo elevado é justificado pela alta capacitânciado fluido do processo e considera que o resfriamento só ocorre por meio da convecçãonatural.
A aquisição dos perfis de temperatura em função do comprimento do poço protótipopara a aplicação da modelo de medição de vazão só começou a ser considerada quandoo primeiro período estável de temperatura foi atingido. É um pré-requisito da aplicaçãometodologia de medição de vazão a qual o sistema se objetiva que a temperatura e a vazãona entrada do poço sejam estáveis. Ou seja, o sobressinal gerou um período de tempo nãoaproveitável para a realização dos testes de medição de vazão.
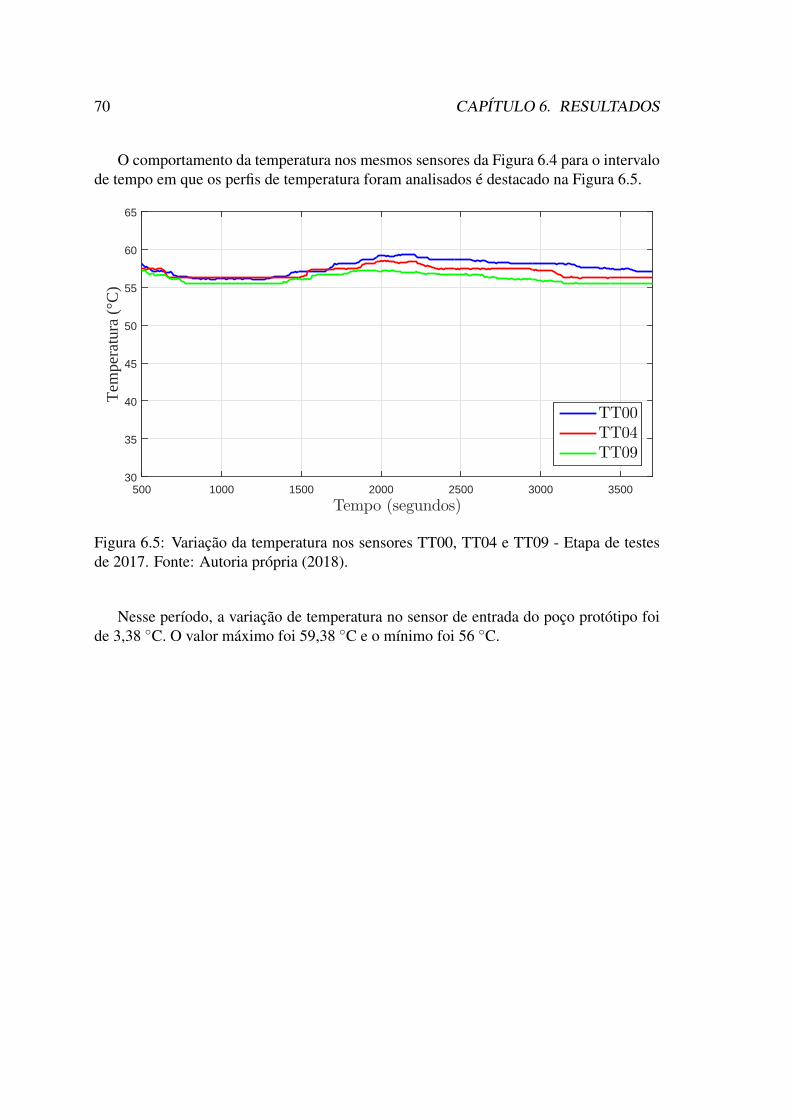
70 CAPÍTULO 6. RESULTADOS
O comportamento da temperatura nos mesmos sensores da Figura 6.4 para o intervalode tempo em que os perfis de temperatura foram analisados é destacado na Figura 6.5.
Tempo (segundos)500 1000 1500 2000 2500 3000 3500
Tem
pera
tura
(°C
)
30
35
40
45
50
55
60
65
TT00TT04TT09
Figura 6.5: Variação da temperatura nos sensores TT00, TT04 e TT09 - Etapa de testesde 2017. Fonte: Autoria própria (2018).
Nesse período, a variação de temperatura no sensor de entrada do poço protótipo foide 3,38 C. O valor máximo foi 59,38 C e o mínimo foi 56 C.
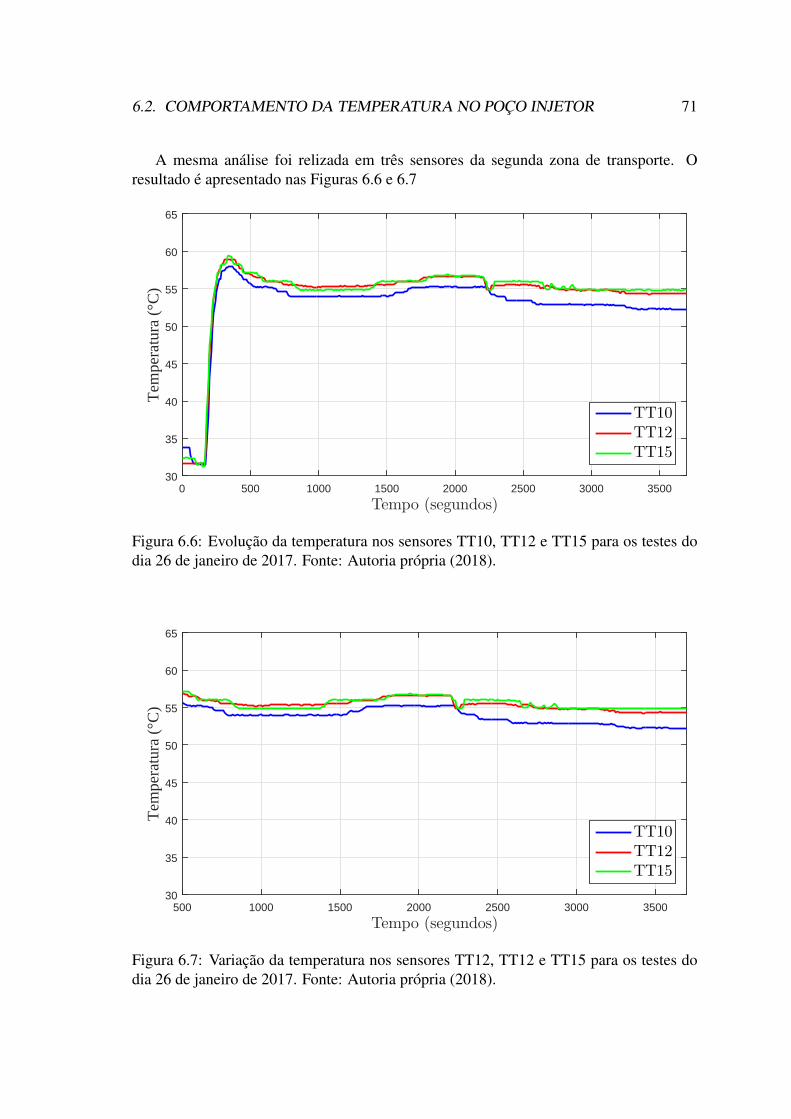
6.2. COMPORTAMENTO DA TEMPERATURA NO POÇO INJETOR 71
A mesma análise foi relizada em três sensores da segunda zona de transporte. Oresultado é apresentado nas Figuras 6.6 e 6.7
Tempo (segundos)0 500 1000 1500 2000 2500 3000 3500
Tem
pera
tura
(°C
)
30
35
40
45
50
55
60
65
TT10TT12TT15
Figura 6.6: Evolução da temperatura nos sensores TT10, TT12 e TT15 para os testes dodia 26 de janeiro de 2017. Fonte: Autoria própria (2018).
Tempo (segundos)500 1000 1500 2000 2500 3000 3500
Tem
pera
tura
(°C
)
30
35
40
45
50
55
60
65
TT10TT12TT15
Figura 6.7: Variação da temperatura nos sensores TT12, TT12 e TT15 para os testes dodia 26 de janeiro de 2017. Fonte: Autoria própria (2018).

72 CAPÍTULO 6. RESULTADOS
A variação de temperatura observada no fim da coluna de injeção foi de 2,34 C. Amesma variou entre o mínimo de 54.81 C e o máximo de 57,15 C.
A segunda etapa de testes, com os relés de estado sólido instalados e com o sinalde potência aplicado ao aquecedor variando de forma contínua, foi realizada. Visandocomparar os resultados de modo similar com os obtidos nas experiências iniciais, o com-portamento da temperatura dos sensores da primeira zona transporte foi traçado. A Figura6.8 mostra o comportamento da evolução da temperatura na primeira zona de transporte.
Tempo (segundos)0 1000 2000 3000 4000 5000 6000
Tem
pera
tura
(°C
)
25
30
35
40
45
50
55
TT00TT04TT09
Figura 6.8: Temperatura nos sensores TT00, TT04 e TT09 para os testes de 2018. Fonte:Autoria própria (2018).
Esse gráfico mostra que a curva de temperatura não apresenta sobressinal, possibili-tando que os perfis de temperatura de interesse possam ser analisados sem precisar esperara temperatura estabilizar.
