A theory of coupled beams for strength assessment of passenger ships
22
Marine Structures 17 (2004) 590–611 A theory of coupled beams for strength assessment of passenger ships Hendrik Naar a, , Petri Varsta b , Pentti Kujala c a Department of Mechanics, Tallinn University of Technology, Ehitajate tee 5 190086, Tallinn, Estonia b Helsinki University of Technology, Ship Laboratory, P.O. Box 4100, FIN-02015 HUT, Finland c Kvaerner Masa Yards, P.P. Box 132 FIN-00151 Helsinki, Finland Received 15 May 2004; received in revised form 20 January 2005; accepted 15 March 2005 Abstract This paper describes a coupled beam method, which estimates elastic response in the longitudinal bending of a passenger ship with a large multi-deck superstructure. The method can be applied during an early project stage, when detailed three-dimensional finite element modelling is not yet possible. The theory is based on the assumption that each deck in the superstructure and also the main hull can be considered as a thin-walled beam. These beams are coupled to adjacent beams with springs modelling vertical and shear stiffness. The shear effect in the side and deck structures is included with options for large openings. As a result, the method allows for the calculation of the normal stresses and vertical deflections in the arbitrary location of the hull girder. Average longitudinal displacements of deck structures and shear stresses in the side structures can be estimated as well. Simplified structures were analysed in order to validate the coupled beam method against the three-dimensional finite element method. r 2005 Elsevier Ltd. All rights reserved. Keywords: Passenger ship; Bending strength; Finite element method; Superstructure; Coupled beam method ARTICLE IN PRESS www.elsevier.com/locate/marstruc 0951-8339/$ - see front matter r 2005 Elsevier Ltd. All rights reserved. doi:10.1016/j.marstruc.2005.03.004 Corresponding author. E-mail addresses: [email protected] (H. Naar), petri.varsta@hut.fi (P. Varsta), pentti.kujala@masa-yards.fi (P. Kujala).
Transcript of A theory of coupled beams for strength assessment of passenger ships

ARTICLE IN PRESS
Marine Structures 17 (2004) 590–611
0951-8339/$ -
doi:10.1016/j
�CorrespoE-mail ad
pentti.kujala@
www.elsevier.com/locate/marstruc
A theory of coupled beams for strengthassessment of passenger ships
Hendrik Naara,�, Petri Varstab, Pentti Kujalac
aDepartment of Mechanics, Tallinn University of Technology, Ehitajate tee 5 190086, Tallinn, EstoniabHelsinki University of Technology, Ship Laboratory, P.O. Box 4100, FIN-02015 HUT, Finland
cKvaerner Masa Yards, P.P. Box 132 FIN-00151 Helsinki, Finland
Received 15 May 2004; received in revised form 20 January 2005; accepted 15 March 2005
Abstract
This paper describes a coupled beam method, which estimates elastic response in the
longitudinal bending of a passenger ship with a large multi-deck superstructure. The method
can be applied during an early project stage, when detailed three-dimensional finite element
modelling is not yet possible. The theory is based on the assumption that each deck in the
superstructure and also the main hull can be considered as a thin-walled beam. These beams
are coupled to adjacent beams with springs modelling vertical and shear stiffness. The shear
effect in the side and deck structures is included with options for large openings. As a result,
the method allows for the calculation of the normal stresses and vertical deflections in the
arbitrary location of the hull girder. Average longitudinal displacements of deck structures
and shear stresses in the side structures can be estimated as well. Simplified structures were
analysed in order to validate the coupled beam method against the three-dimensional finite
element method.
r 2005 Elsevier Ltd. All rights reserved.
Keywords: Passenger ship; Bending strength; Finite element method; Superstructure; Coupled beam
method
see front matter r 2005 Elsevier Ltd. All rights reserved.
.marstruc.2005.03.004
nding author.
dresses: [email protected] (H. Naar), [email protected] (P. Varsta),
masa-yards.fi (P. Kujala).

