AMP Packaged Programmable STAC6-Q/Si Stepper
8
High Performance Stepper Drive Description The STAC6 represents the latest developments in stepper drive technology, incorporating features that will derive the highest performance from today’s stepper motors. Its Anti-Resonance and Waveform Damping control algorithms make it a clear market leader. Self Test and Auto Setup Measures and Configures motor parameters automatically Anti-resonance Eliminates midrange instability Demand Signal Smoothing Reduces extraneous system resonances Torque Ripple Smoothing Adjusts current waveform to reduce low speed torque ripple ● ● ● ● ● ● ● ● Advanced Features www.applied-motion.com Features Current Output 0.5 to 6.0 A 90-135 VAC Input 165V Bus Configurator TM configuration software Configurable Idle Current reduction External control options Pulse and Direction Analog Command Signal Host command via RS232/485. Integral control options - Si Programmer TM - intuitive easy to use graphical programming language. Q - comprehensive high level language with options for control of all drive features. • • • • • • • • • • • • AC6 ST
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of AMP Packaged Programmable STAC6-Q/Si Stepper

High Performance Stepper DriveDescription
The STAC6 represents the latest developments in stepper drive technology, incorporating features that will derive the highest performance from today’s stepper motors. Its Anti-Resonance and Waveform Damping control algorithms make it a clear market leader.
Self Test and Auto SetupMeasures and Configures motor parameters automatically
Anti-resonanceEliminates midrange instability
Demand Signal SmoothingReduces extraneous system resonances
Torque Ripple SmoothingAdjusts current waveform to reduce low speed torque ripple
●●
●●●●
●●
Advanced Features
www.applied-motion.com
Features
Current Output 0.5 to 6.0 A
90-135 VAC Input
165V Bus
ConfiguratorTM configuration software
Configurable Idle Current reduction
External control options
Pulse and Direction
Analog Command Signal
Host command via RS232/485.
Integral control options -
Si ProgrammerTM - intuitive easy to use graphical programming language.
Q - comprehensive high level language with options for control of all drive features.
•
•
•
•
•
•
•
•
•
•
•
•
AC6�ST

�
STAC6 Stepper Drive
STAC6-S Basic drive; Analog, digital and host command input.
• pulse & direction with electronic gearing
• encoder following with electronic gearing
• CW and CCW pulse
• multi-axis Si programming if used with a SiNet Hub
• “Host” commands for real time control from a host PC or PLC using RS-232 or RS-485 serial communication.
• Configurable Oscillator function for running at fixed speeds or with joystick.
STAC6-Si STAC6-Si can be programmed for stand-alone operation with the easy to use Si Programmer™ Windows software with integrated tuning (software and programming cable included).
Graphical point and click format combines motion, I/O, and operator interface functionality for simple machine sequencing Easily integrates with other devices on the machine (Sensors, PLCs etc).
•
•
STAC6-Q Q programming. Comprehensive programming language with options for downloading, storing and executing multiple programs. • Q Programming environment
• Register manipulation• Conditional processing• Math functions• Multi-tasking
• pulse & direction with electronic gearing• encoder following with electronic gearing• CW and CCW pulse• Host interface while executing internal programs.
Drive Models
Features Summary
STSi
STS
ST
STAC6-S STAC6-Si STAC6-Q
Hub 4 4
Command Inputs Pulse and Direction 4
CW and CCW Pulse 4
Master Encoder 4
Command Modes Host Command Language 4 4
Si Indexer 4
Q Programming 4
Logic Input Functions Enable 4 4
Limit Switches 4 4 4
Alarm Reset 4 4
Logic Output Functions Alarm 4 4 4
Brake 4 4 4
In Position 4 4 4
Analog Inputs 4 4
Digital Inputs 7* 15 7*
Digital Outputs 3* 7 3*
*Note - Digital I/O on S and Q models can be increased to 15 inputs and 7 outputs with optional Expansion I/O kit.