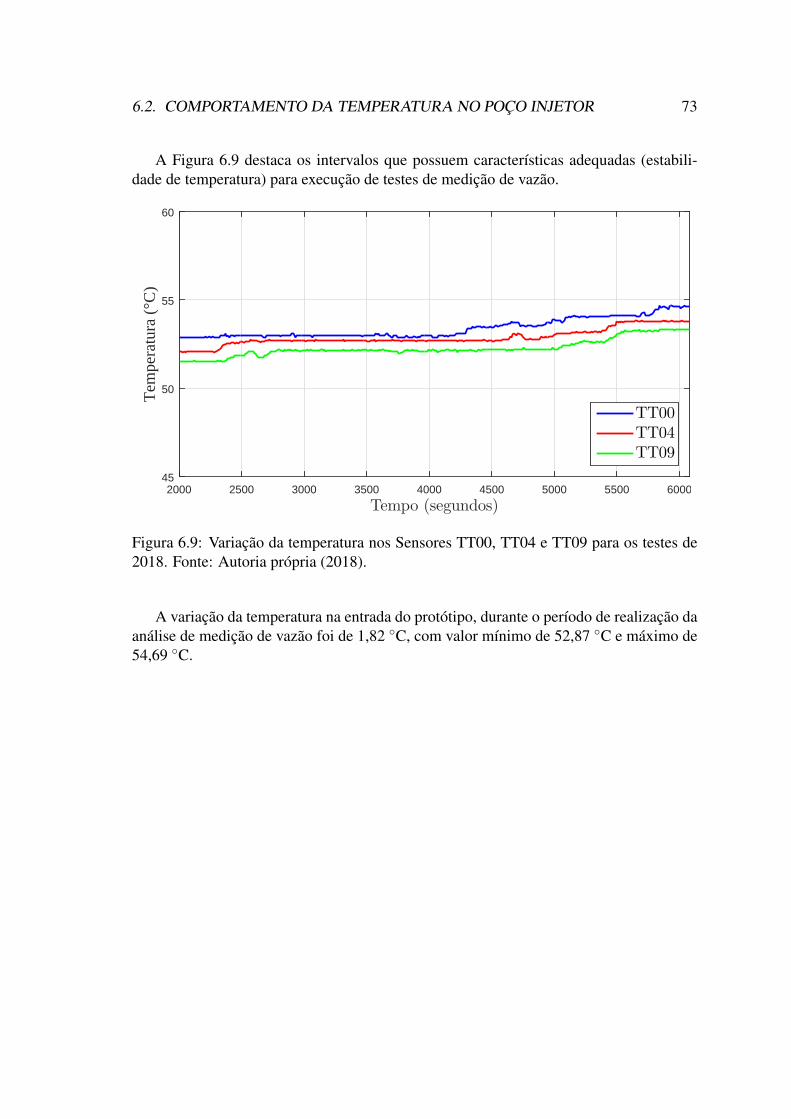
6.2. COMPORTAMENTO DA TEMPERATURA NO POÇO INJETOR 73
A Figura 6.9 destaca os intervalos que possuem características adequadas (estabili-dade de temperatura) para execução de testes de medição de vazão.
Tempo (segundos)2000 2500 3000 3500 4000 4500 5000 5500 6000
Tem
pera
tura
(°C
)
45
50
55
60
TT00TT04TT09
Figura 6.9: Variação da temperatura nos Sensores TT00, TT04 e TT09 para os testes de2018. Fonte: Autoria própria (2018).
A variação da temperatura na entrada do protótipo, durante o período de realização daanálise de medição de vazão foi de 1,82 C, com valor mínimo de 52,87 C e máximo de54,69 C.
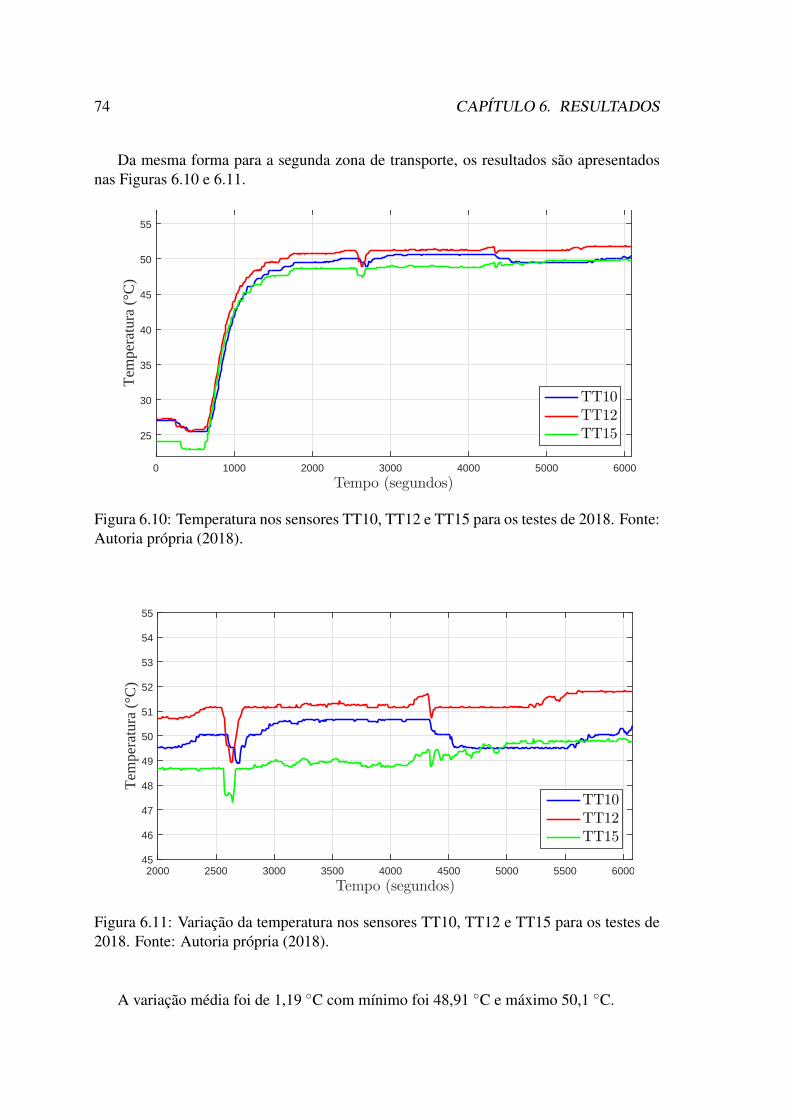
74 CAPÍTULO 6. RESULTADOS
Da mesma forma para a segunda zona de transporte, os resultados são apresentadosnas Figuras 6.10 e 6.11.
Tempo (segundos)0 1000 2000 3000 4000 5000 6000
Tem
pera
tura
(°C
)
25
30
35
40
45
50
55
TT10TT12TT15
Figura 6.10: Temperatura nos sensores TT10, TT12 e TT15 para os testes de 2018. Fonte:Autoria própria (2018).
Tempo (segundos)2000 2500 3000 3500 4000 4500 5000 5500 6000
Tem
pera
tura
(°C
)
45
46
47
48
49
50
51
52
53
54
55
TT10TT12TT15
Figura 6.11: Variação da temperatura nos sensores TT10, TT12 e TT15 para os testes de2018. Fonte: Autoria própria (2018).
A variação média foi de 1,19 C com mínimo foi 48,91 C e máximo 50,1 C.
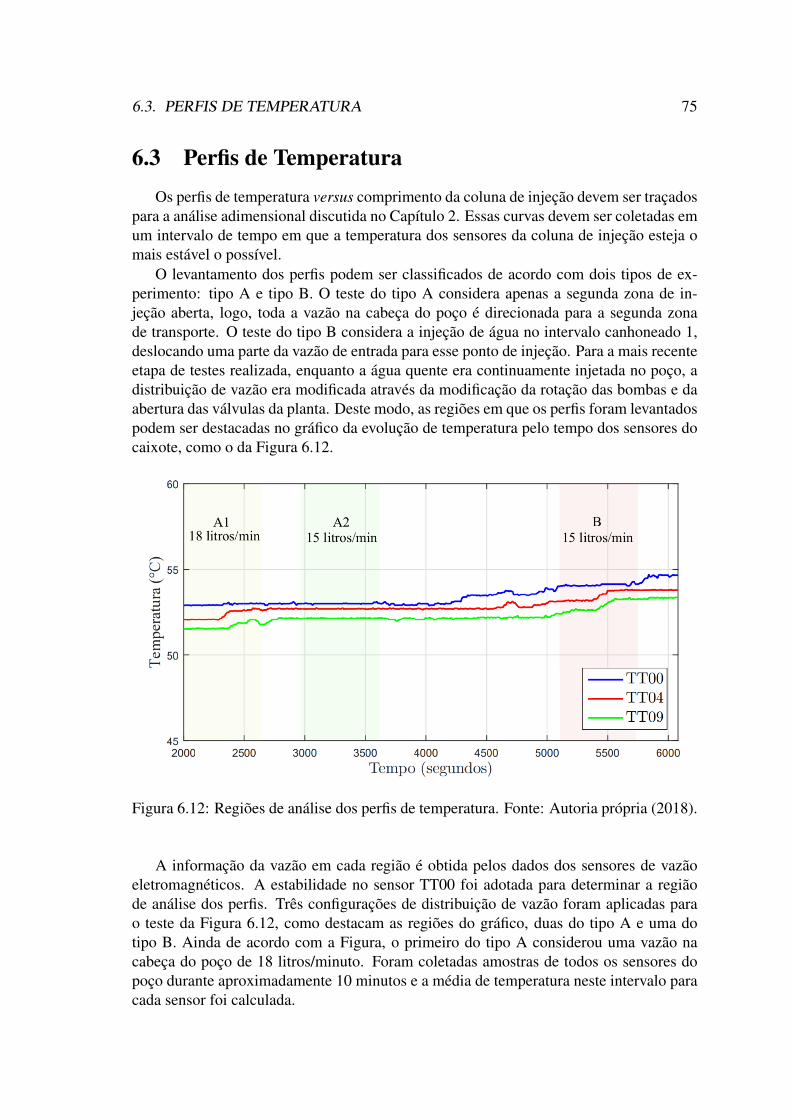
6.3. PERFIS DE TEMPERATURA 75
6.3 Perfis de TemperaturaOs perfis de temperatura versus comprimento da coluna de injeção devem ser traçados
para a análise adimensional discutida no Capítulo 2. Essas curvas devem ser coletadas emum intervalo de tempo em que a temperatura dos sensores da coluna de injeção esteja omais estável o possível.