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611 591
1. Introduction
During the last decades, superstructure sizes of large passenger ships haveenlarged significantly due to a growing need for open spaces in restaurants, theatresand atriums. Therefore, concern for the global strength of passenger ships hasincreased. The hull girder presented in Fig. 1 consists of the hull and of thesuperstructure placed on the main deck. A modern passenger ship has a high andlong superstructure supported by pillars and longitudinal bulkheads. The complexstructural behaviour is caused by large openings in the longitudinal structures andalso by the need to transfer shear stresses. Not only vertical plating, but also decks,for instance in the area of lifeboat recesses, are used for this transfer. Today, apractical tool to solve the response of a passenger ship is the three-dimensional (3D)finite element (FE) method. However, the drawback of the FE method is that it istime-consuming and a straightforward understanding of the structural behaviour isdifficult to reach. Therefore, simplified methods are useful in the preliminary designstage.At present two basic approaches exist to estimate the response of a ship when the
superstructure participates in the longitudinal bending. These are based on the beamor on the plane stress theory. An excellent literature survey is given by de Oliveira [1].Crawford [2] was the first to develop the method based on the two-beam theory,taking into account the longitudinal shear force and the vertical force due to the hull-superstructure interaction. Bleich’s approach [3] is similar, describing a straightfor-ward computation of normal stresses for prismatic beams. Terazawa and Yagi [4]introduced the shear lag correction to the two-beam theory. The stresses werecalculated by the energy approach and by assuming pre-defined stress patterns forthe structure. Terazawa and Yagi also considered the effect of side openings on thestructural behaviour. An alternative approach based on the plane stress theoryenables one to include the shear lag phenomenon in the response model, see Caldwell[5] and Fransman [6].
Fig. 1. Typical cross-section of the hull girder for a modern passenger ship.

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611592
In this paper, the existing method based on the beam theory given by Bleich isextended to multi-deck superstructures. This Coupled Beam (CB) method is basedon the assumption that the global bending response of a modern passenger ship canbe estimated by help of beams coupled to each other by distributed longitudinal andvertical springs. This makes the strain distribution discontinuous, but simplifies theanalysis considerably. The CB-method can be extended to cover the ultimatestrength problem of a passenger ship.
2. Description of the method
2.1. General
The theory is focused on the global bending response of a ship with a long multi-deck superstructure. It is assumed that the length of the superstructure equals that ofthe hull. The hull girder is divided into longitudinal beams that have bending andaxial stiffness. Each beam consists of one deck structure with a connected side shellor side shells as shown in Fig. 2. The longitudinally distributed line load can beapplied on each beam separately or as a resultant load on the hull beam. The beamsare connected by distributed springs, which transfer vertical forces and longitudinalshear forces between the beams. The stiffness of springs corresponds to the verticalelongation of the bulkhead or the side shell and to the shear deformation of thestructure connecting two decks.The coupling between beams is denoted by arrows in Fig. 3. For some cross-
sections, a coupling system more complex than a vertical one has to be used in orderto obtain valid results. In this case, the cross-section has to be divided into beams notonly in the vertical direction but for some decks also in the horizontal direction. Thismixed coupling system is also shown in Fig. 3, where the decks with a side shell andlongitudinal bulkhead are horizontally divided into separate beams, allowing forunequal shear flows in the bulkhead and in the side shell.
Fig. 2. The basic concept to estimate the bending response of a passenger ship.

ARTICLE IN PRESS
Fig. 3. Types of couplings between beams.
H. Naar et al. / Marine Structures 17 (2004) 590–611 593
2.2. Equilibrium equations
In the segment of beam i presented in Fig. 4, internal forces, coupling forces andexternal load are acting. The internal forces are well known from the basic beamtheory. These are axial force Ni, shear force Qi and bending momentMi acting in thecross-section. The coupling forces are composed of vertical distributed force pij andlongitudinal shear force sij , where the subscripts describe the interaction of beam i
with its adjacent beam j. The only external force is distributed vertical line load qi,which arises from the load induced by weights and water pressure. The position ofthe reference line, see Fig. 4, is fixed to the deck position and it can differ from thecentroid of the cross-section. The distances from the reference line to the upper andlower edge of the beam are denoted by dik and eij .The equation of longitudinal equilibrium for beam i with n couplings is
qNi
qxþXn
j¼1
sij ¼ 0, (1)
where shear force matrix sij is
sij ¼
sij if j4i;
0 if j ¼ i;
�sji if joi:
8><>: (2)

