
SISTEMA DE AUTOMAÇÃO PARA CULTIVO DE BABY LEAF ...
82
UNIVERSIDADE SÃO FRANCISCO Engenharia Mecânica Automação e Sistemas FELIPE DA S. MENDES DE PAULA LUAN FELIPE DA SILVEIRA CASTRO LUIS AUGUSTO DE GODOI BUENO SISTEMA DE AUTOMAÇÃO PARA CULTIVO DE BABY LEAF COM ILUMINAÇÃO ARTIFICIAL Campinas 2015
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of SISTEMA DE AUTOMAÇÃO PARA CULTIVO DE BABY LEAF ...

UNIVERSIDADE SÃO FRANCISCO
Engenharia Mecânica Automação e Sistemas
FELIPE DA S. MENDES DE PAULA LUAN FELIPE DA SILVEIRA CASTRO
LUIS AUGUSTO DE GODOI BUENO
SISTEMA DE AUTOMAÇÃO PARA CULTIVO DE BABY LEAF COM ILUMINAÇÃO ARTIFICIAL
Campinas 2015

FELIPE S. MENDES DE PAULA – R.A. 004201301934
LUAN FELIPE DA SILVEIRA CASTRO – R.A. 004201000829 LUIS AUGUSTO DE GODOI BUENO – R.A. 004201101179
SISTEMA DE AUTOMAÇÃO PARA CULTIVO DE BABY LEAF COM ILUMINAÇÃO ARTIFICIAL
Campinas 2015
Monografia apresentada ao Curso de Engenharia Mecânica – Ênfase em Automação e Sistemas da Universidade São Francisco, como requisito parcial para obtenção do título de Bacharel em Engenharia Mecânica. Orientador: Prof. D.r. William César Mariano

FELIPE DA S. MENDES DE PAULA
LUAN FELIPE DA SILVEIRA CASTRO LUIS AUGUSTO DE GODOI BUENO
SISTEMA DE AUTOMAÇÃO PARA CULTIVO DE BABY
LEAF COM ILUMINAÇÃO ARTIFICIAL
Banca examinadora: Prof. D.r. William Cesar Mariano (Orientador) USF – Universidade São Francisco – Campinas – SP. Prof. André Luis Pissolatti (Examinador) USF – Universidade São Francisco – Campinas – SP. Prof. Filipe Alves Coelho (Examinador) USF – Universidade São Francisco – Campinas – SP.
Monografia aprovada pelo programa de graduação Stricto Senso em Engenharia da Universidade São Francisco, como requisito para a obtenção do titulo de Bacharel em Engenharia Mecânica. Data de aprovação: ___ / ___ / ___

Este trabalho é dedicado aos professores que ensinam com dedicação, aos pais que inspiram com sabedoria, as esposas e companheiras que apoiam com complacência e aos filhos que motivam com alegria.

.AGRADECIMENTOS
Ao orientador deste trabalho Prof. Dr. William Cesar Mariano, pela dedicação, paciência e incentivo.
Ao Prof. Dr. Luiz Antônio Rossi da FEAGRI pela inspiração concedida para a realização do trabalho apresentado. Ao Leandro Barbosa Baer e à Phillips pelas luminárias cedidas para o desenvolvimento do experimento. Ao Dr. Antônio Bliska Junior, pelos concelhos cedidos para a realização do trabalho. Ao Prof. Rafael Vasconcelos Ribeiro, pelo auxílio referente ao tópico fisiologia vegetal. Ao Prof. Filipe Alves Coelho pelo auxílio referente ao tópico automação e sistemas. Ao pesquisador Dr. Luís Felipe Villani Purquerio e ao IAC – Instituto Agronômico de Campinas, pela disponibilidade e todo apoio e colaboração com os insumos agrícolas aplicados no projeto.

“O verdadeiro significado da vida é plantar uma árvore,
sob cujas sombras você na espera sentar.” Nelson Henderson
RESUMO
O sistema de agricultura tradicional é dependente do meio físico natural, sendo
resultante da condição favorável do solo, disponibilidade de luz solar, água, entre outros. Têm-se como uma necessidade atual crescente de se produzir vegetais com alta qualidade e minimizar os impactos ambientais causados pela agricultura tradicional, bem como a utilização eficaz dos nossos recursos naturais como água e por último, mas não menos importante, o rápido consumo destes alimentos, que possibilita a diminuição do desperdício e o consumo de alimentos de qualidade. A realização da produção agrícola visando estes benefícios pode ser obtida através da utilização do sistema de cultivo indoor, conhecida também como fazenda vertical. Conforme estudos apresentados, as principais variáveis envolvidas no processo de produção vegetal são: a temperatura, a umidade e a luminosidade. A presença destes fatores dentro dos limites aceitáveis proporciona condições propícias para o desenvolvimento de um vegetal saudável. Portando um sistema robusto para o controle destas variáveis torna-se indispensável. Este trabalho apresenta um sistema de automação desenvolvido para pesquisa voltada para o cultivo indoor com iluminação artificial. Ele utiliza um sistema de controle Open Sourse baseado na tecnologia Arduino que possibilita o controle completo das variáveis através de sensores e sistemas de acionamento. O sistema de experimentação foi instalado no centro de Campinas visando à utilização deste método em grandes centros urbanos e seus dados foram registrados por um datalogger para os estudos posteriores. Palavras-chave: Fazenda Vertical, iluminação artificial, recursos naturais e sistema de automação.

ABSTRACT
The traditional farming system is dependent on the natural physical
environment, being the result of favorable soil condition, availability of sunlight, water, among others. It is a growing need to produce vegetables with high quality and minimize the environmental impacts of traditional agriculture, and the effective use of our natural resources such as water and last but not least, the rapid consumption of these foods which enables reduced waste and consumption of food with high quality. The realization of agricultural production aiming these benefits can be obtained by using the indoor culture system, also known as vertical farm. As presented studies, the main variables involved in vegetable production process are: temperature, humidity and light. The presence of these factors within the acceptable range provides favorable conditions for the development of a healthy vegetable. Therefore a robust system to control these variables becomes indispensable. This paper presents an automation system developed for research aimed at the indoor cultivation with artificial lighting. It uses an Open Sourse control system based on Arduino technology that enables complete control variables using sensors and drive systems. The experimental system was installed in Campinas downtown, in order to use this method in large urban centers and their data were recorded by a data logger for further studies. Key words: Vertical farm, artificial lighting, natural resources and automation system.

LISTA DE ILUSTAÇÕES
FIGURA 1 - QUATRO DESAFIOS GLOBAIS ............................................................................ 3 FIGURA 2 - PEGADA ECOLÓGICA E BIOCAPACIDADE BRASIL .............................................. 4 FIGURA 3 - SINTERIZAÇÃO DOS CARBOIDRATOS A PARTIR DE DIÓXIDO DE CARBONO (CO2)
E ÁGUA, PARA A LIBERAÇÃO DE OXIGÊNIO. ................................................................ 8 FIGURA 4 - CONCEITO DE LUZ ............................................................................................ 9 FIGURA 5 - GRÁFICO DA RADIAÇÃO FOTOSSINTETICAMENTE ATIVA (PAR) ....................... 9 FIGURA 6 - CONCEITO DE FAZENDA VERTICAL ................................................................. 12 FIGURA 7 - PHILLIPS GREEN SENSE FARM ....................................................................... 14 FIGURA 8 - BABY LEAF .................................................................................................... 18 FIGURA 9 - SISTEMA DE CONTROLE BÁSICO .................................................................... 19 FIGURA 10 - SISTEMA DE CONTROLE MALHA ABERTA .................................................... 20 FIGURA 11 - SISTEMA DE CONTROLE DE MALHA FECHADA ............................................. 20 FIGURA 12 - SISTEMA DE CONTROLE ............................................................................... 21 FIGURA 13 - ARQUITETURA BÁSICA DO MICROCONTROLADOR ....................................... 27 FIGURA 14 - CPU E O CICLO DE BUSCA DE INSTRUÇÃO NA ROM ..................................... 28 FIGURA 15 - ARDUINO UNO ............................................................................................ 30 FIGURA 16 - ARDUINO MEGA 2560 REV3 ...................................................................... 31 FIGURA 17 - GREENPOWER LED PRODUCTION DR/B/FR 120 ......................................... 32 FIGURA 18 - SISTEMA DE EXPERIMENTAÇÃO COM LUZES APAGADAS (ESQUERDA) E LUZES
ACESAS (DIREIRA). ................................................................................................... 33 FIGURA 19 - SISTEMA DE MICROASPERSÃO ..................................................................... 34 FIGURA 20 - PAINEL DE CONTROLE ................................................................................. 36 FIGURA 21 - DISTRIBUIÇÃO DOS TRATAMENTOS .............................................................. 37 FIGURA 22 - DIAGRAMA SISTEMA DE CONTROLE ............................................................ 40 FIGURA 23 - FLUXOGRAMA SISTEMA DE AUTOMAÇÃO .................................................... 41 FIGURA 24 - DIAGRAMA HARDWARE............................................................................... 44 FIGURA 25 - ADVERSIDADE SENSOR DE UMIDADE DO SOLO ........................................... 48 FIGURA 26 - SENSOR DE UMIDADE E TEMPERATURA DO AR DHT22 ............................... 49 FIGURA 27 - SENSOR NÍVEL ÁGUA .................................................................................. 50 FIGURA 28 - SENSOR NÍVEL – ATUAÇÃO ......................................................................... 50 FIGURA 29 - MOTOBAMBA CENTRÍFUGA BC-98 .............................................................. 51

FIGURA 30 - SISTEMA DE INSTALAÇÃO HIDRÁULICA ........................................................ 52
FIGURA 31- VÁLVULA SOLENOIDE 100 DV ..................................................................... 56 FIGURA 32 - EMITÂNCIA LUMINOSA ................................................................................ 58 FIGURA 33 - DISTRIBUIÇÃO LUMINOSA ........................................................................... 59 FIGURA 34 – ESTIOLAMENTO APRESENTADOS APÓS TERMINO DO PERÍODO DE CULTIVO . 60

LISTA DE TABELAS
TABELA 1 - QUANTIDADE DE VAPOR DE ÁGUA NO PONTO DE ORVALHO .......................... 24 TABELA 2 - MÉTODOS PARA MEDIÇÃO DE UMIDADE. ....................................................... 25 TABELA 3 - TIPOS DE TERMOPAR (COMPOSIÇÃO E FAIXA DE TEMPERATURA) .................. 26 TABELA 4 - CARACTERÍSTICAS ARDUINO MEGA 2560 REV3 ........................................... 31 TABELA 5 - ESPECIFICAÇÃO TÉCNICA DHT22 ................................................................ 35 TABELA 6 - CARACTERÍSTICA TÉCNICA SENSOR NÍVEL .................................................. 35 TABELA 7 - CALIBRAÇÃO INICIAL ................................................................................... 47 TABELA 8 - DADOS CALIBRAÇÃO SENSORES 1 E 2 ........................................................... 47 TABELA 9 - CARACTERÍSTICA DA BOMBA ........................................................................ 51 TABELA 10 - VAZÃO X ALTURA MANOMÉTRICA .............................................................. 54

LISTA DE GRÁFICOS
GRÁFICO 1 - TEMPERATURA DO AR (°C) .......................................................................... 38 GRÁFICO 2 - TEMPERATURA DO AR (°C) .......................................................................... 38 GRÁFICO 3 – DESVIO PADRÃO SENSORES 1 E 3 UMIDADE DO SOLO ................................ 47 GRÁFICO 4 - CURVA CARACTERÍSTICA E RENDIMENTO DA BOMBA................................. 55

LISTA DE EQUAÇÕES
EQUAÇÃO 1 - CÁLCULO DA CAPACITÂNCIA ..................................................................... 26 EQUAÇÃO 2 - EQUAÇÃO DA VAZÃO ................................................................................. 53 EQUAÇÃO 3 - EQUAÇÃO DA ÁREA DE UMA CIRCUNFERÊNCIA .......................................... 53 EQUAÇÃO 4 - EQUAÇÃO DE REYNOLDS ........................................................................... 53 EQUAÇÃO 5 - EQUAÇÃO CCI (CURVA CARACTERÍSTICA DA INSTALAÇÃO) ..................... 53 EQUAÇÃO 6 - EQUAÇÃO DE PERDA DE CARGA DA INSTALAÇÃO ....................................... 53
LISTA DE ABREVIATURAS E SIGLAS
WHO – World Health Organization GFN – Global Footprint Network RFA – Radiação Fotossintéticamente Ativa PAR – Photosynthetically Active Radiation LED – Light Emitting Diode EUA – Estados Unidos da América NFT – Nutrient Film Technique CLP – Controlador Lógico Programável PPM – Parte por Milhão PTC – Positive Temperature Coefficient NTC – Negative Temperature Coefficient RAM – Random Access Memory CPU – Central Processing Unit ROM – Read Only Memory I/O – Input / Output ALU – Unidade Lógica Aritmética PC – Program Counter IR – Instruction Register USB – Universal Serial Bus Web – World Wide Web MAC – Macintosh LINUX – Núcleo de Sistemas Operacionais de código livre PWM – Pulse Width Modulation UART – Universal Asynchronous Receiver/Transmitter ICSP – In-Circuit Serial Programming AC-DC – Alternating Current / Direct Current PVC – Polyvinyl chloride CIIAGRO – Centro Integrado de Informações Agrometeorológicas SNA – Sensor de Nível Alto SNB – Sensor de Nível Baixo SUS1 – Sensor de Umidade do Solo1

SUS2 – Sensor de Umidade do Solo2
SUST – Sensor de Umidade do Solo Total STA – Sensor Temperatura do AR SUR – Sensor de Umidade Relativa USF – Universidade São Francisco CCI – Curva Característica da Instalação