O levantamento dos perfis podem ser classificados de acordo com dois tipos de ex-perimento: tipo A e tipo B. O teste do tipo A considera apenas a segunda zona de in-jeção aberta, logo, toda a vazão na cabeça do poço é direcionada para a segunda zonade transporte. O teste do tipo B considera a injeção de água no intervalo canhoneado 1,deslocando uma parte da vazão de entrada para esse ponto de injeção. Para a mais recenteetapa de testes realizada, enquanto a água quente era continuamente injetada no poço, adistribuição de vazão era modificada através da modificação da rotação das bombas e daabertura das válvulas da planta. Deste modo, as regiões em que os perfis foram levantadospodem ser destacadas no gráfico da evolução de temperatura pelo tempo dos sensores docaixote, como o da Figura 6.12.
Figura 6.12: Regiões de análise dos perfis de temperatura. Fonte: Autoria própria (2018).
A informação da vazão em cada região é obtida pelos dados dos sensores de vazãoeletromagnéticos. A estabilidade no sensor TT00 foi adotada para determinar a regiãode análise dos perfis. Três configurações de distribuição de vazão foram aplicadas parao teste da Figura 6.12, como destacam as regiões do gráfico, duas do tipo A e uma dotipo B. Ainda de acordo com a Figura, o primeiro do tipo A considerou uma vazão nacabeça do poço de 18 litros/minuto. Foram coletadas amostras de todos os sensores dopoço durante aproximadamente 10 minutos e a média de temperatura neste intervalo paracada sensor foi calculada.
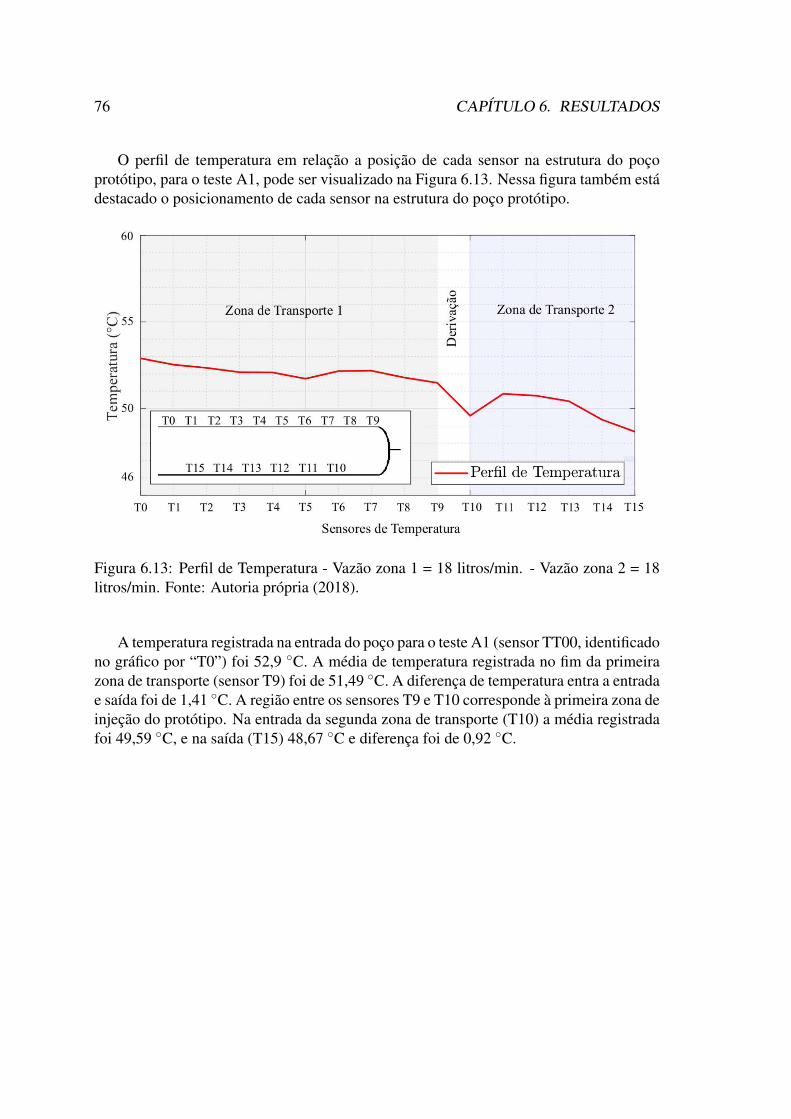
76 CAPÍTULO 6. RESULTADOS
O perfil de temperatura em relação a posição de cada sensor na estrutura do poçoprotótipo, para o teste A1, pode ser visualizado na Figura 6.13. Nessa figura também estádestacado o posicionamento de cada sensor na estrutura do poço protótipo.
Figura 6.13: Perfil de Temperatura - Vazão zona 1 = 18 litros/min. - Vazão zona 2 = 18litros/min. Fonte: Autoria própria (2018).
A temperatura registrada na entrada do poço para o teste A1 (sensor TT00, identificadono gráfico por “T0”) foi 52,9 C. A média de temperatura registrada no fim da primeirazona de transporte (sensor T9) foi de 51,49 C. A diferença de temperatura entra a entradae saída foi de 1,41 C. A região entre os sensores T9 e T10 corresponde à primeira zona deinjeção do protótipo. Na entrada da segunda zona de transporte (T10) a média registradafoi 49,59 C, e na saída (T15) 48,67 C e diferença foi de 0,92 C.
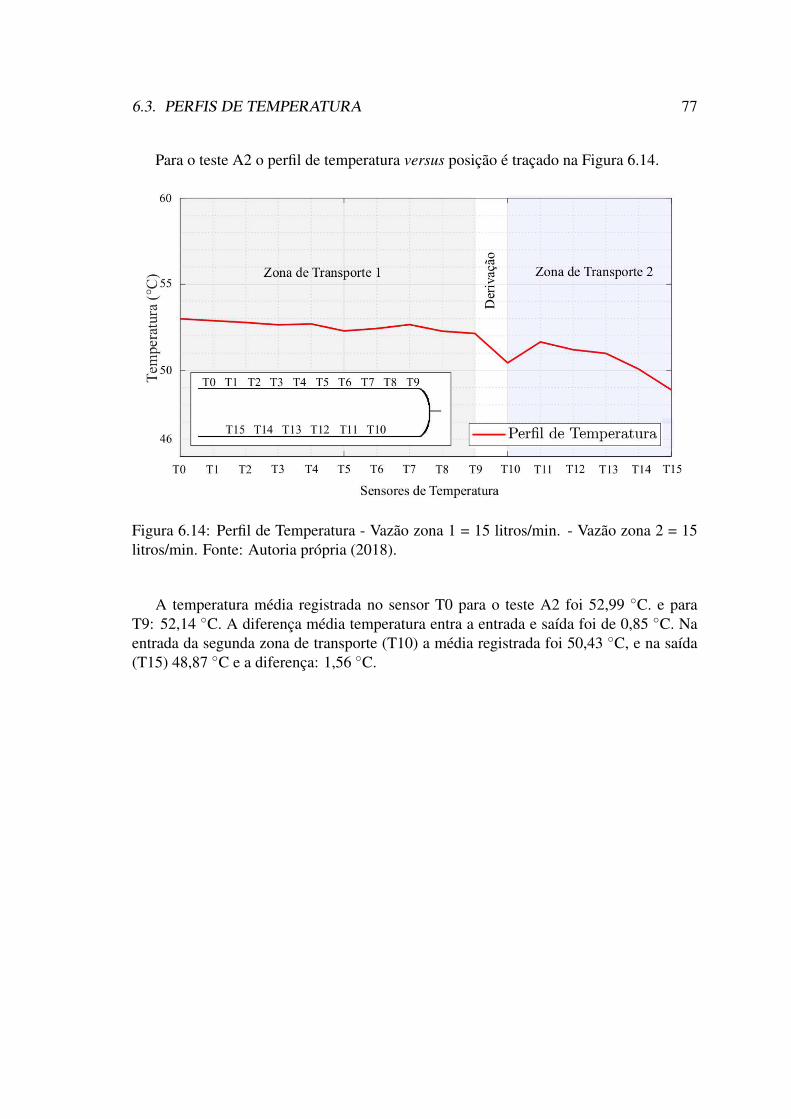
6.3. PERFIS DE TEMPERATURA 77
Para o teste A2 o perfil de temperatura versus posição é traçado na Figura 6.14.
Figura 6.14: Perfil de Temperatura - Vazão zona 1 = 15 litros/min. - Vazão zona 2 = 15litros/min. Fonte: Autoria própria (2018).
A temperatura média registrada no sensor T0 para o teste A2 foi 52,99 C. e paraT9: 52,14 C. A diferença média temperatura entra a entrada e saída foi de 0,85 C. Naentrada da segunda zona de transporte (T10) a média registrada foi 50,43 C, e na saída(T15) 48,87 C e a diferença: 1,56 C.