ARTICLE IN PRESS
Fig. 4. The segment of beam i with internal forces and external load.
H. Naar et al. / Marine Structures 17 (2004) 590–611594
The equilibrium of vertical forces gives
qQi
qxþXn
j¼1
pij ¼ qi, (3)
where qi is the external force vector and pij is the matrix of vertical coupling forces
pij ¼
pij if j4i;
0 if j ¼ i;
�pji if joi:
8><>: (4)
After differentiation and substitution of Eq. (3), the equilibrium of moments aboutz-axis gives
q2Mi
qx2þXn
j¼1
pij þqqx
Xn
j¼1
Cijsij
!¼ qi, (5)
where matrix C is
Cij ¼
dij if j4i;
0 if j ¼ i;
�eij if joi:
8><>: (6)

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611 595
2.3. Coupling equations
Coupling equations define the interaction between the beams. Shear and verticalcoupling are important. Shear coupling between beams i and j is shown in Fig. 5.Due to the shear element with shear stiffness Tij, displacement discontinuity du
ij
causes shear forces sij between beams. This shear force is assumed to be constantover length dx and thus, the force can be described as the response of distributedhorizontal springs. Shear stiffness depends on the effective height Hij of the shearelement and on the effective area. In this case, the effective height shown in Fig. 5equals the deck spacing. Therefore, the approximate shear force in the side shell or inthe longitudinal bulkhead is simply
sijðxÞ ¼ TijðxÞduijðxÞ. (7)
The relative displacement can be formulated by help of axial displacement u anddeflection v of beams as follows:
duij ¼ uj þ eji �
qvMj
qx� ui þ dij �
qvMi
qx, (8)
where vMi is the deflection of beam i caused by bending. Substituting Eq. (8) into (7)
and taking into account Eq. (6), the shear force is
sij ¼ Tij uj � Cji �qvM
j
qx� ui þ Cij �
qvMi
qx
!, (9)
where the longitudinal shear stiffness matrix is
Tij ¼Tij if jai;
0 if j ¼ i:
((10)
Fig. 5. Shear coupling between beams.

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611596
In addition to the side shell, the interaction between beams may demand shearcoupling also in the deck, see Fig. 3. A similar shear element approach is possibleand shear force sij for the deck can be calculated from Eq. (9), assuming thatCij ¼ Cji ¼ 0. Thus, such decks with a strong shear lag are divided into parts and asa result, the shear flow through the deck can be estimated.The second coupling type is the vertical coupling of beams. This becomes
substantial when the superstructure is weakly supported. Then the curvature of theupper structure differs from that of the supporting structure, see Fig. 6. Thisphenomenon is well described in [3].The interaction between beams i and j is described with distributed vertical
springs. Vertical coupling force pij depends on vertical coupling stiffness Kij andrelative deflection dv
ij which is the difference between beam deflections vi and vj .Hence
pijðxÞ ¼ KijðxÞdvijðxÞ ¼ KijðxÞðvjðxÞ � viðxÞÞ, (11)
where vertical stiffness matrix Kij is given as
Kij ¼Kij if jai;
0 if j ¼ i:
((12)
2.4. Relations between internal loads and displacements
Using the beam theory, the relations between the internal forces and displace-ments are defined assuming that the material follows Hooke’s law. If axialdisplacement ui and deflection vi are known for beam i, then bending moment Mi
and axial forces Ni are, see Crisfield [8]
Mi ¼ �EIiiq2vM
i
qx2þ EX ii
qui
qx(13)
and
Ni ¼ EAii
qui
qx� EX ii
q2vMi
qx2, (14)
Fig. 6. Vertical coupling between beams.