SUMÁRIO
1 INTRODUÇÃO ............................................................................................................. 1 1.1 OBJETIVO ............................................................................................................ 2 1.2 JUSTIFICATIVA .................................................................................................. 3 1.3 ORGANIZAÇÃO TEXTUAL .............................................................................. 6
2 REVISÃO BIBLIOGRÁFICA .................................................................................... 7 2.1 FISIOLOGIA VEGETAL ..................................................................................... 7 2.1.1 Água e as células vegetais .................................................................................... 7 2.1.2 Fotossíntese e reações luminosas .......................................................................... 8 2.1.3 Crescimento e desenvolvimento vegetal ............................................................ 10 2.2 FAZENDA VERTICAL ...................................................................................... 11 2.2.1 Exposição ............................................................................................................ 13 2.2.2 Métodos de Cultivo ............................................................................................. 15 2.2.3 Método de irrigação ............................................................................................ 16 2.2.4 Cultura para Cultivo Vertical – Baby Leaf ......................................................... 17 2.3 AUTOMAÇÃO ASSOCIADA AO SISTEMA CULTIVO INDOOR ............... 18 2.3.1 Sistema de Controle ............................................................................................ 19 2.3.2 Arquitetura .......................................................................................................... 21 2.3.3 Sensores .............................................................................................................. 22 2.3.4 Controlador ......................................................................................................... 27
3 MÉTODOS E PROCESSOS ..................................................................................... 32 3.1 CARACTERIZAÇÃO DO PROTÓTIPO DE EXPERIMENTAÇÃO ............... 32 3.2 CARACTERIZAÇÃO DO PROCESSO E TRATAMENTOS........................... 36
4 RESULTADOS E DISCUSSÕES ............................................................................ 38 4.1 ANÁLISE CLIMÁTICA ..................................................................................... 38 4.2 DESENVOLVIMENTO DA CULTURA NO EXPERIMENTO ....................... 39 4.2.1 Sistema de Controle ............................................................................................ 39 4.2.2 Sensores .............................................................................................................. 45 4.2.3 Atuadores ............................................................................................................ 50

4.3 CONSIDERAÇÕES GERAIS ............................................................................. 60
4.4 CONTRIBUIÇÃO ............................................................................................... 61 4.5 MELHORIAS ...................................................................................................... 61 4.6 CONCLUSÕES ................................................................................................... 62
5 BIBLIOGRAFIA ........................................................................................................ 63

1 1 INTRODUÇÃO
O surgimento da agricultura deu origem a um aumento sem precedentes da população humana e os seus animais domesticados. A transformação de primitivos caçadores e coletores para moradores urbanos sofisticados se deu em apenas 10 mil anos. Hoje, mais de 8 milhões de km² estão comprometidos com a agricultura à base de solo, ou seja, cerca de 38% do território total da terra. A agricultura moderna utiliza um grande número de produtos químicos e alta exposição a níveis tóxicos de algumas classes de agrotóxicos como pesticidas e fungicidas, o qual criaram riscos significativos à saúde e que somente agora estão sendo resolvidas por epidemiologistas e toxicologistas. Como se isso não fosse o suficiente para se preocupar, é previsto que ao longo dos próximos 50 anos haverá um crescimento populacional para aproximadamente 9,7 bilhões de pessoas, exigindo um adicional de 8,5 milhões de km² para alimentá-los usando as tecnologias atuais, ou somando a área usada que resulta em aproximadamente o tamanho do Brasil. Essa quantidade de terras cultiváveis adicionais simplesmente não está disponível. Sem uma estratégia alternativa para lidar com este problema, caos social certamente irá substituir o comportamento ordeiro na maioria dos países superlotados. Novos caminhos para a obtenção de uma fonte de alimento abundante e variada, sem invasão e desflorestamento dos ecossistemas restantes devem ser seriamente cogitados. Uma solução envolve a construção de centros de produção urbana de alimentos - fazendas verticais - em que a nossa comida seria crescido continuamente no interior de edifícios altos dentro do ambiente construído. Em um ambiente protegido a produção de alimentos jamais ficará a mercê de eventos climáticos como (enchentes, secas, furacões, etc.).
A produção de alimento estaria disponível para os moradores da cidade sem a necessidade de transportá-lo a milhares de quilômetros das fazendas rurais e distribuindo aos mercados da cidade. A deterioração seria muito reduzida, uma vez que as culturas seriam vendidas e consumidas dentro de pouco tempo após a colheita. Outros benefícios da agricultura vertical incluem a criação de um ambiente urbano sustentável que incentiva a boa saúde para todos os que escolhem viver nela, novas oportunidades de emprego, menos lotes abandonados e edifícios, um ar mais limpo, utilização segura dos resíduos líquidos municipal e uma oferta abundante de água potável.

2 O presente trabalho apresentará um conceito básico do sistema de cultivo
vertical com iluminação artificial para a experimentação do cultivo de babe leaf, que nada mais são que folhas jovens, ou mesmo mini-hortaliças. Este trabalho também tem o intuito de estabelecer o conhecimento preliminar do sistema de automação de cultivo, em decorrência de uma análise realizada dos sensores e atuadores, que posteriormente servirá de base para o desenvolvimento de novos trabalhos na área.
1.1 OBJETIVO
Este trabalho tem como objetivo desenvolver um protótipo de um sistema de automação robusto, visando o desenvolvimento saudável e eficaz de baby leaf usando como base o conceito cultivo indoor com iluminação artificial.

3 1.2 JUSTIFICATIVA
Atualmente no mundo cerca de 870 milhões de pessoas vão pra cama com fome toda noite (GIRALDI, 2012), 1,9 bilhões de pessoas estão acima do peso (WHO, 2015), terras disponíveis para cultivo, água potável e comida saudável estão escassos e é evidente que são necessárias soluções inovadoras para resolver estes problemas. Conforme apresentado na figura 1, são quatro desafios globais deverão ser analisados.
Figura 1 - Quatro desafios globais Fonte: AVF – Association for Vetical Farm

4 De acordo com (MOORE, 2011) no ano de 2014 demorou menos de oito meses para
a humanidade usar todos os recursos naturais disponíveis do planeta para o ano. Dia 19 de Agosto de 2014 é o dia em que o Planeta Azul entra no vermelho: o dia de Sobrecarga da Terra (em inglês, Overshoot Day). A GFN (Global Footprint Network) mede as pressões da humanidade sobre o planeta (Pegada Ecológica - em inglês, Ecological Footprint) diante da biocapacidade da natureza, que é a habilidade de reabastecer os recursos naturais e absorver os resíduos, incluindo CO₂. O Dia de Sobrecarga da Terra marca a data em que a Pegada Ecológica da humanidade excede o quanto o planeta pode se regenerar no mesmo ano. Desde 2000, a data surge cada vez mais cedo de acordo com o cálculo da GFN: de Outubro em 2000 a 19 de Agosto em 2014.
Figura 2 - Pegada ecológica e biocapacidade Brasil
Fonte: GFN – Global Footprint Network
O gráfico acima apresenta a pegada ecológica e a biocapacidade por pessoa no Brasil desde 1961. As duas medições são medidas em hectare global. Biocapacidade por pessoa varia a cada ano conforme o gerenciamento do ecossistema, práticas agrícolas (uso de fertilização e irrigação), degradação do ecossistema, clima e densidade populacional. A Pegada Ecológica ou Ecological footprint por pessoa varia com a quantidade do consumo das fontes naturais e a eficiência de produção.
Os custos para a humanidade de ultrapassar os limites ecológicos do planeta se tornam mais evidentes dia após dia. Desmatamento, escassez de água doce, erosão do solo, perda de biodiversidade e o aumento de CO₂ na nossa atmosfera aumentam a nossa dívida ecológica e trazem ainda prejuízos humanos e econômicos.

5 Independente das circunstâncias de cada país, incorporar os riscos ecológicos no
planejamento econômico e desenvolvimento estratégico não é apena precaução e sim uma necessidade de extrema urgência.
Nesse sentido o cultivo vertical em fazendas urbanas com auxílio de iluminação artificial em grandes centros urbanos desempenha um papel fundamental para o desenvolvimento sustentável da agricultura, trazendo aumento na produtividade, utilização racional dos recursos envolvidos e o aumento da qualidade dos vegetais dentre outros pontos pode ser destacados:
Aumento significativo na produção por área. Proteções dos recursos naturais, com este método diminuirão a degradação de
nossas florestas para o cultivo, a contaminação do solo e do lençol freático, contaminação dos rios por conta dos aditivos químicos provenientes da agricultura.
Possibilidade da automação do processo de cultivo, assim otimizando o consumo de energia elétrica e água, possibilitando também o controle e monitoramento da produção.
Cultivo em ambiente protegido que permite um controle de pragas e doenças e também protege a plantação das devastações naturais causadas pela alteração climática do meio ambiente.
Produção o ano inteiro de alimentos em grande escala com qualidade e saudáveis, livres de agentes químicos usado na agricultura como pesticidas e agrotóxicos.
A introdução de produtos diferenciados no mercado brasileiro pode estimular o consumo por parte da população de folhas jovens baby leaf de hortaliças como alface, agrião, beterraba e rúcula, entre outras, ainda não expandidas completamente, que são colhidas precocemente em relação ao tempo que tradicionalmente se costuma colher para consumo - esse é o conceito de baby leaf. Explica (Purquerio, 2015) que o produto baby leaf pode ser comercializado embalado, higienizado e pronto para o consumo in natura na forma de salada, sendo apresentado separadamente por espécie ou na forma de mix, com folhas de diferentes espécies misturadas. Ainda pode ser comercializado na forma de plantas inteiras com sistema radicular quando produzido em sistema hidropônico. No Brasil, ainda há poucas informações a respeito do cultivo de baby leaf de hortaliças e seus produtos estão começando a serem desenvolvidos.

6 Tendo em vista o importante papel do cultivo vertical em fazendas urbanas com
auxílio de iluminação artificial e a previsão de crescimento do mercado brasileiro por conta dos produtos diferenciados como o baby leaf, este trabalho se propõe a planejar e desenvolver um sistema de automação eficaz para a produção de baby leaf através da iluminação artificial, baseando-se em equipamentos comerciais.
1.3 ORGANIZAÇÃO TEXTUAL
Este trabalho é constituído por cinco capítulos conforme organização abaixo: No segundo capítulo será abordado o estudo teórico embasado em livros, artigos e trabalhos acadêmicos que mencionará a questão do método de cultivo em fazendas verticais e também será realizada uma análise dos sistemas de controle, na arquitetura de um processo de controle de malha fechada clássico adaptada para sistemas de cultivo vertical e sua topologia em termos de controle centralizado e distribuído, além da abordagem dos componentes utilizados nos sistemas de controle, como: sensores, atuadores, controladores e algoritmos. Serão analisados os principais sistemas comerciais de controle ambiental projetado especificamente para utilização sistemas de cultivo em fazendas verticais. O terceiro capítulo será o relato do sistema de experimentação desenvolvido para o controle do cultivo. Através da descrição da arquitetura, organização do sistema, sensores e atuadores utilizados na concepção do sistema bem como suas interligações, tanto no nível de hardware como do algoritmo de programação. No quarto capítulo explicará os testes e análises dos resultados obtidos com a cultura, apresentando uma análise estatística e discussões. Consequentemente o quinto capítulo é destinado a uma análise crítica do trabalho em geral, apresentando as conclusões, possíveis melhorias no sistema a as perspectivas.

7 2 REVISÃO BIBLIOGRÁFICA
2.1 FISIOLOGIA VEGETAL
Segundo (TAIZ & ZEIGER, 2015) fisiologia vegetal é o estudo dos processos vegetais, de que forma as plantas funcionam à medida que interagem com seus ambientes físicos (abióticos) e vivos (bióticos) é importante compreender que todas estas funções como trocas gasosas na folha, a condução de água no xilema, a fotossíntese no cloroplasto, o transporte de íons pela membrana plasmática ou uma rota de transdução de sinal que envolva ação da luz ou de hormônios dependem das estruturas. Em qualquer nível, a estrutura e a função representam diferentes planos de referência de uma unidade biológica.
2.1.1 Água e as células vegetais
A água tem papel fundamental no desenvolvimento das plantas. Para cada grama de matéria orgânica produzida pela planta, aproximadamente 500 g de água são absorvidos pelas raízes, transportados pelo corpo da planta e perdidos para atmosfera (TAIZ & ZEIGER, 2015).
Ainda de acordo com os autores acima, a principal diferença entre células animais e vegetais é a presença da parede celular nas plantas, permitindo a elas desenvolver grandes pressões hidrostáticas internas, chamadas de pressões de turgor, resultantes do processo normal de balanço hídrico. Essa pressão é essencial para muitos processos fisiológicos, incluindo expansão celular, troca gasosa nas folhas, transporte no floema e vários processos de transporte pelas membranas. A maior quantidade de água e pressão de turgor nos tecidos vegetais favorece o crescimento celular.
A água é um dos fatores mais importantes de todos os recursos que as plantas precisam para crescer e geralmente o mais limitante. Vegetais como cenoura e alface, contém de 85 a 95% de água. Para tentar aumentar a produtividade, utiliza-se a irrigação.
As plantas absorvem e perdem água continuamente para a atmosfera. A maior parte dessa água é perdida pela folha à medida que o CO₂ necessário à fotossíntese é absorvido da atmosfera. Em um dia ensolarado, quente e seco, uma folha renovará até

8 100% de sua água em apenas uma hora. Durante o período de vida da planta, uma
quantidade de água equivalente a 100 vezes o peso fresco da mesma pode ser perdida através das superfícies foliares. Essa perda de água é chamada transpiração. A transpiração é uma forma eficiente de dissipar o calor proveniente do sol. (TAIZ & ZEIGER, 2015).
2.1.2 Fotossíntese e reações luminosas
A vida na terra é regida praticamente da energia pela radiação solar que é praticamente a única fonte de energia para os processos fisiológicos e bioquímicos que ocorrem nos vegetais. O termo fotossíntese que significa, literalmente, “síntese por meio da utilização da luz”. Os organismos utilizam a energia solar para sintetizar carboidratos a partir de dióxido de carbono (CO₂) e água, liberando oxigênio, que para a produção final de matéria seca de uma planta depende, em uma instância, da eficiência com que as folhas convertem energia radiante solar em energia química através da fotossíntese (Conforme ilustrado na Figura 3), entretanto, somente uma fração do espectro solar é utilizada pelas plantas no processo de conversão, por causa da sensibilidade seletiva dos cloroplastos que varia de acordo com o tipo de cultura e disposição de suas folhas.
Figura 3 - Sinterização dos carboidratos a partir de dióxido de carbono (CO2) e água, para a
liberação de oxigênio. Fonte: Guia de iluminação LED Philips
A faixa espectral que é utilizada pela fotossíntese para a conversão de energia é denominada de radiação fotossinteticarnente ativa (RFA ou PAR Photosynthetically