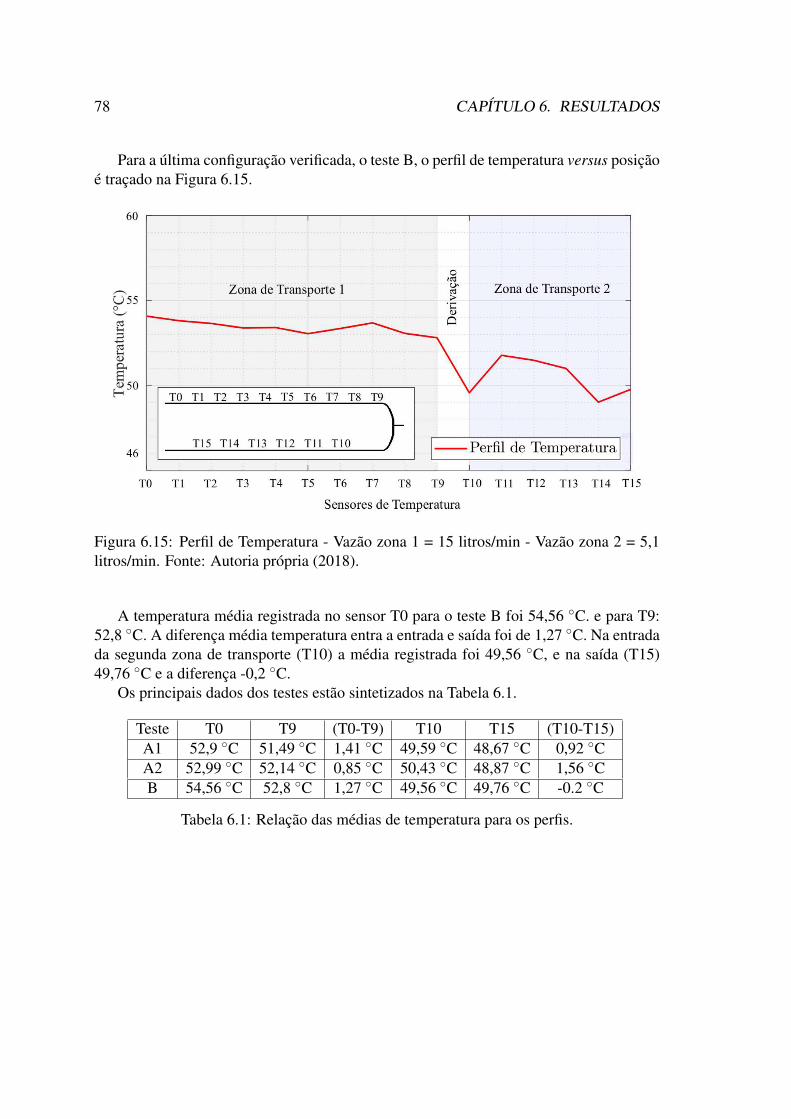
78 CAPÍTULO 6. RESULTADOS
Para a última configuração verificada, o teste B, o perfil de temperatura versus posiçãoé traçado na Figura 6.15.
Figura 6.15: Perfil de Temperatura - Vazão zona 1 = 15 litros/min - Vazão zona 2 = 5,1litros/min. Fonte: Autoria própria (2018).
A temperatura média registrada no sensor T0 para o teste B foi 54,56 C. e para T9:52,8 C. A diferença média temperatura entra a entrada e saída foi de 1,27 C. Na entradada segunda zona de transporte (T10) a média registrada foi 49,56 C, e na saída (T15)49,76 C e a diferença -0,2 C.
Os principais dados dos testes estão sintetizados na Tabela 6.1.
Teste T0 T9 (T0-T9) T10 T15 (T10-T15)A1 52,9 C 51,49 C 1,41 C 49,59 C 48,67 C 0,92 CA2 52,99 C 52,14 C 0,85 C 50,43 C 48,87 C 1,56 CB 54,56 C 52,8 C 1,27 C 49,56 C 49,76 C -0.2 C
Tabela 6.1: Relação das médias de temperatura para os perfis.
Capítulo 7
Conclusão
Este trabalho estudou a aplicação de um sistema de automação ao protótipo de medi-ção de vazão a partir de temperatura construído no Laboratório de Avaliação de Mediçãoem Petróleo da UFRN. Foram realizados os processos de especificação de instrumentos,análise prévia de operação da planta, instalação de equipamentos, programação do sis-tema supervisório, instalação e configuração da rede de comunicação, montagem elétricados quadros de acionamento e controle dos instrumentos de campo, descrição matemáticado sistema de aquecimento e por fim, testes de integração do sistema e validação da estru-tura. Este trabalho pode ser utilizado como um guia geral de operação do sistema, em quea teoria sobre a aplicação industrial do equipamento pode ser encontrada e os manuais deinstalação e operação podem ser consultados (Apendices A e B, respectivamente).
Os resultados da operação do sistema comprovaram a viabilidade técnica de operaçãodo sistema de aquecimento e os testes de controle de temperatura mostram que é possívelatender aos objetivos propostos a partir de um projeto mais detalhado de controlador.
Os sensores instalados permitiram o levantamento dos perfis de temperatura esperadose apresentaram leituras confiáveis que garantem a repetibilidade das experiências paradiferentes condições de testes.
O gerenciamento da planta por meio do sistema supervisor programado não apresen-tou falhas de comunicação ou de operação para os intertravamentos especificados. Alémdisso, permitiu o acompanhamento adequado da operação sem apresentar travamentos.Todos os resultados abordados no capítulo anterior foram coletados através da rotina degeração de relatório implementada no supervisório.
Através dos perfis de temperatura e análises dos dados, é possível observar a relaçãoqualitativa esperada o comportamento da vazão e do perfil de temperatura. Com os perfistraçados, as vazões podem ser obtidas com a metodologia apresentada no Capitulo 2.
Foi possível identificar também um comportamento imprevisível nos sensores próxi-mos as bordas da estrutura do poço protótipo, principalmente para os sensores T10 e T15.Os valores encontrados para esses sensores e destacados na Tabela 6.1 mostram que osmesmos não seguem a tendência esperada, e observada nos demais sensores. Essa dis-persão é prejudicial para a aplicação da metodologia de medição de vazão pois o poço jápossui um número limitado do sensores na segunda zona. Esse efeito pode ser atribuídoà influêcia das bordas do protótipo na temperatura dos sensores das extremidades.
Comparando os perfis de temperatura para os testes A1, A2 e B, constatou-se que ovalor médio dos perfis aumenta de forma cronológica à realização dos testes. Esse efeito

80 CAPÍTULO 7. CONCLUSÃO
é atribuído ao aquecimento da estrutura do poço protótipo devido à influência da tem-peratura injetada. Essa condição também prejudica a realização dos testes pois modificaa temperatura geotérmica, que deveria permanecer constante. Esse problema pode serresolvido ao adotar-se um sistema de irrigação mais eficiente.
As análises apresentadas permitem concluir que o objetivo geral deste trabalho foialcançado. O protótipo de monitoramento de vazão a partir de temperatura hoje é umaplanta automatizada que está pronta para realização de pesquisas voltadas para instru-mentação na indústria de petróleo. Considerando que atualmente há diferentes linhas depesquisa visando a obtenção da vazão a partir da temperatura, o protótipo de testes estádisponível para aplicação dessas diferentes abordagens e validação matemática dos mo-delagens teóricas. Com isso, o protótipo pode ser utilizado como laboratório de testesdessas novas propostas.
Estudos futuros acerca do controle de temperatura do tanque 1 também podem serrealizados. Pode-se analisar o emprego de controladores que se adaptem às variaçõesde parâmetros da planta em uma estrutura de hardware diferente da atual (ControladorNovus N2000). Também é possível estudar uma abordagem que vise também o controlede nível do tanque 1 ou que englobe a variação do nível do tanque na geração dos sinaisde controle aplicados. Outra abordagem do sistema de controle que pode ser analisada é amodificação da variável de processo para à entrada do poço, alterando-se completamentea dinâmica atual da planta. Em relação à modelagem do aquecedor, uma descrição maispróxima da realidade pode ser alcançada por meio da análise da planta com parâmetrosdistribuídos.
Visando diminuir as perdas de energia térmica por convecção nas tubulações, pode-seadotar a aplicação do isolamento térmico das linhas que circulam a água quente. Outramodificação física no aquecedor que pode contribuir para o controle de temperatura éadição de mais resistores de imersão ao cilindro de aquecimento, considerando que afonte de energia do sistema ainda permite um acréscimo na potência de trabalho.
Outra possibilidade de experimentos a serem realizados é a utilização da tecnologiaDTS para o monitoramento da temperatura na coluna de injeção.
Por fim, o ponto mais importante a ser avaliado para execução de projetos futuros é apossibilidade de aumentar o tamanho físico da estrutura que simula as zonas de injeção.Essa modificação pode resolver o problemas das dispersões encontradas nos sensores dasextremidades das zonas de injeção e pode aumentar a diferença de temperatura entre aentrada e saída de cada zona, aumentando a precisão dos dados coletados.
Referências Bibliográficas
Abbas, Ahmed GsemAlkreem, AlaaAwadElkareem Mohammed, Linda Abdul HafeezAwad, Mohammed Abdul Monim Ibraheem et al. (2015), Feasibility Study of Im-proved Oil Recovery through Water flooding In Sudanese Oil Field (Case Study),Tese de doutorado, Sudan University of Science and Technology.
Abukhamsin, Ahmed Yasin (2016), Inflow Profiling and Production Optimization inSmart Wells Using Distributed Acoustic and Temperature Measurements, Tese dedoutorado, Stanford University.
Alves, Ibere N., Francisco J.S. Alhanati & Ovadia Shoham (1992), ‘A unified model forpredicting flowing temperature distribution in wellbores and pipelines’, SPE pro-duction Engineering 7(04), 363–367.
Amado, José A. D. (2008), Projeto e controle de um sistema de aquecimento no labora-tório de avaliação de medição em petróleo, Dissertação de mestrado, UniversidadeFederal do Rio Grande do Norte, UFRN, Natal, RN.
Ameer, SA, AK Almoayyed et al. (1979), Single-string multi-zone completions in thebahrain field, em ‘Middle East Technical Conference and Exhibition’, Society ofPetroleum Engineers.
Bai, Baojun (2008), ‘Overview: Eor/ior (january 2008)’, Journal of Petroleum Technology60(01), 42–42.
Batocchio, Marcelo A Pavanelli, Adriana Lucia Cerri Triques, Hardy Leonardo Pinto,Carlos Sales Souza, Ronaldo Goncalves Izetti et al. (2010), Case history-steam in-jection monitoring with optical fiber distributed temperature sensing, em ‘SPE Intel-ligent Energy Conference and Exhibition’, Society of Petroleum Engineers.
Bird, James M. (1954), Interpretation of temperature logs in water-and gas-injection wellsand gas-producing wells, em ‘Drilling and Production Practice’, American Petro-leum Institute, pp. 187–195.