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611 597
where parameters EAii and EIii are the axial stiffness and the bending stiffness ofbeam i with respect to the reference axis and EX ii is the value which modifies theinternal forces if the reference line differs from the centroid of the cross-section.Matrices EAii, EIii and EX ii are diagonal.The shape of the hull girder deflection for a modern passenger ship, see Fransman
[6], shows that shear deformations are important. The ratio between the length andthe height is close to six in these ships. According to the beam theory, the sheardeformation is important when the ratio is less than ten. The relation between shearforce Qi and deflection due to shear v
Qi is
Qi ¼ GASii �qv
Qi
qx, (15)
where GASii is the shear stiffness of the beam. The typical cross-section of a beam wasshown in Fig. 2, where the shear area of the cross-section ASii consists of that of thevertical plating. This approach on the shear stiffness is also proposed for an I-beamand box beam in [7]. Comparing these cross-sections to those presented in Fig. 3, aconclusion can be drawn that as a first estimation, this approach is possible. Shearstiffness can be expressed more accurately on the basis of the shear factor
ki ¼Aii
Q2
ZA
t2i dA, (16)
where ti is the shear stress in the cross-section. However, this stress depends on theunknown shear flows at the lower and upper edge of the beam, see Fig. 4. Thus, thesolution procedure of the CB method would become non-linear. A rough study ofthe shear factor Eq. (16) indicates that the value of the Aii=Asii-ratio is 20% lower inthe worst case.
2.5. Estimation of stiffness parameters for coupling
The estimation of stiffness parameters Kij and Tij is crucial due to their substantialinfluence on the response of a passenger ship beam in bending. It is assumed that allshear and vertical deformations take place in structural elements between decks. Thevertical elongation stiffness K is defined as the force per unit length, when two deckshave the unit relative deflection with respect to each other. If several elements deformat the same time, the total stiffness is the sum of these. The definition of shearstiffness T is analogous to that of the vertical elongation stiffness. The shear stiffnessis defined as shear force per unit length when the decks have unit relativedisplacement with respect to each other. Some coupling elements typical of a modernpassenger ship with the formulas of stiffness parameters are shown in Fig. 7.Stiffness parameters for the window structure are calculated, assuming that the threeplate parts: lower, upper and connecting strip deform. In the pillar case, the beamhas fixed boundary conditions and the shear deflection is included.

ARTICLE IN PRESS
Fig. 7. Estimated stiffness parameters for various deck-to-deck connections.
H. Naar et al. / Marine Structures 17 (2004) 590–611598

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611 599
2.6. Solution
The main set of equations consists of Eqs. (1), (3) and (5), which are theequilibrium equations. The unknown variables are displacement vector u at thereference line, deflection vector vM caused by the bending deformation and deflectionvector vQ caused by the shear deformation. The solution of the equations for anarbitrary number of beams and couplings is derived using Galerkin’s method. Theboundary conditions for each beam are shown in Fig. 8, where the dimensionless co-ordinate x of the x-axis is given.The deflection and displacement variables can be approximated as a linear
combination of the known beam functions and unknown constants and in a matrixform these are
fvMg ¼ ½BMv fCM
v g, (17)
fvQg ¼ ½BQv fC
Qv g, (18)
fug ¼ ½BufCug, (19)
where CMv , CQ
v , Cu are vectors consisting of constants and BMv , BQ
v , Bu are matrixescomposed of known functions. After numerical integration of the equilibriumequations, which include also couplings, the matrix equation for the unknownconstants is
D11 D12 0
DT12 D22 D23
0 DT23 D33
264
375
Cu
CMv
CQv
8><>:
9>=>; ¼
0
FM
FQ
8><>:
9>=>;, (20)
where Dij are the sub-matrixes of the stiffness matrix and FM , FQ are the sub-vectorsof the global load vector. Detailed derivation of Eq. (20) is presented in theAppendix. After the global stiffness matrix is obtained, the unknown constants canbe directly solved from Eq. (20). The internal forces Mi, Ni, pij and sij can bedetermined after the deflections and displacements are calculated. The approxima-tion of stresses can be done according to the beam theory.
Fig. 8. Boundary conditions for each individual beam.

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611600
3. Comparison with the finite element method
3.1. Box structure with and without side openings
First, a simple prismatic 160m long structure was analysed. The box model hasfive decks. The dimensions of the cross-sections are shown in Fig. 9. Case A had acontinuous side plating and Case B included side openings. The loading was chosensuch that the maximum moment is reached at the midship and maximum shearforces at positions L=4 and 3L=4. Such a loading corresponds to the design load usedby Classification Societies. The shape of the hogging load is shown in Fig. 10 and theload was calculated from
pðxÞ ¼ 200 cospx2
� �þ 3 cos
3px2
� �� �N
mm, (21)
where x is a dimensionless co-ordinate.The deflections and displacements of the beams in the CB method were
approximated with five symmetric and five anti-symmetric shape functions. A finiteelement analysis was carried out for both cases. Both structural models includedabout 100,000 eight node shell elements. Only a half of the ship was modelled due tothe symmetry about the centre plane. The normal stresses amidships are shown in
Fig. 9. Dimensions of cross-sections for the box model. Case A has no side openings and case B is with
side openings.