�
STAC6 Stepper Drive
POWER AMPLIFIER SECTION
AMPLIFIER TYPE..................................... ... MOSFET , Dual H-Bridge, 4 QuadrantCURRENT CONTROL................................ ... 4 state PWM at 20 KhzOUTPUT CURRENT..................................... 0.5— 6.0 in 0.01 amp increments (6A Peak)POWER SUPPLY ......................................... Line Operated Nominal 120 VAC, 50/60 HzDC BUS VOLTAGE ....................................... Nominal 165 VDCAC INPUT VOLTAGE .................................... 94—135VAC, 50/60HzPROTECTION .............................................. Over-Voltage, Under voltage, Over-Temp, External Output Shorts (Phase to-
Phase, Phase-to-Ground), Internal Amplifier ShortsIDLE CURRENT REDUCTION ...................... Reduction to any integer percent of full-current after delay
selectable in milliseconds.MOTOR REGENERATION ............................ Built in regeneration circuit - 25watts max. CONTROLLER SECTION
NON-VOLATILE STORAGE .......................... Configurations are saved in FLASH memory aboard the DSP.STEP AND DIRECTION INPUTS .................. Optically Isolated: 5-12 Volt. Minimum pulse width = 200 ns. Maximum pulse
frequency = 2 MHzSPEED RANGE ............................................ Depends upon selected resolution. Amplifier is suitable for speeds up to 133
rpsRESOLUTION .............................................. Software selectable from 200-to-51200 steps/rev in increments of 1 steps/revANTI RESONANCE ...................................... Raises the system damping ratio to eliminates midrange instability allowing
stable operation to 50 rps or greater.TORQUE SMOOTHING ................................ Allows for fine adjustment of phase current waveform harmonic content to
reduce low-speed torque ripple in the range 0.25 — 1.5 rps.AUTO SETUP............................................... Measures motor parameters and configures tuning and observer parametersSELF TEST .................................................. Identifies the presence of an encoder and determines resolution. Diagnoses
miswires and open phases.MICROSTEP EMULATION ........................... Performs low resolution stepping by synthesizing fine microsteps from course
steps.DYNAMIC SMOOTHING .............................. Software configurable filtering (4th order, elliptic) for use in removing spectral
components from the command sequence. Reduces jerk and excitation of ex-traneous system resonances.
ENCODER OPTION ...................................... Employs encoder (hi or low resolution) to provide failsafe stall detect and per-form position maintenance.
INTERFACE ................................................. RS-232 and RS-485 BusENCODER .................................................... Differential line receivers suitable for 200 KHz or greaterAMBIENT TEMPERATURE ........................... 0 to 55 oC (32- 158 oF)HUMIDITY ................................................... 90% non-condensing
STAC6 Technical Specifications

�
STAC6 Stepper Drive
STAC6 Special FunctionsMicroStep Emulation
Demand Signal Smoothing
Anti-Resonance
Torque Ripple Smoothing
With Microstep Emulation, systems that have a need to use low step resolutions can still provide smooth motion. The drive takes the step count and creates microsteps which are fed to the motor.
As an example this could be used on a retrofit system where the controller resolution is fixed at a low value and cannot easily be changed.
Dynamic smoothing can soften the effect of immediate changes in velocity and direction, making the motion of the motor less jerky. An added advan-tage is that it can reduce the wear on mechanical components.
All step motors have an inherent low speed torque ripple that can effect the motion of the motor. By analysing this torque ripple the system can apply a negative harmonic to negate this effect, this gives the motor much smoother motion at low speed.
Another disadvantage of the step motor is a tendency to “resonate” at some frequency. By entering some system data this natural frequency can be calculated and a damping term entered into the control algorithm. This significantly improves the midrange stability and allows the motor to achieve higher speeds and make more use of the motors available torque.
Self Test
At start-up the drive measures the motor parameters, including the resistance and inductance, then uses this information to optimize the system performance. It also compares this information from the last start-up and checks to see if the motor data has changed (this could indicate a fault or system change). The drive can also detect open and short circuits, and incorrect motor wiring.
Encoder Feedback Functions
With the addition of an encoder on the motor the STAC6 can provide additional functions.
Stall Detect- The drive detects if the motor has stalled and triggers the fault output.
Position Maintenance - when the motor is stopped the drive will hold it in position, even if external forces are trying to move the motor out of position.
Stall Prevention - Even if the motor stalls, the drive will continue to try to end the move with new parameters.