Britto, Ursula (2016), Monitorador de vazão de injeção através de medição de tempera-turas em poços multi-zonas, B.S. thesis, Universidade Federal do Rio Grande doNorte.
Bustamante, AC, CS Kabir, ZA Reza et al. (2018), Learning reservoir dynamics metrics ofimproved oil recovery projects by harnessing real-time analysis and data analytics,em ‘SPE Improved Oil Recovery Conference’, Society of Petroleum Engineers.
81
82 REFERÊNCIAS BIBLIOGRÁFICAS
Carlson, Norman R, JC Bamette et al. (1990), Judging the quality of continuous spinnerflowmeter logs, em ‘SPWLA 31st Annual Logging Symposium’, Society of Pe-trophysicists and Well-Log Analysts.
Çencel, Yunus A (2009), ‘Transferência de calor e massa: uma abordagem prática’.
Cobb, William & James Smith (2001), Waterflooding, William M. Cobb Associates,Dallas, EUA.
Freitas, Victor Carvalho Galvão de (2016), Desenvolvimento de sistema de supervisãopara um duto de testes de pigs, Dissertação de mestrado, Brasil.
Fryer, Vance I, Shuxing Dong, Yujiro Otsubo, George Albert Brown, Paul Guilfoyle et al.(2005), Monitoring of real-time temperature profiles across multizone reservoirs du-ring production and shut in periods using permanent fiber-optic distributed tempera-ture systems, em ‘SPE Asia Pacific Oil and Gas Conference and Exhibition’, Societyof Petroleum Engineers.
Green, Don W, G Paul Willhite et al. (1998), Enhanced oil recovery, Vol. 6, Henry L.Doherty Memorial Fund of AIME, Society of Petroleum Engineers Richardson, TX.
Güemes, Alfredo, Antonio Fernández-López & Brian Soller (2010), ‘Optical fiber distri-buted sensing-physical principles and applications’, Structural Health Monitoring9(3), 233–245.
Hasan, A. Rashid & C. S. Kabir (1994), ‘Aspects of wellbore heat transfer during two-phase flow (includes associated papers 30226 and 30970)’, SPE Production & Faci-lities 9(03), 211–216.
Ilijanic, Marko, Mato Fruk & Goran Malcic (2006), Ultrasonic level measuring, em‘Medunarodni skup MIPRO (29; 2006)’.
Jaimes, M. G., J. A. Prada, R. Dorado & E. Cornejo (2014), Conceptual study and eva-luation of the dts-fiber-optic system as monitoring system of injection-productionprofiles in conventional reservoirs: A colombian field application, em ‘SPE LatinAmerica and Caribbean Petroleum Engineering Conference’, Society of PetroleumEngineers.
Jiang, Liping, Hang Ruan, Yaosheng Chen, Yanjing Liu, Richard O Claus et al. (2000),Measurement of water content of oil downhole using fiber optic sensors and nano-techonology, em ‘Offshore Technology Conference’, Offshore Technology Confe-rence.
Kuphaldt, Tony R (2017), Lessons in industrial instrumentation, Creative Commons At-tribution/PAControl. com.
Lima, V. S. (2017), Protótipo para a avaliação das metodologias de medição de vazão apartir do perfil térmico em poços injetores d’água, Dissertação de mestrado, Univer-sidade Federal do Rio Grande do Norte, UFRN, Natal, RN. 2017.
REFERÊNCIAS BIBLIOGRÁFICAS 83
Liu, Lihua, Xingjian Fu, Qiaoling Wang & Xiaohe Liu (2013), Water temperature controlof an electrically heated boiler based on robust pid, em ‘Mechatronic Sciences, Elec-tric Engineering and Computer (MEC), Proceedings 2013 International Conferenceon’, IEEE, pp. 201–205.
McDonald, Alan T, Stephen H Friskney & David J Ulrich (1989), ‘Thermal model of thedishwasher heater in air’, IEEE transactions on industry applications 25(6), 1176–1180.
Mehtiyev, Nijat, Mahmoodur Rahman & Dwayne Bourgoyne (2012), Determination ofwater injection zonal allocation from distributed temperature sensing data, em ‘SPEWestern Regional Meeting’, Society of Petroleum Engineers.
Mogollón, J. L., T. M. Lokhandwala & E. Tillero (2017), New trends in waterfloodingproject optimization, em ‘SPE Latin America and Caribbean Petroleum EngineeringConference’, Society of Petroleum Engineers.
Nowak, T. J. (1953), ‘The estimation of water injection profiles from temperature sur-veys’, Journal of Petroleum Technology 5(08), 203–212.
Ouyang, Liang-Biao, Dave Belanger et al. (2004), Flow profiling via distributed tempe-rature sensor (dts) system-expectation and reality, em ‘SPE Annual Technical Con-ference and Exhibition’, Society of Petroleum Engineers.
Ramey, H. J. (1962), ‘Wellbore heat transmission’, Journal of Petroleum Technology14(04), 427–435.
Reges, José Edenilson Oliveira (2016), ‘Medição das vazões e análise de incerteza empoços injetores de água multizonas a partir do perfil de temperatura do fluido’.
Reges, José EO, AO Salazar, Carla WSP Maitelli, Lucas G Carvalho & Ursula JB Britto(2016), ‘Flow rates measurement and uncertainty analysis in multiple-zone water-injection wells from fluid temperature profiles’, Sensors 16(7), 1077.
Ribeiro, Marco Antônio (1999), ‘Instrumentação’, Tek Treinamentos LTDA .
Rosa, Adalberto José, Renato de Souza Carvalho & José Augusto Daniel Xavier (2006),Engenharia de reservatórios de petróleo, Interciência.
Singh, Surendra P, O Gerald Kiel et al. (1982), Waterflood design (pattern, rate, andtiming), em ‘International Petroleum Exhibition and Technical Symposium’, Societyof Petroleum Engineers.
Webster, John G (1998), The measurement, instrumentation and sensors handbook, CRCpress.
Yousef, Ali A., Jim S. Liu, Guy Blanchard, , Salah Al-Saleh, Tareq Al-Zahrani, RashadAl-zahrani, Hassan Al-Tammar, Nayef Al-Mulhim & Saudi Aramco (2012), Smartwaterflooding: Industry, em ‘SPE Annual Technical Conference and Exhibition’,Society of Petroleum Engineers.
84 REFERÊNCIAS BIBLIOGRÁFICAS
Zhang, Peng (2010), Advanced industrial control technology, William Andrew.
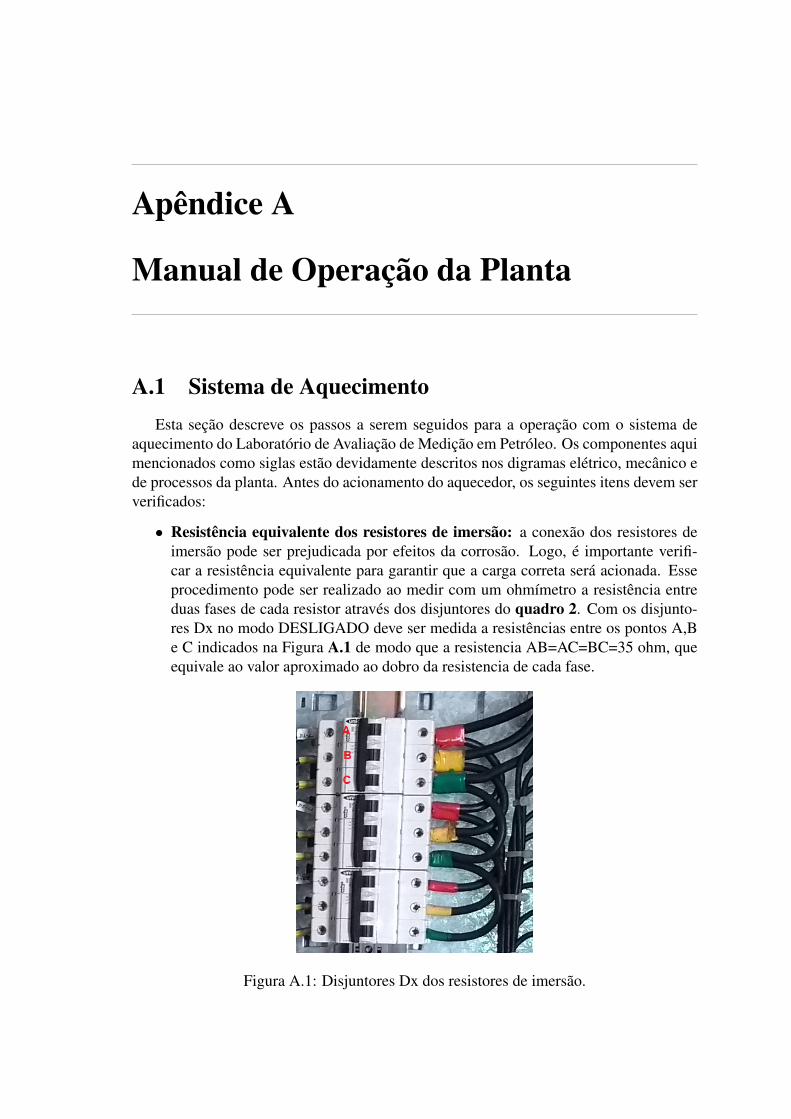
Apêndice A
Manual de Operação da Planta
A.1 Sistema de AquecimentoEsta seção descreve os passos a serem seguidos para a operação com o sistema de
aquecimento do Laboratório de Avaliação de Medição em Petróleo. Os componentes aquimencionados como siglas estão devidamente descritos nos digramas elétrico, mecânico ede processos da planta. Antes do acionamento do aquecedor, os seguintes itens devem serverificados:
• Resistência equivalente dos resistores de imersão: a conexão dos resistores deimersão pode ser prejudicada por efeitos da corrosão. Logo, é importante verifi-car a resistência equivalente para garantir que a carga correta será acionada. Esseprocedimento pode ser realizado ao medir com um ohmímetro a resistência entreduas fases de cada resistor através dos disjuntores do quadro 2. Com os disjunto-res Dx no modo DESLIGADO deve ser medida a resistências entre os pontos A,Be C indicados na Figura A.1 de modo que a resistencia AB=AC=BC=35 ohm, queequivale ao valor aproximado ao dobro da resistencia de cada fase.