ARTICLE IN PRESS
Fig. 10. Loading for the box structure.
Fig. 11. Distribution of normal stress in the box structure ðx ¼ L=2Þ in case A with no side openings andin case B with openings included.
H. Naar et al. / Marine Structures 17 (2004) 590–611 601
Fig. 11. Case A behaves according to the beam theory. Case B shows that the normalstress in the superstructure is not increasing similarly to that of the main hull.Therefore, the basic beam theory cannot be used. However, the CB method can wellestimate the stresses due to bending in both cases. The normal stress values in thehull and in the superstructure decks calculated with the CB method follow well thoseobtained by the FE method.

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611602
In case A, see Fig. 11, the shear lag effect in the bottom plate (z ¼ �10m) and inthe upper deck (z ¼ 12m) can be observed, where the normal stress due to bendingvaries around 30%. However, in Cases A and B, the shear lag was found fairlysmall and therefore horizontal cross-section was not subdivided, see Fig. 9. TheCB-method can be used also to estimate shear stresses. The shear stress betweenadjacent decks is calculated by dividing the longitudinal shear force, see Eq. (7)by the side shell thickness. Fig. 12 shows the longitudinal distributions of the
Fig. 12. Longitudinal distribution of shear stress between adjacent decks in Case A (no openings) and in
case B (openings included).
Fig. 13. Deflections of the lower beam presenting the main hull Cases A and B.

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611 603
shear stress between different adjacent decks. The results indicate that the shearstresses obtained by the CB-method correspond well with those obtained bythe FE-method.The vertical deflection of the beams is a good indicator of the global behaviour of
the hull girder. Fig. 13 shows that the vertical deflection of the main hull obtained bythe CB-method corresponds well with the results given by the FE-method. Case Ashould behave according to the beam theory. However, if the additional verticaldeflection of the girder due to shear deformation is not taken into account, then thebasic beam theory underestimates the vertical deflection of about 30%. In Case B,deformations of the hull girder are already so complicated that the basic beam theoryis not applicable.
3.2. Structural analyses of a post-Panamax passenger ship
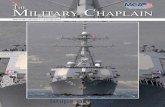
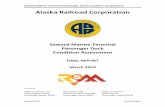
In order to test the applicability of the CB-method for a passenger ship structurewith a modern layout, a post-Panamax passenger ship was analysed. The structurewas modelled as a prismatic beam with the length of 273m. The cosine shape lineload caused the hogging bending moment for the hull girder. The maximum value ofthe bending moment amidships calculated from the line load was 8:94� 106 kNm.The layout of the main frame is given in Fig. 14 and the FE model is shownin Fig. 15. The structural model includes about 800,000 four node shell andtwo node beam elements. Only a quarter of the ship is modelled due to thesymmetry.The structure was designed so that the shear load is carried by the side shell
between the baseline and the 4th deck and above it by the plating in the recess spacebetween the 4th and 6th deck. Above it the shear load is carried by the plating of the6th deck and by the longitudinal bulkhead between the 6th and 11th deck. Theposition of these structural elements carrying the shear load is plotted in Fig. 14 withletters ABCDEF. The side plating of the superstructure is removed due to thebalcony openings.Similarly to the box girder, the deflections and displacements of the beams, for the
post-Panamax passenger ship, are approximated with five symmetric and five anti-symmetric shape functions in the CB-method. The vertical distribution of the normalstress at the cross-section along the path ABCDEF obtained by the CB-method ispresented in Fig. 14. In the same figure, the vertical stress distributions by the FE-analysis are given in four different positions, including the side, the recess, thelongitudinal bulkhead and the centre line. The stress values given by the CB-methodare well compatible with those by the FE-method. The discontinuity of the stress atthe coupling between beams can be clearly noticed in the hull and in thesuperstructure. The discontinuity of the stress due to shear lag between points Dand E and also between points B and C can be observed.The shear lag effect can be considered in the CB-method by dividing the decks
horizontally into several beams. The discontinuities in the normal stress betweenpoints BC and DE are caused by the shear lag effect. As Fig. 14 shows, the shear lagcan be considered quite well. Due to the low shear stiffness of the superstructure, the