9 Active Radiation) indicada em (μmol/s), para fotossíntese, da energia radiante que
chega a superfície da terra as plantas precisam de luz em partes muito específicas do espectro absorção da clorofila, a qual vai do azul (aproximadamente 430nm) até o vermelho (aproximadamente 660nm). Devido a pouca eficiência na absorção da luz verde na parte intermediária da região visível, a maior parte da mesma é refletida para o olho humano o que dá as plantas sua coloração verde característica.
Figura 4 - Conceito de luz
Fonte: (Lincoln Taiz & Eduardo Zeiger, 2013, p. 164)
Luz é uma onda eletromagnética transversa que consiste em campos oscilantes, elétrico e magnético, perpendiculares um ao outro e à direção de propagação da luz. A luz move-se a uma velocidade de 2,99 10 / . O comprimento de onda (λ) é a distância entre sucessivos picos de onda. Exemplificado na figura 4.
Figura 5 - Gráfico da radiação fotossinteticamente ativa (PAR)
Fonte: (Lincoln Taiz & Eduardo Zeiger, 2013, p. 246)

10
A figura 5 relata as propriedades ópticas de uma folha de feijoeiro, sendo mostradas as porcentagens de luz absorvida, refletida e transmitida, em função do comprimento de onda. A luz verde é transmitida e refletida na faixa de 500 a 600 nm, conferindo cor verde às folhas. Observe que a maior parte da luz acima de 700 nm não é absorvida pela folha (SMITH, 1990).
A cada pigmento presente nos vegetais tem diferentes capacidades de absorção da energia luminosa, em função do comprimento de onda, um exemplo são os vegetais com coloração foliar verde que apresentam duas formas de clorofilas, as clorofilas a e clorofilas b, que por sua vez são cruciais para a fabricação de glicose através da fotossíntese.
Foram necessárias centenas de anos, além da contribuição de vários cientistas para o estabelecimento da equação química geral da fotossíntese. Em 1771, Joseph Pristley observou que um pequeno ramo de menta, crescendo no ar onde uma vela havia se apagado, melhorou aquele ar, de forma que outra vela podia ascender. Descobriu então a liberação de oxigênio pelas plantas. O holandês Jan Ingenhousz, em 1779, documentou o papel essencial da luz na fotossíntese (TAIZ & ZEIGER, 2015).
Em qualquer região, a quantidade de radiação fotossinteticamente ativa muda sazonalmente e varia dependendo da hora do dia. Isto pode conduzir alterações morfológicas nas plantas, causando a floração das plantas ou sua dormência. Medindo PAR terrestre pode ajudar a determinar os níveis de luz em uma estufa, a área natural, ou câmara de crescimento. Estas medidas são úteis em pesquisa agronômica e agrícola.
Segundo (TAIZ & ZEIGER, 2015) a energia armazenada nas moléculas da planta por conta da energia luminosa captada pode ser utilizada mais tarde para impulsionar processos celulares da planta e servir como fonte de energia para todas as formas de vida.
2.1.3 Crescimento e desenvolvimento vegetal
O desenvolvimento vegetal se inicia na embriogênese, entretanto está presente durante a vida toda da planta. A embriogênese se inicia com a união do gameta com a oosfera, formando uma célula única chamada zigoto, células somáticas também podem sofrer esse processo sob condições especiais (TAIZ & ZEIGER, 2015).

11 Na maioria das plantas, as folhas são órgãos fotossintetizantes, isto é, onde a
energia luminosa é capturada e utilizada para coordenar as reações químicas que são vitais para a vida da planta. As raízes são adaptadas para o crescimento através do solo e para absorção de água e nutrientes minerais nos espaços capilares entre as partículas do solo. Essas funções têm imposto reservas sobre a evolução da estrutura da raiz. As ramificações das raízes surgem internamente e se formam apenas em regiões maduras onde cessaram o crescimento. A absorção de água e de minerais é ampliada por frágeis pelos radiculares, os quais também se formam atrás da zona de crescimento. Essas células longas aumentam imensamente a área de superfície de absorção da raiz.
O crescimento vegetal pode ser definido como o aumento irreversível de tamanho somado à divisão e expansão das células.
“Ele não é apenas medido pelo tamanho. Assim, o crescimento pode ser medido, também, em termos de mudança de peso fresco – isto é, o peso do tecido vivo – durante um determinado período” (TAIZ & ZEIGER, 2015).
Outra maneira de medir o crescimento de organismos unicelulares é através do número de células. Porém, em organismos multicelulares, essa pode ser uma medida ineficiente, pois as células dividem-se sem aumentar de tamanho.
O crescimento e o desenvolvimento vegetal são controlados por mecanismos complexos através de um meio de comunicação ordenado, sendo influenciados por fatores internos (hormônios vegetais, especialmente) e externos (temperatura, luz, etc).
Para (CASTRO, 1998), hormônio vegetal é um composto orgânico não-nutriente, de ocorrência natural, produzido pela planta, e que em baixas concentrações promove, inibe ou modifica processos morfológicos e fisiológicos do vegetal. Os principais são as auxinas (hormônio do crescimento), as giberelinas (reguladores de altura dos vegetais), as citocininas (reguladores da divisão celular) e o etileno (hormônio gasoso).
2.2 FAZENDA VERTICAL
Reparar o meio ambiente e continuar tendo acesso à comida boa e saudável, significa um objetivo mútuo. Se a população mundial continuar crescendo, não será preciso reduzir ainda mais floresta para produzir comida suficiente para alimentar a todos? Não necessariamente. Uma solução está nas fazendas verticais. Fazendas estas

12 onde crescem alimentos sem solo e são especialmente projetados para o mesmo. Uma
vez tendo as fazendas migradas com sucesso para as cidades, conseguiríamos converter significantemente uma grande quantidade de terras cultiváveis de volta para o ecossistema original, simplesmente deixando-o sozinho (DESPOMMIER, 2010).
Pode-se considerar a grande razão para a conversão do cultivo tradicional no cultivo de vertical, a promessa de restauração de todo o ecossistema e suas funções, por abandonar as áreas de desmatamento e permitir que a terra se reestabeleçam sozinha. Isso foi constatado a partir de uma análise do estado biológico detectado nas experiências feitas com solo onde houve no passado habitação de pessoas e plantações na qual se regenerou sozinha após seu abandono (DESPOMMIER, 2010).
Figura 6 - Conceito de fazenda vertical Fonte: DESPOMMIER, 2010, p. 243
A figura 6 apresenta uma proposta feita por Weber Thompson Architects em Seattle para um protótipo completo de uma fazenda vertical com áreas de hidroponia, sistemas de tratamento de água, instalações de pesquisa e desenvolvimento, áreas verdes, área de varejo e centro de aprendizado para crianças. A fazenda vertical de apenas alguns andares de altura seria ideal para determinar a melhor forma de integrar todas as tecnologias necessárias, afim de, alcançar a máxima eficiência.

13 A integração do cultivo no método fazenda vertical é onde se define o quão
integrado é o sistema de cultivo com a edificação de preferência e são divididas basicamente em três tipos principais:
Holística - Os componentes de produção de alimentos estão integrados no conceito da edificação na fase do projeto de construção.
Retrofitted - Os componentes de produção de alimentos são adaptados para o edifício existente.
Convertido - Os componentes de produção de alimentos substituem os componentes existentes do programa de construção.
Como um dos componentes principais na definição da fazenda vertical a localização do cultivo na edificação também é de suma importância, podendo ser definidas em cinco principais localizações:
No topo da edificação - O cultivo é disposto no topo da edificação, aumentando assim a área verde visível nos grandes centros urbanos.
No interior da edificação – O cultivo é distribuído por todo o interior da edificação, aumentando assim o metro quadrado cultivável.
Na fachada da edificação – Onde as culturas são dispostas na fachada da edificação, o que ajuda na diminuição da temperatura interna do edifício.
No sub-solo da edificação – O cultivo é disposto no sub-solo da edificação, muitas vezes usando o método de conversão da edificação, onde se converte uma parte inutilizada da edificação para o cultivo de vegetais.
No chão – Este método é usado principalmente quando se deseja criar uma área verde ao redor da edificação, onde muita das vezes as culturas são cultivadas em casas de vegetação e são dispostas entorno a edificação.
2.2.1 Exposição
A exposição à luz solar natural é a fonte mais barata disponível, mas para a horticultura, porém nem sempre está disponível em quantidades suficientes para o cultivo, portanto, o uso de luz artificial se tornou muito comum, a fim de aumentar produção e qualidade. A iluminação artificial deve fornecer as plantas a energia e as formações necessárias para o desenvolvimento.

14 Um dos principais benefícios da iluminação artificial para a horticultura é o fato
de poder fornecer apenas o necessário para a planta se desenvolver, garantindo assim a eficiência energética sem desperdícios, assim como o controle do fotoperíodo, ou seja, quantas horas de luz a planta recebe. Dessa forma as pessoas que vivem em latitudes do norte ou sul podem fornecer luz necessária para o crescimento e desenvolvimento, mesmo com um curto período de insolação. Atualmente existem duas dimensões de radiação que devem ser consideradas quando se decide iniciar um processo de cultivo. A primeira é a intensidade luminosa e a segunda é o foto período (período de exposição da cultura à luz). A primeira tem um papel importante no metabolismo das plantas, enquanto a segunda é a reação da planta entre o ciclo de dia-e-noite. Dessa forma, um ciclo importante a ser controlado pela radiação é o fotoperíodo. O controle da radiação é benéfico como um complemento para locais com baixo nível de luz natural. Com a iluminação artificial podemos alterar a duração do fotoperíodo, alterando assim a resposta da planta e sua fisiologia de crescimento.
Figura 7 - Phillips Green Sense Farm
Fonte: Al Jazeera America Para este efeito, LEDs (diodos emissores de luz) são escolhidas para
desempenhar um importante papel na iluminação para a horticultura. Com iluminação LED, o comprimento de onda e a forma espectral que são fatores importantes para o crescimento vegetal e podem ser ajustados, o qual faz com que seja possível aplicar em todas as fases do crescimento de uma cultura. Esta capacidade, juntamente com a gestão eficaz na emissão de calor, vida longa, alta eficiência luminosa e eficiência energética,

15 abre-se uma tremenda oportunidades para os produtores e criadores. Para o mercado
comercial de horticultura isto significa maior rendimento, florescimento precoce, crescimento mais rápido da cultura e economia no espaço plantado.
A escolha da exposição da cultura ao meio ambiente é imprescindível e pode ser disposta em três principais métodos que são comumente usados no cultivo vertical: Exposto – Neste método a cultura é exposta ao sol e aos intempéries do clima, um exemplo é o cultivo nas coberturas das edificações, onde a cultura é exposta diretamente ao clima. Protegido – Neste método a cultura é protegida contra os elementos agressivos, mas utiliza a luz solar como fonte primária de iluminação e aquecimento, este método geralmente é usado para plantio no chão onde as culturas são distribuídas em casa de vegetação, protegidas contra os intempéries do clima. Fechado - Sem a luz solar natural. As plantas são cultivadas utilizando tecnologias de iluminação LED planta. Neste método as culturas são geralmente cultivadas no interior das edificações ou no subsolo, onde são expostas quase que exclusivamente iluminação artificial.
2.2.2 Métodos de Cultivo
Em complemento a exposição da cultura ao meio ambiente o método de cultivo é um fator primordial para seu desenvolvimento, e a definição das edificações são definidas pelo método de cultivo e método de irrigação. Método de cultivo: Planter ou cultivado no solo – Geralmente é utilizada uma caixa onde é depositado o substrato e as culturas são dispostas ao longo da caixa, pouco utilizada, pois é de difícil movimentação. Em bandejas – A grande vantagem deste método é que pode ser facilmente transportado e o que auxilia na automação do processo produtivo, similar ao método Planter o método em bandejas utiliza um substrato que na maioria das vezes é inerte, porém em bandejas menores e de fácil utilização em método de cultivo hidropônico. Extensivo - As culturas são cultivadas diretamente na superfície e no solo com uma profundidade de 6 polegadas ou menos. Este método é indicado para culturas com crescimento médio, que necessitem de uma profundidade média de solo.

16 Intensivo – Muito similar ao método extensivo, as plantas são cultivadas
diretamente na superfície e no solo, porém neste método de cultivo geralmente é indicado para culturas com sistemas radiculares que necessitem de profundidade para sustentar seu crescimento.
2.2.3 Método de irrigação
Segundo (BLISKA & HONÓRIO, 2003) O termo hidroponia significa o cultivo de plantas em meio líquido. É derivado de duas palavras de origem grega: “hydro”, que significa água e “ponos”, que significa trabalho. Esta definição foi proposta primeiramente pelo Professor William Frederick Greice, da Universidade da Califórnia, nos E.U.A., por volta de 1930, quando utilizou esta técnica em escala comercial. Posteriormente, com o advento da II Guerra Mundial, foi usada para fins militares..
No Brasil, o cultivo hidropônico tem sido utilizado como ferramenta por diversos pesquisadores: (BLISKA, 1998).
De acordo com (TEIXEIRA, 1996), o cultivo hidropônico possui diversas vantagens como:
Possibilidade de aproveitamento de áreas inaptas ao cultivo convencional, tais como zonas áridas e solos degradados.
Independência do cultivo às intempéries tais como veranico, geadas, chuvas de granizo, ventos, encharcamentos e às estações climáticas, permitindo o cultivo durante todo o ano.
Redução do uso de mão-de-obra nas atividades “braçais” tais como, capinar e preparo do solo, além das atividades na hidroponia possam ser consideradas mais suaves.
Além disso, ocorre a antecipação da colheita devido ao encurtamento do ciclo da planta.
Rápido retorno econômico dispensa a rotação de culturas e economia de água. Por outro lado, possui algumas desvantagens como:
O alto custo de instalação dos sistemas. Necessita acompanhamento permanente do funcionamento do sistema,
principalmente do fornecimento de energia elétrica e controle da solução nutritiva.