Figura A.1: Disjuntores Dx dos resistores de imersão.

86 APÊNDICE A. MANUAL DE OPERAÇÃO DA PLANTA
• Nível de água no tanque 1: deve haver fluido armazenado no tanque em quanti-dade suficiente para preencher a tubulação de recirculação do sistema de aqueci-mento e do Aquecedor e, além disso, para garantir que a BOMBA 1 não opere emvazio.
• Abertura das válvulas manuais: permitir o fluxo na linha de recirculação.• Acionar quadro do CLP WEG TPW03: procedimento necessário para o aciona-
mento das válvulas pneumáticas.• Abertura da válvula pneumática XV21: esse procedimento deve ser realizado
a partir do programa supervisório com o objetivo de permitir o fluxo na linha derecirculação.
• Acionamento da BOMBA 1: o fluido deve estar em movimento na linha de recir-culação para garantir que não haverá o aquecimento excessivo do fluido armazenadono Aquecedor.
Seguidos os procedimentos anteriores, os passos para o acionamento do aquecedorsão:
1. Dentro do quadro 1, devem ser ligados os disjuntores dos grupos de resitencias: G1,G2 e G3.
2. Dentro do quadro 1, o disjuntor geral C1 deve ser acionado.3. Dentro do quadro 1, o disjuntor do controlador de processos (C2) deve ser acionado.4. Na tampa do quadro 1, posicione a chave S1 para o mono ON. Esse procedimento
acionará a contactora C1, nesse momento, o controlador de processos será ligado,bem como os exaustores dos relés de estado sólido). Observação: verifique nopainel do controlador o estado das saídas.
5. No quadro 2, ligue os disjuntores D1,D2,D3... de cada resistor de imersão. Obser-vação: o número de resistores acionados é livre e dependerá da aplicação.
6. Controle a operação do sistema a partir do painel do controlador e/ou sistema su-pervisório.
A.2 Protótipo de Monitoramento de Injeção
Esta seção descreve os passos a serem seguidos para a operação com o sistema deaquecimento do Laboratório de Avaliação de Medição em Petróleo. Os componentes aquimencionados como siglas estão devidamente descritos nos digramas elétrico, mecânico ede processos da planta. Antes do início das operações na planta, os seguintes itens devemser verificados:
• Nível de água no tanque 1: deve haver fluido armazenado no tanque em quanti-dade suficiente para preencher a tubulação de toda a linha de operação do protó-tipo. Toda a água utilizada nas experiências deve estar armazenada no tanque 1.O horizonte de testes deve ser analisado previamente e o nível adequado deve serestabelecido no tanque.
A.2. PROTÓTIPO DE MONITORAMENTO DE INJEÇÃO 87
• Abertura das válvulas manuais: as válvulas das linhas utilizadas devem ser colo-cadas na posição ABERTA e antes do início das experiências essa situação deve serSEMPRE verificada.
Seguidos os procedimentos anteriores, os passos para a utilização do sistema são:
1. Acionar o compressor para alimentação das linhas de ar. Deve-se aguardar atéo mesmo atingir aproximadamente 6 bar de pressão para que as válvulas abramcorretamente.
2. Acionar o CLP TPW03. Acionar os disjuntores D1, D2, D3 e D4 (devem ser aci-onados nesta sequencia e desligados na sequencia inversa: D4, D3, D2 e D1) doquadro elétrico do CLP.
3. Acionar os inversores de tensão. Acionar os disjuntores D0 e D1 do quadro dosinversores.
4. Verificar, no supervisório, se as variáveis do sistema estão sendo medidas.5. Abrir, através do supervisório, as válvulas pneumáticas das linhas que serão utili-
zadas.6. O acionamento de todos os atuadores do sistema pode ser realizado via supervisó-
rio. Especificamente, as bombas podem ser operadas, além do supervisório, atravésdas interfaces dos inversores de frequência.

88 APÊNDICE A. MANUAL DE OPERAÇÃO DA PLANTA
Apêndice B
Layouts
B.1 Layout - Cabeamento do CLP WEG TPW03A Figura B.1 mostra o layout de encaminhamento das conexões dos sensores da planta
ao CLP TPW03.
B.2 Esquema Elétrico - Quadro CLP WEG TPW03As Figuras B.2 e B.3 mostram os esquemas de conexões elétricas do quadro de insta-
lação do CLP TPW03.
B.3 Esquema Elétrico - Inversores de TensãoA Figura B.4 mostra o esquema de conexão elétricas do quadro dos inversores de
tensão.
B.4 Esquema Elétrico - Quadro do AquecedorAs Figuras B.5, B.6, B.7, B.8, B.9 e B.10 mostram os esquemas de conexões elétricas
dos quadrso de instalação do sistema de aquecimento de água.

90 APÊNDICE B. LAYOUTS
Figura B.1: Encaminhamento de cabos dos sensores da planta.
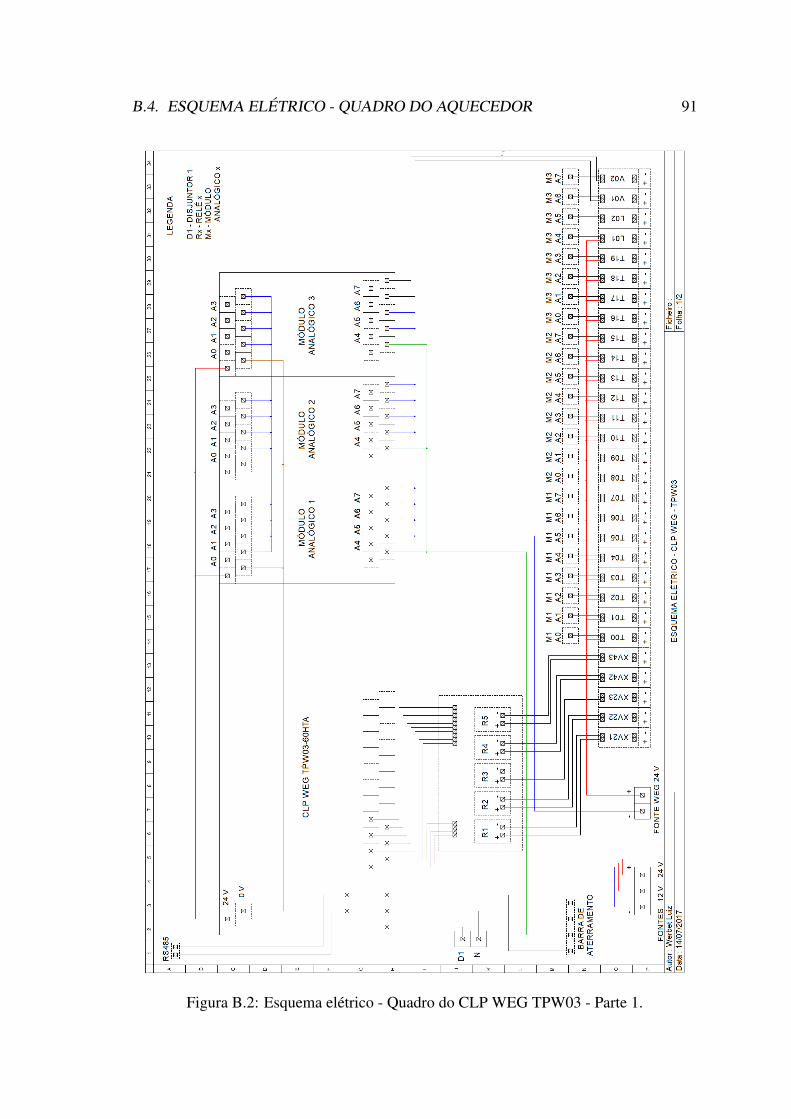
B.4. ESQUEMA ELÉTRICO - QUADRO DO AQUECEDOR 91
Figura B.2: Esquema elétrico - Quadro do CLP WEG TPW03 - Parte 1.

92 APÊNDICE B. LAYOUTS
Figura B.3: Esquema elétrico - quadro do CLP WEG TPW03 - Parte 2.