ARTICLE IN PRESS
Fig. 14. The main frame of a post-Panamax type passenger ship with vertical distributions of normal
stress. Abbreviation D means a deck.
H. Naar et al. / Marine Structures 17 (2004) 590–611604
normal stress is not transferred into the upper decks as efficiently as into the lowerdecks.The longitudinal distributions of shear stress in the side shell between adjacent
decks are shown in Fig. 16. The transverse bulkheads in the FE-model modifysomewhat the shear stress in the side shell and therefore a stress discontinuity isobserved. As the CB-method cannot directly consider the effect of the transversebulkheads, the shear stress distributions are smoothened. The deflection of the hullgirder is again quite well approximated by the CB-method as seen from Fig. 17.A slight difference can bee seen at the boundary but the inaccuracy is still lowerthan 12%.

ARTICLE IN PRESS
Fig. 16. Shear stresses in the side shell.
Fig. 15. FE-model of a post-Panamax type passenger ship.
H. Naar et al. / Marine Structures 17 (2004) 590–611 605
4. Concluding remarks
The Coupled Beam method is described in this paper. To model the structure of amodern passenger ship, multi-coupling of the beams is required and the effect of

ARTICLE IN PRESS
Fig. 17. Deflection of the main hull.
H. Naar et al. / Marine Structures 17 (2004) 590–611606
shear stresses has to be considered. The method is applicable for the calculation ofstresses and deflections of ships having a long superstructure with large openings.The results obtained by the CB-method were validated for three different
prismatic structures with the FE-method. The results indicate that fastand reliable estimation of the stresses and deflections can be conducted with thedeveloped method. A comparison between the 3D FE- and the CB-method showsthat a small divergence of the results exists in certain complex structures,such as in the recess space. However, the global bending behaviour can be describedwell.The CB-method has no direct limitations on the hull girder shape in the
longitudinal direction. Thus, the method can be applied also for non-prismatic shipgeometry. However, this consideration has to be validated.
Acknowledgements
This research was carried out within the framework of the European Unionproject of Development of Innovative Structural Concepts for Advanced PassengerShips (DISCO), (G3RD-CT2000-00290). The financial support by the EuropeanCommission is gratefully acknowledged. Kvaerner Masa Yards is thankedfor providing information of the structural design of a post-Panamax passengership.

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611 607
Appendix
By writing out the functional form of the equilibrium equations required byGalerkin’s method, the order of derivatives used in the equations to be solved can bereduced using integration by parts. Dimensionless co-ordinates changing from �1 to1 were used in the integration. This will simplify later the numerical integration.When integrating the function f ðxÞ from 0 to L, where L is the ship length, a co-ordinate transformation is introduced
x ¼2x
L� 1. (22)
Thus, the definite integral is written asZ L
0
f ðxÞdx ¼
Z 1
�1
f ðxþ 1ÞL
2
� �L
2dx. (23)
Multiplying Eqs. (1), (3) and (5) with the weight functions and integrating over theregion and at the last setting, these weighted residuals equal zeroZ 1
�1
ui
qNi
qxdxþ
Z 1
�1
ui
Xn
j¼1
sij dx ¼ 0, (24)
Z 1
�1
vQi
qQi
qxdxþ
Z 1
�1
vQi
Xn
j¼1
pij dx ¼
Z 1
�1
vQi qi dx (25)
and Z 1
�1
vMi
qqx
qMi
qxþXn
j¼1
Cij � sij
!dxþ
Z 1
�1
vMi
Xn
j¼1
pij dx ¼
Z 1
�1
vMi qi dx. (26)
After integrating Eqs. (24)–(26) by parts and taking into account the boundaryconditions, the equations can be simplified as follows:
ð�1Þ
Z 1
�1
qui
qxNi dxþ
Z 1
�1
ui
Xn
j¼1
sij dx ¼ 0, (27)
ð�1Þ
Z 1
�1
qvQi
qxQi dxþ
Z 1
�1
vQi
Xn
j¼1
pij dx ¼
Z 1
�1
vQi qi dx (28)
and Z 1
�1
q2vMi
qx2Mi dxþ ð�1Þ
Z 1
�1
qvMi
qx
Xn
j¼1
Cij � sij dxþZ 1
�1
vMi
Xn
j¼1
pij dx ¼
Z 1
�1
vMi qi dx.
(29)
Before the final representation of equations, the terms including couplingforce pij and shear force sij have to be reshaped. Therefore, the following matrices