17 Necessidade de mão-de-obra e assistência técnica, novos produtos e técnicas
adequadas no controle de pragas e doenças, pois, os agrotóxicos convencionais podem diminuir a qualidade biológica do produto. Cultivo em água ou nutricultura - As raízes das plantas são contínua ou descontinuamente submersa em uma solução nutritiva. Inclui a técnica do N.F.T (Nutrient Film Technique ou Técnica do filme nutriente), que consiste na passagem de uma lâmina de solução nutritiva por uma canaleta contendo as plantas (CASTELLANE & ARAÚJO, 1994).
Aeroponia – É um sistema hidropônico onde o sistema radicular das plantas é confinado em um ambiente que é continuamente ou descontinuamente saturado com pequenas gotas (névoa ou aerossol) de solução nutriente.
Gotejamento - Tem ganhado espaço, principalmente nos últimos 15 anos. Este sistema que aplica água em apenas parte da área, reduzindo assim, a superfície do solo que fique molhada, exposta às perdas por evaporação. Com isso, a eficiência de aplicação é bem maior e o consumo de água menor. A irrigação localizada é usada, em geral, sob a forma de sistema fixo, ou seja, o sistema é constituído de tantas linhas laterais quantas forem necessárias para suprir toda a área, isto é, não há movimentação das linhas laterais. Todavia, somente um determinado número de linhas laterais deve funcionar por vez, a fim de minimizar a capacidade do cabeçal de controle.
2.2.4 Cultura para Cultivo Vertical – Baby Leaf
Folhas jovens de hortaliças como alface (como mostra figura 8), agrião, beterraba e rúcula, entre outras, ainda não expandidas completamente e colhidas precocemente em relação ao tempo no qual tradicionalmente se costuma colher para consumo - esse é o conceito de baby leaf.

18
Figura 8 - Baby Leaf
Fonte: PURQUERIO, 2015 A introdução da baby leaf no mercado desperta a curiosidade aos consumidores
e pode auxiliar a estimular o consumo de hortaliças por parte da população brasileira, inclusive das crianças, que tem simpatia por produtos de tamanho reduzido. O consumo de hortaliças Brasil ainda é pequeno (50 kg por habitante por ano) se comparado aos países da Europa e América do Norte (mais de 400 kg por habitante por ano).
No mercado brasileiro, as folhas jovens ou baby leaf podem ser encontrados sendo comercializadas na forma individualizada, com apenas uma espécie ou numa mescla de diversas espécies com folhas de diferentes formatos, cores, texturas e sabores. Tal combinação possibilita ao produto, alto valor nutricional. Outra vantagem da baby leaf é sua praticidade, já que o produto pode ser comercializado, já embalado, devidamente higienizado de forma pronta para ser consumido (PURQUERIO, 2011).
2.3 AUTOMAÇÃO ASSOCIADA AO SISTEMA CULTIVO INDOOR
Segundo (MORAES & L.CASTRUCCI, 2001) a palavra automação foi inventada pelo marketing da indústria de equipamentos na década de 1960. O termo buscava enfatizar a participação do computador no controle automático industrial.
Atualmente entende-se por automação qualquer sistema, apoiado em computadores, que substitua o trabalho humano em favor da segurança das pessoas, da qualidade dos produtos, da rapidez da produção ou da redução de custos, assim aperfeiçoando os complexos objetivos das indústrias e dos serviços. Exemplos: automação da mineração, da manufatura metálica, dos grandes processos químicos contínuos, automação bancária, metroviária, aeroportuária.

19 A automação envolve a implantação de sistemas interligados e assistidos por
redes de comunicação, compreendendo sistemas supervisórios e interfaces homem-máquina que possam auxiliar os operadores no exercício da supervisão e da análise dos problemas que porventura venham a ocorrer.
Nesse sentido a automação do cultivo vertical em ambiente controlado é considerada de suma importância para o desenvolvimento da indústria, pois ainda é um setor pouco explorado da indústria e com uma infinidade de opções que visam garantir uma produção com qualidade, segurança e rapidez. O controle do clima em um sistema automatizado, sem a intervenção humana, geralmente é realizado com a utilização de circuitos eletrônicos, sensores e atuadores.
2.3.1 Sistema de Controle
Um sistema de controle é um dispositivo ou um grupo de dispositivos que gerenciam o comportamento de outros dispositivos. Entende-se também como sistema de controle uma interconexão de componentes conectados ou relacionados, de maneira a comandar, controlar ou ajustar a si mesmo ou outro sistema.
Um sistema de controle subdivide em subsistemas e processos (ou plantas) construídos com o objetivo de se obter uma saída desejada com desempenho desejado, para uma entrada específica fornecida. A Figura 9 mostra um sistema de controle em sua forma mais simples, em que a entrada corresponde a uma saída desejada (NISE, 2009).
Figura 9 - Sistema de Controle Básico
Fonte: (NISE, 2009)

20 Sistemas de Controle de Malha Aberta
A característica distintiva de um sistema de controle de malha aberta é que não
se pode gerar nenhuma compensação a nenhuma das perturbações do sistema que seja somada ao sinal de acionamento do controlador, assim sendo os sistemas de controle de malha aberta não é capaz de corrigir perturbações e são comandados simplesmente pela entrada.
Figura 10 - Sistema de Controle Malha Aberta Fonte: (GOLNARAGHI & BENJAMIM, 2010)
Conforme (GOLNARAGHI & BENJAMIM, 2010) os componentes de um
sistema de controle de em malha aberta podem, em geral, ser divididos em duas partes: O controlador e o processo a ser controlado, conforme mostrado na figura 10. Um sinal de entrada, ou comando, é aplicado ao controlador, cuja saída opera como sinal de atuação, o sinal então, controla o processo, de modo que a variável a ser controlada, se comporte de acordo com algum padrão prescrito.
Sistemas de Controle de Malha Fechada
Explica (NISE, 2009) que as desvantagens dos sistemas de malha aberta, como a sensibilidade as perturbações e a falta de habilidade para corrigi-las, podem ser superadas nos sistemas de malha fechada, Conforme mostra a figura 11.
Figura 11 - Sistema de Controle de Malha Fechada Fonte: (GOLNARAGHI & BENJAMIM, 2010)

21 O transdutor de entrada converte o sinal de entrada em sinal utilizado pelo
controlador. Um transdutor de saída, ou sensor, mede a resposta de saída e a converte na saída utilizada pelo controlador. Por exemplo, se o controlador utiliza sinais elétricos para operar as válvulas de um sistema de controle de temperatura, a posição de entrada e a temperatura de saída são convertidas em sinais elétricos facilitando assim, a atuação no sistema.
O sistema de malha fechada compensa as perturbações pela medição da resposta na saída, alimentando aquela medida no caminho de realimentação e comparando aquela resposta com a entrada na junção de adição. Se existir qualquer diferença entre as duas respostas, o sistema acionará a planta, via sinal de atuação, para realizar a correção. Caso não ocorra qualquer diferença, a planta não será acionada, uma vez que a resposta da planta já é a resposta desejada.
Assim, os sistemas de malha fechada possuem a vantagem óbvia de apresentar uma acurácia superior à dos sistemas de malha aberta. Eles são menos sensíveis a ruídos, perturbações e alterações do ambiente.
2.3.2 Arquitetura
Um sistema utilizado para controlar automaticamente o cultivo dentro de um sistema de cultivo vertical utiliza uma malha de realimentação, no qual cada variável definida é controlada e monitorada e seu valor é comparado com um valor pré-definido, gerando um sinal de controle que tem como objetivo minimizar a diferença entre os dois valores.
Figura 12 - Sistema de Controle

22 Esquematicamente o sistema de controle de malha fechada apresentado figura 12
pode ser dividido em quatro partes: Processo - É sistema de cultivo vegetal e suas variáveis a serem controladas
como: Temperatura e humidade do ar, humidade do solo, nível do reservatório, entre outros.
Sensores/Transdutores – São basicamente dispositivos que realizam as medições dos valores das variáveis que necessitam ser controladas no sistema. Exemplo: Sensor de umidade do solo, temperatura, entre outros.
Controlador – É o elemento que compara os valores atuais das variáveis a controlar, que por sua vez são fornecidas pelos sensores, com o valor de referência ou Set Point e executa o algoritmo de controle pré-determinado. Atua emitindo sinais para os atuadores, afim de corrigir o valor da variável para que assim possa minimizar os erros em relação ao valor de referência. Como exemplo para estes dispositivos tem: Microcontroladores, Computadores, CLP´s entre outros.
Atuadores – São responsáveis por receber os sinais de controle fornecidos pelo controlador e agem sobre o meio ambiente, visando mantes as variáveis que se deseja controlar dentro dos limites pré-definidos. Exemplo: Bomba para irrigação, controle de humidade e temperatura, entre outros.
2.3.3 Sensores
No estudo da automação em sistemas indutriais, comerciais, agronomicos, automobilísticos, etc, é preciso determinar as condições ou variáveis do sistema. É necessário obter os valores das variáveis físicas do ambiente a ser controlado, esse papel é empregado aos sensores.
Sensores servem para informar um circuito eletrônico a respeito de um evento que ocorra externamente, sobre o qual ele deva atuar, ou a partir do qual ele deva comandar uma determinada ação (WENDLING, 2010).
Sensores são transdutores, ou seja, conversores de grandezas físicas em sinais elétricos correspondentes podem defini-los ainda como, instrumentos que transmitem impulsos elétricos em resposta a estímulos físicos tais como calor, luz, magnetismo, movimento, pressão e som. A importância do controle de umidade, temperatura e radiação luminosa. Os parâmetros ambientais mais importantes a serem controlados

23 para obter o melhor clima no cultivo indoor são, temperatura, umidade do solo e
radiação luminosa. A temperatura é o parâmetro de controle mais importante no cultivo, pois exerce função essencial no crescimento e desenvolvimento das plantas. A temperatura mais favorável depende da espécie de planta cultivada e do nível desejado de atividade fotossintética. Temperaturas muito altas reduzem o crescimento das plantas, fazendo com que elas murchem e morram; por outro lado, temperaturas muito baixas limitam o crescimento das plantas. Além de aperfeiçoar a temperatura, o controle da umidade é essencial, pois só é possível obter o melhor crescimento das plantas dentro de certa faixa de umidade. A umidade muito alta é favorável ao crescimento de fungos, causando doenças na plantação. Um ambiente muito seco desacelera o crescimento das plantas. São esses os fatores onde os sensores atuam fazendo uma varredura sobre o sistema onde os sinais são enviados ao CLP que é processado e o passo seguinte são os atuadores.
Sensores de Umidade De acordo com (PINTO, ZULLO, & ÁVILA, 2008) Umidade significa, em
termos simplificados, o quanto de água na forma de vapor existe na atmosfera no momento em relação ao total máximo que poderia existir, na temperatura observada. Umidade relativa do ar consiste na quantidade de gotículas de água na atmosfera, que determina se o ar está seco ou úmido.
A umidade do ar depende de determinadas condições atmosférica. Como a temperatura do ar. Quanto mais quente for o ar mais umidade ele absorverá.
Conforme (THOMAZINI & ALBUQUERQUE, 2006) quando a atmosfera contém todo o vapor de água que pode absorver a determinada temperatura, diz-se que o ar esta saturado. Esse ponto de saturação é chamado ponto de orvalho. A quantidade de vapor de água que se encontra no ponto de orvalho esta relacionada a tabela seguinte:

24
Tabela 1 - Quantidade de vapor de água no ponto de orvalho Fonte: (THOMAZINI & ALBUQUERQUE, 2006)
Os valores da umidade relativa são calculadas a partir da tabela 1. A
monitoração da umidade relativa é primordial para qualquer processo biológico, onde influencia diretamente o processo biológico da planta, para isso se utiliza dos sensores para monitoração efetiva do sistema.
A escolha correta do sensor: Na escolha de um sensor de umidade, é importante saber qual a faixa de medição em que ele irá trabalhar, além de analisar os níveis de umidade moderado, seco ou úmido.
Conforme (THOMAZINI & ALBUQUERQUE, 2006) o parâmetro de umidade pode ser expresso numa variedade de termos (conforme tabela 2), tais como: umidade relativa, ponto de orvalho, parte por milhão (PPM), bulbo seco/úmido, gramas por metro cúbico, etc. Mas, independente do parâmetro que se queira medir, a primeira tarefa consiste em determinar os níveis de umidade que o sensor terá de manusear sua aplicação normal.
Temperatura Concentração de vapor de água g/m³ ar.
0°C 4,810°C 9,320°C 17,725°C 22,830°C 3035°C 39,2
Vapor de água no ponto de orvalho

25
Tabela 2 - Métodos para medição de umidade.
Fonte: (THOMAZINI & ALBUQUERQUE, 2006)
Sensores de Temperatura De acordo com (THOMAZINI & ALBUQUERQUE, 2006) existem diversos
modelos de sensores de temperatura disponíveis no mercado: termistores, termopares, termoresistores, entre outros. Os termistores são resistores sensíveis à temperatura. Eles são semicondutores eletrônicos onde sua resistência elétrica varia com a temperatura e são extremamente sensíveis a pequenas mudanças de temperatura. Podem-se citar basicamente dois tipos de termistores: os de coeficiente positivo de temperatura (PTC) e os de coeficiente negativo de temperatura (NTC). Nos PTC’s a resistência será maior conforme a temperatura aumenta. Nos NTC’s a resistência decresce com o aumento da temperatura, então seu coeficiente de temperatura é negativo.
Já os termopares, os princípios e a teoria associada à termoeletricidade geralmente é atribuída a Tomas Johan Seebeck. Ele descobriu, em 1821, que em um circuito fechado e construído com fios de materiais diferentes e se a temperatura em uma das junções estiver acima da outra, haverá corrente elétrica circulando pelo circuito. Portanto, um termopar funciona através da diferença de potencial criada por fios heterogêneos.
Parâmetro Descrição Medição Aplicações típicasTemperatura de bulboumido
Temperatura múnima alcançada po umtermômetro umedecido em um fluxo de ar. ºC
Secadores de alta temperatura,condicionamento de ar, meteorologia,câmaras de ensaio.
Umidade relativa (UR)A relação da pressão do vapor de águaefetivo para a pressão de vapor de saturação,a temperatura do bulbo seco.
0 - 100%Supervisão de salas de condicionamento,câmaras de ensaio, embalagem de produtosfarmaceuticos e gêneros alimentícios.
Ponto de orvalho /Congelamento
Ponto de orvalho é a temperatura à qual o ardeve ser resfriado para alcançar a saturação.Quando a temperatura é inferiror a 0ºCchama se ponto de congelamento.
ºCTratamento térmico, atmosferas derecozimento, controle de ar e deinstrumentos, medição,metereológicos/ambientais.
Relação de volume oumassa
Pertes por milhão (ppm) por volume é arelação da pressão parcial do vapor de águapara a pressão parcial do gás portadorquando seco. Ppm por peso é idêntico aoppm por volume, mas a relação muda deacordo com o peso molecular de gásportador.
ppmp / ppmv
Usando principalmente para garantir a baixaumidade de gases de processamentoindustrial, tais como: ar, nitrogênio,oxigênio, hidrogênio, etc.
Gramas por quilograma Peso de água em gramas por quilograma de ar. g/kg
Este parâmentro é muitas vezes usado emcombinação com o ensaio de motores, túnelaerodinâmico, câmaras de vapor, etc.
Métodos para a medição de umidade