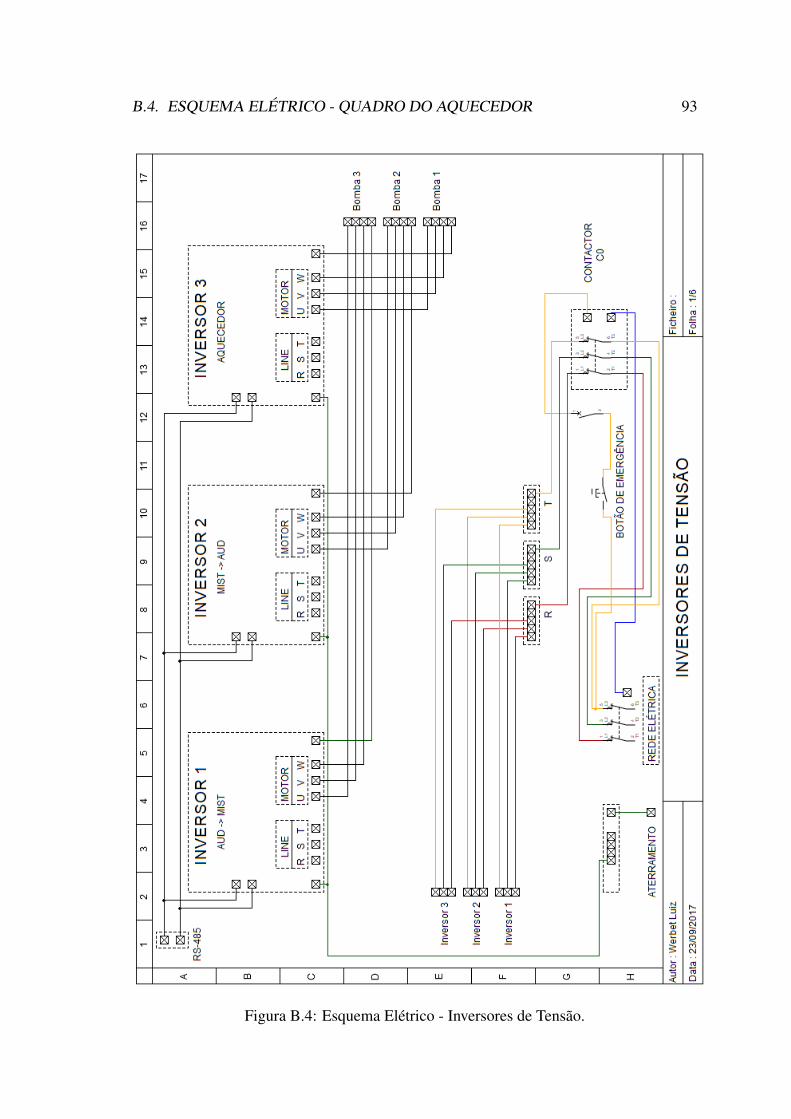
B.4. ESQUEMA ELÉTRICO - QUADRO DO AQUECEDOR 93
Figura B.4: Esquema Elétrico - Inversores de Tensão.
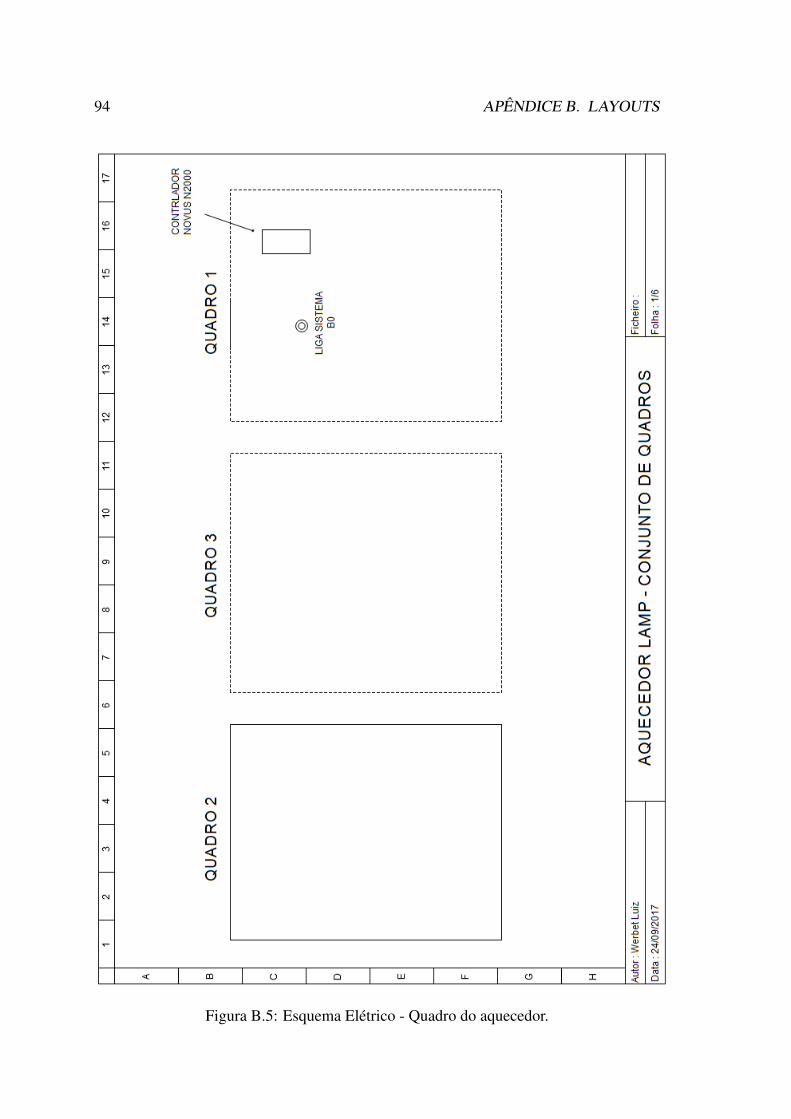
94 APÊNDICE B. LAYOUTS
Figura B.5: Esquema Elétrico - Quadro do aquecedor.
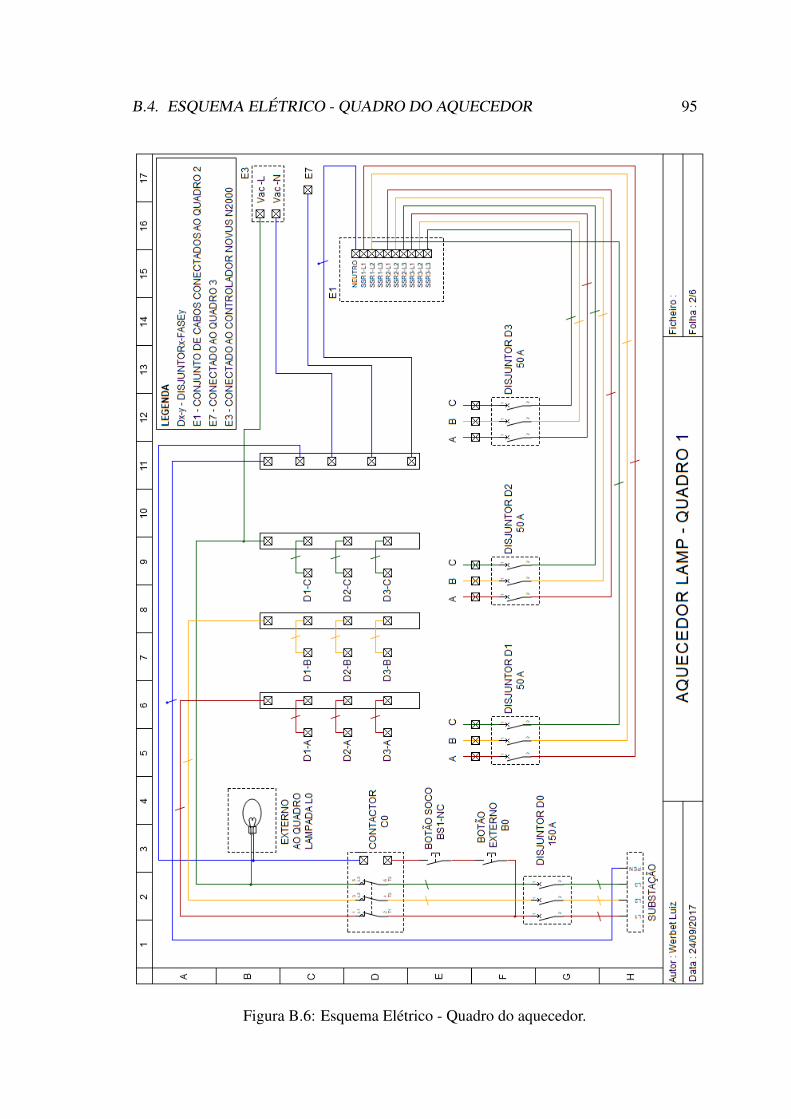
B.4. ESQUEMA ELÉTRICO - QUADRO DO AQUECEDOR 95
Figura B.6: Esquema Elétrico - Quadro do aquecedor.
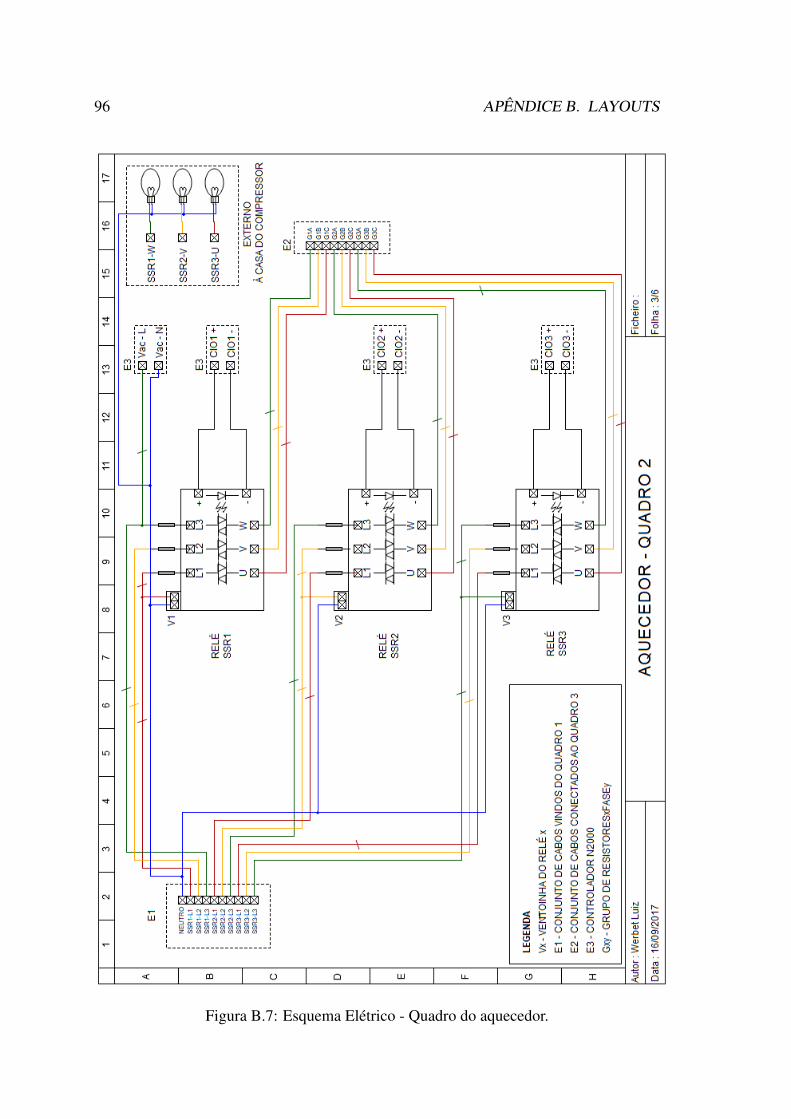
96 APÊNDICE B. LAYOUTS
Figura B.7: Esquema Elétrico - Quadro do aquecedor.