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611608
are needed:
TAij ¼
�Tij if jai;Pnk¼1
Tik if j ¼ i;
8><>: (30)
TBij ¼
�TijCij if jai;Pnk¼1
TikCik if j ¼ i
8><>: (31)
and
TCij ¼
�TijCijCji if jai;Pnk¼1
TikðCikÞ2 if j ¼ i
8><>: (32)
for the longitudinal shear force and
KAij ¼
�Kij if jaiPnk¼1
Kik if j ¼ i
8><>: (33)
for the distributed coupling force. Now the terms needed for the equilibriumequations can be expressed as
Xn
j¼1
sij ¼ ð�1ÞXn
j¼1
TAij uj þ
Xn
j¼1
ðTBij ÞTqvM
j
qx, (34)
Xn
j¼1
Cijsi; j ¼ ð�1ÞXn
j¼1
TBij uj þ
Xn
j¼1
TCij
qvMj
qx(35)
and
Xn
j¼1
pij ¼ ð�1ÞXn
j¼1
KAij vM
j þ ð�1ÞXn
j¼1
KAij v
Qj . (36)
The final set of the equations can be obtained by substituting Eqs. (13)–(15) and(34)–(36) into Eqs. (27)–(29). After substitutionZ 1
�1
qui
qxEAii
qui
qxdxþ ð�1Þ
Z 1
�1
qui
qxEX ii
q2vMi
qx2dx
þ
Z 1
�1
ui
Xn
j¼1
TAij uj dxþ ð�1Þ
Z 1
�1
ui
Xn
j¼1
ðTBij ÞTqvM
j
qxdx ¼ 0, ð37Þ

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611 609
Z 1
�1
qvQi
qxGASii �
qvQi
qxdxþ
Z 1
�1
vQi
Xn
j¼1
KAij vM
j dx
þ
Z 1
�1
vQi
Xn
j¼1
KAij v
Qj dx ¼ ð�1Þ
Z 1
�1
vQi qi dx ð38Þ
and
Z 1
�1
q2vMi
qx2EIii
q2vMi
qx2dxþ ð�1Þ
Z 1
�1
q2vMi
qx2EX ii
qui
qxdx
þ ð�1Þ
Z 1
�1
qvMi
qx
Xn
j¼1
TBij uj dxþ
Z 1
�1
qvMi
qx
Xn
j¼1
TCij
qvMj
qxdx
þ
Z 1
�1
vMi
Xn
j¼1
KAij vM
j dxþZ 1
�1
vMi
Xn
j¼1
KAij v
Qj dx ¼ ð�1Þ
Z 1
�1
vMi qi dx. ð39Þ
Equations (37)–(39) are written for beam i. The sets of the equations for the totalsystem can be presented in a matrix form as follows:
Z 1
�1
qu
qx
� �T½EA
qu
qx
� �dxþ ð�1Þ
Z 1
�1
qu
qx
� �T½EX
q2vM
qx2
� �dx
þ
Z 1
�1
fugT½TAfugdxþ ð�1Þ
Z 1
�1
fugT½TBTqvM
qx
� �dx ¼ 0, ð40Þ
Z 1
�1
qvQ
qx
� �T½GAS �
qvQ
qx
� �dxþ
Z 1
�1
fvQgT½KAfvMgdx
þ
Z 1
�1
fvQgT½KAfvQgdx ¼ ð�1Þ
Z 1
�1
fvQgTfqgdx ð41Þ
and
Z 1
�1
q2vM
qx2
� �T½EI
q2vM
qx2
� �dxþ ð�1Þ
Z 1
�1
q2vM
qx2
� �T½EX
qu
qx
� �dx
þ ð�1Þ
Z 1
�1
qvM
qx
� �T½TBfugdxþ
Z 1
�1
qvM
qx
� �T½TC
qvM
qx
� �dx
þ
Z 1
�1
fvMgT½KAfvMgdxþZ 1
�1
fvMgT½KAfvQgdx ¼ ð�1Þ
Z 1
�1
fvMgTfqgdx.
ð42Þ
All the unknown variables are approximated as a linear combination of knownfunctions BðxÞ1 . . .BðxÞm and unknown constants C1 . . .Cm. The deflections of the