26 Abaixo, a tabela relaciona alguns tipos, composição e faixa de temperatura de
termopares.
Tabela 3 - Tipos de termopar (composição e faixa de temperatura)
Fonte: (ROSÁRIO, 2005)
Sensores de Nível Sensores de nível são usados, principalmente na indústria, para medir a
quantidade de líquido (ou grãos sólidos) presentes em todos os tipos reservatórios. Para (THOMAZINI & ALBUQUERQUE, 2006) os flutuadores são dispositivos
de escolha para muitas aplicações. Basicamente, à medida que o fluido sobe, o flutuador também sobe. Esse movimento de subida e descida desse tipo de nível é convertido em abertura ou fechamento de um contato. Pode ser usado em tanques abertos ou tanques pressurizados.
Já os medidores de nível do tipo capacitivo funcionam através da variação da capacitância causada criada entre a sonda do medidor e a parede do reservatório.
Para se obter a capacitância, multiplica-se a constante dielétrica do material entre as placas ε pela área das placas A, o produto é dividido pela distância d entre as placas. Portanto:
= Equação 1 - Cálculo da capacitância
O autor ainda cita o sensor de nível ultrassônico. Seu princípio de
funcionamento se baseia na emissão de ondas de alta frequência (de 20 a 200 kHz) para
Tipo Composição Faixa de temperaturaT cobre/cobre - níquel (+)(-) -200 a 350°CI ferro/cobre - níquel (+)(-) -40 a 750°CE níquel - cromo/cobre - níquel (+)(-) -200 a 900°CK níquel - cromo/níquel - alumínio (+)(-) -200 a 1200°CS platina - 10% ródio/platina (+)(-) 0 a 1600°CR platina - 13% ródio/platina (+)(-) 0 a 16000°C13 platina - 30% ródio/platina - 6% ródio (+)(-) 600 a 1700°C
níquel - cromo - silício (+)níquel - silício (-)N -200 a 1200°C
Tipos de termopar (composição e faixa de temperatura)

27 realizar a medição do tanque. Ondas mecânicas se propagam melhor no líquido do que
no ar, então quando há líquido entre o emissor e o receptor de sinais, o sinal emitido chega mais rápido do que quando não há. A partir disso, é possível determinar seu nível.
2.3.4 Controlador
(NICOLOSI, 2004) Explica, um controlador é um elemento eletrônico, desenvolvido para executar tarefas específicas, com linguagem de comando específica. Ele se utiliza de uma memória de programa (Random Access Memory- RAM) para “ler” as instruções que deve executar e se utiliza de uma memória de dados RAM para armazenar temporariamente informações de uso das instruções, enquanto essas informações devem ser armazenadas.
Figura 13 - Arquitetura Básica do Microcontrolador FONTE: ( (NICOLOSI, 2004) pag, 61) A figura acima apresenta uma ilustração simplificada de um microcontrolador
com CPU (Central Processing Unit – Unidade Central de Processamento) e seus elementos básicos assiciados: RAM, ROM, periférico e fonte de alimentação. Como principais componentes destacam-se: Vias de controle de endereço: Serve para microcontrolador selecionar com qual posição de memória ou periférico deseja se comunicar.
Vias de controle auxiliar: São sinais de controle que permitem ao microcontrolador acionar em certo tempo a ROM e não a RAM, e vice-versa.

28 Vias de “I/O” (Input/Output – Entrada/Saída): São via que permitem a
comunicação com o “mundo externo”, afim de trocar informações. Ex: Sensores, atuadores, etc.
CPU (Central Processing Unit – Unidade Central de Processamento): É denominado o cérebro do microcontrolador e tem como função acionar e se comunicar com as vias referidas acima, porém sempre seguindo as diretivas gravadas na ROM.
Oscilador: É o elemento que gera o “marca-passo” da CPU, que permite que o microprocessador execute as tarefas interna de maneira sincronizada e com uma velocidade pré-determinada.
Reset: É o elemento que faz a CPU iniciar suas rotinas internas e realiza também a primeira leitura de instrução no endereço 0000h.
Figura 14 - CPU e o ciclo de busca de instrução na ROM FONTE: ( (NICOLOSI, 2004) pag, 62)
Na ilustração acima apresenta a essência básica interna de trabalho de uma CPU e o ciclo de busca de instrução na ROM. Notam-se algumas funções importantes:
Exemplo de funcionamento: Suponha que o microcontrolador lerá uma instrução na ROM. Os seguintes passos serão dados, conforme figura 14.
1- O endereço de PC (Contador de Programa) é posto na via de endereços. 2- O sinal de controle da ROM é ativado, pois vamos ler a ROM e não a RAM. 3- A instrução é lida da ROM, no endereço dado pelo PC e é lida pelas vias de
dados. Estes três itens correspondem ao ciclo de busca ou fetch. 4- A instrução é carregada e armazenada no IR (Registrador de Instrução).

29 5- O PC é incrementado para ler a próxima instrução (apontará para “n+1”).
6- Inicia-se outro ciclo, o de execução interna da instrução, auxiliado pela Unidade de Controle e pelos registradores, decodificado pela Unidade de decodificação e executado pela ALU (Unidade Lógica Aritmética).
Registradores: São equivalentes a uma RAM, porém interna na CPU. Serve o armazenamento temporário de informações de utilidade interna ou externa à CPU.
Contador de Programa (Program Counter - PC): É o indicador de endereço de memória externa, serve para endereçar a próxima instrução a ser lida pelo microcontrolador, a fim de indicar onde estava e onde deve ir.
Registrador de Instrução (Instruction Register – IR): É o local para onde se dirige o código de instrução que foi retirada da ROM por meio do endereço dado pelo PC no ciclo de busca (fetch) da instrução de memória. O IR é necessário para que, depois da busca, um decodificador possa decodificar, “abrir” a instrução e envia-la à unidade de processamento (ALU – Arimetic Logic Unit – Unidade Lógica Aritmética), com o intuito de que neste local, ela seja “executada”.
Unidade de decodificação (Decode Unit): É o local em que a instrução é decodificada e também são gerados os controles que, junto com a Unidade de Controle, permitem a instrução na ALU.
Unidade Lógica Aritmética (ALU - Arimetic Logic Unit): É o local onde são realizadas as operações de: Lógica, aritmética e decisão/comparação. É o cérebro do microcontrolador.
Acumulador: É um registrador principal, na qual, várias instrução referem-se a ele para operar.
Unidade de Controle (Control Unit): É o local onde se processa o controle de fluxo de informação, a fim de, realizar a instrução recebida.
Arduino
Explica (MONK, 2013) que as placas Arduino e interface oferecem uma tecnologia de baixo custo que pode ser usada facilmente para criar projetos baseados em microcontrolador. Com um pouco de eletrônica é possível fazer todo tipo de coisa usando um Arduino, desde controlar as lâmpadas de uma instalação ou até mesmo

30 gerenciar a corrente de elétrica fornecida por um sistema de energia solar. A figura
abaixo mostra o Arduino UNO, o microcontrolador mais popular da família Arduino.
Figura 15 - Arduino UNO
Fonte: ((MONK, 2013) pag, 11) O Arduino é uma pequena placa de micro- controladora que contém uma conexão USB, tornando possível a ligação com um computador. Além disso, contém diversos terminais que permitem a conexão com dispositivos externos, como motores, relés, sensores luminosos, diodos a laser, alto-falantes, microfones e outros. Eles podem ser energiza- dos pelo computador através do cabo USB, por uma bateria de 9 V ou por alguma outra fonte de alimentação. Um Arduino pode ser controlado diretamente pelo computador ou, então, pode trabalhar de forma autônoma. Neste caso, ele é primeiro programado pelo computador através da conexão USB e, em seguida, desconectado desse computador.
O projeto da placa é aberto. Isso significa que qualquer um pode construir placas compatíveis com o Arduino, o que gerou competição e resultou em placas de baixo custo.
O software de programação do seu Arduino é fácil de usar e encontra-se disponível gratuitamente para computadores Windows, Mac e LINUX.
Arduino MEGA

31
Figura 16 - Arduino MEGA 2560 Rev3 Fonte: Arduino.cc
O mega 2560 é uma placa de microcontrolador baseada no Atmega 2560 . Ele tem 54 pinos digitais de entrada / saída (dos quais 15 podem ser usados como saídas PWM - Pulse Width Modulation - Modulação de Largura de Pulso), 16 entradas analógicas, 4 UARTs (portas seriais de hardware ), um cristal oscilador de 16 MHz, uma conexão USB , um conector de alimentação, soquete de comunicação ICSP e um botão de reset . A placa contém todo o necessário para usar o microcontrolador, simplesmente é necessário plugar o cabo usb no computador para liga-lo e programa-lo. A alimentação pode ser feita através do cabo USB, fonte de alimentação AC-DC ou bateria.
Tabela 4 - Características Arduino Mega 2560 Rev3
Fonte: Arduino.cc

32 3 MÉTODOS E PROCESSOS
O experimento foi realizado no município de Campinas durante o período de 25/07/2015 a 05/09/2015, o protótipo foi montado em ambiente fechado, afim de evitar qualquer intempérie do ambiente externo e simular o método de cultivo indoor com iluminação artificial.
3.1 CARACTERIZAÇÃO DO PROTÓTIPO DE EXPERIMENTAÇÃO
A estrutura utilizada para a realização do protótipo teve como dimensões 1,4m de altura, 2,0m de comprimento e 1,6 de largura, construída com perfilado reforçado de 38mmx38mm em aço galvanizado, coberta com um filme PVC para evitar o desperdício de água por conta da irrigação e otimizar a formação de um microclima controlado conforme figura 18. No interior da estrutura foram distribuídas madeiras presas à estrutura para o suporte das bandejas.
Na parte superior foram dispostas 12 luminárias Greenpower LED production DR/B/FR 120 production module de 30W de potência cada, cedidas pela empresa Philips para o protótipo de experimentação. Seu acionamento foi programado para acontecer das 4:00am até as 20:00pm totalizando um total de 16 horas de luz para o desenvolvimento das culturas.
Figura 17 - Greenpower LED production DR/B/FR 120 Fonte: Catálogo Production Modules - Philips

33
Figura 18 - Sistema de experimentação com luzes apagadas (esquerda) e luzes acesas (direira).
Para o desenvolvimento do protótipo o sistema foi segmentado em duas seções principais, a primeira seção, o sistema hidráulico de irrigação/fertilização que foi projetado para a fertirrigar às culturas, por meio de aspersão e consiste em um reservatório de 80L, onde foi armazenada toda a água com a fertilização diluída onde foram dispostos dois sensores de nível alto e nível baixo de água, afim de, garantir o abastecimento constante de água no sistema, em seguida o fluido passa por um filtro manual de disco do fabricante Netafim, que tem como função reter as partículas maiores, afim de, evitar a entrada destas partículas na bomba e posteriormente podendo ocasionar o entupimento dos bicos aspersores. O fluido é bombeado com o auxílio de uma motobamba centrífuga modelo BC-98 do fabricante Schneider 1/2cv de potência, em seguida o fluido é distribuído por meio de um sistema de aspersão de quinze conjuntos de micro aspersores constituídos por uma válvula anti-gotejo de 1,5bar do fabricante Netafim e um microapersor MA-30 de 27,2 l/h de vazão do fabricante Agrojet. Figura 19.