�
STAC6 Stepper Drive
CONFIGURATOR - Configuration Software
Computer Based Help
The new CONFIGURATOR software simplifies the setup and configuration of the STAC6. Click on the icon representing the aspect of the drive that needs changing and an intuitive dialog box will open. Configuration data for AMP recommended motors is available form a drop down menu. The Configurator also allows the user to create a custom motor configuration.
The CONFIGURATOR incorporates a new on-line help menus. All the technical data, application information and advice on setting up the drive is now just a mouse click away.

6
STAC6 Stepper Drive
Size 23 Step MotorsSpecifications
Dimensions
Torque Curves
Holding Torque
RatedCurrent Resistance Inductance Rotor
Inertia
Model oz-in A Ohms Mh oz-in2
HT23-548D 84 1.4 2.8 5.6 0.66HT23-549D 167 1.4 3.6 12.8 1.64HT23-550D 255 1.4 4.5 15.2 2.62
series connection rating
Model Length “L” Dia “D”
HT23-548D 1.7” (43.8mm) 0.25” (6.35mm)
HT23-549D 2.16” (54.8mm) 0.25” (6.35mm)
HT23-550D 3.05” (77.47mm) 0.25” (6.35mm)
1 2 4 86 10 15 20 30 40 500.5
Note - Performance achieved with motor mounted on 8” x 8” x 0.25” aluminum plate.

�
STAC6 Stepper Drive
Size 34 Step MotorsSpecifications
Dimensions
Torque Curves
1 2 4 86 10 15 20 30 40 500.5
Length “L”
Diameter “D”
Holding Torque
RatedCurrent Resistance Inductance Rotor
Inertia
Model oz-in A Ohms Mh oz-in2HT34-488D 650 5.1 0.76 5.2 7.8HT34-489D 1200 5.1 1.08 8.8 14.6HT34-490D 1845 5.8 1.08 9.6 21.9
series connection rating
Model Length “L” Dia “D”
HT34-488D 3.11” (79mm) 0.5” (12.7mm)
HT34-489D 4.63” (117.6mm) 0.5” (12.7mm)
HT34-490D 6.14” (155.9mm) 0.625” (15.875)
Dimensions in mm.
Note - Performance achieved with motor mounted on 10” x 10” x 0.5” aluminum plate.

�
STAC6 Stepper Drive
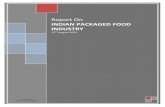
STAC6 ConnectionsSTAC6 Outline Drawings
Distributed by:Applied Motion Products404 Westridge Dr. Watsonville, CA 95076Tel: 831-761-6555 Fax: 831-761 -6544www.applied-motion.com
Version 8/04/05
1817161514
13121110
987654
23
1
19202122232425
+5V
Out 1- Out 2+
Out 1+ Ain Com N/C Ain 1
IN 8-
COM IN 5
IN 6 IN 7+
IN 8+ IN 7-
IN 4
IN 1 COM IN 2
COM IN 3
Out 2- Out 3+ Out 3- Out 4+ Out 4-
IN/OUT 2
Note - this connector is standard on Si version and only on S and Q versions with expanded I/O.
Front View
X COMMON
X7 / CW Limit
X3 / Enable
X5X4 / Alarm Reset
Analog IN-Analog IN+
X2 / DIR-X2 / DIR+
X1 / STEP +X1 / STEP -
GND
GND+5V OUT Y COMMONY3 / FAULT
Y2 / MOTIONY1 / BRAKE
� �� �� �� �� �
� �� �� �� �������
��
�
� �� �� �� �� �� �� �
X6 / CCW Limit
IN/OUT 1
+5V OUT +12V OUT
GNDGND
Accesories
When Purchasing your STAC6 Stepper Drive you will be supplied with software and programming cables.
Applied Motion offers a range of 6 qualified stepper motors for use with the STAC6, these motors are fitted with a 10ft cable and connector for quick connection.
2.31”(60mm)
4.657”(252mm)
7.36”(187mm)IN
/ OU
T 1
IN /
OUT
2
PC/M
MI
Status
AC P
ower G
N
L
RS-4
85/4
22RX+RX-TX+TX-GND
Enco
der
SiST