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611610
total beam system due to the bending moment are given as
vM1
vM2
..
.
vMn
8>>>>><>>>>>:
9>>>>>=>>>>>;
¼
Pmk¼1
BðxÞMk CvM1
k
Pmk¼1
BðxÞMk CvM2
k
..
.
Pmk¼1
BðxÞMk CvM
n
k
2666666666664
3777777777775, (43)
where m is the number of shape functions used in the analysis. The deflection anddisplacement variables can be presented in a matrix form as a multiplication of thebeam function matrices and the unknown vectors of constants as
fvMg ¼ ½BMv fCM
v g, (44)
fvQg ¼ ½BQv fC
Qv g (45)
and
fug ¼ ½BufCug. (46)
In the present analysis beam functions B xð Þi are used, which consist of trigonometricand hyperbolic functions, and the shape functions are given as
BðxÞi ¼ c1 � sin ki �xþ 12
� �þ c2 � sinh ki �
xþ 12
� �
þ c3 � cos ki �xþ 12
� �þ c4 � cosh ki �
xþ 12
� �, ð47Þ
where the constants c1 � c4 and ki can be selected to satisfy the boundary conditionsof the deflection and displacement variables. Finally, the stiffness matrix can bedefined for the total system by substituting Eqs. (44)–(46) into Eqs. (40)–(42)
D11 D12 0
DT12 D22 D23
0 DT23 D33
264
375
Cu
CMv
CQv
8><>:
9>=>; ¼
0
FM
FQ
8><>:
9>=>;, (48)
where
½D11 ¼
Z 1
�1
qqx
½BuT½EA
qqx
½BudxþZ 1
�1
½BuT½TA½Budx, (49)
½D12 ¼ ð�1Þ
Z 1
�1
½BuT½TBT
qqx
½BMv dx�
Z 1
�1
qqx
½Bu½EX q2
qx2½BM
v dx, (50)

ARTICLE IN PRESS
H. Naar et al. / Marine Structures 17 (2004) 590–611 611
½D22 ¼
Z 1
�1
q2
qx2½BM
v T½EI q2
qx2½BM
v dxþZ 1
�1
qqx
½BMv T½TC
qqx
½BMv dx
þ
Z 1
�1
½BMv T½KA½BM
v dx, ð51Þ
½D23 ¼
Z 1
�1
½BMv T½KA½BQ
v dx, (52)
½D33 ¼
Z 1
�1
qqx
½BQv T½GAS
qqx
½BQv dxþ
Z 1
�1
½BQv T½KA½BQ
v dx (53)
are the sub-matrices and
fFMg ¼ ð�1Þ
Z 1
�1
½BMv Tfqgdx, (54)
fFQg ¼ ð�1Þ
Z 1
�1
½BQv Tfqgdx (55)
are the sub-vectors.
References
[1] de Oliveira JG. Hull-deck interaction. In: Evands JH, editor. Ship structural design concepts, second
cycle. USA: Cornell Maritime Press; 1983. p. 160–278.
[2] Crawford L. Theory of long ships’ superstructures. Trans SNAME 1950;58:693–732.
[3] Bleich HH. Nonlinear distribution of bending stresses due to distortion of the cross section. J Appl
Mech 1952;29:95–104.
[4] Terazava K, Yagi J. Stress distribution in deckhouse and superstructure. The Society of Naval
Architects of Japan, 60th Anniversary Series 1964;9:51–150.
[5] Caldwell J. The effect of superstructure on the longitudinal strength of ships. Trans RINA
1957:664–81.
[6] Fransman J. The influence of passenger ship superstructures on the response of the hull girder. Trans
RINA 1988.
[7] Gere JM, Timoshenko SP. Mechanics of materials, third ed. Boston: PWS-KENT Publishing
Company; 1990. p. 693–4.
[8] Crisfield MA. Non-linear finite element analysis of solids and structures, vol 1. West Sussex, England:
Wiley; 1991.