34
Figura 19 - Sistema de Microaspersão
A segunda seção é relacionada ao sistema de automação, que foi dividida em
duas partes no protótipo de experimentação, na primeira parte o sistema de sensoriamento, controle e atuação das variáveis que conta com seis sensores, dentre eles, dois sensores de umidade do solo SEN92355P dispostos sob o substrato, que tem como função medir através da resistividade o teor volumétrico de umidade do solo. Conta também com um sensor de temperatura e umidade relativa do ar DHT22(AMD2302), trata-se de um sensor capacitivo para a medição de umidade relativa e um termistor para a medição da temperatura do ar, na qual o sinal de saída é calibrado constantemente por sistema integrado de recalibração (as especificações do sensor são apresentados na tabela 5), posto no centro da estrutura à 20cm da bancada,. No sistema também temos atuando dois sensores de nível do tipo flutuador com acionamento magnético (reed switch), que tem como principal função no sistema, fazer o reabastecimento do reservatório usando o sensor de nível baixo como nível mínimo e o sensor de nível alto como nível máximo do reservatório (as especificações do sensor são apresentados na tabela 6). Os acionamentos que por definição atuam nas variáveis controladas com o objetivo de mantê-las dentro dos parâmetros (range) definidos. Um dos atuadores, é a motobomba centrífuga BC-98 da Schineider de 1/2cv, responsável pelo bombeamento da água para a irrigação e a nutrição das cultura. Também como parte integrante do sistema de atuação temos doze luminárias Philips Greenpower LED production DR/B/FR 120 module do fabricante Philips, responsáveis pela radiação luminosa (substituindo o Sol) que garantirá o crescimento das culturas. O sistema
Válvula anti-gotejo Netafim
Microaspersor MA-30 Agrojet

35 também conta com uma solenoide 100-DV 1” do fabricante Rain-Bird, que tem como
função liberar o fluxo de água para o reabastecimento do reservatório. O controle foi elaborado com um microcontrolador modelo Mega 2560 V6 do fabricante Arduino que por meio dos dados obtidos pelos sensores comparavam com o set point definidos no programa e se constatado que estivesse fora do range definido acionava os atuadores para a correção das variáveis. A figura 20 apresenta o painel de controle onde ficava alocado o microcontrolados e sistema de hardware para o controle do sistema.
Tabela 5 - Especificação Técnica DHT22
Fonte: Aosong Electronics Co.,Ltd DataSheet
Tabela 6 - Característica Técnica Sensor Nível
A segunda parte foi constituída da elaboração de um datalogger que teve como
objetivo principal registrar os dados de temperatura (°C), umidade relativa do ar (%) e a umidade relativa do solo (%) ao longo do período do experimento e são gravados periodicamente em micro SD para o uso posterior dos dados.
Características Técnicas:Comprimento do cabo: 36cmMáxima potência da carga: 10WMáxima tensão: 220VMáxima corrente de chaveamento: 0.5AMáxima corrente de carga: 1AResistência do contato: 0.1 ΩTemperatura de trabalho: -10°C à 60°C

36
Figura 20 - Painel de Controle
3.2 CARACTERIZAÇÃO DO PROCESSO E TRATAMENTOS
No experimento realizado o delineamento utilizado foi de blocos casualizados em esquema fatorial.
Utilizaram-se dez bandejas com volume de célula de 31 para a semeadura, fabricadas em polipropileno, com 162 células, da marca JKS, com dimensões de 33,6 x 67 cm, área de 2251,2 cm2 e 719,6 células . De acordo com o experimento de (PURQUERIO, 2015) o volume de 31 possibilitou maior produtividade de alface para baby leaf quando comparado aos demais volumes de células estudadas.
Utilizou-se o substrato comercial de fibra de coco da marca Golden Mix fabricante Amafibra para o cultivo. Para o preparo do substrato utilizado seguiu-se as recomendações do fabricante adicionando-se 35 litros de água para cada fardo de fibra de coco de 107 litros, totalizando 240 litros de material. Depois de umedecidos, as bandejas foram preenchidas com o substrato citado acima a cada tratamento. Em cada célula foram feitos manualmente orifícios para colocação das sementes, sendo posteriormente cada bandeja coberta com vermiculita expandida de textura fina.
Após a semeadura, as bandejas foram empilhadas e permaneceram dentro de uma sala fechada por 24hrs para a quebra de dormência das sementes e então foram dispostas na plataforma para o início da experimentação. A irrigação foi realizada por
Display
Controlador
Placa Relé

37 meio de microaspersão, procurando manter a umidade do substrato em 70% evitando
assim o escorrimento de água pelo fundo das bandejas, para assim evitar o desperdício de nutrientes. Por ser o mais indicado para o método de fertirrigação, foi utilizado o fertilizante da marca Kristalon com formulação 06-12-36 (6% Nitrogênio Total (N) – sendo 4,5% N-Nítrico e 1,5% N-Amoniacal, 12% Fósforo (P2O5) e 36% Potássio (K2O)) fabricante Yara desenvolvido para fertirrigação diluído 4g/L.
Com o objetivo de avaliar produtividade de acordo com a quantidade de sementes o experimento foi dividido em oito tratamentos e cinco distribuições, cada bandeja era constituída de quatro tratamentos e dividida em duas culturas diferente, alface Elisa (E) do fornecedor Sakata e Alface Tainá (T) do fornecedor Sakata. Exemplo a bandeja 1 era organizada da seguinte forma: No primeiro quadrante foram semeadas duas sementes da alface Elisa (E) e no segundo quadrante duas sementes da alface Tainá (T), no terceiro quadrante quatro sementes da alface Elisa (E) e quatro sementes da alface Tainá (T) e assim sucessivamente conforme figura abaixo.
Figura 21 - Distribuição dos tratamentos
A colheita das culturas foram realizadas com 42 dias, quando a maior folha da planta estava com aproximadamente 15cm de comprimento medido do inicio do pecíolo

38 até o final do limbo foliar, conforme sugerido por (PURQUERIO, 2015) como máximo
comprimento para se classificar uma folha como baby leaf. Foi realizada colheita manual com auxílio de uma tesoura.
4 RESULTADOS E DISCUSSÕES
4.1 ANÁLISE CLIMÁTICA
Para o presente trabalho que ocorreu de 25 de Julho a 05 de Setembro de 2015 foram constatados os seguintes dados climáticos na área do experimento, temperaturas do ar máximo, médio e mínimo do ar foram de 29,0°C, 23,0°C e 19,7°C. Se comparado com os dados obtidos para o mesmo período no município de Campinas temos as temperaturas do ar máximo, médio e mínimo do ar foram de 32,6°C, 21,1°C e 9,1°C.
Gráfico 1 - Temperatura do ar (°C) Fonte: Datalogger
Gráfico 2 - Temperatura do ar (°C) Fonte: CIIAGRO ONLINE

39
A faixa de temperatura ideal para cultivo de alface é de 15 a 20ºC conforme
(NETO, et al., 2005). Contudo, (FILGUEIRA, 2008) referencia que o cultivo pode ser realizado na faixa de 20 a 30ºC.
Em análise podemos concluir que tanto para os dados do datalogger, quanto para os dados do CIIAGRO apresentados indicam que as temperaturas médias se mantiveram dentro das condições ideais para o cultivo de alface, contudo em ambiente interno evidenciamos poucas alterações nas temperaturas no decorrer do tempo, como mostra o (gráfico 1) tornando assim a o cultivo em ambiente interno mais seguro e adequado quanto as oscilações de temperatura. Em adição ressalta (MORAES, 2013) que altas temperaturas podiam ocasionar pendoamento precoce nas plantas.
4.2 DESENVOLVIMENTO DA CULTURA NO EXPERIMENTO
4.2.1 Sistema de Controle
O projeto de automação conta com o desenvolvimento de um sistema de controle de malha fechada também conhecido como sistema de controle retroativo (realimentação ou feedback), que possibilita uma maior sensibilidade às perturbações e maior rapidez para corrigi-las.

40
Figura 22 - Diagrama Sistema de Controle
A figura 22 representa o diagrama de controle usado para exemplificar o
protótipo de experimentação.

41 Sistema de Programação
Figura 23 - Fluxograma Sistema de Automação No fluxograma do sistema, temos uma malha contínua de programação que foi
sud-dividida em seis blocos de programação distintos, mas que em muita das vezes interagem entre si, sendo um bloco principal e cinco sub-blocos também chamados de sub-rotinas ou sub-programas.
Bloco principal – Tem a função de coletar todos os dados dos sensores e armazena-los em variáveis para seu uso posterior, em seguida o bloco principal aciona as sub-rotinas para a continuidade do programa.
Sub-rotina 1 – Sistema de controle de nível do reservatório. Conforme citado acima é responsável pelo reabastecimento do nível do reservatório. Depois que bloco principal do programa lê as variáveis para esta sub-rotina (SNA – Sensor de Nível Alto e o SNB o Sensor de Nível Baixo) inicia o fluxo verificando o estado do SNB (Sensor de Nível Baixo), se não estiver acionado retornará ao programa principal e iniciará novamente a coleta de dados, porém se for acionado ligará um Piezzo, (que trata se um componente eletrônico que emite um sinal sonoro) e o Led vermelho, após segue mostrando um alerta no display que tem duas principais funções, primeira, sinalizar

42 visualmente que o nível da água está crítico e segunda, sinalizar que é necessária a
reposição do fertilizante para a nutrição das plantas. Em seguida é ligada a solenoide, que está conectado diretamente ao abastecimento de água, fazendo assim, encher o reservatório, em paralelo o sistema verifica o SNA (Sensor de Nível Alto), que quando estiver acionado desligará a solenoide e cortará o abastecimento de água. Seguidamente o sistema conta 30min e desliga o sinal sonoro (Piezzo) e o led, este sistema de tem como objetivo emitir um sinal sonoro e visual para avisar o operador que a sistema de reabastecimento foi concluído e é necessário diluir o fertilizante novamente na água, finalizando assim o sub-programa 1 e retornado para o bloco principal.
Sub-rotina 2 – Sistema de irrigação e nutrição das culturas. É responsável pela irrigação das plantas pelo método de aspersão superior e em conjunto é feita a nutrição pelo método de fertirrigação, que consiste na diluição dos nutrientes na própria água usada para a irrigação, com o intuito de nutrir a cultura enquanto irriga. Recebendo os valores das variáveis SUS1 (Sensor de Umidade do Solo1) e o SUS2 (Sensor de Umidade do Solo2) o sub-programa faz uma operação matemática que consistem em corrigir a diferença da umidade do substrato entre a parte superior (que seca mais rápido) e a parte inferior (que normalmente preserva um pouco mais a umidade do substrato), a operação matemática ocorre da seguinte forma: Primeiro o programa multiplica o valor do SUS1 por 70%, em seguida o SUS2 é multiplicado por 30% e na sequência o sistema soma os valores dos dois sinais resultantes e atribui a uma variável SUST (Sensor de Umidade do Solo Total), que nada mais é que a soma dos dois sinais dos sensores compensando a diferença de umidade no substrato. No próximo passo o programa compara o sinal final com o Range estabelecido, se o mesmo estiver acima de 70% o programa retornará à rotina principal e iniciará novamente a coleta de dados, se não, o programa verificará se o SNB (Sensor de Nível Baixo) está acionado, pois se o mesmo estiver acionado o sub-programa em questão aguardará o sub-programa responsável pelo abastecimento do reservatório acabar o seu ciclo pra somente assim dar continuidade no programa, garantindo assim que a bomba nunca atuará quando o nível do reservatório estiver crítico (baixo), pois poderia danificar a bomba. Em seguida se o SNB não estiver acionado o programa irá ligar a bomba, aguardará 1h30min que é o tempo de pré-estabelecido para regar as culturas sem que as encharquem e escoem por baixo das bandejas, provocando assim a perca dos nutrientes, em continuidade após o delay o programa desliga a bomba e retorna ao programa principal.

43 Sub-rotina 3 – Sistema de controle de temperatura e umidade do ar ambiente.
Como o próprio nome já diz, esta sub-rotina atua no controle da temperatura e umidade do ar. O programa lerá a temperatura do ar e comparará com o Range determinado, se o mesmo estiver abaixo de 30°C o programa retornará ao bloco principal e continuará a leitura, se estiver acima dos 30°C o programa partirá para a verificação da umidade solo que se estiver abaixo de 70% acionará a bomba que irá aspergir o sistema e diminuir a temperatura do ar, podemos determinar assim, que neste processo o sistema de controle de temperatura é escravo do sistema de irrigação, pois somente acionará se o sistema de irrigação estiver fora do Set Point. A umidade relativa do ar foi uma variável que não notou-se alterações significativas no sistema de experimentação, sendo assim, seus dados apenas foram gravados no sistema do Datalogger não causando nenhum acionamento por parte da umidade relativa do ar.
Sub-programa 4 – Sistema de acionamento das iluminações. Este sistema é responsável pelo controle dos acionamentos das luminárias que foram dimensionadas para sistema de experimentação como substitutas do sol para o desenvolvimento das culturas. A programação neste sistema é simples. O programa verificará a hora a cada 30 segundos e se o programa retornar 4:00 da manhã o sistema de acionamento por relés acionará as luminária, o programa continuará verificando a hora e se retornar 8:00 da noite o sistema acionará os relés para o desligamento das luminárias. Este período das lâmpadas ligadas está relacionado ao fotoperíodo, que nada mais é que a representação do comprimento de um dia, ou seja, consiste na duração do período de luz em um determinado lugar. Também podemos chamar este período de período útil de iluminação.
Sub-programa 5 – Datalogger ou sistema de armazenamento de dados. Este sistema consiste no armazenamento dos dados das variáveis para utilizações posteriores, como descrito no tópico 4.1 Análise Climática. A programação para este sistema, assim como os acionamentos das luminárias é simples, pois consistem em um contador e um armazenador de dados. O primeiro passo para o programa é receber os dados do bloco principal, SUST (Sensor de Umidade do Solo Total), STA (Sensor Temperatura do AR), SUR (Sensor de Umidade Relativa), data e hora e estas informações no display para a gestão visual do sistema de controle, posteriormente iniciará o contador que tem como função a cada 15min acionar a gravação dos dados em um cartão micro SD, após isto retornará para o bloco principal e reiniciará o sub-programa.