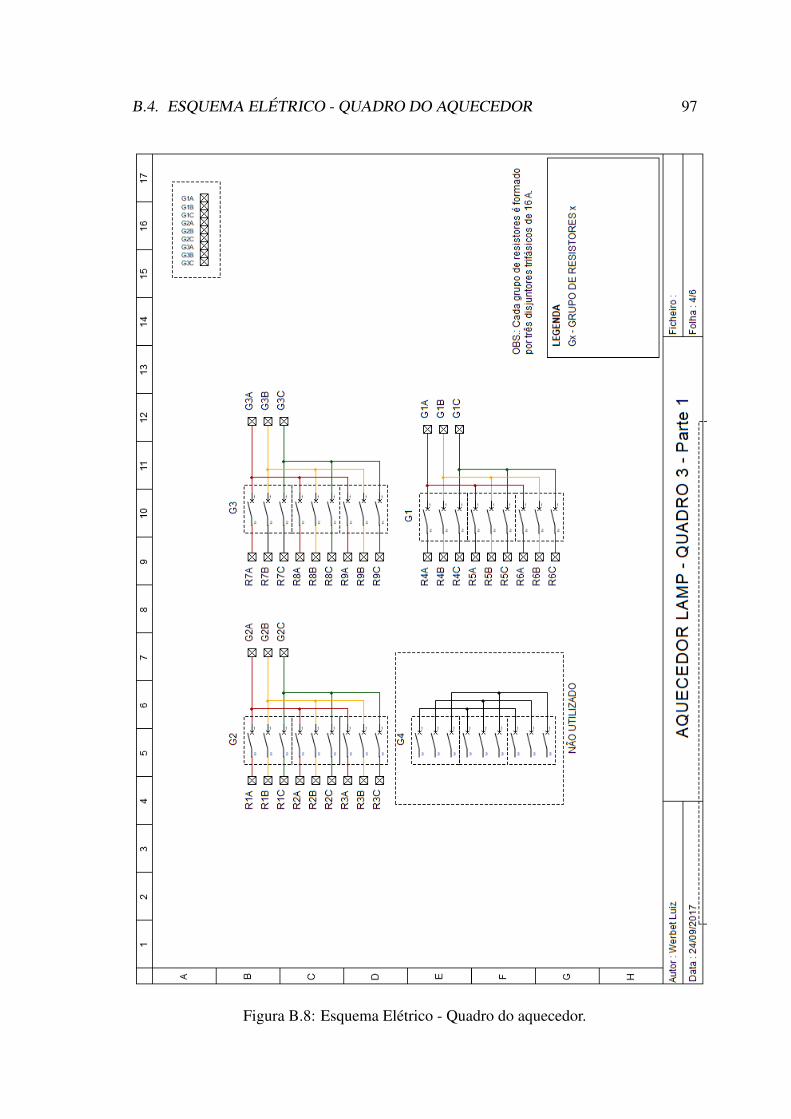
B.4. ESQUEMA ELÉTRICO - QUADRO DO AQUECEDOR 97
Figura B.8: Esquema Elétrico - Quadro do aquecedor.
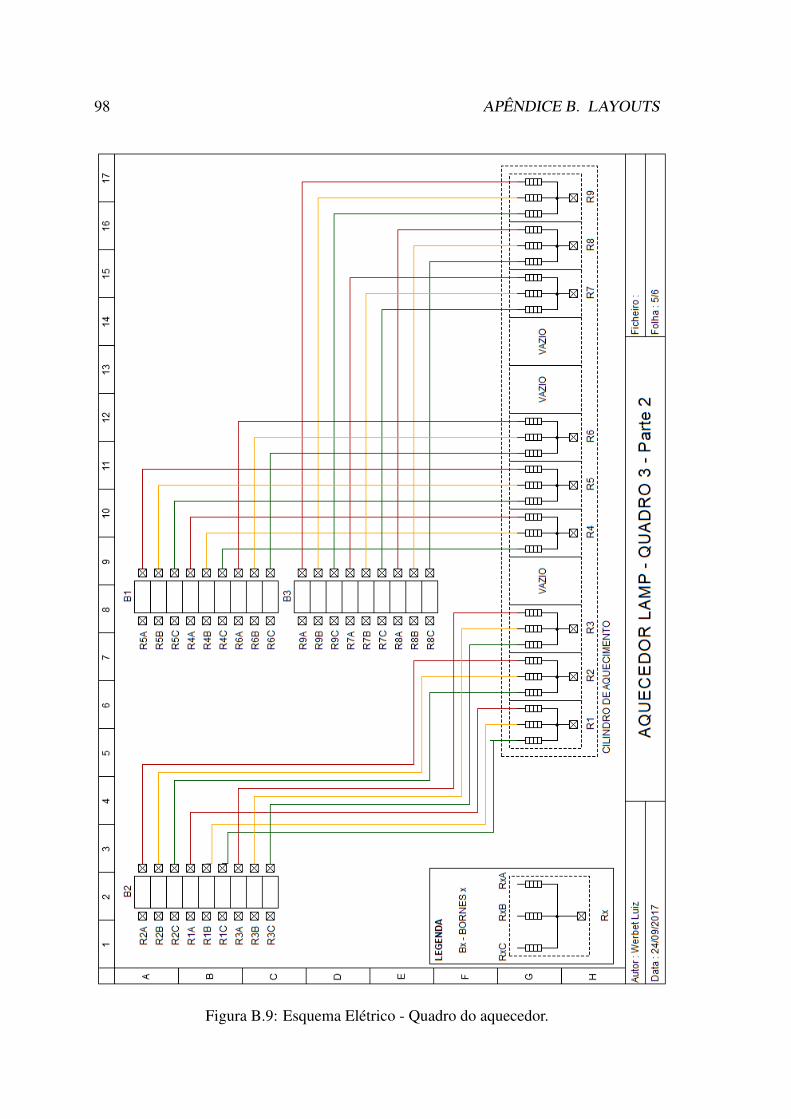
98 APÊNDICE B. LAYOUTS
Figura B.9: Esquema Elétrico - Quadro do aquecedor.
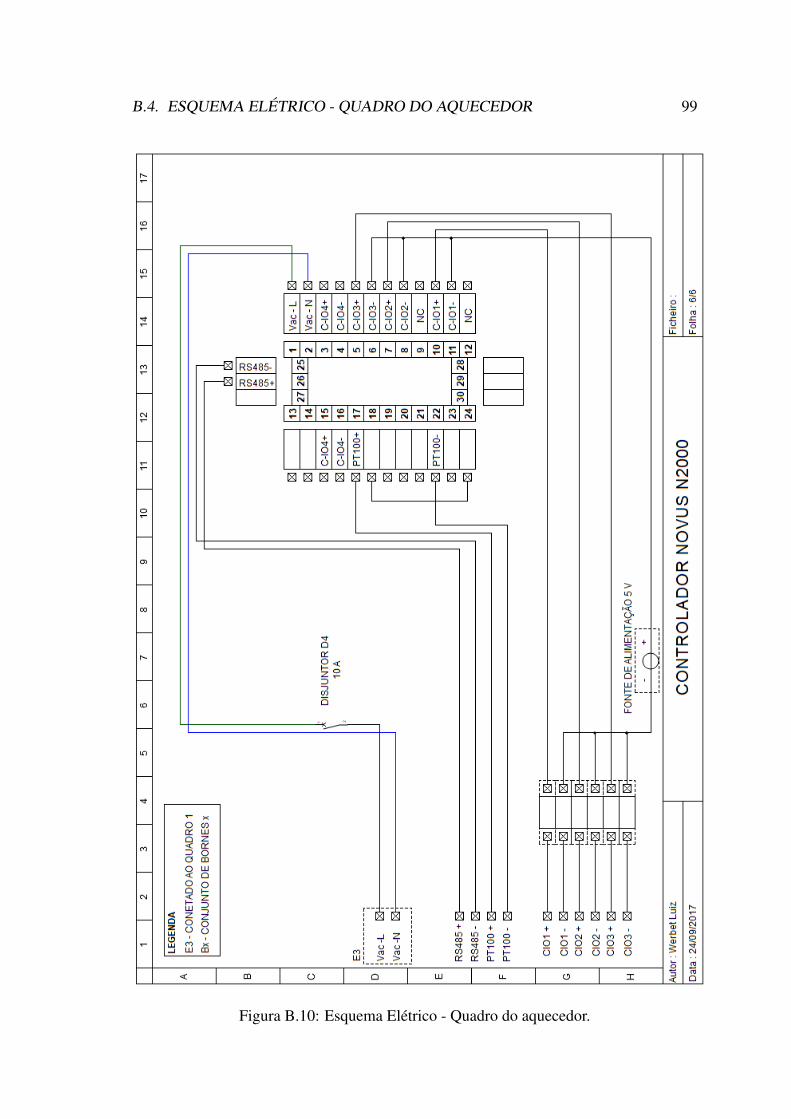
B.4. ESQUEMA ELÉTRICO - QUADRO DO AQUECEDOR 99
Figura B.10: Esquema Elétrico - Quadro do aquecedor.
Copyright © 2022 FDOKUMEN