44 Hardware
Figura 24 - Diagrama Hardware
Na figura acima é apresentado a instalação do hardware no sistema de
automação, que é composto por:
Sensores: 1 – Sensor de Umidade do Solo 1 2 – Sensor de Umidade do Solo 2 3 – Sensor de Nível Alto 4 – Sensor de Nível Baixo
1 2 3 4
5
5 6
7
8
9
10
11

45 5 – Sensor de Umidade e Temperatura do Ar
Eletrônicos e Controlador: 6 – Piezzo 7 – LED RGB 8 – SD Card Shield 9 – RTC (Real Time Clock – Relógio de Tempo Real) Shield 10 – Display Oled
Atuadores: 11 – Relé shield, acoplada com a bomba, a solenoide e o sistema de iluminação.
4.2.2 Sensores
Para atingir uma robustez no sistema de controle aplicado no protótipo de experimentação foram definidas algumas variáveis a serem controladas, e com elas seus respectivos sensores, que coletando os dados a cada 5 segundos, esses são enviados para o controlador comparam com o range pré-definido e acionam os respectivos atuadores. As variáveis destinadas ao controle e o range de atuação são:
Umidade do solo, range da umidade do solo: 70% a 100% - Esta variável é medida pelos sensores de umidade do solo. A finalidade destes sensores é garantir que o substrato esteja sempre úmido (definido pelo valor de 70% de umidade do solo mínima), sem o encharcamento (definido pelo valor de 100% de umidade do solo máxima), que por sua vez, ocasiona a perda de nutrientes do substrato, o que causa a desigualdade no crescimento das culturas. Assim é possível assegurar o uso eficaz da água e garantir a correta irrigação e nutrição das culturas.
Umidade relativa e temperatura do ar, range da umidade relativa do ar: 50% mínimo; range temperatura do ar: 30°C máximo – Estas variáveis são controlada pelo sensor de umidade relativa e temperatura do ar. O sensor tem a função de medir a climatização do ambiente criado no protótipo de experimentação, que auxilia na

46 manutenção da umidade relativa do ar (definido pelo valor de 50% de umidade relativa
do ar mínima), e no controle da temperatura (definido pelo range de 30°C máximo) Nível do reservatório. A variável, nível do reservatório ao contrario das outras
variáveis é determinada seu valor máximo e mínimo por dois sensores: O sensor de nível baixo foi instalado na parte inferior do reservatório, cerca de 15cm de altura da saída do encanamento de recalque da bomba, conforme indicação de segurança do fabricante da bomba. O sensor de nível alto foi instalado na parte superior do reservatório para o monitoramento do nível máximo que deverá ter o reservatório quando cheio, este sensor foi instalado cerca de 10cm a baixo da boca do reservatório. Este processo foi definido desta maneira, pois maximiza o uso do fertilizante diluído na água, antes de um próximo reabastecimento. Tornando assim o uso mais eficaz do fertilizante.
Sensor de Umidade do Solo Com o intuito de melhorar a eficiência da bomba e da economia de água para
fazer o a automação do processo de irrigação e nutrição das plantas foram instalados dois sensores de umidade de solo SEN92355P no substrato.
Sensores de umidade do solo tem a função de medir o teor volumétrico de água no solo. Uma vez que a medição gravimétrica direta da umidade do solo livre requer a remoção, secagem e pesagem de uma amostra, sensores de umidade do solo mede o teor volumétrico de água indiretamente usando alguma outra propriedade do solo, tais como a resistência elétrica, constante dielétrica, ou interação com nêutrons, como uma representação para o teor de humidade. A relação entre a propriedade e umidade do solo medido deve ser calibrada e podem variar dependendo de fatores ambientais, tais como tipo de solo, temperatura, ou de condutividade elétrica.
Para garantirmos uma medição eficaz da umidade solo para o substrato que foi utilizado fizemos uma calibração dos sensores de umidade do solo, afim de, garantir a linearidade e repetibilidade da medição. Como instrumento padrão usamos um medidor de umidade do solo calibrado da marca HidroFarm, modelo: HFM2010 da fabricante Falker. Para o processo de calibração foi utilizado três amostras do substrato, a primeira seca para a definição do parâmetro de 0% de umidade do solo, a segunda na umidade do

47 solo mínima desejada 70% de umidade do solo e por último o solo encharcado para a
definição do parâmetro de 100% da umidade do solo usando a tabela 5 de referência do fabricante a seguir.
Tabela 7 - Calibração Inicial
Para cada uma das repetições foram feitas cinco medição e comparados os
valores do instrumento de referência com o sensor pré-calibrado para a confecção do gráfico da curva de calibração dos sensores. Conforme apresentado na tabela 6 e gráfico 3.
Tabela 8 - Dados Calibração Sensores 1 e 2
Gráfico 3 – Desvio Padrão Sensores 1 e 3 Umidade do Solo
Referência Desv.padrão Sensor 1 Desv.padrãoSeco 0,02% 8,3666E-05 1% 0,005477226Úmido 70,00% 0,000164317 69% 0,008944272Encharcado 99,97% 0,000114018 99% 0,011401754
Referência Desv.padrão Sensor 2 Desv.padrãoSeco 0,02% 5,47723E-05 2% 0,0083666Úmido 70,00% 0,000216795 70% 0,0083666Encharcado 99,93% 0,001272006 99% 0,008944272

48 Conforme representado no gráfico de desvio padrão a repetibilidade e os desvios
foram muito baixos, garantindo assim uma robustez na aquisição dos dados de umidade do solo.
Durante o período de testes com os sensores notou-se que o substrato no primeiro experimento secava na parte superior e o sensor de umidade do solo indicava que a umidade estava dentro do parâmetro definido (>= 70%). O sensor usado foi completamente enterrado no substrato no primeiro teste e o sinal de saída indicava que o solo ainda estava úmido, por conta disso a bomba não atuava causando uma impermeabilização superficial do solo.
Para solução introduzimos dois sensores de umidade do solo, o primeiro na parte superior do solo e definimos que o sinal deste sensor (1) seria responsável por 70% do sinal final e segundo enterrado totalmente no solo, e definimos que o sensor (2) seria responsável por 30% do sinal final, assim garantindo que a bomba atuaria no tempo correto e que o solo como um todo ficaria úmido, conforme exemplificado na figura 25.
Figura 25 - Adversidade Sensor de Umidade do Solo
Sensor de Umidade e Temperatura do Ar Como parte do sistema de controle o sensor de umidade e temperatura do ar é
parte essencial do projeto, pois é ele que controla a temperatura na estufa do experimento. Quando a temperatura atinge mais de 30°C é verificada a umidade do solo e se a mesma estiver abaixo de 70% a bomba é ligada resfriando assim o ambiente da estufa.
Basicamente o sensor é composto de um módulo de sensoriamento digital DHT22/AM2302 capacitivo de temperatura e umidade que é formado por um sensor de

49 umidade capacitivo e um termistor, enviando no pino de dados um sinal digital. O
DHT22/AM2302 tem seu sinal digital de saída calibrado periodicamente, conectado a um microprocessador de 8 bits de alto desempenho que compara com os coeficientes de calibração armazenados no microcontrolador, assim garantindo a maior repetibilidade e estabilidade do sinal ao longo do tempo. O tamanho pequeno, baixo consumo de energia, sinal de transmissão distância de até 20 metros, tornando-se a melhor escolha de todos os tipos de aplicações e até mesmo as aplicações mais exigentes.
Figura 26 - Sensor de Umidade e Temperatura do Ar DHT22 Fonte: Aosong Electronics Co.,Ltd DataSheet
Sensor de Nível
Para o monitoramento o de nível automático do reservatório, foram instalados dois sensores de nível (figura 27), um sensor de nível baixo para garantir a segurança da bomba, não a deixando operar sem água, para garantir o reabastecimento de água no reservatório e um sensor de nível alto para assegurar o desligamento da água quando o reservatório estiver cheio, assim evitando o transbordamento.

50
Figura 27 - Sensor Nível Água
O sensor utilizado foi um sensor de nível magnético e não de mercúrio o que elimina i risco de contaminação da água por mercúrio. O sensor de nível é uma chave ON/OFF (Liga/desliga) que muda o estado de aberto para fechado quando a água atinge certo nível e abre quando o nível da água fica abaixo de outro determinado nível. Este sensor pode chavear diretamente cargas de até 10W 220V, como bobinas de contatores ou pequenas lâmpadas de sinalização.
Figura 28 - Sensor Nível – Atuação Fonte: http://www.arduinoecia.com.br/
4.2.3 Atuadores
A seguir são apresentados os atuadores utilizados para o controle das perturbações, que foram dimensionados com o intuito de manter as variações climáticas o mais próximo possível do set point especificado.

51 Bomba Centrífuga
A definição da bomba foi um fator primordial para o correto funcionamento do
sistema de experimentação de cultivo, pois ela foi responsável pela correção da umidade e temperatura do ar e irrigação e fertilização.
Para seu funcionamento correto as perdas da instalação foram dimensionadas e comparadas com a bomba que foi utilizada para os acionamentos, os requisitos principais foram definidos como uma vazão final de 20,7L/h mínimo e 10mca.
A bomba que melhor se adequou aos requisitos com um custo benéfico alto foi a bomba BC-98, do fabricante Schneider.
Figura 29 - Motobamba Centrífuga BC-98 Fonte: Catálogo Schneider
Tabela 9 - Característica da bomba Fonte: Catálogo Schneider
Para o correto dimensionamento da instalação um diagrama detalhado da
instalação foi desenvolvido contendo, os comprimentos equivalentes da instalação e as perdas de carga dos componentes da instalação retiradas dos componentes de instalação da KSB.
Modelo BC-98Sucção 3/4" Potência kW / (cv) 0,37 (1/2)Recalque 3/4" Rotor [mm] 107N° Pólos 2 Frequência [Hz] 60

52
Figura 30 - Sistema de instalação hidráulica Abaixo, segue o desenvolvimento dos cálculos e as fórmulas usadas para a
criação do gráfico da CCI ( Curva Característica da Instalação) e o dimensionamento da bomba para o uso em nossa instalação.
Dados da Instalação Leq Cot = 0,7m Leq Tee = 1,7m(ramo) Leq Tee = 0,5m (linha) Leq Red 1”p/ 3/4” = 0,8m Leq Red 3/4”p/ 1” = 0,5m Leq Vre = 2,1m Leq Vga = 0,2m (Aberta) Leq Vgl = 8,2m (75% fechada) Leq Vas = 5m Leq Et = 0,7m Leq Ftr = 10m

53 Fórmulas usadas para cálculo:
Equação 2 - Equação da vazão
Equação 3 - Equação da área de uma circunferência
Equação 4 - Equação de Reynolds
Equação 5 - Equação CCI (Curva Característica da Instalação)
Equação 6 - Equação de perda de carga da instalação
Cálculos: = . => = 5,6 ℎ => 1,5 10
1"= π*D2
4 => 1"= π*0,025424 =>A1" = 0,507 10
1"= Q
A => 1,5x10-30,507x10- =>V1" = 2,96 /
1"= ρ*V*D
μ => 998,2 ∗ 2,96 ∗ 0,02541,00 10 => Re1"=75048,7
1" = 0,019 ( )
= . . : = Massa específica (kg/m³) = Velocidade = Diâmetro = Viscosidade
= ∆ + ∗ : ∆ = Carga de elevação = çã = ã
∗ ∗∗ ∗ onde:
= Fator de atrito = Comprimento equivalente = gravidade = Diâmetro da instalação
( / ) = . onde:
= Velocidade = Velocidade
= Diâmetro da Tubulação ( )= π*D24

54 ∆ = 1,6 − 0,3 = 1,3 (altura do sistema, conforme diagrama de instalação)
1"=0,15+0,15+0,5+1+1,6+1,1 => L1" = 4,5
1" = 0,7 + 0,7 + 0,2 + 10 + 0,8 + 0,5 + 2,1 + 0,7 + 0,7 + 0,5 + 0,5 + 0,7 + 0,8 + 0,8
+ 0,8 + 15 ∗ (5)
1" = 95,5
1" = 100
1"= 8*f*LTg*π2*D5 => 8*0,019*100
9,81*π2*0,02545
1"= 14.849.309,26
ℎ = ∆ + ∗ => 1,3 + ( 8*0,019*1009,81*π2*0,02545 )*
Equação calculada para a plotagem do gráfico.
= , + 14.849.309,26 *
Substituindo os valores da vazão com os valores apresentados na tabela da bomba cedida pelo fabricante, temos os seguintes dados:
Tabela Vazão x Alt. Manométrica Q (m³/h) CCB (mca) CCI (mca)
0,0 20,00 1,30 0,5 19,85 1,58 1,0 19,30 2,41 1,5 18,72 3,80 2,0 17,90 5,74 2,5 16,62 8,24 3,0 15,00 11,29 3,5 13,15 14,90 4,0 11,00 19,06 4,5 9,36 23,78 5,0 5,50 29,06 5,5 1,22 34,89
Tabela 10 - Vazão x Altura manométrica

55
Gráfico 4 - Curva Característica e Rendimento da Bomba Fonte: Catálogo Schneider / cálculos
Com isso concluímos a bomba está dentro dos parâmetros de utilização, pois o esperado para a altura manométrica que foi determinado pela instalação era de 10mca mínimo e foi alcançado 14,5 mca e o determinado pela vazão foi de 20,7L/h e foi alcançado 3300L/h, super dimensionando está especificação, também foi plotado o rendimento da bomba que alcançou 41% de rendimento na instalação.
14,5

56 Solenóide
Figura 31- Válvula Solenoide 100 DV
Fonte: Catalogo RainBird Dados do Fabricante
Faixa de Pressão: 15 a 150 psi (1,0 a 10,4 bar); Temperatura da água: Até 43°C; Temperatura do ambiente: Até 52°C; Alimentação: 24 VAC 50/60 Hz; Corrente: 0,30A; Resistência do solenoide: 38 Ohms; Vazão: 0,05 até 9,08 m3/h ou 0,01 até 2,52 l/s; Para vazões abaixo de 0,68 m3/h ou 0,19 l/s ou uso com fertirrigação utilizar filtro de 200 mesh; Diafragma de pressão balanceado: Alta durabilidade; Sistema de expurgo para lavagem manual sistema de modo a remover sujeira durante a instalação e inicialização do sistema.

57
Figura 32 - Perdas de Carga Fonte: Catalogo RainBird
O acionamento da válvula solenoide no sistema depende inteiramente do sensor
de nível baixo, já para o desligamento a válvula solenoide depende do sensor de nível alto do reservatório. Quando o sistema de malha fechada com realimentação (figura 12), fizer a leitura do sensor de nível baixo e ele se encontrar ON (ligado) , aciona a válvula solenoide a mesma se mantém acionada até que o reservatório seja abastecido na altura do sensor de sensor de nível alto, estando ON (ligado) imediatamente a solenoide é desligada e só voltara a ser acionada quando o sensor de nível baixo estiver ON(ligado), a esse ciclo fará com que o reservatório nunca fique vazio.
Iluminação Um dos fatores primordiais para o desenvolvimento do vegetal é a radiação
luminosa, que atua nos processos de fotoenergia (fotossíntese), radiação essa que na agricultura tradicional é fornecida pelo sol. A quantidade total de radiação solar recebida depende não apenas da duração do dia como também da altura do Sol. Como a Terra é curva, a altura do Sol varia com a latitude. A altura do Sol influencia a intensidade de radiação solar, ou irradiância, que é a quantidade de energia que atinge uma área unitária por unidade de tempo (também chamada densidade de fluxo). Este é um dos fatores que define as estação do ano e também a estação de plantio dos vegetais.

58 De modo a utilizar a radiação luminosa de forma mais eficaz, utilizando apenas
o que o vegetal absorve e proporcionando uma radiação luminosa constante, ou seja, criando um ecossistema de estações contínuas, podendo assim ser cultivar o ano todo um determinado tipo de vegetal, o protótipo de experimentação utiliza doze luminária LED modelo Greenpower LED production DR/B/FR 120 module de 30W do fabricante Philips, que foram dimensionadas especialmente para a aplicação apresentada no protótipo de experimentação, estas são mantidas ligadas 16 horas por dia, afim de recriar o período de luz do dia.
A figura abaixo apresenta a distribuição angular da emtiância luminosa emitida por um módulo.
Figura 32 - Emitância Luminosa
Os dados apresentados na figura abaixo, nos mostra um mapa da distribuição luminosa, onde que, para a aquisição dos dados um luxímetro foi disposto perpendicularmente à superfície plana da área delimitada pelo protótipo de experimentação, o qual recebeu a intensidade luminosa fornecida pelas luminárias, e leu o valor dessa intensidade em μmol/s/m² (intensidade luminosa).

59
Figura 33 - Distribuição Luminosa
O nível de iluminação atingido, conforme informado pelo fabricante das luminárias deveria estar em cerca de 150 μmol/s/m², podemos perceber que nas extremidades os níveis de intensidade luminosa estão abaixo do esperado, fato que foi comprovado no experimento conforme figura 34, onde as bandejas dispostas nas extremidades apresentaram estiolamento (desenvolvimento anormal dos vegetais causados pela ausência de luz).
/ / / / / /
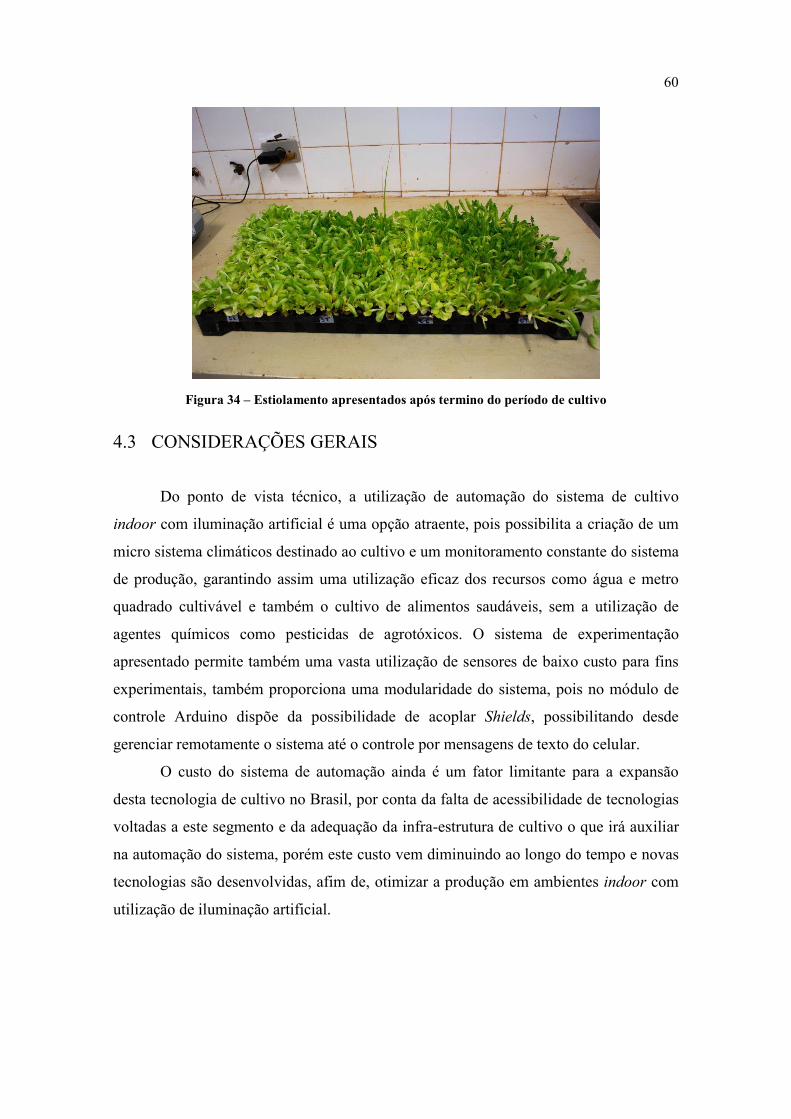
60
Figura 34 – Estiolamento apresentados após termino do período de cultivo
4.3 CONSIDERAÇÕES GERAIS
Do ponto de vista técnico, a utilização de automação do sistema de cultivo indoor com iluminação artificial é uma opção atraente, pois possibilita a criação de um micro sistema climáticos destinado ao cultivo e um monitoramento constante do sistema de produção, garantindo assim uma utilização eficaz dos recursos como água e metro quadrado cultivável e também o cultivo de alimentos saudáveis, sem a utilização de agentes químicos como pesticidas de agrotóxicos. O sistema de experimentação apresentado permite também uma vasta utilização de sensores de baixo custo para fins experimentais, também proporciona uma modularidade do sistema, pois no módulo de controle Arduino dispõe da possibilidade de acoplar Shields, possibilitando desde gerenciar remotamente o sistema até o controle por mensagens de texto do celular.
O custo do sistema de automação ainda é um fator limitante para a expansão desta tecnologia de cultivo no Brasil, por conta da falta de acessibilidade de tecnologias voltadas a este segmento e da adequação da infra-estrutura de cultivo o que irá auxiliar na automação do sistema, porém este custo vem diminuindo ao longo do tempo e novas tecnologias são desenvolvidas, afim de, otimizar a produção em ambientes indoor com utilização de iluminação artificial.

61 4.4 CONTRIBUIÇÃO
Uma das contribuições do presente trabalho é a disponibilidade de um sistema de automação de experimentação voltado para o cultivo indoor com iluminação artificial.
Este é o primeiro trabalho da linha de automação de cultivo em ambiente indoor com iluminação artificial que resultou em uma aplicação prática. Sua continuidade motivará novos trabalhos posteriores devido ao mercado pouco explorado no Brasil.
O presente trabalho motivou a realização de um trabalho de iniciação científica que atualmente está acontecendo na USF Universidade São Francisco no campus do Swift em Campinas, abrindo assim um canal importante para a disseminação do tema com o intuito de inovação tecnológica no setor agrícola.
Durante a realização do projeto foram consultados vários fornecedores de equipamentos de automação e sistemas de cultivo, tanto nacional como internacional, abrindo assim um importante canal de intercâmbio de informações relacionado ao cultivo indoor com automação de sistema e iluminação artificial.
4.5 MELHORIAS
A fim de, evitar o estiolamento apresentado nas culturas durante o período de testes, foi aconselhado pelo fabricante dos módulos de iluminação, descer 10cm da altura total, entre as bandejas e os módulos de iluminação, pois assim proporcionará uma maior distribuição luminosa, aumentando assim o valor mínimo de emitância luminosa nas extremidades.
Para melhor uniformidade no desenvolvimento das culturas, em futuros experimentos, sugere-se a substituição do conceito de irrigação do método de aspersão utilizado no experimento pelo método de hidropônia por piscina (floating), garantindo assim que todas as culturas receberão a quantidade de água e nutriente necessária para o desenvolvimento de cada densidade.

62 4.6 CONCLUSÕES
Para a produção de alface baby leaf, nas condições propostas pelo sistema de experimentação utilizando o conceito cultivo indoor, com iluminação artificial, conclui-se que:
Por se tratar do primeiro estudo acadêmico voltado especificamente para o cultivo indoor de baby leaf com iluminação artificial no Brasil, o sistema de controle mostrou-se robusto quanto ao monitoramento das variáveis e atuação nas perturbações, criando assim um ecossistema estável quanto às oscilações climáticas, baixo consumo de água, aproximadamente 51 litros em 42 dias e não foi utilizado nenhum tipo de agrotóxico para o cultivo.
Para a quantidade esperada de 15kg de produção em 42 dias o sistema mostra-se rentável, apesar do alto consumo dos módulos de LED (cerca de 242kW, 12 módulos de 30W operando por 16hrs por 42 dias) o alto valor agregado do baby leaf compensa os gastos energéticos, porém devido a baixa produção atingida no primeiro experimento, cerca de 7,5kg, faz-se necessário uma nova avaliação quanto ao custo benefício final do sistema.
O objetivo final do delineamento utilizado em blocos casualizados em esquema fatorial definido na metodologia deste trabalho consistia em avaliar produtividade, dentre outras características das culturas após o final do primeiro experimento, porém seus resultados foram inconclusivos, por conta da má formação das culturas causadas pelas adversidades encontradas durante o cultivo. Sendo necessária uma readequação do sistema, conforme proposto no tópico 4.5 do trabalho, que serão implementadas no projeto de iniciação científica proposta pela Universidade São Francisco.
Para este projeto o desenvolvimento de um ambiente de estudo voltado para o cultivo indoor com iluminação artificial mostrou-se uma opção atraente, pois possibilita novos estudos futuros e uma expansão para o desenvolvimento de novas tecnologias voltadas para este segmento pouco explorado no Brasil.

63 5 BIBLIOGRAFIA
BLISKA, A. (1998). Alace (Lactuca stiva L.) distintos sistemas de produção, conservação e avaliação pós-colheita. Campinas. BLISKA, A., & HONÓRIO, S. L. (2003). Cartilha Tecnológica de Hidroponia. CANSADO, J. C. (2003). Sistema de Experimentação de Controle Climático de Casas de Vegetação. Dissertação Mestrado em Engenharia, p. 116. CASTELLANE, P., & ARAÚJO, J. A. (1994). Cultivo sem solo: hodroponia. Jaboticabal. CASTRO, P. R. (1998). Utilização de Reguladores Vegetais na Fruticultura, na Horticultura e em Plantas. p. 92. DESPOMMIER, D. D. (2010). The Vertical Farm (1 ed.). Nova Yorque: Dunne Books. FILGUEIRA, F. A. (2008). Novo Manual de Olericultura. Viçosa: UFV. GIRALDI, R. (09 de Outubro de 2012). ONU. Acesso em 19 de Setembro de 2015, disponível em Organização das Nações Unidas: http://memoria.ebc.com.br/agenciabrasil/noticia/2012-10-09/onu-quase-870-milhoes-de-pessoas-passam-fome-no-mundo GOLNARAGHI, F., & BENJAMIM, C. K. (2010). Sistemas de Controle Automático (9 ed.). LTC. LEBLANC, L. (10 de Novembro de 2014). Indoor farms - a fresh oasis in an urban desert. Acesso em 13 de Setembro de 2015, disponível em Ajazeera América: http://america.aljazeera.com/watch/shows/techknow/articles/2014/11/10/indoor-farms-a-freshoasisinanurbandesert.html

64 MONK, S. (2013). Programação com Arduino - Começando com Skatches (1 ed.).
Porto Alegra: Editora BookMan. MOORE, D. (30 de Junho de 2011). Ecological Footprint Analysis. Acesso em 16 de Setembro de 2015, disponível em Global Footprint Network: http://www.footprintnetwork.org/en/index.php/GFN/page/world_footprint MORAES, C. C., & L.CASTRUCCI, P. (2001). Engenharia de Automação Industrial. Rio de Janeiro: Livros Técnicos e Científicos . MORAES, L. A. (2013). Produção de Baby Leaf de Alface em Bandejas com Reaproveitamento de Substrato. Dissertação (Mestrado em Agricultura Tropical e Sub-Tropical), p. 78. NETO, F. B., ROCHA, R. H., ROCHA, R. C., NEGREIROS, M. Z., LEITÃO, M. d., NUNES, G. H., et al. (2005). Sombreamento para produção de mudas de alface em alta temperatura. Brasília. NICOLOSI, D. E. (2004). Microcontrolador 8051 Detalhado (5 ed.). São Paulo: Editora Érica. NISE, N. S. (2009). Engenharia de Sistemas de Controle (5 ed.). Pamona - California: LTC. PINTO, H. S., ZULLO, J. J., & ÁVILA, A. M. (Setembro de 2008). Umidade do Ar Saúde no Inverno. Acesso em 10 de Outubro de 2015, disponível em Cepagri Unicamp: http://www.cpa.unicamp.br/artigos-especiais/umidade-do-ar-saude-no-inverno.html PURQUERIO, L. F. (Julho de 2011). Caracteristicas potênciais do mercado de baby leaf em Mococa. Acesso em 14 de Março de 2015, disponível em ABH horticultura: http://www.abhorticultura.com.br/eventosx/trabalhos/ev_5/A3651_T5287_Comp.pdf

65 PURQUERIO, L. F. (15 de Julho de 2015). Produção de baby leaf de alface Elisa em
diferentes volumes de células. Acesso em 05 de Março de 2015, disponível em Abhorticultura: http://www.abhorticultura.com.br/eventosx/trabalhos/ev_4/A3065_T4529_Comp.pdf ROSÁRIO, J. M. (2005). Princípios de Mecatrônica. São Paulo: ABDR. SANCHES, S. V. (2007). Avaliação de Cultivares de Alface Crespa Produzidas em Hidroponia Tipo NFT em dois Ambientes Protegidos em Ribeirão Preto (SP). Dissertação (Mestrado em Agronomia) - Programa de Pós-graduação em Agronomia, p. 63. SMITH, R. C. (1990). Raman Scattering and in-water Ocean Optical Properties. TAIZ, L., & ZEIGER, E. (2015). Fisiologia Vegetal, 5 Edição. Porto Alegre: ARTMED. TEIXEIRA, N. (1996). Hidroponia uma alternativa para pequenas áreas. THOMAZINI, D., & ALBUQUERQUE, P. U. (2006). Sensores Industriais: Fundamentos e Aplicações. São Paulo: Érica. WENDLING, M. (2010). Sensores. Acesso em 22 de Setembro de 2015, disponível em http://www2.feg.unesp.br/Home/PaginasPessoais/ProfMarceloWendling/4---sensores- v2.0.pdf WHO. (07 de Janeiro de 2015). Acesso em 19 de Setembro de 2015, disponível em World Health Organization: http://www.who.int/mediacentre/factsheets/fs311/en/




















